Известия ЮФУ. Технические науки № 12, 2008. Тематический выпуск "ПЕРСПЕКТИВНЫЕ СИСТЕМЫ И ЗАДАЧИ УПРАВЛЕНИЯ"
реклама

¹12, äåêàáðü 2008
ISSN 1999-9429
Þæíûé
ôåäåðàëüíûé
óíèâåðñèòåò
Òåõíîëîãè÷åñêèé èíñòèòóò
Þæíîãî ôåäåðàëüíîãî
óíèâåðñèòåòà
â ã. Òàãàíðîãå
È
Ç
Â
Å
Ñ
Ò
È
ß
Ñèñòåìû óïðàâëåíèÿ
Íàâèãàöèîííûå ñèñòåìû
Èíòåëëåêòóàëüíûå òåõíîëîãèè
óïðàâëåíèÿ
Èíôîðìàöèîííûå òåõíîëîãèè
Òåìàòè÷åñêèé âûïóñê
Ïåðñïåêòèâíûå ñèñòåìû
è çàäà÷è óïðàâëåíèÿ
ÞÔÓ
Ò Å Õ Í È × Å Ñ Ê È Å Í ÀÓ Ê È
Известия ЮФУ. Технические науки
№ 12, 2008
Тематический выпуск
ПЕРСПЕКТИВНЫЕ СИСТЕМЫ
И ЗАДАЧИ УПРАВЛЕНИЯ
Таганрог 2008
Известия ЮФУ. Технические науки
Тематический выпуск
Известия ЮФУ. Технические науки. Тематический выпуск «Перспективные системы и задачи управления». – Таганрог: Изд-во ТТИ ЮФУ, 2008, № 12 (89). – 245 с.
В настоящий выпуск включены статьи, отражающие следующие тематические направления: теория и практика систем автоматического управления; методы
и технические средства построения навигационных систем; вопросы построения и
реализации интеллектуальных систем; информационные технологии.
Издание осуществлено при финансовой поддержке Российского фонда фундаментальных исследований, грант №09-08-06010-г.
Журнал включен в «Перечень ведущих рецензируемых научных журналов известий, выпускаемых в Российской Федерации, в которых должны
быть опубликованы основные научные результаты диссертаций и соискание
ученой степени доктора наук».
Журнал включен в Реферативный журнал и Базы данных ВИНИТИ.
Сведения о журнале ежегодно публикуются в международной справочной
системе по периодическим и продолжающимся изданиям «Ulrich`s Periodicals
Directory».
ГЛАВНАЯ РЕДАКЦИОННАЯ КОЛЛЕГИЯ ЖУРНАЛА
Захаревич В.Г. (главный редактор), Сухинов А.И. (зам. главного редактора),
Курейчик В.М. (зам. главного редактора), Моськин В.Н. (ученый секретарь редколлегии), Агеев О.А., Айдаркин Е.К., Берштейн Л.С., Веселов Г.Е., Вишняков Ю.М.,
Грищенко С.Г., Каляев И.А. Колесников А.А., Коноплев Б.Г., Куповых Г.В.,
Курейчик В.В., Макаревич О.Б., Панич А.Е., Пшихопов В.Х., Сергеев Н.Е.,
Финаев В.И., Целых А.Н.
РЕДАКЦИОННАЯ КОЛЛЕГИЯ ВЫПУСКА
Пшихопов В.Х. (главный редактор), Глебов Н.А., Нейдорф Р.А., Гайдук А.Р.
УЧРЕДИТЕЛЬ: Южный федеральный университет.
ИЗДАТЕЛЬ: Технологический институт Южного федерального университета
в г. Таганроге.
Рецензенты:
д.т.н., проф. Иванченко В.Н., д.т.н., проф. Кориков А.М., д.т.н., проф. Нейдорф Р.А.,
д.т.н., проф. Золотухин В.Е., д.т.н., проф. Башкиров Л.Г., д. ф.-м. н., проф. Жорник А.И.,
д.т.н., проф. Расщепляев Ю.С., д.т.н., проф. Пьявченко О.Н.
Свидетельство о регистрации средства массовой информации
ПИ № ФС77-28889 от 12.07.2007
Научно-технический и прикладной журнал
издается с 1995 года
ISSN 1999-9429
© Технологический институт
Южного федерального университета в г. Таганроге, 2008
Содержание
СОДЕРЖАНИЕ
РАЗДЕЛ I. СИСТЕМЫ УПРАВЛЕНИЯ
В.Х. Пшихопов
УПРАВЛЕНИЕ ПОДВИЖНЫМИ ОБЪЕКТАМИ В АПРИОРИ
НЕФОРМАЛИЗОВАННЫХ СРЕДАХ ............................................................
6
М.Ю. Медведев
СТРУКТУРА И АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
НЕЛИНЕЙНОГО НАБЛЮДАТЕЛЯ ПРОИЗВОДНЫХ В
УСЛОВИЯХ ДЕЙСТВИЯ СЛУЧАЙНЫХ ШУМОВ .....................................
20
С.Г. Капустян, Л.Ж. Усачев
МОДЕЛЬ КОЛЛЕКТИВНОГО ВЗАИМОДЕЙСТВИЯ В ЗАДАЧЕ
ГРУППОВОГО УПРАВЛЕНИЯ РОБОТАМИ В УСЛОВИЯХ
ПРОТИВОДЕЙСТВИЯ ....................................................................................
26
Р.И. Балабаев, М.Ю. Медведев
АВТОМАТИЗИРОВАННОЕ ИССЛЕДОВАНИЕ И СИНТЕЗ
СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТОМ-АМФИБИЕЙ НА
ОСНОВЕ БЛОЧНОГО ПОДХОДА .................................................................
37
В.В. Щербинин, П.П. Кравченко, Н.Ш. Хусаинов
РАЗРАБОТКА И МОДЕЛИРОВАНИЕ БОРТОВОЙ
ИНТЕГРИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
С КОРРЕКЦИЕЙ КООРДИНАТ ПО АВТОМАТИЧЕСКОЙ
СИСТЕМЕ БЛИЖНЕЙ РАДИОНАВИГАЦИИ ДЛЯ
ПЕРСПЕКТИВНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ .................................
43
А.Р. Гайдук
К ПРОБЛЕМЕ СИНТЕЗА ИНВАРИАНТНЫХ МНОГОМЕРНЫХ
СИСТЕМ УПРАВЛЕНИЯ ................................................................................
52
П.Г. Яковенко
СИНТЕЗ ОПТИМАЛЬНЫХ УПРАВЛЕНИЙ ПОДВИЖНЫМИ
ОБЪЕКТАМИ ВО ВРЕМЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ .........................
63
С.В. Киор, А.М. Романов
ЦИФРОВОЙ МНОГОФУНКЦИОНАЛЬНЫЙ КОНТРОЛЛЕР
ЭЛЕКТРОПРИВОДА ЦМКП-В2.....................................................................
73
РАЗДЕЛ II. НАВИГАЦИОННЫЕ СИСТЕМЫ
И.И. Маркович, П.Л. Семеняк
ПЕРСПЕКТИВНЫЕ МЕТОДЫ И АЛГОРИТМЫ, СИСТЕМЫ И
УСТРОЙСТВА ЦИФРОВОГО ФОРМИРОВАНИЯ И
ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ И
ИЗОБРАЖЕНИЙ В ПРАКТИЧЕСКИХ РАЗРАБОТКАХ НКБ
ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ЮФУ ............................................
79
Д.Ш. Нагучев, О.А. Савицкий, В.Л. Сахаров
ПРЕДПОСЫЛКИ И КОНЦЕПЦИЯ СОЗДАНИЯ СОВРЕМЕННЫХ
ПАРАМЕТРИЧЕСКИХ ПРОФИЛОГРАФОВ В ОКБ «РИТМ» ЮФУ ........
89
3
Известия ЮФУ. Технические науки
Тематический выпуск
И.Т. Лобач
СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ
ИССЛЕДОВАНИЙ В ОБЛАСТИ ИННОВАЦИОННЫХ
ТЕХНОЛОГИЙ ГИДРОАВИАЦИОННЫХ СИСТЕМ
РАДИОНАВИГАЦИИ И УПРАВЛЕНИЯ ......................................................
94
В.Ю. Волощенко
ПАРАМЕТРИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО
ДЕЙСТВИЯ ДЛЯ ОБЕСПЕЧЕНИЯ ПОДЛЕДНОГО ПЛАВАНИЯ
АВТОНОМНЫХ ПОДВОДНЫХ АППАРАТОВ ...........................................
102
В.Ю. Волощенко, В.И. Тимошенко
ПАРАМЕТРИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА С
ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ ДЛЯ ОБЕСПЕЧЕНИЯ
БЕЗОПАСНОГО ПЛАВАНИЯ СУДОВ ..........................................................
112
РАЗДЕЛ III. ИНТЕЛЛЕКТУАЛЬНЫЕ ТЕХНОЛОГИИ УПРАВЛЕНИЯ
А.Я. Бондарец, О.Д. Крееренко
ИСПОЛЬЗОВАНИЕ НЕЙРОСЕТЕЙ ДЛЯ ИДЕНТИФИКАЦИИ
ПАРАМЕТРОВ ТОРМОЖЕНИЯ КОЛЕС САМОЛЕТА НА
ВЗЛЕТНОЙ ПОЛОСЕ, ПОКРЫТОЙ ОСАДКАМИ ......................................
124
М.Ю. Сиротенко
СИНТЕЗ НЕЙРОСЕТЕВОГО ПЛАНИРОВЩИКА ПЕРЕМЕЩЕНИЙ
АВТОНОМНОГО РОБОТИЗИРОВАННОГО КОМПЛЕКСА НА
БАЗЕ ДИРИЖАБЛЯ, ФУНКЦИОНИРУЮЩЕГО В АПРИОРИ
НЕФОРМАЛИЗОВАННОЙ СРЕДЕ ................................................................
135
В.А. Голубенко, А.А. Кучин, Ю.В. Нечаев, А.А. Филонов
МЕТОДЫ САМОНАВЕДЕНИЯ РАКЕТЫ КЛАССА «ВОЗДУХ-ВОЗДУХ»
ДЛЯ СОВМЕСТНОГО ОБЕСПЕЧЕНИЯ НАВЕДЕНИЯ РАКЕТЫ НА
ЭЛЕМЕНТ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ И ТРЕБУЕМЫХ
УСЛОВИЙ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ СИГНАЛОВ В
АКТИВНОЙ РАДИОЛОКАЦИОННОЙ ГОЛОВКЕ САМОНАВЕДЕНИЯ
РАКЕТЫ .................................................................................................................
143
Т.М. Романова
БОРТОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИНТЕРФЕЙС
МОБИЛЬНОГО РОБОТА ................................................................................
154
РАЗДЕЛ IV. ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
Б.Г. Коноплев, О.А. Агеев
ЭЛИОННЫЕ И ЗОНДОВЫЕ НАНОТЕХНОЛОГИИ ДЛЯ МИКРОИ НАНОСИСТЕМНОЙ ТЕХНИКИ ................................................................
165
Л.К. Бабенко, О.Б. Макаревич
ИССЛЕДОВАНИЯ ПО ПРОБЛЕМАМ ИНФОРМАЦИОННОЙ
БЕЗОПАСНОСТИ В ЮЖНОМ ФЕДЕРАЛЬНОМ УНИВЕРСИТЕТЕ
И ИХ РЕАЛИЗАЦИЯ В ОБРАЗОВАТЕЛЬНОМ ПРОЦЕССЕ .....................
175
Ю.И. Рогозов, А.А. Дубровский, А.С. Свиридов
НОВЫЙ ПОДХОД РЕАЛИЗАЦИИ ИДЕИ
«ПРОГРАММИРОВАНИЕ БЕЗ ПРОГРАММИСТА»...................................
4
186
Содержание
В.С. Поликарпов, Е.В. Поликарпова
НАЦИОНАЛЬНАЯ БЕЗОПАСНОСТЬ В КОНТЕКСТЕ
ИНТЕЛЛЕКТУАЛЬНЫХ ВОЙН .....................................................................
193
А.Л. Береснев, М.А. Береснев
ПРОЕКТИРОВАНИЕ МЕДИЦИНСКИХ ИНФОРМАЦИОННЫХ
СИСТЕМ ДЛЯ МЕДИЦИНСКИХ УЧРЕЖДЕНИЙ
ВООРУЖЕННЫХ СИЛ РФ .............................................................................
204
А.Н. Шкурко
О ПРОГРАММНОЙ СИСТЕМЕ ОПЕРАТИВНОЙ ОБРАБОТКИ
ИНФОРМАЦИИ И ОБНАРУЖЕНИЯ ОРИЕНТИРОВ С
ИСПОЛЬЗОВАНИЕМ МУЛЬТИСПЕКТРАЛЬНЫХ ДАННЫХ ..................
211
В.Д. Яшунский
РАЗРАБОТКА СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ НА
ОСНОВЕ РАСФОКУСИРОВАНИЯ ОБЪЕКТОВ НА
ИЗОБРАЖЕНИИ ...............................................................................................
221
В.Е. Высоцкий, А.А. Андреев, В.Д. Привалов, А.С. Гуртов,
А.Н. Филатов
ФИЗИКО-МАТЕМАТИЧЕСКИЙ МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ
РАЗРАБОТКИ, ИССЛЕДОВАНИЯ И МОНИТОРИНГА СИСТЕМ
ЭЛЕКТРОПИТАНИЯ АВТОНОМНЫХ ОБЪЕКТОВ ...................................
АННОТАЦИИ ......................................................................................................
СВЕДЕНИЯ ОБ АВТОРАХ ...............................................................................
224
227
239
5
Известия ЮФУ. Технические науки
Тематический выпуск
Раздел I. Системы управления
УДК 681.511.4
В.Х. Пшихопов
УПРАВЛЕНИЕ ПОДВИЖНЫМИ ОБЪЕКТАМИ В АПРИОРИ
НЕФОРМАЛИЗОВАННЫХ СРЕДАХ*
Введение
Решению задач организации движения подвижных объектов (ПО) в априори
неформализованных средах посвящен ряд работ отечественных [1, 2, 3] и зарубежных [4, 5, 6] авторов. Предлагаемые решения реализуются как в классе интеллектуальных систем планирования перемещений (стратегический уровень) и управления движением, так и в рамках методов формирования алгоритмов тактического
управления ПО. Например, в работах, базирующихся на положениях работы [4],
предлагаются алгоритмы формирования управляющих воздействий, предполагающие предварительное планирование траекторий движения ПО, что не всегда возможно в условиях непредсказуемой неопределенности среды [1] и вычисление
двух составляющих закона управления: стабилизирующей траекторию движения
ПО и деформирующей ее в окрестностях препятствия. В работе [5] концепция, положенная в основу метода достоверных решеток, требует картографирования локальной области функционирования ПО, что предъявляет дополнительные требования к организации сенсорной системы объекта. Алгоритмы формирования
управляющих воздействий, представленные в [7], также предполагают предварительное картографирование области функционирования ПО и определение габаритов и параметров движения препятствий.
Основные проблемы, связанные с использованием указанных подходов и методов к формированию управлений тактического уровня, с нашей точки зрения, заключаются в следующем: в необходимости предварительного планирования траектории
или картографирования области функционирования ПО, что налагает существенные
ограничения на движение объектов в априори неформализованных средах; в недостаточной проработанности процедур согласования стратегических уровней планирования и тактических уровней управления; в необходимости дополнительной информации о геометрии, фазовых координатах объекта управления и т.д.
В настоящей работе, на основе результатов, полученных автором в [8, 9, 10],
предлагается подход к реализации тактического уровня управления ПО, функционирующими в априори неформализованных средах, с привлечением третьей теоремы Ляпунова (теоремы о неустойчивости) [11, 12], что позволяет формировать
управляющие воздействия в реальном времени без использования интеллектуальных технологий и при минимальных требованиях к сенсорному обеспечению ПО.
Математическая модель ПО и постановка задачи
Пусть модель динамики ПО и его кинематические свойства описываются системой следующих дифференциальных уравнений [4]:
6
Раздел I. Системы управления
X& = M −1 ( Fu − Fd − Fv ),
δ& = KU
(1)
(2)
Σ P (Θ,
X )
,
Σ (Θ, X )
Θ
Y& = Σ(Θ, X ) =
(3)
где X – m-вектор внутренних координат; M – (m×m)-матрица массо-инерционных
параметров, элементами которой являются масса, моменты инерции, присоединенные массы ПО; Fu ( X , Y , δ , l ) – m-вектор управляющих сил и моментов, здесь
l – вектор конструктивных параметров,; Fd ( X , Y , l ) – m-вектор нелинейных элементов динамики ПО; Fv – m-вектор измеряемых и неизмеряемых внешних возмущений; δ – m-вектор управляемых координат (углы отклонения рулей, рычагов
управления тягой двигателя и т.п.); K – (m×m)-матрица коэффициентов управления; U – m-вектор управляющих воздействий; Y = ( P, Θ)T – n-вектор положения
P и ориентации Θ связанной системы координат относительно базовой, n ≤ 6 ;
Σ(Θ, X ) – n-вектор кинематических связей; Σ P (Θ, X ) –v-вектор линейных
скоростей связанной системы координат относительно базовой; ΣΘ (Θ, X ) –
(n–v)-вектор угловых скоростей связанной системы координат относительно базовой.
Следует отметить, что моделью (1)-(3) описывается достаточно широкий
класс подвижных объектов: летательные аппараты, колесные тележки, воздухоплавательные комплексы и т.д.
Предположим, что в зоне движения ПО расположены стационарные и нестационарные препятствия Пj , известны координаты (x, y, z) характерной точки ПО
в базовой системе координат, а также заданы координаты целевой точки
Af (xA, yA, zA) в той же системе координат. В общем случае точка Af может быть нестационарной. Предположим также, что сенсорная система объекта позволяет определить кратчайшие расстояния Rc , c = 1, k от характерной точки ПО (например,
центр связанной системы координат) до ближайших точек, принадлежащих одному или нескольким препятствиям Пj, находящихся в зоне действия сенсора.
Постановка задачи заключается в следующем: для ПО, описываемого системой уравнений (1), (3), необходимо синтезировать такой закон формирования
управляющих воздействий Fu ( P, X ) и алгоритм функционирования тактического уровня системы управления, которые обеспечивали бы перемещение объекта из
произвольной точки (x0, y0, z0) в заданную целевую точку Af (xA, yA, zA) (в случае
необходимости могут задаваться и требования к желаемой ориентации ПО в точке
Af), с выполнением условий:
c = 1, k ,
Rc ≥ R ,
(4)
где k – количество ближайших точек, принадлежащих одному или нескольким
препятствиям;
R – константа, задающая допустимое кратчайшее расстояние от характерной
точки ПО до любого из препятствий Пj.
В отличие от постановки задач, сформулированных в [9, 10], в данном случае
для организации движения ПО не требуются значения скорости и ускорения, с которыми перемещаются препятствия Пj, на число препятствий и характер их движе7
Известия ЮФУ. Технические науки
Тематический выпуск
ния не накладываются никакие ограничения и не требуется определение координат
каких-либо характерных точек. То есть мы расширяем представление о препятствиях до геометрически сложной фигуры, не вдаваясь в ее геометрические характеристики, а зная только расстояние Rc.
Синтез управляющих воздействий
Как показано в работе [10], все множество требований к установившемуся
режиму движения ПО в пространстве Rn×n базовых координат Y и скоростей Y& , в
общем случае может быть представлено в виде вектор-функции Ψ базовых координат и углов ориентации, а также их производных вида:
~
Ψ = Ψtr + A Ψck = 0 ,
Ψtr =
N ( P, t )
P T Ai1 (t ) P + Ai 2 (t ) P + Ai 3 (t )
=
= 0 , i = 1, v , j = 1, µ ,
( P , Θ, t )
j ( P, Θ, t )
Ф
Ф
N (ν ) =ξ ( P T Aν 1 (t ) P + Aν 2 (t ) P + Aν 3 (t )) ,
(
)
T
~
V = 0ν −1 , ξ (V 2 − V *2 ) , 0 µ
,
~
Ψck = J sY& + J t +V = 0, dimΨtr = dimΨcr = ν + µ = m ,
∂N
J s = ∂P
∂
T
Ф
∂P T
∂N
∂ΘT = J NP
∂
J ФP
T
∂Θ
Ф
(5)
2 P T Ai1 (t ) + Ai 2 (t ) 0
J NΘ
∂ j ∂ j
=
, dim J s = (m × n),
J ФΘ
T
T
∂P
∂Θ
Ф
Ф
( P T A& i1 (t ) + A& i 2 (t )) P + A& i 3
,
Jt =
∂ j ( P , Θ, t )
Ф
∂t
~ A
A=
0
~
A – блочная
AΦ − (µ×µ)-матрица
где
0
,
AΦ
диагональная матрица коэффициентов,
~
dim A = (mxm) ;
коэффициентов, определяющих характер переходных про-
– размерность вектора Φ µ , задающего
требования к углам ориентации ПО; A – диагональная (v×v)-матрица, определяющая характер движения ПО относительно траекторного многообразия Ψtr ,
здесь v – размерность пространства функционирования ПО; Aij – матрицы коэффициентов соответствующей размерности, формируемые планировщиками перемецессов по углам ориентации ПО, здесь µ
щений на основе данных сенсорных систем и определяющие вид нестационарной
траектории;
A&ij –
матрица производных по времени элементов матрицы
оценок их скорости изменения;
Φµ –
Aij или
дважды дифференцируемая функция своих
аргументов, отражающая требования к углам ориентации ПО; ξ – параметр, принимающий значение 0 (для позиционной задачи) или 1 (для случая движения с за-
8
Раздел
данной скоростью);
I. Системы управления
V, V* – скорость ПО и ее желаемое значение; 0ν −1 ,0 µ – векто-
ры нулевых элементов размерности
v – 1 и µ соответственно.
При управлении ПО на плоскости,
Y = (x
y α ) T ,ν = 2 , µ = 1 ,
здесь
x, y, α – координаты положения и угол ориентации ПО. В зависимости от конкретной задачи, многообразия
(5) задаются в следующем виде:
♦ движение вдоль прямой y = kx + b , проходящей через две стационарные
*
точки (x0, y0) и (xf, yf), с постоянной скоростью V :
A12 = (− k 1), A13 = b, A11 = A21 ≡ 0, A22 ≡ 0, A23 = 0,
(
)
−k 1 0
T
~
, J t ≡ 0,
V = 0 , (V 2 − V *2 ) , J s =
0 0 0
здесь k =
y f − y0
x f − x0
(6а)
, b = y 0 − x0 k ;
♦ поворот на заданный угол α * при движении с заданной скоро*
стью V :
Ф
1
~
(
= α − α * , V = (V 2 − V *2 ) , 0
)
T
, Js =
0 0 0
0 0 1
, Jt =
0
α&
.
(6б)
♦ выход в стационарную точку (xf, yf) с нулевой скоростью:
A11 = A21 ≡ 0, A12 = (1 0), A22 = (0 1),
A13 = − x f , A23 = − y f ,
1 0 0
~
V ≡ 0 , Js =
, J t ≡ 0.
(6в)
0 1 0
♦ движение вдоль траектории, проходящей через две нестационарные
*
точки (x0(t), y0(t)) и (xf(t), yf(t)), с постоянной скоростью V :
A12 = (− k (t ) 1), A13 = b(t ), A11 = A21 ≡ 0, A22 ≡ 0, A23 = 0,
− k (t ) 1 0
− k&(t ) x + y − b&(t )
T
~
, Jt =
. (6г)
V = 0 , (V 2 − V *2 ) , J s =
(
)
0 0 0
0
В работах [8, 9, 10] были синтезированы законы формирования управляющих
воздействий (автопилоты), стабилизирующие многообразия (5), вида
~~
~~
Fu = −M (T AK 0 ) −1 (T AK1Σ Θ + K 2 Σ + K 3 + K 4 (t )) + Fd + Fˆν ,
(7)
~ ~
~~
K 0 = ( JJ ΣPx + J Θ J ΣΘx ) , K1 = ( JJ ΣPΘ + J Θ J ΣΘΘ ) , K 2 = (T + A) J s + T A Г s ,
~~
~ ~
~~
K 3 = A V + Ψtr , K 4 = (T + A ) J t + T A J t* , J = ( J P + J V ),
9
Известия ЮФУ. Технические науки
JV = (0 (ν −1)×ν
J t*
=
2ΣTP
*
j (1,
t
jt* (1, k )
=
1),
Тематический выпуск
∂Σ i
, здесь i = {P, Θ}, j = {x, Θ},
∂j
J NΘ
J
,
J P = NP , J Θ =
J ФΘ
J ФP
0 µ×ν )T , J Σij =
jt* (1,
(
&&
(PT A
k1
2),
jt* (1,
&& ) P +
+A
k2
3),
∂ 2 Φ1
∂t 2
2( 2 P T A& k1
,
∂ 2Φ 2
∂t 2
,
∂ 2 Φ 3
∂t 2
)
T
,
&&
+ A& k 2 ) P& + A
k3 ,
&& – вторая производная по
где Γs – первая производная по времени матрицы Js; A
времени матрицы А или ее оценка; F̂V – оценка вектора неопределенных сил и
моментов, T~ – диагональная, знакоопределенная матрица коэффициентов, определяющих характер переходных процессов, dim T~ = (mxm) .
~
Матрица T имеет следующую структуру:
~ T 0
,
T =
0 TΦ
где TΦ − (µ×µ)-матрица коэффициентов, определяющих характер переходных
процессов по углам ориентации ПО; T – диагональная (v×v)-матрица, определяющая характер движения ПО относительно траекторного многообразия Ψtr .
Причем при ξ = 1 , элемент T (ν ,ν ) будет определять характер изменения траекторной скорости Vk в переходном режиме.
В случае, если исходная математическая модель ПО задана только уравнениями кинематики (3), то говорят о синтезе алгоритма кинематического управления [13]. Вводя на m выходах регулятора дополнительные динамические звенья в
виде интеграторов
го управления:
X& = U ,
можно получить следующий алгоритм кинематическо-
~~
~~
Fu = −M (T AK 0 ) −1 (T AK1Σ Θ + K 2 Σ + K 3 + K 4 (t )),
(7а)
где функциональные матрицы K 0 , K1 , K 2 , K 3 , K 4 имеют тот же смысл, что и в
выражении (7).
Следует отметить, что реализация алгоритма (7а) не требует оценки элементов вектора внешних возмущений
Fd ,
F̂ν
и вектора нелинейных элементов динамики
что существенным образом сказывается на качестве отработки ПО заданий
при больших скоростях и значительных внешних возмущениях.
Алгоритм (7) обеспечивает стабилизацию многообразий (6) при следующих
значениях функциональных коэффициентов в (7):
JP =
10
−k 1
0
0
, J Θ ≡ 0, J t* ≡ 0, Г s ≡ 0.
(8а)
Раздел I. Системы управления
JP =
Г s ≡ 0, J P =
0 0
Г s ≡ 0, J P =
1 0
0
0
, J Θ = , J t* = .
0 0
1
α&&
0
, J Θ = , J t* = J t ≡ 0.
0 1
0
(8б)
(8в)
− k (t ) 1
− k&(t ) 0 0
− k&(t ) x& + −k&&(t ) x + y& − b&&(t )
, J Θ ≡ 0, Г s =
, J t* =
. (8г)
0
0
0 0 0
0
Матрицы
J∑ij и JV однозначно определяются по уравнениям (3) динамики конкретного ПО в соответствии с выражениями, представленными в (7).
Структурно-алгоритмическая реализация системы управления ПО
Основная идея предлагаемого подхода к структурно-алгоритмической реализации системы управления ПО заключается в использовании управляющих воздействий (6), стабилизирующих траектории (5) в зонах свободных от препятствий, и в
применении третьей теоремы Ляпунова (теорема о неустойчивости) при нарушении неравенств (4), т.е. при нахождении ПО в зоне стационарных или нестационарных препятствий на расстояниях Rс, меньше допустимого значения R.
Иными словами, в зависимости от принадлежности текущего положения ПО
зоне свободной от препятствий, когда соблюдаются неравенства (4) , или зоне, где
эти условия не выполняются, предлагается организовывать такие режимы движения ПО, при которых планируемые траектории, задаваемые многообразиями (5),
были бы устойчивыми в первом случае и неустойчивыми во втором.
В работах [14, 15] показано, что неравенства вида (4) могут быть представлены одним равенством, которое в настоящей работе предлагается формировать в
следующем виде:
β = ∑ Rc − R + ∑ ( Rc − R) ,
(9)
j
j
где j – количество ближайших точек, находящихся в зоне действия сенсорной системы ПО и принадлежащих одному или нескольким препятствиям.
Очевидно, что при соблюдении всех неравенств (4) значение параметра β
(9) равно нулю и соответственно не равно нулю, если хотя бы одно из неравенств
(4) нарушается. Причем во втором случае, значение β всегда положительно.
В работе [9] показано, что устойчивый характер движения ПО вдоль траектории Ψtr обеспечивается при положительной определенности матриц T и A . Соответственно при нарушении условий (4), одна из или обе матрицы T и A должны быть отрицательно определенными. Без потери общности предположим, что
T = A = diag si , i = 1,ν , где si – некоторый функциональный параметр, задающий знакоопределенность матриц T и A .
С учетом вышеизложенного, элементы матриц T и A предлагается задавать
в виде следующей функции:
s0 = const > 0, при β = 0,
si =
1
− , при β ≠ 0,
β
(10)
11
Известия ЮФУ. Технические науки
Тематический выпуск
здесь s0 задает характер движения в свободной от препятствия зоне.
Таким образом, формируя элементы матриц Т и А в соответствии с зависимостью вида (10), мы обеспечиваем устойчивый характер движения ПО вдоль многообразия Ψtr , за исключением областей, где нарушаются неравенства (4).
Поскольку в предлагаемой организации движения ПО предполагается переход из одного устойчивого состояния через неустойчивое движение в другое устойчивое состояние, то параметр β предлагается назвать бифуркационным.
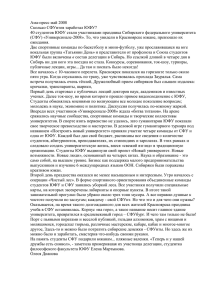
Структурная схема замкнутой системы, реализующей предлагаемый алгоритм
управления, представлена на рис.1 и включает в себя следующие элементы: блоки
M , Fd , Σ(Θ, x ) , сумматор, интеграторы и связи, отражающие структуру объекта управления (1), (3); планировщик движений ПО (оператор, бортовая ЭВМ, нейросеть и т.п.), предназначенный для формирования коэффициентов многообразий
~
~
(5), (6) и элементов матриц T и A ; датчики внутренних Dx и внешних Dy координат; блок Fu вычисления в соответствии с выражениями (7), (8) управляющих воздействий; датчик R определения расстояния до ближайших точек, находящихся в
зоне действия сенсорной системы ПО и принадлежащих одному или нескольким
препятствиям.
Рис. 1. Структурная схема замкнутой системы
Замкнутая система функционирует следующим образом. После инициализации системы управления блок R определяет расстояния Rc и вычисляет, в соответствии с выражением (9), значение бифуркационного параметра β , которое передается в планировщик для формирования элементов матриц Т и А.
12
Раздел I. Системы управления
Планировщик формирует вектор I параметров движения: координаты целевой
точки Af, в общем случае нестационарной; элементы матриц Aij, определяющих
требования к установившимся движениям ПО (в начальный момент, в случае отсутствия препятствий, элементы матриц Aij задают прямую, соединяющую начальное положение ПО с точкой Af); желаемую скорость перемещения объекта V*; параметры si, определяемые в соответствии с выражением (10) и задающие характер
движения ПО в переходных режимах; параметр ξ , характеризующий вид задачи
управления; и, в случае необходимости, векторы оценок lˆ и F̂ν конструктивных
параметров и внешних возмущений [16].
Блок Fu, на основании параметров I, полученных от планировщика, в соответствии с выражением (7), (8а), формирует управляющие воздействия Fu, которые
подаются на исполнительные механизмы ПО и обеспечивают его движение вдоль
прямой, соединяющей начальное положение ПО с точкой Af.
В случае нарушения условий (4), планировщик, в соответствии с выражением
(10), изменяет значение параметров si и ПО переходит в режим неустойчивого
движения до обнуления бифуркационного параметра β , т.е. выхода объекта в зону, свободную от препятствий.
После выхода в зону, свободную от препятствий, планировщик формирует
элементы матриц Aij в выражении (6б) и объект, в соответствии с управляющими
воздействиями, вычисляемыми по выражениям (7), (8б), осуществляет разворот до
выполнения условия α A − α <
π
, где α A , α – соответственно угол направления
2
на целевую точку Af и текущее значение угла ориентации объекта. В случае равенства нулю бифуркационного параметра β планировщик формирует элементы
матриц Aij, соответствующие прямой, соединяющей текущее положение ПО с точкой Af , а блок Fu обеспечивает движение ПО вдоль вновь спланированной прямой.
В противном случае, при β ≠ 0, объект переходит в режим неустойчивого движения до обнуления бифуркационного параметра β .
Следует отметить, что организация разворота объекта используется для доопределения направления его движения вдоль вновь спланированной прямой. В случае использования иных процедур формирования требований к траекторной скорости V [3], этап разворота может быть исключен из предлагаемого алгоритма.
После выхода объекта в свободную от препятствий зону целевой точки Af
планировщик формирует элементы матриц Aij по выражениям (6в) или (6г), что
соответствует управляющим воздействиям (7), (8в) или (7), (8г) соответственно.
Из описанного алгоритма функционирования системы управления ПО следуют ограничения на его использование: так, например, при целенаправленном блокировании перемещений объекта со стороны препятствий или других ПО объект
может не выйти из режима неустойчивого движения; в случае, если препятствия
имеют достаточно сложную форму, типа лабиринта, то поставленная перед объектом задача может быть не решена им в рамках предлагаемого алгоритма без интеллектуализации планировщика, например с использованием нейросетевых технологий [17]; цель управления может быть не достигнута, если энерговооруженность ПО не соответствует динамике нестационарных препятствий и цели.
13
Известия ЮФУ. Технические науки
Тематический выпуск
Основные преимущества предлагаемого в настоящей работе подхода заключаются в простоте его реализации и в том, что при организации обхода препятствий в априори неформализованной среде не требуется построение траекторий в
зоне препятствия, что в ряде случаев, связанных с динамическими изменениями
среды, не всегда представляется возможным в реальном времени.
В описанном алгоритме могут быть использованы отличные от (7), (8) выражения для формирования управляющих воздействий, стабилизирующие спланированные траектории в свободной от препятствий области функционирования ПО.
Моделирование движения ПО
Моделирование движения ПО на базе колесной тележки, имеющей переднее
рулевое колесо и два задних ведущих колеса, управляемых одним приводом в априори неформализованных средах, проведено с использованием изложенных выше
процедур и пакета Mathlab 7.4. Математическая модель ПО представлена в [9].
Функциональные коэффициенты из (7) определяются в соответствии со следующими выражениями:
sβ cα
d
=
β
s
cα
r ∗ω c β s α + h
d
r ∗ω c β c α − h
∑p
,
∑θ
=
r ∗ω s β
,
d
s(.) = sin(.), c(.) = cos(.), P = ( x y), Θ = α , X = (ω β )T ,
ω – угловая скорость задних колес; β – угол поворота рулевого колеса;
α – угол ориентации продольной оси тележки относительно базовой системы ко*
ординат; r , h, d, α, b1, b2 – конструктивные параметры.
где
Соответственно,
hs β cα
r ∗ sβ
d
=
, J ∑ ΘΘ = 0, J ∑ Θx =
hs β sα
d
r ∗ω c β c α −
d
r ∗ω − cβ sα −
J ∑ PΘ
hs β s α
d
=
hs β cα
∗
r cβ s α +
d
r ∗ cβ c α −
J ∑ Px
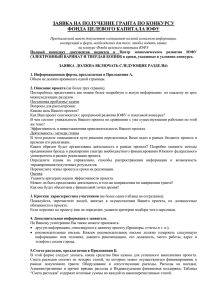
На рис.
hc β sα
d
hc β cα
∗
r ω − sβ sα +
d
r ∗ω − s β c α −
r ∗ω c β
,
d
.
2 представлены результаты моделирования движения ПО из началь(0;0) к стационарной точке Аf (140; 140) в среде с выпуклыми препятствиями: а) траектории движения ПО при различном расположении и геометрии стационарных препятствий и б) графики изменения бифуркационного параметра β
ной точки
на траектории движения.
14
Раздел
а
I. Системы управления
б
Рис. 2. Результаты моделирования движения ПО к стационарной точке Аf в среде
с выпуклыми препятствиями: а – траектории движения ПО; б – графики
изменения бифуркационного параметра β на траектории движения
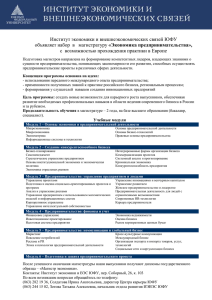
На рис. 3 приведены результаты моделирования движения ПО из начальной
точки (30;30) к стационарным точкам Аf в среде с линейными препятствиями, со
скоростью V=3 м/с и V=2 м/с (а) траектории движения и б) значения траекторной
скорости ПО) Нижний рис. 3,а демонстрирует ограничение на использование
предлагаемого подхода. Задача управления может быть успешно решена при придании планировщику интеллектуальных свойств.
15
Известия
ЮФУ. Технические науки
а
Тематический выпуск
б
Рис. 3. Результаты моделирования движения ПО к стационарной точке Аf в
среде с линейными препятствиями: а – траектории движения ПО;
б – графики изменения траекторной скорости V
На рис. 4 представлены траектории движения ПО к целевой нестационарной
точке в среде с различными вариантами размещения выпуклых препятствий. Причем целевая точка осуществляет равномерное прямолинейное движение из точки
A в точку А .
0
16
f
Раздел I. Системы управления
Рис. 4. Траектории движения ПО к нестационарной точке Аf в среде
с выпуклыми препятствиями
На рис. 5 представлены результаты моделирования движения ПО при организации его движения в целевую стационарную точку А (150, 150) в среде с нестационарными препятствиями, осуществляющими прямолинейное и равномерное движение. Траектории движения препятствий представлены пунктирной линией.
f
17
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 5. Траектории движения ПО к стационарной точке Аf в среде
с нестационарными препятствиями
Следует отметить, что предлагаемый подход не накладывает каких-либо,
кроме энергетических, ограничений на характер движения целевой точки, препятствий, а также на начальное положение ПО.
Представленные результаты моделирования движения ПО в различных априори неформализованных средах демонстрируют эффективность предлагаемого
в работе подхода.
Заключение
Предложенный в работе подход к организации движений автономных мобильных объектов в априори неформализованных средах, основанный на введении
бифуркационного параметра для формирования режимов неустойчивого движения
при переходе из одного устойчивого состояния в другое, не требует привлечения
18
Раздел I. Системы управления
интеллектуальных технологий планирования и управления, предварительного картографирования, а также наличия сложной системы навигации. Представленные
процедуры формирования управляющих воздействий и алгоритм функционирования тактического уровня системы управления позволяют организовать движение
ПО в средах со стационарными и нестационарными целевыми точками и препятствиями различной формы.
Предложенные решения могут быть использованы при формировании автопилотов для колесных тележек, транспортных платформ на базе летательных и
подводных аппаратов, а также средств воздухоплавательной техники.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Интеллектуальные системы автоматического управления / Под ред. И.М. Макарова,
В.М. Лохина. – М.: Физматлит, 2001. – 576 с.
2. Крутько П.Д., Осипов П.А. Кинематические алгоритмы управления движением транспортных систем мобильных роботов // Изв. РАН. Теория и системы управления. – 1999.
– №3. – С.153-160.
3. Бурдаков С.Ф., Мирошник И.В., Стельмаков Р.Э. Системы управления движением колесных роботов. – СПб.: Наука, 2001.
4. Khatib O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. The Int. Journal of Robotics Researches, Vol. 5, №1, 1986. – Р. 90-98.
5. Borenstein J., Koren Y. Real-time Obstacle Avoidance for Fast Mobile Robots. IEEE Transactions on Systems, Man, and Cybernetics, Vol. 19, No. 5, Sept./Oct. 1989. – Р. 1179-1187.
6. Canudas de Wit, Khennouf C.H., Samson C. and Sordalen O.J. Nonlinear control design for
mobile robots // Y. Zheng (ed.) Recent trends in mobile robots. 1993. World Scientific. –
P.121-156.
7. Топчиев Б.В. Синергетическое управление мобильными роботами// Нелинейный мир. –
Т.2. – 2004. – №4. – С. 239-249.
8. Чернухин Ю. В. , Пшихопов В. Х., Писаренко С.Н., Трубачев О.Н. Программная среда
для моделирования поведения адаптивных мобильных роботов с двухуровневой системой управления // «Мехатроника», – 2000. – №6. – С. 26-30.
9. Пшихопов В.Х.. Организация репеллеров при движении мобильных роботов в среде с
препятствиями // «Мехатроника, автоматизация, управление», – 2008. – №2. – С. 34-41.
10. Пшихопов В.Х. Аттракторы и репеллеры в конструировании систем управления подвижными объектами // Известия ТРТУ. Тематический выпуск. Перспективные системы и задачи управления. – Таганрог: Изд-во ТРТУ, – 2006. – № 3 (58). – С. 117 – 123.
11. Демидович Б.П. Лекции по математической теории устойчивости. – М.: Наука, 1967. – 472 с.
12. Ляпунов А.М. Общая задача об устойчивости движения. – Череповец: Меркурий-пресс,
2000. – 386 с.
13. Крутько П.Д., Осипов П.А. Кинематические алгоритмы управления движением транспортных систем мобильных роботов // Известия РАН. Теория и системы управления. –
1999. – №3. – С. 153-160.
14. Зимин М.Ф. Об уравнениях, определяющих площади, объемы и их границы // Математическое образование. – 1980. – №1.
15. Бойчук Л.М. Метод структурного синтеза нелинейных систем автоматического управления. – М: Энергия, 1971. – 112 с.
16. Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов
с оцениванием возмущений // Информационно-измерительные и управляющие системы.
– 2006. – №1. – С.103-109.
17. Пшихопов В.Х., Сиротенко М.Ю. Структурно-алгоритмическая реализация системы
управления автономным мобильным роботом с нейросетевым планировщиком перемещений // Известия ТРТУ. Тематический выпуск «Интеллектуальные САПР». – Таганрог:
Изд-во ТРТУ. – 2004. – №3. – С.185-191.
19
Известия ЮФУ. Технические науки
Тематический выпуск
УДК 681.51
М.Ю. Медведев
СТРУКТУРА И АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ НЕЛИНЕЙНОГО
НАБЛЮДАТЕЛЯ ПРОИЗВОДНЫХ В УСЛОВИЯХ ДЕЙСТВИЯ
СЛУЧАЙНЫХ ШУМОВ
Введение
В современной теории управления широкое распространение получили методы, основанные на управлении динамическими объектами в фазовом пространстве
[1–3]. При этом возникает проблема оценивания производных по времени высокого порядка. Имеющиеся современные методы дифференцирования имеют хорошие
показатели при однократном дифференцировании сигнала. Если же требуется провести многократное дифференцирование, то возникают сложности, связанные с
зашумлением реальных сигналов. Это приводит к необходимости нахождения оптимума по противоречивым критериям качества подавления случайных шумов и
быстродействия. При наличии математической модели объекта оптимальное в указанном смысле решение известно и задается уравнениями фильтра Калмана – Бьюси [4]. При наличии неопределенностей требуется адаптация к модели объекта,
параметрам шумов и действующим на систему возмущениям. Кроме того, недостатком фильтра Калмана – Бьюси является тот факт, что его коэффициенты передачи вычисляются в разомкнутой форме как решения уравнения Риккати. Это
ухудшает свойства фильтра при действии неучтенных факторов.
Структура наблюдателя производных
В работах [5 – 7] предлагаются линейные алгоритмы оценивания производных на основе аппроксимации измеряемого сигнала временным рядом. Авторами
предлагается структура рекуррентного наблюдателя (РНП), состоящего из цепочки
фильтров – дифференциаторов, показанных на рис. 1.
y (t )
Блок
оценивания
производной
ŷ& (t )
Блок
оценивания
производной
(t )
&ŷ&
...
Блок
оценивания
производной
d n yˆ (t )
dt n
Рис. 1. Структура наблюдателя производных
Данный наблюдатель состоит из цепочки однотипных блоков, оценивающих
первую производную от входного сигнала. За счет последовательного включения
блоков осуществляется оценивание производных высокого порядка. Это позволяет
преодолеть проблему многократного дифференцирования при наличии шумов.
Уравнения блоков, показанных на рис. 1, могут быть представлены в виде:
dxi1 ( t )
dt
dxi 2 ( t )
dt
20
= xi 2 + ki1 ( zi − xi1 ) ,
= ki 2 ( zi − xi1 ) ,
(1)
Раздел I. Системы управления
где
переменные состояния наблюдателей, i = 1, 2,…, Nmax, z1 = y ,
zi = xi −12 , i = 2,3,..., N max , k i1 , ki 2 – параметры, определяемые требованиями к
быстродействию и качеству подавления шумов.
Особенностью работы РНП является изменение во времени его коэффициентов передачи. Их изменение организовано таким образом, что оценивание переменных в блоках (1) происходит последовательно во времени. Вначале оценивается входная величина, а затем ее производная. Графики изменения коэффициентов
усиления производных показаны на рис. 2.
xi1(t), xi2(t) –
K1(t)
t
K2(t)
t
Рис. 2. Изменение коэффициентов усиления РНП во времени
Последовательное оценивание производных основывается на том факте, что
во время переходного процесса по входной величине оценка ее производной не
является адекватной. Отметим, что качественных характер изменения коэффициентов усиления РНП совпадает с изменением коэффициентов усиления в оптимальном фильтре Калмана – Бьюси.
Нелинейный алгоритм оценивания производных
Известно, что в линейных системах увеличение быстродействия приводит к
усилению шумов. В этой связи рассмотрим нелинейный наблюдатель, позволяющий в области больших отклонений увеличивать коэффициенты усиления наблюдателя, которые определяются выражениями:
k i1 = k10 + Li f ( z i − xi1 ),
k i 2 = qk i1 ,
(2)
где Li – положительные постоянные параметры;
f ( z i − xi1 ) – положительно-определенные функции;
z i – входная величина блока наблюдателя;
k10 – положительный постоянный параметр;
q – положительный постоянный параметр;
21
Известия ЮФУ. Технические науки
Тематический выпуск
xi1 – первая переменная блока наблюдателя.
Проанализируем свойства наблюдателя (1), (2). Так как блоки наблюдателя
включены последовательно друг другу и не охвачены обратными связями, то можно рассматривать i -й блок как отдельную подсистему. Рассмотрим i -й блок наблюдателя (2).
Запишем квадратичную функцию вида
Vi = 0,5 xi21
xi22
.
+
q (k10 + Li f ( zi − xi1 ))
(3)
Производная по времени функции (3) в силу уравнений (1), (2) определяется
выражением
V&i = −[k 10 + Li f ( z i − xi1 )]xi21 .
(4)
В силу того, что Li , k10 и f (zi − xi1 ) – положительные величины, из (3), (4)
следует асимптотическая устойчивость наблюдателя (1), (2).
Предположим теперь, что на вход наблюдателя действует случайный сигнал,
имеющий спектральную функцию
S (ω ) =
2 aτ k
,
1 + τ k2ω 2
(5)
где a – дисперсия случайного шума;
τ k – время корреляции шума;
ω – частота.
В этом случае можно показать, что в области малых отклонений, когда величина ошибки стремится к нулю
f ( zi − xi1 ) → 0 ,
(6)
можно получить следующие оценки отношения дисперсий на входе и выходах
блока наблюдателя (1), (2):
D xi 1
D zi
D xi 2
D zi
где Dx , Dz , Dx
i1
i
i2
=
τ k (k10 + q ) + τ k2 qk10
1 + τ k k10 + τ k2 qk10
=
τ k q 2 k10
1 + τ k k10 + τ k2 qk10
,
,
(7)
(8)
– дисперсии входного и выходного сигналов звена наблюдателя.
Численное моделирование
Рассмотрим пример использования РНП для оценивания производных в системе Лоренца, которая имеет следующий вид [8]:
22
Раздел I. Системы управления
dx(t )
= σ ( y − x ),
dt
dy (t )
= rx − y − xz ,
dt
dz (t )
= xy − bz ,
dt
(9)
где σ , r, b – положительные параметры;
x – скорость конвективного обмена;
y – горизонтальная вариация температуры;
z – вертикальная вариация температуры.
Пусть измеряемой переменной является горизонтальная вариация тепмературы y.
Параметры равны σ = 4, r = 80, b = 8 / 3 и выбраны так, что решение системы (9) дает
псевдослучайные колебания. На измеряемый сигнал x наложен случайный шум, т.е.
y = y +ξ ,
(10)
где ξ – белый шум с заданной амплитудой, равной 3.
Вначале проведем численное моделирование наблюдателя (1), состоящего из
двух блоков, коэффициенты которого являются кусочно-постоянными и изменяются в соответствии с выражениями:
ki1 = k10 = const ,
(11)
0, если t < 3 / ki1;
ki 2 = 2
ki1 / 4, если t ≥ 3 / ki1.
Выражения (11) описывают алгоритм последовательного во времени оценивания производных, представленный в работах [5 – 7].
Коэффициент усиления k10 равен 300. Результаты оценивания показаны на
рис. 3 – 5. На рис. 3 приведены графики изменения измеряемой переменной y и
ее оценка, на рис. 4 – изменение производной y& и ее оценка, а на рис. 5 – изменение второй производной &y& и ее оценка.
8
700
7
600
6
y(1)
500
dy/dt
5
400
4
300
3
200
2
x11(t)
x12(t)
100
1
0
t,c
t,c
0
0
0.01
0.02
0.03
0.04
0.05
0.06
Рис. 3. Оценка переменной y
0.05
0.1
0.15
0.2
0.25
Рис. 4. Оценка переменной y&
23
Известия ЮФУ. Технические науки
Тематический выпуск
4
4
x 10
d2y/dt2
3
2
1
0
-1
-2
x22(t)
-3
-4
t,c
-5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Рис. 5. Оценка переменной &y&
На рис. 6 – 8 представлены результаты численного моделирования нелинейного алгоритма оценивания производный (1), (2).
8
600
7
500
y(t)
6
dy/dt
400
5
300
4
x12(t)
3
200
2
x11(t)
100
1
0
t,c
0
t,c
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0
Рис. 6. Оценка переменной y
нелинейным алгоритмом
0.05
0.1
0.15
0.2
0.25
Рис. 7. Оценка переменной y&
нелинейным алгоритмом
4
5
x 10
4
d2y/dt2
3
2
1
0
-1
-2
x22(t)
-3
-4
t,c
-5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Рис. 8. Оценка переменной &y& нелинейным алгоритмом
В качестве функции f ( yi − xi1 ) выбрана квадратичная функция ( yi − xi1 )2 .
Это обеспечивает быстрое увеличение коэффициентов усиления нелинейного РНП
в области больших отклонений и быстрое уменьшение этих коэффициентов до по24
Раздел I. Системы управления
стоянного значения в области малых отклонений. Коэффициент усиления k10 равен 100. Параметры Li = 1000 .
Сравнивая графики оценок, представленные на рис. 3 – 5 и рис. 6 – 8, видим,
что скорость оценивания производных увеличена в 2 – 3 раза. При этом уменьшена
случайная ошибка за счет уменьшения постоянного коэффициента k10 . В области
больших отклонений алгоритм (1), (2) дополняется логической функцией, обнуляющей коэффициент усиления k i 2 . Это позволяет реагировать за счет нелинейной функции f ( yi − xi1 ) и соответствующего выбора «малой» области e уменьшить регулярную ошибку наблюдателя и обеспечить последовательное оценивание
производных.
Заключение
В данной работе предлагается нелинейный алгоритм оценивания производных от сигналов, измеряемых с шумом. В отличие от фильтра Калмана–Бьюси,
предложенный наблюдатель синтезируется в условиях отсутствия модели объекта
и шума. По сравнению с аналогичными алгоритмами оценивания, предложенными
в работах [5–7], алгоритм (1), (2) обладает следующими преимуществами:
♦ коэффициенты усиления нелинейного наблюдателя (1), (2) являются
функциями ошибки, т.е. задаются по принципу замкнутой системы
управления, в отличие от ФКБ, где коэффициенты усиления определяются по принципу программного управления на основе решения уравнений
Риккати. Это позволяет компенсировать неучтенные возмущения. Отметим, что в работе [5] такие возмущения учитывались циклическим повторением коэффициентов усиления, что приводило к периодическому скачкообразному увеличению коэффициентов. В этом случае оценки производных являлись циклическими и обладали заданным качеством только в
конце цикла оценивания;
♦ нелинейный РНП как и в работах [5, 6] реализует последовательное оценивание производных, но не во времени, а в области состояния – в области больших отклонений оценивается входная переменная, а в области малых отклонений – ее производная. Это позволяет повысить качество оценивания в переходных режимах.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Kokotović P.V., Arcak M. Constructive nonlinear control: progress in the 90’s // Proceedings
of 14th IFAC World Congress. Beijing. China, 1999. Paper No PT-4, – P. 49-77.
2. Красовский А.А. Алгоритмические основы оптимальных адаптивных регуляторов нового класса // Автоматика и телемеханика. 1995. № 9. – С. 104–116.
3. Перельман И.И. Анализ современных методов адаптивного управления с позиций приложения автоматизации технологических процессов // Автоматика и Телемеханика.
1991. № 7. – С. 3–32.
4. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления. – М.: Мир, 1977.
5. Красовский А.А. Циклическое оценивание при первичной обработке сигналов датчиков
// Автоматика и телемеханика. 1987. № 4. – С. 52–60.
6. Медведев М.Ю., Гайдук А.Р. Построение самоорганизующихся систем управления в
условиях неопределенности. Сборник «Аналитические методы анализа и синтеза регуляторов». – Саратов, 2000. – С. 30–43.
7. Медведев М.Ю., Гайдук А.Р. Оценивание производных // Материалы XLIV научной
конференции ТРТУ. Известия ТРТУ. – Таганрог, 1999.
8. Лоренц Е. Детерминированное непериодическое течение. В кн. «Странные аттракторы».
Серия «Математика». Новое в зарубежной науке. Вып. 22. – М.: Мир, 1981.
25
Известия ЮФУ. Технические науки
Тематический выпуск
УДК 007.52:004.896+004.75
С.Г. Капустян, Л.Ж. Усачев
МОДЕЛЬ КОЛЛЕКТИВНОГО ВЗАИМОДЕЙСТВИЯ В ЗАДАЧЕ
ГРУППОВОГО УПРАВЛЕНИЯ РОБОТАМИ В УСЛОВИЯХ
ПРОТИВОДЕЙСТВИЯ
Введение
Роботы используются во многих областях науки, техники и промышленности,
в первую очередь там, где жизнедеятельность человека либо затруднена, либо вообще невозможна, например, в зонах радиоактивного или химического загрязнения, в условиях боевых действий, при проведении подводных или космических
исследований и т.п.
В то же время понятно, что одиночный робот, каким бы интеллектуальным он
ни был, может использоваться только для решения некоторых частных задач либо
выполнения довольно простых операций, поскольку он, как правило, обладает
сравнительно малыми возможностями для выполнения поставленной задачи (небольшой радиус действия, ограниченный бортовым энергоресурсом; небольшое
число выполняемых функций, ограниченное набором исполнительных устройств,
невысокая вероятность выполнения поставленной задачи при функционировании в
экстремальных ситуациях, поскольку выход из строя одиночного робота ведет к
невыполнимости его миссии и т.п.).
Очевидным решением указанных выше проблем является применение при
решении сложных задач сразу нескольких роботов, т. е. групп роботов. Преимущества группового применения роботов очевидны. Это и больший радиус действия,
достигаемый за счет возможности рассредоточения роботов, и расширенный набор
выполняемых функций, достигаемый за счет установки на каждый робот индивидуальных исполнительных устройств; и, наконец, более высокая вероятность выполнения целевой задачи, достигаемая за счет возможности перераспределения
функций между роботами группы в случае выхода из строя некоторых из них. Поэтому такие сложные задачи как, например, масштабное исследование и зондирование поверхности других планет, сборка сложных конструкций в космосе и под
водой, участие в боевых и обеспечивающих операциях, разминирование территорий и т.п., могут быть эффективно решены роботами только при их взаимодействии в составе групп.
Задача управления в группах роботов значительно усложняется в условиях
организованного противодействия. Примерами такого рода задач являются ведение группами роботов боевых действий или игра роботов в футбол, и для решения
этих задач предлагается использовать метод коллективного управления [1-4]. Рассмотрим модель коллективного взаимодействия роботов при решении задачи
группового управления в условиях организованного противодействия со стороны
другой группы роботов на примере ведения боевых действий.
Формальная постановка задачи управления группами роботов в боевых
условиях
Будем предполагать, что в боевых действиях участвуют две неоднородные
группы роботов, каждая из которых включает в свой состав боевые и обеспечивающие роботы различных типов, таких как безэкипажные (роботизированные) танки,
боевые машины пехоты (БМП), самоходные артиллерийские установки (САУ) и т.д.
26
Раздел I. Системы управления
Каждая боевая единица характеризуется набором параметров, например, таким как:
огневая мощь, скорострельность, дальнобойность, подвижность и т.д.
Кроме того, каждая боевая единица характеризуется некоторым обобщенным
параметром, который будем в дальнейшем называть ее боевым потенциалом. Цель
функционирования каждого из подразделений, участвующих в боевых действиях,
состоит в нанесении максимального урона противнику при допустимом уровне
собственных потерь.
Формально задачу коллективного управления в смешанном подразделении на
поле боя можно представить следующим образом. Предположим, что в боевых
действиях участвуют две группы – ℜ Β = {R Bj , j = 1, N } (условно "наша"), содержащая N боевых единиц, и группа роботов противника
{
}
ℜ C = RiC , i = 1, M , со-
держащая M боевых единиц. Будем считать, что состояние каждой боевой единицы
описывается некоторым вектором параметров
R Bj =< r1B, j , r2B, j ,..., rvB, j >
j = 1, N
(1)
R Ci =< r1C,i , r2C,i ,..., rvC,i >, i = 1, M ,
(2)
или
таких как, например, скорость, боекомплект, подвижность, огневая мощь, дальнобойность, координаты местоположения и т.п. Состояния каждой боевой единицы (1) и (2) в процессе боя могут изменяться, причем эти изменения зависят
от действий
A Bj =< a1B, j , a2B, j ,..., a wB, j >,
j = 1, N ,
A Ci =< a1C,i , a2C,i ,..., a wC,i >, i = 1, M ,
Β
C
реализуемых боевыми единицами подразделения ℜ и подразделения ℜ
соответственно. Примерами таких действий могут быть, например, изменения координат местоположения боевой единицы на поле боя (если, конечно, она не стационарна) в пределах зоны своей подвижности либо нанесение удара по объекту
противника в пределах зоны своей дальнобойности и текущего боекомплекта.
В общем виде изменения состояний роботов, участвующих в бою, под влиянием действий роботов описываются системами уравнений вида:
& B = f (ℜ B , ℜ C , A B , A C ),
R
j
Bj
j = 1, N ,
& C = f (ℜ B , ℜ C , A B , A C ), i = 1, M ,
R
i
Ci
где
A B = {A Bj },
j = 1, N ; A C = {A Ci },
(3)
i = 1, M .
Понятно, что на действия боевых единиц (1) и (2) в текущей ситуации могут
B
налагаться некоторые ограничения. Например, робот R j не может нанести удар
C
по роботу Ri , если последний находится вне зоны досягаемости его вооружения,
B
или робот R j не может переместиться в участок поля боя, занятый другим роботом, и т.п. В общем виде эти ограничения можно представить в виде системы неравенств
27
Известия ЮФУ. Технические науки
Тематический выпуск
A Bj ∈ {A Bj } p , A iC ∈ {A iC } p , R Bj ∈ {R Bj } p , R iC ∈ {R iC } p ,
(4)
то есть действия роботов и их состояния должны быть допустимыми.
Кроме того, как отмечалось выше, каждая боевая единица, участвующая в
бою, характеризуется боевым потенциалом. Боевой потенциал обозначается как
PR B
или
j
PRC
i
и зависит от параметров текущего состояния данной боевой еди-
ницы, т.е.
P
R Bj
(
= F (r
)
),
= F r1Bj , r2Bj ,..., rνBj ,
C C
C
1i , r2i ,..., rvi
P
RiC
j = 1, N ,
Заметим, что в процессе боя потенциал P
R Bj
может только уменьшаться, причем если P
R Bj
(5)
i = 1, M .
, j = 1, N и P
RiC
= 0 или P
RiC
, i = 1, M (5)
= 0 , то это означает,
что соответствующий объект уничтожен.
С учетом вышеизложенного задача, стоящая перед "нашей" группой, боевых
Β
B
роботов ℜ состоит в определении таких действий A j (t ) , j = 1, N , в результате
выполнения которых с учетом связей (3) и ограничений (4) достигается максимум
целевого функционала
Y = K1 ⋅ PℜB − K 2 ⋅ PℜC ,
(6)
N
где
Pℜ B = ∑ PR B – суммарный боевой потенциал группы ℜ Β ; PℜC =
j
j =1
суммарный боевой потенциал группы
M
∑ PRiC
i =1
–
ℜ C ; K1 и K 2 – стратегические коэффици-
енты.
Модель коллективного взаимодействия роботов в группах в условиях
боестолкновения
Сформулированная выше задача управления группой роботов может быть
решена с помощью метода коллективного управления и алгоритмов коллективного
распределения целей, реализующих этот метод и основанных на итерационной
процедуре оптимизации коллективных действий. Для этого в ( k + 1) -м итерационном цикле робот R j ∈ ℜ , j = 1, N группы должен выбирать в качестве текущеB
B
го такое действие A j ( k + 1) , в результате выполнения которого достигается максимум величины приращения целевого функционала (6), т.е.
B
(
)
∆Yc = Yc ( k + 1) − Yc ( k ) = K 1 ⋅ Pℜ B ( k + 1) − K 2 ⋅ PℜC ( k + 1) −
(
)
− K1 ⋅ Pℜ B ( k ) − K 2 ⋅ PℜC ( k ) =
(
)
(
)
= K1 ⋅ Pℜ B ( k + 1) − Pℜ B ( k ) − K 2 PℜC ( k + 1) − PℜC ( k ) =
N
(
)
M
(
)
= K1 ⋅ ∑ PR B ( k + 1) − PR B ( k ) − K 2 ⋅ ∑ PR C ( k + 1) − PR C ( k ) .
j =1
28
j
j
i =1
j
j
Раздел I. Системы управления
С учетом (5) последнее выражение можно переписать следующим образом:
N
((
) (
))
M
((
) (
))
∆Yc = K1 ∑ F R Bj (k + 1) − F R Bj (k ) − K 2 ∑ F R Ci (k + 1) − F R Ci (k ) =
j =1
N
((
) (
((
) (
i =1
))
= K1 ∑ F R Bj (k + 1) + ∆R Bj − F R Bj (k ) −
j =1
M
(7)
))
− K 2 ∑ F R Ci (k + 1) + ∆R Ci − F R Ci ( k ) .
i =1
Если в (5) функция F линейна, то выражение (7) принимает вид
(
N
)
M
(
)
∆Yc = K1 ∑ F ∆R Bj − K 2 ∑ F ∆R Ci .
j =1
i =1
(8)
В свою очередь значения ∆R Bj и ∆R Ci могут быть определены из (3) путем
замены их на разностные уравнения при ∆t = 1 , т.е.
(
(ℜ
)
(k + 1) )
∆R Bj = f B j ℜ тB , ℜ Ст , Α Ст , A B (k + 1) ,
∆R Ci = f Ci
B
т
, ℜ Ст , Α Ст , A B
j = 1, N
i = 1, M ,
(9)
где ℜ тB = {R Bj,т }, j = 1, N ; ℜ Ст = {R Сi ,т }, i = 1, M ; Α Ст = {Α Сi,т }, i = 1,M .
B
C
Здесь R Bj,т и R C
i,т – текущие состояния роботов R j , j = 1, N и Ri ,
i = 1, M ;
Α Сi,т
–
текущее
действие
робота
RiC ,
i ∈ [1, M ] ;
A B (k + 1) = [ A 1B (k ),..., A Bj −1 (k ), A Bj (k + 1), A Bj (k ),..., A BN (k )] (в этом выражении
A Bl (k ) , l = 1, N , l ≠ j – действие, выбранное роботом RlB в k -м цикле итерации; A Bj (k + 1) – действие, выбираемое роботом R Bj в (k + 1) -м цикле итерации).
Тогда, подставляя (9) в (8), получаем
(
)
(
)
N
M
∆Yc = K1 ∑ f B j ℜ тB , ℜ Ст , Α Ст , A B ( k + 1) − K 2 ∑ f Ci ℜ тB , ℜ Ст , Α Ст , A B (k + 1) . (10)
j =1
i =1
При этом в ( k + 1) -м цикле итерационной процедуры оптимизации коллективного управления j-й робот "нашего" подразделения должен выбирать такое действие A Bj ( k + 1) , которое удовлетворяет ограничениям:
ℜ тB ∈ {ℜ B } p , ℜ Cт ∈ {ℜ C } p ,
где
{ℜ B } p , {ℜ C } p , {Α С } p , {Α B } p –
ствия подразделений
величины
ℜ тB
и
ℜ тC ,
Α Ст ∈ {Α С } p , Α B (k + 1) ∈ {Α B } p ,
(11)
допустимые состояния и допустимые дей-
соответственно, и даёт максимальное значение
(10).
29
Известия ЮФУ. Технические науки
Выражения для функций
fBj
Тематический выпуск
и
из
f Ci
(10), а также общая сложность задачи
(9) – (11) будет зависеть от того, что понимается под действиями роботов на поле
A Bj (k + 1)
боя. Пусть, например, под действием
R Bj
понимается перемещение робота
в некоторую точку поля боя и нанесение удара из этой точки по роботу
определенным количеством боеприпасов, что иллюстрируется на рис.
RiC
1.
R Ci = [ r1C,i , r2C,i , r3C,i , r4C,i ]
R1C = [ r1C,1 , r2C,1 , r3C,1 , r4C,1 ]
dk+1
lj,1
lj,i
lj,m
x Rk +B1 , y Rk +B1
j
j
R Ci = [r1C,m , r2C, m , r3C,m , r4C,m ]
R Bj = [r1B, j , r2B, j , r3B, j , r4B, j ]
Рис. 1. Действие A Bj (k + 1) робота R Bj
Это действие описывается формулой
A Bj ( k + 1) =< x k +B1 , y k +B1 , i k +1 , d k +1 > ,
Rj
где
Rj
x k +B1 , y k +B1 – координаты целевого положения робота R Bj ; i k +1 – номер целеRj
Rj
вого робота
RiC
подразделения противника;
деляемых для поражения объекта
RiC .
Тогда выражения для функций
образом (см. рис.
d k +1 – количество боеприпасов, вы-
fBj
и
f Ci
можно представить следующим
1):
f Ci = r1C,i − γ j ,i ⋅ r2B, j ⋅ d k +1 ,
где
r1C,i –
параметр состояния робота
щищенность);
30
r2B, j –
RiC ,
(12)
характеризующий его живучесть (за-
параметр состояния робота
R Bj ,
характеризующий огневую
Раздел
d k +1 – количество боеприпасов, выделяемых роботом R Bj
мощь его вооружения;
для поражения робота
Функция
γ ji
RiC .
из выражения
l j ,i = ( x k +B1 − x
Rj
R Bj
нием робота
RiC
(12) определяется выражением
l j ,i
B
1 − B , если l j , i ≤ r3, j ,
r
=
3, j
если l j , i > r3B, j ,
0,
γ j ,i
где
I. Системы управления
) 2 + ( y k +B1 − y
Rj
RiC
)2 –
и положением робота
(13)
расстояние между целевым положе-
RiC ; r3B, j –
параметр состояния робота
R Bj , характеризующий его дальнобойность;
cp
cp
C
C
f B j = r1B, j − γ cp
j ,i ⋅ r2,i ⋅ r4,i ,
где
r1B, j –
параметр состояния робота
R Bj ,
(14)
характеризующий его живучесть (за-
щищенность);
M
γ
r3C,i –
cp
j ,i
= 1−
∑ li*
i =1
;
M
li*
l j ,i
C ,
= r3, i
0,
параметр состояния робота
RiC ,
если l j , i ≤ r3C, i ,
(15)
если l j , i >
r3C, i ,
характеризующий его дальнобой-
ность;
M
cp
r2C,i
=
∑ r2C,i*
i =1
M
r2C, i*
;
r2C, i ,
=
0,
если l j , i ≤ r2C, i ,
если l j , i > r2C, i ,
r2C,i – параметр состояния робота RiC , характеризующий его огневую
мощь;
M
cp
C
4 ,i
r
=
∑r
i =1
C*
4 ,i
M
C*
4 ,i
; r
r4C,i ,
=
0,
если l j ,i ≤ r4C,i ,
если l j ,i > r4C,i ,
r4C,i – параметр состояния робота RiC , характеризующий его боезапас.
Заметим, что выражение (12) для функции f Ci определяет, в принципе, величину ущерба, наносимого роботу RiC роботом R Bj в случае перемещения последнего в точку x k +B1 , y k +B1 и нанесения удара по роботу RiC с помощью d k +1
Rj
Rj
31
Известия ЮФУ. Технические науки
Тематический выпуск
боеприпасов. В то же время выражение (14) для функции f B j определяет среднее
значение ущерба, который может быть нанесен противником роботу R Bj в случае
его перемещения в точку с координатами x k +B1 , y k +B1 (рис. 1).
Rj
Для
того,
A j (k + 1) =<
B
a1B, j (k
Rj
чтобы
+ 1),..., a wB, j (k
определить
действие
+ 1) > , дающее максимум выражения (12), не-
обходимо, в принципе, перебрать все возможные варианты наборов параметров
a1B, j ,..., a wB, j . Если эти параметры имеют конечное число значений, то осуществить
такой набор не представляет особого труда. В противном случае, когда некоторые
параметры a sB, j имеют бесконечное число значений, (как например, координаты
x
R Bj
,y
R Bj
положения робота R Bj на поле боя), то эти параметры должны быть
предварительно дискретизированы, чтобы число анализируемых вариантов стало
конечным.
Задачу выбора текущих действий робота группы можно существенно упростить, если разбить её на две составляющие: задачу выбора цели для нанесения
удара и задачу выбора цели для движения. Тогда действия боевых роботов R Bj ,
( j = 1, N ) подразделения ℜ Β также можно разделить на два типа – выбор робо-
тов RiC подразделения противника в качестве целей с последующим их поражением и выбор наиболее выгодной для поражения объектов противника позиции в качестве цели движения.
Сначала каждый робот R Bj , ( j = 1, N ) оценивает эффективность нанесения
удара по целям, т. е. по роботам противника RiC , ( i = 1, M ) в соответствии с выражением
K1 ⋅ f B j − K 2 ⋅ f Ci
∆Y j
d j ,i =
=
, i = 1, M
(16)
∆Y max
∆Y max
j
j
для своего текущего положения, то есть при значениях γ
j,i
и γ ср
j,i , вычисленных
по формулам (13) и (15) с учетом значений
l j ,i = ( x т B − x
Rj
RiC
)2 + ( y т B − y
Rj
RiC
)2 ,
где x т B и y т B – координаты текущего положения робота R Bj .
Rj
Rj
В выражении (16) ∆Y max
– максимально возможное значение приращения
j
целевого функционала (5.10), обеспечиваемое действиями робота R Bj . Наличие
значений d j ,i > 0 свидетельствует о возможности нанесения удара по целям, для
32
Раздел I. Системы управления
которых получены данные значения, из текущего положения, в противном случае
нанесение удара из текущего положения не целесообразно.
Затем каждый робот R Bj ( j = 1, N ) оценивает эффективность перемещения
из текущего положения в другие точки для нанесения удара по объектам противника в соответствии с (16). При этом параметры γ
j,i
и γ ср
j,i вычисляются в соот-
ветствии с выражениями (13) и (15). Выбор того или иного действия (нанесение
удара или перемещение в целевую точку) осуществляется с использованием одного
из алгоритмов распределения целей. При этом должны учитываться следующие
ограничения:
♦ один и тот же объект противника в качестве цели может выбрать несколько роботов подразделения ℜ Β , причем число роботов, выбравших
цель определяется как параметрами роботов подразделения ℜ Β (количеством боезапаса, дальнобойностью, поражающей способностью и т.п.),
так и параметрами самой цели (уровнем защиты, уровнем приоритета,
дальнобойностью и т.п.);
♦ одну целевую точку для перемещения может выбрать только один робот
подразделения ℜ Β .
Таким образом, решение задачи коллективного управления роботами в условиях боестолкновения может быть сведено к многократному решению задачи коллективного распределения целей, с учетом изменения ситуации. Наиболее эффективными для этого являются ускоренные алгоритмы решения задачи коллективного распределения целей, дающие если не оптимальное, то близкое к нему решение
в условиях дефицита времени.
Программная модель коллективного управления группами роботов
на поле боя
Для экспериментальной проверки работоспособности предложенных алгоритмов была разработана программная модель, имитирующая действия на поле
боя групп роботов двух противоборствующих сторон, каждая из которых стремиться нанести максимально возможные потери противнику при некотором допустимом уровне собственных потерь [3,4]. При этом каждая из сторон располагает
различными типами роботизированной боевой техники, имеющими определенные
характеристики, основными из которых являются обобщенные параметры, характеризующие силу атаки, защиту, максимальную скорость перемещения и т.д.
Программная модель подсистемы управления взаимодействием боевых роботов позволяет как моделировать бой, так и создавать сценарии боевых действий.
Пользовательский интерфейс программы обеспечивает отображение всей необходимой информации и результатов моделирования.
Предусмотрены три "стратегии" действий:
♦ атака;
♦ активная оборона;
♦ пассивная защита.
"Атака" – агрессивная стратегия (высокий уровень допустимых собственных
потерь и возможность превышения собственных потерь над потерями противника).
"Активная оборона" – агрессивная стратегия, но более осторожные действия
(более низкий уровень допустимых собственных потерь и локального превышения
собственных потерь над потерями противника).
33
Известия ЮФУ. Технические науки
Тематический выпуск
"Пассивная защита" – обороняющаяся сторона не выполняет целераспределения, а лишь отвечает на атакующие действия противника.
Программа может работать как в автоматическом, так и в "ручном" режиме.
"Ручной" режим используется для управления действиями боевых роботов
человеком-оператором. В этом режиме на экране монитора появляется графическая информация, как показано на рис. 2. Оператор получает возможность выбрать
цели для всех или только для части роботов.
Рис. 2. Задание целей для роботов в "ручном режиме"
После того, как для всех или для части роботов оператором будут назначены
цели, запускается автоматический режим, в котором боевые роботы распределяют
между собой оставшиеся цели в соответствии с алгоритмом, реализующим итерационную процедуру оптимизации коллективных действий. Результат решения задачи целераспределения в смешанном подразделении представлен на рис. 3.
Моделирование боя может осуществляться как в непрерывном, так и в пошаговом режиме.
В автоматическом режиме (он возможен только в случае, когда задачи распределения целей для обеих сторон решаются с помощью ЭВМ) непрерывно реализуются две процедуры: 1) выбор и оптимизация коллективных действий (коллективное распределение целей) одной или обеими сторонами; 2) моделирование боевых действий, соответствующих полученному распределению целей. Последовательная реализация этих процедур продолжается до тех пор, пока не будут уничтожены все боевые единицы одной из противоборствующих сторон.
34
Раздел I. Системы управления
Рис. 3. Результат распределения целей в группе боевых роботов
В пошаговом режиме после завершения очередной процедуры выбора и оптимизации действий на экран монитора отображается результат распределения
целей (рис. 3) и осуществляется ожидание команды пользователя на продолжение
работы.
По окончании боя в обоих режимах на экран выводятся итоговые таблицы
используемых средств и сохраненного боевого потенциала противоборствующих
сторон (рис. 4).
Рис. 4. Итоговые таблицы
35
Известия ЮФУ. Технические науки
Тематический выпуск
Рассмотренная программная модель была использована для исследования
эффективности предложенного метода коллективного планирования действий. Для
различных исходных сценариев проводилось моделирование боевых действий. За
"зеленых" задача выбора действий решалась на ЭВМ с помощью одного из алгоритмов коллективного распределения целей, реализующего итерационную процедуру оптимизации коллективных действий, а за "серых" эту задачу решал либо человек, либо ЭВМ (но с помощью других алгоритмов). При 16-ти боевых единицах
с каждой стороны реализация алгоритма распределения целей, основанного на методе коллективного управления, занимает не более 0,5 с. Человеку для решения
этой задачи (со значительно худшим результатом) требуется более 30 с. Применение других алгоритмов приводит к существенному росту времени принятия решения. Эффективность метода коллективного управления при решении задач выбора
действий боевых роботов, подтверждается и тем, что более чем в 75% случаев "зеленые" побеждают (в оставшихся 25% случаях проигрыш "зеленых" обусловлен, в
основном, их невыгодной исходной позицией).
Заключение
Анализ функционирования программной модели показал, что автоматическое
решение задачи распределения целей в подразделении, состоящем из роботов,
осуществляется, как минимум, на порядок быстрее, чем эту задачу решает человек.
Причем чем больше роботов в подразделении, тем выше эффект автоматического
распределения. При управлении смешанными подразделениями, состоящими из
роботов и обычных средств ВВТ, автоматическое решение задачи целераспределения может быть использовано для формирования подсказки экипажу обычного
ВВТ по выбору цели. При этом окончательное решение должно принадлежать
экипажу, поскольку, как бы не были совершенны технические средства систем
управления и как бы не был высок уровень их интеллекта, они не могут заменить
опыт и навыки, которыми обладают люди.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
Каляев И.А., Гайдук А.Р., Капустян С.Г. Распределенные системы планирования дейст-
вий коллективов роботов. – М.: Янус-К, 2002. – 292 с.
Капустян С.Г., Усачев Л.Ж., Стоянов С.В. Метод оптимального распределения целей в
коллективе роботов // Информационные технологии. –М.: Машиностроение. – №4.
1998. – С. 29–34.
3. Капустян С.Г., Усачев Л.Ж. Моделирование функционирования мобильных роботов в
виртуальной среде на ПЭВМ // Известия ТРТУ. – 2002, – №1 (24). – С.52–53.
4. Капустян С.Г., Усачев Л.Ж. Способ и программная модель динамического распределения целей в задаче группового применения мобильных роботов // Интеллектуальные и
многопроцессорные системы – 2003. Материалы Международной научно-технической
конференции. Т.2. – Таганрог: Изд-во ТРТУ, 2003. – С. 203–205.
36
Раздел I. Системы управления
УДК 681.511
Р.И. Балабаев, М.Ю. Медведев
АВТОМАТИЗИРОВАННОЕ ИССЛЕДОВАНИЕ И СИНТЕЗ СИСТЕМЫ
УПРАВЛЕНИЯ САМОЛЕТОМ-АМФИБИЕЙ НА ОСНОВЕ БЛОЧНОГО
ПОДХОДА
Введение
Исследованию свойств устойчивости, управляемости, наблюдаемости и синтезу законов управления нелинейных систем уделяется значительное внимание.
Наиболее общие результаты в этих направлениях получены в теории линейных
систем. Современные технические системы функционируют вдали от положения
равновесия и для их исследования необходимо использовать нелинейные математические модели с учетом взаимосвязей между каналами управления. Однако методы исследования нелинейных систем в настоящее время не обладают логической
завершенностью методов исследования линейных систем и во многих случаях носят скорее теоретический, чем прикладной характер. Выделим ряд подходов исследования нелинейных систем.
Так, следует отметить предложенный в [1] подход к исследованию управляемости посредством условий общности положений (УОП) дающий достаточные
условия управляемости, геометрические методы исследования управляемости [2],
структурные условия управляемости, изложенные в [3], базирующиеся на естественных каскадных свойствах математических моделей подвижных объектов. Также отметим работу [4], где приведены результаты анализа управляемости для математических моделей (ММ) электромеханических систем четвертого порядка с
двумя управлениями. В работе [5] показано существование управляемой формы
Жордана уравнений аффинных по управлению нелинейных систем с одним управлением. Однако, несмотря на множество направлений развивающихся в рамках
перечисленных выше подходов, в литературе практически отсутствуют примеры
исследования многосвязных нелинейных ММ большой размерности. Как показал
анализ выделенных направлений исследования, основной причиной ограничения
n
m
размерности вектора R состояния и управления R является детерминантное
условие управляемости, анализ которого затрудняется при больших значениях
n и m . Естественным подходом в этом случае является декомпозиция, однако ее
применение требует известной осторожности, так как она может привести к потере
ряда важнейших свойств. Это тем более справедливо для нелинейных систем,
склонность которых к бифуркации является скорее правилом, чем исключением. В
связи с этим актуален поиск методик и процедур, которые бы позволили обойти
указанные ограничения на порядок системы и размерность вектора управления.
Постановка задачи попадания системы на многообразия, отражающие взаимосвязь переменных состояния, характерна для методов синтеза законов управления нелинейных системам [6]. Такой подход, например, предложен в работе [7] и
развит в методе АКАР синергетической теории управления [8], реализующий динамическую декомпозицию системы при синтезе. Сущность этого подхода заключается в том, что движение системы происходит через ряд гиперплоскостей образованных переменными состояния системы. При этом движение между гиперпло-
37
Известия ЮФУ. Технические науки
Тематический выпуск
скостями формируется как естественными свойствами системы, так и заданными
требованиями к качеству переходных процессов. В связи с этим сформулируем
цель структурно-качественного исследования управляемости нелинейной, разомкнутой системы. Цель анализа управляемости – выявление особых многообразий в
пространстве состояния, на которых нелинейной системе не могут быть приданы
любые желаемые динамические свойства и траектории движения. Такая постановка задачи дает достаточные, в классическом смысле, условия управляемости.
В теории оптимального управления вопрос наличия в пространстве состояния
системы особых многообразий является первым этапом исследования системы. В
случае наличия особенностей предполагается дальнейшее исследование системы.
Однако в свете постановки задачи синтеза, приведенной выше, полученные в результате анализа особенности, могут быть использованы непосредственно в процедуре синтеза. Например, для задания целей управления в виде аттракторов и репеллеров. Так, в [4, 9] приведены результаты моделирования асинхронного генератора при задании режима функционирования в виде особой точки типа “предельный цикл”.
В связи с вышесказанным, такую постановку задачи можно считать достаточно актуальной при анализе нелинейных многомерных систем как одноканальных,
так и многосвязных.
Одним из направлений практического использования данных теоретических
исследований является авиастроение, поэтому после описания теоретических
предпосылок процедуры анализа управляемости рассмотрим некоторые примеры
анализа нелинейных математических моделей самолета-амфибии.
Необходимость использования новых подходов при проектировании летательных аппаратов обусловлена следующими причинами. Для адекватного описания большинства режимов полета самолета необходимо использование полных
нелинейных математических моделей описывающих динамику и кинематику движения летательного аппарата, а также состояния водной и воздушной сред. Для
самолета-амфибии это наиболее актуально, так как водная и воздушная среды
предъявляют, как правило, диаметрально противоположные требования к летнотехническим характеристикам самолета. Современные самолеты проектируются с
заранее заданными минимальными запасами устойчивости и площадей рулевых
органов для снижения потребления временных и энергетических ресурсов. В связи
с этим при проектировании самолета-амфибии выдвигаются очень жесткие требования к качеству функционирования систем ручного и автоматического пилотирования и траекториям движения самолета.
Класс исследуемых математических моделей
Выделим класс нелинейных, аффинных, каскадных динамических систем
характерный для большинства технических систем, таких как летательные аппараты, рулевые приводы ЛА, мобильные роботы и др. Системы такого класса были рассмотрены при анализе в [1, 2, 5, 9], а также при синтезе систем управления
[7, 8] и др.
Процедура блочного исследования управляемости
Сформируем процедуру структурно-качественного исследования управляемости. Рассмотрим нелинейную, каскадную, аффинную динамическую систему
обычных дифференциальных уравнений размерностью Rn2 , Rm1 в общем виде
38
Раздел I. Системы управления
dx1 (t )
dt = f1 ( x1 , u )
,
(
)
dx
t
2
= f 2 ( x1 , x2 )
dt
(1)
где x1, x2 – переменные состояния системы, u – управление, f1(x1, u), f2(x1, x2) –
дифференцируемые необходимые числа раз функции, описывающие внутреннее
2
2
2
2
состояние объекта, ∂ f1 ∂u = 0 , ∂ f 2 ∂u = 0 .
Анализируя структуру систем такого класса (1), предположим возможность
упрощения процедуры анализа, а именно выделение блоков системы допускающих
декомпозицию процедуры анализа на последовательность однотипных процедур
анализа отдельных блоков системы предполагая взаимосвязь между блоками системы через переменные состояния. Для таких переменных состояния введем термин “внутренние” управления.
Основываясь на этом предположении сделаем вывод, что такая декомпозиция
не приводит к потере взаимосвязей системы, а, следовательно, к потере отдельных
свойств системы, как это происходит, например, при оценке свойств управляемости линейного приближения исходной нелинейной системы.
Представление нелинейной системы (1) через Якобиан дает эквивалентную
систему, отражающую все свойства исходной системы [9]. На основании этого
матрица управляемости, представляющая собой фактически Якобиан по вектору
“внутренних” и “внешних” управлений, будет иметь вид
∂f1 ( x1 , u )
∂u
Bϕ ( x ) =
0
∂f1 ( x1 , u )
∂x1
.
∂f 2 ( x1 , x2 )
∂x1
(2)
Тогда условием управляемости системы (1) на основании матрицы (2), будет
det Bϕ ≠ 0 .
(3)
Исходя из этого получим критерий управляемости системы (1):
∂f1 (x1 , u ) ∂f 2 ( x1 , x2 )
≠ 0.
∂u
∂x1
4)
Подчеркнем, что критерий (4) дает функциональные зависимости переменных состояния системы, которые позволят провести качественную оценку свойства
управляемости системы.
Доказательство полученного условия проведено преобразованием (1) к канонической управляемой форме, что показывает правильность сделанного выше
предположения.
Распространим критерий (4) на многомерные системы Rn1Kn , Rm1 .
Запишем систему такого вида в общем виде
39
Известия ЮФУ. Технические науки
Тематический выпуск
dx1 (t )
dt = f1 (x1 , u )
dx2 (t ) = f (x , x )
2 1
2
dt
,
(5)
L
dxn (t ) = f (x , x )
n
n −1
n
dt
где x1, x2, x3 – переменные состояния системы, u – управление, f1(x1, u), f2(x1, x2),
fn(xn-1, xn) – дифференцируемые функции, описывающие внутреннее состояние объ2
2
екта, ∂ 2 f 1 ∂u 2 = 0 , ∂ f 2 ∂u = 0 .
Структурная схема системы (5) рассмотрена на рис. 1.
Матрица управляемости примет следующий вид:
1
Bϕ ( x ) =
B ϕ
0
0
0
0
B 2ϕ
0
0
0
0
O
0
0
0
,
0
Bϕn
где элементами Bϕ , Bϕ K Bϕ являются матрицы вида (2).
Тогда критерием управляемости будет:
1
2
n
∂f ( x , x ) ∂f ( x , x )
∂f1 ( x1 , u ) ∂f 2 ( x1 , x 2 ) ∂f 3 ( x 2 , x3 )
⋅
⋅ K ⋅ n−1 n −2 n −1 ⋅ n n −1 n ≠ 0 .
⋅
∂x n − 2
∂x n
∂x1
∂x1
∂u
Рис. 1. Структурная схема каскадной системы порядка n с одним каналом
управления
40
Раздел I. Системы управления
Таким образом, получены необходимые и достаточные условия управляемости нелинейных, аффинных, каскадных систем с одним каналом управления
Rn1Kn , Rm1 .
Отметим что система, показанная на рис. 1, является частным случаем блочно-каскадной системы, структура которой изображена на схеме (рис. 2):
Рис. 2. Структурная схема блочно-каскадной системы порядка n
В этом случае анализ блоков системы может быть произведен любым методом наиболее подходящим в данном случае, а дальнейший анализ управляемости
проводится согласно описанной ранее процедуре блочного анализа.
Процедура анализа нелинейных, многосвязных систем
Распространим процедуру анализа на многосвязные, многомерные, нелинейные, аффинные, каскадные математические модели. Воспользуемся полуучеными в
[1] условиями управляемости. Применительно к многосвязным системам предложенная выше процедура будет иметь следующий вид. Анализ выделенных блоков
системы будем проводить посредством условий общности положений. При этом
корректность такой процедуры обосновывается, так же как и для одноканальных
систем, наличием “внутренних” управлений связывающих блоки системы. Процедура позволяет получить достаточные условия управляемости многосвязные, многомерные, нелинейные, аффинные, каскадные системы. Примеры анализа таких
систем будут приведены ниже.
Процедура синтеза нелинейных систем управления
Процедура синтеза сформирована на основе метода АКАР синергетической
теории управления, активно развивающейся в последнее время. Полученная процедура оформлена в виде модуля, позволяющего формировать цели управления с
учетом полученных условий управляемости и моделировать замкнутую систему
при заданных начальных условиях.
Программный комплекс анализа и синтеза
Полученные процедуры анализа и синтеза нелинейных динамических систем
оформлены в программный комплекс (ПК) автоматизированного анализа и синтеза
41
Известия ЮФУ. Технические науки
Тематический выпуск
законов управления. Реализация комплекса выполнена в среде символьных вычислений Maple и оформлена в виде библиотек процедур Analysis и Synthesis. Так же
сформирована библиотека нелинейных математических моделей Mathematical
model. Схему взаимодействия оператора с ПК покажем на рис. 3.
Рис. 3. Схема взаимодействия оператора с ПК
В ПК проведен анализ управляемости нелинейных математических моделей
самолета амфибии в режимах посадки и плавания по водной поверхности. Приведем результаты анализа.
В режиме посадки рассмотрена математическая модель самолета с раскрытием аэродинамических характеристик и характеристиками силовой установки. Были
получены следующие функциональные зависимости, отражающие взаимосвязь
скорости V, высоты H и характеристик силовой установки и взаимосвязь между
углом наклона траектории, скоростью полета и аэродинамическими характеристиками самолета:
qSba N mz I z ≠ 0 ,
(− A+ B⋅V )⋅V + (− C + D⋅ H ) ⋅ H ≠ 0 ,
g cos(ϑ + α )m − ρV 2 2 SLcx ≠ 0 , V ≠ 0 .
В режиме плавания рассмотрена базовая модель самолета амфибии без раскрытия компоновочных решений, аэродинамических и гидродинамических характеристик. В результате анализа получены следующие зависимости, совпадающие с
результатами, приведенными в [10]:
1
sin (β )
cos(β )
≠ 0,
≠ 0,
≠ 0, V ≠ 0.
(1 + k11 )ρVlV
(1 + k22 )ρVlV
(1 + k66 )I z
Для анализа конкретного объекта исследования необходимо раскрыть аэродинамические и гидродинамические характеристики самолета.
По результатам анализа синтезированы законы управления гиппотического
самолета-амфибии в режиме посадки и в режиме плавания. Результаты моделирования замкнутой системы самолет – автопилот подтверждают результаты проведенных исследований и существенно дополняют результаты, приведенные в
[11, 12].
Заключение
В результате проведенных исследований получена процедура анализа управляемости и синтеза системы управления самолета амфибии. Сформирован программный комплекс анализа и синтеза. Полученные результата анализа использо42
Раздел I. Системы управления
ваны при синтезе законов управления автопилота самолета-амфибии в режиме посадки на основе полной нелинейной математической модели.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
4.
5.
6.
7.
8.
Олейников В. А. Оптимальное управление технологическими процессами в нефтяной и
газовой промышленности. – Л.: Изд-во Недра, 1982. – 216 с.
Нелинейные системы: геометрические методы
анализа и синтеза. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2005. – 520с.
Пшихопов В.Х. Организация репеллеров при движении мобильных роботов в среде с
препятствиями // МАУ. 2008. – №2.
Колесников А.А., Беляев В.Е., Попов А.Н. Свойство управляемости нелинейных электроприводов и турбогенераторов // Межвузовский тематический научный сборник: синтез
алгоритмов сложных систем. Москва-Таганрог, –1997. – С. 147-179.
Гайдук А.Р. Синтез нелинейных систем на основе управляемой формы Жордана // Автоматика и телемеханика. № 7, – 2006. С. 3 – 12.
Справочник по теории автоматического регулирования / Под ред. Красовского А.А.
1987. – 711с.
Бойчук Л.М. Структурный синтез автоматических многоуровневых систем функционального управления динамическими объектами. Препринт 74-23. Изд-во института кибернетики АН УССР, Киев, 1974.
Колесников А.А. Синергетическая теория управления. – М.: Энергоатомиздат, 1994.
– 540с.
Краснощеченко В.И., Крищенко А.П.
9. Isidori A. Nonlinear control sistems. N.Y.: Sppringer-Verlag, 1995.
10. Балабаев Р.И. Процедура анализа нелинейных математических моделей самолета амфибии. – Донецк, 2009.
11. Балабаев Р.И. Синергетический синтез законов управления гидросамолета в режиме
взлета и посадки // 5-я международная конференция «Авиация и космонавтика» МАИ
(23-26 октября, 2006г.). Тезисы докладов.
12. Балабаев Р.И. Синтез закона управления легким самолетом-амфибией в режиме захода
на посадку. Известия ТРТУ. – №9. Специальный выпуск: технические науки. – Таганрог,
2006. – С. 172–173.
УДК 629.7.072.1
Щербинин, П.П. Кравченко, Н.Ш. Хусаинов
РАЗРАБОТКА И МОДЕЛИРОВАНИЕ БОРТОВОЙ
ИНТЕГРИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ С
КОРРЕКЦИЕЙ КООРДИНАТ ПО АВТОМАТИЧЕСКОЙ СИСТЕМЕ
БЛИЖНЕЙ РАДИОНАВИГАЦИИ ДЛЯ ПЕРСПЕКТИВНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Введение
В. В.
Тактико-технические характеристики современных и перспективных летательных аппаратов (ЛА) требуют повышения эффективности решения навигационной задачи, заключающейся в выводе объекта в заданную точку пространства земной поверхности с установленной точностью для решения как военных, так и гражданских задач. В основу функционирования бортового оборудования ЛА закладываются все более совершенные алгоритмы навигации и управления.
В данной работе рассматриваются вопросы проектирования бортовой интегрированной системы навигации и управления (БИСУ) перспективного высокоскоростного ЛА и особенности ее функционирования на завершающем участке траек43
Известия ЮФУ. Технические науки
Тематический выпуск
тории движения, когда выполняется коррекция координат ЛА по информации от
автоматической системы ближней радионавигации (АСБРН).
Для формирования комплексной оценки точности вывода объекта в заданную
точку предлагается использование статистического моделирования процессов, выполняемых в подсистемах БИСУ на завершающем участке полета ЛА.
Формирование облика бортовой интегрированной системы управления и
навигации ЛА
На основании анализа комплекса бортового оборудования рассматриваемого
ЛА и требований, предъявляемых к точностным характеристикам навигации и наведения, сформирован облик БИСУ, в котором можно выделить 4 базовых подсистемы (рис. 1):
Рис. 1. Структурная схема БИСУ
♦
44
подсистема, реализующая алгоритмы автоматического управления (САУ)
ЛА. В качестве математического аппарата при синтезе алгоритмов управления в данной работе использована теория оптимизированных дельтапреобразований второго порядка [1]. Ключевыми модулями подсистемы
САУ ЛА являются модули оценки ошибки управления (отклонения от заданной траектории) и формирования управляющих воздействий. В работе
реализованы принципы управления с построением программных траекторий (ПТ) [2]. Алгоритмы построения ПТ позволяют повысить качественные характеристики работы алгоритмов управления в экстремальных ситуациях. Модуль коррекции координат бесплатформенной инерциальной
Раздел I. Системы управления
навигационной системы (БИНС) обеспечивает коррекцию на каждом шаге координат местоположения ЛА, формируемых инерциальной системой навигации в соответствии с результатами выполненных коррекций;
♦ подсистема, реализующая взаимодействие с автономным искусственным
радионавигационным полем и вычисление "моментального" местоположения ЛА (АСБРН) [3]. Измеренные антенным модулем дальности от ЛА
до каждого радиомаяка проходят предварительную обработку и фильтрацию и используются для вычисления координат ЛА с автономным контролем целостности системы. Универсальность разработанных алгоритмов функционирования наземной и бортовой частей АСБРН заключается,
в частности, в том, что для определения координат ЛА могут быть использованы один или несколько алгоритмов из достаточно широкого набора алгоритмов, различающихся по вычислительной трудоемкости, требованиям к памяти и т.п. и показавших сравнительно высокие характеристики по точности при моделирования в наземной части АСБРН;
♦ подсистема, решающая задачи комплексирования координат САУ ЛА,
БИНС и АСБРН (КОМПЛЕКСИРОВАНИЕ) с расчетом весовых коэффициентов по отношениям статистических оценок уровней ошибок различных подсистем;
♦ подсистема БИНС на основе интегрирования показаний датчиков угловых скоростей (ДУСов) и акселерометров рассчитывает инерциальные
координаты ЛА. Функционирование подсистемы БИНС имитируется путем численного решения дифференциальных уравнений описания движения и внесением ошибок, имитирующих "уход" БИНС.
Рассмотрим более подробно принципы функционирования модулей навигации и управления.
Оценка местоположения ЛА средствами автоматической системы
ближней радионавигации и механизм автономного контроля
целостности навигационного поля
В качестве альтернативы использования существующих радионавигационных
систем наземного и космического базирования рассматривается автоматическая
система ближней радионавигации (АСБРН), которая может использоваться для
коррекции координат на завершающем участке траектории движения ЛА. Преимуществами АСБРН являются высокий темп обновления навигационных определений, а также скрытность, автономность, малое время развертывания и низкая
стоимость эксплуатации.
Информационной основой для вычисления координат ЛА средствами АСБРН
является искусственное навигационное поле на основе опорных радионавигационных устройств – наземных радиомаяков (РМ), которые устанавливаются в районе
предполагаемой точки касания ЛА с поверхностью Земли заранее, при этом выполняется их позиционирование и топопривязка в местной или иной системе координат. До получения сигнала активации с борта радиомаяки функционируют в режиме ожидания, что обеспечивает их скрытность и длительное функционирование
за счет малого энергопотребления.
В активном режиме бортовой антенный модуль с высоким темпом формирует
дальномерные измерения от ЛА до каждого из маяков. На основании полученного
вектора измерений и специальных правил расчета, сформированных в наземном
модуле АСБРН перед пуском ЛА, бортовой модуль АСБРН определяет местоположение ЛА относительно радиомаяков АСБРН.
45
Известия ЮФУ. Технические науки
Тематический выпуск
На АСБРН могут быть распространены типовые требования, предъявляемые
к навигационным системам по размерам области действия, точности определения
координат, доступности, целостности и непрерывности обслуживания для конкретных приложений и классов ЛА [3]. К отличительным особенностям функционирования АСБРН, требующим учета при разработке алгоритмов функционирования наземного и бортового навигационных модулей, следует отнести:
♦ доступность АСБРН для различных ЛА обеспечивается путем временного
разделения доступа к радиомаякам. C учетом числа ЛА, одновременно
находящихся в зоне обслуживания радиомаяков, минимальная длительность непрерывного интервала взаимодействия бортового модуля АСБРН
ЛА с радиомаяками может составлять порядка единиц секунд, что фактически означает необходимость решения задач расчета координат ЛА,
оценки целостности системы, комплексирования БИНС и АСБРН, на основе однократных мгновенных измерений дальностей или последовательности из малого числа измерений;
♦ с уменьшением расстояния между ЛА и радиомаяками точность расчета
координат ЛА растет, что необходимо учитывать при взвешенном комплексировании координат, формируемых АСБРН и БИНС;
♦ избыточное число наземных радиомаяков в общем случае может повысить точность и надежность навигационных определений, однако точность их позиционирования и топопривязки в зависимости от условий установки может существенно различаться. Поэтому при выборе "наилучшей" подгруппы радиомаяков и алгоритма решения навигационной задачи актуальной является задача учета не только геометрического фактора,
но и разброса ошибок исходных данных.
АСБРН включает наземную и бортовую части (модули). Задачей наземной
части АСБРН является анализ геометрической конфигурации и ошибок позиционирования радиомаяков, вероятностная оценка точностных характеристик решения
навигационной задачи, выработка рекомендаций и правил для расчета координат
ЛА в бортовой части АСБРН с учетом возможного нарушения целостности наземной информационной схемы. Функционирование наземного модуля АСБРН осуществляется при наличии достаточных вычислительных и временных ресурсов.
Результатами работы наземной части АСБРН являются статистические оценки
ошибок навигации в рассматриваемых зонах коррекции, по величине которых может быть принято решение на запуск ЛА и/или использование АСБРН для коррекции координат. В случае принятия положительного решения наземная часть
АСБРН генерирует полетное задание.
Задачами бортовой части АСБРН являются автономная оценка целостности
наземной информационной схемы, выявление "отказавших" маяков, решение навигационной задачи (с учетом возможных "отказов") и коррекция координат ЛА по
результатам решения. Функционирование программного обеспечения бортовой
части АСБРН осуществляется в режиме жесткого реального времени в условиях
ограниченности вычислительных ресурсов.
При разработке алгоритмов функционирования АСБРН рассмотрен и реализован набор различных методов вычисления вектора координат ЛА в трехмерном
пространстве по дальномерным измерениям при известной конфигурации опорных
радионавигационных устройств. Конечные методы позволяют решать данную задачу при наличии трех радиомаяков (по трем измерениям дальностей при наличии
46
Раздел I. Системы управления
дополнительной "подсказки" для выбора одного правильного решения из двух,
получаемых в ходе решения системы уравнений) или четырех радиомаяков (в этом
случае решение будет единственным, если, конечно, система уравнений не является вырожденной). Итерационные методы (в частности, метод наименьших квадратов) позволяет использовать большее количество радиомаяков (случай с избыточной информационной схемой), что, как правило, приводит к повышению точности
определения координат ЛА. Методы построения прямой решающей функции (корреляционно-экстремальный и нейросетевой) дают схожие по точности результаты
с итерационными алгоритмами, однако характеризуются высокими требованиями к
вычислительным ресурсам наземной и/или бортовой вычислительной системы.
В разработанной схеме автономного контроля целостности АСРН рализовано
последовательное применение следующих способов оценки и анализа измеренных
дальностей от ЛА до РМ.
Первый этап – анализ аппаратного отказа РМ ("работает" / "не работает").
Выполняется на основе оценки факта наличия или отсутствия сигнала от каждого
РМ наземной схемы АСРН. Наиболее простой способ анализа работоспособности
РМ и контроля целостности системы в целом.
Второй этап – независимый фильтрационный анализ каждой измеренной
дальности от ЛА до РМ с целью повышения сглаживания измеренных дальностей
(уменьшения влияния шумов измерений) и отсечения импульсных помех (процедура "ЗАХВАТ"). Данный подход требует накопления некоторой начальной статистики, поэтому "выдача" первой дальности до РМ происходит с некоторой задержкой (последующие дальности до этого же РМ выдаются без задержки).
Третий этап – проверка дальностей до каждого РМ на попадание в границы
пространственного региона, для которого на борту имеется полетное задание.
Четвертый этап – обнаружение и изоляция отказавших РМ, измеренные дальности до которых попадают в область решения, но их использование может привести к существенной ошибке вычисления координат ЛА. Для разработанного и
используемого на данном этапе алгоритма автономного контроля целостности в
случае конфигурации из четырех радиомаяков минимально необходимое количество N РМ в конфигурации для обнаружения отказов кратности не выше q по приведенному выше алгоритму можно оценить как N = q + 3, а минимально необходимое количество N РМ в конфигурации для изоляции отказов кратности не выше
q по приведенному выше алгоритму, можно оценить как N = 2·q + 3. Минимально
необходимое количество N РМ для изоляции отказа кратности не выше q и обнаружения отказа кратности не выше (q + 1) можно оценить как N = 2·q + 4. В основу
алгоритма контроля целостности АСРН при N > 4 положена схема переборов подгрупп, состоящих из P = 4 радиомаяков и формирование результата контроля на
основе совместного анализа полученных ответов для подгрупп.
В общем случае оценка точности определения координат ЛА зависит от
большого количества факторов, в числе которых следует, в первую очередь, отметить точность позиционирования и топопривязки радиомаяков, точность измерения дальностей от РМ до ЛА в процессе полета, геометрический фактор конфигурации РМ и взаимного расположения группы РМ и ЛА, степень избыточности информационной схемы, вероятности отказа радиомаяка, используемого математического аппарата вычисления координат. Поэтому наиболее достоверным вариантом
анализа конфигурации РМ и формирования оценок точности решения навигационной задачи является статистическое моделирование. Результатом такого моделиро47
Известия ЮФУ. Технические науки
Тематический выпуск
вания служат оценки точности определения координат ЛА с использованием
АСБРН на завершающем участке траектории.
Подсистема цифрового управления движением ЛА на завершающем участке
траектории
Синтез алгоритмов управления движением ЛА на завершающем участке траектории выполнен на основе теории оптимизированных дельта-преобразований
второго порядка с использованием модели движения одного из перспективных
высокоскоростных ЛА.
Блок-схема модели системы автоматического цифрового управления ЛА может быть представлена в виде, приведенном на рис. 2.
Рис. 2. Укрупненная блок-схема подсистемы цифрового управления ЛА
Подсистема САУ состоит из 3 независимых каналов управления: по тангажу
(высоте), рысканию (направлению) и крену.
На рис. 2 использованы следующие обозначения: XYZзад,i – заданная точка
траектории движения ЛА на i-м шаге моделирования; Ei – вектор ошибки управления; с*i – вектор-параметр Д-преобразования, применяемый для адаптации веса
кванта модуляции Y''i+1 и в значительной мере определяющий уровень управляющих воздействий на рулевые приводы ЛА (Ui+1,σ) для следующего шага [4].
♦ Комплексирование координат БИНС и АСБРН для использования в системе автоматического управления (САУ) ЛА наряду с очевидными преимуществами по точности позиционирования ЛА, характеризуется следующими особенностями, которые должны учитываться при решении задачи управления:
♦ скачкообразное изменение ошибок координат ЛА в пространстве является сильным внешним возмущающим фактором, который оказывает влияние на качественные характеристики алгоритма управления;
♦ для решения задачи обеспечения касания ЛА с поверхностью в заданной
точке приземления с предельно высокой точностью необходимо исполь48
Раздел I. Системы управления
зование либо алгоритмов компенсации возмущающего воздействия и возврата ЛА на исходную траекторию движения, либо методов формирования новых программных траекторий (ПТ), форма и управление на которых может отличаться от исходной траектории, но конечная точка будет
совпадать с заданной точкой приземления;
♦ поскольку для обеспечения максимальной точности решения навигационной задачи и минимизации влияния ошибок автономной БИНС на
участке движения после коррекции точка (или точки) коррекции должны располагаться как можно ближе к точке приземления, компенсация
возмущения при движении ЛА должна осуществляться за минимальное
время;
♦ формирование интенсивных управляющих воздействия для возврата ЛА
на исходную заданную траекторию движения при больших отклонениях
от нее может потребовать значительных энергетических ресурсов, ограниченных на пассивном участке траектории движения.
В процессе управления движением ЛА с использованием коррекции координат могут быть построены программные траектории двух типов:
♦ программная траектория первого типа – строится в момент коррекции
координат ЛА по информации от АСБРН;
♦ программная траектория второго типа – строится в момент пересечения
касательной к графику ошибки и линии визирования цели в соответствующей плоскости управления при выполнении некоторых дополнительных условий, накладываемых на соотношения знаков приращения ошибки и ошибки.
В момент построения программной траектории ошибка управления по данному направлению сбрасывается в "0".
По каждой из двух плоскостей управления этот анализ (и построение ПТ) выполняется независимо. Переход на ПТ может являться основанием для уменьшения интенсивности управляющих воздействий с целью повышения точности
управления. Количество новых построенных ПТ определяется количеством выполненных коррекций.
Для обеспечения плавности переходных процессов во время отработки новой
программной траектории запрещается введение новых координат коррекции в контур САУ ЛА.
Проектирование схемы взаимодействия подсистем БИСУ
Проектирование схемы взаимодействия подсистем БИСУ связано с определением приоритетов, порядка вызова и длительности выполнения вычислительных
процессов, реализующих (моделирующих) функции подсистем БИСУ.
В качестве основных процессов на схеме взаимодействия (рис. 3) можно выделить (в порядке убывания приоритета):
♦ процесс имитации движения ЛА и расчета инерциальных координат ЛА
по информации от ДУСов и акселерометров. Считывание показаний с
датчиков и их интегрирование выполняется модулем интегрирования и
формирования координат с некоторым постоянным шагом (порядка
100 Гц для широкого спектра современных ИНС) в режиме жесткого реального времени. В программной модели БИСУ функционирование датчиков угловых скоростей и акселерометры имитируются путем численного решения дифференциальных уравнений, описывающих движение ЛА в
пространстве, при этом шаг интегрирования составляет 1 мс. Для имита49
Известия ЮФУ. Технические науки
Тематический выпуск
ции "ухода" БИНС в программной модели в инерциальные координаты,
получаемые на каждом шаге интегрирования, вводится случайная ошибка. Знак ошибки генерируется однократно для всего "пролета", а величина ошибки представляет собой случайную величину с разбросом (сигмой), который соответствует уровню точности БИНС;
Рис. 3. Схема взаимодействия подсистем и процессов в модели БИСУ
♦
50
измерение дальностей и их предварительная обработка процедурой
"ЗАХВАТ" в подсистеме АСБРН. При имитации работы модуля измерения дальностей от ЛА до радиомаяков используется модель генератора
дальностей и генератора искажений измерений дальностей. Интервал между очередным измерением дальности по каждому РМ определяется кон-
Раздел I. Системы управления
структивными особенностями антенного модуля и составляет порядка 70
мс, измерения по всем маякам выполняются синхронно и (с учетом некоторых допущений, которыми на данном этапе можно пренебречь) одновременно в режиме жесткого реального времени. Таким образом, кортеж
из N дальностей (где N – количество маяков в конфигурации) выдается на
вход процедуре "ЗАХВАТ" каждые 70 мс. Случаю, когда антенный блок
не смог сформировать измерение дальности, соответствует особое (фиксированное, заранее предопределенное) выдаваемое значение;
♦ формирование воздействий на рули управления в рамках САУ ЛА. Процесс является процессом жесткого реального времени, вызывается с постоянным временным шагом порядка 0,2 сек;
♦ коррекция координат, построение программных траекторий, оценка
ошибки управления. Процедуры, реализуемые в данном процессе, представляют собой "верхний" логический уровень управления и коррекции
ЛА. Процесс является процессом жесткого реального времени, вызывается с постоянным временным шагом;
♦ расчет "навигационных" координат ЛА в подсистеме АСБРН по информации о дальностях от ЛА группы радиомаяков. Вызов модуля оценки
целостности информационной схема и расчета координат ЛА носит асинхронный (нерегулярный) характер и осуществляется при наличии "неиспользованных" дальностей с выхода процедуры "ЗАХВАТ". Расчет координат ЛА (вместе с оценкой целостности информационной схемы) не является процессом жесткого реального времени и может прерываться рассмотренными выше процессами. Длительность расчета навигационных
координат на борту ЛА существенно зависит от количества радиомаяков,
заданного алгоритма расчета, наличия отказов радиомаяков. Поэтому в
рамках программной модели длительность выполнения данного процесса
характеризуется только верхней границей времени;
♦ комплексирование координат. Вызов соответствующего модуля также
носит асинхронный (нерегулярный) характер, выполняется только при
наличии "неиспользованного" выхода с АСБРН. Процесс может прерываться другими, более приоритетными процессами, имеет прогнозируемое с высокой точностью время выполнения и имеет малую (по сравнению с другими процессами) трудоемкость.
Рассмотренные в статье принципы построения бортовой интегрированной
системы управления и навигации, а также алгоритмы функционирования отдельных подсистем БИСУ реализованы в рамках программной модели бортового информационно-алгоритмического обеспечения, которые представляют собой часть
программного комплекса моделирования решения задачи навигации и наведения
для перспективных ЛА. Проведенные с использованием данного программного
комплекса эксперименты подтвердили работоспособность и эффективность предложенных подходов и позволили сформировать рекомендации и правила по их
применению для различных вариантов исходных данных при решении задач навигации, наведения и посадки высокоскоростных маневренных ЛА.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Кравченко П.П. Основы теории оптимизированных дельта-преобразований второго по-
рядка. Цифровое управление, сжатие и параллельная обработка информации: Монография. – Таганрог: Изд-во ТТИ
, 2008.
ЮФУ
51
Известия ЮФУ. Технические науки
2.
3.
4.
Тематический выпуск
Основы теории систем управления высокоточных ракетных комплексов Сухопутных
войск / Б.Г.Гурский, М.А.Лющанов, Э.П.Спирин: Под ред. В.Л.Солунина. – М.: Изд-во
МГТУ им. Н.Э.Баумана, 2001.
Щербинин В.В., Кравченко П.П., Хусаинов Н.Ш. Методология разработки информационно-алгоритмического обеспечения перспективных систем посадки на малооборудованные и необорудованные аэродромы по информации от автономной системы ближней
радионавигации //Известия ЮФУ. Технические науки. Тематический выпуск "Интеллектуальные САПР". – Таганрог: Изд-во ТТИ ЮФУ, 2006. – № 2.
Кравченко П.П., Хусаинов Н.Ш. Синтез алгоритмов системы управления летательного
аппарата на основе теории оптимизированных дельта-преобразований второго порядка
// Известия ТРТУ. Специальный выпуск "Материалы XLIX научно-технической и научно-методической конференций профессорско-преподавательского состава, аспирантов и
сотрудников ТРТУ. –№ 1(36). – Таганрог: Изд-во ТРТУ, 2004. – С.66-71.
УДК 62 – 501.462
А.Р. Гайдук
К ПРОБЛЕМЕ СИНТЕЗА ИНВАРИАНТНЫХ МНОГОМЕРНЫХ СИСТЕМ
УПРАВЛЕНИЯ
Введение
Задача управления многомерными объектами была поставлена в тридцатых
годах прошлого века И.Н. Вознесенским [1], как задача автономного (независимого) регулирования нескольких выходных переменных. Практически в то же время
Г.В. Щипановым была сформулирована задача синтеза инвариантных к внешним
воздействиям систем управления [2]. Этим задачам посвящены многочисленные
публикации [3 – 9], поскольку с практической точки зрения целесообразно придавать системам управления сложными объектами свойство инвариантности.
Основная сложность решения задачи синтеза многомерных систем автоматического управления (МСАУ) связана с их многомерностью, т.е. наличием нескольких переменных, каждой из которых необходимо управлять либо независимо, либо
согласованно. Если синтезируется инвариантная к внешним воздействиям МСАУ,
то задача осложняется условиями разрешимости задачи синтеза инвариантных
САУ [8].
Анализ известных решений задачи синтеза МСАУ приводит к выводу, что
указанные сложности обусловлены использованием обратных связей и для обеспечения требуемых вход-выходных соотношений, и для придания устойчивости. В то
же время известно, что для автономного или связного управления и инвариантности необходимы определённые значения передаточных нулей, а для устойчивости
– соответствующие значения полюсов системы.
В работе [7] было предложено разделить средства решения этих задач: для
обеспечения автономности или связности использовать управление по воздействиям (прямые связи), а для устойчивости – обратные связи. Разработанный на основе
этого подхода метод является полностью аналитическим и позволяет построить
устойчивую, автономную или связную систему, и придать ей требуемое качество в
переходном и в установившемся режиме.
Ниже излагается метод синтеза инвариантных к воздействиям МСАУ, минимального порядка, в которых используются обратные связи по управляемым переменным и прямые связи по измеряемым воздействиям.
52
Раздел I. Системы управления
Постановка задачи
Многомерный объект управления можно описать уравнениями:
p
A( s ) yi ( s ) = ∑ Bij ( s ) u j ( s ) +
j =1
q
∑H
k =1
ik
( s ) f k ( s ), i = 1, p ,
(1)
где y i ( s ), u j ( s ) и f k ( s) – изображения по Лапласу управляемой величины
y i (t ) , управления u j (t ) и возмущения f k (t ) ; A( s ) = det( sEn − A) ,
Bij ( s ) = ci adj( sE n − A)b j , H ik ( s ) = ci adj( sE n − A) hk . Здесь число
размерность вектора состояния x ∈ R n , A – системная матрица; ci и b j ,
hk – строки и столбцы числовых матриц C и B , H уравнений объекта (1).
Объект (1) может быть неустойчивым, неполным, неминимально-фазовым, но
стабилизируемым [7]. Будем предполагать, что управляемые переменные yi , задающие воздействия g j и часть возмущений f k измеряются.
Уравнения устройства управления (УУ) приводятся ниже. Здесь отметим
только, что оно является линейным, поэтому уравнения «вход-выход» замкнутой
системы имеют следующий вид:
n–
p
yi ( s) = ∑W ij ( s) g j ( s ) +
j =1
q
∑V
k =1
ik
( s ) f k ( s ) , i = 1, p ,
(2)
где y i ( s ), g l ( s ) и f k ( s ) – изображения по Лапласу управляемой величины
y i ( t ) , задающего воздействия g i (t ) и возмущения f k (t ) ; W ij ( s ) ,
V ik ( s ) – передаточные функции системы.
Предположим, на комплексной плоскости выделена область Ω допустимого
расположения полюсов системы (2). Если нули некоторого полинома H ( s ) в
области Ω , то будем писать H Ω ( s ) , в противном случае – H Ω ( s) .
Предполагая, что условие стабилизируемости объекта (1) выполнено, поставим задачу определения УУ так, чтобы нули характеристического полинома
D ( s ) замкнутой системы (2) располагались в области Ω , а её передаточные
функции W ij ( s) каналов g j → yi удовлетворяли условиям:
а) при автономном управлении
W ii ( s ) = W ∗ii ( s ), W ij ( s ) ≡ 0, i ≠ j , i, j = 1, p ;
(3)
б) при связном управлении
W ij ( s ) = Wij∗ ( s ), i, j = 1, p .
(4)
Здесь W ∗ij ( s) – желаемые передаточные функции, сформированные с учетом:
условий инвариантности или желаемого порядка астатизма; соответствующих условий разрешимости, а также требований к качеству переходного процесса данного канала синтезируемой системы (2).
53
Известия ЮФУ. Технические науки
Тематический выпуск
К возмущениям система должна быть либо абсолютно инвариантной, если
это возможно; либо селективно инвариантной, если известно K D -изображение [8]
возмущения f k (t ) , или же астатической в противном случае, т.е.
V ( s ) ≡ 0 , k ∈ [1, q ] или V ( s ) = V% ( s ) F ( s ) , k = 1, q , k ≠ k . (5)
ik
ik
ik
k
Здесь Fk ( s) – либо K D -изображение возмущения f k (t ) , где оператор D
ν
заменён на s, либо Fk ( s) = s f k , где ν f k – желаемый порядок астатизма системы к возмущению f k (t ) .
Синтез системы (2) рассматриваемым методом выполняется в два этапа. На
первом этапе выбирается УУ1. При этом обратные связи по управляемым переменным используются в нём, если не выполняется условие
A( s ) = AΩ ( s ) .
(6)
Прямые связи вводятся в УУ1 лишь по тем измеряемым возмущениям f k ,
k ∈ [1, τ] , по отношению к которым может быть достигнута абсолютная инвариантность синтезируемой системы [8]. На втором этапе синтеза обеспечивается автономность или связность каналов, а также другие требования к качеству системы.
Рассмотрим порядок выполнения первого этапа.
Устойчивость и абсолютная инвариантность
Как известно, при декомпозиции объектов управления с помощью присоединённой матрицы [7] может образовываться неполный объект, полюсы неполной
части которого могут не принадлежать области Ω . Поэтому декомпозировать таким способом можно лишь такой объект, полином A( s ) которого удовлетворяет
условию (6). В связи с этим, обратные и прямые связи целесообразно формировать
так, как показано на рис. 1,а или рис. 1,б.
f1 f q
f1 f q
u1
uµ
up
u1
uµ
up
y1
y2
yp
u1
u1
u2
up
u2
uр
а
y1
yµ
yp
б
Рис. 1. Типы обратных связей МСАУ
В этом случае указанные уравнения будут линейными, а УУ иметь либо один
вход, либо один выход, что существенно упрощает его реализацию.
При этом, если обратные связи введены так, как показано на рис. 1,а, т.е. УУ1
описывается уравнением
54
Раздел I. Системы управления
p
q
R( s)uµ ( s ) = R( s )uµ − ∑ Lµl ( s ) yl ( s) + ∑ M µ k ( s ) f k ( s ) ,
l =1
где
uµ
(7)
k =1
– обозначение управления объекта (1), которое используется для ввода
сигнала обратной связи, то уравнение объекта (1), (7) имеет вид
p
A( s ) yi ( s ) = ∑ Bij ( s ) u j ( s ) +
j =1
q
∑H
k =1
ik
( s ) f k ( s ) , i = 1, p ,
(8)
где
p
A( s ) = R( s) A( s ) + ∑ Lµl ( s) Blµ ( s ) ;
l =1
u j = u j , j = 1, p; j ≠ µ ,
B i j ( s) = R( s) Bi j ( s) +
H ik ( s ) =
p
∑
l =1, l ≠i
p
∑
l =1, l ≠i
(9)
Lµl ( s) A−1 ( s )[ Bi j ( s) Bl µ ( s) − Bi µ ( s) Bl j ( s)] , (10)
Lµl ( s ) A−1 ( s )[ H ik ( s ) Bl µ ( s ) − Bi µ ( s ) H l k ( s )] +
+ R( s ) H ik ( s ) + Bi µ ( s ) M µ k ( s ) .
(11)
Если какие-то возмущения f ∗ не измеряются, то соответствующий полином
k
в (7) и в (11)
M k∗ (s) ≡ 0 . В случае УУ1, показанном на рис. 1,а, условие стаби-
лизируемости объекта (1) можно записать в виде равенства
НОД{ A( s), НОК[ Blµ ( s)]} = OΩ ( s) ,
l =1, p
где
OΩ ( s )
(12)
– некоторый полином или постоянное число.
Если же обратные связи введены, как показано на рис. 1,б, т.е. УУ1 описывается уравнениями :
R( s )u j ( s ) = R ( s )u j − L j µ ( s ) yµ ( s ) , j = 1, p ,
где
yµ
(13)
– управляемая переменная, используемая для образования обратных свя-
зей, то замкнутая система по-прежнему описывается уравнением (8), но его полиномы определяются несколько другими выражениями, а именно:
ν
A( s ) = R ( s ) A( s ) + ∑ Ll µ ( s ) Bµ l ( s ) ,
(14)
l =1
p
B i j ( s) = R( s) Bi j ( s) + ∑ Ll µ ( s ) A−1 ( s)[ Bi j ( s) Bµl ( s) − Bil ( s ) Bµ j ( s)] ,
(15)
l =1
55
Известия ЮФУ. Технические науки
Тематический выпуск
p
H ik (s) = R(s) Hik (s) + ∑ Ll µ (s) A−1 (s)[ Hik (s) Bµl (s) − Bil (s) Hµk (s)] ,
l =1
k = 1, q ,
Условие стабилизируемости объекта (1) здесь имеет вид
НОД{ A( s ),НОК[ Bµl ( s )]} = O% Ω ( s ) ,
l =1, p
(16)
(17)
где O% Ω ( s ) – некоторый полином или постоянное число.
Отметим, что в выражениях (7) – (17) индекс l пробегает лишь те значения
из интервала [1, p ] , которые соответствуют управлениям ul или управляемым
переменным yl , используемым в УУ1 (7) или (13).
Условия физической реализуемости УУ1 (7) и (13) запишем в виде неравенств
max{deg Lµ l ( s )} ≤ deg R( s) − µ∗y ,
l =1, p
max{deg M µ k ( s)} ≤ deg R( s ) − µ∗y ,
k =1, q
(18)
где µ∗y – допустимое по условиям физической реализуемости УУ1 значение относительной степени соответствующих передаточных функций.
Заменяя в выражениях (9) или (14) полином A( s ) полиномом
A∗ ( s ) = AΩ∗ ( s )OΩ ( s ) , где OΩ ( s ) – полином из выражений (12) или (17), а
AΩ* ( s ) – желаемый полином степени n − deg OΩ ( s ) систем (1), (7) или (1),
(13), получим соответствующее полиномиальное уравнение (9) или (14) относительно полиномов R( s ) и Lµl ( s ) или Ll µ ( s ) . Эти уравнения эквивалентны
системам линейных алгебраических уравнений, решения которых определяют коэффициенты полиномов УУ1. Разрешимость той или иной указанной системы алгебраических уравнений обеспечивается, как показано в [9], выбором степеней
полиномов R( s ) и Lµl ( s ) или Ll µ ( s ) с учетом условий (18) и переменных,
используемых для образования обратных связей.
Условия абсолютной инвариантности, как известно, достигаются довольно
редко [8]. В данном случае, они могут быть обеспечены по отношению к некоторому возмущению f k , k ≠ k ∗ лишь при использовании УУ1 (7), схема которого
приведена на рис. 1,а. Необходимое условие H i k ( s ) ≡ 0 , k ≠ k ∗ может быть
достигнуто, например, если при всех i ∈ [1, p ] и некоторых k ∈ [1, q ] ,
k ≠ k ∗ и µ ∈ [1, p ] выполнены условия
H ik ( s ) = ηik H 0 ( s ) , Bi µ ( s ) = βi µ H 0 ( s ) ,
56
Раздел I. Системы управления
p
∑
l =1, l ≠i
Lµl ( s ) A−1 ( s )[ Bl µ ( s ) H i k ( s ) − Bi µ ( s ) H l k ( s )] = H 0 ( s )T i k ( s ) , (19)
где H 0 ( s ) и T i k ( s ) – некоторые полиномы. В этом случае в выражениях
(11)
(7) и
следует положить M µ k ( s) = −(ηik R ( s) + T ik ) / βiµ , а M µ k ( s) ≡ 0 ,
при k ≠ k .
Таким образом, задавшись полиномом AΩ* ( s) , составив и решив одну из
указанных выше систем алгебраических уравнений, найдем по формулам (9) – (11)
или (14) – (16) все полиномы из уравнения (8) нового объекта управления, характеристический полином которого удовлетворяет условию (6). Порядок этого объекта будет равен n = n + deg R( s) . Если найдутся k ∈ [1, q] , при которых
выполняются условия (19), то все его переменные yi (t ) будут абсолютно инвариантными к возмущениям f k .
Отметим, что если исходный объект управления (1) удовлетворяет условию
(6), то в уравнениях (7) или (13) все полиномы Lµl ( s ) ≡ 0 , т.е. обратные связи по
управляемым переменным не вводятся. Аналогично, если условия (19) не выполняются ни при каких k , то в (7) и в (11) все полиномы Mµk (s) ≡ 0 .
Многомерное управление
Для построения управления u , при котором выполняются условия (3) или
(4) представим, следуя [7], уравнение (8) найденного в п. 3 объекта или уравнение
(1) исходного объекта, удовлетворяющего условию (6), в виде
A( s ) y = Byu ( s )u ( s ) + H y f ( s ) f ( s ) ,
(20)
где Byu ( s ) и H y f ( s ) – p × p и p × q матрицы, полиномы которых имеют
известные числовые коэффициенты.
Далее найдём передаточную матрицу Wy u ( s ) = A −1 ( s ) B y u ( s ) , её определитель det Wy u ( s ) и диагонализирующую матрицу Π ( s ) :
det Wyu ( s ) = B 0( s ) / A 0( s) ,
Π ( s ) = A 0( s )adjWy u ( s ) = [Π i j ( s )] ,
где A 0( s ) = A( s ) / O 0( s ) . Здесь O 0( s )
–
(21)
некоторый полином, причём
O 0( s ) = O 0 Ω( s ) , поскольку A( s ) = A Ω( s ) . Затем проведём факторизацию
полинома B 0( s ) относительно области Ω , т.е. найдём представление
B 0 ( s) = B Ω ( s) B Ω ( s) ,
(22)
57
Известия ЮФУ. Технические науки
Тематический выпуск
где
BΩ ( s )
–
нормированный полином или единица, а
B Ω( s) = B 0( s) / B Ω( s) .
Обозначим K D -изображение j -го задающего воздействия g j (t )
j = 1, p при замене оператора D на s как G j ( s ) , j = 1, p и введём полиномы
F ( s) = НОК{F 1( s), K, F q( s)} , Φ j ( s ) = НОК{G j ( s ), F ( s )} , j = 1, p . (23)
k ≠k
Будем считать также, что выполняются следующие условия [8]:
deg Φ j ( s ) ≥ 1 , НОД{BΩ ( s ), Φ j ( s )} = Const , j = 1, p .
(24)
Как и в случае возмущений, если K D -изображение j -го задающего воздействия g j (t ) не известно, то в
(23)
можно полагать G j ( s) = s
νg j
,
где
ν g j – желаемый порядок астатизма канала g j → y j .
Обозначим
ζ j = max{deg P i j ( s)} , m Ω = deg B Ω ( s ) , m Ω = deg B Ω ( s ) ;
i ∈ 1, p
R 0( s) = N ( s) R( s) ,
где N ( s), R( s) , а также L( s) – p × p диагональные матрицы, составленные
из полиномов N j ( s), R j ( s), L j ( s) , j = 1, p .
При этом deg R j ( s) = ζ j + µ∗y − mΩ , N j ( s ) = R 0 j ( s ) / R j ( s ) , а
deg L j ( s ) = deg Φ j ( s ) − 1 . Пусть также Q ( s ) – p × p матрица общего вида,
а Qi j ( s) , i, j = 1, p её полиномы. При этом аналогично условиям
(18)
max{deg Q jl ( s )} ≤ deg N j ( s ) − µ∗y .
l =1, p
Полиномы R0j(s) =BΩ(s)Φj (s)R% 0j(s), причем deg R% 0 j (s) = ζ j + 2µ∗y − 1 − m Ω , а
% ( s ) и L ( s ) определяются
численные значения коэффициентов полиномов R
0j
j
решением полиномиальных уравнений
Φ j ( s ) R% 0 j ( s ) + B Ω( s ) L j ( s ) = D j ( s ) , j = 1, p ,
где
D j ( s)
– желаемые полиномы знаменателей передаточных функций каналов
g i→ y j , f k → y j ,
i, j = 1, p .
58
(25)
причем
deg D j ( s) = deg Φ j ( s ) + deg R%0 j ( s ) ,
Раздел I. Системы управления
Полиномы
Q j j ( s)
определяются решением полиномиальных уравнений
Q j j ( s ) + G j ( s )V%j ( s ) = L j ( s ) ,
причем
(26)
deg Q j j ( s ) = deg G j ( s ) − 1 , а
deg V%j ( s ) = deg L j ( s ) − deg G j ( s ) .
Если обеспечивается селективная инвариантность канала
G j ( s) ≠ s
νg j
g j → y j , причём
, то коэффициенты соответствующего полинома
D j ( s)
из (25)
назначаются, с учётом желаемого характера переходного процесса.
Полиномы
Qi j ( s ) ≡ 0 при i ≠ j , если синтезируется автономная система,
т.е. в соответсвии с условиями (3). Если же требуется обеспечить определённую
взаимосвязь между i-й управляемой переменной и j-м задающим воздействием, то
соответсвующий полином
Qi j ( s )
выбирается, исходя из того, что передаточная
функция замкнутой системы по каналу
нием
g j → yi , i ≠ j
определяется выраже-
Wi j ( s ) = BΩ ( s )Qi j ( s ) / Di ( s ) .
Управление u в уравнении объекта (20) определяется уравнениями:
u ( s ) = B Ω−1 ( s ) Π ( s ) R 1−1 ( s ) k ( s ) ,
(27)
k ( s ) = N ( s ) [Q ( s ) g ( s ) − L ( s ) y ( s )] ,
−1
где
k ( s)
– изображение вектора промежуточных переменных
(28)
k (t ) ∈ R p .
Для реализации УУ1 и УУ2 сначала осуществляется переход к уравнениям в
переменных состояния, подробно рассмотренный в [7].
Пример
Проиллюстрируем методику синтеза многомерных инвариантных систем
управления предложенным методом на примере объекта из работы [6], который
при
наличии
возмущений
описывается
уравнениями
(1),
где
n = 4, p = 2, q = 2 , а полиномы:
(29)
A( s ) = ( s + 0,2 ) 2 ( s + 0,5 ) s ,
B 11( s ) = 0,4 ( s + 0, 4 )( s + 0,5 ) s , B 12 ( s ) = 0,8 ( s + 0, 2 )( s + 0,5 ) s ,
B 21( s ) = 0,1( s − 1)( s + 0, 2 ) s , B 22( s ) = 2 ( s + 0, 2 ) ( s + 0,5 ) ,
2
(30)
H 11( s ) = 0, 2 ( s + 0,5 )( s + 0, 2 ) s ,
H 12( s ) = 0,3 ( s + 0,5 )( s + 0,2 ) s ,
H 21( s ) = 0,8 ( s + 0,5 )( s + 0, 2 ) ( s + 0,175) , H 22( s ) = 0, 4 ( s + 0,2 ) s .(31)
2
59
Известия ЮФУ. Технические науки
Измерению доступны векторы
Тематический выпуск
y, ε= g − y
и
f
. Необходимо найти авто-
номное управление, обеспечивающее селективную инвариантность к гармоническому воздействию
ствию
g1 (t )
с частотой
g 2 (t ) , длительность t p1
лее 1,7 с, а по каналу
g2 → y2
ω = 9,86 , астатизм второго порядка к воздей-
переходной функции по каналу
g 1 → y1
не бо-
– не более 3 с. Степень устойчивости не хуже 0,15.
µ∗y = 0 , а для УУ2 (27) и (28) µ∗y = 1 .
задачи, определим область
Ω условием
Условия реализуемости: для УУ1 (7)
Переходя
к
Re s ≤ − 0,15 .
решению
Заданный объект согласно (29) условию (6) не удовлетворяет.
Так как желательна абсолютная инвариантность системы к возмущениям, примем
уравнения УУ1 в виде (7). С помощью выражений (29) и (30) легко установить, что
условие стабилизируемости (12) выполняется только при
полином
A ( s ) = ( s + 0,2 )
∗
2
( s + 0,5 ) ( s + 2) ,
µ=2
в (7). Полагая
получим из уравнения (9)
R( s ) = 1 , L 22( s ) = 1 . Подставляя полиномы (29) – (31) в (11) заключаем, что
условия (19) не выполняются ни при k = 1 , ни при k = 2 . Поэтому все полиномы M j k ( s ) ≡ 0 и уравнение УУ1 (7) принимают вид u2 = u2 − y2 , u1 = u1 .
С учетом введенной обратной связи полином и матрицы из уравнения (20) устойчивого объекта принимают вид:
A∗ ( s ) = ( s + 0,5)( s + 0, 2) 2 ( s + 2) ,
(32)
0,4s 3+ s 2 + 0,68s + 0,08
0,8s 3+ 0,56 s 2 + 0,08s
B ( s) =
, (33)
3
2
3
2
s
−
s
−
s
s
+
s
+
s
+
0,1
0,08
0,02
2
1,8
0,48
0,04
0,2s 3− 0,1s 2 − 0,132s − 0,016 0,3s 3+ 0,49s 2 + 0,38s + 0,06
H (s) =
.
3
2
3
2
0,8
0,7
0,178
0,014
0,4
0,16
0,016
s
s
s
s
s
s
+
+
+
+
+
Перейдём к определению УУ2. Вычислив по (32) и (33) передаточную функцию
Wyu ( s ) , её определитель det Wyu ( s )
и матрицы
adjWyu ( s )
и
Π(s) ,
найдём следующие полиномы:
B 0( s ) = 0,72( s + 0,7384)( s + 0,1505) , Π 11( s ) = B 22( s ) ,
Π 12( s ) = − B 12( s ) , Π 21( s ) = − B 21( s ) , Π 22( s ) = B 11( s ) ,
при этом
ζ 1= ζ 2 = 3 .
B 0( s ) , получим B Ω ( s ) = s 2 + 0,889 s + 0,111 ,
m Ω = 2 . В рассматриваемом случае G 1( s ) = s 2 + 9,86 ,
Факторизуя по (22) полином
B Ω( s) = 0,74 , т.е.
а
60
в
соответствии
с
требованиями
к
системе
в
установившемся
режиме
Раздел I. Системы управления
F 1( s ) = F 2( s ) = s , G 2( s ) = s 2 .
Φ 1( s ) = s 3 + 9,86 s , Φ 2( s ) = s
2
Поэтому
по
(23)
F ( s) = s ,
а
, причём условие (24) выполняется.
Степени полиномов:
deg R 01( s ) = 3 + 3 + 1 = 7 , deg L 1( s ) = 3 − 1 = 2 ,
deg R% (s) = 7 − 2 − 3 = 2 , deg D (s) = 3 + 1 + 3 − 2 = 5 ,
01
1
deg Q11(s) = 3 − 1 = 2 , deg L% 1( s ) = 0 .
δ 1i полинома D 1( s ) выберем по коэффициентам ∆ 5 = 1 ,
∆ 4 = 2,7 , ∆ 3 = 4,9 , ∆ 2 = 5,4 , ∆ 1 = 3, 4 , ∆ 0 = 1 нормированного полинома, при которых время регулирования t рн = 5,43 c . Полагая временной масштабный коэффициент ω 01= t рн / t p1= 5, 43/1,7 ≈ 3, 2 , найдем [10]:
Коэффициенты
δ 15 = 1, δ 14 = 8,64 , δ 13= 50,18 , δ 12 = 176,95 , δ 11= 356,52 ,
δ 10 = 335,54 .
Таким образом, при j = 1 полиномиальные уравнения (25) и (26) имеют вид
( s 3+ 9,86 s ) R% 01( s ) + 0,72 L 1( s ) = D 1( s ) ,
Q 11( s ) + ( s 2 + 9,86)λ% 0 = L 1( s ) .
Решения систем алгебраических уравнений, соответсвующих этим уравнениям [10], дают:
L1(s) =127,4s 2 − 57,4s + 466,1, Q11(s) = −57,4s + 790,1,
R 01(s) = (s 2 + 0,8889s + 0,1111)(s 2 + 8,64s + 40,32)(s 3 + 9,86) .
При
j = 2 аналогично находим:
deg R 02 ( s ) = 2 + 3 + 1 = 6 , deg L 2 (s) = 2 − 1 = 1,
deg R% 02 (s) = 6 − 2 − 2 = 2 , deg D2(s) = 2 +1+ 3 − 2 = 4 ,
deg Q (s) = 2 − 1 = 1, degV% (s) = −1 , т.е. V% ( s ) = 0 .
22
Коэффициенты
2
2
δ 2i полинома D 2 ( s ) выберем по коэффициентам ∆ 4 = 1 ,
∆ 3 = 7,2 , ∆ 2 = 16,3 , ∆ 1 = 11,8 , ∆ 0 = 1 стандартной передаточной функции
системы с астатизмом 2-го порядка по задающему воздействию, при которой время регулирования t рн = 12 c . При ω 02 = 12 / 3 = 4 найдем δ 24 = 1,
δ 23 = 28,8 , δ 22 = 261 , δ 21 = 755 , δ 20 = 256 . Уравнения
(25) и (26) здесь
принимают вид
61
Известия ЮФУ. Технические науки
Тематический выпуск
s 2 R 02 ( s ) + 0,72 L 2 ( s ) = D 2 ( s ) ,
Q 22 ( s ) = L 2 ( s ) .
В результате решения этих уравнений находим следующие полиномы:
Q22 (s) = L2 (s) =1048,6s + 355,6 ,
R 02 (s) = (s 2 + 0,889s + 0,111)(s 2 + 28,8s + 261)s 2 .
Для записи уравнений УУ2 найдем deg R j ( s ) = 3 + 1 = 4 ; далее, полагая
R j ( s ) = B Ω ( s ) R% 0 j ( s ) , получим N j ( s ) = Φ j ( s ) , j = 1, 2 . Это позволяет
записать по (27), (28) уравнения УУ2 в изображениях:
20s + 18s + 4,8s + 0,4
s 2 + 8,64s + 40,32
0,1
( s 2 + 0,889 s + 0,111) − s 3 + 0,8s 2 + 0,2 s
s 2 + 8,64s + 40,32
3
u ( s) =
2
− s 3 − 5,6s 2 − 0,8s
s 2 + 28,8s + 261
k ( s)
1
,
3
2
4 s + 10s + 6,8s + 0,8 k2 ( s)
s 2 + 28,8s + 261
−57,4 s − 790,1
127,4
y 1 ( s) ,
ε 1( s) −
2
s( s + 9,86)
s
1048,6 s + 255,6
ε 2 ( s) .
k 2 (s) =
s( s 2 + 9,86)
k 1 ( s) =
Как видно, относительная степень передаточных функций УУ2 не превышает
заданного значения. Тем самым обеспечивается возможность перехода к уравнениям в переменных состояния и физическая реализуемость УУ2 .
Путем вычисления передаточных функций или моделирования на ЭВМ, можно убедиться, что найденные управления обеспечивают выполнение всех указанных выше требований к качеству синтезируемой системы.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Вознесенский И.Н. О регулировании машин с большим числом регулируемых парамет-
ров // АиТ. – 1938. – № 4. – С. 4–5.
Щипанов Г.В. Теория и методы проектирования автоматических регуляторов // АиТ.
– 1939. – № 4. – С. 44–66.
3. Баранчук Е.И. Взаимосвязанные и многоконтурные регулируемые системы. – Л.: Энергия, 1968.
4. Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления.
– М.: Наука, 1973.
5. Уонэм М. Линейные многомерные системы управления: Геометрический подход. М.:
Наука, 1980.
6. Медведев В.С., Романова Т.А. Синтез алгоритмов управления, обеспечивающих независимость подсистем многомерного объекта // Изв. РАН. Теория и системы управления.
– 1995. – № 1. –С. 42–49.
7. Гайдук А.Р. Об управлении многомерными объектами // АиТ. – 1998. – № 12. – С. 22–37.
8. Гайдук А.Р. Условия достижимости инвариантных систем управления энергетическими
объектами // АиТ. – 2006. –№ 5. – C. 93–101.
9. Гайдук А.Р. Выбор обратных связей в системе управления минимальной сложности
// АиТ. – 1990. – № 5. – С. 29–37.
10. Красовский А.А., Поспелов Г.С. Основы автоматики и технической кибернетики. – М.
– Л.: Госэнергоиздат, 1962.
2.
62
Раздел I. Системы управления
УДК 531.36; 62-50
П.Г. Яковенко
СИНТЕЗ ОПТИМАЛЬНЫХ УПРАВЛЕНИЙ ПОДВИЖНЫМИ
ОБЪЕКТАМИ ВО ВРЕМЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Введение
Синтез оптимальных по быстродействию управлений линейными и нелинейными системами с ограничением координат традиционными методами не всегда
эффективен. Следует применять новые, нестандартные подходы, в которых требуется не столько искусство математика, сколько хорошее знание рассматриваемой
технической задачи и понимание, какими факторами можно пренебречь и к каким
последствиям это приведет.
Для технических систем характерна иерархия вышестоящего и нижестоящего
уровней. Продвижение к глобальной цели обычно осуществляется за счет соответствующей координации деятельности подсистем. Глобальная цель развертывается
в подцели, причем, часто лишь после достижения подцели появляется возможность
оценить целесообразность принятия того или иного закона управления. Такие действия следует выполнять путем прогнозирования. Метод избыточных переменных
применим для синтеза оптимальных управлений подвижными объектами с учетом
нелинейностей и ограничений координат.
Методика последовательного синтеза оптимальных управлений
В сложных системах наблюдается иерархическая система противоречий, которую следует использовать для создания алгоритмов управления. Имитационное
моделирование позволяет постичь суть явления, не прибегая к экспериментам на
реальном объекте. Обычно модель будущего состояния системы составляется с
учетом того, что происходит на промежуточных этапах. Необходимо сравнивать
последствия возможных шагов, не выполняя их реально.
Новые методики синтеза оптимальных управлений могут быть созданы на
основе методов динамического программирования [1] и имитационного моделирования, принципов «перемены цели» и «ведущего слабого звена» [2]. На моделях
возможен поиск управлений путем исследования переходных процессов в системе,
получаемых в результате приложения пробных воздействий.
Принцип «перемены цели» служит в качестве средства приспособления системы к изменению параметров, фазовых координат, ограничений и требований к
переходным процессам. Принцип «ведущего слабого звена» подразумевает объединение слабых и сильных звеньев для достижения цели причем сильные звенья,
имеющие большие адаптационные возможности, подстраиваются под слабые звенья. В течение переходного процесса главными на разных этапах становятся разные ограничения и требования, причем, некоторые ограничения могут и не стать
главными для конкретного процесса и не участвовать в формировании оптимального управления. Наличие в любой момент времени переходного процесса одного
«слабого звена» существенно упрощает синтез.
Разработана методика синтеза оптимальных по быстродействию управлений
линейными и нелинейными системами путем многократного численного решения
обыкновенных дифференциальных уравнений. Оптимальный закон управления
системой составляется из управлений, найденных во время переходного процесса
для малых интервалов. Расчет этих управлений осуществляется с учетом технологических требований, ограничений фазовых координат, принятого критерия опти63
Известия ЮФУ. Технические науки
Тематический выпуск
мальности, заданного конечного состояния системы и начальных состояний системы на малых интервалах. Методика предполагает действия над разностными уравнениями, которыми описывается поведение системы. В общем случае она представляет собой методику составления программы для численного решения задачи
на вычислительных машинах.
Поиск оптимальных управлений на малых интервалах ведется последовательно по шагам с учетом координат системы, полученных при оптимальном управлении на предыдущих шагах. Синтез оптимального управления системой сводится к
последовательной оптимизации простых процессов управления.
На первом этапе методом динамического программирования с учетом принятых ограничений рассчитывается прогнозируемое оптимальное управление для
очередного шага. Это управление в дальнейшем может быть скорректировано после проведения проверок на отсутствие нарушений ограничений координат во время переходного процесса. На втором этапе определяются координаты системы в
результате выполнения пробного шага с найденным прогнозируемым оптимальным управлением. Расчеты ведутся последовательно от входа к выходу системы.
На третьем этапе методом имитационного моделирования выполняется перевод
системы по оптимальному закону с учетом принятых ограничений из состояния,
полученного в результате выполнения пробного шага, в равновесное состояние.
Под равновесным состоянием понимается состояние системы, в котором она может оставаться длительное время без изменения координат. На четвертом этапе
сравниваются значения координат системы при переводе ее по оптимальному закону в равновесное состояние с допустимыми значениями координат. Если нет
нарушений принятых ограничений, то использованное на пробном шаге управление считается оптимальным и его можно использовать на очередном шаге. Эти
координаты используются в качестве начальных условий для определения оптимального управления на следующем шаге. Если наблюдаются нарушения принятых ограничений, то использованное на пробном шаге управление не является оптимальным, его следует скорректировать и повторить расчеты по описанному циклу, начиная со второго этапа.
Перевод системы в равновесное состояние выполняется методом имитационного моделирования путем изменения в иерархической последовательности всех
координат до установившихся значений. Под установившимся значением фазовой
координаты подразумевается такое ее значение, которое она может достичь при
изменении по оптимальным законам всех предшествующих фазовых координат до
уровней, соответствующих прекращению дальнейшего изменения анализируемой
координаты. При изменении координат до установившихся значений по оптимальным законам могут формироваться различные цели, однако всегда используется
принцип «ведущего слабого звена» и идет подстройка под самое «сильное» в данный момент ограничение. Сложность состоит в необходимости одновременного
выхода на установившееся значение, как анализируемой координаты, так и всех
предшествующих координат. Задача усложняется с повышением порядка системы.
Все расчеты выполняются по циклическим алгоритмам, для одной и той же координаты могут формироваться цели выхода по оптимальным законам на разные
заданные установившиеся значения. Изменение целей связано с необходимостью
выполнения предъявляемых к системе противоречивых требований.
Особенностью предложенной методики, в отличие от других методов решения многошаговых задач, в которых приходится анализировать на каждом шаге все
возможные варианты управления, является использование промежуточных критериев, позволяющих сразу отсечь заведомо неприемлемые управления и тем самым
сократить объем вычислений. Вычисления выполняются по циклическим алгорит64
Раздел I. Системы управления
мам, обеспечивающим перевод координат в установившиеся состояния, поэтому
для решения частных задач в процессе поиска оптимального управления можно
использовать подпрограммы.
В некоторых случаях удается получить простые аналитические выражения
для расчета процесса перевода координат системы в установившиеся состояния
после выполнения пробного шага, что открывает широкие перспективы по разработке алгоритмов синтеза в реальном масштабе времени микропроцессорными
средствами оптимальных управлений системами высоких порядков.
Оптимальное управление системой третьего порядка
Управляемый линейный объект описывается системой уравнений
dX 1
dt = X 2 ,
dX 2
= X 3,
dt
dX 3
dt = U ,
(1)
где Х1, Х2, Х3 – координаты системы. На управляющее воздействие U и главную
координату Х1 наложены ограничения
| U(t) | ≤ Uм,
(2)
| X1(t) | ≤ Хм .
(3)
Определим оптимальное управление U(t), обеспечивающее минимальное
время Т перевода объекта из исходного состояния Х1(0) = 0; Х2(0) = 0; Х3(0) = 0 в
заданное состояние Х1(Т) = Хм; Х2(Т) = 0; Х3(Т) = 0, с помощью методики последовательного многошагового синтеза.
Решение задачи по предложенной методике предполагает, что речь идет о
системе с квантованием координат по уровню и по времени. О текущем времени
можно судить по номеру шага интегрирования, равного периоду квантования. При
этом объект описывается системой разностных уравнений
∆X 1
∆t = X 2 ,
∆X 2
= X 3,
∆t
∆X 3
∆t = U ,
(4)
где ∆Х1, ∆Х2, ∆Х3 – приращения координат системы за шаг интегрирования ∆t.
Задача заключается в определении управления U в виде последовательности значений U0, U1, ... UC , обеспечивающих перевод объекта в заданное состояние за минимальное время Т. Методика позволяет синтезировать оптимальные управления
при переводе объекта в любое требуемое состояние.
Для устранения противоречий между быстродействием и выполнением ограничений в методике последовательного многошагового синтеза оптимальных
управлений используются принципы «перемены цели» и «ведущего слабого звена».
65
Известия ЮФУ. Технические науки
Тематический выпуск
Они позволяют формировать управление, меняя задачи на отдельных интервалах
времени. Сложная задача синтеза оптимального управления в этом случае заменяется набором более простых задач.
Для исходного состояния системы на n-ом шаге интегрирования Х1(n), Х2(n),
Х3(n) первоначально рассчитывается прогнозируемое оптимальное управление U(n+1)
для очередного шага и определяются координаты системы в результате выполнения первого пробного шага X1(n+1), X2(n+1), X3(n+1). Затем осуществляется перевод
системы в равновесное состояние.
Ставится задача изменения координаты X2 с предельными возможностями до
уровня X2 = 0 (с одновременным выходом X3 на уровень X3 = 0). Для этого находится оптимальное управление U(n+2) и рассчитываются значения координат системы X1(n+2), X2(n+2), X3(n+2) в результате выполнения второго пробного шага. Затем по
циклическому алгоритму решается задача изменения координаты X3 с предельными возможностями до уровня X3(k) = 0. Определяются координаты системы X1(к) и
X2(к) при X3(к) = 0. Производится оценка значения координаты X2(к). Если оно не
равно нулю, то рассчитывается еще один пробный шаг по скорейшему достижению координатой X2 нулевого значения, причем, в качестве начальных условий
используются координаты системы X1(n+1), X2(n+1), X3(n+1) с предыдущего второго
пробного шага. По циклическому алгоритму изменяется координата X3 с предельными возможностями до нулевого значения, оценивается значение координаты X2
и далее по описанному циклу. Таким способом удается достичь значений X2(p) = 0 и
X3(p) = 0 , соответствующих равновесному состоянию системы. Оценивается значение главной координаты системы X1(p). Если оно не превышает заданного значения
Xм, то использованное на первом пробном шаге управление считается оптимальным. В рассматриваемом примере управление U(n+1) может быть использовано для
расчета реальных координат системы на (n+1) шаге интегрирования. В случае нарушения ограничения (X1(p) > Xм) следует изменить прогнозируемое оптимальное
управление U(n+1) и повторить расчеты по описанному циклу, начиная со второго
этапа. Синтез оптимального управления для одного шага выполняется по методике, которая применима и для других шагов.
Определение оптимального управления для рассматриваемой системы на
(n+1) шаге интегрирования выполняется в следующей последовательности. Методом динамического программирования рассчитывается управление, обеспечивающее максимальное приращение координаты Х1 на (n+1) шаге.
Определяется требуемое приращение по координате Х1
∆Х1(n+1) = Xм – X1(n),
(5)
затем вычисляется значение координаты Х2, способное обеспечить это приращение
X2(n+1) = ∆X1(n+1) ⁄ ∆t.
(6)
Определяется требуемое приращение по координате Х2
∆X2(n+1) = X2(n+1) – X2(n)
(7)
и значение координаты Х3, способное обеспечить это приращение
X3(n+1)= ∆X2(n+1) ⁄ ∆t.
(8)
Вычисляется требуемое приращение по координате Х3
∆X3(n+1) = X3(n+1) – X3(n)
66
(9)
Раздел I. Системы управления
и обеспечивающее его управление
U(n+1) = ∆X3(n+1) ⁄ ∆t.
(10)
Это управление ограничивается, при необходимости, на уровне Uм с соответствующим знаком. Рассчитываются координаты объекта после выполнения первого пробного шага (X11(n+1), X21(n+1), X31(n+1)) с найденным управлением:
X31(n+1) = X3(n) + U(n+1) ⋅∆t,
(11)
X21(n+1) = X2(n) + X31(n+1) ⋅∆t,
(12)
X11(n+1) = X1(n) + X21(n+1) ⋅∆t.
(13)
Они используются в качестве начальных условий для перевода объекта в равновесное состояние. Это необходимо для проверки ограничения по Х1.
Перевод объекта в равновесное состояние начинается с расчета второго
пробного шага (n+2), выполняемого с целью скорейшего достижения координатой
Х2 значения Х2 = 0. В качестве начальных условий используются координаты системы X11(n+1), X21(n+1), X31(n+1) , полученные в результате расчета первого пробного
шага. Расчет ведется методом динамического программирования, аналогично первому пробному шагу, только теперь изменена цель управления. По аналогичной
методике определяются координаты системы в результате выполнения второго
пробного шага Х12(n+2), Х22(n+2), Х32(n+2) . В качестве «ведущего слабого звена» вновь
выступает ограниченное управление.
Новые координаты объекта Х32(n+2), Х22(n+2), Х12(n+2) используются в качестве
начальных условий в алгоритме, обеспечивающем изменение координаты X3 до
значения Х3 = 0, соответствующего установившемуся значению Х2.
После достижения координатой Х3 значения Х3 = 0 оценивается значение координаты Х2. Если оно оказывается больше Х2(Т), то рассчитывается новый пробный шаг по скорейшему достижению координатой Х2 значения Х2(Т), только в
качестве начальных условий используются координаты объекта Х32(n+2), Х22(n+2),
Х12(n+2) , полученные в результате выполнения предыдущего второго пробного шага. Вновь используется алгоритм, обеспечивающий изменение координаты Х3 до
значения Х3 = 0, и оценивается значение координаты Х2.
Расчеты по такому циклу продолжаются до тех пор, пока координата Х2 не
достигнет значения Х2 = 0. Иногда для одновременного достижения координатами
значений Х2 = 0 и Х3 = 0 приходится использовать метод последовательных приближений. Полученные значения Х2 = 0 и Х3 = 0 соответствуют установившемуся
состоянию объекта, оценивается значение координаты Х1. Если оно не превышает
значение Хм, то найденное на первом пробном шаге управление U(n+1) считается
оптимальным. В противном случае управление на (n+1) шаге определяется методом последовательных приближений.
Методика позволяет синтезировать оптимальное управление переводом подвижного объекта в заданное состояние за минимальное время и при произвольном
изменении возмущающих воздействий в переходном процессе.
Синтез управления глубиной погружения подводного аппарата
Необходимо синтезировать закон изменения управляющего воздействия,
обеспечивающего оптимальный переход с ограниченной скоростью без перерегулирования по положению подводного аппарата на заданную глубину.
67
Известия ЮФУ. Технические науки
Тематический выпуск
Модель объекта представляется обыкновенным дифференциальным уравнением [3]:
m
dV
= F − ξ ⋅V ⋅ V ,
dt
(14)
где F – сила, действующая на подводный аппарат; m – масса аппарата; V – скорость движения аппарата; ξ – коэффициент сопротивления.
Полагаем, что силовые воздействия на аппарат F1 и F2 имеют форму прямоугольных импульсов, воздействия внешней среды от изменения плотности и солености воды, а также сжатия корпуса незначительны, а коэффициент сопротивления
не меняется во время переходного процесса. Импульс, создаваемый силой F1, разгоняет аппарат на погружение или всплытие, а импульс, создаваемый силой F2,
тормозит движение аппарата, стабилизируя его на определенной глубине. Знаки F1
и F2 определяют направление перемещения аппарата.
Рассмотрим алгоритм синтеза оптимального по быстродействию управления
U подводным аппаратом при перемещении по глубине. Для поиска управления
воспользуемся расчетом пробных шагов, выполняемых с предельными динамическими возможностями в сторону увеличения скорости аппарата и последующими
переводами его в равновесные состояния. Анализ текущих значений скоростей и
положений аппарата на модели позволит использовать рассчитанные для пробных
шагов управления на реальном объекте.
Аппарат перемещается из исходного положения L в заданное положение Lz
при ограничении скорости движения на уровне Vm. Начальное значение пути торможения LT аппарата до останова после его разгона принимается равным нулю.
Расчет управления U на очередном шаге ∆t начинается с определения знака силового воздействия F1, которое задает направление перемещения аппарата. При погружении аппарата начальное значение U принимает отрицательное значение F1.
Выполняется расчет пробного шага с целью получения максимального приращения скорости аппарата на очередном шаге. По имитационной модели подводного
аппарата (14) определяется прогнозируемое значение скорости Vp после выполнения пробного шага с предельным управляющим воздействием:
V p =V +
U − ξ ⋅V ⋅ V
⋅ ∆t .
m
(15)
Эта скорость сравнивается с допустимой скоростью движения аппарата Vm. В
случае нарушения ограничения выполняется повторный расчет пробного шага по
выражению (15) с управляющим воздействием U = 0. Таким способом реализуется
ограничение по скорости.
Определяется прогнозируемое перемещение аппарата Lp с начала движения с
учетом выполнения пробного шаг с найденной скоростью Vp:
L p = L + V p ⋅ ∆t .
(16)
Рассчитывается прогнозируемый путь торможения аппарата LTp со скорости
Vp до останова после выполнения пробного шага:
LTp = LT + V p ⋅
68
U − ξ ⋅V ⋅ V
⋅ ∆t .
F 2 − ξ ⋅V p ⋅ V p
(17)
Раздел I. Системы управления
Если Lz превышает сумму прогнозируемого перемещения аппарата Lp с начала движения с учетом выполнения пробного шаг с найденной скоростью Vp и прогнозируемого пути торможения аппарата LTp со скорости Vp до останова после выполнения пробного шага, то ранее полученное значение U используется для управления подводным аппаратом. После выполнения этого шага переменным аппарата
V, L и LT присваиваются соответственно ранее найденные значения Vp, Lp и LTp.
По описанной методике, начиная с выражения (15), рассчитываются управления
для следующих шагов. Действия по такому циклу (15), (16) и (17) продолжаются
до тех пор, пока не будет выполнено условие начала торможения аппарата:
L z ≤ ( L p + LTp ) .
(18)
В этом случае на подводный аппарат подается управление U, равное F2, и определяются значения скорости V и перемещения L после выполнения очередного шага:
U − ξ ⋅V ⋅ V
V =V +
m
L = L + V ⋅ ∆t .
⋅ ∆t ,
(19)
(20)
Оценивается скорость перемещения аппарата V. Если продолжается движение, то на него подается управление U, равное F2, значения скорости и перемещения после выполнения очередного шага определяются по выражениям (19) и (20).
После прекращения движения расчет скорости и перемещения аппарата ведется
по выражениям (19) и (20) с управляющим воздействием U = 0. Таким способом
исключается перерегулирование по положению.
После выхода на заданную глубину силовое воздействие к аппарату не прикладывается. Алгоритм позволяет определять для любого перемещения длительность приложения силового воздействия F1, момент приложения силового воздействия F2 и начала торможения, момент снятия управляющего воздействия с подводного аппарата. После окончания действия первого импульса F1 скорость погружения аппарата снижается за счет сил сопротивления движению, а после окончания второго импульса F2 движение аппарата прекращается и он стабилизируется на
глубине. Машинными экспериментами доказана работоспособность предложенного алгоритма управления подводным аппаратом с параметрами m=1800, F1=–120,
F2 = 100 и ξ = 20 при различных глубинах погружения и ограничениях скорости.
На рис. 1 приведены переходные процессы при перемещении подводного аппарата с глубины 20 м на глубину 80 м при ограничении максимальной скорости
на уровне 1,2 м/с. Алгоритм позволяет определять время погружения подводного
аппарата при любых коэффициентах сопротивления, изменять ограничение на скорость перемещения и задания на глубину погружения. Он обеспечивает синтез оптимальных управляющих воздействий за малый интервал времени микропроцессорными средствами с учетом ограничения скорости и требования выхода подводного аппарата на заданную глубину без перерегулирования по положению.
Рис. 1. Переходные процессы при перемещении подводного аппарата.
69
Известия ЮФУ. Технические науки
Тематический выпуск
Оптимальное управление электродвигателем постоянного тока
В большинстве электромеханических устройств легко прослеживается взаимосвязанность составных частей, структурированность и подчиненность отдельных координат. Процессы протекают не в произвольном порядке, а в определенной
последовательности. Синтезируем оптимальное по быстродействию управление
двигателем постоянного тока по методике последовательного многошагового синтеза. Электродвигатель описывается уравнениями:
U = i ⋅ R + C ⋅ω + L
J
di
,
dt
dω
= С ⋅ (i − ic ) ,
dt
(21)
(22)
где R, L – активное сопротивление и индуктивность якорной цепи; J, C – момент
инерции и конструктивный коэффициент двигателя; ω – частота вращения; U,
i – напряжение и ток якоря; ic – ток статической нагрузки; t – время. Параметры
двигателя во время переходного процесса считаются постоянными. Момент статической нагрузки двигателя принимается реактивным. В качестве управляющего
воздействия используется напряжение на якоре двигателя.
Численным методом определяется управление U(t), обеспечивающее минимум времени перевода двигателя из исходного состояния с координатами U(0), i(0)
и ω (0) в новое состояние с координатами U(T), i(T)=ic и ω (T ) = ω m . При этом
значения частоты вращения ω (t ) , тока i(T), напряжения U(T) и скорости изменеdU (t )
не должны превышать предельных значений соответстdt
dU (t )
венно ω m , im, Um и
m.
dt
ния напряжения
Составлен алгоритм синтеза оптимального по быстродействию управления
двигателем с учетом принятых ограничений. На начальном этапе определяется
управление, необходимое для перевода объекта за один шаг из исходного состояния в заданное состояние. При необходимости управление ограничивается на максимальном уровне. Определяются координаты объекта после выполнения пробного шага с найденным управлением. Затем выполняется расчет процесса изменения
управления с целью выхода на установившееся значение тока. Производится проверка выполнения ограничения по току. В случае нарушения ограничения по току
управление на пробном шаге корректируется. Рассчитывается процесс изменения с
предельными возможностями тока двигателя до статического тока без перерегулирования. Таким способом объект переводится в равновесное состояние после выполнения пробного шага. Сравнивается полученное значение частоты вращения
двигателя в равновесном состоянии с заданной частотой ω m . Нарушение ограничения по частоте вращения указывает на недопустимость использования управления пробного шага на реальном объекте. Его следует скорректировать и повторить
расчеты по описанному циклу. Если отсутствует нарушение ограничения по частоте вращения, то найденное на пробном шаге управление считается оптимальным и
используется на реальном объекте. На следующих шагах синтез управления выполняется по аналогичной методике. Алгоритм позволяет отрабатывать с предельным быстродействием возмущения, вводить ограничения на ускорение, учитывать
изменения момента инерции и нагрузки.
70
Раздел I. Системы управления
Рис. 2. Переходные процессы при разгоне электродвигателя
На рис. 2 представлен оптимальный по быстродействию процесс разгона
электродвигателя с учетом принятых ограничений до частоты вращения 100 рад/с.
Параметры системы: R=1,5 Ом; L = 0,09 Гн; J = 0,0522 Кг•м2;
С = 1,28 В•с /рад; i c = 10 А; iм = 40 A; Uм =150 В;
dU (t )
m = 10000 В/с.
dt
Изменение в ходе переходного процесса ограничений, параметров объекта
или возмущающего воздействия просто учитываются при синтезе оптимального
управления предложенным методом, так как поиск управления на каждом шаге
ведется с использованием имитационного моделирования.
Разработан алгоритм синтеза оптимального по быстродействию управления
электродвигателем постоянного тока независимого возбуждения при разгоне без
перерегулирования до заданной частоты вращения и питании его от реверсивного
вентильного преобразователя с раздельным управлением с ограничением тока двигателя. Исследованы его возможности по воспроизведению заданных траекторий
движения с ограничениями рывка и ускорения.
Управление позиционными и следящими электроприводами
Супервизорное управление электромеханическими устройствами получило
широкое распространение. В позиционных и следящих системах на базе комплектных электроприводов с обратными связями по положению рабочих органов механизмов на микропроцессор возлагается задача синтеза в реальном масштабе времени близких оптимальным по быстродействию законов управления приводом,
качественное воспроизведение которых обеспечивается системой автоматического
регулирования. Синтез законов выполняется с учетом динамических возможностей
электропривода по воспроизведению заданных траекторий движения и технологических требований.
В высокоточных позиционных системах синтез законов управления следует
осуществлять с учетом технологических требований и ограничений скорости, ускорения и рывка. При этом становится возможным выполнение любых перемещений с допустимыми значениями динамических моментов, возникающих в механизмах, и сохранение точности механизмов во времени.
Оптимальный закон управления позиционным электроприводом в общем
случае состоит из участка разгона до максимальной скорости, участка движения на
ней и участка торможения. Средний участок может отсутствовать, если не вступает
в действие ограничение по скорости. Составление алгоритмов синтеза в реальном
71
Известия ЮФУ. Технические науки
Тематический выпуск
масштабе времени оптимальных по быстродействию управлений позиционными
электроприводами значительно упрощается, если представить координаты системы скорость, ускорение и рывок в единицах одной размерности. Для достижения
приводом заданного значения скорости за минимальное время без перерегулирования, при наличии ограничений на рывок и ускорение, необходимо на каждом
шаге интегрирования обеспечивать максимально возможное приращение скорости.
Уменьшение ускорения следует начинать до достижения заданной скорости. Законы управления позиционным приводом, кроме принятых ограничений, должны
учитывать возможное отклонение электропривода от оптимальных траекторий
движения. Путь разгона при выходе привода на установившуюся скорость не должен превышать половины заданного перемещения. Выбор максимальной скорости
движения позиционного привода следует осуществлять в функции заданного перемещения таким образом, чтобы с учетом дискретности управления путь торможения был не меньше пути разгона. Получены простые аналитические выражения для
определения максимальной скорости и пути разгона до нее привода.
На основе предложенной методики разработан алгоритм синтеза управления
на участке разгона позиционного электропривода с учетом принятых ограничений.
Он предусматривает расчет пробных шагов с последующим переводом системы в
установившееся состояние. Анализ координат системы позволяет выбрать управление комплектным электроприводом для очередного шага. Движение на установившейся скорости осуществляется до тех пор, пока остаток перемещения не станет меньше пути торможения, незначительно превышающего путь разгона.
Практическая реализация оптимального по быстродействию закона торможения с учетом принятых ограничений при дискретном управлении связана со значительными трудностями, так как предполагает расчет ускорений привода по шагам
со строгим выполнением условия одностороннего подхода к заданной позиции.
Целесообразно использовать на участке торможения квазиоптимальные законы
управления, которые в отличие от оптимальных законов незначительно увеличивают время отработки задания при строгом соблюдении ограничений. Практическая реализация таких законов относительно проста.
Близкий оптимальному процесс позиционирования получается в случае торможения на начальном участке с постоянным ускорением по параболе, с дальнейшим движением по экспоненте. Противоречия между быстродействием и точностью позиционирования в системе с ограничениями можно существенно уменьшить, изменяя темп торможения в функции ошибки позиционирования и текущего
значения скорости привода по нелинейной зависимости таким образом, чтобы
обеспечить выход в заданную позицию с малым ускорением на малой скорости.
При этом на каждом шаге управления расчет ускорения торможения ведется в
предположении равнозамедленного движения с текущего значения скорости до
останова, принимая остаток перемещения меньше истинного значения на величину
перемещения за один шаг. Задается убывающий запас в пути торможения. Ускорение торможения при этом изменяется по нелинейной зависимости, скорость и ускорение на заключительном этапе позиционирования существенно зависят от темпа уменьшения запаса в пути торможения.
В следящих системах порой задание зависит от информации, считываемой
через определенные интервалы времени с датчика положения объекта. Возможно
как ступенчатое, так и медленное изменение задающего воздействия. Желательно
обеспечивать скорейшую отработку рассогласований с учетом предельных динамических возможностей объектов и технологических ограничений. Принципы
формирования оптимальных по быстродействию управлений, разработанные для
72
Раздел I. Системы управления
позиционных систем, могут успешно применяться в таких системах на базе комплектных электроприводов. Выбор оптимального управления на очередном шаге
выполняется путем расчета пробных шагов и последующих переводов системы в
установившиеся состояния, что позволяет ликвидировать рассогласования между
заданием и реальным положением объекта за минимальное время при строгом выполнении технологических требований и ограничений координат. Непрерывно вычисляется рассогласование по положению между эталонной и действительной траекториями движения. В функции рассогласования производится синтез закона
управления приводом с ограничениями рывка, ускорения и скорости, по аналогии с
позиционной системой. Находятся максимальная скорость отработки этого рассогласования и путь торможения с нее до останова. Найденная максимальная скорость отработки рассогласования алгебраически суммируется с заданной скоростью движения, привод разгоняется до нее с предельными возможностями за минимальное время без перерегулирования. Если сумма скоростей окажется больше
допустимого значения для данной системы, то ее следует ограничить. Движение
привода на суммарной скорости продолжается до тех пор, пока отклонение эталонной от действительной траектории движения не станет меньше ранее определенного пути торможения. Далее изменение скорости привода выполняется с учетом ограничения на рывок и ускорение как в позиционной системе на участке торможения в функции рассогласования. Задание по скорости на привод на участке
торможения определяется суммой двух составляющих от эталонной траектории
движения и от алгоритма изменения скорости отработки рассогласования в функции уменьшающейся ошибки по положению.
Заключение
Методика последовательного многошагового синтеза позволяет реализовывать предельные динамические возможности и автоматизировать сложные производственные процессы, проектировать системы управления и тренажерные системы, обеспечивать операторов в реальном масштабе времени «советами» по управлению высокоскоростными подвижными объектам.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Беллман Р. Динамическое программирование. – М.: Изд-во “Иностранная лит-ра”, 1960.
– 400 с.
2.
. .,
. .,
. . Программное управление оборудованием. – Л.: Машиностроение, Ленингр. отд., 1974. – 243 с.
3.
. . Импульсное управление глубиной погружения подводного аппарата
// Сборник трудов XXXIV Всероссийской конференции «Управление движением морскими судами и специальными аппаратами». – М.: ИПУ РАН, 2007. – С. 20–25.
Мясников В А Игнатьев М Б Покровский А М
Дорри М Х
УДК: 519.6
С.В. Киор, А.М. Романов
ЦИФРОВОЙ МНОГОФУНКЦИОНАЛЬНЫЙ КОНТРОЛЛЕР
ЭЛЕКТРОПРИВОДА ЦМКП-В2
Современное развитие микроэлектроники, в том числе наличие высокопроизводительных вычислителей и быстродействующих цифро-аналоговых (ЦАП) и
аналогово-цифровых преобразователей (АЦП), позволяет построить высокопроиз73
Известия ЮФУ. Технические науки
Тематический выпуск
водительный многофункциональный контроллер электропривода для нужд робототехники и мехатроники. К такому контроллеру предъявляются следующие требования:
♦ Работа со всеми основными типами электродвигателей, применяемыми в
робототехнике, а именно с двигателями постоянного тока, асинхронными,
синхронными и шаговыми.
♦ Обработка нескольких датчиков разных типов (тока, момента, скорости,
положения) имеющих различные как цифровые, так и аналоговые интерфейсы.
♦ Использование современных алгоритмов управления, в том числе на интеллектуальных технологиях, таких как ассоциативная память, искусственные нейронные сети, нечеткая логика [1].
♦ Возможность управления несколькими двигателями при помощи одного
контроллера.
♦ Наличие высокоскоростных интерфейсов, обеспечивающих взаимодействие между несколькими контроллерами.
♦ Наличие стандартизированных интерфейсов, обеспечивающих быструю
интеграцию как в новые разработки, так и в уже существующие системы.
♦ Наличие выделенного высокоскоростного технологического интерфейса
для отладки программного обеспечения и диагностики контроллера.
В рамках поставленной задачи на кафедре «Проблемы управления» МИРЭА
был разработан цифровой многофункциональный контроллер привода (ЦМКП-В2).
Архитектура контроллера представлена на рис. 1. Ядром ЦМКП-В2 является
программируемая логическая интегральная схема (ПЛИС) Spartan 3E [2] с частотой тактового генератора 50 МГц.
Программно-аппаратное обеспечение (ПАО) ПЛИС основано на модульной
архитектуре с открытой шиной Wishbone. Модульная структура подразумевает
наличие отдельных стандартных модулей, которые автоматизировано компонуются в требуемую конфигурацию. Структурная схема программно-аппаратного обеспечение ПЛИС представлена на рис. 2.
Выбранная архитектура позволяет реализовать многоконтурную систему
автоматического управления (САУ), в том числе построенную на нескольких
процессорах или с использованием специализированных вычислителей, что увеличивает производительность и устойчивость к сбоям. Так, например, формирование управляющих сигналов отдельными двигателями становится аппаратнонезависимым. Межпроцессорное взаимодействие может быть реализовано: при
помощи общей шины, с использованием общих массивов памяти либо выделенных портов обмена данными. В качестве основного процессора общего назначения для системы реализован модуль процессора C16. Это стековый 16разрядный процессор адаптированный для работы с кодом, написанным на языке
C. Помимо процессоров общего назначения есть возможность использовать для
реализации функций управления процессоров цифровую обработку сигналов
(ЦОС). На данный момент в качестве модуля процессора ЦОС реализована модификация процессора DSPuva16. По сравнению с оригинальной версией этого
процессора была добавлена возможность проведения 24-битных вычислений с
фиксированной точкой и системой прерываний.
74
Раздел I. Системы управления
Рис. 1. Архитектура контроллера ЦМКП-В2
Для увеличения производительности контроллера в контуре цифровой САУ
использованы отдельные модули реализующие быстрое вычисление тригонометрических функций по алгоритму CORDIC.
Для решения задач управления на базе разработанного контроллера могут
быть аппаратно реализованы технологии нейронных сетей [3] и ассоциативной
75
Известия ЮФУ. Технические науки
Тематический выпуск
памяти. Модули реализующие нейронные сети генерируются автоматически при
помощи специализированной САПР.
Рис. 2 Структурная схема ПОА ПЛИС ЦМКП-В2
Для отладки, настройки и последующей модернизации на контроллере
ЦМКП-В2 реализован технологический интерфейс. Он позволяет оператору подключиться к контроллеру с помощью инструментальной ПЭВМ по интерфейсу
USB. Технологический интерфейс обеспечивает доступ ко всем модулям системы
по общей шине Wishbone, а также к микропроцессорам, модулям нейронной сети и
ассоциативной памяти при помощи выделенного порта.
Подключение цифровых датчиков осуществляется при помощи дискретных
входов/выходов. Плата ЦМКП-В2 имеет 24 дискретных входа 14 дескретных выходов, которые могут быть использованы для обработки датчиков. С точки зрения ПАО
ПЛИС каждый датчик обрабатывается отдельным модулем, который подключает к
остальной системе по общей шине данных. На данный момент реализованы модули
обработки инкрементных квадратурных датчиков, датчиков с интерфейсами SSI, SPI,
I2C, а также датчиков имеющих на выходе ШИМ- и ЧИМ-сигналы.
Для подключения аналоговых датчиков в контроллере реализован
8-канальный 12-разрядный АЦП с частотой дискретизации 250 кГц, который с
точки зрения ПАО ПЛИС является цифровым датчиком с интерфейсом SPI. В том
76
Раздел I. Системы управления
случае, если для работы датчика требуется формирование задающего аналогового
сигнала (например, датчики СКВТ), его можно сформировать при помощи одного
из 2-х 10-разрядных ЦАП, которые также управляются по интерфейсу SPI.
Многофункциональный контроллер электропривода ЦМКП-В2 позволяет работать с двигателями постоянного тока, асинхронными, синхронными и шаговыми
двигателями.
Типовые схемы подключения двигателей к контроллеру представлены на
рис. 3. Совокупность интерфейсов системы подразумевает два основных подхода к
их управлению:
♦ непосредственное формирование напряжения на обмотках двигателя при
помощи ШИМ- или ЧИМ-сигналов, с использованием внешнего усилителя мощности;
♦ управление частотным преобразователем (контроллером шагового двигателя) при помощи аналогового токового интерфейса, сигналами дискретных выходов или цифрового интерфейса стандарта RS422/485.
Рис. 3. Типовые схемы подключения двигателей к контроллеру
В первом случае для подключения к усилителю мощности (УМ) могут быть
использованы 10 дискретных выходов типа открытый коллектор. Это позволяет
при помощи одного контроллера управлять одним двигателем переменного тока
или двумя двигателями постоянного тока. Для использования в ПАО ПЛИС разра77
Известия ЮФУ. Технические науки
Тематический выпуск
ботаны модули управления высокомоментными бесколлекторными двигателями
постоянного тока и векторного управления двигателями переменного тока.
Для управления двигателями переменного тока при помощи частотного преобразователя предпочтительнее использовать токовый интерфейс, так как он имеет более высокие быстродействие и помехозащищенность. Для формирования аналогового сигнала необходимо воспользоваться одним из 2-х расположенных на плате 10разрядных ЦАП. Также возможно управление частотным преобразователем при помощи дискретного интерфейса RS422/485. Для считывания и записи специальных
флагов частотного преобразователя (разрешение/запрет движения, наличие перегрузки по току) могут быть использованы дискретные входы/выходы ЦМКП-В2.
Для управления тормозными муфтами и электромагнитными пускателями на
плате контроллера реализованы 6 сильноточных дискретных выходов на оптосимисторах.
Разработанный цифровой многофункциональный контроллер электропривода
имеет 8 высокоскоростных интерфейсов стандарта RS422/485 со скоростью передачи
данных до 16 Мбит/c. Это позволяет реализовать оперативный обмен командной и
телеметрической информацией между ЦМКП-В2 и системой управления верхнего
уровня и между контроллерами в режиме группового электропривода.
Использование интерфейсов RS422/485 позволяет не только просто интегрировать контроллер с остальными частями системы управления при новых разработках, но и использовать его при модернизации устаревших систем.
Функционал ЦМКП-В2 можно расширить дополнительными интерфейсами,
так как в конструктиве предусмотрен разъем подключения и места для закрепления
мезонинного модуля. На данный момент в номенклатуру разработанных модулей
входят платы интерфейсов: RS232, PS/2, USB1.1, VGA. Ведется разработка модуля
интерфейса FastEthernet. Также существует мезонин высокопроизводительного
контроллера ARM9 Cortex 3 с установленным Ethernet и CAN интерфейсами на
борту.
Разработанный контроллер прошел комплексные испытания в составе системы управления промышленных транспортного робота «Электроника НЦТМ25м» и
манипуляционного робота «РМ-01» [4]. Испытания показали высокое качество
управления, удобство настройки и минимальные сроки внедрения.
1.
2.
3.
4.
78
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Интеллектуальные системы автоматического управления / Под ред. И.М. Макарова,
В.М. Лохина. – М.: ФИЗМАТЛИТ, 2001.
Зотов В.Ю. Проектирование цифровых устройств на основе ПЛИС фирмы Xilinx в
САПР WebPack ISE. – М.: Горячая линия – Телеком, 2003.
Еремин Д. М., Киор С. В. Методы аппаратной реализации цифровых нейронных сетей на
базе программируемых логических интегральных схем. / Труды XII международного научно-технического семинара «Современные технологии в задачах управления, автоматизации и обработки информации», Алушта, 2003.
Черноусько Ф.Л., Болотник Н.Н., Градецкий В.Г. Манипуляционные роботы. – М.: Наука, 1989.
Раздел II. Навигационные системы
Раздел II. Навигационные системы
УДК 621.37:681.3: 681.5
И.И. Маркович, П.Л. Семеняк
ПЕРСПЕКТИВНЫЕ МЕТОДЫ И АЛГОРИТМЫ, СИСТЕМЫ
И УСТРОЙСТВА ЦИФРОВОГО ФОРМИРОВАНИЯ
И ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКИ СИГНАЛОВ
И ИЗОБРАЖЕНИЙ В ПРАКТИЧЕСКИХ РАЗРАБОТКАХ НКБ ЦИФРОВОЙ
ОБРАБОТКИ СИГНАЛОВ ЮФУ
С момента своей организации в НКБ цифровой обработки сигналов ЮФУ
выполнено 33 научно-исследовательские и опытно-конструкторские работы
(НИОКР), которые позволили сформировать основные тематические направления
работы НКБ:
♦ цифровая пространственно-временная обработка (ПВО) сигналов в бортовых и наземных радиолокационных станциях (РЛС);
♦ цифровая ПВО в гидроакустических системах и комплексах;
♦ цифровая обработка изображений (ЦОИ) в системах различного назначения;
♦ цифровое формирование и обработка сигналов в системах управления
следящими выводными устройствами (СВУ).
В рамках данной статьи невозможно охватить весь спектр решённых и решаемых в настоящее время задач. Ниже приведены лишь некоторые результаты,
позволяющие получить представление о научно-технической деятельности НКБ
цифровой обработки сигналов ЮФУ по каждому направлению.
Цифровая ПВО сигналов в бортовых и наземных РЛС
Актуальность выполняемых работ в части создания многофункциональных
(МФ) бортовых и наземных РЛС, обеспечивающих решение задач классов «воздухвоздух», «воздух-поверхность», «земля-воздух» и «земля-земля» в условиях интенсивных пассивных и активных помех, связана с постоянно расширяющимся кругом
задач и увеличением количества режимов работы РЛС, необходимостью учёта особенностей первичной и вторичной обработки радиолокационных сигналов при обнаружении и сопровождении целей, необходимостью обзора наземной обстановки,
в том числе в режимах синтезирования апертуры антенны (САА) и доплеровского
обострения луча (ДОЛ) [1, 2].
Важной тенденцией улучшения тактико-технических характеристик разра-
батываемых РЛС является использование фазированных антенных решёток с
ЦОС, которые требуют для более полной реализации своих потенциальных возможностей разработки новых и оптимизации классических методов и алгоритмов цифровой ПВО сигналов, а также использования для реализации указанных
режимов современных высокопроизводительных многопроцессорных вычислительных систем.
79
Известия ЮФУ. Технические науки
Тематический выпуск
Можно отметить также радиолокаторы, использующие сверхширокополосные сигналы (СШП), применение которых особенно актуально при проведении
антитеррористических и поисково-спасательных операций для оперативного обнаружения людей за оптически непрозрачными препятствиями. ПВО сигналов этих
локаторов усложняется вследствие широкополосности сигналов, не позволяющей
использовать ряд допущений, упрощающих обработку в большинстве РЛС, а также
необходимости учёта специфических особенностей распространения сигналов в
условиях отсутствия априорных сведений о характеристиках среды распространения радиоволн и препятствий [3].
В МФ бортовых РЛС результатом работы алгоритмов первичной обработки
сигналов являются обнаружение и оценка параметров принимаемых сигналов, позволяющие сформировать так называемые первичные измерения пространственных координат объектов наблюдения с последующим их распознаванием. Специфика функционирования МФ бортовых РЛС, заключающаяся в использовании
большого количества режимов работы, определяет многообразие алгоритмов и
систем первичной обработки сигналов. Эти алгоритмы опираются на математический аппарат теорий статистических решений и оценивания, что предопределяет
одну из основных задач разработчиков бортовых РЛС – максимально эффективное
внедрение теоретических достижений в конкретные образцы проектируемых радиолокационных систем.
Одним из важных направлений НИОКР является разработка алгоритмического и программного обеспечений (АО и ПО) существующих и перспективных импульсно-доплеровских (ИД) РЛС, решающих задачи обнаружения и сопровождения воздушных целей [1].
В ИД РЛС основными операциями, используемыми при первичной обработке, практически во всех режимах работы, являются: цифровое формирование квадратурных составляющих (ЦФКС) принимаемого сигнала; согласованная внутрипериодная фильтрация; когерентное накопление и формирование дальностновременных матриц (ДВМ) принимаемых сигналов; доплеровская фильтрация сигналов ДВМ и получение дальностно-частотных матриц (ДЧМ) когерентно накопленных сигналов.
Доплеровская фильтрация, пороговая обработка ДЧМ, выделение и анализ
связанных областей в ДЧМ, где есть превышение порогового уровня, позволяют:
обеспечить большую дальность обнаружения целей за счет когерентного накопления энергии отраженных сигналов в узкополосных доплеровских фильтрах, подавить мешающие отражения от поверхности земли, а также преднамеренные пассивные помехи, повысить разрешающую способность РЛС по скорости и угловым
координатам за счет увеличения времени накопления и компенсации доплеровского сдвига частот сигналов, что важно при наблюдении групповых целей (ГЦ), а
также при обзоре земной поверхности.
Одним из основных режимов работы РЛС является режим разрешения близко
расположенных воздушных целей, находящихся в плотной группе с определением
их количества и взаимного расположения. Этот режим позволяет повысить эффективность решения тактических задач, связанных с определением средств подавления в соответствии с реальной обстановкой.
Для определения количественного состава группы и взаимного расположения
воздушных целей в группе требуются высокая разрешающая способность бортовой
РЛС по дальности (десятки метров), по скорости (единицы метров в секунду) и по
угловым координатам (десятые и даже сотые доли градуса). Обеспечение такой
разрешающей способности по дальности при ограничении на излучаемую мощ80
Раздел II. Навигационные системы
ность может быть реализовано путем использования сложных сигналов с большой полосой рабочих частот, а разрешающая способность по скорости – увеличением длительности пачки или времени накопления сигналов. Высокое разрешение по угловым координатам может быть получено с применением методов
ДОЛ или САА.
Для создания эффективных методов разрешения ГЦ необходимо применение
пространственных методов обработки. Однако пространственные методы разрешения, основанные, например, на использовании методов САА, требуют априорного знания параметров движения разрешаемой группы целей, что, как правило, в
реальных условиях обеспечить невозможно. Поэтому предпочтительно применять
адаптивные методы оценки параметров движения группы и на их основе реализовывать «автофокусировку» синтезируемой апертуры антенны. Существующие алгоритмы «автофокусировки» достаточно хорошо работают в ситуациях, когда в
группе находится не более двух целей, и практически не работоспособны, если
целей в плотной группе три и более.
Разработка эффективных методов и алгоритмов селекции наземных движущихся целей, разрешения групповых воздушных целей и совместного обнаружения-измерения координат малозаметных целей, а также создание аппаратных
средств, реализующих эти методы и алгоритмы с минимальными вычислительными затратами, является одной из областей научно-технической деятельности
НКБ ЦОС.
В этом направлении в НКБ ЦОС были проведены ряд НИОКР, результатом
выполнения которых стали разработанное АО и ПО режима обнаружения медленно движущихся наземных и надводных целей, используемого в бортовых РЛС современных самолетов, а также режима высокого разрешения ГЦ при больших значениях радиальных и тангенциальных составляющих скорости ГЦ для бортовых
РЛС (БРЛС) истребителей нового поколения.
Для проверки эффективности разрабатываемых методов и алгоритмов обработки сигналов и внедрения их в БРЛС требуется выполнять не только их теоретические исследования, но и проводить большой объем экспериментальных исследований, включая натурные испытания БРЛС непосредственно на борту носителя.
Однако этап отладки алгоритмов в натурных условиях связан с большими экономическими затратами (один полет самолета может обходиться в нескольких сотен
тысяч и даже миллионов рублей). Поэтому актуальным является разработка пространственно-временных моделей сигналов и помех, наиболее адекватно отражающих реальную сигнально-помеховую обстановку.
Исследование режимов работы БРЛС с использованием реальных записей
сигналов позволяет снизить затраты на проведение натурных экспериментов и
существенно повысить достоверность оценок эффективности разработанных алгоритмов.
В НКБ ЦОС выполнена ОКР, в результате которой разработан модуль цифровой обработки и регистрации сигнала (ЦОРС), который прошел лабораторные,
механо-климатические и натурные испытания.
При создании регистраторов эхо-сигналов основными проблемами являются
необходимость запоминания чрезвычайно больших объемов радиолокационных
данных при высокой скорости их поступления и обеспечение надежной работы
регистратора в сложных механо-климатических условиях. Последнее требование
практически исключает применение для хранения данных носителей с механическими подвижными частями, например накопителей на жестких магнитных дисках
(ЖМД).
81
Известия ЮФУ. Технические науки
Тематический выпуск
Применение твердотельных накопителей данных, основанных на использовании массивов NAND flash с емкостью одной микросхемы до 4 Гбайт, позволило
разработать модуль ЦОРС без использования накопителей на ЖМД. Для достижения необходимых объёмов радиолокационных данных применены эффективные
алгоритмы цифрового формирования квадратурных составляющих, позволяющие
снизить частоту дискретизации на два и более порядка по сравнению с тактовой
частотой входного аналого-цифрового преобразователя.
В модуле ЦОРС осуществляется хранение и накопление данных, которые при
необходимости могут быть переданы в стационарную вычислительную систему
(ВС) по интерфейсу USB для формирования банка реальных радиолокационных
сигналов. Возможен режим работы, при котором радиолокационные сигналы могут накапливаться в долговременной памяти ВС, что позволяет использовать модуль ЦОРС не только в БРЛС, но и в наземных РЛС. Общий объем памяти
(10 Гбайт) позволяет выполнять непрерывное накопление регистрируемого сигнала в течение нескольких часов.
Для оценки эффективности предлагаемых методов и алгоритмов обработки
СШП сигналов в НКБ ЦОС разработан макет наземного СШП радиолокатора для
обнаружения биологических объектов за препятствиями из кирпича, бетона или
армированного бетона на базе серийно выпускаемого георадара. Разработано АО и
ПО макета, включающее в себя как внутрипериодную, так и межпериодную обработку сигналов. Разработаны алгоритмы определения среднего значения по выборке, определения дисперсии по выборке, оценки эффективности подавления помехи,
определения координат объекта для двумерного случая. Также разработаны алгоритмы определения диэлектрической проницаемости препятствия или его толщины, вычисления скользящего порога для обнаружения сигнала, синтеза эталонного
эхо-сигнала, согласованной фильтрации, череспериодного вычитания и определения оценки спектральной плотности принятых сигналов на заданных временных
интервалах. Кроме того, разрабатываются алгоритмы межпериодной ПВО сигналов на основе высокочастотной цифровой фильтрации (ЦФ), череспериодной корреляции и методы «миграционных» преобразований. Выполнена экспериментальная проверка разработанных алгоритмов высокочастотной ЦФ, череспериодной
корреляции и миграционного преобразования, показавшая целесообразность их
использования при решении задач обнаружения биообъектов за препятствиями.
Эксперименты подтвердили возможность обнаружения человека за препятствием с
помощью созданного макета СШП радиолокатора на дистанциях до 6 м (в зависимости от свойств препятствий) [3].
В части разработки и аппаратной реализации отдельных узлов и блоков радиолокационных систем в НКБ ЦОС выполнен ряд ОКР, связанных с модернизацией наземной РЛС среднего радиуса действия. Целью этих работ является замена
аналоговых систем обработки радиолокационных сигналов и систем отображения
информации современными цифровыми теле- и тепловизионными системами сопровождения подвижных объектов, что позволяет расширить функциональные
возможности модернизируемых РЛС.
Основные результаты этих работ:
♦ разработаны и поставлены в серийное производство модули ЦОС, выполняющие задачи аналого-цифрового преобразования радиолокационных
эхо-сигналов, цифровую селекцию движущихся целей, распознавание
класса целей и передачу данных о параметрах целей на цифровую систему отображения;
82
Раздел II. Навигационные системы
♦ разработаны и поставлены в серийное производство ячейки преобразования сигнала управления, выполняющие задачу согласования управляющих сигналов теле- и тепловизионной систем с управляющими сигналами
поворотных узлов антенной системы. Эти ячейки позволяют заменить
существующие аналоговые системы обработки радиолокационных сигналов, управления и системы отображения информации современными,
цифровыми теле- и тепловизионных системами сопровождения подвижных объектов.
Применение этих устройств обеспечивает повышение эффективности и расширение функциональных возможностей модернизируемых РЛС.
Цифровая ПВО в гидроакустических системах и комплексах
Спектр задач, которые могут решаться с использованием современных гидроакустических (ГА) средств (ГАС), очень широк. Он включает в себя глобальные
геологические исследования недр Мирового океана в широком диапазоне глубин с
целью разработки новых месторождений полезных ископаемых, работы, связанные
со строительством гидротехнических сооружений, регулярным контролем их технического состояния, прокладкой трубопроводов и телекоммуникационных кабелей, экологическим контролем загрязнения водной среды, а также работы, выполняемые в интересах ВМФ РФ [4].
Высокие требования к производительности и качеству выполняемых гидрофизических работ, необходимость обнаружения, измерения координат и параметров движения подводных объектов различного назначения с повышенной точностью делают решение всех проблем одной классической ГАС практически не реализуемым. Поэтому в настоящее время актуальным является как совершенствование отдельных видов ГАС, таких как одно- и многолучевые эхолоты (ОЛЭ и МЛЭ),
гидролокаторы бокового обзора (ГБО), акустические профилографы (АП), так и
создание многофункциональных (МФ) гидроакустических комплексов (ГАК),
примерами которых могут служить системы подводного мониторинга (СПМ) и
интегрированные системы подводного наблюдения (ИСПН) или системы освещения подводной обстановки (ОПО). Кроме того, в случае работы с подводными автономными или буксируемыми аппаратами (БА) возникает необходимость применения комплексов подводной навигации (КПН), а при необходимости работы на
больших дальностях возможно применение ГАС с гибкими буксируемыми антеннами (ГБА).
В НКБ ЦОС выполнен ряд НИОКР по разработке и исследованию отмеченных выше видов ГАС.
При выполнении НИР, посвященных разработке многоканальных гидроакустических систем показана эффективность использования МЛЭ, которые относительно других гидроакустических средств обладают рядом преимуществ, основными из которых являются:
♦ принципиальная независимость метода пространственно-временной обработки при картографировании донной поверхности от рельефа дна;
♦ возможность построения трехмерных изображений рельефа дна;
♦ пространственная селекция в вертикальной траверзной плоскости, увеличивающая соотношение сигнал/шум, а значит и точность измерений;
♦ возможность выполнения высокопроизводительных исследований в широком секторе без "мертвой зоны" под носителем и без применения дополнительных гидроакустических устройств;
83
Известия ЮФУ. Технические науки
Тематический выпуск
♦ многофункциональность МЛЭ – возможность работы в режимах обычного ГБО, фазового ГБО и промерного (навигационного) эхолота.
Использование в современных эхолотах быстродействующих процессоров
цифровой обработки сигналов дает дополнительную возможность перепрограммирования основных режимов и параметров МЛЭ, формирования банка зондирующих простых и сложных сигналов, реализации сложных, требующих большого
количества операций, алгоритмов оптимальной обработки эхосигналов.
В НКБ ЦОС разработаны и созданы два экспериментальных образца МЛЭ, с
помощью которых в ходе проведения полномасштабных натурных испытаний в
акватории Черного моря были получены записи реальных сигналов, сформированы
трехмерные ГА изображения затонувших кораблей.
В настоящее время в НКБ ЦОС ЮФУ завершается модернизация последнего
варианта МЛЭ, основные технические характеристики которого следующие:
♦ диапазон рабочих частот в полосе, кГц
♦ количество элементарных приёмных каналов
♦ разрешающая способность по углу в продольной
и траверзной плоскостях в центральном секторе, градус
♦ количество формируемых лучей ХН в секторе обзора,
♦ сектор обзора в траверзной плоскости, градус
♦ разрешающая способность по дистанции, м,
♦ максимальная длительность зондирующего сигнала, мс,
♦ частота дискретизации входных сигналов, кГц,
♦ частота дискретизации комплексной огибающей, кГц,
150±10;
48;
2,1;
111;
120;
0,1;
12,8;
600;
30.
Для создания современного МЛЭ были проанализированы известные и разработаны новые перспективные методы и алгоритмы цифрового формирования
ХН гидроакустических АС, в значительной мере определяющие требования к процессору первичной обработки сигналов. Показана перспективность реализации
методов электронного управления ХН антенн в частотной области, суть которых
заключается в замене необходимого временного сдвига сигналов элементарных
входных каналов эквивалентным изменениям их фазовых спектров в частотной
области. Показано, что применение процедур БПФ для вычисления прямого и обратного ДПФ, а также для формирования пространственного спектра сигналов
(веера ХН), позволяет существенно увеличить эффективность алгоритмов цифрового формирования ХН и согласованной фильтрации. В МЛЭ широко используются представления эхосигналов в виде комплексных огибающих, содержащих информацию об изменении во времени амплитуды и фазы входного колебания, и эффективные алгоритмы ЦФКС сигналов, позволяющие снизить требования к процессору первичной обработки сигналов и информационным каналам обмена. При
решении задач обнаружения и распознавания затонувших подводных объектов,
находящихся на поверхности дна в условиях значительной донной реверберации,
важную роль играет выбор типа зондирующего сигнала и методов его обработки.
Так, для повышения высокой эффективности проведения поисково-спасательных
работ в МЛЭ предлагается использовать два типа зондирующих сигналов. Для
мелких глубин с целью уменьшения «мёртвой» зоны применять простой сигнал, а
для больших глубин с целью увеличения дальности обнаружения использовать
сложные сигналы с большой базой.
ПВО сигналов в МЛЭ выполняется во временной и частотной областях в соответствии со следующими основными алгоритмами ЦОС:
♦ ЦФКС эхосигналов во временной области;
84
Раздел II. Навигационные системы
♦ согласованная фильтрация в частотной области методом «быстрой
свертки»;
♦ формирование в частотной области статического веера ХН в пространстве с помощью быстрого преобразования Фурье (БПФ);
♦ весовая обработка в частотной области и по пространству;
♦ вычисление модуля комплексного числа;
♦ пороговая обработка.
В многолучевом эхолоте цифровыми методами синтезируются простые и
сложные с ЛЧМ зондирующие сигналы, формируются ХН излучающей антенны в
вертикальной плоскости в продольном направлении и статический веер ХН приёмной антенны в траверсной плоскости.
Создаваемый многолучевой эхолот требует для реализации своих алгоритмов
достаточно мощного вычислителя с производительностью порядка 1,5 GFLOPS и
может служить эффективным средством проведения поисково-спасательных и
гидрографических работ [5, 6, 7].
В ходе выполнения НИР по созданию МФ глубоководного модуля были выполнены следующие работы: была разработана концепция построения подводной
буксируемой части двух ГБО с рабочими частотами 100±10 кГц и 34±2 кГц, а
также и АП, работающего в полосе частот 1,5÷7,5 кГц. По разработанным методикам расчёта основных параметров гидроакустических средств, учитывающим
специфику применения в составе глубоководного модуля, выполнены соответствующие расчеты этих параметров для работы в различных условиях и режимах.
Также разработаны алгоритмы ПВО эхо-сигналов этих ГАС и соответствующее ПО, проработаны вопросы информационного взаимодействия надводной и
подводной частей глубоководного модуля. Реализован дружественный интерфейс
оператора глубоководного модуля. Эффективность решения основных функциональных задач в различных гидрологических условиях и широком диапазоне рабочих глубин обеспечена оптимизацией АО и ПО и использованием современных
технологий разработки ГАС, а также унификацией схемных и конструкторскотехнологических решений при аппаратной реализации ГАС.
Разработаны и изготовлены экспериментальные образцы блоков и модулей
ГБО в составе: два блока цифрового формирования и обработки сигналов с интерфейсными модулями; по два модуля усиления мощности (УМ) низкочастотного и
высокочастотного ГБО; модуль УМ профилографа; модуль предварительного усиления (ПУ) ГБО и АП; два модуль питания. Разработаны и изготовлены экспериментальные образцы блоков и модулей АП в составе модуля СФС, модуля АЦП,
модуля питания, модуля усиления мощности (УМ). Проведены их лабораторные и
натурные испытания.
В процессе выполнения работы, целью которой было создание КПН с ультракороткой базой, получены следующие результаты [8]:
♦ разработана архитектура построения, структурная и функциональная схемы системы цифрового формирования и обработки сигналов (ЦФОС);
♦ разработаны модули системы ЦФОС на базе сигнального процессора
ADSP 21992 и соответствующее прикладное АО и ПО;
♦ проведены испытания системы ЦФОС, в результате которого определены
среднеквадратические погрешности оценки положения СПО – наклонной
дальности ≤ 0,1%, и определения углового положения СПА ≤ 0,2º.
Основываясь на тенденциях развития НЧ гидроакустики, в НКБ ЦОС одним
из направлений по гидроакустической тематике являются исследования в области
создания НЧ ГАС с ГБА, в частности, создания эффективных алгоритмов ПВО,
85
Известия ЮФУ. Технические науки
Тематический выпуск
учитывающих специфику носителя, помехо-сигнальную обстановку и условия
работы, а также создание макетов отдельных функциональных узлов ГАС и ГБА
[9]. На протяжении последних нескольких лет были проведены исследования как
теоретического, так и прикладного характера, из которых можно отметить следующие.
Одно из направлений – компенсация неэквидистантности ГБА вследствие
влияния дестабилизирующих факторов, приводящей к увеличению ошибок оценки
углового положения, уменьшению мощности в основном лепестке и увеличению
уровня боковых лепестков характеристики направленности (ХН). Были рассмотрены различные методы для преодоления проблемы неопределённости положения
гидрофонов в ГБА, которые исследовались с применением программных моделей.
Экспериментальные исследования этих моделей показали, что при небольших деформациях ГБА допустима линейная модель антенны и эффективность ГБА при
этом снижается незначительно. Необходимость компенсации возникает при достаточно больших отклонениях антенны от линейной, что имеет место при различных
эволюциях носителя ГАС с ГБА. При этом часто можно принять модель, при которой форма ГБА соответствует траектории движения носителя, и в рамках этой модели принимается параболическая форма ГБА, оценка параметров которой основана на данных системы спутниковой навигации, установленной на носителе.
Другим направлением является разработка методов и алгоритмов оптимальной ПВО обработки сигналов ГБА. В этом направлении были разработаны алгоритмы обнаружения и оценки параметров подводных объектов, содержащие эффективные (с точки зрения практической реализации вычислителя) процедуры
БПФ, показана достижимость практической реализации ГАС с ГБА, обеспечивающих оптимальную согласованную фильтрацию, в том числе сигналов с доплеровским изменением частоты. Проверка разработанных алгоритмов была проведена
на программных моделях, позволяющих в широких пределах изменять состав процедур обработки, параметры имитируемой помехо-сигнальной обстановки и виды
дестабилизирующих воздействий на ГБА. Проведенные экспериментальные исследования показали эффективность разработанных алгоритмов.
В практическом плане были выполнены проработки создания ГАС с ГБА в
части приемного тракта (ГБА, интерфейсы связи, устройство предварительной
аналоговой обработки), тракта ЦОС и отображения информации, предложены возможные варианты аппаратной реализации некоторых функциональных узлов корабельной и буксируемой частей, устройства предварительной аналоговой обработки, интерфейсов связи.
ЦОИ в системах различного назначения
Еще одним направлением научно-технической деятельности НКБ ЦОС является разработка АО и ПО для систем дистанционного управления роботизированными комплексами специального назначения. В основе этого направления лежит
разработка алгоритмов ЦОИ получаемых от теле- и тепловизионных датчиков.
Алгоритмы ЦОИ предназначены для решения задач автоматического сопровождения подвижных объектов при неблагоприятных условиях эксплуатации (сложный
фон, пониженная контрастность, динамически изменяющаяся форма объекта) при
наличии в области сопровождения различного рода мешающих объектов и помех.
Сложность таких алгоритмов, работающих в реальном масштабе времени при достаточно быстрой динамике изменения сцен, заключается в необходимости принимать оптимальное решение о выборе наиболее информативных параметров, с использованием которых можно осуществить надежное сопровождение как при на86
Раздел II. Навигационные системы
личии помех, так и при временном пропадании оптического контакта с сопровождаемым объектом, например, при маскировании его другим мешающим объектом.
Сами алгоритмы сопровождения должны быть адаптивными, учитывать динамику
изменения формы объекта, исключая ложные перезахваты. Кроме того, алгоритмы
должны учитывать специфику информационного обмена между пунктом управления и управляемым объектом, что при значительных расстояниях между объектом
управления и пунктом управления может потребовать предварительного сжатия
теле- и тепловизионных изображений без существенной потери качества.
В рамках исследований в области ЦОИ в НКБ ЦОС в настоящее время выполняются несколько НИР, имеющие своей целью разработку и создание высокоэффективных устройств сжатия и декодирования видеоинформации.
Также была выполнена работа, в которой была исследована возможность
применения как традиционных методов ЦОИ при формировании и обработке ГИ,
так и стандартных пакетов программ, в частности, средств MATLAB как программной среды для обработки ГИ, в ходе выполнения этой работы были получены следующие основные результаты:
♦ проанализированы современные методы и алгоритмы ЦОИ, применяемые
при формировании и обработке ГИ, с учётом специфических особенностей информации, выдаваемой оператору ГАС для принятия решения;
♦ рассмотрены традиционные методы цифровой обработки изображений,
основанные на преобразованиях яркости и контрастности изображений
применительно к ГИ, в частности, методы гистограммной обработки, линейного контрастирования, логарифмического преобразования, соляризации, гамма-коррекции, кусочно-степенных преобразований, эквализации,
пространственной фильтрации, а также ряд методов морфологической
обработки и сегментации изображений, оценена возможность улучшения
качества ГИ и эффективность рассмотренных методов;
♦ разработаны программные модели алгоритмов, обеспечивающих выделение объектов на ГИ, необходимых для решения задач формирования
классификационных признаков.
Цифровое формирование и обработка сигналов в системах управления
высокоточными следящими выводными устройствами (СВУ)
На протяжении нескольких лет в НКБ ЦОС выполняются ряд НИОКР по разработке и изготовлению различных блоков управления СВУ, а также обеспечивающих программ и алгоритмов бортового авиационного управляющего вычислительного комплекса.
Результаты этих работ в полном объеме внедрены в состав испытательной летающей лаборатории. Все изделия, обеспечивающие управление СВУ в различных
режимах, прошли полный цикл испытаний, в том числе натурные, в составе бортового УВК. Разработанные блоки, АО и ПО показали свою работоспособность и
надежность функционирования в жёстких механо-климатических условиях.
В НКБ ЦОС в настоящее время ведется разработка управляющего многомашинного бортового вычислительного комплекса, обеспечивающего в реальном
масштабе времени высокоточное управление авиационными комплексами самолета-носителя, а также надежное взаимодействие всех систем, подсистем и элементов
комплекса, в том числе реализацию цифрового управляющего фильтра (ЦУФ).
НКБ ЦОС также решает задачу создания СВУ нового поколения, позволяющего улучшить аэродинамические характеристики носителя, создать условия безопасной работы основной высокоточной системы управления и осуществить защиту
87
Известия ЮФУ. Технические науки
Тематический выпуск
объектов управления от воздействия дестабилизирующих факторов агрессивной среды. При этом в НКБ ЦОС разрабатываются методы и алгоритмы, обеспечивающие
работу электропривода в условиях значительных изменений параметров объекта
управления, АО и ПО многорежимного тестирования электропривода и многоконтурные системы управления электроприводами с параметрическими ЦУФ.
Заключение
Квалификация сотрудников НКБ ЦОС ЮФУ, заключающаяся в многолетнем
опыте разработки алгоритмического, программного и аппаратного обеспечений
как гидроакустических комплексов гражданского и специального назначения, так и
авиационного радиоэлектронного вооружения и различных видов обеспечения их
работы, наличие научно-исследовательских и конструкторско-технологических
подразделений, оснащённых средствами вычислительной техники с соответствующим ПО, радиоизмерительными приборами общего назначения и современной
лабораторно-экспериментальной базы, а также возможность изготовления экспериментальных и опытных образцов с привлечением соответствующих структурных
подразделений ЮФУ позволяют обеспечить весь жизненный цикл разрабатываемых в НКБ ЦОС изделий на уровне современных технологий.
1.
2.
3.
4.
5.
6.
7.
8.
9.
88
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Радиолокационные системы многофункциональных самолетов. Т.1. РЛС – информационная основа боевых действий МФ самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И. Канащенкова и В.И. Меркулова. – М.:
Радиотехника, 2006. – 656 с.
Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. – 2-е изд., перераб. и доп.
– М.: Радио и связь, 1984. – 312 с.
Маркович И.И., Дорошенко В.Ю. Экспериментальные исследования алгоритмов обнаружения биообъектов за препятствиями СШП радаром с цифровой обработкой сигналов.
Материалы III Всероссийской научно-практической конференции «Перспективные системы и задачи управления». – Таганрог: Изд-во ТТИ ЮФУ, 2008. Т.1. – С. 163-165.
Морская радиоэлектроника: Справочник / Под ред. А.В.Кравченко. – СПб.: Политехника, 2003. – 246 с.
Маркович И.И., Семеняк П.Л., Ковалев Э.П. Цифровая пространственно-временная обработка сигналов в многоканальной гидроакустической системе // Информационноизмерительные и управляющие системы. Т. 6. – 2008. – №3. – С. 72-75.
Ковалев Э.П., Маркович И.И., Семеняк П.Л. Реализация алгоритмов цифровой пространственно-временной обработки гидроакустических сигналов в многолучевых эхолотах
// Труды IX Всероссийской конференции «Прикладные технологии гидроакустики и
гидрофизики» (ГА-2008). – СПб.: Наука, 2008.– С. 183-187.
Маркович И.И., Жирнов В.С. Интеллектуальная система цифрового формирования и
обработки сигналов в многолучевом эхолоте. Материалы IX Международной научнотехнической конференции «Искусственный интеллект. Интеллектуальные системы».
– Донецк: ИПИИ, Наука i освiта. Т. 2.– 2008. – С. 54-58.
Коваленко Е.И., Кузнецов А.П., Маркович И.И. Аппаратно-программная реализация алгоритмов цифрового формирования и обработки сигналов в комплексах подводной навигации // Труды IX Всероссийской конференции «Прикладные технологии гидроакустики
и гидрофизики» (ГА-2008). – СПб.: Наука, 2008. – С. 277-279.
Ковалев Э.П., Маркович И.И., Семеняк П.Л. Пространственно-временная обработка гидроакустических сигналов гибких протяженных буксируемых антенн // Труды IX Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики»
(ГА-2008). – СПб.: Наука, 2008. – С. 221.
Раздел II. Навигационные системы
УДК 681.883
Д.Ш. Нагучев, О.А. Савицкий, В.Л. Сахаров
ПРЕДПОСЫЛКИ И КОНЦЕПЦИЯ СОЗДАНИЯ СОВРЕМЕННЫХ
ПАРАМЕТРИЧЕСКИХ ПРОФИЛОГРАФОВ В ОКБ «РИТМ» ЮФУ
Гидроакустические профилографы уже давно перестали быть средством
только научных исследований и в настоящее время, объединяя в себе функции
обычного эхолота и устройства, визуализирующего придонные и поддонные
структуры, являются мощным инструментом для проведения поисковых, контрольных, проектно-изыскательских, осмотровых, промерных работ в акваториях
морских портов, в руслах рек, в шельфовой зоне [1,4]. Профилографы могут использоваться как самостоятельно, так и в составе гидрографических комплексов.
Часто гидроакустические профилографы становятся единственным средством визуализации структуры донных отложений, поиска и оконтуривания заиленных обьектов, включая нефте- и газопроводы, другие потенциально опасные объекты.
С 90-х годов прошлого века по настоящее время в нашей стране проводились
ряд прикладных научно-исследовательских работ по разработке методов и средств
донного профилирования [1-3], накоплен достаточно большой опыт эксплуатации
таких устройств при мониторинге трубопроводов, при производстве проектноизыскательских работ на шельфе (ОКБ «Ритм» ЮФУ), проведении научноисследовательских работ на шельфе (каф. ЭГА и МТ ТТИ ЮФУ, ОКБ «Ритм»
ЮФУ) и в глубоководных районах Мирового океана (ИО РАН им. П.П. Ширшова,
ИРЭ РАН, каф. ЭГА и МТ ТТИ ЮФУ).
Вместе с тем рынок гидроакустических приборов донного профилирования и
соответствующих услуг в России до настоящего времени не получил своего развития, находится в зачаточном состоянии. Связано это прежде всего с практическим
отсутствием нормативной базы, отраслевых документов, регламентирующих применение техники донного профилирования и с отсутствием предложения со стороны потенциальных разработчиков и производителей устройств, конкурентноспособных с импортной техникой образцов гидроакустических профилографов,
имеющих доступную для потребителей цену. Качественная импортная аппаратура
не получила распространения на внутреннем рынке РФ вследствие ее высокой
стоимости. Так, например, за всю историю выпуска фирмой «KONGSBERG» параметрических профилографов марок PS40 и PS18, стоимость которых в зависимости от комплектации может доходить до 1 млн долларов США, из 43 проданных
с 1991 г. приборов на первичном рынке в России не было закуплено ни одного
такого устройства.
Большинство организаций, обслуживающих морские и речные порты ЮФО
(отделения «Росморпорта»), занимающихся дноуглубительными работами (ФГУП
«Азовморпуть», ООО «Касптрансформ» и др.), не имеют в своем распоряжении
гидроакустических систем донного профилирования.
Отсутствие на внутреннем рынке заметной конкуренции с западными производителями и имеющийся солидный научный задел в области создания гидроакустических профилографов позволяет утверждать, что имеются все предпосылки
для развития в области разработки и производства современной отечественной
техники донного профилирования.
В последнее время актуальность создания техники донного профилирования
возрастает в связи с дальнейшим освоением шельфовых территорий мирового
89
Известия ЮФУ. Технические науки
Тематический выпуск
океана, в том числе и в ЮФО. Разработка месторождений углеводородного сырья
в Азовском море, транспортировка углеводородного сырья, в том числе газа по
существующим и вновь создаваемым газопроводам («Голубой поток», «Южный
поток»), потребует дополнительного привлечения технических средств донного
профилирования. В первую очередь это гидролокаторы-профилографы, дающие
возможность с высоким пространственным разрешением получать профиль донной поверхности, обнаруживать и оконтуривать придонные и заиленные объекты,
в том числе и малых размеров. Все большую актуальность приобретает задача дистанционной классификации типа грунта, особенно при производстве геологоразведочных и гидротехнических работ.
Ухудшение экологической обстановки, связанное с дальнейшим развитием
технологий и производств, добычей, транспортировкой и сжиганием углеводородного сырья, в том числе и на шельфовых территориях мирового океана, требует
создания техники мониторинга подводных трубопроводов и других размещаемых
на шельфе инженерно-технических сооружений.
В таких условиях актуальным становится создание многофункциональных
профилографов для прецизионной стратификации донных осадков, классификации
типа грунта и поиска придонных объектов.
Наиболее перспективным направлением в технике зондирования морского
дна является создание профилографов, работающих на принципах нелинейной акустики, получивших название параметрических профилографов. Эти приборы сочетают в себе все уникальные свойства параметрических антенн – отсутствие боковых лепестков характеристики направленности, малогабаритность антенны, возможность перестройки частоты и др.
Особое конструкторское бюро «Ритм» Южного Федерального Университета
(ЮФУ) уже более 11 лет занимается разработкой, изготовлением и эксплуатацией
параметрических эхолокационных приборов, в том числе и профилографов. В ОКБ
«Ритм» разработан модельный ряд параметрических профилографов «Искатель»,
«Трасса», «Трасса-сектор», накоплен большой практический опыт их эксплуатации. С 2004 г. разработаны и изготовлены опытные образцы ряда параметрических
гидроакустических приборов, прошедшие межведомственные испытания и рекомендованные к принятию на вооружение (снабжение).
ОКБ «Ритм» располагает необходимым оборудованием, производственной
базой и высококвалифицированными кадрами. Кадровый потенциал ОКБ позволяет решать комплексные задачи, связанные с проведением прикладных исследований, разработкой аппаратной части с использованием современной элементной
базы и материалов, созданием программного обеспечения для управления работой
профилографа и визуализации полученной информации, созданием комплекта конструкторской документации.
Приведенные ниже эхограммы, полученные с помощью параметрического
профилографа «Трасса-сектор», демонстрируют возможности подобных устройств
при инспектировании подводных частей нефте- и газопроводов (рис. 1), поиске
заиленных объектов (рис. 2), при обследовании подходного канала до и после проведения дноуглубительных работ на территории Таганрогского морского порта
(рис. 3).
В 2008 г. коллектив ОКБ «Ритм» приступил к разработке нового параметрического многолучевого профилографа «Интросоник». Данная разработка предполагает дальнейшее коммерческое использование, освоение серийного выпуска.
Профилограф «Интросоник» предназначен для поиска и обнаружения придонных и заиленных объектов, стратификации донных отложений, определения
90
Раздел II. Навигационные системы
типа грунта и может применяться при производстве геофизических изысканий,
инженерно-технических и других видов работ на шельфе как самостоятельно, так и
в составе многофункциональных гидроакустических комплексов. Принцип действия профилографа основан на формировании за счет нелинейного самовоздействия
поля зондирующих сигналов специальной формы в виде веера из пяти или семи
статических характеристик направленности с последующим ненаправленным
приемом эхосигналов от неоднородностей, расположенных в озвучиваемой области с и оптимальной фильтрацией.
Рис. 1. Профилограмма донной поверхности с обнаруженными на ней двумя
ветками трубопровода и заиленными объектами (отмечены указателями)
Рис. 2. Протяженный заиленный объект на глубине около 1 м от поверхности дна
91
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 3. Проведение дноуглубительных работ
Функциональные возможности профилографа:
визуализация акустических неоднородностей, находящихся под грунтом
или вблизи донной поверхности, с высокой разрешающей способностью
(за счет использования сложных сигналов и оптимальной обработки);
♦ определение типа дна (илистое, каменистое, покрытое газовыми пузырьками и т. д.) по фазе комплексного коэффициента отражения;
♦ запись рельефа дна и поддонных структур с высокой производительностью при скорости судна 2-4 узла (благодаря расширенной диаграмме
направленности в поперечном направлении и одновременному зондированию в секторе);
♦ возможность поперечного разрешения зондируемых объектов (за счет
формирования веера ХН в режиме излучения, рис. 4);
♦ возможность работы с DGPS (привязка к географическим координатам).
♦
Рис. 4. Внешний вид приемоизлучающей антенны профилографа
Проектируемый прибор будет иметь следующие технические характеристики:
♦ питание от сети 220 В, 50 Гц;
♦ потребляемая мощность 300 Вт;
♦ диапазон рабочих глубин 0,5-300 м;
♦ заглубление антенн 1-8 м;
92
Раздел II. Навигационные системы
♦
♦
♦
♦
♦
♦
♦
♦
♦
♦
компенсация качки roll ±6°, pitch ±4°;
компенсация вертикальных перемещений антенн < 2 м;
глубина проникновения в грунт 5-30 м (в зависимости от типа грунта);
ширина парциальной характеристики направленности 6°×4°;
количество лучей 5;
частота волны накачки 250 кГц;
типы зондирующих сигналов:
тональный, с частотой 3-10 кГц, длительность импульса 0,1-2 мс;
фазоманипулированный, длительность посылки 5-10 мс;
звуковое давление на частоте накачки 400 кПа×м;
звуковое давление на разностной частоте 6 кПа×м;
разрешающая способность по дальности ≥0,1 м.
Рис. 5. Структурная схема
Обобщенная структурная схема профилографа, поясняющая принцип его работы, приведена на рис. 5. Функции управления работой аппаратной частью профилографа, формирование зондирующих импульсов и обработка информации будут реализованы на сигнальных процессорах семейства BlackFin фирмы Analog
Device.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Новиков Б.К., Тимошенко В.И. Параметрические антенны в гидролокации. – Л.: Судостроение, 1989. – 256 с.
2. Савицкий О.А., Германенко О.Н., Нагучев Д.Ш. Применение числен-ного моделирования при разработке учебно-тренировочного режима в параметрическом профилографе
«Трасса-сектор» // Материалы Х Междуна-родной научно-технической конференции
93
Известия ЮФУ. Технические науки
Тематический выпуск
«Современные методы и средства океанологических исследований». Ч. 3. – М.: ИО РАН,
2007. – С. 22-25.
3. Савицкий О.А., Максимов И.И., Сахаров В.Л. Параметрический гидролокатор ближнего
действия для охраны мелководных акваторий и узких каналов // Труды IX Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики». – СПб.:
Наука, 2008. – С. 76-79.
4. Кичев В.С. Гидроакустические средства морского дна и основные направления их использования // Труды IX Всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики». – СПб.: Наука, 2008. – С. 274-276.
УДК 621.396.96
И.Т. Лобач
СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ
ИССЛЕДОВАНИЙ В ОБЛАСТИ ИННОВАЦИОННЫХ ТЕХНОЛОГИЙ
ГИДРОАВИАЦИОННЫХ СИСТЕМ РАДИОНАВИГАЦИИ
И УПРАВЛЕНИЯ
Среди задач разработки проектных технологии в авиационной навигации
важнейшее место занимают технологии навигации летательных аппаратов над
водными поверхностями. Кроме того, интересы России как морской державы диктуют необходимость развития отечественного аэрокосмического мониторинга
океана и омывающих ее территорию морей. Оперативная информация глобального
и регионального уровней о поверхностном слое океана востребована при решении
научных и практических задач океанографии, разработке достоверных прогнозов
погоды, определении оптимальных путей плавания судов, оценке, контроле и прогнозировании рыбных ресурсов морей и океанов.
В настоящее время сеть наблюдений за поверхностью океана недостаточна.
Как правило, проводятся эпизодические, океанографические наблюдения с помощью приборов, размещенных непосредственно на водной поверхности и на бортах
специальных судов и кораблей погоды. Возможности использования этих методов
ограничиваются метеорологическими условиями, временем суток, а также техническими и организационными трудностями глобальных и региональных исследований Мирового океана. Это позволяет утверждать, что контактные измерения с
помощью различного рода гидрологических, метеорологических и иных инструментов не удовлетворяют потребностям экологического мониторинга ни по объему, ни по оперативности получаемой информации.
Для дистанционного зондирования ВП используются электромагнитные волны широкого диапазона частот от оптических до радиоволн. Возможность получения информации о параметрах поверхностного слоя океана определяется тем, что
механизмы отражения и собственного излучения радиоволн определяются электрофизическими параметрами и геометрией водной поверхности.
Общим требованием для приведенных выше задач является необходимость
аналитического решения задачи рассеяния электромагнитных волн на статистически неровных поверхностях, исследования статистической структуры полей рассеяния и их связи с пространственно-временной структурой полей неровностей
отражающей поверхности.
Несмотря на то, что вопросам исследования особенностей рассеяния электромагнитных волн взволнованной водной поверхности, анализа статистической
94
Раздел II. Навигационные системы
структуры электромагнитных полей рассеяния, анализа и синтеза радиолокационных методов измерения параметров морской поверхности с подвижных носителей
посвящено значительное число работ, вряд ли исследования в этой области к настоящему времени можно считать завершенными.
Связано это с тем обстоятельством, что радиолокация морской поверхности –
исключительно многофакторная проблема. Здесь приходится решать не только
задачи из различных областей радиоэлектроники, таких как электродинамика, теория рассеяния и распространения ЭМВ, статистическая радиотехника, радиолокация, но и вопросы океанографии, физики, атмосферы и океана и др.
Применение адекватных электродинамических моделей, а также учет тонкой
структуры волнения позволяют разработать основы теории рассеяния электромагнитных волн, устраняющие отмеченные недостатки.
Разработка и применение подобных моделей позволили научному коллективу
кафедры «Радиотехнических и телекоммуникационных систем» (РТС) Таганрогского технологического института Южного федерального университета (ТТИ
ЮФУ) получить аналитические решения, связывающие пространственные и частотные энергетические спектры, статистические характеристики радиолокационного сигнала с аналогичными спектрами морской поверхности и с параметрами
волнения. Полученные решения позволяют синтезировать алгоритмы, а также оптимальные и подоптимальные структурные схемы приемно-измерительных устройств, обеспечивающих оценку пространственно-временной структуры волнения.
Предложенные модели позволяют также получить новые результаты, связанные с
исследованием особенностей периодической нестационарности отраженных от
морской поверхности сигналов в подвижной и неподвижной системах координат.
Большинство практических задач, требующих знания свойств морской поверхности, решаются в условиях измерения ограниченного числа параметров: высота,
длина, период, углы наклона, направление распространения морских волн, орбитальная скорость, скорость и направление ветра над морской поверхностью. В условиях
полностью развитого волнения, между названными параметрами, существуют функциональные связи. Однако такой тип волнения в реальных условиях встречается редко. Поэтому, в общем случае, для получения наиболее полной информации о морской поверхности, необходимо измерять одновременно независимыми методами
несколько основных параметров волнения. Накопленный в последние десятилетия
опыт измерения характеристик электромагнитных полей, рассеянных водной поверхностью, вызвал повышенный интерес к радиолокационным методам измерения
параметров волнения как в нашей стране, так и за рубежом [1-3].
Значительное внимание уделено исследованию параметров морского волнения с судов, береговых объектов, неподвижных платформ при настильных углах и
неподвижных РЛС [4, 5]. В ряде работ [6-8], а также в работах автора [9, 10] исследуются методы и средства измерения пространственно-временной структуры
морского волнения с летательных аппаратов. Однако основное внимание, при разработке методов измерения параметров волнения, уделяется анализу алгоритмов и
методов измерения высоты волны. Такие важные параметры как длина, углы наклона, направление распространения морских волн, характер волнения, вектор
скорости ветра над морской поверхностью в известных работах исследованы недостаточно полно. Практически не рассматриваются вопросы синтеза оптимальных алгоритмов и структур измерителей параметров волнения. Разработанные
подоптимальные алгоритмы и методы измерения параметров волнения, как правило, не сопровождаются оценкой погрешностей. В диапазоне декаметровых волн не
разработаны алгоритмы и методы измерения пространственного энергетического
95
Известия ЮФУ. Технические науки
Тематический выпуск
спектра волнения с неподвижных и подвижных носителей. Недостаточно разработаны алгоритмы и методы оперативного определения пространственно-временной
структуры морского волнения в диапазоне СВЧ.
Несмотря на большую потребность, в настоящее время отсутствуют промышленные образцы бортовых измерителей пространственно-временных параметров
морского волнения и приповерхностного поля ветров, выполняющих измерение в
реальном масштабе времени. Это связано с недостаточным объемом исследований
в области синтеза алгоритмов измерений, разработки методов и технических
средств измерений, а также ограниченным объемом экспериментальных исследований в натурных условиях.
Коллективом кафедры РТС и НКБ «МИУС» ТТИ ЮФУ с 1970 г., в рамках
хоздоговорных и госбюджетных НИР и ОКР, проводятся комплексные исследования в области дистанционного контроля параметров водной и земной поверхностей в широком интервале частот, что позволяет существенно расширить объем и
повысить качество извлекаемой информации о состоянии водной поверхности.
Направлениями фундаментальных теоретических исследований научного коллектива кафедры РТС явились задачи синтеза алгоритмов и разработки новых методов
измерений параметров волнения и приводного ветра. Не менее важным направлением исследований является задача совершенствования недостаточно разработанных методов с целью анализа их ограничений, погрешностей и возможностей использования на летательных аппаратах. Разработка алгоритмов измерения параметров волнения и комплексное исследование методов измерений проводится с
единых теоретических позиций, базирующихся на физических принципах отражения электромагнитных волн от взволнованной морской поверхности и на знании
операторов, связывающих поля параметров отраженного сигнала с полем отражающей поверхности.
Получены новые принципиально важные результаты в области теории рассеяния радиоволн неровными поверхностями. Разработан ряд новых радиолокационных методов измерения параметров морского волнения с борта летательного
аппарата. Основные технические решения защищены 21 авторским свидетельством
на изобретения. Результаты исследования представлялись на международных конференциях и выставках, академических и отраслевых научных конференциях.
Сформирован инженерно-научный творческий коллектив с более чем 25-летним
опытом работы в указанной области.
На основе проведенных коллективом исследований впервые в нашей стране
разработаны и изготовлены экспериментальные образцы аппаратуры для измерения параметров морских волн, которые внедрены в специальных разработках на
ряде предприятий страны. Выполнен ряд ОКР, разработаны и изготовлены опытные образцы аппаратуры, которые прошли Государственные испытания. Решением
Государственной комиссии разработанный в ТТИ ЮФУ прибор «Шторм» рекомендован для серийного производства. Прибор «Шторм» используется в качестве
штатного оборудования на самолете-амфибии «Альбатрос» А-40 (г. Таганрог,
ТАНТК им. Г.М. Бериева). В настоящие время выполняется разработка бортового
радиолокационного измерителя параметров волнения для самолета-амфибии
БЕ-200. Накоплен большой опыт разработки алгоритмов измерения параметров
волнения. Натурные эксперименты, проводившиеся с борта самолета на акваториях Азовского, Черного и Балтийского морей, показали эффективность разработанных методов. Измерения высоты морских волн в диапазоне 0,1–3 м. Возможны с
относительной погрешностью не более 9%. Морские волны длиной 10–90 м измеряются с относительной погрешностью 10%. Точность измерения направления
96
Раздел II. Навигационные системы
бега волн не хуже 11°. Измерение пространственного спектра морского волнения
позволяет определять характер волнения и другие параметры [11, 12]. Применение
бортовых вычислительных средств позволяет проводить оперативную обработку
океанографической информации на борту летательного аппарата.
На основе проведенных теоретических исследований был предложен алгоритм корреляционной обработки радиолокационных сигналов СВЧ-диапазона, отраженных взволнованной морской поверхностью, позволяющий проводить измерения скорости и направления ветра в приводном слое. Спроектирован действующий макет бортового измерителя, работоспособность которого была проверена
экспериментально в натурных условиях. Результаты экспериментов подтвердили
возможность измерения скорости ветра в интервале 0,5–30 м/сек. Основные усилия
в дальнейших исследованиях будут направлены на повышение точности измерений
и пространственной разрешающей способности [13, 14].
Коллектив кафедры РТС выполняет фундаментальные теоретические и экспериментальные исследования также в других областях проектного синтеза авиационных систем навигации, управления и контроля.
Одним из направлений исследований является «Разработка методов повышения эффективности радиолокационного обнаружения малоразмерных целей на фоне мешающих отражений от подстилающих водной и земной поверхностей».
Сущность проводимых в этом направлении исследований заключается в разработке алгоритмов повышения контраста радиолокационного изображения малоразмерных целей на фоне отражений от морской поверхности, а также радиолокационного изображения неоднородностей самой морской поверхности. Необходимость
решения подобных задач возникает при разработке средств радиолокационного обнаружения и картографирования нефтяных загрязнений водной поверхности, обнаружения буев, перископов, следов подводных и надводных судов, предупреждения
столкновений судов с малоразмерными объектами (буи, лодки и т.п.), раннего обнаружения волн цунами, дистанционного контроля параметров водной поверхности, ее
неоднородностей, вызванных течениями, внутренними волнами и т.п.
Анализ направлений и тенденций развития методов радиолокационного обнаружения малоконтрастных целей свидетельствует о том, что известные работы,
посвященные радиолокационным наблюдениям неоднородностей морской и земной поверхностей, а также наблюдениям на их фоне малоконтрастных целей основываются обычно лишь на оценке статистических характеристик отраженного сигнала, полученного конкретным радиолокационным устройством, с последующей
интерпретацией их соответственно условиям наблюдения неоднородностей радиолокационного изображения. Задачу повышения достоверности различения контрастов радиолокационного изображения необходимо решать на основе процедуры
оптимальной обработки, получаемой методами теории статистических решений.
Подобный статистический подход для различения контрастов позволит объективно
оценить возможности существующих радиолокационных систем и выявить потенциальные возможности их модернизаций, в основе которых лежит использование
процедуры декорреляции радиолокационных отражений от площадки или объема
разрешения с последующим эффективным накоплением декоррелированных отсчетов сигнала. Новизна проводимых исследований заключается в комплексном
теоретическом рассмотрении физических основ многочастотной временной и пространственной декорреляции радиолокационных сигналов, отраженных областью
разрешения радиолокатора. Временная изменчивость, например, морской поверхности, на фоне которой осуществляется обнаружение малоконтрастной цели, приводит к ограничению временного интервала накопления, отраженного от нее сиг97
Известия ЮФУ. Технические науки
Тематический выпуск
нала. Использование же, например, режима поимпульсного изменения частоты
излучения (n частот излучения) позволяет в рамках допустимого временного интервала накопления повысить в n раз количество некоррелированных отсчетов радиолокационных сигналов, отраженных площадкой разрешения. Предварительные
расчеты показывают, что при n = 50, отношении сигнал/шум равным 3, контраст
радиолокационного изображения величиной 2 дБ обнаруживается с вероятностью
ошибки не более 0,01.
Кроме режима частотного разнесения сигналов анализируются потенциальные возможности фоноконтрастных РЛС с быстрым обзором пространства и с ортогональнополяризованным излучением.
Проводимые исследования позволили: разработать основы теории повышения контраста радиолокационных изображений морской поверхности и малоразмерных объектов на фоне моря на основе комплексного анализа статистической
структуры электромагнитных полей рассеяния; разработать алгоритмы обработки
радиолокационных сигналов фоноконтрастных РЛС с накоплением отсчётов, декоррелированных разнесением во временной и частотной областях; разработать
методологию проектирование фоноконтрастных РЛС.
Разрабатываемые методы и технические средства должны позволить: повысить эффективность радиолокационного обнаружения малоразмерных надводных и
наземных объектов; повысить точность определения координат малоразмерных
объектов; повысить помехоустойчивость радиолокационных средств обнаружения
малоконтрастных объектов.
Следующим направлением исследований, выполняемых сотрудниками кафедры РТС является «Разработка методов определения местоположения наземных
источников радиоизлучений с использованием методов синтезирования приемной
апертуры».
Актуальность работы диктуется необходимостью повышения точности определения местоположения источников радиоизлучений в районах боевых действий,
локальных конфликтов, при сопровождении особо важных грузов, а также при
проведении контртеррористических операций для информационного обеспечения
принятия оперативных решений. В условиях недостаточной точности традиционных бортовых и наземных средств радиотехнических измерений определение местоположения излучающих средств радиосвязи требует привлечения нескольких
летательных аппаратов или наземных комплексов типа «Аргумент». При этом также снижается оперативность и скрытность определения местоположения источников радиосвязи, в частности, подлежащих подавлению. Прорыв в направлении повышения точности местоопределения может быть достигнут при использовании
синтезирования приемной апертуры, возможность реализации которого принципиально обеспечивается на основе априорного знания параметров радиосвязных сигналов или их предварительного определения. Это требует поиска новых путей и
методов высокоточного определения местоположения источников радиосвязи с
использованием синтезирования апертуры с борта одного летательного аппарата
или нескольких наземных когерентных приемных пунктов, а также при сочетании
средств различного типа базирования. Научная новизна проводимых исследований
состоит в развитии методов апертурного синтеза для случая приема сигналов радиосвязи с частично известными параметрами.
В результате выполненных исследований разработаны: теоретические основы, методов и алгоритмов высокоточного местоположения наземных источников
радиосвязи радиотехническими средствами различного типа базирования (с борта
летательного аппарата, наземными приемными пунктами или при их сочетании) на
98
Раздел II. Навигационные системы
основе синтезирования апертуры и использования радионавигационных параметров сигналов; принципы построения систем местоопределения источников радиосвязи для широкого класса радиосигналов, способов передачи информации, включая пакетный режим; имитационно-математические модели, включающие имитаторы связных сигналов, для обработки алгоритмов пространственного разрешения
источников радиосвязи; методы оценки эффективности алгоритмов высокоточного
определения местоположения наземных источников радиосвязи радиотехническими
средствами различного типа базирования (с борта летательного аппарата, наземными
приемными пунктами или при их сочетании) на основе синтезирования апертуры и
использования радионавигационных параметров сигналов; предложения и рекомендации по созданию бортовой системы высокоточного определения местоположения
наземных источников радиосвязи на основе синтезирования апертуры; методики
оценки возможностей определения местоположения заданных источников излучения
в радиосвязных диапазонах для решения навигационных задач.
Авиационная бортовая радиоэлектронная аппаратура в нештатных режимах
функционирует в условиях воздействия агрессивных факторов среды. Кроме того,
к ней предъявляются требования функционирования в нештатных ситуациях, когда
происходят сбои и отказы в работе устройств электропитания, в условиях пожара
на борту, разгерметизации отсеков и других. Все это требует создания нового поколения радиоэлектронной техники, способной обеспечивать высокую работоспособность без потерь качества в экстремальных условиях.
Следующим направлением исследований, проводимых на кафедре является
«Разработке принципов быстрой самоорганизации нелинейных систем управления
маневренными объектами в условиях интенсивного противодействия среды при
дефиците времени и ограниченных ресурсах».
Актуальность работы обусловлена необходимостью быстрого выведения автоматических систем из критических режимов работы, с целью снижения риска
неблагоприятных последствий воздействия больших возмущений и быстрое формирование управлений, парирующих в некоторой мере возмущения ударного типа,
что уменьшит отклонения и скорость изменения этих отклонений управляемых
параметров от требуемых значений и поэтому дополнительно уменьшит время
пребывания системы в критическом режиме и, следовательно, дополнительно снизит риск неблагоприятных последствий.
Традиционные методы не позволяют осуществить самоорганизацию системы
для выведения из критических режимов за время, соизмеримое с их постоянными
времени, свойственными локальным режимам, в силу их грубости и трудности
идентификации развития нежелательных режимов, обусловленной, кроме того,
невозможностью создания позиционных датчиков, измеряющих большие (произвольные) отклонения управляемых параметров полета.
Наиболее перспективным для осуществления быстрого упорядочения процессов в нелинейной динамической системе является применение современной физической теории управления, основы которой заложены в трудах академика
А.А. Андронова. Применение этого подхода к синтезу самоорганизующейся системы (системы с переменной структурой) позволяет управляя состоянием системы
быстро выйти из области притяжения опасного аттрактора (устойчивого предельного цикла). Ценным является также то, что решение этой задачи в наиболее сложных случаях обеспечивает формирование управляющего воздействия, противодействующего короткому импульсу возмущения, что дополнительно уменьшает время
пребывания системы в критическом режиме. Кроме того, использование этого
подхода позволяет применяя только то минимальное количество датчиков, которое
99
Известия ЮФУ. Технические науки
Тематический выпуск
необходимо для функционирования основного контура управления, обеспечивающего астатизм первого – второго порядка. Новизна работы заключается в решении
задачи синтеза управления с привлечением принципа декомпозиции и отыскании
топологического инварианта, позволяющего получить конструктивные условия
полной управляемости объекта.
Основными результатами исследований являются: анализ случайной бифуркации режимов работы нелинейных систем управления, вызванной непрогнозируемыми интенсивными факторами среды; разработка концепций построения сомоорганизующихся нелинейных систем управления маневренными объектами в условиях интенсивного противодействия среды при дефиците времени и ограниченных ресурсов
управления; разработка алгоритмов дуального управления, реализующих принцип
быстрой самоорганизации нелинейных систем управления, придающих гибкость в
формировании адекватного управления в условиях значительных изменений задающих и возмущающих воздействий обеспечивающих одновременно развитие процесса
самоорганизации системы и противодействие большим внезапным возмущениям
ударного типа еще на начальных стадиях их действия.
Построение статистических моделей систем радионавигации и радиолокации
наряду с системными проблемами проектирования требуют разработки статистической модели радиолокационных сигналов, отраженных от подстилающей земной
поверхности и моделей сигналов, отраженных протяженными пространственно
распределенными целями. В этой связи, важным направлением исследований коллектива кафедры РТС является «Проведение теоретических исследований механизма взаимодействия электромагнитных полей с протяженными слоистошероховатыми средами». Исследования проводятся с использованием современной теории статистических моделей и методологии решения подобных волновых
задач. Применение электромагнитных волн в задачах подобного типа осложняется
условиями их распространения в исследуемых средах. Диэлектрические потери и
электропроводность грунтов ограничивают глубину проникновения радиоволн.
Для обеспечения достаточных глубин проникновения вынуждены использовать
относительно низкие для радиолокации частоты коротковолнового и средневолнового диапазонов волн. Переход к названным диапазонам позволяет считать большинство типов земной поверхности слабошероховатыми в масштабе используемых длин радиоволн. Этих условиях решение поставленной задачи может быть
решено как методом Кирхгофа, так и методом малых возмущений. Известные подходы к решению поставленной задачи, основывающиеся на использовании частотной зависимости регулярной (когерентной) составляющей радиолокационного
сигнала, хоть и отличаются математическим изяществом, применены на практике
быть не могут, поскольку требуют фактически измерений комплексного коэффициента отражения Френеля в широком частотном диапазоне либо определения экстремумов его частотной зависимости. Если одновременно учесть технические
сложности формирования, излучения, приема и обработки сверхширокополосных
сигналов коротковолнового и средневолнового диапазонов, становятся понятными
ограниченные возможности подобных методов решения задачи. Один из подходов
к решению задачи основываются на анализе точечных отсчетов указанных частотных зависимостей коэффициента отражения. При этом требуется аналитического
решения систем трансцендентных уравнений, определяющих когерентную составляющую отраженного поля. Для выделения информации об аргументе комплексного коэффициента отражения предусматривается разработка методов формирования опорных колебаний. Это позволит разработать алгоритмы измерения, инвариантные к высоте расположения летательного аппарата. Значительное внимание
100
Раздел II. Навигационные системы
уделяется также устойчивости алгоритмов измерения параметров слоя к высоте
неровностей границ раздела и эволюциям траектории летательного аппарата.
Проведено теоретическое обоснование возможных методов дистанционного
измерения глубины залегания слоя грунтовых вод. Выполнены натурные экспериментальные исследования в пойме реки Дон и в прибрежной зоне Цимлянского
водохранилища, которые сопровождались контрольными замерами глубины залегания грунтовых вод в скважинах, расположенных вдоль зачетного участка малопересеченной поверхности земли. Исследования показали возможность определения уровня грунтовых вод на глубинах залегания от 0,5 до 5 м с погрешностью, не
превышающей 15%, если максимальная высота неровностей поверхности земли не
более 0,8 м. Прибор может эффективно использоваться при картографировании
подтоплений в прибрежных зонах водоемов и при реализации программ рационального природопользования. [15, 16]
Весь комплекс проводимых коллективом кафедры РТС научных исследований является солидной базой для выполнения дальнейших фундаментальных исследований в перечисленных выше областях и для разработки методов и средств
радиолокации, радионавигации и управления подвижными объектами.
1.
Басс Ф.Г., Фукс И.М.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Рассеяние волн на статистически неровной поверхности. – М.:
Наука, 1972. – 424 с.
2. Beckman P., Spizzichino A. The Scattering of Electromagnetic Waves from Rought Surfaces.
Pergamon Press, 1963.
3. Красюк И.П., Розенберг В.Н. Корабельная радиолокация и метеорология. – Л.: Судостроение, 1970.
4. Гарнакерьян А.А., Сосунов А.С. Радиолокация морской поверхности. – Ростов н/Дону.:
Изд-во РГУ, 1978. – 140 с.
5. Жуковский А.П. Влияние скорости ветра на характеристики рассеяния электромагнитных волн от водной поверхности // Вопросы радиоэлектроники. Серия общетехническая. 1970. Вып. 4. – С. 10-16.
6. Зубкович С.Г. Статистические характеристики радиосигналов, отраженных от земной
поверхности. – М.: Сов. радио, 1968. – 224 с.
7. Загородников А.А. Радиолокационная съемка морского волнения с летательных аппаратов. – Л.: Гидрометеоиздат, 1978. – 240 с.
8. Гарнакерьян А.А., Сосунов А.С. О пространственной корреляции радиосигналов, отраженных от морской поверхности // Изв. вузов. Радиоэлектроника. Т.20. –№8. 1977.
– С.59-64.
9. Lobatch V.T., Garnakeryan A.A., Airborne radar probing of a time-spatial strukture of sea
waves // Proceedings of SPIE. Orlando. USA. 1998. Vol.3395. – P.172-178.
10. Лобач В.Т. Радиолокационные измерения пространственно-временной структуры морской поверхности в декаметровом диапазоне радиоволн // Радиосистемы (Радиотехника). Вып. 54. – №1, 2001. –С. 81-88.
11. Лобач В.Т., Буряк В.А., Бухарин В.Д. Радиолокационный измеритель параметров морского волнения // Наука производству. – №9. 2000. – С. 37-42.
12. Лобач В.Т. и др. Разработка методов и средств радиолокационного контроля состояния
морской поверхности // Отчет о НИР № г.р. 10180328. Таганрог. 1991.
13. Лобач В.Т., Долбня Л.А., Буряк В.А., Некрасов А.В. Бортовой корреляционный измеритель скорости приводного ветра // Сб. докладов III научной конференции по гидроавиации «Геленджик - 2000». – М., 2000.
14. Лобач В.Т., Некрасов А.В., Мушенко А.С. Радиолокационное измерение вектора скорости ветра над морской поверхностью с летательного аппарата // Сб. докладов II научной
конференции по гидроавиации. – М., 1998. – С. 294-299.
101
Известия ЮФУ. Технические науки
Тематический выпуск
Лобач В.Т. Радиолокационные измерения параметров слоистой среды. Изв. вузов. Радиоэлектроника. Военные радиоэлектронные технологии. Тем. выпуск. Т. 45. – №3.
2002. – С. 71-77.
16. Лобач В.Т. и др. Подповерхностная радиолокация в декаметровом радиодиапазоне. Труды международной научной конференции «Излучение и рассеяние электромагнитных
волн». Таганрог, 2007.
15.
УДК 534.222.2
В.Ю. Волощенко
ПАРАМЕТРИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО
ДЕЙСТВИЯ ДЛЯ ОБЕСПЕЧЕНИЯ ПОДЛЕДНОГО ПЛАВАНИЯ
АВТОНОМНЫХ ПОДВОДНЫХ АППАРАТОВ
В настоящее время задачи исследования и освоения обширных площадей
мелководного Арктического шельфа России могут быть решены при использовании автономных подводных плавательных аппаратов, оснащенных специализированными локационными системами ближнего действия (ЛС БД), применение которых должно обеспечивать уклонение от столкновения с айсбергами и дном при
движении в темное время года, под сплошным ледяным покровом в каналах, проливах между островами, а также возможность точного измерения толщины ледового покрова и обнаружения во льдах полыней и разводий, в связи с чем подводное
гидроакустическое наблюдение ведется в трех направлениях – вперед, вниз и
вверх. В [1] рассмотрено общее подледное гидролокационное оборудование автономных плавательных аппаратов типа «Стерджен», включающее себя 10 устройств
активной локации: вертикальный обзор вверх обеспечивают семь гидролокаторовэхоледомеров, три из которых сосредоточены в кормовой, один – в средней, один –
в носовой частях главной палубы корпуса, два – на рубке, один из которых – высокочастотный узколучевой профилограф-эхоледомер используется для точного измерения расстояния от верха рубки до ближайшей границы льда, а также его толщины при движении; передний обзор – обнаружитель айсбергов, который непрерывно сканирует пространство впереди лодки в поисках айсбергов или глубоких
выступов льда; вертикальный обзор вниз – два донных эхолота, расположенных в
носовой и кормовой частях лодки. Данный пример наглядно демонстрирует важность получения в реальном масштабе времени достоверной информации о точном
профиле нижней кромки льда и его толщине вдоль всего корпуса лодки с помощью
гидроакустических средств обеспечения ближнего подводного наблюдения – гидролокаторов-эхоледомеров.
Известно, что более 70% бассейна Арктики занимают паковые льды, имеющие среднюю толщину: зимой (3–4) м, летом (0,5–1,5) м и среднеквадратичное
отклонение крупномасштабных неровностей до 3 м на нижней кромке, осадка торосов может достигать (7–8) м, а отдельных выступов – (16–20) м. Под влиянием
ветров и течений арктические льды находятся в постоянном движении, а ледовые
поля изобилуют многочисленными трещинами, каналами и полыньями [2]. Практика использования одночастотных эхоледомеров показала, что в данных условиях
по записям рельефа границ раздела на регистраторах часто бывает трудно классифицировать характер поверхности, а точность измерения осадки и толщины льда
оказывается недостаточной. Для устранения отмеченных недостатков было предложено в эхоледомерах использовать две частоты излучения – высокую и низкую,
102
Раздел II. Навигационные системы
что позволяет на низкой частоте получать рассеянный сигнал от границы раздела
воздух», а на высокой – от границы раздела «вода-лед», и точно определять
рельеф нижней границы ледяного покрова, причем при синхронном излучении
обоих сигналов может быть измерена толщина ледяного покрова [3]. Однако такой
двухчастотный эхоледомер имеет недостатки: 1) требует двух акустических антенн, одна из которых – низкочастотная – имеет большие массу и габариты; 2) используемые в эхоледомере «линейные» интерференционные антенны обладают
протяженной ближней зоной дифракции Френеля и существенными по величине
дополнительными максимумами диаграмм направленности, как в приеме, так и в
излучении, что может привести к возникновению большой ошибки в определении
угловых координат деталей рельефа; 3) проблема достоверной классификации характера лоцируемых границ раздела «вода-лед», «вода-воздух» не решена.
Описанный выше характер нижней кромки ледовых полей обусловливает необходимость применения многочастотной локационной аппаратуры, гидроакустические антенны которой способны формировать излучение с узким основным лепестком и без бокового поля. Эффективность использования ЛС БД в условиях
сложной помеховой обстановки может быть существенно повышена при использовании излучающих параметрических антенн (ПА), формирующих узкий пучок сигналов разностной частоты (СРЧ) с малым уровнем бокового поля при небольших
габаритах электроакустического преобразователя сигналов накачки с частотами
f1 , f 2 . Однако практическое использование для решения рассматриваемых задач
существующих нелинейных параметрических приборов (НПП) в традиционном
режиме имеет некоторые ограничения [4]. Между тем при работе ПА наряду с генерацией СРЧ в водной среде формируются высокочастотные спектральные компоненты – сигнал суммарной частоты (ССЧ) f + = f 2 + f1 , вторые гармоники сигналов накачки 2 f1 , 2 f 2 , акустические поля которых обладают следующими характеристиками:
1) эффективность генерации компонент высокочастотного излучения достаточно высока: на акустической оси для расстояний, составляющих всего полторы
длины ближней зоны дифракции Френеля для преобразователя накачки, амплитуды звуковых давлений формирующихся акустических сигналов достигают максимумов, составляющих до 20% от уровней сигналов накачки, после которых закон
убывания данных сигналов можно считать близким к сферическому;
2) угловые распределения амплитуд звукового давления акустических сигналов вторых гармоник определяются поперечными распределениями амплитуд сигналов накачки в акустическом пучке, возведенными во вторую степень, а для сигнала суммарной частоты – произведением угловых распределений амплитуд сигналов накачки, что позволяет на указанных выше расстояниях сформировать акустические пучки с ослабленным боковым полем и повышенной (в 1,5 – 2 раза) остротой главных максимумов по сравнению с аналогичными характеристиками преобразователя накачки на исходных частотах и на СРЧ;
3) направленный прием эхосигналов ВЧ-компонент спектра может быть осуществлен как с помощью исходного преобразователя накачки ПА, включенного
через коммутатор приема-передачи, так и с помощью отдельного приемного малогабаритного преобразователя, причем близость частот генерируемых компонент
спектра – f + = f 2 + f1 , 2f1, 2f2, кратность частот и фазовая связь ( f1 ,2 f1 и
f 2 ,2 f 2 ) при соответствующей обработке в приемных трактах локационных устройств могут обеспечить получение нового объема данных о ближней подводной
«лед –
103
Известия ЮФУ. Технические науки
Тематический выпуск
обстановке, в частности, при поиске с борта автономного плавательного аппарата
полыньи для всплытия.
Рассмотрим технические решения [4-6] по модернизации существующих нелинейных параметрических приборов (НПП), имеющие своей целью расширение эксплуатационных возможностей, что достигается за счет осуществления приема и соответствующей обработки эхосигналов высокочастотных компонент спектра ПА.
На рис. 1 показана структурная схема параметрического эхоимпульсного локатора, на рис. 2 – эпюры напряжений в различных точках канала обработки фазовых характеристик эхосигналов ВЧ приемного тракта параметрического эхоимпульсного локатора [5].
Работа параметрического эхоимпульсного локатора происходит следующим
образом. Генераторы 1 и 2 (рис. 1) вырабатывают высокочастотные гармонические
сигналы U 1, U 2 с частотами f1 , f 2 , поступающие на два входа хронизаторамодулятора 3, приводящегося в рабочее состояние оператором по команде с блока
управления 39, в результате чего на выходе хронизатора-модулятора получаем радиоимпульс U 3 с бигармоническим ВЧ-заполнением. Данный радиоимпульс после усилителя мощности 4 поступает на электроакустический преобразователь накачки 5 параметрической антенны (ПА), излучающий зондирующий сигнал накачки в водную среду, обладающую нелинейностью своих упругих характеристик.
При этом происходит нелинейное взаимодействие сигналов накачки с частотами
f1 = ω1 2π , f 2 = ω 2 2π в канале распространения, результатом которых является генерация в водной среде акустических сигналов как разностной F = f 2 − f1 ,
так и суммарной f + = f 2 + f1 частот, вторых гармоник 2 f1 ,2 f 2 волн накачки.
Полигармонический зондирующий сигнал, содержащий спектральные составляющие с частотами f1 , f 2 , f + = f 2 + f1 , F = f 2 − f1 ,2 f1 ,2 f 2 , распространяется в
среде лоцирования, имеющей акустическое сопротивление ( Z СР = ρ ср сср ), где
ρ ср – плотность среды, с ср – скорость звука в ней, достигает расположенных в
среде подвижных и покоящихся относительно нее объектов с акустическим сопротивлением ( Z ОБ
= ρ об с об ) ≠ ( Z СР ) и отражается от них. Амплитуды отраженных
волн, несущих информацию об объектах, определяются их рассеивающими свойствами, которые определяются формой объектов, ракурсом облучения, волновыми
размерами. Если акустическое сопротивление объекта
Z ОБ больше акустического
сопротивления среды
Z СР , то отраженные волны имеют ту же фазу, что и падающие, если же Z ОБ < Z СР , то при отражении они изменяют фазу на π радиан,
кроме того, в соответствии с эффектом Доплера перемещение объекта с радиальной скоростью
υР
приведет к изменению частот отраженных акустических коле-
баний всех волновых процессов – доплеровским сдвигам частот ( ±
f D ( f 1) ),
( ± f D ( 2 f 1) ), ( ± f D ( f 2 ) ), ( ± f D ( 2 f 2) ), (± f D ( f + ) ), ( ± f D (F ) ), где (+) и (–) соответствуют приближению или удалению объекта. Отраженные спектральные компоненты полигармонического сигнала достигают приемных преобразователей 6 и
11 НЧ и ВЧ приемных трактов параметрического локатора (акустический сигнал
U 4 ), причем все отраженные составляющие полигармонического сигнала несут
определенную амплитудную, фазовую и частотную информацию об объектах лоцирования и границах раздела, позволяют судить об их отражательной способно104
Раздел II. Навигационные системы
сти, акустическом сопротивлении и характеристиках движения, а также о их удалении от приемно-излучающей системы 5, 6, 11.
Рис. 1. Структурная схема параметрического эхоимпульсного локатора
На выходе канала обработки амплитудных характеристик эхосигналов
НЧ приемного тракта после фильтрации (полосовой фильтр 7), усиления (усилитель 8) и детектирования (детектор 9) выделяется видеоимпульсный электрический
сигнал
U 5 , соответствующий эхосигналам разностной частоты F = f 2 − f1 от
облучаемых границ раздела и объектов, который подается на второй вход индикатора 10, запускаемого подачей синхроимпульса с дополнительного выхода хронизатора-модулятора 3.
На выходе канала обработки амплитудных характеристик эхосигналов
ВЧ приемного тракта после фильтрации (полосовые фильтры 12, 13, 14), усиления
(усилители 15, 16, 17), детектирования (детекторы 18,19,20) и перемножения (21)
выделенных видеоимпульсных сигналов
U 6 ( 2 f1 ), U 7 ( f + ), U 8 ( 2 f 2 ) получа-
ем результирующее напряжение U 9 = U 6 × U 7 × U 8 , соответствующее эхосигналам для высокочастотного излучения от облучаемых границ раздела, которое
подается на третий вход индикатора 10. Уровни каждого из электрических сигналов U 6, U 7, U 8 определяются амплитудной характеристикой направленности
105
Известия ЮФУ. Технические науки
Тематический выпуск
ℜ 2 f 1 (θ ), ℜ + (θ ), ℜ 2 f 2 (θ ) и чувствительностью Υ2 f 1 , Υ+ , Υ2 f 2 в режиме приема преобразователя 11 для каждой из рассеянных объектами акустических волн с
частотами колебаний
2 f1 , f + ,2 f 2 , где θ – угол прихода рассеянных волн, отсчи-
тываемый от нормали к плоскости антенны. Вследствие близости частот
2 f1 , f + ,2 f 2 отраженных акустических сигналов, пространственные характеристики направленности (ХН) для приемного преобразователя 11 на этих частотах
аналогичны и близки по величине друг другу (расположение в пространстве главного и добавочных максимумов излучения, ширина главного максимума по первым направлениям нулевого излучения и по уровню 0,7, уровни добавочных максимумов и т.д.). Таким образом, перемножение электрических сигналов
U 6 × U 7 × U 8 , уровни каждого из которых пропорциональны аналогичным пространственным ХН приемного преобразователя 11, обеспечит сохранение электрических сигналов большой амплитуды, соответствующих главным максимумам на
акустической оси приемно-излучающей системы 5, 6, 11, и ослабление электрических сигналов малой амплитуды, соответствующих добавочным максимумам для
других внеосевых направлений, что эквивалентно уменьшению ширины главного
максимума и подавлению дополнительных максимумов в результирующей характеристике направленности приемного преобразователя 11 [4].
Проиллюстрируем возможность получения различной точности отображения
рельефа нижней кромки льда с использованием каналов обработки амплитудных
характеристик эхосигналов ВЧ и НЧ приемного тракта. Например, на нижней
кромке льда имеются два выступа одинаковой величины, расположенных на расстоянии
D и разделенных глубокой трещиной (рис. 1), отметки, от которых на
эхограмме могут сливаться в одну и тем самым увеличивать толщину льда практически вдвое. Рассчитаем величину угла ∆θ , при отклонении на который в области
максимума диаграмм направленности (ДН) антенных систем обоих каналов оператор или решающий автомат уверенно зафиксирует уменьшение амплитуды сигнала
от каждого из соседних выступов, т.е. они будут зарегистрированы раздельно с
определенной точностью отображения рельефа нижней кромки льда. Величиной
этого угла ∆θ характеризуют точность пеленгования. Для максимального метода
пеленгования
∆θ = 0,6 ⋅ µ ⋅ θ 0,7 , где µ – коэффициент, величина которого при
использовании оператором визуального индикатора составляет (0,05–0,15); для
слухового индикатора – ≥ 0,2. Оценим точность максимального метода пеленгования НЧ и ВЧ амплитудными трактами макета параметрического гидролокатора
ближнего действия [6], который может быть использован в режиме эхоледомера. В
данном устройстве ширина эквивалентных ДН приемно-излучающей системы по
уровню 0,7 составляет: ВЧ-канал – при предлагаемой обработке сигналов
f + = 476 кГц, 2 f1 = 456 кГц, 2 f 2 = 496 кГц и θ 0,7 ВЧ рез = 1,6 0 при отсутствии
боковых лепестков;
θ 0, 7 НЧ = 6,4
0
НЧ-канал – для сигнала разностной частоты
F = 20
кГц,
при наличии боковых лепестков с уровнями до 13%, что должно обес-
печить при вертикальном лоцировании с неподвижного автономного подводного
аппарата, расположенного на глубине 20 метров, следующие величины разрешающей способности по углу
DВЧ рез ∼0,2м и DНЧ ∼0,8 м соответственно. В данном слу-
чае при визуальном пеленговании выступов оператором (µ=0,1) с помощью данной
локационной системы точность пеленгования ∆θ будет составлять: для ВЧ-тракта
106
Раздел II. Навигационные системы
при предлагаемой обработке ∆θ ВЧ рез = 0,280; для НЧ-тракта на сигнале разностной частоты F = 20 кГц – ∆θ НЧ = 1,30.
Работоспособность фазового приемного тракта основана на применении способа получения фазочастотной характеристики (ФЧХ) границы раздела [7], реализуемого с использованием двух пар когерентных гармонических акустических сигналов кратных частот f 2 ,2 f 2 и f1 ,2 f1 . Информацию о наличии или отсутствии
фазового сдвига на π радиан при отражении от границы раздела пары когерентных гармонических акустических сигналов кратных частот f1 ,2 f1 можно получить после соответствующей обработки – фильтрации, усиления, приведения к
одной частоте и фазового детектирования. В результате для обрабатываемых сигналов компенсируются начальные фазы ( φ 02 = 2φ01 ) и набеги фазы как за счет
двойного прохождения расстояния z до границы, так и за счет времени t1 до прихода эхосигналов, а остается только разность фазовых сдвигов, приобретенных при
отражении сигналов от границы раздела, определяемая соотношением акустических сопротивлений поверхности объекта и среды лоцирования. Так, например,
разность фаз, приведенных к одинаковой частоте фазосвязанных сигналов кратных
частот ω 2 = 2π ⋅ (2 f1 ) = 2ω1 и ω1 = 2π ⋅ f 1 , будет равна
∆φ R = 2ω1t1 − 2 ×
2ω1 z
(2ω1 ) z
+ 2φ01 + 2φ R1 (ω1 ) − (2ω1 )t1 + 2 ×
− φ02 − φ R2 (ω2 ) =
c0
c0
= 2φ R1 (ω1 ) − φ R 2 (ω 2 ) ,
(1)
где φ R1 (ω1 ) и φ R 2 (ω 2 ) – величины приобретаемых фазовых сдвигов для звукового давления акустических сигналов при отражении от облучаемой поверхности.
При облучении акустически «жестких» объектов (погруженная часть корпуса надводного судна, граница раздела «вода-лед») акустическое сопротивление Z ОБ которого больше, чем акустическое сопротивление среды распространения Z СР , отражение акустических сигналов кратных частот f1 ,2 f1 происходит без фазового
сдвига на π радиан, т.е. φ R1 (ω1 ) = φ R 2 (ω 2 ) = 0 0 и ∆φ R = 0 0 . В случае обнаружения акустически «мягких» объектов (граница раздела «вода-воздух»), акустическое сопротивление Z ОБ которых меньше, чем акустическое сопротивление среды
распространения Z СР , отражение акустических сигналов кратных частот f1 ,2 f1
происходит с фазовым сдвигом на π радиан, т.е. φ R1 (ω1 ) = φ R 2 (ω 2 ) = 180 0 и
∆φ R = 360 0 − 180 0 = 180 0 .
Таким образом, в канале обработки фазовых характеристик эхосигналов ВЧ
приемного тракта (рис. 2) после фильтрации (полосовые фильтры 22, 23), усиления
(усилители 24, 25) выделяются электрические сигналы U 10, U 11 c частотами сигналов накачки f1 , f 2 , которые удваивают по частоте U 12,U 12′ (умножители частоты 26, 27) и с помощью фазовых детекторов (28, 29) определяют фазовый сдвиг
для эхосигналов частот f1 и 2 f1 , f 2 и 2 f 2 при отражении от границ раздела
при использовании в качестве опорных эхосигналов U 13,U 13′ c частотами 2 f1 и
2 f 2 , подаваемых на вторые входы фазовых детекторов (28, 29) через фазовраща107
Известия ЮФУ. Технические науки
Тематический выпуск
тели (30, 31). Генерация акустических сигналов вторых гармоник 2 f1 ,2 f 2 при нелинейном взаимодействии исходных волн накачки f1 , f 2 сопровождается следующими физическими особенностями процессов: при распространении из ближней в дальнюю зону преобразователя накачки ПА каждый из этих сигналов приобретает определенный дифракционный фазовый сдвиг, обусловленный трансформацией квазиплоской волны соответствующего сигнала у поверхности преобразователя накачки в
расходящуюся квазисферическую на определенном удалении от него.
Рис. 2. Эпюры напряжений в различных точках канала обработки фазовых
характеристик эхосигналов ВЧ приемного тракта параметрического
эхоимпульсного локатора
Компенсация разности дифракционных фазовых сдвигов для сигналов f1 ;
2 f 1 и f 2 ,2 f 2 , сформированных излучающей ПА, осуществляется с помощью
фазовращателей (30, 31), на управляющие входы которых поступают электрические сигналы U 17 и U 18 соответственно, амплитуды которых во времени пропорциональны величинам образующихся разностей дифракционных фазовых сдвигов. Электрические сигналы U 17 и U 18 вырабатывает блок формирования
управляющих напряжений (33) после поступления на его управляющий вход синхроимпульса от хронизатора-модулятора 3. Напряжения U 14 и U 15 , формируемые на выходах фазовых детекторов 28, 29, при лоцировании акустически мягкой
границы раздела («вода-воздух») будет иметь одну полярность, а акустически жесткой («вода-лед») – другую. Сигналы U 14 и U 15 подают на два входа схемы
совпадения 32, причем на ее выходе вырабатывается результирующий сигнал U 16
только в том случае, если сигналы U 14 и U 15 имеют одинаковую полярность. В
случае возникновения результирующего сигнала U 16 он поступает на четвертый
вход индикатора 10 и будет отображаться видеоимпульсами определенной полярности в соответствующих местах линии развертки электроннолучевой трубки ин108
Раздел II. Навигационные системы
дикатора, что позволит с борта автономного аппарата обнаруживать пригодные
для всплытия полыньи и разводья или получать дополнительные данные о толщине
льда над главной палубой.
В качестве индикатора 10 может служить многоканальный осциллограф, у
которого запуск развертки лучей по оси «Х» (текущее время t ) выполняется синхроимпульсом, поступающим с дополнительного выхода хронизатора-модулятора
3, а сигналы U 5,U 9, U 16 поступают на входы усилителей, отклоняющих лучи
осциллографической трубки по оси «Y» [8]. На экране осциллографического индикатора при этом наблюдают видеосигналы U 5,U 9 , амплитуды которых характеризуют отражательную способность обнаруженных объектов и границ раздела для
сигналов с частотами как разностной F = f 2 − f1 , так и суммарной f + = f 2 + f1 ,
вторых гармоник 2 f1 ,2 f 2 волн накачки, а их задержка относительно начала развертки – расстояние z от преобразователей локатора ( z = с0 ∆t 2 , где ∆t – задержка сигналов
U 5, U 9
относительно начала развертки). Сигнал
U 16 ,
наблю-
даемый с той же задержкой на экране осциллографического индикатора 10, представляет собой видеоимпульсы, амплитуда и полярность которых будет зависеть от
соотношений акустических сопротивлений сред распространения последовательно
проходимых фазосвязанными акустическими сигналами кратных частот снизу
вверх по прямому ходу луча.
Проанализируем информацию, отображаемую на экранах индикатора
10 на
F = f 2 − f1 – сигнал U 5 , на вторичных высокочастотных f + ,2 f1 ,2 f 2 – сигнал U 9 , на кратных акустических f1 и 2 f1 ; f 2 и 2 f 2
– сигнал U 16 для различных границ раздела:
1) «вода-воздух». Видеоимпульсные сигналы U 5, U 9 будут регистрироваться
разных частотах: разностной
с одинаковой задержкой относительно начала развертки, но с разной длительностью убывания флюктуирующих амплитуд, причем
длительности маскирующий шлейф. Сигнал
U 16
U9
будет иметь меньший по
будет регистрироваться в виде
стабильного по амплитуде, знаку и расположению на линии развертки видеоимпульса отрицательной полярности (невзволнованная поверхность моря) или меняющегося по амплитуде, знаку и расположению на линии развертки видеоимпульса (взволнованная поверхность моря), что позволит уточнить дистанцию до
морской поверхности и ее состояние.
2) «вода-лед». Передние фронты видеоимпульсных сигналов U 5, U 9 от нижней границы льда на линии развертки будут не совпадать (левее относительно U 9
будет U 5 ), что обеспечит завышение измеряемой толщины льда в НЧ амплитудном приемном тракте. Сигнал U 16 на линии развертки будет совпадать с эхосигналом U 9 и регистрироваться в виде стабильно расположенного на линии развертки, но меняющегося по амплитуде и знаку видеоимпульса.
3) «лед-воздух». Амплитуды видеоимпульсных сигналов U 5, U 9 от верхней
кромки льда вследствие значительного затухания будут достаточно сильно отличаться по величине, причем в ВЧ-тракте влияние маскирующей реверберационной
помехи вследствие затухания будет меньше. Сигнал U 16 будет иметь вид видеоимпульса постоянной амплитуды и отрицательной полярности, стабильно расположенного на линии развертки, что позволит уточнить расположение верхней
кромки льда.
Работоспособность приемного тракта для обработки частотных признаков
эхосигналов основана на измерении изменений спектров эхосигналов по отноше-
109
Известия ЮФУ. Технические науки
Тематический выпуск
нию к спектру зондирующего сигнала в соответствии с эффектом Доплера. В канале обработки частотных характеристик эхосигналов ВЧ приемного тракта после
фильтрации (полосовые фильтры 14, 23), усиления (усилители 17, 25) выделяются
( f 2 ± f D ( f 2 ) ) и ( 2 f 2 ± f D ( 2 f 2) ), которые
поступают на первый и второй сигнальные входы двухвходового аналогового ключа 36, с выхода которого поступает на первый вход частотного дискриминатора 37
тот или иной электрический сигнал с доплеровским сдвигом частоты. На второй
вход частотного дискриминатора 37 с выхода второго двухвходового аналогового
ключа 35 подаётся один из сигналов с частотой f 2 ,2 f 2 соответственно без доплеровского смещения. Для этого оба входа второго аналогового ключа 35 соединены
с выходом высокочастотного генератора 2 с частотой f 2 : первый вход – напрямую, а второй – через умножитель частоты 34 с коэффициентом умножения 2. Выбор той или иной пары сигналов ( f 2 ± f D ( f 2 ) ), f 2 или ( 2 f 2 ± f D ( 2 f 2) ), 2 f 2
электрические сигналы с частотами
производится оператором и осуществляется путём подачи с блока управления 39
соответствующих сигналов на управляющие входы аналоговых ключей 36 и 35.
На выходе частотного дискриминатора 37 выделяется электрический сигнал с
частотой, соответствующей доплеровскому смещению
(
f D ( f 2) , f D ( 2 f 2) ),
зволяет в блоке вторичной обработки доплеровской информации
значения радиальной составляющей скорости
υ P ( f 2 ) ,υ P ( 2 f 2 )
что по-
38 рассчитать два
относительного
сближения (+) или удаления (–) объекта и судна – носителя параметрического локатора, измеренная на соответствующем акустическом сигнале на основе эффекта
Доплера по соотношениям:
υ Р ( f 2) = ±
c × f D( f 2)
υ P ( 2 f 2) = ±
где
2 × f2
=±
c × f D ( 2 f 2)
2 × 2 f2
f D ( f 2)
K V ( f 2)
=±
,
f D ( 2 f 2)
K V ( 2 f 2)
(2)
,
(3)
K V ( f 2) , K V ( 2 f 2) – скоростные чувствительности частотного приемного тракта
параметрического локатора для акустических сигналов на частотах
f2
и
2 f2 ,
представляющие собой приращение доплеровской частоты при изменении скорости на 1 узел; с – скорость звука в водной среде.
Как следует из представленного выше описания сигнала
U 16 , отображаемо-
го на экране индикатора 10 и вырабатываемого фазовым приемным трактом устройства, при облучении взволнованной поверхности моря и неровной нижней
кромки льда существенным отличием информационного сигнала в первом случае
от второго есть лишь периодическое изменение его расположения на линии развертки меняющегося по амплитуде, знаку видеоимпульса, что обусловлено подвижностью свободной водной поверхности в отличие от статичной неровной нижней кромки льда, причем именно данный признак – измерение скорости вертикальных перемещений подвижной свободной поверхности «вода-воздух» – следует
использовать для увеличения достоверности классификации лоцируемых границ
раздела при обнаружении полыней и разводий во льдах, пригодных для всплытия
на поверхность автономного плавательного аппарата. В данном случае именно
точное определение отсутствия или наличия элементов движения неровной отражающей границы за счет обработки частотных признаков эхосигналов позволит
110
Раздел
II. Навигационные системы
однозначно установить статичность («вода-лед») или подвижность («водавоздух») облучаемой границы раздела, причем использование описываемого тракта
позволяет регулировать точность проводимых измерений на акустических сигналах накачки с частотой
f2
и его второй гармонике
2 f 2 . Дело в том, что для вто-
рой гармоники острота главного максимума излучения в
сигнала основной частоты, т.е.
2
раз больше, чем для
θ 0, 7 ( f 2) = 2 ⋅ θ 0,7 ( 2 f 2) , и на взволнованной гра-
нице раздела
«вода-воздух», совершающей вертикальные перемещения со скоростью υ Р , облучаются две концентрические площадки S ( f 2 ) и S ( 2 f 2 ) , что обусловит появление доплеровских спектров частот, ширина которых по уровню половинной мощности определяется приближенным соотношением [9]:
∆f D ( nf 2) ≈ 4 ⋅ (nf 2 ) ⋅
υР
c
⋅ sin Θ D ⋅
θ 0, 7 ( nf 2)
,
2
(4)
Θ – угол скольжения акустического луча относительно границы раздела,
n = 1,2 – номер гармонической составляющей. Расширение спектров частот эхо-
где
сигналов затрудняет выделение доплеровских приращений частот, что вызовет
погрешности их измерений, которые будут тем значительней, чем шире диаграмма
направленности антенны. Так, среднеквадратичная погрешность
δFD
измерения
доплеровского сдвига частот из-за флуктуаций средней частоты спектра может
быть оценена из приближенного соотношения
рый постоянный коэффициент,
уровне половинной мощности
∆f D –
δFD ≈ m ⋅ ∆f D ,
где
m –
некото-
ширина доплеровского спектра сигнала на
[9].
Предложенные технические решения [4-6] расширяют эксплуатационные
возможности существующих нелинейных параметрических приборов (НПП) и
демонстрируют перспективность их использования в качестве гидроакустических
средств обеспечения ближнего подводного наблюдения при подледном плавании.
1.
2.
3.
4.
5.
6.
7.
8.
9.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Макларен А.С. Краткий исторический обзор исследований Арктического бассейна и
прилегающих зон ледяной кромки с помощью подводных лодок // Подводная акустика и
обработка сигналов: Пер. с англ. – М.: Мир, 1985. – С.144-154.
Евтютов А.П., Колесников А.Е., Ляликов А.П. и др. Справочник по гидроакустике. – Л.:
Судостроение, 1982. – 344 с.
Богородский В.В., Яковлев Г.В., Корепин Е.А., Должиков А.К. Гидроакустическая техника исследования и освоения океана. – Л.: Гидрометеоиздат, 1984. – 263 с.
Волощенко В.Ю. Патент 2133047(РФ). Параметрический эхо-импульсный локатор. МКИ
G01S 15/60, опубл.10.09.1999. Бюл. №19.
Волощенко В.Ю., Максимов В.Н., Тарасов С.П., Волощенко А.П. Патент 69646 (РФ).
Параметрический эхоимпульсный локатор. МКИ G01S 15/60, G01N 29/04, опубл.
27.12.2007. Бюл. №36.
Волощенко В.Ю. Гидролокатор ближнего действия с излучающей параметрической антенной. Деп. в ВИНИТИ 23.6.92, №2037 – В92. – Таганрог, ТРТИ, 1992. – 25 с.
Волощенко В.Ю. О возможности различения акустического сопротивления границ раздела в водной среде по фазовым признакам эхосигналов // Изв. вузов. Сев.-Кавк. регион.
Естеств. науки. – 2008. – №3. – С. 41-45.
Кузнецов А.С. Трехканальный осциллограф. – М.: Радио и связь, 1981. – 112 с.
Букатый В.М., Дмитриев В.И. Гидроакустические лаги. – М.: Пищевая промышленность, 1980. – 176 c.
111
Известия ЮФУ. Технические науки
УДК
Тематический выпуск
534.222.2
В.Ю. Волощенко, В.И. Тимошенко
ПАРАМЕТРИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА С
ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ ДЛЯ ОБЕСПЕЧЕНИЯ
БЕЗОПАСНОГО ПЛАВАНИЯ СУДОВ
Перспективные задачи исследования обширных площадей мелководного
Арктического шельфа России и освоения месторождений сырьевых ресурсов могут
быть успешно решены при прокладке оптимальных маршрутов подводной и надводной транспортной системы, использование которой требует разработки специализированных средств судовождения для обеспечения безопасного плавания по
заданному фарватеру, обозначенному донными гидроакустическими маяками. Известен проект навигационного обеспечения плавания по заданному фарватеру значительной протяженности за счет установки и использования гидроакустических
маяков на трассе трансарктических переходов подводных танкеров от нефтеносных районов Аляски до северных берегов Норвегии и Исландии [1]. Маршруты
переходов проходят через районы Северного полюса, морей Бофорта и Баффина,
имеющие помимо ледового покрова большой мощности сложный рельеф дна, причем оптимальный маршрут между Аляской и Норвегией имеет рельеф глубин от 90
до 1800 м и толщину льда до 30 м. Исходя из предельной дальности связи с гидроакустическими маяками, составляющей в арктических морях около (7-8) км, предложен вариант расстановки групп маяков на восьми участках трассы, что обеспечивает возможность пересечения Северного Ледовитого океана за 144 ч при средней скорости 14 узлов (7 м/с). Несмотря на сложность взаимной координации маяков и необходимость их периодической замены, оборудование трансарктического
маршрута гидроакустическими маяками считается экономически целесообразным,
а способ местоопределения с помощью маяков признается наиболее важным и надежным способом навигационного обеспечения в условиях подводного плавания в
Арктике. К недостаткам данного проекта следует отнести малую точность пеленгации гидроакустических маяков при движении танкера, что приводит к ошибке
счисления пройденного пути, сопоставимой с предельной дальностью связи с гидроакустическими маяками. В свете вышесказанного разработка и проектирование
навигационных средств, способных обеспечивать получение более полного и точного объема первичных данных о расположении как подводных, так и надводных
объектов-носителей навигационных систем в море относительно установленных на
дне гидроакустических маяков, является актуальной задачей.
Особенности электронно-акустической аппаратуры маяков подробно рассмотрены в [1, 2]. Так, как правило, характеристика направленности (ХН) обратимой акустической интерференционной антенны маяка не регулируется и диапазон
изменения рабочих частот невелик, а выбор формы ХН определяется глубиной
установки маяка: для больших глубин – коническая, для малых – в виде верхней
полусферы, причем изменение формы достигается применением отражающих конструкций. По мнению автора, гидроакустические маяки должны обеспечивать излучение нескольких рабочих сигналов с достаточно сильно отличающимися частотами (низкой, средней и высокой – в пределах диапазона 20–200 кГц) при наличии
одной акустической излучающей антенны. Это может быть осуществлено при использовании параметрической излучающей антенны, формирующей в водной среде несколько акустических полей – накачки (средняя рабочая частота), сигналов
112
Раздел II. Навигационные системы
разностной частоты (низкая рабочая частота) и сигналов суммарной частоты, вторых гармоник накачки (высокая рабочая частота). Нелинейное взаимодействие
сигналов накачки с частотами f 1 , f 2 в канале распространения, результатом которого является параметрическая генерация акустических сигналов как разностной
F = f 2 − f 1 , так и суммарной f + = f 2 + f 1 частот, вторых гармоник 2 f 1 , 2 f 2
волн накачки, позволяет разделить в пространстве процессы преобразования электрической энергии в акустическую (электроакустический преобразователь маяка) и
формирования направленного излучения (протяженный участок среды, в котором
взаимодействуют мощные акустические волны, длиной в десятки или сотни метров, – объемная «бестелесная» антенна, в которой распределены нелинейные источники данных акустических сигналов), в результате чего при небольших поперечных размерах электроакустического преобразователя удается получить излучение акустических сигналов комбинационных частот F = f 2 − f1 , f + = f 2 + f1 ,
2 f 1 ,2 f 2 в пределах небольших телесных углов при практически полном отсутствии бокового поля [3].
Рассматриваемая параметрическая навигационная система (рис. 1) содержит
маяк (на рисунке представлена структурная схема только излучающего тракта), а
также приемную бортовую аппаратуру судна-носителя устройства, функционально
включающую в себя три приемных тракта, с помощью которых измеряется пеленг
(угол места, курсовой угол) на маяк, рассчитывается дистанция до него и определяются параметры движения объекта-носителя устройства при маневрировании на
малых удалениях от маяка. Общими блоками для этих приемных трактов являются
две группы акустических преобразователей 7, 8, имеющих идентичные диаграммы
направленности без дополнительных максимумов, акустические оси которых сдвинуты относительно друг друга на угол 2θ см (относительно их равносигнального
направления на угол θ см ) и расположены в вертикальной плоскости судовых координат, и компенсатор 9, соединенный с ними.
В излучающем тракте маяка все электронные блоки подключены к источнику
питания 1 и генераторы 2, 3 вырабатывают высокочастотные гармонические сигналы с частотами f1 , f 2 , лежащие в полосе пропускания электроакустического
преобразователя 6, которые поступают на два входа хронизатора-модулятора 4, на
выходе которого сформирован радиоимпульс с бигармоническим ВЧ-заполнением.
Данный радиоимпульс после усилителя мощности 5 поступает на электроакустический преобразователь 6, излучающий зондирующий сигнал накачки в водную среду, обладающую нелинейностью своих упругих характеристик. При этом происходит нелинейное взаимодействие сигналов накачки с частотами f1 , f 2 в канале
распространения, результатом которого является параметрическая генерация акустических сигналов как разностной F = f 2 − f1 , так и суммарной f + = f 2 + f1
частот, вторых гармоник 2 f1 , 2 f 2 волн накачки. Маяк осуществляет излучение в
импульсном режиме, формируя в водной среде акустические пучки данных волн,
сориентированные в пространстве вдоль соответствующего участка трассы перехода в направлении подхода судна-носителя с бортовой аппаратурой, т.е. обеспечивает направленную акустическую «подсветку» в водной среде на нескольких
рабочих сигналах с достаточно сильно отличающимися частотами.
113
Известия ЮФУ. Технические науки
17
16
Тематический выпуск
21
24
15
17
16
18
23
14
19
20
13
22
13
22
22
12
12
12
12
12
12
12
12
12
12
11
11
11
11
11
11
11
11
11
11
f+
10
2f2
10
2f1
10
f1
10
F10
F10
f1
10
2f1
10
2f2
10
f+
10
КАНАЛ 1
КАНАЛ 2
9
7
8
6
1
2
3
4
5
Рис. 1. Структурная схема параметрической навигационной системы
Учитывая, что прием сигналов и уточнение данных о расположении маяка
связаны с перемещением судна-носителя со скоростью υ относительно него, то
при их приеме группами преобразователей 7, 8 происходит доплеровское изменение их частот. Известно, что при движении приемника относительно неподвижного источника сигнала с частотой f измененная частота принимаемого сигнала
будет равна
f ′ = f (1 − υ ⋅ cos ϑ c) = f − υ ⋅ f ⋅ cos ϑ c = f ± f D ,
114
(1)
Раздел II. Навигационные системы
где с – скорость звука в воде, ϑ – угол между направлением скорости приемника
и направлением от источника к приемнику, причем, если угол ϑ тупой, то принимаемая частота повышается (знак +), при ϑ = 900 излучаемая и принимаемая частоты будут одинаковы, а если угол ϑ острый, то принимаемая частота понижается
(знак –) [4].
При распространении в среде полигармонический акустический сигнал с частотами f1 , f 2 , F = f 2 − f1 , f + = f 2 + f1 , 2 f1 ,2 f 2 достигает двух групп акустических преобразователей 7, 8 движущегося со скоростью υ судна-носителя, претерпевая для каждой гармонической компоненты соответствующий доплеровский
сдвиг частоты ( ± f D ( f 1) ), ( ± f D ( 2 f 1) ), ( ± f D ( f 2) ), ( ± f D ( 2 f 2 ) ), ( ± FD ),
( ± f D ( f + ) ), причем для каждой группы 7 и 8 (канал 1 и 2) различие сдвигов частот
определено различием значений углов ϑ1, 2 между направлением скорости суднаносителя и направлениями от источника к приемникам вследствие того, что центры групп преобразователей 7,8 разнесены в пространстве, а их акустические оси,
расположенные в вертикальной плоскости судовых координат, сдвинуты относительно друг друга на угол 2θ см . Электрические сигналы с двух групп акустических преобразователей 7,8, соответствующие принятому акустическому полигармоническому сигналу через компенсатор 9, поступают на входы первого и второго
каналов обработки, которые содержат по пять цепочек в каждом из последовательно включенных полосовых фильтров (10), настроенных на частоты ( f1 ), ( 2 f1 ),
( 2 f 2 ),( F ),( f + ), усилителей (11) и детекторов (12), на выходах которых для каждой из частот в первом и втором каналах вырабатываются видеоимпульсные напряжения U 1F , U 1( f 1) , U 1( f 2) , U 1( 2 f 1) , U 1( 2 f 2) , U 1( f + ) и U 2 F , U 2( f 1) , U 2( f 2) ,
U 2 ( 2 f 1) , U 2 ( 2 f 2 ) , U 2 ( f + ) , амплитуды которых определяются пространственным
положением диаграмм направленности (ДН) групп акустических преобразователей
7, 8 устройства на используемых рабочих сигналах относительно направления на
излучающий электроакустический преобразователь 6 параметрической антенны
пеленгуемого маяка. С выходов детекторов первого и второго каналов обработки
соответствующие пары видеоимпульсных напряжений ( U 1F и U 2 F ), ( U 1( f 1) и
U 2 ( f 1) ), ( U 1( 2 f 1) и U 2 ( 2 f 1) ) и т.д. поступают через пятивходовые аналоговые
ключи 13 на входы вычитающего устройства 14, выход которого соединен со вторым входом устройства отображения информации 15. Выбор необходимой пары
видеоимпульсных напряжений, поступающей на два входа вычитающего устройства 14, определяется оператором и осуществляется путем подачи соответствующего
сигнала с блока управления 24 на управляющие входы аналоговых ключей 13.
Работа приемного тракта для измерения пеленга на маяк в вертикальной
плоскости судовых координат основана на получении оператором двух признаков
точной пеленгации: 1) минимальности амплитуды результирующего электрического сигнала ∆U = U 1 − U 2 , рассогласования первого и второго каналов на рабочих частотах устройства ( f1 , f 2 , F = f 2 − f1 , f + = f 2 + f1 , 2 f1 ,2 f 2 );
2) минимальности доплеровского частотного сдвига ( f D 1K ( f 1) − f D 2 K ( f 1) ),
115
Известия ЮФУ. Технические науки
Тематический выпуск
принимаемых группами преобразователей 7 (канал 1) и
8 (канал 2) акустических сигналов кратных частот ( f 1 ± f D ( f 1) ),( 2 f 1 ± f D ( 2 f 1) ).
Функционирование приемного тракта для вычисления дистанции от суднаносителя до маяка основано на проведении вычислений оператором в соответствии с расчетными соотношениями, полученными в результате исследования основных физических закономерностей генерации высокочастотных сигналов
f + = f 2 + f1 , 2 f1 ,2 f 2 в нелинейной среде параметрической антенной, в которые подставляются полученные в процессе измерений экспериментальные данные. Приемный тракт для определения параметров движения судна-носителя
устройства относительно маяка позволяет оператору выполнить эту задачу на
основе измерения величины доплеровского сдвига для акустических сигналов
кратных частот ( f1 ± f D ( f 1) ),( 2 f1 ± f D ( 2 f 1) ), принимаемых группами преобразователей 7 (канал 1).
( f D 1K ( 2 f 1) − f D 2 K ( 2 f 1) ),
Рис. 2. Пространственное положение ДН при пеленговании методом
равносигнальной зоны
Пеленгование методом равносигнальной зоны осуществляется путем определения разности видеоимпульсных напряжений ∆U = U 1 − U 2 (точки • 1, • 2,
– ◦ 1′, ◦ 2′, ▫ 1′′, ▫ 2′′ на рис. 2) в вычитающем устройстве 14, на входы которого с
выходов первого и второго каналов приемного тракта устройства на рабочих сигналах – или разностной F = f 2 − f1 , или накачки f1 , f 2 , или высокочастотных
f + = f 2 + f1 , 2 f1 , 2 f 2 поступают через аналоговые ключи 13 соответствующие
пары видеоимпульсных напряжений, например, ( U 1F и U 2 F ), ( U 1( f 1) и U 2( f 1) ),
( U 1( 2 f 1) и U 2 ( 2 f 1) ) и т.д., амплитуды которых изменяются при повороте диаграмм
116
Раздел II. Навигационные системы
направленности групп акустических преобразователей 7, 8 компенсатором 9 в процессе пеленгации маяка. Перестройка компенсатора 9 может осуществляться как
оператором вручную, так и автоматически с последующим слежением за маяком.
При нахождении маяка на линии, проходящей через точку пересечения диаграмм
направленности обоих групп акустических преобразователей и называемой линией
равносигнального направления, сигналы обоих каналов равны ( U 1F = U 2 F и
U 1( f 1) = U 2 ( f 1) и U 1( 2 f 1) = U 2 ( 2 f 1) ) и напряжение ∆U будет равно нулю, что и
будет регистрироваться устройством отображения информации 15. Напряжение,
пропорциональное величине угла поворота θ равносигнального направления антенной системы, с дополнительного выхода компенсатора 9, поступает на первый вход
устройства отображения информации 15, которое индицирует информацию о угле
места θ В пеленгуемого маяка в вертикальной плоскости. Определение направления
на маяк в горизонтальной плоскости, т.е. измерение курсового угла θ Г маяка, может
быть осуществлено аналогичным приемным трактом, в котором акустические оси
групп преобразователей 7, 8 расположены в горизонтальной плоскости.
Рис. 3. Пеленгационные характеристики метода равносигнальной зоны на
рабочих частотах устройства
Пеленгационные характеристики метода равносигнальной зоны на частотах
( f 1 ± f D ( f 1) ), ( 2 f 1 ± f D ( 2 f 1) ), ( F ± FD ) для предлагаемого устройства представлены на рис. 3 и обозначены пунктирной, штрих-пунктирной и сплошной линиями
соответственно. Как видно из чертежа, крутизна пеленгационной характеристики
S = dU (θ ) dθ , а следовательно, и пеленгационная чувствительность максимальны при ориентации линии равносигнального направления на маяк (в этом случае ∆U = 0), причем для сигнала второй гармоники 2 f1 пеленгационная чувствительность наивысшая, а для сигнала разностной частоты – наименьшая. Это обусловлено величиной разности видеоимпульсных напряжений ∆U = U 1 − U 2
(точки • 1, • 2, ∆U F , ◦ 1′, ◦ 2′, ∆U f 1 , ▫ 1′′, ▫ 2′′, ∆U 2 f 1 ) для любого угла θ отклонения от линии равносигнального направления, что определяется обострением
117
Известия ЮФУ. Технические науки
Тематический выпуск
основных лепестков ДН-групп акустических преобразователей 7, 8 в режиме приема для более высокочастотных сигналов.
Проиллюстрируем вышесказанное следующим численным примером. Общими блоками для всех трех приемных трактов являются две группы акустических
преобразователей 7, 8, имеющих идентичные диаграммы направленности без дополнительных максимумов, которые сдвинуты относительно друг друга на угол
2θ см (рис. 2), где θ см = (0,5 − 0,7) ⋅ θ 0,7 , θ 0,7 – ширина характеристики направленности группы акустических преобразователей для сигнала накачки по уровню
0,7. Следует учитывать, что острота направленного действия каждой группы акустических преобразователей существенно зависит от волновых размеров их апертуры, т.е. от соотношения D λ , где λ – длина волны принимаемого сигнала, D –
их поперечный размер. Так, например, ширина характеристики направленности
θ 0,7 (в радианах) одного многоэлементного плоского круглого преобразователя 7
или 8 с амплитудным распределением по поверхности, описываемом соотношением (1 − r 2 ) 4 , где r – радиальная текущая координата, отсчитываемая от центра
круговой поверхности антенны, рассчитывается как отношение 1,81 ⋅ λ D при
уровне первого бокового максимума 0,9% от величины основного [5]. Тогда для
диаметра преобразователя 10 см и длинах волн принимаемых сигналов – λ F =75
мм (20 кГц), λ f =15 мм (100 кГц) и λ2 f =7,5 мм (200 кГц) величины ширины основного лепестка по уровню 0,7 θ 0,7 составят ∼ 780, 160 и 80 соответственно, что
при соблюдении условия θ см ≈ (0,5 − 0,7) ⋅ θ 0.7 для двух групп акустических
преобразователей 7, 8 обеспечит сектора обзора по уровню 0,7 θ 0,7 ( гр пр ) ∼ 1360,
130 и 6,40 соответственно. Таким образом, пеленгование на сигнале разностной
частоты целесообразно для осуществления дальнего привода с невысокой точностью судна с параметрической навигационной системой к маяку, пеленгование на
сигнале накачки оптимально при уточнении выбора позиции для средних дистанций до маяка, а пеленгование на сигнале суммарной частоты актуально при маневрировании в непосредственной близости от маяка. Точность осуществляемой многочастотной пеленгации можно численно оценить, используя следующее: угол
∆θ min , при котором оператор или автоматическое устройство уверенно фиксирует наличие разницы в напряжениях U 1 ,U 2 , определяется выражением [6]:
∆θ min = 0,089 ⋅ µ ⋅ (θ 0,7 ( гр пр ) ) 2 θ см ,
(2)
причем при пеленговании оператором с использованием визуального или слухового индикатора величина µ составляет 0,05–0,15 или ≥ 0,2 соответственно. Таким
образом, применение параметрической навигационной системы позволяет осуществить пеленгование маяка методом равносигнальной зоны с точностью, возрастающей для более высокочастотных сигналов. Описанный выше способ увеличения точности пеленгования источника мощных тональных сигналов основной частоты f за счет приема и последующей обработки акустических сигналов высших
гармоник 2 f ,3 f ,....., nf , генерируемых в нелинейной водной среде, реализован
118
Раздел II. Навигационные системы
в акустическом пеленгаторе [7], использование которого предполагается в составе
гидроакустической аппаратуры средств обеспечения судовождения.
С помощью данного устройства можно дополнительно произвести пеленгование маяка в вертикальной плоскости с использованием эффекта Доплера, обусловленное тем, что при движении судна-носителя устройства с горизонтальной
скоростью υ относительно дна происходит изменение частот всех спектральных
составляющих полигармонического сигнала, сформированного в водной среде параметрической антенной маяка и принимаемого двумя группами акустических
преобразователей 7, 8 (см. соотношение (1)). Учитывая особенности конструкции
приемной антенны, состоящей из двух групп акустических преобразователей 7, 8,
имеющих идентичные диаграммы направленности без дополнительных максимумов, акустические оси которых сдвинуты относительно друг друга на угол 2θ см и
расположены в вертикальной плоскости судовых координат, а также условия применения используемого для пеленгования маяка в устройстве метода равносигнальной зоны, можно сделать вывод о том, что основные лепестки ДН групп акустических преобразователей будут всегда ориентированы по-разному относительно направления от источника к приемнику (угол места θ В ) и, соответственно, углы между направлением вектора скорости υ судна-носителя и направлениями основных лепестков при точной пеленгации маяка будут равны ( θ В + 0,6θ 0, 7 ) и
(θ В
− 0,6θ 0,7 ). Как следует из (1), это приведет к тому, что и доплеровский сдвиг
частот для каждой группы акустических преобразователей 7, 8 будет разным и зависящим от местоположения судна относительно маяка: при приближении к местоположению над донным маяком тупой угол ϑ уменьшается и стремится к 90°,
что приведет к постепенному снижению величины доплеровского сдвига частот
( + f D ↓) до минимального значения (при нахождении судна вертикально над маяком угол места
θ В = ϑ ), а затем к постепенному росту величины доплеровского
сдвига ( − f D ↑) при удалении, причем для более высокочастотных сигналов этот
сдвиг будет большим по величине, динамика изменения частот более значительной, т.е. обеспечена большая чувствительность дополнительного пеленгационного
тракта.
В дополнительном пеленгационном тракте на основе эффекта Доплера в первом частотном дискриминаторе 17 могут обрабатываться пары электрических сигналов с частотами ( f1 ± f D ( f 1) )1К и ( f1 ± f D ( f 1) )2К или ( 2 f1 ± f D ( 2 f 1) )1К и
( 2 f 1 ± f D ( 2 f 1) )2К из первого и второго каналов, которые через двухвходовые ана-
логовые ключи 16 поступают с выходов соответствующих усилителей 11. Выходной сигнал первого частотного дискриминатора 17 пропорционален разности доплеровских частот указанных пар данных электрических сигналов и отображается
устройством отображения информации 15. При нахождении судна-носителя непосредственно над маяком равносигнальное направление групп акустических преобразователей 7, 8 будет совпадать с вертикалью, что в силу конструктивных особенностей приемной антенны обусловит следующее расположение в пространстве
основных максимумов групп акустических преобразователей 7, 8: один под углом
(90°– θ см ), а другой (90°+ θ см ) относительно вектора скорости судна-носителя,
что обеспечит разные знаки («+» – канал 1 и «–» – канал 2 ) наименьшего допле-
119
Известия ЮФУ. Технические науки
Тематический выпуск
ровского сдвига в обоих каналах на исходных частотах накачки в соответствии с
соотношениями
f D1K ( f 1) = υ ⋅ f1 cos θ1K c =υ ⋅ f1 cos(90 0 − θ см ) с = + υ ⋅ f1 sin(0,6 ⋅ θ 0,7 ( f 1) ) c , (3)
f D 2 K ( f 1) = υ ⋅ f 1 cos θ 2 K c =υ ⋅ f 1 cos(90 0 + θ см ) с = − υ ⋅ f1 sin(0,6 ⋅ θ 0,7 ( f 1) ) c . (4)
На акустических сигналах вторых гармоник за счет увеличения ∼ в 2 раз
остроты главных максимумов диаграмм направленности групп преобразователей 7,
8 и использования более высокой частоты наименьший доплеровский сдвиг в соседних каналах («+» – канал 1 и «–» – канал 2) будет иметь другую величину
f D1K ( 2 f 1) = υ ⋅ 2 f 1 cos θ 1K c = υ ⋅ 2 f 1 cos(90 0 − θ см ) с = + υ ⋅ 2 f 1 sin( 0,8 ⋅ θ 0, 7 (2 f 1) ) c , (5)
f D 2 K ( 2 f 1) = υ ⋅ 2 f 1 cos θ 2 K c = υ ⋅ 2 f 1 cos(90 0 + θ см ) с = − υ ⋅ 2 f 1 sin( 0,8 ⋅ θ 0, 7 (2 f 1) ) c . (6)
На выходе первого частотного дискриминатора 17 вырабатывается сигнальное напряжение U B , амплитуда которого пропорциональна разности доплеровских частот первого и второго каналов на используемых рабочих сигналах, что с
учетом знаков («+» – канал 1 и «–» – канал 2) наименьших доплеровских сдвигов
частот приведет к их удвоению:
[ f D 1K ( f 1) − f D 2 K ( f 1) ] = 2 ⋅ υ ⋅ f 1 ⋅ sin(0,6 ⋅ θ 0,7 ( f 1) c ,
[ f D 1K ( 2 f 1) − f D 2 K ( 2 f 1) ] = 2 ⋅ υ ⋅ 2 f1 ⋅ sin(0,8 ⋅ θ 0, 7 ( 2 f 1) c .
Тогда в соответствии с АЧХ частотного дискриминатора для более высокочастотных рабочих сигналов и, соответственно, больших разностей доплеровских
сдвигов в первом и втором каналах, величина сигнального напряжения имеет
большую величину ( U В ( 2 f 1) > U В ( f 1) ), что увеличивает как отношение «сигнал/шум», так и помехоустойчивость рассматриваемого приемного тракта.
Выбор того или иного рабочего сигнала осуществляется путем подачи оператором с блока управления 24 сигналов на управляющие входы как пятивходовых
(13), так и двухвходовых (16) аналоговых ключей, что в свою очередь определяется необходимой точностью выполнения задачи определения местоположения донного маяка с судна-носителя устройства в вертикальной плоскости.
Приемный тракт для определения параметров движения судна-носителя данной навигационной системы относительно маяка работает на двух сигналах кратных частот, что позволяет регулировать точность измерений. С выходов соответствующих усилителей 11 первого канала через первый аналоговый ключ 16 электрические сигналы с частотами ( f1 ± f D ( f 1) ) или ( 2 f 1 ± f D ( 2 f 1) ) поступают на
первый вход второго частотного дискриминатора 17, на второй вход которого с
выхода третьего аналогового ключа 18 подаются соответственно один из сигналов
с частотой f1 или 2 f1 без доплеровского смещения. Для этого первый и второй
входы третьего аналогового ключа 18 соединены с выходом дополнительного генератора 19 гармонического сигнала с частотой f1 напрямую и через умножитель
частоты 20 с коэффициентом умножения –«2» соответственно. Выбор того или
иного сигнала осуществляется путём подачи с блока управления 24 соответствую120
Раздел II. Навигационные системы
щих сигналов на управляющие входы первого и третьего аналоговых ключей 16,
18, а также блока обработки вторичной доплеровской информации 21. На выходе
частотного дискриминатора 17 выделяется электрический сигнал с частотой, соответствующей доплеровскому смещению ( f D ( f 1) ) или ( f D ( 2 f 1) ), что позволяет в
блоке обработки вторичной доплеровской информации 21 рассчитать значения
скорости судна-носителя устройства на основе эффекта Доплера по соотношению
υ ( nf ) = ± c ⋅ f D ( nf ) 2nf ⋅ cos(θ В − θ см ) = ± f D ( nf ) K V ( nf ) ,
(7)
где K V ( nf ) – скоростная чувствительность приемного тракта для акустического
сигнала на частоте nf , представляющая собой приращение доплеровской частоты
при изменении скорости на 1 узел; υ ( nf ) – скорость относительного сближения (+)
или удаления (–) маяка-пингера и судна, измеренная на соответствующем акустическом сигнале; nf – частота акустического сигнала, используемого для измерения параметров движения; θ В – измеренное значение угла места пеленгуемого
донного маяка в вертикальной плоскости; n = 1, 2 – номер используемой гармоники; с – скорость звука в водной среде.
Предположим, что осуществляется завершающая стадия точного определения
местоположения маяка при маневрировании судна-носителя, в процессе выполнения которой целесообразно кроме измерения пеленга (курсовой угол θ Г и угол
места θ В ) маяка иметь возможность получения информации и о дальности до него. В данном случае для определения расстояния до пеленгуемого маяка можно
использовать физические особенности нелинейной генерации акустических сигналов суммарной f + = f 2 + f1 частоты, вторых гармоник 2 f1 , 2 f 2 волн накачки
при распространении в водной среде, осевые распределения уровней звуковых
давлений, которых описываются следующими зависимостями [8]:
εω + p01 p02 l Д
P+ =
2 ρ 0 с 03
P2 f 1, 2 =
εω1, 2 p012 ,02 l Д 1, 2
2 ρ 0 c 03
0,25 ln 2 (1 + Z H2 ) + arctg 2 Z H
⋅ exp(−α + z ) ,
1 + Z H2
0,25 ln 2 (1 + Z H2 1, 2 ) + arctg 2 Z H 1, 2
1 + Z H2 1, 2
(8)
⋅ exp(−α 2 f 1, 2 z ) , (9)
где ω + = 2π ( f1 + f 2 ), ω1,2 = 2π ⋅ f1,2 , p01,02 – амплитуды звукового давления
сигналов накачки с частотами f1,2 у поверхности антенны;
l Д = a 2ω 0 2c0 , l Д 1, 2 = a 2ω1, 2 2c0 – длины зон дифракции Френеля для сигналов с центральной частотой накачки f 0 = ( f1 + f 2) 2 и исходных частот f1 , f 2 ;
Z H = z l Д , Z H 1, 2 = z l Д 1, 2 – нормированная продольная координата;
α + , α 2 f 1, 2 – коэффициенты затухания акустических сигналов суммарной частоты,
вторых гармоник исходных волн накачки. Как видно из (8) и (9), второй и третий
сомножители и определяют продольное распределение амплитуд звукового давле121
Известия ЮФУ. Технические науки
Тематический выпуск
ния данных сигналов на оси параметрической антенны маяка, причем анализ нелинейной генерации высокочастотных сигналов комбинационных частот параметрической антенной, образованной коллинеарными акустическими пучками с гауссовым
поперечным распределением накачки средней интенсивности, что позволяет сделать
следующий вывод: на оси параметрической антенны маяка при увеличении продольной координаты z амплитуды звуковых давлений высокочастотных сигналов монотонно возрастают, достигая максимумов различной величины (эффективность генерации прямо пропорциональна квадрату частоты акустического сигнала) на близко
расположенных расстояниях z M ( + ) = 1,425 ⋅ l Д , z M ( 2 f 1,2 ) = 1,425 ⋅ l Д ⋅ ( f1,2 f 0 ) , после чего происходит спад уровней, обусловленный дифракционной расходимостью, причем учет затухания высокочастотных сигналов (при f1 < f 2 ,
р 01 = р 02 = р 0 ) оказывает заметное влияние на уровни амплитуд звуковых давлений в дальней зоне преобразователя накачки параметрической антенны маяка,
выражающееся в их уравнивании и слиянии всех трех осевых распределений, что
обусловлено следующим соотношением пространственных коэффициентов затухания: α 2 f 2 > α + > α 2 f 1 .
Исходя из представленных выводов и соотношений (8)-(9), приблизительную
оценку дальности нахождения маяка от судна-носителя предлагаемого устройства
можно осуществить, например, разделив друг на друга аналитические выражения
вида (9) для амплитуд звуковых давлений P2 f 1 и P2 f 2 вторых гармоник исходных
сигналов накачки с учетом того, что вторые сомножители, описывающие осевые
распределения данных сигналов, приблизительно равны друг другу при условии,
что частоты накачки f1 ≈ f 2 . В этом случае мы получим
P2 f 1 ≈ ( f1 f 2 ) 2 ⋅ P2 f 2 ⋅ exp[(α 2 f 1 − α 2 f 2 ) ⋅ z ] .
(10)
Взяв натуральный логарифм от (10), можно рассчитать дальность нахождения
маяка
z≈
ln( P2 f 1 ⋅ f 22 P2 f 2 ⋅ f12 )
α2 f1 −α2 f 2
.
(11)
Аналогичные соотношения для этой же дальности z маяка можно получить
и для других отношений амплитуд звуковых вторичных высокочастотных компонент – Р+ Р2 f 1 , P2 f 2 P+ , что позволит увеличить точность расчета за счет усреднения. Приемный тракт для расчета дистанции до маяка включает в себя три
измерителя амплитуд 22 и вычислительный блок 23, причем входы измерителей
амплитуд 22 соединены с выходами детекторов 12 во втором канале, вырабатывающих видеоимпульсные напряжения U 2 ( 2 f 1) , U 2 ( 2 f 2 ) , U 2 ( f + ) , измеренные величины которых поступают на входы вычислительного блока 23, причем в момент
точной пеленгации маяка по сигналу с блока управления 24 производятся необходимые вычисления, результаты которых поступают на четвертый вход устройства
отображения информации 15.
Данная параметрическая навигационная система с гидроакустическими маяками может быть использована в качестве гидроакустической измерительной подсистемы, входящей в состав судовой системы как для обеспечения удержания суд122
Раздел II. Навигационные системы
на-носителя в точке проведения работ, так и для получения необходимой информации о ходе работ на грунте, связанных с использованием механизмов или со
строительством подводных сооружений, а также для обеспечения безопасности
движения судов по маршруту, предназначенному для плавания и маневрирования в
пределах естественных узкостей, фарватеров, при входах в гавани и т.д.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бородин В.И., Смирнов Г.Е., Толстякова Н.А., Яковлев Г.В. Гидроакустические навигационные средства. – Л.: Судостроение, 1983. – 264 с.
2. Простаков А.Л. Электронный ключ к океану: Гидроакустическая техника сегодня. – Л.:
Судостроение, 1978. – 192 с.
3. Новиков Б.К., Руденко О.В., Тимошенко В.И. Нелинейная гидроакустика. – Л.: Судостроение, 1981. – 264 с.
4. Маленькая энциклопедия. Ультразвук. Глав. ред. И.П. Голямина. – М.: Советская энциклопедия, 1979. – 400с.
5. Евтютов А.П., Колесников А.Е., Ляликов А.П. и др. Справочник по гидроакустике. – Л.:
Судостроение, 1982. – 344 с.
6. Колчеданцев А.С. Гидроакустические станции. – Л.: Судостроение, 1982. – 240 с.
7. Волощенко В.Ю. Пат. № 2138059 (РФ). Акустический пеленгатор. МКИ G01S
3/00,3/80,15/08, опубл. 20.09.1999, Бюл. № 26.
8. Волощенко В.Ю. Исследование и разработка параметрической антенны в режиме генерации акустических сигналов суммарной частоты для использования в гидроакустических системах ближнего действия: Дис. … канд. техн. наук. – Таганрог, 1993. – 165 с.
123
Известия ЮФУ. Технические науки
Тематический выпуск
Раздел III. Интеллектуальные технологии управления
УДК 629.7.016
А.Я. Бондарец, О.Д. Крееренко
ИСПОЛЬЗОВАНИЕ НЕЙРОСЕТЕЙ ДЛЯ ИДЕНТИФИКАЦИИ
ПАРАМЕТРОВ ТОРМОЖЕНИЯ КОЛЕС САМОЛЕТА НА ВЗЛЕТНОЙ
ПОЛОСЕ, ПОКРЫТОЙ ОСАДКАМИ
Введение
Расчеты и математическое моделирование являются необходимыми инструментами для выполнения исследований и определения эксплуатационных ограничений при разработке авиационной техники. Однако применение расчетных методов сталкивается с проблемой согласования результатов расчета (математического
моделирования) и эксперимента, т.е. необходима идентификация параметров по
экспериментальным данным о поведении реального объекта.
Опыт разработки и применения процедуры уточнения параметров математической модели динамики полета по результатам летных испытаний [7,8] показал,
что наиболее сложным элементом практических задач идентификации является
согласование результатов, получаемых на различных образцах исходных данных.
В процедуре [7] была сделана попытка преодоления этой проблемы путем идентификации поправок к аэродинамическим коэффициентам с оптимизацией критериев
рассогласования сразу по двум (нескольким) фрагментам эталонных данных, полученным в близких условиях, например, дачи "на себя" и "от себя" ("влево", "вправо"), выполненные при одинаковых скоростях и высотах полета. Тем не менее при
решении задачи [8] основные усилия пришлось потратить именно на согласование
и «сшивку» поправок, которые определяла процедура идентификации на разных
образцах данных.
Искусственные нейронные сети (ИНС) содержат в себе адаптивные алгоритмы,
которые позволяют воспроизводить математические зависимости между входными и
выходными параметрами обьекта. Причем в отличие от традиционных методов
идентификации, нейронные сети обладают памятью, т.е. результаты уточняются и
накапливаются при повторных циклах „обучения” (при использовании новых
образцов исходных данных). Таким образом, нейронные сети потенциально
позволяют получить необходимые зависимости сразу для широкого спектра условий
и при этом нивелировать неизбежные в экспериментальных данных случайные
факторы (при повторных циклах „обучения” по различным образцам данных).
Известны примеры использования ИНС для идентификации параметров
математической модели самолета [5,6]. Однако в [5], на наш взгляд, не исчерпаны
вышеназванные преимущества нейросетей – искомые параметры матмодели
идентифицируются в линейном или кусочно-линейном представлении численнымим
значениями, хотя ИНС потенциально обеспечивают поиск нелинейных
функциональных зависимостей. В работе [6] обучение ИНС включено в алгоритм
адаптивной системы управления полетом, т.е. оценка фактических параметров математической модели не рассмотрена как самостоятельная задача.
124
Раздел III. Интеллектуальные технологии управления
В данной работе применение ИНС исследовано в сравнительно простой
задаче оценки фактических параметров сопротивления от колес при движении
самолета на взлетно-посадочной полосе. В последние годы международные
авиационные организации уделяли значительное внимание исследованиям поведения самолетов на земле, в частности, при выполнении взлетов и посадок на
ВПП, покрытых осадками. В разработанных JAA предполагаемых поправках
(NPA No 14/2004) [1] к европейским сертификационным требованиям обобщены
современные знания в этой области, однако сделан вывод о необходимости
дальнейшего изучения этой проблемы. О необходимости таких исследований
свидетельствуют и сообщения об авиационных происшествиях, связанных с выкатыванием самолета за пределы ВПП. Актуальность адекватного математического описания движения самолета по покрытой осадками ВПП обусловлена
тем, что в руководстве по эксплуатации (РЛЭ) должен быть отражен ряд типовых вариантов условий, а в летных испытаниях невозможно «точное попадание»
в типовые условия – комбинации параметров состояния ВПП всегда уникальны
для конкретного эксперимента. То есть для типовых условий загрязненной
осадками ВПП, в отличие от сухой, рекомендации РЛЭ не всегда возможно подтвердить прямой демонстрацией летного эксперимента.
В докладе представлен опыт применения нейронной сети для определения
фактических коэффициентов сопротивления от колес при движении самолета Бе200 на взлетно-посадочной полосе, в том числе покрытой осадками (льдом, снегом, слякотью).
Выбор вида ИНС
Эффективность нейронных сетей для решения подобной задачи (оценки коэффициента трения качения) уже исследовалась авторами ранее [2]. Как и при
идентификации коэффициента трения, для решения задачи выбрана нейронная сеть
DCSL (Dynamic Cell Structure) из библиотеки [3] адаптивных нейронных сетей
«Adaptive Neural Network Library».
Библиотека адаптивных нейронных сетей представляет собой набор блоков
адаптивных нейронных
состоит из 11 блоков, в
которых реализованы следующие пять видов нейронных сетей:
1) ADALINE – адаптивные линейные сети (Adaptive Linear Network);
2) EBPA – двухслойные нейросети с расширенным алгоритмом обратного
распространения (Extended BackPropagation);
3) RBF – нейронные сети с радиально-базисными функциями активации (Ra-
(подсистем), в которых реализуется работа нескольких
сетей, содержащих различные алгоритмы адаптации. Она
dial Basis Functions);
4) EMRAN – RBF-cети с расширенным минимальным ресурсом (Extended
Minimal Resource Allocating);
5) DCS – кусочно-линейные и RBF-сети с динамической ячеистой структурой
(Dynamic Cell Structure).
В процессе выполнения работы в качестве средства идентификации было
испытано несколько вариантов нейронных сетей. Опыт показал, что нейронная
сеть DCSL наиболее подходит для нашей задачи, так как требует небольшое число повторных циклов „обучения” для хорошей сходимости по отдельному
образцу данных и, что более важно, лучше сохранаяет хорошую сходимость,
когда после обучения на других образцах данных мы возвращаемся к „уже
пройденному” образцу. Преимущества «долговременной памяти» DCSнейросетей отмечены и в работе [6].
125
Известия ЮФУ. Технические науки
Тематический выпуск
DCSL представляет собой нейронную сеть с радиально-базисными функциями активации (RBF). Согласно [4] RBF-сети свободны от недостатков, присущих
обучаемым многослойным нейронным сетям (МНС), и в этом смысле могут рассматриваться как альтернатива МНС. RBF-сети являются универсальными аппроксиматорами и при необременительных ограничениях могут быть применены для
аппроксимации любой непрерывной функции. RBF-сети являются двухслойными
сетями, в которых в рабочем режиме используется скрытый слой с фиксированным
нелинейным преобразованием вектора входа, т.е. с ненастраиваемыми в процессе
работы весовыми коэффициентами. Этот слой осуществляет статическое отображение входных переменных r в новые переменные q. Второй, линейный выходной,
слой «взвешивает» эти переменные с настраиваемыми весами w. Скрытый слой
RBF-сети выполнен в виде «самоорганизующейся карты Кохонена», каждый процессорный элемент которой имеет дополнительные боковые связи с соседними
нейронами этого же слоя. Ошибка аппроксимации вычисляется непосредственно
на выходе сети, но настройка только единственного, линейного по параметрам настройки слоя снимает проблему поиска глобального минимума функционала обучения и способствует быстрой сходимости процесса обучения сети.
Алгоритм
В нашей задаче искусственные нейронные сети (ИНС) являются инструментом идентификации. В процессе идентификации («обучения» ИНС) должны быть
получены фактические параметры трения качения, сопротивления слоя осадков и
торможения, при которых минимизируется рассогласование между эмпирическими
и расчетными ускорениями. Задача реализована с использованием программных
средств пакета Matlab Simulink.
На рис. 1 дан фрагмент схемы задачи идентификации, – структура обмена
данными с блоком DCSL.
Рис. 1. Схема подключения ИНС-блока
Вход ’x’ – аргументы определяемой нейронной сетью зависимости (в нашей
задаче это Fy и Vtravel); процедура обучения нейронной сети протекает успешнее,
126
Раздел III. Интеллектуальные технологии управления
если аргументы находятся в диапазоне ±1, поэтому перед подачей в блок DCSL
выполняется нормирование значений Fy и Vtravel.
Выход ’ys’ – определенное нейронной сетью значение функции (в нашем
случае это µ R).
Вход ’e’ – критерий качества (в нашем случае это разница текущего расчетного и текущего эмпирического ускорений).
Вход ’LE’ – ключ, при LE = 1 выполняется обучение нейронной сети, при
LE = 0 – обучение отключено.
Выход ’X’ – внутренние параметры нейронной сети (массив данных). В процессе обучения его содержание модифицируется.
Для решения задачи разработана математическая модель движения самолета
по ВПП. В математической модели учитываются аэродинамические характеристики самолета, в том числе влияние положения механизации крыла, отклонений руля
высоты и стабилизатора, а также выпуска аэродинамических тормозов (тормозных
щитков и интерцепторов). Используются известные высотно-скоростные характеристики двигателя. Воздушная скорость определяется с учетом скорости и направления ветра. Учитываются соответствующие экспериментальным данным градиенты (уклоны) поверхности ВПП. Для целей идентификации математическая
модель реализуется в виде расчета текущих продольных ускорений в процессе
воспроизведения параметров реальных пробежек
wxcalc=Fx / m,
(1)
где Fx – см. формулу (2); m – масса самолета.
При этом в процессе обучения нейронных сетей выборки скорости и положения самолёта на ВПП (пройденный путь) берутся из эмпирических данных, а для
контрольного моделирования математическая модель реализуется с интегрированием (получением расчетной динамики роста скоростей и дистанций).
Из экспериментальных данных определяются эмпирические ускорения wxempir
(численным дифференцированием путевой скорости). Минимизация невязки ускорений выполняется путем модификации сил от колес шасси. Остальные составляющие расчетного ускорения предполагаются достоверными.
Проекции сил на продольную (вдоль ВПП) ось в данной задаче представлены
следующей формулой:
Fx = Pх – G · sin(i) – Xaero – FR+D – FB ,
G – вес самолета;
i – угол уклона поверхности ВПП (вверх > 0);
Pх – проекция силы тяги двигателей на ось ОХ;
Xaero – сила аэродинамического сопротивления;
FR+D – суммарная сила сопротивления качению
осадков;
(2)
где
и сопротивления от слоя
FR+D = µ R+D (δ гл / r гл, V, dc) · Fyгл + µ R+D (δ нос / r нос, V, dc) · Fyнос; (3)
δ гл(Fyгл), r гл – вертикальная деформация шины главных колес и радиус необжатого главного колеса;
δ нос(Fyнос), r нос – вертикальная деформация шины носовых колес и ра-
диус необжатого носового колеса;
127
Известия ЮФУ. Технические науки
Тематический выпуск
Fyнос и Fyгл – вертикальные нагрузки на колесах носовой и главных стоек шасси;
dc – приведенная к плотности воды толщина осадков, эквивалентная толщина слоя воды (W.E.D);
V – путевая скорость самолета;
FB – сила от тормозов колес;
M B /(r гл − δ гл ), если
FB =
MAX
гл
,
Fy ⋅ µ t /g
FB ≤ Fy гл ⋅ µ t /g MAX ,
(4)
MB = f(PB) – суммарный тормозной момент;
PB – давление в тормозной системе;
µ t/gMAX= f(V, µ) – максимальный коэффициент торможения (tire to ground), который при данных условиях на ВПП обеспечен тормозной системой данного самолета (с учетом эффективности системы антиюза);
µ – номинальный коэффициент сцепления на ВПП.
нос
гл
Для определения Fy и Fy использованы условия равновесия проекций сил
на ось ОY (5) и балансировки моментов относительно оси OZ (6).
Fyнос + Fyгл + Yaero + Py – G·cos(i) = 0,
(5)
где Yaero – аэродинамическая подъемная сила;
Py – проекция силы тяги двигателей на ось ОY.
Fyносaнос – Fyгл aгл+Yaero(xT–xT0) + MZaero + MZдв – (FR+D + FB) yшасси –
– Xaero(yT – yT0) = 0,
(6)
где aнос, aгл – плечи вертикальных нагрузок на колесах носовой и главных стоек
шасси относительно центра тяжести самолета;
xT, xT0 – текущее и продувочное положение центра тяжести самолета по оси ОХ;
yT, yT0 – текущее и продувочное положение центра тяжести самолета по оси ОY;
MZaero – момент аэродинамических сил;
MZдв – момент от тяги двигателей;
yшасси – плечо сил FR+D и FB относительно центра тяжести.
Алгоритм идентификации схематично показан на рис. 2. Закономерности сопротивления качению на колесах носовой стойки приняты совпадающими с параметрами, которые процедура идентификации определяет для колес основной стойнос
ки. Поэтому для µ R+D используется результат обучения, полученный через характеристики главного колеса.
Особенностью задачи является то, что мы имеем, в каком-то смысле, одно
calc
empir
уравнение (wx = wx
) и два неизвестных (µ R+D и µ t/gMAX). Для преодоления этой
проблемы использовано управление «ключом обучения»: при наличии давления в
тормозах состояние искусственной нейронной сети (ИНС) «R+D» замораживается,
идет обучение только ИНС «B». И наоборот.
128
Раздел III. Интеллектуальные технологии управления
Рис. 2. Схема алгоритма идентификации (фигурными стрелками показаны
данные, которые берутся из записей летного эксперимента)
Результаты идентификации
Для идентификации коэффициента трения качения использованы данные о
параметрах пробежек, полученные в летных испытаниях самолета. Данные для
сухой ИВПП (искусственной взлетно-посадочной полосы) содержали 5 пробежек
при весе самолета около 32 т, для покрытой уплотненным снегом ВПП 4 пробежки при весе около 30 т и для покрытой слякотью ВПП 1 пробежка при весе около
35 т. На рис. 3 показаны области определения функции µ R+D (δ / r, V), которые отражены в исходных данных. За пределами этих областей закономерности, которые
содержит ИНС, следует рассматривать как ненадежную экстраполяцию. Необходимы результаты пробежек с весом самолета, близким к максимальному, чтобы
уточнить влияние больших обжатий колеса на коэффициент µ R+D (δ / r, V).
В процессе выполнения данной работы были выработаны некоторые методические приемы, которые позволяют сократить время и повысить эффективность
процесса обучения ИНС в нашей задаче. В частности, это «дискретизация» значений входных для ИНС сигналов, которая позволяет сократить разнообразие комбинаций в обучающих выборках. Для определения универсальных (пригодных для
сходимости по всем образцам эмпирических данных) зависимостей необходимо
разумное чередование циклов обучения по разным образцам. Если ИНС уже обучена по нескольким образцам данных, при добавлении нового образца данных необходимо провести повторные циклы обучения и по «старым» образцам, чтобы не
потерять универсальность результата. После циклов «первоначального обучения»,
129
Известия ЮФУ. Технические науки
Тематический выпуск
в которых задействованы обе ИНС «R+D» и «B», выполнялись циклы «доучивания», в которых одна из ИНС «замораживалась». Процесс изменения параметров
при обучении ИНС «B» показан на рис. 4.
Рис. 3. Отраженные в экспериментальных данных области определения функции
µ R+D (δ / r, V): а – на сухой ВПП и на ВПП, покрытой уплотненным снегом;
б – на ВПП, покрытой слякотью
Рис. 4. Процесс обучения ИНС «В» (оценка предельного коэффициента сцепления
µ t/gMAX) . Этап «дообучения» при фиксированном состоянии ИНС «R+D».
Использовано восемь обучающих выборок. Из них 3 на сухой ВПП (dry), 4 на ВПП
покрытой уплотненным снегом (compacted snow) и 1 на ВПП
покрытой слякотью (slush)
Полученные в данной работе результаты потребовали около 200 циклов обучения на каждый образец данных (при отработке процедуры идентификации пришлось выполнить значительно больше циклов, ориентировочная цифра 200 отражает число циклов после «обнуления» памяти ИНС в последнем варианте алгоритма и методики).
Параметры нейронной сети не дают наглядного представления о полученной
зависимости. Чтобы представить результаты идентификации в наглядном виде,
130
Раздел III. Интеллектуальные технологии управления
выполнено «зондирование» нейронной сети. Результаты представлены в графическом виде и скорректированы вручную (аппроксимированы гладкими кривыми), а
за пределами областей определения (рис. 3) экстраполированы экспертным путем.
Полученные зависимости показаны на рис. 5. Результаты контрольного моделирования в сопоставлении с эмпирическими данными, а также с результатами при
MAX
априорно назначенных значениях параметров µ R+D и µ t/g
, показаны на рис. 6.
MAX
Априорно назначались µ R+D = 0,3 и µ t/g
= µ.
Рис. 5. Результаты оценки расчетных параметров движения самолета Бе-200 по
ВПП. “ANN” – значения, полученные зондированием ИНС, “sm” –
сглаженные вручную характеристики: а – на сухой ВПП и на ВПП, покрытой
уплотненным снегом; б – на ВПП, покрытой слякотью
131
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 6. Результаты математического моделирования с априорно назначенными
параметрами (calc 0) и с параметрами, полученными после идентификации
(calc 1), в сопоставлении с результатами испытаний (empir)
132
Раздел III. Интеллектуальные технологии управления
Результаты идентификации необходимо уточнить по дополнительным
образцам экспериментальных данных, полученным при достаточно широком
диапазоне весов самолета. Для чистой ВПП определена (рис. 5,а) существенная
зависимость µ R от обжатия колес и скорости. Так как диапазон обжатий колес в
рассмотренных экспериментах был обусловлен только выпуском воздушных
тормозов, а вес самолета был практически одинаковым, возможно здесь
проявилось влияние неточности аэродинамических данных. Обработка экспериментов, выполненных при большом весе самолета без выпуска воздушных
тормозов, позволит уточнить картину.
Влияние слоя слякоти на сопротивление качению очевидно при
сопоставлении µ R(δ / r, V) на рис. 4,а и µ R+D(δ / r, V) на рис. 5,б. После накопления
достоверных результатов идентификации коэффициента µ R на чистой ВПП мы
предполагаем вместо комплексного коэффициента µ R+D(δ / r, V) оценивать в
процедуре идентификации саму добавку сопротивления от слоя осадков, полагая
при этом фактическую характеристику µ R(δ / r, V) уже известной.
Фактический (с учетом особенностей антиюзовой системы
самолета)
коэффициент сцепления для сухой ВПП оказался довольно низким (около 0,35).
MAX
Поведение этого коэффициента µ t/g
(V) на уплотненном снеге (понижение
сцепления на малых скоростях) также требует дополнительного анализа и
MAX
уточнения. Анализ полученной для слякоти зависимости µ t/g
(V) в сопоставлении
с рекомендуемой для этих условий расчетной формулой
µ t/gMAX(V) = –0,0632(V / 100)3 + 0,2683(V / 100)2 – 0,4321(V / 100) + 0,3485
из NPA-14 (V – скорость в узлах) показывает, что идентифицированные
фактические параметры Бе-200 имеют схожее поведение, однако хуже расчетных
(рис. 7).
Рис. 7. Полученная для условий слякоти зависимость µ t/gMAX(V) в сопоставлении с
рекомендуемой для этих условий в NPA-14
Если предположить, что формула из NPA-14 должна в расчетах применяться
с установленной в АП-25 (для влажной ВПП) поправкой, зависящей от типа установленной на самолете антиюзовой автоматики, то наоборот – полученная харак-
133
Известия ЮФУ. Технические науки
Тематический выпуск
теристика оказывается почти в полтора раза лучше рекомендуемой (на Бе-200 установлен антиюз импульсного типа, – рекомендуемый поправочный коэффициент
равен 0,3).
Выводы
Опыт выполнения данной работы подтвердил целесообразность использования ИНС для оценки фактических параметров математической модели движения
самолета по ВПП. Показано, что основанный на применении ИНС алгоритм позволяет выполнять оценку значений параметров в виде функциональных зависимостей. При этом также обеспечивается согласование результатов получаемых по
разным образцам экспериментальных данных (сглаживание влияния случайных
факторов).
В то же время нужно учитывать, что разработанная процедура идентификации не обеспечивает автоматическое преобразование эмпирических данных в искомые закономерности. Практика идентификации показала, что успешное решение
этой задачи не исчерпывается обработкой данных. То, что ИНС обеспечивают получение функциональных зависимостей и согласование результатов обработки по
нескольким образцам данных, позволяет уменьшить трудности согласования и
«сшивки» получаемых значений параметров. Однако необходимо участие человека-эксперта для оперативного анализа исходных данных и результатов, а также
настройки опций процедуры обработки.
Выбранная для выполнения данной работы программная среда (Matlab Simulink) обеспечила возможности отработки подходов и тестирования различных вариантов алгоритма. Однако многие, в том числе очень простые, алгоритмические
приемы средствами Simulink реализовать трудно или невозможно. Имеются и проблемы с обеспечением удобного интерфейса. В частности, в задачах идентификации, где предполагается обработка и анализ большого числа вариантов экспериментальных данных, важно иметь надежно контролируемые средства управления
исходными данными, а также регистрации и оперативного графического анализа
результатов. Возможности управления исходными данными и графического контроля, которые предоставляет Matlab Simulink, неудовлетворительны для задач
такого типа.
Необходимо совершенствование алгоритма программы и методики ее применения, чтобы минимизировать вероятность получения ошибочных результатов и
уменьшить потребность в экспертном контроле процесса обработки. Поэтому для
решения более сложных практических задач идентификации целесообразно
разработать специальные программные средства, например, на платформе языка
программирования C++.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. JAA NPA. No 14/2004 on certification specifications for large aeroplanes (CS-25) Operation
on Contaminated Runways.
2. Бондарец А.Я., Крееренко О.Д. Использование нейронной сети для идентификации параметров математической модели самолета по данным из летных экспериментов //
Сборник докладов международной научно-технической конференции «Новые рубежи
авиационной науки» ASTEC’07. – М., 2007.
3. Giampero Campa & Mario Luca Fravolini, «Adaptive Neural Network Library», Version 3.1
(Matlab R11.1 through R13), West Virginia University, Jul 2003.
4. Терехов В.А. Нейросетевые системы управления: Учеб. пособие для вузов / В.А. Терехов, Д.В. Ефимов, И.Ю. Тюкин. – М.: Высш. шк., 2002. – 183 с.
134
Раздел III. Интеллектуальные технологии управления
Использование искусственной нейронной сети для определения аэродинамических характеристик самолета из летных испытаний / Ю.Г. Живов, А.В. Каргопольцев, А.С. Фадеев // Техника воздушного флота. 2007. Т.81. №3/4(686/687). – С.4-15.
5. Живов Ю.Г.
6. Williams-Hayes P.S. Selected flight tests results for online learning neural network-based
flight control system. - NASA/ TM-2004-212857, 2004.
7. Бондарец А.Я. Процедура уточнения математической модели динамики полета по результатам летных испытаний // Сборник докладов 3-й научной конференции «Гидроавиасалон-2000». – М., 2000.
8. Бондарец А.Я., Оголев Ю.А. Результаты уточнения математической модели динамики
полета самолета-амфибии Бе-200 по результатам летных испытаний // Сборник докладов 4-й научной конференции «Гидроавиасалон-2002». – М., 2002.
УДК 681.511.4
М.Ю. Сиротенко
СИНТЕЗ НЕЙРОСЕТЕВОГО ПЛАНИРОВЩИКА ПЕРЕМЕЩЕНИЙ
АВТОНОМНОГО РОБОТИЗИРОВАННОГО КОМПЛЕКСА НА БАЗЕ
ДИРИЖАБЛЯ, ФУНКЦИОНИРУЮЩЕГО В АПРИОРИ
НЕФОРМАЛИЗОВАННОЙ СРЕДЕ
Введение
Планирование перемещений мобильных роботов является высшей иерархической ступенью в структуре системы управления, получая на входе задание и выдавая на выходе траектории движения, при отработке которых робот достигает
цели. Передвижение робота в априори неформализуемой среде означает необходимость решения трудноформализуемых задач, таких как формирование пути обхода препятствий по неполным или зашумленным сенсорным данным. В данной
работе для решения этой задачи предлагается использовать аппарат нейронных
сетей и классические методы планирования траекторий. С учетом этого сформулируем постановку задачи.
Постановка задачи
Для синтеза планировщика перемещений необходимо на основе особенностей
объекта управления определить следующие основные начальные условия: тип
входных данных, тип выходных данных, размерность и тип конфигурационного
пространства, требования к быстродействию, требования к обходу препятствий,
требования к учету формы объекта, интеллектуальные функциональные возможности, критерии функционирования.
Особенности робототехнического комплекса на базе дирижабля заключаются
в следующем [1]:
1. как правило, большие габариты, сферическая форма;
2. малая динамика, большая инерционность, как следствие малая маневренность;
3. движение в трехмерном пространстве;
4. возможные препятствия – другие летательные объекты, а также объекты
рельефа и сооружения;
5. фоном, чаще всего, является небо, на котором любые объекты выглядят
контрастно.
135
Известия ЮФУ. Технические науки
Тематический выпуск
Первая и вторая особенности определяют необходимость раннего обнаружения препятствий и построения траекторий их обхода. Учитывая это целесообразно
формировать траектории движения не в виде отрезков прямых, а в виде квадратичных форм, которые в общем случае могут представлять собой окружности, эллипсы, параболы, гиперболы и точки. Третья особенность определяет размерность и
тип конфигурационного пространства. Четвертая особенность наряду с первой и
второй позволяют принять объект управления и препятствия сферами и эллипсами,
так как при большой инерционности, присущей дирижаблю, обход препятствий со
сложной внешней конфигурацией невозможен. Неформализуемость внешней среды определяет необходимость оперативного («онлайн») планирования траекторий
движения. Пятая особенность указывает на широкие возможности использования
системы технического зрения на базе телекамер в качестве источника входных
данных. В обобщенном виде исходные для решения задачи синтеза нейросетевого
планировщика перемещений роботизированного комплекса на базе дирижабля
представлены в таблице 1.
Таблица 1
Исходные данные для решения задачи синтеза нейросетевого планировщика
перемещений
Входные данные
Выходные данные
Размерность конфигурационного
пространства
Тип конфигурационного пространства
Требования к режиму работы
Обнаружение столкновений
Обход препятствий
Интеллектуальные функциональные
возможности
Критерии
Видеоизображение от системы
технического зрения
Траектория движения мобильного
робота в виде коэффициентов
квадратичной формы, целевая позиция
робота, карта
3
Декартовы координаты
Функционирование в реальном режиме
времени
Допускается рассматривать все объекты
как сферы конечного радиуса
Способность формирования траекторий
обхода статических и динамических
препятствий
Способность к обучению и адаптации,
устойчивость к шумам во входных
данных и изменениям внешней среды
Осуществимость прохода по траектории
Синтез планировщика
Структурно-алгоритмическая организация планировщика
На основе поставленной задачи была синтезирована функциональная схема
нейросетевого планировщика, представленная на рисунке 1.
Рассмотрим более подробно функциональную схему нейросетевого планировщика перемещений. Входными данными для планировщика являются изображение от системы технического зрения, цель и карта. Изображение содержит данные о внешней среде в трудноформализуемом виде, из которого планировщик
должен извлечь информацию о наличии препятствий на пути движения и скорректировать траекторию. Цель задается оператором и может представлять собой как
некоторую точку в пространстве, к которой необходимо осуществить движение,
136
Раздел III. Интеллектуальные технологии управления
так и траекторию по которой необходимо двигаться. В зависимости от типа цели
изменяется режим работы планировщика. Карта может представлять собой априори известные сведения о внешней среде, если таковые имеются. Это может быть
карта рельефа местности, или известных препятствий. В предельном случае карта
может быть пустой, что будет означать полное отсутствие каких-либо данных о
внешней среде.
Рис. 1. Функциональная схема нейросетевого планировщика перемещений
Различные входные данные подаются на различные блоки планировщика.
Видеоизображение после предварительной обработки поступает на вход сверточной нейронной сети (более подробно рассматривается в пп. 2. 3), которая формирует карты признаков, соответствующие внешней обстановке дирижабля. Цель и
карта поступают на вход блока формирования глобальной траектории (БФГТ). В
зависимости от типа цели, данный блок может функционировать в двух режимах.
В случае, когда в качестве цели задана точка, БФГТ, используя классические методы поиска пути, формирует траекторию движения в виде полетного задания от текущей точки к целевой, используя в качестве элементарных траекторий квадратичные формы. Когда целью является траектория, БФГТ ищет кротчайшее расстояние
от текущего положения к траектории и формирует полетное задание аналогично
первому режиму. БФГТ функционирует только когда была изменена цель или карта, поэтому к нему могут предъявляться более низкие требования по быстродействию, чем к остальным блокам системы.
На основе данных о глобальной траектории и текущем положении, поступающих от навигационной системы роботизированного комплекса, блок выборки
текущей траектории (БВТТ) определяет траекторию в полетном задании, которую
необходимо отрабатывать в данный момент времени.
Используя данные о текущей траектории движения и карты признаков, содержащие информацию о препятствии на пути следования дирижабля, полносвязная нейронная сеть (ПНС) формирует скорректированную траекторию движения в
виде коэффициентов квадратичной формы. В случае отсутствия препятствий на
пути движения выход ПНС будет эквивалентен выходу БВТТ. Данные коэффици-
137
Известия ЮФУ. Технические науки
Тематический выпуск
енты после прохождения блока постобработки выходных данных поступают на
векторный регулятор, который осуществляет отработку траектории движения.
Алгоритм формирования глобальной траектории
Как было отмечено ранее, среда функционирования дирижабля не предполагает его движения среди множества объектов сложной формы, а является движением по большей части в свободном пространстве с заданным рельефом и единичными препятствиями, аппроксимированными сферами или эллипсами. В таких
условиях наиболее подходит один из классических алгоритмов формирования глобальной траекторий. В данной работе в этих целях предполагается использовать
алгоритм вероятностного планирования траектории [2, 3].
Работа алгоритма основывается на двух фазах: фаза построения путевой карты и фаза уточнения. Пусть A – робототехнический комплекс на базе дирижабля, а
L – локальный планировщик. В данном алгоритме L представляет собой функцию,
на вход которой поступают две точки в конфигурационном пространстве, а ее выходом является осуществимый путь, соединяющий эти точки в отсутствие препятствий. Для случая, когда конфигурационное пространство является Декартовым,
выходом L всегда будет являться отрезок, соединяющий две точки в пространстве.
Также для Декартовых конфигурационных пространств локальный планировщик L
всегда будет симметричным, т.е. для любых заданных конфигураций a и b
L(a,b)=L(b,a). В фазе построения путевой карты строится вероятностная карта и
записывается в ненаправленный граф G=(V,E), где вершины графа V – вероятностно сформированные свободные точки конфигурационного пространства, а ребра
графа E – осуществимые пути, сформированные локальным планировщиком. Построение путевой карты происходит итерационно с использованием вероятностных
методов. В каждой итерации произвольным образом выбирается некоторая свободная конфигурация c и добавляется к V. Для выбора большего числа узлов в
«сложных» местах конфигурационного пространства могут использоваться эвристические методы. Далее производится попытка соединить каждую вновь сформированную вершину графа c с ранее добавленными с помощью L, и если они успешно соединены, то новое ребро добавляется к E.
В фазе уточнения для произвольно заданных точки старта s и целевой точки g
ищутся осуществимые пути Ps и Pg такие, что Ps соединяет s с вершиной графа , а
~ такими, что ~
Pg соединяет g с вершиной графа g
s и g~ граф-связаны. Если такие
пути успешно найдены, производится поиск по дереву графа с целью найти путь
s и g~ .
PG в графе G, соединяющий ~
Синтез нейронной сети
Для решения трудноформализуемой задачи определения препятствия на пути
движения робота по видеоинформации в данной работе предлагается использовать
комбинацию сверточной нейронной сети (СНС) и классической многосвязной нейронной сети [4]. Сверточная нейронная сеть представляет собой особый класс НС,
наилучшим образом подходящий для интеллектуальной обработки визуальных и
аудио данных. СНС объединяют в себе 3 архитектурных идеи для достижения инвариантности к сдвигу и искажению исходного изображения: локальные поля восприятия, разделяемые веса и пространственная субдискретизация [5]. СНС состоит
из чередующихся слоев свертки и субдискретизации. Поступающее на вход изображение подвергается свертке с некоторым ядром свертки в соответствии с выражением:
138
Раздел III. Интеллектуальные технологии управления
ks ls
C{n}(i , j ) = F ∑∑ K {n}( k , l ) ⋅ S (i − k , j − l ) + B( n ) ,
k =1 l =1
(1)
где C – результат свертки (карта признаков), n – номер слоя, i, j – индексы, определяющие положение элемента в карте признаков, F – функция насыщения, обычно
задаваемая как сигмоидальная или тангенциальная функция, k, l – индексы определяющие положение элемента в матрице ядра свертки, ks, ls – размеры ядра свертки,
K – ядро свертки, S – входное изображение, B – матрица смещений.
Ядро свертки является набором разделяемых весовых коэффициентов. Результатом данной операции является также некоторое изображение, которое называется картой признаков. В зависимости от выбранного ядра свертки, карта признаков будет выделять те или иные характеристики входного изображения. Для
наиболее полного выделения характеристик входного изображения используется
несколько различных ядер свертки так, что на выходе сверточного слоя получается
несколько карт признаков.
За сверточным слоем следует слой усреднения и субдискретизации, который
понижает размерность карты признаков, тем самым понижая чувствительность
выходов к сдвигам и поворотам.
Такое чередование сверточных и субдискретизирующих слоев приводит к постепенному увеличению количества карт признаков при уменьшении их размерности от слоя к слою.
Выходы сверточной нейронной сети, совместно с данными о текущей траектории подаются на входы классической многосвязной нейронной сети для формирования коэффициентов квадратичной формы.
Выбор количества слоев и нейронов в слоях. Для корректной работы нейросетевого планировщика необходимо правильно выбрать количество слоев и нейронов в слоях для сверточной и классической полносвязной нейронных сетей.
Выбор количества слоев для сверточной сети определяется размерностью
входных данных и сложностью искомых характеристик изображения. Так как при
субдискретизации изображение уменьшается в два раза по вертикали и по горизонтали, количество слоев пропорционально размерности входного изображения.
Для подбора количества нейронов классической полносвязной нейронной сети предлагается использовать алгоритм OBD (optimal brain damage), который итерационно удаляет нейроны, которые слабо задействованы в вычислительных процессах.
Формирование обучающей выборки. Для обучения нейронной сети в составе планировщика требуется сформировать максимально репрезентативную
обучающую выборку. Для этого необходимо определить тип входных и выходных данных, а также рассмотреть все возможные классы ситуаций, в которых
может оказаться РВК.
Входными данными для нейронной сети являются два типа информации: изображение от системы технического зрения, представляющее собой матрицу интенсивностей, и коэффициенты квадратичной формы, описывающей желаемую траекторию движения. Выходными данными сети являются коэффициенты квадратичной формы, описывающей скорректированную траекторию движения.
139
Известия ЮФУ. Технические науки
Тематический выпуск
Среди возможных ситуаций, можно выделить следующие:
Ситуация
Отсутствие препятствий
Наличие одного препятствия малого размера
Наличие большого количества препятствий
делающих невозможным огибание
препятствия
Выходные значения
Соответствует входным значениям
Корректировка траектории в дугу,
огибающую препятствие
Корректировка траектории со
сменой направления движения
Обучение сети. Для обучения сверточных сетей наилучшим образом подходит стохастическое обучение, методом градиентного спуска. Такой тип обучения
имеет ряд преимуществ по сравнению с пакетным обучением. Во-первых стохастическое обучение гораздо быстрее, поскольку не требует вычисления Гессиана
для всех обучающих образцов. Во-вторых стохастическое обучение менее подвержено попаданию в локальные минимумы и поэтому зачастую дает лучшие результаты чем пакетное обучение. В третьих стохастическое обучение может использоваться для отслеживания изменений в процессе обучения без необходимости ожидания конца обучения.
Пусть имеется обучающая выборка из m элементов. Пусть также все настраиваемые параметры сети включая веса и смещения представлены в виде вектора
W=[w1…wn]. Общее количество весов и смещений соответственно равно n. Количество выходов сети равно k. Выходы обозначим как o1..k. Пусть D = [d1…dk] - требуемые значения выборки. Тогда вектор ошибки e = [e1…ek], где ei = di- oi. Для
среднеквадратичной целевой функции, заданной как:
верхний индекс обозначает номер обучающей выборки. Введем также для удобства
вектор
.
Учитывая введенные обозначения, Якобиан будет равен
тогда градиент можно вычислить как
140
Раздел III. Интеллектуальные технологии управления
откуда следует, что градиент это вектор-столбец, каждый элемент которого определяет суммарное влияние каждого веса на значение целевой функции.
Моделирование
Для моделирования работы нейросетевого планировщика был синтезирован
планировщик, структура которого показана на рисунке 2.
Рис. 2. Структура нейросетевого планировщика перемещений
Данная структура была реализована в среде Матлаб с использованием инструментария создания, обучения и моделирования нейросетевых планировщиков [6]. В качестве обучающей выборки с помощью программного обеспечения
по созданию псевдореалистичной трехмерной графики были сформированы видеоизображения ландшафта и препятствий на их фоне.
Задачей планировщика являлось формирование коэффициентов траектории
движения к цели находящейся прямо по направлению камеры в обход препятствия. Всего было сформировано 1500 изображений с различным расположением
препятствий и элементов ландшафта. Обучающая выборка была построена, используя точные данные о положении объектов и их размеров. Из 1500 элементов, 1000 использовалось для обучения и 500 для тестирования. Процент траекторий, сформированных планировщиком и не отличающихся более чем на 5% по
СКО от сформированных на этапе геренации обучающей выборки для тестовой
выборки составил 89.3%. Пример тестового изображения и траектория, построенная по сформированным планировщиком коэффициентам, представлены на
рисунке 3 (а), (б). На рисунке 3 (б) черный круг представляет собой целевую
точку, пунктирная линия – траекторию, сформированную глобальным планировщиком и сплошная линия – траекторию сформированную локальным нейросетевым планировщиком.
141
Известия ЮФУ. Технические науки
а
Тематический выпуск
Рис. 3. Результат работы планировщика
б
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Пшихопов В.Х. Дирижабли: перспективы использования в робототехнике.//М., «Меха-
троника, автоматизация, управление», №5, 2004 г., с. 15-20.
2. J.P. Laumond. Robot Motion Planning and Control. Springer-Verlag Telos. 1998, 343 pages
3. Steven M. LaValle. Planning Algorithms. Cambridge: Cambridge University Press, 2006.
– 1007 pages.
4. Сиротенко М.Ю., Пшихопов В.Х. Принципы построения нейросетевых планировщиков
перемещений мобильных роботов для априори неформализуемых сред. Известия ЮФУ.
Технические науки. Специальный выпуск. Материалы LIII научно-технической конференции профессорско-преподавательского состава, аспирантов и сотрудников ТТИ
ЮФУ. Таганрог: Изд-во ТТИ ЮФУ, 2008. № 1 (78). 277 с. 196-198.
5. Y. Le Cun and Yoshua Bengio. Convolutional networks for images, speech, and time series. In
Michael A.Arbib, editor, The Handbook of Brain Theory and Neural Networks, pages
255–258. MITPress, Cambridge, Massachusetts, 1995.
6. Сиротенко М.Ю. Использование сверточных нейронных сетей при планировании траекторий движения мобильных роботов.
:
(
, 23-27
2006 .).
1,2
/
. .
. – .:
. - , 2006.
– . 174-181.
Мобильные роботы и мехатронные системы
Материалы научной школы конференции Москва
октября
г Части
Под редакцией академика РАН В А Садовничего М Изд во Моск ун та
С
142
Раздел III. Интеллектуальные технологии управления
УДК 629.7.058.53
В.А. Голубенко, А.А. Кучин, Ю.В. Нечаев, А.А. Филонов
МЕТОДЫ САМОНАВЕДЕНИЯ РАКЕТЫ КЛАССА «ВОЗДУХ-ВОЗДУХ»
ДЛЯ СОВМЕСТНОГО ОБЕСПЕЧЕНИЯ НАВЕДЕНИЯ РАКЕТЫ НА
ЭЛЕМЕНТ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ И ТРЕБУЕМЫХ УСЛОВИЙ
РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ СИГНАЛОВ В АКТИВНОЙ
РАДИОЛОКАЦИОННОЙ ГОЛОВКЕ САМОНАВЕДЕНИЯ РАКЕТЫ*
В общем случае под методом самонаведения управляемой ракеты (УР) понимается [1] закон формирования требуемой фазовой траектории, наведение по которой позволит ракетой поразить ВЦ.
Наиболее широко применяемым методом самонаведения УР с активной радиолокационной головкой самонаведения (АРГС) класса «воздух-воздух» на разрешаемые по угловым координатам воздушные цели (ВЦ) является метод пропорционального наведения [1].
Перспективным приемом применения УР класса «воздух-воздух» по групповой воздушной цели (ГВЦ) является практически одновременное наведение нескольких пущенных с борта истребителя ракет на несколько целей по заданному
виду целераспределения. Для этого необходимо обеспечить в АРГС ракеты селекцию ВЦ в группе, подразумевающую в дальнейшем их разрешение и распознавание типа.
Метод пропорционального наведения может быть использован в ситуации
неразрешения элементов ГВЦ по угловым координатам, когда все они на больших
и средних дальностях будут находиться в главном луче диаграммы направленности
антенны (ДНА) АРГС [2]. При этом в АРГС ракеты ГВЦ будет наблюдаться как
одиночная, и УР будет наводиться на её энергетический центр. В этом случае при
применении узкополосной доплеровской фильтрации (УДФ) отраженных сигналов
в скоростном канале АРГС разрешение элементов ГВЦ в принципе возможно за
счет влияния траекторных скоростных и угловых флюктуаций ведомых самолетов
группы, обусловленных необходимостью сохранения заданных формы и параметров боевых порядков (БП) [2]. Однако, из-за имеющейся неоднозначности «уголскорость (доплеровская частота)», на практике возникают ситуации, когда скоростные и угловые флюктуации целей в группе взаимно компенсируются, что приводит к неразрешению ВЦ по доплеровской частоте в АРГС ракеты.
Выходом из этого положения может быть применение оптимального метода
самонаведения УР, который позволяет обеспечить в АРГС ракеты радиолокационное разрешение целей в группе за счёт реализации режима синтезирования апертуры антенны [3]. Данный метод самонаведения считается оптимальным с точки зрения разрешения ВЦ в группе, но не всегда позволяет обеспечить минимальный
промах ракеты при её наведении.
Распознавание типового состава ГВЦ в скоростном канале АРГС осуществляется на основе анализа взаимного частотного расположения сигналов отражённых от планера самолета (первичная модуляция) и вращающихся элементов его
Статья подготовлена в рамках выполнения исследований по гранту Президента
РФ НШ-3.2008.10.
*
143
Известия ЮФУ. Технические науки
Тематический выпуск
силовой установки (вторичная модуляция) [4]. При этом последние имеют ярко
выраженную ракурсную зависимость. Для того чтобы в АРГС обеспечивались условия для радиолокационного наблюдения сигналов вторичной модуляции в интересах дальнейшего распознавания типа ВЦ, необходимо, чтобы УР находилась в
так называемом конусе распознавания ВЦ, который характеризуется углом между
направлением вектора скорости ВЦ и линией визирования «УР-ВЦ» соответственно в горизонтальной и вертикальной плоскостях. Существует метод самонаведения
УР для обеспечения в ее АРГС радиолокационного наблюдения сигналов вторичной модуляции под требуемым ракурсом [4]. Данный метод заключается во введении в контур самонаведения ракеты требуемого значения угловой скорости вращения линии визирования «УР-ВЦ», изменяющегося по определённому закону.
Вследствие этого вектор скорости ракеты поворачивается на угол, достаточный
для того, чтобы ракета залетела по рациональной траектории в конус распознавания ВЦ и продолжила наведение в нём. Данный метод не является оптимальным,
так как эмпирически считается, что угол поворота ракеты относительно базовой
траектории полета в соответствии с методом пропорционального наведения меняется по законам, описываемым линейной функцией, квадратичной функцией и каноническим уравнением эллипса. Общий случай, или другие законы не рассматриваются.
Поэтому возникает необходимость синтезировать 3 взаимосвязанных друг с
другом оптимальных метода самонаведения УР, которые обеспечивали бы в её
АРГС такие условия радиолокационного наблюдения отражённых от элементов
ГВЦ сигналов, которые позволяли бы осуществить в АРГС ракеты,
♦ во-первых, совместное разрешение по доплеровской частоте ВЦ, находящихся на больших и средних дальностях в главном луче ДНА АРГС, и
наблюдать сигналы вторичной модуляции под требуемым ракурсом в интересах последующего с помощью известных алгоритмов распознавания
и целераспределения элементов ГВЦ между атакующими их ракетами по
типовому составу целей в группе,
♦ во-вторых, только разрешение по доплеровской частоте ВЦ, находящихся
на больших и средних дальностях в главном луче ДНА АРГС, когда состав ГВЦ однотипен и нет необходимости производить целераспределение элементов ГВЦ между атакующими их ракетами по типовому составу
целей в группе,
♦ в-третьих, только наблюдение сигналов вторичной модуляции под требуемым ракурсом в интересах последующего распознавания и целераспределения элементов ГВЦ между атакующими их ракетами по типовому
составу целей в группе в ситуации, когда элементы ГВЦ разрешены по
доплеровской частоте.
Для нахождения оптимальных методов самонаведения УР с АРГС обеспечивающих минимальный среднеквадратический ее промах, при ограничении затрат
энергии на управление, целесообразно воспользоваться локальным функционалом
качества [1]. Его выбор обусловлен меньшим объемом требуемых математических
выкладок, простотой и наглядностью получаемых результатов.
Локальный функционал качества имеет следующий вид [1]
t
Т
I = M У [X Т − XУ ] Q[X Т − XУ ] + ∫ U T KUdt
0
144
(1)
Раздел III. Интеллектуальные технологии управления
при ограничениях на управляющие сигналы в виде условия
u j (t ) ≤ u доп. j ,
(2)
где МУ – операция условного математического ожидания;
ХT и ХУ – n-мерные векторы требуемых и управляемых фазовых координат в
текущие моменты времени t;
K и Q – матрицы штрафов на управление и на точность слежения соответственно;
U – r-мерный (r ≤ n) вектор сигналов управления;
uj и uдоп.j – мгновенные и допустимые значения каждого сигнала управления
соответственно.
Первое слагаемое в (1) представляет собой сумму взвешенных текущих дисперсий ошибок управления и характеризует точность системы самонаведения
(ССН), а второе слагаемое представляет собой взвешенную энергию, затрачиваемую на управление и характеризует экономичность ССН. Вес отдельных сигналов
управления uj определяется коэффициентами kij матрицы штрафов на сигналы
управления К, которые также назначаются с учетом важности этих сигналов [1].
Условие (2) означает, что мгновенные значения uj каждого сигнала управления не должны превышать допустимого значения uдоп.j.
Критерием решения задачи [1] будет минимум локального функционала качества (1).
В интересах последующего синтеза оптимальных методов самонаведения УР,
позволяющих создать условия как для разрешения по доплеровской частоте элементов ГВЦ в АРГС ракеты на основе создания эффекта синтезирования апертуры
антенны, так и для распознавания типа атакуемой ВЦ на основе эффекта вторичной модуляции, сигналы которой наблюдаются под определённым ракурсом, необходимо дополнить известную [1] динамическую модель (ДМ) взаимного перемещения УР и ВЦ дифференциальными уравнениями, учитывающими непосредственное траекторное управление ракетой.
При дальнейшем рассмотрении методов самонаведения считается, что каналы
управления ракетой идентичны и не влияют друг на друга, поэтому все зависимости будут приводиться применительно к горизонтальной плоскости управления
(индекс «г») [1].
Известно, что для реализации режима синтезирования апертуры антенны необходимо наличие бокового (тангенциального) ускорения jг УР, которое может
быть обеспечено, например, за счет введения в контур управления ракеты дополнительной требуемой, не равной нулю составляющей угловой скорости вращения
линии визирования ωг.т «УР – ГВЦ», определяемой, как [3]
ω г .т =
λ
2∆Lmin
FФДЧ
,
(3)
где λ – рабочая длина волны АРГС;
FФДЧ – полоса пропускания узкополосного ФДЧ в АРГС УР;
∆Lmin – требуемое минимальное линейное разрешение целей в группе.
В общем случае, при обеспечении требуемых условий наведения УР для последующего разрешения в её АРГС элементов ГВЦ по доплеровской частоте на
основе эффекта синтезирования апертуры антенны необходимо, чтобы ракета вы-
145
Известия ЮФУ. Технические науки
Тематический выпуск
полняла полёт с угловой скоростью вращения линии визирования «УР-ГВЦ», равной ωг.т.
Для синтеза оптимального метода самонаведения УР, позволяющего выполнить данное требование, необходимо дополнить известную [1] ДМ дифференциальным уравнением
λ
ω& г т = 0 ωг .т (0) =
FФДЧ
2 ∆Lmin
(4)
.
Известно, что для того, чтобы в АРГС УР обеспечивались условия радиолокационного наблюдения сигналов вторичной модуляции в интересах дальнейшего
распознавания типа ВЦ, необходимо, чтобы УР находилась в так называемом конусе распознавания ВЦ, который характеризуется углом между вектором скорости
ВЦ и линией визирования «УР-ВЦ», в горизонтальной и вертикальной плоскостях
соответственно (угол q на рисунке 1).
На рисунке 1 также обозначено:
VР и VЦ – векторы скоростей УР и ВЦ соответственно;
D – расстояние между УР и ВЦ;
ωг – угловая скорость вращения линии визирования «ракета-цель»;
φг – угол пеленга ВЦ.
Из анализа рисунка 1 можно записать выражение для угловой скорости вращения линии визирования «УР-ВЦ» следующим образом
ω =
г
V sin q + V sin ϕ
D
Ц
г
Р
г
.
(5)
Выразив из формулы (5) угол qг и продифференцировав его по времени, получим
q& =
г
Dω& − ω D& − V ϕ& cosϕ г
V 2 − ( Dω − V ϕ ) 2
г
г
Ц
Р
г
г
Р
.
(6)
г
Используем следующее кинематическое дифференциальное уравнение для
угловой скорости вращения линии визирования [1]
ω& г = −
146
2 D&
1
ωг −
j
D
D
г
,
(7)
Раздел III. Интеллектуальные технологии управления
Рис. 1. Динамика перемещения УР и ВЦ при наведении ракеты под требуемым
ракурсом
в котором jг (боковое ускорение УР) является параметром управления.
Подставив выражение (7) в (6), получим
q& = −
3ω D& + V ϕ& + j
V 2 − ( Dω − V ϕ ) 2
г
Р
Ц
или
г
г
г
Р
(8)
г
& + С ϕ& + С j ,
q& = CD D
ϕ г
j г
(9)
где
CD = −
С ϕг = −
С jг = −
3ωг
VЦ2 − ( Dωг − VР ϕ г ) 2
;
(10)
;
(11)
.
(12)
VЦ
VЦ2 − ( Dωг − VР ϕ г ) 2
1
VЦ2 − ( Dωг − VР ϕ г ) 2
Из анализа формулы (9) следует вывод о том, что динамика изменения угла q,
которая в свою очередь определяет условия радиолокационного наблюдения в интересах дальнейшего распознавания типа ВЦ по сигналам вторичной модуляции,
зависит от параметра бокового управления j УР.
Из формул (7) и (8) следует, что посредством управления угловой скоростью
вращения линии визирования «УР-ВЦ» ω имеется возможность изменения ракурса
радиолокационного наблюдения, который характеризуется значением угла q (рис. 1).
Таким образом, выражения (3) и (8) свидетельствуют о том, что за счет
управления угловой скоростью вращения линии визирования «УР-ВЦ» ω могут
быть созданы требуемые условия радиолокационного наблюдения в АРГС ракеты
отражённых от ГВЦ сигналов для совместного разрешения целей в группе и наблюдения их под требуемым ракурсом.
В результате для оптимизации самонаведения УР в интересах создания условия для радиолокационного наблюдения в АРГС ракеты сигналов вторичной модуляции под требуемым ракурсом необходимо дополнить известную [1] ДМ, следующими дифференциальными уравнениями
q& = CD D& + Сϕϕ& + С j j q (0) = q .0 ,
(13)
г
г
г
г
г
г
г
г
г
q& г . т = 0 qг.т (0) = const ,
(14)
описывающими динамику изменения ракурса радиолокационного наблюдения отражённых от ГВЦ сигналов.
Полученные уравнения (4), (13) и (14) совместно с известной [1] ДМ позволяют определить обобщенную динамическую модель, являющуюся основой для
синтеза оптимальных методов самонаведения УР, позволяющих обеспечить в её
АРГС требуемые условия радиолокационного наблюдения отражённых от ГВЦ
147
Известия ЮФУ. Технические науки
Тематический выпуск
сигналов в интересах последующего разрешения по доплеровской частоте элементов ГВЦ и распознавания типа атакуемой ВЦ, как совместно, так и раздельно.
В общем виде динамическая модель при наведении j-й ракеты на i –ю цель
запишется в следующем виде
D& ji = VР . ji + VЦ .i + ∆VР . ji + ∆VЦ .i
V&Р = − a Р .ij
. ji
D ji (0) = D ji .0
VУР (0) = VУР
. ji
. ji 0
a& Р .ij = 0
a Р .ij (0 ) = a Р .ij0
& Р. ji = ∆a Р.ij
∆V
∆VР. ji (0) = ∆VР. ji0
∆&a Р. ji = −α Р. ji ∆ Р. ji − β Р . ji ∆VР . ji + 2α Р . ji σ 2Р . ji n ф 2. j
∆a Р . ji (0) = ∆а Р . ji0
& Ц .i = 0
V
VЦ .i (0) = VЦ .i0
∆V&Ц .i = ∆а Ц .i
∆VЦ .i (0) = ∆VЦ .i0
∆a& Ц .i = − α Ц .i ∆а Ц .i − β Ц .i ∆VЦ .i + 2 α Ц .i σ 2Ц .i n ф1.i
∆a Ц .i (0) = ∆аЦ .i0
ϕ& г . ji = ωг . ji +
ω& г . ji = −
2 D& ji
D ji
1
D&
ji
j
г . ji
ω г . ji −
ϕ г . ji (0 ) = ϕ
+ ξϕ . j
г
1
j . ji +ξω . j
D ji
г
г
&j = ξ
г . ji
j .j
г . т . ji
=0
q& г . т = 0
где
ωг . ji (0) = ω
ωг .т. ji (0) =
q& . ji = CD D& ji + Сϕϕ& . ji + С j j . ji
г
ji .0
г.
ji .0
j г. ji (0 ) = j г. ji .0
г
&
ω
г.
(15)
г
г
λ
2∆Lmin
FФДЧ
q . ji (0) = q . ji .0
г
г
q г .т (0) = const
Dji – расстояние между j ракетой и i целью;
VР.ji – радиальная скорость j ракеты при наведении на i цель;
VЦ.i – радиальная скорость i цели;
∆VР.ji – флуктуационная составляющая радиальной скорости j ракеты при наведении на i цель;
∆VЦ.i – флуктуационная составляющая радиальной скорости i цели;
jг.ji – боковое ускорение j ракеты при наведении на i цель;
φг.ji – угол пеленга j ракеты при наведении на i цель;
ωг.ji – угловая скорость вращения линии визирования «j ракета – i цель»;
аР.ji – радиальное ускорение j ракеты относительно атакуемой i цели;
∆aЦ.ji – радиальная флуктуационная составляющая ускорения j ракеты при наведении на i цель;
∆aР.i – радиальная флуктуационная составляющая ускорения i цели;
148
Раздел
III. Интеллектуальные технологии управления
αР.ji, и αЦ.i– коэффициенты, характеризующие спектральную плотность случайных изменений радиального ускорения j ракеты и i цели соответственно;
βР.ji и βЦ.i – квадраты частоты собственных флюктуаций j ракеты и i цели соответственно;
σР
2
. ji
– дисперсия флуктуаций радиального ускорения j ракеты при наведении
на i цель;
σЦ
2
.i
– дисперсия флуктуаций нормального ускорения i цели;
nФ1.i и nФ2.j – формирующие белые гауссовские шумы с нулевым средним значением и единичной интенсивностью;
ξω . j , ξ j . j , ξϕ . j
г
г
г
– центрированные взаимонезависимые белые гауссовские
шумы с известными односторонними спектральными плотностями.
ωг.т.ji – требуемое значение угловой скорости вращения линии визирования «j
ракета – i цель», позволяющее реализовать на борту j ракеты РСА антенны;
qг.ji – ракурс радиолокационного наблюдения отражённых от i цели сигналов
вторичной модуляции в АРГС j ракеты;
qг.т.ji – требуемое значение ракурса радиолокационного наблюдения отражённых от i цели сигналов в АРГС j ракеты, позволяющее применить алгоритмы распознавания типа атакуемой цели на основе эффекта вторичной модуляции.
Оценим далее возможность синтеза указанных выше методов самонаведения
УР на основе приведённой обобщённой динамической модели (15), а также возможные пути упрощения процедуры синтеза.
Полученная обобщённая динамическая модель (15) обладает такими свойствами [1], как измеримость, наблюдаемость, идентифицируемость и управляемость.
В общем случае синтез оптимальных ССН, заключающийся в получении оптимальных алгоритмов оценивания, идентификации и управления, является достаточно сложной и трудоёмкой задачей [1].
Для упрощения синтеза применяется фундаментальная теорема разделения
или статистической эквивалентности, согласно которой для линейных моделей в
условиях гауссовских возмущений при оптимизации систем по квадратичным
функционалам качества алгоритмы оценивания и управления можно синтезировать
раздельно [1, 3].
В этом случае алгоритм функционирования статистического регулятора, учитывающего влияние возмущений, будет статистически эквивалентен алгоритму
функционирования детерминированного регулятора, полученному для условий,
когда возмущения отсутствуют, при замене фазовых координат вектора состояния
и параметров ССН ракеты их соответствующими оптимальными оценками [1].
Требования линейности динамической модели, квадратичности функционалов качества и гауссовости шумов называются условиями линейно-квадратичногауссовской (ЛКГ) задачи синтеза [1]. Выполнение данных условий позволяет
осуществить синтез законов оптимального управления и оптимального оценивания
параметров, требующихся для формирования этих законов раздельно. Анализ
обобщенной динамической модели (15) и использование в качестве критерия локального функционала качества (1) свидетельствуют, что условия ЛКГ задачи синтеза выполняются.
Поскольку получение оптимальных оценок фазовых координат вектора состояния достаточно хорошо изучено и особых затруднений не вызывает, то в дальнейшем в соответствии с задачей синтеза определим лишь оптимальные законы
управления боковым ускорением УР в процессе её самонаведения, позволяющие
149
Известия ЮФУ. Технические науки
Тематический выпуск
создать в АРГС ракеты условия для разрешения по доплеровской частоте ВЦ, летящих в сомкнутых боевых порядках, на основе эффекта синтезирования апертуры
антенны, и для наблюдения отражённых сигналов под требуемым ракурсом в интересах дальнейшего распознавания типа атакуемой ВЦ на основе эффекта вторичной модуляции.
Для того чтобы осуществить синтез закона оптимального управления боковым
ускорением УР, доставляющего минимум локальному функционалу качества (1),
необходимо из обобщённой ДМ (15) определить вектор состояния Х, из него выделить вектор требуемых фазовых координат ХТ, вектор управляемых фазовых координат ХУ, а также определить вектор наблюдения Z, обеспечивающий условие наблюдаемости процессов, описываемых системой дифференциальных уравнений (15).
Кроме того, из (15) необходимо определить вектор управления U и матрицу
Т
эффективности сигналов управления B У . Далее, задавшись матрицами штрафов
на точность слежения Q и величину сигналов управления K, становится возможным непосредственно определить искомый вектор оптимального управления jгопт.
Анализ системы дифференциальных уравнений (15) позволяет составить следующий вектор состояния Х:
X = [D VР
VЦ
∆VР
∆VЦ
aР
∆a Р
∆a Ц
ϕг
ωг
jг
ωг . т
qг
T
q г.т ] (16)
Для обеспечения наблюдаемости при оценке фазовых координат вектора состояния Х и с учетом принципа построения импульсно-доплеровских АРГС УР
определим вектор наблюдения Z следующим образом
Z = [Z1
где
Z2
Z3
Z4
Z 1 = K 1 D + ξ И1 ;
Z 2 = K 2 VСБЛ + ξ И 2 ;
Z3 = K 3 VР + ξ И 3 ;
Z 4 = K 4 jг + ξ И 4 ;
Z5 = K 5ϕ + ξ И 5 ;
Z5 ] ,
T
(17)
(18)
Z1, Z2, Z3, Z4, Z5, – напряжения на выходе измерителей дальности, скорости
сближения УР с ВЦ, собственной скорости УР, её бокового ускорения jг, угла φг;
K1, K 2, K 3, K 4, K 5, – коэффициенты усиления соответствующих измерителей;
ξИ1, ξИ2, ξИ3, ξИ4, ξИ5, – центрированные, взаимонезависимые гауссовские шумы соответствующих измерителей с известными спектральными плотностями, которые взаимонезависимы с шумами в ДМ (15).
Управляющим воздействием, посредством которого обеспечивается угловое
перемещение УР относительно ВЦ, является её боковое ускорение jг, законы формирования которого для каждого метода самонаведения в дальнейшем определим.
Исходя из того, что параметром управления является боковое ускорение ракеты, для синтеза оптимального метода самонаведения УР, позволяющего обеспечить в её АРГС требуемые условия радиолокационного наблюдения отражённых
от ГВЦ сигналов, вектор управления U вырождается в следующий вид
U= j
150
г
.
(19)
Раздел III. Интеллектуальные технологии управления
Требуемыми параметрами для системы самонаведения УР, учитывающими
управление угловой скоростью вращения линии визирования «УР-ВЦ» для реализации РСА антенны на борту ракеты и ракурсом радиолокационного наблюдения в
АРГС ракеты отражённых от ВЦ сигналов, являются ωг.т и qг.т соответственно, т.е.
вектор требуемых фазовых координат ХТ будет иметь вид
XТ = [ωг .т qг .т ]
T
.
(20)
Соответственно управляемыми параметрами для системы самонаведения УР
являются ωг и qг, т.е. вектор управляемых фазовых координат ХУ будет следующим:
X У = [ωг
qг ] .
T
(21)
Матрицы штрафов на точность слежения Q и на величину сигналов управления K запишем в следующем виде
q11 0
Q=
,
0 q22
K=k.
(22)
(23)
Анализ ДМ (15) позволяет определить матрицу эффективности сигналов
управления
B ТУ
в следующем виде:
1
(24)
B ТУ = −
С jг .
D
В результате подлежащий минимизации функционал качества (1) принимает
следующий вид
ωг .т − ωг т q11 0 ωг .т − ωг t i 2
I = M у
+ ∫ jг kdt . (25)
q г .т − q г 0 q 22 q г .т − q г 0
Вектор оптимального управления, доставляющий минимум локальному
функционалу качества (1) определяется формулой
[1]
)
)
[
]
U = K −1B ТУ Q X Т − X У
(26)
Выполнение в процессе синтеза известных [1, 3] условий ЛКГ задачи синтеза,
позволяет истинные значения фазовых координат векторов ХТ и ХУ заменить их
оптимальными оценками.
Тогда, решив (26) с учетом формул (19) – (24), можно получить следующий
закон оптимального управления боковым ускорением УР
С jг q 22
q11
(24)
(ωг.т − ωг ) ,
k
Dk
где qг.т и qг – соответственно требуемое и текущее значение ракурса РЛ наблюдения отражённых от ВЦ сигналов в АРГС УР;
ωг.т и ωг – соответственно требуемое и текущее значение угловой скорости
вращения линии визирования «УР–ВЦ».
В (27) требуемое значение угловой скорости вращения линии визирования
«УР-ВЦ» определяется выражением (3).
jг .опт.1 =
(q г . т − q г ) −
151
Известия ЮФУ. Технические науки
Тематический выпуск
В этом случае параметр рассогласования для закона (27) принимает следующий вид
С j q22
q
) )
)
∆ г .1 =
( qг .т − qг ) − 11 (ω г.т − ωг ) − j г .
Dk
k
г
(28)
Выражение (27) определяет метод самонаведения УР, позволяющий обеспечить в её АРГС совместные условия для разрешения по доплеровской частоте элементов ГВЦ на основе искусственного создания эффекта синтезирования апертуры
антенны и наведение ракеты под требуемым ракурсом (который определяется ракурсом устойчивого наблюдения сигналов вторичной модуляции) для последующего распознавания на основе эффекта вторичной модуляции заданного для атаки
типа ВЦ из состава группы.
В том частном случае, когда:
♦ элементы ГВЦ разрешены по доплеровской частоте в АРГС ракеты при
её полёте по опорной траектории в соответствии с базовым методом пропорционального наведения;
♦ ГВЦ имеет разнотипный характер и требуется осуществить целераспределение пущенных ракет по элементам ГВЦ на основе распознавания её
типового состава по сигналам вторичной модуляции;
♦ ракурс радиолокационного наблюдения сигналов вторичной модуляции
не соответствует требуемому
♦ необходимо синтезировать соответствующий метод самонаведения УР,
позволяющий обеспечить только наведение ракеты относительно ГВЦ
под требуемым ракурсом.
Для синтеза такого оптимального метода самонаведения УР на основе анализа обобщённой ДМ (15) и вектора состояния Х (16) определим вектор управления
U, векторы требуемых ХТ и управляемых ХУ фазовых координат, матрицы штрафов на точность слежения Q и на величину сигналов управления K , а также матТ
рицу эффективности сигналов управления B У в следующем виде
U= j
г
.
(29)
XТ = [0 qг .т ]
T
X У = [ωг
qг ]
q11
Q=
0
0
,
q22
T
K=k
1
B ТУ = −
Сj ,
D
г
(30)
(31)
(32)
(33)
(34)
В данном случае подлежащий минимизации функционал качества (1) преобразуется к следующему виду
0 − ωг т q 11 0 0 − ωг t i 2
I = M у
+ ∫ jг kdt .
qг .т − qг 0 q 22 qг .т − qг 0
152
(35)
Раздел III. Интеллектуальные технологии управления
Тогда, решив (26) с учетом формул (29–34), для данной ситуации можно получить следующий закон оптимального управления боковым ускорением УР
С j q22
q
jг .опт.2 =
( qг .т − qг ) + 11 ωг ,
(36)
k
Dk
г
а параметр рассогласования для этого закона (36) -
С j q22
q ) )
)
∆ г .2 =
( q г .т − q г ) + 11 ωг − jг .
Dk
k
г
(37)
Таким образом, выражение (36) определяет метод самонаведения УР, позволяющий обеспечить её наведение под требуемым ракурсом с целью создания условий для последующего распознавания в её АРГС типа атакуемой ВЦ на основе эффекта вторичной модуляции.
Для осуществления синтеза оптимального метода самонаведения УР, позволяющего обеспечить в её АРГС разрешение по доплеровской частоте ВЦ, находящихся на больших и средних дальностях в главном луче ДНА АРГС, за счёт реализации на борту ракеты РСА антенны, выделим из обобщённой ДМ (15) и вектора
состояния
(16) вектор управления U, векторы требуемых Т и управляемых У
фазовых координат, матрицы штрафов на точность слежения Q и на величину сиг-
Х
Х
налов управления K, матрицу эффективности сигналов управления
их в следующем виде
Х
B ТУ
U= j .
XТ = ωг т
X У = ωг
Q = q11 ,
K=k
(38)
г
(39)
.
B ТУ = −
(40)
(41)
(42)
1
,
D
При этом подлежащий минимизации функционал качества
дующий вид
и запишем
(43)
(1)
примет сле-
ti
т
I = M у [ωг .т − ωг ] q 11 [ωг .т − ωг ] + ∫ j2г kdt .
0
(44)
Решив (26) с учетом формул (38) – (43), получим следующий закон оптимального управления боковым ускорением УР:
q
jг .опт.3 = − 11 (ωг .т − ωг ) ,
(45)
Dk
Для данного оптимального закона управления параметр рассогласования
принимает следующий вид
153
Известия ЮФУ. Технические науки
Тематический выпуск
)
q
∆ г .3 = − 11 (ω г .т − ω г ) − jг .
Dk
(46)
Если в формуле (45) требуемое значение угловой скорости вращения линии
визирования «УР-ВЦ» определяется формулой (3), то данный закон управления
будет определять метод самонаведения УР, позволяющий обеспечить в её АРГС
разрешение по доплеровской частоте элементов ГВЦ на основе эффекта синтезирования апертуры антенны, а если ωТ =0 рад/с, то закон (45) вырождается в базовый метод пропорционального наведения.
Анализ выражений (27), (36) и (45) показывает, что для формирования сигнала оптимального управления jг.опт на борту УР необходимо иметь оптимальные
оценки дальности до ВЦ, угловой скорости вращения линии визирования «УРВЦ», скорости полёта ВЦ, собственной скорости УР и угла φ пеленга цели.
Таким образом, наряду с известным базовым методом пропорционального
наведения дополнительно синтезированы три метода самонаведения Ракеты с
АРГС, позволяющие обеспечить, как условия для разрешения по доплеровской
частоте элементов ГВЦ, находящихся в главном луче ДНА АРГС, и требуемый
ракурс радиолокационного наблюдения ГВЦ в интересах последующего распознавания типа атакуемой цели на основе эффекта вторичной модуляции, как совместно, так и по отдельности. Поэтому в дальнейшем возникает необходимость в разработке алгоритмов траекторного управления ракетами на основе выбора того или
иного метода самонаведения УР в зависимости от конкретной ситуации относительно типового состава ГВЦ, качества разрешения в АРГС ракеты элементов ГВЦ
и текущего ракурса радиолокационного наблюдения отражённых от ГВЦ сигналов.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
4.
5.
Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. Ч. 1. Теоретические
основы синтеза и анализа авиационных систем радиоуправления. Ч. 2. Радиоэлектронные системы самонаведения. – М.: Радио и связь, 1996. – 396 с.
Богданов А.В. Применение узкополосной доплеровской фильтрации в многофункциональных радиолокационных комплексах. Часть 1. // Научно-методические рекомендации для
адъюнктов и слушателей академии. – Тверь: изд. ВА ПВО им. Жукова Г.К., 1995. – 265 с.
Викулов О.В. Траекторное управление наведением в активной радиолокационной системе самонаведения. – Радиотехника, 1995. №11. – С. 81-85.
Макаев В.Е., Васильев О.В. Метод радиолокационного распознавания воздушной цели по турбинному эффекту. – Радиотехника, 2000. №11. – С. 30-33.
Богданов А.В., Филонов А.А. Способ формирования сигнала управления ракетой класса
«воздух-воздух». Патент на изобретение № 2099665, 1997.
УДК 629.7.016
Т.М. Романова
БОРТОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИНТЕРФЕЙС МОБИЛЬНОГО
РОБОТА
Введение
Создание интеллектуальных систем управления, обеспечивающих надежное
выполнение требуемых прикладных задач в условиях неполноты, нечеткости и
противоречивости поступающей информации представляет собой сложную науч154
Раздел III. Интеллектуальные технологии управления
но-техническую проблему, решение которой предполагает поиск путей реализации
необходимых интеллектуальных функций на основе комплексного применения
современных технологий обработки знаний. Важнейшим элементом интеллектуальных систем управления является развитый естественно-языковой интерфейс,
предназначенный для поддержания активного человеко-машинного диалога и позволяющий обеспечивать оперативный ввод целеуказаний, их последующее преобразование в автоматически реализуемые сценарии поведения и последовательности исполняемых действий.
Развитие языков программирования в XX веке сделало возможным динамическое управление автономными объектами. С ростом уровня автоматизации языки программирования становились более простыми и доступными, а в обыденной
жизни прибавлялось технических новинок, пользователям которых уже не требовалось специального образования в области программирования или управления
объектом. Это было достигнуто за счёт повышения адаптивности систем, создания
высокоуровневого управления для пользователя и улучшения эргономики объектов. Эти тенденции сохраняются и на сегодняшний день. Логическим продолжением такого курса является максимальная интеграция техники в нашу жизнь, а это
значит еще большее повышение адаптивности объектов и возможность простой,
естественной для человека коммуникации между ним и техникой.
Эти задачи в полной мере решает естественно-языковой человеко-машинный
интерфейс − программно-аппаратный модуль, принимающий на вход текст на естественном языке, определяющий его смысл и формирующий на его основе информационный сигнал автономному объекту.
Так как автоматизации подверглись практически все сферы человеческой
деятельности, начиная от производства, хранения и передачи информации до быта,
охраны и защиты, обучения, то область применения человеко-машинного интерфейса чрезвычайно широка:
♦ системы автоматизации проектирования промышленных устройств и
оборудования;
♦ системы управления (СУ) бытовой, специальной и промышленной робототехники;
♦ СУ вооружениями и военной техникой прикладного назначения;
♦ различного рода поисковые и информационные справочные системы;
♦ системы интерактивного обучения.
Сама по себе идея создания человеко-машинного интерфейса не нова. Однако
долгое время он считался как бы вспомогательным элементом и, как следствие,
был зависим от конкретной проблемы или предметной области. Этот так называемый прагматический подход привёл к тому, что до сих пор не существует общей
концептуальной модели человеко-машинного интерфейса.
Однако многие достижения логики и прикладной лингвистики, влившиеся со
временем в искусственный интеллект, будут рационально использоваться при создании концептуальной модели.
В основу создания интерфейса легли исследования в области логики (Аристотель, Ньютон, Декарт, Монтегю), прикладной лингвистики (Уилкинс, Хомский, Ю.С.
Степанов), искусственного интеллекта (Минский, Шенк, Сова). Задачей понимания
естественного языка в разное время занимались Шенк, Мельчук, Нариньяни.
Основным недостатком человеко-машинных интерфейсов было и остаётся то,
что информация о предметной области часто хранится без определённой структуры или, наоборот, в конструкциях, которые жестко регламентируют набор и количество характеристик и связей. Это приводит к тому, что сделанная под опреде155
Известия ЮФУ. Технические науки
Тематический выпуск
лённые нужды модель не только не может быть использована для другого объекта,
но даже не может быть усовершенствована. Способ хранения знаний не позволяет
полноценно использовать их при принятии решения. Решить эту проблему можно
путём использования структурированной, пополняемой и достраиваемой модели
мира с гибкими алгоритмами работы со знаниями.
Модель мира в интеллектуальном интерфейсе играет роль собственных представлений системы о мире и служит для отражения сущностей, объектов, действий
реального мира [3]. Наличие такой модели позволило бы свести задачу создания
интеллектуального интерфейса для различных устройств к элементарной настройке на конкретную предметную область и возможности устройства. Наличие общей
модели, спецификации на структуру и алгоритмы описания объектов реального
мира дало бы возможность интегрировать знания, полученные различными интерфейсами, а значит, упростило бы задачу обучения новых устройств и сделало бы
общение с машиной на естественном языке обычным делом. Хранение знаний о
мире в виде единой иерархии сделало бы модель мира интерфейса независимой от
языка. Таким образом, подключая различные словари, можно было бы использовать один и тот же интерфейс для разноязыких пользователей.
На сегодняшний день не выработано единых оптимальных инструментов, методик, стандартов, спецификаций, для описания всех объектов и явлений окружающего мира. Разработка оптимальных методик и подходов к созданию модели
мира является важной научной задачей. Одним из способов описания модели мира
является семантическая сеть.
Семантические сети, детально разработанные Ричардом Риченсом, представляют собой информационную модель предметной области, имеющую вид ориентированного графа, вершины которого соответствуют объектам предметной области, а дуги задают отношения между ними. Объектами могут быть понятия, события, свойства, процессы. Одной из перспективных моделей описания объекта является фрейм.
Фреймы, родоначальником которых считается Марвин Минский, – это структуры, содержащие описания объектов в виде атрибутов и их значений. Различают
фреймы-образцы, фреймы-экземпляры, фреймы-структуры, фреймы-роли, фреймы-сценарии, фреймы-ситуации.
Важным аспектом является повышение эффективности и скорости работы
интерфейса, которая зависит от того, происходит формирование умозаключений не
в момент диалога или заранее, тогда в ходе диалога используются полученные выводы.
Наличие всех этих наработок, с одной стороны, и нерешенных проблем, с другой, поставило вопрос о создании общей модели естественно-языкового человекомашинного интерфейса с базой знаний, имеющей в своём составе модель мира.
В статье рассматривается разработка естественно-языкового человекомашинного интерфейса для интеллектуальных систем управления автономными
объектами и проведение соответствующих экспериментальных исследований.
На основе проведенного обзора литературы сформированы следующие требования к интеллектуальному интерфейсу:
♦ независимость от предметной области;
♦ ведение коммуникаций на естественном языке;
♦ возможность обработки и хранения информации об объектах рабочей
сцены, их характеристиках и классификации;
♦ возможность пополнения собственной информации посредством диалога,
156
Раздел III. Интеллектуальные технологии управления
учёт пространственно-временного устройства мира при хранении информации;
♦ понятие о существовании неопределённостей, возможность обработки и
хранения информации о различных типах неопределенностей, о разрешении различных типов неопределенностей путём ведения диалога;
♦ понятие о существовании приоритетности, возможность выполнения действий согласно их приоритету.
Такие требования подразумевают наличие в человеко-машинном интерфейсе
пополняемой базы знаний, имеющей в своём составе модель мира.
Этого можно достичь, используя модель представления знаний, ориентированную на глубокое проникновение в контекст, его семантический анализ и построение схематических конструкций, адекватно отражающих смысл.
Для отказа от привязки к конкретным ситуациям, в том числе при разрешении
неопределённостей, вместо конкретного сценария диалога для определенной ситуации, как это реализовывалось ранее [4, 5, 6, 7], используется алгоритм определения типа проблемы, а для каждого типа существует гибкий алгоритм формирования сценария.
Возможность обработки и хранения информации об объектах рабочей сцены,
их характеристиках и классификации появляется за счет того, что знания хранятся
в виде фреймов, определенные слоты которых будут характеризовать их отношение к конкретным типам. По комбинации этих типов будет выбираться алгоритм
или набор алгоритмов, которые нужно выполнить. Особенность этих алгоритмов
состоит в том, что это сценарии с пустыми слотами, которые заполняются свойствами объектов, тип или комбинация типов которых вызвали выполнение этого
сценария.
Возможность пополнения собственной информации посредством диалога
реализуется, как:
♦ описание и последующее занесение в базу знаний нового объекта в результате диалога;
♦ описание и последующее занесение в базу знаний нового типа в результате диалога;
♦ определение нового алгоритма для типа или комбинации типов в результате диалога.
При хранении информации учитывается пространственно-временное устройство мира.
Для формирования цепочки управляющих сигналов согласно их приоритету
создаётся таблица, в которой хранятся «задания». Их приоритет может быть определен или человеком, ведущим диалог, или, если явного указания нет, согласно
типам и характеристикам участвующих объектов. Если по типам и характеристикам этого определить нельзя, «задания» выполняются в хронологическом порядке.
Структура базы знаний представлена на рис. 1 и включает модель мира, кратковременную память о диалоге и данные о рекогносцировке местности автономным объектом.
Модель мира представляет собой иерархию знаний о мире. Во главе этой иерархии стоят простейшие знания о мире: о его трехмерности, звуках, цветах, форме, весе, размерах, тактильных характеристиках, действиях, а также законы со♦
157
Известия ЮФУ. Технические науки
Тематический выпуск
хранения системой равновесия. На следующем уроне иерархии находятся причинно следственные связи между действиями.
Заполнение такой структуры позволяет создать модель мира, которая описывает то, что мир трёхмерен, что движение приводит к изменению местоположения,
что звук имеет локализацию в пространстве, источник и тон, а предметы – цвет,
форму, температуру, плотность. Предметы в нём отличаются по нескольким значимым свойством, о части предметов известно, что они могут двигаться сами, о
части – что можно менять их положение в пространстве. Это составляет некий костяк модели мира, то, что всегда должно входить в неё. Такую структуру можно
назвать первичной моделью мира.
Рис. 1. Структура базы знаний
Следующий уровень иерархии – это сценарии, оперирующие знаниями из
первого уровня при помощи законов причинно-следственной связи, находящихся
на втором уровне. Сценарии не только дают информацию о последовательности
действий, но и косвенно описывают существование времени, но не по его продолжительности, а по отношению к событиям, например: стало светло, значит – утро,
стало темно, значит – вечер.
Простейший сценарий или модель события – один из базовых компонентов
модели [2]. Формирование новых знаний осуществляется через оперирование моделями событий. Первичная модель событий, полученная на основе опыта, – это
лишь начало процесса формирования знаний. Затем происходит организация знаний, полученных опытным путём, их структуризация и использование как самих
знаний, так и сформированных структур данных.
Но опыт – не единственный источник знаний о мире. Такие операции со знаниями, как различного рода трансформации, категоризация, логический вывод,
создают структуры знаний, которые могли не иметь аналогов в опыте интеллектуальной системы.
Модели событий, полученные из опыта, являются толчком к построению более сложных моделей [2]. На основе первичной модели события или сценария, полученного из непосредственного опыта, можно получить и другие сценарии путём
158
Раздел III. Интеллектуальные технологии управления
структуризации данных [8], категоризации данных [1] происходит формирование
новых сценариев.
Формирование базовой модели события определяется ожиданиями, предшествующим опытом и другими факторами. Например, важную роль играют базовые
знания, поставленные цели, табу.
Существует обоюдная зависимость: первичное восприятие события определяется предшествующими знаниями, а процесс освоения новых знаний зависим от
первичного восприятия.
Базовые модели, сформированные на основе опыта, – первый слой следующего уровня иерархии представления знаний. Другие слои представляют собой
скорее динамические системы, в которых различные структуры несут различные
типы информации.
Схема знакомого события занимает промежуточное положение между базовым представлением и абстракциями (например, такими как иерархические категории). Схемы событий производны от конкретных переживаний реальных событий и поэтому они несут информацию о том, как устроен мир.
Одновременно схемы во многом абстрагированы от реальности. Отдельные
элементы события, такие как объекты, люди, действия, представляются в схеме в
виде концептов, которые могут включаться в другие структуры. На еще более абстрактном уровне эти концепты могут входить в иерархические структуры таксономических категорий или логических (математических) систем. По всей видимости, все типы представлений (модели событий, абстрактные концепты) используются в оперировании старыми знаниями для выработки новых конструкций типа
планов, предсказаний. Как видно из предыдущего раздела, такое устройство модели мира соответствует устройству фреймовой модели представления знаний.
Такую иерархию можно организовать в виде семантической сети, в узлах которой находятся фреймы, описывающие объекты. Она состоит из двух блоков:
описаний абстрактных представлений и описаний конкретных объектов. Абстрактные представления вносятся экспертом. Реальные объекты по этим абстрактным
представлениям идентифицируются самим автономным объектом с помощью его
собственных датчиков и описываются в ходе диалога. При этом заполняться свойства и характеристики, и проставится ссылка на соответствующий абстрактный
объект.
Таким образом, используется свойство фреймов – наличие и возможность заполнения незаполненных слотов. Структура фрейма определяется экспертом и зависит от типа объекта. Для абстрактных объектов фрейм имеет слоты, соответствующие постоянным характеристикам объекта такого типа. Для объектов реального мира фрейм, помимо этого, включает слоты, соответствующие переменным характеристикам объекта такого типа. Структура фрейма изображена на рис. 2.
Структура интерфейса, отвечающего поставленным требованиям и имеющего
описанные характеристики, изображена на рис. 3.
Для реализации описанной модели разработаны алгоритмы, позволяющие переходить от предложения, как единицы текста, к его смыслу; определять тип, к
которому относится предложение для его дальнейшей обработки; пополнять базу
знаний модели мира; выполнять команду, разрешать неоднозначности при помощи
модели мира.
159
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 2. Структура фрейма базы знаний
Рис. 3. Структура интеллектуального интерфейса
Например, если предложение побудительное, то используется алгоритм выполнения побуждения, который иллюстрирует рис. 4.
160
Раздел III. Интеллектуальные технологии управления
Рис. 4. Алгоритм выполнения побуждения
Если побудительное предложение неоднозначно, используется алгоритм выделения контекстных данных для обработки сложной побудительной фразы, изображенный на рис. 5.
Рис. 5. Алгоритм выделения контекстных данных для обработки сложной
побудительной фразы
161
Известия ЮФУ. Технические науки
Тематический выпуск
Если предыдущая дискуссия и выделенный из неё контекст, не снимают неоднозначность, используется алгоритм принятия решений в условиях неопределённости, показанный на рис. 6.
Рис. 6. Алгоритм принятия решений в условиях неопределённости
Если побудительно предложение ставит перед автономным объектом задачу, для которой не существует алгоритм решения в базе знаний, используется
алгоритм решения нестандартных задач с последующим пополнением модели
мира на основе поиска противоречий.
Для развития базы знаний используется алгоритм формирования базы знаний на основе обобщения имеющихся знаний. Обобщение происходит путём
применения трансдукции. Трансдукция – это умозаключение, при котором на
основе сходства некоторых свойств объектов делается вывод и о сходстве остальных. В данной работе трансдукция выражается в том, что объектам, имеющим одинаковые постоянные свойства, присваиваются одинаковые возможные
действия.
Эти и более мелкие алгоритмы позволяют реализовать сформированные
требования к интеллектуальному интерфейсу.
С помощью разработанного программного обеспечения было проведено
сравнительное экспериментальное исследование функционирования разработанного интерфейса и интерфейса на основе простой фреймовой модели в экстремальных условиях.
По результатам исследования были выявлены положительные и отрицательные характеристики обоих интерфейсов, представленные в таблице 1.
162
Раздел III. Интеллектуальные технологии управления
Интерфейс с моделью мира
«+»
•
•
•
•
Пользователю в стрессовой ситуации нет необходимости повторять сказанное и точно формулировать задачу, так как эта
информация уже сохранена в
«быстрой» памяти
В модели мира хранится гораздо
больше информации, чем во
фреймовой модели, а именно о
действительных и возможных
взаимосвязях объектов диалога,
опущенных в диалоге
Из предшествующего разговора
взята дополнительная информация, которая впоследствии может оказаться решающей, например, о неполноте гранаты,
что определяет её внешний вид
Даже если какая-то информация
неизвестна, это вызовет гораздо
меньше вопросов, чем у интерфейса, использующего прагматическую диалоговую модель,
который будет выяснять постановку задачи «с нуля».
Недопонимание вследствие неполноты или некорректности заполнения модели мира может
выясниться в самый последний
момент, однако, риск этого не
велик
•
Таблица 1
Интерфейс с простой
фреймовой моделью
При точной формулировке
задания минимален риск недопонимания
Из-за попытки максимально
точно понять условия задачи
автономный объект может
не успеть выполнить поставленную задачу
• Анализируется только информация, содержащаяся в
постановке задачи. В стрессовой ситуации человек может забыть повторить что-то
из уже сказанного, что может оказаться важным для
решения задачи
Проведённые экспериментальные исследования показали, что использование
модели мира описанной структуры существенно повышает скорость и эффективность работы интерфейса.
В работе разработана и описана структура человеко-машинного интерфейса
автономного объекта, в которой учтено то, что автономный объект может находиться на удалении от оператора и, следовательно, может и должен принимать решения в реальном времени на основе собственных знаний, рекогносцировки местности и предшествующего диалога с оператором. Для достижения этих целей было
«−»
•
•
163
Известия ЮФУ. Технические науки
Тематический выпуск
предложено использовать базу знаний на основе модели мира. Предложенная модель мира легко пополняема в ходе диалога на естественном языке, не имеет ограничений по структуре, количеству и типу связей, использует объектноориентированный подход. Модель дополнена так называемой «быстрой памятью»,
а именно историей последних диалогов, которые в первую очередь используются
для разрешения неопределённостей. Разработанная модель мира показала свою
конкурентоспособность в ходе экспериментов, в том числе, по принятию решения
в условиях неопределённости. В данной работе были разработаны алгоритмы и
программное обеспечение для функционирования предложенной модели. При помощи разработанного программного обеспечения были проведены тестовые испытания интерфейса, которые были признаны удовлетворительными. При сравнительном анализе работы данного интерфейса с интерфейсом, не использующим
модель мира, лучшие результаты были получены для разработанной модели.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Искусственный интеллект: Справочник, в 3-х книгах – М.: Радио и связь, 1990.
2. Katherine Nnelson. Event Knowledge Structure and Function in Development. Hillsdale,
New Jersey – l.: Lawrence Erlbaum Associates, Publishers, 1986. – Р. 2.
3. Цаленко М.Ш. Моделирование семантики в базах данных. – М.: Наука, 1989.
4. Thomas Laengle, Tim C. Lueth, Eva Stopp, Gerd Herzog, Gjertrud Kamstrup "KANTRA - A
Natural Language Interface for Intelligent Robots" In: U. Rembold, R. Dillman,
L.O. Hertzberger, and T. Kanade (eds.), Intelligent Autonomous Systems (IAS 4),
pp. 357-364. Amsterdam: IOS, 1995.
5. Lauria S., Bugman G., Kyriacou T., Bos J. and Klein E., «Training Personal Robots Using
Natural Language Instruction», IEEE Intelligent Systems 16 (5) : 38-45, 2001.
6. Spiliotopoulos D., Androutsopoulos I., and Spyropoulos C.D., «Human-Robot Interaction
Based on Spoken Natural Language Dialogue». European Workshop on Service and Humanoid Robots (ServiceRob-2001), Santorini, Greece, 25-27 June, 2001.
7. Гаврилов А.В., Губарев В.В., Джо К.-Х., Ли Х.Х. "Архитектура гибридной системы
управления мобильного робота" Научный вестник НГТУ. – 2004. № 2.
8. Лачинов В.М. «Задача структуризации данных в концепции динамического объекта».
Труды Международной конференции “Интеллектуальные системы информационных
технологий управления”, 2000.
164
Раздел IV. Информационные технологии
Раздел IV. Информационные технологии
УДК 001.89: 539.2 (621.382.132)
Б.Г. Коноплев, О.А. Агеев
ЭЛИОННЫЕ И ЗОНДОВЫЕ НАНОТЕХНОЛОГИИ ДЛЯ МИКРОИ НАНОСИСТЕМНОЙ ТЕХНИКИ
В рамках реализации Федеральной адресной инвестиционной программы
(мероприятия по развитию инфраструктуры наноиндустрии в РФ на 2007 г.) и в
соответствии распоряжением Правительства РФ от 08.02.2007 г. №146-р, приказами Федерального агентства по образованию № 441 от 02.03.07 г. и № 1412 от
03.08.07 г. в Южном федеральном университете на базе Технологического института ЮФУ в г. Таганроге создан научно-образовательный центр по направлению
"Нанотехнологии".
НОЦ “Нанотехнологии” ЮФУ обеспечивает органичное соединение научного, учебного и производственного процессов путем широкого вовлечения в его
деятельность преподавателей и студентов, объединение научного потенциала
кафедр для решения учебных, учебно-методических, технических и экономических задач, стоящих перед университетом, предприятиями Южного федерального округа, подготовку кадров высшей квалификации и студентов по индивидуальным планам.
Основными направлениями деятельности НОЦ “Нанотехнологии” ЮФУ являются:
♦ проведение научно-исследовательских, опытно-конструкторских и иных
работ по договорам и заказам;
♦ учебная и учебно-методическая деятельность;
♦ выполнение научно-методических разработок и издательская деятельность;
♦ целевая подготовка специалистов для народного хозяйства, подготовка
кадров высшей квалификации;
♦ учебно-производственная деятельность по выполнению заказов и реализации изделий социально-бытового, культурного, хозяйственного и технического назначения;
♦ внедренческая деятельность по реализации наукоемкой продукции.
Направления научных работ НОЦ “Нанотехнологии” ЮФУ:
♦ наноматерилы;
♦ наноэлектроника;
♦ наносистемная техника;
♦ производственные нанотехнологии;
♦ биомедицинские нанотехнологии;
♦ нанодиагностика;
♦ нанохимия;
♦ нанофизика.
165
Известия ЮФУ. Технические науки
Тематический выпуск
Структура НОЦ “Нанотехнологии” ЮФУ включает в себя два специализированных чистых помещения – класса 5 ИСО (общая площадь 100 м2) и 7/5 ИСО
(общая площадь 400 м2), а также лаборатории:
♦ лаборатория кластерных технологий (чистое помещение класса 5 ИСО);
♦ лаборатория элионных нанотехнологий;
♦ лаборатория зондовых нанотехнологий;
♦ лаборатория наноматериалов;
♦ технологическая гермозона для формирования структур микро- и наномеханики (чистое помещение класса 7/5 ИСО);
♦ лаборатория микро- и наносистем;
♦ лаборатория моделирования нанотехнологий и САПР;
♦ лаборатория оптоэлектроники и нанооптики.
Тематика основных научно-исследовательских проектов, выполняемых в настоящее время:
♦ разработка функционально-интегрированных элементов сверхбольших
интегральных схем на основе туннельно-связанных квантовых областей;
♦ разработка нетермически активируемых технологических процессов создания элементной базы наноэлектроники;
♦ разработка и исследование элементной базы, методов и средств проектирования микро- и наносистем на кристалле.
В настоящее время проводятся работы с предприятиями и ведомствами:
«Курчатовский институт», институт нанотехнологий микроэлектроники РАН, ЗАО
“Нанотехнологии
МДТ” (г. Москва), “Ростовский-на-Дону научноисследовательский институт радиосвязи”, Южный научный центр РАН, «ООО завод Кристалл» (г. Таганрог) и др.
На базе НОЦ “Нанотехнологии” ЮФУ создается центр подготовки и переподготовки специалистов Южного федерального округа, ориентированных на инновационную деятельность в области нанотехнологий.
Все оборудование осваивается сотрудниками Центра, широко исполь-зуется
при выполнении НИОКР и в учебном процессе студентов, магистрантов и аспирантов. Для школьников Таганрога проводятся ознакомительные занятия по основам нанотехнологии.
На факультете электроники и приборостроения Технологического института
ЮФУ с 2003 г. ведется подготовка инженеров по специальности “Нанотехнология
в электронике”, а также бакалавров и магистров по направлению "Нанотехнология". В 2008 г. состоялся первый выпуск специалистов.
Результаты научных исследований являются основой для подготовки и защиты докторских и кандидатских диссертаций. Осуществляется подготовка кандидатов и докторов наук по специальностям:
♦ 05.27.01 – твердотельная электроника, радиоэлектронные компоненты,
микро- и наноэлектроника, приборы на квантовых эффектах по техническим наукам;
♦ 05.11.17 – приборы, системы и изделия медицинского назначения по
техническим наукам;
♦ 01.04.06 – акустика по техническим наукам.
Оборудование, которым оснащен НОЦ “Нанотехнологии” ЮФУ, позволяет
проводить исследования и разработки, соответствующие современным тенденциям
развития нанотехнологии [1 - 3].
166
Раздел IV. Информационные технологии
В состав оборудования НОЦ “Нанотехнологии” ЮФУ входит многофункциональный сверхвысоковакуумный нанотехнологический комплекс НАНОФАБ НТК-9
(разработка ЗАО "Нанотехнология МДТ" (г. Зеленоград)) (рис. 1), который представляет собой нанотехнологический комплекс с расширенными аналитическими
возможностями, состоящий из сверхвысоковакуумных аналитических и технологических модулей, которые объединены сверхвысоковакуумной транспортной
системой в координатно-связанную технологическую линию для решения задач
разработки, контроля и мелкосерийного производства изделий методами нанотехнологии.
Рис. 1. Многофункциональный сверхвысоковакуумный нанотехнологический
комплекс НАНОФАБ НТК-9
В технологических процессах, реализованных в НАНОФАБ, используется
широкий спектр методов активного физического воздействия для изготовления
наноразмерных структур и синтеза новых перспективных материалов: ионнолучевое воздействие, плазменное воздействие, лазерное воздействие, СЗМлитография и др.
Нанотехнологический комплекс НАНОФАБ НТК-9 оснащаен модулями, которые обеспечивают комплексное решение поставленных задач и получения новых
знаний в области нанотехнологий и перспективных материалов:
♦ модуль сверхвысоковакуумного сканирующего зондового микроскопа
(СЗМ) в котором реализован широкий диапазон аналитических методик
сканирующей зондовой микроскопии и спектроскопии, с возможностями
литографа, ассемблера нанокластеров, наноманипулятора;
♦ модуль со сверхвысоковакуумной сканирующей ионной системой с возможностью фокусировки пучка ионов галлия до 10 нм, для анализа и
формирования структур методами травления фокусированным пучком
ионов, и анализа в режиме ионно-электронного микроскопа;
♦ модуль с высоковакуумной сканирующей ионной системой с возможностью фокусировки пучка ионов галлия до 10 нм для локального формиро167
Известия ЮФУ. Технические науки
Тематический выпуск
вания структур методами ионного травления и деструкции элементоорганических соединений под действием фокусированного пучка ионов (локальный CVD-процесс);
♦ модуль со сверхвысоковакуумной сканирующей ионной системой с возможностью масс-сепарации и фокусировки пучка ионов до 10 нм для локальной ионной имплантации;
♦ сверхвысоковакуумный модуль молекулярно-лучевой эпитаксии GaAs и
твердых растворов на его основе;
♦ специализированный модуль инициированного плазмой газофазного осаждения, для выращивания углеродных нанотрубок (CVD-модуль).
♦ модуль нанесения сегнето- и пьезоэлектрических пленок методом импульсного лазерного осаждения;
♦ модуль отжига образцов;
♦ модули загрузки и транспортировки образцов.
Для проведения структурно-аналитических исследований физико-химических
процессов и методов активного физического воздействия для изготовления наноразмерных структур и синтеза новых перспективных материалов нанотехнологический комплекс НАНОФАБ НТК-9 оснащен:
♦ модулем СЗМ, в котором реализован широкий диапазон аналитических
методик сканирующей зондовой микроскопии и спектроскопии;
♦ вторично-ионным масс-спектрометром и растровым электронным микроскопом в модуле травления фокусированным ионным пучком;
♦ дифрактометром быстрых электронов в модулях молекулярно-лучевой
эпитаксии и импульсного лазерного осаждения;
♦ пирометром в модуле молекулярно-лучевой эпитаксии.
Уникальность нанотехнологического комплекса НАНОФАБ НТК-9 состоит в
том, что он характеризуется наиболее полной комплектацией и объединяет большинство перспективных групповых и индивидуальных методов активного физического воздействия, применяемых в нанотехнологии [1 - 3].
К аналитико-технологическому оборудованию, которое имеется в НОЦ
“Нанотехнологии” ЮФУ относится растровый электронно-ионный микроскоп с
системой электронной литографии Nova NanoLab 600 (FEI Companu, Netherland)
(рис. 2). РЭМ Nova NanoLab 600 предназначен для исследования внутреннего
строения объектов на микро- и наноуровнях, создания трехмерных изображений
образцов. Отличительной особенностью комплекса является совместное использование фокусированных электронного и ионного пучков. Это позволяет совмещать операции модификации подложек ионным пучком с выполнением анализа
и контроля технологического процесса электронным лучом. В состав Nova 600
входят: электронно-лучевая колонна, оснащенная катодом с полевой эмиссией,
ускоряющее напряжение от 200 В до 30 кВ, разрешение 1,1 нм при 15 кВ; ионная колонна Magnum с галлиевым жидкометаллическим источником ионов, ускоряющее напряжение от 5 кВ до 30 кВ, разрешение 7 нм; 4-х канальная газовая
инжекционная система; система энергодисперсного рентгеновского микроанализа EDAX GENESIS 6000i; система электронно-лучевой литографии Raith ELPHY
6 MHZ. Система оснащена 5-и осевым программно-управляемым моторизованным предметным столиком (150×150×10 мм), позиционирующим образец с высокой точностью.
168
Раздел IV. Информационные технологии
Рис. 2. Электронно-ионный сканирующий микроскоп Nova NanoLab 600
НОЦ “Нанотехнологии” ЮФУ оснащен комплектом оборудования для формирования структур микро- и наномеханики, структурных исследований и контрольно-измерительного оборудования для исследования электрофизических параметров, установленного в технологической гермозоне – чистом помещении
класса 7/5 ИСО, общей площадью 400 м2. В состав этого комплекта входит различное оборудование отечественного и зарубежного производства:
♦ установка плазмохимического осаждения в индуктивно-связанной плазме
STE ICPd 47;
♦ установка плазмохимического травления в индуктивно-связанной плазме
STE ICPe 45;
♦ установка плазмохимического осаждения poly-Si OXFОRD Plasma Lab 80
plus LPCVD;
♦ установка плазмохимического травления в кислородной плазме YESCV200RFS;
♦ установка электронно-лучевого и магнетронного напыления AUTO500;
♦ установка термического отжига STE ThA 49 LC;
♦ установка совмещения и экспонирования MJB4;
♦ центрифуги для нанесения резистов и сушки WS-400E-NPP, WS-400E6NPP;
♦ плитки для сушки резистов и образцов HP-401-250, HP-160-250;
♦ шкаф химический для химико-динамического травления VLF Wet
Processing Station;
♦ печь диффузионная СДОМ-3_100-М;
♦ установка для измерения ЭДС Холла Ecopia HMS-3000/1T;
♦ зонд для полуизолирующих подложек LEI 2017B;
♦ установка бесконтактного измерения удельного сопротивления LEI
1510m40;
♦ измерительный комплекс Keithley 4200-SCS;
♦ зондовая станция ЭМ6070А;
♦ микроскоп интерференционный МИИ-4М;
169
Известия ЮФУ. Технические науки
Тематический выпуск
♦ оптические микроскопы различного назначений.
Кроме того, в НОЦ “Нанотехнологии” ЮФУ имеется так же комплект оборудования для исследований зондовыми методами (производитель – ЗАО “Нанотехнология-МДТ”, г. Зеленоград):
♦ сканирующая зондовая нанолаборатория Ntegra Vita;
♦ сканирующий зондовый микроскоп Solver P47Pro;
♦ учебные сканирующие зондовые микроскопы NanoEducator.
Имеющееся оборудование позволяет создавать элементы микро- и наноэлектромеханических систем методом ионно-лучевого травления [1, 3].
В частности, были проведены исследования по созданию топологии элементов шаблонов для LIGA-технологии. В качестве образца для экспериментальных
исследований использовалась пленка золота на кремнии толщиной 500 нм. Травление по заданному шаблону производилось в течение 3 мин при токе ионного
пучка порядка (1-2) нА. В процессе ионно-лучевого травления осуществлялась визуализация структуры с помощью растрового электронного микроскопа.
На рис. 3 представлены результаты формирования и исследования тестовых
элементов шаблонов для LIGA-технологии методами растровой электронной микроскопии и атомно-силовой микроскопии. Кроме того, в ходе исследований были
сформированы массивы упорядоченных наноразмерных структур с высоким аспектным соотношением – автоэлектронных эмиттеров мембранные балки и макеты
чувствительных элементов датчиков кантилеверного типа (рис. 4).
а
б
в
Рис. 3. Тестовые элементы шаблонов для LIGA-технологии:
а – РЭМ-изображение; б – АСМ-изображение; в – профиль структуры
170
Раздел IV. Информационные технологии
а
б
Рис. 4. Массив эмисионных наноразмерных структур (а) и макет
чувствительного элемента датчика кантилеверного типа (б) сформированные
ионно-лучевым травлением
Применение фокусированных ионных пучков дает возможность производить прецизионное ионно-лучевое травление ИМС и локальное осаждение материалов при подаче в зону воздействия пучка газа, являющегося носителем осаждаемого материала. Изучение внутренней структуры микросхем осуществляется
построением серии срезов ионным пучком с последующим контролем плоскости
среза в растровом электронном микроскопе (рис. 5,а). Использование специализированных программных сред дает возможность восстанавливать трехмерную
структуру слоев ИМС.
Метод ФИП может применяться для ретуши топологии ИМС. Например,
возможно разрезание металлических проводников для устранения закороток и
паразитных связей, осаждение проводящих дорожек для восстановления поврежденных проводящих шин на поверхности ИМС [3].
Одной из возможностей метода фокусированных ионных пучков является создание кросс-секций (рис. 5,б), что может быть использовано для пробоподготовки для метода просвечивающей электронной микроскопии (ПЭМ).
Для формирования структур элементов наноэлектроники могут также использоваться прецизионные методы зондовой нанолитографии. В лаборатории
зондовой нанотехнологии НОЦ “Нанотехнологии” ЮФУ проводятся исследования стимулированных процессов зондовой нанолитографии и разработка технологии формирования элементов наноэлектроники метами локального анодного
окисления [1, 4, 5].
Исследования нанолитографии проводилось на поверхности пленки титана с
помощью зондовой нанолаборатории (ЗНЛ) Ntegra Vita методом локального анодного окисления тонких пленок титана на кремниевой подложке. Влажность в технологической камере контролировалась с помощью цифрового измерителя влажности Oregon Scientific ETHG913R с точностью ±1%. Нанолитография выполнялась векторным методом в динамическом режиме АСМ, с применением пакета
прикладных программ Nova RC1 (1.0.26.1238). Исследование влияния длительности импульсов напряжения на геометрические параметры формируемых оксидных
наноразмерных структур проводилось с использованием кремниевых кантилеверов
171
Известия ЮФУ. Технические науки
Тематический выпуск
с проводящим W2C покрытием, путем подачи импульсов напряжения амплитудой
10 В с длительностью от 10 до 1000 мс при трех значениях относительной влажности (50, 70 и 90%), как при стимуляции УФ- и ИК-излучением, так и без нее. Ток
цепи обратной связи системы управления СЗМ (параметр SetPoint) составлял
0,5 нА, скорость сканирования – 1,5 мкм/с. Полученное АСМ-изображение оксидных наноразмерных структур представлено на рис. 6.
а
б
Рис. 5. РЭМ-изображения сечения (а) и кросс-секции участка (б) интегральной
микросхемы полученных методом фокусированных ионных пучков
Рис. 6. АСМ-изображение ОНС титана, сформированных методом ЛАО при
различной длительности импульсов напряжения
172
Раздел IV. Информационные технологии
Создание элементов металлической наноэлектроники основано на формировании квазиодномерных каналов проводимости в тонких металлических пленках.
При поперечных размерах таких каналов порядка 10 нм в них наблюдаются поперечное квантование энергии электронов и квантовые свойства проводимости при
комнатной температуре [4, 5].
Для проверки полученных выводов и исследования влияния стимуляции фотонным излучением на процессы нанолитографии проводилось формирование наноразмерных каналов методом ЛАО. Растровая нанолитография, по шаблону в
виде трех пар линий с одинаковым расстоянием между ними, проводилась на
пленке титана при облучении области окисления источниками УФ- и
ИК-излучения. В результате ЛАО формировались линии из оксида титана. Анализ
показывает, что при УФ-стимуляции между оксидными линиями формировался
канал из титана с поперечными размерами порядка 11 нм, однородный по всей
длине (рис. 7,а). В случае отсутствия фотонной стимуляции, и при облучении ИКизлучением оксидные линии сращивались, и канал не формировался (рис. 7,б).
Анализ литературных данных показал, что такие структуры могут быть сформированы как в системах металл-окисел-полупроводник, так и в полупроводниковых
гетероструктурах, содержащих слой двумерного электронного газа [1, 4, 5].
а
б
Рис. 7. АСМ-изображение поверхности пленки титана:
а – после проведения ЛАО; б – профилограмма
Структуры на основе каналов проводимости, будучи планарными, более технологичны для соединения элементов при конструировании схем наноэлектроники. Основным достоинством такой структуры является то, что операция литографии осуществляется за один шаг.
На рис. 8 показано АСМ-изображение структуры на основе двух наноразмерных каналов проводимости с поперечными размерами порядка 10 нм, сформированной в пленке титана методом локального анодного окисления. Такая структура
может выполнять функцию логического вентиля.
Для исследования электрических характеристик разработанных макетов элементов наноэлектроники необходимо использовать шаблон тестовой структуры.
Внешние контактные площадки, с использованием дорожек металлизации, связаны
с центральной модифицируемой областью, в основе которой лежит анодоокисляемый материал. Ширина дорожек определяется минимальным размером операции
фотолитографии.
В результате проведенных исследований разработаны и экспериментально
реализованы макетные наноразмерные структуры диода, диодного моста и логического вентиля на основе наноразмерных каналов проводимости в пленке титана с
173
Известия ЮФУ. Технические науки
Тематический выпуск
помощью нанолитографии методом ЛАО. Полученные результаты могут быть использованы при разработке элементной базы наноэлектроники.
Рис. 8. АСМ-изображение макета структуры логического вентиля,
сформированного в пленке титана методом ЛАО
Для формирования и анализа электрических параметров полученных структур элементов наноэлектроники наиболее эффективно использование многофункционального нанотехнологического комплекса НАНОФАБ НТК-9, который позволяет проводить комплексные исследования физико-химических процессов, происходящих при формировании наноразмерных структур, контролировать параметры
технологических процессов, а также определять параметры изготовленных приборных структур в условиях сверхвысокого вакуума.
Проведены экспериментальные исследования физико-химических процессов
и технологических режимов формирования наноразмерных структур с использованием фокусированных ионных пучков, которые показали, что метод ФИП является
перспективным при изготовлении элементов микро- и наносистемной техники.
Установлено, что при анализе структуры СБИС применение оборудования
НОЦ “Нанотехнологии” ЮФУ позволяет использовать функциональные возможности систем со сфокусированным ионным пучком, сканирующей электронной
микроскопии и просвечивающей растровой электронной микроскопии. Экспериментально выявлена топологическая структура микросхемы, а также проведено
препарирование и исследована внутренняя структура ИМС. Отработана методика
травления структур по растровым шаблонам и методика создания кросс-секций.
Исследования процессов фотонностимулированной зондовой нанолитографии показали, что метод может быть эффективно использован для изготовления
элементов наноэлектроники, при этом фотонное излучение оказывает дополнительное внешнее воздействие на кинетику процесса ЛАО, что может быть использовано для управления параметрами формируемых оксидных наноразмерных
структур и модификации их свойств.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
Мальцев П.П. Нано- и микросистемная техника. От исследований к разработкам. Сборник статей. – М.: Техносфера, 2005. – 592 с.
Чаплыгин Ю.А. Нанотехнологии в электронике. – М.: Техносфера, 2005. – 448 с.
174
Раздел IV. Информационные технологии
Лучинин В.В. Нанотехнологии: физика, процессы, диагностика, приборы. – М.: Физматлит, 2006. – 552 с.
4. Асеев А.Л. Нанотехнологии в полупроводниковой электронике. – Новосибирск: Изд-во
СО РАН, 2004. – 368 с.
5. Неволин В.К. Зондовые нанотехнологии в электронике. – М.: Техносфера, 2006. – 160 с.
3.
УДК 681.324
Л.К. Бабенко, О.Б. Макаревич
ИССЛЕДОВАНИЯ ПО ПРОБЛЕМАМ ИНФОРМАЦИОННОЙ
БЕЗОПАСНОСТИ В ЮЖНОМ ФЕДЕРАЛЬНОМ УНИВЕРСИТЕТЕ И ИХ
РЕАЛИЗАЦИЯ В ОБРАЗОВАТЕЛЬНОМ ПРОЦЕССЕ
Как определено Концепцией защиты информации в Южном федеральном
округе (ЮФО) одной из основных задач развития системы защиты информации
является формирование и совершенствование структуры системы защиты в федеральном округе, развитие ее научно-технического и кадрового потенциала. Южный
федеральный университет (ЮФУ), будучи одним из ведущих вузов страны, активно участвует во внедрении концепции в Южном федеральном округе.
По проблемам информационной безопасности (ИБ) в ЮФУ в настоящее время реализованы следующие структуры (рис. 1).
Южно-российский
региональный центр по
проблемам информационной
безопасности в системе высшей
школы
Факультет информационной
безопасности в ТТИ ЮФУ,
г. Таганрог
Лаборатория фундаментальных
исследований проблем
ИБ ИИРПУ КБНЦ РАН,
г. Таганрог
Отдел защиты информации в
НИИ физики ЮФУ,
г. Ростов-на-Дону
Рис. 1. Структура подразделений по проблемам ИБ в ЮФУ
Основные работы по направлению «Информационная информация» проводятся в Технологическом институте Южного федерального университета в г. Таганроге (бывшем Таганрогском радиотехническом университете) рис. 2.
Работы по ИБ в ЮФУ ведутся в следующих направлениях:
♦ подготовка, повышение квалификации и переподготовка кадров;
♦ проведение исследований и разработок, направленных на внедрение в
сфере науки и производства безопасных информационных технологий;
♦ аттестация и лицензирование технических средств защиты информации.
175
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 2. Структурные подразделения ТТИ ЮФУ по ИБ
Информационная безопасность – это такая область, в которой невозможно
обойтись без отечественных разработок. В рамках научных структурных подразделений ЮФУ ведутся фундаментальные и прикладные НИОКР. Ежегодно сотрудниками Южно-российского регионального центра по проблемам информационной
безопасности и кафедры БИТ выполняется хоздоговорных и госбюджетных научно-исследовательских и опытно-конструкторских работ на сумму от трех до шести
с половиной миллионов рублей.
Проводимые исследования охватывают широкий круг проблем. К ним относятся:
♦ защита от несанкционированного доступа к информационным ресурсам
рабочих станций в локальных и глобальных сетях с использованием современных методов криптографии и разрабатываемых методов биометрической идентификации (аутентификации) пользователя «по голосу», по
«отпечатку пальца», по клавиатурному подчерку, а также с использованием «интеллектуальных карт» и электронных брелков типа eToken;
♦ создание технологических, программных и программно-аппаратных
средств выявления и обнаружения информационно-технических атак на
объекты информационной сферы;
♦ повышение уровня защищенности информации при передаче в информационно-телекоммуникационных сетях общего пользования на основе
применения средств стеганографии и разработка способов контроля
скрытной передачи информации;
♦ разработка методического обеспечения и средств защиты информации от
несанкционированного доступа, обрабатываемой в геоинформационных
системах;
♦ исследование и выбор оптимальных инженерно-технических решений
создания перспективного защищенного цифрового абонентского терминального оборудования для использования его в интеллектуальных системах (сетях) связи;
♦ разработка методов и средств управления доступом к данным, в частности, для геоинформационных систем с использованием сертификатов открытых ключей.
176
Раздел IV. Информационные технологии
По всем рассматриваемым проблемам широким фронтом ведутся разработки
как сотрудниками подразделений, так аспирантами и студентами. Результатами
данных исследований являются новые алгоритмы, методы, методики, комплексы
программ, а также оптимальные инженерно-технические решения по отдельным
аппаратно-программным средствам, использование которых позволит решить многие проблемы в области защиты информации объектов информатизации. Все они
опубликованы в статьях, доложены на конференциях и семинарах. Сотрудниками
кафедры изданы три монографии: Новые технологии электронного бизнеса и безопасности / 2-е изд., доп. и перер. – М.: Радио и связь, 2002. – 512 с., Защита информации с использованием смарт–карт и электронных брелоков. – М.: Гелиос
АРВ, 2003. – 352 с. и Алгоритмы «распределенных согласований» для оценки вычислительной стойкости криптоалгоритмов. – М.: Изд-во ЛКИ, 2008. – 112 с.
Научные исследования проводятся на современной аппаратуре и сертифицированном программном обеспечении.
Следует отметить, что многие сотрудники кафедры являются руководителями
грантов Российского фонда фундаментальных исследований (РФФИ), всего же за
период 1999 - 2008 гг. кафедра выполнила четырнадцать грантов РФФИ. Среди
них: «Разработка системного программного обеспечения параллельных вычислительных систем на основе сетевых Internet/Intranet кластеров для решения задач
моделирования», «Разработка и исследование методов и средств защиты информации в геоинформационных системах», «Исследование и разработка моделей, методов и средств обнаружения атак», «Исследование и разработка высокоточных методов и средств стегоанализа», «Организация и проведение научно-практических
конференций по информационной безопасности».
Трое молодых сотрудников кафедры выиграли молодежные гранты РФФИ.
Каждый год мы имеем от 40 до 50 публикаций по тематике «Защита информации».
Все вышесказанное подтверждает наличие на кафедре научной школы, способной вести подготовку специалистов высшей квалификации. Таким образом,
исследовательская, опытно-конструкторская работа и научные публикации являются приоритетными задачами персонала кафедры.
Все результаты научных работ используются в учебном процессе при чтении
лекций и проведении лабораторных и практических занятий.
Так, например, создан лабораторный практикум по изучению возможностей и
приобретению практических навыков разработки приложений с использованием
смарт-карт ASE фирмы Athena Smartcard Solutions Ltd [1]. Интегрированная программная среда ASESoft служит для создания приложений на смарт-карте ASE и
состоит из двух уровней.
Первый (нижний) уровень предназначен для обмена данными с картами ASEcard и устройствами считывания карт ASE Drive, передачи потоков данных между
программой и устройством ASE Drive, между устройством и картами.
Второй уровень (High Level Api) позволяет разработчику обмениваться данными с картой по протоколу ISO 7816-4, управлять состоянием ридера и карты,
позволяет сформировать пакет данных, распознаваемых ридером, проверить ответ
на валидность, производить выполнение простейших операций над картой (доступ
к данным, выбор идентификатора файла, получение служебной информации о карте), а также высокоуровневых команд (прочитать данные в пользовательский файл,
создавать и управлять файлами, производить внутреннюю и внешнюю аутентификацию, операции сравнения и т.д.).
Типичное приложение, работающее со смарт-картами, использует следующую последовательность вызова функций:
177
Известия ЮФУ. Технические науки
Тематический выпуск
Получение основной информации об устройстве ASEDrive.
Открытие устройства.
Вызов функций для проведения необходимых операций с картой.
После выполнения всех операций с картой, завершение сеанса работы путем закрытия устройства.
В лабораторном практикуме подробно рассматривается каждый из этапов,
приводится подробное описание всех низкоуровневых и высокоуровневых функций, формулируются варианты заданий для выполнения студентами.
Предлагаемые задания связаны с разработкой приложений, которые проводили
бы аутентификацию и авторизацию при использовании студентами смарт-карт в научно-технической библиотеке, при получении стипендии, в медицинском пункте.
Благодаря изучению смарт-карт ASE, как одного из современных средств защиты информации студенты приобретают навыки эксплуатации и разработки перспективных систем с использованием других интеллектуальных карт, электронных
брелоков, аппартных ключей, которые еще только создаются [2].
Разработан лабораторный практикум по изучению методов и систем биометрической аутентификации [3]. Работа посвящена вопросам практического изучения
функционирования, а также методов оценки характеристик биометрических систем. Программный комплекс текстонезависимой голосовой аутентификации
(рис. 3) состоит из двух основных частей:
♦ подсистема регистрации пользователя;
♦ подсистема аутентификации пользователя.
1.
2.
3.
4.
Рис. 3. Структура системы голосовой аутентификации
178
Раздел IV. Информационные технологии
Для решения задач регистрации и аутентификации пользователя. использованы искусственные нейронные сети. Работа с программным комплексом состоит из
следующих основных этапов:
1. Запись голоса регистрируемого пользователя.
2. Создание биометрического шаблона пользователя. Заключается в удалении
пауз шумных участков речи, выделении биометрических параметров обучения искусственной нейронной сети с архитектурой многослойный персептрон.
3. Аутентификация пользователя на основе созданного ранее шаблона.
Студенты при выполнении работы практически реализуют все три этапа биометрической голосовой аутентификации, используя в качестве дикторов себя и
своих коллег, строят графики распределений вероятностей, определяют ошибки
первого и второго рода.
Благодаря проводимым на кафедре БИТ перспективным НИОКР по биометрическим методам аутентификации с использованием нейросетевых технологий
студенты, магистранты, аспиранты и сотрудники имеют возможность глубоко изучать не только перспективные средства защиты информации, но и современный
уровень теоретических основ информатики.
Разработан лабораторный практикум по изучению системы удостоверяющих
центров для обеспечения взаимной аутентификации, для рассылки и проверки
сертификатов открытых ключей, организации защищенной сетевой транзакции при
регистрации пользователя и получении сертификата [4].
Так выглядит вкладка «Клиенты» в созданной лабораторной работе по системе удостоверяющий центр (рис. 4).
Рис. 4. Меню «Клиенты» в лабораторной работе по удостоверяющим центрам
Разработанный удостоверяющий центр (рис. 5) может выполнять следующие
функции:
♦ хранение и выдачу сертификатов конечным пользователям и другим удостоверяющим центрам;
179
Известия ЮФУ. Технические науки
Тематический выпуск
проверку сертификатов по всей иерархии удостоверяющих центров (до
корневого включительно);
♦ отзыв скомпрометированных сертификатов;
♦ организацию защищенной сетевой регистрации (получение сертификата) для конечных пользователей;
♦ создание разветвленной иерархии удостоверяющих центров любой
конфигурации.
Цифровой сертификат – это набор данных, содержащий значение открытого ключа, информацию, идентифицирующую владельца и издателя сертификата,
служебную информацию, а также электронно-цифровую подпись, сгенерированную удостоверяющим центром. Цифровой сертификат является механизмом
распространения открытых ключей. Разработанная структура сертификата и
методы его проверки отвечают рекомендациям Х.509v3 – международнопризнанному формату инфраструктуры открытых ключей.
♦
Клиент
Удостоверяющий центр
Запрос
База Данных собственных
сертфикатов и ключей
База Данных отозванных
сертификатов
№ проверяемого серт-та
(№ Sпров.)
№ запрошенного серт-та
(№ Sзапр.)
Ответ
Запрошенный серт-т Sзапр
отозван ли Sпров- ДА/НЕТ
элек.-цифр. подпись
Рис. 5. Структура удостверяющего центра
Лабораторная работа состоит из 4 основных этапов:
Установка и настройка корневого удостоверяющего центра на отдельном компьютере в сети (уровень в иерархии = 0).
2. Установка и настройка подчиненного корневому удостоверяющего центра на отдельном компьютере в сети (уровень в иерархии = 0).
3. Установка и настройка клиентского приложения для проведения защищенной сетевой транзакции.
4. Проведение защищенных сетевых транзакций.
На основании знакомства с возможностями удостоверяющих центров, выполнения этапов лабораторной работы, реализуя перечисленные функции, студенты овладевают технологией инфраструктуры открытых ключей, современными протоколами аутентификации.
1.
180
Раздел IV. Информационные технологии
Разработано пять лабораторных работ, посвященных современным методам
криптоанализа [4-8].
1. Изучение метода линейного криптоанализа применительно к алгоритмам шифрования, построенным по схеме Фейстеля.
2. Изучение метода дифференциального криптоанализа применительно к
алгоритмам шифрования, построенным по схеме Фейстеля.
3. Изучение метода дифференциального криптоанализа применительно к
многораундовым алгоритмам шифрования, построенным на основе сети
SPN.
Изучение метода линейного криптоанализа применительно к многораундовым алгоритмам шифрования, построенным на основе сети SPN.
Изучение метода слайдовой атаки на примере алгоритмов шифрования,
построенных по схеме Фейстеля.
Разработанные лабораторные работы отвечают следующим требованиям:
♦ обладают похожим интуитивно понятным интерфейсом;
♦ запрашивают все необходимые сведения о студенте содержат не менее
10 вариантов индивидуальных заданий;
♦ позволяют проверить правильность проведенного анализа..
Для выполнения работ использованы следующие учебные алгоритмы шифрования.
1. Учебный алгоритм шифрования, построенный по схеме Фейстеля.
2. Алгоритм шифрования, построенный по принципу сети SPN.
3. Алгоритм шифрования S_DES.
Первые два алгоритма разработаны авторами специально для проведения
лабораторных работ, третий – позаимствован из литературы [10].
Интерфейсы программы для проведения лабораторных работ изображены
на рис. 6.
Таким образом, на кафедре созданы предпосылки для изучения стойкости
существующих и вновь создаваемых криптоалгоритмов.
Первые три лабораторные работы могут быть использованы для курсов:
«Программно-аппаратные средства обеспечения информационной безопасности», «Программно-аппаратная защита информации» при обучении студентов
специальностей 090103,090104, 090105.
Последние пять лабораторных работ могут быть использованы для курса
«Криптографические методы и средства обеспечения информационной безопасности» при обучении студентов специальностей 090103,090104, 090105.
Благодаря оперативному использованию результатов НИОКР в учебном
процессе студенты, магистранты, аспиранты и преподаватели могут легко осваивать современные средства защиты информации и повышать свою квалификацию в области программно-аппаратных средств и методов защиты, изучая на
практике основные ее подсистемы: криптографическую, аутентификации, управления доступом, контроль целостности.
4.
181
Известия ЮФУ. Технические науки
Тематический выпуск
Рис. 6. Интерфейсы программы для проведения лабораторных работ
В первую очередь ЮФУ является кузницей по подготовке и переподготовке
кадров, особо следует отметить проблему повышения квалификации. Университет
готовит специалистов по трем специальностям направления 090100 Информационная безопасность» [11]. В настоящее время на факультете «Информационной безопасности» ежегодно обучается более 1000 студентов по специальностям:
♦ 090103 – Организация и технология защиты информации;
♦ 090104 – Комплексная защита объектов информатизации;
♦ 090106 – Информационная безопасность телекоммуникационных систем;
♦ 210403 – Защищённые системы связи.
Страна уже получила около 900 специалистов, из них 140 имеют дипломы с
отличием. Наши выпускники работают в государственных организациях и учреждениях, банках, частных фирмах, в силовых структурах. Распределение молодых
специалистов пока не вызывает затруднений, 80% их них работают по специальности. Подготовка кадров в субъектах ЮФО приведена в таблице.
182
Раздел IV. Информационные технологии
Подготовка кадров по ИБ в ЮФО
№
1
2
3
4
5
Субъект ЮФО
Таблица
Кол-во
Кол-во
Вуз Специальность обучающихся выпущенных
студентов специалистов
Ростовская обл.
Все
Ставропольский край 12 специальности
,
Краснодарский край вузов
кроме
Астраханская обл.
090101 и 090107
Волгоградская обл.
3310
1940
Нет специальностей по направлению «Информационная безопасность» в вузах: Кабардино-Балкарии, Северной Осетии, Дагестана, Калмыкии, Чеченской республики, Адыгеи.
Комплексная система подготовки кадров в Технологическом институте ЮФУ
(2000-2008 г.г.), в том числе и высшей квалификации, показана на рис. 7.
Рис. 7. Комплексная система подготовки кадров в ТТИ ЮФУ
Следует отметить, что в совете по защите диссертаций в 2005-2008 гг. защитились 19 соискателей по специальностям 051319 «Защита информации и информационная безопасность» и 052505 «Информационные системы и процессы». Подготовка кадров напрямую связана с проблемами квалификации «учителей» и наличием современной лабораторной базы. В этом плане в ЮФУ все в порядке: на факультете информационной безопасности работает восемь докторов наук и более 30
кандидатов, за последние два года приобретено оборудования на 40 млн рублей.
183
Известия ЮФУ. Технические науки
Тематический выпуск
Большая роль в организации совместных работ и координации деятельности
кафедр, факультетов и структурных подразделений вузов региона Юга России
принадлежит Южно-Российскому региональному учебно-научному центру (РУНЦ)
ЮФУ по проблемам информационной безопасности в системе высшей школы,
созданном приказом по Минвузу от 20.08.97 г. №1781 (рис. 8). Центр участвует в
разработке, формировании и реализации научно-технических и учебных программ
органов государственной власти и местного самоуправления в области проблемных и прикладных проблем ИБ. Основные задачи РУНЦ по ИБ:
♦ создание комплексной системы регионального уровня по подготовке, повышению квалификации и аттестации кадров всех уровней квалификации
в области информационной безопасности;
♦ организация, подготовка и проведение методических семинаров, конференций;
♦ проведение исследований и разработок по ИБ в интересах региональных
структур;
♦ подготовка и издание учебной, научной и методической литературы по ИБ.
Руководитель: д-р техн.
наук,
профессор Бабенко Л.К.
Руководитель: канд.
техн. наук.,
доцент Пескова О.Ю.
Руководитель: д-р физ.мат. наук., профессор
Панченко Е.М.
Рис. 8. Структура и задачи Южно-Российского регионального учебно-научного
центра по проблемам информационной безопасности в системе высшей школы
ЮФУ
Решением Совета по безопасности при представителе Президента в Южном
федеральном округе на Центр возложены функции окружного Центра по обучению и повышению квалификации. С таким же предложением выступил Совет по
безопасности при Губернаторе Ростовской области, при этом Центр ЮФУ должен
функционировать как в Таганроге, так и в Ростове. За последние три года курсы
повышения квалификации окончили 70 сотрудников Администрации Ростовской
области, 30 специалистов Пенсионного фонда РФ, сетевые администраторы Русславбанка и его филиалов, преподаватели вузов Южного региона. Дипломы о дополнительном образовании по специальности «Организация и технология защиты
информации» получили более 300 выпускников других кафедр ЮФУ.
Одной из существенных задач в настоящее время является создание
ЦЕНТРА коллективного пользования, оснащенного современной аппаратурой и
программным продуктом, для проведения обучения студентов, преподавателей и
специалистов ЮФО.
184
Раздел IV. Информационные технологии
Взаимодействие РУНЦ ЮФУ с субъектами Южного федерального округа
осуществляется через:
♦ обучение в ТТИ ЮФУ филиалы по направлению ИБ 090100;
♦ семинары повышения квалификации по ИБ для преподавателей вузов
ЮФО (университеты Ставрополя, Нальчика, Ростова, Махачкалы, Элисты, Новочеркасска, Астрахани и др.);
♦ целевую аспирантуру (из университетов Нальчика, Майкопа, Махачкалы).
В работе регионального диссертационного докторского совета по специальности 051319 участвуют профессора из университетов Ростова, Нальчика, Ставрополя, Краснодара. На научно-практических конференциях по ИБ участвуют практически все университеты ЮФО. Наши профессора участвуют в работе ГЭК университетах Южного региона. (СГУ – Ставрополь, КГУ – Краснодар, ВГУ – Волгоград). Ведутся совместные работы по грантам РФФИ (КБГУ – Нальчик).
Таким образом, Южный федеральный университет своей деятельностью в
области информационной безопасности активно содействует выполнению задач,
обозначенных в Концепции по защите информации в Южном федеральном округе.
Определенный вклад при этом вносит лаборатория фундаментальных проблем
информационной безопасности ИИПРУ КБНЦ РАН, функционирующая в составе
ТТИ ЮФУ.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бабенко Л.К., Зорина Д.А., Юрков П.Ю. Лабораторный практикум по изучению возможностей и приобретению практических навыков разработки приложений с использованием
смарт-карт ASE фирмы Athena Smartcard Solutions Ltd. . – Таганрог, ТРТУ, 2004. – 53 с.
2. Бабенко Л.К., Ищуков С.С., Макаревич О.Б. Защита информации с использованием
смарт-карт и электронных брелков. – М.:ГелиосАРВ, 2003. – 352 с.
3. Бабенко Л.К., Тумоян Е.П., Юрков П.Ю. Лабораторный практикум по изучению методов
и систем биометрической аутентификации. – Таганрог, ТРТУ, 2004. – 14 с.
4. Бабенко Л.К., Басан А.С. Лабораторный практикум по изучению системы удостоверяющих центров. . – Таганрог, ТРТУ, 2004. – 30 с.
5. Бабенко Л.К., Ищукова Е.А. Изучение метода линейного криптоанализа применительно
к алгоритмам шифрования, построенным по схеме Фейстеля. – Таганрог, ТРТУ, 2004. –
21 с.
6. Бабенко Л.К., Ищукова Е.А. Изучение метода дифференциального криптоанализа применительно к алгоритмам шифрования, построенным по схеме Фейстеля. – Таганрог,
ТРТУ, 2004. – 15 с.
7. Бабенко Л.К., Ищукова Е.А. Изучение метода дифференциального криптоанализа применительно к многораундовым алгоритмам шифрования, построенным на основе сети
SPN. – Таганрог, ТРТУ, 2004. – 24 с.
8. Бабенко Л.К., Ищукова Е.А. Изучение метода линейного криптоанализа применительно
к многораундовым алгоритмам шифрования, построенным на основе сети SPN. – Таганрог, ТРТУ, 2004. – 24 с.
9. Бабенко Л.К., Ищукова Е.А. Изучение метода слайдовой атаки на примере алгоритмов
шифрования, построенных по схеме Фейстеля. – Таганрог, ТРТУ, 2004. – 24 с.
10. Столлингс В. Криптография и защита сетей: принципы и практика, 2-е изд.: Пер. с англ.
– М.: Издательский дом «Вильямс», 2001. – 670 с.
11. Захаревич В.Г., Макаревич О.Б. Реализация в Таганрогском государственном радиотехническом университете концепции «Исследовательский университет» по сквозной подготовке специалистов всех уровней в области информационной безопасности. Проблемы образования в области информационной безопасности. Сборник трудов межвузовской научно-методической конференции. Москва, 17-18 ноября 2004 г. – М.: ИКСИ
Академии ФСБ России, 2004. – С.48-56.
185
Известия ЮФУ. Технические науки
Тематический выпуск
УДК 004.415.26
Ю.И. Рогозов, А.А. Дубровский, А.С. Свиридов
НОВЫЙ ПОДХОД РЕАЛИЗАЦИИ ИДЕИ
«ПРОГРАММИРОВАНИЕ БЕЗ ПРОГРАММИСТА»
Введение
Развитие программного обеспечения информационных систем идет в направлении постоянного увеличения сложности создаваемого ПО. Требуются огромные трудозатраты для создания современных систем как в гражданских областях, так и в области специализированных систем, применяемых в военной и
космической промышленности. Именно военная и космическая техника всегда
была на переднем рубеже технического прогресса в нашей стране, и именно в
этой области впервые встала проблема снижения трудозатрат и увеличения прозрачности процесса разработки систем управления.
Запуск первого спутника в 1957 г. потряс весь мир и застал американцев
врасплох. Полет Юрия Гагарина в 1961 г. стал триумфом советской науки. Воплотились в жизнь и стали явью фантастические проекты национального героя
СССР – легендарного конструктора Сергея Королева. Интеллектуальную поддержку его дерзких проектов обеспечивала «нервная система» ракеты – бортовая
система управления, созданная Николаем Пилюгиным [1].
Чем больше усложнялись ракетно-космические комплексы и системы, тем
сильнее была нужда в безупречном взаимопонимании между разработчиками.
Отсутствие взаимопонимания болезненно сказывалось на ходе крупных ракетных проектов. Особенно остро проблема взаимопонимания проявила себя при
создании космического комплекса «Энергия–Буран» [1].
В качестве ответа на эти вызовы совместными усилиями Российского космического агентства (Научно-производственный центр автоматики и приборостроения имени академика Н.А. Пилюгина, г. Москва) и Российской академии
наук (Институт прикладной математики имени академика М.В. Келдыша,
г. Москва) была начата разработка инструмента, обеспечивающего безукоризненное взаимопонимание между людьми, позволяющего описать структуру и
логику программы или бизнес-процесса в понятной неспециалисту по программированию форме, и дальнейшим преобразованием такого описания в программный код.
Разработка получила название «Дракон» и реализовывала основную парадигму «программирование без программиста» или «кто обладает знаниями,
тот и должен их формализовать». «Дракон» развивался более пятнадцати лет
и успешно применялся при создании целого ряда управляющих систем использовавшихся в ракетно-комических комплексах [1]: «Энергия–Буран», «Морской
старт» (Sea Launch), «Протон-М» и др.
«Дракон» использует оригинальную графическую нотацию, основанную на
модифицированных блок-схемах алгоритмов и ряде дополнительных правил их
построения. Может использоваться как для описания бизнес-процессов, так и
для описания алгоритмов работы программы, в таком случае он использует синтаксис определенного языка программирования, образуя подмножество исходного языка («Дракон-С», «Дракон-Паскаль», «Дракон-Оберон» и т.д.).
186
Раздел IV. Информационные технологии
При использовании такого программно-ориентированного «Дракона» возможна трансляция «Дракон-алгоритма» в программный код на соответствующем
языке программирования.
Анализ структуры «Дракон» и области его применения показывает ряд недостатков, особенно остро проявляющихся при использовании для разработки
систем, ориентированных не на управление, а на накопление и обработку информации:
♦ привязка к языку программирования производится на стадии составления «Дракон-алгоритма» работы программного модуля;
♦ требуется знание языка программирования аналитиком, при создании
«Дракон-алгоритма», что нарушает один их принципов «Дракон»;
♦ высокая трудоемкость создания систем, тесно взаимодействующих с
БД, так как операции по работе с БД описываются в «Драконалгоритме» средствами языка программирования, снижая понятность
схемы.
Принципы построения алгоритмического языка описания модулей
Выявленные недостатки языка ДРАКОН в области построения систем, ориентированных на создание информационных систем привели к необходимости
создания нового инструмента. Данный инструмент должен реализовать основную идею, заложенную создателями «Дракон» – сокращение звеньев в цепочке
аналитик – программа, и, за счет этого, снижение затрат при создании системы.
Предлагается новый алгоритмический язык описания структуры и логики
программных модулей (АОМ), на входе которого будут знания о предметной
области, на выходе – работоспособная информационная система. Основным действующим лицом в такой схеме будет системный аналитик, а степень участия
программиста должна стремиться к нулю. Особенностью применения является
ориентация на создание систем сбора, хранения и обработки информации в широком круге предметных областей и бизнес-процессов (БП).
Основными принципами, которые закладываются в АОМ, являются:
♦ качество элементов описания структуры и логики работы программного
модуля (используется набор типовых шаблонов, причем ориентированных на тесное взаимодействие с БД);
♦ качество выразительного средства (используются модифицированные
блок-схемы алгоритмов МБА, с добавлением специализированных элементов);
♦ отказ от трансляции алгоритма в текст программы на языке программирования и компиляции текста в исполняемый код (непосредственная
передача описания модуля в исполняющую среду);
♦ возможность адаптации ИС к изменениям предметной области;
♦ высокая универсальность для решения задач накопления и обработки данных в ИС различных предметных областей, за счет использования оригинальной формы представления данных со статической структурой [2].
Проанализируем соответствие и различия, предлагаемого подхода и структуры использования языка «Дракон» в разрезе стадий разработки, представленных в табл. 1.
187
Известия ЮФУ. Технические науки
Сравнение «Дракон» и АОМ
Средство
Предмет
описания
Элемент
Средство
Предмет
описания
Элемент
Средство
Предмет
описания
Элемент
ДРАКОН
«Дракон»
БП предметной области
Функции БП
«Дракон-С», «Дракон-ПАСКАЛЬ»
и др.
Структура и логика работы
программного модуля
Код на языке программирования
«С», «Паскаль» и др.
Таблица 1
АОМ
Любые методологии
БП предметной
области
Функции БП
АОМ
Структура и логика
работы программного
модуля
Шаблоны программ
Код программы
Операторы языка
программирования
Исполняющая среда
-
еи
на П
си Б
п
О
йы
нм ьл
ма уд
рг ом
ор
П
йы
нм
ма до
рг к
ор
П
йы
м
ея д
нл ок
оп
с
И
Тематический выпуск
Исполняемый код программы
При описании бизнес-процессов предметной области могут быть использованы любые известные методологии, относящиеся как к методам структурного, так и
объектно-ориентированного (SADT, UML, ARIS) анализа и проектирования [3, 4].
Элементами, из которых строится модель на данном уровне, являются отдельные
шаги бизнес-процесса и объекты предметной области.
Переход на этап описания структуры программных модулей производится
после выделения атомарных функций бизнес-процесса и синтеза модульной структуры ИС [5]. Каждый модуль реализует одну или несколько функций бизнеспроцесса, объединенных в логическую последовательность. Данная последовательность записывается в виде алгоритма на АОМ. Элементы АОМ, в отличие от
«Дракон», содержат не код на языке программирования, а являются прототипами
шаблонов, с указанием необходимых параметров. Шаблон представляет собой набор заранее определенных типовых операций, которые применяются при создании
ИС. Шаблоны описывают операции, связанные с манипуляцией данными в БД,
например, получение значений атрибутов указанной сущности, удаление и модификация данных в БД. Кроме того, шаблоны описывают структуру взаимодействия программного модуля с пользователем через графический интерфейс ИС.
При переходе на уровень программной реализации предлагается переводить
алгоритм, записанный в виде совокупности элементов АОМ, не в текст на языке
программирования, а передавать на выполнение в исполняющую среду. При вызове соответствующего программного модуля в момент исполнения происходит интерпретация элементов алгоритма в программные элементы (интерфейсные окна и
компоненты, функции обработки данных и взаимодействия с БД). Для решения
188
Раздел IV. Информационные технологии
задачи унификации программных элементов ИС, т.е. выделения шаблонов АОМ
необходимо преодолеть сложность связанную с особенностями предметной области. Каждая область имеет свой набор данных со своей уникальной структурой.
Проблема унификации традиционно решатся на основании двух подходов:
1) использование низкоуровневых элементов унификации, фактически близких к языкам программирования (в том числе и в подмножествах «Дракон» - «Дракон-С», и т.п.) [1];
2) специализации шаблонов по предметным областям (подход в ERPсистемах) [6].
Нами предлагается подход к унификации программных элементов (шаблонов) на основании унификации структуры данных, хранящихся в БД – статической
структуры данных [2]. Использование такой структуры позволяет на физическом
уровне единообразно работать с данными, имеющими различную структуру на
логическом уровне. Такая унификация структуры данных позволяет выделить небольшой и полный набор шаблонов, достаточный для построения ИС в любой
предметной области без узкой специализации и без низкоуровневого описания.
Структура ИС при таком построении включает несколько составляющих (рис. 1):
Рис. 1. Структура ИС при использовании АОМ
Реализация алгоритмического языка описания модулей
Алгоритмический язык описания модулей основан на следующих составляющих:
♦ декларативная часть, описывающая внешнее взаимодействие модуля и
структуру данных, необходимых для работы модуля;
♦ алгоритм работы модуля, записанный в виде специализированных МБА с
использование шаблонов.
Рассмотрим подробнее декларативное описание модуля, которое состоит:
♦ из описания интерфейсов модуля описываются способы взаимодействия с
этим модулем, исходя из того что, модуль это подмножество mi={f1,f2...fj}
множества M = {m1,m2..mi} всех функций ИС, где fi атомарная функция
системы, можно сказать что интерфейсами являются пересечения подмножеств mi множества M. Принимаемые и передаваемые данные, например, имеется модуль, который может добавлять и изменять данные по
человеку, такой модуль будет иметь 2 интерфейса – «Добавить» без каких-либо параметров и «Изменить» с параметром идентификатор человека;
189
Известия ЮФУ. Технические науки
Тематический выпуск
описания логической структуры данных, с которыми будет работать модуль. Сущности ei∈ E ={e1, e2..en} и их атрибуты, которые будут участвовать в работе модуля;
♦ описания интерфейсных компонентов модуля – детальное описание компонентов отображения и редактирования информации с указанием атрибутов сущностей и результатов запросов, с которыми будет работать этот
компонент, является ли обязательным для заполнения этот компонент,
ограничения по внесению информации;
♦ перечня действий, которые пользователь может выполнить над модулем
(реакция системы события, являющиеся действием пользователя).
Алгоритм работы модуля составляется на основе специальных икон [1] –
графических элементов, отражающих отдельную программную конструкцию или
заранее определенный шаблон (табл. 2).
В табл. 2 приведены некоторые иконы алгоритмического языка описания модулей и их символьное обозначение. Владимир Паронджанов доказал [1], что графический синтаксис языка может представлять собой графическое логическое исчисление («исчисление икон»). Исследования по реализации такого исчисления для
АОМ еще ведутся, перечень икон и их символьное представление в настоящее
время не являются полностью сформированным. Указанное обстоятельство не
препятствует успешному практическому применению АОМ в соответствии с разработанной методикой.
Исходными данными для предлагаемого метода является:
♦ структура сущностей ИС;
♦ структура модулей ИС;
♦ набор функциональных элементов языка.
Для построения модели программного модуля в виде АОМ необходимо выполнение следующих шагов:
1) определение набора интерфейсов взаимодействия системы с модулем на
основании модели ИС, полученной в результате синтеза модульной структуры [5];
2) определение сущностей, с которыми будет производиться работа в данном
модуле на основании модели бизнес-процессов и логической модели данных;
3) определение элементов управления/ввода/отображения обрабатывающихся
в модуле данных на основании модели бизнес-процессов и логической модели
данных;
4) определения перечня действий и событий модуля на основании модели
бизнес-процессов;
5) описание алгоритмов работы действий с помощью икон АОМ на основании модели бизнес-процессов предметной области.
В настоящее время построение АОМ-описания модуля выполняется на основании знаний аналитика с использованием указанных входных данных. Полученное описание передается программисту, а точнее – оператору по настройке исполняемой среды, который, внося в нее схему, фактически «программирует», а точнее
– настраивает ИС под конкретный бизнес-процесс любой предметной области.
Разработан визуальный редактор [7], предназначенный для работы с АОМсхемами, который позволяет максимально сократить разрыв между постановкой
задачи и готовой ИС.
♦
190
Раздел IV. Информационные технологии
Название
Добавление
или изменение
данных
сущности
Удаление
Получение
единичного
значение из
БД
Сохранение
Установка
параметра
компонента
Обозначение
I[E{a1,a2..an},Id]
Таблица 2
Икона
которые будут добавлены
D[E]
S[E{a},Id]
S – обозначение операции
E – сущность, атрибут которой
Com
CSP[c,p,v]
Call[I,[p1,p2..pi]]
Вариант
V[p]
Имя ветки
B[p,v]
Цикл «ДЛЯ»
For[cp,i,j]
Переменная
Var+name
Загрузка
данных для
компонентов
Описание
I – обозначение операции
E – сущность, которая
добавляется/изменяется
a1, a2..an – атрибуты сущности,
Id – идентификатор сущности
D – обозначение операции
E – сущность, которая будет удалена
Вызов
интерфейса
Получение
нового
идентификато
ра
Сохранение в
переменую
Иконы АОМ
GNI[E]
SIV[VarName,Val]
LoadData
необходимо выбрать
a – атрибут
Id – идентификатор сущности
Сохранение данных в базу
CSP – обозначение операции
c – имя компонента
p – имя параметра
v – значение параметра
Call - обозначение операции
I – имя интерфейса
p1, p2…pi – параметры интерфеса
V – обозначение операции
p – рассматриваемый параметр
B – обозначение операции
p – рассматриваемый параметр
v – возможный вариант
For – обозначение операции
cp – переменная цикла
i – начало цикла
j – конец цикла
Name – имя переменной
GNI – обозначение операции
E – тип сущности
SIV – обозначение операции
VarName – имя переменной
Val – значение
LoadData – обозначение операции
191
Известия ЮФУ. Технические науки
Практическая реализация
Тематический выпуск
На базе изложенной концепции и многолетнего опыта разработки информационных систем профессиональным коллективом научно-производственного
предприятия "Deimand" был создан пакет программного обеспечения для проектирования и моделирования информационно-управляющих систем – "ПРИМИУС"
[7] (Проектирование И Моделирование Информационно-Управляющих Систем).
Данное средство реализует исполняющую среду ИС и предназначено для разработки и поддержки информационных систем различной направленности, сложности и масштаба, который дополнительно не требует привлечения услуг высококвалифицированных специалистов и затрат на обучение штатных программистов. Основной упор при создании был сделан на простоту построения пользовательских
форм с помощью визуального редактора и упрощение работы с базами данных.
Для возможности реализации логических алгоритмов был разработан собственный
язык программирования.
Заключение
Алгоритмический язык описания программных модулей, рассмотренный в
данной статье, формулирует новый подход к реализации принципа «программирование без программиста», расширяет его применение на новую область и обладает
рядом достоинств:
♦ использование АОМ позволяет создавать ИС, ориентированные на сбор,
хранение и обработку информации без использования труда высококвалифицированных специалистов;
♦ аналитику для построения схемы работы модуля не требуется знать языки
программирования;
♦ АОМ не зависит от языка программирования, так как нет привязки к
синтаксису языка программирования на этапе создания схемы работы
модуля;
♦ нет привязки к особенностям предметной области, так как данные хранятся и обрабатываются в унифицированной статической структуре БД;
♦ привязка к способу реализации ИС происходит на уровне исполняющей
среды, минуя дополнительную трансляцию в текст на языке программирования и компиляцию в исполняемый код.
Практическое использование разработанной методики и ПРИМИУС в ряде
проектов в области медицинского и социального обслуживания показало высокую
эффективность предлагаемого подхода и его реализации. Во время реализации
систем были оценены на практике преимущества от использования средства
ПРИМИУС:
♦ понижение требований к квалификации программиста – действующие
проекты были реализованы сотрудниками после кратких двухмесячных
курсов обучения работе с ПРИМИУС;
♦ уменьшение времени на разработку проекта, а следовательно, и затрат –
при использовании ПРИМИУС время на разработку системы сократилось
в 2 раза в сравнении с проектами, реализующимися с использованием
средств разработки (C#, Delphi);
♦ централизация прикладной логики и логики хранения данных, упрощение
поддержки и сопровождения ИС.
192
Раздел IV. Информационные технологии
1.
2.
3.
4.
5.
6.
7.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Паронджанов В. Д. Как улучшить работу ума: Алгоритмы без программистов – это
очень просто! – М.: Дело, 2001. – 360 с.
Почечуев Н.В., Рогозов Ю.И. Построение базы данных со статической структурой
// Материалы IX ВНК студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления». – Таганрог: Изд-во ТТИ ЮФУ, 2008. – С. 189.
Трофимов С.А. CASE-технологии: практическая работа в Rational Rose – М: Изд-во
«БИНОМ», 2001. – 272 с.
Марка Д.А., Мак Гоуэн К. Методология структурного анализа и проектирования. – М.:
МетаТехнология, 1993.
Микита Р.М. Методы реализации модульного принципа построения информационных
систем // Известия ТРТУ. Специальный выпуск. Технические науки. – Таганрог: Изд-во
ТРТУ, 2006. – №9. – С. 76.
Д. О`Лири. ERP-системы. Современное планирование и управление ресурсами предприятия. – М.: Вершина, 2004.
Рогозов Ю.И., Бутенков С.А., Свиридов А.С., Горбань Н.С., Дубровский А.А., Друппов
С.А., Жибулис Ю.А., Стукотий Л.Н. Метод создания инструментальный средств разработки автоматизированных информационно-управляющих систем // Мехатроника, автоматизация, управление. – 2008. – №1 (82). – С. 52.
УДК 681.3.067: 007.52: 611.81
В.С. Поликарпов, Е.В. Поликарпова
НАЦИОНАЛЬНАЯ БЕЗОПАСНОСТЬ В КОНТЕКСТЕ
ИНТЕЛЛЕКТУАЛЬНЫХ ВОЙН
В связи с особенностями новых интеллектуальных войн XXI столетия возникают проблемы обеспечения национальной безопасности России. Следует иметь в
виду то существенное обстоятельство, что в этом сверхсложном мире национальная безопасность является комплексной по своему характеру. Поэтому в
этом плане представляет немалый интерес исследования М.С. Алёшенкова комплексной безопасности на основе научных методов познания, предполагающих в
первую очередь, систематизацию научных истин о пространствах, их объектах,
субъектах, причинно-следственных механизмах развития угроз, их переменных
характеристик, способах и средствах оптимального прогнозирования [1]. Здесь
предлагается систематизировать любые расчетно-вероятностные пространства негативных факторов и дается следующее структурирование опасностей и угроз:
1) по объектам (субъектам) расчетного пространства той или иной системы; 2) по
величине ущерба; 3) по степени вероятности наступления негативного события;
4) по масштабу проявления негативных факторов; 5) по причинам возникновения;
6) по характеру проявления; 7) по типу нанесенного (прогнозируемого) ущерба;
8) по виду интенсивности угроз. На основе данных понятий выписывается общая
характеристика опасностей и угроз в следующих расчетных пространствах:
1) социальное; 2) экономическое; 3) культурно-образовательное; 4) экологическое;
5) техногенное; 6) энергоинформационное; 7) военное; 8) медицинское; 9) демографическое; 10) правовое; 11) геополитическое; 12) космическое. Возникает проблема обеспечения комплексной по своему существу национальной безопасности
России в контексте интеллектуальных войн.
Прежде всего, России необходимо найти новые возможности, которые
помогут ей не только адаптироваться к вызовам и угрозам
XXI
века ради
193
Известия ЮФУ. Технические науки
Тематический выпуск
выживания, но и добиться успехов в условиях неопределенности системы
мира. Для этого ей необходимо трансформировать свои организации в интеллек-
туальные организации, примером чего служит опыт западных компаний, показавших способности преобразовываться в научающиеся организации, проводить
слияния, поглощения и консолидации. Стратегия интеллектуальной организации
сочетает в себе минимум планирования и максимум адаптации, она фокусируется
на желаемом будущем, ориентируясь на четко сформулированную цель. В данном
случае интеллектуальная организация, подобно любой сложной системе, имеет
алгоритм защиты, который кажется созданным на основе иммунологических
принципов. Речь идет о представлении иммунной системы как самоотождествляющей системе, чье функционирование в условиях постоянного контакта с внешней средой возможно только благодаря ее непрерывной внутренней реорганизации
как на структурном, так и на параметрическом уровнях. Иными словами, иммунные сети обладают двойной пластичностью, что характерно для множества биологических систем: «Термином «параметрическая пластичность» обозначают механизм адаптации, позволяющий системе в ходе выполнения некоторой задачи изменять параметры функционирования для повышения ее эффективности. Типичным
примером параметрической пластичности служит изменение силы синаптических
связей между нейронами (т.е. весовых коэффициентов синапсов) как неотъемлемый элемент эффективного функционирования нервной системы. Структурная
пластичность дает системе новые возможности для адаптации. В системах взаимодействующих элементов структурная пластичность сводится к способности добавления и исключения уже имеющихся элементов. В случае нейронных сетей это
означает способность нейронов вовремя исчезать или появляться, так что в процессе функционирования системы могут изменяться не только весовые коэффициенты, но и общая структура сети»[2. C. 44-45]. В настоящее время сфера применения искусственных иммунных систем включает в себя моделирование самоорганизации, автономных распределенных систем, коллективного интеллекта, компьютерной безопасности и пр. Эти искусственные иммунные системы можно использовать и для моделирования стратегии развития и обеспечения комплексной безопасности России. В этом случае она превращается в живой организм, способный
«встречать неопределенное и полное сюрпризов будущее с необходимым разнообразием незапланированных объектов»[2. C. XV]. Только метаморфозы России в
интеллектуальный «организм» позволят ей адаптироваться к полному хаосу
и неопределенности миру XXI столетия, которые она будет воспринимать в
качестве своей стратегии.
Осуществление данной стратегии с необходимостью влечет за собой реальное обеспечение именно комплексной национальной безопасности России
в том случае, когда она станет интеллектуальной цивилизацией. В условиях
нарастания интенсивности интеллектуальных войн это означает, что российская
цивилизация должна сменить траекторию развития на основе принципа двойной
пластичности. Это возможно только в случае изменения менталитета, которое заключается в установлении приоритета знания и образования как фундамента общества знания. Тогда наш социум будет обладать, используя выражение Э. Дрекслера, интеллектуальной иммунной системой [3], которая обеспечит комплексную
национальную безопасность России.
В этой интеллектуальной иммунной системе немалое место принадлежит
этике, или этосу как совокупности ценностей, убеждений и норм жизни, глубже
которого является только генетическая основа человека [4]. Этика представляет
собою весьма слабую силу, однако она оказывается весьма действенным
194
Раздел IV. Информационные технологии
фактором существования и развития общества. Не случайно в современном
бизнесе много внимания уделяется этическим основам деятельности человека и
общества, ибо они служат прочным фундаментом всей социальной жизни в качестве духовного фактора. «И именно поэтому ваша честность в измерениях и просчетах способна наделить вас таким ощущением духовной чистоты, какого вам не
достичь ни одним религиозным ритуалом» [5. C. 228]. Именно этика дает возможность эффективного управления государством и обществом, поведением индивидов, что обеспечивает им защиту от различного рода угроз и опасностей.
Значимость этики как мягкого и одновременно самого мощного средства защиты в контексте интеллектуальных войн объясняется тем, что ядром сущности
человека является система нравственных ценностей, интериоризованных в
процессе освоения культуры [6]. В обществе знания, точнее, в обществе научно-
го знания, или информационном обществе, именно культура с присущей ей этическими ценностями играет первостепенную роль. К тому же планировщики цивилизаций включают в себя те или иные этические ценности, часто облаченные в религиозную оболочку. Исследования показывают, что в информационном обществе в
немалой степени повышается релевантность культуры, культурной программной
поддержки психополитической структуры влияния. Еще в 1998 г. представителями
Кубы на мировой конференции ЮНЕСКО в Гаване было сформулировано положение, согласно которому культура является «оружием XXI столетия». Действительно, в современных интеллектуальных (психологических, информационных) войнах
используется весьма эффективно сконструированные мифы. Последние позволяют
устанавливать психокультурные параметры на уровне подсознания посредством
медиации и интерпретации, что делает культуру «самым современным видом
оружия» (К. Беккер).
Значимость культуры как самого современного вида оружия, используемого в
интеллектуальных войнах, проявляется в потенциальном конфликте между планировщиками западной и китайской цивилизаций (между Америкой и Китаем). Этот
потенциальный конфликт обусловлен не только различием экономических моделей, но и разными параметрами их цивилизаций, разными системами ценностей.
Западные ценности основаны на посылке о неотъемлемых правах человека, которые неправомерно отчуждать от индивида ни при каких обстоятельствах, даже во
имя достижения высшего общественного блага.
Характер интеллектуальных войн диктует необходимость планировщикам современных цивилизаций, в том числе и российской цивилизации, как участникам
глобальных игр [7], уделять внимание своему человеческому капиталу, который
формируется в определенной этнической культуре. Ведь функционирование планировщика цивилизации неразрывно связано с этносом, поэтому вполне логично,
что в интеллектуальных войнах стратегическая цель заключается в разрушении или переконфигурации планировщика цивилизации. «Если в предыдущие века человек определял себя, прежде всего, как представитель сословия,
житель определенной местности, последователь той или иной религии – одной из
ветвей христианства, ислама, буддизма, индуизма и т.д., то теперь для населения
большинства стран характерно, прежде всего, осознание принадлежности к этносу
или нации» [8. C. 4]. Существенным является то, что значимость этничности в отношениях между индивидами и народами весьма ярко просматривается в сфере
политики, ибо число государств сейчас насчитывает около двухсот, тогда как этносов более четырех тысяч. Всего существует несколько этнически однородных государств, большинство же – полиэтничны, что делает этническую проблематику
осью политической жизни этих стран.
195
Известия ЮФУ. Технические науки
Тематический выпуск
Вопреки точке зрения, согласно которой попытки этнического размежевания
являются бессмысленными в силу того, что благодаря миграции возрастает этническая мозаичность большинства стран и что глобализация и Интернет влекут за
собой превращение всего мира в «глобальную деревню», в информационную
эпоху все общественные движения консолидируются вокруг культурных
ценностей. «Борьба за изменение смысловых кодов, – подчеркивает М. Кастельс,
в государственных институтах и общественной практике – это весьма важная
стадия процесса общественных изменений в новом историческом контексте, что я
показал в своей книге «Власть идентичности»; эта точка зрения основывается на
результатах широкого спектра исследований общественных движений» [9. C. 167].
В эпоху интеллектуальных войн связь ценностей и консолидация вокруг фундаментальных идей необходимы для защиты заданного планировщиками цивилизаций особого образа жизни и мышления (культурной идентичности). Особенность
современной жизни состоит в том, что сохранение культурной идентичности и
нормального функционирования планировщиков цивилизаций возможно на основе
коммуникационных систем, главным образом Интернета и СМИ, позволяющих
объединить всех, кто придерживается подобных ценностей. Интернет и масс-медиа
становятся в данном случае важным инструментом самосохранения планировщиков цивилизаций, ибо последние воздействуют на соответствующие институты и
учреждения через общественное мнение, опираясь на силу интеллекта. Интернет
сейчас выступает не просто орудием организации бизнеса и средством коммуникации, он становится материальной основой процесса создания нового общества и
рычагом социальных трансформаций.
Экспертные оценки социальной роли знания (речь идет прежде всего о научном знании) показывают, что «распространение знания влечет за собой не только
«непредвидимые» риски и неопределенности, но и создает «освобождающий потенциал действий» [10. C. 44]. Растущее распространение знания в обществе благодаря использованию новых информационных и телекоммуникационных технологий (Интернет-технологии, WEB-технологии, технологий виртуальной реальности и др.) приводит к тому, что основанные на знании общества оказываются
политически хрупкими и социально непрочными. «Современные общества
суть образования, которые отличаются прежде всего тем, что «сами производят»
свои структуры, сами определяют свое будущее – а стало быть, обладают способностью к саморазрушению» [10. C. 44]. Таким образом, хрупкость информационного общества является производной освобожденного потенциала знания, которое
приобретено индивидом в процессе социализации и связанного с ним образования.
Вполне естественно, что, вопреки широко распространенному стереотипу,
индивид фактически неуязвим, тогда как различного рода группы весьма
хрупки [11]. Другими словами, социальные группы, различные сообщества и
–
социум в целом являются хрупкими системами, которые способны разрушить индивид, обладающий определенным творческим потенциалом. Дан-
ное положение особенно применимо к информационному обществу, или обществу научных знаний, сырьем для которого является образование и профессиональная переподготовка. Именно последние факторы лежат в основе деятельности «воинов знания», ведущих интеллектуальные войны, причем следует учитывать такие сущностные характеристики человеческой природы, как потенция и
интенция. Именно последние позволяют понять значимость виртуальных технологий, создающих виртуальную среду интеллектуальных войн как часть мультимедийной символической среды.
196
Раздел IV. Информационные технологии
Характерной особенностью рубежа XX и XXI веков является осознание многими странами и народами того фундаментального факта, что именно человеческая индивидуальность является главным ресурсом, основным звеном сложного иерархического социума и поэтому она выступает в качестве объекта и одновременно субъекта интеллектуальных войн. Спектр угроз и обеспечение комплексной национальной безопасности неразрывно связаны с живой человеческой индивидуальностью, которая представляет собой вполне определенную психическую
реальность. На языке философии эту живую человеческую индивидуальность
(единичного человека, индивидуума) квалифицируют как монаду (достаточно
вспомнить монадологию Лейбница). Эта монада (индивидуум) есть целый сложный многоуровневый мир, «вселенная в миниатюре», находящаяся в определенной
связи с большой вселенной, и поэтому ее прежде всего следует рассматривать с
позиций психологии индивидуальности. Именно эта связь человеческого «микромира», монады с «макромиром» природы и социума свидетельствует о том, что
человеческий индивидуум обладает одновременно чертами универсальности, тотальности и единственности, индивидуальности.
Естественно, что сейчас внимание привлекает «клиническая психология»,
ставящая своей целью «как индивидуализацию (индивидуальное, а не схема), так и
рассмотрение общего, которое характеризуется двумя прилагательными очень широкого спектра значения: «конкретный» и «реальный» [12. C. 32]. Клиническая
психология занимается не конструированием схемы психики индивидуума, осуществляя поиск инвариантов (универсальных черт) внутреннего мира человека, а изучает ее на основе индивидуального подхода. В фокусе внимания клинической психологии – «исследование единичной личности во всей целостности ситуации, в
которой она находится, и ее эволюция» [12. C. 80]. Ее основная задача заключается в сочетании единственного и универсального, что возможно благодаря когнитивной основе, описывающей постоянное взаимодействие индивидуальности человека с социокультурным окружением. Клиническая психология дает возможность проникнуть в индивидуальную психику человека путем исследования
аффективных процессов, которые определяют самочувствие и которые регули-
руются когнитивными процессами. Так как индивидуальность человека представляет собою замкнутые процессы регуляции, то проникнуть в нее можно при помощи самого высокого уровня, регулирующего и контролирующего все вместе, что
способствует свободе, воле и творчеству.
Проблема индивидуального сейчас играет первостепенную роль в интеллектуальных войнах, ибо стоит фундаментальная проблема обнаружения латентного
состояния психики человека, скрывающего его участие в той или иной сети (это
действенно используется в сетевых войнах). Эта проблема не решается на основе
теорий, основанных на поисках латентного генетического, физиологического, социологического, церебрального или бессознательного инварианта. Плодотворным
является моделирование посредством матриц наблюдений, позволяющих «схватить» уникальность индивидуума посредством раскрытия путей формирования
личности в своей группе или ряде своих групп, содержащих в себе гетерогенные
элементы, случайные встречи и пр. Здесь происходит объединение когнитивной
психологии, нейронаук и искусственного интеллекта, хотя между двумя первыми
дисциплинами отсутствует непрерывная связь. «Исследователи тем не менее, отмечает К. М. Прево, – постоянно объединяют когнитивную психологию и нейронауки в некий сталактит, спускающийся с заоблачных высот духа, представлений к
более низким уровням, которые находятся ближе к органическому, например, к
головному мозгу. В то же время снизу искусственный интеллект стараются по197
Известия ЮФУ. Технические науки
Тематический выпуск
строить, так сказать, как сталагмит, экспертные системы которого все более сложны и мощны. Естественно, намерение заключается в том, чтобы сталактит и сталагмит встретились, и создалась мощная колонна, в которой человеческий разум
смоделирован и заключен в самый строгий детерминизм» [12. C. 141-142]. Успешное решение данной проблемы с необходимостью требует более глубокого понимания природы человека, адекватным выражением чего должна быть соответствующая модель человеческой личности. Современные исследования свидетельствуют о разнообразии первичных свойств человека и одновременно о существовании определенных типов, которым присущи более или менее целостные комплексы телесных и психических свойств [13].
Важнейшим методологическим принципом, который позволяет выявить адекватную нашей проблеме модель человеческой личности, служит положение о том,
что именно индивидуальность человека является основой эволюции общества. В современном, глобализованном социуме человеческая индивидуальность
является основой общественных связей. Сложность и многообразие задач, которые
возникают перед обществом, требуют индивидуальной инициативы, и соответственно индивидуального разнообразия. Именно поэтому свободное развитие индивидуальности выступает условием развития и эволюции общества. Такая модель
человека как целостной системы, позволяющей описать индивидуальность и систематизировать множества образов природы человека, обнаружена нами в арсенале множества моделей человеческой личности – это созданная американскими
психологами Дж. Р. Ройсом и А. Пауэллом так называемая супрасистема, состоящая из шести информационных систем [14]. Эта модель человеческой личности
как целостной супрасистемы, состоящей из шести информационных систем, обладает немалыми методологическими возможностями. Ее главное преимущество
перед остальными моделями человеческой личности заключается в том, что она
дает возможность очертить место новых информационных технологий, используемых в современных интеллектуальных войнах, прежде всего воздействующих на
индивидуума. Данную модель можно применить для противодействия противнику
в интеллектуальных войнах на стратегическом и тактическом уровнях, чтобы
обеспечить национальную безопасность.
В этом плане заслуживает внимания разработанная советским ученым
Л.Б. Емельяновым–Ярославским «интеллектуальная квазибиологическая система»,
представляющая собой индуктивный автомат [15]. Она представляет собой полноценный «искусственный интеллект» – полная квазибиологическая модель, которая относится определенно к биологическому направлению и вместе с тем существенно отличается от аналогичного направления Арбиба–Мак-Каллока [16]. Структура этой модели построена на «принципе биологической логики», фиксирующее то движущее начало, которое заставляет работать структуры и создает их. В
кибернетике таким началом считается принцип гомеостаза – поддержание некоторых состояний (значений жизненно важных констант) за счет отрицательных обратных связей в различных контурах регулирования, на которые могут приходить
возмущающие воздействия. Сам Л.Б. Емельянов–Ярославский усматривает начало
биологических систем в необходимости борьбы с внутренним свойством, присущим всякой биологической единице, – со свойством старения, что совпадает с
принципом «устойчивого неравновесия» Э.С. Бауэра. Квинтэссенция модельных
построений Л.Б. Емельянова–Ярославского заключается в двух сформулированных
им предложениях: первое – «импульсная активность нейрона нужна самому нейрону» и второе – «зачем нейрону нужен мозг?». В основе модели индуктивного квазибиологического автомата лежат следующие положения: 1) мышление – это сово198
Раздел IV. Информационные технологии
купность каких-то свойств биологической системы, определяющих особые отношения системы с внешним миром, благодаря которым оказывается возможным
процесс познания; 2) в эволюционном процессе решается единственная первичная
задача о выживаемости биологических единиц – клеток – в условиях ограниченного питания; 3) фундаментальным является физиологический (а не психологический) уровень, где протекают процессы питания и интерпретация ощущений. Основой данной модели является вопрос о «ключе» ко всему, что составляет феномен живого. Ключ этот – свойства элемента (условного нейрона), которых достаточно, чтобы возникали квазибиологические системы, а при определенных условиях и интеллектуальные, причем из элемента системы могут возникать некоторые из
свойств целого [15]. Здесь речь идет о моделировании человеческого мозга, который представляет собой нейронную сеть, которая постоянно осциллирует в зависимости от топологии нейронных связей.
В плане проблематики интеллектуальных войн, особенно сетевых войн, когда
индивидуум является узлом сети, а иногда и нескольких сетей, значительный интерес представляет роль доминанты в модели индуктивного квазибиологического
автомата. Так как существенное место в функционировании этого автомата занимает память (наряду с эмоциональным центром), то элемент памяти может быть
доминантой. Доминантой, согласно Л.Б. Емельянову–Ярославскому, является элемент памяти, который имеет существенно увеличенную возбудимость, т.е. характеризуется большим значением некоторого параметра за счет увеличенной внутренней связности (за счет большой величины возбуждающей связи в петле) [15].
Это значит, что если у элемента Ci памяти внутренняя связь больше некоторой величины qд, то элемент становится доминантой и обозначается как Дi. Группа {Дi}t
определяет «интересы» автомата, его устремления что-то сделать или что-то понять, поэтому, чтобы заставить автомат делать какую-то работу, необходимо создать доминанты, соответствующие элементам памяти для необходимых ситуаций.
Эти доминанты в осциллирующей нейронной сети связаны с ее самоорганизацией,
когда активность одних элементов сменяется активностью других, что приводит к
динамическому хаосу.
В модели индуктивного самоорганизующегося квазибиологического автомата
четко сформулировано наличие собственного механизма оптимизации состояния
нейрона и введено понятие критического звена системы, в активности которого
отражаются системные цели функционирования [15]. Критическое звено воздействует на нейроны самоорганизующегося автомата, нейроны выходят при этом из
оптимального состояния и начинают подстраивать свои параметры (веса связей),
чтобы вновь достигнуть оптимума, но оптимум достигается только тогда, когда
минимизируется активность критического звена. Это означает, что элементы занимаясь только своими проблемами, автоматически формируют такие взаимоотношения, при которых достигается системная цель. В контексте нашей проблематики
это означает, что для эффективного противодействия интеллектуальной, в
том числе и сетевой войне, развязанной против России, каждому индивидууму следует дать общую идею (не случайно сейчас идет поиск такой идеи – ведь
русских может объединить только великая идея). Именно эта национальная идея
способна задать общие цели для множества осциллирующих сетей индивидуумов
российского социума. В этом случае из множества относительно независимых
элементов (человеческих индивидуумов) путем выделения критического звена
можно получить самоорганизующуюся сеть с нужными параметрами. Несмотря на
то, что система российского социума является многоцелевой, цели можно достигнуть одними и теми же средствами, формируя одну доминирующую цель, которая
199
Известия ЮФУ. Технические науки
Тематический выпуск
способна блокировать другие цели, поставленные противником в интеллектуальных войнах. В случае модели индуктивного самоорганизующегося квазибиологического автомата просматривается концепция доминанты Ухтомского, к которой
только сейчас пришли на Западе в разрабатываемой когнитивной психологии.
Особенность применения модели индуктивного автомата состоит в том, что осуществляется не подавление других целей, зачастую инициированных интеллектуальным противником, а выдвигается другая цель. Иными словами, происходит не
подавление несущих угрозы российскому социуму целей, а их вытеснение
благодаря сформулированной доминанте, что гораздо эффективнее других
средств (пропаганда и пр.). Согласно всем канонам кибернетики, использование
модели индуктивного самоорганизующегося квазибиологического автомата в интеллектуальных войнах для обеспечения национальной безопасности России является идеальным, хотя она практически не используется нашим государством.
Для обеспечения национальной безопасности российского социума в интеллектуальных войнах следует использовать на стратегическом уровне темпоральные шкалы виртуального наблюдателя. В одной из интересных работ отечественных философов науки А.Л. Алюшина и Е.Н. Князевой «Эндофизика и временные шкалы виртуального восприятия» излагается так называемый эндофизический подход, который позволяет моделировать восприятие реальности на уровне
замедленных, протяженных (или сверхбыстрых, сжатых) шкал времени виртуальным наблюдателем [17]. Эндофизический подход состоит в исследовании реальности, рассматриваемой в соотношении с реальным или виртуальным наблюдателем. Именно виртуальный наблюдатель выступает в качестве основополагающего
элемента мысленного экспериментирования, когда строятся виртуальные реальности и целостные миры на основе принципа, согласно которому воображаемое как
бы является реальным, а недоступное обычному человеческому восприятию – зримым и осязаемым. Задача заключается в том, «чтобы вместо человеческой субъективности в ее темпоральном аспекте подставить нечеловеческую субъективность, с
тем, чтобы выйти на те темпоральные контуры мира, которые могут оказаться
видны в новой сетке» [17. C. 81-81]. Стержневой идеей здесь является то, что
человеческий мозг данные восприятия обрабатывает в дискретной форме,
или в виде кадров (это относится и иным видам когнитивного процесса, включая
и вербально-логическое мышление). В результате задания соответствующих значений длительности кадров можно воссоздать гипотетический облик реальности,
который становится видимым при большем или меньшем темпоральном угле охвата событий в каждом кадре.
Тогда перед нами предстает ускоряющая или замедляющая кадрирующая
машина мысленного экспериментирования, дающая возможность раскрыть подоплеку того или иного события. При определенных значениях темпорального охвата
событий в кадре прорисовывается какая-то иная, недоступная событийная ткань
явлений. «Один слой событийной ткани из многоуровневого множества всплывает
в фокус, другие уходят в застывший, обрамляющий его сверху и снизу нерельефный фон. Подобным образом с высоты самолета становятся видны крупномасштабные морские волны в их периодическом следовании, которые для пловца внизу вообще неощутимы… Наш замысел – в создании своего рода «макроскопа»,
который позволил бы охватывать виртуальным взором большое число раскинутых
во времени событий, «запихивать» их все в один продленный фрагмент настоящего
и улавливать таким путем некий новый рисунок событий на более широком полотне происходящего» [17. C. 87]. В интеллектуальных войнах такого рода кадрирующая машина дает возможность раскрыть стратегический замысел противника,
200
Раздел IV. Информационные технологии
увидеть узор хода событий, вытекающий из этого стратегического замысла. Однако перед этим необходимо проверить наблюдаемые в реальности того или иного
события при помощи устройства искусственного интеллекта, чтобы установить его
аутентичность.
Ведь в современном мире достаточно широко используются «управление
восприятием» человека посредством распространения сфабрикованных «документов» о «непроисходивших» событиях [18. C. 116], поэтому для их выявления требуется применение устройства искусственного интеллекта. Системы искусственного интеллекта построены на распознавании образов, когда можно выявить адекватность или их неадекватность тех или иных образов действительности. Иными словами, необходимо иметь в виду эвристический характер искусственного интеллекта,
что прекрасно видно на примере процесса познания. Так, в седьмой книге «Государства» Платон излагает миф о пещере, в котором образно представляет тот мир, в
котором мы живем, как пещеру, а всех людей – как узников, крепко скованных
цепями и сидящих в этой пещере. Узники смотрят на глухую стену, на которую
падают отблески света, падающего в пещеру сверху, где находится выход из нее.
Глядя на тени, люди устанавливают причины и следствия явлений и таким образом
полагают, что познают мир. Но если увидеть истинные причины этих явлений, то
окажется, что все познанное на основании отображений не имеет почти никакого
отношения к действительности, ведь тени представляют свои первообразы в сильно искаженном виде.
В современном мире востребованы автоматические системы, позволяющие
уточнить достоверность источника информации (например, способность отличить
ложные факты от действительных, особенно, опубликованные в сети Интернет),
преобразовать информацию, представленную на первый взгляд в непонятном виде,
в вид понятный для человека и т.д. Как частный случай можно рассматривать задачу идентификации теней. В данной работе будут предложены варианты решений
для двух задач: 1) поиск соответствия между тенью и ее первообразом; 2) обнаружение тени, для которой первообраз не существует. Для решения этих задач в качестве классифицирующего устройства целесообразно использовать искусственные нейросети, поскольку они обладают необходимыми свойствами для данной
задачи классификации [19]. Среди таких свойств можно выделить обучение и
обобщение.
Поскольку система распознавания должна работать в реальных условиях, то
образ тени, который необходимо классифицировать, будет практически всегда находиться на фоне другого изображения, например, стены с узорами. Таким образом, прежде чем классифицировать оцифрованное изображение, воспринятое, например, видеокамерой, необходимо отделить образ тени от фонового изображения.
И на этапе отделения тени от фона, и на этапе классификации выделенной тени
можно использовать нейросети прямого распространения (многослойный персептрон). То есть, система будет представлять собой две последовательно включенные
нейросети. Первая нейросеть выполняет функцию фильтра, а именно заменяет
узорчатый фон, например, белым фоном. В результате такой фильтрации выполняется удаление избыточной ненужной информации, остается только форма тени,
причем вторая нейросеть выполняет функцию классификации полученной тени.
Прежде, чем использовать такую систему, обе нейросети необходимо сначала
обучить. Для обучения первой нейросети-фильтра необходимо иметь набор теней и
набор фоновых узоров. На вход нейросети подается изображение фонового узора,
поверх которого накладывается тень. В качестве цели, нейросети предъявляется
изображение только тени, которая подана на вход в смеси с фоном. После этого,
201
Известия ЮФУ. Технические науки
Тематический выпуск
используя алгоритм обратного распространения ошибки, путем подстройки весов
нейронов, добиваются, чтобы разница между выходом нейросети и изображением
этой тени было минимальным. Далее нейросети предъявляется другая пара теньфон из набора, и опять выполняются вышеописанные процедуры. Данные действия
повторяются до того момента, пока нейросеть не будет правильно выполнять
функцию фильтрации.
Обучение второй нейросети выполняется аналогичным способом. Только
здесь необходимо иметь набор теней и набор соответствующих им действительных ассоциаций. Таким образом, эта нейросеть обучается до того момента, пока
она не будет правильно находить ассоциации для каждой из предъявленных теней. То есть, каждый отдельный выход нейросети соответствует определенному
классу первообразов, например, класс 1 – фигура человека, класс 2 – форма автомобиля и т.д. Поэтому, если нейросети на вход было предъявлено изображение
тени фигуры человека, то на выходе «класс 1» у нейросети будет активный уровень, а все остальные выходы будут в пассивном состоянии. На этой же системе
решается задача обнаружения тени, для которой первообраз не существует. Если
теперь предъявить данному комплексу на вход образ тени, который не существует,
то все выходы второй нейросети примут пассивное состояние, что означает – тень
фальшивая и не имеет своего первообраза. Вполне естественно, что именно нейросети можно использовать для выявления дезинформации, распространяемой массмедиа и другими средствами информации и коммуникации, чтобы выявить неаутентичность того или иного события. Только после этого следует использовать
кадрирующую машину для раскрытия стратегического замысла противника
на основе выделенных аутентичных событий, чтобы нанести ему эффективный
удар в происходящих интеллектуальных войнах и обеспечить свою национальную
безопасность.
В современном весьма сложном мире интеллектуальных войн национальная
безопасность немыслима без принятия решений системами управления, что с необходимостью требует не только применения эпистемологии, но и использования
математических моделей. «Участие человека с его возможностями и слабостями в
подготовке принятии решений, – отмечает Р.Х. Тугушев, – может продуцировать
множество вариантов, имеющих различную степень эффективности – от заведомо
проигрышных до единственно правильного, оптимального. Последний может быть
только в том случае, если интеллектуальные способности человека произведут
точный анализ взаимодействия всех характеристик элементов системы, окружающей среды и парциальных событий. Сложность этого процесса усугубляется вероятностным характером смены причинно-следственных процессов, неспособностью
аналитико-мыслительного аппарата человека справиться с избыточным количеством учитываемых характеристик и влиянием на выбор решения практически непредсказуемых воздействий на интеллектуальную сферу человека сложных подсистем психики: эмоциональной, волевой, мировоззренческой и целого ряда других, включая сферу бессознательного. В результате на практике приходится иметь
дело с далеко не лучшими управленческими решениями, которые могут быть квазиправильными, но на самом деле не достигшие своего единственно верного уровня. Облегчив переход от случайно зависимых решений к оптимальному могут помочь математические методы обработки данных, избавляющие человека от анализа значительного объема исходной информации. При этом есть и свои трудности.
Математика очень мощный аппарат, но нужно суметь его правильно загрузить, т.е.
перевести психологические проблемы на язык формул. В целом это пока невозможно, однако для некоторых аспектов принятия решений в управлении могут
202
Раздел IV. Информационные технологии
оказаться полезны методы, опирающиеся на междисциплинарный подход»
Такими математическими моделями, которые связывают психологические характеристики индивидуумов и проблемы достижения ими успеха в управлении, являются матричные модели, а также модели, описывающие традиционные
горячие и интеллектуальные войны.
Математическое моделирование поведения индивидуума взаимообусловлено
качествами, или глобальными чертами его личности (личных диспозиций), во
взаимодействии с тем, как индивидуум воспринимает себя в конкретной ситуации
[21. C. 103-106]. Здесь главная роль принадлежит система потребностей индивидуума, которая определяет его конкретные цели. В одной из теорий психологии
вполне правомерно утверждается, что поведение индивидуума целенаправленно
ориентировано на достижение будущего целевого состояния и управляется рядом
социальных склонностей, причем среди них немалое значение имеют самоутверждение, подражание и созидание. Понятно, что следует принимать во внимание
вкус и мировоззрение индивидуума, другие же склонности (страх, отвращение,
удивление и пр.) не оказывают существенного влияния. В этом плане представляют интерес варианты применения систем дифференциальных нелинейных моделей
Вайдлиха.
Не менее перспективной является матричная модель, созданная на основе соционической концепции типов людей, в основе которой лежит типология К. Юнга
и которая рассматривает «воспринимающий механизм» разных типов психики,
оснащенного разными «принимающими» устройствами. Данная модель охватывает
шестнадцать типов личности: 1) логико-сенсорный рациональный интроверт,
2) этико-сенсорный рациональный интроверт, 3) этико-интуитивный интроверт,
4) логико-интуитивный рациональный интроверт, 5) сенсорно-логический иррациональный интроверт, 6) сенсорно-этический иррациональный интроверт, 7) интуитивно-этический иррациональный интроверт, 8) интуитивно-логический иррациональный интроверт, 9) сенсорно-логический иррациональный экстраверт,
10) сенсорно-этический иррациональный экстраверт, 11) интуитивно-этический
иррациональный экстраверт, 12) интуитивно-логический иррациональный экстраверт, 13) логико-сенсорный рациональный экстраверт, 14) этико-сенсорный рациональный экстраверт, 15) этико-интуитивный рациональный экстраверт, 16) логикоинтуитивный рациональный экстраверт [22]. Все перечисленные типы личностей
представляет собой матрицу, которую можно использовать для математического
моделирования, которое выступает эффективным инструментом ведения интеллектуальных войн.
[20. C. 591].
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Комплексные угрозы российскому обществу XXI века: онтологические
и методологические основы прогнозирования. – М.: ФГОУ ВПО МГАВМиБ им.
К.И. Скрябина, 2003. – 168 с.
Берсини У. Двойная пластичность иммунной сети как источник инженерных решений
// Искусственные иммунные системы и их применение / Под ред. Д. Дасгупты. – М.,
2006. – С. 35-64.
Drexler K.E. Engines of Creation. N.Y.: Anchor/Doubleday, 1990. – 320 р.
1. Алёшенков М.С.
2.
3.
4.
5.
6.
Пригожин А. И. Дезорганизация: Причины, виды, преодоление. – М.: Альпина Бизнес
Букс, 2007. – 402 с.
Барон Д. Тора менеджмента от Моисея. 50 уроков от величайшего лидера в истории
человечества. – М.: ЭКСМО, 2008. – 256 с.
Поликарпова В.А. Социокультурные проблемы генной инженерии человека: Автореф.
Дисс. ... докт. филос. наук, – Ростов-на-Дону, 1999. – 48 с.
203
Известия ЮФУ. Технические науки
Тематический выпуск
Поликарпов В.С. Сталин – властелин истории. Сталин: великий планировщик советской
цивилизации. – Ростов-на-Дону: Изд. дом «Владис», – М.: Изд. дом «РИПОЛ Классик»,
2007. – 448 с.
8. Этнос и политика. Хрестоматия / Автор-составитель А.А. Празаускас. – М., 2000. – 456 с.
9. Кастельс М. Галактика Интернет. – Екатеринбург, 2004. – 435 с.
10. Штер Н. Мир из знания // Deutschland. Политика, культура, экономика и наука. 2001.
– № 1. – С. 43-45.
11. Фарсон Р. Менеджмент абсурда. Парадоксы лидерства. – Киев: Ника, 2001. – 168 с.
12. Прево К.-М. Клиническая психология. – М.: АСТ, – CПб.: СОВА, 2005. – 125 с.
13. Волков Ю.Г., Поликарпов В.С. Человек. Энциклопедический словарь. – М.: Гардарики,
2000. – 520 с.
14. Ройс Дж., Пауэлл А. Индивидуальность и плюралистические образы человеческой природы // Импакт. 1982. – № 2. – C. 46-58.
15. Емельянов–Ярославский Л.Б. Интеллектуальная квазибиологическая система. Индуктивный автомат. – М.: Наука, 1990. – 125 с.
16. Арбиб М. Метафорический мозг. – М.:Едиториал УРСС, 2006. – 304 с.
17. Алюшин А.Л., Князева Е.Н. Эндофизика и временные шкалы виртуального наблюдателя
// Вопросы философии. 2007. – –№ 2. – С. 80-96.
18. Киви Б. Гигабайты власти. – М., 2004.
19. Оссовский С. Нейронные сети для обработки информации. – М.: Финансы и статистика, 2002 – 343 с.
20. Тугушев Р.Х. Математические аспекты системно-психологического анализа синергетики
управления и власти // Государственное управление в XXI веке: традиции и инновации.
Материалы 4-й ежегодной международной конференции факультета государственного
управления МГУ им. Ломоносова (24-26 мая 2006 г.). – М., 2006. – С. 589-594.
21. Теория межличностных отношений и когнитивные теории личности. Г. Салливан,
Дж. Роттер и У. Мишел. – СПб., 2007. – 156 с.
22. Крегер О. Типы людей и бизнес. – М.: Альпина Бизнес Букс, 2005. – 156 с.
7.
УДК 004.942
А.Л. Береснев, М.А. Береснев
ПРОЕКТИРОВАНИЕ МЕДИЦИНСКИХ ИНФОРМАЦИОННЫХ СИСТЕМ
ДЛЯ МЕДИЦИНСКИХ УЧРЕЖДЕНИЙ ВООРУЖЕННЫХ СИЛ РФ
Введение
Создание современной системы здравоохранения является одной из важных
задач в процессе реформирования Вооруженных Сил РФ. При этом существенно
возросли приоритет здоровья военнослужащих и роль человеческого фактора, от
которых напрямую зависят боеготовность войск, социальное благополучие личного состава и общества в целом. В настоящее время военная медицина – это составная часть государственной системы здравоохранения, в числе основных направлений деятельности которой: повышение доступности и качества медицинской помощи, укрепление материально-технической базы, комплексное переоснащение
современным медицинским оборудованием военно-медицинских подразделений,
частей и учреждений, а также интеграция с учреждениями гражданского здравоохранения. В рамках этих направлений появляется возможность внедрения медицинских информационных систем (МИС) для эффективного решения поставленных реформой задач. Это и усиление контроля над работой войсковой медицины и
военных поликлиник, и реорганизация системы управления (обеспечения) качеством лечебно-диагностической работы в амбулаторном звене медицинской службы,
204
Раздел IV. Информационные технологии
и использование медицинских стандартов в диагностике и лечении больных, что
необходимо для развития военных госпиталей, углубления и расширения специализации медицинской помощи, повышения ее качества и эффективности. Вышеперечисленные факторы определяют актуальность разработки медицинских информационных систем для медицинских учреждений военных сил РФ и ставят вопросы определения их специфики и выработки оптимальных подходов к проектированию МИС, учитывающих характерные особенности системы военного здравоохранения.
Цели, функции и характеристики МИС
Согласно Федеральной программе информатизации здравоохранения и социального обеспечения на 2007-2010 гг., главная цель информатизации здравоохранения в целом и, как следствие, вооруженных сил в частности, формулируется следующим образом: создание новых информационных технологий на всех уровнях
управления здравоохранением и новых медицинских компьютерных технологий,
повышающих качество лечебно-профилактической помощи и способствующих
реализации основной функции охраны здоровья населения – увеличению продолжительности активной жизни.
Несомненно, повышение качества лечебно-профилактической помощи является важнейшей целью информатизации здравоохранения на всех его уровнях, в
том числе и в рамках отдельного военного лечебно-профилактического учреждения (ВЛПУ). Соответственно это и является целью любой МИС, достижение которой прямо или косвенно осуществляется выполнением следующего ряда задач:
♦ создание единого информационного пространства, позволяющего организовать взаимодействие различных врачей-специалистов, повысить качество медицинской документации и ускорить доступ к информации;
♦ повышение эффективности труда медицинского персонала и всех сотрудников медицинского учреждения;
♦ увеличение качества решений в процессе диагностики, лечения и реабилитации;
♦ повышение прозрачности деятельности медицинского учреждения, эффективности принимаемых управленческих решений и эффективности
деятельности структурных подразделений медицинского учреждения.
Из этих задач следует набор функций, которые должна предоставлять МИС.
Наиболее важными среди них являются следующие:
♦ сбор, регистрация, структуризация и документирование данных;
♦ обеспечение обмена информацией в рамках единого информационного
пространства, в том числе в связке поликлиника-госпиталь-санаторий;
♦ хранение и поиск информации;
♦ статистический анализ данных;
♦ контроль эффективности и качества оказания медицинской помощи военнослужащим;
♦ поддержка принятия решений;
♦ анализ и контроль работы учреждения, управление ресурсами учреждения;
♦ поддержка экономической составляющей лечебного процесса;
♦ совершенствование программ подготовки и обучения персонала.
205
Известия ЮФУ. Технические науки
Тематический выпуск
Особенности медицинских учреждений Вооруженных сил
Медицинское обеспечение Вооруженных сил Российской Федерации осуществляется по территориальному принципу, в границах военного округа (флота).
Принцип территориальности является организационной основой построения всей
современной системы лечебно-диагностической работы в Вооруженных силах
Российской Федерации и ведет к оптимизации всей системы медицинского обеспечения. Создание в конкретном регионе полноценной инфраструктуры амбулаторно-поликлинического и госпитального звеньев, обеспечивающих необходимый
объем диагностики и специализированного лечения больных, позволяет увеличить
возможности существующей лечебно-диагностической базы и обеспечить доступность медицинской помощи больным в территориальном и временном отношениях, ведет к экономии выделяемых бюджетных ассигнований, рациональному расходованию материальных ресурсов, эффективному использованию предоставляемых услуг, ликвидации дублирующих (по решаемым задачам) структур медицинской службы. Это один из главных приоритетов деятельности медицинской службы в последние годы.
Важным является то обстоятельство, что в соответствии с Концепцией развития здравоохранения и медицинской науки в Российской Федерации, основным
направлением в совершенствовании организации оказания медицинской помощи
на базе муниципального здравоохранения является перераспределение части объемов помощи из стационарного сектора в амбулаторный. В механизмах реализации
Концепции предусматривается проведение реструктуризации стационарной помощи с одновременным развитием амбулаторно-поликлинических учреждений и созданием в них дневных стационаров и стационаров на дому.
Особая роль в здравоохранении ВС отводится и санаторно-курортным учреждениям. Основными направлениями дальнейшего совершенствования системы
санаторно-курортного лечения и отдыха являются: адаптация деятельности военных здравниц к рыночным условиям, дальнейшее развитие и совершенствование
материально-технической базы военных санаторно-курортных учреждений, оснащение их современной медицинской аппаратурой и оборудованием, внедрение в
практику современных медицинских технологий, оптимизация организационноштатной структуры и системы управления санаторно-курортным делом в Вооруженных силах, совершенствование системы подготовки специалистов санаторнокурортного дела.
Таким образом, военные медицинские учреждения отличаются высокой эффективностью, гибкостью, большой степенью интеграции и специализации, что
необходимо обязательно учитывать при их автоматизации.
Анализ методов проектирования МИС
В настоящее время при разработке медицинских информационных систем
чаще всего применяются прогнозирующие модели жизненного цикла [1]. Наиболее
известными представителями таких моделей можно назвать каскадную и спиральную модель. В обеих моделях проектирование представлено в виде этапов дизайна
и спецификации. Входной информацией для фазы проектирования являются требования к системе, полученные при анализе деятельности ВЛПУ. Задача формирования требований к МИС является одной из наиболее ответственных, трудно формализуемых и наиболее дорогих и тяжелых для исправления в случае ошибки.
Требования к МИС часто описывают на языке моделей.
На этапе проектирования, прежде всего, формируются модели данных. Построение логической и физической моделей данных является основной частью
206
Раздел IV. Информационные технологии
проектирования базы данных. Полученная в процессе анализа информационная
модель сначала преобразуется в логическую, а затем в физическую модель данных.
Параллельно с проектированием схемы базы данных выполняется проектирование
процессов, чтобы получить спецификации всех модулей МИС. Оба эти процесса
проектирования тесно связаны, поскольку часть бизнес-логики обычно реализуется
в базе данных (ограничения, триггеры, хранимые процедуры). Главная цель проектирования процессов заключается в отображении функций, полученных на этапе
анализа, в модули информационной системы. При проектировании модулей определяют интерфейсы программ: разметку меню, вид окон, горячие клавиши и связанные с ними вызовы. Этап проектирования завершается разработкой технического проекта МИС. Конечными продуктами этапа являются схема базы данных и
набор спецификаций модулей системы.
Кроме того, на этапе проектирования осуществляется также разработка архитектуры МИС, включающая в себя выбор платформы (платформ) и операционной
системы (операционных систем). В неоднородной ИС могут работать несколько
компьютеров на разных аппаратных платформах и под управлением различных
операционных систем.
Процессы анализа требований, проектирования и разработки могут быть реализованы в рамках различных методологий, отличающихся, прежде всего, своим
подходом к тому, что представляет собой моделируемое медицинское учреждение.
В соответствии с различными представлениями об учреждении, методологии принято делить на структурные (или функциональные) и объектно-ориентированные.
Объектно-ориентированные методы рассматривают моделируемую организацию как набор взаимодействующих объектов – производственных единиц [2].
Объект определяется как осязаемая реальность – предмет или явление, имеющие
четко определяемое поведение. Целью применения ОО-методологии является выделение объектов, составляющих организацию, и распределение между ними ответственности за выполняемые действия.
Структурные методы рассматривают организацию как набор функций, преобразующий поступающий поток информации в выходной поток [3]. Процесс преобразования информации потребляет определенные ресурсы. Основное отличие от
объектно-ориентированной методологии заключается в четком отделении функций
(методов обработки данных) от самих данных.
С точки зрения моделирования каждая методология обладает своими преимуществами. Объектно-ориентированные методы позволяют построить более
устойчивую к изменениям систему, которая лучше соответствует существующим
структурам медицинского учреждения. Структурное моделирование хорошо показывает себя в тех случаях, когда организационная структура находится в процессе
изменения или вообще слабо оформлена. Подход от выполняемых функций интуитивно лучше понимается исполнителями при получении от них информации об их
текущей работе.
Анализ преимуществ и недостатков объектно-ориентированных и структурных методов разработки применительно к медицинским ИС показывает, что различные методологии проявляют себя наилучшим образом на разных этапах жизненного цикла системы. Следовательно, наилучший результат может быть достигнут при комбинировании различных методологий/методов/методик в рамках жизненного цикла разработки МИС.
207
Известия ЮФУ. Технические науки
Тематический выпуск
Инжиниринговый подход к проектированию МИС для медицинских
учреждений ВС
Одним из комбинированных подходов является инжиниринговый подход [4],
предназначенный специально для медицинских учреждений. Он отвечает принципам системности и позволяет получить как статическое, так и динамическое описание учреждения.
Инжиниринговый подход содержит несколько этапов, результатом которых
является построение системы моделей, полностью описывающей учреждение. При
этом ВЛПУ рассматривается как целевая, открытая, социально-экономическая система, принадлежащая иерархической совокупности открытых внешних надсистем
(регулирующие органы) и внутренних подсистем (отделения, подразделения, профили и пр.), возможности которой определяются характеристиками ее структурных подразделений и организацией их взаимодействия. В случаях изменения ситуации, например сокращении коечного фонда госпиталя, метод позволяет провести реорганизацию учреждения для его приспособления к новой нагрузке. Обобщенная схема рассматриваемого подхода представлена на рис. 1.
Рис. 1. Общее представление инжинирингового метода
Построение системы моделей медицинского учреждения начинается с формулировки дерева целей учреждения. Дерево целей – это иерархическая структура,
уточняющая и детализирующая деятельность, для которой данное медицинское
заведение было учреждено. На основании дерева целей формируется дерево стратегий – структура, которая уточняет и детализирует процессы достижения целей.
Основными элементами этого дерева являются стратегии развития, ресурсные
стратегии и функциональные стратегии. Для военных медицинских учреждений,
стратегии развития включают в себя оказываемые услуги и стратегии их развития.
Ресурсные стратегии определяют привлечение материальных, финансовых, человеческих и информационных ресурсов, в то время как функциональные стратегии
описывают организацию компонентов управления и этапы оказания услуг. При
необходимости оптимизации внутренних процессов учреждения уточняется по208
Раздел IV. Информационные технологии
требность и предмет партнерских отношений (например, установление отношений
с лабораторией для проведения анализов при отсутствии собственной).
На следующем этапе описывается потенциал учреждения – набор видов деятельности, направленный на реализацию поставленных задач. На его основе с помощью объектных методов раскрывается общая организационная структура, выделяются основные сущности и связи между ними [5]. Кроме того, потенциал определяет
ресурсы, необходимые для оказания обозначенных стратегией развития услуг.
После потенциала переходят к описанию функционала учреждения – того
множества медицинских функций, функций управления и функций обеспечения,
которые необходимы для предоставления указанных услуг на регулярной основе.
Эта работа заключается в создании обобщенной сервисной модели и описании
сценариев работы исполнителей.
Создание обобщенной сервисной модели
Обобщенная сервисная модель – это модель всех предоставляемых учреждением услуг в привязке к организационным единицам и рабочим местам, которую с
достаточной эффективностью можно выполнить в графическом виде. Она состоит
из слоев услуг, каждый из которых содержит описание одной отдельно взятой услуги и слоя рабочих мест (РМ-слоя), на котором зафиксированы рабочие места
медучреждения. Услуги на слоях рассматриваются как процесс, который выполняется исполнителями с возможным привлечением определенных ресурсов. Этот
процесс можно декомпозировать в сеть медицинских функций, функций управления и функций обеспечения, где вершины обозначают функции, а дуги задают последовательность их выполнения. При этом каждой функции сопоставляется определенный исполнитель.
Процедура создания обобщенной сервисной модели состоит из последовательной декомпозиции каждой услуги на функции. Начальный уровень декомпозиции
выбирается таким образом, чтобы выполняемые исполнителями функции имели
ключевое значение для лица или объекта, в отношении которого предоставляется
услуга. После определения функции и исполнителя определяется рабочее место, где
выполняется функция. Рабочие места наносятся на РМ-слой совместно с нанесением
функции на слой услуги. Дополнительно рабочие места на РМ-слое могут быть
сгруппированы по помещениям, в которых они расположены. Если один исполнитель может выполнять свои функции на нескольких рабочих местах, то это также
необходимо отразить в модели (рис. 2). РМ-слой впоследствии может использоваться
как основа для схемы развертывания АРМов в автоматизируемом ВЛПУ.
Рис. 2. Фрагмент ОСМ с РМ-слоем
209
Известия ЮФУ. Технические науки
Тематический выпуск
Закончив обобщенную сервисную модель, можно перейти к детальному рассмотрению функций исполнителей.
Описание сценариев работы исполнителей
Потенциал и функционал представляют собой статическую часть общей системы моделей учреждения. При этом функциональная модель не разработана до
конца. Процессы, протекающие в учреждении, идентифицированы, классифицированы и закреплены за исполнителями, но само их описание пока отсутствует.
Завершение функциональной модели происходит на этапе динамического
описания учреждения путем детализации протекающих в нем процессов. При этом
необходимо описать процесс последовательного во времени преобразования информационных и материальных потоков учреждения в ходе реализации всех интересующих медицинских и управляющих функций. Сначала на верхнем уровне описывается логика взаимодействия участников процесса, а затем на нижнем уровне –
технология работы отдельных специалистов на своих рабочих местах, представленная сценариями работы исполнителей. Для получения сценария необходимо
декомпозировать каждую функцию ОСМ до уровня базовых операций с медицинской информацией. Сценарий работы исполнителя представляет собой сеть, вершины которой представлены базовыми операциями, а дуги – последовательностью
их выполнения. В случае, когда из одной вершины возможно несколько вариантов
переходов, необходимо зафиксировать их условия.
Для работы над сценариями можно выделить три базовых операции, а именно
поиск, внесение и генерация. У каждой операции есть так называемый i-выход,
который содержит некоторую информацию, необходимую для последующей разработки автоматизированных рабочих мест (АРМов). Для операции «поиск» iвыход – это критерии и объект поиска, требования к представлению результатов.
Для операции «внесение» это источники, формы представления и типы вводимых
данных. Для операции «генерация» это алгоритмы получения и формы представления производимых данных.
При таком описании сценариев базовые операции задают функционал АРМа,
дуги переходов определяют логику работы АРМа, а i-выходы содержат информацию, необходимую для разработки пользовательского интерфейса, выходных форм
и логической модели данных.
После описания сценариев идентифицируется перечень и определяются потоки документов, сопровождающих процессы в медицинском учреждении, т. е. строится модель документооборота, на основании которой получают необходимые отчетные документы.
Заключение
Результатом выполнения вышеуказанных действий является система моделей,
всесторонне описывающая автоматизируемое ВЛПУ (рис. 3).
Таким образом, инжиниринговый подход предполагает построение системы
взаимосвязанных моделей учреждения, которая включает:
♦ Организационную модель, конкретизирующую структуру учреждения и
взаимосвязи между структурными подразделениями.
♦ Обобщенную сервисную модель, описывающую выполняемые учреждением функции и протекающие внутри него процессы.
♦ Модель документооборота, определяющую потоки документов, которые сопровождают описанные функциональной моделью процессы.
♦ Модели автоматизированных рабочих мест, описывающие технологию работы исполнителей на рабочих местах.
210
Раздел IV. Информационные технологии
Рис. 3. Результирующая система моделей
Описанный подход позволяет разработать полную, точную и адекватную модель предметной области, учитывающую особенности военных ЛПУ, на основе
которой может быть построена качественная медицинская информационная система. Кроме того, инжиниринговый подход предоставляет возможность реорганизации МИС вместе с учреждением, что представляется немаловажным в условиях
реформирования Вооруженных сил РФ.
1.
2.
3.
4.
5.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Управление высокотехнологичными программами и проектами / Рассел Д. Арчибальд;
Изд-во: ДМК пресс, 2006; ISBN 5-94074-214-9; 472 с.
Объектно-ориентированный анализ: моделирование мира в состояниях / Шлеер С., Меллор С.; Киев: “Диалектика”, 1993.
Методология структурного анализа и проектирования / Марка, Д.; Макгоуэн, К.; – М.:
Изд-во: МетаТехнология, 1993. ISBN: 5-7395-0007-9.
Береснев М.А. Инжиниринговый подход к моделированию медицинских учреждений
№727 ВИНИТИ, 2006.
Кальянов Г.Н. CASE-технологии: консалтинг в автоматизации бизнес-процессов. – М.,
2002.
УДК 629.7.072.1
А.Н. Шкурко
О ПРОГРАММНОЙ СИСТЕМЕ ОПЕРАТИВНОЙ ОБРАБОТКИ
ИНФОРМАЦИИ И ОБНАРУЖЕНИЯ ОРИЕНТИРОВ С
ИСПОЛЬЗОВАНИЕМ МУЛЬТИСПЕКТРАЛЬНЫХ ДАННЫХ
Введение
В настоящее время все большее распространение получают системы технического зрения, основанные на спектрофотометрической (мульти- и гиперспектральной) съемке. Выигрыш в использовании мультиспектральной съемки достигается
211
Известия ЮФУ. Технические науки
Тематический выпуск
за счет возможности использования более детальной информации об интенсивности электромагнитного излучения объекта в различных спектральных областях, в
том числе и за границами видимого диапазона длин волн. Наиболее часто аппаратура мультиспектральной съемки используется в задачах дистанционного зондирования.
При получении мультиспектральных изображений используют различные типы аппаратов: спутниковые кадровые спектрофотометры; кадровые спектрофотометры, устанавливаемые на самолеты и ДПЛА; стационарные лабораторные спектрофотометрические установки.
В данной статье рассматривается один из вариантов построения системы,
предназначенной для поиска объектов, используемых в качестве ориентиров, основанной на анализе мультиспектральных данных, предназначенной для автоматизированного поиска и последующего обнаружения характерных объектов естественного или искусственного происхождения на местности. Рассматриваемая система
может быть применена в различных областях человеческой деятельности, таких
как геология, спасательные операции, военное дело. Следует также отметить, что в
условиях, когда не доступны классические методы привязки к объектам на местности (такие как установка радиомаяков, лазерных меток и т.п.), подобная система
может оказаться единственным вариантом решения поставленных задач [1].
Общая схема работы системы
Рассматриваемая программная система предполагает использование комплекса специализированных аппаратных средств, предназначенных для мультиспектральной съемки, включающего следующие компоненты:
♦ летательные аппараты (ЛА) или КА с установленным оборудованием
спектрофотометрической съемки, позволяющим осуществлять съемку с
высоким спектральным и оптическим разрешением, предназначенной для
первичной разведки местности;
♦ ЛА гражданского или военного назначения с установленным оборудованием спектрофотометрической съемки, имеющим достаточное оптическое разрешение для осуществления поиска ориентиров (как правило, в
таких аппаратах устанавливается оборудование поддерживающее съемку
в ограниченном наборе спектральных полос).
В общем случае схема работы рассматриваемой системы выглядит следующим образом:
1. Осуществление мультиспектрального зондирования местности при помощи оборудования спектрофотометрической съемки, установленного на
ЛА либо на орбитальном аппарате, с целью получения изображений интересующей области для последующего анализа. Получаемые на данном
этапе изображения характеризуются большим количеством используемых
спектральных полос, а также большим объемом данных. Это существенно усложняет дальнейшую обработку.
2. Выбор оператором интересующих объектов на изображениях. На данном
этапе оператору необходимо предоставить максимально удобный и производительный пользовательский интерфейс, позволяющий осуществлять
просмотр изображения в различных комбинациях спектральных полос, а
также производить оконтуривание интересующих объектов. При этом
следует отметить, что достаточно большой объем анализируемых изображений, существенно усложняет алгоритмы обработки используемые
на данном этапе, так как просматриваемые изображения, как правило, не
212
Раздел IV. Информационные технологии
могут быть полностью размещены в оперативной памяти рабочей станции оператора.
3. Автоматический анализ полученных снимков с целью выявления наиболее информативных спектральных полос (сокращение размерности). Необходимость данного этапа следует из ограничений накладываемых оборудованием, которое будет использоваться для последующего поиска
объектов. Также данный этап позволяет существенно снизить объем обрабатываемых данных, уменьшая тем самым время обработки. Следует
также отметить, что алгоритмы сокращения размерностей построены таким образом, чтобы уменьшить влияние сокращения на точность решения
задачи поиска объекта.
4. Выделение характерных признаков выделенных объектов для построения
так называемого, идентификатора объекта, позволяющего осуществлять
поиск данного объекта на новых изображениях.
5. Оценка показателя «качества» полученных идентификаторов, под которым понимается оценка вероятности обнаружения объекта при его дальнейшем использовании для поиска. Такая оценка позволяет уменьшить
вероятность последующих ошибок при поиске объекта, а значит снизить
последующие затраты времени и материальных средств.
Также следует отметить, что рассматриваемые области применения, характеризующиеся работой системы в достаточно экстремальных условиях дефицита
времени, а также осложненных особенностями рельефа местности, ставят дополнительные ограничения. Среди них наиболее существенными являются невозможность получения нескольких изображений (как правило, присутствует единственное изображение) интересующего объекта (в различных ракурсах или в различное
время суток), при необходимости осуществления его поиска в максимально возможном диапазоне изменения ракурсов и внешних условий.
В данной статье подробно рассматриваются 3 и 4 варианты, как наиболее существенные в представленной схеме работы системы.
Алгоритмы сокращения размерностей
Достаточно большое различие областей применения системы существенно
расширяет набор необходимых алгоритмических решений, наиболее подходящих
под различные задачи. В зависимости от возможностей используемой аппаратуры
и необходимой точности решения задачи возможно использование двух подходов
к сокращению размерности мультиспектральных данных:
♦ первый подход позволяет выбрать заранее известное количество K спектральных каналов, задаваемое конструктивными особенностями системы
мультиспектральной съемки;
♦ второй подход позволяет выбрать заранее неизвестное минимальное число спектральных каналов (по какому-либо критерию содержательности),
комбинация которых позволит с наибольшей вероятностью решать задачу
распознавания объекта.
Следует отметить, что в рассматриваемой постановке задачи, алгоритмы
представляющие первый подход позволяют заранее указать количество спектральных полос, которое будет соответствовать количеству поддерживаемому аппаратурой мультиспектральной съемки. Таким образом, ниже будут рассмотрены алгоритмы, представляющие первую группу, так как вторая группа не представляет
интереса в рамках данной статьи.
213
Известия ЮФУ. Технические науки
Тематический выпуск
Сокращение размерности на основе разностей средних значений
Данный алгоритм предназначен для выбора K (параметр К задается заранее)
спектральных каналов мультиспектрального изображения, наиболее предпочтительных с точки зрения "наилучшего" выделения объекта на окружающем его фоне.
Для выделения наилучших полос спектра в алгоритме используется следующий критерий:
max M ИО − M Ф ,
i
i =1, N
i
где МИО – средний вектор для идентификатора объекта, МФ – средний вектор для
фона, i=1,...N компонент, N – общее количество полос спектра. Причем
M ИО =
Xj
∑
j∈ ПИО N ПИО
, M
Ф=
∑
Xj
j∈ ПФ N ПФ
,
где Xj – вектора пространства признаков, ПИО – область пикселей ИО, ПФ – область пикселей фона, NПИО – количество пикселей в ИО, NПФ – количество пикселей фона.
Таким образом, выбираются полосы спектра, обладающие наибольшей по
модулю разностью средних значений.
Формальный алгоритм автоматического сокращения размерности изображения до K измерений выглядит следующим образом:
0. Подсчитываем МИО.
1. Подсчитываем МФ.
2. Находим
составляющие
вектора
D
по
формуле
Di = M iИО − M iФ , i = 1, N .
Сортируем спектральные каналы так, чтобы соответствующие им компоненты вектора D были расположены по убыванию.
4. Выбираем из отсортированного списка первые K спектральных каналов.
5. Модифицируем исходное изображение так, чтобы в нем осталось только
K выбранных в п. 4 спектральных каналов.
Сокращение размерности на основе разностей средних квадратов значений
Данный алгоритм во многом сходен с предыдущим, за исключением способа
3.
получения
МИО
и
МФ:
M ИО =
∑
j∈ ПИО
X 2j
N ПИО
Ф
и M =
∑
j∈ ПФ
X 2j
N ПФ
, соответствен-
но, т.е. для объекта и фона вычисляются не средние значения яркости по каждому
каналу, а средние значения квадратов яркостей.
Сокращение размерности на основе отношения контрастов освещенностей
В соответствии с рекомендациями Международной комиссии по освещению,
для объекта с яркостью Lоб, находящегося на фоне с яркостью Lф, контраст определяется как
K=
214
Lоб − Lф
Lоб + Lф
.
Раздел IV. Информационные технологии
Предлагаемый подход использует значения MИО и МФ для оценок средней яркости объекта и фона. С учетом этого выражение для получения вектора Di можно
записать как
Di =
где M ИО =
∑
j∈ ПИО
Xj
N ПИО
, M
M iИО − M iФ
M iИО + M iФ
Ф=
∑
j∈ ПФ
, i = 1, N
Xj
N ПФ
, Xj – вектора пространства при-
знаков, ПИО – область пикселей ИО, ПФ – область пикселей фона, NПИО – количество пикселей в ИО, NПФ – количество пикселей фона.
Алгоритм формирования идентификатора объекта
Как уже было отмечено ранее, области применения рассматриваемой системы накладывают существенные ограничения на используемые алгоритмы распознавания. При использовании единственного эталонного изображения решения
задачи поиска не может быть использован целый класс вероятностных методов
распознавания, так как для их работы необходима достаточно большая выборка
эталонных образцов (к таким методам можно отнести методы, основанные на построении различных классификаторов, а также методы основанные на нейронных
сетях), [2].
В описанной постановке, когда ракурс объекта может существенно изменяться, единственным источником характерных признаков для распознавания является
информация о цвете объекта (его спектральные характеристики). При этом могут
быть использованы характеристики как спектра поглощения, так и спектра отражения/излучения объекта, тем более учитывая тот факт, что при использовании
мультиспектральной съемки на снимках может быть представлена более детальная
информация, в том числе из невидимого диапазона световых волн (из области инфракрасного и ультрафиолетового спектров). Таким образом, можно выделить
универсальный критерий, который в дальнейшем будет использоваться для построения алгоритма распознавания, заключающийся в наличии различий в какомлибо диапазоне световых волн спектральных характеристик рассматриваемого
объекта и фона. Данный критерий позволяет использовать подход, при котором
поиск объекта происходит на основании характерных для объекта и "нехарактерных" для фона признаков (шаблонов), построенных на основе статистических характеристик (гистограмм) спектрального представления пикселей в пространстве
признаков (квантованном яркостном пространстве), [2].
На основании описанного выше подхода был разработан алгоритм построения идентификатора объекта для последующего его поиска и распознавания. Ниже
приведено подробное описание данного алгоритма.
Для получения помехоустойчивых результатов на первом этапе работы алгоритма производится предварительное огрубление (переквантование) изображения
с использованием метода гиперкубов.
Суть алгоритма состоит в разбиении спектрального гиперпространства на
кластеры регулярной структуры (гиперкубы) и вычислении специальной хэшфункции, отображающей точку многомерного пространства признаков (пиксель
обучающего мультиспектрального изображения) в соответствующий кластер (гиперкуб). Хэш-функция построена таким образом, что позволяет по координатам
точки в пространстве признаков однозначно вычислить номер кластера (гиперку-
215
Известия ЮФУ. Технические науки
Тематический выпуск
ба), в который она попадет. Таким образом, после одного прохода алгоритма получаем разбиение исходного пространства признаков на кластеры. Поскольку все
кластеры описываются гиперкубами с одинаковыми длинами сторон в каждом измерении, то по номеру кластера нетрудно определить параметры описывающей его
фигуры (центр гиперкуба и расстояния до границ гиперкуба).
Формально алгоритм можно записать следующим образом:
0. Рассматриваем выделенный участок исходного (обучающего) изображения
размером q = V ⋅ Y пикселей, по которому строится идентификатор объекта (ИО).
Для каждой точки выделенного участка изображения выполняем п.1-3.
1. Для каждой компоненты точки вычисляем хэш-функцию по формуле
r
H i = i , i = 1, N ,
d
где [ ]– целая часть числа; N – размерность спектрального пространства; d – размер
стороны гиперкуба по каждой компоненте (параметр d может меняться при настройке алгоритма, по умолчанию он равен 32). Совокупность значений Hi, i=1..N
фактически представляет номер гиперкуба, в который попадает значение исходного вектора яркости пикселя r (ri, i=1..N). Поскольку ri представляется
8-разрядными значениями, то для представления Hi достаточно 3 битов (для d=32).
2. Формируем полную хэш-функцию H многомерного вектора r путем конкатенации 3-битовых значений. Поскольку количество разрядов для представления
каждого значения Hi одинаково, можем по значению H выделить номер гиперкуба,
в который попадают значения вектора r по каждой компоненте.
3. Осуществляем поиск значения хэш-функции в массиве хэш-значений, содержащем значения H для уже рассмотренных пикселей. В случае если совпадения
не обнаружились, добавляем новое число H в массив (добавляем новый непустой
гиперкуб).
4. Получившееся в итоге количество элементов в массиве хэш-значений показывает число различных кластеров (гиперкубов), полученных при анализе заданного участка изображения. Каждому из кластеров сопоставлено определенное значение хэш-функции.
5. Далее производится перевод хэш-значений в координаты нижнего угла гиперкуба и длины его сторон, и эти значения вместе с идентификатором объекта
сохраняются в файле.
Трудоемкость алгоритма составляет порядка O(q2).
Идентификатор объекта формируется с использованием эталонного изображения и служит для выделения характерных черт объекта относительно фона, называемых паттернами или шаблонами.
Каждый шаблон характеризует некоторую область объекта, которая не характерна или мало характерна для всех остальных участков изображения. В качестве
шаблонов выступает специальным образом преобразованная информация о квадратных участках изображения, расположенных на объекте. Необходимость специального преобразования связана с тем, что при распознавании объект может быть
иначе расположен на изображении, если съемка проводилась с использованием
другого ракурса. Поэтому при создании каждого шаблона используется статистическая информация о шаблонном участке изображения – гистограмма распределения пикселей в пространстве признаков (огрубленном цветовом пространстве; для
216
Раздел IV. Информационные технологии
цветных изображений оно трехмерное). Рассмотрим процесс формирования гистограммы подробнее.
Пусть имеется выбранная для формирования шаблона квадратная область
изображения размером WxH, каждый пиксель которой в пространстве признаков
представлен вектором XIJ (I,J – геометрические координаты) размером K элементов, где K – количество спектральных плоскостей в изображении. Тогда укрупненный алгоритм построения гистограммы выглядит следующим образом (АЛГ0):
0. Создаем массив M, в котором в качестве индексов используются все возможные значения векторов X в пространстве признаков.
1. Проходим последовательно по всем пикселям шаблона и увеличиваем на
1 элемент массива M с индексом, равным представлению пикселя в пространстве
признаков.
2. Еще раз проходим по массиву M и убираем из него все нулевые элементы.
Трудоемкость данного алгоритма составляет O(W.H).
Полученный массив M подвергается дополнительной обработке, которая
нужна для того, чтобы минимизировать влияние шумов на результаты работы алгоритма распознавания (АЛГ1):
0. Проходим по всем элементам массива M и выполняем п.п. 1, 2.
1. Сравниваем очередной элемент со всеми последующими и находим для
каждой пары элементов Mi и Mj (j>i) разность индексов – вектор Y и рассчитываем
пороговое значение по формуле
Y
∑ YL 5
NL
,0 ,
P = max1 − L=1
Y
где NL – количество возможных дискретных значений по L-му измерению пространства признаков.
2. Если P>=0,8, то элемент M с меньшим значением добавляется к M с большим значением, а сам уничтожается.
3. Проходим по всем элементам массива M и делим их на максимальное значение элемента, т.е. нормируем.
Сложность этого алгоритма в худшем случае можно оценить как
O((size(M))2), где size(M) – размер массива M.
Фактически гистограмма является образом некоторой области изображения,
который практически не зависит от ее пространственной ориентации. Конечной
целью является распознавание некоторой области на изображении, что достигается
сравнением эталонной гистограммы с гистограммами, полученными на тестовом
изображении. Результатом сравнения двух гистограмм M1 и M2 является коэффициент подобия, для поиска которого применяется следующий алгоритм (АЛГ2):
0. Запоминаем 1 в переменной T, которая будет содержать итоговое значение
коэффициента подобия.
1. Проходим по всем элементам массива M1 и выполняем п.п. 2,3.
2. Для очередного I-го элемента M1 и каждого элемента M2 находим пару с
минимальным значением коэффициента:
217
Известия ЮФУ. Технические науки
Тематический выпуск
Y
∑ YL 5
NL
C = 1 − max1 − L =1
,0 (1 − M 2 − M 1 ) ,
Y
где Y – вектор-разность индексов элементов M1 и M2, NL – количество возможных
дискретных значений по L-му измерению пространства признаков.
3. Вычитаем из T очередное выражение C·M1 [I].
Таким образом, результатом работы алгоритма является коэффициент подобия двух гистограмм, лежащий в диапазоне от 0 до 1. Сложность алгоритма составляет
O(size(M1)·size(M2)).
Рассмотрим теперь алгоритм поиска шаблонов объекта на эталонном изображении. Предварительно объект должен быть оконтурен, что позволяет получить
область объекта на изображении – O, вообще говоря, произвольной формы размером Q пикселей. После получения области O происходит поиск шаблонов, которые
попадут в идентификатор объекта, с использованием алгоритма (АЛГ3):
0. Проходим по всем пикселям (x,y) области O и выполняем п.п. 1-4.
1. Рассматриваем лежащие в пределах области О квадратные подобласти Oi с
координатами левого верхнего угла (x,y). Перебираются размеры подобластей 4x4,
5x5, 7x7, 10x10. Для каждой очередной подобласти выполняются п.п. 2-4.
2. Находится гистограмма подобласти Mi.
3. Mi сравнивается по алгоритму АЛГ2 со всеми остальными подобластями
такого же размера, расположенными на изображении. В случае если полученный
коэффициент подобия выше 0,8, то наращивается один из счетчиков совпадений
для данного шаблона: N0[I] – в случае попадания координат тестовой подобласти в
область объекта О и N1[I] – в случае нахождения координат тестовой подобласти за
пределами области объекта.
4. Значение итогового счетчика совпадений для I-го шаблона N [I] принимается равным N1[I] – N0[I], т.е. оно минимизируется, если шаблон мало встречается
вне области О или много встречается в области О.
5. Массив N сортируется по возрастанию (шаблоны переставляются в том же
порядке), т.е. наиболее удачные шаблоны попадают в начало.
6. Чтобы исключить малозначимые шаблоны, выбирается такое количество
шаблонов NP, начиная с первого, чтобы сумма их N [I] была меньше 80% общего
количества пикселей на изображении.
7. С использованием АЛГ4 производится группировка всех точек изображения, которые являются левыми верхними углами (т.е. координатами) любых шаблонов из оставшихся после п.6 с использованием скользящего окна.
8. Выбирается такое расположение скользящего окна, которое содержит максимальное число шаблонов. Если да, то требуемое количество шаблонов Np и сами
шаблоны найдены, они и будут идентификатором объекта. Если нет, то Np уменьшается на 1, и переходим на п.7, если Np<>0, или в противном случае делаем заключение, что идентификатор объекта сформирован быть не может.
Трудоемкость алгоритма оценивается как O(Q.WИ.HИ), где WИ, HИ – ширина и
высота всего изображения в пикселях.
218
Раздел IV. Информационные технологии
В п. 7 АЛГ3 использовалась группировка точек изображения, являющихся
координатами найденных шаблонов. Группировка выполняется по алгоритму
(АЛГ4):
0. Формируется прямоугольник – область скользящего окна, размеры которой
выбираются в соответствии с размерами идентификатора объекта с учетом возможного геометрического искажения (поворота, масштабирования) объекта.
1. Выполняется проход по изображению скользящим окном.
2. Выбирается такое расположение окна (левый верхний угол), при котором
среднее значение N[I] попавших в него шаблонов максимально. Полученное среднее значение есть Kмакс.
3. п.2 повторяется еще необходимое количество раз, находя при этом уникальные расположения скользящего окна. Для оценки значения K при каждом положении окна выполняется нормирование по числу шаблонов в области, соответствующей Кмакс. Таким образом, получаем на ТИ заданное количество областей с
максимальными значениями коэффициентов K.
Трудоемкость АЛГ4 оценивается в худшем случае как O(ND2), где ND – количество точек, подвергаемых кластеризации.
Алгоритм поиска объекта по идентификатору
Построенный с использованием алгоритма АЛГ3 идентификатор объекта используется в дальнейшем при распознавании (АЛГ5):
0. Выполняется огрубление (квантование) изображения с использованием алгоритма гиперкубов.
1. Шаблоны Mi, попавшие в идентификаторе объекта один за другим сравниваются по алгоритму АЛГ2 со всеми возможными подобластями такого же размера, расположенными на изображении и имеющими разные координаты. В случае
если для очередной точки, полученный при сравнении коэффициент подобия выше
0,8, то эта точка запоминается, и сравнение продолжается до достижения конца
изображения.
2. С использованием АЛГ4 производится группировка всех точек изображения, которые являются левыми верхними углами (т.е. координатами) найденных
шаблонов.
3. Для каждого из полученных расположений скользящего окна находится
среднее значение коэффициента подобия.
4. Выбирается область, содержащая максимальное число шаблонов Nmax, затем средние значения коэффициента подобия каждой из областей делятся на Nmax,
давая в итоге окончательное значение коэффициента корреляции областей изображения с идентификатором объекта.
5. Область с максимальным коэффициентом корреляции считается содержащей объект.
Сложность алгоритма распознавания оценивается как O(NШ.WИ.HИ), где WИ,
И
H – ширина и высота всего изображения в пикселях, а NШ – количество шаблонов.
Методы повышения оперативности решения задачи поиска объектов
Нетрудно заметить, что общая оценка трудоемкости описанных выше алгоритмов стремиться к O(K.WИ.HИ), где WИ, HИ – ширина и высота всего изображения в пикселях, а K – количество спектральных компонент изображения. Таким
образом, время, затрачиваемое на решение задачи данным алгоритмом, может
быть достаточно высоким даже на современных высокопроизводительных вычислителях.
219
Известия ЮФУ. Технические науки
Тематический выпуск
Единственным решением в данной ситуации является внедрение в описанный
выше алгоритм параллельной обработки. Следует отметить, что в описанных выше
алгоритмах параллельная обработка может быть внедрена практически на всех
этапах, начиная с этапа сокращения размерности, в котором возможно распределение между узлами рассматриваемых комбинаций цветовых плоскостей. При этом
можно наблюдать ситуацию, при которой достигаются практически идеальные
условия для распараллеливания, так как параллельные процессы не зависят друг от
друга по данным.
Также могут быть усовершенствованы алгоритмы создания и распознавания
идентификатора объекта, в которых требуется выполнение всех шагов алгоритма
для шаблонов различного размера. Эта задача также может быть распределена по
вычислительным узлам без появления дополнительных зависимостей по данным.
Таким образом, за счет применения параллельной обработки возможно значительно ускорить необходимые вычисления, сделав их время сопоставимым с
временем обработки RGB – изображений, при сохранении всех преимуществ обработки мультиспектральных данных.
Рассмотренные в статье алгоритмы и методы функционирования системы обработки мультиспектральной информации и обнаружения объектов, позволяют
успешно решать поставленные перед ней задачи. Данный вывод подтверждается
экспериментальными исследованиями, проведенными при помощи разработанного
программного комплекса [4] с использованием оборудования мультиспектральной съемки и высокопроизводительного вычислительного кластера, полученных
кафедрой МОП ЭВМ ТТИ ЮФУ в рамках программы развития ЮФУ. Проведенные экспериментальные исследования подтверждают низкую чувствительность
алгоритма к изменениям ракурса съемки (в проведенных экспериментах ракурс
изменялся в пределах от +45 од -45 градусов), а также возможность функционирования алгоритма при зашумленном изображении с уровнем пиксельного шума
2,7σ≤15.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
4.
Щербинин В.В. Этапы и алгоритмы обработки мультиспектральных изображений для
распознавания объектов в системах технического зрения. Труды международных технических конференций «Интеллектуальные системы» (AIS’08) и «Интеллектуальные
САПР» (CAD-2008). Научное издание в 4-х томах. Т.2. – М.: Физматлит, 2008. – 424 с.
Хусаинов Н.Ш., Троценко Р.В., Шкурко А.Н. Разработка перспективных алгоритмов и
программных средств решения задачи распознавания объектов с использованием мультиспектральной системы технического зрения».Вопросы оборонной техники. Сер. 9.
Специальные системы управления, следящие приводы и их элементы. – М.: ФГУП "НТЦ
"Информтехника", 2007. - Вып. 1(230) - 2(231). С.18-22
Форсайт Д., Понс Ж. Компьютерное зрение. Современный подход : Пер. с англ. – М.:
Издательский дом «Вильямс», 2004. – 928 с.
Кравченко П.П., Хусаинов Н.Ш., Троценко Р.В., Шкурко А.Н., Щербинин В.В., Щербинина М.В., Свободин А.М. Рабочее место оператора пункта управления с мультиспек-
тральной системой дистанционного зондирования. Свидетельство об официальной регистрации программы для ЭВМ № 2005611096 от 11.05.2005.
220
Раздел IV. Информационные технологии
УДК: 004.89 + 004.65:004.896
В.Д. Яшунский
РАЗРАБОТКА СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ НА ОСНОВЕ
РАСФОКУСИРОВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ
Современные системы технического зрения находят широкое применение для
решения множества различных прикладных задач, связанных, например, с охраной
объектов и территорий, с контролем дорожной обстановки, с оперативной оценкой
внешней обстановки при управлении автономными мобильными роботами и т.д..
По сравнению с другими средствами очувствления, СТЗ обладает наиболее широким набором потенциальных возможностей по сбору разнородной информации,
включая идентификацию форм и распознавание типов наблюдаемых объектов,
определение расстояний и т.д.. Поэтому в тех случаях, когда габариты и масса готового устройства диктуют жесткие ограничения на используемые системы (что
актуально для мобильных роботов) предпочтение отдаётся именно СТЗ.
В данной статье рассматриваются принципы построения СТЗ на основе эффекта расфокусирования объектов на изображении. В основу метода положен тот
факт, что объектив проецирует четкое изображение лишь для тех объектов, которые располагаются в пределах диапазона резкости. Объекты, расположенные ближе или дальше, оказываются размыты. Таким образом, по серии снимков, снятых с
одной точки с различным значением фокусного расстояния, можно определить
дистанцию до объектов, расположенных в поле зрения объектива [1-2].
Принцип определения дистанции заключается в нахождении кадра, на котором объект становится резким, притом, что на предыдущем кадре он был размыт.
В случае нахождения такого кадра можно говорить о том, что дистанция до объекта лежит в диапазоне, ограниченном расстояниями до ближних границ резкости
этих двух кадров. Необходимыми условиями для получения приемлемой точности
являются малое значение числа диафрагмы и малое изменение фокусного расстояния между последовательными кадрами. Выполнение первого условия обеспечивает резкое размытие изображения объекта при его выходе из области фокусировки
(что упрощает определение граничного кадра), а второе условие напрямую определяет дискретность определения расстояний.
Критерием резкости изображения является степень отличия цвета точки от
цветов окружающих точек и может быть вычислена по формуле:
Ci = ∑ f разн ( X i , X j ) ,
(1)
J
где Ci – степень контрастности для текущей точки,
J – множество соседних точек,
Xi – цвет текущей точки,
Xj – цвет рассматриваемой точки из множества J,
f(Xi, Xj) – функция определения разности цветов, например сумма разностей
по каждому из цветовых каналов, взятых по модулю.
Функция зависимости степени контрастности каждой точки от фокусного
расстояния должна, в идеальном случае, содержать один ярко выраженный максимум, соответствующий тому, что расположенный в данном направлении объект
оказался в фокусе при низких значениях функции на всём остальном диапазоне.
Таким образом, достоверность обратно пропорциональна количеству пиков на
221
Известия ЮФУ. Технические науки
Тематический выпуск
графике. Для практического применения требовалось определить критерии пика,
так как наличие произвольного локального максимума на графике не является достаточным условием для снижения достоверности данных.
Адекватным критерием того, снижает ли данная точка степень достоверности
данных, является ее близость к максимуму. Таким образом, достоверность можно
определить по формуле
R=
C max
N
∑ (C
i =1
i
− C min )
,
(2)
где R – степень достоверности;
N – количество кадров;
Cmax – максимальное значение контрастности на рассматриваемом диапазоне;
Cmin – минимальное значение контрастности на рассматриваемом диапазоне;
Ci – значение контрастности для текущего кадра.
Значение степени достоверности будет стремиться к 1 с приближением к идеальному случаю, когда мы используем объектив с бесконечно малой глубиной резкости, в следствии чего Cmin стремится к 0, а Ci стремится к Cmin для всех кадров,
кроме одного, для которого Ci = Cmax.
Практические испытания показали, что с учётом шумов и реального значения
глубины резкости, хорошим показателем качества является степень достоверности
превышающая 0,03 .. 0,05.
После исключения всех точек, достоверность которых не была признана достаточной, в нашем распоряжении оказывается сетка высот с некоторым количеством
опорных точек, для которых известно расстояние до них и степень достоверности
этого расстояния. Для большинства же точек расстояние не определено. Задачей
процедуры интерполяции является определение этих расстояний на основе данных
опорных точек. Например, возможна интерполяция методом близлежащего распространения. На каждом шаге этого метода значение расстояния, присвоенное каждой
из опорных точек, распространяется на соседние точки, до которых расстояние еще
не определено. То есть шаг алгоритма будет осуществляться по формуле
P ⊂ J Po , RP = 0 ⇒ DP := DPo , RP := RPo ,
(3)
где Po – какая-либо из опорных точек;
JPo – ближайшая окрестность опорной точки Po;
P – произвольная точка, принадлежащая множеству JPo;
DPo – расстояние до опорной точки,
RPo – степень достоверности определения расстояния до Po;
DP – расстояние до P;
RP – степень достоверности определения расстояния до P.
Итерации продолжаются до тех пор, пока в сетке присутствует хотя бы одна
точка с неопределенным расстоянием. К особенностям данного подхода относится
тот факт, что он не изменяет количество различных значений расстояний до точек.
Это является оправданным с точки зрения самой методики определения расстояния до объектов по фокусированию объектов на изображении, так как, изменяя
фокусное расстояние дискретно, мы можем получить лишь дискретное изменение
данных о дальности для объектов. В результате полученная сетка глубины будет
обладать той же дискретностью, с которой был снят эксперимент.
222
Раздел IV. Информационные технологии
Достоинства метода:
♦ отсутствие необходимости в структурированном источнике освещения
или каком-либо другом средстве активного воздействия на сканируемое
пространство, что снижает требования к внешнему освещению;
♦ использование объективов с малым значением диафрагмы, обусловленное требованием к малой глубине резкости означает, что объектив обладает большой светосилой, и, следовательно, может производить сканирование в условиях худшей освещённости без использования дополнительных источников света;
♦ сканирование осуществляется с одной точки, без необходимости смены
ракурса, благодаря чему нет необходимости точно выверять относительное положение камеры на различных снимках, или же использовать несколько камер, жёстко закреплённых друг относительно друга, что в первом случае повышает точность сканирования, а во втором – снижает необходимые габариты устройства;
♦ отсутствие необходимости сопоставления образов, как в методе построения модели по двум статичным изображениям.
Недостатки метода:
♦ для работы требуется высококачественный объектив, так как, требуемые
характеристики присущи крупногабаритным и дорогостоящим моделям;
♦ при использовании объектива небольших габаритов, сканирование можно
осуществлять только в пределах 10-20 метров от точки съёмки;
♦ существование проблем с определением расстояния до неконтрастных
ровных поверхностей, связанных с тем, что не представляется возможным судить об их расположении внутри или вне зоны фокусировки.
Полученная сетка высот может быть представлена в виде трехмерной текстурированной поверхности, соответствующей пространству, расположенному в поле
зрения объектива.
Предложенная методика была успешно апробирована в рамках широкой серии модельных экспериментов, подтвердивших возможность построения средств
измерения расстояний и создания трехмерных сцен на основе эффекта расфокусирования объектов на изображении (рис. 1).
а
б
Рис. 1. Внешний вид полигона на котором производился эксперимент – а;
построенная поверхность – б
223
Известия ЮФУ. Технические науки
Тематический выпуск
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Chaudhuri S.and Rajagopalan A. Depth from defocus: a real aperture imaging approach,
Springer Verlag, 1999.
2. Pentland A. A new sense for depth of field. IEEE Trans. Pattern Anal. Mach. Intell., 9:523531, 1987.
УДК 621.311.001.57
В.Е. Высоцкий, А.А. Андреев, В.Д. Привалов, А.С. Гуртов, А.Н. Филатов
ФИЗИКО-МАТЕМАТИЧЕСКИЙ МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ
РАЗРАБОТКИ, ИССЛЕДОВАНИЯ И МОНИТОРИНГА СИСТЕМ
ЭЛЕКТРОПИТАНИЯ АВТОНОМНЫХ ОБЪЕКТОВ
Системы автономного электропитания (СЭП) относятся к разряду сложных
динамических систем. Качество их функционирования во многом определяет живучесть и работоспособность объекта в целом, а масса и стоимость СЭП существенно влияют на его основные характеристики. Кроме того, значительная доля затрат необходима на стадии разработки и испытаний опытных образцов и готовых
изделий [1, 2].
Несмотря на значительные преимущества аналитических методов разработки
СЭП, они имеют ограниченную достоверность. Поэтому отдельные стадии разработки систем требуют обязательного использования физических элементов или
физических моделей элементов СЭП. Сочетание вычислительных средств и методов с методами физического моделирования является естественным и необходимым при разработке автономных систем. В данной статье ставится и решается задача наиболее рационального сочетания этих методов.
Для решения задач разработки и исследования автономных СЭП предложен
физико-математический моделирующий комплекс (ФММК).
ФММК рассматривается как универсальная моделирующая система, состоящая из комплекса программно-информационных средств математического моделирования и комплекса аппаратно-программных средств физико-математического
моделирования СЭП автономных объектов. Он позволяет сформировать модель
объекта исследований, модели внешних возмущающих факторов, исследовать на
модели объекта испытаний поведение СЭП в различных режимах, а также предоставить пользователю средства формирования и ведения баз данных информационно-методической поддержки проектирования, отработки и эксплуатации системы.
Комплекс аппаратно-программных средств физико-математического моделирования рассматривается как совокупность физических моделей СЭП, образцов
реальной аппаратуры и имитаторов внешних воздействующих факторов, математических моделей. С его помощью осуществляется расчет характеристик автономной СЭП при учете зависимостей параметров физических моделей от внешних условий, длительности функционирования, а также расчет элементов согласования
физических и математических моделей и комплекса управления, позволяющего
проводить отработку полномасштабных экспериментальных установок.
Данная структурная схема позволяет отказаться от проведения экспериментальной отработки СЭП на натурных установках без потери достоверности и
качества.
Структурная схема экспериментальной установки для обработки СЭП с использованием физико-математического моделирования приведены на рис. 1.
224
Раздел IV. Информационные технологии
Рис. 1. Структурная схема ЭУ СЭС на базе ФММК
Реализуется эта возможность за счет комплексного использования методов
математического и физического моделирования СЭП.
В основу физико-математического моделирования положен принцип изучения исследуемых систем посредством других систем, в которых проходят процессы той же физической природы, что и в исследуемой. Таким образом, процессы,
происходящие в натурной СЭП и в ее масштабированной модели, должны быть
физически подобны. Исходя их этого принципа, для физико-математического моделирования батареи солнечной (БС), например, достаточно иметь один или несколько фотопреобразователей, из которых состоит эта батарея.
Аналогично в качестве модели аккумуляторной батареи (АБ) возможно использование аккумуляторов (одного или нескольких), используемых для комплектации штатных АБ. Разумеется, в качестве модели АБ возможно использование и
реального блока аккумуляторной батареи, в этом случае, будет использовано подобие процессов, протекающих в одном блоке АБ, процессам, протекающим в любых
других блоках. В качестве физических моделей комплекса автоматики и стабилизации (КАС) возможно использование как реальных образцов бортовых приборов,
так и силовых узлов регуляторов напряжения, зарядных и разрядных устройств.
Кроме того, физико-математическое моделирование позволяет решать задачи
проектирования в течение всего цикла создания СЭП, начиная с выбора структурной схемы, проверки энергобаланса, отработки логики управления, решения частных исследовательских задач (например, влияния настройки того или иного датчика на функционирование системы), и кончая сопровождением реальной СЭП при
эксплуатации автономного объекта. Заменяя физические модели элементов СЭС на
реальные образцы, и блоки согласования с ФММК, комплекс трансформируется в
натурную экспериментальную установку, на которой возможно более детально
отработать взаимодействие реальных элементов системы, логику управления и
эксплуатационную документацию.
225
Известия ЮФУ. Технические науки
Тематический выпуск
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Гуртов А.С., Миненко С.И., Пушкин В.И., Филатов А.Н. Системы электропитания низкоорбитальных автоматических малогабаритных космических аппаратов. Особенности
построения, отработки и испытаний // III международная конференция-выставка «Малые спутники. Новые технологии, миниатюризация. Области эффективного применения
в XXI веке». Книга III. – Королев, 2002. – С. 303.
2. Гуртов А.С., Миненко С.И., Назаренко Д.С., Привалов В.Д., Филатов А.Н. Эксперимен-
тальная отработка систем электропитания космических аппаратов с использованием
комплекса технических средств измерения амплитудно-частотных характеристик
// Сборник докладов XVII научно-технической конференции. – Томск: НПЦ «Полюс»,
2006. – С. 27.
226
Аннотации
Аннотации
УДК 681.511.4
В.Х. Пшихопов. Управление подвиж-
ными объектами в априори неформализованных средах // Известия ЮФУ.
Технические науки. – 2008. – № 12.
– С. 6-19.
В работе рассмотрен подход к организации движений подвижных объектов в
априори неформализованных средах.
Новизна предлагаемых решений заключается во введении бифуркационного параметра для формирования режимов неустойчивого движения при
переходе из одного устойчивого состояния в другое. Предлагаемый подход не требует привлечения интеллектуальных технологий планирования и
управления, предварительного картографирования, а также наличия сложной системы навигации. Приведены
результаты моделирования движения
робота на базе колесной тележки в средах со стационарными и нестационарными целевыми точками и препятствиями различной формы.
Ключевые слова: управление, робототехника, подвижный объект, синтез.
Ил. 5. Библиогр. 17 назв.
V. Pshikhopov. Mobile objects control in a
priory
nonformalized
environmens
// Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008. – № 12.
– Pp. 6-19.
This paper presents a new approach to
control a motion of mobile objects in a
priory nonformalized environments. The
main novelty of the proposed solutions is
that the bifurcational parameter is used to
form an unstable motion mode while transitioning from one stable state to another.
The proposed approach not requires intelligent planning and control technologies,
preliminary mapping or presence of a sophisticated navigation system. The results
of modeling of the wheeled robot in the
environments with stationary and dynamic
target points and obstacles with various
geometry are presented.
Key words: control, robotics, mobile object, synthesis.
5 Figures. 17 References.
УДК 681.51
М.Ю. Медведев. Структура и алгорит-
мическое обеспечение нелинейного
наблюдателя производных в условиях
действия
случайных
шумов
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 20-25.
В статье рассматривается задача оценивания производных по времени от сигналов, измеряемых со случайными шумами. Предлагается нелинейный алгоритм изменения коэффициентов усиления, обеспечивающий высокое быстродействие в области больших отклонений и требуемое качество подавления
шумов в области малых отклонений.
Ключевые слова: оценивание; производные; случайные шумы
Ил. 8. Библиогр. 8 назв.
M.U. Medvedev. Structure and algorithms
of nonlinear derivative estimator under random noise influence // Higher School Proceedings, North.-Cauc. Region. Technical
Sciences. – 2008. – № 12. – Pp. 20-25.
At this paper estimation of the time derivatives of signals with noise is developed.
Nonlinear algorithm of the derivative estimation is proposed. The one ensures high
performance in the tail region as well as
high precision in the small.
Key words: estimation; derivative; random
noise
8 Figures. 8 References.
УДК 007.52:004.896+004.75
С.Г. Капустян, Л.Ж. Усачев. Модель
коллективного взаимодействия в задаче
группового управления роботами в условиях противодействия // Известия
ЮФУ. Технические науки. – 2008.
– № 12. – С. 26-36.
227
Известия ЮФУ. Технические науки
Статья посвящена проблеме группового
управления роботами в условиях недетерминированных, динамически изменяющихся ситуаций и, прежде всего, в
условиях организованного противодействия. Дается формальная постановка
задачи группового управления роботами для данных условий, а также модель
коллективного взаимодействия роботов
в группах. Приводятся результаты имитационного моделирования задачи
группового управления роботами в условиях противодействия, показавшие
эффективность подхода.
Ключевые слова: группа роботов, недетерминированная ситуация, организованное противодействие, коллективное
взаимодействие.
Ил. 4. Библиогр. 4 назв.
S.G. Kapustjan, L.Z. Usachev. Model of
collective interaction in the task of group
control by robots in conditions of counteraction // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 26-36.
Paper is devoted to a problem of group
control by robots in conditions of not determined, dynamically changing situations
and, first of all, in conditions of the organized counteraction. Formal production of a
task of group control by robots for the
given conditions, and also model of collective interaction of robots in groups is
given. Results of imitating modelling of a
task of group control by robots in conditions the counteractions which have shown
efficiency of the approach are given.
Key words: group of the robots, not determined situation, the organized counteraction, collective interaction
4 Figures. 4 References.
УДК 681.511
Р.И. Балабаев, М.Ю. Медведев. Авто-
матизированное исследование и синтез
системы управления самолетомамфибией на основе блочного подхода
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 37-43.
228
Тематический выпуск
В статье рассмотрен вопрос автоматизации исследования и синтеза систем
управления на основе блочного подхода для класса нелинейных аффинных
каскадных объектов. Сформирована
процедура анализа. Разработан программный комплекс анализа и синтеза.
Приведены результаты автоматизированного анализа гиппотического самолета амфибии.
Ключевые слова: авиация, управляемость, система управления самолетом,
разработка системы управления.
Ил. 3. Библиогр. 12 назв.
R.I. Balabaev, M.U. Medvedev. Automatic investigation and design of control
system for aircraft-amphibious on the base
of unit approach // Higher School Proceedings, North.-Cauc. Region. Technical Sciences. – 2008. – № 12. – Pp. 37-43.
At this paper the problem of development
and design of control systems for nonlinear affine cascade plants on the base of
block approach. Procedure of analysis id
described. Program code for analysis and
design is developed. Results of automatic
analysis for amphibian aircraft are given.
Key words: aircraft, controllability, control design aircraft, controllability, control
design.
3 Figures. 12 References.
УДК 629.7.072.1
В.В. Щербинин, П.П. Кравченко,
Н.Ш. Хусаинов. Разработка и модели-
рование бортовой интегрированной
системы управления движением с коррекцией координат по автоматической
системе ближней радионавигации для
перспективных летательных аппаратов
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 43-52.
Рассматриваются вопросы проектирования бортовой интегрированной системы управления и навигации для перспективных высокоскоростных ЛА.
Особое внимание уделяется вопросам
определения местоположения ЛА по
информации от автоматической системы ближней радионавигации и алго-
Аннотации
ритмам цифрового управления ЛА на
завершающем участке траектории.
Приводится схема взаимодействия отдельных подсистем с учетом временных соотношений в случае их реализации на бортовом вычислителе в реальном масштабе времени. Предложенные
механизмы реализованы в рамках программной модели бортовой интегрированной системы управления и навигации ЛА.
Ключевые слова: бортовая интегрированная система управления и навигации, автоматическая система ближней
радионавигации, автономный контроль
целостности, оптимизированные дельта-преобразования второго порядка,
программная модель.
Ил. 3. Библиогр. 4 назв.
V.V. Scherbinin, P.P. Kravchenko,
Nail' Khusainov. Design and modeeling
of informational-algorithmic support of
the automatic local radionavigation system
intended for perspective flying vehicles
// Higher School Proceedings, North.Cauc. Region. Technical Sciences. – 2008.
– № 12. – Pp. 43-52.
Aspects of design of airbone integrated
guidance & navigation system for perspective high-speed aircrafts. Main attention is
paid to computing aircraft position using
automatic local-area radionavigation system and to algorithms of automatic guidance at the tail end of the path. The
scheme of subsystems real-time interaction
taking into account time intervals is given.
The proposed methods and algorithms are
realized in the framework of airbone integrated guidance & navigation system's
programming model.
Key words: airbone integrated system of
navigation and guidance, automatic radio
navigation system, autonomous integrity
monitoring, optimized second order deltatransformations, programming model
3 Figures. 4 References.
УДК 62 – 501.462
А.Р. Гайдук. К проблеме синтеза инвариантных многомерных систем управ-
ления // Известия ЮФУ. Технические
науки. – 2008. – № 12. – С. 52-62.
Предложен аналитический метод синтеза автономных или связных инвариантных к воздействиям многомерных
систем управления многомерными
многосвязными объектами общего вида. Метод разработан на основе полиномиального подхода и управления по
выходу и воздействиям с применением
декомпозирующей матрицы.
Ключевые слова: Многомерный объект,
декомпозирующая матрица, инвариантность, синтез, управление.
Ил. 1. Библиогр. 10 назв.
A.R. Gayduk. To the synthesis problem of
invariant multivariable control systems
// Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008.
– № 12. – Pp. 52-62.
Analytical method for synthesis of multivariable invariant control systems is proposed. The method is development on
base of control by output and external
force with using of the decoupling matrix.
Key words: Multivariable plant, decoupling matrix, invariant, synthesis, control.
1 Figures. 10 References.
УДК 531.36; 62-50
П.Г. Яковенко. Синтез оптимальных
управлений подвижными объектами во
время переходных процессов // Известия ЮФУ. Технические науки. – 2008.
– № 12. – С. 63-73.
Предложена методика синтеза управлений в линейных и нелинейных системах
при ограничении координат, основанная
на многократном численном решении
уравнений, методах динамического программирования и имитационного моделирования, принципах «перемены цели»
и «ведущего слабого звена». Оптимальный по быстродействию закон управления системой составляется из управлений, найденных для малых шагов.
Ключевые слова: методика, синтез,
управления, системы, ограничения координат.
Ил. 2. Библиогр. 3 назв.
229
Известия ЮФУ. Технические науки
P.G. Yakovenko. Movable objects optimal control synthesis into transient processes // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences. – 2008. – № 12. – Pp. 63-73.
The method of control synthesis for both
linear and non-linear systems with limited
coordinates, which is based on multiple
counting of equations, methods of dynamic programming and imitational
modeling, on the principals of “change
target” and “leading week element” is
offered. The method of synthesis
optimally quick control of systems is
composed of equations found for small
Key words: method, synthesis, control,
steps.
systems, limited coordinates.
2 Figures. 3 References.
УДК 519.6
С.В. Киор, А.М. Романов. Цифровой
многофункциональный контроллер
электропривода ЦМКП-В2 // Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 73-78.
В статье описывается практическая
реализация
многофункционального
цифрового контроллера электропривода, способного работать со всеми основными типами датчиков и двигателей
применяемых в робототехнике и мехатронике, а также реализовывать современные алгоритмы управления, в том
числе на интеллектуальных технологиях, таких как ассоциативная память,
искусственные нейронные сети, нечеткая логика.
Ключевые слова: системы автоматического управления, интеллектуальное
управление, контроллеры, приводы,
программируемые логические интегральные микросхемы, датчики, электродвигатели.
Ил. 3. Библиогр. 4 назв.
S.V. Kior, A.M. Romanov. Digital versatile motor controller DVMC-В2 // Higher
School Proceedings, North.-Cauc. Region.
Technical Sciences. – 2008. – № 12.
– Pp. 73-78.
230
Тематический выпуск
The article tells about the practical implementation of digital multi-functional
AC/DC motor drive controller, that is
compatible with all main types of motors
and sensors used in robotics and also provides modern control algorithms including artificial neural networks, associative
memory and fuzzy-logic.
Key words: automatic control systems,
intellectual control, controllers, motors,
inregal circuits of programmable logic,
sensors.
3 Figures. 4 References.
УДК 621.37:681.3: 681.5
И.И. Маркович, П.Л. Семеняк. Пер-
спективные методы и алгоритмы, системы и устройства цифрового формирования и пространственно-временной
обработки сигналов и изображений в
практических разработках НКБ цифровой обработки сигналов ЮФУ // Известия ЮФУ. Технические науки. – 2008.
– № 12. – С. 79-88.
Рассмотрены перспективные методы и
алгоритмы цифрового формирования и
пространственно-временной обработки
сигналов различных радиолокационных
и гидроакустических средств с учётом
специфических особенностей их базирования и условий применения, а также
вопросы обработки изображений и оптимального управления следящими выводными устройствами. Приведены
примеры практической реализации устройств и систем, разработанных в НКБ
цифровой обработки сигналов ЮФУ.
Ключевые слова: цифровая пространственно-временная обработка, алгоритм
обработки сигналов, программная модель, радиолокационная станция, доплеровская фильтрация, гидроакустическое средство, многолучевой эхолот,
гидролокатор бокового обзора, акустический профилограф, комплекс подводной навигации, гибкая буксируемая
антенна, обработка изображений, система управления, следящее выводное
устройство, цифровой управляющий
фильтр.
Библиогр. 9 назв.
Аннотации
I.I. Markovich, P.L. Semenyak. Advanced methods and algorithms,systems
and devices of digital signal and image
forming,ther time-spatial processing and
practical implementation in engineering
developments of SFedU’s research and
design bureau of digital signal processing
// Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008.
– № 12. – Pp. 79-88.
The long-term methods and algorithms of
generation and digital time-spatial processing of signals in radar and hydroacoustic systems with the special features of
types of carriers and application’s conditions, as well as certain problems of image
processing and optimization operation of
tracing-terminal device’s control systems
are considered. The examples of practical
realization of the results of experimental
studies of the devices, developed in Research and Design Bureau of Digital Signal Processing of Southern Federal University are given.
Key words: digital space-time processing,
signal processing algorithm, algorithm
software model, radar station, monopulse
station, doppler filtering, hydroacoustic
system, multibeam echo sounder, sidescan sonar, acoustic profilograph, underwater navigation complex, flexible towed
array, tracking and control system, image
processing, controll system, tracingterminal device, digital control filter.
9 References.
УДК 681.883
Д.Ш. Нагучев, О.А. Савицкий,
В.Л. Сахаров. Предпосылки и концеп-
ция создания современных параметрических профилографов в ОКБ «Ритм»
ЮФУ // Известия ЮФУ. Технические
науки. – 2008. – № 12. – С. 89-94.
В статье проведен анализ потребности
рынка в разработке современных
средств донного профилирования, дана
оценка отечественных и зарубежных
разработок в данной предметной области. Сформулированы основные требования при разработке параметрических
профилографов, прикладные научные и
технические задачи, решаемые разработчиками данного класса гидроакустической аппаратуры. Обобщен опыт
создания техники донного профилирования в ОКБ «Ритм» ЮФУ.
Ключевые слова: гидроакустика, гидроакустическая аппаратура, параметрический, профилограф, профилирование,
структура, дно, донные отложения.
Ил. 5. Библиогр. 4 назв.
D.Sh. Naguchev, O.A. Savitskiy,
V.L. Sakharov. Modern parametric profilograph construction into SFU DB
“Ritm” preconditions and concepts.
// Higher School Proceedings, North.Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 89-94.
In the article analysis of market requirement in development of a subbottom profiling modern means is conducted, the
estimation of domestic and foreign development in this technics domain is given.
The basic requests are formulated at development of a parametric subbottom profilers, the application scientific and technical problems solved by developers of the
hydroacoustic equipment this class. Experience of making of engineering of a
subbottom profiling in the design office
"Ritm" SFU is generalized.
Key words: Hydroacoustics, hydroacoustic
system, parametrical, profiler, profiling,
structure, bottom, bottom sediment.
5 Figures. 4 References.
УДК 621.396.96
И.Т. Лобач. Современное состояние и
перспективы развития исследований в
области инновационных технологий
гидроавиационных систем радионавигации и управления // Известия ЮФУ.
Технические науки. – 2008. – № 12.
– С. 94-102.
В работе приводятся базовые решения
и формулируются предложения по
дальнейшему развитию теории и методов радиофизического контроля параметров отражающих поверхностей с
борта летательного аппарата, обнаружению малоразмерных объектов на
231
Известия ЮФУ. Технические науки
фоне мешающих отражений от моря,
определению местоположения источников радиоизлучений, а также разработке принципов быстрой самоорганизации нелинейных систем управления
объектами в условиях внезапных внешних воздействий.
Ключевые слова: авиационные системы, радионавигация, управление, параметры волнения, местоположение, источники радиоизлучения, самоорганизация, нелинейные системы управления, грунтовые воды.
Библиогр. 16 назв.
V.T. Lobach. The modern condition and
prospects for the development of probes in
the field of innovative technologies of
hydroair radio-navigation systems and
steering // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 94-102.
Are in-process resulted base solutions and
proposals on the further development of
the theory and methods of the radiophysical supervisory control of parameters of
echoing areas from a side of a flight vehicle, to detection of small objects on a hum
noise of preventing{stirring} reflectings
from the sea, to a position finding of
sources of cabinet radiations, and also
development of principles of fast selforganizing of nonlinear systems of steering by objects in conditions of sudden
external actions are stated.
Key words: air systems, radio navigation,
steering,
parameters
of
agitation,
site{position}, sources of radio-frequency
radiation, self-organizing, nonlinear systems of steering, underground waters.
16 References.
УДК 534.222.2
В.Ю. Волощенко. Параметрическая
локационная система ближнего действия для обеспечения подледного плавания автономных подводных аппаратов
// Известия ЮФУ. Технические науки. –
2008. – № 12. – С 102-111.
Рассмотрены структурные схемы эхоимпульсных локаторов с параметриче232
Тематический выпуск
ской излучающей антенной, в которых
для обнаружения, распознавания и
классификации границ раздела используются амплитудные, фазовые и частотные признаки эхосигналов как исходных, так и формирующихся в водной среде комбинационных частот.
Данные устройства могут быть применены для определения толщины льда
над автономным аппаратом, обнаружения полыней и разводий во льдах, пригодных для всплытия на поверхность.
Ключевые слова: параметрическая антенна, классификация границ раздела,
амплитудные, фазовые и частотные
признаки эхосигналов кратных частот.
Ил. 2. Библиогр. 9 назв.
V.U. Voloschenko. Short-range parametric location system for autonomous underwater vehicles underice functioning
// Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008.
– № 12. – Pp. 102-111.
The impulse parametric sonar’s structural
schemes for the interfaces detection, recognition and classification by amplitude,
phase and frequency features of several
echo signals at primary pump, sum and
difference frequencies, and second harmonic components are considered. Safety
navigation supplying for autonomous underwater vessel under the ice cover, ice
thickness gauging above the vessel, the
patches of ice-free water detection in icefields, which is suitable for emersion etc
by means of these equipment are suggested.
Keywords: parametric antenna, classification of interfaces, amplitude, phase and
frequency signs of the echo-signals of the
multiple frequencies.
2 Figures. 9 References.
УДК 534.222.2
В.Ю. Волощенко, В.И. Тимошенко.
Параметрическая навигационная система с гидроакустическими маяками
для обеспечения безопасного плавания
судов // Известия ЮФУ. Технические
науки. – 2008. – № 12. – С. 112-123.
Аннотации
Рассмотрена структурная схема и
функционирование параметрической
навигационной системы с гидроакустическими маяками, которая позволяет
обеспечить безопасность движения
объекта – носителя устройства по маршруту, предназначенному для плавания
и маневрирования при проведении работ в пределах естественных узкостей,
фарватеров, при входах в гавани.
Ключевые слова: параметрическая антенна, многочастотное пеленгование
методом равносигнальной зоны, эффект Доплера, расчет дистанции до
гидроакустического маяка.
Ил. 3. Библиогр. 8 назв.
V.U. Voloschenko, V.I. Timoshenko.
Parametric navigation system with hydroacoustic beacons for providing of safety sailing // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 112-123.
The structural scheme of the parametric
hydroacoustic navigation system with the
multifrequency bottom sonar beacons and
it’s operation for providing of vessel’s
safety sailing and maneuvering on the navigable paths, mouth of a harbors, channels etc are considered
Key words: parametric array, multifrequency direction finding by equisignalzone method, Doppler effect, distance
computing of sonar beacon.
3 Figures. 8 References.
УДК 629.7.016
А.Я. Бондарец, О.Д. Крееренко. Исполь-
зование нейросетей для идентификации
параметров торможения колес самолета
на взлетной полосе, покрытой осадками
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 124-135.
Представлен опыт применения искусственных нейронных сетей (ИНС) для
определения фактических коэффициентов сопротивления от колес при движении самолета на ВПП. Задача реализована в среде Matlab Simulink. В качестве исходных данных для идентификации использованы результаты летных
испытаний. В процессе «обучения»
ИНС идентифицированы фактические
параметры трения качения, сопротивления слоя осадков и торможения. Показана сходимость результатов расчетов с данными летных испытаний.
Ключевые слова: искусственные нейронные сети, математическая модель
движения самолета по взлетнопосадочной полосе, идентификация.
Ил. 7. Библиогр. 8 назв.
A.Ya. Bondarets, O.D. Kreerenko. Neural
networks application for identification of
aircraft wheels drag parameters on precipitation-covered runway // Higher School Proceedings, North.-Cauc. Region. Technical
Sciences. – 2008. – № 12. – Pp. 124-135.
The experience of neural network application for determination of airplane’s wheels
drag actual coefficient on the runway covered with precipitations is introduced. The
task is solved in Matlab Simulink environment. The data from airplane runs during flight tests in actual conditions are
used to create a samples for neural networks training. The obtained by identification wheels drag parameters (braking, rolling resistance and contamination drag coefficients) are shown. The math modeling
results have been tested for convergence
with experimental data.
Key words: Artificial Neural Network,
Math model of aircraft motion along runway, Identification.
7 Figures. 8 References.
УДК 681.511.4
М.Ю. Сиротенко. Синтез нейросетево-
го планировщика перемещений автономного роботизированного комплекса
на базе дирижабля, функционирующего
в априори неформализованной среде
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 135-142.
В данной работе представлен новый
метод синтеза планировщика перемещений автономного роботизированного
комплекса на базе дирижабля, функционирующего в априори неформализованной среде. Особенностью предла233
Известия ЮФУ. Технические науки
гаемого подхода является интеграция
системы планирования с системой технического зрения, а также совместное
использование классических методов
планирования траекторий с нейросетевым подходом. На основе предложенного метода был разработан и обучен
нейросетевой планировщик. Используя
виртуальную среду, были смоделированы движения дирижабля в пространстве
с препятствиями. Результаты моделирования подтвердили обоснованность
предложенных методов.
Ключевые слова: планирование перемещений, нейронные сети, робототехника, дирижабли.
Ил. 3. Библиогр. 6 назв.
М.Yu.
Sirotenko. Neural Network Motin
Planner Synthesis the Autonomous Robotic Complex Based on Airship Operating in a Priori Nonformilized Environment
// Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008.
– № 12. – Pp. 135-142.
This paper presents a novel method of the
synthesis of a neural network motion planner for the autonomous aerostatic robotic
complex based on airship, operating in a
priory non-formalized environment. Features of a proposed approach are an integration of a planning system with a computer vision system and a simultaneous use
of both classical planning methods with
neural network approach. A neural network planner was developed and trained
on a basis of proposed method. Airship
motion through the area with obstacles
was modeled using a virtual environment.
Modeling results approved a validity of a
proposed method.
Key words: motion planning, neural networks, robotics, airships.
3 Figures. 6 References.
УДК 629.7.058.53
В.А.
Голубенко,
А.А.
Кучин,
Ю.В. Нечаев, А.А. Филонов. Методы
самонаведения ракеты класса «воздухвоздух» для совместного обеспечения
наведения ракеты на элемент групповой
234
Тематический выпуск
воздушной цели и требуемых условий
радиолокационного наблюдения сигналов в активной радиолокационной головке самонаведения ракеты // Известия
ЮФУ. Технические науки. – 2008.
– № 12. – С. 143-154.
На основе алгоритмов статистической
теории оптимального управления разработаны методы самонаведения ракеты для обеспечения её эффективного
наведения на элементы групповой воздушной цели.
Ключевые слова: управляемая ракета,
метод самонаведения, групповая воздушная цель.
Ил. 1. Библиогр. 5 назв.
Golubenko,
А.А. Kuchin,
V.А.
U.V. Nechaev, А.А.Filonov. Тhe methods
of a missile homing are developed for
maintenance of its effective prompting on
elements of multiple air target // Higher
School Proceedings, North.-Cauc. Region.
Technical Sciences. – 2008. – № 12.
– Pp. 143-154.
On the basis of algorithms of the statistical
theory of optimum control the methods of
a missile homing are developed for maintenance of its effective prompting on elements of multiple air target.
Key words: missile, method of homing,
multiple air target.
1 Figures. 5 References.
УДК 621.865.8
Т.М. Романова. Бортовой интеллекту-
альный интерфейс мобильного робота
науки.
// Известия ЮФУ. Технические
– 2008. – № 12. – С. 154-164.
В статье рассматриваются проблемы
создания интеллектуального интерфейса. Обосновано построение архитектуры интерфейса, которая включает анализатор естественного языка, модели
мира, блок принятия решений. Решение задачи поддержания активного
человеко-машинного диалога и формирования целеуказаний осуществляется путём применения модели мира.
Модель мира в интеллектуальном интерфейсе играет роль собственных
Аннотации
представлений системы о мире и служит для отражения сущностей, объектов, действий реального мира и связей
между ними и представляет собой набор взаимосвязанных фреймов специфической структуры, алгоритмов работы с информацией, содержащейся в
этих фреймах, и создания новых
фреймов.
Ключевые слова: интерфейс пользователя, человеко-машинный интерфейс,
интеллектуальный интерфейс, модель
мира, фрейм, семантическая сеть, мобильный робот.
Ил. 6. Библиогр. 8 назв.
T.M. Romanova. Mobile robot onboard
intellectual interface // Higher School Proceedings, North.-Cauc. Region. Technical
Sciences. – 2008. – № 12. – Pp. 154-164.
Intelligent Interface structure (II) including natural language analyzer, intelligent
world map and controller suggested.
Computer-human dialog and next command creation realized by using intelligent
world map. Intelligent world map means a
kind of II’s own introduction about the
world, essences, objects and actions of the
real world and links between them and
consists of the specific structure frames,
frame’s information processing algorithms
and new frame creating algorithms.
Key words: user interface, computerhuman interface (CHI), intelligent interface (II), intelligent world map, frame,
semantic web, mobile robot.
6 Figures. 8 References.
УДК 001.89: 539.2 (621.382.132)
Б.Г. Коноплев, О.А. Агеев. Элионные
и зондовые нанотехнологии для микро- и наносистемной техники // Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 165-175.
Целью работы является представление
задач и возможностей научнообразовательного центра “Нанотехнологии” ЮФУ в области разработки и
изготовления элементов приборов микро- и наносистемной техники на основе
элионные и зондовых нанотехнологий.
Ключевые слова: нанотехнологии, фокусированные ионные пучки, атомносиловая микроскопия, локальное анодное окисление.
Ил. 8. Библиогр. 5 назв.
B.G. Konoplev, O.A. Ageev. Focused ion
beams and probe nanotechnologies for
micro- and nanosystem hardware // Higher
School Proceedings, North.-Cauc. Region.
Technical Sciences. – 2008. – № 12.
– Pp. 165-175.
Work task is representation of tasks and
capabilities of SFU scientific-educational
centre “Nanotechnologies” in area of development and construction micro- and
nanosystem hardware based on focused
ion beams and probe nanotechnologies
Keywords: nanotechnology, focused ion
beams, atomic forces microscopy, local
anodic oxidation.
8 Figures. 5 References.
УДК 681.324
Л.К. Бабенко, О.Б. Макаревич. Ис-
следования по проблемам информационной безопасности в Южном федеральном университете и их реализация
в
образовательном
процессе
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 175-185.
Излагается система взглядов на образовательный процесс с акцентом на научно-исследовательскую его сторону.
Проблема заключается во взаимном,
более глубоком, чем традиционно принятое, проникновении научных разработок в учебный процесс. С одной стороны студенты, магистранты, аспиранты вовлекаются в реально проводимые
кафедрой НИР и ОКР, с другой - результаты научной работы широко используются в учебном процессе. Исходными предпосылками при этом
должны быть высококвалифицированный коллектив преподавателей и соответствующий контингент «учеников»,
научно–технический задел (научная
школа), материально-техническая база.
Ключевые слова: учебный процесс,
научно-исследовательская работа, каче235
Известия ЮФУ. Технические науки
ство образования, высококвалифицированный коллектив, научная школа, материально-техническая база.
Ил. 8. Библиогр. 11 назв.
L.K. Babenko, O.B. Makarevich. Information safety problems in SFU research and
implementation in educational process //
Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008. – №
12. – Pp. 175-185.
This paper is devoted to the problem of
the ensuring high modern quality of the
education on the base of the keeping up of
its solidity and measuring up to the actual
needs of the person, society and state. The
paper presents author’s system of views on
education process with on emphasis on its
research side. The problem consists in
mutual, more in –depth penetrating of the
research works in education process. On
the one hand students, magisters, postgraduate students are involved in research
and experienced design works, really carried out by the department; on the other
hand the results of the research works are
used in education process.
Key words: сonception, presented in the
paper, supposes continuous education
process of training and improving specialist on the all levels beginning from a student to high qualification specialist.
8 Figures. 11 References.
УДК 004.415.26
Ю.И. Рогозов, А.А. Дубровский,
А.С. Свиридов. Новый подход реализа-
ции идеи «программирование без программиста» // Известия ЮФУ. Технические науки. – 2008. – № 12. – С. 186-193.
Статья просвещена развитию идеи
«программирование без программиста», анализу недостатков существующих способов описания структуры программных модулей и разработке нового
алгоритмического языка описания программных модулей.
Ключевые слова: информационная система, блок-схема, алгоритмический
язык, проектирование, визуальное проектирование.
Ил. 1. Библиогр. 7 назв.
236
Тематический выпуск
U.I.
Rogozov,
A.A.
Dubroskiy,
A.S. Sviridov. New implementation approach of idea “programming without programmer” // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 186-193.
Article is educated to idea development
«programming without the programmer»,
to the analysis of lacks of existing ways of
the description of structure of program
modules and working out of a new algorithmic language of the description of program modules.
Key words: information system, flowchart, algorithmic language, program design, visual design.
1 Figures. 7 References.
УДК 681.3.067: 007.52: 611.81
В.С. Поликарпов, Е.В. Поликарпова.
Национальная безопасность в контексте интеллектуальных войн // Известия
ЮФУ. Технические науки. – 2008.
– № 12. – С. 193-204.
В статье рассматривается проблема
национальной безопасности, имеющей
комплексный характер, в контексте
современных интеллектуальных войн,
главным ресурсом которых является
человеческая индивидуальность. Показано, что в данном случае средствами
обеспечения национальной безопасности выступают модели индуктивного
квазибиологического автомата и темпоральные шкалы виртуального наблюдателя
Ключевые слова: национальная безопасность, интеллектуальная война, модель, индуктивный квазибиологический
автомат, темпоральная шкала виртуального наблюдения, человеческая индивидуальность.
Библиогр. 22 назв.
V.S. Polikarpov, E.V. Polikarpova. The
National Safety in Context of Intellectual
Wars // Higher School Proceedings, North.Cauc. Region. Technical Sciences. – 2008.
– № 12. – Pp. 193-204.
The article is dedicated to the problem of
the national safety which is considered to
Аннотации
have complex character taking into account
the up-to-date intellectual wars. The main
resource of them is considered the human
individuality. In this case the main means of
providing the national security is taken the
models of inductive-quasi-biological automat and the temporal scales of virtual observer.
Key words: national safety, intellectual war,
model, human individuality,.inductivequasi-biological automat, the temporal scale
of virtual observer.
22 References.
УДК 004.942
А.Л. Береснев, М.А. Береснев. Проек-
тирование медицинских информационных систем для медицинских учреждений Вооруженных Сил РФ
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 204-211.
В данной статье представлен новый
подход к проектированию медицинских
информационных систем для медицинских учреждений Вооруженных Сил
РФ. Проанализированы цели и задачи
таких информационных систем, указаны особенности целевых автоматизируемых учреждений. На основании обзора существующих методов проектирования показана необходимость использования комбинированных методик для получения оптимальных результатов и подробно описаны процедуры создания системы моделей, описывающих медицинское учреждение.
Ключевые слова: информационная система, медицинское учреждение, системы моделей.
Ил. 3. Библиогр. 5 назв.
A.L. Beresnev, M.A. Beresnev. Designing of
medical information system for RF Armed
Forces medical institutions // Higher School
Proceedings, North.-Cauc. Region. Technical
Sciences. – 2008. – № 12. – Pp. 204-211.
This article describes a new approach to
design of medical information systems for
medical institutions of Russian Federation
Armed Services. It presents analysis of
goals and tasks of such medical institutions and points out peculiarities of auto-
mated institutions. On the basis of existing
design methods review, the necessity of
application of combined methods that allow getting optimal results is shown and
procedures aiding to create a system of
models, precisely describing medical institution are set forth.
Key words: information system, medical
institution, modeling.
3 Figures. 5 References.
УДК 629.7.072.1
А.Н. Шкурко. О программной системе
оперативной обработки информации и
обнаружениЯ ориентиров с использованием мультиспектральных данных
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 211-220.
В статье рассматриваются проблемы
построения программной системы оперативной обработки информации обнаружения ориентиров с использованием
мультиспектральной съемки. Рассматриваются проблемы построения алгоритмов распознавания объектов при
условии наличия единственного эталонного изображения объекта.
Ключевые слова: мультиспектральная
съемка, сокращение размерности, распознавание объектов.
Библиогр. 4 назв.
A.N. Shkurko. Aspects of design of operational data processing and landmark
search program system using of multispectral data // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 211-220.
Aspects of design of operational data
processing and landmark search program
system are described. Main attention is
paid to problems of design of object recognition algorithms with only reference
image.
Key words: multispectral imaging, dimension cut, object recognition.
4 References.
УДК: 004.89 + 004.65:004.896
В.Д. Яшунский. Разработка системы
технического зрения на основе расфокусирования объектов на изображении
237
Известия ЮФУ. Технические науки
// Известия ЮФУ. Технические
– 2008. – № 12. – С. 221-224.
науки.
В статье описывается практическая
реализация системы технического зрения на основе эффекта расфокусирования объектов на изображении. Предложенная методика разработана и апробирована на серии модельных экспериментов, подтвердивших возможность
использования развиваемого подхода
для решения задач определения расстояний до объектов.
Ключевые слова: система технического
зрения, фокусировка.
Ил. 1. Библиогр. 2 назв.
V.D. Yashunsky. Development of computer vision system based on image misfocusing items // Higher School Proceedings,
North.-Cauc. Region. Technical Sciences.
– 2008. – № 12. – Pp. 221-224.
The article tells about the practical implementation of the “depth from focus/defocus” algorithm. The method was
developed and tested on series of model
experiments, that proved the possibility of
it’s usage for distance measuring.
Key words: computer vision, depth from
focus and defocus.
1 Figures. 2 References.
УДК 621.311.001.57
В.Е. Высоцкий, А.А. Андреев,
В.Д. Привалов, А.С. Гуртов,
А.Н. Филатов. Физико-математический
моделирующий комплекс для разработки, исследования и мониторинга систем
электропитания автономных объектов
// Известия ЮФУ. Технические науки.
– 2008. – № 12. – С. 224-226.
В данной статье ставится и решается
задача наиболее рационального сочетания вычислительных средств и методов
238
Тематический выпуск
с методами физического моделирования,
необходимых при разработке и исследовании автономных систем электропитания (СЭП). Для решения этой задачи
предложен физико-математический моделирующий комплекс (ФММК). Физико-математическое моделирование позволяет решать задачи проектирования в
течение всего цикла создания СЭП, начиная с выбора структурной схемы, проверки энергобаланса, отработки логики
управления, решения частных исследовательских задач.
Ключевые слова: мониторинг, электропитание, автономный объект.
V.E.
Visotskiy,
A.A.
Andreev,
V.D. Privalov, A.S. Gurtov, A.N. Filatov.
Physico-mathematical system for autonomous objects power supply systems
development, research, and monitoring //
Higher School Proceedings, North.-Cauc.
Region. Technical Sciences. – 2008. – №
12.
– С. 224-226.
In this clause sets up and resolves task of
more rational combination of calculating
funds and methods with methods of physical modeling, indispensables for develop
and study autonomous systems of power
supply (ASPS).
For the solving this task is offered physical
and mathematical modeling complex
(PMMC).
physical and mathematical modeling is allow to resolve tasks projecting in the course
of all cycle of creation ASPS, from the beginning with selecting the structure scheme,
checking of energy balance, fine-tuning of
logical control, solving the particular exploratory tasks.
Key words: monitoring, autonomous objects, power supply.
Сведения об авторах
Сведения об авторах
Агеев О.А.
–
Ageev O.A.
–
е-mail: [email protected].
RMCKP «Nanotchnology», Taganrog, Russia,
е-mail: [email protected].
Андреев В.В.
–
Самарский государственный технический университет, зав. лабораторией, е-mail: [email protected].
Andreev V.V.
–
Бабенко Л.К.
–
Babenko L.K.
–
Балабаев Р.И.
–
Balabaev R.I.
–
Береснев А.Л.
–
Beresnev A.L.
–
Береснев М.А.
–
Beresnev M.A.
–
Бондарец А.Я.
–
Bondares A.Ya.
–
Волощенко В.Ю.
–
Voloshcenko V.Y.
–
Высоцкий Е.В.
–
Vysotsky E.V.
–
Гайдук А.Р.
–
Gаyduk
–
А.R.
РМЦКП «Нанотехнологии» ЮФУ, зам. директора,
Samara State Technological
е-mail: [email protected].
University,
Samara,
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor, е-mail: [email protected]
Таганрогский технологический инстиут ЮФУ, соискатель, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia,applicant for,
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, доцент, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, docent, е-mail: [email protected].
Таганрогский технологический инстиут, ОКБ «Ритм»
ЮФУ, е-mail: [email protected].
Taganrog institute of technology , Taganrog, Russia,
SCD «Rythm» SFU, е-mail: [email protected].
ОАО «Таганрогский авиационный научно-технический
комплекс им. Г.М. Бериева», ведущий инженерконструктор, е-mail: [email protected].
Taganrog Aviation Scientific and Research Complex after
G.M. Beriev, е-mail: [email protected].
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, Россия, доцент, E-mail:yvoloshcenko, е-mail: @yandex.ru.
Taganrog institute of technology Southern federal university,
Taganrog, Russia, docent, е-mail: [email protected].
Самарский государственный технический университет, профессор, е-mail: [email protected].
Samara State Technological University, Samara,
professor, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, Россия, профессор, еmail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor, еmail: [email protected].
239
Известия ЮФУ. Технические науки
Тематический выпуск
Гуртов А.С.
–
Gurtov A.S.
–
Голубенко В.А.
–
Golubenko V.A.
–
Дубровский А.А.
–
Dubrovskiy A.A.
–
Капустян С.Г.
–
Kapustyan S.G.
–
Киор С.В.
Kior S.V.
–
–
Москва, МИРЭА, ассистент, е-mail: [email protected].
Moskau, MIREA, assistant, е-mail: [email protected].
Коноплев Б.Г.
–
РМЦКП «Нанотехнологии» ЮФУ, директор,
Konoplev B.G.
–
е-mail: [email protected].
RMCKP «Nanotchnology» SFU, Taganrog, Russia, direktor, е-mail:[email protected].
Кравченко П.П.
–
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Kravchenko P.P.
–
Крееренко О.Д.
–
Kreerenko O.D.
–
ФГУП «ЦСКБ-Прогресс», Самара, начальник отдела,
е-mail:[email protected].
FSUI “CSKB Progress”, Samara,
е-mail: [email protected].
Военная академия воздушно-космической обороны им.
маршала Советского Союза Г.К. Жукова, г. Тверь, старший научный сотрудник, раб. тел. (8-48-22) 32-38-87.
Military Space Air Defense Academy named after Marshal of Soviet Union G.K. Zhukov, the higher scientific
associate, оffice number: (8-48-22) 32-38-87.
Таганрогский технологический инстиут ЮФУ, аспирант, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia,the post-graduate syudent,
е-mail: [email protected].
Научно-исследовательский институт многопроцессорных систем ЮФУ, г. Таганрог,
е-mail: [email protected].
Scientific research institute of multiprocessor computing
systems of SFU, Taganrog, Russia,
е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor, е-mail: [email protected].
ОАО «Таганрогский авиационный научнотехнический комплекс им. Г.М. Бериева», ведущий
инженер-конструктор, е-mail: [email protected].
Taganrog Aviation Scientific and Research Complex
after G.M. Beriev, е-mail: [email protected].
Кучин А.А.
–
Kuchin A.A.
–
Лобач В.Т.
–
240
Военная академия воздушно-космической обороны
им. маршала Советского Союза Г.К. Жукова,
г. Тверь, адъюнт, е-mail: [email protected].
Military Space Air Defense Academy named after Marshal of Soviet Union G.K. Zhukov, a post graduate student, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Сведения об авторах
LobachV.T.
–
Макаревич О.Б.
–
Makarevich O.B.
–
Маркович И.И.
–
Markovich I.I.
–
Медведев М.Ю.
–
Medvedev M.U.
–
Нагучев Д.Ш.
–
Naguchev D.
–
Поликарпов В.С.
–
Polikarpov V.S.
–
Поликарпова Е.В.
–
Polikarpova E.V.
–
Нечаев Ю.В.
–
Nechaev J.V.
–
Привалов В.Д.
–
Privalov A.M.
–
Пшихопов В.Х.
–
Pshikhopov V.H.
–
Рогозов Ю.И.
–
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, НКБ
ЦОС, директор, е-mai: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, Director of RDB of DSP,
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, доцент, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia,docent,
е-mail: [email protected].
Таганрогский технологический инстиут ОКБ «Ритм»
ЮФУ, директор, е-mail: [email protected].
Taganrog institute of technology , Taganrog, Russia, SCD
«Rythm» SFU, director SCD, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, professor,
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ,
е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, е-mail: [email protected].
Военная академия воздушно-космической обороны
им. маршала Советского Союза Г.К. Жукова, г. Тверь,
старший научный сотрудник, раб. тел. (8-48-22) 32-38-87.
Military Space Air Defense Academy named after Marshal of Soviet Union G.K. Zhukov, the higher scientific
associate, office number: (8-48-22) 32-38-87.
Самарский государственный технический университет, ст. научный сотрудник, е-mail: [email protected].
Samara State Technological University, Samara, the
higher scientific associate, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, доцент, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, associate professor,
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
241
Известия ЮФУ. Технические науки
Тематический выпуск
Rogozov U.I.
–
Романов А.М.
–
Romanov A.M.
–
е-mail: [email protected].
MIREA, Moscow, student,
е-mail: [email protected].
Романова Т.М.
Romanova T.M.
–
–
МИРЭА, Москва, е-mail: [email protected].
MIREA, Moscow, е-mail: [email protected].
Савицкий О.А.
–
Savitskiy О.А.
Таганрогский технологический инстиут ЮФУ, доцент, е-mail: [email protected].
–
Сахаров В.Л.
–
Sakharov V.L.
–
Свиридов А.С.
–
Sviridov A.S.
–
Семеняк П.Л.
–
Semenyak P.L.
–
Сиротенко М.Ю.
–
Sirotenko M.U.
–
Тимошенко В.И.
–
Timoshenko V.I.
–
Усачев Л.Ж.
–
Usachev L.Zh.
–
Филатов А.Н.
–
Filatov A.N.
–
242
Taganrog institute of technology Southern federal university,
Taganrog, Russia, the professor, е-mail: [email protected].
МИРЭА, Москва, студент,
Taganrog institute of technology Southern federal university, Taganrog, Russia, docent,
е-mail: [email protected].
Таганрогский технологический инстиут ОКБ «Ритм»
ЮФУ, зам. директора ОКБ, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, SCD «Rythm» SFU,
е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, доцент, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, docent, е-mail: [email protected].
Таганрогский технологический инстиут, НКБ ЦОС
ЮФУ, нач. лаборатории, е-mail: [email protected].
Taganrog institute of technology Southern federal university, RDB of Bureau of Digital Signal Processing of
SFU, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, ассистент, е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, профессор, е-mail: [email protected].
Taganrog institute of technology Southern federal university,
Taganrog, Russia,professor, е-mail: [email protected].
Научно-исследовательский институт многопроцессорных систем ЮФУ, г. Таганрог,
е-mail: [email protected].
Scientific research institute of multiprocessor computing
systems Southern federal university, Taganrog, Russia,
е-mail: [email protected].
ФГУП ГНПРКЦ «ЦСКБ-Прогресс», Самара, начальник управления, е-mail: [email protected].
FSUI “CSKB Progress”, Samara,
е-mail: [email protected].
Сведения об авторах
Филонов А.А.
–
Fillonov A.A.
–
Хусаинов Н.Ш.
–
Khusainov Nail'
–
е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia,cand.Sc., е-mail: [email protected].
Шкурко А.Н.
–
Таганрогский технологический инстиут ЮФУ,
Shkurko A.N.
–
Щербинин В.В.
е-mail: [email protected].
Taganrog institute of technology Southern federal university, Taganrog, Russia, е-mail: [email protected].
–
Московский авиационный институт, профессор,
Scherbinin V.V.
–
е-mail: [email protected].
University of Aerospace Technology, professor,
е-mail: [email protected].
Яковенко П.Г.
–
Томский политехнический унирверситет, г. Томск,
доцент, е-mail: Pgj75@ yandex.ru yandex.ru.
Yakovenko P.G.
–
Яшунский В.Д.
–
Yashunsky V.D.
–
Военная академия воздушно-космической обороны
им. маршала Советского Союза Г.К. Жукова,
г. Тверь, докторант, е-mail: [email protected].
Military Space Air Defense Academy named after Marshal of Soviet Union G.K. Zhukov, c. Tver, for doctor's
degree, е-mail: [email protected].
Таганрогский технологический инстиут ЮФУ, к.т.н.,
Tomsk Polytechnic University, docent,
е-mail: Pgj75@ yandex.ru yandex.ru.
МИРЭА, Москва, студент,
е-mail: [email protected].
Moscow, MIREA, 6th grade student,
е-mail:[email protected].
243
Известия ЮФУ. Технические науки
Тематический выпуск
ПРАВИЛА ОФОРМЛЕНИЯ РУКОПИСЕЙ
1. Объем статьи должен быть не менее 10 и не более 18 страниц. Текст набирается в соответствии с правилами компьютерного набора с одной стороны белого
листа бумаги стандартного формата (А 4). На странице должно быть не более 28
строк, 60 знаков в каждой строке, отпечатанных через 1,5 интервала (это относится
к таблицам и примечаниям). Авторы представляют в редакцию 1 экз. статьи и
идентичный электронный вариант. Редактор Word 7 for Windows, шрифт Times
New Roman, размер 14. Поля: правое – 1 см, левое – 3 см, верхнее и нижнее – 2 см.
2. Названию статьи предшествует индекс УДК, соответствующий заявленной
теме.
3. Текст статьи начинается с названия статьи и фамилии, имени и отчества автора (полностью) и снабжается аннотацией на русском и английском языках объёмом
до 7 строк. В тексте аннотации указывается цель, задачи исследования и краткие выводы. После названия статьи приводятся ключевые слова (словосочетания), несущие
в тексте основную смысловую нагрузку (на русском и английском языках).
4. В тексте статьи следует использовать минимальное количество таблиц и
иллюстраций. Рисунок должен иметь объяснения значений всех компонентов, порядковый номер, название, расположенное под рисунком. В тексте на рисунок дается ссылка. Таблица должна иметь порядковый номер, заголовок, расположенный
над ней. Данные таблиц и рисунков не должны дублировать текст.
5. Цитаты тщательно сверяются с первоисточником и визируются автором на
обратной стороне последней страницы: "Цитаты и фактический материал сверены". Подпись, дата.
6. Наличие пристатейного библиографического списка обязательно. В тексте
должны быть ссылки в квадратных скобках.
Примеры оформления литературы: а) для книг: фамилия, инициалы автора(ов),
полное название книги, место, год издания, страницы: б) для статей: фамилия и
инициалы автора(ов), полное название сборника, книги, газеты, журнала, где опубликована статья, место и год издания (сборника, книги), номер (для журнала), год и
дата (для газеты), выпуск, часть (для сборника), страницы, на которых опубликована статья. Иностранная литература оформляется по тем же правилам.
Ссылки на неопубликованные работы не допускаются.
7. Рукопись должна быть тщательно вычитана. Редакционная коллегия оставляет за собой право при необходимости сокращать статьи, редактировать и отсылать авторам на доработку.
8. Статьи сопровождаются сведениями об авторе(ах) (фамилия, имя, отчество,
ученое звание, должность, место работы, адрес, электронный адрес и номер телефона) на русском и английском языках.
9. Плата c аспирантов за публикацию рукописей не взымается.
Адрес журнала в Интернете: http://www.nich.tsure.ru/onti/izv.htm
244
ПЕРСПЕКТИВНЫЕ СИСТЕМЫ И ЗАДАЧИ УПРАВЛЕНИЯ
Ответственный за выпуск Пшихопов В.Х
Редакторы: Надточий З.И., Селезнева И.И., Чиканенко Л.В.
Оригинал-макет выполнен Ярошевич Н.В.
ЛР № 020565. Подписано к печати 23.12.2008 г.
Формат 70 ×108 1 8 . Бумага офсетная.
Офсетная печать. Усл. печ. л. – 31,0. Уч.-изд. л. – 30,5.
Заказ №
. Тираж 500 экз.
“С”
Издательство Технологического института Южного федерального университета
ГСП 17А, Таганрог, 28, Некрасовский, 44
Типография Технологического института Южного федерального университета
ГСП 17А, Таганрог, 28, Энгельса, 1
Èíäåêñ 41970