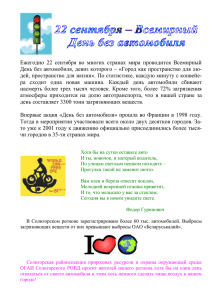
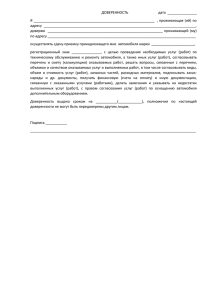
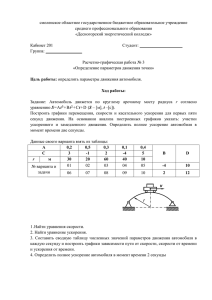
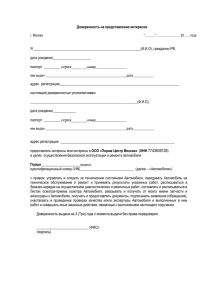
Министерство образования и науки Российской Федерации ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ОРЕНБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» Транспортный факультет Кафедра автомобильного транспорта КУРСОВОЙ ПРОЕКТ по дисциплине «Техника транспорта, обслуживание и ремонт» Расчет характеристик эксплуатационных свойств подвижного состава Пояснительная записка ОГУ 23.03.01. 2123. 135 ПЗ Руководитель докт. техн. наук, профессор ____________ Н.Н. Якунин "____"____________ 2023г. Исполнитель студент группы з20ТТПба)ОП ____________ И.В. Попов "___"____________ 2023г. Оренбург 2023 Содержание Введение ........................................................................................................................... 4 1 Определение параметров двигателя ........................................................................... 5 2 Расчет внешней скоростной характеристики двигателя .......................................... 6 3 Определение передаточных чисел трансмиссии ...................................................... 7 4 Расчет тягового баланса автомобиля ....................................................................... 10 5 Расчет мощностного баланса автомобиля ............................................................... 13 6 Расчет динамической характеристики автомобиля ................................................ 15 7 Расчет ускорений автомобиля ................................................................................... 17 8 Расчет времени и пути разгона автомобиля ............................................................ 19 9 Расчет топливной экономичности автомобиля ....................................................... 22 Список использованных источников .......................................................................... 26 Лист 3 Введение Автомобильный транспорт имеет важное значение для экономического роста любых отраслей промышленности и экономики государства в целом. Без него не мыслимо нормальное функционирование ни одной из отраслей народного хозяйства. Можно выделить некоторые особенности автомобильного транспорта, заключающиеся в следующем: 1 большая экономичность при перевозке определенных видов грузов на расстояние до 400 км, а также при перевозке срочных, ценных и скоро портившихся грузов; 2 доставка грузов от двери к двери; 3 большая мобильность; 4 регулярность и хорошая маневренность перевозок; 5 обеспечение сохранности, количества и качества перевозимого груза; 6 высокая скорость доставки; 7 приспособленность к дорожным условиям. Последний показатель особенно актуален для нашей страны т.к. существуют места трудно доступные для других видов транспорта, таких как железная дорога, авиация, морское и речное судоходство, в силу особенностей каждого из вида транспорта. На автомобильном транспорте можно реализовать различные требования предъявляемые в данных условия: скорость, проходимость, плавность хода, грузоподъемность, маневренность, типаж перевозимых грузов. Седельные тягачи отличаются от других классов грузового парка автомобилей достаточно большой своей универсальностью. За счет наличия прицепного устройства на них возможна реализации разнообразного рода задачи требований. На них возможна быстрая смена навесного оборудования, начиная от обычного полуприцепа и заканчивая специализированным оборудованием. Машины такого типа могут использоваться намного продуктивней и с большей отдачей т.к. сам тягач не зависит от прицепного оборудования, тем самым уменьшается время простоя автомобиля без работы. Лист 4 1 Определение параметров двигателя К параметрам двигателя, определяемым в данном подразделе, относятся минимальная и максимальная частоты вращения коленвала, вращающий момент и мощность двигателя, развиваемая во всем диапазоне частот вращения коленвала. Принимаем минимально устойчивую частоту вращения коленвала двигателя ne min = 750 мин-1, максимальную частоту вращения коленвала двигателя ne max = ne N = 3200 мин-1. Для определения мощности двигателя проектируемого автомобиля необходимо оценить его предполагаемый собственный и полный вес. Собственный вес автомобиля может быть определен по формуле 1: та kc mг , где (1) kc - коэффициент снаряженного веса; mг - масса груза, перевозимого автомобилем, кг. та 0,8 5250 4200 кг. Полная масса автомобиля определяется по следующей зависимости: m ma (75 mб ) n mг , (2) где mб - масса багажа пассажиров, кг; m 4200 (75 10) 3 5250 9705 кг При движении автомобиля затрачивается мощность на преодоление сил сопротивления дороги (NΨ) и сил сопротивления воздуха (NW). Суммарная мощность, затрачиваемая на движение полностью груженого автомобиля с максимальной скоростью по горизонтальной дороге определяется по формуле 3: N NW где 3 m Dmin Vmax k F Vmax , 367 46700 (3) Dmin - минимальное значение динамического фактора, Н/Н, Dmin = 0,03 Н/Н; Vmax - максимальная скорость автомобиля, км/ч; Н с2 k - коэффициент обтекаемости автомобиля, , м4 Лист 5 k = 0,5 Н с2 ; м4 F - лобовая площадь автомобиля, м2; F = 5 м2 . N NW 11055 0,03 90 0,5 5 903 120,9 кВт. 367 46700 Требуемая для движения полностью груженого автомобиля с максимальной скоростью по горизонтальной дороге мощность двигателя определится по формуле: N eV max где N NW , (4) тр ηтр - КПД трансмиссии автомобиля, ηтр = 0,9. N eVmax 160 177 кВт. 0,9 2 Расчет внешней скоростной характеристики двигателя Внешняя скоростная характеристика двигателя представляет собой зависимость мощности и вращающего момента на выходном конце коленвала двигателя от частоты вращения коленвала при полностью открытой дроссельной заслонке или полностью выдвинутой рейке топливного насоса высокого давления. Зависимость между мощностью, развиваемой двигателем, и частотой вращения коленчатого вала двигателя описывается с помощью уравнения Лейдермана: n n N e N e max a e b e ne N ne N 2 n c e n eN 3 (5) где ne - текущая частота вращения коленвала двигателя, для которой определяется мощность, мин-1. Вращающий момент на выходном конце коленвала двигателя при различных частотах его вращения может быть определен по формуле: Лист 6 M e 9555,3 Ne ne (6) Результаты расчетов приведены в таблице 1. Таблица 1 - Расчет мощности Ne и вращающего момента Me на коленвалу двигателя при различных частотах вращения ne ne, мин-1 750 Ne, кВт 34,7 Me, Н·м 442,3 900 44,0 467,1 1300 70,8 520,7 1700 99,0 556,3 2000 119,6 571,2 2300 138,6 575,9 2600 155,2 570,5 2900 168,4 554,9 3200 177,2 529,2 Рисунок 1 - Внешняя скоростная характеристика двигателя 3 Определение передаточных чисел трансмиссии Тип шин подбирается по максимальной нагрузке, приходящейся на неё и максимальной скорости автомобиля Vmax. Для определения нагрузок на шины передней и задних осей определяются нагрузки на оси автомобиля: x G12 m g 12 , 100 (7) Лист 7 где G1(2) - нагрузка, приходящаяся на переднюю 1 или заднюю 2 оси; Н; g - ускорение свободного падения, м/с2; g = 9,81м/с2; x1(2) - часть полного веса автомобиля, приходящегося на переднюю 1 или задние 2 оси автомобиля, %; G1 9705 9,81 30 28562 Н, 100 G2 9705 9,81 70 66644 Н. 100 Нагрузку, приходящуюся на шины передней и задних осей, определяют из выражения 8: Gш12 где G12 , a12b12 (8) а1(2) - число передних 1 или задних 2 осей на автомобиле; b1(2) - число колес на передней1 или задней 2 оси автомобиля; Gш1 28562 14281 Н, 1 2 Gш 2 66644 16661 Н. 1 4 20110 9 1 9 Статический радиус шины, м Высота профиля шины, H, ״ 20 Отношение высоты профиля шины к ширине шины, Н/B 100 Ширина профиля шины, B, ״ Диаметр обода колеса, d, ״ 9.00R20 (260R508) Максимально допустимая скорость, [V], км/ч Марка шины Допустимая нагрузка на шину, [G], Н Таблица 2 - Характеристика шин проектируемого автомобиля 0,476 Лист 8 Передаточное число главной передачи автомобиля определяется из условия обеспечения заданной максимальной скорости движения автомобиля Vmax на высшей передаче: u0 где 0,377rk ne max uk Vmax (9) uk - передаточное число коробки передач на высшей передаче, uk = 1. u0 0,377 0,476 3200 4,917 . 1 110 Передаточное число первой передачи КПП определяется из условия преодоления автомобилем максимального сопротивления дороги: ukI где max rk m g M e max u0 тр (10) ψmax - максимальный коэффициент сопротивления дороги, преодолеваемой автомобилем на первой передаче; ψmax = 0,4; Me max - максимальный вращающий момент, Н·м; u k1 0,4 0,476 9705 9,81 6,7 . 575,9 4,917 0,9 Сцепление ведущих колес с дорогой будет обеспечено, если выполняется условие PT max Pсц где , (11) PT max – максимальная сила тяги на ведущих колесах автомобиля, Н; Рсц – сила сцепления шин с дорогой, Н. PT max PT max M e max ukI u0 тр rk 575,9 6,7 4,917 0,9 38082 Н. 0,476 Лист 9 Рсц Gсц где (12) φ - коэффициент сцепления шин с дорогой, φ = 0,6…0,8; Gсц - сцепной вес автомобиля, Н. Gсц G2 1,2 , (13) Gсц 66644 1,2 79972 Н, Рсц 0,6 79972 47984 Н. Передаточные числа II, III и других передач КПП определяются по формуле 14: uki l 1 ukI l i где (14) l - число ступеней КПП без учета ускоряющей передачи; i - порядковый номер передачи. uk 2 4 6,73 4,16, uk 3 4 6,7 2 2,59 , uk 4 4 6,7 1,61. 4 Расчет тягового баланса автомобиля Уравнение тягового баланса автомобиля имеет следующий вид: PT P PW Pj где (15) Рψ - cила сопротивления дороги, Н; РW - сила сопротивления воздуха, Н; Рj - сила инерции автомобиля при его неравномерном движении, Н. Для построения графика зависимости силы тяги на ведущих колесах автомобиля от скорости его движения используется выражение: Лист 10 PT M e u k u0 тр (16) rk где Ме - вращающий момент на выходном конце коленвала двигателя при соответствующей его частоте вращения, Н·м. Скорость движения автомобиля при различных частотах вращения коленвала двигателя определяется по формуле: V 0,377rk ne u k u0 (17) Таблица 3 – Расчет сил тяги на ведущих колесах проектируемого автомобиля и его скоростей движения 900 1300 1700 2000 2300 2600 2900 3200 ne, мин-1 750 467 521 556 571 576 570 555 529 Me, Н·м 442 PT1, Н 29249 30886 34432 36786 37770 38082 37725 36696 34997 4,6 6,7 8,7 10,3 11,8 13,3 14,9 16,4 V1, км/ч 3,8 PT2, Н 18180 19198 21402 22865 23477 23671 23449 22809 21753 7,4 10,7 14,0 16,5 19,0 21,5 23,9 26,4 V2, км/ч 6,2 PT3, Н 11300 11933 13303 14212 14592 14713 14575 14178 13521 12,0 17,3 22,6 26,6 30,5 34,5 38,5 42,5 V3, км/ч 10,0 PT4, Н 7024 7417 8269 8834 9070 9145 9059 8812 8404 19,2 27,8 36,3 42,7 49,1 55,6 62,0 68,4 V4, км/ч 16,0 PT5, Н 4366 4610 5140 5491 5638 5684 5631 5478 5224 30,9 44,7 58,4 68,8 79,1 89,4 99,7 110,0 V5, км/ч 25,8 Для построения графика зависимости силы сопротивления дороги от скорости движения автомобиля Рψ используется формула: P m g , где ψ - коэффициент сопротивления дороги. i f , где (18) (19) i - уклон дороги; f - коэффициент сопротивления дороги. Лист 11 V2 f 0,015 1 20000 (20) Таким образом, формула для определения силы сопротивления дороги приобретает вид: V2 m g P 0,015 1 20000 (21) Сила сопротивления воздуха РW движению автомобиля определяется по формуле: k F V 2 PW 13 (22) Таблица 4 – Расчет сил сопротивления движению проектируемого автомобиля по горизонтальной дороге с асфальтобетонным покрытием V, км/ч Pψ, Н Pw, Н 25,8 30,9 44,7 58,4 68,8 79,1 89,4 1475,55 1496,43 1570,68 1671,93 1765,59 1874,43 1998,46 99,7 2137,68 110,0 2292,09 129,61 1937,83 2359,50 186,64 389,41 665,91 921,68 1218,92 1557,64 Рисунок 2 - График тягового баланса проектируемого автомобиля Лист 12 5 Расчет мощностного баланса автомобиля Мощностной баланс автомобиля в общем виде можно представить следующей формулой: NT N f Ni NW N j где воздуха, (23) NT - мощность, подводимая к ведущим колесам автомобиля, кВт; Nf - мощность, затрачиваемая на преодоление сопротивления качению колес автомобиля, кВт; Ni - мощность, затрачиваемая на преодоление подъёма, кВт; NW - мощность, затрачиваемая на преодоление сопротивления кВт; NT Ne тр (24) Ne - мощность на выходном конце коленчатого вала двигателя, кВт; Nf NW Pf V (25) 3600 PW V 3600 (26) N j NT ( N f Ni NW ) (27) N j NT ( N f NW ) (28) При N i 0 Лист 13 Таблица 5 – Расчет мощностного баланса проектируемого автомобиля 750 900 1300 1700 2000 2300 2600 2900 3200 Ne , кВт Nт , кВт 34,7 31,2 44,0 39,6 70,8 63,8 99,0 89,1 119,6 107,6 138,6 124,8 155,2 139,7 168,4 151,6 177,2 159,5 1 V, км/ч Nf , кВт Nw , кВт Nj , кВт 3,8 1,5 0,003 29,7 4,6 1,8 0,005 37,8 6,7 2,7 0,016 61,1 8,7 3,5 0,036 85,6 10,3 4,1 0,059 103,4 11,8 4,7 0,089 120,0 13,3 5,3 0,129 134,2 14,9 6,0 0,178 145,4 16,4 6,6 0,240 152,7 2 V, км/ч Nf , кВт Nw , кВт Nj , кВт 6,2 2,5 0,013 28,8 7,4 3,0 0,02 36,6 10,7 4,3 0,07 59,4 14,0 5,6 0,15 83,3 16,5 6,6 0,24 100,7 19,0 7,7 0,37 116,7 21,5 8,7 0,54 130,5 23,9 9,8 0,74 141,1 26,4 10,8 1,00 147,7 3 V, км/ч Nf , кВт Nw , кВт Nj , кВт 10,0 4,0 0,05 27,2 12,0 4,8 0,09 34,7 17,3 7,0 0,28 56,5 22,6 9,2 0,62 79,3 26,6 10,9 1,02 95,7 30,5 12,7 1,54 110,5 34,5 14,5 2,23 123,0 38,5 16,4 3,09 132,1 42,5 18,4 4,16 137,0 4 V, км/ч Nf , кВт Nw , кВт Nj , кВт 16,0 6,4 0,2 24,6 19,2 7,8 0,4 31,4 27,8 11,4 1,2 51,2 36,3 15,4 2,6 71,1 42,7 18,5 4,2 84,9 49,1 21,8 6,4 96,5 55,6 25,4 9,3 105,0 62,0 29,3 12,9 109,4 68,4 33,5 17,3 108,7 5 V, км/ч Nf , кВт Nw , кВт Nj , кВт 25,8 10,6 0,9 19,8 30,9 12,9 1,6 25,1 44,7 19,5 4,8 39,4 58,4 27,1 10,8 51,1 68,8 33,7 17,6 56,3 79,1 41,2 26,8 56,8 89,4 49,6 38,7 51,4 99,7 59,2 53,7 38,7 110,0 70,0 72,1 17,4 передача ne , мин-1 Лист 14 Рисунок 3 – График мощностного баланса проектируемого автомобиля 6 Расчет динамической характеристики автомобиля Динамическим фактором автомобиля D называют отношение разности силы тяги на ведущих колесах автомобиля РТ и силы сопротивления воздуха РW к полному весу автомобиля G. D PT PW G (29) Динамический фактор автомобиля при включении различных передач КПП определяется по формуле: Di PTi PWi G (30) PWi k F Vi 2 13 (31) Лист 15 Величина динамического фактора ограничивается условиями сцепления ведущих колес автомобиля с дорогой. Динамический фактор по условиям сцепления колес с дорогой может быть определён по формуле: D где m2 G2 G (32) φ - коэффициент сцепления шин с дорогой, φ = 0,2…0,4; m2 - коэффициент перераспределения нормальных реакций для задней оси; m2 =1,2; G2 - часть полного веса автомобиля, приходящаяся на заднюю ось, Н. D 0,2 1,2 66644 H 0,168 . 95206 H Таблица 6 – Расчет динамического фактора проектируемого автомобиля передача КПП 1 2 3 4 5 V, км/ч PT, Н Pw, H PT - Pw, H Di, H/H 3,8 6,7 10,3 13,3 16,4 6,2 10,7 16,5 21,5 26,4 10,0 17,3 26,6 34,5 42,5 16,0 27,8 42,7 55,6 68,4 25,8 44,7 68,8 89,4 110,0 29249 34432 37770 37725 34997 18180 21402 23477 23449 21753 11300 13303 14592 14575 13521 7024 8269 9070 9059 8404 4366 5140 5638 5631 5224 2,89 8,68 20,54 34,71 52,57 7,47 22,46 53,15 89,83 136,07 19,35 58,13 137,58 232,50 352,19 50,08 150,45 356,09 601,79 911,59 129,61 389,41 921,68 1557,64 2359,5 29246 34424 37749 37690 34945 18173 21380 23423 23359 21617 11281 13245 14455 14342 13169 6974 8118 8714 8458 7493 4236 4750 4716 4073 2864 0,307 0,362 0,396 0,396 0,367 0,191 0,225 0,246 0,245 0,227 0,118 0,139 0,152 0,151 0,138 0,073 0,085 0,092 0,089 0,079 0,044 0,050 0,050 0,043 0,030 Лист 16 Рисунок 4 – Динамическая характеристика проектируемого автомобиля 7 Расчет ускорений автомобиля Динамический фактор автомобиля соответствует дорожному сопротивлению, характеризуемому коэффициентом сопротивления дороги Ψ, которое автомобиль способен преодолеть на данной передаче с заданной постоянной скоростью. В случае, если величина динамического фактора автомобиля отличается от коэффициента сопротивления дороги, по которой он движется, то это движение будет ускоренным (при D > Ψ), либо замедленным (при D < Ψ). Величина развиваемого автомобилем ускорения (замедления) определяется по формуле: (33) D g j вр где δвр - коэффициент учета вращающихся масс автомобиля; вр 1,05 0,05 uk2 где (34) uk - передаточное число передачи КПП, на которой движется автомобиль. Лист 17 V 2 f 0,015 1 20000 (35) Таблица 7– Расчет ускорений автомобиля переда ча uki 1 6,70 2 4,16 3 2,59 4 1,61 5 1 V, км/ч Di, H/H ψ=f D-ψ δвр j 2,6 6,7 10,3 13,3 16,4 4,1 10,7 16,5 21,5 26,4 6,6 17,3 26,6 34,5 42,5 10,7 27,8 42,7 55,6 68,4 17,2 44,7 68,8 89,4 110,0 0,275 0,362 0,396 0,396 0,367 0,171 0,225 0,246 0,245 0,227 0,106 0,139 0,152 0,151 0,138 0,066 0,085 0,092 0,089 0,079 0,040 0,050 0,050 0,043 0,030 0,01500 0,01503 0,01508 0,01513 0,01520 0,01501 0,01509 0,01520 0,01535 0,01552 0,01503 0,01522 0,01553 0,01589 0,01635 0,01509 0,01558 0,01637 0,01731 0,01851 0,01522 0,01650 0,01854 0,02099 0,02408 0,25963 0,34654 0,38142 0,38074 0,35184 0,15566 0,20948 0,23082 0,23000 0,21153 0,09099 0,12389 0,13630 0,13475 0,12197 0,05063 0,06969 0,07516 0,07152 0,06019 0,02517 0,03340 0,03099 0,02179 0,00601 3,29 3,29 3,29 3,29 3,29 1,92 1,92 1,92 1,92 1,92 1,38 1,38 1,38 1,38 1,38 1,18 1,18 1,18 1,18 1,18 1,1 1,1 1,1 1,1 1,1 0,77 1,03 1,14 1,13 1,05 0,80 1,07 1,18 1,18 1,08 0,64 0,88 0,97 0,95 0,86 0,42 0,58 0,63 0,59 0,50 0,22 0,30 0,28 0,19 0,05 Лист 18 Рисунок 5 – График ускорений проектируемого автомобиля 8 Расчет времени и пути разгона автомобиля Время и путь разгона автомобиля до максимальной скорости являются самыми распространенными и наглядными характеристиками динамичности автомобиля. Их определение производят графоаналитическим способом с использованием графика ускорений автомобиля. При проведении расчетов полагают, что разгон автомобиля на каждой передаче производится до достижения двигателем максимальных оборотов. Кривые ускорений автомобиля, начиная с первой передачи, разбивают на 3…4 интервала скоростей. Для каждого интервала скоростей определяют среднее ускорение и изменение скорости в пределах интервала. Время разгона автомобиля в данном интервале скоростей определяется по формуле: ti где Vi 3,6 jср (36) ΔVi - изменение скорости автомобиля в интервале скоростей для которого определяется время разгона, км/ч; jср - среднее ускорение в данном интервале скоростей, м/с2. Лист 19 Vi Vi 1 Vi , (37) ji ji 1 2 (38) jср При определении времени разгона автомобиля учитывается и время на переключение передач. Падение скорости автомобиля за время переключения передач определяется по формуле: VH где 3,6t H g (39) H δН - коэффициент учета вращающихся масс при движении автомобиля накатом; принимается =1,05, так как при накате uk = 0; ΔtH - время переключения передачи, с; Ψ - коэффициент сопротивления дороги, соответствующий скорости движения автомобиля при которой происходит переключение передачи; Путь разгона автомобиля определяется для тех же интервалов изменения скорости автомобиля по формуле: Si где Vсрi ti (40) 3,6 Vсрi - средняя скорость движения в каждом интервале скоростей, км/ч; Vсрi Vi Vi 1 2 Путь, проходимый автомобилем за (движение накатом), определяется по формуле: S H время (41) переключения VH 17t H t H передач (42) 3,6 Лист 20 Таблица 7 – Расчет времени и пути разгона проектируемого автомобиля до максимальной скорости Номер передач и КПП I-я Накат II- я Накат III- я Накат IV- я Накат V- я Vi , км/ч Vi+1 , км/ч j i , м/с2 j i+1 , м/с2 2,6 6,7 10,3 13,3 16,4 16,4 15,9 16,5 21,5 26,4 26,4 25,9 26,6 34,5 42,5 42,5 42,0 42,7 55,6 68,4 68,4 67,8 68,8 89,4 110,0 6,7 10,3 13,3 16,4 0,87 1,03 1,14 1,13 1,05 1,03 1,14 1,13 1,05 1,07 1,18 1,18 1,08 0,88 0,97 0,95 0,86 15,9 16,5 21,5 26,4 25,9 26,6 34,5 42,5 42,0 42,7 55,6 68,4 67,8 68,8 89,4 110,0 ΔVi , км/ч jср i , м/с2 Δt i , с ∑Δt i , c 2,8 3,6 3,1 3,1 0,951 1,084 1,135 1,091 1,18 1,18 1,08 0,6 5,0 5,0 1,061 1,179 1,130 0,82 0,92 0,75 0,78 1 0,16 1,17 1,22 0,97 0,95 0,86 0,7 8,0 8,0 0,888 0,960 0,909 1 0,21 2,31 2,43 0,58 0,63 0,59 0,50 0,63 0,59 0,50 0,8 12,8 12,8 0,573 0,610 0,548 1 0,37 5,84 6,50 0,30 0,28 0,19 0,05 0,28 0,19 0,05 0,9 20,6 20,6 0,253 0,235 0,124 1 1,02 24,34 46,21 3,28 2,54 4,95 12,71 71,57 Vср i , км/ч ΔS i , м ∑ΔSi , м 5,3 8,5 11,8 14,9 16,2 16,2 19,0 23,9 1,20 2,16 2,47 3,24 4,49 0,71 6,15 8,10 26,2 26,2 30,5 38,5 7,26 1,52 19,56 26,05 42,2 42,3 49,1 62,0 11,73 4,39 79,69 195,97 111,89 68,1 68,3 79,1 99,7 18,92 19,31 534,57 1833,41 1279,53 9,08 14,96 47,13 Лист 21 Рисунок 6 – График времени и пути разгона проектируемого автомобиля до максимальной скорости 9 Расчет топливной экономичности автомобиля Топливно-экономические качества вновь проектируемых автомобилей при движении с постоянной скоростью оцениваются топливно-экономической характеристикой. Эта характеристика представляет собой график зависимости путевого расхода топлива от скорости движения для различных дорожных условий. Путевой расход топлива определяется по формуле: gп где ge Ne 10V T (43) ge - удельный эффективный расход топлива, г/кВт ч; Ne - мощность двигателя, необходимая для равномерного движения по дороге с коэффициентом сопротивления Ψ с заданной скоростью, кВт; ρT - плотность используемого топлива, кг/л; ρT = 0,8 кг/л. Лист 22 Удельный эффективный расход топлива зависит от частоты вращения коленвала двигателя и степени использования мощности двигателя (степени использования хода рейки топливного насоса высокого давления). Это положение учитывают коэффициенты формулы 44, связывающей удельный расход топлива при заданном режиме движения и удельный расход топлива при максимальной мощности двигателя. ge g N K n K N где (44) gN - удельный расход топлива при максимальной мощности двигателя; gN = 258,4 г/кВт ч. Kn - коэффициент, учитывающий изменение удельного расхода топлива в зависимости от частоты вращения коленвала двигателя; KN - коэффициент, учитывающий изменение удельного расхода топлива в зависимости от степени использования мощности двигателя при заданных дорожных условиях; является функцией от отношения текущей мощности и максимальной для данной скорости движения. n K n f e nN где (45) ne - частота вращения коленвала двигателя при заданных условиях движения, мин-1; nN - частота вращения коленвала двигателя при максимальной мощности; мин-1; N K N f e N100 (46) где Ne - мощность двигателя при заданной скорости движения автомобиля, требуемая для преодоления сопротивлений дороги и сопротивления воздуха; N100 - максимальная мощность двигателя для заданной скорости движения. Ne N NW тр m V k F V 3 367 тр 46700 тр (47) Лист 23 Таблица 8 – Расчет проектируемого автомобиля. Параметры топливно-экономической характеристики Коэффициент сопротивления дороги Ψ1 ne, мин-1 750 1300 2000 2600 3200 ne/nN Kn V, км/ч Ne, кВт 0,23 1,11 25,8 12,4 0,41 0,995 44,7 25,1 0,63 0,958 68,8 49,9 0,81 0,972 89,4 82,5 1,00 1 110,0 128,8 N(100), кВт 34,7 70,8 119,6 155,2 177,2 Ne / N(100) KN 0,36 1,46 0,35 1,48 0,42 1,29 0,53 1,08 0,73 0,97 g e, г/кВт ч 418,8 380,5 319,3 271,3 250,6 g п , л/100 км 25,2 26,7 29,0 31,3 36,7 Параметры Коэффициент сопротивления дороги Ψ2 ne, мин-1 750 1300 2000 2600 3200 ne /nN Kn V, км/ч Ne, кВт 0,23 1,11 25,8 23,8 0,41 0,995 44,7 44,8 0,63 0,958 68,8 80,2 0,81 0,972 89,4 121,8 1,00 1 110,0 177,2 N(100), кВт 34,7 70,8 119,6 155,2 177,2 Ne / N(100) KN 0,68 0,97 0,63 0,98 0,67 0,97 0,78 0,98 1,00 1 g e, г/кВт ч 278,2 252,0 240,1 246,1 258,4 g п , л/100 км 32,0 31,6 35,0 41,9 52,0 Лист 24 Рисунок 7 – Топливно-экономическая характеристика проектируемого автомобиля Лист 25 Список использованных источников 1 Бухарин, Н.А. Автомобили / Н.А. Бухарин, В.С. Прозоров, М.В. Щукин. – Л.: Машиностроение, 1977. – 128 с. 2 Вахламов, В.К. Автомобили. Конструкция и элементы расчета / В.К. Вахламов. Изд. 2-е. – М.: Академия, 2006. – 480 с. 3 Вахламов, В.К. Конструкция, расчет и эксплуатационные свойства автомобилей / В.К. Вахламов. Изд. 2-е. – М.: Академия, 2007. – 560 с. 4 Гаспарянц, Г.А. Конструкция, основы теории и расчета автомобиля / Г.А. Гаспарянц. – М.: Машиностроение, 1978. – 351 с. Лист 26