41 31^Н1 I?
Зм \*тК
пушшмтЁЙЙН
^^^^^3
-^--^^—-д
ШЯЯЯ1^^^Ш
Ю. К. Головин
СУПОВЫЕ
ЭЛЕКТРИЧЕСКИЕ
ПРИВОДЫ
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Утверждено
Главным управлением кадров,
учебных заведений
и социального развития
в качестве учебника для курсантов
специальности 21 07
"Эксплуатация электрооборудования
и автоматики судов"
мореходных училищ
МОСКВА "ТРАНСПОРТ" 1991
УДК 6? Н1 :(,?<)!.' (071 1.4
Головин Ю. К. Судовые электрические приводы: Учеб. для мореход, училищ.2-е изд., перераб. и доп.-М'.: Транспорт, 1991.-327 с.
Рассмотрены электромеханические свойства электрических двигателей, принцип
действия и характеристики тиристорных преобразователей, схемы автоматизированного судового электропривода (рулевого, якорно-швартовного, грузового, вспомогательных механизмов и др.). Изложены основные сведения по устройству и
особенностям эксплуатации контактных и бесконтактных электрических аппаратов.
Особое внимание обращено на физические процессы в электрических машинах,
аппаратах и тиристорных преобразователях.
По сравнению с первым изданием (1984 г.) шире представлены электроприводы
рулевых устройств и вспомогательных механизмов, системы управления с использованием логических элементов, дополнены разделы по тиристорным преобразователям
частоты, в более полном объеме рассмотрены схемы электроприводов с тиристорами.
Введен материал по микропроцессорному управлению электроприводами.
Для учащихся мореходных училищ. Может быть полезен судовым электромеханикам.
Ил. 154, табл. 1, библиогр. 11 назв.
Р е ц е н з е н т ы : Ю.И. Акулов, А.М. Бабаев
З а в е д у ю щ и й р е д а к ц и е й Е. Д. Некрасова
Р е д а к т о р С.Ю. Ланцев
Г
3205030000-190
049 (01)-91
5-277-01096-3
166-91
©
@
Издательство «Транспорт», 1984
Ю.К. Головин, 1991, с изменениями и дополнениями
От автора
На современных морских судах установлены многочисленные и
разнообразные механизмы и системы, обеспечивающие работу
энергетической установки и судовых устройств. В основном механизмы приводятся в действие с помощью электроприводов, о чем
свидетельствует постоянный рост мощности установленного на
судах электрооборудования. Известно, что средняя мощность электростанций морских судов удваивается каждые 20 лет.
Многие электроприводы оказывают решающее влияние на безопасную, надежную и экономичную работу судна в целом. Поэтому
судовому персоналу, обслуживающему электроприводы, необходимо
хорошо знать их конструкцию и принципы действия, возможные
отказы и способы их устранения. Главная цель, которую ставил
перед собой автор,-помочь будущим специалистам грамотно осуществлять техническую эксплуатацию электроприводов.
Предмет «Судовые электрические приводы» является завершающим в учебном плане по данной специальности и базируется на
таких дисциплинах, как «Теоретические основы электротехники»,
«Судовые электрические машины», «Основы электроники и судовая
электроавтоматика» и др.
Новое, 2-е, издание учебника предпринято для того, чтобы
привести его содержание в соответствие с новой техникой, устанавливаемой на судах. Так, в настоящем издании шире представлены
тиристорные электроприводы, приведены сведения о новых системах управления с использованием микропроцессоров и логических
элементов, полнее освещается частотное управление асинхронными
двигателями, устаревшие схемы электроприводов заменены более
совершенными. Одновременно сокращен объем материала по электроприводам постоянного тока, все реже применяющимся на судах.
Правила построения схем и буквенно-цифровые обозначения
согласованы с ЕСКД.
Учитывая эксплуатационный профиль техников-электромехаников, в учебнике акцентируется внимание на типовых конструктивных
решениях, на нагрузочных диаграммах рабочих механизмов, приводятся электрические схемы действующих электроприводов современных судов, указываются особенности их эксплуатации. Для
обозначения элементов электрических схем применены 2-буквенные
коды согласно ГОСТ 2.710 81 «Обозначения буквенно-цифровые в
электрических схемах».
Для повышения эффективности усвоения материала служат контрольные вопросы-задания, приведенные в конце каждой главы.
Замечания, советы и пожелания по данному учебнику будут
приняты автором с благодарностью.
3
Список принятых сокращений
АД
-асинхронный двигатель
АИ
-автономный инвертор
АЙН -автономный инвертор напряжения
АЛУ -арифметико-логическое устройство
АЦП -аналого-цифровой преобразователь
АШЛ -автоматическая швартовная лебедка
БК
-бесконтактный коммутатор
БО
-блок операций
БП -блок питания
БР
-буферный регистр
БРА -буферный регистр адреса
БРД -буферный регистр данных
БС
-блок соединения
БУ
-блок управления
ВК
-выходной каскад
ВУ
- выходное устройство
Г - Д - генератор - двигатель
ГИ
-генератор импульсов
ГПН -генератор йилообразного напряжения
ДК -датчик курса
ДУ -дифференцирующее устройство
ЗГ
-задающий генератор
ЗУД -запоминающее устройство данных
ЗУ К -запоминающее устройство команд
ИД -исполнительный двигатель
ИМ -исполнительный механизм
ИП -источник питания
ИУ -импульсный усилитель
ИЦП -импульсно-цифровой преобразователь
ЛЭ -логический элемент
МП -микропроцессор
НПЧ -непосредственный преобразователь частоты
ОП
ПЗУ
- ограничительная плата
-постоянное запоминающее устройство
ПИ
-плата преобразователей
ПСУ --пульт следящего управления
ПУ
-пульт управления
ПУМ -передаточное устройство механизма
РАП -регистр адреса памяти
-рулевой датчик
РД
РИ
-распределитель импульсов
РК
-регистр команд
РО
-рабочий орган
РОН --регистр общего назначения
РП
-регистр признаков
РЭГП -рулевой электрогидравлический
привод
РЭП --рулевой электропривод
СК
-счетчик команд
СОЗУ -сверхоперативное запоминающее устройство
СП
-силовой преобразователь
ТПЧ --тиристорный преобразователь
частоты
УВВ -устройство ввода-вывода
УВУ -управляющее вычислительное
устройство
УЖЛ --устройство жесткой логики
-устройство связи
УС
УУ
управляющее устройство
ФСУ - фазосдвигающее устройство
ФЧУ -фазочувствительный усилитель
ЦАП -цифроаналоговый преобразователь
ЦПУ -центральный пост управления
ЧЭ
-чувствительный элемент
-шина адреса
ША
ШД
шина данных
ШУ -шина управления
-электродвигатель
ЭД
ЭП
- электропривод
Введение
Использование электропривода на судах началось во второй половине XIX века. Вначале были электрифицированы механизмы машинного отделения, общесудовые вентиляторы, а затем палубные
и грузоподъемные механизмы. Все судовые электрические установки
того времени работали на постоянном токе при напряжении, как
правило, не превышающем 110 В. С 1908 г. на судах отечественного
флота начали применять двигатели переменного тока как наиболее
простые и надежные, что в судовых условиях имеет особое значение.
До середины XX века происходила электрификация всех судовых
механизмов и совершенствовались системы управления, в основном
на базе релейно-контакторной автоматики.
В период с 1950 по 1970 г. осуществлялся переход к использованию на судах электроэнергии переменного тока. Важную роль
в этом сыграло внедрение многоскоростных асинхронных двигателей. Современные суда морского флота содержат большое количество электромеханизмов либо в виде автоматизированных комплексов, либо в виде самостоятельных систем, обеспечивающих
функционирование судна в соответствии с его назначением.
По степени автоматизации судовые электроприводы принято
разделять на 3 уровня автоматизации. Наиболее простыми являются
электроприводы с первым уровнем автоматизации. Это приводы,
которые требуют участия обслуживающего персонала как для
выработки начального управляющего воздействия, так и для контроля в процессе последующей работы электропривода. При втором
уровне автоматизации обслуживающий персонал участвует только в
выработке начального управляющего воздействия на электропривод.
Более совершенным является третий уровень автоматизации, при
котором обслуживающий персонал участвует только в надзоре за
электромеханической системой. Ручное управление при этом уровне
предусматривается, но только при особых режимах судна и его
энергетической установки.
Общая тенденция в развитии судовых механизмов характеризуется усложнением возлагаемых на электроприводы задач как по
повышению степени автоматизации, так и по упрощению их обслуживания. Это направлено на повышение производительности труда
путем автоматизации и механизации труда и оптимального использования установленных агрегатов. Повышение производительности
труда на судах связано также со снижением затрат времени на
техническое обслуживание и ремонт за счет совершенствования
конструкций электроприводов и приспособления их к специфическим условиям судовой эксплуатации. В свете этих задач реали-
чуются следующие направления, по которым идет совершенствование электроприводов судовых механизмов:
автоматизация отдельных электромеханизмов и объединение
взаимосвязанных механизмов в автоматизированные системы с
оптимальным режимом эксплуатации. В системе управления электроприводом все чаще включают вычислительные машины, микропроцессоры, с большой точностью осуществляющие операции
управления, ранее выполняемые человеком;
повышение производительности механизмов и судна в целом за
счет выбора оптимальных скоростей и условий регулирования;
повышение надежности и ресурса электроприводов за счет совершенствования конструкции и правильного выбора отдельных
элементов;
увеличение межремонтных периодов и снижение затрат на техническое обслуживание за счет использования элементов и систем,
соответствующих условиям эксплуатации;
снижение издержек на ремонтные работы за счет унификации
элементов и применения блочных конструкций.
Автоматизация судовых электроприводов вместе с использованием средств диагностирования позволит в минимальные сроки
восстановить их работоспособность при постепенных или внезапных отказах, а также значительно сократить трудозатраты на их
обслуживание.
Глава 1
ОСНОВНЫЕ СВЕДЕНИЯ ПО МЕХАНИКЕ
ЭЛЕКТРОПРИВОДА
1. Работа электродвигателей совместно с механизмами
Производственные механизмы состоят из собственно механизма, выполняющего полезную работу; двигателя, приводящего в
действие этот механизм; передаточного устройства, соединяющего
двигатель с механизмом; системы управления двигателем.
Электрическим приводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного,
передаточного и управляющего устройства, предназначенная для
приведения в движение вспомогательных органов рабочей машины
и управления этим движением.
Основные электромеханические параметры электродвигателя:
мощность, напряжение, сила тока, угловая скорость, вращающий
момент, коэффициент полезного действия и коэффициент мощности.
В зависимости от назначения, места установки и условий эксплуатации применяют электродвигатели различного конструктивного
исполнения. Выбор конструктивного исполнения электродвигателя
проводится на основании учета условий окружающей среды с целью
защиты электродвигателя от воздействия пыли, влаги, газов, едких
паров, высокой температуры и т. п., а также для защиты среды от
возможного искрообразования в токоведущих частях ЭД.
По с т е п е н и з а щ и т ы от воздействия окружающей среды ЭД
(и аппараты управления ими) делятся на открытые, защищенные,
брызгозащищенные, водозащищенные. В большинстве судовых помещений устанавливают ЭД брызгозащищенного исполнения, снабженные защитными устройствами от попадания внутрь двигателя
капель, падающих сверху под углом не более 45° к вертикали. Для
установки на открытых палубах предназначены ЭД водозащищенного исполнения, которые предохранены от попадания внутрь воды при обливании их из шланга. Персонал, обслуживающий электроприводы, должен быть защищен от соприкосновения с находящимися под напряжением или движущимися частями внутри корпуса.
Для обозначения степени защиты применяют 2-буквенный индекс
1Р и следующие за ними 2 цифры. Первая буква обозначает степень
защиты персонала от соприкосновения с находящимися под напряжением частями и оборудования от попадания внутрь предметов, а вторая-степень защиты оборудования от проникновения
7
воды. Первая цифра имеет семь значений (от 0 до 6), а вторая
девять (от 0 до 8). Согласно Правилам Регистра СССР пемемь
защиты электрооборудования, установленного в помещениях машинного отделения, должна быть не ниже 1Р23, а установленного на
открытых палубах -1Р56.
Конструктивное исполнение двигателя также определяется спос о б о м о х л а ж д е н и я . При этом различают ЭД с естественным
охлаждением, самовентиляцией и независимым охлаждением. Наибольшее распространение получили ЭД с самовентиляцией, которые охлаждаются при помощи вентилятора, составляющего одно
целое с вращающейся частью ЭД.
Электродвигатели должны соответствовать режиму работы
приводимого механизма. Режимы работы судовых механизмов
чрезвычайно разнообразны, поэтому характер тепловых процессов,
протекающих в обмотках ЭД, неодинаков для различных приводов.
В соответствии с условиями нагрева ЭД различают 3 основных
р е ж и м а р а б о т ы ЭП: продолжительный, кратковременный и
повторно-кратковременный.
Продолжительным называют режим, длительность которого
настолько велика, что температура нагрева при работе успевает
достигнуть установившегося значения, а за время последующей
паузы ЭД охлаждается до температуры окружающей среды. В продолжительном режиме работают ЭП судовых насосов, вентиляторов, а также гребные ЭД.
Кратковременным называют циклический режим, продолжительность рабочих периодов которого настолько мала, что температура
нагрева ЭД не успевает за время работы достичь установившегося
значения, а продолжительность паузы между двумя периодами
настолько велика, что температура нагрева успевает снизиться до
температуры окружающей среды. В таком режиме на судах работают ЭП якорно-швартовных устройств. Если ЭД, рассчитанный
заводом-изготовителем для продолжительного режима работы,
использовать полностью в кратковременном режиме, то он будет
перегружен но механическим свойствам. Другими словами, недостаточная механическая перегрузочная способность двигателей, рассчитанных для продолжительного режима работы, не позволяет
полностью использовать их в кратковременных режимах. В связи
с этим промышленность выпускает ЭД, специально рассчитанные
для кратковременных режимов работы. В каталогах эти двигатели
приводятся для стандартных длительностей работы-10, 30 и 60 мин.
Повторно-кратковременный режим характеризуется тем, что за
время работы ЭД не успеет нагреться до установившейся температуры, а за время паузы не успеет охладиться до температуры
окружающей среды. Суммарная продолжительность рабочего периода /р и паузы / 0 , т.е. время цикла 7^, не должна превышать
10 мин. Напряженность этого режима оценивается коэффициентом,
называемым продолжительностью включения (%):
ПВ = [гДгр + О] ЮО = (УГЦ)100.
В повторно-кратковременном режиме ЭД недоиспользуется по
нагреву, а значит можно выбрать двигатель меньшей мощности. По
тем же соображениям, что и в кратковременном режиме, для
повторно-кратковременного режима промышленность выпускает
специальные ЭД, обладающие большей перегрузочной способностью, чем ЭД для продолжительного режима. Эти ЭД имеют
стандартную продолжительность включения 15, 25, 40 и 60%.
Типичным примером ЭП, работающего в повторно-кратковременном режиме, является грузоподъемное устройство.
Приводные ЭД могут быть постоянного и переменного тока.
В настоящее время на судах морского флота широкое распространение получили ЭД переменного суда (3-фазные асинхронные),
двигатели постоянного тока находят ограниченное применение.
При выборе параметров ЭД, приводящего в движение рабочий
механизм, существенное значение приобретает изучение вопросов
о совместном действии вращающих моментов, развиваемых ЭД,
и моментов сопротивления самого механизма. Вследствие этого
изучение основ теории электропривода базируется прежде всего на
основных сведениях, известных из механики.
Потребляемая из сети мощность ЭД, работающего в системе
электропривода с рабочим механизмом, расходуется при постоянной скорости движения механизма на преодоление статической
нагрузки, & при изменении этой скорости -динамической нагрузки
во всех движущихся элементах электропривода. Работа ЭП при
равномерном движении называется работой в установившемся режиме, а при неравномерном (ускорении, замедлении)-в неустановившемся, или переходном, режиме.
Статическая нагрузка обусловливается при этом как моментом
статического сопротивления на валу рабочего механизма, так и силами сопротивления трению в передачах, соединяющих вал ЭП
с валом механизма. Динамическая нагрузка определяется динамическим моментом, обусловленным изменением скорости всех движущихся элементов системы электропривода и связанным с изменением запаса кинетической энергии в них.
Характер изменения моментов сопротивления на валу рабочего
механизма может быть различен для разных механизмов. В простейшем случае момент статического сопротивления механизма
практически постоянен. Например, для ЭД грузового крана, когда
момент, развиваемый ЭД, преодолевает при определенной грузоподъемности крана постоянный момент статического сопротивления, определяемый массой груза и радиусом барабана механизма
подъема. Постоянным моментом статического сопротивления обладают механизмы с преобладанием момента трения. В ряде
случаев момент статического сопротивления рабочего механизма
зависит от скорости движения последнего. Это можно видеть на
9
примере вентилятора или центробежного насоса, у которых момент
статического сопротивления приблизительно пропорционален квадрату угловой скорости.
2. Статический и динамический моменты
Статический момент. Рассмотрим подробнее отдельные случаи
статической нагрузки. Во время работы ЭП в установившемся
режиме на движущиеся части привода и механизма оказывают
действие момент, развиваемый ЭД, и статический момент, создаваемый силами, действующими в механизме и передаче. Эти моменты
равны по абсолютному значению, но противоположны по направлению. Принято считать, что моменты, действующие согласно
направлению вращения вала ЭД, положительны, а направленные
навстречу ему-отрицательны. Поэтому алгебраическая сумма моментов в установившемся режиме равна нулю. Статический момент
создается нагрузкой рабочего органа механизма, выполняющего
полезную работу, и силами трения в самом механизме и передаче.
Различают реактивные и потенциальные (активные) статические
моменты.
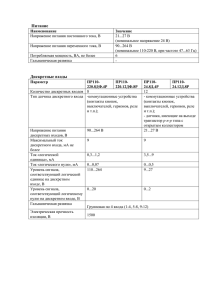
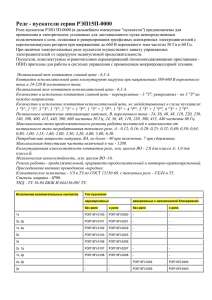
Реактивные моменты (рис. 1, а) создаются силами трения
в механизме и передаче и силами сжатия, растяжения или скручивания неупругих тел. Реактивные моменты всегда противодействуют
вращению ЭП, тормозят механизм и поэтому всегда отрицательны.
Потенциальные моменты (рис. 1, б) создаются силами тяжести
и силами сжатия, растяжения или скручивания упругих тел, т. е.
силами, изменяющими запас потенциальной энергии всей движущейся системы. Знак потенциальных моментов не зависит от направления вращения ЭП. Например, и при подъеме и при спуске
груза они направлены в одну сторону-в сторону спуска. Потенциальные моменты препятствуют подъему груза и способствуют
его спуску. В первом случае они направлены навстречу вращению
ЭП и потому отрицательны, а во втором совпадают с направлением
вращения ЭП и поэтому положительны.
Судовым механизмам в большей части присущи статические
моменты реактивного характера. К таким механизмам относятся:
насосы, компрессоры, вентиляторы, станки механической мастер5)
а>
а;
а>
ской и др. При работе ЭД с механизмами данного типа он всегда
развивает вращающий момент,
0
М
0
направленный
в сторону движе"с
ния механизма, и затрачивает его
на преодоление момента сопроРис. 1. Графики реактивного (а) и по- тивления. Эта работа соответствует двигательному режиму ЭД.
тенциального (б) моментов
0
10
Статические моменты грузоподъемных механизмов и якорношвартовных устройств являются в основном потенциальными.
Однако этим механизмам из-за сил трения в передаче свойственны
также и реактивные моменты. Действующий на вал ЭД статический
момент представляет собой алгебраическую сумму моментов, создаваемых рабочим органом машины и силами трения в кинематической передаче:
мс=-мр±мп,
где Мр) Мп - соответственно реактивный и потенциальный моменты.
Полный статический момент может быть как отрицательным,
так и положительным. Если ЭД работает на подъеме груза, то
потенциальный момент М п , создаваемый грузом, и реактивный
момент сил трения механизма являются отрицательными (тормозными) и в сумме создают нагрузку на ЭД, который при этом
развивает положительный движущий момент. Если же при работе
ЭД на спуск момент сил трения превышает создаваемый грузом
момент (статический момент отрицательный), то для опускания
груза необходимо, чтобы двигатель создавал направленный в сторону спуска движущий момент, который вместе с моментом,
создаваемым грузом, преодолевал бы момент сил трения. Такой
спуск называется силовым и осуществляется в грузоподъемных
механизмах при опускании ж нагруженного гака. При опускании
тяжелого груза, когда момент, создаваемый грузом, превышает
момент сил трения, статический момент положителен. В этом
случае электродвигатель, включенный на подъем, вместе с силами
трения создает тормозной (отрицательный) момент и ограничивает
скорость спуска. Таким образом, характер статической нагрузки
оказывает существенное влияние на работу ЭП. Поэтому при
выборе типа электропривода необходимо выяснить, какой из моментов преобладает в механизме-реактивный или потенциальный?
Это определяет режим работы ЭД-двигательный или тормозной.
Динамический момент. Механизмы, длительно работающие с
неизменной нагрузкой и постоянной скоростью, в практике встречаются редко (некоторые вентиляторы и насосы). В большинстве
случаев исполнительные механизмы и их электроприводы работают
с меняющейся нагрузкой, регулируемой скоростью, периодическими пусками и остановками. При переходе ЭП от одного установившегося режима к другому возникает переходный процесс, когда
угловая скорость, момент и другие параметры режима ЭД изменяются во времени. Состояние ЭП при переходном процессе называется переходным или динамическим режимом. Без переходных
процессов не обходится работа ни одного ЭП. При неустановившемся движении изменение скорости вызывает изменение запаса
кинетической энергии движущихся частей ЭД и механизма. Для
вращательного
движения запас кинетической
энергии (Дж) А =
2
2
= 7ю /2, где /-момент инерции, кг-м ; ю-угловая скорость, рад/с.
и
Момент инерции, характеризующий
инерционность вращаю2
щихся частей электропривода, / = тр , где т -масса вращающегося
тела, кг; р - приведенный радиус инерции относительно оси вращения, м. Соответственно изменение запаса кинетической энергии при
переходном процессе характеризуется динамической мощностью
(Вт) РДИН = сЫ/ёл При ^ = соп»! получим
со2
Так как при вращательном движении Р — Мю, то для рассматриваемого случая динамический момент (Н • м)
Мдяя = Лшн/й = ЛЬ/с1/.
(1)
Как видно из формулы (1), на динамическое усилие влияют
момент инерции вращающихся частей ЭП и их угловое ускорение.
Поэтому при выборе ЭП необходимы электродвигатели и схемы
управления ими, которые бы наиболее оптимально удовлетворяли
условиям эксплуатации и способствовали уменьшению динамических потерь.
3. Уравнение движения электропривода
Поведение ЭП при движении зависит от сил и моментов, действующих в механической части системы электропривод ^рабочая
машина, и от моментов инерции и масс движущихся частей системы.
Все эти параметры взаимосвязаны уравнением движения ЭП. Движение отдельных элементов системы может быть как поступательным, так и вращательным.
Согласно основам механики зависимость между . силами Р,
вызывающими движение, и силами сопротивления Рс , противодействующими движению, в случае поступательного движения выражается так: Р — Рс — тйи/ё/, где т -масса тел; сЬ/Ш-их ускорение. При установившемся движении, соответствующем постоянной
скорости, имеем Р = Рс.
Для вращательного движения, по аналогии с поступательным,
используют уравнение моментов
М - Мс = М<о/<11,
(2)
где М- вращающий момент, развиваемый электродвигателем привода;
Мс момент сопротивления; /йсо/ёг = Мдян.
Из формулы (2) получим
М = Мс +
Это уравнение показывает, что разваваемый ЭД момент уравновешивается статическим и динамическим моментами.
12
Как отмечалось выше, моменты ЭД и моменты сопротивления
могут совпадать с направлением движения или быть направленными против него, поэтому анализ работы ЭП удобно проводить
по изменению динамического момента, направление которого всегда
совпадает с направлением ускорения электропривода. Анализируя
уравнение (2), рассмотрим 3 возможных состояния вращающегося
ЭП, считая статический момент реактивным.
1 . Момент ЭД больше статического момента: М > Мс. В этом
случае динамический момент положителен, т. е. /ёсо/с!/ > 0. Следовательно, угловое ускорение с1ю/с1г > 0. Это означает, что происходит
ускорение (разгон) ЭП.
2. Момент ЭД меньше статического момента: М < Мс . В этом
случае динамическиъй момент отрицателен, следовательно, <1со/<1? < 0.
Это означает замедление (торможение) ЭП.
3. Момент ЭД равен статическому моменту: М = М С . В этом
случае динамический момент и, следовательно, угловое ускорение
равны нулю, т. е. вал ЭП вращается с постоянной угловой скоростью. Очевидно, что ЭП работает в установившемся режиме.
Если статический момент в основном потенциальный, то могут
быть и другие случаи. Рассмотрим, к примеру, работу электропривода грузовой лебедки. Для режима подъема груза сделанные выше
выводы для различных соотношений М и Мс остаются в силе, но
при спуске груза получается иное. Если момент ЭД направлен
в сторону спуска, то уравнение движения приобретает вид
М + Мс =
и независимо от соотношения значений момента ЭД и статического
момента динамический момент оказывается положительным -происходит ускорение ЭП.
Если момент ЭД направлен в сторону подъема, то уравнение
движения будет иметь следующий вид:
- М +М =
Здесь также возможны 3 случая.
1. Момент ЭД больше статического момента: М > Мс. Тогда
динамический момент отрицателен и происходит замедление ЭП,
в то время как при реактивном статическом моменте такое соотношение моментов приводило к ускорению.
2. Момент ЭД меньше статического: М < М С . В этом случае
динамический момент положителен и ЭП ускоряется, а не замедляется, как было при реактивном моменте.
3. Момент ЭД равен статическому: М = М с . Здесь, как и при
реактивном моменте, динамический момент равен нулю и происходит движение с постоянной скоростью.
Уравнение движения привода дает возможность определить
в переходных режимах зависимости момента, тока и скорости от
времени, а также провести анализ работы ЭД при неустановившем)3
ся процессе и дать рекомендации но его оолее надежной эксплуаг
тации. Особое значение уравнение движения имеет для ЭП, работающих с частыми пусками и остановками.
4. Приведение вращения элементов электропривода к одной оси
Уравнение движения ЭП в рассмотренном виде справедливо,
если оно применяется для системы, состоящей из элементов, вращающихся вокруг одной оси с одинаковой угловой скоростью,
например для электровентилятора, рабочее колесо которого закреплено непосредственно на валу ЭД. Однако часто между электродвигателем и механизмом помещается промежуточная передача
зубчатый редуктор. В этом случае угловые скорости вращающихся
элементов электродвигателя, механизма и передачи различим и
вращение их происходит вокруг разных осей. Для исследования
движения такой системы необходимо составлять уравнения движения для каждого отдельного элемента и, кроме того, учитывать
влияние каждого элемента на другой. Практически это весьма
затруднительно. Поэтому в таких случаях реальную систему заменяют простейшей, так называемой приведенной системой, состоящей
только из одного элемента, вращающеюся со скоростью ротора ЭД
вокруг его оси, и оказывающей при этом такое же влияние на режим
работы ЭД, какое оказывает на него реальная система.
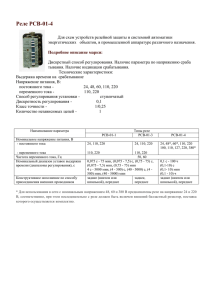
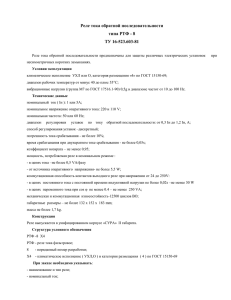
В системе, состоящей исключительно из вращающихся элементов (рис. 2, а), приведем действующие в ней статические моменты
и моменты инерции к валу ЭД. Сначала сделаем это со статическим
моментом. В установившемся режиме вращающий момент ЭД
равен статическому моменту на его валу. Очевидно, что и мощность,
развиваемая электродвигателем, равна статической мощности на
его валу. Последняя отличается от статической мощности на валу
механизма М из-за потерь на трение в передаче. Эти потери
учитываются коэффициентом полезного действия передачи. На
основании изложенного определим значение статического момента
на валу ЭД.
Статическая мощность (Вт) на валу электродвигателя
Рс = Мс(о,
где Мс - статический момент на валу ЭД, Н • м; со угловая скорость вала
ЭД, рад/с.
Статическая мощность (Вт) на валу механизма
П.м = Мс.мш ,
где Мсм-статический момент на валу механизма, Н м; сом-угловая скорость механизма, рад/с.
Так как Рс = Рс.м/т\п, где г|п-коэффициент полезного действия
передачи, то
14
Мсю = М см ю м /Л„.
Отсюда
М
с = Мс^(йм/(Цп&).
Обозначим со/шм = /', где г -передаточное число от ЭД к механизму, и подставим I в предыдущее уравнение. В результате
получим приведенный статический момент ^ _ ^ //г-_ ^
Если передача от ЭД к механизму состоит из нескольких элементарных передач с передаточными числами г\ , /2 , /3 , . . . , \
и коэффициентами полезного действия соответственно г|п1 , г|п2 ,
Лпз ' • • • ' ^п* 'то общее передаточное число передачи / = 1^ /2 г'3 х . . .
х \, а полный КПД передачи г\ = т|п1 г|п2 г)п3 х ... х г\пН.
Выведенное выражение приведенного статического момента
справедливо для случая двигательного режима ЭП, в котором
потери в передачах преодолеваются ЭД. Для случая генераторного
режима, когда потери в передачах преодолеваются движущим
статическим моментом механизма, это выражение приобретает
другой вид:
где Т1'П-КПД передачи в этом режиме.
В общем случае г|'п -Ф г) п . С достаточной точностью г)'п может
быть определен из соотношения г|'п = г) — 1/г|п .
Теперь рассмотрим способ приведения моментов инерции. Кинетическая энергия вращающейся системы, состоящей из ЭД, передачи и механизма, равна сумме кинетических энергий каждого
элемента системы:
Выразим значения кинетической энергии элементов системы
через моменты инерции:
Т= ^(0'|'2 -!- /,со?/2 + ^2^й^|2 + ... + ./Х/2,
глс ^ и о соответственно момент
инерции и угловая скорость якоря
(ротора) ЭД и элементов, находящихся на его валу; ^^, ... , ^I, и со, ,
. . . , а\ -соответственно моменты
инерции и угловые скорости остальных элементов системы (см. рис. 2, а).
Заменим динамическое действие всех элементов системы динамическим действием одного Рис 2
сосредоточенного Элемента, Вра- - Приведение
моментов инерции
П И
вдающегося с угловой скоростью
Р вращательном движении:
| - 1 т т / л / - \ » ж
а- схема системы; б -приведенная
вала ЭД (рис. 2, б). Массу и
система
15
момент инерции этого элемента подберем так, чтобы кинети/
ческая энергия всей системы при такой замене оставалась неизменной:
Т= .7прш2/2,
где /пр - приведенный момент инерции.
Приравняв правые части двух последних выражений
^ар(й2/2 = 7о>2/2 + ^1к^21/2 + ^2(а22/2 + ... + /Х/2
и разделив почленно на ю2/2, получим
где со/о)! = /г передаточное число от ЭД к первому элементу системы
(считая от электродвигателя к промежуточному валу передачи); со/о, =
= к>(й1/(&1к>2) = /5/2 (здесь /2- переда точное число от первого элемента
системы ко второму); со/со4 = (со/со1)(ю1/со2)(ю2/Юз).. .(га^-х/ю^) = 1^21Ъ х ...
... х 4(здесь 1 1 , ... , /4- передаточные числа от каждого предыдущего элемента системы к последующему, см. рис. 2, а.
Подставив передаточные числа в предыдущее выражение, получим приведенный момент инерции
Л.Р = ЛЛ2 + .//(«•? «1) + • • • + ЛЛФ1 • • • Ч) •
В выражении (3) основное влияние оказывают момент инерции
электродвигателя и вращающиеся элементы системы, находящиеся
с ним на одном валу (первый член правой части уравнения).
Влияние моментов инерции остальных элементов тем меньше, чем
больше передаточные числа к ним от предыдущих элементов
системы, т. е. чем меньше их угловая скорость.
5. Определение времени пуска и торможения
Рассмотрим влияние моментов инерции на длительность протекания процессов пуска и торможения ЭД. Предположим, при пуске
ЭД развивает неизменный на всем протяжении переходного процесса вращающий момент М и статический момент на его валу М с
в это время также не изменяется, т. е. М = сопяг, Мс = сопзг. Это
частный случай пуска. В общем случае оба момента во время пуска
могут изменяться по значению. Предположим также, что разгон ЭД
происходит от начальной скорости, равной нулю, до конечной,
установившейся, угловой скорости, равной номинальной сон.
Определение времени переходных режимов основано на интегрировании уравнения движения привода (2). Разделив переменные, получаем
ё/ = 7с1ю/(М - Мс).
16
(3)
Время, необходимое для изменения скорости от (ог до ю 2 ,
ы
2
)/(М - Мс) или ?ц 2 = /(со2 - (яг)1(М - Мс).
1
Подставим частные значения для скорости при пуске сох = О
и га2 = сон , определим время пуска ЭД
/в = 7юн/Ш - Мс) = 7юн/Мдин .
(4)
Входящая в выражение (4) разность М — Мс называется избыточным моментом. Чем больше избыточный момент, тем меньше
время разгона ЭД. При неизменном на протяжении пуска статическом моменте Мс разгон происходит тем быстрее, чем больший
вращающий момент М развивает ЭД.
Определим время /т торможения электродвигателя от угловой
скорости юн до полной остановки (со = 0) в случае отключения его
от питающей сети (М = 0) и в предположении, что в процессе
торможения статический момент остается неизменным (Мс = соп81).
Это будет частный случай торможения. Уравнение движения (2) при
принятых условиях приобретает такой вид:
М =
При решении данного уравнения время торможения
?г = .7м„/Мс.
(5)
Рассматривая выражение (4) и (5), заключаем, что длительность
переходных процессов пуска и торможения находится в прямой
зависимости от момента инерции. Чем он больше, тем дольше
продолжается разгон ЭД и тем больше время торможения.
Для механизмов, работающих в режимах с частыми пусками
и остановками, важно уменьшить длительность переходных процессов с целью повышения их производительности. Поэтому для
привода этих механизмов применяют специальные, так называемые
крановые ЭД, у которых якоря или роторы имеют большую длину
и соответственно меньший диаметр, чем у нормальных ЭД той же
мощности и такой же номинальной частоты вращения. Вследствие
этого при примерно одинаковой массе якоря или ротора момент
инерции крановых ЭД, пропорциональный квадрату диаметра инерции, в свою очередь пропорционального диаметру якоря или
ротора, оказывается меньше на 20-30%, чем у нормальных ЭД,
а это способствует уменьшению времени переходных процессов.
Контрольные вопросы-задания
1.
2.
3.
4.
5.
Как классифицируются ЭД по исполнению?
Что такое статическая нагрузка?
Напишите уравнения движения ЭД для различных режимов.
Для чего необходимо приведение моментов инерции?
;.
Какие параметры влияют на время торможения электропривода
.....
Глава 2
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
6. Механические характеристики электродвигателей
и механизмов
Механическая характеристика электродвигателя-зависимость
угловой скорости ЭД от момента на его валу: со (М). У большинства
ЭД (кроме синхронных) с увеличением нагрузки на валу угловая
скорость уменьшается. Характер изменения угловой скорости двигателя с изменением момента сопротивления определяет жесткость
механической характеристики. По степени жесткости различают
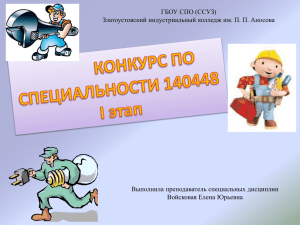
механические характеристики трех видов (рис. 3): абсолютно жесткие, жесткие и мягкие.
Абсолютно жесткие характеристики присущи синхронным двигателям (прямая 7). При изменяющемся моменте в пределах перегрузочной способности угловая скорость этих ЭД не изменяется.
Жесткими характеристиками обладают ЭД постоянного тока
параллельного возбуждения (наклонная прямая 2) и асинхронные
электродвигатели в пределах рабочей части их характеристик
(верхняя часть кривой .?). У этих ЭД при значительном изменении
момента ст-оросто изменяется в малой степени.
Мя?гче характеристики свойственны ЭД постоянного тока последовательного (кривая 4), смешанного возбуждения (кривая 5) и
-Мс=сопз1:
О
М
Рис. 3. Механические характеристики
электродвигателей
18
Рис. 4. Механические характеристики механизмов
ЭД в системе ГД с иротивокомпаундной обмоткой. Механические
характеристики этих ЭД таковы, что при небольшом изменении
момента происходит значительное изменение их угловой скорости.
Степень жесткое)и механической характеристики является одним из основных электромеханических свойств ЭД.
Наряду с механическими характеристиками электромеханические свойства ЭД отражают также электромеханические характеристики, являющиеся одним из видов рабочих характеристик и представляющие собой зависимость угловой скорости ЭД от тока,
протекающего по цепи его якоря или ротора: ю(/). Механические и
электромеханические характеристики ЭД разделяют на естественные и искусственные.
Естественной характеристикой называется характеристика, соответствующая работе ЭД при номинальных параметрах питающей
сети, нормальной схеме подключения к ней и при отсутствии
добавочных сопротивлений в цепях электродвигателя. Каждому ЭД
присуща только одна естественная характеристика.
Искусственные характеристики получаются при питании ЭД от
сети с напряжением или частотой, отличающимися от номинальных, или при включении в одну из цепей ЭД добавочного резистора,
или если ЭД подключен к источнику тока по необычной схеме. Для
каждого ЭД можно создать неограниченное количество искусственных характеристик. Работа на них происходит при пуске, регулировании частоты вращения и торможении ЭД.
При рассмотрении работы ЭД, приводящего в движение механизм, необходимо также принимать во внимание механическую
характеристику механизма, ибо от степени их соответствия зависят
условия эксплуатации двигателя.
Механической характеристикой механизма называется зависимость создаваемого им приведенного статического момента от
угловой скорости ЭД: Мс(со). По характеру этой зависимости
большинство судовых механизмов можно разделить на две основные группы (рис. 4):
1. Механизмы с не зависящим от угловой скорости статическим
моментом Мс — сопз1 (прямая /). К этой группе механизмов относятся грузоподъемные лебедки, краны, лифты, поршневые насосы
и компрессоры.
2. Механизмы, у которых статический момент зависит от
квадрата угловой скорости: М с = М0 + ею2. Механическая характеристика этих механизмов изображается в виде параболической
кривой 2, не проходящей через начало координат. Их начальный
статический момент обозначается через М0 и обусловлен трением
в подшипниках и другими потерями. К механизмам, обладающим
такой характеристикой, называемой вентиляторной, относятся
вентиляторы, центробежные насосы и гребные винты.
Сравнивая механические характеристики, нетрудно увидеть, что
для механизмов с характеристикой / необходимы ЭД, способные
19
а)
О)
<>>СЗ
О
м;мс
Рис. 5. Совмещенные механические
элсктро двигате:! я
М;мс
характеристики механизмов
и
развивать большой пусковой момент, а для механизмов с характеристикой 2 приводные ЭД могут развивать меньший момент.
Располагая механическими характеристиками ЭД и механизма,
легко найти значение угловой скорости ЭД при установившемся
режиме работы привода. Поскольку в этом режиме система привода находится в состоянии равновесия, т. е. М — М с , очевидно, что
установившаяся скорость сос будет определяться точкой пересечения
механических характеристик. Например, для характеристики 1 двигателя (рис. 5, а) и характеристик 2 и 3 механизмов установившимися скоростями будут сос2 и оо с3 . Если же механические характеристики ЭД и механизма не пересекаются, то установившийся
режим работы привода в этом случае невозможен. Следует иметь в
виду, что не в любой точке пересечения характеристик со(М) и
ю(М с ) работа ЭП может быть устойчивой. Например, на рис. 5,6
механические характеристики ЭД и механизма пересекаются в
точках установившегося режима <ас и сое. Однако точка (о'с соответствует неустойчивому установившемуся режиму. В этом можно
убедиться следующим образом. Пусть под действием какой-либо
внешней причины система привода будет выведена из состояния
равновесия в точке к/, (в этой точке происходит колебание скорости
+ Асо'). Тогда при со > к>'с появится динамический момент Мдин =
= М — Мс > 0 и скорость станет еще более возрастать. При со < а>'с
значение М дин = М — Мс < 0, поэтому скорость будет продолжать
снижаться. Напротив, точка сос является точкой устойчивого установившегося режима. Действительно, при отклонении угловой скорости + Асо от значения сос возникает динамический момент Мдин,
который будет положительным при со < сос и отрицательным при
со > сос. Положительный динамический момент при уменьшении
скорости и отрицательный при ее возрастании обеспечит возврат
системы привода в точку сос.
20
Таким образом, вид механических характеристик ЭД и механизма существенно влияет на характер переходных процессов, и
это необходимо принимать во внимание при эксплуатации ЭП.
7. Двигательный и тормозной режимы
Анализ статической и динамической нагрузки ЭД показал, что
в процессе работы вращающий момент, развиваемый ЭД, может
быть для привода движущим или тормозным. Для ЭП также
свойственны 2 направления вращения. Исходя из этого при изображении механических характеристик ЭД в прямоугольной системе
координат одно из направлений вращающего момента ЭД и его
угловой скорости принимают условно положительным и откладывают положительное значение скорости вверх, а положительное
значение момента - вправо от начала координат (рис. 6).
Так как мощность ЭД пропорциональна произведению момента
и скорости, то, следовательно, при положительных значениях
сомножителей мощность также положительна и направлена от ЭД
к механизму. Этому режиму работы соответствует механическая
характеристика ЭД, расположенная в первом квадранте. Мощность
ЭД также будет положительна и направлена о I ЭД к механизму при
противоположных значениях момента и угловой скорости (— М,
— со). Механическая характеристика ЭД, работающего при данном
значении момента и скорости, расположена в третьем квадранте.
Подобный режим, когда мощность передается от электродвигателя
к механизму, называется двигательныАг. Для двигательного режима
характерно, что момент сопротивления механизма в основном
направлен против момента ЭД, а если направлен согласно, то имеет
значительно меньшее значение по сравнению с вращающим моментом ЭД. Большинство судовых ЭД работают только в дви+0)
гательном режиме.
I
п
Если направление момента
ЭД изменилось, например вследствие изменения направления тока в его обмотках, а направление
скорости осталось прежним, н>
0
мощность ЭД стала отрицатель- -м
ной, направленной от механизма
к ЭД. Электродвигатель развивает момент, который направлен
против вращения привода, и поэтому такой режим называется
,„
тормозным.
Тормозной
'
г
грежим _Рис. о.
Расположение механических ха-
)
возможен ИЛИ при
замедлении,
когда движение в том же нанрав-
ракгеристик в четырех квадрантах
21
лении поддерживается посредством накопленной кинетической
энергии, или вследствие каких-либо внешних сил, приложенных к
приводу (например, подвешенный груз). Когда движение поддерживается благодаря накопленной кинетической энергии и направление
вращения не изменяется, то благодаря тому, что изменил свое
направление момент, работе ЭД будет соответствовать механическая характеристика, расположенная в другом квадранте. Например, если двигательный режим соответствовал механической
характеристике двигателя, расположенной в первом квадранте, то
тормозной режим соответствует механической характеристике двигателя, расположенной во втором квадранте (со, — М).
Аналогично двигательному режиму, обеспечиваемому механической характеристикой, расположенной в третьем квадранте, соответствует тормозной режим ЭД, механическая характеристика
которого расположена в четвертом квадранте (—со, М). Тормозной
режим возникает и в том случае, когда при неизменном направлении момента ЭД под действием внешних сил меняется направление
вращения (мощность ЭД также становится отрицательной и направлена от механизма к электродвигателю). Механические характеристики ЭД будут также расположены во втором и четвертом
квадрантах. Подробно процессы электрического торможения будут
рассмотрены в пп. 9 и 14.
8. Механические характеристики
в двигательном режиме
электродвигателей
Электродвигатели параллельного возбуждения. В установившемся режиме напряжение (7, приложенное к цепи якоря ЭД,
уравновешивается ЭДС якоря Е и падением напряжения в якорной
цепи 1К (рис. 7):
и = Е + 1К,
(6)
где К = Кя + /?д- сопротивление цепи якоря, в общем случае состоящее из
сопротивления якоря и добавочного сопротивления резистора Кл.
Выражение (6) называется уравнением равновесия электродвижущих сил, его можно представить так:
1 = (и- Е)/К.
(7)
Возникающая в магнитном поле ЭДС (В)
Е = /сФсо,
(8)
где /с = /?Л7(2тм)-постоянный коэффициент, зависящий от конструкции ЭД
(здесь р число пар полюсов ЭД; N число активных проводников обмотки
якоря; а число пар параллельных ветвей обмотки якоря); Ф -магнитный
поток возбуждения, Вб; со-угловая скорость ЭД, рад/с;
Если в уравнение (6) подставить значение Е из формулы (8). то
при преобразовании получим выражение для скорости двигателя
22
со = (V - Ш)/(Щ.
(9)
При неизменных напряжении,
потоке возбуждения и сопротивлении цепи якоря выражение (9)
представляет собой зависимость
угловой скорости ЭД от тока нагрузки: о>(7), которую называют
электромеханической характеристикой ЭД.
Для получения уравнения механической характеристики необходимо найти зависимость угловой Рис. 7. Схема подключения электродвигателя параллельного возскорости от момента ЭД. Врабуждения
щающий момент М электродвигателя, пренебрегая потерями на трение в подшипниках, вентиляционными потерями и потерями в стали, можно считать равным
электромагнитному моменту (Н-м):
М = Ш.
(10)
Разделив почленно числитель правой части уравнения (9) на
знаменатель и подставив в полученное выражение /, найденное из
выражения (10), получим
со = 1}/(Щ - МК/(Ь2Ф2).
(11)
При неизменных напряжении, потоке возбуждения и сопротивлении цепи якоря это выражение показывает зависимость угловой скорости ЭД от момента на валу [со (М)] и называется уравнением механической характеристики ЭД постоянного тока. Значение
&Ф, входящее в уравнение (11), тоже неизменно, и его можно
заменить коэффициентом с = &Ф, который принимается постоянным, если для обычных ЭД пренебречь реакцией якоря. Подставив
значение с в уравнение (11), получим уравнение механической
характеристики ЭД параллельного возбуждения
со = и/с - МК/с2.
(12)
Введем понятие идеального холостого хода, под которым будем
понимать режим работы ЭД с моментом М = О и потребляемым
током / = 0. Угловая скорость при идеальном холостом ходе,
называемая скоростью идеального холостого хода, будет [11]:
<в0 = [7//сФ или со о = и/с.
(13)
Тогда угловая скорость со электродвигателя, которую он развивает при моменте М, можно представить как разность скорости
со0 идеального холостого хода и величины Лео = МК/(к2Ф), которая
характеризует крутизну механической характеристики:
со = со0 — Асо.
23
Из уравнения (11) видно, что механическая характеристика
выражает пропорциональную зависимость между со и М. Следовательно, на графике эта характеристика изобразится прямой линией
с наклоном к оси М (рис. 8). Подставив выражение (13) в формулу
(12), получим другой вид уравнения механической характеристики:
со = ю0 - МК/с2.
(14)
При со = 0 момент М = с11/К и называется моментом стоянки
МСТ = сП/К.
(15)
Механическая характеристика (рис. 8, а) построена по двум точкам с координатами М = О, со = ю 0 и с о = 0;М — Мст. Тангенс угла
наклона прямой, изображающей характеристику, к оси абсцисс
1§ а = ш0/Мст = (С7/с):(с1//Л) = К/с2.
Из последнего выражения следует, что наклон характеристики к
оси абсцисс, а следовательно, и ее жесткость зависят от сопротивления цепи якоря. Если в цепи якоря нет добавочных резисторов, то
тангенс угла наклона и сам угол приобретают наименьшее значение.
Следовательно, естественная характеристика ЭД наиболее жесткая.
При введении в цепь якоря добавочных резисторов угол наклона
характеристик увеличивается. Получается семейство искусственных
характеристик, причем каждому значению сопротивления добавочного резистора соответствует определенная характеристика, тем
более мягкая, чем больше сопротивление (рис. 8,6). Все характеристики пересекаются с осью ординат в одной точке со0, так как
угловая скорость идеального холостого хода, что видно из выражения (13), не зависит от сопротивления цепи якоря.
Момент стоянки Мст существенно зависит от сопротивления
цепи якоря, что следует из выражения (15). Чем меньше сопротивление, тем больше момент стоянки. Если в цепи якоря нет
а)
5)
М
'н
Рис. К. Механические характеристики электродвигателя параллельного возбуждения:
а без учета реакции якоря в облает больших нагрузок;
о- искусственные (1 -3) ч естественная (4)
24
и
а=
Рис. 9. Электродвигатель последовательного возбуждения:
а схема подключения; б механические характеристики при различных сопротивлениях
добавочного резистора, то момент стоянки приобретает значение,
во много раз превосходящее значение номинального момента.
Соответственно моменту увеличивается и ток стоянки. Работать
при таких нагрузках ЭД практически не могут. Поэтому их механические характеристики изображают только в рабочей части, г. е. при
реальных моментах, не превышающих (2,0 -- 2,5) Мн. В этом случае
масштаб моментов, откладываемых при построении характеристики на оси абсцисс, изменяется по сравнению с масштабом, принятым на рис. 8, а, и та же естественная характеристика приобретает в
другом масштабе вид, показанный на рис. 8, б (характеристика 4).
Ток стоянки возникает при остановке ЭД, вследствие перегрузки
или в начальный период пуска. В последнем случае, когда ЭД
неподвижен (ю — 0), его ЭДС Е = Фю = 0, пусковой ток /„ = 11/К.я
достигает очень больших значений (в 10-20 раз превышают номинальное). Для ограничения гока в цепь якоря ЭД при пуске
вводят пусковой резистор /?п, благодаря которому значение тока
/п = [//(-/?„ + ^п) уменьшается. При ускорении ЭД возникшая в нем
ЭДС Е — &Фш увеличивается, а ток якоря 1 = 1} — Е/(КЯ + /?п)
уменьшается. Когда ЭД выходит на номинальную частоту вращения, ток в цепи якоря уменьшится до номинального значения и
пусковой резистор /?п выводят. Из-за жесткости механической
характеристики и неспособности выдерживать большие перегрузки
ЭД параллельного возбуждения находят ограниченное применение
на судах, электрифицированных на постоянном токе, в качестве
электроприводов механизмов машинного отделения и приводных
ЭД преобразователей.
Электродвигатели последовательного возбуждения. Ток, протекающий по якорю ЭД данного типа, является в то же время и
током возбуждения (рис. 9, а). Поэтому намагничивающая сила,
создаваемая обмоткой возбуждения ЬМ, у этих электродвигателей
не постоянна, как при параллельной обмотке возбуждения, а зависит от значения тока якоря. Кроме того, полная намагничивающая сила зависит не только от намагничивающей силы возбуждения, но и от размагничивающей силы реакции якоря, в свою очередь
25
зависящей от тока якоря: Р = Рв — Рр.я, где .Рв-намагничивающая
'сила возбуждени.; Рр.я~размагничивающая сила реакции якоря.
Вследствие явления насыщения зависимость магнитного потока
от намагничивающей силы ЭД последовательного возбуждения
невозможно представить в виде математической формулы, т.е.
аналитически. В практических расчетах для построения характеристик этих ЭД применяют графические и графоаналитические
методы, используя в качестве исходных данных универсальные
естественные характеристики ЭД, которые приводятся в каталогах
заводов-изготовителей. Эти характеристики получают на заводах
опытным путем, испытывая готовые ЭД на стенде. Обычно заводы
дают характеристики со (7) и М (I), которые выражают в процентах
или относительных единицах. По этим двум характеристикам можно легко построить механическую характеристику ю(М) в процентах. Зная номинальные параметры ЭД, можно построить механическую характеристику и в абсолютных значениях, помня, что за
100% угловой скорости принимается номинальная, т.е. еон. Полученные характеристики отражают зависимость между угловой
скоростью и моментом более точно, чем характеристики ЭД параллельного возбуждения, построенные по уравнению, так как последнее учитывает связь угловой скорости с электромагнитным моментом, а заводские характеристики-с механическим моментом,
фактически действующим на валу.
Как видно из рис. 9,6, естественная характеристика ЭД последовательного возбуждения весьма мягкая, особенно при нагрузках,
меньших, чем номинальная. При большом уменьшении нагрузки
угловая скорость ЭД чрезмерно увеличивается, а при идеальном
холостом ходе, как это видно из уравнения (9), становится бесконечно большой (/ = 0; Ф = 0; со = оо). В реальных условиях, даже если
нагрузка на валу отсутствует, в ЭД имеются потери на трение и на
вентиляцию. Поэтому ток в цепи якоря не равен нулю. Кроме того,
в магнитной системе ЭД сохраняется небольшой поток остаточного
намагничивания, и при холостом ходе ЭД вращается с некоторой
конечной угловой скоростью, но в 5-6 раз превышающей номинальную. При такой угловой скорости действие центробежных
сил может привести к разрушению ЭД. Это явление называют
разносом двигателя.
Искусственные характеристики ЭД последовательного возбуждения (рис. 9, б) при включении в цепь якоря добавочных резисторов
проходят ниже естественной, что объясняется снижением угловой
скорости из-за дополнительного падения напряжения на добавочном резисторе. Характеристики тем мягче, чем больше сопротивление добавочного резистора.
При большом пусковом токе /„ = 11/(Кя + -Яп) в момент пуска
ЭД создает большой магнитный поток ф в последовательной
обмотке возбуждения, благодаря чему ЭД способен развивать
большой пусковой момент Мп = ЫПФ. Это свойство позволяет
26
Рис.
10. Электродвигатель смешанного возбуждения:
а -схема подключения; б механические характеристики
широко использовать ЭД последовательного возбуждения на судах
в качестве стартера для пуска аварийных дизель-генераторов.
Электродвигатели смешанного возбуждения. В отличие от ЭД
параллельного и последовательного возбуждения ЭД смешанного
возбуждения (рис. 10, а) снабжен двумя обмотками возбуждения:
параллельной ЬМ1 и последовательной ЬМ2. Магнитный поток ЭД
создается суммой намагничивающих сил этих обмоток за вычетом
намагничивающей силы реакции якоря. Намагничивающая сила
параллельной обмотки не зависит от нагрузки ЭД, а намагничивающие силы последовательной обмотки и реакции якоря прямо
пропорциональны току нагрузки. Магнитный поток возбуждения,
так же как у ЭД последовательного возбуждения, является функцией тока якоря. Причем из-за наличия параллельной обмотки этот
ток влияет на поток возбуждения в меньшей степени, чем в ЭД
последовательного возбуждения. Поэтому по жесткости электромеханические и механические характеристики ЭД смешанного возбуждения являются промежуточными между характеристиками ЭД
последовательного и параллельного возбуждения.
Жесткость характеристик зависит от соотношения намагничивающих сил обмоток возбуждения (рис. 10. б). У нормальных ЭД
при номинальном токе якоря намагничивающие силы обеих обмоток равны между собой (кривая 2). Если намагничивающая сила
последовательной обмотки ЭД больше намагничивающей силы
параллельной, то его характеристики смягчаются по сравнению с
характеристиками нормального ЭД смешанного возбуждения (кривая 3), а если наоборот, то становятся более жесткими (кривая 7).
Различают ЭД смешанного возбуждения с легкой параллельной и
с легкой последовательной обмотками.
Намагничивающая сила последовательной обмотки возбуждения создается током нагрузки. Магнитный поток усиливается с
27
увеличением нагрузки на валу ЭД, при этом угловая скорость его
резко уменьшается, а затем, по мере насыщения магнитной системы, становится все более постоянной. Иными словами, ЭД со
смешанным возбуждением имеет более мягкую характеристику при
малых и более жесткую при больших нагрузках.
По сравнению с ЭД последовательного возбуждения ЭД смешанного возбуждения обладают весьма хорошим свойством: они не
идут вразнос при холостом ходе. При отсутствии тока в цепи якоря
магнитный поток у этих ЭД равен не нулю, а магнитному потоку
ф ш > создаваемому параллельной обмоткой возбуждения, и угловая
скорость в этом случае равна не бесконечности, а угловой скорости
идеального холостого хода
.
(16)
Скорость идеального холостого хода согласно формуле (16)
зависит только от магнитного потока Фш параллельной обмотки
возбуждения и не зависит от намагничивающих сил последовательной обмотки.
Аналитически выразить уравнение механической характеристики
ЭД смешанного возбуждения гак же трудно, как и ЭД последовательного возбуждения. При расчетах и проектировании ЭП с
двигателями смешанного возбуждения пользуются экспериментальными данными завода-изготовш ел я -универсальными характеристиками со(/) и М(1).
9. Электрическое торможение
Электрическое торможение применяется в ЭП, имеющих частые пуски и остановки, а также регулирование частоты вращения.
Благодаря электрическому торможению выполняю гея следующие
функции:
осуществляется переход ЭП с большей угловой скорости на
меньшую;
ограничивается угловая скорость ЭП, когда он работает в
тормозном режиме;
достигаются экстренные остановки.
Для ЭД постоянного тока существуют следующие способы
электрического торможения: рекуперативное; динамическое; противовключением (противотоком).
Рекуперативное торможение. Рекуперация это отдача электроэнергии электродвигателем обратно в питающую сеть. Рекуперативный режим с отдачей энергии в сеть происходит в том случае,
когда якорь ЭД под действием запаса кинетической энергии инерционных, масс привода и механизма или потенциального статического момента вращается со скоростью о> > со0 в ту же сторону,
что и в двигательном режиме для данного направления вращения.
28
Этот режим может происходить, например, при спуске тяжелого
груза грузоподъемным механизмом. Работая в рекуперативном
режиме, ЭД преобразовывает сообщаемую ему механизмом энергию в электрическую и возвращает ее в сеть. При этом он развивает
отрицательный (тормозной) момент.
Процесс перехода ЭД из двигательного режима в режим рекуперативного торможения можно рассмотреть на примере ЭД
параллельного возбуждения, приводящего в движение грузоподъемный механизм или какой-либо другой механизм с потенциальным
статическим моментом.
При включении ЭД на спуск тяжелого груза или при наличии
каких-либо других внешних воздействий, направленных в сторону
движения, угловая скорость якоря ЭД постепенно увеличивается.
Возрастание угловой скорости вызывает увеличение ЭДС, что
приводит к уменьшению тока якоря I = (V — Е)/К., соответственно
уменьшается вращающий момент ЭД (рис. 11, квадранты / и ///).
При угловой скорости со = со0 ток, потребляемый ЭД, равен нулю,
так как напряжение сети уравновесится противоЭДС обмотки якоря
V = Е = &Фсо0. Эта скорость идеального холостого хода является
неустойчивой: когда под влиянием внешних воздействий она станет
больше со0, то ЭДС станет больше приложенного напряжения.
Из уравнения (7) видно, что в этом случае ток якоря
I = (V — Е)/К = —(Е — Щ/Я, станет отрицательным. В результате
изменения направления тока меняет направление и момент ЭД,
который для вращающегося в прежнем направлении привода является тормозным:
Мт = Ш> = - /с 1(Е - и)/К] Ф.
С увеличением угловой скорости тормозной момент ЭД увеличивается. Ускорение якоря ЭД в генераторном режиме прекращается, когда при определенном значении скорости тормозной момент
настолько возрастет, что уравновесит момент сопротивления,
ускорявший до этого вал ЭП.
При переходе с двигательного режима на тормозной схема
подключения ЭД к сети и его параметры не изменялись. Поэтому
для режима рекуперативного торможения ЭД параллельного возбуждения можно воспользоваться уравнением механической характеристики (12), подставив в него ют вместо ш и Мт вместо М:
сот = и/с + МтК/с2.
(17)
Анализируя это выражение, видим, что при увеличении сопротивления К угловая скорость в тормозном режиме при том же
моменте не уменьшается, как в двигательном, а увеличивается.
Механические характеристики ЭД (естественная и искусственная),
соответствующие уравнению (17), показаны на рис. 11. Они являются продолжением механических характеристик ЭД в двигательном
29
режиме и проходят в квадранте
/ V при спуске груза и в квадранте
Я при движении электротранспорта в направлении вперед под уклон.
Рекуперативное торможение
ЭД последовательного возбуждения при нормальной схеме подключения к сети неосуществимо
ввиду
невыполнения условия
ю > о)0. При рекуперативном торможении ЭД смешанного возбуждения вследствие изменения направления тока в последовательной обмотке ее намагничивающая сила действует встречно наРис. 11. Механические характеристики
магничивающей силе параллельэлектродвигателя параллельной обмотки и размагничивает
ного возбуждения при рекупеЭД.
Вследствие этого тормозной
ративном торможении
момент значительно уменьшается: торможение происходит при
недопустимо больших угловых скоростях. Поэтому на время торможения последовательную обмотку либо выключаю! из цепи
якоря (магнитный поток ЭД создается только одной параллельной
обмоткой), либо подключают параллельно с якорем. В этом случае
механические характеристики получаются такими же, как при рекуперативном торможении ЭД параллельного возбуждения.
Недостаток этого способа торможения большие тормозные
скорости. Достоинство- отдача электрической энергии в сеть. Однако при мощности грузоподъемного механизма, соизмеримой с
мощностью судовой электростанции, это приводит к повышению
напряжения судовой сети и отрицательно сказывается на работе
отдельных приемников, в первую очередь- сети освещения.
Динамическое торможение. Если отключить ЭП от питающей
сети, то он, вращаясь сначала но инерции, через некоторое время
остановится вследствие тормозящего действия отрицательного статического момента механизма и сил трения в самом ЭД. Этот
процесс называют свободным вращением. Подобный метод остановки приемлем для механизмов, работающих в длительном режиме. Однако для палубных механизмов, работающих с частыми
пусками и остановками, этот способ не годится. Наиболее эффективный вид электрического торможения ЭД постоянного тока —
динамическое торможение.
При динамическом торможении ЭД параллельного возбуждения
его якорь отключают от питающей сети и замыкают на резистор, а
параллельную обмотку продолжают по-прежнему питать о г сети
(рис. 12, а). В обмотке якоря, вращающегося но инерции в магнитном ноле возбуждения, продолжает индуцироваться ЭДС, вследст30
вне чего по обмотке и по резистору Кт динамического торможения
проходит ток. Таким образом, ЭД переходит в генераторный
режим, преобразовывая запасенную в нем при вращении кинетическую энергию в электрическую, которая расходуется на -нагрев
якоря и резистора. Так как вращение по инерции происходит
в прежнем направлении, знак ЭДС при переходе в генераторный режим не изменяется. Рассматривая выражение (7)
при (7 = 0, замечаем, что в этом режиме ток отрицателен:
Изменившийся по направлению ток создает противоположный
по направлению момент, который для вращающегося по инерции
якоря будет являться тормозным. Под действием этого момента
ЭД останавливается, и тем быстрее, чем момент больше. По мере
уменьшения угловой скорости снижаются ЭДС, ток и тормозной
момент. При полной остановке они равны нулю.
Подставив в выражение (12) (7 = 0, — М = Мт и К = В.я + Кг,
получим уравнение механической характеристики ЭД параллельного возбуждения при динамическом торможении:
Это уравнение прямой линии, проходящей через начало координат (при Мт = 0, сот = 0). Тангенс угла наклона этой линии
Чем меньше сопротивление 7?т, тем меньше угол а и тем
характеристика более пологая. На рис. 12, б в квадранте 77 показаны две характеристики 1 и 2 для разных значений тормозных
сопротивлений: 7?т1 > /?Т2. При одинаковой начальной угловой
скорости торможения еот тормозной момент получается большим
при работе на более пологой характеристике 2, т.е. при меньшем
сопротивлении. Наибольший тормозной момент получается при
замыкании обмотки якоря непосредственно на себя. Однако при
этом возникает ток, не допустимый по условиям коммутации.
Если включить неподвижный
ЭД по схеме динамического
торможения для направления
спуска, подключив обмотку возбуждения к сети и замкнув обмотку якоря на тормозное сопротивление, то при наличии положительного статического момента на валу ЯКОрЬ ЭД ПОД ДСЙСТВИ- Рис. 12. Динамическое торможение
ем ЭТОГО момента начнет враэлектродвигателя параллельЩаТЬСЯ В СТОРОНУ СПуСКа И СОЗДаСТ
ТОрМОЗНОИ МОМеНТ М т . Таким
Г™еГ^Ге!шя: б механические характеристики
31
способом можно осуществлять тормозной спуск тяжелых грузов
при ограниченной угловой скорости гог. Механическая характеристика 3, соответствующая указанному режиму работы, показана на
рис. 12, б в квадранте IV. Силовой спуск легких грузов при работе на
этой характеристике невозможен.
Динамическое торможение ЭД смешанного возбуждения обычно
осуществляют так же, как и ЭД параллельного возбуждения, но при
отключенной последовательной обмотке. Эту обмотку отсоединяют от якоря по причинам, изложенным при описании рекуперативного торможения ЭД. Поток возбуждения при торможении создается одной только обмоткой параллельного возбуждения. Поэтому
механические характеристики в этом случае имеют такой же вид,
как у ЭД параллельного возбуждения. Использование динамического торможения в ЭП палубных механизмов при их отключении позволяет значительно уменьшить частоту вращения ЭД и
таким образом при окончательном затормаживании облегчает работу электромагнитного тормоза.
Торможение противовключением. Режим противовключения создается в том случае, когда ЭД, включенный в сеть, под действием
потенциального статического момента или кинетической энергии
инерционных масс вращается в направлении, противоположном
направлению его вращения в двигательном режиме. В первом
случае торможение применяют для ограничения скорости при
опускании тяжелых грузов, во втором-для реверсивных ЭП,
у которых процесс торможения является промежуточным при переходе от одного направления вращения к другому. Реверс ЭД
параллельного возбуждения достигается изменением направления
тока в обмотке якоря или в обмотке возбуждения. В основном
применяют первый способ, так как переключение цепи обмотки
возбуждения связано со следующими тремя отрицательными особенностями работы ЭП:
1. Разрыв цепи обмотки возбуждения, обладающей значительной индуктивностью, приводит к тому, что на зажимах этой
обмотки появляется ЭДС самоиндукции, в несколько раз превышающая значение рабочего напряжения. Это может вызвать
пробой изоляции.
2. Большая индуктивность параллельной обмотки возбуждения
способствует медленному спаданию и нарастанию магнитного потока, а это увеличивает время реверса.
3. На время спадания магнитного потока ток в цепи якоря
значительно возрастает, и для ограничения его до допустимого
значения пришлось бы вводить дополнительный резистор. Это
значительно усложняет схему управления.
Режим противовключения при реактивном статическом моменте
наступает, если якорь ЭД, вращающийся с угловой скоростью,
переключить контактами на обратное вращение (рис. 13, а). В момент переключения якорь ЭД вращается в первоначальном на32
правлении. Следовательно, у ЭД
в это время знак ЭДС сохраняется прежним, хотя знак приложенного напряжения изменился
на противоположный первоначальному. Поэтому ток якоря в
момент переключения отрицателен: / = (-(/- Ё)/Я < 0, г. е. изменяет направление.
ж
Если в момент переключения
/?=&
сопротивление цепи якоря равно
только сопротивлению самого
якоря (К. = /?я), то тормозной ток Рис. 13. Торможение противовключением электродвигателей паоказывается почти вдвое больше
раллельного возбуждения:
пускового, так как по абсолютно« схема подключения; б механиму значению ЭДС ненамного
ческие характеристики
меньше приложенного напряжения, а их знаки в этом режиме
совпадают. Чтобы ограничить превышение тормозного тока до
значения, допустимого по условиям коммутации, в цепь якоря
включают дополнительный резистор, называемый резистором противотока /?„р. При этом тормозной ток
Ввиду того, что ток при переключении изменил свое направление, то и момент двигателя будет действовать в противоположную
сторону, становясь тормозным по отношению к неизменному направлению вращения. Под действием тормозного и реактивного
статического момента ЭД затормаживается, а с уменьшением
угловой скорости будут уменьшаться ЭДС, ток и тормозной момент. Когда ЭД окончательно затормозится, т. е. со = 0, то
Е — /сфсо = 0, а ток якоря
/„ = - и/(К, + Япр).
(18)
Как видно из формулы (18), при остановке ЭД ток якоря,
определяясь направлением напряжения, сохраняет тог же знак, что
и при тормозном режиме, соответствующее направление сохраняет
пусковой момент Мп = &7ПФ. Под действием отрицательного пускового момента происходит ускорение вращения якоря ЭД в новом
направлении, т. е. ЭД работает в двигательном режиме. Если целью
торможения было не реверсирование, а остановка ЭД, то в момент,
когда со = 0, его отключают от питающей сети. Уравнение механической характеристики для данного режима можно получить из
уравнения механической характеристики ЭД параллельного возбуждения (12) при подстановке в него — I/, — М и К = Кя + Япр.
В этом случае уравнение приобретает вид:
2
2
ш = - и/с + М(КК + Япр)/с или - ю = и/с - М(КЯ + Дпр)/с .
2
.!аь. 127п
(19)
33
Это уравнение искусственной
характеристики,
соответствующей двигательному режиму при
вращении ЭД в направлении, противоположном первоначальному.
Характеристика проходит в квадранте //, а продолжение ее-в
квадранте /// (прямая 2 на
м
рис. 13,6).
При переключении ЭД по схеме противовключения он переходит с естественной характеристики 1 при угловой скорости юн, с
которой он вращался в двига~ш
тельном режиме, на характеристику 2 в квадранте Я (показано
Рис. 14. Механические характеристики
электродвигателя смешаннострелкой), тормозится по ней до
го возбуждения при торможесо = 0, а затем разгоняется в пронии противовключением
тивоположную сторону по части
характеристики 2, лежащей в
квадранте III. По достижении определенной отрицательной угловой скорости резистор противотока выключают и переводят ЭД на
обычную естественную характеристику для разгона его якоря до
— ю н , соответствующей статическому моменту на валу ЭД при
другом направлении вращения. Начальный тормозной момент Мт
зависит от значения сопротивления резистора противотока. Чем
оно меньше, тем больше момент и тем быстрее протекает процесс
торможения. В то же время уменьшение сопротивления приводит к
возрастанию тока, который должен быть ограничен по условиям
коммутации.
Режим противовключения можно реализовать и в случае, когда
ЭД включен для вращения в одну сторону, например в сторону
подъема груза, а положительный статический момент М с , создаваемый массой груза, оказывается больше, чем момент стоянки Мст
электродвигателя при работе на данной искусственной характеристике (прямая 3 на рис. 13,6). Под действием статического момента Мс якорь ЭД вращается в сторону спуска груза. Момент,
развиваемый ЭД и совпадающий с направлением подъема, для ЭП,
вращающегося в сторону спуска, будет являться тормозным моментом. Так как направление вращения изменилось, изменился и
знак ЭДС. В этом случае /т = (V + Е}/(КЯ + Кл). По мере ускорения
ЭД в сторону спуска ЭДС ток и тормозной момент увеличиваются.
Когда тормозной момент ЭД станет равным статическому моменту, его вращение происходит с установившейся угловой скоростью — сот. Так же как и при реверсе, для ограничения тока в этом
режиме вводят добавочный резистор. Это делает механическую
тормозную характеристику ЭД более мягкой, что не обеспечивает
34
стабильной работы ЭП. Указанный недостаток и низкая экономичность ограничивают использование режима торможения противовключением, которое возможно лишь для обеспечения посадочных скоростей при опускании тяжелых грузов.
Торможение противовключением ЭД последовательного и смешанного возбуждения протекает аналогично описанному. Криволинейный характер тормозных механических характеристик
(рис. 14) объясняется изменением значения магнитного потока последовательной обмотки, обусловленного меняющимся током
якоря.
10. Способы регулирования угловой скорости
Возможность регулирования угловой скорости ЭД постоянного тока вытекает из уравнения электромеханической характеристики (9).
Принципиально возможны 3 способа регулирования:
1) изменением напряжения, приложенного к цепи якоря ЭД;
2) изменением сопротивления цепи якоря;
3) изменением магнитного потока возбуждения.
Первый способ при питании ЭД от сети не применим. Им
пользуются в случаях, когда ЭД получает питание от отдельного,
специально предназначенного для него генератора (система генератор-двигатель) или тиристорного преобразователя. Более подробно эти способы будут рассмотрены при последующем изложении материала.
Изменение сопротивления цепи якоря. При регулировании скорости ЭД параллельного возбуждения этим способом в цепь якоря
включают добавочный резистор Кд (рис. 15, а). Вследствие этого угловая скорость ЭД уменьшается, что объясняется следующим. Сила тока ЭД до включения добавочного резистора
/! = (V — /сФю 1уст )/Л я , а момент М\ = /сФ/^ Этот момент при установившейся угловой скорости равен статическому моменту, т.е.
М = М с . В момент времени введения резистора в цепь якоря
угловая скорость не может измениться мгновенно из-за инерции ЭП
и остается равной <в 1уст . Поэтому в этот момент времени ток
/ = (17 — /сФсо1усг)/(7?я + /?д), т.е. становится меньше 1г. Так как ток
уменьшился, то уменьшается и момент ЭД М'2 = / с Ф / < М х : раа) "
Рис. 15. Регулирование угловой скорости двигателя параллелыюI о возбуждения изменением
сопротивления цепи якоря:
а - схема подключения; 6 регулировочные характеристики
О М0
Мг
М, М, Н
35
венство вращающего и статического моментов нарушилось. Следовательно, появляется отрицательный избыточный момент
М'г — Мс < 0 и происходит замедление вращения вала ЭД до
тех пор, пока ток, который при этом увеличивается из-за
уменьшения ЭДС, не возрастает до прежнего значения /2 =
= (V — /сФш2уст)/(Ля + -^д) = ^1- Только в этом случае момент
электродвигателя М2 = /сФ/2 снова станет равным статическому.
Работа ЭП будет происходить при новой установившейся угловой
скорости оо2уст, меньшей, чем начальная ш 1уС1 .
Если статический момент при регулировании не остается постоянным, а уменьшается, то равновесие наступает при меньшем
значении тока / 2 .
Регулирование этим способом возможно только вниз от номинальной угловой скорости. Чем больше добавочное сопротивление, тем меньше угловая скорость. Добавочный резистор называют
регулировочным. Он состоит из нескольких ступеней, при включении которых получаются регулировочные характеристики такие же,
как пусковые (рис. 15,6, прямые 1-3). Жесткость регулировочных
характеристик по сравнению с естественной характеристикой 4
сильно уменьшается при увеличении регулировочного сопротивления. Поэтому невозможно получить малую и вместе с тем достаточно устойчивую угловую скорость. Например, при работе на
характеристике / незначительное изменение нагрузки на валу от М\
до М2 вызывает большое изменение угловой скорости Аш. Это
обстоятельство значительно уменьшает диапазон регулирования.
Если принять наименьшую допустимую с точки зрения устойчивости угловую скорость равной 0,5оон, то диапазон регулирования
составляет всего 1:2. При уменьшении нагрузки по сравнению с
номинальной пределы регулирования намного сужаются. При холостом ходе механизма (момент М0) регулирование этим способом
практически неосуществимо.
По регулировочным резисторам протекает большой ток якоря.
Поэтому регулирование сопровождается значительными потерями
энергии. Например, при снижении угловой скорости примерно
в 2 раза в регулировочном резисторе выделяется в виде теплоты
мощность, равная механической мощности, развиваемой ЭД. Обычно и число ступеней регулирования равно числу пусковых ступеней.
Для повышения плавности регулирования можно применять любое
число ступеней регулировочного резистора. Однако при этом значительно усложняется конструкция аппаратуры управления, при помощи которой выключают и включают ступени резистора, так как
эта аппаратура должна быть рассчитана на большой ток. Обычно
регулировочный резистор объединяют с пусковым и используют его
для пуска ЭД. В этом случае пускорегулировочный резистор при
том же значении сопротивления и при том же числе ступеней, что и
пусковой, значительно больше него по габаритным размерам и
дороже, так как пусковой резистор рассчитан на кратковременное
36
протекание пускового тока, а пускорегулировочныи - на длительный
номинальный ток.
Рассмотренный способ регулирования вследствие его низкой
экономичности и других указанных недостатков применяется в
основном для ЭП, работающих на регулировочных характеристиках непродолжительное время, если остальные требования к регулируемому ЭП при этом удовлетворены.
Изменение магнитного потока возбуждения. Регулирование угловой скорости ЭД параллельного возбуждения изменением магнитного потока осуществляют, включая регулировочный резистор Кр в
цепь обмотки возбуждения ЭД (рис. 16, а). Это приводит к уменьшению тока возбуждения, а значит и к уменьшению намагничиванэщей силы и магнитного потока. В результате угловая скорость
якоря ЭД увеличивается по сравнению с номинальной при полном
потоке возбуждения. Это объясняется следующим. При уменьшении магнитного потока от «1^ до Ф2 ток электродвигателя в
первый момент регулирования увеличивается, так как из-за инерции
угловая скорость мгновенно измениться не может:
Значение Е± = /сФ1со1 ненамного меньше значения V, а поэтому
даже небольшое уменьшение потока приводит к значительному
возрастанию тока. Например, если уменьшить магнитный поток на
20%, т. е. Ф2 = 0,8ФХ, то значения ЭДС при полном и уменьшенном
магнитных потоках будут:
Е! = А^Ю! = 0,917;
Е2 = /сФ2Ш! = О.В/сФ^ = 0,7217.
Соответственно токи при скорости % будут определяться
выражениями:
/! = (17 - 0,9У)/ЛЯ = 0,Ш/ДЯ;
7 2 =(17-0,721/)/Я я = 0,28С7/Яя.
Полученные выражения (20) и
(21) показывают, что уменьшение
магнитного потока (в частном
случае на 20%) вызывает значительно большее увеличение тока
(в данном случае ток увеличился в
2,8 раза). Из-за указанной причины в начальный период уменьшения магнитного потока вращающий момент увеличивается
(М = /сФ 2 / > Л/! = /сФ,/!) и становится больше статического момента М с . Появляется положительный избыточный момент
(20)
(21)
О
М„
п
Рис. 16. Регулирование угловой скорости электродвигателя параллельного возбуждения изменением магнитного потока:
а схема подключения; б-регулировочные характеристики
37
М — Мс > 0, и происходит ускорение вращения вала ЭП. При этом
возрастает ЭДС и уменьшается ток. Это продолжается до тех пор,
пока не установится равновесие моментов М2 = /сФ2/2 = Мс, при
котором ток 12 = (V — &Ф2ю2)/-^я > /!• Если при возрастании скорости момент Мс не остается постоянным, а увеличивается, то
равновесие наступает при другом, еще большем значении тока 12.
Регулирование этим способом возможно только вверх от номинальной угловой скорости. Регулировочный резистор, вводимый
в цепь возбуждения, делают из большого числа ступеней, так как
ток возбуждения мал и конструктивных препятствий для изготовления соответствующего регулировочного аппарата, которым
включают и выключают эти ступени, нет. Поэтому плавность
регулирования этим способом может быть очень высокой. Потери в
регулировочном резисторе из-за небольшого тока возбуждения
очень незначительны, практически ими можно пренебречь. Поэтому
рассматриваемый способ регулирования весьма экономичен.
Сравним механические характеристики ЭД при полном и ослабленном магнитном потоке. Из уравнений
о>1 = (У/^-М/^/О^Ф2); ю2 = С7ДФ2 - МЯя/(/с2Ф|)
следует, что
(/с2Ф?) < Асо2 = МКЯ/(Ъ2Ф1); Аю 01 = [//(/сФ^ < со02 =
Очевидно, жесткость механических характеристик с уменьшением магнитного потока уменьшается (рис. 16,6). Обычные ЭД
допускают увеличение угловой скорости посредством ослабления
магнитного потока не более чем на 10-20% (по сравнению с
номинальной), так как при возрастании тока и частоты вращения
ухудшаются условия коммутации. Кроме того, увеличение угловой
скорости ограничивается механической прочностью ЭД. Поэтому,
если необходимо регулирование в более широких пределах, применяют специальные регулируемые ЭД, рассчитанные и в электрическом, и в механическом отношениях на работу с высокими
угловыми скоростями.
Принцип регулирования скорости ЭД последовательного и смешанного возбуждения изменением сопротивления в цепи якоря и
физические процессы, протекающие при этом, подобны рассмотренному ЭД параллельного возбуждения.
Регулирование изменением магнитного потока для ЭД смешанного возбуждения выполняют, воздействуя на ток возбуждения
параллельной обмотки так же, как при регулировании скорости ЭД
параллельного возбуждения. Магнитный поток последовательной
обмотки при этом не изменяют. По сравнению с ЭД параллельного
возбуждения ЭД смешанного возбуждения обладают лучшими
регулировочными свойствами, ибо допускают возможность практически удобного регулирования в обоих направлениях от номинальной частоты вращения.
38
11. Система генератор-двигатель
Двигатели постоянного тока, питающиеся непосредственно
от сети, не всегда обеспечивают выполнение технологических и
эксплуатационных требований, предъявляемых к ЭП судовых механизмов. В этих случаях применяют сложные системы ЭП, среди
которых наиболее распространена система генератор-двигатель
(рис. 17).
Система Г-Д как минимум состоит из трех электрических
машин: исполнительного электродвигателя М2, приводящего в
действие механизм; генератора С1, питающего исполнительный ЭД;
приводного электродвигателя М1, вращающего якорь генератора и
образующего с ним так называемый преобразователь. Машины М2
и О1 -постоянного тока с независимым возбуждением. Несмотря на
это, система Г-Д может применяться при любом роде тока
питающей сети. Если сеть постоянного тока, то применяют приводной ЭД параллельного возбуждения, а обмотки возбуждения
всех машин получают питание от сети. Если сеть переменного тока,
то используют асинхронный приводной ЭД. Для питания обмоток
возбуждения Ы01 и ЬМ2 в этом случае применяют четвертую
машину-возбудитель 02. Это небольшой генератор постоянного
тока с самовозбуждением. Он приводится во вращение тем же
приводным ЭД, что и генератор С1.
Система действует следующим образом. Сначала пускают приводной ЭД, якорь которого затем вращается постоянно в одну
сторону с неизменной скоростью. Потом возбуждают возбудитель,
создающий неизменное напряжение. От него получают питание
независимые обмотки возбуждения исполнительного электродвигателя ЬМ2 и генератора ЫО1. В цепь первой включен регулировочный резистор КР2, в цепь второй - регулировочный резистор
К.Р1 и переключатель 8А, изменяющий направление тока в обмотке
ЫС1. Перед пуском резистор КР1 должен быть полностью введен
в цепь, а резистор КР2- выведен. Для пуска М2 переключатель 8А
устанавливают в одно из рабочих положений и постепенно выводят
резистор КР1, увеличивая этим
ток возбуждения в обмотке ЫС1.
Последний возбуждается и подает
плавно возрастающее напряжение
на якорную обмотку М2. По цепи
якорей О1 и М2 протекает ток.
Так как М2 возбужден, его якорь
начинает вращаться, и по мере
возрастания напряжения, подведенного к его якорю, увеличивается угловая скорость. При
полностью выведенном резисторе Рис. 17. Схема системы генератор КР1 напряжение С1 и угловая
двигатель
39
скорость М2 номинальные. Для реверса переключателем 8А изменяют направление тока в обмотке возбуждения ЫС1. Генератор
изменяет полярность напряжения, ток якорной цепи изменяет
направление, и исполнительный ЭД реверсируется. Остановка происходит при отключении обмотки ЫС1 тем же переключателем.
Регулирование скорости вниз от номинальной выполняют, вводя
в цепь обмотки возбуждения ЫС1 регулировочный резистор КР1.
Ток возбуждения, магнитный поток и напряжение генератора
уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается.
Таким образом, здесь применяют первый из указанных в п. 10
способов регулирования. Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмотки возбуждения М2
регулировочный резистор КР2, что уменьшает ток и поток возбуждения, при этом скорость ЭД увеличивается.
Выведем уравнение механической характеристики исполнительного ЭД. При этом не учитываем размагничивающее действие
реакции якоря (7/ и считаем, что ЭД снабжен стабилизирующей
обмоткой, а следовательно, его поток возбуждения не зависит от
тока нагрузки. Напряжение, создаваемое генератором,
ит = Ет-Щ,
(22)
Г/д = С/г - /Д пр ,
(23)
VЛ = ЕЛ + 1КЯ,
(24)
Еп = Е,-1 (Кг + Япр + Яд) = Ет - 1К,
(25)
где Ет ЭДС генератора; /- ток в цепи якорей С1 и М2; Кг -сопротивление
якорной обмотки С1.
Напряжение, подаваемое к якорю ЭД,
где Кар- сопротивление соединительных проводов.
Оно уравновешивается ЭДС электродвигателя и падением напряжения в его якорной обмотке:
где Еа- ЭДС исполнительного ЭД; Лд- сопротивление его якорной обмотки.
Подставив выражение (22) в формулу (23), а уравнение (23) в
формулу (24), найдем:
где К -суммарное сопротивление цепи якорей системы Г—Д.
Подставив в уравнение (25) значение Еа — &дФдоз, имеем:
(26)
(0 = (Ег - /Д)/(/сдФд),
где А- -коэффициент, зависящий от конструктивных данных исполнительного ЭД; Ф, -поток возбуждения исполнительного ЭД.
Это уравнение электромеханической характеристики. Если подставить в него / = МД/СдФд), то получим уравнение механической
характеристики
2
со = ДГ/(*ДФД) - МЯ/(/сФд) .
(27)
40
При номинальной ЭДС генератора Ег.н и номинальном потоке возбуждения электродвигателя Фд.„ скорость идеального
холостого хода
Жесткость
регулировочных
характеристик (рис. 18) 1-3 при
регулировании скорости исполнительного ЭД вниз от номинальной практически не изменяется по сравнению с жесткостью
о
естественной характеристики 4.
Последняя менее жестка, чем ха- Рис. 18. Регулировочные характеристики исполнительно! о элекрактеристика 5 ЭД параллельного
тродвигателя в системе геневозбуждения, питающегося от
ратор двигатель
сети, что объясняется большим
значением сопротивления К по
сравнению с внутренним сопротивлением якоря. Регулировочные
характеристики 6, 7 при регулировании вверх от номинальной
скорости не отличаются от таких же характеристик ЭД параллельного возбуждения.
Система Г-Д обладает исключительно хорошими регулировочными свойствами и позволяет регулировать скорость в пределах
1 :20- 1 : 30. Регулирование получается плавным, так как из-за сравнительно небольших токов возбуждения можно сделать регулировочные резисторы с большим количеством ступеней. Система
Г-Д обладает существенным недостатком -большое количество
установленных электрических машин. Поэтому такая установка
дорогая, громоздкая, тяжелая и имеет низкий КПД.
В настоящее время разомкнутые системы Г-Д практически не
применяются. Но достоинства этих систем, как имеющих возможность плавного регулирования скорости и ряд других преимуществ,
используются и развиты в более совершенных системах с обратными связями, т.е. в замкнутых системах Г-Д. Существуют
обратные связи по току, напряжению, скорости и т. д. Применение
обратных связей в системах Г-Д позволяет расширить диапазон
регулирования скорости и получить механические характеристики
специального вида. В судовых ЭП наибольшее распространение
находят' жесткие отрицательные обратные связи по току, которые
защищают исполнительный ЭД механизма от перегрузки.
Рассмотрим подробно систему Г-Д с нротивокомпаундным
генератором, которая широко применяется в ЭП судовых механизмов. Она отличается от системы Г-Д в чистом виде тем, что
генератор помимо независимой обмотки возбуждения ЫО1 снабжен еще одной обмоткой возбуждения - противокомпаундной об41
моткой Ь2С1, включенной последовательно в цепь якоря О1 и
выполняющей функции жесткой обратной связи по току (на рис. 17
включение Ь2С1 показано штриховой линией). Ее намагничивающая сила Рп направлена встречно намагничивающей силе Рн обмотки независимого возбуждения ЫС1, т.е. она действует на
генератор размагничивающе. Магнитный поток возбуждения генератора создается разностью намагничивающих сил обеих обмоток.
При нормальной нагрузке намагничивающая сила обмотки ЫС1
значительно больше, чем обмотки Ь2С1, и генератор развивает
ЭДС, как в обычной системе Г Д. При перегрузке разность
намагничивающих сил обмоток уменьшается, магнитный поток и
ЭДС генератора снижаются, напряжение, подведенное к ЭД, падает,
и угловая скорость ЭД становится меньше. При заклинивании
якоря ЭДС генератора настолько уменьшается, что ток стоянки
/ст = ЕТ/(К.Г + Клр + /?д) = ЕТ/К оказывается в пределах кратковременно допустимого, обычно равного (2,2-1-2,5) 1„.
Контрольные вопросы-задания
1. Что такое естественная и искусственная механические характеристики электродвигателя?
2. Дайте определение скорости идеально холостого хода. От каких параметров она
зависит?
3. Чем определяется потребляемый ток электродвигателя при пуске и во время его
работы?
4. Какие виды тормозных режимов свойственны электродвигателю постоянного
тока?
5. Назовите условия рекуперативного торможения.
6. Каким образом выполняется динамическое торможение?
7. Перечислите способы регулирования скорости электродвигателя постоянного
тока.
8. Каково назначение противокомпаундной обмотки в ситеме Г-Д?
Глава 3
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО
ТОКА
12. Механические характеристики электродвигателей
в двигательном режиме
Асинхронные двигатели получили на морском флоте весьма
широкое применение благодаря ряду существенных преимуществ по
сравнению с ЭД других типов. Они подразделяются в зависимости
от конструктивного исполнения ротора на двигатели с фазным и
короткозамкнутым ротором (рис. 19). Наибольшее распространение в судовых ЭП получили АД с короткозамкнутым ротором. Это
объясняется простотой их обслуживания и высокой надежностью,
малыми размерами и небольшой массой.
Основные параметры АД-угловая скорость ротора со и вращающий момент М-определяют его механическую характеристику. Угловая скорость ротора
щ = (!-«) то,
(28)
где 5 = (со0 — со)/<а0 ~ скольжение; со0 = 2?^ /р - угловая скорость поля статора или синхронная угловая скорость АД (здесь/^-частота тока, питающего сети; р—число пар полюсов статора).
Значение ю0 может быть выражено так:
ю0 = 2яи0/60,
(29)
где и0-синхронная частота вращения ротора.
Необходимым условием работы АД является отставание ротора
по скорости от вращающегося поля статора (скольжение). Если
поле статора вращается с угловой
скоростью ш 0 , а ротор - с угловой
скоростью со, то поле статора относительно ротора вращается с
угловой скоростью со2 = ю0 — со.
С этой скоростью поле статора
пересекает обмотку ротора и индуцирует в ней ЭДС Е2 с частотой
скольжения / 2 :
/2 =
Р К -со)
-~
2п
Рис. 19. Схема
подключения асинхронных двигателей:
а - короткозамкнутого; 6 с фазным ротором
43
Наличие ЭДС в замкнутой электрической цепи вызывает протекание по обмотке ротора тока
2
/2 = Е2,!к1 + XI = я2/У(я2/,у) + х\,
(зо)
где Е2!1 = 4,44&2/2и'2ф-ЭДС, индуцируемая в фазе вращающегося ротора;
К2, Х2~ соответственно активное и индуктивное сопротивления фазы неподвижного ротора; Х2^ = 2 л/2 Ь- индуктивное сопротивление фазы вращающегося ротора; /с2 - обмоточный коэффициент; и?2- число витков в фазе
ротора.
Значение Е^з численно равно: Е2* = Е2з, где #2-ЭДС, индуцируемая в фазе неподвижного ротора. Возникающий при этом вращающий момент
(31)
где /с -постоянный коэффициент для данного АД; / 2 -ток ротора; Ф- полный магнитный поток статора; \|/ 2 -угол сдвига векторов Е2 и 12, косинус
которого
соя у 2 = Л 2 Д/Л2 + ХЦ,.
(32)
Если скольжение АД изменяется от единицы (при пуске) до
значения, близкого к нулю (при холостом ходе), то частота тока
изменяется от /2 = /г — 50 Гц до /2 = 1 ч- 2 Гц.
Выражения (30)^(32) показывают изменение основных электрических параметров (ЭДС, индуктивного сопротивления, тока ротора) в зависимости от угловой скорости и поясняют физический
смысл механической характеристики АД (рис. 20, а). Очевидно, с
уменьшением скольжения момент АД медленно увеличивается от
пускового значения Мп до максимального значения М та х, а затем
быстро уменьшается .по мере приближения угловой скорости ротора к угловой скорости поля статора.
При ю — о>0 вращающий момент электродвигателя М = 0. Увеличение вращающего момента на участке С- В объясняется повышением активной составляющей тока ротора / 2а кт = / 2 СО8 Уа >
которая возрастает вследствие более интенсивного увеличения
со8У|/2 по сравнению с уменьшением полного тока ротора 12- На
участке В- А при со8\|/2 = 1 (скольжение очень мало и индуктивным
сопротивлением ротора можно пренебречь) интенсивное уменьшение вращающего момента происходит из-за уменьшения тока
ротора. Момент достигает максимума при некотором критическом
скольжении 5К, которое имеег место, когда реактивное сопротивление ротора ^2я при увеличении угловой скорости уменьшится до
значения, равного его активному сопротивлению К2 . Это соответствует критической угловой скорости ротора сок = ю 0 (1 — $к).
Максимальный (критический) момент
2
2
мк = си // ,
где с -коэффициент пропорциональности.
44
(зз)
Рис. 20. Механические характеристики асинхронного двигателя:
а, б-соответственно до и после введения активных сопротивлений в цепь ротора
Из уравнения (33) следует: критический момент АД не зависит от
активного сопротивления роторной цепи.
Механическая характеристика АД определяется положением трех
точек (см. рис. 20, а) с координатами: 1) М = 0; со = ш 0 ; 2) М = Мк;
со = сок; 3) М = Мп; со = 0. Меняя координаты этих точек путем
изменения электрических параметров (значения активного сопротивления в цепи ротора, напряжения на обмотках статора и частоты
тока питающей сети), можно получить ряд искусственных механических характеристик. Ввиду того, что способ изменения механической характеристики посредством частоты тока будет рассмотрен
при регулировании угловой скорости, то ограничимся рассмотрением влияния первых двух параметров.
Положение искусственных механических характеристик АД с
фазным ротором при различных активных сопротивлениях цепи
ротора (рис. 20,6) определяется координатами трех указанных
выше точек.
1. Точка (0, со0) для всех характеристик остается постоянной, так
как значение о>0 = 2л/!/р не зависит от активного сопротивления
в цени ротора.
2. Максимальный момент остается неизменным в соответствии с
формулой (33). С увеличением включаемых в цепь ротора активных
сопротивлений уменьшается критическая угловая скорость ю к , что
П И
объясняется равенством Х2в — К2 Р большем значении скольжения ,?к. Чем больше значение добавочных сопротивлений, тем
большую крутизну имеет механическая характеристика АД.
3. Уменьшение критической скорости АД влечет за собой изменение пускового момента-с уменьшением сок до нуля пусковой
момент увеличивается. При юк = О ($„ = !) пусковой момент АД
45
равен критическому Мп = М к . При дальнейшем увеличении активного сопротивления пусковой момент уменьшается: Мпз < М к . Это
объясняется значительным уменьшением тока ротора; соз \|/2 увеличивается в малой степени, так как доля реактивного сопротивления
ротора при пуске очень мала по сравнению с большим значением
активного сопротивления. Критическое скольжение зк может в этом
случае быть лишь тогда, когда ЭД будет работать в тормозном
режиме противовключения, ибо при этом возрастает доля реактивного сопротивления ротора и возникает равенство Х2а —^-необходимое условие критического момента.
Основные особенности искусственных механических характеристик (рис. 21) при изменении напряжения, подводимого к статору,
заключается в следующем:
как и в предыдущем случае, синхронная угловая скорость ротора
ю0 остается неизменной при различных напряжениях сети;
для всех характеристик критическое скольжение ак, а соответственно и критическая скорость сок, не зависят от напряжения сети и
остаются постоянными. Однако критический момент уменьшается в
квадратичной зависимости и перегрузочная способность АД резко
снижается (Мк2 < Мк1 и т.д.). Из-за снижения напряжения также
резко уменьшается пусковой момент АД.
Для дальнейшего анализа и практических расчетов наиболее
удобно использовать уравнение механической характеристики
М = 2Мк/(фк + зк/з).
(34)
Пользуясь этим уравнением, можно построить механическую
характеристику по паспортным данным АД. Значение критического
момента приводится в каталогах в абсолютных единицах в виде
кратности критического момента: ^к = М К /М Н . Номинальный момент можно определить по номинальной мощности. Критическое
скольжение можно найти по уравнению (34), положив в нем М — Мн
и 5 = 5Н. После преобразований получим дк = лн (ик + ^/ц| —1).
Номинальное скольжение лн определяют по сон и синхронной ш0
угловым скоростям, т. е. ян = (ю0 — шн)/со0. Угловую скорость АД,
соответствующую изменяющемуся скольжению, находят по формуле ю = со0(1 — 5).
Уравнение (34) позволяет с достаточной для практических расчетов точностью построить механическую характеристику АД в
пределах скольжения от 0 до л к . При скольжениях от 5К до ^ = 1 это
уравнение дает недопустимые погрешности, которые, однако, можно устранить, введя поправочный коэффициент, предложенный
Чекуновым:
М = Мк [2 + (*2 - ^) Г\/(ФЖ + *,Д),
г
1
где К = [а (1/л к + ик) — 2]/(1 — л ^)- поправочный коэффициент (здесь а =
МП/МК = /см/цк - коэффициент, выражающий соотношение между пусковым
и максимальным моментами АД).
46
О
Рис. 21. Искусственные механические
характеристики асинхронного
двигателя с фазным ротором
Мн Мп Мс
М
Рис. 22. Совмещенные характеристики
асинхронного двигателя (1) и
приводного механизма (2)
Очевидно, если, используя зависимость ю = <о0 (1 — л), перейти от
скольжения к угловой скорости двигателя га, то получится механическая характеристика ю(М). Вид механической характеристики
определяется из анализа уравнения (34). Для угловых скоростей,
близких к синхронной угловой скорости со0 (когда 5 « 5К), первым
слагаемым знаменателя, а именно л/5к, можно пренебречь. Тогда
получим уравнение М = 2Мкл'/,ук, которое позволяет считать участок
характеристики от М = О до М — \ ,5МН прямой линией. При угловых скоростях АД от скорости, соответствующей Мк, до нуля,
т.е. при скольжениях у > .УК, в уравнении (34) можно пренебречь
вторым слагаемым знаменателя, а именно 5к/5. Для соответствующего участка характеристики будет действительно уравнение
М --= 2Мк1ук/5.
Рассматривая естественную механическую характеристику 1
(рис. 22), отметим, что АД может работать устойчиво только на
верхней, рабочей части характеристики. Предположим, что АД
приводит в действие механизм с постоянным приведенным статическим моментом на валу Мс (характеристика 2). Механическая
характеристика механизма пересекает характеристику АД в точках
Л и В. Если при работе в точке А угловая скорость АД несколько
уменьшится, то при этом увеличится вращающий момент. Когда он
станет больше статического, образуется избыточный момент, который вызовет ускорение ЭП. Угловая скорость увеличится до
прежней, при которой снова наступит равновесие между вращающим и статическим моментами. Аналогичное явление произойдет
при случайном возрастании угловой скорости. Если же уменьшение
угловой скорости произойдет при работе в точке В, то одновременно уменьшится и вращающий момент АД, поэтому при
реактивном статическом моменте АД остановится (точка О), а при
47
потенциальном - реверсируется и разгонится в противоположную
сторону. В случае возрастания угловой скорости при работе в точке
В вращающий момент увеличивается и АД разгоняется до скорости,
соответствующей точке А.
Таким образом, работа в точке В неустойчива. Устойчивая
работа возможна только в точке Л, лежащей на рабочей части
характеристики. На нижней части характеристики АД работает
только во время переходного процесса пуска. Если во время работы
АД на устойчивой части характеристики статический момент значительно увеличится и станет больше критического, АД остановится
(точка О). Это явление называется опрокидыванием, а критический
момент иногда называют опрокидывающим. АД не могут развивать момент больший, чем критический, и поэтому очень чувствительны даже к кратковременным перегрузкам. Их перегрузочная
способность определяется коэффициентом ик = М К /М Н .
!3. Пусковые процессы
Пуск АД в основном осуществляется непосредственным подключением обмотки статора к сети. Такой метод пуска называется
прямым. Следует отметить, что в начальный период пускового
процесса скольжение 5 = 1 , а поэтому пусковой ток ротора
/ 2п = Е2$1^/~К\ + Х\8г имеет максимальное значение. По мере разгона АД скольжение уменьшается и ток /2п ротора снижается.
Таким же образом изменяется и ток /\ статора (рис. 23). Кратность
пускового тока этих асинхронных электродвигателей /с( — 4 -ь 7. При
неизменных значениях частоты и напряжения питающей сети
магнитный поток статора Ф постоянен.
Может показаться, что вследствие большого пускового тока АД
развивает столь же большой пусковой момент. Однако в отличие от
ЭД постоянного тока здесь на значение пускового момента влияет
не только пусковой ток, но и значение со8\|/ 2 . В начале пуска, кого),
да „V = 1, из-за большого индуктивного сопротивления ротора
100
значение со8\]/2 минимальное, а
80
затем по мере уменьшения сколь60
жения оно возрастает. Поэтому
40
вращающий момент, пропорцио20
нальный произведению этих знаО
чений, при пуске, несмотря на
100
200 300
400 500
большой пусковой ток, весьма
Рис. 23. Механическая характеристика
мал (см. рис. 20). Затем вращаюи характеристика тока статора
щий момент постепенно возрастаасинхронного короткозамкнует, а после достижения ротором
того двигателя
48
угловой скорости, соответствующей критическому скольжению,
снова убывает. Кратность пускового момента современных нормальных АД &м = 0,8 ч- 2,0.
По сравнению с ЭД постоянного тока короткозамкнутые АД
обладают значительно худшими пусковыми свойствами: кратность
пускового тока у них больше, а кратность пускового момента
меньше. В частности, АД при прочих равных условиях разгоняются
до рабочей угловой скорости значительно дольше, чем ЭД постоянного тока.
Пусковой юк из-за большого индуктивного сопротивления содержит большую реактивную составляющую, а поэтому не опасен
для АД. Только при пуске очень мощных АД приходится считаться
с большими электродинамическими силами в обмотках, возникающими при прохождении пускового тока. Тепловое действие пусковых токов незначительно ввиду их кратковременности. Однако они
вызывают провалы напряжения в питающей сети из-за увеличивающейся при прохождении пускового тока потери напряжения.
Особенно нежелательны большие пусковые токи в судовых
электроустановках, в которых мощности крупных АД соизмеримы с
мощностями синхронных генераторов, питающих судовую сеть.
Синхронные генераторы при увеличении тока сильно снижают
напряжение, что вредно сказывается на работе остальных потребителей, присоединенных к судовой сети. Ухудшающим фактором
является также низкий коэффициент мощности АД при пуске,
вследствие чего напряжение синхронных генераторов снижается
и по этой причине. Регистр СССР разрешает прямой пуск только
таких АД, которые вызывают снижение напряжения сети не более
чем на 15% номинального. Поэтому максимальная мощность АД,
допускающих прямой пуск, определяется мощностью судовой
электростанции и способом регулирования напряжения судовых
генераторов.
С целью уменьшения провалов напряжения на судах часто
применяют искусственные методы пуска АД, снижающие пусковые
токи до приемлемых значений. Необходимость использования этих
методов устанавливают, анализируя работу судовой электростанции в различных режимах при внезапном пуске данного АД.
Пуск АД короткозамкнутых большой мощности основан на
понижении напряжения в начальный период пускового процесса с
последующей подачей полного его значения, когда ЭД достигнет
номинальной угловой скорости. Для этого последовательно в цепь
статора вводят реакторы (реакторный пуск), конденсаторно-реакторные пусковые устройства (реакторно-емкостной пуск) или же
регулируют напряжение на зажимах статора с помощью автотрансформаторов. При пуске с пониженным напряжением уменьшают пусковой ток, а также в квадратичной зависимости от
напряжения - пусковой момент. Соотношение между пусковыми
моментами АД при прямом и искусственном способах пуска
49
1Л11Л2ЦВ
М'а/Мп = (ГП/1П)2,
где /п, Мп-пусковые соответственно
ток и момент при прямом пуске; Гп,
М'п — пусковые соответственно ток и
момент при искусственном пуске.
Из полученного выражения
следует, что при искусственном
пуске по сравнению с прямым
пусковой момент уменьшается
Рис. 24. Схема переключения асинх- пропорционально квадрату уменьронного двигателя со схемы шения тока. Из-за снижения
«звезда» на схему «треуголь- пускового момента пуск при поник»
ниженном напряжении можно использовать лишь для ЭП механизмов, у которых пусковой режим, осуществляется на холостом ходу (например, центробежные
насосы).
На судах широко применяется схема пуска методом переключения со «звезды» на «треугольник» (рис. 24). В начальный момент
пуска переключатель (^8 устанавливают в положение «право». При
этом фазные обмотки АД, которые в нормальном режиме работы
соединены по схеме «треугольник», включают по схеме «звезда».
Вследствие этого фазное напряжение уменьшается в ^/3 раз, а
пусковой ток-в 3 раза по сравнению с этими же значениями при
прямом пуске АД, соединенного по схеме «треугольник». После
разгона до определенной угловой скорости переключатель ()5
устанавливают в положение «лево», включая обмотки по схеме
«треугольник». Для обычных АД с номинальным напряжением 380/220 В этот способ пригоден только при напряжении сети
220 В.
Иначе обстоит дело при искусственном пуске АД с фазным
ротором, который осуществляют, включая резисторы в цепь обмотки ротора (рис. 25). При этом снижается пусковой ток и увеличивается соз ^2' а следовательно, увеличивается и пусковой момент АД.
Последнее происходит до определенного значения пускового резистора-при слишком большом сопротивлении пусковой момент
уменьшается из-за значительного снижения пускового тока. Это
видно из сравнения моментов Мп, М^, М„2, Мп3 на характеристиках, показанных на рис. 20, б. По мере разгона АД ток ротора и
вращающий момент уменьшаются. Для ускорения процесса пуска
пусковой резистор постепенно выключают из цепи ротора так же,
как при пуске ЭД постоянного тока. При выключении каждой
очередной ступени резистора контактами КМ1 и КМ2 происходит
увеличение тока и момента. Определяя количество и значения
ступеней резистора расчетом и координируя время скоростью
разгоняющегося АД, можно получить плавный и быстрый разгон
ЭП при допустимых толчках пускового тока.
50
В ряде случаев для упрощения схемы* пуска и уменьшения числа
ступеней пускового резистора при заданном числе искусственных
пусковых характеристик отдельные ступени выключают не одновременно во всех трех фазах цепи ротора, а поочередно в каждой
фазе. Такой способ будет называться пуском с несимметричными
сопротивлениями.
Сравнивая пусковые свойства АД с фазными роторами и с
короткозамкнутыми, можно установить значительное преимущество первых. Кратность пускового момента может быть доведена у
них при помощи пускового резистора до кратности критического
момента, следовательно, она гораздо больше, чем у короткозамкнутых АД. Вместе с тем, кратность пускового тока у них значительно
меньше, чем у последних. Однако АД с фазными роторами сложнее
по устройству и поэтому дороже, чем короткозамкнутые. В настоящее время на судах они применяются редко, в основном для
привода мощных механизмов с тяжелыми условиями пуска.
Основное применение в судовых ЭП нашли асинхронные двигатели с короткозамкнутым ротором, которые для большинства
0,Нд
100
Рис. 25. Пуск асинхронных двигателей с фазным ротором:
о-схема подключения резисторов в цепь ротора; б-характеристики тока статора;
в механические характеристики
51
механизмов обеспечивают требуемые характеристики. В электроприводах палубных механизмов, а также в некоторых других с
тяжелыми условиями пуска наряду с обычными АД широко применяются также и АД с улучшенными пусковыми свойствами.
14. Тормозные режимы
Асинхронные двигатели могут работать во всех рассмотренных ранее для ЭД постоянного тока тормозных режимах: рекуперативном (сверхсинхронном) с отдачей энергии в сеть, противовключения и динамического торможения.
Рекуперативное торможение. Указанный режим с отдачей электрической энергии в сеть создается, если, не отключая статора АД от
сети, вращать ротор от постороннего источника механической
энергии в направлении вращения магнитного поля статора со
скоростью ю, превышающей синхронную скорость или скорость
поля статора ю 0 . В этом режиме скольжение становится отрицательным и вследствие этого момент АД меняет направление.
Рекуперативный режим электрического торможения используется
преимущественно для короткозамкнутых АД с переключением
числа полюсов обмотки статора, которые являются приводами
палубных механизмов. В указанных АД рекуперативное торможение может быть получено как при работе на одной скорости
благодаря действию силы тяжести опускаемого груза, так и при
переключении числа нар полюсов. Рекуперативный режим при
изменении числа пар полюсов обмотки статора подробно рассматривается в п. 15.
Рассмотрим рекуперативное торможение, которое возможно в
ЭП грузоподъемного механизма при опускании тяжелого груза.
При включении ЭП на спуск тяжелого груза ротор АД постепенно увеличивает угловую скорость, вследствие чего скольжение
.V = (ю0 — ю)/со0 постепенно уменьшается. Направление и значение
момента электродвигателя М =/с/ 2 Фсо8\|/ 2 определяется скольжением, так как скольжение определяет ЭДС Е2х, от которой зависит
фаза и значение тока ротора. При достижении ротором угловой
синхронной скорости 5 = 0 и соответственно равны нулю ЭДС, ток
и вращающий момент АД. В этом случае Х2в = 0, а сок \[/2 = 1. Под
действием момента сопротивления от силы тяжести груза продолжается дальнейшее ускорение ротора и его скорость становится
больше угловой скорости поля статора. При скорости со > ю0 ротор
опережает вращающееся магнитное поле и проводники его обмотки
пересекаются магнитным потоком в противоположном направлении.
Следовательно, также изменяется и скольжение 5 = (ю0 — (о)/о)0 =
= — (ю — со0)/ю0. Ввиду того, что скольжение стало отрицательным
по знаку, меняется фаза ЭДС и активной составляющей тока
52
ротора. Это приводит к изменению направления момента АД,
который для ЭП, вращающегося
в сторону опускания, является
тормозным. При дальнейшем увеличении угловой скорости под
действием момента сопротивления скольжение по абсолютному
значению возрастает-ЭДС и ток
ротора увеличиваются.
При ускорении ротора также
увеличивается его индуктивное
сопротивление и соответственно
со5\|/2 уменьшается. Однако при
скорости ротора, немного превышающей синхронную, уменьшением со5\|/2 можно пренебречь,
поэтому при ускорении ротора Рис. 26. Механические характеристики
асинхронного двигателя в ревследствие возрастания его тока
жиме рекуперативного тортормозной момент электродвигаможения
теля Мт = /с/ 2 Фсо8\|/2 увеличивается. Когда тормозной момент
станет равным движущему моменту сопротивления, разгон прекратится и ЭП будет вращаться с установившейся скоростью. Если при
большом моменте М'е скорость ротора и соответственно скольжение возрастут настолько, что индуктивное сопротивление ротора
Х2* — 2т$\Ъя станет равным К2, то тормозной момент хотя и
достигнет критического значения М'к, но будет оставаться меньше
М'с. При этом ротор будет продолжать ускоряться и в результате
ЭДС ток ротора и индуктивное сопротивление будут увеличиваться,
а соя 1|/2 - уменьшаться. Более интенсивное уменьшение соз\|/2 по
сравнению с увеличением тока ротора после М'к вызовет уменьшение тормозного момента и при резком увеличении скорости АД
происходит почти свободное падение груза (квадранты Я и IV на
рис. 26, опрокидывание показано штриховой линией).
При работе АД в режиме рекуперации происходит отдача
электрической энергии в сеть. Это объясняется тем, что в двигательном режиме магнитные поля статора и ротора действуют встречно
и результирующее магнитное поле наводит в статоре ЭДС, которая
меньше, чем напряжение сети: Е1 — 4,44/с^и^Ф, где 1с1- обмоточный коэффициент; и^-число витков статора.
Когда АД переходит в режим рекуперативного торможения, то
вследствие изменения фазы тока в роторе магнитное поле его
действует согласно с магнитным полем статора и результирующий
магнитный поток увеличивается. Соответственно возрастает ЭДС
статора и ввиду того, что значение ее оказывается больше напряжения сети, происходит отдача активной энергии в сеть. Из-за увели53
и)
А
С В) А
Рис. 27. Торможение противовключением асинхронных двигателей:
а, б схемы подключения двигателей соответственно с короткозамкнутым и фазным
роторами: в - механические характеристики
ченного магнитного потока тормозной момент Мг = /с/2Ф сок VI/2
имеет увеличенное значение, поэтому в режиме рекуперации критическое значение момента будет больше, чем в двигательном режиме
МЁ > М к . Отдача электрической энергии в сеть может вызвать
повышение напряжения, а также привести к срабатыванию реле
обратной мощности.
Торможение противовключением. Режим противовключения возникает в том случае, когда ротор вращается в направлении, противоположном направлению вращения магнитного поля статора. Так
же, как и в ЭП постоянного тока, данный режим осуществляется в
процессе реверса при переходе от одного направления вращения к
другому и при ограничении скорости спуска тяжелых грузов.
В первом случае, чтобы ввести АД в режим противовключения,
необходимо поменять местами 2 фазы статора (рис. 27, а, б). Из-за
перемены фаз поле статора меняет направление вращения, а ротор в
первоначальный момент по инерции продолжает вращаться в прежнюю сторону. Так как витки ротора движутся навстречу магнитному полю статора, то скольжение $ = (— ю0 — со)/ — ю0 > 1, а из-за
изменения направления вращения поля статора меняется фаза ЭДС
и активной составляющей тока ротора. Соответственно меняет
направление момент АД, который для вращающегося в прежнем
направлении ротора будет являться тормозным. Из-за большого скольжения в начальный период резко возрастают ток
/ 2 = Е2а1^/К.\ + Х\$ и индуктивное сопротивление ротора Х2з =
= 2л/! $1,2' а со8\|/2 уменьшается. Несмотря на большой ток ротора,
его активная составляющая вследствие низкого со§\)/2 мала и
соответственно малое значение имеет тормозной момент АД.
У двигателя с фазным ротором уменьшение броска тока и увеличение тормозного момента достигаются вводом добавочных резисторов- в цепь ротора. Для АД с короткозамкнутым ротором уменьшение тока осуществляется вводом резисторов в цепь статора. В этом
случае резко снижается и тормозной момент. Под действием тор54
мозного момента, а также статического момента сопротивления
(когда последний отрицателен) ротор затормаживается, и вследствие этого скольжение уменьшается.
Из-за снижения скольжения уменьшается ЭДС и индуктивное
сопротивление ротора, что приводит к увеличению активной составляющей тока (резкое повышение со8\|/2) и соответствующему
возрастанию тормозного момента. Если при ю = 0 двигатель не
отключить от сети, то ротор будет разгоняться в обратном направлении до угловой скорости, которая определяется нагрузкой на
валу (рис. 21, в). Механические характеристики 1 и Г относятся к
короткозамкнутому АД, а 2 и 3-к фазному при различных значениях резисторов противовключения )?пр2 > К.пр1. Очевидно, начальный тормозной момент короткозамкнутого АД весьма мал, а у АД
с фазным ротором он тем больше, чем больше сопротивление
противотока.
Следует отметить, что возрастание тормозного момента происходит при увеличении активного сопротивления до определенного
значения, и если это значение превысит значение индуктивного
сопротивления Х2„ соответствующего начальному периоду реверса, то тормозной момент уменьшается. Подобный случай может
также иметь место в ЭП вентиляторов машинного отделения и
трюмов, которые приводятся в движение АД: в отключенном
состоянии рабочие колеса всегда вращаются потоком воздуха, и
пуск возможен в этом режиме.
Для АД с фазным ротором режим торможения противовключением можно использовать с целью получения посадочных скоростей
при опускании тяжелых грузов. Необходимым условием его осуществления является ввод больших активных сопротивлений в цепь
ротора, при котором критическое скольжение як > 1, а пусковой
момент АД меньше статического, создаваемого силой тяжести
груза. В свою очередь критический момент АД должен быть больше
статического момента. При этих условиях, несмотря на включение
АД в сторону подъема, ускорение его ротора будет происходить в
сторону опускания. Увеличение угловой скорости приводит к увеличению скольжения .у = (о>0 + ш)/со0, и, следовательно, возрастают
ЭДС, ток ротора и тормозной момент. Когда значение последнего
станет равным статическому моменту, АД будет работать в сторону опускания с установившейся угловой скоростью — сот. Искусственная характеристика 4 на рис. 27, в соответствует случаю тормозного спуска груза в данном режиме.
Динамическое торможение. Известны 2 вида динамического торможения: постоянным током и конденсаторное. Торможение постоянным током может происходить при независимом возбуждении
и самовозбуждении. Торможение с независимым возбуждением
осуществляют, отключая обмотку статора от сети и подавая на нее
(обычно на 2 ее фазы) постоянный ток (рис. 28). Последний получают
от сети через понижающий трансформатор и полупроводниковый
55
и
{.2 13
I
§)
Рис. 28. Динамическое торможение асинхронных двигателей при независимом возбуждении:
а, б схемы подключения двигателей соответственно с короIкочамкнуIым и фазным
роторами; а механические характеристики
выпрямитель, а при большой мощности АД-от специальных
возбудителей низкого напряжения (рис. 28, а).
У АД с фазным ротором наряду с этим в цепь ротора вводят
тормозной резистор (рис. 28,6). При таком соединении в обмотке
статора возникает неподвижное магнитное поле, индуцирующее в
обмотке вращающегося по инерции ротора ЭДС. В этом режиме
АД работает как неявнополюсный синхронный генератор, вырабатывая в роторной цепи ток, частота которого уменьшается по мере
снижения угловой скорости ротора. Этот ток, взаимодействуя с
потоком возбуждения статора, создает, как и в обычном синхронном генераторе, тормозной момент, под действием которого ротор
останавливается. По мере снижения угловой скорости ЭДС ток
ротора и тормозной момент убывают до нуля. Запасенная в
двигательном режиме кинетическая энергия преобразовывается в
электрическую, а затем в тепловую, выделяемую в обмотке ротора
асинхронного двигателя и в резисторе динамического торможения
(если он есть).
Значение М,, в начальный период и форма механических характеристик при торможении зависят от тока возбуждения и от
сопротивления роторной цепи. При сравнении механических характеристик / и 2 (рис. 28,в), которые соответствуют короткозамкнутому АД при токах возбуждения /В2 > /„1, видно, что большему току соответствуют большие начальны!! и максимальный
тормозные моменты. На этом же рисунке приведены характеристики 3 и 4 фазного АД при том же токе возбуждения / ч 1 , но с
разными сопротивлениями в цепи ротора К.,2> К.^, и характеристики 5 и 6 при тех же значениях тормозного сопротивления, но
при токе возбуждения 1п2. Из сопоставления этих характеристик
видно, что при одинаковом токе возбуждения М7 в начальный
период тем выше, тем больше сопротивление цепи ротора, а при
56
том же сопротивлении максимальный тормозной момент тем больше, чем выше ток возбуждения.
Увеличение тормозного момента при введении в цепь ротора
активного сопротивления объясняется тем, что работе АД в начальный период соответствует большое скольжение и ввиду этого
СО8
активная составляющая тока ротора 12лкт ~ 12
Уг очень мала. С
введением активного сопротивления со8\|/2 возрастает в большей
степени по сравнению с уменьшением 1г и тормозной момент АД
увеличивается. Повышение тока возбуждения во всех случаях приводит к увеличению магнитного потока статора и соответствующему возрастанию тормозного момента.
Ввиду того, что в цепь ротора АД с фазным ротором вводится
активное сопротивление, Мт в начале тормозного процесса будет
больше, как видно из характеристик, чем у короткозамкнутых АД.
По тем же причинам у АД с фазным ротором критическое скольжение для данного режима имеет большее значение (К2 — 2к/1$кЬ) и
максимальный тормозной момент достигается при большей угловой скорости. Поэтому фазный АД при прочих равных условиях во
время торможения делает меньше оборотов, чем короткозамкнутый, хотя продолжи I елыюсть торможения у обоих примерно одинаковая. Чтобы обеспечить у короткозамкнутого АД такую же
инерцию при остановке, как и у АД с фазным ротором, приходится
подавать в обмотку его статора значительно больший гок. Рассмотренный способ торможения весьма эффективен, но для него необходим /дополнительный источник постоянного тока или выпрямитель.
Динамическое торможение с независимым возбуждением применяется в ЭП механизма поворота грузовых кранов, обеспечивая
мягкое торможение и предотвращая тем самым раскачивание груза.
На судах в ЭП грузовых кранов, где приводным двигателем
является АД с фазным ротором,
также широко используется торможение постоянным током с самовозбуждением (рис. 29). Указанный вид торможения применяют
при тормозном спуске тяжелых
грузов. Для этого обмотку статора контактами КМ1 отключают
от секи 3-фазного тока и подключаю! контактами КМ2 к выпрямителю {]'/.. Ввиду того, что АД
продолжает вращаться иод действием момента сопротивления, Рис 24
обусловленною СИЛОЙ тяжести
- - Схема подключения асинхгруза, а в зубках статора имеется
Р™, ^^ #ЛГ
остаточное намагничивание, то в
ческого юрможешя с само-
роторной
возбуждением
обмотке
НаВОДИТСЯ
57
переменная ЭДС. С помощью выпрямителя 112 переменный ток
преобразуется в постоянный и через контакты КМ2 поступает на
статор. Магнитный поток статора увеличивается, ЭДС ротора
становится больше и т.д. Таким образом, в результате самовозбуждения возрастают постоянный ток статора, магнитный поток
и тормозной момент Мт = /с/2акТФ. Тормозной момент при большой
угловой скорости достигает очень больших значений, обеспечивая
эффективное торможение, а по мере замедления АД его значение
уменьшается.
Емкостное торможение применяют для остановки АД малой
мощности. Для этого обмотку статора отключают от сети переменного тока и подключают к заряженным'конденсаторам, являющимся источником питания постоянным током. Физический процесс
торможения аналогичен торможению АД постоянным током. Необходимо отметить, что конденсаторы в процессе торможения АД
разряжаются и в конце тормозного процесса оно становится неэффективным.
15. Способы регулирования угловой скорости
Регулирование угловой скорости АД можно осуществлять
четырьмя основными способами: изменением активного сопротивления, включенного в цепь ротора АД с фазным ротором; изменением частоты тока питающей сети; переключением обмоток
статора на различное число пар полюсов; изменением напряжения,
подаваемого на обмотку статора. (Этот способ будет подробно
рассмотрен в п. 20.) Получить плавное регулирование скорости АД
в широких пределах можно путем изменения реактивного сопротивления, включаемого в цепь обмотки статора АД. Однако данный
способ регулирования в судовых ЭП не применяется и поэтому
рассматриваться не будет.
Изменение сопротивления цепи ротора. Первоначальная работа
АД характеризуется точкой А на характеристике 1 (рис. 30).
Вращающий момент может быть выражен приближенной формулой М = с/2Ф. Допускаем сов VI/2 = 1, так как при работе на рабочей
части характеристики скольжение очень мало и индуктивным сопротивлением ротора можно пренебречь. При увеличении сопротивления цепи ротора в первый момент времени уменьшается ток
ротора /2 = Е2„ [22 и соответственно уменьшается момент М
электродвигателя. Нарушается равновесие моментов, которым характеризуется установившееся движение, и вращающий момент ЭД
оказывается меньше момента сопротивления (тока В). Это приводит к снижению угловой скорости ротора и, следовательно, к
увеличению скольжения и ЭДС ротора. Увеличение ЭДС ротора
при уменьшении угловой скорости вызовет увеличение тока / 2 и
вращающего момента М. Снижение скорости ротора АД будет
продолжаться до тех пор, пока вращающий момент не возрастет
58
настолько, что он станет равным
моменту сопротивления. Таким
образом АД перейдет на механическую характеристику 2. Ввиду
большей крутизны характеристики 2 устойчивость угловой скорости будет меньшей. Данный
способ сходен с методами регулирования скорости ЭД постоянного тока при включении рези- Рис. 30. Регулировочные характериссторов в цепь якоря.
тики асинхронных двигателей
с фазным ротором при введеПлавность регулирования зании сопротивления в цепь ровисит от числа ступеней регулитора
руемого резистора. Обычно в качестве регулируемых ступеней используются пусковые ступени, а
иногда ступени противовключения. Регулирование проводится вниз
от основной угловой скорости на естественной характеристике,
причем лучшее использование АД достигается при регулировании с
постоянным моментом. Жесткость характеристик значительно
уменьшается по мере снижения угловой скорости, поэтому диапазон регулирования невелик и зависит от возможных колебаний
нагрузки. Обычно диапазон регулирования составляет (2ч-3): 1.
Недостатком этого способа являются также значительные потери энергии при работе на реостатных характеристиках, поскольку потери мощности пропорциональны моменту и скольжению
АР2 — Мсо0л'. С точки зрения потерь наиболее невыгодным оказывается регулирование при постоянном моменте и постоянной
мощности. Более благоприятным в отношении потерь энергии
получается регулирование при вентиляторной нагрузке, когда Мс
уменьшается по мере снижения скорости. Из-за своей простоты этот
способ находит применение в ЭП кратковременного режима работы
(например, в ЭП якорно-швартовных устройств).
Изменение частоты тока. При изменении этого параметра изменяется угловая скорость поля статора ш0 = 2п/г/р, а пропорционально изменяется и скорость ротора. Этим способом пользуются, присоединяя АД к отдельному, специально для него предназначенному синхронному генератору или же тиристорному преобразователю частоты. Более подробно этот способ рассматривается в гл. 4.
Изменение числа нар полюсов статора. Наиболее широко применяется, так как пригоден для короткозамкну гых АД, этот способ
регулирования угловой скорости. Как следует из формулы (28),
изменяя число пар полюсов р переключением фазных обмоток
статора с одной схемы соединения на другую (рис. 31), можно
в обратно пропорциональной зависимости изменить синхронную
угловую скорость АД под нагузкой. При этом число пар полюсов
59
/ч хч
короткозамкнутого ротора изменяется автоматически. Так как
л/ 5 /V ^ л/ «5 л/
N
.V
р-целое число, то регулирование
*
данным способом ступенчатое.
В простейшем и наиболее расX
•ч-- X
пространенном
случае полюса
) /Л
< цн -) « » ^
>;л
'
переключают со схемы соединения «звезда» на схему соединения
В А
В^Р=4
Р-8
^
«двойная звезда» (рис. 32, а). КажРис. 31. Схемы соединения двух полодая
фазная обмотка специального
вин одной фазной обмотки
2-скоростного
АД состоит из двух
2-скоростного асинхронного
короткозамкнутого двигателя:
секций. Начала и концы каждой
а последовательное соединение;
из половин фазных обмоток, рас6 - параллельное соединение
положенных на панели выводов
АД, соединяют последовательно
или параллельно (во втором случае получается схема «двойная звезда»). Число пар полюсов при
этом уменьшается вдвое. Это становится очевидным из сопоставления принципиальных схем соединения обеих половин обмотки
одной фазы АД. На рис. 31, а обе половины соединены последовательно перемычкой 1К-2Н между концом первой половины и
началом второй. Рассматривая направление тока в активных сторохч
хЧ
*
/Ч
хч
хч.
^ч
5
5
1
•чи^
ч^*»
•*,**
^
т
Рис. 32. Схемы переключения обмоток статора асинхронного 2-скоростного короткозамкнутого двигателя:
а -со «звезды» на «двойную звезду»; 6 с «треугольника» на «двойную звезду»
60
м
-м м
Рис. 33. Механические характеристики 2-скоростного асинхронного двигателя:
а при переключении обмотки стаюра со «звезды» на «двойную звезду»; б- с «треугольника» на «двойную звезду»
нах секции обмотки в определенный момент времени, устанавливаем, что в АД создано вращающееся магнитное поле, образованное восемью полюсами. На рис. 31,6 обе половины обмотки соединены параллельно перемычками 1К-2Н и 1Н-2К. Теперь в некоторых соседних сторонах секций ток в данный момент времени
течет в одинаковом направлении, вследствие чего образуется всего
4 полюса. Угловая скорость ротора АД в результате такого
переключения увеличивается вдвое. То же получается при переключении обмоток со схемы «треугольник» на схему «двойная
звезда» (рис. 32,6).
В качестве примера рассмотрим простейшие переключения
обмоток 2-скоростных АД: со «звезды» или «треугольника» на
«двойную звезду» (см. рис. 32). При переключении двух частей
каждой фазы с последовательного соединения на параллельное
число пар полюсов уменьшается вдвое, а угловая скорость поля
статора во столько же раз увеличивается, и соответственно в такой
же степени возрастает угловая скорость ротора. Отличие соответствующих механических характеристик (рис. 33) при различных
способах переключения пар полюсов состоит в неодинаковости
критических моментов и объясняется следующими обстоятельствами.
При переключении со «звезды» на «двойную звезду» вдвое
уменьшается число пар полюсов и вдвое увеличивается магнитный
поток одного полюса. Последнее объясняется тем, что у «двойной
звезды» по отношению к «звезде» при том же значении фазового
напряжения число последовательно соединенных витков одной фазы будет меньше в 2 раза, а это ведет к увеличению в 2 раза тока
статора и соответственно в 2 раза увеличивается магнитный поток
одной пары полюсов. Так как вращающий момент АД, и в частном
случае критический момент, пропорционален числу полюсов,
то его значение может быть выражено следующей формулой:
Мкр — с1р12Фсо§у2- Из этого уравнения ясно, что поскольку при
переключении числа пар полюсов по первому способу значение рФ
61
не изменяется, критический момент АД, определяющий его перегрузочную способность, остается таким же.
В случае переключения с «треугольника» на «двойную звезду»
фазное напряжение уменьшается в ^/3 раз, а число последовательно
соединенных витков одной фазы-в 2 раза. Поэтому ток возбуждения и магнитный поток здесь увеличиваются всего на 14%. Значение
рФ при уменьшении вдвое числа пар полюсов также уменьшается.
Следовательно, уменьшается и критический момент АД, т. е. снижается перегрузочная способность.
При переключении многоскоростного АД с большей скорости на
меньшую в первоначальный момент скорость вращающегося по
инерции ротора оказывается больше угловой скорости поля статора, снизившейся в 2 раза. Вследствие этого скольжение становится
отрицательным, ЭДС ротора Е2а становится противоположной
по фазе и соответственно меняется на 180° по фазе ток ротора
12. Изменившийся по фазе ток создает во взаимодействии с магнитным потоком противоположный по направлению момент
Мт = /с/2Ф со» \|/2, который для вращающегося в том же направлении ротора будет являться тормозным. Это явление в схемах ЭП
судовых грузоподъемных механизмов широко используют для облегчения работы механических электромагнитных тормозов.
Возможны и другие переключения схем соединения обмоток,
причем каждая фазная обмотка может состоять не только из двух
половин, но и из трех, четырех и даже пяти частей. В этих случаях
отдельные части обмоток соединяют, кроме указанных выше схем,
«двойным» и «тройным треугольником», «тройной звездой»; применяют комбинированное соединение нескольких частей обмоток и
т. п. В результате можно получать не только две, но и три, четыре
угловые скорости. Такие полюсопереключаемые АД называются
многоскоростными.
В судовых ЭП применяются многоскоростные 2- и 3-обмоточные АД серии МАП, у которых есть 2 или 3 независимые одна от
другой 3-фазные обмотки статора. Каждая из обмоток выполнена
на разное число пар полюсов. Одна из обмоток называется тихоходной, другая - быстроходной и т.д. Любую из этих обмоток
можно переключить со схемы «треугольник» на схему «двойная
звезда» и получить таким образом большее число скоростей.
Наибольшее распространение в 2-скоростном исполнении получили
АД с кратностью скоростей 2:1, а в 3-скоростном исполнении^с
кратностью 4 : 2 : 1 и 6 : 2 : 1 . Полюсопереключаемые АД, используемые в ЭП палубных механизмов, могут иметь обычный ротор с
короткозамкнутой обмоткой, а также ротор с переменными параметрами (двойная беличья клетка и т.п.).
Способ регулирования скорости переключением числа пар полюсов прост в реализации и экономичен, поскольку АД работают с
малыми скольжениями. Основной недостаток этого способа-ограниченное число скоростей в заданном диапазоне регулирования: для
62
1-обмоточных АД-обычно 2 скорости, для 2-обмоточных-З. Обеспечить плавное регулирование скорости здесь невозможно, нельзя
получить также «ползучие» скорости. При ступенчатом изменении
числа пар полюсов угловая скорость поля статора, а соответственно
и скольжение также изменяются ступенчато. Это приводит к ступенчатому изменению значений ЭДС, тока ротора, вращающего
момента, и АД испытывает дополнительные динамические нагрузки. Кроме того, многоскоростные АД при прочих равных условиях
больше по габаритным размерам, и для управления ими нужна
более сложная и дорогая аппаратура.
Контрольные вопросы-задания
1. Как влияют на механическую характеристику параметры асинхронного двигателя
и электрической сети?
2. Каковы особенности пускового процесса асинхронного двигателя?
3. Как влияет активное сопротивление в цепи ротора на пусковой момент асинхронного двигателя?
4. Чем ограничивается мощность асинхронного двигателя, для которого возможен
прямой пуск?
5. Перечислите виды тормозных режимов асинхронного двигателя.
6. Используя схемы, объясните, как реализуется режим рекуперативного торможения многоскоростного асинхронного полюсопереключаемого двигателя?
7. В каких случаях применяют тот или иной способ регулирования скорости
асинхронного двигателя?
Глава 4
ТИРИСТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ
16. Тиристорные электроприводы постоянного тока
Тиристорный преобразователь в ЭП постоянного тока выполняет те же функции, что и электромашинный в системе Г Д, т. е.
осуществляет преобразование переменного тока в постоянный и
управление ЭД (пуск, торможение, реверсирование, регулирование
угловой скорости, получение специальных механических характеристик). В большинстве преобразователей, применяемых для ЭП, в
качестве силовых вентилей используются тиристоры, выполняющие
функции выпрямительных устройств.
Выпрямление напряжения происходит при открытии соответствующего тиристора, для чего на его управляющий электрод подается соответствующий импульс. Таким образом, время подачи импульса на управляющий электрод определяет значение выпрямленного напряжения. Это время, принимаемое по отношению к началу
естественной коммутации тиристоров и выражаемое в электрических градусах, обозначается углом а. Нетрудно заметить, что с
изменением угла а (угла запаздывания или угла управления) значение выпрямленного напряжения изменяется и будет тем меньше,
чем больше угол а. Таким образом, сущность управления тиристорами заключается в том, чтобы в какой-то момент времени выработать сигнал и подать его на управляющий электрод. Сигнал
в схеме управления вырабатывает система импульсно-фазового
управления.
Система фазового управления (рис. 34, а), выполненная по вертикальному принципу, состоит из фазосдвигающего устройства
РСУ
с
"
гпн
•>
УС
\
1
1
ги
•»•
ВУ
Рис. 34. Фазосдвигающий узел:
а структурная схема; 6-кривые напряжений; в выходные импульсы
64
ФСУ и импульсного устройства
//У, которые включают в себя
наиболее характерные звенья: синхронизатор С, генератор пилообразного напряжения ГПН, узел
сравнения УС, генератор импульсов ГИ и выходное устройство
ВУ.
Принцип вертикального управления состоит в следующем.
В узел сравнения УС поступают 2
противоположно направленных Рис. 35. Принципиальная схема фазового управления с маломощнапряжения: регулируемое по знаными тиристорами
чению постоянное напряжение V
и пилообразное С7„, вырабатываемое ГПН. При равенстве этих напряжений с генератора импульсов ГИ (рис. 34,6, в) поступает импульс С7И на управляющий
электрод тиристора и происходит его открытие. Четкость открывания тиристора достигается тем, что управляющий импульс 1/и
имеет высокую крутизну (в идеальном случае прямоугольную
форму). Изменяя управляющее напряжение I/ , можно регулировать фазу управляющих импульсов, т.е. угол управления а.
В многофазных схемах число каналов системы фазового управления соответствует фазности преобразователя. Работа канала синхронизируется с соответствующей фазой напряжения сети при
помощи синхронизатора, наиболее распространенная схема которого-трансформатор. В качестве генераторов импульсов применяются блокинг-генераторы, действующие в ждущем режиме. Сигналы с блокинг-генераторов поступают на выходные устройства.
Обычно в качестве выходных устройств находят применение маломощные тиристоры. Для развязки цепей системы управления и
силовой управляющие импульсы на силовые тиристоры подаются
через многообмоточные импульсные трансформаторы, которые
входят в состав выходных устройств.
В схеме фазового управления (рис. 35) получение сигнала обеспечивается генератором импульсов, основу которого составляют маномощный тиристор У81 и конденсатор СУ. Здесь от переменного
напряжения через диод У&1 проходит заряд конденсатора С/,
последовательно в цепь включена первичная обмотка Ы импульсного трансформатора 7Т2, собранного на тороидальном сердечнике. Параллельно конденсатору С1 и обмотке Ы включен маломощный тиристор УВ1, номинальный ток которого, однако, значительно превосходит по значению импульс управляющего тока. Во
время заряда конденсатора С1 тиристор У81 заперт. После окончания заряда конденсатора и накопления в нем достаточного количества энергии на управляющий электрод У81 подается входной
сигнал из устройства сравнения. Тиристор УВ1 при этом открывает65
ся, давая возможность конденсатору С1 разрядиться на обмотку Ы
импульсного трансформатора. Импульс, возникающий на вторичной обмотке Ь2 трансформатора, через диод УО2 и резистор К.1
передается на управляющий электрод главного тиристора У82
(резистор К2 ограничивает напряжение импульса).
Тиристорные преобразователи выполняются как с 1-фазными,
так и с многофазными схемами выпрямления. Преобразователи с
1-фазными схемами выпрямления применяются в установках малой
мощности (до 10-15 кВт), Преобразователи с многофазными схемами выпрямления предназначаются, как правило, для питания якорных цепей ЭД мощностью более 15 кВт.
В судовых ЭП применяются в основном 3-фазные схемы выпрямления, которые по сравнению с 1-фазными позволяют достичь
лучшего использования трансформаторов и вентилей. Для ограничения пульсаций тока до допустимого уровня последовательно с
якорем ЭД включается сглаживающий дроссель, поглощающий
энергию цепи в момент ее максимального значения и отдающий
энергию в цепь в период ее наименьшего значения (тем самым
ограничивается зона прерывистых токов). Трехфазные тиристорные
преобразователи применяются для реверсивных и нереверсивных
ЭП в том случае, когда требуется получить большой диапазон
регулирования скорости и обеспечить высокое качество протекания
динамических режимов ЭП.
Рассмотрим работу нереверсивного ЭП с тиристорным преобразователем, соединенным по 3-фазной мостовой схеме (рис. 36, а).
В фазы вторичной обмотки трансформатора ТУ включены тиристоры У81-У86, образующие преобразователь ТР. К преобразователю подключена нагрузка: якорная цепь двигателя М с независимым возбуждением. Для сглаживания пульсаций выпрямленного тока последовательно с якорем включен сглаживающий дроссель Ь. На эквивалентной схеме замещения (рис. 36,6) рассматриваемого ЭП приняты следующие условные обозначения: е2а, е2Ь,
ег 2с-ЭДС, наводимые во вторичных обмотках трансформатора;
! ~ гб-мгновенные значения токов, протекающих через соответствующие тиристоры; е2аЬ, е2Ьс, е2га-линейные ЭДС между вторичными обмотками трансформатора (показаны штриховой линией); Vл,
1й-мгновенные значения соответственно напряжения и тока на
выходе преобразователя; Р.т, Хт - соответственно активное и индуктивное сопротивления фазы трансформатора; Ь-индуктивность
сглаживающего дросселя. Указанные направления ЭДС, напряжений и токов соответствуют выпрямительному режиму тиристорного преобразователя. Проанализируем работу преобразователя
в этом режиме.
Вначале для упрощения анализа схемы рассмотрим ее работу,
когда на управляющие электроды тиристоров постоянно подано
напряжение, достаточное для их открытия, т.е. тиристоры выполняют обычную функцию диодов, или их открытие происходит
66
его
752
Рис. 36. Нереверсивный электропривод с 3-фазным мостовым тиристорным преобразователем:
а, б- соответственно принципиальная и эквивалентная схемы
при угле а = 0. В рабочем состоянии схемы ток пропускают одновременно 2 тиристора: 1 в группе тиристоров с общими катодами
(тиристоры У&1, У83, К55 -катодная группа) и 1 -в группе с общими
анодами (тиристоры У52, У54, У86 - анодная группа). Протекание
тока связано с действием двух фазных ЭДС, поэтому тиристоры
находятся под воздействием линейных ЭДС, значения которых и
определяют коммутацию тиристоров (их включение и отключение).
Очевидно, включенными оказываются тиристоры, которые находятся под воздействием большего значения линейной ЭДС. Граничными точками изменения линейных ЭДС, как это видно из
рис. 37, а, являются точки пересечения синусоид фазных ЭДС,
поэтому переключение тиристоров происходит в моменты времени,
соответствующие точкам пересечения фазных ЭДС, которые носят
название точек естественного отпирания. Анодная группа переключается в моменты времени, соответствующие пересечению отрицательных полуволн фазных ЭДС, а катодная группа-в точках
пересечения положительных полуволн. В катодной группе коммутация тока происходит на тиристор, обладающий наибольшим положительным потенциалом анода, в анодной группе-на
тиристор с наиболее отрицательным потенциалом катода.
Начиная с момента времени со/ 1 , наибольшее положительное
значение имеет ЭДС е2а, а наибольшее отрицательное - ЭДС е2ьВ результате открываются тиристор катодной группы У51, включенный в фазу а, и тиристор анодной группы У84, включенный в
фазу Ь. Благодаря этому между вторичными обмотками трансформатора фаз а и Ъ, через тиристоры У81, У84, дроссель и якорь
двигателя М протекает под воздействием линейной ЭДС еаЬ ток / 1)4 .
Пренебрегая потерями, считаем, что в этом случае выпрямленная
,Ч"
67
ЭДС еЛаЬ равна линейной ЭДС е2аЬ. Этот процесс в схеме продолжается до момента ю?2, т.е. в течение времени тс/3, когда ЭДС
е2с станет более отрицательной, чем е2ь • Это приводит к переключению тиристоров анодной группы: тиристор У86 фазы с включается,
а тиристор У84 фазы Ъ выключается. Ток электрической цепи г'1>6 в
этом случае от фазы трансформатора а к фазе с протекает через
тиристоры У81 и У86 (действует линейная ЭДС е2ас). В момент
времени юг3 более положительной становится ЭДС е2Ь, поэтому
происходит переключение тиристоров катодной группы: включается тиристор У83 и выключается У81. Ток г3,6 под воздействием
линейной ЭДС е2ьс протекает между фазами трансформатора Ъ и с
через тиристоры У83 и У86.
Далее через интервалы времени я/3 происходит коммутация
следующих вентильных пар: У83-У82, У85-У82, У85-У84. Таким
образом, в течение периода питающего напряжения имеются
6 коммутаций с интервалом я/3 каждая, причем 3 из них происходят
в катодной группе вентилей (У81, У83, У85) и 3-в анодной группе
вентией (У84, У86, У82). Поочередная работа различных пар вентилей в схеме приводит к появлению на выходе преобразователя
выпрямленной ЭДС ей, состоящей из частей линейных ЭДС вторичных обмоток трансформатора.
Выпрямленная ЭДС имеет пульсирующий характер с числом
пульсаций т = 6 за период питающего напряжения. Дроссель Ь (см.
рис. 36) в значительной степени сглаживает пульсации, поэтому
будем считать выпрямленный ток идеально сглаженным, на всех
0\-
ппгпггтт
ги|4..л
Рис. 37. Диаграммы ЭДС и токов 3-фазного мостового тиристорного преобразователя: а -при угле а = 0; б - п р и угле ав > 0 и работе его в режиме выпрямления
68
участках одинаковым и обозначим его 1Л (см. рис. 37, а). Для
3-фазной мостовой схемы выпрямленная ЭДС
ЕЛО — 2,34Е2ф >
где Ь"2ф -действующее значение фазной ЭДС вторичной обмотки трансформатора.
Ввиду того, что каждый тиристор за период включен в течение
времени 2я/3, то среднее значение тока тиристора / т = 1а/3.
Если при помощи системы управления отпирающие импульсы
поступают с задержкой на угол ав относительно точки пересечения
фазных ЭДС (точки естественного отпирания), то среднее значение
выпрямленной ЭДС снижается (рис. 37, б). Это объясняется тем, что
в период закрытого состояния тиристора, определяемого углом а в ,
соответствующая фазная ЭДС с наибольшим положительным или
отрицательным потенциалом через этот тиристор не поступает на
схему выпрямления, в результате продолжают оставаться открытыми те тиристоры, которые проводили ток и до точки естественного отпирания. Через открытые тиристоры поступают те же фазные
ЭДС, положительное или отрицательное значение которых меньше,
чем у невключаемых фазных ЭДС. Соответственно на этот период
задержки уменьшается линейная ЭДС, которая и определяет значение выпрямленного напряжения. Например, в точке естественного
отпирания со?! значение с2а > е2с, но из-за отсутствия управляющего
сигнала тиристор У81 не открывается и фазная ЭДС е2а на схему
выпрямления не поступает. Ввиду закрытого состояния тиристора
У81 (см. рис. 37, б) продолжает оставаться открытым тиристор У55,
а также включен тиристор У84. Через эти тиристоры на период
задержки поступают фазные ЭДС е2с и е2ь, которые, как это видно
из рис. 37,6, в зоне задержки (точке ю^) имеют меньшую линейную
ЭДС, чем в случае, если бы в точке ю^ вместо фазы с подключилась
фаза а(е2Ьс < е2иЬ). Выпрямленное значение ЭДС на этом участке
уменьшается (в зоне задержки еЛЬс < еааЬ). Аналогично уменьшаются
текущие значения ел на всех участках, что приводит к уменьшению
значения выпрямленной ЭДС, среднее значение которой в зависимости от угла управления ав определяется но формуле
С увеличением угла ав значение выпрямленной ЭДС уменьшается: при ав = 90° значение Ейъ — 0. Таким образом, при изменении угла ав от 0 до 90° выпрямленная ЭДС изменяется от
значения Ело до нуля.
В реальных схемах из-за индуктивных сопротивлений фаз Хг
токи во вторичных обмотках трансформатора не появляются и не
исчезают мгновенно. Поэтому когда вступит в работу очередной
тиристор (например, тиристор У81) в момент времени со?'2, то
предыдущий тиристор У85 еще будет пропускать ток. В результате
некоторое время одновременно пропускают ток оба тиристора
69
одного и того же плеча - катодного или анодного (для рассматриваемого случая это будут тиристоры У81 и У85 катодного плеча). Это
явление носит название коммутации анодов (перекрытие), а электрический угол у, соответствующий времени перекрытия, называется
углом коммутации (перекрытия). Из диаграммы токов тиристоров с
учетом явления коммутации (см. рис. 37,6) видно, что каждый
тиристор пропускает ток в течение интервала Я, = 60° + у. В результате перекрытия тиристоров уменьшается среднее значение напряжения преобразователя, что воспринимается внешней цепью как
результат падения напряжения на некотором активном сопротивлении, находящемся внутри преобразователя. Активное сопротивление обмоток трансформатора и активное сопротивление коммутации образуют как бы внутреннее активное сопротивление преобразоватля К„р. Падение напряжения во внутреннем активном
сопротивлении преобразователя зависит от тока: А11вп = 1лКпр.
Кроме того, происходит падение напряжения А(7В внутри преобразователя непосредственно в вентилях моста. С учетом падения
напряжения снимаемое с преобразователя выпрямленное напряжение
Из этого уравнения следует, что внешняя характеристика преобразователя, представляющая собой зависимость 11а(1л), есть прямая линия, наклон которой определяется значением внутреннего
сопротивления Кпр преобразователя. Если изменять угол управления в пределах а.г — а 6 , то значение выпрямленного напряжения
изменяется и мы получим семейство внешних характеристик в виде
прямых наклонных линий, параллельных между собой (рис. 38).
Однако линейный характер внешней характеристики сохраняется
только в области непрерывных токов (область II). При малых
нагрузках появляется область прерывистых токов (область /).
В этой области наблюдается нелинейная зависимость выпрямленного напряжения от тока, при этом с изменением тока якоря
напряжение преобразователя изменяется весьма существенно, что
объясняется спецификой режима прерывистых токов. Это отражается на изменении угловой скорости якоря ЭД при изменении нагрузки. Механические характеристики тиристорного ЭП постоянного тока определяются внешней характеристикой преобразователя
(рис. 39).
В выпрямительном режиме работы преобразователя снимаемое
напряжение подается на электродвигатель М (см. рис. 36), и его
полярность (показана на щетках ЭД без скобок) определяет направление тока (изображено на схеме стрелкой в виде сплошной
линии). При переходе ЭД в рекуперативный режим, когда ЭДС
двигателя становится больше приложенного напряжения (Ея > С^),
полярность на щетках ЭД (показана на рис. 36 в скобках) меняется
на противоположную и ток якоря протекает в обратном направ70
(Х,= О
Рис. 38. Внешние характеристики тиристорного преобразователя
в системе электропривода
Рис. 39. Механические
характеристики
тиристорного
электропривода
постоянного тока
лении (показано на схеме рис. 36 штриховой линией). В этом
режиме ток, вырабатываемый ЭД как источником энергии, должен
передаваться через преобразователь в сеть.
Рассмотренный режим работы преобразователя называют инверторным, а преобразователь - инвертором, ведомым сетью. При
новой полярности на щетках «плюс» от ЭД подключается к тиристорам анодной группы, а «минус»-к тиристорам с общими
катодами. Исходя из условий коммутации (наибольшая разность
потенциалов между анодом и катодом) включение тиристоров
анодной группы У82, У84, У86 (см. рис. 36) происходит, если
подавать управляющий импульс на тот тиристор, к катоду которого прикладывается наименьшее положительное значение фазной
ЭДС или ее наибольшее отрицательное значение. Соответственно в
катодной группе (У81, У83, У85) коммутируется тот тиристор, у
которого подача импульса на управляющий электрод осуществляется в момент времени, когда к его аноду прикладывается наименьшее отрицательное или наибольшее положительное значение
фазной ЭДС. В обоих случаях обеспечивается наибольшая разность
потенциалов между анодом и катодом при положительном смещении анода относительно катода.
В связи с тем, что передача энергии от ЭД в сеть будет
происходить, когда ЭДС сети будет направлена навстречу току ЭД,
т. е. при приложении положительных полуволн фазных ЭДС к
катодам анодной и к анодам катодной групп, то выполнение
условия режима инвертирования возможно, если подавать управляющий импульс при угле аи > 90°. Отсчет угла осуществляется
относительно точек естественной коммутации. На диаграмме ЭДС
преобразователя, работающего в режиме инвертирования (рис. 40),
71
Рис. 40. Диаграмма
ЭДС
показан угол управления аи - угол
коммутации тиристора У81 катодной группы. Обычно при анализе схем угол управления в инверторном режиме принято отсчитывать в сторону опережения
(влево) на 180° относительно угла
а и . Данный угол, определяемый
3-фазного НОВЫМ
мостового тиристорного преобразователя при угле а„ > 0 и раооте
точек
ОТСЧСТОМ
ОТНОСИТСЛЬНО
естественной коммутации,
:
называют
углом
опережения
р = я - аи.
Из рис. 40 видно, что угол запаздывания аи и угол опережения
Р соответствуют включению тиристора одной и той же фазы а, но в
первом случае включается тиристор У82 анодной группы, а во
втором случае -тиристор У81 катодной группы. В процессе работы
схемы через 60° поочередно коммутируются тиристоры анодной и
катодной групп: У81 - У86 - У83 - У82 - У85 - У84 - У81 и т. д.,
на которые в период коммутации системы управления подают
управляющие импульсы. В результате этого в каждый момент
времени оказываются одновременно включенными по 2 тиристора,
например У85 - У84, У81 - У84, У81 - У86 и т.д., которыми
обеспечивается подача на ЭД выпрямленных линейных ЭДС еЬс, еаЬ,
еас (выпрямленное напряжение). Выпрямленные ЭДС направлены
встречно ЭДС двигателя, поэтому выполняют функции противоЭДС. Очевидно, каждая фаза вторичной обмотки трансформатора за период оказывается подключенной к ЭД в течение времени,
соответствующего 120°. Таким образом, ток, протекающий от ЭД
ко вторичной обмотке трансформатора, является 3-фазным. Он
индуцируется в первичную обмотку и отдается в электрическую
сеть. Значение вырабатываемой противоЭДС инвертора (так же как
и при работе преобразователя в режиме выпрямления) зависит от
угла <хи:
его в инверторам режиме
Значения угла аи варьируются в пределах 90° ^ аи ^ 180°. Ограничение угла аи связано с той особенностью инвертора, что коммутация тока с анода на анод должна завершиться раньше, чем
анодная ЭДС выходящего из работы тиристора станет равной
анодной ЭДС тиристора, вступающего в работу: это дает возможность тиристору восстановить свои запирающие свойства. Предельно допустимый угол регулирования тиристорного преобразователя в инвенторном режиме составляет а итах « 155°. Ограничение
угла регулирования приводит к ограничению предельной ЭДС
двигателя, работающего в рекуперативном режиме, т. е. к ограничению его угловой скорости.
72
17. Тиристорные преобразователи частоты
с промежуточным звеном постоянного тока
Использование ЭД постоянного тока с тиристорным управлением значительно повышает технико-экономические показатели
регулируемых ЭП, но не устраняет ряда существенных недостатков,
обусловленных конструкцией машин постоянного тока. Поэтому
более целесообразным является использование в таких приводах
ЛД. Однако многоскоростные АД с короткозамкнутым ротором
недостаточно полно удовлетворяют требованиям, предъявляемым к
судовому регулируемому ЭП. Резкое повышение регулировочных
свойств АД стало возможным с разработкой тиристорных схем
управления. На судах применяют следующие способы управления
тиристорным приводом: частотное; параметрическое регулирование
в цепи статора; широтно-импульсное регулирование в цепи ротора;
регулирование путем введения в цепь ротора АД добавочной ЭДС.
Основным видом регулирования ЭП переменного тока является
частотный. Частотное регулирование, пуск и торможение - это
наиболее экономичные методы управления АД. Этот способ осуществляется благодаря тиристорным преобразователям частоты,
которые при этом виде регулирования должны преобразовывать
напряжение сети промышленной частоты в напряжение другой
частоты, причем его амплитуда, частота и фаза должны изменяться
в широком диапазоне. Частота-это временной параметр переменного напряжения, определяющий, по существу, интервалы времени,
через которые изменяется знак этого напряжения. В ТПЧ это
достигается включением и отключением тиристоров в функции
времени по такому закону, который обеспечивал бы подключение
источника энергии к нагрузке (двигатель) с задаваемой частотой
смены знака среднего значения напряжения на этом выходе.
Выделяют 2 основных класса ТПЧ:
с промежуточным звеном постоянного тока;
с непосредственной связью питающей сети и цепей нагрузки
(в литературе иногда называются преобразователями с неявно
выраженным звеном постоянного тока).
В ТПЧ с промежуточным звеном (рис. 41) переменное напряжение [71 с частотой Д поступает на вход выпрямителя В. Выпрямленное напряжение сглаживается фильтром Ф и поступает на вход
автономного инвертора АИ, имеющего выходное напряжение V2 с
частотой/ 2 . В этих ТПЧ частота
выходного напряжения не зависит
от частоты питающей сети и мо- &ш?
жет быть как больше, так и
меньше этой частоты. Основным Рис
УЗЛОМ в ТПЧ ланного типа явттяузлом В 1114 данного типа ЯВЛЯ6ТСЯ автономный ИЛИ незавиСИ-
мый инвертор, который преобра-
- 41.Структурная схема тиристорного
преобразователя частоты с промежуточным эвеном постоянного
тока
73
/и
/
/ \(
\/
~^Н'~^Н
Рис. 42. Схемы 1-фазных автономных инверторов напряжения (а) и тока (б), диаграммы токов и напряжений на их выходах
зует выпрямленное напряжение в 3-фазное напряжение регулируемой частоты.
По характеру протекающих в схеме электромагнитных процессов автономные инверторы подразделяют на инверторы тока и
инверторы напряжения. Такое разделение инверторов условно. Рассмотрим это на примере двух автономных инверторов, питающихся
от источника постоянного напряжения \]л (рис. 42).
В цепь постоянного тока первого инвертора (рис. 42, б) включен
реактор Ь с большой индуктивностью. Благодаря этому в интервале
между коммутациями тиристоров У81 — У84 ток в реакторе практически остается неизменным по значению. В этом случае тиристоры
У51 - У84 изменяют только направление (но не значение) тока в
нагрузке, так что последняя питается как бы от источника тока, что
и нашло отражение в названии-инвертор тока. Форма напряжения
при неизменном значении тока зависит от характера нагрузки.
Перевод выпрямителя в режим регулируемого источника тока при
работе на автономный инвертор тока обычно достигается или
путем включения сглаживающего реактора очень большой индуктивности, или посредством охвата выпрямителя сильной отрицательной обратной связью по току при одновременном использовании сглаживающего реактора. В регулируемом ЭП наиболее
целесообразен второй способ, обеспечивающий приемлемые массогабаритные показатели ТПЧ и его достаточно высокое быстродействие.
Автономный инвертор напряжения-это инвертор, форма напряжения на выходе которого определяется только порядком переключения тиристоров инвертора, а форма тока зависит от характера
нагрузки. В схеме АЙН (рис. 42, а) источник подключен непосредственно к тиристорам У81 — У84, которые периодически с изменением
полярности подключают это напряжение к нагрузке. При неизменном угле управления а источник напряжения подает на нагрузку
постоянное по значению напряжение: соответственно инвертор
74
получил название автономного инвертора напряжения. Включение
тиристоров У81, У82 или У83, У84 изменяет только полярность
напряжения. Ток АЙН переменный по значению, и его изменение
зависит от характера нагрузки. При работе автономного инвертора
напряжения на АД, являющийся активно-индуктивной нагрузкой,
должна быть обеспечена возможностью обмена реактивной энергией между АД и источником напряжения. Это достигается включением параллельно входу инвертора конденсатора большой емкости,
а также параллельно схеме автономного инвертора напряжения
подключается обратный выпрямитель с диодами УВ1-УО4.
Несмотря на большое разнообразие 3-фазных тиристорных инверторов, все они строятся на основе одной и той же принципиальной схемы (рис. 43, а). Преобразование постоянного напряжения в напряжение переменного т ока необходимой частоты
осуществляется переключением с заданной частотой и определенной последовательностью тиристоров в плечах моста. Открытие и
закрытие тиристоров определяется последовательностью импульсов, поступающих из схемы управления на их управляющие
электроды. Это достигается в схеме управления с помощью задающего генератора. В качестве задающего генератора обычно используется релаксационный Л — С-1 енератор, выходной сигнал которого
подается на вход схемы логики. Последняя формирует импульсы
требуемой формы и распределяет их между управляющими и
коммутирующими цепями тиристоров.
Наибольшее распространение получили ТПЧ с широтно-импульсным регулированием, при этом на входе инвертора используется неуправляемый выпрямитель. Переменная выходная ЭДС формируется из ряда прямоугольных напряжений, которые образуются
при высокочастотной коммутации пары тиристоров каждой фазы
(УВ1 и У84, У83 и У86, У85 и У82 на рис. 43, а). В автономном
т ш ш 455
1 2 \} 1 2 1 2
ь_^
1 2
ш
:2
!2
^ ^
Рис. 43, Трехфазный тиристорный инвертор:
а схема; и- 1иаграммы электродвижущей силы и тока
75
инверторе с широтно-импульсной модуляцией нет поочередного
переключения тока нагрузки с тиристора анодной на тиристор
катодной группы и наоборот. Здесь тиристор анодной группы,
осуществляя ряд коммутаций, пропускает положительную полуволну тока нагрузки и лишь при изменении направления тока
вступает в работу тиристор катодной группы. Если ?в - продолжительность включения положительного или отрицательного импульса напряжения, приложенного к нагрузке, а Тк = /„ + 10- период
коммутации вентилей (рис. 43,6). то скважность включения вентилей у = (Я/ТК определяет среднее значение ЭДС или тока за период
коммутации.
Для симметричного способа коммутации ЭДС еп = 17й/[2(2у — !)]•
Настраивая систему управления каждой фазы на синусоидальный
закон регулирования скважности, т. е. 2у — 1 = ц зт со?, получим для
трех фаз преобразователя частоты: епЛ — Vл/^\и зт со?); е„в —
= 1у[(2ц8т(ю? - 2я/3]; е„с = (7й/[2ц ап (оо/ + 2я/3)]. Изменяя с помощью системы управления глубину модуляции ц и угловую
частоту и, можно выполнять необходимое регулирование амплитуды и частоты выходной ЭДС преобразователя.
Регулирование частоты выходных напряжений ТПЧ осуществляется системой управления инвертором (рис. 44), которая включает в
свой состав: задающий генератор частоты ЗГ, преобразующий
аналоговый сигнал управления [7уу в колебания прямоугольной
формы с частотой /3-г; распределитель импульсов РИ, преобразующий колебания ЗГ в синхронизированную по частоте и фазе 3-фазную систему импульсов и распределяющий импульсы по шести
каналам управления тиристорами У81 - У8б инвертора; формирователь управляющего импульса ФИ, формирующий импульс управления тиристором по длительности, форме и мощности (в зависимости от схемных решений ФИ может быть как самостоятельным
элементом, гак и входить в состав РИ).
В качестве ЗГ преобразователя обычно используется генератор
прямоугольных напряжений. Его выходное напряжение имеет форму 2-полярных прямоугольных колебаний, частота которых пропорциональна управляющему напряжению. Распределитель импульсов может быть построен на основе кольцевых коммутаторов,
диодных матриц и схем совпадений. Независимо от принципа
построения функционально РИ всех видов работают одинаково. На
шести выходных каналах РИ по числу тиристоров в автономном
инверторе выделяются узкие синхронизирующие импульсы. Возникая в каждый полупериод ЗГ, импульсы передаются поочередно на
выходные каналы 1, 2, ..., 6; 1, 2, ..., 6 и т.д. Полученные
синхронизирующие импульсы усиливаются и расширяются с помощью формирователей импульсов, т. е. сигналы приобретаю!
параметры, необходимые для надежного открывания тиристоров
инвертора. Таким образом, формирователь импульсов представляет собой усилительное звено.
76
Ь:
"У/-
р-1
|_|
зг
РН
<РН
Л?, г
/\
/1
^
Рис. 44. Структурная схема управления инвертором
Включение и отключение тиристоров требует специальных мер
(например, при отключении необходимо обеспечить спадание протекающего через него тока до нуля и задержку подачи прямого
напряжения). В автономных инверторах отсутствие сетевого напряжения (или переменного напряжения каких-либо других источников) приводит к необходимости использовать принудительную
конденсаторную коммутацию. При принудительной коммутации в
АИ коммутирующие цепи воздействуют на работу схемы только в
требуемый момент, т.е. во время коммутационного процесса. Для
запирания тиристора с помощью конденсатора подается импульс
обратного тока, а затем к его электродам прикладывается обратное
напряжение на то время, которое необходимо для восстановления
запирающих свойств в прямом направлении. Этот способ известен
под названием импульсной коммутации и применим при широком
диапазоне изменения выходной частоты.
В зависимости от способа включения коммутирующего конденсатора по отношению к цепи нагрузки различают АИ двух
типов: с отделенными и не отделенными от нагрузки конденсаторами. В основном применяют инверторы, в которых «отсекающие»
вентили или тиристоры отделяют коммутирующие конденсаторы
от нагрузки. Отсутствие прямой связи с нагрузкой не только
исключает возникновение режима самовозбуждения АД, но и
предотвращает разряд конденсаторов через его обмотку. Последнее
обстоятельство дает возможность уменьшить емкость конденсаторов.
Автономные инверторы с отделенными от нагрузки коммутирующими конденсаторами имеют большое количество схемных
решений. Они могут быть по характеру и организации процесса
коммутации разделены на 2 группы: с 1- и 2-ступенчатой коммутацией.
Под 1-ступенчатой понимается коммутация, при которой ток,
протекающий через тиристор перед его выключением, переводится
на включающий рабочий тиристор другой фазы или же на включающийся тиристор собственной фазы, причем процессы выключения одного рабочего тиристора и включения другого происходят
одновременно. Принцип 1-ступенчатой коммутации тиристоров
77
а)
г
ч 1451
-,? +
п«
V да
Рис, 45. Принципиальные схемы 1-ступенчатой (а) и 2-етупенчатой (5) коммутации
тиристоров
инвертора поясняется упрощенной схемой (рис. 45, д), на которой
«отсекающие» диоды, отделяющие конденсатор от нагрузки, не
показаны.
Предположим, что тиристор У81 открыт. Через этот тиристор
по цепи « + »- К1- У8]-« —» протекает ток нагрузки и одновременно по цепи « + »-/?2-С-К5/-«—•» заряжается конденсатор с
полярностью, указанной на схеме. Когда на тиристор У82 поступает управляющий импульс, то он включается. Так как открыты
оба тиристора, то но цепи « + »~С~У82~У81 происходит разряд
конденсатора, при котором ток разряда направлен встречно току
тиристора У81. В цепи разряда конденсатора отсутствует индуктивность, поэтому ток разряда нарастает весьма быстро и тиристор
У81 практически мгновенно выключается. Через тиристор У82
происходит перезаряд конденсатора (на его обкладках будет напряжение обратной полярности), а также протекает ток нагрузки по
цени « + »-К2- К52-« —». До тех пор, пока конденсатор в результате перезаряда по цепи « + »-Л/-С-К52-« —» не изменит
полярности напряжения на своих обкладках, к тиристору У81 будет
приложено обратное напряжение, и он может восстанавливать свою
запирающую способность. В последующий момент времени, когда
поступает отпирающий импульс на тиристор У81, последний включается и происходит разряд конденсатора, а тиристор У82 выключается и т.д.
Под 2-ступенчатой понимается коммутация, которая осуществляется с помощью вспомогательного коммутирующего тиристора.
Рабочий тиристор выключается при включении коммутирующего
тиристора. При этом образуется контур, изменяющий полярность
напряжения на выключаемом тиристоре. Включение следующего
рабочего тиристора происходит независимо от процесса коммутации в выключаемом тиристоре, но обычно по окончании этого
процесса. Поэтому с помощью упрощенной схемы (рис. 45,6) разберем принцип включения и отключения только одного рабочего
тиристора У8 при 2-ступенчатой коммутации с помощью вспомогательного тиристора У8К.
Пусть конденсатор С заряжен и имеет полярность, указанную на
схеме без скобок, основной рабочий тиристор У8 включен и
78
проводит ток по цепи « + » - У8 - Кн - « — », а тиристор У8К выключен. При подаче отпирающего импульса на вспомогательный
тиристор У8К он включается и благодаря разряду конденсатора по
цепи « + С»-У8К-У8-«С» тиристор У8 выключается (из-за действия встречного тока разряда). Далее происходит перезаряд конденсатора обратной полярностью по цепи « + »-« — С» — У8К— Ки~-« — » (обратная полярность показана на схеме в скобках). Для
того чтобы конденсатор С был заряжен с нужной для следующего
выключения тиристора У8 полярностью, его необходимо повторно
перезарядить. Этот процесс перезаряда начинается в момент
включения основного тиристора У8, при котором образуется
электрическая цепь перезаряда « + С»-У8-Ь~УО~« — С» и полярность конденсатора изменяется на противоположную, т.е. будет
такой же, как и при начальном рассмотрении схемы (без скобок).
Процесс носит колебательный характер, и длительность его определяется параметрами контура Ь- С. В течение процесса перезаряда
ток колебательного контура суммируется в тиристоре У8 с током
нагрузки. Диод УО предотвращает дальнейшее протекание процесса
перезаряда (когда из-за большого напряжения на обкладках конденсатора ток колебательного Ь- С-контура начинает изменять свое
направление на противоположное), фиксируя тем самым на обкладках конденсатора заряд, нужный для коммутации тиристора У8.
В судовом ЭП в основном применяются ТПЧ, которые предусматривают реверс АД. Причем реверс АД достигается изменением чередования двух фаз путем изменения порядка следования
управляющих импульсов. Реверсивный АД в электроприводе палубных механизмов обычно работает в рекуперативном режиме. Так
как прямая рекуперация энергии в сеть невозможна, энергия, заттясетпгая при торможении, должна рекуперироваться в сеть косвенным путем. Для этой цели в реверсивных ТПЧ используются
инверторы, ведомые сетью, или зависимые инверторы.
Достоинством ТПЧ со звеном постоянного тока является
возможность регулирования частоты в направлении как вверх, так и
вниз г.т частоты питающей сети переменного тока. Верхний предел
изменения частоты ограничивается максимально допустимой скоростью АД и максимально допустимой частотой коммутации
вентилей. Нижний предел частоты ограничивается дискретностью
вращения векторов напряжения и тока инвертора, приводящей к
неравномерности вращения АД. Однако ТПЧ с широтно-импульсным инвертором напряжения, имеющие близкий к синусоиде ток и
напряжение, способны обеспечить большой диапазон снижения
скорости АД. Недостатком рассмотренных ТПЧ является сложность, поскольку они состоят из двух устройств: выпрямителя и
инвертора с искусственной коммутацией тиристоров. Два включенных последовательно устройства обусловливают 2-кратное преобразование энергии, что приводит к снижению КПД преобразователя.
79
18. Тиристорные преобразователи частоты
с непосредственной связью
Данный класс преобразователей, получивших название непосредственных преобразователей частоты, характерен 1-кратным
преобразованием энергии. Потребляемая из сети переменного тока
электроэнергия с неизменными напряжением и частотой преобразуется в одном силовом устройстве в энергию переменного тока с
регулируемыми по амплитуде и частоте напряжением и током
нагрузки, в качестве которой служит 3-фазный АД.
Рассмотрим принципы преобразования 3-фазного напряжения
сети в 1-фазное напряжение пониженной частоты. Это может быть
достигнуто применением двух 3-фазных 1 -йолупериодных групп
тиристоров, включенных встречно-параллельно (рис. 46, а). Когда
работает катодная группа /, то выпрямляются положительные
полуволны напряжения, а при работе анодной группы //- отрицательные полуволны. Ввиду того что значение выпрямленного напряжения Ий = 1}м соя ав зависит от угла управления, то, изменяя
углы управления тиристоров при работе какой-либо из групп,
можно получить любой закон изменения выпрямленного напряжения, в том числе и синусоидальный (рис. 46, б). Усредненное значение синусоиды показано штриховой линией (мгновенные значения
напряжения для упрощения не показаны).
При включении катодной группы синусоидальное изменение
напряжения достигается при изменении угла управления ик от 0 до
я/2 (в точке А: ак = я/2, 1}л = 0; в точке В: ак = О, IIл = [7ЙО; в точке
С: ак = я/2, 17д = 0). Соответственно в анодной группе синусоидальное изменение достигается изменением угла управления аа от я/2 до
я (в точке С: аа = я/2, Vй — 0; в точке О: аа = я, 1}л — — 1}ло; в точке
Е: аа = я/2, V'й = 0). Таким образом, изменяя угол управления от я/2
до 0, от 0 до я/2, от я/2 до я и от я до я/2, формируется 1 -и период
а)
I
\ 7 N7
7 ^
^ ^
о
I
Г
2 \ 1\ 1
Г
г
^
_/Т>~\-
Рис. 46. Преобразователь частоты с непосредственной связью:
а принципиальная схема: б - кривая выходного напряжения
80
~Сеть
^.
г.
/-.
7 \ 7 \ 1 2 \ 1 /~.
7 \ 7 \ 1 2 \ ^ \ 1.
± 1
} '_/ '-Г
'-Г •_/
}7
У~. Г.
\1
/-
\
^
'-Г 1 2
1. \
2
Ь
ГУ-ОП
гуу-О
1
-•У"*"!"*
Рис. 47. Схема 3-фачного преобразователя частоты с непосредственной связью
напряжения выходной частоты. Эта частота определяется скоростью изменения а и не зависит от частоты сети. На рис. 46,6
показано формирование полного периода Т2 кривой напряжения.
Принципиально каждая из групп при соответствующем изменении угла а может создать напряжение, изменяющееся по синусоидальному закону. Однако ток выпрямителя может протекать только в одном направлении, поэтому для формирования полного
периода кривой тока используются 2 группы тиристоров (катодная
и анодная). Катодная группа вентилей обеспечивает протекание
тока в течение положительного полупериода, а анодная группа-в
течение отрицательного полупериода. Две группы вентилей обеспечивают также режим инвертирования, который необходим при
рекуперации электрической энергии в сеть. Так как катодная и
анодная группы включены встречно-параллельно, средние значения
их выходных напряжений должны быть одинаковыми по амплитуде
и противоположными по знаку для ограничения уравнительных
токов. Это достигается при условии, если углы управления ак и аа
катодной и анодной групп связаны соотношением а к = л — а а .
Однако мгновенные значения напряжений при этом существенно
различаются, поэтому для ограничения высших гармонических
составляющих токов в нагрузке в схему включаются реакторы Ь
(рис. 47).
В схемах НПЧ протекание уравнительного тока также исключается благодаря запиранию всех тиристоров группы, которая в
данный момент времени не проводит тока нагрузки. Это достигается снятием управляющих импульсов в соответствующие моменты
времени. В таком случае уравнительные реакторы могут быть
существенно уменьшены или полностью исключены. При этом
способе управления в каждую фазу нагрузки включается датчик
тока, который в зависимости от знака выходного тока дает команду
в схему управления для снятия управляющих импульсов с тиристоров непроводящей группы. В 3-фазной схеме используется 3 подоб81
ных 1-фазных преобразователя с взаимным фазовым сдвигом 120°
(см. рис. 47). Этот преобразователь содержит 18 тиристоров, однако при подобной мостовой схеме их потребуется 36.
При работе преобразователя на АД необходимо регулировать
напряжение и частоту. Условие получения синусоидальной волны
выходного напряжения при изменении угла управления от 0 до к,
которое было приведено выше, не является обязательным. Если
установить начальный угол управления, равный я/2, а затем медленно изменять его в пределах ±я/2 (что было сделано в нашем
примере) в обе стороны от начального значения, то получим
выходное напряжение низкой частоты с максимальным значением
П И
±11<ю Р углах управления 0 и 180°. При уменьшении диапазона
колебаний а по обе стороны от начального значения я/2 углы
управления будут бодьше 0 или меньше 180°. В этом случае также
создается синусоидальная волна напряжения, но с меньшим амплитудным значением, т. е. осуществляется регулирование напряжения.
Выходная частота НПЧ в этом случае определяется скоростью
изменения а относительно угла я/2. Следовательно, и напряжение, и
частота формируются управляющими импульсами системы управления, воздействующими на тиристоры.
На вход системы управления НПЧ (рис. 48) подаются сигналы:
1/3.а-в соответствии с заданием на амплитуду выходного напряжения; Г/,/-с заданием на частоту. Задающее устройство ЗУ, представляющее собой низкочастотный задающий генератор, формирует управляющие напряжения С/у1, 1/у2 и [7у3, образующие 3-фазную
систему. Эта сигналы поступают в системы импульсно-фазового
управления СИФУ1-СИФУЗ, которые вырабатывают управляющие импульсы для открытия тиристоров вентильных групп
ВГ1 - ВГЗ. Следует отметить, что задающие сигналы, кроме создания различных импульсов, изменяют углы управления анодной и
катодной групп таким образом, чтобы выполнялось соотношение
с?к + ая — •"•. Реверс АД, подключенного к преобразователю, осуществляется изменением чередования фаз задающего генератора и,
следовательно, в силовой схеме не требуется проводить никаких
переключений.
нт
%
1Г
•V
ЗУ
%
%
|,
СНЧУ1
БГ1
СИ9У2
ВГ2
стз
ВГЗ
Ег ,№п**
ЕЛС
-\
Рис. 48. Структурная схема управления непосредственным преобразователем частоты
82
Достоинствами НПЧ, в которых коммутация осуществляется за
счет напряжения сети, являются: высокий КПД вследствие 1-кратного преобразования энергии; широкий диапазон регулирования;
возможность передачи мощности в обоих направлениях между
источником и нагрузкой, Также НПЧ могут работать в режиме
рекуперации энергии во всем диапазоне регулирования угловой
скорости (вплоть до полной остановки ротора двигателя). Недостатками этих преобразователей являются: низкий коэффициент
мощности со стороны питающей сети, большая доля высших
гармоник и ограниченность максимальной выходной частоты тока.
Использовать НПЧ целесообразно в низкоскоростных реверсивных
ЭП (например, палубных механизмов).
19. Управление асинхронными двигателями с использованием
тиристорных преобразователей частоты
В электроприводе ТПЧ в основном служат для регулирования
частоты тока, поступающего на статор АД. Изменяющийся по
частоте ток приводит к изменению угловой скорости поля статора
го0 == 2Я/5 /р, в результате пропорционально изменяется угловая
скорость ротора. Плавное изменение частоты /, тока статора и
широкий диапазон ее изменения позволяют плавно изменять угловую скорость АД в широких пределах. Применение ТПЧ улучшает
также другие качественные показатели регулируемого ЭП: прежде
всего это относится к пусковым и тормозным режимам АД.
Как известно, момент асинхронного двигателя М = /с/ 2 Фсок1|/ 2
зависит от значения магнитного потока Ф в воздушном зазоре и
угла \|/ 2 . Значение магнитного потока зависит от отношения напряжения к частоте [///; поэтому, регулируя вместе с частотой
значение напряжения, можно изменить магнитный ноток и вращающий момент АД. При регулировании можно получить различные
механические характеристики АД. Если С7//=соп81, то магнитный
поток статора Ф = соп81, следовательно, критический момент М кр
асинхронного двигателя остается неизменными при различных
частотах тока статора (рис. 49, а). Подобный закон регулирования используется в ЭП палубных механизмов, работающих при
Мс = сопя!. Если в процессе регулирования частоты тока напряжение ТПЧ не изменять, то с увеличением частоты тока значение
критического момента АД уменьшается (рис. 49, б). Указанный вид
регулирования можно осуществлять в ЭП, у которых момент
сопротивления при увеличенной угловой скорости будет меньше.
Следует отметить, что пуск АД проводят при уменьшенной
частоте и по мере его ускорения частоту тока, подаваемого на
статор, увеличивают. При малой частоте уменьшается индуктивное
сопротивление ротора Х2 = 2я/2^2 (при пуске_/ 2 —Л)» увеличивается
83
Рис. 49. Механические характеристики асинхронного двигателя с частотным регулированием:
«-при постоянном маитгном иоюкс, <> при посюянном напряжении
со8\)/2 и соответственно пусковой момент АД имеет увеличенное
значение по сравнению с тем значением момента, если бы на статор
подавался ток номинальной частоты (см. рис. 49). Увеличенный
пусковой момент способствует большему ускорению ротора АД и
уменьшает время пуска, что очень важно для ЭП, работающих в
нов горно-кратковременном режиме. В последующем для увеличения угловой скорости ротора АД до номинальной частоту тока
статора постепенно увеличивают. Если в процессе ускорения вращения ротора частоту увеличивать медленно, то при работе на каждой
частотной характеристике АД достигает угловой скорости на ее
рабочей части и переход па большую скорость не сопровождается
большими бросками тока. Такой частотный пуск называется «мягким». При «мягком» пуске АД погори энергии и потребляемая
энергия сравнительно невелики, но увеличивается время пускового
процесса. Если же скорость изменения частоты тока статора большая, то ротор АД не успевают достичь скорости, соответствующей
критическому скольжению (л > §к), и переход с одной частотной
характеристики на другую происходит в области их неустойчивых
частей. Такой режим частотного пуска, характерный большими
значениями тока и потерь, называют «жестким».
Очевидно, в ТПЧ наиболее рационально устанавливать такую
скорость изменения частоты тока, при которой переход с одной
частотной механической характеристики на другую будет происходить при максимальных моментах, т.е. при а = Л'к. Указанное
условие будет выполняться, когда темп или ускорение частоты тока
в статоре будет одинаковым с ускорением ротора.
На судах ТПЧ применяют в основном в реверсивных ЭП, для
которых характерны режимы торможения противовключением и
рекуперативный. Как известно (см. п. 14), начальный период ревер84
са при большой угловой скорости АД сопровождается резким
увеличением скольжения и, как следствие, при этом возрастает ток.
Однако из-за максимального значения индуктивного сопротивления
ротора активная составляющая тока и тормозной момент малы,
поэтому время переходного процесса до остановки ротора АД
достаточно большое. Применение ТПЧ позволяет предварительно
понизить частоту тока / х , подаваемого на статор АД, при этом
пропорционально уменьшится индуктивное сопротивление ротора,
со» \|/2 увеличится и это приведет к увеличению тормозного момента
Мт = &/2Фсо81|/2 (соответственно время тормозного процесса сокращается). Одновременно при уменьшении частоты тока мгновенно снижается угловая скорость поля статора и скорость ротора
оказывается выше скорости поля статора. Это способствует работе
АД на небольшом отрезке времени в режиме рекуперации, что
дополнительно сокращает время реверса.
Режим рекуперации может быть не только при реверсе, но и при
регулировании угловой скорости в сторону уменьшения, когда
приходится снижать частоту тока статора. В подобных случаях, так
же как и в предыдущем, переход работы АД с одной механической
характеристики на другую происходит в зоне рекуперативного
торможения. Переход сопровождается бросками тока, значения
которых завися! от скорости изменения частоты. Аналогично, как и
при пуске, переходный режим может быть «мягким» и «жестким».
Для уменьшения бросков тока и потерь при регулировании стремятся скорость уменьшения частоты иметь небольшую, т.е. переходный процесс выполняют по возможности «мягким». Задавая определенные законы изменения частоты с помощью системы управления ТПЧ, можно получить гамму механических характеристик АД,
отвечающих оптимальному режиму его работы.
20. Регулирование угловой скорости асинхронных
двигателей с помощью тиристоров
Кроме рассмотренного частотного управления АД, тиристорные схемы позволяют изменять угловую скорость АД и другими
способами. Регулирование угловой скорости благодаря переключающим способностям тиристоров в этих схемах построено на
изменении рабочих параметров АД, которое достигается: изменением напряжения, подаваемого на ста гор; импульсным регулированием в цени ротора; введением добавочной ЭДС в цепь ротора.
Изменения напряжения, подаваемою на статор. При изменении
напряжения тиристорным регулятором изменяется магнитный поток статора, а это приводит к изменению вращающего момента
АД: тем самым нарушается условие равновесия, которым характеризуется установившееся движение. В случае уменьшения напряжения вращающий момент становится меньше момента сопротивле85
ния и ротор АД будет замедляться. Уменьшение скорости приводит
к увеличению скольжения, ЭДС, тока ротора и вращающего момента. Когда при замедлении наступит равновесие моментов, то
ротор АД будет вращаться с новой установившейся скоростью,
которая будет меньше, чем до снижения напряжения на зажимах
статора.
В цепи статора АД электропривода с тиристорным регулятором
напряжения (рис. 50) в каждую фазу включены встречно-параллельно 2 тиристора, которые управляются симметрично, т.е. в
одинаковые моменты каждого полупериода, и пропускают через
себя положительную и отрицательную полуволны. С помощью
тиристоров можно регулировать напряжение питания АД путем
изменения угла а отпирания тиристоров, отсчитываемого от начала
полуволны фазного напряжения сети. Изменяя угол а в пределах от
О до 150°, можно изменять напряжение на статоре АД от напряжения сети С7Н практически до 0. В данном режиме АД питаются
напряжением прерывистой формы, а их токи содержат значительные гармоники. Несмотря на эти отрицательные факторы, режимы
работы АД оказываются приемлемыми для АД малой и средней
мощности (примерно до 75 кВт). Механические характеристики АД
при различных углах показаны на рис. 51.
Следует отметить, что с увеличением угла а и снижением
напряжения на статоре критический момент АД (Мкр = II2) резко
уменьшается, т. е. снижается перегрузочная способность АД, При
угле а = 0 получается характеристика, совпадающая с естественной;
при а = 150° характеристика практически совпадает с осью ординат.
С уменьшением напряжения, как видно из рис. 51, жесткость механических характеристик уменьшается. Чтобы увеличить жесткость
механической характеристики в ЭП с тиристорным регулятором
Рис. 50. Схема тиристорного регулятора напряжения с обратной
связью для 3-фазных асинхронных двигателей
86
Рис. 51. Механические характеристики
асинхронного двигателя при
изменении напряжения на
статоре с помощью тиристорных регуляторов напряжения
напряжения, применяется обратная связь по скорости. Это достигается подачей на вход системы фазового управления тиристорами
сигнала, представляющего собой разность задающего напряжения
\}ъ, снимаемого с потенциометра, и ЭДС тахогенератора, находящегося на одном валу с управляемым АД (см. рис. 50). Если
[/т.г «. Ет.т, то значение сигнала будет: 1}у= 1}3 — (7Т.Г. В этом случае
при увеличении нагрузки на валу АД, что вызывает уменьшение его
угловой скорости, сигнал управления 1}у = 173 — (Ут г возрастает.
Это приведет к уменьшению угла а, увеличению напряжения на АД
и соответствующему увеличению вращающего момента АД.
Достаточно сравнительно небольшого снижения угловой скорости, чтобы момент АД уравновесил увеличивающийся момент
нагрузки. Поэтому механическая характеристика при наличии обратной связи получается жесткой, подобно характеристике 1-4,
показанной на рис. 51 штриховой линией. Изменяя значение сигнала, можно получить в рассматриваемой системе семейство жестких
механических характеристик (/' — 4' и Г-4").
Применение тиристорных регуляторов напряжения позволяет
осуществлять плавный пуск АД путем постепенного уменьшения
угла а, а также динамическое торможение. Например, если запереть
тиристоры У8Г и У82' при работающих остальных тиристорах, то
в этом случае по обмоткам статора будет протекать выпрямленный
ток, что и обеспечит режим динамического торможения.
Устройство регуляторов напряжения значительно проще и дешевле описанных ранее схем ТПЧ. Однако КПД двигателей с
регуляторами напряжения невысок, поэтому приходится увеличивать габаритные размеры АД во избежание превышения допустимой температуры вследствие роста тока и ухудшения вентиляции.
На судах тиристорные регуляторы напряжения используются в
ЭП кранов и лебедок, где большие моменты при малых угловых
скоростях требуются лишь в течение небольшой части рабочего
цикла.
Импульсное регулирование в цепи ротора. Сущность импульсного
регулирования состоит в том, что для изменения угловой скорости
АД осуществляется периодическое кратковременное изменение его
параметров, благодаря чему дозируется поток энергии, передаваемой от сети к АД и в обратном направлении. Данный метод может
быть проиллюстрирован схемой и диаграммой, представленными
на рис. 52.
Согласно схеме (рис. 52, а) в цепь ротора АД включен добавочный резистор ,/?д, который либо полностью вводится в схему,
либо замыкается накоротко контактором. Коммутация контакта
КМ осуществляется периодически. При замкнутых контактах
резистор зашунтирован и общее сопротивление роторной цепи характеризуется его внутренним сопротивлением /?вн.р0т = л/^р + -Кр.
Если контакты разомкнуты, то резистор Лд полностью введен и
87
Рис. 52. Схема асинхронного двигателя
при импульсном регулировании
(в) и диаграмма изменения сопротивления цепи ротора (б)
Рис. 53. Схема широтно-импульсного регулирования асинхронного двигателя
сопротивление роторной цепи 2'рот — ^/Х% + (Кр + /?д) . В первом
случае ток ротора будет увеличенным (соответственно увеличится
вращающий момент АД). Когда контакты размыкаются, при
введенном резисторе Лд ток ротора уменьшается, становится меньше вращающий момент и угловая скорость АД снижается. При
периодическом замыкании и размыкании контактов угловая скорость АД характеризуется средним значением между угловыми
скоростями АД при введенном и зашунтированном резисторе.
Коммутация контактов обычно осуществляется таким образом
(рис. 52,6), что период коммутации Гк остается неизменным, а
изменяется лишь соотношение времен их замкнутого /3 и разомкнутого /р состояний. Иными словами, изменяется ширина замыкающего импульса. В связи с этим такой способ управления значением
параметра получил название широтно-импульсного. Возможен и
другой вариант управления-частотно-импульсный, когда г, = сопз1,
а изменяется период 7^, т.е. частота коммутации контакта. Более
распространен широтно-импульсный метод регулирования угловой
скорости.
Обычно время замыкания гз принято выражать в виде относительного значения у = 1,/Тк, называемого также скважностью
управляющего импульса. Очевидно, что при увеличении у, т. е. того
времени, при котором АД работает при шунтируемом резисторе
Кд, увеличивается средняя угловая скорость АД. Это соответствует
работе АД при включении в цепь его ротора добавочного эквивалентного сопротивления /гд.э = (1 — у) /?д.
Таким образом, при изменении в цикле времени замкнутого
состояния контактов изменяется значение эквивалентного сопротивления, и это приводит к изменению угловой скорости АД. Для
реализации импульсного способа регулирования сопротивления
применяются бесконтактные аппараты, выполненные на базе транзисторов (при токах до 15-20 А) или тиристоров (при токах более
20 А).
88
Широтно-импульсное регулирование (рис. 53) осуществляется с
помощью устройства, включающего диоды VI) 1 ~ УОб, тиристор
75, резистор К.д и индуктивность Ьд. Путем периодического включения тиристора У8, выполняющего функции тиристорного ключа,
формируются импульсы выпрямленного тока моста 1)2. Регулирование среднего значения данного тока достигается изменением
скважности импульсов, соответственно изменяются вращающий
момент и угловая скорость АД. Рассмотренная схема тиристорного
ключа может также использоваться для импульсного регулирования добавочного резистора, который включается последовательно с
обмоткой статора. Подобный импульсный метод регулирования
применим и для ЭД постоянного тока, в цепях которых тиристорные ключи регулируют или напряжение, подводимое к якорю ЭД,
или эквивалентное сопротивление в цепи якоря, или магнитный
поток.
Следует отметить, что вследствие небольшого значения мощности, необходимой для управления тиристорным ключом, данный
способ позволяет получить бесступенчатое плавное изменение угловой скорости. Механические характеристики АД при данном способе регулирования можно получить более жесткими но сравнению
с реостатными, так как при изменении нагрузки на валу АД имеется
возможность изменять управляющий сигнал таким образом, чтобы
скорость практически не менялась.
Введение добавочной ЭДС в цепь ротора. Путем подключения к
цепи ротора АД независимого источника энергии перемешшя ЭДС
этого источника подается в противофазе с ЭДС ротора. На
рис. 54, а показана схема АД с фазным ротором, в роторную цепь
которого включены 3-фазный выпрямитель 112.1 из неуправляемых
вентилей (диодов) и инвертор 1122 на тиристорах, выполненный по
3-фазной мостовой схеме. Выпрямитель 1121 выпрямляет ЭДС
ротора, а инвертор 1}22 является источником встречной доба-
м
Рис. 54. Схема регулирования асинхронного двигателя введением добавочной ЭДС
(а) и его механические характеристики при различных ЭДС инвертора (б)
89
войной ЭДС. Рассмотрим процесс регулирования угловой скорости
АД согласно данной схеме.
Положим, что АД работает в двигательном режиме и к его валу
приложен момент сопротивления М с , не зависящий от скорости.
Если встречная ЭДС, создаваемая инвертором, Еи = О, то ток
ротора определяется только ЭДС роторной обмотки Е2з и ее
сопротивлением 22: 12 — Е2х/22.
При введении в цепь ротора ЭДС инвертора, направленной
встречно, часть энергии ротора потребляется инвертором, и вследствие этого количество энергии, выделяемой непосредственно
в обмотке ротора, уменьшается. Это приводит к уменьшению
тока ротора, значение которого определяется выражением 12 =
= (Е28 — Еи)/22. Уменьшение тока ротора приводит к уменьшению
электромагнитного момента АД, который становится меньше момента сопротивления Мс, и ротор АД начинает замедляться. Но
при уменьшении угловой скорости увеличивается скольжение, а
значит и ЭДС ротора. Увеличение Е2„ приводит к увеличению тока
/2 и момента АД. Когда увеличивающийся момент АД станет
равным моменту сопротивления, снижение угловой скорости прекращается и АД вновь работает в установившемся режиме, но уже
при угловой скорости, более низкой, чем ранее. Очевидно, что при
увеличении ЭДС инвертора угловая скорость АД уменьшается, а
при ее уменьшении скорость становится больше.
При Еи = О двигатель работает на механической характеристике,
близкой к естественной. Угловая скорость холостого хода АД также
изменяется с изменением ЭДС инвертора (ее значение можно
получить из условия, что ток ротора /2 при холостом ходе должен
быть равен нулю). Для выполнения этого условия необходимо,
чтобы ЭДС ротора Е2, = Е2з полностью была компенсирована ЭДС
инвертора, т.е. должно выполняться условие Ек = Е2„. Ввиду того,
что 5 = (со0 — со)/о)0 — 1 ~ ю/Юо' то ПРИ холостом ходе со = юх и
5 = 1 — о>х/ю<1. Тогда Е2!1 = Ея = Е2з — Е2(\ — <вх/со0) или сох =
«о (1 - ЕЯ/Е^.
Чем больше значение Ек, тем меньше угловая скорость <эх
холостого хода двигателя при неизменном значении оо0. Регулирование ЭДС инвертора, а следовательно, угловой скорости АД,
достигается изменением угла регулирования тиристоров инвертора.
Механические характеристики АД при различных углах регулирования сохраняют свою исходную жесткость (рис. 54,6). При
данном регулировании потери в резисторах отсутствуют, отобранная от ротора мощность через инвертор возвращается в сеть,
поэтому данный способ изменения скорости является экономичным.
Если в данной схеме заменить в выпрямителе диоды тиристорами, то регулирование угловой скорости АД можно осуществлять
как изменением угла управления тиристоров инвертора, так и
выпрямителя. В таких схемах возможно 2-зонное регулирование,
т. е. регулирование угловой скорости как ниже, так и выше синхрон90
ной скорости. Последнее становится возможным, когда ЭДС инвертора действует согласно с ЭДС ротора, что достигается переводом инвертора в выпрямительный режим, а выпрямительной группы-в инверторный.
Способ регулирования введением добавочной ЭДС связан с
преобразованием энергии постоянного тока в переменный или
наоборот, поэтому указанные схемы имеют пониженные значения
коэффициента мощности и КПД. Такой способ регулирования
наиболее целесообразен лишь при небольшом диапазоне регулирования скорости ЭП, что в условиях судна применимо для отдельных
насосов.
Контрольные вопросы-заданкн
1. Как регулируется напряжение в тиристорном преобразователе?
2. Перечислите функции системы управления в тиристорном преобразователе постоянного тока.
3. В чем заключается принцип действия тиристорного преобразователя частоты со
звеном постоянного тока?
4. Объясните физическую сущность коммутации тиристоров.
5. Пользуясь схемой, опишите принцип действия преобразователя частоты с непосредственной связью.
6. Как используются тиристоры при импульсном регулировании скорости асинхронного двигателя?
Глава 5
КОНТАКТНАЯ АППАРАТУРА И ОСОБЕННОСТИ
ЕЕ ЭКСПЛУАТАЦИИ
21. Общие сведения
На электрифицированном объекте, каким является судно,
источник питания (генератор) преобразует механическую энергию
в электрическую. Электродвигатели, приводящие в движение механизмы, преобразуют электрическую энергию в механическую.
Электрические аппараты управляют процессом передачи электроэнергии от источника к ЭД. Таким образом, под электрическими
аппаратами понимаются электротехнические устройства, служащие
для управления электрическими токами или механическими нагрузками работающего электрооборудования. Управление потоком
электрической энергии, поступающей на ЭД и дозируемой с
помощью электрической аппаратуры, называется управлением ЭП.
К операциям по управлению ЭП относятся: пуск, реверс и остановка электродвигателя, изменение частоты вращения, защита,
поддержание постоянства скорости при изменении нагрузки и т. п.
Электрическая аппаратура подразделяется на контактную и
бесконтактную. В основном применяется контактная аппаратура,
но в дальнейшем все в большей степени будут внедряться полупроводниковые бесконтактные устройства. Контактная аппаратура,
применяемая в судовых ЭП, относится к категории низковольтной
электрической аппаратуры.
По принципу действия различают электромагнитные, индукционные, тепловые и контактно-механические аппараты, а по назначению их делят на 3 группы:
коммутационные аппараты, служащие для переключения и
защиты ЭД и электрической сети;
аппараты управления, осуществляющие оперативное управление
и местную защиту ЭП;
контролирующие и регулировочные аппараты, служащие для
сигнализации и контроля заданных параметров ЭД.
Для управления судовыми ЭП наибольшее распространение
среди контактной аппаратуры получили: контакторы, контроллеры,
различные электромагнитные реле, тепловые и механические датчики
и др.
Условия эксплуатации электрических аппаратов, применяемых
в судовых устройствах, существенно отличаются от условий экс92
плуатации электрических аппаратов, применяемых в стационарных
установках. К неблагоприятным факторам, утяжеляющим условия
эксплуатации, относятся: вибрация, сотрясения, наклоны, высокая
влажность, значительные пределы колебания температуры, тесное
расположение и в некоторых случаях затрудненность доступа для
повседневного осмотра, а также периодическое обливание водой
электрооборудования, расположенного на открытой палубе. В
связи с этим к судовым электрическим аппаратам предъявляются
ряд дополнительных требований, определяемых режимом их работы и условиями эксплуатации. К числу общих требований относятся: безотказность и простота конструкции, износоустойчивость,
влагостойкость и нагревостойкость электрической изоляции, вибростойкость и ударостойкость, стабильность характеристик при
кренах и дифферентах, легкий доступ для осмотра и замены
сменных частей, брызгозащищенность или водозащищенность (в
зависимости от места установки). Дополнительные требования,
предъявляемые к отдельным аннарпш, определяются их назначением.
Например, для всех электромагнитных аппаратов важное значение имеет износоустойчивость. Для силовых контакторов
большое значение имеют коммутационные свойства. Для некоторых типов реле существенное значение имеет время срабатывания
или чувствительность, а для путевых и конечных выключателей
качество работы определяется значением «мертвого» хода.
22. Электромагнитные контакторы
Аппарат дистанционного действия, предназначенный для
частых включений и выключений силовых электрических цепей
электродвигателей при нормальных режимах его работы, называется контактором. По роду коммутационного тока различают
контакторы постоянного и переменного тока.
Контакторы постоянного тока. Стальной магнитопровод аппарата (рис. 55) состоит из неподвижного Г-образного ярма 75,
привернутого к нему сердечника с полюсным наконечником 2 и
поворотного якоря 1. На сердечник надета втягивающая катушка
13. При обесточенной катушке якорь прижат к упору 20 отключающей пружиной 25. Ее натяжение регулируют винтом 26. На
якоре укреплен главный подвижной контакт 4, изготовленный из
электролитической меди. Он соединен гибким медным проводником 27 с шиной. На контакт нажимает пружина 3. К стойке 12
прикреплен главный неподвижный контакт 6. Последовательно
с ним соединена дугогасительная катушка 8, она надета на стальной
сердечник, к которому прикреплены 2 полюсных наконечника 10.
Между ними вставлена съемная асбестоцементная дугогасительная
93
камера 9 (на рисунке камера и полюсные наконечники показаны
повернутыми вверх от своего
нормального положения). Камера
состоит из двух щек. Между ними
есть полость, в которой находятся оба контакта. В верхней части
камеры сделано сужение (щель).
Внутри камеры укреплен стальной дугогасительный рог 7, соприкасающийся с защитной коронкой 5 неподвижного контакта.
К нижней части якоря прикреплены 2 изолированных от него
подвижных контакта 23 и 22. Напротив них на шпильках установлены неподвижные контакты 24
и 21. Все неподвижные детали
контактора смонтированы на
изоляционной плите 18.
При подаче напряжения на
Рис. 55. Контактор постоянного тока
выводы 14 катущки контактора
(один из них на рисунке не виден)
сердечник намагничивается и притягивает к себе якорь. Главные
контакты соприкасаются и замыкают коммутируемую цепь: от
вывода 19 к выводу 11 может пройти ток. При обесточивании
катушки отключающая пружина оттягивает якорь от сердечника
и эти контакты размыкают цепь тока.
Кроме того, при притягивании якоря замыкаются в вспомогательные контакты 23 и 24 и размыкаются контакты 22 и 21. При
отпускании якоря эти контакты снова занимают положение, в
котором они показаны на рисунке. Благодаря этому при срабатывании контактора создаются или прерываются вспомогательные
цепи, в которые включены вспомогательные контакты. Выводы
контактов 22 и 21 вспомогательных цепей отмечены на рисунке
цифрами 16 и 17.
Существует множество конструктивных форм контакторов,
отличающихся взаиморасположением деталей, размерами, устройством отдельных узлов и т. п., но все эти аппараты состоят из таких
же основных элементов и действуют но такому же принципу.
Рассмотрим детально устройство и назначение отдельных узлов
контакторов и познакомимся с основными характерными параметрами и свойствами этих наиболее распространенных аппаратов.
Д у г о г а с и т е л ь н о е устройство предназначено для гашения
электрической дуги, возникающей между контактами при размыкании цепи тока. Температура ду! и достигаеч нескольких тысяч
градусов, поэтому поверхность контактов оплавляется, обгорает,
94
делается неровной, бугристой. Площадь контактирования уменьшается, и плотность тока, проходящего через замкнутые контакты,
возрастает; контакты нагреваются, температура их может превысить допустимую. Это приводит к привариванию контактов,
и ЭП оказывается в аварийном состоянии. Кроме того, дуга
увеличивает изнашивание контактов и сокращает срок службы
аппарата.
Для уменьшения вредного действия дуги необходимо возможно
быстрее погасить ее. С этой целью применяют дугогасительные
устройства. В описанном выше типе контактора дугогасительным
устройством обеспечивается так называемое магнитное дутье.
Принцип магнитного гашения дуги состоит в следующем (рис. 56).
Ток, проходящий по виткам дугогасительной катушки 2, создает
магнитный поток, замыкающийся через сердечник катушки 3,
полюсные наконечники 4 и воздушный промежуток между ними
(этот поток показан на рис. 56, а штриховыми линиями, а его
направление-стрелками). Вокруг дуги /, возникающей между
размыкающимися контактами 5, образуется второй магнитный
поток, показанный сплошными линиями. Направление его, определенное по правилу буравчика, показано стрелками. В результате
взаимодействия обоих потоков возникает сила Р, направленная
вверх от контактов. Под действием этой силы дуга быстро перемещается по контактам от места возникновения к их верхним
краям, а затем перебрасывается одним концом на дугогасительный
рог 7 (рис. 56, б). Дуга как бы выдувается магнитным полем
Направление
тока
Рис. 56. Магнитное гашение электрической дуги:
в схема устройства; 6 растяжение душ в камере
95
дугогасителыюи катушки вверх и вталкивается в узкую часть
дугогасителъной камеры 6. Длина дуги при этом значительно
увеличивается.
Быстрое расхождение контактов, большая скорость движения
выдуваемой дуги, которая при перемещении интенсивно охлаждается встречным потоком воздуха, отбор теплоты у дуги стенками
щели дугогасителытой камеры и удлинение дуги создают условия,
при которых дуга очень быстро гаснет. Перемещаясь по поверхности контактов, она не успевает сильно нагреть их и на рабочую
часть контактов почти не действует; обгорают верхние, нерабочие,
части контактов и дугогасительный рог.
Главные контакты служат для коммутации силовых электрических цепей и размыкают сравнительно большие токи. Чаще всего
главные контакты изготовляют из меди. Через некоторое время их
поверхность покрывается тонкой пленкой окиси меди, являющейся
плохим проводником. Поэтому переходное сопротивление контактов по мере их работы во включенном состоянии возрастает.
В результате сильно увеличивается нагрев контактов, что может
привести к свариванию. Для продолжительного режима работы
применяют контакты с серебряными накладками. Серебро почти не
окисляется, и переходное сопротивление таких контактов изменяется очень мало, однако такие контакты дороже медных и
быстрее изнашиваются. Поэтому во многих типах современных
контакторов применяют более износостойкие металлокерамические
контакты.
Главные контакты контактора (см. рис. 55) замыкаются, когда
якорь притягивается к сердечнику. Такие контакты называют
замыкающими. Есть контакторы, у которых главные контакты при
подаче напряжения на втягивающую катушку не замыкаются, а,
напротив, размыкаются. Такие контакты называют размыкающими.
У контакторов может быть несколько главных контактов,
например, 2 главных замыкающих контакта. Такой контактор
называют 2-полюсным в отличие от рассмотренных выше 1-полюсных. У 2-полюсных контакторов подвижные контакты изолированы
от якоря, и ток к ним подводится гибкими токоведущими перемычками из медной плетенки.
Кроме главных контактов, предназначенных для коммутирования силовых цепей, контакторы снабжают в с п о м о г а т е л ь н ы м и
к о н т а к т а м и , замыкающими и размыкающими цепи катушек
других электромагнитных аппаратов, цепи сигнальных приборов
и др. Токи в этих цепях небольшие, поэтому вспомогательные
контакты не имеют дугогасительного устройства.
В рассмотренном контакторе применена м а г н и т н а я система
с поворотным якорем. Осью, вокруг которой поворачивается якорь,
здесь служит грань призмы. Намагничивающая сила создается
электромагнитной катушкой. После отключения катушки контактора в магнитопроводе, изготовленном из ферромагнитного мате96
риала, сохраняется остаточная магнитная индукция. Соответствующая ей сила, притягивающая якорь к сердечнику, может
оказаться больше силы отключающей пружины или силы тяжести
якоря. В таком случае якорь не возвращается в исходное положение
и контакты аппарата не разомкнутся. Это явление называют
прилипанием якоря. Для уменьшения силы притяжения, обусловленной остаточной индукцией, искусственно увеличивают магнитное сопротивление магнитной цепи аппарата, образуя при помощи
немагнитной (медной) прокладки зазор между частями магнитопровода. Медную прокладку обычно помещают между сердечником
и полюсным наконечником. Толщина ее составляет 0,1-0,2 мм.
Контакторы переменного тока. Принцип действия контакторов
переменного тока такой же, как контакторов постоянного тока, но
устроены они несколько иначе. Для примера рассмотрим контактор
серии КТ (рис. 57).
Магнитопровод аппарата состоит из неподвижного ярма 7, на
сердечнике которого находится катушка 4, и поворотного якоря 5.
На крайних торцах ярма установлены так называемые короткозамкнутые витки 2-латунные рамки, вставленные в специальные
прорези и охватывающие часть магнитопровода. Отключающей
пружины здесь нет, и якорь перемещается от ярма после отключения катушки только под действием силы тяжести. Такого рода
магнитные системы называются неуравновешенными. Во избежание
самопроизвольного перемещения якоря к ярму, которое может
произойти из-за качки судна, магнитная система контактора
снабжена защелкой 5. При подаче напряжения на катушку защелка
под действием потока рассеяния поворачивается пролив часовой
стрелки, сжимая при этом свою пружину, и дает возможность
якорю притянуться к ярму. Якорь поворачивает горизонтальный
вал аппарата 6. На валу укреплены изолированные от него 3
подвижных контакта 9, снабженных нажимными пружинами. Подвижные контакты соединены гибкими медными перемычками 10
с выводами 12, установленными на изоляционной плите //, на
которой смонтированы также все остальные детали аппарата.
Неподвижные главные контакты 13 соединены с верхними выводами 14. Контакты помещены внутри дугогасительной камеры 7,
показанной в разрезе. Внутри камеры под контактами вертикально
расположены стальные омедненные пластины 8, образующие так
называемую деионную решетку. К горизонтальному валу аппарата
левее главных контактов прикреплены мостиковые вспомогательные контакты 15.
Ознакомимся с особенностями устройства контакторов переменного тока по сравнению с контакторами постоянного тока.
М а г н и т о п р о в о д ы контакторов переменного тока не сплошные, а шихтованные они собраны на заклепках из многих тонких
пластин, выштампованных из листов электротехнической стали.
Пластины изолированы одна от другой слоем окалины. Это
4
'Лак
1276
97
Рис. 57. Контактор переменного тока серии КТ
98
сделано для уменьшения нагрева магнитопровода вихревыми
токами.
По включающей катушке аппарата протекает переменный ток,
изменяющийся во времени по синусоидальному закону / = /ш81псоГ,
где 1т- амплитуда тока; со? -угол сдвига по фазе между напряжением и током. Магнитный поток катушки
(35)
где Лм- магнитное сопротивление магнитопровода.
Так как при притянутом якоре Лм = соп§1, то это уравнение
можно представить так:
Ф = /сзтю/.
Следовательно, магнитный поток также изменяется по синусоидальному закону, совпадая по фазе с намагничивающим током.
Согласно закону Максвелла, сила Р притяжения якоря пропорциональна квадрату потока, следовательно,
Р = Ь25т2к>1.
(36)
Рассматривая уравнение (36), замечаем, что сила притяжения
зависит от момента времени: при со? = я/2 кто ? = 1 и Р принимает
максимальное значение; при со ( = 0 и Р — 0. Так как угол со/ = 2я/г,
где /-частота тока, равная 50 Гц, устанавливаем, что сила притяжения будет пульсировать с частотой 2/= 100 Гц, т.е. что она
100 раз в секунду будет равна нулю (рис. 58, а). В момент времени,
когда Р = 0, притянутый к ярму якорь контактора будет стремиться
отпасть от него. Однако, поскольку изменение силы во времени
происходит очень быстро, а якорь обладает механической инерцией,
отпасть от ярма он не успеет, а контакты аппарата не разомкнутся.
Но якорь из-за пульсации силы притяжения будет непрерывно
вибрировать, создавая неприятный шум, что будет мешать обслуживающему персоналу. В результате вибрации ослабевает контактное нажатие, а это может привести к их свариванию.
Для устранения описанного явления во всех аппаратах переменного тока устанавливают короткозамкнутые витки. Виток охватывает часть магнитопровода, обычно 2 / 3 его сечения (рис. 58,6).
Эту часть называют экранированной, а вторую, не охваченную
ви! ком, -неэкранированной. Магнитный поток Ф, созданный втягивающей катушкой, частично проходит по экранированной части
магнитопровода (обозначим его Фэ), а частичо по неэкранированной
(обозначим его Фн). Поток Фэ, пронизывающий короткозамкнутый
виток, индуцирует в нем ЭДС и ток /к. Этот ток сдвинут по фазе
относительно вызвавшего его потока почти на я/2. Ток /к вызывает
появление потока Фк, совпадающего с ним по фазе и охватывающего виток, из-за чего он направлен относительно потоков Фэ
и Фн по-разному: если в данный момент времени поток Фк совпадает
4*
99
по направлению с одним из них, то по отношению к другому он
направлен встречно.
Допустим, что в данное мгновение направление потоков Фэ, Фк
и Фн такое, как показано на рис. 58, в. Рассмотрим силы притяжения,
которые возникают в экранированной и неэкранированной частях
магнитопровода. Для этого сначала найдем результирующий поток
экранированной части Фр э = Фэ + Фк, причем поток Фк отстает по
фазе от потока Фэ примерно на л/2. На рис. 58, г показаны синусоиды обоих потоков и результирующая кривая, полученная способом графического сложения этих синусоид. То же самое построение проделаем для неэкранированной части магнитопровода
Рис. 58. К пояснению принципа действия короткозамкнутого витка магнитной
системы аппаратов переменного тока
100
(рис. 58, д), учитывая, что в тот же
момент времени поток Фк опережает поток Фн, причем тоже примерно на я/2. Затем на обоих
графиках построим в соответствии с уравнением (36) кривые
изменения сил притяжения Р3
и Ра. Сопоставляя их, замечаем,
что когда одна из этих сил равна
нулю, другая близка к максимуму. Сложим графически обе кривые (рис. 58, е). Результирующая
кривая Р'({) показывает, что в
любой МОМеНТ времени пульСИ-
рующая сила притяжения якоря
Рис. 59. к пояснению
принципа гашения дуги в^ка-
мере
с денежнойррешеткой
н
не равна нулю. Следовательно,
в результате применения короткозамкнутого витка вибраций якоря
не происходит.
Включающие к а т у ш к и контакторов переменного тока по
форме сердечников, на которых они размещаются, не цилиндрические, а прямоугольные. Ток в катушке зависит не только от ее
активного сопротивления, но и от индуктивного, причем в большей
мере от индуктивного сопротивления
X = (оЬ = 2п/Ь =
где Ъ- индуктивность катушки; Км- сопротивление магнитопровода.
Отсюда следует, что значение воздушного зазора 5 оказывает
большое влияние на индуктивное сопротивление катушки, а значит,
и на ее ток. Когда якорь контактора находится в наибольшем
удалении от ярма, индуктивное сопротивление катушки наименьшее, а ток в катушке максимальный. Его называют током срабатывания контактора. Он в несколько раз больше, чем рабочий ток
катушки, обусловленный конечным воздушным зазором в магнитной системе аппарата. Ток срабатывания влияет на нагрев
катушки. При большом числе очень часто повторяющихся включений контактора катушка может недопустимо нагреться. Для
контакторов постоянного тока такой режим гораздо менее опасен.
Поскольку рабочий ток катушки зависит от параметров конечного воздушного зазора, последний стараются сделать по возможности наименьшим. Если во время эксплуатации шлифованные
торцы якоря и ярма становятся неровными или загрязняются,
катушка перегревается и изоляция ее может сгореть.
В качестве дугогасительного устройства в контакторах
переменного тока в основном применяют камеры с деионной
решеткой (рис. 59). Образующаяся при замыкании контактов дуга
испытывает действие электродинамической силы Р, стремящейся
вытолкнуть ее в пространство над контактами. Здесь дуга попадает
101
на изолированные стальные пластины -решетки и разбивается на
несколько коротких дуг. Каждая из них после этого движется
самостоятельно - одна быстрее, другая медленнее. Ток проходит
и по пластинам. Из-за взаимодействия токов в получившихся
П-образных контурах электродинамические силы / стремятся сместить опережающие дуги вверх, а отстающие-вниз. Дуга растягивается, и это способствует ее быстрому гашению.
В контакторах тяжелого режима работы, где включения часто
следуют одно за другим, деионная решетка не обеспечивает
надежного гашения дуги, так как в промежутках между отключениями пластины решетки не остывают, а ионизированный воздух
внутри камеры не успевает приобрести изоляционные свойства.
В таких контакторах применяют магнитное гашение дуги, такое же,
как в контакторах постоянного тока.
23. Электромагнитные реле
Электрическое реле-это аппарат, предназначенный для скачкообразного изменения величин в выходных цепях при заданных
значениях воздействующих величин на входе. Реле при срабатывании замыкает или размыкает свои контакты, включенные в цепи
управления, защиты или сигнализации, чем обеспечиваются требуемые изменения в этой цепи. В зависимости от контролируемой
величины реле могут быть: электрическими, реагирующими на
изменение тока, напряжения, мощности, сопротивления; механическими, срабатывающими при изменении давления, скорости,
уровня жидкости, направления вращения; тепловыми, реагирующими на изменение температуры. Механические реле получили
название датчиков.
Реле, реагирующие на изменение электрических параметров
цепи, построены на электромагнитном принципе. Электромагнитное реле-это электрическое реле, работа которого основана на
воздействии магнитного поля неподвижной обмотки на подвижный
ферромагнитный элемент. В этом отношении они схожи с электромагнитными контакторами; в устройстве этих аппаратов много
общего. Электромагнитные реле бывают постоянного и переменного тока. Электромагнитное реле переменного тока отличается от
реле постоянного тока тем, что его магнитная система набрана из
листов электротехнической стали и в торцах сердечника встроены
короткозамкнутые витки. Срабатывание реле после наступления
причины срабатывания происходит мгновенно или с выдержкой
времени (эти реле называют реле времени или замедляющими
реле). Реле мгновенного действия разделяют на реле напряжения
и реле тока. Минимальное значение напряжения или тока, при
котором якорь электромагнитного реле может полностью притянуться к сердечнику, называется напряжением или током втя102
гивания реле. Максимальное значение напряжения или тока, при
котором якорь может вернуться в исходное положение, называется
напряжением или током отпускания реле. Отношение напряжения
(тока) отпускания к напряжению (току) втягивания называют
коэффициентом возврата реле:
У обычных реле /св = 0,4 -=- 0,6, а у специальных достигает
значений 0,85-0,95.
Значение напряжения или тока, при котором реле срабатывает,
называется уставкой реле. Реле, срабатывающее при возрастании
напряжения или тока до уставки, называется максимальным, а
срабатывающие при уменьшении этих значений до уставки -минимальным. Уставка максимального реле равна или больше значения
втягивания, уставка минимального реле равна или меньше значения
отпускания. У электромагнитных реле времени уставкой или
выдержкой времени называют время с момента включения или
выключения тока в цепи катушки, реле до момента срабатывания.
Одно и то же реле можно настроить на разные уставки.
Электромагнитные реле, якоря которых при снижении контролируемой величины до значения напряжения или тока отпускания
возвращаются в положение, которое они занимали до срабатывания, называются реле с самовозвратом. Реле, у которых якоря
при таких же обстоятельствах не возвращаются в исходное положение, называются реле без самовозврата. Чтобы вернуть якорь
такого реле в начальное положение, нужно сбросить удерживающую его защелку. Различают реле с ручным и дистанционным
возвратом. Во втором случае защелку сбрасывают, подавая ток на
специальную электромагнитную катушку возврата.
Реле мгновенного действия. Для защиты ЭД постоянного тока от
недопустимых перегрузок служат реле максимального тока
(рис. 60). На сердечнике 2 ярма магнитопровода 4 расположена
электромагнитная катушка 1. Ее включают в цепь главного тока
ЭД, поэтому она наматывается толстым проводом и имеет мало
витков. При увеличении тока в этой цепи до уставки реле якорь
3 притягивается к сердечнику, преодолевая при этом силу сопротивления отключающей пружины 6, и размыкает мостиковые
контакты 8. Эти контакты обычно включены в цепь катушки
контактора, обеспечивающего своими главными контактами питание ЭД. Поэтому размыкание контактов реле приводит к отключению ЭД от сети. Уставку реле регулируют, изменяя натяжение
пружины при помощи гайки 5. На шкале 7 нанесены метки,
соответствующие 110, 220 и 350% номинального тока катушки. Ток
уставки можно регулировать в этих пределах. Катушки реле рассчитаны на номинальные токи от 5 до 1200 А.
103
После исчезновения тока в цепи катушки якорь реле, изображенный на рис. 60, а, возвращается в исходное положение сам.
В реле с ручным возвратом (рис. 60,6) притянутый к сердечнику
якорь защелкивается в этом положении Г-образной защелкой 10, на
которую действует пружина 9. Для возврата якоря в исходное
положение нужно нажать вручную на хвостовик защелки. Аналогично защелкивается якорь и в реле с дистанционным возвратом
(рис. 60, в). Для возврата надо подать ток на электромагнитную
катушку возврата, в результате защелка притягивается к сердечнику
этой катушки и освобождает якорь реле.
В качестве реле минимального тока в судовом ЭП применяют электромагнитные реле серии РЭМ-25. Эти реле используют
для контроля цепей возбуждения ЭД постоянного тока, поэтому их
называют реле обрыва поля. Чувствительные элементы - электромагнитные катушки реле данного типа - включаются последовательно с обмотками возбуждения ЭД, а контакты реле-в цепь
нулевой защиты ЭП. Реле срабатывает (включается) при прохождении заданного расчетного значения тока и отключается при
прекращении тока.
Рис. 60. Реле максимального тока:
а с самовозвратом; б с ручным возвратом; в с дистанционным возвратом
104
Реле н а п р я ж е н и я устроены
аналогично реле тока, но их катушки включают в цепь параллельно. Часто одну и ту же конструкцию аппарата применяют
и для реле тока, и для реле на- Рис- 61- Схема геркона
пряжения-заменяют только катушку. Реле напряжения используют в основном в узлах защиты от
перерыва питания или недопустимого снижения напряжения, а
также для выполнения определенных программ срабатывания коммутирующих аппаратов в схемах ЭП, т. е. они выполняют функции
реле управления.
Для повышения надежности и уменьшения црёмени срабатывания в качестве реле управления ЭП находят применение магнитоуправляемые герметические контакты - г е р к о н ы. Простейший
геркон (рис. 61) представляет собой 2 отрезка 7 и 4 пермаллоевой
проволоки диаметром 0,6-1,3 мм, у которых часть поверхности,
осуществляющая контакт, покрыта защитным слоем благородного
металла. Эти проволоки-пружины запаивают в стеклянный баллон
2, заполненный газом или вакуумированный. При воздействии на
геркон поля, создаваемого катушкой 3, магнитные силовые линии,
проходящие через пермаллоевые пружины и немагнитный зазор,
стремятся сократиться, вследствие чего пружины несколько
деформируются, притягиваются одна к другой и замыкают контакты. Время срабатывания герконов (0,4-2,0 мкс) и отключения
(0,1-0,7 мкс) намного меньше, чем у обычных электромагнитных
реле. Из-за отсутствия трения в подвижных частях они обладают
высокой механической износостойкостью. Максимальное число
срабатываний герконов, зависящее от значения коммутируемого
тока, достигает 107-109. Герконы позволяют коммутировать сигналы постоянного и переменного тока мощностью 100-250 В - А
и токи от десятков пикоампер до 3 А.
Реле времени. В целях управления ЭП применяют электомагнитные реле времени. Реле автоматически регулируют заданные
выдержки времени подачи импульсов на различную аппаратуру
управления ЭД. Выдержка времени достигается в этих реле механическим или электромагнитным путем. Принцип получения выдержки времени у реле первого типа заключается в следующем. При
подаче питания на реле притягивается якорь, связанный с механическим замедлителем (например, часовой или маятниковый механизм). Таким образом, с момента подачи питания на катушку реле
до полного втягивания якоря и замыкания (размыкания) контактов
реализуется выдержка времени в пределах 1-10 с. Реле второго
типа, называемые электромагнитными реле времени постоянного
тока, имеют электромагнитный демпфер, который обеспечивает
медленное спадание магнитного потока в магнитопроводе после
отключения цепи катушки.
105
В электромагнитном реле времени серии РЭМ-200 (рис. 62, а)
Ц-образный цилиндрический стальной магнитопровод 3 залит
алюминиевым основанием 1. На обоих кернах магнитопровода
находятся электромагнитные демпферы 2 и 13 - толстостенные
цилиндры из немагнитного материала (алюминия или латуни). На
демпфер 13 надета втягивающая катушка 16. Якорь 8 с закрепленными на нем противовесами 5 отжимается от неподвижного
магнитопровода пружиной 4, степень сжатия которой регулируется
гайкой 6. Ход якоря ограничен регулируемым упором 7. При
притягивании якорь нажимает пластиной 14 на штырь контактного
узла 15 (на рис. 62,6 показан в увеличенном масштабе). При
нажатии на штырь 17 контактный мостик 18 прогибается и замыкает вместо нижних неподвижных контактов 20 верхние 19. Для
гашения дуги в контактном узле смонтированы постоянные магни-
а)
1В
19
Рис. 62. Электромагнитное реле времени
РЭМ-200 с электромагнитным
демпфером:
я-схема; б контактный узел; взависимости уставки от толщины немагнитной прокладки и степени сжатия отключающих
пружин
ты. На якоре укреплена тонкая немагнитная прокладка 9, обеспечивающая конечный зазор в магнитной цепи аппарата (зазор
необходим во избежание прилипания якоря). В притянутом положении якоря упор 12 смещается вправо и сжимает пружину упора
10, которая регулируется гайками 11.
При подаче напряжения на катушку реле якорь протягивается
практически мгновенно. При отключении реле спадающий основной
магнитный поток индуцирует в демпферах токи, обусловливающие
появление дополнительного магнитного потока, замыкающегося по
тому же пути, что и основной. Согласно закону Ленца поток
демпферов направлен так, что препятствует причине, вызвавшей
его, т.е. уменьшению основного потока. Следовательно, поток
демпферов направлен согласно основному потоку, и общий поток
в магнитопроводе из-за появления этого дополнительного потока
снижается замедленно. Аналогичное демпфирующее действие оказывает и немагнитное основание реле. Замедлению спадания потока
способствуют и потоки от вихревых токов, возникающих в массивном магнитопроводе при изменении основного потока.
Магнитный поток (рис. 62, в) спадает от начального значения Фн
до значения Фост, обусловленного остаточной индукцией. Якорь
реле отходит от сердечника только тогда, когда поток уменьшится
до значения потока отпускания Фо1, при котором удерживающий
момент реле, созданный этим ь ,>током, оказывается меньше отрывного момента, обусловленного силами отключающей пружины
и пружины упора. Время ^ ,спадания потока до этого значения
равно выдержке времени реле, изменить которую можно двумя
способами: заменив немагнитную прокладку прокладкой другой
толщины или изменив степень сжатия пружин.
В первом случае из-за увеличения толщины прокладки и, следовательно, магнитного сопротивления магнитной цепи уменьшаются
начальный и остаточный потоки. Первый из них уменьшится
ненамного (до Фн2) вследствие того, что магнитная система насыщена, а второй уменьшается больше (до Фост2), так как по мере
уменьшения намагничивающей силы катушки при ее отключении
насыщение магнитопровода снижается. Соответствующая этому
случаю кривая 2 (см. рис. 62, в) проходит ниже кривой 1. Таким
образом, при том же потоке отпускания Фо2 = Фо1 выдержка времени реле получается меньше: 12 < 1г. Этим способом осуществляется
грубая ступенчатая настройка реле.
Во втором случае изменяется отрывной момент пружин. Если
затянуть пружины, то отрыв якоря произойдет при большом потоке
отпускания Фо3 и выдержка времени уменьшится: ?3 < 12. Этим
способом осуществляют тонкую плавную настройку реле. Время
выдержки реле можно регулировать только в определенных пределах, обусловленных параметрами данного типа реле (например,
реле РЭМ-221 может иметь выдержку в пределах 0,3-1,5 с, а
РЭМ-222-от 0,8 до 2,5 с).
107
Следует отметить, что нельзя ставить слишком тонкую немагнитную прокладку или сильно ослаблять пружины, так как это
может привести к прилипанию якоря.
Создать выдержку времени электромагнитного реле постоянного тока можно не только отключив его катушку, но и замкнув ее
накоротко (при условии, что это не приведет к короткому замыканию сети). Ток в короткозамкнутой катушке спадает вследствие
ее большой индуктивности постепенно, причем тем дольше, чем
больше электромагнитная постоянная времени катушки. Поэтому
и поток катушки убывает замедленно, а притянутый якорь реле не
отходит от сердечника до тех пор, пока этот поток не снизится до
значения потока отпускания. При наличии электромагнитных
демпферов этот способ обеспечивает большие выдержки времени.
Электромагнитные реле времени постоянного тока имеют погрешность + 10%. Их широко применяют в схемах управления ЭП
как постоянного, так и переменного тока. В последнем случае для
питания катушке реле предусматривают индивидуальный полупроводниковый выпрямитель. Реле времени с механическим замедлителем используются в основном на судах иностранной постройки.
Электромагнитные реле составляют основную часть электромагнитных аппаратов в схемах управления ЭП, поэтому их надежность определяет качество работы всего ЭП.
24. Электротепловые и механические реле
Электротепловые реле. Реле, работа которых основана на
тепловом действии электрического тока, называют электротепловыми. Их применяют для защиты АД от перегрузок. Известно, что
около 80% асинхронных двигателей выходят из строя из-за повреждений обмоток статора в результате перегрузок, ведущих к недопустимым перегревам изоляции. Создание надежной защиты ЭД
от перегрузок представляет собой сложную задачу (особенно АД
электроприводов палубных механизмов). Электромагнитные токовые реле оказываются непригодными для выполнения этих функций. Если, например, для защиты АД применить максимальное
токовое реле мгновенного действия и настроить его на ток, превышающий номинальный (например, в 2 раза), то при каждой попытке
пуска АД реле будет срабатывать. Если реле настроить на ток,
превышающий пусковой, то оно не будет защищать АД от
3-4-кратных токов перегрузки, что недопустимо.
Тепловое же реле независимо от настройки при пуске не срабатывает, так как пусковой ток кратковременен и реле не успевает за
время его протекания нагреться до температуры уставки. Зато при
длительном протекании сравнительно небольшого тока перегрузки
(в 1,5-2 раза превышающего номинальный) реле срабатывает
и отключает АД раньше, чем он перегреется. Контакты этих реле
108
Рис. 63. Электротепловое реле:
я при нормальном токе; 5-при токе, превышающем нормальное значение; в времятоковая характеристика реле
включают в цепь катушки контактора, подающего питание АД, так
же как контакты электромагнитных реле максимального тока.
Получившие распространение электротепловые реле по принципу
действия могут быть резделены на 2 основные группы: токовые
и температурные.
Воспринимающим органом простейшего теплового токового
реле (рис. 63) является биметаллическая пластина 1. Она склепана
из двух пластин, изготовленных из металлов с различными коэффициентами линейного расширения. Обычно одна из пластин стальная, а вторая сделана из сплава инвар. Вблизи биметаллической
пластины размещен спиральный нагревательный элемент 2, изготовленный из нихрома. Часть пластины и спираль закрыты теплоизоляционной камерой 7. По нагревательному элементу проходит
ток защищаемого АД. При нормальном токе биметаллическая
пластина находится в положении, показанном на рис. 63, я. Контакты 6 реле в этом состоянии замкнуты. Если ток АД превысит
нормальное значение, в нагревательном элементе выделится больше теплоты, чем при нормальной нагрузке, и температура биметаллической пластины повысится. Ее составные части увеличатся на
разную длину, но так как перемещаться независимо они не могут,
то пластина изогнется в сторону элемента с меньшим коэффициентом линейного расширения. При определенной температуре
она займет положение, показанное на рис. 63, б, и освободит защелку 3, которая под действием пружины 4 повернется и разомкнет
контакты реле. Это приведет к отключению АД.
Таким образом, ток по нагревательному элементу протекать
перестанет, и биметаллическая пластина начнет остывать. По мере
охлаждения она выпрямится и займет прежнее положение, но войти
109
в зацепление с защелкой сама не сможет (это реле без самовозврата). Для возврата подвижной системы в прежнее положение
нужно нажать пальцем на кнопку толкателя 5. Однако это/возможно только после того, как биметаллическая пластина охладится
до прежней температуры.
Работу теплового реле определяет его время-токовая характеристика (рис. 63, в), которая показывает зависимость времени
срабатывания от тока. Время-токовая характеристика у верх тепловых реле обратно пропорциональная: при больших тока'х перегрузки реле срабатывает быстро, а при малых время срабатывания
увеличивается.
Рассмотренные тепловые токовые реле защиты сравнительно
просты, надежны и дешевы. Они могут обеспечить удовлетворительную защиту АД в длительном режиме работы (при условии
выбора или регулирования уставки срабатывания реле непосредственно на судне в соответствии с реальной нагрузкой АД). Наиболее целесообразной как с экономической, так и с технологической
точек зрения является регулирование уставки тепловых реле этого
типа при включении их на 2-кратный номинальный АД ток с
холодного состояния. Время срабатывания реле при этом не превышает 80 с.
Известно, что зависимость времени срабатывания аппарата от
тока в его главной цени должна в максимальной степени соответствовать перегрузочной характеристике АД. Однако указанные реле
не гарантируют полную защиту АД в электроприводах палубных
механизмов во всех эксплуатационных режимах по следующим
причинам:
постоянные времени теплоэлемента и АД существенно отличаются, вследствие чего тепловое состояние реле защиты не всегда
отражает тепловое состояние АД, а согласование этих характеристик простыми средствами невозможно;
на точность срабатывания реле влияет температура окружающей среды, а также разброс и старение биметаллической пластины; перегрев АД может быть вызван причинами, не связанными
с изменением тока в ею цени.
Наиболее естественным и надежным методом защиты является
метод, основанный на непосредственном контроле температуры
обмоток. Это достигается при помощи встроенных непосредственно
в лобовые части обмоток статора АД чувствительных элементов.
В качестве ЧЭ применяются как биметаллические пластины, так
и полупроводниковые терморезисторы с большим температурным
коэффициентом сопрот явления.
Электротепловые реле с терморезисторами имеют значительно
улучшенные характеристики. Подобные реле включают в себя
терморезисторы, размещенные в обмотках АД, и усилительнорелейный блок в станции управления (пускателе). При возрастании
температуры обмотки значение сопротивления терморезистора с
110
отрицательным температурным
коэффициентом уменьшается, а
терморезистора с положительным \ температурным коэффициентом (позистор)-резко возрастает. Изменение значений сопротивления используется в схеме
блока Для включения или выключения электромагнитного реле,
контакты которого управляют
силовым контактором.
В качестве примера рассмотрим работу схемы температурной:
защиты АД (рис. 64), осуществляемой с помощью термодатчиков
(позисторов). При подаче напряжения исполнительное реле защиты К V включается, так как
суммарное сопротивление трех
последовательно включенных позчеторов КК мало. Замыкающий
контакт реле КУ находится в цепи катушки реле напряжения, и
благодаря этому указанное реле
может быть включено, обеспечивая дальнейшую работу схемы.
При "ерегпезе обметки АД и резком в ',ч)ячи с этим возрастании
сопротивления хотя
бы одного
К!7 отключается,
позисторя
цель реле напряжения разрыр.?ется, м это приводит к отхпточегапо
АД.
Механические реле. На изменение давления в сосудах илтт системах, не сообщающихся с атмосферой, реагиругот датчики
ль влеки?. Их широко гпимер^ют
в схемах судовой автоматики.
Одни от так»1х датчиков покал(.ш ;'Я рис. 65, а. В корпусе 1,
закрытом, кожухом 4, находятся
две мембраны 9 (йа рисунке видна
одна). К ним снизу подведена
трубка, соединенная с сосудом,
в котором давление может измениться. Сверху к мембранам при-
ПК
Рис. 64. Принципиальная схема температурной защиты электродвигателя
Рис. 65. Датчики:
а давления; 6 - уровня
111
легают два поршня 2, упирающиеся своими колонками в подушки 8.
На подушки нажимают две пружины 5, надетые на стержн^ 7.
Сжатие пружин регулируется гайками 3. При увеличении давления
в системе до максимальной уставки датчика, зависящей от степени
сжатия пружины, одна мембрана преодолевает силу упругости
пружины и перемещает вверх свой поршень, который воздействует
на один из двух микровыключателей 6 (микровыключател^ - это
выключатель с очень малым ходом подвижных частей). Контакты
микровыключателя при этом замыкаются. При снижении давления
в системе до минимальной уставки вторая пружина смещает поршень второй мембраны вниз. Поршень отходит от второго микровыключателя, и его контакты размыкаются.
Во время эксплуатации датчиков необходимо следить за состоянием контактной системы, а также проверять погрешности при
замыкании и размыкании контактов и дифференциал. Давление
определяют с помощью контрольного манометра со шкалой, соответствующей диапазону настройки датчика. Проверку проводят для
нескольких точек шкалы, включая ее крайние точки. Для каждой
точки делают 2-3 измерения. Установив указатель на уставку
срабатывания, создают давление несколько больше уставки. После
этого равномерно снижают давление до момента размыкания
контактов. Затем для определения дифференциала повышают давление до замыкания контактов. Результаты проверки можно считать удовлетворительными, если погрешность и дифференциал
будут находиться в пределах, допустимых для данного аппарата.
Для контроля уровня жидкости в сосудах, соединенных с атмосферой, применяют датчики уровня. Датчик уровня поплавкового
типа (рис. 65,6) состоит из пустотелого герметичного поплавка 1,
закрепленного на конце рычага 2. Второй конец рычага соединен
с пальцем, имеющим возможность поворачиваться в подшипнике 4.
Подшипник смонтирован на основании, закрепленном на крышке
цистерны 6, сквозь прорезь в которой пропущен рычаг. С пальцем
рычага при помощи тяги 5 соединен валик контактного устройства
3, состоящий из двух микровыключателей. При изменении уровня
жидкости в цистерне поплавок перемещается вверх или вниз. В
крайних положениях, обусловленных заданными уровнями жидкости, контакты микровыключателей замыкаются или размыкаются.
25. Комплексные устройства управления
Аппаратура управления конкретного ЭП или группы ЭП
монтируется в отдельном устройстве, которое выполняет определенные функции. Аппаратами этого вида являются магнитные
пускатели и контроллеры.
112
Магнитными пускателями
М № ЛЬ ю
называют комплексные устройI 1—I С13
ства, служащие для пуска, отключений и защиты ЭД. По роду тока
их разделяют на пускатели переменного и постоянного тока. В
основном применяют пускатели
переменного тока, которые состоят из одного или двух контакторов переменного тока и Рис. 66. Принципиальная схема прямого пуска асинхронного двиэлектротепловых реле, смонтирогателя при помощи нереверванных на общем основании и
сивного магнитного пускателя
собранных в общую электрическую схему. Магнитные пускатели с одним контактором служат
только для прямого пуска АД (их называют нереверсивными).
Схема прямого пуска АД при помощи нереверсивного пускателя
(рис. 66) очень проста и в пояснениях не нуждается. Магнитные
пускатели с двумя контакторами служат для пуска и реверса АД (их
называют реверсивными). В реверсивных пускателях контакторы
сблокированы механически - между их якорями находится поворачивающееся на оси коромысло или другое устройство, не дающее
притянуться якорю одного контактора, если притянуть якорь другого контактора. Это необходимо во избежание короткого замыкания, получающегося при включении обоих контакторов.
В судовом ЭП переменного тока основное применение нашли
магнитные пускатели отечественного производства серий ПММ
и П6-100. Пускатели выполняются открытого и закрытого исполнений (брызгозащищенного или водозащищенного). Меньшее
распространение получили магнитные пускатели постоянного
тока.
Магнитные контроллеры представляют собой наиболее
сложные комплексные устройства контактной аппаратуры, которые
используют при управлении ЭД с регулированием скорости или для
нерегулируемых реверсивных ЭД с большой частотой включений,
тяжелыми условиями пуска, а также повышенными требованиями
к надежности отключения. Магнитные контроллеры судового исполнения объединяют в 5 групп: 2 группы постоянного тока (для
управления ЭД палубных механизмов; для управления ЭД механизмов насосов, вентиляторов и компрессоров); 3 группы переменного тока (для управления ЭД палубных механизмов; для управления регулируемыми ЭД насосов, вентиляторов и компрессоров;
контроллеры для пуска мощных АД).
Магнитные контроллеры представляют собой металлические
шкафы брызгозащищенного и водозащищенного исполнения с
установленными в них коммутационными и защитными аппаратами: контакторами, реле, автоматическими выключателями, пре113
дохранителями, резисторами, полупроводниковыми приборами и
т. п. По своему назначению и схемам магнитные контроллеры
имеют большое число исполнений применительно к разнообразйым
судовым ЭП.
;
26. Силовые контроллеры и командоаппараты
Контроллером называется многопозиционный коммутационный аппарат, который имеет ряд коммутационных положений
и позволяет осуществлять ряд переключений в цепи ЭД. Контроллеры наиболее широко применяют для управления ЭД постоянного
и переменного тока палубных грузоподъемных и промысловых
механизмов. По роду тока контроллеры можно разделить на
контроллеры постоянного и переменного тока. Переключение в
цепи ЭД достигается при помощи контактов контроллера, которые
управляются посредством поворота рукоятки, связанной с основным валом данного электрического аппарата. Если контакты контроллера включаются непосредственно в силовую цепь ЭД, то такие
контроллеры называют силовыми, а если контакты контроллера
включаются во вспомогательные цепи питания катушек электромагнитных аппаратов, то такие контроллеры получили название
комапдохонтроллеров.
Сяловые контроллеры. По конструкции различают 2 вида силовых контроллеров: барабанные и кулачковые. В настоящее время
наиболее широко применяют на морских судах кулачковые контродчеры. Опи обладают высокой износостойкостью контактов
и длпускг:*~т по 600 включений в час.
Литой "огпус силового кулачкового контроллера (рис. 67) закрыт крыштас-л с резиновым уплотнением. С МЗХОРТТКОМ контроллера мехактч:еа:" связан вал, на котором смонтированы хутачковые
шакбы. Протк" гардой кулзчгорой шайбы на неподвижной части
(изодяциогпюй панели) укреплены контактные устройства. Кулачковь'г шайбы яри «ращении вала с ттомощью маховика соприкасаются торцами с роликом 8 рычага 7. При попадании ролика
в выемку кулачговой шайбы рычаг под действие:»: пружины 9 занимает положение, в котором он показзг га рисунке. При набегании
на ролик вт;тг-ту;;а тшайбьт рычаг поЕора*гя"->ется и отводит подвижной КОЯТЛ7СГ ^ о 1т<*ттодэижного 12. Контакты перекатываются
благодаря повороту суппорта 5 вокруг оси на конце рычага, при
котором снимается пружиаа контакта 6. УГЛЫ поворота вала
с кулачхочымк шайбами фиксируются в определенных положениях
с помощью грапового устройства, этим обеспечивается необходимая последовательность замыкания контактов. С контактами
контроллера через электрические перемычки и кабели соединяется
главная цепь ЭД. Профиль кулачков на валу контроллера соответствует определенной программе управления ЭД. Каждое фикси114
руемое положение маховика определяет режим работы ЭП (пуск,
первая скорость, вторая скорость, торможение и т.д.).
Силовые контакты контроллера должны быть достаточно мощными и обеспечивать гашение электрической дуги. В рассматриваемом контактном устройстве постоянного тока дугогасительное
устройство состоит из последовательной (искрогасительной) катушки 10, сердечника //, полюсных наконечников 2, дугогасительного рога / и асбестоцементной камеры 3. При переменном токе
дугогашение обеспечивается установкой между кулачковыми элементами асбестоцементных перегородок, которые препятствуют
перекрытию дугой полюса аппарата. Контактные устройства цепей
управления работают аналогичным образом, но их контакты не
пальцевые, а мостиковые и без дугогашения.
В корпус силового кулачкового контроллера также монтируются
коммутационные и защитные элементы: контактор включения
питания (линейный контактор) и реле защиты.
Работоспособность контроллеров в процессе эксплуатации обеспечивается надлежащим состоянием контактов, изоляционных
частей механизма перемещения контактов.
а)
Рис. 67. Кулачковый контроллер:
а-общий вид; б --контактное устройство постоянного тока
115
Командоаппараты. В цепях управления ЭП используются командоаппараты, которые служат для передачи команд ручного
управления (командоконтроллеры и кнопки) и путевого контроля
(конечные и путевые выключатели). Контакты этих аппаратов при
срабатывании включают или выключают ток в цепи катушек
контактора и электромагнитных реле.
Командоконтроллеры применяют для управления ЭП, работающими в повторно-кратковременном и кратковременном режимах. Замыкание и размыкание их контактов происходит по заданной программе с помощью контактных устройств, приводимых
в движение кулачками, расположенных на общем валу и приводимых в движение вручную. Принцип воздействия кулачков на
контактные устройства аналогичен силовым контроллерам. Поскольку в судовом ЭП командоконтроллеры используют, как правило, для управления различными механизмами, установленными
на открытых палубах, то их изготовляют большей частью в водозащищенном исполнении. На судах находит применение большая
группа командоаппаратов как отечественного производства (серий
КВО, КН, КТ, КМ-1200-для палубных механизмов, серии КР-для
рулевых электроприводов), так и производства иностранных фирм.
Принцип действия командоаппарата (рис. 68), применяемого
для управления ЭП палубного механизма, заключается в следующем. Литой корпус 3 аппарата, закрывающийся крышкой 16
с резиновым уплотнением, обеспечивающим водонепроницаемость,
устанавливается на вертикальной колонке (трубе) 1, крепящейся
к палубе своим нижним фланцем. Внутри на изоляционной панели
11 установлены неподвижные контакты 10. Подвижные мостиковые
контакты 9 укреплены на поворачивающемся вокруг оси 4 пластмассовом рычаге 7. Включающая пружина 5, воздействуя на рычаг,
стремится замкнуть контакты. Укрепленный на рычаге вращающийся ролик 8 касается торца кулачковой шайбы 2, по окружности которой расположены впадины 6. Шайба надета на квадратный горизонтальный вал 14. При повороте вала ролик рычага
катится по окружности шайбы. Контакты в это время разомкнуты.
В момент, когда ролик попадает во впадину на шайбе, включающая
пружина замыкает контакты. При дальнейшем повороте вала ролик
выходит из впадины и контакты снова размыкаются. В КК имеется
6 кулачковых шайб и 12 контактных устройств. Каждая шайба
воздействует на 2 контактных устройства, расположенных по обе
стороны.
Кулачковый вал поворачивают выведенной наружу рукояткой
13. Она фиксируется в определенных положениях собачкой, входящей в полукруглые прорези на дугообразной планке 18. Фиксированных положений несколько: одно нулевое (в этом положении
рукоятка расположена вертикально), а остальные-рабочие, расположенные симметрично по обе стороны от нулевого. Каждая
половина рабочих положений рукоятки соответствует определен116
Рис. 68. Командоконтроллер
ному направлению, а каждое положение - определенной частоте
вращения ЭП. В соответствии с этим на крышке КК (в зависимости
от его назначения) нанесены стрелки с надписями: «Спуск»«Подъем» или «Вперед»-«Назад», «Влево»-«Вправо», «Травить»«Выбирать» и т. д. В вертикальном положении рукоятка удерживается специальной защелкой 19, предохраняющей ее от самопроизвольного перемещения при вибрации. Чтобы передвинуть
рукоятку из нулевого положения, нужно одновременно нажать
пальцем на выступающую из ее головки кнопку 12 защелки. При
этом собачка защелки выходит из прорези на фиксирующей планке
и освобождает рукоятку. В крайних положениях рукоятки ее перемещение ограничено упорами.
В соответствии со схемой управления ЭП контакты КК замыкаются в последовательности, которая обеспечивается определенным подбором кулачковых шайб. Один контакт КК управляется
отдельной съемной рукояткой 15 и не связан с поворотом кулачкового вала. Эта рукоятка вставляется в прорезь гнезда 17 *во
включенном положении ее контакта. После поворота рукоятки и
включения контакта вынуть ее из гнезда невозможно. Этот контакт
с ручкой называют выключателем управления. Через него поступает ток в цепь управления ЭП.
Размыкание контакта выключателя управления приводит к
немедленной остановке ЭД, поэтому им пользуются в экстренных
аварийных случаях.
К о н е ч н ы е в ы к л ю ч а т е л и - э т о командоаппараты, кинематически связанные с рабочим механизмом и предназначенные для
срабатывания в крайних его положениях. Обычно при этом
контакты конечных выключателей размыкаются и останавливают
117
ЭД. Конечные выключатели применяют чаще всего в ЭП грузоподъемных и якорно-швартовых
устройств, а также в рулевом ЭП.
В грузовых устройствах конечные
выключатели ограничивают перемещение груза или платформы
Рис. 69. Рычажный конечный выклю- крана, а в рулевом ЭП-угол поворота пера руля. В зависимости
чатель
от кинематической схемы конечные выключатели подразделяют на рычажные и шпиндельные.
Размыкание контактов в рычажных выключателях осуществляется
воздействием упора механизма на рычаг выключателя, а в шпиндельных-перемещением гайки по винту, связанному через передачи
с валом механизма при достижении последним его крайнего
положения.
Контактный вал рычажного конечного выключателя (рис. 69)
связан с рычагом 3, на конце которого расположен ролик 2. При
набегании на ролик приводной линейки 1, связанной с подвижной
частью механизма, рычаг поворачивается на 30е, вследствие чего
один контакт аппарата замыкается, а другой размыкается. То же
происходит, если линейка набегает с другой стороны. При отводе
линейки назад возвратная пружина устанавливает рычаг в вертикальное положение.
Путевые выключатели-это командоаппараты, кинематически связанные с рабочим механизмом и предназначенные для
срабатывания в определенных его положениях. Путевые выключатели отличаются от конечных тем, что они замыкают свои
контакты не только в крайних положениях подвижной части механизма, но и в промежуточных положениях его пути. На судах
путевые выключатели применяют в ЭП грузоподъемных механизмов и рулевых устройств. При использовании путевого выключателя в рулевом ЭП 2 контакта этого аппарата размыкаются
в крайних положениях руля и ограничивают его дальнейшее перемещение, а 3-выключают и включают сигнальные лампы, помещенные на посту управления рулем.
Путевые и конечные выключатели необходимо проверять на
срабатывание до пуска ЭП. Опробование следует проводить при
малых частотах вращения вала ЭД. Для обеспечения надежности
конечных и путевых выключателей следует регулярно проводить их
техническое обслуживание. При этом необходимо удалять загрязнения и масло как снаружи, так и изнутри аппарата (труднодоступные детали следует очищать от загрязнений путем обдувки
сухим и сжатым воздухом давлением до 0,2 МПа или при помощи
ручных мехов). При техническом обслуживании проверяют: плотность прилегания крышки к корпусу и состояние сальников; поджатие контактных и крепежных болтов; легкость хода подвижных
118
деталей (рычагов, роликов); состояние изоляционных деталей
аппарата; наличие смазки в трущихся частях выключателя; сопротивление изоляции. В некоторых случаях проверяют раствор и
провал контактов и при необходимости аппарат подвергают дополнительной регулировке на срабатывание.
27. Тормозные электромагниты
Основное назначение тормоза состоит в том, чтобы после
отключения приводного ЭД обеспечить ускоренную точную остановку механизма и удержание его в строго фиксированном положении. Тормозные электромагниты применяются для ЭП, работающих в кратковременном и повторно-кратковременном режимах.
В ЭП применяются 2 вида тормозов: колодочные тормоза, устанавливаемые на механизмах, и дисковые тормоза с электромагнитным
приводом, пристраиваемые к ЭД.
В колодочном тормозе (рис. 70) торможение вращающегося
вместе с ЭД тормозного шкива / осуществляется при помощи двух
колодок 2. Колодки прижимаются к шкиву сильной пружиной 5,
которая воздействует на колодки посредством двух рычагов 3, Для
того, чтобы разжать тормозные колодки, необходимо при помощи
специального привода переместить шток 4. В качестве такого
привода колодочных тормозов применяются электрогидравлические толкатели, а также короткоходовые и длинноходовые тормозные электромагниты постоянного и переменного тока.
Электрогидравлический толкатель представляет собой устройство, в котором ЭД толкателя, погруженный в масло, вращает
колесо центробежного насоса. Нагнетаемое насосом масло поднимает поршень до верхнего положения, соответственно перемещается шток 4 и, воздействуя на колодки 2, растормаживает ЭД.
В этом положении масло, нагнетаемое насосом, проходит через
каналы в корпусе и возвращается
к вращающемуся колесу, и таким
образом поддерживается постоянное давление масла, благодаря
чему поршень остается в верхнем
положении. При отключении ЭД
насоса поршень под действием
собственной массы и внешних сил
возвращается в нижнее положение. В процессе эксплуатации
длина хода поршня может регулироваться в зависимости от условий работы механизма, при
этом время обратного хода со119
кращается приблизительно пропорционально сокращению длины
хода. Электрогидравлические толкатели изготовляют на переменном токе напряжением 380/220 В для питания от 3-фазной сети
частотой 50 Гц. Их заправляют трансформаторным маслом
АМГ-10.
В случае применения к колодочному тормозу электромагнитного привода воздействие на рычаги 3 осуществляют электромагниты. Выпускаемые нашей промышленностью электромагниты
постоянного тока серии ВМ предназначены для привода длинноходовых пружинных колодочных тормозов, а электромагниты
переменного тока серии МОМ-короткоходовых. Электромагниты
используют в основном для приводов редко срабатывающих тормозов (дублирующие тормоза грузоподъемных механизмов, тормоза промысловых и якорных механизмов).
Тормоза, пристраиваемые к ЭД, могут быть с дисковыми или
колодочными фрикционными элементами. Для палубных механизмов в основном используют дисковые тормоза с приводом от
короткоходовых электромагнитов постоянного и переменного тока.
В ЭП зарубежного производства преимущественное распространение находят 1-дисковые тормоза постоянного тока, в отечественных электроприводах применяют многодисковые тормоза переменного тока. Принципы действия дисковых тормозов постоянного
и переменного тока одинаковы, хотя их электромагнитные системы
различны. Торможение осуществляется трением вращающихся
дисков с наклеенным фрикционным материалом о неподвижные
стальные диски. Подвижные диски надевают на втулки со шлицевым соединением, которые посажены на вал ЭД. Неподвижные
диски надеты на штыри, укрепленные в корпусе. Между корпусом
и подвижным сердечником установлена главная тормозная пружина, усилие которой через подвижной сердечник передается к
неподвижным дискам и через поверхности трения -к подвижным
дискам, т. е. обеспечивается торможение вала ЭД. Растормаживание
происходит при протекании тока по катушке электромагнита, якорь
которого, притягиваясь к сердечнику, преодолевает силу сжатия
пружины тормоза и отводит его неподвижные части от вращающихся.
Принцип действия электромагнитного дискового тормоза рассмотрим на примере тормоза серии ТМО (рис. 71), предназначенного для сопряжения с короткозамкнутыми АД серии МАП. Тормоз, закрытый кожухом 11, прикреплен к специально приспособленному для этого подшипниковому щиту 1 АД со стороны,
противоположной той, которой АД соединяют с приводным механизмом. На конец вала 3 плотно надета в гулка 2. На ней свободно
по шлицам перемещается втулка 4, к которой прикреплены 2 диска
5 с фрикционными кольцами 7. У тормозов наиболее мощных АД
данной серии таких дисков 3. На четырех штырях б, запрессованных
в подшипниковый щит, могут перемещаться в осевом направлении
120
Б-Б
А-А
22
2 1
23
Рис. 71. Электромагнитный дисковый тормоз переменного тока типа ТМО-3
2 промежуточных диска 8 и нажимной диск 9. Пружина 13 плотно
сжимает все диски и прижимает их к стенке подшипникового щита.
Силы трения, возникающие между дисками, создают тормозной
момент, который препятствует вращению вала АД.
На неподвижном диске 19 смонтированы 4 короткоходовых
электромагнита переменного тока с прямоходовой магнитной системой, состоящей из Ш-образного ярма 20, якоря 2/ и катушки 18.
Якоря электромагнитов прикреплены к нажимному диску. При
подаче напряжения на катушки электромагнитов якоря притягиваются и тянут за собой нажимной диск, сжимая при этом пружину.
Диски раздвигаются, и вал АД получает возможность свободно
вращаться. Две диаметрально расположенные катушки электромагнитов соединены последовательно между собой. Каждая пара
катушек подключена к разным фазам питающей сети по схеме
«открытый треугольник». Такое включение четырех 1-фазных
электромагнитов обеспечивает получение наибольшего суммарного
тягового усилия. Для сглаживания пульсирующего тягового усилия
каждого из электромагнитов применены короткозамкнутые витки
23. Концы катушек размещены в коробке 22 выводов, закрытой
крышкой.
На случай выхода из строя электромагнитов на тормозе предусмотрено устройство для ручного растормаживания вала АД. Оно
состоит из штыря 14, ввинченного в гайку 12, связанную с нажимным диском, и из съемной эксцентриковой рукоятки 16, поворачивающейся на оси /5, вставленной в отверстие на хвостовике
штыря. При повороте рукоятки вверх штырь смещается вправо,
121
гайка захватывает нажимной диск, а он сжимает пружину и раздвигает диски.
Электромагнитные дисковые тормоза в процессе эксплуатации
проверяют на правильность работы в схеме и плавность движения
якоря. Не реже одного раза в месяц проверяют длину хода подвижной части, определяемую зазором между дисками и корпусом
(зазор различен для тормозов разных типоразмеров). По мере
изнашивания фрикционных колец 7 увеличивается ход якоря. При
этом уменьшается втягивающее усилие электромагнита. В какой-то
момент усилие может оказаться настолько малым, что растормаживания АД не произойдет. Кроме того, при увеличенном ходе
якоря возрастают удары при включении и отключении электромагнита.
Если ход якоря превышает допустимое значение, указанное
в инструкции завода-изготовителя, проводят регулирование тормоза. Для этого рукоятку 16 поворачивают из нижнего положения
в верхнее и растормаживают АД.
Длину воздушного зазора электромагнитов регулируют перемещением неподвижного диска при помощи регулировочных гаек
10. Дисковые тормоза обычно поставляют отрегулированными на
номинальный тормозной момент. Тормозной момент можно несколько уменьшить, ослабив натяжение пружины 13 при помощи
упорного кольца 17.
Следует иметь в виду, что установленный в холодном состоянии
тормозной момент несколько снижается в нагретом состоянии
тормоза. Для определения значения тормозного момента после
регулирования подвешивают груз к рычагу, закрепленному на валу АД, определяют максимальный груз, удерживаемый тормозом.
Зная массу груза и его расстояние от оси вала, легко вычислить
тормозной момент.
Многие электромагнитные тормоза снабжают экономическими
выключателями, имеющими механическую связь при помощи толкателей с подвижной частью тормоза. Эти выключатели в процессе
эксплуатации часто ломаются, и приходится после их восстановления проводить регулирование тормоза.
В процессе регулирования положение толкателей необходимо
установить в независимости от размера хода подвижной системы
тормозного магнита.
В процессе технического обслуживания тормозов проверяют
состояние фрикционных колец, протирают тормозные прокладки
и очищают внутреннюю часть, применяя для этого ручной мех.
Одновременно подтягивают болтовые соединения, крепящие отдельные детали, в трущиеся части тормоза добавляют смазку,
изношенные уплотнения заменяют новыми. Сопротивление изоляции должно быть не менее 1 МОм.
122
28.Резисторы
Резисторы в ЭП применяют для ограничения и регулирования
тока в главных цепях, цепях возбуждения и цепях управления,
а также для преобразования параметров электрической энергии
в определенных узлах ЭП.
В зависимости от назначения различают следующие резисторы:
пусковые, предназначенные для уменьшения тока в период пуска
ЭД;
регулировочные, используемые для регулирования частоты вращения ЭД. Кроме того, регулировочные резисторы, включаемые
в главную цепь ЭД, выполняют также функции пусковых, поэтому
их называют пускорегулировочными резисторами;
тормозные, применяемые для электрического торможения ЭД;
добавочные, предназначенные для поглощения части напряжения сети и включаемые последовательно в главную цепь ЭД или
в цепь возбуждения, а также в цепь катушки напряжения электромагнитного аппарата;
экономические, включаемые последовательно с катушками электромагнитных аппаратов или обмотками возбуждения ЭД с целью
уменьшения в этих элементах тепловых потерь. Например, после
включения контактора для удержания якоря в притянутом положении требуется меньшее электромагнитное усилие, которое достигается вводом в цепь катушки резистора. Ввод резистора в подключенную цепь возбуждения при неработающем ЭД уменьшает нагрев
обмотки;
разрядные, включаемые параллельно катушки напряжения электрических аппаратов или обмотки возбуждения электрических машин с целью уменьшения напряжения на них при отключении.
Явление перенапряжения связано с возникновением ЭДС самоиндукции при отключении, которая при большом числе витков катушки может превысить номинальное напряжение. Благодаря разрядному резистору создается электрический контур, в котором при
размыкании цепи катушки гасится ЭДС самоиндукции.
Материалами для изготовления резисторов служат металлические сплавы, обладающие высоким удельным сопротивлением, малым температурным коэффициентом электрического сопротивления и допускающие длительный нагрев при высоких температурах
без образования окалины. К таким материалам относятся константан, нихром и фехраль.
Резисторы изготовляют в виде отдельных элементов. Распространены 3 конструктивных типа резистивных элементов:
трубчатый, состоящий из нихромовой проволоки, намотанной
на фарфоровой трубке с последующим покрытием стеклоэмалью;
рамочный, состоящий из металлического держателя с надетыми
на него фарфоровыми изоляторами, на которые навивается константановая или фехралевая проволока диаметром 0,5-1,6 мм;
123
ленточный, представляющий собой металлический держатель
с надетыми на него фарфоровыми изоляторами, на ребра которых
навивается фехралевая лента сечением от 0,8 х 6 до 1,6 х 15 мм.
Трубчатые элементы применяют как добавочные, экономические
к разрядные резисторы, а рамочные и ленточные элементы-как
пусковые, регулировочные, тормозные и добавочные резисторы,
когда их включают в главную токовую цепь ЭД. Основными
параметрами резисторов являются сопротивление, предельный длительный ток (допустимый по условиям нагрева) и режим работы.
Необходимый параметр резистора для конкретного ЭП получают
путем последовательного и параллельного соединения отдельных
резистивных элементов, которые конструктивно компонуются.
Трубчатые элементы применяют как самостоятельно (в магнитных
и кулачковых контроллерах), так и в специальных оболочках -резисторных ящиках. Рамочные и ленточные элементы, как правило,
компонуют в специальные резисторные комплектные устройстваящики и шкафы. При монтаже резисторов учитывают их возможный нагрев при работе, характеризуемый рассеиваемой мощностью.
Резисторы, сопротивления которых можно изменять при протекании по ним тока, называют реостатами. Для управления судовыми ЭП постоянного тока применяют регулировочные, пусковые
и пускорегулировочные реостаты.
Регулировочные реостаты служат для регулирования тока возбуждения генераторов и ЭД.
Пусковые реостаты используют для пуска ЭД постоянного тока.
При этом реостат включают в цепь якоря ЭД и по мере разгона
последнего постепенно полностью выводят. По условиям нагрева
реостаты рассчитаны только на кратковременный пусковой ток ЭД.
Применять реостаты для регулирования частоты вращения ЭД
нельзя. Пусковые реостаты не рассчитаны на частые пуски.
Пускорегулировочные реостаты состоят из элементов пускового
реостата и регулятора возбуждения. Конструктивно они мало
отличаются от пусковых реостатов. Пуск и регулирование осуществляют перемещением одной и той же контактной щетки, сначала
выводящей пусковой резистор из цепи якоря ЭД, а затем вводящей
регулировочный резистор в цепь его обмотки возбуждения.
Обслуживание резисторов в процессе эксплуатации сводится
в основном к наблюдению за контактными соединениями, поддержанию их в должном состоянии и к удалению с них загрязнений.
О состоянии контактных соединений можно судить по их нагреву.
При ухудшении состояния контактных соединений вследствие ослабления контактных нажатий или окисления контактных поверхностей на контактирующих деталях появляются цвета побежалости,
а затем места плохого контакта начинают нагреваться до температуры видимого свечения. На плохой контакт пусковых резисторов
указывает также искрение в местах контактирования. При обнаружении таких явлений необходимо при первом же перерыве в работе
124
разобрать резистор, зачистить контактные поверхности, собрать
резистор и надежно поджать все контактные соединения.
При перегорании или поломке отдельных резистивных элементов необходимо заменить их запасными, имеющими те же параметры. В случае обгорания изоляции на стяжных шпильках их нужно
заменить. Недопустимо использовать резисторы в тех режимах, на
которые они не рассчитаны.
29. Выбор аппаратуры по основным параметрам электропривода
В процессе эксплуатации возможна замена электрических аппаратов в целом или отдельных их узлов и элементов вследствие
выхода их из строя. При отсутствии аппаратуры подобной серии ее
приходится заменять аналогами. Выбирать параметры новой аппаратуры нужно таким образом, чтобы действие схемы не нарушалось, а ЭП после восстановления обладал теми же основными
характеристиками.
Контакторы выбирают по следующим показателям: роду тока;
количеству полюсов; соответствию главных и вспомогательных
контактов; номинальной силе тока; напряжению втягивающей катушки; коммутационной способности, которая характеризуется наибольшим значением тока (предельная отключающая способность),
наибольшим пиком тока (предельная способность включения и термическая устойчивость); режиму работы (продолжительный, кратковременный, повторно-кратковременный).
Серии контакторов выбирают с учетом их назначения и классификации по использованию в различных режимах. В пределах
выбранной серии габаритные размеры контакторов выбирают по
току нагрузки при том режиме, который является номинальным для
данного ЭП. Эквивалентный среднеквадратичный ток нагрузки,
приведенный к номинальному режиму главных контактов контактора, не должен превышать номинального тока контактора. При
этом ток, проходящий по контактам контактора в течение времени,
превышающего 3 мин, не должен быть больше 170% номинального
тока контактора, а в течение времени, превышающего 1 мин,-не
более 500%.
Выбранные габаритные размеры контактора проверяют по условиям коммутационной способности. Расчетный пусковой ток ЭД
должен составлять не более 95% номинального тока включения
контактора. Номинальный ток контактора должен составлять 8090% расчетного установившегося тока перегрузки или тока при
застопоренном ЭД. Если коммутационная способность контактора
окажется ниже указанной, то выбирают следующие большие размеры контактора.
Э л е к т р о т е п л о в ы е р е л е выбирают по номинальному току
защищаемого ЭД, т.е. должно выполняться условие 1у = 1я, где
125
/ у - номинальный ток теплового элемента или ток уставки; / н - номинальный ток защищаемого ЭД. Указанное условие выбора обеспечивает несрабатывание теплового реле при токе 1,1 /н и срабатывание его в течение 10-30 мин при токе (1,35 -г- 1,4) / н .
Тепловое реле при эксплуатации должно в нагретом состоянии
выдержать без срабатывания 2 пуска ЭД подряд. Для проверки
этого определяют минимальное время 1тор срабатывания реле в нагретом состоянии, используя временные характеристики тепловых
реле. Для реле каждого типа в справочных изданиях приводятся
временные характеристики * ср (/ ср // н ), где 1ер- время срабатывания;
/ ср -ток срабатывания; /н - номинальный ток уставки (см. рис. 63, в).
Принимая /ср = 0,8 / п , где / п - пусковой ток защищаемого ЭД,
находим по временной характеристике соответствующее ему время,
которое является расчетным временем /хол срабатывания реле из
холодного состояния. Минимальное время срабатывания реле в нагретом состоянии
где /с р - отношение тока срабатывания к току уставки реле; 1с -отношение
тока срабатывания к току предварительного нагрева (ток предварительного
нагрева выбирают согласно действительной нагрузке ЭД).
Для обеспечения несрабатывания реле при двух пусках ЭД
должно быть выполнено условие ?гор > 2/ п , где 1П- время пуска ЭД.
Выбранное реле при выполнении рассмотренных функций должно одновременно в течение 8-12 с из холодного состояния отключать ЭД при стоянке под током. При проверке выполнения этого
условия нужно определить по временной характеристике расчетное
время срабатывания реле при пусковом токе (/ср = /п ) из холодного
состояния. Это время должно быть не выше 70% допустимого
времени стоянки ЭД под пусковым током.
Вся приведенная методика касается выбора тепловых реле для
ЭД длительного режима работы. Защита же тепловыми реле ЭД
кратковременного и повторно-кратковременного режимов должна
учитывать их заданный режим работы при пусковом токе, поэтому
методика выбора уставки теплового элемента отличается. Исходя
из нормальной работы схемы и выполнения защитных функций
расчетное время срабатывания реле при пусковом токе из холодного состояния должно составлять не менее 140% заданного времени
работы ЭП при пусковом токе и вместе с тем это время должно
быть меньше на 40-45% допустимого времени стоянки ЭД под
током. Таким образом, задавшись временем срабатывания в соответствии с этими условиями, по временной характеристике определяют отношение тока срабатывания к номинальному току уставки,
а затем вычисляют номинальный ток уставки по известному значению пускового тока. Выбранный этим методом номинальный ток
уставки в 1-1,3 раза больше номинального тока ЭД, поэтому
срабатывание реле в нормальном режиме исключается.
126
Когда ЭП работает при циклической нагрузке с частыми пусками и торможениями, то в этом случае определяют среднеквадратичный ток и по нему выбирают реле аналогично варианту ЭП
длительного режима работы, с той лишь разницей, что проверку на
срабатывание проводят для четырех пусков подряд.
М а г н и т н ы е п у с к а т е л и выбирают по значениям номинального и расчетного пускового токов ЭД. Также принимаются во
внимание режим работы, напряжение втягивающей катушки, число
вспомогательных контактов и т. п. После выбора пускателя подбирают тепловые реле по изложенной выше методике.
С и л о в ы е к о н т р о л л е р ы характеризуются номинальным током, напряжением, числом цепей с дугогашением и без дугогашения
и пределом регулирования защитных реле, если таковые входят
в конструкцию контроллера. Выбор контроллеров переменного
тока осуществляют по значениям пусковых токов, а постоянного
тока-по значениям номинальных токов (однако при этом не
следует превышать пределы рекомендованных мощностей ЭД).
К о м а н д о а п п а р а т ы выбирают в зависимости от значений
длительного тока, максимального допустимого тока включения,
разрывного тока при индуктивной нагрузке, допустимой частоты
включений, числа контактов, напряжения, а также от вида исполнения. Конечные выключатели характеризуются также требуемым
усилием нажатия на штифт или ролик.
Э л е к т р о м а г н и т н ы е р е л е выбирают по числу контактов,
роду тока, напряжению втягивающей катушки и коммутационной
способности (току включения и отключения). Для реле максимального тока дополнительным критерием является предел регулирования уставки тока срабатывания. Реле времени дополнительно характеризуется уставкой времени срабатывания и пределом ее регулирования.
Датчики уровня или давления выбирают по напряжению цепи
управления и по крайним предельным значениям уставок (по
уровню для датчика уровня и по давлению -для датчика давления).
Р е з и с т о р ы выбирают по допускаемой силе тока, режиму
работы, сопротивлению и по рассеиваемой мощности, определяющей их нагрев.
Контрольные вопросы-задания
1. Каковы конструктивные особенности контакторов постоянного тока?
2. В чем состоит отличие конструкций электромагнитной аппаратуры постоянного
и переменного тока?
3. По каким параметрам выбирают контакторы и электротепловые реле?
4. Каков принцип действия электромагнитных реле времени?
5. Какие чувствительные элементы используются в электротепловых реле?
6. На каком принципе построены электромагнитные тормоза и каковы особенности
их обслуживания?
7. Перечислите виды резисторов по выполняемым ими функциям.
8. Как осуществляется выбор электрических аппаратов?
127
Глава 6
БЕСКОНТАКТНАЯ АППАРАТУРА И УСТРОЙСТВА
ЦЕПЕЙ АВТОМАТИКИ
30. Общие сведения
В связи с ширикой автоматизацией производственных процессов и внедрением систем автоматического управления на судах
существенно возросли требования к надежности и быстродействию
электрической аппаратуры, до минимума должен быть сведен уход
за аппаратами в процессе эксплуатации. Этим требованиям в значительной степени отвечают бесконтактные электрические аппараты.
Важными преимуществами бесконтактных аппаратов по сравнению
с контактными обусловливается отсутствие контактов и подвижных
частей.
Опыт эксплуатации ЭП показывает, что наибольшее число
отказов происходит из-за несовершенства аппаратов и комплектных
устройств. Все неисправности и нарушения работы контакторов,
реле, силовых контроллеров, командоаппаратов делятся на неисправности механические и электрические. К числу механических
неисправностей относятся перекосы, заедания и деформации движущихся частей аппаратов и устройств, нарушение фиксации кулачковых валов, кнопочных элементов, рычагов и кнопок путевых
выключателей, изменение силы нажатия отключающих и контактных пружин. Нарушения механического происхождения, даже если
они непосредственно не приводят к отказу аппарата или устройства,
со временем становятся причинами появления электрических неисправностей. К основным неисправностям и нарушениям электрического характера относятся обрывы силовых цепей, цепей возбуждения, катушек контакторов, реле и тормозных электромагнитов,
а также снижение сопротивления изоляции, короткие замыкания,
перегорание предохранителей и нарушение контактных соединений
в этих цепях. Наибольшее число отказов связано с ненормальностями в работе контактов (приваривание, обгорание, эрозия, окисление, деформация, ослабление контактного нажатия и др.).
После сдачи судна заводом-изготовителем контактная аппаратура, как правило, удовлетворяет соответствующим нормам, но
в процессе эксплуатации в результате естественного изнашивания,
влияния окружающей среды, вибрации, нарушения регулировки
и отказов появляется необходимость в замене аппаратов и их
частей. Это затрудняет обслуживание и вызывает необходимость
128
в увеличении штата электротехнического персонала. Поэтому для
дальнейшего развития автоматизированного судового ЭП необходимо внедрение бесконтактной аппаратуры, которая отличается
большими быстродействием, долговечностью, простотой обслуживания, механической стойкостью и способностью работы во взрывоопасных и загрязненных средах. Следует отметить, что этот
неполный перечень преимуществ бесконтактных аппаратов вовсе не
исключает применения контактных. Контактные аппараты, например, обеспечивают несравненно более «глубокую» коммутацию,
видимый разрыв электрической пени и, как правило, более устойчивы к перенапряжениям и перегрузкам. Контактные и бесконтактные
аппараты дополняют одни другие, поэтому в ряде случаев наилучшее техническое решение дает сочетание контактной и бесконтактной аппаратуры.
Бесконтактные электрические аппараты по выполняемым функциям могут быть классифицированы на следующие основные типы:
контрольные и защитные (реле, контролирующие изменение
напряжения, тока, мощности, создающие выдержку времени и др.;
датчики, преобразующие неэлектрические параметры в электрические; измерительные трансформаторы тока и напряжения);
коммутационные (контакторы, пускатели, реле управления и
др.);
регулирующие (обеспечивают регулирование тока и напряжения нагрузки или поддерживают эти параметры ш> заданном
уровне).
Бесконтактные электрические аппараты выполняют на магнитных и полупроводниковых элементах, обладающих нелинейной
вольт-амперной характеристикой. Нелинейные элементы включают
в рабочую цепь между источником питания и нагрузкой и могут
изменять свое сопротивление от сравнительно малого значения, что
соответствует включенному контакту, до очень большого, соответствующего разрыву электрической цепи. Изменение сопротивления цепи, а соответственно и изменение большой мощности нагрузки достигается с помощью цепи управления малой мощности.
Поэтому большинство бесконтактных аппаратов и элементов, на
базе которых их выполняют, называют усилителями. В последующих параграфах данной главы рассматриваются возможности применения полупроводниковых устройств для различной бесконтактной аппаратуры в схемах судового ЭП.
31. Бесконтактные коммутаторы
Основным элементом бесконтактного коммутатора является
тиристор, включенное и выключенное состояния которого соответствуют замыканию и размыканию электрической цепи. Бесконтактные коммутаторы, выполненные на полупроводниковых эле5
Зак. 127(>
129
ментах, или, как их иначе называют, тиристорные контакторы,
служат для:
пуска и реверса ЭД:
переключения питания в многоскоростных ЭД;
торможения ЭД;
ступенчатого регулирования частоты вращения ЭД.
Замена контактных коммутационных устройств (электромагнитных контакторов) бесконтактными позволяет:
повысить надежность работы и увеличить межремонтный период, упростить обслуживание самого коммутатора и ЭП в целом;
увеличить допустимое число включений ЭП;
расширить возможности управления пуском, торможением и
другими переходными режимами ЭП.
Применяют БК постоянного и переменного тока. Однако БК
постоянного тока не получили распространения в ЭП. Для управления АД применяются БК переменного тока (особенно в тех ЭП,
где требуется реализовать большое количество переключений).
Контактные коммутаторы для таких ЭП при всех преимуществах,
обусловленных их простотой и низкой стоимостью, имеют один
существенный недостаток: процесс коммутации индуктивных цепей
АД ведет к быстрому изнашиванию контактов, в результате чего
необходимы частые ремонты коммутационных устройств.
В простейшем случае силовая часть 1-фазного БК (рис. 72, а)
представляет собой 2 встречно-параллельно включенных тиристора.
Если тиристоры проводят ток, то БК включен, если тиристоры ток
не проводят, то БК выключен. Так как ток переменный, то одну
полуволну тока проводит тиристор У 51, а другую - тиристор У82.
Наиболее просто реализуется подобная коммутация тиристоров
при использовании геркона К (рис. 72,6), имеющего высокое
быстродействие, и диодов УВ1 - УО4. При этом каждый тиристор
переводится в состояние проводимости в течение того полупериода
приложенного напряжения, когда его анод имеет положительный
потенциал. Например, при положительном потенциале анода тиристора У81 на его управляющий электрод подается импульс через
диоды УПЗ и V^1, и он открыт. В следующую полуволну напряжения положительный потенциал будет уже на аноде тиристора У82,
одновременно на управляющий электрод этого тиристора через
диоды V^2 и УО4 подается импульс, следовательно, У82 открыт
и проводит вторую полуволну напряжения.
Отключение БК обеспечивается размыканием контакта геркона,
который отключает управляющие электроды обоих тиристоров.
Поскольку тиристор является незапираемым элементом, то для его
выключения необходимо обеспечить спадание тока до нуля. Если
контактор включен, в цепи с активным сопротивлением 2Ь = Ки (см.
рис. 72, а), то моменты прохождения через нуль тока и напряжения
совпадают. При активно-индуктивной нагрузке ток отстает от
напряжения, переход тока с одного тиристора на другой происходит
130
и
X*
Г К?/
(
ч
Рис. 72. Бесконтактный коммутатор переменного тока с естественной коммутацией:
а схема силовой части; н схема коммутации гиристоров: в диаграммы напряжения
и тока при включенном контакторе
позже на угол фн (рис. 72, в), который определяется коэффициентом мощности нагрузки. Для того чтобы выключить тиристор
раньше момента прохождения тока коммутируемой цепи через
нуль, необходимо применять искусственную коммутацию тиристоров.
В зависимости от того, выключаются тиристоры под воздействием естественного спадания переменного тока до нуля или посредством их искусственной коммутации, различают БК с естественной
и искусственной коммутацией. Для того чтобы выключить БК
с естественной коммутацией, достаточно прекратить подачу импульсов управления на тиристоры. В этом случае максимальное
время выключения тиристора не будет превышать половины периода выходного напряжения. Например, если прекратить подачу
импульсов управления в момент включения очередного тиристора,
то он будет проводить полуволну тока, т.е. в течение полупериода,
а другой тиристор уже не сможет включиться из-за отсутствия
импульса управления.
При необходимости обеспечить время выключения меньше, чем
половина периода выходного напряжения, следует применять БК
с искусственной коммутацией тиристоров. Однако в этом случае
возникает проблема отвода энергии, накопленной в индуктивностях
нагрузки (электродвигателя) при обесточивании цепи, соединяющей
источник электроэнергии с нагрузкой. Это связано с тем, что
согласно основным законам коммутации ток в индуктивности не
может изменяться скачком. Поэтому чем быстрее происходит
131
V52
отключение цепи, содержащей
индуктивность с током, отличным от нуля, тем большие перенапряжения возникнут на отключающем аппарате. Указанные перенапряжения являются следствием наведения ЭДС в индуктивности, препятствующей изменению тока нагрузки. Для устранения перенапряжений в тиристоре
следует в случае применения БК
с искусственной коммутацией предусматривать возможность отвоРис. 73. Схема бесконтактного коммуда или сброса энергии, накоплентатора переменною тока с
ной в индуктивностях нагрузки,
искусственной коммутацией
в какой-либо приемник или накопитель электроэнергии. В частности, таким приемником может
служить конденсатор или источник переменного тока, способный
принимать электроэнергию.
В БК с искусственной коммутацией (рис. 73) включение основных тиристоров У81 и У82 осуществляется подачей импульсов на
управляющие электроды в соответствующие моменты времени, а их
отключение-с помощью колебательного контура, элементами которого являются конденсатор Ск и реактор Ьк. Такие схемы иногда
называют схемами с параллельной коммутацией. Когда тиристорный контактор включен, то ток нагрузки протекает в один полупериод через тиристор У81 и диод УО1, в другой-через тиристор У82
и диод УО2. Коммутирующий конденсатор заряжен от маломощного вспомогательного трансформатора 7Ус полярностью, указанной
на рис. 73, и отделен от основных тиристоров и диодов коммутирующим тиристором У8К. Для выключения основных тиристоров
необходимо подать отпирающий импульс на коммутирующий тиристор У8К. При этом в результате разряда конденсатора Ск
в колебательном контуре возникает ток / Е , который будет протекать
через тот основной тиристор, который в этот момент проводит ток,
и будет направлен навстречу этому току.
Например, допустим, что ток нагрузки проводит тиристор У81.
При включении тиристора У8К через тиристор У81 начинает
протекать разность тока нагрузки /н и тока / к . Пока ток /к меньше
тока /н, тиристор У81 будет включен, а диод УО2 выключен, так как
к нему приложено обратное напряжение, обусловленное падением
напряжения на тиристоре У81. При равенстве токов / н , /к тиристор
У81 выключается, ток /к продолжает возрастать, и разность токов гк
и /н будет протекать через диод УО2. На интервале проводимости
диода УО2 к тиристору У81 будет приложено запирающее напряжение, равное падению напряжения на У&2. Когда гк станет меньше / н ,
диод У&2 выключается, и ток нагрузки /н начинает протекать по
132
I
I
КУ/ У52
1
I
У55 У56
1
1
1/53 V5^^
1 \~\ 1
2
{^
1
Рис. 74. Схемы силовых цепей 3-фазного бесконтактного коммутатора:
а нереверсивного; б -реверсивною
контуру: диод УОЗ-конденсатор С к -реактор Ьх-тиристор 75Кдиод 7В7-нагрузка-источник-диод УОЗ. При этом будет происходить перезаряд конденсатора Ск током нагрузки /„, и энергия,
запасенная в индуктивности нагрузки, будет переходить в конденсатор С к .
Быстродействие рассмотренного БК переменного тока при использовании его для коммутации цепей с активной нагрузкой
ограничено практически только временем восстановления запирающей способности тиристоров (обычно десятки микросекунд). Однако при активно-индуктивной нагрузке, какой является АД, это
время увеличивается и зависит от параметров схемы и нагрузки.
В многофазных системах БК переменного тока устанавливают
по одному на каждую фазу. При этом некоторые функциональные
узлы фазных БК могут быть схемно и конструктивно объединены.
Основное применение нашли 3-фазные БК (рис. 74), которые служат
для управления АД. Реверс АД в устройствах с БК осуществляется
так же, как и в контактных устройствах, т.е. переключением двух
фаз. Как видно из схемы рис. 74, б, указанное переключение достигается вводом двух тиристорных групп У87, У88 и У89, У810.
Необходимо отметить, что наряду с положительными качествами, отмеченными выше, БК присущи и определенные недостатки:
значительно меньшая по сравнению с контактными аппаратами
перегрузочная способность по току; ограниченное число коммутируемых цепей; большие тепловые потери в тиристорах при протекании переменного тока; несколько большие, чем у электромагнитных контакторов, масса, габаритные размеры и стоимость. Наконец, всем полупроводниковым БК присущ один общий недостаток-невозможность обеспечения полной гальванической развязки
коммутируемых цепей в отключенном состоянии. Это объясняется
тем, что сопротивление полностью выключенного полупроводникового прибора всегда имеет конечное значение, в то же время
133
механические контакты обеспечивают полный разрыв цепи. По
мере совершенствования схем БК
будут находить все большее применение.
Наряду с бесконтактными аппаратами в судовых ЭП находят
широкое распространение магнитные контроллеры, в которых совместно с электромагнитными контакторами применяются тиристорные устройства. Это позволяет
повысить электрическую износостойкость контакторов. Такое сочетание обеспечивает коммутацию
тока в цепи ЭД при помощи
Рис. 75. Схема бездуговой коммутации
тиристоров, а все переключения
без тока -контактными элементами контакторов.
Структурная схема подобного устройства для одной фазы контактора показана на рис. 75. Принцип бездуговой коммутации
состоит в шунтировании главных контактов КМ тиристорами У81
и У82, включенными встречно-параллельно, при вибрации и размыкании главных контактов, что исключает дуговой разряд. В момент
включения главных контакторов через первичную обмотку трансформатора ТА начинает протекать ток. В результате почти мгновенно появляется вторичный сигнал на обмотках 2 и 4. Через диоды
УО4 или У08 поступает отпирающий импульс на управляющий
электрод одного из тиристоров У81 или У82, и происходит включение того из тиристоров, который соответствует данной полярности первичного тока. Отключение тиристора происходит или при
переходе тока через нуль, или при достижении нормального нажатия на главные контакты, которыми шунтируются силовые цепи
тиристоров.
Благодаря шунтированию ток через тиристоры в промежутках
между включениями не протекает, хотя отпирающие импульсы на
их управляющие электроды поступают. При отключении контактора соответствующий тиристор, открытый по цепи управления,
включается в момент размыкания главных контактов и запирается
при последующем переходе тока сети через нуль. В случае короткого замыкания происходит отброс главных контактов, вторичные
сигналы на обмотках / и 3 трансформатора ТА достигают значений
пробоя стабилитронов УВ2, УЬз, УВ6, УП7 (в зависимости от
полярности полуволны тока короткого замыкания). Это приводит
к отпиранию тиристоров У83 или У84, которые совместно со
стабилитронами УОЗ и УО 7 шунтируют сигналы управления обмоток 2 и 4, что предотвращает включение тиристоров при по134
следующем отбросе контактов. Цепи К-С служат для снижения
скорости нарастания напряжения на контактах в моменты их
размыкания.
32. Управляющие и защитные реле
Полупроводниковые аппараты управления и защиты представляют новое направление развития электроаппаратостроения, возникшее на базе полупроводниковой техники. Полупроводниковые
реле широко используют в различных электрических аппаратах. На
их базе выполняют различного рода реле: первичные, усиливающие
слабые выходные сигналы датчиков; защиты (например, электротепловые реле, реле минимального напряжения, реле максимального тока) и управления (реле времени и промежуточные реле).
Следует отметить, что бесконтактные полупроводниковые реле
могут работать с высокой скоростью и частотой переключения.
При этом высокая частота переключений практически не сказывается на сроке службы релейного устройства, что выгодно отличает
бесконтактное полупроводниковое реле от контактного устройства.
Рассмотрим принципы реализации бесконтактных реле на базе
полупроводниковых приборов. Так как рассматривают их возможные выполняемые функции, то принципиальные схемы приведены
упрощенно и воздействие этих устройств осуществляется на электромагнитную аппаратуру. Необходимо отметить, что использование управляемых транзисторных усилителей значительно повышает
чувствительность и надежность электромагнитных реле. Основными элементами бесконтактных реле, которые предназначены для
защиты ЭД, являются измерительные элементы и релейные усилители. В качестве измерительных элементов могут применяться
трансформаторы тока и напряжения, шунты, терморезисторы и др.
Для бесконтактных реле существует множество электронных
схем усиления. Простейшим релейным усилителем, например, может быть обычный 2-каскадный
усилитель, работающий в релейном режиме. Полупроводниковый усилитель выполняют на
транзисторах. В схеме, показанной на рис. 76, применен усилитель с обратной связью по току,
который называют
триггером
Шмитта. Основными элементами
триггера являются 2 транзистора
УТ1 и УТ2. На базу транзистора
УТ1 подается входное напряжение
С/ в х , которое снимается с изме- Рис. 76. Принципиальная схема реле
рительного элемента (трансфорперегрузки
135
матора тока ТА). Первичная обмотка трансформатора тока включена последовательно с защищаемой цепью. Когда в цепи протекает
нормальный ток, то со вторичной обмотки трансформатора и выпрямителя VI. снимается малое по значению входное напряжение
1}вк, благодаря чему транзистор УТ1 закрыт. При закрытом состоянии этого транзистора через делитель напряжения К.1-К2-К4 протекает незначительный ток, который создает малое падение напряжения на резисторе В.1. При этом на базе транзистора в точке
Ъ имеется положительный потенциал относительно эмиттера (положительное смещение), и в связи с этим УТ2 открыт. При открытом УТ2 по цепи «+-»
К У-УТ2-КЗ-« —», т.е. через катушку
электромагнитного реле К V, протекает ток, и реле срабатывает,
замыкая свои контакты. Если ток в защищенной цепи увеличится до
критического значения, то [7ВХ достигнет такого значения, при
котором положительный потенциал на базе транзистора УТ1 (в
точке а) относительно эмиттера будет достаточным для открытия
этого транзистора, и УТ1 открывается. При открытом УТ1 по цепи
« + » ---К1-УТ1-КЗ- « —» протекает ток, который в резисторе
создает дополнительное падение напряжения, и потенциал на базе
УТ2 уменьшается, что приводит к закрытию этого транзистора.
Соответственно катушка электромагнитного реле К К обесточивается, и размыканием контакта этого реле через последующую
электромагнитную аппаратуру отключает цепь нагрузки.
Подобное сочетание трансформатора тока с триггером выполняет функции реле перегрузки или реле максимального тока. Если
вместо трансформатора тока к триггеру в точках а и Ь подключить
другой измерительный элемент-шунт постоянного тока /?ш, как
это показано на рис. 76, то подобное сочетание этих устройств
выполняет функции реле перегрузки на постоянном токе (принцип
действия аналогичен). Для нулевой защиты ЭД может использоваться полупроводниковое реле, выполненное по аналогичной схеме
(рис. 77), но в качестве измерительного элемента этого реле применяют трансформатор напряжения ТУ.
Потенциал на базе транзистора УТ1 в точке а определяется
разницей напряжения источника питания триггера, подаваемого
через резистор Кб, и контролируемого напряжения, подаваемого
через резистор Л5. При нормальном значении 1/контр эти напряжения
равны, и потенциал на базе УТ1 в точке а близок к нулю. При этом
УТ1 закрыт, а УТ2 открыт, и через катушку реле X К протекает ток.
Реле срабатывает, замыкая свои контакты. При уменьшении или
исчезновении 1/контр потенциал на базе УТ1 станет положительным
благодаря преобладанию в этом случае положительного напряжения, подаваемого через Кб, над контролируемым отрицательным
напряжением, подаваемым через К5. При этом УТ1 откроется, УТ2
закроется и катушка реле обесточится. Реле разомкнет свои контакты. При полном исчезновении питания триггера катушка реле К1'пе
получи! питания и его контакты разомкнутся. Таким образом,
136
Рис. 77. Принципиальная схема реле
минимального напряжения
Рис. 78 Принципиальная схема аппарата тепловой защиты
т чи ни.
исчезновение питания на полупроводниковом реле также вызывает
сигнал, аналогичный сигналу при снижении 1/контр.
На базе полупроводниковой техники на судах в настоящее время
нашли применение устройства, осуществляющие температурную
защиту ЭД. В качестве бесконтактных датчиков используют полупроводниковые терморезисторы с большим температурным коэффициентом сопротивления. Аппаратура защиты с применением
терморезисторов включает в себя термодатчики, размещенные в
обмотках ЭД, и аппараты защиты, монтируемые в пускателе или
станции управления. При возрастании температуры обмотки ЭД
сопротивление терморезистора с отрицательным температурным
коэффициентом плавно уменьшается, а сопротивление терморезистора с положительным температурным коэффициентом в узком
интервале температур, соответствующем заданной уставке срабатывания, резко возрастает. Наиболее совершенной является температурная защита ЭД, основанная на использовании терморезисторов с положительным температурным коэффициентом, получивших
название позисторов.
На рис. 78 приведена схема аппарата защиты асинхронных
двигателей серии 4А. Понижающий трансформатор ТУ и выпрямитель 1)7. со сглаживающими конденсаторами С1 и С2 обеспечивают
питание исполнительной и измерительной частей схемы. Исполнительная часть схемы включает в себя диоды УО5, У06, транзистор
УТЗ и реле К V. Измерительная часть состоит из резисторов К1, К.2,
К4-К6, К8-К12, диода УО7, транзисторов УТ1, УТ2 и терморези137
сторон КК4 и КК7 с отрицательным коэффициентом сопротивления. Стабилизация напряжения, подаваемого на измерительную
часть и термодатчики, обеспечивается стабилитроном УВ8 и резистором К13. При малом сопротивлении термодатчика, состоящем
из трех последовательно соединенных позисторов КК1-К.КЗ, падение напряжения на них мало, потенциал на базе УТ1 высок
(смещение между базой и эмиттером мало) и этот транзистор
закрыт. При закрытом УТ1 с его коллектора снимается отрицательное напряжение, которое через резистор К.11 подается на базу
транзистора УТ2, и данный транзистор открыт. Протекающий
через УТ2 ток создает падение напряжения в К1 и уменьшает тем
самым отрицательное напряжение на базе транзистора УТЗ, благодаря чему УТЗ закрыт и обмотка реле КУ обесточена.
При перегреве обмотки АД и значительном возрастании сопротивления позисторов КК1-ККЗ термодатчика падение напряжения
на них возрастает таким образом, что отрицательное смещение на
базе транзистора УТ1 увеличивается и он открывается. Падение
напряжения на резисторе К2 снижает отрицательное напряжение на
базе транзистора УТ2 до такого значения, что он закрывается.
Соответствующее уменьшение падения напряжения на Ш приводит
к увеличению отрицательного напряжения на базе транзистора
УТЗ, его открыванию и срабатыванию реле КУ, которое своим
размыкающим контактом разрывает цепь управления (пускателя,
контактора). Питание схемы после срабатывания осуществляется
через замыкающий контакт КУ.
Терморезисторы КК4 и КК7 служат для термокомпенсации
схемы. Параметры цепочки из резисторов К8, К9 и терморезистора
КК7 подобраны так, что практически при любом сопротивлении
термодатчика схема не имеет самовозврата после срабатывания.
Обратная связь, осуществляемая с помощью резисторов К4, К5
и герморезистора КК4, позволяет получить скачкообразное изменение напряжения в цепи термодатчика при резком возрастании или
уменьшении их сопротивления и обеспечивает только 2 устойчивых
состояния схемы. Это свойство используется для осуществления
ручного возврата, выполняемого кнопкой 8В, шунтирующей цепь
термодатчиков.
Рассмотренные полупроводниковые реле выполняют защитные
функции. Одновременно в схемах ЭП применяют реле, обеспечивающие управление ЭД (реле напряжения, реле времени и др.).
Бесконтактные реле напряжения строят по тем же принципам, что
и рассмотренные выше реле защиты. Схем полупроводниковых реле
времени очень много, но во всех из них используют свойство
медленного заряда (разряда) конденсатора через большое активное
сопротивление.
Типовая схема реле времени (рис. 79) способна обеспечить
выдержку времени до 3-5 с. В исходном положении схема включена
выключателем 8А1 и управляющий контакт 8А2 замкнут. При этом
138
конденсатор С от источника питания заряжен с полярностью,
указанной на схеме. Так как на
базу транзистора УТ1 подается
отрицательный потенциал от источника питания СВ, то V Т1 открыт и по цепи « + » — К2-УТ1
-К1-8А1- « — » протекает ток.
В результате на базу УТ2 подает- Рис. 79. Принципиальная схема конся близкий к нулю потенциал (соденсаторного реле времени
противление резистора К2 очень
мало) и УТ2 закрыт, так как отрицательного смещения напряжения на базе по отношению к эмиттеру нет. Промежуточное реле К V отключено. Если разомкнуть
управляющий контакт 8А2, то транзистор УТ1 мгновенно не
отключится, так как на его базу продолжает поступать отрицательный потенциал от конденсатора. Однако конденсатор С из-за
размокнутого контакта начинает разряжаться через резистор К2.
Когда окончится процесс разряда конденсатора, то отрицательный
потенциал на базе УТ1 исчезнет и транзистор УТ1 закрывается.
При этом «минус» от источника питания через резисторы К1 и КЗ
подается на базу УТ2 и этот транзистор открывается: катушка
электромагнитного реле КУ получает питание по цепи « + »
— КУ-~УТ2-Ку-8А1~ « — », и реле срабатывает.
Время, прошедшее с момента размыкания контакта 8А2 до
срабатывания контактного устройства промежуточного реле, и будет являться выдержкой времени. Выдержка времени такого реле
зависит от постоянной времени конденсатора
где /с -коэффициент пропорциональности; К значение разрядного сопротивления (значение сопротивления резистора К2).
Регулированием значения К можно устанавливать различные
выдержки времени.
33. Тиристорные пускатели
Тиристорные пускатели приходят на смену распространенным
магнитным пускателям. Тиристорные пускатели представляют собой сложное комплексное устройство, осуществляющее коммутацию электрических цепей и защиту ЭД. Таким образом, они
выполняют функции бесконтактных силовых коммутаторов и защитных полупроводниковых реле.
Тиристорный пускатель (рис. 80) предназначен для включения
и отключения 3-фазных АД и для защиты их от коротких замыканий, перегрузок и понижения напряжения. Приведенная схема
139
Рис. 80. Тиристорный пускатель:
и схема подключения; б-схема управления
140
упрощена с целью пояснения основных функций тиристорного
пускателя как коммутатора, в котором включение и отключение АД
достигается силовыми тиристорами У81-У86. Для управления
этими тиристорами к сети подключен трансформатор ТУ/, от
которого получают питание выпрямители В], ВЗ и 55 (все выпрямители 3-фазные, условно на рис. 80 они показаны квадратиками)
и первичная обмотка основного управляющего трансформатора
ТУ 2. Ко вторичным обмоткам этого трансформатора через импульсный блок ИБ подключены управляющие электроды и катоды
основных тиристоров, что обеспечивает при подаче напряжения их
открытие (на рис. 80 показана только цепь управления одного
тиристора, остальные подключены по аналогичной схеме). Пускатель включается при нажатии на кнопку 8В1, при этом поступающее
напряжение с выпрямителя В1 включает вспомогательный тиристор
У87 и последний создает электрическую цепь первичной обмотки
трансформатора УТ2. Со вторичной обмотки ТУ2 поступают
импульсы на управляющие электроды тиристоров У81-У86, и последние открываются. При нажатии на кнопку 8В2 выключается
тиристор У87, подача управляющих сигналов прекращается и пускатель выключается. Трансформатор ТУ2 питает также выпрямитель В4, а напряжение с трансформаторов тока ТА поступает на
выпрямители Вб и В7 (включение ТА показано условно). Цепи
управления пускателем на рис. 80, а показаны весьма упрощенно,
более подробно они приведены на схеме управления рис. 80, б (одни
и те же элементы на этих рисунках обозначены одинаково).
Одним из основных элементов включения силовых тиристоров
является синхронный ключ К, который соединен последовательно
с кнопкой 8В1. Он обеспечивает включение пускателя в начале
периода напряжения питания, т. е. с таким расчетом, чтобы силовые
тиристоры пропускали полное напряжение. Синхронный ключ выполнен на транзисторе У Т1 и быстронасыщающемся трансформаторе ТУЗ (напряжение на ТУЗ подается от одной из вторичных
обмоток трансформатора УТ2). Включение синхронного ключа
К происходит тогда, когда в начале полуволны определенной
полярности на эмиттере транзистора Т1 V напряжение выпрямителя
В] суммируется с напряжением вторичной обмотки трансформатора ТУЗ, а на базе транзистора УТ1 напряжение вторичной обмотки
трансформатора ТУЗ соответственно вычитается. В этом случае
из-за отрицательного смещения потенциала на базе по отношению
к эмиттеру транзистор УТ1 открывается и открывающий сигнал
подается на управляющий электрод тиристора У87.
Основным полупроводниковым устройством, выполняющим
защитные функции, является транзистор УТ2. При его включении
от выпрямителя ВЗ получает питание первичная обмотка импульсного трансформатора ТУ 4 и со вторичной обмотки этого трансформатора подается напряжение на управляющий электрод вспомогательного тиристора У88, благодаря чему последний откры141
вается. В результате этого происходит разряд конденсатора СЗ, до
этото времени заряженного напряжением выпрямителя ВЗ по цепи
« + С5»—У88-У57-В2-«—СЗ» (указанная цепь разряда возможна,
так как напряжение выпрямителя ВЗ примерно вдвое больше
напряжения выпрямителя В2). При разряде из-за подачи положительного потенциала на катод вспомогательного тиристора У87
последний закрывается, соответственно прекращается питание
управляющего трансформатора ТУ2, пускатель выключается и АД
отключается от сети. Воздействие на основной транзистор защиты
УТ2 осуществляется с помощью транзисторов УТЗ, УТ4, УТ5
и УТб, каждый из которых реагирует на ненормальные режимы
работы АД.
Транзистор УТЗ реагирует на уменьшение напряжения в сети,
т. е. выполняет функции минимальной или нулевой защиты. Потенциал на базе УТЗ определяется разницей напряжений выпрямителя В5, подаваемого через резисторы К1 и Е7, и выпрямителя
В4, подаваемого через резисторы Л5 и Кб. При нормальном
значении напряжения сети значения напряжений одинаковы, и потенциал на базе транзистора УТЗ близок к нулю, при этом УТЗ
закрыт. Когда напряжение сети уменьшается, то плюсовой потенциал от выпрямителя В5 становится меньше минусового потенциала выпрямителя В4, на базе УТЗ появится отрицательное
смещение, при котором УТЗ открывается. Это вызывает протекание
тока по цепи «. + В4» — УТЗ~К8-К9-«—В4». Ток создаст падение
напряжения в резисторе К9, и благодаря этому появится положительное смещение потенциала на базе транзистора УТ2 относительно его эмиттера. Транзистор УТ2 откроется, и в результате
пускатель отключится. Время срабатывания защиты определяется
напряжением на конденсаторе С1 и постоянной цепи разряда, так
как транзистор УТЗ не откроется, пока конденсатор С1 не разрядится в такой степени, что его напряжение не станет равным
уменьшенному напряжению на выпрямителе 55. Это предотвращает отключение тиристорного пускателя при кратковременном
снижении напряжения сети.
Отключение при коротком замыкании осуществляется с помощью транзисторов УТ4, УТ5, чувствительным элементом является выпрямитель В6. При коротком замыкании напряжение на
вторичных обмотках трансформаторов тока ТА увеличивается и это
приводит к повышению напряжения на выпрямителе В6. В результате увеличивается положительный потенциал эмиттера транзистора УТЗ^к со стороны вывода « —» выпрямителя увеличенный
потенциал подается через резистор К10 на стабилитрон УО9,
благодаря чему последний открывается. При открытии стабилитрона минусовой потенциал выпрямителя В6 поступает на базу
транзистора УТ5 и из-за образующегося отрицательного потенциала базы относительно увеличившегося положительного потенциала
эмиттера этот транзистор открывается. Через открытый транзистор
142
УТ5 вывод « + » выпрямителя В$ подключается к эмиттеру транзистора УТ4, а вывод « —» через резисторы К10 и К.11 подсоединяется к базе этого транзистора. Это приводит к его открытию,
и образуется электрическая цепь « + В4»—УО5-УТ4-К8-К9—«-В4». Последующее срабатывание защиты аналогично срабатыванию защиты от минимального напряжения.
Защита от перегрузок обеспечивается транзисторами УТ4 и
УТ6, а чувствительным элементом является выпрямитель В7. Ввиду
того что при перегрузке напряжение на вторичных обмотках трансформатора тока увеличивается, то соответственно возрастает напряжение на выпрямителе В7. Аналогично защите от коротких
замыканий при перегрузке увеличивается положительный потенциал на эмиттере транзистора УТ6, подключаемого к выводу « + »
выпрямителя В7. Увеличенный отрицательный потенциал от вывода « —» выпрямителя В7 подается через резистор ШО на стабилитроны УО8, УО9, и они открываются, вследствие чего отрицательный потенциал поступает на базу транзистора УТ6. Отрицательный потенциал базы по отношению к эмиттеру вызывает
открытие этого транзистора. Когда транзистор УТ6 открыт, то
эмиттер транзистора УТ4 подключается к выводу «+-» выпрямителя В7, а его база через резисторы К.10 и К.11-к выводу « —». При
этом происходит заряд конденсатора С2 по цепи « + 57»—КЗ-УОЗ-УТ6-К.4-С2. Как только напряжение конденсатора достигнет
максимального значения, т.е. конденсатор С2 зарядится, отрицательное смещение потенциала базы транзистора УТ4 относительно
его эмиттера станет достаточным для его открытия. В последующем УТ4 открывает УТ2 и т.д., т.е. тиристорный пускатель
отключает АД.
Как видно, защита от перегрузки имеет выдержку времени,
значение которой зависит от времени заряда конденсатора, определяемого значением выпрямленного напряжения В7 и сопротивлением резисторов КЗ и К4. Таким образом, с увеличением тока
перегрузки значение выпрямленного напряжения В7 увеличивается,
возрастает ток заряда и время достижения конденсатором С2
необходимого значения напряжения для срабатывания УТ5 уменьшается Кратковременные перегрузки благодаря выдержке времени
не вызывают отключение АД.
34. Особенности эксплуатации
В большинстве случаев бесконтактные системы управления ЭП
являются неоднородными в том смысле, что кроме полупроводниковых приборов используются также и другие элементы: электромагнитные реле, переключатели, кнопки и др. Несмотря на наличие
этих устройств, систему управления ЭП все же называют полупроводниковой, если ее основная (логическая) часть состоит из полу143
проводниковых приборов. Периодически выполняемые работы пб
техническому обслуживанию для подобных систем в основном
относятся к обслуживанию контактных аппаратов. Сами же по#упроводнисовые устройства не требуют обслуживания, за исключением контроля за их работой и устранения появляющихся неисправностей. Операции по устранению отказов не требуют больших
трудовых затрат, значительно большее время расходуется на поиски и устранение неисправностей в полупроводниковых приборах.
Поиск неисправности может оказаться успешным только в том
случае, если обслуживающий персонал хорошо знает построение
и функционирование бесконтактных полупроводниковых аппаратов
и располагает подробной технической документацией, в частности
развернутыми принципиальными схемами всех блоков. Ввиду того
что отказы чаще всего происходят в контактной аппаратуре, необходимо убедиться, что отказ произошел именно в логической части
схемы. 'После этого с помощью технической документации следует
выявить, какие именно контуры участвуют в формировании той
логической функции, которая не выполняется или выполняется
неправильно. Следует установить, на каких печатных платах расположены элементы поврежденной логической части схемы. Далее
проверяют, посватает ли питание па платы и не нарушилось ли
соединение в разъемах шип. Штыревые разъемы являются довольно уязвимым местом, так как в них может произойти окисление
штырей или ослабление взаимного прижима контактов, что приводит к резкому возрастанию переходного сопротивления и к нарушению соединения.
Для выявления неисправности в разъеме надо проследить, не
нарушается ли питание и не наблюдаются ли прерывания в выходных сигналах платы при покачивании ее путем легкого нажима на
торцовую часть. При плохом соединении следует тщательно протереть контактные поверхности спиртом, а ослабевшие контакты
поджать пинцетом. Далее проводят внешний осмотр плат, на
которых расположены отказавшие контуры. Можно выявить обуглившиеся резисторы, вспученные конденсаторы, оплавленные концы, потемневшие участки на печатной плате и т. п. Все эти признаки
помогают уточнить место неисправности.
Однако могут быть и такие неисправности, выявить которые при
внешнем осмотре не удается. Поэтому после внешнего осмотра
плат приступают к выполнению простейших электрических измерений с помощью тестера. Иногда для более детальной проверки
полупроводниковых приборов требуется применять и более сложную аппаратуру. Для выявления отказавших компонентов контура
схемы, обеспечивающей определенную логическую операцию, следует разбить контур на последовательные участки, где выход
каждого предшествующего участка является входом следующего.
Поиск неисправного участка контура можно вести в двух направлениях: либо начать с входов контура и, последовательно проверяя
144
участок за участком, двигаться к выходам контура, либо проверять
в противоположном направлении - от выхода к входам контура.
Для каждого выделенного участка измеряют выходное и входное
значения величин и убеждаются, что между этими значениями
существует правильная функциональная связь. Если же такая связь
нарушена, то это свидетельствует о неисправности данного участка.
Дальнейшая задача заключается в поиске вышедшего из строя
элемента, входящего в состав данного участка контура. Рассмотрим
наиболее характерные неисправности отдельных приборов, входящих в соеIив полупроводниковых контуров.
Резисторы. Характерными неисправностями резисторов являются сгорание токспроводящего слоя, обрыв (внутренний или
наружный), повреждение изолирующего покрытия. Проверяют резйсторь! при выключенном питании с помощью авометра, установив его переключатель в положение «Сопротивление». Для проверки один вывод резистора следует выпаять, иначе прибор измеряет
сопротивление примыкающей цепи, что приведет к неправильным
результатам измерения. Для сгоревшего резистора авометр покажет сопротивление, равное «бесконечности». При внутреннем обрыве оно также может быть равным «бесконечности» или же очень
большим (в несколько раз превышающим паспортное значение).
Конденсаторы. Характерные неисправности конденсаторов: пробой изоляции, внутренний обрыв, утечка заряда. Все эти неисправности обычно не изменяют внешнего вида конденсатора, и только
при утечке в электролитических конденсаторах может произойти
заметное вспучивание корпуса и даже его разрыв. Грубую оценку
исправности конденсатора можно выполнить с помощью авометра
путем измерения сопротивления конденсатора постоянному току.
Сопротивление исправного конденсатора очень велико, и авометр
показывает бесконечность. При наличии пробоя сопротивление
конденсаторов может составлять несколько омов. В случае утечки
сопротивление конденсатора уменьшено: оно значительно выше,
чем при пробое, но все же стрелка авометра отклоняется от деления
«бесконечность», и тем больше, чем больше утечка. При внутреннем
обрыве конденсатора авометр также показывает бесконечное сопротивление, но если у исправного конденсатора стрелка авометра
резко отклоняется от деления «бесконечность», а затем медленно
возвращается на это деление (происходит заряд конденсатора от
батареи, питающей схему авометра), то у неисправного конденсатора отклонения стрелки не происходит.
Диоды. Наиболее распространенные неисправности диодов: пробой, обрыв внутренних проводников, уменьшение сопротивления
при обратном включении, нарушение герметичности корпуса. Все
эти дефекты не выявляются по внешнему виду и требуют проведения электрических измерений. Проверяют диоды авометром, подготовленным для измерения сопротивления. Для исправного диода
его сопротивление в прямом направлении значительно меньше, чем
145
Рис. 81. Схемы проверки исправности транзистора (а) и тиристора (б)
в обратном направлении. В случае пробоя диод практически не
оказывает сопротивления как в прямом, так и в обратном направлении. При обрыве внутренних проводников сопротивление диода
в прямом и обратном направлениях становится бесконечным. Когда
диод имеет уменьшенное сопротивление при обратном включении,
то при прямом включении сопротивление диода остается нормальным. При измерении сопротивления обратно включенного диода
в течение первых нескольких секунд сопротивление такое же, но
затем медленно уменьшается. Стрелка авометра медленно сползет
до значения 60-70% начального. Такое поведение стрелки указывает на то, что в диоде началось необратимое перерождение
кристалла полупроводника. Нарушения герметичности корпуса
диодов выявляют при внешнем осмотре, особое внимание обращая
на место, где имеются резкие изгибы выводов вблизи корпуса.
Дефектные диоды всегда необходимо заменять новыми.
Транзисторы. Характерными неисправностями транзисторов
являются пробой электронно-дырочных переходов, обрыв выводов,
утечка, нарушение герметичности корпуса. Исправность или неисправность транзистора можно также выявить авометром, который подготавливают к работе в качестве вольтметра постоянного
тока. При проверке исправности транзистора авометром (рис. 81, а)
вначале приводят контур в такое состояние, при котором на базу
транзистора подается напряжение низшего уровня. При этом измеряют напряжение между базой и эмиттером (измерение /), а затем
между коллектором и эмиттером (I/). Затем приводят контур
в состояние, при котором на базу транзистора подается напряжение
высшего уровня: повторяют измерения / и //. Если транзистор
исправен, то в первом случае при измерении // получается напряжение, очень близкое к напряжению питания (+ Г7П), а во втором
случае, когда транзистор открыт, измерение II дает результат,
близкий к нулю. Если транзистор пробит, то в обоих случаях
результаты измерений // равны нулю. При внутреннем обрыве
в обоих случаях измерение Я дает напряжение, равное + [7П. При
146
утечках замер II при низшем уровне напряжения на базе показывает
постепенное сползание напряжения от + (7П до 70-80% этого
значения, так как сопротивление между эмиттером и коллектором
уменьшается.
Причинами пробоев и внутренних обрывов могут быть перегрузки транзисторов по току или слишком высокая температура
окружающей среды.
Тиристоры. Основой нормальной работы тиристора является его
запирающая способность, которая контролируется с помощью
омметра. В зависимости от типа и класса испытуемых приборов
ориентировочные значения сопротивлений при их работоспособном
состоянии будут равны единицам и десяткам мегаомов. Более
полная проверка может быть проведена по схеме, показанной на
рис. 81,6. На тиристор У8 через выключатель 5'А подается постоянное напряжение 10-12 В, а на управляющий электрод через резистор
йр поступает ток управления, фиксируемый амперметром КА1. При
испытании с помощью резистора Кр увеличивают ток управления
до номинального и добиваются срабатывания тиристора, о чем
свидетельствует протекающий через амперметр РА2 ток. Типовые
значения токов управления тиристоров обычно на порядок ниже
максимальных (последние приводятся в каталогах), Невозможность
включения тиристора в испытательной схеме или его включение при
токе управления, значительно меньшем типового, свидетельствует
о том, что он неисправен и подлежит замене.
Контрольные вопросы-задания
1. Перечислите преимущества бесконтактной аппаратуры перед контактной.
2. В чем заключается принцип действия бесконтактного коммутатора?
3. Как можно использовать полупроводниковые устройства в качестве защитных
реле?
4. Назовите функции, выполняемые тиристорным пускателем.
5. Каков принцип действия защитных устройств в тиристорном пускателе?
6. Перечислите основные неисправности полупроводниковых устройств.
7. Используя схемы, объясните, как проверить транзисторы и тиристоры.
Глава 7
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
СУДОВЫМИ
35. Классификация и принципы построения схем управления
Для удобства изображения схем управления ЭП отдельным
элементам электрических машин и аппаратов, входящих в эти
схемы, соответствуют определенные графические обозначения.
В СССР они регламентированы Единой системой конструкторской
документации (ЕСКД). В соответствии с ГОСТ 2.710-81 этим
элементам присваивают также определенные буквенно-цифровые
обозначения. Так, на схемах, приведенных в учебнике, для обозначения каждого элемента в основном применен 2-буквенньда код
(например, выпрямитель--117, тиристор-К5), хотя отдельные
элементы обозначены одной буквой (например, электродвигатель -М, резистор-1?). Если в схеме использованы несколько аппаратов одинакового назначения, то для их различия после буквенного обозначения ставится цифра. Для многоконтактных аппаратов
в отдельных случаях также указывается номер контактов.
В соответствии с ГОСТ 2.701-84 все электрические схемы
подразделяют на структурные, функциональные, принципиальные,
схемы соединений, подключений и расположения.
На с т р у к т у р н ы х с х е м а х прямоугольниками изображают
основные функциональные части ЭП с указанием стрелками направления сигналов управления и обратных связей (см. рис. 44). Наименование элементов установки указывают внутри прямоугольников.
Эти схемы используют для общего ознакомления с ЭП в условиях
эксплуатации.
Ф у н к ц и о н а л ь н ы е с х е м ы с помощью условных графических обозначений разъясняют процессы, протекающие в ЭП. Отдельные элементы допускается изображать прямоугольниками. Все
элементы должны иметь наименования, обозначения или тип и
соединяться между собой функциональными связями или конкретными соединениями (см. рис. 80, б). Схемы подобного типа используют для изучения принципов работы, а также при наладке, регулировании и ремонте систем.
П р и н ц и п и а л ь н о й называют схему, определяющую полный
состав элементов и связей между ними и дающую детальное
представление о принципах работы ЭП. Элементы в схеме изображают с помощью условных графических обозначений и распола148
гаю г в порядке, облегчающем чтение схемы, без учета действительного размещения их в установке или изделии. Каждому элементу на
схеме присваивают буквенно-цифровое позиционное обозначение.
Поскольку элементы схемы обычно изображают разнесенным способом, то необходимо, чтобы все их части (например, катушки,
главные и вспомогательные контакты) имели одно и то же буквенное обозначение.
Контакты всех аппаратов изображают в нормальном положении, соответствующем обесточенным катушкам электромагнитных
аппаратов и нулевому положению рукояток контроллеров. Состояние контактов контроллеров в таких схемах определяют по прилагаемой к ним таблице замыкания контактов. В горизонтальные
строки такой таблицы вписаны номера контактов, в вертикальные
колонки - положение маховика аппарата, косой крестик в графе
пересечения означает, что данный контакт в этом положении
замкнут, а пустая графа-он разомкнут. Состояние контактов многоступенчатых командоаппаратов в различных положениях аппарата определяют по жирным точкам, поставленным возле значка
контакта (рис. 82). Условные обозначения контактов располагают
обязательно одно под другим, а справа и слева от них проводят
вертикальные штриховые линии, соответствующие положениям
аппарата. Одну такую линию проводят посредине контактов-она
сответствует нулевому положению командоконтроллера. Точка возле значка контакта на вертикальной штриховой линии означает, что
в данном положении этот контакт замкнут. Если на чертеже не
удается расположить контакты один под другим, их состояние в
различных положениях командоаппарата обозначают при помощи
таких же таблиц, какие применяют для контроллеров.
В схемах выделяют главные (силовые) цепи и цени управления. К
главным относяг цепи, предназначенные для подачи электроэнергии
к машине или к другой части установки в целях преобразования
одного вида энергии в другой или изменения ее параметров. К
цепям управления относят цепи управляющих, усиливающих и
информационных устройств. В
принципиальных схемах ЭП постоянного тока главные цепи
Подъем
Сп усн
0
обычно вычерчивают в верхней
г \г
'' «/
части чертежа, цепи управления1
1
ниже главной цепи, В схемах ЭП
I т
1
1
переменного тока цепи управле1
1
1
1
\
ния изображают справа от глав1
ной цепи. Цепи управления пред1
1
ставляют собой параллельные
Т ш
развернутые (горизонтальные или
4
т
вертикальные) линии с различными полюсами на концах при ПО- Рис. 82. Развертка замыкания контакСТОЯШЮМ И С различными фазами
тов командоаппарата
*
1
149
на концах при переменном токе. Для большей наглядности главные
цепи следует показывать жирными линиями, цепи управления - тонкими.
Принципиальные схемы используют для изучения работы ЭП, а
также при его наладке, регулировке и ремонте. Они служат основанием для разработки схем соединений и подключений. Для облегчения перехода от принципиальной схемы к схеме соединений обозначения всех элементов на обеих схемах должны строго соответствовать одни другим.
В с х е м е с о е д и н е н и й вычерчивают все элементы установки и
соединения между ними в соответствии с их действительным расположением, приводят сечения и марки проводов и кабелей. Различают схемы внутренних и внешних соединений. Схемы внутренних
соединений показывают соединения между элементами отдельного
устройства (магнитного контроллера, логического элемента и др.),
причем все эти элементы изображают в виде условных графических
обозначений в совмещенном виде. Схемы внешних соединений
показывают связь между отдельными устройствами, смонтированными в шкафах управления, с устройствами, расположенными на
механизме (электрические двигатели).
С х е м а п о д к л ю ч е н и я показывает внешние подключения
составных частей ЭП. На схемах подключений изделия (панели,
шкафы управления и пр.) изображают, как правило, в виде прямоугольников, а их входные элементы показывают условными графическими обозначениями.
36. Автоматизация электроприводов с использованием
контактной аппаратуры
Управление ЭП заключается в осуществлении пуска, регулирования скорости, торможения, реверсирования, а также поддержания
определенного режима работы. Указанные операции осуществляются воздействием источника питания через электрическую аппаратуру на ЭД. В связи с этим системой управления в дальнейшем
будем называть комплекс, состоящий из преобразователя электрической энергии (если такой имеется), аппаратуры управления, контроля защиты.
Принципиально различают 3 вида управления: ручное; автоматизированное с непрерывным регулированием через обратные связи
по контролируемым параметрам; автоматизированное с ручным
контролем или автоматизированное по заданной программе. При
ручном управлении оператор непосредственно воздействует на коммутационные и регулировочные аппараты. В этом случае качество
управляемого процесса зависит от оператора, исключается возможность дистанционного управления ЭП. Вследствие указанных
недостатков данный способ на судах применяют очень редко.
Автоматизированные системы с непрерывным регулированием че150
рез обратные связи позволяют осуществлять управление без непосредственного участия оператора по заранее заданным программам с помощью системы взаимосвязанных автоматических устройств. На судах подобные системы управления нашли применение
в авторулевых и с совершенствованием судового ЭП будут использоваться все шире. Самой распространенной системой управления,
применяемой на судах в настоящее время, является автоматизированная система с ручным контролем и автоматизированным регулированием по определенной программе. Воздействие на работу
ЭП осуществляется как автоматическими аппаратами, так и оператором.
Пуск. Существуют 3 основных принципа автоматизации процесса пуска: пуск в функции скорости, в функции тока и в функции
времени.
При автоматизации в ф у н к ц и и с к о р о с т и частоту вращения
разгоняющегося якоря ЭД постоянного тока контролируют по
изменению ЭДС, а частоту вращения АД с фазным ротором-по
частоте/2 тока ротора. Соответственно для первого случая применяют реле, реагирующие на значение напряжения, а для второго
случая-реле частоты.
Когда автоматизация пуска осуществляется в ф у н к ц и и т о к а ,
то контролирующая аппаратура реагирует на значение тока в цепи
якоря ЭД постоянного тока или в цепи ротора АД с фазным
ротором. Соответственно в автоматической схеме пуска, построенной по этому принципу управления, должно быть одно или несколько токовых реле (в зависимости от числа ступеней пускового
сопротивления). Электромагнитные катушки этих реле включают
последовательно с цепью якоря или ротора.
Наиболее широкое распространение в судовом ЭП получил
принцип пуска в ф у н к ц и и в р е м е н и . Сущность принципа заключается в том, что последовательность пусковых операций подчинена
строго установленному графику времени и не зависит ни от изменения угловой скорости ЭД, ни от изменения тока в главной цепи.
Управление пуском в функции времени иначе называется управлением с независимой выдержкой времени. Пуск в функции времени
осуществляется при помощи реле времени или контакторов с
выдержкой времени (таймтакторов).
В схеме пуска ЭД постоянного тока в функции времени (рис. 83,
а) выдержки времени создаются двумя электромагнитными реле
времени КТ1 и К Т2. Выдержки времени этих реле обеспечиваются
при обесточивании катушек. При подаче напряжения получает
питание катушка КТ 1 и реле размыкает свой контакт (это называется подготовкой схемы). Затем включают контактор КМ1. Начинается разгон якоря ЭД по искусственной характеристике 1 (рис. 83,
б), определяемой двумя ступенями пускового резистора в цепи
якоря. Размыкающий контакт КМ1 одновременно с этим обесточивает катушку КТ1, а замыкающий подает питание на катушку
151
К Т 2. Второе реле размыкает свой контакт КТ2 сразу же, а первое
замыкает контакт КТ1 только по истечении выдержки времени 1г,
на которую оно настроено. Ее определяют заранее с таким расчетом, чтобы ЭП, имеющий обычную для него нагрузку, успел за это
время разогнаться до угловой скорости о^ и чтобы его пусковой ток
1П уменьшился в связи с этим до значения, принятого в расчете
переключающего тока /„ (рис. 83, в).
В результате замыкания контакта К Т1 получает питание катушка контактора ускорения КМ2. Контактор срабатывает и шунтирует главным контактом первую ступень резистора, в результате
ЭД переходит на искусственную характеристику 2 и продолжает
разгон. Размыкающийся контакт КМ2 при срабатывании контактора обесточивает катушку КТ2. По истечении выдержки времени (2
этого реле контакты КТ2 замыкаются. Этим включается второй
контактор ускорения, который шунтирует своим главным контактом вторую ступень резистора и выводит ЭД на естественную
характеристику 3 при угловой скорости со2. Процесс пуска заРис. 83. Автоматизированный
пуск
элек гродвигателя постоянного
тока параллельною возбуждения в функции времени;
а схема: Г> пусковая диаграмма;
в график изменения гока
и)
«
На
И
152
•V
V
Рис. 84, Схемы автоматизации пуска (а) и динамического торможения (б) короткозамкнутого асинхронною двигателя в функции времени
канчивается, когда якорь ЭД достигает угловой скорости ю с . Следует отметить, что из-за независимости уставок срабатывания реле
времени при пуске ЭД с повышенной нагрузкой, соответствующей
току / с , выключение пусковых сопротивлений, как видно из рис. 83,
б, происходит при меньших угловых скоростях о>1 и ю'2 (этому
соответствуют большие значения пусковых токов Гл2 и Гп3).
Автоматизация пуска АД в функции времени (рис. 84, а) также
осуществляется с помощью реле времени К Т, которое питается
постоянным током через выпрямитель V 7.. При подаче напряжения
на схему катушка реле К Т получает питание и размыкает свой
контакт. Нажатие на пусковую кнопку вызывает срабатывание
линейного контактора КМ1. Начинается разгон ротора АД при
включенных в цепь статора пусковых резисторах ./?. Одновременно
один вспомогательный контакт КМI замыкается и подготавливает
цепь катушки контактора ускорения КМ2, а второй размыкается и
обесточивает выпрямитель и катушку К Т. По истечении выдержки
времени реле его контакты замыкаются и подают питание на
катушку КМ2. Контактор срабатывает и шунтирует пусковые
резисторы.
Торможение. Автоматизация режимов электрического торможения чаще всего используется в ЭП палубных механизмов. Для этих
целей применяют торможение рекуперативное, противовключением
и динамическое.
А втоматизация р е к у п е р а т и в н о г о т о р м о ж е н и я ЭП
постоянного тока не требуе'1 особой схемной реализации, а в ЭП
переменного тока преимущественно осуществляется в многоскоростных АД при остановке путем искусственного подключения
тихоходной обмотки статора. Физический процесс рекуперативного
торможения в нолюсопереключаемом АД был рассмотрен в п. 14, а
его схемная реализация будет приведена при изучении конкретных
грузоподъемных механизмов.
153
Процесс т о р м о ж е н и я п р о т и в о в к л ю ч е н и е м связан с увеличением тока ЭД, поэтому цель автоматизации состоит в ограничении тока путем ввода резисторов в цепи якоря (для ЭД постоянного тока) или ротора (для АД с фазным ротором). Эти добавочные
резисторы называют ступенями противовключения. Включение и
отключение ступени противовключения осуществляются с помощью реле напряжения, которое включается у ЭД постоянного
тока параллельно якорю, а у АД-в цепь ротора. Ограничение тока
АД с короткозамкнутым ротором достигается временной задержкой пуска двигателя в новом направлении.
Автоматизация д и н а м и ч е с к о г о т о р м о ж е н и я ЭД постоянного тока состоит в том, что в момент отключения ЭД от сети
аппаратуры управления автоматически присоединяют параллельно
якорю резистор динамического торможения, а затем отключают
его, чтобы при новом пуске ЭД он не использовался. Динамическое
торможение данного типа ЭД может быть осуществлено по схемам,
работающим в функции скорости (ЭДС) или в функции времени.
Сущность автоматизации динамического торможения АД заключается в том, что в момент отключения АД от сети на его статорную
обмотку подают постоянный ток, а после окончания торможения
отключают его. Последняя операция чаще всего автоматизируется в
функции времени (рис. 84, б).
До начала торможения, когда АД подключен к сети переменного
тока, цепь питания катушки К Т замкнута через замыкающие
контакты контактора КМ1. Замыкающий контакт К Т замкнут, но
катушка контактора КМ2 не получает питания благодаря разомкнутым размыкающим контактам КМ 1. При отключении линейного
контактора КМ1 размыкается цепь статора АД и цепь катушки
реле К Т. Размыкающий контакт КМ1, замыкаясь, включает контактор динамического торможения КМ2. В этом случае через
трансформатор ТУ, выпрямитель V2, и замкнутые контакты КМ2
подается постоянный ток в обмотку статора АД, вследствие чего
осуществляется динамическое торможение. По окончании торможения срабатывает реле времени К Т и отключает контактор КМ2.
37. Защита электродвигателей и систем управления
Чтобы предотвратить выход из строя электрооборудования и
повысить надежность ЭП, применяют следующие виды электрической защиты: защиту от короткого замыкания в силовых цепях и
при недопустимо больших бросках тока ЭД; защиту ЭД от перегрузки; при обрыве цепи обмотки возбуждения; защиту цепей
управления при коротком замыкании, а также защитные блокировки.
Защита от короткого замыкания (максимально-токовая защита).
Она обеспечивается немедленным отключением цепи, в которой
154
а] А в с
Я А ь с
НАг
+ 0-
Рис. 85. Узлы схем защиты электродвигателей при коротком
замыкании
произошло короткое замыкание. В силовых цепях защита осуществляется плавкими предохранителями Р III (рис. 85, а), автоматическими выключателями ()Р с электромагнитным расцепителем (рис.
85, б) и реле максимального тока КА1 и КА2 (рис. 85, в). Цепи
управления при коротком замыкании защищают обычно своими
предохранителями. При коротком замыкании вставка плавится
почти мгновенно, не позволяя току короткого замыкания достичь
своего установившегося значения.
Для АД с короткозамкнутым ротором ток плавкой вставки 7ВСТ
можно определить исходя из условий:
/ всг ^ */„; / всг > />,
где /с -коэффициент чагрузки АД; / н и /„-соответственно номинальный и
пусковой токи АД: а -коэффициент, учитывающий условия пуска АД (для
тяжелых условий пуска а = 1,6 ч- 2, для легких а, = 2,5).
Для защиты цепей управления
*вст ~ -^^ ^ уЕ>
где /УЕ - суммарный ток катушек максимального количества одновременно
включенных аппаратов.
В современных судовых электроустановках большее применение
находят установочные автоматы, которые обладают более высокой
разрывной способностью, чем предохранители, позволяют быстро
осуществить повторное включение и предотвращают работу АД на
двух фазах. Ток уставки электромагнитного расщепителя автомата
При защите от коротких замыканий с помощью реле максимального тока (см. рис. 85, в) последние размыкают цепь питания
катушки линейного контактора КМ, что приводит к отключению
ЭД. Ток уставки реле максимального тока, включающего функцию
защиты от коротких замыканий, выбирают исходя из тех же
условий, что и для электромагнитного расцепителя автомата.
155
Защита от перегрузок. Этот вид защиты является основным для
ЭД, причем возможны 2 варианта защиты: максимальная и грузовая. Максимальная защита применяется с целью предотвращения
кратковременных чрезмерных перегрузок, опасных для ЭД постоянного тока по условиям коммутации, а для АД с фазным роторомиз-за возможных повреждений изоляции, щеток и др. Указанная
защита осуществляется реле максимального тока, которое включается в схему ЭП так же, как и при коротком замыкании (см. рис.
85, в). Это реле при срабатывании отключает ЭД от сети. Обычно
ток уставки реле максимального тока / вст = (2 н- 4) / н . Грузовая
защита применяется в ЭП, которые в процессе работы подвергаются перегрузкам (например, ЭП брашпиля при отрыве якоря от
грунта) и нуждются в ограничении момента до его 2-кратного
номинального значения. Отличие такого типа грузового реле от
максимального состоит в том, что оно не отключает ЭД от сети, а
лишь ограничивает его ток путем ввода резисторов в цепь якоря
или ротора и переводит ЭД на другую скорость. Ток уставки
грузового реле обычно выбирают из условия: /ВС1 = (1,8 ~ 2,5)/н.
Электромагнитные токовые реле с различными устройствами
из-за отсутствия выдержек времени широкого применения для
защиты АД от перегрузок не получили. В основном защита АД от
перегрузок осуществляется с помощью тепловых токовых и температурных реле. Наиболее широкое распространение получили
тепловые токовые реле с термобиметаллическими элементами.
Такие реле включают в 2 фазы (см. рис. 66), а в зарубежной
практике в 3 фазы сети. Выдержка времени их срабатывания обратно зависима от тока. Применение для защиты АД двух или трех
тепловых реле позволяет одновременно обеспечить защиту АД от
работы на двух фазах.
Однако такие реле не гарантируют полную защищенность АД в
электроприводах палубных механизмов из-за неодинаковости
постоянных времени нагрева АД и термобиметаллической пластины, изменения температуры окружающей среды, старения и т.д.
Поэтому Правилами Регистра СССР рекомендуется для защиты от
перегрузок ЭД кратковременного и повторно-кратковременного
режимов работы устанавливать температурные реле. Ввиду того,
что чувствительный элемент (термодатчик) встраивается в обмотку
статора, то реле данного типа непосредственно реагирует на температуру ЭД. Термодатчики так же, как и рассмотренные выше
токовые тепловые реле, воздействуют на цепь управления ЭД.
Нулевая защита. Этот вид защиты отключает ЭД при исчезновении или при чрезмерном снижении напряжения сети, а также
предотвращает самозапуск ЭД при восстановлении напряжения.
Последнее необходимо для предотвращения несчастных случаев,
возможных при произвольных включениях механизмов. При кнопочном управлении (см. рис. 66) защиту обеспечивает линейный
контактор КМ, замыкающий контакт которого подключен парал156
лельно кнопке 8В], поэтому в
случае обесточивания включение
ЭД может произойти лишь в результате нажатия на эту кнопку.
При управлении командоконтроллером нулевая защита
обеспечивается (рис. 86) с помощью реле напряжения К V. Принцип ее выполнения заключается в
том, что катушка К V во всех рабочих положениях поста уиравле-.
ния питается через собственный
замыкающий контакт. В случае
обесточивания цепь катушки КУ
прерывается, другим контактом
К V отключается цепь управления
и последующее включение ЭД
возможно лишь при возврате рукоятки командоконтроллера в
нулевое положение.
Защита при цепи возбуждения.
При отсутствии нагрузки ЭД параллельного возбуждения идет
вразнос, а при значительной нагрузке на валу переходит в режим
стоянки под током. Во избежание
указанных аварийных режимов в
схемах ЭП, где предусматривается регулирование скорости изменением магнитного потока, устанавливают реле минимального
тока КV (рис. 87), называемого
реле обрыва поля. Катушка реле
ККвключается последовательно с
обмоткой возбуждения и реле замыкает свой контакт при токе
возбуждения, близком к номинальному. При исчезновении или
чрезмерном снижении тока возбуждения контакты реле К К размыкаются, что вызывает отключение ЭД.
Защитные электрические блокировки. В схемах ЭП одновременное срабатывание каких-либо
определенных контактов может
привести к аварии электроуста-
II 0
\ 15/1/1
|! Т
11
\ \
\\
К\1
П
и
Цепи улрадления
РИС. 86. Узел схемы нулевой защиты
электродвигателя
Рис. 87. Узел схемы защиты электродвигателя при обрыве поля
А
В С
Рис. 88. Схема электрической блокировки между реверсивными
контакторами асинхронного
двигателя
157
новки. Например, одновременное срабатывание реверсивных контакторов КМ1 и КМ2 в цепи АД (рис. 88) приводит к короткому
замыканию. Можно привести еще ряд других примеров. Во избежание этих явлений в схемах управления АД предусматривают
электрическую блокировку между отдельными контакторами.
Электрическая блокировка контакторов КМ1 и КМ2 обеспечивается
размыкающими контактами этих контакторов, которые включены в
цепь их электромагнитных катушек. В этом случае, если даже,
например, приварились главные контакты контактора КМ2, включение контактора КМ1 не произойдет.
38. Автоматизация электроприводов с использованием
логических элементов
Рассмотренные выше принципы автоматизации ЭП посредством релейно-контактной аппаратуры имеют недостатки, связанные
с наличием большого числа контактов и ограничением функциональных возможностей схемы. В последнее время наметилась
тенденция к замене контактных реле в схемах автоматизации
бесконтактными логическими элементами. Бесконтактные ЛЭ изготовляют в виде модулей неразборных и не подлежащих ремонту
конструкций. По сравнению с контактными аппаратами они обладают более высоким быстродействием и компактностью, а также не
имеют быстроизнашивающихся частей. Так как ЛЭ имеют малую
мощность, их применяют в схемах управления в сочетании с
согласующими входными, выходными (усилительными) и исполнительными устройствами. В схемах ЛЭ заменяют реле, работающие
в дискретном режиме: включено - выключено, что соответствует
логическим понятиям «Да»-«Нет». В связи с этим состояние
входных и выходных цепей элемента удобно описывать цифрами 1 и
О, причем для контактных реле цифра 1 означает - цепь замкнута,
О-цепь разомкнута. Аналогично для ЛЭ наличие напряжения на
входе или выходе обозначают цифрой 1, отсутствие напряженияцифрой 0.
Рассмотрим некоторые примеры построения типовых узлов схем
автоматического управления с ЛЭ. При изображении схем с бесконтактными ЛЭ показывают только логические связи между элементами, т. е. цепи передачи «минуса» сигналов, поскольку все ЛЭ
выводами «плюс» подсоединены к положительному полюсу источника питания. С целью большей наглядности для каждого из таких
узлов приведен соответствующий узел схемы, выполненный с применением контактных реле.
В схеме, показанной на рис. 89, как видно из контактного
варианта, возможно включить контактор КМ при нажатии на
кнопку 8В1 и оставить его включенным после отпускания кнопки.
Для отключения контактора необходимо нажать на кнопку 8В2.
В исходном положении схемы с ЛЭ на входы 1 и 2 элемента ^^^
158
а)
Рис. 89. Схемы подключения линейного контактора в контактном (а) и бесконтактном (б) вариантах
поданы сигналы 0, поэтому на выходе элемента и соответственно на
входе 3 элемента 1Ш2 существует сигнал 1, а на его выходе
5-сигнал 0. Следовательно, на выходе усилителя ПА напряжение
равно нулю, и контактор КМ не включен. При нажатии на кнопку
8В1 на вход 1 элемента ОО1 подается сигнал 1, на выходе этого
элемента, т. е. на входе 3 элемента ПВ2 возникает сигнал 0. Поэтому
на выходе 5 этого элемента появляется сигнал 1, который подается
на вход усилителя и на вход 2 элемента ОВ1.
Таким образом, если на входе усилителя существует единственный сигнал 1 (входное напряжение, по значению достаточное для
того, чтобы выходное напряжение превышало напряжение срабатывания контактора КМ), то контактор КМ включается. Контактор
КМ остается включенным и после отпускания кнопки 8В1, так как с
выхода 5 элемента /)1)2 на вход 2 элемента ОО1 продолжает
поступать сигнал 1 и на выходе этого элемента сохраняется сигнал
0. Следовательно, схема запомнила команду «Пуск». При нажатии
на кнопку 8В2 на вход 4 элемента ОО2 подается сигнал 1, а на его
выходе 5 в результате этого создается сигнал 0. Это приводит к
отключению контактора КМ и возврату элемента ^^^ в исходное
состояние (на его входы / и 2 поданы сигналы 0, а на выход
3-сигнал 1). Поэтому после отпускания кнопки 8В2 на выходе
элемента ОГ>2 остается сигнал 0. Элементы ^^1 и ОО2, соединенные
по указанной схеме, образуют типовую ячейку «Память». Сигнал 1
на входе ОО1 этой ячейки включает «Память», сигнал 1 на входе
ОО2 отключает ее.
Принцип действия контактного варианта схемы (рис. 90, а)
управления короткозамкнутым АД с помощью магнитного пускателя уже рассматривался (см. рис. 66). Для бесконтактного варианта
(рис. 90, б) в схеме управления использованы логические элементы
ИЛИ-НЕ (ОО1 и 9О2), а также элемент И-НЕ (БОЗ). В исходном
положении схемы на входах ОВ1 будет сигнал 0, а на выходе-1,
соответственно на выходе ПО2-0, питание на усилитель ПА не
подается, и контактор КМ отключен. При нажатии на кнопку 8В1
«Пуск» на вход №1 поступает 1, на выходе этого элемента и входе
ОО2 будет 0, и в результате с выхода ОО2 будет сниматься сигнал 1.
На усилитель ОА поступает питание и включившийся контактор
КМ подключает двигатель. С выхода ОО2 сигнал 1 поступает на
159
вход ВО1, а поэтому кнопку 8В1 отпускают, ибо обратная связь
обеспечивает подключение контактора.
Отключение ЭД происходит при нажатии на кнопку 8В2 или же
при перегрузке в момент размыкания контактов теплового реле КК.
В обоих случаях на выходе ООЗ и входе ОО2 будет сигнал 1, а на
выходе ОП2-0. Катушка контактора КМ обесточится, что приведет
к остановке ЭД.
В качестве более сложного примера рассмотрим работу схемы
(рис. 91) судовой осушительной системы, состоящей из автоматизированного ЭП центробежного насоса и арматуры, управляемой
электромагнитом.
В контактном варианте условия пуска насоса следующие. Если
достигнут верхний уровень воды (контакты 8Ы.1 датчика уровня
замкнуты) или нажата пусковая кнопка 8В1, то включается электромагнит привода арматуры У А и она открывается. Если арматура
открыта (механически сблокированный с ней контакт У А замкнут) и
если имеется вода в трубопроводе насоса (контакты датчика 5Ь2
замкнуты), то подается питание на катушку магнитного пускателя
КМ и насос пускается. Условия остановки насоса следующие. Если
достигнут нижний уровень воды (контакты 8Ы.2 датчика уровня
разомкнуты), температура ЭД или масла в насосе превышает
допустимую (разомкнуты контакты КК или 5 К); или нажата кнопка
5В2 «Стоп», то отключается магнитный пускатель КМ, что приводит к остановке ЭД и снятию сигнала с электромагнита привода
арматуры.
Рассмотрим более подробно эту схему для бесконтактного
варианта, где, кроме логических элементов, применены два /?-5триггера (О81 и .052). При нажатии пусковой кнопки 8В1 или при
срабатывании датчика уровня (замкнется контакт 8Ы.1) через
элемент ^^7 подается сигнал на вход 5 триггера В82, затем
проходит через усилитель ОА2 и поступает на электромагнит
привода арматуры. При открытии арматуры замыкается механически сблокированный с ней контакт У А, и если при наличии воды в
_ь.
Рис. 90. Релейно-контактная схема пуска ЛД (а) и ее бесконтактный аналог (о)
160
г)
1)
+ ЗВ1
мп
У-
кп
зк
^х'
^
кн
кп
Х1_П_Т
У
<>
ЦП!
л/
5
"
\
1—Г^Дт |>т Ц*}* 1>т
гп
-,? Т
г
Г
Л
г
—гл
л/.^, ^7^
;
мгу.
_]_
_
>
.
Г
^^^ г •&1
О
ПЯ1
Ъ 51
Г&П г^,
•г
1
_^_г
—
1
кп
—^
^
1
УЯ
5И.1
\
й
—X —
У/1
1
+
/Г/7
-П1_1
27275"
Рг1
?^«
\ГКК
5В1
1
11^
"л>
<__!г
V 'П7
1
77 ,г?
т
-К
77/? ?
.О
УЯ
\ \
и
Рис. 91. Схемы управления электроприводом осушительного насоса в контактном
(я) и бесконтактном (б) вариантах
трубопроводе окажется замкнутым контакт 8Ь2, то на входе элемента Ш)7 будут 2 сигнала 1, а на выходе - сигнал 1, который
подается на вход элемента ЛЭ ^^2. При разомкнутом контакте КМ
на вход ООЗ поступает 0 и на выходе его будет сигнал 1, который
также поступает на вход ВО2, и с выхода его снимается сигнал 1,
подаваемый на вход 5 триггера О81. На выходе триггера также
будет 1, и усиленный сигнал с помощью усилителя ОА1 поступает
на катушку контактора КМ, который при срабатывании подключает ЭД осушительного насоса.
Отключение ЭД происходит в случаях: нажатия на кнопку 552;
при перегрузке ЭД (замыкаются контакты теплового реле КК);
повышении температуры масла (замыкаются контакты температурного реле 8К); достижении нижнего уровня воды, когда замкнутся
контакты 8Ы.2 датчика уровня. Во всех случаях, когда на входе
элемента ВО6 будет сигнал 1, на выходе также образуется 1,
поступающая затем на входы $О4 и ПО5. На входе ^^4 образуются
2 сигнала 1 (другая единица будет при замкнутом контакте КМ), и
на вход К триггера В81 поступает сигнал, благодаря чему триггер
занимает противоположное состояние. Сигнал с ВА1 снимается,
катушка контактора КМ обесточивается и ЭД отключается. При
размыкании вспомогательного контакта КМ на выходе ВОЗ образуется сигнал 1, который вместе с сигналом 1 элемента ^^6 вызовет
на выходе ОО5 сигнал 1. Этот сигнал поступает на вход К триггера
.052, и триггер займет противоположное состояние. Сигнал с
усилителя ОА2 снимается, электромагнит УА обесточивается и
арматура закрывается.
6
Зак. 1276
161
39. Микропроцессорное управление электроприводами
Применяемые релейно-контакторные системы управления
представляют собой аппаратно реализованный алгоритм управления
электроприводом, состоящий из логической и силовой частей. Для
каждого ЭП разрабатывается самостоятельная схема управления,
позволяющая выполнять определенные функции. Эти устройства,
работающие на жесткой логике, имеют серьезные недостатки,
которые затрудняют решение сложных задач управления, не создают гибкости в работе и не решают задачи оптимизации процессов.
Логическая часть этой системы управления значительно усложнена.
Например, приходится использовать большое число реле только
для увеличения контактов, а это делает установку более громоздкой
и уменьшает ее надежность. Такие недостатки отсутствуют у
программируемых устройств логического управления. К ним относятся микропроцессоры и построенные на их основе микроЭВМ, а
также программируемые контроллеры. Если в релейно-контакторных системах управления ЭП используют аналоговые регуляторы с
фиксированными уставками срабатывания, то в микропроцессорных системах применяется цифровая информация в двоичном коде.
Источником информации о состоянии ЭП являются датчики
тока, напряжения, температуры, скорости и др. Для обработки
информации в МП сигналы с этих датчиков преобразуются в
цифровой двоичный код. Процесс преобразования обычно осуществляется в 3 этапа. Первый этап - преобразование сигналов разной
физической природы в напряжение постоянного тока. Вторым
этапом является нормализация сигнала. Это понятие включает в
себя комплекс мер по улучшению качества сигнала, повышению
достоверности содержащейся в сигнале информации. Сюда входит
усиление сигнала, подавление и фильтрация помех, согласование
уровня сигнала с номинальным уровнем преобразователя аналогкод. Наконец, третий этап-соответственно аналого-цифровое преобразование. Так как аналоговой величиной здесь является напряжение, то речь идет о преобразовании напряжения в двоичный код. В
большинстве тиристорных ЭП управление силовым преобразователем осуществляется аналоговыми сигналами. Поэтому после обработки информации МП требуется ее обратное преобразование из
цифровой формы в форму импульса напряжения постоянного тока
требуемых уровня и полярности. Эта операция осуществляется
цифроаналоговым преобразователем.
В состав микропроцессорной системы управления ЭП входят
следующие блоки и устройства (рис. 92):
устройство связи УС со старшей по иерархии ЭВМ или с
оператором. В УС используются преобразователи кодов, пульт
управления с устройством отображения информации;
управляющее вычислительное устройство УБУ, состоящее из
аппаратных средств АС и программного обеспечения ПО. Аппарат162
п0
УС
\
\
Ь}1 (Л — *
УВМ
А 1'
1
]
Г
ИП
V
Рис. 92. Структурная схема микропроцессорной системы управления электроприводом
ные средства это по существу комплекс жестко закоммутированных автоматов, который за счет использования специальных программ становится функциональным узлом специфического применения. В системе управления УВУ занимает центральное место,
вырабатывая управляющие сигналы на основании директив, поступающих через УС от ЭВМ следующего по иерархии уровня и
сигналов с датчиков, установленных в устройствах, которые перечислены ниже;
устройство жесткой логики УЖЛ, представляющее собой систему отдельных жестко закоммутированных блоков управляющей
аппаратуры. Эта аппаратура служит для автономного управления
процессом в случае выхода из строя ЭВМ, а также при необходимости вмешательства обслуживающего персонала в ходе управления процессом. В ряде случаев эти блоки или часть их участвуют в
автоматическом режиме работы, если от системы требуется высокое быстродействие. Выходные сигналы УЖЛ поступают на входы
источника питания ИП и силового преобразователя СП;
управляемый источник силового питания, в качестве которого
может быть управляемый или неуправляемый выпрямитель. В
отдельных тиристорных преобразователях функции ИП и СП совмещают. Жирными стрелками на рис. 92 отмечено направление
потока электроэнергии в двигательном и рекуперативном режимах,
светлыми - потоки информации. Управляющие сигналы ИП получает от УВУ и УЖЛ, в обратном направлении следует диагностическая и сигнальная информация;
силовой преобразователь СП, обычно представляющий управляемый выпрямитель или инвертор в преобразователе частоты.
Поток электроэнергии в СП также 2-сгоронний (в зависимости от
режима двигателя). Управляющие сигналы поступают от УЖЛ и
о»
163
УВУ, а в обратном направлении следует диагностическая и сигнальная информация;
электродвигатель ЭД, включающий в себя, кроме двигателя,
также датчики скорости, тока и температуры обмоток;
передаточное устройство механизма ПУМ и рабочий орган РО
механизма (например, цепная звездочка на брашпиле).
Для выявления функциональных взаимосвязей в системе рассмотрим процесс прохождения информации. Основным информационным и управляющим компонентом системы является УВУ, в
качестве которого могут применяться микроЭВМ или программируемый контроллер. На входы УВУ информация поступает от ЭВМ
соседнего по иерархии уровня. Связь УВУ с устройствами системы
осуществляется с помощью аналоговых, цифровых и импульсных
сигналов. Для этого в состав УВУ вводятся аналого-цифровые,
цифроаналоговые, цифроимпульсные, импульсно-цифровые преобразователи. Для связи с оператором применяются устройства ввода-вывода: пульт с дисплеем или без него, печатающее устройство и
т. п. На УВУ поступает информация с датчиков о ходе процессов и
состоянии параметров ИП и С/7. Эта информация используется для
коррекции управляющих сигналов и для контроля работоспособности. Двигатель, передаточное устройство и рабочий орган также
оборудуются датчиками состояния. Информация с них постоянно
или по запросу подается на УВУ, где используется в качестве
сигналов обратных связей или диагностических сообщений.
40. Архитектура микропроцессора
Микропроцессор как управляющее устройство является
составной частью в системе управления автоматизированным ЭП.
Рассмотрим сначала функциональный состав и принцип действия
МП как комплексного программно-управляемого элемента.
Исходно представим МП как единое устройство в виде некоторого «черного ящика» (рис. 93, о), имеющего внешние входы и
выходы для рабочей информации (данные О, О') и для команд
управления данными (X). Внутри МП происходят 2 процесса:
обработки данных, при котором поступающие в данные О подвергаются логическим и вычислительным операциям и в новом качестве П' выводятся из МП; управления обработкой данных на
основании заранее составленной программы (X). В соответствии с
указанными процессами в составе МП можно выделить 2 основных
функциональных блока- блок операций БО и блок управления БУ
(рис. 93, б). Основным является блок операций, так как именно он
реализует функциональное назначение МП. Блок управления обеспечивает правильное функционирование БО, при этом поступающая программа работы МП в виде последовательности команд X
164
5)
~" ~
/У/7
п,
77
п'
Л,
—.*.
У
МП
*»
п
X
—»
ьV
в)
нг ч
"
У
V
ЗУД
«0
"
..._
"
МП
'
а . к
— »•—
(7
#
34 К
-• 1 !»•
*,
1'
—|
УО
и
<*-
^
I, ,1
Г
Г
?
УБВ
и
Ип
Л
I "
'
°У \ ОУ
-~\
1
1
1
Рис. 93. Структурные схемы модели микропроцессора
преобразуется БУ с учетом сигналов У 0 , оповещающих о состоянии
БО, в серию управляющих сигналов У, воздействующих на БО.
В своей работе МП взаимодействует с внешними устройствами,
которые совместно с ним образуют микропроцессорную систему
управления МСУ некоторым объектом О У (рис. 93, в). Источником
исходных данных и программы являются соответственно запоминающие устройства данных ЗУД и команд ЗУК. Приемником
обработанных данных служит так называемое устройство ввода-вывода УВВ, через которое обработанная цифровая рабочая информация О' в преобразованном виде как выходное управляющее воздействие (7у поступает на объект управления. Из ОУ в УВВ поступает
информация о состоянии объекта управления в виде сигналов
обратных связей [70. В МСУ поток рабочей информации может
иметь не только прямое направление (от ЗУД и к УВВ), но и
обратное (от УВВ к МП и к ЗУД). Это дает возможность обмена
информацией между ЗУД, БО и УВВ, позволяет обрабатывать
данные обратных связей и запоминать результаты операций. Совместная взаимосвязанная работа всех устройств и блоков в МСУ
обеспечивается системой управляющих сигналов У и 70. Необходимая согласованность действий во времени блоков МП и МСУ
достигается с помощью синхронизирующих импульсов Хс, поступающих от генератора высокостабильной частоты.
Познакомившись с основными функциональными блоками
микропроцессорной системы, рассмотрим принцип действия МП
как комплексного управляющего элемента, реализующего некоторую логическую функцию, например, вида
у=
х2)д:3
(37)
Заданная функция может быть реализована аппаратным способом с помощью типовых логических элементов. Для этого согласно
формуле (37) потребуются 3 элемента ИЛИ и 2 элемента И,
соединенных по схеме, приведенной на рис. 94. Схема реализует1 5
действий: у\ =х^+ х2; у2 = у1 х3; у3 = у2 + л^; у4 = у3 х 3 ; у5 = у4 +
165
+ х2 = у, для каждого из которых
предусмотрен отдельный элемент, хотя различных действий
здесь только 2-дизъюнкция (у1г
у3, у5) и конъюнкция (у2, у4). В
Рис. 94. Схема аппаратной реализации
этом недостаток
аппаратного
логической функции
способа реализации алгоритма
управления-с усложнением алгоритма соответственно возрастает количество аппаратуры. При
программном способе реализации функции (37) потребуется вместо
пяти только 2 элемента, один из которых ИЛИ, а другой И.
Необходимые действия согласно формуле (37) будут выполняться
поочередно в соответствии с заранее составленной программой.
ЗУД
с
ш
ЯП1
>
В2
г\ М
дА
г \ 19
НА
V-
( т
**•
-4- 1 21
В4
ЯП ^
V-* N ^
**•
(
*ч
,
хп
В5
ЯП5
ВВ
(7/7/9
Ъ7
э**
ЯП в
1
гг
В8
.
'2
>/^
"}
-, Т>
„^
я*
0
/
Чт Р 1,1
Чт 1^2,2
2
ЛС Р1 и Р2
3
Зп ^, <*
6
Чт
Рг,ь
В
7
ЛУ
Р1 и Р2
А, 5
Р1,1
Р2,5
Р1 и Р2
А, В
Р1,3
Р2,6
(.
ЗУН
г
9
10
11
12
13
Зп
Чт
Чт
ЛС
Зп
Чт
Чт
*т
ч*
^
>
,15 ^
V
>у—
, 16
/•
> у——
г™"
> >^1
Я5"
'
?7|
1 И-
*
11
N
п
21
1
4^Т — и11— ^
1
(
(
"р
1 /70
_<:
гг
1
X
/>1
?
(
>• }^
1^\
(Л
Л
>
3
/ ^ 11
г
лЛ У
х^ )
^\ 9
/
|
1
УЛ.О
К УВВ{
м/
"ВВ1
х
\
«
15
16
17
13
19
С
ЛУ Р 1 и /
3ч
чГ
чТ
лС
5п
20 1Чь(В
А,7 ^
/'*!?
У
1 2,7
Р 1 и/
А, 8
^
,4, УЬЩ
1
Рис. 95. Функциональная схема модели микропроцессора
166
29
Проанализируем решение поставленной задачи, выраженной
формулой (37), с помощью МП, для которого примем функциональную модель, изображенную на рис. 95. В этой модели по
сравнению с моделью, приведенной на рис. 93, дополнительно
показаны линии БО и ЗУД и внутреннее устройство БО. Дополнительные элементы представлены упрощенно, чтобы лучше понять
принцип действия МП. В состав блока операций, который называется также арифметико-логическим устройством (АЛУ), входят
элементы ИЛИ, И (применительно к решаемой задаче) и переключатель операций ПО. Шины Р1 и Р2, через которые данные вводятся
в БО, соединяются с помощью электронных ключей 1-16 с выходными шинами ЗУД (В1-В8). Шина А воспринимает результат
операций в АЛУ, который может быть записан в ячейках памяти
ЯП1-ЯП8 запоминающего устройства данных или передан в У ВВ.
Блок управления БУ вырабатывает сигналы:
1/рИ, (У р2г -управляют электронными ключами 1-8, 9-16;
1}Л1, 1/в.в,-- управляют электронными ключами 17-24, 29;
иил-управляет переключателем операций (при 17П 0 = 1 включены контакты 25 и 27; при С/п 0 = 0 включены контакты 26 и 28);
[7
-разрешает чтение данных из ЗУД (при [ 7 = 1 ) или
запись в ЗУД (1/ з у д = 0);
[7^ к - разрешает чтение команд из ЗУ К.
Единичное значение сигналов С/ рИ , 1/р2,-, &&, 17В.В; означает
включенное состояние электронных ключей с номером г.
Составим программу работы МП в соответствии с алгоритмом,
заданным в виде логической функции (37). Пусть в исходном
состоянии МП значения переменных х1, х2, х3 записаны в ячейки
ЯП1, ЯП2, ЯПЗ, а остальные ячейки ЗУД свободны. Тогда для
выполнения действий уг— у5, соответствующих формуле (37),
потребуется совокупность операций, осуществляемых последовательно одна за другой по очевидной программе (см. рис. 95):
0
чтение числа х1 из ЯП1 на шину Р1;
1 -чтение числа х2 из ЯП2 на шину Р2;
2 -логически сложить числа х± и х2;
3 -запись результата сложения у± с шины А в ЯП4;
4 -чтение числа хъ из ЯПЗ на шину Р1;
5 -чтение числа уг из ЯП4 на шину Р2;
6 -логически умножить числа хъ и у\;
7 -запись результата умножения у2 с шины А в ЯП5;
8 -чтение числа хг из ЯП1 на шину Р1;
9 -чтение числа у2 из ЯП5 на шину Р2;
10 -логически сложить числа х1 и у2;
11 -запись результата сложения у3 с шины А в ЯП6;
12 чтение числа х3 из ЯПЗ на шину Р1;
13 -чтение числа у3 из ЯП6 на шину Р2;
14 -логически умножить числа х э и уъ;
15 -запись результата умножения _у4 с шины А в ЯП7;
167
-чтение числа х2 из ЯП2 на шину Р1;
-чтение числа у4 из ЯП7 на шину Р2;
-логически сложить числа х2 и у4;
- запись результата сложения у5 = у с шины А в ЯП8;
-вывод результата сложения у5 — у с шины А на УВВ{.
Перечисленным операциям соответствует то же число команд,
по которым данные операции выполняются МП. В командах,
записанных в сокращенной символической форме, можно выделить
2 части-наименование операции и адрес расположения данных, над
которыми совершаются операции. Так как МП может воспринимать команду только в цифровом виде, то символическая форма
команды преобразуется в цифровой код. В этом коде команды
записываются в ячейки ЗУК в последовательности, соответствующей составленной программе.
Номер ячейки ЗУК означает адрес команды, а также очередность
ее выполнения. В сокращенном виде программу работы МП можно
представить в табличной форме (см. таблицу). Отработка программы начинается с декодирования в блоке управления команды с
нулевым адресом, который внесен исходно в БО как начало отсчета
команд программы. Декодирование команды вызывает появление
управляющих импульсов 1/3.у.д = 1> Ц>1,1 = 1> осуществляющих
выполнение первой команды Чт Р1,1. Одновременно с этим в БО к
начальному номеру адреса прибавляется единица, что определяет
следующий адрес новой команды. Появившийся вследствие этого
16
17
18
19
20
Программа МП (см. рис. 95) для реализации функции,
выраженной формулой (37)
Адрес команды
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
168
Символичный код
команды
Чт Р1,1
Чт Р2.2
ЛС Р1 и Р2
Зп А, 4
Чт Р1.3
Чт Р2,4
Лу Р1 и Р2
Зп А,5
Чт Р1.1
Чт Р2.5
ЛС Р1 и Р2
Зп А, 6
Чт Р1,3
Чт Р2,6
ЛУ Р1 и Р2
Зп А. 7
Чт Р1,2
Чт Р2.7
ЛС Р1 и Р2
Зп А, 8
Вып А, УВВ1
Номер включаемого контакта
;
;
25, 27
20
3
12
26, 28
21
1
13
25, 27
22
3
14
26, 28
23
2
15
25, 27
24
29
Значения управляющих сигналов
^,1.1 = 1. У„.а
=1
^Р2,2 = 1, У,,.« = 1
<„ = 1
^а,20 = 1, 1/„.» = 0
Ц,1.з = 1. ^,,.я = 1
^Р1.» = 1' ^з.у.д = 1
^„.о = 0
^а.21 = 1, ^, у .д=0
^Р1.1 = >' ^.д = 1
^Р2дэ = 1, ^,У.д = 1
<. = 1
У а ,22 = 1, 1/,,.д = 0
^р!3, ^ , „ = 1
Ург'д*» С» = 1
^и.о = 0
^а,23 = 1, ^,у.д = 0
^Р1,2 = 1, У,у.д = 1
^Р2.15 = 1, ^,у.д = 1
V =\
<24 = 1, ^,у.д = 0
V,.»* = 1
Рис. 96. Структурная схема микропроцессора
управляющий сигнал 1/3.у.к = 1 обусловливает чтение команды с
адресом / в блоке управления и ее декодирование. Сигналы
^э.у.к = 1 и 1}р2,2 = 1 обеспечивают выполнение команды ЧтР2,2.
Аналогично выполняются последующие команды. Как видно из
таблицы, программа реализуется при выполнении 20 команд. Разделение выполнения команд во времени, последовательность и согласованность действия управляющих сигналов осуществляются с
помощью высокочастотных синхронизирующих импульсов Хс, поступающих в блок управления.
Рассмотрим теперь более детально структуру МП: на рис. 96
изображена структурная схема МП, в которой 2 основных функциональных блока БО и БУ детализированы. Имеются 3 шины: шина
данных ЩД, шина адреса ША, шина управления ШУ. В составе МП
ныделены 3 группы регистров:
группа, обслуживающая процесс обработки данных (состоит из
аккумулятора А, буферных регистров БР1, БР2, БРД, регистра
признаков Р/7);
группа, обслуживающая процесс управления обработкой данных
(регистр команд РК, счетчик команд СК, регистр адреса памяти
ГАП и буферный регистр адреса БРА);
группа регистров общего назначения РОН, которая выполняет
функцию внутреннего сверхоперативного запоминающего устройстна СОЗУ, что повышает быстродействие МП.
Основу блока операций составляет арифметико-логическое
устройство АЛУ, построенное на комбинационных схемах без
запоминающих устройств. При поступлении на оба входных регистра БР1 и БР2 данных на выходе АЛУ немедленно (через время
срабатывания АЛУ) появляется результат операции. Поэтому для
АЛУ необходимо запоминающее устройство для временного хране169
ния входных и выходных данных, функцию которого выполняет
регистр А, названный аккумулятором. АЛУ обрабатывает две
величины, одна из которых предварительно вводится в аккумулятор. Результат обработки данных также сначала записывается в А.
Чтобы исключить сбои в работе АЛУ из-за наложения выходной
величины на входную, используется буферный регистр БР2 аккумулятора, в который перед операцией входная величина считывается
из А. Определенную характеристику операций дает регистр признаков РП. Информацию о результатах операций дают числовые
значения соответствующих разрядов регистра, при этом единичное
значение свидетельствует о присутствии данного признака. Буферные регистры адреса и данных (БРА и БРД), являясь усилительными элементами, согласуют нагрузку шин ША и ШД с МП.
Основу блока управления составляет управляющее устройство
У У, вырабатывающее сигналы управления. Регистр команд РК
запоминает очередную команду и передает ее в УУ. Осуществляется
это следующим образом. С началом машинного цикла, т.е. при
подцикле «выборка», по шине Ш команда поступает в регистр
команд. В следующем подцикле «выполнение» содержание регистра
команд передается через дешифратор, откуда декодированный сигнал поступает в УУ и тем самым осуществляется реализация
команды. УУ соединено со всеми блоками микропроцессора и
осуществляет управление этими блоками в определенной последовательности, в соответствии с программой. Шина Ш осуществляет
взаимосвязь между блоками БО, БУ, СОЗУ внутри микропроцессора.
Реализация вычислительных и управляющих функций возможна
лишь в том случае, если кроме МП имеются по крайней мере
устройства памяти и ввода-вывода. Эти устройства, являющиеся
внешними по отношению к МП, в совокупности с ним составляют
микропроцессорную систему. Микропроцессор с внешними устройствами связан системой многоразрядных шин: данных ШД, шин
адресов ША и шин управления ШУ. Устройства памяти включают в
себя постоянные и оперативные запоминающие устройства (ПЗУ и
ОЗУ). Информация, хранящаяся в ПЗУ, а это могут быть как
команды, так и наборы данных, сохраняется и при выключении
питания. Такую память называют энергонезависимой. Блок ОЗУэто энергозависимая память с высоким быстродействием осуществления операций - считывания. Доступ к ячейкам ОЗУ прямой, т.е.
отсутствует необходимость проходить через некоторую последовательность ячеек памяти. Чтобы получить информацию из какой-либо ячейки, достаточно выставить на ША адрес этой ячейки. Устройство ввода-вывода предназначено для приема информации от
внешних источников и передачи ее в МП или внешнюю память МП,
а также для преобразования выходной информации. Посредством
этого устройства в микропроцессорную систему загружаются
исходные данные и программы.
170
Функционирование МП будет более понятно, если рассмотреть
пример выполнения какой-либо программы. Для этого воспользуемся рассмотренным выше примером. Пусть величины хг, х2, х3
записаны не во внешнем ЗУД, как это предполагалось в схеме рис.
95, а во внутреннем СОЗУ в его трех регистрах Р1, Р2, РЗ. Считаем,
что программа работы МП записана во внешнем ОЗУ. Наличие
аккумулятора позволяет результат операций сразу направлять на
вход АЛУ для последующей операции. Это упрощает программу
выполнения решаемой задачи, освободив ее от лишних команд.
Пусть первой командой будет извлечение величины из регистра
Р1 и помещение ее в аккумулятор. Назовем эту команду «пересылка
содержимого регистра Р1 в аккумулятор» или сокращенно Пр А,
Р1. Тогда с учетом использования аккумулятора следующей командой может быть «логическое сложение содержимого регистров А и
Р2» или сокращенно ЛС А и Р2. Поскольку результат предыдущей
операции является согласно формуле (37) и с помощью аккумулятора всегда одной из входных величин, готовой для последующей
операции, то команды непосредственно операций могут следовать
одна за другой без команд записи результата и чтения данных,
предусмотренных составленной ранее программой. Вместо ранее
составленных 20 команд для решения поставленной задачи с использованием регистра А и СОЗУ потребуется всего лишь 7 команд:
Пр А, Р1; ЛС А и Р2; ЛУ А и РЗ; ЛС Л и Р1; ЛУ А и РЗ; ЛС Л и Р2;
Выв А, У ВВ. Причем каждая команда располагается в своей ячейке
ЗУ К, как это показано на рис. 95.
Микропроцессор как комплексное устройство состоит из ряда
типовых элементов. Ведущее место в элементном составе МП
занимают регистры. В составе АЛУ основным элементом является
комбинационный сумматор, позволяющий реализовать как арифметические, так и логические операции. Управляющее устройство
может выполняться двояко: с хранимой в памяти программной
логикой и с жесткой логикой на основе комбинационной схемы.
Контрольные вопросы-задания
1. Как классифицируют электрические схемы?
2. Какие виды защит применяют в судовом электроприводе?
3. Используя схему, объясните, как действует магнитный пускатель, выполненный на
логических элементах?
4. В чем заключаются особенности схемы автоматизации насоса с использованием
ЛЭ?
5. Перечислите основные достоинства микропроцессорного управления.
6. Из каких элементов состоит микропроцессор и какие функции он выполняет?
Глава 8
ЭЛЕКТРОПРИВОДЫ ВСПОМОГАТЕЛЬНЫХ
МЕХАНИЗМОВ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК
И СУДОВЫХ СИСТЕМ
41. Общие сведения
Вспомогательные механизмы (насосы, вентиляторы, воздуходувки, компрессоры) предназначены для обслуживания энергетических установок и общих нужд судна. Эти механизмы обеспечивают
дв'ижение судна, безопасность мореплавания, сохранность перевозимых грузов, улучшение обитаемости и бытовых условий экипажа
судна. В настоящее время почти все вспомогательные механизмы
электрифицированы и ЭП этих механизмов являются основными
потребителями электроэнергии: на их долю приходится около 50%
электроэнергии, вырабатываемой судовой электростанцией.
По назначению вспомогательные механизмы делят на 2 основные группы: судовых энергетических установок и общесудовых
систем. К механизмам судовых энергетических установок относятся: топливные, масляные, циркуляционные, конденсаторные,
охлаждающие, питательные насосы; машинные, котельные, охлаждающие вентиляторы, а также нагнетатели; компрессоры, обеспечивающие поступление сжатого воздуха для пуска дизелей и распыливания топлива в них во время работы. К механизмам общесудовых
систем относятся: пожарные, водоотливные, балластные, трюмные,
санитарные, зачистные, грузовые насосы; трюмные, каютные, рефрижераторные вентиляторы; компрессоры, используемые в холодильных и климатических установках, а также для снабжения
сжатым воздухом других судовых потребителей.
По принципу действия различают механизмы поршневые, лопастные, роторные и др.
В судовых установках применяют поршневые насосы и компрессоры. Достоинством поршневых насосов являются: относительная
простота конструкции; высокий напор; относительно высокий КПД
(Пнас = 0-5 -^ 0,8); способность к самовсасыванию и постоянная
готовность к работе. Но поршневым насосам присущи и недостатки;
неудобство сочленения с ЭД, поскольку они работают при возвратно-поступательном движении поршня; быстрое изнашивание трущихся частей, особенно при работе с загрязненной жидкостью;
опасность возникновения недопустимых давлений при перекрытии
вентилей. Те же достоинства и недостатки, исключая специфику
работы с жидкостью, присущи и поршневым компрессорам.
172
Наиболее обширную группу составляют лопастные механизмы,
которые делятся на центробежные и осевые (осевые насосы применяют лишь в тех случаях, когда необходимо сочетать большую
подачу с незначительным напором). К достоинствам механизмов
центробежного типа (насосы, вентиляторы, нагнетатели, турбокомпрессоры) относят: простоту конструкции, минимальное число
изнашивающихся частей, равномерность подачи жидкости или воздуха, возможность непосредственного сочленения механизма с ЭД.
Роторные насосы подразделяют на зубчатые (шестеренные) и
винтовые. Они служат для перекачивания вязких жидкостей - топлива, масел и др. Достоинством роторных насосов являются их малые
габаритные размеры, равномерность и непрерывность подачи жидкости, способность создавать высокие напоры и возможность непосредственного сочленения насоса с ЭД.
Основными параметрами, характеризующими работу вспомогательных механизмов, а следовательно, и режим работы их приводных ЭД, являются подача и напор.
Подача-количество жидкости или газа, подаваемое механизмом
в единицу времени.
Для3 выражения подачи наиболее удобны объем3
ные единицы (м /ч, м /с, л/мин).
Напор - удельная механическая энергия, сообщаемая единице
массы перекачиваемой жидкости или газа. Напор расходуется на
движение потока и преодоление им в пути различного рода сопротивлений. Напор выражают в метрах. Для насосов объемного типа
в качестве основного параметра обычно указывают не напор Я, а
создаваемое им полное давление р. Между давлением и напором
существует зависимость р — рдН, где р-плотность жидкости;
д- ускорение свободного падения.
42. Нагрузочные характеристики
Нагрузка на валу приводного ЭД вспомогательного механизма зависит от рабочих параметров механизма - подачи и напора.
Мощность ЭД (кВт), необходимая для вращения вала насоса,
3
где 2 -подача насоса, м /с; Яст статический напор, м; ЛЯ потери напора
в трубопроводе и местных
сопротивлениях, м; р- плотность перекачиваемой жидкости, кг/м 3 ; т) нас -КПД насоса.
В процессе работы насосов иногда приходится регулировать их
подачу, и это отражается на нагрузке ЭД.
Регулирование подачи осуществляется:
изменением частоты вращения приводного ЭД, так как для всех
типов насосов подача пропорциональна частоте вращения;
173
дросселированием нагнетания или всасывания;
обратным перепуском части перекачиваемой жидкости.
Последний способ применяется в зубчатых и винтовых насосах.
Подача центробежных насосов регулируется изменением частоты
вращения и дросселированием. Регулирование дросселированием
осуществляется перекрытием задвижки в напорном или всасывающем трубопроводе. В основе этого способа лежит искусственное
увеличение сопротивления системы. Регулирование данным способом становится возможным потому, что у центробежных насосов с
увеличением напора резко уменьшается подача и это не создает
перегрузки ЭД. Однако из-за дополнительных потерь напора данный способ регулирования неэкономичен. Возможности регулирования поршневых насосов сравнительно с центробежными боле;
ограничены. Дросселирование их недопустимо, так как оно вызывает гидравлические удары. Регулирование подачи поршневых насосов достигается только благодаря изменению частоты вращения
ЭД. Для насосов всех типов этот способ наиболее экономичен, но он
усложняет и удорожает систему управления.
При оценке характера нагрузки ЭД необходимо также принимать во внимание пусковые свойства насосов. Центробежные насосы имеют квадратичную
зависимость момента сопротивления от
скорости: Мс = ю 2 . При этом3 потребляемая мощность пропорциональна кубу скорости: _Р=со . Отсюда следует, что центробежные
насосы характеризуются легкими условиями пуска. Для привода
этих насосов применяют ЭД, имеющие сравнительно жесткие механические характеристики и развивающие сравнительно небольшой
пусковой момент (ЭД параллельного возбуждения с легкой последовательной обмоткой -при постоянном токе и АД с короткозамкнутым ротором нормального исполнения - при переменном токе). У
поршневых насосов напор не зависит от подачи и, следовательно, от
скорости (моменты ЭД у них как при пуске, так и при установившейся скорости одинаковы). Условия пуска ЭП поршневого насоса
тяжелые (пусковой момент может достигать 2МН). Это объясняется,
во-первых, необходимостью вытеснять жидкость из трубопровода,
во-вторых, повышенным трением в поршнях и уплотняющих сальниках при начальном сдвиге с места, в-третьих, наличием большого
динамического момента, вызываемого маховиком. Исходя из пусковых условий для привода поршневых насосов целесообразно
использовать ЭД смешанного возбуждения с легкой последовательной обмоткой, если судно электрифицировано на постоянном токе,
и АД с глубоким пазом или двойной клеткой ротора - при электрификации на переменном токе.
Мощность (кВт) ЭД, необходимая для вращения вала вентилятора,
где <2 -подача вентилятора, м 3 /с; р давление (разрежение) воздуха, Па;
г| вент -КПД вентилятора.
174
Характер нагрузки ЭП вентилятора при изменении подачи и
напора, а также пусковые условия одинаковы с ЭП центробежного
насоса, поэтому для их привода применяют ЭД тех же типов.
Мощность (кВт) ЭД компрессора
где 2 -подача компрессора, м 3 /с; р— давление, Па.
Для ЭП компрессора характерна пульсирующая нагрузка (всасывание и сжатие) с частотой, пропорциональной частоте вращения
ЭД. Пульсирующая нагрузка на валу ЭД приводит к колебаниям
тока в сети (амплитуда зависит от момента инерции и жесткости
характеристики ЭП). Для ограничения колебаний тока компрессоры
снабжают маховиками. При выборе типа ЭД к поршневому компрессору учитывается также тяжелый режим пуска компрессора,
обусловленный наличием противодавления в период пуска и маховиком. Наиболее подходящим для этого привода при электрификации судна на переменном токе является короткозамкнутый АД с
повышенным пусковым моментом. Только в тех случаях, когда
компрессор работает периодически (например, в холодильных установках), целесообразно применять АД повышенного скольжения.
Для компрессоров на судах с сетями постоянного тока выбирают
ЭД смешанного возбуждения, последовательные обмотки которых
способствуют увеличению пускового момента и сглаживанию пульсаций тока при нагнетании и всасывании воздуха.
43. Системы управления
Режим работы вспомогательных механизмов определяется
режимом работы установки или системы, для которой предназначены механизмы. ЭП насосов и вентиляторов в основном работают
в длительном режиме с неизменной нагрузкой. Небольшая часть
насосов общесудового назначения работает эпизодически, в кратковременном режиме. К ним относятся санитарные насосы и насосы
пресной водт>т, обслуживающие гидрофоры, топливо- и маслоперег.т'очающиг насосы, пополняющие расходные цистерны, и др.
Судовые насосы, вентиляторы и компрессоры включаются
сравнительно редко, не требуют специальных способов торможения
к обычно работают без регулирования скорости. Важным отличием
приводов этих механизмов является отсутствие реверса ЭД, что
укрощает схемы управления, сводя их назначение лишь к пуску,
остановке и только в редких случаях -к незначительному изменению скорости.
На функциональные особенности схем управления влияет также
принятый для судна уровень автоматизации. При постоянной вахте
в машинном помещении имеет место первый уровень автоматизации. На данном уровне осуществляются управление, контроль,
175
защита и сигнализация с местных постов управления, располагаемых вблизи механизма или непосредственно на нем. В этом случае
для включения и отключения большинства насосов и вентиляторов,
работающих на постоянном токе, применяют пусковые реостаты, а
работающих на переменном токе-магнитные пускатели.
По правилам Регистра СССР некоторые ЭП обязательно должны иметь устройство для дистанционного отключения.. К ним
относятся ЭП вентиляторов машинного отделения, топливо- и
маслоперекачивающих насосов и котельных нагнетателей, т. е. механизмов, которые во время пожара могут раздувать пламя и
подавать масло и топливо в огонь. Посты дистанционного отключения указанных ЭП располагают вне машинно-котельного отделения и его шахты. Аналогичное требование распространяется и на
ЭП общесудовых вентиляторов. Их отключающее устройство,
обычно централизованного типа, размещают в рулевой рубке. На
пассажирских судах таких устройств должно быть 2, и они должны
быть удалены как можно дальше одно от другого. Дистанционное
отключение необходимо и для ЭП насосов, имеющих слив за борт
выше ватерлинии или в районе спуска спасательных шлюпок.
Выключатели устанавливают на шлюпочной палубе, чтобы в случае
спуска шлюпок при аварии судна можно было остановить насосы,
которые своей струей могут залить и затопить спущенные на воду
шлюпки.
Дистанционное отключение чаще всего выполняют при помощи
кнопок, включенных в цепь управления ЭП последовательно с
кнопкой «Стоп» местного поста управления. В других случаях
применяют выключатель, контакты которого включены в ту же
цепь. Аварийные кнопки и выключатели окрашивают в красный
цвет, выделяющий-их среди окружающих предметов. Ручки выключателей обычно пломбируют, чтобы не было ошибочных выключений во время нормальной эксплуатации.
Электроприводы аварийных трюмно-осушительных насосов
должны по Правилам Регистра СССР иметь дистанционные посты
управления не только для остановки, но и для пуска. Посты
управления должны быть установлены в помещениях, расположенных выше палубы переборок. Аналогичное дистанционное управление применяют для пожарных насосов, насосов химического пенотушения и т.д. Для ЭП грузовых и зачистных насосов применяют
дистанционное управление, обеспечивающее возможность не только пуска и остановки ЭП, но и в некоторых случаях регулирования
скорости.
Дистанционное управление по схемам релейно-контакторного
типа позволяет проводить автоматический пуск и остановку ЭД в
функции давления, уровня, температуры и Других параметров.
При первом уровне автоматизации автоматическое управление
широко применяют для ЭП: санитарных насосов; насосов пресной
воды, питающих гидрофоры; насосов, пополняющих различные
расходные цистерны; компрессоров пускового воздуха; компрессоров и насосов холодильных установок и др. Наиболее просто
осуществляется автоматизация центробежных механизмов, поскольку пуск их при закрытой задвижке неопасен. Сложнее обстоит дело
при автоматизации поршневых насосов, так как недопустим их пуск
при закрытой задвижке. Приходится применять усложняющие схему управления блокировки, которые не дают возможности пустить
ЭП, если задвижка закрыта, делать задвижки с дистанционным
приводом - электрическим или пневматическим и т.д.
При постоянной вахте в центральном посту управления и периодическом обслуживании машинных помещений имеет место второй
уровень автоматизации (знак А2). В этом случае обеспечивается
автоматическое управление по заданным программам совокупностью отдельных механизмов и контроль за их работой. Кроме
того, в ЦПУ предусматривается управление рядом ответственных
систем. Для повышения надежности при работе механизмов, обслуживающих энергетическую установку судна и ряда ответственных
систем, в работе ЭП предусматривается резервирование, что означает автоматическое включение резервного агрегата при выходе из
строя основного. Из ЦПУ должны осуществляться дистанционный
пуск и остановка насосов, обеспечивающих работу главных двигателей; автоматический пуск их резервных насосов при понижении
давления в соответствующих системах с последующей остановкой
ранее работавших насосов; автоматическое пополнение баллонов
пускового воздуха.
При отсутствии постоянной вахты в ЦПУ и машинных помещениях имеет место третий уровень автоматизации (знак А1). В этом
случае с помощью управляющего комплекса обеспечивается управление системами по заданным программам, а также корректировка
режимов работы системами без участия обслуживающего персонала. Более надежная работа механизмов достигается повышенным
контролем их состояния по увеличенному числу параметров.
Например, автоматическая работа компрессора пускового воздуха
предусматривает: автоматизированный пуск и остановку из ЦПУ и
местного поста; ручное управление, разгрузку при пуске и остановке; продувку компрессора во время работы; включение и выключение клапанов на линии подачи воды при пуске и остановке;
автоматическую защиту по давлению масла, охлаждающей воды,
давлению воздуха и температуре. Также должен осуществляться
автоматический пуск резервного компрессора при аварийной остановке и недостаточной подаче основного. По всем аварийным
параметрам в ЦПУ должна срабатывать аварийная сигнализация.
Для второго и третьего уровня автоматизации после исчезновения и последующего восстановления напряжения судовой электростанции находящиеся в работе приводы должны автоматически
вводиться в действие. Пуск ЭД необходимо производить по специальной временной программе в порядке важности ЭП.
177
44. Схемы систем управления
Большинство ЭП постоянного тока управляются с помощью
пусковых реостатов. Однако при мощности ЭП более 25 кВт или
при их частичной автоматизации и дистанционном пуске применяют также станции управления. Схемы управления ЭП вспомогательных механизмов, электрифицированных на постоянном токе,
эксплуатируются на судах старой постройки. Из-за ограниченных
функциональных возможностей они просты по принципу действия,
поэтому описание схем в учебнике не приводится.
При ручном управлении ЭП переменного тока в основном
используют магнитные пускатели, а при автоматическом управлении - специальные схемы релейно-контакторного типа, позволяющие осуществлять пуск и остановку ЭД в функции давления, уровня
температуры и других параметров. Для повышения надежности и
облегчения эксплуатации с сокращенной численностью машинной
команды в схемах управления ЭП ряда механизмов предусматривается резервирование, при котором в случае выхода из строя основного агрегата включается резервный.
Управление ЭП санитарного насоса. Для пополнения гидрофора,
необходимого для поддержания давления в системе, используется
санитарный насос. Ввиду малой мощности ЭД схемой (рис. 97),
предусмотрен прямой пуск при помощи обычного магнитного
пускателя. Предусматривается 2 вида управления: ручное и автоматическое. Переход с ручного управления на автоматическое осуществляется переключателем 5/4. Чувствительным элементом установки является датчик давления, смонтированный в верхней части
герметически закрытой расходной цистерны. При ручном управлении перетсчючатель режимов 8 А устанавливают в положение «Ручное», вследствие чего он присоединяет пускатель к местному кнопочному посту, необходимому при наладочных работах, проверках
и т.п.
Для автоматического управления переключатель поворачивают
в положение «Автоматическое» и присоединяют этим к пускателю
2-позйционный датчик давления с контактами 8Рт[л и 8Ртлл. Если
из-за большого расхода воды давлеив? в гидрофоре понизится и
станет меньше уставки датчика, последний замкнет свой контакт
&РШ;П и включит ЭД насоса. Давление в гкдрофоре начнет увеличиваться и через некоторое время контакт 8Рт1п разомкнется. Однако
ЭД из-за этого не отключится-линейный контактор КМ после
срабатывания получает питание через собственный вспомогательный котагт помимо контакта 8Рт1а. При достижении заданного
давления датчик снова сработает и разомкнет контакт 5Ртах, в
результате ЭД остановится, а схема управления возвратится в
исходное состояние, будучи готова к новому циклу работы.
По рассматриваемому принципу также легко автоматизируются
ЭП других вспомогательных механизмов. Например, для автомати178
А
В
С
Рис. 97. Принципиальная схема автоматического управления электроприводом центробежного санитарного насоса
ческой работы холодильной установки используются температурное реле и датчик давления, а для автоматизации питающих насосов
можно использовать датчик уровня.
Управление ЭП осушительного насоса. Система автоматического
осушения машинного отделения особенно необходима при его
безвахтенном обслуживании. Кроме откачивания всех жидкостей,
скапливающихся в сточных колодцах машинного отделения, эта
система сигнализирует об излишне длительной работе автоматизированного осушительного насоса. На рис. 98 приведена схема ЭП
осушительного насоса, применяемая на теплоходе «Новомиргород». Системой с помощью переключателя $А предусматривается
ручное и автоматическое управление. Ручное включение осуществляется пусковой кнопкой, а при автоматическом управлении роль
пусковой кнопки выполняют датчики уровня 8Ы и 8Ь2. При
верхнем уровне воды в каком-либо из колодцев срабатывает один
из датчиков уровня (8Ы или 5Ь2), подключая катушку соответствующего реле времени (КТЗ или КТ4). При срабатывании реле
времени включаются линейный контактор КМ и электромагнитный
клапан (УК/ или УК?) соответствующего колодца. Осушительный
насос начинает работать, откачивая воду из колодца через открытый электромагнитный вентиль сброса УК?, который подключается
при подаче напряжения на схему. Датчики уровня имеют большой
дифференциал между включением и отключением, и работа ЭД
происходит до размыкания контактов 8Ы или 5Ь2, что соответствует минимальному уровню воды в колодцах. В схеме последовательно с контактами датчиков уровня включены реле времени КТЗ
и КТ4, которые предотвращают ложные срабатывания этих контактов при колебании уровня в колодцах во время качки.
Работа ЭП осушительного насоса контролируется. При включенном линейном контакторе получает питание катушка промежуточного реле КУ. Контакты этого реле включают лампу НЬ,
сигнализирующую о работе насоса, и получает питание реле времени К 77, контролирующее время работы насоса. Если насос работает в течение времени, превышающего уставку реле (50 мин), то
179
У'"' ' г »//0с0с работает ОЬРНЬ до/ко
Рис. 98. Принципиальная схем» .штомачическс-го управления
электроприводом осупшгельного насоса
при замыкании контактов КТ1 формируется сигнал «Насос работает очень долго». При ненормальной работе насоса в случае
срабатывания теплового реле КК, отключающего ЭД. или при
отсутствии давления откачиваемой воды, когда замыкается контакт
реле давления 5/*, подключается реле времени АТ2, которое формирует сигнал «Насос неисправен».
Управление ЭП тоиливоподкачкаакипя* насосов. Для обеспечения надежности топлпвоподкач.-шаю'цей системы в схеме (рис. 99)
предусматривается автоматическое управление двумя тошювоподкачивающими насосами, один из которых является рабочим, а
второй находится в стадии ожидания для включения и выполняет
функции резервного насоса. Подобная система автоматического
управления позволяет поддерживать заданное давление топлива
(0,3 МПа) в цистернах.
Рассмотрим работу ЭП с начального периода включения, когда
давление в системе ниже 0,3 МПа и контакты 8Р контактного
манометра разомкнуты. При подаче напряжения на схему получает
180
питание реле времени КТ1, которое замыкает свой контакт и
включает реле КУ6. Последнее срабатывает и замыкает свои контакты в цепи катушек контакторов КМ1 и КМ2 и реле времени К Т2.
Реле времени КТ2 замыкает свои контакты, подготавливая для
включения промежуточные реле К УЗ и КУ4. Если в качестве
рабочего насоса принят первый, то при нажатии на кнопку «Пуск»
18В1 получает питание линейный контактор КМ1 и происходит пуск
электродвигателя М1 насоса. Замкнувшимися вспомогательными
контактами КМ1 подключается катушка КУЗ, благодаря чему
шунтируется кнопка «Пуск» 15 В 1 и получает питание реле К VI.
Замкнувшимися контактами К VI обеспечивается постоянное пита-
д в с
РИС. 99. Принципиальная схема автоматического управления электроприводом топливоподкачивающих насосов
т
ние катушки КУ1 на время работы ЭД. Разомкнувшиеся вспомогательные контакты КМ1 отключают реле времени КТ1,и последнее
через 5 с отключает катушку реле КУб. Размыкание контактов КУб
не отключает катушку реле времени КТ2, так как за указанную
выдержку времени давление поднялось до 0,3 МПа и контакты 5Р
контактного манометра замкнулись.
Если в процессе работы из-за неисправности первого насоса
давление в системе станет меньше заданного, то контакты 8Р
размыкаются и реле КТ2 не получает питание. Разомкнувшиеся
контакты КТ2 отключают реле КУЗ, что приведет к обесточиванию
КМ1 и отсоединению двигателя М1 от сети. Замкнувшиеся вспомогательные контакты КМ1 подают питание на реле КТ1, последнее
замыкает свой контакт и подключает реле КУб. Замкнувшимися
контактами КУб подключается реле времени КТ2, а также создается электрическая цепь катушки КМ2 через замкнутые контакты
реле КУ1, КУЗ, КУб и КУ2. Это приводит к пуску электродвигателя
М2 второго насоса. Последующее срабатывание аппаратуры управления аналогично пуску первого ЭД. Подобное аварийное состояние характеризуется тем, что размыкающие контакты КУЗ и
замыкающие контакты К VI оказываются замкнутыми и на щите
сигнализации загорается лампа НЫ, указывающая аварийное
состояние первого насоса.
Нормальная работа насоса характеризуется горением лампы
НЬ2. Подобная сигнализация применена и для ЭП второго насоса.
Схема имеет высокую надежность, однако при эксплуатации следует обращать внимание на герметизацию ЭД, так как проникновение внутрь ЭД топлива может привести к выходу его из строя.
Также необходимо следить за состоянием цепей сигнализации.
Управление ЭП компрессора пускового воздуха. Рассматриваемое устройство эксплуатируется на теплоходе «Сухуми», где
уста3
новлено 2 воздушных компрессора, имеющих подачу 240м /ч каждый при давлении 3 МПа. Компрессоры работают в полном автоматическом режиме. На схеме компрессора (рис. 100, а) показаны:
ЭМ1- электромагнитный соленоид, соединяющий нагнетательную полость 1 с атмосферой и служащий для разгрузки компрессора во время пуска;
ЭМ2- электромагнитный соленоид продувания нижней ступени 3;
ЭМЗ- электромагнитный соленоид продувания ступени 2 высокого давления;
ЭМ4 электромагнитный соленоид охлаждающей воды.
Автоматизированная работа ЭП (рис. 100, б) обеспечивается
датчиками давления с контактами 8Р1 и ВРГ. Когда давление
воздуха в баллонах нормальное, то контакты 8Р1 разомкнуты, а
8РГ- замкнуты. Схема обеспечивает автоматизированную работу
ЭП в двух режимах. В исходном положении для работы компрессора в основном автоматическом режиме необходимо поставить
182
Рис. 100. Электропривод
компрессора
пускового воздуха:
«--структурная
схема компрессора; б-принципиальная схема системы автоматического управления
переключатель 8А1 в положение 2, а переключатель 8А2 в центральном посту управления-в положение 1.
При снижении давления воздуха ниже уставки датчика давления
контакт 8Р1 замыкается и вследствие этого через размыкающие
контакты К ТЗ и КТ2 получают питание линейный контактор КМ и
промежуточное реле КУЗ, а также подключаются катушки реле
времени КТ2, КТЗ. Контактором КМ подключается ЭД, а промежуточное реле К УЗ подает питание на электромагнитный соленоид
УЙ/ разгрузки компрессора, способствуя уменьшению пусковых
токов ЭД. Если после пуска компрессора давление воды, контролируемое датчиком давления 8Р2, и масла, контролируемое датчиком
давления 8РЗ, нормальное, то их контакты переключаются на
подачу питания контактору КМ и реле времени К Т2 по другой
цепи, исключая контакты реле времени КТЗ. По окончании выдержки времени реле К 72 его размыкающие контакты отключают
реле КУЗ, поэтому электромагнитный соленоид УУ1 обесточивается
и закрывается, создавая нагрузку работающему компрессору. Когда
закончится выдержка времени реле КТЗ, его контакты переключаются и тем самым включается реле КУ2, которое разблокирует
цепь сигнализации компрессора (цепь сигнализации на схеме не
показана, но она блокируется на время пуска и стоянки компрес183
сора). После пуска компрессора вспомогательные контакты КМ
подают питание на электромагнитные соленоиды УУ2, УУЗ и УУ4,
благодаря чему закрывается продувание ступеней низкого и высокого давления и обеспечивается прохождение охлаждающей воды.
При закрытых электромагнитных соленоидах УУ1, УУ2 и УУЗ компрессор подает воздух в баллон. Работа компрессора по нагнетанию
воздуха происходит до тех пор, пока давление воздуха не достигнет
верхней уставки датчика давления.В этом случае его контакты 8Р1
размыкаются и компрессор останавливается. Цикл повторяется.
Схемой предусмотрен еще один автоматический режим работы,
когда переключатель 8А1 находится в положении 1, а выключатель
8АЗ замкнут. Как видно из схемы, в этом случае компрессор
работает постоянно, но когда давление воздуха достигает верхней
уставки датчика давления, его контакты 8РГ замкнутся и включат
реле КVI и реле времени КТ1. Размыкающий контакт КУ1 размыкается, и обесточенные электромагнитные соленоиды УУ2 и УУЗ
обеспечат продувание ступеней низкого и высокого давления, а по
истечении выдержки времени реле КТ1 включится реле КУЗ, которое подключает электромагнитный соленоид УУ1. Воздух компрессора стравливается и ЭП работает вхолостую, пока не снизится
давление и не разомкнутся контакты 8РГ. Этот режим применяют,
когда требуется обеспечить большой расход воздуха и частые пуски
ЭД нежелательны.
Давление воды и масла контролируется датчиками давления 8Р2
и 8РЗ, а температура охлаждающей воды - температурным реле 5К.
Если в процессе работы при двух рассмотренных видах автоматического управления снизится давление воды или масла, или повысится температура охлаждающей воды, то их контакты разомкнутся и обесточат катушку контактора КМ, а каждый переключающийся контакт 8Р2, 8РЗ и 8К замкнет свое реле сигнализации КУ4,
КУ5 и КУ6, которые при срабатывании укажут причину остановки
компрессора (цепь сигнализации на схеме не приведена). Недостатком рассмотренной системы управления является отсутствие периодической продувки компрессора во время работы, что приводит к
проникновению воды и масла в воздушную систему и отрицательно
сказывается на работе пневматических устройств.
Управление ЭП холодильной установки системы кондиционирования. Электрическая схема ЭП холодильной установки системы
кондиционирования (рис. 101), представленная двумя агрегатами
(компрессорно-конденсатным агрегатом типа МАК-ФУУ-180,р/11 и
охлаждающим насосом типа НЦВ 40/30), обеспечивает ручное и
автоматическое управление. В качестве приводных двигателей применяются АД: для компрессора-АМ92-4 (380 В, 55 кВт), для
насоса-АМ52-4 (380 В, 8 кВт). После включения соответствующего
автоматического выключателя на главном распределительном щите
подается напряжение на щит холодильной установки, о чем свидетельствует загорание желтой лампы НЫ.
184
При ручном режиме управления пакетный переключатель 8А
должен быть установлен в положение 1. При этом получит питание
промежуточное реле КУ4, которое замкнет свои контакты в цепи
магнитных пускателей КМ1 и КМ2, подготавливая тем самым к
пуску охлаждающий насос и компрессор. Пуск ЭД охлаждающего
насоса осуществляется до пуска компрессора. После нажатия на
пусковую кнопку 28В1 получает питание катушка промежуточного
реле КУ2, которое замыкает свои контакты и вызывает срабатывание магнитного пускателя КМ2, пуская тем самым электродвигатель М2 охлаждающего насоса. При срабатывании пускателя КМ2
получит питание также катушка промежуточного реле КУЗ, которое
замкнет свой контакт в цепи катушки КМ1, подготавливая к пуску
электродвигатель М1 компрессора. На щите через контакты КУЗ
загорится лампа НЬЗ, сигнализирующая о работе охлаждающего
насоса. При нажатии на пусковую кнопку 18В1 получит питание
Рис. 101. Принципиальная схема автоматического управления электроприводом
холодильной установки системы кондиционирования
185
катушка промежуточного реле К VI, которое при срабатывании
замкнет свой контакт в цепи катушки КМ1. Магнитный пускатель
КМ1 срабатывает, и ЭД компрессора пускается. При замыкании
вспомогательных контактов КМ1 получают питание катушки реле
КУ5 и К Т. Это приводит к поступлению питания к катушкам
электромагнитных соленоидов УУЗ, УУ4 и УИ5, которые открываются и обеспечивают 100 %-ную холодильную мощность компрессора. Загорание лампы НЬ2 свидетельствует о пуске ЭД.
Реле времени КТ, катушка которого получает питание при пуске
ЭД в течение 30 с, не размыкает контакт, обеспечивая питание
катушки К VI. За эту выдержку времени у работающего компрессора поднимается давление масла до уставки срабатывания датчика
давления 5Р5, который замыкает свои контакты, и разомкнувшиеся
контакты КТ не прерывают цепи питания катушки КVI. При
ручном режиме управления поддержание необходимой температуры в рециркуляционном канале осуществляется периодическим
включением и отключением установки.
При автоматическом управлении переключатель устанавливают
в положение 2 и нажимают пусковые кнопки 18В1 и 28В1. Если
температура в рециркуляционном канале выше заданной, то контакты термодатчика 5К замкнутся и получит питание реле КУ4.
Замкнувшиеся контакты КУ4 в цепи катушек магнитных пускателей
КМ1 и КМ2 вызывают их срабатывание, и происходит пуск охлаждающего насоса и компрессора в том же порядке, как и при ручном
управлении. После первоначального ручного пуска компрессора и
насоса их дальнейшая работа (пуск и остановка) осуществляется в
зависимости от тепловой нагрузки холодильной установки. Термодатчик 8К включает компрессор при температуре выше заданной и
отключает его при нормальной температуре. При понижении тепловой нагрузки для поддержания заданных параметров холодильной
установки должно произойти соответствующее понижение ее холодильной мощности, что осуществляется автоматически с помощью
датчиков давления 8РЗ и 8Р4. При снижении холодильной мощности от 100 до 75% размыкает свой контакт датчик 8РЗ и теряет
питание реле КУ6, которое замкнет свой контакт в цепи соленоида
УК/. Последний откроется, и подача компрессора уменьшится до
75%. При снижении холодильной мощности от 75 до 50% разомкнет свой контакт датчик 8Р4, вследствие чего теряет питание К V? и
замыкает свой контакт в цепи соленоидного клапана УИ?. Последний открывается, и подача компрессора уменьшается. При повышении тепловой нагрузки холодильная мощность установки увеличивается и закрытие (открытие) клапанов происходит в обратной
последовательности.
Схема обеспечивает работу компрессора от резервного охлаждения без охлаждающего насоса. Для этого переключатель 8А устанавливают в положение 3. Дальнейшая работа идет автоматически,
как было описано выше.
186
В электрической схеме холодильной установки системы кондиционирования предусмотрены следующие виды защиты:
тепловая (осуществляется тепловыми реле КК1 - КК4 магнитных
пускателей КМ1, КМ2);
нулевая (осуществляется промежуточными реле КУ1 и КУ2);
от коротких замыканий силовых цепей ЭД компрессора и
охлаждающего насоса (осуществляется автоматическими выключателями (2-Р7 и (}Р2, а цепей управления - предохранителями);
отключение компрессора и закрытие соленоида УИ5 в случае
повышения давления в нагнетающем трубопроводе или понижения
давления в смазочной системе.
Повышение и понижение давления в трубопроводе вызывают
срабатывание датчиков 8Р1 и 8Р2, а падение давления в смазочной
системе приводит в действие датчик 5Р5. Во всех случаях размыкание контактов любого из датчиков 8Р1, 5Р2 и 5Р5 приводит к
обесточиванию катушки К VI и отключению магнитного пускателя
КМ1, при котором компрессор останавливается. Реле КУ5 также
теряет питание и отключает электромагнитный соленоид УУ5 и
подключает катушку реле сигнализации К У8. Последнее срабатывает и на щите загорается лампа НЬ4, свидетельствующая об
аварийном состоянии холодильной установки. В случае превышения
давления в нагнетающем трубопроводе (понижения давления во
всасывающем) и в смазочной системе необходимо отрегулировать
соответствующие датчики давления.
45. Тиристорные преобразователи частоты
в электроприводе грузовых насосов нефтеналивных судов
На судах типа «Григорий Нестеренко» установлены ЭП грузовых насосов, выполненные фирмой «Стрёмберг» (Швеция), где
применен короткозамкнутый АД с тиристорными преобразователями частоты серии 8АМ1. Преобразователь имеет номинальную
мощность 250 кВт, номинальное напряжение 380 В и диапазон
регулирования частоты 0-100 Гц.
Входным блоком преобразователя (рис. 102, а) является выпрямитель В, собранный из полупроводниковых диодов по 3-фазной
мостовой схеме. Выпрямленное им напряжение пропорционально
напряжению сети переменного тока, поэтому в последующем оно
обозначено 1/с. Это напряжение поступает на промежуточное звено
ПЗ с фильтром низких частот и далее с наименьшим коэффициентом пульсации подается на инвертор АИ, который преобразовывает
постоянный ток в переменный. В комплекте с промежуточным
звеном АИ (рис.'102, б) в общем случае является переключателем,
на выходе которого образуются периодические колебания напряжения пирамидальной формы, приближающиеся к синусоидальным. В
рассматриваемом инверторе выходная ЭДС формируется по сину187
соидальному закону с помощью широтно-импульсной модуляции,
что достигается переключением с заданной частотой и определенной последовательностью пары тиристоров каждой фазы моста
(Ш7 и У814, У812 и КШ, КШ и Шб). За счет того, что период
коммутации Тк значительно меньше рабочего периода преобразователя частоты, линейное напряжение близко к синусоидальной
форме.
Включение и отключение тиристоров требует специальных мер.
Например, при отключении тиристора необходимо обеспечить
уменьшение протекающего через него тока до нуля и задержку
подачи прямого напряжения. Для этого применена специальная
и-} _я .
С
'
0 П
1
1
05
г
1
«<к
д
'
М"
\
\
?:
г
1
1
^— -'
I
5Я
НУ
11
1
я'
N
%
-И
ва
—•>•
ЛЯ
\ -^А пп ,7
ч
цгг '
№
/°^ 1
|, •
ТУГ
,
«•
нп\
*
6с
|
п Ч
1
р
^
1
1~"
1—
1 №
Т1 ^1
Т1 1
4_—1
кч
ап
1
и л г
-Г ц—<
-С5
С1 =|
нн
г
Й/'У
+
=
21
упг УЛЗ \7
мат
(+)
И
• *
7
^
>Л
3 4'.
]Г4
тге\
УИН
\
и -Г
2 \ УП1
"г?
4
1,0 т.
Тя
V
/г- ^7<> НУ
ипт 7/9/7 ения
У512 \7
Н
р»
2^
И
\ / ^г
*
СЧ
"1
2\ VIII
1 [
ч
7
2
~У515
Л
> . ,
\ Н блоку
^ [ \^^2^
1 в
V
Н электродвигателю
- \ ппппКпрнмя
РИС. 102. Тиристорньш преобразователь частоты серии 8АМ1:
я- структурная схема; б схема силовой цепи
188
УЯ6
1 1\
переключающая схема, входящая в промежуточное звено постоянного тока. Пассивные компоненты переключающих схем (конденсаторы и дроссели) являются общими для всех фаз тиристоров, а
поэтому выполняют переключения последовательно и поочередно
для разных фаз. Используется принудительная коммутация, выполненная с помощью конденсаторов С2 и СЗ. Для запирания
тиристоров с помощью конденсаторов подается импульс обратного
тока, а затем к его электродам прикладывается обратное напряжение на то время, которое необходимо для восстановления запирающих свойств в прямом направлении. В инверторе применен принцип
2-ступенчатой коммутации: он включает' в себя 6 рабочих тиристоров У511-У816, 6 обратно включенных диодов У01-УО6 и 6
коммутирующих тиристоров У821- У826. Коммутирующие тиристоры позволяют в определенный момент времени разряжаться конденсаторам С2 к СЗ в обратном направлении проводящего рабочего
тиристора и тем самым приводить его в непроводящее состояние.
Покажем это на примере работы фазы А, где используются
рабочие тиристоры У5П и У814, коммутирующие тиристоры У521 и
У824. В исходном положении, когда тиристор У511 является проводящим, конденсаторы С2 и СЗ заряжены, имеют полярность напряжения, указанную без скобок, и разность потенциалов на выводах:
Vс2 = 0,5 {7С: {7с3 = 1,5 1/с; (Ус1 = С/ ч .. Проводящим является тиристор У$11, и ток нагрузки проходит но цепи « + »-И>7/-фаза А
двигателя. При переключения фазы А с плюсовой шины на минусовую необходимо закрыть тиристор У511 и включить тиристор У514.
Для этого следует снять импульс с управляющего электрода У511 и
дать положительный импульс на управляющий электрод У521,
благодаря чему он откроется. При '«ом образуются цепи разряда
конденсаторов: « + С2» У821 У811 и И) 1 -1Л -« - С2»; « + СЗ» -- У821-У$11 и УО1- Ы С1- « — С?». Ток разряда проходит встречно с рабочим током ЭД, поэтому ток тиристора УБП быстро
уменьшается до нулевого значения, благодаря чему тиристор У811
закрывается. Конденсаторы С2 и СЗ продолжают разряжаться через
диод И)7, и одновременно происходит их перезаряд на противоположную полярность, указанную в скобках. К концу перезаряда
напряжения на конденсаторах становятся следующими: 11с2 = 1,5 х
х [7С; 1/с3 — 0,5 (7С. В этот момент времени подается импульс на
управляющий электрод У$14, тиристор открывается и анод диода
И)1 имеет полярность « — ». В результате этого диод закрывается и
разряд конденсаторов прекращается. При открытом рабочем тиристоре У814 ток от фазы А двигателя через него протекает к
минусовой шине. Переключение на плюсовую шину достигается
отключением У514 (также любого тиристора катодной группы) и
включением УБ11 или любого -тиристора анодной группы. При
снятии импульса с управляющего электрода У814 и подачи импульса на коммутирующий тиристор У824 образуются цепи разряда
конденсаторов:
189
«(+)С2»-С1-и-1Ы4 и
«( + )СЗ»-Ы-Ю14 и УО4-Ш4-«(-)СЗ».
Применяемые дроссели Ы обеспечивают снижение пиковых
значений разрядных токов, что увеличивает длительность разряда
конденсаторов и создает тем самым необходимое время для восстановления запирающего слоя тиристоров. Время коммутации,
составляющее от 3 до 50 мкс, обеспечивает необходимую межфазную коммутацию. Инвертор со схемой переключения является
основным узлом, обеспечивающим качество работы и надежность
преобразователя. В связи с этим блоком контроля БК (см. рис.
102, а) осуществляется контроль его рабочих параметров, а блоком
защиты БЗ-защита основных узлов. В первую очередь это относится к защите от перенапряжения тиристоров, которая обеспечивается цепями КС, включенными параллельно полупроводниковым
приборам (на схеме не показаны). Напряжение тиристорного моста
контролируется, для чего из цепей защиты КС выводится сигнал на
импульсный усилитель ИУ, который регулирует время коммутации
тиристоров. При помощи светодиодов осуществляется контроль
исправного состояния защиты КС. Важными параметрами инвертора являются напряжение сети, значение переключающих токов
конденсаторов и его нагрузка. Значения этих параметров фиксируются, о чем будет сказано ниже.
Система управления преобразователем предусматривает подключение его к силовой сети с помощью релейного блока РБ и
управление коммутацией тиристоров, выполняемое блоком управления БУ. Для пояснения работы преобразователя дополнительно к
структурной схеме приведены в сокращенном варианте схемы цепей
катушек реле и контакторов, входящие в релейный блок РБ (рис.
103). При включении разъединителя ()8 и автоматических выключателей ()Р1, 0,Р2 к сети подключаются преобразователи (на схеме
показан только трансформатор ТУ1, обеспечивающий напряжение
220 В для питания катушек контакторов) и блок соединения БС,
и) \+
0
'Ш1
| Ш
! УН ,
.-"" ГЫ .'
КП
0тБУ<
190
КУ4-
/ п^. пи - —О
/ГИ5
,
^1
п^
и
, гг* и
3
-220В
[-|/Г^
^^
/ГЛ72
х
Л
Д'
Рис. 103. Схемы цепей катушки (а) и контакторов (б) тиристорного преобразователя
частоты
вырабатывающий вспомогательное напряжение 48 В для питания
катушек реле и электронных приборов. При включении этих аппаратов сигнал, поступающий от блока управления, примет значение
+ 48 В и реле КУ1 сработает, замкнув свои контакты (рис. 103, а).
Последующее включение преобразователя в работу осуществляется
с поста управления выключателями 8А1 и 8А2. Если выключатель
8А1 поставить во включенное положение 2, то замкнутся его
контакты 18А1 и 28А1, сработает реле КУ6 и, замкнув свои
контакты в цепи катушки КМЗ, вызовет срабатывание этого контактора. Блок выпрямителя подключается к сети и работает в качестве
1-фазного диодного моста, заряжая конденсаторы через резистор Л.
Зарядной цепью ограничивают зарядный ток до необходимого
значения. Когда конденсаторы зарядятся (примерно через 3 с),
сигнал электронного устройства примет значение + 48 В, что
вызовет срабатывание реле К У4; тем самым подключается катушка
КМ1. Главный контактор КМ1 подключает напрямую 3 фазы сети к
выпрямителю, а контактор КМЗ отключается. При этом выключатель 8А1 переводится в положение 1, контакты 28А1 размыкаются,
но их цепь оказывается зашунтированной контактами КУ6 и КУ4.
Последующий пуск осуществляется поворотом выключателя
8А2 в положение 2, при котором замкнутся его контакты 18А2 и
28 А2. Сработает реле КУ5 и подаст сигнал на блок управления (цепь
не показана), благодаря чему начинается коммутация тиристоров
инвертора. Контакты КУ5 частично блокируют цепь выключателя,
а поэтому 8А2 переводится в положение 1, при котором контакты
28А2 размыкаются, а контакты 18А2 остаются замкнутыми, т. е.
релейные цепи сохраняются. Преобразователь начинает работать,
от блока управления поступает сигнал + 48 В на катушку реле К УЗ,
и последнее при срабатывании своими замыкающими контактами
(на схеме не показаны) подает сообщение «работает».
Остановка преобразователя достигается переводом выключателя 8А2 в нулевое положение (контакты 18А2 размыкаются), при
этом отключается реле КУ5 и тиристорный блок перестает работать. Его можно отключить также выключателем 8А1, но при этом
отключится и главный контактор. На схеме в точках 1-3, 5-7, 9-11
не показаны блокировочные цепи, которые также отключают преобразователь при различных неисправностях или при аварийной
остановке.
Управление коммутацией тиристоров, определяющих выходной
ток заданной частоты, осуществляется блоком управления (рис. 104,
а). От блока соединения к релейной плате РП поступает аналоговый
сигнал в виде напряжения С/норм, значение которого устанавливается
потенциометром в зависимости от заданной частоты /зад (для /зад =
= 50 Гц значение 1/норм = + 3,33 В). При прохождении через плату
РП он изменяется по значению и полярности (на выходе при
/зад = 50 Гц значение 1/норм = 2 В) и с измененными параметрами
поступает на ограничительную плату ОП. Эта плата регулирует
191
работу преобразователя и на нее, кроме нормируемого сигнала
*Унорм, поступают контролирующие сигналы С/с, /к и / акт , от значения которых зависит качество его работы. Сигнал С/с характеризует
напряжение сети и поступает от конденсатора С1 (см. рис. 102, б)
через согласующий резистор (при номинальном напряжении сети
С/с = + 5 В). Сигнал /к определяет переключающий ток конденсаторов, снимается с трансформатора ТА блока инвертора и поступает
на плату через согласующий резистор в виде напряжения [7К.
Сигнал /акт тока активной составляющей характеризует потребляемую ЭД активную мощность и соответственно значение вращающего момента. Поступающий на ограничительную плату (рис. 104, б)
нормируемый сигнал [/норм с помощью операционных усилителей
ОАЗ-ОА4 преобразуется следующим образом: на выходе ВАЗ он
имеет минусовую полярность, проходит через диод ИХ?, и с выхода
ОА4 снимается положительный сигнал, принимающий при / =
= 50 Гц значение (/новм = + 2 В, Операционный усилитель ОА7
УПЮ
Рис. 104. Блок управления тиристорным преобразователем:
а-структурная схема; б функциональная схема ограничительной платы
192
преобразует его в сигнал обратной полярности, а усилитель ОА8
делает ^/норм положительным, т.е. значение сигнала не меняется,
Ограничительная плата регулирует нагрузку ЭД. обеспечивая
ему оптимальный режим. При увеличении нагрузки ЭД соответственно возрастает и вращающий момент Мвр — г м / а к т Ф. Это вызывает увеличение активной составляющей тока / а к 1 , отрицательный
потенциал на входе операционного усилшеля ОА1 будет превалировать над положительным значением 1/с (результирующий сигнал на
входе усилителя будет отрицательным), и в связи с этим на выходе
ОА1 образуется положительный сигнал. Он поступает на вход
усилителя 1)А4 и, являясь встречным с основным сигналом, уменьшает потенциал на входе ЬА4. Это приводит к уменьшению
положительного сигнала в точке /, что в конечном итоге вызовет
уменьшение нормируемого сигнала заданной частоты. Уменьшение
частоты выходного тока преобразователя приводит к снижению
частоты вращения ЭД, его мощности и вращающего момента. Если
же в процессе работы происходит увеличение напряжения сети и
поступающий с конденсатора положительный сигнал 1/с возрастает,
то суммарное отрицательное напряжение на входе усилителя О А!
по абсолютной величине становится меньше. Это вызовет уменьшение положительного сигнала на выходе ПА1, что приведет к
увеличению нормируемого сигнала заданной частоты и ЭД автоматически увеличивает частоту вращения при допустимом значении
тока / а к т . Ввиду того что работа усилителя ОА1 происходит лишь
при сигнале -/ З К 1 , большем по значению, чем положительный
сигнал 1/с, подаваемый на тот же вход, го потенциометром Як
можно устанавливать предельное значение момента.
Токовая нагрузка ЭД регулируется также операционным усилителем ОА2, осуществляющим контроль за переключающими токами конденсаторов, на вход которого подаются сигналы 11К и / акт .
Положительный сигнал от переключающих токов конденсаторов (7К
больше отрицательного сигнала от -/ акг . и соответственно результирующий сигнал на входе операционного усилителя ОА2 всегда
положителен. С выхода ОА2 в этом случае снимается отрицательный сигнал, который через диоды И5/ и У04 поступает на выход
усилителя ОАЗ и суммируется с основным отрицательным сигналом. В случае возрастания вращающего момента на валу ЭД
значение ~/ ак , увеличивается, а результирующий входной сигнал
усилителя ОА2 уменьшается, что приводит к уменьшению результирующего сигнала на выходе усилителя ОАЗ. Это вызовет снижение
нормируемого сигнала заданной частоты 1/норм, благодаря чему
нагрузка ЭД уменьшится. Наоборот, увеличение переключающих
токов конденсаторов при коммутации тиристоров вызовет увеличение положительного сигнала на входе усилителя ОА2, и частота
тока преобразователя увеличится.
Остановка ЭД связана всегда с уменьшением частоты тока
преобразователя, что обусловливает работу ЭД в режиме рекупера7
:(;,к. 1274.
193
ции с отдачей электрической энергии в сеть. Данный режим работы
может вызвать перенапряжение на конденсаторах. Для предотвращения этого явления в блоке применены компараторы ОА5 и ОА6.
На инвертирующие входы этих компараторов подается сигнал 1/с,
соответствующий напряжению сети, а на неинвертирующие входы
подключаются эталонные напряжения, соответствующие 116%-ному и 119%-ному номинальным напряжениям сети. При нормальных
условиях компараторы не работают, так как положительный сигнал, снимаемый с выхода компараторов, заперт диодами УО 7 и УО8.
Если напряжение {7С при торможении ЭД возрастает до 116%
номинального, то с выхода компаратора ВА5 снимается отрицательный сигнал, который через диод УВ7 и резистор К16 поступает
на вход операционного усилителя ПАЗ и суммируется с основным
отрицательным сигналом. Соответственно сигнал заданной частоты увеличивается, и ЭД начинает работать с большей частотой
вращения. При этом отдача электрической энергии в сеть уменьшается и напряжение на конденсаторах восстанавливается до номинального значения. Обратная связь, выполненная с помощью диода
У05 и резистора 7?77, обеспечивает более плавный переход на
большую частоту вращения. Компаратор ВА6 работает аналогично, но повышает частоту тока при увеличении напряжения на
конденсаторах до 119% номинального.
С помощью электронного устройства А (см. рис. 104, б) предусмотрено дополнительное регулирование частоты тока в зависимости от напряжения сети. Сигнал [715 вырабатываемый этим
устройством, положителен и по значению пропорционален С/ с . При
возрастании напряжения {7С значение II1 увеличивается и при
суммировании с основным сигналом напряжение на входе усилителя О А 7 становится больше, что приводит к возрастанию частоты
тока преобразователя. Если же напряжение сети уменьшается до
96% номинального, то формируемый этим устройством положительный сигнал [72 на входе усилителя ОА8 вычитается из основного отрицательного сигнала и частота тока преобразователя
уменьшается. Таким образом, ЭД переходит в режим рекуперации и
отдает в электрическую сеть столько энергии, сколько необходимо
для поддержания установленного значения 17с.
Откорректированный нормируемый сигнал с ограничительной
платы поступает на плату преобразователей 7777 (см. рис. 104, а), где
аналоговое значение напряжения {7норм преобразуется в импульсные
сигналы. Преобразователи данной платы образуют 3 вида импульсных сигналов: заданной частоты тока (/^ад); заданного числа импульсов за полупериод (2ИМП); заданного напряжения, определяющего выходное напряжение преобразователя (С/ зад ).
Преобразователь, вырабатывающий импульсы, определяющие
/зад' работает только в функции нормируемого сигнала. Число
импульсов, вырабатываемое другим преобразователем за полупериод, зависит как от частоты вырабатываемого тока, так и от
194
заданного значения выходного напряжения: 2ят — Р (&трм, Умл)Очевидно, при уменьшении частоты, когда длительность периода
увеличивается, необходимо увеличивать число импульсов за каждый полупериод. Количество импульсов также определяет значение
выходного напряжения.
Сигнал заданного значения напряжения, вырабатываемый
третьим преобразователем, определяет качество работы ЭД, который при частотах 0-50 Гц имеет постоянный магнитный поток
лишь при условии !///= сот!. Очевидно, преобразователь, формирующий этот сигнал, должен реагировать как на изменение выходной частоты тока так и на изменение напряжения сети. Например,
при уменьшении частоты и возрастании длительности полупериода
длительность импульса сигнала также должна автоматически увеличиваться. Ес.чк при работе напряжение сети уменьшилось и стало
ниже номинального, то импульсы, формирующие это напряжение
на выходе, о уду т также меньшими по величине. Но преобразователь, формирующий их, на основании разницы между номинальным и действительным значениями напряжения сформирует импульсы большей длительности, благодаря чему выходное напряжение на зажимях двигателя остается неизменным. Преобразователь
также увелмчиьаог ч/гибельность импульса при работе ЭД с увеличенной нагрузкой в области малых частот. При большом моменте
на валу А/ = см /«, Ф значение /акт велико, поэтому вырабатывается
дополнительный сигнал (Удоп, который поступает на преобразователь. Последний, увеличивая длительность импульса, способствует
повышению напряжения на выводах ЭД, что приводит к росту
вращающего момента за счет увеличения магнитного потока (роста
тока при увеличенном моменте нет). Таким образом, сигнал преобразователя заданного выходного напряжения определяется многозначной функцией, зависящей от ряда параметров: [7зад = !•'(/зад,
^дсйст'^ном' 4кД а также от сигналов блока логики.
Выданные платой преобразователя управляющие сигналы (/,ад,
2ямп, и,ад) поступают через схему согласования СС1 на плату
микропроцессора (рис. 105). в устройство согласования по времени
УС, функцию которого выполняет программируемый таймер (сигнал 2!„мп предварительно обрабатывается блоком логики 577).
Центральный процессор ЦП по программе, заложенной в постоянном запоминающем устройстве ПЗУ, обрабатывает данные УС и
нофазно формирует управляющие сигналы (/ з а д л ,..., / задС ; 2 и м п 4 ,...,
и
Х импГ ; С/ з а а Л ,.... 1/.,адС) направляет в блок вывода БВ. Эти сигналы
через схему согласования СС2 подаются на плату выходного
каскада ЬК (см. рис. 104, а\. Плата выходною каскада определяет
точнуо дл./Г|{'.<П'11«ть времени сигналов, окончательные моменты
включччшх лфпсгоров. усиливает эти сигналы и через логику
нанраь.мяет на плату импульсных усилителей НУ. Блок импульсных
усилителен состоит из деляги усилителей: но одному- на каждый
главный тиристор и по одному -на 2 вспомогательных тиристора
Т-
195
и
зад
-ГцадА
А
~2цнп
-УзадА
- ?задВ
-2импВ
-имп
Рис. 105. Структурная схема п л ш ы микропроцессора тиристорною преобразователя
одной и той же фазы. С лого блока усиленные сигналы поступают
на управляющие электроды тиристоров, вызывая работу инвертора.
При работе тиристорного преобразователя частоты возникают
неисправности, основными из которых являются: неправильное
переключение тиристоров; одновременное включение тиристоров
одной фазы (опрокидывание); повышение температуры в тиристорном блоке выше допустимой; увеличение тока ЭД сверх допустимого; замыкание на корпус; перегрев ЭД. При большинстве неисправностей блок управления воздействует на блокировочные цепи
контактных релейных устройств, что приводит к отключению преобразователя. Сигнал неисправности воздействует через блок контроля. Запоминающие устройства этого блока фиксируют поступившие сигналы неисправности и включают светодиоды. Работа светодиодов не прекращается до устранения возникающих помех. Неисправности устраняют согласно инструкции по эксплуатации.
Так как преобразователи типа 8АМ1 в диапазоне частот 0--50 Гц
работают при постоянном магнитном потоке, то возможно их
использование для ЭП палубных механизмов. Регулирование частоты вращения ЭП палубных механизмов может осуществляться
изменением входного сигнала заданной частоты с ромощью потенциометра релейной платы, связанного с управляющим контроллером. Опыт эксплуатации тиристорных преобразователей показал их
высокую надежность, поэтому в ближайшее время они получат
широкое распространение на судах для регулируемых ЭП.
46. Особенности эксплуатации
Эксплуатация электрооборудования вспомогательных механизмов включает: готовность ЭП к действию; техническое обслуживание, обеспечивающее исправное состояние ЭП; ремонт, восста196
навливающий до необходимого уровня технико-эксплуатационные
характеристики ЭП. Нормы и порядок технической эксплуатации
определяются соответствующим сводом правил, различного рода
судовыми инструкциями, а также заводскими формулярами и
паспортными указаниями. Электротехнический персонал обеспечивает техническое обслуживание только электрических машин и
аппаратов. Техническое обслуживание самих вспомогательных механизмов обеспечивает машинная команда. Однако эксплуатационное состояние самих механизмов должно быть полностью известно
электротехническому персоналу. Без учета этой взаимосвязи эксплуатация ЭП недопустима.
Наиболее серьезной аварией электрооборудования вспомогательных механизмов является выход ЭД из строя. Причинами этого
могут быть: механические неисправности механизма и системы
(поломка насоса или перекрытие клапанов); снижение сопротивления изоляции обмоток ЭД вследствие попадания внутрь жидкости
(воды, топлива, масла). При внешнем осмотре проверяют качество
контактных соединений и внешний вид элементов, приборов и
оборудования, входящих в ЭП. По внешнему виду (потемневшие
резисюры, вспученные конденсаторы, оплавленные концы) можно
своевременно предотвратить неисправность.
Перед пуском полагается осмотреть ЭД снаружи и внутри,
чтобы убедиться: нет ли предметов, которые могли бы помешать
вращению ротора, нет ли скоплений пыли у входных вентиляционных отверстий. Если ЭП бездействовал длительное время или был в
ремонте, то перед пуском его тщательно осматривают, проверяют
наличие и целостность щеток, пружин, щеткодержателей, нет ли
масла и влаги на обмотках, чистоту и шероховатость коллектора и
т.д. Затем, если эго возможно, прокручивают якорь (ротор) ЭД
вручную на один-два оборота, проверяя, не мешает ли что-нибудь
вращению. Необходимо измерить сопротивление .изоляции ЭД
вместе с пускорегулировочной аппаратурой и питающими кабелями. Это делают при помощи переносного мегаомметра. Сопротивление изоляции должно быть согласно Правилам Регистра СССР не
менее 0,7 МОм при рабочей температуре ЭП. В холодном
состоянии сопротивление изоляции должно быть выше (1,52 МОм). Если проверка показывает, что сопротивление изоляции
слишком низкое (например, менее 0,5 МОм), то пускать ЭП
нельзя - необходимо его высушить. Кроме проверки ЭД, перед
пуском внимательно осматривают пускорегулировочную аппаратуру, чтобы убедиться в ее исправности и готовности к пуску.
После осмотров и проверок, объем которых зависит от продолжительности периода бездействия ЭП, подают питание на схему
управления, включив рубильник или автоматический выключатель
на распредели тельном щиге. В большинстве случаев о ютовноети
ЭП к пуску свидетельствует загорание специальной сигнальной
лампы, установленной в месте, откуда происходит управление ЭП.
197
Затем осуществляют пуск ЭП и наблюдают за последовательностью срабатывания реле и контакторов. При этом обращают
внимание на четкость срабатывания аппаратов и реле, соответствие
(примерно) выдержек времени реле требуемым, проверяют блокировки, защиту, сигнализацию и т. п. Если во время пуска замечены
необычный шум, чрезмерная вибрация, запах дыма и т.п., то ЭП
немедленно останавливают и выясняют причины неисправности.
После окончания пуска ЭП продолжительного режима работы
необходимо некоторое время понаблюдать за ними: убедиться, что
шум ЭД нормальный, вращение равномерное, без рывков, искрения
под щетками нет. Кроме того, надо проверить нагрузку ЭП по
амперметру-она должна быть не выше номинальной.
При самопроизвольной остановке ЭП (например, из-за срабатывания защиты) повторно пускать ЭД запрещается. Нужно отключить питание, выяснить причину остановки, устранить ее и только
после этого можно возобновить работу ЭП.
Кроме общих рекомендаций по обслуживанию электрооборудования вспомогательных механизмов существуют частные рекомендации, применимые для конкретных ЭП. Например, специфическими неисправностями в работе автоматизированных насосов является нарушение регулировки датчиков давления или нарушение
нормальной работы-контактов микровыключателей датчиков уровня. Поэтому, помимо выполнения общих рекомендаций по обслуживанию и проверке правильности работы контактов аппаратуры
схемы, необходимо обращать особое внимание на исправность
работы микровыключателей поплавкового устройства и соответствие уставок срабатывания датчиков давления их заданным значениям. Специфическими неисправностями рефрижераторных установок являются обрывы в цепи катушек электромагнитов, оперативных цепей автоматики и сигнализации, а также неисправности
контактов датчиков и реле. При эксплуатации системы кондиционирования воздуха необходимо регулярно проверять работу датчиков
температуры, влажности и давления, а также терморегулятора,
сравнивая фактические значения давления, температуры и влажности при срабатывании датчиков с заданными значениями их
уставок.
Обслуживание ЭП компрессоров, кроме выполнения общих
требований, сводится к периодическим проверкам срабатывания
аппаратуры автоматики при заданных значениях уставок. Специфические неисправности при работе: обрывы в катушках электромагнитов; нарушения цепей и нормальной работы контактов датчиков
давления, температурных реле и электроконтактного манометра и
других датчиков.
При тяжелых условиях эксплуатации надежная работа автоматизированных ЭП машинных отделений обеспечивается регулярной
проверкой чистоты контактов датчиков, реле и другой аппаратуры.
Особое внимание обращают на резервные насосы, компрессоры и
198
вентиляторы. Их следует содержать в таком состоянии, которое
допускало бы немедленный пуск в условиях эксплуатации.
Автоматизированные вспомогательные механизмы должны
быть немедленно отключены: при появлении дыма или огня из ЭД,
пускорегулировочной аппаратуры или аппаратуры автоматики;
большой вибрации, угрожающей сохранности ЭП; несчастном случае с обслуживающим персоналом; поломке приводного механизма; недопустимом нагреве подшипников; резком снижении или
повышении частоты вращения.
При уровнях автоматизации, допускающих безвахтенное обслуживание или вахту с сокращенным машинным персоналом, необходим постоянный контроль за исправным состоянием сигнализации.
Надежная работа сигнализации обеспечивает своевременное вмешательство электротехнического персонала в случае аварии ЭП.
Контрольные вопросы-задания
1. Как классифицируют судовые насосы и вентиляторы?
2. Перечислите основные особенности систем управления при различных уровнях
автоматизации.
3. Какие параметры влияют на нагрузку электродвигателей вспомогательных механизмов и каким образом изменяются условия пуска?
4. Назовите виды электродвигателей, применяемых для привода вспомогательных
механизмов.
5. Каковы основные функции тиристорного преобразователя частоты в электроприводе грузового насоса?
6. Как влияет нагрузка электродвигателя на работу тиристорного преобразователя
частоты?
7. Каковы характерные особенности эксплуатации электроприводов вспомогательных
механизмов?
Глава 9
ЭЛЕКТРОПРИВОДЫ РУЛЕВЫХ И ПОДРУЛИВАЮЩИХ
УСТРОЙСТВ
47. Общие сведения
Рулевое устройство предназначено для обеспечения управляемости судна: удержания его на заданном курсе, изменения курса и
маневрирования. Руль, рулевая машина, а также элементы управления и контроля в целом составляют рулевое устройство судна.
Почти повсеместно для привода руля используют ЭД, которые в
сочетании с передаточным механизмом и органами управления
называют рулевыми приводами. Управление РЭП обеспечивает
перекладку руля, его остановку, реверсирование, регулирование
скорости и т. п.
На судах применяют рули различной формы и конструкции.
Наиболее распространенное рулевое устройство показано на
рис. 106. Оно состоит из пера руля / и баллера 2, переходящего в
нижней части в рудерпис 4. Баллер - стальной вертикальный вал проходит в румпельное помещение судна через отверстие в ахтерштевне, называемое гельмпортом. Место прохода уплотнено сальником 3. На рудерписе есть петли 5, при помощи которых руль
навешен на штыри рудерпоста 6. Перо профильного руля состоит из
каркаса, обшитого с боков стальными листами. Для поворота руля
на верхнюю часть баллера надевают румпель, связанный с передаточным механизмом рулевого устройства.
По расположению частей пера руля относительно оси вращения
различают простые, балансирные и полубалансирные рули
(рис. 107). Форма пера руля чаще
всего произвольная, как на этом
рисунке, но применяют и рули
прямоугольной формы. У простых рулей ось вращения совпадает с передней кромкой руля.
Балансирные рули применяют,
чтобы уменьшить моменты на
баллере, требуемые для перекладки руля. Ось вращения этих рулей
делит плоскость пера на 2 части:
носовую (балансирную) и кормовую. Отношение площади баРис. 106. Рулевое устройство
200
лансирнои части ко всей площади
пера руля называют коэффициен1
1
том компенсации. Значение его
/?
(0,15-0,2) существенно влияет на
в1
характеристику момента на бал1
.
1
лере и соответственно на нагрузку
1
РЭП. Полубалансирный руль от1,
1
г,
личается от балансирного тем,
1 ^,
что его балансирная часть занимает не всю высоту руля.
Рис. 107. Типы судовых рулей:
В последнее время для повоа-простой; б- балансирный;
рота судов на малых скоростях
в - полубалансирный
начали применять активные рули.
В перо руля встраивается двигатель, вращающий внутри кольцевой насадки вспомогательный винт. При отклонении руля от
диаметральной плоскости этот вспомогательный винт создает упор,
поворачивающий судно.
Перекладка руля, необходимая для поворота судна, осуществляется с помощью силового ЭД, который воздействует на руль через
передаточный механизм. Управление ЭД осуществляется различными системами управления с постов управления, один из которых
устанавливается в рулевой рубке. Система контроля служит для
проверки исполнения заданной по перекладке руля и результатов
его действия на судно. В систему контроля входят рулевой указатель-аксиометр, позволяющий определить положение пера руля
относительно диаметральной плоскости, и репитер гирокомпаса,
показывающий курс судна и его изменение. В современных РЭП
информационные приборы контроля встраивают в пост управления.
Используемые на транспортных судах РЭП отличаются большим
многообразием. Это связано с конструктивными особенностями
рабочего органа-режимом работы, видом механических связей
между ЭД и рулем, степенью автоматизации и т. п.
48. Силы и моменты, действующие на баллер руля
Изменение направления движения судна достигается перекладкой руля на тот или иной борт. Рассмотрим принцип действия руля.
Погруженный в воду руль, находясь в диаметральной плоскости
движущегося вперед судна, испытывает с обеих сторон одинаковое
давление набегающих струй воды и не влияет на направление
движения судна. Если отклонить руль от диаметральной плоскости
на угол а (рис. 108), то равновесие нарушается. Со стороны, в
которую повернулся руль, на него начинают действовать силы
давления потока воды, встретившего на своем пути препятствие. Их
можно представить в виде равнодействующей, приложенной в
центре давления С и направленной перпендикулярно к плоскости
201
пера руля. Разложим эту силу на 2
взаимно перпендикулярные составляющие Рх и Ру, вторая из
которых перпендикулярна линии
курса судна. Поместим в центр
тяжести судна (в точку С) 2 взаимно уравновешивающиеся силы
„
„
Р.,,1 и Р„
у2 , равные и параллельные
Рис. 108. Силы, действующие на судно при * р с7^
р
р
,
повороте руля
силе г.. и,илы
г иг
пару сил, плечо которой Л можно
считать приблизительно равным
половине длины судна Ь. Они образуют момент, поворачивающий
судно в сторону перекладки руля:
у
М
у
у2
= Ру Ь/2 = (Ра /.сое а)/2.
(38)
Этот момент оказывает основное влияние на поворот движущегося судна. Кроме того, сила Рх создает дополнительное сопротивление движению судна, а сила Ру1 , называемая силой дрейфа, сносит
судно боком во внешнюю сторону и создает крен судна. С другой
стороны, сила Ра создает момент на баллере руля
Полученное выражение служит исходным для определения моментов сопротивления на баллере руля, а следовательно, и для
построения нагрузочной диаграммы привода. Таким образом, для
вычисления момента сопротивления необходимо определить 8 (расстояние точки приложения равнодействующей относительно передней кромки руля) и значение силы />„. Эти значения зависят от угла
поворота руля а.
Значение 8 может быть определено из выражения
где /-ширина пластины.
Полученное значение 8 может быть принято как плечо сил
только применительно к простым рулям (см. рис. 107, а}. Для
балансириых рулей прямоугольной формы плечо давления, полученное относительно передней кромки пера руля, должно быть
уменьшено при переднем ходе на ширину балансировочной части,
т.е. приведено к оси баллера (см. рис. 107, б):
5 = (0,2 + 0,3шт)/-/!,
где /, - расстояние от оси вращения руля до передней кромки.
В общем виде сила (Н)
р
_
Ь Г „2
^ а — "-а* ^ ?
где А:а (а) -некоторая функция угла а; /'-площадь пера руля, м2; V- скорость судна, м/с.
202
Для простых рулей прямоугольной формы
/са = 5,3 К зт а/(0,2 + 0.3 яш а),
где К - редукционный коэффициент, учитывающий явления обтекания я
плотность воды.
В соответствии с выражением (38) момент поворота судна при
отклоненном руле зависит от силы Ра и сов а. Сила нормального
давления Ра представляется непрерывно возрастающей, а сок а убывающей функцией угла а. Анализ выражения (38) показывает,
что при угле поворота а > 35° значение Мпов изменяется незначительно, хотя Ра возрастает, что приводит к увеличению мощности
РЭП. В связи с этим для рулевых устройств морских судов задаются
максимальным углом перекладки а т а х = 35°.
Зависимость Л/б(а) обычно изображают графически, применяя
при построении следующие правила: углы перекладки, соответствующие прямому ходу руля от диаметральной плоскости к любому
борту, принимают положительными, а углы, соответствующие
обратному ходу руля от любого борта к диаметральной плоскости,-отрицательными; моменты на баллере руля, созданные силами давления воды, принимают положительными, если они препятствуют перекладке руля, отрицательными- если они ей помогают.
Для простого руля при его прямом ходе момент на баллере круто
возрастает (рис. 109, а) и достигает максимального значения М б т а х .
При перекладке в обратном направлении момент на баллере отрицателен, силы давления воды помогают РЭП повернуть руль.
Балансирные и полубалансирные рули применяют для уменьшения момента на баллере руля и, следовательно, мощности РЭП.
Давление воды на балансирную часть руля, расположенную впереди
оси вращения, способствует перекладке руля от диамеграли к
борту, поэтому при малых углах поворота момент на баллере
отрицателен (рис. 109, б). При больших углах поворота точка
приложения равнодействующей находится уже на основной части
"1.3.x.
Рис. 109. Графики изменения момента на баллерах рулей:
я простого; 6-балансирного и полубалансирного; «-при заднем ходе судна
203
руля, моменты на баллере противодействуют перекладке руля,
поэтому будут положительны. По абсолютному значению они
будут меньше, чем у простого руля из-за уменьшения плеча давления.
При заднем ходе судна задняя кромка пера руля становится
передней. К ней смещается центр приложения нормальной силы,
что увеличивает момент нагрузки (рис. 109, в). При перекладке руля
к борту момент на баллере отрицателен, а при повороте к диаметрали-положителен. Наибольшее значение момент принимает при
максимальном угле перекладки а т а х в начале поворота руля к
диаметрали.
Необходимо отметить, что приведенная методика расчета момента на баллере применима только для пластинчатых рулей
прямоугольной формы. Для определения силы давления и момента
на баллере обтекаемых рулей используется разработанная
Н. Е. Жуковским аэродинамическая теория крыла.
49. Электроприводы с механической и гидравлической
передачами
Основным классификационным признаком, в значительной
степени влияющим на характеристики электрооборудования,
является тип передачи крутящего момента от РЭП к баллеру руля.
Вид передаточного механизма определяет характер работы рулевого исполнительного двигателя, степень его энергетического использования и особенности управления. На морских судах нашли применение передаточные устройства двух чипов: механические и гидравлические. Соответственно и приводы получили общее название - рулевые электромеханические и электрогидравлические передачи.
Электромеханические передачи. Обычно применяют механические приводы трех типов: винтовые, секторные и штуртросовые. На
морских судах основное применение получили секторные передачи
(рис. 110). Электродвигатель / через червяк 2 и червячное колесо 3
вращает цилиндрическую шестерню 5, входящую в зацепление с
зубчатым сектором 6. Сектор надет на верхнюю часть баллера руля
8 и свободно на нем поворачивается влево и вправо от диаметральной плоскости на 35 40'. Ниже сектора на баллер надет и закреплен
шпонкой румпель 7, который соединен с сектором двумя буферными пружинами 4, играющими роль амортизаторов. Они защищают
механизм от динамических усилий, возникающих при ударах волн о
перо руля. Ручной привод руля выполнен при помощи штурвальных
колес 13, вращающих вертикальный вал, на котором находится
шестерня 14. Маховичком 15 .ее вводят в зацепление с малым
сектором /2. соединенным с баллером шпонкой. Румпель можно
закрепить неподвижно в любом положении стопорными колодками
10, прижимаемыми к ее секторной части винтом 9 с рукояткой-тре204
с/ . с
с / г// с
с
Рис. 110. Рулевой электропривод с секторной передачей
205
щоткой /7. Это бывает нужно в случае выхода из строя рулевогф
механизма.
Червячная пара-самотормозящаяся, так как КПД ее равен 0,5.
Эта непременная особенность рулевых приводов вызвана необходимостью удержать .руль, переложенный кл борт во время движения
судна в том положении, в каком он оказался после остановки ЭД.
Передаточное число для секторных приводов находится в пределах
1500-2500. Общий КПД передачи обычно составляет 0,4-0,5, а
мощность рулевого ЭД не превышает 70 кВт. Секторные передачи
распространены на судах среднего и малого водоизмещения.
Электрогидравлические передачи. Этот вид передач получил в
РЭП наибольшее распространение. Увеличение водоизмещения и
скорости судов предопределяет существенный рост моментов на
баллере рулей. Секторная передача в рассматриваемых условиях
становится громоздкой, неэффективной из-за значительных затрат
энергии и малонадежной из-за прерывистости работы мощного
исполнительного ЭД. Все указанные факторы способствовали внедрению на судах рулевых гидравлических машин, которым присущи
следующие достоинства: возможность создания привода с большими усилиями и крутящими моментами; простота осуществления
плавного и точного регулирования привода; обеспечение защиты от
перегрузок; сравнительно малые массы и габаритные размеры.
Основное применение получили плунжерные рулевые гидравлические машины, которые могут быть в зависимости от момента
на баллере 2- или 4-цилиндровые (рис. 1 1 1 ) . Цилиндры /, 2, 8, 10
Рис. 1 1 1 . Принципиальная схема гидравлической рулевой машины
206
установлены на фундаменте в направляющих 7, 15. В цилиндрах
передвигаются плунжеры 3, 6, 9, 16. Выходы цилиндров имеют
уплотнения (кожаные или из маслостойкой резины). Плунжеры 3, 6
и 9, 16 соединены соответственно в опорах, где расположены муфты
4 и 14, свободно вращающиеся вокруг вертикальных осей. В муфты
входят цилиндрические хвостовики румпеля 13. Румпель закреплен
на баллере руля тремя шпонками. При перемещении плунжеров в
разные стороны происходит поворот баллера руля, сопровождающийся скольжением хвостовиков румпеля в муфтах, а также поворотом муфт. Боковые усилия, возникающие на румпеле при его
выходе из диаметральной плоскости через ползуны 5, 12, воспринимаются направляющими 7. 15, предотвращающими возможный
изгиб плунжеров.
Для поворота баллера руля (например, против часовой стрелки)
нужно по трубопроводу а подать масло под давлением в цилиндры
1, 8, а из цилиндров 2, 10 в связи с изменением объема масло
сливается по трубопроводу 6. Плунжеры 9. 16 перемещаются при
этом вправо, а плунжеры 3, 6 -влево. При изменении направления
поворота баллера трубопровод б становится нагнетающим, а трубопровод а - сливным. Давление в цилиндрах определяется преодолеваемыми усилиями в плунжерах, которые зависят от момента на
баллере руля. При возникновении чрезмерных давлений (например,
при ударах штормов*.;*', волн, при дав.герии льда) через дроссель 11
прон~холит перепуск масла из одной полости в другую. Это
п"гюша^" энергию ртсш^ей нагрузки V ослабляет динамические
Под?*.".} масла в трубопровод рулевого гидравлического привода
осуществляется специальными насосами. Насосы, откачивая жидхост т. ':з одних цилиндров тт нагнетая ее в другие, создают в
последних избыток давления, чотопос передается через плунжеры
румпелю и баллеру, ч;с позволяет повернуть руль в определенном
на !>рав тента. Применяют насосы постоянной или регулируемой
подачи. Насосы регулируе\мй подачи МОГУТ быть ахсиально-поршт] ,ыми и радиальными. Основное распространение получили рулевы-.- гидг-иг-лз^еские машины с насссами регулируемой подачи.
Оеч&етвеяной промышленностью выпускаются плунжерные гидравлические машины ТИНОР Р1 1-^*20 с одним или двумя масляными
часосами регулируемой подачи, имеющими ЭП.
Указанные машины способны развивать момент на. баллере
63-- 1000 кН-м,
Гидравлическая система аксиально-поршневого насоса (рис. 112,
а) включает следующие элементы: основной насос регулируемой
подачи: шестеренный насос; золотниковую коробку и гидравлический усилитель, включающий в себя силовые цилиндры и рычажную
систему: клапанное устройство, состоящее из двух подпкточпых
(сливного и предохранительного) клапане?.; нуль-установители;
распределительную коробку и фильтр. Регулирующим органом
207
й)1 2
3
4
16
5
15
6
/4
189
ЮН
15 12
в)
К напорной, полости
гидроцилиндрой
От сливной полости 'гивроцилчнвроИ
Рис. 112. Насос регулируемой подачи:
а- кинематическая схема; б -схема работы насоса
насоса является люлька. Принцип действия указанной системы
следующий.
Вал насоса, получая вращение от ЭД, передает его через кардан
блоку 12 с цилиндрами, а также через шестерню 5 зубчатому колесу
/5, надетому на приводной вал 16 шестеренного насоса. Рабочая
жидкость, нагнетаемая шестеренным насосом, расходуется на восполнение ее утечек из замкнутого объема: насос - магистральные
трубопроводы - гидроцилиндры рулевой машины. Шестеренный насос всасывает рабочую жидкость из корпуса основного насоса,
служащего одновременно резервуаром рабочей жидкости, и нагнетает ее в систему через фильтр. После фильтра рабочая жидкость
направляется по трубопроводам к распределительной коробке,
воздействует на переключающий золотник и открывает себе доступ
в нуль-установители 13 и в золотниковую коробку 7 гидроусилителя, а избыток рабочей жидкости сливается через сливной клапан.
Нуль-установители 13 предназначены для вывода люльки насоса в
среднее (нулевое) положение при включении насоса и для удержания
люльки в этом положении, пока насос не работает. Это нужно для
того, чтобы последующее включение проводилось при среднем
положении люльки (это уменьшает пусковую мощность ЭД). При
поступлении рабочей жидкости в цилиндры нуль-установителей
штоки их убираются, сжимая пружины, что дает возможность
люльке 11 насоса свободно поворачиваться на цапфах на угол 30° в
обе стороны от среднего положения при помощи гидравлического
усилителя мощности и вручную (силовое управление насосом).
Гидроусилитель состоит из золотниковой коробки /, двух силовых цилиндров 9 и рычажной системы 3. При смещении золотника в
ту или иную сторону открывается доступ рабочей жидкости в один
из силовых цилиндров. Золотник смещают поворотом вала управления 10 и рычажной системой. Под давлением рабочей жидкости
208
поршень, находящийся в одном силовом цилиндре, перемещается,
например, влево и при помощи шатуна поворачивает люльку 11
насоса. Одновременно с этим поршень второго силового цилиндра
перемещается поворачивающейся люлькой вправо и вытесняет
рабочую жидкость из полости цилиндра через золотниковую коробку в корпус насоса. При этом рычаг 6 обратной связи возвращает
золотник в среднее положение, доступ рабочей жидкости в силовой
цилиндр прекращается и люлька останавливается. Поэтому, чтобы
поставить люльку на нужный угол, надо повернуть валик 4 управления на тот же угол (передаточное число рычажной системы равно
единице). Для более точной установки валика управления втулке 2
золотниковой коробки сообщена осевая вибрация, осуществляемая
при помощи эксцентрикового вибратора 8, получающего вращение
от вала 16 шестеренного насоса через коническую пару 14.
Когда люлька насоса занимает среднее положение, то вращение
вала 7 насоса не вызывав! возвратно-поступательного движения
поршней в цилиндрах /2, и подачи рабочей жидкости в гидроцилиндры привода рулевой машины не происходит. Поворот люльки
насоса создает наклон оси блока цилиндров 12 к оси вала 7 (рис.
112, г7), и при его вращении поршни, находящиеся в цилиндрах
блока, начинают совершать возвратно-поступательное движение. За
один оборот вала насоса каждый поршень делает один ход вперед и
один назад. Поршни, выходя из цилиндров, всасывают рабочую
жидкость в цилиндры, а двигаясь внутрь,-нагнетают из цилиндров.
Перемена направления движения поршня происходит в момент
нахождения его в горизонтальной диаметральной плоскости блока
цилиндров. Поршни, находящиеся по одну сторону этой плоскости,
будут нагнетать рабочую жидкость в гидроцилиндры рулевой
машины, а поршни, находящиеся по другую сторону,-всасывать.
При отклонении люльки в другую сторону поршни гидроцилиндров
рулевой машины будут перемещаться в обратном направлении, так
как сторона всасывания и сторона нагнетания меняются местами и
направление перекладки руля изменяется.
Угол отклонения люльки, зависящий от угла поворота валика 4
управления, определяет подачу насоса и скорость перекладки руля.
С увеличением угла поворота возрастают подача насоса и скорость
перекладки руля. Валик поворачивают прибором ИМ, установленным на корпусе насоса и входящим в комплект аппаратуры электрической системы управления. Прибор получает сигнал на поворот
валика насоса при задании угла перекладки с пульта управления.
Сигнал обратной связи, пропорциональный углу поворота руля от
РД, установленного на приводе к баллеру, поступает в пульт
системы управления со знаком, противоположным знаку сигнала
задания. В результате суммирования прямого и обратного сигналов
валик насоса, повернутый на тог или иной угол при задании, будет
возвращен в среднее нейтральное положение при подходе руля к
заданному углу поворота. При этом подача масла насосам, а
209
.
.
следовательно, и перекладка руля прекращаются. Работа системы
управления более подробно рассмотрена ниже (при изложении
принципа действия авторулевых). В.приборах ИМ предусмотрена
также рукоятка для возможности ручного аварийного (местного)
управления, которое используют при выходе из строя аппаратуры
дистанционной системы электрического управления, а также при
опробовании рулевой машины из румпельного помещения. Таким
образом, все управление рулем сводится к необходимому воздействию на люльку.
В радиально-поршневых насосах вместо люльки регулирующим
органом является эксцен грирующее кольцо, и порции жидкости,
перекачиваемые каждым поршнем, зависят от значения эксцентриситета, созданного этим кольцом. Смещение эксцентрирующего
кольца в противоположную сторону изменяет направление перекачивания жидкости. Указанные действия выполняются манипулятором насоса, и поэтому управление рулем сводится к воздействию на
манипулятор.
Как правило, электрогидравлические рулевые машины (исключая самые малые) имеют по 2 насоса. Один из них основной,
другой резервный. Все нормированные свойства рулевой системы
обеспечиваются при работе одного насоса. Вместе с тем в сложных
условиях плавания с целью повышения надежности в действие
могут быть введены 2 насоса. Так как подача при этом удваивается,
то скорость перекладки руля при двух работающих насосах увеличивается,
В РЭП трт;:'-е иногда используются насосы постоянной подачи.
Однако облает' применения последних очень мала, поэтому их
г;
принцип д- -'•••'-- тта рассматривается.
5Э. М:.
"»1,г 'управления электрогидравлическими
природа*::, г насосами переменной подачи
Для перекладкь руля в гшектрогидравлических системах с
насосом переменили по дате требуется сместить манипулятор насоса (создать эксцентриситет)- Это до--- ш ается вспомогательным
сервоприводом, в котором используются передачи электрического и
гидравлического типов. При электрической системе передачи оперативные функции в ру.^тельном отделении выполняет ЭД, называемый серводвигателем. При гидравлической системе передачи для
воздействия на манипулятор используют гидравлический серводвигатель (типа толкателя). Процесс перекладки руля при управлении
сервоприводом содержит 4 основные операции: включение сервопривода; отключение в положении, когда задана максимальная
подача насоса; обратное включение сервопривода; отключение его
точно в позиции нулевой последовательности. Точная остановка
манипулятора в нейтральном положении в условиях, когда серво210
Рис. 113. Схемы кинематические систем управления гидравлической рулевой машиной с рычажным дифференциалом:
а с дифференциальным редуктором; б -с гидроусилителем
привод обладает свойством выбега после отключения благодаря
запасенной энергии в движущихся частях, при описанном способе
методом отдельных операций практически невозможна. Поэтому
для упрощения способа управления рулем, обеспечения устойчивости управления сервопривод снабжают кинематическим устройством, связывающим задающий орган, манипулятор насоса и баллер
руля. Рассмотрим некоторые из таких механизмов.
Электрический механизм с рычажным дифференциалом (рис. 113).
Приводы такого типа установлены на многих судах (например, на
теплоходах типа «Михаил Калинин», «Выборг», «Красноград»,
лесовозах типа «Волголес» и др.). Принцип действия кинематического механизма легче понять, разбив процесс управления на ряд
простых операций. Перекладка руля задается включением электрическою серводвигателя СР1 или СР2- резервный (рис. 113, а).
Дифференциальный редуктор ДфР вращает винтовой шпиндель /,
который перемещает но горизонтали каретку 2. Пусть, например,
каретка переходит из точки В в точку С. Дифференциальный рычаг
ДР, поворачиваясь вокруг неподвижной точки А, смещает тягу 3
манипулятора насоса Н1. Начинается подача масла в гидроцилиндры рулевой машины, руль перекладывается по часовой стрелке.
Тягой 10 обратной связи дифференциальный рычаг ДР, поворачиваясь вокруг точки С, смещает манипулятор в сторону нейтрального положения, при достижении которого в точке Д перекладка
прекращается. Изменение направления подачи насоса и соответственно обратная перекладка руля происходят при перемещении
каретки в другую сторону. Каждое положение каретки после отработки определяет соответствующий угол поворота руля.
211
Значение эксцентриситета насоса равно 15-25 мм; тяга манипулятора, пройдя это расстояние, доходит до упора. Перемещение в
этих пределах обычно соответствует заданию перекладки руля на
угол 5-6°. При задании больших углов, когда манипулятор достигает положения упора, дифференциальный рычаг ДР при перемещении каретки будет поворачиваться в шарнире связи его с управляющей тягой насоса. Движение будет происходить благодаря сжатию
или растяжению пружины Пр, являющейся составной частью рычага 10. Перекладка на основной части пути ведется при максимальной подаче насоса с примерно постоянной скоростью. Лишь при
подходе к заданному положению (за 5-6°) подача насоса постепенно уменьшается. Пружина Пр одновременно служит демпфером при
ударных нагрузках на баллере. При случайных перемещениях баллера через рычаг ДР задается необходимая подача насосу, и положение восстанавливается. В динамике, когда перемещение каретки и
баллера происходит одновременно, дифференциальный рычаг суммирует оба движения и задает подачу насосу, эквивалентную
разностному положению каретки и баллера в каждый данный
момент.
При управлении оператор следит за движением каретки по
аксиометру заданного положения, датчик Д2 которого связан через
редуктор со шпинделем. Действительный угол руля контролируется
по аксиометру, работающему от баллера через датчик Д1. Сельсины-приемники, связанные с датчиками Д1 и Д2. совмещаются в
одном 2-стрелочном приборе заданного и действительного положений. Дистанционное управление осуществляется посредством серводвигателей, местное - штурвалом 4. В схемах автоматического
действия датчики обратной связи ДОС. путевые ПВ и конечные КВ
выключатели механически связаны не с отрабатывающим органом-баллером, а с задающим-кареткой. Конструктивно их объединяют в едином блоке 5, Мощность электрических серводвигателей составляет 0.3-0,8 кВт.
Вместо электрического привода с редуктором ДфР и шпинделем
часто применяют гидравлические механизмы. На рис. 113, б представлен электрический сервопривод с промежуточным гидроусилителем. Такая схема широко используется в отечественных рулевых
системах РЭГ-8. Гидроусилитель состоит из золотника 7 и силового
цилиндра 8, шток которого 6 действует на управляющий рычаг
манипулятора насоса. Дифференциальный рычаг 9 обеспечивает
обратную связь между золотником и рабочим поршнем Передвигая с помощью серводвигателя СР и рычажной системы поршень
золотника 7, сообщают полости цилиндра 8 с насосом системы
управления. Шток поршня при перемещении возвращает через
рычаг 9 золотник в нейтральное положение.
В рассматриваемой системе положение выходного рычага от
серводвигателя СР определяет перемещение управляющей каретки,
связанной со штоком 6, которая, в свою очередь, устанавливает
212
К насосу левого оорта
К 2ГУ левого борта
Л //"У левого борта
РЯС. 114. Схема кинематики управления рулевой машиной с рычажным дифферен,;
ниа.пом и двумя каскадами гидроусиления
-угол поворота руля. Аксиометр задания поворота обычно связывают через редуктор с серводвигателем СР, мощность которого
составляет 10-15 Вт. В качестве двигателей используют хорошо
управляемые бесконтактные 2-фазные асинхронные машины с полым ротором.
Электрогидравлический механизм с рычажным дифференциалом.
В рулевых машинах большой мощности (РЭГ-4, РЭГ-11) с максимальным моментом на баллере более 880 кН • м применяют
электрогидравлические механизмы. Отличительной особенностью
системы (рис. 114) является наличие двух каскадов гидроусиления
1ГУ, 2ГУ, ограничителя мощности ГОМ, исключающего перегрузку исполнительного ЭД. На рисунке показана кинематическая схема
взаимодействия элементов правого борта, дублирующая система
левого борта имеет аналогичное устройство. Рассмотрим работу
системы при перекладке руля на левый борт (направления движения
ее элементов для этого случая показаны на схеме сплошными
стрелками).
При повороте штурвала поста управления ПУ на пропорциональный угол поворачивается ротор бесконтактного сельсина-датчика СД. Ротор соединенного с ним сельсина-приемника СП поворачивается на такой же угол. Через червячный редуктор ЧР и
пружинный рычаг редуктора ПРР сельсин смещает вниз (на схеме)
213
шток золотников гидроусилителя первого каскада 1ГУ. К золотниковому устройству подводится под давлением жидкость, которую
нагнетает шестеренный насос гидроусилителя 1НГ с отдельным
электродвигателем ДНГ. При смещении золотников вниз жидкость
поступает в верхнюю полость силового цилиндра гидроусилителя.
Плунжер 1ГУ опускается и при помощи первого дифференциального рычага 1ДР возвращает шток золотника в прежнее положение.
Золотник перекрывает выходное отверстие, и плунжер останавливается в определенном положении, зависящем от того, насколько
был смещен вниз шток золотника, т. е. от того, на какой угол был
повернут штурвал ПУ. Одновременно плунжер поворачивает выходной вал ВВ и укрепленный на нем рычаг. Усилие на конце
рычага возрастает до 590 Н благодаря энергии, подведенной к ЭД
насоса гидроусилителя. При повороте выходного вала поворачивается на определенный угол промежуточный вал ПРВ, смещая вниз
тягу Т ГУ гидроусилителя второго каскада 2ГУ. Одновременно
поворачивается ротор сельсина-датчика заданного угла ДЗУ. Он
соединен с сельсином-приемником ПЗУ, который поворачивает
одну из стрелок 2-стрелочного указателя РУ на посту управления.
По ней ориентируются, задавая поворотом штурвала нужный угол
перекладки руля.
Тяга гидроусилителя 2ГУ смещает шток золотников вверх. В
нижнюю полость силового цилиндра поступает под давлением
масло от шестеренного гидроусилителя 2НГ, соединенного с насосом переменной подачи Я/777 и приводящегося в действие его
электродвигателем ДН. Плунжер 2ГУ передвигается вверх и при
помощи второго дифференциального рычага 2ДР возвращает золотник на прежнее место, останавливаясь после этого в определенном положении. При движении он с помощью третьего дифференциального рычага ЗДР смещает манипулятор насоса на определенное значение, зависящее от того, насколько был смещен золотник
2ГУ, или, в конечном счете, от того, на какой угол был повернут
штурвал поста управления ПУ. Усилие на штоке силового цилиндра
достигает 14,2 кН. Насос подает жидкость в цилиндры /77 и //
гидравлической машины, и руль поворачивается на левый борт.
При этом румпель Р смещает вправо (на схеме) первую тягу
отработки / 2 0 , а она передвигает вниз вторую тягу 2ТО (направление движения при отработке показано штриховыми стрелками). Эта
тяга при помощи рычага ЗДР возвращает обратно манипулятор
насоса в тот момент, когда руль достигает заданного угла перекладки. Контроль осуществляется при помощи сельсина-датчика ДОУ
отработанного угла, который соединен с сельсином-приемником
/70У, поворачивающим вторую стрелку РУ на посту управления.
Таким образом, система управления является следящей.
Если во время перекладки руля давление в цилиндрах гидравлической машины превысит уставку гидравлического ограничителя
мощности ГОМ (10 МПа при наибольшем давлении в системе 13,5
214
МПа), то его клапан преодолеет пружину и впустит жидкость в
силовой цилиндр (на схеме снизу). Плунжер ограничителя скачком
сместится вверх и при помощи рычага ЗДР отведет манипулятор в
сторону уменьшения подачи насоса. Эксцентриситет при этом
окажется равным 60-65% максимального. Соответственно уменьшается и подача насоса.
При повороте штурвала ПУ в обратную сторону система работает таким же образом, но все ее элементы перемещаются и
поворачиваются в противоположном направлении.
51. Нагрузочные диаграммы
Рулевому устройству свойственны следующие режимы работы:
режим при ходе судна по курсу; маневренный режим; режим при
заднем ходе судна. Наиболее напряженным является режим маневрирования, так как руль перекладывается на максимальные углы и
на баллере возникают максимальные моменты сопротивления. Для
правильной эксплуатации рулевого ЭД, а также для выбора его
мощности необходимо знать его нагрузочную диаграмму при
работе в наиболее напряженном режиме. Учитывая специфику
работы ЭД в рулевых машинах с механической и гидравлической
передачей, нагрузочные диаграммы рассмотрим для каждой из них.
Электроприводы с механической передачей. Нагрузочная характеристика рулевого исполнительного ЭД представляет собой зависимость момента на валу ЭД от угла поворота руля: М (а). Момент
на валу ЭД определяется моментом нагрузки на баллере руля и
потерями на трение в механизме передачи, которые обусловлены
данной нагрузкой.
При прямом ходе пера руля момент ЭД
М = М б /Ол),
(39)
где /-передаточное число механической передачи; л-прямой КПД передачи.
Передаточное число и КПД определяют как произведения соответствующих значений каждого элемента передачи.
При обратном ходе пера руля момент ЭД
М=М6л'Д,
где л' = 2— 1/л -обратный КПД передачи.
(40)
Так как передачи РЭП всегда содержат самотормозящий элемент, то прямой и обратный КПД не равны (г\ ^ ц'), причем л/ < 0.
При обратном ходе пера руля отрицательный момент на баллере
руля и отрицательный КПД обусловливают согласно формуле (40)
положительный момент на валу ЭД. Иначе говоря, несмотря на
стремление пера руля самому повернуться в направлении перекладки, т. е. диаметрали, ЭД все же приходится работать в двигательном
215
6)
М
8)
м'[
М0
0
Рис. 115. Приближенные нагрузочные диаграммы рулевого электропривода:
а- для простого руля; о -для балансирного и полубалансирного рулей; «-при заднем
ходе судна
режиме, преодолевая сопротивление трения в элементах передачи,
расположенных между валом ЭД и самотормозящимся элементом.
Построение точных нагрузочных диаграмм аналитическим путем весьма затруднительно, в частности из-за того, что КПД
передачи - величина переменная, зависящая от нагрузки. Поэтому
для практических расчетов удовлетворяются приближенными нагрузочными диаграммами (рис. 1 1 5). Максимальный момент Мтт
при прямом ходе руля и переднем ходе судна определяют по
формуле (39), подставляя в нее КПД, соответствующий наибольшей
нагрузке М 6 т а х (этот КПД обычно известен). Момент М0 при
обратном ходе пера руля и при переходе через диаметральную
плоскость принимают равным (0,1 — 0,3)Мгаах. Это же значение
момента принимается на участке от 0 до а ( для балансирных рулей.
Нижний предел относится к простым рулям, а верхний -к балансирным и полубалансирным. Это объясняется тем, что трение в
ненагруженном приводе не зависит от типа руля, в то время как у
рулей с балансирной частью значения М бтах значительно снижены и
для получения того же значения М0 следует брать большую часть от
-Мтах. Изменение же момента на участках от а т а х до а — О для
простых рулей и до а, для балансирных принимают прямолинейным. При заднем ходе судна, как отмечено в п. 48, плечо сил
давления по сравнению с передним ходом увеличивается, что
способствует увеличению моментов на баллере. Однако при практических расчетах РЭП ограничиваются лишь нагрузочными диаграммами рулевого устройства при переднем ходе, так как из-за уменьшенной скорости заднего хода, обычно принимаемой г, х = (0,5 -н
- 0,7) IV* , значение М блт:1Х < Мй тах.
Электроприводы с гидравлической передачей. Переменные моменты на баллере, создающиеся при отклонении руля на различные
углы от диаметральной плоскости, вызывают появление соответствующих переменных давлений в насосном агрегате, с которыми
связано изменение его подачи, и это приводит к изменению момента на валу ЭД насоса. Таким образом, нагрузочный момент на валу
ЭД зависит от гидравлической нагрузки насоса, которая определяется его подачей и создаваемым давлением. Рассмотрим факто216
ры, влияющие на зависимость между моментом на баллере руля
при различных углах поворота и условиями работы ЭД.
Когда руль отклоняется от диаметральной плоскости (рис. 1 16),
на его перо действует сила давления воды, создающая гидродинамический момент Мъ на баллере. В шарнирном соединении рулевой
машины этот момент перпендикулярно румпелю создает силу
где т -число пар гидроцилиндров рулевой машины; 7? - действующая длина
румпеля; л б -КПД, учитывающий потери на трение в опорах баллера руля
(лб = 0.8 -=- 0,87); /?0- расстояние от оси баллера до оси гидроцилиндров.
Сила Рр разлагается на 2 составляющие Рх и Ру по взаимно
перпендикулярным осям. Составляющая Рх через ползуны воспринимается направляющими, а сила Ру, действующая вдоль оси
плунжеров, для своего уравновешивания требует создания необходимого противодавления в цилиндрах.
При работе рулевой машины во время перекладки руля в
шарнирных соединениях, упорных ползунах, сальниках возникают
силы трения АР, направленные всегда против движения. Эти силы
вместе с Ру создают общую силу сопротивления Р. Для обеспечения
движения руля сила давления в цилиндрах должна быть равной силе
Р:
где т)р м - КПД рулевой машины, учитывающий потери на трение во всех ее
элементах (зависит не только от нагрузки, но и от угла а).
Рабочее давление (Па), создаваемое насосом для обеспечения
этой движущей силы,
2
4М к соз а
(41)
где О-диаметр поршня, м.
Формула (4!) справедлива, когда момент на баллере положительный. Отрицательные моменты на баллере в период перекладки руля от борта в диаметральную плоскость и создаваемые
ими давления в направлении перекладки обеспечивают естественное перетекание рабочей жидкости из одного цилиндра в другой. Насос рабочего давления не
создает. Электродвигатель вращает его в режиме холостого хода, содействуя лишь процессу перетекания жидкости и возмещая
при этом потери в самом насос-
РИС. П6. Схема сил, действующих на
плунжеры
гидравлической
рулевой машины
217
-ос° -
Рис.
-оса° О
+<х.,„,+ас°
117. Зависимость рабочего давления насоса от углов перекладки руля
25° +35°+ос°
Рис.
118. Нагрузочная диаграмма электродвигателя рулевого гидравлического привода
ном агрегате. В области положительных моментов на баллере, т. е.
когда угол поворота находится в пределах 0-атах (рис. 117), рабочее
давление растет с увеличением угла поворота. При отрицательных
моментах на баллере давление р = 0. Лишь в конце обратной
перекладки руля при угле — а0 отжимного действия набегающего на
руль потока воды становится недостаточно, поэтому для возмещения потерь в системе передачи возникает уже необходимость создания некоторого рабочего давления.
Кроме давления, насос при перекладке руля обеспечивает определенную подачу, установленное значение которой при номинальной угловой скорости зависит от степени смещения люльки или
манипулятора: (?уст(е), где е-смещение, именуемое эксцентриситетом. Практически насос после смещения регулирующего органа
очень быстро достигает полной установленной подачи, в последующем при перекладке руля это значение остается постоянным.
Момент (Н • м) сопротивления на валу ЭД
Л4 = 9,57еустМи„лмех),
(42)
3
где 2 уст -установленная подача, м /с; р-рабочее давление в цилиндрах, Па;
«„-номинальная частота вращения ЭД; г) мсх -механический КПД насоса
(зависит от р и С уст ).
Используя формулу (42) и приведенные выше данные, можно
построить нагрузочную диаграмму М с (а) (рис. 118). В области
отрицательных моментов на баллере, когда рабочее давление в
насосе отсутствует и ЭД работает в режиме холостого хода, момент
сопротивления на валу Мх имеет минимальное значение. Обычно
Л/х = (0,15 — 0,35) Мн, где Мн - номинальный момент ЭД. При положительных моментах на баллере с увеличением угла поворота из-за
возрастания рабочего давления момент сопротивления на валу ЭД
увеличивается, достигая максимального значения М'т,лх при + а тах .
Для уменьшения нагрузочного момента ЭД, а соответственно и
мощности на его валу в рулевых гидравлических машинах применяют гидравлические ограничители установленной подачи. Это
устройство при увеличении давления в рабочем цилиндре до определенного уровня срабатывает и, воздействуя скачкообразно на
218
регулирующий орган насоса, снижает его эксцентриситет. Подача
при этом падает настолько, что увеличение давления до максимума
не приводит к превышению допускаемых значений вращающего
момента и мощности ЭД, которые пропорциональны установленной подаче насоса. Ограничитель момента настраивается на определенное снижение подачи ^ат = (0,5 ~ 0,65) ^н. На нагрузочной
диаграмме (см. рис. 118) этот сброс показан при а = + 25° штриховой линией: момент на валу уменьшается до Мтах и в конце цикла
перекладки при + а тах , когда прекращается подача, он становится
равным моменту холостого хода М х .
52. Системы управления
Состав электрооборудования рулевых устройств определяется
системами рулевого управления и зависит от типа передаточного
механизма. В РЭП исполнительные ЭД жестко связаны с баллером
руля, а поэтому должны выдерживать большое число включений,
переменную нагрузку и кратковременную перегрузку (вплоть до
стоянки под током).
Приведенные требования показывают, что рулевые ЭД для
механических передач вне зависимости от рода тока и схемы
включения должны иметь мягкую механическую характеристику.
Это обусловлено стремлением не допустить поломки механизма
руля от случайных заеданий в системе, а также ограничить динамические усилия при ударах волн о руль. При постоянном и переменном токе для этого типа рулевой передачи, безусловно, наилучшей
является система Г-Д, которая благодаря противокомпаундной
обмотке генератора обеспечивает исполнительному ЭД мягкую
механическую характеристику и защищает его от токовых перегрузок.
В РЭГП исполнительные ЭД непрерывно вращают насос, т. е. их
частые пуски исключены (режим работы является длительным при
переменной нагрузке). Для этих ЭД необходима жесткая механическая характеристика. Поэтому следует применять ЭД постоянного
тока с параллельным возбуждением или короткозамкнутые АД с
нормальным скольжением. Жесткая характеристика позволяет поддерживать подачу насоса с ростом нагрузки, а перегрузка и динамическая нагрузка ограничиваются с помощью перепускных клапанов
и гидравлических ограничителей подачи.
Учитывая важное значение РЭП и исходя из характерных для
него режимов работы, к нему предъявляют следующие технические требования, установленные и контролируемые Регистром
СССР:
1. При работе РЭП должен быть надежным и иметь достаточный резерв на случай аварии. С этой целью на морских судах
необходимо устанавливать 2 привода-основной и резервный. В
219
этом случае, если основной привод является сдвоенным, т. е. 2
агрегата действуют независимо один от другого, установка резервного РЭП не требуется.
2. Исполнительные двигатели РЭП должны допускать полуторакрагную перегрузку в течение 1 мин. Для РЭП с механической
передачей ИД должен быть рассчитан на минутную стоянку под
током с нагретого состояния.
3. Основной РЭП должен обеспечивать перекладку руля от — 35
до + 30: за 28 с. Если максимальный угол перекладки меньше 35',
то время перекладки от — а тах до + (атах - 5') пропорционально
уменьшается.
4. При ходе судна по курсу с наибольшей эксплуатационной
скоростью в течение 1 ч привод должен выдерживать режим
перекладок руля на угол, обеспечивающий 350 перекладок в час.
5. В режиме маневрирования РЭП должен при полной скорости
хода обеспечивать для каждого ат регата непрерывную перекладку с
борта на борт в течение 0,5 ч.
6. Должна быть обеспечена удовлетворительная работа РЭП
при заднем ходе судна со средней скоростью.
7. Питание РЭП должно обеспечиваться по двум независимым
фидерам, один из которых рекомендуется выводить из аварийного
распределительного шита.
8. Защита ЭД рулевого устройства должна быть только ог
коротких замыканий (при перегрузке включается сигнализация).
9. Пуск и остановка ЭД насосов, приводных двигателей в
системе Г —Д предусматривается из двух мест —из румпельного
отделения и из рулевой рубки. При этом должен обеспечиваться
автоматический пуск при восстановлении напряжения после перерыва в питании.
10. На пассажирских судах, диаметр головки баллера руля
которых превышает 230 мм, должен быть предусмотрен вспомогательный пост управления РЭП в кормовой части судна. Посты
управления снабжаются дистанционными указателями положения
пера руля-аксиометрами.
1 1 . Для РЭП в рулевой рубке и у поста управления главными
механизмами должна быть предусмотрена звуковая и световая
сигнализация об исчезновении напряжения, обрыве фазы и перегрузке в цепи питания; об исчезновении напряжения в цепи питания
системы управления; о минимальном уровне масла в цистерне.
Дистанционное управление рулем осуществляется со специального поста, расположенного в рулевой рубке. В непосредственной
близости от поста размещают приборы контроля: аксиометр, репитер гирокомпаса, элементы сигнализации о работе РЭП, переключатели для ввода в действие основных и резервных звеньев привода и
схемы управления.
В современных системах все основные контрольные приборы
встраиваются в рулевой пост.
220
Управление рулевым устройством в зависимости от типа и
системы РЭП осуществляется различно. По принципу управления
рулевые электроприводы могут быть разделены на 3 группы:
системы простого управления; системы следящего управления;
системы автоматического управления.
В системах простого управления для перекладки руля требуется
включение ЭД при помощи поста управления (штурвала, рукоятки
или кнопки), который удерживается включенным до тех пор, пока
руль не займет необходимое положение. Для возврата руля в
прежнее положение ЭД реверсируют тем же способом. Положение
руля определяется визуально по шкале рулевого указателя или
аксиометра. В этой системе при перекладке руля в сторону от
диаметральной плоскости и обратно следует осуществить 4 операции: перекладку рулевого поста в сторону, возврат его в среднее
положение, перекладку в обра жую сторону и возврат опять в
среднее положение.
При следящем управлении положение пера руля после отработки соответствует положению штурвала управления. Разность положений в зависимости от знака определяет наличие сигнала управления и перекладку руля в сторону согласования. Иногда рассматриваемый принцип называют управлением по пути. Штурвал механически связан со стрелкой, указывающей заданное положение руля.
После отработки руль автоматически перекладывается на требуемый угол, ч го может быть проверено по аксиометру. В некоторых
случаях указательные стрелки заданного и действительного положений руля работают на общую шкалу совмещенного аксиометра.
Для перекладки руля к борту и обратно рулевому нужно совершить
только 2 операции: переложить штурвал на нужный угол и вернуть
его в нулевое положение. Управление РЭП по этой системе значительно проще и удобнее, требует меньшей затраты физических сил и
внимания.
Автоматическое управление предполагает задание угла перекладки руля по определенной программе, разрабатываемой автоматически судовым счетно-вычислительным комплексом в зависимости от решаемых навигационных или иных задач. В настоящее
время на транспортных судах применяют наиболее простые рулевые автоматы, обеспечивающие автоматическую стабилизацию судна на заданном курсе. При меньших угловых отклонениях руля
авторулевые точнее удерживают судно на курсе, что благодаря
спрямлению линии движения сокращает проходимое расстояние на
2,5-3% по сравнению с ручным управлением. Уменьшение тормозного действия отклоненного руля способствует некоторому увеличению средней скорости судна.
Выполнение функций РЭП согласно изложенным выше принципам обеспечивается электрическими системами управления.
221
53. Схемы электроприводов при следящем управлении
Системы следящего управления могут функционировать как
самостоятельно, так и в составе авторулевого. Электрические схемы
РЭП с механическими и гидравлическими передачами имеют свои
специфические особенности.
Электропривод с механической передачей. В приводах с секторными механизмами перекладка руля осуществляется непосредственно
ИД. Тяжелый режим работы, частые пуски и реверсы в сочетании с
требованиями высокой надежности обусловили применение в данном РЭП системы генератор-двигатель, в которую входит следующее оборудование: ИД постоянного тока с независимым возбуждением; 3-машинный преобразовательный агрегат, состоящий из приводного двигателя, генератора и возбудителя; аппаратура управления, защиты и сигнализации. Трехмашинный агрегат устанавливают чаще всего в румпельном отделении, где имеется щит питания
РЭП с соответствующей коммутационной аппаратурой. Пуск агрегата осуществляют дистанционно не менее чем из двух постов,
включая местный из румпельного отделения.
Рассмотрим бесконтактную схему следящего управления секторным рулевым электроприводом, выполненную по системе Г —Д
(рис. 119). Управление генератором осуществляется через возбудитель (72, который имеет 2 дифференциально включенные обмотки
возбуждения ЬС2 (5, 6), каждая из которых получает питание от
своего магнитного усилителя (МУ1 или МУ2). Усилители с самонасыщением имеют выход на постоянном токе, снабжены двумя
обмотками управления Ы, ЬЗ или Ь2, Ь4, магнитодвижущие силы
которых направлены встречно. Обмотки Ни 1,2, принадлежащие
разным усилителям, соединены последовательно и работают от
выпрямителя 1)2,1. Аналогичная цепь, составленная из обмоток ЬЗ,
Ь4, подключена к выпрямителю 1}22. При равных напряжениях С/3
и 04, поступающих на выпрямители, по обмоткам пойдут одинаковые токи и общая магнитодвижущая сила управления каждого
усилителя будет равна нулю. Усилители или полностью закрыты.
или полуоткрыты. Степень начального открытия обоих усилителей
должна быть одинаковой с тем, чтобы в обмотках 5 и 6 возбудителя
обеспечивалось равенство токов. Она регулируется установочным
резистором в дополнительных обмотках смещения, подключенных
к выпрямителю (на схеме не показаны).
Работа схемы управления рулем происходит следующим образом. В исходном состоянии к трансформатору ТУ подключены
первичные обмотки 1 и 2 сельсинов ВС1 и ВС2; снимаемые с их
вторичных обмоток ЭДС равны кулю (с^ = ег =• 0). Напряжения V3
и 6'4 на выпрямителях 1/2ГУ и 1122 фазочувствительной схемы
соответственно равны напряжениям V ^ и II2 вторичных нолуобмоток трансформатора ТУ (17, = С/3 — 02 = С/4). Степень открытия
МУ1 и МУ2 одинакова. Общая магнитодвижущая сила возбудителя
222
Рис. 119. Бесконтактная схема системы следящего управления
секторным электроприводом
:
равна нулю. Генератор не возбужден, и исполнительный двигатель
М2 стоит. Для перекладки руля (наример, вправо) поворачивают
штурвал поста и связанный с ним сельсин ВС1. На вторичной
обмотке сельсина появится ЭДС е± определенной фазы (первая
полуволна показана стрелкой). На выпрямителях 112.1 и 1}22'
появятся напряжения соответственно [73 = (У, — е^ и 17.4 = (72 + ег.
Сигнал на усилителе МУУ будет открывающим, а на МУ2-закрывающим. Ток в обмотке б возбудителя увеличится, а в обмотке
5-уменьшится. На генераторе появится напряжение определенной
полярности, в результате чего ИД начнет перекладывать руль на
правый борт. Вместе с баллером повернется сельсин ВС2, на
выходной обмотке которого образуется ЭДС е2 встречной фазы
относительно е1. Разность напряжений 1/4 и 1/3 будет уменьшаться,'
что приведет к снижению магнитодвижущей силы возбуждения
возбудителя и уменьшению частоты вращения ИД. Когда сельсин
ВС2 достигнет такого же положения, что и ВС1, тогда ЭДС е^ и е2
уравняются. Действие управляющего сигнала прекратится, и ИД
остановится.
223
В динамике сигнал открытия усилителей формируется разностью напряжений (74 и 1/3, причем: [74 = 1/2 + (е^ — ег); 1/3 =
= 1/1 (е1 — е2). Эта разность зависит от угла рассогласования между
сельсинами ВС1 и ВС2. При углах рассогласования, превышающих
4-5°, усилитель МУ1 полностью открыт, а МУ2- закрыт. Напряжение на возбудителе достигнет наибольшего значения. Следовательно, перекладка на большие углы ведется с максимальной скоростью, которая постепенно снижается при подходе к заданному
положению.
Работа схемы по перекладке на левый борт происходит аналогичным образом. Фаза ЭДС с^ изменяется на 180°: большим
становится напряжение 1/3. меньшим -(У 4 . Усилитель МУ2 открывается, а усилитель МУ1 закрывается. Полярность возбудителя
меняется на обратную, вследствие чего ИД реверсируется.
Рассмотренный принцип бесконтактного управления является
универсальным. В частности, аналогичная схема использована для
управления серводвигателем электрогидравлической рулевой машины в комплекте с авторулевым.
Электроприводы с гидравлической передачей. Рулевой электрогидравлический привод состоит из силового привода и сервопривода. В РЭГП на руль воздействует работающий агрегат электродвигатель-насос. Вместе с тем управление перекладкой руля, регулирование скоростей его движения связано с изменением подачи
масла на рулевую машину, которое осуществляет сервопривод.
Поэтому целесообразно в РЭГП рассматривать 2 раздельные системы: управления ЭД насоса, представляющую силовой привод рулевой системы; управления сервоприводом, непосредственно задающую и контролирующую перекладку рабочего органа.
В схемах силового привода предусматривают дистанционный
пуск и остановку ЭД из нескольких мест, включая рулевую рубку и
румпелыюе отделение, пакетными переключателями, имеющими
фиксацию положения, что обеспечивает самозапуск ИД после возможного перерыва питания. Схемы основного и резервного приводов аналогичны. Обычно предусматривается автоматический ввод
резервного агрегата при выходе из строя основного. Режим пуска
аналогичен пуску большинства ЭП машинного отделения.
Контакторные станции управления силовым ЭП устанавливаются в румпельном отделении. Там же устанавливается и щиток
питания рулевого устройства, напряжение на который подается по
двум независимым линиям, разведенным по бортам. Автоматические выключатели, установленные на главных и аварийных распределительных щитах, защищают фидеры и схему от коротких замыканий. На каждом фидере имеется контактор, контролирующий наличие'напряжения питания. При выходе из строя работающего фидера
контактор его отключается и своим вспомогательным контактом
замыкает цепь катушки контактора резервного фидера. Продолжительность переключения питания, когда схема остается без иапря224
жения, составляет доли секунды (ЭД насоса за это время почти не
уменьшает частоты вращения). Поэтому переход с основного фидера на резервный практически не сопровождается повторным
пуском ИД.
Минимальные потребности в элементах сигнализации определены Регистром СССР. Обычно состояние силового ЭП и системы
управления контролируется системой сигнализации (звуковой и
световой). Так, в румпельном отделении на групповом щитке для
каждого фидера устанавливают сигнальные лампы наличия питания. Контакторные станции имеют световое табло, свидетельствующее о нахождении данного агрегата в действии. Аналогичные
лампы находятся в постах дистанционного пуска ИД, а также в
посту управления рулем в рулевой рубке. Перегрузка ЭП контролируется с помощью тепловых или токовых (с выдержкой времени)
реле, воздействующих на световую и акустическую сигнализации в
машинном отделении и рулевой рубке. Акустический сигнал может
быть отключен специальным переключателем, но при этом подается питание на ламповое табло «Сигнализация отключена».
В качестве примера рассмотрим систему управления ЭП насосов
рулевой машины РЭГ-4 (рис. 120), которая применена на многих
судах отечественной постройки (схема показана в сокращенном
виде). Для двух двигателей М1 и М2 насосов предусмотрен местный
(из румпельного помещения) и дистанционный (из рулевой рубки)
пуск с помощью переключателей 5А1 и 8А2, расположенных в
румпельном помещении. Управление каждым ЭД раздельное. В
случае дистанционного управления необходимо при пуске дополнительно замкнуть соответствующие выключатели 8АЗ или 8А4,
смонтированные на колонке авторулевого. При этом получают
питание реле-защелки К VI, КУ2, что приводит к срабатыванию
контакторов КМ1 и КМ2 и пуску ЭД.
Сигнализация подключается цепью управления через трансформатор ТУ (цепь управления включена через вспомогательные контакты переключателей, которые на схеме не показаны). При нормальной работе получают питание катушки реле КУЗ и КУ4,
благодаря чему их замыкающие контакты замкнуты, размыкающие-разомкнуты. В этом случае катушки реле времени К.Т1 и КТ2
питания не получают и также отключен ревун НА. Работа двигателей М1 и М2 сигнализируется горением ламп НЬ2 и НЬЗ. Лампа
НЬ2 при нормальной работе включена через замыкающие контакты
КУЗ к КМ1, а лампа НЬЗ-через замыкающие контакты КУ4 и
КМ2. Параллельно этим лампам подключены катушки промежуточных реле КУ5 и КУ6, ввиду чего замыкающие контакты этих
реле замкнуты, а размыкающие-разомкнуты. Лампа НЬ4 не горит.
Если при работе ЭД один из них (например, М1) оказывается
перегруженным, то срабатывает одно из тепловых реле 1КК11ККЗ и катушка реле КУЗ отключается. В этом случае размыкаюший контакт КУЗ подключает ревун НА и подается акустический
8
З а к . 1276
225
сигнал о неисправности. Одновременно получает питание реле
времени К 77, которое при срабатывании подключает катушку реле
К 72, последнее воздействует на первое, благодаря чему оба реле
начинают работать в прерывистом режиме. Цепь сигнальной лампы
771,2 меняется: она получает питание вместо разомкнувшихся замыкающих контактов К УЗ через размыкающие контакты К Т1 и КУЗ.
При прерывистом режиме работы реле КТ1 начинается мигание
лампы //7,2, что свидетельствует о перегрузке двигателя М1. Перегрев двигателя М2 сигнализируется лампой 777,2. При отключении
двух двигателей катушки реле К.У5 и КУ6 будут обесточены, их
размыкающие контакты замыкаются и благодаря этому включается ревун и загорается сигнальная лампа Н1^4. При данной аварийной ситуации также не горят лампы 777,2 и 777,.?. Ревун во всех
случаях может быть отключен нажатием на кнопку 57?.
[ \ Дистанционное ., ду/
5А /1 ~"" ^^ гТ! г—»
I—^-| г-1
Местное
—
^_^^}
Местное
•-о
кмг
КН1
ч«
\
[]
Дистанци-
ч"
\ЛА//
/ш шг 1ККЗ
X
2КК1 2КК2 2ККЗ
сэсаса
I Ь|| Р1СЗ
2'
3'
РИС. 120. Схема системы управления электроприводами насосов рулевой машины
РЭГ-4
226
. Сервопривод гидравлической рулевой машины включает в себя:
серводвигатель, кинематический передаточный механизм и схемы
управления и контроля. Схемы управления рулевым сервоприводом
и представляют собой собственно схемы управления рулем. Используемые на судах схемы отличаются большим многообразием и
могут быть классифицированы:
по типу кинематического механизма управления (системы с
каскадами гидроусиления или системы с дифференциалами);'
по типу серводвигателя (с 3-фазным или 2-фазным АД, с
гидравлическим серводвигателем и т. п.);
по принципу управления серводвигателем (релейно-контакторные, система Г Д, бесконтактные и т.п.).
Системы РЭП предусматривают ручное и автоматическое управление. Для РЭГП указанные функции управления выполняются в
основном с помощью авторулевых.
>
54. Схемы электроприводов
при автоматическом управлении
Системы управления РЭП, обеспечивающие движение судна по
заданному курсу без воздействия рулевого, называются автоматическими. Для управления работой рулевого устройства в этом
случае используются авторулевые, которые обеспечивают автомагическое удержание судна на заданном курсе, а также позволяют
выполнять необходимые маневры. Несмотря на большое разнообразие авторулевых, их структурные схемы в принципе аналогичны и
различаются только элементной базой и незначительными особенностями. Так, при сравнении устаревших авторулевых АТР и
современных авторулевых типа «Аист» можно отметить следующее: в авторулевом АТР корректирующее устройство электромеханическое, а у авторулевого «Аист» - электронное; у последнего в
исполнительном механизме отсутствует электромагнитная муфта.
Принцип действия авторулевых. Отклонение судна от заданного
курса воспринимается гирокомпасом ГК (рис. 121), который через
датчик повернет ротор сельсина-приемника курса СП. Последний
через необратимую передачу НП поворачивает вал механического
дифференциала МД. На второй вал механического дифференциала
от штурвала подается заданное значение курса сц. На выходном
(третьем) валу МД получается разность между -заданным и истинным значениями курса, которая характеризуется утлом отклонения
от заданного курса и. Выходной вал МД поворачивает датчик курса
ДК, который вырабатывает напряжение II1 = ^ а, пропорциональное углу рассогласования судна тю курсу (является основным
управляющим сигналом). Два других управляющих сигнала вырабатываются в блоке коррекции БК, включающем в себя дифференцирующее ДУ и интегрирующее ИУ устройства.
8*
227
Рис. 121. Упрощенная структурная схема авторулевого при виде
управления «Автомат»
Дифференцирующее устройство вырабатывает сигнал V '2 =
— &2с1а/<1г, пропорциональный скорости отклонения от заданного
курса. Сигнал дифференцирующего устройства предназначен компенсировать энергию поворота судна, т, е. погасить его инерцию
путем отрицательной закладки руля. Сигнал, вырабатываемый
интегрирующим устройством, пропорционален интегралу от угла
I
отклонения судна по времени: [73 = &3 |ас1/. Этот сигнал обуслов0
ливает перекладку руля для компенсации сноса судна с курса в
результате действия односторонних сил.
Таким образом на входе усилителя суммируются 3 сигнала
(пропорциональный углу отклонения судна, его производной и
интегралу):
(7у =
Сумма сигналов {Уу подается на вход усилителя У, откуда
усиленный сигнал поступает на исполнительный двигатель ИД,
который поворачивает управляющий орган насоса Н рулевой машины РМ. Насос рулевой машины в соответствии с положением
управляющего органа приводит в движение поршни силовых цилиндров С Ц, которые будут поворачивать руль на угол (3. При
повороте руля приходит в движение рулевой датчик РД, имеющий
механическую связь с баллером, и вырабатывает сигнал отрицательной обратной связи У4 = & 4 р\ Этот сигнал вычитается из
управляющего сигнала, а поэтому ограничивает угол перекладки
руля и вместе с сигналом 1/х обеспечивает удержание судна на
заданном курсе (по закону незатухающих колебаний).
Исполнительный двигатель ИД связан с управляющим органом
насоса через исполнительный механизм. В зависимости от типа РМ
228
в комплект авторулевого может входить исполнительный механизм
ИМ-1 или ИМ-2. В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый угол е, а в приборе ИМ-2 выходной
валик совершает поступательное перемещение на некоторую величину /. Значение смещения определяет подачу насоса, а соответственно и скорость перекладки руля. Таким образом, е = Ыр/ё/,
поэтому датчик ДН обратной связи по насосу, механически связанный с ИД, вырабатывает сигнал II5 = /с 5 с!р/дг. Этот сигнал отрицательной обратной связи вычитается из управляющего сигнала и
служит для уменьшения автоколебаний пера руля.
Процесс управления судном для удержания его на заданном
курсе можно представить следующим образом. При отклонении
судна от заданного курса выработанный авторулевым управляющий сигнал поступает через усилитель на ИД. Последний приводит
в движение управляющий орган и датчик ДН, вырабатывает сигнал
1/5, который вычитается из управляющего сигнала усилителя.
Когда при определенном смещении управляющего органа значение
сигнала отрицательной обратной связи станет равным управляющему сигналу на входе усилителя, разность напряжений станет
равной нулю, а следовательно, и напряжение, подаваемое на ИД,
тоже станет равным нулю. Двигатель остановится, а управляющий
орган насоса будет повернут на определенный угол. Насос рулевой
машины в соответствии с управляющим органом приведет в движение поршни СЦ рулевой машины, которые будут поворачивать
руль.
При повороте руля рулевой датчик РД вырабатывает сигнал
1/4 , который вычитается из управляющего сигнала усилителя.
Поскольку в рассматриваемый момент разность сигналов на усилителе была равна нулю, то под действием сигнала обратной связи РД
усилитель будет вырабатывать напряжение противоположной фазы, ротор ИД будет вращаться в обратную сторону и перемещать
управляющий орган насоса к нулевому положению. При этом
сигнал 175 обратной связи датчика ДН насоса будет соответственно
уменьшаться. Когда управляющий орган насоса вернется в нулевое
положение, рулевая машина прекратит движение, руль остановится
в определном положении, сигнал датчика ДН будет равен нулю,
сигнал датчика РД будет равен по значению управляющему напряжению V и противоположен но знаку. Разность сигналов на входе
усилителя опять будет равна нулю. Под действием момента, создаваемого рулем, судно начнет возвращаться на заданный курс и в
связи с этим значение управляющего напряжения С/у уменьшается.
Это приводит к нарушению равенства сигналов и под действием
напряжения, определяемого полярностью сигнала (74 рулевого
датчика, ИД начинает смещать регулирующий орган насоса в
противоположную сторону. В результате обеспечивается возврат
руля в диаметральную плоскость, когда судно оказывается на
заданном курсе.
229
В авторулевых, кроме автоматического управления, возможно
осуществлять также следящее, простое и ручное (аварийное) управление. С целью повышения надежности управляющие элементы
авторулевых дублируют. Созданные таким образом каналы управления могут работать параллельно или раздельно в зависимости от
пуска двух насосов или одного из них. При выходе из строя одного
из каналов управления можно управлять рулем с помощью другого
канала, выключив насос неисправного канала.
Авторулевой «Аист». На судах, имеющих электрогидравлические
рулевые машины, устанавливают авторулевой «Аист». В комплект
авторулевого входят следующие устройства: пульт управления,
пульт следящего управления, переключатель пультов (10-ПП), исполнительный механизм, рулевой датчик. Пульт управления является основным прибором авторулевого, в котором размещены
электротехнические элементы, усилители и другие устройства, предназначенные для выработки сигналов управления. Его устанавливают в рулевой рубке. Пульт следящего управления предназначен
для управления судном только в двух режимах: следящем и простом. Устанавливается он также в рулевой рубке. Переключатель
пультов 10-ПП обеспечивает переключение электрических цепей,
если в комплектации авторулевого предусмотрено несколько пультов управления. Исполнительный механизм служит для управления
электрогидравлической рулевой машиной. В зависимости от типа
рулевой машины применяют исполнительный механизм ИМ-1 или
ИМ-2, устанавливаемый в румпельном отделении на корпусе насоса. Рулевой датчик содержит электромеханические элементы для
выработки сигнала обратной связи в схеме авторулевого. Его
устанавливают в румпельном отделении, РД имеет непосредственную механическую связь с баллером руля.
На рис. 122 показана схема авторулевого, обеспечивающая автоматическое, следящее, простое и ручное управление.
При а в т о м а т и ч е с к о м у п р а в л е н и и переключатель 5'А 1
устанавливают в положение 1. при этом вырабатывается 5 сигналов: I/!, и2, 1/3- V*' ^зСигнал 17) = &)« формируется сельсином-датчиком ВСЗ, который механически связан с сельсином-приемником курса ВЕ2. Связь
с переключателем выполнена через контакты переключателя 8А 1.1 и
8 А 1.2.
I
Сигналы 1/2 = /с2с!а/о!/ и (У3 = /с3 |а<1/ вырабатываются соответ0
ственно в дифференцирующем ДУ и интегрирующем ИУ устройствах блока коррекции. Все элементы блока коррекции получают
необходимые для работы напряжения от блока питания БП. Силовой трансформатор блока БП (на схеме не показан) подсоединяется
к судовой сети через переключатель 5А 1.9 только в автоматическом
режиме. В других режимах схема БП обесточена, узлы ДУ и ИУ
питания не получают, поэтому сигналы V2 и (У3 отсутствуют.
230
Рис. 122. Функциональная схема авторулевого «Аист»
Устройства ДУ и ИУ имеют одинаковые электрические схемы,
включающие усилитель постоянного тока (элементы М, У, ДМ) и
регулируемый ограничитель РО напряжения.
Поскольку сигнал 171, поступающий с сельсина-датчика курса
ВСЗ на общий вход блока коррекции является сигналом переменного тока определенной фазы, его необходимо преобразовать в сигнал
постоянного тока соответствующей полярности. Для этой цели
служит фазочувствительный выпрямитель ФЧВ, с выхода которого
сигнал 1/с постоянного тока через конденсатор С1 подается на вход
ДУ, а через регулируемый резистор КЗ-т вход ИУ. В последующем происходит усиление сигнала в блоках УПТ, но для этого
требуется предварительно преобразование этого сигнала в переменный ток. Каждый УПТ содержит модулятор М, преобразующий
постоянный ток в переменный, усилитель У переменного тока и
демодулятор ДМ, служащий для обратного преобразования
переменного тока в постоянный (это необходимо для реализации в
УПТ обратных связей). Обратная связь в ДУ образуется через
резистор Л.1, а в ИУ через конденсатор СЗ. Последний этап
преобразования сигналов протекает в блоках регулируемых ограничителей РО. Здесь сигналы постоянного тока вновь преобразуются в
напряжения переменного тока и попутно происходит регулирование
выходных сигналов с ограничением их амплитуды. Выходными
элементами устройств ДУ и ИУ являются трансформаторы ТУ1
и ТУ2, вторичные обмотки которых с сигналами (72 и [/3 соединены
последовательно. Они являются частью схемы суммирования сигналов авторулевого.
Схемы устройств ДУ и ИУ отличаются одна от другой только
тем, что в ДУ конденсатор С1 включен на входе, а в блоке ИУ
конденсатор СЗ включен в цепи обратной связи. Благодаря конденсатору на входе ДУ сигнал на его выходе появляется только в том
случае, если есть изменение входного сигнала V 1, что происходит
при отклонении судна от курса. Этот сигнал пропорционален
Скорости ухода судна с курсом (ёа/д?). Регулируемый резистор К1
в цепи обратной связи, охватывающей ДУ, служит элементом
настройки сигнала производной. Необходимое значение сигнала 1/2
устанавливают в зависимости от состояния моря (при отсутствии
волнения устанавливают максимальный диапазон по шкале регулятора , а с ухудшением погоды его уменьшают). Сигал V2 повышает
стабилизацию судна на заданном курсе, обеспечивая гашение колебаний судна относительно заданного курса.
Обратная связь в ИУ, образованная конденсатором СЗ, при
появлении на входе сигнала постоянной амплитуды вызывает на
выходе ИУ напряжение, изменяющееся по экспоненциальному закону. Большая емкость конденсатора СЗ затягивает процесс до
нескольких минут. Практически для ограниченного интервала времени процесс нарастания напряжения на выходе УПТ и соответственно на конденсаторе СЗ можно считать линейно изменяющимся
232
во времени по интегральному закону, т. е. напряжение пропорционально интегралу от входной величины или интегралу угла отклонения от курса .судна. Таким образом, рыскания судна определяют
медленно протекающий процесс заряда и разряда конденсатора СЗ.
Если рыскания симметричны, то общий заряд СЗ за период близок
к нулю и не изменяется во времени. Односторонние рыскания,
обусловленные дополнительными внешними воздействиями, способствуют за некоторое время (более 100 с) накоплению заряда
конденсатора и появлению на нем напряжения определенной полярности. Это же напряжение будет на выходе УПТ интегратора.
Данный сигнал обеспечивает дополнительную перекладку руля на
некоторый постоянный угол, в результате чего влияние внешнего
несимметричного возмущения компенсируется. На входе интегратора имеется регулируемый резистор КЗ, посредством которого
можно изменять скорость интегрирования в пределах о-8 мВ/с при
входном сигнале 400 мВ. Регулирование резистора КЗ используется
при начальной настройке авторулевого на конкретном судне.
Сигнал 1}4 = &4Р вырабатывается сельсином- датчиком ВСб,
находящимся в рулевом датчике. Ротор сельсина ВС6 механически
связан с рулем. Сигнал 1/4 всегда находится в противофазе с сигналом С/ 1 . Он создает отрицательную обратную связь. От значения
напряжения 1}4 зависит угол перекладки руля (3 (при заданных
значениях угла рыскания судна а), ибо при уравновешивании этим
сигналом управляющего сигнала прекращается перекладка руля.
Для регулирования сигнала [74 и, следовательно, для установления
определенного угла р (в зависимости от условий погоды) имеется
регулятор коэффициента /с0 с обратной связи. Регулирование
&0 с проводится переключателем 5^42 за счет изменения напряжения,
снимаемого со вторичной обмотки трансформатора ТУЗ, которое
служит для возбуждения сельсина-датчика ВС6. При увеличении
возбуждения, что возможно при возрастании /с„ с , равновесие
между управляющим сигналом и сигналом 1/4 происходит при
меньшем угле поворота р. Значение /с0 с = а/р регулируется в пределах от 0,2 до 2,0 и фиксируется на шкале пульта управления. При
слабом волнении моря значение /с0 с устанавливают, как правило,
меньше единицы, причем с уменьшением скорости судна его снижают. С усилением волнения коэффициент &0 с увеличивают, при
этом угол перекладки руля уменьшается и тем самым снижается
нагрузка на рулевую машину.
Сигнал 1/5 = Ис 5 (1р/си вырабатывают сельсином-датчиком ВС5
исполнительного механизма. Ротор сельсина ВС5 механически
связан с исполнительным двигателем М1, который устанавливает
перемещение выходного валика в положение управляющего органа
насоса. Угол поворота е двигателя М1, таким образом, определяет
смещение управляющего органа насоса, что влияет на подачу
насоса и скорость перекладки руля. Вырабатываемый сельсином
ВС5 сигнал (/5 также зависит от угла е и поэтому пропорционален
233
скорости перекладки руля ёр/с!/. Сигнал {75 является сигналом
отрицательной обратной связи, обеспечивающим гашение автоколебаний в системе исполнительный механизм-руль.
Все 5 напряжений ([/1-[75) суммируются путем последовательного соединения сигнальных элементов: сельсина ВСЗ, трансформаторов ТУ1 и ТУ2 блока коррекции, сельсинов ВС6 и ВСЗ. Суммарный сигнал 11С = 1/1 + V'г + (73 + (74 + V 5 подается на вход усилителя А1. Значение суммарного сигнала в зависимости от состояния
моря можно установить переключателем ВАЗ («Грубо» или «Точно»). В положении «Точно» (при тихой погоде) на вход усилителя
поступает все напряжение (7С. При сильном волнении перключатель
8АЗ переводится в положение «Грубо», благодаря чему часть
сигнала С/с шунтируется резистором К2. Из-за уменьшения сигнала
авторулевой не реагирует на малые отклонения судна от курса. Это
уменьшает число перекладок руля, вследствие чего уменьшается
изнашивание рулевой машины. Начальное регулирование резистора
К2 проводят при установке авторулевого на судне.
Усилитель А1 осуществляет усиление суммарного сигнала, который с выхода усилителя А1 через переключатель 5'А 1.8 поступает на
управляющую обмотку исполнительного двигателя М7, в результате
смещается управляющий орган насоса. Усилитель А1 состоит из
следующих основных частей:
ограничителя больших сигналов (2 встречно включенных диода
УО1 и УО2 и резисторов К4 и К.5 на входе); резистором К4
осуществляют начальное регулирование входного сигнала, обеспе-'
;
чивая нормальную работу усилителя ;
Г
предварительного усилителя ПУ, состоящего из эмиттерного
|;
повторителя и одного усилительного каскада;
двойного преобразователя сигнала с демодулятором ДМ и мо^:
!
дулятором М (двойное преобразование сигналов компенсирует '
;П
фазовые сдвиги по отношению к опорному напряжению);
усилителя мощности УН, имеющего 2 каскада усиления;
-к
усилителя мощности УМ, состоящего из двух каскадов усиле-'?
>
ния, каждый из которых работает по 2-тактной схеме;
выходного трансформатора ТУ4, вторичная обмотка которого
подключена на управляющую обмотку исполнительного двигателя
М1 (со специальной обмотки трансформатора ТУ4 осуществляется
обратная связь на вход модулятора М через узел обратной связи
УОС);
блока питания БП, подключенного к сети и вырабатывающего
опорное напряжение переменного тока {7ОП для работы демодулятора ДМ и модуляторам, а также напряжения постоянного тока
1/п1 и Г/п2 для питания других элементов схемы.
При автоматическом управлении перед началом работы заданное значение курса устанавливают штурвалом при повороте его на
угол у. Вращение штурвала передается через механический дифференциал МД на ротор сельсина ВСЗ, который получает начальную
234
ориентировку для выработки основного сигнала С/ 1 . При повороте
судна иа угол а сельсином ВСЗ вырабатывается сигнал (7, — /с, а,
который после усиления подается на исполнительный двигатель
М1. Вращение двигателя М1 (угол е) передается на сельсин ВС5,
с которого снимается сигнал 1/5, пропорциональный углу е и находящийся в противофазе с сигналом Ъ\. Значение сигнала С/5 при
вращении двигателя М1 (в увеличивается) быстро возрастает и
достигает значения (7,. При полной компенсации напряжений (71
и (75 результирующий сигнал становится равным нулю и двигатель
М1 останавливается. Выработанный при этом угол етах соответствует максимальному смещению регулирующего устройства насоса,
благодаря чему начинается перекладка, руля со скоростью ф/с1/,
пропорциональной углу е.
При перекладке руля поворачивается ротор сельсина ВС6, который вырабатывает сигнал 1/4 - /с4р, противоположный по фазе
сигналу 11^. С появлением сигнала и4 равновесие напряжений
нарушается. Результирующий сигнал будет противоположен по
фазе начальному и вызывает вращение двигателя М1 в обратную
сторону, что уменьшает угол е и скорость перекладки руля. При
этом происходит одновременное уменьшение сигнала ?75 и возрастание сигнала (74 из-за продолжающейся перекладки руля в сторону увеличения угла р. Когда при совместном изменении сигналов
регулирующее устройство насоса займет начальное положение
(е = 0, 1/5 = 0), а-сигнал (У4 станет равным напряжению (7\, то
двигатель М1 остановится. При этом рулевая машина прекращает
перекладку и руль оказывается переложенным на какой-то угол р.
Это вызывает поворот судна к прежнему курсу, происходит уменьшение угла а и напряжения II^, и равновесие напряжений нарушается. Появляется результирующий сигнал, определяемый фазой сигнала 1/4, и двигатель М/ начинает вращаться, смещая регулирующее устройство насоса в противоположном направлении. Получает
вращение ротор сельсина ВСЗ, который вырабатывает сигнал С/ 5 ,
совпадающий по фазе с напряжением II±. При равновесии сигналов
1}\, (74 и II5 двигатель М1 останавливается.
При смещенном в противоположном направлении регулирующем устройстве насоса начинается возврат руля в диаметральную
плоскость. При приближении руля к диаметральной плоскости,
а судна к заданному курсу уменьшаются сигналы [74 и 1)^^, ввиду
чего равновесие напряжений нарушается. Появляется результирующий сигнал, определяемый фазой сигналов Vг и С/ 5 , и двигатель М1 начинает вращаться, возвращая регулирующее устройство
насоса в исходное положение. В итоге при уменьшающихся сигналах (У ] , 1/4 и С/, судно возвращается на заданный курс (а = 0), руль
-в диаметральную плоскость (р = 0), а регулирующее устройство
насоса в нейтральное положение (е = 0).
На точность управления рулем влияют также сигналы блока
коррекции. Сигнал устройства ДУ (напряжение (72 = &2с1а/с10 соз235
дает эффект сдерживания, т. е. обеспечивает возвращение руля
в диаметральную плоскость раньше, чём судно выйдет на заданный
курс.
При наличии несимметричного рыскания судна через некоторое
•
=
время появляется сигнал устройства ИУ (напряжение (У3 ^з
о
который вызывает отклонение среднего положения руля на некоторый угол от диаметральной плоскости и компенсирует возмущение,
создающее несимметричное рыскание.
В пульте управления есть аксиометр с двумя стрелками - заданного Р3 и истинного Ри положения пера руля. Стрелка заданного
положения механически связана с подвижным индексом репитера
и отклоняется на угол Р3 = и, а стрелка истинного положения
устанавливается сельсином-приемником ВЕ8, который электрически связан с сельсином-датчиком руля ВС7 (прибор РД). Ротор
сельсина ВС7 поворачивается на угол Р, так как механически
соединен с баллером руля.
В авторулевом предусмотрена звуковая сигнализация (ревун
НА): при автоматическом управлении (контакты переключателей
8А1.13 и 8А1. 14- в положении 7) в случае ухода судна с курса на
угол более заданного ревун НА подает звуковой сигнал. Угол, при
котором срабатывает ревун, задается переключателем 8А4, имеющим 4 фиксированных положения: сигнализация выключена; отклонение от курса 3°; отклонение от курса 6°; отклонение от курса 9°.
Питание ревуна обеспечивается выпрямителем 112.1 через переключатель 8А4, подвижной контакт которого механически связан с
сельсином-приемником ВЕ2 курса. Этот же ревун используется для
сигнализации о перегрузке насосов рулевой машины (питание подается через выпрямитель 1}22). Кнопка 8В 11 служит для снятия
звукового сигнала.
Задание нового курса в автоматическом режиме осуществляется
поворотом штурвала. При этом замыкается контакт 5^45, который
через переключатель 5 А 1.10 шунтирует конденсатор СЗ в цепи
обратной связи ИУ блока коррекции (сигнал 173 становится равным
нулю). Это делается для того, чтобы не увеличивалось время
выхода судна на заданный курс. С окончанием поворота судна
контакт 8А5 размыкается и ИУ блока коррекции снова начинает
вырабатывать сигнал 173 . При переходе на следящий или простой
вид управления конденсатор СЗ шунтируется контактами 5 А 1.10,
снимается сигнал 173 , т. е. выполняется сброс интегратора в нулевое
положение. Контакты 5 А 1.9 отключают питание блока коррекции.
Этим достигается прекращение выработки сигналов [/2 и 173 на
время, пока не будет включен автоматический режим управления.
В случае когда в автоматическом режиме руль перекладывается
на максимальный угол (Р = 35°), срабатывают конечные выключатели $0,8 или 809 (в зависимости от направления перекладки руля).
Эти выключатели, расположенные в РД, механически связаны
236
с баллером руля. При срабатывании 8()8 (или 5(?9) включается цепь
питания катушки реле КМ1 (или КМ2), находящегося в усилителе
А1. Напряжение + С/п2 на обмотки этих реле подается от БП. Пока
руль перекладывается в допустимых пределах (р < 35°), катушки
обоих реле обесточены и их контакты КМ1.1 и КМ2.1 замкнуты.
Диоды V^^0 и УОП зашунтированы контактами этих реле. Модулятор М усилителя А1 может создавать сигналы как одной фазы
(для перекладки руля влево), так и другой (для перекладки руля
вправо). При перекладке руля на максимальный угол замыкается
контакт выключателя 8()8 (или Х<2-9) в приборе РД и на катушку
реле КМ1 (или КМ2) будет подано напряжение (7п2. Контакты
КМ1.1 (или КМ2.1) разомкнутся и вместо них подключится диод
И) 10 (или УО11). Одна фаза сигнала, обеспечивающая дальнейшее
увеличение угла р, вырабатываться не будет. Двигатель М/ остановится и перекладка руля прекратится. Если при этом в схеме
возникает сигнал, противоположный по фазе, то на выходе усилителя благодаря открытому состоянию диода У010 (или \Ф11)
появится напряжение, которое обеспечивает вращение двигателя
М1 в противоположном направлении и перекладку руля к диаметральной плоскости. При этом конечные выключатели возвратятся
в исходное положение и катушки реле КМ1, КМ2 обесточатся.
Схема модулятора снова будет способна вырабатывать сигнал для
вращения двигателя М/ в обоих направлениях.
Для перехода на с л е д я щ е е у п р а в л е н и е переключатель 5А1
необходимо установить в положение 2. При этом происходит
следующее.
1. Сельсин-приемник ВЕ2 курса отсоединяется от гирокомпаса,
так как контактами 5А1.1 и 5/17.2 его обмотка синхронизации
отключается от сельсина-датчика курса: сигнал и^^^Ь^^а вырабатываться не будет. Вместо него за счет вращения штурвала создается сигнал V! — ^у, где у-угол поворота штурвала.
2. Контактами переключателя 5А 1.4 подключается сигнальная
лампа НЬ2, горение которой свидетельствует о работе авторулевого в следящем режиме.
3. Контактами 5А1.9 переключателя отключается БП корректи*
рующего устройства и прекращается формирование сигналов 172
и [73.
4. Контактами 5А1.10 шунтируется конденсатор СЗ и обеспечивается сброс интегрирующего устройства в нулевое положение.
5. Контактами 5А1.13 и 8А1.14 отключается звуковая сигнализация, фиксирующая отклонение судна от заданного курса.
При повороте рулевым штурвала на некоторый угол у вправо
или влево вращение через редуктор передается на ротор сельсина
ВСЗ и с его обмотки синхронизации снимается управляющий сигнал
[/л = /^у. Сигнал [/! подается непосредственно (через цепи ТУ 1,
ТУ2, ВС6, ВС5) на вход усилителя А1 исполнительного механизма,который смещает регулирующее устройство насоса. Сигналы 174 и
237
{/5 формируются сельсинами ВС6 и ВС5 так же, как и при
автоматическом управлении. При работе авторулевого в следящем
режиме в схеме устанавливается Л0 с .=• 1, чем обеспечиваются наиболее оптимальные условия работы рулевой машины. При достижении рулем максимального угла гак же, как и при автоматическом
управлении, срабатывает конечный выключатель 8()8 или 8(^9 и
перекладка руля прекращается.
Сельсины ВСЗ и ВС5 установлены таким образом, что угол
поворота ротора сельсина ВС5 всегда примерно на 0,3° меньше, чем
у ротора сельсина ВСЗ. Это означает, что сигнал 111 больше сигнала
С/5. Благодаря этой разности напряжений двигатель М1 исполнительного механизма развивает момент, достаточный для компенсации усилий пружин нулевого установи геля. Поэтому рулевая машина осуществляет перекладку руля с постоянной скоростью. Перекладка руля прекращается в тот момент, когда сигнал 114, пропорциональный углу поворота руля, компенсирует напряжение I I 1 . При
этом напряжение (У5 практически будет равно нулю.
Для возврата руля в диаметральную плоскость судна штурвал
необходимо установить в нулевое положение. Вследствие того что в
этом случае сигнал (71 будет равен нулю, под действием напряжения V4 руль возвратится в диаметральную плоскость. Возврат
штурвала в нулевое положение осуществляется специальным блоком (рис. 123). При задании необходимой перекладки руля штурвалом / вместе с сельсином-датчиком ВСЗ (на схеме на показан),
формирующим сигнал перекладки руля, поворачивается ротор сельсина ВС1, который выдает управляющее напряжение на схему
электрического 'возврата штурвала. Этот сигнал через трансформатор ТУ подается на 2-тактный усилитель, состоящий из двух5
транзисторов УТ1 и УТ2. Нагрузкой плеч усилителя являются
резисторы Я1 и К2. С выхода1
1
усилителя сигнал подается'*на уп -'
равляющую обмотку 1,1 двигате-?
ля М, который через механическую передачу вращает штурвал. Одновременно поворачивается сельсин ВС1, и в нулевом положении управляющий сигнал исчезает. Двигатель М останавливается. Происходит механическая
фиксация штурвала. Обмотка Ь2
возбуждения двигателя М постоянно подключена к сети через
конденсатор С1. Конденсатор С2
компенсирует фазовый сдвиг в
Рис. 123. Принципиальная схема бло-
ка возврата штурвала авторулевого «Аист»
238
СИГШШе управления. образуЮЩИЙ-
ся из-за его прохождения через
индуктивные цепи.
При п р о с т о м у п р а в л е н и и контакты переключателя переводятся в положение 3 (см. рис. 122). В этом случае все элементы
схемы авторулевого, находящиеся в посту управления, отключаются. Управляющая обмотка исполнительного двигателя М1 контактами 8А1.8 отключается от усилителя А1, а контактами 8А1.6,
8А1.7, 8А1.11 и 8А1.12 подключается к трансформатору ТУ5. Контактами переключателя 5А 1.4 подключается сигнальная лампа НЬЗ,
горение которой свидетельствует о работе авторулевого при простом управлении. Кнопки 8В6 и 8В7 служат для подачи напряжения
одной или другой фазы на двигатель М1. В этой цепи оказываются
включенными конечные выключатели 5()$ и $0.9. Вращение двигателя М1 в определенном направлении обеспечивает перекладку руля
в нужную сторону. При нажатии кнопки 8В6 («Лево») двигатель М1
начинает вращаться, и сжимая пружину нулевого установителя,
перемещает или поворачивает выходной валик прибора ИМ. Золотник насоса рулевой машины смещается в соответствующую сторону, и руль перекладывается на левый борт. Если отпустить кнопку
8В6, двигатель М1 обесточигся и нулевой установитель возвращает
выходной валик прибора ИМ и золотник насоса рулевой машины в
исходное положение. Перекладка руля прекращается.
Для возврата руля в диаметральную плоскость или его перекладки на другой борт необходимо нажать кнопку 8В7 («Право»). Таким
образом, при простом управлении угол перекладки руля зависит от
времени удержания в нажатом состоянии кнопок 8В6 или 8В7.
Максимальный угол перекладки, так же как и при других видах
управления, ограничивается конечными выключателями 80,8 и $0,9.
В случае неисправности исполнительного двигателя М1 или его
цепей управления можно использовать р у ч н о е ( а в а р и й н о е )
у п р а в л е н и е . Для этого в приборе ИМ рукоятка, с помощью
которой можно вручную перемещать (вращать) выходной валик
исполнительного механизма и воздействовать на золотник насоса
рулевой машины.
55. Электроприводы специального назначения
На судах с целью улучшения их мореходных качеств применяют ряд органов управления, к которым относятся: подруливающие устройства, системы кренования и дифферента, успокоители
качки
Электропривод подруливающих устройств. На судне устанавливают обычно 1-2 подруливающих устройства в носовой части с
целью улучшения маневренных качеств. Однако на некоторых
крупнотоннажных судах зарубежной постройки имеется по нескольку подруливающих устройств, расположенных по всей длине судна.
Это дает большие преимущества, так как позволяет судам двигаться бортом, разворачиваться на месте, менять курс на малых ходах и
239
уменьшать радиус разворота. Подруливающие устройства создают
поперечную тягу, необходимую при швартовках судна или
маневрировании в узкости. Сила тяги создается движителями, в
качестве которых на судах используют гребные винты регулируемого и фиксированного шага. Винты приводятся во вращение
ЭД, мощность которых зависит от требуемой силы тяги (кН)
Р = Д,Г,
где/-относительная тяга, значение которой определяется конкретно для
судна в зависимости от требуемой маневренности, кН/м2; Ь-длина судна
между перпендикулярами, м; Т-осадка, м.
Если скорость истечения воды равна «(м/с), то мощность,
развиваемая подруливающим устройством, Рл — РV, а мощность
(кВт) электродвигателя
ЛД = ^/(Л Г Л М ),
где т)г-гидравлический КПД движителя; г| м -КПД механической передачи.
В качестве ЭД для подруливающих устройств применяют АД с
короткозамкнутым или фазным ротором и двигатели постоянного
тока (система Г-Д). Номинальная мощность ЭД даже при малых
значениях составляет 5-10% мощности судовой электроустановки.
Поэтому при использовании АД и работе их в условиях ограниченной мощности судовой электростанции необходимо применять
меры для уменьшения пускового тока. Пуск ЭД подруливающего
устройства с винтом регулируемого шага для уменьшения пускового момента и тока всегда проводится при лопастях винта, установленных в нулевом положении. Одновременно во всех видах установок осуществляют токоограничивающие способы пуска путем
пониженного напряжения, приложенного к статору, или введением
резисторов в цепь АД с фазным ротором. В некоторых случаях для
исключения колебания напряжения судовой сети ЭД подруливающего устройства получает питание от отдельного генератора. Изменение значения и направления силы тяги в ЭП с винтом регулируемого шага Достигается поворотом лопастей, а в приводах с
винтом фиксированного шага-путем реверса ЭД и изменения
частоты его вращения. Поворот лопастей винта регулируемого
шага осуществляется гидравлическими механизмами, которые
имеют электрическую систему управления.
Рассмотрим систему управления ЭП подруливающего устройства
с винтом фиксированного шага, установленного на судах смешанного плавания типа «Ладога» (рис. 124). В качестве приводного
двигателя винта применен АД с фазным ротором мощностью
64 кВт, который имеет 2 основные скорости: 1060 об/мин при
.первом положении контроллера и 1465 об/мин-при втором положении. С помощью автоматического выключателя 0,Р подключается схема управления и подается питание на блок терморезисторов
реле КК. Оно срабатывает, замыкая свой замыкающий контакт в
240
7д
с
\\ ]""
ГУ
1
1
~~ЗУ^^«Л 1
1И
,с
1
^
<
^, ПК
КМ!
^г/ I
/Г7-/ ^
1^ ЛТ/ ^^
А
V
г 1
>"
1
^л ^
Право
> г
Г-|
Ш
^ У "п
М"
^
о
Ъ
р] КТ1
| 1
'-
^4
^..
(лс^
«VI
1
Д^
1
~1
ц]/!
"1"
КН6
I
^='
|—Ха"
/Г/У*
ш
Рис. 124. Принципиальная схема электропривода подруливающего устройства
241
цепи катушки КТ1 и размыкая размыкающий контакт в цепи
катушки КУ2. Реле времени КТ1 размыкает контакты в цепи ревуна
НА и сигнальной лампы НЬ и замыкает контакт в цепи катушки
реле напряжения КУ1. Управление ЭП осуществляется командоконтроллерами. Пуск ЭД можно провести, если рукоятки командоконтроллеров всех постов будут находиться в нулевом положении
(на схеме показано управление только от одного контроллера и
блокировочные цепи не изображены). Если аварийный выключатель
18А предварительно замкнуть, то при переводе рукоятки контроллера из нулевого положения в первое (при направлении, например,
«Право») на какой-то период времени окажутся одновременно
замкнутыми контакты контроллера 8А1 и 8А2 и в результате
получит питание реле К VI. Включение этого реле обеспечивает
нулевую блокировку ЭП.
В первом положении «Право» получает питание реле времени
КТ2, которое при срабатывании включает реверсивный контактор
КМ1 и ЭД начинает разгон с полностью введенным пусковым
резистором (рис. 125, характеристика 1). Через замыкающий контакт КМ1 получает питание реле времени КТ4, включающее с
выдержкой времени контактор КМЗ, и первая ступень пускового
резистора в цепи ротора оказывается зашунтированной. Работе ЭД
в первом положении контроллера соответствует механическая характеристика 2 (см. рис. 125). Через замыкающий контакт КМЗ
контактора включается реле К Т5, которое подготавливает цепь
питания катушки реле К ТЬ.
Когда рукоятка командоконтроллера будет установлена во второе положение, то получит питание катушка реле КТб. При срабатывании этого реле его замыкающий контакт замыкается мгновен-
10и
Рис. 125. Механические характеристики
электропривода подруливающего устройства
242
М,%
Рис. 126. Схема действия гидродинамических сил на бортовых рулях
но, а размыкающий контакт размыкается с выдержкой времени 3 с.
В результате этого срабатывает контактор КМ4, который своими
главными контактами шунтирует вторую ступень пускового резистора (характеристика 3), а замыкающим вспомогательным контактом подключает реле времени К Т 7. Последовательное срабатывание реле времени К 77, К78, КТ9 и КТ10 вызывает поочередное
срабатывание контакторов КМ5, КМб, КМ7 и КМ8, в результате
чего с выдержкой времени шунтируются пусковые резисторы и
ротор ЭД ускоряется в соответствии с механическими характеристиками 4-1 (см. рис. 125).
При включении контактора КМ8 его замыкающий контакт
шунтирует размыкающий контакт реле К ТЪ. Размыкание этого
контакта происходит позднее, так как выдержка времени этого реле,
равная 3 с, будет больше, чем суммарное время срабатывания реле
К 77 (1 с), КТ8 (0,5 с), К79 (0,5 с), КТ10 (0,5 с). Таким образом, реле
КТЬ осуществляет контроль срабатывания схемы. Если какаялибо из цепей не сработала, то вспомогательные контакты КМ8 не
замкнутся, а разомкнувшиеся через 3 с размыкающие контакты
К 76 обесточат контактор КМ4, последовательно отключаются
другие контакторы и ЭД переходит в режим, соответствующий
механической характеристике 2,
Кроме нулевой защиты, осуществляемой реле КVI, предусмотрена также защита от перегрузок с помощью теплового реле КК.
Тепловое реле выполнено с помощью трех терморезисторов, встроенных в обмотку статора. В нормальных условиях реле КК,
включенное через терморезисторы, срабатывает. В том случае, если
температура обмоток ЭД превышает 120°С, замыкающий контакт в
цепи катушки К 77 размыкается, а размыкающий контакт в цепи
катушки КV2 замыкается. Отключение реле времени КТ1 вызывает
замыкание его контактов в цепи ревуна НА и сигнальной лампы
НЬ, также начинается отсчет выдержки времени этого реле (10 с).
Звуковой сигнал можно отключить нажатием на кнопку 8В и
принять меры к устранению перегрузки (переставить рукоятку в
положение 1). Если в течение 10с перегрузка не устранена, то
размыкающий контакт К 77 отключает реле К VI, благодаря чему
ЭД отключается от сети.
При резком переводе рукоятки командоконтроллера с положения «Право» на положение «Лево» или наоборот переключение
реверсивных контакторов КМ 1 и КМ2 происходит с выдержкой
времени, обеспечиваемой реле времени КТ2 и КТЗ, что уменьшает
переключающие токи.
Электропривод успокоителей качки. Основное применение на
судах нашли успокоители бортовой качки, главной частью которых
являются бортовые рули. Они служат для получения препятствующих качке судна сил и передачи их через корпусные ниши на
конструкцию судна. Перекладка рулей осуществляется так, что
гидродинамические подъемные силы Р (рис. 126), возникающие на
243
Рис. 127. Структурная схема системы управления успокоителями качки
рулях при ходе судна, создают восстанавливающие моменты, направленные в сторону, противоположную кренящему моменту,
вызванному волнением, и уменьшают качку судна. Для работы
успокоителя качки используются приводы перекладки рулей и
приводы их выдвижения и уборки. Тип силового привода обычно
гидравлический, масло в гидроцилиндры нагнетается при помощи
насосов переменной подачи. Управление работой насосов переменной подачи осуществляется различными системами управления,
которым, однако, присущи общие принципы управления механизмами силовых приводов успокоителя.
В состав системы управления (рис. 127) в общем случае входят
следующие приборы для измерения параметров качки судна: гидровертикаль 1 измеряет угол крена судна и вырабатывает электрический сигнал, пропорциональный этому параметру; гидротахометр
2 измеряет скорость бортовой качки и выдает соответствующий
сигнал; гидроакселерометр 3 измеряет ускорение, электрический
сигнал от которого вырабатывается, как и в других приборах,
вращающимся трансформатором или сельсином. Электрические
сигналы от измерителей параметров качки поступают в прибор
управления 4, где они суммируются. Суммарный сигнал управления
через усилители 5, куда приходят также сигналы обратных связей,
поступает в приборы 6 управления насосами переменной подачи 8
(вращаются электродвигателями 7), обеспечивая соответствующее
направление и угол перекладки руля. Наличие обратной связи по
углу перекладки руля от прибора 9 и по скорости перекладки от
прибора 6 обеспечивает следящий режим работы устройства.
244
Электроприводы систем кренования и дифферента. На ледоколах
и на ролкерах применяют системы кренования, в состав которых
входят: цистерны, расположенные по бортам симметрично относительно диаметральной плоскости судна, трубопроводы, насосы, ЭД
и системы управления. Кренование осуществляется попеременным
перекачиванием балласта с помощью насоса из цистерн одного
борта в цистерны другого борта. Применяемые насосы - лопастные
(с фиксированными или поворотными лопастями). Для насосов с
поворотными лопастями используется нерегулируемый ЭП, а для
насосов с фиксированными лопастями-регулируемый.
Дифферентная система состоит из тех же основых конструктивных элементов, что и система кренования. Цистерны ее располагаются в пиковых отсеках кормовой и носовой оконечностей.
Освобождение ледокола от заклинивания с помощью дифферентной
системы осуществляется изменением дифферента судна за счет
перекачивания балласта из кормовых цистерн в носовые (или
наоборот) или опорожнением дифферентных систем и всплытием
благодаря откачке балласта за борт.
56. Особенности эксплуатации
От качества и надежности работы РЭП в значительной степени
зависят безопасность плавания, а также технико-экономические
показатели судов. Поддержание РЭП в работоспособном состоянии
достигается грамотной технической эксплуатацией.
В состав РЭП входит множество элементов, показатели надежности которых неодинаковы. Ряд элементов (транзисторы, конденсаторы и т. п.), отказы которых носят внезапный характер, не
обладают ремонтопригодностью и требуют замены после выхода
из строя. Обнаружение неисправности здесь для неработающей
системы возможно только путем периодических проверок. Многие
звенья подвержены влиянию физического старения, постепенно
изменяют свои свойства во времени (износ, ухудшение сопротивления изоляции). Работоспособность таких элементов может быть
восстановлена в процессе обслуживания, которое предусматривает
замену и регулировку еще исправных узлов оборудования, достигших определенного возраста или степени изнашивания.
Характеристики распределения времени отказов аппаратуры
РЭП являются предметом изучения теории надежности. Значение
таких характеристик позволяет обоснованно регламентировать обслуживания: периодичность и объем. осмотров, замен, периодичность проверок с целью контроля исправности оборудования и т. д.
С целью накопления материала все отказы оборудования регистрируют в специальных журналах с указанием характера отказа,
времени наработки и т. п. Информация об отказах направляется с
очередным рейсовым донесением в службу судового хозяйства
245
пароходства, где ведутся ее учет и анализ, вырабатываются конкретные рекомендации по обслуживанию, составу сменных и запасных частей и режиму их хранения.
Рулевой электропривод -система многократного действия. Продолжительность рабочих и нерабочих периодов определяется длительностью рейса и стоянок, являющихся в общем случае непостоянными. Характер обслуживания РЭП зависит от эксплуатационного состояния, в котором находится судно. В настоящее время в
практике деятельности судовых электротехнических групп можно
выделить 2 основных вида обслуживания рулевых систем.
Подготовка к работе. Рулевая машина, как и вся система
управления ЭП, должна быть в полной готовности к моменту
выхода судна в рейс. Готовность РЭП к работе определяется
электромехаником. В первую очередь необходимо проверить работу авторулевого и убедиться в исправности узлов, блоков и приборов. При этом проверяют состояние электрических машин рулевого
устройства, систему питания, аппаратуру управления силовым приводом, измеряют сопротивление изоляции всего электрооборудования (в холодном состоянии оно должно быть не менее 2 МОм).
Затем с разрешения старшего механика и при участии вахтенных
механика и штурмана опробуют рулевое устройство в действии
путем перекладки руля с борта на борт при различных предусмотренных видах управления. Оценивают работу электрических машин,
пускорегулировочной аппаратуры, постов управления силовым
приводом, сверяют показания • рулевых указателей с истинным
положением, испытывают конечные выключатели. Обнаруженные
неисправности незамедлительно устраняют. Опробование простого,
следящего и автомагического режимов работы осуществляют в
объеме и порядке, предусмотренных инструкциями по эксплуатации
авторулевых и РЭП в целом.
О результатах проверки РЭП электромеханик и вахтенный
механик докладывают старшему механику и делают соответствующую запись в вахтенных журналах.
Техническое обслуживание. Периодичность и общий объем обслуживания устанавливаются правилами технической эксплуатации
электрооборудования. Наряду с этим следует учитывать также
указания заводских инструкций, конкретизирующих нормативы и
технологию операций по обслуживанию в зависимости от качества
установленных приборов.
Для качественного обслуживания авторулевых электротехническому персоналу необходимо изучить техническую документацию,
прилагаемую к каждому авторулевому. Для РЭП, содержащих в
системах управления авторулевые, предусматривают специальные
виды технического обслуживания. Еженедельно необходимо проводить наружный осмотр и проверять работу системы со всех
управляющих постов. Каждый месяц следует измерять сопротивле246
ние изоляции электрических машин, цепей питания, монтажных
соединений. Резиновые уплотнения смазывают специальной смазкой из смеси графита и касторового масла. Подтягивают крепеж
агрегатов питания, приборов, проверяют состояние амортизаторов.
Один раз в полгода смазывают кинематические узлы в приборах,
измеряют и регулируют контактные нажатия, промывают контакты. Одновременно проверяют наличие и состояние деталей ЗИП.
В процессе эксплуатации возникает необходимость в регулировании трех основных параметров авторулевого: коэффициента обратной связи, коэффициента сигнала тахогенератора и коэффициента усиления. Изменение коэффициента обратной связи существенно
отражается на качестве удержания судна на курсе: при полной
загрузке судна этот коэффициент рекомендуется уменьшать, а при
плавании с балластом увеличивать. Коэффициент сигнала тахогенератора позволяет регулировать сигнал по скорости отклонения
судна от курса. При ходе в тихую погоду его следует увеличивать,
что повышает точность удержания судна на курсе. Вместе с тем это
же способствует увеличению интенсивности работы рулевой машины, поэтому в свежую погоду сигнал тахогенератора необходимо
уменьшать. Коэффициент усиления системы изменяется регулятором «Грубо-Точно». Перевод регулятора из положения «Точно» в
положение «Грубо» существенно облегчает работу рулевой машины, незначительно ухудшая качество удержания на курсе. Поэтому
рекомендуется при волнениях свыше 4-5 баллов «загрублять»
чувствительность стабилизирующей системы.
Во время хода судна работа рулевого устройства проверяется
вахтенным электромехаником не менее двух раз за вахту. При
эксплуатации РЭП совместно с авторулевым необходимо руководствоваться следующим:
при следовании в узкостях, швартовке и выходе из порта
рекомендуется использовать вид управления «Следящий» как наиболее удобный и экономичный;
в случае наличия неисправностей в следящих системах перейти
на вид управления «Простой», который является резервным и
позволяет выполнять все необходимые мероприятия по маневрированию судна;
при сложных маневрах судна для обеспечения надежности управления рекомендуется пускать оба насоса, что при видах управления
«Следящий» или «Простой» увеличивает скорость перекладки
руля;
с целью уменьшения изнашивания РЭП переключатель чувствительности авторулевого в необходимых случаях устанавливать в
положение «Грубо»;
для более равномерной эксплуатации оборудования рекомендуется при работе на одном насосе через каждые 12 ч переходить на
другой насос (переключение следует проводить в момент времени,
согласованный по телефону с вахтенным штурманом и по его
247
приказанию). При обнаружении неисправностей, требующих остановки РЭП, электромеханик докладывает вахтенному механику и
штурману и в дальнейшем действует по их указанию.
Контрольные вопросы-задания
1. Как действуют на судно силы давления воды при перекладке руля?
2. В чем заключается принцип действия рулевых электрогидравлических приводов?
3. Перечислите функции, выполняемые механизмами управления в электрогидравлических приводах.
4. Как определяют нагрузку электроприводов с механической и гидравлической
передачами?
5. Каковы требования Регистра СССР к рулевому электроприводу?
6. Чем отличаются системы управления электроприводами с механическими и
гидравлическими передачами?
7. Пользуясь схемой, объясните работу авторулевого «Аист» при различных видах
управления.
8. Какие особенности имеет настройка авторулевого «Аист»?
' '
,'П
Глава 10
ЭЛЕКТРОПРИВОДЫ ЯКОРНО-ШВАРТОВНЫХ
УСТРОЙСТВ
-I,
57. Общие сведения
Якорно-швартовные устройства предназначены для спуска
и подъема якорей при постановке судна на якорь.и съемке с якоря,
для обеспечения надежной стоянки судна, а также для выполнения
швартовных операций. Якорно-швартовное устройство включает
в себя исполнительный двигатель с аппаратурой управления, лебедку, якорные цепи и якоря. К якорно-швартовным лебедкам относятся: брашпили, шпили и швартовные лебедки. Несмотря на конструктивное различие механизмов и довольно узкое назначение некоторых из них, ЭП их имеют много общего и по существу представляют собой одну группу. Некоторые различия имеются лишь в ЭП
автоматических швартовных лебедок, которые снабжены дополнительными устройствами для слежения за натяжением швартовного
троса и для автоматического включения ЭД в случае необходимости.
Рассмотрим устройство якорно-швартовных лебедок на примере
брашпиля (рис. 128). Электродвигатель 1 через предохранительную
фрикционную муфту 2 соединен с червячным редуктором 11 и
вращает промежуточный вал 12. Через пару шестерен 13 вращение
передается на главный вал 14, на котором закреплены турачки 9.
С этим валом при помощи двух одинаковых пар зубчатых колес 10
соединены 2 грузовых вала 3. На них могут свободно вращаться
пятиугольные якорные звездочки или цепные барабаны 5, выполненные совместно с тормозными колесами 7. Эти колеса охвачены
лентой # ленточного тормоза с ручным приводом 6. Цепные
барабаны при помощи кулачкового устройства 4 с ручным приводом могут присоединяться к большим зубчатым колесам и вращаться вместе с ними.
На рис. 128 правый барабан соединен с зубчатым колесом,
а левый отсоединен - брашпиль может травить и выбирать обе
якорные цепи независимо одну от другой.
Редуктор брашпиля может быть как самотормозящимся, так
и несамотормозящимся. Во втором случае якорный механизм
должен иметь автоматическое тормозное устройство, срабатывающее при исчезновении приводной энергии или выходе ЭП из строя.
Брашпиль обеспечивает раздельную работу звездочек левого и пра249
Рис. 128. Кинематическая схема брашпиля
вого бортов. Каждая звездочка имеет ленточный тормоз с винтовым
приводом. Отдача якоря осуществляется под действием его собственного веса. Скорость регулируется ленточным тормозом. Современные брашпили имеют гидравлические устройства дистанционного управления ленточным стопором, что позволяет отдавать
якорь непосредственно из рулевой рубки. При этом сохраняется
контроль за длиной вытравленной цепи. Приводные ЭД брашпиля
снабжены непосредственно электромагнитными дисковыми тормозами, которые предназначены для быстрой остановки ЭД и удержания грузового вала от обратного разворота.
Недостаток брашпилей заключается в их уязвимости и трудности обслуживания, так как весь механизм и приводной ЭД установлены на открытой палубе. В ряде случаев целесообразно всю
конструкцию ЭП якорно-швартовного устройства сделать более
компактной или расположить основную его часть под палубой,
оставив над палубой только якорную звездочку и барабан. В
этих случаях применяют якорно-швартовные или швартовные
шпили.
На транспортных судах, занятых перевозкой груза, в основном
применяют якорно-швартовные устройства при сравнительно ограниченном уровне автоматизации.
Однако в последние годы также широко применяют автоматические швартовные лебедки, принцип действия которых изложен
в п. 61.
250
58. Нагрузочные диаграммы
Электроприводам якорно-швартовных устройств свойственны
следующие основные режимы работы: подъем одного якоря; одновременный подъем двух якорей; швартовный.
Режим подъема одного якоря. Основным режимом работы ЭП
якорно-швартовного устройства является подъем одного якоря
с нормальной глубины стоянки. По значению вращающих моментов на валу, потребных для снятия судна с якоря, рассчитывают
мощность исполнительного ЭД. Для удобства рассмотрения нагрузочной диаграммы брашпильного (шпилевого) ЭП в этом режиме целесообразно рассмотреть начальные условия, т. е. нормальные
условия стоянки судна на якоре.
При стоянке судна на якоре один конец якорной цепи закреплен
у клюза судна, второй-у якоря (рис. 129). Для надежной и безопасной стоянки необходимо, чтобы часть якорной цепи лежала на
грунте. Другая часть цепи является провисающей, усилие в ней
зависит от внешних сил, действующих на судно: силы ветра Рв
и силы течения воды ,РТ. Длина провисающей части с изменением
действия внешних сил изменяется. Чем больше внешние силы, тем
больше силы натяжения цепи. Увеличение последних вызывает
подъем части цепи с грунта, т. е. длина провисающей части цепи
увеличивается. Усилия, возникающие в провисающей части цепи,
и создают основные усилия у клюза /\, передаваемые на механизм.
Процесс снятия судна с якоря разбивается на четыре стадии.
В с т а д и и / (см. рис. 129) брашпиль выбирает цепь, втягивая ее
звенья в клюз, и судно под действием ЭП якорного устройства
движется с небольшой скоростью к месту залегания якоря. При
этом количество звеньев цепи, втягиваемых в клюз, равно количеству звеньев, поднятых с грунта. Характер провисания цепи не
меняется, а следовательно, сила натяжения цени у входа в клюз ^к1
(Н) и момент М 1 (Н-м) на валу ЭД остаются постоянными:
/Л /'У/ Ж Ж Ж //,
Рис. 129. Схемы снятия судна с якоря
251
м'ПкяК
(43),
где Гс = Ря + Гт- равнодействующая от сил ветра и сопротивления воды
движению судна (здесь ^„-сила давления ветра на надводную часть судна,
Н; Рт-сила трения воды о судно, Н); р- вес одного метра цепи, Н/м;
Л- номинальная глубина стоянки, условно устанавливаемая для каждого
судна в зависимости от диаметра якорной цепи, м; Л зв -радиус звездочки
якорного устройства, м; г- передаточное число редуктора; г) м , г\К11 КПД
соответственно механизма и клюза.
Первая стадия заканчивается, когда с грунта будет поднято
последнее свободно лежащее звено цепи.
В течение с т а д и и 77 брашпиль продолжает втягивать цепь
в клюз, а судно продолжает двигаться практически равномерно
вследствие приобретенной инерции. Натяжение цепи увеличивается
и в конце стадии при полностью выбранной провисающей части
цепи достигает максимального значения. При этом закон изменения
натяжения цепи достаточно сложный и аналитическое выражение
его отсутствует. Приближенно можно считать, что сила натяжения
цепи во второй стадии изменяется во времени по прямолинейному
закону от Рк1 до ^к2 т а х .
На с т а д и и III брашпиль постоянно выбирает слабину, образующуюся вследствие движения судна по инерции. Таким образом,
натяжение цепи Гх^ остается все время максимальным и равным
/\ 2 т а х , при этом ЭД может даже затормозиться и перейти в режим
сюянки под током. Судно, продолжая по инерции движение, проходит над местом залегания якоря и совместно с ЭД отрывает
якорь от грунта с силой (Н)
где А;у = 0, 87- коэффициент, учитывающий уменьшение веса цепи и якоря
в морской воде; & я = 3 н- 4- коэффициент силы, держащей якорь; Су- вес-1
якоря, Н.
':)
В реальных условиях нагрузка на первых трех стадиях значи?,
тельно отличается от представленной и носит колебательный характер. В первое время после его включения мощность, развиваемая
ЭД. расходуется на сообщение ускорения неподвижно стоящему
судну. Момент на валу резко возрастает, а скорость ЭД уменьшается. Затем запасенная судном энергия вызывает его разгон, в связи
с чем развиваемый ЭД момент уменьшается, а скорость увеличивается. Судно, погасив инерцию, вновь запасается энергией с
вала ЭД.
На с т а д и и IV брашпиль выбирает свободно висящую цепь
и якорь. Усилие (Н) у клюза изменяется: в начале стадии Рк4н =
— & у (Ся + рЬ), а в конце Р к4к = Ся . Моменты М3 , М4 нач и М4 кон на
валу электродвигателя можно определить по формуле (43), подставляя соответствующие значения Рк. Далее по механической харак252
5) М
п
1Вкан
Рис. !30. Нагрузочные диаграммы электропривода брашпиля при подъеме одного (а)
и двух (&) якорей
теристике со(М) электродвигателя находят угловые скорости ш х , со2 ,
со 3 , со 4 . Затем с учетом длины выбранной цепи и глубины стоянки
определяют время работы ЭД в течение каждой стадии.
Продолжительность (с) стадии / при неизменной угловой скорости ЭП /! = (Ь— /)//(со !-&,„), где Ь-длина вытравленной цепи, м;
/-длина провисающей части цепи, м; Ь— /-длина цепи, лежащей на
грунте.
Продолжительность (с) стадии II 12 = (I — И] /Дсо Пср /?зв), где
соп = (с»! + со2)/2-средняя угловая скорость ЭД, рад/с.
Продолжительность стадии /77 аналитически определить невозможно, поэтому обычно принимают Г3 = 60 с.
На стадии IV время (с) работы ЭД при подъеме якоря и цепи
14 = А//(со, Уср /г зв ), где со,Уср = (о>3 + со4)/2- средняя угловая скорость
ЭД, рад/с.
По значениям моментов и времени работы на каждой стадии
строят нагрузочную диаграмму М(г) электропривода брашпиля
(рис. 130, а).
Время снятия с якоря определяют суммированием продолжительности всех стадий:
Г = / 1 + * 2 - М 3 + /4.
Режим подъема двух якорей. Этот режим осуществляется с половинной глубины стоянки при предварительном отдельном отрыве
каждого якоря от грунта. Моменты (Н-м) на валу ЭД в начале
и в конце этого режима
Время работы определяют аналогично стадии IV. Нагрузочная
диаграмма для этого режима приведена на рис. 130, б.
Швартовный режим. Характеризуется усилием на тросе, которое
может меняться от нуля до номинального значения, а при рывках
253
и гашении инерции судна тяговое усилие может достигать таких
значений, когда происходит остановка механизма. Однако продолжительность перегрузки невелика (не превышает 4-7 с). Усилие
(Н), передаваемое швартовному барабану,
^ш.6 = / 'У(Пш С О К ( Р)>
где ^-усилие, необходимое для подтягивания судна при швартовке (в
основном это противодействие давлению ветра на судовые надстройки;
очевидно, что максимальное значение Р будет при подтягивании судна
швартовыми, лагом против ветра), Н; л.ш-КПД швартовного клюза;
ф-угол, образованный направлением движения судна и направлением
швартовного троса.
Работа в этом режиме контролируется обслуживающим персоналом, и скорость барабана может колебаться от 0,12 до 0,6 м/с.
Электроприводу брашпиля также свойствен аварийный режим,
возникающий тогда, когда глубина стоянки превышает длину цепи
и отданный якорь не ляжет на грунт.
59. Характеристики силового электрооборудования
Использование тех или иных якорно-швартовных устройств,
их количество и размещение зависят от назначения судна и требований безопасности мореплавания. Номинальные параметры ЭП этих
механизмов зависят от силы, действующей на якорной звездочке,
которая в свою очередь определяется размерами судна и его
надстройками, создающими повышенную парусность. Таким образом, нормой, определяющей якорное снабжение и параметры якорно-швартовных устройств, является обобщенная характеристика
судна
л)
где V водоизмещение судна, м3; В- ширина судна, м; //-высота от летней8
грузовой ватерлинии до настила самой высокой рубки, м: 5 пар - парусящая
поверхность судна, м 2 .
Якорно-швартовыые ЭП являются ответственным оборудованием, определяющим безопасность мореплавания. Они должны
быть гибкими и надежными в эксплуатации, обеспечивать широкую
маневренность и простоту управления. Регистр СССР предъявляет
к якорно-швартовным ЭП следующие требования:
1. Мощность ЭП якорного механизма должна обеспечивать
выбирание якорной цепи со скоростью, не меньшей 0,17 м/с, при
тяговом усилии (Н) на звездочке
7\ ^ П,2(рН + Ся).
2. Пусковой момент ЭП должен обеспечивать тяговое усилие не
менее 2Тг .
254
3. Привод якорно-швартовного механизма должен обеспечивать
одновременное выбирание двух свободно висящих якорей с половины номинальной
глубины стоянки. Эта нагрузка создает усилие
Т2 = 1,32т1! и таким образом регламентирует пуск ЭП при моменте
статической нагрузки не ниже 130% номинального.
4. Привод швартовного механизма должен обеспечивать непрерывное выбирание швартовного троса при номинальном тяговом
усилии с номинальной скоростью в течение не менее 0,3 м/с.
5. Привод швартовного механизма должен развивать кратковременно (около 15 с) усилие не менее 2-кратного номинального
и не выше 4-кратного номинального.
6. У якорно-швартовных шпилей, брашпилей и лебедок на
ступенях скоростей, предназначенных только для швартовных операций, должна быть предусмотрена соответствующая защита от
перегрузки ЭП (например, автоматическое переключение со ступени, предназначенной для швартовной операции, на ступень, предназначенную для подъема якоря).
7. Стоянка под током при номинальном напряжении ЭД швартовных механизмов должна составлять не менее 15 с после 30 мин
работы при номинальной нагрузке, а якорных механизмов - 30 с.
Автоматические швартовные лебедки удовлетворяют всем требованиям, относящимся к швартовным механизмам ручного управления. Дополнительно они должны быть снабжены указателем
фактического натяжения и иметь звуковую сигнализацию на случай,
когда изменение длины швартовного накала при автоматическом
режиме работы будет превосходить максимально допустимое значение.
При электрификации судна на постоянном токе лучше всего для
ЭП якорно-швартовных устройств подходят ЭД смешанного возбуждения (серия ДПМ). Они обеспечивают весьма желательные для
ЭП мягкие механические характеристики при выбирании якоря
и жесткие-при тормозном травлении. Регулирование их частоты
вращения в требуемых пределах обеспечивается введением резисторов как в цепь якоря, так и в цепь параллельной обмотки возбуждения. «Ползучие» скорости получаются при искусственных схемах
включения ЭД. Для выбирания швартовов при переменном ветре
используют крутую искусственную характеристику, получающуюся
при введении большого сопротивления в цепь якоря. Эта характеристика обеспечивает автоматическое изменение скорости выбирания в широких пределах, не допуская образования слабины троса.
Для возможности стоянки ЭД под током применяют грузовые реле.
При электрификации судна на переменном 3-фазном токе частотой 50 Гц для якорно-швартовных механизмов используют в основном ЭП трех типов: постоянного тока системы Г-Д; переменного
тока с фазными АД; переменного тока с многоскоростными АД.
Система Г-Д находит применение при больших мощностях ЭП
якорно-швартовных механизмов. Пуск приводного ЭД преобразо255
вателя происходит здесь без нагрузки, поэтому можно пускать его
через различные токоограничивающие устройства в цепи статора
и снижать этим броски пускового тока до допустимых значений. Все
прочие требования системы Г-Д удовлетворяют наилучшим образом. Для обеспечения жестких характеристик при тормозном травлении противокомпаундную обмотку генератора в этом режиме
замыкают накоротко, получается генератор с независимым возбуждением. Однако системы Г-Д по экономическим соображениям не
являются перспективными и на морских судах нашли ограниченное
применение.
Электроприводы с АД с фазным ротором хорошо выдерживают
стоянку под током, ограниченным автоматически введенными в
цепь ротора резисторами, но не обеспечивают возможности большого возрастания скорости при выбирании слабины швартовов. На
некоторых судах применяют 2-скоростные АД с ротором, имеющим 2 обмотки: фазную и короткозамкнутую. При выбирании
якоря работа ведется на тихоходной обмотке статора и скорость
регулируется введением резистора в цепь фазной обмотки ротора.
При швартовных операциях фазная обмотка ротора замыкается
накоротко, и работа выполняется на быстроходной обмотке. Асинхронные двигатели указанных типов также нашли ограниченное
применение.
К самой многочисленной группе относятся якорно-швартовные
ЭП переменного тока с 3-скоростными АД с числом полюсов
2р = 4/8/16, что обеспечивает изменение рабочих скоростей в отношении 4 : 2 : 1 . При этом малая скорость предназначена для втягивания якоря в клюз и плавного подтягивания судна к причалу,
вторая-для выбирания якорной цепи и подъема якоря или выбирания нагруженного троса, а третья-для выбирания ненагруженного
швартовного троса. На морских судах наряду с отечественными
установлены также ЭП производства различных иностранных фирм.
Полюсопереключаемые АД отечественного производства (серии
МАП) изготавливают с независимыми полюсными обмотками
статора, а двигатели зарубежного производства выполняются, как
правило, с полюсопереключаемой обмоткой Даландера. Для смягчения механических характеристик с целью улучшения динамических
свойств ЭП прибегают к различным способам включения секций
одной обмотки по отношению к питающему напряжению.
Все 3-скоростные АД якорно-швартовных электроприводов являются 1-тормозными с пристроенными электромагнитными тормозами (зарубежные тормоза многодисковые постоянного тока).
Номинальную мощность ЭД принято относить к 30-минутному
кратковременному режиму работы. Это требование распространено
и на 3-скоростные АД, хотя последние принципиально отличаются
от ЭД других типов, в частности, от ЭД с фазным ротором или ЭД
постоянного тока, для которых и было сформулировано это требование. Однако к заданному режиму работы отнесена мощность
256
3-скоростного АД только на одной, основной, скорости. Мощности
же 3-скоростных АД при работе на двух других скоростях отнесены
к различным, более кратковременным режимам.
60. Системы управления
Для управления ЭГТ якорно-швартовных устройств применяют
следующие системы управления: контроллерные, контакторные и
системы Г-Д.
Контроллерные системы управления применяют преимущественно в ЭП мощностью до 20 кВт (в отдельных случаях и большей
мощности). Управление ЭП при данной системе осуществляется
силовым кулачковым контроллером серии КВ, контакты которого
включены в силовую цепь ЭД. Контроллеры устанавливают на
палубе вблизи механизма, а ящики с пускорегулировочными резисторами - под палубой. Для предотвращения обгорания контактов
контроллера в схему обычно вводят линейный контактор, обеспечивающий коммутационную нагрузку при включении ЭД. Линейный
контактор также выполняет функцию нулевой защиты, с его помощью также осуществляется защита ЭП от перегрузок. Высокая
надежность и простота обслуживания этих аппаратов дают им
преимущество перед другими системами.
Применение контроллерных систем при мощности ЭП выше
20-25 кВт не рекомендуется, их заменяют контакторными системами, которые наиболее широко распространены на современных
судах. Эти системы обеспечивают автоматизацию процесса пуска,
регулирования режимов и необходимую защиту ЭД. Для управления
используют комплектные устройства в виде контакторных станций,
называемых магнитными контроллерами. Магнитные контроллеры
применяют как в ЭП постоянного тока (серий БП и ВП-брызгои водозащищенного исполнения), так и в ЭП переменного тока
(серии БТ и ВТ-брызго- и водозащищенного исполнения). Автоматизация отдельных режимов (пуск, торможение) выполняется, как
правило, в функции времени. Управление якорно-швартовными ЭП
осуществляется при помощи командоконтроллеров, которые устанавливаются вблизи механизмов.
Системы Г-Д имеют ограниченное применение. В свое время их
использование было оправдано для больших мощностей якорных
ЭП, где устройства интенсивно использовались и по технологии
выполняемых работ требовали большего предела и плавности
регулирования. Системы Г-Д выполняют с противокомпаундной
обмоткой генератора, чем обеспечиваются смягчение механических
характеристик, защита от перегрузки по току и ограничение мощности, потребляемой из сети. Целесообразным также следует считать
замену электромашинного преобразователя тиристорным, что в
качестве эксперимента осуществляется на некоторых судах.
9
Зак. 127ё
257
При всех системах управления ЭД якорно-швартовных механизмов по требованию Регистра СССР должны обеспечиваться системами защиты от токов короткого замыкания и перегрузок, а также
нулевой защитой, которые устанавливают на распределительных
щитах питания и в магнитных контроллерах. Системы защиты
могут вызывать отключение ЭП, ограничение нагрузочного режима
или подачу предупреждающего сигнала. Защиту от перегрузки
в отечественных ЭП с асинхронными двигателями типа МАП
выполняют в некоторых случаях с помощью тепловых токовых реле
серии ТРТ, но за последние годы более широкое применение
получили температурные средства защиты: биметаллические термореле, встроенные непосредственно в лобовые части обмоток
статора, и термореле с использованием полупроводниковых терморезисторов. Защита от коротких замыканий осуществляется автоматическими выключателями. Нулевая блокировка, выполненная
посредством электромагнитных реле, позволяет восстановить работоспособность схемы только после постановки командоаппарата
в нулевое положение, что обеспечивает безопасность ведения якорных и швартовных операций. Кроме указанных защит, якорношвартовные ЭП снабжаются ручными выключателями безопасности,
которые устанавливаются на командоконтроллере и отключают ЭД
при поломке механизма или возникновении ситуаций, опасных для
обслуживающего персонала.
В качестве примера рассмотрим ряд типовых схем, имеющих
широкое распространение на судах морского флота отечественной
и зарубежной постройки.
Типовая контакторная система управления. На судах отечественной постройки применяют типовую контакторную схему (рис. 131)
ЭП якорно-швартовного устройства, служащую для управления
3-скоростными 3-обмоточными АД мощностью до 75 кВт. Управление ЭП осуществляется посредством командоконтроллера с тремя
рабочими положениями в двух направлениях вращения. Переключение контактов КК при различных положениях приводит к подключению обмотки статора с определенным числом полюсов,
и этим достигается регулирование скорости.
Схема симметрична (работает одинаково в сторону «Выбирать»
и «Травить»), поэтому ее работу рассмотрим только в положении
«Выбирать». В нулевом положении командоконтроллера при подаче напряжения на схему в замкнутом выключателе управления 28А
через размыкающие контакты реле КТ1 и замкнутый контакт 18А1
питание поступает на выпрямитель 1}2, а от выпрямителя через
размыкающий контакт КМ6 контактора тормоза и контакты реле
защиты включается реле КТ1 напряжения. Контакты этого реле
в цепи контакта 5А1 размыкаются, но замыкаются 2 других
контакта КТ1, которые шунтируют контакт 18А1 (подготавливается
цепь нулевой защиты). От выпрямителя через замкнутый в нулевом
положении контакт 18А2 срабатывает реле времени К 72, которое
258
без выдержки времени размыкает свой контакт в цепи контактора
КМ5 и замыкает контакт в цепи контактора КМ4. Кроме
этого, в нулевом положении командоконтроллера через контакт
18А8, контакты грузового реле К Кб и промежуточного реле КУ2
получает питание катушка промежуточного реле КУ1. Его замыкающий контакт замыкается в цепи катушки контактора КМ5, а размыкающий контакт размыкается в цепи катушки контактора КМ4.
Другим замыкающим контактом промежуточного реле К VI шунтируется контакт 18А8, через контакт 18А8 и контакт реле КУ1
включается сигнальная лампа НЬ.
КТ1 Травить
321
0
Выбирать
123
КТ1
У-
Рис. 131. Схема типовой контакторной системы управления электроприводом якорношвартовного усгройства на переменном токе
9*
259
При переводе рукоятки командоконтроллера в первое положение «Выбирать» замыкаются контакты 18АЗ и 18А5, а контакты
18А1 и 18А2 размыкаются. Через контакты 18АЗ получает питание
реверсивный контактор КМ1 и своими главными контактами частично обеспечивает питание ЭД. Через замыкающий вспомогательный контакт КМ1 включается контактор тормоза КМ6, происходит
растормаживание ЭД тормозным магнитом УВ, а после срабатывания контактора КМ6 через контакт 75АЗ, вспомогательные контакты
КМ1 и КМ6, контакт 75.45 включается контактор первой скорости
КМЗ. Его главные контакты подключают тихоходную обмотку
статора АД, и начинается его работа на малой скорости, которая
служит для втягивания якоря в клюз и для швартования с малой
скоростью. Несмотря на размыкание контактов 75^2 реле КТ2
через замыкающий контакт КМЗ продолжает получать питание,
а через другой замыкающий контакт КМЗ (вместо разомкнувшихся
контактов КМ6) продолжает получать питание реле КТ1.
При переводе рукоятки командоконтроллера во второе положение размыкаются контакты 18А5, а 18А6- замыкается. В результате
этого контактор КМЗ теряет питание и отключает тихоходную
обмотку, а по цепи 28А-КТ1- 18АЗ-КМ1-КМб-КМЗ- 18А6 получает питание контактор КМ4 второй скорости, который и включает соответствующую обмотку двигателя. Теперь реле 7<Т7 питается через контакты КМ4, реле КТ2 выключается.
Если рукоятку командоконтроллера перевести в третье положение, то размыкаются контакты 18 А6 и замыкаются 18 А7. Размыканием контактов 18А6 отключается контактор КМ4, и если к этому
моменту выдержка времени реле КТ2 истекла, то его замыкающий
контакт разомкнется, а размыкающий замкнется и включит контактор КМ5 (последний подключает быстроходную обмотку статора).
Если при быстром переводе рукоятки командоконтроллера в третье
положение выдержка времени реле К Т2 еще не истекла, то , несмотря на разомкнутый контакт 75А6, через замкнутый контакт 18А7
и замыкающий контакт КТ2 продолжает получать питание контактор КМ4, т. е. АД продолжает работать на второй скорости. Это
происходит в течение выдержки времени реле КТ2, а после истечения выдержки времени замыкающими контактами КТ2 отключается
контактор КМ4, а размыкающими контактами КТ2 включается
контактор КМ5. Таким образом, при быстром переводе рукоятки
командоконтроллера из нулевого в третье положение АД неизбежно работает на второй скорости и затем переходит на третью. Этим
обеспечивается его плавный пуск.
При положениях контроллера «Травить» вместо контактов 75АЗ
замыкаются контакты 18А4 и соответственно включится уже другой реверсивный контактор КМ2. В результате этого фазы сети,
подключаемые к соответствующим фазам АД, меняются местами,
вследствие чего АД будет вращаться в обратном направлении.
260
Последующее срабатывание аппаратуры аналогично положению
«Выбирать».
В схеме предусмотрены следующие виды защиты:
1. При снижении напряжения или его отключении происходит
выключение реле КТ1, которое размыкает свои замыкающие контакты и отключает тем самым всю схему управления. После
восстановления напряжения пуск АД возможен только при возврате
рукоятки командоконтроллера в нулевое положение (нулевая и
минимальная защита). Выдержка времени реле КТ1 исключает
ложное срабатывание при кратковременном снижении напряжения
или кратковременном отключении питания.
2. В случае больших перегрузок по току срабатывает одно из реле
КК1-КК5 и посредством реле КТ1 двигатель отключается от сети
и затормаживается тормозом. При аварийной ситуации последствия
срабатывания защиты от перегрузок ликвидируются выключателем
38А: нажатием на педаль и включением выключателя 38А при
нулевом положейии рукоятки командоконтроллера получает питание реле КУ2, которое своими замкнувшимися контактами шунтирует контакты тепловых реле. В этом случае исключается только
работа на третьей скорости, так как размыкающие контакты КМ5
исключают эту шунтирующую цепочку.
3. Индивидуальная защита АД при работе на третьей скорости
от перегрузок выполнена с помощью грузового реле ККб. Нагревательный элемент этого реле, включенный в силовую цепь обмотки
третьей скорости, при перегрузке быстроходной обмотки срабатывает. Контакт КК6 обесточит реле КУ1. Один из контактов КУ1
разомкнется, отключая контактор КМ5, а другой контакт КУ1
замкнется, и через него включится контактор КМ4, в результате АД
автоматически перейдет работать на вторую скорость. О срабатывании грузовой защиты сигнализирует погасание сигнальной лампы
НЬ . Если обстановка требует быстро включить третью скорость,
то для этого следует при втором положении командоконтроллера
включить выключатель 35А, При этом включается реле КУ2 и своим замкнувшимся контактом зашунтирует разомкнутый контакт
КК6 и подключит реле К VI. Последнее при переводе рукоятки
командоконтроллера в третье положение подключит контактор
КМ5.
Контакторная система управления фирмы «Сименс». На судах
типов «Волголес» и «Красноград» установлены якорно-швартовные
устройства, укомплектованные серийными 3-скоростными АД различных мощностей (имеют по 2 независимые статорные обмотки).
Одна из обмоток выполнена по схеме Даландера и при соединении
по схеме «треугольник» или «открытый треугольник» образует вращающееся магнитное поле с числом полюсов 2/7-16, а при переключении на «двойную звезду» -2/78. Вторая обмотка выполнена с числом полюсов 2/7-4. Двухклеточный ротор позволяет получить большую кратность пусковых моментов АД при включении на любую
261
скорость. В зависимости от назначения ЭП максимальный момент
должен принимать различную кратность номинальному значению.
Например, шпилевой ЭП при работе на первой скорости должен
развивать максимальный момент, равный 2-кратному номинальному, а брашпильный ЭП-примерно 1,5-кратному. Для этой цели
в ЭП шпиля предусмотрена возможность соединения статорной
обмотки при 2/?-16 по схеме «треугольник», а в ЭП брашпиля-по
схеме «открытый треугольник». При соединении по схеме «открытый треугольник» происходит несимметричное включение АД в сеть
и образуется пульсирующее магнитное поле, которое можно разложить на 2 поля, вращающиеся в разные стороны: поле прямой
и поле обратной последовательности. Полю прямой последовательности соответствует вращающий момент, развиваемый АД при
соединении обмотки по схеме «треугольник», а обратному полютормозной момент. Алгебраическая сумма этих моментов, развиваемых при соответствующих частотах вращения АД, будет меньше.
В приведенной на рис. 132 схеме обмотки статора соединены
в «треугольник» (соединение «открытый треугольник» образуется,
если убрать перемычку /-/')• При подаче напряжения на схему
и включении аварийного выключателя 28А, расположенного на
колонке командоконтроллера (он имеет пружинный нулевой возврат),
срабатывают реле напряжения КУ1 и вспомогательный контактор
КУ4 тормозного магнита. При срабатывании реле КУ1 подготавливается к включению схема управления, а при включении контактора
КУ4 замыкающими контактами шунтируется экономический резистор в цепи тормозного магнита. Размыкание контакта КУ4 в цепи
реле К VI не прерывает цепь этого реле, так как размыкающие
контакты КУ4 зашунтированы контактами реле времени КТЗ.
Схема управления работает симметрично относительно положений
«Выбирать» и «Травить», поэтому рассмотрим ее работу только
в положении «Выбирать».
В положении / командоконтроллера замыкаются контакты 18А2
и 18А4 и подается напряжение на катушки контактора КМЗ первой
скорости и реверсивного контактора КМ1. В результате срабатывания контакторов КМ1 и КМЗ обмотка статора, соединенная в
«треугольник», подключается к сети, а также подается напряжение
на катушку контактора КМ 7 тормоза. При включении контактора
КМ7 тормозной электромагнит УВ, получив питание, срабатывает
и расторможенный АД работает на первой скорости, а размыкающими контактами КМ 7 в цепь катушки контактора вводится
экономический резистор. Срабатывание электромагнитного тормоза вызывает размыкание механически сблокированного с ним конечного выключателя 5(?, который обесточивает контактор КУ4.
В результате этого замыкающие контакты КУ4 размыкаются и в
цепь катушки УВ вводится экономический резистор, а размыкающие
контакты КУ4 в цепи КУ1 замыкаются. В этом положении также
получают питание реле времени К ТЗ, которое с выдержкой времени
262
I I ! КШ
| | |
.п лл?/
""'П
! Iг ; П
* Ж|_Г
I !, I /ш
I 1 х^км1
п
Рис. 132. Схема контакторной системы управления электроприводом шпиля фирмы
«Сименс»
9В*
263
размыкает свои контакты, но отключения К VI не происходит, так
как эти контакты оказались уже
зашунтированными контактами
КУ4. Подобное сочетание контактов КУ4 с контактами КТЗ
обеспечивает контроль за исправным состоянием и работой конечного выключателя $0. тормоза.
Работе АД на этой скорости соответствует механическая характеристика 1 (рис. 133), которая используется при медленном подтягивании судна к причалу.
В положении 2 командоконтроллера контакты 18А4 размыкаются, а контакты 18А5 замыкаются. При этом отключаются
контактор КМЗ и обмотка статора, соединенная в «треугольник».
Рис. 133. Механические характеристики
швартовного шпиля на переПри замыкании размыкающего
менном токе
вспомогательного контакта КМЗ
в цепи катушек контакторов второй скорости происходит последовательное срабатывание контакторов КМ4 и КМЗ, которые переключают обмотку статора
с «треугольника» на «двойную звезду» и подсоединяют ее к сети.
Также подключается и катушка реле времени К 77, которое начинает отсчет выдержки времени. Работе АД на этой скорости
соответствует механическая характеристика 2 (см. рис. 133). Второе
положение используется при работе с номинальной скоростью при
подтягивании с номинальным тяговым усилием.
В положении 3 командоконтроллера замыкаются контакты
18 А6, и по истечении выдержки времени реле К 77 (составляет 2 с)
подается напряжение на катушку контактора КМ6 третьей скорости. Контактор КМ6 при срабатывании подключает быстроходную
обмотку статора и, обесточивая контакторы КМЗ и КМ4, отключает вторую скорость. Третья скорость (характеристика 3, см.
рис. 133) служит для быстрого выбирания троса при половинной
нагрузке и продолжительности включения, равной 10 мин.
В зависимости от положений командоконтроллера катушка
контактора КМ7 получает питание через соответствующие вспомогательные контакты КМЗ, КМ4, КМЗ и КМ6. В период переключения происходит первоначально размыкание ранее замкнутых контактов и затем замыкание разомкнутых. Катушка КМ7 оказывается
на небольшой промежуток времени обесточенной. Однако перемещения якоря от сердечника в этот период не происходит, так как
катушка через контур выпрямителя оказывается замкнутой на себя
264
и спадание магнитного потока при ее отключенном состоянии
происходит замедленно: данной выдержки времени достаточно для
переключения контактов.
В схеме предусмотрена нулевая защита, выполненная с помощью
реле КУ1, и защита от перегрузки, осуществляемая тепловыми
биметаллическими реле и электромагнитным грузовым реле КА.
При срабатывании реле КК1 полностью отключается АД. Реле
КК2, включенное в одну из фаз питания полюсопереключаемой
обмотки при соединении ее по схеме «треугольник», отключает
первую скорость после 5-минутной работы при полной нагрузке.
При этом получает питание вспомогательное реле КУ2 и размыкается цепь контактора КМЗ. Срабатывание реле КК2 позволяет
ЭП работать на второй и третьей скоростях. При работе на третьей
скорости 20%-ная перегрузка в течение 2 с вызывает срабатывание
грузового реле К А, которое подключает вспомогательное реле К УЗ,
после чего размыкающими контактами К УЗ отключается контактор
КМ6. В этом случае АД автоматически включается на вторую
скорость. Включение вспомогательного реле КУЗ происходит через
контакты вспомогательного реле времени К 72, на катушку которого напряжение подается в третьем положении контроллера.
Выдержка времени реле КТ2 необходима, так как при быстром
переводе рукоятки контроллера из нулевого в третье положение
возникают броски тока и может произойти ложное срабатывание
реле К А. При быстром переводе рукоятки контроллера из третьего
положения «Выбирать» в третье положение «Травить» включение
третьей скорости не происходит, хотя тормоз успевает сработать.
Это объясняется тем, что реле времени К72 не успевает разомкнуть
свои контакты, а реле КА из-за больших бросков тока срабатывает
мгновенно. В этом случае катушка КУЗ оказывается подключенной
и разомкнувшиеся контакты этого реле держат отключенной цепь
питания катушки КМ6.
При эксплуатации ЭП необходимо обращать внимание на соблюдение режима продолжительности включения, ибо нарушение
указанного режима при отказе тепловой защиты может привести
к выходу АД из строя. Также следует проверять работу релейных
устройств по выдержке времени и четкости срабатывания.
Дистанционная отдача якоря. На транспортных судах в ЭП
якорных устройств наряду с местным ручным управлением все
большее распространение получает дистанционная отдача якоря.
Используемые для этих целей брашпили имеют гидравлические
устройства дистанционного управления ленточным стопором, что
позволяет отдавать якорь непосредственно из рулевой рубки. Якорь
в этом случае отдают обычно для постановки судна на якорь или
для экстренного торможения судна провисающей якорной цепью
в аварийной ситуации. При указанной операции важно сохранять
контроль за длиной вытравленной цепи и скоростью, так как эти
параметры определяют динамику процесса и нагрузку якорного
265
Рис. 134. Дистанционная отдача якоря:
и схема устройства; б-схема управления и контроля
устройства. Рассмотрим принцип действия устройства дистанционной отдачи якоря (рис. 134).
В качестве тормозного устройства (рис. 134, а) применен ленточный стопор 5, который накладывается на тормозной барабан,
имеющий механическую связь с якорной звездочкой. Управление
стопором выполняет поворотный рычаг 4, соединенный со штоком
силового гидропривода 3. Силовой цилиндр гидропривода связан
с пневмогидравлическим бустером 7, который имеет отдельную
систему 2, заполняющую его маслом. Верхняя воздушная полость
бустера сообщается через электромагнитный золотник ТА с судовой воздушной магистралью постоянного рабочего давления. При
подаче питания на электромагнит воздух поступает в верхнюю
полость бустера, и при движении штока масло из его нижней части
перегоняется в рабочий цилиндр гидропривода. Перемещающийся
при этом шток рабочего цилиндра освобождает ленточный стопор,
и происходит отдача якоря.
При вращении якорной звездочки (на рис. 134, а не показана)
получает вращение шестеренный насос 7, связанный с ней через
роликовую муфту 6, которая обеспечивает вращения насоса только
в сторону спуска якоря. Шестеренный насос нагнетает масло в противоположную полость рабочего цилиндра и выполняет функции
отрицательной обратной связи. Если скорость отдачи якоря возрастает, то давление масла в противоположной полости рабочего
266
цилиндра увеличивается, что способствует притормаживанию привода и сохранению постоянства скорости. С якорной звездочкой
через механическую передачу также связан сельсин-датчик ВС,
посредством которого ведется контроль за длиной вытравленной
цепи (поворот сельсина на Г соответствует изменению длины
якорной цепи на 1 м). На оси сельсина ВС имеются 2 профильных
кулачка, каждый из которых воздействует на свой микровыключатель 8(22 и 8()3 (рис. 134, б): 8()2 переключается, когда якорь
приспущен на 2 м и готов к отдаче, а 8<23 разрывает свой контакт,
когда вытравлена вся якорная цепь.
Рассмотрим работу схемы управления (см. рис. 134, б) при
отдаче якоря с пульта управления рулевой рубки, где располагаются все основные управляющие аппараты автоматики. Схема управления подключается выключателем 5А. При этом подключается
реле КУ1, которое при замыкании контактов подключает сигнальную
лампу Н11 и подготавливает электрическую цепь управляющего
электромагнита УА золотника. Лампа НЫ обеспечивает контроль
наличия напряжения и одновременно освещает шкалы заданной
и действительной длины вытравленной цепи. При готовности якоря
к отдаче на местном пульте управления необходимо нажать кнопку
5В1 и подключить реле КУ2. При срабатывании этого реле оно
самоблокируется и включает сигнальную лампу НЬ 2. Заданная
длина якорной цепи контролируется контактом микровыключателя
5(2/, который управляется кулачковой шайбой, находящейся на
валу сельсина ВЕ-указателя длины. Необходимую длину травления устанавливают поворотом кулачка с помощью рукоятки. Затем
нажимают кнопку 8В2 предварительного спуска, и в результате
срабатывают реле К УЗ и КУ4, которые вводят в действие электромагнит пневматического золотника и подключают с помощью
промежуточного реле К У5 лампу НЬ 4, сигнализирующую о начале
отдачи якоря. Как только вытравится более 2 м якорной цепи,
путевой выключатель 80,2 переключается, вследствие чего отключится реле КУ2 и подключится КУ6. Сигнальная лампа готовности
НЬ 2 погаснет, но включится лампа НЬЗ- «Якорь приспущен».
После предварительной операции кнопку 8В2 можно отпустить и якорь из-за обесточенного электромагнита УА застопорится.
В последующем для автоматической контролируемой отдачи
якоря необходимо нажать кнопку 8ВЗ (8В4 - дублирующая кнопка
на баке). При этом включится промежуточное реле КУ7, которое
включит управляющее реле КУ8. В результате подключаются реле
КУЗ, электромагнит УА, а реле КУ8 самоблокируется. Ленточный
стопор освобождается и происходит свободная отдача якоря с
регулируемой скоростью. При достижении установленной длины
якорной цепи кулачковый микровыключатель $0,1 размыкается
и отключает реле К У8, благодаря чему звездочка застопоривается.
Другой кулачковый микровыключатель $(Х? отключает схему
267
управления тогда, когда якорная цепь будет полностью на клюзе.
Процесс отдачи может быть в любое время прерван нажатием на
кнопку 555 «Стоп» (аналогичная кнопка 8В6 на баке).
61. Схемы электроприводов автоматических швартовных
лебедок
Автоматические швартовные лебедки предназначены для выполнения швартовных операций при постановке судна на швартовы
и поддержания постоянного натяжения в канате при его стоянке.
В некоторых случаях АШЛ обеспечивают также операции по подъему и опусканию якорей. Использование АШЛ позволяет стабилизировать нагрузки на швартовные канаты, увеличить их долговечность,
облегчить труд экипажа. В процессе эксплуатации лебедки работают
в ручном и автоматических режимах. Все судовые АШЛ по способу
оценки натяжения швартовного каната при работе в автоматическом режиме можно разделить на лебедки без взвешивающего
устройства и оборудованные им.
Автоматические швартовные лебедки без взвешивающего устройства. Функции взвешивающего устройства в таких АШЛ (рис. 135, а)
выполняет сам электродвигатель ИД, оставаясь постоянно включенным и работающим в режиме стоянки под током. Для этого
двигатель ИД через редуктор Р имеет жесткую связь с барабаном Б,
который в автоматическом режиме работы дополнительно связывается с валом контроллера поста управления ПУ. В качестве источника питания в подобной системе чаще всего используют специальный генератор Г, приводимый во вращение приводным двигателем
ПД (также может применяться судовая сеть при тиристорном
управлении). Поддержание натяжения троса на заданном уровне
осуществляется ИД, работающим в режиме стоянки под током
а)
с кэ
//У
г
ц
п
г? .тУ
^
/ т,У^ П
/'
\ /1,
Г
1
ог
1
*=
п В,
клЩр
I—1
1—1
" Р
—1 Р
Рис. 135. Схемы автоматических швартов• ных лебедок без взвешивающего
устройства (а) и с ним (б)
268
В 5
Рис. 136. Кинематическая
схема автоматической швартовной лебедки фирмы «Эльмор»
с определенным вращающим (пусковым) моментом на валу. Если
момент сопротивления, обусловленный натяжением троса, увеличивается, то под действием внешнего избыточного момента двигатель
переходит в режим противовключения и стравливает трос. Если
момент сопротивления уменьшается, то двигатель переходит в двигательный режим и выбирает образовавшуюся слабину.
Автоматические швартовные лебедки со взвешивающим устройством. Электродвигатели таких АШЛ (рис. 135, 6) управляются
через магнитную станцию МС: при неавтоматическом режиме
с помощью контроллера У/У, а при автоматическом режиме командоаппаратом А К, механическое воздействие на который передается динамометрическим датчиком Д. Датчик имеет механическое соединение с одной из ступеней редуктора Р и фиксирует
натяжение троса на барабане Б.
Принцип действия системы в автоматическом режиме заключается в следующем. При нормальном натяжении в тросе двигатель
ИД выключен и заторможен. Если же усилие в тросе достигает
значения уставки, на которую система настроена, то срабатывает
датчик и, воздействуя на командоаппарат, включает ИД в направлении «Травить». Благодаря этому с троса снимается нагрузка
и при уменьшении натяжения до необходимого значения ЭД отключается и система снова стопорится.
На современных морских судах большое распространение получили автоматические швартовные лебедки (рис. 136) с регулируемым
тяговым усилием до 78 кН фирмы «Эльмор» (ПНР), которые
предназначены для проведения швартовных операций и операций
по подъему и опусканию якорей. Механизм швартовной лебедки
представляет собой 4-ступенчатую 2-ходовую передачу в закрытом
269
литом корпусе. Вращение от электродвигателя / передается первой
ступени, состоящей из планетарной передачи 2, с которой соединяются электромагнитный тормоз 5 и электромагнитная муфта 6.
При работе АШЛ с нагруженным тросом тормоз и муфта находятся
в обесточенном состоянии, а поэтому первая ступень передачи
включена и вращение от нее передается на следующие ступени. При
работе со слабонагруженным тросом угловая скорость барабана 13
и ту рачки 7 может быть увеличена примерно в 5 раз. Это достигается подачей напряжения на электромагнитную муфту 6 и тормоз
5. В результате этого происходит зацепление муфты и растормаживание тормоза, благодаря чему обеспечивается передача вращающего момента на вторую ступень. Вторая и третья ступени передачи
обеспечиваются цилиндрическими шестернями 4, 3 и 3, 8. От
третьей ступени получает вращение вал с турачкой 7. Четвертая
ступень представляет собой цилиндрическую передачу внутреннего
зацепления с шестернями 9, 10. На валу четвертой ступени устанавливают зубчатую муфту 11, передающую вращение на барабан.
Барабан снабжается ручным ленточным тормозом 12, который
удерживает его от поворота при тяговом усилии на тросе, равном
0,8 его разрывного усилия.
Лебедка имеет якорную приставку, которая соединяется с грузовым валом при помощи зубчатой муфты 14. Последующая передача
движения звездочке 17 передается через цилиндрическую пару 15
и 16 и кулачковую муфту (последняя на схеме не показана).
С помощью кулачковой муфты включается и отключается якорная
приставка. Через промежуточные зубчатые колеса с четвертой
ступенью имеет механическую связь датчик тягового усилия, который воздействует на замыкание и размыкание контактов автоматического контроллера.
Приводной ЭД лебедки - 3-скоростной с тремя отдельными обмотками, имеющими 28; 8; 4 полюса (мощности при соответствующих скоростях 4,5; 22; 45 кВт). Его номинальное напряжение 380 В.
Внутри ЭД встроен электромагнитный тормоз. Охлаждается ЭД
снаружи при помощи вентилятора, приводимого во вращение отдельным двигателем.
Система управления (рис. 137) обеспечивает 2 вида управления:
ручное и автоматическое. Ручное управление осуществляется с
помощью двух командоконтроллеров 18А, которые имеют 3 рабочих положения в каждую сторону и снабжены пружиной возврата
рукоятки в нулевое положение (на схеме показано управление
только от одного контроллера). Автоматическое управление осуществляется посредством встроенного командоаппарата 28 А,
имеющего привод от взвешивающего устройства лебедки, цель
которого - поддержание значения заданного тягового усилия путем
включения ЭД на «Выбирание» или «Травление».
При р у ч н ом у п р а в л е н и и перед вводом АШЛ в действие
открывают вентиляционную заслонку и благодаря этому сблоки270
т П2 лз
ад 5
1/5/14 | | 155/1 РучноеКЧЗШМОГ\
КТЗ
КМ5
1^^
^
Рис. 137. Схема системы управления электроприводом автоматической лебедки на переменном токе
рованный с заслонкой выключатель $0.1 замыкается. При включении выключателя 38А через контакт теплового реле КК получает
питание контактор КМ6 и происходит включение двигателя А/2
вентилятора. Замыкающий контакт КМ6 также подготавливает
цепь включения скоростных контакторов КМ5 и КМ4: этим исключается работа двигателя М1 на второй и третьей скоростях без
принудительной вентиляции. Реле КVI получает питание через
контакт командоконтроллера 18А1 и размыкающий контакт реле
КУ9. Срабатывание реле КVI приводит к замыканию ряда его
контактов. Один из его контактов подключает воспринимающую
часть тепловых реле-катушки электромагнитных реле КV14 и
КУ15, включенных через блок БТС терморезисторов, и последние
при срабатывании замыкают свои контакты. Замыкающие контакты КУН вместе с контактами КУ1 шунтируют контакты 18А1: этим
подготавливается нулевая защита и защита ЭД на первой скорости
от перегрузок.
Катушка вспомогательного реле КУ8 получает питание через
размыкающие контакты вспомогательных реверсивных реле КV2
и №3. Замыкающий контакт КУ8 последовательно с контактом
теплового реле КУ15 шунтирует контакты КУ2 и КУЗ в цепи
питания катушки реле КУ8: этим подготавливается защита обмоток
средней и большой скоростей от перегрузок. Второй замыкающий
контакт КУЗ подготавливает цепь включения катушек контакторов
второй КМ4 и третьей КМ5 скоростей. Через размыкающие контакты КМ4 и КМ5 получают питание катушка реле времени К77
и катушка контактора КМЗ первой скорости. Реле КТ1 временно
разрывает цепь питания катушек реверсивных контакторов КМ1
и КМ2. Контактор КМЗ при срабатывании замыканием главных
контактов подготавливает цепь включения тихоходной обмотки
статора, а замыкающий вспомогательный контакт КМЗ-цепь питания катушки контактора тормозного электромагнита КМ7. Через
конечный выключатель 8(^4, имеющий механическую связь с диском
тормозного электромагнита, получает питание вспомогательный
контактор КМЗ тормоза и замыкающими контактами шунтирует
экономический резистор К1 в цепи катушки тормозного магнита
(подготавливает тормоз к включению.) Другие замыкающие контакты КМЗ подготавливают к включению вспомогательные реверсивные реле КУ2 и КУЗ. В нулевом положении также получают
питание через конечные выключатели 5@2 и 5(23 катушки вспомогательных реле КVII и КУ12: их срабатывание подготавливает
к включению соответствующие электрические цепи.
Дальнейшая работа схемы зависит от перевода рукоятки командоконтроллера 18А в положение «Травить» или «Выбирать». Рассмотрим работу схемы в положении «Травить», когда происходит
постепенный перевод рукоятки из нулевого положения в третье.
В положении 1 рукоятки контроллера замкнуты контакты 18АЗ
и 18 А5. Контакты 18А1 размыкаются, этим вводятся нулевая
272
защита и защита первой скорости от перегрузок. При замыкании
контактов 18АЗ получает питание электромагнитная катушка реле
КУ4 ручного управления, которое срабатывает и при замыкании
своих контактов подготавливает цепи включения реле КУ2 и КУЗ
и контакторов КМ4 и КМ5. Контакт 18А5 включает реле КУЗ через
контакты КМ8, КУ4, КУ2, КУП и КМ1. Размыкающие контакты
этого реле исключают включение реле КУ2 и вводят тепловую
защиту второй и третьей скоростей посредством реле КУЗ. Замыкающие контакты КУЗ шунтируют контакты КМЗ в собственной
цепи, включают реверсивный контактор КМ2 и подготавливают
цепь включения контактора КМ7. Замыкающий контакт КМ2
включает катушку контактора КМ7 через контакты КУЗ, КМ2,
КМ и КУ13. Замыкающие главные контакты КМ7 подают напряжение на катушку тормозного электромагнита УВ1, действие тормоза прекращается. Главными контактами реверсивного контактора КМ2 происходит подключение ЭД, и последний работает на
первой скорости. При срабатывании тормозного электромагнита
размыкается конечный выключатель $0,4, благодаря чему обесточивается катушка контактора КМЗ и в цепь тормозного магнита
вводится экономический резистор К1. Замкнувшие контакты КМЗ
подготавливают для включения контакторы КМ4 и КМ5, а разомкнувшиеся контакты КМЗ оставляют только одну цепь питания
реле КУЗ через собственные контакты.
При переводе рукоятки контроллера в положение 2 замыкается
контакт 18А6 и электромагнитная катушка контактора КМ4 получает питание по цепи КУЗ, КМ2, КМЗ, КМ6, КУЗ, КУ12, КУ4, КМ5.
Размыкающие контакты КМ4 отключают контактор КМЗ, а замыкающие контакты КМ4 обеспечивают питание катушки КМ 7 (вместо
разомкнувшихся контактов КМЗ). В случае временного обесточивания катушки КМ7 при отказах контактов КМЗ, КМ4 и КМ5
замедленное уменьшение ее магнитного потока обеспечивается за
счет электромагнитной катушки ЬТ, подключенной параллельно.
Соответственно при этом контактор КМ7 не отключается и электромагнитный тормоз находится под напряжением. Обмотка второй скорости подключается главными контактами КМ4.
Если перевести рукоятку контроллера в положение 3, то при
замыкании контакта 18А7 получает питание реле времени КТЗ
и с выдержкой времени 1 с включает контактор третьей скорости
КМ5. Размыкающий контакт КМ5 отключает контактор КМ4,
замыкающие контакты КМ5 обеспечивают питание катушке контактора КМ7. Главные контакты КМ5 переключают обмотки
статора ЭД на третью скорость. Следует отметить, что при работе
ЭД на второй и третьей скоростях реле времени КТ1 питания не
получает, поэтому его размыкающие контакты в цепи контакторов
КМ1 и КМ2 будут замкнуты.
При резком переводе рукоятки контроллера из второго или
третьего в нулевое положение отключения ЭД не происходит ввиду
273
того, что контакторы КМ2 или КМЗ могут получать питание через
свои контакты и контакты реле времени КТ1. Двигатель работает
в режиме рекуперативного торможения при включенной первой
скорости, а его окончательное отключение осуществляется реле
времени К77, имеющим выдержку времени 0,25 с.
/
Работа схемы в положении контроллера «Выбирать» протекает
аналогичным образом, но при этом получают питание контактор
КМ1 и реле КУ2.
Ускоренный режим со слабонагруженным тросом при ручном
управлении обеспечивается замыканием выключателя 48А. При
нулевом положении контроллера через контакты 18А2 получает
питание электромагнитная катушка контактора КМ10, благодаря
чему подключается электромагнитная муфта УС ускоренного режима. При включении муфты УС получает питание токовое реле
КА2 и включает контактор КМ9. Замыкающие контакты КМ9
подают напряжение на катушку тормоза УВ2, благодаря чему при
совместном включении тормоза и муфты происходит переключение
редуктора и лебедка может работать с повышенной скоростью.
Включение УВ2 приводит к срабатыванию токового реле К АЗ,
в результате замыкающими контактами КМ 9 и К АЗ создается
электрическая цепь, шунтирующая контакт 18А2, т. е. создаются
предпосылки для совместной работы муфты УС и тормоза УВ2 при
рабочих положениях контроллера. Переводом рукоятки 18А в
положения 7, 2 и 3 обеспечивается включение реверсивных и скоростных контакторов и работа ЭД происходит при увеличенной
скорости (включение аппаратуры аналогичное, как и при нормальном режиме). При возникновении перегрузок в ускоренном режиме
замыкается один из контактов командоаппарата и включается реле
сигнализации, которое при срабатывании включает лампу, сигнализирующую о перегрузке (на схеме указанная электрическая цепь не
показана).
В случае использования АШЛ для выполнения якорных операций необходимо переключить кулачковую муфту, т. е. выполнить
соединение цепной звездочки с грузовым валом. С кулачковой
муфтой имеют механическую связь конечные выключатели 8(22
и 8(^3. Конечный выключатель 8(^2 при включенной муфте разомкнут, реле КУП питания не получает и его замыкающие контакты в цепи катушек КМ10, КУ5 и КМ7 разомкнуты. Это
исключает работу ЭП в ускоренном и автомагическом режимах
и предотвращает растормаживание ЭД при превышении тягового
усилия на тросе более 80 кН. Механический выключатель 5<23
замкнут как при разобщенной, так и при включенной кулачковой
муфте, но размыкается на короткий период в момент переключения.
В результате этого в момент переключения отключается реле К VI2,
которое своими размыкающимися контактами отключает вторую
и третью скорости. Тем самым исключается переключение муфты
на больших скоростях.
274
При а в т о м а т и ч е с к о м у п р а в л е н и и на командоаппарате
28А, связанном с механизмЪм, устанавливают заданное значение
тягового усилия. Фактическое усилие на тросе достигается включением ЭД в режиме «Выбирать» при помощи ручного командоконтроллера. При этом стрелка встроенного командоаппарата 28А
должна показать одинаковое значение со стрелкой указателя заданного значения. Переключатель 58А на колонке управления переключается из положения «Ручное» в положение «Автоматическое».
Его контакты в цепи катушки К У2 размыкаются, а контакты в цепях
автоматического командоаппарата 28А замыкаются. Через контакты 18А2 контроллера ручного управления, рукоятка которого
находится в нулевом положении, получает питание реле КУ7 и
своими контактами подключает реле КУ5 (контакты 25,4/ при
равенстве заданного и фактического усилий замкнуты). При автоматическом управлении ручным командоконтроллером можно
включить ЭД только в положение «Травить».
Размыкающий контакт К У5 отключает цепь питания контактора
КМ10, это исключает включение ускоренного режима при автоматическом управлении. Замыкающие контакты КУ5 подготавливают
цепь включения реле КУ9, КУЮ и контакторов КМ4 и КМ5,
одновременно шунтируется контакт командоаппарата 28А1. В
дальнейшем работа схемы зависит от положения командоаппарата
"28А. Если тяговое усилие на тросе превысит заданное, то первоначально размыкаются контакты 28А1 и вводится нулевая защита.
В последующем замыканием контактов 28А4 подключается реле
КУЮ, которое размыкающими контактами в цепи катушки КУ2
блокирует ручное управление в режиме «Выбирать», а замыкающими контактами включает реле К УЗ, благодаря чему срабатывает
реверсивный контактор КМ2. При этом размыкающий контакт реле
КУЮ исключает включение первой скорости, а замыкающий контакт подключает контактор КМ7 и электродвигатель растормаживается. Это приводит к отравлению троса. При недостаточном
уменьшении тягового усилия на тросе в подобном режиме происходи! замыкание контактов 25/15 и ЭД работает в сторону «Травить»
на второй скорости. Если в этом случае усилие на тросе не
уменьшается, то замыкается контакт 25.46, что обеспечивает включение ЭД на третью скорость.
В случае когда при травлении усилие на тросе уменьшается ниже
заданного, то замыкаются контакты 25.4.? и включается реле КУ9,
которое подключает реле К У2, благодаря чему срабатывает реверсивный контактор КМ1. Двигатель включается на первую скорость
в положение «Выбирать». Когда, несмотря на выбирание, усилие на
канате продолжает уменьшаться, происходит замыкание контактов
28А5 и 28А6, ввиду чего ЭД переключается на вторую и третью
скорости. При постепенном возрастании или резком увеличении
тягового усилия на тросе свыше 69 кН замыкаются аварийные
контакты командоаппарата 25А2 и 28 А7. Замыкание контактов
275
28А7 происходит с небольшим запаздыванием по отношенное к
контактам 28А2. Через контакты 25^42 получает питание реле ^У6,
замыкающие контакты которого включают реле КУЗ и /КУ8,
а также шунтируют контакты КУ15, чем исключается тепловая
защита ЭД на второй и третьей скоростях. Контакт 28А7 включает
электромагнитный тормоз ЭД, и происходит стравливание троса.
Если тяговое усилие не уменьшается, то реле К Уб включает вначале
вторую скорость ЭД, а затем с выдержкой времени 1 с через реле
КТЗ включаетя третья скорость. Контакт 25^47 включает также
тормоз ЭД при ручном управлении, когда командоконтроллер 18А
находится в нулевом положении, что позволяет стравливать трос.
Системой управления обеспечиваются следующие виды защиты ЭД:
нулевая, выполняемая с помощью реле КУ1;
от обрыва фазы, обеспечиваемая включением цепи управления
на 3 фазы;
от перегрузок на первой и второй скоростях, осуществляется
с помощью тепловых реле на полупроводниковых элементах, а для
третьей скорости — реле КА1 максимального тока.
Чувствительным элементом тепловых реле являются терморезисторы, смонтированные в обмотках. Через терморезисторы (на
схеме блок терморезисторов обозначен буквенным индексом БТС)
получают питание вспомогательные электромагнитные реле КУЙ
и КУ15. Повышение температуры обмоток приводит к увеличению
сопротивления терморезисторов, ток электромагнитных катушек
уменьшается и при определенной уставке указанные реле размыкают свои контакты. Размыкание контактов КУМ вызывает отключение реле К VI, и ЭД останавливается. Когда при тепловой перегрузке сработает реле КУ15, то размыкается цепь реле КУЗ, благодаря чему отключаются вторая и третья скорости. При перегрузке
ЭД на третьей скорости срабатывает реле КА1 и включает реле
времени КТ2, которое с выдержкой времени 5 с отключает обмотку
третьей скорости ЭД. Защита ЭД вентилятора обеспечивается
биметаллическим реле КК.
62. Особенности эксплуатации
Надежность якорно-швартовных ЭП обеспечивает сохранность
судна и экипажа. Момент, когда возникает необходимость использования ЭП, не всегда задан наперед. Учитывая особенности эксплуатации электрооборудования якорно-швартовных механизмов, нетрудно представить, насколько важно обеспечить их безотказность
и постоянную готовность к работе. Большинство этих механизмов
не резервируют, а это повышает требования к безотказности в работе электрических машин, пускорегулирующей аппаратуры и других элементов ЭП.
276
Характерной особенностью эксплуатации указанных механизмов является их малая наработка, составляющая для брашпилей
30-80 ч/год, а для швартовных шпилей 30-60 ч/год. Вследствие
малого времени использования наработка элементов электрической
аппаратуры и ЭД также незначительна: их изнашивание меньше,
чем у ЭП грузоподъемных устройств. Однако длительное пребывание электрооборудования в неработающем состоянии усиливает
влияние внешних факторов, к которым относятся влияние окружающей среды и различные механические воздействия. В зонах
тропического климата электрооборудование подвержено воздействию повышенной солнечной радиации, высокой температуры
окружающего воздуха, росы и влаги, выпадающих на наружных
и внутренних поверхностях машин и аппаратов, солей, содержащихся в воздухе, и т. п. При совместном воздействии этих факторов
ухудшаются электроизоляционные свойства материалов, образуются токопроводящие пленки, уменьшается вязкость смазки в подшипниках, происходят ускоренная коррозия металлов, разрушение лакокрасочных и гальванических покрытий.
При плавании судов ЭП якорно-швартовных механизмов также
подвергаются вибрации и тряскам при ударах судна о волны. Это
приводит к обрыву монтажных проводов, ослаблению контактных
соединений, к ускоренному изнашиванию кабельной изоляции и к
снижению сопротивления изоляции электрических машин ниже
допустимых норм. Непосредственное воздействие волн на электрооборудование, установленное на открытых палубах, так же как
и сотрясения, возникающие при ударах судна о волны, способны
нанести серьезные механические повреждения. Например, известны
случаи срыва с фундаментов командоконтроллеров брашпилей или
заливания водой помещений с расположенными в них магнитными
контроллерами. В последнем случае из строя выходит вся электрическая аппаратура.
Поддержание высокой степени готовности в сложных кратковременно используемых системах возможно посредством проверок
оборудования, которые способствуют повышению безотказности
в работе. Необходимо постоянно следить за состоянием резиновых
прокладок и прочих уплотнений электрооборудования. Все обжимаемые болты, гайки, барашки или замки, зажимные гайки сальников должны быть хорошо поджаты, а свободные сальники вводов
без кабелей закрыты резиновыми заглушками. Не реже одного раза
в 3 мес следует проверять состояние резиновых прокладок. Прокладки, имеющие трещины, а также высохшие или раскисшие необходимо своевременно заменять новыми. Фетровые кольца уплотнений
выступающих концов вала ЭД по мере изнашивания следует подтягивать нажимным кольцом при помощи болтов.
Правила технической эксплуатации электрооборудования судов
регламентируют порядок вахтенного и технического обслуживания.
После окончания швартовных операций по распоряжению вахтен277
ного штурмана палубная команда должна укрыть электрооборудование чехлами. При этом электрик или электромеханик отключает
питание. До начала швартовных операций судовые электрики должны по команде вахтенного штурмана включить питание ЭП
брашпиля и шпиля и совместно с палубной командой проверить их
в работе на холостом ходу при отключенной звездочке брашпиля
и при снятых со швартовных барабанов тросах. Перед пуском
якорного ЭП после длительной его стоянки электромеханический
персонал обязан провести внешний осмотр, проверить положение
пусковых устройств, состояние подшипников и измерить сопротивления изоляции. Особое внимание следует уделять действию электромагнитных тормозов, осуществляя пробные пуски и торможение
ЭД. При проверке могут быть обнаружены различные неисправности. Анализ показывает, что около 75% всех отказов связаны
с нарушением работы магнитных контроллеров и командоконтроллеров, до 10-15% составляют отказы тормозов. Неисправности
могут быть двух групп: при повреждении элемента или при отклонении параметров от нормативно установленных (например, изменение настройки срабатывания реле времени).
При эксплуатации якорного ЭП в случае получения сильных
ударов и сотрясений необходимо проверить в электромагнитных
тормозах состояние фрикционных колец, промежуточных дисков,
шлицевых втулок и т. п. Также следует измерить размеры хода якоря
и сопротивления изоляции. Обнаруженные при осмотре детали с
наличием, трещин, а также изношенные сверх допустимых норм
следует заменять новыми. Разборку тормозов обычно проводят
только при замене изношенных или имеющих трещину дисков, смене
катушки тормозного электромагнита, а также при разборке ЭД.
Опыт эксплуатации показывает, что большое количество поломок
брашпилей и выхода из строя ЭД происходит по причинам их
перегрузки. Перегрузка ЭД возникает из-за увеличения интенсивности работы выше расчетной, обрыва одной фазы питающей сети,
ухудшения вентиляции, неисправностей редуктора, тормоза и др.
Например, очень часто происходит перегрузка ЭП якорно-швартовных устройств мри работе на быстроходной обмотке ЭД, номинальный момент которой меньше момента основной обмотки.
Контрольные вопросы-задания
1. Каковы особенности электродвигателей, применяемых в якорно-швартовных
устройствах'.'
2. Перечислите функции, выполняемые защитой в электроприводе якорных
устройств.
3. На каких основных принципах построено регулирование скорости якорношвартовных устройств?
4. Пользуясь схемой, объясните действие автоматических швартовных лебедок при
ручном и автоматическом управлении.
5. Назовите функции защиты в электроприводе автоматических швартовных лебедок.
6. Каковы особенности эксплуатации электрооборудования якорно-швартовных
устройств?
278
Глава 11
ЭЛЕКТРОПРИВОДЫ СУДОВЫХ ГРУЗОПОДЪЕМНЫХ
МЕХАНИЗМОВ
63. Общие сведения
Под грузоподъемным механизмом понимается комплекс оборудования и конструкций, предназначенных для переработки различных грузов. Судовые грузоподъемные механизмы с ЭП могут
быть классифицированы по назначению и типу передаточного
механизма, В зависимости от назначения указанные механизмы
бывают грузовые, шлюпочные, лифтовые и др.; по типу передаточного механизма их подразделяют на подъемные механизмы с механической и гидравлической передачами. Грузовые механизмы судов-лебедки и краны-составляют наиболее значительную группу
палубных механизмов и по назначению могут быть разделены на
4 подгруппы:
лебедки и краны грузоподъемностью до 8 т, обеспечивающие
переработку массовых грузов;
грузовые механизмы для перегрузки контейнеров массой от 8 до
32 т, а также тяжеловесных грузов (тяжеловесные лебедки, козловые
и мостовые контейнерные краны);
лебедки общесудового назначения (шлюпочные, траповые и др.)
и лебедки грузовых и пассажирских лифтов;
специальные лебедки и краны, применяемые на судах специального назначения (буксирные, траловые, гидрологические и др.)
Грузовые лебедки являются наиболее распространенными грузоподъемными механизмами на судах. Операции переноса груза
выполняются грузовыми лебедками с помощью грузовых стрел.
Применяют различные сочетания грузовых стрел и лебедок: работа
двух лебедок или трех лебедок на один общий гак. В последнем
случае 1 лебедка используется для подъема груза, а 2 другие-для
поворота и изменения вылета стрелы.
Судовые грузовые краны являются автономными механизмами
и в отличие от лебедок не требуют дополнительного такелажа.
Грузовые краны имеют 3 механизма: подъема груза, изменения
вылета стрелы и поворота. Козловые и мостовые контейнерные
краны имеют 2 механизма: подъема и передвижения, а в некоторых
случаях имеют третий механизм, служащий для захвата контейнеров. Грузовые краны постоянно готовы к действию и обеспечивают
более высокую производительность и экономичность перегрузоч279
ных работ. Меньший вылет стрелы компенсируется тем, что краны
устанавливают вдоль бортов судна, а грузовые люки делают
больших размеров. Последнее обстоятельство значительно облегчает размещение грузов внутри трюма. Указанные преимущества
обусловили то, что большинство сухогрузных судов теперь оснащают кранами.
По исполнению механической части грузовые лебедки и механизмы подъема крана могут иметь червячный или цилиндрический
редуктор. Наибольшее распространение получили грузовые устройства с цилиндрическим редуктором, который по сравнению с червячным обеспечивает более высокий КПД механизма.
В настоящее время на судах находят применение также электрогидравлические грузовые краны. Механизмы подъема груза, изменения вылета стрелы и поворота платформы этих кранов приводятся в движение гидравлическими двигателями, в которые подается масло под давлением, создаваемым установленным на кране
насосом с приводным ЭД.
64. Нагрузочные диаграммы
Для обоснованного выбора режима эксплуатации ЭП, а также
для выбора ЭД по мощности необходимо прежде всего знать, как
изменяется нагрузка на валу ЭД во времени. Режим работы грузоподъемных механизмов характеризуется усредненным циклом выполнения грузовой операции, В общем виде цикл работы состоит из
следующих операций: подъем груза, перенос груза в горизонтальной плоскости, опускание груза, расстропка груза, подъем холостого гака и обратное перемещение в горизонтальной плоскости,
опускание холостого гака и застропка груза. Грузовые операции
могут осуществляться одной лебедкой, двумя лебедками или грузовым краном.
Работа одной лебедки. Если в грузовых операциях участвует одна
лебедка, то грузоподъемный механизм обеспечивает подъем и спуск
груза, а перемещают его за борт или к трюму вручную. Для приема
груза с причала стрела выносится оттяжками к борту, после чего
стропят груз. В последующем выбирают лебедкой шкентель и переводят стрелу с висящим на ней грузом к люку судна. После этого
травят лебедкой шкентель и груз опускается в трюм.
Работу лебедки в этом случае можно проиллюстрировать диаграммой изменения момента на валу ЭД за цикл погрузки (рис. 138).
Момент на валу ЭД считают положительным в том случае, когда
он совпадает по знаку с направлением вращения ЭД, и отрицательным, когда не совпадает, т. е. ЭД работает в тормозном (рекуперативном) режиме. На диаграмме приняты обозначения: М, -статический момент ЭД при подъеме груза; М2 —то же при спуске груза;
М3, М4 - статические моменты соответственно при подъеме и спу280
Рис. 138. Нагрузочная диаграмма электропривода при работе
одной лебедки
ске холостого гака; Г-полное время цикла; 11, 13, ( 5 , / 7 -время
работы лебедки; Г 2 - время перевода стрелы с грузом от борта
к люку; / 4 - время освобождения груза от стропов; (б- время перевода стрелы с пустым гаком от люка к борту; 18 - время застропливания груза.
Нагрузка на валу ЭД лебедки на соответствующих участках
цикла определяется моментами сопротивления. Момент (Н • м) при
подъеме груза
где (7 -вес груза, Н; (70-вес гака, Н; П6- диаметр грузового барабана
лебедки, м; г- передаточное число редуктора; л.,-- номинальный КПД механизма лебедки.
Момент (Н • м) при спуске груза
М2 = (С + С 0 )В б Л 2 /(20 = МД2Л, - 1),
где г)2 = 2 — 1/Г),.-КПД лебедки при спуске груза.
Спуск груза происходит при тормозном режиме работы ЭД,
поэтому знак момента принимают отрицательным.
М3 = М4 = (0,1 -=-0,2)М н ,
где Мн -момент, развиваемый ЭД при подъеме номинального груза С н .
При работе одной лебедки перемещение стрелы из одного
положения в другое вручную отнимает много времени, поэтому
грузовые операции обычно осуществляют при помощи двух грузоподъемных стрел, каждая из которых оборудована отдельной лебедкой.
281
Рис. 139. Схема погрузки при помощи двух стрел и двух лебедок
Работа двух лебедок на один гак. В этом случае для приема груза
с причала нок одной стрелы располагают над люком трюма,
а другую стрелу выводят за борт судна (рис. 139). В этом положении
обе стрелы-трюмную и бортовую -раскрепляют неподвижно оттяжками. Концы обеих шкентелей присоединяют к общему гаку.
Работу при погрузке судна ведут в таком порядке:
поднимают груз лебедкой бортовой стрелы, вторая лебедка выбирает образующуюся при этом слабину своего шкентеля
(рис. 139, а);
перемещают груз поперек судна, для чего трюмная лебедка
выбирает шкентель и подтягивает груз, а бортовая поддерживает
его, работая в режиме тормозного травления (рис. 139, б);
опускают груз в трюм трюмной лебедкой, бортовая же травит
свой шкентель вхолостую (рис. 139, в);
после расстропления груза поднимают холостой гак трюмной
лебедкой, а бортовая лебедка в это время выбирает слабину
(рис. 139, г);
перетягивают гак к причалу бортовой лебедкой, трюмная же при
этом травит свой шкентель (рис. 139, д);
опускают гак бортовой лебедкой, а вторая лебедка продолжает
травить свой шкентель (рис. 139,е).
282
Бортобая
Трюмная
ледедка
лебедка
Рис. 140. Нагрузочная диаграмма электропривода при работе двух лебедок на один гак
Цикл заканчивается застропливанием нового груза. Нагрузочная
диаграмма ЭП при работе двух лебедок на один гак приведена на
рис. 140.
Работа ЭП крана. При выполнении грузовых операций судовым
краном его нагрузочные характеристики представляются работой
трех механизмов: механизма подъема, механизма изменения вылета
стрелы и механизма поворота. Упрощенная нагрузочная диаграмма
работы всех трех ЭП указанных механизмов при погрузке судна
представлена на рис. 141. После застропки груза включают ЭД
механизма подъема, который работает с моментом М гр1 на валу
в течение времени ^ , поднимая груз на необходимую высоту выше
борта. В течение времени (2 работает ЭД механизма изменения
вылета стрелы, поднимая стрелу с грузом так, чтобы нок стрелы
после ее поворота оказался над люком трюма. По мере уменьшения
вылета уменьшаются также плечи сил тяжести груза и стрелы, что
объясняет уменьшение момента на валу ЭД от значения Мстр.1 до
значения Мстр 2 . В период времени (3 работает ЭД механизма
поворота крана, который развивает момент МповЛ . В конце этого
периода груз оказывается над люком трюма, куда и опускается
в течение времени (4 при работе ЭД механизма подъема в режиме
рекуперативного торможения с моментом Мгр 2 . После расстроп283
ливания груза в трюме (время ( 5 ) холостой гак в течение времени 16
поднимается ЭД механизма подъема. Момент Мгр 3 на валу ЭД
создается силами трения в передаче. Далее следует поворот крана
с выводом нока стрелы за борт (время ? 7 , момент Мпов 2), опускание
стрелы (время / 8 , уменьшение момента от М стр 3 до Мстр 4) и спуск
холостого гака (время (9, момент Мгр 4) за новой партией груза.
Застропливанием этого груза в течение времени 110 заканчивается
цикл работы ЭП крана.
Рассмотренные нагрузочные диаграммы показывают, что ЭП
грузоподъемных устройств работает в повторно-кратковременном
режиме с различной продолжительностью включения. Действительная продолжительность включения зависит от свойств ЭП
и ряда других обстоятельств: опыта грузчиков, характера груза,
а) м
ттгттт
1ЛЩ
0 * *ст/>.1
'/т№
Гтттт
Рис. 141. Нагрузочная диаграмма электропривода грузового поворотного крана:
и—механизм подъема груза: 6 -механизм изменения вылета стрелы;
в механизм поворота крана
284
механизации грузовых работ и т. п. В приведенных графиках не
учтены динамические нагрузки, возникающие при пусках, торможениях и реверсах ЭП.
Высокая производительность грузоподъемных устройств достигается применением ЭД с большим диапазоном изменения скоростей и уменьшенным временем переходных процессов при пусках
и торможениях. Сокращение пускового времени достигается благодаря увеличенным пусковым моментам, уменьшению моментов
инерции и использованию ЭД со сравнительно небольшой частотой
вращения. В ЭД постоянного тока повышенный пусковой момент
обеспечивается последовательной обмоткой возбуждения, а в ЭП
переменного тока-применением АД с повышенным скольжением.
Для уменьшения времени торможения в ЭП грузоподъемных устройств применяют электрическое торможение и механические тормоза с растормаживающими электромагнитами. В ЭП постоянного
тока чаще всего применяют режим динамического торможения,
в АД-рекуперативного. Рекуперативное торможение в ЭП переменного тока осуществляют при остановке АД с наивысшей скорости, путем искусственного подключения статора на тихоходную
обмотку. Окончательное торможение ЭП осуществляют механические тормоза, которыми снабжаются ЭД грузоподъемных устройств.
65. Системы управления
Исходя из специфики работы, к электрооборудованию грузовых устройств предъявляют следующие основные требования:
возможность работы в повторно-кратковременном режиме при
частых пусках и торможениях;
обеспечение большого момента при пуске и эффективного торможения при остановке;
плавное изменение частоты вращения в широких пределах при
обоих направлениях вращения;
возможность плавного пуска и торможения.
Электроприводы грузовых устройств могут быть выполнены на
постоянном и переменном токе.
Электроприводы постоянного тока. Обычно в этих ЭП применяют ЭД смешанного возбуждения с контроллерными и релейноконтакторными схемами управления, систему Г-Д, ЭД постоянного тока с тиристорным управлением.
Электроприводы с ЭД постоянного тока смешанного возбуждения имеют мягкие механические характеристики. Эти характеристики обладают свойством автоматичности, так как с уменьшением
нагрузки частота вращения ЭД увеличивается, а при увеличении
груз а-автоматически снижается. Обычно тяжелые грузы требуют
285
более осторожного обращения, поэтому ЭД постоянного тока,
обеспечивая малую скорость их подъема, наиболее удовлетворяют
требованиям, предъявляемым к ЭП судовых лебедок. Регулирование частоты вращения ЭД достигается изменением сопротивления
цепи якоря; посадочная скорость обеспечивается шунтированием
обмотки якоря резистором. Для быстрого подъема и опускания
холостого гака увеличение частоты вращения ЭД возможно благодаря ослаблению магнитного потока параллельной обмотки возбуждения. То обстоятельство, что ЭД грузового устройства работает, как правило, с нагрузкой, не превышающей номинального
значения, делает лебедку с ЭД постоянного тока производительнее
лебедки с АД.
Несмотря на широкое применение переменного тока на судах
для грузовых лебедок, в ряде случаев сохраняется ЭП постоянного
тока по системе Г-Д. Лебедки с таким ЭП обладают большим
диапазоном регулирования рабочих скоростей (до 1 :50). Система
Г-Д обеспечивает бесступенчатое плавное регулирование, высокую
производительность, удобство управления лебедками. Наряду с
этим следует отметить относительную сложность ЭП из-за наличия
преобразователей для каждого исполнительного ЭД и, как следствие, более высокую стоимость, более сложное техническое обслуживание.
С развитием полупроводниковой, в том числе тиристорной
техники, появилась возможность создания регулируемого тиристорного ЭП с двигателями постоянного тока, питаемого от сети
переменного тока. Тиристорное управление позволяет получить
плавное глубокое регулирование частоты вращения ЭД и тем
самым увеличить производительность грузовых устройств. Достоинством такого ЭП является также отсутствие аппаратуры
управления с контакторами и реле, что является основой обеспечения высокой надежности.
Электроприводы переменного тока. Несмотря на указанные достоинства ЭП постоянного тока на судах в грузовых устройствах
в основном применяют ЭП переменного тока. Дело в том, что
системы управления ЭП постоянного тока сложнее, требуют применения значительно большего количества аппаратов управления,
поэтому они менее надежны, нежели системы переменного тока.
Упрощает уход за АД и увеличивает их надежность также то, что
они не имеют коллекторов. Наконец, более высокий КПД асинхронных двигателей по сравнению с ЭД постоянного тока обусловливает большую экономичность установок с ЭП переменного тока.
На морских судах ЭП переменного тока комплектуют в основном многоскоростными АД с короткозамкнутым ротором и несколько реже АД с фазным ротором. Опыт показал, что для
грузовых лебедок и подъемных механизмов судовых кранов наиболее рациональными оказались ЭП с 3-скоростными АД, а для
механизмов поворота крана и изменения вылета стрелы—с 2-ско286
ростными. Подавляющее большинство 3-скоросгных АД выполнено с тремя независимыми статорными обмотками. Однако применяют и 3-скоростные АД с двумя независимыми обмотками, из
которых одна - полюсопереключаемая, обеспечивающая при соответствующих соединениях работу АД на малой и средней частотах
вращения, а независимая - на высокой.
Большинство 3-скоростных АД выполнено по принципу постоянства момента, что позволяет использовать их для подъема
груза на всех трех скоростях. По конструкции ротора все 3-скоростные АД можно разделить на 1- и 2-роторные. Устройство
3-скоростных 1-роторных АД отличается от обычных АД тем, что
в пазы статора уложены 3 обмотки, причем чем больше полюсов
имеет обмотка, тем ближе она расположена к воздушному зазору.
У 2-роторных 3-скоростных АД тихоходный ротор и соответствующий ему пакет статора с многополюсной 3-фазной обмоткой
размещены со стороны, противоположной механизму. Быстроходный ротор и статор с двумя электрически несвязанными обмотками
расположены со стороны свободного конца вала, т. е. со стороны
механизма. Однороторные АД по сравнению с 2-роторными проще
по конструкции, технологичнее, обладают меньшими габаритными
размерами и массой, вполне приемлемым диапазоном регулирования и малыми моментами инерции. Однако по своей теплоемкости
они уступают 2-роторным АД, особенно при длительной работе
тихоходных обмоток.
Все зарубежные АД оборудованы независимым охлаждением от
автономного электровентилятора, а АД отечественного производства типа МАП охлаждаются с помощью рабочего колеса вентилятора, насаженного на вал (самообдувом). Входное и выходное
отверстие для воздуха в нерабочем состоянии обычно закрывают
заслонками. Положение заслонок контролируется конечным выключателем, контакт которого включается последовательно с реле
нулевой защиты ЭП. С торцовой части, противоположной механизму, к корпусу пристроен дисковый электромагнитный тормоз.
Электроприводы механизмов поворота и изменения вылета
стрелы кранов главным образом укомплектованы 1-роторными
2-скоротными АД с одной полюсопереключаемой или с двумя
независимыми обмотками.
В ЭД грузовых устройств используют 2 системы тормозов:
пристраиваемые к АД тормоза в основном дискового типа с электромагнитным приводом; колодочные тормоза, устанавливаемые на
механизмах и имеющие привод от электрогидравлических толкателей. Применяют тормозные электромагниты переменного и постоянного тока. Более надежны в работе тормозные электромагниты постоянного тока. Они не столь чувствительны к появлению
грязи и коррозии, как электромагниты переменного тока, и лучше
приспособлены к частым включениям и отключениям. Для ускоре287
ния срабатывания тормоза применяют форсирование: в момент
включения катушки на нее подают повышенное напряжение, а после
срабатывания вводят в ее цепь экономический резистор, снижающий
ток катушки до значения, необходимого лишь для удержания
притянутого якоря.
В каждый ЭП входит соответствующий комплект пускорегулирующей коммутационной аппаратуры, состоящей из магнитного
контроллера и командоконтроллера. В магнитный контроллер
обычно входят все коммутационные и защитные аппараты, регулировочные и разрядные резисторы, трансформаторы и выпрямители.
В ЭП грузовых лебедок аппаратуру магнитных контроллеров размещают обычно в шкафах брызгозащищенного исполнения. В ЭП
кранов магнитные контроллеры бывают в двух исполнениях: водозащищенного и открытого. Последние устанавливают непосредственно в кабине крана в закрытой выгородке, защищенной от
работающего крановщика. Во всех случаях в магнитных контроллерах устанавливают керамические резисторы для подогрева воздуха в нерабочем состоянии. Командоконтроллеры в зависимости
от типа грузового устройства выполняют раздельными или совмещенными. Раздельные контроллеры в основном применяют в ЭП
грузовых лебедок, а совмещенные-в кранах и механизированных
стрелах. Совмещаются главным образом Командоконтроллеры ЭП
изменения угла наклона и поворота стрелы. Большинство командоконтроллеров оснащено пружинами возврата рукоятки в нулевое
положение, что обеспечивает функцию дополнительной защиты.
Системы управления ЭП лебедок и кранов должны обеспечивать
автоматическую задержку времени на промежуточных положениях
при разгоне и торможении. В ЭП грузоподъемных устройств,
требующих ограничения движения, должны быть предусмотрены
конечные выключатели, обеспечивающие надежное отключение АД.
При этом после остановки при вращении в одном направлении АД
должен иметь возможность вращаться в обратном направлении.
Для предотвращения работы оборудования в ненормальных
и аварийных режимах применяют следующие виды защиты: от
коротких замыканий, от перегрузок, грузовую и минимальную.
Защита от короткого замыкания.осуществляется плавкими предохранителями (только для цепей управления), реле максимального
тока и автоматическими выключателями. Защита от перегрузокзащита от повреждений, вызываемых длительным превышением
допустимого по нагреву значения тока. Причиной перегрузки может
быть неисправность механизма, тормоза или использование другого эксплуатационного режима. В качестве элементов защиты
используют электромагнитные токовые реле и тепловые реле. Грузовая защита контролирует ток, потребляемый ЭД, но при превышении тока защита не отключает ЭП, а переводи! его на новый
облегченный режим работы. Минимальная защита отключает грузовое устройство при уменьшении напряжения сети ниже заданного.
288
• " • • . , . . ,
66. Контакторные схемы электропривода
грузовых лебедок и кранов
Электропривод грузового крана на переменном токе. Рассматриваемая система управления электроприводом грузового крана установлена на многих судах иностранной постройки. Каждый механизм грузового крана приводится в движение отдельным АД.
Питание к крановому электрооборудованию подается через выключатели ()Р1-()Р5 (рис. 142-144). Электромагнитные тормоза трех
приводных ПД (механизмов подъема, поворота и вылета стрелы
крана) получают напряжение через общий трансформатор 1У2 (см.
рис. 143), включаемый выключателем ()Р4.
В м е х а н и з м е п о д ъ е м а (см. рис. 142) в качестве исполнительного ЭД используют 3-скоростной АД мощностью 3,1/19/38
кВт при частотах вращения 115/700/1415 об/мин. Питание подается
через выключатель 0,Р1, который может быть включен при предварительном замыкании аварийного выключателя 15А, установленного на командоконтроллере. Выключатель ()Р1 также включается
через конечный выключатель -/5<25, который замкнут при закрытых
дверях кабины крана.
Перед началом работы необходимо открыть заслонку, либо
в противном случае контакт заслонки 1$()4 окажется разомкнутым
и питания в схеме не будет. При открытии заслонки получает
питание катушка КМ6, включается АД вентилятора и подготавливается цепь питания второй и третьей скорости.
В нулевом положении контроллера получает питание реле КУ1,
которое своими контактами шунтирует контакты 8А1 и подает
питание на остальную часть схемы управления. При этом срабатывают контакторы 1КМ8, КМЗ, реле КУ4 и реле времени КТ1.
Замыкание контактов 1КМ8 вызывает шунтирование экономического резистора в цепи катушки тормозного магнита УВ1 (см.
рис. 143). При срабатывании реле КУ4 (см. рис. 142) подключается
дублирующая цепь питания собственной катушки, а также подготавливается цепь питания второй и третьей скоростей.
В первом положении контроллера «Подъем» получают питание
катушки реле КУ2, контакторов КМ1 и 1КМ7 и расторможенный
АД работает на тихоходной обмотке, подключаемой контактором
К.МЗ, который сработал еще ранее (в нулевом положении). Катушка контактора 1КМ7 питается постоянным током от выпрямителя
1}2. В случае прекращения питания при переключении с одной
скорости на другую контактор 1КМ7 отключается с замедлением.
Необходимая выдержка времени обеспечивается конденсатором С1,
который служит одновременно и для сглаживания пульсации выпрямленного напряжения. Экономический выключатель 18()3, имеющий механическую связь с тормозным диском, при включении
тормоза размыкается и отключает катушку контактора 1КМ8,
благодаря чему в цепь катушки электромагнитного тормоза вво289
дится экономический резистор, который предохраняет катушку от
перегрева и способствует быстрому срабатыванию тормоза после
отключения АД. Замыкание размыкающих контактов 1КМ8 подготавливает к включению цепи второй и третьей скоростей АД.
Во втором положении контроллера получают питание контактор КМ4 и реле времени КТ2. Происходит включение обмотки
статора второй скорости,, отключается тихоходная обмотка и начинается отсчет выдержки времени реле КТ2. Одновременно отключается катушка КТ1, его размыкающий контакт замыкается, создавая дублирующую цепь питания для катушки КМ1.
Л В С
я/
-\^Х
ш,
,?? ^0
и№
ш; '^|
еть
с/74/с/?
Подъен
1одъеп
3 21 0
-~
ш
~\~}^
>,.
^Ч+тйхСН
|
I
*|/7 VI/?
У[
~Гт1>СН
КМ1
кмг
оН>
Рис. 142. Схема системы управления электроприводом механизма подъема грузового
крана
290
5) [ А
Лево
ЦРЗ
Прабо ^ КУ1
2 1\~01 2
*- 1
1—I
\
5К
*~~Т 1
2КМ6
2КМ6
,-Х
-.
^
^
^л/;
Рис. 143. Схемы системы управления электроприводом механизма поворота грузового крана: и-цепи силовая и подключения
электромагнитных тормозов; б-цепь управления
КУ1
Ниже
Выше
2 1 0 1 2
Рис. 144. Схемы системы управления электроприводом механизма изменения вылета
стрелы грузового крана:
а цепь силовая; б -цепь управления
В третьем положении контроллера после отсчета выдержки
времени реле КТ2 контактором КМ5 включается быстроходная
обмотка, а контактор КМ4 обесточивается размыкающим вспомогательным контактом КМ5.
При быстром переводе рукоятки контроллера из третьего или
второго положения в нулевое благодаря реле К Т1 реверсивный
контактор КМ1 остается включенным, и при включенном контакторе КМЗ тихоходная обмотка статора остается подключенной
к сети. Это дает возможность АД, используя режим рекуперативного торможения при переходе с большей скорости на меньшую,
к моменту наложения механического тормоза резко снизить первоначальную скорость. Последнее значительно облегчает работу тормоза и обеспечивает плавное торможение груза. Работа АД в режиме рекуперативного торможения обеспечивается выдержкой времени реле К Т/, которое до наложения электромагнитного тормоза
полностью отключает АД.
Конечный выключатель 18()1, установленный на ноке стрелы,
ограничивает подъем гака. Выключатель удерживается во включенном состоянии при помощи противовеса. Когда гак доходит до
противовеса и немного его приподнимает, пружинный механизм
отключает выключатель 18^^. При спуске груза конечный выклю292
чатель 18()2 ограничивает сматывание шкентеля с барабана и размыкается, когда на барабане остается 1,5 шлага шкентеля.
Тихоходная обмотка статора защищена от перегрева термореле
5К1, а обмотка второй и третьей скорости - 5К2. Реле смонтировано непосредственно среди витков обмотки и срабатывает при
температуре 170°С. При перегреве обмотки первой скорости реле
8К1 полностью отключает АД. Срабатывание реле 8К2 отключает
реле КУ4, и таким образом исключается работа АД на второй
и третьей скоростях. Двигатель вентилятора защищен от перегрузки
тепловым реле КК. При срабатывании этого реле прерывается цепь
питания контакторов КМ6 и вместе с отключением АД вентилятора
благодаря разомкнутым контактам КМ6 исключается работа механизма подъема на второй и третьей скоростях.
Система управления м е х а н и з м а п о в о р о т а (см. рис. 143)
обеспечивает большой пусковой момент АД, необходимый для
преодоления инерции крана с грузом, а также осуществляет плавный пуск и торможение, исключающее раскачивание груза. Для
большей эффективности тормозного процесса в данном ЭП последовательно осуществляются режимы рекуперативного и динамического торможения.
Приводной АД механизма поворота 2-скоростной. Изменение
основной скорости достигается переключением обмотки статора
с «треугольника» на «двойную звезду». К сети ЭП подключается
выключателем ()РЗ и при нулевом положении контроллера включаются реле КУ1 и контактор ЗКМ10. Таким образом, подготавливается к включению схема управления и шунтируется экономический резистор в цепи катушки тормозного магнита 7ВЗ. Схема
управления симметрична, поэтому рассмотрим только положение
«Право».
В первом положении контроллера включаются контакторы КМ1,
КМЗ, КМ4, ЗКМ9, реле'КУ2 и реле времени КТ 1: АД включается
по схеме «звезда» и работает с малой частотой вращения, которая
используется как предварительная ступень пуска. При этом АД
развивает момент меньший, чем нужно для поворота крана с грузом, но достаточный для выбирания люфта механической передачи.
Уменьшение пускового момента снижает ускорение ЭП и исключает возможность появления чрезмерных динамических усилий, т. е.
обеспечивается высокая плавность трогания с места. По истечении
выдержки (0,5 с) реле времени КТ 1 его размыкающими контактами
отключается контактор КМ4, а замыкающими контактами подключается контактор КМ5. При включенных контакторах КМ5
и КМЗ обмотка статора пересоединяется на «треугольник» и АД,
увеличивая пусковой момент, обеспечивает поворот крана с малой
скоростью. Замкнувшиеся вспомогательные контакты КМ5 совместно с контактами ЗКМ9 подключают реле времени КТ2.
Во втором положении контроллера по истечении выдержки
времени реле КТ2 включается реле КУ4, которое одним из замы293
кающих контактов шунтирует контакты реле времени КТ2, другим - включает контактор КМ7, а размыкающими контактами отключает контакторы КМЗ, КМ5 и реле времени КТ1. Замыкающие
контакты КМ7 при срабатывании контактора включают контактор
КМ4, а затем совместно с его замыкающими контактами включают
контактор КМ6. При включенных контакторах КМ4, КМ7 и КМ6
обмотка статора подключена к сети по схеме «двойная звезда»,
число пар полюсов сокращается с восьми до четырех, и АД
развивает максимальную частоту вращения. Ограничение поворота
обеспечивается конечным выключателем, размыкающие контакты
38(21 и 38<22 которого отключают АД механизма поворота в крайних положениях крана.
При быстром переводе командоконтроллера из нулевого положения во второе процесс пуска происходит автоматически и протекает следующим образом. Первоначально АД подключается с обмоткой статора, соединенной по схеме «звезда». По истечении 0,5 с
(выдержка времени реле КТ1) происходит переключение со «звезды» на «треугольник», при этом число полюсов остается равным
восьми. На первой скорости АД работает в течение 0,75 с (выдержка времени реле КТ2) и затем, переключенный на «двойную
звезду», начинает развивать максимальную частоту вращения.
При возврате контроллера из второго положения в нулевое
процесс торможения также протекает автоматически. После установки контроллера в нулевое положение реверсивные контакторы
КМ] или КМ2 продолжают получать питание через размыкающие
контакты КТ1, и обмотка статора с включенными контакторами
КМЗ и КМ4 оказывается соединенной но схеме «звезда» и подключена к сети. В это время происходит процесс рекуперативного
торможения в связи с переходом АД с большей частоты вращения
на меньшую. Данный процесс протекает в течение 0,5 с, так как
катушка КТ1 при обесточивании реле КУ4 получает питание
и через указанную выдержку времени размыканием размыкающих
контактов КТ1 обесточивает реверсивные контакторы (КМ1 или
КМ2). При отключении АД от сети замкнувшимися вспомогательными контактами реверсивных контакторов подается напряжение
на контактор КМЗ, который подключает обмотку статора, соединенную по схеме «звезда», к сети постоянного тока, и АД работает
в режиме динамического торможения. Отключение электромагнитного тормоза и АД от сети постоянного тока осуществляется
посредством реле времени КТЗ, катушка которого включается
вместе с контактором КМ8, и выдержка времени составляет 1 с. За
это время кран почти полностью останавливается и происходит
одновременное наложение механического тормоза, который также
обесточивается по окончании выдержки времени реле КТЗ вследствие обесточивания катушки контактора ЗКМ9. Подобное комбинированное торможение обеспечивает высокую плавность остановки
и намного облегчает работу тормоза.
294
Тепловая защита АД осуществляется термореле 8К, которое при
превышении температуры обмотки статора выше допустимой отключает АД от сети. Трансформатор ТУ1, питающий сеть постоянного тока, от перегрузки защищается тепловым реле КК, которое
при срабатывании размыкает цепь контактора КМ8 динамического
торможения.
В качестве приводного ЭД м е х а н и з м а и з м е н е н и я в ы л е т а
с т р е л ы применен 2-скоростной АД мощностью 3,4/7 кВт, частотой вращения 690/1425 об/мин (см. рис. 144). Для ограничения
работы данного механизма применен конечный выключатель, ограничивающий вылет стрелы и имеющий 2 пары размыкающих
контактов 25()2 и 25(21. Контакты 28()2 размыкаются при верхнем
предельном положении стрелы, соответствующем вылету 4 м,
а контакты 25^7-при нижнем предельном положении, соответствующем вылету 14 м. При необходимости укладки стрелы по-походному контакты 28() 1 шунтируются кнопочным выключателем
55. Конечный выключатель 18()1 механизма подъема исключает
возможность опускания стрелы, когда гак находится в верхнем
положении.
В нулевом положении контроллера при включении выключателя
<2Р2 получают питание реле КУI и контактор 2КМ6 экономического резистора тормоза.
При переводе рукоятки контроллера в первое положение включается один из реверсивных контакторов (КМ 1 или КМ2), контакторы КМЗ и 2КМ5: АД работает на тихоходной обмотке. После
растормаживания ввиду срабатывания выключателя 28<23 в цепь
магнита УВ2 (см. рис. 143) вводится экономический резистор разомкнувшимися контактами 2КМ6.
При включении обмотки первой скорости АД также получает
питание катушка реле времени К Т (см. рис. 144), благодаря чему во
втором положении контроллера по истечении выдержки времени
данного реле включается быстроходная обмотка. Разомкнувшимися вспомогательными контактами КМ4 отключается контактор
КМЗ и соответственно теряет питание катушка реле времени КТ.
Питание катушки контактора КМ4 осуществляется через собственные замкнувшиеся вспомогательные контакты.
При быстром переводе рукоятки контроллера из второго положения в нулевое при опускании стрелы через контакт КТп вспомогательный контакт КМ2 катушка контактора КМ2 продолжает
получать питание и АД, подключенный на первую скорость, работает в режиме рекуперативного торможения в течение 0,5 с, что
обусловлено выдержкой времени реле КТ.
Защита от перегрева обмотки статора осуществляется реле 5К,
которое при температуре обмотки, равной уставке срабатывания
реле 155°С, отключает АД.
Во время эксплуатации ЭП крана особенное внимание следует
уделять регулированию электромагнитных тормозов, в первую
295
очередь тормозов механизма подъема. Хотя тормоза являются
саморегулирующимися, но возможны их отказы из-за самоотвинчивания регулировочного болта экономического микровыключателя 28<23. Это может привести к выходу из строя от перегрузок
выпрямителей, к которым они очень чувствительны. Необходимо
периодически (вместе с осмотром контактов) измерять щупами
зазор между дисками тормоза (при увеличении зазора до 5 мм
колодки надо заменять) и следить за исправностью цепи динамического торможения механизма поворота крана. При отказе цепи
динамического торможения кран после установки рукоятки контроллера в нулевое положение будет продолжать поворачиваться по
инерции на угол 20-30°, что приведет к быстрому выходу из строя
электромеханического тормоза АД механизма поворота. В процессе
эксплуатации часто действительная продолжительность включения
оказывается больше установленной. Это приводит к перегреву
обмоток статора, которые могут быть своевременно отключены
при четком срабатывании тепловой защиты.
Слабым звеном ъ электрооборудовании крана являются конечные выключатели, подверженные действию морской воды. В процессе эксплуатации необходимо проверять их герметичность.
Электропривод грузовой лебедки. В настоящее время на многих
морских судах установлены лебедки отечественного производства,
в ЭП которых применяют 3-скоростные АД типа МАП 622-6/12/24
и МАП 622-4/8/24 с номинальной мощностью на одной из обмоток
40 кВт. Эти АД снабжены электромагнитными тормозами постоянного тока. В системе управления (рис. 145) электромагнитный
тормоз получает питание через понижающий трансформатор Т V
и выпрямитель 117,. Магнитный контроллер включает в себя большой комплекс аппаратуры управления. В качестве реверсивных
контакторов КМ1 и КМ2, а также контактора первой скорости
применены контакторы типа КТ6000. Включения и выключения
обмоток второй и третьей скорости обеспечивается контакторами
КМ4 и КМ5 (типа КТ7000Б) совместно с тиристорным блоком.
Применение тиристоров позволяет осуществить бездуговую коммутацию (см. п. 31). Благодаря использованию такого комплекса
электрическая износостойкость магнитного контроллера составляет
6
5 - Ю циклов включено - отключено с частотой до 600 включений
в час.
В нулевом положении командоконтроллера выключатель О.Р
и выключатель цепи управления 18А предварительно включены,
замкнуты контакты 5/47, 8А5, 8А6, 8А11 и получают питание реле
времени КТ2, КТЗ, КТ4 и КТ7. Реле КТ2 и КТЗ замыкающими
контактами подготавливают к включению цепь катушки контактора КМЗ, а размыкающими контактами предотвращают включение
контакторов КМ 4 и КМ 5. Реле КТ4 шунтирует экономический
резистор КР1 в цепи тормозного магнита УВ. При срабатывании
реле КТ7 одним контактом включает реле времени КТЗ, другим296
Рис. 145. Схема системы управления электроприводом грузовой лебедки с 3-скоростным асинхронным двигателем типа
МАП-622
создает дополнительную цепь питания катушек КТ2 и КТЗ, а третий контакт КТ7 при размыкании предотвращает мгновенное
включение контактора КМЗ. Реле КТЗ после включения одним из
замыкающих контактов подключает реле напряжения КТ1, другим-подготавливает дополнительную цепь питания контактора
КМ4, а размыкающим контактом предотвращает преждевременную подачу напряжения на катушку контактора КМ5. После включения реле КТ1 контакты 8А1 шунтируются, таким образом обеспечивается питание цепи управления при рабочих положениях контроллера. Схема симметрична для двух направлений вращения АД,
поэтому рассмотрим ее работу только для положения «Подъем».
При установке командоконтроллера в первое положение замыкаются контакты 8АЗ и 8А4 (контакты 8А5, 5А6 остаются замкнутыми) и размыкаются контакты 8А1, ЗАП. В этом случае последовательно включаются контакторы КМ1, КМ6 и реле К К, в результате подключается катушка тормозного магнита УВ и АД растормаживается. Реле К V одновременно размыкает свой контакт в цепи
катушек КТ4 и КТ7. Отключение реле КТ4 позволяет с выдержкой
времени, рассчитанной на собственное время срабатывания тормоза, ввести экономический резистор в цепь его катушки. При обесточивании реле КТ7 с выдержкой времени замыкает свой размыкающий контакт в цепи катушки КМЗ, благодаря чему расторможенный АД начинает работать на первой скорости. Расторможенное состояние АД гарантируется уставкой времени реле КТ7,
значение которой настраивается на время срабатывания тормоза.
Это способствует уменьшению пусковых токов. При работе АД на
первой скорости меняется цепь питания реле К 77 и КТ8, катушки
которых получают питание через замкнувшиеся вспомогательные
контакты КМЗ вместо разомкнувшихся контактов КТ7 и КУ. По
истечении выдержки времени реле КТ2, катушка которого обесточивается разомкнувшимися контактами КМ 1 и К Т 7, его замыкающие контакты размыкаются, а размыкающие-замыкаются.
Размыкающие контакты КТ2 подготавливают к включению цепи
обмотки второй скорости, размыкание же замыкающих контактов
не приводит к отключению контактора КМЗ, так как катушка
последнего продолжает получать питание через замыкающий контакт КТЗ и контакт 8А6.
Во втором положении контроллера размыкаются контакты 8А6
и замыкаются контакты 8А7. Если выдержка времени реле КТ2
закончилась, то контактор КМЗ отключается, а контактор КМ4
через размыкающие контакты КТ2 и контакты 8А7 включается.
Таким образом АД начинает работать на второй скорости. В случае
быстрого перевода рукоятки контроллера во второе положение,
когда выдержка времени реле КТ2 еще не закончилась, контактор
КМЗ продолжает оставаться включенным через контакты 8А5
и лишь после срабатывания реле КТ2 происходит переключение АД
на вторую скорость. Размыкание вспомогательного контакта КМЗ
298
вызывает отключение реле КТ8, а замыкание КМ4-включение реле
времени КТ5. Соответственно во втором положении катушка КТ1
получает питание через замыкающие контакты КТ5 и КМ4 вместо
разомкнувшихся контактов КМЗ, КТ8 и КТ5. Реле КТ5 при
срабатывании также одним из замыкающих контактов создает
дублирующую цепь питания контактора КМ1, другим контактом
подготавливает к включению контактор КМ5.
Перевод рукоятки контроллера в третье положение вызывает
размыкание контактов 8А7 и замыкание контактов 8А9. В случае
окончившейся выдержки времени реле КТ8 размыкание контактов
8А7 приводит к отключению контактора КМ4, а замкнувшиеся
контакты 5А9 подключат контактор КМ5. Соответственно АД
переключается на обмотку третьей скорости. Если перевод рукоятки
контроллера в третье положение произойдет без соответствующей
задержки на втором положении и выдержка времени реле КТ8 не
закончится, то контактор КМ4 остается включенным через контакты 8А9 и замыкающие контакты КТ8, в результате АД будет
продолжать работу на второй скорости. Переход на третью скорость произойдет автоматически по окончании выдержки времени,
когда замыкающие контакты КТ8 отключат контактор КМ4, а размыкающие контакты КТ8- включат контактор КМ5. Контактор
КМ5 при срабатывании своими замыкающими вспомогательными
контактами подключает тормозное реле времени КТ6, которое
двумя замыкающими контактами создает дополнительную цепь
питания контакторов скорости, необходимую при остановке и реверсе АД, другим замыкающим контактом создается электрическая
цепь реле КТ5, размыкающий контакт КТ6 при отключении предотвращает включение обмотки первой скорости.
При быстром переводе рукоятки контроллера из нулевого в
третье положение замкнутыми окажутся контакты 8АЗ, 8А4, 8А5
и 8А9. В результате через контакты 8А5 первоначально включается
контактор КМЗ, по истечении выдержки времени реле КТ2 через
контакты 8А9 и замыкающие контакты КТ8 срабатывает контактор КМ4, а затем по окончании выдержки времени реле КТ8 через
его размыкающие контакты включается контактор КМ5. В соответствии с уставками срабатывания АД плавно ускоряется на
первой скорости, на второй скорости и затем переходит работать на
третью скорость. Когда рукоятка контроллера мгновенно возвращается из третьего положения в нулевое, реле КТ6 в течение
заданной уставки времени продолжает держать свои замыкающие
контакты замкнутыми, а размыкающие - разомкнутыми; также
остаются замкнутыми замыкающие контакты реле КТ5. В этом
случае реверсивный контактор КМ1 остается включенным через
свои вспомогательные контакты и замыкающий контакт К Т5; через
контакты КТЗ, 8А6 и замыкающий контакт КТ6 подключается
контактор КМ4 и двигатель переходит работать на вторую скорость (при этом контактор К Мб включен замкнувшимися вспомо10*
299
2УУ
гательными контактами КМ4). По окончании выдержки времени
реле КТ6 его замыкающие контакты отключают контактор КМ4,
а размыкающие контакты включат контактор КМЗ, в результате
АД переключается на первую скорость. На всех переходных скоростях угловая скорость ротора оказывается больше угловой скорости поля статора, т.е. АД работает в режиме рекуперативного
торможения и создает на валу тормозной момент. Его окончательное отключение обеспечивает реле КТ5, катушка которого обесточивается вспомогательными контактами КМ4. Полное торможение
вала АД осуществляется электромагнитным тормозом, отключающимся контактором КМ6 в момент размыкания контактов КМ4.
Если при работе на третьей скорости контактор КМ5 по каким-либо причинам отключится, то через замыкающий контакт КТ6 сразу
включается контактор КМЗ; АД, переключаясь на первую скорость,
в режиме рекуперативного торможения уменьшает частоту вращения, а затем отключается через реле КТ5 реверсивным контактором.
Переключение на первую скорость в этом случае делает торможение более эффективным.
При резком переводе рукоятки контроллера из третьего положения «Подъем» в третье положение «Спуск» работа ЭП автоматизируется следующим образом. Первоначально АД посредством
реле КТ5 и КТ6 остается включенным на подъем и, работая
в режиме рекуперативного торможения, последовательно уменьшает частоту вращения, которая в момент переключения реверсивных контакторов практически уменьшается до нуля. После переключения реверсивных контакторов через контакты 8А6 включается
контактор КМЗ, затем после переключения реле КТЗ через контакты 5А10 и замыкающие контакты КТЗ включается контактор
КМ4, после переключения реле времени КТЗ срабатывает контактор КМ5. В результате АД последовательно без толчков ускоряется
на первой, второй скорости и затем переходит на третью скорость.
Система управления ЭП обеспечивает:
нулевую защиту, выполняемую с помощью реле КТ1. Реле КТI
также контролирует правильность срабатывания аппаратуры. Снижение напряжения или его полное исчезновение, а также неправильная работа электрических аппаратов приводят к отключению реле
КТ1, и АД отключается. Таким образом обеспечивается достаточно
четкая работа коммутационной аппаратуры, а в случае обрывов
цепей питания катушек скоростных контакторов предотвращаются
аварии грузового устройства;
защиту от перегрузок с помощью тепловых токовых реле КК1КК5 типа ТРТ (при срабатывании указанной защиты также отключается АД);
защиту от крайних предельных положений груза и превышения
номинального значения грузоподъемности, осуществляемую конечными выключателями 8<21, §0,2 и 8Р, которые отключают АД
в указанных экстремальных условиях,
зоо
При эксплуатации ЭП необходимо обращать внимание на работу электромагнитного тормоза, который при реверсе АД может не
включиться. Например, если контроллер переводить через нулевое
положение резко, то возможны случаи несрабатывания реле КТ4
форсировки, в результате на катушки тормоза будет подано пониженное напряжение. Тогда разгон АД в противоположную сторону
будет происходить при частично расторможенном тормозе. При
многократных повторениях это может вызвать усиленное изнашивание тормозных колодок, повышенный нагрев трущихся поверхностей тормоза и статорных обмоток АД. Чтобы исключить эти
нежелательные явления, в процессе настройки магнитного контроллера необходимо добиться уменьшенного собственного времени
срабатывания реле КТ4 форсировки, которое должно быть несколько меньше времени срабатывания реле тормоза. Если повышение
нагрева тормоза по этой причине обнаружено в процессе грузовых
операций, а условия работы не позволяют провести проверку
и регулирование аппаратуры, то надежное срабатывание и удержание тормоза можно обеспечить, увеличивая подводимое к катушке
тормоза напряжение путем уменьшения сопротивления экономического резистора КР1. Особое внимание следует обращать на
элементы, обеспечивающие водозащищенность АД со стороны вала
и вывода коробок.
67. Тиристорные электроприводы грузоподъемных механизмов
Развитие и совершенствование систем управления ЭП грузоподъемных механизмов направлено на повышение производительности, грузоподъемности, надежности, а также на дальнейшую их
автоматизацию. Используемые ЭП постоянного и переменного
тока с контакторным управлением из-за недостаточной плавности
регулирования, малого диапазона скоростей и многообразия аппаратуры не могут в полной мере способствовать повышению этих
показателей. Поэтому в настоящее время получает распространение
тиристорный ЭП постоянного и переменного тока. Производительность лебедки с тиристорным ЭП постоянного тока по системе
тиристорный преобразователь - двигатель на 15-20% выше, чем
лебедки с приводом системы Г-Д. Однако на судах с источниками
питания переменного тока более целесообразен тиристорный асинхронный привод, где в качестве исполнительных ЭД могут быть
применены 1-скоростные АД.
На судах зарубежной постройки используются ЭП с параметрическим регулированием в цепи статора и ротора, а также с регулированием тормозного момента. В отечественных судовых электроприводах АД с фазным ротором применения не нашли. Поэтому
внедрение тиристорных систем управления происходит путем разработки бесконтактной аппаратуры и систем частотного регулиро301
вания. В качестве преобразователей частоты используются как
преобразователи со звеном постоянного тока, так и НПЧ, которые
более компактны и наиболее просто обеспечивают тормозные
режимы АД (однако диапазон регулирования скоростей у них
меньший). В связи с этим для получения большого диапазона
скоростей НПЧ целесообразно использовать с многоскоростным
полюсопереключаемым АД.
В качестве примера рассмотрим тиристорный ЭП козлового
крана, который установлен на судах типа «Стахановец Котов»,
построенных в Финляндии. Во время грузовых операций судно при
открытой рампе с помощью мощной балластной системы притапливается и груз на понтоне заводится в трюм. Кран имеет 2 механизма подъема грузоподъемностью по 175 т и 8 механизмов
передвижения. Для подъема грузов массой более 175 т предусмотрена параллельная работа обоих грузоподъемных механизмов (система управления обеспечивает движение гаков в этом режиме
с одинаковой скоростью при всех положениях контроллера).
Механизм подъема. Для привода грузоподъемного механизма
применен 3-фазный АД с фазным ротором (мощность 22 кВт,
частота вращения 1000 об/мин). Вращение вала АД передается на
канатный барабан через 2 редуктора, один из которых имеет
переключатель скорости. В положении рычажного переключателя
«40 т» можно поднимать грузы массой до 40 т со скоростью
2 м/мин. В положении рычажного переключателя «175 т» можно
поднимать грузы массой до 175 т со скоростью 0,5 м/мин.
Регулирование угловой скорости АД осуществляется изменением сопротивления цепи ротора и изменением механической нагрузки АД с помощью тормоза вихревых токов УВЗ (рис. 146).
Первый принцип регулирования подробно изложен в п. .15. Второй
принцип вытекает из приближенного уравнения рабочей части
механической характеристики АД: ю = ю0 — /сМ. Очевидно, что при
достаточно мягкой характеристике АД изменение механической
нагрузки, а значит, и момента АД вызывает значительное изменение угловой скорости. Момент на валу АД изменяется при помощи
тормоза вихревых токов, который непосредственно подсоединен
к валу АД. Тормоз состоит из неподвижного статора, в котором
расположены полюса, намагничиваемые постоянным током катушек, и вращающегося ротора, механически связанного с ротором
АД подъема. При вращении ротора через его обод проходит
магнитный поток полюсов статора и в ободе ротора индуцируются
вихревые токи. Взаимодействие вихревых токов и магнитного
потока полюсов создает на роторе тормозной момент, который
передается на АД в виде дополнительной механической нагрузки.
Значение тормозного момента зависит от значения постоянного
тока полюсов, который регулируется специальным тиристорным
регулятором. Питание тиристорного регулятора и управление им
обеспечиваются основной системой управления (см. рис. 146).
302
ВВС
КМ7
КМ6
КМ5
К№
Рис. 146. Функциональная схема электропривода механизма подъема козлового крана
Схема системы управления представлена в сокращенном виде: из
нее исключены различные конечные выключатели, блокировочные
устройства, регулятор разницы уровней гаков и др. Чтобы уяснить
принцип действия основной схемы, рассмотрим сначала работу
тиристорного регулятора тормоза, упрощенная схема которого
показана на рис. 147. Питание поступает от основной схемы
с выводов I-13 на одноименные выводы входного блока тиристорного регулятора. Входной блок содержит: источники тока БП1
и БП2; входные цепи положений контроллера (выводы 10-13),
которые с помощью трансформаторов ТУ2-ТУ5 и выпрямителей
1121-1124 вырабатывают определенные сигналы, поступающие в
блок управления (эти сигналы характеризуют заданную скорость
АД); входные цепи от ротора (выводы 1-3) вырабатывают сигнал,
пропорциональный напряжению ротора, зависящий от его скорости, т. е. напряжение, снимаемое с выпрямителя 1125, образует
действительное значение скорости. Напряжение, пропорциональное
заданной скорости,-положительно, а действительной скоростиотрицательно (по абсолютной величине оно превосходит положительное значение).
303
—
л
Л-
Рис. 147. Функциональная схема регулятора тормоза вихревых токов
Сигналы заданной и действительной скоростей, настроенные потенциометрами КР1-КР4 и усиленные операционными усилителями У1 и У2, поступают на операционный усилитель УЗ, который
преобразует разность этих сигналов и выдает напряжение управления, поступающее на сравнивающие устройства СУ2 и СУЗ блока
синхронизации. Разность напряжений действительного и заданного
значений скорости усиливается и инвертируется в усилителе УЗ,
поэтому напряжение управления имеет положительное значение. На
эти устройства поступают также сигналы от генераторов ГПН1
и ГПН2 пилообразного напряжения, которые сравнивают эти сигналы. Вырабатываемое сравнивающими устройствами СУ2 и СУЗ
напряжение усиливается при помощи триггерного блока, состоящего из генератора ГПИ прямоугольных импульсов и импульсных
трансформаторов ТУ6 и ТУ7. Поступающие от импульсных трансформаторов сигналы на управляющие электроды тиристоров У81У84 обеспечивают их открытие в тот момент, когда напряжение
управления на сравнивающих устройствах больше пилообразного
напряжения.
Тормозной ток зависит от угла открытия тиристоров. Угол
открытия определяется напряжением управления и имеет наимень304
шее значение при минимальном значении напряжения. При нулевом
и первом положениях контроллера, когда все входные цепи сигнала
заданной скорости подключены, разностное напряжение будет наименьшим, поэтому через тормоз вихревых токов проходит полный
ток. Дополнительно при нулевом положении контроллера от выпрямителя \]7Л на базу транзистора УТЗ подается положительное
смещение и он открыт. Тогда напряжение управления, снимаемое
с усилителя УЗ, оказывается равным нулю, что также обусловливает наибольший ток тормоза. Во втором положении контроллера
тормозной ток уменьшается (отключается выпрямитель 1)23), а при
третьем положении из-за отключения выпрямителя (722 задающий
сигнал уменьшается еще в большей степени, значение тока становится равным нулю, что соответствует отключению тормоза.
Угол открытия тиристоров и соответственно ток тормоза также
зависят от скорости ротора. Когда скорость увеличивается, то ЭДС
ротора становится меньше и уменыдаетя отрицательное напряжение, снимаемое с усилителя ГУ2, соответствующее действительному значению скорости. При этом уменьшается положительное напряжение на выходе усилителя ГУЗ и ток тормоза снижается. Когда
скорость ротора уменьшается, напряжение управления растет и ток
тормоза снижается.
Регулятором тормоза обеспечивается также ограничение скорости механизма. Блок ограничения скорости управляется реле КУЗ,
которое размыкает свой контакт в цепи реле К VI и отключает АД,
когда скорость в соответствующем положении контроллера на 50%
превышает синхронную. При нулевом положении контроллера реле
КУЗ всегда включено. Это объясняется тем, что на базу транзистора
УТ1 подается от выпрямителя 1]24 положительное смещение и
транзистор УТ1 открыт. Его открытое состояние обеспечивает
открытие диода У01, благодаря чему положительное смещение на
базу транзистора УТ2 не подается и он закрыт. В результате этого
положительное смещение имеет транзистор УТ4, через который
поступает напряжение на катушку реле К УЗ. Когда АД работает, то
на базу транзистора УТ1 положительное смещение не поступает
и он закрыт, но также в закрытом состоянии находится диод УО1,
на катод которого подается положительный сигнал от вывода
+ 15 В. Если в процессе работы скорость ротора превысит допустимое критическое значение, то отрицательное напряжение действительной скорости уменьшается по отношению к положительному напряжению от блока БП2: на выходе устройства СУ1
образуется положительный потенциал, благодаря чему диод УО2
закрывается. В этом случае от вывода + 15 В поступает положительный сигнал на базу транзистора УТ2, который открывается,
снимая тем самым положительное смещение на базе транзистора
УТ4.
Транзистор УТ4 закрывается, и катушка реле скорости КУЗ не
получает питание.
305
Схемой регулятора для избежания резкого торможения предусматривается ограничение тока тормоза при переводе рукоятки
контроллера из третьего во второе или первое положение. Подобное переключение характеризуется тем, что вращающийся по инерции ротор имеет наименьшую ЭДС и с усилителя У2 снимается
наименьшее отрицательное напряжение. Это напряжение подается
на вход устройства СУ1, которое вырабатывает сигнал, способствующий закрытию усилителя У4. Благодаря этому напряжение
управления увеличивается, что приводит к уменьшению тока
тормоза.
Рассмотрим действие системы управления ЭП механизма подъема в целом (см. рис. 146). После включения выключателя ()Р1
срабатывает контактор КМ8, который подключает через тиристорный регулятор тормоз УВЗ. Как было отмечено выше, тормоз
получает полный ток, и благодаря этому происходит срабатывание
токового реле К А, при котором подготавливаются цепи питания
контакторов КМ1 и КМ2. Также согласно изложенному выше
получает питание реле К УЗ, которое подключает реле КУ1.
Когда рукоятка контроллера находится в первом положении
«Подъем», включается контактор КМ4, полностью вводящий в
цепь ротора резистор. Своим вспомогательным контактом он
включает реверсивный контактор КМ 1, главные контакты которого
подключают исполнительный двигатель М к сети. Вспомогательными контактами КМ1 и КМ4 подключается контактор КМЗ,
тормозные электромагниты УВ1 и УВ2 двигателя получают питание,
и расторможенный АД начинает вращаться. Так как до срабатывания контактора КМ1 тормоз УВЗ получил питание, то исключаются
резкие рывки груза, т. е. АД сразу начинает работать на «ползучей»
характеристике первой ступени (рис. 148).
При переводе рукоятки контроллера во второе положение АД
продолжает работать с полностью введенным в цепь ротора резистором, но из-за размыкания контакта 8А6 (см. рис. 146) отключается выпрямитель 1123 и на входе усилителя У1 будет уже
меньшее значение напряжения. Ток возбуждения тормоза УВЗ
становится меньше, тормозной момент, создаваемый им, также
уменьшается, в результате АД, увеличивая скорость, переходит на
работу по «ползучей» характеристике 2С второй ступени (см.
рис. 148).
В третьем положении командоконтроллера включается реле
ускорения К У2, которое вызывает срабатывание контактора КМ5,
затем (через выдержку времени реле К 77) контактора КМ6 и (через
выдержку времени реле КТ2) контактора КМ7. Этими контакторами шунтируются ступени резистора в цепи ротора. Одновременно
разомкнувшимися контактами 8А5 отключается еще одна задающая цепь тиристорного регулятора и тиристоры запираются, снимая
тем самым возбуждение с тормоза УВЗ. Шунтирование резистора
в цепи ротора, а также отключение тормоза приводят к резкому
306
зс
3 положение
2 положение
1 положение
юо
м, %
положение
2 положение
-50
••
3 положение
Рис. 148. Механические характеристики электродвигателя механизма подъема
увеличению скорости АД (см. рис. 148, характеристика ЗС). На
третьей ступени осуществляется основной режим работы АД, а на
первую и вторую ступени АД подключается кратковременно.
Работа ЭП при положении «Спуск» контроллера происходит
почти аналогично: разница заключается в том, что включен реверсивный контактор КМ2, а цепь ротора при первых двух положениях
контроллера замкнута через добавочный резистор только на 2 фазы.
Подобное включение ротора создает уменьшенный пусковой момент (см. рис. 148, характеристики 4С и 5С) и способствует более
плавному ускорению при опускании груза (характеристика 6С).
Третья скорость спуска полностью симметрична соответствующей
скорости подъема. Следует отметить, что работа ЭП при спуске,
особенно большого груза, происходит в основном в режиме рекуперативного торможения.
Конечные выключатели 80.1 и 5(22 (см. рис. 146) ограничивают
предельные положения гака, и при их отключении АД можно
включить только в противоположную сторону. Для защиты от
перегрузки АД оборудован 2-ступенчатыми терморезисторами.
Если обмотка АД нагревается до 100° С, то в кабине крановщика
307
загорается табло «Двигатель подъема перегрет» (блоки термо-/
резисторов и контакты сигнализации на схеме не показаны). Когдг/
температура обмотки достигает 120° С, то размыкается контакт 5/
и АД отключается.
.
/
Механизм передвижения. Передвижение крана по рельсовому
пути со скоростью 10 м/мин обеспечивает механизм передвижения.
Каждая из четырех опор через шарнирные соединения опирается на
2 тележки, которые приводятся в движение восемью АД с фазным
ротором мощностью по 3,7 кВт, имеющими встроенные дисковые
электромагнитные тормоза. Электропривод механизма передвижения обеспечивает мягкую падающую механическую характеристику,
которая достигается благодаря постоянно включенному в цепь
ротора добавочному резистору (с этим резистором АД развивает
пусковой момент 2,5 Мн). Благодаря тиристорному регулированию
напряжения на статоре и обратной связи по скорости обеспечивается устойчивая угловая скорость АД в широком диапазоне.
Тиристорный регулятор напряжения управляет работой всех АД
механизма передвижения и получает питание через автоматический
выключатель от силовой цепи. Основу регулятора составляет тиристорный блок (в каждую фазу встречно включены по 2 тиристора).
На рис. 149 показана тиристорная схема управления для одного АД
механизма передвижения. Работой тиристоров У81-У$6 управляет
блок синхронизации БС совместно с триггерным блоком ТБ.
Питание вспомогательных цепей ТРИ обеспечивает трансформатор
ТУ, от которого подается напряжение на блоки питания БП1 и БП2
и различные усилительные устройства других блоков.
Управление механизмом передвижения осуществляется командоконтроллером, при перемещении рукоятки которого, кроме
замыкания соответствующих контактов, изменяет положение движок потенциометра КР, связанный с ней. С потенциометра подается пропорциональное положению рукоятки напряжение, задающее
значение скорости. Это напряжение усиливается усилителем УЗ
и подается на усилитель У4. На этот усилитель также поступает
напряжение с присоединенного к электродвигателю М тахогенератора ВК, которое пропорционально скорости и понимается как
действительное значение скорости (в начальный период пуска, когда
п = О, то 1/вк = 0). Разность напряжений между задающим значением и действительным снимается с выхода усилителя У4. Полярность
сигнала разности, а она зависит прежде всего от полярности
задающего сигнала, определяет направление момента, а его абсолютное значение - значение момента. Эти сигналы параллельно
поступают как на блок БЛ логики, определяющий направление
вращения АД, так и на усилитель УЗ, который регулирует скорость
благодаря изменению момента. На усилитель У5, кроме заданного
значения тока, поступающего с усилителя У4, подается также
действительное значение тока от включенных по схеме «звезда»
трансформаторов тока ТА. На выходе усилителя У5 создается
308
2206
' Рис. 149. Функциональная схема электропривода механизма передвижения козлового
''
крана
напряжение управления, которое поступает на блок синхронизации
и управляет открытием тиристоров в цепи АД исходя из существующей разницы токов. Подаваемое на статор АД напряжение регулируется тиристорами таким образом, чтобы разность между задающим значением и действительным током оставалась наименьшей.
Следует отметить, что в начальный период пуска, когда угол
отклонения рукоятки контроллера мал, задающий сигнал, снимаемый с потенциометра, также имеет небольшое значение. Это обусловливает большой угол открытия тиристоров и малое напряжение
на статоре. При дальнейшем движении рукоятки контроллера
увеличивается подводимое к АД напряжение, в результате создается
необходимый пусковой момент и кран начинает движение в заданном направлении, постепенно увеличивая скорость.
Ознакомимся более подробно с работой блока синхронизации
и триггерного блока. На блок синхронизации (рис. 150) от трансформатора управления ТУ (см. рис. 149) подаются сдвинутые на
120° напряжения синхронизации амплитудой 165 В (выводы /, 2,
309
15 В
[V [V [V
[V
Управление
Рис. 150. Принципиальная схема блока синхронизации системы управления механизмом
передвижения
3 и 76, 20, 22) и напряжение управления, снимаемое с усилителя тока
У5. В блоке для каждой фазы формируется пилообразное напряжение,
сравнивается с напряжением управления и в виде выходных сигналов (выводы 8, 9, 10) поступает в тригтерный блок, где формируются
управляющие импульсы для тиристоров. Генераторы пилообразных
напряжений собраны на конденсаторах С4, С5, С6 и транзисторах
УТ4, УК, УТ8. Основу работы генераторов составляют заряд
и разряд конденсаторов. Заряд конденсаторов происходит через
транзисторы УТ1, УТ2, УТЗ, которые обеспечивают стабильный ток
заряда и благодаря этому - линейный закон увеличения напряжения
на обкладках конденсаторов. Разряд конденсаторов происходит при
открытых транзисторах УТ4, У76, УТ8 через резисторы К9, К11, К13.
Эти транзисторы открываются, когда соответствующее напряжение
синхронизации, подаваемое на их базу, становится более положительным, чем-15 В. В процессе заряда-разряда конденсаторов
напряжения на них изменяются: при заряде потенциалы на верхних
(по схеме) обкладках повышаются от — 15 В до нуля, при разряде
потенциалы на обеих обкладках составляют — 15 В. Изменяющееся
напряжение заряда-разряда влияет на потенциал базы выходных
транзисторов УТ5, УТ7, УТ9, значение которого представляет собой
разность между напряжением управления (снимаемого с усилителя
У5) и падением напряжения на базовых резисторах К14, К.17 и К20.
Поскольку эти падения напряжения создаются током, определяе310
ппп
К6\П8 К9 \КП\КП
13
,Рис. 151. Принципиальная схема триггерного блока системы управления механизмом
передвижения
мым как отношение разности потенциалов положительного напряжения управления и отрицательного напряжения на конденсаторах
к общему сопротивлению цепи, то потенциал базы транзистора
(например, К75), определяется выражением:
П6 = [ / _ _ - - Я 1 4 (1/ у п р + 1/ сб )/(Л 14 + К 1 ! ( ).
(44)
Когда потетщиалы баз выходных транзисторов превышают + 5 В,
транзисторы открываются. Через резисторы К16, К19, К22 протекает ток, создающий падение напряжения в них, благодаря чему
снимается блокирующий сигнал + 15 В, подаваемый на триггерный
блок (выводы 8, 9, 10). В триггерном блоке (рис. 151) происходит
подача отпирающих импульсов на тиристоры соответствующей
фазы. Это происходит при заряде конденсаторов и, как видно из
выражения (44), с увеличением напряжения управления выходные
транзисторы открываются раньше. Соответственно раньше открываются тиристоры, обеспечивая большее напряжение на АД. Отпирающие импульсы на тиристоры силового блока поступают со
вторичных обмоток импульсных трансформаторов ТУ1 - ГИ? при
прохождении тока по их первичным обмоткам, которые получают
питание через составные транзисторы УТ5/УТЪ, У7%/У19, УТ11/УТ12.
На базы этих транзисторов через резисторы К15, К20, Я25 и транзистор УТЗ, служащий усилителем мощности, подаются положительные импульсы от мультивибратора, собранного на транзисторах
311
УТ1, УТ2 и конденсаторе С1. За счет заряда-разряда конденсатора
транзисторы УТ1 и УТ2 поочередно открываются и закрываются/
с частотой 1650Гц, т.е. происходит колебание коллекторного/
напряжения транзистора УТ2 в диапазоне от 20 до 12 В. Этс
напряжение через разделительный конденсатор С2 поступает нг!
базу транзистора УТЗ, на которую через резистор К9 также поданг
постоянное смещение. В результате напряжение на базе транзистора
УТЗ колеблется в пределах от — 7 до + 5 В. Таким образом, при
отсутствии запирающих сигналов мультивибратор постоянно
крывает транзистор УТЗ, через который поступает отпирающее
напряжение на составные транзисторы, и система непрерывно
вырабатывает импульсы на управляющие Электроды тиристоров.
Запрет прохождению импульсов обеспечивается открытием
транзисторов УТ4, УТ7, УТ10, вследствие чего базы составных транзисторов заземляются на нуль (исчезает положительное смещение
базы относительно эмиттера), что приводит к их закрытию, несмотря на продолжающееся поступление импульсов с транзистора
УТЗ. Транзисторы УТ4, УТ7, УТ10 открываются положительными
управляющими сигналами с блока синхронизации (на блоке синхронизации в это время закрыты транзисторы УТ5, УТ7, УТ9), которые
подаются через выводы 8, 9, 10, и резисторы К14, К19, К24 на их
базы. Кроме того, возможно одновременное открытие этих транзисторов при подаче блокирующего положительного сигнала
напряжением более 8 В на вывод 11. Конденсаторы Сб, С7, С8
фильтруют паразитные напряжения входных контуров импульсов
пуска. Диоды УО2, У04, УПб служат разрядными цепями для ЭДС
самоиндукции, возникающей в первичных обмотках импульсных
трансформаторов при запирании транзисторов УТ6, 779, УТ12,
и таким образом предохраняют эти транзисторы от перенапряжения.
Рассмотрим работу системы управления ЭП механизма передвижения в целом (см. рис. 149). Управление АД осуществляется
контроллером, при повороте рукоятки которого в одно из рабочих
положений параллельно с перемещением движка потенциометра
замыкаются контакты 5А1 или 8А2. В результате с усилителя У4
снимается сигнал, а замкнувшимися контактами включаются реле
КУ4 или КУЗ, которые при срабатывании подключают блок логики
БЛ и блок помех БПХ. При отсутствии ненормальных режимов (а
они определяются усилителем У4) блок помех выдает сигнал на
релейный блок РБ и реле КУ01 этого блока замыкает свой контакт,
подключая вспомогательное реле КУ5. Контакты этого реле подготавливают цепи питания катушек реле КУ6 или КУ7. Если
контроллер установлен в положении «Вперед», то срабатывает реле
К У4 и при наличии нормального сигнала усилителя У4 блок логики
выдает сигнал на включение реле К У02. Замыкание контактов этого
реле вызывает подключение катушки реле КУ6, и таким образом
включается реверсивный контактор КМ1, обеспечивая работу АД
312
\1 в определенном направлении. Сигнал, поступающий с блока БЛ
в релейный блок РБ, вызывает срабатывание реле КУ04, которое
'(подключает контактор КМЗ: срабатывает тормозной магнит (на
\схеме не показан), начинается передвижение крана. При установке
контроллера в положение «Назад» срабатывают реле КУЗ, КУОЗ,
^ У7 и контактор КМ2. Соответственно ротор начинает вращаться
Ц противоположную сторону.
1 Реверсивные контакторы, а также их вспомогательные реле КУЗ
и\КУ4 имеют электрическую блокировку. Конечные выключатели
8&1 и 8<22 ограничивают перемещение крана вдоль судна отключением реверсивных контакторов. Если кран находится в конечной
точке и один из конечных выключателей 8(^3 или 8()4 разомкнут, то
риле КУ1 или КУ2 питания не получают. В результате этого
размыкающий контакт одного из этих реле подключает к усилителю УЗ напряжение + 12 В и задающий сигнал уменьшается на
30%. Соответственно напряжение на статоре имеет пониженное
значение, благодаря чему обеспечивается более плавное трогание АД.
К основным неисправностям ЭП относятся: исчезновение напряжения — 15 В на регуляторе; асимметрия токов в фазах АД
выше установленного предела; несовпадение направления вращения
ротора исполнительного АД с напряжением, заданным контроллером. Указанные неисправности контролируются блоком помех
БПХ (рис. 152). Выходной сигнал (вывод 75) данного блока управляет сотоянием катушки КУ01 в релейном блоке РБ (см. рис. 149),
через замыкающий контакт которого питается катушка реле КУ5.
Реле КУ5 в свою очередь подает питание через свой замыкающий
контакт на цепи катушек промежуточных реле КУ6, КУ7 и контакторов направления и тормоза. При появлении одной из названных неисправностей реле КУ01 и вслед за ним реле КУ5 обесточиваются, отключая АД от сети. Повторное включение возможно
после установки контроллера в нулевое положение при условии
устранения неисправности.
При всех указанных ненормальных режимах на выходе диодов
УО12, УО13, УО14 образуется логическая единица в виде положительного напряжения определенного значения. Это приводит к
заряду конденсатора С8, и по истечении выдержки времени, определяемой временем заряда, положительный сигнал определенного
значения поступает на базу транзистора УТ1 и открывает его. Для
выполнения функций защиты в блоке применены логические элементы НЕ и И-НЕ, в следующем именуемые только по буквенноцифровым индексам (например, 1)1)2). С коллектора транзистора
УТ1 поступает нулевой сигнал на вход ВОЛ и на его выходе
образуется логическая единица, которая подается на вход ОО12.
При отсутствии блокирующего нулевого сигнала с выводов К16 от
блока логики на выходе ^^12 образуется нулевой сигнал, что
приводит к отключению реле КУ01 и в конечном итоге к отключению АД. Нулевой (аварийный) сигнал на выходе ОО12 остается
313
и после устранения аварийного параметра, при котором происходит
закрытие транзистора VII. Для снятия аварийного сигнала необходимо подать сигнал нуль на блокирующий вход К16, а для этого,
необходимо контроллер установить в нулевое положение.
Аварийный сигнал о несимметричной нагрузке АД вырабаты-^
вается на выходе операционного усилителя ОА1. При симметричной
нагрузке напряжения вторичных обмоток токовых трансформатс
ров в фазах А, В, С двигателя после 1-полупериодного выпрямлена
диодами УВ1 - УОЗ создают одинаковые напряжения на конденс^торах СЗ, С4, С5, в результате напряжение на выходе О А1 близко
к нулю. При разбалансе токов фаз (в предельном случае - обрцв
фазы) возрастает отрицательное напряжение на инвертирующем
Рис. 152. Принципиальная
передвижения
314
схема блока защиты системы управления механизмом
\
\
'
'•*"
\ входе ОА1, и когда оно на выходе достигает + 6 В, через диод \>Т)13
\ срабатывает описанная выше схема защиты.
\
Аварийный сигнал об отсутствии напряжения — 15 В образуетря, когда ликвидируется электрическая цепь между напряжениями
\Ь 15 и — 15 В (исчезновение напряжения — 1 5 В). В этом случае
в делителе напряжения, образованном резисторами К10 и К.11,
щдение напряжения резко уменьшается и увеличенное положительн^ре напряжение через диод У012 также вызывает открытие транзистора УТ1 и последующее срабатывание защитных устройств.
| Аварийный сигнал о несовпадении направления вращения с
заданным формируется с помощью операционного усилителя ОА2
и ^огических элементов ОО1-ОО10. Сигнал заданного направления
по/дается в виде напряжения + 12 В на вход (II (13) или при другом
направлении-на вход (12 (14). Действительное направление вращения указывается полярностью сигнала тахогенератора, поступающего на вход 22 данного блока через дополнительный резистор К16.
Напряжение на входе 22, достаточное для срабатывания схемы,
составляет + 0,5 В. Если задано направление вращения <Н, напряжение тахогенератора на входе 22 должно быть положительным,
а при направлении вращения (12 это напряжение примет отрицательное значение.
В случае если задано направление (11, при нормальном направлении вращения на инвертирующем входе усилителя ОА2
присутствует положительный сигнал. Поэтому на его выходе должно появиться отрицательное напряжение, которое гасится диодом
обратной связи УО15, и на выходе усилителя будет нуль. В результате на выходах ОО1 и ОО2 будет логическая единица и в соответствии с этим на входе ООЗ две единицы, а на входе ОО4 — ауль от
ООЗ и единица-с ОО1. На выходе ОО4 образуется логическая
единица в виде положительного напряжения, которое через К18
и УО16 поступает на базу транзистора УТ2 и-держит его открытым.
Нулевое напряжение от вывода 12, снимаемое с коллектора транзистора УТ2, поступает через инверторы ОО6 и ОО7 на диод УО14
и в последующем на базу транзистора УТ1. Транзистор закрыт,
и сигнал аварии отсутствует.
Если направление вращения ротора не совпадает с заданным, го
тахогенератор вырабатывает отрицательное напряжение и на инвертирующем входе усилителя ОА2 суммарный сигнал окажется
отрицательным. Это вызывает появление на выходе усилителя
положительного напряжения около 10 В (логическая единица). На
выходе ОО2 будет нуль, а на выходе ОО1 останется единица (от (12
поступает нуль). Так как <11 также равен единице, то на выходе ООЗ
будет единица. Две единицы, поступающие на вход ОО4, дают на
выходе этого элемента нуль. Положительный сигнал на базу транзистора У72 перестанет поступать, и с выдержкой времени 0,8 с,
вызванной разрядом конденсатора СП, транзистор закроется. Единичный сигнал благодаря высокому потенциалу, снимаемому с его
315
коллектора, через инверторы О Об, ОО7 и диод УО14 поступает на
базу транзистора 777, что вызывает срабатывание защиты.
Если контроллер находится в нулевом положении, то напряже-/
ния (11 и (12 равны нулю. В результате этого на выходах инверторов/
ОО5 и ОП8 будут единицы, а на выходе 1)1)9-нуль. С выхода оЬш
в этом случае снимается логическая единица в виде положительного
напряжения, которое через цепь УО19-К18- УО16 поступает на базу
транзистора УТ2 и держит его открытым. Этим самым блокируется
срабатывание защиты при любом направлении вращения АД в этом
режиме.
68. Электроприводы лифтов
Лифтом называют транспортное устройство прерывного действия, предназначенное для подъема и спуска людей и грузов
с одного уровня на другой. В зависимости от назначения судовые
лифты разделяют на пассажирские, грузо-пассажирские, грузовые
с проводником, грузовые без проводника, предназначенные для
транспортировки только груза, малые грузовые (камбузные). Судовой лифт состоит из следующих основных узлов: шахты с машинным
помещением, кабины или платформы, противовеса, лебедки, ограничителя скорости с натяжным устройством, системы отводных
блоков, шахтных дверей, электроаппаратуры управления и сигнализации.
Главной частью лифта является его подъемный механизм лебедка, приводимая в движение ЭД. Для судовых лифтов применяют редукторные лебедки двух типов: с канатоведущим шкивом
и барабаном. В грузовом лифте (рис. 153), выполненном с канатоведущим шкивом 3 и противовесом 8, кабина 6 и противовес
8 приводятся в движение от элетродвигателя / через редуктор 2,
шкив 3 и систему отводных блоков 4. Натяжное устройство 7 обеспечивает движение кабины в направляющих, устанавливаемых на
всю высоту шахты. Подъемный механизм (лебедка) и все связанные
с ним устройства размещают над шахтой или в нижней части шахты
в специальном машинном помещении. В этом же помещении
монтируют магнитную станцию управления лифтом. Для обеспечения надежной работы лифт снабжают необходимыми предохранительными приспособлениями: ловителями на кабине, ограничителями 5 скорости и упорами под кабиной.
Управление движением кабины осуществляется палубными переключателями, которые устанавливают в шахте на уровне каждой
палубы. Кабина лифта, проходя мимо переключателя, задевает за
его рычаг специальным выступом, и контакты аппарата дают при
этом нужный командный импульс в систему управления ЭП лебедки. Конечные выключатели ограничивают перемещение кабины
вверх или вниз за крайние положения. Для безопасности пассажиров
316
в системах управления лифтами
применяют блокировки, не допускающие движение кабины, если ее дверь или одна из дверей
шахты открыты. Кроме того,
двери шахты обычно снабжают
замком с электромагнитным приводом, запирающим дверь шахты
изнутри,-открыть дверь снаружи
невозможно до тех пор, пока напротив нее не остановится кабина
лифта. Это сделано, чтобы чело- РИС. 153. Кинематическая схема лифта с
канатоведущим шкивом и провек не провалился в шахту, шагтивовесом
нув за порог открытой по ошибке
двери.
Электропривод лифтовой лебедки работает в повторно-кратковременном режиме с частыми пусками, остановками и реверсами.
Продолжительность включения ЭД лифтов обычно не превышает 40%. Нагрузка ЭД колеблется в широких пределах в зависимости от массы груза или пассажиров. Обеспечение постоянной
скорости ЭП лифтовых лебедок при переменной нагрузке достигается применением ЭД с жесткими механическими характеристиками: АД или ЭД постоянного тока параллельного возбуждения.
Используемые в приводе лифтов АД с короткозамкнутым ротором
могут быть 1- и 2-скоростными. Наиболее широкое распространение
в судовых лифтах получили ЭП с 1 -скоростным короткозамкнутым
АД. Для точной остановки данного привода при различных нагруз: ках на валу АД обычно применяют колодочные тормоза, позволяющие регулировать тормозной момент в широких пределах.
Двухскоростные АД применяют лишь в тех случаях, когда необходима повышенная точность остановки кабины.
Управление ЭП современных лифтов осуществляется по контакторной системе. Для вызова лифта на нужную палубу и отправки его на палубу назначения, а также для аварийной остановки
применяют многокнопочные посты управления. У грузовых лифтов
их устанавливают в местах погрузки и разгрузки снаружи шахты,
а у пассажирских-внутри кабины. Снаружи, у дверей шахты, для
пассажирских лифтов помещают только одну кнопку вызова свободного лифта. Во время движения кабины ни одна из кнопок,
кроме аварийной, не должна влиять на работу схемы. Все электрооборудование, находящееся внутри движущейся кабины, соединено
с аппаратами управления гибким кабелем, свободно провисающим
в шахте.
Рассмотрим систему управления ЭП лифта с 1-скоростным АД
на 3 остановки (рис. 154). Система управления является унифицированной и применяется для пассажирских и грузовых лифтов,
имеющих от трех до семи остановок. Рассматриваемый вариант
^
317
схемы применен к ЭГТ лифта с тремя остановками. В качестве
приводного ЭД лебедки используется АД с повышенным скольжением. Для включения лифта необходимо поставить выключатель
8А1 в положение / и включить выключатель сигнализации 8А2
(контакты 8А2.1 и 8А2.2 замыкаются). Управление лифтом может
осуществляться как из кабины посредством кнопок приказа 18В1
38В1, так и с помощью кнопок 18В2-38В2 вызова, которые
устанавливают на каждой палубе. Регистрация соответствующих
приказов и вызовов осуществляется палубными реле КУЗ-КУ5.
Выбор направления вращения АД и его остановки на нужной палубе
после нажатия кнопки осуществляется автоматически палубными
П1
/12
/13
ПI АЯ&
Гт^^
8011
НМ2
Ц,
нгг
имз
ИТЗ П
РИС. 154. Схема системы управления электроприводом 1-скоростного лифта с асинхронным двигателем
318
переключателями 8(211 -8()14. Контакты 5^77 и $0,14 палубных
переключателей крайних палуб (первой и третьей) размыкаются при
подходе лифта к соответствующей палубе. Контакты палубного
переключателя промежуточной палубы (второй) также размыкаются при подходе лифта к этой .палубе, но контакт 5(272 размыкается,
когда кабина движется сверху вниз, а 8()13-при ее движении снизу
вверх. Аварийная остановка лифта в крайних положениях достигается с помощью конечных выключателей 5(27 и 80,2. Положение
дверей шахты и кабины контролируется выключателями 5()4~ 5(26
и 5<23, которые замыкаются при закрытии дверей. Двери шахты
закрываются на замок при помощи электромагнита УА, который
воздействует через систему рычагов на закрывающее устройство.
При закрытии дверей шахты на замок замыкается механически
сблокированный с ним один из контактов 5(2 7-5(2 9 в цепи управления.
Предположим, что лифт находится на второй палубе (контакты
5(273, 5(25 и 5^3 разомкнуты) и при управлении из кабины необходимо поднять ее со второй палубы на третью. Для этого сначала
захлопывают двери шахты и кабины - контакты 5^5 и 5(23 замыкаются. Затем нажимают кнопку 38В1. При этом срабатывает
палубное реле третьей палубы КУ5 и своими контактами шунтирует
кнопку и подает питание на реле К ТЗ, в свою очередь подключающее
реверсивный контактор КМ2. Своими главными контактами контактор КМ2 частично подготавливает к включению силовую цепь
АД, а замыкающим вспомогательным контактом включает электромагнитный тормоз дверей УА, который приводит в действие
систему рычагов, и двери шахты запираются изнутри. Этим самым
замыкается выключатель 5<?# и получает питание дверное реле КУ1.
Реле КУ1 контролирует работу ЭП в процессе его работы. Через
замыкающие вспомогательные контакты КМ2 и контакты КУ1
получает питание линейный контактор КМ1 и при его срабатывании включается электродвигатель М и электромагнитный тормоз
УВ (происходит подъем кабины). При подходе кабины к третьей
палубе контакты палубного переключателя 8<214 размыкаются,
отключаются контакторы КМ2 и КМ1 и двигатель останавливается. Одновременно отключается электромагнит дверей, который
в отключенном состоянии позволяет открыть двери шахты. Для
случая направления лифта на вторую палубу его остановка будет
производиться палубным переключателем 5(273-при движении
вверх и 5(272-при движении вниз.
В процессе работы лифта получает также питание через замыкающий контакт КМ1 катушка реле времени КТ1, благодаря чему
его размыкающий контакт будет разомкнут и этим самым отключается управление кнопками 7552-3552, расположенными у дверей
шахты. Выдержка времени этого реле необходима для открывания
дверей кабины и шахты на палубе назначения. Пол в кабине лифта
подвижной и опускается под действием силы тяжести груза и пас319
сажира. Это приводит к размыканию установленного под полом
конечного выключателя 8<210, который также не позволяет в этом
случае управлять лифтом палубными кнопками. При одновременном нажатии кнопок противоположных направлений движение
лифта невозможно из-за наличия в схеме ЭП электрической блокировки, осуществляемой реле контроля направления КТ2 и КТЗ.
Для проверки работы электропривода лифта в схеме предусмотрены выключатель 8А1 и кнопки 8В1, 8В2 и 8В4, смонтированные
в машинном отделении. Выключатель 5А1 при этом устанавливают
в положение 2. С помощью этих аппаратов обеспечиваются подъем
и спуск кабины до уровня крайних палуб.
На каждой палубе лифта предусмотрена сигнализация, указывающая, занята или свободна кабина. Такая сигнализация обеспечивается сигнальными лампами ЯЬ / - НЬ 3, получающими питание
от трансформатора ТУ2 через выключатель 8А2.2 и замыкающие
контакты реле КУ2. Включенному состоянию этого реле соответствует положение «свободно» (загораются лампочки на каждой
палубе).
Защита ЭП от перегрузок обеспечивается тепловыми реле
КК1-КК2.
69. Особенности эксплуатации
При техническом обслуживании ЭП грузовых устройств необходимо руководствоваться Правилами технической эксплуатации,
где перечислено содержание работ и последовательность их выполнения, а также исходить из условий, в которых указанные ЭП
эксплуатируются. Электрооборудование грузовых устройств, расположенное на открытой палубе, в наибольшей мере подвержено
воздействию окружающей среды, а при грузовых операциях работа
его носит весьма напряженный характер. В результате возникают
2 группы отказов: связанные с воздействием внешней среды и связанные с напряженным режимом работы.
Отказы первой группы обусловлены прежде всего недостаточной
герметичностью ЭД и аппаратуры управления. Попадание влаги
в обмотки ЭД приводят к выходу его из строя. Это происходит
из-за неудовлетворительного выполнения коробок выводов концов
валов, фланцевых соединений корпуса с подшипниковыми щитами,
наличием отверстий в корпусах ЭД для спуска масла и конденсата.
Из электрических аппаратов этот недостаток свойствен командоконтроллерам и конечным выключателям, подверженным воздействию-морской воды и волн непосредственно. Проникновение влаги
и солей в эти аппараты через уплотнения приводит к снижению
сопротивления изоляции, замыканиям на корпус, усиленной коррозии, заеданию подвижных механических соединений, нарушению
прилегания контактов и пр.
320
Отказы второй группы связаны с перегрузкой ЭП и нарушением
режима его эксплуатации. При этом часто возникают следующие
неисправности:
1. Повреждение статорных обмоток, которое в АД, как правило,
происходит вследствие ухудшения сопротивления изоляции под
воздействием высоких температур, значительно превышающих
допустимые значения. Возможны также случаи повреждения изоляции в период сборки АД. Основная причина перегрева статорных
обмоток - несоответствие эксплуатационной производительности
ЭП грузового устройства допустимой по условиям нагрева.
2. Повреждения ротора, характеризующиеся обрывом стержней,
а иногда и контактных колец'короткозамкнутого ротора, и связанные с напряженным динамическим режимом, возникающим в многоскоростном АД из-за резкого изменения скоростей. При наличии
лопнувших стержней последние перемещаются в пазах, и внутренние клетки сдвигаются вдоль оси ротора. В последней стадии, когда
все стержни оборваны, выступающие из пазов стержни наружной
пусковой клетки разрушаются оторвавшимися кольцами рабочей
клетки, которые в свою очередь разрушают лобовые части статорных обмоток.
3. Повреждения контакторов, обусловленные весьма слабыми
пластмассовыми держателями, которые под воздействием температуры деформируются, вследствие чего возникают перекосы и заедания в подвижной системе, а также появляются трещины. Так же
происходит разрегулировка контактной и магнитной систем из-за
больших механических нагрузок при работе.
4. Неточное срабатывание коммутационной аппаратуры при
быстрых перекладках рукоятки контроллера, особенно при реверсировании ЭП, что приводит к большим броскам тока. Это может
вызвать выход обмотки ЭД из строя и подгорание контакторов
скорости. .При разрегулировке реле времени в ЭП с многоскоростным АД может произойти одновременное подключение двух скоростей, что также приводит к дополнительному нагреву и обгоранию контактов.
5. Ненадежная работа электромагнитных тормозов, обусловленная тем, что при работе изменяется воздушный зазор между
дисками. При разрегулированном электромагнитном тормозе происходит повышенный нагрев ЭД, а также поломка толкателей
механически связывающих тормоз с экономическими выключателями. В процессе работы необходимо периодически измерять и вести
запись размеров зазоров, чтобы иметь возможность следить за
изнашиванием дисков и проводить соответствующую регулировку.
6. Нарушение регулировки конечных выключателей, происходящее вследствие изменяющейся деформации длины троса и приводящее к затягиванию гака в нок стрелы, перегрузке ЭД и др. Для
регулирования конечных или путевых выключателей механизм грузоподъемного устройства подводят ЭП к положению, в котором
321
выключатель должен сработать, а кулачок регулируемого аппарата
устанавливают так, чтобы соответствующие контакты разомкнулись. Окончательно кулачки устанавливают в нормальных условиях
работы механизма с некоторым опережением срабатывания контактов, чтобы учесть свободный выбег механизма.
Обслуживание ЭП грузоподъемных устройств, предусматривающее осмотр и чистку электрооборудования без разборки или с разборкой, выполняется, как правило, в рейсе. Проверка действия
электромеханизма проводится также перед началом грузовых работ.
В этом случае электротехнический персонал проверяет действие
командоконтроллеров, магнитных контроллеров, электромагнитных тормозов, блокировочных устройств. Затем открывают вентиляционные люки и проверяют работу электромеханизма в целом на
всех рабочих положениях контроллера. Если в процессе проверки
обнаружился какой-либо недостаток в работе, то необходимо выяснить, в какой части ЭП (в электрических машинах или в системе
управления) имеется неисправность.
Если отказ произошел в системе управления, то составляется
конкретный план, обеспечивающий обнаружение любой неисправности. Поиск следует начинать с определения простейших возможных причин отказов (наличие питания, целостность предохранителей,
действие блокировок). Аппаратуру первоначально проверяют при
ее обесточенном состоянии вручную. При этом обращают внимание
на состояние контактных поверхностей, на плотность прилегания
и нажатия контактов, отсутствие заеданий подвижных частей контакторов и реле. Проверку работы аппаратов проводят при снятых
дугогасительных камерах. Следующей операцией является проверка
сопротивления изоляции всей схемы относительно корпуса и между
полюсами или фазами. После выполнения указанных операций
и устранения выявленных дефектов можно приступить к проверке
действия системы под напряжением, строго придерживаясь правил
техники безопасности. При этом наблюдают за последовательностью срабатывания реле и контакторов для двух направлений
вращения ЭД, а также определяют действие защиты и конечных
выключателей.
Электротехническому персоналу в процессе грузовых операций
необходимо наблюдать за работой ЭП и за действиями операторов.
Если во время эксплуатации обнаруживается, что момент, развиваемый ЭД, недостаточен для вращения приводимого механизма,
то причиной этому может быть как неисправность приводного
механизма (заклинивание), так и неисправность ЭД (задевание
ротора о статор, обрыв стержней ротора, повреждение или износ
подшипников, перекос подшипниковых щитов). Для выявления
причины ненормальной работы необходимо отсоединить ЭД и проверить его работу На холостом ходу без механизма. Если ЭД на
холостом ходу работает нормально, необходимо искать повреждение в самом механизме или в аппаратуре управления. Работу ЭП
322
грузоподъемного механизма также следует прекратить в случае
перегрева ЭД, сильного искрения под щетками, нечеткой работы
тормозов и пр. Повышенный нагрев ЭД нередко связан с его
перегрузкой вследствие повышенной массы груза или увеличенной
продолжительности включения.
С целью устранения перегрузки можно переключить редуктор на
большую грузоподъемность или же, исходя из существующей продолжительности включения, определить для механизма допускаемый
вес (кН) груза
где ПВЯ -номинальная продолжительность включения, %; У7ДДФЙСТВ =
= Ю2^/ра6/(Л/ра6 + Х/паузЬ действительная продолжительность включения, %.
После окончания грузовых работ необходимо осмотреть все
электрооборудование, установить контроллер в нулевое положение,
выключить питание и закрыть вентиляционные лючки во избежание
появления конденсата. После этого палубная команда должна
укрыть все электрооборудование промасленными брезентовыми
чехлами. Периодически не реже одного раза в неделю следует
проветривать магнитный контроллер, открывая его дверцы на
10-15 мин, а также наблюдать за состоянием аппаратуры.
Контрольные вопросы-задания
1. Каков характер нагрузки электропривода грузовых устройств?
2. Какие электродвигатели находят применение в электроприводах грузовых кранов
и лебедок?
3. Для чего необходимы конечные выключатели в грузовых устройствах?
4. В чем заключается особенность торможения электропривода механизма поворота
крана?
5. Каковы принципы регулирования скорости в тиристорном электроприводе козлового крана?
6. Как осуществляется защита в электроприводе механизма передвижения козлового
крана?
7. Как рассчитать допускаемый вес поднимаемого груза?
Список литературы
1. Б а б а е в А.М., Я г о д к и н В. Я. Автоматизированные судовые электроприводы. М.: Транспорт, 1986. 448 с.
2. Б о ч а р о в Ю. И., Б у т ы р и н Н. Г., Ш а р а х и н В. Н. Микропроцессорные системы управления электроприводами. Ленинградский политехнический институт
имени М. И. Калинина, 1986. 79 с.
3. В а с и л ь е в В. Н., К а р а у ш Н. Я. Эксплуатация судовых электроприводов.
М.: Транспорт, 1985. 278 с.
4. В о р о н о в В. В., Г о р о х о в И. В., Я л о в е н ко А. В. Авторулевой «Аист».
М.: В/О «Мортехинформреклама», 1986. 30 с.
5. Г о л о в и н Ю. К. Судовые электрические приводы. М.: Транспорт, 1984. 376 с.
6. Правила классификации и постройки морских судов/Регистр СССР. Л.:
Транспорт, 1985. 928 с.
7. Правила технической эксплуатации судовых технических средств. М.: В/О «Мортехинформреклама», 1984. 388 с.
8. Справочник по автоматизированному электроприводу/Под ред. В. А. Елисеева
и А. В. Шинявского. М.: Энергоатомиздат, 1983. 616с.
9. Судовые электроприводы: Справочник. Л.: Судостроение, 1983. Т. 1 2 .
10. Т е р е х о в В. М. Элементы автоматизированного электропривода. М: Энергоатомиздат, 1987. 224 с.
11. Электрическая защита судового электрооборудования/Е. А. Калязин, Ю. В. Рокотян, В. Д. Филимонов, Л. Л. Игнатьев. Л.: Судостроение, 1983. 240 с.
Оглавление
От автора
Список принятых сокращений
Введение
Глава
.
1. Основные сведения по механике электропривода
1.
2.
3.
4.
5.
Глава
.
7
Работа электродвигателей совместно с механизмами
Статический и динамический моменты
Уравнение движения электропривода
Приведение вращения элементов электропривода к одной оси .
Определение времени пуска и торможения
2. Электромеханические
тока
свойства
электродвигателей
.
постоянного
6. Механические характеристики электродвигателей и механизмов . .
7. Двигательный и тормозной режимы
8. Механические характеристики электродвигателей в двигательном
режиме
9. Электрическое торможение
10. Способы регулирования угловой скорости
11. Система генератор-двигатель
Глава 3. Электромеханические
тока
свойства
электродвигателей
переменного
12. Механические характеристики электродвигателей в двигательном
режиме
13. Пусковые процессы
14. Тормозные режимы
15. Способы регулирования угловой скорости
Глава
4. Тиристорное управление электроприводами
3
4
5
.
16. Тиристорные электроприводы постоянного тока
•
17. Тиристорные преобразователи частоты с промежуточным звеном
постоянного тока
18. Тиристорные преобразователи частоты с непосредственной связью
19. Управление асинхронными двигателями с использованием гиристорных преобразователей частоты
20. Регулирование угловой скорости асинхронных двигателей с помощью тиристоров
7
10
12
14
16
18
18
21
22
28
35
39
43
43
48
52
58
64
64
73
80
83
85
325
Глава
Глава
Глава
Глава
5. Контактная аппаратура и особенности ее эксплуатации
92
21.
22.
23.
24.
25.
26.
27.
28.
29.
Общие сведения
Электромагнитные контакторы
Электромагнитные реле
Элекротепловые и механические реле
Комплексные устройства управления
Силовые контроллеры и командоаппараты
Тормозные электромагниты
Резисторы
Выбор аппаратуры по основным параметрам электропривода .
6.
30.
31.
32.
33.
34.
Бесконтактная аппаратура и устройства цепей автоматики .
Общие
сведения
Бесконтактные коммутаторы
Управляющие и защитные реле
Тиристорныс пускатели
Особенности эксплуатации
.
128
128
129
135
139
143
. . . .
148
35. Классификация и принципы построения схем управления . . . .
36. Автоматизация электроприводов с использованием контактной аппаратуры
37. Защита электродвигателей и систем управления
38. Автоматизация электроприводов с использованием логических
элементов
39. Микропроцессорное управление электроприводами
40. Архитектура микропроцессора
148
7 . Автоматизация управления судовыми электроприводами
.
.
.
8. Электроприводы вспомогательных механизмов энергетических установок и судовых систем
41.
42.
43.
44.
45.
Общие сведения
Нагрузочные характеристики
Системы управления
Схемы систем управления
Тиристорные преобразователи частоты в электроприводе грузовых
насосов нефтеналивных судов . . . .
46. Особенности эксплуатации
Глава
9.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
Электроприводы рулевых и подруливающих устройств
Общие сведения
Силы и моменты, действующие на баллер руля
Электроприводы с механической и гидравлической передачами . .
Механизмы управления электрогидравлическими приводами с насосами переменной подачи
Нагрузочные диаграммы
Системы управления
Схемы электроприводов при следящем управлении
Схемы электроприводов п р и автоматическом управлении . . . .
Элекроприводы специального назначения
Особенности эксплуатации
Глава 10. Электроприводы якорно-швартовных устройств
57. Общие сведения
58. Нагрузочные диаграммы
59. Характеристики силового электрооборудования
326
92
93
102
108
112
114
119
123
125
150
154
158
162
164
172
172
173
175
178
187
196
200
200
201
204
210
215
219
222
227
239
245
249
249
251
254
\
I
:
,
60. Системы у п р а в л е н и я
61. Схемы элек'фоирииодов автоматических швартовных лебедок .
62. Особенное 1и эксплуатации
.
Глава 11. Электроприводы судовых грузоподъемных механизмов
1
63. Общие сведения
64. Нагрузочные диаграммы
65. Системы у п р а н л е н и я
66. Контакторные схемы электропривода грузовых лебедок и кранов
6 7 . Тиристорные электроприводы грузоподъемных механизмов . . .
68. Электроприводы лифтов
69. Особенности эксплуатации .
Список литературы
257
268
276
279
279
280
285
289
301
316
320
324
Учебное издание
Головин Юрий Константинович
СУДОВЫЕ ЭЛЕКТРИЧЕСКИЕ ПРИВОДЫ
Технический редактор С. В. Щукина
Корректор-вычитчик Т. А. Попова
Корректор Л. А. Петрова
ИБ № 4200
Сдано в набор 04.07.90. Подписано в печать 10.07.91. Формат 60 х
Бум. офс. № 2 Гарнитура корра Тайме. Офсетная печать. Усл. печ. л. 20,09.
Усл. кр.-отт. 20,09. Уч.-изд. л. 22,23. Тираж 6500 экз. Заказ 914. Цена 3 р. 50 к.
Изд. № 1-1-2/10 № 4876
Ордена «Знак Почета» издательство «Транспорт», 103064 Москва,
Басманный туп., 6а
Набрано в Можайском полиграфкомбинате В/О «Совэкспорткнига»
Государственного комитета СССР по печати.
143200, г. Можайск, ул. Мира, 93.
Отпечатано с готовых форм в Московской типографии № 4
Государственного комитета СССР по печати.3ак.|276
129041, Москва, Б. Переяславская, 46