Чегодаев Д. Е., Шатилов Ю. В.
УПРАВЛЯЕМАЯ
ВИБРОИЗОЛЯЦИЯ
(Конструктивные варианты и эффективность)
г. С ам ара — 1995
У Д К 621.888.6; 534.833
Дмитрий Евгеньевич Чегодаев, Юрий Викторович Шатилов
УПРАВЛЯЕМАЯ ВИБРОИЗОЛЯЦИЯ
(Конструктивные варианты и эффективность)
АННО ТАЦ ИЯ
Р а с см о т р ен ы вопросы синтеза у п р а в л я ю щ и х а лгоритм ов, п р и нцип ы построения
к онструкций и р е зу л ь т а т ы исследований ги д р а в ли ч е ск о й а ктив ной виброизоляции,
в ибро и зол яции с сам оподстройкой д е м п ф и р о в а н и я и в и брои зо л яц и и с а лгоритм ически
у п р а в л я е м о й жесткостью.
Кни га п р е д н а з н а ч е н а д л я научных и ин ж енерно-техни ческих работн ик о в , з а н и м а ­
ющ ихся исследованием и п р о ек ти р овани ем пер сп ективны х с редств ви б р о з ащ и т ы .
© Ч е г о д а е в Д . Е.,
ISBN 5-7350-0110-8
Ш атилов Ю. В.
С амарский аэро­
к осмический уни­
в ерситет
СОДЕРЖ АНИЕ
П Р Е Д И С Л О В И Е ...............................................................................................................................................5
В В Е Д Е Н И Е .......................................................................................................................................................... 8
Г л а в а
п е р в а я .
АКТИВНАЯ ГИДРАВЛИЧЕСКАЯ В И БРО И ЗО Л Я Ц И Я .1 5
1.1 А н а л и з в л и я н и я х а р а к т е р и с т и к р е г у л я т о р а на виброизолирую щ ие
с во й ст в а а к т и в н о г о г и д р а в л и ч е ск о г о в и б р о и з о л я т о р а ........................................................15
1.2. К о н с тр у к ц и я , с т р у к т у р н а я схема и м а т е м а т и ч е с к а я модель ш ирокополос­
ного а к т и в н о г о в и б р о и з о л я т о р а .....................................................................................................23
1.3. Э л е м е н т ы к онстр ук ци и ш ирокополосного активного гидравлического в ибр о­
и з о л я т о р а ....................................................................................................................................................28
1.4.
И с с л е д о в а н и е р а б о ты а кт ив ного в и б р о и зо л я то р а ............................................................ 30
Г л ав а
вторая.
А Д А П Т И В Н А Я В И Б Р О И З О Л Я Ц И Я ...................................................39
2.1. У с л о ви е м и н и м у м а ди сп е рс и и в и броу с к орен и я при случай ны х в о зде й ­
с т в и я х .............................................................................................................................................................39
2.2. А л г о р и т м ы под стр ойк и д е м п ф и р о в а н и я д л я одно- и двухстепенных моделей
в и б р о и з о л я ц и и ..........................................................................................................................................41
2.3. П р и в е д е н и е а л г о р и т м о в подстройки д е м п ф и р о в а н и я к виду, удобному дл я
р е а л и з а ц и и ................................................................................................................................................. 48
2.4.
П о с тр о е н и е у стр ойств д л я на ст р о й к и д е м п ф и р о в а н и я .................................................. 50
2.5. Э ф ф е к т и в н о с т ь в и б р о и зо л я ц и и с устройством с ам оподстройки дем пф и р овани я
под с п е к т р а л ь н ы е х а р а к т е р и с т и к и вибро в о зд ей ств ия ..................................................... 52
2.6. О с обе нно с ти и с п о л ь з о в а н и я а д а п ти в н о й в ибро и зол яции в системах подрессор и в а н и я с идений водителей т р а н с п о р т н ы х с р е д с т в ........................
65
Глава
третья.
В И Б Р О И З О Л Я Ц И Я НА О С Н О В Е У П Р У Г И Х Э Л Е М Е Н Т О В
С П Е Р Е К Л Ю Ч А Е М О Й Ж Е С Т К О С Т Ь Ю ................................................................. 75
3.1. О с н о в н ы е р а с ч е т н ы е соотнош ения м еханики п ереклю ч ен ия жесткости упругого
э л е м е н т а в и б р о и з о л я т о р а ...................................................................................................................75
3.2.
М а т е м а т и ч е с к а я м одель в и б р о и з о л я т о р а с п е р ек л ю ч ае м ой ж е с т к о с т ь ю ........... 77
3.3 А л г о р и т м ы у п р а в л е н и я ж ес тк ос ть ю д л я ре ж и м ов гаш ени я собствен ных коле­
б а н и й ................................................................................................................................................................. 79
3.4. А л г ор и т м ы у п р а в л е н и я ж ес тк ос ть ю д л я ре ж и м о в р а б о ты при в ы н у ж д е н н ы х
к о л е б а н и я х .................................................................................................................................................. 89
3.5. Э ф ф е к ти в н о ст ь в и б р о и зо л яц и и на основе упругих эл е м ен то в с пе рек л ю ч ае м ой
ж е с т к о с т ь ю .................................................................................................................................................. 86
Г л а в а
четвертая.
ВОП РОСЫ ЭК С П ЕРИ М ЕН ТА Л ЬН О Й ОТРАБОТКИ
В И Б Р О И З О Л Я Т О Р О В НА О С Н О В Е У П РУ Г И Х Э Л Е М Е Н Т О В С
У П Р А В Л Я Е М О Й ( П Е Р Е К Л Ю Ч А Е М О Й ) Ж Е С Т К О С Т Ь Ю ........................107
4.1. К о н с т р у и р о в а н и е вибр о и зо л ято р о в с
п е р ек л ю ч ае м о й ж е с т к о с т ь ю .........................107
4.2. А п п а р а т у р н а я р е а л и з а ц и я а лг ор и т м о в п ерек л ю ч ен ия ж ес тк о с ти упругого
эл е м е н т а .....................................................................................................................................................113
4.3. Р е з у л ь т а т ы с тендов ы х и на ту р н ы х и спы тани й в и б р о и зо л я ц и и на основе
упру гих эл е м ен тов с п е рек л ю ч ае м ой
ж е с т к о с т ь ю .......................................................120
З А К Л Ю Ч Е Н И Е .............................................................................................................................................. 135
ЛИТЕРАТУРА
136
ПРЕДИСЛОВИЕ
Исследования, представленные в настоящей книге, затрагиваю т
зад ач и создания низкочастотных виброизоляторов для систем подрессоривания транспортных средств, сидений водителей, а такж е
особо чувствительных к перегрузкам транспортируемых или эксплу­
атирующихся на транспорте технических комплексов.
Общеизвестно о противоречиях, возникающих при проектирова­
нии низкочастотных виброизоляторов по «классическим», традицион­
ным принципам. В первую очередь это касается выбора приемлемых
габаритов виброизоляторов и требуемого уровня демпфирования при
широкополосных по частоте вибровоздействиях.
В работе рассмотрены весьма радикальные подходы к решению
перечисленных проблем. Предложена и исследована оригинальная
конструкция гидравлического активного виброизолятора, на основе
принципов построения самонастраиваю щ ихся систем автоматическо­
го регулирования разработан о устройство для задания оптимальной
величины демпфирования при нестационарных по частоте вибровоз­
действиях, обобщены м атериалы исследований по синтезу алгорит­
мов управления, качеству работы и конструированию виброизоляции
на основе упругих элементов с релейно переключаемой жесткостью.
Приведенные м атериалы базируются на большом объеме расчет­
ных и экспериментальных исследований. П оказаны пути реализации
и приведены примеры конструктивно отработанных образцов у п рав­
ляемы х виброизоляторов.
Книга представляет особый интерес как для научных работников
соответствующего профиля, ж елаю щ их ознакомиться с перспектив­
ными об р азц ам и новой техники, так и для инженеров-конструкторов
практиков, занимаю щ ихся разработкой конкурентоспособных и вы­
сокоэффективных средств виброзащиты.
Академик РАН Ганиев Р. Ф.
* * *
М ате р и а л ы книги являю тся результатом одного из направлений
работ, выполняемых в Сам арском аэрокосмическом университете по
созданию новых параметрически управляемых и активных средств
виброизоляции.
Интерес к активным виброизоляторам обусловлен их свойствами,
которые недостижимы в системах на пассивных элементах. В первую
очередь это возможность создания виброизолятора не чувствительно­
го к статической нагрузке, имеющего достаточно малую собственную
частоту и, следовательно, высокие изолирующие свойства.
Наименьший удельный вес и габариты на единицу массы защи­
щаемого объекта имеют гидравлические активные виброизоляторы.
Однако обеспечить высокую эффективность активного гидравличес­
кого виброизолятора в широком диапазоне частот не всегда удается
в основном из-за инерционных и нелинейных свойств гидравлических
регуляторов.
В первой главе анализируется влияние параметров гидравличес­
ких регуляторов на виброизолирующие свойства типового гидравли­
ческого виброизолятора, предлагается принцип построения активно­
го гидравлического устройства, в котором указанные неидеальности
практически не оказы ваю т влияния на качество виброзащиты. При­
водятся результаты экспериментальных исследований опытной кон­
струкции активного гидравлического виброизолятора.
Р я д технических объектов и, в первую очередь, транспортная
техника, эксплуатируется при нестационарных вибровоздействиях.
Невозможно создать средства нодрессоривания транспортных машин
с неизменяемыми парам етрам и максимально эффективные в своем
классе на всех дорогах и при всех скоростях движения. Возникает
потребность в виброзащитных устройствах, обладающих свойством
адаптации (приспосабливаемое™ ) своих параметров к изменяющим­
ся парам етрам вибронагружения.
Во второй главе решается зад ач а создания виброзащитного ус­
тройства с адаптацией уровня демпфирования под изменяющиеся
спектральные характеристики вибрационного воздействия. В качест­
ве критерия качества подстройки принят критерий минимума дис­
персии виброускорения. Выполненные исследования частично вос­
полняют пробел в создании высокоэффективных защитных устройств
подобного рода.
Типовые средства виброизоляции динамических нагрузок пред­
ставляю т собой, как правило, комбинацию упругих и демпфирующих
элементов. К ак известно, демпфирование улучшает виброизоляцию в
области резонансных частот и резко ухудшает ее на высоких часто­
тах. В виброизоляторах с постоянным неуправляемым демпфирова­
нием это противоречие может быть минимизировано при оптималь­
ном выборе уровня демпфирования, но не устранено. Указанное
обстоятельство стимулировало разработку устройств виброизоляции
с гасителями на основе упругих элементов с управляемой ж ес­
ткостью. Диссипация энергии колебаний в этих устройствах осущес­
твляется в моменты релейного (ступенчатого) изменения (переключе6
ния) жесткости упругого элемента. Этим обеспечивается гашение
колебаний в резонансной полосе частот при сохранении виброизоли­
рующих свойств упругого элемента на высоких зарезонансных час­
тотах практически на уровне виброизоляции без демпфера.
В третьей и четвертой главах книги рассматриваются вопросы
синтеза алгоритмов управления и проблемы конструирования вибро­
изоляторов на основе упругих элементов с переключаемой ж ест­
костью, приводятся результаты их расчетных и экспериментальных
исследований.
Авторы.
ВВЕДЕНИЕ
Создание высокоэффективных машин с повышенным ресурсом
работы и малой металлоемкостью стимулирует разработку новых
принципов снижения вибровоздействий.
Исследованиям перспективных виброзащитных систем посвяще­
ны работы К. В. Фролова, Р. Ф. Ганиева, М. Д. Генкина, Р. И. Фурунжиева, В. О. Кононенко, А. Д. Дербаремдикера, М. 3. Коловского, В. И. Кольцова, В. Б. Л арина, С. В. Елисеева, В. В. Болотина,
А. В. Синева, А. М. Певзнера, Ф. А. Фурмана, В. В. Гурецкого,
Д. С. К арнопа, Д. Е. Руж ичка, А. К. Трике, Р. Р. Аллена, Д. У. Шу­
берта и многих других ученых.
К решению задач виброзащиты наряду с методами теории коле­
баний /35, 5 0 / привлечены методы спектральных представлений виб­
рационных процессов /101, 47, 102/, статистической динамики /81/,
методы исследования нелинейных систем / 7 7 /, методы нахождения
оптимальных параметров /45, 59, 106, 141/, методы систем с пере­
менной структурой /66, 6 5 / и исследования динамических систем на
фазовой плоскости / 3 6 / . Р азработан ряд критериев оценки эффек­
тивности виброзащиты.
Методы спектральных представлений, основанные на преобразо­
ваниях Фурье и Л ап л аса, обладают особой наглядностью. Они весь­
ма удобны для анализа и синтеза линейных (линеаризованных) виб­
розащитных систем как при детерминированных, так и случайных
вибровоздействиях. Методами оптимальной линейной фильтрации
при известных параметрах случайного стационарного воздействия
удается найти оптимальную передаточную функцию линейной вибро­
защ иты /4 2 , 114/.
При исследованиях нелинейных виброзащитных систем нашли
применение методы гармонической / 9 3 / и статистической /7 3 / ли­
неаризации.
С развитием методов многопараметрической оптимизации стало
возможным решение громоздких задач аналитического или машинно­
го проектирования оптимальных виброзащитных систем /1 1 3 /.
В аж ны м моментом синтеза и анализа виброзащитных систем
является выбор критерия оценки качества ее работы. К настоящему
времени в зависимости от требований решаемых зад ач применяют
различные критериальные оценки /1 3 1 /.
Оценку линейных систем виброизоляции можно выполнять по
8
амплитудно-частотным характеристикам или передаточным функци­
ям, полностью определяющим их свойства.
Величина максимального ускорения, динамический ход, вид пере­
ходного процесса или комплекс этих параметров могут служить
критерием эффективности устройства, работающего при единичных
воздействиях типа ударного импульса.
Критерий оценки качества работы подвесок колесных транспорт­
ных средств долж ен учитывать условие безотрывности движения
колеса, оценку виброзащиты для человека-оператора проводят по
критерию, учитывающему неравномерную чувствительность челове­
ческого организма к вибрациям разных частот /1 3 4 /.
В случае стохастических воздействий эффективность виброзащи­
ты удобно оценивать величинами дисперсий выходных параметров,
таких, к а к об ж атие виброизолятора, скорость, ускорение, а в неко­
торых случаях и скорость изменения ускорения защищаемого объек­
та / 6 2 / .
Однако критерии, связанны е с дисперсиями, не всегда отражаю т
эффективность виброзащитного устройства по отношению к по ка за ­
телям прочности и надежности защ ищ аем ы х конструкций. Был пред­
ложен критерий, непосредственно связывающий параметры виброза­
щиты с прогнозированием надежности и долговечности конструкций
/4 3 , 139/. Критерий вы р а ж а ет ся через математическое ожидание
числа выбросов параметров системы из области допустимых состо­
яний за некоторый промежуток времени. В зависимости от характе­
ра решаемой зад ач и область допустимых состояний задается или
уровнем ускорений (перемещений) точек системы или напряжениями
в элементах конструкции.
М атематические методы синтеза и анализа виброзащитных сис­
тем представляю т разработчикам достаточно широкие возможности
в деле дальнейшего совершенствования виброзащитных устройств.
Вместе с тем, в ряде важ ны х для практики случаев применение этих
методов затруднено. Р еальны е виброзащитные устройства работают,
как правило, в условиях нестационарного вибронагружения. Х а р а к ­
тер воздействия может являться сочетанием нескольких процессов,
например, ударного и вибрационного. В отдельных случаях сложно
прогнозировать диапазон изменения параметров вибронагружения.
Поэтому зачастую разработка новых средств виброзащиты включает
элементы интуитивных, эвристических процессов / 8 3 / .
Имеется большой ряд конструктивных разновидностей виброизо­
ляторов, предназначенных для снижения нагрузок различного ч ас­
тотного диапазона, для разнообразных условий применения /68, 4,
57 95 104/. Анализ научно-технической и патентной литературы
показывает, что дальнейшее развитие виброизолирующих устройств
происходит в направлении совершенствования классических схем
виброзащиты, реализуемых на пассивных (функционирующих без
источника энергии) упруговязких и инерционных элементах, р а з р а ­
ботки устройств с параметрическим управлением и активных (с
источником энергии) средств виброзащиты /110, 112/.
Виброзащитные устройства на пассивных неуправляемых элемен­
тах просты по конструкции и наиболее распространены в практике.
Они могут состоять из одного упругого элемента, упругого элемента
с демпфером, комбинации упругого элемента, демпфера и инерцион­
ных масс, последовательно-параллельного, иногда многокаскадного
соединения этих элементов. В зависимости от исполнения упругих и
демпфирующих элементов различаю т пневматические /91, 39, 124,
132, 2 9/, гидравлические /61, 122/, пружинные /22, 11/, рессорные
/24, 3 0 /, резиновые / 5 8 / , тросовые /119, 89/, из материала «МР»
/117, 80, 107, 118/ и другие виброзащитные средства.
Несмотря на то, что виброзащитные устройства на пассивных
элементах способны изолировать значительную долю колебательной
энергии, они не удовлетворяют запросам и нормам, предъявляемым
к перспективным и конкурентоспособным образцам новой техники.
Устройства, состоящие только из одного упругого элемента, из-за
резкого усиления колебаний в резонансной области не позволяют
использовать их для защиты от вибраций в широком диапазоне
частот и в неустановившихся режимах колебаний.
Противоречивы при широкополосных воздействиях и требования
к демпфирующему элементу, устанавливаемому параллельно упру­
гому элементу (по схеме Кельвина), ввиду того что демпфер ухудша­
ет виброизоляцию на высоких (зарезонансных) частотах.
Компромиссным решением задачи может служить комбинация
упругих и демпфирующего элементов, включенных по схеме Зенера,
н азы ваем ая релаксационной подвеской /116, 48, 51, 140/. Демпфи­
рующий элемент в этой схеме включен через дополнительный упру­
гий элемент. Тем не менее, как показывают исследования, даже при
оптимальном выборе параметров релаксационной схемы на высоких
частотах она проигрывает по виброизоляции упругому элементу без
дем пф ера, а в резонансной полосе частот удовлетворительный ре­
зул ьтат достигается за счет существенного повышения жесткостных
парам етров виброизолятора. Так, по данным / 9 7 / , при оптимальном
выборе демпфирования в схеме Зенера усиление колебаний на ре­
зонансной частоте равно двум, но при этом жесткость системы в три
раза выше, чем в схеме Кельвина.
Недостатки присущи и устройствам с дополнительными инерци­
онными массами, что вы раж ается в их громоздкости при ограничен­
ном частотном диапазоне эффективной работы. Такие устройства
используют как антивибраторы для отдельных частотных составля­
ющих вибровоздействий /64, 94/. К этим устройствам можно отнести
и устройства с преобразованием движения / 6 9 / .
К пассивным средствам виброзащиты относятся и устройства
10
квазинулевой жесткостью /3 , 67, 71, 7 2 /, выполненные на элементах
или конструкциях с прохлопывающим эффектом. Несмотря на, к а з а ­
лось бы, высокую эффективность виброизоляторов с квазинулевой
жесткостью, их применение ограничивается из-за большой чувстви­
тельности к изменению как параметров самого виброизолятора, так
и изменению веса и наклона защищаемого объекта. К ак правило,
участок характеристики нулевой жесткости ограничен, энергоем­
кость виброизолятора в пределах этого участка невысока, последнее
не позволяет воспринимать воздействия в виде скачка скорости.
Конструкции виброизоляторов с пассивными неуправляемыми
элем ентам и имеют ограниченные возможности. Д л я решения более
универсальных за д ач и с большей эффективностью на основе пассив­
ных виброизоляторов р а зрабаты ваю тся параметрически управл яе­
мые устройства. В качестве управляемого п арам етра выступает
ж есткостная или демпф ирую щ ая характеристика виброизолятора.
Управление может быть возложено на человека-оператора,
но ввиду очевидности ряда недостатков ручного управления такие
системы р а зр а б а ты в а ю т с я для решения сравнительно простых
за д ач / 6 0 / .
Более слож ны е алгоритмы управления реализуют с помощью
систем, в состав которых входят датчики параметров колебаний,
блоки ф ормирования сигнала управления и регуляторы параметров.
Виброизоляторы с такими системами называю т полуактивными или
устройствами с совместно установленными датчиками и манипулято­
рами (принцип СУ Д М ) /126, 127, 129, 130/.
Существенным фактором является величина скорости изменения
регулируемого п арам етра. П ри достаточно быстром изменении п а р а ­
метров виброзащ итная система приобретает свойства, недостижимые
ни при какой постоянной, промежуточной величине изменяемого
п а рам етра. Этот вывод согласуется с результатами исследований
систем с переменной структурой / 6 6 / .
Так, в работах /129, 130/ описывается виброзащитная система с
алгоритмическим управлением величиной демпфирования в процессе
одного периода колебаний. Управление (переключение) по опреде­
ленному алгоритму демпфирования придает виброзащитной системе
свойства, близкие к свойствам колебательной системы с «опертым»
в пространстве демпфером. В такой системе реализуется высокое
демпф ирование на резонансных частотах при хорошей виброизоля­
ции высокочастотных воздействий. Недостаток системы — высокие
требования к быстродействию регулятора.
Д л я повышения быстродействия применяют электрические мето­
ды управления параметрам и. При этом используют различного рода
магнитные и электропроводные смеси, а сигнал управления подают
на индукторы, магнитное поле которых взаимодействует с этими
жидкостями /28, 18/.
Вместе с тем имеют место и разработки на основе традиционных
способов управления параметром демпфирования, заключающихся в
изменении площади дросселирующих отверстий в демпфере /27, 2U/.
Упругий элемент является хорошим виброизолятором высокочас­
тотных вибраций, и зад ач а управления его жесткостью может быть
сведена к обеспечению демпфирующих свойств в области низких,
резонансных частот. Виброзащитные системы с управляемой жес­
ткостью можно считать (при соответствующих эффективных алгорит­
мах управления и регулятора жесткости) наиболее перспективным
направлением при создании устройств защиты от широкополосных
воздействий.
В результате проделанных в этом направлении исследований
предложены варианты выполнения конструкций виброизоляторов с
управляемой жесткостью. Известно устройство / 1 7 /, в котором для
гашения колебаний жесткость изменяют в зависимости от направле­
ния движения защ ищ аем ого объекта. Это осуществляется подключе­
нием и отключением в соответствующие моменты времени дополни­
тельного упругого элемента. Недостатки устройства — невысокие
гасящ ие свойства и большая энергоемкость, так как подключение
дополнительного упругого элемента осуществляется электромагнит­
ным способом.
В устройстве / 1 5 / для увеличения гасящих свойств дополнитель­
ный упругий элемент имеет предварительную затяжку. При этом
колебания малых амплитуд на защищаемый объект передаются без
ослабления.
В работе / 1 2 8 / описана система, в которой для изменения жест­
кости виброизолятора дополнительный упругий элемент подключает­
ся через моментный фрикцион. Недостатком этого устройства явля­
ется малый ресурс и большая силонагруженность фрикциона.
К виброизоляторам с изменяемой жесткостью следует отнести и
пневматические многокамерные устройства, в которых повышение
гасящих свойств достигается определенной коммутацией объемов
кам ер при помощи клапанов, устанавливаемых в каналах, соединя­
ющих кам еры /86, 7, 8, 9, 23/. Известен такж е способ, основанный
на подкачке газа в камеру с мембранным элементом / 1 2 / и способ ^
электромагнитного управления жесткостью подвеса /1 3 5 /.
Управление п арам етрам и виброизоляции может производиться
как по внешней информации, получаемой с датчиков / 6 / , так и по
определенной программе /1 0 9 /. Кроме того, параметрически управ­
ляемы е виброзащитные устройства можно разделить на системы с
жесткой логикой работы и системы, функционирующие по принципу
адаптации под изменяющиеся характеристики внешнего воздействия
Перспективными являются адаптивные, самооптимизируюшиеся
и самоорганизующиеся виброзащитные устройства / 1 1 1 /
Р азличаю т системы подстройки с предсказанием и системы под
12
стройки по выходным парам етрам вибрационного процесса / 9 2 / .
Д л я реализации первых систем требуется предварительная инфор­
мация о процессах, которые еще не произошли или предсказание
этих процессов (с определенной достоверностью), вторые системы
работаю т по выходным параметрам.
И м еется ряд предложений по построению поисковых и самооптимизирующихся систем /78, 63/, но реализация их весьма ограничена
громоздкостью аппаратурного обеспечения, да и возможностями
устройств управления параметрам и.
П рактичны алгоритмы и устройства, которые форсированно с
малой погрешностью осуществляют настройку параметров виброизо­
ляции под условия эксплуатационного вибровоздействия при простой
аппаратурной реализации алгоритмов.
При изменяющихся спектральных характеристиках вибровоздей­
ствия, к а к будет показано ниже (см. главу 2), хорошие результаты
можно получить, применив подстройку по методу частотных фильт­
ров / 8 4 / .
Большой объем исследований выполнен в области активных виброзащитных устройств. В этих устройствах с помощью различного
рода датчиков, исполнительных элементов и источников энергии
моделируются необходимые связи (силовые, скоростные, кинемати­
ческие) меж ду источником вибровоздействия и защ ищ аемым объек­
том / 2 / , причем, в отличие от параметрически управляемых систем
возможна реализация отрицательных параметров жесткости и демп­
фирования. Принципиальные возможности таких устройств при иде­
альных характеристиках исполнительных элементов довольно широ­
ки. Это и привлекает исследователей. Так, предложены устройства
активной виброизоляции со сложными многоконтурными управлени­
ями, что д а ет возможность повысить эффективность виброизоляции
в одном или нескольких частотных диапазонах при защите от меня­
ющейся по амплитуде и частоте вибрации /1 2 5 /. Наиболее полно
принципы построения активных виброзащитных устройств раскрыты
в монографиях /76, 52/.
Вместе с тем, несмотря на обширные исследования, до практичес­
кого применения к настоящ ему времени доведены относительно
простые схемы и устройства активной виброзащиты. Не вызывает
особых технических трудностей реализация активных устройств
динамической компенсации вибрационного поля /103, 13, 137, 136,
133/, активных устройств с электромеханическими и электрическими
исполнительными элементами /79, 85, 1/. Сложнее, ввиду податли­
вости газов, реализовать возможности активной изоляции с пневма­
тическими исполнительными элементами /38, 120, 98, 121/, а ввиду
ограниченного быстродействия — с гидравлическими /138, 5, 70/.
На базе электродинамических и электромеханических исполни­
тельных элементов предложены активные виброизоляторы со сл ож ­
ными многофункциональными системами управления /16, 9 0/.
не менее, несмотря на быстродействие, электрические исполнитель­
ные элементы не конкурируют с гидравлическими из-за большого
удельного веса и габаритов на единицу развиваемого ими усилия.
Видимо, наиболее приемлемыми для практики следует считать
активные виброизоляторы на основе гидравлических исполнительных
устройств / 3 3 / . Однако необходимо принимать меры по улучшению
их виброизолирующих свойств на высоких частотах, например, вве­
дением дополнительных виброизоляторов пассивного вида /41, 26/.
Одно из конструктивных решений по улучшению эффективности
активного гидравлического виброизолятора предлагается в главе 1.
Глава
АКТИВНАЯ
первая
ГИДР АВЛ И ЧЕС К А Я
ВИ Б РОИЗОЛЯЦИЯ
1.1 Анализ влияния характеристик регулятора на виброизолирую­
щие свойства активного гидравлического виброизолятора.
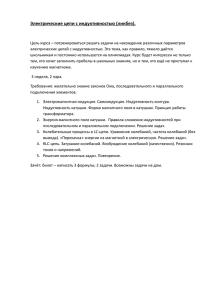
Конструкция типового гидравлического виброизолятора (рис. 1.1)
/ 7 6 / состоит из регулятора, исполнительного элемента (гидроцилин­
дра), соединенного через регулятор с насосом, блока формирования
сигнала управления и датчиков. По сигналам с датчиков в блоке
управления формируется управляю щ ий сигнал Пупр. Последний воз­
действует через регулятор на исполнительный элемент, способствуя
уменьшению динамических нагрузок, поддержанию заданного поло­
жения штока исполнительного гидроцилиндра и гашению возможных
в активной виброзащитной системе собственных и резонансных ко­
лебаний.
Вид управляю щ его сигнала определяет эффективность активного
ЛИ
блок управления
Uynp
■Щ
Насос
Регулятор
7777777
Рис
1.1. Схема конструкции типового активного виброизолятора.
15
виброизолятора. Можно показать / 5 4 /, что значительного ослабле­
ния динамических воздействий можно достигнуть, если использовать
сигналы, пропорциональные производным высшего порядка от пере­
мещения защищаемого объекта. Однако получение и в особенности
воспроизведение таких сигналов в системах с невысоким быстродей­
ствием сопряж ено с определенными техническими трудностями.
Потому ограничиваются управлением по трем сигналам, пропорци­
ональным ускорению х, абсолютной скорости х и положению да.
Сигнал, пропорциональный ускорению х, может быть получен с
датчика ускорения Д*, установленного на объекте массой т . Сигнал,
пропорциональный абсолютной скорости объекта х — интегрирова­
нием в рабочей полосе частот сигнала ускорения, а сигнал, пропор­
циональный положению штока гидроцилиндра w ~ ( x — q), получают
с датчика относительных перемещений Д*. Здесь х — координата
массы защ ищ аем ого объекта, q — кинематическое воздействие со
стороны виброактивного основания, С/упр. — сигнал управления рас­
ходным регулятором.
Структурная схема активного гидравлического виброизолятора с
названными сигналами в цепях обратных связей приведена на
рис. 1.2а, где:
Q — расход жидкости через регулятор;
Y — положение золотника регулятора;
k\ — коэффициент передачи в цепи обратной связи по относи­
тельному перемещению;
&2 — коэффициент передачи в цепи обратной связи по ускоре­
нию г,
ki —- коэффициент
передачи
в цепи обратной связи по
скорости х;
S — площадь гидроцилиндра;
Н ( у ) — нелинейная функция расходной характеристики регуля­
тора;
Wv(p), W<t,(p), WH(p) — передаточные функции соответственно
регулятора, фильтра, интегратора;
Wp(w), W'tbfa)). WH((o) — амплитудно-частотные характеристики
регулятора, фильтра и интегратора.
Фильтр высоких частот (V^^(p)), служит для исключения влия­
ния на работу виброизолятора постоянного и квазистатического
ускорения.
На схеме (рис. 1.2а) регулятор представлен последовательно
включенным линейным звеном с передаточной функцией Wp(p) и
нелинейным элементом Н ( у ) (рис. 1.2д).
О писанная структурная схема является упрощенной моделью
реального гидравлического виброизолятора, не отраж аю щ ей всех
процессов в гидравлических цепях и механических узлах виброизо­
лятора. Однако она достаточно полно отражает качественную кар16
Рис.
j ^ T J — |у/ц{(>)|— -
XV
1
U)c.(p
__________
( 21
| X
(Oc.u \ \ e' fа)
(5 )
$
-у
1.2. С т р у к т у р н а я схема (а ) и х а р а к т е р и с т и к и (б ), ( в ) , ( г ) , ( д ) типового активного в иброи зол я тора.
(а)
T
Wu(U)),
Wplui)
тину работы гидравлического виброизолятора и широко использует­
ся при анализе его эффективности (76).
Рассмотрим предельные возможности типовой схемы активного
гидравлического виброизолятора при условии, что регулятор являет­
ся безынерционным элементом W § ( p ) = K P, а мощность, подводимая
в исполнительный элемент, не ограничивается ни производитель­
ностью насоса, ни пропускной способностью регулятора, т. е. система
линейна и Н — у.
Тогда согласно структурной схеме (рис. 1.2а) работа виброизоля­
тора (для упрощения принято W $( p ) = \, a К Р= 1) опишется следу­
ющей системой уравнений:
Uynv = k\W-\- k 2x + k 2 х
Х\=
UynpS
‘ x=q—xu
w — x — q.
Эта система сводится к одному уравнению:
T 2x + 2 V 2 T x + 2 V J w + w = 0 ,
(U)
в котором х, X, х — соответственно перемещение, скорость и уско­
рение защ ищ аемого объекта, q — кинематическое воздействие,
T = n - * = J k 2/ k ь
V 2= S / 2 K p4 h h ^
Отметим, что собственная частота О. определяется только соотно­
шением коэффициентов k\ и k2 в цепях обратных связей по обжатию
w и ускорению х. В уравнение (1.1) не входит величина массы
защ ищ аем ого объекта. Следовательно, качество виброизоляции и
статический «прогиб» не зависят от массы объекта.
Коэффициенты
и % характеризуют демпфирование в активном
виброизоляторе. В отличие от пассивных систем представляется
возможным уменьшить демпфирующую связь по относительной ско­
рости w = ( x —q) за счет введения новой демпфирующей связи по
абсолютной скорости к. Демпфирование по относительной скорости
ухудшает виброизоляцию на высоких частотах (при со
Д~2), а
демпфирование по абсолютной скорости не влияет на виброизоля­
цию высокочастотных воздействий. Следовательно, теоретически актив­
ная виброзащита не уступает пассивной, а при определенных усло­
виях и превосходит ее (рис. 1.3, сплошные линии — пассивная виб­
роизоляция, пунктирная — характеристика активного виброизолято­
ра при Vi = 0 , V 2=0,3).
Однако характеристики реальных регуляторов далеки от рас­
смотренных. Расходные характеристики у них существенно нелиней18
O/i
0,5
Рис.
1 12 1/*
2
3
k
1.3. А м п ли туд но -ча сто тн ы е х а р ак т ер и с т и к и ускорения.
0,8
v=-
6
V=0,05
V-0,5
<0
г * ы /л
ны, практически всегда имеет зону нечувствительности и ограниче­
ние, невысоко и быстродействие гидравлических расходных регуля­
торов. Лучшие образцы электрогидроусилителей имеют частотный
диапазон работы не выше 12...20 Гц (105).
Рассмотрим влияние этих неидеальностей на работу виброзащитного устройства. Д л я этого передаточную функцию регулятора зада­
дим в виде инерционного звена 1-го порядка
щ (р)=
*>,
^ рР + 1
.
расходную характеристику — зависимостью Н ( у ) с ограничением
(рис. 1.2, г). Тогда уравнения, описывающие работу системы, будут
иметь вид:
Uynp= k\{x
<])-{~k2X-\-k?,X,
y -U y n p W p (p ),
xi= H (y)/S,
H(u)=
\ У при^ 1< У*
| Qo sign у при |//| > уо,
x=q-x\.
П риняв Н ( у ) —у (нет ограничения), оценим влияние только инер­
ционности регулятора. Расчеты показывают, что инерционность ре­
гулятора ухудшает виброизоляцию тем сильнее, чем выше частота
воздействия и чем больше постоянная времени Тр (рис. 1.4).
На рис. 1.5 приведены результаты расчетов эффективности виб­
роизоляции, работающей с ограничениями на подводимую мощность
при безынерционном регуляторе Н/,(р)=1.
Виброзащитное устройство при ограниченном расходе жидкости
через регулятор работает в нелинейном режиме. Характер нелиней­
ных колебаний при синусоидальном воздействии представлен на
осциллограммах (рис. 1.6). В моменты времени, когда наступает
ограничение по расходу, наблюдается резкое увеличение ускорения
защ ищ аемого объекта.
Полученные результаты показывают, что при создании виброзащитного устройства, работающего в широком частотном диапазоне
/ д о 50... 100 Гц/, необходимо принимать меры по снижению запазды­
вания в регуляторе, как наиболее инерционном агрегате схемы уп­
равления, и не допускать работы с ограниченным расходом. Если
потребная расходная характеристика может быть обеспечена за счет
повышения мощности насоса и пропускной способности регулятора,
то вопрос повышения быстродействия регулятора решается не про­
сто. Исследования / 4 9 / показали, что применение различных кор20
X
Рис.
1.4. В л и я н и е ин ерци онности р е г у л я т о р а на а м п л и ту д н о -ч а с то т н ы е х а р а к т е ­
р и с ти к и ускорения.
Ю,г
Рис.
1.5. В л и я н и е нелинейности расходной х а р а к т е р и с т и к и (о гр ани чения по
ра сх о д у ) р е г у л я т о р а н а х а р а к т е р и с т и к и ускорения.
ректирующих устройств для компенсации запазды вания в типовых
электрогидроусилителях дает незначительный эффект. Нелинейности
и запазды вания приводят к возникновению автоколебаний уж е при
малых величинах коэффициента &2 в цепи сигнала обратной связи по
ускорению. В результате не удается реализовать низкую собствен­
ную частоту Q, а следовательно, обеспечить качественную виброза­
щиту /100, 21/.
Поэтому предложены устройства, в которых в качестве регуля­
тора использованы высокочувствительные и малоинерционные кла­
паны,
управляем ы е
непосредственно
давлением
в полостях
.ъг
Р и с . 1.6. О с ц и лло гр а м м ы колеб а ни й в активной
виброи зол яции при ограниченном расходе рабочей
жидкости через регулятор.
А — участ ок работы с ограничением по р а с хо д у ;
В — участки работы в лин ейн ом реж име.
22
исполнительного гидроцилиндра. К лапаны могут быть выполнены с
достаточно
малой
массой, а управляющее давление за счет
увеличения
площади
клапана
создает большие управляющие
силы, чем и достигается значительное повышение быстродействия
и чувствительности регулятора. Устройство с подобным регулято­
ром
описано в работе / 1 0 / . В нем для создания необходимых
управляю щ их усилий на клапанах применены мембранные эле­
менты.
О днако это устройство выполнено таким образом, что масса
защ ищ аем ого объекта и квазистатическое ускорение влияют на
статическое положение виброизолятора. На поддержание стати­
ческого положения д а ж е при отсутствии возмущающих ф а к ­
торов непрерывно затрач ивается энергия, высокочастотные и им­
пульсные воздействия снижаю тся при значительных пиковых мощ­
ностях.
В конструкции гидравлического активного виброизолятора, кон­
струкция которого описана ниже, сделана попытка устранить пере­
численные недостатки.
1.2. Конструкция, структурная схема и математическая модель
широкополосного активного виброизолятора
Конструкция предлагаемого активного гидравлического виброизо­
лятора / 8 7 / показана на рис. 1.7.
Виброизолятор состоит из симметричного гидроцилиндра и двух
узлов управления с обратными связями по ускорению и относитель­
ному положению объекта.
Узел управления положением может быть выполнен в виде золот­
никового следящ его устройства, соединенного входными каналам и с
насосом, а выходными с полостями гидроцилиндра. Перемещение
объекта относительно основания вы зы вает смещение связанного с
объектом золотника ( З К ) относительно его корпуса, установленного
на основании. При этом происходит коммутация соответствующих
каналов, и жидкость, поступая под давлением в полости гидроцилин­
дра, см ещ ает объект в равновесное состояние.
Узел управл ения с обратной связью по ускорению включает
клапанны е устройства (К Л 1) и (К Л 2) и два сглаживающих устрой­
ства, ка ж д о е из которых состоит из дросселя (Д ) и гидроаккумуля­
тора (А).
К л а п а н ы имеют четыре выходных канала: два рабочих и два
управляющ их. Рабочие каналы соединены с полостями гидроцилин­
д р а Ч ерез них происходит перетекание рабочей жидкости из одной
v ----------------
s' / y v r / s s / 'r rryvs
эг>«
CJ
о
Шm
ч
Р
ис.
узел обратной с (ш и
по ускорению
Д1, Д 2
A l, А2
—
—
дроссели,
гидроаккумулят оры .
1.7. К онстр ук ц ия ш ирокополосн ого активного гидра в ли че ск ого в и брои зо л ятор а
P I, Р 2 — д а в л е н и я в полост ях симм ет ричного ги д р о ц и л и н д р а ,
К Л 1, К Л 2 — к лапаны ,
узе а о8рат н оа сбяза
по относительному смешению
но сое
полости гидроцилиндра в другую. Один из управляющих каналов
соединен с полостью исполнительного гидроцилиндра, из которого
происходит стравливание жидкости, а второй связы вает полость
противодавления к л а п а н а с гидроаккумулятором (А). В полость
противодавления к л а п а н а подается осредненное управляю щ ее д а в ­
ление. Следовательно, суммарное управляю щ ее давление на клапане
представлено разностью полного давления и осредненного давления.
Этим исключается открытие клапанов при статических и квазистатических нагрузках, а та к ж е при изменении массы защищаемого
объекта.
Снижение динамических нагрузок происходит следующим о б ра­
зом. Воздействие q вы зывает ввиду инерционности объекта массой т
перепад давлений АР в полостях гидроцилиндра. В зависимости от
знака перепада открывается первый или второй клапан и происхо­
дит переток жидкости из полости гидроцилиндра с повышенным
давлением в полость с малым давлением. Тем самым уменьшается
перепад давления АР или, что эквивалентно, усилие, передаваемое
на объект через виброизолятор. Тем самым уменьшается ускорение
защищаемого объекта, реализуется отрицательная обратная связь
по ускорению.
Сочетание симметричной схемы гидроцилиндра с клапанами поз­
волило реализовать эту связь без источника энергии. Следовательно,
в отличие от известных конструкций в данном устройстве энергия
затрачивается только для поддерж ания среднего положения гидро­
цилиндра. Так к а к поддерж ание среднего положения осуществляет­
ся с небольшими ускорениями и малой скоростью, требуется и не­
большая мощность гидравлического потока, подводимого в исполни­
тельный механизм. В то же время ввиду малоинерционности к л а п а ­
нов в цепи отрицательной обратной связи по ускорению достигается
эффективное ослабление высокочастотных динамических воздейст­
вий.
Д л я обоснования выбора параметров элементов конструкции
обратимся к структурной схеме (рис. 1.8). В этой схеме предпо­
лагается, что кл апаны в рабочем диапазоне частот работают безы­
нерционно. П рактически это означает, что собственная частота
клапана
на
поджимаю щей пружине должна быть в 2...3 раза
выше наивысшей частоты воздействия. К примеру, в эксперимен­
тальной конструкции, которая будет описана ниже, при массе
клапана в 10 г и жесткости поджимающей пружины в 100 Н /см
собственная частота составляла около 160 Гц. В принципе возмож­
на р еали зац и я перепускных клапанов и с большей собственной
частотой.
25
Итак, считая, что клапаны безынерционны, запишем согласно
структурной схеме (рис. 1.8) уравнения движения:
( 3 c = q -(x i+ * 2),
' xi= k \ ( x —q),
h = Q /S ,
j (ЬР\— AP0)feioi при| AP| >A P0,
\ 0 при | ЛР) < APoA P,= APW$B‘
(1.3)
AP = F S
Q = H V.
тр
n p n l N | > FTp,
при IN 1 < PTp,
N=(x+g)m.
В этих уравнениях:
k\ — коэффициент передачи в цепи обратной связи по положе­
нию,
х\ — составляющая скорости объекта, вызванная работой конту­
ра по положению,
Х2 — составляющая скорости, вызванная работой контура по
ускорению,
Q — расход жидкости через открытые клапаны,
5 — площадь штока цилиндра,
АР — полный перепад давлений между полостями гидроци­
линдра,
^кл — коэффициент, характеризующий наклон расходной харак­
теристики клапана,
АРо — давление предварительной затяжки пружин клапа­
нов,
АР\ — динамическая составляющая перепада давления между
полостями,
F — составляю щ ая силы, передаваемой через виброзолятор, вос­
принимаемая давлением жидкости,
N — полная сила, передаваемая через виброизолятор,
FTр — составляю щ ая силы, приходящая на трение в направляю­
щих гидроцилиндра,
g — ускорение свободного падения,
т — масса защищаемого объекта.
При отсутствии трения в направляющих FTp= 0 и предваритель­
ной затяж к и пружин клапанов (АР0= О ) работа виброизолятора
будет описываться линейными уравнениями, которые при И^фвч^
сводятся к следующему уравнению:
26
b)
F m p = F 0s i g n ( x — q ) — с и ла трения,
- передат очная ф у н к ц и я фильт ра в ы с о к и х частот,
g
у с к о р е н и е силы тяжести,
Г б / — ^ ь^ ° ^ ° ^ астотная сост авляю щ ая п е р е п а д а д а вле н и й .
( у
н е л и н ей н а я характ ерист ика H i = F ( N ) .
( в ) — н е ли н ей н а я р а с хо д н а я характ ерист ика к л а п а н о в H ,= Q ( A P ) .
С т р у к т у р н а я схема широкополосного активного гидр авли ческ о го виброизолятора.
( а ) — структурная схема:
N — сила, дейст вую щ ая на за щ и щ а е м ы й объект,
в0СпРиним аем а-я д а в л е н и е м жидкости в полост ях ги д роцилинд ра,
"Frp
F= N- Ftp
Г,2х+ 2'Р .7’> +
где Т. = \ / n = yj m k KJl/ l hS,
Обозначив m k ^ / S = 1%, получим
ния собственной частоты
Q=^
ш= 0 ,
(1.4)
V. = S 1' 2 /
выражения
для
нахожде­
и величины коэффициента
демпфирования 'Р. = 1 / 2 - J k ^ l , не отличающиеся внешне от зави­
симостей для определения Q и Ч* в типовой конструкции (1.2).
Однако k i является функцией массы объекта, площади штока и
расходной характеристики клапанов.
1.3. Элементы конструкции широкополосного активного
гидравлического виброизолятора
Основными узлами в конструкции предложенного виброизолятора
являются механический фильтр высоких частот и перепускные кла­
паны.
Механический фильтр служит для исключения влияния статичес­
ких и квазистатических усилий на обжатие виброизолятора. Для
получения расчетных зависимостей рассмотрим схему (рис. 1.9), со-
Ш
Рис.
28
1.9. Схема механического ф ильтра высоких частот.
Д — д россель;
К Л — клапан;
А — аккум улят ор.
стоящ ую из перепускного кл апана, дросселя и гидроаккумулятора,
с о г л а с н о этой схеме входным параметром я в л я е т с я давление в
одной из полостей исполнительного цилиндра Р, а выходным п а р а ­
метром перемещение кл а п а н а у. П окаж ем , что перемещение к л а п а ­
на отсл еж и вает только динамическую составляющую давления Р. Из
схемы (рис. 1.9) видно,_что клапан управляется разностью двух
д авлений
полного Р и
осредненного давления Р\. Осредненное давл ение Р\ выделяется механическим фильтром низких час­
тот, который образован последовательно соединенными дросселем Д
и гидроаккумулятором А. Следовательно, на клапан действует уп­
равл яю щ е е давление
Я у п р ^ Р -Я ,.
Т ак к а к P x= P W $ m , то Яупр= Р ( 1 — Ц7фнч). Выражение (1 — №фн,)
явл яется характеристикой фильтра высоких частот, т. е.
Рупр = Р й^фвчИ так, в рассмотренной схеме управляющее давление на пере­
пускном к л а п а н е пропорционально только динамической составляю­
щей полного давления Р. В управляющем давлении не присутству­
ют статические составляю щ ие полного давления и уменьшены квазистатические.
Р ассм отрим
уравнения, описывающие динамику совместной
работы к л а п а н а
с фильтром,
пренебрегая
массой
клапана,
трением, силам и облитерации, массой поршня гидроаккумуля­
тора и т. д.
Обозначим: S A — площадь поршня аккумулятора, СА — ж ест­
кость упругого элемента аккумулятора, Ск — жесткость пружины
к л а п а н а, z — перемещение поршня аккумулятора, у — перемеще­
ние к л а п а н а , S k — площадь клапана, на которую действуют д авл е­
ния Р и Р\.
У равнение равновесия сил на поршне аккумулятора имеет вид:
S A^ = CAz,
(1.5)
S KF - S K^ - C Ky = 0 ,
(1.6)
уравнение сил на клапане:
у о а в н е н и е неразры вно сти жидкости при перетекании через дрос­
сель в аккум улятор, из а к к у м у л ят о р а в сообщающуюся с ней
к а м е р у кл а п а н а:
29
J
Q d t = S A z—S ky,
(1.7)
где Q = K ap( P — Pi) — расход жидкости через дроссель (в первом
приближении _будем считать расход линейной функцией перепада
давления Л Р = Р —Р\).
У равнения (1.5)—(1.7) позволяют получить зависимость пере­
мещения к л а п а н а у от д авл ен и я Р. Эта зависимость вытекает из
уравнения:
( C kS A7 S 'k C a + S k ) « / + ( К я?Ск.) / S Ky = ( S 2x / Са ) Р
(1.8)
Передаточная функция, соответствующая этому уравнению, имеет
вид
Щ у ( Р ) / Р ( р ) ) = К ф Р / ( Т ф Р + 1) = ^фвч,
(1.9)
где р — оператор Л ап л аса, /Сф=(5 а5к)/(Са/СдРСк ), 7’ф= 1//Сдр(5а2/
Ca+ S V C k )Выражение (1.9) соответствует передаточной функции фильтра
высоких частот с частотой среза Ш ф = 7 ф '1. Следовательно, выбрав
параметры клапана, дросселя, гидроаккумулятора, можно реализо­
вать на механических элементах фильтр высоких частот.
Рассмотренная конструкция кл ап ан а с фильтром является ус­
тройством одностороннего действия. Поэтому в виброизоляторе уста­
новлено два таких устройства, каждое из которых соединено со своей
полостью гидроцилиндра. Этим обеспечивается симметричная работа
контура обратной связи по ускорению.
1.4. Исследование работы активного виброизолятора
В случае, если в направляющих исполнительного элемента отсут­
ствует трение (F xp= 0 ) , пружины клапанов имеют нулевую затяжку
ЛР0= 0, и если Ц7фвч= 1 , то характеристики виброизолятора опреде­
ляются уравнением (1.4). Это уравнение соответствует типовой схеме
пассивной виброизоляции, амплитудно-частотные характеристики ко­
торой приведены на рис. 1.3 (сплошные линии).
Фильтр высоких частот изменяет низкочастотную характеристику
виброизолятора, делая его менее чувствительным по обжатию к
квазистатической нагрузке.
Чтобы ослабить влияние квазистатического нагружения, частоту
среза фильтра следует увеличивать, но как показали расчеты, при
(Оф > 0,4£2 фильтр несколько ухудшает гашение колебаний в резонанс30
ной области. Ухудшение можно скомпенсировать увеличением *Р*, но
при этом ухудшится виброизоляция на зарезонансных частотах.
Исследования показали, что при действии постоянного усилия
(ускорения) виброизолятор с фильтром не имеет обжатия, а без
фильтра «проседает» на величину w = x CT/Q.2, где хст — величина
статического ускорения.
Рассмотрим поведение более сложной модели с учетом нелиней­
ности в цепи обратной связи по ускорению.
Нелинейность обусловлена наличием сухого трения FTp в н а п р а в ­
ляющих гидроцилиндра, которое при малых усилиях, передаваемых
через виброизолятор, вызывает его блокировку и исключает из
работы разгружающие клапаны. Если блокировка произойдет не в
положении равновесия, то при нулевой за тяж к е пружин клапана
возможен режим замыкания потока жидкости от насоса через к л а ­
паны и невыход исполнительного элемента в положение равновесия.
Для исключения непроизводительных утечек и ликвидации зоны
нечувствительности в управлении по положению предлагается при
наличии трения вводить предварительную затяж к у пружин. Вели­
чина этой затяж ки ЛРо должна компенсировать блокировку от
трения: ЛРо > FTp/ S . При больших значениях силы трения вибро­
изоляция может ухудшиться значительно. Поэтому выгоднее идти
по пути уменьшения трения в направляющих.
Вместе с тем предварительную затяж к у пружин кл апана р ац и ­
онально иногда ввести и в виброизолятор с малым трением. В этом
случае удается исключить работу виброизолятора не только при
квазистатических нагрузках на частотах, ниже резонансной, но и на
частотах резонансной области. На этих частотах виброизолятор не­
эффективен, в особенности при малых *Р*, когда воздействие значи­
тельно усиливается. Большие значения 4х» снижают резонанс, но при
этом ухудшается изоляция зарезонансных, высокочастотных воздей­
ствий. Выключение из работы перепускных клапанов на резонанс­
ных частотах приводит к блокировке виброизолятора, и он работает
как жесткая связь, не усиливая воздействия. Тем самым устраняется
резонанс, что дает возможность снизить 'Р* и улучшить виброизоля­
цию высокочастотных нагрузок. Однако если воздействие достаточно
сложно (полигармонично) или имеет переменную амплитуду вибра­
ций на резонансных частотах, то такой способ устранения резонан­
сных колебаний становится неэффективен.
Поэтому для защиты от полигармонических вибраций с изменя­
ющимся уровнем амплитуд необходимо использовать виброизолятор
с малым трением и небольшой зоной чувствительности в клапанах.
Эффективность его будет определяться величиной собственной ч ас­
тоты £2 и коэффициента апериодичности *Р*.
31
В процессе исследования была разработан а установка, на кото­
рой проведены испытания активного виброизолятора.
Следует отметить, что испытание виброзащитных систем в инфранизкочастотном диапазоне сопряжено с определенными затруд­
нениями. В первую очередь это относится к лабораторным иссле­
дованиям. В настоящее время практически отсутствуют подходящие
установки для инфранизкочастотного нагружения. Выпускаемые
промышленностью электродинамические вибраторы не захватывают
важную зону частот 0...10 Гц. Механические вибраторы громоздки,
не позволяют моделировать сложный закон нагружения. Извест­
ные отечественные электрогидравлические вибраторы имеют не­
высокие динамические характеристики, сложны в эксплуатации
и дороги.
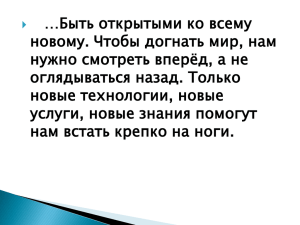
Р а зраб отан н ы й электрогидравлический вибростенд (рис. 1.10,
фото) предназначен для испытания виброзащитных систем и имеет
следующие данные:
— максимальное толкающее усилие — 5,5 кН;
— частотный диапазон — 0...70 Гц;
— максимальный ход — 200 мм;
— агрегат управления — АУ-38 Б 1 ( Р Но м = 2 1 МПа,
Q m ax=
70
Л /М И Н ).
Амплитудно-частотные характеристики стенда приведены на рис.
1.11. Д ля улучшения динамических и эксплуатационных характерис­
тик в систему управления стендом включен широтно-импульсный
модулятор и усилитель тока.
При проведении лабораторных испытаний использовалась виброизм ерительная а п п а р а т у р а ВИ6-ТН, моделирующие установки,
шлейфовый осциллограф Н041У4.2, потенциометрические датчики
перегрузок
типа
МП-95,
МП-68,
обладающие повышенной
чувствительностью на малых частотах. Цель испытаний состояла
в проверке работоспособности
виброизолятора
на частотах до
30 Гц,
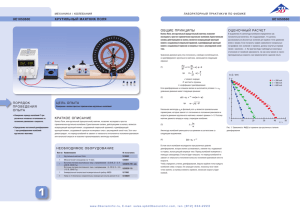
Конструкция испытываемого виброизолятора (рис. 1.12) была
выполнена на основе симметричного гидроцилиндра с площадью
штока S = 5 см2. Объект имитировался грузом массой 30 кг. В состав
установки входил блок клапанов с регулируемой затяжкой пружин
и контур управления положением гидроцилиндра.
В экспериментальной конструкции контур управления положени­
ем гидроцилиндра реализован с помощью потенциометрического
датчика и электрогидроусилителя типа 6Ц 201-ЗА. Это расширило
возможности экспериментальной установки. Так была предпринята
попытка реализовать типовую схему гидравлического активного виб­
роизолятора с датчиком ускорения. Однако с данным типом гидро32
относительная
амплитуда
fl%
Р и а 1.10. Э л ек т р о ги д р авл и ч еск и й вибростенд.
75
50
?5
2
3
4
5
7
10
20
30
40 50
70
100
ч астота , га
Р и с . 1.11. А м п л и ту д н о -ч асто тн ая х а р а к т е р и с т и к а перем ещ ени я стол а ви бростен д а.
Рис.
34
1.12. О п ы т н а я кон струкц и я ш ирокополосн ого активного
ги д р ав л и ч еск о го в и б р о и зо л ято р а.
усилителя, имеющего зону нечувствительности AU около 7% от м а к ­
симального управляющего сигнала, не удалось устранить возникаю­
щих при работе автоколебаний как с низкочастотным датчиком
ускорений типа МП-68, так и с широкополосным датчиком а п п а р а ­
туры ВИ6-ТН. Практически, эффекта снижения виброперегрузок не
удалось наблюдать на всех частотах.
Испытания виброизолятора с контуром обратной связи по уско­
рению на перепускных клапанах выполнены при следующих п а р а ­
метрах
клапанов:
площадь
клапана
— 1,5 см2, жесткость
пружины — 80 Н /см , масса золотника клапана — 0,01 кг.
В процессе испытаний измерялись ускорения стола вибростенда
и ускорения на имитаторе защищаемого объекта.
Наличие значительного сухого трения в направляющих гидроци­
линдра привело к блокировке виброизолятора на частотах до 4 Гц.
Для исключения утечек при работе узла обратной связи по положе­
нию клапаны имели предварительную затяж к у пружин.
Испытания на частотах более 4 Гц показали, что в зависи­
мости от частоты и уровня виброперегрузки коэффициент ос л аб ­
ления вибрационных воздействий Ко достигал 2...5 раз и увели­
чивался с ростом частоты (см. результаты испытаний в таблице
1 .1 )
Таблица
1.1
С ниж ение вибраци онны х н агр у зо к
i),ed.g
0,93
1,86
2,09
2,32
2,09
2,32
2,44
3,13
0,93
2,23
3,42
3,81
4,47
6,31
8,14
15,80
II
3
5
7
10
15
20
25
30
x ,e d .g
■о
Ч асто та, Гц
1,00
1,19
1,64
1,64
2,14
2,72
3,32
5,04
На рис. 1.13 показаны осциллограммы работы активного вибро­
изолятора на различных частотах.
При импульсных нагрузках ударного типа (кинематические сту­
пенчатые воздействия) получено снижение перегрузки до 5 раз.
Результаты таких испытаний отраж ает таблица 1.2 и осциллограм­
мы на рис. 1.14.
2*
35
-hr
X
(си
15)
Л/ W W *—
хч
WWW
(
Рис
'W v w v v w
6)
12)
1.13. О с ц и л л о гр ам м ы р аботы активного в и б р о и зо л ято р а на различн ы х
частотах.
( а ) — частота 5 Гц,
( б ) — частота 10 Гц,
( в ) — частота 15 Гц,
(г)
—
частота 25 Г и .
tf.cn
2,9
0,1
ZZ.
0.2
0.3
0,4
0,5
0.6
t ,c
186
Р иис с.. 11 14.
14 О с ц и л л о г р а м м ы р а б о т ы а к т и в н о г о в и б р о и з о л я т о р а п р и и м п у л ь с н ы х
( у д а р н ы х ) в о з д е й с т в и я х ( и с п ы т а н и е 4, т а б л . 1.2.).
37
Т а б л и ц а
1.2
С ни ж ение у д а р н ы х н агрузок
№
w = x —q,
испыт.
см
см
1
2
3
4
5
6
7
1.95
3,7
4,1
2,9
0,5
2,4
2,9
2,7
4,8
5,4
5,1
1,0
3,5
3,6
<7.
"f"Хмах,
ед. g
1,05
1,6
1,6
1,85
2,2
3,5
1,4
Хтах,
ед. g
3,02
3,7
3,2
3,5
2,3
2,6
3,0
“Ь^тах,
Qmax,
ед. g
ед. g
5,5
7,1
7,6
7,1
2,3
6,8
6,6
7,2
7,9
6,6
7,9
3,4
5,2
7,9
к 0+
5,3
4,3
4,7
3,8
1,0
1,9
4,7
КГ
2,4
2,1
2,0
2,3
1,5
2,0
2,6
Можно утверждать, что в отличие от типовых конструкций на
основе гидроусилителей, предложенное устройство эффективно в
более широком диапазоне частот. При испытаниях не выявлено
ухудшение работы виброизолятора с ростом частоты.
Коэффициент снижения перегрузки Ко, как показали испытания,
существенно зависит от уровня перегрузки на входе. Чем выше этот
уровень, тем эффективней снижение виброударных ускорений. С
другой стороны, перегрузки малого уровня или не снижались (но и
не усиливались), или снижались незначительно. Д л я повышения эф­
фективности активного виброизолятора при малых амплитудах виб­
ровоздействия следует снизить трение в направляющих гидроци­
линдра.
Глава
АДАПТИВНАЯ
втор ая
ВИБРОИЗОЛЯЦИЯ
2.1. Условие минимума дисперсии виброускорения при случайных
воздействиях
Из теории систем автоматического управления известны методы,
обеспечивающие высокое качество работы устройств управления при
изменении внешних условий и параметров самих устройств /92, 99/.
К ним относятся метод подстройки с эталонной моделью, градиент­
ные методы, методы, использующие информацию о частотных и вре­
менных характеристиках, и т. д.
Особый интерес применительно к решаемой задаче представляет
метод, основанный на сравнении высокочастотных и низкочастотных
составляющих колебаний системы /84, 75/. Он применяется для
поддержания заданного запаса устойчивости систем автоматического
регулирования. С определенной модификацией этот метод, как пока­
зали исследования, можно использовать и для подстройки демпф и­
рования в виброзащитном устройстве.
Определим условия, при которых подстройка демпфирования
позволяет минимизировать ускорение защищаемого объекта. Д ля
этого рассмотрим линейную виброзащитную систему, амплитудночастотная характеристика ускорения Wx((0, \|/) которой является
функцией частоты со и параметра демпфирования \р. Допустим, что
воздействие со стороны дороги является стационарным случайным
процессом со спектральной плотностью S q(co). Тогда дисперсия ус­
корения определяется выражением:
оо
At((B)= J^(®’
%
V )Sq(co)dco.
(2.1)
о
Из (2.1) следует, что дисперсия Dx т а к ж е является функцией
параметра демпфирования \р. Следовательно, минимум дисперсии
ускорения будет достигаться при равенстве нулю частной производ­
ной по y вы раж ения (2.1). Учитывая, что спектральная плотность
входного воздействия S q(<») не зависит от \р, получим условие экстре­
мума в виде:
= 1?ЭЦ7-:(ш, ¥ ) s q((o)da)=0
Э\р
71 о
(2.2)
Эу
39
Так как S q((o) является положительной функцией, то дл^ сущест­
вования экстремума необходимо, чтобы производная
с^х(о), у)
Эу
была знакопеременной функцией частоты. Причем с изменением
парам етра демпфирования \(/, например при увеличении, значения
производной одного знака должны по абсолютной величине возрас­
тать, а другого — уменьшаться.
dw \{й), \)/)
Если п рои зв одн ая
^ — удовлетворяет этим условиям, то
условие экстремума можно записать в следующей форме:
п ш/
m СОу
d lh (\\r)
I ГЭГх
2(оэ, у) с /
^
w
.V I
Го>1Гх2(щ, w)
^
(2-3)
0>i
®i
где интервалы частот C0j...c0j соответствуют положительным значениям
9Wx(o), у)
-----^ — - а интервалы Шк-.Ш) — отрицательным, п и т —
количество соответствующих частотных интервалов.
Интегралы в выражении (2.3) можно рассматривать как дисперсии
некоторого процесса в отдельных частотных интервалах, причем
взятые со знаком, совпадающим со знаком функции
dWf(g>, \|/)
Э\|/
в этих частотных интервалах. С учетом сказанного условие экстре­
мума в общем случае запишется в виде равенства суммы п дисперЭГх((о, у ) ^ п
сии Un в частотных областях, гд е
=:-------------и>сумме m дисперсии
Э Г |« о , у )
п
*
Dm, где
ч
< 0, то есть в виде:
dV|/
п
щ
Z -P n = £ п т .
(2.4)
i
i
Итак, для обеспечения минимума дисперсии ускорения защ ищ а­
емого объекта следует зад ать значение параметра демпфирования \|/
таким, чтобы выполнить условие (2.4). Это значение существует, если
„ „
,
V)
выполняется ряд условии. Во-первых, функция ---------
должна
быть знакопеременной по частоте и определенным образом, как
указано выше, зависеть от \|/, во-вторых, дисперсия ускорения Оц((о)
в зависимости от \j/ должна иметь экстремальное значение — мини­
мум.
40
Из (2.4) следует алгоритм настройки параметра демпфирования
у. Система настройки должна измерять дисперсии, соответствую­
щие
интегралам
в
выражении (2.3), суммировать дисперсии
одного знака и изменять у таким образом, чтобы выполнялось
условие (2.4).
Если
настройку
осуществлять со скоростью, превышающей
скорость изменения спектральной плотности воздействия, то р а с ­
смотренный алгоритм обеспечит минимизацию дисперсии ускорения
защищаемого объекта и при нестационарных, изменяющихся х а р а к ­
теристиках
вибровоздействия. Более того, можно предположить,
что и при стационарном воздействии, если подстройку парам етра
демпфирования \|/ выполнять с учетом текущих характеристик воз­
действия, можно добиться более низкого уровня ускорения з а щ и ­
щаемого объекта, чем при параметре ¥ , определенном для осредненных
характеристик. Конкретные реализации алгоритма н а ­
стройки демпфирования виброзащитного устройства рассмотрим
применительно к различным простейшим моделям систем вибро­
изоляции.
2.2.
Разработка алгоритмов подстройки демпфирования
для одно- и двухстепенной моделей систем виброизоляции
В первом приближении ряд систем виброизоляции можно пред­
ставить в виде линейной одностепенной модели, представленной в
виде массы М, упругого элемента с жесткостью С, демпфера с
коэффициентом сопротивления К и внешнего кинематического воз­
действия q (рис. 2.1а).
При исследовании виброизоляции транспортных средств модель
должна отражать динамику колебаний колес транспортера. В этом
случае простейшая модель имеет две степени свободы и включает
массу М, упругий элемент с жесткостью С, демпфер с коэффициен­
том сопротивления К, а такж е имитирующие податливость и инер­
ционную характеристику колеса упругий элемент с жесткостью Ск и
массу т (рис. 2.2а).
Амплитудно-частотные характеристики одностепенной системы
виброзащиты (рис. 2.16) описываются зависимостью:
Гщ(а>, ¥ ) = г 2 л/ ( 1 + 4 ¥ 2г2) / [ ( 1 - г2) Ч 4 ¥ 2г2] ,
(2.5)
где r=co/Q —- безразм ерная частота, Q = V С / М — собственная ч ас­
тота, \\1=К/2л1С/М — параметр демпфирования, ш — частота внеш­
него кинематического воздействия.
41
: e )
0.8
((f:
Р и с . 2.1. О д н о м ас с о ва я м одель ( а ) и ее ам п л и ту д н о -ч асто тн ая х а р ак т ер и с т и к а (б ).
0,5
4^
Ш
Р и с . 2.2. Д в у х м а с с о в а я м одель ( а ) и ее а м п л и ту д н о -ч а с то т н а я х а р а к т е р и с т и к а ( б ) .
К
Д л я двухстепенной системы амплитудно-частотная характеристи­
ка ускорения (рис. 2.26) имеет вид:
Щ 2(г, \|/)= г2
( А Р - Д / У ) 2 + ( A L y + ££>\|/)2
I
( 2 .6 )
(А2 + В 2\|/2)
где Л = г 4—г2( а Р + а + 1 ) + а | 3 ,
L = 2 a P r . Z ) = ap. а = М / т ,
\|1=К/2л] CM.
Б=2г(/-2( а + 1 ) —сф),
_____
Р= С ц / С , r=co/Q, Q.= \IC /M ,
Дифференцируя (2.5) по \|/, подставляя в (2.2) и перейдя к отно­
сительной частоте, получим условия экстремума для одномассовой
модели:
^ j 0 2(r,\i/)S9(r)rf/ = O
Э\|/
где
O i(r)= —
о\|/
(2.7)
— =8\|/г2(г2—2)/[(1— r2f-\-A\\f2r2f .
Функция Ф ,(г,^) (рис. 2.3) в зависимости от частоты г может
принимать как положительные при г
так и отрицательные
значения при
г > Л/2Г причем частота раздела г = - / 2
знака
функции Ф](г,у/) не зависит от параметра демпфирования \|/. С
учетом этого условие минимума дисперсии ускорения для односте­
пенной модели будет иметь вид:
Г2
<*>
- j 0 i ( r , \ | f ) s (?(r)rfr + - f 0 1( r , \ i f ) s 4 ( r ) d t = О
(2.8)
г,
г2
где Г\ = 0, г2 = л/2 — корни функции Ф ^ г , ^ ) .
В случае двухмассовой модели:
оо
■ if ^ ( r ,v ) S ,( r ) d < = 0
ic J
где
Ф2( г ,у )
(2-9)
_ dW?t _ 2 r \ ( A 2L2 - В2Р 2) ,
Э\|/
(А2 + В 2м/2)2
А = г 4 - г2 (aP + а + 1) + аР,
L = 2 ар г,
4
В = 2 г(г2 (а + 1) - ар,
D = аР
Функция Ф2(г,\|/) (рис. 2.4) удовлетворяет требованиям знакопе44
t-
-2 0
-60
г
Р и с . 2.3. Ф ункция Ф | при р а зл и ч н ы х зн ач ен и ях п а р а м е т р а д е м п ф и р о ва н и я.
45
(80
V =0,5
Р и с . 2.4. Ф ун к ц и я Ф 2 при р азл и ч н ы х зн ач ен и ях п а р а м е т р а дем пф и ровани я.
46
ременности, ее абсолютная величина растет с увеличением \|/ на
одних частотных интервалах и уменьшается при этом на тех частот­
ных интервалах, где она имеет противоположный знак. Частотами
раздела знаков функции Ф2(г, у ) являются ее корни /у, /у, гз и /у.
В этом случае условие минимума дисперсии ускорения примет
вид:
1Ч
. Гз
- f Ф2(Л V)Sq (г № + - f Ф2 (г, V)5q (r)dr +
л j
л
nJ
п
Г2
(2.10)
1 Г4
17
[ ф 2(г,\|/)5ч(г)о[/- + - | ф 2(/-,\(|)5q(r)dr = 0,
+-
Л
где
J
4
TCJ
4
гх = 0 , г2 = д/2ССк / (Ск + С )М , г3 = ^ М С к / С т к ,
г4 - 2л/(Ск + С ) / т - у / С / М.
Применив метод градиента, согласно которому скорость под­
стройки параметра должна быть пропорциональна частной произ­
водной от выбранного критерия качества по этому параметру /9 9 /,
получим алгоритм настройки параметра демпфирования у для од­
номассовой системы в виде:
Г2
00
( 2 . 11 )
J % ( r , y ) S q(r)dr + J Фх(г, \(/)Sq(r)c?r
Vi
Vo
Г2
О
Г2
для двухмассовой
л
jq>2{ r ,y ) S q(r)dr + J ® 2(r,\|/)Sq(r)flfr +
( 2 . 12)
' 4
1 —
+ J Ф2(г, v ) $ , (r)dr + - J Ф2(г, v ) ^ , ( r ) d r
гз
r4
где X — коэффицент пропорциональности.
Интегралы в выражениях (2.11) и (2.12) представляют дисперсии
некоторых процессов, зависящих о тФ ,(г,\у ), Ф 2(г,\j/), в зят ы е со
знаком этих функций. Дисперсии определяются в частотных об л ас ­
тях, границами которых для выражения (2.11) являются корни функ­
ций Ф ^ г . у ) и для (2.12) — Ф2( г , у ) .
Выражения (2.11) и (2.12) являются точными алгоритмами под­
стройки величины демпфирования в виброзагцитной системе с целью
минимизации дисперсии ускорения.
2.3. Приведение алгоритмов подстройки демпфирования к виду,
удобному для реализации
Нахождение параметра у по зависимостям (2.11) и (2.12) связано
с определением дисперсий некоторых процессов, зависящих от
Ф(г, \|/), S q(p) и \|/. С целью упрощения аппаратурной реализации
подстройки функцию Ф(г, \|/) в подынтегральных выражениях алго­
ритмов подстройки представим в виде произведения квадрата моду­
ля амплитудно-частотной характеристики по ускорению и корректи­
рующей функции Wk(r, \|/):
Ф(г,¥ ) = 1 ^ ( Л ¥ )1Гк.
(2.13)
Подставив полученные выражения для функции Ф(г,\|/) в алго­
ритм подстройки (2.11) и (2.12) и учитывая, что №’’xfr,\|/)Sq(r)=Sx(/',\|0—
спектральная характеристика ускорения защищаемого объекта, получим для одномассовои системы:
л /*
(2.14)
Vi = ----
л
Г2
Vn
для двухмассовой системы:
'1
¥2
'2
J Sx2(r,\\i)Wk2dr + J Si2(r,^f)Wk2dr +
rt
О
(2.15)
h
J 5x 2 {r, v f e dr + J 5x 2
v M 4d
Выражения (2.14) и (2.15) являются такж е алгоритмами точной
подстройки параметра демпфирования. Д л я реализации этих алго­
ритмов необходима информация о спектральной плотности ускоре­
ния защищаемого объекта в соответствующих частотных областях.
Получение этой информации не вызывает принципиальных аппара­
турных затруднений, например, спектральная плотность может быть
определена при помощи датчика ускорений и полосовых фильтров.
48
Однако исследования показывают, что корректирующая функция
Wk(r, у ) сложным образом зависит от частоты со и п арам етра у.
Поэтому реализация корректирующего звена с характеристиками,
соответствующими Wk(r, \|/) затруднительна.
В связи с этим было предложено упростить реализацию алгорит­
ма подстройки, приняв, что Wk (г, \|/) = 1. Действительно, в этом
случае интегралы в выражениях (2.14) и (2.15) представляют собой
дисперсии ускорения, измеренные в соответствующих частотных
областях. Согласно теореме Рейли можно записать, что
оо
оо
(2.16)
где X( t ) — ускорение защищаемого объекта.
Учитывая (2.16), получим легко реализуемый алгоритм подстрой­
ки демпфирования для одномассовой модели в виде:
\
Ъ « -у
- j x 2(t)0 r2d t + j x 2( t \ 2 y t
о
(2.17)
для двухмассовой:
Ч о
о
(2.18)
Алгоритмы (2.17) и (2.18) будут алгоритмами приближенной под­
стройки демпфирования на оптимальное значение. Такой замене
точного алгоритма на приближенный благоприятствует то, что пове­
дение амплитудно-частотных характеристик в обозначенных частот­
ных областях совпадает с изменением модуля функции Ф(г,\|/) в тех
же частотных областях, причем корни выражений (2.5) и (2.6), опи­
сывающих амплитудно-частотные характеристики и корни функции
Ф(г, у) совпадают. Так как дисперсии ускорения положительны в
любом частотном интервале, суммирование их в алгоритмах (2.17) и
(2.18) осуществляется с соответствующими знаками. Дисперсии ус­
корения в тех частотных интервалах, где параметр \|г увеличивает их,
берутся с положительным знаком, что соответствует знакам функции
Ф(г, \|/) в этих же частотных областях.
49
2.4. Построение устройств для настройки демпфирования
виброизолятора
Устройства, реализующие настройку демпфирования по алгорит­
мам (2.17) и (2.18), состоят из датчика ускорения, полосовых филь­
тров, детекторов, осреднителей и сумматоров исполнительных эле­
ментов интегрирующего типа (рис. 2.5а, б).
Полосовые фильтры предназначены для разделения сигнала с
датчика ускорения на соответствующие, определяемые корнями час­
тотной характеристики W-x-{r, у ) частотные области. Можно рекомен­
довать фильтры простого типа, с затуханием —20 дб/декаду, кото­
рые реализуются на операционных усилителях (рис. 2.6) и имеют
передаточную функцию вида:
Кр
где К — Ci R 2, о»н =
1/C iR i, сов =
1/ C 2R 2 -
Согласно алгоритму настройки после разделения сигнала ускоре­
ния на частотные области производится вычисление дисперсий в
каждой из частотных областей.
Д л я упрощения измерительной схемы дисперсию процесса можно
оценивать по средневыпрямленному значению сигналов. Д л я этого
следует применить детекторы на диодах и RC осреднители. Вы­
прямление сигналов и их сложение с необходимыми знаками также
удобно выполнить на операционных усилителях. В результате сложе­
ния формируется сигнал, пропорциональный разности дисперсий.
Этот сигнал и управляет работой исполнительного механизма.
Д л я жидкостного демпфера можно предложить две конструкции
исполнительного механизма: непрерывного и дискретного изменения
величины демпфирующей силы. Конструкция исполнительного эле­
мента непрерывного действия включает заслонку для перекрывания
дросселирующих отверстий в демпфере и приводной механизм (гид­
равлического, электрического или пневматического типа) для пере­
мещения заслонки. Скорость перемещения определяется сигналом,
пропорциональным разности дисперсии ускорения в частотных об­
ластях, где демпфирование улучшает виброзащиту (резонансные
области), и дисперсии ускорения в частотных областях, где демпфи­
рование ухудшает виброзащиту (межрезонансные и зарезонансные
области).
Электрическая принципиальная схема устройства формирования
сигнала управления демпфированием с помощью исполнительного
элемента непрерывного действия представлена на рис. 2.7 (для од­
номассовой модели).
50
Полособой
йетектор
среунитепь
Ботчих
ускорения
Испопнигет
мый элемент
Полособой
])етекгтрj—— Осредчитвь
Элемент
сравнении
1й)
Полособой
т а
Ваплчик
ускорения
"ПолосоЗоЕ
фильтр
UJV-LJa
Полособой
фильтр
(Oe-US
ПолосоЬой
*'г фильтр
Ц)з-Ыл
Бетектор —— Очернитель
D em em op
Осредиитель
Сумпатор
Эгемеит
сраон екуя
исполнитель
hwDэпепент
Детектор
Осреунишь
Д етектор
Осредните/?е>
Сумматор
(б)
Р „ а 2.5. Б л о к -сх ем а устр о й ства д л я настройки дем п ф и рован и я по алгоритм у
(2.17) — ( а ) и по алгори тм у (2.18) — ( о ) .
.-частотная х а р ак т ер и с т и к а ( б ) простейш его
Р и с 2 6 . С хем а ( а ) и ам
ам п
п лл и
и туд
туд н
н оо
полосового ф и л ьтра.
к и L'
51
проста. Она может быть выполнена в виде нескольких электрокла
панов, подключенных через дополнительную электронную схему. Эта
схема включает интегратор и логическое устройство в виде анало­
гоцифрового преобразователя — АЦП (рис. 2.8), который в зависи­
мости от уровня сигнала с интегратора подключает тот или иной
клапан или одновременно несколько клапанов. Подключение осу­
ществляется
таким
образом,
чтобы дискретное управление в
наибольшей мере было приближено к более точному непрерывному.
Расчеты показывают, что д аж е при трех клапанах можно задать 8
значений параметра демпфирования (рис. 2.9).
В заключение следует отметить, что интегрирующий исполнитель­
ный элемент и интегратор в схеме дискретного управления выпол­
няют роль осреднителей, поэтому последние из управляющей схемы
могут быть исключены.
2.5. Эффективность виброизоляции с устройством самоподстройки
демпфирования под спектральные характеристики
вибровоздействия
Д л я оценки эффективности предлагаемой виброзащиты были
выполнены два типа исследований.
Первые исследования заключались в проверке точности попада­
ния на минимум дисперсии ускорения защищаемого объекта в слу­
чае уравнивания дисперсий ускорений в отдельных частотных облас­
тях колебаний, то есть проверялась ошибка, которая возникает
вследствие отклонения предлагаемого алгоритма настройки от точ­
ного алгоритма. Эти исследования выполнялись для одностепенной
и двухстепенной виброзащитных систем расчетным путем. Расчеты
выполнены для типовых спектральных характеристик: Sn(ft)) = 1,
S q(co) = l/co, S q (со) = 1/со2, S q (co) = 1/ щ 3, S q (co) = 1/от, причем
для исключения расходимости интегралов при определении диспер­
сий эти характеристики были взяты усеченными и их значения рав­
нялись нулю при исследовании одностепенной модели на частотах
со > 20, а двухстепенной — на частотах со > 30,
Расчеты показали, что как в одностепенной (рис. 2.10... 2.14), так
и в двухстепенной (рис. 2.15... 2.19) виброзащитных системах при
выполнении условий (2.11) и (2.12) (при уравнении дисперсий в об­
ластях, где демпфирование положительно влияет на качество вибро­
изоляции с дисперсиями в областях, где оно ухудшает характерис­
тики виброзащиты) обеспечивается достаточно точное значение у,
соответствующее значению дисперсии
ускорения защищаемого
объекта, близкому к минимальному. Причем для спектров S q (со) = 1,
1/со, \/с $ , 1 / ( 0? величина дисперсии ускорения практически соответ52
СП
Рис.
Ш
W
Ш
2.7. П р и н ц и п и а л ь н а я э л е к т р и ч е с к а я с х е м а у с т р о й с т в а ф о р м и р о в а н и я у п р а в л я ю щ е г о с и г н а л а .
чм
m
Rw
с
Р и с . 2.8. Б лок-схем а устройства дискретного управления демпфированием.
/
U упр
Р и с
54
2.9. И з м е н е н и е п а р а м е т р а д е м п ф и р о в а н и я п р и д и с к р е т н о м у п р а в л е н и и
(т р и к л а п а н а ) .
ст в у е т м и н и м а л ь н о д о с т и ж и м о м у р е зу л ь т а т у , а д л я с п ектра
Sq(co)= l/(o4 отклонение от теоретического минимума составляет в
одностепенной модели 18%, а в двухстепенной — 9%.
Второй тип исследования выполнялся моделированием на нало­
говых вычислительных машинах. Исследовалась работа виброизоля­
тора с контуром подстройки демпфирования с целью проверки р а ­
ботоспособности контура подстройки, определения наиболее рацио­
нальных величин параметров управляющей схемы (времени осредне­
ния, коэффициента усиления сигнала в управляющей цепи регуля­
тора), а та к ж е с целью оценки эффективности адаптивной виброза­
щиты в различных режимах работы, в том числе и в переходных.
Постоянные времени Тос осреднения сигналов с помощью полосо­
вых фильтров и коэффициент усиления
в контуре настройки
определяют точность, скорость настройки демпфирования, а в опре­
деленных условиях и устойчивость работы регулятора.
М оделирование показало, что устройство управления демпфи­
рованием обеспечивает минимизацию ускорения защищаемого
объекта.
Установлено, что уменьшение времени осреднения Тос и увеличе­
ние коэффициента усиления /% положительно влияет не только на
переходный процесс настройки демпфирования, но и на снижение
дисперсии ускорения.
Причем положительное влияние проявляется не только при рабо­
те в переходных режимах, но и при работе в стационарном режиме
вибронагружения. Так, на рис. 2.20 показано, что увеличение позво­
ляет дополнительно на 10...15% снизить дисперсию ускорения в
сравнении с минимальным значением дисперсии, достигаемым при
ф оп т^ co n st.
Такое влияние К и и Тос объясняется тем, что спектральные ха р а к­
теристики стационарного процесса на отдельных небольших участ­
ках отличны от среднестатистических. Повышение за счет увеличе­
ния /Си и уменьшения Тос быстродействия системы позволяет точнее
подстраиваться под спектр отдельного участка, чем и достигается
более эффективное снижение суммарной дисперсии ускорения.
Следовательно, хотя алгоритм подстройки разработан на основе
математических методов, используемых при работе со стационарны­
ми процессами, тем не менее он с успехом может быть использован
и для нестационарных процессов, в которых спектральный состав
изменяется со скоростью, не превышающей скорости подстройки.
Более того, при достаточно высокой скорости подстройки можно
вести речь и о регулировании демпфирования при единичных, у д а р ­
ных воздействиях. В этих случаях, как показали исследования, в
процессе ударного воздействия, заданного, например, кинематичес­
ким воздействием, близким к ступенчатому, демпфирование умень55
во
0.05
0.1
Р и с . 2.10. И зм ен ен и е дисперсий ускорения в резонансной D/, зарезонансной
D 2 ч астотн ы х о б л астях и сумм арной дисперсии D в зависимости от параметра
\|/ при случ ай ном воздействии на одностепенную систему с
Я =
1 при S q(o>) = 0 ПРИ ® * 20
Р
4
[О при ш > 20.
во
SO
АО
30
Ю
Wotr.* 0,087
0.1
Р и с . 2.11. И зм ен ен и е д и сп ерси й ускорени я в резонансной /)/, зар езо н ан ­
сной D 2 частотн ы х о б л а ст ях и сум м арн ой ди сперсии D в зависим ости от
п а р а м е т р а \|/ при случ ай ном воздействии на одностепенную систем у с
П =
56
1 при S Jc o )— I */® ПРИ ® - 20,
*
I 0 при ю > 20.
30
23
20
и.
Р и с . 2.12. И зм ен е н и е д и сп ер си й ускорен и я в резонансной £>;, зарезон ан сн ой
D i частотны х о б л а с т я х и с у м м ар н о й ди сперсии D в зависимости от п а р ам е тр а
у при с л у ч ай н о м в оздей стви и на одностепенную систему с
п
=
1 при S»(a>)= { ’ /ю 2 при ® < 20,
[О при со > 20.
7
6
5
А
2
5
<М
0,57
О.А
Р и с 2.13. И зм ен е н и е д и сп ер си й у ско р ен и я в резонансной £>/, за резон ан сн ой
[)j частотных областях и суммарной дисперсии D в зависимости от парам етра
у при сл у ч ай н о м возд ей ств и и н а одностепенную систему с
_
Q =
I
с , \
1 при S,(co) =
\ 1/о*3 ПР И а - 20,
| 0 „PH ® > 20.
57
д>,в,,д>,
037 V
Vorrf-С.в
Р и с . 2.14. И зм ен ен и е д и сп ерси й ускорен и я в резонансной D,, зарезонансной
D 2 частотных областях и суммарной дисперсии D в зависимости от параметра
\|/ при случ ай ном воздей стви и на одностепенную систем у с
£2
при S q(со) =
1/оо4 при со < 20,
О при со > 20.
4000
800
600
500
300
200
V oni
0,03
Q.4
о .гэ
045
оз
Р и с . 2.15. И зм ен ен и е д и сп ерси й у скорен и я в резонансной £>/,
D зарезонансной
D? частотных областях и суммарной д и сп ерси и D в зави си м ости от п арам етра
\|/ при случ ай ном воздей стви и на двухстепенную систем у с
£2j = - J С / М =
1, Q 2 =л/ С у / т =
Sq((Z>) —
58
10, С ^ / С =
1 при со < 30,
О при со > 30.
10, М /т , =
10 при
во
70
60
50
50
20
0.1
0.15
0.2
Р и с . 2.16. И зм ен е н и е ди сп ер си й у скорен и я в резонансной D Jt зарезонансн ой
D 2 ч а сто тн ы х о б л а с т я х и с у м м ар н о й ди сперсии D в зависим ости от п а р ам е тр а
у при случ ай н ом в о здей стви и на двухстепенную систему с
£2j = л / С /М =
1, Q 2 W С к /т =
10, С ^/С =
10, М /т =
10 при
S (m \ — {
при со < 30,
| о при со > 30.
Р и с . 2.17. И зм ен е н и е ди сп ер си й ускорен и я в резонансной D h зарезон ан сн ой
D 2 часто тн ы х о б л а с т я х и с у м м ар н о й ди сперсии D в зави си м ости от п а р ам е тр а
\|с при случ ай н ом в о здей стви и на двухстепенную систему с
n,
= J c /M
=
1, П2 =■>/ С к/ т
=
10, Ск/С = 10,
М /т =
10
при
7,5
2>«
V- 0.36
0.3
0.2
О,A
0.5
Р и с 2.18. И зм ен ен и е д и сп ерси й ускорен и я в резо н ан сн ой D /, зарезонансн ой
D 2 частотны х о б л а ст ях и сум м арн ой ди сперсии D в зав и си м о сти от п арам етра
\|f при случай ном воздействии на двухстепенную систем у с
fti
= ^l
c/M = 1, П 2 =yl С у / т =
S„(ro) =
10, С у / С =
10, A f/m =
10 при
I '/ ю 3 при и < 3 0 ,
' 0 при со > 30.
о. а
0.9
0,4
О.?
03
Р и с . 2.19. И зм ен ен и е д и сп ерси й ускорен и я в резонансной £>/, зарезон ан сн ой
D 2 частотны х о б л а ст ях и с у м м арн ой ди сперсии D в за ви си м ости от п а р ам е тр а
\|/ при случай ном воздействии на двухстепенную систему с
Й! = J
c Jm
1
Цг =■>/ С у / т =
10, С у / С
10, М / т =
1 /ш 4 при ю < 30,
О при со > 30.
60
10 при
Р и с . 2.20. В л и ян и е ко эф ф и ц и ен та у си л ен и я в контуре
настрой ки на вели чин у ди сп ер си и ускорен и я в п роц ентах
от вели чин ы ди сп ер си и при \i/onT = c o n s t (одн остеп ен н ая
модель).
шается до нуля, а затем после прекращения воздействия увеличи­
вается (рис. 2.21). При этом эффективно гасятся послеударные ко­
лебания. Такая работа виброизоляции с управляемым демпфирова­
нием обеспечивает практически минимально достижимые перегрузки
и при единичных воздействиях.
Далее рассмотрим выигрыш, который может дать использование
предлагаемой виброизоляции в реальных условиях нагружения. Д л я
этого обратимся к материалам исследований эффективности подве­
сок отечественных автомобилей.
В работе / 6 2 / показано, что для обеспечения лучшей плавности
хода автомобиля в общем случае сопротивление демпфера следует
устанавливать в зависимости от скорости движения Va и дорожных
условий. Большинство типов дорог имеют возмущающие спектры,
аппроксимирующиеся выражением:
Sq(a>) = D0Va(m2 +(o?)a>-4,
где со, = К,А,,, А,— дорож ная частота в м~!.
61
о
о
0.6
03
о
О
0,2
0,4 0,6
0,8
1,0
1,2
Ц
1,6
20
t,c
Р и с . 2.21. О сц и л л о гр ам м ы р аботы одн ом ассовой м одели в и брозащ и тн ой системы
с у п р а в л я ем ы м д ем п ф и рован и ем .
1ip n
pV
U
K
IU
H
U
l^V
ys
IV
V
/
V
/VI1IV
1
1
1
У
1
хорошим приближением я в л я ­
ется спектр вида
Sq(w ) = В Д о Г 2 ,
с увеличением скорости движения
s q(co) = а д 3®-4 ,
Зависимость оптимальных значений \|/ при движении по дорогам
с однородным спектром и от вида спектра можно проследить по
данным из таблицы 2.1, заимствованной из /6 2 /.
Т а б л и ц а 2.1
Существующие оптимальные значения параметра у
отечественных автомобилей
для некоторых
К о эф ф и ц и ен т апери одичности
А втомобиль
с грузом
П о д веска
О п ти м ал ьн ы й при
С ущ ествую щ ий
Sq (o>) = О Д со"2 ,
О п ти м ал ьн ы й при
Sq (co) = О Д 3« Г \
п ер ед н яя
0.22
0.257
0.505
за д н я я
0.30
0.233
0.464
ЗИ Л -131
п еред н яя
0.48
0.245
0.487
У рал-375
п еред н яя
0.253
0.390
0.560
п еред н яя
0.25
0.288
0.520
за д н я я
0.31
0.300
0.510
п ер ед н яя
0.288
0.140
0.502
задняя
0.275
0.208
0.515
ЗИ Л -1 3 0
Г а з-66
З И Л -1 1 4
Анализ данных говорит о том, что для автомобилей общего на­
значения в зависимости от спектра дороги величина оптимального (в
смысле обеспечения минимума перегрузки) параметра демпфирова­
ния в подвеске долж на изменяться в 2...3 и более раз — от значений
0.15...0.3 до 0.45...0.56.
Такой же диапазон изменения \|/ по данным / 6 2 / должен быть обеспе­
чен и при изменении скорости движения по дорогам со спектром
•Sq (<*>) = А ) К ( ю 2 + СО2 ) о Г 4 ,
Количественную оценку эффективности адаптивной виброзащиты
можно получить из графика, представленного на рис. 2.22 / 6 2 / . Этот
график показывает, как изменяется отношение дисперсий ускорения
63
Dx при произвольном у К дисперсии 0]Г5пТпри ЮГТТИМаТГЬНОМ М^опт ДЛЯ
спектра
S q (o>) = D 0Va(O~2,
При существующем у* = 0.283 дисперсия ускорения в сравнении с
минимальным значением возрастает на 30%, если значение параметра
\|/ принять равным 0.502, являющееся оптимальным для спектра
Sq(to) - О Д 3о И ,
то проигрыш по дисперсии составит около 95%.
Использование разработанной адаптивной виброзащитной систе­
мы позволит существенно улучшить виброзащиту транспортных
средств.
Устройства, работающие по такому принципу /123, 55, 31/, эф­
фективны в условиях стационарного и нестационарного случайного
воздействия, а такж е при единичных воздействиях, если быстродей­
ствие контура адаптации демпфирования превышает скорость изме­
нения спектральных составляющих вибровоздействия.
Р и с . 2.22. З а в и си м о ст ь отнош ения д и сп ерси й D x/ D xonт ко л е­
б ан и й передней п о д в е с к и -ав т о м о б и л я З И Л -1 1 4 от к о эф ф и ц и ­
ен та апери одичности \|/ при сп ек т р ал ь н о й плотности возд ей ст­
вия Sq (<o) = D0Paa T 2 .
64
2*
л
реализуется относительно просто, при­
чем реализация может быть выполнена доработкой существующих
систем виброзащиты. Доработка заключается во введении в демпфер
регулятора и электронного устройства с датчиком ускорений.
Возможными областями применения виброзащитных устройств с
контуром подстройки демпфирования кроме транспортных автомо­
бильных и тракторных средств является авиация для снижения
перегрузок в режимах взлета и руления самолетов, а такж е и другие
отрасли народного хозяйства, где требуется защ ищ ать различного
рода объекты и человека-оператора от вибронагрузок с изменяю­
щимся спектром.
2.6. Особенности использования адаптивной виброизоляции
в системах подрессоривания сидений водителей транспортных
средств
Современные транспортные машины являются источником повы­
шенной виброактивности, в первую очередь это относится к больше­
грузным автомобилям и тракторам.
Вибронагруженность водителей транспортных машин является
одним из основных факторов, определяющих режим и условия их
труда. Интенсивные колебания вы нуж даю т водителя ум еньшать
скорость движения, сокращать продолжительность работы автомоби­
ля /9 6 /. Из 8000 опрошенных водителей, работающих в различных
дорожно-климатических районах страны, 45% указали, что вибрация
является причиной неудовлетворительных условий труда в кабинах
автомобиля / 4 4 /. В связи с этим вопросам снижения вибраций на
транспорте уделяется большое внимание.
Математическая модель системы транспортное средство — си­
денье — водитель (рис. 2.23) включает:
Подрессоренное
кресло
Водитель
2
Вибрация
пола каоины
кресла
Колебания
водителя
Р и с . 2.23. С хем а в о зд е й с тв и я в и б р ац и и на в од и теля и сиденье.
'А
3
-
3 3 5 0
65
X — вибрационное воздействие со стороны пола кабины тран­
спортного средства,
Wk — передаточную функцию подрессоренного сиденья,
W B — динамическую характеристику человека.
Входным параметром системы является вибрационное воздейст­
вие X, выходным — колебания Z водителя транспортного средства,
колебания Y кресла являются промежуточным параметром.
Известно (46), что спектральная плотность S x(co) входного вибра­
ционного воздействия X зависит от типа дороги (рис. 2.24), от ско­
рости движения (рис. 2.25), характеристик подвески и загрузки тран­
спортного средства (рис. 2.26). Следовательно, входное воздействие
представляет вибрацию с нестационарной спектральной характерис­
тикой. Данное обстоятельство говорит о рациональности применения
адаптивной, самооптимизирующейся виброзащиты.
Вторым обстоятельством, усложняющим расчет и проектирование
подвесок сидений, являются особенности динамических свойств чело­
веческого тела, приводящие к неравномерной чувствительности чело­
века к вибровоздействиям различных частот.
Существуют нормативные требования допустимых вибрационных
воздействий, основанные на субъективных оценках восприятия виб­
раций человеком, а та кж е на физиологических, функциональных,
биомеханических реакциях его организма на действие вибраций. Эти
требования изложены в международном стандарте ИСО 2631-78 и в
действующем в нашей стране ГОСТе 12.1.012-90 / 5 6 /.
Нормируемыми показателями вибрационной нагрузки согласно
ГОСТу 12.1.012-90 являются одночисловые параметры (корректиро­
ванные по частоте значения контролируемого параметра, доза виб­
рации, эквивалентное корректированное значение контролируемого
параметра) или спектр вибрации, установленные нормами Минздра­
ва.
Корректированное по частоте значение контролируемого пара­
метра (U ) или его логарифмический уровень (L u), определяются по
формулам:
(2.19)
( 2 .20 )
г=1
где Ui и L Ui — среднеквадратическое значение контролируемого
парам етра вибрации (виброскорости или виброускорения) и его ло­
гарифмический уровень в i-и частотной полосе;
п — число полос в нормируемом диапазоне;
К \, L k i - весовые коэффициенты для i-и частотной полосы для
66
булыжник
Асфальт
6
2
Р
ТО
8
f, Ги,
ис.
2.24. С п е к тр а л ь н а я плотность ви броускорен ий в зав и си м о сти
от типа дороги (ав т о м о б и л ь М А З-500, Р дв = 45 к м /ч а с ).
1
.3 0 km/ zqc
/
[
1
'
...
^ 4 5 кмЛ а с
У'\(
■
/ 1 1 /\
'
1
.4
0
|/
!/
X
о ч
м/гас
1
/
И
/
N
/ . ^X
/V
X X.
II/
'С /
2
К
6
в
Ю
Гц
Р и с . 2.25. С п е к т р а л ь н а я пл отность виброускорен и й в за ви си м ости
от скорости д в и ж е н и я (а в т о м о б и л ь З И Л -1 3 0 ).
среднего квадратического значения парам етра контролируемого па­
раметра или его логарифмического уровня (таблица 2.2).
Доза вибрации (D ) определяется по формуле:
т
D = j U m(t)d t,
(2.21)
о
где U (t) — корректированное по частоте значение контролируемого
параметра в момент времени t, м /с или м /с 2,
Т — время воздействия вибрации, с,
m — показатель эквивалентности физиологического воздействия
вибрации, устанавливаемый санитарными нормами или по согласо­
ванию с Минздравом.
А
М
■I
6
ij
5
Г
k
\
^Трактер МТЗ-50П, Vgh9,5 кп/zac
, '1
1
1
h i
'
1У1
\
i\
3
2
\
\Л\
я)
к
/
1
\
limoMoSiш ГАЗ53,
\Vg6=30 км/гас
“
\
Л А
\Х> V...... > 4
\
Скрепер И-.357, Vg| =15км/гос
'■—
2
к
б
8
ГС
Z
f ;Ги,
Р и с . 2.26. С п е к т р а л ь н а я плотность виброускорен ий в зависим ости
от типа тран сп ортн ого сред ства
68
Т а б л и ц а
2.2
Весовые коэффициенты Ki, L-, для общ ей вибрации для виброускорения
Среднегеомет.
частоты
полос, Гц
В 1\ 1 октав е
В 1 \3 о ктав ы
вер ти к ал ьн .
гори зон тал ьн .
Li
Ki
Li
Ki
0,8
0,45
-7
1,0
0
1,0
0,5
—6
1,0
0
1,25
0,56
-5
1,0
0
1,6
0,63
—4
1,0
0
2,0
0,71
-3
1,0
0
2,5
0,8
—2
0,8
3,15
0,9
—1
0,63
—4
4,0
1,0
0
0,5
-6
5,0
1,0
0
0,4
-8
гори зон тал ьн .
К,
Li
Ki
L,
0,5
-6
1,0
0
0,71
-3
1,0
0
1,0
0
0,5
-6
1,0
0
0,25
-1 2
0,5
-6
0,125
-1 8
0,25
-1 2
0,063
— 24
0,125
-1 8
0,0315
-3 0
-2
6,3
1,0
0
0,315
-1 0
8,0
1,0
0
0,25
-1 2
10,0
0,8
-2
0,2
— 14
12,5
0,63
—4
0,16
-1 6
16,0
0,5
-6
0,125
-1 8
20,0
0,4
-8
0,1
-2 0
25,0
0,315
-1 0
0,08
-2 2
31,5
0,25
-1 2
0,063
-2 4
40,0
0,2
— 14
0,05
-2 6
50,0
0,16
-1 6
0,04
-2 8
63,0
0,125
-1 8
0,0315
-3 0
0,1
-2 0
0,025
-3 2
80,0
верти кал ьн .
Эквивалентное корректированное значение (£/экв) определяется по
формуле:
U3KB = % Э / Т .
(2.22)
При вы раж ении вибрацион
спектр вибрации нормируемыми показателями являются средние
квадратические значения виброускорения (виброскорости) или их
логарифмические уровни в октавных и третьоктавных полосах час­
тот.
Критерием качества К проектируемой виброизоляции сиденья
оператора виброактивной машины может служить условие, миними­
зирующее дозу вибрационного воздействия на человека:
К —» min D,
(2.23)
где D — доза вибрации, определяемая всоответствии с(2.21), или
дисперсия виброускорения, приведенная согласно весовым коэффи­
циентам К\ (табл. 2.2) к эквивалентному уровню:
К -» min Dy,
(2.24)
где Dy—суммарная дисперсия ускорений, отнормированных
в со­
ответствующих частотных областях по степени чувствительности
человека.
Из рассмотрения особенностей виброизоляции человека следует,
что система самоподстройки демпфирования должна минимизиро­
вать приведенную (отнормированную) дисперсию виброускорения на
рабочем месте водителя транспортного средства.
В случае защиты только от вертикальных вибраций данное усло­
вие реализуется введением в устройство самоподстройки фильтра
(рис. 2.27), частотная характеристика (рис. 2.28) которого аппрокси­
мируется в соответствии с весовыми коэффициентами К\ из таблицы
2.2 для вертикальных колебаний. Этот фильтр установлен между
датчиком ускорения и полосовыми фильтрами резонансных и нере­
зонансных частот (рис. 2.29).
Такая система была апробирована в опытной конструкции си­
денья водителя большегрузного автомобиля (рис. 2.30). В конструк­
ции использован направляющий механизм / 3 4 / с моментной переда­
чей усилия на упругий элемент, выполненный в виде торсиона.
В качестве демпфера применен гидроцилиндр с электромеханичес­
ким приводом заслонки (рис. 2.31), установленной в проходном к а ­
нале гидродемпфера.
Опытный образец сиденья имеет следующие проектные пара­
метры:
масса защищаемого оператора — 50... 130 кг;
собственная частота колебаний водителя на подрессоренной по­
душ ке сиденья — 1,0...1,6 Гц;
допустимый динамический ход в подвеске сиденья — ±9,0 см;
упругий элемент — торсион с погонной жесткостью 30 Н/м;
70
h =8
>
Сг
Рис.
2.27. С хем а норм ирую щ его
ф и л ь тр а
W (P) =
т,
Р и с . 2.28. Ч а с т о т н а я х а р а к т е р и с т и к а
норм ирую щ его ф и л ьтр а
( T lP + \)(T 2 P + l)
=
RiC, = 0,04 с,
Т2 = R2C2 = 0,02 с.
•И
I______
L_J
7Т7Т7~Т
Р и с . 2.29. Б л ок -схем а а д ап ти вн о й в и б рои зол яц и и сиденья водителя:
/
— датчик уск о р е н и я ,
2
— сиденье (п о д у ш к а ),
3
— н о р м и р у ю щ и й фильтр,
4, 5
— п о ло с о вы е фильтры,
6, 7
— детекторы,
8
— элемент ср а внени я ,
9
— исполнит ельны й элемент ( р е гуля т о р ),
10
— д ем пф ер,
11
— у п р у г и й элемент п о д ве ск и сиденья,
12
— п о л транспортного средства
71
-<
to1
Рис.
2.30. М ак етн ы й о б р а зе ц сиденья води теля б о л ьш егрузн ого а вто м о б и л я с с ам о п о д стр аи ваю щ и м ся
уровнем д ем п ф и р о ван и я
Р и с . 2.31. Г идрод ем пф ер сиденья с электром ехан ически м регулятором
Р и с . 2.32. Д а т ч и к (а ) и электрон н ы й блок (б ) системы регул и рован и я
д е м п ф и р о ва н и я д л я подвески сиденья
вид демпфера — гидравлический демпфер с электромеханичес­
ким регулятором;
диапазон регулирования относительного коэффициента демпфи­
рования — от 0,1 до 0,7;
вид р е гулирования — автоматический под текущие спектральные
характеристики вибровоздействия (возможна и ручная настройка
уровня демпфирования);
система упр а в ле н и я — электронный блок с датчиком ускорения
и электромеханический привод заслонки гидродемпфера.
На фотографии (рис. 2.32) показан внешний вид используемого
датчика и электронного устройства для управления уровнем демп­
фирования.
Глава
третья
В И Б РО И ЗО Л Я Ц И Я НА ОСНОВЕ УПРУГИХ
ЭЛЕМЕНТОВ С ПЕРЕКЛЮЧАЕМОЙ ЖЕСТКОСТЬЮ
3.1. Основные расчетные соотношения механики переключения
жесткости упругого элемента
Разл ичаю т активный и пассивный способы управления ж ест­
костью упругого элемента. Суть этих способов отражена на диаграм ­
мах, показанных на рис. 3.1 и рис. 3.2. При активном способе энергия
упругого элемента при изменении жесткости может как уменьшаться
АЕ < 0 (см. рис. 3.1, переключение 1—2 с жесткости С0 на меньшую
С/), так и увеличиваться АЕ > 0 (переключение 1—3 с жесткости С0
на большую Сг), причем
АЕ =
0,5 (С -
С0)да*2,
где С0 — величина исходной жесткости,
С — жесткость после переключения,
w * — деформация упругого элемента.
Переключение как на меньшую, так и на большую жесткость
сопровождается скачкообразным изменением силы, передаваемой
упругим элементом:
АР — (С — С0 )w*.
Очевидно, что реализация такого переключения возможна при
помощи устройств, способных как отводить энергию из упругого
элемента, так и осуществлять подвод энергии.
Более рациональным является пассивный способ (рис. 3.2), когда
переключение жесткости производится путем блокировки (запира­
нии) части упругого элемента виброизолятора. Причем энергетиче­
ские затраты при запирании весьма малы, так как запирание можно
осуществлять поперек силового поля. При пассивном переключении
жесткости энергия извне в упругий элемент не поступает, она только
накапливается в его частях, имеющих разную деформацию, а затем
при разблокировке одной из частей рассеивается в запирающем
устройстве.
p
о
V
Р и с 3.1. Д и а г р а м м а р аб о ты упругого эл е м ен та при активном способе
у п р а в л ен и я ж есткостью
ю
дЕ<0
ьг
Р и с . 3.2. Д и а г р а м м а р аб о ты уп ругого эл е м ен та при пассивном способе
у п р а в л ен и я ж есткостью
76
Особенностью пассивного метода управления является то, что
жесткость упругого элемента нельзя уменьшить менее некоторой
первоначальной величины С/. Кроме того, при переключении с малой
величины жесткости С\ на большую С2 (точка «1» на рис. 3.2) сме­
щается положение статического равновесия системы объект-вибро­
изолятор на величину
wo = (п — 1) П'1 W\ ,
(3.1)
где п = С2 / С 1 — соотношение жесткостей.
В этот момент энергетических изменений в упругом элементе не
происходит. При обратном переключении с большой жесткости на
малую (точка «2» на рис. 3.2) происходит скачкообразное изменение
силы в упругом элементе на величину
ЛР = (им -
w 2) (п -
1) С/
(3.2)
и высвобождается энергия
ЛЕ = —0,5 (п — 1) (w\ — Ш2)2 С/.
(3.3)
Величина этой энергии зависит от деформации упругого элемента
в момент предыдущего переключения с малой жесткости на боль­
шую — w 1, его деформации в момент обратного переключения — W2 ,
а т а к ж е от величины п.
3.2. Математическая модель виброизолятора с переключаемой
жесткостью
У
Р и с . 3.3. М о д ел ь в и б р о и зо л я ­
тора с у п р а в л я е м о й ж есткостью
Д л я синтеза алгоритмов переклю­
чения жесткости использовалась про­
стейшая модель системы виброизоля­
ции, показанная на рис. 3.3, где т —
величины массы защищаемого объек­
та, Са — жесткость свободной части
упругого элемента, Cg — жесткость
блокируемой части упругого элемента.
В
качестве
модели блокирующего
устройства принят демпфер, коэффи­
ц и е н т с о п р о т и в л е н и я К к о т о р о го
принимает два значения: К = 0 — бло­
кировки нет и К = °° — демпфер и
параллельно включенная с демпфером
часть упругого элемента заблокированы.
М одель (рис. 3.3) не учитывает
влияние масс подвижных частей ре­
альных упругих элементов запираю ­
щего устройства и не отражает механи­
ку рассеивания энергии колебаний. Предполагается, что энергия,
высвобождаемая при разблокировании, рассеивается в запирающем
устройстве (демпфере).
С учетом изложенного модель виброизолятора с переключаемой
жесткостью описывается следующими уравнениями:
т х + СА {х — у) = О,
СА (х - у) = СБ (у - х) + К (У — Ц),
|0 при £/уПр = U\
[°° при /7упр = и 2,
К =
где
(3.4)
управляющая функция,
Vu U2 значения управляющей функции.
При малой жесткости виброизолятора С = С/ (демпфер разбло­
кирован, К = 0) уравнение (3.4) имеет вид:
Uynp
т х = С,(х — q) = 0,
где
С/ = С д Сб/(С' л + С б ).
При переключении на жесткость С — С2 (демпфер заблокирован,
К = °°) движение объекта описывается уравнением:
т х+
С ^ х — q) + Р = 0,
С2 = Са,
р = (п — I) (w\ —w) С/ — сила, определяющая величину
смещения равновесного состояния системы при блокировке части
упругого элемента,
w/ — деформация всего упругого элемента в момент блокировки,
w — текущая деформация всего упругого элемента.
Модель, описываемая уравнениями (3.4), оказалась удобной при
исследованиях на аналоговых вычислительных машинах. При расче­
тах на цифровых машинах более рациональна следующая форма
записи уравнений:
где
тх +
С (х — q) +
С/ при Пупр =
С =
Р =
С2 при
t /упр
=
Р = 0,
Uu
U2,
0 при Пупр =
Ui,
C\W*
П ри
~
(3.7)
Пупр =
U 2,
где w , — деформация упругого элемента в момент изменения ж ест­
кости.
Приведенные уравнения были использованы при разработке и
78
расчетах эффективности виброизоляторов с управляемой ж е с т­
костью. Несмотря на то, что они не в полной мере отражают про­
цессы, происходящие в реальных системах при переключении жест­
кости пассивным методом, результаты расчетов по ним, как показа­
ли исследования, близки к экспериментальным. И только в тех
случаях, когда необходимо было рассчитать параметры блокирующе­
го устройства, использовалась более сложная модель виброизоляции,
учитывающая инерционные свойства реальных блокирующих элемен­
тов и процессы, протекающие в них.
3.3. Алгоритмы управления жесткостью для режимов гашения
собственных колебаний
З а критерий качества алгоритма переключения жесткости вибро­
изолятора можно принять условие перевода объекта из возмущенно-
Г~
дХ
Р и с . 3.4. Т р а е к т о р и я д в и ж е н и я из возм ущ енного состояния
в р авн овесн ое полож ен ие
го состояния в равновесное без последующих колебаний при мини­
мальном количестве переключений.
Д л я нахождения таких алгоритмов удобно рассмотреть движение
защ ищ аем ого объекта на фазовой плоскости «х — х» (рис. 3.4), а
судить об энергетических изменениях по диаграмме «Р — до»
(рис. 3.5).
Возмущенное положение объекта в произвольной точке фазового
пространства «£ — х» задано начальными условиями X/, х/. Стоит
за д ач а перевода объекта из возмущенного состояния в положение
равновесия системы с координатами х = 0, х = 0 при минимуме
переключений. Д л я исключения последующих колебаний энергия
системы в момент попадания в положение равновесия должна быть
равна нулю. Анализ диаграм м работы упругого элемента (рис. 3.5)
показывает, что минимальное количество переключений, при которых
полностью рассеивается энергия системы к моменту попадания в
положение равновесия — начало координат (х = 0, х — 0), равно
двум. Возможные гистерезисные циклы, получающиеся при этом,
описываются траекториями 1—2 —3 —3’—4 и 1—3—3’—2’—4. Пере­
ключение жесткости происходит в точках 3, 3’ и 4, 0, причем жест­
кость в этих точках импульсно переключается на малую С\ и затем
вновь на исходную С2 . Импульсу 4, 0 соответствует момент попада­
ния объекта в начало координат. Координату хз, соответствующую
моменту 3, 3’, необходимо найти.
Д л я нахождения этой координаты приравняем выражения для
полной энергии системы и энергии, заключенной в гистерезисной
петле на д иаграм м е «Р — до» работы упругого элемента.
Полная энергия является функцией начальных условий X; и X/
Э = т х /2/ 2 +
Сгх,2/ 2
(3.9)
или функцией координаты х 2 в те моменты, когда х — 0
С2Х22
2
(3.10)
где Х2 — та кж е функция начальных условий
(3.11)
причем а
Энергия гистерезисного цикла рассеивается при двух переключе­
ниях. Используя зависимость (3.3), можно определить, что эта энер­
гия равна
Тогда из равен ства Э п =
Э гист о п р е д е л и м хз:
(3.13)
хз = х 2 у ] п / 2( п ~ О-
Анализ выражения (3.13) показывает, что хз существует при п > 2.
Если 1 < п < 2, то х з > Х2 , что противоречит условию реализуемости
траектории без подвода энергии в упругий элемент. При п ^ 1
формула (3.13) теряет смысл, что говорит о невозможности реализа­
ции цикла с полным рассеиванием начальной энергии и в активных
системах.
Движение из начальной точки х/, X/ в начало координат начина­
ется по траектории, которая описывается уравнением эллипса, сим­
метричного относительно начала координат:
х2
х2
-ч 2 +
x
, 2
2 Q
,
2
1
<3 | 4 >
Из этого уравнения можно определить значение скорости в мо­
мент переключения, приняв х = хз:
Хо = ±
п- 2
Qxo
(3.15)
2 (га - 1 )
Х еи/
AX
дХ
Р и с . 3.5. Д и а г р а м м а р а б о ты у п ругого эл ем ен та у п р ав л яем о го в и брои зол ятора
4 -
81
З н а к «—» относится к траектории 1—2—3—3’—4, а знак « + »
относится к траектории 1—3—3’—2’—4.
После переключения траектория движения представляет эллипс,
смещенный относительно начала координат на величину
Лх = х2 J ( n - l ) / 2 п .
(3.16)
Зависимость (3.16) следует из формул (3.1) и (3.13). Уравнение
такого эллипса имеет вид:
х2
(х - Дх)2
Ах2
+ Ax2Q " '
(3.17)
Найдем линии переключения, на которых происходит изменение
траектории движения с эллипса (3.14) на эллипс (3.17). Для этого
рассмотрим вы ражение для хз(3.13) и хз(3.15). Они показывают, что
хз и хз линейно зависят от одной и той же величины хг, являющейся
функцией начальных условий системы (3.11). При х2 = 0, хз и хз
равны нулю. Следовательно, линия переключения представляет со­
бой прямую, проходящую через начало координат.
Д л я траектории 1—2 —3 —3’—4 —0 линия переключения описыва­
ется выражением:
х =
- 2 ) / п Qx,
(3.18)
для траектории 1—3 —3’—2’—4 —0:
х = +у/{п - 2 ) / п Qx.
(3.19)
Рассмотрим, к а к а я из траекторий является предпочтительней.
Во-первых, отметим, что при п = 2 траектории одинаковы, а линией
переключения является ось ОХ, при п > 2 переключение жесткостей
в точке хз на траектории 1—2 —3 —3’—4 —0 происходит в 4-й четвер­
ти фазовой плоскости, а на траектории 1—3—3’—4—0 в 1-й четверти.
Это приводит к некоторым отличиям в траекториях при движении
в промежутке между линиями переключения, а именно траектория
с переключением в 1-й четверти имеет большие значения амплитуды
колебаний (х2 > х2).
Действительно, х2’ = 2Дх = 2 ^ ( п - \ ) / 2п х2
и при п > 2, х2 > х%
Так, при п = 3 х ) = 1,1 5х2, при п = 4 х ’2 = 1 , 2 2 х2, при п — 10
х'2 = 1,34 х2.
Поэтому из дальнейшего рассмотрения траекторию 1—3 —3’—
2’—4 —0 (рис. 3.4 и 3.5 — пунктирные линии) исключаем.
82
Алгоритм переключения жесткости для траектории
3’—4 —0 на основании (3.18) имеет вид:
[— 2 — 3 —
С, при (х + , j ( n - 2 ) / n Пл) = О,
С=
(3.20)
С2 при (х + ^ ( п - 2 ) / п Qx) Ф 0.
Если по условиям работы виброизолятора можно принять п = 2,
то алгоритм (3.20) будет представлен следующим выражением:
С=
С, при х = 0,
С2 при
(3.21)
х Ф 0.
Реал изация алгоритма при этом значительно упрощается. Д ей­
ствительно, вы ражение (3.21) определяет только моменты перехода
скорости защ ищ аемого объекта через нулевое значение, в то время
как для реализации (3.20) необходимы величина этой скорости, а
такж е величина деформации упругого элемента виброизолятора.
Алгоритмы (3.20) и (3.21) позволяют перевести защищаемый объ­
ект из возмущенного состояния в начало координат без последу­
ющих колебаний с минимальным количеством циклов нагружения
(рис. 3.6, 3.7).
3.4. Алгоритмы управления жесткостью для режимов работы
при вынужденных колебаниях
Нахождение алгоритма управления жесткостью виброизолятора в
режиме вынужденных колебаний заключается в разработке алгорит­
ма, придающего виброизолятору антирезонансные свойства.
Д л я синтеза такого алгоритма рассмотрим отдельные фазы дви­
жения защ ищ аемого объекта относительно внешнего воздействия и
определим на каждой фазе жесткость виброизолятора, способству­
ющую уменьшению колебаний объекта.
В качестве параметров, характеризующих возможные фазы, рас­
смотрим знаки абсолютной скорости X объекта, скорости q воздей­
ствия и знаки относительной скорости ( х — q).
Анализ показывает, что возможны восемь сочетаний (фаз) рас­
сматриваемых параметров (табл. 3.1), в двух из которых (2 и 6 фаза
в табл. 3.1) жесткость следует уменьшать, а в остальных — увели­
чивать. Отличаются эти фазы соотношением знаков абсолютной и
относительной скоростей объекта X и (X — q).
При совпадении знаков скоростей х и (х — q) скорость движения
объекта х или совпадает со скоростью воздействия (основания) q,
4*
83
Р и с . 3.6. П ер ех о д н ы е проц ессы в систем е с п ереклю ч аем ой ж есткостью
(х /* 0 , х /* 0, п = 2)
X
о
(а)
(5)
Р и с . 3.7. П ереходны е проц ессы в систем е с п ер ек л ю ч аем о й ж естк остью
( х / = 0 , х/*0, п = 2)
84
превышая ее по абсолютной величине, или не совпадает по н аправ­
лению с q. В этих случаях для более эффективного торможения
объекта рационально увеличить жесткость (С = С2) упругой связи
между объектом и движущимся в противоположном направлении
или с меньшей скоростью основанием.
Т а б л и ц а
3.1
Возможны е сочетания знаков параметров колебаний и ж елаемы е значения
жесткости виброизоляции
В О З М О Ж Н А Я ФАЗА
П А РА М ЕТР
1
2
3
4
5
6
7
8
s ig n X
+
+
+
+
—
—
—
—
s ig n q
+
+
—
—
—
-
+
+
sig n (\x \ - \ q \ )
+
—
—
—
+
—
+
—
s ig n ( x — q)
+
—
+
+
—
+
+
—
Ж е с тк о с ть , С
c2
Ci
C2
c2
c2
Ci
c2
c2
В тех ф азах движения, когда знаки x и (х — (?) не совпадают
(объект и воздействие имеют скорости, совпадающие по знаку, но
абсолютная величина скорости воздействия \q\ при этом превышает \к[
рационально для уменьшения передачи воздействия на объект
уменьшить величину жесткости упругой связи (С — Сi).
Из этих рассуждений вытекает алгоритм переключения жестко­
сти виброизолятора, позволяющий эффективно гасить резонансные
колебания:
(С, при x ( x - q ) < 0 ,
(3 22)
|С 2 при к(к - (?) > 0.
Однако данный алгоритм непригоден для гашения собственных
колебаний объекта, так как при отсутствии внешнего воздействия
х = (к — q). Д л я того, чтобы осуществить гашение и собственных
колебаний, было предложено в измерительное устройство одного из
анализируемых параметров к или (к — (?) ввести элемент, осущест­
вляющий некоторую сдвижку сигнала по уровню или фазе /8 8 /.
Такой алгоритм со сдвижкой сигнала скорости к по уровню будет
иметь вид:
c = jCi при {x + A U ) { x - q ) < 0 ,
(3 23)
[С2 при (х + AU)(x - q) > 0.
где AU — величина сдвижки сигнала х, причем AU — малая вели­
чина ( A U ~ 0 ).
При сдвижке одного из сигналов гашение собственных колебаний
при работе виброизолятора по алгоритму (3.23) осуществляется
импульсным переключением на малую жесткость в моменты, когда
к ~ 0 (рис. 3.8).
Следовательно, данный алгоритм при работе в режиме собствен­
ных колебаний совпадает при п = 2 с алгоритмом (3.21).
3.5. Эффективность виброизоляторов на основе упругих элементов
с переключаемой жесткостью
Эффективность определялась методами аналогового моделирова­
ния. И сследовалась модель (рис. 3.3), которая описывалась уравне­
ниями (3.4). Схема набора на АВМ изображена на рис. 3.9. Она
состоит из модели виброизолятора и реального устройства управле­
ния жесткостью. Последнее выполнено в виде электронного блока с
быстродействующим реле, которое производит переключение ко­
эффициента сопротивления запирающего устройства со значения
к = к на значение /с = 0. Изменением этого коэффициента и
осуществлялось подключение или отключение части упругого эле­
мента, т. е. изменение жесткости виброизолятора.
В процессе исследования измерялись амплитудные значения сиг­
налов (схема измерения рис. 3.10), дисперсии (рис. 3.11), интенсив­
ности выбросов за уровень (рис. 3.12), законы распределения выход­
ных параметров (рис. 3.13) и спектральные плотности (3.14).
Необходимый спектральный вид входного возмущения формиро­
вался при помощи аналоговых фильтров, а дисперсия шума допол­
нительно стабилизировалась (рис. 3.15).
К ак следовало ожидать, алгоритм (3.23) при работе в режиме
вынужденных колебаний реализует значительно более высокие антирезонансные свойства, чем алгоритм (3.20), синтезированный для
режима гашения собственных колебаний. Так, при изменении п от 2
до 6 амплитудные значения ускорений защищаемого объекта при
гармонических воздействиях изменяются от 2.2 (п = 2) до 1.7 (п = 6)
(см. рис. 3.16а), амплитуды деформации упругого элемента соответ­
ственно от 1.8 до 1.2 (рис. 3.166). Следовательно, алгоритм (3.20) не
86
x.ur
о
о
с
0
Р и с . 3.8. Ф о р м и р о в ан и е с и гн а л а на переклю ч ен ие ж есткости упругого эл ем ен та
по а л го р и т м у (3.23) в р е ж и м е собствен ны х колебаний.
Я7
~ы
йст1
-W
i_____
Р и с . 3.9. С хем а м о д е л и р о в ан и я на ан ал о го в о й вы числительн ой м аш ин е виброзащ итной систем ы с п ерекл ю ч аем ой ж есткостью .
88
3 тенен т
Цuix
- срабтения^
Ц е те ктор
Н у л ь -о р г а н
интегратор
Прибор
Т ^ Г
Каин сброса
Р
ис.
3.10. Б л о к -сх е м а у с тр о й ства д л я и зм ерения
а м п л и ту д н ы х зн ач ен и й а н ал о го в ы х сигн алов.
Э лектронны е
Клю ч
сброса
часы
Р и с . 3.11. Б л о к -сх е м а у с тр о й ства д л я изм ерения
ди сперсии.
Э лем ент
срабненоя
Uui«. *-
WS-
Ц е те кто р
~ *Н Э
Нуль-орган
Uctouhuk
опорного
напояш
ени»
Цель 0- ' з ь к .
з а п у с к а часто
Электронньк
часы
Р и с . 3.12. Б л о к -сх е м а у с тр о й ства д л я изм ерения
ин тенсивности вы б р о со в си гн ал о в з а уровень.
С четчи к
и м п ул ьсов
---------о--------Клю ч сбросе показаний
Р и с . 3.13. Б л о к-сх ем а устрой ства дл я и зм ерения значений
функции расп редел ен и я.
U ( t)
Ф и л ьтр
н и з к и х частот
о----------
Дмализцрценый
сигнал
Р
ис.
3.14. Б л о к -сх ем а а н ал о го в о го а н а л и за т о р а спектра.
И н тегратор
Р и с. 3.15. Б л о к -сх е м а устр о й ства д л я ф о р м и р о в ан и я
с п ек т р а входного в оздей стви я и с та б и л и зац и и его ди сперсии.
90
позволяет в резонансной полосе частот иметь амплитудно-частотные
характеристики без усиления внешнего воздействия.
Антирезонансные свойства алгоритма (3.23) значительно выше.
При изменении п от 2 до 6 значения амплитудно-частотных х а р а к ­
теристик на резонансной частоте системы уменьшаются по ускоре­
нию от 1,85 до 0,8 (рис. 3.17а) и по деформации от 1,5 до 1,05 (рис.
3.176), т. е. при больших п характеристики соответствуют хар а к те ­
ристикам виброизоляции без резонансного усиления колебаний.
Особенностью виброизоляторов с переключаемой жесткостью
является, несмотря на существенно нелинейный характер процессов
в них, пропорциональность амплитуд выходных характеристик по
отношению к амплитуде внешнего гармонического воздействия. Р а с ­
смотренные здесь характеристики справедливы для любых амплитуд
воздействия. В то же время исследования показали, что принцип
суперпозиции при определении параметров колебаний от сочетания
различных воздействий по реакциям на компоненты сочетания для
виброизоляторов с управляемой жесткостью неприменим.
Нелинейность процессов определяется тем, что при внешнем га р ­
моническом воздействии выходные параметры не являются гармони­
ческими функциями. П рав да, такие параметры , как деформация
упругого элемента (х — q), перемещение объекта х и его скорость
Л, близки к гармоническим. Однако к ускорению объекта х такое
допущение применять нельзя (см. осциллограммы на рис. 3.18).
Разработанные алгоритмы прошли проверку на работоспособ­
ность (по эффективности гашения колебаний) в присутствии высоко­
частотных возмущений. Установлено, что и в присутствии высокочас­
тотных помех гасящие свойства виброизоляции на резонансных час­
тотах (см. рис. 3.19) не ухудшаются.
Так как при реализации алгоритмов (3.20) и (3.23) могут возник­
нуть определенные затруднения (необходима информация о несколь­
ких параметрах колебаний), то представляет интерес исследование
наиболее просто реализуемого алгоритма (3.21).
На рис. 3.20 даны характеристики виброизоляции, работающей по
зависимости (3.21), при п = 2, 2,5, 3, 4, 6. Амплитудные значения
ускорений с ростом величины п снижаются с 2,2 до 1,65, а дефор­
мация с 1,8 до 1,5. Можно утверждать, сравнивая с характеристи­
ками на рис. 3.16, что данный алгоритм практически обеспечивает
те же самые парам етры колебаний, что и алгоритм (3.20). Однако
использование алгоритма (3.21) при п > 2 приводит к затянутости
переходных процессов при гашении собственных колебаний.
Реальные виброзащитные системы, как правило, имеют дополни­
тельные диссипативные потери на трение в направляющих. Д л я того,
чтобы оценить влияние этих потерь, а т а к ж е выяснить возможность
реализации виброизоляции с меньшим усилением колебаний в резо-
X
г
n-J
г
1
3
г
(а)
11-2,5
«Г)
Р и с . 3.16. А м п ли туд н о-частотн ы е х а р ак т ер и с т и к и в и б р о и зо л ято р а с п ер ек л ю ­
чаем ой ж естк о стью (а л го р и т м (3.20).
а ) — у ск о р е н и е x = x max/£ l2q0,
б ) — обжатие w = ( x — q ) max/Уо,
f=m /О £У=./Со / т.
X
Г1=Э
n=6
г
(Q)
n=6
о
z
Рис
3.17. А м п ли ту д н о -ч асто тн ы е х а р а к т е р и с т и к и в и б р о и зо л ято р а с п е р ек л ю ­
чаем ой ж естк о сть ю (а л го р и т м (3.23).
а ) — у с к о р е н и е x = x max/Q ?q0,
б ) — обжатие w = ( x — q ) max/qo,
“
/Q ,
V С2 / т .
Р и с . 3.18. О с ц и л л о гр ам м ы р аб о ты ви бр о и зо л ято р а с переклю чаем ой по
а л го р и т м у (3.21) ж естко стью на резонансной частоте
(X
Р и с 3.19. О с ц и л л о гр ам м ы р аб о ты в и б р о и зо л ято р а с п ер ек л ю ч аем о й по
ал го р и тм у (3.21) ж есткостью при двухч астотном ки н ем ати ч еском
воздей стви и с ч а сто там и
(В| = П =
94
и ю2 = 6С2
I
о
<
г
3
и- г
о
Р и с . 3.20. А м п ли туд н о-частотн ы е х а р а к т е р и с т и к и ви б р о и зо л ято р а с п е р ек л ю ­
чаем ой ж естк о сть ю (а л го р и т м (3.21).
а ) — у с к о р е н и е X—Хтах /Cl2q о>
б ) — обжатие w ~ = (x— q ) max/qo,
г=ш /Й, ft=
/ m95
нансной области, выполнены исследования схемы виброзащиты с
дополнительным вязким трением (демпфером).
Исследовалась виброизоляция с переключением по алгоритму
(3.21) при п = 2, величина дополнительного л инейного демпфирова­
ния определялась коэффициентом \|/ = / 2^C2m. Оказалось, что
наличие дополнительного демпфирования в управляемой виброизо­
ляции не ухудшает ее работу, а эффективность гашения колебаний
определяется суммарной эффективностью двух гасителей: обычного
демпфера и управляемого на основе упругого элемента с переклю­
чаемой жесткостью (рис. 3.21). Введение демпфирования позволяет
улучшить гашение вынужденных колебаний в резонансной области
частот. Так при дополнительном вязком сопротивлении величиной
ф = 0,3 резонансные колебания уменьшаются до значений, которые
имеют обычные виброизоляторы с ф — 0,5...0,6. Вместе с тем введе­
ние демпф ера соответственно ухудшает качество виброизоляции на
высоких частотах. Это ухудшение будет тем выше, чем выше частота
и больше величина ф. Следовательно, система с комбинированным
гасителем будет выгодна, когда велик уровень резонансных, низко­
частотных и среднечастотных воздействий.
Итогом исследований на гармонические воздействия являются
следующие выводы: виброизоляторы с управлением (3.21) по просто­
те реализации предпочтительней виброизоляторов с управлением
(3.20), имеющих приблизительно те же показатели; более качествен­
ную виброизоляцию обеспечивает управление по алгоритму (3.23).
Исследования на случайные воздействия выполнялись для алго­
ритмов (3.21) и (3.23). Аналоговое моделирование позволило прово­
дить статистическую обработку достаточно длительных (до 400 с)
реализаций. Это обеспечило малую статистическую погрешность
измерений e s < 0,2, при высокой разрешающей способности спек­
трального анализа (Af = 0,3 Гц) и малые значения вероятностей
превышения измеряемых сигналов за высокие уровни (при о > 2,
где (Т — среднеквадратическое отклонение измеряемой величины).
При измерении дисперсий погрешность измерения оценивалась по
следующей формуле /4 0 /:
k
е = е в + e s>
es - 1 / V 5 T ,
где В
— полоса частот анализируемого процесса,
е в = 0 — ошибка смещения,
es
— статистическая ошибка,
Т
— длительность реализации.
Если принять, что Es < 0,1, то при измерении дисперсии процессов
с полосой частот В — 10 Гц длина реализации Т > 10 с.
96
v=0,l
о
Ur i
,v«o
1
0
z
Р и с . 3.21. А м п ли туд н о-частотн ы е х а р ак т ер и с т и к и в и б р о и зо л ято р а
с к ом б и н и ров ан н ы м гас и т ел е м к олеб ани й.
а ) — у с к о р е н и е x = X max/ Q 2q0,
б ) — обжатие w = ( x - q ) max/q o ,
г = 0 ) /П , C1=~JC2 / т.
07
Ошибку спектрального анализа такж е можно записать в виде
e^Eg+e,., где согласно /4 0 /:
S(<а)*\2
_ К
es - l / Д ~ Т ,
^
575
VS(co)
где Ве = 0,3 Гц — разрешающая способность анализа (шумовая
полоса фильтра),
S(a>) — вторая частная производная по частоте от спектральной
плотности.
Д л я рассматриваемых спектров ввиду их равномерности согласно
(40) можно предположить, что Eg < 0,1. Тогда, чтобы спектральный
анализ проводить с суммарной ошибкой £ < 0,2, необходимо анали­
зировать реализации длительностью Т > 330 с.
Ошибки измерения закона распределения и количества выбросов
за
фиксированный
уровень можно определить по диаграммам,
приведенным в / 8 2 / . Из диаграмм следует, что если es <0,2, то
при | х | / <т= 1 длительность реализации 7 = 10 с, если же 1x1/о = 3 ,
то длительность анализа 7 = 4 0 0 с для процессов с полосой В =10 Гц.
Исследования выполнены на случайные возмущения двух типов:
узкополосное возмущение — белый шум по ускорению в полосе
частот от 2 до 20 Гц и широкополосное — белый шум по скорости
в той же полосе частот. Спектральные характеристики кинематичес­
кого узкополосного q { и широкополосного нагружения q2 показаны
на рис. 3.22. Там же изображены характеристики этих процессов по
ускорению (q v q2). Спектральные характеристики по кинематическо­
му воздействию аппроксимируются выражением:
s »
—
7|2(й
(г,2® + l) (г22со + l) (т32со + l) (г42со + l)
где со = 2л/ — круговая частота, ^ = 0 ,4 с, 72= 0 ,2 5 с, Г3=0,15 с, а
Т4= 0 с для высокочастотного возмущения и Г4= 0,07 с для низко­
частотного.
Ввиду нелинейности уравнений, описывающих работу виброизоля­
торов с управляемой жесткостью, закон распределения ускорения
защ ищ аемого объекта отличается от нормального. На рис. 3.23 по­
казаны кривая нормального распределения и кривая, полученная в
результате вычислений закона распределения ускорения. При а < 2
полученная кривая проходит ниже кривой нормального распределе­
ния, а если с > 2 — выше. Эта кривая справедлива для алгоритмов
(3.20), (3.21) и (3.23) при п = 2...3. Исследования показали, что закон
распределения обжатия w = ( x — q) близок к нормальному.
В процессе исследований проводилось сопоставление результатов
98
2
0,5
0,2
0,1
Р и с . 3.22. С п е к т р а л ь н ы е х а р а к т е р и с т и к и входны х кин ем ати ч ески х
в оздей стви й .
0.05
0.003
-3 6
-0,56
Р и с 3.23. Ф ункции н о р м а л ьн о го р а сп р е д е л е н и я и р а сп р е д е л ен и я
ускорен и я в ви бр о защ и тн о й си стем е с п ерекл ю ч аем ой ж есткостью
(а л г о р и т м ы (3.21), (3.23) при п < 3).
s*
rW2
,V*0,5
V=0,3
0,08
0,06
'
0,02
Р и с . 3.24. С п е к тр а л ь н ы е х а р ак т ер и с т и к и ускорени я о б ъ ек та на виброизоляторе
с п ерекл ю ч аем ой по ал го р и т м ам (3.21) и (3.23) ж естк о стью и на виброизоляторе
с линейн ы м дем пф ером при воздействии q r
100
Р и с . 3.25. С п е к тр а л ь н ы е х а р а к т е р и с т и к и у ско р ен и я о б ъ ек т а на ви б р о и зо л ято р е
с переклю чаем ой по а л го р и т м ам (3.21) и (3.23) ж естк о стью и на ви б р о и зо л ято р е
с л инейн ы м д ем п ф ер о м при в оздей стви и qr
расчетов характеристик виброизоляторов с жесткостью, изменяемой
по алгоритмам (3.21) и (3.23) при различных п, так и результатов
расчета линейной виброзащиты с постоянными параметрами при
\|/=0,3 и \р=0,5.
Снижения ускорения по частотам характеризуют спектральные
характеристики ускорения (рис. 3.24, 3.25). По сравнению с линейны­
ми неуправляемы ми виброизоляторы с управляемой жесткостью
дают выигрыш по ускорению на всех частотах. Причем управление
по алгоритму (3.23) более эффективно.
При узкополосном воздействии q] управляемые виброизоляторы
снижаю т дисперсию ускорений в 2—4 раза относительно дисперсий
ускорений при использовании типовых неуправляемых устройств.
Дисперсии деформации упругого элемента (обжатия) при п= 2 в
1,5 р а за выше, чем дисперсия входного воздействия. При « = 3 эта
дисперсия при управлении по алгоритму (3.23) не превышает диспер­
сии входного воздействия (табл. 3.2)
Т а б л и ц а 3.2
Дисперсии параметров колебаний при случайных воздействиях
Н а и м е н о в ан и е
ди сперсии
Л инейная
с и стем а
у = 0 ,3
Линейная
с и стем а
у = 0 ,5
А лгоритм (3.21)
п= 2
п= 3
А лгоритм (3.23)
п= 2
п= 3
Н и зкочастотн ое, q t
В озд ействи е
D х.— D х'
../D ql,
1,73
1,80
0,96
0,66
0,75
0,42
D w— D w/' D q1
,
1,00
0,63
1,50
1,40
1,35
1,00
D х= D х'
/ D .ql
2,00
1,40
1,60
1,30
1,60
0,80
В о зд ей стви е
Dt= D J D ^ 2
В ы сокочастотное, <?2
2,80
5,50
1,10
0,74
0,84
0,42
1,10
0,74
1,60
1,26
1,53
1,20
1,42
1,42
1,60
1,37
1,64
0,95
В случае высокочастотного входного процесса q2 выигрыш по
дисперсии ускорения в управляемой виброизоляции достигает 3...10
раз, дисперсии обжатия в 1,5... 1,6 раза превосходят дисперсию вход­
ного воздействия при п= 2 и в 1,2...1,3 при п = 3.
Важной характеристикой виброизоляторов, предназначенных для
102
10
5
п.-з
^3.23)
05
П-2.
N
6
5
4
3
2
0,6
0,5
05
0,5
0,2
(3.23)
(5)
Р и с . 3.26. И н тен си вн ость вы бросов ускорени я за уровень.
а ) — воздейст вие q2,
б ) — воздейст вие q r
(a)
6
2
0,6
0
0.5
1
1.5
2
2.S
б
( 5J
Р и с . 3.27. И н тенсивность вы бросов у ско р ен и я з а уровен ь,
о тн есен н ая к величине сред н ек в а д р ат и ч н о го ускорен и я.
а) — п= 2,
б) - п= 3.
104
защиты различных конструкций, является интенсивность выбросов
ускорений
(перегрузок)
за некоторый фиксированный уровень.
Графики (рис. 3.26) показывают, что виброизоляторы с уп равл я­
емой жесткостью в сравнении с типовыми устройствами значитель­
но снижают интенсивность выбросов перегрузок (v — количество
выбросов в единицу времени). Чем высокочастотней процесс,
тем
эффективнее
у п равл яем ая виброизоляция по сравнению с
типовой. В отличие от графиков на рис. 3.26 графики на
рис. 3.27 построены в относительных координатах в зависимости от
среднеквадратичного отклонения и позволяют использовать их для
определения интенсивности выбросов, если известна дисперсия
ускорения.
По результатам проведенных модельных исследований можно
сделать следующие выводы:
— в виброизоляторах с параметрически управляемой (переклю­
чаемой) жесткостью упругий элемент не блокируется демпфирую­
щим устройством, поэтому их виброизолирующие свойства на з а р е ­
зонансных частотах близки к виброизолирующим свойствам упругого
элемента без демпфера, причем ускорение (перегрузка) защ ищ аем о­
го объекта определяется практически только жесткостью упругого
элемента и величиной кинематического возмущения и не зависит от
величины скорости воздействия.
Антирезонансные свойства виброизоляторов с управляемой жест­
костью при вынужденных колебаниях и гасящие в переходных
режимах работы зависят от алгоритма (закона) изменения жесткос­
ти упругого элемента. Алгоритмы, синтезированные в настоящей
работе, позволяют перевести защ ищ аем ы й объект из возмущен­
ного состояния
в положение равновесия без последующих ко­
лебаний.
При этом в режимах вынужденных колебаний на ре­
зонансных частотах усиление вибровоздействия не
превышает
2...2,5 единицы. Антирезонансные свойства, как показали иссле­
дования, определяются и величиной п — отношением коммутиру­
емых
жесткостей.
Чем
выше
п,
тем выше при данном
алгоритме антирезонансные свойства виброизоляторов. Наибольши­
ми гасящими свойствами в резонансной полосе частот обладает
алгоритм, синтезированный из условия работы при вынужденных
колебаниях.
В результате исследований удалось оценить эффективность пред­
ложенных алгоритмов в различных сложных режимах работы, в том
числе и при случайных воздействиях. Исследованиями установлено,
что виброизоляторы с переключаемой жесткостью при случайных
нагрузках в 2...5 раз эффективнее (по снижению дисперсий вибропе­
регрузок), чем виброизоляторы с линейным вязким демпфером. В
105
несколько раз ниже при такого рода воздействиях и интенсивность
выбросов перегрузок высоких уровней.
Предварительный анализ показывает, что наименьшие аппара­
турные сложности возникают при реализации алгоритма (3.21).
Эффективность этого алгоритма при п = 2...3 близка к эффективности
более сложно реализуемых (с большим количеством измеряемых
координат) алгоритмов (3.20) и (3.23). Техническая реализация виб­
роизоляторов с переключаемой жесткостью рассмотрена в следую­
щей главе.
Глава
четвертая
ВОПРОСЫ Э К С П Е Р И М Е Н Т А Л Ь Н О Й ОТРАБОТКИ
ВИ Б Р О И З О Л Я Т О Р О В НА ОСНОВЕ УПРУГИХ
Э Л Е М ЕНТОВ С У П Р А В Л Я Е М О Й
( П Е Р Е К Л Ю Ч А Е М О Й ) ЖЕСТКОСТЬЮ
4.1. Конструирование виброизоляторов с переключаемой
жесткостью
Конструкция виброизолятора с переключаемой жесткостью состо­
ит из основного (свободного) упругого элемента, дополнительного
(блокируемого) упругого элемента, блокирующего устройства, блока
формирования сигнала управления и датчиков.
Тип датчиков и конструкция блока формирования управляющего
сигнала определяется видом выбранного алгоритма переключения.
Упругие элементы и блокирующее устройство являются более
универсальными составными частями виброизолятора с переключа­
емой жесткостью.
В тех случаях, когда основной и дополнительный упругие элемен­
ты конструктивно выполнены как одно целое, следует различать
свободную и блокируемую части упругого элемента.
Эти части упругого элемента могут быть соединены последова­
тельно или параллельно (рис. 4.1).
В схеме с параллельным соединением (рис. 4.1а) отношение ж ест­
костей
п = ( С а+
С б ) /С а,
т. е. С = С А, С2= С „ + С В.
В схеме с последовательным соединением частей упругого эле­
мента (рис. 4.16)
/ М С АСВ)/(С А+ С , ) ) / С , = С В/ ( С А+ С В),
С , = С АСБ/ ( С А+ С В), С2= С А.
Рассмотренные конструкции обладаю т примерно одинаковыми
107
У
Сб
%
(со
(8 )
Р и с . 4.1. П а р а л л е л ь н а я ( а ) и п о с л ед о ва тел ьн ая ( б ) схемы соединения упругих
эл ем ен тов виброи зол ятора.
Электрокпстсш
Камера<
тт»/Л
Рис.
108
4.2. П н ев м ати ч еск и й ви бр о и зо л ято р с п ерек л ю ч аем ой ж естко стью п? const
возможностями, и выбор той или иной схемы определяется в основ­
ном компоновочными возможностями. Тем не менее, следует отме­
тить, что схема с параллельным соединением (рис. 4.16) имеет менее
нагруженную конструкцию, так как упругий элемент Съ не воспри­
нимает статическую нагрузку.
Упругие элементы могут быть выполнены на основе стальных
пружин, рессор, пневмокамер.
Если применены пневматические упругие элементы, то переклю­
чение жесткости можно осуществлять при помощи электроклапана,
установленного в перегородке между газовыми полостями.
Здесь возможны две конструкции. В первой конструкции (рис.
4.2) / 1 4 / объемы газов в полостях при закрытом клапане зависят от
деформации упругого элемента в момент закрытия. Поэтому соотно­
шение жесткостей п будет непостоянным, что отрицательно с к а зы в а ­
ется на качестве гашения колебаний.
Во второй конструкции (рис. 4.3) / 2 5 / объем воздушных камер
при работе виброизолятора остается неизменным. Однако это дости­
гается за счет значительного усложнения конструкции упругого
элемента.
Наиболее проста конструкция упругих элементов в виде стальных
витых пружин. Однако при этом возникает проблема создания н а ­
дежно и длительно работающего (при большом количестве циклов)
устройства для управляемой блокировки упругого элемента. В кон­
струкции одной из разработок / 1 2 8 / для этой цели применен у п р а в ­
ляемый элемент сухого трения — фрикционная муфта. Недостатки
такой конструкции заключаются в малой долговечности фрикцион­
ной пары муфты из-за износа и в необходимости создания уп р а вл я­
ющих усилий, по величине превосходящих передаваемую через муф­
ту нагрузку. В дальнейшем было предложено использовать гидрав­
лическое блокирующее устройство.
Конструкция гидравлического блокирующего устройства может
быть выполнена как в виде моментного, так и линейного. Рац и он ал ь­
на симметричная конструкция линейного гидроцилиндра (рис. 4.4) с
двухсторонним выходом штока / 1 9 / . Она позволяет осуществить
блокировку при работе как при сжатии, так и при растяжении
упругого элемента. Уплотняющие элементы на выходе штоков вы зы ­
вают появление дополнительных сил трения, порой весьма значи­
тельных. Трение, препятствуя полному выравниванию пружин, иска­
жает алгоритм работы виброизолятора. Следовательно, силы трения
должны быть сведены к минимуму.
Управляющий сигнал поступает на электромагнит клапана, кото­
рый, открываясь, сообщает полости симметричного гидроцилиндра.
Происходит освобождение запертой части упругого элемента ж ест­
костью СБ (пружина 1). Если к моменту открытия клапана заблоки­
рованная и свободная части упругого элемента имели различные
109
Камера 2
U. упр.
Жидкостная
камера
Р
110
ис
. 4.3. П н ев м ати ч ески й в и брои зол ятор с перекл ю ч аем ой ж есткостью
n = c o n s t.
^Llynp
У
Перегородка
П руж ина 2
X
Р
ис
. 4.4. П р у ж и н н ы й ви бр о и зо л ято р с перекл ю ч аем ой
ж есткостью .
111
деформации, то при открытии клапана происходит выравнивание
деформаций частей упругого элемента (пружин 1 и 2). Выравнивание
заклю чается в перемещении массы перегородки и связанных с ней
масс в равновесное состояние. В процессе выравнивания происходит
рассеивание энергии. Процесс выравнивания может быть апериоди­
ческий или колебательный. В последнем случае колебания перего­
родки и связанных с ней частей с приведенной массой т через
свободную часть упругого элемента СА (пружина 2) могут переда­
ваться на защ ищ аемый объект в виде высокочастотного воздействия
с частотой
rrz
ч .
ю = у/\СА +СБ) / т.
В процессе проектирования для обеспечения заданных режимов
вы равнивания требуется определить такие параметры блокирующе­
го устройства, как рабочая площадь поршня, площадь проходных
отверстий клапана, и, кроме того, оценить влияние утечек между
полостями гидроцилиндра и в клапане на податливость блокирую­
щего устройства. Д л я этого следует использовать уравнения, описы­
вающие динамику работы реальной конструкции виброизолятора:
\ М х + СА{ х - у ) = О,
[ту + СА(у - х ) + СБ{у - q) + F = О,
М — масса защ ищ аемого объекта,
х — координата массы М,
т — приведенная масса подвижных частей гидрозатвора,
у — координата приведенной массы т,
q — кинематическое воздействие со стороны транспортера,
F — сила гидравлического сопротивления в блокирующем ус­
тройстве.
Гидравлическое сопротивление при закрытом клапане определя­
ется из уравнений ламинарного истечения жидкости через неуплот­
ненные зазоры в парах поршень—цилиндр, шток—цилиндр и в кла­
пане по следующей зависимости /3 7 /:
где
А—
Щ
I
v.
<42>
AS/
у
где F
— рабочая площадь поршня гидрозатвора,
у^
— объемный вес жидкости,
v
— кинематическая вязкость жидкости,
g
— ускорение свободного падения,
D , S., L. — соответственно диаметр, высота и длина кольцевой
щели в г-й паре сопряжения.
112
4*
При открытом клапане возможен как ламинарный режим исте­
чения, когда число Рейнольдса R e= L Kv / v (LK— характерный размер
каналов в клапане, v — скорость движения жидкости) меньше кри­
тического R e< R e’, так и турбулентный при R e> R e\
Для клапана с проходными каналам и в виде п отверстий д иам ет­
ром d и площадью / сила гидравлического сопротивления при
R<gR" находится по формуле:
Р2 = 3211ж^
dgnf
(У - д),
(4.3)
где L0 — длина отрезка истечения через отверстие диаметром d.
Когда R ^ > R ’, зависимость для расчета силы гидравлического
сопротивления имеет вид:
и> = 2g\iznzf z a
- •
(*■*)
где р. — коэффициент расхода.
В уравнениях, описывающих работу виброизолятора с у п равл яе­
мой жесткостью, электромагнитный клапан предполагается безынер­
ционным элементом. Практически это означает, что время с р а б а ты ­
вания клапана составляет не более 0,1 от времени выравнивания
пружин. Для повышения быстродействия рекомендуется применять
электромагниты с невысокой индуктивностью, а в блок формирова­
ния сигнала вводить устройства, обеспечивающие форсированное
включение и выключение клапана.
Согласно вышеперечисленным рекомендациям разработана кон­
струкция пружинного виброизолятора с переключаемой жесткостью
для защиты технических систем от транспортировочных нагрузок.
Отличительной особенностью конструкции является возможность
изменения жесткости и соответственно предельной нагрузки вибро­
изолятора путем установки требуемого количества пружин (рис. 4.5).
4.2. Аппаратурная реализация алгоритмов переключения
жесткости упругого элемента
Возможности современной электроники таковы, что создание
дешевых, компактных и надежно работающих устройств формирова­
ния сигналов для управления жесткостью упругого элемента не
представляет каких-либо принципиальных затруднений /1 1 5 /. Здесь
возможно использование таких интегральных элементов, как опера­
ционные усилители, устройства дискретной логики, так и микропро­
цессорной техники.
Сложнее решается вопрос с выбором необходимых датчиков.
Серийно выпускаемая аппаратура для измерения параметров вибра­
ций громоздка, сложна, дорога, и поэтому ее использование в соста­
ве устройств для управления параметрами виброизоляторов нераци­
онально. Исключением являются конструкции потенциометрических
датчиков типа МП-95, МП-68, не требующие специального аппара­
турного обеспечения в виде преобразователей и усилителей сигнала.
Д л я придания алгоритму (3.23) формы, удобной для аппаратур­
ной реализации, запишем его в виде /8 8 /:
_ [ U 0 при sign(* + AU) w < 0,
упр
[О
при s i g n ( i + AU) w > 0,
где x — абсолютная скорость защищаемого объекта,
w = ( x —q) — относительная скорость,
q — скорость внешнего кинематического воздействия,
AU — сдвижка сигнала скорости, причем AU <.<.xmax.
При Uynp= U 0 клапан открыт и жесткость виброизолятора С=С,,
при Uynp= 0 клапан закры т и С = С 2> С ;.
Блок-схема устройства формирования Uynp по (4.5) содержит
(рис. 4.6) измеритель абсолютной скорости, выполненный в виде
датчика ускорений МП-95 и интегратора с фильтром. Фильтр слу­
жит для исключения постоянной составляющей сигнала с датчика.
Сигнал с фильтра-интегратора поступает на нуль-органы, где сдви­
гается по уровню на величину ALJ. На выходе нуль-органов форми­
руется сигнал со знаком, соответствующий s i g n ( i ± AU). Два нульоргана необходимы для создания симметричной относительно нуля
зоны, что позволяет отрабаты вать алгоритм как при входе, так и при
выходе из зоны.
Сравнение знаков скоростей выполняется на логическом элементе
« И С К Л Ю Ч А Ю Щ Е Е ИЛИ». Логика работы этого элемента такова,
что при совпадении знаков (уровней) сигналов на его входе на
выходе формируется сигнал низкого уровня, в противном случае —
высокого. Д а л е е сигнал с элемента «И С К Л Ю Ч А Ю Щ Е Е ИЛИ» по­
ступает на суммирующий логический элемент «И Л И 2», где проис­
ходит его сложение с сигналом с нуль-органов. Причем последний
сигнал формируется суммированием сигналов с нуль-органов на
элементе « И Л И 1» и последующим нормированием по длительности
при помощи ждущего мультивибратора. Ж дущ ий мультивибратор
за д ае т импульс, длительность которого соответствует времени полно­
го выравнивания частей упругого элемента. Этим достигается качес­
твенная работа виброизолятора при рассеивании энергии в режиме
собственных колебаний.
Сигнал с элемента «И Л И 2» соответствует сигналу Uynp согласно
114
Р и с . 4.5. В неш ний вид п р у ж и н н ого в и б р о и зо л ято р а с п ерек л ю ч аем ой ж ес т
костью на п редел ьн ую н а гр у з к у 2,5 кН — ( а ) , 5 кН — ( б ) , 10 к Н
(в).
5*
115
зависимости (4.5). Д л я согласования по току между элементо\
« И Л И 2» и электроклапаном блокирующего устройства введен уси
литель тока.
Более детально рассмотрим порядок построения блока формиро
вания управляющего сигнала по алгоритму (3.21) / 1 9 / .
Этот блок формирует сигнал
О при ( t - t i ) > T ,
^упр
jc
UQ при
(4.6;
| = A U,
х — скорость защищаемого объекта,
A U — зона срабаты вания нуль-органов,
текущее время,
t
ti ~ момент начала последней разблокировки,
Т
длительность импульса разблокировки.
Управляющий сигнал при Ump= 0 соответствует жесткости виб­
роизолятора С = С 2, при Uynp= U 0 — жесткости С = С , < С 2.
Алгоритм (4.6) является модификацией выражения (3.21) приме­
нительно к аппаратурной реализации.
где
Н у л ь-о р ган
дЦ
В атч и к
перегрузок
X
Фильтр-
Логический
элемент ЦЛИ<
и н тегр атор
ли
Н уль-орган
Л атчил огнос(/те/1ь
ной
w
НцЛЬ-Ор-М
Н
1
Реле 5 но ка
отн оси т, скор.
Sijjn UT
1
Siдп(У+&Щ
А
в
3 lo
3 <КЭ
5^3
h=5S
Uynp
У сили тель
м о щ н о ст и
_Г1_
_TL
Логический
эленем М Ц 2
-Л-
Р и с . 4.6. Б л о к-сх ем а устр о й ства ф о р м и р о в ан и я с и г н а л а на п ер екл ю ч е­
ние ж есткости в и б р о и зо л ято р а по а л го р и т м ам (3.23) и (4.5).
116
Блок-схема устройства (рис. 4.7) представлена последовательным
соединением датчика ускорения фильтра-интегратора, нуль-органов,
элемента «ИЛИ», ждущего мультивибратора и усилителя мощности.
Назначение основных элементов блок-схемы то же, что и при р е а ­
лизации алгоритма (3.23).
Работа блока формирования сигнала управления жесткостью
зависит от параметров ее элементов: фильтра-интегратора, нульоргана и мультивибратора.
В рабочем диапазоне частот сигнал с выхода интегратора должен
быть пропорционален скорости защищаемого объекта. З а рабочие
частоты следует считать диапазон частот резонансной области
колебаний, где требуется наиболее эффективная работа гасителя.
Из амплитудно-частотных характеристик относительно колебаний
(рис. 3.20 б) следует, что этой области соответствуют частоты от
со = 0,7^С2 / М до о = 2 ,0^C 2 / М.
В разработанной схеме в качестве интегратора используется
фильтр низких частот (рис. 4.8). Преобразование сигнала с датчика
ускорений в сигнал скорости происходит согласно следующей пере­
даточной функции, описывающей интегратор и фильтр:
W(p) = ------- ^
-------- .
(Т\р + 1)(72р + 1)
где K = R 2/R ,, Tl= C lR l, Т2= С ^ 2.
Этой передаточной функции соответствует амплитудно-частотная
характеристика, которая приведена на рис. 4.9. Из характеристики
видно, что частота среза фильтра высоких частот оо]= 1 / 7 ’1, со2= 1 / Т 2.
К выбору частоты среза фильтра высоких частот предъявляются
противоречивые требования. С одной стороны, увеличение cOj позво­
ляет сильнее ослабить квазистатические составляющие сигнала ус­
корения и устранить их влияние на гашение резонансных частот, с
другой — увеличение ш, влияет на точность интегрирования. К ак
показали исследования, можно рекомендовать выбирать частоту
равной частоте начала интегрирования со2.
Частоту ш2 следует выбирать, исходя из обеспечения достаточно
высокой точности интегрирования на рабочих частотах. Можно по­
казать /1 0 8 /, что ю2^0,1...0^ ©ра6, где <ора6 — нижняя граница рабо­
чей частоты.
В этом случае обеспечиваются достаточно малые амплитудные и
фазовые отличия сигнала, проинтегрированного в данном устройстве,
от сигнала, полученного с идеального интегратора.
Коэффициент усиления фильтра-интегратора К с целью обеспече­
ния наибольшего динамического диапазона работы схемы следует
задавать максимально возможным. Тогда работа схемы происходит
при наименьших погрешностях (относительно мало влияет дрейф
117
Li
Н уль-орган
Ботчик
ускорен и я
X
T in
Финьтр-
aU
Uynp
Р
ис
Логический
элемент ИЛИ
цнтегратор
Ну.'и>- орган
У силитель
Тона импульсо
-П.
Ждущий
мультибаЗратор
. 4.7. Б л о к -сх е м а устр о й ства ф о р м и р о в ан и я с и гн а л а на переклю че­
ние ж естк о сти в и б р о и зо л я то р а по а л го р и т м у (4.6).
К*
Р и с . 4.8. С хем а ф и л ь т р а -и н т е г р а т о р а .
Р и с . 4.9. Л о га р и ф м и ч е с к а я а м п л и ту д н о -ч а с то т н а я х а р а к т е р и с т а я Ж и пктпя-интргпятопа.
118
нуля усилителей, шумы). Величина коэффициента К зависит от
динамического диапазона выходных напряжений усилителя, который
нельзя превышать, чувствительности датчика ускорения, амплитуды
и частоты входного сигнала.
В первом приближении можно считать, что
_
^max ^2
Х тах
^
где
Uшах
— максимальное возможное выходное напряжение
^
операционного усилителя,
хтах — максимальная амплитуда ускорения объекта на час­
тоте Q,
ka — чувствительность датчика (в-с2/м),
£2 = д/С2 / М — частота наибольшего подъема амплитудночастотной характеристики скорости объекта.
Величина порога срабатывания нуль-органов AU определяет точ­
ность отработки алгоритма управления жесткостью. При большей
величине порога срабатывания уменьшается динамический диапазон
работы устройства.
Кроме того, вносятся большие фазовые искажения по времени
подачи управляющего импульса. Поэтому нулевая зона с р а б а т ы в а ­
ния нуль-органов должна быть небольшой. Н ижняя граница здесь
определяется смещением нуля и шумами операционных усилителей.
Нуль-органы, выполненные на операционных усилителях, позво­
ляют получить малый порог срабаты вания (д(/ -> 0) и точно опре­
делить момент перехода сигнала скорости через момент подачи уп­
равляющего импульса при самых малых колебаниях объекта.
Управляющий алгоритм подразумевает импульсное, мгновенное
рассеивание энергии при переключении жесткости. Реальные про­
цессы выравнивания пружин при переключении жесткости инерци­
онны и растянуты по времени. В этих условиях длительность уп рав­
ляющего импульса Т должна быть не менее длительности переход­
ных процессов выравнивания пружин. С другой стороны, чрезмерное
увеличение импульса по времени ухудшает гашение колебаний.
Наличие же генератора калиброванных по длительности импуль­
сов ждущего мультивибратора позволяет нормировать длительность
управляющего импульса и иметь ее минимальной, равной времени
выравнивания пружин. Ж ел ател ьно иметь регулятор длительности
импульса Т для его подстройки под характеристики реальной кон­
струкции виброизолятора. В работе / 3 2 / рассмотрено управление с
датчиком окончания выравнивания пружин.
Как показали экспериментальные исследования, длительность
импульса в зависимости от количества пружин, установленных в
описанную выше конструкцию виброизолятора, колеблется от 0,02 до
0,08 с.
Рассмотренные рекомендации были реализованы при разработке
принципиальной схемы (рис. 4.10) устройства формирования управ­
ляющего сигнала по алгоритму (4.6). Конструкция устройства (рис.
4.11) представляет собой отдельную плату размером 120x70 мм. На
рис. 4.12 приведены осциллограммы сигналов в различных точках
устройства.
4.3. Результаты стендовых и натурных испытаний
виброизоляторов на основе упругих элементов с переключаемой
жесткостью
В процессе испытаний, которые выполнялись на гидравлическом
вибростенде, проверялась работоспособность конструкции виброизо­
лятора (рис. 4.13) и проводилась настройка параметров блока управ­
ления. С помощью вибростенда имитировались два вида внешнего
кинематического воздействия: ступенчатое и гармоническое. Способ­
ность управляемого виброизолятора гасить колебания в переходных
реж им ах проверялась при ступенчатом воздействии (рис. 4.14), резо­
нансных колебаний — при гармоническом (рис. 4.15). В результате
испытаний получены результаты, близкие к расчетным. При этом
определена оптимальная для данной конструкции длительность уп­
равляющего импульса (время разблокировки пружин).
Выполнено исследование характеристик разработанного быстро­
действующего электромагнитного клапана. Сопротивление его об­
мотки составляет 4,3 Ома. При напряжении 27 вольт установившееся
значение тока приблизительно равно 4 амперам. Время установле­
ния тока не превышает 0,01—0,012 с. Средний ток при работе элек­
троклапана с частотой следования импульсов 3 Гц и длительностью
импульса 0,05 с составляет около 0,6 А. Средняя потребляемая
мощность в таком режиме работы равна 14— 15 Вт.
Описанный виброизолятор был применен в конструкции много­
компонентной виброзащитной системы для снижения транспортиро­
вочных перегрузок при железнодорожных перевозках / 7 4 /.
Система обеспечивает защиту от вертикальных, горизонтальных
(по ходу поезда) и крутильных воздействий со стороны транспортера.
В поперечном направлении ввиду малых значений действующих
перегрузок виброзащита не предусмотрена.
Защ ищ аем ы й объект располагается на платформе, подвешенной
на восьми виброизоляторах с переключаемой жесткостью. Четыре из
них удерживают платформу в вертикальном направлении и четыре —
в горизонтальном. Перемещение платформы в поперечном направле­
нии ограничено специальным направляющим устройством.
В горизонтальном направлении использованы виброизоляторы,
аналогичные вертикальным, но имеющие предварительное натяж е­
ние пружин.
120
Рис.
VB3
vort
VT2
VT3
m
+ 27Б2
VTS
VD9
КПОПАН
А о Р 8?
4.10. П р и н ц и п и а л ь н а я э л е к тр и ч е ск а я схем а устр о й ства д л я ф о р м и р о в ан и я с и гн а л а у п р а в л ен и я
по а л го р и тм у (4.6).
B*og
VT1
Р и с 4.11. К о н струкц и я устр о й ства ф орм и ров ан и я с и гн ал а у п р а в ­
л ен и я по а л го р и т м у (4.6).
с дДтчикД.
С
ингвгясттара
—t
{--------
е Hy/rt-afirMit
]
Ццпр
t i - T~ l i
122
Р и с . 4.12. О с ц и л л о гр ам м ы си гн а­
лов в р азл и чн ы х точках устройст­
ва ф о рм и рован и я с и гн ал а у п р а в ­
л ен и я ж есткостью по алгоритм у
(4.6) при синусоидальном сигнале
с д а тч и к а .
Р и с . 4.13.
В и б рои зол ятор
с п ерекл ю ч аем ой
ж есткостью
на ви бростен д е.
123
X
О
Ри с.
4.14. Р а б о т а в и б р о и зо л ято р а с п ереклю ч аем ой ж есткостью
при ступенчатом кинем атич еском воздействии.
XI
ст о л
ви я р о с ген д я
зп щ и щ ы е м ы и о&ьенрг)
О
Р и с . 4.15. Р а б о т а в и б р о и зо л ято р а с перекл ю ч аем ой ж есткостью
в р еж и м е у с тан ови вш и хся гарм он и чески х колеб ани й.
124
Геометрическая компоновка такова, что горизонтальные вибро­
изоляторы ввиду малости угловых перемещений платформы (относи­
тельно поперечной оси) воспринимают практически только осевые по
ходу поезда воздействия. Вертикальные воспринимают как верти­
кальные, так и крутильные нагрузки.
Работа многокомпонентной виброзащитной системы из-за с вязан ­
ности колебаний по различным координатам и наложения колебаний
с различными резонансными частотами отличается от работы при
колебаниях подвеса с одной степенью свободы. В спроектированной
виброзащитной системе удалось добиться эффективного гашения
всех видов резонансных колебаний (вертикальных, крутильных и
горизонтальных). Гашение горизонтальных колебаний осуществляет­
ся по сигналам с датчика ускорений, сориентированного в горизон­
тальном направлении и расположенного в центре масс. В ертикаль­
ные виброизоляторы объединены в две группы, одна из которых
располагается на левой стороне, а вторая на правой стороне пл ат­
формы. Управление каждой из групп вертикальных виброизоляторов
осуществляется по сигналам с датчика, расположенного в месте
крепления виброизоляторов данной группы. Такое расположение
датчиков и виброизоляторов (рис. 4.16) позволяет гасить как кру­
тильные, так и вертикальные колебания.
Исследования выявили рациональность выбранной схемы уп рав­
ления и эффективность ее работы при самых разнообразных реж и ­
мах нагружения. Экспериментальные исследования опытной кон­
струкции многокомпонентной виброзащитной системы / 5 3 / подтвер­
дили теоретические расчеты.
Испытывалась виброзащ итная система (рис. 4.17), имеющая сле­
дующие характеристики:
максимальная величина массы защищаемого объекта
— 2000 кг,
динамический ход в вертикальном направлении
— ± 2 5 см,
динамический ход в горизонтальном направлении
— ± 2 5 см,
собственная частота вертикальных и горизонтальных
колебаний
— 1,4 Гц,
собственная частота крутильных колебаний
— 2,7 Гц,
количество вертикальных виброизоляторов
— 4,
количество горизонтальных виброизоляторов
— 4,
статическая нагрузка на 1 виброизолятор
— 5 кН,
число каналов управления
— 4,
количество датчиков
— 4,
напряжение источника электропитания
— 27 в.
потребляемый ток при отсутствии колебаний
— 0,2 а,
средний потребляемый ток в режиме движения
поезда
— 2,5 а.
Регистрация параметров колебаний производилась с помощью
виброизмерительной аппаратуры ВИ6-6ТН (измерялись ускорения
125
CZJ,
(6j
Р и с . 4.16. С хем а р асп о л о ж ен и я в и б р ои зол яторов и датч и ко в в
уп р а в л яем о й в и брозащ и тн ой системе.
а ) — ви д свер х у,
б) — ви д сбоку.
В ,, В2, В?, В8, — верт икальны е виброизолят оры.,
В3, В4, В5, В6, — горизонт альны е виброизолят оры ,
Д ,, Д 4 — датчики верт икальны х уско р ен и й ,
Д 2, Д 3 — датчики горизонт альн ы х у с к о р е н и й
126
Р и с . 4.17. О п ы т н а я в и б р о з а щ и т н а я с и стем а с п ер ек л ю ч аем о й ж еск остью
упруги х элем ен тов.
вагона и защищаемого объекта по трем координатным направлени­
ям), светолучевых осциллографов, а для фиксации размаха относи­
тельных колебаний в подвеске были разработаны специальные са­
мописцы.
В результате проведенных испытаний получены материалы (ос­
циллограммы, диаграммы), характеризующие работу виброзащиты в
различных режимах реального нагружения.
В режиме стационарного установившегося движения поезда на­
грузки оценивались статическими параметрами: дисперсиями уско­
рений, спектральными характеристиками ускорений, количеством
выбросов амплитуды колебаний за уровень, а такж е по величине
относительных перемещений. В режимах ударных испытаний (столк­
новение вагонов) эффективность виброизоляции оценивалась по степе­
ни снижения максимальных уровней перегрузок.
В процессе дорожных испытаний получены записи нагрузок на
транспортере и объекте в режимах стационарного движения с типо­
выми значениями скоростей (60...80 км/час). Подтверждено, что при
равномерном движении поезда преобладающими нагрузками на
объект со стороны транспортера являются вертикальные виброуско­
рения.
Так, обработка нескольких осциллограмм ускорений транспорте­
ра, полученных при движении поезда на различных участках, пока­
зала, что дисперсии вертикальных ускорений л е ж а т в диапазоне от
1.7 м2/ с 4 до 2,8 м2/ с 4, а горизонтальных от 0,5 м2/ с 4 до 0,9 м2/ с 4.
В спектральном составе вертикальных ускорений транспортера
преобладают частоты от 2,5 Гц до 4 Гц и от 8 Гц до 13 Гц (рис. 4.18,
сплошная линия). Спектр продольных ускорений транспортера прак­
тически равномерно распределен в диапазоне частот от 0,5 до 40 Гц.
Дисперсии и спектральные характеристики нагрузок получены
обработкой осциллограм м с шагом д искретизации по времени
/М=0,005 с, при этом длительность спектрального анализа ^=40 с,
шаг дискретизации по частоте — спектральное «окно» анализа со­
ставляет 0,5 Гц.
Виброзащитная система обеспечивает значительное уменьшение
величины ускорений как в вертикальном, так и в горизонтальном
направлениях. Дисперсия вертикальных ускорений объекта в 5 раз
ниже, чем транспортера, продольных в 10... 15 раз. Распределение
энергии колебаний по частотам показывает, что виброзащитная
система усиливает низкочастотные (от 0,5 Гц до 1,8 Гц) виброуско­
рения, не изменяет характера ускорений в диапазоне от 2 Гц до
2.7 Гц и ослабляет ускорения на частотах выше 3 Гц (рис. 4.18).
Оценка эффективности виброизоляторов в режимах равномерного
движения поезда проведена и по количеству выбросов в единицу
128
Р и с . 4.18. С п е к тр а л ьн ы е х а р ак т ер и с т и к и в ер т и к а л ьн ы х виброускорен ий (гаси тел и р аботаю т).
Длит ельност ь р е а л и з а ц и и — 40 с.
Д и с п е р с и я у с к о р е н и я п о ла транспортера — 2,75 м2/ с4.
Д и с п е р с и я у с к о р е н и я з а щ и щ а е м о го объект а — 0,55 м 2/ с4.
т ранспорт ер
f ,
2Ц
времени амплитуд ускорений за фиксированные уровни. В таблице
4.1 приведены результаты соответствующей обработки ряда ос­
циллограмм суммарной длительностью около 150 с.
Т а б л и ц а 4.1
Количество выбросов ускорений за уровень в 1 час
Н а п р а в л е н и е ускорени я
У ровень в
ед. g-
вер ти к ал ьн .
ваго н а
верти к ал ьн .
об ъ екта
продольн.
ваго н а
продольн.
объекта
0,25
8500
1830
3750
0,50
910
0
48
0
0,75
12
0
0
0
215
Эти результаты показывают, что виброзащита, снижая количест­
во циклов нагружения защищаемого объекта, полностью (в режиме
установившегося движения) исключают перегрузки > 0,5 ед. g.
Эффективность работы управляемых виброизоляторов в режиме
установившегося движения состава характеризуется как величинами
ускорений, так и относительных перемещений груза (или обжатия
виброизоляторов). При выключении устройства управления жест­
костью (гасителя колебаний) защ ищ аемый объект оказывается под­
вешенным на пружинах постоянной жесткости. В этом случае дис­
персия ускорения объекта примерно в 1,5 раза превышает диспер­
сию ускорений транспортера, т. е. пружинная подвеска "He только не
снижает вертикальные ускорения, но и способствует их увеличению.
Значение спектральной плотности ускорений объекта в неуправляе­
мой виброизоляции на резонансной частоте ( /= 1 ,4 Гц) почти вдвое
выше спектра мощности ускорений транспортера (рис. 4.19).
Р азм ах относительных колебаний в вертикальном направлении в
виброзащитной системе с работающими гасителями не превышал (по
данным многочасовых экспозиций) 75 мм (рис. 4.20), при выключении
гасителей — достигал 160...190 мм (рис. 4.21). Можно считать, что
гасители уменьшают амплитуды вертикальных колебаний при ста­
тистическом резонансе в 2...2,5 раза.
Формирование состава, трогание, резкое торможение сопровожда­
ются значительными ударными перегрузками вагона-транспортера
как в горизонтальном по ходу поезда, так и в вертикальном направ­
лениях. Испытания виброзащитной системы в нестационарных реж и­
мах требуют синхронизации включения регистрирующей аппаратуры
и момента соударения, измерения скоростей соударяющихся вагонов
130
_
w
^ .
v
=^+
Р и с 4.19. С п е к тр а л ьн ы е х ар ак т ер и с т и к и в ер ти к ал ьн ы х ви броускорен ий (си стем а у п р а в л ен и я вы клю чен а).
Длит ельност ь р е а л и з а ц и и — 42 с.
Д и с п е р с и я у с к о р е н и я п о л а транспортера — 2,14 м 2/ с4.
Д и с п е р с и я у с к о р е н и я за щ и щ а е м о го объект а — 3,45 м2/ с 4.
U
о5ъекгг>
frn P Q-H с h о P m e P
},гц
Р и с 4.20. Д и а г р а м м а относи тельны х
к о л еб ан и й с р а б о таю щ и м и гаси тел ям и .
Удвиж= 70 к м /ч а с , эк с п о зи ц и я —
Т = 3 ,5 часа.
Р и с . 4.21. Д и а г р а м м а относи тельны х
к о л еб ан и й с вы клю ченной систем ой
у п р а в л ен и я ж есткостью .
Удвиж= 70 к м /ч а с , э к с п о зи ц и я —
Т = 1 ,5 часа.
и их масс. Во время настоящих испытаний на неподвижный тран­
спортер общей массой 80 т накаты вался вагон-боек массой 70 т.
Скорость накаты вания определялась расчетным путем по времени
прохождения мерного участка пути непосредственно перед соударе­
нием. П арам етры колебаний транспортера и груза в режиме соуда­
рения фиксировались шлейфовыми осциллографами.
Процесс соударения можно разбить на два этапа. Первый этап
характеризуется большими амплитудами высокочастотных (10...15 Гц)
составляющих горизонтальных и вертикальных ускорений транспор­
тера, которые затем на втором этапе (при />0,25...0,3 с) переходят
в затухающие низкочастотные (2,5...5 Гц) колебания (см. рис. 4.22 —
осциллограм мы соударения). Причем колебания транспортера в
осевом направлении практически затухают за 1,5...2 с, а вертикаль­
ные колебания за 3...4 с.
В таблице 4.2 приведены значения перегрузок объекта и тран ­
спортера при двух соударениях со скоростями соударения в 6 и
9 км /час.
Эффективность виброзащиты оценивалась по коэффициенту сни­
жения перегрузок. Этот коэффициент находится как отношение
максимальной перегрузки транспортера к максимальному значению
перегрузки объекта, имеющему место за промежуток времени At.
Виброзащита эффективна, если К > 1.
Т а б л и ц а
П ерегрузки в процессе соударения (максимальные значения ед.
Н а п р авл ен и е перегрузки
V соударе­
ния к м /ч а с
9
6
A t, с
вертикальная,
ось Y
вагон
объ ект
0..1
2,30
1..2
гор и зо н тал ьн ая,
ось X
4. 2
g)
К оэф ф ици ент сниж ения
перегрузки
Ку
вагон
объект
0,63
3,70
0,97
3,6
3,80
0,96
0,70
0,50
0,68
1,4
0,74
2..3
0,36
0,31
0,27
0,14
1,1
1,90
0..1
1,67
0,50
2,30
0,70
3,3
3,30
1..2
0,60
0,35
0,20
0,22
1,7
0,90
2..3
0,30
0,20
0,20
0,15
1,5
1,30
к,
В ы сокая эффективность виброзащиты достигается на первом
этапе процесса столкновения. Виброзащита в 3...4 раза снижает
осевые и вертикальные перегрузки. На втором этапе, когда ампли­
туда колебаний резко падает и колебания становятся низкочастот­
ными, эффективность виброзащиты уменьшается.
Анализ осциллограмм соударения показал, что после затухания
колебаний транспортера, гашение колебаний объекта происходит за
промежуток времени At ~ 0,5 с, что близко к теоретически достижи­
мому результату. Относительные перемещения объекта при скорос­
тях соударения до 9 к м /ч а с в горизонтальном (по ходу поезда)
направлении не превышает 15 см. Испытания подтвердили рацио­
нальность схемы установки датчиков ускорения (по концам подвиж­
ной платформы) для управления жесткостью вертикальных вибро­
изоляторов. Такое расположение датчиков позволяет эффективно га ­
сить и вращательные (вокруг горизонтальной поперечной оси) коле­
бания платформы с защ ищ аем ым объектом.
133
-0,25
0,2Sf
AM
Р и с . 4.22. О с ц и л л о гр ам м ы кол еб ан и й при с о ударен и и в агон ов ( К = 9 к м /ч а с ).
х, cjx — п р о д о л ь н ы е ( горизонт альн ы е) уско р ен и я ,
у, qy — верт икальны е у ско р е н и я .
>пР&нсног>тер
ЗАКЛЮ ЧЕНИЕ
Обозначим области применения разработанных виброизоляторов
и перспективы дальнейших исследований по рассмотренным н ап рав­
лениям.
По предложенному в работе принципу могут быть спроектирова­
ны компактные и эффективные в широкой полосе частот активные
гидравлические средства виброизоляции человека, приборных систем
и виброактивного оборудования. Следует использовать гидроцилин­
дры с низким уровнем трения в направляющих и уплотнительных
узлах. Д л я повышения функциональных свойств активного виброизо­
лятора характеристики его перепускных клапанов должны быть
регулируемые.
Основным препятствием к применению активных систем является
потребность в энергетических установках, поддерживающих их рабо­
ту. Менее энергоемки параметрически управляемые (полуактивные)
виброизоляторы.
Виброизоляция с системой параметрической оптимизации уровня
демпфирования применима в первую - очередь там, где особенно
высока нестационарность вибровоздействия. Эффективно использо­
вание таких систем в управляемых подвесках транспортных средств,
а с указанной в работе модификацией и для качественной виброза­
щиты сидений водителей. Не исключено, что подобный алгоритм
окажется целесообразным при демпфировании нестационарных ко­
лебательных процессов, возникающих при разгоне различного рода
виброактивного оборудования типа энергетических машин, центри­
фуг и т. п. техники.
Виброизоляторы на основе упругих элементов с алгоритмически
управляемой жесткостью относятся к классу систем с переменной
структурой. Они имеют нетрадиционную конструкцию. В настоящее
время применение подобных виброизоляторов зависит от степени
отработки используемых в них механических узлов и аппаратных
средств. Первый опыт применения виброизоляторов с управляемой
жесткостью показал решаемость обозначенных технических задач.
Учитывая, что эти виброизоляторы существенно эффективнее тр а д и ­
ционных средств, можно утверждать, что в перспективе они найдут
свое применение и в первую очередь в таких областях как транспорт
и авиация, причем в авиации и в качестве поглотителей кинетичес­
кой энергии при посадке летательного аппарата.
135
ЛИТЕРАТУРА
1. А б у-А к и л (A by-A keel А. К .) Э лектродин ам и ческий виброп огл оти тел ь к ак
пасси в н ое или акти в н о е устрой ство (T he e le c tro d y n a m ic v ib ra tio n a b s o rb e r a s a p a s ­
siv e or a c tiv e dev ice) / Т руды А м ери кан ского общ ества и н ж енеров-м ехан иков. Сер. В.,
Т. 89, № 4, М .: М и р. 1967. — С. 166— 179.
2. А к м у х а м м е д о в А .
О б уп р ав л ен и и д виж ением твердого тела,
подчиненного сер в о с в я зя м : И зве с ти я АН Т уркм. С С Р / / С ерия физ.-техн. химия и
геол оги я. — 1972. — № 5. С. 2 2 —28.
3. А л а б у ж е в П. М . У пругие систем ы постоянного усилия / / Конф еренция
по п р о б л е м а м к о л еб ат ел ь н ы х систем . — К иев, 1969. — С. 204—206.
4. А л е к с е е в А. М. , С б о р о в с к и й
А. К. С удовы е в иброгасители . — Л.:
С удп р о м ., 1962. — 325 с.
5. А. С. 214243 С С С Р , М К И F 0 6 F . У стройство д л я гаш ен и я м еханических коле­
б ан и й / А. С. Г ел ь м а н , Ф. А. Ф у р м ан , Ф. Г. Ворончихин и др. (С С С Р ). — № 1135342/
25-28, з а я в л . 20.11.67, оп уб л. 20.03.68, бю л. № 11.
6. А. С. 259569 С С С Р , М К И F 16F . У строй ство д л я ам о р т и зац и и / В. Б. Ш илин,
Э. К. В а с е р м а н и с (С С С Р ). — № 1263035/25-28, з а я в л . 09.08.68, опубл. 12.12.69, бюл.
№ 2.
7. А. С. 261926 С С С Р , М К И B 6 0 G 1 1 /2 6 , F 1 6 F 9 /0 4 . П н ев м ати ч еск и й упругий
эл ем ен т / К. И . Г ви н ери я, Г. Д . Д ж о х а д зе (С С С Р ) — № 1163498/27-11, заявл .
12.06.67, оп уб л. 13.01.70, бю л. № 5.
8. А. С. 315639 С С С Р , М К И B 6 1 F 5 /1 0 , B 6 0 G 1 1 /2 6 , F 1 6 F 1 5 /1 6 . Г ас и т ел ь механи­
ческих к о л еб ан и й / И . В. А стахов (С С С Р ). — № 1379468/27-11, з а я в л . 26.11.69, опубл.
01.10.71, бю л. № 29.
9. А. С. 386179 С С С Р , М К И F 1 6 F 9 /0 2 . К л ап ан н о е устр о й ство п н евм атического
гас и т ел я к о л еб ан и й двухсторон него дей ств и я / И. В. А стахов (С С С Р ). — № 1627372/
27-11, з а я в л . 02.03.71, опубл. 14.06.73, бю л. № 26.
10. А. С. 436193 С С С Р , М К И F 1 6 F 9 /2 8 . Г и д р а в л и ч е ск о е в н б р о защ и т н о е устрой ­
ство / Ф. А. Ф ур м ан , К. В. Ф ролов и др. (С С С Р ). — № 1838145/25-28, з а я в л . 20.10.72,
опубл. 15.07.74, бю л. № 26.
11. А. С. 507723 С С С Р , М К И F 1 6 F 3 /0 2 . П р у ж и н н и й а м о р т и з а т о р / Э. И. Росик,
В. В. М а л ы ш е в (С С С Р ). — № 2 0 9 2 9 04/25-28, з а я в л . 06-01.75, опуб л. 25.03.76, бюл.
№ 11 .
12. А. С. 517724 С С С Р , М К И F 1 6 F 9 /0 2 . У пругий эл ем ен т с р е гул и руем ой ж е с т ­
костью / А. В. С ин ев (С С С Р ). — № 1958509/28, з а я в л . 18.09.73, оп уб л. 15.06.76, бюл.
№ 22 .
13. А. С. 533774 (С С С Р ). С пособ ком п ен сац и и в и б р а ц и й м ехан и чески х ко н стр у к ­
ций. / Б. Д . Т а р т а к о в с к и й и др. , № 2 0 0 0 7 4 3 3 /2 8 , з а я в л . 07.03.74, опуб л. в Б. И . 1976,
№ 40.
14. А. С. 568770 С С С Р , М К И B 6 0 G 2 3 /0 0 F 1 6 F 9 /5 0 . У строй ство д л я гаш ен и я
кол еб ан и й о б ъ ек та / Н. В. Г ераси м ов, Ю. В. Ш ати л о в (С С С Р ).— № 2050614, за я в л е н о
26.07.74, опуб л. 15.08.77. бю л. № 30.
15. А. С. 588421 С С С Р , М К И F 1 6 F 7 /0 8 . Способ д е м п ф и р о в а н и я м еханических
к о л еб ан и й / В. Г. К л и м ов (С С С Р ). — № 2 1 3 9 5 1 2 /2 8 , з а я в л е н о 30.05.75, опубл.
15.01.78, бю л. № 2.
16. А. С. 596763 С С С Р , М К И F 1 6 F 1 5 /0 3 . А м о р ти зато р с авто м ат и ч ес к и м у п р а в ­
136
лением / И. Ю. С кучас и др. (С С С Р ). — № 2 3 3 5 7 17/25-28, з а я в л . 18.03.76, оп уб л.
05.03.78, бюл. № 9.
17. А. С. 629378 С С С Р , М К И F 1 6 F 1 5 /0 3 . В и б р о и зо л ято р с а в то м ати ч еск и м у п р а в ­
лением / В. А. Т регубое, В. А. С ы тай (С С С Р ). — № 2 3 4 4 2 02/25-28, з а я в л . 06.04.76,
опубл. 25.10.78, бю л. № 21.
18. А. С. 634042 С С С Р , М К И F 1 6 F 1 5 /0 0 . У строй ство акти вн ого в и б р о га ш е н и я /
И. 3. Копп, Е. А. П а тр у с о в , К. М . Р а г у л ь с к и с и др. (С С С Р ). — № 2 5 1 0 5 58/25-28,
за я в л . 27.07.77, опубл. 25.11.78, бю л. № 43.
19. А. С. 771380 С С С Р , М К И F 1 6 F 9 /0 6 . А м орти затор / Н. В. Г ераси м ов, Ю. В.
Ш ати лов (С С С Р ). — № 2647612, з а я в л . 24.05.78, опубл. 15.10.80, бю л. № 38.
20. А. С. 868186 С С С Р , М К И F 1 6 F 9 /0 2 . Г азо с т а т и ч е с к а я опора / В. М . Г о л о щ а ­
пов, А. И. К лим енко, А. А. С идоренко, Д . Е. Ч его д аев (С С С Р ). — № 2 8 3 1 9 42/25-28,
з а я в л . 26.10.79, опубл. 30.09.81, бю л. № 36.
21. А. С. 88^792 С С С Р , М К И В 6 0 № 1 /0 2 , F 1 6 F 9 /2 8 . А к ти в н ая ги д р о м е х ан и ч е ск а я
под веска сиденья сам оходной м аш ины / Я. И . З а я ц , В. Я. К отик, А. В. Р е б р о в ,
Е. С. Ш аш кин (СССР). — № 2859225/27-11, заявл. 28.12.79, опубл. 23.11.81, бюл. № 43.
22. А. С. 893653 (С С С Р ). П руж и н н о -ги д р ав л и ч еск и й поглощ аю щ и й а п п а р а т ж е ­
лезн одорож н ого тр ан сп ортн ого ср ед с т в а . / Е. С. Б а р к л а е в с к и й и д р .№ 2 9 0 9 3 49/27-11,
з а я в л . 14.04.80, опубл. в Б. И. 1981, № 48.
23. А. С. 970004 С С С Р , М К И F 1 6 F 9 /0 2 . Способ гаш ен и я м ехани ческих к о л еб ан и й
о бъ екта на двухкам ерной пневм оподвеске и устройство д л я его о сущ ествлен и я / Б . А.
К а л а ш н и к о в , Г. А. К о л о к о л о в , В. Ф. С а м о й л е н к о , И . Н. Г р еч у х ( С С С Р ). —
№ 3 279416/25-28, з а я в л . 16.04.81, опубл. 30.10.82, бю л. № 40.
24. А. С. 1004685 С С С Р ,
М К И F 1 6 F 1 /1 8 . П л а с т и н ч а т а я рессо р а З а м и т т е р а /
М. Н. Замиттер (СССР). — № 2604568/22-11, заявлено 21.04.78, опубл. 15.03.83, бюл. № 11.
25. А. С.
1024615 С С С Р , М К И F 1 6 F 9 /5 0 . У стройство д л я гаш ен и я к ол еб ан и
об ъ ек та / Н.
В. Г ераси м ов, В. И. К рай н ов , Ю.В. Ш ати л ов и д р . (С С С Р ). З а я в л е н о
01.04.80, опубл. 23.06.83, бю л. № 23.
26. А. С.
1025540 (С С С Р ). У стройство д л я у п р а в л ен и я систем ой в и б р о защ и ты
сиденья транспортного средства. / И. А. Веренич, А. Н. Останин и Р. И. Ф урунжиев. —
№ 3 390005/27-11, з а я в л . 05.02.82., оп уб л. 1983, Б . И . № 24.
27. А. С. 1060506 С С С Р , М К И B G O G 17/08. Г и дроп н евм ати чески й а м о р т и зат о р
подвески автом обиля / П. И. М ордю ш енко, А. И. Зори н , А. П. М орю ш енко (С С С Р ).
— № 3 249789/27-11, з а я в л . 20.02.81, опубл. 15.12.83, бю л. № 46.
28. А. С. 1062450 (С С С Р ). А м о р ти зато р . / В. И. С убботин и др. № 349 6 8 0 3 /2 5 -2 8 ,
з а я в л . 30.09.82, опубл. в Б. И . 1983, № 17.
29. А. С. 1062077 (С С С Р ). П н евм оп од веш и ван и е э к и п а ж а ж ел е зн о д о р о ж н о го т р а н ­
спортного с р ед ства. / Э. П . Е л б ае в . — № 3 393660/27-11, з а я в л . 11.02.82, опуб л. в
Б. И. 1983, № 47.
30. А. С. 1096413 С С С Р , М К И F 1 6 F 1 /1 8 . М н огол и сто вая рессо р а / В. X. А м б а р ­
цум ян, В. А. Б у л гак о в , В. П . Е горов и др. (С С С Р ). — № 4 325993/25-28, з а я в л е н о
11.31.82, опубл. 07.06.04., бю л. № 21.
31. А. С. 1167591 С С С Р , М К И G 0 5 D 19 / 0 0 / / F 16 F 15/00. У стройство д л я у п р а в л е ­
ния дем пф и рую щ ей силой в а м о р т и зат о р е / Н. В. Г ераси м ов, Ю. В. Ш ати л ов (С С С Р ).
— № 3603090, з а я в л . 15.04.83, опубл. 15.07.85, бю л. № 26.
32. А. С. 1173088 С С С Р , М К И F 1 6 F 9 /0 6 . В и б р о защ и т н а я систем а с у п р а в л яем о й
ж есткостью . / Ю. В. Ш ати л о в, В. А. Ц ы п л а к о в (С С С Р ). — № 3594073, з а я в л е н о
13.05.83, опубл. 15.08.85, бю л. № 30.
33. А. С. 1227853 С С С Р , М К И F 1 6 F 1 5 /0 2 . А к ти в н а я в и б р о за щ и т н а я с и стем а
/ Ю. В. Ш ати л ов, X. С. Х азан о в , С. В. С адовн и к ов (С С С Р ). — № 3808387, за я в л е н о
31.08.84; опубл. 30.04.86, бю л. № 36.
34. А. С. 1564018 С С С Р , М К И В 60№ 2 /0 2 . С иденье води теля т р ан сп о р тн о го
средства / Ю. В. Ш ати л о в, Ю. П. Х аритонов и др. С С С Р . — № 4462996/31-11 за я в л
19.07.88, опубл. 23.07.89, бю л. № 18.
'
137
35. Б а б а к о в И .
М. Т еория к ол еб ан и й .
—
М.: Н а у к а , 1968. — 560
36. Б а у т и н
Н. Н. , Л е о н т о в и ч
Е. А. М етоды и при ем ы качественн ого
и с сл е д о в а н и я ди н ам и ческ и х систем на плоскости. — М.: Н а у к а , 1967. — 496 с.
37. Б а ш т а Т. М. Р а с ч е ты и конструкци и с ам ол етн ы х ги д р а в л и ч е ск и х устройств.
— М.: О б орон ги з,
1961.
— 475 с.
38. Б е л о у с о в А.
И ., С и д о р е н к оА.
А.
Э к сп ер и м ен тал ь н о е иссл
акти вн ой п н евм ати ч еской виброзащ и тн ой системы . / / В и б р о защ и т а чел овек а-оп ератора и к о л еб ан и й в м аш и н ах. — М.: Н а у к а , 1977. С. 4 4 —47.
39. Б е л о у с о в А. И., Т о к а р е в И. П., Ч е г о д а е в Д . И. Р е л ак с ац и о н н ая
га зо с т а т и ч е с к а я под веска д л я за щ и ты о п е р ат о р а от вибраци онны х и у д ар н ы х н а гр у ­
зок. — В кн.: М етоды и ср ед с т ва ви б р о защ и ты ч ел овека. М.: И М А Ш , 1977. — С.
8 9 .-9 3 .
40. Б е н д а т Д ж ., П и р с о л А. П ри м енение корреляц ионного и спектрального
а н а л и з а . — М.: М и р, 1983. — 321 с.
41. Б и с Д . А. И ссл е д о в а н и е гибридной в и брозащ и тн ой систем ы / / И сп ы тател ь­
ны е п р и б о р ы и стенды ; Э к сп р ес с-и н ф о р м а ц и я, 1969. — № 13. — С. 15—20.
42. Б о г о м о л о в А. И ., С т е п а н о в П. А. О п редел ен и е оптимальны х
п ер ед ато ч н ы х ф ункц ий систем а м о р ти зац и и : И зве с ти я вы сш их учебны х заведени й / /
М а ш и н о стр о ен и е. — 1979. — № 7. — С. 5 5 — 59.
43. Б о л о т и н В. В. Т еория оп ти м альн ой в и брозащ и ты при случай ны х воздей­
ствиях: Сб. научн . т р у д о в / М осковский эн ергети ч ески й институт. — М осква, 1970. —
№ 74. - С. 5 - 1 5 .
44. В а й с м а н А. И. и др. К вопросу ф изико-гигиенической оценки влияния
а вто м о б и л я на о р ган и зм чел о в ек а. Т езисы д о к л а д о в конф ерен ции «В лияни е вибраций
на о р ган и зм ч е л о в ек а и п роб лем ы ви б р о защ и ты » . И зд. « Н а у к а» , М осква, 1974.
45. В а р а в а В. И . А н ал и з м етодов о п ти м и зац и и ви брозащ и тн ы х систем / /
П р и к л а д н а я м ех ан и ка. — 1973. — № 3. — С. 111 — 118.
46. В и б р а ц и я в технике. С п р а в о ч н и к в 6 том ах. Т. 6. З а щ и т а от вибраци й и
у д а р о в / П од р е д а к ц и е й К. В. Ф ролова. — М.: М аш и н остроен и е, 1981. — 456 с.
47. В о л л е р н е р Н. Ф. А п п ар а т у р н ы й сп ек т р ал ь н ы й а н а л и з сигн алов. — М.:
Сов. р ад и о , 1977. — 208 с.
48. Г а л а х е р Д. , В а л ь т е р р а Е. М ат ем а ти ч ес к и й а н а л и з «релаксаци онной
подвески». / / П р и к л а д н а я м ат е м а т и к а и м аш ин остроен ие: Сб. переводов. — 1953. —
№ 3.
49. Г а м ы н и н Н. С. Г и дравл и чески й след ящ и й при вод / П од ред. Л ещ енко.
— М.: М аш и н о стр о ен и е, 1968. — 563 с.
50. Га н и е в Р . Ф., К о н о н е н к о В. О. К о л еб ан и я тв е р д ы х тел . — М.: Н ау к а,
1976. - 432 с.
51. В. М . Г а р б у з о в . Р е с со р н а я си стем а в аго н а с упруго вклю ченны м ги д р а в ­
лическим гаси тел ем кол еб ан и й / / Д и н а м и к а подви ж н ого с о ст ав а : Сб. научн. трудов
/ Л ен и н гр ад ск и й институт ин ж ен еров ж ел езн о д о р о ж н о го т р а н с п о р т а . — Л ен и н град :
Т р ан с п о р т, 1968. — Вы п. 281. — С. 157— 165.
52. Г е н к и н М . Д ., Е л е з о в В. Г., Я б л о н с к и й В. В. М етоды уп р ав л яем о й
в и б р о защ и т ы м аш ин . — М.: Н а у к а , 1985. — 240 с.
53. Г е р а с и м о в Н. В., Ш а т и л о в Ю. В., К р а й н о в В. И ., Р о
м а ш к и н
В. М. Р е зу л ь т а т ы испы тани й в и брозащ и тн ой систем ы с у п р а в л яем о й
ж есткостью / С т а т ь я в м еж вузовском сборн и к е « В и б р ац и о н н а я прочность и н а д е ж ­
ность д в и га те л ей и систем л ет а те л ьн ы х а п п а р ат о в » , вып. 7, К уА И , К уй б ы ш ев, 1980.
54. Г е р а с и м о в Н. В., Ш а т и л о в Ю. В. А н ал и з в л и я н и я связей на
в и б рои золирую щ ие х а р ак т ер и с т и к и простейш его м еханического ф и л ь тр а / / Вопросы
прочности эл ем ен тов ави ац и он н ы х конструкци й: М еж ву зо вск и й сборник. — К у й б ы ­
ш ев, 1974. — Вы п. 1. — С. 115— 122.
55. Г е р а с и м о в Н. В., Ш а т и л о в Ю. В. К вопросу с о зд а н и я с а м о н а с т р а ­
иваю щ и хся в и б розащ и тн ы х систем / / Вопросы прочности и долговечности элем ен тов
138
авиационны х конструкций: М еж ву зо вск и й сборник, 1979. — Вып. 5. — С. 132— 137.
56. ГОСТ 12.1.012—90. В и б р ац и о н н а я безоп асн ость. О б щ ие т р еб о в ан и я.
57. Г р и б о в М. М. Р е гу л и р у ем ы е
ам о р т и зат о р ы РЭА . — М.: Сов. Р ад и о ,
1974. - 144 с.
58. Г р и г о р ь е в Е. Т. Р а с ч е т и к он струи рован и е резиновы х а м о р т и з а т о ­
ров. — М.: М аш ги з, 1960. — 160 с.
59. Г у р е ц к и й В. В., М а з и н
J1. С. О б оптим альной ам о р т и зац и и упругих
тел / / М аш иноведение. — 1970. — №
3. — С. 17—23.
60. Д е р б а р е м д и к е р А. Д . А м ортизаторы с регулируем ы м сопроти влением
/ / А втом обильная пром ы ш ленность. — 1968. — № 3.
61. Д е р б а р е м д и к е р
А. Д . А м орти заторы тран сп о р тн ы х м аш ин. — М.:
М аш иностроение, 1985. — 199 с.
62. Д и н ам и к а систем д о р о г а — ш и н а — авт о м о б и л ь— водитель. / П од р ед ак ц и ей
А. А. Х а ч а ту р о в а ,— М.: М аш и н остроен и е, 1976. — 535 с.
63. Е л е з о в В. П., Д а в л е т ш и н а М. М ., М и г у н Ю. Г. С а м о н а с т р а ­
и ваю щ аяся ABC. — В ибротехника, 1982. — № 3 /4 , — С. 3 1 — 42.
64. Е л и с е е в С. В., Н е р у б е н к о Г. П. Д и н ам и ч еск и е гаси тел и к о л е б а ­
ний. — Н овосибирск: Н а у к а , 1982. — 144 с.
65. Е л и с е е в С. В., О л ь к о в В. В. Н екоторы е за д а ч и в и б р о защ и ты в к л а с с е
систем с переменной структурой / / М ехан и к а и процессы уп рав л ен и я: М а т ер и а л ы
юбилейной н.-т. конференции м еханического ф а к у л ь те т а И П И . — И рк утск , 1971. —
С. 1 8 - 2 6 .
66. Е м е л ь я н о в С. В. С истем ы автом ати ч еского у п р ав л ен и я с перем енной
структурой. — М.: Н а у к а , 1967. — 336 с.
67. И в о в и ч В. А., И в а н о в Г. В. С обственны е ко л еб ан и я в и б рои золирован ной
системы с ж есткой близкой к нулевой в некотором д и ап а зо н е перем ещ ений / / М а ш и ­
новедение. — 1976. — № 1. — С. 3 0 — 33.
68. И л ь и н с к и й В. С. З а щ и т а а п п а р а т о в от ди н ам и чески х воздействий . —
М.: Э нергия, 1979. — 320 с.
69. 3 а с я д ь к о А. А., О л ь к о в В. В., Е л и с е е в
С. В. О возм ож ности
активной виброзащ иты с помощ ью устройств с п реоб р азо в ан и ем д в и ж ен и я. С борн ик
м атериалов
научно-технической
конф ерен ции м еханического ф а к у л ь те т а И П И /
И П И — И ркутск, 1971. — С.
8 9 —97.
70. 3 а я ц Я. И., Ц в и к Б. Д . О п отен циальны х возм ож н остях эл е к тр о ги д р а в лической виброзащ итной системы . / / В лияни е в и б рац и й на орган и зм чел овека и
проблем ы в иброзащ иты . — М.: Н а у к а , 1974. — С. 636—642.
71. 3 у е в А. К. В ибраци и м аш ин и пути их ви брои зол яц и и / / Вопросы ви б р о ­
изоляции судовы х м ехани зм ов и м аш ин. Т руды Н овосиби рского ин ститута и н ж енеров
водного тран сп о р та. В ы пуск 163. — Н овосибирск: 1983. — С. 6 — 17.
72. 3 у е в А. К. Н овы е у п руги е опоры судовы х д в и гател ей / / С борн ик научны х
трудов «П овы ш ение н ад еж н о сти и долговечности ответственн ы х судовы х д е та л ей
механизм ов и устройств», изд. Н И И В Т ; 1985. — С. 4 6 — 52.
73. К а з а к о в И. Д ., Д о с т у п о в Б. Г. С тат и с ти ч ес к ая д и н ам и к а нелинейны х
автом атических систем. — М: Ф и зм атги з, 1962. — 331 с.
74. К р а й н о в В. И., Ш
а т ил о в
Ю. В. К онтейнер с у п р а в л яем о й сис
виброизоляции. В сборнике « М а т ер и а л ы 2-го Российско-ки тайского си м пози ум а по
космической науке и технике». С а м а р а , 1990. — С. 89.
75. К о з л о в М. С., Ф е д о р е н к о Г. И. Д и н ам и к а сам о н а с тр а и в аю щ ей ся
системы уп р ав л ен и я полетом , сохраняю щ ей зад а н н ы й з а п а с устойчивости. / / С а м о ­
н астр аи в аю щ и еся а вто м ати ч еск и е систем ы . — М.: Н а у к а , 1965. — С. 8 3 —92.
76. К о л о в с к и й М. 3. А втом атическое у п р ав л ен и е виброзащ и тн ы м и си сте­
мами. — М.: Н а у к а , 1976. — 320 с.
77. К о л о в с к и й
1966. - 318 С .
М. 3. Н ел и н ей н ая теория виброзащ и тн ы х систем — М • Н а у к а
паука,
139
78. К о л ь ц о в В. И ., X а ч а т у р о в А. А. П ри м енение стати сти ч ески х методов
к с и н тезу и а н а л и зу сам о н а с тр а и в аю щ и х с я подвесок а втом оби л я. / / П рим енение
м атем ати ч еск и х м аш ин при конструи ровани и и и спы тани ях а втом оби л ей и д в и га те ­
л ей . — М О Н Т И Н А М И , 1962. — С. 8 5 — 112.
79. К о р а б л е в С. С. К теории эл ектром ехан и ческого в и б р о га си т ел я
//
П р и к л а д н а я м ех ан и ка. — 1968. — № 3. — С. 100— 107.
80. Л а з у т к и н Г. В. У пругоф рикц ионны е и прочностны е х а р ак тери сти к и
в и б р о и зо л ято р о в ти п а Д К У из м а т е р и а л а М Р . / / В и б р ац и о н н а я прочность и н а д е ж ­
ность д в и га те л ей и систем л ет а те л ьн ы х а п п а р ат о в : Сб. научны х трудов К уА И . К уй­
бы ш ев , 1985. С. 5 8 —64.
81. Л а р и н В. В. С тати сти ч еск и е за д а ч и ви бр о защ и ты . — К иев: Н а у к о в а дум ка,
1974. 127 с.
82. М и р с к и й Г. Я. А п п ар ату р н о е определени е х а р ак т ер и с т и к случайны х
проц ессов. — М .: Э н ерги я, 1972. — 455 с.
83. М и ш и к Э., М ю л л е р П. М етоды п р и н яти я технических реш ений. — М.:
М и р, 1990. - 208 с.
84. Н а й л е н д Ф. С. С а м о н а с т р а и в а ю щ а я с я систем а у п р а в л ен и я д л я большой
упругой р а ке т ы . — В опросы р акетн ой техники, 1962. — № 1.
85. О д а р е е в В. А , О л ь к о в В. В. У п р ав л яем о е электром еханическое
ви б р о защ и т н о е устрой ство с к в ази н у л е во й ж есткостью . / / В лияни е виброзащ иты на
ор ган и зм ч ел о в ек а и п роб лем ы в и б р о защ и ты . — М .: Н а у к а , 1974. — С. 671—676.
86. П а т е н т 640650 С С С Р , М К И B 6 0 G 1 1 /2 6 . П н ев м а ти ч ес к ая р ессора / Л . Вад
(В Н Р ), Л . Х а й о ш (В Н Р ); О р т а г о ш Г у м и п а р и В а л а л а т (п р е д п р и я т и е В Н Р ). —
№ 1 448294/27-11, з а я в л . 04.06.70, опубл. 30.12.78, бюл. № 48.
87. П а т е н т 1110964 РФ . Г и д р а в л и ч е ск о е акти вн ое ви бро защ и тн о е устройство
/ Ю. В. Ш а ти л о в. З а я в л . 20.04.83, оп уб л. 30.08.84. Бю л. № 32.
88. П а т е н т 1359520 РФ . С пособ у п р а в л ен и я ж есткостью ви б р о и зо л ято р а / Ю. В.
Ш а ти л о в. З а я в л . 06.11.84, опуб л. 15.12.87. Б ю л. № 46.
89. П а т е н т 1746092 Р Ф . А м о р ти за то р / Ю. К. П о н о м ар ев , Д . Е. Ч егодаев. З а яв л .
03.07.89, оп уб л. 07.07.92. Б ю л. № 25.
90. П а т е н т 3408292А Ф Р Г , М К И В 6 0 П 1 7 /0 0 . A k tiv es f e d e r u n g s s y s te m / R. Schussle r (Ф Р Г ), В. A ck er (Ф Р Г ). — N P 34082992.1, з а я в л . 25.02.84, оп уб л. 29.08.85.
91. П е в з н е р Я. М. , Г о р е л и к А. М . П н ев м ати ч еск и е и гидропн евм атические
п одвески . — М .: М а ш ги з, 1963. — 363 с.
92. П ри н ц и п ы п остроени я и п р о ек ти р о ван и я с ам о н а с тр а и в аю щ и х с я систем у п р а в ­
лен ия. / Б. Н. П етров, В. Ю. Р утк ов ски й , И . Н. К р у т о ва , С. Д . З е м л я к о в . — М.:
М аш и н остроен и е, 1972. — 269 с.
93. П о п о в Е. П . П р и к л а д н а я теори я процессов у п р а в л ен и я в нелинейны х
систем ах. — М . Н а у к а , 1973. — 584 с.
94. Р е з н и к о в Л . М . О п ти м и зац и я п а р а м е т р о в д и н ам и чески х гаси тел ей с
разл и ч н ы м и ви д ам и сопроти вления. / / П роб лем ы прочности, 1979. — № 9. — С.
4 6 -5 1 .
95. Р и в и н Е. И. В и б рои зол яторы и систем ы устан овк и о б о р у д о ван и я с ав т о ­
м ати ч ески м р егу л и р о в ан и ем . — О б зор: С ери я с-1, Н И И М А Ш . М.: 1971. — 17 с.
96. Р о т е н б е р г Р. В. П о д ве с к а а втом оби л я. К о л еб ан и я и п л ав н о сть хода. —
М.: М аш и н остроен и е, 1972. — 392 с.
97. Р у ж и ч к a (R u z ic k a J. Е .) Р езо н ан сн ы е х а р ак т ер и с т и к и н ап р а в л е н н ы х
в и б р о защ и тн ы х систем с дем п ф и р о ван и ем вязки м и сухим трени ем (R e so n a n c e c h a ­
r a c te r is tic s of u n id ire c tio n a l v isc o n s a n d c o u lo u m b -d am p e d v ib ra tio n iso la tio n sy s te m s)
/ Т руды А м ер и к ан ск о го о б щ ества ин ж ен еров м ехаников. Сер. В. Т. 89. № 4. — М.:
М и р, 1967. - С. 1 5 3 - 1 6 5 .
98. Р у ж и ч к а Д ж . А ктивны е в и брозащ и тн ы е систем ы / / И сп ы тател ьн ы е
при боры и стенды (Э к сп р ес с-и н ф о р м а ц и я). — 1969. — № 10 — С. 14—24.
99. С а м о н а с т р а и в а ю щ и е с я систем ы . / П од ред. П. И. Ч и н а ев а . — Киев: Н а у к о в а
140
дум ка, 1969. — 528 с. К остю к В. И . Б есп ои сковы е град и ен тн ы е с ам о н а с тр а и в а ю щ и е с я
системы. — Киев: Т ехни ка, 1969. — 276 с.
100. С а ф о н о в
Ю. Г., С и н е в А. В., С о л о в ь е в В. С. И ссл е д о в а н и е
электрогидравлической систем ы в и б рои зол яц и и ч ел о в ек а -о п е р ат о р а. / / В л и ян и е в и б ­
раций на орган и зм чел о в ек а и п роб лем ы в и б р о защ и ты . — М ., Н а у к а , 1974.
С.
6 4 3 -6 5 4 .
101. С в е т л и ц к и й В. А. С л у ч ай н ы е к о л еб ан и я м ехани ческих систем . —
М.: М аш иностроение, 1991. — 320 с.
102. С и л а е в
А. А. С п е к т р а л ь н а я теория п од рессори ван и я тран сп о р тн ы х м а ­
шин. — М.: М аш ги з, 1963. — 167 с.
103. С у д и н и н а Н. В. С н и ж ен и е в и брац и й вертол етов систем ой в и б р о гаси тел ей
/ / П роблем ы проекти рован и я соврем ен ны х вертолетов: С борн ик Т рудов Всесою зной
научной конф еренции. Ч а с т ь 1. — М , 1979. — С. 122— 123.
104. С у р о в ц е в
Ю. А. А м о р ти зац и я ради оэлектрон н ой а п п а р а т у р ы . — М.:
Советское радио, 1974. — 176 с.
105. Т ехническая к и б ер н ети к а. К н и га 2: (У строй ства и эл ем ен ты авто м ати ч еск о го
регулирования и у п р а в л ен и я ) / П од ред. В. В. С олодовни кова. — М.: М а ш и н о с тр о ­
ение, 1975. — 687 с.
106. Т р о и ц к и й В. А. О синтезе о п ти м альн ы х а м о р ти зато р о в / / П р и к л а д н а я
м атем атика и м ехан и ка. — 1967. — 31, № 4. — С. 6 2 4 — 630.
107. Т р о й н и к о в А. А., Б а р а с С. Д . Ф и зи ч еск ая м одель м а т е р и а л а М Р .
/ / В ибраци онная прочность и н а д е ж н о сть д в и га те л ей и систем л ет а те л ь н ы х а п п а р а ­
тов: Сб. научны х трудов К уА И : К уйб ы ш ев, 1989.
108. Т о п ч е е в
Ю. И. А т л ас д л я п роек ти р о ван и я систем авто м ати ч еско го
регулирования. — М.: М аш и ностроение. 1989. — 752 с.
109. Ф р о л о в К. В. У м еньш ение ам п л и ту д ы кол еб ан и й резон ан сн ы х систем путем
управляем ого изм енения п а р ам е тр о в . — М аш и н овед ен и е. — 1965. — № 3. — С.
1 0 -1 4 .
110. Ф р о л о в К. В., Ф у р м а н Ф. А. П р и к л а д н а я теори я в и б р о защ и т н ы х
систем. — М.: М аш и н остроен и е, 1980. — 205 с.
111. Ф у р у н ж и е в
Р . И . А д а п т а ц и я и обучение в з а д а ч а х о п ти м и зац и и
механических к о л еб ател ьн ы х систем . / / В лияни е в и б р ац и й на о р ган и зм ч е л о в ек а и
проблемы в и брозащ и ты . — М .: Н а у к а , 1974. — С. 572— 585.
112. Ф у р у н ж и е в Р. И. , О с т а н и н А. Н. С оврем енны е н а п р а в л е н и я с о зд ан и я
новых средств в и б р о защ и ты . — М инск.: Б Н И И Н Т И Т Э И , 1976. — 45 с.
113. Ф у р у н ж и е в Р . И . П р о ек ти р о ван и е о п ти м альн ы х в и б р о защ и тн ы х
систем.— М инск.: В ы сш ая ш к о л а , 1967. — 318 с.
114. Ц е й т л и н Я. М . П р о е к ти р о ва н и е опти м альн ы х линейн ы х систем . — М.:
М аш иностроение, 1973. — 240 с.
115. Х о р о в и ц , Х олл. И ск у сств о схемотехники: В трех том ах. П ер. с ан гл —
4-е изд. п е р ер а б . и д о п .— М .: М и р, 1993.
116. Ч е г о д а е в Д . Е ., Б е л о у с о в
А. И. О б щ ие свой ства п н евм ати ч еск и х
и гидравли ческих устройств у п р а в л ен и я и систем р ел ак сац и о н н о го д ем п ф и р о ван и я
/ / П н евм атические и ги д р а в л и ч е ск и е устрой ства и систем ы уп р ав л ен и я: Т руды 10-й
М еж дународной конф ерен ции « Я б л он н а-86» — М.: Э н е р го а т о м и зд а т, 1986 —
С. 9 4 - 9 7 .
117. Ч е г о д а е в Д . Е „ М у л ю к и н О. П., К о л т ы г и н Е. Б . К о н струи рован и е
рабочих о рган ов м аш ин и о б о р у д о ван и я из упругопористого м а т е р и а л а М Р . У чебное
справочное пособие. Ч а с т ь 1, 2. — Н П Ц . «А виатор»: С а м а р а , 1994 Ч 1 — 156 с
Ч. 2. - 100 с.
118. Ч е г о д а е в Д . Е „ М у л ю к и н О. П., П о н о м а р е в Ю. К. О сновны е
нап равлен и я и персп ективы пром ы ш ленного исп ол ьзован и я м атер и ал о в к ап и л л яр н о й
структуры . / / П ТС: Технология ави ац и он н ого приборо- и агр егато стр о ен и я С аратовН И Т И , 1990, № 4. С. 4 6 - 5 3 .
141
119. Ч е г о д а е в Д . Е., П о н о м а р е в Ю. К. и др. Р а з р а б о т к а средств
в и б р о защ и ты двойного п ри м енения д л я и сп ол ьзован и я в р акетн о-косм и ч еской технике
и м аш ин остроен ии. Н аучн о-технические р а зр а б о т к и и вы сокие технологии двойного
при м ен ен и я. М а т е р и а л ы 1-й П ов о л ж ско й научно-технической к онф ерен ции 2 1 —23
ф е в р а л я 1995 года. В 2-х частях . Ч а с т ь 1. С а м а р а , 1995. — С. 4 8 — 49.
120. Ч е г о д а е в
Д. Е. , Ш а к и р о в
Ф. М . Э ф ф е к ти в н ая система
в и б р о защ и т ы на основе д в ухкам ерн ой газостати ческ ой опоры . / / М ех ан и ка маш ин. —
Т билиси: 1984. — С. 104— 111.
121. Ч е г о д а е в
Д. Е. ,
Ш а к и р о в
Ф. М. , П о п о в
А. И.
Э к сп ер и м ен та л ь н о е и ссл ед о в ан и е ди н ам и чески х х а р а к т е р и с т и к д в ухк ам ерн ой г а зо с т а ­
ти ческой опоры . / / В естник м аш ин остроен ия. — 1986. — № 4. — С. 3 0 —34.
122. Ч е л н о к о в
И . И . Г и д р ав л и ч еск и е гаси тел и к ол еб ан и й п ассаж и рски х
вагон ов. — М.: Т р ан сп о р т, 1975. 72 с.
123. Ш а т и л о в
Ю. В. Р а з р а б о т к а и и ссл едован и е эф ф ективности п а р ам е т ­
рически у п р а в л я е м ы х и акти вн ы х ви бр о защ и тн ы х устройств. II В сесою зная конф ерен­
ц и я «С оврем ен н ы е п роб лем ы строительной м еханики и прочности л етател ьн ы х ап п а­
р а то в » . Т ези сы д о к л а д о в , К уй б ы ш ев, 1986, С. 60.
124. Ш м а к о в
В. Т., К о ч е т о в О. С., С о л о т о в А. Д . В иброизоляция
технологического с та ц и о н ар н о го обор у д о ван и я п н евм атич еским и опорам и. — В кн.:
М етоды и с р е д с т в а в и б р о защ и ты ч ел о в ек а. — М.: И М А Ш , 1977. — С. 9 4 —97.
125. Ш у б е р т ( S h u b e rt D. W .), Р у ж и ч к a (R u z ic k a J. Е .) Теоретическое
и эк с п е р и м ен та л ь н о е и ссл ед о в ан и е эл е к тр о ги д р а в л и ч е ск и х ви брозащ и тн ы х систем.
(T h e o re tic a l a n d e x p e rim e n ta l in v e s tig a tio n of e le c tro h y d ra u lic v ib ra tio n iso la tio n sy s­
te m s .) / Т руды А м ер и кан ск о го о б щ ества и н ж ен еров-м ехан и к ов. Сер. В. Т. 91. № 4. М.:
М и р. 1969 — С. 6 2 — 64.
126. A l l e n
R. R. (А л л ен ). D y n a m ic s of L in e a r S y s te m s w ith S e m ia c tiv e Force
G e n e r a to rs (Д и н а м и к а линейн ы х систем с п ол уакти вн ы м и ген е р а то р а м и усилий / /
Р а к е т н а я тех н и ка и к о см о н ав ти к а: — 1977. — Т. 15, № 2 — С. 12— 22.
127. C r o s b y
М . J , К а г п о р р D. С. The a c tiv e d a m p e r a new concept
for sh o c h a n d v ib ra tio n c o n tro l / / S hoch a n d V ib ra tio n B ull., n 43, P a r t 4. P rediction
a n d E x p e rim e n ta l T ec h n iq u e s, Is o la tio n a n d D a m p in g , 1973. — P p . 119— 133.
128. K a u e r H. E in n e a u r tig e s F e d e rs y s te m fu r g e la n d e r g a n g ig e N u tz — fa h rzeu g e
(П о д в е с к а нового т и п а д л я вездеходов) / / A utom ob. — J n d ., 1974. — 19, № 4. — Pp.
4 1 — 47.
129. K a r n o p p
D. К. (К а р н о п ), A l l e n
R. R. (А л л ен). S e m ia c tiv e control
of m u ltim o d e v ib ra to ry sy ste m u s in g th e J L S M c o n ce p t. (П о л у а к ти в н о е управляем ое
гаш ен и е к о л еб ан и й систем с больш им числом собствен ны х ф орм , основан ное на при­
нципе С У Д М ) / / Т руды А м ери кан ск ого о б щ ества и н ж ен еров-м ехан и к ов. Сер. В. —
№ 3 — С. 136— 142.
130. K a r n o p p
D. К. (К а р н о п ), C r o s b y
М . J. (К р о с б и ), H a r w o o d
R. А. (Х ар в у д ). V ib ra tio n c o n tro l u s in g se m i-a c tiv e force d e n e ra to r s (Уменьш ение
в и б р ац и й при помощ и п ол уак ти вн ы х ген ераторов усилий) / / Т руды А м ериканского
об щ ества и н ж ен ер о в-м ех ан и к о в . С ер. В. Т. 96, 1974. — № 2 — С. 2 3 9 — 247.
131. K a r n o p p
D. С. (К а р н о п ), Т г i k h а А. К. (Т а й к а ) C o m p a ra tiv e stu d y
of o p tim iz a tio n te c h n iq u e s for sh o ch a n d v ib ra tio n iso la tio n (С р а в н и т ел ь н о е и ссл ед о в а­
ние м етодов оп ти м и зац и и систем за щ и ты от у д ар о в и в и б р а ц и й ) / / Т руды А м ер и к ан ­
ского об щ ества и н ж ен еров-м ехан и ков . М.: М ир. Т. 91. С ер. В, 1969. — № 4. —
С. 2 1 3 - 2 1 8 .
132. K e i z e r
С. R. (К а й зе р ). D e m p in g v a n lu c h tv e re n (Д е м п ф и р о в а н и е с
помощ ью воздуш ны х п р у ж и н ) / / J n g e n e u r (N e d erl.), — 1960. — 72, № 14. —
W. 8 5 -9 1 .
133. L e a t h e r w o o d
J. D. , D i x o n
G. V. A ctiv e v ib ra tio n is o la tio n for
flex ib le p a y lo a d s / / J E S P ro c e e d in g s , A pr. 1968. — P p. 4 0 7 —413.
134. P a r k
W. H. (П а р к ), W a m b о 1 d J. С. (Уомболд), V a s h l i s h a n
142
R. G. (В а ш л и ш а н ) P re d ic tio n of o b je c tiv e p a s s e n g e r co m fo rt from ro a d p ro file (О б ъ ­
ективный м етод о п редел ен и я к ом ф орта п а с с а ж и р а по изм енению д орож ного п р о ф и л я)
/ / Труды А м ери кан ского о б щ ества и н ж енеров-м ехан иков. М.: М ир. Т. 96. С ер. В,
1974. - № 2. - С. 1 1 8 - 1 3 4 .
135. R o d g e r s
P . W. P a r a m e tr ic p h e n o m e n s a s a p p lie d to v ib ra tio n is o la to r s
and m e c h a n ic a l a m p lifie rs / / J. S o u n d a n d v ib ra t. — 1967. — 5, № 3. — P p . 4 8 9 —498.
136. R o c k w e l l
Т. H. In v e s tig a tio n of s tru c tu re - b o r n e a c tiv e v ib r a tio n d a m p e r
/ / Jo u rn . of th e A coust. Soc. of A m er., 1965. — v. 98, № 4. — P p . 6 2 3 —628.
137. S m о 1 1 e n L. E , M a r s h a I I P., G a b e 1 R. A se rv o c o n tro lle d
rotor v ib ra tio n iso la tio n sy ste m for th e re d u c tio n of h e lic o p te r v ib ra tio n / / JA S P a p e r.
№ 6 2 —33. I n s titu te of A e ro sp a c e S c ie n c e s, J a n , 1962.
138. S h u b e r t
D. W ., R u z i с k a J. E. T h e o re tic a l a n d e x p e rim e n ta l
in v estig a tio n of e le c tro h y d ra u lic v ib ra tio n iso la tio n sy s te m s. — J. of E n g in e e rin g for
In d u stry (T ra n s, of th e A S M E ), se r. B, 1969, P p. 6 9 — 78.
139. T r i k h а А. К. (Т р а й к а ), K a r n o p p
D. С. (К а р н о п ) A n ew q rite rio n
for o p tim iz in g lin e a r v ib ra tio n iso la tio n s is te m s s u b je c t to R an d o m in p u t (Н о в ы й
критерий оптим изаци и линейн ы х ви бр о защ и тн ы х систем , п о д вер ж ен н ы х случ ай н о м у
внешнему воздействию ) / / Т руды А м ери кан ского о б щ ества и н ж ен ер о в-м ех ан и к о в .
Сер. В. Т. 91, № 4. М.: М ир. 1969. — С. 6 9 —94.
140. W i l l i a m s
W. W. (В и л ь ям с ), G a r r a r d
W. С. J. (Г аральд), W i 11 i a m s Y. К- (В и л ь ям с) L o n d in g s a re le ss ro u g h w ith d o u b le a c tio n shock a b s o rb e rs
(А мортизационны е стойки ш асси д л я сам о л ето в , эк сп л у ати р у ю щ и х ся на а эр о д р о м а х с
неровной поверхностью ) / / SA E J o u r n a l, 1966. — 74, № 11. — P p . 5 4 — 60.
141. Y o u n g
J. W ., W о r m 1e у
D. N. O p tim iz a tio n of lin e a r ve h ic le
su sp en sio n s su b je c te d to s im u lta h e o s q u iew ay a n d e x te rn a l force q is tu rb a n c e s / / T r a n s ­
actions of th e A S M E , jo u rn a l of D y n a m ec S y s te m s, M e a s u re m e n t a n d C o n tro l, Vol. 95,
Series G. J u n e 1973.
—P p. 2 1 3 —219.