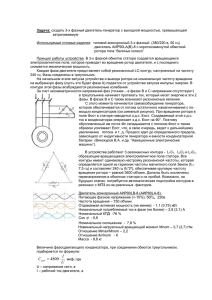
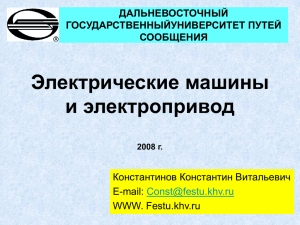
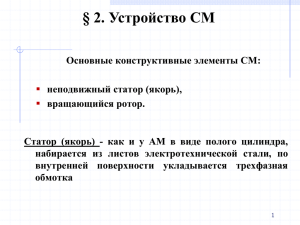
1. ВЫБОР ОСНОВНОГО И ВСПОМОГАТЕЛЬНОГО ОБОРУДОВАНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ ПЕРЕМЕННОГО ТОКА МОЩНОСТЬЮ 2200 кВт 1.1 Выбор дизеля проектируемого тепловоза. Многолетний опыт работы дизелей позволяет дать перечень требований технико-экономические показателей предъявляемых к современным дизелям тепловозов. При создании новых и модернизации эксплуатируемых тепловозов, дизеля выбирают из числа серийно выпускаемых или подготавливаемых к выпуску дизелестроительной промышленностью по таким основным показателям как: 1) Высокая экономичность. Современные тепловозные дизели имеют удельный расход топлива на номинальной мощности 205-220 г/(кВт ч), причем такой расход должен выдерживаться в интервале от номинального режима до 60-70 % от номинальной мощности. Удельный расход масла должен быть не более 1.5 - 2 г/(кВт ч). 2) Минимальные габариты и размеры и удобная конфигурация, обеспечивающая свободный доступ к дизелю и его агрегатам в процессе эксплуатации, при монтаже и демонтаже. 3) Удельная масса двухтактного дизеля на отечественных тепловозах составляет 12 – 16 % массы всего локомотива. Удельная масса четырехтактных дизелей – 5.0 – 8.4 кг/кВт. 4) Достаточный моторесурс. Срок службы тепловозного дизеля до переборки с выемкой поршней должен быть не менее 200 – 250 тыс. км. пробега тепловоза 13 или (12000 – 15000 ч), а моторесурс до капитального ремонта не менее 750 – 800 тыс. км. пробега (45000 – 60000 ч). 5) Надежность пуска дизеля, как в горячем, так и в холодном состоянии, а также быстрый переход с одного режима работы на другой. 6) Возможность применения высокотемпературного охлаждения. 7) Возможность работы на топливе содержащем до 0.2 % серы. 8) Для тепловозных дизелей большое значение имеет возможность развертывания конструкции в мощностной ряд для применения на локомотивах разной мощности с целью унификации отдельных узлов и деталей, снижение расходов на их ремонт и обслуживание, а также обеспечения возможности повышения мощности силового агрегата в перспективе. Мощностные ряды развертываются на базе цилиндров и кривошипно-шатунных механизмов одинаковой конструкции и размерности. Изменение мощности двигателя достигается варьированием числа цилиндров, их расположением, давлением надувочного воздуха, частотой вращения вала. При этом для дизелей одного ряда можно сохранять 80 – 85 унифицированных деталей и узлов одинаковой конструкции, что обеспечивает возможность их массового производства, снижает стоимость изготовления и расходы в эксплуатации. Примером мощностного ряда являются дизеля семейства Д-49 Коломенского завода. Дизеля типа Д-49 отвечают требованиям, которые предъявляются к тепловым двигателям. Габаритно – весовые показатели его позволяют разместить в одном помещении дизель – генераторную установку. Дизель-генератор 1А-9ДГ-2 состоит из дизеля 1А-5Д49-2 и синхронного генератора, установленных общей под дизельной раме и соединенных муфтой пластинчатого типа. Дизель является одной из модификаций мощностного ряда тепловозных дизелей типа 16ЧН26/26, разработанных тепловозостроительным заводом им. Куйбышева (г. Коломна). Диапазон мощностей этих дизелей от 590 до 4415 кВт или 800- 6000 л.с.). Дизель-генератор обладает рядом достоинств, он удобен в обслуживании и ремонте, его сборка и разборка производится узлами, что обеспечивает взаимозаменяемость. Надежность и износостойкость 14 деталей дизелей повышены благодаря применению высококачественных материалов, рациональным современным методом химико-термической обработки, поверхностному упрощению и качественным покрытиям. «Рис.1.1 Дизель-генератор 1А-9ДГ-2. Поперечный разрез: 1 - втулка цилиндра; 2 - поршень; 3 - крышка цилиндра; 4 - лоток; 5 - объединенный регулятор; 6 топливный насос; 7 - выпускной коллектор; 8 - блок цилиндров; 9 - шатунный механизм; 10 - охладитель масла». 15 Таблица 1.1 Конструктивные параметры и основные характеристики дизель-генератора 1А-9ДГ-2 Обозначение дизеля 16 ЧН 26/26 Условное обозначение дизеля 1А-5Д49-2 Номинальная мощность дизеля при нормальных условиях, кВт (л. с.) 2250 (3060) Частота вращения, с-1 (об/мин): номинальная 16,67 (1000) наименьшая 5,83 (350) Удельный эффективный расход топлива, г/кВт (г/э. л. с. ч) 205+12 (151+9) Удельный расход масла не более, г/кВт (г/э. л. с. ч) 1,76 (1,3) Число цилиндров 16 с У-образным расположением Рабочий объем цилиндров, дм3 (л) 221 (221) Порядок нумерации цилиндров от переднего торца Порядок работы цилиндров 1п - 4п - 5п - 2л - 7п 6л - 3п - 1л - 8п - 5л 4п - 7л - 2п - 3л - 6п 8л Диаметр цилиндра, мм 260 Ход поршня, мм 260 Направление вращения коленчатого вала, если смотреть со стороны генератора по часовой стрелке Фазы газораспределения, град: начало открытия впускных клапанов до в. м. т. 55 конец закрытия впускных клапанов после н. м. т. 30 начало открытия выпускных клапанов до н. м. т. 50 16 конец закрытия выпускных клапанов после в. м. т. Окончание табл. 1.1 35 Общий угол опережения подачи топлива, град поворота коленчатого вала при ходе плунжера топливного насоса 25—27 на 5 мм Параметры дизеля на номинальной мощности при нормальных условиях: температура выпускных газов перед турбокомпрессором не более, К (°С) температура выпускных газов по цилиндрам, не более, К (°С) давление сгорания, МПа (кгс/см2) давление наддувочного воздуха не менее, МПа (кгс/см2) 893 (620) 853 (580) 11,4 (115) 0,124 (1,35) температура воды на выходе из дизеля: рекомендуемая, К (°С) 348—363 (75—90) наибольшая допустимая, К (°С) 377 (104) Давление масла на входе в дизель при температуре масла 353К (80°С),МПа (кгс/см2): на номинальной частоте вращения, не менее 0,44 (4,5) на наименьшей частоте вращения, не менее 0,098 (1,0) Габаритные размеры дизель-генератора, мм: длина 6188 ширина 1920 высота 3067 Масса дизель-генератора, т 28,15 17 1.2. Выбор электрического оборудования 1.2.1.Выбор типа передачи для проектного тепловоза. Из многих схем электрических передач в настоящее время наиболее перспективна передача переменного тока с короткозамкнутым ротором асинхронного тягового электродвигателя и статическим преобразователем частоты. Преимущества короткозамкнутых асинхронных двигателей – простота, надёжность, высокая удельная мощность, жёсткая характеристика, сравнительно малая стоимость. Передача переменного тока по сравнению с гидравлической передачей более экономична и надёжна. Для проектируемого тепловоза принимаем передачу переменного тока. СГ Д ВУ И АД КП «Рис. 1.2 Структурная схема передачи мощности: Д – дизель; СГ – синхронный генератор; ВУ – выпрямительная установка; И – инвертор; АД – тяговые двигатели; КП – колесные пары». Преимущества электрической передачи переменного тока: - отсутствие щеточно-коллекторного аппарата; - сокращение расходов дорогостоящих материалов: меди и электротехнической стали; - повышение коэффициента сцепления, за счёт возможности работы в зоне предельного коэффициента сцепления реализуемого в режиме жесткой характеристики ДАТ, совместно с датчиками частоты вращения ротора тяговых асинхронных двигателей. 1.2.2. Выбор тягового генератора для проектного тепловоза 18 На проектируемом тепловозе применима электрическая передача переменно-постоянного-переменного тока. Постоянный ток нужен для работы стартер-генератора. Таблица 1.2. Принимаем тяговый генератор ГС-501А переменного тока с номинальными данными: Мощность, кВт Напряжение продолжительного режима, низшее, В Напряжение продолжительного режима, высшее, В Ток при высшем напряжении, А Ток при низшем напряжении, А Частота вращения, об/мин Частота, Гц Число фаз Коэффициент мощности при высшем напряжении Коэффициент мощности при низшем напряжении КПД при высшем напряжении, КПД при низшем напряжении, Масса, кг 2800 360 580 1500 2400 1000 100 6 0,925 0,935 95,8 95 6000 Генератор представляет собой синхронную машину горизонтального защитного исполнения с явно выраженными 12 полюсами на роторе, с независимым возбуждением и принудительной вентиляцией, имеющая на статоре две трехфазные обмотки, сдвинутые друг относительно друга на 30 19 электрических градусов. Генератор состоит из неподвижной части – статора, в пазах которого размещены две трехфазные обмотки, и вращающейся части – ротора с обмоткой возбуждения, питаемой через контактные кольца щетки. В пазах статора уложена волновая двухслойная обмотка, катушки которого изолированы от корпуса полиамидной пленкой. Для предохранения катушки от повреждения предусмотрена выстилка паза пленкой – стеклотканью. Катушки обмотки статора имеют прямоугольную форму и выполнены из девяти уложенных друг на друга широкой стороной медных проводников. Статорная обмотка пропитывается кремнийорганическим лаком. Лобовые части статорной обмотки крепятся к изолированным кольцам стекло шнуром. Изоляция катушек статорной обмотки имеет класс нагревостойкости Н. Корпус ротора сварно-литой конструкции. На корпус шихтован пакет стальных листов индуктора, в котором выполнены пазы формы «Ласточкина хвоста» для установки полюсов. Полюса имеют многоблочную конструкцию и крепятся на корпусе ротора с помощью клиновых шпонок. Катушки полюсов ротора выполнены из медной ленты, гнутой на ребро. Между витками меди прокладывается изоляция и катушка подвергается запеканию, после чего пропитывается в сборе с сердечником полюса эпоксидным компаундом. Изоляция катушек полюсов имеет класс нагревостойкости F. В пазах полюсных наконечников расположены медные стержни демпферной обмотки, соединенные между собой по торцам коротко замыкающими кольцами. Генератор переменного тока не может выполнять функции стартера, как это имеет место на всех существующих тепловозах с электропередачей постоянного тока. Поэтому на проектируемом тепловозе запуск дизеля осуществляется специальным стартер генератором, совмещающем функции стартера и генератора вспомогательных нужд. Стартер-генератор получает вращение от дизеля через распределительный редуктор. 1.2.3. Выбор стартер – генератор для проектного тепловоза. 20 Предназначен для пуска дизель – генераторной установки (с синхронными тяговыми генераторами ) и питания вспомогательных машин постоянного тока. Рис. 1.3 Схема запуска дизеля от стартер-генератора Стартер – генератор является четырехполюсной машиной постоянного тока с самовентиляцией, предназначенной для работы в двух режимах: стартерном – в качестве электродвигателя с последовательным возбуждением; генераторном – в качестве вспомогательного генератора независимого возбуждения. Основные технические данные стартер генератора для проектного тепловоза: 1) Генераторный режим (продолжительный) Мощность 55 кВт Напряжение 110 В Ток 500 А 2) Стартерный режим (кратковременный) Мощность 50 кВт Напряжение 60-62 В Ток 800 А Частота вращения Масса 200 об/мин 780 кг По выше перечисленным данным наиболее подходит стартер – генератор типа М2ПСГУХЛ2. 21 1.2.4 Выбор выпрямительной установки для проектного тепловоза. Электрическая схема выпрямительной установки представляет собой два трехфазных моста, соединенных в две «звезды», получающих питание от статорных обмоток тягового генератора, уложенных со сдвигом 30 электрических градусов. Трехфазные мосты на стороне постоянного тока соединены параллельно. Выпрямительная установка состоит из шкафа, где размещаются вентили. Шкаф с вентилями имеет двухсторонние обслуживание. На каждой стороне шкафа размещен трехфазный мост. Вентили с охладителями радиаторами собраны в отдельные блоки по 20 штук в блоке. На каждой стороне шкафа расположены по 6 блоков. Все блоки съемные, что обеспечивает доступ для очистки воздушного канала и смены охладителей. Вентили охлаждаются вентилятором с электроприводом расположенным над ВУ. В качестве выпрямителей использованы лавинные кремниевые вентили типа ДЛ 171 – 320 . Основные технические данные выпрямительной установки. Номинальная мощность Номинальный выпрямленный ток, А –2720кВт – 6800 А Номинальное выпрямленное напряжение – 400 В Частота питающей сети Охлаждение Масса - 35 – 100 Гц – воздушное – 650 кг. 1.3 Выбор системы охлаждения для проектного тепловоза. Для отвода тепла, выделяющегося при работе дизель-генератора, служит система охлаждения тепловоза закрытого типа с принудительной циркуляцией. На тепловозе имеются два самостоятельных контура охлаждения, каждый из которых имеет свой трубопровод, водяной насос, секции радиатора и моторвентиляторы. 22 Контур охлаждения дизеля предназначен для охлаждения втулок и крышей цилиндров дизеля, корпуса турбокомпрессора и выпускных коллекторов. В холодное время года охлаждающая жидкость используется для подогрева топлива, обогрева кабины машиниста, подогрева воды в баке санитарного устройства. Этот контур предусматривает как высокотемпературное, так и низкотемпературное охлаждение, причем переход на высокотемпературное охлаждение допускается при давлении в расширительном баке не менее 0,03 МПа (0,3 кгс/см2). Переход осуществляется вручную установкой тумблера на шкафу аппаратной камеры в положение "104 "С"; при этом отключается реле, обеспечивающее снятие нагрузки дизельгенератора при температуре охлаждающей жидкости 96 'С. Водяной охлаждающую охлаждающая насос дизеля жидкость жидкость в (правый по охлаждающие отводится от ходу тепловоза) полости дизеля в нагнетает дизеля. верхний Нагретая коллектор холодильника тепловоза, проходит через секции радиатора 21 (рис. 47) и из нижнего правого коллектора поступает во всасывающую полость насоса, замыкая круг циркуляции "горячего" контура. На трубопроводе отвода охлаждающей жидкости из дизеля предусмотрены две бонки 3 для электротермометров, измеряющих температуру жидкости на выходе из дизеля, а также пять бонок 20 для датчиков-реле температуры, три из которых служат для управления холодильником тепловоза, а оставшиеся два предназначены для снятия нагрузки дизель-генератора при достижении предельных температур охлаждающей жидкости при высокотемпературном и низкотемпературном охлаждении. На этом же трубопроводе имеется штуцер 6 для манометра. Такой же штуцер есть на трубопроводе подвода охлаждающей жидкости к всасывающей полости водяного насоса; рядом с ним установлен патрубок 7 для ртутного термометра. На выходе охлаждающей жидкости из дизеля от наивысшей точки трубопровода и от верхней части коллекторов охлаждающих секций идут трубопроводы в расширительный бак. Они отводят паровоздушную смесь во 23 время работы дизель-генератора и воздух при заправке системы, благодаря чему исключается образование в системе "пробки", которая может привести к нарушению режима охлаждения. Трубопровод на всасывании соединен через невозвратный клапан 18 с расширительным баком, что обеспечивает подпитку контура системы охлаждения. Кроме того, столб охлаждающей жидкости от расширительного бака до полости на всасывании насоса создает подпор, улучшающий условия работы водяного насоса. От контура охлаждения дизеля предусмотрен отбор горячей воды через вентиль 26 на подогрев топлива. При открытом вентиле 23 охлаждающая жидкость подогревает воду в баке 4 санитарного устройства. От задней части дизель-генератора охлаждающая жидкость при открытом вентиле 33 поступает охлаждающей в отопительно-вентиляционный жидкости из трубопровода агрегат. Для выпуска отопительно-вентиляционного агрегата необходимо открыть вентиль 31 и краны 41 и 42. Кран 42 служит, кроме того, для выпуска воздуха при заправке системы. Его необходимо также открывать перед каждым пуском дизель-генератора после длительной стоянки тепловоза во избежание образования воздушной "пробки" и замерзания в холодное время года воды в трубопроводе, идущем к отопительновентиляционному агрегату. Так как трубопровод отопительно-вентиляционного агрегата в зимнее время может подвергаться переохлаждению, то на нем предусмотрена теплоизоляция. 24 25 ОСОБЕННОСТИ 2. РЕГУЛИРОВАНИЯ ТЯГОВОГО АСИНХРОННОГО ДВИГАТЕЛЯ При современном развитии техники наиболее вероятным кажется применение на тяговом подвижном составе асинхронных тяговых электродвигателей. Благодаря сравнительно низкой массе и отсутствию коллектора и щеток короткозамкнутые тяговые электродвигатели могут надежно работать в быстроходных пассажирских локомотивах при опорноосевой подвеске. Вместе с тем АД не создают каких-либо препятствий для использования опорно-рамной и других типов подвесок. АД с короткозамкнутым ротором имеет относительно малый пусковой момент и большой пусковой ток. Увеличение пускового момента и уменьшение пускового тока возможно при выполнении беличьей клетки ротора с повышенным активным сопротивлением, но при этом двигатель имеет увеличенное скольжение и большие потери мощности в обмотке ротора. Применяются следующие разновидности короткозамкнутых АД, у которых параметры обмотки ротора (активное сопротивление и индуктивность рассеяния) зависят от частоты токов ротора : двухклеточные двигатели, глубокопазные двигатели и двигатели со сплошным стальным ротором. Режимы работы АД. Одним из важных параметров работы АД является относительное скольжение S n1 n 2 , n1 (2.1) где n1 — частота вращения магнитного поля статора; n2 — частота вращения ротора. 26 Так как частота тока, питающего обмотку статора (или, что то же, частота вращения магнитного поля статора), f1 pn1 , а частота вращения магнитного 60 поля ротора f2 pn2 , 60 то S f1 f 2 (2.2) f1 Разность f1 f 2 f - абсолютная частота скольжения ротора. ЭДС, наводимая во вращающемся роторе, имеет именно эту частоту. Абсолютная частота скольжения ротора f связана с его относительным скольжением зависимостью, определяемой на основании выражения (2.2), как f Sf1 При номинальной нагрузке частота вращения ротора для различных электродвигателей обычно составляет 98,0—92,5% частоты вращения n1 (скольжение SНОМ = 2 - 7,5%). Относительное скольжение меняется от S = 1 при неподвижном роторе до S = 0. Чем больше нагрузка, т. е. вращающий момент, который должен развивать электродвигатель, тем меньше частота вращения ротора. Кривая на рис. 2.1 (частота вращения асинхронного электродвигателя) лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Ммах электродвигатель развивает при некотором скольжении Sкр составляющем 10—20%. Отношение Ммах/Мном определяет перегрузочную способность электродвигателя, а отношение МП/Мном — его пусковые свойства. Электродвигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу внешним моментом нагрузки и моментом, развиваемым электродвигателем. Этому условию соответствует верхняя часть характеристики до достижения Ммах (до точки В). Если внешний нагрузочный момент превысит момент Ммах, то электродвигатель теряет устойчивость и 27 останавливается, при этом по обмоткам машины будет проходить ток в 5—7 раз больше номинального. Для условий тяги и электрического торможения относительное скольжение s не полностью определяет режим работы асинхронного электродвигателя: при движении локомотива приходится регулировать скорость, а следовательно, f1 и f 2 . Возможно регулировать и напряжение, подводимое к тяговому электродвигателю. Поэтому режимы работы асинхронного тягового электродвигателя могут быть самыми разнообразными при одном и том же относительном скольжении S. Если учесть, что максимальный момент электродвигателя также зависит от величины приложенного к нему напряжения и частоты тока, питающего статор, то при изменении режимов работы локомотива будет изменяться запас устойчивости тягового электродвигателя. Учитывая выражение n2 n1 1 S 60 f1 1 S , p следует, что частоту вращения n2 ротора АД можно изменять следующими способами: регулированием частоты напряжения питания f1 (частотное регулирование), что обеспечивает плавное изменение частоты вращения n1 магнитного поля; изменением числа пар полюсов р обмоток статора и ротора, что обеспечивает дискретное изменение частоты вращения n1 магнитного поля; изменением скольжения S (без использования энергии скольжения) вследствие изменения вида механической характеристики двигателя. Это изменение вида регулированием: регулятором механической первичного напряжения характеристики напряжения (тиристорное U 1, можно обеспечить например тиристорным регулирование); изменением индуктивного или активного сопротивления цепей обмоток статора или ротора; созданием дополнительного тормозного момента на валу электродвигателя (метод наложения); путем искажения симметрии системы подведенных к обмотке статора напряжений; 28 изменением скольжения (с использованием части энергии скольжения) путем введения в цепь обмотки ротора ЭДС частоты скольжения f 2 Sf1 (каскадные схемы регулирования); Рис. 2.1 Механическая характеристика асинхронного двигателя комбинированными способами регулирования, основанными на использовании переключения числа пар полюсов в сочетании с изменением скольжения тиристорными регуляторами напряжения или управляемыми реакторами. Для того чтобы установить наиболее эффективные законы регулирования режимов работы АД, рассмотрим зависимость вращающего момента М от его параметров: M p1 m1U 12 r1 S r 2f 1 r2' 1 x1 x 2' S , (2.3) p1 и т1 - число пар полюсов и число фаз обмотки статора; r1 и х1 - активное и индуктивное сопротивления обмотки статора; 29 r'2 и х'2 - приведенные к параметрам цепи статора активное и индуктивное сопротивления цепи ротора; U1 - напряжение питания, приложенное к статору; пренебрегая падением напряжения в обмотке статора, считаем U1 E1 (где Е1 — ЭДС фазы статора). Поскольку относительное скольжение при нормальной работе асинхронного тягового электродвигателя мало, то, считая S2 = 0 и пренебрегая активным сопротивлением обмотки статора, т. е. полагая S r1 0 , запишем r2' CU12 S M f1 где C (2.4) p1 m1 . 2 r2' Так как нагрузка тягового электродвигателя, а следовательно, и его вращающий момент меняются в эксплуатации в широких пределах, важно соблюдать условие, обеспечивающее наиболее экономичную работу тягового электродвигателя. Оно заключается в том, что при всех возможных режимах работы мощность потерь в двигателе должна быть минимальной, т. е. Pmin PM PC P2 min (2.5) где ΔРМ и ΔРС - механические и магнитные потери в двигателе, которые в первом приближении считаются не зависящими от нагрузки двигателя, т. е. от тока ротора I2; ΔР2 = М(п1 - n2) — потери в роторе. Разность частоты вращения поля статора n1 ротора n2 2f1 и частоты вращения p 2f 2 называют абсолютным скольжением ротора: p 30 n n1 n 2 2 f p (2.6) Тогда потери в роторе составят P2 2 2 M f1 f 2 Mf . p p Условие ΔРmin = const требует того, чтобы абсолютная разность частот вращения поля статора и ротора (абсолютное скольжение Δn) была минимальной и постоянной во всех режимах: f f 1 f 2 min const (2.7) Чтобы выявить способы реализации условия (2.7), рассмотрим два режима нагрузки электродвигателя. В первом из них напряжение, питающее ' ' статор, равно U1 и частота eгo f1 , во втором соответственно U1 и f1 . Относительное скольжение ротора в первом и втором режимах соответственно f 1' f 2' f1 f 2 ' и S1 . S1 f1 f 1' Вращающий момент электродвигателя в первом режиме на основании выражения (2.4) M1 C U 12 f 1 f 2 U 2f f C 1 12 2 f1 f1 f1 (2.8) и во втором режиме ' M1 U C ' 2 1 ' f1 f 1' f 2' f 1' U f f C f ' 2 1 ' ' 1 2 ' 2 1 (2.9) 31 Поскольку по условию (2.8) постоянства потерь в электродвигателе f1 f 2 min должно быть выдержано равенство f 1' f 2' min const , то на основании выражений (2.8) и (2.9) отношение вращающих моментов при рассматриваемых режимах составит M 1 CU 12 f 1 f 2 min M2 f 12 C U 1' f ' 2 1 f 2 1 f 2 min U 12 U ' 2 1 f ' 2 1 2 1 f . (2.10) Отсюда U 1 f1 M1 ' ' U 1 f1 M 1' Оптимальный электродвигателя режим работы определяется (2.11) асинхронного соотношением короткозамкнутого трех его параметров: напряжения U1 частоты f1 и вращающего момента М1. Меняя соотношение между этими параметрами по закону (2.11), можно обеспечить работу асинхронного двигателя с минимальными потерями, т. е. с наибольшим КПД, мощностным коэффициентом cos и постоянной перегрузочной способностью. При больших нагрузках учитывается влияние падения напряжения в обмотке статора. Для получения наилучших показателей работы двигателя вводят коррективы в закон регулирования, учитывающие фактическое напряжение на обмотке статора. С этой целью на локомотивах должны быть предусмотрены системы автоматического регулирования работы двигателей. Режим работы локомотива характеризуется скоростью движения V и силой тяги FK, тогда, учитывая, что V 0.188 DКЛ 60 f 1 1S или, приближенно, на p рабочей ветви характеристики, где S мало, V 0.188 DКЛ 60 f1 2М 3 С 2 М , С1 f1 , а Fк Dкл p 32 получим на основании выражения (2.11) общий закон регулирования режимов локомотива с асинхронными электродвигателями в виде U 1 V1 U 1' V1' U V M1 или 1' 1' ' M1 U 1 V1 F1 F1' (2.12) Здесь скорость движения V1 и сила тяги F1 соответствуют частоте f1 питающего напряжения U1,а V1' и FK' - частоте питающего напряжения U 1' . Поскольку U 12 U 1 2 P1 FV 1' 1 ' 1 , то, возведя обе части (2.12) в квадрат, получим P2 FK V1 V12 FK V1 2 FK , Откуда U1 V 1 ' V1 U1 Следовательно, для обеспечения условия постоянства мощности электродвигателя нужно изменять питающее напряжение пропорционально квадратному корню из его частоты. Режим постоянства скорости движения локомотива, т. е. V= const или V1 f 1 , равносилен условию постоянства частоты питающего напряжения 1' 1 ' V1 f1 . При этом из выражения (2.12) получим U1 FK . Значит, для обеспечения ' FK U1 постоянства скорости движения питающее напряжение следует менять пропорционально квадратному корню из силы тяги. 33 Если приложенное постоянным, т.е. к электродвигателю напряжение сохраняется U U1 1 основании соотношения (2.12) получим 1' ' U2 U1 FK F K' Следовательно, тяговая характеристика FK(V) изменяется по закону квадратичной гиперболы, как у ненасыщенного электродвигателя постоянного тока с последовательным возбуждением. При условии постоянства питающего напряжения, изменяя его частоту обратно пропорционально силе тяги, получим мягкую характеристику электродвигателя при минимуме потерь. Например, при неизменном напряжении питания, имеющем частоту f 50 Гц , двигатель развивает силу тяги FK (линия 1, рис. 2.2). С ростом скорости увеличивается частота питающего напряжения. Если скорость движения, а следовательно, и частота питающего напряжения возросли, допустим, в f 1' 2 50 70 Гц , то сила тяги зависимости (2.12) в отношении двигателя уменьшится 2 раз, т. е. на основании FK , т. е. будет равна половине исходного FK' значения Fk , т. е. FK'= 0,5FK. Абсолютная частота скольжения ротора остается неизменной, как это показано на рис. 2.2. Если далее скорость движения возросла по отношению к исходной в 2 раза, т. е. f1" 2 f1 100 Гц , то при том же питающем напряжении получим на основании выражения (2.12) f" V" 1 V1 f1 FK FK" Отсюда сила тяги FK" 0.25FK , т. е. уменьшится при удвоенной скорости движения в 4 раза относительно первоначального значения F1, соответствующего частоте питающего напряжения f1 50 Гц . Абсолютная частота а скольжения тяговых электродвигателей, следовательно, и энергетические потери в локомотиве по-прежнему минимальны. 34 При увеличении питающего напряжения характеристики смещаются в область более высоких скоростей (см. линия 2, рис. 2.2), при понижении — в область более низких скоростей (кривая З). Одновременно изменяя питающее напряжение U1 и его частоту f1 , можно получить в зависимости от принятого закона регулирования характеристики локомотива любой жесткости. Управление тяговыми АД путем изменения числа пар их полюсов и полюсов тягового синхронного генератора позволяет получить ступенчатое изменение частоты вращения. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего исполнения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется ступенями; при частоте f1 50 Гц частота вращения поля п1 при переключениях изменяется в отношении 3000:1500:1000:750. В электропередачах с АД возможно электрическое торможение. Режим реостатного торможения АД в тепловозах имеет ограничения по сцеплению колес с рельсами, току нагрузки, напряжению, магнитному потоку АД и перегрузочной его способности. Рис. 2.2 Характеристики асинхронного двигателя при частотном регулировании 35 3. УСТАНОВЛЕНИЕ ОСНОВНЫХ ИСХОДНЫХ ДАННЫХ ДЛЯ ЭЛЕКТРОМАГНИТНОГО РАСЧЕТА. Тип двигателя Асинхронный частотнорегулируемый с короткозамкнутым ротором Номинальный расчетный режим продолжительный Мощность тягового двигателя P2=1000 кВт Тяговое усилие одной среднеизношенных оси бандажах, при не менее F=6250 кгс Выпрямленное напряжение Ud=1500 B Число фаз обмотки статора m1=3 Номинальная частота абсолютного скольжения Напряжение f2=1,0 Гц изоляции обмоток двигателя относительно земли Класс нагревостойкости Uc=1500 B изоляции обмотки статора F Подвеска опорно-осевая Зубчатая передача двусторонняя, косозубая, одноступенчатая Модуль зацепления(нормальный) mн=12,0 мм Расстояние между нижней точкой кожуха зубчатой передачи и головкой рельса (клиренс) при новых b=120 мм 36 бандажах, не менее Диаметр бандажа ведущего колеса по кругу катания: нового Dб=1250 мм среднеизношенного Dб=1200 мм Максимальная скорость тепловоза Umax=110км/ч Максимальная окружная скорость ротора, не более Up max=100 м/с Максимальная частота вращения по условиям работоспособности роторных подшипников, не более nmax=2100 об/мин Максимальная частота по условиям работоспособности тиристоров, не более fmax=150 Гц Вентиляция независимая, аксиальная Устанавливаем основные исходные данные для электромагнитного расчета. Среднее значение выпрямленного тока Id P2 1000 10 3 712 А , U d Д 1500 0,936 где д=0,936 – принятый предварительно КПД двигателя. Действующее значение основной гармонической фазного напряжения двигателя U ф1 2 U d 2 1500 675В , 37 Действующее значение основной гармонической линейного напряжения двигателя: U Л1 6 U d 6 1500 1170 В Активная мощность на зажимах двигателя Р1 Р2 Д 1000 1068кВт , 0,936 Полная мощность на зажимах двигателя Рполн Р2 P 1068 1 1271кВА , Д cos cos 0,84 где cos= 0,84 принят предварительно. Действующее значение основной гармонической тока одной фазы статора двигателя (при соединении обмотки статора звездой) I Ф1 Р2 3 U Л 1 Д cos Pполн 3 U Л1 1271 3 1170 627 А , По условиям работоспособности роторных подшипников наибольшее передаточное число не должно превышать =4,3. Так как ротор проектируемого асинхронного двигателя короткозамкнутый, следует ожидать, что он будет по сравнению с ротором вентильного двигателя менее напряженным по электромагнитным и тепловым нагрузкам. Поэтому асинхронный двигатель при одинаковых заданных номинальных мощности и тяговом усилии может быть спроектирован на меньших диаметрах ротора и статора и более скоростным, чем вентильный. При этом не потребуется делать максимальную раздвижку по централи и может быть принята обычно применяемая оптимальная коррекция, равная 38 (0,50,7) ms, а также, видимо, не потребуется глубокого врезания оси колесной пары в остов, и большей будет толщина тела остова в местах расположения моторно-осевых подшипников. Поэтому принимаем такими же число зубьев большого зубчатого колеса Z=75; модуль нормальный mн=12,0 мм; торцовый ms=12,81 мм. Число зубьев шестерни уменьшаем, приняв z=18. Передаточное число зубчатой передачи =75/18=4,166. Получаем: Централь Ц ms 12,81 Z z 0,65ms 75 18 0,65 12,81 604 мм , 2 2 Максимальный внутренний диаметр остова (в расточке) D 235 D j 2 Ц вкл h j 2 604 17.5 938 мм , 2 2 где Dвкл=235 мм – наружный диаметр вкладышей моторно-осевых подшипников; hj=17,5 мм – толщина тела остова в местах расположения вкладышей моторно-осевых подшипников. Внешний диаметр активной стали статора принимаем на 2 мм меньшим: Da D j 2 938 2 936 мм Скорость локомотива v э 367 Р2 367 1000 3 0.975 57,3км / ч , F 6250 где з=0,975-к.п.д. зубчатой передачи в номинальном режиме. Частота вращения двигателя в номинальном режиме: n 5.3 v э 5,3 4,166 57,3 1054об / мин , Dб 1,2 39 Вращающий момент в продолжительном режиме М 974 Р2 1000 974 924кгс м , n 1054 Частота вращения двигателя при максимальной скорости тепловоза nmax n vmax 110 1054 2023об / мин , v 57,3 Для заданной мощности целесообразно рассматривать и сопоставлять варианты с 2р=6 и 2р=8. Десяти полюсное исполнение двигателя неприемлемо, так как частота при максимальной скорости тепловоза получается чрезмерно высокой-170-180 Гц, превышая максимально допустимую по условиям работоспособности тиристоров (150 Гц). Так как в системе с рассматриваемыми двигателями по сравнению с вентилируемыми электрооборудование тепловоза получается большей массы, следует стремиться иметь более легким тяговый двигатель (чтобы не превышать заданное давление оси на рельс). Принимаем 2р=8, так как по сравнению с 2р=6 двигатель получается меньшей массы за счет меньшей толщины спинок статора и ротора. Механическая частота вращения ротора fr p n 4 1054 70.3 Гц , 60 60 Максимальная механическая частота ротора f r max f r nmax 2023 84.3 161,8 Гц , n 1054 Номинальная частота тока статора f1Н f r f 2 70,3 1.0 71.3Гц , 40 Максимальная частота тока статора f 1 max f r max f 2 161,8 1,0 162,8 Гц Частота вращения магнитного поля статора в номинальном режиме n1 60 f1Н 60 71,3 1069об / мин , р 4 Угловая скорость вращающегося магнитного поля статора в номинальном режиме: 1Н 2 2 f 1Н 71,3 112 рад / с , р 4 Угловая скорость ротора в номинальном режиме Н 2 2 fr 70,3 110 рад / с р 4 Абсолютное скольжение ротора 2 2 f2 1.0 1.57 рад / с р 4 Относительное скольжение в номинальном режиме s n1 n f 1069 1054 1,57 1,0 2 0,0140 1,40% n1 1Н f1Н 1069 112 71,3 Параметр абсолютного скольжения (равен относительному скольжению в номинальном режиме) f2 1.0 s 0.0140 1.0 0.0140 , f 1Н 71.3 f1 1,0 f 1Н 41 Стремлением уменьшить намагничивающий ток двигателя и тем самым повысить cos объясняется тем, что воздушный зазор между статором и ротором выполняется минимально возможным по конструктивным и производственным условиями. Из-за этого обмотка и сердечник статора очень слабо обдуваются вентилирующим воздухом со стороны, обращенной к ротору. Для улучшения охлаждения надпазовых каналов эффективно устройство так называемых статора, образуемых за счет соответствующего углубления пазов. При этом уменьшается аэродинамическое сопротивление и увеличивается поверхность теплоотдачи с активного слоя статора. Высота надпазового канала составляет (1,01,5) bп, где bп- ширина паза статора. В асинхронном двигателе увеличение индуктивного сопротивления рассеяния обмотки статора не столь вредно, так как коммутация осуществляется принудительно, специальной коммутирующей цепью. Для дальнейшего электромагнитного расчета приняты внутренний диаметр статора Di=700 мм; внешний диаметр ротора D2=696 мм. Выбирая размер минимально допустимого воздушного зазора, следует оценивать: ток холостого хода и cos при номинальной нагрузке; допустимое рассеяние в воздушном зазоре; механические условия (начальный эксцентриситет ротора, износ подшипников, одностороннее магнитное притяжение и прогиб вала). С учетом производственных возможностей принят односторонний воздушный зазор между ротором и статором =2,0 мм. Максимальная окружная скорость ротора: v p max D2 nmax 60 0.696 2030 60 74 м / с . Полюсное деление по внутреннему диаметру статора 1 Di 2p 700 8 275 мм . 42 4. РАСЧЕТ АКТИВНОГО СЛОЯ СТАТОРА. Пренебрегая активной составляющей тока холостого хода, действующее значение основной гармонической ЭДС фазы обмотки статора предварительно можно выразить так Еф1 U ф1 I 0 x1 0.97 0.95 U ф1 0,96 766 735 , где x1 – индуктивное сопротивление рассеяния обмотки статора, Ом; I0намагничивающий ток, А. Для выполнения условий симметрии обмотки статора число пазов на полюс и фазу принимаем равным целому числу, q1=4. Полное число пазов статора Z1=2pm1q1=2434=96 Применяем двухслойную волновую обработку обмотку (что по сравнению с петлевой обмоткой позволяет сократить число групповых соединений) с 60-градусной фазной зоной, с укороченными переходами в передней лобовой части. Число эффективных проводников в пазу sп1=2. При относительном небольшом токе фазы Iф1=660А можно принять параллельных ветвей в фазе а=1. Число последовательных витков в фазе обмотки статора 1=z1sп1(2m1q1)=962(231)=32 Шаги обмотки статора: по пазам 43 y z1 Z1 96 m1 q1 3 4 12 ; 2p 8 результирующий Z1 96 2m1 q1 2 3 4 24 ; 2p 4 y первый частичный шаг у1=10; второй у2=у-у1=24-10=14 Относительный шаг обмотки y1 y1 10 0.833 . y z1 m1 q1 12 Соединение фаз статорной обмотки - звезда с выведенным нулем. При этом устраняются 3-я и кратные 3 пространственные гармонические ЭДС. При =0,833 имеет место наименьшее процентное содержание в кривой ЭДС одновременно гармонических 5-го и 7-го порядков при достаточно высоком коэффициенте сокращения шага обмотки для основной гармонической ЭДС. k y1 sin 2 sin 0.833 90 0 sin 75 0 0.966 . Коэффициент распределения основной гармонической ЭДС обмотки sin k p1 q1 sin 2m1 2m1 q1 sin 4 sin 23 0.957 . 2 3 4 Обмоточный коэффициент для основной гармонической ЭДС обмотки статора: k об1 k y1 k p1 0.966 0.957 0.925 . Размеры проводников обмотки определяют размеры пазов и геометрию зубцов статора, а последние в свою очередь в зависимости от допускаемых индукций при расчете магнитной цепи определяют длину пакета сердечника статора. Чтобы оценить эти связи и найти оптимальные соотношения, приходится предварительно выполнить несколько приближений. По результатам таких предварительных расчетов выбираем по ГОСТ 434-71 44 элементарный проводник hпрbпр=3,158,0 сечением 24,65 мм2. Каждый эффективный проводник делаем состоящим из пяти элементарных. Сечение одного эффективного проводника qа1=24,655=123,25 мм2 Для снижения добавочных потерь в меди обмотки статора принята малая высота проводника (hпр=3,15 мм). Плотность тока в обмотке статора j1 I ф1 а1 qa1 660 5.35 А / мм 2 123.25 Линейная нагрузка статора А1 I ф s П1 Z 1 Di 660 2 96 577 А / см . 70.0 Тепловой фактор обмотки статора А1 j1 577 5.35 3080 А 2 / см мм 2 Амплитуда основной волны первой гармонической н. с. статора трехфазной машины при симметричной нагрузке с фазным током Iф1 равна на один полюс F1a max m1 2 1 k об1 3 2 32 0,925 I ф1 660 6600 А р 4 4.1. Заполнение паза статора. 45 Чтобы не было электрических соединений между элементарными проводниками одного эффективного проводника, 2-й и 4-й элементарные проводники изолируют витковой изоляцией. Ширина, мм Медь 8,00 Витковая изоляция 2 – стеклослюдинитовая лента толщиной 0,11 мм, один слой встык 0,1121 Корпусная 0,22 изоляция 3 – стеклослюдинитовая лента толщиной 0,11мм, пять слоев вполуперекрышу 0,11225 Покровная изоляция 4 – 2,20 стеклолента толщиной 0,1 мм, один слой встык 0,121 0,20 Зазор на укладку 0,28 Ширина паза в свету |bп 10,9 Ширина паза в штампе bп=bп+0,2=10,9+0,2 11,1 Высота, мм Высота меди 3,1510 Витковая изоляция 31,50 2 – стеклослюдинитовая лента толщиной 0,11 мм, один слой встык, 2-й и 4-й проводники каждого пакета0,1124 0,88 Корпусная изоляция 4 двух пакетов – стеклосюдинитовая лента толщиной 0,11 мм, пять слоев вполуперекрышку 0,112252 4,40 Покровная изоляция 4 двух пакетов – 46 стеклолента толщиной 0,1 мм, один слой встык 0,40 0,122 Прокладки 1, размером 0,53 1,50 Клин 5 толщиной 3,00 Зазор в укладку 0,12 Высота паза в свету hz 41,8 Высота паза в штампе (для размещения катушки обмотки статора) hz=hz+0,1=41,8+0,1 41,9 Полная высота паза с учетом надпазового канала высотой 13,1 мм hz=hz+13,1=41,9+13,1 55,0 4.2. Геометрия зубца статора. Зубцовый шаг по внутреннему диаметру статора t1 Di Z1 700 96 22.9 мм . Ширина головки зубца (в штампе) bz1 t1 bП' t1 bП 0,2 22,9 11,1 11,8 мм Зубцовый шаг по дну пазов t1' Di 2hZ" 700 2 55 Z1 96 26.5 мм Ширина зубца у основания (в штампе) 47 bZ' 1 t1' bП' t1' bП 0,2 26,5 11,1 15,4 мм Зубцовый шаг в расчетном сечении 2 3 2 700 55 3 24.1мм 96 Di hZ" t 1 1 3 Z1 Ширина зубца расчетная, с учетом штамповки b Z t 1 bП' t 1 bП 0,2 24,1 11,1 13,0 мм 1 3 1 3 1 3 В качестве расчетного принято сечение на высоте одной трети от узкого основания зубца, так как при этом методе расчета получается некоторый запас намагничивающей силы по сравнению с более точными методами. 4.3. Геометрия катушки статора В процессе проектирования необходимо оценивать размеры и компоновку машины в продольном направлении. Выполняем геометрический расчет лобовых вылетов катушки обмотки статора. Имеем: а=28мм–прямолинейный участок катушки при выходе из паза, принимается в зависимости от напряжения относительно корпуса; с=7мм прямолинейный участок у головок; d r hкат r hZ 41.8 5 26 мм 2 2 размер головки катушки (r=5мм-внутренний радиус изгиба головки); 48 b=15мм-прямолинейный участок проводников перед пайкой; g-длина участка пайки: I ф1 g 2nэл bпр j 660 33 мм 2 5 8.0 0.25 где nэл=5-число элементарных проводников в эффективном проводнике; bпр-ширина проводника; j=0,25 Амм2-допускаемая плотность тока в спаиваемом слое. Принято g=35мм. Угол, под которым расположены наклонные части катушек: sin bк 10.9 0.5 0.473; t' 24.0 28018' Здесь =0,5 мм - наименьший зазор между соседними катушками; bкbп=10,9мм - толщина катушки в пазовой части (может приниматься равной ширине паза в свету); t' D 2hZ" hZ hкл1 700 255 41.8 3.0 Z1 96 24.0 мм Зубцовый шаг по наименьшему диаметру укладки катушек обмотки статора (hкл1=3,0мм-толщина клина паза статора). Проекции (вылеты) косых, наклонных участков, переднего lп и заднего lз на продольную ось двигателя равны: lП y2 ' 14 t tg 24.0 tg 28018' 91мм 2 2 ; lЗ y1 ' 10 t tg 24.0 tg 28018' 65 мм 2 2 49 Полные передний и задний вылеты лобовых частей обмотки соответственно равны: lвп=a+lп+b+g=28+91+15+35=169мм; lвз=a+lз+c+d=28+65+7+26=126мм. Суммарная длина лобовых вылетов обмотки статора Lлоб=lвп+lвз=169+126=295 мм. Средняя длина витка обмотки l1=2(ls1+la), где ls1 - развернутая длина лобовой части полувитка. Определяем ее приближенно. Так как верхняя и нижняя стороны катушки располагаются на разных диаметрах, зубцовый шаг и угол наклона измеряем на диаметре, проходящем через середину обмотанной высоты паза hz. Зубцовый шаг t" Di 2hZ" hZ 700 2 55 41.8 Z1 96 25.2 мм Угол наклона bк ' 10.9 0.55 0 arcsin arcsin 0.454 27 " 25.2 t ' arcsin , где =0,55мм-зазор между соседними катушками на расчетном диаметре. 50 Длины переднего и заднего наклонных участков соответственно равны: LП lП 91 200 мм, ' sin 0.454 LЗ lЗ 65 144 мм, ' sin 0.454 Длина лобовой части полувитка ls1 g b LП a a LЗ c Здесь d 2 d 2 35 15 200 28 28 144 7 26 2 498 мм 41мм - длина участка катушки в головке. Такой же практический результат получается и по приближенной формуле ls1 1.1 Di hZ" b 2 p 1 П t1 2 hZ" 2a 1.1 700 55 10.9 0.5 2 p 1 22.9 2 55 2 28 489 мм Итак, средняя длина витка l1=2(ls1+la)=2(498+450)=1896 мм, где lа=450мм-длина сердечника статора. Омическое сопротивление фазы обмотки статора при температуре 1300С 51 r1 l1 1 1.896 32 tr 1.44 0.0125Ом qa1 57 123.25 57 Для того чтобы по возможности уменьшить намагничивающий ток, в качестве материала для сердечника статора применяем трансформаторную сталь марки Э32 толщиной 0,5 мм по ГОСТ 802-58, имеющую лучшую магнитную проницаемость, чем сталь Э43. 52 5. РАСЧЕТ АКТИВНОГО СЛОЯ РОТОРА. Число пазов короткозамкнутого ротора z2 при заданном числе пазов статора z1 выбираем, исходя из допустимых паразитных (асинхронных и синхронных) моментов, радиальных вибрационных сил и магнитного шума машины. При неправильном выборе числа пазов ротора z2 увеличиваются добавочные потери и возникают большие «паразитные» тангенциальные и радиальные силы, которые, ухудшая моментную характеристику двигателя, создавая в ней провалы, вызывают шум при работе двигателя. В частности, число пазов ротора z2 не должно быть равно числу пазов статора z1 и z2 должны иметь по возможности меньше общих множителей и z2 выбираем четным, так как z1 всегда четно. Принимаем z2=82. Не предусматриваем скоса пазов ни статора, ни ротора, так как тяговый двигатель, работающий под тепловозом, нет необходимости выполнять бесшумным за счет усложнения производства. Для надежной фиксации короткозамкнутой обмотки в пазах ротора их выполняют клиновидной формы, радиально сужающимися по направлению к наружной поверхности ротора. Стержни 1 обмотки изготавливают из меди, профиль сечения которой соответствует форме пазов ротора и закрепляют в пазах снизу клиновыми шпонками 2 .и 3. Концы стержней по обоим торцам ротора приваривают к медным короткозамыкающим кольцам 4. Вверху клиновидный паз сменяется круглым со шлицем. Это сделано для того, чтобы геометрия коронок зубцов ротора оставалась более или менее стабильной, несмотря на возможные колебания размеров при установке стержней в пазах ротора; в противном случае при малом воздушном зазоре между ротором и статором даже небольшие колебания в геометрии коронок зубцов могут привести к нестабильности и разбросу характеристик двигателей. Рассматривая короткозамкнутую беличью клетку как многофазную обмотку, в которой каждый стержень представляет собой фазный провод, с 53 числом фаз m2=z2=82, обмоточный коэффициент коб2=1,0 и числом витков в фазе 2=0,5, находим действующее значение э. д. с. фазы ротора. ЕФ 2 ЕФ1 2 к об 2 0,5 1,0 735 12,45В 1 к об1 32 0,925 Определяем ток в стержне ротора при номинальной нагрузке. Как известно, это делается в начале расчета с некоторым приближением и может быть уточнено в конце расчета. Так как статор двигателя получает питание от автономного инвертора, переключение вентилей которого происходит непрерывно, в результате коммутации тока в короткозамкнутых фазах обмотки статора в двигателе будут возникать повышенные дополнительные потери от высших гармонических, что приводит, в конечном счете, к увеличению тока. Принимая это во внимание, в формулу для определения тока ротора подставляем активную мощность Р1. Действующее значение тока в стержне клетке ротора I ф2 Р1 1280 1280 A Z 2 EФ 2 1 s 82 12.45 1 0.017 Ток в короткозамыкающем кольце ротора I кл I ф2 1280 1280 4170 A p 4 2 sin 8.780 2 sin 2 sin Z2 82 Допуская плотность тока в стержне ротора 7-8 Амм2, принимаем сечение стержня ротора с размерами по рис. 5.1,а. Угол , определяющий клиновидность стержня, следует брать равным 16200; меньшее основание трапецеидального сечения - не менее 3,5 мм; большее основание нужно увязывать с сужением зубца ротора в механическом и магнитном отношениях. 54 Приняв большее основанием трапеции равным bст=11мм, высоту стержня hст=23мм, угол =180, находим меньшее основание сечения стержня аст bст 2hстtg 2 11 2 23tg 180 3.7 мм. 2 Площадь сечения стержня qа 2 bcт аст 11,0 3,7 hст 23 169 мм 2 2 2 Плотность тока в стержне j2 I ф2 qa 2 1280 А 7.56 169 мм 2 Линейная нагрузка ротора А2 I Ф1Z 2 1280 80 А 479 D2 696 см Тепловой фактор ротора А2 j2 479 7.56 3620 А2 см мм 2 Геометрия зубца и паза ротора видна из рис. 5.1, б. В связи с тем, что конфигурация зубца и конструкция паза сложны, многие размеры приходится устанавливать конструктивно. Ширина зубца в самом узком сечении по условиям технологии и производства не должна быть менее 8-10 мм. При слишком узких зубцах приходится удлинять ротор, чтобы магнитная индукция не была чрезмерной. В окончательном исполнении это наиболее узкое сечение 55 проверяют на отрыв под действием центробежных сил обмотки, заложенной в пазы ротора. Клиновые стальные шпонки, расположенные в нижней части фигурного паза, имеют ширину на 20-25% меньше, чем большее основание трапецеидального сечения стержня. Это позволяет предотвратить дальнейшее сужение зубца ротора с углублением паза в радиальном направлении к центру окружности ротора. На рис.5.1, а размер ∆h+hст=26,5мм,превышающий высоту стержня на ∆h=3,5мм, намечен из того условия, чтобы при установке стержня в паз ротора односторонний боковой зазор равнялся ≈0,5 мм. Из простых 56 тригонометрических соотношений ширина паза в месте наибольшего сужения зубцов получается равной bП 2 мах 2htg 2 bст 2 3.5 tg 180 11.0 12.1мм 2 При длине активной части ротора более 200мм конструктивно удобнее применять две пары клиновых шпонок; каждая пара –на половине длины ротора. Угол, определяющий клиновидность шпонки, равен примерно 10. Высоту шпонки в наибольшем сечении принимают равной ее ширине, т. е.h′′шп=9,0мм. В наименьшем сечении она получается равной h″шп≈4,5мм. Следовательно, общая высота клиновых шпонок в поперечном сечении равна ' " hШП hШП hШП 9.0 4.5 13.5 мм Шлиц вверху паза имеет размеры: высота hs=1,0мм, шлиц bs=2,0мм. Диаметр окружности верхней части паза по технологическим причинам не должна быть менее d=8мм, причем центр этой окружности расположен на верхнем основании стержня. Таким образом, общая высота паза ротора будет складываться из размеров следующих величин (см. рис. 5.1. а), мм: Высота шлица hs 1,0 Радиус окружности верхней части паза d/2 4,0 Высота стержня hст 23,0 Монтажный зазор под стержнем Δh 3,5 Высота активной части паза h’Z2 31,5 Суммарная толщина двух клиновидных шпонок hшп 13,5 Полная высота зубца ротора h”Z2 41,5 57 5.1 Геометрия зубца ротора Зубцовый шаг по внутреннему диаметру ротора t 2 D2 Z2 696 82 26,7 мм . Ширина головки зубца bz 2 t 2 bs 26.7 2.0 24.7 мм Зубцовый шаг по дну пазов t ' 2 D2 2hZ" 2 696 2 41.5 Z2 82 23.5 мм Ширина ножки зубца bZ' 2 t2 bШП 23,5 9,0 14,5 мм Зубцовый шаг на диаметре наибольшей ширины пазов t 2" D2 2 hZ' 2 696 2 31.5 Z2 82 24.3 мм Ширина зубца в самом узком месте bZ 2min t "2 bП 2max 24,3 12,1 12.2 мм 58 В качестве расчетного будем рассматривать сечение зубцового слоя на высоте 1/3 от самого узкого сечения клиновидного участка. Зубцовый шаг в расчетном сечении 4 3 Z2 4 696 31.5 3 25.0 мм 82 D2 hZ' 2 t 1 2 3 Ширина паза в расчетном сечении b 1 П 2 3 2 ' 2 180 bП 2 мах hZ 2tg 12.1 31.5tg 8.8 мм 3 2 3 2 Ширина зуба расчетная b Z t 2 3 1 2 3 b 1 П 2 3 25,01 8,8 16,2 мм Пакет сердечника ротора в спрессованном состоянии удерживается двумя нажимными шайбами каждая толщиной 40 – 50 мм. Примерно на этих расстояниях от краев сердечника ротора должны отстоять короткозамыкающие кольца. Длинна стержня до короткозамыкающих колец l' 2 l2 2lS 2 450 2 55 560 мм Здесь 2lS2=2•55=110мм – суммарная длина обеих «лобовых» частей одного стержня; l2 = 450 мм – длина сердечника ротора (устанавливается окончательно по результатам расчета магнитной цепи). Расчетная длина стержня (до середин короткозамыкающих колец) 59 l 2 l' 2 bКЛ 560 30 590 мм, где bКЛ = 30 мм - ширина короткозамыкающего кольца. Омическое сопротивление стержня ротора при 1300 С rСТ l 2 0.59 tr 1.44 0.08825 10 3 Ом. qa 2 57 169 Рассматривая беличью клетку как многофазную обмотку, соединенную в звезду и замкнутую накоротко, сопротивление элементов колец нужно учесть соответствующим увеличением сопротивлений стержня. Толщина коротокзамыкающего кольца в радиальном направлении принимается конструктивно hКЛ 1.6 1.8hСТ 1,6 1,8 23 40 мм. Площадь сечения коротокзамыкающего кольца ротора qКЛ bКЛ hКЛ 30 40 1200 мм 2 Плотность тока в коротокзамыкающем кольце ротора jКЛ I КЛ 4170 А 3,48 q КЛ 1200 мм 2 Средний диаметр коротокзамыкающего кольца DКЛ D2 hКЛ 696 40 656 мм 60 Длина одного пазового деления ротора (длина коротокзамыкающего кольца между центрами соседних стержней) по среднему диаметру кольца l КЛ DКЛ Z2 656 82 25.2 мм Так как каждому стержню соответствуют два прилегающих к нему с обоих концов элемента колец, то омическое сопротивление при 1300 С двух участков коротокзамыкающих колец между центрами соседних стержней (на длине одного пазового деления ротора), приведенное к сопротивлению стержня равно ' rКЛ 2lКЛ 57qКЛ tr 2 25.2 10 3 1.44 0.01132 10 3 Ом 57 1200 p 4 4 sin 2 4 sin 2 82 Z2 Следовательно, активное сопротивление каждой фазы беличьей клетки m k 3 32 0,925 r r2 1 1 об1 2 0,0996 103 0,0128Ом. 2 Z 2 2 kоб 2 82 0,5 1,0 2 2 ' 2 В относительных единицах активное сопротивление ротора, приведенное к статору, представляет собой получающееся относительное скольжение s r2' r2' I Ф1 660 0,0128 0,0111 U Ф1 766 В качестве материала сердечника ротора применяется та же сталь марки Э32 толщиной 0,5 мм, что и для статора, причем листы статора и ротора штампуют одновременно компаундным штампом, что обеспечивает более стабильный воздушный зазор. 61 6. РАСЧЕТ МАГНИТНОЙ ЦЕПИ. Предварительные замечания. В нашем случае нет необходимости рассчитывать всю характеристику холостого хода, а нужно рассчитать одну точку, соответствующую холостому ходу при номинальном напряжении. Известно, что вследствие небольшого воздушного зазора между ротором и статором в асинхронном двигателе на кривой поля в воздушном зазоре существенно сказывается насыщение стальных участков. Если у слабо насыщенных двигателей кривая распределения магнитной индукции в воздушном зазоре практически синусоидальна и коэффициент полюсного перекрытия может быть принят 2 0,637 ,то с увеличением насыщения стали магнитной цепи кривая индукции будет отличаться от синусоиды, становясь более плоской в области максимума. Вследствие этого коэффициент 2 полюсного перекрытия становится больше , увеличиваясь с насыщением. На рис. 6.1 изображена кривая зависимости от коэффициента насыщения кН F FZ 1 FZ 2 F , где F , FZ 1 и FZ 2 — магнитные напряжения соответственно воздушного зазора, зубцов статора и зубцов ротора. 62 Рис. 6.1 Кривая зависимости коэффициента полюсного перекрытия от коэффициента насыщения. Один из способов учета уплощения кривой поля заключается в том, что, задаваясь предварительно коэффициентом насыщения и находя соответствующее ему значение , выполняют расчет магнитной цепи, добиваясь методом последовательных приближений совпадения полученного коэффициента насыщения с тем, которым задались. Однако более простым и требующим меньше времени является способ, основанный на практике большинства электромашиностроительных заводов, когда расчет магнитной, 63 цепи ведут по первой гармонической, магнитной индукции, принимая 2 коэффициент полюсного перекрытия равным , а напряженность магнитного ноля в зубцах определяют по специальной кривой, составленной в табличной форме с учетом уплощения кривой индукции В . При расчете магнитного напряжения ярма (спинки) статора и ротора учитываем, что магнитная индукция имеет наибольшее значение в сечении ярма, соответствующем половине длины индукционной (силовой) линии, и уменьшается в обоих направлениях от этого сечения. Это обстоятельство можно учитывать либо специальным коэффициентом в зависимости от средней индукции, либо по специальным кривым намагничивания, полученным из основной кривой намагничивания и составленным в табличной форме уже с учетом влияния этой неравномерности поля. Напряженности магнитного поля по этим специальным для зубцов и ярма кривым намагничивания получаются меньше, чем по основной кривой при тех же значениях магнитной индукции. При расчете магнитного напряжения воздушного зазора дополнительное сопротивление, вносимое наличием пазом статора и ротора, учитываем коэффициентом Картера. Пазы статора открытые, заклинены немагнитными клиньями. Коэффициенты Картера: обусловленный пазами статора к 1 1 bП'2 1.112 1.342 t1 5 bП' bП'2 2.29 5 0.2 1.11 1.112 Пазами ротора к 2 1 bs2 0.2 2 1 1 0.0127 1.0127 t 2 5 bs bs2 2.67 5 0.2 0.2 0.2 2 64 Результирующий к к 1 к 2 1,0 1,342 1,0127 1,0 1,3547 1,355 6.1 Определение размеров магнитной цепи Определение размеров магнитной цепи (рис. 6.2). На параметры электрооборудования тепловоза существенно влияют насыщение магнитной системы и cos φ двигателя. Стремясь выполнить машину по возможности короче, следим за тем, чтобы коэффициент насыщения магнитной цепи не превышал 1,25, а намагничивающий ток не превосходил ~35%. Сделав несколько предварительных расчетов для ряда длин статора и ротора в пределах от 400 до 500 мм, принимаем длины сердечников статора и ротора lа = l2 = 450 мм. Крайние листы с каждого края сердечника «работают» менее эффективно, чем листы в середине пакета, а воздушный зазор в торцовых зонах машины получается увеличенным по сравнению с воздушным зазором на остальной активной длине машины. Поэтому расчетную длину сердечника принимаем примерно на 10мм меньшей размера по чертежу lа, = l2, = 440 мм. Учитывая наличие по наружному диаметру статора местных шпоночных клиньев толщиной ~ 15 мм, расположенных между шихтованным статором и массивным остовом, уменьшающих сечение спинки статора, вводим усредненный расчетный наружный диаметр статора D'a = Da —15 = 936—15 = 921 мм. Расчетная высота спинки статора Da Di 2hz" 921 700 2 55 55,5 мм 2 2 hа1= 65 Сечение спинки (ярма) статора Sa1=kcha1lá=0,94×0,0555×0,44=0,023 м2 где кс = 0,94 — коэффициент заполнения сердечника сталью. Рис. 6.2 Поперечный разрез асинхронного двигателя Расчетная длина магнитных линий в ярме статора на один полюс ( Da' ha1 ) La1= 2 2 p (921 55,5) 28 170 мм 17,0см 66 Расчетная площадь сечения зубцового слоя статора на один полюс S Z 1 0.94b Z 1 3 Z1 96 la' 0.94 0.013 0.637 0.44 0.0411м 2 2p 8 Длина магнитного пути в зубцах статора на один полюс hz = 5,5 см. Расчетное сечение воздушного зазора на один полюс (берем по среднему диаметру между ротором и статором) S ( Di ) 2p la l2 (700 2) 450 450 106 0.0785 м 2 2 4 2 Расчетное сечение зубцового слоя ротора на один полюс S Z 2 0.94b Z 2 3 Z2 82 l2' 0.94 0.0162 0.637 0.44 0.0437 м 2 2p 8 Длина магнитного пути в зубцах ротора на один полюс h”Z2 = 41,5 см. Расчетная высота спинки ротора D2 2hZ" 2 Di 1.33nk d k 696 2 41.5 400 1.33 1 26 ha 2 89 мм 2 2 где Di = 400 мм — внутренний диаметр ротора; пk = 1 — число рядов осевых вентиляционных каналов в ярме ротора; dK = 26 мм — диаметр вентиляционного канала. Величины Di, nK, dk увязывают с индукцией в ярме. Расчетное сечение спинки ротора S a 2 0.94ha 2l2' 0.94 0.089 0.44 0.0368 м 2 67 Расчетная длина магнитного пути в ярме ротора на один полюс La 2 D2 2hZ" 2 ha 2 2 2p 696 2 41.5 89 28 10 1 10.5см 6.2 Расчет намагничивающей силы и намагничивающего тока. Магнитный поток первой гармонической в воздушном зазоре Ф1 Е ф1 4к в f1H 1 к об1 735 0,066 Вб 4 1,11 85,3 32 0,925 Здесь кв=1,11 — коэффициент формы для первой гармонической кривой индукции. Магнитная индукция в ярме статора Ва1 Ф1 / 2S a1 0,066 /( 2 0,023) 1,435Т Магнитная напряженность по табл. 2.1 [ ] Ha1=5,1 А/см. Магнитное напряжение ярма статора Fa1 H a1 La1 5,1 17 88 А . Магнитная индукция в зубцах статора Вz1 Ф1 / S z1 0,066 / 0,0411 1,61Т Магнитная напряженность в зубцах статора по табл. 2.2 [ ] Н z1 14,6 А / см . Магнитное напряжение зубцов статора Fz1 H z1hz 14,6 5,5 81А Расчетная магнитная индукция в воздушном зазоре В Ф1 / S 0,066 / 0,0785 0,842Т Магнитное напряжение воздушного зазора 68 F 1 0 B k 1 0,842 1,355 0,002 1820 А 4 10 7 где 0 4 10 7 Г / м — магнитная проницаемость воздуха; 0,002 м — воздушный зазор. Магнитная индукция в зубцах ротора Вz1 Ф1 0,066 1,51Т S z 2 0,0437 Магнитная напряженность в зубцах ротора по табл. 2.2 [ ] H z 2 8,8 А / см Магнитное напряжение в зубцах ротора Fz 2 H z 2 hz2 8,8 4,15 37 А Магнитная индукция в ярме (спинке) ротора Ва 2 Ф1 0,066 0,895Т . 2S а 2 2 0,0368 Магнитная напряженность ярма ротора по табл. 2.1 [ ] H а 2 0,95 А / см Магнитное напряжение ярма ротора Fа 2 H а 2 Lа 2 0,95 10,5 10 А . Намагничивающая сила при холостом ходе на один полюс (с запасом 3% на неточность расчета) F0 1,03( Fa1 Fz1 F Fz 2 Fа 2 ) 1,03(88 81 1820 37 10) 2100 А Из курса «Электрические машины» известно, что амплитуда первой гармонической вращающейся в пространстве результирующей намагничивающей силы на один полюс F1 max m1 2 1 k об1 р I где I — действующее значение тока фазы.| 69 Заменяя в этом выражении F1max найденным значением н. с. холостого хода F0 и решая его относительно тока, находим действующее значение намагничивающего тока I m1 2 pF0 pF0 pF0 0,74 4 2100 0,74 210 А, 1 k об1 3 2 1 k об1 1 k об1 32 0,925 что составляет I / I Ф1 210 / 660 0,32 32% Так как активная составляющая тока холостого хода составляет обычно всего 4—5%, можно предварительно принять ток холостого хода I 0 I 210 A Коэффициент насыщения k H F0| / F 2100 / 1820 1,155. 70 7. РАСЧЕТ ПОТЕРЬ И КПД. Определяем потери холостого хода, складывающиеся из потерь в меди обмотки статора при холостом ходе и магнитных потерь в стали сердечника статора. Потери в меди обмотки статора при холостом ходе PM 0 m1 I 02 r1 3 210 2 0,0125 10 3 1,66кВт Потери в стали сердечника статора Pc Cп р у ma1 Ba21 mz1 Bz21 10 3 2,85 4,02 575 1,4352 238 1,612 10 3 20,4кВт. Здесь масса зубцов статора m z1 z1 bz1 bz' 1 " 1,18 1,54 hz l a 0,94 ст 96 5,5 45,0 0,94 7,85 10 3 238кВт 2 2 Масса спинки сердечника статора ma1 Da2 Di 2hz" 4 l 2 a 0,94 ст 93,6 2 70,0 2 5,5 2 4 45,0 0,94 7,85 10 3 575кг Удельные потери f p у р1 / 50 1H 50 1, 5 85,3 1,8 50 1, 5 4,02 ВТ / кг , где р1/50=1,8 Вт/кг-для стали Э32. 71 Коэффициент Сп зависит от формы пазов статора и ротора; для двигателей с контактными кольцами Сп=2,0- при полуоткрытых пазах и С п 2,6 2,9 -при открытом пазе статора и полузакрытом пазе ротора; для двигателей с короткозамкнутым ротором при 0,8z1 z 2 1,25z1 Сп=2,7 3,0; принято Сп=2,85. Следовательно, потери холостого хода P0 PM 0 Pc 1,66 20,4 22,06кВт Механические потери. Их принимаем, как и при расчете вентильного двигателя, Pмех 0,002Р1 0,002 1280 2,56кВт Добавочные потери в стали машины от высших гармонических составляющих напряжения. Масса зубцов ротора bz 2 bz' 1 " 0,0247 0,0145 m z 2 0,94 z 2 hz 2 l 2 cn 10 3 0,94 82 0,0415 0,45 7,85 10 3 222кг. 2 2 Масса спинки сердечника ротора m a 2 0,94 0,94 4 4 l 2 D2 2hz" 2 2 D02 mk d k2 ст 10 3 0,45 0,696 2 0,026 2 7,85 10 3 508кг Масса сердечника ротора m2 m z 2 ma 2 222 508 730кг Масса сердечника статора 72 m1 m z1 ma1 238 575 813кг , Основные потери в стали при холостом ходе Рс 20,400кВт. Следовательно, Рсвг Pc m1 m2 813 730 1 1 1 1 2,7 20,400 2, 7 2, 7 2, 7 2, 7 m1 5;7;11;13 813 7 11 13 5 0,790кВт. Учитывая ранее определенные суммарные добавочные потери в меди всей машины от всех гармонических составляющих выпрямленного тока Р мдоб 18,34кВт и принимая согласно ГОСТ 11828-66 добавочные потери при нагрузке равными 0,5% от подведенной активной мощности, находим общие добавочные потери Р доб Рсвг Рмдоб 0,005Р1 0,790 18,43 0,005 1280 25,62кВт. Полная механическая мощность в номинальном режиме Рмх Р2 Рмех Рдоб 1200 2,56 25,62 1228,18кВт. 73 8. РАСЧЕТ ХАРАКТЕРИСТИК. Условия эксплуатации в большинстве случаев могут быть такими, что каждая из основных величин, определяющих работу тягового двигателя, — напряжение, частота, нагрузка, будет меняться по различным законам. Поэтому приходится принимать некоторые параметры постоянными и делать расчеты для нескольких значений этих параметров. Но и при этом особую трудность представляет учет изменения отдельных видов потерь, и точный расчет характеристик становится чрезвычайно трудоемким и, главное, чрезмерно громоздким. Поэтому приходится вводить упрощения, учитывая приближенно изменение отдельных видов потерь. На основании Т-образной схемы замещения А. А. Булгаков, пренебрегая потерями в стали, дает следующие формулы: ток статора, А 1 2 2 I 1 U ф1( н ) b 2 2 1 1 r2'2 2 x1 c2 2 d 2 e2 2 r2'2 2 2r1 (8.1) r2' ток ротора, приведенный к статору, А I 2' U ф1( н ) 1 b 2 c2 2 d 2 e2 2 r2'2 2 2r1 r2' (8.2) электромагнитный момент, кгс . м 74 МЭ m1 U ф21( н ) 9,81 1н 2 1 b 2 c2 2 d 2 e2 2 r2' r2' (8.3) 2r1 максимальный (опрокидывающий) момент, кгс × м М Э max m1 U ф21( н ) 2 9,81 1н 2 b 1 2 c d 2 e 2 2 r1 2 2 ; (8.4) пусковой момент (когда β=α), кгс × м МП m1 U ф21( н ) 9,81 1н 1 b 2 c 2 2 r2' d e 2 2 2 r2' ; (8.5) 2r1 Разделив (8.4) на (8.3), находим выражение для так называемого коэффициента статической перегружаемости, равного отношению максимального момента к моменту на валу, взятых при одинаковых значениях частоты и напряжения, М Э ( МАХ ) МЭ Критическое b 2 c2 2 2 b значение 2 r2' d 2 e2 2 r2' 2r1 c 2 2 d 2 e 2 2 r1 параметра абсолютного (8.6) скольжения (соответствующее максимальному моменту) не зависит от напряжения статора, т. е. от параметра γ и равно max r2' d 2 e2 2 b2 c2 2 (8.7) 75 В приведенных формулах Uф1(н) —действующее значение 1-й гармонической фазного напряжения двигателя в номинальном режиме; γ = Uф1 / Uф1(н). Значения и определение остальных параметров этих формул приведены ниже. Индуктивное сопротивление намагничивающей ветви x0 U ф1 I x1 I 766 210 0,172 3,48Ом 210 Коэффициент рассеяния статора 1 x1 0,172 0,0495; x 0 3,48 Ротора 2 x 2' 0,142 0,0408; x 0 3,48 Общий коэффициент рассеяния 1 2 1 2 0,0495 0,0408 0,0495 0,0408 0,0923. Введем вспомогательные обозначения величин, входящих в формулы (8.1) — (8.7): b r1 1 2 0,0125 1 0,0408 0,013; c x 0 3,48 0,0923 0,321; d r1 0,0125 0,0036; x0 3,48 e 1 1 1 0,0495 1,05. 76 В качестве примера рассчитываем характеристики при постоянном значении параметра абсолютного скольжения, полученного в результате электромагнитного расчета. Задаемся рядом значений скорости, начиная с максимальной vЭ(мах) = 110 км/ч, определяем нужные величины, сводя расчет в табл. 8.1 (UЛ1 = 1330В; Uф1 = 766 В; γ = 1). По электромагнитному моменту, найденному по (8.3), определяем полную механическую мощность РМХ М Э 1Н , где f1 f 1н Так как формула (8.3) для электромагнитного момента выведена при пренебрежении потерями в стали, при определении полезной мощности учтем это обстоятельство, вычитая потери в стали в сумме с механическими и добавочными из полной механической мощности, Р2 РМХ РС РМЕХ Р ДОБ Точный расчет потерь в стали, а также добавочных потерь для каждого режима является чрезмерно громоздким, поэтому при расчете характеристик полагаем потери в стали пропорциональными магнитному потоку в квадрате и частоте в степени 1,5. А так как поток пропорционален напряжению и обратно пропорционален частоте, то 2 2 1, 5 РС РС ( Н ) 2 20,4 где РС(Н) =20,4 кВт — потери в стали в номинальном режиме. 77 Добавочные потери также упрощенно полагаем составляющими примерно ~ 2% от электромагнитной мощности в каждом рассматриваемом режиме, равной Рэ = Мэ ×ω1. Механические потери находим, изменяя пропорционально частоте вращения потери, определенные для номинального режима, РМЕХ РМЕХ ( Н ) n( Н ) n 2,56 n 0,00202n. 1265 Так как определение подведенной активной мощности в каждом рассматриваемом режиме затруднительно, для определения тягового усилия на оси без большой погрешности можно КПД зубчатой передачи определять по данным ГОСТ 2582—72 в зависимости от подводимой мощности. Выполняем сначала расчет для номинального напряжения: UЛ1 = 1330В; Uф1 = 766 В; γ = 1 Данные для других скоростей получаем по следующим соотношениям: n Э fr 5,3 5,3 4,166 Э 18,4 Э ; Dб 1,2 pn 4n n ; 60 60 15 f1 f r f 2 n 0,93; 15 1 2 f1 f1 ; p 2 f1 f 1 . f 1Н 85,3 Некоторое незначительное несовпадение, расхождение некоторых данных номинального режима при расчете характеристик по сравнению с электромагнитным расчетом вполне естественно и допустимо. По данным табл. 8.1 могут быть построены различные нужные зависимости. 78 При расчете характеристик для других напряжений рабочего диапазона, как следует из формул (8.1), (8.2) и (8.3), значения vЭ, n, α, ƒ1, ω1, α-β и ΔРмех не меняются, токи IФ1 и I’2 меняются пропорционально γ; величины Мэ, Рэ, Рэ/Рэ(ном), РМХ, ΔРС, ΔРдоб изменяются пропорционально γ2. Аналогичные расчеты следует выполнить и для других значений β. В табл. н мах н представлены 8.2 данные для nmax 0,0109 1,6 0,0176 и f2 = 1,5 Гц при γ = 1,0, UЛ1 = Uл1н= nн 1330 В. Таблица 8.1 υЭ, км/ч 110 100 90 80 68,8 60 50 40 n, об/мин 2030 1840 1655 1470 1267 1105 920 736 f1, Гц 136,2 123,6 111,23 99,0 85,3 74,6 62,3 49,15 ω1, рад/с 214 194 175 156 134 117,3 98 77,2 α 1,597 1,448 1,304 1,16 1,0 0,875 0,73 0,576 α-β 1,586 1,437 1,293 1,149 0,9891 0,864 0,719 0,565 Iф1, А 408 438 500 562 650 742 892 1120 I ’2 , А 373 402 456 513 594 678 815 1030 МЭ, кгс×м 376 456 557 703 950 1240 1770 2810 РЭ, кВт 790 868 955 1078 1248 1425 1700 2130 0,632 0,695 0,766 0,861 1,0 1,145 1,36 1,74 РМХ, кВт 780 862 947 1070 1237 1409 1670 2090 ΔРС, кВт 16,1 16,7 17,9 18,9 20,4 21,8 23,9 26,9 ΔРМЕХ, кВт 4,1 3,78 3,34 2,97 2,56 2,23 1,86 1,49 15,8 17,4 19,1 21,6 24,9 28,5 34 42,6 744 824 907 1027 1190 1356 1610 2019 РЭ РЭ НОМ ΣΔРДОБ=0,02РЭ, кВт Р2, кВт 79 Таблица 8.2 υЭ, км/ч 110 100 90 80 68,8 60 50 40 n, об/мин 2030 1840 1655 1470 1267 1105 920 736 f1, Гц 136,8 124,0 111,8 99,5 86,0 75,2 62,9 50,6 ω1, рад/с 215,0 195,0 175,5 156,3 135,0 118,0 99,8 79,4 α 1,605 1,165 1,009 0,882 0,737 0,593 α-β 1,587 1,432 1,292 1,147 0,991 0,864 0,719 0,575 1,45 1,31 Iф1, А 596 660 731 820 946 1129 1290 1595 I’2, А 562 623 689 744 894 1019 1215 1503 МЭ, кгс×м 544 637 814 1022 1365 1775 2530 3730 РЭ, кВт 1146 1218 1400 1567 1810 2055 2475 2910 РЭ НОМ 0,916 0,978 1,145 1,255 1,45 1,65 1,98 2,33 РМХ, кВт 1135 1200 1383 1540 1780 2010 2390 2820 ΔРС, кВт 16,1 17,0 17,85 18,9 20,35 21,8 23,8 26,5 ΔРМЕХ, кВт 4,1 3,72 3,34 2,97 2,56 2,23 1,86 1,49 22,92 24,0 28,0 31,6 36,2 40,2 49,5 58,2 Р2, кВт 1092 1155 1334 1487 1721 1946 2315 2744 ηЗ 0,975 0,975 0,975 0,975 0,97 0,97 0,965 0,965 F, кгс 3560 4130 5300 6650 8900 11550 16450 24300 МЭ(МАХ)/МЭ 1,39 1,38 1,385 1,39 1,385 1,383 РЭ ΣΔРДОБ=0,02РЭ, кВт 1,385 1,381 80