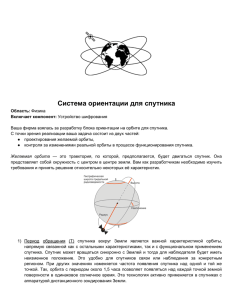
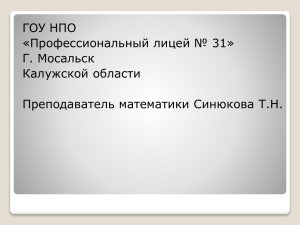
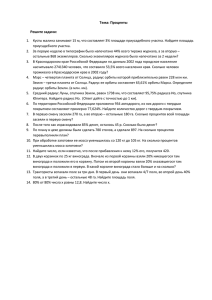
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ "МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ (НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)" КУРС ЛЕКЦИЙ Динамика космического полета (наименование дисциплины) специализированной профессиональной подготовки специалистов Базовая дисциплина: __Основы теории полета__ (наименование базовой дисциплины) Автор(ы): __д.т.н., профессор М.С.Константинов__ (ученая степень, ученое звание, фамилия, имя, отчество) к.т.н, доцент В.Г.Петухов Москва, 2015 г. Оглавление 1. Введение в теорию движения космических аппаратов ................................... 4 1.1. Конкретизация понятия «Движение КА» ...................................................... 5 1.2. Проблема выбора траектории КА .................................................................. 7 1.3. Проблема выбора условий старта КА .......................................................... 14 1.4. Азимут запуска ракеты-носителя ................................................................. 17 1.5. Орбита спутника Земли ................................................................................. 18 1.6. Трасса искусственного спутника Земли ...................................................... 27 1.7. Выбор азимута запуска ракеты-носителя .................................................... 30 2. Задача двух тел .................................................................................................. 33 2.1. Законы Кеплера ........................................................................................... 33 2.2. Уравнения движения в задаче двух тел .................................................... 35 2.3. Интегралы задачи двух тел ........................................................................ 38 2.3.1. Интеграл энергии ................................................................................. 38 2.3.2. Интеграл площадей .............................................................................. 40 2.3.3. Интеграл Лапласа ................................................................................. 43 2.3.4. Соотношения между интегралами задачи двух тел.......................... 44 2.4. Уравнение орбиты ...................................................................................... 46 2.5. Геометрические характеристики кеплеровских орбит ........................... 48 2.5.1. Эллиптическая орбита ......................................................................... 48 2.5.2. Параболическая орбита ....................................................................... 53 2.5.3. Гиперболическая орбита ..................................................................... 54 2.6. Координаты и скорость в плоском кеплеровском движении................. 56 2.7. Уравнение Кеплера ..................................................................................... 62 2.7.1. Уравнение Кеплера для эллиптической орбиты ............................... 63 2.7.2. Период обращения КА по эллиптической орбите ............................ 66 2.7.3. Уравнение Кеплера для параболической орбиты ............................. 67 2.7.4. Уравнение Кеплера для гиперболической орбиты ........................... 67 2.8. Кеплеровская орбита в пространстве ....................................................... 68 3. Межорбитальные перелеты .............................................................................. 73 3.1. Характеристическая скорость. Уравнение Циолковского ..................... 74 3.2. Одноимпульсные маневры ........................................................................ 75 3.2.1. Изменение наклонения круговой орбиты .......................................... 76 3.2.2. Плоский перелет между круговой и эллиптической орбитами, имеющими точку касания ............................................................................. 77 3.2.3. Плоский перелет между пересекающимися круговой и эллиптической орбитами ............................................................................... 80 3.2.4. Плоский перелет ................................................................................... 82 между произвольными кеплеровскими орбитами ...................................... 82 3.3. Двухимпульсные маневры ......................................................................... 84 3.3.1. Перелет между компланарными круговыми орбитами. Гомановский перелет ............................................................................................................. 85 3.3.2. Перелет между некомпланарными круговыми орбитами................ 89 3.3.3. Апсидальные перелеты между эллиптическими орбитами ............. 93 3.4. Трехимпульсные перелеты ........................................................................ 94 3.4.1. Биэллиптическая схема перелета между компланарными круговыми орбитами ...................................................................................... 95 3.4.2. Биэллиптический пространственный перелет .................................. 98 3.4.3. Разбиение импульсов скорости для снижения потерь характеристической скорости. Схема выведения на ГСО с разбиением перигейного импульса. ................................................................................ 101 1. Введение в теорию движения космических аппаратов Ниже представлено введение в некоторые проблемы теории движения космических аппаратов (КА), представление о тех проблемах теории движения КА, которые определяют общий подход к проблеме проектирования космических аппаратов. Каждый специалист (или почти каждый специалист) считает свою специальность очень важной для той отрасли, в которой работает. Но далеко не всякий специалист имеет возможность утверждать, что его специальность является определяющей, базовой, самой важной для всей отрасли. На мой взгляд, та теория, о кратком содержании, точнее кратком введении в которую я собираюсь Вам рассказать, является фундаментом ракетно-космической отрасли человеческой деятельности, фундаментом космонавтики. Берусь утверждать, что сначала появились идеи теории движения КА, развивая которые основоположники теории (К.Э. Циолковский, Ф.А. Цандер, W. Homann и многие другие) создали базу не только для самой теории движения КА, но и стимулировали первые ракетно-космические проекты, создали базу для новой в свое время отрасли человеческой деятельности. В начале требуется сделать два замечания. Первое замечание о названии теории, о некоторых основах которой я собираюсь Вам рассказать. Мнения разных специалистов в таких вопросах практически никогда не совпадают. Многие считают, что хорошим названием является – «механика космического полета», некоторые – «астродинамика», многие не соглашаются с такими названиями. Хотя я считаю, что термин «механика космического полета» вполне соответствует содержанию теории, но вынужден согласиться с тем, что во многих случаях более точным является название «теория движения КА». Правда, при этом следует оговорить, какие объекты человеческой деятельности мы собираемся называть космическими аппаратами. Будем считать космическими аппаратами такие объекты как: ракеты-носители (аппараты, обеспечивающие выведение космических объектов на орбиты спутников Земли с ее поверхности); искусственные спутники Земли, космические станции и платформы; разгонные блоки, обеспечивающие перевод космического объекта с одной орбиты на другую (межорбитальные перелеты); спускаемые на Землю из космоса КА; лунные и межпланетные космические аппараты, их отдельные отделяемые части, которые обеспечивают операции посадки на поверхности планет, орбитального маневрирования или операций возврата КА к Земле и т.д. Теорией движения всех этих КА и занимается механика космического полета. Второе замечание связано с тем, что в настоящее время теория движения КА включает очень большой комплекс проблем, каждая из которых может быть рассмотрена как отдельная теория. С моей точки зрения, в настоящее время невозможно быть специалистом во всех проблемах теории движения космических аппаратов. Я собираюсь дать введение в те из проблем теории движения, которые непосредственно относятся к проектированию некоторых классов КА, определяют облик этих КА, определяют во многом процесс эксплуатации этих КА и их систем. Рассматриваемые классы КА это ракеты-носители, спутники, спутниковые системы, разгонные блоки и возвращаемые на Землю КА. 1.1. Конкретизация понятия «Движение КА» Мы конкретизировали понятие «космический аппарат» и ограничили рассматриваемые нами классы КА. Для строгости постановки рассматриваемой проблемы следует договориться и о том, что мы собираемся вкладывать в понятие «движение». Для нашего курса определяющим движение будет понятие траектории КА. Под ней мы будем подразумевать геометрическое место точек, определяющих положение центра масс КА во времени. Траектория КА это некоторая кривая в рассматриваемом (вводимом) нами пространстве, характеризующая перемещение в пространстве космического аппарата. Общепринятое понятие траектории хорошо согласуется с понятием траектории, которое рассматривается в механике космического полета. Итак, в нашем курсе мы собираемся рассматривать комплекс проблем, которые определяют траекторию КА, дают возможность анализировать траекторию, выбирать ее для решения той или иной транспортной, народно-хозяйственной, коммерческой или научной задачи, которая стоит перед КА. Заметим, что с точки зрения механики, как науки, траектория КА описывает только поступательные степени свободы КА. Но у всякого твердого тела существую еще и вращательные степени свободы. Они характеризуют ориентацию твердого тела в пространстве. В нашем курсе обойтись без ориентации КА в пространстве не удастся. Но анализ ориентации (углового или по-другому вращательного движение КА) в нашем курсе часто будет лишь вспомогательной проблемой, направленной, прежде всего, на то, чтобы обеспечивать требуемую траекторию КА. Заметим, что реальный КА это не твердое тело, он включает емкости, частично заполненные жидкостью, он имеет определенную жесткость с определенными «жесткостными» характеристиками, которые приводят к очень сложному перемещению (например, колебанию) одних частей КА относительно других частей. В нашем курсе нам удастся избежать анализа этих сложных движений. Мы будем считать (это оказывается допустимым и обоснованным при анализе многих проблем), что КА это жесткое твердое тело переменной массы, движение которого характеризуется тремя поступательными степенями свободы и тремя вращательными степенями свободы. Причем главными для нас будут поступательные степени свободы, определяющие траекторию КА. 1.2. Проблема выбора траектории КА Траектория КА (как любого тела) зависит от условий движения КА, от того, какие силы на него будут действовать. Эти условия движения во многом определяются характеристиками начального состояния КА в момент его старта и тем, как КА будет управляться в процессе его полета. Проектант КА во многих случаях имеет возможности выбирать и условия старта КА, и, в еще большей степени, характеристики законов управления движением КА. Без математической модели движения при этом обойтись невозможно. Математическая модель это полная (замкнутая) системы уравнений, решение которой дает возможность определить характеристики движения КА и прежде всего для нашей дисциплины траекторию КА. Но сначала попробуем объяснить проблему выбора условий старта и самой траектории КА на примере маневра выведения спутника Земли на низкую околоземную орбиту. На Рисунке 1 схематично показана Земля (ее сечение заштриховано), и в несколько искаженном по масштабу виде представлена круговая орбита спутника Земли, скажем высотой 300 км. Искажение допущено в соотношении величины радиуса Земли (часто средний радиус Земли принимается равным 6371 км) и величины высоты рассматриваемой орбиты. Построенная в масштабе орбита спутника практически будет совпадать с земной поверхностью. Чтобы рисунок был более наглядным, мы допустили небольшое искажение масштаба. траектория выведения №1 траектория выведения №2 траектория выведения №3 С центр Земли орбита спутника траектория выведения №4 Рисунок 1. К анализу возможных видов траекторий ракет-носителей Рисунок 1. К анализу возможных видов траекторий На рисунке показано положение космодрома. Это точка K и она расположена на поверхности Земли. Рассмотрим несколько принципиально возможных схем выведения КА на орбиту спутника. Каждая схема обеспечивает конкретную траекторию полета ракеты-носителя при выведении КА на орбиту спутника. На рисунке показано 4 такие траектории. Прежде чем анализировать эти траектории немного конкретизирует ту транспортную проблему, которую решает любая ракета-носитель. Задача ракеты-носителя, как транспортного средства, доставить КА на орбиту спутника. Формализовать эту задачу можно следующим образом. Стартую со своего космодрома, ракета-носитель должна перенести КА в некоторую точку в окрестности Земли и обеспечить его движение по заранее выбранной орбите. Для определенности будем считать, что это круговая орбита высотой 300 км над поверхностью Земли. Интуитивно понятно, что обеспечение условий движения по круговой орбите означает, что ракета-носитель должна обеспечить: перемещение КА в некоторую точку окрестности Земли с заданной высотой 300 км над ее поверхностью; должен обеспечить космическому аппарату в этой точке вполне определенную величину и направление скорости. Что касается величины скорости, то Вы мне должны поверить, что эта величина зависит от высоты орбиты и для высоты 300 км, она равна 7.73 км/сек. Еще проще обстоит дело с направлением скорости. В момент выведения КА на круговую орбиту его скорость должна обеспечивать движение по круговой орбите, и, стало быть, она должна быть направлена по местному горизонту (принадлежать плоскости местного горизонта). Радиусом вектором КА называется вектор, который имеет началом центр Земли и заканчивается в точке, в которой находится КА в любой момент времени. Плоскость местного горизонта это плоскость перпендикулярная радиусу вектору той точки, в которой находится КА. После сделанного пояснения можно утверждать, что ракета-носитель для выведения на орбиту спутника Земли должна обеспечить выполнение трех условий: определенную высоту КА (в нашем примере 300 км); определенную скорость КА (в нашем случае 7.73 км/сек); определенный угол между скоростью КА и плоскостью местного горизонта (в нашем случае 0 градусов). Принципиально за счет выбора программы управления движением ракеты-носителя можно обеспечить выполнение перечисленных условий выведения на конечную орбиту многими способами. Каждый способ будет использовать различные траектории выведения. На Рисунке 1 показаны четыре принципиально возможные траектории полета ракеты-носителя. Эти траектории перенумерованы. Каждая из приведенных траекторий имеет свои преимущества и недостатки. Я хотел бы Вас спросить: какую из приведенных траекторий Вы бы выбрали для своей ракеты-носителя. Я уверен, что несмотря на различные мнения большинство из вас остановит свой выбор на действительно хорошей для реализации (если хотите рациональной или даже оптимальной несмотря на то, что критерий оптимизации нами еще не сформулирован) траектории. Давайте проанализируем каждую из приведенных траекторий. Траектория под номером 1 характерна тем, что на ней КА двигается почти все время вертикально вверх и только тогда, когда он приближается к заданной высоте орбиты назначения, направление его скорости достаточно резко изменяется. В этот момент угол наклона скорости к местному горизонту резко изменяется от значения 90 градусов к нулевому значению. Ваше мнение, какие недостатки в такой схеме выведения, в такой траектории ракеты-носителя? Внимательный слушатель отмечает следующие два недостатка анализируемой схемы выведения: Первый недостаток заключается в том, на рассматриваемой траектории существует большой участок вертикального подъема КА. На таких участках траектории гравитационная сила притяжения космического аппарата Землей сильно замедляет скорость КА. Гравитационная сила «съедает» значительную часть скорости КА. Появляются, как мы будем говорить, значительные гравитационные потери в скорости. С точки зрения гравитационных потерь участки вертикального подъема КА являются самыми не выгодными. Более выгодными с этой точки зрения являются участки полого подъема. Гравитационные потери в скорости для маневра, который выполняет ракета-носитель, являются самыми большими из всех типов потерь в скорости. Они могут достигать и 2 км/сек. Поэтому при выборе схемы полета (программы полета КА) на эти потери следует обращать большое внимание и стремиться уменьшить. Отметим, что гравитационные потери определяются не только крутизной траектории (углом наклона скорости к горизонту), но и временем выведения (временем действия гравитационной силы в процессе выведения). Чем это время меньше, тем меньше гравитационные потери в скорости. С точки зрения времени выведения рассматриваемая траектория достаточно хороша. Но этот фактор не оказывается решающим в рассматриваемом случае – гравитационные потери для траектории № 1 оказываются очень большими. Это первый, но не последний недостаток рассматриваемой схемы выведения КА на орбиту. Второй недостаток этой траектории, который слушатели находят и называют прежде всего, заключается в следующем. На анализируемой траектории есть участок, на котором резко изменяется направление движения. Действительно, в конце практически вертикального участка подъема КА его скорость от почти вертикальной быстро становится направленной по местному горизонту. Безусловно, существуют значительные трудности в реализации такого маневра. На изменение направления скорости всегда приходится тратить большую энергию КА. Особенно трудно изменять направление скорости большой величины. В этом случае приходится тягой двигателя не ускорять движение КА, направляю тягу по скорости КА, а направлять тягу двигателя под большим углом к направлению скорости. При этом появляются значительные потери в скорости. Такие потери называют потерями на управление движением КА. Так что траектория № 1 является неудачной траекторией из-за большой величины гравитационных потерь и потерь на управление. Следует отметить и одно достоинства этой траектории: имея ввиду малую протяженность траектории, можно с некоторой осторожностью полагать, что время выведение с ее использованием весьма мало. Это безусловное преимущество. Преимуществом могло быть рассмотрено и то обстоятельство, что точка выхода КА на орбиту находится вблизи космодрома. Последнее обстоятельство упрощает наблюдение за КА в процессе его выведения на орбиту, упрощает и управление движением КА. Но перечисленные выше недостатки траектории (большие величины потерь в скорости на гравитацию и на управления) оказываются определяющими и такая траектория при выведении КА на орбиту спутника Земли не используется. Перейдем к анализу траектории под номером 2. Она характерна тем, что КА в процессе движения поднимается на высоту большую, чем высота орбиты, на которую КА выводится. КА достигает какой-то максимальной высоты и затем сверху опускается до заданной высоты 300 км. Я полагаю, что у Вас появилась определенная неудовлетворенность таким свойством траектории № 2. Хотя принципиально отвергать возможность использования движения, при котором мы сначала пролетаем мимо цели, с тем, чтобы потом к ней вернуться, нельзя, но целесообразность такого маневра нужно серьезно обосновывать. В рассматриваемом примере у такого маневра нет тех преимуществ, которые при отсутствии каких-либо специфических обстоятельств и ограничений делали бы его рациональным. Чтобы подняться на большую высоту придется преодолевать гравитационное притяжение Земли. При этом на рассматриваемой траектории есть большой участок, на котором КА «круто», резко поднимается вверх. Гравитационные потери на этом участке достигают большой величины и делают схему выведения с использованием траектории № 2 нерациональной. Проанализируем траекторию выведения под номером 4. Прежде всего, бросается в глаза ее большая длина. Интуитивно понятно, что это недостаток рассматриваемой траектории. Но более правильно при анализе траектории опираться на другие свойства траектории, хотя эти свойства во многом связаны с большой протяженностью траектории выведения. Первое свойство –большое время выведения. Вопрос стоит не только и не столько в самом большом времени выведения (хотя это и само плохо), но в том, что при большом времени выведения потери в скорости могут оказаться большими. При этом идет разговор не только о уже упоминавшихся гравитационных потерях в скорости, но в большей степени об аэродинамических потерях в скорости. Эти потери определяются работой силы лобового сопротивления КА при его движении в атмосфере. Аэродинамическое сопротивление тормозит КА, «съедает» некоторую часть его скорости, которая и называется аэродинамическими потерями в скорости. Аэродинамическое сопротивление зависит от скорости КА и плотности среды (атмосферы), в которой он двигается. Аэродинамические потери тем больше, чем дольше КА находится в атмосфере, чем больше скорость КА (особенно в плотных слоях атмосферы). С точки зрения аэродинамических потерь в скорости траектория выведения под номером 4 очень неудачна. При ее использовании КА долго двигается в атмосфере, скорее всего он постепенно набирает большую скорость в атмосфере на относительно небольшой высоте. Все это приводит к тому, что аэродинамические потери в скорости оказываются весьма большими. Впрочем, вряд ли на этой траектории удастся получить небольшими и гравитационные потери в скорости (время выведение большое – гравитационная сила, долго работая, значительно уменьшит величину скорости, набираемой КА). Если теперь вернуться к траектории выведения под номером 1, можно отметить, что при использовании этой траектории КА быстро выходит из плотных слоев атмосферы, не успевая набрать большую скорость в атмосфере, что приводит к существенному снижению аэродинамических потерь в скорости. Так что с точки зрения аэродинамических потерь в скорости траектория №1 близка к идеальной. Но траекторию №1 мы уже раскритиковали из-за других факторов. Не проанализированной на рисунке осталась одна траектория. Ее номер – 3. Как Вы, наверное, догадываетесь, что я собираюсь объяснить, почему схема выведения с использованием такой траектории оказывается рациональной. Дело в том, что при использовании такой траектории удается достичь минимальных суммарных потерь в скорости. Суммарные потери в скорости есть сумма потерь в скорости, связанных с потерями на гравитацию, на аэродинамическое сопротивление, на управление (о этих потерях мы уже говорили) и с некоторыми другими факторами, о которых во вводной лекции я решил Вам не рассказывать. Время выведение по траектории № 3 относительно невелико, начальный участок вертикального подъема на этой траектории совсем мал, на остальной части траектории угол наклона скорости к местному горизонту относительно мал. Это объяснят то, что гравитационные потери в скорости относительно невелики. С другой стороны, используя эту траекторию удается избежать и больших аэродинамических и некоторых других потерь. Траекторию 3 можно рассматривать как компромисс между отдельными группами потерь в скорости. 1.3. Проблема выбора условий старта КА Географические характеристики космодрома Хочу рассказать еще об одной частной, но достаточно важной проблеме теории движения КА - о выборе условий старта КА. Очевидно, что, изменяя условия старта, мы изменяем и условия движения КА, влияем на траекторию КА, на то, как будет решаться та, например, транспортная задача, которая стоит перед КА. Понятно, что условия старта могут быть благоприятными и неблагоприятными и наша задача выбирать и обеспечивать благоприятные условия старта с учетом существующих ограничений самой разной «физики». Обратимся опять к маневру выведения спутника на околоземную орбиту. Рассмотрим ситуацию, когда мы имеем возможность для запуска какой-либо ракеты-носителя выбрать один из возможных для этой ракетыносителя космодром. Например, пусть есть возможность для запуска ракетыносителя «Союз» использовать или космодром «Байконур», или космодром «Плесецк». Вы, конечно, меня понимаете, что я собираюсь анализировать не политические или коммерческие аспекты этого выбора. Для нас сейчас важны баллистические особенности возможности использования этих двух космодромов, то есть те особенности, которые связаны с теорией движения космических аппаратов. При таком анализе определяющим будет географические координаты космодромов, их расположение на поверхности Земли. Каждый космодром расположен в некоторой точке поверхности Земли и имеет определенные географические координаты. При этом космодром вместе с Землей перемещается в пространстве. Для рассматриваемой нами проблемы важно не движение Земли относительно Солнца (Земля двигается относительно Солнца по некоторой эллиптической орбите и совершает полный оборот вокруг Солнца за один год), а суточное вращение Земли. За одни сутки Земля делает один оборот вокруг своей оси. Она вращается с запада на восток и угловая скорость вращения Земли относительно звездного пространства оказывается равна 7.292* 10-5 радиан/сек или 4.178*10-3 градусов/сек. Период полного суточного оборота Земли относительно звезд оказывается равен 86164 секунды (это примерно 23 часа 56 минут). Суточное вращение Земли обеспечивает определенную скорость движения в звездном пространстве каждой точки поверхности Земли и, конечно, космодромов тоже. Скорость движения космодрома направлена по местной параллели, а ее величина равна произведению приведенной выше угловой скорости вращения Земли на расстояние космодрома от оси Земли. Рисунок 2 иллюстрирует меридиональная плоскость это утверждение. сечения Земли, На в нем представлена которой находится рассматриваемый космодром. С – центр Земли. O – точка расположения космодрома. Вектор СO называется радиусом вектором космодрома. Земная поверхность не является сферической. В некотором приближении эту поверхность можно рассматривать как сжатый по полюсам эллипсоид. При этом экваториальный радиус Земли примерно равен 6378.4 км, полярный радиус Земли примерно равен 6357 км. Поэтому длина радиуса вектора космодрома зависит от географической широты. Для Байконура этот радиус примерно равен 6366.5 км. Но эта длина не является определяющей для определения величины скорости космодрома в звездном пространстве. Важно другое - расстояние космодрома от оси Земли, а это расстояние сильно зависит от положения космодрома (от широты космодрома). Для того, чтобы найти это расстояние, следует длину радиуса вектора космодрома умножить на косинус геоцентрической широты космодрома. Геоцентрическая широта это угол между радиусом вектором космодрома и экваториальной плоскостью. Если принять, что космодром Байконур имеет геоцентрическую широту 48 градусов, то скорость суточного движения космодрома Байконур будет примерно равна 310 м/сек. ось вращения Земли O С геоцентрическая широта космодрома плоскость экватора Рисунок 2. Положение космодрома в меридианальной плоскости земной поверхности. Рисунок 2. космодрома, Положение космодрома O -положение C - центр Земли в меридиональной плоскости земной поверхности, О – положение космодрома, C – центр Земли Космодром Байконур, участвуя в суточном вращении Земли вокруг ее оси, относительно звездного пространства имеет скорость примерно равную 310 м/сек. Эта скорость направлена по местной параллели в восточном направлении. Таким образом, ракета-носитель, еще не запущенная, но установленная на космодроме Байконур имеет скорость относительно звездного пространства равную 310 м/сек и направленную строго в восточном направлении. Следует признать, что это весьма значительная скорость и ей следует пытаться воспользоваться. О том, какие при этом могут появиться трудности, мы поговорим позже. А пока приведем оценки скорости других земных космодромов. Уже упоминавшийся космодром Плесецк имеет скорость меньше 220 м/сек. Самый большой космодром США, расположенный на мысе Канаверал и острове Меррит (штат Флорида), имеет скорость более 408 м/сек. Космодром Куру во Французской Гвиане расположен совсем близко от экватора (5 градусов северной широты) поэтому его использование с точки зрения обсуждаемых преимущества. баллистических Скорость космодрома характеристик Куру имеет относительно большие звездного пространства больше 460 м/сек. К сожалению, далеко не всегда удается воспользоваться проанализированной переносной скоростью космодрома при запуске ракетыносителя. 1.4. Азимут запуска ракеты-носителя Азимутом запуска называется угол между северным направлением меридиана и направлением запуска ракеты-носителя. При этом положительными называют азимуты запуска в восточном направлении, отрицательными – азимуты запуска в западном направлении. Исходя из рассмотренного выше материала, мы имеем право утверждать, что с точки зрения приобретения КА скорости самым выгодным направлением запуска ракеты-носителя является восточное направление. При этом азимут запуска равен +90 градусов. Самым неудачным по тому критерию следует считать азимут запуска минус 90 градусов. В последнем случае за счет тяги двигателя, разгоняя КА, придется преодолеть скорость, которую в восточном направлении имеет космодром запуска. Транспортные возможности одной и той же ракеты-носителя будут различными при использовании различных азимутов запуска. При азимуте запуска 90 градусов он сможет вывести на околоземную орбиту спутник с максимальной массой. Если почему-либо такой азимут не может быть использован, то выводимая масса этой ракеты-носителя будет меньше. В этих условиях кажется целесообразным всегда пользоваться азимутом запуска 90 градусов. Это далеко не всегда так. Разберемся с причинами этого обстоятельства. Для этого оказывается целесообразным коротко рассмотреть вопрос об орбитах спутников Земли. Замечу, что даже если бы такого повода при анализе азимута запуска не случилось, все равно во введении теории движения КА некоторые сведения об орбитах спутников земли должны были появиться. 1.5. Орбита спутника Земли Искусственными спутниками Земли называют КА, выведенные на орбиты вокруг Земли, для решения научных и прикладных задач. В таком определении фигурирует термин орбита, и он должен быть объяснен. Если обратиться к энциклопедии (например, энциклопедии «Космонавтика»), то для орбиты спутника Земли можно получить следующее определение: «Орбита спутника Земли - это траектория, по которой движется вокруг Земли центр масс искусственного спутника». Анализ этой траектории, проводимый в «Теории движения КА» приводит к следующему очень приятному по своей простоте результату. Оказывается, что с некоторой неточностью (с некоторым приближением) орбита спутника Земли является «кеплеровской» орбитой, то есть подчиняется законам Кеплера. Для некоторого (достаточно большого) числа важных для практики задач удается использовать это приближение и считать, что орбита выводимого нами спутника Земли есть кеплеровская орбита. Воспользуемся таким допущением. В таком случае орбита спутника Земли представляет собой замкнутую кривую, конкретно - эллипс, в одном из фокусов которого расположен центр Земли. Эллипс это плоская кривая второго порядка – он расположен в некоторой плоскости. Эту плоскость будем называть плоскостью орбиты спутника. Каждый выводимый нами спутник Земли может иметь свою собственную орбиту. Для того, чтобы охарактеризовать эту орбиту вводятся так называемые, элементы орбиты спутника. Сама орбита полностью может быть охарактеризована пятью элементами. О шестом элементе, фиксирующем временное движение спутника по орбите, в нашем введении говорить не будем, а остановимся на этих пяти элементах, причем не на всех подробно и строго. Два элемента характеризуют форму и размер орбиты. Так как фиксировать форму и размер орбиты можно различными параметрами, то существует свобода их выбора. Любые два параметра, определяющие форму и размер орбиты могут рассматриваться как независимые, а остальные параметры следует уметь находить по этим независимым параметрам. Воспользуемся наиболее понятными человеку далекому от космонавтики характеристиками орбиты. В начале космической эры (в 50..60 годах прошлого столетия), о каждом запуске спутника Земли сообщали газеты и указывали минимальную и максимальную высоту орбиты спутника над поверхностью Земли. Действительно эти две характеристики полностью определяют форму и размер орбиты. Проведем краткий анализ орбиты по двум этим элементам орбиты, предполагая, что высоты орбиты отсчитываются от среднего радиуса Земли, часто принимаемого равным 6371 км. Сначала рассмотрим частный случай: – пусть минимальная и максимальная высоты орбиты совпадают. Этот случай соответствует круговой орбите спутника Земли (Рис 3). Круговая орбита является частным случаем эллиптической орбиты. На круговой орбите эксцентриситет (элемент орбиты характеризующий форму - вытянутость орбиты) равен нулю. Размер круговой орбиты характеризуется радиусом орбиты. Таким образом, если рассматриваемая орбита круговая, то ее эксцентриситет равен нулю (ниже мы дадим строгое определение эксцентриситета), а радиус орбиты равен сумме радиуса Земли и высоты круговой орбиты над земной поверхностью. rрадиус орбиты круговая орбита спутника Земли С центр Земли Рис 3. Круговая орбита Рисунок 3. Круговая орбита Перейдем к общему случаю эллиптической орбиты (рис. 4). Пусть максимальная и минимальная высота орбиты не совпадают. В этом случае орбита КА имеет высота апогейную и перигейную точки. Апогеем орбиты спутника называется точка орбиты с максимальным удалением от Земли (на рисунке – точка A). Перигеем орбиты называется точка орбиты с минимальным удалением от Земли (на рисунке – точка P). Перигей и апогей орбиты называются апсидальными точками орбиты. Свойства эллиптической орбиты таковы, что перигей и апогей лежат на прямой, проходящий через центр Земли, по разную сторону от центра Земли. Эта прямая называется линией апсид, и часто ее рассматривают как ось с положительным направлением от центра Земли в перигей орбиты. a ra rp апогей орбиты c D перигей орбиты P A O C линия апсид b B Ha Hp Рисунок 4. Эллиптическая орбита спутника, Рисунок 4. Эллиптическая орбита спутника центр Земли, центр эллипса С - центр Земли; O -Сгеометрический О – геометрический центр эллипса Если нам известны высоты апогея (H) и перигея (H) орбиты, то легко найти величину радиусов векторов апогея (r) и перигея (r): r =Re + H ; r =Re + H . В этих равенствах Re –радиус Земли, часто принимаемый равным 6371 км. Для анализа размера орбиты часто используют средний радиус орбиты, называемый большой полуосью орбиты. Он обозначается a. Соотношение для определения большой полуоси имеет вид: a = (r + r )/ 2. Эксцентриситет орбиты связан с уже введенными величинами следующим соотношением: e = (r - r ) / (r + r). или e = (r - r ) /2 a. Для полноты картины введем еще четыре характеристики (четыре элемента орбиты), которые могут использоваться для описания формы и размера орбиты. Фокальное расстояние орбиты спутника. Оно обозначается c и есть расстояние от геометрического центра эллипса (точка O на рисунке) до его фокуса (до центра Земли – точка С на рисунке). На рисунке фокусное расстояние нанесено - это длина OС. Фокусное расстояние может быть определено по уже введенным характеристикам следующим образом: c = a e. Малая полуось орбиты спутника. Она обозначается b, на рисунке 4 это есть расстояние OB. Малая полуось орбиты спутника может быть определено по уже введенным элементам орбиты следующим образом: b =(a2 – c2)1/2 = a (1 - e2) 1/2 . Фокальный параметр орбиты спутника. Он обозначается p и есть расстояние по перпендикуляру к линии апсид, проведенному из центра Земли до пересечения с орбитой. На рисунке 4 фокальный параметр есть длина отрезка СD. Фокальный параметр может быть определен по уже введенным характеристикам следующим образом: p = a (1 - e2) = b2 / a. Период орбиты спутника. Эллипс это замкнутая кривая, поэтому, двигаясь по эллипсу, КА проходит через некоторые промежутки времени одни и те же точки орбиты. Период орбиты – это промежуток времени между двумя последовательными прохождением спутника одной и той же точки его орбиты. Интересно, что период орбиты полностью определяется большой полуосью орбиты. Разумеется, чем больше большая полуось, тем больше период орбиты. Приведем соотношение, связывающее большую полуось a с периодом орбиты T: T = 2 (a3/)1/2 ; В последнем соотношении - гравитационный параметр Земли. Он равен 398600 км2/с3. Таким образом, форма и размер орбиты определяется любыми двумя из перечисленных элементов орбиты: радиусом апогея r., радиусом перигея r, большой полуосью a, эксцентриситетом орбиты e; малой полуосью b, фокальным расстоянием c, фокальным параметром p. Если мы имеем любые два из перечисленных элементов, то можем найти все перечисленные остальные, и если нам дадут достаточно большой кусок картона, то, нарисовав контур орбиты на нем, мы сможем вырезать орбиту спутника. Эту орбиту надо как-то поместить в пространстве. Пока нам понятно, что в одном из фокусов орбиты расположен центр Земли, но это явно недостаточно, чтобы зафиксировать положение плоскости орбиты спутника в пространстве. Займемся этой операцией. Начать следует с введения самого пространства. Рассмотрим геоцентрическую экваториальную систему координат (Рис. 5). Это такая прямоугольная правая декартовая система координат, начало которой находится в центре Земли С (геоцентрическая система) и основная плоскость которой Cxy совпадает с плоскостью экватора. При этом ось x направлена в так называемую точку весеннего равноденствия (постоянная на небесной сфере точка, находящаяся в окрестности созвездия Овен). Направление оси x совпадает с направлением Земля – Солнце в момент весеннего равноденствия, почему и появился термин «точка весеннего равноденствия». Ось z геоцентрической экваториальной системы координат направлена по оси Земли к северному его полюсу. Ось y геоцентрической экваториальной системе принадлежит плоскости экватора, перпендикулярна оси x и направлена так, что рассматриваемая система координат Cxyz является правой. норт внешней s нормали нисходящий узел орбиты спутника z i В ось вращения Земли Центр Земли C y А x плоскость земного экватора направление движения спутника по орбите восходящий узел орбиты спутника Рисунок 5. Геоцентрическая экваториальная система координат Рисунок 5. Геоцентрическая экваториальная система координат Попробуем зафиксировать положение плоскости орбиты спутника Земли относительно введенной системы координат. В общем случае плоскость орбиты спутника пересекает плоскость экватора по некоторой прямой (AB на рисунке). В частном случаем плоскость орбиты совпадает с плоскостью экватора – такой случай стоит рассматривать отдельно. Этой прямой AB обязательно принадлежит центр Земли, потому что центр Земли, являясь фокусом эллиптической орбиты, принадлежит ее плоскости, и одновременно он принадлежит плоскости экватора. На этой прямой есть две точки, в которых спутник переходит из южного полушария в северное, и затем, наоборот, из северного полушария в южное полушарие. Точка орбиты спутника, в которой он переходит из южного полушария в северное, называется восходящим узлом орбиты спутника. На Рисунке 5 это точка A. Точка орбиты спутника, в которой спутник переходит из северного полушария в южное, называется нисходящим узлом орбиты спутника. На Рисунке 5 это точка B. Восходящий и нисходящий узел орбиты находятся на прямой пересечения плоскости орбиты и плоскости экватора. Поэтому эту прямую пересечения AB называют линией узлов и часто рассматривают ее как ось, положительное направление которой есть направление из центра Земли (или из нисходящего узла орбиты) в восходящий узел орбиты. Угол между осью x и линией узлов отсчитанный в восточном направлении называют долготой восходящего узла. Обычно для этого угла выбирается следующий диапазон изменения [0o …360o]. Если долгота восходящего узла равна, например, 90 градусов, то понятно, что восходящий узел орбиты находится на положительном направлении оси y, если он равен 180о, то восходящий узел орбиты находится на отрицательном направлении оси x. Впрочем, вполне допустимо использование и отрицательных значений долготы восходящего узла. Например, если говорят, что долгота восходящего узла минус 60о, то это эквивалентно долготе восходящего узла 300о. Еще раз заметим, что долгота восходящего узла это есть угол между двумя осями в одной плоскости (плоскости экватора). Поэтому диапазон изменения этого угла 360о. Зафиксировав линию узлов орбиты ее долготой, мы зафиксировали прямую, принадлежащую плоскости орбиты спутника. Тогда для полной фиксации плоскости орбиты спутника в пространстве достаточно корректно ввести угол, характеризующий поворот плоскости орбиты спутника относительно линии узлов. Таким углом часто рассматривают наклонение орбиты спутника. Не совсем правильно под таким углом понимать угол между плоскостью орбиты и плоскостью экватора, хотя общая геометрия при этом будет соблюдена. Угол меду двумя плоскостями может изменяться от нуля до 90о. Строгое введение наклонения орбиты приведет к тому, что наклонение орбиты, изменяясь от нуля до 180о, будет не только определять саму величину угла между плоскостями орбиты, но и фиксировать направления движения КА в плоскости орбиты. Введем наклонение орбиты, как элемента орбиты спутника. Для этого построим, так называемый, орт внешней нормали к плоскости орбиты. Это единичный вектор с началом в центре Земли. Он перпендикулярен к плоскости орбиты и направлен в сторону, с которой движение спутника по орбите было видно против часовой стрелки. На Рисунке 5 этот орт обозначен . Угол между осью z и ортом внешней нормали к плоскости орбиты называется наклонение орбиты. Как угол между двумя осями в пространстве этот угол изменяется в диапазоне [0o…180o]. Если наклонение орбиты равно нулю, то есть орт внешней нормали направлена по оси z, то плоскость орбиты принадлежит плоскости экватора. Такую орбиту принято называть экваториальной. Если наклонение орбиты равно 90о, то есть орт внешней нормали принадлежит плоскости экватора, то сама плоскость орбиты перпендикулярна плоскости экватора. При этом на каждом витке траектории спутник проходит над северным и южным земными полюсами. Такую орбиту называют полярной. Рассмотрим, еще один частный случай. Пусть наклонение орбиты равно 180о. При этом орт внешней нормали лежит на оси Земли и направлен к южному полюсу Земли. Сама орбита принадлежит плоскости экватора, но такая орбита в отличие от ранее рассмотренного случая нулевого наклонения орбиты называется обратной экваториальной. Двигаясь по обратной экваториальной орбите, спутник всегда находится в экваториальной плоскости, но направление его вращения по орбите противоположно направлению вращения Земли. Земля вращается с запада на восток, а спутник вращается в противоположном направлении. Введенные два угла: долгота восходящего узла и наклонение орбиты полностью фиксируют положение плоскости орбиты в пространстве. Хотя полного набора элементов орбиты мы пока не рассмотрели, но в настоящей лекции ограничимся введенными элементами орбиты спутника Земли. 1.6. Трасса искусственного спутника Земли Искусственный спутник Земли двигается по орбите. Мы договорились, что в некотором приближении орбита спутника есть кеплеровская орбита (эллипс с фокусов в центре Земли). Орбита постоянна во введенном звездном пространстве, то есть имеет постоянные форму и размер, постоянную плоскость движения, постоянное расположение в этой плоскости. Рассмотрим какой-либо момент времени. Пусть в этот момент спутник находится в некоторой точке A своей орбиты (рис. 6). Спроектируем точку A на поверхность Земли. Обозначим эту проекцию P и назовем точку P подспутниковой точкой спутника в рассматриваемый момент времени. Спутник двигается по своей орбите, а Земля вращается вокруг своей оси, поэтому в общем случае подспутниковая точка перемешается по поверхности Земли. Эта совокупность подспутниковых точек называется трассой спутника. Характеристики трассы спутника важны для вопросов радиовидимости спутника с пунктов его наблюдения, обслуживания спутником земных территорий. для вопросов возможности A A1 P P1 C Рисунок 6. Подспутниковая точка P Рисунок 6. Подспутниковая точка спутника Земли A Р спутника Земли А Выявим некоторые важные свойства трассы спутника. Для простоты рассуждений будем рассматривать поверхность Земли как сферическую поверхность. Сначала я хочу Вас спросить: какова была бы трасса спутника Земли, если бы Земля не вращалась вокруг своей оси. Итак, спутник двигается вокруг Земли по эллиптической орбите в некоторой плоскости, проходящей через центр Земли, а Земля не вращается. Какова траектория подспутниковой точки (трасса спутника) в такой модели? Трассой спутника в такой гипотетической модели оказывается окружность с радиусом равным радиусу Земли, которая есть сечение Земли плоскостью орбиты спутника. Да такая простая трасса у спутника была бы, если бы Земля не вращалась вокруг своей оси. Но Земля вращается вокруг оси и «подставляет» под спутник все новые, другие точки своей поверхности. Выявим несколько важных свойств реальной трассы спутника. На Рисунке 7 представлена меридиональная плоскость сечения Земли, ее ось Сz и след экваториальной плоскости Сm. Полагаем, что плоскость орбиты спутника перпендикулярна рассматриваемой меридиональной плоскости Земли и след плоскости орбиты спутника Земли есть АВ. В точке А спутник уходит от нас за меридиональную плоскость Земли, а в точке В появляется из-под этой плоскости, чтобы совершить свои пол-оборота вокруг Земли впереди рассматриваемой меридиональной плоскости. Угол между АВ (следом плоскости орбиты) и экватором Сm равен наклонению орбиты спутника i. Из рисунка понятно, что КА не может оказаться над точками поверхности Земли, геоцентрическая широта которых больше наклонения орбиты i. Отсюда важный вывод – трасса спутника расположена в широтном поясе, ограниченном двумя земными параллелями: с юга параллелью, широта которой равна i градусами южной широты, с севера параллелью, широта которой равна i градусов северной широты. Таким образом, если наклонение орбиты спутника равно 51 градусов, то трасса такого спутника не может проходить над Москвой, так как ее широта больше чем 51 градусов. Для того, чтобы трасса спутника проходила над северным полюсом Земли (также как и над южным тоже) наклонение орбиты должно быть равно 90 о. Последний пример – если наклонение орбиты равно нулю, то подспутниковыми точками могут быть только точки экватора. В общем случае при этом трасса спутника есть все точки экватора. z A i С плоскость экватора m B Рисунок 7. Трасса спутника и широтный пояс Земли, которому Рисунок 7. Трасса спутника и широтный пояс Земли, принадлежит эта трасса которому принадлежит трасса Для типичного спутника, двигающегося на невысоких близких к круговым орбитах трасса спутника представляет собой линию синусоидального типа, ось которой совпадает с экватором, а амплитуда определяется наклонением орбиты. Такая трасса может быть замкнутой или чаще незамкнутой линией, что определяется соотношением периода орбиты и периода углового вращения Земли вокруг ее оси. Мы ограничимся такими сведениями о трассе спутника, так как более подробный анализ во введение к теории движения КА невозможно провести. Отметим, что теперь Вы получили информацию, которая нужна для рассмотрения вопроса, связанного с выбором азимута запуска ракетыносителя. Вернемся к вопросу об азимуте запуска ракеты-носителя. 1.7. Выбор азимута запуска ракеты-носителя Как ранее мы показали, самым выгодным (с точки зрения использования скорости вращения Земли) для запуска КА является азимут 90 градусов. Давайте охарактеризуем ту орбиту, на которую легко вывести КА, при использовании космодрома “Байконур” и азимута запуска 90о. Обратимся к Рисунку 8. На нем показана меридиональная плоскость сечения Земли, в котором в точке О, находится космодром. При использовании азимута запуска 90о мы собираемся разгонять КА в направлении перпендикулярном изображенной плоскости, так чтобы КА набирал скорость, направленную за рассматриваемую меридиональную плоскость. Предположим, что нам удалось почти мгновенно (реально достаточно быстро) поднять КА на нужную высоту и сообщить КА скорость, достаточную для движения КА по орбите. Тогда точка О будет принадлежать плоскости орбиты спутника, а сама плоскость орбиты будет перпендикулярна нарисованной меридиональной плоскости. След плоскости орбиты спутника (AB) будет включать отрезок СО. Наклонение орбиты спутника будет равно геоцентрической широте космодрома «Байконур». z A O i С плоскость экватора m B Рисунок 8. Наклонение орбиты спутника при азимуте запуска 90 градусов АВ - след плоскости орбиты спутника; OA -при следазимуте траектории ракеты-носителя Рисунок 8. Наклонение орбиты спутника запуска 90 градусов, с азимутом запуска 90 градусов АВ – след плоскости орбиты спутника, ОА – след траектории ракеты-носителя с азимутом запуска 90 градусов Уже сообщалось, что широта космодрома Байконур примерно 48 о. Поэтому казалось бы, что спутники, запущенные ракетами-носителями с использованием этого космодрома должны часто иметь наклонение 48о. Если мы посмотрим на сводку выведенных с этого космодрома спутников, то не найдем ни одной орбиты спутника с таким наклонением. В чем же дело? Почему не используется самый выгодный азимут запуска с этого активно используемого космодрома? Дело объясняется тем, что существует не только трасса спутника, но и трасса ракеты носителя. В процессе его движения он пролетает над определенной земной территорией. Трасса ракеты-носителя существенно зависит от азимута запуска. И приходится выбирать допустимые азимуты запуска с точки зрения ограничений по допустимым трассам ракетыносителя. Коротко поясним, физику ограничений по трассе ракеты-носителя. Прежде всего, понятно, что такая трасса должна выбираться так, чтобы она не проходила над сильно населенными районами Земли. Возможность аварии абсолютно любой ракеты-носителя существует. Для некоторых ракет- носителей это вероятность очень мала, но все равно она ненулевая. Имея это ввиду, трассу ракеты-носителя нужно проводить вдали от городов и больших поселений. Не будем забывать и о том, что все существующие ракеты носители являются многоступенчатыми и поэтому в процессе полета от них отделяются отработанные ненужные для дальнейшего полета конструкции. Эти конструкции должны падать в специальных зонах земной поверхности (зонах отчуждения). Это условие влияет не только на выбор азимута запуска ракеты-носителя, но и выбор всей программы его полета. Такие ограничения существуют даже при очень благоприятном расположении космодромов, когда трасса ракеты-носителя проходит над мировым океаном (например, уже упоминавшиеся космодромы во Флориде и Куру). Но там ограничений существенно меньше и существует возможность использовать самый выгодный с точки зрения энергетики ракеты-носителя азимут +90о. У космодрома «Байконур» такой возможности нет. Поэтому минимальное наклонение орбиты спутника, запущенного с космодрома «Байконур» примерно равно 51о. У космодрома «Байконур», как и у других космодромов, есть несколько допустимых азимутов запуска. Они позволяют вывести спутники на орбиты с наклонениями большими отмеченных выше 51о. Но энергетика выведения на такие орбиты выше. Транспортные возможности ракетносителей при выведении на такие орбиты меньше (меньше масса спутников, выведенных на орбиты с наклонением большим 51о). 2. Задача двух тел Космические аппараты в своем движении по орбитам подчиняются тем же законам движения, что и планеты, и другие небесные тела. История естествознания и математики тесно связана с историей решения вопроса о законах движения небесных тел. Решение этого вопроса потребовало значительных усилий многих замечательных исследователей – Николая Коперника, Тихо Браге, Иоганна Кеплера, Галилео Галилея, Исаака Ньютона и многих других. В результате именно этих исследований сформировалась классическая теоретическая механика и такие основополагающие математические методы, как дифференциальное и интегральное исчисления. Оказывается, что во многих случаях движение небесных тел может быть с достаточно высокой степенью точности описано простыми закономерностями. В честь первооткрывателя этих закономерностей, такое движение называется кеплеровским. 2.1. Законы Кеплера Впервые законы орбитального движения были сформулированы Иоганном Кеплером в начале XVII столетия. И. Кеплер получил эти законы эмпирическим способом, точнее, в результате обработки 20-летних наблюдений Марса, проведенных датским астрономом Тихо Браге. Успеху Кеплера способствовала, во-первых, исключительная для своего времени точность измерений угловых координат Марса, имевшихся в его распоряжении, и, во-вторых, выбор самого объекта – планеты Марс. Дело в том, что орбита Марса существенно отличается от круговой. Если бы, например, Кеплер проводил свои исследования на основе измерений положения Венеры, имеющей почти круговую орбиту, законы орбитального движения, возможно, не были бы им открыты. В результате многолетних исследований, Кеплер получил следующие законы движения планет вокруг Солнца. Первый закон Кеплера: планеты движутся по эллипсам, в одном из фокусов которого находится Солнце. На рис. 1 показана эллиптическая орбита планеты K, вращающейся вокруг Солнца, расположенного в фокусе F1 этой орбиты. Точка F2 на рис. 1 – второй (пустой) фокус орбиты планеты, r – гелиоцентрический радиусвектор планеты. K r F1 F2 Рисунок 1. Первый закон Кеплера Второй закон Кеплера: гелиоцентрический радиус-вектор планеты за одинаковые промежутки времени заметает равные площади (рис. 2). Если планета проходит дугу орбиты AB за такой же промежуток времени, что и дугу CD, то площади выделенных серым цветом на рис. 2 секторов эллипса совпадают. B C A D F tB - tA = tD - tC SFAB = SFCD Рисунок 2. Второй закон Кеплера Третий закон Кеплера: Квадраты периодов обращения двух планет вокруг Солнца T1 и T2 относятся друг к другу как кубы средних гелиоцентрических расстояний этих планет a1 и a2 (рис. 3). F 2a1 2a2 T12/T22 = a13/a23 Рисунок 3. Третий закон Кеплера Впоследствии Исаак Ньютон разработал теорию движения небесных тел, в рамках которой было показано, что законы Кеплера являются частным случаем движения тел, взаимодействующих друг с другом в соответствии с законом всемирного тяготения. 2.2. Уравнения движения в задаче двух тел Согласно открытому И. Ньютоном закону всемирного тяготения, две материальные точки притягиваются друг к другу с силой, пропорциональной произведению их масс и обратно пропорциональной расстоянию между ними. Рассмотрим движение этих материальных точек под действием сил взаимного притяжения. Для этого введем в рассмотрение некоторую инерциальную систему координат OXYZ (рис. 4). Z z GM M x rM Gm m r rm y O Y X Рисунок 4. Задача двух тел Пусть rm и rM - радиус-векторы точек m и M соответственно, массы которых обозначим теми же буквами – m и M. Пусть r – радиус-вектор точки m относительно точки M, то есть r = rm – rM. Тогда вектор силы притяжения, действующей на точку m со стороны точки M можно записать в виде: G m mM mM r er 2 , 2 r r r (1) где - универсальная гравитационная постоянная, r – модуль вектора r: r r x 2 y 2 z 2 , x, y, z – компоненты вектора r, er – единичный вектор в направлении вектора r. Точка M притягивается точкой m с силой, равной по величине и противоположной по направлению: G M mM r er mM 2 2 r r r (2) Согласно второму закону Ньютона, произведение массы материальной точки на ее ускорение равно силе, действующей на эту точку. Так как ускорение точки – это вторая производная от ее радиус-вектора по времени, можно записать: d 2 rm G m dt 2 d 2 rM M GM dt 2 m mM r2 mM r2 r , r r . r (3) Разделив левую и правую часть первого уравнения системы (3) на m, второго уравнения – на M, и вычитая второе уравнения из первого, получим: d 2r ( M m) r . 2 r dt r2 (4) Полученное векторное дифференциальное уравнение (4) называется дифференциальным уравнением задачи двух тел. В большинстве представляющих практический интерес задач, масса материальной точки m существенно меньше массы материальной точки M. Например, если точкой m моделируется Земля, а точкой M – Солнце, то m/M 310-6, а если за m принимается космический аппарат массой 1000 кг, а за M – Земля, то m/M 10-21. Поэтому в уравнении (4) множитель (M + m) = M (1 + m/M) M. Дифференциальное уравнение d 2r M r r 2 2 , 2 dt r r r r (5) полученное из (4) в предположении малости отношения m/M, называется дифференциальным уравнением ограниченной задачи двух тел. Параметр M = называется гравитационным параметром. Гравитационный параметр является одной из характеристик небесного тела. Например, гравитационный параметр Земли приблизительно равен 398600.5 км3/с2, Солнца – 1.327181011 км3/с2. 2.3. Интегралы задачи двух тел Дифференциальные уравнения (4) и (5) интегрируются в квадратурах. В дальнейшем мы будем рассматривать только уравнения (5), но все выводы, сделанные для ограниченной задачи двух тел (5), останутся справедливыми и для задачи двух тел (4) при замене = M на (M + m). Дифференциальные уравнения (5) допускают один скалярный первый интеграл (интеграл энергии) и два векторных первых интеграла: интеграл площадей и интеграл Лапласа. В дальнейшем, для определенности и если не оговорено противное, будем считать, что материальная точка m моделирует КА, а материальная точка M моделирует Землю. Поэтому, например, фразу «геоцентрический радиус-вектор КА» следует понимать как «вектор положения точки m в системе координат с центром в точке M». 2.3.1. Интеграл энергии Умножим левую и правую части уравнения (5) скалярно на вектор скорости КА v dr : dt v Принимая во внимание, что v d 2r v r 2 . 2 dt r r (6) d 2r d v v d v 2 v r d , где , 2 2 dt 2 dt 2 dt r dt r r v v v x2 v y2 v z2 , а vx, vy и vz – компоненты вектора скорости КА v, из (6) получим: d v2 0. dt 2 r (7) Из (7) следует, что выражение в скобках не изменяется вдоль траектории КА, то есть v2 2 h, r (8) где h – постоянная энергии. Соотношение (8) и есть интеграл энергии задачи двух тел (5). Первое слагаемое в левой части (8) пропорционально величине кинетической энергии орбитального движения КА, а второе – пропорционально потенциальной энергии. Сумма кинетической и потенциальной энергии является полной энергией орбитального движения КА, а интеграл энергии – это математическая формулировка утверждения, что полная энергия орбитального движения КА в задаче двух тел остается постоянной величиной. Величину постоянной энергии h можно определить величинами радиус-вектора и скорости КА в произвольной точке траектории. Если известна величина h и известно, что КА в своем движении достигает геоцентрического удаления r, то из интеграла энергии (8) однозначно определяется величина скорости КА в этой точке: v(r ) h 2 r (9) Из соотношения (9) следует, что движение КА в задаче двух тел может быть либо неограниченным, либо ограниченным. В самом деле, скорость КА – это действительная величина, следовательно выражение под знаком корня в (9) должно быть больше нуля. Если h неотрицательна, то это подкоренное выражение положительно при любом r, так как второе слагаемое под корнем (9) всегда положительно. Если же постоянная энергии h меньше нуля, то существует геоцентрическое удаление rmax = -2/h, на котором скорость КА обращается в 0. Понятно, что удалиться от Земли на расстояние, превышающее rmax, КА не может. Следует отметить, что при отрицательной величине орбитальной энергии h фактическое максимальное геоцентрическое удаление КА от Земли может быть и меньше rmax = -2/h. Это зависит от других, пока еще неучтенных характеристик движения (забегая вперед, можно сказать, что это зависит от угла между начальным вектором скорости и начальным радиусвектором КА). Сейчас важно отметить, что максимальное геоцентрическое удаление КА при отрицательном h не превосходит величину rmax. При отрицательной постоянной энергии КА движется по эллиптической траектории в соответствии с первым законом Кеплера. Строгое доказательство этого факта будет приведено позднее. Из (9) следует также, что минимальное значение постоянной энергии КА, при котором он может удалиться на бесконечное расстояние от Земли, равно нулю. При этом орбитальная скорость КА на геоцентрическом удалении r получится подстановкой в (9) h = 0: v p (r ) 2 r (10) Скорость (10) называется местной параболической скоростью. Далее будет показано, что в этом случае КА движется по параболической траектории. В частности, на поверхности Земли геоцентрический радиус равен радиусу Земли, а местная параболическая скорость равна второй космической скорости 11.186 км/с. При увеличении геоцентрического удаления КА, движущегося по параболической траектории, его скорость, в соответствии с (10), стремится к нулю. 2.3.2. Интеграл площадей Рассмотрим векторное произведение радиус-вектора КА на его скорость rv. Вычислим производную по времени от этого выражения, принимая во внимание уравнения движения (5): 2 d r v dr v r dv v v r d 2r v v r 2 r v v 3 r r 0 , (11) dt dt dt dt r r r так как векторное произведение вектора на себя равно 0. Из (11) следует, что векторное произведение радиус-вектора и скорости КА постоянно на всей его траектории: rv = с. (12) Соотношение (12) называется интегралом площадей. Из (12) следует, что движение КА происходит в неизменной плоскости, так как в любой момент времени текущие радиус-вектор и его производная по времени вектор скорости КА - ортогональны одному и тому же постоянному вектору c. Величина c называется постоянной площадей. Величина вектора c, в соответствии с (12), равна площади параллелограмма, построенного на радиус-векторе КА r и векторе его скорости v (рис. 5). z c M r m v y x Рисунок 5. Постоянная площадей Покажем, что из интеграла площадей (12) следует второй закон Кеплера. Так как движение КА происходит в неизменной плоскости, достаточно рассмотреть плоское движение. Пусть в некоторый момент времени t КА находится в точке m, при этом радиус-вектор КА равен r, а вектор его скорости равен v (рис. 6). В момент времени t + t КА перемещается в точку m1, при этом его радиус-вектор становится равным r + r. v v m1 r + r vr S r m M Рисунок 6. Интеграл площадей и второй закон Кеплера Вектор скорости КА можно разложить на радиальную (коллинеарную r) и трансверсальную (ортогональную r и принадлежащую плоскости движения) компоненты, vr и v соответственно. Из интеграла площадей (12) следует, что c c rv , где v = |v|. Но, так как v r (13) d , dt c r2 d . dt (14) С другой стороны, площадь выделенной серым цветом на рис. 6 фигуры, заметаемой радиус-вектором КА при его перемещении за промежуток времени t из точки m в точку m1, равна S 1 2 r Or . 2 (15) Разделив левую и правую часть (15) на t и перейдя к пределу t 0, с учетом (14), получим dS 1 2 d 1 r c, dt 2 dt 2 (16) то есть, что производная по времени от площади, заметаемой радиусвектором КА, постоянна на всей траектории КА. Следовательно площади, заметаемые радиус вектором КА за любые равные промежутки времени постоянны, что и составляет содержание второго закона Кеплера. 2.3.3. Интеграл Лапласа Умножим векторно и левую, и правую части уравнений движения (5) на векторную постоянную площадей c: d 2r c 3 rc. 2 dt r (17) Левая часть (17) легко преобразуется к виду d 2r dv d c c v c . 2 dt dt dt (18) Покажем, что правая часть (17) тоже представляет собой производную по времени от некоторой векторной функции. В самом деле, r 3 rc r 3 r r v r3 rr v vr r . (19) Первое слагаемое (19) имеет при векторе r скалярный множитель r 3 r v d . dt r (20) Подставляя (20) в (19), получим r 3 rc r d d dr d r . v r dt r r dt r dt r dt r Приравнивая (18) и (21), получим (21) d v c d r d v c r 0 . dt dt r dt r (22) Из (22) следует интеграл Лапласа: vc r rf, (23) где f – постоянный вектор, который называется вектором Лапласа. 2.3.4. Соотношения между интегралами задачи двух тел Таким образом, существуют три первых интеграла задачи двух тел (5), из которых один скалярный (интеграл энергии (8)) и два векторных (интеграл площадей (12) и интеграл Лапласа (23)). Так как каждый векторный интеграл состоит из трех скалярных, имеется всего 7 скалярных первых интегралов. Оказывается, не все эти интегралы являются независимыми. Действительно, скалярное произведение f c v c c r r c c cv r r r v 0 r v r r 0 . (24) Отсюда следует что векторы f и c ортогональны. Соотношение (24) является первым соотношением между интегралами задачи двух тел. Второе соотношение можно получить вычислением квадрата интеграла Лапласа (23): f 2 v c 2 2 r r v c 2 r 2 r r v 2c 2 2 r c r v 2 v 2 c 2 2 r c2 2 2 2 2 v2 c , r где f – абсолютная величина вектора Лапласа f: f = |f|. Выражение в скобках есть ни что иное, как правая часть интеграла энергии (8), равное постоянной h. Поэтому второе соотношение между интегралами задачи двух тел можно записать в виде: f 2 hc 2 2 . (25) Наличие двух дополнительных скалярных соотношений между семью скалярными первыми интегралами задачи двух тел позволяют сделать вывод, что число независимых скалярных первых интегралов задачи двух тел равно пяти. 2.4. Уравнение орбиты Умножим скалярно левую и правую части интеграла Лапласа (23) на радиус-вектор: v c r r f r . r (26) Рассмотрим левую часть (26): 2 v c r r v c r r r v c r c r . r (27) Левую часть (26), по определению скалярного произведения векторов, можно представить в виде произведения модулей векторов f и r, умноженного на косинус угла между ними: f r fr cos ν . (28) Приравнивая (27) и (28), получим: c 2 r fr cos . (29) Решая уравнение (29) относительно r, получим уравнение орбиты: r c2 c2 . f cos 1 f cos (30) Вводя обозначения p c2 e f , (31) , уравнение (30) можно переписать в виде: r p , 1 e cos (32) получив окончательный вид уравнения кеплеровской орбиты. В (32) величина p называется фокальным параметром, e – эксцентриситетом, а угол - истинной аномалией. Уравнение (32) представляет собой уравнение алгебраической кривой 2-го порядка в полярных координатах (r, ). Известны 3 типа алгебраических кривых 2-го порядка: эллипс (частный случай эллипса – окружность), парабола и гипербола. Все эти три типа геометрически можно представить в виде различных сечений конуса (см. рис. 7). Обозначим угол между образующей конуса и плоскостью его основания через . Тогда, если угол между образующей конуса и плоскостью сечения находится в пределах интервала 1 < 2, то сечением конуса является эллипс. При 1 = 2, сечением конуса будет парабола, а при 1 > 2 - гипербола . c= окружност 2 < h < < e< p = эллипс парабола гипербола Рисунок 7. Представление кеплеровских орбит в виде конических сечений В связи с таким представлением формы орбит невозмущенного кеплеровского движения КА, участки кеплеровских орбит часто называют дугами конических сечений. Из уравнения орбиты (32) следует, что тип орбиты определяет значение эксцентриситета e. При 0 e <1 орбита имеет форму эллипса (окружности при e = 0), при e = 1 – параболы и при e > 1 – гиперболы. 2.5. Геометрические характеристики кеплеровских орбит Рассмотрим основные геометрические характеристики кеплеровских орбит на плоскости. 2.5.1. Эллиптическая орбита Эллипс образует множество всех точек на плоскости, сумма расстояний до которых от двух фиксированных точек, называемых фокусами, постоянна. Кеплеровская орбита КА является эллиптической, если эксцентриситет орбиты e < 1. Постоянная энергии h на эллиптической орбите отрицательна: h < 0. Основные геометрические характеристики эллиптической орбиты представлены на рис. 8. y ra Kr b A F2 O rp F1 = M p P x b С a С a Рисунок 8. Геометрические характеристики эллиптической орбиты На рис. 8 положение КА обозначено точкой K, а положение притягивающего центра – точкой M. Эллиптическая орбита имеет 5 характерных точек. Это – центр эллипса (точка O), два фокуса (точка F1, совпадающая с центром притяжения M и пустая фокусная точка F2), перицентр P – точка минимального удаления КА от притягивающего центра M и апоцентр A – точка максимального удаления КА от притягивающего центра. Все перечисленные точки лежат на одной прямой. Отрезок этой прямой [AP], ограниченный точками апоцентра и перицентра, называется большой осью эллиптической орбиты. Длина большой оси обычно обозначается как 2a: 2a = |AP|. Обозначим радиус перицентра как rp = |MP|, а радиус апоцентра как ra = |MA|. Из уравнения орбиты (32) следует, что rp p p . , ra 1 e 1 e (33) Величина большой полуоси a (половина большой оси) эллиптической орбиты равна a = |OA| = |OP| = (rp+ra)/2, (34) или, после подстановки (33) в (34) a = p/(1-e2). (35) Из (35) следует важное соотношение для постоянной энергии h. Чтобы получить его, выразим в (35) фокальный параметр и эксцентриситет через постоянные интегрирования с помощью формул (31), (32): c2 a 1 f 2 c 2 2 f 2 . (36) 2 Но, как следует из (25), 2-f2 = -hc2. Подставляя это выражение в (36), и разрешая полученную формулу относительно h, получим это соотношение h a . (37) Расстояние от центра эллипса до фокуса С = |OM| = |OF2| называется фокусным расстоянием. Из рис. 8 видно, что С = a-rp = ra-a. (38) Подставляя (33) в (38), с учетом (35) получим: С = ae. (39) Очевидно, что при e = 0 фокусы эллипса совпадают с его центром и орбита становится круговой. С ростом эксцентриситета эллиптическая орбита становится более вытянутой. Таким образом, эксцентриситет e определяет форму, а фокальный параметр p (или большая полуось a) – размер эллиптической орбиты. Из (38), (39) следует, что радиусы перицентра и апоцентра можно выразить через большую полуось и эксцентриситет: rp = a(1-e), ra = a(1+e). (40) Положение КА на кеплеровской орбите определяется углом между направлением из притягивающего центра на перицентр и радиус-вектором КА. Этот угол = PMK (см. рис. 8) называется истинной аномалией. Фокальный параметр p, как следует из уравнения орбиты (32), равен геоцентрическому удалению КА при = 90°. Точке перицентра соответствует = 0°, а точке апоцентра – = 180°. В дальнейшем потребуются некоторые дополнительные геометрические характеристики эллиптической орбиты, а именно величина малой полуоси и отношение ординат эллипса и описанной вокруг него окружности. Выведем эти соотношения. Малой осью эллипса называется отрезок прямой, образованной пересечением эллипса с перпендикуляром к его большой оси, проведенным через центр эллипса. Половина малой оси называется малой полуосью эллипса и обычно обозначается символом b. На рис. 9 b = |OB|. B y b * - * F1 O С=ae a P rp Рисунок 9. К определению малой полуоси Если КА в некоторый момент времени находится в точке B, текущее значение его истинной аномалии равно * (см. рис. 9). Величина текущего радиус-вектора КА в этой точке, в соответствии с (32), (35) равна r* = p/(1+ecos*) = a(1-e2)/(1+ecos*). Из рис. 9 видно, что |OF1| = r* cos(-*) = -a*(1-e2)cos*/(1+ecos*). С другой стороны, |OF1| = c = ae (см. (39)). Приравнивая правые части последних двух выражений друг другу, и выражая из полученного соотношения косинус истинной аномалии, получим cos* = -e. Очевидно, что b = |OB| = r*sin*. Отсюда, используя только что полученные соотношения, получим выражение для малой полуоси эллиптической орбиты: a 1 e 2 sin * a 1 e 2 1 e 2 b a 1 e2 2 1 e cos * 1 e (41) Отношение между ординатами эллипса и описанной около него окружности можно получить, используя уравнения для эллипса с полуосями a и b и окружности радиуса a с центром в начале координат (рис. 10). В этом случае уравнения эллипса и окружности имеют вид x2 y2 1, a2 b2 x2 y2 a2 соответственно. Выразим явно из этих соотношений квадраты ординат эллипса и окружности (см. рис. 10): x2 b2 2 y элл b 2 1 2 2 a 2 x 2 , y кр2 a 2 x 2 . a a Отсюда 2 y элл y b2 b 2 элл 1 e 2 . 2 y кр a y кр a (42) y yкр P’ yэл P x2 y 2 a2 x x2 y2 1 a 2 b2 x Рисунок 10. Соотношение ординат эллипса и описанной вокруг него окружности Ранее отмечалось, что при нулевом эксцентриситете орбита становится круговой. В этом случае точки фокуса совпадают с центром эллипса, p = a, r = a = const. Для полноты изложения следует отметить, что существует другая крайность - вырожденный случай эллиптической орбиты. Этот случай имеет место при отрицательной постоянной энергии h и нулевой векторной постоянной площадей с. В этом случае, как следует из (31), фокальный параметр равен 0, и эллиптическая орбита вырождается в отрезок прямой линии, причем точка перицентра совпадает с притягивающим центром, а радиус апоцентра имеет конечное значение. Движение КА по такой орбите физически соответствует вертикальному подъему или падению в центральном ньютоновском гравитационном поле. Разумеется, окрестность точки перицентра на такой орбите в реальном движении КА недостижима, так как эту окрестность занимает притягивающее небесное тело, и при движении по такой орбите неизбежно столкновение КА с поверхностью этого тела. 2.5.2. Параболическая орбита Движение КА по параболической траектории имеет место при e = 1 и нулевой постоянной энергии (h = 0). В отличие от эллипса, параболическая орбита разомкнута, то есть на такой орбите существует точка минимального удаления КА от притягивающего центра – перицентр P (рис. 11), но нет точки апоцентра. Двигаясь по параболической орбите, КА может удалиться от притягивающего центра на произвольное расстояние. K y директрис p r F=M P x rp Рисунок 11. Параболическая орбита Парабола – это геометрическое место точек, одинаково удаленных от некоторой фиксированной точки (фокуса) и прямой (директрисы). Движение по параболе является особым случаем движения КА, когда строго выполняется равенство h = 0. Отсюда, с учетом интеграла энергии (8), следует, что для любой точки параболической орбиты должно выполняться следующее соотношение между орбитальной скоростью КА v и его удалением от притягивающего центра r: v 2 . r (43) Уравнение (43) называется уравнением для параболической скорости. Если в качестве геоцентрическое притягивающего удаление КА тела равно рассматривается среднему Земля, радиусу Земли, а то параболическая скорость называется второй космической скоростью. Численно вторая космическая скорость равна 11186.1 м/с. Любое отклонение от соотношения (43) приводит к смене типа движения: при уменьшении скорости относительно (43) орбита становится эллиптической, а при увеличении – гиперболической. Из интеграла энергии (8) очевидно, что при орбитальной скорости КА выше параболической постоянная энергии h > 0, а при орбитальной скорости меньше параболической h < 0. Эксцентриситет параболической орбиты равен 1, следовательно уравнение орбиты (32) в этом случае можно записать в виде: r p . 1 cos (44) Из (44) следует, что радиус перицентра параболической орбиты связан с ее фокальным параметром соотношением (см. рис. 11): rp = p/2. Большую вычисляя полуось предел (45) параболической выражения (35) при орбиты e 1. можно определить, Очевидно, что для место при параболической орбиты a = . 2.5.3. Гиперболическая орбита Движение КА по гиперболической орбите имеет эксцентриситете e > 1 и постоянной энергии h > 0. Для перелета от Земли к другим планетам КА должен быть выведен на гиперболическую геоцентрическую траекторию. y K пр r F1 = M p P O F2 x -a Рисунок 12. Гиперболическая орбита Гипербола – это геометрическое место точек, разность расстояний от которых до двух фиксированных точек (фокусов) постоянна (рис. 12). Физическое движение КА происходит по одной из ветвей гиперболы, охватывающей фокус, в котором расположен притягивающий центр (толстая сплошная кривая кривая на рис. 12). Из уравнения орбиты (32) следует, что при движении КА по гиперболической орбите реализуются не все значения истинной аномалии, а лишь те из них, которые удовлетворяют соотношению || < пр. Предельное (асимптотическое) значение истинной аномалии определяется из условия равенства нулю знаменателя правой части (32): 1+ecosпр = 0, откуда 1 e пр arccos . (46) Как и в случае параболической орбиты, на гиперболической орбите имеется точка перицентра P и нет точки апоцентра (рис. 12). Радиус перицентра определяется формулой rp p , 1 e (47) как и в случае эллиптической орбиты. 2.6. Координаты и скорость в плоском кеплеровском движении Рассмотрим плоское кеплеровское движение КА. Уравнение кеплеровской орбиты в полярных координатах (r, ) в общем случае имеет вид (32). Введем в рассмотрение инерциальную декартовую систему координат с началом в притягивающем центре M, осью xp, направленной в перицентр орбиты и осью yp, дополняющей систему до правой (рис. 13). Эта система координат называется перицентральной системой координат. y v y r vyp v vxp x M P x Рисунок 13. Радиус-вектор и вектор скорости КА в перицентральной системе координат Очевидно, что в перицентральной системе координаты КА определяются соотношениями: p cos , 1 e cos p sin y p r sin . 1 e cos x p r cos (48) Как уже отмечалось ранее, орбитальную скорость КА в кеплеровском движении всегда можно разложить на две компоненты: радиальную и трансверсальную (рис. 14). vr y v r v M P x Рисунок 14. Радиальная и трансверсальная компоненты скорости Радиальная компонента скорости vr коллинеарна радиус-вектору КА, а трансверсальная v – перпендикулярна радиус вектору, лежит в плоскости орбиты и направлена в сторону движения КА. С использованием введенных обозначений, из интеграла площадей получаем rv c r 2 p d d c c 2 2 . dt dt r r (49) В (49) трансверсальная скорость выражена через угловую скорость и радиус-вектор: v r d dt и использовано определение фокального параметра (31). Радиальная скорость равна полной производной dr/dt: vr dr d p pe sin d . dt dt 1 e cos 1 e cos 2 dt Подставляя в это выражение производную от истинной аномалии по времени из (49), получим окончательное выражение для радиальной скорости: vr p pe sin 1 e cos 2 r 2 p 1 e cos 2 pe sin 1 e cos 2 p 2 p e sin . (50) Для трансверсальной компоненты скорости имеем: v r p d r 2 dt r p r p 1 e cos . (51) Из (50), (51) легко получить выражение для полной скорости орбитального движения КА: v vr2 v2 p 1 e 2 2e cos . (52) Из (50) следует, что в точках перицентра ( = 0) и апоцентра ( = ) радиальная составляющая скорости равна нулю, то есть в этих точках (называемых также точками апсид) скорость перпендикулярна радиусвектору. Величину орбитальной скорости КА в точках апсид легко получить из (52) или (51) подстановкой соответствующих значений истинной аномалии. Именно, скорость КА в перицентре определяется соотношением vp p 1 e , (53) 1 e . (54) а в апоцентре - соотношением va p Используя интеграл энергии (8) и соотношения (34), (37) легко выразить скорость КА в перигее и апогее эллиптической орбиты через радиусы перицентра и апоцентра. В самом деле, с учетом (37), (34) интеграл энергии приобретает вид: v2 2 2 . r a rp ra В частности, в точке перицентра v 2p следовательно 2 2 , rp rp ra vp 2ra . rp rp ra (55) Аналогично, для скорости в апогее имеем: 2rp va ra rp ra (56) Из уравнения орбиты (32) и (52) следует часто используемое в дальнейшем выражение для скорости КА на круговой (e = 0) орбите радиуса r: v кр (57) r Скорость (57) называется круговой скоростью КА на удалении r от притягивающего центра (местной круговой скоростью). Если в качестве притягивающего центра рассматривается Земля, а геоцентрическое удаление КА равно среднему радиусу Земли, то соответствующая круговая скорость называется первой космической скоростью. Численно первая космическая скорость равна 7909.8 м/с. Проекции вектора скорости на оси перицентральной системы координат имеют вид (рис. 14): v xp v r cos v sin v yp v r sin v cos Как следует из вывода p p sin , (58) e cos . уравнения орбиты, направление из притягивающего центра к перицентру коллинеарно вектору Лапласа f. Следовательно, ось xp перицентральной системы координат направлена вдоль вектора Лапласа. перицентральную Однако систему не всегда координат бывает для удобно использовать математического описания движения КА. В общем случае плоского движения вектор Лапласа может быть наклонен на некоторый угол к оси x используемой инерциальной системы координат с началом в притягивающем центре M (рис. 15). Угол в механике космического полета называется аргументом перицентра. Необходимо отметить, что определение аргумента перицентра для пространственного движения, которое будет рассмотрено позже, слегка отличается от приведенного здесь определения для плоского случая. Определим компоненты вектора a в системе координат общего вида Mxy, если известны его компоненты (xp, yp) в перицентральной системе координат. Из рис. 15 видно, что компоненты вектора a в перицентральной системе можно представить в виде xp = acos, yp = asin, где a = |a|, - угол между осью xp и вектором a. Компоненты этого же вектора в системе координат Mxy примут вид: x = acos(+) = acoscos - asinsin = xpcos – ypsin, y = asin(+) = asincos + acossin = ypcos + xpsin. Эти соотношения определяют формулы преобразования координат вектора при повороте системы координат на угол и справедливы для любого вектора. Из них следует, что в системе координат Mxy компоненты радиусвектора КА и вектора скорости определяются соотношениями x x p cos y p sin , y x p sin y p cos , (59) и v x v xp cos v yp sin , v y v xp sin v yp cos , соответственно. (60) y y y a y x M P x x Рисунок 15. Вычисление компонент вектора в общем случае плоского движения x 2.7. Уравнение Кеплера Выше были рассмотрены основные геометрические и кинематические характеристики плоского кеплеровского движения, в частности, получены выражения, позволяющие определять векторы положения и скорости КА для любой точки кеплеровской орбиты, определяемой значением истинной аномалии. Однако, до настоящего времени, не рассматривалась зависимость параметров движения КА от времени. В общем виде такую зависимость легко можно получить из интеграла площадей и уравнения орбиты. В самом деле, подставляя в (49) уравнение орбиты (32), имеем d dt p 3 1 e cos 2 (61) Из (61) следует, что d 1 e cos 2 p3 dt . (62) Пусть в некоторый момент времени истинная аномалия = 0, тогда значение истинной аномалии в момент времени t можно неявно определить, интегрируя левую часть (62) по истинной аномалии от 0 до , а правую – по времени от 0 до t: d 1 e cos 2 0 p3 t . (63) Нулевое значение истинной аномалии в момент времени означает, что в этот момент времени КА проходит перицентр орбиты, поэтому называется временем прохождения перицентра. Интеграл в правой части (63) имеет различное выражение в элементарных функциях для случаев e < 1, e = 1 и e > 1, то есть для различных типов кеплеровских орбит. Более того, даже после вычисления квадратуры, для определения значения истинной аномалии (t) из выражения (63), необходимо решить нелинейное уравнение. На практике для определения (t) обычно решают не уравнение (63), а уравнение Кеплера, которое получается из (63) после некоторых преобразований. Уравнение Кеплера имеет разный вид для различных типов кеплеровского движения. Уравнение Кеплера, как и (63), является нелинейным уравнением. Преимущество уравнения Кеплера перед уравнением (63) заключается в относительной простоте его численного решения. 2.7.1. Уравнение Кеплера для эллиптической орбиты Рассмотрим случай движения КА по эллиптической орбите: e < 1. На рис. 16 представлена часть эллиптической орбиты КА, движущегося вокруг притягивающего центра F1. a Q a b P O - E P1 F1 a x Рисунок 16. К выводу уравнения Кеплера Пусть в некоторый момент времени КА находится в точке P. Введем в рассмотрение эксцентрическую аномалию E КА, которая в эллиптическом движении может использоваться наряду с истинной аномалией для определения положения КА на заданной орбите. Геометрическая интерпретация эксцентрической аномалии E представлена на рис. 16. Очевидно, что OF1 = ae – фокусное расстояние. С другой стороны, OF1 = OP1 + P1F1, следовательно p cos a1 e 2 cos ae a cos E r cos a cos E ae a cos E . 1 e cos 1 e cos Из последнего соотношения следует, что cos cos E e 1 e cos E (64) 1 1 e cos E 1 e cos 1 e2 (65) Отметим, что из (65) и уравнения орбиты следует следующая зависимость величины радиус-вектора КА от эксцентрической аномалии: r p a1 e cos E . 1 e cos (66) Теперь отметим, что QP1 = asinE, PP1 = rsin (см. рис. 16). Но, в соответствии с (42), PP1/QP1 = b/a = (1-e2)1/2. Следовательно, r sin a 1 e 2 sin E a 1 e 2 sin E , 1 e 2 sin a sin E r a1 e cos E то есть 1 e 2 sin E . sin 1 e cos E (67) Из (64) и (67) с учетом известной тригонометрической формулы для тангенса половинного угла - tg(x/2) = sinx/(1+cosx), имеем: tg 2 sin 1 e sin E , 1 cos 1 e 1 cos E или tg 2 1 e E tg . 1 e 2 (68) Вычислим дифференциал (67): cos d 1 e2 1 e cos E 2 cos E 1 e cos E sin E e sin E dE 1 e 2 cos E e 1 e cos E 2 Отсюда, d то есть 1 1 e 2 cos E e 1 e cos E 1 e 2 cos E e dE dE , cos 1 e cos E 2 cos E e 1 e cos E 2 dE 1 e2 dE . 1 e cos E d (69) Теперь, с учетом (65), (69), интеграл в левой части (63) можно переписать в виде: d 1 e cos E 2 0 0 1 e cos E 1 e 2 32 dE e e sin E 1 e 2 32 . (70) Подставляя (70) в левую часть (63), после сокращения подобных членов получим уравнение Кеплера для эллиптического движения: E e sin E a3 t . (71) Величина n (72) a3 в (71) называется средним движением. Физически, среднее движение – это средняя за виток угловая скорость движения КА вокруг притягивающего центра. В небесной механике и механике космического полета часто используется средняя аномалия M, численно равная правой части (71): M = n(t-) (73) Средняя аномалия равна углу между направлением на перицентр и фиктивным радиус-вектором КА в момент времени t, при условии движения КА по орбите с постоянной угловой скоростью, равной среднему движению. С учетом (73), уравнение Кеплера (71) можно переписать в виде E – esinE = M. (74) Для заданной орбиты (a, e) и для заданного промежутка времени после прохождения перицентра t-, по (72), (73) определяется среднее движение и средняя аномалия. Далее, из уравнения (74) определяется эксцентрическая аномалия E. Обычно это уравнение решается численно. Следует отметить, что для малого эксцентриситета e << 1 приближенной формулой E M + esinM. можно воспользоваться Для немалых e можно воспользоваться, например, методом простой итерации (E1, E2, E3,… - последовательные приближения к точному значению эксцентрической аномалии): E0 = M, E1 = M + esinE0, E2 = M + esinE1, E3 = M + esinE3, … и т.д., пока не будет достигнута требуемая точность вычисления E Ei, то есть пока в процессе итераций разница между текущим и предыдущим приближение Ei - Ei-1 не станет достаточно малой. После определения эксцентрической аномалии, по формуле (68) вычисляется истинная аномалия . Таким образом, истинная аномалия определяется как функция от времени t. Подстановка этого значения истинной аномалии в полученные ранее зависимости для координат и скорости КА позволяют определить и их в виде функции времени. Таким образом, через уравнение Кеплера по известным элементам орбиты a, e и определяется положение КА на орбите и его орбитальная скорость в любой конкретный момент времени t. 2.7.2. Период обращения КА по эллиптической орбите Периодом обращения КА по эллиптической орбите называется промежуток времени между двумя прохождениями КА фиксированной точки орбиты. В качестве такой точки может рассматриваться произвольная точка орбиты, в частности ее перицентр. Из рис. 16 и (64), (67) следует, что в перицентре истинная и эксцентрическая аномалии равны нулю, а в апоцентре – . Вычислим время движения КА от перицентра до апоцентра Tpa. Из уравнения (71) следует, что T pa a3 Из соображений симметрии (или из (71)) очевидно, что время движения КА от апоцентра до перицентра Tap = Tpa. Период обращения КА T, как отмечалось выше, можно определить как время движения КА между двумя последовательными прохождениями перицентра. Поэтому T = Tap + Tpa =2 Tpa, или T 2 a3 . (75) Из (75) следует важный результат: период обращения КА по эллиптической орбите зависит только от ее размера (большой полуоси) и не зависит от формы. Из выражения (75) следует также третий закон Кеплера. 2.7.3. Уравнение Кеплера для параболической орбиты Для параболической и гиперболической орбит уравнение Кеплера имеет другой вид. Приведем соответствующие результаты без вывода. Если орбита КА – параболическая, уравнение Кеплера сводится к кубическому уравнению относительно тангенса половины истинной аномалии: 1 tg tg3 2 3 t . 2 3 2 p (76) 2.7.4. Уравнение Кеплера для гиперболической орбиты Для гиперболической орбиты уравнение Кеплера имеет вид: e sh H H p e 2 1 3 t , (77) где tg 2 e 1 H th . e 1 2 (78) 2.8. Кеплеровская орбита в пространстве Из интеграла площадей (12) следует, что движение КА в центральном ньютоновском поле происходит в неизменной плоскости. С использованием этого результата анализ кеплеровского движения был сведен к анализу движения в этой плоскости. Однако, из (12) следует, что ориентация плоскости орбитального движения зависит от начальных значений векторов положения и скорости КА и может быть произвольной. Поэтому для определения положения и скорости КА относительно Земли или каких-либо ориентиров на небесной сфере рассмотрение пространственного движения все же необходимо. Рассмотрим инерциальную геоэкваториальную систему координат XYZ. Центр этой системы координат совпадает с центром Земли, ось Z направлена к северному полюсу, плоскость XY совпадает с плоскостью экватора Земли, причем ось X направлена в неподвижную точку (в точку весеннего равноденствия – точку небесной сферы, в которой пересекаются экваториальная плоскость Земли с плоскостью земной орбиты, причем Земля в своем орбитальном движении пересекает экваториальную плоскость снизу вверх), а ось Y дополняет систему координат до правой. На рис. 17 представлен общий случай ориентации плоскости орбиты в пространстве. Ориентацию плоскости орбиты, как и любой другой плоскости, можно определить единичным вектором нормали. Нормалью к плоскости орбиты является векторная постоянная площадей c. В заданной системе координат единичный вектор в заданном направлении полностью определяется двумя углами. В небесной механике и в механике космического полета в качестве таких углов принято использовать наклонение i и долготу восходящего узла . Узлом орбиты называется точка пересечения орбитой плоскости экватора. Точка пересечения экваториальной плоскости при движении КА из южного полушарии в северное называется восходящим узлом, а из северного в южное – нисходящим узлом орбиты. Как видно из рис. 17, i – это наклонение плоскости орбиты КА к плоскости экватора (или, что тоже самое, угол между вектором c и осью Z), а - угол между осью X и линией пересечения плоскости орбиты с плоскостью экватора, называемой линией узлов орбиты КА. Из рис. 17 видно, что компоненты вектора c выражаются через наклонение и долготу восходящего узла следующим образом: c X c sin i sin , cY c sin i cos , (79) cZ c cos i. Z Линия узлов c Орбита i Плоскос ть 2 Нисходящи i КА й узел экватора 2 i Y X Направление движения Восходящий узел Рисунок 17. Ориентация плоскости орбиты в пространстве Таким образом, фокальный параметр p (или большая полуось a) определяет размер орбиты, эксцентриситет e – ее форму, наклонение i и долгота восходящего узла – ориентацию орбитальной плоскости, истинная аномалия – положение КА на орбите. Для полного определения пространственной ориентации орбиты, необходимо ввести параметр, определяющий положение перицентра в плоскости орбиты. Таким параметром является аргумент перицентра , который в общем случае пространственного движения определяется как угол между векторами, направленными в восходящий узел и в перицентр орбиты (рис. 18). Так как оба указанных вектора принадлежат плоскости орбиты, аргумент перицентра измеряется в орбитальной плоскости. На рис. 18 перицентр обозначен точкой P, восходящий узел – точкой N, текущее положение КА – точкой K. Положение перицентральной системы координат xpypzp относительно инерциальной геоэкваториальной системы координат XYZ определяется углами , i, . Как видно из рис. 18, геоэкваториальную инерциальной систему координат можно совместить с перицентральной последовательностью трех разворотов: 1) поворотом вокруг оси Z на угол , 2) поворотом вокруг оси x1 на угол i, 3) поворотом вокруг оси zp на угол . Из аналитической геометрии известно, что матрица поворота вокруг оси z правой декартовой системы координат на угол имеет вид: cos M 3 sin 0 sin cos 0 0 , 1 (80) 0 sin . cos (81) 0 а матрица поворота вокруг оси x на угол 0 1 M 1 0 cos 0 sin yp Z zp K P xp экватор i X Y N i x1 Рисунок 18. Пространственные элементы кеплеровской орбиты Поэтому матрицу перехода от системы координат XYZ к xpypzp можно представить в виде: M(, i, ) = M3() M1(i) M3() (82) Подставляя (80), (81) в (82), получим явное выражение для матрицы перехода (82): (83) Теперь вектор положения x и скорости v КА в инерциальной геоэкваториальной системе координат XYZ могут быть выражены через матрицу M (83), координаты (48) и компоненты скорости (58) КА в перицентральной системе координат: xp x M yp , 0 (84) vxp v M v yp . 0 (85) Обозначая столбцы матрицы M как P, Q, W, получим x P xp Q yp , v P vxp Q v yp . (86) Очевидно, что P – единичный вектор (орт) оси xp перицентральной системы координат, направленный вдоль вектора Лапласа из притягивающего центра к перицентру орбиты, W – орт оси zp перицентральной системы координат, направленный из притягивающего центра вдоль векторной постоянной площадей, а Q – орт оси yp перицентральной системы координат. Вычисляя (84), (85) (или (86)), после элементарных тригонометрических преобразований имеем явные выражения для координат и компонент скорости КА через кеплеровские орбитальные элементы p, e, , i, , : x r cos u cos sin u sin cos i , y r cos u sin sin u cos cos i , z r sin u sin i, vx vy vz p (86) e sin cos u cos sin u sin cos i 1 e cos sin u cos cos u sin cos i , e sin cos u sin sin u cos cos i 1 e cos sin u sin cos u cos cos i , (87) p e sin sin u sin i 1 e cos cos u cos i , p 3. Межорбитальные перелеты Маневром КА называется целенаправленное изменение его траектории. Активным маневром называется маневр, осуществляемый с помощью тяги ракетных двигателей КА. Кроме реактивной тяги, для выполнения маневров могут использоваться внешние силы, такие как аэродинамическое сопротивление верхних слоев атмосферы (аэродинамический маневр), гравитация небесных тел при в случае их пролета (гравитационный маневр). Целью маневра может быть выведение КА на целевую орбиту, коррекция параметров движения КА, обеспечение условий входа в атмосферу спускаемого аппарата при посадке на Землю или другую планету, сближение с другим КА или небесным телом, посадка на безатмосферное небесное тело. В настоящем разделе рассматриваются только активные маневры КА в центральном ньютоновском гравитационном поле поле. В этом случае в промежутках между включениями двигателей КА движется по дугам кеплеровских орбит, то есть по эллиптическим, параболическим или гиперболическим траекториям. Более того, при достаточно большой тяговооруженности КА продолжительностью работы двигательной установки в первом приближении можно пренебречь. Такая математическая модель маневрирования КА называется импульсной. В рамках этой модели двигательная установка КА включается на бесконечно малое время и при этом обеспечивает конечное приращение скорости движения КА. Следовательно, в импульсной постановке принимается, что скорость КА изменяется мгновенно и за время выдачи импульса координаты КА остаются неизменными. Координаты КА в момент приложения импульса определяют точку, называемую точкой приложения импульса. Понятно, что точка приложения импульса является общей точкой начальной орбиты КА до приложения импульса и конечной орбиты КА после приложения импульса. Это означает, что точка приложения импульса в общем случае является либо точкой пересечения либо точкой касания начальной и конечной орбит КА. Из последнего замечания следует, что один импульс скорости может обеспечить перелет только между касающимися или пересекающимися орбитами. Если начальная и конечная орбиты КА не имеют общих точек, минимальное число импульсов для обеспечения перелета КА с начальной орбиты на конечную равно двум. Импульсная модель орбитального маневрирования эквивалентна допущению о бесконечно большой величине тяги двигательной установки КА. Очевидно, что при конечной величине тяги время работы двигательной установки также будет конечным. При этом во время работы двигательной установки будет меняться не только вектор скорости КА, но и вектор его положения. При движении в гравитационном поле это неизбежно приводит к увеличению требуемого импульса тяги, связанного с гравитационными потерями и потерями на управление. 3.1. Характеристическая скорость. Уравнение Циолковского Сумма абсолютной величины приращения скорости КА в импульсах и потерь называется характеристической скоростью маневра. В импульсной постановке, характеристическая скорость совпадает с абсолютной величиной приращения скорости в импульсах. Характеристическая скорость является наиболее важной динамической характеристикой маневра КА, так как она связывает баллистические параметры траектории с основными проектными параметрами КА. Эта связь была установлена К.Э. Циолковским. Им была рассмотрена задача прямолинейного движения ракеты в «безопорном пространстве», то есть только под действием реактивной тяги при отсутствии внешних сил. Эта задача известна в литературе как первая задача Циолковского. Как известно, тяга P ракетного двигателя в вакууме определяется формулой: P dm w, dt (88) где dm/dt – суммарный массовый расход компонентов топлива, w – скорость истечения. Второй закон Ньютона в рассматриваемом случае можно записать в виде: m dV dm w, dt dt (89) где m – масса ракеты, V – ее скорость. Уравнение (89) легко интегрируется: Vk mk dm m Vk V0 w ln 0 , mk m0 m dV w V0 где V0, m0 – скорость и масса ракеты в начальный момент времени, Vk, mk – скорость и масса ракеты в конечный момент времени. Перепишем последнее уравнение в виде V w ln m0 , mk (90) где V = Vk – V0 – приращение скорости. Уравнение (90) называется уравнением Циолковского. Абсолютная величина приращения скорости, обеспечиваемая работой ракетного двигателя при отсутствии внешних сил называется характеристической скоростью Vхар, поэтому уравнение Циолковского можно переписать в виде Vхар = w ln(m0/mk). (91) Отметим, что в рамках импульсной модели время работы двигательной установки бесконечно мало, поэтому работа внешних сил за время выдачи импульса равна нулю и, следовательно, характеристическая скорость совпадает с абсолютной величиной изменения скорости в импульсе. 3.2. Одноимпульсные маневры Как было отмечено выше, одноимпульсные перелеты возможны в случае, если начальная и конечная орбиты имеют общие точки – то есть либо касаются друг друга, либо имеют точки пересечения. Из геометрии известно, что кривые второго порядка имеют не более двух точек пересечения. Следовательно может существовать не более двух вариантов одноимпульсного перелета между заданными кеплеровскими орбитами. 3.2.1. Изменение наклонения круговой орбиты Рассмотрим одноимпульсный маневр перехода с начальной круговой орбиты 0, имеющей радиус r и наклонение к плоскости экватора i0 на конечную круговую орбиту K того же радиуса r, имеющую наклонение ik (см. рис. 19). K 0 V Vk V0 i эквато Vk V узел орбиты линия i/2 i/ V i узлов Рисунок 19. Изменение наклонения круговой орбиты Вектор орбитальной скорости КА имеет одинаковую величину на начальной и конечной орбитах, равную местной круговой скорости: V0 Vk V r . Вектор орбитальной скорости всегда направлен по касательной к орбите КА. В случае круговой орбиты, он направлен в трансверсальном направлении, то есть перпендикулярно радиус-вектору КА, в орбитальной плоскости в направлении орбитального движения. Для изменения ориентации плоскости орбиты достаточно развернуть вектор орбитальной скорости КА на заданный угол i = ik – i0. Для изменения наклонения плоскости круговой орбиты импульс скорости должен быть приложен в одной из двух узловых точек: восходящем узле (рис. 19) или нисходящем узле орбиты. Очевидно, что в точке приложения импульса должно выполняться векторное соотношение: Vk = V0 + V, (92) где V – требуемое приращение (импульс) скорости. Соответствующий треугольник скоростей представлен на рис. 19. Из условий задачи следует, что этот треугольник равнобедренный с углом при противолежащей основанию вершине i. Следовательно требуемое приращение скорости можно определить как V 2V sin i 2 2 r sin i 2 . (93) 3.2.2. Плоский перелет между круговой и эллиптической орбитами, имеющими точку касания Пусть КА движется по некоторой круговой орбите 1 радиуса r1 и требуется перевести его на эллиптическую орбиту 2 с радиусом перицентра, совпадающим с радиусом начальной круговой орбиты и заданным радиусом апоцентра r2 (рис. 20). A r 2 M 1 r P v vc v Рисунок 20. Увеличение радиуса апоцентра Очевидно, что начальная и конечная орбита имеют в этом случае единственную общую точку, в которой эти орбиты касаются друг друга. Точка касания орбит совпадает с точкой перицентра конечной орбиты. В этой точке орбитальные скорости КА на начальной vc1 и конечной vP орбите коллинеарны. Из рис. 20 видно, что для перелета с орбиты 1 на орбиту 2 необходимо приложить импульс скорости vP = vP - vc1, (94) направленный вдоль вектора орбитальной скорости КА в точке P. Учитывая выражения для круговой скорости и скорости в перицентре орбиты, из (94) следует следующее выражение для величины импульса скорости vP: v P 2r2 r1 r1 r2 r1 2r2 1 r1 r1 r2 (95) Аналогичная задача возникает при необходимости снизить перицентр орбиты КА, движущегося по начальной круговой орбите 1. В этом случае точка касания совпадает с апоцентром конечной орбиты 2, а импульс скорости должен быть направлен в направлении противоположном орбитальной скорости КА в этой точке (рис. 21) Из рис. 21 следует, что требуемое приращение скорости определяется выражением vA = vc1 – vA, (96) а величина требуемого импульса скорости vA может быть представлена в виде: v A r1 2r2 r1 r1 r2 2r2 1 r1 r1 r2 . v A v vc r 1 M 2 r P Рисунок 21. Уменьшение радиуса перицентра (97) 3.2.3. Плоский перелет между пересекающимися круговой и эллиптической орбитами Плоский одноимпульсный перелет с круговой орбиты радиуса r1 на эллиптическую орбиту с радиусом перицентра rp и радиусом апоцентра ra возможен только при условии rp r1 ra. Если радиус круговой орбиты равен радиусу апоцентра или радиусу перицентра конечной орбиты, то задача сводится к одному из двух рассмотренных ранее случаев. Пересечение начальной и конечной орбит имеет место только в случае выполнения строгих неравенств (см. рис. 22). v2r y v K r v2 M v1 P x L Рисунок 22. Одноимпульсный перелет с круговой на эллиптическую орбиту В этом случае имеются 2 точки пересечения орбит K и L, в которых может быть выполнен одноимпульсный маневр. Определим истинную аномалию точек пересечения орбит K и L на конечной эллиптической орбите. Для этого выпишем уравнение конечной эллиптической орбиты и приравняем ее радиус радиусу начальной орбиты: pk r1 . 1 ek cos Здесь ek ra rp ra rp , pk 2ra rp ra rp - эксцентриситет и фокальный параметр конечной орбиты соответственно. Из этого уравнения получим, что 1 ek cos pk 1 . r1 Соответственно, истинные аномалии точек K и L на конечной орбите будут равны 1 pk 1, ek r1 K arccos 1 L 2 arccos ek (98) pk 1 r1 соответственно. Орбитальная скорость КА v1 на начальной круговой орбите в точке пересечения K равна местной круговой скорости v1 r1 и направлена по трансверсали. Орбитальная скорость КА v2 в точке пересечения K на конечной v2 pk орбите направлена имеет трансверсальную 1 ek cos K и радиальную компоненту v2 r pk компоненту ek sin K . Понятно, что вектор импульса скорости требуемый для перевода КА с начальной орбиты на конечную равен v = v2 - v1, а его абсолютная величина равна v v 2 v1 v22r . 2 (99) Очевидно, что абсолютная величина требуемого импульса скорости при выполнении маневра в точке L равна абсолютной величине требуемого импульса скорости при выполнении маневра в точке K. 3.2.4. Плоский перелет между произвольными кеплеровскими орбитами Немного сложней случай плоского одноимпульсного перелета между произвольными кеплеровскими орбитами. По-прежнему рассматривается случай, когда начальная и конечная орбита принадлежат одной плоскости. В этом случае начальная и конечная орбиты полностью определяются тройками элементов p1, e1, 1 и p2, e2, 2 соответственно. Для удобства будем рассматривать движение КА в перицентральной системе координат, связанной с начальной орбитой (рис. 23). Уравнение начальной орбиты имеет вид r1 = p1/(1+e1cos1), а конечной – r2 = p2/(1+e2cos2). Но 2 = 1 - , где = 2 - 1 (см. рис. 23). Поэтому уравнение конечной орбиты можно переписать в виде r2 = p2/[1+e2cos(1 )]. В точках пересечения орбиты r1 = r2, поэтому для определения истинной аномалии КА на начальной орбите в точках пересечения орбит необходимо решить уравнение r1(1) = r2(1), то есть уравнение p1/(1+e1cos1) = p2/[1+e2cos(1 - )]. (100) Уравнение (100) легко приводится к виду Acos1 + Bsin1 = D, (101) где A p1e2 cos p2e1 , B p1e2 sin , D p2 p1. (102) y v1 K =2- r v P M x L Рисунок 23. Одноимпульсный перелет между эллиптическими орбитами Для решения уравнения (101) введем вспомогательный угол , однозначно определяемый следующим образом: cos A A B 2 2 , sin B A B2 2 . (103) Тогда уравнение (101) можно переписать в виде: A2 B 2 cos(1 ) D . (104) Уравнение (104), очевидно, имеет 2 решения D , arccos 2 A B2 1 D 2 arccos 2 A B2 (105) при условии D A2 B 2 . (106) Неравенство (106) является условием пересечения орбит. При D A2 B 2 точки пересечения орбит совпадают, то есть имеет место касание начальной и конечной орбит. После определения истинной аномалии КА на начальной орбите в точке пересечения орбит 1, определяется истинная аномалия КА в точке пересечения орбит на конечной орбите 2, по формулам (50), (51) определяются радиальные и трансверсальные компоненты скорости на начальной орбите v1, vr1 и на конечной орбите v2, vr2. Величина импульса скорости, требуемая для перехода с начальной орбиты на конечную определяется как v vr 2 vr1 2 v 2 v1 2 . (107) Несимметричное расположение точек пересечения орбит приводит к неравенству требуемых импульсов скорости для перехода с начальной орбиты на конечную в разных точках пересечения орбит. Поэтому в рассмотренной задаче при отсутствии других ограничений следует выбирать точку приложения импульса, соответствующую минимальной абсолютной величине импульса скорости. 3.3. Двухимпульсные маневры Одноимпульсные маневры, как указывалось выше, возможны только между пересекающимися или касающимися друг друга орбитами. Даже если начальная и конечная орбита имеют общие точки, одноимпульсный перелет не всегда возможен из-за дополнительных ограничений на проведение маневра или из-за чрезмерно высоких затрат характеристической скорости. Перелет между произвольными кеплеровскими орбитами теоретически всегда осуществим с помощью двухимпульсного маневра. Это следует из простого факта, что две произвольные точки пространства всегда можно соединить дугой некоторой переходной кеплеровской орбиты. Если одна из этих точек расположена на начальной орбите, а другая – на конечной, то такая переходная орбита будет пересекаться (или касаться) и с начальной, и с конечной орбитой. Требуемые импульсы скорости определяются как векторная разность между орбитальными скоростями КА на переходной и граничных орбитах в точках их пересечения. Так как в качестве начальной точки может использоваться произвольная точка на начальной орбите, а в качестве конечной – произвольная точка на конечной орбите, то имеется бесконечное множество вариантов двухимпульсных перелетов между заданными кеплеровскими орбитами. 3.3.1. Перелет между компланарными круговыми орбитами. Гомановский перелет В 1925 г. Вальтер Гоман предложил использовать для перелетов между расположенными в одной плоскости круговыми орбитами перелет по эллиптической траектории, которая в перицентре касается одной круговой орбиты, а в апоцентре – другой (рис. 24). Такой тип перелета называется гомановским. Позднее было доказано, что гомановский перелет между компланарными круговыми орбитами является оптимальным, то есть он требует минимальной абсолютной величины суммы абсолютных величин импульсов среди всего множества возможных двухимпульсных перелетов. Рассмотрим перелет с начальной круговой орбиты 1, имеющей радиус r1, на конечную круговую орбиту 2, имеющую радиус r2. Скорость КА на орбите 1 равна vc1 = (/r1)1/2. Для реализации гомановского перелета в некоторой точке P начальной орбиты КА сообщается приращение скорости vP в направлении вектора его орбитальной скорости vc1. Величина этого приращения скорости выбирается такой, чтобы КА перешел на эллиптическую орбиту, касающуюся в апоцентре конечной орбиты 2, то есть, чтобы радиус апоцентра переходной эллиптической орбиты равнялся r2. Радиус перицентра переходной орбиты равняется радиусу начальной орбиты r1, поэтому, используя (55), можно записать скорость КА в точке P – перицентре переходной орбиты: vP 2r2 . r1 r1 r2 Требуемое приращение скорости КА в точке P равно разнице между этой величиной и круговой скоростью КА на начальной орбите: vP 2r2 . r1 r1 r2 r1 (108) Аналогично, требуемое приращение скорости КА в точке A равно разности между скоростью КА на конечной круговой орбите и скоростью КА в апоцентре переходного эллипса: v A r2 2r1 . r2 r1 r2 (109) v vc v A r 2 M 1 r P v vc v Рисунок 24. Гомановский перелет Суммарное требуемое приращение скорости КА для осуществления плоского перелета между круговыми орбитами по гомановской схеме равно сумме приращений скорости в точках P и A: v v P v A . (110) Рассмотрим зависимость требуемых импульсов скорости при перелете по гомановской схеме от соотношения радиусов начальной и конечной орбит. Для качественного анализа удобно использовать безразмерные единицы измерения, отнесенные к начальной орбите КА. В качестве единицы длины будем использовать радиус начальной орбиты r1, а в качестве единицы скорости – круговую скорость на начальной орбите vc1 = (/r1)1/2. Выражение (108) для первого импульса скорости можно переписать в виде: vP 2r2 , 1 r1 r1 r2 или в безразмерных величинах: v~P где v~p v p r1 2 1, 1 (111) - безразмерный импульс скорости в точке P, = r2/r1 – безразмерный радиус конечной орбиты (отношение радиусов конечной и начальной орбит). Аналогично, для второго импульса скорости имеем: v A r1 2r12 , r1 r2 r2 r1 r2 или в безразмерных переменных: v~A 1 2 1 1 2 1 1 , (112) где v~A v A - безразмерный импульс скорости в точке A. r1 На рис. 25 приведен график зависимости безразмерных импульсов скорости и их суммы v~ v~P v~A от соотношения радиусов конечной и начальной орбит . 0.536 ~ v 2-1 ~ vP ~ v 0.190 ~ vA 3.304 5.879 = r2/r1 15.582 Рисунок 25. Зависимость импульсов скорости в гомановском перелете от соотношения радиусов конечной и начальной орбит Очевидно, что при = 1 начальная и конечная орбиты совпадают, поэтому все импульсы скорости – нулевые. Предел первого импульса скорости (111) при бесконечном увеличении равен lim v~P 2 1 . (113) Предельный импульс скорости (113) соответствует переходу с начальной круговой на параболическую орбиту, радиус апогея которой, как известно, бесконечен. Предел второго импульса скорости (112) при бесконечном увеличении равен 0. Так как начальное значение (112) при =1 и предельное значение (112) при равны 0, а производная от (112) по при =1 больше 0, должен существовать максимум второго импульса скорости. Этот максимум имеет место при = 5.879362, при этом v~A 0.190046 (см. рис. 25). Для типичного перелета с околоземной круговой опорной орбиты высотой 200 км это значение соответствует высоте конечной орбиты 32262 км. Суммарный импульс скорости имеет максимум при = 15.58172 (высота конечной орбиты ~96000 км при высоте начальной орбиты 200 км), при этом v~A 0.536258 . Наличие максимума величины суммарного импульса скорости при гомановском перелете между компланарными круговыми орбитами является нетривиальным результатом, из которого, в частности, следует что перелет с орбиты высотой 200 км на орбиту высотой, например, 400 тысяч км реализовать легче, чем перелет на орбиту высотой 100 тысяч км. Интересно отметить, что при > 3.304168 (высота конечной орбиты более ~15340 км при высоте начальной орбиты 200 км) суммарный импульс скорости на гомановском перелете превышает импульс скорости, необходимый для выведения КА на параболическую отлетную траекторию. 3.3.2. Перелет между некомпланарными круговыми орбитами Для перелета с наклоненной круговой орбиты на круговую экваториальную орбиту можно использовать схему перелета, аналогичную гомановской схеме, если приращения скорости КА реализовывать в узлах орбиты КА (рис. 26). i = i - i A1 vc2 vc1 vA vA vc1 vP vP i1 P Рисунок 26. Пространственный перелет между круговыми орбитами Пусть начальная круговая орбита КА имеет радиус r1 и наклонена к экватору на угол i. В точке P, являющейся узловой точкой начальной круговой орбиты, а также узловой точкой и точкой перицентра переходного эллипса, КА получает приращение скорости vA, обеспечивающее одновременно увеличение радиуса апоцентра до радиуса конечной круговой орбиты r2 поворот плоскости орбиты на некоторый угол i1, абсолютная величина которого не превосходит наклонения начальной орбиты i. Абсолютная величина скорости на начальной круговой орбите, в том числе и в точке P, равна vc1 r1 . Абсолютная величина скорости в точке перицентра P на переходном эллипсе, в соответствии с (55), равна vP 2r2 . r1 r1 r2 Угол между вектором скорости vc1 и вектором скорости vP равен требуемому изменению наклонения i1. С другой стороны, вектор требуемого приращения скорости КА в точке P для перевода его с начальной орбиты на переходный эллипс, равен разности этих скоростей: vP = vP - vc1. Векторы vP, vc1 и vP образуют треугольник скоростей, представленный на рис. 27. v v vc i P i экватор Рисунок 27. Треугольник скоростей для расчета требуемого приращения скорости КА в перицентре переходного эллипса Из этого треугольника по теореме косинусов можно определить абсолютную величину требуемого приращения скорости в точке P: v P vc21 v P2 2vc1v P cos i1 . (114) В точке A можно построить аналогичный треугольник скоростей (рис. 28), составленный из вектора скорости КА на конечной круговой орбите vc2, вектора скорости КА в точке апоцентра A переходного эллипса vA и требуемого приращения скорости КА vA, для того чтобы повысить радиус перицентра его орбиты до радиуса конечной орбиты и изменить наклонение плоскости орбиты на оставшийся угол i2 = i - i1. vc i2 = i - A экватор v v Рисунок 28. Треугольник скоростей для расчета требуемого приращения скорости КА в апоцентре переходного эллипса Для маневра в точке A, аналогично рассмотренному маневру в точке P, имеем: vc 2 vA r2 , 2r1 , r2 r1 r2 и v A vc22 v A2 2vc 2 v A cosi i1 . (115) Величина изменения наклонения i1 в точке P, вообще говоря, должна оптимизироваться, то есть выбираться такой, чтобы требуемое суммарное приращение скорости КА vP + vA было минимальным. Для перелета с низкой круговой орбиты высотой 200 км с наклонением 51.6° на ГСО оптимальное значение i1 равно 2.8°, при этом требуемое суммарное приращение скорости равно 4848 м/с. Следует отметить, что при нулевом i1 требуемое суммарное приращение скорости больше всего на 39 м/с и составляет 4887 м/с. Однако, если весь поворот плоскости орбиты осуществлять в точке P (i1 = 51.6°), требуемое суммарное приращение скорости составит 9642 м/с, что, конечно, приводит к неоправданным затратам топлива на осуществление перелета. В общем случае, если плоскость начальной орбиты наклонена к плоскости конечной орбиты на угол i, расчетные формулы для определения характеристик маневра остаются прежними – (114) и (115). Однако, в этом случае импульсы скорости должны прилагаться не в узловых точках, а в точках орбит, лежащих на линии пересечения плоскостей начальной и конечной орбиты. 3.3.3. Апсидальные перелеты между эллиптическими орбитами Апсидальным перелетом называется перелет из точки перицентра или апоцентра начальной орбиты в точку перицентра или апоцентра конечной орбиты. Наиболее экономичен апсидальный двухимпульсный перелет с угловой дальностью 180°, который возможен, если линии апсид начальной и конечной орбит совпадают. Для реализации апсидального перелета с одновременным изменением наклонения орбиты необходимо, кроме того, чтобы линии апсид орбит совпадали с их узловыми линиями. Требуемые импульсы скорости при реализации апсидального двухимпульсного перелета с угловой дальностью 180° определяются как векторные разности орбитальных скоростей КА в точках апсид на начальной и конечной орбитах. Расчет значений этих импульсов аналогичен расчету импульсов перелета между круговыми орбитами, только вместо круговых скоростей граничных орбит необходимо использовать формулы (55), (56) для скоростей в перицентре или апоцентре граничной орбиты. Для каждой конкретной конфигурации граничных орбит существуют по крайней мере 2 варианта апсидального перелета с угловой дальностью 180°, соответствующие перелету из перицентра или апоцентра начальной орбиты. В случае пересекающихся граничных орбит или в случае коллинеарности векторов Лапласа оптимальной всегда является одна и та же схема (см. рис. 29). Если же граничные орбиты не пересекаются, а их векторы Лапласа направлены в противоположные стороны, то оптимальной может оказаться любая схем из двух возможных, в зависимости от величин радиусов перицентров и апоцентров граничных орбит (рис. 29). При пересечении граничных орбит возможен также и одноимпульсный перелет. Однако двухимпульсный апсидальный перелет с угловой дальностью 180° всегда оказывается экономичнее. 3.4. Трехимпульсные перелеты Во многих случаях введение дополнительных импульсов скорости позволяет уменьшить суммарные затраты характеристической скорости на перелет между заданными граничными орбитами. Среди причин уменьшения характеристической скорости, помимо особенностей кеплеровского движения, можно указать уменьшение потерь характеристической скорости при отработке импульсов меньшей величины при ограниченной тяговооруженности КА. Обычно уменьшение затрат характеристической скорости сопровождается увеличением времени перелета. Увеличение времени перелета особенно существенно, если траектория перелета включает в себя промежуточные орбиты с большой высотой апогея. Такие траектории позволяют существенно уменьшить затраты характеристической скорости, например, на разворот плоскости орбиты. Однако, в ряде случаев ограничения на время перелета (связанные, например, с ограничением на срок активного существования РБ) или на максимальную высоту полета (связанные с ограничением на работу бортовых и наземных радиотехнических средств, со светотеневой обстановкой и тепловыми режимами на траектории перелета) ограничивают возможности применения таких схем выведения. A2 A2 M M P1 A1 A2 A2 M P1 M P1 A1 P2 Рисунок 29. Оптимальные плоские апсидальные перелеты между эллиптическими орбитами 3.4.1. Биэллиптическая схема перелета между компланарными круговыми орбитами В рамках схемы плоского биэллиптического перелета между круговыми орбитами 1 и 2 (см. рис. 30) первый (разгонный) импульс используется для перевода КА с начальной круговой орбиты радиуса r1 на эллиптическую промежуточную орбиту с радиусом апоцентра ra и радиусом перицентра r1, причем r1 больше радиуса конечной орбиты r2. Через полвитка, в апоцентре этой промежуточной орбиты, отрабатывается второй разгонный импульс скорости, поднимающий радиус перицентра промежуточной орбиты до радиуса конечной орбиты. Еще через полвитка, в перицентре второй промежуточной орбиты, выдается последний, тормозной импульс скорости, обеспечивающий снижение величины орбитальной скорости КА до местной круговой скорости. Абсолютную величину перечисленных импульсов скорости легко вычислить с использованием выражений для скоростей орбитального движения КА в перицентре и апоцентре. Именно, абсолютные величины импульсов скорости равны: v1 2ra , r1 r1 ra r1 v2 2r2 2r1 , ra r2 ra ra r1 ra v3 2ra . r2 r2 ra r2 (116) Сравнение перелетов по гомановской и биэллиптической схеме показывает, что биэллиптический перелет требует меньшего суммарного импульса скорости только для достаточно большого радиуса конечной орбиты. На рис. 31 представлена область оптимальности биэллиптического перелета. По оси ординат графика отложено отношение радиуса r2 конечной орбиты к радиусу r1 начальной орбиты: = r2/r1, а по оси абсцисс отношение радиуса апоцентра ra промежуточной орбиты к радиусу r1 начальной орбиты: a = ra/r1. v vA1 vA2 A r 2 M 1 r P vP1 vc v r vc vP2 v Рисунок 30. Биэллиптический перелет между компланарными круговыми орбитами Из графика видно, что при > 15.58 перелет по биэллиптической схеме всегда предпочтительнее двухимпульсного перелета, а при < 11.94 предпочтительным является гомановский перелет. Для промежуточных значений (11.94 < < 15.58) всегда можно подобрать такой (достаточно большой) радиус апоцентра промежуточной орбиты, начиная с которого биэллиптический перелет требует меньшего суммарного импульса скорости по сравнению с гомановским перелетом. Необходимо отметить, что экономия характеристической скорости при использовании плоского биэллиптического перелета незначительна. В наилучшем случае выигрыш в суммарном импульсе скорости при использовании этой схемы вместо гомановской не превышает 4% от круговой скорости на начальной орбите (или 8% от суммарного приращения скорости в гомановском перелете). Область ra = r1 оптимальности 15.58 11.94 = биэллиптичесского Область оптимальности гомановского a = Рисунок 31. Область оптимальности плоского биэллиптического перелета 3.4.2. Биэллиптический пространственный перелет В случае, если плоскости начальной и конечной орбит наклонены друг к другу под достаточно большим углом i, выигрыш от использования биэллиптической схемы выведения может быть существенно большим, чем в случае плоского перелета. Это объясняется возможностью осуществления разворота плоскости орбиты в апогее промежуточной орбиты, где орбитальная скорость КА может быть существенно меньше, чем орбитальная скорость на начальной или конечной орбитах. В общем случае, однако, существует оптимальное разбиение углов поворота плоскости орбиты по всем трем импульсам, как и в случае пространственного двухимпульсного перелета, когда разворот плоскости орбиты осуществляется в обеих апсидальных точках промежуточной орбиты. Итак, рассматривается биэллиптический перелет между некомпланарными круговыми орбитами 1 и 2 (рис. 32). Радиусы начальной и конечной орбит равны r1 и r2 соответственно, угол между их орбитальными плоскостями равен i. Пусть задан некоторый радиус апогея промежуточной орбиты ra: ra > r2. Пусть на первом импульсе наклонение орбиты изменяется на угол i1, на втором – на угол i2, а на третьем – на угол i3 = i - i1 - i2. Обозначим через vc1 круговую скорость на начальной орбите, vp1 и va1 – скорость в перицентре и апоцентре первой промежуточной орбиты, по которой КА движется после первого импульса скорости, vp2 и va2 – скорость в перицентре и апоцентре второй промежуточной орбиты, на которую КА переходит после второго импульса скорости и через vc2 – круговую скорость на конечной орбите. v1 va2 i2 vc1 va1 v2 vp1 i1 vp2 2 1 v3 i3 vc2 Рисунок 32. Биэллиптический пространственный перелет Очевидно, что: vc1 r1 , v p1 2ra , r1 r1 ra v a1 2r1 , ra r1 ra v p2 2ra , r2 r2 ra va 2 2r2 , ra r2 ra vc 2 r2 (117) , Требуемые импульсы скорости определяются из соответствующих треугольников скоростей (см. рис. 32): v 1 v p1 v c1 , v 2 v a 2 v a1 , (118) v 3 v c 2 v p 2 . Абсолютные величины импульсов скорости можно определить, как и раньше, с использованием теоремы косинусов: v1 v 2p1 vc21 2v p1vc1 cos i1 , v 2 v a22 v a21 2v a 2 v a1 cos i2 , (119) v3 v 2p 2 vc22 2v p 2 vc 2 cosi i1 i2 . Для каждого набора параметров r1, r2, ra и i существуют оптимальные значения i1 и i2, обеспечивающие минимальный суммарный импульс скорости. Интересно отметить, что для предельного пространственного биэллиптического перелета, при ra , второй импульс скорости стремится к нулю, а суммарный импульс скорости равен сумме разностей между параболической и круговой скоростью на начальной и конечной орбитах. 3.4.3. Разбиение импульсов скорости для снижения потерь характеристической скорости. Схема выведения на ГСО с разбиением перигейного импульса. Как отмечалось выше, величина характеристической скорость складывается из величины импульса скорости и величины потерь, связанных с конечной длительностью участка работы двигательной установки. Потери характеристической скорости при оптимальной программе управления вектором тяги монотонно увеличиваются с увеличением продолжительности активного участка. Следовательно, при прочих равных условиях потери характеристической скорости будут больше в случае более низкой тяговооруженности КА или при отработке большего импульса скорости. В качестве примера, на рис. 33 приведен график зависимости потерь характеристической скорости при плоском одноимпульсном перелете с целью увеличении высоты апогея. Этот график получен в результате численного интегрирования уравнений движения КА в ньютоновском гравитационном поле с оптимальной программой управления вектором тяги. Начальная орбита – круговая, высотой 200 км. Начальная масса КА – 20000 кг, тяга двигательной установки – 2000 кгс (что соответствует начальной тяговооруженности 0.1), удельный импульс - 325.5 с. Программа ориентации тяга – оптимальная из класса линейных по времени функций. Это значит, что вектор тяги поворачивается с постоянной угловой скоростью в орбитальной плоскости, а начальное направление тяги и угловая скорость ее вращения оптимизируются с целью достичь заданной высоты апогея с минимальными затратами характеристической скорости, то есть с минимальными потерями. В результате численного решения серии таких задач оптимального управления, была получена зависимость требуемых затрат характеристической скорости от высоты апогея конечной орбиты. В то же время, зависимость требуемого импульса скорости от высоты апогея конечной орбиты определяется формулой (95). Разница между полученным численным интегрированием значением характеристической скорости и импульсом скорости для каждой высоты апогея и есть, в данном случае, потери характеристической скорости, приведенные на рис. 33. Потери характеристической скорости, м/с 350 300 250 200 150 100 50 0 0 500 1000 1500 2000 2500 3000 3500 Импульс скорости, м/с Рисунок 33. Потери характеристической скорости при плоском разгоне с начальной круговой орбиты высотой 200 км с начальной тяговооруженностью 0,1 Величина первого импульса скорости для перелета на ГСО составляет около 2460 м/с. На рис. 33 видно, что при этом потери характеристической скорости будут около 177.3 м/с. Это достаточно большая величина – более 7% от импульса скорости. Как видно из рис. 33, скорость роста потерь увеличивается с ростом величины импульса. Поэтому при отработке импульса скорости величиной V потери характеристической скорости будут более чем в 2 раза больше потерь при отработке импульса скорости V/2. Это обстоятельство можно использовать для уменьшения, при необходимости, потерь характеристической скорости. Вместо того, чтобы сразу повысить высоту апогея до заданного значения сделаем это в два этапа. При первом включении двигательной установки увеличим высоту апогея до некоторого промежуточного значения, меньшего заданного. В результате КА перейдет на промежуточную орбиту. сделав по ней полный виток, он вернется к перигею, где двигательная установка включается второй раз, увеличивая высоту апогея до заданной. Высота апогея промежуточной орбиты выбирается таким образом, чтобы минимизировать потери характеристической скорости. Обычно это имеет место, если полный требуемый импульс скорости разбивается на два импульса примерно равной величины. Например, прямое одноимпульсное выведение с круговой орбиты высотой 200 км на эллипс с высотой апогея 36000 км при начальной тяговооруженности 0,1 (удельный импульс 325,5 с) требует затрат характеристической скорости 2637.331 м/с. Двухимпульсное же выведение с использованием промежуточной орбиты с высотой апогея 7000 км приводит к суммарным затратам характеристической скорости 2509.168 м/с (1263.442 м/с при первом включении и 1245,726 м/с при втором включении двигателя). В результате потери характеристической скорости уменьшаются с 177.3 м/с при одноимпульсном выведении до 49.1 м/с при двухимпульсном. Разбиение перигейного импульса используется, в частности, при выведении КА на ГСО с использованием разгонного блока «Бриз-М». Такую схему выведения часто называют 10-часовой, потому что при типичных значениях параметров перелета время полета от момента старта до отделения КА от разгонного блока на ГСО составляет примерно 10 часов. Схема выведения по 10-часовой схеме представлена на рис. 34. Понятно, что и в этом случае, при необходимости изменения наклонения орбиты, существуют оптимальные значения углов разворота плоскости орбиты на каждом импульсе. v v v Рисунок 34. 10-часовая схема выведения на ГСО Следует отметить, что потери характеристической скорости в апогее вытянутых эллиптических орбит становятся заметными при существенно более низкой тяговооруженности. Для тяговооруженности порядка 0,1 и выше потерями характеристической скорости при отработке импульсов на высоте 10000 км и выше в первом приближении можно пренебречь.