СОДЕРЖ АНИЕ
I. ВВЕДЕНИЕ.......................................................................................................... 5
Характеристика работ слесаря КИП и А ........................................................5
Техника безопасности........................................................................................ 6
1. Общие положения............................................................................................ 6
2. Права, обязанности и ответственность в области охраны труда......... 7
3. Функции руководителей, специалистов и рабочих цехов, участков
в рамках системы управления промышленной безопасностью и
охраной труда на предприятии................................................................... 8
4. Осуществления контрольных функций за состоянием промышлен­
ной безопасности и охраны труда............................................................... 9
II. СЛЕСАРНЫЕ РАБОТЫ, ИХ ВИД И НАЗНАЧЕНИЕ.............................14
III. ОСНОВЫ ФИЗИКИ........................................................................................ 20
IV. ОСНОВЫ ЭЛЕКТРОТЕХНИКИ..................................................................25
V. ОСНОВЫ ЭЛЕКТРОНИКИ......................................................................... 32
1. Основные схемы выпрямления электрического тока........................ 32
2. Сглаживающие фильтры.......................................................................... 34
3. Стабилизаторы напряжения.....................................................................36
4. Типы усилителей на транзисторах..........................................................37
5. Элементы цифровых электронных цепей............................................38
5.1. Триггеры............................................................................................. 40
6. Операционные усилители........................................................................42
VI. МЕТРОЛОГИЧЕСКИЕ ПОНЯТИЯ...........................................................47
1. Классификация приборов.......................................................................... 49
VII. ВТОРИЧНЫЕ ПНЕВМАТИЧЕСКИЕ ПРИБОРЫ................................. 52
VIII. ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ................................................... 57
IX. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ.........................................65
1. Жидкостные манометры.......................................................................... 65
2. Деформационные манометры................................................................ 66
3. Грузопоршневые манометры................................................................. 67
4. Электрические манометры.......................................................................68
5. Преобразователи давления электрические с силовой
компенсацией............................................................................................. 68
6. Преобразователи давления и разрежения с пневмовыходом...........70
7. Манометр сильфонный МС-П1 (МС-П2)............................................ 71
X...ИЗМЕРЕНИЕ РАСХОДА ЖИДКОСТЕЙ, ГАЗОВ И ПАРОВ.............74
1. Расходомеры переменного перепада давления.................................. 74
2. Расходомеры постоянного перепада давления.................................. 76
3. Ротаметры....................................................................................................78
4. Электромагнитные расходомеры...........................................................82
5. Счётчики...................................................................................................... 83
XI. ПРИБОРЫ ИЗМЕРЕНИЯ УРОВНЯ..........................................................87
1. Уровнемеры пневматические буйковые УБ-П................................... 88
2. Пьезометрические уровнемеры............................................................. 89
3. Гидростатические датчики уровня........................................................91
3
XII. ДАТЧИКИ ТЕМПЕРАТУРЫ................................................................... 92
1. Общие сведения....................................................................................... 92
2. Термометры стеклянные........................................................................92
3. Манометрические термометры............................................................ 94
4. Термопреобразователи сопротивления..............................................95
5. Термоэлектрические преобразователи............................................... 96
XIII. ПИРОМЕТРИЯ........................................................................................... 98
1. Милливольтметры и логометры........................................................... 98
2. Автоматические электронные мосты и потенциометры................101
XIV. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ ТЕХНОЛОГИЧЕСКОГО
КОНТРОЛЯ И СИГНАЛИЗАЦИИ.........................................................106
XV. ЭЛЕКТРОИЗМЕРЕНИЯ........................................................................... 114
1. Классификация электроизмерительных приборов..........................114
2. Приборы магнитоэлектрической системы........................................117
3. Приборы электромагнитной системы................................................ 118
4. Приборы электродинамической системы..........................................119
5. Приборы индукционной системы........................................................120
XVI. ЭЛЕКТРОННЫЕ ДАТЧИКИ...................................................................122
1. Датчики давления и разности давлений............................................. 122
2. Приборы для измерения расхода.........................................................124
XVII. ВТОРИЧНЫЕ ЭЛЕКТРОННЫЕ ПРИБОРЫ И
ПРЕОБРАЗОВАТЕЛИ............................................................................ 127
1. Структурные схемы автоматических вторичных приборов........ 127
2. Прибор регистрирующий Диск-250................................................. 129
3. Преобразователь измерительный многопредельный П-282........ 130
4. Устройство контроля и регистрации ФЩЛ-502,501..................... 132
XVIII. УРОВНЕМЕРЫ ПОВЫШЕННОЙ СЛОЖНОСТИ........................ 137
1. Виды уровнемеров и методы измерения уровня...........................137
XIX..рН-метры..................................................................................................... 147
XX. КОНДУКТОМЕТРЫ................................................................................ 151
XXI. ОПТИЧЕСКИЕ МЕТОДЫ АНАЛИЗА................................................ 158
XXII. ПРИБОРЫ ГАЗОВОГО АНАЛИЗА................................................... 164
XXIII. ХРОМАТОГРАФИЧЕСКИЙ МЕТОД АНАЛИЗА........................ 173
XXIV. ПРИБОРЫ И АВТОМАТИКА КОТЕЛЬНЫХ............................... 178
1. Защита котла........................................................................................ 179
2. Технологическая сигнализация........................................................180
3. Контрольно-измерительные приборы............................................ 180
4. Системы автоматизации отопительных котельных.................... 182
XXV. РАЗНОВИДНОСТЬ, УСТРОЙСТВО И РАБОТА
ВЕСОИЗМЕРИТЕЛЬНОЙ ТЕХНИКИ............................................... 184
Б и б л и о гр а ф и ч ес к и й с п и с о к .....................................................................194
4
I. ВВЕДЕНИЕ
Характеристика работ слесаря по КИПиА
3 -й разряд
Характеристика работ. Ремонт, сборка, проверка, регулировка, испытание, юс­
тировка, монтаж и сдача теплоизмерительных, электромагнитных, электродинамических,
счетных, оптико-механических, пирометрических, автоматических, самопишущих и дру­
гих приборов средней сложности со снятием схем. Слесарная обработка деталей по 11-12
квалитетам с подгонкой и доводкой деталей. Составление и монтаж схем соединений
средней сложности. Окраска приборов. Пайка различными припоями (медными, серебря­
ными и др.). Термообработка деталей с последующей доводкой их. Определение твердо­
сти металлов тарированными напильниками. Ремонт, регулировка и юстировка особо
сложных приборов под руководством слесаря более высокой квалификации.
Должен знать: устройство, назначение и принцип работы ремонтируемых и юсти­
руемых приборов и аппаратов; государственные стандарты на испытание и сдачу отдель­
ных приборов, механизмов и аппаратов; основные свойства металлов, сплавов и других
материалов, применяемых при ремонте; электрические свойства токопроводящих и изо­
ляционных материалов; способы термообработки деталей с последующей их доводкой;
влияние температур на точность измерения; условные обозначения запорной, регулирую­
щей, предохранительной арматуры в тепловых схемах; правила установки сужающих уст­
ройств; виды прокладок импульсных трубопроводов; установку уравнительных и разде­
лительных сосудов; систему допусков и посадок, квалитеты и параметры шероховатости.
4 разряд
Характеристика работ. Ремонт, регулировка, испытание, юстировка, монтаж и
сдача сложных электромагнитных, электродинамических, теплоизмерительных, оптико­
механических, счетных, автоматических, пиротехнических и других приборов с под­
гонкой и доводкой деталей и узлов. Настройка и наладка устройства релейной защи­
ты, электроавтоматики, телемеханики. Определение дефектов ремонтируемых приборов
и устранение их. Слесарная обработка деталей по 7-10 квалитетам и сборка зубчатых
и червячных зацеплений. Составление и монтаж сложных схем соединений. Вычис­
ление абсолютной и относительной погрешности при проверке и испытании прибо­
ров. Составление дефектных ведомостей и заполнение паспортов и аттестатов на
приборы и автоматы.
Должен знать: Устройство, принцип работы и способы наладки ремонтируе­
мых и юстируемых сложных приборов, механизмов, аппаратов, назначение и способы
наладки контрольно-измерительных и контрольно-юстировочных приборов, способы
регулировки и градуировки приборов и аппаратов и правила снятия характеристик
при их испытании, правила расчета сопротивлений, схемы сложных соединений,
правила вычисления абсолютной и относительной погрешностей при проверке и ис­
пытании приборов, обозначения тепловых и электрических схем и чертежей, систему
допусков и посадок, квалитеты и параметры шероховатости, основы механики и
электроники в объеме выполняемой работы.
5 разряд
Характеристика работ. Ремонт, регулировка, испытание, юстировка, монтаж,
наладка и сдача сложных теплоизмерительных, оптикомеханических, электродинами­
ческих, счетных , автоматических и других приборов с установкой автоматического
регулирования с суммирующим механизмом и дистанционной передачей показаний.
Выявление и устранение дефектов в работе приборов, изготовление лабораторных
приборов. Вычерчивание шкал, сеток и составление сложных эскизов. Пересчет элек­
трических приборов на другие пределы измерения. Регулировка и проверка по ква5
литетам всех видов тепловых и электрических контрольно - измерительных приборов,
авторегуляторов и автоматов питания.
Должен знать: Конструктивные особенности ремонтируемых сложных и
точных приборов и способы их регулировки и юстировки, устройство точных изме­
рительных инструментов, причины возникновения дефектов в работе приборов и
автоматов, меры предупреждения и устранения их, кинематическую схему самопи­
шущих приборов всех типов, правила ремонта, проверки и юстировки сложных
приборов и автоматов и правила выбора базисных поверхностей, гарантирующих
получение требуемой точности.
6 разряд
Характеристика работ. Ремонт, регулировка, монтаж, испытание, наладка, юс­
тировка и тарировка экспериментальных, опытных и уникальной теплоизмеритель­
ной, автоматической и электронной аппаратуры проекционных и оптических систем,
радиоактивных приборов, агрегатов радиостанций, пеленгаторов, радарных установок.
Выявление и устранение дефектов в работе аппаратуры. Определение степени износа
деталей и узлов. Наладка и комплексное опробование после монтажных схем тепло­
вого контроля и автоматики котлов, турбин и технологического оборудования. Сборка
схем для проверки устройств тепловой автоматики.
Должен знать. Устройство, взаимодействие сложных приборов, технологиче­
ский процесс их сборки и способы юстировки, электрические тепловые схемы уст­
ройств тепловой автоматики, устройство и методы выверки сложных контрольноюстировочных приборов, свойства оптического стекла, металлов и вспомогательных
материалов, проводников, полупроводников, применяемых в приборостроении, осно­
вы расчета зубчатых колес различных профилей зацепления и оптических систем,
основы физики, механики, телемеханики, теплотехники, электротехники, метрологии,
радиотехники и электроники в объеме выполняемой работы.
Техника безопасности
При прохождении обучения или выполнении своих непосредственных обязанно­
стей в части соблюдения правил техники безопасности и охраны труда слесарь по КИПиА
руководствуется инструкцией по рабочему месту и ОБЩЕДЕИСТВУЮЩИМ ПОЛОЖЕ­
НИЕМ о системе управления промышленной безопасностью и охраной труда основные
положения которого приведены ниже.
I. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Настоящее Положение разработано на основе действующих законодательных и
нормативных актов Российской Федерации, Правил организации и осуществления произ­
водственного контроля за соблюдением требований промышленной безопасности на
опасном производственном объекте (утв. Постановлением Правительства РФ N 263 от
10.03.1999 г.) и Методических рекомендаций по организации производственного контроля
за соблюдением требований промышленной безопасности на опасных производственных
объектах (утв. Приказом Федерального горного и промышленного надзора России N 49 от
26.04.2000 г.).
1.2. Положение разработано в целях создания устойчивых организационноправовых
условий по обеспечению охраны труда и промышленной безопасности на " и регламенти­
рует:
функции и задачи, конкретное содержание работ по обеспечению соблюдения тре­
бований промышленной безопасности и охраны труда на различных уровнях управления
производством;
6
- порядок сбора, анализа информации, учета и отчетности в вопросах обеспечения
промышленной безопасности и охраны труда;
- порядок обмена информацией, необходимой степени детализации в соответствии с
уровнем управления;
- формы учета и государственной статистической отчетности в данной сфере дея­
тельности.
2. ПРАВА, ОБЯЗАННОСТИ И ОТВЕТСТВЕННОСТЬ
В ОБЛАСТИ ОХРАНЫ ТРУДА
2.1. Функции и задачи в системе обеспечения охраны труда.
2.1.1. Основными функциями системы обеспечения безопасности труда являются:
- организация и координация работ по производственному контролю;
- организация и координация работ по охране труда;
- обеспечение промышленной безопасности (обеспечение безопасности производст­
венного оборудования, технологических процессов, зданий и сооружений);
- обучение работающих безопасности труда;
- контроль за состоянием условий и охраны труда;
- информационное обеспечение охраны труда;
- создание экономических механизмов обеспечения безопасности труда.
2.1.2. Содержание работ в каждой из указанных функций, порядок их выполнения,
обязанности должностных лиц по обеспечению безопасности производственных объектов
регламентируются Федеральными Законами ("Об основах охраны труда в Российской Фе­
дерации", "О промышленной безопасности опасных производственных объектов", Кодек­
сом законов о труде), государственными стандартами системы ССБТ, нормативными пра­
вовыми актами Минтруда России, органов государственного надзора, документами и на­
стоящим Положением.
2.1.3. Организация и координация работ в области промышленной безопасности и
охраны труда предусматривает:
- наличие отдела охраны труда и промышленной безопасности по действующим
нормативам;
- определение обязанностей и порядка взаимодействия лиц и служб, участвующих в
обеспечении безопасности труда;
- принятие и реализацию управленческих решений (приказы, распоряжения, указа­
ния и др.).
2.1.4. Обеспечение безопасности труда должно достигаться приведением техноло­
гических процессов, эксплуатируемого оборудования, зданий и сооружений в соответст­
вии с требованиями:
- Федерального закона "О промышленной безопасности опасных производственных
объектов";
- государственных стандартов безопасности труда по видам технологических про­
цессов, работ оборудования;
- строительных норм и правил обеспечения безопасности зданий и сооружений.
2.1.5. Обучение работающих безопасности труда должно проводиться в соответст­
вии с требованиями:
- ГОСТ 12.0.004-90. ССБТ. "Организация обучения по безопасности труда. Общие
положения";
- Типового положения о порядке обучения и проверки знаний по охране труда руко­
водителей и специалистов предприятий, учреждений и организаций (постановление Мин­
труда РФ от 12.10.94 г. N 65);
7
- Положения о порядке подготовки и аттестации работников организаций, эксплуа­
тирующих опасные производственные объекты подконтрольные Гостехнадзору России
(постановление от 11.01.99 г. N 2);
- Нормативными документами ", устанавливающими порядок обучения работников
безопасности труда.
2.1.6. Информационное обеспечение охраны труда предусматривает:
- организацию информационных потоков между различными уровнями управления
производством;
- определение состава информации (перечня показателей), периодичности и формы
ее представления;
- учет (регистрацию) информации по мере ее возникновения (авария, несчастный
случай, проведенная проверка, выданное предписание);
- передачу сообщений (уведомлений) о событиях, предусмотренных перечнем пока­
зателей;
- обработку, хранение информации, состояние статистических отчетов, направление
их в установленные органы;
- назначение ответственных за организацию и функционирование системы инфор­
мационного обеспечения.
2.1.7. Создание экономических механизмов обеспечения безопасности предусмат­
ривает:
- обеспечение экономической заинтересованности акционерного общества, его
структурных единиц, производственных подразделений и всех работающих в создании
здоровых и безопасных условий труда.
- обязательное страхование работников от несчастных случаев на производстве и
профессиональных заболеваний и заключение договоров страхования риска ответственно­
сти за причинение вреда при эксплуатации
опасных производственных объектов со­
гласно действующему законодательству.
3. ФУНКЦИИ РУКОВОДИТЕЛЕЙ, СПЕЦИАЛИСТОВ И РАБОЧИХ
ЦЕХОВ, УЧАСТКОВ В РАМКАХ СИСТЕМЫ УПРАВЛЕНИЯ
ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТЬЮ И ОХРАНОЙ
ТРУДА НА ПРЕДПРИЯТИИ
3.1.1. Ответственность за организацию работы по промышленной безопасности и
охране труда возлагается на генерального директора
3.1.2. Руководство организацией по промышленной безопасности и охране труда
возлагается на главного инженера
3.1.3. Оперативное, методическое руководство, координация работ по промышлен­
ной безопасности и охране труда возлагается на начальника службы производственного
контроля и экологии.
3.1.4. Обязанности должностных лиц, изложенные в настоящем разделе, являются
типовыми для перечня должностей.
Конкретные обязанности работников в области промышленной безопасности и ох­
раны труда должны отражаться в их должностных инструкциях с учетом структуры
3.1.5. РАБОЧИЙ (АППАРАТЧИК, СЛЕСАРЬ И ДР.):
- обязан соблюдать правила охраны труда и промышленной безопасности, пожар­
ной безопасности, промышленной санитарии при проведении всех видов работ и техноло­
гических операций по рабочему месту согласно должностных инструкций, инструкций по
охране труда и иных документов при выполнении определенных видов работ;
8
- перед началом работы проверяет на своем рабочем месте исправность и работо­
способность оборудования, приборов, средств защиты, блокировочных и сигнализирую­
щих устройств, исправность ограждений, инструмента, средств пожаротушения, предо­
хранительных приспособлений и устройств, целостность защитного заземления, отсутст­
вия нарушений в ведении технологического процесса. О выявленных нарушениях при
проверке докладывает непосредственному руководителю;
- обязан не допускать случаев загазованности помещений и территории, сброса не­
регламентных сточных вод;
- постоянно находится на рабочем месте в положенной и исправной спецодежде,
спецобуви, имеет необходимые средства защиты (согласно инструкции по рабочему мес­
ту);
- обязан содержать в исправности и чистоте оборудование и инструменты, не до­
пускать наличия на рабочем месте посторонних предметов, немедленно убирать рабочее
место от посторонних предметов и оставшихся материалов, деталей и др. после заверше­
ния ремонтных и других работ;
- контролирует работу приточно-вытяжной вентиляции;
- производит обслуживание оборудования и коммуникаций со стационарных пло­
щадок или других специальных устройств. Обслуживание оборудования и коммуникаций
со случайных предметов (бочек, стульев, подоконников, и т.д.) запрещается;
- о каждом нарушении по содержанию и эксплуатации оборудования, коммуника­
ций, ведению технологического процесса, происшедшем несчастном случае немедленно
докладывает непосредственному руководителю работ;
выполняет только ту работу, которая входит в круг его обязанностей согласно
инструкции по рабочему месту.
4. ОСУЩЕСТВЛЕНИЕ КОНТРОЛЬНЫХ ФУНКЦИЙ ЗА
СОСТОЯНИЕМ ПРОМЫШЛЕННОЙ БЕЗОПАСНОСТИ
И ОХРАНЫ ТРУДА
4.1. ПОРЯДОК КОНТРОЛЯ
4.1.1. Постоянный профилактический контроль состояния промышленной безопас­
ности и охраны труда на рабочих местах является одним из средств предупреждения ава­
рий, производственного травматизма и осуществляется путем оперативного выявления
отклонений от требований промышленной безопасности с принятием необходимых мер
по их устранению.
4.1.2. Основной принцип контроля за состоянием условий и охраны труда - это ре­
гулярные проверки, проводимые руководителями разных уровней управления производ­
ством по определенной схеме.
4.1.3. Контроль за состоянием промышленной безопасности и охраны труда осуще­
ствляется:
- руководителями I уровня контроля - непосредственными руководителями работ
(мастерами, механиками, энергетиками, начальниками смен, производителями работ, мас­
терами производственных участков и др.);
- руководителями II уровня контроля
- начальниками цехов, участков и других
производственных подразделений;
- руководителями III уровня контроля - руководящими работниками предприятия,
главными специалистами, начальниками отделов, работниками производственного отдела,
отдела охраны труда и промышленной безопасности, других отделов предприятия;
9
4.1.4. Первый этап контроля.
Руководители I уровня контроля (мастера, начальники смен, механики, энергетики
и другие непосредственные руководители работ) ежедневно в начале работы самостоя­
тельно или с участием уполномоченных лиц по охране труда должны проверять:
- состояние и правильность организации рабочих мест (безопасное состояние рабо­
чей зоны и рабочих мест, состояние переходов и проездов), правильность складирования и
хранения деталей, инструмента, материалов;
- техническое состояние и исправность оборудования, механизмов, контрольно­
измерительных приборов, приспособлений и инструмента, соответствие их требованиям
правил безопасности и условиям безопасной работы;
- наличие и исправность заземляющих устройств для защиты от статического элек­
тричества;
- герметизацию оборудования, запорной и регулирующей арматуры и коммуника­
ций;
- состояние емкостей, баллонов, ресиверов и других аппаратов и сосудов работаю­
щих под давлением;
- наличие и исправность оградительных, предохранительных и герметизирующих
устройств, устройств автоматического контроля, сигнализации, дистанционного управле­
ния и других средств защиты;
- исправность и бесперебойную работу вентиляционных установок и систем мест­
ных отсосов;
- исправность систем освещения и состояние освещенности рабочих мест;
- наличие и правильность пользования рабочими спецодеждой, средствами индиви­
дуальной защиты (касками, противогазами, защитными очками, предохранительными
поясами и др.);
- соблюдение рабочими безопасных методов и приемов работы, технологических
режимов, инструкций, нарядов, производственной и трудовой дисциплины;
- санитарное состояние рабочих мест, содержание санитарно-бытовых помещений,
устройств;
- наличие и состояние инструкций, плакатов, предупредительных надписей, знаков
безопасности, обозначений и маркировок пусковых устройств, символов управления;
- усвоение рабочими, проходящими стажировку, безопасных приемов и методов ра­
боты.
Выявленные при проверке нарушения и недостатки должны быть устранены. Нару­
шения, которые не могут быть устранены силами бригады, смены, службы, требующие
определенных сроков для их устранения или устранение их не входит в компетенцию не­
посредственного руководителя работ, регистрируются в Журнале профилактической ра­
боты цеха (участка) для последующего принятия соответствующих мер.
В журнале должно быть отражено: дата проверки, фамилия, инициалы, должность и
подпись проверяющих, выявленные недостатки и предложения по их устранению, сроки и
ответственные лица за исполнение. Руководители I уровня об этих нарушениях и недос­
татках должны своевременно информировать руководство цеха (участка), которое должно
принять необходимые меры по обеспечению безопасности работающих.
Ответственность за осуществление I этапа контроля наряду с мастерами, руководи­
телями работ несет также и их непосредственный руководитель, который определяет от­
ветственных исполнителей или лично организует устранение выявленных нарушений и
недостатков.
4.1.5. Второй этап контроля.
Руководитель II уровня контроля (начальник цеха (участка) или его заместители),
не реже чем один раз в месяц, должен совместно с инженером по охране труда и промыш­
ленной безопасности, с участием уполномоченных (доверенных) лиц по охране труда, ме­
хаником цеха, заместителем начальника цеха, энергетиком, мастером КИПиА проверять
10
работу руководителей I уровня по проведению первого этапа контроля, состояние условий
и охраны труда на каждом производственном объекте и принимать оперативные меры по
устранению выявленных нарушений и недостатков. При проведении особое внимание об­
ращать на:
- работу мастеров по проведению первого этапа контроля и анализа состояния усло­
вий труда (регулярность и качество проверок, их эффективность);
- наличие и правильность ведения документации по вопросам безопасности произ­
водства (регистрации инструктажей, паспортов оборудования и др.);
- своевременность и полноту выполнения мероприятий по улучшению условий тру­
да, предложений уполномоченных (доверенных лиц) по охране труда;
- своевременность и качество проведения мастерами, другими руководителями пер­
вого уровня, инструктажей рабочих, правильность и качество оформления инструктажей,
наличие у рабочих удостоверений о проверке знаний по спецправилам;
- правильную и безопасную организацию рабочих мест (безопасное состояние рабо­
чей зоны и рабочих мест, состояние переходов и проездов);
- техническое состояние и исправность оборудования, механизмов, контрольно­
измерительных приборов, приспособлений и инструмента, соответствие их требованиям
правил безопасности и условиям безопасной работы;
- наличие и исправность заземляющих устройств для защиты от статического элек­
тричества;
- герметизацию оборудования, запорной и регулирующей арматуры и коммуника­
ций, работу устройств для вентиляции и очистке воздуха, их состояние;
- состояние емкостей, баллонов, ресиверов и других аппаратов и сосудов работаю­
щих под давлением;
- наличие и исправность оградительных, предохранительных и герметизирующих
устройств, устройств автоматического контроля, сигнализации, дистанционного управле­
ния и других средств защиты;
- исправность систем освещения и состояние освещенности рабочих мест;
- наличие и правильность пользования рабочими спецодеждой, средствами индиви­
дуальной защиты (касками, противогазами, защитными очками, предохранительными
поясами и др.);
- правильную и безопасную организацию работ, ведение технологических процессов
согласно требований технологических регламентов, соблюдение рабочими безопасных
методов и приемов работы, технологических режимов, инструкций, производственной и
трудовой дисциплины;
- санитарное состояние рабочих мест, содержание санитарно-бытовых
помеще­
ний, обеспеченность рабочих мест умывальниками, моющими средствами, принадлежно­
стями для мытья в душевых, наличие и укомплектованность медицинских аптечек;
- наличие и состояние инструкций, плакатов, предупредительных надписей, знаков
безопасности, обозначений и маркировок пусковых устройств, символов управления;
- подготовку и проведение ремонтных опасных, огневых и газоопасных работ; на­
личие и правильность оформления документации на эти работы (нарядов, разрешений,
проектов, планов и т.д.);
- выполнение руководителями работ (мастерами, механиками и т.д.) своих обязан­
ностей по обеспечению безопасных условий труда, предусмотренных должностными ин­
струкциями.
Выявленные в процессе проверки нарушения и недостатки должны быть немедлен­
но устранены. Нарушения, которые не могут быть устранены в ходе проверки, записыва­
ются в Журнале профилактической работы цеха (участка) для последующего принятия
соответствующих мер с указанием исполнителей и сроков исполнения. При необходимо­
сти по итогам проверки начальник цеха издает распоряжение по цеху, которое доводит до
всех инженерно-технических работников и рабочих.
11
Если выявленные нарушения не могут быть устранены силами своего подразделе­
ния или их устранение не входит в компетенцию начальника цеха, то он должен инфор­
мировать руководство предприятия и принимать соответствующие меры по обеспечению
безопасности.
Ответственность за осуществление второго этапа контроля и за своевременное уст­
ранение выявленных нарушений и недостатков возлагается на руководителей II уровня
контроля - начальников цехов (участков) или руководителей подразделений приравнен­
ных к цеху.
4.1.6. Третий этап контроля.
Руководящие работники, главные специалисты, начальники отделов (ОТН и Д, ООТ
и ПБ, ОКСР и ЭЗС, ОПК, ООП), командир ВГСО в составе постоянно действующей ко­
миссии по безопасности труда предприятия по утвержденному графику, должны осущест­
влять выборочную проверку работы руководителей структурных подразделений по осу­
ществлению первых двух этапов контроля, состояния условий и охраны труда в подразде­
лениях, на участках и рабочих местах. Работники производственного отдела, отдела охра­
ны труда и промышленной безопасности, отдела главного механика, главного метролога,
главного энергетика, отдела подготовки кадров, отдела капитального строительства, ре­
монта и эксплуатации зданий и сооружений, отдела технадзора и диагностики, отдела ох­
раны природы, ВГСО лично или в составе постоянно действующей комиссии по безопас­
ности труда предприятия не реже двух раз в месяц по утвержденному графику, должны
осуществлять выборочную проверку работы руководителей структурных подразделений
по осуществлению первых двух этапов контроля, состояния условий и охраны труда, про­
мышленной безопасности в подразделениях, на участках и рабочих местах.
При этом они проверяют:
- выполнение приказов и распоряжений руководства предприятия, предписаний
контролирующих органов, а также выполнение предложений и устранение замечаний вне­
сенных в журналы и акты проверок состояния условий труда и промышленной безопасно­
сти;
- наличие планов работы по промышленной безопасности и охране труда и состоя­
ние их выполнения;
- работу начальников цехов, их заместителей и других специалистов по обеспечению
безопасных условий труда в соответствии с их должностными инструкциями;
- эффективность проведения руководителями I уровня, начальниками цехов первых
двух этапов контроля (регулярность, полнота, принятие необходимых мер и т.д.);
- своевременность и полноту выполнения запланированных мероприятий по улуч­
шению условий труда, а также мероприятий, предусмотренных актами расследования ава­
рий и несчастных случаев на производстве;
- своевременность и качество проведения инструктажей рабочих, правильность и
качество оформления журналов, протоколов, удостоверений, порядок проведения внеоче­
редных инструктажей;
- порядок ознакомления работников с приказами, указаниями, информационными
письмами;
- порядок обучения и стажировки рабочих перед допуском их к обслуживанию
сложного оборудования и механизмов, наличие у них документов на право работы;
- организацию и состав цеховых комиссий по аттестации рабочих, порядок работы
комиссий, наличие программ, их содержание, оформление результатов аттестации и про­
верок знаний рабочих;
- наличие и состояние инструкций, плакатов, предупредительных надписей, знаков
безопасности;
- наличие и правильность ведения документации по вопросам безопасности (журна­
лов, паспортов, протоколов и т.д.);
12
- техническое состояние и исправность и правильность эксплуатации оборудования,
механизмов, контрольно-измерительных приборов, приспособлений и инструмента, уст­
ройств для вентиляции и очистки воздуха, систем отопления и освещения, заземления
оборудования и сооружений, а также средств автоматизации и механизации, транспорт­
ных средств, соответствие их требованиям правил безопасности и условиям безопасной
работы;
- организацию и проведение дефектоскопии оборудования и технического освиде­
тельствования сосудов, работающих под давлением, грузоподъемных механизмов и дру­
гого оборудования;
- наличие и исправность оградительных, предохранительных и герметизирующих
устройств, устройств автоматического контроля, сигнализации, дистанционного управле­
ния и других средств защиты;
- правильность организации работ и ведения технологических процессов, соблюде­
ние рабочими безопасных методов и приемов работы, технологических режимов, инст­
рукций;
- подготовку и проведение работ повышенной опасности, наличие и правильность
оформления документации на эти работы (нарядов, разрешений, проектов, планов и т.д.),
порядок проведения инструктажей перед допуском рабочих к выполнению таких работ;
- обеспеченность работающих и оснащенность рабочих мест средствами защиты,
правильность пользования ими, состояние этих средств;
- обеспеченность цехов и объектов санптарно-бытовыми помещениями и устройст­
вами, и их состояние.
Выявленные в процессе проверки нарушения и недостатки должны быть немедлен­
но устранены. Нарушения, которые не могут быть устранены в ходе проверки, записыва­
ются в Журнале профилактической работы цеха (участка) для последующего принятия
соответствующих мер с указанием исполнителей и сроков исполнения.
Если выявленные нарушения и недостатки могут привести к аварии или травмиро­
ванию работающих, то работы должны немедленно прекращаться до устранения этих на­
рушений.
Результаты проверок по третьему этапу контроля обсуждаются на расширенном за­
седании комиссии и оформляются актом, в котором дается оценка состояния промышлен­
ной безопасности и работы руководителей цехов с выводами и предложениями по устра­
нению выявленных нарушений и недостатков, при необходимости руководством предпри­
ятия издается приказ.
Ответственность за своевременное устранение выявленных нарушений возлагается
на начальников цехов (участков).
Руководящие работники и специалисты (инженерно-технические работники) пред­
приятия при посещении цехов, участков, производственных объектов по своим основным
функциям обязаны проверять состояние безопасности и условий труда на объектах, при­
нимать необходимые меры по устранению выявленных недостатков и оказывать руково­
дителям подразделений практическую помощь в их работе.
13
II. СЛЕСАРНЫЕ РАБОТЫ,
ИХ ВИД И НАЗНАЧЕНИЕ
Слесарные работы - обработка металлов, обычно дополняющая станочную меха­
ническую обработку или завершающая изготовление металлических изделий соединением
деталей, сборных машин и механизмов, а также их регулировкой.
Слесарные работы выполняются с помощью ручного или механизированного сле­
сарного инструмента или на станках.
Ни одна машина, механизм или прибор не могут быть собраны без участия слеса­
ря, по этой причине слесари-универсалы стали подразделяться по видам работ: слесарисборщики, слесари-ремонтники, слесари-инструментальщики, слесари по ремонту прибо­
ров и т.д.
Всех слесарей объединяет единая технология выполнения операций, к которым
относятся разметка, рубка, правка и гибка, резка металла, опиливание, сверление, зенкование и зенкерование, развертывание отверстий, нарезание резьбы, клепка, шабрение,
распиливание и припасовка, притирка и доводка, пайка, лужение и склеивание.
При изготовлении или обработке изделий из металла слесарным способом важ­
нейшие слесарные операции производятся обычно в определенном порядке, в котором
одна операция предшествует другой. Цель всех операций состоит в придании куску ме­
талла, заготовке, изготовленной вчерне заготовке формы, размера и состояния поверхно­
сти в соответствии чертежу, которые должно иметь готовое изделие. Более грубая обра­
ботка всегда предшествует более тонкой.
Точность обработки и изготовления детали
Детали машин и их отдельные элементы изготавливаются с различной степенью
точности, в зависимости от характера соединения. В слесарном деле имеются следующие
понятия характеризующие точность - квалитет, посадка, допуск, шероховатость.
Квалитет (степень точности)- ряд допусков, характеризующийся постоянной от­
носительной точностью для всех номинальных размеров установленного диапазона. Ко­
личество квалитетов - 19:
•
0; 1-; 1 - для концевых мер;
•
2 - 5 - для калибров, особо точных изделий;
•
6 -1 2 - для наиболее распространённых видов соединения;
•
13 - 17 - для неответственных и свободных размеров.
П осадки бывают с зазором, натягом, переходные.
1. Посадки с зазором применяются для подвижных и неподвижных соединений:
• H/h (скользящие) - соединение подлежит частой сборке и разборке;
• H/g, G/h (движение) - для подвижных и неподвижных соединений, имеющих гаранти­
рованный зазор;
• H/f, F/h (ходовые), Н/е, E/h (легкоходовые) - для обеспечения свободного вращения и
возвратно-поступательных движений.
2. Посадки с натягом применяются для неразъёмных соединений.
• H/u, U/h, Н/х, H/z - тяжёлопрессовые;
• H/z, H/s, H/t - среднепрессовые;
• H/n, P/n - легкопрессовые.
3. Переходные посадки применяются для неподвижных соединений, разборка ко­
торых осуществляется при небольших усилиях.
- для редко разбираемых соединений
14
Суммарный до­
пуск формы и
расположения
Допуск распо­
ложения
Допуск
формы
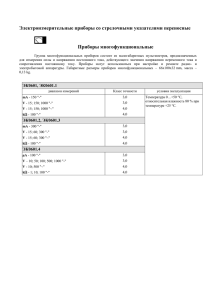
Допуск - это предел, ограничивающий предельные значения отклонения.
Существуют следующие виды допусков формы и расположения поверхностей:
допуск формы, допуск расположения, суммарный допуск формы и расположения.
Знаки видов допусков формы и расположения приведены в таблице._________
Группа
Вид допуска
Знак
допуска
--Допуск прямолинейности
Допуск плоскостности
£7
Допуск кругло сти
О
Допуск цилиндричности
&
Допуск профиля продольного сечения
Допуск параллельности
//
Допуск перпендикулярности
-L
Допуск наклона
Допуск соосности
Допуск симетричности
Позиционный допуск
-ФДопуск персечения осей
X
Допуск радиального биения
Допуск торцевого биения
/
Допуск биения в заданном направлении
Допуск полного радиального биения
Л У
Допуск полного торцевого биения
г~ \
Допуск формы заданного профиля
Допуск формы заданной поверхности
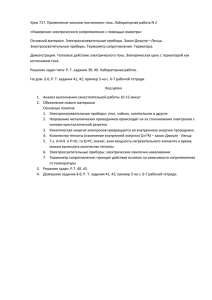
В следующей таблице приведены примеры обозначения на чертежах допусков
формы и расположения.___________________________
Вид допуска
Условное обозначение
Пояснение
Допуск прямолинейности
образующей конуса
-10.01
0.01 мм
к
Допуск прямолинейности
0 0.08 м
S
оси отверстия 0 0.08 мм (до­
о
///// ///
д
эК
пуск зависимый)
(D
////////
д
к
Допуск прямолинейности
0.25
о4
5
0.1/100
поверхности
0.25 мм на всей
W
6
длине и 0.1 мм на длине
К
И
100 мм
О
й
К
О
—
1г
о
n,ns
4 0.0 1
1Г
о Юл
о
и д
Допуск прямолинейности
поверхности в поперечном
направлении 0.05 мм, в про­
дольном - 0.01 мм
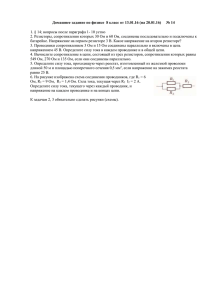
Допуск плоскостности по­
верхности 0.1 мм
О
9
ое и
^ о
ч
к
ОЮ. т 00x100
15
Допуск плоскостности по­
верхности 0.1 мм на площади
100x100 мм
о
о
ю
Допуск
круглости
Допуск
цилиндричн
ости
0"
........................
0 0.02
'
-
Допуск круглости вала
0.02 мм
Допуск круглости конуса
0.02 мм
-1
^ 0 .0 4
Допуск цилиндричности вала
0.04 мм
0 V
Ш ероховатость - совокупность неровностей поверхности с относительно малы­
ми шагами, выделяется на базовой длине. Обозначается знаком \ J
, над которым ста­
вится высота неровностей.
Рабочее место слесаря
Основное оборудование рабочего места слесаря - верстак с установленным на
нем тисками. Верстак представляет собой специальный стол для выполнения слесарных
работ. При слесарных работах для удержания и закрепления обрабатываемых предметов
на верстаке устанавливают верстачные тиски. В слесарном деле употребляют тиски сту­
ловые, параллельные и ручные.
Параллельные тиски называются так, потому что их подвижная губка при рас­
крывании тисков перемещается параллельно неподвижной губке в любом положении.
Размеры тисков определяются шириной их губок, которая колеблется от 60 до 150 мм.
Правильность установки - локоть на тиски, расправленные пальцы касаются подбородка.
Набор необходимого рабочего инструмента слесаря
Слесарные молотки — инструмент для ударных работ. Изготавливают двух ти­
пов: с квадратным бойком и круглым. Молоток состоит из ударника и ручки.
• круглые № 1 - ^ 6
200 ^ 1000 гр.
• квадратные № 1 ^ 8
50 ^ 1000 гр.
Материал молотка: ст. 50, 40Х, У7, У8. Рукоятку делают из твердых пород дерева
(кизила, рябины, клена, граба, ясеня, березы).
Конец, на который насаживается молоток, расклинивается деревянным или ме­
таллическим клином.
Вес молотка: 400 500; 600; 800.
Длина ручки:
350;
380; 430.
Зубило — применяют для удаления рубкой слоя металла с поверхности обрабаты­
ваемых деталей, для разрубания на части заготовок, для вырубания заготовок из листового
материала и т.д. В зубиле различают три части - рабочую, среднюю, ударную.
Угол заострения зубила выбирается в зависимости от твердости обрабатываемого
материала (металла):
• твердые материалы (тв. сталь, бронза, чугун) 70°
• средней твёрдости (сталь)
60°
• мягкие материалы (латунь, медь)
45°
• алюминий
35 °
L = 100, 125, 160,200
h = 5, 10 ,16,20
Твердость рабочей части НВС 53-59, боёк 35-45.
Изготавливаются из ст. У7А, У8А, 7ХО, 8ХО.
16
Крейцмейсель — отличается от зубила более узкой режущей кромкой, предна­
значен для вырубания узких канавок, шпоночных пазов и т.п. Для вырубания профильных
канавок - полукруглых, двугранных и др. применяются канавочники.
Материал и заточка та же, что и у зубила.
Напильники — тоже являются режущим инструментом. Они различаются по
профилю, видам и роду насечки и по размерам.
По профилю напильники подразделяются на плоские, квадратные, трехгранные,
круглые, полукруглые, специальные.
По виду насечки различают напильники драчевые, личные, бархатные.
По роду насечки различают напильники с одинарной (простой) и двойной насеч­
кой.
Размеры напильников от 75 до 500 мм. Материал У8 ^ У13, ШХ6, ШХ9, ШХ15.
Ш аберы - представляют собой стальные полосы прямоугольного или трехгран­
ного сечения с режущими кромками на одном конце. Это режущий инструмент, предна­
значенный для окончательной обработки плоских и криволинейных поверхностей. При­
меняются в тех случаях, когда необходимо получить хорошо пригнанные поверхности
сопрягающихся деталей. Материал У 12 — У12А .
Отвертки - употребляются для завинчивания и отвертывания винтов и шурупов.
Гаечные ключи - простые и раздвижные - применяются для отвинчивания гаек и
болтов.
Контрольно-измерительные приборы
Масштабная линейка - применяется для измерений наружных и внутренних ли­
нейных размеров.
Точность измерения - ±0,5 мм.
Размеры - 150, 300, 500, 1000.
Материал - У7, У8.
Ш тангенциркуль - применяется для более точного определения наружных и
внутренних линейных размеров.
Точность измерения - ±0.1 мм.
Кронциркуль и путномер - служат для измерения линейных размеров, с после­
дующим их отсчетом масштабной линейкой.
Материал - У7, У8.
Точность измерения - ±0,5 мм.
Угольники - применяются для проверки наружных и внутренних прямых углов.
Угломеры - применяются для разметки различных углов.
Плоскостная разметка
Выполняется обычно на поверхностях плоских деталей и заключается в нанесе­
нии на заготовку контурных параллельных и перпендикулярных линий, окружностей, дуг,
углов, осевых, линий, разнообразных геометрических фигур по заданным размерам или
контуров различных отверстий по шаблонам.
Пространственная разметка
Трудность пространственной разметки заключается в том, что приходится не про­
сто различать отдельные поверхности детали, расположенные в различных поверхностях
и под различными углами друг к другу, а увязывать разметку этих отдельных поверхно­
стей между собой.
17
Инструмент для разметки
• разметочные плиты;
• чертилки (У 10, У 12);
• кернер;
• циркули;
• рейсмас;
• угломер;
• штангенциркуль;
• молоток;
Перед разметкой:
• очистить поверхность;
• изучить чертеж;
• определить базовые поверхности.
Рубка металла
Рубкой называется слесарная операция, при которой с помощью режущего инст­
румента (зубила, крейцмейселя) и ударного инструмента (слесарного молотка), с поверх­
ности заготовки, детали удаляются лишние слои металла или заготовка разрубается на
части.
Положение тела к тискам — 45°.
Зубило берется на расстоянии 1 5 - 2 0 мм, от конца ударной части.
Молоток берется правой рукой за рукоятку на расстоянии 1 5 - 3 0 мм, от конца.
Техника безопасности
Мероприятия по технике безопасности заключаются в правильной организации
рабочего места и использовании в работе только исправного инструмента. При организа­
ции рабочего места особое внимание обратить на то, чтобы все вращающиеся части стан­
ков и механизмов, а также детали с выступающими частями должны иметь защитные ог­
раждения.
Д о начала работы - надев спецодежду, проверить чтобы у нее не было свисаю­
щих концов.
• проверить слесарный верстак, тиски;
• подготовить рабочее место, удалив все посторонние предметы, заготовить, разложить
в соответствующем порядке требуемый для работы инструмент, приспособления, ма­
териалы;
• проверить исправность инструмента, правильность его заточки и заправки;
• проверить исправность оборудования, на котором придется работать, и его огражде­
ние.
•
•
•
•
•
Во время работы:
прочно зажимать в тисках деталь;
опилки с верстака, стружку со станка удалять только щеткой;
при рубке металла установить защитную сетку, работать только в защитных очках;
не пользоваться случайными подставками или неисправными приспособлениями;
не допускать загрязнения одежды керосином, маслом, бензином.
18
•
•
•
По окончании работы.
убрать рабочее место;
уложить инструмент, приспособления, материалы;
во избежании самовозгорания промасленных тряпок, убирать их в специальные метал­
лические ящики.
19
ІІІ.ОСНОВЫ ФИЗИКИ
Строение вещества
Как устроены тела? Этот вопрос с давних времен вызывал интерес. Ещё некото­
рые древнегреческие учёные считали, что все вещества состоят из отдельных частиц. Впо­
следствии это предположение подтвердилось опытами.
Все мы прекрасно знаем, что при нагревании тела увеличиваются, а при охлажде­
нии уменьшаются. Это легко объяснить, исходя их того, что вещества состоят из отдель­
ных частиц, между которыми есть промежутки. При нагревании расстояние между части­
цами увеличиваются, а при охлаждении уменьшаются.
Частицы, из которых состоят многие вещества, называют молекулами. Все моле­
кулы одного и того же вещества совершенно одинаковы. В свою очередь молекулы обра­
зованы из атомов. В составе молекулы их может быть от двух до нескольких тысяч. На­
пример, молекула воды состоит из двух атомов водорода и одного атомов кислорода, а
молекула азота - из двух атомов азота. Существуют и вещества, состоящие непосредст­
венно из атомов, не объединённых в молекулы, например неон. Молекулы и атомы на­
столько малы, что их нельзя увидеть даже с помощью микроскопа. Чтобы представить се­
бе размер молекулы, можно привести следующее сравнение: молекула примерно во
столько же раз меньше яблока, во сколько раз яблоко меньше земного шара.
Как известно, многие вещества в природе могут находиться в трёх состояниях:
твёрдом, жидком и газообразном. Например, лёд, вода и пар - это три состояния одного и
того же вещества. Несмотря на то, что все они состоят из молекул воды, физические свой­
ства их различны. Объясняется это разным расположением и движением молекул.
Сильнее всего проявляется взаимодействие частиц вещества в твёрдом состоянии.
Расстояние между молекулами примерно равно их собственным размерам. Это приводит к
достаточно сильному взаимодействию, что практически лишает частицы возможности
двигаться: они только колеблются (дрожат) около некоторого положения равновесия. По
этой причине частицы большинства твердых тел располагаются в определённом порядке,
как бы образуя жесткую конструкцию. Строением твердых тел определяются их свойства:
они сохраняют и форму и объём.
Свойства жидкостей также определяются их строением. Частицы вещества в жид­
костях взаимодействуют менее интенсивно, чем в твёрдых телах, и поэтому могут скачка­
ми менять своё местоположение - жидкости не сохраняют свою форму - они текучи.
Однако, удерживаемые силами притяжения, частицы не могут расходиться на большие
расстояния. Поэтому жидкости сохраняют свой объём и практически несжимаемы.
Г аз представляет собой собрание молекул, беспорядочно движущихся по всем на­
правлениям независимо друг от друга. Расстояние между молекулами газа во много раз
больше, чем в жидкостях, - частицы газа очень слабо взаимодействуют. Вот почему газы
не имеют собственной формы, занимают весь предоставленный им объём и легко сжи­
маемы.
Масса и плотность
Масса - физическая величина, являющаяся мерой инертности тела. Чем больше
масса, тем трудней изменить скорость тела - разогнать или остановить его. Единица мас­
сы - килограмм (кг).
Масса тела определяет его вес, что позволяет определять массу тел с помощью
взвешивания на весах. При взвешивании сравнивают массу данного тела с массой образца
(эталона).
20
Чем же определяется масса тела? Вспомним, что вещества состоят из частиц молекул или атомов. Масса тела и складывается из их масс. Хотя каждая частица имеет
малую собственную массу, масса тела в целом может быть очень большой, т.к. тела состо­
ят из громаднейшего числа частиц.
Как известно, молекулы, составляющие различные вещества, неодинаковы. По­
этому взятые в равных объёмах разные вещества будут отличаться массой. Кроме того, их
частицы находятся на различных расстояниях друг от друга. Значит, в одинаковом объёме
будет разное количество частиц - от этого тоже зависит масса тела. Например, масса льда,
доверху заполняющего кастрюлю, будет меньше, чем масса воды, налитой в ту же каст­
рюлю до краёв. Масса заполняющего бутылку воздуха несравнимо меньше массы воды,
которая поместится в ту же бутылку.
Каждое вещество характеризуется своей плотностью. Плотность вещества по­
казывает, какую массу имеет единица объёма данного вещества. Так, если говорят, что
плотность стали 7.8 г/см3, это означает, что 1 см3 стали имеет массу 7.8 г. Или плотность
алюминия 2700 кг/м3 говорит о том, что масса 1 м3 алюминия равна 2700 кг.
Чтобы узнать плотность вещества, нужно его массу разделить на объём:
^
масса
Плотность = --------объём
Запишем формулу, используя общепринятые буквенные обозначения массы - т ,
объёма - V, и п л о т н о с т и - р:
т
Р ~ V
Проведя нехитрые математические преобразования, получим из этой формулы
две другие. Одну для расчёта массы по известным плотности и объёму:
т = р ■V ,
другую - для расчёта объёма по известным массе и плотности:
V- —.
Р
Плотности многих веществ определены опытным путём и составлены специаль­
ные таблицы плотностей.
Силы
Мы установили, что тело под действием других тел может изменить свою ско­
рость: увеличить или уменьшить её или поменять направление движения. В подобных си­
туациях просто говорят, что это произошло под действием некоторой силы. Сила харак­
теризует действие на данное тело других тел.
Таким образом, можно сказать, что сила - причина изменения скорости движе­
ния.
Сила, как и скорость, характеризуется величиной и направлением. Сила, направ­
ленная вдоль движения тела, увеличивает его скорость. Сила, направленная против дви­
жения, уменьшает её. Если направление силы не совпадает с направлением движения, то
она вызывает изменение направления движения тела.
Сила - векторная физическая величина, характеризующая взаимодействие,
являющаяся его мерой и равная произведению массы тела т на его ускорение а.
F = т -а .
На чертеже силу обозначают в виде отрезка со стрелкой на конце. Начало отрезка
и есть точка приложения силы. Единица силы - ньютон (Н). Названа так, в честь великого
английского физика Исаака Ньютона. 1 Н - это такая сила, которая сообщает телу массой
1 кг ускорение 1 м/с2.
21
Все тела во Вселенной притягиваются друг к другу. Причём притягиваются
тем сильнее, чем больше их массы и чем ближе друг к другу они находятся. Это закон
природы, открытый Исааком Ньютоном. Поскольку притягиваются друг к другу все тела,
это явление названо всемирным тяготением, а закон - законом всемирного тяготения.
F = G -C nhniz/R 2),
где mi и m 2 - массы тел;
R - расстояние между телами;
G - постоянная всемирного тяготения.
Этим объясняется известный факт, что все окружающие нас тела притягиваются к
Земле. Силу, с которой тело притягивается к Земле вследствие всемирного тяготе­
ния, называют силой тяжести.
Из закона всемирного тяготения следует, что сила тяжести тем больше, чем
больше масса тела, кроме того сила тяжести уменьшается при удалении от Земли.
F th)k — П1 • g ,
где m - масса тела;
g - ускорение свободного падения, равное 9.8 м/с2.
Силу, с которой вследствие притяжения к Земле тело действует на опору или рас­
тягивает подвес, называют весом тела.
Р = m •g .
Часто вес путают с силой тяжести. Отличить их друг от друга очень просто: сила
тяжести действует на само тело со стороны Земли, а вес действует со стороны рас­
сматриваемого тела на его опору или подвес.
Когда тело расположено на неподвижной горизонтальной опоре, его вес равен си­
ле тяжести. Если же опора (или подвес) начинает движение вверх или вниз, то вес тела
изменяется. Кто ездил в скоростных лифтах, тот ощущал, как придавливает к полу собст­
венный вес в тот момент, когда лифт начинает двигаться вверх. И наоборот, когда лифт
тормозит, поднявшись на нужный этаж, вес его пассажиров при этом уменьшается.
Если у тела нет опоры или подвеса, то оно при этом не может весить - оно нахо­
дится в состоянии невесомости. Такое состояние испытывают не только космонавты на
орбите, но все люди во время прыжков, когда ноги не имеют опоры, а руки ни за что не
держатся.
Нам уже известно, что при попытке сжать или растянуть тело, оно «сопротивля­
ется» - проявляет упругость. Это происходит вследствие взаимодействия частиц вещества.
Тело проявляет упругость и в тех случаях, когда изменяют его форму (деформируют) какнибудь иначе (закручивают, изгибают).
Силу, которая возникает внутри тела при его деформации и препятствует изме­
нению формы, называют силой упругости.
Закон Гука: Сила упругости, возникающая при деформации тела, прямо про­
порциональна удлинению (деформации) тела, и направлена в сторону противопо­
ложную деформации.
Fynp - k ’X,
где к - коэффициент пропорциональности, называемый жёсткостью тела, завися­
щий от размеров тела, его формы, материала, из которого сделано тело (Н/м);
х - величина удлинения (деформации) тела, (м).
Сила упругости тем больше, чем сильнее изменяют форму тела. На этом основано
действие прибора для измерения силы - динамометра.
Как бы быстро ни катился мяч, он в конце концов останавливается, Разогнавшись
на коньках, можно некоторое время скользить, но и это движение вскоре прекратится. В
этих и многих других подобных случаях движение прекращается из-за трения.
22
Сила, возникающая при движении одного тела по поверхности другого, направ­
ленная против движения, называется силой трения.
Причина возникновения трения в том, что на поверхности любого тела есть не­
ровности (порой даже незаметные на глаз). Если же трущиеся поверхности хорошо отпо­
лированы, и зазор между ними очень мал, то движению мешают силы притяжения между
частицами вещества этих поверхностей. Это вторая причина трения.
Чаще всего в реальной жизни на любое тело действует не одна, а сразу несколько
сил. При решении практических задач удобно мысленно заменить несколько сил, реально
действующих на тело, одной силой, действие которой приведёт к тем же результатам, что
и действие всех реальных сил вместе взятых.
Силу, результат действия которой на тело такой же, как при одновремен­
ном действии на него нескольких сил, принято называть равнодействующей этих не­
скольких сил.
Закон Архимеда гласит: на тело, погруженное в жидкость или газ, действует
выталкивающая сила, направленная вертикально вверх, численно равная весу вытес­
ненной жидкости или газа. Выталкивающую силу принято называть архимедовой, ее
можно рассчитать следующим образом:
Fapx = P ' g - V ,
где р - плотность жидкости или газа, в которое помещают тело;
g - ускорение свободного паления, равное 9,8 м/с2;
V - объём тела, погруженного в жидкость или газ.
Давление
Нам неоднократно приходилось наблюдать, как действие одной и той же силы
приводит к разным результатам. Например, как бы сильно мы не давили на доску, нам
вряд ли удастся проткнуть её пальцем. Но, действуя с той же силой на шляпку канцеляр­
ской кнопки, мы легко загоняем её острый конец в ту же самую доску. Чтобы не прова­
литься в глубокий снег, человек надевает лыжи. И хотя вес человека при этом не меняет­
ся, на лыжах он не продавливает поверхность снега.
Это и множество других примеров показывают, что результат действия силы за­
висит не только от ее численного значения, но и от площади поверхности, на которую она
действует. В зависимости от площади поверхности одна и та же сила оказывает разное
давление.
Давлением называют отношение силы, действующей на поверхность тела
перпендикулярно этой поверхности, к площади этой поверхности:
^
сила
Давление = ------------площадь
Давление принято обозначать буквой Р. Поэтому можно записать формулу, ис­
пользуя буквенное обозначения (вспомним, что сила обозначается буквой F, а площадь S):
Давление показывает, какая сила действует на единицу площади поверхности те­
ла. Единица давления - паскаль (Па). Давление в один Паскаль оказывает сила в один
Ньютон на площадь в один квадратный метр: 1 Па = 1 Н/1 м2.
Силу, которая создает давление на какую-либо поверхность, называют силой
давления.
23
Твердые тела передают оказываемое на них давление в направлении действия си­
лы. Например, кнопка продавливает доску в том же направлении, в котором на нее давит
палец.
Совсем иначе дело обстоит с жидкостями и газами. Если мы надуваем воздушный
шарик, то своим дыханием оказываем давление в определенном направлении. Однако при
этом шарик раздувается в разные стороны. Играя с самодельными брызгалками, мальчиш­
ки сдавливают с боков пластмассовые баночки, заполненные водой. При этом, вода бьет
из отверстия в пробке - направление давления изменяется. Эти и подобные опыты под­
тверждают закон Паскаля, который гласит: жидкости и газы передают оказываемое на
них давление без изменения в каждую точку жидкости или газа (т.е. во все стороны
одинаково).
Рассчитаем, какое давление оказывает столб жидкости высотой h на дно сосуда,
площадь которого S. На дно сосуда оказывает давление вес всей находящейся в нем жид­
кости. В состоянии покоя вес равен силе тяжести. Силу тяжести подсчитываем по извест­
ной нам формуле:
Ртяж = m 'g>
где т - это масса жидкости. Хотя масса нам не известна, мы её можем рассчитать
по объёму и плотности:
т = р ■V .
Плотность возьмем из таблицы, а объем V вычислим. Объем, как известно, равен
произведению площади основания S на высоту h :
V = S -h .
Масса жидкости получится равной:
т = р - Ѵ = р - S -h .
Подставим массу в формулу для расчета силы тяжести:
Г*** = m - g = p - S - h - g .
Определим давление жидкости на дно сосуда:
Р =p-h-g .
Как видно из формулы, давление жидкости на дно сосуда прямо пропорцио­
нально высоте столба жидкости.
24
IV. ОСНОВЫ ЭЛЕКТРОТЕХНИКИ
Электрическое сопротивление
Электрическое сопротивление - это свойство проводника препятствовать свободно­
му перемещению электронов, при протекании электрического тока.
Разные проводники обладают разным электрическим сопротивлением.
Сопротивление обозначают буквой R:
I
За единицу сопротивления принимают сопротивление такого проводника, в котором
при напряжении на концах 1 В сила тока равна 1 А. Единица сопротивления названа омом
(Ом).
Причиной сопротивления является то, что электроны взаимодействуют с ионами кри­
сталлической решётки, при этом усиливается беспорядочное движение электронов, что мешает
их упорядоченному движению.
Чем длиннее проводник, тем с большим числом ионов взаимодействует на своём пути
электрон, тем соответственно больше его сопротивление R.
Понятно, что сопротивление должно зависеть от рода вещества проводника, так как
сила взаимодействия между частицами у разных веществ различна.
Опытным путём было установлено, что сопротивление проводника прямо пропорцио­
нально его длине, обратно пропорционально площади поперечного сечения и зависит от мате­
риала, из которого сделан проводник.
Зависимость сопротивления проводника от материала характеризуется величиной, на­
зываемой удельным сопротивлением вещества.
Удельным сопротивлением вещества называется сопротивление проводника дли­
ной 1 м и площадью поперечного сечения 1 мм2. Удельное сопротивление обозначается бук­
вой р.
Если 1 - длина проводника, S - площадь поперечного сечения, тогда сопротивление
проводника выражается формулой:
Единица измерения удельного сопротивления вещества - 1 Ом*м. Часто используют
. О м ■м м 2
_
такую единицу, как 1-------------, так как площадь поперечного сечения проводника удобно вым
ражаіъ в квадратных миллиметрах.
Электрический ток
Электрическим током называется упорядоченное движение электрических
зарядов. Для того чтобы существовал электрический ток, необходимо наличие:
1. свободных носителей электрических зарядов;
2. электрического поля.
Носителями электрического заряда обычно являются свободные электроны и ио­
ны. За на правление тока условно принято направление движения, противоположное
движению носителей отрицательных зарядов. На практике в электрических цепях ток
всегда направлен от «+» к «-» источника. Силой тока называется величина, равная за­
ряду, проходящему через поперечное сечение проводника за 1 с:
25
Единица силы тока называется ампер (А). По определению понятия силы тока,
при которой через поперечное сечение проводника за 1 секунду проходит заряд в 1 кулон.
Если сила тока в проводнике постоянна по величине и направлению, то ток назы­
вается постоянным. Если же величина силы тока и его направление изменяются, то такой
ток называют переменным.
Различные действия электрического тока, такие, как нагревание проводника, маг­
нитные и химические действия, зависят от силы тока. Но для того, чтобы получить воз­
можность управлять током в цепи, нужно знать, от чего и как он зависит. Такая зависи­
мость была установлена экспериментально Георгом Омом в 1827 году. Закон Ома форму­
лируется следующим образом: сила тока на участке цепи прямо пропорциональна на­
пряжению на его концах и обратно пропорциональна сопротивлению участка.
R
математическая запись закона Ома для участка цепи.
Последовательное соединение проводников
Последовательным называют такое соединение, при котором конец одного про­
водника соединяется с началом другого (рис. 1).
R1
R2
R3
---- ►
---- ►
----- ►
І1
І2
Рис.1
ІЗ
При последовательном соединении проводников:
1.
Сила тока во всех последовательно соединённых проводниках одинакова:
/ ! = / 2 = / 3.
2.
Напряжение на концах участка цепи равно сумме напряжений на каждом
проводнике:
и = и 1 = и 2 = и ъ.
3.
водников:
Сопротивление участка цепи равно сумме сопротивлений отдельных про­
R —ifj + 1?2 + 2?з .
Параллельное соединение проводников
Параллельным называют соединение, при котором концы всех проводников со­
единяются в один узел, а начала в другой (рис. 2). Для всех узлов сумма токов, входящих
в узел, равна сумме токов, выходящих из узла, следовательно, 1 = Іі + І 2 + І з + •••
Рис. 2
26
Формула расчёта эквивалентного сопротивления п соединённых параллельно
одинаковых резисторов выглядит следующим образом:
п
Если параллельно соединено два различных сопротивления, то формула для рас­
чёта имеет вид:
1
1
1
R.R,
-+ —
=> R 12
R
і?2
“1“ К 2
Закон Ома для полной цепи
Полная замкнутая цепь представляет собой электрическую цепь, в состав которой
входят внешнее сопротивление R и источник тока (рис. 3).
R
І ік
г
-------1|-------
+
Рис. 3
Функция источника тока состоит в том, чтобы в процессе прохождения тока под­
держивать постоянную разность потенциалов Дер на своих полюсах. Под действием разно­
сти потенциалов по резистору R будет идти постоянный ток.
Энергетической характеристикой источника тока является электродвижущая
сила (ЭДС) Е.
Е = IR + Іг .
Произведение силы тока на сопротивление участка цепи часто называют падени­
ем напряжения на этом участке. Таким образом , ЭДС равна сумме падений напряжений
на внутреннем и внешнем участках замкнутой цепи. Обычно это выражение записываю
так:
R+г
Эту зависимость опытным путём получил Г. Ом, и называется она законом Ома
для полной цепи и читается так: Сила тока в полной цепи прямо пропорциональна ЭДС
источника тока и обратно пропорциональна полному сопротивлению цепи.
При разомкнутой цепи ЭДС равна напряжению на зажимах источника и, следова­
тельно, может быть измерена вольтметром.
Законы Кирхгофа
Первый закон Кирхгофа является следствием закона сохранения количества элек­
тричества, согласно которому в узле заряд одного знака не может ни накапливаться, не
убывать. Кроме того, первый закон Кирхгофа - это, по существу, закон сохранения энер­
гии для электрических цепей. Его можно сформулировать следующим образом.
Сумма всех токов, приходящих к узлу электрической цепи, равна сумме всех
токов, выходящих из этого узла. Иначе, алгебраическая сумма токов в узле равна ну­
лю:
1 . 1 = 0.
21
Применительно к узлу, показанному на рис. 4, первый закон Кирхгофа можно за­
писать так:
/і + / 3 - І 2 - / 4 = 0
.
Второй закон Кирхгофа применяют к замкнутым контурам. Он может быть
сформулирован следующим образом:
Алгебраическая сумма напряжений на сопротивлениях участков замкнутого
контура равна алгебраической сумме ЭДС источников, входящих в контур:
Применительно к контуру, показанному на рис. 5, второй закон Кирхгофа можно
записать так:
/ •r{ + 1 ■r2 + 1 ■г3 = Е\ + Е 2 - Е 3 .
Электрическая ёмкость
Электроёмкостью уединённого проводника С называется физическая величина,
равная заряду, который надо сообщить проводнику, чтобы его потенциал изменился на 1
вольт.
Единица измерения электроёмкости - фарад (Ф). 1 фарад - это очень большая ём­
кость. Такой ёмкостью обладает шар радиусом 9-1011 см.
На практике применяются единицы во много раз меньшие, чем фарад. (1 мкФ =
10'6 Ф, 1 пФ = 10'9 Ф, 1 нФ = 1(Г12 Ф).
Известно, что все заряды, сообщённые проводнику, распределяются по его по­
верхности, независимо от того, полый он или сплошной. Значит, электроёмкость не зави­
сит от массы проводника и от материала, а зависит от формы и величины площади по­
верхности проводника.
Мощность и работа электрического тока
Чтобы определить работу электрического тока на каком-либо участке цепи, нуж­
но напряжение на этом участке умножить на заряд, прошедший по нему. Обозначив рабо­
ту Л, получим:
А = U q,
учитывая, что
28
q- I t.
Можно получить другую формулу:
A = U I t.
Работа измеряется в джоулях (Дж).
Так как мощность - это работа, произведённая за единицу времени, можно за­
писать:
где Р- мощность тока. Измеряется она в ваттах (Вт).
Работа электрического тока равна А = U ■I ■t , следовательно, мощность можно выразить
следующим образом:
P =U I .
Если мощность измерена в ваттах, а время в секундах, то работа получается в
джоулях. На практике работу тока чаще измеряют в других единицах: ватт-час (Вт-ч),
киловатт-час (кВт-ч).
1 кВт-ч = 3600Дж.
Для измерения работы электрического тока используют счётчики. Такие счётчики
установлены в квартирах.
Полупроводники
Полупроводники - это вещества, удельное сопротивление которых убывает с по­
вышением температуры, наличия примесей, изменения освещённости. По этим свойствам
они разительно отличаются от металлов. Обычно к полупроводникам относятся кристал­
лы, в которых для освобождения электрона требуется энергия более 1 . 5 - 2 эВ. Типичны­
ми полупроводниками являются кристаллы германия и кремния, в которых атомы объе­
динены ковалентной связью.
В идеальном кристалле ток создаётся равным количеством электронов и дырок.
Такой тип проводимости называют собственной проводимостью полупроводников. При
повышении температуры (или освещённости) собственная проводимость проводников
увеличивается. На проводимость полупроводников большое влияние оказывают примеси.
Примеси бывают донорные и акцепторные.
Донорная примесь - большей валентности. При добавлении донорной примеси в
полупроводнике образуются лишние электроны. Проводимость станет электронной, а
полупроводник называют полупроводником п-типа. Например, для кремния с валентно­
стью п = 4 донорной примесью является мышьяк с валентностью п = 5. Каждый атом при­
меси мышьяка приведёт к образованию одного электрона проводимости.
Акцепторная примесь - это примесь с меньшей валентностью. При добавлении
такой примеси в полупроводнике образуется лишнее количество «дырок». Проводимость
будет дырочной, а полупроводник называют полупроводником p-типа. Например, для
кремния акцепторной примесью является индий с валентностью п = 3. Каждый атом ин­
дия приведёт к образованию лишней дырки.
Принцип действия большинства полупроводниковых приборов основан на свой­
ствах р-п-перехода. При приведении в контакт двух полупроводниковых приборов р-типа
и п-типа в месте контакта начинается диффузия электронов из n-области в p-область, а
«дырок» из р в п-область. Этот процесс будет не бесконечный во времени, так как образу­
ется запирающий слой, который будет препятствовать дальнейшей диффузии электронов
и «дырок».
p-n-контакт полупроводников обладает односторонней проводимостью: если к робласти подключить «+» источника тока, а к п-области
источника тока, то запирающий
слой разрушится и р-п-переход будет проводить электрический ток. Электроны из области
29
п пойдут в p-область, а «дырки» из p-области в п-область. В случае обратного подключе­
ния ток равен нулю.
Так, если к p -области подключить «-» источника тока, а к п-области «+», то запи­
рающий слой расширится.
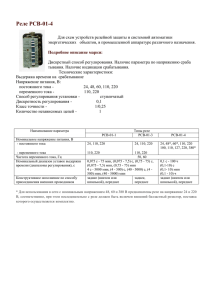
Полупроводниковый диод (рис. 6) состоит из полупроводников р и п-типа. Дос­
тоинством полупроводникового диода являются малые размеры и масса, длительный срок
службы, высокая механическая прочность, высокий КПД, а недостатком - зависимость
его сопротивления от температуры. Основное применение полупроводникового диода - в
качестве выпрямителя тока.
п
+
р-п-переход
Рис. 6
Вольтамперная характеристика диода представлена на рис. 7, а простейшая схема
однополупериодного выпрямителя с полупроводниковым диодом показана на рис. 8.
—
Б4Цвых
U bx
Рис. 8
+ °— С
U bx
R
Л
h
Цвых
- оа)
б)
Рис. 9
Стабилитроны - это полупроводниковые диоды, принцип работы которых ос­
нован на том, что при обратном напряжении на р-п-переходе в области электрического
пробоя напряжение на нём изменяется незначительно при значительном изменении тока.
Стабилитроны предназначены для стабилизации напряжений и используются в парамет­
рических стабилизаторах напряжения, в качестве источников опорных напряжений.
Вольт-амперная характеристика стабилитрона, условное обозначение в схемах и
простейшая схема стабилизации постоянного напряжения с помощью стабилитрона пока­
заны на рис. 9 (а, б).
В радиоэлектронике применяется ещё один полупроводниковый прибор: транзи­
стор, который был изобретён в 1948 году. В основе транзистора лежит не один, а два р-пперехода (рис. 10).
30
а)
б)
в)
г)
Рис. 10
Средняя область кристалла называется базой, а две крайние области кристалла на­
зываются коллектором и эмиттером. Основное применение транзистора - это использова­
ние его в качестве усилителя слабых сигналов по току и напряжению. Транзисторы на
электрических схемах обозначаются, как показано на рис. 10 (в, г).
При включении транзистора в схему один из его выводов делают общим для
входной и выходной цепей, поэтому схемы бывают: с общей базой (ОБ) (рис. 11, а); с об­
щим эмиттером (ОЭ) (рис. 11, б); с общим коллектором (ОК) (рис. 11, в).
Рис. 11
Наибольшее применение имеет схема включения с общим эмиттером. Схема
включения с общей базой имеет ряд недостатков и используется реже.
31
V. ОСНОВЫ ЭЛЕКТРОНИКИ
1
Основные схемы выпрямления электрического тока
Одним из главных применений полупроводниковых диодов является выпрямле­
ние переменного тока. Выпрямитель служит для преобразования переменного напряжения
в постоянное. Выпрямленное напряжение ещё содержит переменные составляющие, кото­
рые называются пульсациями. От пульсаций избавляются с помощью сглаживающих
фильтров.
Основными параметрами, характеризующими диоды в выпрямителях, являются:
среднее значение прямого тока, максимальное значение обратного напряжения и рассеи­
ваемая мощность.
Трансформаторы, работающие в выпрямителях, характеризуются действующими
значениями токов и напряжений первичной и вторичной обмоток и номинальной мощно­
стью.
Наиболее распространены три основные схемы выпрямителей: однополупериодная, двухполупериодная и мостовая.
Схема однополупериодного выпрямителя изображена на рис.1, где Т - транс­
форматор, VD - полупроводниковый диод, a R - нагрузка.
R
Рис.2
Рис.1
Когда на верхнюю часть вторичной обмотки подан положительный полупериод
переменного тока, на диод подаётся прямое напряжение, и он пропускает его, а когда от­
рицательный, то диод заперт. Через нагрузку протекает пульсирующий прерывистый ток
(рис.2).
Однополупериодная схема очень редко используется в современных выпрямите­
лях, поскольку вторичная обмотка трансформатора работает только половину периода, и
поэтому габаритная мощность трансформатора должна превышать мощность выпрямлен­
ного тока примерно в три раза. Кроме того, выпрямленное напряжение имеет очень высо­
кий коэффициент пульсаций, что затрудняет его сглаживание.
На рис. 3 изображена двухполупериодная схема, где Т - трансформатор с отво­
дом от середины вторичной обмотки, VDi и VD 2 - полупроводниковые диоды, a R - на­
грузка.
Т
ѵп,
R
Рис.4
Эту схему можно рассматривать как две самостоятельные однополупериодные
схемы, имеющие общую нагрузку. В ней диоды VDi и VD 2 оказываются открытыми в
32
разные половины периода переменного напряжения, и поэтому ток через нагрузку R про­
текает в обе половины периода, пульсируя с двойной частотой (рис. 4).
Среднее действующее напряжение на выходе двухполупериодного выпрямителя в
отсутствие нагрузки вдвое больше напряжения на выходе однополупериодного выпрями­
теля. Ток протекающий через каждый диод в двухполупериодной схеме в два раза мень­
ше, чем однополупериодной схеме. Кроме того коэффициент пульсаций значительно ни­
же.
Двухполупериодная схема довольно часто используется на практике. Её недос­
татками являются: необходимость отвода от середины вторичной обмотки трансформато­
ра и неполное использование вторичной обмотки трансформатора по напряжению. Эти
недостатки устранены в мостовой схеме.
Мостовая схема выпрямления изображена на рис. 5 и состоит из трансформатора
Т и четырёх диодов VDi - V D 4 .
т
А
Рис. 5
Диагональ АВ моста подключена к вторичной обмотке трансформатора, а диаго­
наль CD - к нагрузке. Полярность напряжений на вторичной обмотке изменяется каждую
половину периода, в результате чего при более высоком потенциале точки А (+) по срав­
нению с потенциалом точки В (-) ток проходит в течении полупериода A —»VDi—»С—»R—»
D—»ѴБз—»В—»А, а в следующий полупериод по пути В—»VD2 —»С—»R—»D—»VD4 —»А—»В.
Таким образом, выпрямленный ток идёт через нагрузку R в течение всего периода
переменного тока, поэтому мостовая схема является двухполупериодной.
В мостовой схеме выпрямленный ток и напряжение имеют такую же форму, как и
в двухполупериодной схеме со средней точкой.
Особенностью мостовой схемы является отсутствие во вторичной обмотке транс­
форматора отвода от её середины, поэтому для получения одного и того же значения вы­
прямленного напряжения по сравнению со схемой с отводом от середины вторичной об­
мотки в мостовой схеме требуется обмотка с вдвое меньшим числом витков. Вследствие
этого обратное напряжение, действующее на каждый диод, в два раза меньше, чем в схеме
с отводом от середины вторичной обмотки.
Рассмотрим теперь трёхфазные схемы выпрямления. Простейшая трёхфазная
схема выпрямления с нейтральной точкой изображена на рис. 6.
t
*-
Рис. 6
Рис. 7
33
В этой схеме первичные обмотки трёхфазного трансформатора соединяются звез­
дой или треугольником, а вторичные - звездой, причём в каждую вторичную обмотку
включено по диоду. В этом случае в каждый момент выпрямленный ток проходит только
через тот диод, анод которого соединён с зажимом обмотки, имеющим наибольший поло­
жительный потенциал по отношению к нейтральной точке трансформатора. Поэтому вы­
прямленное напряжение будет изменяться по кривой, являющейся огибающей положи­
тельных полуволн фазных напряжений вторичных обмоток трансформатора (рис. 7). Пе­
реключение диодов происходит в моменты, соответствующие пересечению положитель­
ных полусинусоид напряжения. В нагрузке R токи, проходящие через три диода, сумми­
руются.
Трёхфазную схему выпрямления с нейтральной точкой применяют только в ма­
ломощных силовых установках.
Мостовая трёхфазная схема выпрямления переменного тока изображена на
рис. 8. В ней сочетаются принципы мостовой схемы и схемы много фазного выпрямле­
ния. В этой схеме нулевая точка трансформатора для выпрямления не нужна и поэтому
первичные и вторичные обмотки могут быть соединены как звездой, так и треугольником.
VD 246
VD,
А о
В
о-
/V Y Y \
С о-
Рис. 9
Шесть диодов образуют две группы - нечётную VDi, V D 3 , V D 5 и чётную VD 2 ,
V D 4 , VD(l. У нечётной группы катоды соединены вместе и служат точкой вывода выпря­
мителя с положительным потенциалом, а у чётной группы - аноды соединены вместе и
служат точкой вывода с отрицательным потенциалом. При работе этой схемы выпрямля­
ются обе полуволны переменных напряжений всех вторичных обмоток трансформатора,
благодаря чему пульсации выпрямленного напряжения значительно уменьшаются. В каж­
дый момент работает тот диод нечётной группы, у которого анод в этот момент имеет
наибольший положительный потенциал, а вместе с ним и тот диод чётной группы, у кото­
рого катод имеет наибольший по абсолютной величине отрицательный потенциал. Вы­
прямленное напряжение будет изменяться по огибающей с двойной частотой пульсаций
(рис. 9).
2 Сглаживающие фильтры
Рассмотренные схемы выпрямления переменного тока позволяют получать вы­
прямленное, но пульсирующее напряжение. Для питания электронных приборов пульси­
рующее напряжение непригодно: оно создаёт фон переменного тока, вызывает искажение
сигналов и приводит к неустойчивой работе приборов. Для устранения пульсаций (сгла­
живания) применяют сглаживающие фильтры.
Сглаживающий фильтр состоит из реактивных элементов: конденсаторов и кату­
шек индуктивности (дросселей). Физическая сущность работы в фильтре (рис. 10) конден­
сатора и дросселя состоит в том, что конденсатор (обычно большой ёмкости), подключён­
ный параллельно к нагрузке, заряжается при нарастании импульсов выпрямленного на­
34
пряжения и разряжается при их убывании, сглаживая тем самым его пульсации. Дроссель,
наоборот, при нарастании импульсов выпрямленного
Др
тока
в результате действия ЭДС самоиндукции за­
_ rw w
держивает рост тока, а при убывании импульсов за­
держивает его убывание, сглаживая пульсации тока в
R
цепи нагрузки. С другой стороны, конденсатор и
дроссель можно рассматривать как некоторые резер­
вуары энергии. Они запасают её, когда ток в цепи на­
грузки превышает среднее значение, и отдают когда
Рис. 10
ток стремиться уменьшится ниже среднего значения.
Это и приводит к сглаживанию пульсаций.
Рассмотрим несколько подробнее ёмкостной фильтр, в котором на выходе двухполупериодного выпрямителя параллельно нагрузке R включён конденсатор С (рис. 11).
ѵп,
.. г-н -
нЧ1
тс/,Ц)*
Рис. 11
Рис 12
При возрастании выпрямленного напряжения (при открытом диоде VDi)
конденсатор зарядится, а при убывании выпрямленного напряжения полярность
напряжения на диоде изменится на противоположную и диод закроется, отключив
вторичную обмотку трансформатора от нагрузки.
Когда входной сигнал начинает падать в отрицательном направлении,
конденсатор разряжается через нагрузку. Скорость разряда конденсатора зависит от
постоянной времени RC, а следовательно, от сопротивления нагрузки. Постоянная
времени разряда велика по сравнению с периодом переменного тока. Следовательно,
период заканчивается раньше, чем конденсатор может разрядится. Поэтому после первой
четверти периода ток через нагрузку поддерживается разряжающимся конденсатором. До
того, как конденсатор полностью разрядится, начинается следующий период синусоиды.
Конденсатор зарядится снова, и цикл повторится. В результате пульсации напряжения
сгладятся и выходное тнапряжение фактически повысится.
Чем больше ёмкость конденсатора, тем больше постоянная времени RC. Это
приводит к более медленному разряду конденсатора, что повышает выходное напряжение.
Наиболее распространёнными сглаживающими фильтрами в выпрямителях элек­
тронных приборов являются П-образные LC-фильтры (рис. 13а). В них постоянная со­
ставляющая выпрямленного тока, свободно проходящая через дроссель Др, попадает за­
тем в нагрузку и замыкается через трансформатор. Переменные составляющие, замыкаясь
через большие ёмкости Сі и СЬ, в нагрузку не проходят.
При больших токах нагрузки успешно работает Г-образный фильтр (рис. 136), а
при малых токах нагрузки в качестве сглаживающего фильтра достаточно включить кон­
денсатор (рис. 13в), что делается в переносных радиоприёмниках и магнитолах. Во мно­
гих случаях дроссель заменяют резистором, что несколько снижает качество фильтрации,
но зато значительно удешевляет фильтр (рис.13г,д). В наиболее ответственных случаях
сглаживающий фильтр делают многозвенным, состоящим их нескольких П-образных или
Г-образных LC или RC фильтров (рис. 13е).
35
Др
С,
Др
JYYYV
C,=L
R„
I
=Ьс
С
R„
I
I
R
R
Д рі
R
R„
R„
rv^m
±C, c2=h
RH
=b
.
Д рі
/y w i
c,
I
Д
Рис. 13
3 Стабилизаторы напряжения
Выходное напряжение выпрямителя может изменяться по двум причинам. Вопервых, может изменяться входное напряжение выпрямителя, что приводит к уменьше­
нию или увеличению выходного напряжения. Во-вторых, может изменяться сопротивле­
ние нагрузки, что приводит к изменению потребляемого тока.
Многие электрические цепи рассчитаны на работу при определённом напряже­
нии. Изменения напряжения могут влиять на работу цепи. Следовательно, выпрямитель
должен обеспечивать выходное напряжение постоянной величины независимо от измене­
ния нагрузки или входного напряжения. Для этого после сглаживающего фильтра ставят
стабилизатор напряжения.
Существуют два основных типа стабилизаторов напряжения: параллельные и по­
следовательные. Последовательные стабилизаторы более популярны, чем параллельные,
так как они более эффективны и рассеивают меньшую мощность. Последовательный ста­
билизатор напряжения также работает в качестве управляющего устройства, защищая ис­
точник питания от короткого замыкания в нагрузке.
R2
R
Вход
X УОг
Выход
Рис. 14
На рис. 14 показана простая регулирующая цепь на основе стабилитрона. Это
параллельный стабилизатор. Стабилитрон соединён последователь-но с резисторм.
Входное постоянное напряжение прикладывается к стабилитрону и резистору и смещает
стабилитрон в обратном направлении. Резистор позволяет протекать малому току и
поддерживать стабилитрон в области пробоя. Входное напряжение должно быть выше,
чем напряжение стабилизации стабилитрона. Выходное напряжение может быть
увеличено или уменьшено путём замены стабилитрона и последовательно включённого
резистора.
На рис. 15 изображена параллельная регулирующая цепь, использующая транзи­
стор. Заметим, что транзистор ѴТі включён параллельно нагрузке. Это защищает стаби­
лизатор в случае короткого замыкания в нагрузке. Существуют более сложные параллель­
ные стабилизаторы, которые используют более одного транзистора.
36
На рис. 16 изображён простой последо­
вательный стабилизатор. На его вход подаётся
нестабилизированное постоянное напряжение, а
на его выходе получается стабилизированное по­
стоянное напряжение меньшее по величине. На­
пряжение на базе транзистора устанавливается с
помощью стабилитрона. Следовательно, выход­
ное напряжение равно напряжению стабилизации
стабилитрона минус 0,7 В падения напряжения
на переходе база-эмиттер.
В последнее время вместо стабилизаторов на дискретных компонентах всё чаще
используют стабилизаторы на интегральных микросхемах, которые дёшевы и просты в
применении. Большинство стабилизаторов на интегральных микросхемах имеют только
три вывода (вход, выход, земля) и могут быть подсоединенные непосредственно к выходу
фильтра выпрямителя. Стабилизаторы на интегральных микросхемах обеспечивают ши­
рокий диапазон выходных напряжений как положительной, так и отрицательной полярно­
сти. Существуют также двухполярные стабилизаторы напряжения. Если стабилизатора с
нужным напряжением нет среди стандартных микросхем, можно использовать микросхе­
му стабилизатора с регулируемым напряжением.
При выборе микросхемы стабилизатора необходимо знать напряжение и ток на­
грузки, а также электрические характеристики нестабилизированного блока питания.
r 2
4 Типы усилителей на транзисторах
Усилители - это электронные цепи, которые используют для увеличения ампли­
туды электронного сигнала. Цепь, рассчитанная на преобразование низкого напряжения в
высокое, называется усилителем напряжения. Цепь, рассчитанная на преобразование сла­
бого тока в сильный, называется усилителем тока. В современной электронике основными
усилительными устройствами являются транзисторы.
Существует несколько способов включения транзистора в цепь: схема с общей
базой, схема с общим эмиттером и схема с общим коллектором. В каждой из этих
схем один из выводов транзистора служит общей точкой, а два других являются входом и
выходом, при этом на переход эмиттер-база подаётся напряжение смещения в прямом на­
правлении, а на переход коллектор база - в обратном. Каждая схема имеет преимущества
и недостатки и может быть собрана как с р-п-р, так и с п-р-п транзистором.
В схеме с общей базой (рис. 17) входной сигнал подаётся в цепь эмиттер-база, а
выходной снимается с цепи коллектор-база. База является общим элементом для входа и
В схеме с общим эмиттером (рис. 18) входной сигнал подаётся в цепь эмиттербаза, а выходной сигнал снимается с цепи коллектор-эмиттер. Эмиттер является общим
для входа и выхода. Этот способ включения транзистора используется наиболее широко.
37
В схеме с общим коллектором (рис. 19) вход­
ной сигнал подаётся в цепь база-коллектор, а выход­
ной сигнал снимается с цепи эмиттер-коллектор.
Здесь коллектор является общим для входа и выхода.
В таблице 1 приведены входные и выходные
сопротивления, а также величина усиления по напря­
жению, току и мощности для трёх схем включения
транзистора.
Таблица 1
Тип цепи
Входное сопро­
тивление
Общая база
Десятки Ом
Общий
эмиттер
Общий
коллектор
Тысячи Ом
Десятки-сотни
кОм
Выходное со­
противление
Сотни кОм единицы МОм
Десятки-сотни
кОм
Десятки-сотни
Ом
Усиление по
напряжению
Несколько
сотен
Несколько
десятков
Меньше
единицы
Усиление по
току
Меньше
единицы
Несколько
сотен
Несколько
сотен
Усиление по
мощности
Несколько
сотен
Несколько
тысяч
Несколько
десятков
Поскольку цепи с общим эмиттером используются наиболее часто, мы их опишем
более детально. Те же принципы применимы и к цепям с общей базой и общим коллекто­
ром.
На рис. 20 изображён транзисторный усилитель с
общим эмиттером, использующий один источник питания.
Источник
питания обозначен +V. Символ заземления явля­
Rf.
RK
Вы ход
ется отрицательным выводом источника питания V. Один
Вход
источник питания обеспечивает подачу смещения для пере­
о—
ходов база-эмиттер и база-коллектор. Два резистора (R e и
R k) используются для распределения напряжения, обеспечи­
вающего правильную работу. Резистор R k , сопротивление
Рис. 20
нагрузки коллектора, соединён последовательно с коллекто­
ром. Когда через коллектор течёт ток, на резисторе R k п о я в ляется падение напряжения. Падение напряжения на резисторе R k и падение напряжения
на переходе коллектор-эмиттер транзистора в сумме должны равняться приложенному
напряжению.
Резистор R]„ соединяющий базу с источником питания, управляет величиной тока
базы. Ток базы, текущий через резистор R e, создаёт на нём падение напряжения, состав­
ляющее большую часть напряжения источника питания. Меньшая часть этого напряжения
падает на переходе база-эмиттер транзистора, обеспечивая правильное прямое смещение.
і
5 Элементы цифровых электронных цепей
В основе цифровой электроники лежит двоичная система счисления. Для записи
чисел в двоичной системе нужны только две цифры - ноль (0) и единица (1). Двоичная
система счисления используется в цифровых цепях благодаря тому, что двоичные цифры
легко представить в виде двух напряжений - высокого и низкого. Данные в двоичной сис­
теме представляются двоичными цифрами, которые называются битами. Термин бит оз­
начает двоичная цифра (разряд) (binary dig#).
Всё цифровое оборудование, от простого до сложного, сконструировано с ис­
пользованием небольшого количества основных схем. Эти схемы, называемые логиче­
скими элементами, выполняют некоторые логические функции с двоичными данными.
Рассмотрим некоторые логические схемы.
38
Элемент И - это логическая схема, на выходе которой 1 появляется только тогда,
когда на все его входы поступает сигнал 1. Если на какой-либо из входов поступает 0, на
выходе появляется 0.
&
А.
А— &
в —
С
— Y
В'
А _ &
В—
_ у
с—
— Y
D
Рис. 21
На рис. 21 показаны стандартные обозначения, используемые для элементов И.
Элемент И может иметь любое количество входов, большее одного. Показанные на ри­
сунке обозначения представляют наиболее часто используемые элементы с двумя, тремя и
четырьмя входами.
Состояние и логическую связь между входными и выходными сигналами элемен­
та И отражает так называемая таблица истинности (таблица 2), которая показывает вы­
ходное состояние двухвходового элемента для любых возможных состояний входов: А и
В - входы; Y - выход.
Таблица 2
А
0
1
0
1
В
0
0
1
1
Y
0
0
0
1
Элемент И выполняет операцию логического умножения. Логическое умножение
известно как функция И
Элемент И Л И - это логическая схема, на выходе которой появляется 1, если на
любой из его входов подана 1. На его выходе появляется 0, если на все его входы поданы
0. Этот элемент, как и элемент И, может иметь два или более входов. На рисунке 22 пока­
заны стандартные обозначения, используемые для элементов И Л И с двумя, тремя и че­
тырьмя входами.
А_
1
— Y
В'
А— 1
в —
С
_ у
А _ 1
В—
с—
-Y
D
Рис. 22
Значения на выходе элемента И Л И с двумя входами приведены в таблице истин­
ности (таблица 3): А и В - входы; Y - выход.
Таблица 3
А
В
Y
0
0
0
1
1
0
1
1
0
1
1
1
Элемент И Л И выполняют логическую операцию сложения.
39
Элемент НЕ - выполняет функцию, которая называется инверсией, или допол­
нением, и обычно называется инвертором. Цель инвертора - сделать состояние выхода
противоположным состоянию входа. В логических цепях возможны два состояния - 1 и 0.
Состояние 1 также называют высоким, чтобы указать, что напряжение в этом состоянии
выше, чем в состоянии 0. Состояние 0 также называют низким, чтобы указать, что напря­
жение в этом состоянии ниже, чем в состоянии 1. Если на вход инвертора подано высокое
состояние, или 1, то на выходе появится низкое состояние, или 0. Если же на вход инвер­
тора подать низкое состояние, или 0, то на выходе появится высокое состояние, или 1.
Схематическое обозначение инвертора показано на рисунке 23.
Таблица 4
А
Y
0
1
1
0
Работу инвертора отражает таблица истинности (таблица 4). Вход инвертора обо­
значен А, а выход А (читается «не А»), Чёрточка над буквой А показывает отрицание А.
Элемент И-НЕ является комбинацией элементов И и НЕ. Элемент И-НЕ являет­
ся наиболее широко используемой логической функцией. Это обусловлено тем, что эти
элементы могут быть использованы для создания некоторых других логических элемен­
тов.
Схематическое обозначение элементов И-НЕ показано на рисунке 24, а его таб­
лица истинности представлена в таблице 5.
Таблица 5
А.
&
А
0
1
0
1
Y
В'
Рис. 24
В
0
0
1
1
Y
1
1
1
0
Элемент ИЛИ-HE - является комбинацией элемента ИЛИ и инвертора. Подобно
элементу И-НЕ, элемент ИЛИ-HE также может быть использован для создания других ло­
гических элементов.
Схематическое обозначение элемента ИЛИ-HE показано на рисунке 25, а его таб­
лица истинности представлена в таблице 6.
Таблица 6
А
1
А
0
1
0
1
Y
В
Рис. 25
В
0
0
1
1
Y
1
0
0
0
5.1 Триггеры
Триггер - это элемент на выходе которого может быть либо высокое, либо низкое
напряжение. На выходе триггера остаётся высокое или низкое напряжение до тех пор, по­
ка на вход не будет подан пусковой сигнал.
Существуют несколько типов триггеров.
RS-триггер образован двумя перекрёстно связанными элементами ИЛИ-HE или
И-НЕ (рис. 26).
40
RS-триггер имеет два выхода Q и Q и два управ­
ляющих входа: R (Reset - сброс) и S (Set - установка). На
выходах триггера уровни всегда противоположны (допол­
няющие уровни): если Q = 1, то Q = 0, и наоборот.
Для того, чтобы понять работу цепи, предположим
что выход Q, вход R и вход S имеют низкий уровень. Низ­
кий уровень выхода Q подаётся на один из входов элемента
2.
На входе S также низкий уровень. Н
высокий уровень. Этот высокий уровень подаётся на вход
Рис. 26
элемента 1, удерживая его выход на низком уровне. Когда
на выходе Q появляется низкий уровень, говорят, что триг­
гер в исходном состоянии (RESET). Он остаётся в этом состоянии неопределённо долго,
до тех пор, пока на вход S элемента 2 не будет подан высокий уровень. Когда на вход S
элемента 2 будет подан высокий уровень, на выходе элемента 2 появится низкий уровень,
а этот выход связан со входом элемента 1. Поскольку на входе R элемента 1 низкий уро­
вень, на его выходе Q низкий уровень изменится на высокий. Этот высокий уровень пода­
ётся на вход элемента 2, обеспечивая на выходе Q низкий уровень. Когда на выходе Q вы­
сокий уровень, говорят, что триггер в единичном (SET) состоянии. Он остаётся в этом со­
стоянии до тех пор, пока на вход R не будет подан высокий уровень, переводящий триггер
в исходное состояние.
«Недопустимое», или «неразрешённое», условие имеет место, когда на оба входа,
R и S, подаётся высокий уровень. В этом случае выходы Q и Q пытаются перейти в низкое
состояние, но Q и Q не могут быть одновременно в одинаковом состоянии без нарушения
работы триггера. При одновременном отключении высокого уровня со входов R и S оба
выхода пытаются перейти в состояние с высоким уровнем. Поскольку всегда логические
элементы немного отличаются друг от друга, то один из них перейдёт в состояние с высо­
ким уровнем. Это заставит другой элемент перейти в состояние с низким уровнем. В этом
случае имеет место непредсказуемый режим работы и, следовательно, состояние выходов
триггера не может быть определено.
Таблица 7 - таблица истинности для работы RS-триггера. На рисунке 27 изобра­
жено упрощённое схематическое обозначение RS-триггера.
Таблица 7
R
т
S
Рис. 27
О
О
R
Q
0
0
Без
изменений
Без
изменений
0
1
0
1
1
0
1
0
1
1
?
?
S
Q
Другим типом триггера является триггер с синхронизирующим входом. Он от­
личается от RS-триггера тем, что для его работы необходим дополнительный вход. Третий
вход называется тактовым (или синхронизирующим). На рисунке 28 изображено схемати­
ческое обозначение такого триггера.
Триггер с синхронизирующим входом управляется
----- r
j ___ Р
логичискими состояниями входов R и S при наличии тактового
____~q
— импульса. Изменение состояния триггера происходит только по
___ g”
э----переднему фронту тактового импульса. Передний фронт тактового
— -----импульса - это переход в положительном направлении (от низкого
Рис. 28
к высокому), что означает возрастание амплитуды импульса от
41
нулевого до положительного напряжения. Этот процесс называется запуск по
положительному фронту (фронту импульса, запускающего цепь).
Пока уровень на тактовом входе низкий, уровни входов R и S могут изменяться,
не влияя на состояние триггера. Входы R и S становятся чувствительными только в
течении тактового импульса. Триггер работает синхронно с тактовым импульсом.
Синхронная работа важна в компьютерах и калькуляторах, когда каждый шаг должен
быть выполнен в определённом порядке.
В цифровых микросхемах очень часто применяют триггеры с единственным
входом данных D (data), так называемые D -триггеры. Они полезны тогда, когда должен
быть сохранён только один бит данных (1 или 0). На рис. 29
о изображено условное обозначение D-триггера.
Он имеет один вход для данных и вход для тактовых
о импульсов. D-триггер также называют триггером с задержкой. Вход
D задерживает один тактовый импульс перед изменением уровня
Рис. 29
выхода (Q). Иногда D-триггер имеет вход PS (предустановка) и вход
CLR (очистка). Когда на вход предустановки подан низкий уровень
(0), он устанавливает выход (Q) в состояние 1. Когда на вход очистки подан 0, он
устанавливает на выходе Q также 0. D-триггеры, соединённые вместе образуют сдвиговые
регистры и регистры памяти, которые широко используются в цифровых системах.
Наиболее широко используемый триггер - это JK-триггер. Он обладает всеми
особенностями триггеров других типов. Обозначение JK-триггера
О
показано на рисунке 30.
J т
J и К - это входы. Важной особенностью этого триггера .
с
О
является то, что когда на оба входа J и К подан высокий уровень,
к
повторяющиеся тактовые импульсы заставляют выход переключаться
или изменять состояние. JK-триггер может иметь два асинхронных
Рис. 30
входа, PS (предустановка) и CLR (очистка), которые блокируют
синхронные входы (входы данных J, К и вход тактовых импульсов). JK-триггеры широко
используются во многих цифровых цепях, особенно в схемах счётчиков.
Триггеры являются основными строительнымиблоками для построения
последовательных логических цепей. Они могут быть соединены вместе и образовывать
счётчики, сдвиговые регистры и устройства памяти.
6 Операционные усилители
Интегральный операционный усилитель - это высококачественный прецизион­
ный усилитель способный выполнять множество функций. На основе одного и того же ОУ
можно формировать большое число линейных и нелинейных функциональных устройств.
Это достигается коммутацией цепей обратной связи (ОС).
С целью повышения качества ОУ они должны удовлетворять следующим требо­
ваниям:
1) Иметь большой набор различных ОС.
2) Иметь высокий и стабильный коэффициент усиления (от 1000 до 100000).
3) Иметь высокую стабильность характеристик и параметров.
4) Иметь большое входное сопротивление (десятки МОм) и малое выходное
(единицы Ом).
5) Иметь широкую полосу пропускания (от 10 до 100 МГц).
Основой всех ОУ является дифференциальный усилитель (ДУ).
Принципиальная схема дифференциального усилителя имеет вид:
42
Схема имеет два симметричных плеча R1,VT1 и R2,VT2, а в общей цепи включен
источник постоянного тока, обеспечивающий постоянный ток эмиттеров обоих транзи­
сторов.
Если предположить, что входное напряжение U b x I равно входному напряжению
U bx 2 и равно 0, то следовательно ток коллектора VT1 будет равен току коллектора VT2,
соответственно выходные напряжения Ц выхі и Цвых2 будут равны. Если увеличить U bx I
и U bx 2 на одну и ту же величину, то на одну и ту же величину возрастут токи обоих тран­
зисторов, а следовательно пропорционально увеличатся Ц выхі и ІІвых2 и по-прежнему
ивых1-ивых2=0. Тоже самое произойдет и при одинаковом уменьшении U b x I и U bx 2.
При этом сигналы U b x I и U bx2 равные по величине и по фазе называются синфазными.
Рассмотрим случай, когда входные сигналы отличаются друг от друга. При этом:
U b x I = U b x I о + AU b x I; U bx2 = U bx 2 o- AU bx 2, следовательно,
Ікі = Ікіо + ЛІкІ; Ік2 = Ік2о - АІк2.
и в ы х і = ивы хіо + Д ивы хі; ивых2 = ивых2о - Дивых2,
и как результат: ивы х2 - и в ы х і = 2Дивых.
Из последнего выражения видно, что присутствие на входе ДУ разнополярных
сигналов ведет к увеличению разности напряжений на выходе (ивых).
Входные сигналы, отличающиеся друг от друга на одну и ту же величину, назы­
ваются дифференциальными или парафазными. Если на один вход ДУ подать нулевой по­
тенциал, а на другой вход - усиливаемый сигнал, то ДУ будет работать как обычный уси­
литель напряжения.
Таким образом, синфазность входных сигналов позволяет подавлять синфазные
помехи, то есть сигналы которые в одинаковой мере увеличиваются или уменьшаются по
амплитуде. Это значит, что изменение входных напряжений обусловленных изменениями
температуры, колебаниями питающих напряжений и старением элементов, на выходе ДУ
дают нулевые приращения. Следовательно дифференциальный усилитель является иде­
альным усилителем постоянного тока, причем подавление синфазных сигналов тем боль­
ше, чем симметричнее выполнены плечи. Идеальным с этой точки зрения является ОУ в
интегральном исполнении, так как резисторы R1 и R2, транзисторы VT1 и ѴТ2 имеют
одинаковую геометрию, расположены близко друг к другу, сформированы на одной под­
ложке, изготовлены в одном и том же технологическом цикле, подвергаются одним и тем
же температурным изменениям и имеют одинаковую интенсивность старения.
Структурная схема операционного усилителя и его условное обозначение приве­
дены на рисунке.
43
Вход 1, обозначенный знаком плюс, называют неинвентирующим (прямым), так
как сигнал на выходе и сигнал на этом входе имеют одинаковую полярность. Вход 2, обо­
значенный знаком минус, называют инвентирующим, так как сигнал на выходе по отно­
шению к сигналу на этом входе имеет противоположную полярность.
Рассмотрим принципиальную схему подключения ОУ, приведённую на рисунке.
В ход і
11вх1
В ы ход
Ubx2
Вход2
ІІвы х
Питание осуществляется от двух последовательно включённых источников, на­
пряжения которых одинаковы, но знаки относительно заземлённой точки разные. Этим
обеспечивается нулевой сигнал на выходе в отсутствие входного сигнала и возможность
получить выходной сигнал или положительной, или отрицательной полярности. Сигнал
можно подавать от симметричного источника сигнала, соединённого с общим проводом,
на вход 1 - вход 2 либо от двух отдельных источников, один из которых подключают к
инвертирующему входу и общему проводу, другой - к неинвертирующему и общему про­
воду. Часто сигнал подают на неинвертирующий вход, а через инвертирующий вход ОУ
охватывают глубокой обратной связью (ОС). В этом случае можно получать устройства с
различными свойствами, которые будут определяться параметрами цепи ОС. С помощью
такого ОУ можно осуществлять математические операции (умножение, интегрирование,
дифференцирование, сравнение и др. - отсюда произошло название этих усилителей операционные).
Многообразие функций, которые можно выполнять ОУ, сделало его основным
универсальным устройством аналоговых (линейных) интегральных микросхем.
Простым примером интегральных дифференциальных усилителей может служить
микросхема К122УД1, представленная на рисунке.
-
Рассмотрим примеры построения электронных схем на базе ОУ.
Усилители низкой частоты (УНЧ):
сз
ѵ
R1
+пит
-с=ь
С1
н\С2'10
вход
-=гвыход
-\)г
fl
С4
С5
11 С7
А1 К1УС22 1
Сб
44
-
Усилители высокой частоты (УВЧ):
-
Компараторы на основе ОУ:
+15ѵ
U1
4 \1 1
о---------
Uо-------2 з
+5ѵ
Пкі
выход
DAI К554САЗ
■15ѵ
Генератор синусоидальных колебаний с мостом Вина:
R1
+пит
Активный полосовой фильтр:
Логарифмирующий и антилогарифмирующий усилитель:
VDl
R1
+ПКТ
вход
VD1
-п и т
45
Стабилизатор напряжения:
Стабилизатор тока:
46
VI. МЕТРОЛОГИЧЕСКИЕ ПОНЯТИЯ
Управление техническими процессами, как известно, не возможно без измерения
технологических параметров.
Наука об измерениях называется метрологией.
Метрология - наука об измерениях, методах и средствах обеспечения их единст­
ва и способах достижения требуемой точности.
Основной метрологической характеристикой измерительных приборов и измери­
тельной цепи в целом является погрешность измерения.
Погрешность измерения - это отклонение результата измерения от истинного
значения измеряемого параметра.
Различают случайные, грубые и систематические погрешности.
Случайные погрешности изменяются случайным образом при многократных из­
мерениях одного и того же параметра. Они принципиально не могут быть устранены или
учтены при измерениях.
Грубые погрешности возникают при неправильной организации процесса изме­
рения (например, из-за неправильной эксплуатации измерительных приборов, неправиль­
ного отсчета показаний, выхода из строя какого- либо элемента), такие погрешности мо­
гут быть обнаружены и устранены.
Систематические погрешности - погрешности изменяются закономерно или ос­
таются постоянными при многократных измерениях одного и того же параметра. Они вы­
званы недостатками методов измерения и конструкций измерительных приборов. Систе­
матические погрешности могут быть вычислены, следовательно, учтены в результатах из­
мерений.
Погрешность измерения определяют по абсолютной величине разности между
измеренным и истинным значениями параметра, это абсолютная погрешность измерения.
АХ = Хи - X,
где АХ - абсолютная погрешность;
Хи - результат измерения;
X - истинное значение параметра.
Поскольку истинное значение измеряемого параметра нельзя измерить абсолютно
точно, то для оценки погрешности измерения вместо неизвестного истинного значения
измеряемого параметра X обычно используют результат измерения его более точным
прибором или его значение, найденное теоретически.
Абсолютная погрешность неудобна для сравнения точности различных измерений
Так ошибка в 1 г, при взвешивании массы в 10 г значительно более существенна, чем при
взвешивании массы в 1 кг, хотя абсолютная погрешность в обоих случаях одинакова. По­
этому вводится понятия относительной погрешности.
Относительная погрешность измерения - это отношение абсолютной погрешно­
сти к истинному значению измеряемого параметра т.е.
АХ
Х и-Х
б = ----- = ------
X
X
Относительная погрешность в отличии от абсолютной, - безразмерная величина и
выражается в %.
Погрешность измерительных приборов оценивают по приведенной погрешности,
которая определяется как отношение абсолютной погрешности X к некоторой постоян­
ной нормирующей величине X.
АХ
у = ----
X
47
В качестве нормирующей величины обычно принимают диапазон измерения.
Приведенная погрешность безразмерная величина, выраженная в %, она пропор­
циональна абсолютной погрешности, поэтому, если абсолютная погрешность измеритель­
ного прибора постоянна во всем диапазон измерения, то приведенная будет также посто­
янной. Следовательно она характеризует точность измерительного прибора независимо
от значения измеряемого параметра и ее считают основной метрологической характери­
стикой измерительного прибора.
Приведенная погрешность изменяется под действием изменения окружающей
температуры, давления, вибрации и т. д. В связи с этим для каждого прибора регламенти­
руют нормальные условия эксплуатации (температуру, влажность, напряжение питания и
Т.д)
Погрешность измерительного прибора при его эксплуатации в нормальных усло­
виях является основной, а при отключении от нормальных условий - дополнительной.
Наличие различных показателей точности - абсолютной и приведенной, основной
и дополнительной погрешностей, затрудняет сравнение измерительных приборов. Необ­
ходима обобщенная характеристика их метрологических свойств. Такой характеристикой
является класс точности измерительного прибора.
Класс точности - это максимально допустимая приведенная погрешность (в про­
центах) при нормальных условиях эксплуатации.
Погрешность в каждом отдельном измерении может быть и меньше максималь­
ной. Поэтому класс точности не может служить непосредственным показателем точности
прибора, он лишь определяет предельное возможное значение приведенной погрешности.
ГОСТом установлены стандартные классы точности:
0,005, 0,002, 0,05, 0,1, 0,25, 0,5, 1,0, 1,5, 2,5, 4,0.
Кроме основной метрологической характеристики измерительных приборов су­
ществует такие метрологические понятия как:
Чувствительность прибора - под этим термином подразумевают отношение ли­
нейного углового перемещения указателя к изменению измеряемой величины вызвавшей
это перемещение.
Чувствительность характеризует способность измерительного прибора измерять
малые сигналы.
Коэффициент передачи - отношение диапазона изменения выходного сигнала
прибора к диапазону изменения его входного сигнала
8у
К = -----.
5Х
Если входной и выходной сигналы преобразователя выражены в одинаковых еди­
ницах измерения, то коэффициент передачи оказывается безразмерным и в этом случае
употребляют термин коэффициент усиления.
Вариация - максимальная разность показаний измерительного прибора, опреде­
ленная при прямом (Аип) и обратном (Аио) ходе изменения параметра для одного и того
же его действительного значения.
В = Аип - Аио
Вариация может быть выражена в % от диапазона шкалы и должна быть меньше
основной погрешности.
Аип - Аио
В = --------------Ак - Ан
где Ак конец шкалы;
Ан - начало шкалы.
Причиной вариации является трение в опорах, люфт в зубчатых передачах.
48
Цена деления - это разность значений между двумя соседними отметками шка­
лы, выраженная в единицах измерения.
Для равномерной шкалы:
Ак - Ан
С = ------------- ед./1дел.,
п
где п- количество делений.
Инертность - это время, за которое показания прибора приходит в соответствии
со значением измеряемой величины.
Безотказность - это свойство прибора сохранять работоспособность в течении
некоторого времени без вынужденных перерывов.
Надежность - это способность прибора сохранять свои характеристики в задан­
ных пределах в течении требуемого промежутка времени.
1. Классификация приборов
Все измерительные приборы можно подразделить на следующие группы по различным
признакам.
1. По способу отсчета.
1.1 Компарирующие приборы. При измерении этими приборами необходимо
участие человека, в них происходит сравнивание измеряемой величины с мерой, эталон­
ной величиной. Самый простой пример - это весы.
1.2 Показывающие приборы. Величина измеряемого параметра указывается отсчетным устройством. Эти приборы просты по конструкции, однако показывают величину
измеряемого параметра только в момент измерения, что не позволяет следить за его изме­
нением во времени. В большинстве приборов показывающее устройство выполнено в ви­
де неподвижной шкалы и подвижной стрелки. В некоторых приборах, наоборот шкала
двигается относительно неподвижного указателя. Такая конструкция позволяет значи­
тельно уменьшить фронтальные размеры прибора. Но на результат отсчета влияют субъ­
ективные особенности оператора.
1.3 Регистрирующие или самопишущие приборы. Значение измеряемой величи­
ны в них непрерывно или в отдельные промежутки времени записывается. Запись произ­
водится обычно на бумажной дисковой или ленточной диаграмме, движущейся с посто­
янной скоростью. Это позволяет наблюдать характер изменения параметра во времени. На
дисковой диаграмме обычно записывается только один параметр. Ленточная диаграмма
допускает поочередную запись нескольких параметров. Такие приборы называются мно­
готочечными и выпускаются на 3, 6 и 12 точек измерения.
1.4 Суммирующие приборы или интеграторы. В них происходит непрерывное
суммирование (интегрирование) мгновенных значений измеряемого параметра. Для этого
они снабжены счетчиком (например электрическим). Приборы показывают суммарное
значение измеряемой величины за промежуток времени. К ним относятся счетчики элек­
троэнергии, счетчики расхода воды, пара и других величин.
1.5 Комбинированные приборы. Они могут одновременно показывать и записы­
вать величину измеряемого параметра.
2 По виду шкалы.
2.1 С линейной шкалой.
I I I I I I I I I I I IJ^ I I I і I I I I і I I I
К этим приборам относятся все вторичные пневматические приборы.
49
2.2 С дуговой шкалой.
К этим приборам относятся такие приборы как, КСП-3, КСМ-3, КС Д-3, МТ, МО и многие
электроизмерительные приборы.
2.3 С профильной шкалой.
Такие шкалы имеют логометры, милливольтметры и т.п. приборы.
2.4 С барабанной шкалой.
Такие шкалы могут быть подвижные и неподвижные, равномерные и неравномерные.
3 По метрологическому назначению
3.1
Технические приборы. Предназначены для работы в производственных
условиях. Поэтому они должны быть недорогими и надежными в эксплуатации. В показа­
ниях таких приборов не вводят поправки на погрешность измерений. Класс точности
большинства технических приборов в пределах 0.25 - 4.0 %.
3.2
Контрольные приборы. Они служат для контроля исправности промыш­
ленных приборов на месте их установки.
3.3
Лабораторные приборы. Их применяют для точных измерений в лабора­
торных условиях. Для повышения точности измерения в их показания вводят поправки,
учитывающие внешние условия, в которых проводились измерения (температура, атмо­
сферное давление, влажность и т.п.). Кроме того лабораторные приборы используют для
поверки технических приборов.
3.4
Образцовые приборы. Они служат для поверки лабораторных и техниче­
ских приборов.
50
3.5
Эталонные приборы. Они служат для поверки образцовых приборов.
Эталон, его характеристики определяются уровнем развития науки и техники.
4 По роду измеряемой величины различают приборы для измерения:
♦♦♦ температуры;
♦♦♦ давления;
❖ расхода;
♦♦♦ уровня;
♦♦♦ состава;
♦♦♦ концентрации;
♦♦♦ плотности;
♦♦♦ и т.д.
51
VII. ВТОРИЧНЫЕ ПНЕВМАТИЧЕСКИЕ ПРИБОРЫ
Вторичные пневматические приборы предназначены для контроля и записи раз­
личных технологических параметров, величины которых преобразованы в стандартный
диапазон измерения пневматического сигнала.
Питание приборов осуществляется сжатым очищенным и осушенным воздухом
давлением 1.4 + 0.14 кгс/см2.
Действие измерительных систем вторичных пневматических приборов основано
на компенсационном принципе измерения, при котором усилие на приемном элементе,
возникающее от входного давления (Рвх), уравновешивается усилием, развиваемым эле­
ментом обратной связи.
Самопишущие пневматические приборы снабжены электрическим (последняя бу­
ква в обозначении модификации прибора — Э) или пневматическим (то же, буква П) при­
водом диаграммной ленты.
Основные характеристики вторичных пневматических приборов.
Тип
прибора
ПВ3.2
ПВ2.2
ПВ4.4Э
ПВ10.1Э
ПВ10.2Э
ПВ4.2Э
ПВ4.3Э
ППВ1.1
ПКР-1
Дополнительные
устройства
Станция
управ­
ления
+
Блок
сигнали­
зации
Количество контро­
лируемых параметров
За­
дат­
чик
+
+
+
+
1
2
4, 6,
8, 16
+
+
+
+
+
+
+
+
+
+
+
+
ПКР-2
+
ПК1.3
ПВ1.3
РПВ4.2Э
РПВ4.3Э
3
+
+
+
Основ­
ная по­
греш­
ность,
%
1.0
1.0
1.0
1.0
1.0
1.0
1.0
1.0
0.5
1.0
0.5
1.0
0.5
1.0
0.5
1.0
1.0
Способ
контроля
Показы Само­
вающи пишу­
й
щий
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
В приборах типа ПВ (рис.1) измеряемое давление Рвх от первичного преобразова­
теля поступает на приемный элемент — сильфон 5. Сжатый воздух от источника питания
через постоянный дроссель 3 поступает в линию, соединяющую сопло 7 с силовым эле­
ментом 11. При измерении Рвх сильфон перемещает рычаг 4, что вызывает изменение за­
зора между соплом 7 и заслонкой 8, находящейся на конце рычага 4. Это приводит к из­
менению давления в линии сопла, а следовательно, в силовом элементе 11. При этом пе­
ремещаются сферическая упругая мембрана силового элемента и упирающийся в нее ры­
чаг 10. Последний посредством лавсановой нити 2 и пружины обратной связи с рычагом
4. Пружина 9 растягивается и создает усилие, действующее обратно усилию, образован­
ному на силовом элементе 11.
52
Рис.1
Таким образом, усилие, созданное Рвх на приемном сильфоне 5, уравновешивается
усилием в линии обратной связи. Перемещение рычага 10 силового элемента передается
указателю 1 и перу. Начальное положение стрелки при Рвх = (0,2 кгс, см2) устанавливает­
ся вращение винта 12 корректора нуля под шкалой (изменением положения направляюще­
го ролика). Корректировка диапазона измерения прибора при Рвх= (1 кгс,см2) осуществ­
ляется изменением числа рабочих витков пружины обратной связи (осторожным враще­
нием фиксатора — скобы). Грубая настройка нуля осуществляется винтом на приемном
сильфоне.
Приборы типов ПВ3.2. ПВ10. применяемые в схемах автоматического регули­
рования, помимо измерительных устройств имеют станцию управления, состоящую из
ручного задатчика ЗД и переключателя П (рис. 2). Узел задатчика VI предназначен для
установки задания (контрольной точки) при автоматическом регулировании и изменения
положения клапана исполнительного механизма при ручном управлении.
Переключатель П состоит из пяти кнопок и предназначен для плавного перевода
систем автоматизации технологических процессов в различные режимы, ручного управ­
ления с помощью задатчика прибора, непосредственно подключенного к исполнительно­
му механизму, автоматического регулирования, при котором исполнительным механиз­
мом управляет регулятор, автоматического программного регулирования, при котором
задание регулятору поступает от специального прибора программного задатчика.
Кнопками «Р» , «А», «АП», выбирают соответственно ручной, автоматический и
автоматический программный режимы управления, кнопками «Откл.» И «Вкл.» Управля­
ют включением регулятора (работает в режимах «А» и «АП», в остальных режимах дол­
жен быть отключен).
53
При ведении технологического процесса переход из одного режима управления в
другой осуществляется переключением кнопок станции в следующей последовательно1) ручное управление — нажимают кнопки «Р» и «Откл», при этом отключают­
ся клапаны I и II, сигнал от задатчика VI через усилитель VII и клапан I переходит к шту­
церам 7 пневматического разъема и прибора, к штуцеру 1 на регулятор и шкалу клапана
исполнительного механизма, регулируемая переменная подводится к штуцеру 2-1 прибо­
ра и к штуцеру 2 на регулятор;
2) промежуточное положение при переходе с ручного управления на автомати­
ческое регулирование — нажимают кнопку «А», клапан I закрывается и отключает за­
датчик от исполнительного механизма, через клапан II давления от задатчика через шту­
цер разъема 5 поступает на шкалу задания прибора и в регулятор, при отключенном регу­
ляторе (кнопка «Откл» нажата) устанавливают задание равным переменной;
3) автоматическое регулирование — нажимают кнопку «Вкл» при этом выклю­
чающее реле регулятора (штуцер 3) через клапан IV соединяется с атмосферой, выход ре­
гулятора (штуцер 1) с исполнительным механизмом (штуцер 7) и его шкалой на приборе,
задание от ручного задатчика поступает на регулятор и шкалу задания прибора;
4) промежуточное положение при переходе с автоматического на автоматиче­
ское программное регулирование — нажимают кнопку «Откл» (кнопка «А» включена),
в выключающее реле (штуцер 3) поступает питание из клапана V на шкалу «Задание» и в
регулятор идет сигнал от задатчика VI. Затем нажимают кнопку «АП» и, когда давление
программного задатчика VI в момент его отключения, включают регулятор кнопкой
«Вкл»;
5) автоматическое программное регулирование — нажимают кнопки «АП» и
«Вкл», сигнал от программного задатчика через клапан III поступает в регулятор и на
54
шкалу прибора, ручной задатчик отключается от регулятора и шкалы прибора (клапан II
закрыт), регулятор управляет исполнительным механизмом по программе;
6) промежуточное положение при переходе с автоматического программного на
автоматическое регулирование — нажимают кнопку «Откл», затем кнопку «А» и ручным
задатчиком устанавливают давление, равное давлению на программном задатчике в мо­
мент его отключения, затем нажимают кнопку «Вкл»;
7) промежуточное положение при переходе с автоматического в ручной режим
управления — нажимают кнопку «Откл», кнопку «А» выключают, по шкале «Задание»
ручным задатчиком устанавливают давление, равное давлению на шкале клапана испол­
нительного механизма, после чего нажимают кнопку «Р» и переходят на ручное управлеПриборы ПВ2.2 (рис.З) снабжены блоком сигнализации выхода параметра из ра­
бочего диапазона. Предельные значения рабочего диапазона устанавливают с помощью
двух сигнальных указателей, расположенных на шкале прибора. Измерительная схема
прибора ПВ2.2.Когда указатель переменной находится внутри рабочего диапазона между
стрелками 4 и 5 сопел 1 и 2, С21 и С211 закрыты, сигнал на выход не поступает (Р вых =
0). При повышении параметром значение верхней границы рабочего диапазона зазор меж­
ду соплом и заслонкой увеличивается, камера А 11 сообщается с атмосферой, через откры­
тое сопло С211 на выход реле проходит сигнал 1, приводящий в действие какое-либо сиг­
нальное устройство (Рсиг(1-1)=1). Как только параметр достигнет значение нижней гра­
ницы рабочего диапазона, сопла С11 и С2 закроются, камера А1 сообщится с атмосферой
и через открытое сопло С21 на выходе снова появится сигнал 1 (Рсиг(1-2)=1).
Рис. 3
55
Принципиальная схема прибора типа РПВ с одним механизмом приведена на рис.
4. Входной сигнал в виде сжатого воздуха поступает в сильфон 3. Усилие, развиваемое
сильфоном 3, передается на рычаг 1, который, поворачиваясь вокруг упругой опоры 2, пе­
рекрывает шариковое сопло 6 пропорционально величине входного сигнала. Изменение
входного сигнала вызывает изменение зазора между соплом 6 и рычагом 1, что приводит к
изменению давления в линии сопла, а следовательно, и в полости цилиндра 4 пневматиче­
ского сервомеханизма. Изменение давления в цилиндре 4 вызывает перемещение поршня
10, уплотненного манжетной мембраной 9. Поступательное движение поршняЮ с помо­
щью ленточной передачи преобразуется во вращательное движение выходного вала 8, на
котором жестко закреплен шкив 11, приводящий в движение посредством тросика каретку
с пером и стрелкой. Поршень 10 сервомеханизма будет перемещаться, поворачивая вы­
ходной вал 8, тем самым
А
Рис. 4
меняя натяжение пружины обратной связи 5 до тех пор, пока создаваемый натяжением
пружины момент не уравновесит момент, созданный сильфоном 3. Новому состоянию
равновесия соответствует новое положение стрелки прибора.
В приборах модификации «КП» и «КЭ» при изменении входного сигнала, посту­
пающего в измерительный механизм, выходной вал 8 поворачивается на угол пропорцио­
нальный корню квадратному из величины этого изменения.
Извлечение корня квадратного осуществляется профильным кулачком 7, выпол­
ненным по параболическому закону и воздействующим на пружину обратной связи 5.
56
VIII. ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Пневматические регуляторы (регулирующие устройства) работают с первичными
преобразователями, приборами контроля и другими устройствами со стандартными вход2 тПневматические
—
г
ными и выходными сигналами в диапазоне 0.02-0.1 МПа (0.2-1 кгс/см“).
регуляторы используют для автоматического управления технологическими процессами
по одному из выбранных законов регулирования: позиционному, пропорциональному,
пропорционально-интегральному, пропорционольно-дифференциальному и пропорционально-интегрально-дифференциальному.
Для своей работы пневматические регуляторы используют энергию сжатого воздуха с давлением питания 0.14 МПа ± 10 % (1.4 кгс/см“ ± 10 %) и могут быть установлены
во взрыво- и пожароопасных помещениях.
В зависимости от аппаратурного решения их подразделяют на на пневматические
регуляторы приборного типа для установки внутри контрольно-измерительных приборов
и регуляторы системы «Старт», построенные на базе элементов УСЭППА.
Рассмотрим устройство, работу и способы проверки пневматических регуляторов
системы «Старт», нашедшие широкое применение на нашем предприятии.
Позиционный регулятор типа ПР1.5
Регулятор типа ПР1.5 предназначен для двухпозиционного регулирования и сиг­
нализации отклонения текущего значения регулируемого параметра от заданного значеНастроенный на максимум регулятор выдаёт верхний дискретный пневматиче­
ский сигнал с выходным давлением Рвых от 0.11 до 0.14 МПа (от 1.1 до 1.4 кгс/см2) при
превышении регулируемым параметром заданного значения, что соответствует дискрет­
ному сигналу «1». Если параметр меньше заданного значения, на выходе регулятора уста­
навливается нижний дискретный пневматический сигнал с выходным давлением Рвых = 0
- 0.01 МПа (от 0 до 0.1 кгс/см2), что соответствует дискретному сигналу «0». Регулятор
настроенный на минимум, выдаёт верхний сигнал, когда параметр становится ниже за­
данного значения.
Регулятор типа ПР1.5 (рис. 1) состоит из трёхмембранного элемента сравнения 3,
усилителя 4 и постоянного дросселя 2. Установка заданного значения регулятору произ­
водится винтом задатчика 1 по манометру М. Регулятор настраивается на максимум или
минимум диск-переключателем входных каналов П.
57
Предмонтажная проверка регулятора ПР1.5 включает проверки диапазона изме­
нения выходного сигнала и исправности задатчика, определение основной погрешности и
дифференциала срабатывания.
Принципиальная схема и схема проверки регулятора ПР1.5 приведены на рис. 1.
Проверка исправности задатчика проводится плавным вращением его винта, при
этом давление задания, контролируемое манометрами М01 и М, должно непрерывно изменяться в диапазоне 0.02 - 0.1 МПа (0.2 - 1 кгс/см ).
При проверке диапазона измерения выходного сигнала винтом задатчика 1 регулятора по манометру М01 устанавливают давление задания Рз = 0.06 МПа (0.6 кгс/см ). За­
тем внешним задатчиком ЗД изменяют входное давление Рп от 0.02 до 0.1 МПа (от 0.2 до
1.0 кгс/см2). При этом давление на выходе регулятора Рвых, контролируемое манометром
М03, должно изменяться скачком от значения не более 0.11 МПа (1.1 кгс/см2), если регу­
лятор настроен на максимум, или в обратном направлении, если на минимум.
При определении основной погрешности (регулятор настроен на максимум) уста­
навливают давление задания Рз = 0.03 МПа (0.3 кгс/см2). Затем задатчиком ЗД увеличи­
вают давление Рп до тех пор, пока регулятор не сработает, т.е. на выходе не установится
максимальный сигнал.
Основную приведённую погрешность (%) определяют по формуле:
у = (Рп - Рз) 100/ АРвых,
где (Рп - Рз) - разность между текущим и заданным значениями параметра в момент сра­
батывания регулятора; АРвых - диапазон изменения выходного сигнала, равный 0.08 МПа
(0.8 кгс/см2).
Продолжают проверку, последовательно устанавливая Рз = 0.06 и 0.09 МПа (0.6 и
0.9 кгс/см ). То же осуществляют при уменьшении Рп при тех же значениях Рз, фиксируя
срабатывание регулятора.
При настройке регулятора на минимум проверка осуществляется способом, ана­
логичным приведённому выше. Величина погрешности не должна превышать ± 0.5 %.
Определение дифферинциала срабатывания проводится при трёх значениях дав­
ления задания Рз = 0.03; 0.06; 0.09 МПа (0.3; 0.6; 0.9 кгс/см2). Изменяя Рп относительно
задания, фиксирует срабатывание регулятора при подходе к заданию слева и справа (Р'п и
Р''п).
Величина дифференциала срабатывания (%) определяется как
£ = (Р'п - Р"п) 100/АРвых.
Расчётная величина s не должна превышать ± 1 %.
Основные неисправности регулятора ПР1.5 приведены в таблице 1.
Таблица 1
Неисправности
Причина
Способ устранения
За датчиком регулятора не
Засорился постоян­ Прочистить дроссель иглой
устанавливается
нужное ный дроссель задатчика
давление задания
Неисправность эле­ Проверить
работоспособность
Выходное давление отсут­
ствует или изменяется мед­ мента сравнения или элемента сравнения и усилителя
усилителя мощности
путём подсоединения маномет­
ленно
ров к их выходам, произвести
регулировку взаимного располо­
жения сопл и мембранного блока
с помощью регулировочных вин­
тов
Величина
основной по­
Разрегулирован эле­ То же
грешности или дифферен­ мент сравнения
циала срабатывания превы­
шает допустимое значение
58
Пропорциональный регулятор ПР2.8
Регулятор ПР2.8 имеет линейные статические характеристики и предназначен для
получения непрерывного пропорционального регулирующего воздействия на исполни­
тельный механизм при отключении регулируемого параметра от заданного значения.
Настроенный на прямое регулирование регулятор при отклонении текущего зна­
чения от заданного вырабатывает на выходе сигнал, пропорциональный величине этого
отклонения. При настройке на обратное регулирование выходной сигнал регулятора также
пропорционален отклонению текущего значения от заданного, но знак изменения сигнала
на выходе не совпадает со знаком отклонения на входе.
т е
6
.5 r f e
L
т
0
І>
Ж
о
--Ч
Ч/lW
Л
т “Ч й >
V
§
)—<
<45
—’
MOJJ 0
Э-
№
■0
пт
s i.
* " 0 -4
Я?
W'
мои(? )
ЗДІ
UJ2
0
Рис. 2
Регулятор типа ПР2.8 (рис.2) состоит из пятимембранного элемента сравнения 4,
повторителя-усилителя мощности 5, задатчика 10, отключающего реле 6, двух дроссель­
ных сумматоров в прямом канале (дроссели 1, 2, 3) и в линии обратной связи (дроссели 7,
8, 9). Настройка регулятора на прямое и обратное регулирование производится дискпереключателем П.
Наличие двух дроссельных сумматоров позволяет проводить плавную настройку
предела пропорциональности в диапазоне 2 - 3000 %. Настройку предела пропорциональ­
ности в диапазоне 2 - 100 % проводят переменным дросселем 8, установив предваритель­
но дроссель 3 на отметку 100 %, что соответствует его закрытию. Настройку предела про­
порциональности в диапазоне 100-3000 % проводят переменным дросселем 3, при этом
дроссель 8 ставят на отметку 100 % (соответствует его закрытию). Начальное давление Рн,
определяющее рабочую точку регулятора, устанавливается задатчиком 10.
Предмонтажная проверка регулятора ПР2.8 включает проверки: диапазона из­
менения выходного сигнала, смещения контрольной точки, градуировки органов настрой­
ки предела пропорциональности, исправности задатчика и отключающего реле.
Проверка работы узла задатчика. Для контроля начального давления Рн под­
ключают образцовый манометр МОЗ, предварительно заменив заглушку задатчика 10
штуцером. При вращении регулировочного винта задатчика начальное давление Рн долж59
но изменяться плавно в диапазоне от ) до 0.1 МПа (от 0 до 1.0 кгс/см2). В противном слу­
чае необходимо прочистить дроссельіі, продуть задатчик и, если это не помогает произ­
вести его ремонт.
Проверка диапазона изменения выходного сигнала. Диск настройки предела про­
порциональности в диапазоне 2 - 100 % устанавливается в положение 2 %, а диск на­
стройки предела пропорциональности 100 - 3000 % - на 100 %. Далее винтом задатчика 10
устанавливают давление Рн = 0.06 МПа (0.6 кгс/см ). Плавно изменяют Рп от 0.02 до 0.1
МПа (от 0.2 до 1.0 кгс/см2), при этом давление на выходе Рвых должно измениться от
нижнего до верхнего граничных значений при настройке регулятора на прямое регулиро­
вание (переключатель П в положении «ПРЯМ.») или от верхнего до нижнего граничных
значений при настройке регулятора на обратное регулирование (переключатель П в поло­
жении «ОБРАТИ.»). Нижнее граничное значение соответствует диапазону от 0 до 5 кПа (
от 0 до 0.05 кгс/см2) до давления питания.
Проверка смещения контрольной точки (основной погрешности) регулятора про­
водится на всех оцифрованных отметках шкалы пределов пропорциональности (или для 3
- 4 промежуточных значений). При проверке смещения контрольной точки для пределов
пропорциональности (ПП) в диапазоне 2 - 100 % задают величину давления задания и ве­
личину начального давления Рз = Рн = 0.03 МПа (0.3 кгс/см2). Затем изменяют величину
давления переменной до тех пор, пока давление на выходе регулятора не станет стабиль­
ным и равным 0.03 МПа (0.3 кгс/см2). По полученным данным определяют смещение кон­
трольной точки регулятора по формуле:
ЛР = Рп —Рз.
При проверке смещения контрольной точки для пределов пропорциональности
(ПП) в диапазоне 100 - 3000 % задают величину давлений задания, переменной и начального давления Рз = Рп = Рн = 0.03 МПа (0.3 кгс/см ). Фиксируют значение давления на
выходе регулятора Рвых и определяют смещение контрольной точки регулятора по фор­
муле:
АР = Рвых - Рн.
При этом значение величины смещения контрольной точки АР не должно превышать 8 кПа ( 0.008 кгс/см ) в каждой точке измерения.
При проверке градуировки шкалы пределов пропорциональности устанавливают
диск шкалы на проверяемую отметку. По манометрам МОІ - МОЗ задают давление Рн =
Рп = Рз = 0.06 МПа ( 0.6 кгс/см2), после фиксации выходного давления (Рвых = Рн = 0.06
МПа) наносят возмущение на входе регулятора изменением давления переменной на ве­
личину АР.
Если величина установленного ПП < 100 %, то переменную изменяют до тех пор,
пока давление на выходе не изменится на АРвых = 0.03 МПа, т.е. пока выходное давление
Рвых не станет равным 0.03 либо 0.09 МПа (0.3 либо 0.9 кгс/см2).
Если величина установленного ПП > 100 %, то переменную изменяют на АРп =
0.03 МПа (0.3 кгс/см ), т.е. пока её значение не станет равным 0.03 либо 0.09 МПа (0.3 ли­
бо 0.9 кгс/см2), при этом на выходе регулятора установится определённое давление Рвых.
На каждой проверяемой отметке ПП проверку проводят 3-4 раза, меняя напрвление изменения Рп. Фактическое значение величины ПП (%) определяют по формуле:
П П = (АРп /АРвых) 100.
Если полученное значение ПП не соответствует значению, нанесённому на шкале,
то необходимо снять шкалу переменных дросселей 3 и 8 и произвести её тарировку с по­
мощью регулировочных винтов.
Проверка отключающего реле проводится в следующем порядке. С помощью задатчика ЗД1 устанавливают на выходе давление Рвых = 0.1 МПа (1.0 кгс/см ) и задатчи­
ком ЗДЗ по манометру МТ2 - командное давление Рк = 0.12 МПа (1.2 кгс/см2). Включают
пневмотумблер ПТ и с помощью пенообразующего раствора проверяют утечку воздуха на
выходе регулятора, которая не допускается.
60
Основные неисправности пропорционального регулятора ПР2.8 приведены в
табл. 2.
Таблица 2
Неисправность
Причина
Способ устранения
Задатчиком регулятора не Засорился
постоянный Прочистить дроссель иглой,
устанавливается нужное на­ дроссель 11 задатчика провести ревизию задатчика.
чальное давление либо оно 10.
нестабильно.
Отсутствует выходное давле­ Неисправности в элемен­ Проверить работоспособность
ние или оно сбрасывается не те сравнения, усилителе элемента сравнения, усилите­
мощности и отключаю­ ля, отключающего реле путём
полностью.
подсоединения манометров к
щем реле.
их выходам, провести регули­
ровку взаимного расположе­
ния сопл и мембранного блока
с помощью регулировочных
винтов.
Величина основной погреш­ Разрегулирован элемент То же
ности регулятора (смещение сравнения.
контрольной точки) больше
допустимого значения.
Пропорционально-интегральный регулятор ПР3.31
Регулятор типа ПР3.31 предназначен для получения непрерывного пропорционально-интегрального регулирующего воздействия на исполнительный механизм при от­
клонении регулируемого параметра от заданного значения. Регулятор (рис. 3) имеет ли­
нейные статические характеристики и состоит из пятимембранного 1 и трёхмембранного 6
элементов сравнения, повторителя-усилителя мощности 8, повторителя 11, ёмкости 12,
двух дроссельных сумматоров в прямом канале (дроссели 2 и 3) и в линии отрицательной
обратной связи (дроссели 4, 5), регулируемого дросселя 13, включающих реле 9 и 14. Для
настройки регулятора на прямое и обратное регулирование в нём установлен диск пере­
ключатель П. Нерегулируемый дроссель ПД1 встроен в повторитель-усилитель мощности,
а дроссель ПД2 вставлен во входной канал этого же элемента.
Отличительной конструктивной особенностью регулятора ПР3.31 является нали­
чие двух органов настройки предела пропорциональности в диапазоне 2 - 3000 %, что
значительно повышает плавность настройки. При настройке предела пропорциональности
в диапазоне 100 - 3000 % дроссель 5 необходимо поставить на отметку 100 %, что соот­
ветствует полному его открытию, а дроссель 2 устанавливают на требуемую отметку. При
работе регулятора в диапазоне настроек предела пропорциональности от 2 до 100 % дрос­
сель 2 ставят на отметку 100 %, а дроссель 5 устанавливают на требуемую отметку. Вре­
мя интегрирования (Ти) настраивается дросселем 13 (минимальное значение Ти соответ­
ствует полностью открытому дросселю).
Настройки предела пропорциональности и времени интегрирования взаимонезависимы.
Выходное давление АРвых регулятора ПР3.31 при наличии рассогласования на
входе изменяется по следующей зависимости:
1 с
АР = Кр • АРвх н-----[ АРвх • d t,
Ти J
61
где Кр = ----- *100% - коэффициент усиления регулятора; АРвх - рассогласование между
текущим и заданным значениями регулируемого параметра.
Предмонтажная проверка регулятора типа ПР3.31 включает проверки: диапа­
зона изменения входного сигнала, смещения контрольной точки и вариации, градуировки
органов настройки ПП и времени интегрирования, исправности отключающих реле.
Проверку диапазона изменения выходного сигнала проводят так же, как и провер­
ку регулятора ПР2.8 плавно изменяя Рп от 0.02 до 0.1 МПа (0.2 - 1.0 кгс/см2) при Рз = 0.06
т-г
2
«-*
МПа (0.6 кгс/см“). Диски настройки предела пропорциональности при этом должны быть
установлены на минимальном значении ПП, а диск настройки времени интегрирования Ти
- на максимальную отметку.
Проверку смещения контрольной точки (основной погрешности) рекомендуется
проводить для значений пределов пропорциональности ПП = 40; 100; 250; 1000; 3000 %.
Диск дросселя времени интегрирования устанавливают на отметку, соответствующую
минимальному времени интегрирования и по манометру М 02 задают давление задания Рз
0.03 МПа (0.3 кгс/см2). Изменяя по манометру МОІ давление переменной Рп добиваются,
чтобы давление на выходе Рвых стало стабильным и равным 0.03 МПа (0.3 кгс/см2). Сме­
щение контрольной точки, МПа:
АР = Рп - Р з.
Смещение контрольной точки подвергают трёхкратной проверке в каждой точке
при прямом и обратном ходах (подводе Рп к Рз с обеих сторон).
Из полученных данных выбирают наибольшую величину АР и сравнивают её с
допустимым значением: АРдоп = 4 кПа (0.004 кгс/см2).
62
Вариацию показаний определяют как наибольшую разность между смещениями
контрольной точки, соответствующими одному и тому же выходному давлению при пря­
мом и обратном ходах, она не должна превышать абсолютного значения основной по­
грешности. При значениях смещения контрольной точки и вариации больше допускаемых
регулируют элемент 1.
Проверка градуировки органа настройки предела пропорциональности проводит­
ся на всех оцифрованных отметках. Для этого при полностью открытом дросселе времени
интегрирования (Ти = 0.1) устанавливают контрольную точку Рн = Рз = Рвых = 0.06 МПа
(0.6 кгс/см ). Затем дроссель времени интегрирования закрывают (Ти = оо), при этом регу­
лятор становится пропорциональным. Проверку шкалы предела пропорциональности про­
водят также, как для регулятора ПР2.8.
Проверку градуировки шкалы дросселя времени интегрирования проводят на всех
оцифрованных отметках, для чего указатель предела пропорциональности устанавливают
на отметку 100 % и при открытом дросселе времени интегрирования (Ти = 0.1) регулятор
выводят на контрольную точку при Рп = Рз = Рвых =0.06 МПа (0.6 кгс/см ). Затем дрос­
сель времени интегрирования устанавливают ан проверяемую отметку и изменяют Рп на
±0.015 МПа (0.15 кгс/см ). Выходное давление Рвых в начальный момент времени изме­
няется безинерционно под действием пропорциональной составляющей на величину:
лреы* = А/>* - 1 0 0 % .
ПП
Затем по секундомеру фиксируют время, за которое выходное давление изменит­
ся ещё на ± 0.015 МПа (0.15 кгс/см2). Отсчитанное время является временем интегрирова­
ния.
На каждой отметке шкалы времени интегрирования проверку проводят 3-4 раза
при различных направлениях изменения давления и контрольной точки. Действительное
значение времени интегрирования определяют как среднеарифметическое четырёх значе­
ний, полученных экспериметально. Полученные значения времени интегрирования не
должны превышать допустимые: 0.015 мин для отметки шкалы 0.05 мин, 0.1 мин для 0.5
мин, 0.2 мин для 1 мин, 2 мин для 5мин, 8 мин для 20 мин.
При необходимости проводят корректировку времени интегрирования с помощью
регулировочных винтов, находящихся под табличкой на диске дросселя 13.
При проверке исправности работы отключающих реле предел пропорционально­
сти устанавливается равным 100 %, и при открытом дросселе времени интегрирования ус­
танавливается контрольная точка Рп = Рз = Рвых = 0.06 МПа. Затем дроссель времени ин­
тегрирования закрывают и изменяют давление переменной на ± 0.015 МПа. После изме­
нения выходного давления на Рвых = ± ^-^15 • 1 00%МПа дальнейшее изменение Рвых не
ПП
должно происходить, либо должно изменяться очень медленно (не более 150 Па в мин). В
этом случае можно считать, что сопло С2 элемента 9 герметично.
Причиной изменения Рвых может быть также утечка воздуха через закрытый
дроссель 13. Поэтому при изменении давления Рвых необходимо вначале проверить на
герметичность указанный дроссель. Если утечка воздуха есть, то винтом, расположенным
под табличкой диска дросселя 13 против отметки « о о » , добиваются её устранения. Затем
повторно проверяют герметичность сопла Сг, предварительно поставив на место заглушку
камеры Д элемента 1.
Затем проверяют на герметичность сопло Сь При негерметичности сопл отклю­
чающих реле их разбирают, прочищают, и при необходимости приклеивают резиновую
заслонку либо заменяют её новой.
Основные неисправности пропорционально-интегрального регулятора ПР3.31
приведены в таблице 3.
63
Таблица 3
Неисправность
Причина
Способ устранения
Контрольная
точка Разрегулированы или не­ Проверить работоспособность эле­
смещена больше до­ исправны элементы срав­ ментов сравнения, произвести регу­
лировку взаимного расположения
пустимого значения.
нения 1 и 6.
сопл и мембранного блока с помо­
щью регулировочных винтов.
Отсутствует выход­ Неисправность
отклю­ Проверить, отрегулировать положе­
ное давление
чающего реле.
ние шарикового клапана.
Забит дроссель питания.
Продуть, прочистить иглой.
Нарушена герметичность Проверить герметичность обмылисоединительных трубок и ванием мест соединений, подтянуть
элементов, элементов и винты, заменить прокладки.
платы, межкамерных мем­
бран в самих элементах.
64
IX. ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ
Давление характеризуется отношением силы, равномерно распределенной по пло­
щади и нормальной к величине этой площади.
По принципу действия приборы для измерения давлений делятся на жидкостные,
деформационные, грузопоршневые и электрические.
В зависимости от измеряемой величины различают следующие приборы: мано­
метры - для измерения избыточных давлений; вакуумметры - для измерения разрежения
мановакуумметры - для измерения избыточных давлений; напоромеры, тягомеры и тягонапоромеры - для измерения малых избыточных давлений и разрежений (до нескольких
кПа); дифференциальные манометры (дифманометры) - для измерения перепадов (разно­
сти) давлений.
1. Жидкостные манометры
Принцип действия жидкостных манометров основан на уравновешивании измеряе­
мой величины высотой столба рабочей жидкости. В качестве рабочей жидкости, в зависи­
мости от величины измеряемого избыточного давления или разряжения, а также от хими­
ческих свойств измеряемого вещества, применяются: вода, спирт, ртуть, минеральные
масла небольшой вязкости.
Простота конструкции и надежность гидростатического метода, лежащего в основе
работы этих приборов, а также достаточно высокая точность - причины их широкого
применения, как для лабораторных, так и для технических измерений небольших избы­
точных давлений, разрежений, разности двух давлений, атмосферного давления. Образцо­
вые жидкостные приборы служат для поверки некоторых типов манометров, вакууммет­
ров, тягомеров, напоромеров, барометров, дифференциальных манометров.
Наиболее распространенным и самым простым по устройству является U-образный
прибор (рис. 1). Он состоит из изогнутой в виде буквы U стеклянной трубки 4, примерно
до половины заполненной рабочей жидкостью 3. С помощью скобок 1 трубка прикрепле­
на к доске 2, между ветвями трубки размещена шкала 5.
Когда давления Р1 и Р2 равны, уровни жидкости в левой и правой ветвях Uобразной трубки находятся против нулевой отметки шкалы. При неравенстве давлений,
например, Р1>Р2, уровень в левой ветви опустится, а в правой - поднимется. Отсчет нуж­
65
но производить дважды: от нуля вниз до уровня в левой ветви и от нуля вверх до уровня в
правой ветви; полученные значения отсчетов (их сумма равна h) надо сложить. Это реко­
мендуется делать, поскольку трубки обеих ветвей прибора могут немного отличаться по
диаметру. В этом случае жидкость будет опускаться (в левой) и подниматься (в правой)
ветвях на неодинаковое количество делений.
Значение измеряемой величины (разность давлений Р1 и Р2) определяется по шкале
прибора:
Pl-P2=hpg,
где р - плотность рабочей жидкости; g - ускорение силы тяжести.
2. Деформационные манометры
В этих приборах измеряемое давление или разрежение уравновешивается силами
упругого противодействия различных чувствительных элементов, деформация которых,
пропорциональная измеряемому параметру, через рычаги передается на стрелку или перо
прибора. При снятии давления чувствительный элемент возвращается в первоначальное
положение под воздействием упругой деформации. Деформационные манометры нашли
широкое применение в промышленности, что обусловлено простотой и надежностью кон­
струкции, наглядностью показаний, малыми габаритами, высокой точностью и широкими
пределами измерения.
В качестве измерительных элементов деформационных манометров и измери­
тельных преобразователей давления, разрежения и перепада давлений используют одновитковую трубчатую пружину (рис. За), сильфон (рис. 36), мембранную коробку (рис. Зв),
многовитковую трубчатую пружину (рис. Зг), вялую мембрану (рис. Зд), жесткую мем­
брану (рис. Зе).
В трубчато-пружинном манометре с одновитковой трубчатой пружиной (рис. 4),
получившем наибольшее распространение, чувствительным элементом является трубча­
тая пружина 2, представляющая собой полую трубку овального или эллиптического сече­
ния, согнутую по дуге окружности на 180-270°. Маленькая ось эллипса трубки располо­
жена параллельно, а большая - перпендикулярно плоскости чертежа. Один конец трубча­
той пружины жестко соединен с держателем 1, укрепленным винтами в круглом корпусе
3 манометра. Держатель имеет резьбовой ниппель, предназначенный для крепления при­
бора на трубопроводе или аппарате, в котором измеряется давление. Свободный конец
пружины поводком связан с передаточным механизмом 7 , состоящим из зубчатого секто­
ра и сцепленной с ним шестеренки, на ось которой насажена стрелка 4.
£
Рис. 3
66
Для устранения мертвого хода стрелки, вызванного люфтами в соединениях, пере­
даточный механизм снабжен упругим спиральным волоском 5. Внутренний конец волоска
крепится на оси стрелки, а внешний - на неподвижной плате механизма. Волосок посто­
янно прижимает шестеренки со стрелкой в направлении, противоположном перемещению
звеньев механизма под действием давления, что устраняет влияние люфтов в соединени­
ях, и стрелка прибора начинает двигаться одновременно с отклонением чувствительного
элемента.
Под действием давления среды, сообщающийся с внутренней полостью трубчатой
пружины, последняя несколько распрямляется, свободный конец перемещается и тянет за
собой поводок, который через передаточный механизм вызывает перемещение стрелки по
шкале прибора. Раскручивание трубчатой пружины, согнутой по дуге окружности, обу­
словлено тем, что при подаче давления ее эллиптическое сечение стремиться перейти в
круглое. При этом малая ось эллипса, расположенная в плоскости чертежа, увеличивается,
и волокна пружины, находящиеся на радиусе гі, переходят на больший радиус гГ, а во­
локна, находящиеся на радиусе г2, переходят на меньший радиус г2\ Так как длина труб­
чатой пружины остается неизменной, а один конец ее жестко заделан в держателе, в пру­
жине возникают внутренние напряжения, приводящие к ее раскручиванию и перемеще­
нию свободного конца. Последний и, следовательно, стрелка прибора перемещаются
пропорционально изменению измеряемого давления, поэтому манометр имеет равномер­
ную шкалу.
Р
Рис. 4
3. Грузопоршневые манометры
В этих приборах измеряемое давление определяется по величине нагрузки, воздей­
ствующей на поршень определенной площади. Грузопоршневые манометры имеют высо­
кую точность (0,02; 0,05; 0,2) и широкий диапазон измерения (0,1- 250 МПа). Обычно их
применяют для градуировки и поверки грузопоршневых манометров.
67
Рис. 5
Грузопоршневой образцовый манометр МП-60 (рис. 5), предназначенный для по­
верки технических манометров с одновитковой трубчатой пружиной состоит из верти­
кального цилиндра 8 с тщательно пригнанным стальным поршнем 5, на верхнем конце
которого закреплена тарелка 7 для укладки образцовых грузов 6, имеющих форму дисков.
Воронка 4 служит для заполнения прибора минеральным маслом. Прибор имеет поршне­
вой пресс 1 с манжетным уплотнением. Для установки поверяемых манометров предна­
значены штуцеры 3 и 10. Игольчатые вентили 2, 9, и 11 служат для перекрытия каналов,
вентиль 12 для спуска масла. Создаваемое грузом давление Р = т /А , где т - масса поршня
с тарелкой и грузом; А - эффективная площадь поршня, за которую принимают сумму
площади сечения поршня и половину площади кольцевого зазора между поршнем и ци­
линдром (обычно А=0,996-1,004см2). Пределы измерения прибора 0 - 6 МПа. Класс точ­
ности 0,05.
4. Электрические манометры
Действие этих приборов основано на зависимости электрических параметров пре­
образователя давления от величины измеряемого давления. К ним относятся: пьезометри­
ческие манометры, в которых используется зависимость электрического заряда пьезоэле­
мента от измеряемого давления; манометры сопротивления, основанные на зависимости
электрического сопротивления чувствительного элемента от измеряемого давления; иони­
зационные манометры, действие которых базируется на зависимости силы тока положи­
тельных ионов, образованных в результате ионизации молекул разреженного газа, от из­
меряемого давления; а также радиоизотопные манометры, в которых для ионизации газа
используется излучение радиоизотопных источников.
5. Преобразователи давления электрические
с силовой компенсацией
Преобразователи давления измерительные с электрическим токовым выходным
сигналом входят в общий комплекс унифицированной системы взаимозаменяемых ком­
пенсационных преобразователей ГСП.
68
Измерительные преобразователи давления (в дальнейшем преобразователи) предна­
значены для непрерывного преобразования давления (абсолютного, избыточного или вакуумметрического) в пропорциональный электрический токовый сигнал дистанционной
передачи.
Преобразователи используют в комплекте с вторичными приборами, регуляторами
и другими устройствами автоматики, машинами центрального контроля и системами
управления, работающими от стандартного входного сигнала в виде электрического по­
стоянного тока 0-20, 4-20 или 0-5 мА.
Преобразователи построены по блочному принципу. Основным блоком преобразо­
вателя является электросиловой преобразователь.
Каждый преобразователь состоит из электросилового линейного преобразователя и
измерительного блока.
Принцип действия преобразователя основан на электрической силовой компенсаУсилие, с которым измерительный блок воздействует на электросиловой преобра­
зователь, создает момент М, (рис. 6) вызывающей незначительные перемещения рычаж­
ной системы передаточного механизма и связанного с ним плунжера 6 индикатора рассо­
гласования. Индикатор рассогласования преобразует это перемещение в управляющий
сигнал электрического тока, поступающий на вход электронного усилителя 7. Выходной
сигнал усилителя в виде постоянного тока поступает на обмотку катушки силового меха­
низма и одновременно в последовательно соединенную с ней линию дистанционной пере­
дачи.
и
а
и
5
Рис. 6
В электросиловом преобразователе типа П-Э1 (рис. 6а) взаимодействие постоян­
ного магнита 10 с магнитным полем, создаваемым током. Протекающим по обмотке под­
вижной катушки 9, создает пропорциональное этому току усилие.
69
В электросиловом преобразователе типа П-ЭР1 (рис. 66) взаимодействие электро­
магнита 12 с подвижным сердечником 11 создает усилие, пропорциональное квадрату то­
ка, протекающего по обмотке этого электромагнита.
Усилие, создаваемое силовым механизмом, уравновешивает через рычажную сис­
тему входное усилие.
6. Преобразователи давления и разрежения
с пневматическим выходом
Преобразователи давления и разрежения измерительные (в дальнейшем - преобра­
зователи) предназначены для работы в системах автоматического управления, контроля и
регулирования производственных процессов с целью выдачи информации об измеряемом
давлении или разрежении газа или жидкости в виде унифицированного пневматического
аналогового выходного сигнала. Преобразователи входят в общий комплекс унифициро­
ванной системы взаимозаменяемых компенсационных преобразователей ГСП типа МАСП, МС-П, ВС-П, МВС-П, ГС-П, НС-П, ТНС-П.
По устойчивости к воздействию окружающей среды преобразователи исполняются в
двух исполнениях: защищенном от попадания внутрь пыли и воды и защищенном от аг­
рессивной среды (коррозионно-стойком), содержащей сероводород, аммиак и другие сме­
си, агрессивные к меди и медным сплавам.
Измерительные пневматические преобразователи предназначены для непрерывного
преобразования давления, разрежения, тяги, перепада в унифицированный пневматиче­
ский сигнал.
Преобразователи могут применяться во взрывоопасных помещениях.
Преобразователи построены по блочному принципу. Основным блоком преобразо­
вателя является пневмосиловой преобразователь
Пневмосиловые преобразователи состоят из чувствительного элемента, силового
узла и усилителя. Принцип действия приборов основан на пневматической силовой ком­
пенсации.
Пневмосиловой преобразователь предназначен для непрерывного преобразования
усилия, развиваемого чувствительным элементом преобразователя, в стандартный пнев­
матический выходной сигнал и может использоваться в различных преобразователях, в
которых изменение измеряемого параметра может быть преобразовано в изменение силы.
В преобразователях с пневмосиловой компенсацией измеряемая величина воздейст­
вует на чувствительный элемент и преобразуется в силу, которая автоматически уравно­
вешивается усилием, развиваемым давлением воздуха в сильфоне обратной связи. Это
давление и является выходным сигналом. Все преобразователи конструктивно выполнены
одинаково, и отличаются друг от друга только типом измерительного элемента.
Преобразователи типов ТС-П1, ТС-П2, ТС-ПЗ, НС-П1, НС-П2, НС-ПЗ, ТНС-П 1,
ТНС-П2, ТНС-ПЗ, МАС-П1, МАС-П2, МАС-ПЗ, используют при измерении параметров
газа. Все остальные для измерения параметров газа и жидкости. При измерении давления
или разрежения жидкости для преобразователей типов МС-П1, МС-П2, МС-П 12, МС-П13,
ВС-П1, МВС-П1 и МВС-П2 допускается дополнительная погрешность 0,5 кПа.
Рассмотрим принципиальную схему пневмосилового преобразователя (рис. 7). Уси­
лие, с которым измерительный блок воздействует на пневмосилвой преобразователь, соз­
дает момент М, вызывающий незначительные перемещения рычажной системы переда­
точного механизма и связанной с рычагом 1 заслонки 8 относительно неподвижного сопла
5.
70
5
Н
3
2
1
9
Рис. 7
Возникший в линии сопла сигнал управляет давлением, поступающим с усилите­
ля мощности 7 в сильфон обратной связи 6.
Пневмосиловой преобразователь состоит из следующих основных элементов: пере­
даточного механизма, сильфона обратной связи, индикатора рассогласования и усилителя
мощности.
Передаточный механизм смонтирован между двумя платами. Усилие передается от
Т-образного рычага к Г-образному рычагу через подвижную опору.
Индикатор рассогласования выполнен по системе сопло-заслонка. Заслонка закреп­
лена на Т-образном рычаге при помощи двух параллельных плоских пружин. При нор­
мальной работе заслонка перемещается вместе рычагом относительно неподвижного со­
пла. При перегрузках заслонка плотно закрывает отверстие сопла и остается неподвижной
при дальнейшем перемещении Т-образного рычага пневмосилового преобразователя.
Для устранения автоколебания предусмотрен жидкостной демпфер. В демпфере
используют полиметилсилоксановую жидкость ПМС вязкостью от 15000 до 30000 ст. До­
пускается использование других жидкостей той же вязкости, в том числе демпферного
масла ДС-1. Их применение может быть ограничено температурами, при которых эти
жидкости замерзают.
7. Манометр сильфонный МС-П1 (МС-П2)
Манометр сильфонный МС-П1 (МС-П2) предназначен для непрерывного преобра­
зования величины измеряемого избыточного давления газов или жидкостей в пропорцио­
нальный пневматический сигнал давлением от 0,02 до 0,1 МПа.
Манометр (рис. 8) состоит из измерительного блока и унифицированного пневма­
тического узла. Чувствительным элементом измерительного блока этого прибора является
сильфон. Унифицированный преобразователь, построенный на принципе пневматической
силовой компенсации, включает в себя управляющее устройство «сопло - заслонка» с
системой рычагов, усилитель и сильфон обратной связи.
Измеряемое давление Ризм подводится к сильфону 1 измерительного блока. При
изменении измеряемого давления несколько перемещаются рычаги 3 и заслонка 6 относи­
тельно сопла 5. Система сопло-заслонка преобразует это перемещение в сигнал давления
сжатого воздуха, поступающий на усилитель 7. Выходной сигнал Рвых с усилителя на­
правляется в пневматическую линию к вторичному прибору и в сильфон обратной связи
8, уравновешивающий при помощи системы рычагов измеряемое давление Ризм. Диапа­
зон измерений прибора может регулироваться изменением в пределах 1:10 его передаточ­
ного отношения перемещением опоры 2 вдоль рычагов 3. Начальное значение выходного
сигнала 0,02 МПа устанавливается пружиной - корректором нуля 4.
71
Рис. 8
Рис. 9
Рассмотрим схему усилителя прибора (рис. 9). Воздух питания под давлением
0,14МПа поступает в камеру высокого давления 11, откуда через шариковый клапан 1 на­
правляется в камеру 7 и к соплу 3. При полностью открытом сопле жесткость пружины 10
и воздействие воздуха на эффективную площадь мембраны 2 обеспечивают в камерах 6 и
9 давление, равное 4,0-6,7 кПа (30-50 мм. рт. ст.). Когда же измеряемое давление Ризм
увеличивается, заслонка 12 приближается к соплу 3,вызывая возрастание давления в ка­
мере 7. При этом мембрана 4 закрывает шариковый клапан 5 сброса воздуха в атмосферу,
мембрана 2 открывает шариковый клапан 1 и давление Рвых увеличивается до восстанов­
ления равновесия сил на мембранах 2 и 4.
В случае уменьшения измеряемого давления Ризм заслонка 12 отходит от сопла 3,
силы на мембранах действуют в обратном направлении, и Рвых уменьшается.
МС-П2 отличается от МС-П1 только размерами чувствительного элемента (вход­
ного сильфона). Эффективная площадь сильфона в МС-П1 - 2 см2, а в МС-П2 - 0.4 см2.
Пределы измерения манометра сильфонного МС-П1 от 0,025 до 0-0,4 МПа, а
МС-П2 от 0.6 до 2.5 МПа; классы точности 0,5; 1,0.
Возможные неисправности и методы их устранения манометров сильфонных МСП1 (МС-П2) приведены в таблице 1.
Таблица 1
Неисправность
Вероятная причина
Метод устранения
1. Выходной сигнал Обрыв или полное засоре­ Устранить обрыв или засорение,
равен нулю.
ние линии питания, соеди­ прочистить, продуть или сменить
нительных линий, засоре­ фильтр или дроссель.
ние фильтра или дросселя
пневмореле.
2. Завышенные зна­ Засорение сопла или не­ Прочистить сопло специальной иг­
чения выходного сиг­ большое
отвёртывание лой.
нала
дросселя пневмореле. На­ Завернуть дроссель.
рушен диапазон настройки. Отрегулировать диапазон настрой­
ки с помощью подвижной опоры
3. Заниженные значе­ Засорение дросселя пнев­ Вывернуть дроссельный винт и
прочистить капиллярную трубку
ния выходного сигна­ мореле
ла.
дросселя иглой, а затем поставить
Выходной сигнал не­
дроссельный винт на место.
стабилен.
72
4. Не удаётся устано­
вить значение выход­
ного сигнала, соот­
ветствующее нулево­
му или начальному
значению измеряемо­
го давления
5. Выходной сигнал
нестабилен.
То же, что и в пп. 2 и 3, а
также неправильная регу­
лировка упоров 2 или ос­
лабление крепления пру­
жины корректора нуля.
Затирание демпфера.
Проверить и, в случае необходимо­
сти, отрегулировать положение
упоров, прочистить дроссель или
сопло, проверить крепление пру­
жины.
Проверить визуально зазор между
поршнем и стаканом демпфера, ус­
тановить поршень таким образом,
чтобы зазор со всех сторон был
одинаковым и чтобы при постоян­
ном входном давлении и повороте
стакана в пределах одного оборота
выходной сигнал устанавливался на
одно и то же значение.
Некачественное крепление Подтянуть все крепёжные винты и
деталей
измерительного болты.
блока и преобразователя.
Разрушение или деформа­ Проверить, нет ли лопнувших или
ция ленточных опор.
прогнутых ленточных опор и, в
случае необходимости, заменить
их.
Повышенная влажность пи­ Обеспечить осушку питающего
тающего воздуха и образо­ воздуха в соответствии с требова­
вание в каналах пневмоси­ ниями ГОСТ 24484-80
стемы конденсата или инея.
6. Значительные ав­ Неправильная регулировка Отрегулировать демпфер.
токолебания выход­ демпфера или неисправ­ Заменить пневмореле.
ного сигнала.
ность пневмореле.
73
X. ИЗМЕРЕНИЕ РАСХОДА ЖИДКОСТЕЙ,
ГАЗОВ И ПАРОВ
Наиболее широко применяющиеся приборы для измерения расходов веществ, про­
текающие по трубопроводам, можно разделить на следующие группы:
1) Расходомеры переменного перепада давления.
2) Расходомеры постоянного перепада давления.
3) Электромагнитные расходомеры.
4) Счетчики.
5) Другие.
1. Расходомеры переменного перепада давления
Расходомеры переменного перепада давления основаны на зависимости от расхо­
да перепада давления, создаваемого устройством, которое установлено в трубопроводе,
или же самим элементом последнего.
В состав расходомера входят: преобразователь расхода, создающий перепад дав­
ления; дифференциальный манометр, измеряющий этот перепад и соединительные (им­
пульсные) трубки между преобразователем и дифманометром. При необходимости пере­
дать показания расходомера на значительное расстояние к указанным трём элементам до­
бавляются ещё вторичный преобразователь, преобразующий перемещение подвижного
элемента дифманометра в электрический и пневматический сигнал, который по линии
связи передаётся к вторичному измерительному прибору. Если первичный дифманометр
(или вторичный измерительный прибор) имеет интегратор, то такой прибор измеряет не
только расход, но и количество прошедшего вещества.
В зависимости от принципа действия преобразователя расхода данные расходо­
меры подразделяются на шесть самостоятельных групп:
1. Расходомеры с сужающими устройствами.
2. Расходомеры с гидравлическим сопротивлением.
3. Центробежные расходомеры.
4. Расходомеры с напорным устройством.
5. Расходомеры с напорным усилителем.
6. Расходомеры ударно-струйные.
Рассмотрим поподробнее расходомеры с сужающим устройством, так как они по­
лучили наибольшее распространение в качестве основных промышленных приборов для
измерения расхода жидкости, газа и пара, в том числе на нашем предприятии. Они осно­
ваны на зависимости от расхода перепада давления, создаваемого сужающим устройст­
вом, в результате которого происходит преобразование части потенциальной энергии по­
тока в кинетическую.
Имеется много разновидностей сужающих устройств. Так на рис.1, а и б показаны
стандартные диафрагмы, на рис. 1, в - стандартное сопло, на рис. 1, г, д, е - диафрагмы
для измерения загрязнённых веществ - сегментная, эксцентричная и кольцевая. На сле­
дующих семи позициях рис. 1 показаны сужающие устройства применяемые при малых
числах Рейнольдса (для веществ с большой вязкостью); так, на рис. 1, ж, з, и изображены
диафрагмы - двойная, с входным конусом, с двойным конусом, а на рис.1, к, л, м, н - со­
пла-полукруга, четверть круга, комбинированное и цилиндрическое. На рис. 1, о изобра­
жена диафрагма с переменной площадью отверстия, автоматически компенсирующая
влияние изменения давления и температуры вещества. На рис. 1, н, р, с, т приведены рас­
ходомерные трубы - труба Вентури, сопло Вентури, труба Далла и сопло Вентури с двой­
ным сужением. Для них характерна очень маленькая потеря давления.
74
е)
ж)
з)
и)
к)
л) м)
н)
І
1
1-1
с)
+
Рис.1
Разность давлений до и после сужающего устройства измеряется дифманометром.
В качестве примера рассмотрим принцип действия приборов 13ДД11 и Сапфир -22ДД.
Принцип действия преобразователей разности давлений 13ДД основан на пнев­
матической силовой компенсации. Схема прибора представлена на рис. 2. В плюсовую 2 и
минусовую 6 полости преобразователя, образованные фланцами 1, 7 и мембранами 3,5
подводится давление. Измеряемый перепад давления воздействует на мембраны, прива­
ренные к основанию 4. Внутренняя полость между мембранами заполнена кремнийорганической жидкостью. Под воздействием давления мембраны поворачивают рычаг 8 на не75
большой угол относительно опоры - упругой мембраны вывода 9. Заслонка 11 перемеща­
ется относительно сопла 12, питаемого сжатым воздухом. При этом сигнал в линии сопла
управляет давлением в усилителе 13 и в сильфоне отрицательной обратной связи 14. По­
следний создает момент на рычаге 8, компенсирующий момент, возникающий от перепада
давления. Сигнал, поступающий в сильфон 14,пропорциональный измеряемому перепаду
давления, одновременно направляется в выходную линию преобразователя. Пружина кор­
ректора нуля 10 позволяет устанавливать начальное значение выходного сигнала, равное
0.02 МПа. Настройка преобразователя на заданный предел измерения осуществляется пе­
ремещением сильфона 14 вдоль рычага 8. Измерительные пневматические преобразовате­
ли других модификаций выполнены аналогично.
Рис. 3
Преобразователи разности давлений Сапфир-2ДД (рис. 3) имеет две камеры:
плюсовую 7 и минусовую 13, к которым подводится давление. Измеряемая разность дав­
лений воздействует на мембраны 6, приваренные по периметру к основанию 9. Фланцы
уплотняются прокладками 8. Внутренняя полость 4, ограниченная мембранами и тензопребразователем 3, заполненная кремнийоранческой жидкостью. Под воздействием раз­
ности давлений мембраны перемещают тягу 11, которая через шток 12 передает усилие на
рычаг тензопреобразователя 3. Это вызывает прогиб мембраны тензопреобразователя 3 и
соответствующий электрический сигнал, передаваемый в электронное устройство 1 через
гермовывод 2.
2. Расходомеры постоянного перепада давления
Принцип их действия основан на восприятии динамического напора контролируе­
мой среды, зависящего от расхода, чувствительным элементом (например, поплавком),
помещенным в поток. В результате воздействия потока чувствительный элемент переме­
щается, и величина перемещения служит мерой расхода.
Приборы, работающие на этом принципе - ротаметры (рис. 4).
76
Рис. 4
Поток контролируемого вещества поступает в трубку снизу вверх и увлекает за
собой поплавок, перемещая его вверх, на высоту Н. При этом увеличивается зазор между
ним и стенкой конической трубки, в результате уменьшается скорость жидкости (газа) и
возрастает давление над поплавком.
На поплавок действует усилие снизу вверх:
G1=P1«S => P1=G1/S
и сверху вниз
G2=P2*S+q => P2=G2/S-q/S,
где Р 1, Р2 - давление вещества на поплавок снизу и сверху;
S - площадь поплавка;
q - вес поплавка.
Когда поплавок находится в состоянии равновесия G1=G2, следовательно:
Pl-P2=q/S,
так как q/S=const, значит:
Pl-P2=const,
поэтому такие приборы называют расходомерами постоянного перепада давления.
При этом объемный расход может быть рассчитан по формуле:
Q0=c(Fc-F) • ((Р1-Р2)/р)0,5
где Fc - площадь сечения конической трубки на высоте h, м2; F-площадь верхней торце­
вой поверхности поплавка, м2; р-плотность измеряемой среды, кг*м3; с - коэффициент,
зависящий от размеров и конструкции поплавка.
Ротаметры со стеклянной трубкой применяются только для визуальных отсчётов
расхода и лишены устройств, для передачи сигнала на расстояние.
Ротаметр не следует устанавливать в трубопроводах, подверженным сильным виб­
рациям.
Длина прямого участка трубопровода перед ротаметром должна быть не менее 10
Ду, а после ротаметра не менее 5 Ду.
77
3. Ротаметры
Устройство ротаметра
1—корпус; 2— поплавок; 3—направляющая; 4—конус мерительный; 5—
следящий магнит; 6—кольцо; 7—сдвоенные магниты; 8—реле механиче­
ское; 9—стрелка; 10— механизм перемещения; I I — тяга; 12— направляю­
щая; 13— реле пневматическое: 14—шток (трубка); 15—стакан; 1G_сер­
вопривод; 17—-сильфон; 18—манометр; 19— напраьляющая; 20—корпус
пневмоголовки; 21— гайка; 22—гайка специальная; 24—пружина; 25__со­
пло; 26— плата.
Рис. 5
Ротаметр пневматический фторопластовый типа РПФ
Ротаметры типа РПФ предназначены для измерения объемного расхода плавно ме­
няющихся однородных потоков чистых и слабозагрязненных агрессивных жидкостей с
дисперсными немагнитными включениями инородных частиц, нейтральных к фторопла­
сту и преобразование величины расхода в унифицированный пневматический сигнал.
РПФ состоит из ротаметрической и пневматической части (пневмоголовки).
Корпус ротамометрической части 1 (рис.5) представляет собой прямоточную трубу
с приваренными на концах кольцами 6.
Внутри корпуса расположены: перемещающийся под действием измеряемого потока по­
плавок 2, жестко связанный со сдвоенными магнитами 7, конус мерительный 4, направ­
ляющие 3, 12.
Корпус ротамометрической части футерован фторопластом-4, а направляющие 3,
12, поплавок 2, конус мерительный 4 выполнены из фторопласта-4.
78
Пневмоголовка предназначена для обеспечения местных показаний и представляет
круглый корпус 20, в котором размещены: сервопривод 16, реле пневматическое 13, ма­
нометры 18, стрелка 9, механизм перемещения 10, шкала местных показаний, входной и
выходной штуцера.
Сервопривод 16 представляет собой металлический стакан 15, в котором находится
узел сильф она 17. Сильфон 17 разделяет внутреннюю полость сервопривода от внешней
среды и в комплекте с пружиной 24 служит в качестве упругого элемента.
Нижний конец сильфона припаян к подвижному дну, с которым жестко связан
шток 14. На противоположном конце штока 14 закреплено сопло 25 и реле механическое
8.
При работе реле механическое обеспечивает закрытие сопла заслонкой при увели­
чении расхода и открытие сопла при уменьшении расхода.
Реле механическое (рис.6) состоит из кронштейна 1, закрепленного на колодке 3,
заслонки 2, установленной вместе со следящим магнитом 5 на кернах в скобе 4. Скоба 4
крепится винтами к колодке 3. Регулировка положения реле механического относительно
сопла производится перемещением реле механического вдоль оси штока сервопривода.
Реле механическое
I —кронштейн; 2—заслонка; 3—колодка; 4—скобл; 5—следящий маг-
mu.
Рис. 6
Механизм перемещения 10 шарнирно соединен с реле механическим 8 тягой 11,
преобразует перемещение вертикальное штока 14 во вращательное движение стрелки 9.
Все детали пневмоголовки защищены от воздействия окружающей среды (пыли,
брызги) и механических повреждений крышкой.
Принцип действия ротаметра основан на восприятии поплавком, перемещающемся
в мерительном конусе 4, динамического напора, проходящего снизу вверх измеряемого
потока (рис.6).
При подъеме поплавка проходной зазор между мерительной поверхностью конуса
и кромкой поплавка увеличивается, при этом уменьшается перепад давления на поплавке.
Когда перепад давления становится равным весу поплавка, приходящемуся на еди­
ницу площади его поперечного сечения, наступает равновесие. При этом каждой величине
расхода измеряемой жидкости при определенной плотности и кинематической вязкости
соответствует строго определенное положение поплавка.
В принципе магнитопневматического преобразователя используется свойство вос­
приятия следящим магнитом 6, механического перемещения сдвоенных магнитом 7, же­
79
стко связанным с поплавком, и преобразование этого перемещения в выходной пневмати­
ческий сигнал (рис.7).
Перемещение поплавка вверх вызывает изменение положения следящего магнита 6
и жестко связанной с ним заслонки 5. При этом зазор между соплом и заслонкой умень­
шается, командное давление увеличивается, Увеличивая давление на выходе пневматиче­
ского реле 4 (рис. 7).
Усиленный по мощности сигнал поступает во внутреннюю полость стакана 15
(рис.5). Под действием этого сигнала происходит сжатие упругого элемента (сильфон 17пружина 24) сервопривода 16, перемещение вверх штока 14, жестко связанного с нижним
концом сильфона 17, сопла 25, реле механического 8, укрепленных на штоке 14.
Движение штока 14 происходит до тех пор, пока следящий магнит 5 с заслонкой не
займут первоначальное положение относительно сдвоенных магнитов 7.
Принцип действия ротаметра
5
j1|
;
s
—H1
1 1А
■l
J I
6
1— манометр;
матическое:
2— трубка
5—заслонка;
выходная; 3— трубка входная; 4— реле пнев­
6 —следящий
8— сильфон; 9 -сопло;
а— положение равновесия;
б — центральный магнит поднят,
магнит;
сопло
7— сдвоенные
магниты;
закрыто;
в— центральный магнит опушен, сопло открыто.
I— вход
II— выход
Рис. 7
При движении поплавка вниз изменяется положение следящего магнита 5 и свя­
занной с ним заслонки, при этом зазор между заслонкой и соплом 25 увеличивается,
80
уменьшая тем самым командное давление и давление на выходе пневматического реле.
Избыточный воздух из полости стакана 15 (рис. 4) через клапан пневматического реле
стравливается в атмосферу. Так как давление в стакане 15 уменьшилось, шток 14 под дей­
ствием упругого элемента (сильфон-пружина) месте с механическим реле 8 перемещается
вниз (в сторону движения поплавка) до тех пор, пока следящий магнит 5 с заслонкой не
займут первоначальное положение относительно сдвоенных магнитов.
Пневматическое реле предназначено для усиления выходного пневмосигнала по
мощности.
Ротаметр специальный прямоточный ВИР
Принцип действия расходомера ВИР основан на ротаметрическом способе измере­
ния, то есть мерой расхода в нём является вертикальное перемещение поплавка под воз­
действием обтекающего его потока жидкости. Перемещение поплавка преобразуется в
электрический сигнал.
Принципиальная электрическая схема ВИР со схемой подключения к преобразо­
вателю (КСД) представлена на рис. 8.
ВИР представляет из себя ротаметрическую пару (мерительный конус, поплавоксердечник), реагирующую на изменение потока измеряемой жидкости, посредством диф­
ференциального трансформатора Т1, преобразующего перемещение поплавка-сердечника
в напряжение переменного тока. Преобразователь (КСД) предназначен для питания пер­
вичной обмотки трансформатора Т1 датчика и преобразования напряжения переменного
тока, индуктирующегося во вторичной обмотке дифференциального трансформатора Т1
датчика, в показания на шкале прибора, соответствующее протекаемому расходу жидко­
сти.
Изменение напряжения на вторичной обмотке дифференциального трансформа­
тора Т2, вызванное перемещением сердечника-поплавка в датчике, усиливается и переда­
ётся на реверсивный двигатель.
Подвижный сердечник дифференциального трансформатора Т2 является элемен­
том отрицательной обратной связи, компенсирующей изменение напряжения на входе
трансформатора Т2. Перемещение сердечника осуществляется через кулачок при враще­
нии реверсивного двигателя РД. Одновременно вращение реверсивного двигателя переда­
ётся на стрелку прибора.
Датчик ротаметра (рис. 9) состоит из корпуса 1, ротаметрической трубки 2, ка­
тушки дифференциального трансформатора 3, поплавка-сердечника 4 и клеммной короб­
ки 5.
Корпус представляет собой цилиндр с крышками 9, внутри которого проходит ротаметрическая труба, а к его боковой поверхности приварена клеммная коробка с крыш­
81
кой 6, которая крепится шестью болтами. В корпусе находится катушка дифференциаль­
ного трансформатора, залитая компаундом 10 (ВИКСИНТ К-18).
Ротаметрическая труба представляет собой трубу из нержавеющей стали, на кон­
цах которой приварены фланцы 7, служащие для крепления датчика на технологическую
линию. Внутри ротаметрической трубы находится фторопластовая труба 8 с внутренним
мерительным конусом.
7
Рис. 9
Катушка дифференциального трансформатора намотана непосредственно на ротаметрическую трубу, концы обмоток катушки присоединены к проходным зажимам
клеммной коробки.
Поплавок-сердечник состоит из поплавка специальной конструкции, выполненного
из фторопласта-4 и сердечника из электротехнической стали, расположенного внутри по­
плавка.
Катушка дифференциального трансформатора с поплавком сердечником состав­
ляет дифференциальный трансформатор датчика, первичная обмотка которого питается от
преобразователя, а напряжение, индуктируемое во вторичной обмотке, поступает на пре­
образователь.
4. Электромагнитные расходомеры
В основе электромагнитных расходомеров лежит взаимодействие движущейся
электропроводной жидкости с магнитным полем, подчиняющееся закону электромагнит­
ной индукции.
Основное применение получили такие электромагнитные расходомеры, у которых
измеряется ЭДС, индуктируемая в жидкости, при пересечении ею магнитного поля. Для
этого (рис. 10) в участок 2 трубопровода, изготовленного из немагнитного материала, по­
крытого изнутри неэлектропроводной изоляцией и помещённого между полюсами 1 и 4
82
магнита или электромагнита, вводятся два электрода 3 и 5 в направлении, перпендикуляр­
ном как к направлению движения жидкости, так и к направлению силовых линий магнит­
ного поля. Разность потенциалов Е на электродах 3 и 5 определяется уравнением:
4 -B.Q0
Е = В ■D -ѵ =
к ■D
где - В - магнитная индукция; D - расстояние между концами электродов, равное
внутреннему диаметру трубопровода; ѵ и Qo~ средняя скорость и объёмный расход жид­
кости.
Таким образом, измеряемая разность потенциалов Е прямо пропорциональна объ­
ёмному расходу Qo. Для учёта краевых эффектов, вызываемых неоднородностью магнит­
ного поля и шунтирующим действием трубы, уравнение умножается на поправочные ко­
эффициенты км и ки, обычно весьма близкие к единице.
Достоинства электромагнитных расходомеров: независимость показаний от вяз­
кости и плотности измеряемого вещества, возможность применения в трубах любого диа­
метра, отсутствие потери давления, линейность шкалы, необходимость в меньших длинах
прямых участков труб, высокое быстродействие, возможность измерения агрессивных,
абразивных и вязких жидкостей. Но электромагнитные расходомеры неприменимы для
измерения расхода газа и пара, а также жидкостей диэлектриков, таких, как спирты и неф­
тепродукты. Они пригодны для измерения расхода жидкости, у которых удельная элек­
трическая проводимость не менее 10"3 См/м.
5. Счётчики
По принципу действия все счетчики жидкостей и газов делятся на скоростные и
объемные.
Скоростные счетчики устроены таким образом, что жидкость, протекающая через
камеру прибора, приводит во вращение вертушку или крыльчатку, угловая скорость кото­
рых пропорциональна скорости потока, а, следовательно, и расходу.
Объемные счетчики. Поступающая в прибор жидкость (или газ) измеряется от­
дельными, равными по объему дозами, которые затем суммируются.
Скоростной счетчик с винтовой вертушкой
Скоростной счетчик с винтовой вертушкой служит для измерения больших объё­
мов воды.
83
Поток жидкости 4 рис. 11 поступая в прибор, выравнивается струевыпрямителем
3 и попадает на лопасти вертушки 2, которая выполнена в виде многозаходного винта с
большим шагом лопасти. Вращение вертушки через червячную пару и передаточный ме­
ханизм 4 передается счетному устройству. Для регулировки прибора одна из радиальных
лопастей струевыпрямителя делается поворотной, благодаря чему, изменяя скорость по­
тока, можно укорить или замедлить скорость вертушки
Скоростной счетчик с вертикальной крыльчаткой
Этот счетчик применяется для измерения сравнительно небольших расходов воды
и выпускается на номинальные расходы от 1 до 6,3 м3/ч при калибрах от 15 до 40 мм.
В зависимости от распределения потока воды, поступающей на крыльчатку, раз­
личают две модификации счетчиков - одноструйные и многоструйные.
84
На рис. 12 показано устройство одноструйного счетчика. Жидкость подводится к
крыльчатке тангенциально к окружности, описываемой средним радиусом лопастей.
Преимуществом многоструйных счетчиков является сравнительно небольшая на­
грузка на опору и ось крыльчатки, а недостатком - более сложная по сравнению с одно­
струйными конструкция, возможность засорения струеподводящих отверстий. Вертушки
и крыльчатки счетчиков изготавливают из целлулоида, пластических масс и эбонита.
Счетчик устанавливается на линейном участке трубопровода, при чем на расстоя­
нии 8-10 D перед ним (D-диаметр трубопровода) не должно быть устройств, искажающих
поток (колена, тройники, задвижки и др.). В тех случаях, когда все же ожидается некото­
рое искажение потока, перед счетчиками устанавливают дополнительные струевыпрямители.
Счетчики с горизонтальной вертушкой можно устанавливать на горизонтальных,
наклонных и вертикальных трубопроводах, тогда как счетчики с вертикальной крыльчат­
кой - только на горизонтальных трубопроводах.
Жидкостной объёмный счётчик с овальными шестернями
Действие этого счетчика основано на вытеснении определенных объемов жидкости
из измерительной камеры прибора овальными шестернями, находящимися в зубчатом за­
цеплении и вращающимися под действием разности давлений на входном и выходном
патрубках прибора.
Рис. 13
Схема такого счетчика приведена на рис 13. В первом исходном положении (рис. 13,
а) поверхность га шестеренки 2 находится под давлением поступающей жидкости, а рав­
ная ей поверхность вг - под давлением выходящей жидкости. Меньшим входного. Эта
разность давлений создает крутящий момент, вращающий шестерню 2 по часовой стрел­
ке. При чем жидкость из полости 1 и полости, расположенной под шестерней 3, вытесня­
ется в выходной патрубок. Крутящий момент шестерни 3 равен нулю, так как поверхности
а іг і и г ів і равны и находятся под одинаковым входным давлением. Следовательно, шес­
терня 2-ведущая, шестерня 3-ведомая.
В промежуточном положении (рис. 13, б) шестерня 2 вращается в прежнем на­
правлении, но ее крутящий момент будет меньше, чем в положении а, из-за противодейст­
вующего момента, созданного давлением на поверхность дг (д-точка контакта шестерней).
Поверхность а ів і шестерни 3 находится под давлением входящей, а поверхность ві 61 под давлением выходящей. Шестерня испытывает крутящий момент, направленный про­
тив часовой стрелки. В этом положении обе шестерни ведущие.
Во втором исходном положении (рис. 13, в) шестерня 3 находится под дей­
ствием наибольшего крутящего момента и является ведущей, в то время как крутящий
момент шестерни 2 равен нулю, она ведомая.
85
Однако суммарный крутящий момент обеих шестерен для любого из положений ос­
тается постоянным.
За время полного оборот шестерен (один цикл работы счётчика) полости 1 и
4 два раза заполняются и два раза опорожняются. Объем четырех доз жидкости, вытес­
ненных из этих полостей, и составляет измерительный объем счетчика.
Чем больше расход жидкости через счетчик, тем с большей скоростью вращаются
шестерни. Вытесняя отмеренные объемы. Передача от овальных шестерен счетному ме­
ханизму осуществляется через магнитную муфту, которая работает следующим образом.
Ведущий магнит укреплен в торце овальной шестерни 3, а ведомый на оси, связывающий
муфту редуктором 5. Камера, где расположены овальные шестерни, отделена от редуктора
5 и счетного механизма 6 немагнитной перегородкой. Вращаясь, ведущий вал укрепляет
за собой ведомый.
86
XI. ПРИБОРЫ ИЗМЕРЕНИЯ УРОВНЯ
Для измерения уровня жидкостей применяются специальные средства измерений
- уровнемеры. Многообразие типов уровнемеров, принцип действия которых основан на
различных физических методах, объясняется разнообразием свойств измеряемых жидко­
стей.
Наибольшее распространение на нашем предприятии получили следующие виды
уровнемеров: буйковые, пьезометрические, гидростатические, поплавковые, и ёмкостные.
Буйковый уровнемер - уровнемер, принцип действия которого основан на изме­
рении перемещения буйка или силы гидростатического давления, действующей на буёк.
Буёк в отличие от поплавка не плавает на поверхности жидкости, а погружён в
жидкость и перемещается в зависимости от её уровня.
Буйковые уровнемеры наиболее часто применяются для измерения уровня одно­
родных, в том числе агрессивных, жидкостей, находящихся при высоких рабочих давле­
ниях (до 32 МПа), широком диапазоне температур (от -200 до +600°С) и не обладающих
свойствами адгезии (прилипания) к буйкам.
Главной особенностью буйковых уровнемеров является возможность измерения
уровня границы раздела двух жидкостей.
Недостатком буйковых уровнемеров являются зависимость их точности от плот­
ности и температуры измеряемой среды, ограниченность использования для больших
(свыше 16 м) диапазонов измерения уровней жидкостей и жидкостей обладающих адгези­
ей к буйку.
Пьезометрический уровнемер - уровнемер, принцип действия которого основан
на преобразовании гидростатического давления жидкости в давление воздуха, подаваемо­
го от постороннего источника и барботирующего через слой жидкости.
У этого уровнемера чувствительный элемент не находится в непосредственном
контакте с измеряемой средой, а воспринимает гидростатическое давление через воздух,
что является его достоинством.
Для пьезометрических уровнемеров также характерна погрешность измерения изза изменения плотности измеряемой среды.
Гидростатический уровнемер - уровнемер, принцип действия которого основан
на измерении манометром или напоромером гидростатического давления жидкости, зави­
сящего от высоты её уровня.
Уровнемеры этого вида обычно используют для измерения неагрессивных, неза­
грязнённых жидкостей, находящихся под атмосферным давлением.
Для измерения уровней агрессивных сред используют специальные разделитель­
ные устройства.
Недостатком гидростатических уровнемеров является погрешность измерения
при изменении плотности жидкости.
Поплавковый уровнемер - уровнемер, принцип действия которого основан на из­
мерении перемещения поплавка, плавающего на поверхности жидкости (поплавок как бы
отслеживает уровень жидкости).
Поплавковые уровнемеры не пригодны для вязких жидкостей (дизельного топли­
ва, мазута, смол) из-за залипания поплавка, обволакивания его вязкой средой.
При измерении уровня криогенных жидкостей из-за кипения верхнего слоя воз­
никает вибрация поплавка, что приводит к искажениям результатов измерения.
Наиболее часто поплавковые уровнемеры используют для измерения уровней в
больших открытых резервуарах, а также в закрытых резервуарах с низким давлением.
Применение магнитной связи для передачи перемещения поплавка позволяет
герметизировать вывод передачи в измерительный блок, упростить конструкцию, повы­
сить надёжность, измерять уровень в резервуарах под давлением.
87
Ёмкостной уровнемер - уровнемер, принцип действия которого основан на раз­
личии диэлектрической проницаемости жидкости и воздуха.
В связи с этим по мере погружения электродов датчика уровнемера в жидкость
изменяется ёмкость между ними пропорционально уровню жидкости в резервуаре.
1. Уровнемеры пневматические буйковые УБ-П
Уровнемеры пневматические буйковые типа УБ-П с силовой компенсацией ГСП
предназначены для получения унифицированного пневматического сигнала 0.02 - 0.1
МПа (0.2 - 1.0 кгс/см2) об уровне жидкости или уровне раздела фаз, находящихся под вакууметрическим, атмосферным или избыточном давлением и выдачи его в систему кон­
троля, управления и регулирования параметров технологических процессов. Уровнемеры
работают в комплекте с вторичными пневматическими приборами, регуляторами, маши­
нами централизованного контроля и другими устройствами автоматики.
Уровнемеры этого типа выпускаются различных модификаций с классами точно­
сти для уровнемеров с верхним пределом измерения уровня до 1 м - 1.0 и 1.5 %; от 1.6 м 1.5 %.
Выходной пневматический сигнал уровнемера прямо пропорционален измерен­
ному значению уровня, рабочий диапазон его изменения составляет 0.08 МПа (0.8
кгс/см2). Передача выходного сигнала осуществляется по пневматической связи с внут­
ренним диаметром трубки 6 мм и длиной от 3 до 300 м.
Принцип действия уровнемера (рис. 1) основан на пневматической силовой ком­
пенсации. Чувствительный элемент - стальной буёк 13 - подвешен на конце рычага 11.
Изменение уровня жидкости в ёмкости вызывает изменение глубины погружения буйка,
масса его при этом соответственно увеличивается или уменьшается. Изменение массы
буйка приводит к перемещению рычага 11, связанного с ним Т-образного рычага 2 с за­
слонкой 6. Перемещение заслонки относительно неподвижного сопла 5 вызывает измене­
ние сигнала на входе и выходе пневмоусилителя 4 и сильфоне обратной связи 8.
Изменение давления в сильфоне создаёт усилие, воздействующее через Гобразный рычаг 7 и подвижную опору 3 на Т-образный рычаг 2 в направлении, обратном
усилию, созданному массой буйка. При компенсации усилия, создаваемого массой буйка
13 усилием на сильфоне обратной связи 8, подвижная система находится в равновесии.
Начальная масса буйка уравновешивается специальным грузом 9, навинченным
на плечо дополнительного рычага 10. Установка требуемого значения выходного сигнала
при начальном значении уровня (0.02 МПа) осуществляется корректором «нуль» - пружи­
88
ной 1. Установка верхнего значения выходного сигнала при максимальном значении
уровня (0.1 МПа) осуществляется перемещением подвижной опоры 3.
Настройка уровнемеров на заданные пределы измерения проводится с помощью
грузов путём имитации гидростатической выталкивающей силы, соответствующей верх­
нему пределу измерений.
Расчётное значение давления, соответствующее верхнему пределу измерений,
т
Р р = 0,2 + 0.8«шах
Масса грузов уровнемеров:
для жидкости
для раздела фаз
• / / max •р ж;
т шах - — —
•( р нж- р вж),
где d - диаметр буйка испытываемого уровнемера, см; Нтах - верхний предел измерения
уровня жидкости, см; рж - п л о т н о с т ь измеряемой жидкости, г/см3; р нж, р в.ж - плотности
соответственно нижней и верхней измеряемой жидкости в случае измерения уровня раз­
дела фаз, г/см3.
2. Пьезометрические уровнемеры
В пьезометрических системах измерения уровня для продувания через трубку
помещённую в жидкость, дозированного расхода воздуха наиболее часто применяют ре­
гуляторы расхода воздуха типа РРВ-1. Принцип действия этого регулятора основан на ав­
томатическом поддержании постоянного перепада давления на дросселе, в результате че­
го обеспечивается постоянный расход воздуха через этот дроссель.
Принципиальная пьезометрическая схема измерения уровня в открытом резервуа­
ре представлена на рис. 2, а, б, в, г.
На рис 2, д показана принципиальная пьезометрическая схема измерения уровня
жидкости в резервуаре, находящемся под давлением. Для исключения влияния давления в
резервуаре на показания прибора, измеряющего уровень жидкости, применяется диффе­
ренциальный метод измерения с двумя регуляторами расхода. От одного регулятора рас­
хода воздух подаётся в пьезометрическую трубку, от другого в верхнюю часть резервуара
над жидкостью. Разность давлений в трубках, пропорциональная уровню жидкости, изме­
ряется дифманометром.
В системах измерения нижний конец пьезотрубки должен находится на нижнем
контролируемом уровне жидкости, но не ниже 80 мм от дна резервуара.
Расход воздуха устанавливается минимальным, чтобы перепад давления на пье­
зотрубке был возможно меньшим, так как это определяет погрешность измерения пьезо­
метрическим методом.
Минимальный расход воздуха обеспечивается постоянным, без запаздывания, вы­
ходом воздуха из пьезометрической трубки при изменениях уровня. Обычно расход воз­
духа принимается равным 0.1 - 0.2 м3/ч.
Если пренебречь перепадом давления на пьезометрической трубке, то уровень в
резервуаре
p 'g
где Р - давление на манометре М или перепад давления на дифманометре; р - плотность
жидкости; g - ускорение свободного падения.
89
В случае, когда измеряется уровень в резервуаре, находящемся под избыточным
давлением, давление питания регулятора расхода воздуха, подающего воздух в пьезотруб­
ку, должно быть:
Р пит ^ Ризб + Н макс ' го • оo’ 9
где Р и з б - избыточное давление, кПа;
столба жидкости, кПа.
H MaKc P g
- максимальное гидростатическое давление
На рис. 2, е показан пример обвязки и монтажа пьезометрического уровнемера с
подачей промывочной воды в защитную трубу. В этом случае защищается от «обраста­
ния» нижний конец пьезотрубки, который оказывается в зоне промывочной воды и не
контактирует с измеряемой жидкостью.
3. Гидростатические датчики уровня
Схемы обвязки и работы гидростатических датчиков уровня представлены на рис.
3, а, б, причём последняя применяется при измерении уровня жидкости в ёмкости, нахо­
дящейся под избыточным давлением.
Рис. 3
В этом случае импульсная трубка, идущая к минусовой полости чувствительного
элемента, прокладывается от места отбора давления с уклоном в верх, а в нижней части
устанавливаются отстойный сосуд и разделитель мембранный РМ.
91
XII. ДАТЧИКИ ТЕМПЕРАТУРЫ
1. Общие сведения
В соответствии с Международной практической температурной шкалой 1968 г.
основной температурой является термодинамическая температура, единица которой Кельвин (К) на практике часто применяется температура Цельсия, единица которой -гра­
дус (С), равный Кельвину, между температурой Цельсия и термодинамической темпера­
турой существует следующее соотношение: t, С=Т,К-273.15
Для изменения температур применяется контактные методы. Для реализации
контактных методов измерения применяются термометры расширения (стеклянные, жид­
костные, манометрические, биметаллические и дилатометрические), термопреобразовате­
ли сопротивления (проводниковые и полупроводниковые) и термоэлектрические преобра­
зователи. Бесконтактные измерения температуры осуществляются пирометрами (квазимонохроматическими, спектрального отношения и полного излучения).
Контактные методы измерения более просты и точны, чем бесконтактные. Но
для измерения температуры необходим непосредственный контакт с измеряемой средой и
телом. И в результате этого может возникать, с одной стороны, искажение температуры
среды в месте измерения и с другой - несоответствие температуры чувствительного эле­
мента и измеряемой среды.
Бесконтактные методы измерения не оказывают никакого влияния на температуру среды или тело. Но зато они сложнее и их методические погрешности существенно
больше, чем у контактных методов.
Серийно выпускаемые термометры и термопреобразователи охватывают диапа­
зон температур от - 260 до 2200°С и кратковременно до 2500°С. Бесконтактные средства
измерения температуры серийно выпускаются на диапазон температур от 20 до 4000°С.
2. Термометры стеклянные
Принцип действия основан на зависимости объемного расширения жидкости
от температуры. Отличаются высокой точностью, простотой устройства и дешевизной.
Однако стеклянные термометры хрупки, как правило, не ремонтопригодны, не могут пе­
редавать показания на расстояние.
Основными элементами конструкции являются резервуар с припаянным к нему
капилляром, заполненные частично термометрической жидкостью, и шкала .
Конструктивно различаются палочные термометры со шкалой, вложенной
внутрь стеклянной оболочки. У палочных термометров шкала наносится непосредственно
на поверхность толстостенного капилляра. У термометров с вложенной шкалой капилляр
и шкальная пластина с нанесенной шкалой, заключены в защитную оболочку, припаян­
ную к резервуару.
Стеклянные термометры расширения выпускаются для измерения температур
о т -100 до 600°С.
Выпускаются также ртутные электроконтактные термометры, предназначенные
для сигнализации или поддержания заданной температуры. Термометры выпускаются с
заданным постоянным контактом (ТЗК) или с подвижным контактом (ТПК).
Точность показаний термометров зависит от правильности их установки.
Важнейшим требованием, предъявляемым при установке, является обеспечение наиболее
благоприятных условий притока тепла от измеряемой среды к термобаллону и наимень­
ший отвод тепла от остальной части термометра во внешнюю среду. Большей частью тер­
мометры устанавливают в защитную оправу.
92
Рис.1 Стеклянные термометры
Рис. 2 Электроконтактные термометры
93
3. Манометрические термометры
Манометрические термометры предназначены для непрерывного дистанционно­
го измерения температуры жидких и газообразных нейтральных сред в стационарных ус­
ловиях .
Принцип действия основан на измерении давления (объема) рабочего вещества в
замкнутом объеме в зависимости от температуры чувствительного элемента. Основными
частями манометрических термометров являются термобаллон (чувствительный элемент),
капилляр и деформационный манометрический преобразователь, связанный со стрелкой
прибора.
Рис. 5. Схема манометрического термометра
Рис. 6. Схема термометра с сигнальным устройством
►
v <«, <r>
В зависимости от агрегатного состояния вещества, заполняющего систему, ма­
нометрические термометры делятся на жидкостные, газовые и парожидкостные (конденсатные). В качестве заполнителей термосистем применяются: в газовых манометрических
94
термометрах - азот, в жидкостных - полиметилоксановые жидкости, в парожидкостных
-ацетон, метил хлористый, фреон.
Измерение температуры контролируемой среды воспринимается заполнителем
через термобаллон и преобразуется в изменение давления, под действием которого мано­
метрическая трубчатая пружина с помощью тяги и сектора перемещает стрелку относи­
тельно шкалы.
В зависимости от выполняемых функций манометрические термометры разделя­
ются на показывающие, самопишущие, комбинированные, бесконтактные, с наличием
устройств для телеметрической передачи, сигнализации, регулирования или без них.
В зависимости от способа соединения термобаллона с корпусом, термометры мо­
гут быть местные и дистанционные. В зависимости от формы диаграммы и поля записи,
самопишущие термометры подразделяют на дисковые, ленточные. В зависимости от типа
механизма для передвижения диаграммных лент самопишущие термометры изготовляют
с часовым или электрическим приводом.
Достоинством манометрических термометров являются: возможность измерения
температуры без использования дополнительных источников энергии, сравнительная про­
стота конструкции, возможность автоматической записи показаний, взрывобезопасность,
нечувствительность к внешним магнитным полям.
К недостаткам относятся: относительно невысокая точность измерения, труд­
ность ремонта при разгерметизации измерительной системы, низкая прочность капилляра,
небольшое расстояние дистанционной передачи показаний, значительная инерционность.
Основные типы манометрических термометров:
ТПГ - 100 Эк, ТПГ- 1ООСг -газовый показывающий сигнализирующий
ТКП - 1 0 0 , ТКП - 160 -конденсационный показывающий
ТЖП - 100 - жидкостной показывающий
ТГП - 100 - газовый показывающий
4. Термопреобразователи сопротивления
Термопреобразователи сопротивление применяются для измерения температур а
пределах от -260 до 750°С. Принцип действия основан на свойстве проводника изменять
свое электрическое сопротивление с изменением температуры. Основными частями тер­
мопреобразователя сопротивления являются: чувствительный элемент, защитная арматура
и головка преобразователя с зажимами для подключения и соединительных проводов.
Чувствительные элементы медных термопреобразователей представляют собой проволо­
ку, покрытую эмалевой изоляцией, которая бифилярно намотана на каркас, либо без кар­
каса, помещенную в тонкостенную металлическую оболочку. Чувствительный элемент
помещается в защитную арматуру.
Платиновая проволока не может быть покрыта слоем изоляции. Поэтому плати­
новые спирали располагают в тонких каналах керамического каркаса, заполненных кера­
мическим порошком. Этот порошок выполняет функции изолятора, осуществляет фикса­
цию положения спиралей в каналах и препятствует межвитковому замыканию.
Термопреобразователи сопротивления выпускаются для измерений температур в
диапазоне от -260 до 1100°С следующих исполнений: погружаемые и поверхностные,
стационарные и переносные; негерметичные и герметичные; обыкновенные, пылезащи­
щенные, водозащищенные, взрывобезопасные, защищенные от агрессивных сред и других
внешних воздействий; малоинерционные, средней и большой инерционности; обыкновен­
ные и виброустойчивые; одинарные и двойные; 1-3 классов точности.
Выпускаются термопреобразователи сопротивления следующих номинальных
статических характеристик преобразования: платиновые -10П, 50П, 100П, медные -ЮМ,
95
50М, 100М. Число в условном обозначении характеристики показывает сопротивление
термопреобразователя при 0°С.
К числу достоинств следует отнести высокую точность и стабильность характери­
стики преобразователя, возможность измерять криогенные температуры, возможность
Я
Q
41
осуществления автоматической записи и дистанционной передачи показаний.
К недостаткам следует отнести больше размеры чувствительного элемента, не по­
зволяющие измерять температуру в точке объекта или измеряемой среды, необходимость
индивидуального источника питания, значительная инертность.
5. Термоэлектрические преобразователи
Термометры термоэлектрические представляют собой чувствительные элементы в
виде двух проводов из разнородных металлов или полупроводников со спаянными конца­
ми. Действие термоэлектрического преобразователя основано на эффекте Зеебека - появ­
лении термоЭДС в контуре, составленном из двух разнородных проводников, спаи кото­
рых нагреты до различных температур. При поддержании температуры одного из спаев
постоянной можно по значению термоЭДС судить о температуре другого спая. Спай, тем­
пература которого должна быть постоянной, принято называть холодным, а спай, непо­
средственно соприкасающийся с измеряемой средой - горячим.
В наименовании термоэлектрического преобразователя всегда принято ставить на
первое место название положительного термоэлектрода, а на второе - отрицательного.
Преобразователи термоэлектрические изготовляют следующих типов:
ТВР - термопреобразователь вольфрамрениевый
ТПР - термопреобразователь платинородиевый
ТПП - термопреобразователь платинородий-платиновый
ТХА - термопреобразователь хромель-алюмелевый
ТХК - термопреобразователь хромель-копелевый
ТМК - термопреобразователь медь-копелевый
Термопреобразователи различают:
По способу контакта с измеряемой средой - погружаемые, поверхностные.
По условиям эксплуатации - стационарные, переносные, разового применения,
многократного применения, кратковременного применения.
По защищенности воздействия окружающей среды - обыкновенные, водозащит­
ные, защищенные от агрессивных сред, взрывозащищенные, защищенные от других меха­
нических воздействий.
По герметичности к измеряемой среде - негерметичные, герметичные.
По числу термопар - одинарные, двойные тройные.
96
По числу зон - однозонные, многозонные.
Если температуру холодного спая поддерживать постоянной, то термоЭДС будет
зависеть только от степени нагрева рабочего конца термопреобразователя , что позволяет
отградуировать измерительный прибор в соответствующих единицах температуры . В
случае отклонения температуры свободных концов от градуировочного значения, равного
0°С, к показаниям вторичного прибора вводиться соответствующая поправка. Температу­
ру свободных концов учитывают для того, чтобы знать величину поправки.
Для вывода свободных концов термопреобразователя в зону с постоянной темпе­
ратурой служат удлиненные термоэлектродные провода. Они должны быть термоэлектри­
чески идентичны термоэлектродам термопреобразователя.
Существует два способа подбора компенсационных проводов. Первый способ подбирают провода, которые в паре с соответствующим электродом имеют термоЭДС.
Его применяют в тех случаях, когда необходимо производить измерения с повышенной
точностью. В случае недефицитных материалов и удовлетворительных эксплуатационных
свойств провода изготовляют из тех же материалов, что и подключаемая термопара.
Таким образом, чтобы определить измеряемую температуру среды с помощью
термоэлектрического преобразователя, необходимо выполнить следующие операции:
• измерить термоЭДС в цепи преобразователя;
• определить температуру свободных концов;
• в измеряемую величину термоЭДС ввести поправку на температуру свободных кон­
цов;
• по известной зависимости термоЭДС от температуры определить измеряемую темпе­
ратуру среды.
В зависимости от материала термоэлектродов различают: термопреобразовате­
ли с металлическими термопарами из благородных и неблагородных металлов и сплавов;
термопреобразователи с термопарами из тугоплавких металлов и сплавов.
Термопары из благородных металлов, обладая устойчивостью к высоким темпе­
ратурам и агрессивным средам, а также постоянной термоЭДС, широко пользуются для
замера высоких температур в промышленных и лабораторных условиях. Термопары из
неблагородных металлов и сплавов применяются доя измерения температур до 1000°С.
Достоинством этих термопар является сравнительно небольшая стоимость и способность
из развивать большие термоЭДС.
Для защиты термоэлектродов от механических повреждений и агрессивного дей­
ствия среды, а также для удобства установки на технологическом оборудовании приме­
няют защитную арматуру. Материал и исполнение арматуры могут быть различными в
зависимости от назначения и области применения. Наиболее широко в качестве материа­
лов используют высоколегированные стали и коррозионно-стойкие, жаропрочные и жа­
ростойкие сплавы на основе железа, никеля, хрома и добавок алюминия, кремния, мар­
ганца.
97
XIII. ПИРОМЕТРИЯ
1. Милливольтметры и логометры
Милливольтметры являются вторичными электрическими приборами магнито­
электрической системы, работающие в комплекте с промышленными термоэлектриче­
скими термометрами (термопарами) различных градуировок и показывающие температу­
ру в градусах Цельсия.
Основная погрешность промышленных милливольтметров составляет 0.5; 1.0; 1.5;
2.0; 2.5 %.
Измерительный механизм состоит из рамки (намотанной из медной проволоки),
вращающейся в равномерном поле постоянного магнита вокруг цилиндрического желез­
ного сердечника. Жёстко с рамкой связан указатель, на противоположном конце которого
расположены два грузика - противовеса для балансировки подвижной системы. Рамка
подключается к электрической измерительной цепи через противодействующие (возврат
на нуль при отключении прибора) спиральные пружины, либо через растяжки или под­
вески при креплении на них рамки.
Принципиальная схема промышленного милливольтметра приведена на рис. 1.
“1
Рис. 1
Подсоединение термоэлектрического термометра к милливольтметру осуществ­
ляется с помощью специальных термоэлектродных удлинительных проводов.
Если удлинительные провода непосредственно подсоединяются к зажимам мил­
ливольтметра, то каждый раз при измерении температуры необходимо вносить поправку
и корректировать показания прибора на температуру окружающей среды. Величина по­
правки рассчитывается по формуле:
Тд = Т и + ( Т х - Т о ) ,
где Тд - действительное значение температуры; Ти - измеренное значение (показания
прибора) температуры; К- поправочный коэффициент, зависящий от типа термометра и
98
интервала измерения температуры (табл. 1); Тх - фактическая температура холодного
спая; То - температура холодного спая, при которой производилась градуировка термо­
электрического термометра (О °С).
Таблица 1
Гра­
Диапазон измеряемых температур, °С
дуи­
ровка
101 201301401501601701термо
0 -1 0 0
801-900
200
300
400
500
600
700
800
метра
ХА (К)
ХК (L)
n n (S )
1.00
1.00
1.00
1.02
1.02
0.90
0.82
0.84
0.72
0.98
0.81
0.69
0.97
0.80
0.66
0.96
0.78
0.63
0.97
0.79
0.62
0.98
0.80
0.60
1.01
-
0.59
Механический способ внесения поправок заключается в том, что корректором
прибора указатель заранее устанавливается на температуру свободных концов (температуру окружающей их среды), измеренную предварительно стеклянным термометром.
Для автоматического введения поправки и устранения погрешности в измерени­
ях, возникающей из-за отличия температуры свободных концов от градуировочного зна­
чения (О °С), применяют компенсационную коробку типа КТ-54.
Сопротивление внешней цепи милливольтметров RBH составляет 0.6; 1.6; 5.0;
15.0; 16.2; 25.0 Ом и указывается на шкале прибора.
Подгонка сопротивления внешней цепи до значения, указанного на шкале прибо­
ра, производится следующим образом.
Меняя полярность, дважды измеряют сопротивление соединительных проводов и
термоэлектрического термометра (для устранения влияния термоЭДС на результат изме­
рения). Искомое сопротивление RBH вычисляют по результатам обоих измерений
) по формуле:
ии
пЯ
к ри
_|- Т?И
Л
)'
Затем отматывая с подгоночной катушки, расположенной на клеммнике внешних
соединений прибора, часть витков, доводят значение её сопротивления до значения
' \ Л ЯЯ1
D
—
7?
—
Л 5Я2
Т?И
Логометры применяют для измерения температуры в комплекте с термопреобра­
зователями сопротивлений. При наличии дополнительных устройств они могут осуществ­
лять измерение, запись, регулирование и сигнализацию температуры. Применение логометров наиболее целесообразно при измерении низких минусовых (от -200 °С) и невысо­
ких плюсовых температур (до +500 °С), так как в данном случае они обладают большой
надежностью по сравнению с милливольтметрами. Принципиальная схема пирометриче­
ского логометра показана на рис. 3.
Пирометрические логометры являются магнитоэлектрическими приборами и со­
стоят из измерительного механизма и измерительной схемы. Измерительный механизм
логометра состоит из двух жестко связанных между собой скрещенных рамок 1, вращаю­
щихся на одной оси в магнитном поле постоянного магнита 2. Воздушный зазор между
полюсами магнита и сердечником 4 сделан неравномерным, в результате чего магнитная
индукция в воздушном зазоре между ними будет непостоянная. Наибольшее значение
магнитная индукция будет иметь у середины полюсных наконечников, наименьшее — в
зазоре у краев.
Рамки логометров изготовляют из тонкой медной проволоки и соединяют таким
образом, чтобы их вращающиеся моменты Мі и ІѴЬ были направлены навстречу друг дру­
гу. Подвод тока к рамкам осуществляется по трем спиральным пружинам с очень малым
99
противодействующим моментом.
Измерительная схема логометра состоит из двух параллельных цепей (плеч), пи­
таемых от источника постоянного тока 3.
Действие прибора основано на из­
мерении отношения токов, проходящих в
двух параллельных цепях, питаемых от по­
t
Mi
Mz
стороннего источника тока, в каждую из ко­
торых включено по одной рамке. Таким об­
N
разом, ток от источника питания, разветв­
ляясь, проходит по двум цепям: через со­
К
противление R и обмотку одной рамки, че­
Z
*
рез термопреобразователь сопротивления Rt
и обмотку другой рамки. Значение этих то­
ков обратно пропорционально сопротив­
лениям плеч логометра. Токи Іі и І2, прохо­
дящие по соответствующим рамкам, созда­
ют вращающие моменты Мі и ІѴЬ, дейст­
вующие на рамки в противоположных на­
правлениях. При равенстве сопротивлений в
Рис. 3
плечах, токи в них будут равны, а следова­
тельно, вращающие моменты Мі и ІѴЬ тоже
равны и подвижная система находится в
равновесии.
При увеличении сопротивления датчика (за счет его нагревания) величина тока в
рамке R 2 уменьшится, а вместе с этим уменьшится и момент, создаваемый этой рамкой
Л
Ж
,
№
М2.
Равенство моментов Мі и М 2 нарушится и подвижная система логометра начнет
поворачиваться в сторону действия большого момента. Таким образом, рамка Ri, по кото­
рой протекает теперь больший ток, попадает в область более слабого магнитного поля,
что ведет к уменьшению момента М], а рамка R2, наоборот, начинает входить в область
более сильного магнитного поля, что ведет к увеличению момента М 2. Новое равновесие
подвижной системы прибора наступит, когда вращающие моменты рамок сравняются.
Следовательно, различным температурам сопротивления датчика будут соответствовать
различные углы поворота рамок, зависящие от отношения величины токов, проходящих в
рамках.
Так как цепи обеих рамок питаются от одного источника тока, то значительные
колебания его напряжения не оказывают существенного влияния на показания логометра.
Однако при большом понижении напряжения возрастает влияние упругости спиральных
пружин, подводящих ток к рамкам и сил трения при перемещении подвижной системы, а
при увеличении напряжения происходит нагрев током обмотки термометра и рамок при­
бора, вызывающий изменение соотношения токов в цепях логометра. Исходя из этого от­
клонение напряжения источника питания логометров не должно превышать ± 20 % номи­
нального значения. Для компенсации изменения сопротивления соединительных проводов
при колебании температуры окружающей среды предусмотрен третий провод.
При трехпроводной схеме сопротивления проводов а и б оказываются включен­
ными в различные цепи измерительной схемы и изменение сопротивления этих проводов,
вызванные внешними условиями, взаимно компенсируются.
Для проверки исправности логометров и правильности подгонки сопротивлений
соединительных проводов, приборы снабжают контрольным сопротивлением. При вклю­
чении в измерительную схему прибора контрольного сопротивления вместо датчика,
стрелка логометра при правильно подогнанном сопротивлении соединительных проводов
должна установиться против контрольной красной отметки на шкале прибора.
100
2. Автоматические электронные мосты и
потенциометры
Электронные автоматические потенциометры и уравновешенные мосты приме­
няют для измерения, записи и регулирования температуры и других величин, изменение
значений которых может быть преобразовано в напряжение постоянного тока или в изме­
нение активного сопротивления.
Приборы состоят из трех основных узлов: измерительной схемы, электронного
усилителя и отсчётного устройства. В основу работы автоматических потенциометров по­
ложен компенсационный метод измерения, основанный на уравновешивании измеряемой
величины другой известной величиной. Компенсационный метод характеризуется высо­
кой точностью измерения.
Типовая измерительная схема автоматического потенциометра приведена на
рис. 4. В одну диагональ мостовой схемы включен стабилизированный источник питания
У2; в другую через нуль-индикатор УI подается ЭДС датчика УЗ. Если измеряемая ЭДС
равна падению напряжения на реохорде К, то к усилителю У 1, выполняющему функцию
нуль-индикатора, будет подведен нулевой сигнал и вся система будет находиться в равно­
весии. При изменении ЭДС датчика на величину, равную или большую чувствительности
усилителя, на вход последнего подается напряжение разбаланса, которое после преобра­
зования и усиления воздействует на уравновешивающий электродвигатель. Ротор по­
следнего, вращаясь, перемещает движок реохорда до равновесного состояния схемы.
Вращение выходного вала реверсивного электродвигателя с помощью механической пе­
редачи преобразуется в перемещение указателя.
Рис. 4. Измерительная схема автоматического потенциометра
Так как каждому значению ЭДС датчика соответствует определенное положение
движка реохорда и указателя, то в момент равновесия схемы положение указателя опре­
деляет значение измеряемого параметра.
Измерительная схема потенциометра состоит из резисторов, каждый из которых
имеет свое назначение: Rp — сопротивление реохорда, уравновешивающего измеритель­
ную схему; Rin - сопротивление подгонки реохорда к эквивалентному сопротивлению; R h
- сопротивление подгонки начальной точки шкалы потенциометра; Rn — сопротивление
подгонки конечной точки шкалы потенциометра; гн и гп - подгоночные сопротивления,
выполненные в виде спиралей и представляющие собой части сопротивлений Rh и Rn.
101
Сопротивления служат: Ra — для ограничения тока в измерительной схеме; Rc —
для проверки наличия рабочего тока в измерительной цепи; R pT - для ограничения тока в
цепи источника питания; R 'pT — для установки величины рабочего тока в измерительной
схеме; Rx, Ry, Roy и RTy - для соединения элементов измерительной схемы. Все резисто­
ры измерительной схемы, кроме R m , изготавливают из стабилизированной манганиновой
проволоки. Резистор R m выполнен из медной проволоки, имеющей большой температур­
ный коэффициент сопротивления, и расположен в месте подключения компенсационных
проводов к прибору. В результате этого резистор R m и свободные концы термопары нахо­
дятся при одинаковой температуре и изменение ЭДС термопары за счет изменения темпе­
ратуры свободных концов компенсируется изменением падения напряжения на R m вслед­
ствие изменения величины этого сопротивления. Таким образом, компенсация температу­
ры свободных концов термопары осуществляется автоматически.
Уравновешивающим устройством в измерительных схемах потенциометров яв­
ляется реохорд, состоящий обычно из рабочей и токосъемной спиралей, выполненных из
устойчивой к износу и коррозии вольфрамопалладиевой проволоки, намотанной на две
изолированные медные шинки. Для повышения надежности работы схемы движок рео­
хорда снабжают контактами, выполненными из сплава золото — серебро — медь.
В основу работы электронных автоматических мостов положен нулевой Метод
измерения сопротивления. Типовая измерительная схема автоматического уравновешен­
ного моста показана на рис. 5. Она построена по схеме уравновешенного моста, в одну
диагональ которого включают источник постоянного или переменного тока, а в противо­
положную диагональ - электронный усилитель, управляющий работой асинхронного
электродвигателя следящей системы.
Рис.5 Измерительная схема автоматического
уравновешивающего моста
Измерительная мостовая схема состоит из резисторов, каждый из которых имеет
свое назначение: Rp — сопротивление спирали реохорда; Rm — сопротивление, служащее
для подгонки сопротивления реохорда к эквивалентному сопротивлению. Сопротивления
Rn и гп определяют пределы измерения прибора, причем Rn намотано на катушку, а гп подгоночное сопротивление имеет вид спирали.
Сопротивления R h и гн, служат для регулировки нижнего предела измерения. При
102
этом rH- подгоночное сопротивление в виде спирали, являющееся частью сопротивления
R h . Резисторы R l, R2, R3 — плечи моста.
Сопротивление R 6 служит для ограничения тока измерительной цепи. Сопротив­
ления Rn предназначены для подгонки сопротивления соединительных проводов линии к
определенному значению. R t — термопреобразователь сопротивления, изменение сопро­
тивления которого пропорционально измеряемой температуре.
Схема работает следующим образом. При изменении температуры контролируе­
мого объекта изменяется сопротивление термопреобразователя сопротивления R t , в ре­
зультате чего нарушается равновесие мостовой схемы. В измерительной диагонали моста
появляется напряжение разбаланса, поступающее на усилитель У1, выполняющий роль
нуль-индикатора. Напряжение разбаланса в усилителе усиливается до величины, доста­
точной для приведения в действие реверсивного электродвигателя, ротор которого, вра­
щаясь, перемещает движок реохорда до равновесного состояния схемы.
Вращение выходного вала реверсивного электродвигателя с помощью механиче­
ской передачи преобразуется в перемещение указателя. Так как каждому значению термо­
преобразователя сопротивления соответствует определенное положение движка реохорда
и указателя, то в момент равновесия схемы положение указателя определяет значение из­
меряемого параметра. Полярность сигнала зависит от величины сопротивления датчика по
отношению к значению сопротивления реохорда в момент равновесия.
Уравновешивающим устройством в измерительных схемах мостов является ка­
либрованный реохорд, аналогичный по своему устройству с реохордом, применяемым в
автоматических потенциометрах.
Термопреобразователь температуры соединяют с измерительным мостом по двух
проводной или трёхпроводной схеме. Двухпроводную схему применяют при постоянной
температуре в местах прокладки линии связи. Питающий провод подключают к началу
линии связи, как правило, к коммутационному зажиму, на котором установлена подго­
ночная катушка.
Для исключения температурной погрешности от изменения сопротивления
внешней линии подключение термопреобразователя сопротивления выполняют по трех­
проводной схеме, т. е. точка питания моста переносится непосредственно к термопреобра­
зователю сопротивления, в результате чего сопротивление линии распределяется на раз­
ные плечи моста.
Сопротивление линии связи, на которое отградуирован прибор (5, 15 или 20 Ом)
обычно указано на его шкале. Подгонка сопротивления линии связи к этому значению
осуществляется подгоночными катушками R h. При двухпроводной схеме подключения
замыкают накоротко оба провода у головки термометра сопротивления и подгоночной
катушкой добиваются требуемого значения сопротивления линии связи. При трёхпровод­
ной схеме сопротивление каждого из проводов, соединяющих термопреобразователь с
измерительным мостом, вместе со своей подгоночной катушкой должно быть равно поло­
вине сопротивления линии, указанного на шкале прибора, т.е. 2.5; 7.5 или 10 Ом. Подгон­
ка сопротивлений линии связи проводится следующим образом:
• закоротить в головке термопреобразователя зажимы, к которым подключают­
ся идущие от устройства провода;
• отключить провода, идущие к термопреобразователю сопротивления от пане­
ли с катушками, измерить их сопротивление попарно и составить три уравнения с тремя
неизвестными:
C l = R l +R2; C 2 = R 1 + R 3 ; C 3 = R 2 + R 3 ,
где R l и R2 - сопротивления проводов, последовательно с которыми включаются подго­
ночные катушки; R3 - сопротивление третьего провода от термопреобразователя сопро­
тивления;
• из этих уравнений найти значения R1 и R2:
103
П1
С 1-С З + С2 по С З -С 2 + С1
= --------^-------- ’^ 2 = -------- ^--------’
2
2
• уменьшить, путём отмотки проводов с подгоночных катушек, сопротивления
R1 и R2 до требуемого значения;
• поставить подгоночные катушки на место, снять перемычки, подключить
провода к устройству.
Различают следующие типы автоматических электронных потенциометров и
мостов: показывающие, регистрирующие (самопишущие); показывающие и регистри­
рующие (самопишущие). В зависимости от назначения любая группа приборов может
иметь следующие исполнения: с регулирующим устройством; с задатчиками для регули­
рующих устройств; с дополнительными устройствами, служащими для сигнализации, пе­
редачи информации об измеряемой величине, выдаче электрических или пневматических
сигналов. В зависимости от условий эксплуатации приборы имеют следующие исполне­
ния: обыкновенное; обыкновенное с искробезопасной измерительной цепью; тропическое;
тропическое с искробезопасной измерительной цепью. По числу измерительных систем
регистрирующих устройств приборы подразделяют на одноканальные, многоканальные, а
по числу контролируемых точек — на одноточечные, многоточечные.
Устанавливают следующие классы точности приборов: 0,25; 0,5; 1,0; 1,5.
По виду регистрации приборы разделяют на следующие группы: с регистрацией
в прямоугольных координатах; с регистрацией в полярных координатах.
Предел допустимой основной погрешности приборов, выраженный в процентах
от нормирующего значения измеряемой величины, на всех отметках шкалы или диаграм­
мы не должен превышать ± 0,25 — для класса 0,25; ±1,0 - для класса 1,0; ± 0,5 — для
класса 0,5; ± 1,5 - для класса 1,5.
Для мостов за нормирующее значение принимают разность конечных значений
диапазона измерения. Для потенциометров за нормирующее значение принимают: верх­
нее конечное значение диапазона измерения, если нулевое значение находится вне диапа­
зона измерения; сумму абсолютных конечных значений диапазона измерения, если нуле­
вое значение находится внутри диапазона измерения. Нормирующее значение и диапазон
измерения выражаются в единицах входного сигнала.
Разброс точек записи в многоточечных приборах не должен выходить за пределы
допустимой основной погрешности записи.
Вариация показаний приборов не должна превышать 0,2 % для приборов класса
0,25 и половины абсолютного значения предела основной допустимой погрешности —
для приборов остальных классов точности. Вариация показаний выражается так же, как
основная погрешность. Характер успокоения приборов должен быть таким, чтобы указа­
тель устанавливался не более чем после трех полуколебаний для показывающих прибо­
ров и двух полуколебаний - для регистрирующих приборов. Электрическое сопротивле­
ние изоляции измерительных цепей приборов относительно корпуса и относительно дру­
гих цепей при температуре окружающего воздуха (20 ± 5) °С и относительной влажности
не более 80 % должно быть не менее 100 МОм. Электрическое сопротивление изоляции
остальных цепей прибора относительно корпуса и цепей между собой должно быть не
менее 40 МОм.
При изменении напряжения питания силовой электрической цепи приборов на
+10 % и -15% от номинального значения, изменение показаний приборов не должно пре­
вышать 0,2 % для приборов класса точности 0,25 и половины абсолютного значения пре­
дела допустимой основной погрешности - для приборов остальных классов точности.
Потенциометры должны выдерживать в течение 2 ч перегрузку по измеряемой
величине, на 2 0 % превышающую максимальное значение измеряемого параметра, выра­
женного в единицах напряжения или тока.
Мосты должны выдерживать в течение 2 ч короткое замыкание и обрыв любого
провода линии связи с датчиком.
104
Конец указателя должен перекрывать не менее 1/4 и не более 3/4 наименьшей от­
метки шкалы. В приборах должен быть обеспечен заход указателя за крайние отметки
шкалы. Запись должна производиться непрерывной линией; ширина линии записи не
должна превышать для приборов с шириной поля регистрации диаграммной ленты или
диска, мм: до 100 — 0,8 мм, свыше 100 до 250 — 1 мм; свыше 250 — 1,2 мм. Многоточеч­
ные регистрирующие приборы должны выпускаться с многоцветной записью.
Номинальную скорость продвижения диаграммной ленты регистрирующих при­
боров выбирают из ряда: 10; 20; 40; 60; 120; 180; 240; 300; 600; 720; 1200; 1800; 2400;
3600; 5400; 7200; 12800; 14400; 18000; 36000; 54000; 90000 мм/ч.
Номинальную скорость вращения диаграммных дисков регистрирующих прибо­
ров выбирают из ряда: один оборот за 0,1; 0,5; 1.0; 2,0; 4,0; 6,0; 8,0; 12,0; 16,0; 24,0; 48,0;
72,0; 120,0; 168,0 ч. Погрешность скорости перемещения диаграммных лент и дисков не
должна превышать ± 0,5 % заданной скорости при напряжении сети 220 В и частоте
50 Гц.
105
XIV.
ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
ТЕХНОЛОГИЧЕСКОГО КОНТРОЛЯ И
СИГНАЛИЗАЦИИ
Оптимизация технологических процессов, повышение их рабочих параметров до
критических и сверхкритических, сложные взаимосвязи между различными технологиче­
скими участками, не допускающими отклонения в работе отдельных агрегатов от предпи­
санных режимов, требуют всё возрастающего количества точек контроля допускаемых
значений различных параметров автоматизируемых объектов. В связи с этим в проектах
автоматизации широкое применение находят специальные схемы технологической сигна­
лизации большого числа параметров. Алгоритм работы этих схем сводится к следующему:
• при отклонении параметра от заданного значения подаются звуковой и свето­
вой сигналы;
• звуковой сигнал снимается кнопкой съёма звукового сигнала;
• световой сигнал исчезает при уменьшении отклонения параметра до допус­
каемого значения.
• в случае необходимости каждый вновь поступивший сигнал выделяется ми­
гающим светом. При съёме звукового сигнала оператором сигнальная лампочка переходит
на ровный свет.
В настоящее время для технологической сигнализации наиболее часто применя­
ются унифицированные блоки технологической сигнализации, многоканальные ком­
плектные устройства сигнализации и бесконтактные логические элементы, на которых
реализуются различные системы технологической сигнализации с требуемым алгоритмом
работы.
Блоки технологической сигнализации
Блоки технологической сигнализации предназначены для индивидуальной свето­
вой и общей звуковой сигнализации конечных состояний объектов и дискретных значений
технологических параметров.
Блоки технологической сигнализации реализуют аварийную сигнализацию пре­
дельных значений отдельных параметров, характеризующих ход технологического про­
цесса, и позиционную сигнализацию состояний (включен, отключен, открыт, закрыт) ап­
паратуры, агрегатов и механизмов, участвующих в технологическом процессе.
Алгоритм работы аварийной сигнализации:
• в исходном состоянии (технологический контакт разомкнут) сигнальная лам­
почка, соответствующая данному технологическому параметру, погашена, звуковая сиг­
нализация выключена;
• при нарушении технологического параметра (технологический контакт замы­
кается) сигнальная лампочка загорается мигающим светом, включается звуковая сигнали­
зация;
• при квитировании сигнальная лампочка переходит на ровное горение, звуко­
вая сигнализация выключается;
• при восстановлении нормального значения технологического параметра (тех­
нологический контакт размыкается) сигнальная лампочка гаснет;
• при восстановлении технологического параметра до квитирования сигнальная
лампочка гаснет, звуковая сигнализация выключается, схема переходит в исходное со­
стояние.
Алгоритм работы позиционной сигнализации:
106
• при включенном (открытом) состоянии механизма, соответствующем нор­
мальному протеканию технологического процесса (технологический контакт замкнут),
сигнальная лампочка горит ровным светом, звуковая сигнализация выключена;
• при несанкционированном отключении (закрытии) механизма (технологиче­
ский контакт размыкается) сигнальная лампочка горит мигающим светом, включается
звуковая сигнализация;
• при квитировании сигнальная лампочка гаснет, звуковая сигнализация вы­
ключается.
Номенклатура унифицированных блоков технологической сигнализации следую• блок аварийной сигнализации (БАС) на пять индивидуальных точек сигнализации;
• блок позиционной сигнализации (БПС) на пять индивидуальных точек сигнализации;
• блоки общих цепей (БОЦ-1 - БОЦ-3), выполняющие функции управления мигающим
светом, звуковой сигнализацией и питания блоков БАС и БПС (общим числом не более 20
блоков.
Блок аварийной сигнализации БАС
Принципиальная электрическая схема блока аварийной сигнализации представле­
на на рис. 1 .
Функционально БАС состоит из пяти каналов индивидуальной сигнализации,
объединённых общими шинами.
В исходном состоянии технологический контакт ТКі разомкнут, соответствующая
ему лампочка сигнализации HLi погашена, звука нет. При замыкании ТКі лампочка HLi
подключается к шине мигающего света по цепи ТКі - VD3 - VD5 - HLi - VD7 - VD s - ши­
на Мигание АС; одновременно по цепи ТКі - VD3 - VD4 - Кі - VD(, - VD16 - шина Квити­
рование, звук АС включается звуковой сигнал. Включения реле Кі при этом не происхо­
дит, так как ток, протекающий по его обмотке, ограничен по уровню ниже тока срабаты­
вания резисторами Ri, R?, которые находятся в блоке БОЦ-2. При нажатии оператором
107
кнопки Квитирование АС шина Квитирование, звук АС подключается непосредственно к
шине -24 В, реле Кі срабатывает и через собственный контакт (1,2) и диод VD 40 подклю­
чается к цепи -24 В (становится на самоблокировку).Лампочка через замкнутый контакт(3,4) реле Кі подключается к шине +Uji и переходит на ровное горение (VD7 запирает­
ся); звуковой сигнал выключается, так как замкнутый контакт ( 1 ,2 ) реле Кі шунтирует
шину Квитирование, звук АС и диод VD(l, который запирается, выключая ток, проходив­
ший на вход узла звуковой сигнализации.
При размыкании ТКі лампочка HLi гаснет, но контакты реле Кі остаются замкну­
тыми, так как реле продолжает получать питание от узла задержки через шину Задержка
и диоды VD 32 и VD 2. По окончании времени задержки, определяемого времязадающей
цепью узла задержки Сз и Ri 6 в блоке БОЦ-2, реле Кі выключается. Таким образом, крат­
ковременное размыкание датчика, при котором он успевает замкнуться до окончания за­
держки, воспринимается схемой как случайное и разблокировки реле Кі не происходит.
Контроль исправности сигнальных лампочек и каналов индивидуальной сигнали­
зации осуществляется оператором нажатием кнопки Контроль, которая подключает шину
Контроль и диоды VDi (VD9, VDn, VD25, VD33) к шине +24 В, +Un, что равнозначно
включению всех ТК.
Диоды VD3, V D n , VD 19, VD 27, VD 35 являются развязывающими и обеспечивают
возможность подключения к ТК других ячеек сигнализации или входов схем блокировок.
В целях защиты общих шин от короткого замыкания подключаемых к ним по
схеме ИЛИ полупроводниковых диодов общие шины заводятся в БАС через дополнитель­
ные схемно-избыточные диоды VDs, VD 16, VD 24, VD32, VD 40. Это увеличивает эксплутационную надёжность аппаратуры за счёт возможности локализации аварийного отказа в
аппаратуре.
Блок позиционной сигнализации БПС
Принципиальная электрическая схема блока позиционной сигнализации пред­
ставлена на рис. 2 .
Функционально БПС состоит из пяти каналов индивидуальной сигнализации,
объединённых общими шинами.
В исходном состоянии блок-контакт БКі замкнут, соответствующая ему лампочка
HLi горит ровным светом, звука нет. Лампочка HLi получает питание по цепи шина +24
В, +Цд - БКі - VD2 - HLi - шина -Цд. Одновременно по цепи: БКі - VD4 - реле Кі - V D n
- шина -24 В получает питание реле Кі и держит замкнутыми свои замыкающие контак­
ты. Однако несмотря на то, что замыкающие контакты реле Кі замкнуты, тока в цепи этих
контактов и соединённой с ним шины Квитирование, звук ПС нет, так как эта цепь зашунтирована БКі и диодом VD4. Узел звуковой сигнализации, вход которого соединён с ши­
ной Квитирование, звук ПС, включён.
При размыкании БКі реле Кі получает питание по цепи шина Квитирование, звук
ПС - VD 23 - VD 15 - Кі - VDi 1 - шина -24 В.
Ток этой цепи удерживает реле Кі во включенном состоянии и, кроме того, вклю­
чает звуковой сигнал. Лампочка HLi получает питание по цепи шина Мигание ПС - VD 29 Кі - VDi - HLi - шина -Цд и горит мигающим светом.
При нажатии оператором кнопки Квитирование ПС разрывается цепь тока, про­
ходящая по шине Квитирование, звук ПС, реле Кі выключается, замыкающие контакты
реле Кі размыкаются, HLi гаснет, выключается звуковой сигнал.
Контроль исправности сигнальных лампочек и каналов индивидуальной сигнали­
зации осуществляется оператором нажатием кнопки Контроль, которая подключает шину
Контроль к шине +24 В, +Цд, что равнозначно включению всех БК.
В целях защиты общих шин от короткого замыкания подключаемых к ним по
схеме ИЛИ полупроводниковых диодов общие шины заводятся в БПС через дополнитель­
108
ные схемно-избыточные диоды V D n , VD 17, VD?3, VD 29. Это увеличивает эксплутационную надёжность аппаратуры за счёт возможности локализации аварийного отказа в аппа­
ратуре.
Рис. 2
Блок общих цепей БОЦ-1
Принципиальная электрическая схема БОЦ-1 представлена на рис. 3.
Функционально блок БОЦ-1 выполняет функции организации и управления ми­
гающим светом. Основу этого узла составляет симметричный мультивибратор на транзи­
сторах VT2, ѴТз с частотой колебаний 1 Гц.
Диодно-трансформаторный компаратор формирует на обмотке W3 трансформато­
ра ТУ запускающие импульсы длительностью0.5 мс с частотой следования 100 Гц в нача­
ле каждой полуволны напряжения фазы А.
При совпадении импульсов с обмотки W3 трансформатора ТУ и импульсов разре­
шения, снимаемых с эмиттера транзистора ѴТ2 мультивибратора, открывается транзистор
ѴТі и через обмотки W5 и W6 трансформатора ТУ пачки запускающих импульсов (дли­
тельность пачки определяется мультивибратором и составляет 0.5 с) поступают на управ­
ляющие переходы тиристоров VD 7 и ѴБц. Тиристор, включённый запускающим импуль­
сом, остаётся в открытом состоянии до окончания полуволны питающего напряжения (фа­
за А), а затем выключается и включается вначале следующей полуволны следующим им­
пульсом. Таким образом, при наличии пачки запускающих импульсов тиристор открыт, а
при отсутствии - закрыт.
Фазовые соотношения на входе компаратора выбраны таким образом, что запус­
кающие импульсы формируются в момент, когда напряжение фазы А нарастает не более
чем до 30 % амплитудного значения. Это позволяет защитить замыкающийся ТК от воз­
можной токовой перегрузки при коммутации холодной лампочки накаливания в случае
109
аварийной сигнализации, так как максимальная мощность, коммутируемая ТК, благодаря
принятым мерам в 5-10 раз меньше, чем при обычной коммутации холодной лампочки.
Рис. 3
Квитирование аварийной сигнализации и связанное с ним переключение лампоч­
ки накаливания герконовым замыкающим контактом реле Кі на ровный свет происходит
при уже разогретой лампочке, что снижает нагрузку на геркон. Кроме того, с целью по­
вышения надёжности герконового контакта предусмотрено включение тиристора VD 7 при
квитировании с помощью дополнительных контактов кнопки Квитирование АС и рези­
сторов Rs и R9, так что коммутация рассматриваемого герконового контакта происхолдит
на уровне напряжения не более 5 В. Это позволяет значительно снизить нагрузку на кон­
такты и повысить их надёжность до уровня надёжности полупроводниковых элементов.
Блок общих цепей БОЦ-2
Принципиальная электрическая схема БОЦ-2 представлена на рис. 4.
Функционально блок БОЦ-2 выполняет функции управления звуковой сигнализа­
цией и организации задержки.
Рассмотрим работу блока в режиме аварийной сигнализации.
Как было описано выше, при замыкании любого ТК появляется ток в шине Кви­
тирование, звук АС, которая подключена к входу усилителя на транзисторах ѴТі - ѴТ4
узла звуковой сигнализации. Ток, протекающий через обмотку реле Кі, ограничен рези­
сторами Ri и R? на уровне ниже уровня срабатывания реле Кі (БАС), но достаточном для
насыщения транзистора ѴТі и срабатывания усилителя на транзисторах ѴТі - ѴТ4. В кол­
лекторной цепи транзистора ѴТ4 включено реле Кі. Контакты реле Кі запускают тирис110
сторный ключ на тиристоре VDio, который подключает источник звукового сигнала Зв к
источнику переменного напряжения U3B.
Конденсатор Сі и резисторы R 5, R<s образуют времязадающую цепь, определяю­
щую задержку на включение источника звукового сигнала, необходимую для предотвра­
щения ложных срабатываний звукового сигнализатора при кратковременных (менее 0.2 с)
замыканиях ТК.
При нажатии оператором кнопки SBi Квитирование АС закрывается транзистор
ѴТі, открывается ѴТ2, происходит разряд ёмкости Сі через резистор Re, транзисторы ѴТ3
и ѴТ4 закрываются и звуковой сигнал выключается. При отпускании кнопки SBi Квити­
рование АС шина Квитирование, звук АС остаётся обесточенной благодаря шунтирующе­
му действию замыкающих контактов реле Кі в блоке БАС.
Узел задержки обеспечивает задержку на отпускание герконового реле Кі з а а к ­
тированного индивидуального канала аварийной сигнализации (блок БАС) при кратко­
временном (случайном) размыкании технологического контакта датчика. Время задержки
определяется временем разряда конденсатора Сз. Как описано выше, после квитирования
катушка реле Кі индивидуального канала сигнализации (блок БАС) получает питание по
цепи шина +24 В, + U ji - ТК - VD 3, VD4 - контакты реле Кі - VD 40 - шина -24 В. Диод
VD 2 при этом закрыт. При размыкании ТК диод VD 2 открывается. Катушка реле Кі под­
соединяется к шине +24 В по цепи - VD2 - VD32 - шина Задержка - эмиттер-база ѴТ9 R 19, R21. Транзистор VT9 открывается, через него начинает протекать ток разряда конден­
сатора Сз, при этом открывается транзистор VTs. Через открытый транзистор VTs прохо­
дит ток удержания реле Кі по цепи шина +24 В -Цд, R n - коллектор-эмиттер VTs. VD(, коллектор-эмиттер VT9, VD 2 (БАС) - замыкающие контакты реле Кі - шина -24 В. Этот
ток существует на время разряда конденсатора Сз, пока открыт транзистор VTs. По окон­
чании разряда конденсатора Сз транзистор VTs закрывается, транзистор VT7 открывается.
Ток удержания реле Кі исчезает, реле Кі отпускает и замыкающими контактами разрывает
цепь на шину -24 В.
Через резистор R15 и открытый транзистор ѴТ7 проходит ток заряда конденсатора
Сз. Схема возвращается в исходное состояние.
Рассмотрим работу блока БОЦ-2 в режиме позиционной сигнализации.
При размыкании любого БК от шины +Цл, +24 В через размыкающие контакты
кнопки SB2 Квитирование ПС и вход усилителя на транзисторе ѴТ5, зашунтированный
четырьмя диодами ДШ, начинает протекать ток в шину Квитирование, звук ПС. Транзи­
стор ѴТ5 этим током открывается и с помощью транзистора ѴТб включает реле Кі, кон­
такты которого включают цепь источника звукового сигнала Зв.
При нажатии оператором кнопки SB2 Квитирование ПС разрывается цепь пита­
ния реле Кі, замыкающие контакты реле Кі размыкаются, шина Квитирование, звук ПС
обесточивается, транзисторы ѴТ5. ѴТб закрываются и звуковой сигнал Зв выключается.
Диоды ДШ необходимы для предохранения входа усилителя на транзисторе ѴТ5
от перегрузок. Они должны быть рассчитаны на суммарный ток реле всех каналов пози­
ционной сигнализации. В качестве таких диодов могут быть использованы, например
диоды выпрямительного моста БОЦ-3.
Блок общих цепей БОЦ-3
Принципиальная электрическая схема блока общих цепей БОЦ-3 представлена на
рис. 5.
Функционально блок БОЦ-3 выполняет функцию блоков питания для аварийной
и позиционной сигнализации.
Схема питания собрана по трёхфазной двухтактной схеме (схеме Ларионова), где
с каждой фазной обмоткой одного из трёх трансформаторов соединены два полупровод-
112
никовых диода: один - анодом, другой - катодом. Первичные и вторичные обмотки
трансформаторов соответственно соединены звездой.
$4.
«Iм
СО
N
*
6210 ггі>25
-и*
Ьі5 ЬібЬ$Ьг be
щ
vus
2І 2І 2І
21 21
ѵщ
vd2 %
ж21
21 21
Щ Щ VD„
Рис.4
Второй выпрямитель для лампочек сигнализации собран по однофазной двухкон­
тактной (мостовой) схеме.
113
X V . Э Л Е К Т Р О И ЗМ Е Р Е Н И Я
1. Классификация электроизмерительных приборов
Электроизмерительные приборы классифицируют по различным признакам.
По роду измеряемой величины электроизмерительные приборы подразделяют на
амперметры, вольтметры, ваттметры, счётчики электрической энергии, фазометры, часто­
томеры, омметры и т.д. Условное обозначение прибора по роду измеряемой величины
(таблица 1) наносится на лицевую сторону прибора.______________________Таблица
Условное обо­
Наименование прибора
значение
Амперметр
А
Вольтметр
V
Вольтамперметр
ѴА
Ваттметр
W
Варметр
Ѵаг
Микроамперметр
цА
Миллиамперметр, милливольтметр
МА, mV
Омметр
Q.
Мегаомметр
М Q.
Hz
Частотомер
Волномер
к
Фазометр: измеряющий сдвиг фаз
Ф
измеряющий коэффициент мощности
COS ф
Счётчик ампер-часов
Ah
Счётчик ватт-часов
Wh
Счётчик вольт-ампер-часов реактивный
varh
Гальванометр
Ф
м
Осцилограф
На шкалах электроизмерительных приборов указывают также условные обозна­
чения, отражающие род электрического тока, класс точности прибора, испытательного
напряжения изоляции, рабочего положения прибора и т.д. (таблица 2)._______Таблица 2
Условное обо­
Значение условного обозначения
значение
—
Прибор постоянного тока
/■ѵ
Прибор постоянного и переменного тока
Прибор переменного тока
Прибор трёхфазного тока
1—1
Рабочее положение шкалы горизонтальное
Рабочее положение шкалы вертикальное
_L
Рабочее положение шкалы наклонное, под углом 60° к горизонту
Прибор класса точности 0,5
0,5
Измерительная цепь изолирована от корпуса и испытана
напряжением 3 кВ
Прибор испытанию прочности изоляции не подлежит
114
ік
Чк
Электроизмерительные приборы бывают аналоговыми и цифровыми.
Аналоговыми называют измерительные приборы, показания которых являются
непрерывной функцией измеряемой величины. Цифровыми называют измерительные
приборы, показания которых выражены в цифровой форме.
В зависимости от вида получаемой измерительной информации приборы подраз­
деляют на показывающие, регистрирующие, самопишущие, печатающие, интегрирующие,
суммирующие.
Наибольшее распространение в электротехнической практике получили показы­
вающие приборы, т.е. приборы непосредственной оценки, или прямого отсчёта. Приборы
этого типа независимо от принципа действия и назначения состоят из двух основных час­
тей: измерительной цепи и измерительного механизма. Простейшая измерительная цепь,
например, вольтметра представляет собой индуктивную катушку с последовательно под­
соединённым добавочным сопротивлением. При постоянном сопротивлении такой цепи
через катушку проходит ток, пропорциональный измеряемому напряжению.
В простейшем амперметре измерительная цепь состоит из измерительной катуш­
ки, последовательно подключённой к электрической сети, в которой необходимо измерить
Измерительный механизм предназначен для преобразования подводимой к нему
электрической энергии в механическую энергию перемещения подвижной части прибора
и связанной с ней стрелкой или другим указательным устройством, каждому положению
которого соответствует определённое значение измеряемой величины. Одинаковый по
конструкции измерительный механизм в сочетании с различными измерительными цепя­
ми можно применять для измерения различных электрических величин.
Перемещение подвижной части измерительного прибора происходит за счёт
взаимодействия магнитных или электрических полей в электроизмерительном приборе, в
результате которого возникает вращающий момент Мвр, пропорциональный значению из­
меряемой величины. Под действием Мвр подвижная часть измерительного механизма по­
вернётся до упора, если этому не будет препятствовать противодействующий момент Мпр.
Установившееся отклонение подвижной части измерительного механизма наступает при
равенстве вращающего и противодействующего моментов: Мвр = Мпр.
Для создания противодействующего момента в современном электроприборо­
строении используются механические и электромагнитные силы. Приборы с электромаг­
нитными противодействующим моментом называются логометрами, устройство и работа
которых были рассмотрены в разделе «ПИРОМЕТРИЯ». Для создания механического
противодействующего момента широко используют спиральные пружины из фосфорной
бронзы (рис. 1 , а).
115
В более чувствительных приборах, например гальванометрах, иногда применяют
подвесы или растяжки. Подвес обычно представляет собой упругую металлическую лен­
ту 1, на которой свободно подвешена подвижная система прибора 2 (рис. 1, б). Растяжки
1 выполняют так же, как и подвесы, но в приборе их две и они имеют предварительное
натяжение (рис. 1 , в).
Для точной установки стрелки 2 прибора (рис. 1, а) на нулевое значение служит
специальное корректирующее устройство, позволяющее с помощью специального винта 5
смещать поводок 1 , в котором закреплён неподвижный конец противодействующей пру­
жины 4. Подвижная часть прибора не должна изменять положения под действием сил тя­
жести. Уравновешивание подвижной системы прибора достигается путём её балансировки
с помощью грузиков 3, которые устанавливаются на тонких нарезных стержнях с проти­
воположной стороны стрелки.
Для того чтобы при внезапном изменении значения измеряемой величины, когда
нарушается равновесие моментов, стрелка прибора быстро (без колебаний) занимала но­
вое положение, показывающие приборы снабжают успокоителями (демпферами). Назна­
чение успокоителей состоит в том, чтобы поглощать кинетическую энергию подвижной
части измерительного механизма. При хорошем успокоительном воздействии демпфера
подвижная часть прибора должна принимать новое положение равновесия после неболь­
шого колебания, причём для большинства стрелочных прибоов время успокоения не
должно превышать 4 с. За время успокоения принимают промежуток времени от момента
включения прибора до момента, когда стрелка прибора отклоняется от положения равно­
весия не более чем на 1 % шкалы.
Наибольшее распространение получили воздушные и магнитоиндукционные ус­
покоители. В воздушном успокоителе (рис. 2, а) демпфирующий момент создаётся за счёт
торможения лёгкого поршенька 2 , жёстко связанного с подвижной частью прибора и дви­
гающегося внутри закрытой камеры 1 .
В магнитоиндукционных успокоителях (рис. 2, б) демпфирующий момент созда­
ётся силами взаимодействия между полем постоянного магнита 1 и вихревыми токами,
наводимыми этим полем в металлическом диске 2 при его движении.
К электроизмерительным приборам предъявляются следующие основные требо­
вания:
1) погрешность прибора не должна превышать указанного на лицевой стороне
предела (класса точности) и не должна изменяться с течением времени;
2) шкала прибора должна быть проградуирована в единицах СИ;
3) прибор должен быть снабжён успокоительной системой;
116
4) магнитные и электрические поля, температура окружающей среды не должны
оказывать заметного влияния на показания прибора;
5) прибор должен потреблять минимальное количество энергии и должен вы­
держивать установленную ГОСТом перегрузку.
2. Приборы магнитоэлектрической системы
Принцип действия приборов магнитоэлектрической системы основан на воздей­
ствии магнитного поля постоянного магнита на подвижную катушку с током, помещённое
в это поле. Устройство прибора такой системы с механической противодействующей си­
лой показано на рис. 3. Прибор состоит из неподвижной части, представляющей собой
подковообразный магнит 3 с полюсными наконечниками, которые выполнены из магни­
томягкой стали и имеют цилиндрическую расточку. В пространстве между полюсными
наконечниками неподвижно закреплён стальной цилиндрический сердечник 2 , который
необходим для создания в воздушном зазоре 1 между полюсными наконечниками и сер­
дечником равномерного радиально направленного поля. В воздушном зазоре расположена
подвижная катушка 4, выполненная из тонкого изолированного провода, намотанного на
алюминиевый каркас прямоугольной формы (или без каркаса). Концы обмотки соединены
со спиральными пружинами 5 (растяжками или подвесом), изолированно закреплёнными
на стальных полуосях 00 1 рамки. С другой стороны, пружины своими свободными конца­
ми соединены с двумя неподвижными проводами, подводящими ток к катушке, т.е. пру­
жины являются токоведущими частями прибора. Пружины изготовляют из фосфористой
бронзы. Их основное назначение - создание противодействующего момента в приборе и
возвращение подвижной системы в первоначальное положение, когда прибор отключен от
сети.
Направление отклонения стрелки приборов магнитоэлектрической системы зави­
сит от направления измеряемого тока, поэтому при включении их в цепь переменного то­
ка на подвижную катушку действуют быстроизменяющиеся по значению и направлению
механические силы, среднее значение которых равно нулю. Следовательно такие приборы
пригодны только для измерений в цепях постоянного тока.
117
Приборы магнитоэлектрических систем производятся на токи не более 150 200мА, так как при больших токах происходит недопустимый нагрев спиральных пружин
(или растяжек), служащих как отмечалось ранее, токопроводящими элементами системы.
Для расширения пределов измерения магнитоэлектрических приборов по току использу­
ют шунты, представляющие собой сопротивление, включённое параллельно прибору для
того, чтобы только определённая часть измеряемого тока проходила через сам прибор.
Измерительные приборы магнитоэлектрической системы можно применять при
измерениях в цепях переменного тока, если в цепи подвижной катушки включить преоб­
разователь переменного тока в постоянный или пульсирующий.
Магнитоэлектрические приборы обладают следующими положительными свойст­
вами: высокой чувствительностью и большой точностью измерений; незначительной соб­
ственной потребляемой мощностью; незначительной зависимостью работы приборов от
внешних магнитных полей и температуры окружающей среды, равномерностью шкалы по
всей её длине и большим диапазоном измерения значений тока (от 10"6 до 50 А) и напря­
жения (от 10"3 до нескольких сотен вольт при применении добавочных сопротивлений);
хорошей апериодичностью, т.е. быстрым успокоением подвижной системы.
К отрицательным свойствам магнитоэлектрических приборов следует отнести
слабую перегрузочную способность и необходимость при измерениях в цепях переменно­
го тока применять специальные преобразователи.
3. Приборы электромагнитной системы
Принцип действия приборов электромагнитной системы основан на механизме
втягивания подвижного ферромагнитного сердечника внутрь неподвижной катушки под
действием её магнитного поля, создаваемого в катушке проходящим через неё измеряе­
мым током.
Наиболее широко распространены электромагнитные приборы с плоской катуш­
кой (рис. 4).
Прибор состоит из прямоугольной неподвижной катушки 5, через которую про­
ходит измеряемый ток. Катушка имеет узкую щель, в которую может входить сердечник,
выполненный в виде тонкого лепестка 2 из магнитомягкой стали и закреплённой эксцен­
трично на оси прибора. К этой же оси прикреплены указательная стрелка 1, спиральная
пружина 6 , создающая противодействующий момент, и поршень 4 воздушного успокои­
теля 3, создающего демпфирующий момент. Концы оси прибора удерживаются в под­
шипниках. Ток I, проходя через витки катушки, создаёт магнитный поток, который, на­
118
магничивая стальной сердечник, втягивает его в катушку, причём тем сильнее, чем боль­
ше магнитная индукция поля катушки. При втягивании стального сердечника ось прибора
поворачивается и стрелка отклоняется на некоторый угол.
При изменении направления тока в катушке электромагнитного прибора меняют­
ся одновременно на противоположные магнитные полюсы ферромагнитного сердечника,
вследствие чего направление вращающего момента подвижной части прибора не меняет­
ся. Поэтому приборы электромагнитной системы пригодны для измерений в цепях как по­
стоянного, так и переменного токов.
Основные достоинства приборов электромагнитной системы - простота и надёж­
ность устройства, высокая перегрузочная способность, дешевизна и возможность исполь­
зования для измерений в цепях постоянного и переменного тока.
К недостаткам приборов электромагнитной системы можно отнести невысокий
класс точности, который обычно не выше 1,0 из-за влияния гистерезиса; относительно
большое собственное потребление мощности; неравномерность шкалы; низкая чувстви­
тельность, из-за чего эти приборы непригодны для измерения малых токов и напряжений;
зависимость показаний от внешних магнитных полей, так как собственное поле катушки
расположено в воздушной среде и поэтому его индукция незначительна; ограниченность
диапазона частот (не свыше 8000 Гц).
4. Приборы электродинамической системы
Принцип действия приборов электродинамической системы основан на взаимо­
действии проводников с токами. Известно, что два проводника с токами взаимно притяги­
ваются, если токи в них имеют одинаковое направление, и взаимно отталкиваются при
различном направлении токов.
Прибор этой системы (рис. 5) состоит из двух катушек: неподвижной 2, состоя­
щей из двух секций, которые соединены между собой последовательно, и подвижной 3,
закреплённой на оси и вращающейся на ней внутри неподвижной катушки. Ток к подвиж­
ной катушке подводят через закреплённые на оси спиральные пружинки 1 , которые одно­
временно создают противодействующий момент, пропорциональный углу закручивания.
При этом пружинки электрически изолированы от оси. На оси подвижной катушки закре­
плены также указательная стрелка 4 и крыло воздушного успокоителя 5. Для повышения
класса точности прибора и его чувствительности обмотку подвижной катушки выполняют
из тонкой изолированной проволоки на ток не более 0,5 А.
119
Приборы электродинамической системы имеют высокую точность, что обуслов­
лено отсутствием ферромагнитных сердечников, и могут использоваться для измерений в
цепях постоянного и переменного тока. При измерении в цепях переменного тока элек­
тродинамические приборы являются самыми точными. Их выполняют в основном в виде
переносных приборов, имеющих классы точности 0,1; 0,2; 0,5. Высокая точность прибо­
ров обусловлена тем, что для создания вращающего момента подвижной части приборов
используют магнитные потоки, действующие в воздухе, что исключает возможность воз­
никновения погрешностей из-за вихревых токов, гистерезиса и т.д.
Недостатками приборов электродинамической системы являются зависимость их
показаний от воздействия внешних магнитных полей, так как их собственное магнитное
поле незначительно, и слабая перегрузочная способность, так как подвод тока к подвиж­
ной катушке осуществляется через тонкие спиральные пружинки. Кроме того, эти прибо­
ры потребляют довольно значительную мощность, так как для создания достаточного
вращающего момента приходится из-за слабости собственного магнитного поля заметно
увеличивать число витков неподвижной и подвижной катушек.
5. Приборы индукционной системы
Работа приборов индукционной системы основана на использовании явления воз­
никновения вращающегося (или бегущего) магнитного поля, т.е. на способности этих по­
лей создавать вращающий момент, действующий на подвижное металлическое тело, по­
мещённое в такое поле.
Индукционные приборы применяют для измерения тока, напряжения, мощности
и энергии в цепях переменного тока. Поэтому принцип действия индукционных приборов
рассмотрим на примере работы счётчика электрической энергии переменного однофазно­
го тока (рис. 6 ).
В индукционном счётчике бегущее магнитное поле, создаваемое токами его ка­
тушек, индуцирует в алюминиевом подвижном диске вихревые токи. Взаимодействие бе­
гущего магнитного поля с вихревыми токами создаёт вращающий момент, заставляющий
диск вращаться в ту же сторону, в которую вращается поле. Противодействующий момент
создаётся в результате взаимодействия поля постоянного магнита 8 с наводимым им во
вращающемся алюминиевом диске вихревыми токами.
Подвижная часть прибора представляет собой алюминиевый диск 5, укреплённый
на оси 4. Неподвижная часть сердечника состоит из двух электромагнитов 1 и 6 с намаг­
120
ничивающимися катушками 2 и 7 соответственно. Электромагнит 1 является трёхстерж­
невым, а катушка 2 состоит из большого числа витков изолированного проводника малого
сечения.
Электроэнергия, учитываемая счётчиком, пропорциональна частоте вращения
диска.
Также счётчик электроэнергии имеет счётный механизм, который связан червяч­
ной передачей с осью диска. По показаниям счётного механизма определяют количество
электроэнергии, которое израсходовал потребитель.
К достоинствам индукционных счётчиков следует отнести их большую надёж­
ность в работе, значительную перегрузочную способность по току ( около 300 %), незна­
чительную чувствительность к внешним магнитным полям и большое значение вращаю­
щего момента.
Индукционные приборы пригодны для переменного тока только одной опреде­
лённой частоты, что является в определённой степени недостатком таких приборов. Дру­
гим недостатком можно считать зависимость показаний прибора от температуры окру­
жающей среды: с повышением температуры окружающей среды увеличивается сопротив­
ление прибора и уменьшаются вихревые токи, что приводит к уменьшению вращающего
момента (примерно на 0.4 % при нагревании на 1°С).
121
XVI. ЭЛЕКТРОННЫЕ ДАТЧИКИ
1. Датчики давления и разности давлений
Датчики давления и разности давлений (далее - преобразователи) представлены
следующими типами:
■ модель Сапфир 22М
■ модель Метран 22М
■ модель 50DPP, 50DPF фирмы
■ модель
фирмы WIKA
■ модель
фирмы YOKOGAWA
Преобразователи предназначены для непрерывного или дискретного измерения
абсолютного, избыточного давлений, давления разрежения, и разности давлений в унифи­
цированный токовый сигнал.
Преобразователи указанных типов позволяют измерять давление в диапазоне от 0,1 МПа абсолютного давления до 1000 МПа избыточного давления.
Предел допускаемой основной погрешности измерения от 0,2 % (фирма YOKO­
GAWA) до 1,0 % (Сапфир 22М датчик 2184 избыточное давление до 1000 МПа).
Дополнительная погрешность, вызванная изменением окружающей температуры,
у моделей разного поколения отличается довольно существенно. Так дополнительная
температурная погрешность преобразователя Сапфир 22М-ДД модель 2430 (наиболее
распространенная на ОАО “Каустик ”) с пределом измерения от 6,3 КПа до 40 КПа со­
ставляет 0,93 % (максимальная !!!) на каждые 10 °С при допускаемой основной по­
грешности 0,5% и текущим пределом измерения 6,3 КПа. Современный преобразователь
фирмы YOKOGAWA имеет дополнительную температурную погрешность 0,083 % на
каждые 10 °С при допускаемой основной погрешности 0,2 %. Такой высокий показатель
обеспечивается наличием встроенного в измерительный блок полупроводникового дат­
чика температуры (диод, транзистор (свойство р-п перехода)). Измерительная микропро­
цессорная система преобразователя корректирует температурную погрешность измери­
тельного блока в соответствии с сигналом датчика температуры.
Измерение давления основано на физических свойствах некоторых материалов:
изменения электрического сопротивления при деформации - тензоэффект.
возникновение разницы потенциалов при деформации - прямой пьезоэффект.
Состав и работа преобразователя
на основе модели Сапфир 22М
Измерительная часть преобразователя - чувствительный элемент, состоящий из
пластины монокристаллического сапфира с кремниевыми тензорезисторами (полупровод­
никовый тензорезистор). Пластина прочно соединена с металлической мембраной тензопреобразователя. Внутренняя полость заполнена кремнийорганической жидкостью, пере­
дающей внешнее воздействие от разделительной гофрированной мембраны на мембрану
тензопреобразователя. Результатом является изменение сопротивления тензорезисторов.
Тензорезисторы измерительного блока соединены по мостовой схеме, питание тензомоста осуществляется источником тока (генератором тока) с номинальным напряжением
питания 6 В (см. блок схему). Сигнал рассогласования с измерительного тензомоста, в за­
висимости от типа датчика до 250 мВ, поступает на вход дифференциального каскада
обеспечивающего высокую термостабильность усилителя, усиливается до нормализован­
ного уровня. В состав усилителя входят следующие блоки компенсации погрешности:
компенсации нелинейности тензомоста
компенсация температурной погрешности диапазона (электронной части)
122
компенсация температурной погрешности нуля (электронной части)
Преобразователь напряжение-ток формирует выходной унифицированный токо­
вый сигнал 0-5мА , 0-20мА и 4-20мА, а также содержит элементы настройки диапазона и
нуля. Напряжение питания преобразователя 24В или 36В постоянного тока. При напряже­
нии питания 24В максимальное сопротивление нагрузки не более 500 Ом.
Схема структурных соединений блоков представлена на Рис.1
Рис. 1 Структурная блок схема преобразователей типа
Сапфир 22М, Метран 22М, 50DPP, 50DPF, WIKA тип
Датчики фирмы YOKOGAWA тип
представляют собой высокоточные изме­
рительные преобразователи давления в унифицированный выходной сигнал 4-20мА, и что
важно поддерживают один из сетевых протоколов HART , который позволяет создать ав­
томатизированную систему управления и сбора информации на уровне лаборатории, цеха,
предприятия. Сетевой протокол HART использует последовательный двунаправленный
асинхронный способ передачи данных по двухпроводной линии связи, используя, для по­
вышения помехозащищенности на линии, частотную модуляцию сигнала. Скорость пере­
дачи регламентирована 19,2 Кбод/сек.
Структурная схема преобразователя представлена на Рис. 2 .
Микроконтроллер
Память
программ
PROM
Выход 4-20мА
Интерфейс HART
Микро­
процессор
Ж
RAM
ЦАП
Ж
Ж.
Flash
ROM4
Контроллер
HART
АЦП
Датчик
Электрически программируемая память
Для параметров пользователя
Рис.2 Структурная блок схема преобразователя
тип
фирмы YOKOGAWA
123
Краткое назначение блоков схемы:
■ Измерительный блок состоит из:
измерительного преобразователя
датчика температуры
- АЦП
■ Процессорной системы на базе микроконтроллера:
микроконтроллер
контроллер HART
- ЦАП
Измерительный преобразователь используя либо тензоэффект либо прямой пье­
зоэффект, формирует линейный выходной сигнал пропорционально измеряемому давле­
нию. Датчик температуры отслеживает температуру измерительного блока , для дальней­
шей коррекции . АЦП преобразует аналоговый сигнал измерительного преобразователя и
сигнала с датчика температуры в цифровой код. Далее код с АЦП читает микроконтрол­
лер и выполняет лианеризацию измерительного преобразователя. Управление всеми узла­
ми преобразователя осуществляет микроконтроллер. Для формирования выходного токо­
вого сигнала 4-20 мА используется ЦАП. Контроллер HART осуществляет связь с уда­
ленным терминалом по последовательному каналу.
2. Приборы для измерения расхода
Приборы для измерения объемного расхода (далее - расходомеры) используемые
на ОАО “Каустик” представлены следующими типами :
■ Индукционный - модель ВИР с вторичным прибором КС Д-3.
■ Электромагнитный - модель ИР-51 с датчиком ПРИ.
■ Ультразвуковой - модель Расход -7 и Акустрон.
■ Расходомеры фирмы KROHNE - модель MFM 2081 и MFM 3081 используют фи­
зический эффект называемый силой Кориолиса.
Принцип действия индукционного расходомера основан на физическом эффек­
те - взаимной индукции, т.е. при наличии двух контуров (катушек индуктивности), рас­
положенных рядом, переменный ток . протекающий по одному из контуров . создает пе­
ременное магнитное поле, вызывающее появление э.д.с. индукции в другом контуре.
При наличии ферромагнетиков (например, сердечник из электротехнического железа) и
разном количестве витков в обмотках, взаимодействие контуров друг с другом будет раз­
личным и постоянным, т.к. изменится напряженность магнитного поля и магнитный поток
через сердечник (в результате получим трансформатор).
Рис.З Датчик индукционного расходомера измерительный дифференциальный трансформатор.
124
Изменяя длину сердечника из ферромагнетика с постоянным поперечным сече­
нием (уменьшая), изменится (увеличится) магнитный поток через поперечное сечение
сердечника, и как следствие изменится (увеличится) значение э.д.с. индукции во вторич­
ном контуре, с точки зрения практики получим измерительный дифференциальный
трансформатор.
Принцип действия электромагнитного расходомера основан на физическом
эффекте названном электромагнитная индукция - в замкнутом проводящем контуре при
изменении магнитного поля через поверхность, ограниченную этим контуром, возникает
индуцируемый электрический ток и э.д.с. индукции. При прохождении электропроводной
жидкости через однородное магнитное поле в ней, как в движущемся проводнике, возни­
кает э.д.с. индукции, пропорциональная средней скорости потока жидкости.
Принцип действия ультразвуковых расходомеров класса Расход-7 и Акустрон
основан на эффекте Доплера для волн, распространяющихся в среде (газ, жидкость).
Эффект Доплера заключается в следующем: если приемник и (или) передатчик движутся
относительно среды распространения сигнала номинальной частоты f , то частота сигнала
воспринимаемого приемником будет отличатся от частоты сигнала генерируемого пере­
датчиком на величину Af, которая зависит от скорости перемещения приемника и (или)
передатчика сигнала и направления перемещения (отдаление или сближение).
Датчик ультразвуковых расходомеров представляет собой два пьезоэлектриче­
ских преобразователя (ППЭ) расположенных на противоположных стенках трубы с изме­
ряемой средой и направленных навстречу друг другу. Первый датчик формирует сигнал,
совпадающий с направлением движения среды - ППЭ по потоку, второй датчик соответ­
ственно против направления движения среды - ППЭ против потока. В момент генерации
импульса ППЭ по потоку амплитудой 60В второй датчик подключается схемой управле­
ния на приемный тракт измерительной схемы. Время прохождения ультразвукового им­
пульса по потоку фиксируется. Соответственно, в момент генерации импульса ППЭ про­
тив потока первый датчик коммутируется на приемный тракт измерительной схемы и
время прохождения ультразвукового импульса против потока также фиксируется. Разница
времени прохождения ультразвуковых импульсов по потоку и против потока - измерен­
125
ная искомая задержка, определяющая скорость перемещения среды в трубопроводе. При
известных остальных параметрах легко определить текущий расход.
Расходомеры фирмы KROHNE - модель MFM 2081 и MFM 3081 используют
физический эффект называемый силой Кориолиса. Сила вводится для учета влияния
вращения подвижной системы отсчета на относительное движение материальной точки.
Физический эффект состоит в том, что во вращающейся системе отсчета материальная
точка, движущаяся параллельно оси этого вращения, отклоняется по направлению, пер­
пендикулярному к ее относительной скорости или оказывает давление на тело, препятст­
вующее такому отклонению. В системах где присутствует сила Кориолиса возникает ус­
корение Кориолиса - как следствие изменения относительной скорости движения мате­
риальной точки при переносном движении и переносной скорости при относительном
движении материальной точки. Переносное движение - движение всех точек подвижной
системы относительно условно неподвижной. Собственно принцип действия расходоме­
ров фирмы KROHNE и основан на кориолисовом ускорении.
На Рис 5 видно, что на участке CD частицы протекающей среды будут ускорятся,
на участке EF напротив тормозится. В результате трубка деформируется (DD ЕЕ FF ) как
показано на рисунке. Трубка со средой не обязательно вращается на 360° , ее достаточно
вращать по неполной круговой орбите.
Расходомеры данного типа позволяют измерять расход независимо от плотности,
давления, температуры, вязкости и поведения измеряемой среды. Наличие воздушных пу­
зырьков и малых твердых частиц не влияет на точность измерения расхода, в отличии от
расходомеров использующих ультразвуковой принцип измерения.
Е
Рис. 5 Рисунок поясняющий принцип работы
датчика кориолисовых расходомеров.
126
XVII. ВТОРИЧНЫЕ ЭЛЕКТРОННЫЕ ПРИБОРЫ
И ПРЕОБРАЗОВАТЕЛИ
1 Структурные схемы автоматических
вторичных приборов
В настоящее время промышленностью выпускается большое количество различ­
ных конструкций автоматических электронных приборов. Принцип действия вторичных
автоматических приборов может быть рассмотрен по единой для всех разновидностей ба­
зовой конструкции, функциональная схема которой представлена на рис. 1 .
Рис. 1
В зависимости от назначения и типа прибора каждый из указанных узлов может
иметь разное схемное решение и конструктивное оформление, но структурная схема оста­
ётся в основном одинаковой.
Первичный преобразователь (датчик) служит для преобразования неэлектриче­
ской величины в электрическую и размещается на контролируемом объекте. Связь пер­
вичного преобразователя с измерительной схемой осуществляется с помощью соедини­
тельной линии.
Тип измерительной схемы определяется датчиком. Измерительная схема в общем
случае включает в себя источник питания, уравновешивающее устройство и вспомога­
тельные датчики для компенсации вредного влияния внешних факторов.
Электронный усилитель состоит из преобразовательного каскада, усилителя на­
пряжения, усилителя мощности. В автоматических приборах применяют усилители пере­
менного тока, обеспечивающие большую стабильность нуля.
Показывающее и записывающее устройство в общем случае состоит из шкалы
указателя, лентопротяжного механизма и пишущего устройства.
1.1 Измерительные схемы
В настоящее время для автоматического контроля и регулирования широко при­
меняют приборы с нулевым методом измерения. В автоматических электронных приборах
с использованием нулевого метода измерения в основном используются четыре вида из­
мерительных схем:
компенсационные схемы;
мостовые уравновешенные схемы;
дифференциально-трансформаторные схемы;
уравновешенные схемы с ферродинамическими датчиками.
В компенсационных схемах неизвестная измеряемая величина, преобразованная в
электрическую величину (напряжение, ЭДС), уравновешивается известным напряжением
127
измерительной схемы. Уравновешенные компенсационные схемы применяются для изме­
рения напряжения, ЭДС, тока, а также неэлектрических величин.
В мостовых уравновешенных схемах неизвестное измеряемое сопротивление
уравновешивается известным сопротивлением. Такие схемы применяются для измерения
электрического сопротивления, ёмкости, индуктивности.
В дифференциально-трансформаторных схемах перемещения сердечника первич­
ного датчика уравновешивается известным перемещением сердечника вторичного датчи­
ка. Дифференциально-трансформаторные схемы применяют для измерения расхода, дав­
ления, тяги, напора, уровня и других величин, значения которых могут быть преобразова­
ны в малые перемещения сердечника катушки.
В измерительных схемах с ферродинамическими датчиками напряжения в обмот­
ке первичного датчика уравновешивается известным напряжением обмотки вторичного
прибора. Такие схемы применяют для измерения физических величин, значения которых
могут быть преобразованы в угол поворота рамки ферродинамического датчика и широко
используются для дистанционной передачи показаний первичного прибора.
1.2 Усилители
Усилитель является одним из основных узлов вторичных контрольно­
измерительных приборов. Усилитель предназначен для повышения мощности сигнала за
счёт энергии внешнего источника.
Усилитель характеризуется:
а) коэффициентом усиления;
б) инерционностью;
в) стабильностью его характеристик;
г) степенью искажения усиливаемого сигнала по амплитуде, фазе и т.д.
Под коэффициентом усиления понимается отношение величины сигнала, сни­
маемого с выхода усилителя, к величине сигнала, подаваемого на вход усилителя.
если усилитель состоит из нескольких каскадов, то общий коэффициент усиления
Кобщ определяется произведением коэффициентов отдельных каскадов
к , = к.1 ■2кп ■ к .
ОО Щ
П
Под инерционностью понимают некоторое запаздывание выходной величины
усилителя относительно входной.
Rh
Рис. 2
Под стабильностью характеристик усилителя понимают постоянство коэффици­
ента усиления и амплитуды выходного напряжения (или тока), а также изменения выход­
ного сигнала при постоянстве сигнала на входе (дрейф нуля).
Искажения, вносимые усилителем можно разделить на два вида: нелинейные и
линейные. Искажения, связанные с наличием нелинейных элементов в усилителе, назы­
128
ваются нелинейными искажениями. Искажения, обусловленные изменениями коэффици­
ента усиления на различных частотах, называют частотными искажениями.
Усилитель должен обеспечивать такое максимальное выходное напряжение, при
котором выходной каскад отдает максимальную мощность в нагрузку, а также выдержи­
вать перегрузки входном сигналом и не должен давать значительного фазового сдвига вы­
ходного напряжения.
Для повышения стабильности работы, уменьшения нелинейных искажений и
внутренних шумов используют различные отрицательные обратные связи.
При ООС напряжение обратной связи и напряжение сигнала вычитаются и на
вход подается из разность.
Наибольшее распространение в усилителях получила ООС по напряжению.
1.3 Электрические двигатели
В автоматических контрольно-измерительных приборах применяются в основном
два вида асинхронных двухфазных реверсивных двигателей: конденсаторные и с экрани­
рованными полюсами.
Основное распространение получили конденсаторные электродвигатели с корот­
козамкнутым ротором.
Статор имеет две обмотки (управления и возбуждения). Питание обмотки управ­
ления производится от электронного усилителя, а возбуждения от сети переменного тока
через конденсатор, который обеспечивает сдвиг по фазе между магнитными потоками об­
моток на 90°.
Для привода диаграммной ленты применяют однофазные синхронные двигатели.
1.4 Записывающие устройства
Существующие записывающие устройства во вторичных приборах можно разде­
лить на три группы. К первой группе относятся устройства записи нанесением слоя веще­
ства, ко второй - изменением состояния вещества носителя и к третьей - снятием слоя
вещества носителя.
2 Прибор регистрирующий Диск-250
Диск-250 предназначен для измерения и регистрации активного сопротивления,
силы и напряжения постоянного тока, а также неэлектрических величин, преобразованных
в указанные сигналы.
Устройство и работа прибора
Функциональная электрическая схема прибора приведена на рис.З. В основу ра­
боты положен принцип электромеханического следящего уравновешивания. Входной сиг­
нал от датчика предварительно усиливается и лишь после этого происходит уравновеши­
вание его сигналом компенсирующего элемента (реохорда).
В приборе Диск-250 входной сигнал от датчика Д поступает в блок искрозащиты
БИ, предохраняющий датчик от опасного повышения тока и напряжения, которые могут
возникнуть при аварийном состоянии прибора. Затем входной сигнал поступает на усили­
тель УВС с жёсткой отрицательной обратной связью, где сигнал нормализуется по верх­
нему пределу измерения. На выходе УВС сигнал меняется от -0.5 до -8.5 В.
129
Сигнал с реохорда Р, преобразованный усилителем УР в напряжение , изменяю­
щееся от +0.5 до +8.5 В сравнивается на выходе усилителя небаланса УН с сигналом УВС
и далее сигнал небаланса с УН подаётся на управление работой электродвигателя.
Двигатель перемещает движок реохорда Р до тех пор, пока сигнал с усилителя УР
не станет равным (по абсолютной величине) сигналу с усилителя УВС. Таким образом,
каждому значению измеряемого параметра соответствует определённое положение движ­
ка реохорда и связанного с ним указателя прибора.
Рис. 3
Д - датчик; БИ - блок искрозащиты; ВхУ - входное устройство; УВС - усилитель входного
сигнала; ПУ - предварительный усилитель; ОкУ - оконечный усилитель; УР - усилитель
сигнала реохорда; Р - реохорд; Дв - балансирующий двигатель; УН - усилитель небаланса;
ИП - источник питания; PH, РВ - регулирующие устройства «меньше», «больше»;
СН, СВ - сигнализирующие устройства «меньше», «больше».
3 Преобразователь измерительный
многопредельный П-282
Преобразователь предназначен для преобразования термоэлектродвижущей силы
термоэлектрических преобразователей (термопар), или сопротивления термопреобразова­
телей сопротивления (термосопротивлений) и напряжения постоянного тока низкого
уровня (до 100 мВ) в один из унифицированных сигналов ГСП постоянного тока 0 - 5 мА,
4 - 2 0 мА или в сигнал напряжения постоянного тока 0 - 10 В.
Устройство и работа преобразователя
Схема электрическая структурная преобразователя приведена на рис. 4.
Рис. 4
А1 - панель внешних подключений; А2 - входное устройство; АЗ - входная
схема АЦФП; А4 - арифметическое устройство АЦФП; А5 - трансформатор;
А6 - аналого-цифровой функциональный преобразователь АЦФП
130
Преобразователь содержит панель А1, устройство входное А2, аналого-цифровой
функциональный преобразователь (АЦФП) А 6 , состоящий из входной схемы АЗ и ариф­
метического устройства А4, трансформатор А5.
Панель А1 служит для подключения входных и выходных цепей, а также напря­
жения питания преобразователя.
Устройство входное А2 обеспечивает искробезопасность входных цепей, автома­
тическую термокомпенсацию ЭДС «холодного спая»; компенсацию начальной ЭДС тер­
моэлектрического преобразователя и компенсацию напряжения постоянного тока в пре­
образователях с ненулевым началом диапазона входного сигнала; преобразование измене­
ния величины сопротивления термопреобразователя сопротивления в напряжение посто­
янного тока, пропорциональное величине изменения сопротивления; усиление сигналов
напряжения постоянного тока и приведение их к нормированному значению 0 - 10 В.
Входная схема АЗ АЦПФ А 6 предназначена для линейного преобразования на­
пряжения постоянного тока в цифровой код, а также гальванического разделения входных
и выходных цепей преобразователя и формирования стабилизированных напряжений по­
стоянного тока.
Арифметическое устройство А4 АЦПФ А 6 предназначено для осуществления
цифровой линеаризации характеристик входного сигнала и формирования сигналов по­
стоянного тока или напряжения постоянного тока.
Трансформатор А5 предназначен для питания преобразователя, гальванически не
связанными между собой напряжениями переменного тока.
Принцип действия преобразователя основан на усилении входных сигналов до
определённого уровня, функциональном аналого-цифровом преобразовании с учётом не­
линейности характеристики датчика и дальнейшем цифро-аналоговом преобразовании.
Функциональная схема, поясняющая принцип нелинейного аналого-цифрового
преобразования, приведена на рис. 5.
Рис. 5
1 - генератор тактовых импульсов; 2 - счётчик 1; 3 - устройство входное; 4 цифро-аналоговый преобразователь 1; 5 - устройство сравнения; 6 - гальвани­
ческая развязка; 7 - счётчик текущего значения функции - дешифратор; 8 элемент НЕ; 9 - запоминающее устройство; 10 - арифметическое устройство; 11
- счётчик; 12 - выходной регистр; 13 - цифро-аналоговый преобразователь 2.
В общем схема преобразователя представляет собой аналого-цифровой функцио­
нальный преобразователь (без учёта ЦАПЬ), у которого зависимость выходного кода от
входного аналогового сигнала (напряжения) нелинейна и обратна (по знаку) нелинейности
датчика.
131
Схема осуществляет следующую цепь преобразований:
Ubx —> N —> N 1 —> ІІвых,
где U b x —> N
- это линейное преобразование входного напряжения в код,
осуществляемое входной схемой АЗ;
N —> N 1
- нелинейное преобразование кода;
N —> ІІвых - линейное преобразование кода в выходное напряжение,
осуществляемое ЦАПЬ.
Цепь преобразований N —> N1 —> Ubbix осуществляется схемой, представляющей
собой арифметическое устройство и ЦАПЬ, выходное напряжение которого изменяется по
определённому закону.
Схема работает следующим образом: в исходном состоянии счётчик текущих
значений 7, счётчики 1 и 2 и выходной регистр 12 обнулены. Импульсы с генератора так­
товых импульсов начинают поступать одновременно в счётчик 1 и в арифметическое уст­
ройство. На выходе ЦАПі при этом происходит линейное нарастание выходного напря­
жения до момента равенства с входным напряжением. При этом срабатывает устройство
сравнения и запрещает поступление импульсов в регистр 12. С генератора тактовых им­
пульсов импульсы одновременно поступают через арифметическое устройство в счётчик
2 и регистр. Если арифметическое устройство осуществляет линейное преобразование, то
число импульсов в счётчике текущих значений и счётчике 2 (а значит и в регистре) равны
между собой в любой промежуток времени. Учитывая, что в момент срабатывания уст­
ройства сравнения происходит остановка счёта импульсов и фиксирование их числа в ре­
гистре, это число будет линейным эквивалентом входного напряжения:
NRG = К • U b x
Для осуществления линеаризации характеристик в арифметическом устройстве
происходит нелинейное преобразование числа импульсов. Упрощённо это выглядит так:
каждым, например 10 -ти импульсам, поступившим на вход арифметического устройства
на выходе соответствует 7 или 12, в зависимости от того, какой характер нелинейности.
4 Устройство контроля и регистрации ФЩЛ-502,501
Устройство контроля и регистрации ФЩЛ-501,502 предназначено для измерения
и регистрации силы и напряжения постоянного тока и неэлектрических величин, преобра­
зованных в указанные электрические величины и активное сопротивление, а также для
световой сигнализации отклонения измеряемых величин от заданных значений и форми­
рования позиционных выходных сигналов на исполнительные устройства.
Прибор рассчитан для работы с выходными сигналами:
1) от термопреобразователей сопротивления;
2 ) от термоэлектрических преобразователей;
3) от преобразователей силы и напряжения постоянного тока.
Приборы могут быть однодиапазонными и трёхдиапазонными. Однодиапазонные
приборы обеспечивают подключение 12 однотипных датчиков, трёхдиапазонные - три
группы одного, либо различных типов, по четыре однотипных датчика на каждый диапа­
зон измерений.
Подключение термопреобразователей сопротивления к устройству производится
по трёхпроводной или четырёхпроводной схеме.
Допускаемое сопротивление каждого провода линии связи, кроме провода пита­
ния: при трёх проводной схеме подключения - (2,50 ± 0,01) Ом и не более 150 Ом при че­
тырёх проводной схеме подключения.
132
Принцип работы устройства
ФЩЛ-502, 501 состоит из блока регулирования, блока регистрации и блока внеш­
них подключений. Его структурная схема представлена на рис. 6 .
Измеренные сигналы XI - X I2 через блок внешних подключений поступают на
входы блока регулирования.
Блок регулирования осуществляет:
линейное последовательное преобразование измеряемых сигналов в выходной
сигнал Цвых;
сигнализацию выхода каждого измеряемого сигнала за пределы нормы;
формирование позиционных выходных сигналов U mh, U mji по каждому из
двенадцати каналов.
Рис. 6
1 - блок регулирования; 2 - блок регистрации;
3 - блок внешних подключений.
Выходной сигнал Цвых поступает на вход блока регистрации, по шкале которого
с помощью визира производится отсчёт измеряемых физических величин, а также регист­
рация их на диаграммной ленте.
Сигнализация превышения уровня задачи МНОГО и снижения за уровень задачи
МАЛО осуществляется путём включения светодиодов МНОГО и МАЛО, расположенных
на передней панели блока регулирования.
Значение задачи МНОГО и МАЛО по каждому каналу устанавливает оператор по
шкале прибора с помощью переменных резисторов, оси которых выведены на переднюю
панель блока регулирования.
Синхронизация работы блока регулирования и блока регистрации осуществляется
с помощью двунаправленной шины управления Шупр.
Блок регулирования
Структурная схема трёхпозиционного блока регулирования представлена на рис.
7.
Измеряемые сигналы X I, Х2, ..., Х12 поступают через плату коммутации 1 на
вход платы нормализации 3, где происходит их линейное преобразование в унифициро­
ванный сигнал УС (0-5 В). Коммутацию входных реле платы коммутации осуществляют
133
силовые ключи 2 , расположенные на плате компараторов 16 и управляемые сигналами от
платы управления и согласования 9.
Сигнал УС через коммутатор 4 поступает на вход активного фильтра 7 нижних
частот 4-го порядка с частотой среза 50 Гц. Сигнал УС с выхода фильтра поступает на
вход компаратора 12 и параллельно уходит на выход блока регулирования и к блоку реги­
страции.
ІІеых
Рис. 7
1 - плата коммутации; 2 - ключи включения выходных реле; 3 - плата нормали­
зации; 4 - коммутатор УС; 5 - переключатели уставок задач МАЛО, МНОГО; 6 задатчики; 7 - фильтр; 8 - коммутатор задатчиков; 9 - плата управления и со­
гласования; 10 - переключатель РЕГИСТ. ЗА НОРМОЙ; 11 - переключатель
РЕЖИМ 0,5 с; 12 - компаратор; 13 - индикаторы; 14 - плата регулирования; 15 плата силовых ключей; 16 - плата компараторов; 17 - плата индикации.
На второй вход компаратора 12 через коммутатор 8 задатчиков, работающих син­
хронно с коммутатором 4, последовательно во времени поступают сигналы задатчиков 6 .
В компараторе осуществляется сравнение сигналов датчиков и задатчиков, результаты
сравнения последовательно записываются в регистры платы регулирования 14.
Если уровень сигналов превышает или меньше уровня задач, то выходные сигна­
лы с платы регулирования 14 включают соответствующие силовые ключи 15 и светодиод­
ные индикаторы 13.
Плата управления и согласования 9 осуществляет управление коммутацией дат­
чиков и задатчиков, запись информации в регистры и синхронизацию работы блока регу­
лирования с блоком регистрации.
Переключатели 5 задач МНОГО, МАЛО предназначены для перехода с режима
измерения и регистрации параметров датчиков на режим установки значений по шкале
блока регистрации.
Переключатель 10 (РЕГИСТ. ЗА НОРМОЙ) режима регистрации позволяет осу­
ществлять переход из режима непрерывной последовательной регистрации параметров
датчиков в режим регистрации только тех датчиков, параметры которых вышли за преде­
лы нормы.
При отжатой кнопке переключателя 11 (РЕЖИМ 0,5 с) запись в регистр платы ре­
гулирования измеряемого в данный момент времени канала происходит только один раз
за цикл регистрации в конце цикла. При нажатой кнопке переключателя 11 блок работает
следующим образом. После нахождения и подключения необходимого для регистрации
134
датчика, блок даёт разрешение регистрации сигнала и узел следящего уравновешивания
блока регистрации отслеживает сигнал в течение 1,5 с. Затем программа регистрации пре­
рывается и блок регулирования начинает автономную работу в режиме регулирования и
производит опрос всех каналов с частотой 2 Гц. За 2 с до конца цикла регистрации вновь
даётся сигнал разрешения регистрации. Блок регистрации после корректировки положе­
ния следящей системы производит регистрацию. Данный режим регулирования возможно
использовать при циклах регистрации 24 с, 72 с.
Блок регистрации
Блок регистрации предназначен для регистрации и измерения сигналов напряже­
ния постоянного тока в диапазоне 0 - 5 В.
По методу измерения блок является автокомпенсатором следящего уравновеши­
вания циклического действия.
Структурная схема блока представлена на рис. 8 .
Рис. 8
1 - усилитель постоянного тока; 2 - реохорд; 3 - источник стабилизированно­
го напряжения; 4 - корректирующее звено; 5 - формирователь импульсного
сигнала; 6 - коммутатор; 7 - бесколлекторный двигатель; 8 - редуктор; 9 преобразователь вращательного движения в поступательное; 10 - печатаю­
щая каретка; 11 - шаговый двигатель печати; 12 - датчики положения печа­
тающего диска; 13 - блок управления; 14 - коммутатор шагового двигателя
печати; 15 - задающий генератор; 16 - управляемый делитель частоты; 17 коммутатор шагового двигателя лентопротяжного механизма; 18 - шаговый
двигатель лентопротяжного механизма; 19 - лентопротяжный механизм
Входной сигнал U b x о т каждого датчика последовательно во времени поступает
на вход усилителя постоянного тока 1 , где сравнивается с компенсирующим напряжением
( U k ) на выходе реохорда 2 , к которому подключён стабилизированный источник напря­
жения 3.
Сигнал ошибки A U = U bx - U bx после усиления поступает на вход корректирую­
щего звена 4, на выходе которого появляется напряжение, пропорциональное ошибке A U
и её производной. Выходное напряжение корректирующего звена преобразуется преобра­
зователем 5 в длительность импульсов, которые поступают на коммутатор 6 исполнитель­
ного механизма и далее на двигатель 7.
Двигатель 7 через редуктор 8 и преобразователь вращательного движения в по­
ступательное 9 перемещает каретку печатающую 10 и контактную группу реохорда 2 до
135
тех пор, пока измеряемое напряжение U bx не будет скомпенсировано напряжением Ur.
Электронные устройства 1, 3, 4, 5 конструктивно объединены в одном узле-плате усили­
теля.
Управление перемещением диаграммной ленты осуществляется по следующей
схеме. С задающего генератора 15 импульсы поступают на управляемый делитель часто­
ты 16, импульсный сигнал с которого поступает в коммутатор 17 шагового двигателя лен­
топротяжного механизма 18, который приводит в действие ЛПМ 19.
Циклическая регистрация входных параметров осуществляется с помощью шаго­
вого двигателя печати 11, который механически связан с печатающей кареткой 10. На ва­
лу печатающей каретки жёстко закреплён управляющий диск с просечкой, причём эта
просечка находится между литерами 11 и 12 каналов. Диск вращается в зазоре между све­
тодиодом и фототранзистором, перекрывая оптический канал связи между ними.
Когда в зазоре оказывается просечка, т.е. между светодиодом и фототранзистором
появится оптическая связь, в электронной схеме формируется сигнал НАЧАЛО СЧЁТА,
которым обнуляется счётчик, формирующий код номера канала.
На выходном валу редуктора шагового двигателя печати установлен ещё один
диск с двумя просечками, который также вращается в зазоре между второй оптической
парой светодиод-фототранзистор, которая формирует сигналы, поступающие в счётчикформирователь кода номера канала. Содержание счётчика при прохождении очередной
просечки увеличивается на единицу. Таким образом, если учесть, что перед прохождени­
ем литеры первого канала над диаграммной лентой, счётчик обнулен, а затем его содер­
жимое возрастает на единицу с приходом каждого импульса со второй оптопары, то на
выходе счётчика формируется двоичный код, соответствующий литере на печатающем
диске, находящимся над диаграммной лентой.
В блоке управления 13 происходит сравнение полученного кода номера канала с
выбранным для регистрации номером канала. При совпадении номеров происходит оста­
новка двигателя печати.
Код номера канала поступает в блок регулирования, где по этому коду к норма­
лизующему усилителю подключается датчик выбранного канала, и на вход блока регист­
рации поступает напряжение, пропорциональное измеряемой величине. Начинается про­
цесс уравновешивания следящей системы. Т.е. печатающая каретка устанавливается в та­
кое положение, когда отпечатанная на диаграммной ленте точка будет соответствовать
измеряемой величине. После выдержки времени, длительность которой устанавливается
переключателем ЦИКЛ РЕГИСТРАЦИИ, на коммутатор 14 двигателя печати поступает
сигнал, включающий его в противоположном направлении, благодаря чему осуществляет­
ся прижатие диска с литерой к диаграммной ленте и происходит отпечатывание точки с
индексом номера канала. Затем двигатель печати реверсируется и происходит переход к
следующему выбранному для регистрации каналу.
136
XVIII. УРОВНЕМЕРЫ ПОВЫШЕННОЙ СЛОЖНОСТИ
1. Виды уровнемеров и методы измерения уровня
1.1 Широкий круг задач, связанных с измерением и регулированием уровня,
обусловил появление большого числа различных приборов и устройств, основанных на
разных принципах действия с различной степенью сложности в изготовлении и наладке
таких устройств и приборов. В соответствии с изложенным, приборы для измерения и ре­
гулирования уровня разделяются:
• по принципу действия - на поплавковые и буйковые, электронные, давле­
ния, радиоизотопные, акустические, ультразвуковые и радиочастотные (так называемые
танк-радары);
• по характеру измеряемой среды - на приборы для измерения уровня жид­
ких сред, сыпучих тел или уровня раздела сред с различной плотностью или электропро­
водностью;
• по стойкости воздействия измеряемой среды - на приборы для измерения
агрессивных или не агрессивных сред;
• по условиям работы - на приборы, рассчитанные либо не рассчитанные на
работу в условиях вибрации, ударов, тряски, высокой температуры, влажности, воздейст­
вия микроорганизмов, запыленности и т. п.;
• по характеру выполняемых операций - на приборы для измерения, сигна­
лизации или регулирования уровня.
1.2 Поплавкковые и буйковые уровнемеры - уровнемеры, где чувствитель­
ным элементом является плавающий или полностью погруженный в измеряемую жид­
кость металлический (или какого либо другого типа) поплавок или буек. У поплавковых
приборов принцип работы прибора основывается на следящем действии поплавка, пла­
вающего на поверхности жидкости и перемещающегося вместе с ее уровнем. У буйковых
уровнемеров принцип работы прибора основывается на законе Архимеда. Измерительным
параметром является выталкивающая сила тонущего буйка, величина которой пропор­
циональна глубине его погружения в жидкость, при этом жидкость может находиться
под атмосферным, избыточным или вакуумметрическим давлением.
1.3 Электронные приборы измерения уровня - приборы, в основу измерения
которых положен принцип изменения емкости, индуктивности или сопротивления от
уровня жидкости.
1.4 Уровнемеры давления - уровнемеры, использующие силу давления столба
жидкости, которая зависит от уровня жидкости в емкости.
1.5 Радиоизотопные приборы используют изменение интенсивности потока уизлучения при прохождении его через измеряемую жидкость.
1.6 Радиочастотные уровнемеры - приборы, построенные по принципу рада­
ров, т.е. используется отражение электромагнитной волны от поверхности жидкости или
раздела 2 сред (с разной диэлектрической проницаемостью).
Рассмотрим утройство, принцип действия электронных и радиочастотных уров­
немеров, относящихся к уровнемерам повышенной сложности.
2. Танк - радары фирмы «KROHNE» типа ВМ100
Уровнемер ВМ100 фирмы «KROHNE» относится к радиочастотным уровнеме­
рам. Ниже на рисункедприведен внешний вид уровнемера ВМ100, установленного на ем­
кости.
137
Принцип измерения
Опыт успешного применения радиолокационной технологии для измерения
уровня позволил фирме Krohne разработать новый принцип измерения уровня жидкости
или раздела сред без использования движущихся частей. Одним из таких приборов явля­
ется Reflex Radar ВМ 100. Он может использоваться для измерения уровня или раздела
фаз для всех жидких материалов и измерения уровня сыпучих материалов, а также в тех
случаях, когда не могут быть использованы традиционные методы измерения.
Фланец
ш
S
I
О
С
Сенсор
о
с
Q
<
Q.
Электрический
импульс
Уровень
-П
X
ш
Поверхность
раздела
ОС
С
CL
>
Рис. 1
2.1.2 Принцип работы: прямой метод измерений
Измеритель уровня Reflex Radar ВМ 100 действует по принципу TDR (измерение
коэффициента отражения методом совмещения прямого и отраженного испытательных
сигналов), который широко используется при тестировании повреждений в кабелях связи.
Компания Krohne применила этот принцип для измерений уровня в промышлен­
ности.
Маломощные электромагнитные импульсы наносекундной длительности посы­
лаются вниз с помощью двух жестких или гибких проводников. При встрече волны с
жидкостью происходит частичное отражение волны. Чем больше будет диэлектрическая
проницаемость верхнего слоя, тем сильнее будет это отражение. Для воды происходит
полное отражение). Эти направляемые волны являются намного более сильными, чем все
другие акустические или электромагнитные волны, и на них не оказывают воздействие
такие факторы внешней среды, как пена, пар и т. д. Направляемая волна перемещается со
138
скоростью света, а не со скоростью звука, которому свойственно рассеивание, на нее не
оказывает влияние изменения давления и температуры, ни форма емкости. Колебания ди­
электрической проницаемости также не оказывают влияния на измерение уровня.
Для одновременных измерений уровня и границы раздела фаз оставшиеся волны
продолжают движение до отражения от границы раздела. Использование этой технологии
позволяет расширить применение Reflex Radar ВМ 100 во многих областях, где ранее бы­
ло сложно обеспечить точные измерения уровня.
2.1.3 Принцип действия TBF для продуктов с
низкой диэлектрической проницаемостью
Используется только для продуктов с очень низкой диэлектрической проницае­
мостью 8Г< 2 .
Ввиду очень низкой диэлектрической проницаемости продукта отражение волны
от поверхности достаточно мало. Тем не менее, нам точно известны значения длины дат­
чиков и скорость волны (VI). Время прохождения волны определяется положением замы­
кателя, который закорачивает цепь и обеспечивает возврат волны. По мере увеличения
уровня продукта в емкости, время обратного прохождения волны также увеличивается.
Это связано со скоростью волны (V2), которая зависит от диэлектрической проницаемо­
сти среды, и при этом Ѵ2 < VI. Таким образом, на прохождение того же расстояния по­
требуется большее время, а величина задержания будет прямо пропорциональна уровню
продукта и его диэлектрической проницаемости. Вследствие косвенного измерения уров­
ня продукта и колебаний диэлектрической проницаемости погрешность измерения увели­
чивается до ± 100 мм против ± 5 мм для продуктов с 8Г> 2.
139
Эта погрешность может быть больше для порошков или для очень летучих
хлопьев или хлопьев с сильной электризуемостью, тем не менее, точность измерений для
таких материалов оказывается выше, чем у каких-либо других средств измерения, имею­
щихся на рынке.
VI = Скорость света С0
При пустой емкости
1 = Первоначальный импульс
2 = Электрический импульс с VI
3 = Отражение от замыкателя
4 = Приход сигнала в блок электроники
При наличии продукта в емкости
5 = Электрический импульс с Ѵ2
Ѵ2 = C o/V sr
У
.А .
Длина сенсор
У
А .
Уровень = задержка
Данные о сенсоре
Типы датчиков
Тип А:
Применение:
Сенсор с 2 стержнями
Измерение уровней всех жидкостей/твердых веществ и границы
раздела фаз жидкостей
Диапазон измерения:
Максимальное значение 6 м
Уровнемеры с датчиками типа А применяются на ОАО «КАУСТИК».
Тип В:
Сенсор с 2 тросами и грузом или механическим крепежным устрой­
ством на конце датчика.
Применение:
Измерение уровней всех жидкостей/твердых веществ и границы
раздела фаз жидкостей
Диапазон измерения:
Максимальное значение 60 м
Тип С:
Сенсор коаксиального типа, состоит из трубки с внутренним про­
водником.
140
Применение:
Измерение уровня раздела для всех жидкостей, не склонных к кри­
сталлизации.
Диапазон измерения:
Максимальное значение 6 м
L = Полная длина сенсора включая верхнюю мертвую зону (А) и нижнюю мерт­
вую зону (В). Нижняя мертвая зона зависит от типа сенсора и, как и верхняя мертвая зона,
от величины диэлектрической проницаемости sr.
I = Активная зона измерений.
ВМ100 со стержнями, Тип А
А = Верхняя мертвая зона
В = Нижняя мертвая зона
На рисунках показаны приборы с разными типами сенсоров.
На предприятии ОАО «КАУСТИК» нашли применение уровнемеры ВМ 100 с
сенсорами стержневого вида, типа А. Данные уровнемеры используются на танках с жид­
ким хлором в цехах 2 1 , 6 .
Уровнемер ВМ100 имеет только «местную» индикацию показаний т.е. на самом
уровнемере по месту установки. Для контроля за уровнем в танке служит пассивный то­
ковый выход (0-20, 4-20, или 20-4, 20-0 мА) или сигнал RS485 протокола.
Вид токового сигнала определяется заказчиком и программируется через основное
меню.
На рисунке показана схема обвязки ВМ100 (пассивный токовый выход).
141
Где: ВМ100
ИП =24 В ПК
-
уровнемер,
источник питания =24 В (30 мА),
показывающий прибор или регистратор с входом 4-20 мА.
На рисунке показан вариант установки ВМ100 с выбором пределов измерения.
Уровнемер ВМ100 для прохождения поверки не требует поверочной установки.
Сдача в поверку производится перемещением отражающего кольца из металла вдоль
электродов с отсчетом по рулетке или линейке, прошедшей поверку.
1
- электрод
- отражающее кольцо
3 -В М 100
4 - линейка
На рисунке показан вариант проведения поверки ВМ100.
1
2
142
Система измерения уровня СУ-5Д
Н азн ач ен и е
Система СУ-5Д предназначена для измерения уровня, объема и массы различных
жидких сред в условиях их хранения и использования в технологических процессах. Сис­
тема СУ-5Д ориентирована на применение на различных предприятиях (в том числе хи­
мической и нефтехимической промышленности), в энергетике, на складах, на базах сжи­
женного газа.
Система измерения уровня СУ-5Д обеспечивает:
измерение уровня жидкостей в резервуарах;
выдачу на цифровой индикатор значений уровня, объема и массы;
формирование и выдачу на светодиодные индикаторы сигналов превышения заданных
предельных значений уровня;
выдачу сигналов на управление реле;
выдачу информации в последовательном коде на ПЭВМ;
регистрацию информации (уровень, масса, сигнализация, исправность) за последние
три года эксплуатации на жестком диске ПЭВМ;
вывод на дисплей ПЭВМ и на принтер текущей информации по всем резервуарам в
цифровом и мнемоническом виде;
вывод на дисплей ПЭВМ и на принтер архивной информации по любому резервуару за
любой день в виде таблиц и в виде графиков;
возможность дублирования датчиков и блоков.
У стр ой ств о , принцип дей стви я и
структурные схемы системы СУ-5Д
Работа системы измерения уровня СУ-5Д основана на базе емкостных датчиков, в
качестве которых использована конструкция в виде труба в трубе, т.е. в трубе большего
диаметра располагают трубу меньшего. В данном случае внутренняя поверхность трубы
большего диаметра является одной обкладкой конденсатора, а наружная поверхность тру­
бы меньшего диаметра другой. Заполняя промежуток между трубами диэлектрической
жидкостью, емкость конденсатора будет линейно возрастать с ростом уровня жидкости.
Для компенсации изменения диэлектрической проницаемости измеряемой жидко­
сти служит компенсационный датчик. Поэтому один канал измерения состоит из основно­
го и компенсационного датчика. Микропроцессорный блок прибора служит для обработки
результатов измерения и выдачи их на индикатор в заданном виде.
Структурная схема системы в минимальной конфигурации на 8 резервуаров.
ДАТЧИКИ
ЛИНИЯ СВЯЗИ
ПЭВМ
143
БЛОКИ
Структурная схема системы на 16 резервуаров с дублированием микропроцессорных
блоков и дополнительными функциями приема и выдачи аналоговых сигналов.
Блоки ПАС-4 позволяют принимать и обрабатывать информацию от любых уст­
ройств с унифицированным электрическим выходом 0...5 В или 0...5 мА или 4...20 мА.
Блоки ФАС-4 позволяют организовать унифицированные электрические выходы 0...5 В
или 0...5 мА.
Структурная схема системы измерения жидкого хлора реализованная в цехе 27.
(12 емкостей)
Функциональное назначение блоков и датчиков
Микропроцессорные блоки обработки БО-4 обеспечивают опрос датчиков, обра­
ботку информации, выдачу информации об уровне, объеме и массе на встроенные све­
тодиодные индикаторы и в последовательном коде RS-232 во внешние устройства (IBMсовместимый компьютер). Один из блоков обработки функционально является основным,
144
а другой дублирующим. Функциональное назначение блока БО-4 определяется его ме­
стом установки с помощью перемычки на разъёме.
Датчики ДЖС-7
При отказе основного блока обработки (не проходит встроенный автоконтроль)
дублирующий блок автоматически переходит из режима ожидания в режим работы с дат­
чиками.
145
В блоке обработки имеется реирограммируемая память для записи и хранения
констант. Рабочая программа и константы сохраняются при выключенном питании неог­
раниченное время.
Блоки ИЗК-З обеспечивают питание и опрос датчиков и гальваническую развяз­
ку сигналов датчиков через оптопары (допустимое напряжение изоляции 1500 В).
В системе организованы две одинаковые шины для подключения блоков ИЗК-З и
датчиков и одна шина для связи с внешними устройствами (релейные блоки, блоки АЦП,
блоки ЦАП).
Датчики имеют маркировку взрывозащиты "ІЕхіЫІВТб в комплекте СУ-5Д" и
могут устанавливаться во взрывоопасных зонах помещений и наружных установок.
Блоки искрозащиты и коммутации ИЗК-З с входными искробезопасными элек­
трическими цепями уровня " ib " имеют маркировку взрывозащиты «ЕхіЬІІВ в комплек­
те СУ-5Д» и предназначены для установки вне взрывоопасных зон помещений и наруж­
ных установок.
Выше на рисунке приведен внешний вид датчиков применяемых на ОАО «КАУ­
СТИК».
На ОАО «КАУСТИК» применяются датчики ДЖС-7 только коаксиального типа
Возможные неисправности и методы их устранения
(наиболее вероятные неисправности из инструкции по эксплуатации)
При отсутствии питания блоков проверьте исправность предохранителей.
Если не работает датчик, проверьте на нем напряжение (должно быть 8,5... 12,5
В) и потребляемый ток (должен быть 17.. .30 мА).
Проверка системы производится по тестам.
При неисправности микропроцессорного блока установите микросхему с тесто­
вой программой (тестовая программа работоспособна почти при всех неисправностях и
позволяет определить неисправные модули).
Если при программировании констант произошло два сбоя подряд, замените
микросхему памяти констант на чистую и запрограммируйте константы (сперва програм­
мируется нулевой канал, затем ему присваивается номер рабочего канала).
Если плохо работает вентилятор, его необходимо почистить мягкой кисточкой или
заменить на новый (если используемый неисправен)
146
146
XIX. рН-метры
Назначение
рН-метры в основном являются приборами, предназначенными для определения
величины pH и окислительно-восстановительных потенциалов водных растворов, а также
для использования в качестве высокоомного милливольтметра.
Прибором можно производить измерения как методом отбора проб с помощью
входящих в комплект датчиков, так и непосредственно в лабораторных установках.
Приборы рассчитаны для использования в научно-исследовательских учрежде­
ниях, промышленных предприятиях и различных отраслях народного хозяйства.
На производстве в основном используются рН-метры типа рН-210, рН-215 и др.,
а также иономеры, предназначенные для определения активности одно- и двухвалентных
анионов и катионов (величины рХ) в водных растворах, типа И-120, И-130, И-135 и др.
Принцип измерения величины рП
Для измерения величины pH используется потенциометрический метод анализа,
который основан на использовании зависимости электрического сигнала (потенциала)
специального датчика, называемого измерительным электродом, от состава анализи­
руемого раствора. Измерительный электрод реагирует на ионы водорода, а его потенциал
зависит от содержания этих ионов в растворе и подчиняется уравнению Нернста:
Е = Ео + R T/F ln ан = Ео - 2,3-R-T/F-pH,
где R - универсальная газовая постоянная, равная 8,315 • 107 эрг/С-моль;
Т температура раствора, К;
F 96000 кулон/г экв (число Фарадея );
ан ■ активность ионов водорода в растворе;
рН - величина pH раствора;
Ео - потенциал стеклянного электрода по отношению к
стандартному водородному электроду при ан= 1 .
Абсолютную величину потенциала в настоящее время измерить невозможно, од­
нако можно измерить потенциал относительно другого электрода, потенциал которого не
зависит от состава раствора и условно равен нулю. Такой электрод называется электро­
дом сравнения или вспомогательным электродом.
Таким образом, измерения всегда проводятся при помощи двух электродов: из­
мерительного и электрода сравнения. Кроме того, в настоящее время существуют комби­
нированные электроды, которые в одном корпусе содержат оба электрода и измеритель­
ный, и сравнительный.
Кроме того следует знать, что электродная
функция зависит от температуры раствора. Эта зави­
симость показана на графике.
С увеличением температуры увеличивается
наклон (крутизна) электродной характеристики.
Концентрация анализируемых ионов, пнри ко­
торой потенциал электрода не зависит от температуры,
называется изопотенциальной точкой.
—1-------------- ►
рНі
pH
147
Значения концентрации раствора и потенциала электрода в этой точке называют
координатами изопотенциальной точки.
Для стеклянных электродов координаты изопотенциальной точки нормируются,
т.е. указываются изготовителем, а для прочих электродов обычно нет. Современные изме­
рительные приборы позволяют автоматически учитывать температурные изменения элек­
тродной характеристики (термокомпенсация), для этого в прибор должны быть введены
координаты изопотенциальной точки и текущая температура. Последняя может вводиться
либо вручную, либо посредством термодатчика, подключенного к прибору.
При выборе электродов, рекомендуется выбирать такой электрод, изопотенциальная точка которого, лежит вблизи средней концентрации анализируемых растворов.
Рассмотрим измерительную систему со стеклянными измерительным и вспомога­
тельным электродами, схема которой приведена на рис. 1 .
4
Рис. 1. Схема измерения величины pH раствора
1 - полый шарик из электродного стекла; 2 - стеклянный электрод; 3 внутренний контактный электрод; 4 - вспомогательный электрод; 5 электролитический ключ; 6 - пористая перегородка; 7 - милливольтметр.
При погружении электрода в раствор между поверхностью шарика 1 стеклянного
электрода и раствором происходит обмен ионами, в результате которого ионы лития в
поверхностных слоях стекла замещаются ионами водорода, и стеклянный электрод при­
обретает свойства водородного электрода.
Между поверхностью стекла и контролируемым раствором возникает разность
потенциалов Ех, величина которой определяется активностью ионов водорода в растворе и
его температурой.
Для создания электрической цепи при измерении применяются контактные
электроды: внутренний контактный электрод 3, осуществляющий электрический контакт
с раствором, заполняющим внутреннюю часть стеклянного электрода, и внешний кон­
тактный электрод (вспомогательный электрод) 4, осуществляющий электрический кон­
такт с контролируемым раствором.
Для защиты от воздействия высоких температур (при измерении pH растворов,
температура которых выше температуры окружающего воздуха) вспомогательный элек­
трод помещают вне контролируемого раствора и связь с ним осуществляется с помощью
148
электролитического ключа 5 - трубки, наполненной раствором хлористого калия и закан­
чивающейся пробкой со стеклянным волокном 6 .
Раствор хлористого калия непрерывно просачивается через стеклянное волокно
пробки, предотвращая проникновение из контролируемого раствора в систему электрода 4
посторонних ионов, которые могли бы изменить величину потенциала электрода.
Электродвижущая сила электродной системы равна алгебраической сумме по­
тенциалов контактов электродов Ек и Евсп потенциала, возникающего на внутренней по­
верхности стеклянного электрода и определяемого величиной pH внутреннего раствора
Евн и потенциала, возникающего на наружной поверхности стеклянного электрода Ек.
Величины Ек, Евсп, и Евн не зависят от состава контролируемого раствора и меня­
ются только при изменении температуры
Е = Ек+ Евсп+ Евн+ Ех= Е0 - 2,3-R-T/F-pH.
Суммарная электродвижущая сила электродной системы зависит от величины pH
раствора.
Измеряя э.д.с. электродной системы с помощью милливольтметра, шкала которо­
го градуирована в единицах pH, определяют величину pH контролируемого раствора.
Принцип действия прибора
Электродная система, являющаяся датчиком, имеет большое внутреннее сопро­
тивление, достигающее 500-1000 МОм.
Для измерения э. д. с. электродной системы применяется компенсационная схема,
позволяющая существенно уменьшить ток, потребляемый от датчика при измерении.
Элементарная схема, поясняющая принцип действия рН-метра, приведена на
рис.2 .
Рис. 2. Элементарная схема прибора
Э.
д. с. электродной системы Ех сравнивается с падением напряжения на сопро­
тивлении R, через которое протекает ток Івых оконечного каскада усилителя. Падение на­
пряжения и вых на сопротивлении R противоположно по знаку электродвижущей силе Ех, и
на вход усилителя подается напряжение: UBX=Ex-UBbiX=Ex-R-IBbIx.
149
Напряжение UBX преобразуется вибропреобразователем в переменное напряже­
ние, которое затем многократно усиливается и при помощи фазочувствительного детекто­
ра вновь преобразуется в постоянное напряжение. Это напряжение управляется током Івых
оконечного каскада усилителя. При достаточно большом коэффициенте усиления усили­
теля напряжение и вых мало отличается от э. д. с. Ех и благодаря этому ток, протекающий
через электроды в процессе измерения э. д. с., весьма мал.
Ток Іцых, протекающий через сопротивление R, пропорционален э. д. с. электрод­
ной системы и величине pH контролируемого раствора.
Электродная система
Основной характеристикой электродной системы является зависимость ее э. д. с. от
величины pH и температуры раствора. В общем случае э. д. с. может быть выражена урав­
нением:
E=E„-[S20+a(t-20)] (рН-рНи),
где Е - э. д. с. в милливольтах;
tтемпература электродов;
pH - величина pH раствора;
рНи - величина pH раствора, соответствующая изопотенциальной точке;
S20 - крутизна характеристики в изопотенциальной точке;
а - температурный коэффициент крутизны.
Зависимость э. д. с. электродной системы pH и температуры может быть представ­
лена следующим приближенным уравнением:
Е=-33-(54,196+0,1884t) (рН-3,28)
150
XX. КОНДУКТОМЕТРЫ
Кондуктометрические методы анализа и
назначение приборов
Кондуктометрические методы анализа основаны на измерении удельной электро­
проводности исследуемых растворов.
Электричество переносится через растворы электролитов находящимися в рас­
творе ионами, несущими положительные и отрицательные заряды. Для предотвращения
электролиза при измерении электропроводности растворов используют переменный ток.
Электропроводность зависит от многих факторов и, в частности, от природы ве­
щества, растворителя и концентрации. Измеряя электропроводность, можно определить
содержание различных веществ и их соединений в исследуемых растворах. Электропро­
водность растворов определяется с помощью кондуктометров различных конструкций,
измеряя электрическое сопротивление слоя жидкости, находящейся между двумя элек­
тродами, опущенными в исследуемый раствор.
Однако возможно непрерывно измерять удельную электрическую проводимость
электропроводящих растворов бесконтактным индуктивным способом.
Кроме того, можно наблюдать за изменением электропроводности раствора в
процессе химического взаимодействия. В зависимости от принципа измерения методы
классифицируют на:
1) прямая кондуктометрия, основанная на непосредственном измерении элек­
тропроводности исследуемого раствора индивидуального вещества;
2) Кондуктометрическое титрование, основанное на измерении электропровод­
ности, изменяющейся в процессе взаимодействия титранта с определяемым веществом во
время титрования; при этом о содержании вещества судят по излому кривой титрования,
которую строят в координатах: удельная электропроводность - колличество добавленного
электролита;
3) Хронокондуктометрическое титрование, основанное на определении содер­
жания вещества по времени титрования, автоматически регистрируемому на диаграммной
бумаге регистратора кривой титрования.
В зависимости от методов и назначения существуют различные конструкции кон­
дуктометров.
Кондуктометры позволяют решать многие практические задачи, в том числе для
осуществления непрерывного контроля производством. Их используют для контроля очи­
стки воды, оценки сточных вод, контроля солей в минеральной, морской речной воде. Оп­
ределение электропроводности- один из методов контроля качества пищевых продуктов:
молока, вин, напитков и т. д. Нередко при анализе смесей электролитов измерение элек­
тропроводности сочетают с измерением других величин (рефракции, вязкости, pH, плот­
ности и т. д.).
В некоторых случаях определению электропроводности предшествует химиче­
ское взаимодействие. Именно так проводят кондуктометрическое определение различных
газов: СО2, СО, О2, NH3, SO2, H2S и т. д. Например, при определении СО2 измеряют элек­
тропроводность раствора щелочи после поглощения им СО2 . Этот прием используют при
кондуктометрическом определении С, N, О, S и Н в органических соединениях, металлах
и сплавах.
Принцип действия и устройство прибора
Электропроводность раствора электролита может быть найдена, если измерить
активное сопротивление между погруженными в него электродами. Для измерения сопро­
151
тивления пользуются переменным током, так как постоянный ток вызывает электролиз и
поляризацию электродов. Источником тока обычно служат генераторы звуковой частоты.
Сопротивление раствора электролита определяют путем сравнения с эталонным
сопротивлением. Для этого используют мостик Утстона (рис.1). Сопротивления Ri, R2,
R3, R4 можно подобрать так, чтобы ток в диагонали мостика отсутствовал, т. е. сопротив­
ление его ветвей было пропорционально друг другу. Измеряемое сопротивление R 4 мож­
но найти по формуле:
К_і=Кз R2/R1
Сопротивления Ri и R2 выбирают постоянными или сохраняют постоянными их
соотношение; R3 может изменяться. Таким образом, при балансировке моста регулируют
сопротивление R3 и находят сопротивление R4 . В качестве нуль-индикатора применяют
осциллографы, гальванометры переменного тока или (после выпрямления) постоянного
тока, цифровые вольтметры.
Рис.1. Мостик Уитстона:
RI, R2, R3, R4- плечи моста; С- переменная емкость; 1- звуковой
генератор; 2- индикатор нуля; 3- электролитическая ячейка.
Условия равновесия моста применимы к переменному току, если Ri, R2, R3, R4 активные сопротивления. Однако на мостике переменного тока силу тока в диагонали
нельзя свести к нулю, так как к активному сопротивлению добавляется некоторое реак­
тивное сопротивление, обусловленное емкостью электролитической ячейки и цепи.
В электрическую эквивалентную схему электролитической ячейки (рис.2) кроме
истинного активного сопротивления раствора R, зависящего от концентрации ионов и их
эквивалентной электропроводности, входят дополнительные активные и реактивные со­
противления, возникающие в ячейке при измерении сопротивления. Электрическую ячей­
ку - сосуд той или иной формы, содержащий электролит с погруженными в него электро­
дами, в принципе можно рассматривать как конденсатор с электродной поверхностью S,
электродным расстоянием 1, заполненный раствором с диэлектрической проницаемостью
8 . Сопротивление емкости Сг, шунтирующее истинное сопротивление электролита в вод­
ных растворах, обычно значительно выше истинного сопротивления раствора и поэтому
не вызывает ошибок в измерении электропроводности. Однако при очень высоком истин­
152
ном сопротивлении электролита эти величины могут быть соизмеримы. Возникающие
ошибки уменьшаются с понижением частоты тока.
На границе металлический электрод - раствор электролита возникает двойной
электрический слой. Емкость двойного слоя влияет на сдвиг фаз между током и напряже­
нием, что приводит к ошибкам в измерении истинного сопротивления раствора.
Ошибки измерений могут быть связаны с электрохимическими процессами на
электродах - разрядкой ионов, приводящей к изменению концентрации ионов у поверхно­
сти электрода. Вследствие медленной диффузии ионов к электроду наблюдается концен­
трационная поляризация, которая создает поляризационную емкость Сп и поляризацион­
ное сопротивление Rn. Ошибки, связанные с поляризационными явлениями, уменьшаются
с повышением частоты тока и увеличением концентрации. При чистоте тока выше 1000
Гц влияние поляризации незначительно.
Сд
Сг
Рис.2. Электрическая эквивалентная схема ячейки:
R - истинное сопротивление раствора; Сг - геометрическая емкость ячей­
ки; Сд - емкость двойного слоя; Сп и Rn - емкость и сопротивление поля­
ризации; С1 и R1 - шунтирующие емкость и сопротивление, зависящие от
конструкции ячейки; С2 - емкость проводов.
Шунтирование сопротивления R емкостью Сі и сопротивлением Ri, возникающее
при неудачной конструкции ячейки (близкое расположение проводов, идущих от электро­
дов), также вызывает ошибки измерения. Емкость проводов Сг может стать причиной ем­
костных утечек тока.
Ячейки для кондуктометров должны отвечать следующим основным требовани­
ям:
1) иметь оптимальные геометрические размеры межэлектродного пространства;
2 ) поляризационные явления на электродах должны быть минимальными;
3) утечка тока, обусловленная паразитными емкостными связями, должна быть
минимальной.
Емкостное сопротивление компенсируется путем включения конденсатора парал­
лельно сопротивлению R3.
Ошибки, связанные с поляризационным сопротивлением, уменьшаются при ис­
пользовании платинированных электродов, так как увеличенная поверхность их уменьша­
ет плотность тока. Платинированные электроды нельзя применять, если платиновая чернь
оказывает влияние на проводимую реакцию или изменяет концентрацию вещества вслед­
ствие абсорбции. В некоторых случаях удобно применять платинированные электроды,
153
прокаленные до красного каления (серое платинирование). Такие электроды значительно
уменьшают поляризацию, но они обладают значительно меньшими абсорбционными
свойствами.
Установка для кондуктометрического анализа состоит из электролитической
ячейки, звукового генератора, мостика Уитстона и индикатора нуля. Для подачи стан­
дартного раствора используют полумикробюретку.
Для питания системы переменным током используют генераторы ГЗ-1, ГЗ-2, ГЗ10, ГЗ-ЗЗ и др. Для работы используют переменный ток частотой 1000 Гц.
В качестве нуль индикатора может использоваться осциллографический индика­
тор нуля. При полном балансе мостика эллипс на экране стягивается в горизонтальную
линию.
Такого рода установки имеют высокую чувствительность.
Типы кондуктометров
Измерение электропроводности растворов может быть осуществлено при помощи
уравновешенных мостов промышленного производства. К числу таких приборов относят­
ся Р-38, Р-556, Р-577, Р-568 и др. Приведем краткие характеристики некоторых кондукто­
метров.
Реохордный мост Р-38. Р-38 широко используется в практике и представляет собой
четырехплечевой уравновешенный мост со ступенчато-регулируемым плечем сравнения и
плавно регулируемым отношением плеч. Прибор питается от сети переменного тока с
частотой 50 - 500 Гц с напряжением 127 или 220 В через трансформатор, включенный в
схему моста. Измеряемое сопротивление может изменяться 0,3-30000 Ом. Прибор содер­
жит гальванометр типа М314, который служит нуль инструментом.
Кондуктометр ММЗЧ-64. Кондуктометр собран по схеме четырехплечевого урав­
новешенного моста. Питание - от сети переменного тока напряжением 220 В частотой 50
Гц через генератор, вмонтированный в установку. При этом частота повышается до 1150
Гц. Плечо сравнения имеет три декады сопротивлений. В каждую декаду включено по 9
сопротивлений, равных соответственно 1000, 100, 10. Сопротивление плеча сравнения
можно изменять ступенями по 10 Ом в пределах от 10 до 10000 Ом. Кондуктометр позво­
ляет измерять сопротивление от 0,01 Ом до 10 кОм. Блок конденсаторов используется для
компенсации емкостной составляющей. Кондуктометр имеет электронно-оптический ин­
дикатор баланса моста. Погрешность измерений не превышает 1%.
Кондуктометр К-1-4. Кондуктометр собран по схеме четырехплечевого уравнове­
шенного моста. Питание - от сети переменного тока напряжением 220 В частотой 50 Гц
через генератор, вмонтированный в установку. При этом частота повышается до 1000 Гц.
Область измеряемых сопротивлений составляет 100-90000 Ом. Плечи R1 и R2 представ­
ляют постоянные сопротивления в 100 Ом. Плечо сравнения является магазином сопро­
тивлений типа Р-33. Предусмотрена балансировка моста по реактивной составляющей.
При балансировке моста используется микроамперметр типа М-495, который включен че­
рез выпрямитель на выход усилителя. Погрешность измерений не выходит за пределы
0,5%.
Кондуктометр «Импульс» типа KJI-1-2. Кондуктометр «Импульс» предназначен
для измерения электропроводности растворов. К прибору приложены две ячейки, для ко­
торых отградуирована шкала прибора. Прибор собран по мостовой схеме с питанием им­
пульсным током переменной полярности и интегрированием синхронного выпрямленного
сигнала разбаланса. Погрешность измерений составляет 0,25%.
154
Принцип работы и устройство
бесконтактных кондуктометров.
Бесконтактные кондуктометрнческие анализаторы и концентратомеры предна­
значены для непрерывного измерения удельной электрической проводимости растворов.
Бесконтактные кондуктометры выпускаются в различном исполнении: погружные, с раз­
личной глубиной погружения, и проточные. К таким кондуктометрам, используемым в
производстве, относятся БКА-М, КНЧ-1М и другие.
В основу работы анализатора положен индуктивный метод измерения проводи­
мости. Анализатор состоит из датчика и измерительного преобразователя. Датчик анали­
затора обычно выполнен с видами взрывозащиты: «искробезопасная электрическая цепь»,
«взрывонепроницаемая оболочка» и предназначен для преобразования удельной электро­
проводности в унифицированный сигнал постоянного тока.
Первичный
преобразователь
Рис.З. Датчик
Рис.4. Измерительный преобразователь.
155
Измерительный преобразователь предназначен для преобразования удельной
электропроводности в унифицированный сигнал постоянного тока, температурной ком­
пенсации и питания постоянным напряжением всех цепей датчика.
Рассмотрим устройство на примере проточного кондуктометра БКА-М.
Датчик состоит из первичного преобразователя с фланцами для установки на
технологическом трубопроводе. В проточной части корпуса первичного преобразователя
расположены чувствительный элемент и термометр сопротивления, которые опрессованы
пластмассой. На наружной поверхности корпуса установлено основание для размещения
электронного блока и блоков искрозащиты и устройство ввода.
Чувствительный элемент состоит из силовой ( генераторной ) ГК и измеритель­
ной ИК тороидальных катушек, помещенных в электростатический экран.
Электронный блок анализатора состоит из генератора переменного тока Г, усили­
теля Ус, детектора Д и преобразователей напряжение - ток ПНТ 1 и ПНТ 2.
Датчик работает следующим образом.
Переменное напряжение с генератора через блок искрозащиты 1 поступает на си­
ловую катушку ГК первичного преобразователя и создает магнитный поток, который на­
водит ЭДС в жидкостном контуре связи, который является вторичной обмоткой для сило­
вой катушки. Сила тока в контурах связи пропорциональна удельной электрической про­
водимости. Изменения силы тока в контуре связи изменяет наводимую им ЭДС в измери­
тельной катушке ИК. Выходное напряжение первичного преобразователя через блок ис­
крозащиты поступает на вход усилителя Ус. Усиленный сигнал детектируется, фильтру­
ется, поступает на вход преобразователя напряжение - ток ПНТ-1 и по линии связи пере­
дается в измерительный преобразователь.
Напряжение с мостовой схемы измерителя температуры ИТ поступает на вход
усилителей У. Усиленное напряжение постоянного тока, пропорциональное температуре
анализируемой среды, поступает на вход преобразователя напряжение - ток ПНТ -2 и по
линии связи передается в измерительный преобразователь.
Анализатор работает следующим образом.
С одного выхода датчика токовый сигнал, пропорциональный удельной электри­
ческой проводимости, поступает на вход преобразователя ток - напряжение ПТН-1, ко­
торый подключен к одному из входов делителя Дел . С другого выхода датчика токовый
сигнал, пропорциональный температуре анализируемой среды, поступает на вход преоб­
разователя ток - напряжение ПТН-2, который подключен к входу сумматора Е.
Зависимость удельной электрической проводимости имеет следующий вид:
Xt = Х0 [ 1 + at ( t - 10) ] ,
где
Xt
-
Хо
-
at
to
t
-
значение удельной электропроводности при текущей
температуре, См/м;
значение удельной электропроводности при начальной
температуре, См/м;
температурный коэффициент раствора, град"1;
начальная температура раствора, град;
текущая температура раствора, град;
Для электролитов ( солей, кислот и щелочей ) a t положителен и имеет значение
от 0,019 до 0,025.
При повышении температуры раствора его удельная электропроводность увели­
чивается. Для компенсации этого увеличения необходимо уменьшить выходной сигнал.
На входе сумматора устанавливается напряжение равное
at ( t - 10)
На выходе сумматора устанавливается напряжение
1 + at ( t - 10)
и подается на другой вход делителя.
156
На выходе делителя устанавливается напряжение, пропорциональное
Хо = Xt /[ 1 + a t ( t - t0 ) ] ,
Которое не будет зависеть от температуры анализируемой среды.
Датчик анализатора устанавливается на обводной линии технологического трубо­
провода с помощью фланцевых соединений в горизонтальном положении в помещениях
и наружных установках, рекомендуемая схема обвязки датчика анализатора приведена на
рис.5.
157
XI. ОПТИЧЕСКИЕ МЕТОДЫ АНАЛИЗА
Задачей аналитической химии является определение содержания тех или иных
веществ в исследуемой системе наиболее быстрыми, точными и рациональными метода­
ми. В зависимости от поставленных задач используется реакция, которая либо только об­
наруживает их присутствие, либо позволяет определить их количество в системе. В пер­
вом случае мы имеем дело с качественным, а во втором - с количественным анализом.
Физико-химические методы анализа основаны на взаимосвязи между составом
системы и её физическими и физико-химическими свойствами.
Физико-химические методы анализа классифицируется соответственно исполь­
зуемым свойствам системы. В оптических методах анализа используется связь между оп­
тическими свойствами системы:
1. Светопоглощением.
2. Светорассеянием.
3. Преломлением света.
4. Вращением плоскости поляризации плоскополяризованного света.
5. Вторичным свечением вещества - и её составом.
Сюда относятся соответственно:
1. Колориметрический анализ.
2. Нефелометрический и турбидиметрический анализ.
3. Рефрактометрический анализ.
4. Поляриметрический анализ.
5. Люминесцентный анализ.
Колориметрический метод анализа
Метод анализа, основанный на сравнении качественного и количественного изме­
нения световых потоков при их прохождении через исследуемый и стандартный растворы,
называется колориметрическим методом анализа.
Правильнее этот вид химического анализа называть абсорбционным спектраль­
ным анализом, так как он, в сущности, основан на измерении ослабления светового пото­
ка, происходящего вследствие избирательного поглощения света определяемым вещест­
вом. Различают спектрофотометрический и фотометрический методы абсорбционного
анализа. Спектрофотометрический метод основан на измерении в монохроматическом по­
токе света (света определённой длины волны). Фотометрический метод основан на изме­
рениях в не строго монохроматическом пучке света. Для измерений используют приборы
- фотоэлектрические колориметры и спектрофотометры.
Фотоэлектрический колориметр является универсальным прибором и предназна­
чается для определения концентрации окрашенных растворов, взвесей, эмульсий, и кол­
лоидных растворов путем сравнения двух световых потоков, проходящих через эталонный
и испытуемый образец. Принципиальная схема фотоколориметра ФЭК-М приведена на
рис. 1.
Спектрофотометрами называют приборы, позволяющие производить измерения
светопоглощения образцов в узких по спектральному составу пучках света (монохромати­
ческий свет). Спектрофотометры позволяют разлагать белый свет в непрерывный спектр,
выделять из этого спектра узкий интервал длин волн, в пределах которого световой пучок
можно считать монохроматическим (ширина выделяемой полосы спектра 1 - 2 0 нм), про­
пускать изолированный пучок через анализируемый раствор и измерять с высокой степе­
нью точности интенсивность этого пучка.
158
«*Н ffi- Ма
Рис. 35. Принципиальная схема
фотоколориметра ФЭК-М;
Л—лампа, з* и э3—Зеркалй, С%и С»—све­
тофильтры, /4* и At— кюветы в кюветодержателях, К —оптический клин, D—
диафрагма.
Ф| и Ф2 — фотоэлементы,
Г—гальванометр
Рис. 1
Поглощение света окрашенным веществом в растворе измеряют, сравнивая его с
поглощением нулевого раствора. В качестве примера на рисунке 2 приведена оптическая
схема спектрофотометра СФ-4.
Оптическая схема спектрофотометра СФ-4:
1—источник света, 2—конденсор,
стинка,
3—зеркало, 4—щель
В-_княпирпяп т »
fr-объектив
7-приэма, S - линза, Р-свегс^вдьтр, ІО -^ ю ^ Ѵ
t l кварцевое стекло, 12—шторка., 13—фотоалеыенты
*
Рис. 2
Нефелометрический и турбидиметрический методы анализа
При прохождении пучка света через взвеси мельчайших твёрдых частиц в раство­
рителе, т.е. через дисперсную систему, наблюдается боковое рассеяние света, благодаря
чему свет, проходящий через среду, имеет вид мутной полосы. Мутность её объясняется
рассеянием светового луча вследствие различных причин и зависит от размеров взвешен­
ных частиц. Если линейные размеры частиц больше длины падающей световой волны, то
рассеяние света обусловлено преломлением света на границе раздела частица - раствори­
тель и отражением света частицами. Если длина падающего света сравнительно с линей­
ными размерами частицы велика, то наблюдается дифракция световой волны, огибание
ею частицы. На этом факте, что интенсивность рассеянного света с увеличением числа
рассеивающих частиц возрастает, основаны два родственных аналитических метода опре­
деления концентрации вещества: нефелометрия и турбидиметрия.
Нефелометрический метод анализа основан на измерении интенсивности светово­
го потока, возникающего в следствии рассеяния падающего на взвесь света.
Турбидиметрический метод анализа основан на измерении ослабления светового
потока, прошедшего через суспензию.
Нефелометрические измерения в основном производят с помощью нефеломет­
ров - приборов, аналогичных по конструкции фотометрам, но имеющих приспособление
для наблюдения рассеянного света под утлом 90° к направлению падающего луча. На ри­
сунке 3 приведена оптическая схема нефелометра НФМ
Оптическая схема нефелометра НФМ:
аефглоютрнческая приставка, £—фотометрнчесхая г-оловкя
2—алчстшкл. разделяющая слетошой в д т о к Г ^ д н л и н п п ^ ^
световой поток При исследовании малых
■ера с дистиллированной ВОДОЙ, 7_объектив
»
А
_ ЯР*3* * ’ с*одящ ая световые п учка к
окуляр, 16-—красный светофнлътп fввояитса ж
^ Д М И іі.
14—
Рис. 3
Для турбидиметрпческих измерений с успехом могут быть использованы любые
фотоэлектрические колориметры, спектрофотометры.
Рефрактометрический метод анализа
Преломлением, или рефракцией, называют изменение направления прямолиней­
ного распространения света при переходе из одной среды в другую.
Рефрактометрия - измерение преломления света. Преломление света оценивается
по величине показателя преломления, зависящего от состава индивидуальных веществ и
систем, от того, в какой концентрации и какие молекулы встретит световой луч на своём
пути, так как под действием света молекулы разных веществ поляризуются по разному.
Именно на этой зависимости и основан рефрактометрический анализ.
160
Рефрактометрами называют приборы, служащие для измерения величины показа­
теля преломления равен 90°. В качестве примера на рисунке 4 приведена оптическая схе­
ма рефрактометра ИРФ-454.
Схема оптическая рефрактометра ИРФ-454:
1— зеркало; 2— призма измерительная; 3— стекло защитное;
4 —зеркало;
5—призма
осветительная;
6— компенсатор;
7—линза склеенная; 8—сетка; 9—окуляр; 10—призма АР-900;
,11—зеркало; 12—объектив; 13—зеркало; 14—светофильтр;
15 —призма; 16— шкала
Рис. 4
Поляриметрический метод анализа
Поляриметрический метод анализа основан па измерениях, связанных с явлением
поляризации света (направленность световых колебаний). Плоскость, проходящую через
линии, соответствующие направлению ориентированных колебаний и направлению ори­
ентированных колебаний и направлению распространения световой волны, называют
плоскостью колебаний, перпендикулярную ей плоскость называют плоскостью поляризаИзвестно, что оптически активными называют вещества, прохождение через ко­
торые плоскополяризованного света связано с так называемым вращением плоскости по­
ляризации, с поворотом её на определённый угол.
Поляриметрический метод анализа основан на зависимости угла вращения плос­
кости поляризации плоскополяризованного света от концентрации оптически активного
вещества в растворе.
Оптически активные вещества встречаются в двух модификациях - правовра­
щающей и левовращающей.
Прибор для измерения угла вращения плоскости поляризации (поляриметр) дол­
жен сочетать в себе устройство для получения поляризованного света (поляризатор) с
устройством, которое позволило бы проанализировать явление (анализатор) - найти на­
правление вращения и величину угла, на который оказалась повёрнута плоскость поляри­
зации в результате прохождения света через оптически активное вещество.
161
Люминесцентный метод анализа
Способность атомов и молекул поглощать энергию, поступающую к ним извне,
вызывает новое энергетическое состояние вещества, которое называется возбужденным.
Избыточная энергия атомов или молекул, полученная при возбуждении, может быть из­
расходована на отрыв электронов - ионизацию вещества; на какие-либо фотохимические
реакции; на нагрев вещества; кроме того, возбужденные атомы или молекулы способны
всю избыточную энергию или часть её в виде света. У некоторых веществ наблюдается
свечение без нагревания при комнатной температуре, которое называют холодным свече­
нием или люминесценцией. Явления люминесценции многообразны по свойствам и про­
исхождению.
В аналитической практике наиболее широкое применение получила фотолюми­
несценция, или флюоресценция, основанная на свечении вещества при поглощении лучи­
стой или световой энергии.
Для возбуждения люминесценции пользуются различными источниками ультра­
фиолетового излучения. Наиболее широкое применение в качестве источника ультрафио­
летового света нашли ртутные и ртутно-кварцевые лампы.
Флуориметр предназначен для количественного анализа флуоресцирующих ве­
ществ в растворе. Оптическая схема флуориметра ЭВ-ЗМ приведена на рисунке 5.
Флуориметр ЭФ-ЗМ:
/ — кварцевая лампа, 2 — диафрагма, 8 —заслон*
ка, ^—первичный фильтр, б — кварцевая оптика,
о — пробирка с испытуемым раствором, 7 — квар­
цевая оптика, в — вторичные светофильтры. 9 —
фотоалеѵенты
Рис. 5
Для измерения интенсивности свечения кристаллофосфоров предназначен фото­
электрический люминесцентный фотометр.
Проведение наиболее ответственных люминесцентных анализов, требующих вы­
сокой точности, воспроизводимости и изучения спектральной характеристики анализи­
руемого вещества, возможно при использовании современных фотоэлектрических мето­
дов измерения интенсивности света в сочетании со спектральными приборами.
162
Анализатор ртути “Юлия - 2”
Функциональная схема
1 — кювета; 2 — шторка лампы; 3 — лампа; 4 — фотоэлемепт; 5 — пробирка с барботером для поглощения отработанной ртути; 6, /, 8 — воздуховоды; 9 — микрономпрессор; 10 — пробирка с барботсром для пробы; 11 — штуцер микрокомпрессора
Рис. 6
Заключение
В настоящее время оптические методы анализа широко применяются в химиче­
ской промышленности. Современные приборы оптического анализа при применении ком­
пьютерных технологий позволяет автоматизировать аналитический процесс, повысить его
эффективность, снизить энергопотребление.
163
XXII. ПРИБОРЫ ГАЗОВОГО АНАЛИЗА
Газоанализаторы предназначены для измерения концентраций компонентов газо­
вых смесей на основе различных физико-химических свойств газов.
По принципу действия газоанализаторы делятся на:
- термохимические (ПГФ2М1-У4, ЭТХ-1, СТХ-5А, СТХ-6, СВК-ЗМ, ЩИТ-2,
СТМ-10, СГГ-3, Politron ND Ex);
- термокондуктометрические (ТП-1120, ТП-5501, BXJI-1, Caldos-15);
- кулонометрические (Байкал-1, Байкал-2, Байкал-3, Байкал-4, Байкал-5, Ко­
рунд-М);
- фотоколометрические (Сирена-2, Сирена-4, Сирена-М, ФКГ-ЗМ);
- электрохимические (Анкат-7621, Анкат-7631, Анкат-7641, Анкат-7645, ППХ1);
- искровые пневматические (СВИП-1, СВИП-2);
- оптико-абсорбционные (121 ФА-01, ГИАМ-27, Radas-2).
Рассмотрим принцип действия вышеперечисленных газоанализаторов на примере
приборов используемых на ОАО "КАУСТИК".
1. Термохимические газоанализаторы
СТХ-5А. Сигнализатор предназначен для периодического контроля довзрывоопасных концентраций горючих газов, паров и их смесей в воздухе производственных
помещений и выдачи сигналов в диапазоне сигнальных концентраций.
Функциональная схема сигнализатора СТХ-5А
Принцип действия сигнализатора основан на термохимической реакции окисле­
ния (сгорания) горючих веществ на рабочем чувствительном элементе, включённом в
схему моста. Работает сигнализатор следующим образом: измерительный мост сигнализа­
тора питается стабилизированным напряжением (1.8 ±0. 1 В). В измерительную диаго­
наль моста включён показывающий прибор (микроамперметр). При сгорании на чувстви­
тельном элементе горючих веществ, измерительный мост разбалансируется и в его диаго­
нали появляется напряжение постоянного тока, по величине пропорциональное концен­
трации контролируемых веществ. После того, как напряжение разбаланса достигает опре­
делённой величины, стрелка показывающего прибора войдёт в сигнальную зону (рис. 1).
164
Politron ND Ex. Газоанализатор предназначен для стационарной установки в
классифицированных взрывоопасных зонах, требующих постоянного контроля концен­
трации взрывоопасных газов и паров.
Работа прибора основана на принципе каталитического сгорания с использовани­
ем согласованной пары чувствительных элементов: один элемент обладает высокой чув­
ствительностью к взрывоопасному газу, а другой является нечувствительным. Элементы
составляют половину мостовой схемы и нагреваются постоянным током, который подаёт­
ся с печатной платы. Другая половина мостовой схемы расположена на печатной плате. В
присутствии взрывоопасного газа на чувствительном элементе происходит его сгорание,
что увеличивает температуру и соответственно электрическое сопротивление элемента.
Это разбалансирует мост, приводя к появлению сигнала, пропорционального концентра­
ции газа. Нечувствительный элемент компенсирует изменения условий окружающей сре­
ды (рис. 2). На печатной плате сигнал с сенсора усиливается и преобразуется в аналого­
вый сигнал 4 - 2 0 мА для передачи на контроллер Regard.
Рис. 2
Функциональная схема газоанализатора Politron ND Ех
2. Термокондуктометрические газоанализаторы
ТП-5501. Принцип действия газоанализатора основан на использовании зависи­
мости теплопроводности анализируемой газовой смеси от содержания в ней измеряемого
компонента, поскольку теплопроводность последнего значительно отличается от тепло­
проводности остальных компонентов. Изменение теплопроводности анализируемой газо­
вой смеси, вызванное изменением содержания анализируемого компонента, приводит к
изменению теплоотдачи с поверхности чувствительного элемента. Изменение температу­
ры (сопротивления) последнего, компенсируется в газоанализаторе соответствующим из­
менением тока через чувствительный элемент таким образом, чтобы температура (сопро­
тивление) чувствительного элемента поддерживалась на неизменном уровне. Изменение
тока через чувствительный элемент, несущие в себе измерительную информацию, преоб­
разуются электрической системой газоанализатора в форму, удобную для дальнейшего
использования.
Основой прибора является датчик. Он состоит из чувствительных элементов R1 и
R2 (рис. 3), входящих в мостовую схему устройства регулирования. Резистор R2 служит
для преобразования изменений теплопроводности анализируемой газовой смеси, R1 слу-
165
жит для линеаризации и устанавливается по необходимости для небольших диапазонов
измерения.
Рис. 3
Схема электрическая принципиальная датчика
Мост на резисторах R4 ... R7 служит для формирования сигнала, пропорциональ­
ного изменениям температуры во внутреннем объёме датчика. Резистор R3 является на­
гревателем и служит нагрузкой устройства терморегулирования, изготавливается из мед­
ной проволоки.
Рис. 4
Схема электрическая структурная
газоанализатора ТП-5501
166
Устройство электрической схемы газоанализатора и взаимодействие его состав­
ных частей объясняется схемой электрической структурной, приведённой на рис. 4.
Устройство терморегулирования служит для поддержания температуры во внут­
реннем пространстве датчика в +75°С, что позволяет уменьшить влияние изменений
внешней температуры на показания газоанализатора.
Устройство регулирования служит для поддержания на неизменном уровне тем­
пературы (сопротивления) чувствительного элемента датчика и преобразователя измене­
ния теплопроводности анализируемой газовой смеси в электрический сигнал, который за­
тем поступает на вход устройства нормирования сигнала.
Устройство нормирования сигнала служит для усиления сигнала с устройства ре­
гулирования и формирования линейных электрических стандартных выходных сигналов.
Устройство сигнализации осуществляет переключение контактов реле при дости­
жении выходным сигналом одного из четырёх уровней, установленных в пределах от 5 до
95 % от диапазона измерения.
Газоанализатор ТП-5501 предназначен для непрерывного измерения объёмного
содержания водорода или двуокиси углерода, или метана, или гелия, или азота во взрыво­
опасных двухкомпонентных газовых смесях.
3. Кулонометрические газоанализаторы
Байкал -5. Гигрометр «Байкал - 5» предназначен для непрерывного измерения
объёмной доли влаги и абсолютной влажности в воздухе и азоте, может использоваться
для работы на воздухоразделительных установках, в технологических процессах, а также
в лабораториях для научных исследований.
Принцип работы гигрометра основан на непрерывном извлечении влаги влаго­
сорбирующей плёнкой из точно дозируемого потока газа, одновременном электролитиче­
ском разложении извлечённой влаги на водород и кислород и измерении тока электролиза
(см. рис. 5). В канале стеклянного цилиндрического корпуса 1 чувствительного элемента
размещены три электрода: рабочий 2, контрольный 3 и общий 4, выполненные в виде ге­
ликоидальных несоприкасающихся спиралей. Между электродами нанесена плёнка час­
тично гидратированной пятиокиси фосфора 5, обладающая высокой влагосорбирующей
способностью.
Рис. 5
Принцип работы гигрометра
Через канал чувствительного элемента непрерывно проходит дозируемый поток
газа, устанавливаемый при настройке равным 100 см /мин. При указанном расходе влага
практически полностью извлекается из потока анализируемого газа влагосорбирующей
плёнкой. К электродам чувствительного элемента подключён источник постоянного тока,
напряжение которого превышает потенциал разложения воды (2.3 В), поэтому одновре­
167
менно с поглощением влаги, непрерывно осуществляется её электролиз. В установившем­
ся режиме работы чувствительного элемента, количество извлечённой и разложенной в
единицу времени влаги равны, а ток электролиза, измеряемый миллиамперметром, про­
порционален объёмной доле влаги в анализируемом газе. При длительной работе гигро­
метра активная поверхность влагосорбирующей плёнки может уменьшаться за счёт за­
грязнения её механическими примесями и аэрозолями масел. Это приводит к неполному
извлечению влаги из анализируемого газа. Контроль исправности чувствительного эле­
мента осуществляется автоматически по соотношению токов контрольной и рабочей час­
тей чувствительного элемента, определяемых длиной рабочего и контрольного электро­
дов. Для проверки работоспособности схемы контроля предусмотрен переключатель «из­
мерение - поверка».
Выход газа
Рис. 6
Газовая принципиальная схема гигрометра «Байкал - 5»
1,3 —фильтр; 2,5 - сопротивление постоянное пневматическое; 4 - элемент
чувствительный; 6 - индикатор расхода; 7 - стабилизатор расхода газа.
4. Фотоколометрические газоанализаторы
Сирена -2, Сирена-4. Газоанализаторы Сирена-2 и Сирена-4 предназначены для
постоянного автоматического определения микроконцентрации токсических газов - амиака и фосгена соответственно в воздухе производственных помещений, а также сигнализа­
ции превышения предела измерения.
В основу работы газоанализаторов положен фотоколометрический метод с при­
менением индикаторного порошка в качестве первичного измерительного преобразовате­
ля. Принцип действия индикаторного порошка в составе газоанализатора основан на из­
менении спектрального коэффициента отражения от его поверхности в видимой области
спектра при контакте с анализируемым компонентом. В газоанализаторе реализовано
многократное использование индикаторного порошка.
Г азоанализатор выполнен в виде трёх конструктивно законченных блоков, соеди­
нённых между собой кабелями: датчика, блока управления и автоматического потенцио­
метра КСП-4-052И (рис. 7).
Через штуцер «Вход газа» непрерывно подаётся анализируемый воздух при по­
мощи побудителя. Контроль за расходом воздуха производится индикатором расхода.
Циклически через каждые 5 минут производится обдув индикаторного порошка в чашке
под фотоблоком при помощи побудителя расхода (сильфона), расположенного в датчике,
приводящимся в действие электроприводом от сети ~220 В. Анализируемый компонент
вступает в реакцию с индикаторным порошком. Изменение спектрального коэффициента
отражения индикаторного порошка в диапазоне длин волн 555 - 585 нм преобразуется в
пропорциональный выходной сигнал постоянного тока 0 - 5 мА, который поступает на
вход блока управления «искробезоп. цепи», где преобразуется в напряжение 0 - 1 0 мВ,
168
которое подаётся на разъём «Вход пскробезоп. цепь» автоматического потенциометра
КСП-4-052И. Потенцмиометр производит индикацию и регистрацию измеряемого значе­
ния концентрации и выдаёт сигнал о превышении заданных значений ПДК.
Вход газа
►
—
искрооезоп. цепи
О^ ------------- 1—
-С
Датчик
Блок управле­
ния
“220 В
<
: □ -------------
Івигатель
= Индикатор
= расхода
Потенцио­
метр КСП-4
Побудитель
ПМВ-1-0405
т
“220 В
“220 В
Вход
«искробез. цепь»
Сброс газа
Рис. 7
Схема электропневматическая газоанализаторов Сирена-2, Сирена-4.
5. Электрохимические газоанализаторы
Анкат-7621. Газоанализаторы Анкат-7621 предназначены для непрерывного
контроля содержания в производственном помещении или наружных установках одного
из следующих компонентов: SO2, СО, H2S, СЬ и выдачи аварийной сигнализации при пре­
вышении ПДК измеряемого компонента.
Принцип действия газоанализатора - электрохимический. Питание газоанализа­
тора (рис. 8) осуществляется от источника 15 -30 В, в качестве которого используется
блок питания и сигнализации БПиС. Двухпроводная линия служит одновременно для
дистанционной передачи токового сигнала газоанализатора.
Схема электрическая функциональная газоанализатора Анкат-7621
169
Токовый сигнал поступает в устройство сигнализации и может быть использован
для подключения вторичных показывающих приборов. В газоанализаторе использована
трёхэлектродная, дифференциально включенная электрохимическая ячейка. При нулевом
показании газоанализатора резистором R(l устанавливается ток в линии связи Jco = 4 мА.
Резистором RK, нагружающим выход нормирующего преобразователя, устанавливается
ток JCK= 20 мА при показаниях газоанализатора, соответствующих концу шкалы. При от­
сутствующих нагрузочных резисторах Ro и RKпотребление в цепи питания газоанализато­
ра не зависит от уровня измеряемой концентрации. Это является условием токового пре­
образования в цепи питания. Таким образом газоанализатор имеет унифицированный то­
ковый выход 4 - 2 0 мА.
Электрохимическая ячейка является чувствительным элементом газоанализатора.
Она состоит из рабочего, сравнительного и компенсационного электродов, которые изго­
товлены путём нанесения металлического катализатора на пористую фторопластовую
плёнку. Со стороны электролита электроды защищены устойчивой к составу электролита
тканью и проницаемой решёткой для придания механической прочности конструкции. Ра­
бочий и компенсационный электроды выполнены на одной подложке, но к компенсаци­
онному электроду доступ анализируемого воздуха перекрыт непроницаемой плёнкой. К
рабочему и компенсационному электродам по отношению к сравнительному приложен
одинаковый потенциал. При попадании анализируемого газа через пористую подложку на
металлический катализатор рабочего электрода, происходит окисление газа с выделением
свободных электронов. С помощью электрической схемы газоанализатора электрический
сигнал нормируется, преобразуется в цифровую и токовую форму. Компенсационный
электрод с анализируемым воздухом не соприкасается и изменение тока через него при
изменении температуры окружающей среды, используется для стабилизации нулевых по­
казаний газоанализатора.
6. Искровые пневматические газоанализаторы
СВИП-2. Сигнализатор СВИП-2 представляет собой промышленный стационар­
ный автоматический прибор постоянного циклического действия, обеспечивающий по­
очерёдный контроль взрывоопасности в четырёх различных точках. Он предназначен для
контроля в воздухе производственных помещений взрывоопасных концентраций горючих
газов, паров и их смесей: ацетон, бензин, водород, пропан, метан, метанол и др.
Принцип действия сигнализатора основан на методе прямого испытания среды на
взрываемость путём искусственного воспламенения определённого объёма анализируе­
мой газовой смеси, обогащённой некоторым объёмом горючего газа. В соответствии с
этим принципом в сигнализаторе автоматически выполняются в определённой последова­
тельности следующие операции: смещение в заданном соотношении анализируемого и
горючего газов, формирование электрической искры и смеси горючего газа с воздухом
для получения факела, индикация взрыва по давлению в испытательной камере (камере
взрыва), транспортирование через камеру взрыва газовой смеси и продуктов взрыва, а
также синхронизация операций во времени и контроль их выполнения, включая проверку
работоспособности элементов конструкции.
Газоанализатор состоит из следующих узлов: управления, смещения, коммута­
ции, контроля работоспособности, датчика взрыва, вспомогательного.
Узел управления предназначен для синхронизации остальных узлов и состоит из:
трёх последовательно соединённых импульсаторов; клапана, предназначенного для при­
ведения импульсаторов в исходное состояние после срабатывания последнего; мульти­
вибратора.
Узел смещения предназначен для смещения заданных объёмов анализируемого и
горючего газов в камере взрыва и приготовления смеси горючего газа с воздухом для по­
лучения факела.
170
Узел коммутации предназначен для подключения ко входу коллектора одного из
четырёх входных каналов (Вх.1, Вх.2, Вх.З, Вх.4). Подключение осуществляется с помо­
щью четырёх коммутаторов. Переключение происходит с помощью четырёх реле. Для оп­
ределения, из какой точки отбора пробы происходит забор анализируемого газа, в каждой
из входных линий установлены ротаметрические индикаторы расхода.
Узел контроля работоспособности предназначен для автоматической и ручной
проверки работоспособности генератора искры, детектора взрыва и включения сигнализа­
ции в случае неисправности. Принцип действия этого узла основан на искусственном соз­
дании в камере взрыва заведомо взрывоопасной концентрации горючего газа.
Датчик взрыва состоит из генератора искры, камеры взрыва с двумя электродами
и огнепреградителями и индикатора взрыва.
Вспомогательный узел содержит четыре повторителя для формирования избы­
точного давления 0.8 кгс/см2, большого 0.7 кгс/см2 и малого 0.4 кгс/см2 подпоров и давле­
ния задания Ро, с помощью которого регулируется объём дозы горючего газа, величину
которой выбирают так, чтобы обеспечить заданную (20 % НКПР) сигнальную точку.
Иными словами, если горючие продукты содержатся в воздухе в количестве, соответст­
вующем сигнальной точке, то в сумме с добавленным горючим газом получается смесь
предельного состава, которая взрывается в камере при поджигании.
7. Оптико-абсорбционные газоанализаторы
Оптико-абсорбционный метод анализа газа основан на измерении поглощения
инфрокрасной (ИК) энергии излучения анализируемым компонентом. Степень поглоще­
ния ИК-энергии излучения зависит от концентрации анализируемого компонента в газо­
вой смеси. Каждому газу присуща своя область длин волн поглощения. Это обуславливает
возможность проведения избирательного анализа газов.
ГИАМ-27. Газоанализатор ГИАМ-27 предназначен для контроля технического
состояния двигателей внутреннего сгорания. Он определяет содержание окиси углерода
СО, углеводородов СН в выхлопных газах и число оборотов коленчатого вала карбюра­
торных двигателей.
Рис. 9
Схема функциональная газоанализатора ГИАМ-27
171
Газоанализатор содержит оптический блок, блок обработки сигналов, блок инди­
кации, датчик частоты вращения коленчатого вала карбюраторного двигателя автомобиля
(рис. 9).
Оптический блок состоит из двух излучателей Е1 и Е2, создающих потоки ИКэнергии, которые попадают в камеры, каждая из которых имеет две полости, обозначен­
ные РК - рабочую с анализируемой газовой смесью и СК - сравнительную без анализи­
руемой газовой смеси; обтюратора О, вращающегося от электродвигателя М; двух интер­
ференционных фильтров ИФ1 и ИФ2; двух фоконов Ф1 и Ф2 с двумя приёмниками ИКизлучения П 1 и П2; оптоэлектронных пар ОП, выдающих информацию выдающих ин­
формацию о положении обтюратора; датчика температуры Dt°.
Блок обработки сигналов состоит из двух каналов обработки сигналов и тахомет­
ра, содержащего формирователь импульсов и фильтр. Каждый канал обработки сигнала
включает в себя предварительный усилитель ПУ, регулируемый усилитель РУ, усилитель
постоянного тока УПТ, аналоговое запоминающее устройство сигналов с рабочей и срав­
нительной камер АЗУср и АЗУр, выходной усилитель ВУ, схему сравнения СС, источник
опорного напряжения ИОН.
Блок индикации содержит два индикатора, один из которых индицирует содержа­
ние СО, другой - содержание СН или частоту вращения коленчатого вала двигателя.
В зависимости от положения обтюратора поток ИК-излучения излучателя попа­
дает на приёмник либо через рабочую камеру, либо через сравнительную камеру, пройдя
через интерференционный фильтр, фокон.
На приёмнике регистрируется переменный сигнал, который несёт информацию о
количестве ИК-энергии, поглощённой анализируемым газом с частотой обтюрации, и,
следовательно, о концентрации анализируемого газа. Сигнал с приёмника излучения, уси­
ленны с помощью предварительного усилителя, поступает на регулируемый усилитель, с
выхода которого сигнал проходит на два аналоговых запоминающих устройства АЗУр и
АЗУср, управляемых формирователями синхроимпульсов, выдающих информацию о по­
ложении обтюратора в момент максимального открытия рабочей и сравнительной камер.
В АЗУр запоминается сигнал, пропорциональный ИК-потоку, проходящему через
рабочую камеру, В АЗУср - сигнал пропорциональный ИК-потоку, проходящему через
сравнительную камеру.
С выходов запоминающих устройств сигналы поступают на дифференциальный
выходной усилитель постоянного тока, затем на индикаторное устройство.
Выходное напряжение с АЗУр поступает на схему сравнения СС, которая через
УПТ управляет коэффициентом передачи РУ таким образом, чтобы сигнал с АЗУр был
равен сигналу с ИОН.
Для повышения линейности статической характеристики газоанализатора в кана­
ле введено звено обратной связи ЗОС с выхода ВУ на входы АЗУр и АЗУср.
Для температурной компенсации чувствительности газоанализатора в ИОН ввёден сигнал с датчика температуры Dt°.
172
X X III. Х Р О М А Т О Г Р А Ф И Ч Е С К И Й М Е Т О Д А Н А Л И З А
Выделение индивидуальных химических соединений из смесей различного происхо­
ждения всегда было и остаётся одной из основных задач химии. Прежде чем начать подроб­
ное исследование какого-либо вещества, необходимо, как правило, выделить его в возможно
более чистом виде и в достаточном количестве. В природных условиях вещества находятся
главным образом в смесях, а продукты синтеза и других химических реакций обычно также
не получаются сразу в чистом виде. Исходные смеси веществ могут быть чрезвычайно слож­
ным по составу. Поэтому разделение смесей на отдельные компоненты является для химика
одной из наиболее частых работ.
Таким образом, методы разделения имеют важное значение, как в промышленности,
так и в лабораторных работах препаративного и аналитического характера.
Одним из методов разделения сложных смесей органических и неорганических ве­
ществ на отдельные компоненты является хроматографический метод.
Метод разработан в 1903 году Михаилом Цветом, который показал, что при пропус­
кании смеси растительных пигментов через слой бесцветного сорбента индивидуальные ве­
щества располагаются в виде отдельных окрашенных зон. Полученный таким образом по­
слойно окрашенный столбик сорбента Цвет назвал хроматограммой, а метод - хроматогра­
фией.
Хроматография
Хроматография - физико-химический метод разделения и анализа смесей, основан­
ный на распределении их компонентов между двумя фазами - неподвижной и подвижной
(элюент), протекающий через неподвижную.
Ряд видов хроматографий осуществляется с помощью приборов называемых хрома­
тографами. Хроматографы используют для анализа и для препаративного разделения смесей
веществ.
Хроматографы
Хроматографы - приборы или установки для хроматографического разделения и
анализа смесей веществ. Основными частями хроматографа являются: система для ввода ис­
следуемой смеси веществ (пробы); хроматографическая колонка; детектирующее устройство
(детектор); системы регистрации и термостатирования; для препаративных (в т. ч. производ­
ственных) хроматографов, кроме того, отборные приспособления и приёмники для разделён­
ных компонентов.
В соответствии с агрегатным состоянием используемой подвижной фазы существуют
газовые и жидкостные хроматографы.
Для анализа и разделения веществ переходящих без разложения веществ, переходя­
щих без разложения в парообразное состояние, получила газовая хроматография, где в каче­
стве элюента (газа-носителя) используется гелий, азот, аргон, и др. газы.
В жидкостной колоночной хроматографии в качестве элюента применяют легколету­
чие растворители (напр., углеводороды, эфиры, спирты).
173
Газовый хроматограф
Принципиальная схема газового хроматографа приведена на рис.1.
В газовом хроматографе газ-носитель из баллона через регуляторы расхода и давле­
ния непрерывно с постоянной или переменной скоростью подаётся в хроматографическую
колонку - трубку, заполненную сорбентом и помещённую в термостат позволяющий под­
держивать заданную температуру.
Рис. 1
Ввод газообразной пробы ( 1 - 5 0 куб. см) и жидкой (неск. мкл.) осуществляется ли­
бо вручную (газовым шприцем или микрошприцем), либо автоматически - при помощи мик­
родозаторов. В хроматографической колонке происходит разделение многокомпонетной сме­
си на ряд бинарных смесей, состоящих из газа - носителя и одного из анализируемых компо­
нентов. Бинарные смеси в определённой последовательности, зависящей от сорбируемости
компонентов, поступают в детектор. В результате происходящих в детекторе процессов (из­
менение теплопроводности, ионизационного тока и др.) фиксируется изменение концетрации
выходящих компонентов; преобразованные в электрический сигнал, эти процессы записыва­
ются в виде выходной кривой.
Хроматографические колонки
Хроматографическая колонка - “сердце” хроматографа, в ней и происходит собст­
венно разделение смеси. Колонки подразделяются на упаковочные (набивные) и капилярные.
Изготавливают их из стеклянных, стальных, полиэтиленовых, тефлоновых и иногда медных
трубок.
174
Термостат
Подвижность разделяемых компонентов в колонке в большей степени зависит от
температуры, поэтому, чтобы элюирование длилось приемлемое время, в колонке необходи­
мо поддерживать выбранную температуру. Область рабочих температур чрезвычайно об­
ширна - от температуры жидкого азота и до 400 °С и более в соответствии с природой хрома­
тографируемых соединений и конструкцией прибора.
Выбранная температура должна поддерживаться постоянной в очень узком интерва­
ле (± 0,1 °С). Современные термостаты вполне позволяют поддерживать температуру с такой
степенью точности. Хроматографические термостаты снабжены воздушным нагревателем и
вентилятором. Преимущество таких термостатов - их чувствительность при работе при вы­
соких температурах.
Детекторы
Хроматографический детектор - это прибор, преобразующий результаты разделе­
ния в форму, удобную для регистрации самописцем.
Поскольку принцип действия хроматографических детекторов может быть самым
разным, детекторы трудно сравнивать. Однако существуют несколько общих критериев. Это
селективность, чувствительность, реакция, шум, нижний предел детектирования (наимень­
шее детектирующее количество) и линейность отклика. Последняя характеристика зависит от
принципа работы детектора. Для количественной работы почти каждый детектор требует ка­
либровки, необходимой для определения поправочных коэффициентов.
Схема катарометра
I
— ввод газ* из колонки; ? - «“ ход в .тмосферу; 3 - н и т ь сопротивлений; 4 - мэодктор; 5 — металлический блок.
« и .™
Рис.2
ДТП - детектор по теплопроводности (катарометр, рис. 2) - принцип действия ос­
нован на сравнении теплопроводности чистого газа-носителя и бинарной смеси состоящей из
газа-носителя и одного из компонентов анализируемой смеси, различие теплопроводности
приводит к разбалансу моста, что служит сигналом детектора. Чувствительные элементы де­
тектора включены по мостовой схеме (R1,R2,C1,C2), показанной на рис. 3.
175
Схема моста
Ci Ct — измерительные ячейки; R,. / ^ — сравнительные ячейки; / . — вход газа из колон­
ки; 2 — инод чистого газ а -носителя; 3 — установка нуля: < — миллиамперметр; 5 — регу­
лятор тока, проходящего через нити; 6 — источник тока; 7^— вывод на самописец.
Рис. 3
ДИП - детектор ионизации в пламени (рис. 4) - принцип действия основан на изме­
нении электропроводности водородо-воздушного пламени.
Схема ионизационного детектора
источник ионизации; 2 — область между электродами; 3 — электрометр; 4 — самлпи*
сец; 5 источник напряжения ионизации; 5 — источник компенсационного потенциала;
с*
измеряемое напряжение; R , — электрическое сопротивление среды; ІІі — измеряв*
мое сопротивление.
Рис. 4
Существуют и другие детекторы (ДЭЗ, ТИД, ДИР, ДПР, ПФД и др.), но ДТП и ДИП
наиболее чаще используемые (ОАО “КАУСТИК”) в газовой хроматографии.
176
Для жидкостной хроматографии используют детекторы: кондуктометрический, фо­
тометрический (спектрофотометрический), рефрактометрический и др. Подачу подвижной
фазы - растворителя осуществляют при помощи беспульсационных систем (давление до 50
МПа), а ввод пробы - микрошприцем или переключающимся краном
Рис. 5
Регистраторы
Компонент смеси, поступающий из колонки, с помощью детектора трансформирует­
ся в изменение некоторого электрического параметра, как правило, напряжения. Изменение
этого параметра во времени регистрируется, и полученную хроматограмму можно обрабаты­
вать как качественно, так и количественно. Регистрируют хроматограммы самопишущие по­
тенциометры, которые дают длительную запись отклика детектора как функции времени.
В хроматографии можно применять ли ть те самописцы, которые отвечают опреде­
лённым требованиям: это высокая скорость регистрации; воспроизводимое отклонение пера
при подаче одного и того же напряжения; линейная зависимость по всей шкале; высокая чув­
ствительность, т.е. отклонение пера при очень маленьком изменении потенциала.
Основной недостаток самописцев - ограниченная линейная область. Именно по этой
причине такое большое внимание уделялось разработке методов регистрации сигналов детек­
торов без применения переключения диапазонов. К приборам такого типа относятся, в част­
ности, цифровые интеграторы.
Заключение
В настоящее время выпускаются хроматографические комплексы отечественного про­
изводства на базе газового хроматографа “Кристалл - 2000м”.
Комплексы позволяют полностью автоматизировать процесс хроматографического
анализа. Программное обеспечение “Хроматэк Аналитик” обеспечивает полное управление
всеми режимами хроматографа, позволяет регистрировать хроматограмму в большой линей­
ной области, производить полную обработку и расчёт хроматограмм, а так же управлять до­
полнительными устройствами хроматографического комплекса.
177
X X IV . П Р И Б О Р Ы И А В Т О М А Т И К А К О Т Е Л Ь Н Ы Х
В отопительных и отопительно-производственных котельных, работающих на газе,
находят применение комплексные системы автоматики, каждая из которых в зависимости от
назначения и мощности котельной, давления газа, вида и параметров теплоносителя имеет
свою специфику и область применения.
Основные требования к автоматизации отопительных котельных предусматривают
обеспечение безопасной эксплуатации их и рациональное регулирование расхода топлива.
Показатели совершенства применяемых систем автоматизации является их самокон­
троль, т.е. подача сигнала об аварийном выключении котельной или одного из котлов и авто­
матическая фиксация причины, вызвавшей аварийное отключение.
Некоторые из серийно выпускаемых систем автоматики позволяют осуществлять по­
луавтоматический пуск и останов котлоагрегатов, работающих на газовом и жидком топливе.
Одна из особенностей систем автоматизации газифицированных котельных - полный кон­
троль за безопасностью работы оборудования и агрегатов. Система специальных защитных
блокировок должна обеспечить отключение подачи топлива при:
• нарушении нормальной последовательности пусковых операций;
• отключении дутьевых вентиляторов;
• понижении (повышении) давления газа ниже (выше) допустимого придела;
• нарушении тяги в топке котла;
• срывах и погасании факела;
• упуске уровня воды в котле;
• и в других случаях отклонения параметров работы котлоагрегатов от нормы.
Поэтому современные системы автоматизации состоят из приборов и оборудования,
обеспечивающих комплексное регулирования режима и безопасность их работы. Осуществ­
ление комплексной автоматизации предусматривает сокращение обслуживающего персонала
в зависимости от степени автоматизации. Некоторые из применяемых систем автоматики
способствуют автоматизации всех технологических процессов в котельных, включая дистан­
ционный режим котлов, что позволяет контролировать работу котельных непосредственно из
диспетчерского пункта, при этом персонал полностью выведен из котельных. Однако для
диспетчеризации котельных необходима высокая степень надежности работы исполнитель­
ных органов и датчиков систем автоматики. В ряде случаев ограничиваются применением в
котельных автоматики «минимум» предназначенной для контроля лишь основных парамет­
ров (частичная автоматизация). К выпускаемым и вновь разрабатываемым системам автома­
тизации отопительных котельных предъявляется ряд технологических требований, как-то:
агрегатность, т.е. возможность набора любой схемы из ограниченного числа унифицирован­
ных элементов; блочность - возможность лёгкой замены вышедшего из строя блока. Наличие
устройств, позволяющих осуществлять телеуправление автоматизированными установками
по минимальному количеству каналов связи минимальная инерционность и быстрейшее воз­
вращение к норме при любом возможном разбалансе системы. Полная автоматизация работы
вспомогательного оборудования: регулирование давления в обратном коллекторе (подпитка
теплосети), давления в головке-деаэратора, уровня воды в баке-аккумуляторе деаэратора и
др.
1. Защита котла
Защита котлоагрегата при возникновении аварийных режимов является одной из ос­
новных задач автоматизации котельных установок. Аварийные режимы возникают чаще все­
178
го в результате неправильных действий обслуживающего персонала, преимущественно при
пуске котлоагрегата. Схема защиты обеспечивает заданную последовательность операций
при растопке котла и автоматическое прекращение подачи топлива при возникновении ава­
рийных режимов.
Схема защиты должна решать следующие задачи:
• контроль за правильным выполнением предпусковых операций;
• включение тягодутьевых устройств, заполнение котла водой и т.д.;
• контроль за нормальным состоянием параметров (как при пуске, так и при работе кот­
ла);
• дистанционный розжиг запальника со щита управления;
• автоматическое прекращение подачи газа к запальникам после кратковременной со­
вместной работы запальника и основной горелки (для проверки горения факела основных го­
релок), если факелы запальника и горелки имеют общий прибор контроля.
Оборудование котлоагрегатов защитой при сжигании любого вида топлива является
обязательным.
Паровые котлы независимо от давления и паропроизводителъности при сжигании
газообразного и жидкого топлива должны быть оборудованы устройствами прекращаю­
щими подачу топлива к горелкам в случае:
• повышения или понижения давления газообразного топлива перед горелками;
• понижения давления жидкого топлива перед горелками (для котловоборудованных ро­
тационными форсунками не выполнять);
• уменьшения разряжения в топке;
• понижения или повышения уровня воды в барабане;
• понижения давления воздуха перед горелками (для котлов, оборудованных горелками
с принудительной подачей воздуха);
• повышения давления пара (только при работе котельных без постоянного обслужи­
вающего персонала);
• погасания факела горелок, отключение которых при работе котла не допускается;
• неисправности цепей защиты, включая исчезновение напряжения.
Водогрейные котлы при сжигании газообразного и жидкого топлива должны быть
оборудованы устройствами, автоматически прекращающими подачу топлива к горелкам в
случае:
• повышения температуры воды за котлом;
• повышения или понижения давления воды за котлом;
• понижения давления воздуха перед горелками (для котлов оборудованных горелками с
принудительной подачей воздуха);
• повышения или понижения газообразного топлива;
• понижения давления жидкого топлива (для котлов оборудованных ротационными го­
релками, не выполнять);
• уменьшения разряжения в топке;
• уменьшения расхода воды через котёл;
• погасания факела горелок, отключение которых при работе котла не допускается;
• неисправности цепей защиты, включая исчезновение напряжения.
Для водогрейных котлов с температурой нагрева воды 115°С и ниже защита по по­
нижению давления воды за котлом и уменьшению расхода воды через котел может не вы­
полняться.
179
2. Технологическая сигнализация
Для предупреждения обслуживающего персонала об отклонении основных техноло­
гических параметров от нормы предусматривается технологическая светозвуковая сигнали­
зация. Схема технологической сигнализации котельной разделяется, как правило, на схемы
сигнализации котлоагрегатов и вспомогательного оборудования котельной. В котельных с
постоянным обслуживающим персоналом должна предусматриваться сигнализация:
а) остановка котла (при срабатывании защиты);
б) причины срабатывания защиты;
в) понижения температуры и давления жидкого топлива в общем трубопроводе к котлам;
г) понижения давления воды в питательной магистрали;
д) понижения или повышения давления воды в обратном трубопроводе тепловой сети;
е) повышения или понижения уровня в баках (деаэраторных, аккумуляторных систем го­
рячего водоснабжения, конденсатных, питательной воды, хранения жидкого топлива и др.), а
также понижения уровня в баках промывочной воды;
ж) повышения температуры в баках хранения жидких присадок;
з) неисправность оборудования установок для снабжения котельных жидким топливом
(при их эксплуатации без постоянного обслуживающего персонала);
и) повышения температуры подшипников электродвигателей при требовании заводаизготовителя;
к) понижения величины pH в обрабатываемой воде (в схемах водоподготовки с подкислением);
л) повышения давления (ухудшения вакуума) в деаэраторе;
м) повышения или понижения давления газа.
3. Контрольно-измерительные приборы
Приборы для измерения температуры
В автоматизированных системах измерение температуры осуществляется, как прави­
ло, на основе контроля физических свойств тел функционально связанных с температурой
последних. Приборы для контроля температуры по принципу действия могут быть разделены
на следующие группы:
1) термометры расширения для контроля теплового расширения жидкости или твердых
тел (ртутные, керосиновые, толуоловые и др.);
2) манометрические термометры для контроля температуры путем измерения давления
жидкости, пара или газа, заключенных в замкнутую систему постоянного объема (например
ТТЛ-100);
3) приборы с термометрами сопротивления или термисторами для контроля электриче­
ского сопротивления металлических проводников (термометры сопротивления) или полупро­
водниковых элементов (термисторов, ТСМ, ТСП);
4) термоэлектрические приборы для контроля термоэлектродвижущей силы (ТЭДС)
развиваемой термопарой из двух различных проводников (величина ТЭДС зависит от разно­
сти температур спая и свободных концов термопары, присоединяемых к измерительной схе­
ме) (ТПП, ТХА, ТХК и др.);
5) пирометры излучения для измерения температуры по яркости, цвету или тепловому
излучению накаленного тела (ФЭП-4);
180
6)
радиационные пирометры для измерения температуры по тепловому действию луче­
испусканию накаленного тела (РАПИР).
Вторичные приборы для измерения температуры
1.
2.
3.
4.
Логометры
(предназначены для измерения температуры в комплекте с термометрами
Мосты
[сопротивления стандартных градуировок 21, 22, 23, 24, 50-М, 100П и др.
Милливольтметры
(предназначены для измерения температуры в комплекте с
Потенциометра
[термопарами стандартных градуировок ТПП, ТХА, ТХК и др.
Приборы для измерения давления и разряжения (в котельных)
По принципу действия приборы для измерения давления и разряжения разделяются
на:
• жидкостные - давление (разряжение) уравновешивается высотой столба жидкости (Uобразные, ТДЖ, ТНЖ-Н и др.);
• пружинные - давление уравновешивается силой упругой деформации чувствительного
элемента (мембраны, трубчатой пружины, сильфона и т.п.) (ТНМП-52, НМП-52, ОБМ-1 и
ДР-)-
Преобразователи
1. Дифференциально-трансформаторные (МЭД, ДМ, ДТГ-50, ДТ-200);
2. Токовые (САПФИР);
3. Электроконтактные (ЭКМ, ВЭ-16рб, ДМ-2005, ДНТ,ДГМ и др.).
Приборы для измерения расхода
Для измерения расходов жидкостей и газов используют в основном два вида расхо­
домеров - переменного и постоянного перепада. В основу принципа действия расходомеров
переменного перепада положено измерение перепада давления на сопротивлении, введенном
в поток жидкости или газа. Если измерять давление до сопротивления и непосредственно за
ним, то разность давлений (перепад) будет зависеть от скорости потока, а следовательно, и от
расхода. Такие сопротивления, установленные в трубопроводах, называются сужающими
устройствами. В качестве сужающих устройств в системах контроля расхода широко приме­
няются нормальные диафрагмы. Комплект диафрагм состоит из диска с отверстием, кромка
которого с плоскостью диска составляет угол 45 град. Диск помещается между корпусами
кольцевых камер. Между фланцами и камерами установлены уплотняющие прокладки. От­
боры давления до и после диафрагмы берут из кольцевых камер.
В качестве измерительных приборов и передающих преобразователей в комплекте с
преобразователями переменного перепада для измерения расхода применяют дифференци­
альные манометры (дифманометры) ДП-780, ДП-778-поплавковые; ДСС-712, ДСП-780Нсильфонные; ДМ-дифференциально-трансформаторные; «САПФИР»-токовые.
Вторичные приборы для измерения уровня: ВМД, КСД-2 для работы с ДМ; А542 для
работы с «САПФИРОМ» и другие.
181
Приборы для измерения уровня. Сигнализаторы уровня
Предназначены для сигнализации и поддержания в заданных приделах уровня воды и
жидких электропроводных сред в ёмкости: ЭРСУ-3, ЭСУ-1М, ЭСУ-2М, ESP-50.
Устройства для дистанционного измерения уровня: УМ-2-32 ОНБТ-21М—
сельсинный (комплект устройства состоит из датчика ДСУ-2М и приемника УСП-1М; датчик
снабжен металлическим поплавком); УДУ-5М—поплавковый.
Приборы для измерения состава вещества
Автоматический стационарный газоанализатор МН5106 предназначен для измерения
и регистрации концентрации кислорода в отходящих газах котельных установок. В последнее
время в состав проектов автоматизации котельных включают анализаторы на СО-угарный
газ.
Преобразователи типа П-215 предназначены для использования в системах непре­
рывного контроля и автоматического регулирования величины pH промышленных растворов.
Запально-защитные устройства
Устройство предназначено для автоматического или дистанционного розжига горе­
лок работающих на жидком или газообразном топливе, а также для защиты котлоагрегата
при погасании факела (ЗЗУ, ФЗЧ-2).
Регуляторы прямого действия. РТ
Регулятор температуры используется для автоматического поддержания заданной
температуры жидких и газообразных сред. Регуляторы комплектуются прямым либо обрат­
ным каналом.
Регуляторы непрямого действия
Система автоматического регулирования «Контур». Система «Контур» предназначе­
на для применения в схемах автоматического регулирования и управления в котельных. Ре­
гулирующие приборы системы типа Р-25 (РС-29) формируют совместно с исполнительными
механизмами (МЭОК, МЭО) - «ПИ»-закон регулирования.
4. Системы автоматизации отопительных котельных
Комплект средств управления КСУ-7 предназначен для автоматического управления
водогрейными одногорел очными котлами мощностью от 0,5 до 3,15 МВт, работающими на
газообразном и жидком топливе.
Технические данные:
1) автономный
2)
с верхнего уровня иерархии управления (с диспетчерского пункта или общественного
управляющего устройства).
В обоих режимах управления комплект обеспечивает выполнение следующих функ­
ций:
182
1. автоматический пуск и останов котла
2. автоматическая стабилизация разряжения (для котлов с тягой), закон регулирования—
позиционный
3. позиционные управления мощностью котла путем включения режима «большого» и
«малого» горения
4. аварийная защита, обеспечивающая останов котла при возникновении аварийных си­
туаций, включение звукового сигнала и запоминание первопричин аварии
5. световая сигнализация о работе комплекта и состоянии параметров котла
6. информационная связь и связь по управлению с верхним уровнем иерархии управле­
ния.
Особенности наладки
При наладке комплекта средств управления КСУ-7 особое внимание необходимо
уделить контролю пламени в топке котла. При установке датчика соблюдать следующие тре­
бования:
1) ориентировать датчик на зону максимальной интенсивности пульсаций излучения
пламени
2) между пламенем и датчиком не должно быть препятствий, пламя постоянно должно
находиться в поле зрения датчика
3) датчик должен устанавливаться с наклоном, предотвращающим оседание различных
фракций на его визирное стекло
4) температура датчика не должна превышать 50 С; для чего необходимо производить
постоянный обдув через специальный штуцер в корпусе датчика, предусмотреть теплоизоля­
цию между корпусом датчика и горелочного устройства; датчики ФД-1 рекомендуется уста­
навливать на специальных тубусах
5) применять в качестве первичного элемента фоторезисторы ФР1-3-150кОм.
Заключение
В последнее время широкое применение получили приборы на базе микропроцес­
сорной техники. Так в замен комплекта средств управления КСУ-7 выпускается КСУ-ЭВМ,
что ведет к подъему показателей совершенства применяемых систем безопасности, работы
оборудования и агрегатов.
183
XXV. РАЗНОВИДНОСТЬ, УСТРОЙСТВО И РАБОТА
ВЕСОИЗМЕРИТЕЛЬНОЙ ТЕХНИКИ
ЭТАЛОНЫ
Эталоны классифицируют:
Первичные - воспроизводят, хранят единицы и передают их с наивысшей точно­
стью.
Специальные - когда прямая передача размера технически неосуществима.
Вторичные - эталоны-копии, эталоны-сравнения, рабочие эталоны.
Эталоны-копии - для передачи размера единицы от первичных к рабочим этало­
нам.
Эталоны-сравнения - для сличения первичных эталонов.
Рабочие-эталоны - для проверки образцовых и рабочих средств высшей и высо­
кой точности.
Так же эталоны делят на:
- одиночные - состоит из одного средства измерений.
- групповые - совокупность однотипных средств измерений.
Эталонный набор - совокупность средств измерений, каждое из которых позволя­
ет воспроизводить, хранить физическую величину в определенном диапазоне.
Эталонный комплекс — совокупность не однотипных технических средств. К та­
ким эталонам принадлежит государственный первичный эталон единицы массы, которой
состоит:
1. Национальный прототип килограмма - копия №12 Международного прототипа
килограмма (гиря из платиноиридиевого сплава для передачи размера единицы массы R1).
2. Копия №26 - для поверки копии №12 и её замены в период сличений.
3. Гиря R1 и набор гирь - для передачи размера единицы массы эталонамкопиям.
4. Два компаратора (эталонные весы).
Вся весоизмерительная техника по точности делится на классы и разряды. Суще­
ствует шесть классов (1^6) и пять разрядов la, I, II, III, IV. Разряды присваиваются образ­
цовому оборудованию, предназначенному для воспроизведения и хранения единиц изме­
рений и для поверки и градуировки мер и измерительных приборов. А классы присваи­
ваются рабочему оборудованию, которое предназначено для практических измерений.
Лабораторные весы 1-^3 классов и la, I, II, III разрядов относятся к весам специ­
ального класса точности и им присваивается международный индекс 1.
Лабораторные весы 4 класса и IV разряда относятся к весам высокого класса точ­
ности и им присваивается международный индекс II.
Весы для статического взвешивания имеющих количество поверочных цен деле­
ния более 500 е, относятся к весам среднего класса точности и им присваивается между­
народный индекс III.
А если количество поверочных цен деления не более 500 е, то обычный класс
точности с международным индексом ІІІІ.
Рассмотрим теперь общую классификацию средств измерения массы.
Однозначные меры - это гири.
Измерительные приборы - это весы, весовые дозаторы, контрольные весовые ав­
томаты.
184
Средства измерения массы
Меры массы
Весоизмерительные приборы
Гири образцовые
Весы для статического взвешивания
Гири общего назначения
Весовые дозаторы дискретного и
непрерывного действия
Гири встроенные в весы
Весовые устройства для взвеши­
вания в движении
Гири специальные
Весы специального назначения
Лабораторные весы подразделяются по назначению на:
■ лабораторные весы общего назначения;
■ образцовые, специального назначения.
Весы общего назначения - только для взвешивания.
Весы образцовые - исключительно для поверки.
Весы специального назначения - это приборы, основанные на весовом принципе,
но предназначены для определения физических величин, не являющихся массой или ве­
сом, например ВЛВ-100 (измерение влажности), маслопробные весы, пурка.
Весы специальных конструкций - весы, конструкция которых обладает специфи­
кой, обусловленной особенностями объекта или условий взвешивания, что не позволяет
использовать их для определения массы (веса) других объектов (каратные весы, пробир­
ные весы).
По способу предоставления измерительной информации весы подразделяют на
весы с аналоговым и цифровым отсчетным устройством.
По степени автоматизации цикла взвешивания - автоматические, полуавтомати­
ческие, неавтоматического уравновешивания.
По конструктивным признакам - именованной шкалой, с неименованной шкалой,
с механизмом компенсации (выборки), тары, без механизма компенсации, с верхним рас­
положением грузоприемной площадки, с нижним расположением грузоприемной пло­
щадки.
Лабораторные рычажные весы делятся на 4 класса, отличающихся друг от друга,
ценой деления шкалы.
Весы 1-го и 2-го классов называют аналитическими, а 3-го и 4-го классов - тех­
ническими.
Аналитические весы применяют для микрохимических и химических анализов, а
технические весы — для взвешивания драгоценных металлов и медикаментов, а так же
технических анализов.
Условные обозначения лабораторных весов могут быть следующие:
■ ВЛР - весы лабораторные, равноплечие с оптическим отсчетом;
■ ВЛК - весы лабораторные квадрантные;
185
■ BJIKT - весы лабораторные с механизмом выборки тары;
■ BJIT - весы лабораторные технические;
■ BJIM - весы лабораторные микроаналитические;
■ BJIAO - весы лабораторные аналитические одноплечие;
■ ВЛЭ - весы лабораторные электронные;
■ ВЛО - весы лабораторные образцовые.
После буквенного обозначения стоит цифра - это наибольший предел взвешива­
ния, через дробь / стоит цифра - это цена деления, через - стоит цифра - это класс точно­
сти.
Приведем пример: ВЛК—2 кг/20—3 это весы лабораторные квадрантные с наи­
большим пределом взвешивания 2 кг, ценой деления 20 г и классом точности 3.
По конструктивным признакам и области применения лабораторные весы бывают
ещё:
1.Равноплечие (ВЛР, ВЛА...).
Серьга
Подвески
Коромысло
Стрелка
Шкала
Изолир
Тарировочные гайки
Регулированные гайки
Успокоитель воздушный
\ \ \
1. Серьга
2.Подвеска
3.Коромысло
4.Микрошкала
5.Изолир
6.Встроенные гири
7.Механизм наложения гирь
8.Зеркала
9. Линзы
10.Матовый экран
11 .Тарировочные гайки
12.Регулировочные гайки
13. Успокоитель воздушный
186
3. Квадрантные
11
4.
I .Чашка
2.Квадрант
3.Зеркала
4. Линзы
5 .Лампа
6.Матовый экран
7.Микрошкала
8.Встроенные гири
9.Механизм положения гирь
10. Струнка
II .Тарировочный груз
12.Регулировочный груз
13.Магнитный успокоитель
Электронные
5. С упругими опорами (крутильные, торсионные) основаны на принципе упру­
гого закручивания металлической нити или изгиба пружины.
Весы для статического взвешивания
Весы для статического взвешивания по способу установки подразделяют на:
■ настольные (наибольший предел взвешивания (НПВ) 1-^50 кг);
■ передвижные (50 -КЮ00 кг);
■ стационарные (5 -И 00т).
По типу отсчетного устройства весы подразделяют на:
1. С указателем равновесия;
2. С коромысловым шкальным уравновешивающим устройством;
3. С циферблатным отсчетным устройством;
4. С проекционным отсчетным устройством;
5. С дискретно-цифровым отсчетным устройством L = kdd, где к - целое число;
6. С аналоговым отсчетным устройством L=d (к ним относятся с 1 по 4 пункты),
dd. единица дискретного отсчета
d - наименьшая цена деления
Весы для статического взвешивания,
условные обозначения
Первая буква: Р - рычажномеханические весы
Т—электронно-тензометрические весы
В - виброчастотные
Вторая буква: Н - настольные
П—передвижные
С—стационарные
Затем цифры - наибольшей предел взвешивания
Затем буква - Г- коромысловые гирные
187
Ш-коромысловые шкальные
Ц- циферблатные
Д-дискретно-цифровые
Затем цифры: 1.визуальный отсчет показаний
2.документальная регистрация
Затем цифры: 3.отсчет показаний на месте
4.дистанционный отсчет
Рассмотрим несколько примеров кинематических схем.
КИНЕМАТИЧЕСКАЯ СХЕМА НАСТОЛЬНЫХ ГИРНЫХ ВЕСОВ
1
*4-О tjл
1г
л
КИНЕМАТИЧЕСКАЯ СХЕМА НАСТОЛЬНЫХ ШКАЛЬНЫХ ВЕСОВ.
188
КИНЕМАТИЧЕСКАЯ СХЕМА ДВУХПЛОЩАДОЧНЫХ ШКАЛЬНЫХ ВЕСОВ
КИНЕМАТИЧЕСКАЯ СХЕМА ГИРНЫХ ВЕСОВ
Аналогичная схема для шкальных весов, но другое коромысло.
189
СХЕМА ЦИФЕРБЛАТНЫХ ВЕСОВ СО ВСТРОЕННЫМ ГРУЗОМ.
Тензодатчики
В настоящее время очень широкое распространение получают тензовесы или ве­
совые устройства на основе тензодатчиков, чувствительными элементами которых явля­
ются тензорезисторы. Несомненными преимуществами таких весовых устройств является:
высокая точность, небольшие габаритные размеры, возможность использования в автома­
тических системах регулирования, простота монтажа, наладки и эксплуатации.
Принцип действия тензорезистора основан на изменении его внутреннего элек­
трического сопротивления при механической деформации.
Для измерения небольших деформаций s от 0,005 до 2 % применяются фольговые
и плёночные тензорезисторы. Для измерения больших деформаций s от 5 до 10 % приме­
няют проволочные тензорезисторы. Также бывают полупроводниковые тензорезисторы,
которые применяют для измерения деформаций до 0,1 %.
При измерении тензорезисторы обычно включаются в мостовую измерительную
цепь. Напряжение питания моста ограничивается допустимой мощностью, рассеиваемой в
тензорезисторе, и лежит в диапазоне 2-12 В.
Небольшое рабочее относительное изменение сопротивления тензорезистора оп­
ределяет и сравнительно небольшое напряжение на выходе моста. Так, выходной сигнал
190
моста с проволочными тензорезисторами составляет не более 10-15 мВ при деформации
8=1 %.
При измерениях деформаций с помощью тензорезисторов одной из наиболее су­
щественных погрешностей является температурная, для уменьшения которой используют
дифференциальное включение тензорезисторов. В этом случае применяют два тензорезистора, наклеиваемых таким образом, чтобы деформация объекта вызывала растяжение од­
ного тензорезистора и сжатие другого. Тензорезисторы включаются в два соседних плеча
моста. Вследствие того, что изменение температуры вызывает однонаправленные измене­
ния сопротивлений тензорезисторов, температурную погрешность удаётся снизить при­
мерно на порядок. Одновременно за счёт дифференциальной схемы включения вдвое воз­
растает чувствительность.
Рассмотрим устройство и работу тензодатчика на базе преобразователя ДЭДВУ,
работающего в комплекте с весоизмерительными устройствами типа КСТ-3.
Общий вид и устройство преобразователя ДЭДВУ приведено на рис. 1.
Рис. 1
В корпусе 1 установлен упругий элемент 2, представляющий собой цилиндриче­
ский столбик с основанием и сферической пятой. На рабочей части упругого элемента на­
клеены тензорезисторы 3. Для передачи усилия упругому элементу служит сферическая
пята 4. В углублении корпуса помещена монтажная плата 5 с подгоночными резисторами,
выводные проводники которых соединены с вилкой разъёма 6. Сверху упругий элемент
закрыт диафрагмой 7, снизу крышкой 8, обеспечивающими герметичность внутреннего
объёма преобразователя. Вилка разъёма закрыта колпаком 9 для защиты от механических
повреждений при транспортировке и хранении преобразователя.
Принцип действия преобразователя основан на изменении электрического сопро­
тивления тензорезисторов при их деформации.
191
Измеряемое усилие передаётся упругому элементу, вызывая его деформацию, ко­
торая передаётся тензорезисторам.
Схема электрическая принципиальная преобразователя приведена на рис. 2.
Тензорезисторы R l, R2, R3, R4 вместе с компенсационными резисторами R9 и
R10 образуют электрический мост, в одну диагональ которого подключено напряжение
питания, а с другой диагонали снимается выходной сигнал.
При отсутствии усилия мост находится в равновесии и выходной сигнал равен
нулю.
При воздействии измеряемого усилия тензорезисторы R l, R2, R3, R4 претерпе­
вают деформацию, вызывая разбаланс моста, в измерительной диагонали которого появ­
ляется напряжение, пропорциональное измеряемому усилию.
Для подгонки величины выходного сигнала нагруженного преобразователя слу­
жат резисторы R5, R6, R7, а начального сигнала - резисторы R9, R10. При этом резисторы
R9, R10 могут быть установлены в соответствующее плечо моста в зависимости от поляр­
ности начального сигнала (показано штриховыми линиями).
Для подгонки величины входного сопротивления преобразователя служит рези­
стор R8.
Штырь 4 разъёма соединён с корпусом преобразователя и служит для его зазем­
ления. Схема преобразователя изолирована от корпуса.
Рассмотрим классификацию и основные параметры датчиков тензорезисторных.
192