9. Понятие, назначение и классификация манипуляционных систем.
10. Преобразование Денавита-Хартенберга.
11. Техническое обеспечение АСУ ПС.
12. Математическое обеспечение АСУ ПС.
13. Критерии надежности АСУ ПС.
14. Интегрированные системы проектирования и управления.
15. Рабочая зона манипулятора.
16. Математическое обеспечение АСУ ПС.
9. Понятие, назначение и классификация манипуляционных систем.
Манипуляционные системы предназначены для перемещения и
изменения ориентации в пространстве различных предметов труда.
Автоматизированные
манипуляционные
системы
присутствуют
в
большинстве автоматизированных технологических систем.
Автоматизированные манипуляционные системы могут быть
универсальными и специализированными. Наибольшей универсальностью
обладают манипуляционные системы промышленных роботов. В качестве
примера специализированных манипуляционных систем можно назвать
автооператоры, механические руки, различные питатели и др.
Для общности изложения вопроса в дальнейшем будем рассматривать
универсальные манипуляционные системы на примере манипуляционной
системы промышленного робота. Полученные при этом расчетные
соотношения и зависимости могут быть распространены в упрощенном виде
на другие типы манипуляционных систем.
В качестве предметов манипулирования могут выступать:
· в машиностроении – заготовки, детали, инструменты,
технологическая оснастка, емкости с расплавленным металлом и т.д.
· в атомной промышленности – стержни радиоактивного материала,
крышки люков, приборы контроля и т.д.
· в исследовательских (информационных) роботах – теле- и
видеокамеры, буровые инструменты, космические модули и т.д.
· в роботах для экстремальных условий – специальные устройства для
обработки местности, навесные орудия обработки земли, поверхностей зданий
и др.
Примеры промышленных роботов
Промышленный робот с числовым программным управлением модели
М20П.40.01 предназначен для автоматизации загрузки-выгрузки деталей и
смены инструмента на металлорежущих станках с автоматическим циклом
обработки детали.
Робот может обслуживать один или два станка, образуя с ними
комплекс станок — промышленный робот, который может являться базой для
создания гибких производственных модулей, предназначенных для
продолжительной работы без участия оператора.
Промышленный робот работает в цилиндрической системе координат,
оснащен устройством программного управления «Контур-1» или РБ241Б с
вводом программы с пульта обучения, кассеты внешней памяти и от ЭВМ
высшего ранга. Робот работает в трех режимах: обучение, повторение,
редактирование.
10. Преобразование Денавита-Хартенберга.
Для описания вращательных и поступательных связей между
соседними звеньями Денавит и Хартенберг предложили матричный метод
последовательного построения систем координат, связанных с каждым звеном
кинематической цепи. Смысл представления Денавита–Хартенберга (ДХпредставление)
состоит
в
формировании
однородной
матрицы
преобразования, имеющей размерность 4×4 и описывающей положение
системы координат каждого звена относительно системы координат
предыдущего звена. Это дает возможность последовательно преобразовать
координаты схвата манипулятора из системы отсчета, связанной с последним
звеном, в базовую систему отсчета, являющейся инерциальной системой
координат для рассматриваемой динамической системы.
Каждая система координат формируется на основе следующих трех
правил:
1) ось zi-1направлена вдоль оси i–го сочленения;
2) ось xi перпендикулярна оси zi-1 и направлена от нее;
3) ось yi дополняет оси xi, zi до правой декартовой системы координат.
ДХ–представление
твердых
звеньев
зависит
от
четырех
геометрических параметров, соответствующих каждому звену. Эти четыре
параметра полностью описывают любое вращательное или поступательное
движение и определяются в соответствии с рис. 5.4 следующим образом:
– присоединенный угол, на который надо повернуть ось xi-1вокруг
оси zi-1, чтобы она стала сонаправлена с осью xi (знак определяется в
соответствии с правилом правой руки);
di - расстояние между пересечением оси zi-1 с осью xi и началом (i-1)й системы координат, отсчитываемое вдоль оси zi-1 ;
ai - линейное смещение – расстояние между пересечением оси zi-1 с
осью xi и началом i-й системы координат, отсчитываемое вдоль оси xi, т. е.
кратчайшее расстояние между осями zi-1 и zi;
αi - угловое смещение - угол, на который надо повернуть ось zi-1 вокруг
оси xi, чтобы она стала сонаправленной с осью zi (знак определяется в
соответствии с правилом правой руки).
Для вращательных сочленений параметры di, ai и αi являются
характеристикамисочленения, постоянными для данного типа робота. В то же
еличиной, изменяющейся при движении
(вращении) i-го звена относительно (i-1)-го.
Алгоритм формирования систем координат звеньев
Для каждого звена манипулятора с n степенями свободы этот алгоритм
формирует ортонормированную систему координат. Системы координат
нумеруются в порядке возрастания от основания к схвату манипулятора.
Взаимное расположение соседних звеньев описывается однородной матрицей
преобразования размерностью 4х4.
Параметры систем координат звеньев манипулятора Пума
Сочленение i
Пределы
измерения
1
90
-90
0
0
-160-+160
2
0
0
431,8 мм
149,09 мм
-225-45
3
90
90
-20,32 мм
0
-45-225
4
0
-90
0
433,07 мм
-110-170
5
0
90
0
0
-100-100
6
0
0
0
56,25 мм
-266-266
11. Техническое обеспечение АСУ ПС.
Техническое обеспечение (ТО) - комплекс технических средств,
применяемых для функционирования автоматизированной системы
управления (ГОСТ 24003-84). Комплекс технических средств предназначен
для автоматизированной реализации информационного процесса.
Техническое обеспечение связи и АСУ осуществляется в целях
поддержания их в исправном состоянии. В состав технического обеспечения
входит: своевременное снабжение соединений, частей и кораблей техникой
связи и АСУ, эксплуатационно-расходными материалами, восстановление их
расхода и потерь, содержание техники и ЗИП в комплекте и в исправности;
проведение регламентов, обслуживание и контроль состояния техники в
установленные сроки; организацию эксплуатации и ремонта поврежденной
(неисправной) техники; организацию управления силами и средствами
технического обеспечения.
Как известно, в информационном процессе выделяют следующие
частные подпроцессы:
сбор и регистрация;
обработка;
хранение;
передача информации и др.
Для реализации каждого подпроцесса необходимо иметь специальные
технические средства.
Таблица 1
Средства ТО
основные
регистраци
и
и сбора
информац
ии
-средства
сбора;
измерител
ь-ные
приборы
вспомогательные
ввода
передачи данных обработки
хранения
выдачи
элекинформаци
информац информации информаци тропии
ии
и
тания
технического
обслуж. и
ремонта
-ЭВМ;
-внешние -устройства
устройства коммутационные -вычисли- запоминающ документир
ва
средства;
тельные
ие
ования;
локального
комплексы устройства -устройства
ввода;
каналообразующ
отображени
-устройства
ие
я.
удаленного
устройства;
ввода
-аппаратура
передачи
данных;
засекречивающа
я аппаратура
связи
В соответствии с этим выделяют основные и вспомогательные
технические средства или средства технического обеспечения (таблица 1).
Так, например, средства регистрации и сбора информации
обеспечивают фиксацию первичной информации о состоянии объектов
управления и среды, а также преобразование к виду, допускающему ее
восприятие другими техническими средствами. Используется данное
оборудование, прежде всего, в командной подсистеме АСУ. Средства ввода
информации по своему функциональному предназначению примыкают к
средствам регистрации и средствам передачи. Средства передачи данных
обеспечивают обмен информацией между элементами системы управления.
Средства
обработки
информации
обеспечивают
содержательное
преобразование информации и частичное изменение формы информации во
времени. Средства выдачи обеспечивают преобразование информации в
удобный для дальнейшего использования вид.
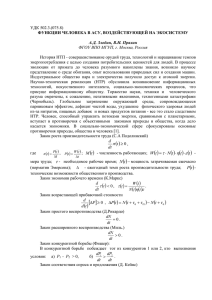
12. Математическое обеспечение АСУ ПС.
Математическое обеспечение необходимо для формализации
процессов управления (с целью их автоматизации) и реализации алгоритмов
управления на ЭВМ. Математическое описание в общем случае включает:
* формализованные описания объектов и процессов управления;
* алгоритмы решения задач управления;
* программное обеспечение средств вычислительной техники,
используемой на всех уровнях управления.
Процесс формализованного описания позволяет получить общее
описание объекта управления и процесса управления в виде формализованных
математических моделей. На базе этих моделей разрабатываются алгоритмы
управления.
Алгоритмы управления определяют необходимую последовательность
действий при управлении и позволяют формализовать описание процесса
управления с целью автоматического его осуществления. Алгоритм является
основой для разработки программы управления соответствующим объектом
от ЭВМ.
Программное обеспечение (ПО) необходимо для реализации
алгоритмов управления на конкретных ЭВМ, входящих в состав АСУ ГПС.
Под управлением ПО обеспечивается взаимодействие ЭВМ с оперативным
персоналом и оборудованием в процессе управления.
Например, при автоматическом регулировании параметров объекта
управления, система управления реализует функции автоматического
регулятора:
x (t) = yз (t) - y (t);
U (t) = A {x (t)},
где x(t) – ошибка объекта управления; yз(t) – заданное значение
управляемого параметра, y(t) – текущее значение управляемого параметра;
U(t) – управляющее воздействие; A – оператор, зависящий от закона
регулирования.
13. Критерии надежности АСУ ПС.
ГОСТ 24.701-86 «Единая система стандартов автоматизированных
систем управления»
1.5. Уровень надежности АСУ зависит от следующих основных
факторов:
- состава и уровня надежности используемых технических средств, их
взаимосвязи в надежностной структуре комплекса технических средств АСУ
(КТС АСУ);
- состава и уровня надежности используемых программных средств, их
содержания (возможностей) и взаимосвязи в структуре программного
обеспечения АСУ (ПО АСУ);
- уровня квалификации персонала, организации работы и уровня
надежности действий персонала АСУ;
- рациональности распределения задач, решаемых системой, между
КТС АСУ, ПО АСУ и персоналом АСУ;
- режимов, параметров организационных форм технической
эксплуатации КТС АСУ;
- степени использования различных видов резервирования
(структурного,
информационного,
временного,
алгоритмического,
функционального);
- степени использования методов и средств технической диагностики;
- реальных условий функционирования АСУ.
Примечание.
Свойства
информационного,
математического,
лингвистического,
метрологического,
организационного,
правового
обеспечений АСУ влияют на надежность АСУ только косвенно, через
функционирование технических и программных средств и персонала АСУ и
поэтому при решении вопросов, связанных с надежностью АСУ, отдельно не
учитываются.
14. Интегрированные системы проектирования и управления.
Интегрированные системы проектирования и управления — это
программно-аппаратные комплексы, которые предназначены для создания
автоматизированных систем управления технологическими процессами
(АСУТП) и осуществляющие в спроектированных системах функции
управления верхнего уровня.
15. Рабочая зона манипулятора.
Рабочая зона манипулятора - это пространство, в котором может
находиться его рабочий орган при всех возможных положениях звеньев
манипулятора. Форма рабочей зоны определяется системой координат, в
которой осуществляется движение рабочего органа манипулятора, и числом
степеней подвижности манипулятора. Различают плоские и пространственные
рабочие зоны. Тип рабочей зоны определяется числом степеней свободы,
структурой и характером отношений между парами манипулятора.
Рабочей зоной плоского манипулятора является фигура, очерченная
предельными положениями схвата или его предельной траекторией.
Реальная рабочая зона манипулятора должна быть меньше или равна
заданной рабочей зоне.
16. Математическое обеспечение АСУ ПС.
Повторяется с 12 вопросом.