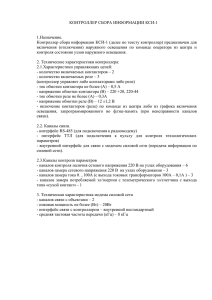
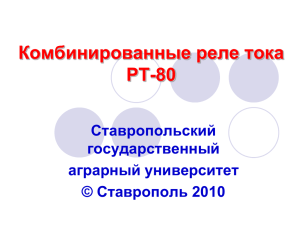
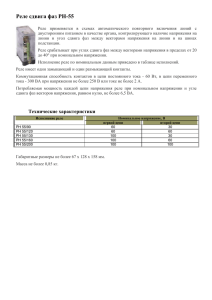
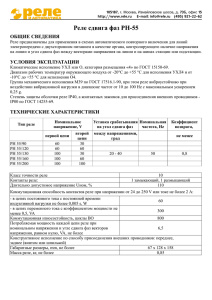
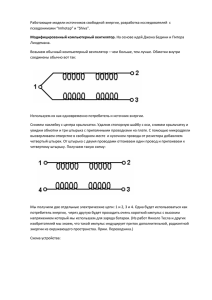
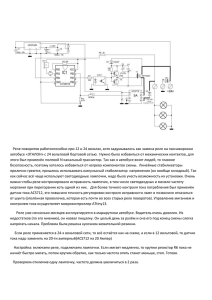
ГЛАВА УСТРОЙСТВ 3. ЭЛЕКТРОПРИВОДЫ ЯКОРНО-ШВАРТОВНЫХ § 3.1. Общая характеристика якорных устройств 1. Назначение якорных устройств Якорным устройством называется электромеханическая система, предназначенная для выполнения якорных и швартовных операций. Под якорными понимают операции по травлению или выбиранию якоря вместе с якорь-цепью. Под швартовными понимают операции по перемещению швартовного каната. Швартовный канат изготавливают из стальных, растительных или синтетических прядей. Швартовный канат, состоящий из стальных прядей, называется тросом, из растительных – манильским канатом, из синтетических – синтетическим канатом. Якорные устройства обеспечивают травление якоря тремя способами: 1. посредством электропривода, при котором электродвигатель включают в направлении на спуск якоря; 2. свободным травлением, под действием собственного веса якоря; 3. свободным травлением с подтормаживанием тормозом цепной звёздочки. Кроме того, якорные устройства обеспечивают следующие режимы работы электропривода: 1. стоянку на якоре на тормозе цепной звёздочки; 2. поочерёдный отрыв 2-х якорей с половины расчётной глубины стоянки; 3. одновременный подъём 2-х якорей с половины расчётной глубины стоянки; 4. швартовные операции при отжимном ветре до 5 баллов. Рабочий механизм якорного устройства состоит из 4-х узлов: 1. редуктора; 2. тормозных средств; 3. муфт переключений; 4. основного и вспомогательного грузового барабанов. Основной барабан предназначен для перемещения якорей, вспомогательный – для перемещения швартовных канатов. Число якорей зависит от водоизмещения судна и составляет 2..3. При этом на судах неограниченного района плавания якорей – 3, один из которых – запасной. Масса якорей зависит от водоизмещения судна : на судах водоизмещением 250…400 Т масса одного якоря составляет 300 кг, водоизмещением 70 000…100 000 Т – 11 000 кг. 1 Суммарная длина обеих якорных цепей зависит от водоизмещения судна и составляет 110…770 м; например, для судна водоизмещением 2 000 т суммарная длина составляет 412,5 м, для судна с водоизмещением 20 000 т 550 м; Якорная цепь состоит из отдельных участков – смычек, длиной 25….27,5 м каждая. 2. Классификация якорно-швартовных и швартовных устройств Якорно-швартовные устройства делятся на 3 основные группы: 1. якорные шпили; 2. якорно-швартовные шпили; 3. брашпили. Якорные и якорно-швартовные шпили имеют вертикальное расположение вала. При этом на валу якорных шпилей расположена якорная звёздочка, якорно-швартовных – якорная звёздочка и швартовный барабан ( турачка ). Брашпили имеют расположение горизонтальное расположение вала, на котором находятся 2 швартовных барабана и 2 якорные звёздочки. Брашпили по скорости и устройству делятся на нормальные и облегченные. Первые применяются на судах морского флота, вторые – на судах речного и озёрного флота, где применяются короткие якорные цепи. Швартовные устройства делятся на 2 группы: 1. швартовные шпили; 2. швартовные лебёдки. У швартовных шпилей при швартовке трос вручную накладывается на швартовный барабан, а после окончания швартовки также вручную сматывается с барабана. У швартовных лебёдок на барабане хранится весь запас троса. 3. Кинематические схемы якорно-швартовных устройств Кинематическая схема брашпиля Электродвигатель 1 (рис. 157) через предохранительную фрикционную муфту 2 соединён с червячным редуктором 11 и промежуточным валом 12. Вращение этого вала через пару шестерней 13 передаётся на главный вал 14, на котором находятся швартовные барабаны 9. 2 Рис. 157. Кинематическая схема брашпиля С главным валом при помощи двух одинаковых пар зубчатых колёс 10 соединены 2 грузовых вала 3. На них могут свободно вращаться пятиугольные якорные звёздочки ( цепные барабаны ) 5, выполненные заодно с тормозными колёсами 7. Эти колёса охвачены лентами 8 ленточного тормоза с ручным винтовым приводом 6. Цепные барабаны при помощи кулачкового устройства 4 с ручным приводом могут присоединяться к грузовым валам 3 и вращаться вместе с ними. На рис. 157 правый барабан сообщён с зубчатым колесом, а левый отсоединён, по-этому брашпиль может перемещать только правый якорь. Таким образом, электродвигатель брашпиля может перемещать оба якоря поочерёдно или одновременно. Редуктор брашпиля может быть как самотормозящимся, так и несамотормозящимся. Во втором случае брашпиль должен иметь электромагнитные дисковые тормоза, затормаживающие привод при обесточивании судна или срабатывании защит в схеме электропривода. Отдача якоря происходит под действием его собственного веса, скорость травления регулируется ленточным тормозом. Современные суда имеют гидравлические устройства управлениял ленточными тормозами, что позволяет отдавать якорь дистанционно ( из рулевой рубки ). При этом контролируется длина вытравленной якорь-цепи и скорость её травления. Весь механизм брашпиля и исполнительный электродвигатель расположены на открытой палубе, что усложняет обслуживание и повышает уязвимость. Кинематическая схема якорно-швартовного шпиля 3 Этого недостатка лишены шпили, у которых на открытой палубе расположены только якорная звёздочка и барабан, а электродвигатель с редуктором находятся ниже палубы полубака в закрытом помещении (рис. 158). Рис. 158. Якорно-швартовный шпиль: 1 – скоба-отбойник; 2 – кулачковая муфта; 3 – турачек; 4 – пустотелый вал; 5 – маховик включения звездочки; 6 – зубчатая муфта; 7 – палубный стакан; 8 – цепная звездочка; 9 – ленточный тормоз; 10 – кнопка управления ленточным тормозом; 11 – маховик; 12 – электродвигатель; 13 – червячная передача 4. Нагрузочные диаграммы якорно-швартовных устройств Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени. Нагрузочная диаграмма электропривода брашпиля – это зависимость момента на валу электродвигателя от времени (рис. 160). Рассмотрим нагрузочные диаграммы электропривода брашпиля при подъеме 1-го якоря с полной расчётной глубины стоянки (рис. 160,а) и 2-х якорей с половинной расчётной глубины (рис. 160,б). Режим подъёма одного якоря. При стоянке судна на якоре один конец якорной цепи с якорем лежит на грунте, а второй проходит через клюз и якорную звёздочку в цепной ящик. Провисающая в воде часть цепи “а” находится под действием внешних сил, действующих на судно: силы ветра F в и силы течения воды F т . Чем больше эти силы, тем сильнее натянута якорная цепь. 4 Увеличение натяжения цепи вызывает подъём части цепи с грунта, при этом увеличивается длина её провисающей части. Процесс снятия судна с якоря делится на 4 стадии ( рис. 159 ). Рис. 159. Процесс снятия судна с якоря В стадии 1 брашпиль выбирает цепь, втягивая её звенья в клюз. При этом судно под действием усилия в цепи, созданного работой электродвигателя брашпиля, движется с небольшой скоростью к месту залегания якоря. Количество звеньев, втягиваемых в клюз, равно количеству звеньев, поднятых с грунта, поэтому форма провисающей части цепи «б» не изменяется. Значит, сила натяжения цепи у входа в клюз и момент М 1 на валу электродвигателя на этой стадии не изменяются. Стадия 1 заканчивается, когда с грунта будет поднято последнее свободно лежащее звено цепи. На этой стадии скорость выбирания якоря увеличивается, как правило, от 9 до 12 м / мин. Рис.160. Нагрузочные диаграммы электропривода брашпиля при подъеме одного ( а ) и двух ( б ) якорей В течение стадии 2 брашпиль продолжает втягивать цепь в клюз, а судно продолжает двигаться практически с неизменной скоростью вследствие приобретённой инерции. Натяжение цепи увеличивается и её форма в конце стадии провисающей части цепи «в» приближается к прямой. В конце стадии 2 двигатель может остановиться, если момент на валу электродвигателя недостаточен для отрыва якоря от грунта. Двигатель при этом 5 переходит в режим стоянки под током, длительность которого ограничена Правилами Регистра до 30 с. На этой стадии момент на валу электродвигателя М 2 увеличивался от значения М 1 до значения М 3 . На стадии 3 двигатель выбирает слабину цепи, образующуюся вследствие движения судна по инерции. Значение момента на валу электродвигателя практически не изменяется, т.е. равно М 3 . В конце стадии 3 судно проходит над местом залегания якоря и отрывает его от грунта. В результате момент электродвигателя скачкообразно уменьшается от значения М 3 до значения М 4 нач . На стадии 4 двигатель выбирает свободно висящую цепь, длина которой, находящаяся в воде, непрерывно уменьшается. Момент на валу электродвигателя постепенно уменьшается от значения М 4 нач до значения М 4 кон , при котором цепь полностью втянута в клюз. Двигатель при этом надо отключить от сети. На этой стадии скорость выбирания якоря уменьшается, как правило, от 12 м/мин до 3 м/мин. Режим подъёма 2-х якорей В этом режиме якоря предварительно оторваны от грунта, а длина цепи в воде равна половине расчётной глубины стоянки. Начальный момент на валу электродвигателя, обусловленный суммарным весом якоря и цепи, составляет М 2 нач (рис. 160, б). После включения электродвигателя происходит плавный подъём якоря, момент электродвигателя уменьшается от значения М 2 нач до значения М 2 кон . Швартовный режим В этом режиме усилие на тросе может изменяться от нуля (слабина троса) до номинального значения. Кроме того, при рывках тяговое усилие в тросе может достигать значений, когда происходит остановка механизма. Однако продолжительность перегрузки обычно не превышает 4…7 с. Работа в швартовном режиме контролируется членами экипажа, и скорость на барабане может изменяться в пределах 7,2…18 м/мин. Исходные нормативные нагрузки якорно-швартовных устройств Работа якорного электропривода характеризуется следующими величинами: 1. тяговым усилием, развиваемым на якорной звездочке, которое зависит от массы якоря, калибра и длины якорной цепи, вытравленной за клюз и провисающей в зависимости от глубины стоянки; 6 2. усилиями, создаваемыми ветром и течением и действующими на судно во время его съемки с якоря; 3. скоростью выбирания якорь-цепи; 4. продолжительностью рабочего периода, которая зависит от общей длины вытравленной якорной цепи при съемке судна с якоря. К исходным нормативным нагрузкам относят: 1. нормы якорного снабжения судов; 2. расчетные нагрузки на якорной звездочке при подъеме одного и двух якорей; 3. продолжительность работы и скорость выбирания якорных и швартовных канатов. 5. Нормы якорного снабжения судов Характеристика снабжения. Нормы снабжения морских судов якорями и якорными канатами определяются государственными стандартами и Правилами Регистра. Якорное вооружение зависит от главных размерений судна и от развитости его надстроек и рубок, создающих повышенную парусность. По ним определяется исходная величина – т.н. характеристика якорного 2 снабжения N c ( м ) : 2/3 Nc = Δ + 2 BH + 0,1 А где: А — весовое водоизмещение судна, тс; В — наибольшая ширина судна, м; Н - условная высота по борту от летней грузовой ватерлинии до верхней кромки самой высокой надстройки или рубки с шириной более 0,25В, м. Если под широкой кой имеется узкая < 0,25В, то последняя в Н не включается; А — площадь парусности, м2. Определяется по ДП судна в пределах от летней грузовой марки WL c учетом, кроме корпуса, надстроек и рубок с шириной >0,25В. Характеристика снабжения N c является исходной для расчета всех элементов якорного вооружения судна. Становые якоря Все суда должны иметь не менее двух становых якорей. Суда неограниченного района плавания (НРП) при N c >200 обязательно снабжаются третьим - запасным якорем. Масса каждого якоря определяется из выражения Q я = kN c , где значения коэффициента k принимаются: k =3,0 - для судов НРП; 2,75 - для судов ограниченного района плавания I (ОРП-I); 2,5 - для судов ОРП-II; 2,0 – для cудов ОРП-III. 7 Ограниченными районами плавания считаются: I — открытые моря с удалением от места-убежища до 200 миль, т.е. расстояния между местами убежищ до 400 миль, а также закрытые моря; II —открытые моря с удалением от места убежища де 50 миль, а также закрытые моря в границах, устанавливаемых для каждого судна Правилами Регистра; III — прибрежные и рейдовые районы в границах, устанавливаемых Правилами Регистра в каждом отдельном случае. Цепи для становых якорей Суммарная длина обеих цепей двух бортов должна быть не менее (м) 0, 25 L = 87r N c , где: коэффициент r = 1 для судов НРП и уменьшается на Δ r = 0,12 для каждого, более ограниченного района плавания, т.е. r = 1 - k р.п Δ r. Например, для судов ОРП-III имеем r = 1 - k р.п Δ r = 1 – 3*0,12 = 0,64. Во всех случаях должно быть: L ≥ 200 м для судов НРП и 100 м для судов ОРП. Для небольших судов при N c ≤ 200 допускается наличие одной цепи с половинной длиной от L . Якорные цепи комплектуются из отдельных смычек по 25 - 27,5 м. Расчетная суммарная длина должна быть поэтому округлена в любую сторону до целого числа промежуточных смычек. Якорная и коренная смычки могут быть очень короткими и не учитываться. Если число смычек оказывается нечетным, то цепь правого борта делается на одну смычку длиннее. Цепи малого калибра d<15 мм могут на смычки не разделяться. Калибр якорных цепей. Под калибром понимают диаметр якорной стали, из которой изготовлены звенья цепи (мм), 1/ 2 d=stN , где: s - коэффициент, равный 1 для судов НРП и уменьшается на Δ s = 0,06 для каждого более ограниченного района плавания, т. е. s = 1 - k р.п Δ s ; t = 1,75 — коэффициент для обыкновенных якорных цепей, t = 1,55 для цепей повышенной прочности, t =1,35 для особо прочных цепей. Для определения нагрузок от массы якорной цепи, провисающей за клюзом, по ее калибру может быть установлен вес погонного метра. Наиболее просто его определение на основании эмпирической формулы: для цепи с распорками ( Н / м ) 8 2 Р = 0,215 d ≈ 0,215 Q я , для цепи без распорок ( Н / м ) 2 Р = 0,227 d . Для судов НРП, снабженных обыкновенными цепями, т. е. при s = 1 и t = 2 = 1,75, справедливо соотношение d ≈ Q я . Учитывая потерю веса якорной цепи в воде, получаем ( Н/м ): Р1 = Р ( γ – δ ) / γ , где γ = 7,75 - 7,8 - плотность якорной стали, относительные единицы; δ = 1,025 - плотность морской воды (для речной и озерной δ = 1). Длина якорной цепи на клюзе Выдаваемая на клюз длина якорь-цепи определяется прежде всего глубиной якорной стоянки судна. Следует отметить, что нормальные эксплуатационные глубины рейдовых стоянок судов обычно 15—30 м. Однако расчетная глубина, по которой, в частности, определяется и мощность электропривода, значительно превышает эти величины и нормируется Регистром в зависимости от массы якорного оборудования. При d <14 мм расчетная глубина стоянки рассчитывается по формуле (м) h = (1 / 3) L п.б , где: L п.б - полная длина цепи правого борта. При d > 14 мм глубина стоянки не рассчитывается а принимается такой: при d =15 – 17 мм, h = 65 м; при d =18 – 28 мм, h = 80 м; при d > 28 мм, h = 100 м. Для повышения надежности якорной стоянки держащая сила якоря увеличивается за счет цепи, лежащей на грунте. Провисающая часть цепи выполняет амортизирующую роль. Кинетическая энергия, сообщаемая судну волной и ветром, расходуется на частичное поднятие с грунта якорного каната и, таким образом, поглощается им. При усилении ветра длина якорь-цепи не должна увеличиваться. Морская практика рекомендует в среднем следующие соотношения между длиной якорь-цепи на клюзе и глубиной стоянки: L 0 = (2…4) h. Нижний предел относится к большим глубинам стоянки. Наибольшая возможная длина якорь-цепи на клюзе, которую следует учитывать при нормированной глубине, равна ее полной длине без длины сухого участка, измеряемого вдоль цепи от глаголь-гака в цепном ящике до клюза. 9 Необходимые тяговые силы Основной расчетной нагрузкой на якорной звездочке по нормам Регистра считается усилие (в ньютонах) Т рег = 1,13 (G я + ph), где: G я - вес якоря, Н; р — вес погонного метра якорной цепи, Н/м; h - глубина якорной стоянки, м. Эта нагрузка отвечает нахождению судна над местом заложения якоря — на панере. Здесь учтены потери веса в воде и дополнительная нагрузка от трения якорь-цепи на участке от бортового клюза до якорной звездочки, оцениваемая коэффициентом f k = 1,28-М,35, т. е. 0,87*1,3 = 1,13. Наибольшей величиной нормальной эксплуатационной нагрузки, приложенной к якорной звездочке, следует считать отрывную, которая примерно соответствует режиму подъема одного якоря с расчетной глубины при одновременном отрыве его от грунта. На основании статистических данных; по результатам испытаний якорных устройств, силу подрыва заиленного якоря Холла принято считать равной его двойному весу - 2 G я . Таким образом, отрывное усилие ( Н ) Т отр = [ 2 G я + ( G я + ph )0,87] f k . В числе ненормированных перегрузочных режимов наиболее характерными являются: 1. подъем двух якорей с расчетной глубины, в этом случае отрывное усилие ( Н ) Т 2 я отр = 2 ( G я + ph ) 0,87f k . Эта нагрузка равна нормированной Регистром пусковой тяговой силе 2 Т рег ; 2. подъем одного якоря с предельно возможной глубины при полном провисании на всю длину якорной цепи, отрывное усилие ( Н ) Т пр = ( G я + pL пр )0,87f k , где: L пр - предельная длина цепи на клюзе, м. Такой случай при современных средствах измерения глубин маловероятен. Он может быть связан лишь с местными разрывами грунта или со сползанием якоря при дрейфе судна и является критическим. Известны отдельные случаи, когда судно из-за срочного штормового предупреждения, не выбрав якоря, стягивало его и уходило на более глубокое место. 6. Характеристика швартовного снабжения судов 10 Под характеристикой швартовного снабжения судов понимают совокупность таких параметров швартовных канатов: количества, длины и диаметра. При этом количество и длина определяются Правилами Регистра, а диаметр рассчитывается по формуле (см. ниже). Количество швартовных канатов (тросов) на судне зависит от основной характеристики снабжения N c и составляет 3…20 шт. Длина швартовных канатов также зависит от основной характеристики снабжения N c и составляет 130…200 м каждый. Диаметры канатов определяют исходя из нормированного разрывного усилия F≥ а 2 ( N c - в 2 ) 0,5 , причём коэффициенты а 2 и в 2 имеют следующие значения: Таблица 1. Значения коэффициентов а 2 и в 2 Nc , Т а2 До 1000 500 1000...5000 630 Свыше 5000 825 в2 0 375 2300 Однако максимальное значение разрывного усилия каната не следует выбирать более 50 000 даН. Номинальное тяговое усилие швартовных механизмов не должно быть больше 1/3 разрывного усилия швартовных канатов. Продолжительность и скорость выбирания якорных и швартовных канатов Принятые продолжительность и скорости выработаны опытом работы и приемок якорных и швартовных механизмов на морском флоте. Продолжительность съемки судна с якоря исчисляется от начала работы якорного устройства до втягивания якоря в клюз; она задается техническими условиями и обычно продолжается 30 мин при номинальных тяговой силе и скорости. Скорость выбирания якорной цепи определяется Регистром и отраслевой нормалью по судостроению. Выбирание якорной цепи при расчетной нагрузке Т рег должно происходить со скоростью не менее 10 м /мин. Скорость поднятия цепи, лежащей на грунте, не нормируется. Подход якоря к клюзу и втягивание его рекомендуется производить не быстрее 7 м/ мин. На практике эта скорость принимается равной 6-8 м / мин. Скорость выбирания швартовного троса при номинальной тяговой силе по Регистру, как правило, не должна быть больше 18 м / мин. 11 Скорость выбирания свободных швартовных канатов не нормируется, но предусматривается нормалями порядка 24…25 м / мин. 7. Требования Правил Регистра к якорным и швартовным электроприводам 1. Мощность электропривода якорного механизма должна обеспечивать номинальное тяговое усилие на звёздочке (Н) F к.н = 11 ( рh + Q ), где: р – масса одного метра цепи, кг; h – глубина стоянки на якоре, м; Q - масса одного якоря, кг. 2. Указанную мощность электродвигатель якорного механизма должен развивать в течение 30 мин непрерывной работы с последующей стоянкой под током в течение 30 с; 3. Скорость выбирания якорной цепи при номинальном тяговом усилии на звёздочке F к.н должна быть не менее 0,17 м/с (10,2 м/мин); 4. Пусковой момент электродвигателя должен обеспечить двойное значение номинального тягового усилия на звёздочке 2 F к.н ; 5. Если пусковой момент электродвигателя создаёт усилие, превышающее номинальное тяговое усилие в 4 раза, между электродвигателем и механизмом должна устанавливаться предохранительная фрикционная муфта; 6. Тормоз механизма должен развивать момент, препятствующий развороту механизма при тяговом усилии на звёздочке не менее 1,3 F к.н ; 7. Электропривод якорно-швартовного механизма должен обеспечивать одновременное выбирание двух свободно висящих якорей с половины номинальной глубины стоянки; 8. при подходе якоря к клюзу электропривод должен развивать скорость не более 0,17 м/с (10,2 м/мин); предпочтительной является скорость 0,12 м/с (7,2 м/мин); 9. на ступенях скоростей, предназначенных только для швартовных операций, должна быть предусмотрена защита от перегрузки, при срабатывании которой электродвигатель переходит на ступень, предназначенную для подъёма якоря; 10. привод якорного устройства должен обеспечивать непрерывную работу с номинальным тяговым усилием в течение 30 мин, а затем, без перерыва, стоянку под током в заторможенном состоянии в течение 30 с – для якорных механизмов и 15 с – для швартовных механизмов; 11. при этом допускается превышение температуры на 30% по отношению к предельной температуре обмоток, определённых классом изоляции обмоток ( электрические машины морского исполнения выпускают с изоляцией обмоток классов В - 130°С, F - 155°С и Н - 180°С ); 12 12. при стоянке под током асинхронные двигатели с фазным ротором и двигатели постоянного тока должны развивать момент стоянки не менее двойного номинального момента; 13. питание электроприводов якорно-швартовных механизмов должно производиться непосредственно от ГРЩ. 8. Рекомендации по выбору систем электроприводов якорношвартовных устройств Процесс съёмки с якоря включает в себя: 1. вспомогательные операции, связанные с освобождением цепных стопоров и подготовкой механизма; 2. выбирание цепи; 3. ввод якоря в клюз и крепление его в походном положении, и др. Несмотря на многочисленные попытки автоматизировать весь процесс работы якорно-швартовных устройств, многие операции остаются ручными и не поддаются автоматизации. В настоящее время автоматизирована отдача якоря при помощи управления ленточным тормозом с мостика. Длина вытравленной якорь-цепи контролируется при помощи счётчика в 2-х местах - на мостике и непосредственно у привода якорно-швартовного устройства на полубаке. Процесс выбирания цепи также может быть автоматизирован, однако перед вводом якоря в клюз рекомендуется перейти на местное управление для визуального контроля за движением цепи и якоря. Швартовные операции в силу специфики должны находиться под непрерывным визуальным контролем (кроме операций по контролю натяжения троса, который может быть автоматизирован при помощи автоматических швартовных лебёдок – АШЛ). Для всех типов шпилей и брашпилей морского и речного флота в пределах калибров цепей 100 мм (водоизмещение судов до 100 000 Т включительно) целесообразно применение асинхронных короткозамкнутых полюсопереключаемых электродвигателей серии МАП с 2-мя и 3-мя обмотками на статоре. Степень защиты – IP56. Выбор системы управления ЯШУ зависит от мощности исполнительного двигателя ЯШУ, а именно: 1. при мощности до 25 кВт – контроллерная система управления; 2. при мощности до 60…70 кВт – контакторная; 3. при мощности свыше 70…75 кВт – система генератор – двигатель (Г – Д). § 3.2. Системы управления электроприводами якорно-швартовных устройств Контроллерная схема асинхронным двигателем управления ЯШУ с 3-скоростным 13 Основные сведения Схема предназначена для управления электроприводом якорношвартовного устройства с 3-скоростным асинхронным двигателем (рис. 161). Якорно-швартовные устройства предназначены для перемещения якоря и швартовных канатов. Число скоростей ЯШУ – 3 или 6. Для получения 3-х скоростей применяют асинхронный двигатель с короткозамкнутым ротором, 6-ти скоростей – асинхронный двигатель с фазным ротором. В данной схеме применяется асинхронный двигатель с короткозамкнутым ротором и тремя обмотками на статоре. Способ регулирования скорости – изменением числа пар полюсов. Мощность электродвигателя – 20...25 кВт. При подъёме (спуске) якоря используются только 1-я и 2-я скорости, при швартов ных операциях – все 3. Рис. 161. Контроллерная схема управления трехскоростным якорношвартовным электроприводом Основные элементы схемы К основным элементам схемы относятся (рис. 161): 1. QF – автоматический выключатель электродвигателя; 2. YB – тормозной электромагнит; 14 3. F1…F5 – нагревательные элементы тепловых реле; 4. ML1, ML2, ML3 – обмотки статора 1-й, 2-й и 3-й скоростей; 5. Т – понижающий трансформатор для питания цепей управления; 6. VD1, VD2 – диоды схемы выпрямления; 7. S3 – аварийная кнопка блокировки тепловой защиты обмоток 1-й и 2-й скоростей; 8. QF – катушка минимального расцепителя автоматического выключателя QF; 9. КМ1, КМ2 - контакторы 3-й скорости. Особенность силовой части схемы состоит в том, что обмотки 1-й и 2-й скорости соединены последовательно, но при работе включаются поочерёдно. Такое соединение обеспечивает безобрывное переключение этих обмоток и защиту контактов Q10, Q11 и Q12 от обгорания. Таблица переключения контактов контроллера – в нижнем правом углу рис. 161. Как видно из таблицы, контроллер имеет 3 фиксированных положения в каждую сторону («травить» и «выбирать»). В промежуточном состоянии между положениями 2 и 3 рукоятка контроллера не фиксируется. Контроллер имеет 10 главных контактов - Q3…Q12 и 2 вспомогательных - S1 и S2. Подготовка схемы к работе Для подготовки схемы к работе включают автоматический выключатель QF. При этом получает питание первичная обмотка трансформатора, Напряжение вторичной обмотки выпрямляется диодами VD1, VD2. образуется цепь тока катушки минимального расцепителя автомата: плюс - катушка QF – размыкающие контакты тепловых реле F4-F1 – минус (на средней точке вторичной обмотки трансформатора). Схема готова к работе. Работа схемы Схема управления симметрична, поэтому рассмотрим работу схемы в направлении «Выбирать». При переводе рукоятки контроллера в положение «1» замыкаются контакты Q3,Q5, Q7, Q10, Q11 и Q12. При замыкании контактов Q10, Q11 и Q12 шунтируется обмотка 2й скорости ML2, Q3, Q5 и Q7 – подаётся питание на катушку электромагнитного тормоза YB и обмотку 1-й скорости ML1. Обмотка ML1 соединена «звездой». Двигатель растормаживается и работает на первой скорости. При переводе рукоятки контроллера в положение «2» размыкаются контакты Q10, Q11 и Q12 (снимается шунтирование обмотки ML2) и замыкаются Q8 и Q9, соединяющие нижние выводы обмотки ML2 в общую точку. В результате обмотка ML2 соединяется в «звезду». Двигатель переходит на 2-ю скорость. 15 При переводе рукоятки в 3-е положение в промежуточном положении замкнутся вспомогательные контакты S1 и S2. Через эти контакты образуется цепь тока последовательно соединённых катушек КМ1 и КМ2 контакторов 3-й скорости: плюс - S1 - S2 – F5 – RV1 – RM2 – F4 – F3 – F2 - F1 – минус (на средней точке вторичной обмотки трансформатора). Контакторы КМ1 и КМ2 размыкают контакты в цепи обмоток 1-й и 2-й скоростей и замыкают контакты в цепи обмотки 3 -й скорости. Одновременно замыкается вспомогательный контакт КМ1 и шунтирует контакт S1 контроллера. Двигатель переходит на 3-ю скорость. При переводе рукоятки контроллера в 3-е фиксированное положение контакт S1 размыкается, но цепь катушек контакторов КМ1 и КМ2 сохраняется через вспомогательный контакт КМ1. Защиты Защита от токов короткого замыкания При коротком замыкании в обмотке статора отключается автомат QF. Двигатель отключается от сети и затормаживается. При коротком замыкании в цепи катушки QF или контакторов КМ1, КМ2 сгорает предохранитель в цепи первичной обмотки трансформатора. При этом теряет питание катушка QF, отключается автомат QF. Двигатель отключается от сети и затормаживается. Защита от токов перегрузки Для защиты от токов перегрузки обмотки 1-й скорости служит тепловое реле F1, обмотки 2-й скорости – реле F2, F3, обмотки 3-й скорости – реле F4, F5. Токи срабатывания (уставки) реле F4 и F5 разные, у реле F5 меньше, у реле F4 – больше. При перегрузке 3-й скорости быстрее (при меньшем токе перегрузки) срабатывает реле F5, оно размыкает свой контакт в цепи катушек контакторов 3-й скорости КМ1, КМ2. Контакторы отключаются, размыкают свои контакты в цепи обмотки 3-й скорости ML3 и замыкают в цепи обмотки 2-й скорости ML2. Одновременно размыкается вспомогательный контакт КМ1 ( параллельно контакту S1 ). Двигатель переходит с 3-й скорости на вторую. После отключения обмотки ML3 нагревательный элемент F5 остывает и контакт F5 повторно замыкается. Однако контакторы КМ1 и КМ2 самопроизвольно включиться не смогут, т.к. разомкнут вспомогательный контакт КМ1. 16 Для возврата на 3-ю скорость надо сначала замкнуть контакт S1, а для этого рукоятку контроллера перевести из 3-го положения в промежуточное ( см. таблицу ). При перегрузке обмоток 2-й или 1-й скорости размыкаются контакты F2 или F3 (2-скорость) или F1 (1-я скорость). Катушка QF обесточивается, автомат QF отключается. При необходимости, нажатием кнопки S3 шунтируют контакты F1…F4, тем самым оставляя без защиты от перегрузки обмотки 1-й и 2-й скорости. Такая необходимость может возникнуть, если надо быстро сняться с якоря, а тепловые реле F1…F4 постоянно срабатывают. В этом случае надо доложить о срабатывании защиты на мостик и только после получения команды с мостика нажать кнопку S3. Защита по снижению напряжения ( минимальная и нулевая ) Минимальная защита При снижении напряжения до 60% и менее якорь минимального расцепителя автомата QF отпадает, автомат отключается. После восстановления напряжения автомат надо включить повторно и продолжить работу. Нулевая защита При обесточивании якорь минимального расцепителя автомата QF отпадает, автомат отключается. После восстановления напряжения автомат надо включить повторно и продолжить работу. Таким образом, минимальная и нулевая защиты предотвращают самопроизвольное повторное включение двигателя после провала напряжения (минимальная защита) или его исчезновении (нулевая защита). Такое самопроизвольное включение может привести к аварии. Особенности схемы: 1. обмотки 1-й и 2-й скорости соединены последовательно, но при работе включаются поочерёдно. Такое соединение обеспечивает безобрывное переключение этих обмоток и защиту контактов Q10, Q11 и Q12 от обгорания; 2. все 3 обмотки связаны гальванически через средний провод (фаза В), что небезопасно при обслуживании; 3. в схеме для переключения 3-х скоростей использованы 2 контактора – КМ1 и КМ2, что упрощает и удешевляет её. Схема управления генератор-двигатель электроприводом брашпиля по системе Основные сведения Системой генератор-двигатель (Г-Д) называют систему, в которой исполнительный двигатель, приводящий в движение механизм, питается от отдельного генератора, а не от судовой сети. 17 Сам генератор приводится в движение дизелем (на электроходах) или асинхронным электродвигателем ПД (в данной схеме). Система Г-Д имеет низкий коэффициент полезного действия – 30 - 40%, что объясняется трёхкратным преобразование энергии. В данной схеме такое преобразование происходит: 1. в приводном асинхронном двигателе ПД, в котором электроэнергия судовой сети преобразуется в механическую на валу двигателя; 2. в генераторе Г, в котором механическая энергия приводного двигателя ПД преобразуется в электрическую самого генератора; 3. в исполнительных двигателях 1ИД, 2ИД, в которых электрическая энергия, получаемая от генератора Г, преобразуется в механическую на их валах. Однако система Г-Д позволяет плавно и в широких пределах регулировать скорость исполнительного двигателя, чего нельзя достигнуть иными способами регулирования скорости. Поэтому она до сих пор широко применяется на судах. В этой системе обмотки якорей генератора Г и исполнительных двигателей 1ИД и 2ИД соединены последовательно (они обтекаются одинаковым током), что позволило создать простую и эффективную защиту от токов перегрузки при помощи последователь ной противокомпаундной обмотки (ПКО) генератора (см. ниже). Описание принципиальной схемы К основным элементам схемы относятся (рис. 162): 1. ПД – приводной асинхронный двигатель с короткозамкнутым ротором; 2. Г – генератор постоянного тока смешанного возбуждения напряжением 220 В и мощностью 45 кВт; 3. В – генератор постоянного тока смешанного возбуждения напряжением 220 В и мощностью 4,5 кВт; 4. 1ИД, 2ИД – исполнительные двигатели постоянного тока независимого возбуждения напряжением 110 В и мощностью 17 кВт каждый. Приводной двигатель (ПД) предназначен для вращения якорей генератора Г и возбудителя В. Ротор ПД и якоря генератора и возбудителя сидят на одном валу. Скорость ПД – 1500 об / мин, значит, скорость якорей генератора и возбудителя такая же. Генератор Г на главных полюсах имеет три обмотки возбуждения: 1. параллельную ОГ; 2. последовательную ПКО; 3. независимую НОГ. Магнитные потоки параллельной и независимой обмоток направлены согласно и намагничивают генератор. Последовательная обмотка включена так, 18 что её магнитный поток направлен встречно магнитным потокам параллельной и независимой обмоток, т.е. эта обмотка размагничивает генератор. Таким образом, результирующий магнитный поток генератора Ф рез = Ф ног + Ф ог - Ф пко . Встречное включение ПКО позволяет получить крутопадающие характеристики генератора и обоих двигателей (рис. 163) и тем самым ограничить ток стоянки двигателей до допустимых значений I ст ≤ 2,5 I ном . Рис. 162. Схема управления электроприводом брашпиля по системе Г – Д 19 Рис. 163. Механические характеристики одного исполнительного двигателя Последовательно с параллельной обмоткой ОГ включено установочное сопротивление СУ. Это сопротивление регулируется только при настройке. Оно предназначено для того, чтобы исключить самовозбуждение генератора Г при нулевом положении штурвала. Такое самовозбуждение может вызвать аварию, т.к. при самовозбуждении появляется напряжение на зажимах генератора и приводные двигатели 1ИД и 2ИД начинают вращаться (хотя рукоятка командоконтроллера находится в положении «0»). Возбудитель В имеет на главных полюсах последовательную ПОВ и параллельную ОВВ обмотки возбуждения. Магнитные потоки обмоток направлены согласно, что обеспечивает стабильное напряжение на зажимах В без применения автоматического регулятора напряжения. Возбудитель служит для питания независимых обмоток возбуждения 1НОИД и 2НОИД обоих двигателей, независимой обмотки возбуждения генератора НОГ и двух катушек 1ТМ, 2ТМ электромагнитных тормозов обоих двигателей. Каждый из двигателей 1ИД и 2ИД имеет на главных полюсах независимые обмотки возбуждения 1НОИД и 2НОИД. Последовательно с обмотками включены экономические сопротивления 1СЭ и 2СЭ, уменьшающие нагрев этих обмоток в нерабочем состоянии брашпиля. Параллельно обмоткам включены разрядные резисторы 1СР и 2СР, защищающие обмотки от перенапряжений при размыкании контактов 1П-4, 1П-5 и 2П-4, 2П-5. Кроме того, последовательно с обмотками 1НОИД и 2НОИД включены токовые катушки 1РОП, а параллельно этим обмоткам – катушки напряжения 1РОП и 2РОП реле обрыва поля. Магнитные потоки обеих катушек направлены согласно. Назначение РОП объясняется ниже (см. «Защита от обрыва поля»). Способ регулирования скорости обоих двигателей 1ИД, 2ИД – изменением напряжения на каждом якоре. Для такого регулирования служит регулировочный резистор Р0-Р7 в цепи независимой обмотки генератора НОГ. Этот резистор имеет 7 ступеней: 1. нерегулируемые при работе ступени Р0-Р1 и Р6-Р7; 2. регулируемые ступени Р1-Р2, Р2-Р3, Р3-Р4, Р4-Р5 и Р5-Р6. Ступени Р0-Р1 и Р6-Р7 регулируются только при настройке, остальные ступени выводятся (вводятся) замыканием (размыканием) контактов КК16…КК20 командоконтроллера КК. Таблица переключений контактов КК показана в нижней левой части рис. 1. Из таблицы следует, что рукоятка командоконтроллера имеет 13 положений: нерабочее положение «0» и по 6 рабочих положений в направлениях «Выбирать» и «Травить». 20 Схема управления предусматривает 3 режима работы электропривода брашпиля: 1. в работе оба двигателя, 1ИД и 2ИД; этот режим – основной; 2. в работе двигатель 1ИД; 3. в работе двигатель 2ИД. Второй и третий режим применяют при выходе из действия любого двигателя, что повышает живучесть электропривода. Для получения необходимого режима работы служат 7-полюсные переключатели 1П и 2П. Каждый переключатель имеет 2 положения: 1. двигатель в работе; 2. двигатель не работает. На схеме контакты обоих переключателей находятся в положении, соответствующем основному режиму работы, т.е. в работе оба двигателя. Подготовка схемы к работе Основной режим работы Для подготовки схемы к работе электромеханик должен выполнить следующие действия: 1. включить автоматический выключатель АВ на ГРЩ ( на схеме не показан ); 2. включить выключатель цепей управления ВЦУ ( аварийный выключатель ) на тумбе командоконтроллера; 3. проверить положение обоих переключателей режимов работы 1П и 2П, оба переключателя должны находиться в положении «Двигатель в работе»; 4. проверить положение рукоятки командоконтроллера и при необходимости установить её в положение «0». В этом положении замкнут контакт КК22; 5. нажать кнопку КнП «Пуск». При этом образуется цепь катушки линейного (промежуточного) реле ЛР левый вывод вторичной обмотки трансформатора Тр – левый предохранитель – ВЦУ – 1ТР – КнС – КнС – КнП – КК22 – катушка ЛР – 2ТР – ВЦУ - правый предохранитель – правый вывод вторичной обмотки трансформатора Тр . Реле ЛР включается и замыкает 2 контакта: верхний, шунтирующий кнопку КнП (её можно отпустить) и нижний, через который включается линейный контактор Л. Линейный контактор включается, замыкает три главных контакта, подключая приводной двигатель ПД к судовой сети, и вспомогательный в цепи катушки контактора возбуждения КВ. При этом происходит пуск ПД, начинают вращаться якоря генератора Г и возбудителя В. Генератор Г не возбуждается, т.к. в цепи его параллельной обмотки включёно установочное сопротивление СУ. Сопротивление (в омах) СУ при 21 настройке отрегулировано так, чтобы суммарное сопротивление его и обмотки ОГ было больше т.н. «критического», при котором генератор не самовозбуждается. Возбудитель В самовозбуждается за счёт параллельной обмотки ОВВ до напряжения 220 В. Если напряжение возбудителя отличается от 220 В, его можно подрегулировать при помощи реостата возбуждения РВ. От возбудителя питаются такие цепи: 1. цепь сигнальной лампочки ЛС: «плюс» на левой щётке В – предохранитель 10 А - предохранитель 0,5 А – ЛС –предохранитель 0,5 А - предохранитель 10 А – параллельно включённые контакты 1П-3, 2П-3 переключателей режима двигателей 1ИД, 2ИД - «минус» на правой щётке. Надо обратить внимание на то, что цепь лампочки защищена предохранителями 0,5 А. Это сделано для того, чтобы при коротком замыкании внутри лампочки перегорали именно эти предохранители. Если бы их не было, то при коротком замыкании внутри лампочки перегорали бы предохранители 10 А, что привело бы к остановке брашпиля; 2. цепь независимой обмотки 1НОИД: «плюс» на левой щётке В – предохранитель 10 А – 1П4 – 1СЭ – 1НОИД – токовая катушка 1РОП – 1П5 - предохранитель 10 А – параллельно включённые контакты 1П-3, 2П-3 переключателей режима двигателей 1ИД, 2ИД - «минус» на правой щётке. Ток в этой обмотке ограничен до 80% за счёт экономического резистора 1СЭ, но двигатель уже возбуждён на 80%; 3. цепь катушки напряжения реле 1РОП: «плюс» на левой щётке В – предохранитель 10 А – 1П4 – катушка напряжения 1РОП – 1П5 - предохранитель 10 А – параллельно включённые контакты 1П-3, 2П-3 переключателей режима двигателей 1ИД, 2ИД - «минус» на правой щётке; 4. аналогичные две цепи ( см. пп. 2 и 3 ) образуются для двигателя 2ИД. Оба реле 1РОП и 2РОП включаются и замыкают последовательно соединённые контакты в цепи катушки контактора возбуждения КВ. Контактор КВ включается и замыкает контакт КВ. Схема готова к работе. Работа схемы с двумя исполнительными двигателями (основной режи ) Схема управления симметрична, поэтому рассмотрим работу схемы в направлении «Выбирать». При переводе рукоятки командоконтроллера из положения «0» в положение «1» размыкается контакт КК22 и замыкаются контакты КК1, КК3, КК5, КК9 и КК13. Размыкание контакта КК22 не приводит к отключению линейного реле ЛР, потому что его катушка продолжает питаться через контакт ЛР (параллельно кнопке КнП). 22 При замыкании контакта КК1 включаются катушки 1ТМ и 2ТМ электромагнитных тормозов обоих двигателей, двигатели 1ИД и 2ИД растормаживаются. При замыкании контактов КК3 и КК5 шунтируются экономические сопротивления 1СЭ и 2 СЭ, в результате магнитный поток обоих двигателей увеличивается от 80% до 100%. При замыкании контактов КК9 и КК13 образуется цепь тока обмотки возбуждения генератора Г: плюс» на левой щётке В – предохранитель 10 А – КК9 – НОГ (параллельно – разрядный резистор 4СР) – Р0-Р6 – 1П6 – 2П6 - предохранитель 10 А – параллельно включённые контакты 1П-3, 2П-3 переключателей режима двигателей 1ИД, 2ИД - «минус» на правой щётке. Ток возбуждения генератора ограничен резисторами Р0-Р6. На зажимах генератора Г появляется напряжение 40 В, исполнительные двигатели 1ИД и 2ИД начинают вращаться с малой скоростью. При переводе рукоятки командоконтроллера из положения «1» в положение «2» Замыкается контакт КК16, шунтирующий ступень Р1-Р2. Ток возбуждения генератора, а значит, скорость исполнительных двигателей 1ИД и 2ИД также увеличивается. При дальнейшем переводе рукоятки командоконтроллера из положения «2» в после дующие «3», «4», «5» и «6» последовательно замыкаются контакты КК17, КК18, КК19 и КК20. Ток возбуждения генератора и скорость исполнительных двигателей увеличиваются. В положении «6» напряжение генератора – 220 В, двигатели развивают максимальную скорость. Напряжение на якоре каждого двигателя – 110 В. Реверс электропривода Для реверса электропривода рукоятку переводят в положение «Травить». При этом замыкаются контакты КК7 и КК11, что приводит к изменению направления тока в обмотке НОГ генератора. Полярность напряжения генератора, а значит, направление тока в обмотках якорей генератора и обоих исполнительных двигателей 1ИД и 2ИД изменяются на обратное, двигатели 1ИД и 2ИД реверсируют. В остальном схема работает так же, как в направлении «Выбирать». Работа схемы с одним исполнительным двигателем Подготовка схемы к работе Предположим, что надо исключить из работы исполнительный двигатель 1ИД. Для этого переключатель 1П переводят из положения «двигатель в работе» в положение «двигатель не работает». Контакты 1П-1…1П-7 переключаются следующим образом: 23 1. контакты 1П-1, 1П-2 переключаются в нижнее положение, при этом обмотка якоря 1ИД исключается из цепи главного тока, но вместо неё вводится перемычка; 2. контакт 1П-3 размыкается, но это не влияет на работу схемы, т.к. остаётся замкнутым контакт 2П-3; 3. размыкаются контакты 1П-4, 1П-5, отключая обмотку возбуждения 1НОИД; при этом отключается реле обрыва поля 1РОП, которое размыкает контакт 1РОП в цепи катушки контактора возбуждения КВ, контактор отключается; 4. размыкается контакт 1П-6, в цепь НОГ дополнительно вводится нерегулируемая ступень Р6-Р7. При этом ток возбуждения генератора Г уменьшается в 2 раза, поэтому при работе в положении «6» напряжение генератора составляет не 220 В, а 110 В. Это напряжение генератора Г как раз равно номинальному напряжению 110 В якоря 2ИД; 5. замыкается контакт 1П-7 (параллельно разомкнувшемуся контакту 1РОП), контактор возбуждения КВ повторно включается. Схема готова к работе. Работа схемы Схема с одним исполнительным двигателем работает так же, как с двумя. При переводе рукоятки командоконтроллера из положения «0» в положения «1»…«6» последовательно замыкаются контакты КК16…КК20, при этом увеличивается ток возбуждения генератора Г, его напряжение и скорость двигателя 2ИД. Однако при этом в каждом положении ток возбуждения генератора Г и его напряжение в 2 раза меньше, чем в схеме с двумя исполнительными двигателями. Необходимость в снижении напряжения объясняется тем, что теперь в цепи главного тока находится только одна обмотка якоря, а не две. Номинальное напряжение каждого якоря – 110 В. Защиты Защита от токов короткого замыкания Для защиты от токов короткого замыкания в обмотке статора приводного двигателя ПД служит автоматический выключатель на ГРЩ (на схеме не показан). Для от токов короткого замыкания в катушках линейного реле ЛР и линейного контактора Л служат предохранители Пр 2 А. Для защиты от токов короткого замыкания в цепях, питающихся от возбудителя В, служат предохранители 10 А. Для от токов короткого замыкания в цепи сигнальной лампочки служат предохранители 0,5 А. 24 Защита от токов перегрузки Для защиты от токов перегрузки приводного двигателя ПД служат тепловые реле 1ТР и 2ТР. При перегрузке ПД эти реле размыкают контакты 1Тр, 2ТР в цепи катушек реле ЛР и контактора Л, что приводит к отключению ПД от судовой сети. Электропривод брашпиля останавливается и затормаживается. Для защиты от токов перегрузки генератора Г и приводных двигателей 1ИД и 2ИД служит противокомпаундная обмотка ПКО генератора Г. Перегрузка может возникнуть, например, если невозможно оторвать якоря от грунта. При этом оба двигателя переходят в режим стоянки под током, ток главной цепи увеличивается. Этот ток, протекая через ПКО, усиливает её размагничивающее действие генератора. Напряжение генератора уменьшается (3.14, внешняя характеристика «1») генератора что, по закону Ома, приводит к уменьшению тока главной цепи до безопасного для якорей генератора Г и двигателей 1ИД и 2ИД значения. Для генераторов этот ток называют током короткого замыкания I к. з , а для двигателей – током стоянки I ст . Обычно это значение I к. з = I ст ≤ 2,5 I ном . При большем токе на коллекторе электрических машин (генератора и двигателя) возникает круговой огонь, коллектор нагревается, выплавляется олово из петушков коллекторных пластин, обмотка якоря сгорает. В системе Г-Д перегрузка исполнительного двигателя ИД приводит к перегрузке не только генератора Г, но и приводного двигателя ПД, в данной схеме – 3-фазного асинхронного двигателя ПД. На электроходах в качестве приводного двигателя ПД используется двигатель внутреннего сгорания (дизель). Дизели выдерживают перегрузку в 10% номинальной мощности в течение только 1 часа. Поэтому на электроходах применение ПКО в системах Г-Д ограничивает перегрузку дизелей до допустимых значений. Защита от обрыва поля Под обрывом магнитного поля (обрывом поля) понимают уменьшение до нуля магнитного потока параллельной обмотки возбуждения. Например, в данной схеме обрыв поля может произойти, если какой-либо из контактов 1П-4, 1П-5, 2П-4, 2П-5 перестанет пропускать ток. Пусть перестал пропускать ток контакт 1П-4. В этом случае магнитный поток Ф обмотки 1НОИД уменьшится до нуля. ПротивоЭДС обмотки якоря двигателя Е = с*ω*Ф = с*ω*0 = 0, что приведёт к резкому увеличению тока якоря двигателя I а = ( U – E ) / R а = ( U – 0 ) / R а = U / R а = I к. з Обмотка якоря двигателя сгорает. 25 В данной схеме защита от обрыва поля работает так. При обрыве поля перестаёт протекать ток в цепи 1НОИД (2НОИД) и токовой катушке 1РОП (2РОП). Реле 1РОП (2РОП) размыкает контакт 1РОП (2РОП) в цепи катушки контактора возбуждения КВ. Контактор КВ отключается и размыкает контакт КВ в цепях катушек тормозов 1ТМ, 2ТМ и цепи независимой обмотки генератора НОГ. При этом напряжение генератора уменьшается до нуля, а оба двигателя затормаживаются. Защита по снижению напряжения При снижении напряжения до 60% и менее реле ЛР отпускает свой якорь и размыкает оба контакта – в цепях катушек ЛР и линейного контактора Л. Последний размыкает контакты Л в цепи обмотки статора приводного двигателя ПД, двигатель останавливается. Это приводит к остановке электропривода брашпиля. Для повторного пуска надо вначале установить рукоятку командоконтроллера в положение «0», после чего нажать кнопку КнП «Пуск». Далее работа схемы повторяется (см. «Подготовка схемы к работе»). Типовая система управления ЯШУ на переменном токе Основные сведения Якорно-швартовные устройства предназначены для работы с якорными и швартовными канатами. Данная схема служит для управления 3-скоростным асинхронным двигателем с короткозамкнутым ротором. Способ регулирования скорости двигателя: изменением числа пар полюсов. Для этого на статоре уложены 3 обмотки с разным числом пар полюсов, которые при работе включаются поочерёдно. Каждая обмотка рассчитана на определённую мощность, а именно: 1. обмотка 1-й скорости – 60 кВт; 2. обмотка 2-й скорости –55 кВт; 3. обмотка 3-й скорости – 18 кВт. Из сравнения мощностей следует, что обмотка 3-й скорости не предназначена для работы с тяжёлыми якорными канатами, она используется только для работы со швартовными канатами. Иначе говоря, якорные канаты можно выбирать и травить только на 1-й и 2-й скоростях, а швартовные – на всех 3-х скоростях. Аппаратом управления служит командоконтроллер, имеющий 7 положений: одно нерабочее ( нулевое ) и 6 рабочих, по три в стороны «Выбирать» и «Травить». Диаграмма переключений контактов командоконтроллера показана непосредственно на схеме. 26 Рис. 164. Типовая схема управления швартовного устройства на переменном токе электроприводом якорно- Элементы схемы Элементы силовой части схемы К основным элементам силовой части относятся: 1. линейные провода А, В, С; 2. КМ1, КМ2 – главные контакты реверсивных контакторов «Выбирать» и «Травить»; 3. ТА – трансформатор тока, во вторичную обмотку которого включён малогабаритный амперметр. Сам амперметр встроен в верхнюю часть тумбы командоконтроллера и позволяет боцману следить за нагрузкой двигателя; 4. YB – ( вай-би ) – катушка электромагнитного тормоза; 5. КК1…КК6 – нагревательные элементы тепловых реле; 6. КМ4, КМ5, КМ6 – главные контакты контакторов 1-й, 2-й и 3-й скоростей. Элементы схемы управления 1. FU – предохранители с плавкой вставкой, для защиты от токов короткого замыкания в любой цепи схемы управления; 27 2. 2 SA – аварийный выключатель на тумбе командоконтроллера; предназначен для остановки электропривода в случае, если рукоятку командоконтроллера не удаётся вернуть в нулевое положение; 3. КМ1 – катушка контактора «Выбирать»; 4. КМ2 – катушка контактора «Травить»; 5. КМ6 – катушка тормозного контактора, через главные контакты которого пода ётся питание на катушку электромагнитного тормоза YB; 6. КМ3 – катушка контактора 1-й скорости; 7. КМ4 – катушка контактора 2-й скорости; 8. КМ5 – катушка контактора 3-й скорости; 9. КV1 – блокировочное реле, служит для предотвращения самовозврата двигателя на 3-ю скорость после того, как в результате перегрузки схема перевела двигатель с 3-й скорости на 2-ю; 10.HL – сигнальная лампочка «Можно работать». Эта же лампочка в темное время суток подсвечивает шкалу амперметра, встроенного в верхнюю часть тумбы командоконтроллера, что позволяет боцману контролировать ток нагрузки электродвигателя; 11.КТ2 – электромагнитное реле времени, для задержки перехода со 2-й скорости на 3-ю; 12.КТ1 – реле напряжения, для отключения электродвигателя при снижении напряжения до 60% и менее; 13.KV2 – реле блокировки тепловых защит, для отключения тепловых реле при необходимости быстро выбрать якоря; 14. UZ – выпрямительный мостик, для питания катушек реле KV1, KV2 и КТ1, КТ2. Подготовка схемы к работе Для подготовки схемы к работе электромеханик должен: 1. на ГРЩ включить автоматический выключатель брашпиля ( на схеме не показан ); 2. на тумбе командоконтроллера включить аварийный выключатель 2SA; 3. установить рукоятку командоконтроллера в нулевое положение. В этом положении замкнуты контакты 1SA1, 1SA8 и 1SA2. Через контакт 1SA1 линейное напряжение с проводов А и С поступает на вход выпря мительного мостика UZ по цепи: 4. линейный провод С – FU - 2SA – КТ1 - 1SA1- КТ1 – левый вывод UZ – правый вы вод UZ – FU- линейный провод А. На выходе мостика возникает выпрямленное напряжение, при этом образуются цепи тока катушек реле КV1, КТ2 и КТ1: 1. «плюс» - 1SA8 – КК6 – КV2 – КV1 – «минус». Параллельно катушке включается делитель напряжения на 2-х резисторах, напряжение с левого резистора снимается на сигнальную лампочку HL «Питание подано», подсвечивающую шкалу амперметра; 28 2. «плюс» - 1SA2 – КТ2 – «минус»; 3. «плюс» - КМ6 – КК1…КК5 – КТ1 – «минус». Реле КV1 включается и переключает 3 своих контакта: верхний контакт в цепи катушки контактора КМ4 размыкается; средний контакт в цепи катушки контактора КМ5 замыкается; нижний контакт в цепи катушки реле КV1 замыкается, шунтируя контакт 1SA8 во всех положениях рукоятки, кроме 3-го. Реле КТ2 включается и переключает 2 своих контакта: верхний контакт в цепи катушки контактора КМ4 замыкается; нижний контакт в цепи катушки контактора КМ5 размыкается, не давая контактору включиться без выдержки времени. Реле КТ1 включается и переключает 4 своих контакта: верхняя пара контактов замыкается, нижняя пара размыкается. С этого момента времени питание на вход мостика UZ поступает через верхнюю пару контактов КТ1. Таким образом, в исходном состоянии включены реле КV1, КТ2 и КТ1, горит сигнальная лампочка HL. Схема готова к работе. Работа схемы Схема управления симметрична, рассмотрим работу схемы в направлении «Выбирать». 1-я скорость При переводе рукоятки КК в первое положение размыкаются контакты 1SA1, 1SA2 и замыкаются 1SA3, 1SA5. Размыкание контакта 1SA1 не влияет на схему, т.к. ещё в нулевом положении разомкнулись нижние контакты КТ1. При замыкании контакта 1SA3 образуется цепь тока катушки контактора КМ1 «Выбирать»: правый линейный провод – FU - 2SA – КТ1 – КТ1 - 1SA3 – КМ2 – катушка КМ1 – левый линейный провод. Контактор КМ1 включается, замыкает 2 главных контакта в силовой части схемы и вспомогательный, через который параллельно катушке КМ1 включается катушка тормоз ного контактора КМ6. Контактор КМ6 включается, замыкает 2 главных контакта в цепи катушки электро магнитного тормоза YB ( двигатель растормаживается ) и вспомогательный ( последовательно с контактом 1SA5 ). При этом образуется образуется цепь тока катушки контактора 1-й скорости КМ3: правый линейный провод – FU - 2SA – КТ1 – КТ1 - 1SA3 – КМ1 – КМ6 – 1SA5 – КМ4 – катушка КМ3 – КМ5 - левый линейный провод. Контактор КМ3 КМ1 включается, замыкает 3 главных контакта в силовой части схемы, двигатель начинает работать на 1-й скорости. Кроме того, замыкается вспомогательный контакт КМ3 параллельно контакту 1SA2, поэтому реле времени КТ2 не отключается. 29 2 скорость При переводе рукоятки КК во второе положение размыкается контакт 1SA5 и замыкается 1SA6. Эти контакты переключаются в промежуточном положении, что уменьшает время переключения контакторов КМ3 и КМ4 ( когда на обмотки статора питание не поступает ). При размыкании 1SA5 отключается контактор КМ3 и обмотка 1-й скорости, при замыкании 1SA6 включается контактор 2-й скорости КМ4, двигатель переходит на 2-ю скорость. Одновременно размыкается вспомогательный контакт КМ3 в цепи катушки реле времени КТ2. С этого момента начинается отсчёт выдержки времени этого реле. 3 скорость При переводе рукоятки КК в третье положение размыкается контакт 1SA6 и замыкается 1SA7. Эти контакты переключаются в промежуточном положении, что уменьшает время переключения контакторов КМ4 и КМ5 (когда на обмотки статора питание не поступает). Если к моменту перевода рукоятки в 3-е положение выдержка времени КТ2 не закончилась, катушка контактора КМ4 продолжает питаться через верхний не успевший разомкнуться контакт КТ2. Когда же выдержка времени КТ2 закончится, верхний контакт КТ2 разомкнётся, отключая контактор КМ4, а нижний замкнётся, включая контактор 3-й скорости КМ5. Если к моменту перевода рукоятки в 3-е положение выдержка времени КТ2 закончилась, катушка контактора КМ5 получает питание через нижний контакт КТ2. Двигатель работает на 3-й скорости. Таким образом, пуск частично автоматизирован в функции времени при помощи реле КТ2. Это реле задержало переход двигателя со 2-й скорости на 3ю. Защиты Защита от токов короткого замыкания Защита от токов короткого замыкания в цепях обмоток статора – при помощи автоматического выключателя на ГРЩ. Защита от токов короткого замыкания в цепях катушек контакторов и реле – при помощи предохранителей FU. Защита от токов перегрузки При перегрузке обмотки 3-й скорости тепловое реле КК6 размыкает свой контакт и отключает блокировочное реле КV1. Контакты КV1 переключаются: средний контакт КV1 размыкается, отключая катушку контактора КМ5, а верхний замыкается, включая катушку контактора КМ4. 30 Двигатель переходит с 3-й скорости на 2-ю. Нижний контакт КV1 размыкается, тем самым не позволяя реле КV1 повторно включиться после остывания реле КК6 и замыкания его контакта в цепи катушки КМ5. Поэтому двигатель и после замыкания контакта КК6 останется работать на 2-й скорости. При этом катушка КМ4 питается через контакты 1SA7, КТ2 и КV1. Для продолжения работы на 3-й скорости надо замкнуть контакт 1SA8, т.е перевести рукоятку из 3-го положения во второе. При срабатывании тепловых реле 1-й и 2-й скорости КК1…КК4 двигатель отключается от сети и затормаживается. При необходимости можно исключить тепловую защиту 1-й и 2-й скорости. Для того боцман нажимает ногой на педальный выключатель 3SA. При этом включается блокировочное реле КV2, шунтирующее контакты КК1…КК5. Такая необходимость может возникнуть, когда надо срочно сняться с якоря, несмотря на срабатывание тепловых реле КК1…КК4. Схема дистанционной отдачи якоря Основные сведения На современных транспортных судах применяют 2 вида управления отдачей якоря: 1. местное ручное, при котором все операции по отдаче якоря выполняются вручную боцманом, находящимся на полубаке непосредственно у брашпиля; 2. дистанционное, из рулевой рубки. Дистанционное управление из рулевой рубки применяют: 1. в обычных условиях - для постановки судна на якорь; 2. в аварийной ситуации - для экстренного торможения судна, при котором якорь-цепь вытравливают на грунт и тем самым уменьшают скорость движения судна. В соответствии с Правилами Регистра, в рулевой рубке должен быть счётчик длины вытравленной цепи и указатель предельной скорости травления с отметкой предельно допустимой скорости 180 м/мин. При дистанционной отдаче якоря для управления ленточным тормозом применяется специальное гидравлическое устройство (описано ниже). Постановка судна на якорь или съёмка с якоря – ответственная операция, в которой участвуют офицеры и рядовой состав. При этом местонахождение и действия каждого члена экипажа строго определены соответствующими руководящими документами, например, «Уставом службы на судах морского флота» и другими. 31 В постановке судна на якорь участвуют капитан, старший помощник, 2-й и 3-й помощники, боцман, старший рулевой матрос и матросы. В рулевой рубке находятся капитан, старший помощник, старший рулевой матрос; на баке - 3-й помощник, боцман и несколько матросов; на корме - 2-й помощник и матросы. Связь между рулевой рубкой и баком и кормой – при помощи переносных приёмопередатчиков («воки-токи», от англ. walk – ходить, talk – говорить, вместе – говорить на ходу), а также телефонов парной связи «рубка – бак» и «рубка – корма». Описание кинематической схемы устройства дистанционной отдачи якоря Рис. 165. Схема дистанционной отдачи якоря: а – кинематическая часть; б – схема управления и контроля Бустер ( от англ. «вooster») – усилитель. Сервопривод - привод, в составе которого есть усилитель. К основным элементам схемы относятся ( рис. 165, а ): 1 – пневмогидравлический бустер. Бустер – это цилиндр, внутри которого перемещается поршень. Поршень делит цилиндр на верхнюю и нижнюю части. В верхней части находится воздух, в нижней части – масло; 2 – трубопровод масляной системы; служит для подачи масла в нижнюю полость бустера и правую часть силового цилиндра 3; 32 3 – силовой цилиндр гидропривода; внутри цилиндра перемещается поршень. Поршень делит цилиндр на левую и правую части. В обеих частях цилиндра находится масло. Масло поступает: в правую часть – из трубопровода 2, в левую часть – от масляного шестерённого насоса 7; Кроме того, в левой части находится пружина, стремящаяся переместить поршень вправо. Шток поршня при помощи горизонтальной тяги соединён с верхним плечом поворотного рычага 4; 4 – двухплечий поворотный рычаг; его нижнее ( горизонтальное ) плечо соединено с ленточным стопором 5; 5 – ленточный стопор в виде ленты, охватывающей цилиндрический тормозной барабан. Левый конец ленты прикреплён к корпусу судна, правый соединён с поворотным рычагом 4. Сам тормозной барабан механически соединён с якорной звёздочкой ( якорная звёздочка или, иначе, цепной барабан, через который проходит якорьцепь, на рис. 165, а не показана ); 6 – нереверсивная роликовая муфта; служит для передачи вращения от якорной звёздочки к шестерённому масляному насосу 7 только при спуске якоря; 7 - шестерённый масляный насос, служит для нагнетания масла в левую часть силового цилиндра 3; YA – катушка электромагнитного золотника. Сам золотник представляет собой цилиндр, внутри которого находится поршень. Поршень делит цилиндр на левую и правую части. В левую часть подаётся воздух из судовой воздушной магистрали с постоянным давлением. Правая часть через отверстие в корпусе соединена с атмосферой; ВС – сельсин-датчик длины вытравленной цепи; ротор сельсина механически связан с якорной звёздочкой. На валу ротора ВС находятся два кулачка: 1. кулачок, переключающий контакты микропереключателя SQ2, когда будет вытравлено 2 м якорь-цепи; 2. кулачок, переключающий контакты микропереключателя SQ3, когда будет вытравлена полная длина якорь-цепи. Контакты микропереключателей SQ2 и SQ3 показаны на рис. 165, б. Исходное состояние схемы В исходном состоянии напряжение на катушке YA золотника отсутствует. Поршень золотника находится в положении, показанном на схеме. При таком положении поршня правая часть цилиндра золотника сообщена с атмосферой, поэтому поршень бустера 1 давлением масла в нижней части цилиндра приподнят вверх. Давление масла в нижней части бустера 1 и соединённой с ней правой части цилиндра гидропривода 3 невелико. Поршень и шток гидропривода 33 занимают положение, показанное на рис. 165,а. Сила давления штока на верхнее плечо поворотного рычага невелика, лента плотно охватывает тормозной барабан. Якорная звёздочка неподвижна. Работа схемы Для растормаживания тормоза подают питание на катушку YA золотника. Поршень золотника перемещается вправо и при этом: 1. верхняя полость бустера перестаёт сообщаться с атмосферой; 2. в верхнюю полость поступает воздух из судовой воздушной магистрали. Давление воздуха перемещает поршень бустера 1 вниз, поршень выдавливает масло в правую часть цилиндра гидропривода 3. Поршень внутри этого цилиндра перемещается влево и поворачивает рычаг 4. Лента тормоза освобождается, начинается травление якоря. Якорная звёздочка вращается и через роликовую муфту 6 начинает вращать масляный шестерённый насос 7. Это насос нагнетает масло в левую часть цилиндра гидропривода 3, создавая противодавление на поршень. При этом, чем больше скорость якорной звёздочки (т.е. скорость травления якорьцепи), тем противодавление больше, поэтому лента плотнее охватывает тормозной барабан, что приводит к уменьшению скорости травления. Отсюда следует, что шестерённый насос обеспечивает постоянство скорости травления якорь-цепи. Якорная звездочка через передачу поворачивает ротор сельсина- датчика ВС, причём при изменении длины якорь-цепи на 1 м ротор ВС поворачивается на 1º. При этом поворачивается на такой же угол ротор сельсина-приёмника ВЕ в рулевой рубке (рис. 165, б), что позволяет непосредственно из неё контролировать длину якорь-цепи. Иногда сельсин-приёмник ВЕ называют «сельсин-указатель длины якорьцепи». Описание схемы управления и контроля К основным элементам схемы относятся (рис. 165, б): SA – 4-полюсный выключатель, через 1-й и 2-й слева контакты на схему подаётся напряжение 110 В переменного тока, через 3-й и 4-й слева контакты напряжение 24 В постоянного тока; 1. SB1 – кнопка «Подготовка к работе», находится на баке; 2. SB2 – кнопка «Предварительный спуск якоря», на баке; 3. SB3 – кнопка «Автоматический спуск якоря», в рулевой рубке; 4. SB4 - кнопка «Автоматический спуск якоря», на баке; 5. SB5 – кнопка «Стоп», в рулевой рубке; 6. SB6 – кнопка «Стоп», на баке; 34 7. SQ1 – микровыключатель заданной длины якорь-цепи; контакт размыкается при вытравливании якорь-цепи на заданную длину; 8. SQ2 – микропереключатель предварительной отдачи якоря; переключается при вытравливании 2м якорь-цепи; 9. SQ3 – микровыключатель максимальной длины вытравленной якорьцепи; 10. KV1 – реле напряжения, для коммутации цепей управления и контроля; 11.KV2 – реле «Якорь готов к отдаче»; 12.KV3 – реле предварительного спуска; 13.KV4 – реле предварительного спуска; 14.KV5 – реле «Начало предварительной отдачи якоря»; 15.KV6 – реле «Окончание предварительной отдачи якоря»; 16.KV7 – промежуточное реле «Автоматический спуск якоря»; 17.KV8 – управляющее реле. 18.ВС – сельсин-датчик длины вытравленной якорь-цепи; 19.ВЕ – сельсин-приёмник длины вытравленной якорь-цепи; HL1 – лампочка сигнальная , для освещения шкал заданной и действительной длины вытравленной якорь-цепи; HL2 - лампочка сигнальная «Якорь готов к отдаче»; HL3 - лампочка сигнальная «Якорь приспущен на 2 м» HL4 - лампочка сигнальная «Начало отдачи якоря». R – регулировочный резистор в цепи сигнальных ламп, для уменьшения накала ламп в темное время суток (чтобы не ослеплять вахту на мостике). Электрическую ( правую ) часть схемы управления условно можно разделить на две половины: 1. измерительно-сигнальная, в которую входят цепи питания обоих сельсинов ВС и ВЕ, а также цепи катушек реле KV1, KV2 и KV6 и сигнальных лампочек HL1, HL2, HL3 и HL4. Эта часть питается переменным напряжение 110 В; 2. исполнительная, в которую входят реле KV7, KV3, KV4, KV5 и KV8 и катушка YA электромагнита золотникового устройства. Эта часть питается постоянным током напряжением 24 В. При нормальной работе судовой электростанции напряжение 24 В получается от судовой сети при помощи понижающего трансформатора и выпрямителя. При обесточивании судна происходит автоматическое переключение питания исполнительной части от судовой сети переменного тока на аккумуляторную батарею. Это дает возможность травить якорь с якорь-цепью в ручном режиме даже если судно обесточено. Для этого нажимают кнопку SB2 и удерживают ее до тех пор, пока не будет вытравлено нужное число смычек якорь-цепи. Узел контроля длины якорь-цепи 35 Узел контроля действительной длины якорь-цепи представляет собой систему синхронной связи, в состав которой входят два сельсина: 1. сельсин-датчик длины якорь-цепи ВС; ротор этого сельсина через зубчатую передачу жёстко связан с якорной звёздочкой ( рис. 165, а ); 2. сельсин-приёмник ( указатель ) длины якорь-цепи ВЕ; на оси ротора сельсина закреплена стрелка, которая при отдаче якоря перемещается вдоль шкалы действительной длины якорь-цепи. Кроме стрелки, на оси находится кулачковая шайба с переменным профилем, по торцевой поверхности которой скользит ролик кулачкового устройства микропереключателя 1SQ1 (cм. ниже «Узел задания длины якорьцепи»). Само кулачковое устройство закреплено на рукоятке задания длины якорь-цепи. Однофазные обмотки возбуждения обоих сельсинов включены параллельно на напряжение 110 В переменного тока (выводы обмоток показаны горизонтальными линиями, выходящими из прямоугольников «ВС» и «ВЕ» на рис. 165, б). Трёхфазные обмотки ротора сельсинов соединены тремя проводами ( три вертикальные линии между прямоугольниками «ВС» и «ВЕ» ). Принцип действия системы синхронной связи: при повороте ротора сельсина ВС на такой же угол поворачивается ротор сельсина ВЕ. На судах такие системы синхронной связи применяются в рулевых указателях, машинных телеграфах и др. Узел задания длины якорь-цепи Необходимую длину вытравленной якорь-цепи задают поворотом специальной рукоятки. На оси рукоятки закреплена стрелка, которая при повороте рукоятки перемещается вдоль шкалы заданной длины якорь-цепи. На шкале есть отметки (деления) заданной длины якорь-цепи в метрах. Кроме стрелки, на оси рукоятки закреплено кулачковое устройство микропереключателя 1SQ1 заданной длины якорь-цепи. Для задания необходимой длины рукоятку надо повернуть так, чтобы стрелка расположилась напротив соответствующего деления (числа) на шкале. При этом одновременно повернётся кулачковое устройство микропереключателя 1SQ1 заданной длины якорь-цепи. Тем самым изменится взаимное расположение этого устройства и кулачковой шайбы на валу сельсина-датчика ВЕ длины якорь-цепи. Чем больше угол поворота рукоятки, тем большее расстояние (дугу) при травлении якорь-цепи пройдёт кулачковая шайба и тем позже переключится контакт 1SQ1. В нулевом положении рукоятки контакт 1SQ1 разомкнут, т.е. травление якорь-цепи невозможно. Алгоритм работы схемы Алгоритм работы схемы крайне прост. 36 Травление якорь-цепи выполняется в 2 этапа: 1. предварительный (ручное управление травлением); 2. основной (втоматическое травление ). На первом боцман на баке последовательно нажимает кнопки SB1 «Подготовка к работе» и SB2 «Предварительный спуск якоря». После нажатия кнопки SB1 загорается сигнальная лампочка НL2 «Якорь готов к отдаче», свидетельствуя о том, что можно начинать спуск якорь-цепи. После нажатия кнопки SB2 сразу же загорается сигнальная лампочка НL4 «Начало отдачи якоря», якорь опускается на 2 м. При этом загорается сигнальная лампочка НL3 «Якорь приспущен», после чего боцман должен отпустить кнопку SB2. Таким образом, на предварительном этапе якорь опускают на 2 м в ручном режиме. На основном этапе выполняют автоматическое травление якорь-цепи на заданную длину нажатием кнопки SB3 ( SB4 ) «Автоматический спуск якоря». Кнопка SB3 находится в рулевой рубке, кнопка SB4 – на баке. Выбор того или иного места определяет капитан. Подготовка схемы к работе Для подготовки схемы к работе включают выключатель SA в рулевой рубке. При этом включается реле KV1 напряжением 110 В, которое замыкает 2 контакта: 1. в цепи сигнальной лампочки HL1, которая освещает шкалы заданной и действительной длины вытравленной якорь-цепи; 2. в цепи катушек управляющего реле KV8 и электромагнита YA золотника, подготавливая их к последующей работе. Подсветка шкал одновременно является сигналом «Напряжение на схему подано». Кроме того, через контакты SA подаётся напряжение 110 В на параллельно включённые обмотки возбуждения сельсина-указателя длины ВЕ ( рулевая рубка ) и сельсина- датчика длины ВС ( якорная звёздочка на баке ). После этого задают необходимую длину травления якорь-цепи поворотом специальной рукоятки ( см. выше ). Схема готова к работе. Работа схемы Предварительный этап Цель предварительного этапа – приспустить якорь на 2м и тем самым подготовить его к последующей автоматической отдаче. На этом этапе порядок действий такой. По команде с мостика «Приготовить якорь к отдаче» боцман нажимает кнопку SB1 «Подготовка к работе». Через контакты кнопки включается реле KV2 «Якорь готов к отдаче», которое замыкает один контакт в цепи своей катушки (после чего кнопку SB1 37 можно отпустить) и второй контакт в цепи лампочки HL2 «Якорь готов к отдаче». Убедившись в загорании лампочки HL2, боцман нажимает cдвоенную кнопку SB2. При этом, через верхний контакт SB2 образуется цепь катушки первого реле предварительного спуска KV3: третий слева контакт выключателя SA – SB5 – SQ3 – SB6 – SB2 – катушка KV3 – крайний правый контакт выключателя SA. Реле KV3 включается и замыкает контакт KV3, через который включаются сигнальное реле KV5 и второе реле предварительного KV4 ( в цепи катушки которого – второй контакт SB2 ). Реле KV5 включает лампочку HL4 «Начало отдачи якоря». Реле KV4 включается и замыкает два контакта , через которые включается катушка YA золотникового устройства. Начинается травление якоря. Когда якорь опустится на 2 м, путевой переключатель SQ2 переключает контакт из верхнего положения в нижнее. При этом отключается реле KV2 и гаснет лампочка HL2 «Начало отдачи якоря», и включается реле KV6, загорается лампочка HL3«Якорь приспущен на 2 м». В этот момент боцман должен отпустить кнопку SB2. Контакты кнопки размыкаются, отключаются реле KV3, KV4 и катушка YA. Травление якоря прекращается. При травлении якоря ротор сельсина ВС поворачивается, что приводит к повороту ротора сельсина ВЕ. При этом стрелка на валу сельсина ВЕ поворачивается и скользит вдоль шкалы действительной длины якорь-цепи. Это позволяет в рулевой рубке контролировать длину вытравливаемой якорь-цепи. Основной этап Цель основного этапа – вытравить автоматически якорь-цепь на заданную длину. Для автоматического травления нажимают кнопку SB3 в рулевой рубке или SB4 на баке. При этом включается реле KV7, замыкающее контакты в цепи катушек реле KV3 и KV8. Цепь катушки реле KV3: третий слева контакт выключателя SA – SB5 – SQ3 – SB6 – КМ7 – катушка KV3 –крайний правый контакт выключателя SA. Реле KV3 включается, через его контакт: 1. повторно включается реле KV5, загорается лампочка HL4 «Начало отдачи якоря»; 2. образуется цепь катушки реле KV8: 38 третий слева контакт выключателя SA – KV3 – KV1 – SQ1 – KV7 – катушка KV8 –крайний правый контакт выключателя SA. Реле KV8 включается, образуется цепь катушки золотника YA: третий слева контакт выключателя SA – KV3 – KV1 – KV8 – катушка YA –крайний правый контакт выключателя SA. Золотник внутри цилиндра перемещается, травление якоря восстанавливается. После включения реле KV8 кнопку SB3 ( SB4 ) можно отпустить, реле KV7 отключается и размыкает контакт KV7 в цепи катушки KV8. Однако реле KV8 продолжает получать питание через собственный контакт KV8 ( самоблокировка ). По мере травления роторы сельсинов ВС ( на баке ) и ВЕ ( в рулевой рубке ) поворачиваются. Вместе с ротором сельсина ВЕ поворачивается кулачковая шайба, которая надавливает на ролик кулачкового устройства микропереключателя SQ1 в тот момент, когда ранее заданная длина якорь-цепи будет достигнута. Контакт SQ1 размыкается, отключая реле KV8. Реле размыкает контакт KV8, отключая катушку золотника YA. Травление якоря прекращается. Аварийная остановка якоря При необходимости прекратить травление на предварительном или основном этапе нажимают кнопку SB5 в рулевой рубке или SB6 на баке. При этом реле KV3 отключается и размыкает контакт KV3, катушка YA обесточивается, травление прекращается. Предельный выключатель длины якорь-цепи В случае, если аварийная остановка якоря по каким-либо причинам невозможна (например, при нажатии кнопки SB5 или SB3 травление продолжается), якорь остановится только после срабатывания микропереключателя SQ3 предельной длины якорь-цепи. При этом контакт SQ3 размыкается, отключая реле KV3, вследствие чего отключается катушка золотника YA. Совершенно ясно, что при настройке этот конечный выключатель надо отрегулировать на меньшую, чем предельная, длину якорь-цепи. В противном случае, из-за набранной инерции, после наложения тормоза продолжение движения якорь-цепи приведёт к отрыву жвака-галса от скобы, приваренной к палубе внутри цепного ящика. В результате якорь-цепь с якорем будут утеряны, со всеми вытекающими для электромеханика последствиями. Травление якоря при обесточивании судне Схема управления предусматривает возможность травления якоря, если судно обесточено. 39 Для этого правая половина схемы управления питается через третий и четвертый слева контакты выключателя управления SA напряжением 24 В постоянного тока: 1. при нормальной работе судовой электростанции – от судовой сети через понижающий трансформатор и выпрямитель (на схеме не показаны); 2. при обесточивании судна – от аккумуляторной батареи 24 В. Для автоматического переключения с одного источника питания на другой (т.е. с судовой сети на батарею, а после восстановления напряжения – с батареи на судовую сеть) используется реле, катушка которого подключена к питающей сети (не показано на схеме). Если напряжение в судовой сети есть, реле включено и через свои контакты подключает правую половину схемы управления к выходу трансформаторно-выпрямительного блока. Если судно обесточится, реле теряет питание и через вторую пару контактов подключает правую половину схемы управления к аккумуляторной батарее. Если напряжение сети восстановится, реле вновь включается и переключает правую половину схемы на питание от судовой сети, батарея отключается. Схема контакторной системы управления электроприводом шпиля фирмы «Сименс» Основные сведения Для управления электроприводом шпиля служит 3-скоростной асинхронный двигатель с синхронными частотами вращения 375, 750 и 1500 об/мин. Способ регулирования скорости – изменением числа пар полюсов. При этом на статоре уложены две независимые обмотки: первая с её переключением по схеме «треугольник» - «двойная звезда», вторая собрана в схему «треугольник» (рис. 166). Основные элементы схемы К основным элементам схемы относятся: 1. TV – понижающий трансформатор, для питания катушки электромагнитного тормоза YB; 2. UZ – выпрямительный мостик, для получения постоянного тока катушки электромагнитного тормоза YB; 3. YB - катушка электромагнитного тормоза YB; 4. КК1 – нагревательные элементы тепловых реле, для защиты обмотки статора двигателя от токов перегрузки; 5. 2 SA - выключатель управления (аварийный выключатель) на тумбе командоконтроллера; для аварийной остановки электродвигателя; 6. КМ1 – реверсивный контактор «Вперёд»; 40 7. КМ2 - реверсивный контактор «Назад»; 8. КМ3 – контактор 1-й скорости («треугольник»); 9. КМ4 и КМ5 – два контакторы 2-й скорости («двойная звезда»); 10.КМ6 – контактор 3-й скорости («треугольник»); 11.КМ7 – тормозной контактор; Рис. 166. Схема контакторной системы управления электроприводом шпиля фирмы «Сименс» 12. KV1 – реле напряжения, для отключения электродвигателя при снижении напряжения до 60% и менее (минимальная и нулевая защиты по напряжению); 13.KV2 – реле защиты обмотки 1-й скорости от токов перегрузки, для отключения обмотки 1-й скорости при перегрузке; 41 14.KV3 – реле защиты обмотки 3-й скорости от токов перегрузки, для отключения обмотки 3-й скорости при перегрузке; 15.KV4 – экономический контактор; 16.КТ1 – реле времени, для задержки перехода со 2-й скорости на 3-ю; 17.КТ2 – реле времени, для блокировки отключения обмотки 3-й скорости пусковым током этой обмотки; 18.КТ3 – реле времени, для контроля за исправностью электромагнитного тормоза YB; 19.R1 – экономический резистор, для уменьшения нагрева катушки тормоза YB 20 SQ – экономический выключатель тормоза, размыкается при срабатывании тормоза. Подготовка схемы к работе Для подготовки схемы к работе: 1. включают на ГРЩ автоматический выключатель QF; 2. включают на тумбе командоконтроллера на полубаке (КК) аварийный выклюю чатель 2SA; 3. устанавливают рукоятку КК в нулевое положение. В нулевом положение рукоятки КК замкнуты контакты 1SA1 и 1SA4. Через контакт 1SA1 включается реле напряжения KV1 по цепи: левый линейный провод – левый контакт QF – левый предохранитель – 2SA – КТ3 (паралельно – КV4) – 1SA1 – КК1 – катушка KV1 – правый предохранитель – правый контакт QF – правый линейный провод. Реле KV1 включается и замыкает два контакта: верхний, который шунтирует контакт 1SA1, и левый, через который поступает питание на остальную часть схемы управления. Кроме того, включается экономический контактор KV4, который замыкает 2 контакта, шунтирующих экономический резистор R1. и размыкает контакт KV1 в цепи катушки реле напряжения KV1. Однако реле KV1 не отключается, т.к. остаётся замкнутым контакт КТ3. Таким образом, в нулевом положении рукоятки КК включены реле KV1 и KV4. Схема готова к работе. Работа схемы Схема управления симметрична, поэтому рассмотрим работу схемы в направлении «Выбирать». 1 скорость При переводе рукоятки КК из положения «0» в положение «1» размыкается контакт 1SA1 и замыкается 1SA2. 42 Несмотря на размыкание 1SA1, катушка реле KV1 продолжает питаться через свой контакт KV1 (параллельно 1SA1). Через контакт 1SA2 включается контактор КМ1 «Выбирать». Он замыкает главные контакты в силовой части схемы и вспомогательный контакт. Через этот контакт и контакт 1SA4 включается контактор 1-й скорости КМ3. Контактор КМ3 замыкает главные контакты в силовой части схемы (питание поступает на обмотку 1-й скорости) и вспомогательный в цепи выпрямительного мостика тормозного контактора КМ7. Контактор КМ7 включается, подаёт питание на катушку тормоза YB. Параллельно контактору КМ7 включается реле времени КТ3 с выдержкой 1,5 с. Двигатель растормаживается и работает на 1-й скорости («треугольник»). После срабатывания тормоза размыкается контакт SQ, реле KV4 теряет питание и замыкает контакт KV4 в цепи катушки реле KV1. Если тормоз не сработает, через 1,5 с реле КТ3 разомкнёт свой контакт в цепи катушки КV1, это реле отключится и разомкнёт свои контакты. Двигатель отключится от сети и тормозится. 2 скорость При переводе рукоятки КК из положения «1» в положение «2» размыкается контакт 1SA4 и замыкается 1SA5. При размыкании контакта 1SA4 отключается контактор 1-й скорости КМ3. При замыкании контакта 1SA5 включаются контактор КМ4 и реле времени КТ1. Контактор КМ4 замыкает главные контакты, подавая питание на выводы «двойной звезды» и вспомогательный в цепи катушки контактора КМ5. Последний включается и через свои главные образует нулевую точку «двойной звезды». Таким образом, для образования схемы «двойной звезды» служат два трехполюсных контактора КМ4 и КМ5. Двигатель переходит на 2-ю скорость. 3 скорость При переводе рукоятки КК из положения «2» в положение «3» замыкается контакт 1SA6. При этом возможны два варианта перехода на 3-ю скорость: 1. при резком переводе реле времени КТ1 не успевает замкнуть свой контакт в цепи катушки контактора КМ6, поэтому двигатель продолжит работу на 2-й скорости до истечения выдержки времени реле КТ1, после чего перейдёт на 3-ю скорость; 2. при медленном переводе реле КТ1 успевает замкнуть свой контакт в цепи КМ6. 43 Контактор КМ6 включается, размыкает свой вспомогательный контакт в цепи катушки контактора КМ4, последний отключается, отключая второй контактор «двойной звезды» - КМ5. Двигатель переходит со 2-й скорости на 3-ю. Защиты Защита от токов короткого замыкания Защита от токов короткого замыкания в обмотках статора – при помощи автоматического выключателя QF. Защита от токов короткого замыкания в цепях управления – при помощи предохранителей. Защита от токов перегрузки Для защиты от токов перегрузки служат тепловые реле КК1, КК2 и электромагнитное реле КА. Реле КК2 защищает от токов перегрузки только обмотку 1-й скорости («треугольник»). Оно срабатывает через 5 мин работы на 1-й скорости с полной нагрузкой. При перегрузке обмотки 1-й скорости реле КК2 замыкает контакт КК2 и включает промежуточное реле KV2. Это реле размыкает верхний контакт, отключая контактор КМ3, и замыкает нижний, шунтируя контакт КК2 (самоблокировка самого реле). Если после срабатывания КК2 рукоятка КК осталась в первом положении, двигатель отключается от сети и затормаживается, т.к. отключаются контакторы КМ3 и КМ7. Однако, после срабатывания КК2 и отключения КМ3, можно продолжить работу на 2-й или 3-й скорости переводом рукоятки КК в положение «2» или «3» (см. выше). Реле КК1 защищает от токов перегрузки все три обмотки: 1-й, 2-й и 3-й скорости, отключая двигатель при перегрузке любой из них. Реле КА защищает обмотку 3-й скорости. При перегрузке этой обмотки на 20% по току, реле замыкает свой контакт, включая реле времени КТ2 с выдержкой 2с. Выдержка времени нужна для того, чтобы контактор КМ6 не отключался пусковым током обмотки 3-й скорости, который больше номинального тока этой обмотки в несколько раз. Если перегрузка сохраняется, через 2 с реле КТ2 замыкает контакт, включая промежуточное реле КV3. Последнее размыкает верхний контакт и отключает катушку КМ6; одновременно через нижний контакт становится на самоудержание (самоблокировку). Двигатель переходит на 2-ю скорость. 44 Для продолжения работы на 3-й скорости надо вернуть рукоятку в положение «2», при этом отключится реле KV3, после чего перевести в положение «3». Защита по снижению напряжения При снижении напряжения до 60% и менее якорь реле напряжения KV1 отпадает, его контакты размыкаются, схема управления отключается. Двигатель отключается от сети и затормаживается. После восстановления напряжения для продолжения работы сначала надо вернуть рукоятку КК в положение «0», чтобы включилось реле KV1, после чего перевести её в нужное рабочее положение. § 3.3. Техническая эксплуатация якорно-швартовных устройств 1. Подготовка к действию, отдача и подъем якоря При подготовке к действию брашпиля (шпиля) боцман или лицо, его заменяющее, должны: .1. убедиться в отключении ручного привода; .2. проверить положение ленточного тормоза и, если нужно, затянуть его; .3. проверить действие кулачковой (фрикционной) муфты; .4. проверить чистоту якорной цепи на участке от механизма до клюза и правильность ее положения на цепном барабане; .5. подготовить к действию привод брашпиля (шпиля); при паровом приводе прогреть паропровод и паровую машину; .6. при отключенном цепном барабане провернуть брашпиль (шпиль) вхолостую в обе стороны на несколько оборотов, наблюдая за показаниями амперметра; .7. при наличии дистанционного управления проверить действий исполнительных механизмов при управлении со всех постов; .8. доложить на мостик о готовности брашпиля (шпиля) к действию. При отдаче якоря без включения двигателя брашпиля необходимо: .1. зажать ленточный тормоз и выключить цепной барабан; .2. отжать ленточный тормоз и произвести травление якоря; для уменьшения скорости травления зажимать ленточный тормоз плавно и без рывков; .3. после вытравливания заданного числа смычек якорной цепи зажать полностью ленточный тормоз. Для подъема якоря необходимо: .1. включить муфту, сообщающую цепной барабан с валом; .2. ослабить ленточный тормоз и одновременно пустить двигатель брашпиля; .3. обмывать водой цепь при подъеме; 45 .4. вести наблюдение за состоянием якорной цепи и положением якоря при подходе к клюзу, при этом скорость подъема должна быть снижена; .5. после подъема якоря затянуть ленточный тормоз до отказа; .6. взять якорную цепь на стопор; .7. передать нагрузку с ленточного тормоза на стопор, для чего ослабить тормоз и снова затянуть его; .8. отключить цепной барабан. При включенном приводе брашпиля (шпиля) следить, чтобы колодки и ленты тормозов были достаточно отжаты и не препятствовали работе двигателя. При работе электрического привода брашпиля (шпиля) следить за показаниями амперметра, не допуская увеличения силы тока свыше номинального значения. Муфты предельного момента должны быть всегда исправны и отрегулированы. Во время травления якорной цепи или работы на турачку необходимо находиться в стороне от линии движения якорной цепи или швартовного троса и не прикасаться к движущимся частям. Запрещается оставлять на турачках закрепленные тросы, а также использовать стопоры для удержания якорной цепи при стоянке на якоре. Назначение этих стопоров – крепление втянутых якорей по-походному. Необходимо следить за смазкой механизма брашпиля (шпиля), проверяя ее состояние в каждом случае подготовки к работе. Открытые передачи брашпиля должны быть постоянно покрыты смазкой рекомендованного состава и закрыты защитными кожухами Не допускается работа брашпиля с таким износом цепных барабанов, при котором наблюдается проскальзывание якорной цепи. При выводе из действия брашпиля с паровым приводом должны быть обеспечены продувание цилиндров и паропровода и освобождение их от конденсата во избежание гидравлических ударов при последующих пусках и возможного размораживания машины и трубопроводов в зимний период. 2. Техническое использование и обслуживание ЯШУ Надежность якорно-швартовных ЭП обеспечивает сохранность судна и экипажа. Большинство этих механизмов не резервируют, а это повышает требования к безотказности в работе электрических машин, пускорегулирующей аппаратуры и других элементов ЭП. Характерной особенностью эксплуатации указанных механизмов является их малая наработка, составляющая для брашпилей 30-80 ч/год, а для швартовных шпилей 30-60 ч/год. Вследствие малого времени использования наработка элементов электрической аппаратуры и ЭД также незначительна: их изнашивание меньше, чем у ЭП грузоподъемных устройств. 46 Однако длительное пребывание электрооборудования в неработающем состоянии усиливает влияние внешних факторов, к которым относятся влияние окружающей среды и различные механические воздействия. В зонах тропического климата электрооборудование подвержено воздействию повышенной солнечной радиации, высокой температуры окружающего воздуха, росы и влаги, выпадающих на наружных и внутренних поверхностях машин и аппаратов, солей, содержащихся в воздухе, и т. п. При совместном воздействии этих факторов ухудшаются электроизоляционные свойства материалов, образуются токопроводящие пленки, уменьшается вязкость смазки в подшипниках, происходят ускоренная коррозия металлов, разрушение лакокрасочных и гальванических покрытий. При плавании судов ЭП якорно-швартовных механизмов также подвергаются вибрации и тряскам при ударах судна о волны. Это приводит к обрыву монтажных проводов, ослаблению контактных соединений, к ускоренному изнашиванию кабельной изоляции и к снижению сопротивления изоляции электрических машин ниже допустимых норм. Непосредственное воздействие волн на электрооборудование, установленное на открытых палубах, так же как и сотрясения, возникающие при ударах судна о волны, способны нанести серьезные механические повреждения. Например, известны случаи срыва с фундаментов командоконтроллеров брашпилей или заливания водой помещений с расположенными в них магнитными контроллерами. В последнем случае из строя выходит вся электрическая аппаратура. Поддержание высокой степени готовности в сложных кратковременно используемых системах возможно посредством проверок оборудования, которые способствуют повышению безотказности в работе. Необходимо постоянно следить за состоянием резиновых прокладок и прочих уплотнений электрооборудования. Все обжимаемые болты, гайки, барашки или замки, зажимные гайки сальников должны быть хорошо поджаты, а свободные сальники вводов без кабелей закрыты резиновыми заглушками. Не реже одного раза в 3 мес следует проверять состояние резиновых прокладок. Прокладки, имеющие трещины, а также высохшие или раскисшие необходимо своевременно заменять новыми. Фетровые кольца уплотнений выступающих концов вала ЭД по мере изнашивания следует подтягивать нажимным кольцом при помощи болтов. Правила технической эксплуатации электрооборудования судов регламентируют порядок вахтенного и технического обслуживания. После окончания швартовных операций по распоряжению вахтенного штурмана палубная команда должна укрыть электрооборудование чехлами. При этом электромеханик отключает питание. До начала швартовных операций электромеханик должен по команде вахтенного штурмана включить питание ЭП брашпиля и шпиля и совместно с боцманом и палубной командой проверить их в работе на 47 холостом ходу при отключенной звездочке брашпиля и при снятых со швартовных барабанов тросах. Перед пуском якорного ЭП после длительной его стоянки электромеханик обязан провести внешний осмотр, проверить положение пусковых устройств, состояние подшипников и измерить сопротивления изоляции. Особое внимание следует уделять действию электромагнитных тормозов, осуществляя пробные пуски и торможение ЭД. При проверке могут быть обнаружены различные неисправности. Анализ показывает, что около 75% всех отказов связаны с нарушением работы магнитных контроллеров и командоконтроллеров, до 10-15% составляют отказы тормозов. Неисправности могут быть двух групп: при повреждении элемента или при отклонении параметров от нормативно установленных (например, изменение настройки срабатывания реле времени). При эксплуатации якорного ЭП в случае получения сильных ударов и сотрясений необходимо проверить в электромагнитных тормозах состояние фрикционных колец, промежуточных дисков, шлицевых втулок и т. п. Также следует измерить размеры хода якоря и сопротивления изоляции. Обнаруженные при осмотре детали с наличием трещин, а также изношенные сверх допустимых норм следует заменять новыми. Разборку тормозов обычно проводят только при замене изношенных или имеющих трещину дисков, смене катушки тормозного электромагнита, а также при разборке ЭД. Опыт эксплуатации показывает, что большое количество поломок брашпилей и выхода из строя ЭД происходит по причинам их перегрузки. Перегрузка ЭД возникает из-за увеличения интенсивности работы выше расчетной, обрыва одной фазы питающей сети, ухудшения вентиляции, неисправностей редуктора, тормоза и др. Например, очень часто происходит перегрузка ЭП якорно-швартовных устройств при работе на быстроходной обмотке ЭД, номинальный момент которой меньше момента основной обмотки. Контрольные вопросы-задания 1. Каково назначение ЯШУ? Из каких узлов состоит рабочий механизм ЯШУ? 2. Для чего предназначены основной и вспомогательный барабаны ЯШУ? 3. Как классифицируются якорно-швартовные и швартовные устройства судов? 4. Почему вспомогательный (швартовный) барабан при работе исполнительного электродвигателя ЯШУ вращается непрерывно? 5. В чем состоит пренимущество якорного шпиля над брашпилем? 6. Что такое характеристика якорного снабжения судов? На какие параметры ЯШУ она влияет? 7. Чем отличаются друг от друга ограниченные районы плавания судов ОРП I, ОРП II и ОРП III? 8. Что такое характеристика швартовного снабжения судов? На какие параметры ЯШУ она влияет? 48 9. Какова, по Правилам Регистра, скорость выбирания якоря при номинальном тяговом усилии? При подходе якоря к клюзу? За какое время должен быть выбран якорь с глубины стоянки L = 200 м? 10. От какого распределительного щита должны получать питание ЯШУ? Почему? 11. В каких случаях между исполнительным электродвигателем и приводом ЯШУ должна устанавливаться предохранительная муфта? Каково ее назначение? 12. От чего зависит выбор системы управления ЯШУ? Какие системы управления применяют для ЯШУ? 14. Какие виды защит обеспечивает автоматический выключатель QF в контроллерной системе управления ЯШУ с 3-скоростным асинхронным двигателем? Какой способ регулирования скорости двигателя использован в этой схеме? 15. Каково назначение ПКО в системе Г – Д управления электроприводом брашпиля? 16. Каково назначение реле КК6 в типовой системе управления ЯШУ на переменном токе? Какое требование Правил Регистра выполнено при помощи этого реле? 17. Почему в типовой системе управления ЯШУ на переменном токе в качестве реле напряжения использовано реле времени КТ1? 18. Каково назначение шестеренчатого насоса 7 в схеме дистанционной отдаче якоря? Как опустить якорь, если судно обесточено? Каково назначение конечных выключателей SQ1, SQ2 и SQ3? Каким образом обеспечивается контроль за вытравленной частью якорь-цепи? 19. Почему в контакторной системе управления шпилем фирмы «Сименс» для получения 2-й скорости используются два 3- полюсных контактора КМ4 и КМ5? Как будет работать схема, если при включении 1-й скорости тормоз не отттормозится? 20. Каков порядок подготовки к действию, спуске и подъеме якоря ? Кто из членов экипажа имеет допуск для работы с ЯШУ на полубаке? 21. В чем состоит техническое использование и техническое обслуживание ЯШУ? 49