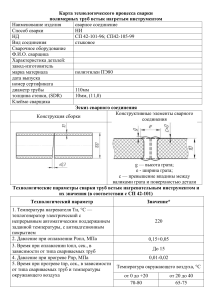
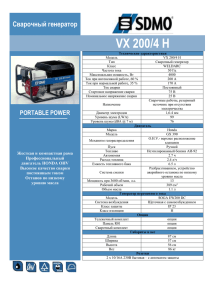
Р ешетневс ки е ч тения устройств с заданной точностью при воздействии случайных ветровых возмущений. Таким образом, применение предложенной методики синтеза проиллюстрировано успешным решением задачи синтеза закона управления для контура автоматического управления летательного аппарата на режиме заправки топливом в полете. В общем случае данная методика позволяет синтезировать законы управления для линейных многосвязных стохастических систем при действии случайных возмущений, напрямую обеспечивая заданную точность управления для каждого регулируемого параметра индивидуально. Необходимо отметить, что представленная методика позволяет синтезировать простые статические регуляторы для решения других задач, требующих высокоточное управление – это заход на посадку [3], полет летательных аппаратов в группе и др. Библиографический список 1. Буков, В. Н. Вложение систем. Аналитический подход к анализу и синтезу матричных систем / В. Н. Буков. Калуга : Изд-во науч. лит. Н. Ф. Бочкаревой, 2006. 2. Бочаров, А. С. Методика синтеза законов управления для контура автоматической системы заправки самолета в воздухе с учетом ветровых возмущений / А. С. Бочаров, Н. И. Сельвесюк // Приборы и системы. Управление, контроль, диагностика. 2007. № 7. С. 21–27. 3. Бочаров, А. С. Синтез автоматизированной системы захода на посадку с гарантированной точностью / А. С. Бочаров, Н. И. Сельвесюк // Исследования и перспективные разработки в авиационной промышленности. Ст. и материалы 3-й науч.-практ. конф. молодых ученых и специалистов. М. : ОКБ Сухого, 2005. С. 24–29. A. S. Bocharov Stavropol Higher Military Aviation Engineering School (Military Institute) name of the Marshal of aircraft of V. A. Sudets, Russia, Stavropol TECHNIQUE OF SYNTHESIS OF MANAGEMENT OF THE SET ACCURACY FOR THE MANEUVERABLE PLANE In the report the technique of synthesis of regulators of the set accuracy on the basis of the new approach to synthesis of linear stochastic multidimensional control systems is presented. Feature of the given approach is that requirements to accuracy of control are formulated through elements of the state covariance matrixes of linear system for each regulate parameter individually. The given methodology is used for synthesis of laws of controls in a contour of automatic refueling system of the plane by fuel in flight in conditions of atmospheric turbulence. © Бочаров А. С., 2009 УДК 621.791.72 А. Н. Бочаров, С. В. Котельникова Сибирский государственный аэрокосмический университет имени академика М. Ф. Решетнева, Россия, Красноярск ИСПОЛЬЗОВАНИЕ ВИДЕОИНФОРМАЦИИ ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭЛЕКТРОННО-ЛУЧЕВОЙ СВАРКИ Рассмотрен вопрос автоматизации процесса электронно-лучевой сварки (ЭЛС) на основе видеоинформации В ООО «СИЦЭЛТ» была разработана и успешно используется система видеонаблюдения за процессом электронно-лучевой сварки. На первом этапе задачей этой системы было не только наблюдение за сварочной ванной и стыком в зоне сварки, но и визуализация поверхности при позиционировании электронного пучка со стыком свариваемых деталей как на малом настроечном токе, так и во время сварки, а также анализ качества формирования шва после сварки. Кроме это- го, систему видеонаблюдения используют при проведении подготовительных и настроечных работ, проводимых до вакуумирования установки. В ходе эксплуатации система видеонаблюдения показала свою работоспособность. На изображении четко и ясно видны свариваемые детали, стык и пятно луча (рис. 1). Исходя из этого было предложено использовать получаемую видеоинформацию не только как сервисную функцию, облегчающую работу оператора и дающую 490 Информатика и информационно-управляющие системы возможность повышения качества сварки, но и включить ее в контур управления ЭЛС. чае – это электронный пучок и стык свариваемых деталей). Рис. 1. Процесс сварки, полученный видеосистемой Одной из актуальных проблем в технологии ЭЛС является контроль положения электронного пучка на стыке сварных изделий. Применять видеоинформацию для контроля положения можно двумя способами: 1. Следить за стыком на основе видеоинформации. 2. Использовать видеопоток как источник дополнительной информацией для системы слежения за стыком. Выделение и сопровождение объектов в видеопотоке (стык и пятно луча) осуществляется с помощью моделей разных уровней. Модель более высокого уровня использует данные, полученные от модели предыдущего уровня (рис. 2). На первом уровне происходит вычитание фона (background subtraction), т. е. классифицируются пикселы изображения на два класса: пикселы заднего (фон) и переднего плана. На втором уровне происходит сегментация объектов (objects segmentation): из множества пикселов переднего плана выделяется множество объектов, т. е. семантически связных областей изображения, принадлежащих одному движущемуся либо стационарному объекту (в данном слу- Рис. 2. Уровни обработки видеоинформации На третьем уровне осуществляется сопровождение объектов (objects tracking), т. е. межкадровое связывание выделенных областей, вычисление траектории движения, координат, скорости, размера объектов, их идентификация. Кроме того, перед сегментацией осуществляется предварительная обработка изображения. В результате обработки изображение огрубляется для избавления от второстепенных деталей, а также естественных и искусственных помех, например царапины на деталях и прихватки. Одновременно с этим из изображения удаляются блики, засветка и более четко выделяются контуры объектов. После модуля сегментации объектов получается последовательность сгруппированных между собой пикселов, с помощью которых можно определить некий усредненный образ цели. Далее полученный образ сравнивается с уже существующими в базе данных образами (шаблонами траекторий сварки), и полученный результат может быть использован либо в системе наведения электронного пучка на стык свариваемых деталей, либо в системе слежения по стыку. A. N. Bocharov, S. V. Kotelnicova Siberian State Aerospace University named after academician M. F. Reshetnev, Russia, Krasnoyarsk APPLICATION OF VIDEO INFORMATION FOR CONTROL OF ELECTRON-BEAM WELDING PROCESS The question of electron-beam welding (EBW) process automation on the basis of video information was considered. © Бочаров А. Н., Котельникова С. В., 2009 491