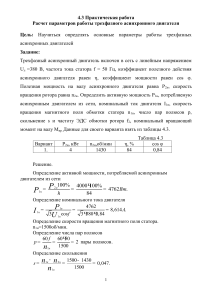
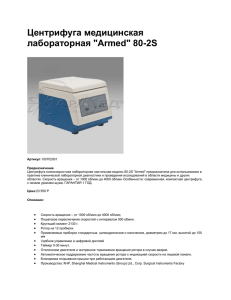
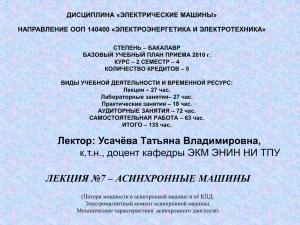
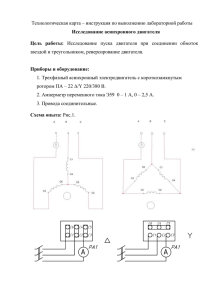
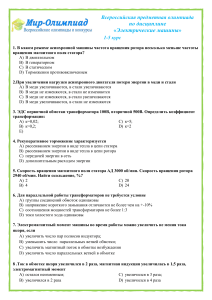
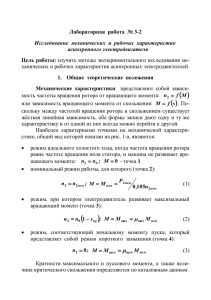
Д.Ю. Тарасов; Р.В. Солопов, к.т.н., доцент (Филиал ФГБОУ ВО «НИУ «МЭИ» в г. Смоленске) СИНТЕЗ ОПТИМАЛЬНОГО ЗАКОНА УПРАВЛЕНИЯ ЧАСТОТНОРЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ В ПУСКОВЫХ РЕЖИМАХ Более 60% потребляемой в мире электроэнергии приходится на электродвигатели различных типов: асинхронные двигатели (АД), синхронные двигатели (СД), двигатели постоянного тока (ДПТ) и другие [2]. Самым популярным из них является асинхронный двигатель, который составляет около 70% всей двигательной нагрузки в мире. Особенности использования АД накладывает определенные ограничения на работу данного оборудования. Одним из наиболее сложных режимов работы АД является режим пуска, сопровождающийся увеличением токов и падением напряжения в электрической сети [1]. Также, когда асинхронный двигатель питается непосредственно от сети, невозможно контролировать скорость и динамику его разгона до номинальных значений без дополнительного оборудования, к тому же скорость его вращения определяется параметрами сети [3]. Оптимальное управление режимом запуска асинхронных двигателей может быть обеспечено автоматическими контроллерами [3], одним из которых является транзисторный преобразователь частоты (ТПЧ). Преобразователи частоты обеспечивают плавный пуск асинхронного двигателя. Ядро их программного обеспечения включает в себя систему управления, основанную на законе регулирования скорости вращения ротора АД. Оптимальный режим пуска достигается за счет правильного выбора конфигурации и автоматического управления законом постоянных коэффициентов. Пуск асинхронного двигателя может осуществляться непосредственно от сети питания без каких-либо дополнительных устройств [2]. Но этот режим работы демонстрирует колебательный характер ускорения. Эта природа может быть рассчитана с помощью анализа передаточной функции AД. В качестве примера рассмотрим модель асинхронного двигателя типа 4А315С4У3 [5], характеристики которой представлены в таблице 1. Таблица 1. Характеристики 4А315С4У3 Uном,В Оборотов в минуту 380 1500 КМс КМкрит 1.0 1.9 КПД, % 93.5 КМмин 0.9 cos 0.91 KЕсть 7.0 Кол-во полюсов 4 Где KMs - отношение пускового момента к номинальному крутящему моменту, KMcrit - критическое отношение крутящего момента к номинальному крутящему моменту, KMmin - отношение минимального крутящего момента к номинальному крутящему моменту, KIs - пусковой ток. Исследуемый асинхронный двигатель моделируется с помощью блока «Блоки управления асинхронным двигателем» программного комплекса Matlab Simulink. Параметры блока были рассчитаны в соответствии с методом, представленным в, и результаты представлены в таблице 2 вместе с расчетом эквивалентной схемы, показанной на рис. 2. Таблица 2. Эквивалентные параметры схемы r1, o.e. r2, o.e. L1, o.e. L2, o.e. -4 0.018 0.017 3.4×10 4.8×10-4 Рис. 1. Асинхронная эквивалентная схема машины Lm, o.e. 0.014 S, o.e. 0.02 Рис. 2. АД без функции скорости вращения ротора ТЧП Параметры сети модели выбраны в соответствии с номинальными данными AД: напряжение от линии к линии составляет 380 В, частота - 50 Гц. Моделирование было выполнено со следующими допущениями: • Не учитывается сопротивление соединительных проводов; • Система подключена к бесконечному источнику питания (IPS); • Механическая нагрузка на ротор АД равна нулю; • Расчеты и их оценка принимаются с погрешностью не более 5%. Функция скорости вращения ротора модели AД в режиме пуска без подключения ТПЧ показана на рис. 2. Период от 0 до 0,4 с сопровождается периодическими затухающими колебаниями. Эта характеристика асинхронного двигателя может быть оценена путем анализа корней характеристического уравнения (1), которое рассчитывается с использованием методологии, упомянутой в [1]. ( 𝑊𝐴 = − 𝑟2 ∙ (𝑆 − 1) ∙ (𝑟𝑚 + 𝑝𝐿𝑚 )) 𝑆 (𝑟𝑚 + 𝑝𝐿𝑚 + 𝑝𝐿2 − (𝑟2 ∙ (𝑆 − 1))) ) 𝑆 + 𝑟1 + 𝑝𝐿1 (1) Где: 𝑟1 , 𝑟2 , 𝑟𝑚 , 𝐿1 , 𝐿2 , 𝐿𝑚 являются параметрами AД, 𝑆 – скольжение и 𝑑 𝑝 = производный оператор. 𝑑𝑡 Для решения символьных уравнений в общем виде используются вычислительные возможности программного комплекса Matlab. Для дальнейшего продолжения вычислений необходимо привести это уравнение к линейному виду (преобразования, а также функция переноса результата не показаны, так как их внешний вид довольно громоздкий). Уравнение (2) показывает пару корней уравнения (1) в комплексном виде для значений параметров AД, представленных в таблице 2. 𝑥1,2 = −107.6 ± 194.5𝑗 (2) Отрицательное действительная величина и наличие мнимой части корней (2) указывает на затухающий колебательный характер реакции передаточной функции АД на внешние воздействия. Для асинхронного двигателя также может быть рассчитан критерий колебаний(3). 𝜇= 𝐼𝑚(𝑥1,2 ) = 1.78 𝑅𝑒(𝑥1,2 ) (3) Закон автоматического управления – функция зависимости выходных значений системы от входных. Задача выбора оптимального закона управления предполагает выбор наиболее подходящих звеньев передаточной функции системы управления и ее постоянных коэффициентов. Это также включает в себя синтез передаточных функций. Синтез передаточных функций также подробно описан в. Следует лишь отметить, что данное исследование включает в себя только апериодические и интегрирующие звенья, которые используются с обратными линиями основных параметров АД, включая напряжение статора, скорость ротора, активную и реактивную мощность. В соответствии с [4] предполагается использовать закон регулирования напряжения-частоты на входах асинхронного двигателя, передаточная функция в проекции на ось d системы координат dq0 [2] указана в уравнении (4), а на оси q - в уравнении (5) 𝐾0𝜔 𝐾1𝜔 ∙ 𝑝𝑇1𝜔 +𝜔 + 1 + 𝑝𝑇0𝜔 1 + 𝑝𝑇1𝜔 𝐾0𝑃 𝐾1𝑃 +∆𝑃 + ∆𝑃 (4) 1 + 𝑝𝑇0𝑃 𝑝(1 + 𝑝𝑇1𝑃 ) 𝑈𝑓𝑑 (1 + 𝑝𝑇в ) = −𝐾0𝑄 −𝐾1𝑄 −𝐾0𝑈 −𝐾1𝑈 ∙ 𝑝𝑇1𝑈 = ∆𝑄 + ∆𝑄 + ∆𝑈 +𝑈 + 𝑈𝑓𝑑 (0) (5) 1 + 𝑝𝑇0𝑄 𝑝(1 + 𝑝𝑇1𝑄 ) 1 + 𝑝𝑇0𝑈 1 + 𝑝𝑇1𝑈 Где: ∆𝜔 = 𝜔 − 𝜔𝑠𝑒𝑡 ; ∆𝑃 = 𝑃 − 𝑃𝑠𝑒𝑡 ; ∆𝑄 = 𝑄 − 𝑄𝑠𝑒𝑡 ; ∆𝑈 = 𝑈 − 𝑈𝑠𝑒𝑡 . 𝑈𝑓𝑞 (1 + 𝑝𝑇в ) = ∆𝜔 𝜔 — измеренная частота вращения ротора; 𝑈 — измеренное напряжение статора; 𝑃 — измеренное потребление АМ активной мощности; 𝑄 — измеренная реактивная мощность потребления АМ; 𝜔𝑠𝑒𝑡 – величина регулировки частоты вращения ротора; 𝑈𝑠𝑒𝑡 – установочное значение напряжения статора; 𝑃𝑠𝑒𝑡 –Значение активной настройки мощности потребления АМ; 𝑄𝑠𝑒𝑡 – Установочное значение реактивной мощности потребления АМ; 𝐾0𝜔 , 𝐾0𝑈 , 𝐾0𝑃 , 𝐾0𝑄 , 𝐾0𝜔 , 𝐾0𝑈 , 𝐾0𝑃 , 𝐾0𝑄 – коэффициент усиления звеньев передаточной функции; 𝑇0𝜔 , 𝑇0𝑈 , 𝑇0𝑃 , 𝑇0𝑄 , 𝑇0𝜔 , 𝑇0𝑈 , 𝑇0𝑃 , 𝑇0𝑄 – временные константы связи функции передачи. Из уравнений (1) и (2) видно, что предложенный закон управления может быть представлен в виде набора параллельно соединенных апериодических, интегрирующих и стабилизирующих звеньев [9], общей функцией которых является сглаживание колебательной составляющей выходного значения всей системы. При формировании требуемого значения управляющего сигнала используется обратная связь, основанная на измерениях частоты вращения ротора, напряжения, активных и реактивных мощностей ИМ, значения которых сравниваются с настройками, определяемыми требуемым режимом работы электрической машины. В результате функция закона управления, представленная в качестве конечной функции конечного сигнала для преобразователя частоты, равна (6). 2 2 𝑊𝐹𝐶 = √𝑈𝑓𝑑 + 𝑈𝑓𝑞 ∙ sin ((𝜔𝑢𝑓 − 𝛾𝑈𝑓 ) + 𝛾𝑈𝑓 ) Где: 𝜔𝑢𝑓 = 𝑎𝑟𝑐𝑡𝑔 ( 𝑈𝑓𝑑 𝑈𝑓𝑞 (6) ) и 𝛾𝑈𝑓 – начальное значение угла напряжения Таким образом, передаточная функция (7) всей рассматриваемой системы (включая АД) является суммой (1) и (6). Его графическое представление показано на рис.3, где 𝜔𝑠𝑒𝑡 , 𝑈𝑠𝑒𝑡 , 𝑃𝑠𝑒𝑡 , 𝑄𝑠𝑒𝑡 – установочные значения частоты вращения ротора в рабочем режиме, напряжения статора, потребления активной и реактивной мощности AД и 𝜔, 𝑈, 𝑃, 𝑄 являются их измеренными значениями. Рис.3. Графическое представление функции передачи системы Функция скорости вращения ротора AД без ТПЧ 𝑊 = 𝑊𝐹𝐶 + 𝑊𝐴𝑀 (7) Решение задачи оптимизации плавного запуска АД включает в себя поиск коэффициентов и временных констант всех звеньев передаточной функции (6). После этого необходимо провести исследование стабильности системы с целью проверки результата расчета. Перед началом расчета оценки устойчивости системы уравнение (7) преобразуется в однострочную форму (не упоминается из-за громоздкой нотации). Устойчивость системы автоматического управления зависит от того, какие коэффициенты дифференциального уравнения. Идея метода D – разложения состоит в том, чтобы найти границу между стабильным и нестабильным коэффициентами и тем самым указать область устойчивости. Коэффициенты, не включенные в область D-раздела, нестабильны. D - декомпозиция на один параметр подразумевает последовательную оценку коэффициентов уравнения (7) для каждого из них. Значения остальных коэффициентов фиксируются и строится зона устойчивости. Таким образом, получается число n характеристик, где n — величина неизвестных коэффициентов. После нахождения всех областей стабильности приступают к методам оптимизации. Градиентный спуск — метод нахождения минимального значения рассматриваемой характеристической функции. Суть метода заключается в итеративном поиске минимума комплексной функции путем последовательного приближения к нему значения, пропорционального градиенту вдоль оси одной или нескольких переменных осей. Для реализации метода характеристическое уравнение последовательно интегрируется по всем неизвестным коэффициентам (поиск градиентов). Далее задаются начальные значения переменных. Предпочтительнее выбирать исходные значения из областей устойчивости, рассчитанных методом D- декомпозиции, из-за вероятности нахождения оптимального решения от первого применения реализации метода. Уравнение (8) — общая форма градиентов для конкретной задачи. Уравнение (9) является условием выхода из цикла поиска решения. 𝑉𝑖 = 𝑉𝑖−1 − 𝛼 ∙ ∇W(V) |𝑉𝑖 − 𝑉𝑖−1 | ≤ 𝜀 (8) (9) Где V- переменная, α – шаг спуска градиента, W – характеристическая функция, i – количество итераций, ∇- символ математического градиента, точность. В результате использования градиентного спуска уравнение (7) преобразуется в передаточную функцию с известными коэффициентами усиления и временными константами, которые оптимально подобраны и обеспечивают стабильную работу АД с минимальными затухающими колебаниями. В работе показан метод выбора оптимального закона управления для преобразователя частоты, обеспечивающий плавный запуск асинхронного двигателя. Методика включает в себя выбор самого закона управления, который состоит из апериодических, интегрирующих и стабилизирующих звеньев, охватываемых обратной связью. В статье также представлено использование градиентного спуска в качестве основного метода оптимизации коэффициентов закона управления и констант времени, а также параллельная оценка исследуемой устойчивости системы с выбранными параметрами методом D-декомпозиции. Этот метод может быть распространен на аналогичные исследования. Литература: 1. Катсман М. М. Электрические машины. Академия: учеба для студентов сред. проф.: [Академия: Учебник для студентов средних специальностей], Москва, 2001, 463 стр. 2. Усольцев А. А. Электрические машины. НИУ ИТМО: Учебное пособие, Санкт-Петербург, 2018, 416 страниц 3. Новиков Г.В. Частотный контроль асинхронных электродвигателей, Наука и образование: научное издание МГТУ им. Н.Е. Баумана, Москва, 2016, 498 с. (на русском языке) 4. Барков В.А. Энергетическая электроника в автоматизированном электроприводе. Нестор: Учебник, Москва, 1999, 252 стр.