влияние нелинейных элементов на качество электромеханической следящей системы
реклама

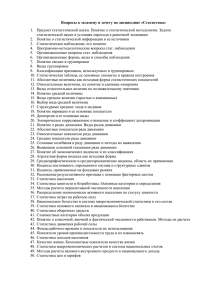
Лабораторная работа №6 Влияние нелинейных элементов на качество электромеханической следящей системы. Цель работы: Провести исследование влияния положения в схеме и параметров нелинейных элементов различных типов на показатели качества электромеханической системы. Функциональная схема системы: Стрелки указывают на возможное положение нелинейного элемента в схеме. Результаты выполнения: По полученным данным можно проследить следующие закономерности: перерегулирование всегда выше, а время регулирования немного меньше в случае, если нелинейный элемент стоит перед усилителем, причем почти всегда с увеличением параметра нелинейного звена время регулирования уменьшается, а перерегулирование увеличивается. Значения показателей качества примерно сопоставимы для случаев нелинейности между усилителем и динамикой и нелинейностью после динамики. Статические и кинетические ошибки за исключением некоторых случаев всегда растут при увеличении параметров нелинейных элементов. При включении нелинейных элементов типа «насыщение» система обладает наибольшим временем регулирования, однако наименьшими перерегулированием и статической ошибкой. Наибольшие значения перерегулирования и кинетической ошибки наблюдаются в случае элемента с нелинейностью типа «люфт». Нелинейность оказывает крайне низкое влияние на устойчивость системы, поскольку во всех случаях запас по фазе системы равен 46.6°. Тип нелинейности Расположение До усилителя Насыщение Между усилителем и динамикой После динамики До усилителя Нечувствитель ность Между усилителем и динамикой После динамики До усилителя Люфт Между усилителем и динамикой После динамики Значение параметра 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 0.01 0.1 1 tрег, с σ, % Δстат Δкин 4.8 1.4 1.3 98 10.7 2.1 98 10.7 2.1 1.4 1.4 1.4 1.4 1.4 1.3 1.4 1.4 1.4 1.5 1.4 1.4 1.6 0.5 4.1 22 0.2 0.2 1.6 0.04 3.3 3.2 20 19.2 21.5 21 20 21.5 21 17 20.5 27.5 69.5 20.5 20.7 22.6 21.5 21.5 24.4 0 0 0 0 0 0 0 0 0 0.004 0.06 0 0.002 0.04 0 0.004 0.01 0.03 0.05 0 0.001 0.02 0 0.02 0.019 →∞ 0.25 0.05 →∞ →∞ 0.07 →∞ →∞ 0.05 0.07 0.15 0.04 0.04 0.08 0.04 0.06 0.07 0.04 0.015 0.4 0.04 0.04 0.05 0.04 0.04 0.02