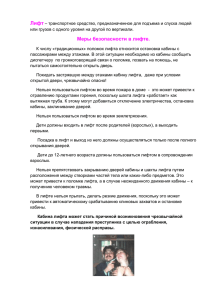
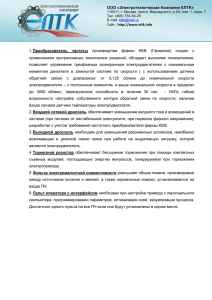
Петербургский Государственный Университет Путей Сообщения Кафедра «Электротехника» Расчетно-пояснительная записка к курсовой работе «Электропривод грузового лифта» Выполнил: студент гр. ПТМ-511 Петров К.А. Проверил: Хожаинов А.И. Санкт- Петербург 2008г Содержание: 1. ХАРАКТЕРИСТИКИ ГРУЗОВОГО ЛИФТА И ЕГО ЭЛЕКТРОПРИВОДА 1.1. Грузовые лифты …………………………………………………………..3 1.2. Статические и динамические нагрузки электроприводов подъемных лебедок ………………………………………………………………….……... 3 2.РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ГРУЗОВОГО ЛИФТА 2.1. Расчет мощности электродвигателя в первом приближении ………....6 2.2. Выбор электродвигателя из каталога ……………………………….......8 2.3. Расчет времени пуска и торможения электропривода …………….…12 2.4. Построение нагрузочной диаграммы электропривода и определение мощности электродвигателя во втором приближении ……………………17 2.5. Система управления электроприводом лифта с двухскоростным асинхронным двигателем …………………………...………………………..20 Список использованной литературы…………………………………………..25 2 1. ХАРАКТЕРИСТИКИ ГРУЗОВОГО ЛИФТА И ЕГО ЭЛЕКТРОПРИВОДА 1.1. Грузовые лифты Лифтами как средством вертикального перемещения грузов оборудуются здания промышленных и ремонтных предприятий, а также жилищные и складские помещения. Грузовые лифты устанавливаются в вертикальной шахте; обычно вверху над шахтой размещается машинное отделение. Грузовые лифты изготавливаются различной грузоподъемности, на две и более остановок и могут быть выполнены для работы с проводником или без него. Кабины лифтов выполняются разных размеров в зависимости от грузоподъемности, габаритов перевозимых грузов, имеют одну или две двери (сквозные кабины). Перемещение кабины лифта осуществляется подъемной лебедкой, обеспечивающей передачу усилий от приводного электродвигателя кабине с помощью подъемного каната 1.2. Статические и динамические нагрузки электроприводов подъемных лебедок По принципу работы лебедки подразделяются на одноконцевые и двуконцевые, а по конструкции органа навивки каната — на барабанные лебедки и лебедки с канатоведущими шкивами. Одноконцевые лебедки являются неуравновешенными механизмами, нагрузка электропривода которых определяется суммой масс всех поднимаемых частей — каната, кабины и полезного груза. Такие механизмы постоянно совершают дополнительную работу по подъему кабины, являющейся балластным грузом. При спуске двигателя должен тормозить не только опускающийся полезный груз, но и балластный груз. Эти факторы 3 приводят к завышению мощности приводного электродвигателя и увеличению удельного расхода электроэнергии на единицу полезного груза. Перечисленные недостатки устраняются использованием двуконцевых подъемных лебедок, при которых наряду с рабочей кабиной навешивается балластный контргруз — противовес. Кинематическая схема такой лебедки приведена на рис. 1, где приняты следующие обозначения: ЭД — электродвигатель; Т —тормоз; Р —редуктор; КШ — канатоведущий шкив; К — кабина; Пр — противовес; ПК — подъемный канат; УК — уравновешивающий канат; Н — высота подъема. Рис.1 4 2. РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ГРУЗОВОГО ЛИФТА Для полного представления о нагрузке, создаваемой исполнительным механизмом на валу электродвигателя в процессе его работы, прибегают к построению понимают нагрузочных зависимость диаграмм вращающего электропривода, под которыми момента, или мощности тока электродвигателя от времени в течение рабочего цикла. Обычно строят нагрузочную диаграмму М = F(t). Уравнение движения электропривода M Дин I d 1 dn I M Mc dt 9,55 dt показывает, что момент электродвигателя М равен алгебраической сумме момента сопротивления Мс и динамического момента Mдин. Применительно к электроприводам лифтов Mс = const и нагрузочная диаграмма М = F(t) определяется характером протекания переходных процессов. Для определения Mдин необходимо располагать зависимостью n(t), но кроме того, необходимо знать приведенный к валу электродвигателя суммарный момент инерции IΣ , который включает в себя и момент инерции ротора двигателя. Получается неопределенность: пока не выбран электродвигатель, нельзя построить нагрузочную диаграмму, а без нагрузочной диаграммы нельзя правильно выбрать электродвигатель. Эту неопределенность приходится разрешать методом последовательных приближений, который заключается в следующем. Сначала приближении мощность (Pp1) по электродвигателя рассчитывается среднеквадратичному значению в первом момента сопротивления (Pск) за цикл работы и установившейся частоте вращения (nу). По этой мощности двигатель выбирается из каталога и строится нагрузочная 5 диаграмма электропривода, которую используют для расчета мощности электродвигателя во втором приближении. 2.1. Расчет мощности электродвигателя в первом приближении Используется следующая формула для расчета мощности электродвигателя: Pp1 k3 M ск ny 9550 где коэффициент запаса k3 приближенно позволяет учесть влияние динамических нагрузок, k3 = 1,1—1,5. В зависимости от соотношения времени пуска (tп) к времени установившегося движения (tу) при tп/ty < 0,05 следует брать меньшее из указанных значений, а при tп/ty > 0,2—0,3— большее. ny 60i p y Dêø 60 40 1,5 955,41 3,14 1,2 Оценка времени пуска (tп) и торможения (tT) производится по ускорению, задаваемому в пределах а = 0,5— 1,5 м/с, и установившейся скорости подъема лифта t ï tT vy a 1,5 1,5c 1,0 По заданной высоте подъема груза H определяются путь, проходимый лифтом с установившейся скоростью (Hy), и время установившегося движения Hy H 2 ty Hy vy v ytï 2 10 2 1,5 1,5 7,75 ì 2 7,75 5,17c 1,5 tn 1,5 0,29 k 3 1,1 t y 5,17 6 Кз 1,5 1,1 tп/tу 0 Время 0,15 работы 0,3 электродвигателя при подъеме и спуске лифта принимается одинаковым tр1=tр2=ty+2tп=5,17+2•1,5=8,17с По заданному числу циклов в час определяется время одного цикла tö 3600 3600 60 Nö 60 В соответствии с заданным циклом работы грузового лифта (подъем груза, пауза, спуск пустой кабины, пауза) определяется среднеквадратичный момент нагрузки: M C1 (G GН ) Д К . Ш . (750 9,81 0,5 750 9,81) 1,2 61,31Н м 2 i р п 2 40 0,9 GН G -грузоподъемность M С' 2 M ск G Н DК . Ш 0,5 750 1,2 9,81 61,31Н м 2 i р n 2 40 0,9 M c21t p1 M c'22 t p 2 t р1 t р 2 61,312 8,17 61,312 8,17 61,31Н м 8,17 8,17 Так же продолжительность включения ÏÂ t ð1 t ð 2 tö Pp1 100 8,17 8,17 100 27,23% 60 k 3 M ск n y 9550 1,1 61,31 955,41 6,75кВт 9550 Как правило, ПВ отличается от стандартных значений (ПВСТ = 15, 25, 40, 7 60%), поэтому мощность электродвигателя приводится к стандартному значению ПВСТ: Р р.ст Р р1 ПВ 27,23 6,75 5,57кВт ПВст 40 2.2. Выбор электродвигателя из каталога Электродвигатель выбирается из каталога в соответствии с условиями Р р.ст Рн.ст ; nн n y В большинстве случаев в качестве приводных электродвигателей лифтов применяются одно- и двухскоростные асинхронные электродвигатели с короткозамкнутым ротором. Наиболее проста система электропривода с односкоростным электродвигателем, который выполняется с повышенным скольжением, обладает при небольшим относительно пусковым током. больших Пуск значениях пускового электродвигателя момента осуществляется непосредственным подключением обмотки статора к питающей сети, остановка — отключением электродвигателя от сети с одновременным наложением колодок механического тормоза. Недостаток этой системы электропривода — наложение механического тормоза на полной рабочей скорости, что вызывает ускоренный износ колодок тормоза. Кроме того, не может быть получена высокая точность остановки кабины на заданном уровне, так как при постоянной величине тормозного усилия механического тормоза путь торможения при различных загрузках кабины различен. Такие системы электроприводов применяются для тихоходных лифтов (до 0,75 м/с) при малой высоте подъема и небольшой интенсивности работы. Наиболее распространена система электропривода лифта, в которой используются специализированные лифтовые двухскоростные асинхронные электродвигатели с двумя независимыми обмотками на статоре, обеспечивающими соотношение скоростей 1:3 или 1:4. Эти электродвигатели 8 имеют повышенные пусковые моменты; ограниченные значения максимальных моментов как в двигательном, так и в генераторном режимах; ограниченные значения пусковых токов и др. Двускоростной электродвигатель позволяет снижать в несколько раз рабочую скорость лифта перед остановкой, что уменьшает износ тормозного устройства увеличивает точность остановки. Пуск лифта в такой и системе осуществляется подключением к сети обмотки большой скорости. При этом лифт разгоняется и переходит на рабочую скорость. Перед остановкой лифта производится отключение от сети этой обмотки и включение обмотки малой скорости. Электродвигатель переходит в режим генераторного торможения, скорость лифта снижается (в 3 или 4 раза), и лифт подходит к заданному уровню высоты. Остановка осуществляется отключением от сети обмотки малой скорости и наложением механического тормоза. Обмотка малой скорости обеспечивает также перемещение лифта на сниженной скорости в режиме ревизии. Тип электродвигателя расшифровывается следующим образом: первая цифра — порядковый номер серии; А — асинхронный; Н — защищенного исполнения; Ф — с пристроенным вентилятором; цифры 11—52 и 160—250 —габарит; последующие цифры —число полюсов обмоток (для двухскоростных двигателей в числителе указано число полюсов обмотки большой скорости, в знаменателе —малой скорости); Н —малошумный; Л —лифтовой; Б —со встроенной температурной защитой. Лифтовые электродвигатели работают от сети переменного тока частотой 50 Гц, напряжением 220 и 380 В. Средний срок службы лифтовых электродвигателей — 15 лет при общей наработке 40 000 ч с заменой подшипников через каждые 12 000 ч и обмоток через 20 000 ч. Выбираем 4АН–250–6/24НЛБ Р=20,0/5,0 кВт–номинальная мощность; N=1000/250 об/мин–синхронная частота вращения; 9 Скольжение 5/12%; η=90,0/38%; cosφ=0,72/0,35–при номинальной нагрузке; М пуск 490 412 Н м –начальный пусковой момент; М м акс.вращ 617 412 Н м –максимальный вращательный момент; Кратность пускового тока 6,0/2,0; ПВ=60% Момент инерции ротора 1,0кг•м2; Допустимое число включений 90; M=510 кг–масса Расчет механических характеристик асинхронных двигателей лифтов может быть выполнен с использованием формулы Клосса M 2M к S SK SK S где Мк — критический (максимальный) момент электродвигателя; s — скольжение; s 60 f 1 n1 n ; n1 р n1 n1 -частота вращения магнитного поля статора р — число пар полюсов; n- — частота вращения вала электродвигателя. f1 –частота питающего тока Критическое скольжение sк определяется по формуле Для большей скорости МН kM РН 9550 20 9550 201,05Нм nН 950 Mk 617 3,07 M í 201,05 s k s í (k M k M2 1) 0,05 3,07 3,07 2 1 0,299 Для меньшей скорости МН РН 9550 5 9550 217 Нм nН 220 10 kM M k 412 1,89 M í 217 s k s í (k M k M2 1) 0,12 1,89 1,89 2 1 0,42 где kм — кратность максимального момента; Мн и Sн— номинальные значения момента электродвигателя. Знак «плюс» в формуле относится к двигательному режиму, знак «минус» — к генераторному. Задаваясь различными значениями скольжения (s = 0,l; 0,2; 0,4; 0,6; 0,8; 0,9), по формуле рассчитывается зависимость М(s), и по формуле n n1 (1 s) осуществляется переход к механической характеристике электродвигателя — n = F (М). Необходимо иметь в виду, что формула Клосса является приближенной, дающей ощутимую погрешность в определении пускового момента Мп(s=1,0), в связи с чем его значение необходимо брать непосредственно из каталога. Для расчета асинхронного механической двигателя при характеристики работе с обмоткой двухскоростного малой скорости используются те же формулы, но в режиме генераторного торможения надо задаваться отрицательными значениями скольжения (s =-0,1; -0,2; -0,4; -0,6; 0,8; -1,0 и т. д.); s max 1 n1á 1000 1 3 n1M 250 где n1M и n1б –частоты вращения магнитного поля статора при работе соответственно с обмоткой малой и большой скорости. Механические характеристики двухскоростного асинхронного двигателя лифта приведены на рис. 1 11 Большая скорость, двигательный режим Табл.1 s 0,1 0,2 0,4 0,6 0,8 0,9 n n1 ( 1 s ) 2M ê M S SK SK S 900 800 600 400 200 100 371,19 570,27 591,76 492,61 404,68 369,21 Малая скорость,двигательный режим Табл.2 S n n1 ( 1 s ) 2M к M S SK SK S 0,1 225 0,2 200 0,4 150 0,6 100 0,8 50 0,9 25 185,67 319,85 411,51 387,11 339,13 315,77 Малая скорость,генераторный режим Табл.3 S n n1 ( 1 s ) 2M к M S SK SK S -0.1 275 -0,5 375 -1 500 -185,67 -405,81 -1,5 625 -2 750 -294,18 -213,95 -2,5 875 165,73 -3 1000 134,63 113,14 2.3. Расчет времени пуска и торможения электропривода Уравнение движения электропривода можно записать следующим образом 2M к d M c I S SK SK S dt где 1 2n1 2 3,14 1000 104,67 60 60 магнитного поля статора. После — угловая разделения скорость вращения переменных и интегрирования при sнач. = 1 получим следующую зависимость для расчета времени в функции от скольжения двигателя при пуске 12 электропривода: M M s2 R t TП K ( s 1) s K K ln 4 K MC MC W M K MC 2 ( Ar th X 1 Ar th X 2 ) 1)Лифт с грузом TП I 1 1,65 104,67 0,28с MK 617 —электромеханическая постоянная времени привода лифта, равная времени разбега привода вхолостую из неподвижного состояния до синхронной скорости вращения под действием критического момента Мк. I kп I Д I мех v2 129,6 1,5 2 m 1 , 2 0 , 8 2975 1,65кг м 2 i р2 2 40 2 104,67 2 М к 617Н м I Д 1,0кг м 2 –момент инерции ротора (из каталога двигателей); I м ех 0,6 mк .ш Dк2.ш 0,6 150 1,2 2 129,6кг м 2 Так как мощность электродвигателя определяется разностью концевых нагрузок, а момент инерции связан с суммой всех масс, особенностью двуконцевых подъемных лебедок является большой момент инерции механизма, превышающий в 2—5 раз момент инерции двигателя. Момент инерции имеет размерность [I]=кг•м2. Часто в каталогах для электродвигателей приводятся не моменты инерции роторов, а маховые моменты [ GDД2 ] = кг•м2; переход к моментам инерции в этом случае осуществляется по формуле GDД2 IД 4 mΣ = mпр + m0 + mгр + mк= 1225 850 750 150 2975кг mпр mо 0,5 mгр 850 0,5 750 1225кг н 2 n 2 3,14 1000 104,67 –угловая 60 60 скорость вращения вала электродвигателя; Для s=1: 13 М 617 R s к2 2 s к к s s 2 (0,299) 2 2 0,299 1 1 4,92 61,31 М с1 M 2 617 2 4 s 1 ê 4 (0,299) 2 1 35,86 61 , 31 M ñ1 2 ê М 617 W s к2 2 s к к 1 (0,299) 2 2 0,299 1 4,92 ; 61,31 М с1 M 617 2 s 2 s k K 2 1 2 0,299 M C1 61,31 X1 0,671 5,987 M 617 2 2 s k K 2 2 0,299 M C1 61,31 X2 0,671 35,86 Следует иметь в виду, что при |Х| < 1 Ar th X 1 1 x ln 2 1 x Поэтому при x1 <1 и x2 <1 выражение приводится к виду: t T MK M C1 2 s k2 M R ( s 1) s k K ln MC W 2 MK M C1 ln (1 x1 ) (1 x 2 ) (1 x1 ) (1 x 2 ) 2 2 617 2 0,299 61,31 (1 0,671) (1 0,671) 617 617 4,92 0,28 (1 1) 0,299 ln ln 0 61,31 61.31 4,92 (1 0,671)(1 0,671) 35,86 S R X1 X2 t 1 0,092 -4,92 -0,45 -0,671 -0,974 -0,671 -0,671 0 1,22 Табл.4 14 2)Лифт с пустой кабиной TП I 1 1,498 104,67 0,25 MK 617 I мех v2 129,6 1,5 2 I k п I Д 2 m 2 1,2 0,98 2225 1,498 iр 40 2 104,67 2 М к 617Н м I Д 1,0кг м 2 I м ех 0,6 mк .ш Dк2.ш 0,6 150 1,2 2 129,6кг м 2 IΣ = mпр + m0 + mк= 1225 850 150 2225кг mпр m0 mн 850 0,5 750 1225кг 2 n 2 3,14 1000 104,67 60 60 Для s=1: М 617 R s к2 2 s к к s s 2 (0,299) 2 2 0,299 1 1 4,92 61,31 М с1 M 2 617 2 4 s 1 ê 4 (0,299) 2 1 35,86 61 , 31 M ñ1 2 ê М 617 W s к2 2 s к к 1 (0,299) 2 2 0,299 1 4,92 ; 61,31 М с1 M 617 2 s 2 s k K 2 1 2 0,299 M C1 61,31 X1 0,671 5,987 M 617 2 2 s k K 2 2 0,299 M C1 61,31 X2 0,671 35,86 15 t T MK M C1 2 s k2 M R ( s 1) s k K ln MC W 2 MK M C1 ln (1 x1 ) (1 x 2 ) (1 x1 ) (1 x 2 ) 2 2 617 2 0,299 61,31 (1 0,671) (1 0,671) 617 617 4,92 0,25 (1 1) 0,299 ln ln 0 61,31 61,31 4,92 (1 0,671)(1 0,671) 35,86 S t 1 0 0,092 1,19 Табл.5 Задаваясь значениями скольжения (s=l; Sкон) и определяя время, можно построить пусковую диаграмму n(t) определить время пуска электропривода tп и ускорение лифта при разгоне. При проведении расчетов по формуле необходимо при пуске лифта с грузом и пустой кабиной подставлять соответственно моменты сопротивления Мс1 и M’c2 Причем в последнем случае при определении IΣ по следует принять mгр = 0. Пуск электропривода заканчивается при s = Sкон, соответствующему 95% nу; определяемой по механическим характеристикам для Mc1 и M’c2: s кон n1 0,95n y n1 1000 955,4 0,95 0,092 1000 В целях сокращения времени тормозная диаграмма n(t) применительно к работе двухскоростного электродвигателя с обмоткой малой скорости в генераторном режиме может быть построена в предположении |ап| = |ат|; при этом частота вращения электродвигателя должна изменяться от nу до n1м. Диаграммы пуска и торможения электропривода лифта приведены на рис.2, рис.3 16 2.4. Построение нагрузочной диаграммы электропривода и определение мощности электродвигателя во втором приближении Последовательность построения графиков для получения нагрузочной диаграммы электропривода М = F(t) приведена на рис. 6. В соответствии с данными расчетов диаграмм пуска и торможения строится зависимость n(t) за цикл работы лифта (подъем груза — пауза — спуск пустой кабины — пауза) при этом расчетная кривая, соответствующая режиму пуска, заменяется прямой линией. Построение графика n(t) осуществляется следующим образом. По диаграммам пуска и торможения определяются ускорение при пуске и замедление при торможении С грузом: aп dv nп Dк.ш 670 3,14 1,2 aT 2,1 м c dt t 60 i р 0,5 60 40 Без груза: aп dv nп Dк.ш 680 3,14 1,2 aT 2,14 м c dt t 60 i р 0,5 60 40 Рассчитывается пройденный лифтом путь при пуске и торможении С грузом: a п t п2 2,1 1,22 2 hп 1,56 м 2 2 aТ tТ2 2,1 1,04 2 hТ 1,14 м 2 2 Без груза: hп a п t п2 2,14 1,19 2 1,52 м 2 2 hТ aТ tТ2 2,14 0,97 2 1,01м 2 2 Частота вращения электродвигателя в установившемся режиме определяется по механической характеристике или по формуле 17 n y n1 1 s y Таким образом, все исходные данные для построения графика n(t) становятся известными. C учетом построенного графика n(t) строится график зависимости динамического момента от времени Мдин(t). Подъем груза: M Дин1 I d 1 dn 1 670 I M M c 1,65 231,5Н м dt 9,55 dt 9,55 0,5 Спуск пустой кабины: M Дин2 I d 1 dn 1 680 I M M c 1,498 213,32 Н м dt 9,55 dt 9,55 0,5 График Mc(t) является заданным, так как Mc1 = const и Mc2= const. Нагрузочная диаграмма M=F(t) строится путем алгебраического суммирования динамического момента и момента сопротивления. По нагрузочной диаграмме определяется действительное значение относительной продолжительности включения и эквивалентный момент ПВ t п1 t р1 tТ 1 t п 2 t p 2 tТ 2 tц 100% 1,22 8,17 1,04 1,19 8,17 0,97 100 34,5% 60 t o t ц (t п1 t р1 tТ 1 t П 2 t р 2 tТ 2 ) 60 (1,22 8,17 1,04 1,19 8,17 0,97) 39,24 M1=Mc1+ MДин1=61,31+231,5=292,81Нм M2=Mc1=61,31Нм M3=Mc1– MДин1=61,31-231,5=-170,19Нм M4=M’c2– MДин2=-61,31–213,32=-274,63Нм M5=M’c2=-61,31Нм M6=M’c2+ MДин2=-61,31+213,32=152,01Нм MЭ M 12 t П1 M 22 t p 2 M 32 tТ 1 M 42 t П 2 M 52 t p 2 M 62 tТ 2 t п1 t р1 tТ 1 t п 2 t p 2 tТ 2 292,812 1,22 61,312 8,17 (170,19) 2 1,04 (274,63) 2 1,19 (61,31) 2 8,17 152,012 0,97 1,22 8,17 1,04 1,19 8,17 0,97 120,75Н м 18 Определяются путь, проходимый лифтом с установившейся скоростью (Hy), и время установившегося движения: Подъем с грузом H у1 H (hп hТ ) 10 (1,56 1,14) 7,3 м Спуск пустой кабины: H у 2 H (hп hТ ) 10 (1,52 1,01) 7,47 м t у1 Hу t у1 Hу vу vу 7,3 4,87c 1,5 7,47 4,98c 1,5 Частота вращения электродвигателя в установившемся режиме: n у n1 (1 s у ) Sу 1 nу n1 ; 1 955,41 0,045 1000 Определяется мощность электродвигателя во втором приближении Р р2 По М э ny 9550 120,75 955 ,41 12,08кВт . 9550 формуле Рp2 приводится к стандартному значению ПВ. Электродвигатель выбирается из каталога. Как правило, на этом расчет мощности электродвигателя лифта завершается. Р р.ст Р р1 ПВ 34,5 12,08 9,16кВт ПВст 60 Выбираем 4АН–250–6/24НЛБ Р=20,0/5,0 кВт–номинальная мощность; N=1000/250 об/мин–синхронная частота вращения; Скольжение 5/12%; η=90,0/38%; cosφ=0,72/0,35–при номинальной нагрузке; М пуск 490 412 Н м –начальный пусковой момент; М м акс.вращ 617 412 Н м –максимальный вращательный момент; 19 Кратность пускового тока 6,0/2,0; ПВ=60% Момент инерции ротора 1,0кг•м2; Допустимое число включений 90; M=510 кг–масса 2.5. Система управления электроприводом лифта с двухскоростным асинхронным двигателем. На рис. 5 представлена электрическая схема системы управления электроприводом лифта с двухскоростным асинхронным двигателем с вызовом на любую из пяти этажных площадок. Силовая схема двухскоростного асинхронного двигателя получает питание от сети трехфазного переменного тока напряжением 380 В через автомат АВ. Концевой выключатель (KB) при переходе кабиной крайних положений разрывает цепь главного тока в трех фазах двухскоростного АД. Независимые обмотки большом и малой скорости асинхронного двигателя подключаются к трехфазной сети переменного тока соответственно контактором Б_ (большой скорости) или М (малой скорости). Реверсирование АД осуществляется контакторами В («Вперед») и Н («Назад»). Тормозной электромагнит ТМ получает питание при включении контактора В пли Н и освобождает механический тормоз. В силовую цепь асинхронного двигателя включены тепловые реле (1РТ—4РТ). Цепь управления питается переменным током через предохранитель Пр. 1. Кнопки приказов (КП) и кнопки вызовов (КБ) подключают к питающей сети катушки соответствующих этажных реле (РЭ). Реле механических этажных переключателей выполняет центральный этажный переключатель (ЭП), установленный в машинном помещении. Двери шахты снабжены замком с контактами ДШ и ригельным затвором с контактами РК. Подвижная отводка, воздействующая на дверные замки и затворы, 20 приводится в движение электромагнитом МРО (магнит ригельной отводки). Остановка кабины выключателя на (ЭВ), этаже осуществляется установленного на посредством кабине. Контакт этажного этажного выключателя, с одной стороны, управляется электромагнитом МЭВ (магнит этажного выключателя), а с другой (через шток с роликом) отводками, установленными в шахте на каждом этаже. Электромагниты МРО и МЭВ питаются постоянным током через выпрямитель В. Для включения освещения кабины и сигналов «Занято», установленных на всех этажах, где имеются вызывные аппараты, схемой предусматривается специальное световое реле СР. Пуск лифта производится нажатием на кнопку приказа КП этажа, на который должен быть доставлен груз. При этом по цепи: контакт ограничителя скорости ОС, контакты тепловых реле РТ, дверные контакты ДШ, кнопка «1 стоп» в вызывном аппарате первого этажа, контакт фиксатора кабины ФК, дверной контакт кабины ДК, кнопка «Стоп» в кабине, замкнутые контакты контакторов «Вперед» (В) и «Назад» (Н), нажатая кнопка приказа (1КП—5КП)—подается питание катушке реле РЭ соответствующего этажа. Реле РЭ, срабатывая, замыкает свои контакты и подает питание катушке контактора Б, а также подготавливает цепь питания реверсивных контакторов через ригельные контакты РК и контакты переключателя ЭП. При включении контактора Б подключается на шины реверсирующих контакторов обмотка большой скорости асинхронного электродвигателя. Одновременно его вспомогательные контакты Б замыкают цепь выпрямителя В и включают электромагниты МРО и МЭВ. Первый (МРО) замыкает ригельные контакты РК этажей, а второй (МЭВ) втягивает шток с роликом этажного выключателя и размыкает контакт ЭВ. С замыканием ригельных контактов (1РК 5РК) создается цепь для включения катушки контактора В («Вперед»). Главные контакты контактора В в силовой электрической цепи замыкаются и (по ранее подготовленной цепи) через контакты Б 21 подсоединяют к сети электродвигатель (АД). Одновременно включается тормозной электромагнит, и освобожденная от механического тормоза кабина приходит в движение. Когда кнопку приказа (1КП—5КП) отпускают, ее контакт размыкается и цепь питания контакторов Б, В и этажного реле после кнопки «Стоп» проходит через замкнутый контакт Ml замкнутый контакт В и далее разветвляется на две цепи: Т) через замкнутый контакт Н получает питание катушка контактора В; 2) через этажный переключатель ЭП, замкнутые контакты этажного реле (1РЭ—5РЭ), ригельные контакты (1РК—5РК), замкнутый контакт М получает питание катушка контактора Б. Катушки этажных реле (1РЭ—5РЭ) питаются через собственный замкнутый контакт. Перед подходом кабины к заданному этажу размыкается контакт этажного переключателя (ЭП) и отключает контактор Б и этажное реле РЭ. Контакт Б в цепи контактора малой скорости (М) замыкается, и катушка контактора М включается по ранее подготовленной цепи: контакт ОС, контакты 1РТ—4РТ, замкнутый контакт В, замкнутый контакт Б контактора большой скорости. Главными контактами контактор малой скорости М подключает к сети обмотку малой скорости асинхронного двигателя. Одновременно с отключением контактора Б отключается выпрямитель В, и электромагниты МРО и МЭВ теряют питание. При отключении МРО ригельная отводка под действием пружины выходит на уровень роликов ригелей и в дальнейшем, с приходом кабины на этаж, поворачивает ригель и тем самым размыкает ригельный контакт (1РК—5РК). С отключением МЭВ контакт этажного выключателя ЭВ в цепи реверсивных катушек контакторов В и Н замыкается и тем самым поддерживает цепь питания катушки контактора В вместо разомкнувшего контакта М. С приходом кабины на заданный этаж отводка, установленная в шахте, воздействует на ролик этажного выключателя и размыкает его контакт ЭВ. Цепь катушки контактора В разрывается и контактор В размыкает свои 22 контакты, отключая электродвигатель и тормозной электромагнит. Работа схемы при управлении лифтом посредством установленных на этажных площадках вызывных кнопок KB не отличается от описанного. Вызвать кабину можно на любой этаж лишь в том случае, если, кабина свободна от груза. Это контролируется контактом ПК, который включен последовательно с кнопками вызова (KB) и замкнут при пустой кабине. Лампа освещения кабины (ОСК) и сигнальные лампы («1 Занято» — «5 Занято») включаются контактом светового реле СР. Отключение реле СР в нормальных условиях работы лифта происходит при открывании дверей шахты вследствие размыкания дверного контакта (1ДШ—5ДШ). После размещения в кабине груза размыкается подпольный контакт ПК, что исключает возможность включения светового реле при закрытии дверей шахты и замыкании дверного контакта. Таким образом, лампа ОСК и сигналы «1 Занято» — «5 Занято», загораясь при открывании дверей шахты, будут гореть до тех пор, пока в кабине находится груз. 23 Рис.5 24 Список использованной литературы. 1.Методические указания к курсовой работе «Электропривод грузового лифта» С-Петербург, 1992 2.Конспект лекций по дисциплине «Электроприводы машин». 25