Центробежные насосы
advertisement

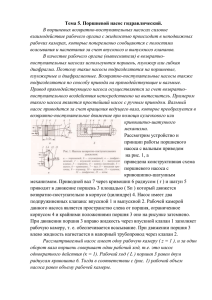
Министерство образования и науки Украины ОДЕССКАЯ НАЦИОНАЛЬНАЯ АКАДЕМИЯ ПИЩЕВЫХ ТЕХНОЛОГИЙ Кафедра теплохладотехники КОНСПЕКТ ЛЕКЦИЙ по курсу “ГИДРОГАЗОДИНАМИКА” Часть II. Гидравлические машины, гидро- и пневмопривод для студентов, обучающихся по учебному плану бакалавров специальности 6.092501, заочной формы обучения Утверждено Методсоветом ОНАПТ протокол № 3 от 25 ноября 2005 года Одесса ОНАПТ 2005 4 Конспект лекций по курсу “Гидрогазодинамика” для бакалавров специальности 7.092501 заочной формы обучения. Часть II. Гидравлические машины, гидро- и пневмопривод / Составитель Н.Д. Захаров Одесса: ОНАПТ, 2005. 49 с. Составитель: Н.Д. Захаров, д-р.техн.наук, профессор Ответственный за выпуск заведующий кафедрой теплохладотехники Н.Д. Захаров, д-р техн. наук, профессор Подписано к печати __________ 200 __ г. Формат 1/16 Объём _______. Зак. № ________. Тираж ________. Экз. _______ ОПК Евротайс, Палубный пер. 9/4, тел. 714-91-70 5 ВВЕДЕНИЕ Насосы предназначены для перемещения жидкостей под напором. В зависимости от принципа действия они подразделяются на динамические и объемные. В насосах динамического типа увеличивается скоростной напор жидкости, который в дальнейшем преобразуется в пьезометрический. К этой группе относятся центробежные (одно- и многоступенчатые), осевые, вихревые и струйные насосы. Объемные насосы действуют по принципу вытеснения жидкости из рабочего пространства. Они подразделяются на поршневые, диафрагменные, пластинчатые, винтовые и шестеренные насосы. Центробежные насосы Конструкция одноступенчатого консольного центробежного насоса показана на рис.1. Его основными элементами являются рабочее колесо 1 с лопатками 2, выполненный в виде спиральной камеры корпус 3, всасывающий патрубок 4 с обратным клапаном и нагнетательный патрубок 5. В межлопаточных каналах рабочего колеса за счет действия центробежных сил скорость жидкости увеличивается до 20-25 м/c. В спиральной камере она падает до 1-5 м/c, благодаря чему давление жидкости возрастает до 1 МПа. Рис. 1 Основными характеристиками центробежных насосов являются подача, напор, полезная мощность и КПД. Подачей называют объемный расход жидкости через выходной патрубок Q, м³/c. Расход через рабочее колесо превышает подачу на величину утечек. Под напором насоса понимают разность полных напоров жидкости в выходном и входном патрубках 2 2 p2 p1 v2 v1 H z 2 z1 g 2g 6 Теоретический напор насоса превышает реальный на величину гидравлических потерь на входе в рабочее колесо, в проточной части и на выходе. Полезную мощность насоса определяют как произведение N п gQH Потребляемая мощность на валу насоса Nв превышает полезную мощность на величину механических, объемных и гидравлических потерь. КПД насоса представляет собой отношение Nп Nв В зависимости от подачи, напора и конструкции насоса КПД находится в пределах 65-90 %. Основы теории центробежных насосов В основе теории центробежных насосов лежит уравнение Эйлера, полученное в 1755 г при допущении, что число лопаток велико и режим движения жидкости можно считать ламинарным. Расчетная схема представлена на рис.2. Рис. 2 На выходной кромке лопаток окружная скорость u2 перпендикулярна радиусу, направление относительной скорости w2 совпадает с касательной к профилю лопатки, а абсолютная скорость с2 определяется по правилу параллелограмма. Пусть объемный расход жидкости через канал составляет q, массовый q, а количество движения qc2. Момент количества движения равен q c2 l 2 q c2 r 2 Cos 2 Как известно, изменение момента количества движения жидкости равно моменту приложенных к ней внешних сил, т.е. крутящему моменту mкр qc2 r 2 Cos 2 c1 r1Cos 1, 7 где индекс “1” относится к входному треугольнику скоростей. Суммируя по всем каналам, получаем M кр Qc2 r 2 Cos 2 c1 r1Cos 1 Но мощность, потребляемая рабочим колесом насоса, равна N M кр Qc2 u2 Cos 2 c1u1Cos 1 Здесь учтено, что произведение угловой скорости на радиус r равно окружной скорости u. C другой стороны N gQH Отсюда развиваемый колесом теоретический напор равен c2 u 2 Cos 2 c1u1Cos 1 H g Приведенное уравнение Эйлера позволяет по геометрии, частоте вращения и подаче определить напор или по подаче, напору и частоте вращения подобрать размеры рабочего колеса. Главная энергетическая характеристика центробежного насоса Главной характеристикой называют графические или аналитические зависимости напора, потребляемой мощности и КПД от подачи при номинальной частоте вращения. Их получают при испытании насосов на специальных стендах. Две типичные характеристики представлены на рис.3. H , N в , H , Nв , H Nв H Nв Q Рис.3. Энергетические характеристики центробежных насосов Q 8 На левой характеристике, которую называют стабильной, напор при увеличении подачи непрерывно уменьшается. Насосы с такой характеристикой устойчиво работают при любых режимах. Правая характеристика отличается наличием максимума напора. В области максимума одному и тому же значению напора отвечают два неустойчивых режима работы насоса с разными подачами. Самопроизвольное изменение подачи сопровождается шумом и гидравлическими ударами. Поэтому следует работать за пределами этой зоны в режимах, близких к оптимальным, которым соответствует максимум КПД. Пересчет характеристик центробежных насосов на другую частоту вращения При эксплуатации насосов может возникнуть необходимость в изменении частоты вращения и, следовательно, пересчете характеристик. Для этого используют методы теории подобия. В подобных режимах работы числа Эйлера должны быть равны Eu gH 2 idem c Но скорость пропорциональна произведению частоты вращения на определяющий линейный размер c nl Поэтому n2 H 2 H 1 n1 2 Подача пропорциональна произведению определяющего размера Q c l2 скорости на квадрат Поэтому n2 n1 Что касается полезной мощности, то Q 2 Q1 3 n2 N 2 N1 n1 Из приведенных соотношений следует, что в подобных режимах работы 2 H 2 Q 2 ; H1 Q 1 H 2 H 1 s, 2 2 Q2 Q2 9 т.е. уравнением кривой подобных режимов является парабола, проходящая через начало координат и точку на главной характеристике 2 H sQ С помощью кривой подобных режимов можно подобрать частоту вращения, обеспечивающую нужный напор насоса при заданной подаче. Для этого по требуемым значениям H2 и Q2 рассчитываем параметр s и находим точку 1, в которой кривая подобных режимов пересекается с главной характеристикой (рис.4). H n1 H1 H2 n2 1 2 Q2 Рис. 4 Q1 Q По подаче в этой точке и номинальной частоте вращения находим требуемую частоту Q2 n2 n1 Q1 Следует заметить, что повышение частоты вращения более чем на 15 % должно быть согласовано с заводом-изготовителем насоса. Изменение характеристик центробежных насосов обточкой рабочих колес Если требуемая рабочая точка лежит ниже главной характеристики насоса и отсутствует возможность регулирования частоты вращения, то можно уменьшить обточкой диаметр рабочего колеса на выходе d2. При этом снизится окружная скорость u2, абсолютная скорость c2 и напор, развиваемый насосом. Приближенно 2 ' ' Q d 2 d H2 2 ; 2, Q1 d 2 H 1 d 2 где штрих относится к диаметру рабочего колеса после обточки. Отсюда 2 H 2 Q 2 , H 1 Q1 10 т.е. при уменьшении диаметра колеса новые рабочие точки располагают на кривой, называемой параболой обточки 2 H kQ Коэффициент пропорциональности k определяют по требуемым значениям подачи и напора (точка 2 на рис.5). На главной характеристике находят точку 1, соответствующей этому коэффициенту, и подачу Q1. H 1 H1 2 H2 Q1 Q2 Q Рис. 5 Обточка осуществляют до диаметра Q2 ' , d2 d2 Q1 но не более, чем на 20 %. Коэффициент быстроходности центробежных насосов Выбор типа насоса из числа выпускаемых промышленностью для конкретных условий применения представляет собой довольно сложную задачу. Для облегчения ее решения насосы разбиты на группы в зависимости от значения коэффициента быстроходности ns, под которым понимают частоту вращения геометрически подобного насоса с напором 1 м вод.ст. при подаче 0,075 м³/с. С учетом рассмотренного выше влияния частоты вращения и размеров рабочего колеса на напор и подачу можно получить ns 3,65n Q 3/ 4 , H где Q, H – оптимальные характеристики насоса, соответствующие максимуму КПД. В группу тихоходных входят насосы с коэффициентом быстроходности 50-80. Они развивают большой напор при сравнительно малой подаче за счет увеличения выходного диаметра рабочего колеса. Для быстроходных насосов, обеспечивающих большую подачу при умеренном напоре, этот показатель составляет 150-350. Выбор насоса из большого разнообразия типоразмеров сводится к поиску по каталогам аналога с наиболее близким к требуемому коэффициентом быстроходности. 11 Работа центробежных насосов в гидравлической сети При работе насоса на сеть, схематично изображенную на рис.6, требуемый напор должен обеспечить подъем жидкости на высоту Hг, и преодоление всех гидравлических сопротивлений во всасывающей и напорной линиях H тр H г H пот Сумма потерь на местных сопротивлениях и потерь по длине в квадратичной области связана с расходом жидкости соотношением 2 H пот k Q Поэтому 2 H тр H г k Q На рис.6 зависимость требуемого напора от расхода жидкости (характеристика сети) показана линией 1, а характеристика насоса линией 2. Точка A, в которой эти линии пересекаются, является рабочей точкой насосной установки. Если подача насоса превосходит расход жидкости из водонапорного резервуара, то уровень жидкости в нем будет повышаться, а характеристика сети эквидистантно смещаться вверх до касания с характеристикой насоса в точке B. H 1 В а а А 7 2 5 4 Hг 6 3 2 Q 1 Рис. 6 (1- всасывающий фильтр с обратным клапаном; 2- центробежный насос; 3- вакуумметр; 4- задвижка; 5- обратный клапан; 6-манометр; 7- напорный резервуар) В этот момент напор, развиваемый насосом, становится меньше напора, требуемого по характеристике сети, подача жидкости в резервуар прекращается и уровень начинает снижаться. Возобновится подача, когда уровень жидкости перейдет отметку a-a , после чего весь процесс повторится. Насосная установка будет работать в пульсирующем режиме с появлением гидравлических ударов, называемом помпажом. Для предупреждения этого явления необходимо 12 применять такой насос, чтобы рабочая точка установки находилась вдали от зоны помпажа. Не менее опасной является работа насосов с кавитацией в межлопаточных каналах. В соответствии с уравнением Бернулли давление на входе в рабочее колесо равно 2 v p pатм g H вс H пот 2g При больших высоте всасывания и подаче оно может стать ниже давления насыщения и произойдет самовскипание жидкости. В межлопаточных каналах давление возрастает и паровые пузыри схлопываются с появлением гидравлических микроударов, разрушающих рабочее колесо. Это явление и получило название кавитации. При интенсивном парообразовании возможен даже разрыв потока с прекращением подачи жидкости. Для предотвращения кавитации необходимо ограничивать высоту всасывания значением pатм p s макс H кав H пот H вс g g В этом выражении ps – давление насыщения жидкости, соответствующее ее температуре (см. таблицу), Hкав – допускаемый кавитационный запас, равный H кав 1,1 1,3 H кр Критическая величина кавитационного запаса находится при проведении стендовых испытаний насосов или по формуле Руднева 4/3 n Q H кр 10 c , где n – частота вращения, об/мин; Q – подача, м³/c; c – коэффициент, зависящий от быстроходности и равный 600-800 для тихоходных насосов, 900-1000 для нормальных насосов и 1100-1300 для быстроходных насосов. Зависимость давления насыщения воды (в м вод.ст.) от температуры t,C ps/g 5 0,09 10 0,12 20 0,24 30 0,43 40 0,75 50 1,25 60 2,02 70 3,17 80 4,82 Регулирование работы насосов Регулирование работы насосной установки, целью которого является изменение подачи и напора, может осуществляться уменьшением или увеличением гидравлического сопротивления сети или частоты вращения рабочего колеса. В первом случае на напорной линии насоса устанавливается задвижка, создающая регулируемое местное сопротивление. При уменьшении проходного сечения задвижки характеристика сети приобретает более крутую 13 форму и пересекает характеристику насоса в новой рабочей точке 2, соответствующей требуемой подаче Q2 (рис.7). H n1 2 H2 1 A H тр n2 Q2 Q1 Q Рис. 7 Насос при этом развивает напор H2 вместо требуемого напора Hтр и потребляет излишнюю мощность g Q2 H 2 H тр N в Более экономичным является второй способ регулирования работы насосной установки. Частота вращения n2 по описанной выше методике подбирается так, чтобы напорная характеристика насоса проходила через точку А. Плавное регулирование обеспечивается применением электродвигателей постоянного тока, электродвигателей переменного тока с полупроводниковыми преобразователями частоты, электромагнитных и гидромуфт. Гидромуфта состоит из расположенных соосно с зазором 3-10 мм в общем корпусе 1 лопастного насоса 2 и гидротурбины 3 (рис. 8). Насос приводится во 3 4 5 2 1 Рис. 8 вращение с частотой n1 асинхронным электродвигателем 4. Минеральное масло, заполняющее корпус, насосным колесом подается в турбину, соединенную с центробежным насосом 5 и вращающуюся с частотой n2. Отработавшее масло возвращается на всасывание насосного колеса. Регулирование частоты вращения ведомого вала достигается изменением количества масла в гидромуфте. Помимо этого гидромуфта предохраняет 14 электродвигатель от перегрузки при пуске и сглаживает пульсации крутящего момента. Следует, однако, иметь в виду, что ее КПД связан с передаточным числом соотношением =0,97i, т.е. уменьшается при снижении частоты вращения центробежного насоса. Помимо сложности конструкции это является основным недостатком гидромуфт. Параллельная работа насосов Параллельное включение насосов осуществляется при необходимости значительного увеличения расхода жидкости или неравномерном ее потреблении. Энергетическую характеристику параллельно работающих насосов получают сложением подач при одинаковых напорах, а рабочей точкой А является пересечение с нею характеристики сети (рис.9). H 1 A 1+2 2 Q Рис.9 Последовательная работа насосов На практике последовательную работу насосов применяют в тех случаях, когда велико гидравлическое сопротивление сети или жидкость подается на большую высоту. Характеристику последовательно работающих насосов получают сложением напоров при одинаковых подачах (рис.10). H 1+2 A 1 2 Q Рис.10 При построении характеристики сети необходимо учесть потери в линии, соединяющей насосы, и по возможности их минимизировать. Особое внимание следует обращать на предельно допускаемое по условию прочности давление нагнетания второй ступени. При перекачке жидкости на большие расстояния целесообразно устанавливать насосы на отдалении друг от друга. 15 Конструкции и правила эксплуатации центробежных насосов По конструктивному исполнению насосы подразделяются на: – одноколесные консольные с односторонним всасыванием; – одноколесные с двухсторонним всасыванием; – многоступенчатые или секционные. Одна из конструкций консольного насоса представлена на рис.11. Чугунное рабочее колесо 2 с лопатками закреплено на конце стального вала 5 гайкой 6. Вал вращается в чугунном корпусе 1 на двух шариковых подшипниках 7, размещенных в масляной ванне опорной стойки 3, и уплотняется сальником 8 с нажимной втулкой и кольцом 9. С электродвигателем вал соединяется посредством упругой муфты 10 или ременной передачи. Горизонтальный входной патрубок 4, выполненный заодно с крышкой корпуса, крепится к корпусу шпильками, что позволяет проводить ревизию рабочего колеса во время эксплуатации без полной разборки насоса. Выходной патрубок расположен вертикально. Для разделения полостей высокого и низкого давления служит уплотнительный узел, образованный выступами на рабочем колесе и кольцом, закрепленным в крышке корпуса. Рис.11 Насосы такого типа имеют подачу 5-360 м³/час при напоре 10-100м вод.ст., коэффициент быстроходности 60-250, КПД 50-85 %. Допустимая высота всасывания в зависимости от температуры воды составляет 3-8,7 м. На рис.12 изображен центробежный насос с двухсторонним всасыванием, которое позволяет существенно увеличить подачу и уравновесить усилия на рабочее колесо. Благодаря улучшенным антикавитационным свойствам температура перекачиваемой воды может достигать 80°С. Выпускаются такие насосы с подачей от 90 до 12500 м³/час при напоре от 10 до 140 м вод.ст. КПД составляет 75-90 %. Многоступенчатый насос состоит из 2-10 размещенных в одном корпусе секций (рис.13). Перекачиваемая жидкость передается от одного рабочего колеса к следующему по внутреннему каналу и лопастному направляющему аппарату. Для компенсации осевого усилия применяется разгрузочное устройство в виде закрепленного на валу диска, на который действует жидкость под 16 высоким давлением. Подача таких насосов составляет 100-900 м³/час, напор до 2000м вод.ст., КПД 70-80 %. Применяются для подачи воды на большую высоту и в высоконапорных гидросистемах. Рис.12 Рис.13 Основные правила эксплуатации центробежных насосов сводятся к следующему. При пуске насос и всасывающий трубопровод необходимо залить водой до полного удаления воздуха из внутренних полостей через штуцер, расположенный в верхней части корпуса. После включения электродвигателя, набора оборотов и повышения давления до максимальной величины с контролем по манометру подается вода на сальниковое уплотнение и на охлаждение подшипников, если это предусмотрено конструкцией насоса. После этого открывается задвижка на линии нагнетания и устанавливается требуемое давление в сети. Во время работы необходимо не допускать повышения температуры подшипников более, чем на 40-50 °С по сравнению с температурой окружающей среды; поддерживать по маслоуказателю нужный уровень масла в ванне и производить его замену через 800-1000 часов работы; своевременно подтягивать сальник, не допуская больших утечек; следить за наличием и исправностью защитных приспособлений, обеспечивающих безопасную эксплуатацию насоса. 17 Вихревые насосы Рабочим органом вихревого насоса является ротор с радиальными или наклонными лопатками, вращающийся в корпусе с малым зазором (рис.14,а). При вращении ротора жидкость захватывается лопатками возле входа 1 в кольцевой канал 2. Затем под действием центробежных сил она выбрасывается в этот канал и снова захватывается лопатками. За один оборот такой процесс повторяется несколько раз, что обеспечивает значительное повышение энергии жидкости. При этом в канале возникают сложные вихревые потоки, давшие название насосу. Рабочие колеса бывают закрытого типа с короткими лопатками (рис.14,б) и открытого типа с длинными радиальными или наклонными лопатками (рис.14,в). Рис.14 Вихревые насосы при одинаковых размерах и частоте вращения развивают напор в 2-4 раза больший по сравнению с центробежными (до 250 м вод. ст.) при подаче 0,3-15 л/c. Кроме того, они обладают самовсасывающей способностью, что упрощает их запуск в работу. Преимущественно вихревые насосы применяются для перекачки легколетучих сред (бензин, спирт, сжиженные газы). Однако, в связи с большими потерями от вихреобразования их КПД составляет всего 30-50 %. Струйные насосы В струйном насосе перекачка жидкости осуществляется посредством ее смешения с потоком жидкости с более высоким давлением. Принципиальная схема такого насоса приведена на рис.15. Он состоит из трубопровода высокого давления 1 c соплом на конце, трубопровода низкого давления 2 с кольцевым соплом 3, камеры смешения 4 и диффузора 5, в котором уменьшается скорость смеси и в соответствии с уравнением Бернулли устанавливается промежуточное давление. Струйные насосы просты по конструкции, малогабаритны, не имеют движущихся частей, могут работать на агрессивных жидкостях и выполнять функции смешения. Их часто устанавливают перед лопастными насосами для 18 устранения кавитации. Рабочий поток при этом отбирают из нагнетательной линии этих насосов. pв, Q1 1 pa, Q0 pc 3 4 2 5 Рис.15 Основными характеристиками струйных насосов являются: – рабочий напор 2 2 2 2 pв vв pc vc H p g 2 g g 2 g – полезный напор pc vc pa va H п g 2 g g 2 g – коэффициент полезного действия Q0 H п Q1 H p КПД струйных насосов составляет 0,2-0,3. Столь низкие значения обусловлены значительными потерями энергии в камере смешения вследствие вихреобразования. Поршневые насосы Поршневые насосы, имеющие разнообразное конструктивное исполнение, широко применяются для перекачки различных жидкостей и как источник энергии в гидросистемах машин и установок. Исторически первым представителем насосов этого типа является кривошипно-шатунный насос простого действия, принципиальная схема которого приведена на рис.16. x R R-r Rcosα -rCosγ Рис.16 r 19 Когда поршень, соединенный шатуном длиной R с вращающимся кривошипом длиной r, совершает ход вправо, в цилиндр через самодействующий всасывающий клапан поступает перекачиваемая жидкость. Нагнетательный клапан под действием пружины в это время закрыт. При ходе поршня влево, как показано на рисунке, жидкость вытесняется из цилиндра. За каждый оборот кривошипа совершается один рабочий ход. Поэтому поршневые насосы отличаются от лопастных цикличностью подачи. К их преимуществам относятся герметичность рабочей полости цилиндра, что обеспечивает самовсасывание жидкости при холостом ходе поршня, и незначительная зависимость подачи от давления. В связи с изменением скорости движения поршня vп работа насоса характеризуется не только цикличностью, но и неравномерностью подачи при нагнетании жидкости. Ее текущее значение равно Q vп , где - площадь поршня. Перемещение поршня от правой мертвой точки составляет x RCos rCos R r Обычно длина шатуна R намного превышает длину кривошипа r, Cos близок к единице и перемещение поршня поэтому приблизительно равно x r 1 Cos Дифференцирование по времени дает d dx vп d rSin d rSin , где - угловая скорость кривошипа. Таким образом, текущая подача поршневого насоса, равная Q rSin, меняется по синусоидальному закону (рис.17) с максимальным значением Q макс r Q π Рис. 17 0 Средняя скорость поршня равна vпср vп d 0 2 r 2π 20 В поршневых насосах, как и в центробежных, при определенных условиях возможно возникновение кавитационного режима работы. Действительно, без учета инерционных сил, вызываемых неравномерностью движения поршня, давление в цилиндре в процессе всасывания в соответствии с уравнением Бернулли равно 2 vж g рц ратм рпот , Н вс 2 где Hвс – высота всасывания; vж – скорость жидкости в цилиндре; Δрпот – потери давления во всасывающей линии и клапане. Выражение в скобках зависит от подачи насоса, т.е. от частоты вращения кривошипа. При большой частоте вращения давление в цилиндре снижается до давления насыщения жидкости рs, происходит ее самовскипание, у поршня появляется паровая прослойка и жидкость отрывается от поршня (точка 1 на рис.18). v vп vжмакс 1 2 3 γ 0 0,25 π π Рис. 18 Так как разность давлений ратм - рs не меняется, то жидкость движется с постоянной скоростью vжмакс. В точке 2 скорости поршня и жидкости выравниваются и в дальнейшем жидкость начинает догонять поршень, который движется с замедлением. Если она успевает полностью заполнить цилиндр до мертвой точки 3, то подача насоса сохраняется, но его работа сопровождается шумами и вибрацией. В критическом режиме кавитации заштрихованные на рисунке площади равны. Из этого следует, что соответствующие возникновению этого режима положение кривошипа и скорость поршня составляют кр 0,25 ; vпкр vжмакс 1,12 vпср При заданной частоте вращения кривошипа во избежание кавитации должны быть ограничены высота всасывания и сопротивление всасывающей линии. Теоретическая подача насоса за один оборот кривошипа определяется рабочим объемом цилиндра и частотой его вращения Q V pn 21 Действительная подача меньше теоретической на 2-3 % из-за утечек, запаздывания действия клапанов, а при высоких давлениях и сжимаемости жидкости. Поршневые насосы создают давление до 100 МПа при подаче до 200 л/c. Полезная, индикаторная и мощность на валу соответственно равны N пол , N ин , N пол gQH , N ин Nв ин м где ηин =0,87-0,9 – индикаторный КПД, учитывающий гидравлические потери; ηм =0,94-0,99 – механический КПД, учитывающий потери на трение в узлах и механизмах. Полный КПД насоса определяют как произведение н ин м и находится в пределах 0,82-0,89. Для устранения цикличности подачи применяют поршневые насосы двойного действия (рис.19), в которых за один оборот кривошипа дважды происходит всасывание и нагнетание, а для уменьшения ее неравномерности на входе или на выходе устанавливают воздушные колпаки. Они аккумулируют Рис.19 некоторое количество жидкости, когда подача насоса превышает отбор жидкости потребителем, и возвращают жидкость в сеть, когда подача насоса снижается. Многоцилиндровые поршневые насосы Для уменьшения неравномерности подачи, что имеет принципиальное значение в системах гидропривода и гидроавтоматики, поршневые насосы выполняют многоцилиндровыми с общими линиями всасывания и нагнетания. К ним относятся роторные радиально-поршневые, радиально-кулачковые и аксиально-поршневые насосы. Роторные радиально-поршневые насосы Основными элементами таких насосов (рис.20) являются корпус 1, подвижная каретка 2, поршни 3, неподвижная цапфа 4 с пазами 6,7 и осевыми каналами для подвода и отвода жидкости, ротор 5 с радиально расположенными отверстиями-цилиндрами, размещенный эксцентрически в 22 каретке и образующий с цапфой гарантированно малый зазор, направляющая обойма 8 на подшипниках качения для уменьшения трения. Рис.20 При вращении ротора благодаря наличию эксцентриситета меняются рабочие объемы поршневых секций, образованные пазами цапфы и цилиндрами в роторе. Поршни, находящиеся ниже горизонтальной оси насоса, движутся от центра к периферии, всасывая жидкость из паза 6 в цилиндры, а остальные движутся от периферии к центру, выдавливая жидкость в паз 7 и далее через канал в цапфе в нагнетательную линию. Подача насоса зависит от величины эксцентриситета е и регулируется перемещением каретки в корпусе. Промышленностью выпускаются нереверсивные и реверсивные насосы с ручным, гидравлическим и электрогидравлическим управлением. Одна из реальных конструкций радиально-поршневого насоса представлена на рис.21. В зависимости от числа рядов поршней такие насосы имеют подачу до 400 л/с при напоре 20 МПа. КПД составляет 75-85 %. Рис.21 23 Радиально-кулачковые поршневые насосы В насосах этого типа (рис.22) блок цилиндров неподвижен, а перемещение поршней происходит под действием кулачковых механизмов. В корпусе 1 на подшипниках качения 2 установлен вал 3 с тремя эксцентрическими шейками 4, смещенными одна от другой на угол 120˚. На каждой из них на игольчатых подшипниках 5 сидят обоймы 6. Рис.22 При вращении вала 3 обойма прижимается к всасывающему клапану 11, который передвигает поршень 10, преодолевая сопротивление пружины 9, и вытесняет жидкость из рабочего объема цилиндра через нагнетательный клапан 8 в выходной канал 7. При обратном ходе под действием пружины вначале примерно на 2 мм открывается всасывающий клапан, а затем вместе с ним начинает перемещаться поршень. Жидкость из корпуса насоса поступает в рабочий объем цилиндра. Радиально-кулачковые насосы отличаются повышенной надежностью и достаточно высоким КПД. Аксиально-поршневые насосы Принципиальная схема насоса с наклонным диском показана на рис.23, а одна из реальных конструкций на рис.24. Приводной вал 1 вращается на шарикоподшипниках 2, запрессованных в корпусе 10. Неподвижный наклонный диск 5 смонтирован в корпусе под углом к вертикальной оси, который с целью регулирования подачи насоса можно менять. По диску скользят башмаки 13, шарнирно соединенные со сферическими головками поршней 11. Поршни перемещаются аксиально в блоке цилиндров 7, жестко соединенном с приводным валом опорой 8 со скользящей шпонкой и установленном в корпусе на подшипнике 12. Плотный контакт поршней с наклонным диском обеспечивается пружиной 6 через шаровую опору 3 и 24 кольцо 4, прижимающее к диску торцовые поверхности башмаков. Этой же пружиной блок цилиндров прижимается к распределительному узлу 9,14 с серповидными окнами 15,16 для подвода и отвода жидкости. При работе насоса дополнительные прижимающие усилия создаются жидкостью под давлением. Благодаря этому насос может работать как самовсасывающий. Рис.23 При вращении вала через шпоночное соединение опоры 8 приводится в движение блок цилиндров 7. Поршни 11, вращаясь вместе с блоком и находясь постоянно в контакте с наклонным диском 5, совершают относительно блока возвратно-поступательное движение, всасывая и выталкивая жидкость через серповидные окна. Рис.24 Аксиально-поршневые насосы развивают давление до 40 МПа при подаче 0,1-4 л/c и отличаются высокой экономичностью (КПД достигает 80-95 %). 25 Пластинчатые насосы Принципиальная схема пластинчатого насоса приведена на рис.25,а. В корпусе 1 эксцентрически размещен ротор 6 с пластинами 3, прижимаемыми к ротору пружиной 2. Жидкость поступает в насос через всасывающий патрубок 5 и при вращении ротора подается в нагнетательный патрубок 4. Подача насоса зависит от величины эксцентриситета ε. В многопластинчатом насосе, изображенном на рис.25,б), предусмотрена возможность перемещения корпуса с целью изменения этого эксцентриситета и, следовательно, подачи. а) б) Рис.25 Пластинчатые насосы развивают давление до 12 МПа при подаче 0,1-4 л/c, имеют хорошую всасывающую способность (допускается давление во всасывающей линии 0,4-0,5 бар). КПД в зависимости от типоразмера составляет 55-90 %. Винтовые насосы Схема наиболее распространенного трехвинтового насоса c центральным ведущим валом а и находящимися с ним в зацеплении ведомыми валами б приведена на рис.26. Они также отличаются самовсасывающей способностью и равномерностью подачи, но имеют более низкий КПД по сравнению с пластинчатыми насосами (70-80 %). Рис.26 26 Шестеренные насосы Принцип работы шестеренного насоса c внешним зацеплением колес иллюстрируется рис.27. Основными деталями являются зубчатые колеса, помещенные в плотно охватывающий их корпус с патрубками для подвода и отвода жидкости. Рис.27 При вращении колес жидкость поступает в левую полость насоса, где зубья выходят из зацепления и создается вакуум, и переносится примыкающими к корпусу зубьями в правую полость и далее в напорную линию. Шестеренные насосы отличаются простотой конструкции, компактностью и надежностью в работе. Они развивают напор до 20 МПа при подаче 0,2-3 л/c. Однако, в связи с относительно большими потерями на трение и перетечками имеют сравнительно низкий КПД (50-80 %). Более экономичными являются шестеренные насосы с внутренним зацеплением эксцентрически расположенных зубчатых колес. Гидравлические приводы Гидроприводы широко используются в системах управления рабочими органами различных машин и механизмов. К ним относятся металлорежущие станки, прессы, роботы-манипуляторы, дорожно-строительные машины, транспортные средства, разнообразное технологическое оборудование пищевых предприятий и многое другое. Столь масштабное применение гидроприводов объясняется целым рядом их преимуществ, в том числе компактностью при большой развиваемой мощности, плавностью перемещения подвижных звеньев, бесступенчатым регулированием скорости, реверсированием исполнительного механизма, устойчивостью работы в широком диапазоне нагрузок, малой инерционностью, возможностью свободной компоновки, простотой управления, легкостью предохранения от перегрузок, высокой эксплуатационной надежностью. Гидроприводы подразделяются: – по виду источника энергии на насосные, магистральные и аккумуляторные; – по характеру перемещения выходного звена на возвратнопоступательного, поворотного и вращательного движения; – по скорости перемещения выходного звена на нерегулируемые и регулируемые. 27 Гидроприводы возвратно-поступательного движения Принципиальная схема простейшего нерегулируемого гидропривода, предназначенного для осуществления возвратно-поступательного движения рабочего органа, представлена на рис.28. E D C F G B A Рис.28 Рабочая жидкость из бака А через фильтр В поступает в нереверсивный насос С с фиксированной подачей, а из него – в трехпозиционный четырехканальный гидрораспределитель D c ручным управлением. При изображенном на рисунке нейтральном положении распределителя отключены каналы, связывающие его с гидроцилиндром Е, и поршень неподвижен. При перемещении рукоятки распределителя вправо жидкость под давлением поступает в поршневую полость гидроцилиндра и сливается в бак из штоковой полости. Поршень перемещается вправо. Реверсирование гидропривода осуществляется переключением каналов распределителя. Для предотвращения чрезмерного повышения давления в схеме имеется предохранительный клапан G. Он срабатывает, когда усилие на поршень гидроцилиндра превышает расчетное или когда оператор с опозданием переключает рукоятку распределителя потоков после достижения поршнем крайнего положения. Дроссельное регулирование гидропривода Для изменения скорости движения поршня гидроцилиндра в схему гидропривода вводится дроссельное устройство. Оно может быть установлено последовательно с гидроцилиндром (рис.29,а) или параллельно ему (рис.29,б). Скорость поршня равна отношению объемного расхода жидкости в гидроцилиндр к площади поршня Q vп п Расход жидкости через дроссель по аналогии с истечением через отверстие составляет Qдр др где μ – коэффициент расхода; 2 рдр , 28 ωдр – проходное сечение дросселя; pдр – перепад давления на дросселе. б) a) Рис. 29 При последовательном включении дросселя рдр рн рц , где рн – избыточное давление, развиваемое насосом; рц – избыточное давление в силовой полости гидроцилиндра. В свою очередь без учета площади штока F рц , п где F – внешняя сила, действующая на поршень. Окончательно др 2 р F / п н п vп Таким образом, нагрузочные характеристики гидропривода имеют вид плавно ниспадающих парабол с положительной кривизной (рис.30) и не зависят от места установки дросселя – на входе в гидроцилиндр или на выходе из него. Во втором случае, однако, гидропривод работает более устойчиво, потери энергии от дросселирования в форме тепла сбрасываются в бак, чем предупреждается нагрев цилиндра. vп ωдр1 ωдр2 рн п Рис.30 F 29 КПД органов управления равен v п п pц N ц Qц pц v п рц , N н Qн pн vпмакс п pн где vп макс – максимальная скорость перемещения поршня, определяемая подачей насоса; v п , рц - относительные значения скорости поршня и давления y в цилиндре. Очевидно, что дрмакс 2 р н , п vпмакс vп vп vпмакс др 1 рц , у др рц 1 рц Из последнего соотношения видно, что КПД органов управления принимает нулевые значения при относительных давлениях в цилиндре ˉрц =0 и ˉрц =1, а значит, имеет максимум в этом диапазоне. Исследование на максимум дает рцопт 2 / 3, умакс 0,385 др Этому соответствует относительный расход жидкости в гидроцилиндр Q опт умакс рц 0,58 др Таким образом, при последовательном дроссельном регулировании гидропривода даже в оптимальных условиях полезно используется только 58 % подачи насоса (остальная жидкость сбрасывается в бак через перепускной клапан) и 2/3 развиваемого насосом напора. КПД гидропривода с учетом потерь в насосе и гидроцилиндре не превышает 30 %. Более эффективным в энергетическом отношении является гидропривод с параллельным дроссельным регулированием (рис.29,б). В этой схеме предохранительный клапан срабатывает лишь при чрезмерном повышении давления в системе. Расход жидкости в гидроцилиндр равен Q Qн Qдр Как и ранее, расход через дроссельное устройство может быть представлен в виде Qдр др 2р н др 2F п 30 С учетом этого скорость передвижения поршня составит vп Q 1 п п Qн др 2F п Нагрузочные характеристики такого гидропривода представлены на рис.31. Они имеют вид ниспадающих парабол с отрицательной кривизной. Штриховая линия соответствует срабатыванию предохранительного клапана. vп ωдр1 ωдр2 ωдр3 F Рис.31 КПД органов управления в этом случае равен Qн Qдр 1 др, y Qн т.е. в зависимости от степени открытия дросселя меняется от нуля (дроссель полностью открыт и жидкость в гидроцилиндр не поступает) до единицы (дроссель полностью закрыт, вся жидкость поступает в гидроцилиндр). Однако, как следует из сравнения рис.30 и 31, характеристики гидропривода с параллельным дросселированием менее устойчивы. Для устранения указанного недостатка перед дроссельным устройством устанавливают редукционный клапан, настраиваемый на определенное давление. В таком гидроприводе расход жидкости через дроссель постоянен, а значит, при постоянной подаче насоса расход жидкости в гидроцилиндр и скорость перемещения поршня не зависят от нагрузки. Гидропривод носит название стабилизированного. Объемное регулирование гидропривода Осуществляется изменением подачи регулируемых насосов объемного типа: пластинчатых, радиально-поршневых, аксиально-поршневых. При закрытом предохранительном клапане скорость перемещения поршня гидроцилиндра определяется выражением vп k V pоб n где Vp – рабочий объем насоса; п , 31 об – объемный КПД, учитывающий утечки жидкости в насосе и цилиндре; n – частота вращения вала; k – коэффициент использования подачи насоса, зависящий от эксцентриситета или угла наклона диска. Так как объемный КПД линейно убывает с ростом давления жидкости (растут утечки), то характеристики гидропривода имеют вид, показанный на рис.32). vп k=1 0,6 0,2 F Рис.32 При некотором предельном значении нагрузки срабатывает предохранительный клапан и скорость поршня резко падает до нуля. КПД органов регулирования в нормальных условиях работы близок к единице. Но стоимость гидропривода с объемным регулированием выше в связи с более сложной конструкцией насоса. Примеры гидроприводов разного назначения Кроме регулирования скорости перемещения поршня, органы управления могут осуществлять дополнительные функции. Так, к числу распространенных технологических операций относится поднятие тяжелых грузов на некоторую высоту. Для безопасной эксплуатации подъемных механизмов необходимо исключить вероятность неожиданного падения груза, которое может привести к серьезным последствиям. Достигается это введением в схему гидропривода редукционного 1 и обратного клапана 2 между трехпозиционным распределителем потоков 3 и поршневой полостью гидроцилиндра 4 (рис.33). Когда распределитель потоков находится в левом положении, жидкость под давлением через обратный клапан, минуя закрытый редукционный клапан, поступает в поршневую полость цилиндра, поднимающего груз 5. Из штоковой полости жидкость сливается в бак. Редукционный клапан настроен на давление, несколько превышающее давление, создаваемое самим грузом. Для остановки или опускания груза распределитель потоков переводится в правое положение, создается избыточное противодавление в штоковой полости цилиндра, срабатывает редукционный клапан и жидкость сливается из поршневой полости в бак. При аварийной остановке насоса или разрыве трубопровода ниже редукционного клапана во время подъема груза закрывается обратный клапан, что предотвращает опорожнение поршневой полости цилиндра и падение груза. 32 5 4 2 1 3 Рис. 33 Значительная часть машин и технологического оборудования в пищевой промышленности работает циклически. Независимо от сложности машины или технологической линии эти циклы часто состоят из следующих операций: быстрый подвод – рабочая подача – реверс – быстрый отвод. Схема гидропривода, работающего по такому циклу, представлена на рис.34. Он состоит из насоса 1, предохранительного клапана 2, дроссельного клапана 3, двухпозиционных распределителей потоков жидкости 4 и 6, управляемых электромагнитными реле, гидроцилиндра 5, связанного с рабочим органом. В исходном положении реле обесточены, золотники занимают положение, показанное на схеме, обе полости цилиндра соединены со сливом, насос перекачивает жидкость через оба распределителя в бак. Для быстрого подвода рабочего органа к объекту подается напряжение на оба реле и переключаются золотники, сжимая пружины. При этом в поршневую полость цилиндра подается жидкость насосом, а из штоковой она сливается в бак через распределители 4 и 6. Для перехода на рабочую подачу обесточивается левое реле и золотник распределителя 4 под действием пружины возвращается в исходное положение. 5 4 6 3 2 1 Рис. 34 33 Слив жидкости из штоковой полости происходит через дроссельный клапан 3 с меньшим расходом. Нужная подача обеспечивается его настройкой. Для реверсирования и быстрого отвода рабочего органа напряжение на левое реле подается, а правое реле обесточивается. Золотники занимают крайнее левое положение. Штоковая полость цилиндра через распределители 6 и 4 подключается к насосу, а из поршневой полости через распределитель 6 жидкость сливается в бак. В конце хода поршня обесточивается левое реле и гидропривод возвращается в исходное положение. Синхронизация гидроприводов Синхронные гидроприводы предназначены для согласованного перемещения нескольких исполнительных механизмов. При дроссельной синхронизации гидроприводов возвратно-поступательного движения (рис.35) расходы жидкости в гидроцилиндры без учета объема штока составляют Q1 vп1 п1 др1 Q2 vп2 п2 др2 2 p1 2 p2 , где р1, p2 – избыточное давление перед дросселями. Балансы сил в гидроцилиндрах рн р1 п1 F1 рн р2 п2 F 2 С учетом этого vп1 др1 рн п2 F1 п2 / п1 др2 рн п1 F 2 п1 / п2 vп2 При точной синхронизации гидроприводов по скорости проходные сечения дросселей должны отвечать соотношению др2 др1 рн п2 F1 п2 / п1 рн F 2 / п1 п1 п2 F1 р1 pн р2 F2 Рис. 35 При изменении усилий на штоки возникает рассогласование работы гидроцилиндров и необходимость в новой настройки дросселей. 34 Этот недостаток отсутствует в схеме с делителем потока жидкости, выполненном в виде балансировочного золотника 2, в полость которого поступает жидкость под давлением через одинаковые нерегулируемые дроссели 1 (рис.36). pз1 1 p з2 2 1 pн Рис. 36 Если гидроцилиндры имеют одинаковое поперечное сечение, то при равенстве нагрузок F1=F2 одинаковы давления в цилиндрах р1=р2 и золотник находится в среднем положении. При этом равны давления и в полостях золотника рз1=рз2, а значит, и расходы жидкости через дроссели. При изменении соотношения между нагрузками меняются давления в цилиндрах и в первый момент в полостях золотника. Под действием разности давлений он смещается и уменьшает дросселирующую щель менее нагруженного цилиндра до тех пор, пока давления в полостях золотника не выровняются. Это приводит к выравниванию расходов жидкости в цилиндры, а значит, и скоростей перемещения поршней. Вместо балансировочных золотников для синхронизации работы гидроприводов могут использоваться устройства объемного типа, к которым относятся шестеренные и винтовые делители потоков жидкости и плунжерные дозаторы. Плунжерный дозатор (рис.37) установлен между трехпозиционным золотниковым распределителем потоков жидкости 4 и синхронизируемыми гидроцилиндрами 1,2. Он состоит из разделенного перегородкой общего корпуса 7, в котором перемещаются поршни, расположенные на общем штоке. Когда полости 6 и 9 соединены с нагнетательной линией насоса, поршни дозатора перемещаются вправо, вытесняя равные количества жидкости из полостей 8 и 3 в цилиндры. Жидкость из штоковых полостей сливается в бак. Если цилиндры имеют одинаковое поперечное сечение, то скорости исполнительных механизмов будут равны независимо от усилий на штоки. Для реверсирования гидроприводов меняется положение золотника распределителя 4. Жидкость под давлением поступает в штоковые полости цилиндров, а из поршневых полостей вытесняется в полости 3 и 8 дозатора. Одновременно из полостей 6 и 9 она сливается в бак. 35 1 2 6 9 7 8 3 4 5 Рис. 37 В ряде случаев синхронизацию гидроприводов необходимо осуществлять не по скорости, а по положению рабочих органов. Достигается это дозированием жидкости в цилиндры в соответствии с требуемым положением поршней. Двигатели такого типа называются синфазными. В приводах с автоматическим объемным дозированием синхронизация обеспечивается механическими силовыми связями перемещаемых органов (рис.38). Рис.38 Точность синхронизации зависит от деформации звеньев и люфтов в сочленениях. Недостатком такого способа при сравнительной простоте является громоздкость и невозможность разнесения гидроприводов в пространстве. От этого недостатка свободны приводы, синфазность которых обеспечивается применением регулируемых насосов, управляемых системами обратной связи, реагирующими на положение рабочих органов. Следящие гидроприводы Следящим называют гидропривод, в котором движение выходного звена меняется по определенному закону, задаваемому звеном управления. К этой функции добавляется усиление управляющего сигнала. Они являются 36 эффективным средством автоматизации производственных процессов, в том числе в пищевой промышленности. В машиностроении такие приводы используются в копировальных устройствах металлорежущих станков, обрабатывающих центрах, технологическом оборудовании с числовым программным управлением, автоматических линиях. Функциональная схема следящего гидропривода приведена на рис.39. В чувствительный элемент ЧЭ поступает сигнал х о перемещении щупа, отслеживающего форму копира. Этот сигнал передается в датчик рассогласования ДР. Сюда же по цепи обратной связи поступает измеренная каким-либо устройством выходная величина у (перемещение рабочего органа). Сигнал рассогласования х-у усиливается в гидроусилителе, рабочая жидкость из которого поступает в гидродвигатель исполнительного механизма. источник питания ЧЭ копир x ДР гидроусилитель обратная связь гидро двигатель рабочий орган y измеритльное устройство Рис. 39 На рис.40 представлена в качестве примера принципиальная схема следящего гидропривода копировального токарного станка. Жидкость под давлением рн поступает в штоковую полость цилиндра, выполненного в подвижной каретке 1, на которой укреплен резец 2. В поршневую полость жидкость перетекает через канал 8. Эта полость соединяется со сливной линией через дросселирующую щель s, образованную рабочей кромкой золотника 6 и расточкой в каретке. Рис.40 37 В нейтральном положении золотника, когда дросселирующая щель перекрыта, цилиндр находится в равновесии (рF=pнF′) и следящая каретка неподвижна. Когда обрабатываемая деталь 3 начинает вращаться, а продольный суппорт 7 перемещаться, то выступ на копире 4, воздействуя на щуп 5, перемещает золотник вверх, сжимая пружину. При этом дросселирующая щель увеличивается, давление в поршневой полости падает и каретка перемещается вверх. Одновременно уменьшается площадь щели и золотник стремится занять нейтральное положение. Этим обеспечивается обратная связь при обработке детали. Элементы гидроприводов К основным элементам гидроприводов относятся насосы, гидродвигатели, распределители потоков жидкости и гидроусилитетели, а к вспомогательным – запорные, предохранительные, редукционные, обратные и дроссельные клапаны, фильтры, манометры и др. Как правило, в состав гидроприводов входят насосы объемного типа, рассмотренные выше. В качестве гидродвигателей в зависимости от назначения гидропривода применяются гидроцилиндры возвратно-поступательного движения, вращательные и поворотные гидромоторы. Гидроцилиндры подразделяются на: – одностороннего действия, в которых поршень или плунжер возвращаются в исходное положение пружиной или силами тяжести (рис.41,а-б); – двухстороннего действия, в которых поршень перемещается в прямом и обратном направлениях жидкостью под давлением (рис.41, в-г); По конструктивному исполнению гидроцилиндры делятся на поршневые со штоком и плунжерные без него. б) a) в) г) Рис.41 Усилие, развиваемое гидроцилиндром при неравномерной скорости передвижения поршня определяется нагрузкой со стороны рабочего органа, силами трения, инерции и тяжести (если цилиндр расположен вертикально). Под действием значительных сжимающих усилий может произойти прогиб штока и даже разрушение цилиндра. Для предотвращения этих явлений необходимо выдерживать определенные соотношения между диаметрами цилиндра и штока и величиной хода поршня. 38 Гидроцилиндры выпускаются на расход 0,3-20 л/c с давлением до 10 МПа и толкающим усилием на штоке 7-800 кН. Роторные радиально-поршневые, аксиально-поршневые и пластинчатые моторы вращательного движения по сути являются обращенными насосами такого же типа, т.е. осуществляют преобразование потенциальной энергии жидкости под давлением в механическую энергию вращения ротора. Они развивают мощность до 20 кВт, имеют широкий диапазон регулирования частоты вращения (от 0,3 до 40 об/c), допускают изменение крутящего момента от 5 до 200 Н·м и реверсирование, имеют достаточно высокий КПД, отличаются быстродействием, по габаритам меньше электродвигателей в 3 раза, а по массе в 15 раз. Поворотные гидродвигатели предназначены для осуществления перемещений на угол до 270º. На рис.42 приведены схемы двигателей пластинчатого (а) и поршневого типа с зубчатой рейкой, находящейся в зацеплении с зубчатым колесом (б). Рис.42 Гидрораспределители предназначены для пуска гидропривода, изменения направления движения рабочей жидкости и прекращения ее подачи в гидродвигатель при остановке. С их помощью осуществляются и другие функциональные операции. В зависимости от принципа действия различают золотниковые и крановые распределители. Преимущественное применение находят первые из них, как достаточно простые в конструктивном отношении, имеющие малое время реверса (0,01-0,02 сек с соленоидным приводом) и разгруженные от гидростатического давления. По числу положений золотника различают двух-, трех- и многопозиционные распределители. Число поясков золотника определяется количеством присоединенных к нему гидролиний. Схема четырехлинейного золотника с двумя поясками представлена на рис.43. 1 2 3 4 Рис. 43 39 Рабочая жидкость подводится к золотнику через канал 1, каналы 2 и 3 соединены с полостями гидроцилиндра. Слив жидкости в бак осуществляется через канал 4. При нейтральном положении золотника каналы 2 и 3 перекрыты и жидкость в цилиндр не поступает. В крайних положениях золотника полости цилиндра сообщаются с нагнетательной и сливной линиями гидропривода и происходит прямой или обратный ход поршня. Золотники изготавливают из низкоуглеродистой цементированной стали. Для обеспечения герметичности зазор между шлифованным пояском и цилиндрической расточкой корпуса находится в пределах 4-10 мкм. В хорошо изготовленном распределителе усилие перемещения золотника не превышает 1Н. Рабочими элементами крановых распределителей являются цилиндрические, реже конусные пробки с отверстиями, совершающие поворотное движение в расточке корпуса и переключающие имеющиеся в нем каналы. Как правило, они изготавливаются на небольшой расход и давление жидкости. Гидроусилители Назначением гидроусилителей в отличие от рассмотренных выше распределителей является не только переключение потоков, но и регулирование расхода жидкости в гидродвигатель. В следящих гидроприводах находят применение золотниковые усилители, усилители типа сопло-заслонка и усилители со струйной трубкой. На рис.45 схематично изображен четырехкромочный золотниковый усилитель. По аналогии с электрическими цепями его можно представить в виде мостика гидравлических сопротивлений. В зависимости от входного сигнала меняется проходное сечение дросселирующих щелей si, их сопротивления Δрi, расходы жидкости Qi и давления в полостях гидродвигателя р 1 и р2. Рис.45 Пренебрегая потерями в линиях и площадью штока, избыточное давление, развиваемое насосом, можно представить в виде F р1, рн р2 р1 р2 р1 р2 п 40 где F, ωп – нагрузка на двигатель и площадь поршня. Так как мостик симметричен, то p1 p2 p С учетом этого 1 F p рн п Расход через дросселирующую щель равен 2 Qi d 2p При постоянной нагрузке на гидроцилиндр Q k , Qi k ; т.е. статическая характеристика усилителя линейна. Это обстоятельство предопределяет широкое применение золотниковых усилителей такого типа в следящих гидроприводах и системах автоматики. При переменной нагрузке на гидродвигатель скорость перемещения поршня пропорциональна vп k рн F / п , т.е. характеристики следящего привода и рассмотренного выше привода с последовательным дроссельным регулированием аналогичны. Принципиальная схема усилителя типа сопло-заслонка приведена на рис. 46,а. На входе в усилитель установлен нерегулируемый дроссель 1, а на выходе – регулируемый дроссель, образованный торцом сопла 2 и подвижной заслонкой 3. Перемещение заслонки под воздействием сигнала δ приводит к изменению гидравлического сопротивления дросселя, расхода жидкости через него Q2, давления в междроссельной камере р1 и расхода в гидродвигатель Q. а) б) Рис.46 В следящих гидроприводах двухстороннего действия применяют усилители с двумя соплами (рис.46,б). Усилители типа сопло-заслонка имеют 41 малые габаритные размеры и массу, благодаря отсутствию трущихся частей обладают высокой чувствительностью и быстродействием, просты в изготовлении, долговечны. Их статическая характеристика в диапазоне нагрузок +60 % близка к линейной. КПД, однако, не превышает 15 %. Основным управляющим элементом усилителя со струйной трубкой является поворотная трубка 1 (рис.47), в которую поступает рабочая жидкость под давлением 0,4-1 МПа. Заканчивается трубка соплом 2 диаметром 1-2 мм. Вытекающая из сопла жидкость со скоростью 30-50 м/с попадает в приемные окна 3,4, выполненные в виде диффузоров. Здесь кинетическая энергия потока преобразуется в потенциальную энергию давления . Рис.47 При отклонении трубки от нейтрального положения в полостях гидродвигателя 5 меняется давление и плунжер начинает перемещаться. Рабочие жидкости гидроприводов В гидроприводах используют минеральные и синтетические масла, эмульсии и водно-гликолевые растворы (тасолы). Они часто содержат добавки, улучшающие эксплуатационные свойства, и ингибиторы коррозии. Минеральные масла выгодно отличаются дешевизной и доступностью, работоспособностью в широком диапазоне температур, обладают хорошими смазывающими свойствами, что уменьшает износ трущихся поверхностей. Их главным недостатком является воспламеняемость, что обусловливает повышенные требования к безопасности. Синтетические масла производят на основе хлорированных углеводородов, органичеких соединений, силиконов. К их преимуществам относятся негорючесть и работоспособность в течение длительного времени. При высоких температурах, однако, возможно разложение с выделением кислот, вызывающих коррозию элементов гидропривода. Эмульсии являются диспергированными несмешивающимися смесями масел и воды, содержащими до 80 % второго компонента. Они, кроме того, 42 содержат эмульгаторы и добавки, препятствующие возникновению электрохимической коррозии. Следует иметь в виду, что диапазон их применения ограничен повышенной испаряемостью при высоких температурах и замерзанием при низких. Водно-гликолевые растворы работоспособны при отрицательных температурах. Вязкость и воспламеняемость зависят от содержания воды. При высокой частоте вращения и больших нагрузках резко снижают ресурс подшипников из антифрикционных материалов. Вызывают электрохимическую коррозию деталей из алюминиевых сплавов и разрушают покрытия из цинка, кадмия, магния. При выборе рабочих жидкостей необходимо также выполнять рекомендации производителей элементов гидроприводов. Гидропередачи Гидропередачи вращательного движения (трансмиссии) предназначены для бесступенчатого регулирования частоты вращения различных механизмов при большой передаваемой мощности. Они состоят из насоса и гидромотора и конструктивно могут быть выполнены в раздельном исполнении (на рис.48,а насос и мотор соединены трубопроводами) или в виде единого агрегата (на рис.48,б аксиально-поршневые насос и мотор скомпонованы в одном корпусе). а) б) Рис.48 43 Регулирование частоты вращения выходного вала гидропередачи осуществляется изменением подачи насоса, либо изменением рабочего объема мотора, либо тем и другим вместе. В первом примере это достигается изменением эксцентриситета, а во втором – угла наклона дисков сопряженных машин. Без учета утечек частота вращения мотора связана с частотой насоса и рабочими объемами машин соотношениями Теоретическая потребляемая мощность и крутящий момент на валу мотора равны n м nн N м р м Q; Vн Vм N м рм Q , Мм м 2 n м где Δpм – перепад давлений; φм – угловая скорость. В пределах, обеспечивающих приемлемые значения КПД (80-95 %), общий диапазон регулирования может достигать 500:1. Пневмопривод Пневмопривод широко применяется для механизации и автоматизации операций, не требующих строго заданного режима перемещения исполнительного органа (зажим, поворот, кантование, пневмоинструмент и т.п.). В роботехнике доля пневмопривода превышает 50 %. Это объясняется такими преимуществами, как – высокая скорость срабатывания; – работоспособность в экстремальных условиях эксплуатации (высокие и низкие температуры, радиация, вибрации); – пожаробезопасность; – простота конструкции и надежность; – легкость обслуживания. К недостаткам пневмопривода относятся большой расход энергии на сжатие воздуха и склонность к коррозии. Принципиальная схема пневмопривода возвратно-поступательного движения приведена на рис.49. В исходном состоянии поршни пневмоцилиндров 1 и 8 занимают крайнее левое положение, кулачки прижимают подпружиненные выключатели 3 и 6. Через выключатель 3 сжатый воздух подается в правую полость распределителя 5 и удерживает его в левом положении. Сигнал от выключателя 6 прерван пневмотумблером 9. При кратковременном включении тумблера воздух поступает в левую полость распределителя 2 и перемещает его вправо (вторая полость через подпружиненный выключатель 7 связана с атмосферой). Последующее выключение пневмотумблера прерывает сигнал, но переключатель 2 остается в правом положении и поршень пневмоцилиндра 1 начинает двигаться вправо, освобождая выключатель 3. Правая полость 44 распределителя 5 при этом сообщается с атмосферой. В конце хода поршня срабатывает выключатель 4, разблокируется и начинает перемещаться поршень пневмоцилиндра 8. После срабатывания выключателя 7 перемещается распределитель 2 и поршень пневмоцилиндра 1 возвращается в исходное положение. То же происходит с поршнем пневмоцилиндра 8 после срабатывания выключателя 3. При повторном включении пневмотумблера все операции повторяются. 3 сжатый воздух в атмосферу 1 2 4 5 6 Рис. 49 (1-фильтр; 2-редуктор; 3-манометр; 4- маслораспылитель; 5-переключатель потоков, 6-пневмоцилиндр) На рис.50 приведена схема автоматической блокировки перемещения двух пневмоцилиндров. 1 8 2 3 4 5 6 7 9 Рис. 50 На рис.51 приведена функциональная схема пневмопривода отрезного полуавтомата. Воздух через распределитель 1 с ручным приводом поступает в пневмоцилиндр 3 с кулачком на конце штока. Из штоковой полости цилиндра воздух удаляется в атмосферу через дроссель 2, с помощью которого регулируется скорость опускания поршня. Происходит зажим изделия. В конце хода поршня срабатывает роликовый переключатель 4 и воздух через дроссель 5 направляется в распределитель 6. Под действием давления золотник занимает нижнее положение и к магистрали со сжатым воздухом подключается распределитель 8, питающий поршневые полости пневмоцилиндров 9 и 10. Одновременно через дроссель 7 наполняется воздухом его правая полость. Из штоковых полостей пневмоцилиндров воздух сбрасывается в атмосферу. При 45 перемещении поршней пневмоцилиндров 9 и 10 изделие разрезается. После наполнения правой полости распределителя 8 и его срабатывания сжатый воздух поступает в штоковые полости пневмоцилиндров и нижнюю полость распределителя 1. Из поршневых полостей воздух сбрасывается в атмосферу и поршни занимают исходное положение. Одновременно переключается распределитель 1, подавая воздух в штоковую полость пневмоцилиндра 3 и опорожняя поршневую полость. При ходе поршня вверх освобождается ролик переключателя 4, он возвращается в исходное положение и с атмосферой через обратный клапан 11 соединяется верхняя полость распределителя 6, который под действием пружины также занимает исходное положение. Настройкой дросселей 5 и 7 обеспечивается нужная задержка выполнения операций. 3 2 9 1 10 5 4 7 11 6 8 Рис. 51 Регулирование пневмоприводов В пневмоприводах в зависимости от назначения регулируются скорость перемещения поршня и усилие на шток. Кроме того в состав привода могут входить элементы, предназначенные для торможения или остановки поршня в нужном положении. Регулирование скорости применяется с целью обеспечения плавного перемещения рабочего органа. Она зависит от количества сжатого воздуха, поступающего в пневмоцилиндр, и отработанного воздуха, удаляемого из него. Расходы воздуха подбираются дросселями с обратными клапанами. Схема с ручным управлением (рис.52,а) позволяет регулировать скорость перемещения поршня в пневмоцилиндре одностороннего действия с возвратной пружиной. 46 а) б) Рис. 52 Здесь дроссель установлен на входе в поршневую полость пневмоцилиндра и его настройкой обеспечивается требуемая скорость рабочего хода. При переключении распределителя эта полость через обратный клапан соединяется с атмосферой и поршень под действием пружины совершает быстрый обратный ход. Однако, из-за наличия пружины, создающей неравномерное противодавление по ходу поршня, точно регулировать скорость с помощью этой схемы не удается. На рис.52,б представлена схема регулирования скорости поршня в цилиндре двухстороннего действия. В этом положении сжатый воздух через обратный клапан свободно проходит в штоковую полость цилиндра, а из поршневой полости осуществляется регулируемый выхлоп через дроссель. При переключении распределителя дросселем создается подпор в штоковой полости. Таким образом обеспечивается плавное перемещение поршня в прямом и обратном направлениях. Благодаря быстрому заполнению полостей пневмопривод устойчиво работает при изменении внешней нагрузки. Для стабилизации или изменения усилия, развиваемого пневмоприводом, в схему вводят регулятор давления, устанавливаемый, как правило, на входе в рабочую полость. Схема автоматического торможения поршня приведена на рис.53. 1 2 3 4 Рис.53 Сжатый воздух поступает в рабочую полость цилиндра и вызывает перемещение поршня вправо. Из штоковой полости воздух свободно сбрасывается в атмосферу. В конце рабочего хода срабатывает кулачковый выключатель 1 и выхлоп воздуха заканчивается через дроссель 2, что обеспечивает торможение поршня. Для перемещения поршня влево переключается распределитель 4 и 47 сжатый воздух направляется в штоковую полость цилиндра сначала через обратный клапан 3, а после повторного срабатывания под действием пружины выключателя 1 – по основной линии. Элементы пневмоприводов В состав пневмоприводов, как и гидроприводов, входят исполнительные механизмы (поршневые, плунжерные, мембранные и сильфонные пневмодвигатели возвратно-поступательного движения, поворотные двигатели и пневмомоторы), распределительные устройства с ручным, электромеханическим и пневматическим управлением (золотниковые, клапанные, крановые), управляющие устройства, обеспечивающие переключение распределителей в соответствии с требуемой последовательностью технологических операций, пневмопреобразователи, пневмоусилители, датчики состояния, например, рассмотренные выше конечные переключатели, задатчики закона движения исполнительного механизма, например, дроссели. Конструктивно многие элементы аналогичны применяемым в гидроприводах. Источником сжатого воздуха в пневмоприводах являются компрессоры поршневого и пластинчатого типа. Конструкции поршневых компрессоров простого (а) и двойного (b) действия, представленные на рис.54, во многом напоминают паровые машины, но рабочие процессы в них имеют противоположное направление. Рис. 54 48 (delivery – нагнетание; induction – всасывание; water jacket – водяная рубашка; clearance volume – мертвый объем; stroke volume – объем, описываемый поршнем) На рис.55 в p-v-диаграмме изображены обратимые процессы изотермического (1-2) и (адиабатного 1-2') сжатия. В первом случае абсолютная величина потребляемой компрессором удельной работы, если считать сжимаемый газ идеальным, равна / l RT ln p2 , p1 а во втором k p 2 vdp R 1 T l k 1 1 p1 1 / 2 k 1 / k В действительности сжатие газа сопровождается теплообменом со стенками цилиндра и может быть описано политропой с переменным показателем. Вначале, когда тепловой поток направлен от стенок цилиндра к свежей порции газа, n k, а в конце процесса сжатия, когда меняется направление теплового потока, n k. Работу компрессора в этом случае рассчитывают по среднему показателю политропы. Дополнительное влияние на характер процесса оказывает тепло трения. Потери в реальных компрессорах учитываются изотермическим КПД при интенсивном охлаждении цилиндра или адиабатическим КПД, если оно отсутствует. Для промышленных компрессоров из=0,5-0,8; ад =0,82-0,85. Работа, потребляемая неохлаждаемыми компрессорами, может быть уменьшена переходом на двухступенчатое сжатие с охлаждением газа в межступенчатом теплообменнике до исходной температуры. Наглядно это иллюстрируется рис.55, где экономия работы изображается заштрихованной площадкой. p p2 2 / 2 рпром 1 р1 1 v Рис. 55 49 На рис.56 схематично изображен объемный пластинчатый компрессор. Он состоит из ротора, расположенного экцентрично в корпусе и опирающегося на подшипники. В пазы ротора вставлены подвижные пластины, изготавливаемые из антифрикционных материалов. Когда пластина проходит всасывающее окно, начинается сжатие газа вследствие уменьшения объема между ротором и корпусом компрессора. После открытия нагнетательного окна сжатый газ выталкивается в ресивер. Рис.56 Производительность пластинчатых компрессоров достигает 150 м³/мин, а отношение давлений в специальном исполнении – до 20. Схема управления пневмоприводом с контролем по давлению приведена на рис.57. Оно обеспечивается клапаном, срабатывающим по достижении заданного давления или разности давлений в полостях. 2 5 y 3 1 4 Рис. 57 В исходном положении нижняя полость клапана 1 и поршневая полость пневмоцилиндра 2 соединены через распределитель 3 и дроссель 4 с атмосферой. В верхнюю полость клапана и штоковую полость пневмоцилиндра поступает сжатый воздух. Поршень находится в крайнем левом положении, а канал управления у, который дает команду на выполнение следующей операции, перекрыт, так как объект 5 не зажат. При переключении распределителя сжатый воздух поступает в поршневую полость цилиндра, поршень 50 передвигается вправо и зажимает объект. Одновременно падает давление в верхней полости клапана и растет в нижней. Когда разность давлений станет достаточной для преодоления усилия пружины клапана, управляющий канал открывается и подается команда на выполнение следующей операции. С аналогичной целью может использоваться пневмоклапан, показанный на рис.58. При подаче воздуха в полость 11 мембрана 10 перекрывает сопло 9, отсекая рабочую полость 2 от атмосферной линии. Через регулируемый дроссель 1 она и емкость 8 наполняются воздухом. Одновременно через дроссель 3 воздух поступает в полость 4, создавая противодавление. Через некоторое время давление в рабочей полости становится достаточным для перемещения поршня с заслонкой на штоке. Полость 4 быстро опорожняется, шток “выстреливает” и переключает распределитель 5, на выходе которого появляется сигнал управления у. В конце хода поршень перекрывает щель 6 и полость 4 герметизируется. Для подготовки клапана к повторному срабатыванию достаточно снять давление на входе. Откроется сопло 9 и опорожнится емкость 2. Под действием пружины распределителя 5 поршень вернется в исходное положение. Изменение времени появления управляющего сигнала достигается подбором объема емкости 8 и настройкой дросселя 1. Управление может также осуществляться с контролем по перемещению. Кроме приведенных выше примеров с конечными выключателями, к этой группе относятся приводы с кулачковыми переключателями каналов пневмораспределителей и шифраторами с кодирующим диском или перфокартой (рис. 59). Рис. 58 Рис. 59 Пневмопреобразователи выполняются по принципу компенсации перемещения чувствительного элемента или компенсации усилия на него, которые преобразуются в пропорциональное давление воздуха. К первой группе относятся рассмотренные в гидроприводе преобразователи типа сопло-заслонка, имеющие близкие к линейным характеристики. 51 Представителем второй группы является преобразователь, изображенный на рис.60. Рис. 60 Он состоит из нерегулируемого дросселя 4, через который воздух от источника питания с давлением р1 поступает в междроссельную камеру 5, управляемого дросселя 2 с заслонкой 1, смонтированной на эластичной мембране 3, защемленной в корпусе преобразователя. Обычно мембраны изготавливают из прорезиненной ткани или металлизированного найлона. Входным сигналом преобразователя является усилие х, приложенное к центру мембраны. Компенсация этого усилия осуществляется давлением р2 находящегося в камере 5 воздуха, которое пропорционально перемещению заслонки. Воздух с этим давлением направляется в распределитель пневмодвигателя. Дискретный усилитель мембранного типа изображен на рис.61. Он состоит из камер А,Б,В, разделенных мембранами 4 и 2. Жесткие центры мембран связаны втулкой 3 и являются одновременно заслонками сопел 1 и 6. Пружина 5, настраиваемая на определенный порог срабатывания, прижимает мембранный блок к соплу 1, питаемому сжатым воздухом с давлением р1. Воздух с давлением р2, подлежащим усилению, подводится в камеру Б. Выходная линия усилителя с давлением р3 через сопло 6 и камеру В связана с атмосферой. При отсутствии входного сигнала заслонка под действием пружины перекрывает сопло 1 и воздух в выходную линию не поступает. Когда давление р2 превышает порог чувствительности мембраны, открывается сопло 1 и перекрывается сопло 6. Происходит усиление входного сигнала вплоть до давления питания р1.