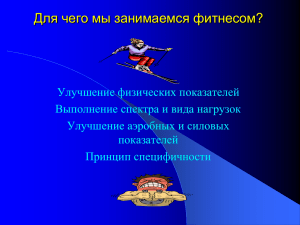
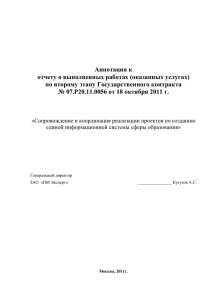
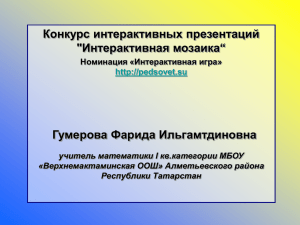
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего образования «СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ГЕОСИСТЕМ И ТЕХНОЛОГИЙ» (СГУГИТ) Институт дистанционного обучения Кафедра инженерной геодезии и маркшейдерского дела Контрольная работа №5 Вариант 1 Выполнил: Потапов А.Е. Группа: 2 ПГ Преподаватель: Любивая Л.С. Новосибирск 2020г ПРИМЕНЕНИЕ АЭРОФОТОТОПОГРАФИЧЕСКОЙ СЪЁМКИ ДЛЯ СОЗДАНИЯ ПЛАНОВ КРУПНОГО МАСШТАБА ИСХОДНЫЕ ДАННЫЕ 1. Масштаб съемки 1:5000 2. Номенклатура листов Границами участка работ являются рамки трапеций масштаба1:10000 У-41-34-В-г-1,_У- 41-34-В-г-2__ 3. Метод съемки стереотопографический 4. Местоположение объекта (по административному делению) г. Новосибирск. Назначение 5. плана разработка проекта строительства бетонного завода Виды и объем 6. топографо-геодезических работ, подлежащих выполнению создание проекта съёмочного геодезического обоснования Исходные пункты :Пункты полигонометрии 7. 3 класса в количестве 3-х, высоты которых определены из нивелирования IV класса, показаны на карте Система координат 1942 г .Система высот Балтийская. 8. Картографические и аэрофотосъемочные материалы для проектирования Топографическая карта __Масштаб 1 : 25 000 У-41-34-В-г Аэрофотосъемка 1:10 000 Задание 1. СОСТАВЛЕНИЕ ПРОЕКТА РАЗМЕЩЕНИЯ ОПОЗНАКОВ Цель работы: Практическое освоение задач, связанных с проектированием аэрофототопографической съёмки. Содержание работы: 1 Раскрыть общие сведения об аэрофототопографической съёмке 2 Составить проект аэрофотосъёмочных работ 3 Составить проект размещения о познаков. Порядок выполнения работы: 1 Раскрыть общие сведения об аэрофототопографической съёмке. Аэрофототопографическая обновления топографических съёмка карт, – это планов метод создания местности на или основе использования аэрофотоснимков. Различают контурную, комбинированную и стереофотограмметрическую аэрофототопографическую съемку. При контурной аэрофототопографической съемке аэрофотоснимки используются только для построения контурной части карты, рельеф на ней не отображается. Служит для съёмки отдельных участков местности, объектов и др. При комбинированной аэрофототопографической съемке контурная часть карты создаётся по аэрофотоснимкам, а рельеф наносится в результате наземной топографической съёмки. Применяется при составлении карт крупного масштаба (1:2000 — 1:10000). При стереофотограмметрической аэрофототопографической съемке контуры и рельеф карты создаются по аэрофотоснимкам. Этот вид аэрофототопографической топографических карт аэрофототопографической аэрофотографирования фотохимический съемки является всех съемки при масштабов. помимо (лётносъёмочный и основным Технология типовых процесс) фотограмметрические создании процессов включает процессы и топографогеодезические работы, заключающиеся в определении геодезических координат отдельных точек местности, изображённых на аэрофотоснимках или нанесённых на них по результатам дешифрирования на местности. Эти геометрического координаты подобия аэрофотоснимкам необходимы модели самой для обеспечения местности, местности. точного построенной Разработкой по теории аэрофототопографической съемки и способов её практическогоприменения занимается научная дисциплина — аэрофототопография. Аэрофотосъемка осуществляется с помощью аэрофотоаппаратов (АФА), их фокусные расстояния, а также высота фотографирования выбираются, исходя из методов создания и обновления карт, характера местности и используемых фотограмметрических приборов, для с обработки таким расчётом, аэрофотоснимков чтобы ошибки определения высот точек и съёмки рельефа местности по аэрофотоснимкам не превосходили значений, установленных инструкцией. Данные требования приведены в таблице 1. Таблица1-Основные параметры аэрофотосъёмки Масштаб плана Масштаб фотографирования Фокусное расстояние .мм Формат * снимка, см 1:5000 1:20000 1:15000 1:10000 1:8000 1:4500 1:5000 1:2400 1:3000 1:1200 200, 100 350 350. 200, 100 500, 350, 200 500, 350, 200 500, 350, 200 500, 350, 200 500, 350, 200 500, 350, 200 18 х 18 18 х 18 30 х 30 30 х 30 30 х 30 30 х 30 30 Х 30 30 х 30 30 х 30 1:2000 1:1000 1:500 Перекрытие снимков, % 80-90, для городских территорий - 60 80-90, для городских территорий - 60 80-90, для городских территорий - 60 80-90, для городских территорий - 60 2. Составить проект аэрофотосъёмочных работ Проект аэросъемочных маршрутов составляем на карте масштаба 1:25000. Масштаб аэросъемки равен 1:10000. Маршрут аэросъемки проектируем по длинной стороне карты параллельными линиями с запада на восток. Первый маршрут совмещаем с северной рамкой трапеции, последний с южной. Расстояние между маршрутами на карте вычислим по формуле by By M , где М - знаменатель масштаба карты, на которой составляют проект; By- расстояние между осями маршрутов на местности (поперечный базис фотографирования), вычисляемое по формуле By l (100% Py %) 100% m, гдеl,см – размер стороны аэрофотоснимка; Py% - величина поперечного перекрытия(30%); m – знаменатель масштаба аэрофотосъёмки. Общее количество маршрутов для аэрофотосъёмочного участка подсчитываем по формуле Q K B y 1 , где Q – ширина участка местности. Далее на карте в обе стороны от осей маршрутов откладывают расстояние, вычисленное по формуле S( ñì ) l m , 2M где М – знаменатель масштаба карты, по которой выполняется проектирование. Это позволяет выделить зоны поперечных перекрытий, в которых размещают плановые и высотные опознаки. Для определения расстояния между центрами снимков вдоль одного маршрута, называемого продольным базисом фотографирования, используем формулу bx Bx , M гдеbx – продольный базис фотографирования в сантиметрах на карте; Bx - продольный базис фотографирования в сантиметрах на местности. При составлении проекта аэрофотосъёмочных работ подсчитываем количество аэрофотоснимков на участок съёмки по следующей формуле n L 3, Bx где L – длина участка местности. Общее количество аэрофотоснимков подсчитываем по формуле N = nK. Результаты вычислений при аэрофототопографической съёмки представлены в таблице 2. проектировании Таблица 2 - Данные для составления проекта размещения о познаков Порядок вычислений 1 1 Формулы By 2 3 4 5 6 7 8 2 l (100% Py %) 100% by Bx m By Результат вычислений 3 126000 5,04см M l (100% Px %) m 100% 72000 bx Bx M 2,88 S( ñì ) l m 2M 7,2 Примечание 4 Расстояние между маршрутами (на местности) Расстояние между маршрутами (в масштабе карты) Продольный базис фотографирования (на местности) Продольный базис фотографирования (в масштабе карты) Расстояние от оси маршрута до границ аэрофотосъёмки (в масштабе карты) Количество маршрутов Q K 1 B y L n 3 Bx 2 4 Количество аэрофотоснимков в одном маршруте N=nK 16 Общее количество аэрофотоснимков 3. Составить проект размещения о познаков Для составления проекта размещения плановых о познаков используют карту масштаба 1:25000.Опознаки располагают рядами поперёк аэрофотосъёмочных маршрутов и размещают их примерно посередине поперечных перекрытий в зонах тройного продольного перекрытия аэроснимков в маршруте. Расстояния между рядами с познаков для планов масштаба 1:5000 длины секций составят 8-10км. Точки высотного обоснования, необходимые для обработки снимков и рисовки рельефа на фотограмметрических приборах, совмещают с точками планового обоснования. Рис. 2 Проект размещения планово-высотных о познаков Задание 2. МЕТОДЫ ПОСТРОЕНИЯ ПЛАНОВЫХ СЕТЕЙ СГУЩЕНИЯ Цель работы: Освоить методы проектирования и оценки точности плановых геодезических сетей сгущения. Содержание работы: - описать методы построения плановых сетей сгущения; - на карте масштаба 1:25000 запроектировать полигонометрический ход 4 класса или 1-го разряда; - выполнить оценку точности запроектированного хода и сделать вывод о соответствии полученной точности требованиям инструкции. Порядок выполнения работы: 1. Методы построения плановых сетей сгущения. Средняя плотность пунктов плановой государственной геодезической сети для создания съёмочного геодезического обоснования топографических съёмок должна быть доведена на территориях, подлежащим съёмкам в масштабе 1:5000 до одного пункта триангуляции или полигонометрии на 2030 км2. Дальнейшее увеличение плотности геодезической основы крупномасштабных съёмок достигается развитием геодезических сетей сгущения и съёмочного обоснования. Плотность геодезической основы для съёмок в масштабе 1:5000 территорий вне населённых пунктов должна быть доведена не менее чем до 1 пункта на 7-10 км2. Плановое положение пунктов геодезических сетей сгущения следует определять методами триангуляции, полигонометрии, а также на основе использования спутниковой геодезической аппаратуры (приёмники GPS и др.) и их сочетанием. Требования к построению сетей методами триангуляции полигонометрии приведены в таблицах 1 и 2. Таблица 3-Требования к триангуляции 1 и 2 разрядов Показатели 1 Длина стороны треугольника, км 1 разряд 2 0,5-5 2 разряд 3 0,25-3 и Число измеренных базисных 2 (выходных) сторон в свободных геодезических сетях, не опирающихся на пункты высшего класса или разряда Относительная погрешность не более: 1 базисной выходной стороны 50000 1 20000 определяемой стороны сети в наиболее слабом месте 1 10000 Наименьшее значение угла треугольника между направлениями данного класса (разряда), градусы: в сплошной сети в связующей во вставке Предельная невязка в треугольнике, с Средняя квадратическая погрешность измеренного угла (вычисленная по невязкам треугольников), с, не более Длина базисной (выходной) стороны, км, не менее Число треугольников между исходными (базисными) сторонами или между исходным пунктом и исходной стороной, не более Количество приемов при измерении длин базисных сторон светодальномерами и (или) электронными тахеометрами 1 50000 2 20 30 30 20 20 30 20 40 5 10 1 1 10 10 2 2 Таблица 4-Требования к полигонометрии 4 класса, 1 и 2 разрядов Показатели 1 Предельные длины отдельных полигонометрических ходов при измерении линий светодальномерами и (или) электронными тахеометрами в зависимости от числа сторон в ходе, км (n - число сторон в ходе) 4 класс 2 8 при n =30 1 разряд 3 10 при n=50 2 разряд 4 6 при n =30 10 при n =20 12 при n =15 15 при n =10 20 при n =6 . 15 12 при n=40 15 при n=25 20 при n=15 25 при n=10 5 8 при n =20 10 при n=10 12 при n=8 14 при n=6 3 Предельная длина хода при измерении длин линий другими методами, км Предельные длины ходов, км, между 2/3 длины отдельного хода, исходным пунктом и узловой точкой определяемой в зависимости от числа сторон в ходе узловыми точками Средняя квадратическая погрешность измеренного угла (по невязкам в ходах), с, не более Угловая невязка в ходах или полигонах, с, не более (n - число углов в ходе или полигоне) Предельная относительная погрешность хода Периметр полигона, образованного полигонометрическими ходами в свободной сети, км, не более Количество приемов при измерении углов способом круговых приемов по трехштативной системе теодолитами: Tl, T1A и равноточными ЗТ2КП и равноточными ЗТ5КП и равноточными Количество приемов при измерении длин линий светодальномерами и (или) электронными тахеометрами Расхождения (колебания) между результатами наблюдений направления на начальный предмет в начале и конце полуприема, не более: ЗТ2КП и равноточные, с ЗТ5КП и равноточные, мин. Расхождения (колебания) между значениями направлений в отдельных приемах (полуприемах), приведенных к общему нулю, не более: ЗТ2КП и равноточные, с ЗТ5КП и равноточные, мин. 1/2 длины отдельного хода, определяемой в зависимости от числа сторон в ходе. При уменьшении числа сторон хода соответственно на 2/3 и 1/2 3 5 10 5√n 10√n 20√n 1 25000 30 15 I 5000 9 4 2 1 6 3 3 2 2 3 1 8 8 8 8 8 0,2 8 - - 0,2 Погрешность центрирования инструмента над центром пункта, мм, не более '2 2 2 Примечания 1. В полигонометрической сети следует предусматривать минимальное число порядков, ограничиваясь, как правило, полигонометрией 4 класса и 1 разряда. 2. При измерении длин линий свет дальномерами или электронными тахеометрами предельные длины сторон не устанавливаются. 2. На карте масштаба 1:25000 запроектировать полигонометрический ход 4 класса или 1-го разряда На карте масштаба 1:25000 запроектируем полигонометрический ход 4 класса, который будет опираться на пункты триангуляции: пт. Высокое, с высотной отметкой 152,80м и пт.1, с высотной отметкой 152,90м. (Рис.3) Предельная длина хода 3км. Рис. 3 Схема полигонометрического хода Таблица 5 – Ведомость координат полигонометрического хода № пункта Расстояние, м пт Высотное Координаты, м X Y 5953055,05 11676201,06 1118,99 пп1 5954171,39 11676182,86 5954730,88 11676527,36 5955540,06 11677093,13 5955340,06 11678302,71 5954764,48 11678566,60 662,68 пп2 987,45 пп3 1226,00 пп4 633,19 пт 1 3. Выполнить оценку точности запроектированного хода и сделать вывод о соответствии полученной точности требованиям инструкции. О точности хода свидетельствует средняя квадратическая ошибка - М положения пункта в слабом месте хода после уравнивания. Эту ошибку вычисляют по разным формулам в зависимости от формы хода. Так как форма запроектированного хода может быть вытянутой или изогнутой, то для того чтобы правильно выбрать формулу для оценки точности, необходимо воспользоваться критерием вытянутости хода. Полигонометрический ход считается вытянутым. если отношение [S ] 1.3 , L гдеS – длина хода, т.е. сумма длин сторон; L - длина замыкающей (прямая, соединяющая начальный и конечный пункты хода). В нашем случае S/L=4628,31/2918,55=1,59 Полигонометрический ход изогнутый. Определяем среднюю квадратическую ошибку по формуле: M nm s 2 2 m 2 D 2 , 2 o ,i где D0,I – расстояние от центра тяжести хода до каждого пункта хода, включая исходные; n– число сторон в запроектированном ходе (определяется по схеме хода на карте); ms – СКО измерения линий, определяемая по паспорту прибора, которым предполагается измерять линии; mβ – ср. измерения углов, выбираемая из таблицы 2, в зависимости от класса или разряда предполагаемых работ; ρ" = 206265", но в данном случае его значение может быть приравнено числу 2·105"; Координаты центра тяжести хода определяют по координатам всех точек хода, включая начальный и конечный исходные пункты хода, которые графически определяют по карте с помощью линейки с миллиметровыми делениями. При этом используют формулы: X0 X , Y Y , n 1 0 n 1 где (n + 1) – число пунктов хода. Таблица 6 – Координаты центра тяжести хода № пункта Координаты, м пт Высотное X 1488263,76 Y 2919050,27 пп1 1488542,85 2919045,72 пп2 1488682,72 2919131,84 пп3 1488885,02 2919273,28 пп4 1488835,02 2919575,68 пт 1 1488691,12 2919641,65 Рис. 4 Графическая схема определения центра тяжести хода М=0,190 Далее вычисляем относительную ошибку хода по формуле 2M . =0,190/ 4628,31=1/24359 S При этом должно быть выполнено условие 2M 1 , S T где 1/ T – предельная относительная ошибка хода (1/25000) 1/24359≤1/25000 Таким образом, относительная ошибка хода не превышает предельной, значит ход запроектирован правильно. Задание 3. МЕТОДЫ ПОСТРОЕНИЯ ВЫСОТНОЙ ОСНОВЫ ТОПОГРАФИЧЕСКИХ СЪЁМОК Цель работы: Освоить методы проектирования и оценки точности высотных сетей. Содержание работы: - описать методы и приборы для построения высотной основы; - на карте масштаба 1:25000 запроектировать по пунктам полигонометрии ходIV класса или технического нивелирования; - выполнить оценку точности нивелирного хода. Порядок выполнения работы: 1 Описание методов и приборов для построения высотной основы Согласно Инструкции рекомендуется совмещать линии нивелирования с закреплёнными пунктами полигонометрических ходов, отметки которых должны быть определены из нивелирования IV класса или технического нивелирования. Нивелирные сети создают в виде отдельных ходов или полигонов и привязывают не менее чем к двум исходным реперам высшего класса. Нивелирные ходы IV класса прокладывают в одном направлении. Длина линий нивелирования IV класса в обжитых районах не должна превышать 60 км, а в малообжитых – 80 км, в застроенной городской территории – 8 км, а на незастроенной городской территории – 12 км. Нивелирование IV класса производят нивелирами с цилиндрическим уровнем или компенсатором, имеющими увеличение зрительной трубы 2022х, цену деления цилиндрического уровня не более 30" на 2 мм. Перед началом полевых работ нивелиры исследуют и поверят. Наблюдения на станции выполняют в следующей последовательности: - устанавливают нивелир в рабочее положение с помощью установочного уровня; - наводят трубу на чёрную сторону задней рейки и, приведя пузырёк уровня элевационным винтом в ноль пункт, делают отсчёты по средней и верхней дальномерной нитям. При работе нивелиром с компенсатором отсчёт по рейке берут сразу же после приведения нивелира в рабочее положение и наведения трубы на рейку; - наводят трубу на чёрную сторону передней рейки и выполняют действия, указанные при наблюдении задней рейки; - наводят трубу на красную сторону передней рейки и делают отсчёт по средней нити; - наводят трубу на красную сторону задней рейки и делают отсчёт по средней нити. Допустимое расхождение значений превышения на станции, определённых по чёрным и красным сторонам реек с учётом разности высот нулей пары реек не должно быть более 5 мм. Невязки в нивелирных ходах между исходными пунктами и в полигонах не должны превышать величины, подсчитанной по формуле 20мм · L , где L – длина хода (полигона) в км. Ходы техническое нивелирования прокладывают между двумя исходными реперами старшего класса в виде одиночных ходов или систем ходов с одной или несколькими узловыми точками. Техническое нивелирование производят нивелирами с увеличением зрительной трубы не менее 20х и ценой деления уровня не более 45" на 2 мм. Длины ходов технического нивелирования зависят от высоты сечения рельефа. При высоте сечения 1м и более длины ходов не должны превышать 16 км. Ходы технического нивелирования выполняются в одном направлении. Порядок работы на станции следующий: - устанавливают нивелир в рабочее положение с помощью установочного уровня; - наводят трубу на чёрную сторону задней рейки и, приведя пузырёк цилиндрического уровня в ноль пункт с помощью элевационного винта, делают отсчёт по средней нити. При работе нивелиром с компенсатором отсчёт по рейке берут сразу же после приведения нивелира в рабочее положение и наведения трубы на рейку; - поворачивают заднюю рейку красной стороной и делают отсчёт по средней нити; - наводят зрительную трубу на чёрную сторону передней рейки и выполняют действия, указанные при наблюдении задней рейки; - поворачивают переднюю рейку красной стороной и делают отсчёт по средней нити. Расхождения превышений на станции, определённых по чёрным и красным сторонам реек, не должны превышать 5 мм. Невязки нивелирных ходов или замкнутых полигонов не должны превышать величины, вычисленной по формуле 50мм · L , где L – длина хода (полигона) в км. Согласно ГОСТ 10528 96 нивелиры классифицируются по точности на высокоточные, точные и технические. В зависимости от устройства, применяемого для приведения визирной оси в горизонтальное положение, нивелиры всех типов выпускаются в двух вариантах: с уровнем при зрительной трубе и с компенсатором углов наклона, автоматически устанавливающим линию визирования в горизонтальное положение. Стремительные темпы автоматизации привели к созданию нового поколения цифровых нивелиров, у которых благодаря наличию цифровых датчиков точно регистрируется отсчёт по специальной рейке со штриховым кодом. Для нивелирования IVклассамогут быть использованы отечественные нивелиры с кодом Н-3, Н-3КЛ, а для технического нивелирования, кроме выше названных, нивелиры с кодом Н-10, Н-10КЛ. Кроме того, для обоих видов нивелирования могут быть использованы цифровые нивелиры DiNi 10, DiNi 22 (фирмы «Карл Цейс»), SDL(фирмы «Sokkia»), NA2000 (фирмы «Leika») и др. 2 Проектирование нивелирного хода по пунктам полигонометрического хода Рис. 5 Схема нивелирного хода Запроектируем по пунктам полигонометрии нивелирный ходIVкласса, который опирается на пункты триангуляции. Rp1 – пт. Высокое, с отметкой 152,80м и Rp2 – пт1, с отметкой 152,90. Таблица 7 - Отметки пунктов нивелирного хода № пунктов Отметка, м 152.80 153.75 161.40 217.50 169.00 152.90 Rp1 пп1 пп2 пп3 пп4 Rp2 3 Оценка точности нивелирного хода Для вычисления погрешностей отметок всех промежуточных реперов уравненного нивелирного хода применяют формулу L mÍ ñë LA,i 1 A,i L где η – , случайная средняя квадратическая погрешность превышения на 1 км двойного хода (0,01м); LA,i –длина нивелирного хода от начального репера оцениваемой точки; L - длина всего нивелирного хода от начального до конечного исходных реперов (4628,31м). Таблица 8 – Вычисление погрешностей отметок № пункта Rp1 пп1 Погрешность отметки 0,029 до пп2 пп3 пп4 Rp2 0,020 0,019 0,012 Погрешность наиболее слабого репера пп4, сравним её значение с допустимым значением, которое вычисляем по формуле: пред m км L , где пред - предельная СКО положения точки по высоте в середине хода после уравнивания; m км - СКО на один километр хода, принимаемая равной 10 мм для IV класса и 25 мм для технического нивелирования; L - длина нивелирного хода в километрах. ∆пред=0,01√4,628=0,021 0,012≤0,021 Задание 4. ПЛАНОВАЯ И ВЫСОТНАЯ ПРИВЯЗКА ОПОЗНАКОВ Цель работы: Освоить методы проектирования планово-высотной привязки и оценки точности положения о познаков Содержание работы: 1 Описать способы плановой и высотной привязки о познаков 2 Запроектировать на карте масштаба 1:25000 привязку трёх о познаков от пунктов полигонометрического хода способами: - прямой угловой засечкой; - обратной угловой засечкой; - полярной засечкой. 3 Описать способы высотной привязки этих же о познаков 4 Выполнить оценку точности геодезического определения координат и отметок о познаков и сравнить полученные погрешности с допустимыми значениями Порядок выполнения работы: 1. Описание способов плановой и высотной привязки о познаков Выбор способа привязки о познаков зависит в основном от характера участка местности и плотности исходных пунктов. Для плановой привязки используют угловые. линейные засечки, их комбинации, тахеометрические ходы. Высотную привязку выполняют геометрическим и тригонометрическим нивелированием. Исходные пункты государственных геодезических сетей и геодезических сетей сгущения при съёмке в масштабе 1:5000 должны находиться в пределах от 0.5 до 10.0 км от определяемого опознала. Погрешности положения плановых о познаков относительно ближайших пунктов опорной геодезической сети не должны превышать 0.1мм в масштабе создаваемого плана. Предельные погрешности положения опознака устанавливают в зависимости от характера участка съёмки: - для застроенной территории, а также открытой местности – 0.2мм в масштабе создаваемого плана (для масштаба 1:5000 данная погрешность составит 1.0м); - для лесных районов – 0.3мм в масштабе плана (для масштаба 1:5000 данная погрешность составит 1.5м). Погрешности определения высот о познаков не должны превышать величины 0.1 от высоты сечения рельефа, а предельные погрешности – 0.2 от установленной высоты сечения. При высоте сечения 2м предельная погрешность будет равна 0.4м 2. Запроектировать на карте масштаба 1:25000 привязку трёх о познаков от пунктов полигонометрического хода способами: прямой угловой засечкой; обратной угловой засечкой; полярной засечкой. Запроектируем на карте М1:25000 привязку о познаков от пунктов полигонометрии. Методом прямой угловой засечки привязан ОП7 и ОП8, ОП5 привязан методом полярной засечки. Рис. 6 Схема привязки о познаков 3 Описать способы высотной привязки этих же о познаков Определение координат ОП8 Таблица 9 - Решение прямой угловой засечки по двум треугольникам. Обозначения пунктов углов Углы, º′″ пп1 пп2 ОП1 79 39 06 77 46 07 22 34 47 α β Х, м 5954171,39 5954730,88 5953528,92 сtgα, ctgβ, сtgα+ ctgβ 2,590812579 -6,02220812 -3,43139555 Y,м 11676182,86 11676527,36 11677727,24 пп2 пп3 ОП1 α β 100 07 16 52 25 42 27 27 02 5954730,88 5955540,06 5953528,92 7,787049754 5,037038386 12,82408814 11676527,36 11677093,13 11677727,24 Для решения вариантов засечки использовать следующие формулы Юнга: р 1сtg 2 ctg 1 2 , ctg ctg p 1ctg 2 ctg 1 2 , ctg ctg Координаты ОП1 (5953528.92;11677727.24) Определение координат ОП7. Таблица 10 - Решение прямой угловой засечки по одному треугольнику. Обозначения пунктов уг Углы, º′″ пп1 пт. Высокое ОП1 73 20 05 78 33 53 5954171,39 5953055,05 сtgα, ctgβ, сtgα+ ctgβ 2,590812579 -6,02220812 28 06 02 5953440,47 -3,43139555 α β Х, м Y,м 11676182,86 11676201,06 11673957,84 По известным координатам пп3 и дирекционному направлению пп3ОП5, определим координаты ОП5, которые привязаны полярным способом. пп3 (5955540,06;11677093,13) αпп3-ОП5=54º34′43″ ОП5(5955931,39;11677643,35) 3. Описать способы высотной привязки этих же опознаков Высотная подготовка аэрофотоснимков заключается в определении отметок о познаков техническим или тригонометрическим нивелированием. Геометрическое нивелирование применяют при съёмках с высотой сечения рельефа 1 и 2м. При съёмках всхолмлённых и горных районов с высотами сечения рельефа 2 и 5м отметки о познаков определяют тригонометрическим нивелированием. Техническое нивелирование выполняют согласно Инструкции , а также этот метод подробно описан в лабораторной работе 3. Определение высот тригонометрическим нивелированием осуществляют измерением вертикальных углов на о по знаки одновременно с измерением горизонтальных углов теми же приборами. Измерения осуществляются не менее чем по двум сторонам длиной не более 3км. Расхождения в отметках, полученных по разным направлениям, не допускаются более 0,7м при съёмке с высотой сечения равной 2м. За окончательное значение отметки высотного о по знака принимают среднее весовое из отметок, полученных по каждому направлению. 4. Расчёт основных способов плановой и высотной привязки о по знаков Определить среднюю квадратическую ошибку положения точки ОП8 и ОП7 для каждого варианта засечки по формуле: mp m sin s12 s 22 , где mβ – средняя квадратическая ошибка измерения углов ( принять в задании mβ = 10˝), γ - угол в треугольнике при точке ОП8, S1,S2 - стороны засечки, в м (определить по схеме), Значение ρ принять в секундах (ρ =206265˝). mp1=10˝/206265˝×sin22 34 47√1686,692+1697,792=0.061 mp2=10˝/206265˝×sin27 27 02√2108,742+1697,792=0.071 Среднюю квадратическую ошибку координат, полученных из двух вариантов засечки, найти по формуле: Mpср= 1 m 2p1 m 2p 2 . 2 Mpср=1/2√0.0712+0.0612=0.05 mp1=10˝/206265˝×sin28 06 02√2330,522+2275,892=0.093 Ожидаемое значение Mpср не превышает допустимого значения 0,1м, значит расчеты выполнены верно. Определить среднюю квадратическую ошибку положения точки ОП5.Установить необходимую точность построения угла ( m ) и линии (mS, mS /S ), приняв допустимую ошибку восстановления mС =0.5 м mС mS2 ( mS mC 2 m , )2 S 2 m mC 2 S ms=0.05/√2=0,035 mβ=0,05*206265/√2×675,19=1,69 Относительная ошибка составляет 0,035/675,19=1/19291 Так как ms /S больше, чем 1/1000 ,то используем мерную ленту одним откладыванием.