Л. Ф. НИКОЛАЕВ
АЭРОДИНАМИКА
И ДИНАМИКА
ПОЛЕТА
ТРАНСПОРТНЫХ
САМОЛЕТОВ
Допущ ено
У п р а в л е н и е м учебны х за ве д е н и й М Г А
в ка че стве у че б ни ка
для вы сш их учебны х
за ве д е ний гр а ж д а н с ко й авиации
МОСКВА "ТРАНСПОРТ" 1990
Николаев Л. Ф. Аэродинамика и динамика полета транспортныл
самолетов: Учеб. для вузов.—М.: Транспорт, 1990.—с. 392.
И зл ож ен ы теоретические основы аэродинамики и динамики по­
лета транспортных самолетов гражданской авиации. Рассмотрены
основные режимы полета, летно-технические характеристики само­
лета, характеристики устойчивости и управляемости, влияние на них
эксплуатационных факторов, особые случаи в полете. Даны кон­
кретные рекомендации пилоту по влиянию различных факторов на
летны е ограничения и обеспечение безопасности полетов.
Д л я курсантов высших летных училищ гражданской авиации.
Ил. 256, табл. 3, библиогр. 12 назв.
Рецензенты: В. П. Бехтир (Центр ГА СЭВ) и проф. Л. Г. Тотиаш ви ли (кафедра аэродинамики и динамики полета Р К И И Г А )
Заведующий
Редактор
редакцией
Л. В. Васильева
И. В. Иванова
3206030000-267
Н ----------------------------- 212-90
049(01 )-90
ISB N 5-277-00988-4
© Л . Ф. Н и к о л аев.
Написание настоящего учебника диктовалось отсутствием необхо­
димой для подготовки инж енера-пилота учебной литературы по аэро­
динамике и динамике полета транспортны х самолетов. С одерж ание
имеющихся к настоящему времени фундаментальных учебников «Аэ1 рогидромеханика* 14] и «Аэромеханика самолетов» 13], предназначен­
ных для студентов авиационных специальностей вузов, выходит далеко
, за рамки программы подготовки инж енеров-пилотов в высш их летных
училищ ах граж данской авиации. Кроме того, они не акцентированы
на подготовку специалиста полетной эксплуатации транспортны х само­
летов. Учебные пособия по практической аэродинамике самолетов [5,
9 и др.] по своему назначению и содерж анию такж е не могут в полной
мере удовлетворить требованиям программы подготовки пилотов в ву­
зах граж данской авиации, поскольку в них не рассм атриваю тся осно­
вополагающие вопросы аэродинамики и динамики полета, общие для
всех самолетов, а рассматриваются тол ьк о частные п рилож ени я к кон­
кретным их типам. Учебники по аэродинам ике и динам ике полета для
летного состава ВВС [2] имеют хорош ую направленность на подготов­
ку военного летчика, но не в полной мере соответствуют подготовке
пилота граж данской авиации.
Настоящ ее издание — воплощ енная попытка автора создать учебник по аэродинамике и динамике полета транспортны х самолетов,
предназначенный для подготовки инж енера-пилота граж дан ской ави­
ации, обеспечивающий достаточное научное содерж ание и его н ап рав­
ленность на достижение целей обучения, определенных квал и ф и кац и ­
онной характеристикой специалиста.
В книге ш ироко использованы нормативны е документы : Н астав­
ление по производству полетов в граж данской авиации СССР (Н П П
ГА-85), Единые нормы летной годности граж дан ски х воздуш ны х судов
(ЕН ЛГС) стран-членов СЭВ, Государственны е стандарты .
Учебник вклю чает две части: аэродин ам и ка и д и н ам и ка полета.
В первой части изложены теоретические основы аэродинам ики и во­
просы прикладной аэродинамики прим енительно к транспортны м само­
летам: физико-механические свойства и основные ур ав н ен и я движ ения
воздуха, особенности сверхзвуковы х течений, пограничны й слой,
аэродинамичиеские силы, моменты и аэродинамические характери сти ки
крыла на малых, дозвуковых и тран сзвуковы х скоростях, аэродинам и­
ческие характеристики частей сам олета и сам олета в целом, аэродина­
мические характеристики воздуш ного винта.
.ч
Во второй части рассмотрены теоретические основы динамики п оле­
та тр ан сп о р тн ы х самолетов: уравнения движ ения, основные этапы
полета и летно-технические характеристики, эксплуатационные ог­
раничения реж имов полета, влияни е условий эксплуатации на х ар а к ­
теристики полета, устойчивость, управляемость, балансировка само­
лета в полете и влияние на них эксплуатационны х факторов, критиче­
ские реж им ы , особые у сл ови я и особые случаи в полете. Д ано аэроди­
намическое обоснование рекомендаций по пилотированию. Изложение
м атериала иллю стрируется примерами для самолетов с турбореактив­
ными двухконтурны м и двигателям и (ТРД Д ) и с турбовинтовыми дви­
гателям и (ТВ Д ).
Р у б р и к ац и я учебника, научное содержание и объем разделов от­
р аж аю т его связь с соответствующими традиционными разделами фун­
дам ентальной науки.
М ногие теоретические вопросы даны в кратком изложении, а вы­
воды некоторы х соотнош ений, не имеющие принципиального значения,
опущ ены . В конце каж дой главы приведен перечень дополнительной
л итературы с указанием страни ц , с помощью которой можно найти под­
робные выводы и фундаментальны е обоснования. Д л я самоконтроля
обучаемых и оказан ия методической помощи преподавателям к к а ж ­
дой гл ав е приведены контрольны е вопросы, Охватывающие основное
содерж ание учебного м атери ала. Изучив основы аэродинамики и ди­
намики полета транспортны х самолетов, воспользовавш ись дополни­
тельной литературой, читатель может углубить и конкретизировать
свои зн ан и я .
У чебник предназначен д л я курсантов высших летных училищ и сту­
дентов вузов граж данской авиации по специальности «Летная эксп луа­
тация». К роме того, он м ож ет быть использован летным составом, про­
ходящ им повышение квалиф икации, слушателями центров подготовки
пилотов, учебно-тренировочны х отрядов, а так ж е летным составом.
В ы раж аю искреннюю признательность рецензентам, принявшим
участие в рассмотрении рукописи учебника и особенно проф.
Л . Г. Т отиаш вили за ценные советы и конструктивные предложения,
учтенны е при написании книги.
З ам еч ан и я и советы читателей, которые позволят в дальнейшем
улучш ить содерж ание и стр у к ту р у учебника, прошу направлять по ад­
ресу: М осква, 103051, С ретенка, 27/29, И здательство «Транспорт».
А эродинамика и динамика полета являю тся разделам и м еханики—
науки, изучающей общие закономерности, связы ваю щ ие движ ение и
взаимодействие тел, находящ ихся в различны х состоян иях — твер­
дом, жидком и газообразном.
Аэродинамика — раздел механики сплошных сред, в котором и зу­
чаются закономерности движ ения газа, преимущ ественно воздуха, а
так ж е механическое и тепловое взаимодействие меж ду газом и д ви ж у­
щимися в нем телами.
А эродинамика является областью аэрогидром еханики (механики
жидкости и газа) — науки, изучающей законом ерности движ ения и
равновесия жидкостей и газов и их силового взаим одействия с обте­
каемыми телами или граничными поверхностями (внутренними и
внешними поверхностями тел, обтекаемыми потоком). М ах ан и ка ж и д ­
кого тела называется гидромеханикой, механика газооб разн ого тел а—
аэромеханикой. Аэромеханика изучает равновесие и д ви ж ени е газо­
образных сред, преимущественно воздуха, м еханического воздействия
сред на находящ иеся в них тела. Она подразделяется на аэростатику и
аэродинамику. Аэростатика изучает условия равн овеси я неподвиж ­
ных газов на погруженное в них твердое тело. З а к о н ы аэростатики
применяются к летательным аппаратам легче воздуха.
А эродинамика сформировалась в самостоятельную н а у к у в X X в.
в связи с развитием авиации, турбостроения и м етеорологии в к а­
честве их теоретической основы. О сновная зад ач а аэродин ам и ки со­
стоит в определении сил, действующих на дви ж ущ ееся в газе тело„ ис­
следовании распределения д авления на его поверхности, изучении н а­
правления струй воздуха вокруг него. Ее принято д ел и ть на теорети­
ческую и экспериментальную . Это деление было всегда условны м , так
к ак познание является комплексным процессом и п ред п ол агает п олу­
чение данных, необходимых в практике.
Н ау ка о механике жидкостей, основополож никам и которой я в л я ­
ются члены Российской Академии н ау к JI. Эйлер и Д . Б е р н у л л и , з а ­
лож и ла фундамент для развития аэродинамики.
Основы современной аэродинамики созданы труд ам и Н . Е . Ж у к о в ­
ского, С. А. Чаплы гина, Л . П рандтля, Т . К арм ана и д р.
Накопление фундаментальных теоретических и эксп ери м ен тальн ы х
результатов, а такж е знания, полученные из п р ак ти к и п роекти рова­
ния испытаний и эксплуатации летательны х ап п ар ато в , р азд ви н ул и
рамки аэродинамики и привели к формированию н а п р а в л е н и я , кото-
рое п рин ято назы вать аэродинамикой летательных аппаратов и, в
частности, аэродинамикой самолета.
Больш ой вклад в развитие аэродинамики внесли советские ученые:
В. С. А вдуевский, О. М. Белоцерковский, Г. С. Бю ш генс, В. В. Го­
лубев, А . А . Д ородницы н, М. В. Келдыш, Н . Е. Кочин, М. А. Л авренть­
ев, А . И . Н екр асо в, Н . Н . П авловский, Г. И. Петров, Г. П. Свищев,
Л . И. Седов, В .В . Струминский, А .А . Фридман, С.А. Христианович,
Г. Г. Ч ер н ы й и др.
Д и н а м и к а летат ельных аппаратов в атмосфере — раздел механи­
ки, в котором изучается движ ение летательных аппаратов в атмосфере.
Д и н а м и к а полета самолета рассматривает вопросы, связанны е с ис­
следованием траекторий движ ения самолета, его устойчивости и уп­
р авляем ости . В своих методах исследования она опирается на основ­
ные полож ения теоретической механики, аэродинамики, теории двига­
телей, теории автоматического управления и других дисциплин. В свою
очередь, д ин ам ика полета самолета используется при изучении таких
дисциплин, к а к конструирование и проектирование самолетов, конст­
р у и ровани е систем управлен ия полетом самолета, прочность само­
лета, тех н и ческая эксп луатац и я самолета, летная эксп луатац и я, безо­
пасность полетов и др.
О громны й в кл ад в развитие динамики полета внесли Н .Е . Ж уков­
ский, С. А . Ч аплы ги н и их ученики и последователи: В. С. Ведров,
В. П. В етчинкин, Г. С. К алачев, И. В. Остославский, В. С. Пышнов.
Д и н ам и к а полета современных самолетов — это стройная, посто­
янно соверш енствую щ аяся н аучная дисциплина, позволяю щ ая реш ать
задачи ан а л и за и исследования характеристик движ ения самолета на
всех этап ах их создания, испытаний и летной эксплуатации.
Н овы м вкладом в исследование динамики самолета стали работы
Л . М. Ш кадова, Г. С. Бю ш генса, Р . В. Студнева, Н . М. Лысенко,
И. М. М аш ковского и других ученых
П олет сам олета с точки зрен и я механики является управляемы м дви­
ж ением В зависимости от управляю щ их воздействий пилота и работы
бортовы х автоматических средств управления может быть реализовано
бесконечное множ ество траектори й. У правляю щ ие воздействия форми­
рую тся в полете из условия получения требуемых параметров движе­
ния: ск о р о сти , высоты полета (эшелона), направления (курса) Пилот
к о н тр о л и р у ет зн ачен ия этих параметров по приборам и парирует от­
клон ен ия от задан н ы х значений соответствующим отклонением орга­
нов у п р ав л ен и я , перемещ ая ры чаги управления. Бортовы е автомати­
ческие у стр о й ства в соответствии с заданной программой вместе с пи­
лотом воздействую т на органы управления.
З н ач и т е л ьн о е влияни е на параметры полета оказы вает состояние
атм осферы . Д о полета оно известно лиш ь приближенно. П ри эксп луа­
тац и и сам о л ета в различны х климатических зонах изменяю тся усло­
вия п олета (тем пература, вы сота, плотность, число М и д р .). В ходе по­
л ета сам олет испыты вает внеш ние возмущения вследствие атмосферной
ту р б у л ен тн о сти , колебаний температуры воздуха и т.п.
Реальное движение самолета условно разделяю т на две составляю ­
щие: опорное — движение по ж елаемой траектории в отсутствие в о з­
мущений и возмущенное — движ ение при воздействии возмущений.
В условиях возмущенного движ ения приближение к ж елаемой траекто­
рии достигается за счет естественной способности самолета сохранять
устойчивость движения и парированием отклонений пилотом и авто­
матическими устройствами.
В общем случае движение самолета имеет пространственный х а р а к ­
тер. Оно может быть прямолинейным и криволинейным, с постоянной
или изменяющейся скоростью, на постоянной или изменяю щ ейся вы ­
соте, с креном, скольжением или без них.
Из всего многообразия возможных траект орий полет а транспорт­
ного самолета можно выделить основные этапы, являю щ иеся частями
траектории полета: взлет, набор высоты, горизонтальны й полет, к р и ­
волинейные в горизонтальной и вертикальной плоскости участки т р а ­
ектории, снижение и посадка. К ажды й этап полета вы полняется в з а ­
данном режиме, характеризуемом программой изменения высоты, ско­
рости, угла наклона траектории, крена и т. д.
Режимы полет а, в которых основные параметры движ ения и п реж ­
де всего скорость постоянны или изменяются достаточно медленно,
называю тся установившимися. В установивш емся полете углы откло­
нения органов управления, углы атаки, крена, скольж ени я, перегруз­
ка, реж им работы двигателей считаются неизменными. Н а установив­
шихся реж им ах (практически бли зких к установивш имся) выполняю тся
многие этапы полета. Д л я них рассчитываю т больш инство х ар ак тер и ­
стик полета.
Сравнительно короткий этап полета, цель которого — измене­
ние параметров движения самолета (высоты, скорости, курса, наклона
траектории), называется маневром. При выполнении маневров д ви ж е­
ние, к ак правило, неустановивш ееся.
Совершенство самолета определяется его лет но-т ехническими х а ­
ракт ерист иками (J1TX), к которым относят:
скорость и высоту полета, скороподъемность и их зависим ость от
условий эксплуатации;
дальность, продолжительность полета, коммерческую н агр у зку и
расход топлива;
взлетно-посадочные характеристики (длина разбега, скорость от­
рыва, посадочная скорость, дли н а пробега и др.);
маневренные характеристики самолета, определяю щ ие способность
самолета изменять скорость и нап равлен ие полета и др.
При расчете J1TX и траекторий рассматривается опорное движение
самолета, так к ак влияние возмущ ений на движ ение центра масс с а ­
молета обычно невелико. В опорном движ ении исследую тся бал ан си ро­
вочные и статические характеристики самолета. Т акой подход позво­
ляет наиболее просто учесть вл и ян и е условий эксп л уатац и и на л ет­
но-технические балансировочные и статические характери сти ки сам о­
лета. В озмущ енное движение самолета изучается при оценке характе­
ристик устойчивости и управляемости самолета.
Условия эксплуат ации характеризую тся параметрами состояния
воздуш ной среды (температура, давление, плотность), наличием воз­
мущающих факторов (порывы ветра, осадки, изменение направления и
скорости ветра), условиями загр у зк и самолета (значения полетной мас­
сы, центровки), состоянием В П П , параметрами, определяющими режим
полета (высота, горизонтальны е и вертикальные скорости полета, числа
М полета, углы атаки, крепа, скольж ения и т.д.), режимом работы дви­
гателей, конфигурацией самолета и др.
Спроектированны й с учетом требований безопасности транспортный
самолет проходит цикл летных испытаний, в процессе которых осуще­
ствляется доводка его характери сти к в соответствии с техническими
требованиями и нормами, уточняю тся допустимые при эксплуатации
режимы и условия полета.
Н а основе расчетов и испытаний конкретного типа самолета состав­
ляется Р уководство по летной эксплуатации (РЛЭ), регламентирующ ее
способы и условия его эксп луатац и и.
Я вления и процессы, протекаю щие на всех этапах полета, а также
особенности движ ения конкретного типа самолета рассматриваю тся в
практической аэродинамике самолета (точнее аэродинамике и динами­
ке полета конкретного типа самолета).
Глубокие зн ан ия аэродинамики и динамики полета, особенностей
поведения самолета позволят пилоту:
правильно проводить подготовку к полету;
грамотно выбирать режим полета, анализировать поведение само­
л ета, принимать и реализовы вать решение, обеспечивая безопасность
и экономичность полета;
ан ал и зи р о вать авиационные происшествия и предпосылки к ним.
вы рабаты вать и реализовать рекомендации по их предотвращению
самостоятельно изучать новые типы самолетов, анализировать их
характери сти ки ;
участвовать в соверш енствовании летной эксплуатации самолетов.
О бобщ ая вы сказы вания пилотов означении глубоких знаний аэро­
динам ики и динам ики полета д л я летного состава, можно сказать, что
аэродинам ика и динам ика полета как никакая другая дисциплина
ф орм ирует профессиональную кул ьтуру пилота.
РАЗДЕЛ I
АЭ Р О Д И Н А М И КА
Глава
1
ОСНОВНЫЕ ПОЛОЖЕНИЯ АЭРОДИНАМИКИ
1.1. Физико-механические характеристики воздуха
Физическая структура жидкости и газа. Ж идкость представляет
собой совокупность хаотически движ ущ ихся молекул, расстояние
меж ду которыми значительно превыш ает их линейны е размеры. Это­
му определению во многих сл у ч аях соответствуют и газы , что привело
к объединению их общим термином «жидкости».
В аэрогидромеханике ж идкость рассм атривается к ак сплош ная сре­
д а, в которой не учитывается ее м олекулярн ая струк тура. Согласно
гипотезе сплошности среды, считается, что даж е в объемах, малых по
сравнению с обтекаемым телом, находится достаточно большое коли­
чество молекул, размеры и длина свободного пробега которых малы по
сравнению с размерами тела. Гипотеза непреры вности среды позволяет
рассм атривать кинематические и динамические характеристики дви­
ж ущ ей ся жидкости (скорость, давление и др.) к ак непрерывные ф ун к­
ции координат и времени, поэтому можно применить аппарат матема­
тического анализа, разработанны й для непреры вны х ф ункций. Гипо­
теза сплошности не применима д л я сильно разреж енны х газов.
Основными общими свойствами ж идкостей и газов являю тся л егк ая
подвиж ность, вязкость и сж имаемость, хотя степень выраж енности
этих свойств различна. П оскол ьку предметом изучения является дви­
ж ение самолета, будем пользоваться термином «газ», «воздух», подра­
зу м евая, что они являю тся сплошными средами, обладающими или
не обладаю щими сжимаемостью и вязкостью в зависимости от реш ае­
мой задачи .
В оздух представляет собою смесь газов, из которы х состоит атмо­
сфера Земли (азот, кислород, инертны е газы , углекислы й газ и др.),
водяного пара, взвешенных частиц различны х вещ еств и т. п. К воз­
д уху применимы гипотезы сплош ности и непреры вности среды . Н а
очень больш их высотах (более 100 км) гипотеза сплош ности среды не
применима. Здесь необходимо учитывать молекулярное строение ат­
мосферы.
Основные физико-механические характеристики воздуха. Ф и зи к о -м ех ан и ­
ческое состояние во здух а ха р а к т е р и з у е тс я температурой, давлени ем, массовой
плотностью, относительной плотностью, сжимаемостю, вязкостью.
Температур а атмосферного воздуха Т определяет его термодинамическое со­
стояние равновесия. О на п р оп о рц и он ал ь н а средней скорости д в и ж е н и я м ол ек ул ,
т. е. я в л я ет ся х а р ак т е р и ст и к о й интенсивности м олекулярн ого д в и ж е н и я . Если
температура р азли чн ы х объемов в о зду ха не одинакова, то пр оисхо д ит тепло­
обмен. Т е м п ер ату ра может быть в ы р аж ен а в кельвинах (К). З н а ч е н и я тем п ера­
тур ы по ш кале Ц е л ь си я св я за н ы с абсолютной температурой соотношением
/ ' = Г — 273 К.
Давление — ф и з и ч е ск ая величина, х ар ак т ер и з у ю щ ая интенсивность нор­
мальных (п е р п ен д и к у л я р н ы х к поверхности) сил F, с которыми одно тело дей­
ствует на поверхность S другого. Если силы распределены вдоль поверхности
равномерно, то дав л ен и е
P = F/S.
(
1. 1)
Массовая пл отность —• величина, определяемая отношением массы возду
ха, закл ю ч енн о го в единице объема,
р = т / 1/ .
Относител ьная
плотность воздуха Д — отношение плотности
р на некоторой высоте Н к плотности воздуха р0 на высоте Н — 0:
Д = р /р „.
( 1.2 )
воздуха
(1-3)-
Вязкость (внутрен ее трение) — свойство газов и жидкостей, х а р а к т е р и з у ю ­
щее сопротивление действию внешних сил, вызывающих их течение. В язкос т ь
воздуха оп р едел я ется м е ж м о л е к у л я р н ы м взаимодействием, обусловленным
взаимным п ри т я ж ен и ем и отта л ки в ан и ем электрически н ейтр ал ьн ы х молекул,
хаотичным дв и ж ен ием м ол ек у л , о бусловливаю щ им перенос эн ер г и и из одного
слоя в другой и п еремеш ивание в дв и ж у щ ем с я потоке. Поэтому с увеличением
тем п ер атур ы в я зк о с т ь в о зду ха п овы ш ается за счет скорости д в и ж е н и я молекул.
В язко ст ь во зду ха х а р а к т е р и з у е т с я динамической вязкостью (i и кинематичес­
кой в язк остью V.
Д инамич е с к ая вязкость х а р а к т е р и з у е т м ол ек ул ярн ы й перенос импульса в
потоке газа, п р и в о д я щ и й при нали чии градиента скорости к п о я в л е н и ю каса­
тельны х н а п р я ж е н и й . Д и н а м и ч е с к а я в язк о с т ь при различных т е м п е р а т у р ах
(1 .4)
Кин е матич е с к ая вя
плотности:
.у х а
— отношение динамической вязкости к
v = n/p .
(1 .5)
Д л я в озд у ха при Т = 288 К ц = 1,8 • 105 Н • с/м2 и v = 1,45 • 105 м2/с.
Сжимаемость — способность в о з д у х а изменять свой объем, а сл едов ател ь­
но, и плотн ость при изменении д а в л е н и я и температуры. С ж и м аем ость х а р а к т е ­
р и зуется коэффициентом объемного с ж а т и я ($, который при и зотермическом про­
цессе ( Т = const) о бр ат н о п р о п о р ц и о н ал ен давлению.
Р = Пр.
(
1. 6 )
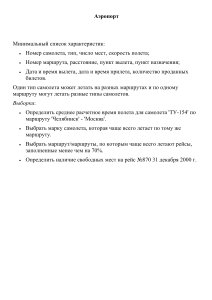
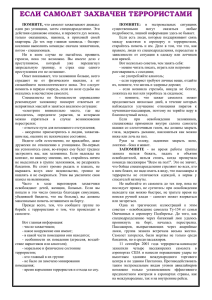
С ж имаемость в о зд у х а тесно с в я з а н а со скоростью распространения з в у к а . Изме­
нения местных д а в л е н и й в в оздуш ной ср еде называются возм ущ ен иям и давления.
Они р а с п р о с т р а н я ю т с я в виде у п р у г и х в олн , одной из разновидностей которых
я в л я е т с я звуко вая волна. Если ис­
т о ч н и к возмущений неподвижен о т­
носительно воздушной среды, то воз­
мущ ен и е (звук о вая волна) распрост­
р а н я е т с я равномерно во все стороны
с постоянной скоростью (скорость
з в у к а ) в виде сферических звуковых
кол ебан ий (рис. 1.1). При этом пере­
носа массы воздуха не происходит,
т а к к а к частицы воздуха колеблются
по зам кн уты м тра ек т о р и я м , но осу ­
щ ествляется перенос энергии в о л ­
ной. В момент времени /, = 1 с р а ­
ди ус сферы с повышенным давлением
(волны) Tj = а. Ч ер ез 2 с радиус
сф еры г = 2а, через п секунд гп =
— па. Т аким образом, границей в оз­
м ущ енной зоны я в л я е т ся р асш и р яю ­
щ а я с я сферическая поверхность с
центром в источнике возмущений.
П р о и зв о д н ая dp/dp х ар ак теризу ет
способность воздуха сопротивляться
изменению плотности и определяет
его у п р у г и е свойства. Эта п роизвод­
ная р ав на квадрату скорости зв ука
аг = d p/ d p .
Рис. 1.1. Распространение малых в о з­
мущений от точечного источника, не­
подвижного относительно воздушной
среды
(1 .7 )
Если считать, что процесс распространения з в у к о в ы х волн я в л я е т с я а д и а б а т и ­
ческим (происходящим без отдачи и притока т е п л а и звн е), то ск о ро ст ь з в у к а
а = ' Y d p l d p = V * (PlP) -
(1 -8 )
где к — п о казатель адиабаты. Д л я воздуха к = 1,4.
Н а основании известного из физики у р а в н е н и я с остояни я и д еал ь н ого газа
р = р/?Г
(1.9)
ф о р м у л у ( 1.8) можно привести к виду
а = У к Ш ,
(1.10)
где R — газо вая постоянная. Д л я сухого в о з д у х а при Т — 288 К и р —
1,013 • 106 Па R = 287,14 м2/с2 • К).
П одставляя в ( 1.10) вместо к к R и х з н а ч е н и я , п о луч и м ф о р м у л у д л я р асч е­
та скорости зв ука (м/с) в воздухе:
=
а = 20,1 ~ \/Т .
(1.11)
Т а к и м образом, х ар а к т ер и ст и к о й сжимаемости в о зду ш н ой среды я в л я е т с я
с к о р о с т ь звука. Из формулы ( 1.7) следует, что чем больш ей сжимаемостью обла­
дает воздушная среда, тем она менее у п р у г а , тем м ен ь ш е ск ор ос т ь р а с п р о с т р а ­
н ени я зв ука в ней. Чем меньше сжимаемость во зд у ш н о й среды , тем бо л ьш е
с к о р о с т ь распространения з в у к а в ней. Д л я н ес ж и м аем ой среды с к о р о с т ь р а с ­
п р о ст р ан ен и я з в у к а стремится к бесконечности.
С увеличением высоты полета тем п ер атур а в о з д у х а у м е н ь ш а е т с я , с л е д о в а ­
т е л ь н о , уменьшается и скорость зв у к а :
а = ан = 0 у т / т ^ ,
где Н — высота полета, м.
( 1. 12)
Одним из п ракти ческ и важ н ы х параметров, х а р а к т е р и з у ю щ и х с ж и м а е ­
мость дв и ж у щ егося газа (сжимаемость воздушного потока), я в л я е т с я число
М а х а М — б е з р а зм е р н а я величина, р ав ная отношению скорости т ечен и я газа
V к местной скорости з в у к а а:
М = К /а .
( 1 .1 3 )
П ри числах М < 0,4 в ли яни е сжимаемости на х ар ак тер исти к и т ечен и я в о з ­
д у х а не с к а зы в а е т с я , но по мере увеличения числа М влияние сж имаем ости
возрастает.
1.2. Строение атмосферы Земли
Атмосф ера З ем ли — это воздуш ная оболочка, окруж аю щ ая Зем ­
лю . Н иж ней границей атмосферы является поверхность Зем ли. Высо­
та верхней границы атмосферы условно принята равной 2— 3 тыс. км.
Д о высоты 100 км состав атмосферы не изменяется, так как тепловое
дви ж ени е частиц приводит к непрерывному их перемешиванию. По­
ск о льку высота полета современных транспортных самолетов не пре­
восходит 20 км, то целесообразно рассмотреть строение атмосферы в
пределах этой высоты.
Слой атмосферы, непосредственно прилегающий к поверхности
Зем л и ,н азы вается тропосферой. Высота тропосферы различна; в сред­
них ш иротах она р авн а примерно 11 км, над эк в ато р о м — 16— 18 км
и над полюсами 7— 8 км. В тропосфере сосредоточено 79 % массы
атмосферы Зем ли. Д л я солнечной радиации тропосфера п розрачна,
поэтому п рогреван ие воздуш ных масс тропосферы происходит от по­
верхности Зем ли, поглощающей тепловую энергию С олнца. По мере
увеличения высоты тем пература воздуха понижается прим ерно на
6,5 °С на каж дый километр (до Н = 11 км), а скорость зв у ка ум еньш ает­
ся на 1 м/с через каж ды е 250 м. В тропосфере образуется основная часть
о б лаков.
Выше тропосферы располож ен слой воздуха, называемый троп опау­
зой, который яв л яется к ак бы переходным между тропосферой и стра­
тосф ерой. Толщ ина тропопаузы примерно 1—2 км. Стратосфера рас­
полож ена выше тропопаузы и распространяется до высоты 50— 55 км.
Т ем пература возду х а в стратосфере сохраняется практически постоян­
ной до высоты 25— 30 км и равна —56,5 °С, затем начинает повы ш аться.
В верхней части тропосферы, в тропопаузе и в стратосфере происхо­
дит интенсивное движ ение воздуш ных масс с резкими перепадами тем­
п ератур и скоростей течения. Скорость струйных течений достигает
зн ачен ий 150— 500 км /ч, ш ирина течений — сотен километров. Состо­
ян и е атмосферы м еняется в зависимости от времени года, суток, ко­
ордин ат местности. Н априм ер, тем пература воздуха в средних ш иро­
тах наш ей страны колеблется в течение года в пределах 70°, а в Сиби­
ри — в пределах 90°. В пределах 10 % изменяется плотность воздуха,
в п ределах 8 % — атмосферное давление у поверхности Зем ли.
Таблица
1
Характеристики стандартной атмосферы (значения параметров округлены)
В ы сота
Н. м
Т е м п е р ат у ­
р а т, к
Д авлен ие
Р. П а
П л о тн о сть
р, кг/м3
О тн о с и те л ь­
н ая
п лотн ость
0
1 ООО
2 000
3 000
4 000
5 000
6 000
7 000
8 000
9 000
10 000
11 000
12 000
13 000
14 000
15 000
288,2
281,7
275,1
268,6
262,1
255,6
249,1
242,6
236,1
229,6
223,2
216,7
216,7
216,7
216,7
216,7
101 330
89 880
79 490
70 130
61 660
54 050
47 210
41 090
35 650
30 790
26 290
22 690
19 390
16 570
14 160
12 110
1,23
1,11
1,01
9 ,0 9 -ю - '
8 ,1 9 -1 0 - 1
7,37-10 - 1
6 ,60-1 о - 1
5 ,9 0 -1 0 - '
5 ,2 6 -1 0 - '
4 ,6 7 -1 0 - '
4 ,1 4 -1 0 - '
3 ,6 5 -1 0 - '
3 ,1 2 -1 0 - '
2 ,6 7 -1 0 - 1
2 ,2 8 -1 0 - '
1 ,95-10-'
1,000
0,903
0,821
0,739
0,666
0,599
0,537
0,480
0,428
0,380
0,337
0,297
0,254
0,217
0,185
0,159
Д=Р/Ро
С к о р о сть
зв у к а а*
м /с
340,4
336,6
332,7
328,7
324,7
320,7
316,6
312,4
308,2
303,9
299,6
295,2
295,2
295,2
295,2
295,2
Л етны е характери сти ки самолета в значительной мере зав и ся т от
температуры и плотности воздуха, атмосферного давления, наличия
ветра, осадков. Они определяю тся состоянием атмосферы и высотой
полета. Д ля проведения аэродинамических расчетов, расчетов х а р а к ­
теристик движения самолетов, сравнения характери сти к различны х
самолетов, расчета поправок на влияние внеш них условий п ри н ята
стандартная атмосфера (табл. 1).
Стандарт ная атмосфера {СА ) —условн ая атмосфера, в которой
распределение давления рассчитывается при определенных предполо­
ж ен и ях о распределении температуры по верти кали . Она яв л яется еди ­
ным условным законом изменения давлен ия, температуры и п лотно­
сти воздуха по высоте, отсчитываемой от среднего уровня моря (Н = 0 ) .
П ри расчете стандартной атмосферы принимается условие статическо­
го равновесия воздуха, которое описывается уравнением статики ат­
мосферы, связывающим давление воздуха р, плотность р, ускорение
свободного падения g и геометрическую высоту над уровнем м оря Н:
— d p — pgdH.
(114)
С вязь давления воздуха с температурой и плотностью устанавли вается
уравнением состояния идеального газа (1.9).
Д л я приближенных расчетов может быть использована ф орм ул а
р = 0 ,4 6 3 р /7 \
где р — атмосферное давление, мм рт. ст.; Т — т е м п е р а т у р а , К.
(1 • 15}
Высота полета, соответствующая плотности воздуха, определенной
по СА, назы вается приведенной высотой, которая может быть больш е,
меньше или равна фактической.
Любое тело, находящ ееся в атмосфере, испытывает статическое
давление (1.15). При этом на каждый элемент поверхности тела д ей ст­
вует сила, направленная по нормали к элементу поверхности. Ч ем на
большей высоте над уровнем моря находится тело, тем меньший «столб»
воздуха находится над ним, тем меньше атмосферное давление оно ис­
пытывает. Современный самолет имеет значительные размеры. П оэтому
атмосферное давление в точках на нижней поверхности ф ю зел яж а, р ас­
положенной на меньшей высоте относительно земной поверхности бу­
дет больше, чем в точках на верхней поверхности киля, располож ен­
ного на большой высоте. Этой разницей давлений из-за малой массовой
плотности воздуха пренебрегаю т (так как высота самолета не превыш а­
ет 30 м), а атмосферное давление изменяется на 1 % при изменении
высоты в пределах 64—85 м.
1.3. Основные сведения о воздушном потоке
Кинематические характеристики. Воздушный поток — масса в о з­
д у х а, движ ущ егося относительно рассматриваемого тела. Т акое о п р е­
деление воздуш ного потока предполагает, что относительное движ ение
воздуха и тела рассматривается независимо от того, движ ется ли поток
относительно неподвижного тела или тело движется относительно
подвижного воздуха. Л етящ ий с некоторой скоростью самолет испыты­
вает со стороны воздуха силовое воздействие. Если бы самолет оста­
новить и заставить воздуш ный поток двигаться относительно него с той
ж е скоростью , то картин а обтекания воздушным потоком и силовое
взаимодействие воздуха с самолетом остались бы практически неизмен­
ными. Это следует из общего принципа относительности м еханики и в
аэродинам ике назы вается приниципом обратимости.
В аэродинамике для экспериментального изучения силового в заи ­
модействия между воздухом и телом (модели кры ла, ф ю зеляж а, само­
лета) применяю тся два способа: телу сообщается скорость относитель­
но неподвижного воздуха или неподвижное тело обдувается потоком.
П ервы й способ леж и т в основе летны х экспериментов летательн ы х ап ­
паратов, яв л яется дорогостоящ им и имеет ограниченное применение
(в основном на заверш аю щ их этапах создания летательны х аппаратов).
Второй способ реали зуется в аэродинамических трубах и получил ш и­
ро ко е применение в аэродинамических исследованиях.
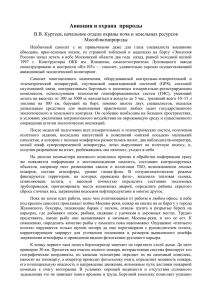
П усть поток воздуха обтекает твердое тело (рис. 1.2, а). Если в точ­
ке 1 потока все проходящ ие через эту точку частицы будут иметь неиз­
менную скорость V i, то течение воздуха будет установивш имся (или
стационарны м ). Возьмем точку 2, бесконечно близкую к точке 1 и на­
ходящ ую ся на векторе VV В этот ж е момент времени i в точке 2 вектор
14
скорости будет V 2. В точке#, нахо­
дящ ейся бесконечно близко к точке
2 на векторе V2, в момент времени t
скорость будет V u. Таким образом,
момент времени t получим ломаную
линию 1, 2, 3 ... Если число точек
неограниченно увеличивать, а рас­
стояние между ними уменьшать, то
в пределе получим кривую, кото­
рая называется линией тока. Если
внутри потока провести линию то­
ка, то вектор скорости в каждой
Рис. 1.2. Линия тока (а ) и трубка т о­
ка (б)
точке в данный момент времени t
будет совпадать по направлению с
касательной к линии тока. При установивш емся течении через каж дую
точку потока в каждый момент времени можно провести только одну
линию тока. При этом линии тока совпадаю т с траекториям и частиц.
Все частицы, проходящие через точку 1, будут далее д ви гаться по
одной и той же линии 1 , 2 , 3 ... Если частицы воздуха сделать види­
мыми и фотографировать течение, то полученная картина позволила
бы судить о движении каждой частицы и п оказала бы линии тока.
В неустановившемся течении, где значение и направление скорости
частиц в каждый момент времени изменяю тся, линии тока изменяю т
форму и не совпадают с траекториями частиц. Отсюда следует, что л и ­
ниями тока целесообразно изображ ать только установивш иеся тече­
ния. Опыт показывает, что больш инство аэродинамических зад ач мо­
жет быть решено в предположении, что течение установивш ееся.
Если в потоке выделить произвольны й зам кнуты й контур С, то
через точки, находящ иеся на нем, можно провести бесчисленное мно­
жество линий тока (рис. 1.2, б). П ри бесконечном увеличении числа
линий тока они образую т зам кнутую поверхность тока, называемую
трубкой тока. В оздух, протекающий внутри трубки тока, назы вается
элементарной струйкой. Элементарная струй ка обладает следующими
свойствами: она сохраняет свою форму и разм еры во времени; через бо­
ковые поверхности струйки воздух не протекает, так как векторы ско­
рости касательны к поверхности струй ки ; скорости потока в любой
точке сечения струйки, нормального направлению течения, равны.
Траектории движения частиц, линии тока, трубки тока, элем ентар­
ные струйки служ ат не только для наглядного представления воздуш ­
ных потоков, но и для аналитического исследования законов движ ения.
Весь поток можно разделить на отдельны е несмешиваемые струй ки .
Это приводит к упрощению реш ения ряда задач аэродинам ики.
Н аряд у с поступательным движением частицы воздуха могут совер­
ш ать и вращ ательное движение.
По аналогии с линией тока и трубкой тока в аэродинам ике вводится
понятие вихревой линии и вихревой трубки. Вихревая л и н и я — лин и я,
в каждой точке которой касательны е к ней совпадают с направлением
вектора угловой скорости. Вихревая т рубка — поверхность, состоя­
щ ая из вихревых линий, проведенных через все точки замкнутого кон­
т у р а. Если размеры контура малы, то такую вихревую трубку назы ва­
ют вихревым шнуром или вихрем.
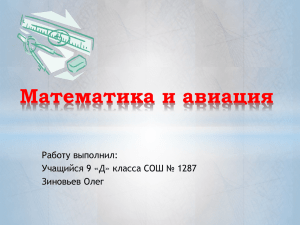
Рассмотрим бесконечный вихрь, поперечное сечение которого мало
и имеет радиус гп (рис. 1.3). В ихрь вращается со скоростью ы. Заметим,
что воздух, располож енны й вокруг вихря, не находится в покое, час­
тицы движ утся по круговы м окруж ностям. Это движение назы вается
ц иркулярны м вихревым движением. Только ядро вихря радиусом г0
(центральная часть вихря) вращ ается со скоростью to как твердое те­
ло. О к р у ж н ая скорость частиц внутри ядра вихря
и~шг,
где г — п о л я р н а я к о о рди ната рассматриваемой частицы.
Интенсивность ви хря характеризуется удвоенным произведением
угловой скорости ш на площ адь сечения вихря F, называемым ц и р к у л я ­
цией скорости
Г = 2(oF = 2лшг(5 •
(116)
Если вращ ательное движ ение частиц воздуха в потоке отсутствует,
то он назы вается безвихревым, или потенциальным. В потенциальных
потоках могут сущ ествовать одиночные вихри, ядра которых вращ а­
ются как твердое тело. В ихри увлекаю т в циркулярное движение ч ас­
тицы воздуха, прилегаю щ ие к ним.
В общем случае скорость движ ения частицы жидкости (газа) мож ­
но рассм атривать как резул ьтат слож ения скорости поступательного
движения по траектории
Кпост
вместе с некоторой точкой и ско­
рость вращ ательного движ ения
Квр вокруг мгновенной оси, про­
ходящей через эту точку, и скоро­
сти
деформационного движ ения
У деф, изменяющего форму части­
цы. В векторной форме движ ение
жидкого элемента вы раж ается так:
V = Улост + ^врЧ" ^дефЭта формула справедлива для
бесконечно малых частиц.
Рис. 1.3. Ядро вихря и скорости д в и ­
жения частиц воздуха вокруг него
Модели обтекания. Р еал ьн ы е тече­
ния воздуха слож ны и недоступны для
строгого теоретического а н а л и з а , по-
этому для построения теории обтек а­
ния твердого те л а воздушным потоком
изучают не р еал ь н о е обтекание, а его /
упрощенную ф изическую модель. В т е­
оретической аэроди нам ике приняты сле­
дую щие модели обтекания.
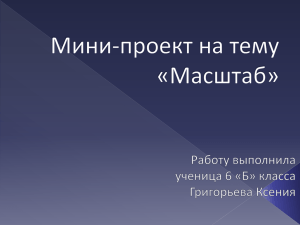
Воздух — среда, состоящая из от­
д ел ьн ы х, не св язан н ы х между собою
Рис. 1.4 К орпускулярная модель обчастиц (к о рп у ску л ). Согласно этой мотекания
дели, предложенной Ньютоном, к о р п у ­
с к у л ы при столкновении с телом пол­
ностью передают ему кинетическую энерги ю и п ри л и п аю т к нему (рис. 1.4). Ч а ­
стицы в о здуха , не столкнувшиеся с телом, п роходят мимо, не и з м е н я я н аправ­
л е н и я д в и ж ен и я . З а телом образуется зас т о й н ая обл асть, в которой скорость
частиц равна нулю . Эта модель и спо л ь зуется при изучении о б т е к а н и я тел сильно
р азреж енн ы м в о здухом, например, при полете космических о б ъ е к т о в на высоте
более 100 км. Т а к , например, на высоте 160 км в 1 мм3 с о д е р ж и т с я в среднем
одна молекула в оздух а, поэтому воздух мо ж но считать со стоя щ им из отдель­
ных молекул (к ор п у скул ).
Воздух — и деал ь н ая жидкость, п р ед ст ав л я ю щ а я собою с п л о ш н у ю среду,
лиш енную вязкости и сжимаемости. Эта модель и ссл едовал ась Л . Э йлером, ко­
тор ы й вывел у р ав н е н и я , позволяю щ ие в любой то чк е в о зд у ш н о г о п от о ка, обте­
кающего те л а, определить скорость V и д ав л е н и е р. Модель д а е т достоверные ре­
зу л ь т а т ы , если размеры тела не менее чем в 106 р аз больш е д л и н ы свободного
пробега молекул. Исследования этой модели Н. Е. Ж у к о в с к и м п о звол и л и р а з р а ­
ботать теорию подъемной силы к р ы л а.
Воздух — сж им аем ая ж идкость, п р е д ст ав л я ю щ ая собой с п л о ш н у ю среду,
лиш енн ую вязк ост и . На основании этой модели создана н а у к а — г а з о в а я д и н а ­
мика, изучаю щ ая законы дви ж ен ия тел в г а з а х со с к о р о ст ям и , при к о т ор ы х с ж и ­
маемость ок азы в а ет существенное в л и я н и е на дви ж ен ие. Эта мо д ел ь исследова­
лась С. А. Ч ап лы гин ы м , зал ож ивш и м ф ундамент газовой д и н а м и к и .
Воздух — в я з к а я жидкость, п р ед ст ав л я ю щ а я собою с п л о ш н у ю среду , об­
ладаю щ ую вязкостью . На основе исследований этой модели Л . П р ан д т л ем с о з­
дана теория пограничного слоя.
Полученные на основании рассмотренных моделей за к о н ы о б т е к а н и я твердых
тел воздушным потоком позволили в ы яви ть зак он о м ерно сти о б т е к а н и я твердых
тел реальным воздушным потоком, обладаю щ и м в я зк о с т ь ю и сж и м аем о с т ью .
1.4. Понятие о подобии явлений при обтекании
воздушным потоком твердых тел
Аэродинамический эксперимент. А эродинамический расчет само­
лета связан с определением действую щ их на него аэродинам ических
сил и моментов. Теоретические расчеты отличаю тся значительной
сложностью и не всегда позволяю т учиты вать все особенности обтека­
ния из-за неизбежного упрощ ения задачи, что приводит к недостаточ­
но точным для технических целей резул ьтатам . А эродинам ические
эксперименты позволяю т рассм атривать реальн ое о б текан и е, а не его
упрощенную схему. О пираясь на выводы теоретических исследований,
аэродинамический эксперимент п озволяет вы яви ть ф и зи ческую кар ти ­
ну явлений, вы яснить влияние различны х кон структивн ы х и э к с п л у а ­
тационных факторов на характери сти ки об текани я, си лы и моменты,
действующие на исследуемый объект, обобщ ить р езу л ь таты исследова­
ний.
В свое время для получения
картины взаимодействия частей са­
молета с воздухом применялся ме­
тод свободного падения с высоты и
аэродинамические тележ ки, на ко­
торых исследуемый объект переме­
щ ался в неподвижном воздухе. З а ­
тем в методике аэродинамического
эксперимента нашли применение
машины, приводящ ие объект во
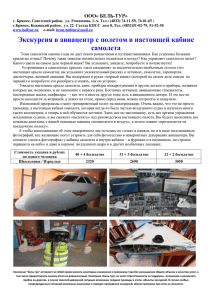
Рис. 1.5. Схема простейшей аэроди на­
мической трубы
вращ ательное движение. При этом
линейная скорость объекта отно­
сительно в о зд у х а о п ределялась к ак произведение угловой скорости
вращ ени я со на расстояние г от оси вращ ения: V = ыг.
В п р акти ке аэродинамического эксперимента наиболее широкое
распростран ен ие получили аэродинамические трубы. Аэродинами­
ческая тр у б а — лабораторн ая установка, позволяю щ ая создавать воз­
душ ный поток для эксперим ентального изучения явлений при обте­
кани и тверды х тел. Рассмотрим принцип работы простейшей аэроди­
намической трубы (рис. 1.5). Вентилятор 8, приводимый во вращение
электроприводом 9, втягивает воздушный поток через коллектор 2 и
сп рям ляю щ ую реш етку 3, установленную в корпусе / . в рабочую часть
трубы 4, в которой на аэродинамических весах 6 закреплена испытуе­
м ая м одель 5. Воздуш ный поток обтекает модель 5 и выходит через диф­
ф узор 7 н ар у ж у .
А эродинам ические силы , действующие на модель 5, измеряются
при помощи аэродинам ических весов 6. С прямляю щ ая реш етка пред­
н азн ачен а д л я ф ормирования воздуш ного потока так, чтобы в рабочей
части трубы он дви гался п араллельно стенкам трубы Скорость вра­
щ ения вен ти л ято р а мож ет регулироваться. При неизменной скорости
вращения в рабочей части созда­
ется движение воздуха с постоян­
ной скоростью (установившееся те­
чение). Н а рис. 1.6 приведен ти­
повой контур аэродинамической
трубы с открытой рабочей частью.
Существующие аэродинамические
трубы отличаю тся по форме, р аз­
мерам, величине скорости воздуш ­
ного потока, принципу действия,
назначению и т.п.
Значение трубного эксперимен­
Рис. 1.6. Типовой контур аэроди нам и ­
та в самолетостроении все более
ческой
1, убы с открытой рабочей
частью:
возрастает. По данным мировой
I — ф о т о к а м е р а ; 2 — с п р я м л я ю щ а я реш етстатистики при создании современ­
к а; 3 — коллектор; 4 — р аб очая часть тру­
бы ; 5 — ди ф ф узор;
6 — защ и тн ая
сетка;
ного самолета на проведение непо­
7 — вен ти лятор; 8 — направляю щ ие л о п ат­
средственно трубных эксперим ен­
ки ; 9 — о б р а т н ы й к а н а л
тов затрачивается 10—30 тыс. ч в
зависимости от типа самолета. Д л я
уточнения в необходимых случ аях
результатов трубных эксперимен­
тов проводят аэродинамические ис­
пытания реальны х самолетов и их
частей, а так ж е моделей, за к р е п ­
ленных на летающих самолетахлабораториях.
Рис. 1.7. Дымовой спектр обтекания
твердого тела
Д ля
изучения
качественной
картины обтекания тел воздушным
потоком возникает необходимость визуализации (достиж ения «видимо­
сти») воздуш ного потока. При исследовании обтекани я с малыми ско­
ростями применяется дымовой спектр. В изуализаци я картины обтека­
ния достигается при помощи тонких дымовых струек, выпускаемых из
специальны х дымарей и движ ущ ихся в потоке воздуха, набегаю щ его
на модель. Н а дымовых сп ектрах хорошо видна картин а обтекания
(рис. 1.7).
Ш ирокое распространение получил метод ш елковинок. Смысл его
заклю чается в том, что тонкие нити длиной 5— 15 мм одним концом
приклеиваю т к поверхности исследуемой модели или к проволоке на
некотором расстоянии от поверхности, а другой коней свободно пере­
мещается под действием потока. Ф отограф ируя или зари совы вая по­
мещенную в воздушный поток и покрытую ш елковинкам и поверхность
исследуемой модели, получают спектр ее обтекания (рис. 1.8). Н ап р ав ­
ление свободного конца ш елковинки указы вает нап равлен ие воздуш ­
ного потока. Метод ш елковинок может применяться при аэродинамиче­
ских исследованиях самолетов. При этом длина нитей достигает 70—
80 мм.
Д л я исследования обтекания тел в потоках, д ви ж ущ ихся со скоро­
стями, близкими к скорости распространения зв у к а, использую т оп­
тические методы, основанные на изменении н ап равлен ия распростра­
нения световых лучей, что п роявляется в изменении освещ енности
экран а. Ф отографирование экран а позволяет получить карти н у из­
менения плотности воздуха вследствие сжимаемости.
Д л я «визуализации» воздуш ного потока на р и сун ках
конста­
тации факта деформации струек и
а)
изменения вследствие этого скоро­
сти потока при обтекании твердо­
го тела воздушный поток изобра­
жается системой линий подобно
дымовому спектру. Чем больш е
густота линий, тем больше дефор­
мация струек и скорость течения.
Рис. 1.8. Спектры обтекания, получен­
Критерии подобия. Н атурны е
ные методом шелковинок:
аэродинамические
эксперименты
а
при б езо тр ы в н о м о б т е к а н и и ;
б
при
(с реальными самолетами или их
с р ы ве в о зд у ш н о го п о то к а
частями) требую т значительных затрат, а иногда бывают вообще не­
возможны по соображ ениям безопасности, сложности и т.п. В этих
случаях незаменимыми становятся продувки моделей реальных объ­
ектов, имеющих, как правило, меньшие размеры, в аэродинамиче­
ских тр у б ах . П ри этом результаты испытаний моделей можно перене­
сти на натурны й объект только тогда, когда будет обоснована анало­
гия модели и натуры . Вопросы установления аналогии модели и
натуры изучает теория подобия. Теория подобия доказы вает, что
д ля обеспечения подобия аэродинамических явлений долж но сущест­
вовать геометрическое, кинематическое и динамическое подобие. Мо­
дель и натурны й объект считаю тся геометрически подобными, если
отнош ения их сходственных линейны х размеров одинаковы. В геомет­
ри чески подобных телах соответствующ ие углы равны
А эродинамические явл ен и я считаются кинематически подобными,
если при наличии геометрического подобия моделей их ориентировка
относительно вектора скорости воздушного потока (или некоторого
характерн ого направления) одинакова, а векторы скорости при обте­
кании потоком во всех характерн ы х точках пропорциональны и одина­
ково направлен ы . Критериями кинематического подобия являю тся уг­
лы , определяю щ ие положение модели относительно вектора скорости
воздуш ного потока.
А эродинамические явления считаются динамически подобными,
если при наличии геометрического подобия все аэродинамические силы
и моменты одинаково ориентированы относительно воздуш ного потока
и пропорциональны . Полное динамическое подобие обеспечивается
только тогда, когда физические величины (вязкость, плотность, давле­
ние, тем пература и т.д.) во всех соответствующих точках одинаковы.
Т ако го подобия добиться крайн е сложно, поэтому для практических
целей добиваю тся пропорциональности сил трения и давления.
Течение газа и его взаимодействие с твердым телом сопровождается
возникновением и изменением сил трения и давления. В механически
подобных системах силы трения пропорциональны силам давления.
При наличии геометрического и кинематического подобия критерием
подобия по силам трения принято число Рейнольдса — безразм ерная
величина, представляю щ ая собою отношение сил инерции к силам
вязкости,
---
Ц
,
V1 . . I )
V
где р — плотность газа; V — х а р а к т е р н а я скорость; / — хар актер ны й л и н ей ­
ный ра зм ер (диаметр тр убы , р азм ах к р ы л а и т п.); р и г — соответственно д и н а­
м и ческ а я и к и н ем ати ческ ая в язк ос т и газа.
В яв л ен и ях , подобных по силам трения, числа Re, и Re.2одинаковы .
К ритерием подобия аэродинамических явлений по силам давления в
потоке яв л яе тся число М аха М. представляющ ее собой отношение х а­
рак тер н о й скорости течения газа к характерной скорости звука. Н а­
пример, ч и сл о М полета, равное отношению скорости полета к скорости
20
звука в невозмущенной среде составляет:
М= ^ / « „ .
(1.18)
Ч и сло М характеризует влияни е сжимаемости среды и режим обте­
кания (дозвуковой, трансзвуковой, сверхзвуковой, гиперзвуковой).
Д ва явления считаются подобными по силам д авлен ия, если скоро­
сти течения потоков пропорциональны скоростям звука в среде,
т. е. если выполняется условие
П ри моделировании неустановивш егося движ ения вводится крите­
рий подобия — число С трухаля Sh — безразмерный параметр, рав­
ный отношению характерного пути V t частицы газа в поле течения за
интервал времени t к характерному линейному разм еру 1\
Sh + v t;t.
Так, например, при исследовании воздушных винтов за характерную
скорость V принимается скорость полета самолета, за характерны й
линейный размер / — диаметр винта, за t — время одного оборота воз­
душ ного винта. Кроме рассмотренных критериев подобия, имеется
еще р яд критериев, определяю щ их подобие явлений по различным
признакам. Н апример, число Ф руда F r устанавливает подобие явле­
ний, в которых необходимо учиты вать влияние сил тяж ести газа (ж ид­
кости). В аэродинамике влиянием сил тяж ести воздуха пренебрегают.
Число Кнудсена Кп характери зует степень разреж енности газа.
В задачах аэродинамики основными критериям и подобия являю тся
числа R e и М, а в случае неустановивш егося дви ж ени я и число Sh.
Д остичь подобия явлений при испы таниях модели сам олета в аэроди­
намической трубе и в реальном полете весьма слож но. Д л я достиже­
ния этого соответствующим образом изменяют скорости потока в аэро­
динамической трубе, линейные разм еры модели (при сохранении гео­
метрического подобия), кинематическую вязкость воздуш ной среды
(уп равляя давлением в контуре трубы или добавляя в воздуш ную сре­
ду газы с малой вязкостью, наприм ер, водород или гелий).
1.5. Основные уравнения движения воздуха
Уравнение неразрывности (постоянства расхода). П рим еняя все­
общий закон сохранения материи к струй ке сж имаемой ж идкости,
Л . Эйлер доказал тот факт, что при установивш емся движ ении в каждый
промежуток времени массы воздуха, втекаю щ его в некоторый объем
струйки и вытекающего из него, равны . Причем весь объем остается
сплош ь без разры вов заполненным воздухом.
Рассмотрим картину обтекания твердого тела, им?ющего попереч­
ное сечение, подобное профилю кры л а, потоком воздуха, набегаю щ его
на него со скоростью
(рис. 1.9). Выделим в этом потоке струй ку,
а в ней два произвольных сечения площ адью S , и S 2. С корости тече­
ния воздуха в сечениях струйки обозначим соответственно V, и V 2,
- плотность воздуха о, и р 2. Объемы воздуха, протекаю щ его через сече­
Рис. 1.9. Д еф ор м ац и я струйки в оз­
душного потока, обтекающего т вер ­
дое тело ( а ) и спектр обтекания, от ­
ражающий качественную картину д е ­
формации воздуш ного потока и изме­
нения скорости (б)
ния S , и S 2 в интервал времени
A t = 1 с, соответственно равны
и VS2. Этим объемам воздух со­
ответствуют массы mx = p1V,1S l и
т 2 =
По определению
струйки расход воздуха через бо­
ковую поверхность отсутствует, и
согласно закону сохранения массы,
во всех поперечных сечениях струй­
ки секундный массовый расход ос­
тается постоянным:
m = p l V1
= р 2 V2 S 2 = pK S = const.
(1.19)
В ы раж ение (1.19) представляет собою уравнение неразрывности для
ст руйки, или уравнение постоянства расхода. Оно справедливо для
дозвуковой и сверхзвуковой скоростей течения воздуха.
При м алы х скоростях течения, когда сжимаемостью воздуха можно
пренебречь, плотность воздуха во всех сечениях струйки остается по­
стоянной, т. е. pj = р2 = const, поэтому уравнение (1.19) можно запи­
сать в виде:
С
Ki
= I'', S 2, и л и —
S2
I/
ИЛИ
Vl
V S = con st.
( 1. 20)
Из уравн ен ия (1.20) следует, что при малых скоростях течения ск о­
рость дви ж ени я воздуха в струй ке обратно пропорциональна площади
ее поперечного сечения. Это означает, что через сечения 5 Х и S 2 про­
ходит один и тот ж е объем воздуха, но скорость течения различна.
Чем меньше площ адь сечения, тем больше скорость течения воздуха.
Из уравн ен ия (1.19) можно получить соотношение между параметрами,
характеризую щ ими течение в лю бы х сечениях струйки:
( 1.21)
Из у р авн ен и я (1.21) следует, что для увеличения скорости течения V2
необходимо уменьш ать площ адь сечения S 2 струйки или плотность воз­
духа р я. О днако при уменьш ении площади сечения S 2 плотность воз­
духа р„ в нем повыш ается, причем в большей степени, чем уменьшается
площ адь. Теоретически и экспериментально установлено, что в суж аю ­
щ емся к ан ал е скорость К , мож но увеличить только до некоторого зна­
чения, не превыш аю щ его скорости звука (У г < а). Д л я увеличения
скорости течения до сверхзвуковой , как следует из формулы (1.18),
необходимо обеспечить дальнейш ее уменьшение произведения р25 2.
Это мож но осущ ествить только в том случае, если после достижения
скорости зв у к а V = а в суж аю щ ейся части канала постепенно расши22
р я т ь его по определенному закону.
В расш иряю щ ейся части канала
плотность воздуха уменьшается бы­
стрее, чем увеличивается площ адь
сечени я, что приводит к дальней­
шему увеличению скорости до
сверхзвуковой. Н а этом принципе
построено СОПЛО Л аваля, ИСПОЛЬр ис j J0 Изменение скорости течения
зуем ое для непрерывного разгона
от дозвуковой до сверхзвуковой iv
воздуха И получения сверхзвукосопле Л а в а л я
вых скоростей течения (рис. 1 . 10 ).
П оскольку воздушный поток можно представить множеством струек,
то зако н постоянства расхода в полной мере распростран яется на
п о то к.
Уравнение Бернулли. В аэродинамике рассм атриваю тся уравне-ния Б ернулли для несжимаемой и сжимаемой ж и дкости (газа).
Уравнение для несжимаемой жидкости (газа) выведено примени­
тельно к струйке несжимаемой жидкости акад. Д . Б ерн ул л и и оп убли ­
ковано в 1738 г. Уравнение имеет вид
р У2
р-\---- -— = const.
Оно
при
ной
ная
при
( 1. 2 2 )
вы раж ает закон сохранения энергии и утверж д ает тот ф акт, что
установивш емся движении несжимаемого газа сумма потенциаль­
и кинетической энергий объема массой т есть величина постоян ­
в любом сечении одной и той ж е струйки. И ли другим и словами,
установившемся движении несжимаемого газа сумма статического
давлен ия р и скоростного напора (или динам ического д а в л е н и я )^ есть величина постоянная в любом сечении одной и той ж е с ф у й к и .
Е сли в аэродинамической трубе воздух неподвиж ен, то модель, у с­
тановленная в ее рабочей части, и стенки испытываю т статическое д ав ­
ление р , равное атмосферному. При вклю чении трубы часть потенци­
альной энергии переходит в кинетическую , которая п роявл яется в
скоростном напоре. М одель и стенки трубы испы ты ваю т статическое
давление меньшее атмосферного, а поверхности, п ерп ен ди кулярны е
вектору скорости воздуш ного потока, испытываю т динам ическое д ав ­
ление рУ 2/2. Согласно уравнению Б ерн улли, сумма этих давлений оста­
ется постоянной.
П оскольку кинетическая энергия Е некоторой массы т движ ущ е­
гося воздуха определяется зависимостью
2
( 1 .2 3 )
а масса 1 м3 воздуха равна его плотности, то, зам ен ив в вы раж ен и и
(1.23) массу воздуха т его плотностью р, получим ф орм улу д л я оц ен ки
скоростного напора q:
(1.24)
Таким образом , скоростной напор есть кинетическая энергия 1 м 3
движ ущ егося воздуха. Чем больше его плотность р и скорость V , тем
больш е скоростной напор.
Уравнение для сжимаемого газа. Воздух, обтекающий твердое тело
с большими дозвуковы ми или околозвуковыми скоростями, уж е нель­
зя рассм атривать к ак несжимаемую среду (р = const). Н абегая на те­
ло, воздух подвергается сжатию , которое можно считать адиабатиче­
ским (происходящ им без отдачи и притока тепла извне). Н а основании
этого получены уравнения:
К2
~
k
+ т
р
^ Т ~ с-
V2
kRT
V2
а2
— + т з т - с - " - 25>
У равнени я (1.25) являю тся различными формами уравнения Б ер­
нулли д ля сж им аемого газа, из которых следует, что при установив­
шемся движ ении сжимаемого газа и отсутствии теплообмена с окруж а­
ющей средой п олная энергия единицы массы газа вдоль струйки по­
сто ян н а. П рим енение той или иной формы уравнения определяется
услови ям и зад ач и . У равнения Б ернулли используются для объясне­
ния о б разован и я подъемной силы кры ла, при расчетах измерителей
скорости полета самолета и скорости течения газовых потоков, при рас­
чете п арам етров тормож ения газового потока, т. е. во всех случаях,
когда необходимо определить св язь между давлением, плотностью и
скоростью в разли чн ы х сечениях струйки установившегося течения га­
за или ж идкости.
1.6. Зависимость параметров воздуха от скорости течения
Измерение скорости воздушного потока. Скорость воздушного по­
т ока — ск о р о сть движ ения воздуха относительно твердого тела. И з­
мерение скорости воздуш ного потока основано на применении уравне­
ния Б ер н у л л и и вы полняется при помощи приемника воздуш ного дав­
лен и я (П В Д ).
П ри ем н и к воздуш ного давления устанавливается так, чтобы внут­
рен н яя т р у б к а 1 была обращ ена к набегающему потоку воздуха
(рис. 1.11). О н а воспринимает статическое давление воздуха и скорост­
ной напор, т. е. явл яется приемником полного давления воздуха р +
+
р
2~.
В н еш н яя трубка 2, в которой имеются небольшие боковые от­
версти я, я в л я е т ся приемником только статического давлен ия. Р а з­
ность полн ого и статического давлений, измеренная U-образным ма­
нометром (рис. 1 . 1 1 , а), дает величину скоростного напора q = р V2/ 2 =
— Р о —■Р- О тсю да скорость воздуш ного потока без учета сжимае­
мости
Рис. 1.11. Изменение скорости воздушного потока:
/ — в н у тр ен н яя т р у б к а ; 2 — вн е ш н я я т р у б к а ; 3 — ^ /-о б р азн ы й м ан ом етр: 4 — П В Д : 5 —
м е м б р а н н а я ко р о б ка; 6 — м ан о м етр и ч еск ая ко р о б к а ;
7 — с т р ел к а у к а з а т е л я ско р о сти ; 8 —
ш к а л а у к а за т е л я скорости
l i . 26)
В лабораторны х условиях скорость потока вычисляю т
где Ah — разность высот у р ав нен ий ж ид кости ,
в (/-образном манометре.
имеющей
по ф орм уле
плотность рнг
Д л я измерения скорости самолета прим еняется прибор, н азы вае­
мый указателем скорости (рис. 1.11, б). В отличие от лабораторного
измерителя скорости воздуш ного потока полное давление от П В Д по­
дается внутрь мембранной коробки 5, а статическое давление — в по­
лость манометрической коробки 6 указател я скорости. Р азн ость д ав л е­
ний, воспринимаемых мембранной коробкой, равн а скоростному н а.
пору: q = p +
рК2
^ ------ р =
pV2
Под действием этой разности давлений м ем бранная коробка дефор­
мируется и при помощи механической передачи поворачивает стрел ку
и у казател я скорости. Прибор фактически изм еряет не скорость поле­
та, а величину скоростного н апора. Если скоростной напор q и п лот­
ность р известны (а ш кала у казател я скорости градуи руется д л я плот­
ности воздуха на носке П В Д ), то из формулы (1.26) мож но п олучи ть
скорость, измеренную указателем скорости л назы ваемую приб орной,
Vnp — ~ V /ро •
(1 . 2 7 )
Ш кала у казателя скорости в соответствии с этой формулой гр ад уи рует­
ся в км/ч в стандартны х метеоусловиях (р = р 0). С корость воздуш ного
потока V np, указы ваем ая реальным прибором, изм еряется с погреш ­
ностями, которые учитываются соответствующ ими поправкам и к no­
казаниям прибора: на неточность измерителя скорости, но зап азды ва­
ние показаний прибора вследствие его инерционности, на аэродинами­
ческое влияние стенок аэродинамической трубы или частей самолета,
на сжимаемость воздуха. Эти поправки рассчитываются по резул ьта­
там лабораторны х испытаний прибора. Т ак, например, при скорости
потока, соответствующей числу М < 0,4, погрешность измерителя ско­
рости на сж имаемость не превышает 4 % , а при М - 0,8 она составля­
ет более 17 % . Н еучет влияния сжимаемости может привести к искаж е­
нию результатов измерения скорости.
Скорость, которую показал бы идеальный, не имеющий погрешно­
стей у казатель скорости, назы вается индикаторной V
Н а использовании уравнения Б ернулли основан прибор д л я изме­
рения числа М полета. Число М полета определяется в соответствии с
зависимостью, полученной из формулы (1.27):
- / S
У (t)v - ' — / F f T - ”
где А р =- р 0 — р — скоростной напор воздуха.
Параметры газа в точке полного торможения. При обтекании тела,
например кры ла, в точке Л , находящ ейся на передней кромке, скорость
набегающего воздуш ного потока Vх уменьшается до нуля (см.
рис. 1.9, б). Т очка А назы вается точкой полного торможения,
а параметры воздуха в этой точке р 0, р 0, Т 0, а 0 называются парамет ра­
м и заторможенного потока. При условии, что в точке А скорость пото­
ка нулевая, на основании известных соотношений:
V ! а ~ : М;
a* = k p / p ;
p = Cpk .
С учетом того, что для воздуха k — 1,4, получим соотношения:
Р«/Рво = ( 1 + 0 . 2 М * , ) 3-»:
р0 роо= ( I : 0 , 2 М ^ ) 3 ’5 ; r „ / 7 V = l - b O , 2 M ^
(1.28)
из которых следует, что параметры воздушного потока в точке полного
тормож ения зав и ся т от соответствующих параметров невозмущенного
потока и числа
полета.
К ритические парам етры потока. Режим течения газа, при котором
его местная скорость равна местной скорости звука (М — 1), назы вает­
ся крит ическим , а параметры, характеризую щ ие течение (давление р р,
плотность р*, тем пература Г*), — крит ическими. К ритический режим
течения газа достигается в сечении S 2 сопла Л ав ал я (см. рис. 1.10),
а так ж е при обтекании самолета и его частей в местах, где площ адь се­
чения струи достигает наименьш его значения, например в сечении ф 2
струй ки (см. рис. 1.9). Н аименьш ее ч и с л о М невозмущенного потока,
при котором местное число М на поверхности тела достигает единицы,
назы вается критическим М р . П олагая параметры заторможенного в
точке А (см. рис. 1.9, б) потока известными и учитывая, что скорость
26
воздуш ного потока увеличивается от нуля до значения V = а, при ко­
тором М = 1, на основании уравнений Б ерн ул л и (1.25) получим ф ор­
мулы для определения критических параметров течения воздуха:
р* = 0,568р„;
р * - 0 , 6 3 6 р о;
Т =-- 0 . 8 3 I 7 V
(1 .29)
Число М является параметром, по которому определяется х а р а к ­
тер течения (дозвуковое, сверхзвуковое), но при расчетах его не всег­
да удобно использовать, так как местная скорость звука не пропорцио­
нальна числу М Поэтому для расчетов введен другой параметр, н азы ­
ваемый коэффициентом скорости и равный отношению скорости тече­
ния к критической скорости,
х v.at .
( 1 .:Ю)
При критической скорости
М = К = 1.
течения (V'
а) справедливо
равенство
1.7. Особенности сверхзвуковых течений газа
Распространение малых возмущений в воздухе. В аэродинам ике р а с с м а т ­
ри ваю т два вида возмущений: малые (слабые) и конечные (сильные). Примером
малых возмущений могут с л у ж и т ь изменения д а в л е н и я в каж дой точке п о в е р х ­
ности твердого тела при дозвуковом обтекании воздуш ным потоком. При малых
возмущ ениях все параметры течения я вл я ю т ся непрерывными ф у н к ц и я м и в р е ­
мени. Скорость расп ространен и я малых в озмущ ений р авна местной скорости з в у ­
ка. К конечным (сильным) возмущ ениям о тносят т а к называемые ск а чк и у п л о т ­
н ения, головную удар н у ю волну, во зни каю щ и е при св ер хзвук о в о м обтекании
самолета. Скорость дви ж ен ия ударны х волн бол ьш е скорости з в у к а в данном
среде.
Если источник возмущений, например точк а на передней к ром ке к р ы л а ,
дв и ж ется относительно воздушной среды со скоростью V <. а, то возмущения,
создаваемые этим источником, т а к же будут р ас п р о с т р а н я т ь с я в воздухе в виде
сферических звуковы х колебаний, но центры этих сфер будут отставать от и сточ­
ника и находиться позади него (рис. 1.12, а). Т а к , через 1 с зв у к о в а я во л н а, с о з ­
д ан н а я в точке 0 , удалится от нее на рассто яни е г =-■ а, через 2 с — на р а с с т о я ­
ние г г ----- 2а и т. д. Но за время 1 с точечный источник возмущений переместится
в положение 0 , на расстояние от точки 0 , рав ное Vt. Созданное в точке О в о з м у ­
щение будет распространяться со скоростью з в у к а . Ч ер ез п с ек унд точечный ис­
точник сместится относительно п оло ж ен ия О на р ас сто я ни е, равное V t n , а радиус
зв у к о в о й волны в точке О станет равным a t n , в то чк е О, — a t n - и в точке 0 2 - а / 2 и т. д.
Т аки м образом, за каж дую секунду ради у с волны увели ч ивается на в е л и ч и ­
ну а. П ри этом центр волны смещается в н а п р а в л ен и и д в и ж ен и я и сточника в оз­
мущений. Источник возмущений останется в нутри всех возбу ж ден ны х им волн.
Иными словами, впереди перемещающегося точечного источника д в и ж у т с я волны
возмущений, к ак бы предуп р еж д ая воздуш ную среду о п р иб л иж ени и источника.
Этим о бъясняется то, что деформация ст р у ек перед д в и ж у щ и м с я в воздушной
среде твердым телом происходит за б л агов рем ен но . С труйки к а к бы р асс т у п аю т ­
ся перед приближ ающ имся телом (см. рис. 1.9). Чем бол ьш е с к ор ость д в и ж е н и я
т ела, тем на меньшую величину о п ер еж аю т волны возм ущ ен ий д а в л е н и я сам и с­
точн и к возмущений. При малых ск о р о с т ях д в и ж е н и я тел а с т р у й к и начи наю т де­
ф орм и роваться р аньш е, чем при бол ьш и х с к о р о ст я х д в и ж е н и я .
П ри достижении источником возмущ ений скор ости з в у к а ск о ро сть р а с п р о ­
ст р ан ен и я возмущений будет р авна скорости д в и ж е н и я и сто чн ик а ( V = а).
З в у к о в ы е волны, в озбуж ден ны е точечным источником при различны х его п о л о ­
ж е н и я х , н акл ад ы в аю тся одна на другую , создавая перед телом волн у в озм ущ е­
ний. При этом точечный источник и волна возмущений имеют общую точку к а с а ­
ния (см. рис. 1.12, б). Границей возмущений явл я е т ся плоскость, п е р п ен д и к у ­
л я р н а я к н аправл ени ю скорости источника возмущений.
Если скорость д в и ж е н и я точечного источника больше скорости з в у к а ( V > a ) ,
то источник возмущ ений будет оп ереж ать волны возмущений и постоянно н а х о ­
диться вне возбуж даемы х им сферических волн. В олны возмущений будут на­
к л ады ваться, с озд авая коническую волну возмущений {рис. 1.12, в). К а ж д а я точ­
ка конической огибающей л е ж и т на сферической волне, созданной в некоторый
момент времени и представляю щ ей собою слабое возмущение. К оническую в о л ­
ну возмущений мож но р ассм атр и вать к ак поверхность, разделяю щ ую н ево зм у ­
щенную и возмущ енную среду. Т аким образом, малые возмущения в с в е р х з в у ­
ковом воздушном потоке р асп ро стр аняю тся тол ько внутри конуса возмущений.
Рис. 1.12. Распространение малых в о з­
мущений от движущегося точечного
источника
Угол меж ду направлением вектора скорости в св ерхзвуковом потоке (полете)
и образующей конуса возмущений н азывается у гл ом М а х а , или углом в о зм у щ е ­
ния ц. К ак следует из треу го льн и ка А ОВ,
а = -----* .
sm u = —
V
М
(1 .3 1)
'
'
Угол возмущения зависит от числа М п олета. С увеличением скорости п о л е­
та при условии, что V > а, угол ц ум ен ьш ается и, наоборот, с ум ен ьш ен ием ск о ­
рости полета (при V > а) угол у в ели ч ив ается. П ри V = а угол |х = 90°.
Таким образом, при движении и сточн ика м ал ы х возмущ ений со зв у к о в о й
и сверхзвуковой скоростями возбуж даемы е им возмущ ен ия не могут опередить
источник. В этом состоит главная особенность р асп р о ст р ан е н и я м ал ы х в о зм у щ е­
ний при зв уковы х и сверхзвуковых ск о р о ст ях полета.
Скачки уплотнения на околозвуковых скоростях. Н алож ен ие волн
малых возмущений, образованных различны ми точками движ ущ егося
с околозвуковой скоростью тела — источниками возмущ ений, приво­
дит к возникновению сильных возмущ ений среды неподвижных отно­
сительно тела и перемещающихся в воздухе вместе с ним скачков у п ­
лот нения или ударны х волн. При движ ении тела со сверхзвуковой ско­
ростью возмущения не могут распростран яться впереди тела, не могут
«предупредить» воздушные массы о приближ ении тела. П еред телом об­
разуется головная ударная волна (рис. 1.13, а), на которой тормож ение,
сж атие воздуха и искривление линий тока происходят скачком .
В зависимости от положения фронта ск ач ка уплотнения относитель­
но вектора скорости скачки уплотнения подразделяю т на прямы е и ко­
сые. Форма скачка зависит от формы тела и скорости его д ви ж ен и я.
Прямым назы вается скачок уплотнения, фронт которого составляет
прямой угол с направлением полета. Примером прямого ск ач к а уп лот­
нения может служ и ть центральная часть скач ка при сверхзвуковом
обтекании затупленного тела вращ ения (рис. 1.13, а) или к ры л а. Косым
называется скачок уплотнения, фронт которого располож ен наклонно
к направлению ветра скорости (рис. 1.13, б). Косой ск ач ок об разуется,
если поток, пересекающий фронт скач ка, вынуж ден изменить свое н а­
правление, например при сверхзвуковом обтекании воздухом кры ла с
клиновидным профилем или заостренного конического об текател я.
При определенных условиях полета перед затупленны м телом на
некотором расстоянии образуется скачок с криволинейны м фронтом,
который относится к прямым скачкам (см. рис. 1.13, а). П о мере уд ал е­
ния скачка от оси симметрии тела наблю дается переход в косой с к а ­
чок, вырождающийся на больш их расстоян и ях в слабую вол н у возм у­
щ ения. Такой скачок уплотнения н азы вается от соединенны м ,или
отсоединенной главной волной.
У заостренного носка тела при сверхзвуковом обтекании о б р азу ет­
ся присоединенный скачок (присоединенная головная волна), р асп ол о­
женный вплотную к носку тела (рис. 1.13, б , в). П рисоединенны й ск а­
чок уплотнения, как показываю т исследования, о б р азу ется тол ьк о
при сравнительно малых углах клиновидности 0. П ри увеличении угл а
клиновидности и достижении его значений больш е н екоторого крити-
а-)
V>a
v>a
Рис. 1.13. Прямой и косой скачки уплотнения при сверхзвуковом обтекании за т у п ­
ленного тела вращения (а ), заостренного конуса (б) и клина с малым (я) и
большим (г) углом клиновидности 0
ческого 0 * наблю дается отсоединение скачка уплотнения от носка
(рис. 1.13, г).
Рассм отри м о б р аз о в ан и е ск ач к о в уплотнения при обтекании поверхности
с в ну трен ни м тупым угло м (рис. 1.14, а). В этом сл у чае источники малых в озм у ­
щ ений бу д ут со зд авать л и н и и возмущений, направленные под углом щ к п овер х­
ности А В И сточники во зм ущ ен ий , расположенные на участке поверхности ВС.
б у д у т с о зд ават ь л ин и и возм ущ ен ий , направленные под углом ц 2 к поверхности
В С. Т а к к а к сечение с т р у е к , обтекающих поверхность по линии A B C , будет
у м е н ь ш а т ь с я (рис. 1.14, б), то скорость потока т а к ж е будет уменьш аться, з н а ­
чи т М 2 С M t и
1 1
1
1
— — > ■ ----- и л и ----------- > ------------, или sin u,„ > sin щ ,
М2
Мх
sin |д..2
sin ji,
т . e. ц 2 > ц ,. С л ед о в а те л ь н о , линии малых возмущений, образованны х точками
на п о в е р х н о с т я х А В и В С , пер есеку тся меж ду собой, произойдет налож ен ие м а­
л ы х в о зм ущ ен ий по л и н и и B D , н ахо дя щ ейс я в ск ачк е уплотнения.
П а р а м е т р ы потока р , р, V, Т для линий малых возмущений от поверхности
А В , р а с п о л о ж е н н ы х под углом jxj, и от поверхности В С, располож енны х под у г ­
л о м ц 2, не могут быть од и н ако в ы м и . Поверхность, п редставленная л инией B D,
н а з ы в а е т с я ск ач к о м у п л о т н е н и я . П араметры потока р езк о изменяются на скачке
уплотнения и по обе стороны от него
различны. Теоретически скачок у п л о т ­
нения не имеет толщины. Практически
толщина с к а ч к а уплотнения при поле­
те в тропосфере составляет 10—7 ... 10—8м
и равна средней длине свободного пр о­
бега молекул. А налогичная по своей
физической сути картина образован ия
ск ачк а уп лотн ен ия наблюдается при
обтекании сверх звук о в ы м потоком вог­
нутой поверхности (рис. 3.3, в).
Угол н акл он а скачка у плотнения
можно определить графически, если и з ­
вестны значение и направление с к о р о ­
стей потока до и после косого ск а ч к а .
Р азл ож им векторы скорости потока до
скачка Vx и после него V 2 на сос т ав ля ю ­
щие: к асательны е к ск ачк у К ,т и V x2 и
нормальные к с к а ч к у Vnl и Vn2 соответ­
ственно (рис. 1.15). Из треугольн и ков
скоростей можно найти
Кщ = 1Л sin ц и К,12 = Kjj sin (ц — 6 ) ,
(1 .3 2)
Рис. 1.14. Обтекание сверхзвуковым
где б — угол поворота вектора с к о ­
потоком поверхности, имеющей вну­
рости К2 относительно К,.
тренний тупой угол
Из соотношений (1.32) следует, что,
нормальная со став ляю щ ая вектора с к о ­
рости за скачком меньше нормальной составляю щ ей до с к а ч к а , т. е. Vn2 < У„|.
Следовательно, с уменьшением скорости V t до значений К,
а , н о р м а л ь н ая
составляю щ ая скорости Vn2 за скачком у плотнения может стать дозвуковой.
Значение Vn2 и температура воздуха за скачком оп ределяю т так:
Vn2 = y v f W T = 1/ V \ — V I ; Г 2 = Г,
Т|
р 2р ,
.
( I .33)
Угол о тк л о нен ия б вектора скорости К2 относительно вектора скорости V,
можно определить из формулы (1.32). При дви ж ен ии з а т у п л ен н о г о тела со с в е р х ­
звуковой скоростью происходит тор м о ж е н и е воздушного потока. Поэтому
непосредственно перед затупленным телом скорость течен и я в о зд у х а меньше,
чем скорость з в у к а (рис. 1.16). В этой зоне ( V2 < а) з в у к о в ы е волны бу д у т обго­
нять тело. С качок уплотнения п о яв л яет ся в местах, где с к ор ость р асп р о с т р а н ен и я
волны равна и противоположна ск орости потока. Этим о б ъ я с н я е т с я отсоедине­
ние с к а ч к а уп лотн ен ия при движении за т у п л е н н о г о тела. На т о р м о ж е н и е потока
от св ерх зву к ов ой скорости до звуковой
затрачивается значи тельная эн ер ги я.
Поэтому при проектировании с в е р х з в у ­
ковых самолетов избегают затуп лени й
и углов больш ой клиновидности.
Рассмотрим обтекание св е р х зв у к о ­
вым потоком поверхности, имеющей
внешний тупой угол (рис. 1.17, а). При
попадании с в е р х звук о в о го потока с по­
верхности А В на поверхность В С с т р у й ­
ки р асш иряю тся и скорость течения уве­
личивается. И сследования показы ваю т,
что при обтекании тупого угла, начиРис. 1.15. Определение угла наклона
пая от линии возмущений B D, н аправскачка уплотнения
ленной под углом (Xj, поток поворачива­
ется, постепенно р а с ш и р я я с ь до линии
возмущений B E , н аправ л енн о й под уг­
лом ц 2. К аж дому у г л у поворота соответ­
V, >а
ствует увеличение скорости и уменьше­
ние давления. П ри обтекании сверх­
р,.М ,
звуковым потоком криволинейной вы­
пуклой поверхности (рис. 1.17, б) обра­
зуется н епреры вная возмущ енная об­
ласть, в которой л ин и и возмущения от­
ходят от к аж д ой точки поверхности под
местным углом ц = arcsin Via.
Если скорость обтекан ия
мень­
Рис. 1.16. Сверхзвуковые и дозвуко­
ше скорости з в у к а (К х < а), то при об­
вые зоны за прямым скачком уплотне­
текании вы п укл ого тупого угла и обте­
ния (А — точка полного торможения
кании выпуклой к риволинейной поверх­
потока)
ности возможно увеличение скорости
потока до с в ер хзу к овой (К 2 > а).
Соотношения между параметрами газа для скачка уплотнения. Известны п а­
раметры газа до ск ач к а у п лотн ен ия p lt plt
и Т г до с к а ч к а . В соответствии с з а ­
коном со х р ан ен и я массы ур авнен ие неравзрывности потока можно записать в ви­
де
(1 .34)
Pi У ]= Р 2 Vt .
И зменение количества дв и ж ен ия при прохождении с к а ч к а в ыраж ается соотношением
Pl ^ l + P l = р 2 V \ + p2.
(1.35)
Процессы, происходящ и е в ск ачк е
уплотнения, быстротечны и теплообмен
практически отсутствует. Поэтому в со­
ответствии с закон ом сохран ени я энер­
гии
Pi
Pi
k— 1
Л
Pi
2
Ра
k— \
(1 .36)
+
Уравение состояния
использовать в форме
Рис. 1.17. Обтекание сверхзвуковым
воздуш ным
потоком
поверхности,
имеющей внешний тупой угол (а) и
выпуклой криволинейной поверхно­
сти (б)
газа
удобно
Pi— Pi = R ( Pa Т'а — P iT 'i) -
(1-37)
Система четырех уравнений (1.34) —
(1.37) позволяет определить параметры
воздуха за скачком уплотнения: р г, р 2,
К2, Т 2. О п у ск ая промежуточные преоб­
разования, приведем основные расчет­
ные формулы и выводы, полученные из
решения системы у р а в н ен и я . Кр и ти ч е ­
ская скорость звука для п рямого ск а ч к а
, Р 1+ Р2
,
Р ср
a l = k ----- ------- --------------- = K1 V1, (1 .3 8 )
Р1 + Р2
Рср
где
Pep = ‘о (Pi
—
" Pa)
Pep
средние значения д ав л е­
ния и плотности воздуха в области п р я ­
мого ск ачк а.
Д а в л е н и е воздух а за прямым ск а ч ­
ком в то чк е полного торможения мень­
ше, чем перед прямым скачком, что
объясняется потерями энергии на с к ач­
ке. Т а к к ак скорость воздушного потока
V = М а , скорость зв у к а а = 1 / i 4 !L, то
Г
’ р
скоростной напор
рУ2
q= ~
—=
р
-у
М 2 « 2 ^ 0 ,7 р А 1 2. ( 1 . 3 9 )
Рис. 1.18. Система скачков уплотне­
ния на входе газотурбинного дви га­
теля сверхзвукового самолета:
/ — си стем а ко сы х с к а ч к о в уп лотн ен и я; 2 —
с л аб ы й п рям ой с к а ч о к уп лотн ен и я
При переходе через прямой скачок ин
тенсивность уменьшения М 2 выше ин­
тенсивности увеличения р, поэтому скоростной напор за п рямы м скачком будет
меньше, чем перед скачком (1.39).
З а косым скачком н ормальная со с т а в л я ю щ а я скорости Vn2 < а.
П олн ая скорость потока К2= I Vx, ! Упг > а , но V2 < Кх. Отсюда следует
практически в аж ный вывод, что путем о р г а н и зац и и системы косых с к ач к о в уп ­
л о тнен и я, следую щих друг за другом , мо ж но п олучить постепенное тормож ение
свер хзву к ов ого потока. При этом со п ро тив л ени е дв и ж ен ию самолета и потери
полного да в л ен и я будут значительно меньше, чем на п рямом с к а ч к е . Примером
конструктивного у п равл ен ия конф и гу рац и ей ск ач к о в уп л о т н е н и я может с л у ­
ж ить устройство на входе в озду хо заб ор ни к а г азотур би нн о го д в и га т е л я с в е р х з в у ­
кового самолета (рис. 1.18). Б л аго д ар я т а к о м у устройству ск о р о с т ь потока в д в и ­
гателе сн иж ает с я до дозвуковой и обеспечивается высокое д а в л е н и е на входе в
двигатель.
1.8. Понятие о пограничном слое
Два режима течения. Н аличие сил внутреннего трения в реаль­
ном газе и ж идкости объясняет два качественно различны х и широко
распространенны х в природе течения: лам инарное и турбулентное.
Л ам инарное, или слоистое течение, характери зуется тем, что каж д ая
частица потока движется вдоль плавно изменяющ ейся траектори и . П ро­
цесс переноса (обмена) между соседними слоями происходит на моле­
кулярном уровне, перемешивание частиц отсутствует. Т ак о е течение
присуще потокам, имеющим сравнительно малые скорости.
Турбулент ное, или бурное, возмущ енное течение характери зуется
тем, что мгновенное значение скорости и давления испытываю т нере­
гулярны е пульсации, наблюдаются поперечные перемещ ения не толь­
ко молекул, но и частиц. Заметим, что вихревое дви ж ени е воздуха
(вращ ение частиц) может быть к а к в лам инарном, т а к и в турб ул ен т­
ном потоке, но в ламинарном потоке частицы воздуха вращ аю тся упо­
рядоченно, перемешивания частиц не происходит. В турбулентном по-
' З
а
к2
5
4
7
14072 3 0
3
3
токе наблю даю тся вращ ение и перемешивание частиц. О тож дествлять
турбулентное течение с вихревым н ельзя,п оскольку вихревое течение
так ж е явл яется упорядоченным.
Процесс механического перемешивания частиц в турбулентном по­
токе обусловливает возникновение дополнительного сопротивления
трения, эквивалентного многократному увеличению вязкости . Поэто­
му сопротивление движению тела в турбулентном потоке воздуха (на­
пример, горизонтального оперения самолета в турбулизированном
крылом воздуш ном потоке) во много раз больше, чем в ламинарном по­
токе. В этом п роявляется отрицательная роль турбулентности воздуш­
ного потока.
Е сли рассмотреть течение в центральной части аэродинамической
трубы на некотором расстоянии от стенок, то заметим, что скорости
вращ ательного движ ения п рактически отсутствуют, и поток можно счи­
тать ламинарны м . Л ам инарны й реж им характерен для малы х скоростей
течения, турбулентны й — для сравнительно больш их.
Реж им течения определяется значением числа Рейнольдса, которое
х ар актер и зу ет соотношение инерционных сил и сил внутреннего тре­
ния (вязкости) в потоке (1.17). Постепенное измерение параметров те­
чения в воздуш ном потоке: скорости, плотности, температуры , а сле­
довательно, и вязкости (1.4) приводит к переходу ламинарного тече­
ния в турбулентное.
Г р ан и ц а между ламинарны м и турбулентным течениями весьма ус­
ловна, так к ак устойчивость течения зависит от многих причин (ше­
роховатости и кривизны поверхности, начальных возмущений потока и
д р.). С корость и соответственно число Re*, при достижении которых
лам инарны й реж им течения переходит в турбулентный, назы вается со­
ответственно крит ической скоростью и крит ическим числом Рейно­
льдса.
С труктура пограничного слоя. Рассмотрим обтекание твердого
тела, например плоской пластины значительной длины, потоком воз­
д уха (рис. 1.19). М олекулы воздуха, находящиеся вблизи поверхности
пластины, прилипаю т к ней и полностью заторм аж иваю тся. Обмен мо­
л екулам и меж ду прилипш им к поверхности тела слоем воздуха и со­
седними слоям и приводит к образованию некоторого градиента скоро­
сти течен и я. По мере удален и я по поверхности скорость течения увели­
чивается, асимптоматически приближ аясь к скорости набегающего на
тело невозмущ енного потока. Тонкий по сравнению с характерны м л и ­
нейным разм ером тела слой газа, прилегающий к твердой поверхности,
в котором градиенты газодинамических переменных (скорости, давле­
ния, плотности, тем пературы и т.д.) в нормальном к поверхности тела
н ап равлен ии значительно превыш ают градиенты этих величин в каса­
тельн ы х н ап р авл ен и ях, а инерционные и вязк и е силы имеют один и
гот ж е порядок, назы вается пограничны м слоем. Пограничный слой
во зн и кает при числе R e
1. В нем сосредоточено основное воздейст­
вие сил вязко сти на тело. Толщиной пограничного слоя называется
условное расстояние по норм али к обтекаемой поверхности, на котором
34
Рис. 1.19. Структура и эпюры скоростей в пограничном слое при обтекании в оз­
душным потоком плоской пластины:
/ — л а м и н а р н ы й пограничны й слой; 2 — п ер ех о д н ы й ; 3 — т у р б у л е н т н ы й ; 4 — л а м и н а р н ы й под
слой; х — к о о р д и н а т а точки перехода Т л а м и н а р н о г о п о гр ан и чн ого с л о я в т у р б у л е н т н ы й ;
I — р а з м а х (д л и н а ) п ластин ы ; Ь — ш ирина
значение скорости отличается от ее значения во внешнем потоке на
I 0,5 % .
В неш няя граница пограничного слоя не явл яется линией тока и сл у ­
ж ит лиш ь условным пределом зоны влияния вязкости. В близи передней
кромки плоской пластины течение в пределах пограничного слоя лам и ­
нарное. По мене удаления от передней кромки пластины местное число
Re в пограничном слое постепенно увеличивается. Это объясняется тем,
что силы трения, вызывающие изменение скорости по толщ ине п огра­
ничного слоя, играют все меньшую роль по сравнению с инерционными
силами, препятствующими изменениям. С ледовательно, н арастание
скорости с удалением от поверхности твердого тела зам едляется, а
толщ ина пограничного слоя увеличивается.
Рассмотрим движение произвольно выбранной частицы m воздуха в
пограничном ламинарном слое. Сторона частицы в оздуха, располож ен ­
ная дальш е от поверхности тела, движ ется быстрее, чем сторона, р ас­
полож енная ближ е к поверхности тела. Эта приводит к деформации
частицы и является причиной образован ия вихрей. С увеличением
местного числа R e по мере удаления от носка пластины интенсивность
вихреобразования возрастает. П ри этом устойчивость лам и н арн ого
течения ум еньш ается. Линии то ка становятся волнисты ми, а затем р а з­
вивается устойчивое турбулентное течение. Т очка Т , в которой лам и ­
нарный пограничный слой переходит в турбулентны й, назы вается
тонкой перехода. П оложение точки перехода зави си т от степени т у р ­
булентности внешнего потока и ш ероховатости п ласти н ы . Ч ем б оль­
ше ш ероховатость и чем больше степень турбулентности внеш него по­
тока, тем раньш е осущ ествляется переход.
П ограничный слой, в котором имеются ламинарное и турбулентное
течения, назы вается смешанным. М ежду ламинарным и турбулентным
пограничным слоем имеется переходная зона. П ротяж енность зоны
(от ламинарного к турбулентному состоянию) сравнительно невелика,
и при реш ении практических задач переходную зону сводят к точке
перехода Т , имеющей координату х . Разруш ение лам инарной структу­
ры пограничного слоя происходит при критическом значении местного
числа Re*:
Re* = V x / v .
(1-40)
И сследования показы ваю т, что ламинарный режим течения воздуш­
ного потока при обтекании кры ла, фю зеляжа и других частей самолета
сохраняется только до чисел Re* < 3 ,8 -105.
В отличие от ламинарного пограничного слоя, в котором перенос
количества дви ж ени я по нормали к поверхности пластины осущ ествля­
ется только за сч?т хаотического движения молекул, в турбулентном
слое б лагодаря интенсивным вихревым движениям вдоль нормали к по­
верхности переносятся не только отдельные молекулы , но и сравни­
тельно больш ие воздуш ные частицы. Это приводит к более рез­
кому н арастанию скорости с удалением от поверхности пластины по
сравнению с ламинарны м слоем. По этой же причине заторможенные
воздуш ные частицы выносятся значительно дальш е от поверх­
ности пластины во внешний воздушный поток, что вызывает увеличе­
ние толщ ины турбулентного пограничного слоя по сравнению с лами­
нарным. В турбулентном пограничном слое имеется тонкий лам инар­
ный подслой, в котором м олекулярны е процессы обмена частиц преоб­
ладаю т над процессами турбулентного обмена.
Воздуш ный поток, обтекающий твердое тело, условно можно раз­
бить на три части: внешний поток, который принимается невязким, по­
граничны й слой и спутный след (рис. 1 .20 ).
Спупгный след — область течения, которая образуется позади тела
при движ ении или обтекании его потоком газа. О бласть спутного сле­
да, непосредственно примыкаю щ ая к телу, назы вается ближним спутным следом. З а нею располож ен дальний спутный след, в котором ста­
тическое давление мало отличается от статического д авления в невоз­
мущенном потоке. Таким образом,
наличие сил внутреннего трения
взаимодействия молекул воздуха с
поверхностью обтекаемого тела при­
водит к образованию погранично­
го слоя. П ограничны й слой как
бы вытесняет часть внешнего пото­
ка, увеличивая разм еры тела и сме­
щ ая линии тока. Расстояние от
Рис. 1.20. С тр у кт у р а воздушного по­
нормали к обтекаемой поверхности,
т ока, обтек аю щ его твердое тело:
которое определяет смещение ли­
/ — вн еш н и й н ев я з к и й с л о й ; 2 — п о гр а н и ч ­
ний тока, назы вается толщиной
н ы й (в я з к и й ) с л о й ; 3 — сп у тн ы й с л е д
36
вытеснения. Физически она характеризует потерю расхода в озд уха
в пограничном слое из-за наличия сил трения.
Е сли толщ ину тела увеличить на толщ ину пограничного сл оя, то
при обтекании его потоком невязкого газа с той ж е скоростью, получим
теоретически такие ж е аэродинамические силы, что и в вязком воздуш ­
ном потоке.
В ажнейшей особенностью пограничного слоя является то, что
давление внешнего потока на условной границе пограничного слоя без
изменения передается на поверхность обтекаемого тела. В обычных
услови ях полета влиянием пограничного слоя на внешний поток можно
пренебречь и рассматривать обтекание в соответствии с законами обте­
кани я невязким воздушным потоком.
Сопротивление трения при обтекании твердого тел а потоком возду­
ха. П роявление свойств вязкости воздуха приводит к возникновению в
пограничном слое сил, препятствующих движению тела и называемых
силами сопротивления трения. Н а преодоление сил трения воздуха з а ­
трачивается энергия движущ егося тела.
Сопротивление трения различны х по форме тел, движ ущ ихся в воз­
духе, удобно рассчитывать по сопротивлению трения эквивалентной
по площади и линейным размерам плоской пластины, для которой тео­
рия расчета, подтвержденная большим экспериментальным м атери а­
лом, достаточно хорошо разработана. Сила сопротивления трения X ,
одной стороны плоской пластины, имеющей линейный размер b (см.
рис. 4.1, б) и единичный размах I, пропорциональна скоростному напору
рУ2
-g - и линеиному размеру о:
1>1/2
(1 .4 1 )
где су — коэффициент трения одной стороны плоской пластины.
Коэффициент трения cf зависит от характера пограничного слоя
(ламинарный, турбулентный, переходный) и рассчиты вается по при­
ближенным формулам:
1,33
0,455
С,лам = у ^ Г ’ С/т у р б =
(In R e ) 2-58
jif
C/uep ~ с/турб
(С/турб
с/лам)
'
(1 .4 2 )
Повышение температуры в пограничном слое приводит к уменьш е­
нию плотности, увеличению вязкости , утолщению пограничного слоя,
уменьшению числа R e и увеличению ct . Уменьш ение сопротивления
трения самолета является одной из важ ны х задач, которы е решаются
на этап ах конструирования, изготовления и эксп луатац и и . Т а к к ак л а ­
минарный пограничный слой обеспечивает меньшее сопротивление тре­
ния, чем турбулентный, то целесообразно вы бирать фюрмы профилей
кры ла и оперения, обеспечивающие переход ламинарного слоя в тур*
булентный на расстоянии, возможно большем от передней кром ки. По­
вышение чистоты обработки внешних поверхностей самолета (умень­
шение высоты микронеровностей), устранение выступов и впадин на
поверхностях (головок заклепок, накладных соединений листового ма­
тер и ал а и т. п.), недопущение вмятин, грубых царапин, загрязнений
поверхностей приводят к уменьшению толщины пограничного слоя и
снижению сопротивления трения.
Если скорость полета V и коэффициент кинематической вязкости v
воздуха известны, то координата точки перехода на плоской пластине
* = R e *-^ -.
( 1 .4 3 )
При скорости полета у земли V ^ 260 км/ч (72,5 м/с) и v =
1 ,4 5 -10~5 м2/с критическое число R e = 2 - 10е, координата точки перехода
лам инарного слоя в турбулентны й на кры ле х = 0,4 м. И з рассмот­
ренного примера видно, что даж е при сравнительно малой скорости по­
л ета значение координаты х значительно меньше протяженности любой
из основных частей самолета в направлении его продольной оси. Следо­
вательно, в полете на большей части внешних поверхностей самолета
пограничный слой имеет турбулентную структуру.
Отрыв пограничного слоя при обтекании криволинейной поверх­
ности. При обтекании криволинейной поверхности в соответствии с
уравнением Б ер н у л л и наблюдается изменение скорости течения в
струй ках и изменение статического давления. При дозвуковой скоро­
сти полета по направлению течения потока от точки 1 до точки 2
струй ки воздуха сжимаются (рис. 1.21. а). При этом скорость течения
в струйке увеличивается, а статическое давление падает. Точке 2 со­
ответствую т м аксим альная скорость течения и минимальное статиче­
ск о е давление. Градиент давления на у ч а с т к е / — 2 поверхности отри­
цательны й ^ < 0 . т. е. по мере удаления от точки 1 статическое дав­
лен и е уменьш ается.
Н ачи ная с точки 2 и далее к точке 3, струйки расш иряю тся. Ско­
рость течения в струй ках уменьш ается, а статическое давление посте­
пенно растет. Г радиент давления на этом участке положительный, т .е .
^
> 0 , по мере удаления от точки 2 к точке 3 поверхности статиче­
ск о е давлен ие повыш ается. Е сли кривизну поверхности увеличить,
то градиенты давлений в струй ках будут возрастать. П оложительный
гради ен т давлен ий
> о ),
характеризую щ ий повышение давления
на единице пути струйки вдоль криволинейной поверхности, обеспечи­
вает торм ож ение потока. Во внешнем потоке, прилегающем к погра­
ничному слою , повышение давлен ия приводит к уменьшению скорости
до скорости невозмущ енного набегающего потока.
В пограничном слое (рис. 1.21,6),
где наблю дается торможение воз­
духа вследствие вязкости, поло­
ж ительные градиенты давлений мо­
гут стать настолько большими, что
в некоторой точке С, называемой
точкой отрыва пограничного слоя,
скорость течения
пограничного
слоя будет равна нулю. В точках,
расположенны х по направлению
потока (точка D), течение п огра­
ничного слоя становится обратным
навстречу основному потоку. К
Рис. 1.21. Изменение характеристик
точке С воздушный поток прихо­ течения струйки у криволинейной по­
верхности (а) и схема течения в о б л а ­
дит спереди и сзади одновременно,
сти отрыва пограничного слоя (б)
поэтому пограничный слой быстро
утолщ ается. Заторможенные части­
цы воздуха накапливаю тся около точки отры ва, оттесняя струики
внешнего потока, происходит отры в пограничного слоя, т. е. отход
его от поверхности тела. В зону отры ва устремляю тся частицы возду­
ха из зоны более высокого д авлен ия, разви вается обратное течение,
при встрече которого с основным потоком об разуется ви хрь. В ихрь
вместе с накопившимся около точки отрыва воздухом уносится пото­
ком. Н акопление заторможенного потока в точке отры ва, отры в погра­
ничного слоя, развитие обратного течения, образован ие вихря и
его унос потоком повторяются.
П роцесс отрыва пограничного слоя при обтекании потоком кри воли ­
нейной поверхности является я р к о выраженным нестационарным про­
цессом. Период отрыва пограничного слоя определяется геометрией и
ш ероховатостью поверхности, степенью турб ули зац и и набегающ его
потока, направлением набегания воздуш ного потока на криволиней­
ную поверхность, числами R e и М. И сследованиям и установлено: л а ­
минарный пограничный слой более подверж ен отры ву по сравнению с
турбулентны м; турбулентное течение пограничного слоя мож ет рас­
пространяться на большее расстоян и е в зону отры ва, чем л ам и н ар­
ное; чем больше степень турбулентности в пограничном слое, тем ин­
тенсивнее перенос энергии в пограничном слое, тем больш е скорости
течения вблизи поверхности, тем меньш е вероятность отры ва погранич­
ного сл о я.
Сила сопротивления движению тела в воздуш ной среде склады вает­
ся из сопротивления трения, обусловленного вязкостью воздуш ной
среды, а такж е сопротивления д авл ен и я, об условленного разностью
давлений в носовой и хвостовой частях обтекаемого тел а. О тры в по­
граничного слоя приводит к падению статического д ав л ен и я за зоной
отрыва, которое препятствует движ ению тела в воздуш ной среде, уве­
личивает сопротивление движению .
Если поперечные размеры тела больше по сравнению с продольны­
ми, то на его поверхности всегда наблюдается отрыв пограничного слоя,
например на поверхности ш ара, цилиндра, обтекаемых воздухом. Ста­
тическое давление за зоной отры ва пограничного слоя падает, сопротив­
ление движ ению тела растет. Т аки е тела называют неудобообтекаемыми.
Если тело имеет плавны е обводы, вытянутую по потоку форму, на­
пример каплеобразную , то отры ва пограничного слоя на его поверхно­
сти не наблю дается или наблю дается на незначительной части поверх­
ности. Основную долю сопротивления движению составляет сопротив­
ление трен и я. Т аки е тела назы ваю т удобообтекаемыми. К ры лу, фюзе­
л яж у , гондолам двигателей и другим частям самолета придаю т удобообтекаемую ф орм улу, при которой срыв потока на эксплуатационны х
реж имах полета либо совсем не возникает, либо наблю дается на при­
емлемо малой площ ади.
Управление пограничным слоем. Д л я предотвращения преждевременного
отрыва пограничного слоя широко применяют системы управления пограничным
слоем (УГ1С). Термин управление пограничным слоем п одразумевает любой ме­
ханизм или процесс, который позволяет видоизменить характер течения в по­
граничном слое в области отрыва потока. Системы УПО подразделяю т на пас­
сивные н активные. Примером пассивных систем УПС являются предкрылки,
щелевые закрылки, в которых для предотвращения срыва потока используется
избыток энергии потока, имеющийся на нижней поверхности крыла по отноше­
нию к верхней. К активным системам УПС можно отнести системы вдува (под­
вода газа в пограничный слой) и отсоса (отвода газа из пограничного слоя)
через проницаемую поверхность обтекаемого тела. Преждевременный отрыв по­
граничного слоя можно предотвратить искусственной турбулизацией его в зоне
положительных градиентов давлений, например, путем установки п ла с ти н — турбулизаторов. При этом срыв пограничного слоя затягивается, уменьшается со­
противление трения, но увеличивается сопротивление давления. Поэтому в кон­
кретных случаях находится оптимальное решение.
Влияние сжимаемости воздуха на пограничный слой. Теоретиче­
ск и й расчет в л и ян и я сж имаемости воздуха на характеристики погра­
ничного слоя явл яется слож ной задачей, выходящей за рам ки настоя­
щего учебника. Поэтому остановимся только на рассмотрении качест­
венной картины в л и ян и я сжимаемости на характеристики погранично­
го слоя и некоторы х эмпирических зависимостей.
П ри увеличении скорости воздуш ного потока до значений, соответ­
ствую щ их М > 0 , 4 , из-за торм ож ения воздуха в пограничном слое тем­
пература повы ш ается. Это приводит к увеличению вязкости воздуха,
уменьшению его плотности, оказываю щ их влияние на толщ ину погра­
ничного слоя и си лу трен и я.
Д л я расчета толщ ины пограничного слоя, плотности, силы трения
и д р у ги х х ар актер и сти к пользую тся средними значениями этих па­
рам етров.
П ри известны х зн ачен иях толщ ины 6 Нсж и коэффициента силы тре­
ния c xf л ам и н ар н о го пограничного слоя в условиях М < 0 , 3 -гО,4 мож­
но рассчитать значения характери сти к с учетом сжимаемости:
6с>К—бнсж ( 1 + 0 , 1М2);
сх, сж
Cxf нсж
( 1 + 0 . 0 6 6 М 2)
2_
3
(1 .4 4 )
Д л я турбулентного пограничного слоя
^сж — ^нж — ( 1 -|-0 ,0 6 6 М 2) ;
cx f cm —
° x f . нсж
(1 + 0.066Л*2)
3_
( 1 .4 5 )
2
Н а основании анализа зависимостей (1.44) и (1.45) можно зак л ю ­
чить, что с увеличением числа
полета толщ ина ламинарного по­
граничного слоя увеличивается более интенсивно, чем турбулентного
слоя, а коэффициент трения при ламинарном течении падает более ин­
тенсивно, чем при турбулентном.
Дополнительная литература
I II, с. 1 6—66, 262—291; [4|, с. 4 2 —81, 9 6 — 11, 132 — 152.
Контрольные вопросы
1. О т каких параметров воздуха зависит скорость з в у к а ? Н апи ш и те ф орм улу.
2. Как изменяются основные параметры атмосферы с высотой?
3. По формулам Ветчинкина определить плотность в о зду ха и скорость з в у ­
ка на высоте 6000 м в условиях стандартной атмосферы. С р а вн и ть полученные ре­
з у л ь т а т ы по таблице стандартной атмосферы.
4. При полете на высоте 6000 м давление и т е м п е р а т у р а воздуха имеет сл е­
д у ю щ и е значения: Р
330 мм рт. ст. и t = — 13 °С. О п р е д ели т ь плотность в о з­
ду х а и приведенную высоту полета. Ответ: р -- 0,597 кг/м 3; /У„р = 7000 м.
5. В чем состоит принцип обратимости в а э р о ди нам ик е?
6 . П еречислите основные способы в и зуал и зац ии возду ш н ого потока.
7. Перечислите основные критерии подобия я вл ен и й в аэ р оди нам ик е.
8 . О бъясните физическую суть числа М полета к ак п ар ам ет р а аэ р о д и н а м и ­
ческого подобия.
9. Рассчитайте число М полета и давление в точке п олн ого т о р м о ж ен и я п о­
то к а д л я самолета, летящ его со скоростью 720 км/ч на высоте 8000 м (р<х
~ 35 650 Па; р,*, ■=■- 0,52 кг. мя; а<х> = 308 м/с). Ответ: М - 0,6 5; р 0 = 51 59 2.2К
Па.
10. Определить скоростной напор , если ско ро сть полета V
200 ч с. илот
ность в оздух а р =■ 0,557 кг/м3. Ответ: q — 11 140 Н /м 2.
11. Почему струйки «расступаются» перед д в и ж у щ и м с я телом?
12. Что является причиной в озникновения ск ач к а у п л о т н е н и я при с в е р х з в у ­
ковом обтекании тела?
13. К ак изменяются параметры воздуха при п р о х о ж д ен и и через п рям ой и
косой с к а ч к и уплотнения?
14. Определить скорость полета самолета на высоте Н — 15 000 м, если и з ­
вестно, что угол возмущения ц = л / 6 . Ответ: V = 590 м/с.
15. Р ассчитать, во сколько р а з повысится плотность в о зд у х а за прямы м
скачком при полете на высотах
= 300 м и Н г = 15 000 м и скорости V =
--- 600 м/с. Ответ: в 2,39 и в 2,71 р аза.
16. Что называется пограничным слоем? К ак он о б р а з у е т с я ?
17. К аки е ф ак т о р ы и к ак влияют на координаты точки п ерехода л а м и н а р ­
ного п ограничного с л о я в турбулентны й?
18. Н азовите и объ ясни те пути уменьшения сопротивления т р е н и я при об­
текании.
19. О бъясните процесс отрыва пограничного слоя при обтекании криволи ­
нейной поверхности.
20. Н азови те и поясните способы уп р авл ен и я пограничным слоем.
21. О пределите с и л у трен ия гладкой тонкой пластины разм ах ом I = 1 м и
шириной b = 3 м при условии, что поток набегает п ар а л лел ьн о плоскости п л а ­
стины и имеет ск ор ости
= 12 м/с (течение считать ламинарны м),
= 180 м/с
(течение считать турбу л ен тны м ) на высоте 1500 м над уровнем м о р я . ,
Ответ: Х п = 0,343 Н; X f t = 17,48 Н.
21
Рассчитай те к оординату точки перехода на тонкой пластине, если v =
1 -45 -1 0 - 5 м2/с, R e , = 2 - 1 0 6 и скорость полета у земли V = 60 м/с. Ответ:
х = 0,48 м.
Глава
2
АЭРОДИНАМИЧЕСКИЕ СИЛЫ И МОМЕНТЫ КРЫЛА
2.1. Геометрические характеристики крыла
С вязанная и скоростная системы координат. Д л я рассмотрения силового взаимодействия между самолетом и воздушной среды приняты
скоростная и связанная системы координат (ГОСТ 20058—80). Н ачало
л их п рям оугольны х, правых, подвижных систем координат помещает­
ся в центре масс самолета, обычно расположенном в плоскости симмет­
рии самолета O X Y (рис. 2.1). Продольная ось О Х связанной системы
координат O X Y Z леж и т в плоскости симметрии самолета и направлена
от хвостовой части самолета к носовой параллельно средней аэродина­
мической хорде (САХ) кры ла или строительной горизонтали фюзе­
ляж а.
В дальнейш ем будем считать, что ось О Х направлена п араллельно
средней аэродинамической хорде кры ла.
Н орм альная ось O Y связанной системы координат находится в
плоскости симметрии и направ­
лена к верхней части самолета.
Поперечная ось OZ перпендикуляр­
на плоскости симметрии самолета
и направлена в сторону правого
полукры ла. Скоростная ось О Х а
скоростной системы
координат
O X nY aZ a совпадает с направле­
нием скорости самолета относи—^ Ось
тельно воздушной среды V.
подъемной силы 0 Y a леж ит в
Рис. 2.1. С в я за н н а я и скоростная сиплоскости симметрии самолета и
стемы коор ди нат
направлена к верхней части само­
л е т а . Боковая ось 0Z„ нормаль­
на к плоскости O X aY a и направ­
лена в сторону правого полукры л а.
С вязанная система координат
неподвижна относительно самоле­
та, а скоростная система коорди­
нат поворачивается, «следя» за
Рис. 2.2. Трапециевидное крыло:
вектором скорости полета V. По­
а — п р ям о е с п рям оугол ьн ы м ц е н т р о п л а ­
лож ение самолета относительно
ном и б е з н его; б — с постоянн ой и п е р е ­
менной стр ел о ви д н о сть ю
вектора скорости полета (или н а­
бегаю щ его воздушного потока) оп­
ределяется двумя углами: углом атаки а и углом скольж ени я р.
Угол атаки а — это угол между продольной осью О Х и проекцией
вектора скорости V на плоскость симметрии самолета OX Z . Он сч и та­
ется положительным, если проекция вектора скорости на ось O Y
отрицательна. Угол между вектором скорости и плоскостью ОХУ'
симметрии самолета называется углом скольж ения В. Он считается
положительным, если проекция вектора скорости самолета на по­
перечную ось 0 Z положительна (самолет скользи т на правое полукры ло). В частном случае, когда скольж ение отсутствует (р = 0), вектор
V л еж и т в плоскости симметрии самолета O X Y , а угол, заклю ченный
меж ду вектором скорости V и продольной осью самолета ОХ. будет у г ­
лом атаки а.
Геометрические характеристики крыла. К ры ло самолета яв л яе тся
основной несущей поверхностью 1 самолета и предназначено для со зд а­
ния аэродинамической подъемной силы. К ры ло самолета может иметь
различны е формы в плане. Н аибольш ее распространение на соврем ен­
ных самолетах получили трапециевидные прям ы е (рис. 2 . 2 , а) и т р а п е­
циевидные стреловидные (рис. 2.2, б) кры л ья. К рыло обычно имеет
плоскость симметрии, совпадающую с плоскостью симметрии сам о­
лета.
Ф орма сечения кры ла в направлении обтекаю щ его его воздуш ного
потока называется профилем. К ак правило, исследую тся профили,
полученные сечением кры ла плоскостью, п араллельной плоскости
симметрии, или плоскостью, перпендикулярной передней кром ке
KpbLli.
Профили кры ла обычно не одинаковы на различны х расстоян и ях от
плоскости симметрии, но имеют характерн ую удобообтекаемую форму
(рис. 2.3). Обычно при описании геометрических характери сти к п ро­
ф и ля пользую тся прямоугольной системой координат, у которой н а ­
чало располагается в передней крайней точке А (носке) п роф иля, а
ось О Х проходит через заднюю по отношению к набегающ ему воздуш 1
Несущей поверхностью самолета называется поверхность, созд аю щ ая п о д ъ ­
емную силу, значительно превышающую силу сопротивления движению (лобово<:
сопротивление).
ному потоку (хвостовую) точку В
профиля.
Ось 0 Y
направлена
вверх.
Л иния, соединяющая наиболее
удаленные точки профиля А я В ,
называется хордой проф иля Ь. ХорРис. 2.3. Профиль крыла и его геоделит профиль на две части —
метрические характеристики
г т
„
верхнюю и нижнюю. Ь сл и верхняя
и ниж няя части профиля симмет­
ричны относительно хорды, то такой профиль называется симмет рич­
ным. Более ш ирокое применение нашли несимметричные профили,
один из которых мы и рассматриваем.
Наибольш ий перпендикулярны й хорде отрезок, заключенный
между верхним и нижним обводами профиля, называется м аксим аль­
ной толщиной или просто толщиной проф иля. Отношение толщ ины про­
филя к длине хорды называется относительной толщиной профиля
с = —— 100 %.
О
(2 . 1)
Л и ни я, соединяю щ ая середины отрезков, перпендикулярны х хор­
де профиля и заклю ченны х между верхним и нижним обводами, назы­
вается средней ли нией профиля. В симметричном профиле сред­
н яя линия профиля совпадает с хордой. Если средняя линия профиля
имеет форму буквы S , такой профиль называют S -образным и для
него вводится понятие отрицательной кривизны. Из профилей с отри­
цательной кривизной («перевернутые») иногда набирается кры ло вбли­
зи мест соп ряж ен ия с фю зеляжем.
Н аибольш ая длина отрезка, перпендикулярного к хорде и заклю ­
ченного между хордой и средней линей, называется максимальной
кривизной или просто кривизной проф иля /. Отношение кривизны про­
ф иля к хорде — относительная кривизна профиля
Г = — 100 %.
b
(2 . 2 )
П олож ение максимальной толщины профиля и максимальной кривизны
определяется соответственно координатами х с и x f относительно носка
профиля, называемыми
соответственно абсциссами максимальной
т олщ ины и кривизны . Отношения их к длине САХ назы ваю тся отно­
сит ельны ми абсциссами:
~хс =
ь
100 % ;
(2 .3 )
(2 .4 )
Профили подразделяю т на тон­
кие (с < 8 % ), средние (с= 8 =
= 8 ч - 1 2 %) и толстые (с > 12 %).
О тносительная толщина профилей
кры ла современных дозвуковых
самолетов с = 8 ч- 16 %, сверхзву­
ковых самолетов с = 2,5-=-6 %.
О тносительная кривизна J профи­
лей кры ла
не превышает 3 %.
К ры лья современных тран сп орт­
ных самолетов имеют двояковы ­
пуклые несимметричные профили
с х е = 2 5 -^5 5 % . К ры лья окол о­
звуковы х и сверхзвуковы х само­
летов, как правило, имеют то н ­
кие двояковыпуклы е симметричные
Рис. 2.4. Основные
геометрические
профили С х с =40==50 %
характеристиик трапециевидного крыДеформируя какой-либо исходла с положительным поперечным V
ный профиль по заданному закону с
сохранением неизменным одного или нескольких перечисленных отно­
сительных параметров (с, /, х с, x f), можно получить серию профилей
Эти серии профилей вносят в каталоги ICAO или в национальны е к а т а ­
логи, из которых при конструировании кры ла (самолета) выбирают
профили, подходящие по характеристикам .
Угол, заключенный между направлением вектора скорости невоз­
мущенного потока V<„ и хордой профиля, назы вается углом атаки а .
Угол атаки, при котором подъемная сила, создаваемая профилем, р ав ­
на нулю, называется углом атаки нулевой подъемной силы а 0.
Крыло (рис. 2.4) — несущая поверхность самолета, предназначен­
ная для создания аэродинамической подъемной силы. При исследова­
ниях крыла начало связанной системы координат выбирается либо в
носке корневой хорды Ьп, либо в другой удобной точке. П родольная
ось О Х параллельна средней аэродинамической хорде кры ла Ъа и на­
правлена вперед. Н орм альная ось O Y леж и т в плоскости симметрии
кры ла. Плоскость симметрии O X Y делит кры ло на левое и правое полукр ы л ья. Поперечная ось 0 Z связанной системы координат ” 37,давлена
в сторону правого полукры ла.
Плищадь крыла S — площ адь проекции кры л а на плоскость, пер­
пендикулярную плоскости симметрии кры ла и содерж ащ ую корневую
хорду Ь0.
П рофиль кры ла в плоскости его симметрии O X Y н азы вается кор­
невым, а хорда Ь0 этого профиля — корневой (центральной). Соответ­
ственно профиль и хорда Ьк концевого сечения назы ваю тся концевыми.
Р асстояние / между двумя плоскостями, п араллельны м и плоскости
симметрии кры ла и касающ имися его поверхности, назы вается разм а­
хом крыла.
—
1
Крыло назы вается геометрически плоским, если хорды всех сечений параллельны плоскости OXZ .
>
Если хорды профилей составляю т
с плоскостью O X Z некоторый угол,
Рис. 2 .5. Угол геометрической крутки
то кРыло называется геометрически
крыла фк (показано крыло, имеющее
закрученным. Угол между хордой
отрицательную крутку)
корневого профиля Ь0 ,лежащ ей од­
новременно в плоскости O X Z и в
плоскости симметрии O X Y кры ла, хордой q K концевого профиля,
спроектированного на плоскость симметрии, называется углом геомет­
рической крут ки сркр (рис. 2.5). Геометрическая крутка кры ла счита­
ется отрицательной, если хвостовая кромка рассматриваемого про­
филя располагается выше передней кромки. В противном случае
геометрическая кр у тк а назы вается полож ительной. В реальных кон­
стр у кц и ях используют отрицательную геометрическую крутку, пре­
дотвращ аю щ ую значительное увеличение улов атаки концевых сече­
ний кры ла в результате деформации. Если крутка крыла вызвана
только изменением формы профилей по разм аху кры ла, а не их в за­
имным поворотом, то так ая крутка называется аэродинамической.
К ры ло может иметь излом в корневом сечении, напоминающий
б укву V (см. рис. 2.4). В этом случае говорят, что крыло имеет попе­
речное V, которое х арактери зуется углом г|\ заключенным между осью
OZ и проекцией передней кромки кры ла на плоскость OYZ. Угол по­
перечного V крыла мож ет быть положительным, равным нулю или о т­
рицательным. У современных транспортных самолетов угол попереч­
ного V кры ла
= 1 — 3°. Положительное поперечное V кры ла по­
выш ает поперечную устойчивость самолета, а отрицательное ум еньш а­
ет.
Л и н и я, п роходящ ая на расстоянии 1/4 линии хорд от их носка, н а­
зы вается линией фокусов кры ла. Угол х между плоскостью, перпенди­
кулярной центральной хорде кры ла, и линией фокусов назы вается у г ­
лом ст реловидности. К ры ло, у которого угол стреловидности х = О,
назы вается прямым. У гол стреловидности может такж е зам еряться
между плоскостью , перпендикулярной центральной хорде, и передней
кромкой кры ла Хо (угол стреловидности кры ла по передней кромке) или
задней кромкой х 3 (угол стреловидности кры ла по задней кромке).
Отношение квад р ата разм аха кры ла I к площади S называется у д л и ­
нением крыла:
k = l 2/ S .
( 2 .5 )
О тнош ение длины центральной хорды Ь0 к длине концевой хорды Ь„
назы вается суж ением крыла:
ц = Ь„/Ьк .
(2.6)
К р ы л ья дозвуковы х транспортны х самолетов имеют удлинение X =
= 6 -г- 13 и суж ение т] = 1ч-3.
В аэродйнамике и динамике полета широко используется понятие
средней аэродинамической хорды кры ла (САХ). З а САХ принимается
хорда эквивалентного прямоугольного кры ла, имеющего такую же
площ адь S и создающего такие ж е аэродинамические силы и моменты,
как и заданное кры ло. Д ля определения длины средней аэродинам и­
ческой хорды кры ла сложной формы в плане используется и н теграл ь­
ная зависимость
i
2
*А = Т
\ b2{z ) dz ’
(2 7)
о
где Ь — длина проекции местной хорды к р ы л а (хорды любого п р о ф и л я к р ы ­
ла) на плоскость симметрии крыла; г — перем ен ная коо рди ната по р а з м а х у к р ы ­
ла; / и S — соответственно размах и площ адь к ры л а .
Д лина средней аэродинамической хорды трапециевидного кры ла
л (п + 0 Ьа
з
(ч +
( 2 .8 )
1
Если известны значения центральной Ь0 и
трапециевидного кры ла САХ
2
концевой Ьк хорд, то для
60 Ьк
— (Ь0
+ Ьк ) ~
frA= —
о (Ь» + м - —С>0-Г &к •
<2-9)
Положение САХ относительно плоскости симметрии сам олета оп­
ределяется соотношениями:
1
I
b0+ 2bK I
или г , = --------- --------— .
г) + 1 I
А
60 + ftK 6
( 2 . 10)
Расстояние от носка хорды Ьд до носка Ь0
•vA = ZAtgXn-
(2 .U )
Разм ер и положение средней аэродинамической хорды трап ец и евид­
ного кры ла можно определить следующ им образом (см. рис. 2.4):
вычертить кры ло в определенном масш табе, затем провести линию
А В , делящ ую хорды пополам. Н а продолж ении концевой хорды от­
лож и ть отрезок CD — b0. а на продолжении центральной хорды кры ­
ла — отрезок E F = ЬК, затем через концы этих отрезков провести п р я­
мую и через точку G пересечения отрезков А В и D E провести прям ую ,
параллельную корневой хорде. О трезок M N — Ьд будет средней аэдинамической хордой крыла. Д л я определения САХ кры ла слож н ой
формы его в плане разбивают на ряд секций, каж д ая из которы х пред­
ставляет собою крыло трапециевидной формы постоянной стрел ови д ­
ности. Д ля каждой секции определяю т свою САХ. С редняя аэр о д и н а­
мическая хорда всего крыла
ЬА =
2
i= I
bA i Si
2
/ i= l
где bAi — средн яя аэроди нам ическая хорда
/-й секции.
S <-
i -й секции; S t
( 2 . 12)
— п лощ адь
2.2. Обтекание профиля крыла несжимаемым воздушным потоком
А эродинамика кры ла, оперения самолета и близких к ним по фор­
ме и назначению частей самолета определяется формой профиля. Не­
смотря на то, что сам профиль не является отдельной частью самолета,
его изучение представляет интерес. В чистом виде аэродинамика про­
филя рассматривается к ак аэродинамика сечения прямого кры ла бес­
конечного разм аха. Все профили такого крыла обтекаются воздушным
потоком одинаково. К артина обтекания профиля воздушным потоком
считается плоской, а закономерности силового взаимодействия с воз­
душным потоком распространяю тся на любой участок кры ла, заклю ­
ченный между двумя произвольными сечениями, параллельными пло­
скости симметрии. П рактически картину обтекания профиля изу­
чают на некотором отрезке кры ла размахом I в условиях, когда пере­
текание воздуха через концы кры ла отсутствует.
В этих условиях можно считать, что центральны е профили кры ла
обтекаю тся плоскопараллельны м потоком, как на крыле бесконечного
р азм ах а.
В отличие от кры ла бесконечного размаха реальное крыло (крыло
конечного разм аха) взаимодействует с ограниченной массой воздуха.
При этом наблю дается перетекание воздуха через концы кры ла, тече­
ния от середины кры ла к концам. В целом обтекание реального кры ла
потоком воздуха имеет не плоскопараллельный, а пространственный
хар актер . О днако основные закономерности, полученные при изуче­
нии аэродинам ики профиля кры ла бесконечного разм аха или просто
проф иля, можно распространить на крыло конечного размаха с учетом
особенностей его обтекания.
Р ассм отри м обтекание профиля крыла (отрезка кры ла бетконечного разм аха) плоско-параллельны м потоком воздуха, скорость
которого соответствует числу М <
< 0,4. Влиянием сжимаемости воз­
духа пренебрежем.
Выделим в
потоке
воздуха
струйки на верхней и нижней по­
верхностях кры ла, непосредствен­
но прилегающие к пограничному
слою (рис. 2.6). Взаимодействие
Рис. 2.6. Д еф о рм ац ия струйки на струек с крылом приводит к их
верхней и нижней поверхностях про­
деформации и изменению парамет­
ф ил я крыла при обтекании потоком
во зду ха
ров течения. В сечении 1— / , рас48
\
\
п о л о ж ен н о м \н а достаточном удалении от кры ла, параметры тече­
ния струек одйлаковы и равны параметрам невозмущенного потока:
Vx , Рос, Ро°- По мере приближения к кры лу площади сечения их
будут уменьш аться и в соответствии с уравнением неразрывности
(1.19) скорость течения будет увеличиваться. При этом в соот­
ветствии с уравнением Бернулли для струйки несжимаемого газа
сумма статического давления и скоростного напора будет посто­
янной, т. е. р-\-
= const,
а скоростной напор p F 2/ 2 вследствие
роста скорости будет увеличиваться, следовательно статическое
деление будет падать. В сечении 2 — 2 площади сечения струек
достигнут значений S 2 < S 2, соответственно параметры течения
V2 > V 2 , Р -2 < р 2 и pj = р 2 = р» (воздух считается несжимаемым).
Таким образом, с уменьшением сечения струек статическое давле­
ние будет пониж аться. Поскольку кривизна верхней поверхности кры ­
ла больше, то и деформация струек на верхней поверхности больше,
чем на нижней. Значит возникает разность давлений на верхней и ниж ­
ней поверхности кры ла, которая и создает подъемную силу.
Если измерить давление в точках на верхней и нижней поверхно­
стях кры ла, то получим распределение давления по профилю кры ла
при его обтекании воздушным потоком. Оно определяется, к ак правило,
экспериментально путем продувки в аэродинамической трубе моде­
ли крыла исследуемого профиля. М одель 2 имеет тонкие отверстия на
поверхности (дренированная модель), через которые статическое дав­
ление по трубкам передается к батарейному
м икроманом етру
(рис. 2.7). Батарейный микроманометр — это несколько кали б ро­
ванных стеклянны х трубок, присоединенных к одному общему резер­
вуару с окраш енной жидкостью, плотность которой известна (спирт,
вода, толуол и т.д.).
Прибор перед замером устанав­
ливается по уровню в горизонталь­
ное положение. К аж дую из трубок
микроманометра соединяют с соот­
ветствующим отверстием на иссле­
дуемой модели. К резервуару с
жидкостью подводят то давл зние, с
которым производится сравнение.
Обычно это либо атмосферное дав­
ление, либо давление в рабочей ч а­
сти аэродинамической трубы. Вы­
сота подъема жидкости в каждой
трубке микроманометра будет со­
ответствовать разности давлений
в исследуемой точке поверхности
и е невозмущенном потоке (напри­
Рис. 2.7. Схема подключения ба т аре й ­
мер, атмосферное). Ф иксируя вы­
ного манометра (1 ) к дренированно­
соты подъема и опускания уровней
му крылу (2)
жидкости во всех трубках мано­
метра, можно получить картину
распределения давления по исс­
ледуемой поверхности. Таким об­
разом, высота h столба жидкости
плотностью р ж микроманометра
показывает разность статических
давлений Ар в соответствующ ей
точке кры ла и давлен ия р в не­
возмущенном потоке:
Лржй = ЛР = Р —Рос
При аэродинамических иссле­
дованиях обычно рассматриваются
не абсолютная разность давлений
в точках поверхности кры ла, а ко­
Рис. 2 .8. Координатная (а) и вектор­
эффициенты
давления с,,.
ная ( 6 ) диаграммы распределения
Коэффициент давления — без­
коэффициента давления по несиммет­
ричному профилю при сс= 0
размерная величина, равная раз­
ности местного давления и давле­
ния в невозмущгнном потоке, отнесенной к скоростному напору не­
возмущ енного потока:
Р— Ро,
2 (Р -Р о о )
(2 .13 )
р
г оо V*оо
Q оо
Запиш ем уравнение Б ерн ул л и для двух сечений 1— 1 и 2— 2 струйки,
считая в сечении 1— / поток невозмущенным:
Г оо
о
р1 Л
Роо + --- 2----- = /,+
П реобразуем это уравнение к виду
р
2
г оо V
г оо
Р -Р оо =
П оделив левую и правую
части
V*
уравнения на
р
°°2 °°-, получим без­
разм ерны й коэффициент давлен ия:
Vг
V2
( 2 . 14>
И з вы раж ен и я (2.14) следует, что коэффициент давления не зависит
от скорости невозмущ енного потока, так к ак увеличение скорости
Vx приведет к пропорциональному увеличению скорости V, в ре­
зу л ьтате отношение V2/ о с т а н е т с я неизменным.
Р аспределение коэффициента давления по профилю изображается
в виде векторны х и координатных диаграмм (рис. 2.8). Н а векторной
диаграмме коэффициент давления изображ ается векторами-стрелками,
направленными по нормали к контуру профиля. В точках, где местная
скорость потока меньше скорости невозмущенного потока (V > V»),
коэффициент давления ср > 0 , стрелки направлены в сторону внут­
ренней нормали (к поверхности профиля), при ср < 0 в сторону внеш­
ней нормали (от поверхности профиля).
При построении координатной диаграммы по оси абсцисс отклады ­
вают приведенную координату.
х = х/Ь,
где х — координата точки, в которой и змеряется коэффициент давления;
Ь — хорда проф и ля.
При х = b х = 1. По оси ординат отклады ваю т коэффициент д авле­
ния ср для верхнего и нижнего контуров профиля. И з формулы (2.14)
следует, что в точке полного тормож ения (критическая точка А ) ско­
рость потока V — 0 , поэтому коэффициент давления с р = 1 .
Если местное давление в точках профиля превыш ает давление в не­
возмущенной атмосфере, то величина (р — р <*,) > 0 назы вается и з­
быточным давлением, а коэффициент давления с р > 0 . Если местное
давление понижено по сравнению с давлением в невозмущенном пото­
ке, то величина (р — р „) < 0 назы вается разреж ением, а коэффи­
циент давления с р < 0. Избыточное давление на векторны х диаграм ­
мах обозначается знаком «+ », разреж ен и е — знаком «—». Д л я на­
глядности отрицательны е значения коэффициента давлен ия отклады ­
ваются вверх по оси ординат.
На участке от точки В до точки С профиля скорость потока продол­
ж ает расти и в точке С достигает м аксимального значения V --- Vmax.
а коэффициент давления — миним ального
П олож ение точки С
зависит от толщ ины и кривизны профиля кры ла, а так ж е от угла ата­
ки. Н а участке CD местная скорость течения уменьш ается и достигает
в точке D значения V = Vx , а коэффициент давления увеличивается
до значения с р ^ 0. Н а участке от точки D до хвостовой кром ки мест­
ная скорость потока продолжает падать, коэффициент давлен ия растет.
Д авление на хвостовой кромке не восстанавливается до давлен ия в к р и ­
тической точке А , так как при стеканни пограничного слоя за крылом
образую тся вихри, на что расходуется часть энергии воздуш ного по­
то к а. Кроме того, часть энергии затрачи вается на трение.
Р азн ость давлений, действую щ их на носовую и хвостовую части
проф иля кры ла, обусловливает п оявлен ие сопротивления давления,
которое значительно возрастает при отры ве пограничного сл о я. Р азр е­
жение на верхней части крылч несимметричного проф иля значительно
превыш ает разреж ение на нижней части, что создает подъемную силу.
К оординатная и векторная диаграм м ы для симметричного профиля
при угле атаки а = 0 имеют р яд особенностей (рис. 2 .9 ). В симметрич-
Рис. 2.9. В екторная и кординатная диаграммы распределения давления
метричному профилю:
по сим­
а — при а —0; б — при а > 0
ных точках верхнего и ниж него контуров профиля местные скорости
течения, давления, а так ж е коэффициенты давления одинаковы. По­
этому на векторны х диаграм м ах кривые, соединяющие концы векто­
ров коэффициентов д авлен ия, симметричны, а на координатных диа­
грам м ах кривы е Срв (х) и с Р н (*) сливаю тся. П ри таком распределении
давлений на верхнем и нижнем контурах профиля разность давлений
(подъемная сила) равн а нулю.
П ри у гл а х атаки а > 0 у симметричных и несимметричных про­
ф илей на нижнем контуре давление может быть как меньше, так и
больш е д авления
в зависимости от толщины профиля, кривизны
и угла атаки . Д авлени е на верхнем контуре меньше, чем в невозму­
щенном потоке. К рити ческая точка А при а > 0 располагается на
нижнем контуре проф иля, а при а < 0 — на верхнем. Увеличение
разности давлений между верхним и нижним контурами при а > а „
приводит к росту подъемной силы . Таким образом, на поверхность от­
р езк а к р ы л а бесконечного р азм ах а, как и на контуры профиля, при об­
текании его воздушным потоком действует система сил давления и тре­
ния, распределенны х ПС поверхности .
2.3. Аэродинамические силы крыла
Г лавны й вектор системы сил, действующих на крыло со стороны ок­
руж аю щ ей среды при обтекании, называется аэродинамической силой
кры ла R a (полной аэродинамической силой).
52
П ри обтекании крыла плоскопараллельным воздуш ным потоком
(перетекание воздуха через концы кры ла отсутствует) полная аэроди­
намическая сила складывается из равнодействующей сил давления и
трен и я, распределенных по поверхности, прилож енны х в центре дав­
ления,
R A = R P+ Rf.
(2.1 5)
Центром давления проф ит кры ла назы вается точка Д пересечения
линии действия аэродинамической силы R A с хордой профиля
{рис. 2.10). Значение и направление аэродинамической силы R A , а так ж е
положение центра давления Д зави сят от формы и разм еров кры ла, ше­
роховатости его поверхности, положения кры ла относительно вектора
скорости набегающего потока (углов атаки ск ольж ен и я), скорости по­
тока К,», числа Моо, степени турбулентности, тем пературы Т ж, плот­
ности рос, давления р х набегающего воздуш ного потока (атмосферного
давления).
А эродинамическая сила кры ла
^ а ~ сн а
где
— безразмерный
2
s ~ cr a (IooS ’
коэффициент
полной
аэр оди нам ич еско й
( 2 >6 )
силы ;
<7оо — скоростной напор набегающего воздушного потока; S — х а р а к т е р н а я пло
щадь (н ап ример, площадь крыла в плане).
Т акую структуру (произведение безразм ерного коэффициента аэроди­
намической силы на скоростной напор и характерн ую площ адь) име­
ет формула любой аэродинамической силы, поэтому вы раж ение (2.16)
назы ваю т общей формулой аэродинамической силы . О на в явном виде
учитывает влияние плотности невозмущенной среды р х , скорости поле­
та Vx , линейных размеров тела, вы раж енны х площ адью к р ы л а в п л а ­
не. В явном виде формула не отраж ает в л и ян и я на полную аэродина­
мическую силу положения кры ла
относительно скорости набегаю щ е­
го потока, определяемого углами
атаки а и скольж ения |3, формы
кры ла и его профилей, ш ероховато­
сти поверхности, числа
полета,
характеризую щ его
сжимаемость
воздуш ной среды, степени ту р б у ­
лентности невозмущенной телом ат­
мосферы, температуры Т . , атмос­
ферного давления /?„, х ар актер и ­
Рис 2.10. С оставл яю щ и е аэродинами
зую щ их вязкость среды, опреде­
ческой силы к р ы л а по осям скорост­
ляемую числом Рейнольдса
R e.
ной и связанной систем координат
В лияни е указанны х факторов на
(Р -0)
полную аэродинамическую силу учитывается коэффициентом c r a .
Коэффициентом аэродинамической силы Cr a назы вается отношение
аэродинам ической силы крыла R 4к произведению скоростного напора
на х арактерн ую площ адь:
( 2 ' 7’
Д л я практических расчетов обычно пользуются не значениями пол­
ной аэродинамической силы R A , а ее составляющими — проекциями
на оси скоростной или связанной систем координат при отсутстии у г­
л а ско льж ен и я. П роекция аэродинамической силы R A на ось 0 Х „
скоростной системы координат называется силой лобового сопротивле­
н и я , лобовым сопротивлением или просто сопротивлением. Сила лобо­
вого сопротивления всегда направлена по потоку и препятствует от­
носительному движению тела и воздушной среды. Она определяется
как
Ха = СУа
Роо
°°
°°
S ^ C X a qx S t
(2.18)
где сха — коэффициент аэродинамической силы лобового сопротивления
П роекция аэродинамической силы R A на ось 0 Y а скоростной систе­
мы координат назы вается аэродинамической подъемной силой Y„.
Б л аго д ар я этой силе преодолевается сила тяж ести и становится воз­
можным полет самолета.
А эродинам ическая подъемная сила
Уа — Сха
-
^ — Суа 4сх,^<
(2.19)
где суа — коэффициент аэродинам ической подъемной силы.
П роекции аэродинамической силы R A на оси 0 Y и 0 Y связанной
системы координат назы ваю тся соответственно аэродинамической про­
дольной силой X , аэродинамической нормальной силой Y:
р V2
Х = с * ------ ^ S
= c x 9ooS ;
(2.20)
Y = c y - ^ - S = c!iqooS ,
(2 . 21)
р
V2
где сх , Су — соответственно коэффициенты аэродинамических продольной и
н о р м а л ь н о й си л
Е сли известны аэродинамические силы Х а, Y a и X , Y , то полную
аэродинам ическую силу можно найти как геометрическую сумму:
R a = у х * + у* = т/X* + Y*.
(2 . 22)
Рассмотрим составляющие аэродинамической силы по осям ск о р о ­
стной и связанной систем координат при отсутствии угла скольж ен и я.
Из геометрического анализа можно записать соотнош ения, устан авл и ­
вающие связь между проекциями аэродинамической силы R A на оси
скоростной и связанной систем координат:
X=.-Xa c o s a — y „ s i n a ;
“
Y = Y a cos a - { - X u sin a ;
(2 .23 )
X a = Xcos<x + K s i n a ;
(2 24)
Y„ = V' cos a — X s i n a .
Поделив левые и правые части выражений (2.23) и (2.24) на п рои зве­
дение <7*,S, получим соотношения, устанавливаю щ ие св язь между к о ­
эффициентами аэродинамических сил:
с у —с »• cos a — с и sin a ,
a
сУ = C y a
a
co s
( x - \ - c Xa
( 2 .2 5 )
sin a ;
Cv = сЛ. cos a 4-Си si n a ;
a
Cya = C y
(2 .2 6 )
c os a — c x s i n a .
П ри малых углах атаки, характерны х для полета самолета, м ож но
принять cos a « 1, а sin а жО и с достаточной для практики точностью
можно считать, что c Ua = с у и Y a — Y . Т акое допущ ение зн ач и тель­
но упрощ ает расчеты.
Подъемная сила. П ервая попытка научно объяснить происхож де­
ние подъемной силы была предпринята Л еонардо да Винчи в 1505 г.
Он считал, что подъемная сила, поддерж иваю щ ая птицу, возни кает
из-за уплотнения воздуха при ударах кры льям и. О ш ибочность этой
теории в настоящее время очевидна, так как при скоростях движ ения
кры ла воздух не может сж им аться и уплотняться.
И сслед ован и я Г. Г. Магнуса, ино­
ст р ан но го члена — корреспондента Пе­
тер бур гск о й академии наук, привели к
откры ти ю им в 1852 г. эффекта в о зн и к ­
новения поперечной силы Y при обтека­
нии в ращ аю щ егося шара воздушным по­
током (эффект Магнуса).
Ш а р , врашающ ийся со скоростью
&» при взаимодействии с набегающим на
него со скоростью Уоо воздушным пото­
ком, о т к л о н я е т ся под действием силы Y
в ту сто р о н у , где скорость воздушного
потока К » и линейные скорости точек
Ущ поверхности шара склады ваю тся
(рис. 2 . 11).
М ногочисленные
эксперименты с
л етаю щ им и моделями п ланеров, в о з­
душных змеев
и т. п., проведенные
А. Ф. Можайским, К. Э. Циолковским,
Рис. 2.11. О бтекание вращ аю щ егося
шара воздушным потоком, н абегаю ­
щим со скоростью V (эффект М аг­
нуса)
а)
О. Лилиенталем и многими другими и с
следователями, не о б ъ я с н я л и причины
образования подъемной си лы . Ответ на
этот вопрос был дан Н .Е . Ж у к о в с к и м .
Если в воздушный поток поме­
стить невращающийся цилиндр бес­
конечной длины (рис. 2 . 12 , а), то
картина обтекания верхней и ниж ­
ней поверхностей будет одинако­
вой. Разность давлений, а следо­
вательно, подъемная си ла будут
Y >0
б)
равны нулю. При вращ ении ци­
линдра с угловой скоростью со кар­
тина обтекания изменится (рис.
2.12, б). В ращ аю щ ийся цилиндр
вследствие вязкости воздуха будет
увлекать за собой пограничный
слой и прилегающие к нему слои
воздуха. Н а верхней поверхности
цилиндра скорость набегающего
Рис. 2.12. Обтекание цилиндра пото­
воздушного потока и скорость воз­
ком воздуха и векторные диаграммы
духа, увлекаемого во вращ ение ци­
(теоретические) распределения коэф ­
линдром, будут суммироваться, а
фициента давления по поверхности
на нижней поверхности ■— вычи­
невращающегося ( а ) и вращающегося
( 6 ) цилиндра
таться. В результате скорость об­
текания верхней поверхности ци­
линдра будет больш е, чем скорость обтекания нижней поверхности.
С огласно уравнению Б ерн улли , давление на верхней поверхности
цилиндра будет меньше, чем на нижней. Разность давлений на верхней
и нижней поверхностях приведет к появлению подъемной силы Y .
Вращ аю щ ийся цилиндр, увлекая за собой воздушные массы, факти­
чески создает вокруг себя вихрь. Это дает основание зам енить вращ аю ­
щ ийся цилиндр бесконечной длины вихрем, имеющим ту ж е ц и ркуля­
цию скорости, создающим такое ж е поле скоростей. Зам ена вращ аю щ е­
гося цилиндра вихрем позволила Н . Е. Ж уковском у создать вихревую
теорию кры ла. В 1904 г. им была доказана теорема о подъемной силе
кры ла. С ущ ность теоремы заклю чается в том, что, если воздуш ный по­
ток, имеющий плотность р „ , скорость У», обтекает цилиндрическое
тело бесконечной длины (крыло бесконечного разм аха) и ц и ркуляц и я
скорости по кон туру равна Г, то на участок кры ла единичного разм аха
действует подъемная сила У„, перпендикулярная вектору скорости
невозмущ енного потока V x и равн ая произведению ц и ркуляц и и Г на
плотность р«,, скорость потока
и размах участка кры ла I:
У« = Роо ^
Г /.
(2.27)
К ры ло бесконечного разм аха можно уподобить вращ аю щ емуся ци­
линдру, так к а к при обтекании кры ла воздушным потоком вследствие
56
деформации струек скорость обтекания верхней поверхности выше,
чем скорость обтекания нижней. В результате в воздушном потоке соз­
дается поле скоростей, имеющее такую же циркуляцию по любому контуру, охватывающему крыло, как и при заменяющем его вращающем­
ся цилиндре или вихре. Бесконечный вихрь, названный Н. Е. Ж уков­
ским присоединенным, является простейшей моделью крыла беско­
нечного размаха. Несмотря на кажущуюся простоту, теорема Н. Е.
Жуковского о подъемной силе явилась итогом упорных эксперимен­
тальных и теоретических исследований.
Таким образом, аэродинамическая подъемная сила Y а крыла явля­
ется результатом разности давлений на нижней и верхней поверхно­
стях крыла, возникающих при его обтекании воздушным потоком.
Очевидно, подъемная сила, рассчитанная по теореме Н. Е. Ж уковско­
го для участка / крыла бесконечного размаха, и подъемная сила крыла
конечного размаха / (без учета перетекания воздушного потока через
концы крыла) должны быть равны. На основании зависимостей (2.18)
и (2.19) можно записать
(
2 . 28)
Выражение (2.28) называется уравнением связи. На основании это­
го уравнения можно получить формулу для расчета циркуляции скоро­
сти по замкнутому контуру:
с»
I’ = — 2-— —
2/
,
(2 .2 9 )
устанавливающую связь между циркуляцией скорости и коэффици­
ентом подъемной силы. Циркуляция Г равна интенсивности вихря,
пронизывающего замкнутый контур. Если для заданного угла атаки
известен коэффициент подъемной силы с уа, скорость невозмущенного
потока К,», площадь крыла 5 и его размах /, можно получить значение
циркуляции скорости без учета перетекания потока через концевые
части крыла. Уравнение (2.29) справедливо также для любого участка
/ крыла в предложении, что он обтекается плоскопараллельным пото­
ком, как и участок крыла бесконечного размаха. Вихревая теория
образования подъемной силы крыла, разработанная Н. Е. Ж уковс­
ким, не единственная. Она получила широкое распространение в
мировой науке.
Сила лобового сопротивления. Проекцию аэродинамической силы
R Л на ось 0 Х а скоростной системы координат крыла бесконечного
размаха или крыла размаха / без учета перетекания воздуха через кон­
цы крыла при угле атаки нулевой подъемной силы называют профиль­
ным сопротивлением Х 0. Оно складывается из сил сопротивления тре­
ния X ] и сопротивления давления Х р . При малых скоростях обтека-
ния (Moo <Z 0,4) сила лобового сопротивления участка крыла беско­
нечного размаха
X a= X0=*Xf + X p
(2 .3 0 )
или
с *а <?=с S = Сх, 9-х,5
- C.Xf ?<*> S + Cx p р х S.
(2 .3 1 )
Поделив левую и правую части уравнения (2.31) на произведение qx S ,
получим соотношение, устанавливающее связь между безразмерными
коэффициентами аэродинамических сил:
°*п ' С*0^ С*/ + С*р.
( 2 .3 2 )
где с г0, сх/, схР — с о о т в е т ст в е н н о коэф ф ициенты п р оф и л ь н ого с о п р о т и в л е ­
ния к ры л а, си л тр е н и я и давл ен и я .
Сопротивление трения является результатом вязкости воздуха в по­
граничном слое. Для уменьшения сопротивления трения добиваются
ламинарного обтекания путем применения ламинарных профилей. Мак­
симальная толщина ламинарных профилей находится на расстоянии
40—60 % хорды, что обеспечивает смещение точки перехода ламинар­
ного слоя в турбулентный к задней кромке профиля и уменьшение со­
противления трения (рис. 2.13). Важное средство снижения сопротив­
ления трения — повышение чистоты обработки поверхности. Наличие
вмятин, царапин, забоин, загрязнений, особенно в носовой части кры­
ла. где пограничный слой ламинарный, приводит к перемещению точ­
ки перехода ламинарного пограничного слоя вперед, к более ранней и
интенсивной турбулизации воздушного потока, к увеличению сопро­
тивления трения. В условиях безотрывного обтекания на долю сопро­
тивления трения приходится 80—85 % профильного сопротивления.
Сопротивление давления возникает из-за разности давлений, рас­
пределенных по поверхности крыла. Рассмотрим распределение дав­
лений по поверхности профиля крыла (рис. 2.14). Спроектируем векто­
ры коэффициентов давлений на направление вектора К». Одна часть
Рис. 2.13. П о л о ж е н и е точ к и перехода
на о б ы ч н ом
(а ) и лам и н арн ом
(б )
проф и лях кры ла, и м ею щ и х од и н а к о­
в у ю о тн о си те л ь н у ю то л щ и н у
Рис. 2.14. Векторная д и а гра м м а рас­
пределения
коэф ф ициента давления
на профиле крыла
векторов сил давления, располо­
женная впереди точек В и В ' , «тя­
нет» профиль вперед, а другая,
расположенная
позади,
назад.
С увеличением угла атаки суммар­
ный вектор сил, тянущих профиль
назад, увеличивается.
Разность давлений на нижнем
и верхнем контурах профиля зави­
сит от геометрических характерис­
тик профиля. Чем больше относи­
тельные толщина с и кривизна ],
тем больше разность давлений и сопротивнениедавления. Сопротивле­
ние давления при малых числах
отн оси тел ь н о начала связан н ой си ст е ­
мы к оор д и н а т
М.» имеет вихревую природу. Про­
фили крыла имеют небольшие от­
носительные толщины и плавные обводы, поэтому энергетические
затраты на вихреобразование при их бессрывном обтекании невелики.
Коэффициент с Ха в основном зависит от коэффициента с Хр, ко­
торый растет с увеличением угла атаки. Особенно интенсивно растет
коэффициент с Хр с началом отрыва пограничного слоя. При этом он
может в несколько раз превосходить коэффициент c Xf.
Аэродинамический момент крыла. Момент полной аэродинамиче­
ской силы крыла R a относительно начала связанной системы коорди­
нат называется аэродинамическим моментом крыла. Для определения
аэродинамического момента крыла начало связанной системы коорди­
нат выбирается либо в точке пересечения корневой хорды крыла Ь(,
с передней кромкой, либо в центре масс крыла, либо в носке средней
аэродинамической хорды, спроецированной на плоскость симметрии
крыла (рис. 2.15). Для прямоугольного крыла Ь0 и ЬА совпадают.
Аэродинамический момент крыла, как и любой другой аэродина­
мический момент, выражается общей формулой, полученной на основа­
нии теории подобия:
р
М= т —
У*
x -S t — mqgoS l t
( 2 .3 3 )
г д е т — б езр а зм ер н ы й коэф ф ициен т а э р о д и н а м и ч е с к о г о м ом ен та к р ы л а ; S —
х а р а к т е р н а я п л ощ адь (п л ощ ад ь к р ы л а ); I — х а р а к т е р н ы й л и н ей н ы й р а зм ер
(р а з м а х крыла или длина ср едн ей а эр од и н а м и ч еск ой х о р д ы кры л а ЬА ).
Коэффициент аэродинамического момента — безразмерная
ве­
личина, равная отношению аэродинамического момента М к произве­
дению скоростного напора q на характерный линейный размер I и на
характерную площадь крыла S :
Коэффициент аэродинамического момента конкретного крыла не
зависит от скорости воздушного потока, а зависит только от углов ата­
ки а , скольжения р при постоянных значениях чисел М „ и Re. Для
практических расчетов используют не аэродинамический момент от­
носительно начала связанной системы координат, а его составляющие
относительно каждой оси. При отсутствии скольжения составляющие
аэродинамического момента относительно осей О Х и 0 Y связанной сис­
темы равны нулю.
Аэродинамический момент М г, действующий относительно оси 0 Z
связанной системы координат, называется аэродинамическим момен­
том тангажа:
р
h\z = mz
V*
SbAi
где тг — к оэф ф и ц и ен т а эр од и н а м и ч еск ого м ом ента та н га ж а ;
ср ед н ей а эр о д и н а м и ч е ск ой х ор ды к ры л а; S — п л ощ адь кры ла.
( 2 .3 5 )
ЬА — длина
Значение и направление аэродинамического момента тангажа зави­
сят от формы и размеров тела, скорости полета, плотности воздуш­
ной среды, угла атаки.
С вя зь к о эф ф и ц и е н тов а эр оди н а м и чески х сил и м ом ен тов с к оэф ф и ц и ен та м и
д а вл ен и я . Р а ссм о тр и м о т р е з о к крыла б еск о н е ч н о го разм аха д ли н ой I в н еп од ­
ви ж н о й п р я м о у г о л ь н о й си стем е к оор д и н а т, начало О к отор ой р а сп о л о ж е н о в н о с­
ке п р о ф и л я , п о л у ч е н н о г о сечением к ры ла п л о ск о ст ь ю н орм альн ой к передней
к р о м к е . О сь ОХ со в п а д а е т с х ор д ой проф иля и направлен а от н оска к х в о с т и к у .
О с ь O Y л е ж и т в п л о ск о ст и сечен ия и направлен а ввер х (р и с. 2 .1 6 ). В ы д ел и м у ч а ­
с т о к проф и ля dx. На эл е м е н т а р н у ю п л ощ а дк у Ids, где s — длина д у г и эл ем ента
п р о ф и л я на в ер хн ей п о в е р х н о ст и к р ы л а, д ей ств у ет си л а давления p Blds. П р о е к ­
ция эт о й силы на о с ь 0 Y равн а р в cos P '/d s , где |3 — у гол м еж ду о с ь ю 0 Y и н а­
п ра в л ен и ем н орм али к п л ощ а д к е. Т а к как ds cos Р' — dx, т о п р оек ц и ю э л е м е н т а р ­
ной си л ы д а в л е н и я , д е й ст в у ю щ е й на в е р х н ю ю п л ощ а д к у вдоль оси 0 Y , м о ж н о
за п и са т ь как п р о и з в е д е н и е р ъШх.
А н а л о ги ч н о м о ж н о п о л у ч и ть эл ем ен т а р н у ю си л у давления в д о л ь оси О У ,
д е й с т в у ю щ у ю на п л о щ а д к у , с о о т в е т с т в у ю щ у ю эл ем ен ту проф иля dx на н иж н ей
п ов ер х н ости к ры л а. Р а з н о с т ь си л д а в л е ­
ния м еж ду ниж ней и в ер х н ей п л о щ а д ­
ками кры ла даст эл ем ен т а р н у ю н о р ­
м а л ь н ую си л у давления
dYp — l ( р н — Рв) d x .
(2 .3 6 )
А н а л оги ч н о н а ход я т п р о д о л ь н у ю э л е ­
м ен та р н ую си л у давлен и я, д е й с т в у ю щ у ю
на эл ем ент кры л а dx в н а п р а вл ен и и оси
ОХ:
dXp = / (Рп — Р х в )^ !/»
Р и с. 2.16. Силы давлен и я, д е й ств у ю ­
щ и е на эл ем ент п о в е р х н ости отрезка
кры ла бе ск о н е ч н о го ра зм а ха
( 2 .3 7 )
где р п и р хв — да вл ен и е на э л е ­
м ен тарн ы х п л ощ а дк ах на передн ем и
х в о с т о в о м к о н т у р а х п р оф и л я .
П р о и н т е г р и р о в а в вы раж ен и я (2.3 6 ) и (2 .3 7 ), п ол учи м ф орм улы для н о р м а л ь ­
ной и п р од ол ьн ой си л давления крыла без уч ета си л тр ен и я :
в
Ур = 1 I ( Рн— Рв) dx',
( 2 .3 8 )
А
К
X P = l f (Рп— Рхв)Лу.
( 2 .3 9 )
Продольная сила давления крыла — р а з н о ст ь давл ен и й , д е й ст в у ю щ и х на
п е р е д н ю ю и х в о с т о в у ю ч асть кры ла. Н ор м а л ь н а я си л а давлен ия со з д а е т м ом ен т
та н га ж а
в
М гр = — 1 § ( Р н — Рв) х( 1у.
А
(2 .4 0 )
М ом ен т тан гаж а о т п р од ол ьн ой силы д а вл ен и я , как п р а в и л о, п р ен еб р еж и м о мал
В вы раж ен ия ( 2 .3 8 )— (2.4 0 ) м ож н о перейти о т си л и момента к их к оэф ф и ­
ц и ен там :
1
с « р =
J ( c / ' „ — c P B) d x '
о
«в
СхР
.1
*н
( Cr > „ - c P x B ) d y ;
( 2 -41)
1
mzp = — i ( cP « ~ cPB) dx’
о
г д е х = xlb\ у = ylb.
П е р е х о д о т коэф ф и ц иен тов а эр од и н а м и ч еск и х си л в св я за н н ой си ст е м е к о ­
о р д и н а т к со о т в е т ст в у ю щ и м коэф ф ициентам в с к о р о с т н о й си стем е к о о р д и н а т о с у ­
щ ествл я ется в соо тв е т ств и и с соотн ош ен и я м и (2 .2 6 ).
Д л я у гл ов а та к и , на к отор ы х об ы ч н о в ы п ол н я ется п ол ет, к оэф ф и ц и ен т а э р о ­
ди н а м и ч еск ой подъ ем н ой силы
СУа== H CpH ~ CPB)d x '
0
( 2 .4 2 )
М о ж н о д о к а за ть , что площ адь а , за к л ю ч ен н а я м еж д у кри вы м и р а сп р ед ел ен и я
коэф ф и ц иен та давлен и я п о вер хн ем у и н и ж н ем у к он ту р а м проф иля к р ы л а (на
ри с. 2 .8 и 2 ,9 эта п л ощ адь за ш тр и х ов а н а ), в оп р ед ел ен н ом м а сш та бе п р о п о р ц и о ­
нальна коэф ф ициенту а эр од и н а м и ч еск ой н ор м а л ь н ой си л ы су , к о т о р ы й д л я л ет­
ных у г л о в атаки при н и м ается равны м к оэф ф и ц и ен ту а эр од и н а м и ч еск ой п од ъ ем ­
ной си л ы
2.4. Особенности обтекания крыла конечного размаха
Трансформация воздушного потока. Рассмотрим крыло конечного
размаха, обтекаемое потоком воздуха при постоянной скорости У » и
угле атаки а > а 0- Разность давлений под крылом и над крылом приво­
дит к об, азованию не только подъемной силы крыла, но и к появле61
нию течений, направленных вдоль
размаха крыла из зоны более высо­
кого давления (под крылом) в зо­
ну низкого давления (над кры­
лом), рис. 2.17. Под влиянием раз­
ности давлений струйки воздуха
под крылом искривляются к концам
крыла(штриховые линии), а над
крылом — к средней части (сплош­
ные линии). Стекающие с верх­
Рис. 2.17. О бра зова н и е ви хревой пе­
ней и нижней поверхностей крыла
лены за прямоугольны м кры лом к о ­
воздушные потоки взаимодейству­
нечного размаха
ют, образуя за крылом вихревую
пелену,
представляющую собой
систему свободных вихрей , имеющих общую тенденцию движения к
концам крыла и вниз. На некотором расстоянии за крылом, как по­
казывают расчеты и экспериментальные исследования, вихревая пеле­
на свертывается в два вихревых концевых шнура (рис 2.18).
Таким образом, основной особенностью обтекания крыла конечно­
го размаха воздушным потоком при углах атаки а > а 0 является об­
разование системы свободных вихрей, стекающих с крыла. Система
свободных вихрей индуцирует в воздушной среде поле скоростей V Уо,
направленных по нормали к вектору скорости набегающего невозму­
щенного потока К,»- Величина V y изменяется по размаху крыла и
хордам, увеличиваясь к концевым частям и задней кромке крыла
(рис. 2.19).
Наличие составляющих скорости V y приводит к тому, что каждая
частица воздуха искривляет свою траекторию вниз. Воздушный по-
х-
Ри с. 2.18. Т рансф ор м ац и я
вихревой
пелены в концевы е ви хр евы е ж гуты
Рис. 2.19. Распределение
со ст а в л я ю ­
щих ск о р о ст и V
по р а з м а х у и х о р ­
д е крыла
Рис. 2.20. Р азвитие ск оса возд уш н ого потока за крылом
тивление
и ин дуктивное
соп ро­
ток за крылом в целом отклоняется вниз, становится повернутым
(скошенным) на некоторый угол относительно невозмущенного потока.
Индуктивное сопротивление. Обозначим через V
среднее зна­
чение составляющих скорости, нормальных к скорости невозмущенно­
го потока (рис. 2.20). Геометрическое сложение векторов
и
V Д а е т вектор истинной скорости Кисх потока за крылом. Вектор ис­
тинной скорости потока оказывается отклоненным вниз на некоторый
угол е, называемый углом скоса потока.
Истинный угол атаки крыла а ист, измеряемый между хордой и
фактическим направлением воздушного потока, имеющего скорость
^иет, будет меньше геометрического угла атаки а на угол скоса пото­
ка et
«и ст — « — е.
(2 .4 3 )
Углу атаки а будет соответствовать истинное значение подъемной силы
У „ ис , действующей по нормали к истинному направлению воздушно­
го потока V„CT. Проекция X,- истинной подъемной силы К „иет на ось
О Х ц, связанную с вектором скорости невозмущенного потока 1Л».
направлена против вектора скорости, препятствует движению и назы­
вается индуктивным сопротивлением. Индуктивное сопротивление,
как видно из треугольника сил.
Xi = У a tg 8 .
(2 .4 4 )
Отсюда следует, что чем больше подъемная сила Y а и угол скоса по­
тока е, тем больше индуктивное сопротивление. С энергетической точ­
ки зрения индуктивное сопротивление является результатом затрат
энергии на образование системы вихрей, ведущее место в которой за­
нимают концевые вихревые жгуты. Индуктивное сопротивление для
заданного угла атаки
X i ~ c xi
Poo V%,
2
S ~ cx i4 a oS '
(2 - 4 5 )
где cxi — коэф ф ициент аэр оди н ам и ческой силы и н д у к т и в н о г о со п р о т и в л е ­
н и я.
Естественно, что, кроме индуктивного сопротивления на крыле конеч­
ного размаха при обтекании несжимаемым воздушным потоком, дей­
ствуют рассмотренные ранее силы трения и давления. Поэтому сум­
марная аэродинамическая сила лобового сопротивления крыла
Х а — Xj-\-
Xi = Х0 -f X i .
( 2 .4 6 )
Поделив левую и правую части уравнения (2.46) на произведение
■
7осS, получим соотношение, устанавливающее связь между безразмер­
ными коэффициентами аэродинамических сил,
с х а = с х} + с х р = с х1 = сх0- г с х1<
мы
( 2 .4 7 )
где сх0 — коэф ф и ц иен т п р оф и л ь н ого соп р оти вл ен и я или к оэф ф и циен т ф о р ­
к ры л а.
В практике самолетостроения разработана система конструктивных
мер, направленных на уменьшение индуктивного сопротивления.
Главной из них является применение различного типа концевых аэро­
динамических поверхностей (рис.
а)
2 .2 1 ),
располагаемых в концевой
части крыла и предназначенных
для уменьшения перетекания воз­
душных масс с нижней поверхности
крыла на верхнюю и снижения по­
терь энергии на образование вих­
ревых жгутов. Важнейший способ
уменьшения потерь на индуктив­
ное сопротивление — применение
крыльев большого удлинения.
GEE)
Рис. 2.21. Ф орм ы
н остей кры л а:
кон ц евы х
поверх*
а — к о н ц ева я ш а й ба ; б — сл ож н ы й
отги б
к он ц е в о й части крыл, t; в — к р ы л ы ш к о; г —
о т г и б к он ц ев ой части кры ла вв ер х
В ихревы е
модели крыла. Т еор и я
кры ла к о н е ч н о го ра зм а ха б а зи р у е тся
на ви хр евой модели к р ы л а, п р е д л о ж е н ­
н ой Н . Е. Ж у к о в с к и м . О б о сн о в а н и е и
вы бор в и х р ев ой модели к р ы л а и м ею т
к ак т е о р е т и ч е ск о е , так
и п р и к л а д н ое
зн ачен ие и за н и м а ю т од н о из ц ен тр а л ь ­
ны х мест в те о р е ти ч е ск о й а эр од и н а м и ­
к е. Так как к р ы л о б е ск о н е ч н о го р а зм а ­
х а при обтек а н и и п оток ом в о з д у х а не
созд а ет с в о б о д н ы х в и х р е й , т о его м о ­
дел ью я вл я ется беск он еч н ы й п р и со е д и ­
ненный ви хр ь.
К ры ло к о н еч н ого р а зм а х а со з д а е т
си стем у с в о б о д н ы х ви хр ей , к о то р а я п р и ­
в о д и т к зн а ч и тел ьн ом у
у сл о ж н е н и ю
Рис. 2.22. Вихревы е модели крыла:
а — П -обра зн ая м одел ь; б — м одель реального крыла
ви хр евой м одели. Н аи бол ее простая а эр оди н а м и ч еск а я м одель к р ы л а к о н е ч ­
н ого разм аха — П-образная аэродинамическая модель, п р ед ста в л я ю щ а я с о б о й
прям ой при соед и н ен н ы й в и х р ь , за м ы к а ю щ и й ся д вум я св об од н ы м и (к о н ц е в ы м и )
ви хр я м и , сбега ю щ и м и с концевы х к р о м о к к ры ла (р и с. 2 .2 2 , а).
Такая м о­
дель имеет ограниченное применение и используется в приближ енны х расчетах.
а)
Za.
-
1№
7
£а.
ffOOOQOQOQijQ)
Рис. 2.23. Распределение несущ ей нагрузки на отр езк е / крыла б е ск о н е ч н о го р а з ­
маха ( а ) , на крыле разм аха I с п остоя н н ой циркуляцией ( б ) и на реал ьн ом
крыле размаха / с переменной циркуляцией (в)
так как справедлива тол ь к о для крыла определенной, далекой о т реальной ф ор ­
мы, о б л а д а ю щ е го п остоя н н ой циркуляцией. Вихревая модель реального крыла
со ста в л я е тся из м н ож ества элементарны х П -образн ы х вихрей (ри с. 2 .2 2 , б ) . Э ле­
ментарны е присоединенны е вихри об р а зую т присоединенны й вихрь переменной
циркуляции, а элем ентарны е св об од н ы е вихри — ви х р ев у ю пелену, свор а ч и ва ю ­
щ у ю ся на н екотором ра сстоян и и от крыла в два кон цевы х вихревы х ж гута .
К артины распределения несущ ей нагрузки по р а зм а ху крыла конечного размаха I
и уч а стк а I крыла беск он ечн ого размаха, построенны е на основании принятых
ви хр евы х моделей, приведены на рис. 2.23. У ч асток крыла I бескон ечн ого р а з­
маха не о б р а з у е т св о б о д н ы х вихрен, п оэтом у распределение несущ ей нагрузки
ра вн ом ер н о п о всем у р а зм а х у участка (рис. 2.23, а ) .
Крыло с постоянной циркуляцией (р и с. 2 .2 3 , б) им еет расп р ед ел ен и е а э р о д и ­
н а м и ч еск ой н а г р у з к и , о б у с л о в л е н н о е взаи м одей стви ем п р я м о го п р и соед и н ен ­
н о г о в и х р я и д в у х с в о б о д н ы х в и х р ей . К ры л ья, и м ею щ и е та к и е ф орм ы в план е,
в п р а к т и к е не п р и м е н я ю т ся , та к как не имею т а эр од и н а м и ч еск и х п р еи м у щ еств по
ср а в н е н и ю с д р у г и м и , не у д о в л е т в о р я ю т тр ебов а н и я м р а в н оп р оч н ости к о н с т р у к ­
ции и и м ею т б о л ь ш у ю м а с с у . Р еа л ьн ое кры л о л ю б о г о су ж е н и я при та к ой ж е п л о ­
щ ади имеет б о л ь ш и е , чем у к ры ла п остоя н н ой ц и р к у л я ц и и , х ор д ы в ср ед н ей ч а с­
ти и м ен ьш и е по к он ц ам (р и с . 2 .2 3 , в).
2.5. Особенности обтекания профиля и крыла
дозвуковым и околозвуковым воздушным потоком
Обтекание дозвуковым потоком. В несжимаемом воздушном пото­
ке плотность воздуха сохраняется постоянной (р = р,»). В соответст­
вии с уравнением Бернулли (1.22) скоростной напор р”
Р —
в
и сумма
любом сечении струйки зависят только от местной скоро­
сти V.
Влияние сжимаемости воздуха начинает заметно проявляться при
> 0,4-^-0,5. В сжимаемом воздушном потоке изменение попереч­
ного сечения струйки сопровождается изменением плотности воздуха.
При сужении струйки увеличение местной скорости течения сопро­
вождается снижением местного давления и уменьшением плотности
воздуха, при расширении струйки — повышением местного давле­
ния и плотности. Так как массовый секундный расход воздуха в струй­
ке остается постоянным, то уменьшение плотности воздуха компенсиру­
ется увеличением местной скорости течения. Причем местные скоро­
сти течения растут не пропорционально увеличению М », а быстрее.
Разгон воздуха в струйке происходит за счет работы сил давления, по­
этому дополнительное увеличение скорости, обусловленное расшире­
нием воздуха, сопровождается падением местного статического давле­
ния р . Это хорошо иллюстрируется векторными и координатными диа­
граммами распределения давления (рис. 2.24). Влияние сжимаемости
сказывается в том, что в области положительных значений коэффици­
енты давления ср будут выше, а в области отрицательных значений —
ниже, чем в несжимаемом потоке. В результате абсолютные значения
коэффициента давления увеличиваются, что п р и в о д и т к увеличению ра­
зности давлений между нижней и верхней поверхностями, т.е. к уве66
личению подъемной силы крыла
Y a и силы лобового сопротивле­
ния Х а. Увеличение разности дав­
лений в передней части крыла боль­
ше, чем в хвостовой, что свиде­
тельствует не только об изменении
результирующего давления, но и о
его перераспределении вдоль хор­
ды. При М » < ; М* влиянием пере­
распределения давления обычно
пренебрегают.
Обтекания околозвуковым по­
током. При приближении потока
к крылу струйки сужаются. При
этом скорость течения вдоль профи­
ля увеличивается, достигая на­
ибольшего значения У,пах в наи­
более
узком
сечении струйки
(рис. 2.25, а). При некотором зна­
чении скорости невозмущенного по­
тока Voo, которой соответствует
Рис- 2.24. К оорди н атн ая ( а ) и векторЧИСЛО Д
А < 1 , местные скорости
ная
диаграм м ы распределения котечения струйки могут достигнуть
'- “
- " Г е е ™ ” ™»
скорости звука. Скорость невозмувозуш ны й
п оток ; -----------сж имаемы й
щенного потока, при которой мествоздуш н ы й поток
ная скорость течения струйки до­
стигает местной скорости звука V^,
а, называется критической,
а соответствующее этой скорости число М* — критическим. Крити­
ческое число М* профиля зависит от его геометрических характери­
стик и угла атаки. Чем больше относительная толщина профиля кры­
ла и угол атаки, тем меньше М*.
Если скорость невозмущенного воздушного потока больше крити­
ческой (Ми > М * ), то в минимальном сечении струйки скорость тече­
ния достигнет значения местной скорости звука, а за минимальным
сечением струйка, расширяясь подобно соплу Лаваля, выйдет на сверх­
звуковой режим. Часть энергии давления, которая в постоянно сужа­
ющейся струйке на носовой части крыла не может преобразоваться в
кинетическую, будет преобразовываться в расширяющейся части
Рис. 2.25. Д еф орм ац и я струйки (а ) и границы местн ой св ер х зв у к о в о й
при обтекании проф иля крыла ок ол озвук овы м п оток ом
зон ы ( б )
струйки на хвостовой части крыла. При расширении струйки продол­
жается разгон воздуха и образуется сверхзвуковая зона (рис. 2.25,6).
Границами сверхзвуковой зоны являются:
спереди сверху — поверхность, представленная линией А В , на
которой располагаются минимальные сечения элементарных струек.
Эта поверхность — геометрическое место точек воздушного потока,
соответствующих достижению скорости звука. В процессе плавного
разгона потока за этой поверхностью скорость потока становится
сверхзвуковой;
снизу — поверхность А С , расположенная в верхней части погра­
ничного слоя, на которой скорость потока равна скорости звука;
сзади — поверхность В С , представляющая собой фронт местного
скачка уплотнения, которым обязательно замыкается сверхзвуковая
зона. На этой поверхности происходит скачкообразный переход ско­
рости течения от сверхзвуковой к дозвуковой.
Местный скачок уплотнения образуется аналогично головному
скачку уплотнения, но роль препятствия для образования скачка уп­
лотнения играет не передняя кромка крыла, а воздушная среда, дви­
жущаяся за крылом со скоростью невозмущенного потока V <С а.
При разгоне воздуха в расширяющейся части струйки до сверхзвуко­
вой скорости растет разрежение, статическое давление и плотность
воздуха в потоке падают, скорость распространения сверхзвуковых
колебаний становится меньше, чем в зоне более высокого статического
давления. Звуковые волны из зоны высокого давления за крылом рас­
пространяются со скоростью звука навстречу потоку и постепенно ос­
лабевают. В точках, где скорость потока равна скорости звука, эти
волны останавливаются (скорость их движения относительно поверх­
ности крыла становится равной нулю), образуется фронт местного
прямого скачка уплотнения В С .
Как правило, перед прямым местным скачком уплотнения образу­
ется слабый косой скачок уплотнения, за которым поток остается сверх­
звуковым. Причина образования местного косого скачка уплотнения
тормозящее действие на поток прямого скачка уплотнения. Комби­
нацию прямого и косого скачков уплотнения называют к-образным
скачком уплотнения. При турбулентном пограничном слое возникает
интенсивный прямой скачок уплотнения, интенсивность косого скачка
пренебрежимо мала. На ламинарном пограничном слое образуется
ярко выраженный косой скачок, интенсивность прямого скачка уплот­
нения понижена. В целом скачок уплотнения на крыле с турбулентным
пограничным слоем оказывает большее сопротивление, чем Х-образный скачок на крыле с ламинарным пограничным слоем.
При значительной интенсивности местного прямого скачка уплот­
нения нижняя часть пограничного слоя, расположенного под скачком,
затормаживается и утолщается. Давление в заторможенном потоке
растет, распространяется против течения, заторможенные частицы
воздуха накапливаются, оттесняя струйки внешнего потока, происхо­
дит отрыв пограничного слоя. В зону отрыва устремляются частицы
G8
воздуха из области более высокого давления, появляется обратное те­
чение в пограничном слое, образуются вихри, которые уносятся воз­
душным потоком и рассеиваются в атмосфере. При этом кинетическая
энергия преобразуется в тепловую. Процесс отрыва пограничного слоя
под скачком уплотнения является нестационарным и называется волно­
вым срывом.
Явление образования местных сверхзвуковых зон на крыле и воз­
никновение скачков уплотнения, приводящее к волновому срыву воз­
душного потока и резкому изменению аэродинамических характери­
стик, называется волновым кризисом. Началом волнового кризиса
является образование сверхзвуковой зоны и местных скачков уплот­
нения. Заканчивается волновой кризис перемещением скачков уплот­
нения на заднюю кромку крыла. Изменение числа
потока приводит
к изменению распределения сверхзвуковых зон и скачков уплотне­
ния (рис. 2.26). При Мю, незначительно превышающем М*, сверхзву­
ковая зона невелика, местный скачок уплотнения имеет небольшую ин­
тенсивность, волновой срыв потока отсутствует.
С увеличением числа
полета сверхзвуковая зона расширяется,
на задней кромке крыла воздух разгоняется до все больших сверхзву­
ковых значений, интенсивность местного скачка уплотнения на верх­
ней поверхности крыла растет, наблюдается смещение скачка уплот­
нения к задней кромке, волновой срыв потока под скачком расширяет­
ся. Дальнейшее увеличение числа
приводит к образованию скачка
уплотнения на нижней поверхности крыла. Этот скачок уплотнения за­
нимает, как правило, более заднее положение по сравнению со скачком
уплотнения на верхней поверхности.
Увеличение скорости невозмущенного потока до значения, соот­
ветствующего Мтс — 1 , приводит к начальному формированию голов­
ного скачка уплотнения, местные скачки уплотнения на верхней и
нижней поверхностях смещаются на заднюю кромку, образуя хвосто­
вые скачки уплотнения. При
> 1 головной скачок приближается
теоретически из бесконечности к носку крыла.
При закругленной передней кромке образуется головной отсоеди­
ненный скачок уплотнения, имеющий прямой фронт и постепенно пере­
ходящий в косой скачок уплотнения. Скорость за таким скачком уплот­
нения не может превышать скорость звука. Если крыло имеет острую
переднюю кромку, то образуются присоединенные скачки уплотнения,
за которыми скорость течения может остаться сверхзвуковой. Режим
Рис. 2.26. Р азви ти е свер хзвук овы х зон и ск а ч к ов уплотнения при изменении ч и с­
ла М полета и постоян н ом угле атаки
обтекания, при котором в потоке
на поверхности крыла имеются до­
звуковые и сверхзвуковые зоны
течения, называется смешанным.
Он реализуется при любом около­
звуковом числе М* < Мм < 1.
В носовой части крыла ско­
рость обтекания дозвуковая, а
при расширении струек на заднем
скате крыла скорость потока стано­
Рис. 2.27. П ерераспределение д а в л е­
вится сверхзвуковой. Дальнейшее
ния по п роф и лю крыла при обтекании
увеличение числа М„ приводит к
с околозвуковой
ск о р о ст ь ю
(М .<
постепенному сокращению зоны
дозвукового обтекания в носовой
части.
На основании качественного анализа распределения коэффициен­
та давления по профилю крыла при околозвуковых числах М х
(рис. 2.27) можно сделать следующие выводы:
при увеличении числа Мю сверх М* подъемная сила Y a продолжа­
ет расти;
происходит перераспределение давления вдоль хорды, центр дав­
ления смещается назад, растет аэродинамический момент тангажа
М, (вследствие смещения центра давления назад и роста подъемной
силы);
при закритических скоростях доля составляющих коэффициентов
давления, «тянущих» крыло назад, больше составляющих, «тянущих»
крыло вперед.
Волновое сопротивление. Появление местных сверхзвуковых зон
и скачков уплотнения, волновой срыв и вихреобразование, а также
процесс образования системы свободных вихрей, стекающих с крыла,
и скоса потока обусловливает дополнительное сопротивление, называ­
емое волновым. Волновое сопротивление крыла
Х в = Хвв-^г X t B,
( 2 .4 8 )
гд е Х 0в — в о л н о в о е с о п р о т и в л е н и е , не за ви сящ ее о т п од ъ ем н ой си лы в ди­
а п а зо н е л е тн ы х у г л о в атаки и п р и н и м а ем ое равным в о л н о в о м у с о п р о т и в л е н и ю
при н у л е в о й п о д ъ е м н о й си л е (к о г д а ос = а 0) ; X iB — и н д у к т и в н о -в о л н о в о е с о п р о ­
ти в л е н и е , в о з н и к а ю щ е е при п оя в л ен и и подъем ной си л ы на у г л а х атаки а > а 0 .
Для крыла конечного размаха аэродинамичная сила лобового сопро­
тивления
* а = * о + *1в-
<2 -49>
Первое слагаемое Х 0 не зависит от подъемной силы и складывается из
сопротивления трения крыла в пограничном слое X / и волнового со­
противления при нулевой подъемной силе:
X 0 = X f + X 0B.
(2 .5 0 )
Аэродинамическая сила сопротивления трения X f практически
не зависит от числа М^, в дозвуковом и околозвуковом режимах
обтекания. Второе слагаемое X iB есть индуктивно-волновое сопро­
тивление. При одних и тех же углах атаки его значение больше
индуктивного сопротивления в условиях дозвукового обтекания X t
на величину ЛХг„:
Х ; в = Х г + Д Х гв.
(2.51)
На основании (2.49) и (2.50) сила лобового сопротивления крыла ко­
нечного размаха при околозвуковых скоростях
X a = X / + X 0B + X i B .
(2.52)
Поделив правую и левую части уравнения (2.52) на скоростной
напор невозмущенного потока, получим соотношение между коэффи­
циентами аэродинамических сил
c x a = cx f - \ - c xaB+ c x i B.
(2.53)
Величина сХа и ее составляющие могут быть приближенно рассчитаны
по эмпирическим зависимостям [4], но практически определяются
экспер иментально.
2.6. Особенности обтекания стреловидного крыла
и крыла малого удлинения
Обтекание стреловидного крыла. В
современной транспортной
авиации наиболее широкое применение нашли трапециевидные кры­
лья: прямые и стреловидные. Трапециевидные крылья считаются пря­
мыми, если угол стреловидности по передней кромке х 0 = 5 ... 15°.
К стреловидным относятся трапециевидные крылья, угол стреловидно­
сти которых по передней кромке превышает 15°.
Обтекание полукрыльев стреловидного крыла можно в первом при­
ближении сравнить с обтеканием крыла бесконечного размаха воздуш­
ным потоком, набегающим под углом скольжения р = %„ (рис. 2.28).
Вектор скорости невозмущенного потока V ж разложим на две состав­
ляющие: нормальную к передней кромке крыла V n и тангенциальную
(направленную по касательной к передней кромке) Vr: Vx = V n +
4- Vr . Нормальная составляющая скорости V n =
cos |S=
= V,*, cos Xo обтекает профиль с хордой bn = b cos p. Вектор скорости
невозмущенного потока обтекает профиль с хордой Ь.
Геометрические характеристики профилей различны и находятся
в определенном соотношении:
=
— £ ------; Ы =
c o s Xo
—
------ ,
( 2 .5 4 )
COS Хо
гд е с и / — отн оси тел ь н ы е тол щ и н а и к р и ви зн а п р о ф и л я к р ы л а в н а п р а в л е ­
нии в е к т о р а с к о р о с т и У ,».
Различие геометрических ха­
рактеристик профилей и скоро­
стей V^, V n и Vx приводит к раз­
личному распределению сил трения
и давления. Тангенциальная со­
ставляющая
скорости
Vx =
=
sinXo=VaoSin P вызывает обра­
зование поверхностных сил трения
и не влияет на распределение дав­
ления по профилям. Нормальная
составляющая вектора скорости оп­
ределяет как поверхностные силы
трения, так и распределение давле­
ния по сечению крыла, которое бу­
дет в cos р раз меньше, чем в не­
возмущенном потоке. Наличие нор­
мальной и тангенциальной состав­
ляющих скорости, кривизна по­
верхности крыла приводят к ис­
кривлению линий тока и измене­
нию местных углов скольжения
Рис. 2.28. О б те к а н и е крыла бескон еч­
ного разм аха возд уш н ы м п отоком , на­
вдоль линий тока. Совокупность
бегаю щ и м под угл ом скольж ения р
указанных явлений принято назы­
(скользящ ее кры л о)
вать эффектом скольжения крыла
бесконечного размаха.
У стреловидного крыла эффект скольжения проявляется не в пол­
ной мере. На стреловидном крыле достаточного удлинения условно
можно выделить три зоны (рис. 2.29, п). В зоне / проявляется взаим­
ное влияние левого и правого полукрыльев, что приводит к спрямле-
5)
Рис. 2.29. О б те к а н и е стр ел ови д н ого крыла воздуш ны м потоком ( а ) и распределе­
ние коэф ф и ц и ен та давлен и я по сечениям, параллельным п лоскости симметрии ( б ) :
/ — ц ен тр а л ьн а я ч а с т ь к р ы л а ; 2 — ср ед н яя ч а с т » полукры ла; 3 — конц евы е сеч ен и я
z
о
z
Рис. 2.30. Распределение аэродинам ической нагрузки по сечениям прям ого т р а ­
пециевидного крыла с малым углом стрелови дн ости ( а ) и стр ел ови д н ого крыла
(б ) при a 2><Xi
нию воздушного потока. Это явление называется корневым или сере­
динным эффектом. Перетекание воздуха с нижней поверхности крыла
на верхнюю в области концов крыла (зона I I I ) также искажает эффект
скольжения и называется концевым эффектом. На средних участках
полукрыльев (зона II) эффект скольжения проявляется в более или
менее чистом виде.
Наличие корневого и концевого эффектов на стреловидном крыле
определяет характер распределения давления по поверхности крыла.
В отличие от крыла бесконечного размаха или прямого крыла больше­
го удлинения, у которых давление распределяется примерно одинако­
во во всех сечениях, у стреловидного крыла давление изменяется от
сечения к сечению (рис. 2.29,6). В корневых сечениях крыла максимум
разрежения смещен к хвостовой кромке, а в концевых сечениях наи­
большее разрежение наблюдается ближе к передней кромке и степень
разрежения выше, чем в других сечениях. В центральной части полу­
крыльев распределение давления занимает некоторое промежуточное
значение. Такое различие в распределении коэффициента давления
по хордам крыла обусловливает и различное распределение аэроди­
намической нагрузки по размаху крыла. В результате при одном
и том же угле атаки концевые сечения оказываются более нагружен­
ными, чем корневые (рис. 2.30).
Своеобразное распредеаение давления по сечениям и размаху крыла
обусловливает начало отрыва пограничного слоя (срыва потока) в на­
иболее аэродинамически нагруженных частях: на прямом — в кор­
невых, а на стреловидном — в концевых сечениях крыла (заштрихо­
ванная зона). Более ранний срыв потока в концевых сечениях провоци­
руется также отеканием пограничного слоя от середины к концам кры­
ла, что ведет к утолщению пограничного слоя и его отрыву. Срыв по­
тока на стреловидном крыле начинается на меньших углах атаки, чем
на прямом, но с увеличением угла атаки распространяется более мед­
ленно, чем на прямом.
Центры давления в концевых
сечениях стреловидного
крыла
смещаются вперед, а в корневых —
назад, что приводит к изменению
аэродинамического момента танга­
жа. При срыве воздушного потока
подъемная сила на участке срыва
снижается, что сопровождается из­
менением момента тангажа. Срыв
воздушного потока с концевых се­
Рис. 2.31. П рям ой ск ачок уплотнения
чений
крыла приводит к смещению
на стр елови дн ом
крыле при числе
центра давления крыла вперед и
уменьшению момента тангажа.
I — ф ронт м естны х ск а ч к о в уплотнения
Увеличение стреловидности и су­
жения стреловидного крыла приво­
дит еще к более яркому проявлению рассмотренных явлений. Так как
у стреловидного крыла нормальная составляющая скорости V n =
—
cos х0, участвующая в создании сил давления меньше скорости
полета, то местная скорость течения будет достигать скорости звука
на больших, чем у прямого крыла, скоростях полета. Следовательно,
волновой кризис наступит при больших скоростях полета, и критичес­
кое число М* стреловидного крыла будет больше, чем у прямого. В от­
личие от прямого крыла, на котором образуются прямые скачки уплот­
нения, замыкающие сверхзвуковые зоны, на стреловидном крыле скач­
ки уплотнения будучи прямыми в плоскости O X Y , наклонены к век­
тору скорости Vx в плоскости O X Z (рис. 2.31). Этот наклон обуслов­
ливает снижение интенсивности
скачка уплотнения и уменьшение
сопротивления.
Поскольку распределение дав­
ления в различных сечениях стре­
ловидного крыла по размеру не
одинаково, то будут различия и в
развитии волнового кризиса. Он
начинает развиваться в наиболее
аэродинамически нагруженных се­
чениях крыла: на прямом крыле в
корневых сечениях, на стреловид­
ном в концевых. В результате центр
давления прямого крыла имеет тен­
денцию к смещению назад, а стре­
ловидного вперед.
Обтекание крыла малого удли­
нения. Горизонтальное и верти­
Р и с. 2.32.
удлинения
О б те к а н и е
крыла
м алого
кальное оперения самолета могут
представлять собою крылья МЗЛОго удлинения, поэтому рассмотре-
ние их аэродинамики представляет практический интерес. Основной
особенностью крыльев малого удлинения является то, что перетека­
ние воздуха через боковые кромки распространяется на значительную
часть размаха и обусловливает создание сложного поля давлений по
поверхности крыла. Вихревая пелена, образующаяся за крылом и
представляющая собою систему вихрей, сворачивается в расположен­
ные под углом к поверхности крыла мощные вихревые жгуты, кото­
рые соединяются с концевыми вихрями (рис. 2.32). Внутри вихре­
вых жгутов создается разрежение, что вызывает появление дополни­
тельной подъемной силы.
При увеличении угла атаки интенсивность вихревых жгутов по­
вышается, степень разрежения на верхней поверхности увеличивается,
подъемная сила растет.
При этом наблюдается выравнивание давления по поверхности,
срыв потока происходит на больших углах атаки, чем на крыльях
больших удлинений.
Д оп ол н и тел ьн а я л и тер атура
[1 ], с . 113— 170; [4], с . 190— 20 4 , 2 3 0 — 235; [1 4 ], с . 5 1 — 62.
К о н тр о л ь н ы е воп р осы
1. И зобр а зи те св я з а н н у ю и с к о р о с т н у ю си стем ы к о о р д и н а т , у к а ж и т е у г л ы ,
оп р е д е л я ю щ и е их взаим н ое п ол ож ен и е.
2. И зобр а зи те проф и ль к ры ла и п ок а ж и те е г о о с н о в н ы е ге о м е тр и ч е ск и е х а ­
р а к те р и сти к и .
3. И зобр а зи те тр ап ец и еви д н ое к р ы л о и у к а ж и т е е г о осн о в н ы е ге о м е т р и ч е ­
с к и е х а р а к те р и сти к и .
4. Запиш ите об щ и е ф орм ул ы а эр од и н а м и ч еск ой си л ы и м ом ен та , н а зови те
и х с т р у к т у р н ы е со ста в л я ю щ и е .
5. О бъ я сн и те п р и р о д у а эр од и н а м и ч еск ой п од ъ ем н ой си л ы .
6 . О б ъ я сн и те
п р и р од у
а эр од и н а м и ч еск ой
си л ы
л обового
соп р оти вл ен и я .
7. П о я сн и те осо б е н н ости кры л а к о н е ч н о го р а з м а х а . К а к о в а п р и р од а и н д у к ­
т и в н о г о со п р о ти в л е н и я ?
8 . К а к и зм ен яется век тор н а я д и а гра м м а р а сп р ед ел ен и я коэф ф и ц и ен та д а в ­
л ен и я п о п роф илю при увел и ч ен и и ск о р о с т и п ол ета о т д о з в у к о в о й к о к о л о з в у ­
ковой?
9. О б ъ я сн и те ф и зи ч еск ую с у щ н о с т ь в о л н о в о г о к р и зи са .
10. И зо бр а зи те к а р ти н у об т е к а н и я с т р е л о в и д н о г о к ры л а в о з д у ш н ы м п о т о ­
к о м . С ф о р м у л и р у й те о сн овн ы е о со б е н н о с т и об т е к а н и я с т р е л о в и д н о г о к р ы л а по
с р а в н е н и ю с прямы м .
11. Н айдите д л и н у средней а эр о д и н а м и ч е ск о й х ор д ы тр а п е ц и е в и д н о го к р ы ­
л а , е сл и Ьи = 7 ,2 5 м, Ьк = 3 ,5 м . О тв ет: Ьд = 5 ,2 6 м.
12. О бъ я сн и те о со б е н н ости об т е к а н и я к ры л а м а л о го у д л и н ен и я .
Глава 3
АЭРОДИНАМИЧЕСКИЕ
ХАРАКТЕРИСТИКИ ОСНОВНЫХ ЧАСТЕЙ САМ О ЛЕТА
3.1. Аэродинамические характеристики крыла
Общие сведения. Аэродинамическими характеристиками частей
самолета и самолета в целом называются зависимости коэффициентов
аэродинамических сил и моментов от критериев геометрического, ки­
нематического и динамического подобия. Критериями геометрического
подобия для профиля являются равенство отношений сходственных
линейных размеров: относительной толщины с, относительной кривиз­
ны /, относительных координат сходственных точек на контуре профи­
ля. Критерии геометрического подобия крыла — удлинение X, суже­
ние 1), угол стреловидности г|з и т.д.
Для самолета число линейных размеров, по которым определяют
геометрическое подобие, значительно возрастает, так как к числу ли­
нейных размеров относятся и размеры, определяющие сложную форму
?опряжений частей самолета, например крыла и фюзеляжа, гондол
двигателей и крыла и т. д. При этом геометрическое подобие обеспе­
чивается пропорциональностью и коллинеарностью радиусов-векторов
сходственных точек самолета него модели относительно выбранной си­
стемы координат. Критериями кинематического подобия являются уг­
лы атаки а и скольжения р, параметры динамического подобия — чис­
ла Re, М, Sh и др.
Достичь полного подобия, когда во всем пространстве, окружаю­
щем натурный объект и соответствующую модель, поле скоростей, ус­
корений. действующих сил и все физические величины, определяющие
движение, находятся в определенном постоянном соотношении в сход­
ственных точках пространства в сходственные моменты времени прак­
тически удается далеко не всегда. Наиболее часто экспериментальные
исследования проводятся в условиях частичного подобия, например,
когда подобны силы трения и давления при взаимодействии потока с
исследуемым объектом.
К основным аэродинамическим характеристикам крыла относятся:
зависимость коэффициента аэродинамической подъемной силы от
угла атаки с у (а); зависимость коэффициента аэродинамической си­
лы лобового сопротивления от угла атаки с х (а), поляра крыла, пред­
ставляющая собою зависимость между коэффициентами с х и c Ug
при различных углах атаки: с х = f (Сух, а); аэродинамическое каче­
ство К в зависимости от угла атаки К (а); зависимость коэффици­
ента момента аэродинамической нормальной силы от угла ата­
ки m z (а).
При обтекании крыла воздушным потоком при угле скольжения
Р = О возникают:
аэродинамическая подъемная сила
Р» V I
Уа= Суа
2
5;
аэродинамическая сила лобового сопротивления
р
Х а = с*
а
а
°°
о
V2
°°
S;
аэродинамический момент тангажа относительно оси 0 Z связанной
системы координат
P° ° V'®
о,
M z = m z — --------Sb A .
Если в процессе трубного эксперимента измерить указанные аэродина­
мические силы и моменты при помощи аэродинамических весов, то
при известных значениях параметров р^, V ^, S и Ьа и заданных значе­
ниях угла атаки а, чисел
и Re,*, коэффициенты аэродинамических
сил и момента определяются соотношениями:
2Уа
Уа
р V ОО
2 S
ГО О
2Ха
сх „
а
р V ОО
2 S ’
Г ОО
2Мг
р V 2 S bЛ.
Г О О О О
Зависимости этих коэффициентов от параметров подобия (аэро­
динамические характеристики крыла) представляют в виде графиков с
указанием условий испытаний. При известных c x<iJ с Уа. m z определя­
ют аэродинамические силы Х „ и Y действующие на реальное крыло, и
момент M z для соответствующих скоростей потока (чисел М^), плот­
ности воздуха, углов атаки.
При наличии угла скольжения р на крыло действуют аэродинами­
ческие силы, приводящие к образованию аэродинамического момента
крена М х (относительно оси О Х ). Эти силы и моменты рассмотрим при
изучении аэродинамики самолета.
Зависимость коэффициента аэродинамической подъемной силы от
угла атаки. Рассмотрим картину обтекания и распределения коэффи­
циента давления по поверхности отрезка крыла бесконечного размаха,
имеющего несимметричный профиль. При угле
атаки нулевой
подъемной силы а = а 0 > 0 кривые распределения давления по верх­
ней и нижней поверхности сливаются (рис. 3.1, а), площадь о, заклю­
ченная между ними, равна нулю. При увеличении угла атаки разреже­
ние на верхней поверхности увеличивается, а на нижней уменьшается
(рис. 3.1, б) и при некотором угле атаки давление на кижней поверх­
ности
может стать больше давления в невозмущенном потоке
(рис. 3.1, в).
Увеличение угла атаки сопровождается ростом площади а. При не­
котором угле атаки вследствие повышения положительного градиента
давления на верхней поверхности крыла будет наблюдаться отрыв по-
Р и с. 3.1. Р а сп р ед ел ен и е давления по несимметричному профилю кры ла при раз­
ли чн ы х угл ах атаки (сп ек тры обтекани я, диаграммы распределения коэф ф ициен ­
та д а в л е н и я ):
и —
6 — а —0; в — а С а н . с ; г — а н . с < а < а к р
\
Граничного слоя (срыв потока). '‘ Уа суа т а » '
Дальнейшее увеличение угла ата­
ч
ки сопровождается расширением 7,5 Суа ».с
Г~
/ \
зоны срыва потока (рис. 3.1, г).
/
1
1
1
Площадь а продолжает увеличи­
/
1
1
1
ваться с ростом угла атаки до тех Ю
1
1
пор, пока срыв потока не достигнет
1
i
некоторого критического. Дальней­ 0,5
1
1
шее увеличение угла атаки сопро­
вождается расширением зоны сры­
* 4
V <р
ва и уменьшением площади а.
’ A ct
Так как площадь а пропорцио­
Рис. 3.2. З ави си м ость коэф ф ициен та
нальна коэффициенту аэродинами­
подъем ной силы
крыла с н еси м м ет­
ческой нормальной силы с и, то, из­
ричным профилем от угла атаки
меряя площадь ст для различных
углов атаки при постоянных значе­
ниях чисел М,*, и Re,*,, можно было бы получить зависимость коэффи­
циентов с у от угла атаки, а от нее перейти к зависимости с Уа (а).
Обычно эти зависимости (рис. 3.2) получают более простым мето­
дом: на различных углах атаки измеряют при помощи аэродинамиче­
ских весов подъемную силу Y а и определяют
/
А
су а = 2 К а /р У 2 S.
Коэффициент подъемной силы равен нулю при угле атаки нулевой
подъемной силы. С увеличением угла атаки из-за перераспределения
давления на верхней и нижней поверхностях крыла подъемная сила
и ее коэффициент возрастают по линейному закону (для отрезка кры­
ла бесконечного размаха) до тех пор,пока угол атаки не увеличится до
значения, при котором на верхней поверхности крыла возникнет срыв
потока. Этот угол атаки крыла называется углом атаки начала срыва
а — а н. с- На крыльевых профилях срыв потока при М < М * начина
ется при углах атаки а = а „ . с « 10 ... 15°.
Если угол наклона кривой с„а (а) относительно оси абсцисс обозна­
чить через <р, то
А Си
tg ф=
Производная с“
Да
дСУд
(3 .1 )
да
характеризует темп изменения коэффициента сУа с
изменением угла атаки. Чем больше с“ а, тем чувствительнее крыло
к изменению угла атаки. Если угол наклона <р постоянный, то при из­
вестном с“ а для каждого значения угла атаки а на линейном участке
кривой Су (а) можно определить коэффициент подъемной силы:
CU
= Cуа
U ( а — « о ) = с?
'а
уа
=
уа
а.
С
Уа^уатat
14
_
/
/
|
!
j
1
|С6НС ICCкр
гОсб,°
10
При углах атаки а > а н.с зона
срыва потока расширяется, рост
коэффициента подъемной силы за­
медляется,
линейность
кривой
с у (а) теряется, значение произ­
водной са уменьшается. КоэффиУа
циент аэродинамической подъемной
^кр -сйнс йсУа{
силы достигает максимального зна­
о
о) Лее,
~2
чения Суатах при угле атаки а Уа,
называемом критическим. Даль­
1 1
1-1 1
нейшее увеличение угла атаки при­
1 1
водит к уменьшению коэффициента
1 1
1 1
подъемной силы с Уа вследствие раз­
вития
срыва на верхней поверхно­
~суан.с
сти
вдоль
хорды и размаха крыла.
\ Чу*
7
s
\ / 4----- ±PJ —
Г
Практически используется верхняя
иУатах
часть зависимости с и (а) для углов
атаки а ^ а 0.
”
Рис. 3.3. Зави си м ость
коэффициента
Для крыла с симметричным
подъемной силы крыла с си м м етрич­
ным профилем от угла атаки
профилем кривые с !1а (а) проходят
через начало координат, так как
угол атаки нулевой подъемной силы а 0 = 0. Для таких крыльев при
а > * „ и ос < ос0 кривые симметричны (рис. 3.3).
В соответствии с (2.25) при малых углах атаки можно считать, что
с уа ~ с у ® Диапазоне углов атаки, не превышающих а „ . с, зависимости с у„ (а ) ч с у (а) подобны (рис. 3.4). С увеличением угла а подобие
кривых нарушается. Таким образом, если известны зависимости с у (а)
для крыла заданного профиля, то, зная скорость воздушного потока I/*,.
плотность рю и площадь крыла S , можно рассчитать значение подъем­
ной силы, действующей на крыло при различных углах атаки:
р
V ОО
2
• ОО
=с»в*«
Рис. 3.4. З а ви си м ости коэф ф ициентов
подъ ем н ой и норм альной а эр оди н а ­
мических сил о т угла атаки
(3 .3 )
Значение с и для заданных уг­
лов атаки снимается по графику
кривой с„ (а). Производную с®
■в
Уа
всегда можно определить по гра­
фику кривой с у (а) как тангенс
угла ее наклона.
Приращение угла атаки на
величину Да вызывает прираще­
ние подъемной силы
АКа = У “ Д а = с “
Да q ^ S .
(3 .4 )
Ьсли известно значение с°
ТО ПО
у,
формуле (3.4) можно определить
приращение подъемной силы, соот­
ветствующее
приращению угла
атаки.
Зависимость коэффициента ло­
бового сопротивления крыла от уг­
ла атаки. Эта зависимость получа­
Рис. 3.5. З ави си м ость коэф ф ициента
л о б о в о г о сопротивления
отр езк а
I
крыла беск он ечн ого разм аха о т угла
атаки
ется по результатам продувки мо­
дели крыла в аэродинамической
трубе при обеспечении достаточно
полного динамического подобия. Типичная зависимость с Ха (а) для
отрезка I крыла бесконечного размаха представлена на рис. 3.5. При
увеличении угла атаки перераспределяется давление на крыле, изме­
няется эпюра скоростей в пограничном слое, что приводит к изменению
сопротивлений трения и давления. С возрастанием углов атаки коэф­
фициент с х увеличивается по закону, близкому к параболическому.
Причем составляющую трения
при отсутствии срыва можно считать
постоянной. Изменение коэффициента с Ха вызвано в основном увеличе­
нием составляющей сопротивления давления с х , которая при фикси­
рованном числе Re,*, зависит от угла атаки, относительной кривизны
и толщины профиля. В связи с этим коэффициент лобового сопро­
тивления
(3 .5 )
ПпН
коэф ф ициент л о б о в о г о с о п р о т и в л е н и я при н ул ев ой п одъ ем н ой
где с.'x „m in
— коэф ф и ц иен т д о п ол н и тел ь н ого с о п р о т и в л е н и я д а в л ен и я , о б у с л о в -
с и л е ; Ас
*р
л е н н о г о увел ичен и ем угл а атаки.
С появлением и развитием местных срывов потока при а ^ а „ . с
величина Ас Хр растет более интенсивно, что объясняется потерей энер­
гии воздушного потока на вихреобразование.
Образование подъемной силы крыла конечного размаха связано с
возникновением системы свободных вихрей и скоса воздушного
потока, что вызывает дополнительную потерю механической энергии
и возникновение индуктивного сопротивления.
На основании вихревой теории крыла коэффициент индуктивного
сопротивления с х . и средний угол скоса потока еср рассчитывают
по формулам:
яХэф
^эф
эф ф ек ти вн ое удли н ен и е к р ы л а .
яЯзф
(3 .6 )
Эффективное удлинение крыла связано с геометрическим удлине­
нием соотношением
где б — п а ра м етр , у ч и ты ва ю щ и й геом етр и ческ и е х а р а к тер и сти к и
п л а н е (у г о л стр е л о в и д н о сти %, с у ж е н и е г| и удли н ен и е А,).
кры л а в
Величина 6 определяется зависимостью
Из выражений (3.6), справедливых для случая безотрывного обте­
кания, следует:
коэффициент индуктивного
сопротивления сх . пропорционален
квадрату коэффициента подъемной силы и изменяется в зависимости от
угла атаки по параболическому закону;
угол скоса потока еср пропорционален углу атаки;
при угле атаки а п коэффициент подъемной силы с Уа — 0, поэтому
индуктивное сопротивление и угол скоса потока отсутствуют;
индуктивное сопротивление и угол скоса потока достигают макси­
мальных значений при критическом угле атаки, когда с я — СуатЯхНаличие сил профильного и индуктивного сопротивлений, возни­
кающих при обтекании крыла конечного размаха, определяет аэроди­
намическую силу лобового сопротивления и соответственно ее коэф­
фициент
сха
где
ло 0
—c.vo ~i "Cxi —С
'.Т0 -f"
с х о — к оэф ф и ц и ен т, у ч и ты в а ю щ и й соп р оти в л ен и е трени я
обНх а кр
Р и с. 3.6. З а ви си м ость соста в л я ю щ и х
к оэф ф и ц и ен та л о б о в о г о соп р о ти в л е ­
ния кры ла к он ечн ого ра зм а ха о т угла
атаки б е з учета сж и м а е м ости
(3 .9 )
и д а вл ен и я .
Из последней формулы следует,
что на режимах безотрывного об­
текания (а 0 < а < а н. с) зависи­
мость коэффициента лобового со­
противления с Ха от угла атаки
имеет вид квадратичной параболы
(рис. 3.6). По этой кривой для каж­
дого угла атаки можно определить
коэффициент с Ха и его составляю­
щие.
Аэродинамическое качество кры­
ла. Отношение подъемной силы
к силе лобового сопротивления или
отношение их аэродинамических
коэффициентов при одном и том же угле атаки называется аэродина­
мическим качеством
К = Y a/Xa = с у а/сХа-
( 3 .1 0 )
Это отношение показывает, во сколько раз при заданном угле
атаки аэродинамическая подъемная сила крыла больше силы лобо­
вого сопротивления, т. е. характеризует степень аэродинамического
совершенства крыла.
Аэродинамическое качество крыла можно выразить через тангенс
угла наклона полной аэродинамической силы R a к направлению векто­
ра скорости:
/С =
tg cp .
(3.11)
Угол ф называется углом аэродинамического качества (рис. 3.7).
Чем меньше лобовое сопротивление при том же значении подъемной
силы, тем больше аэродинамическое качество.
Аэродинамическое качество крыла так же, как и коэффициенты аэ­
родинамических сил, зависит от геометрических характеристик крыла,
угла атаки, чисел М и Re и не за­
висит от скорости. Типичная зави­
симость аэродинамического качест­
ва от угла атаки приведена на
рис. 3.8. При угле атаки нулевой
подъемной силы а 0 аэродинамичес­
кое качество К = 0. Угол атаки
а нп, при котором аэродинамичес­
кое качество достигает максималь­
Рнс. 3.7. С оста в л я ю щ и е аэр оди н а м и ­
ного значения, называется наивы­
ческой силы крыла и у гол а эр од и н а ­
годнейшим. Это значит, что при
мического качества
угле а нв соотношение между подъ­
емной силой крыла и лобовым со­
противлением наилучшее.
Аэродинамическое качество кры­
ла оказывает большое влияние на
такие летно-технические характе­
ристики самолета, как дальность
планирования, дальность и про­
должительность полета, расход топ­
лива, характеристики набора высо­
ты и др. Поэтому на этапах конст­
руирования и изготовления стре­
мятся обеспечить наиболее высокое
аэродинамическое качество.
Поляра крыла. Зависимость меж­
Р ис 3.8.
З а в и си м о ст ь
а эр од и н а м и ­
ду коэффициентами аэродинамическ ого качества кры ла о т угла атаки
ческой подъемной силы с„ а и лобового сопротивления с Ха при раз­
личных углах атаки называется по­
лярой крыла или полярой первого
рода (рис. 3.9). Поляра — важнейг
шая аэродинамическая характери­
стика крыла. Название поляры объ­
ясняется тем, что при одинаковых
масштабах вдоль осей с Ха и с Уа за­
висимость с Ха = f (с Уа, а) можно
рассматривать, как полярную диа­
грамму или годограф вектора коэф­
Рис. 3.9. П ол я ра
крыла
кон ечн ого
фициента полной аэродинамичес­
разм аха и соста вл я ю щ и е коэф ф и ц и ­
кой силы Cr , длина которого Cr =
ента л о б о в о г о сопротивления
= 1/с| + с\ , а ф — угол накло­
на данного вектора к направлению
г-корости невозмущенного потока, который связан с аэродинамическим
качеством соотношением К = tg ф. Если известны кривые с Уп (а) и
с Ха (а), то поляру с Ха = / (су , а) можно построить по координатам
точек, соответствующих нескольким углам атаки. Координаты точек
определяют непосредственно по кривым с у (а) и с Ха (а) с учетом мас­
штаба. Так как в диапазоне летных углов атаки коэффициент с Уа в
несколько раз больше коэффициента с х , то для наглядности и удоб­
ства пользования полярой масштаб по оси сх выбирают в 5— 10 раз
больше, чем вдоль оси сх . Поляра может быть задана уравнением, на­
зываемым уравнением поляры:
'"'О
где A cs
яА,эф
+ Д с,
(3 .1 2 )
— при р ащ ен и е коэф ф и ц иен та давления при ср ы в е п о то к а .
Обычно полет осуществляется на углах атаки а <С а н.с- В этом слу­
чае уравнение поляры упрощается:
(3 .1 3 )
яХЭф
Составляющие коэффициента лобового сопротивления крыла в соот­
ветствии с уравнением (3.12) показаны на рис. 3.9.
На поляре можно указать характерные точки, соответствующие
определенным углам атаки (см. рис. 3.9)угол атаки нулевой подъемной силы а 0 соответствует точке пере­
сечения поляры с осью абсцисс;
Рис. 3.10. О сн овн ы е аэродинамические характеристики крыла и характерны е т о ч ­
ки на них
наивыгоднейший угол атаки а нв, который определяется касатель­
ной, проведенной из начала координат к поляре, соответствует мак­
симальному аэподинамическому качеству крыла /Стах;
критический угол атаки а |!р определяется касательной к поляре,
проведенной параллельно оси абсцисс;
угол атаки a r mln наименьшего лобового сопротивления опреде
ха
ляется касательной к поляре, проведенной параллельно оси ординат.
Если крыло не имеет крутки, то углы а п и а с mIll совпадают.
л'о
Точкам пересечения секущей, проведенной из начала координат,
с полярой соответствуют углы атаки а , и а 2, один из которых меньше,
а второй больше наивыгоднейшего угла атаки а ,М). Это углы называ­
ются углами атаки равного аэродинамического качества. Если на поля­
ре не обозначены цифровые значения углов атаки, то их можно най­
ти. Для этого на поляре определяют значение с„о, соответствующее
интересующей точке поляры, и по кривой с у (а) находят значение
угла атаки.
Если кривые с Ха = f (с Уд, a), c v (а) и с Ха (а) построены в од­
ном масштабе по соответствующим осям, то характерные точки и со­
ответствующие им числовые значения аэродинамических характерис­
тик можно определить геометрическим построением (рис. 3.10).
Поляра, построенная в разных масштабах по осям с И и с Ха, являет­
ся искаженной, поэтому на ней нельзя непосредственным измере­
нием определять углы аэродинамического качества и коэффициенты
полной аэродинамической силы.
Для определения аэродинамического качества профиля на задан­
ном угле атаки находят коэффициенты с Ча и с х и вычисляют аэроди­
намическое качество по формуле (3.10).
Зависимость коэффициента аэродинамической нормальной силы
с у от коэффициента аэродинамической продольной силы с х при различ­
ных углах атаки называется полярой второго рода с х = f (су, а).
Поляра второго рода по виду значительно отличается от поляры пер­
вого рода Суа = / (сУа, а), что определяется появлением на больших
углах атаки продольной силы X , направленной против вектора ско­
рости набегающего воздушного потока, в отличие от силы лобового
сопротисления Х а, всегда направленной по вектору скорости набега­
ющего воздушного потока.
Экспериментальные поляры первого и второго рода для прямого
крыла конечного размаха приведены на рис. 3.11.
Поляра второго рода используется при анализе прочностных ха­
рактеристик крыла и самолета.
Зависимость коэффициента аэродинамического момента тангажа
от угла атаки. Аэродинамический момент тангажа M z полной аэро­
динамической силы R a относительно оси 0 Z создается в основном си­
лами давления, распределенными по поверхности крыла, которые в
отличие от сил трения зависят от угла атаки. Зависимость коэффи­
циента аэродинамического момента тангажа от угла атаки крыла
т г (ос) получают экспериментально. Типичные зависимости для крыла,
набранного из симметричных и несимметричных профилей, пока­
заны на рис. 3.12. Для наглядности они совмещены с кривыми
с уа (а )У крыла симметричного профиля при угле атаки нулевой подъем­
ной силы а„ распределение давления на верхней и нижней поверхно­
стях профиля симметричное, поэтому аэродинамический момент, дей­
ствующий относительно носка профиля, М г= 0 , а следовательно, и
коэффициент момента т г — 0.
У крыла несимметричного профиля момент тангажа и его коэффи­
циент обращаются в нуль при некотором угле атаки а = а„, называ-
Рис. 3.11. П оляры крыла:
и и 6 — п е р в ого и в т о р о го р ода со о т в е т ст в е н н о
86
Рис. 3.12. С овмещ енны е кривые
маха:
тг ( а )
и
си ( а ) для крыла кон ечн ого р а з­
а
а и б — сим м етричны й и несимметричный профили соот в ет ств ен н о
емом углом атаки нулевого момента тангажа. Дальнейшее увеличе­
ние угла гтаки приводит к увеличению абсолютного значения коэф­
фициента момента тангажа. Аэродинамический момент тангажа
и
его коэффициент т. считаются отрицательными, если момент М 2
стремится уменьшить угол атаки. При угле атаки нулевой подъемной
силы а — а„ подъемная сила крыла Y a = 0, но момент М 0г, называе­
мый аэродинамическим моментом тангажа при нулевой подъемной
силе, М ог Ф 0. Действительно, аэродинамическую нагрузку, дейст­
вующую на крыло несимметричного профиля при нулевой подъемной
силе (см. рис. 3.1, а), можно привести к паре сил Y 0l и Y a„ равных
по значению, но противоположно направленных (рис. 3.13).
Коэффициент этого момента называется коэффициентом аэроди­
намического момента тангажа при нулевой подъемной силе moz.
С увеличением угла атаки аэродинамическая нагрузка по профилю
крыла изменяется, центр давления перемещается вдоль хорды, а подъ­
емная сила увеличивается. Это приводит к соответствующему росту
коэффициента т г, который для рассматриваемого отрезка крыла уве-
Рис. 3 .1 3 . С хем а
аэродинамических
сил, д е й ств у ю щ и х на несимметричный
профиль при а 0= 0
Рис. 3.14. З а в и си м ост ь коэф ф ициента
а эр оди н а м и ческого м ом ен та та н га ж а
крыла о т к оэф ф и ц иен та
нормальной
аэроди н ам и ческой силы
личивается по абсолютному значению, оставаясь отрицательным.
При углах атаки а > а Н(. линейность кривой mz (а) из-за перерас­
пределения давления в результате срыва потока нарушается. При уг­
ле а = а кр коэффициент т г достигает максимального отрицатель­
ного значения и при закритических углах атаки а > а К|, уменьшает­
ся по абсолютному значению.
Для практических расчетов более удобна графическая зависимость
коэффициента т г от коэффициента аэродинамической подъемной силы
Суи (рис. 3.14). Так как углы атаки в диапазоне летных углов можно
считать малыми, то принимают с,, ж с у , отождествляя подъемную
и нормальную силы.
Линейный участок зависимости т 2 (су) можно выразить в соответ­
ствии с общей формулой линейной функции:
mz = moz + т°У c ,j,
cv
(3 .1 4 )
дтг
где m * — п р о и зв од н а я “з— , к о т о р а я равна та н ген су угл а н а к л он а л и н еи ного
у ч а стк а к р и в о й mz ( с у) к оси а б сц и сс.
Из рис. 6.12, б следует:
mz = m ‘ y ( a - a mt).
(3 .1 5 )
Для расчета значения т 2 при заданном угле атаки а по кривой
с 9 и по известным /л02, тсу и а ш0 рассчиты­
вают коэффициент т г
Если известна кривая т г (cyJ , то значения tnoz и mz для любого
заданного коэффициента с,у можно определить по этой кривой
(см. рис. 3.14).
с Уа(а) определяют с я «
3.2. Центр давления и фокус профиля крыла
Как показывают исследования, положение центра давления про­
филя крыла при изменении угла атаки не остается постоянным. При
угле атаки а 0 координата Хд центра давления находится позади про­
филя, теоретически в бесконечности. С увеличением угла атаки от а„
до а кр центр давления приближается к некоторой точке F , располо­
женной у крыльевых профилей, примерно на расстоянии четверти
хорды от носка профиля (рис. 3.15). Положение центра давления про­
филя при различных углах атаки определяется, как проекция точки,
соответствующей заданному углу атаки и принадлежащей некоторой
гиперболе, на хорду профиля (точки 1 , 2 и т.д.). Исключение состав­
ляют симметричные профили, у которых центр давления при углах
атаки а < а н с не изменяет своего положения на хорде, соответствую­
щего 0,25 b от носка.
Аэродинамический момент тан­
гажа, создаваемый силой Y a отно­
сительно носка профиля,
М г = Уа хд .
( 3 .1 6 )
Поделив левую и правую части
этого выражения на qSb A, получим
заьисимость в безразмерной форме
1д>
(3 .1 7 )
п риведенная
где
ко-
ор д и н а т а центра д авл ен и я , вы раж ен н ая
ч д о л я х или п роц ен та х х ор ды Ьл .
Непостоянство координаты центра
Рис. 3.15.
З а ви си м ость
к оорди н аты
центра давления профиля о т угла
давления хд при изменении угла
атаки, сложность ее определения
атаки
осложняют расчет аэродинамиче­
ского момента тангажа профиля. Поэтому введено понятие фокуса про­
филя крыла как точки F , относительно которой (или относительно оси,
проходящей через эту точку) момент аэродинамических сил при малых
изменениях угла атаки остается постоянным (рис. 3.16, а).
Если при угле атаки а, > а 0 на профиль крыла действует подъем­
ная сила Y al, приложенная в центре давления Д ъ то при угле атаки
а 2 > а , на него будет действовать подъемная сила Y nl > Y aU при­
ложенная в центре давления Д г. По определению фокуса профиля
крыла момент этих сил относительно фокуса должен остаться одинако­
вым:
M F = Yal а = Уаг Ь— c o n s t.
Для выполнения этого равенства необходимо, чтобы прирост подъем­
ной силы компенсировался уменьшением ее плеча относительно точ­
ки F .
Найдем координаты фокуса профиля крыла. Для этого запишем
выражение для момента относительно некоторой точки /', произволь­
но расположенной на хорде (рис. 3.16, б):
' У { x JX
^ f ) —"
У
Поделим левую и правую части этого равенства на qx S b A и с учетом
(3.14) получим
Г=
где
xF =
т 0г +
{т °У
+
Хр
j
су
,
x j b — при веден н ая к оор д и н а та ф о к у с а .
(3 .1 8 )
Рис.
3.16.
С хем а
м ом ен тов
(а),
координаты
ф ок уса
и
центра
давлен и я
(б )
Из выражения (3.18) следует, что коэффициент trip не зависит от угла
атаки (от коэффициента с у, являющегося функцией угла атаки) в том
случае, если второе слагаемое будет равно нулю. Это возможно, если
приведенная координата фокуса
Х р = — т°У.
( 3 .1 9 )
При известной координате фокуса профиля крыла коэффициент мо­
мента тангажа с учетом зависимости (3.14) может быть представлен в
виде
/и2 = /п 02
СуХр.
( 3 .2 0 )
При безотрывном обтекании и малых числах Мм положение фокуса
профилей остается практически постоянным: Xf = 0,22 ... 0,25.
3.3. Влияние числа М полета и геометрии крыла
на аэродинамические характеристики
Влияние числа М. Особенности обтекания крыла воздушным по­
током с дозвуковой и околозвуковой скоростями и связанное с ними
изменение аэродинамических сил отражаются в аэродинамических
характеристиках крыла и, в частности, в зависимости коэффициента
аэродинамической подъемной силы от числа
(рис. 3.17). Увеличе­
ние коэффициента подъемной си­
лы с Уа в диапазоне чисел М00< М #
объясняется проявлением сжимае­
мости воздуха. Если коэффициент
подъемной силы при обтекании
крыла несжимаемым воздушным
потоком обозначить c U(jH.c, то при
обтекании сжимаемым воздушным
потоком коэффициент подъемной
силы
Рис. 3.17. З а в и си м о ст ь коэф ф ициента
подъ ем н ой силы п р я м ого крыла от
числа Моо при п о сто я н н ом угле атаки
Суа сж — с уаИ.с/ \ 1 —
( 3- 21)
Р и с. 3.18. Зави си м ость коэффициента
л о б о в о г о сопротивления п рям ого к ры ­
ла от числа М » при постоянном угле
атаки
Рис. 3.19. З ави си м ость пол ож ен и я ф о ­
куса
профиля
крыла
о т числа
М . (a = co n st)
Следовательно, с увеличением числа
коэффициент подъемной си­
лы c UaCiк растет. Более сложный закон изменения коэффициента с Уп
при М,*, > М * связан с возникновением и развитием волнового кри­
зиса. Коэффициент подъемной силы продолжает расти, пока сверх­
звуковая зона развивается на верхней поверхности крыла (участок
1— 2 кривой). Дальнейшее увеличение числа
и развитие сверх­
звуковой зоны на нижней поверхности приводят к резкому снижению
коэффициента подъемной силы (участок 2 — 3). При дальнейшем уве­
личении числа Мд,, вследствие перераспределения давления на верх­
ней и нижней поверхностях коэффициент подъемной силы вновь
увеличивается и растет до момента, соответствующего числу М,,, = 1,
после чего вновь уменьшается.
Коэффициент лобового сопротивления с„ увеличивается при об ­
текании сжимаемым воздушным потоком (М^ < М*) главным обра­
зом за счет индуктивного сопротивления
с2
Уд
°Xl
Я>.эф
Влияние числа
на индуктивное сопротивление проявляется через
коэффициент с у . Характер зависимости коэффициента лобового со­
противления от числа М,,, (рис. 3.18) определяется тем, что сопротив­
ление трения при
<С М* практически остается постоянным, а со ­
противление давления меняется в значительно меньшей степени, чем
индуктивное сопротивление. Увеличение числа Мж до закритических
значений приводит к росту волнового сопротивления. Лобовое сопро­
тивление достигает максимального значения при числах М^, равных
или несколько больших единицы.
Поляра прямого крыла конечного размаха в дозвуковом потоке
при безотрывном обтекании определяется зависимостью
где е
-
к оэф ф и ц иен т
п роф и л ь н ого
со п р о ти в л е н и я , уч и ты ва ю щ и й с о п р о ­
ти в л е н и е трения и д а в л ен и я , в том числе и в ол н овое соп р оти в л ен и е. В л и я н и е ч и с­
ла Моо уч и ты ва ется через вели чи н у суа.
Коэффициент аэродинамического момента тангажа с ростом числа
до значений, меньших М*. увеличивается:
( 3 .2 2 )
При числах М.*. > М* вследствие перераспределения давления на
прямом крыле центр давления и фокус смещаются назад. При лет­
ных углах атаки центр давления такого крыла находится примерно
на половине хорды (рис. 3.19). Смещение центра давления и увеличе­
ние коэффициента с и (см. рис. 3.17) приводят к резкому росту мо­
мента тангажа и его коэффициента тг.
Изменение коэффициентов аэродинамических сил с у и с х при
различных числах
обусловливают соответствующее изменение
аэродинамического качества крыла (рис. 3.20). Увеличение числа
приводит к росту аэродинамической нагрузки е сечениях крыла, по­
ложительных градиентов давления и срыву потока на меньших углах
атаки. В результате углы атаки начала срыва а н с и критический а кр
уменьшаются (рис. 3.21). Это может привести также к уменьшению
коэффициента c „ amax.
Влияние геометрии крыла. Крыло набирается из профилей, име­
ющих различную геометрию. Исследованиями установлены характер­
ные качественные закономерности, являющиеся ориентировочной
основой при конструировании и летной эксплуатации самолетов.
К
Рис. 3.20. З а ви си м ость а эроди н ам и че­
ск о го качества проф иля
крыла
от
числа M „ ( a = co n st)
Рис. 3.21. Зависим ость коэф ф ициента
аэродинамической подъ ем н ой силы от
угла атаки при M ooi< M oo2< M .
Р и с. 3.22. З ави си м ость
величин
су т а х ,
а кр и /С тах
от
отн оси тельн ой тол ­
щины профиля
Увеличение относительной толщины профиля ( приводит сначала
к росту коэффициента подъемной силы с*а„1ах и достижению макси­
мальных значений при некоторых значениях с, затем к постепенному
уменьшению (рис. 3.22, а). При этом коэффициент силы лобового со­
противления c 3r„rnin возрастает по закону, близкому к линейному.
Критический угол атаки а ,.р с увеличением с увеличивается, а мак­
симальное аэродинамическое качество К т ах уменьшается (рис. 3.22,6).
Аэродинамический фокус профиля при увеличении с незначительно
смещается вперед.
С увеличением относительной кривизны / профиля, геометриче­
ской и аэродинамической крутки крыла наблюдается рост коэффици­
ента су тах ^см. рис. 3.22, а). Кривая с„ (а) с увеличением кривизны
Рис. 3.23. З а ви си м ость коэф ф ициента аэр оди н ам и ческой п одъ ем н ой силы о т угла
атаки крыла (а) и поляры крыла ( б ) :
/ — несимметричны й
клонены
проф иль;
2 — отр и ц ател ьн ая
геом етр и ч еск а я
к р у тк а ;
3 — закр ы л ки
от­
f профилей
крыла и крутки сме­
щается влево, в сторону меньших
углов атаки (рис. 3.23, а).
Крутка крыла приводит к не­
которому увеличению коэффициен­
та лобового сопротивления в об­
ласти углов атаки, близких к а „.
Поляра крыла имеет характерный
изгиб (риг. 3.23, б). Минимальный
коэффициент лобового сопротивле­
ния соответствует углу
атаки
acx
.inin
>
«оПри
этом
в
зависимо­
Р и с. 3.24. Влияние числа
R e на к о ­
сти от относительной толщины про­
эф ф ициент аэродин ам ической п од ъ ем ­
ной силы
филя с и изменения относительной
кривизны f изменяется положение
центра давления *д. Эта зависимость носит сложный характер и по­
лучается экспериментально.
Значительное влияние на аэродинамические характеристики про­
филя и крыла оказывают число Re,*, и начальная турбулентность воз­
душного потока (рис. 3.24). С ростом числа Re^ на профилях средней
толщины коэффициент с аТПах увеличивается, точка отрыва погра­
ничного слоя перемещается ближе к задней кромке профиля из-за
повышения интенсивности переноса количества движения в погранич­
ном слое. У тонких профилей с заостренным носком отрыв погранич­
ного слоя происходит при малых углах атаки вблизи носка, поэтому
коэффициент c Vgmax для них практически не зависит от числа Re,*,.
Для толстых профилей (с > 15 % ) увеличение числа Re^ вызывает
уменьшение c Bii„lax вследствие повышения градиентов давлений. Воз­
растание начальной турбулентности воздушного потока уменьшает
зону с ламинарным пограничным слоем, что ведет к увеличению зна­
чения с*оГП(п, а коэффициент с УоП1ЯХ изменяется незначительно.
3.4. Аэродинамические характеристики стреловидного крыла
и крыла малого удлинения
Стреловидное крыло. Рассмотрим основные яэродинамические ха­
рактеристики стреловидного крыла в сравнении с характеристиками
прямого трапециевидного крыла с малым углом стреловидности по
передней кромке. Крылья набрзны из одинаковых профилей и имеют
одно и то же удлинение к и сужение т).
Угол атаки нулевой подъемной силы а„ определяется кривизной
профилей и для плоского крыла от угла стреловидности не зависит.
Так как подъемная сила стреловидного крыла создается только нор­
мальной к передней кромке составляющей скорости Vn. то при рав94
Рис. 3.25. З ави си м ости коэффициента
видного крыльев: при докритическом
с
от угла атаки для п р я м ого и стрело-
(а) и закритическом (б ) числах Моо
ных углах атаки коэффициент подъемной силы с и стреловидного
крыла меньше, чем у прямого (рис. 3.25. а).
Вследствие роста пиков разрежения в концевых сечениях при
увеличении угла атаки до значений а н.с раньше, чем в других сече­
ниях крыла, зарождается срыв потока. Срыву потока в концевых се­
чениях способствует то, что сюда, в область высоких разрежений,
перетекает пограничный слой с участков крыла, расположенных бли­
же к плоскости симметрии Срыв потока начинается на меньших уг­
лах атаки, чем у прямого крыла, но зона срыва потока с увеличением
угла атаки расширяется медленнее, чем у прямого, так как этому пре­
пятствует тангенциальная составляющая скорости потока V T, на­
правленная против распространения срыва. Такой характер распро­
странения срыва потока на стреловидном крыле обусловливает плав­
ное изменение коэффициента с,,а (а) в сравнительно широком диапазо­
не докритических углов атаки: а н с < а < а кр. Критический угол
атаки а кр стреловидного крыла заметно больше, чем прямого, и уве­
личивается с увеличением угла стреловидности. При этом максималь­
ный коэффициент c,JamstX стреловидного крыла меньше, чем прямого,
т. е. несущие свойства у стреловидного крыла при малых числах Мю
хуже, чем у прямого.
Коэффициенты аэродинамической подъемной силы прямого с !/пЯ и
стреловидного с,,аС крыльев связаны соотношением
cva° х с Уа* cos2X-
( 3 .2 3 )
Соответственно производные са „ и са с, характеризующие изменеУа
Уа
ние коэффициента подъемной силы . ри изменении угла атаки на 1°,
связаны соотношением:
( 3 .2 4 )
Поскольку с увеличением угла стреловидности cos % уменьшается,
то из выражений (3.23) и (3.24) следует, что с увеличением угла стре­
ловидности несущие свойства крыла ухудшаются. Профильное, сопро­
тивление стреловидного крыла почти полностью определяется сопро­
тивлением трения и практически не зависит от угла стреловидности.
Коэффициенты индуктивного сопротивления прямого и стреловид­
ного крыльев одного удлинения при малых числах
и углах стре­
ловидности х
20° практически одинаковы. С увеличением угла
стреловидности коэффициент с х . увеличивается и при угле % = 35°
примерно в 1,2 раза больше, чем у прямого крыла. Увеличение стре­
ловидности и сужения крыла приводит к более раннему срыву потока
на его концах, так как способствует повышению аэродинамической на­
грузки в концевых сечениях, а также перетеканию пограничного слоя
от серединных сечений к концам крыла. Таким образом, при малых
числах Мзо коэффициент аэродинамической подъемной силы является
функцией удлинения, стреловидности и сужения крыла. Чем меньше
удлинение и больше стреловидность крыла, тем меньше производная
с“а (тем больше кривая с,1п(а) наклонена к оси абсцисс), тем хуже
несущие свойства крыла.
При числах Л!*, > М* на наиболее аэродинамически нагружен­
ных участках поверхности крыла возникает и развивается волновой
кризис. Так как критическое число М* стреловидного крыла сущест­
венно больше, чем прямого, то при закритических для прямого крыла
скоростях полета коэффициент подъемной силы стреловидного крыла
прЬдолжает расти и превышает коэффициент подъемной силы прямого
крыла (рис. 3.25, б). Даже при смешанном обтекании стреловидного
крыла, несмотря на снижение местных коэффициентов подъемной си­
лы, в зонах волнового срыва потока коэффициент подъемной силы
стреловидного крыла продолжает расти до
« 1.
Наличие волнового сопротивления приводит к соответствующему
увеличению лобового сопротивления. Наклон скачков уплотнения к
вектору скорости
в плоскости O X Z (см. рис. 2.31) обусловливает
снижение интенсивности скачков уплотнения и уменьшение с*0„, а
следовательйо, и с х стреловидного крыла по сравнению с прямым.
Несмотря на то, что коэффициент индуктивного сопротивления с х .
стреловидного крыла больше, чем прямого крыла такого же удлине­
ния, но благодаря меньшему волновому сопротивлению давления
c Xf)K наблюдается снижение коэффициента волнового сопротивления
с.Т(гВ стреловидного крыла по сравнению с прямым. Например, в диа­
пазоне чисел
= 0,8...0.85 крыло с углом стреловидности % —
= 35° имеет коэффициент волнового сопротивления примерно на 25 %
меньше, чем прямое. Снижение коэффициента волнового сопротив­
ления стреловидного крыла приводит к существенному снижению ко­
эффициента профильного сопротивления или сопротивления формы
крыла (рис. 3.26).
Снижение скоростей полета до
значений, соответствующих числам
М ^ С М * , избавляет от волнового
сопротивления и тем самым обес­
печивает снижение лобового сопро­
тивления.
Значительное влияние на аэро­
динамические характеристики стре­
ловидного крыла оказывает удли­
нение. Чем меньше удлинение, тем
на большую часть крыла распро­
страняется перетекание потока че­
рез концевые части и переднюю
кромку, тем больше коэффициент
Рис. 3.26. З а ви си м ость коэффициента
индуктивного сопротивления. Вмес­
сх
от числа
М-* при
различных
те с тем уменьшение удлинения
углах стр ел ови дн ости
крыла приводит к уменьшению вол­
нового сопротивления давления и
коэффициент профильного сопротивления при М* < Мм < 1 крыль­
ев малого удлинения меньше, чем крыльев большого удлинения
(рис. 3.27). Поэтому в указанном диапазоне чисел
целесообразно
применение крыла малого удлинения.
Крыло малого удлинения. Нелинейность зависимости с,,а(а)
крыла малого удлинения обусловливается началом срыва потока на
малых углах атаки у боковых и передних кромок, а при увеличении
углов атаки — у задней кромки (рис. 3.28). Образующиеся вихри
создают дополнительное разрежение на верхней поверхности крыла,
что приводит к росту коэффициента подъемной силы, и при больших
углах атаки он может превысить значение с,/я для крыла большого уд­
линения. Срыв потока с крыла малого удлинения приводит к росту
индуктивного сопротивления и снижению аэродинамического качества.
сх 0
0,03
0,02
0 01
0
0,5
Рис. 3.27. З а ви си м ость коэффициента
проф ильного сопротивления от числа М
Рис. 3.28. З а в и си м ост ь коэф ф ициента
подъем ной си лы о т угла атаки крыльев б ол ь ш ого и м а л ого удлинения
Для транспортных самолетов, рассчитанных на скорости полета,
соответствующие числам
■< М*, целесообразно применение крыла
большого удлинения (X = 7... 13), обладающего существенно более
низким индуктивным сопротивлением и высоким аэродинамическим
качеством.
Применение аэродинамической и геометрической крутки, обеспе­
чивающей приемлемое распределение аэродинамической нагрузки
по размаху крыла, аэродинамических гребней, препятствующих стеканию пограничного слоя от корневых к концевым сечениям, кон­
цевых аэродинамических поверхностей, снижающих перетекание по­
тока с нижней поверхности крыла на верхнюю, подбор профилей, об­
ладающих приемлемыми характеристиками, обеспечение
перемен­
ной стреловидности по размаху позволяют в значительной мере улуч­
шить аэродинамические свойства стреловидного крыла.
3.5. Характеристики фюзеляжа
Геометрические характеристики.
Фюзеляж — основная
часть
конструкции самолета, служащая для соединения в одно целое всех
его частей, а также для размещения экипажа, пассажиров, оборудова­
ния и грузов. Фюзеляж современного транспортного самолета пред­
ставляет собой вытянутое по потоку тело вращения с тупым закруг­
ленным носом и заостренной хвостовой частью. Форма фюзеляжа оп­
ределяется назначением самолета (пассажирский или грузовой), ком­
поновкой, диапазоном скоростей полета. Для обеспечения наимень­
шего сопротивления фюзеляжу стремятся придать плавные формы
контура.
Длина фюзеляжа / ф — расстояние между двумя плоскостями, ка­
сающимися носовой и хвостовой частей фюзеляжа и перпендикуляр­
ными к его строительной горизонтали (рис. 3.29). Высотой
и шири­
ной
называются максимальные внешние размеры поперечного се­
чения фюзеляжа, перпендикулярного к строительной горизонтали.
За строительную горизонталь принимается некоторая условная ли­
ния в плоскости симметрии фюзеляжа, относительно которой опре­
деляют координаты элементов самолета при его проектировании и из­
готовлении. Удлинением фюзеляжа называется отношение длины фю­
зеляжа к его эквивалентному диаметру:
^ ф= ^ ф/ ^ ф-
(3.25)
Эквивалентный диаметр фюзеляжа d3 — диаметр круга, площадь
которого равна площади миделевого сечения 5 М. Эквивалентный диа­
метр фюзеляжа
Рис. 3.29. О сновны е геометрические
характеристики ф ю зеляж а
Рис. 3.30. О бтек ан и е ф ю зеляж а в о з ­
душ ны м
п оток ом
ири н ебольш ом
угле атаки
Миделевым сечением фюзеляжа называется сечение, перпендикуляр­
ное строительной горизонтали и имеющее наибольшую площадь.
Обтекание фюзеляжа воздушным потоком. При угле атаки а — О
воздушный поток набегает на фюзеляж параллельно строительной го­
ризонтали (продольной оси фюзеляжа). В носовой части пограничный
слой, как правило, ламинарный. По мере удаления от носка толщина
пограничного слоя растет, ламинарный слой постепенно переходит в
гурбулентный. При угле атаки а Ф 0 появляется поперечная состав­
ляющая скорости набегающего воздушного потока
sinot (рис. 3.30).
Часть воздушного потока перетекает с наветренной стороны (обра­
щенной к вектору скорости набегающего воздушного потока) на под­
ветренную, что способствует увеличению толщины пограничного слоя.
Вязкость воздуха приводит к уменьшению скорости течения в погра­
ничном слое, вызывает появление положительных градиентов давле­
ния и создает условия для его отрыва с боковых поверхностей.
Непрерывно утолщающийся по мере удаления от носовой части
пограничный слой отрывается вдоль некоторой линии отрыва и не­
прерывно сносится по потоку, сворачиваясь в мощные вихревые жгу­
ты на боковых сторонах фюзеляжа. Положение точек отрыва погранич­
ного слоя относительно передней точки фюзеляжа и начало образова­
ния вихревой системы зависят от угла атаки, формы, чисел Re,*, и
М^. С увеличением числа М ж положение точек отрыва смещается к
носовой части.
Экспериментально установлено, что при полете с дозвуковой ско­
ростью (М С М*) можно выделить три режима обтекания фюзеляжа:
при малых углах атаки (а < 5°) наблюдается безотрывное обтека­
ние; при средних углах атаки (5° < a <Z 16°) наблюдается отрыв воз­
душного потока с боковых поверхностей и сворачивание его в два
вихревых жгута; при больших углах атаки (а > 2 5 ° ) вихревые жгуты
срываются с поверхности фюзеляжа, не достигая его хвостовой части.
При нарушении симметричности обтекания на средних и больших уг4*
99
лах атаки возможен несимметричный срыв потока с боковых поверх­
ностей, что приводит к появлению моментов рыскания.
Аэродинамические силы. Равнодействующая всех аэродинамиче­
ских сил, распределенных по поверхности фюзеляжа при обтекании
его воздушным потоком, называется полной аэродинамической силой
фюзеляжа /?ф. Она приложена в центре давления Д (ф) — точке пере­
сечения линии действия полной аэродинамической силы со строитель­
ной горизонталью (рис. 3.31). Полную аэродинамическую силу фюзе­
ляжа можно разложить по осям скоростной и связанной систем ко­
ординат. Проекции полной аэродинамической силы /?ф на оси О Х и
0 Y связанной системы называются соответственно: продольной Х ф и
нормальной У ф силами. Проекции полной аэродинамической силы на
оси скоростной системы координат 0 Х а и 0 Y a называются соответ­
ственно: подъемной силой фюзеляжа У аф и силой лобового сопротив­
ления Х аф. При малых углах атаки можно считать, что Кф да Y ai^
и Хф да Х„ф. Эти силы определяются по общим формулам аэродина­
мических сил:
Poo V lc
2
) ф ^ Уаф ~ сУаФ
^ м’
( 3 - 27 )
°° S M.
( 3 . 28 )
р V2
Х ф ъ Х аф = сХаф
~
Нормальная и подъемная силы фюзеляжа, приложенные в
центре давления, создают аэродинамические моменты относительно
передней точки фюзеляжа
V2
р
Мгф х Л4гаф = тгф
-
5 м /ф.
( 3 . 29 )
Коэффициенты аэродинамичес­
ких сил и моментов фюзеляжа,
как и крыла, определяются расче­
том или экспериментально при
продувке моделей фюзеляжа в аэ­
родинамических
трубах.
На
рис. 3.31, б показана эпюра рас­
пределения коэффициента давления
по поверхности фюзеляжа.
Коэффициент нормальной си­
лы
Рис. 3.31. С о ста в л я ю щ и е полной а э р о ­
динам ической силы ф ю зеляж а R ф в
проекциях на оси ск о р ост н ой и с в я ­
занной си стем ы к оор д и н а т ( а ) и э п ю ­
ра расп ределен и я коэф ф ициента д а в ­
ления по п овер хн ости (б)
С у ф — С у н 0 С -) -С у С р
г с ?/хв>
( 3 . 30 )
где Сунос* суср< Сух в
коэф ф и ци ­
енты
а эр оди н а м и ч еск и х
н орм альн ы х
си л , возн и к а ю щ и х на н о с о в о й , средней
и х в о с т о в о й ч а стя х ф ю зе л я ж а .
Из рис. 3.31, а и соотношений
(3.27) и (3.28) можно найти зависи­
мость между коэффициентами аэро­
динамических сил в скоростной и
связанной системах
координат:
Суаф = с уф COS а — с уф sin а. Отсюда
следует, что при малых углах атаки
с ипФ ~ суФ-
Аэродинамические характерис­
тики. Типичные аэродинамические
характеристики фюзеляжа, полу­
ченные экспериментально, приве­
дены на рис. 3.32. В пределах ли­
нейного участка кривой с УоФ (а)
справедливо соотношение с Упф =
-= г“ аФос. Тогда
Уа Ф
Рис. 3.32. Типичные аэр оди н а м и чес­
кие характеристики
ф ю зеляж а при
М<0,7
я* са — па
уФ
У HOC I ~ у с р 1 ~.«хв*
Значения с“ф и с®яф зависят от формы носовой, хвостовой и сред­
ней частей фюзеляжа, структуры пограничного слоя, удлинения фю­
зеляжа, чисел
и Re.
Аэродинамическую силу сопротивления фюзеляжа можно пред­
ставить как сумму аэродинамических сил сопротивления трения, дей­
ствующих по касательной к поверхности, и сил сопротивления давле­
ния, действующих по нормали к поверхности. Сопротивление давле­
ния можно рассматривать как сумму сопротивлений давления на но­
совую, хвостовую части и сопротивления давления на донном срезе.
С другой стороны, аэродинамическое сопротивление можно предста­
вить как сумму профильного сопротивления Х „, которое не связано
с образованием подъемной силы, и индуктивного сопротивления Х г,
зависящего от подъемной силы. Сопротивление давления можно рас­
сматривать как сумму вихревого и волнового сопротивлений, кото­
рые отсутствуют в профильном и индуктивном сопротивлениях:
С хф = сХ:1ф -Ьсх^ф+Сянф,
(3 .3 2 )
где сх ф, сх ф, сх ф — с о о т в е т ст в е н н о коэф ф и ц иен т п р о ф и л ь н о го , и н д у к т и в н о ­
го и в о л н о в о г о со п р оти вл ен и й ф ю зел я ж а .
При дозвуковых скоростях полета на долю сопротивления трения
приходится 75 ... 80 % от общего сопротивления и на долю сопротив­
ления давления 1 5 ...2 0 % . При трансзвуковых скоростях полета
вследствие роста волнового сопротивления сопротивление давления
может в 1,5 ... 2 раза превышать сопротивление трения. Для сниже­
ния аэродинамического сопротивления фюзеляжу стремятся придать
форму с минимальной поверхностью трения. При числе Мте < 0,7 оп­
ии
гимальное удлинение таких фюзеляжей К (ф) = 7-г- 9, Носовая часть
фюзеляжа выполняется закругленной.
При трансзвуковых скоростях полета (Мм < 0,9) на фю?еляже по­
являются местные сверхзвуковые зоны течения, скачки уплотнения,
волновой срыв потока, что приводит к появлению волнового сопро­
тивления. Заметим, что влияние сжимаемости воздуха на фюзеляже
проявляется слабее, чем на крыле (например, у крыла с относитель­
ной толщиной профиля с = 15 % М* = 0,78, а у фюзеляжа М*
— 0,92. Для уменьшения волнового сопротивления выгоднее приме­
нять фюзеляжи большого удлинения (>..-. — 10 ~ 15) с заостренной но­
совой частью.
Для предотвращения касания хвостовой частью фюзеляжа поверх­
ности взлетно-посадочной полосы (ВПП) при взлете и посадке хвосто­
вая часть фюзеляжа выполняется несколько приподнятой. У грузо­
вых транспортных самолетов, имеющих отклоняющуюся рампу для по­
грузки, хвостовая часть плоская и боле\- поднята чем у пассажирских
самолетов, что приводит к увеличению донного сопротивления фюзе­
ляжа и ухудшению аэродинамических характеристик. Для уменьше­
ния сопротивления на наружной поверхности вдоль фюзеляжа в хво­
стовой части устанавливаются ребра, что позволяет снизить сопротив­
ление фюзеляжа на 10 ...15 % и повысить аэродинамическое качество
самолета на крейсерских режимах полета. Рассмотренный подход к
определению аэродинамических характеристик фюзеляжа в полной ме­
ре относится к определению аэродинамических характеристик других
тел вращения, например мотогондол силовой установки.
3.6. Характеристики органов управления
Общие сведения. К основным аэродинамическим органам управле­
ния самолета относятся оперение, руль высоты, руль направления и
элероны. При обтекании органов управления воздушным потоком на
них создаются аэродинамические силы. Они сравнительно невелики,
но благодаря большому плечу относительно центра масс самолета
создают аэродинамические моменты, способные уравновесить суммар­
ный момент от всех остальных частей самолета: крыла, фюзеляжа, шас­
си, гондол и т.п. При отклонении органов управления изменяются
аэродинамические моменты, под действием которых самолет развора­
чивается относительно центра масс. При этом изменяются углы атаки,
скольжения и крена, что вызывает соответствующее изменение аэро­
динамических сил, действующих на самолет, и изменение траектории
движения.
Эффективность аэродинамических органов управления оценивает­
ся приращением управляющего момента, равного произведению рав­
нодействующей аэродинамической силы органа управления на ее пле­
чо относительно соответствующей оси связанной системы координат при
полном отклонении органа управ­
ления. Она зависит от площади
оперения и рулей, расположения
их на самолете, их формы, плот­
ности воздуха (высоты полета) и
других факторов. На самолетах
традиционной компоновочной схе­
мы оперение расположено в хвос­
товой части фюзеляжа, а на само­
летах типа «утка» — перед крылом.
Оперение представляет собою
несущие поверхности, предназна­
Рис. 3.33. Оперение са м ол ета:
ченные для обеспечения продоль­ а — с н и зкорасп ол ож енн ы м ст а б и л и з а т о ­
ной (относительно оси 0Z ) и путе­ р ом ; б — с в ы сок ор а сп ол ож ен н ы м ст а б и л и ­
за то р о м : / — ф оркил ь; 2 — киль; 3 — руль
вой (относительно оси 0 Y ) устой­ направления; -4 — трим м ер руля нап равл е­
5 — сер в о к о м п е н са то р ; 6 — т р и м ­
чивости и управляемости самолета. ния;
мер руля вы соты : 7 — рул ь в ы со ты ; 8 ст а б и л и за то р ; 9 — п одф ю зел я ж н ы й гребен ь
Г оризонтальное оперение — часть
оперения, предназначенная для
обеспечения продольной балансировки, устойчивости и управляе­
мости самолета, а также управления самолетом относительно попереч­
ной оси. Основные типы горизонтального оперения показаны на
рис. 3.33. Наибольшее распространение получили неподвижные и
подвижные стабилизаторы, на которых установлены рули высоты.
Неподвижный стабилизатор жестко связан с фюзеляжем и имеет
постоянный угол установки относительно строительной горизонтали.
Он обеспечивает грубую балансировку самолета относительно оси OZ
на всех допустимых режимах полета, а точную балансировку и управ­
ление продольным движением осуществляют отклонением руля вы­
соты. Подвижный стабилизатор с изменяемым углом установки в по­
лете используется для балансировки самолета, а руль высоты — для
изменения угла атаки и управления продольным движением самолета.
Переставной стабилизатор отличается от подвижного тем, что спосо­
бен занимать несколько фиксированных положений. Управляемый
стабилизатор без руля высоты обеспечивает балансировку и управле­
ние движением на всех режимах полета.
Дифференциальный стабилизатор состоит из двух половин и обес­
печивает продольную балансировку, а также управление продольным
движением при отклонении обоих половин на одинаковый угол вверх
или вниз. При отклонении половин стабилизатора на разные углы
осуществляется управление самолетом в боковом движении (относи­
тельно осей О Х и O Y ).
По месту расположения горизонтальное оперение разделяется на
низко- и высокорасположенное. Низкорасположенное горизонтальное
оперение (рис. 3.33, а) в полете постоянно находится в возмущенном
воздушном потоке и только при больших углах атаки выходит из него.
Значительное влияние на характер обтекания такого оперения оказы­
вает скос потока за крылом. Высокорасположенное горизонтальное
т
оперение (рис. 3.33. б) в полете находится в невозмущенном крылом
потоке и только при выходе на большие углы атаки может попасть в
воздушный поток, возмущенный крылом. При этом эффективность
его снижается. Скос воздушного потока за крылом оказывает на вы­
сокорасположенное оперение небольшое влияние.
С точки зрения аэродинамики, горизонтальное оперение можно рас­
сматривать как крыло, имеющее геометрические характеристики с,
А, rj. Функциональное назначение крыла и горизонтального опере­
ния в полете различны. Подъемная сила крыла предназначена для
уравновешивания силы тяжести самолета и искривления траектории
полета вверх (если подъемная сила крыла больше силы тяжести само­
лета) или вниз (если подъемная сила крыла меньше силы тяжести са­
молета). Подъемная сила горизонтального оперения нужна для созда­
ния аэродинамического момента тангажа, удерживающего самолет под
требуемым углом атаки относительно вектора скорости набегающего
потока. Отклонение руля высоты вниз (угол отклонения б„ положи­
телен) или вверх (угол отклонения 6В отрицателен) приводит к пере­
распределению давления по поверхности горизонтального оперения,
к изменению значения и направления подъемной силы оперения.
Вертикальное оперение состоит из жестко связанного с фюзеляжем
киля и руля направления. Принципиально оно работает также, как
и горизонтальное оперение. Отклонение руля направления вправо
(6„ > 0 ) или влево (6„ <С 0) приводит к перераспределению давления
по поверхности вертикального оперения и появлению аэродинамиче­
ской силы, создающей аэродинамический момент относительно оси
O Y . Аэродинамический момент рыскания, создаваемый вертикальным
оперением, возникает также при появлении угла скольжения (не­
симметричного обтекания). Равнодействующая аэродинамических сил
на вертикальном оперении, приложенная в центре давления, создает
также аэродинамический момент относительно продольной оси фюзе­
ляжа (аэродинамический момент крена).
Для повышения эффективности вертикального оперения необходи­
мо увеличивать его площадь. Для этого на некоторых самолетах перед
килем устанавливают форкиль, представляющий собою гребень пере­
менной стреловидности, идущий от киля вдоль верхней образующей
фюзеляжа. С этой же целью могут применяться подфюзеляжные греб­
ни (рис. 3.33, а). Горизонтальное и вертикальное оперение самолета
набирается из симметричных профилей и, как правило, имеет трапе­
циевидную или стреловидную формы.
Аэродинамические характеристики. Рассмотрим картину обтека­
ния горизонтального оперения воздушным потоком при отклоненном
и неотклоненном руле высоты (рис. 3.34). При симметричном обте­
кании руля высоты (аг.0 - - 0) и неотклоненном руле высоты давления
на верхней и нижней поверхностях равны, поэтому подъемная сила
У г. 0 = 0. При угле атаки а г. 0 обтекание будет несимметричным и
разность давлений на верхней и нижней поверхностях приведет к по­
явлению подъемной силы Кг. о- При отклонении руля высоты на не-
4У6
б)
Д(Срн
X
Д
Д|
Рис. 3.34. О бтекание стабилизатора воздуш н ы м п оток ом и ди аграм м ы коэф ф и ци ­
ента давления:
и — при неотклоненном руле высоты и М ^ ^ М * ; 6 — при
М о о < М # ; в — при отклоненном руле вы соты и М х > М *
отк л он ен н ом
руле
вы соты
н
большой угол 6„ воздушный поток на верхней поверхности будет раз­
гоняться, а на нижней — тормозиться. В результате произойдет пере­
распределение давления на поверхностях и возникнет приращение
подъемной силы АКГ0. Коэффициент подъемной силы горизонталь­
ного оперения при бессрывном обтекании
( 3 .3 3 )
Приращение коэффициента подъемной силы, вызванное отклонением
руля высоты (в пределах бессрывного обтекания),
Производная сбвг.0 показывает, какое приращение коэффициента соУа
ответствует отклонению руля высоты на 1°. При отклонении руля
105
изменяется только относительная кривизна профиля. Остальные гео­
метрические характеристики оперения практически не изменяются,
поэтому в зависимости с „ аГ.0 (ссг.0) изменяется только угол нулевой
подъемной силы а г-0. Соответственно кривая с УаГ О (аг.0), не изменяя
своего наклона, смещается в сторону меньших или больших углов ата­
ки в зависимости от значения и направления отклонения руля высоты
(рис. 3.35, а). Сказанное в полной мере относится к вертикальному опе­
рению (рис. 3.35, б).
Коэффициенты подъемной силы горизонтального оперения и боко­
вой силы вертикального оперения выражаются зависимостями:
V
»
= Cv . o a - +
Cv
, 6« =
с7а г.о < * г .о + « в 6 в ) ;
c za p.o = с гаг.о ^ ' Сг Нв о ^н — сгав.о ( Р “Ь пн ^н) •
(3 .3 5 ).
( 3 .3 6 )
Для повышения эффективности оперения необходимо увеличивать
производные, например для горизонтального оперения с“ гг°о и с^в.
В выражениях (3.35) и (3.36) пв и п н — коэффициенты относительной
эффективности соответственно руля высоты и руля направления при
Мх < М* определяют приближенно по формулам:
ЛВ = V ^ ' b I ' V o ’
ПН =
/^ в . о •
( 3 .3 7 )
где S B, S H, S r.o , 5 В о — с о о т в е т ст в е н н о площ ади ру л ей вы соты и направле­
ни я, г о р и з о н т а л ь н о г о и в е р т и к а л ь н о го оперен и я.
Для стреловидного горизонтального оперения коэффициент подъ­
емной силы определяется
c (/ar.o = c " r; 00 c o s X ( a r .o + rtB 6 B c o s x ) ,
( 3 .3 8 )
где х — у г о л стр е л о в и д н о сти го р и з о н т а л ь н о г о оп ерен и я по линии 1/4 х о р д ;
аг ,,
с у аг о — зн а ч ен и е коэф ф и циен та для п р я м ого кры ла.
Рис. 3.35. З а в и си м о ст ь коэф ф и ц иен тов
аэродинамических сил гор и зон тал ьн ого
оп ерен и я (а) и вер ти кал ьн ого оперения ( б ) о т углов а г о и р
Рис. 3.36. П ерераспределение аэродинам ической нагрузки на крыле при отк л он е­
нии эл ер он ов (а ) и зависим ость коэф ф ициента подъ ем н ой силы с
крыла от
У<1
угла атаки при отклонении элерона (б)
Коэффициент боковой силы вертикального оперения определяют
по аналогичной формуле.
При числе
> М * коэффициент относительной эффективности
рулей уменьшается. Это объясняется тем, что в условиях дозвукового
обтекания перераспределение аэродинамической нагрузки, например
при отклонении руля высоты, распространяется на всю площадь опе­
рения (см. рис. 7.6, б), а при появлении скачков уплотнения отклоне­
ние руля высоты вызывает перераспределение давлений только на
части стабилизатора за скачком уплотнения, поскольку возмущения
не могут распространяться через скачок уплотнения (см. рис. 3.34, в).
Перераспределение давления вызывает смещение центра давления.
Уменьшение коэффициента при сверхзвуковом обтекании вызвало
применение управляемого стабилизатора без руля высоты.
Характеристики элеронов. Элероны служат для управления са­
молетом по углу крена. Кинематическая схема системы управления
элеронами выполнена так, что при повороте штурвала один из них
отклоняется вверх, а другой вниз (рис. 3.36, а). За положительное
отклонение элеронов принято такое, при котором правый элерон от­
клонен вниз. При отклонении элеронов на участках крыла, занимае­
мых элеронами, происходит перераспределение несущей аэродинами­
ческой нагрузки, что приводит к увеличению подъемной силы на ве­
личину ЛКЭ на полукрыле с отклоненным вниз элероном и уменьше­
ние подъемной силы на величину ДК, на крыле с элероном, отклонен­
ным вверх. Эта пара сил создает аэродинамический момент относи­
тельно оси О Х .
Отклонение элеронов вызывает изменение лобового сопротивле­
ния. Разность сил лобового сопротивления создает аэродинамический
момент относительно оси 0 Y , под действием которого самолет может
развернуться в сторону полукрыла с опущенным элероном. Для
устранения этого недостатка применяется дифференциальное управле­
ние элеронами, при котором элероны отклоняются вверх на угол,
больший, чем при отклонении противоположного элерона вниз. От­
клонение элерона приводит к соответствующему изменению зависи­
мости с Уа (а) на полукрыле (рис. 3.36, б).
Функции управления самолетом по крену могут также выполнять
интерцепторы и элевоны. Интерцепторы применяют, как правило,
совместно с элеронами. Элевоны представляют собою подвижные
части крыла, выполняющие функции руля высоты и элеронов. Элево­
ны применяются на самолетах схемы «летающее крыло». Углы откло­
нения всех органов управления ограничены по срыву потока. Боль­
шие углы отклонения органов управления приводят к увеличению кри­
визны профиля, появлению срыва потока, уменьшению или к полной
потере эффективности органов управления.
3.7. Шарнирные моменты рулей
Природа шарнирных моментов. При обтекании воздушным пото­
ком отклоненного от нейтрального положения руля возникают аэро­
динамические силы, которые создают относительно оси вращения аэро­
динамический момент, называемый шарнирным М ш. Например, при
отклонении руля высоты на угол 6В (рис. 3.37) возникает шарнирный
момент руля высоты, равный произведению подъемной силы Кв на
плечо Ьв:
М щ .в — У в
— % .«
^А
к° п я со,
( 3 .3 9 )
где тш в — • к оэф ф и ц иен т ш а р н и р н о го м ом ен та, п ол у ч а ем ы й эк сп ер и м ен ­
т а л ь н о ; S B и 4 . — со о т в е т ст в е н н о п л ощ а дь и ср едн я я а эр оди н а м и ч еск а я хор да
В
р у л я в ы со т ы ; коп — коэф ф и ц иен т то р м о ж е н и я п оток а в об л а сти оп е р е н и я ; q<x> —
с к о р о с т н о й н ап ор н е в о зм у щ ен н ого п о то к а .
Шарнирные моменты других аэродинамических органов управления
выражаются формулами, аналогичными (3.39).
Значения потребных усилий Р , прикладываемых пилотом к рычагу
управления (штурвалу, педали) для отклонения органа управления,
зависят от шарнирного момента и схемы проводки системы управления,
характеризующейся коэффициентом передачи кш, показывающим от­
ношение приращения отклонения органа управления, на единичное
перемещение рычага управления, например, для руля высоты:
д&в
Р — кш М ш .
(3 .4 0 )
(3 .4 1 )
м„
Рис. 3.37. С хема нагруж ения ш турвал а:
1 — ст а б и л и за то р ; 2 — руль вы соты ; 3 — о сь вращения
Как видно из формулы (3.41), чем больше шарнирный момент, тем
больше усилие Р на рычаге управления. С увеличением площади руля
и скорости полета шарнирный момент интенсивно растет. Следователь­
но, возрастает и усилие на рычагах управления. На современных са­
молетах, требующих больших площадей органов управления и рассчи­
танных на значительные скорости полета, потребные усилия Р могут
превысить мускульные возможности пилота при ручном управлении
Для уменьшения усилий на рычагах управления применяются гидро­
усилители и другие системы автоматики. На самолетах с ручным уп
равлением для уменьшения усилий применяются различные средства
аэродинамической компенсации шарнирных моментов рулей.
Компенсация шарнирных моментов. Существует несколько видов
аэродинамической компенсации: роговая, осевая, внутренняя, сер­
вокомпенсация, триммер и серворуль. Действие всех видов аэродина­
мической компенсации сводится к тому, что часть аэродинамической
силы на руле создает момент, противоположно направленный шарнир­
ному моменту.
Роговая аэродинамическая ком­
пенсация осуществляется
с
по­
мощью компенсатора, представля­
ющего собой часть рулевой по­
верхности, расположенной впереди
оси вращения (шарнира) у внеш­
него края руля (рис. 3.38, а). Пло­
щадь рогового компенсатора равна
8— 12 % площади руля.
Осевая аэродинамическая ком­
пенсация выполняется с помощью
осевого компенсатора — части ру­
ля, расположенной впереди оси
вращения по осевой длине руля
(рис. 3.38, б). Относительная пло­
Рис. 3.38. Р о г о в а я
( а ) , осев а я
(б )
ком пен саци я
ш арнирны х
м ом ен тов
руля и принцип р а б о т ы к о м п е н са то ­
ра (в)
щадь осевого компенсатора равна 10—30 % площади руля. Аэроди­
намические моменты, создаваемые относительно оси вращения рулем
A fp = b v Y K и компенсатором М к = b KY K, имеют противоположные
знаки (рис. 3.38, в). Значение шарнирного момента определяется
их разностью |МШ| = |МР|— |AfK|.
При больших отклонениях руля с осевой компенсацией передняя
кромка его может выйти за очертания профиля стабилизатора (киля,
крыла). В этом случае возникает дополнительный компенсирую­
щий момент М к, который может превышать момент M v, что приведет
к обратным усилиям на рычаге управления. При очень больших от­
клонениях органа управления и возникновении недопустимо боль­
ших углов атаки или скольжения может развиться срыв потока на
управляющей поверхности. При этом под действием компенсирующего
момента руль может отклониться в крайнее положение. Для его воз­
вращения может потребоваться усилие на рычаге управления, нахо­
дящееся за пределами физических возможностей пилота. Такое явле­
ние называется перекомпенсацией органа управления.
Внутренняя аэродинамическая компенсация применяется преиму­
щественно на элеронах и представляет собой осевой компенсатор боль­
шой относительной площади, помещенный в камеру с узкими щелями
(рис. 3.39). Камера разделена герметической гибкой перегородкой,
прикрепленной с одной стороны к носку элерона, а с другой — к стен­
ке камеры. Носок элерона находится под действием разности статиче­
ских давлений, которые устанавливаются на данном режиме полета в
обеих полостях камеры. Площадь компенсатора составляет около
40 % площади элерона. Преимуществом такого компенсатора явля­
ется незначительное увеличение лобового сопротивления.
Сервокомпенсатор — часть руля высоты 4, расположенная у хво­
стовой его кромки и отклоняющаяся одновременно с отклонением ру­
ля (рис. 3.40). Сервокомпенсатор 3 соединен тягой 2 с неподвижным
кронштейном 1, расположенным на стабилизаторе (киле, крыле).
При отклонении руля сервокомпенсатор отклоняется в сторону, про­
тивоположную отклонению руля. Площадь сервокомпенсатора состав­
ляет 6—8 % площади руля.
Триммер — вспомогательная поверхность,
устанавливаемая
в
хвостовой части руля так же, как и сервокомпенсатор, но не связан-
7
Рис. 3.39. С хем а вн утр ен н его а эр оди н а м и ческ ого к ом п е н са тор а :
/ — к а м е р а ; 2 — к р ы л о; 3 — ги б к а я гер м е­
ти ч е ск а я п е р е г о р о д к а ; 4 — о с ь
вращ ен ия;
5 — узки е щ ел и ; 6 — эл ер он ; 7 — ком п ен са-
Рис. 3.40. С хема сер вок ом п ен сатора
ная к
матически с неподвижной
частьюхоперения или крыла и от­
клоняемая пилотом отдельно от
основного руля через специальную
проводку* управления.
/
Серворцль
соединен
жесткой
проводкой с рычагом управления.
С основным рулем проводка управ­
ления соединяется шарнирно и усиJ --------------------------^— |
лий на него не передает. Под дей*
°°
ствием аэродинамических СИЛ, ВОЗ- Рис. 3.41. З а ви си м ость коэффициента
никающих на, серворуле, отклоня- ш арн и рн ого момента от числа М.» (а
ется свободно навешенный на ось
H6H=const)
основной руль, Основной руль от­
клоняется до тех пор, пока шарнирные моменты серворуля и о с ­
новного руля не станут равными. Усилия для отклонения сервору­
ля значительно меньше, чем для поворота основного руля, площадь
которого в несколько раз больше площади серворуля.
На значение шарнирного момента руля значительное влияние ока­
зывает сжимаемость воздуха. С возникновением и развитием волново­
го кризиса в области руля, перераспределением давления и смещением
центра давления назад (см. рис. 3.34, в) шарнирный момент изменяет­
ся. Коэффициент шарнирного момента при
5* М* резко возраста­
ет (рис. 3.41). В безбустерных системах управления соответственно
изменяется усилие на рычаге управления.
Д оп олн и тельн ая
л и тература
[1], с . 1 43— 147, 155— 158, 168— 171, 2 0 8 — 211; |4], с . 2 0 4 — 281, 3 1 3 — 32 5 ; [ 1 4 ] ,
с. 51 — 101, 2 0 4 — 245.
К он тр ол ьн ы е воп р осы
1. И зо бр а зи те к а р ти н у р а сп р едел ен и я коэф ф и ц и ен та да вл ен и я по п р оф и л ю
кры ла при различны х у гл а х атаки.
2. И зо бр а зи те и ср а в н и те к ри вы е с уд ( а ) для к ры л а с си м м етр и чн ы м и н еси м ­
м етричны м проф илем.
3. И зо бр а зи те и ср ав н и те за в и си м ости сХа (а ) д ля о т р е з к а кры л а б е с к о н е ч ­
н о г о ра зм а ха и кры ла к он еч н ого р а зм а ха .
4. Ч то назы вается а эр оди н а м и ческ и м к а ч еством к р ы л а ?
И з о б р а зи т е к р и в у ю
К ( а ) , п оя сн и те х а р а к тер н ы е т о ч к и .
5. Ч то назы вается п ол я р ой к р ы л а , и зо б р а з и т е ее и п о я сн и те х а р а к т е р н ы е
то ч к и .
6 . И зо бр а зи те совм ещ ен н ы е к р и вы е сУа ( а ) , с х ( а ) , К (а ) и п о л я р у к р ы л а ,
при ведя в со о тв е т ств и е ха р а к тер н ы е точ к и .
7. И зо бр а зи те за в и си м ости mz (а) и тг (су ) для к р ы л а н е си м м е т р и ч н о го п р о ­
ф и л я , п оя сн и те ха р а к тер н ы е точ к и .
8 . З апи ш и те вы р аж ен и я для оп р ед ел ен и я зн а ч ен и й к оэф ф и ц и ен тов с Уа и
/п2 д л я л ю б о г о угл а а в предел ах л и н ей н ого у ч а ст к а .
9. Д ай те оп р е д е л е н и е центра давлен ия и ф ок у са проф иля к р ы л а , о б о с н у й т е
н е о б х о д и м о сть введен и я пон я ти я ф о к у са .
10. О б ъ я сн и те вл и я н и е числа М ,» и геом етри и к ры ла на а эр оди н а м и ч еск и е
х а р а к те р и сти к и .
11. С равн и те а эр о д и н а м и ч еск и е ха р а к тер и сти к и п р я м ого, с т р е л о в и д н о г о
к ры ла и крыла м а л о го удл и н ен и я при о к о л о з в у к о в ы х с к о р о с т я х п ол ета .
12. О п ред ел и те а эр од и н а м и ч еск ое к а чество кры ла при угл е а та к и , к о т о р о м у
с о о т в е т с т в у е т с Уа = 0 ,6 , если сх = 0 ,0 2 и эф ф екти вн ое удли н ен и е Яяф = 8. О т ­
вет: К = 17,6.
13. О предел ите у г о л атаки н улевой подъемной си лы к ры л а, если при
Суи — 0 ,6 , п р о и зв о д н а я с^а = 0 , 1 . О твет: а 0 =
а=4°
— 2 °.
14. С равн и те ср е д н и е зн ачен ия угл а ск о са п оток а за кры лом при у г л а х а ,
к оторы м с о о т в е т с т в у ю т Суо , = 0 ,4 и суа2 = 0 ,9 . Эф ф ективное уд л и н ен и е кры ла
/.,ф = 6. О твет: еср1 = 1 ,2 ' и еср2 = 2,8°.
15. О пред ел и те коэф ф и циен ты суп и тг кры ла при fAx — 0 ,8 5 , есл и при
М -= 0 ,3
их зн ач ен и я с о с т а в л я ю т су
=
0 ,6 и mz =
0 ,2 . О твет: с и
=
0 ,9 ; mz x
«
0 ,3 8 .
16. И зо бр а зи те к а р ти н у перер асп редел ен и я давлен ия по го р и з о н та л ь н о м у
оп е р е н и ю при отк л о н е н и и р ул я вы соты .
17. И зо бр а зи те и п оя сн и те за в и си м ости коэф ф ициента а эр оди н а м и ч еск ой
п од ъ ем н ой си лы о т у гл а атаки при разли чн ы х отк л он ен и я х руля в ы со т ы , рул я
н а п р а вл ен и я , э л е р о н о в .
18. П оя сн и те о б р а з о в а н и е ш а р н и р н ого момента на рул е и с п о с о б ы к ом п ен ­
сац и и ш а рн и рн ы х м ом ен тов. К ак и зм ен яется ш арнирны й момент рул я на о к о л о ­
з в у к о в ы х с к о р о с т я х п ол ета ?
19. О п р ед ел и ть к оэф ф и циен т а эр оди н а м и ческ ой подъемной си л ы г о р и з о н ­
та л ь н о го о п е р е н и я , если а г 0 = 2 \ а у гол отк л он ен и я руля вы соты 8 В = 4°.
П л ощ ад ь г о р и з о н т а л ь н о г о оп ерен и я S r „ = 2 1 ,3 м2, а площ адь р у л я вы соты
S B = 7 ,7 м2. О тв е т: сУиГ 0 = 0 ,4 4.
Г л а в а
4
АЭРО ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ САМОЛЕТА
4.1. Аэродинамическая интерференция частей самолета
Аэродинамические характеристики самолета зависят от аэродина­
мических характеристик его частей (крыла, фюзеляжа, оперения и
и др.), но в то же время не являются их суммой. Причиной тому слу­
жит наложение отдельных частей самолета в геометрическом понима­
нии и изолирование вследствие этого некоторой области воздушного
потока, а также аэродинамическая интерференция (взаимовлияние)
частей. Это взаимовлияние выражается в изменении поля скоростей
и давлений вблизи и на поверхностях обтекаемых частей. В результате
изменяется распределение сил трения и давления, а следовательно, и
результирующих аэродинамических сил.
Рассмотрим упрощенную картину обтекания воздушным потоком
системы крыло — фюзеляж. Воздушный поток, набегающий на само­
лет под углом атаки а со скоростью V ^ , разложим на продольную V х—
Рис. 4.1. Схема образования приращений нормальной составляющей скорости
AV„ при обтекании системы крыло—фюзеляж (а) и подъемной силы AY (б):
/ — крыло; 2 — ф ю зеляж
= Vx cos а и нормальную V „ =
sin а составляющие (рис. 4.1).
Обтекание фюзеляжа потоком с нормальной составляющей скорости
Vу сопровождается деформацией потока и увеличением ее на величину
Л Vу в корневых сечениях крыла, а также увеличением местных углов
атаки на величину Да, повышением давления под крылом. Увеличение
местных углов атаки в корневых сечениях крыла повышает деформа­
цию струек на верхней поверхности крыла, увеличивает скорость те­
чения и разрежение, которое, распространяясь на фюзеляж, увели­
чивает подъемную силу системы крыло — фюзеляж за счет корневых
сечений. Коэффициент подъемной силы системы крыло—фюзеляж с Уа
можно представить суммой коэффициента подъемной силы изолиро­
ванного крыла Су кр и приращения коэффициента подъемной силы
ДСуа, вызванного интерференцией между крылом и фюзеляжем:
0Уа= С Уау'Р “Г ^ СУо-
(4 .1 )
Если исходное изолированное крыло имело коэффициент индуктивного
сопротивления с х ., то в комбинации с фюзеляжем оно будет иметь
большой коэффициент индуктивного сопротивления:
:
лЛэф
^инт>
(4 .2 )
где /Синт — коэффициент интерференции м еж ду кры лом и ф ю зел я ж ем .
Коэффициент интерференции
^ и „ т = 1+ —
где S K<j, — п лощ адь к ры ла 5 , з а н я т а я ф ю зел яж ем .
( 4. 3)
Т ак как часть крыла занята фюзеляжем, то коэффициент лобового со­
противления при нулевой подъемной силе крыла с Х(| будет меньше,
Тем коэффициент лобового сопротивления изолированного крыла сх, изС*„
( 4 .4 )
с х„ из ^ *
Вместе с тем фюзеляж нарушает распределение подъемной силы крыла
и приводит к росту индуктивного сопротивления. Взаимодействие
пограничных слоев крыла и фюзеляжа в местах их соединения приво­
дит к утолщению объединенного пограничного слоя, что является пред­
посылкой к его отрыву. В сочленении крыла с фюзеляжем создаются
условия движения воздушного потока как бы по двугранному каналу
переменного сечения (рис. 4.2). В сужающейся части канала скорость
потока растет, давление падает, а в расширяющейся скорость потока
уменьшается, давление растет, пограничный слой утолщается и отры­
вается, увеличивается профильное сопротивление. Это явление носит
название диффузорного эффекта. Если коэффициент профильного со­
противления изолированного крыла с х ая известен, то коэффициент
профильного сопротивления системы фюзеляж—крыло можно прибли­
женно рассчитать по формуле
сх
Xо= са-о
5кф \
----
''И Н Т
£
I»
( 4 .5 )
где АГ„НТ — коэффициент интерференции меж ду крылом и ф ю зел я ж ем ; S и
■^кф — соответственно п лощ адь к р ы л а , з а н я т а я ф юзеляжем.
Наибольший диффузорный эффект присущ самолету-низкоплану.
Коэффициент интерференции низкоплана 0,25 ... 0.56, среднеплана0,85,
высокоплана 0,95 ... 1. С увеличением скорости полета волновой кри­
зис развивается в области расширения диффузора, причем на меньших
числах
по сравнению с изолированным крылом и фюзеляжем.
Рассмотрим интерференцию между крылом и горизонтальным опе­
рением, расположенным за крылом в хвостовой части фюзеляжа. Кры­
ло, взаимодействуя с воздушным потоком, уменьшает значение и из­
меняет направление скорости пото­
ка, вызывает его турбулизацию.
Скорость воздушного потока у го­
ризонтального оперения
> = ^ У / С г .о .
Рис. 4.2. Дифф узорный эффект в мес­
те сочленения крыла и ф ю зел я ж а:
1 — ф ю зел я ж ; 2 — крыло
(4 .6 )
Яг- о
- к оэф ф ициент тор
где Я г.о =
мож ения воздушного потока к р ы л о м и
ф ю зел я ж ем (здесь q и qr0 — скоростны е
напоры к ры л а и г ор изон тал ь но го о п ере­
ния).
Рис. 4.3. Скос воздушного потока за крылом, измеренный у горизонтального опе­
рения ( ф г , о = 0 ) :
1 — к ры ло; 2 — с т р о и т е л ь н а я гор изо нтал ь; 3 — г о р и з о н т а л ь н о е оперение
Д ля дозвуковых самолетов коэффициент К , . 0 0.8—0,95. Чем более
высокое расположение оперения по отношению к крылу, тем меньше
торможение потока и больше значение К г. 0. Угол е, заключенный
между направлением скорости невозмущенного крылом потока V «,
и фактическим направлением воздушного потока в области горизон­
тального оперения V/r.(l, называется углом скоса воздушного потока у
горизонтального оперения (рис. 4.3). Скос потока у горизонтального
оперения создается в основном крылом и частично реактивной струей
двигателей, расположенных в хвостовой части. Он в значительной
мере зависит от расположения горизонтального оперения относитель­
но крыла по высоте и положения механизации крыла (конфигурации
самолета).
Угол атаки горизонтального оперения а г. 0 определяется углом ата­
ки самолета а , углом установки горизонтального оперения ф г. 0
относительно средней аэродинамической хорды крыла и углом скоса
воздушного потока:
а г .о = а + <Рг.о— е -
(4 .7 )
С увеличением угла скоса потока,
как следует из формулы (4.7),
угол атаки горизонтального опере­
ния а г # может стать большим от­
рицательным.
Влияние крыла на оперение
проявляется в изменении подъем­
ной силы самолета, увеличении
аэродинамического сопротивления,
изменении аэродинамического мо­
мента относительно центра масс.
Отрицательное влияние интерфе­
ренции частей самолета можно сни­
зить конструктивными методами.
Д л я уменьшения диффузорного
Рис. 4.4. Зависимости коэффициента
сопротивления модели самолета и его
частей без учета индуктивного сопро­
тивления от числа Моо:
/ — п о л н а я мо дел ь; 2 — к р ы л о ; ф ю з е л я ж ,
к и л ь и г он д ол ы
двигателей;
3 — кры ло ,
ф ю з е л я ж и к и л ь; 4 — к р ы л о и ф ю з е л я ж
Рис. 4.5. Зависимость коэффициента подъемной силы от угла атаки (а) и по­
л яр а (б) модели самолета и крыла
эффекта в местах сочленения крыла и фюзеляжа, пилонов и крыла,
пилонов и фюзеляжа устанавливаются обтекатели, называемые за­
лизами .
Они создают плавные обводы в местах сочленения частей, обес­
печивают в диффузоре такое обтекание, при котором отсутствует
сильное торможение воздушного потока.
Д ля уменьшения вредной интерференции на трансзвуковых скорос­
тях полета при выборе компоновочной схемы самолета используется
так называемое правило площадей. Согласно этому правилу, для обес­
печения минимального волнового сопротивления необходимо, чтобы
площади поперечных сечений самолета изменялись так, как у тела
вращения, обладающего минимальным сопротивлением. Это требова­
ние практически сводится к уменьшению площади поперечного сече­
ния фюзеляжа в местах сопряжения с крылом, мотогондолами или
увеличению площади поперечного сечения фюзеляжа перед кры­
лом .
В качестве примера отрицательного влияния интерференции час
тей самолета рассмотрим некоторые аэродинамические характеристики
одной из опытных моделей самолета типа Ту-154 (рис. 4.4 и 4.5). Из
анализа рисунков ясно, что по сравнению с аэродинамическими харак­
теристиками изолированного крыла коэффициент подъемной силы са­
молета уменьшился, а коэффициент силы лобового сопротивления по­
высился. Это приводит к снижению аэродинамического качества са­
молета .
Равнодействующая всех аэродинамических сил, распределенных по
поверхности самолета, называется аэродинамической силой планера
R a ( п о л н о й аэродинамической силой самолета). Точкой приложения
этой силы является центр давления Д (рис. 4.6), положение которого
изменяется при изменении углов атаки и скольжения, конфигурации
самолета и при увеличении числа М полета, особенно при М* > М .
В аэродинамике и динамике полета пользуются не аэродинамической
силой планера FА. а ее проекциями на оси скоростной O X aY aZ a и свя­
занной O X Y Z систем координат. Проекции аэродинамической силы
планера R A на оси 0 Х а, 0 Y a и OZ„ скоростной системы координат запи­
сываются в соответствии с общей формулой аэродинамических сил:
сила лобового сопротивления
pV2
х и = сх а — г — S — сХа qS;
(4 .8 )
аэродинамическая подъемная сила (подъемная сила)
V _
' " ~ С'1а
_£К 1 с _
о
с
(4 .9 )
^ ~ CVa qS’
аэродинамическая боковая сила (боковая сила)
рУ*
s= c z„ qs.
(4 .1 0 )
Проекции аэродинамической силы планера R A на оси связанной си­
стемы координат следующие:
аэродинамическая продольная сила
pl/2
X = с х — г — S = сх qS\
(4 .П )
аэродинамическая нормальная сила (нормальная сила)
pV2
■■c,,qS\
(4 .1 2 )
аэродинамическая
поперечная
сила (поперечная сила)
pV-
Z = cz — — S = c z qS.
В
выражениях
(4 .1 3 )
(4.8) — (4.12)
V — скорость самолета (скорость
начала связанной системы координат относительно невозмущенной
самолетом воздушной среды); р
плотность воздушной среды; 5 —
р ис
д э р0д и нам ическая сила пла-
пера К а и ее со ставляю щ ие в ск о ­
ростной и связанной системах к о о р д и ­
нат ((5=0)
площадь крыла, с Ха, c ,J a, cZa и т. д. — коэффициенты соответст­
вующих аэродинамических сил. Взаимосвязь между проекциями аэро­
динамической силы планера R A на оси связанной и скоростной систем
координат определяется соотношениями (2.23):
X — Х а cos а — Y а sin а ;
Y = Y а cos а -j- Х а sin а .
При увеличении угла атаки уменьшение значения cos а в существен­
ной мере компенсируется увеличением значения sin а , поэтому в ди­
апазоне летных углов атаки можно принять, что подъемная и нормаль­
ная силы равны: Y а == Y . Следовательно, можно считать равными их
коэффициенты: с у — с у. Эго не распространяется на силы Х а и X .
Равенство Х а = X наблюдается только при малых углах атаки. С уве­
личением угла атаки составляющая Y a sin а быстро возрастает и ста­
новится соизмеримой со слагаемым Х а cos а . Поэтому на средних уг­
лах атаки значение X = 0. При дальнейшем увеличении угла атаки
слагаемое Y а sin ос становится по модулю больше, чем слагаемое
X acos а , сила X меняет знак на противоположный и теперь направлена
вдоль средней аэродинамической хорды вперед.
Аэродинамическая сила планера создает относительно начала свя­
занной системы координат (относительно центра масс самолета) аэро­
динамический момент М .
—у
Составляющие аэродинамического момента М относительно осей
связанной системы координат O X , OY, OZ определяются в соответст­
вии с общей формулой аэродинамических моментов:
момент крена
pV2
М х — т х — - — S l = m x qSl\
(4.14)
момент рыскания
pV2
М !/ = т !/— - — Sl = m y qSl;
(4.15)
момент тангажа
Мг = тг
pV2
■— S b A = m z q S bAt
(4.16)
где т х , т у , т. — коэффициенты аэродинамических моментов.
Коэффициенты аэродинамических сил и моментов определяются
по результатам продувок моделей самолета в условиях динамического
подобия, уточняются в процессе летных испытаний и приводятся в
техническом описании самолета и других документах в виде графиче­
ских зависимостей (аэродинамических характеристик).
В теоретических расчетах влияние интерференции на коэффициенты
аэродинамических сил и моментов учитывают соответствующими ко­
эффициентами интерференции. Более подробно этот вопрос рассмат­
ривается в специальной литературе [41.
В отличие от аэродинамических характеристик крыла аэродинами­
ческие характеристики самолета зависят от отклонения органов уп­
равления, конфигурации, режимов работы силовой установки, близо­
сти поверхности земли (при взлете и посадке) и упругих деформаций
самолета в полете. Они определяются его компоновочной схемой и ге­
ометрическими параметрами: формой крыла в плане (стреловидностью,
удлинением, сужением), геометрическими характеристиками профилей
крыла (толщиной, кривизной и т.д.), геометрическими характеристи­
ками и формой фюзеляжа.
Влияние режима работы силовой установки на аэродинамические
характеристики самолета проявляется в том, что при изменении ре­
жима работы ее изменяется расход воздуха через воздухозаборники
двигателей, что изменяет характер обтекания самолета воздушным по­
током. Еще в большей степени это влияние проявляется у самолетов с
турбовинтовыми силовыми установками, создающими дополнительный
воздушный поток воздушными винтами.
Влияние указанных факторов на аэродинамические характеристи­
ки определяется экспериментально. Рассмотрим аэродинамические
характеристики самолета при нейтральном положении органов управ­
ления, при убранных механизации крыла и шасси.
При углах атаки, не превышающих 10— 15°, зависимость с Уа (а)
практически линейна для большинства транспортных самолетов
(рис. 4.7) и может быть представлена в виде
Суа ( а ) = с ° а (<х— а 0) .
(4 .17)
На больших углах атаки эта зависимость теряет линейность. П ри­
чиной этого является возникновение на крыле местных срывов пото­
ка, развитие которых вызывает вибрацию и тряску самолета.
Угол
атаки, при котором впервые воз­
никают вибрации и тряска самоле­
та, называется углом атаки т ряс­
ки. Такое название этот угол ата­
ки получил потому, что срыв воз­
душного потока ощущается пило­
том по характерному потряхива­
нию самолета, связанному с нестационарностью процесса обтека­
ния при возникновении и развитии
местных срывов потока. Дальней­
шее увеличение угла атаки сопро­
вождается развитием срыва потока
и уменьшением темпа роста коэф­ Рис. 4.7. Типичная зависимость к о ­
эффициента подъемной силы от угла
фициента подъемной силы с Уа (а).
атаки дл я дозвукового самолета
При критическом угле атаки а кр коэффициент аэродинамической
подъемной силы достигает максимального значения с ;/ „,ах. После
достижения
ах для самолетов с трапециевидным нестреловидным
крылом наблюдается резкое падение коэффициента с,,а.
У самолетов со стреловидным крылом и крылом малого удлинения
из-за медленного развития срыва потока коэффициент c Ua уменьшает­
ся медленнее. При малых числах М величина с„а является функцией
удлинения, стреловидности и сужения крыла. Чем меньше удлинение
и больше стреловидность крыла, тем меньше производная Су .
Сжимаемость воздуха уменьшает максимальный коэффициент подъ­
емной силы
,пах и коэффициент подъемной силы, соответствующий
тряске с,/(1тр. Заметим, что угол атаки нулевой подъемной силы
а 0 на рис. 4.7 отрицателен. Если крыло имеет геометрическую и
аэродинамическую крутку (крыло околозвукового самолета), то угол
атаки а п может быть небольшим положительным.
Коэффициент лобового сопротивления самолета с Ха представляют
обычно в виде двух составляющих, одна из которых обусловлена свой­
ствами вязкости и сжимаемости воздуха и соответствует сопротивлению
без учета подъемной силы с у (включая сопротивление трения, сопро­
тивление давления или профильное сопротивление и волновое сопро­
тивление), а другая обусловлена подъемной силой самолета, соответ­
ствует коэффициенту индуктивного сопротивления и зависит от угла
атаки а:
(4.181
c x a =--cxatt+ c s a i.
При увеличении чисел М и Re коэффициенты трения и давления изме­
няются незначительно вплоть до чисел М > М*, на которых появля­
ется волновое сопротивление.
Индуктивное сопротивление, а следовательно, и суммарное сопро­
тивление с х зависят от угла атаки (подъемной силы). Наличие сопро­
тивлений трения, давления, волнового и индуктивного сопротивле­
ний определяет уравнение поляры самолета:
х а° '
я А эф
х а° '
■Ас*
"а
( 4 . 19 )
где А = 1/яХЭф — коэффициент, учитывающий в ли яни е эффективного у д ­
л и н е н и я на индукти вн ое сопротивление.
При полете на больших дозвуковых и околозвуковых скоростях
берется эффективное удлинение с учетом сжимаемости ^-эфсж- Д ля
различных скоростей полета распределение сопротивления между ча­
стями самолета не одинаково. На дозвуковых скоростях полета совре­
менных транспортных самолетов при угле атаки а = 5 4 - 6 ° коэффи­
циент подъемной силы с Уа = 0,44-0,5, а коэффициент лобового сопро­
тивления с Ха = 0,034-0,031. При этом на долю крыла приходится
42—50 % полного сопротивления
самолета, на фюзеляж 25—32 %,
на мотогондолы двигателей 8 —
10 %, на горизонтальное оперение
5— 6 %, на вертикальное опере­
ние 3—4 %. Волновое сопротивле­
ние составляет около 20 % общего
сопротивления самолета.
При малых углах атаки коэф­
фициент подъемной силы самолета
приближенно можно считать рав­
ным коэффициенту подъемной силы
крыла. Д ля повышения точности
Рис. 4.8. Поляры самолета при р а з­
расчетов необходимо учитывать
личных числах М полета
влияние интерференции частей.
При малых скоростях полета поляра самолета подобна поляре крыла
(см. рис. 4.5).
При изменении числа М будут изменяться коэффициенты аэроди­
намических сил с Ха и с и поэтому каждому числу М полета будет со­
ответствовать своя поляра. В связи с этим для самолета строится се­
мейство поляр во всем диапазоне чисел М полета (рис. 4.8). Д ля
всех чисел М < 0,4, когда сжимаемость воздуха практически не про­
является, поляра одна. С увеличением числа М начинает проявляться
сжимаемость воздушного потока. Из-за увеличения коэффициента с,,п
поляра самолета при одних и тех же углах атаки «вытягивается»
вверх и на больших углах атаки отклоняется вправо вследствие уве­
личения коэффициента с., за счет индуктивного сопротивления с х.
При числах М > М* развивается волновой кризис, увеличивается
коэффициент с Хп. Поляра уже не просто постепенно отклоняется от
поляры М < 0,4 при увеличении угла атаки, как наблюдалось до
М < М*, а сдвигается вправо от этой поляры.
Аэродинамическое качество самолета определяется зависимостью,
рассмотренной ранее для крыла:
К
~-с !1а 1 С х а-
Подставив в эту формулу выражение (4.19), получим
к=-
С ’’ а
с.ха 0 + Ас*
(4 .2 0 )
Максимальное аэродинамическое качество и соответствующий ему
наивыгоднейший коэффициент подъемной силы определяются соотно­
шениями:
1
Заметим, что термин «наивыгоднейший» здесь относится только к по­
ляре. В реальном полете выгодны углы атаки, меньше наивыгодней­
шего а нв. Типичные зависимости аэродинамического качества тран­
спортного околозвукового самолета от угла атаки и числа М полета
приведены на рис. 4.9. К ривая К (а) при М = 0,4 подобна кривой
для изолированного крыла, рассмотренной ранее (см. рис. 3.9). При
малых числах М полета качество К тах приближенно считается по­
стоянным (коэффициенты аэродинамических сил с Уа и с Ха с ростом
числа М полета увеличиваются пропорционально). В диапазоне чисел
М = 1 - М ,4 величина Кшах интенсивно уменьшается из-за увеличе­
ния коэффициента сх
за счет составляющей волнового сопротив­
ления (рис. 4.10).
Формулы (4.20) и (4.21) позволяют проанализировать влияние раз­
личных конструктивных и эксплуатационных факторов на аэроди­
намическое качество самолета. На аэродинамическое качество ока­
зывает влияние как профильное, так и индуктивное сопротивление.
Очевидно, самолеты, обладающие хорошим аэродинамическим качест­
вом, должны иметь высокие несущие свойства и обтекаемые формы с
минимальной отрицательной интерференцией частей, что обеспечивает
приемлемое лобовое сопротивление на всех режимах полета. Д озву­
ковые транспортные самолеты выполняются с крылом большого уд­
линения умеренной стреловидности с профилем сравнительно большой
относительной толщины. Д л я обеспечения высоких несущих свойств
стреловидному крылу придают аэродинамическую и отрицательную
геометрическую крутку.
Выбор формы крыла в плане, применение ламинарных профилей
позволяют уменьшить профильное сопротивление крыла. Использова­
ние компоновочных схем с положительной и минимальной отрицатель­
ной интерференцией частей, зализов в местах стыковки частей само-
------------------ ^
J М = 0.4
12
1
1
I
1
1
------L .
««не
0,7
0,8
10 с6,°
Рис. 4.9. Зависимость аэроди нам иче­
ского качества околозвукового с а м о ­
лета от угла атаки при различных
числах М полета
Рис. 4.10. Зависимость максимально­
го аэродинамического качества около­
звукового самолета от числа М по­
лета
лета позволяет добиться значительного снижения лобового сопротив­
ления самолета. Одним из важных средств снижения лобового сопро­
тивления самолета является установка крыла под некоторым положи­
тельным (до 3°) углом относительно строительной горизонтали фюзе­
ляжа. В результате при основных крейсерских режимах полета, ког­
да угол атаки самолета близок к углу установки кры ла, воздушный
поток набегает на фюзеляж параллельно строительной горизонтали.
При этом сопротивление фюзеляжа становится минимальным. Индук­
тивное сопротивление уменьшается при установке на концах крыла
аэродинамических поверхностей (самолеты Ил-96, Ту-204 и др.).
Улучшение состояния поверхности самолета позволяет в значи­
тельной мере снизить сопротивление трения. С этой целью поверх­
ность самолета делается по возможности наиболее гладкой, применяют­
ся заклепки с потайными головками. Небрежная окраска самолета, за­
грязнение поверхности пылью, маслами, вмятины, забоины, царапи­
ны на поверхности могут увеличивать сопротивление на 10— 15 °п.
Значительное влияние на лобовое сопротивление самолета оказы ­
вает герметичность конструкции самолета. Перетекание воздуха че­
рез щели между элементами конструкции, вытекание воздуха из внут­
ренних отсеков самолета вызывают завихрение воздушного потока,
создают дополнительное сопротивление. Этому способствуют неплот­
но закрытые створки, люки, плохая подгонка элементов конструкции.
Нарушение герметичности конструкции может увеличить лобовое со­
противление самолета на 8 — 12 % .
В процессе длительной эксплуатации самолета происходят естест­
венная деформация конструкции, нарушение регулировки проводки
органов управления, установки органов управления относительно не­
подвижных частей, нарушение симметричности тяги двигателей. В ре­
зультате этого появляется необходимость в дополнительном отклоне­
нии органов управления для уравновешивания аэродинамических мо­
ментов относительно осей связанной системы координат. Это ведет
к увеличению аэродинамического сопротивления, снижению аэроди­
намического качества самолета. Эффективным методом снижения ло­
бового сопротивления самолета в процессе летной эксплуатации я в л я ­
ется уменьшение балансировочного отклонения органов управления
(отклонения органов управления для уравновешивания действующих
на него моментов).
Рассмотрим зависимость коэффициента аэродинамического момен­
та тангажа самолета от угла атаки т г (а) при нейтральном положении
органов управления (рис. 4.11). По характеру эта зависимость анало­
гична рассмотренной для крыла (см. рис. 3.12). Коэффициент момента
тангажа inz (а) в технических описаниях самолета чаще приводится
не как функция угла атаки, а как функция коэффициента нормальной
силы tnz (с,,). Д ля линейного участка зависимости m z (су) справедливо
соотношение:
т2 = т Си ( с у - - с , /(|)
т°г У Л с;/ ,
( 4 . 22)
где су — коэффициент аэродинамической нормальной силы , соответствую ­
щей зн ач ен и ю т 2 — 0; су — т ек ущ ее значение коэффициента нормальной силы;
с
дт2
тг« =
— про изводн ая от коэффициента момента т а н г а ж а по коэффициенту
н о р м ал ь ной с и л ы , численно р а в н а я тангенсу угла н акл о н а л инейного участка
кривой т г (су) к оси абсцисс.
Приближенно производная
m ‘ v ж A mz/ A c H,
(4.23)
где А т г и Асу — малые п риращ ен и я коэффициентов, п роизвольно взятые
по к р ив ой (ри с. 4.12).
£
Знак производной т J определяется знаками приращений Дтг и
А Су. В нашем случае положительному значению Асу соответствует отс
рицательное приращение Ат г, поэтому производная т " отрицатель­
на. П оскольку величина ^
S b A всегда положительна, то знак момента
Рис. 4.11. З ав иси м о сти коэффициента
аэроди нам ического момента т ан гаж а
т г от у гла ат ак и ( а ) и от коэффици­
ента аэродинам ической
нормальной
силы (б)
Рис. 4.12. Поперечная аэродинамиче­
ская сила Z и аэродинамический мо­
мент рыскания М у , действующие на
самолет при
несимметричном
об­
текании (Р = ^ 0 )
тангажа M z определяется знаком коэффициента момента тангажа т 2.
Положительное значение коэффициента момента тангажа
соот­
ветствует а 0 >■ 0 , что достигается соответствующей круткой крыла.
4.4. Аэродинамические силы и моменты,
действующие на самолет при скольжении
До сих пор мы рассматривали обтекание крыла и самолета при от­
сутствии угла скольжения р. Наличие угла скольжения приводит к
несимметричному обтеканию самолета. При этом аэродинамическая
сила планера R A отклоняется от плоскости симметрии самолета и, сле­
довательно, проектируется не только на оси ОХ и O Y связанной сис­
темы координат, но и на поперечную ось 0Z. В результате появляется
поперечная аэродинамическая сила 2 , которая является результи­
рующей аэродинамических поперечных сил, создаваемых фюзеляжем,
вертикальным оперением, крылом, мотогондолами и др. (рис. 4.12)
Z — 2 ф + 2 в 0 -j Z Kp - f Z Mr--f- •••>
где Zfy =
поперечных сил,
ф ю зе л я ж а .
(4.24)
j Z,j,2;
и Z $ 2 — равнодействую щ ие аэро ди н ам и ч ески х
приложенных соответственно в носовой и хвостовой частях
Основную долю аэродинамической поперечной силы Z создают
фюзеляж и вертикальное оперение. Сравнительно небольшую часть
аэродинамической поперечной силы создают мотогондолы и крыло.
При малых углах скольжения, соответствующих допустимым режимам
полета, аэродинамическая поперечная сила Z близка к аэродинамиче­
ской боковой силе Z a и с достаточной для практики точностью можно
считать Z = Z a.
При малых углах скольжения р < 14° зависимость аэродинамиче­
ской поперечной силы и ее составляющих от угла скольжения близка
к линейной (рис. 4.13). Поэтому
(4.25)
Направление (знак) аэродинамической поперечной силы зависит
от знака угла скольжения р. При скольжении на правое полукрыло
угол скольжения р положителен, а коэффициент сг и сила Z отрица­
тельны. Аэродинамическая поперечная сила Z, приложенная в центре
давления, создает относительно нормальной оси 0 Y , проходящей через
центр масс самолета, аэродинамический момент рыскания
( 4.26)
где m.y — коэффициент момента р ы с к а н и я .
Рис. 4.1.4. Зависимость коэффициента
аэродинамической поперечной силы с,
от угла скольжения Р при нейтраль­
ном положении аэродинамических ор ­
ганов управления
Рис. 4.14. Зависимость коэффициента
аэродинамического момента рыскания
самолета т у от угла скольжения р
при нейтральном положении аэроди­
намических органов управления
Коэффициент момента рыскания т у определяется по результатам
аэродинамических экспериментов и уточняется в процессе летных ис­
пытаний (рис. 4.14).
Знак аэродинамического момента рыскания определяется знаком
его коэффициента. Знаки угла скольжения и коэффициента момента
рыскания противоположны, если центр давления находится позади
центра масс самолета. Такого положения фокуса добиваются на этапе
конструирования и эксплуатации самолета, чтобы полная аэродина­
мическая сила создавала момент рыскания, направленный на устранение появившегося угла скольже­
ния независимо от причины, выз­
вавшей его появление.
Наличие угла скольжения и
связанное с этим несимметричное
обтекание самолета приводит не
только к появлению момента рыс­
кания, но и момента крена М х,
действующего относительно про­
дольной оси самолета О Х связан­
ной системы координат. Момент
крена М х создается в основном
крылом и вертикальным оперением
только при наличии угла скольже­
ния. Рассмотрим аэродинамический
момент крена, создаваемый прямо­
угольным крылом (рис. 4.15, а).
Набегающий на крыло при сколь­
жении воздушный поток, имеющий
Рнс. 4.15. Составляющие скорости н а ­
скорость V, можно разложить на
бегаю щ его воздушного потока (а) и
изменение аэродинамической нагр уз­
две составляющие: нормальную к
ки по разм аху прямоугольного к р ы ­
передней кромке крыла V cos fi
л а при скольжении (б) и возникнове­
и тангенциальную (параллельную
ние аэродинамического момента к р е­
передней кромке крыла) К sin р.
на (rt)
Рис. 4.16. Составляющие скорости набегающего воздушного потока (a ), р а с ­
пределение аэродинамической нагрузки по размаху стреловидного крыла при
скольжении (б) и возникновении аэродинамического момента крена (в)
Нормальная составляющая скорости воздушного потока V cos р
участвует в образовании подъемной силы крыла и одинакова для
любого симметричного сечения по всему размаху кры ла. Д л я тан­
генциальной составляющей скорости воздушного потока
V sin р
конец выдвинутого вперед при скольжении полукрыла (правого)
служит передней кромкой крыла. Распределение аэродинамической
нагрузки по размаху крыла (рис. 4.15, б ) становится несимметричным
(сплошная кривая), что приводит к появлению небольшого момента
крена крыла М х
направленного в сторону отстающего при сколь­
жении полукрыла (рис. 4.15, в).
При скольжении стреловидного крыла, имеющего угол стреловид­
ности
измеренный по передней кромке (рис 4.16, и), нормальная
составляющая скорости V c o s(x „
р) на выдвинутом вперед полукрыле больше, чем на отстающем V cos (Хп • Р)- Это приводит к ярко
выраженной несимметричности распределения аэродинамической на­
грузки по размаху крыла (рис. 4.16, о). Прирост подъемной силы на
выдвинутом вперед при скольжении полукрыле и уменьшение подъем­
ной силы на отстающем полукрыле создают значительный момент
крена М.ткр в сторону отстающего при скольжении полукрыла
(рис. 4.16, в). С увеличением угла стреловидности несимметричность
распределения аэродинамической нагрузки по крылу, а следователь­
но, и момент крена М *кр в сторону отстающего при скольж ении полукрыла увеличиваются.
Значительное влияние на распределение нормальной аэродинами­
ческой нагрузки по размаху крыла оказывает угол \|) поперечного V
крыла (рис. 4.16, в). Предположим, что самолет имеет отрицательный
угол г|э крыла и скользит на правое полукрыло под углом р. Р азл о ­
жим скорость воздушного потока, набегающего на кры ло при скольж е­
нии, на две составляющие: параллельную продольной оси О Х самоле­
та V cos р и параллельную поперечной оси 0 Z самолета V sin р. По­
перечный поток воздуха, набегающий на крыло со скоростью V sinji,
приводит к уменьшению углов атаки в сечениях выдвинутого вперед
при скольжении полукрыла и к их увеличению в сечениях отстающего
при скольжении полукрыла. Так как в полете углы скольжения не
превышают обычно 10 °, а угол ф не превышает 6 °, то изменение углов
атаки (в радианах) в сечениях выдвинутого вперед при скольжении по­
лукры ла Д а := —
а отстающего полукрыла Д а =
Такое асиммет­
ричное изменение углов атаки на полукрыльях обусловливает падение
подъемной силы Д Y n на выдвинутом вперед при скольжении полукрыле и увеличение ее на отстающем полукрыле. В результате возникает
момент крена, направленный при отрицательном ^ в сторону выдвину­
того вперед при скольжении полукрыла.
Если крыло имеет положительный угол г|), то при скольжении на
полукрыльях возникает обратный прирост подъемной силы и креня­
щий момент направлен в сторону отстающего при скольжении полу­
крыла. Таким образом, изменение угла \J> крыла приводит либо к ос­
лаблению реакции крыла по крену на скольжение (при отрицатель­
ном «(•), либо к усилению (при положительном ф). Это свойство исполь­
зуется конструкторами для обеспечения требуемых характеристик по­
перечной устойчивости самолета.
Момент крена создается также вертикальным оперением. Причи­
ной возникновения момента крена ,М,. „.о является то, что точка прило­
жения поперечной аэродинамической силы 2 в.0, возникающей на вер­
тикальном оперении при скольжении, расположена выше центра масс
а)
Рис. 4.17. О бр азо вани е составляющих
л *|>олинамического
момента
крена
при скольжении
самолета (рис. 4.17, а). Действуя
на плече i/B. 0, сила ZB. 0 создает
момент крена
Мх. ВО--2 В.0 Ув.О-
0
(4 .2 7 )
У самолетов с высоко расположен­
ным, имеющим большую площадь
вертикальным оперением, момент
Рис. 4.18. Зависимость коэффициента
аэродинамического момента крена т х
крена М х,во может быть сравним с
от угла скольжения при нейтральном
моментом крена крыла.
положении органов управления
Заметную роль в создании мо­
мента крена при скольжении играет
интерференция между крылом и фюзеляжем. Поперечный воздушный
поток V sin р, набегая на фюзеляж, трансформируется. При этом соз­
дается поле вертикальных скоростей, изменяющих местные углы ата­
ки в области прикорневых сечений. На выдвинутом вперед полукрыле
самолета высокопланной схемы местные углы атаки увеличиваются, а
на отстающем—уменьшаются (рис. 4.17, б). У самолета низкопланной
схемы распределение приращений угла атаки, обусловленных интер­
ференцией, обратное по сравнению с высокопланом (рис. 4.17, в).
Асимметричное распределение местных углов атаки по размаху крыла
приводит к асимметричному распределению приращения подъемной
силы и созданию вследствие этого момента крена, направление которо­
го определяется компоновкой самолета и знаком угла скольжения.
Таким образом, суммарный момент крена, действующий на само­
лет при скольжении, создается в основном крылом, вертикальным
оперением, а также вследствие интерференции между крылом и фюзе­
ляжем (влиянием других частей пренебрегают):
МХ
„ \-Мх
Л= МХ
Лкр
I *'в»0 -\-МхЛ1111Т‘
Этот момент определяется как
М х = тх qSl =
f i qS l ,
(4 .2 8 )
где t n x — коэффициент момента к р е н а , в о зн и к а ю щ и й при с к о л ь ж е н и и и за
висящии от угла ск о л ь ж е н ия (рис. 4.18);
я
дт х
— п р о и зв о д н а я от а э р о д и ­
намического коэффициента момента к р е н а по у г л у с к о л ь ж е н и я (тан ген с у гла н а ­
клона к ривой т жр к оси абсцисс).
Производная т \ отрицательна по знаку. Это значит, что при поло­
жительном угле скольжения (на правое полукрыло) возникает отри­
цательный момент крена (на отстающее левое полукрыло) и, наоборот,
при скольжении на левое полукрыло возникает момент крена, направ­
ленный на правое полукрыло.
4.5. Механизация крыла и ее влияние на аэродинамические
характеристики
Формы крыла одинаково пригодной для малых скоростей полета,
дозвуковых и сверхзвуковых не существует. Крыло, рассчитанное для
полета на дозвуковых и сверхзвуковых скоростях, при уменьшении
скорости до взлетной или посадочной становится непригодным из-за
появления срыва потока при уменьшении скорости (увеличении угла
атаки). Этот недостаток устраняется применением различных средств
механизации крыла (рис. 4.19). Механизацией крыла называется систе­
ма устройств, позволяющих изменять его аэродинамические характе­
ристики. Таким образом, применение механизации крыла вызвано
необходимостью увеличения скорости полета с одновременным улуч­
шением взлетно-посадочных характеристик самолета.
Идея применения механизации крыла была выдвинута С.А. Чаплы­
гиным еще в 1910 г. Он впервые предложил выполнить крыло с щеля­
ми по размаху. Проходящий через эти щели поток должен сдувать по­
граничный слой с верхней поверхности крыла, тем самым предотвра­
щать преждевременный срыв потока.
По выполняемым функциям средства механизации подразделяют
на изменяющие несущую способность крыла и увеличивающие лобовое
сопротивление. По месту расположения на крыле различают средства
механизации передней и средства механизации хвостовой кромок
крыла.
Закрылок — профилированная подвижная часть крыла, располо­
женная в его хвостовой части и отклоняемая вниз (рис. 4.20). Закрылки
могут быть поворотными, т. е. поворачивающимися вокруг связанной
с крылом оси вращения и не образующими при этом профилирован­
ной щели; щелевыми — при их от­
клонении между носком закрылка
и крылом образуется профилиро­
ванная щель; многощелевыми - с о ­
ставленными из нескольких под­
вижных звеньев, отклоняющихся
на различные углы и разделяю­
щихся профилированными щеля­
ми; выдвижными — поворачиваемы­
ми относительно оси вращения и
одновременно смещаемыми назад
вдоль хорды крыла для увеличения
его площади; с отклоняемой хвос­
товой частью — для увеличения
Рис. 4.19. Механизированное крыло
кривизны профиля закрылка и в
околозвукового транспортного с а м о ­
лета:
целом крыла.
I — турбулизаторы:
2 — предкрылок;
3 —
Недостатком поворотного безэ л ер о н ; 4 — т р и м м е р э л ер о н а ;
5 — серво­
к о м п е н с а т о р э л е р о н а ; 6 — в н е ш ни й з а к р ы ­
щелевого закрылка является то,
л о к ; 7 — и н т е р ц е п т о р ы ; 8 — в н у т р ен н и й з а ­
что при углах атаки 10 — 12° и
крылок; 9 — торм озн ы е щиткн
Рис. 4.20. Схема обтекания крыла с зак р ы л к о м в рабочем п олож ении ( а ) , измене­
ние угла атаки (б), перераспределение аэродинамической н агр у зк и ( в ) и зав иси ­
мости
сУа ( а )
при поворотном зак р ы л к е, отклоненном на р азличные углы (г)
(штриховой линией показаны кривые д л я щелевого з а к р ы л к а )
отклонении на угол б3 = 25-^30° уже появляется срыв потока на
нем.
Щелевые закрылки, образуя профилированные щели, позволяют
увеличить угол отклонения до 50° без срыва воздушного потока. При
этом критический угол атаки уменьшается всего на
1 ... 3° по
сравнению с убранным закрылком. К ак видно из рисунка, отклонение
закрылков приводит к увеличению несущей способности крыла и тем
в большей степени, чем на больший (в пределах допустимого диапазо­
на) угол отклонен закрылок. Этому такж е способствует увеличение
фактического угла атаки, кривизны профилей кры ла и площади кры­
ла. Отклонение закрылков приводит к уменьшению угла атаки нуле­
вой подъемной силы и к увеличению коэффициента лобового сопро­
тивления.
При больших углах отклонения закры лков прирост коэффициента
лобового сопротивления, вызванный отклонением закры лков, может
стать больше, чем прирост коэффициента подъемной силы. В связи с
этим при взлете самолета для сокращ ения длины разбега закры лки от­
клоняются на небольшие углы, что обеспечивает преимущественное
увеличение подъемной силы при сравнительно небольшом лобовом со­
противлении.
На посадке угол отклонения закры лков больше, что обеспечивает
высокие несущие свойства кры ла и достаточно больш ое лобовое со5*
131
противление, приводящее к уменьшению длины пробега. Многощеле­
вые закры лки увеличивают коэффициент с Уа в 2 ... 3 раза, критический
угол атаки и коэффициент c X(j.
Предкрылок — профилированная часть крыла, расположенная в
носовой части и предназначенная для улучшения аэродинамических
характеристик крыла (рис. 4.21). Предкрылки могут быть неподвиж­
ными, не изменяющими своего положения относительно крыла,
или подвижными. Подвижные предкрылки в нерабочем положении
плотно прижаты к крылу и, как другие средства механизации, вписы­
ваются в обводы крыла. По воле пилота или автоматически предкрыл­
ки приводятся в рабочее положение. Оптимальный угол отклонения
предкрылков не более 35°. Применение предкрылков обусловлено не­
обходимостью улучшения аэродинамических характеристик крыла
при использовании средств механизации хвостовой кромки крыла.
С увеличением скорости воздушного потока на верхней поверхно­
сти крыла при отклонении закры лков увеличивается местный угол ата­
ки носовой части крыла, что может вызвать срыв. Отклонение пред­
крылков предупреждает срыв потока. Между предкрылком и крылом
образуется профилированная щель, вход в которую располагается в
области точек полного торможения воздушного потока, а выход —
вблизи области минимальных давлений (максимальных сужений
струи). Воздух, проходя через щель, разгоняется, выходит на верхнюю
поверхность, увлекает за собой пограничный слой, увеличивая его
кинетическую энергию. В резуль­
тате разрежение на верхней по­
верхности увеличивается, а отрыв
пограничного слоя происходит на
большем угле атаки и дальше от
передней кромки крыла. Это при­
водит к увеличению угла а кр и
коэффициента с УаГпах, некоторому
увеличению коэффициента лобово­
го сопротивления сХа за счет уве­
личения индуктивного сопротив­
ления и потери энергии воздуш­
ного потока в щели.
Предкрылок увеличивает подъ­
емную силу крыла до 20 %. Однако
увеличение критического угла ата­
ки не позволяет в полной мере ис­
Рис. 4.21. С х е м а обтекания к р ы л а с
пользовать эффект предкрылка,
п р едкры лком в рабочем положении
так как это приводит к осложне­
(а)
и зависи м о сть
коэф ф ициента
подъемной силы от угла ат ак и при
нию посадки и взлета за счет уве­
различных
п олож ен иях
п р ед к р ы л ­
личения
угла атаки и возможности
ка (б ):
Р
касания
взлетно-посадочной поло­
I — рабочее
положение;
предкрылок
Убран
сы хвостовой частью фюзеляжа.
132
Предкрылки могут быть установле­
ны по всему свободному размаху
крыла или перед средствами меха­
низации задней кромки крыла.
Предотвращая срыв потока, они
повышают их эффективность. Сов­
местное применение закрылков и
предкрылков дает значительное
улучшение аэродинамических ха­
рактеристик взлета и посадки
(рис. 4.22). При этом возрастает
коэффициент подъемной силы на
одних и тех же углах атаки, умень­
шается угол атаки нулевой подъ­
емной силы, критический угол ата­
ки увеличивается по сравнению с
раздельным
применением пред­
Рис. 4.22. Зависимость аэродинам иче­
крылков и закрылков. При выпус­ ского коэффициента подъемной силы
ке предкрылков центр давления
от угла атаки при различных комби
крыла перемещается вперед, и пи­ нациях предкрылка и вы дви ж н ы х з а ­
крылков
(одно-, дв у х - и тр ех щ е ­
кирующий момент, возникающий
левых)
при выпуске закрылков, умень­
шается.
Носовой щиток и отклоняемый носок крыла (рис. 4.23) выполня­
ет такую же роль, как и предкрылок. Качественное влияние их на
аэродинамические характеристики крыла аналогично предкрылку.
Как и предкрылки, носовые щитки и отклоняемые носки крыла приме­
няются совместно со средствами механизации хвостовой кромки
крыла.
Щиток — плоский, подвижный, отклоняющийся вниз элемент,
устанавливаемый у хвостовой кромки крыла вдоль разм аха и предназ­
наченный для увеличения подъемной силы крыла. Он не изменяет
форму верхней поверхности крыла (рис. 4.24). При этом значительно
увеличивается кривизна крыла, что приводит к уменьшению угла ата­
ки а 0. В пространстве между щитком и крылом наблюдаются значи­
тельное разрежение, срыв потока с верхней поверхности щитка и ин­
тенсивное вихреобразование, что
приводит к отсосу пограничного
слоя, снижению градиентов давле­
ния на верхней поверхности кры­
ла к безотрывному обтеканию. Оп­
тимальный угол отклонения щит­
ков не превышает 60°. При этом
критический угол атаки крыла не­
сколько уменьшается, увеличивает­
ся коэффициент подъемной силы
Рис. 4.23. Схемы отк л о н я ю щ ег о нос­
с ч„, наблюдается значительно боль­
ка крыла ( а ) и носового щ и т к а ( б )
ший прирост коэффициента лобового сопротивления сХа, чем при от­
клонении закрылков, что объясняется мощным вихреобразованием.
Выдвижной щиток, кроме этого, увеличивает площадь крыла, как и
выдвижной закрылок. Увеличение лобового сопротивления обуслов­
ливает применение тормозных щитков.
Гаситель подъемной силы — это отклоняемый конструктивный
элемент, расположенный на верхней поверхности крыла в зоне, обслу­
живаемой закрылками, и предназначенный для торможения и резкого
уменьшения подъемной силы крыла. Гасители подъемной силы явля­
ются важным средством улучшения посадочных характеристик само­
лета .
Интерцепторы — пластины, расположенные на верхней поверх­
ности крыла и предназначенные для управления самолетом по крену
совместно с элеронами. Применение интерцепторов вызвано нескольки­
ми причинами: ограниченностью размеров элеронов из условия жест­
кости кры ла и занятости хвостовой кромки крыла другими средства­
ми механизации, потерей эффективности элеронов при концевом срыве
потока, необходимостью повышения эффективности управления по кре­
ну при появлении углов скольжения, необходимостью создания до­
полнительного лобового сопротивления и гашения подъемной силы
на посадке. При использовании для управления по крену интерцеп­
торы отклоняю тся только на полукрыле с отклоненным вверх элеро­
ном.
Интерцепторы представляют собой узкие плоские или слегка ис­
кривленны е пластины, расположенные вдоль размаха крыла и вы­
двигаемые через щели в крыле по нормали к поверхности или откло­
няемые на постоянный или изменяемый по воле пилота угол. Как и
гасители подъемной силы, интерцепторы вызывают турбулизацию по­
граничного слоя или срыв потока с крыла на поверхности, располо­
женной за интерцептором в зависимости от высоты выдвижения или
угла отклонения. Действие интерцепторов приводит к перераспреде­
лению давления по крылу, что вызывает изменение коэффициентов
аэродинамических сил и моментов. Уменьшение коэффициента подъ­
емной силы и увеличение коэффициента лобового сопротивления вы­
зы ваю т резкое уменьшение аэродинамического качества самолета.
Значение и знак изменения коэффициентов аэродинамических сил за­
висят не только от угла отклонения интерцепторов или высоты их вы­
движ ения, но и места расположения интерцептора вдоль хорды. При­
менение гасителей подъемной силы и интерцепторов приводит к значи­
тельном у уменьшению коэффициента подъемной силы и увеличению
коэффициента лобового сопротивления, что вызывает резкое снижение
несущих свойств крыла и эффективности других средств механиза­
ции. Уменьшение подъемной силы при движении самолета по взлет­
но-посадочной полосе вызывает повышение нагрузки на колеса и уве­
личение силы трения колес, что уменьшает длину пробега.
Тормозной щиток — подвижный элемент, предназначенный для
увеличения аэродинамического сопротивления самолета. Д ля повыше134
Рис. 4.24. Схема обтекания крыла с
щитком в рабочем положении (а), о т ­
клоняемым интерцептором (б) и т о р­
мозным щитком типа «крокодил» (в )
и зависимость коэффициента подъем­
ной силы от угла атаки при отклонен­
ном щитке ( г)
Рис. 4.25. Схема обтекания крыла со
струйными средствами механизации
и средствами управления погранич­
ным слоем:
а - р е а к т и в н ы -ft з а к р ы л о к :
tV— з а к р ы л о к
с ре а к т и в н ы м *икр ылко м; а — X П С с ду во м
с верхней н о в е р \ н о с т и з а к р ы л к а : г — УП С
с ду во м 'с ве рх ней п о в е р х н о с т и к р ы л а ; д —
УП С от сосом с ве рхн ей п ове рхн ос ти к р ы л а
пия эффективности торможения на пробеге тормозные щитки отклоня­
ются, что приводит к срыву воздушного потока за ними и резкому уве­
личению лобового сопротивления. По принципу действия тормозной
щиток — эффективное средство повышения лобового сопротивления.
Применение интерцепторов и тормозных щитков на посадке сокра­
щает длину пробега. Перспективным является применение крыла с из­
меняемой в полете кривизной профиля. Изменение относительной кри­
визны профиля приводит к изменению коэффициента угла атаки нуле­
вой подъемной силы а 0, коэффициента момента тангаж а при нулевой
подъемной силе m Zo, положения центра давления дгд. Управление кри­
визной профиля крыла в полете позволяет обеспечить оптимальное со­
отношение между подъемной силой и лобовым сопротивлением за счет
характеристик самого крыла и балансировочного отклонения органов
управления.
Находит применение струйная механизация крыла: реактивные
закрылки, реактивные предкрылки, системы управления пограничным
слоем (УПС). Они предназначены для повышения кинетической энергии
пограничного слоя и предотвращения преждевременного срыва потока,
замены механических закрылков струйными, создания дополнитель­
ной подъемной силы за счет реакции струи (рис. 4.25). В узкую щель,
расположенную на крыле, вдувается струя газов, отбираемых от си­
ловой установки или подаваемых специальным компрессором. Б л а­
годаря этому улучшается обтекание крыла и одновременно создается
реактивная сила R струи. Изменяя направление струи, можно изме­
нять нормальную R,j и продольную R x составляющие реактивной силы.
Благодаря этому возрастает коэффициент подъемной силы без значи­
тельного увеличения критического угла атаки. Увеличения кинети­
ческой энергии пограничного слоя можно также достичь отсосом воз­
духа с верхней поверхности крыла через тонкие отверстия или щели.
В практике самолетостроения выбирается комбинация наиболее це­
лесообразных для данного типа самолета средств механизации крыла.
При этом необходимо иметь в виду, что механизация располагается на
его определенных частях (см. рис. 4.19). Если на крыле расположены
гондолы двигателей, то размах крыла, занятый механизацией, еще бо­
лее сокращается. Механизация хвостовой кромки крыла расположена,
как правило, между фюзеляжем и элеронами, механизация передней
кромки крыла, как правило, — по всему свободному размаху крыла.
Форма крыла в плане оказывает существенное влияние на эффек­
тивность использования механизации, поэтому рассмотренные аэро­
динамические характеристики дают только качественную картину
эффекта механизации. При определении аэродинамических характе­
ристик крыла с механизацией в основном используются данные экс­
периментальных исследований.
4.6. Влияние конфигурации самолета
на аэродинамические характеристики
Конфигурация самолета определяется сочетанием положения меха­
низации крыла, шасси и других частей и агрегатов самолета, изме­
няющих его внешние очертания. Нормами летной годности самолетов
установлены следующие конфигурации самолетов: первая взлетная—
механизация крыла во взлетном положении, шасси выпущено
(ШВ); вторая взлетная - механизация крыла во взлетном положе­
нии, шасси убрано (ШУ); полетная — механизация крыла в положе­
нии, соответствующем крейсерскому полету, шасси убрано; предпоса­
дочная — механизация крыла в положении, соответствующем усло­
виям захода на посадку, шасси выпущено; посадочная — механиза­
ция крыла в посадочном положении, шасси выпущено.
Влияние конфигурации самоле­
та удобно рассмотреть на полярах
самолета, так как эти кривые дают
наглядное представление о качест­
венных и количественных измене­
ниях коэффициентов аэродинами­
ческих сил и аэродинамического
качества при различных углах
атаки. Исходя из требований обес­
печения жесткости и прочности кон­
струкции, устойчивости и управ­
ляемости, безопасности полетов,
скорость полета, на которой воз­
можно изменение конфигурации,
ограничивается. Типичные поляры
Рис. 4.26. П о ляр ы самолета при р а з ­
самолета при различных конфигу­ личных
конфигурациях:
рациях приведены на рис. 4.26.
/ — м ехани заци я и ш асси убраны (полет­
ная к о н ф и г у р а ц и я ) ; 2 — м е х а н и з а ц и я к р ы ­
Крейсерский полет (наиболее про­
л а у б р а н а , ш а с си в ы п у щ е н о ; 3 — за к р ы л к и ;
должительный этап) целесообразно
предкрылки
выпущены,
ша с си
убрано
(вторая взлетная конфигурация); 4 — з а ­
выполнять при крейсерском угле
к р ы л к и и п р е д к р ы л к и во вз л ет н ом п о л о ж е ­
нии ш а с си в ы п у щ е н о ( п е р в а я в з л е т н а я к о н ­
атаки а кс, значительно меньшем
ф и гура ц и я ); 5 — закры лки, предкрылки и
наивыгоднейшего угла атаки а нв. ш а с си в ы п у щ е н о ( п р е д п о с а д о ч н а я к о н ф и ­
гурация);
6 — закрылки,
предкрылки
и
Крейсерскому углу атаки соответ­ ша
с си в ы п у щ е н о , и н т е р ц е п т о р ы о т к л о н е ­
ны
(
п
о
с
а
д
о
ч
н
а
я
к
о
н
ф
и
г
у
р
а
ц
и
я
)
ствует близкое к минимальному
лобовое сопротивление самолета
f* 0 r.un (поляра /).
Выпуск шасси увеличивает лобовое сопротивление самолета на
5 ... 10 % вследствие увеличения профильного сопротивления само­
лета и сопротивления интерференции системы: кры ло—шасси—фюзе­
ляж . Кроме того, при выпуске и уборке шасси открываются створки
люков гондол для шасси, расположенных на крыле или фюзеляже. Это
приводит к значительному приросту лобового сопротивления самоле­
та. На подъемную силу выпуск и уборка шасси оказывают незначи­
тельное влияние (поляра 2). Поляры самолета при выпущенном шасси
смещены вправо в направлении увеличения с х . При выпуске и уборке
шасси сопротивление интерференции достигает максимума при неко­
тором промежуточном положении шасси. Увеличение коэффициента
лобового сопротивления приводит к уменьшению аэродинамического
качества, что видно по уменьшению угла аэродинамического качества
ф. Выпуск шасси вызывает уменьшение аэродинамического качества
па 12 - 25% , а угол а нв увеличивается на 8— 14 % .
При выпущенных шасси подкрылках и закры лках поляра сдвига­
ется вправо вверх (поляра 4). Причиной этого является увеличение
коэффициентов с Уа и с х . Коэффициент с Ха увеличивается не только
вследствие выпуска шасси, но и за счет появления дополнительного
сопротивления крыла при выпуске закры лков. Чем больше угол от­
клонения закрылков, тем больше коэффициенты лобового сопротивле­
ния и подъемной силы.
Отклонение других средств механизации, увеличивающих подъем­
ную силу крыла, например предкрылков, приводит к росту коэффи­
циентов с Уа и с Ха, смещению поляры вправо и вверх, а такж е некото­
рой ее трансформации. Трансформация поляры объясняется сложным
аэродинамическим взаимодействием частей самолета, которое может
существенно изменяться в небольшом диапазоне углов атаки. При от­
клоненных в посадочное положение закрылках, выпущенных шасси и
предкрылках поляра занимает самое верхнее положение (поляра 5).
Отклонение интерцепторов на посадке значительно увеличивает лобо­
вое сопротивление самолета и резко снижает подъемную силу. Поляра
самолета сдвигается вправо и опускается вниз (поляра 6). При этом
аэродинамическое качество самолета становится минимальным и рав­
ным 20—50 % значения /СтЕ,х.
4.7. Экранирующее влияние ВПП на аэродинамические
характеристики самолета
На взлете и посадке из-за экранирующего воздействия земной по­
верхности ограничивается скос воздушного потока за крылом, изме­
няется обтекание самолета воздухом. Изменение условий обтекания
наблюдается при сравнительно небольших расстояниях h.t от фокуса
самолета 1 F до земли (рис. 4.27, а). Уже при расстояниях, равных дли­
не средней аэродинамической хорды ЬА до поверхности ВПП, влия­
ние экрана земли практически исчезает.
При движении самолета вблизи земли на его несущих поверхностях
наблюдается перераспределение давления. В результатате повыше1 Фокус самолета или фокус по углу атаки—точка, расположенная на линии
пересечения плоскости O X Z связанном системы координат с плоскостью симмет­
рии самолета ОХУ, относительно которой момент тангаж а остается постоянным
при малых изменениях угла атаки.
Рис. 4.27. Влияние близости земли на распределение давления по профилю крн
ла (а) и скос воздуш ного потока за крылом (б):
/ — в д а л и от з е м л и ; 2 — в б л и з и зе м л и
Рис. 4.28. Влияние близости земли на
зависимость с (а ) при убранных и
уа
отклоненных закрылках (а) и поляру
самолета (б):
I — в б л и зи земли; 2 — в д ал и от земли
Рис. 4.29. Зависимость относительного
увеличения коэффициента подъемной
силы с,. (h —0)!c (Л = о о ) от относи­
ла
“'а
тельного удаления самолета от з е м ­
ли h
ния давления под крылом скорость воздушного потока на верхней по­
верхности и особенно вблизи передней кромки повышается, увеличи­
вается разрежение, уменьшается средняя вертикальная составляющая
скорости Ууср. Перераспределение давлений на верхней и нижней по­
верхностях крыла приводит к повышению коэффициентов подъемной
силы при одних и тех же углах атаки. Прирост коэффициента подъем­
ной силы вследствие влияния земли может достигать 20 %. Уменьше­
ние угла скоса воздушного потока (е2) за крылом из-за экранирующего
влияния земли (рис. 4.27, б) приводит к увеличению истинного угла
атаки. Поэтому срыв воздушного потока с крыла начинается на мень­
ших углах атаки, значение а нр уменьшается (рис. 4.28). Отклонение
механизации крыла вызывает еще более существенное перераспреде­
ление давления по профилю крыла, изменение коэффициента подъем­
ной силы и скоса воздушного потока. При этом тенденция изменения
аэродинамических характеристик из-за близости земли сохраняется
(рис. 4.28, а). Уменьшение скоса воздушного потока за крылом обу­
словливает уменьшение сопротивления сил давления и уменьшение
индуктивного сопротивления крыла, в результате общее лобовое со­
противление самолета уменьшается, поляра крыла (см. рис. 4.28, б)
смещается влево и имеет меньший наклон.
Поскольку срыв воздушного потока с крыла вблизи земли насту­
пает на меньших углах атаки, то возрастает роль средств управления
пограничным слоем и механизации крыла, в частности, отклоняемого
носка, предкрылка и носового щитка.
Д л я сравнительной оценки влияния близости земли на аэродина­
мические характеристики самолетов введено понятие относительного
удаления
где / — размах крыла.
Рис. 4.30. Д еф ор м ац ия подстилающей поверхности (воды)
Низкопланы испытывают экранирующее влияние земной поверхно­
сти в большей степени, чем высокопланы. Степень влияния близости
земли на коэффициент подъемной силы самолета характеризуется за­
висимостью, представленной на рис. 4.29.
Уменьшение индуктивного сопротивления за счет экранирующего
влияния земной поверхности эквивалентно увеличению удлинения
кры ла. Поэтому влияние близости земли можно учесть при расчетах
введением эффективного удлинения крыла
(4 .3 0 )
Деформация экрана (подстилающей поверхности), например, при
движении самолета у поверхности воды или у поверхности земли,
заросшей мелкой растительностью (травой, кустарником), приводит к
снижению эффекта экрана (рис. 4.30). Это явление должно учитывать­
ся пилотом при взлете и посадке на грунтовых аэродромах, а также
при выполнении вынужденных посадок, поскольку потребное движе­
ние рычагами управления будет отличаться от привычного, вырабо­
танного на твердых ВПП.
Д оп о л н и т е л ь н а я л и т е р а т у р а
14|, с. 3 2 6 — 341, 2 8 7 —295; [7|, с. 2 1 - 5 4 ; [9], с. 1 9 - 4 5 ; [14], с. 2 04 —265.
К о н тр о л ь н ы е вопросы
1. Что пони м аю т под аэродинамической интерференцией?
2 . И зо б р а зи т е п роекции аэродинамической силы планера на оси с к о р о с т ­
ной системы к о о р д и н ат , назовите их и запиш ите формулы.
3. Н а зо в и т е и за п и ш и т е формулы аэродинамических моментов а э р о д и н а ­
мической силы п л а н е р а относительно осей связан н о й системы координат.
4. З а п и ш и т е у р а в н е н и е п о ляры самолета, сравните поляры к р ы л а и само­
л е т а при М < 0,4.
5. И зо б р а зи т е и поясн ите семейство п оляр при различных числах М полета.
6 . П о ясн и т е в л и я н и е числа М полета на аэродинамические х а р а к т ер и ст и к и
самолета.
7. И зобразите зависимости m z (а) и т г (суа), у к а ж и т е и поясните х а р а к т е р ­
ные точки.
8 . О бъясните природу аэродинамического момента ры скан и я.
9. Объясните природу аэродинамического момента крена.
10. Дайте определение механизации к р ы л а и проведите ее к л а с с и ф и к а ц и ю .
И . Изобразите схему обтекания к ры л а с отклоненными за к р ы л к а м и , п р е д ­
к р ы л к ам и , носовым щитком и отклоняемым носком к р ы л а , п р о а н а л и зи р у й т е з а ­
висимости сУа (а).
12. Объясните обтекание крыла, сн абж енн ого струйной м ехан и заци ей , и з о ­
бразите и п р о ан а л и зи р у й т е зависимости су ^ (а).
13. Поясните принцип действия гасителей подъемной силы и то рм о зн ы х
щ итков.
14. И зобразите п о л я р у самолета с убран н ой и выпущенной м е х ан и зац и ей ,
у к а ж и т е ха р а к т ер н ы е точки, проведите их сравни тельны й ан ализ.
15. Дайте обоснование влияния близости земли на аэро ди нам ич ески е х а ­
рактеристи ки самолета, проведите срав н и т ел ь н ы й а н ал и з зависимостей сУа(а )
вдали и вблизи земли.
16. Рассчитайте угол атаки г о ризон та л ь ного оперения при полете на у г л а х
атаки а 1 = 3° и а 2= 10°, если угол установки гор изо н тал ьно го о п ерени я а г 0 =
= — 3°, а углы скоса потока, измеренные у г оризон тального о п е р е н и я , e j =
= 2° и е , = 5°. Ответ: а гл)1 = — 2°; сег о2 = 2°.
17. Условием выполнения г оризон тального полета самолета я в л я е т с я р а ­
венство подъемной силы Y (, силе тяж ести G. В ы п ол ни тся ли это услови е, если п о ­
л е т совершается на высоте 7500 м со скоростью 600 км/ч (су — 1,6; S
80 м2).
Ответ: Y a = 989 430 Н (р = 05 557 кг/м3).
18. Определите аэродинамическое качество самолета, если су = 2 ; сХ()= 0,02 и Яэф = 6,5. Ответ: К = 9,3.
19. К ак изменится аэродинамическое качество самолета при сУа — 1,7, если
из-за увеличения шероховатости поверхности и у х удш ени я герметичности в е л и ­
чина сХ() возрастет на 30 %. Д л я нового самолета c v — 0,025; Яэф = 7 . Ответ:
в 1,05 раза.
Г л а в а
5
ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ВИНТА
5.1. Геометрические и кинематические характеристики
Классификация воздушных винтов. Воздушный винт предназна­
чен для преобразования энергии вращения вала двигателя в энергию
поступательного движения самолета путем отбрасывания воздуха в на­
правлении, обратном полету.
Теория воздушного винта была создана Н. Е. Ж уковским и полу­
чила дальнейшее развитие в работах В. П. Ветчинкина, Б . Н. Ю рьева,
Г. X. Сабинина, Г. И. Кузьмина, Т. Кармана, Г. Гладуэрта и других
ученых.
Основными частями воздушного винта являются лопасти и втулка
с механизмом поворота лопастей (рис. 5.1).
Воздушные винты классифицируют: по способу закрепления л о ­
пастей на втулке, числу лопастей, форме лопасти, ее материалу, н а ­
правлению вращения и другим признакам. По способу закрепления
лопастей на втулке воздушные винты подразделяют на винты фиксиро­
ванного и изменяемого шага. Воздушные винты, у которых лопасти
жестко соединены с втулкой и не изменяют углы установки по отно­
шению к плоскости вращения, называют воздушными винтами фикси­
рованного шага (ВФШ). Воздушные винты, у которых угол установки
лопастей в полете может изменяться автоматически под действием аэ­
родинамических сил или под действием специального регулятора, на­
зывают воздушными винтами изменяемого шага (ВИШ). По способ)
управления воздушные винты изменяемого шага подразделяют на вин­
ты ручного и автоматического управления.
По числу лопастей воздушные винты делятся на двух-, трех-,
четырех- и многолопастные. Двухлопастные воздушные винты имеют
наибольший к.п.д. вследствие наименьшей аэродинамической интер­
ференции между лопастями. Однако для того, чтобы воздушный винт
использовал всю мощность, отдаваемую ему двигателем, необходимо
увеличить диаметр винта, что ограничивается высотой шасси, расстоя­
нием между воздушными винтами, установленными на крыле, и дру­
гими факторами. Это приводит к необходимости применения воздуш­
ных винтов с большим числом лопастей, несмотря на снижение к. п. д.
Лопасти изготавливают из металла (в основном алюминиевые спла­
вы), пластмассы, композиционных материалов, дерева.
По направлению вращения воздушные винты подразделяют на воз­
душные винты левого и правого вращения. Направление вращения оп­
ределяется относительно пилота, находящегося в кабине. Н аправле­
ние вращения воздушного винта против хода часовой стрелки считает­
ся левым. По роду действия воздушные винты бывают тянущими и тол­
кающими. Если воздушный винт расположен впереди двигателя, то
он называется тянущим, если позади — толкающим. Если на само­
лете несколько силовых установок, их иногда располагают одну за
другой (тандем). При этом передний воздушный винт является тяну­
щим, а задний — толкающим. Направление вращения таких воздуш­
ных винтов обычно противоположное.
Наиболее широкое применение в настоящее время получили воз­
душные винты изменяемого шага: флюгерные, реверсивные, соосные,
туннельные.
Флюгерные воздушные винты имеют ту особенность, что в случае от­
каза или преднамеренного выключения двигателя их лопасти могут
развернуться относительно набегающего потока в положение, при ко­
тором сопротивление наименьшее. Все воздушные винты, применяе­
мые на транспортных самолетах, являются флюгерными.
Реверсивные воздушные винты отличаются возможностью поворота
лопастей на такие установочные углы, при которых создается отрица­
тельная тяга, направленная против движения самолета. Использова­
ние реверса тяги при посадке позволяет значительно сократить ди­
станцию пробега.
Рис. 5.1. Воздушный винт;
' — лопасти; 2 — в т у л к а с механи змом
ворота л оп а с т ей
по­
Рис. 5.2. Форма лопастей воздушного
винта:
а — о в а л ь н а я ; б ■— п р я м о у г о л ь н а я ; в — в е с ­
лообразная; г — саблевидная;
<3 — т р а п е ­
циевидная
Соосные воздушные винты представляют собой два воздушных вин­
та, устанавливаемых один за другим на небольшом расстоянии. Они
вращаются в разные стороны относительно одной геометрической оси.
Благодаря такой установке снижаются потери на закрутку воздуха и
повышается к.п.д. Кроме того, взаимно уравновешиваются реактивный
н гидроскопический моменты винтов.
Туннельным называется воздушный винт, помещенный в профили­
рованный кольцевой туннель. Вследствие уменьшения потерь энергии
на отбрасывание воздуха повышается к.п.д. винта.
Геометрические характеристики. Основными геометрическими ха­
рактеристиками воздушного винта являю тся: форма лопасти в плане,
геометрические характеристики профилей лопасти, диаметр, ометаемая винтом площадь, угол установки лопасти, коэффициент заполне­
ния.
Формой лопасти в плане (рис. 5.2) называется форма проекции ло­
пасти на плоскость вращения воздушного винта.
Если лопасть рассечь плоскостью, параллельной оси вращения воз­
душного винта на расстоянии гс, называемом радиусом сечения
(рис. 5.3, а), то получим форму профиля лопасти в данном сечении. Как
правило, форма профилей в сечениях, соответствующих различным ра­
диусам гс, не одинакова (рис. 5.3, б). Профили лопастей по форме
близки к профилям крыла и имеют те же геометрические характери­
стики (см. рис. 2.3).
Диаметр воздушного винта D — это диаметр круга, ометаемого
воздушным винтом при вращении (см. рис. 5.3, а). Диаметры воздуш­
на
Рио. 5.3. Воздушный винт в плане (а ) и формы профилей лопастей
винта в сечениях различных радиусов (б)
воздушного
ных винтов транспортных самолетов выбираются равными 3— 6 м.
Диаметр нерабочей части воздушного винта (диаметр d втулки) обыч­
но не более 0 ,2 D.
Ометаемая воздушным винтом площадь F — площадь, ометаемая
его рабочей частью:
П= —
( D * — rf2).
(5.1)
4
Д ля воздушных винтов транспортных самолетов F — (0,95 —
ДД2
0,98) —р . Угол установки лопасти ф — угол между хордой сечения
лопасти, расположенного на расстоянии г — 0,75 R от оси вращения,
и плоскостью вращения воздушного винта (см. рис. 5.4, б). Сечение ло­
пастей, указанного радиуса г, называется контрольным.
Коэффициент заполнения а — отношение суммы площадей всех
лопастей к площади, ометаемой воздушным винтом:
a - i
F„/F,
(5.2)
i
Площадь лопасти — площадь проекции лопасти на плоскость вра­
щения. Поскольку у воздушных винтов с изменяемым шагом угол ус­
тановки лопасти ф не постоянен, то форма и площадь лопасти Рл будут
неременными. При определении этих характеристик оговаривается
угол установки лопасти, при котором производятся измерения, на­
пример наименьший угол установки лопасти.
При вращении воздушного винта каждое сечение лопасти обтека­
ется воздушным потоком с различными скоростями, соответствующи­
ми линейной скорости ис каждого сечения:
ис — 2я г с л с ,
(Л. 3)
где гс
р ад и у с сеч ени я; п с — частота вращ ения вала воздуш ного винта
(число о бор отов в I с).
При большой частоте вращения и большой скорости полета на конце­
вых сечениях лопастей могут появиться сверхзвуковые зоны обтека­
ния. Д л я предотвращения этого профили концевых частей лопасти
выполняют тонкими. Кроме того, применяют аэродинамическую и ге­
ометрическую крутку лопастей.
Лопастям воздушных винтов, работающих в условиях околозвуко­
вого обтекания, придают саблевидную или стреловидную форму.
Кинематические характеристики. К кинематическим характеристи­
кам воздушного винта относятся параметры, характеризующ ие гео­
метрические свойства перемещения во времени: геометрический шаг,
поступь, скольжение, относительная поступь, поступательная ско­
рость, линейная скорость сечений за счет вращ ения, истинная ско­
рость сечения.
Геометрическим шагом Н воздушного винта называется расстоя­
ние, на которое продвинется воздушный винт вдоль оси вращения за
один оборот в твердой среде. Геометрический шаг измеряется по конт­
рольному сечению г — 0,75 R и определяется как
H — 2nrtgq>.
(5 .4 )
Поступь воздушного винта h — расстояние вдоль оси вращения, на
которое продвигается воздушный винт в воздухе за один оборот
(рис. 5.4, а).
Скольжение воздушного винта s — разность между геометрическим
шагом и поступью:
s — H — h.
(5 .5 )
Рис. 5.4. Геометрический шаг, поступь и скольжение возду ш н ого винта:
а — п р о с т р а н с т в е н н о е д в и ж е н и е то чк и А с еч ен и я л о п а с т и ,
г= 0,75 о т оси в р а щ е н и я ; 6 — р а з в е р т к а ц и л и н д р а
расположенного
на
расстоянии
Относительная поступь воз­
душного винта Я — отношение по­
ступи воздушного винта к его диа­
метру:
k —h , D.
Рис. 5.5. Треугольник
скоростей и
аэродинамические силы, действующие
на элемент лопасти площадью AS
воздушного винта (вращение винта
левое)
(5.6)
Так как самолет движется с не­
которой скоростью V относительно
воздушной среды, то и воздушный
винт совершает
поступательное
движение вместе с самолетом. Если
за 1 с самолет пролетит некоторый
путь, а воздушный винт за 1 с со­
вершит пс оборотов, то поступь,
как путь, пройденный за 1 с воз­
душного винта в воздухе, опреде­
лится соотношением
h - V/пс .
(5 .7 )
В зависимости от скорости полета и частоты вращения воздушного
винта поступь h может быть меньше, равна или больше геометричес­
кого шага Н . Действительно, за один оборот воздушного винта точка А
пройдет во вращательном движении путь, равный 2п г (отрезок А В,
рис. 5.4, б), а такж е путь в поступательном движении вместе с самоле­
том ВС = h. Очевидно, чем больше скорость поступательного движе­
ния самолета при постоянной частоте вращения воздушного винта, тем
больше поступь h При увеличении скорости можно получить h у> Н .
Подставляя в формулу (5.6) вместо к выражение из (5.7), получим
еще одну формулу относительной поступи:
Рассмотрим скорости движения сечения лопасти при его враща­
тельно-поступательном движении (рис. 5.5, а). Если и — вектор ско­
рости вращ ательного движения сечения лопасти, V — вектор скоро­
сти поступательного движения его вместе с самолетом, то вектор истин­
ной скорости 1^2 сечения лопасти относительно воздушной среды:
Vs = V + u .
(5 .9 )
Таким образом, на каждое сечение лопасти в результате его враща­
тельно-поступательного движения набегает воздушный поток со ско­
ростью Vx .
Угол а сеч, заключенный между вектором скорости набегающего на
каждое сечение воздушного потока
и хордой сечения, называется
углом ат аки сечения лопасти.
Угол а , определенный для контрольного сечения лопасти
= 0,75 R ), называется углом атаки лопасти:
V
а = Ф— arctg — .
и
(г =
(5 .1 0 )
Линейная скорость и лопасти (м/с) вследствие вращательного дви­
жения:
и = я D пс .
(5 .1 1 )
Скорость поступательного движения выражается через кинемати­
ческие характеристики воздушного винта
V = hnc = k D n c .
(5 .1 2 )
Я.
а = <р— a r c t g — .
л
(5 .1 3 )
Угол атаки лопасти
Увеличение скорости полета вызывает уменьшение угла атаки л о ­
пасти (5.10), а увеличение частоты вращения воздушного винта (уве­
личение и) — увеличение угла атаки лопасти воздушного винта фикси­
рованного шага. Наибольшим угол атаки лопасти будет при V = 0,
т. е. при работе воздушного винта на месте, если ф = const. При этом
угол атаки равен углу установки лопасти.
5.2. Аэродинамические силы и к.п.д. воздушного винта
Аэродинамические силы. Каждое сечение (профиль) лопасти воз­
душного винта обтекается воздушным потоком подобно профилю кры ­
ла (см. рис. 5.5, а). При этом в результате его взаимодействия с воз­
душным потоком возникают аэродинамические силы. Выделим на ло­
пасти элемент площадью A S, заключенный между двумя сечениями ло­
пасти, параллельными оси вращения воздушного винта (см. рис. 5.5,6).
Будем считать, что элемент лопасти обтекается однородным потоком
воздуха. Равнодействующая всех аэродинамических сил, распреде­
ленных по поверхности элемента лопасти, называется аэродинамиче­
ской силой элемента лопасти
рvl
д R = Cr- ~ -
R
2
AS,
...
(5.14)
где c R — коэффициент аэродинам ической силы элем ента лоп а с ти .
Разложим аэродинамическую силу AR на составляющие в плоско­
сти, параллельной оси вращения и перпендикулярной ей. С оставляю ­
щ ая, действующая в плоскости вращения, называется аэродинамиче147
AQ. Она создает момент сопро­
ской силой сопротивления вращению
тивления вращению ДМ воздушного винта
A M = A Q r c,
(5.15)
где гс — ради ус сечения, соответствующего рассматриваемому элементу л о ­
пасти (точнее, средний радиус сечения).
Составляющая аэродинамической силы элемента лопасти, направ­
ленная перпендикулярно плоскости вращения, называется тягой
элемента лопасти А Р . Сложив элементарные тяги АР и элементарные
силы сопротивления вращению AQ, получим соответственно тягу воз­
душного винта и силу сопротивления вращению:
S;
(5.16)
Q = cQ i L _ ? _ S ,
(5.17)
Р = ср
р
Р VA
2
р К!
где с и Cq — коэффициенты аэродинамической составляющей т я г и и силы
со п р о т и в л ен и я в ращ ени ю , за в и ся щ и е от параметров геометрического подобия
л о п ас те й в оздуш н ого винта, у гла атаки и определеляемые эксп ери м ен тальн о .
В практике летной эксплуатации тягу выражают эмпирической
формулой, полученной из теории воздушных винтов:
P = ctpn?fl‘,
(5. 18)
где а — коэффициент т я ги воздушного винта, определяемый э к с п е р и м е н т а л ь ­
но по резу л ь т ат ам п родувок воздуш ного винта в аэродинамических т р у б а х для
сер и и в оздуш н ы х винтов.
Сила сопротивления вращению воздушного винта Q создает относи­
тельно оси вращения момент сопротивления вращению M q , для пре­
одоления которого от силовой установки отбирается мощность,
jVb = Р р
Пс
о 5.
(5.19)
где Р — коэффициент мощности воздушного винта, определяемый эксп ери ­
м е н т а л ь н о д л я серии воздуш ных винтов.
Коэффициенты тяги а и мощности р. Указанные коэффициенты за­
висят от скорости полета, частоты вращения воздушного винта, его
диаметра и могут быть представлены как функции относительной по­
ступи К для воздушного винта (серии воздушных винтов). Изменение к
в процессе испытаний достигается путем изменения частоты вращения
т)с винта и скорости V воздушного потока в аэродинамической трубе.
Коэффициенты а и р в процессе испытаний определяют по формулам:
« = -----р яTTjZ—
с D4 ;
<5-20>
р пс D5
где Р и N — измерен ны е весовым методом в процессе испытаний т я г а и мощ ­
ность во зд у ш н о г о винта.
Анализ зависимостей коэффи­
циентов а и р воздушного винта от
относительной поступи X (р и с.5.6)
показывает, что при относительной
поступи X — 0 , т. е. при работе
воздушного винта на месте ( У = 0 ),
коэффициенты а и р близки к мак­
симальным. При постоянной часто­
те вращения воздушного винта и
увеличении скорости набегающего
потока относительная поступь X Рис. 5.6. Зависимости коэффициентов
к.п.д., мощности и тяги воздушного
увеличивается, а коэффициенты
винта от относительной поступи:
а и р уменьшаются. При некото­ А , Б и В — о б л а ст и р е ж и м о в п о л о ж и т е л ь ­
ной т я г и , р е ве рса
и ветряка соответст­
рых значениях X коэффициенты
вен но
а и р обращаются в ноль. Д ал ь­
нейшее увеличение X сопровождается ростом отрицательных значений
коэффициентов. Обычно зависимости а (X), р (X) и к.п.д. воздушного
винта от поступи г|в (Я) приводятся вместе.
К. п. д. воздушного винта. На создание тяги воздушного винта
расходуется только часть мощности, отбираемой от двигателя. По­
лезная часть мощности, затрачиваемая на продвижение самолета, на­
зывается тяговой мощностью
Np = P V .
( 5 .2 2 )
Отношение тяговой мощности N p к мощности, затрачиваемой на вра­
щение воздушного винта N B, называется коэффициентом полезного
действия воздушного винта
ilD = ^ p /iVB= ( a / P ) X.
(5 .2 3 )
Из формулы (5.23) следует, что к. п. д. винта является функцией
характеристики режима работы воздушного винта—относительной по­
ступи X. Диаметр воздушного винта D и частота вращения п0 являю т­
ся постоянными, поэтому относительная поступь определяется толь­
ко скоростью полета V. При работе воздушного винта на месте, когда
V = 0 и X = 0, к.п.д. винта tib = 0. Это объясняется тем, что, хотя
воздушный винт при V = 0 и создает тягу, но из-за отсутствия посту­
пательной скорости полезной работы не совершается (см. рис. 5.6).
Мощность, отбираемая от двигателя, затрачивается на преодоление
сопротивления вращению, сжатие, отбрасывание воздуха назад,
его закручивание и т.д.
С увеличением скорости к.п. д. растет и достигает максимального
значения при некоторой относительной поступи X. М аксимальный
к. п. д. винтов TiB< 0,9. При дальнейшем увеличении скорости поле­
та (относительной поступи Я) к. п. д. воздушного винта уменьшается,
так как возрастают потери на сжимаемость воздуха. Это является
причиной ограничения диапазона скоростей полета самолетов с винто­
моторной силовой установкой.
Из всех частей самолета воздушный винт первым входит в зону
волнового кризиса, так как его концы оказываются в условиях сверх­
звукового обтекания, когда скорость полета еще далека от критиче­
ской для планера. Появление зон сверхзвукового обтекания и скач­
ков уплотнения наступает на такой скорости полета V , при которой ре­
зультирующая скорость V? потока, набегающего на лопасти воздуш­
ного винта, станет больше, чем критическая скорость V*, соответст­
вующая числу /И* для концевых профилей лопасти:
Kv = V ' V'2~t- ( я D п с ) 2
(5.2 4)
Д л я повышения скорости полета самолета исходя из условия появле­
ния волнового кризиса на концах лопасти предусматривают следую­
щие меры: подбор более тонких профилей для концевых сечений лопа­
стей, уменьшение диаметра воздушного винта при одновременном уве­
личении числа лопастей, уменьшение частоты вращения, крутку, при­
менение лопастей стреловидной и саблевидной формы.
При подборе воздушного винта стремятся добиться больших зна­
чений коэффициентов а и р при к = 0 для обеспечения хороших взлет­
ных характеристик самолета и высокого к.п.д. при больших скоростях
крейсерского полета. Подбор воздушного винта к самолету требует
компромиссного подхода и является достаточно сложной задачей. Ис­
ходными данными для расчетов служат скорость, скороподъемность,
требования к взлетным характеристикам, высоте полета, мощности,
двигателя и т. д.
5.3. Режимы работы воздушного винта
Режим работы воздушного винта определяется знаком угла ата­
ки лопастей. Различаю т следующие основные режимы: положитель­
ной тяги, нулевой тяги, реверса тяги и авторотации (ветряка). Если
угол атаки лопастей воздушного винта равен углу установки лопастей
(а = ф), то такой режим работы воздушного винта называется геликоптерным (рис. 5.7, б). В этом режиме воздушный винт работает, ког­
да самолет стоит на месте {V = 0 ).
Режим положительной тяги создается при углах атаки а > 0
и является наиболее продолжительным. Режим положительной тяги
при угле атаки, меньшем, чем установочный угол атаки (а < <р, на­
зывается пропеллерным (рис. 5.7, а). В этом режиме проходит основ­
ная часть полета. При этом тяга Р воздушного винта направлена впе­
ред. Она тем больше, чем больше угол атаки лопастей и плотность воз­
духа (5.18). Частота вращ ения воздушного винта пс и диаметр D счи­
таются постоянными. Сила сопротивления вращению Q создает аэро­
динамический момент, препятствующий вращению воздушного винта.
Рис. 5.7. Схемы сил, действующих на воздушный
работы:
и — п роп еллер н ый б — ге л ик опт ерны й; в — нулевой
р я к а : е — фл ю гер н ое п о л о ж е н и е лопа стей
тяги;
винт на различных
г
-реверсирования
реж имах
т я ги :
9-
ве г
Д ля его преодоления затрачивается основная часть энергии двига­
теля.
Режим нулевой тяги ( Р — 0 ) возникает при небольшом отрицатель­
ном угле атаки (рис. 5.7, в). При изучении аэродинамических харак­
теристик крыла такой угол называется углом атаки нулевой подъем­
ной силы. В этом режиме аэродинамическая сила R воздушного винта
равна силе сопротивления вращению, т. е. R = Q. Д л я преодоления
аэродинамического момента сопротивления вращению, создаваемого
силой Q, отбирается мощность от двигателя.
Режим реверсирования тяги создается переводом лопастей воздуш­
ного винта на отрицательные углы атаки (рис. 5.7, г). При этом тяга Р
направлена против движения самолета. Сила сопротивления вращению
Q создает аэродинамический момент, препятствующий вращению воз-
душного винта. Энергия двигателя расходуется на создание отрица­
тельной тяги Р и преодоление момента сопротивления вращению воз­
душного винта, т. е. для торможения самолета. Режим реверсирова­
ния тяги используется при посадке самолета для сокращения длины
пробега. Из рис. 5.7, г следует, что чем больше скорость движения са­
молета при неизменном угле ф установки лопастей, тем больше отри­
цательный угол атаки и отрицательная тяга.
Режим ветряка создается при возникновении больших отрицатель­
ных углов атаки (рис. 5.7, д). При этом энергия набегающего воздуш­
ного потока расходуется на вращения воздушного винта, работающе­
го как ветряк. Так как угол атаки лопастей отрицателен, то и тяга
воздушного винта отрицательна. Аэродинамическая сила сопротивле­
ния вращению Q совпадает с направлением вращения воздушного
винта, энергия воздушного потока передается на вал двигателя, уве­
личивая частоту вращ ения. Режим ветряка может возникнуть при от­
казе двигателя в полете, при уменьшении мощности на валу двигате­
ля за пределы минимально допустимого значения, соответствующего
заданному режиму полета, при недопустимо большом увеличении ско­
рости полета, например при пикировании.
Возникновение большой отрицательной тяги при отказе одного из
двигателей, установленных на крыле, приводит к возникновению раз­
ворачивающего момента относительно оси 0 Y и возникновению боль­
шого угла скольжения самолета. Д ля уменьшения этого момента ло­
пасти воздушного винта переводятся во флюгерное положение (рис.
5.7, е). При этом аэродинамические силы воздушного винта Р и Q зна­
чительно уменьшаются, появляется сравнительно небольшое допол­
нительное лобовое сопротивление X , увеличивающее общее сопротив­
ление самолета.
Рассмотренные режимы работы воздушного винта удобно объяснить
по рабочим характеристикам воздушного винта (см. рис. 5.6). Режимы
положительной тяги обеспечиваются при таких значениях относитель­
ной поступи X (скорости полета), при которых углы атаки лопасти,
коэффициенты тяги а и мощности р положительны. Точка а соответст­
вует значению X — О, V = 0 , когда воздушный винт работает на месте.
Точка б соответствует режиму работы воздушного винта, при котором
сила тяги не создается, вся мощность двигателя расходуется на преодо­
ление момента сопротивления воздушного винта без отбрасывания воз­
духа назад. Это режим нулевой тяги. Точка в соответствует такому зна­
чению относительной поступи X, при котором угол атаки лопасти
а<сО. Создается отрицательная тяга (коэффициент тяги а < 0), коэф­
фициент мощности ( J = 0 , т. е. воздушный винт не отбирает мощность
от двигателя, энергия набегающего воздушного потока расходуется
только на вращение винта. Этот режим называется режимом самовращения или авторотации. Режимы работы винта при значениях относи­
тельной поступи, соответствующих промежутку между точками б н е ,
характерны наличием отрицательной тяги и отбором мощности от дви­
гателя на преодоление сопротивления вращению воздушного винта.
Дальнейшее увеличение относительной поступи X за значение, соот­
ветствующее точке в, выводит воздушный винт на режимы ветряка,
при которых тяга отрицательна, а винт раскручивается набегающим
потоком воздуха, передавая энергию на вал двигателя.
5.4. Составляющие тяги при косой обдувке воздушного винта
До сих пор мы считали, что поток воздуха набегает на воздушный
винт перпендикулярно плоскости его вращения. Если направление
потока воздуха не перпендикулярно плоскости вращения воздушного
винта, то такая обдувка называется косой. Косая обдувка приводит к
перераспределению аэродинамических нагрузок на лопастях и возник­
новению аэродинамической составляющей тяги, лежащей в плоскости
его вращения. Наибольший интерес для практики летной эксплуата­
ции представляет рассмотрение косой обдувки воздушного винта при
углах атаки самолета а и скольжения р.
Ось вращения воздушного винта установлена под некоторым не­
большим углом ц)Р к средней аэродинамической хорде крыла ЬА
(рис. 5.8. а). Угол ф/>, как правило, отрицателен и составляет 1—3°.
Таким образом, если самолет в полете имеет угол атаки а , то воздуш­
ный поток набегает на воздушный винт под углом Д а = а — фр,
который увеличивается с ростом угла атаки.
Если поток воздуха набегает на воздушный винт перпендикуляр­
но плоскости вращения, то силы сопротивления вращению Qn на всех
лопастях будут взаимно уравновешены (рис. 5.8, а). Эти силы созда-
Рис. 5.8. Схемы установки воздушного винта (а ) и сил, действующих
при прямой (б) и косой ( в ) обдувке
на него
ют только аэродинамический момент сопротивления вращению
(-Ф л = 0). Если воздушный поток набегает на винт под некоторым уг­
лом &а , то вектор скорости V можно разложить на две составляющие
(рис. 5.8, б): нормальную к плоскости вращения винта Vх и составля­
ющую V y, действующую в плоскости вращения воздушного винта.
Составляющая Vx скорости участвует в образовании продольной тяги
Р, направленной по оси вращения воздушного винта. Составляющая
скорости воздушного потока Vи, набегающая на винт снизу вверх,
складывается с линейными скоростями и каждого сечения лопастей.
При этом на сечениях опускающейся лопасти скорость обтекания уве­
личивается на величину Vу, а на сечениях поднимающейся лопасти —
уменьшается на такую же величину. Это приводит к тому, что сила со­
противления вращению увеличивается на опускающейся лопасти на
величину AQ и уменьшается на такую же величину на поднимающей­
ся лопасти. В результате момент сопротивления вращению не изме­
нится, но равнодействующая сил сопротивления воздуха уже не будет
равна нулю. Как видно из рис. 5.8, <5, силы AQ, возникающие на опу­
скающейся и поднимающейся лопастях, направлены в одну сторону —
в данном случае вверх
Таким образом, при косой обдувке воздушного винта потоком воз­
духа, набегающим на него под некоторым углом атаки Да, возникает
нормальная составляющая тяги
PU^ 2 A Q .
(5. 25)
Сила Р у тем больше, чем больше угол атаки самолета а и скорость по­
лета V . Аналогично при набегании потока на воздушный винт под не­
которым углом р, равным углу скольжения самолета, возникает по­
перечная составляющая тяги воздушного винта Р £, действующая в
плоскости вращения воздушного винта. При полете самолета с малы­
ми углами атаки и скольжения нормальной Р у и поперечной Р г со­
ставляющими тяги, возникающими вследствие обдувки воздушного
винта, пренебрегают. При полете с большими углами атаки и сколь­
жения значения указанных сил у многодвигательного самолета дости­
гают нескольких тысяч Ньютонов.
S.S. Влияние обдувки самолета потоком воздуха
от воздушного винта на его аэродинамические характеристики
При разбеге воздушный винт отбрасывает назад закрученный по­
ток воздуха, значительно увеличивающий скорость потока, обтекаю­
щего самолет. На четырехдвигательном турбовинтовом самолете более
50 % площади крыла обдувается воздушным потоком, ускоренным
воздушным винтом. Это приводит к существенному увеличению подъ­
емной силы крыла и некоторому увеличению лобового сопротивле­
ния самолета вследствие увеличения сил трения и потерь на вихреобразование. Особенно больших значений разница скоростей невозму­
щенного потока и потока за воз­
душным винтом достигает при ма­
лых скоростях движения и боль­
ших режимах работы двигателей
(на взлете и уходе на второй круг).
Интенсивность обдувки В само­
лета потоком воздуха от винта за ­
висит от тяги, ометаемой площа­
ди и скорости напора:
В = P/qF.
(5.2 6)
С увеличением скорости полета
тяга воздушного винта уменьшает­
Рис. 5.9. Зависимость интенсивности
ся, что приводит к уменьшению
обдувки В самолета потоком от воз­
интенсивности обдувки (рис. 5.9).
душного винта на взлетном (штрихо­
Увеличение режима работы двига­ вая кривая) и номинальном режимах
теля повышает интенсивность об­ от индикаторной скорости
дувки, а увеличение высоты поле­
та уменьшает ее.
При работе воздушного винта в режимах реверсирования тяги и
ветряка тяга Р и интенсивность обдувки отрицательны. Если срав­
нить приращения коэффициентов подъемных сил при одной и той же
интенсивности В. но разных ее знаках, то прирост коэффициента подъ­
емной силы при отрицательном значении В будет больше, чем при по­
ложительном. Это вызывает значительное уменьшение коэффициента
подъемной силы крыла и является важным фактором уменьшения
длины пробега при посадке. При отказе двигателя в полете за счет от­
рицательной величины В значительно уменьшается подъемная сила,
возникают большие аэродинамические моменты рыскания, крена и
тангажа.
Сравнение аэродинамических характеристик* полученных при об­
дувке и ее отсутствии, позволяет сделать следующие выводы.
В)
а)
0=0,9 Суа
с Уи
-----20
I
----- 75
----- 10
Я
/
/
/Г
/!
в)
20
0
/11
1
1
1
1
1
10 сс.лр20 а .
*0=0,3
s'O
К
в=о
15
15
10
10
11
11
/I
//
0.1
\В ~0,9
0,2
.—
'
:V "
'S.
i
10
<5^зо°
20
А,
Рис. 5.10. Основные аэродинамические характеристики самолета с учетом обдув
ки потоком от воздушного винта
1. При обдувке самолета потоком воздуха от воздушного винта су­
щественно увеличивается коэффициент подъемной силы с Уа особенно
на больших углах атаки (рис. 5.10, а). При этом критический угол ата­
ки несколько уменьшается.
2. Обдувка потоком воздуха от винта вызывает некоторый рост
коэффициента лобового сопротивления (рис. 5.10, б), причем с увели­
чением угла атаки интенсивность прироста коэффициента лобового
сопротивления выше, чем коэффициента подъемной силы.
3. Аэродинамическое качество самолета при обдувке уменьшается
(рис. 5.10, в). Отклонение закрылков обусловливает более интенсив­
ное уменьшение аэродинамического качества.
Обдувка самолета потоком воздуха от работающего воздушного
винта оказывает также влияние на моментные характеристики само­
лета mz (а), т 2 (с у), т х (р) и т у (р). Интенсивность обдувки оказыва­
ет влияние на угол скоса потока.
К онтрольные вопросы
1. Д а й т е определение и п оясните основные геометрические харак т ер и ст и к и
воздуш ного винта.
2 . Д а й т е определение и поясн ите основные кинематические х ар ак тер исти к и
воздуш ного винта.
3. З а п и ш и т е и поясните ф ормулы т я ги и мощности воздуш ного винта.
4. И зо б р а зи т е совмещенные к р и в ы е а (А,), Р (Я) и г) (А.), у к а ж и т е на них х а ­
р ак тер ны е т о чк и и основные реж им ы работы воздушного винта.
5. И зо б р ази т е и поясните схемы си л , действующих на сечение лопасти к ры ла
во всех р е ж и м а х полета.
6 . И зо б р а зи т е и поясните схему си л , действующих на воздуш ный винт при
косой о бдувке.
7. И зо б р а зи т е и поясните аэродинам ические х арак тер исти к и самолета с уче­
том р азл и ч н о й интенсивности обдувки к р ы л а струей от в оздуш ного винта.
8 . О п ред ели ть геометрический ш а г Я и относительную поступь к воздуш н о­
го в ин та, если его диаметр D = 4 м; <р = 10°, V — 100 м/с; пс = 26 об/с. Ответ:
Н = 1,66 м; к = 0,96 об- 1 .
РАЗДЕЛ II
ДИНАМИКА ПОЛЕТА
Глава 6
ПРЯМОЛИНЕЙНЫЙ ГОРИЗОНТАЛЬНЫЙ ПОЛЕТ
6.1. Общие сведения об уравнениях движения самолета
Уравнения движения в векторной форме. Самолет в полете пред­
ставляет собой сложную динамическую систему переменной массы с
жидким наполнением, состоящую из совокупности твердых деформи*
руемых тел (крыло, фюзеляж, оперение, органы управления, силовая
установка, шасси и т. д.), которые упруго или шарнирно связаны меж­
ду собой. Исследование динамических свойств такой системы чрезвы­
чайно сложно. Решение практических задач динамики полета приво­
дит к необходимости замены реального самолета упрощенными меха­
ническими моделями, позволяющими сравнительно просто и с доста­
точной степенью точности исследовать характеристики движения са­
молета.
При расчете возможных и наивыгоднейших траекторий полета са­
молета и его летно-технических характеристик самолет принимается
материальной точкой постоянной массы. При этом рассматривается
движение центра масс самолета, а реальные размеры и формы самолета
учитывают только при определении аэродинамических сил.
При решении задач устойчивости и управляемости самолет счита­
ется управляемым твердым телом постоянной массы. Движение само­
лета рассматривается под действием внешних сил и моментов. К внеш­
ним силам относятся силы тяж ести, аэродинамические силы, тяга си­
ловой установки, силы органов управления, силы, возникающие при
контакте самолета в ВПП, инерционные и кориолисовы силы. Эти си­
лы создают соответствующие моменты относительно центра масс само­
лета. При решении задач аэроупругости самолет считается деформи­
руемым телом.
Движение самолета как материальной точки относительно инерциальной системы отсчета под действием внешних сил описывается
векторным уравнением
m _ l L = 7?,
dt
(6.1)
вектор у с к о р е н и я центра масс; F — суммарный
вектор всех внешних сил F,-,
дей ствую щ и х на самолет, F = 2 F t .
i
Инерциальной называется система отсчета, по отношению к кото­
рой всякая материальная частица при отсутствии приложенных к ней
сил или под действием приложенных к ней взаимно уравновешенных сил
совершает равномерное прямолинейное движение. Если пренебречь
суточным вращением Земли, то при решении практических задач лет­
ной эксплуатации транспортных самолетов систему координат, свя­
занную с Землей, можно считать инерциальной.
Движение самолета как твердого тела определяется двумя вектор­
ными уравнениями:
т ! Х
=7'\
dt
£Л . — м ,
(6.2 )
dt
где К — су м м а рн ы й вектор момента количества дв и ж ен ия самолета относи­
т е л ь н о ц ентр а масс; К = 2 (rl m i V,-). Здесь г — радиус-вектор, определяю щ ий
i
п о лож ен ие э л е м ентар н ой массы m t относительно центра масс самолета;
Vt —
вектор л и н е й н о й скорости эл ем е нтар н ой массы; М — суммарный вектор момен­
тов внешних сил УИ; , действую щ их на самолет относительно ц ентра масс.
Первое уравнение системы (6.2) описывает поступательное движе­
ние центра масс самолета по траектории под действием внешних сил
и называется уравнением сил. Второе уравнение описывает вращатель­
ное движение самолета вокруг центра масс под действием моментов
внешних сил и называется уравнением моментов.
Д ля изучения движения самолета векторные уравнения (6.1) и
(6 .2 ) представляют в скалярной форме, т.е. рассматривают их в проек­
циях на оси выбранной системы координат. Выбор системы координат
производится исходя из характера решаемой задачи таким образом,
чтобы максимально упростить решение.
Основные системы координат. Д ля определения положения само­
лета в воздушном пространстве необходимо иметь две системы коорди­
нат: связанную с Землей и связанную с самолетом. В динамике полета
транспортных самолетов приняты различные системы координат, из
которых для решения задач летной эксплуатации выберем следующие
основные системы координат: нормальную земную, нормальную, свя­
занную, скоростную и траекторную. Все они являются прямоуголь­
ными и правыми. За положительное направление вращения выбран­
ной системы координат относительно другой принято вращение по на­
правлению часовой стрелки, если смотреть в сторону положительного
направления оси координат, относительно которой осуществляется
поворот. Этим правилом пользуются для определения знаков углов по168
Ф
Z9
Рис. 6.1. Нормальная земная OoXgYgZg
н св язан н ая O X Y Z системы коорди­
нат:
f
Z
Рис. 6.2. Взаимное положение с в язан ­
ной O X Y Z и нормальной O X g YgZg
систем координат
X g . Ug,
— коо р д и н а т ы центра масс с а ­
молета в норма ль ной земной системе к о ­
о рди на т
ворота самолета и моментов сил, угловых скоростей, угловых ускоре­
ний, отклонения органов управления и др.
Нормальная земная система координат O^XgY^Zg (рис. 6.1) не­
подвижно связана с Землей и считается инерциальной. Начало ко­
ординат выбирается в соответствии с рассматриваемой задачей на по­
верхности Земли (точка О0). Ось O0Y & направлена вверх по местной
вертикали, оси O0X g и 0„Zg леж ат в плоскости местного горизонта
0„Х gZ g (в горизонтальной плоскости). Направление оси 0 0Х g выби­
рается в соответствии с задачей. Плоскость 0 UX g Y g называется вер­
тикальной. Положение самолета относительно нормальной земной
системы координат определяется тремя координатами х g; у g\ z g цент­
ра масс О самолета.
Нормальная система координат O X gY gZ g (рис. 6 .2 ) — подвиж­
ная система координат, начало которой помещено в центре масс само­
лета, ось O Y g направлена по местной вертикали, а направление осей
OX g и 0 Z g выбирается в соответствии с задачей, например парал­
лельно соответствующим осям нормальной земной системы координат.
Положение связанной системы координат O X Y Z относительно
нормальной системы координат 0 X gY gZg определяется углами i|), Ф и
V (рис. 6.2). Угол рыскания \|> — это угол между осью OX g нормаль­
ной системы координат и проекцией продольной оси О Х на горизон­
тальную плоскость OXgZg нормальной системы координат. Угол ры­
скания г|з считается положительным, если ось OX g совмещается с про­
екцией продольной оси на горизонтальную плоскость поворотом вок­
руг оси 0 Y g по часовой стрелке.
Угол тангажа ft — угол между продольной осью ОХ и горизон­
тальной плоскостью OXg Zg нормальной системы координат. Он по­
ложителен, если продольная ось ОХ находится выше горизонтальной
плоскости O X gZg.
Угол крена у — угол между поперечной осью 0 Z и осью OZ g нор­
мальной системы координат, смещенной в положение, при котором
угол рыскания равен нулю или, что то же самое, угол, заключенный
между нормальной осью 0 Y и вертикальной плоскостью, содержащей
продольную ось О Х . Угол крена у положителен, если ось 0 Z g совме­
щается с поперечной осью 0 Z поворотом вокруг продольной оси по
часовой стрелке, если смотреть в направлении этой оси (самолет на­
кренен на правое полукрыло). На рис. 6.2 показаны положительные
значения углов.
Связанная система координат удобна при решении задач устойчи­
вости и управляемости, учитывающих вращение самолета относитель­
но центра масс. Если связанная система координат (самолет) вращает­
ся с некоторой угловой скоростью со относительно нормальной систе­
мы координат, то, пользуясь общими правилами, можно получить про—>
екции вектора а> на оси связанной системы координат в виде уравне­
ний:
d У I dty . „
COv = ---------- ---------- sin w
dt
dt
d 4dft
• c o s O c o s y + —~ — s i n y ;
dt
'
dt
d ft
rf
cos у — — ;— cos xt sin y .
dt
dt
(6-3)
где («д., Ыу, сог — угловы е скорости крена, рыскания и т а н г а ж а соответст­
венно.
Уравнения (6.3) называются кинематическими. Они устанавливают
связь между проекциями на оси связанной системы координат угловой
скорости to самолета относительно осей нормальной системы коорди­
нат и производными углов А, г|з, у по времени. Если известны угловые
координаты ft, \|\ у, то, решая уравнения (6.3), можно получить угло­
вые скорости Wj, шу, со2 вращения самолета. И, наоборот, если извест­
ны величины шх, сОу, шг, то можно определить углы ft, я)>, у . Проекции
скорости V самолета на оси связанной системы координат (см. рис. 2.1)
имеют вид:
1/ Л= V cos Р cos a :
Vy = — K c o s f 5 s i n a ; V'2 = K s i s p .
(6.4)
Эти уравнения устанавливают связь между линейными скоростями
V х , V у , Vz и углами а и р .
Положение скоростной системы координат 0 X aY aZ a относительно
нормальной системы координат O X gY gZ g определяется углами г|за,
160
Рис. 6.3. Положение скоростной си­
стемы координат O X aYaZ a относи­
тельно нормальной OXgYgZg
Рис. 6.4. Взаимное положение нор­
мальной
OXgYgZg и траекторией
OXKY KZ K систем координат
tt.j и Уа (рис. 6.3). Уголг|з0 между осью О Х 8 нормальной системы коор­
динат и проекцией скоростной оси 0 Х а на горизонтальную плоскость
O X q Z ? нормальной системы координат называется скоростным углом
рыскания. Угол й между скоростной осью О Х а и горизонтальной пло­
скостью OXgZg нормальной системы координат называется скорост­
ным углом тангажа.
Угол у а между боковой осью 0 Z a и осью 0 Z g нормальной системы
координат, смещенной в положение, при котором скоростной угол
рыскания равен нулю, называется скоростным углом крена. Скорость
движения самолета относительно земной системы координат называет­
ся земной скоростью V K. Если движение самолета рассматривается при
отсутствии ветра, то скорость самолета относительно невозмущенной
воздушной среды (скорость полета) и земная скорость самолета совпа­
дают: V = Кк.
Траекторная система координат O X KY KZ K (рис. 6.4) — это под­
виж ная система координат, начало которой леж ит в центре масс само—^
лета. Ось 0 Х К направлена по вектору земной скорости самолета VKОсь O Y к лежит в вертикальной плоскости, проходящей через ось 0 Х „ ,
и направлена обычно вверх от поверхности Земли. Ось 0 Z K образует
с осями ОХ к и 0 Y к правую систему координат. Положение траектор­
ией системы координат относительно нормальной системы определяет­
ся двумя траекторными углами 0 и ф. Угол 0 между горизонтальной
плоскостью OX gZg и вектором земной скорости У,, называется углом
наклона траектории. Угол лр — между осью OX g нормальной систе—
►
мы координат и направлением путевой скорости V п называется путе-
вым. Путевой скоростью V п называется проекция земной скорости
самолета на горизонтальную плоскость O X gZ g нормальной системы
координат. Так как направление оси O X g задается исходя из усло­
вия задачи, то при ф ~ О путевая скорость V n совпадаете осью ОХ я.
—У
Она называется горизонтальной составляющей скорости VK. Проек­
ция земной скорости V к на ось 0 Y ц называется вертикальной сос­
тавляющей скорости V K или вертикальной скоростью и обозначает­
ся Vц. При отсутствии ветра траекторная система координат отли­
чается от скоростной только углом скоростного крена у а. Если ветер
отсутствует и у„ = 0 , то скоростная и траекторная системы коорди­
нат совпадают.
Уравнения движения самолета в скалярной форме. Пространст­
венное движение самолета для удобства изучения представляется в ви­
де двух независимых движений: в вертикальной плоскости и в гори­
зонтальной. Каждое из движений в свою очередь представляется со­
вокупностью поступательного движения центра масс и вращательного
оию сителыю го центра масс, которые считаются также независимыми.
Движение самолета в плоскости симметрии O X Y Z называется
продольным движением самолета. Оно включает: поступательное дви­
жение центра масс вдоль осей ОХ и 0 Y и вращательное движение от­
носительно оси 0 Z . Движение самолета в вертикальной плоскости
является частным случаем продольного движения самолета. Система
уравнений движения самолета в вертикальной плоскости имеет вид:
т■
dt
= F-v • m V со, — F„ •
«’
г,!
Мк’
l/,e -=Kcos0:
^
= V'sine;
d6
dt
*
/ , = ------— --- М 2\
г
dt
4
=
r
= VV «
( 6 5!
dff
dt
где / г — м ом ент и нерц и и самолета относительно оси 0 Z.
Первые два уравнения — динамические уравнения движения центра
масс , третье — динамическое уравнение движения относительно оси
0 Z , остальные— кинематические уравнения. Динамические уравнения
движения центра масс и соответствующие кинематические уравнения
позволяют исследовать опорное движение в прямолинейном и криво­
линейном полете самолета в вертикальной плоскости. Опорное движе­
ние может быть установившимся (V = const, ^
162
= 0), неустановив-
шимся (V Ф 0; ~ Ф 0), с креном (у
0) и
скольжением (|5 Ф 0)
или без них, на постоянной высоте (0 — 0 ). с набором высоты (0 > 0 )
или снижением (0 < 0). Динамическое уравнение движения относи­
тельно центра масс совместно с соответствующими кинематическими
уравнениями позволяет исследовать вращательное движение и полу­
чить характеристики продольной устойчивости и управляемости.
Движение самолета в плоскости 0 XZ . перпендикулярной плоско­
сти симметрии самолета, называется боковым. Оно включает поступа­
тельное движение центра масс вдоль оси 0 2 и вращательные движе­
ния относительно осей ОХ и O Y . Движение самолета в горизонтальной
плоскости является частным случаем бокового движения. Система ди­
намических уравнений движения самолета в горизонтальной плоско­
сти имеет вид:
dV
г,,
г
т ------- = г х ■ — m V -------- = г г ‘ / V ---------- — i х и ---------- = М Х ,
dt
к’
Iу
dt
d(ou
2к’
dt
d to,
^
и
dt
„
(6 .6 )
— Му.
где I х и / у — осевые моменты самолета; I ху и 1у х — центробежные м ом ен ­
ты самолета относительно осей с в язан н о й системы координат.
Силы, действующие на самолет в полете. На самолет в полете дей­
ствуют аэродинамические силы, тяга силовой установки и сила тяж е­
сти. Равнодействующая аэродинамических сил, распределенных по
поверхности самолета, называемая аэродинамической силой планера
—У-
R a . приложена в центре давления, положение которого изменяется в
зависимости от угла атаки, конфигурации самолета, числа М полета.
Т яга силовой установки Р является равнодействующей тяг двигате­
лей. Точка приложения ее определяется положением двигателей на са­
молете. Тяга зависит от режима работы двигателей, режима полета
(скорости, высоты) и других факторов.
Аэродинамическую силу R A и тягу Р называют поверхностными,
поскольку они являются равнодействующими нагрузок, распределен­
ных либо по поверхности планера, либо по поверхности проточной ча-—
У
сти двигателей и воздушных винтов. Сила тяжести G направлена по
вектору ускорения свободного падения вниз. В полете масса самолета
вследствие выгорания топлива изменяется. Точкой приложения силы
тяжести G — равнодействующей сил тяжести каждого элемента массы
самолета является центр масс самолета.
Поскольку аэродинамическая сила планера R A и тяга Р прилож е­
ны не в центре масс самолета, то они создают относительно него со­
ответствующие моменты. Д ля уравновешивания этих моментов откло­
няют рулевые органы, на которых возникают силы, создающие уп рав­
ляющие моменты относительно центра масс. Если все моменты, дейсч6*
163
вующие на самолет, взаимно уравновешены, то такой самолет называ­
ется сбалансированным по моментам. При этом вращение самолета от­
носительно центра масс отсутствует и его можно рассматривать как
тело, движущееся под действием сил, приложенных в центре масс. Ус­
корение самолета определяется суммарным вектором внешних сил,
действующих на него.
Перегрузка. При исследовании многих задач динамики полета ис­
пользуется понятие перегрузки. Перегрузкой называется отношение
суммы векторов тяги и полной аэродинамической силы к величине си­
лы тяжести
(6 .7)
п
mg
Вектор перегрузки характеризует маневренность самолета, поскольку
он учитывает величину и направление сил, изменяя которые можно
управлять полетом. В динамике полета обычно пользуются не векто­
ром перегрузки, а его проекциями на оси связанной или скоростной
систем координат. Проекции вектора перегрузки на оси связанной
системы координат:
n x = Rx/G\
n y = Ry,G-, n z = R z / 0
( 6 .8 )
называются соответственно продольной, нормальной и поперечной
перегрузкой.
Проекции вектора перегрузки на оси скоростной системы коорди­
нат
(6 9)
называются соответственно тангенциальной, нормальной и боковой
перегрузкой.
Исходные данные для расчета траекторий. Уравнения движения
центра масс позволяют рассчитать параметры полета и траекторию,
если заданы: начальная или текущая масса самолета т, площадь кры­
л а S, запас топлива на борту т г , тяга двигателя Р , условия полета,
аэродинамические характеристики самолета, ограничения, определя­
ющие предельные для данного самолета режимы полета (предельное
число М полета, безопасная высота полета, минимальная допустимая
скорость и т.п.).
Аэродинамические характеристики самолета задаются для рассмат­
риваемой полетной конфигурации, числа М полета и числа Re.
Д л я определения тяги силовой установки на различных режимах
полета задаются высотно-скоростные и дроссельные характеристики
двигателей, а такж е зависимостями удельного расхода топлива от чис­
л а М полета.
6.2. Уравнения горизонтального полета
Горизонтальным называется полет на постоянной высоте. Это ос­
новной эксплуатационный режим транспортных самолетов. Он может
быть прямолинейным и криволинейным, установившимся и неустановившимся, с креном, скольжением и без них. Наиболее характерным
для самолетов гражданской авиации является прямолинейный гори­
зонтальный установившийся полет. Его удобно рассматривать как
движение самолета в вертикальной плоскости на постоянной высоте.
Заданная высота полета контролируется по высотомеру, направление
полета — по указателю курса, значение скорости — по указателю
скорости. При этом авиагоризонт должен показывать отсутствие кре­
на и скольжения и угол тангажа, равный углу атаки, вариометр —
отсутствие вертикальной скорости. На современных самолетах конт­
роль параметров полета осуществляется по соответствующим шкалам
пилотажно-командных приборов.
При изучении горизонтального полета, как и других основных ре­
жимов полета, движение самолета рассматривается в траекторной си­
стеме координат. При этом считается, что полет совершается в штиль,
без крена (7 = 0) и скольжения (Р = 0). В этом случае скоростная
и траекторная системы координат совпадают, а скорости V, земная
и путевая V п по их определению равны. Все внешние моменты,
действующие на самолет, взаимно уравновешены, следовательно, вра­
щение вокруг центра масс отсутствует. При этом движение реального
самолета можно рассматривать как движение его центра масс под дей­
ствием внешних сил, т. е. реальный самолет заменить его простейшей
механической моделью — материальной точкой. В прямолинейном го­
ризонтальном полете (рис. 6.5) на самолет действуют следующие силы:
Pcos(&-pp)
' G=m9
Рис. 6.5. Схема сил, действующих на самолет в горизонтальном полете
тяга силовой установки Р , направленная под углом <рр относи­
тельно оси ОХ связанной системы координат OXYZ; сила тяжести
G — mg\ подъемная аэродинамическая сила Y a. направленная по нор—>
мал и к вектору скорости полета V\ аэродинамическая сила лобового
сопротивления Х„, направленная противоположно вектору скоро­
сти полета.
В принятых условиях движение самолета описывается векторным
уравнением (6.1), которое для заданной системы сил имеет вид
m - ^ - ^ P + G + Y a + Xn.
at
(6.10)
Д л я получения дифференциальных уравнений горизонтального
полета в скалярном виде спроектируем векторы, входящие в уравне­
ние (6.10), на оси траекторной системы координат O X KY ;!Z K. По­
скольку в принятых условиях полета скоростная и траекторная систе­
мы координат совпадают, индексы «к», указывающие на принадлеж­
ность проекций аэродинамических сил к траекторной
еме коорди­
нат, будем заменять на индексы «а» без последую
ний.
В результате получим систему уравнений:
т
d V
^
= Р cos ( а — (рр ) — Х а ;
0 = P s i n ( a — < P p ) + i/ a — G,
( 6. 11)
где ф р — угол у с тан о вк и дви гателей относительно САХ к р ы л а.
Полученные уравнения описывают неустановившийся прямолиней­
ный горизонтальный полет. Если известны аэродинамические характе­
ристики самолета, полетная масса, характеристики силовой установ­
ки. высота полета и параметры атмосферы, то можно определить силы,
действующие на самолет. Решив уравнения (6.11) (силы Р, Х а, Y а,
G известны), можно определить все параметры неустановившегося го­
ризонтального полета: ускорение
скорость полета V в любой мо­
мент времени, время полета t на заданном участке, расстояние /_,
пролетаемое самолетом в заданный отрезок времени, расход топлива
и т.д. Таким образом, решение полученной системы уравнений позво­
ляет ответить на любой вопрос, касающийся неустановившегося гори­
зонтального прямолинейного полета.
Угол установки двигателей ц.р относительно средней аэродинами­
ческой хорды крыла отрицателен (рис. 6.5) и составляет 1—3°, а угол
атаки а на крейсерских режимах полета не превосходит 5°, поэтому
разность a —
является малым углом и на всех эксплуатационных
режимах полета можно считать sin ( a — <pp) = 0, а cos (а — <рр ) = 1.
С учетом этого система уравнений (6.11) примет вид:
т - ^ - = Р — Х а - 0 = Y a — Q.
dt
(6 .1 2 )
Первое уравнение системы ((S. 12) характеризует изменение скорости
прямолинейного горизонтального полета под действием разности сил:
тяги силовой установки Р и силы лобового сопротивления самолета
Х а. Если тяга силовой установки больше силы лобового сопротивле­
ния, то самолет будет двигаться с разгоном (ускорение j j > 0 ) ,
если меньше — с торможением ( ^ < 0). Решение системы уравнений
неустановившегося прямолинейного горизонтального полета (6.11) и
(6.12) выполняется при помощи ЭВМ методами численного интегрирозания.
Для практических расчетов в летной эксплуатации ограничиваются
эассмотрением установившегося прямолинейного
горизонтального
полета, при котором V — const и ускорение ^
= 0. Тогда уравнения
6.12) преобразуются к виду:
( 6. 13)
(6 .1 4 '
Равенство (6.13) выражает условие равновесия сил в направлении
полета и определяет потребную тягу силовой установки Р необходи­
мую для уравновешивания силы лобового сопротивления Х„ и обеспече­
ния полета с постоянной скоростью V. Равенство (6.14)
условие
равновесия сил Y a и G по вертикали, которое и обеспечивает постоян­
ство заданной высоты полета Н. Решение уравнений (6.13) и (6.14)
выполняется обычными алгебраическими методами. Равновесие сил
для обеспечения горизонтального полета достигается пилотом подбо­
ром режима работы силовой установки и заданием угла атаки откло­
нением руля высоты. При этом поддерживаются заданная высота и
скорость полета.
Из равенства (6.13) следует, что тяга силовой установки Я г-П,
потребная для осуществления установившегося прямолинейного го­
ризонтального полета на заданных значениях высоты Н и скорости
равна лобовому сопротивлению самолета Х а:
Рг.п —Ха
сха
(6 .1 5 )
Поделив почленно равенство (6.13) на равенство (6.14),получим выра­
жение для тяги Р г п в другой форме:
Отсюда следует, что потребная тяга силовой установки для обеспече­
ния прямолинейного установившегося горизонтального полета на за­
данной высоте с заданным углом атаки равна отношению силы тяж е­
сти самолета G к его аэродинамическому качеству К . Чем меньше по­
летная масса т и больше аэродинамическое качество самолета, тем
меньше потребная тяга силовой установки.
Энергетические возможности самолетов с турбовинтовыми и порш­
невыми двигателями принято оценивать в единицах мощности. В свя­
зи с этим целесообразно вместо потребной тяги, характеризующей ус­
ловие прямолинейного установившегося горизонтального полета, вве­
сти потребную мощность
Л'г.п— ^г.и V — сХ(1
р V2
~
р Vs
ЗКр.п ~ Cjra
2
(6 .1 7 )
Если в равенство (6.14) подставить выражение подъемной силы Уа =
— c y ^ Y S , то после преобразования можно получить формулу для
определения потребной скорости прямолинейного установившегося
горизонтального полета:
V = I/
/
20
--------- = 1 /
V °yaPS
Г
V
Что
-------- ------.
(6 .1 8 )
CVa Р S
Из формулы (6.18) следует, что при выполнении условия с Уи = const
полета) потребная скорость
прямолинейного установившегося горизонтального полета растет с
увеличением полетной массы самолета т и уменьшением плотности
воздуха р.
С увеличением угла атаки увеличивается с Уа и потребная ско­
рость уменьшается. С увеличением высоты полета плотность воздуха
(> падает, что ведет к увеличению потребной скорости прямолинейного
установившегося горизонтального полета. Пилотирование самолета
осуществляется не по истинной, а по приборной скорости К пр, зна­
чение которой считывается по шкале указателя скорости.
Приборная скорость 1/пр связана с индикаторной скоростью Vt :
(сУа зависит от угла атаки и числа М
= К п р т - Д ^ „ „ стр + Д Каэр г А ^ з а п + А V'c k ,
(6 .1 9 )
где ЛУинстр — и н ст р у м ен т ал ь н ая поправка, учиты ваю щ ая неточность и з ­
мери тел я скорости; Л Каэр — аэродинам ическая п оправка, учиты ваю щ ая неточ­
ность изм ерен ия ск о р о ст н о г о напора приемником воздушного д ав л е н и я (П В Д ),
в ы з в а н н а я аэ р о ди нам ич ески м влиянием на него др уги х частей самолета; А Кзап—
п о п р а в к а на з а п а з д ы в а н и е п о к аз а н и я прибора вследствие его инерционности;
— п о п р а в к а на с ж и м аем о ст ь воздуха.
Инструментальная и аэродинамическая поправки учитываются по
результатам лабораторных исследований погрешностей прибора. По­
правка на запаздывание показаний прибора учитывается пилотом при
выполнении маневров, связанных с изменением скорости. Основное
значение имеет поправка на сжимаемость.
Т ак как при полете с постоянной индикаторной скоростью в стан­
дартных условиях у земли (Н — 0, р = р0) и на некоторой высоте
Н > 0 скоростной напор
следует, что
постоянен
= у - , то из этого условия
При полете у поверхности земли р = р0 и К = У ; . С увеличением вы­
соты различие между V и Vt растет пропорционально V р/ро- Н апри­
мер, в стандартных условиях на высоте # = 10 000 м скорость V —
= 1,72 Vi. Сжимаемость воздуха приводит к завышению измеряе­
мого скоростного напора, поэтому величина ДКСж отрицательна.
Приборную скорость можно считать грубо замеренной индикатор­
ной скоростью и использовать ее в первом приближении вместо инди­
каторной для контроля за режимом полета:
У пр=1/
V
2mg ■■
сУа Р ^
(6-21)
Отсюда следует, что приборная скорость не зависит от высоты полета
при постоянном коэффициенте с у .
6.3. Кривые Жуковского
Аэродинамическую силу лобового сопротивления самолета при по­
лете с дозвуковой скоростью удобно представить как сумму сопротив­
лений при нулевой подъемной силе Х„, индуктивного Х г и сопротивле­
ния ДХ, обусловленного местными срывами потока на больших углах
атаки:
Л„ = Л0 ^ Aj — ДА.
Указанные сопротивления зависят от скорости полета (рис. 6.6).
СопротивлениеХ„ складывается из сопротивления трения X / и сопро­
тивления давления Хр. При скоростях полета, соответствующих
М < М*, основную долю этого сопротивления (85 ... 90% ) состав­
ляет сопротивление трения. При числах М > Л 4 * появляется волно­
вое сопротивление Х в = Х ов * Х гв, включающее составляющие со­
противления при нулевой подъемной силе Х ов и индуктивно-волновое
сопротивление X iB. Индуктивное
сопротивление Х г, связанное с об­
разованием подъемной силы само­
лета, увеличивается с увеличением
угла атаки (уменьшением скорости
установившегося горизонтального
полета) и уменьшается с уменьше­
нием угла атаки (увеличением ско­
рости).
Таким образом, при полете на
малых скоростях большую часть в
общем лобовом сопротивлении са­
молета составляют индуктивное со­
противление X; и сопротивление,
Рис. 6.6. Зависимость со ст ав ля ю щ и х
обусловленное местными срывами
сил лобового сопротивления Ха с а ­
потока на крыле ДХ. На больших
молета от скорости полета (ч исла М)
скоростях полета (малых углах атаки) основным является профильное
сопротивление. Если бы волновое сопротивление Х„ при М > М* не
возникало, то профильное сопротивление при изменении скорости из­
менялось бы в соответствии со штриховой кривой.
Сложение кривых с учетом волнового сопротивления дает суммар­
ную кривую Х г.„ ( V ), определяющую связь между скоростью прямоли­
нейного установившегося горизонтального полета V и силой лобового
сопротивления Х г. п самолета, имеющего полетную массу т на задан­
ной высоте Я . Поскольку для обеспечения прямолинейного уста­
новившегося горизонтального полета (6.13) тяга силовой установ­
ки должна уравновешивать лобовое сопротивление ( Р г . п = ^ г . п ) >
то зависимость потребной тяги прямолинейного установившегося го­
ризонтального полета от скорости Р г п ( V ) аналогична зависимости
Xг. п (V7)- Зависимость потребной тяги силовой установки для обеспе­
чения прямолинейного установившегося горизонтального полета от
скорости самолета, имеющего полетную массу т на заданной высоте
Н, называется кривой Ж уковского по тяге (рис. 6.7). Зависимость по­
требной мощности силовой установки для обеспечения прямолиней­
ного установившегося горизонтального полета от скорости самолета,
имеющего полетную массу т на заданной высоте Я, называется кри­
вой Ж уковского по мощности (рис. 6.8). Кривые Жуковского устанав­
ливают зависимость между скоростью V, соответствующим ей углом
атаки а и потребной тягой силовой установки Р г. и (потребной мощно­
стью iVr.„), необходимой для уравновешивания лобового сопротивле­
ния X в прямолинейном установившемся горизонтальном полете са­
молета массой m на заданной высоте Я.
Д ля построения кривых Жуковского для заданной высоты полета
Н и известной полетной массы m используют поляры самолета (см.
рис. 4.8), построенные для определенных чисел М полета, и зависи­
мости (3.10), (6.16), (6.17), (6.18). По поляре определяют четыре —
шесть значений коэффициента подъемной силы с Уа и соответствую-
Рис. 6.7. Кривые потребных и располагаемых тяг для самолетов:
о — Т Р Д Д ; б — Т В Д ( Н ш —c o n s t )
Рис. 6.8. Кривые потребных и располагаемых мощностей для самолетов:
а — Т В Д ; б — Т Р Д Д (Н , ш - const)
щих им значений коэффициента лобового сопротивления с Х(Г Удобно
выбрать значения с Уа и с Ха для наивыгоднейшего угла атаки, однодва значения для углов атаки, больших а нв. и два-три для углов ата­
ки, меньших а нв. По полученным значениям с Уа и с Ха рассчитывают
аэродинамическое качество К, потребные тяги Яг. скорость V и мощ­
ность yVr . n. По осям тяг и скоростей или мощностей и скоростей откла­
дывают полученные значения и по ним определяют точки на плоско­
сти. Плавная кривая, проведенная через полученные точки, и являет­
ся кривой P r. n(V) или N T. n(V). М аксимальная допустимая тяга (мощ­
ность) всех двигателей, разрешенная РЛ Э для данного этапа полета
(горизонтального, набора высоты и др.), называется располагаемой
тягой P v (располагаемой мощностью N p).
Фактическая тяга Яф, равная потребной Яг.п, подбирается пилотом.
Она не должна превышать располагаемой тяги. Д ля осуществления
прямолинейного установившегося горизонтального полета фактиче­
ская тяга подбирается из условия (6.13), т. е. должна быть равна
силе лобового сопротивления на выбранной пилотом скорости:
Рф—Рг.п = Х а = сХа q S .
(6 .22 )
рК2
где q = - у - = 0,7 р М 2 — скоростной напор возду ха; сХа — коэффициент
лобового соп ро тивл ени я, определяемый по п о л я р е самолета д л я потребного в
горизонтальном полете коэффициента сУа, у д ов л е т вор я ю щ его у с л о в и я (6.14),
т. е. Y a = mg.
Определение потребной тяги из соотношения (6.22) является прибли­
женным, поскольку при выводе уравнений (6.13) и (6.14) было приня­
то допущение о малости угла (а — <рр). Д л я удобства исследований
летно-технических характеристик самолета и основных режимов по­
лета строят совмещенные кривые потребных Р г,п (К) и располагае­
мых тяг Р р (К), потребных N г. п (У) и располагаемых N v (У) мощно­
стей. Совмещенные кривые потребных и располагаемых тяг (мощно­
стей) приводятся в технических описаниях самолета.
На сравнении потребных и располагаемых тяг (мощностей) основан
графоаналитический метод решения уравнений движения, предло­
женный Н. Е. Ж уковским и названный методом тяг (методом мощно­
стей). Точки пересечения кривых потребных и располагаемых тяг
( Я г . п = ^ р ) или мощностей ( j V r . „ = N v ) дают решение уравнений
движения, соответствующее установившемуся прямолинейному гори­
зонтальному полету (6.13 и 6.14). Совместное рассмотрение кривых
располагаемых и потребных тяг (мощностей) на различных высотах
позволяет определить избытки тяг (мощностей) при любых скоро­
стях полета и полетных массах самолета, т. е.
АР = P v — Р г. п
или A N —N V— jVr. п- Знание избытков тяг (мощностей) позво­
ляет рассчитать характеристики: разгона и торможения самолета,
горизонтального полета, набора высоты, маневра в вертикальной
и горизонтальной плоскостях и др. По кривым можно также опреде­
лить скорости полета, которым соответствуют максимальные избытки
тяги (мощности), судить о необходимой степени дросселирования дви­
гателей для осуществления установившегося прямолинейного горизон­
тального полета с заданной скоростью, при которой выполняются
равенства АР = 0 и A N =- 0.
Точка пересечения кривых потребных тяг (мощностей) с кривыми
располагаемых тяг (мощностей), соответствующих максимально допу­
стимому режиму работы силовой установки, в правой части графиков
(см. рис. 6.7 и 6.8) определяет максимальную скорость Ут а х прямоли­
нейного установившегося горизонтального полета на заданной высоте
Н с заданным (обычно номинальным) режимом работы двигателей.
Увеличение степени дросселирования двигателей приводит к снижению
фактических тяг (мощностей), уменьшению скорости полета и до­
стижению нового режима прямолинейного установившегося горизон­
тального полета с меньшей скоростью и большим углом атаки, который
определяется точкой пересечения кривых потребных и фактических
тяг (мощностей). Между прежним и новым режимами установившего­
ся прямолинейного горизонтального полета выполняется неустановившийся полет с уменьшающейся скоростью и возрастающим углом
атаки. Практически возможны только такие режимы установившегося
прямолинейного горизонтального полета, в которых лобовое сопро­
тивление Х а не превышает располагаемую тягу P v силовой уста­
новки.
Н а кривых Ж уковского по тяге можно найти точки, определяющие
характерные режимы прямолинейного установившегося горизонталь­
ного полета (см. рис. 6.7). Если провести касательную к кривой
Р г. л (V), параллельную оси абсцисс, то получим точку, соответствую­
щую минимальному значению потребной тяги Р Т n min- Из формулы
(6.16) следует, что минимум потребной тяги прямолинейного устано172
вившегося горизонтального полета достигается при максимальном зна­
чении аэродинамического качества /Стах самолета:
^ г.п ш 1п— тё ; К m ax-
(6 .2 3 )
Максимальное аэродинамическое качество достигается при полете на
наивыгоднейшем угле атаки а нь. Скорость прямолинейного установив­
шегося горизонтального полета, соответствующая наивыгоднейшему
углу атаки, называется наивыгоднейшей
Ун.» = у
2mg
(6-24)
VaPS
Уменьшение или увеличение скорости прямолинейного установившего­
ся горизонтального полета по сравнению с Унв приводит к увеличе­
нию потребной тяги. Наивыгоднейшая скорость современных транс­
портных самолетов составляет 300—480 км/ч.
Углу атаки, близкому к наивыгоднейшему (точнее несколько боль­
шему, чем а Нв ) , соответствует максимальный избыток тяги А Рта*
самолетов с ТРД Д и максимальный избыток мощности AiVmax само­
летов с ТВД.
Критический угол атаки а кр и соответствующая ему минимальная
теоретическая скорость полета Ут.т т определяются проведением
касательной к кривой Р Г п (У), параллельной оси ординат. Минималь­
ная теоретическая скорость прямолинейного установившегося гори­
зонтального полета
^ T . m >n
у
= l
/
----------- ( 6 . 2 5 )
су а m ax Р ^
где СуаГаах — коэффициент подъемной си лы , соответствую щ ий полету с к р и ­
тическим углом атаки а к р .
Если провести касательную к кривой Ж уковского Р г.п (У) из на"
чала координат, то точка касания определит режим полета, который
называется крейсерским. Крейсерскому режиму полета соответствует
минимальное значение отношения ^ - п и крейсерская скорость У к с ^
« 1 .3 У „ в .
Крейсерская скорость прямолинейного установившегося горизон­
тального полета
V
V « -\/
-* = * _ .
(6.26|
где суаКС — коэффициент подъемной си лы , соо тве тству ю щ ий кр ей сер ск о м у
углу атаки а кс.
Крейсерская скорость на эшелоне самолетов с Т Р Д Д равна 750—870
км/ч, самолетов с ТВД — 450—650 км/ч. Из сравнения зависимостей
(6.15 и 6.17) следует, что величина Р г_п пропорциональна квадрату
скорости, a yVr п пропорциональна кубу скорости, следовательно,
кривая jVr n ( V) в отличие от кривой Яг. п (У) характеризуется более
резким изменением с ростом скорости полета. Минимальная потребная
мощность установившегося прямолинейного горизонтального полета
^r.nm in определяется проведением касательной к кривой Ж уковского
по мощности (см. рис. 6.8), параллельной оси абсцисс. Минимальной
потребной мощности соответствуют экономический угол атаки а эк и
экономическая скорость
1/эк. Экономическая скорость самолетов с
турбовинтовыми силовыми установками равна 230...260 км/ч. Умень­
шение или увеличение скорости полета по сравнению с экономической
приводит к увеличению потребной мощности. Экономическому углу
атаки а эК соответствует максимальный избыток тяги А Р тах самоле­
тов с ТВД (см. рис. 6.7). Заметим, что экономическая скорость не яв­
ляется характерной для самолетов с ТРД, но ее можно определить как
скорость, соответствующую минимальному значению произведения
Pr.uV. Точку, соответствующую скорости Кэк, приближенно можно
получить, проведя касательную к кривой потребной тяги Р Т п, кото­
рая эквидистантна кривой располагаемой тяги Р р (см. рис. 6.7,
ш триховая линия).
Касательная к кривой Ж уковского по мощности, проведенная из
начала координат, определяет наивыгоднейший угол атаки а нв, ко­
торому соответствуют наивыгоднейшая скорость горизонтального по­
лета V Hn и минимальное значение отношения N r_„/V. Наивыгодней­
шая скорость современных транспортных самолетов с ТВД равна
320 -480 км/ч. Максимальный избыток мощности самолета с ТРДД
соответствует углу атаки, несколько большему, чем а нв (см. рис. 6.8).
6.4. Первые и вторые режимы полета
Д л я осуществления прямолинейного установившегося горизонталь­
ного полета с заданной скоростью на заданной высоте необходимо вы­
брать такой режим работы двигателей, чтобы выполнялось равенство
Р г.п = Р р или УУГ-П = N р. При больших режимах работы двигате­
л я и малой высоте полета кривые потребной и располагаемой тяг
(мощностей) пересекаются в одной точке (рис. 6.9). При увеличении
степени дросселирования двигателей кривая фактической
тяги
(мощности) опускается вниз и при некотором режиме работы двигате­
лей кривые потребных и фактических тяг (мощностей) пересекаются
в двух точках 1 и 2. Уменьшая тягу (мощность) двигателей, можно до­
биться того, что кривые потребных и фактических тяг (мощностей)
будут касаться в одной точке, которой соответствует так называемая
граничная скорость Угр прямолинейного установившегося горизон­
тального полета. Эта скорость является границей двух режимов поле­
та: первых (I) при V > V vv и вторых (II) при V < Угр.
В точках 1 и 2 выполняется необходимое для установившегося
прямолинейного горизонтального полета условие равновесия иотреб174
Рис. 6.9. Области первых и вторых режимов горизонтального полета на кривых
Жуковского п о т я г е (а) и мощности (б)
ных и фактических тяг Р г п — Р р и мощностей /Vr. и ~ N v . При­
чем в области первых режимов полета, например на скорости К,,
это равновесие устойчивое, а в области вторых режимов, например на
скорости V2, неустойчивое.
Действительно, при случайном увеличении истинной скорости
полета (самолет попал во встречный ноток воздуха) или уменьшении
скорости (самолет попал в попутный поток воздуха) лобовое сопротив­
ление самолета изменяется, равенство потребных и фактических
тяг (мощностей) нарушается. Например, при случайном увеличении
или уменьшении истинной скорости Vj на величину Л К возник избы­
ток тяги АР = Р р — Р Г11 или мощности A N — Л 'р = — N r- п.
При увеличении скорости V, лобовое сопротивление самолета Х„ =
= Р г. п увеличивается, избыток тяги (мощности) становится отрица­
тельным, а при уменьшении скорости I/, — положительным. Если пи­
лот, не изменяя режима работы двигателей (степень дросселирова­
ния), будет поддерживать заданную высоту полета соответствующим
изменением угла атаки, то под действием избытка тяги (мощности)
самолет будет восстанавливать исходную скорость К, и равновесие
потребных и располагаемых тяг (мощностей).
Иная каргина наблюдается при полете на вторых режимах, напри­
мер в режиме, соответствующем точке 2. При увеличении скорости
Уг лобовое сопротивление самолета уменьшится, появится положи­
тельный избыток тяги (мощности) и скорость самолета при неизмен­
ном режиме работы двигателей будет еще больше увеличиваться. Если
пилот уменьшением угла атаки будет поддерживать заданную высоту
полета (пу — 1), то скорость самолета будет увеличиваться до тех пор,
пока наступит устойчивое равновесие между потребной и фактичес­
кой тягой (мощностью). Такое равновесие наступит только в точке /,
когда самолет увеличит скорость до скорости VV Если произойдет
случайное уменьшение скорости V2 на величину A V , то лобовое сопро­
тивление самолета увеличится, появится отрицательный избыток тяги
(мощности), под действием которого (если пилот будет поддержи-
вать заданную высоту полета только увеличением угла атаки, не изме­
няя степень дросселирования двигателей) скорость самолета будет
уменьшаться вплоть до скорости сваливания.
Если необходимо увеличить скорость горизонтального полета
(Я = const) на первых режимах, пилот плавно увеличивает тягу дви­
гателей (РУ Д вперед) и по мере роста скорости полета отклоняет штур­
вал от себя, подбирая соответствующий меньший угол атаки, в ре­
зультате чего скорость увеличится до требуемого фиксированного зна­
чения. При необходимости уменьшить скорость пилот плавно снижает
тягу (РУ Д назад) и по мере уменьшения скорости полета соразмерным
движением отклоняет штурвал на себя, обеспечивая соответствующий
требуемой скорости больший угол атаки. Направления движения
РУ Д и ш турвала при преднамеренном изменении скорости горизон­
тального полета в первых режимах совпадают.
При необходимости увеличить скорость горизонтального полета на
вторых режимах, например до значения V2 -f AV, пилот плавно увели­
чивает тягу (РУ Д вперед) и по мере роста скорости для сохранения го­
ризонтального полета (заданной высоты) соразмерным движением от­
клоняет ш турвал от себя для обеспечения меньшего угла атаки. По
мере увеличения скорости полета до требуемой пилот уменьшает тягу
(РУ Д назад) до требуемого значения Р р — АР или N р — AN, соот­
ветствующего большей скорости вторых режимов.
Д л я уменьшения скорости до значения У2 — AV пилот сначала
уменьшает тягу (РУ Д назад), соразмерно отклоняет штурвал на себя
для перехода на больший угол атаки и по мере уменьшения скорости
полета увеличивает тягу (РУ Д вперед) до требуемого значения Я р+
-ьЛ Я или N p 4- AN. Таким образом, для изменения скорости гори­
зонтального полета во вторых режимах требуются двойные движения
РУ Д . Н аправления движения штурвала и РУ Д при приближении к
требуемому значению скорости горизонтального полета противопо­
ложны.
Полет на вторых режимах выполняется на сравнительно малых
скоростях (больших углах атаки), что повышает вероятность выхода
самолета на недопустимо большие углы атаки и не удовлетворяет тре­
бованиям безопасности полетов. Первые режимы полета более эконо­
мичны по сравнению со вторыми, так как при одном и том же режиме
работы двигателя (Р р = const, N p = const) полет выполняется на
большей скорости.
По признаку равновесия между потребными и фактическими тяга­
ми (мощностями) первые режимы являются устойчивыми, а вторые —
неустойчивыми. Чтобы сохранить заданную скорость прямолинейного
горизонтального полета на вторых режимах, пилоту приходится при­
стально следить за скоростью и непрерывно работать Р У Д и штурва­
лом.
Вторые режимы полета требуют более сложного управления не
только для выдерживания заданной скорости, но и при переходе на
новую скорость, в частности —двойного движения РУ Д.
Как видно из рис. 6.9, граничная скорость ]/гр, разделяющая пер­
вые и вторые режимы полета, лежит между УаК и 1/11в, причем для с а ­
молетов с ТРД Д VPp близка к V m , а для самолетов с ТВД Угр близка
к Уэк. Поэтому на практике граничной скоростью между первыми и
вторыми режимами полета с целью повышения безопасности полетов
считаются соответственно V HB (для самолетов с ТРД Д) и V.K (Для са'
молетов с ТВД).
'
3
Как правило, горизонтальный полет выполняют на первых режи­
мах полета. Чтобы не вывести самолет на вторые режимы при посадоч­
ном и взлетном положениях механизации крыла, пилоту необходимо
помнить значения приборных скоростей, соответствующих разделу
двух режимов полета. Использование механизации крыла, выпуск
шасси значительно сдвигают границу между первыми и вторыми режи­
мами в сторону уменьшения скоростей.
6.5. Диапазон скоростей и высот горизонтального полета
Область значений скоростей от минимальной теоретической
^тш 1п Д° максимальной Кшах, при которых возможен прямолиней­
ный установившийся горизонтальный полет при заданной массе на
заданной высоте, называется диапазоном скоростей горизонтального
полета. Д ля анализа влияния эксплуатационных факторов (высоты
полета, температуры наружного воздуха, полетной массы, конф игура­
ции самолета, обледенения самолета, отказа одного из двигателей в по­
лете на диапазон скоростей и высот прямолинейного устан ови вш егося
горизонтального полета) воспользуемся зависимостями (6.16)
Влияние высоты полета. Оно проявляется через изменение плотно­
сти воздуха р, его температуры Т и атмосферного давления р , ч то вы­
зывает соответствующее изменение потрабной скорости п р я м о л и н е й ­
ного установившегося горизонтального полета V, и з м е н е н н е р а с п о л а ­
гаемой тяги P Fwп, мощности /Vr-n и удельного расхода топлива £у дРассмотрим, как влияет изменение высоты полета на н а и в ы г о д н е й шую скорость прямолинейного установившегося г о р и з о н т а л ь н о г о '
полета. На некоторой высоте полета Н г , которой соответствуют п л о т ­
ность воздуха рг и угол атаки а нв, потребная н а и в ы г о д н е й ш а я с к о р о с т ь
прямолинейного установившегося горизонтального полета о п р е д е ­
ляется зависимостью V ПВ1 = у 2G/c1, ap1S . Соответственно н<г в ы с о т е
полета # 2 > Нг плотность воздуха будет р2 и скорость полета при у г ­
ле а нв будет V2= V 2G/cVap 2S. Поскольку с увеличением высоты п о л е т а
плотность воздуха уменьшается, то р 2< р х и УНв г > KHBi. Ташм о б ­
разом, с увеличением высоты полета потребная скорость прямслинейного установившегося горизонтального полета увеличивается пропор­
ционально отношению Vrpi/p2> например
4 — Унв I ~\/ P i/P s •
6.2Ту
*>ис 6.10. Кривые потребных и располагаемых тяг (а) и мощностей (б) для раз­
н ы х высот полета при неизменном режиме двигателей ( m = c o n s t , Н \ < Н 2< Н 3<
Потребная тяга прямолинейного установившегося горизонтального
полета Р г п =( щ ) / К от высоты полета не зависит. На основании этого
можно сделать вывод о том, что точка кривой Ж уковского Р г. „ (V),
соответствующая углу а нв, с увеличением высоты полета сместится
в,чраво (вдоль оси скоростей) пропорционально | / pi/p2- Потребная
мощность /Vr „ --- Р,, „ V в отличие от потребной тяги будет изменяться
с высотой полета пропорционально скорости V. Следовательно, точ­
ка на кривой Ж уковского но мощности МГшП(У), соответствующая
Углу <хНв, сместится вправо и вверх пропорционально значению
K fV jv
Увеличение высоты полета и связанное с этим уменьшение плотно­
сти воздуха приведет к смещению каждой точки кривых Ж уковского
в соответствии с формулами (6.16, 6.17 и 6.18). Поэтому кривая Ж у ­
ковского по тяге сместится с увеличением высоты только вправо, а
кривая Ж уковского по мощности — вправо и вверх (рис. 6.10). С уве­
личением высоты полета кривые потребных тяг и мощностей не только
смещаются вправо, но и несколько трансформируются, уменьшая угол
наклона в области скоростей V > Кнв и как бы распрямляясь. Это
объясняется тем, что с увеличением высоты полета профильное сопрогииление Х„ уменьшается пропорционально плотности воздуха, а ин­
дуктивное сопротивление X t растет.
Увеличение высоты полета и связанное с этим увеличение потреб­
ной скорости прямолинейного установившегося горизонтального по­
лета V может привести к тому, что при скоростях полета, которым со­
ответствует число М > М*, на поверхностях самолета образуются
цветные скачки уплотнения. При дальнейшем увеличении скорости по­
мета развивается волновой кризис. В результате резко увеличивается
волновое сопротивление Х в. Это вызовет прирост лобового сопротивле­
ния самолета Х а в целом и увеличение потребной тяги Р г-П (мощности
/Vr ,,). Скачкообразное увеличение лобового сопротивления Х а приво­
дит к скачкообразному смещению кривых Ж уковского вверх.
Влияние высоты полета на располагаемые тягу Р р и мощность Л/р.
а также на удельный расход топлива видно из высотно-скоростных
характеристик двигателей. При неизменном режиме работы двигате­
лей с увеличением высоты полета и уменьшением плотности воздуха
располагаемые тяга Р р и мощность N р,уменьшаются. Увеличение высо­
ты полета до 11 км сопровождается падением температуры воздуха, что
как бы компенсирует влияние уменьшения плотности воздуха на тягу
двигателей. При дальнейшем увеличении высоты полета плотность
воздуха падает, а температура остается постоянной. В результате
более интенсивно уменьшается располагаемая тяга.
Как видно из рис. 6.10, с увеличением высоты полета кривые рас­
полагаемых тяг и мощностей опускаются при неизменном режиме рабо­
ты двигателей. При некоторой высоте Я 4 располагаемая тяга (мощ­
ность) может уменьшиться настолько, что кривые погребных и распо­
лагаемых тяг (мощностей) будут касаться только в одной точке, со­
ответствующей углу атаки, близкому к углу а Н1, для самолетов с Т Р Д Д
и близкому к углу а як для самолетов с ТВ Д . Предельная высота уста­
новившегося горизонтального полета при максимально допустимом
режиме работы двигателей называется теоретическим потолком са­
молета Я т. На этой высоте для самолетов с Т РД Д
V„„У m a x ’ для самолетов С ТВД V Tm i n
V3h --- V m a x . т. е. прямоли­
нейный установившийся горизонтальный полет теоретически возмо­
жен только на одной единственной скорости VJ1B или V3K в зависимо­
сти от типа силовой установки. Практически прямолинейный устано­
вившийся горизонтальный полет на высоте Я т невозможен. М акси­
мальная скорость установившегося горизонтального полета У1па\
для максимально допустимого режима работы двигателя в прямоли­
нейном установившемся горизонтальном полете на заданной высоте
определяется точкой пересечения кривых потребных и располагаемых
тяг (мощностей) в правых частях графиков (см. рис. 6.10). Формулы
максимальной скорости прямолинейного установившегося горизон­
тального полета (Р г „ = Р р) можно получить из выражений (6.15) и
(6.17):
( 6 . 28 )
Как видно из рис. 6.10, с увеличением высоты полета максимальная
истинная располагаемая скорость самолета растет, а начиная с неко­
торой высоты из-за влияния совокупности эксплуатационных факторов
(плотности воздуха, температуры, атмосферного давления, числа М по­
лета и т.п ), максимальная скорость начинает уменьшаться.
Потребная минимальная
теоретическая
скорость
УТт т =
прямолинейного установившегося горизонтального по­
лета с увеличением высоты растет. Увеличение высоты полета сопро­
вождается уменьшением располагаемой тяги силовой установки, по­
этому на больших высотах минимальная теоретическая скорость, со­
ответствующая Суатах в прямолинейном установившемся горизонталь­
ном полете, рассматриваться не может. Как показано на рис. 6.10, на
высотах # 3 и более точка пересечения кривых потребных и располага­
емых тяг (мощностей) в левых частях графиков соответствует углам
атаки ol <Z а кр (сиа < i с Уа тах). Таким образом, с увеличением вы­
соты полета потребные скорости полета VTmlI1 и Vmax растут. При этом
потребная теоретическая скорость увеличивается более интенсивно,
чем максимальная, диапазон скоростей полета сужается. С увеличе­
нием высоты потребные тяги и мощности растут, а располагаемые —
уменьшаются, что вызывает постепенное уменьшение избытка тяги и
мощности. На теоретическом потолке они становятся равными нулю.
Общая тенденция изменения характерных скоростей с высотой
для самолета с Т Р Д Д и ТВ Д сохраняется (рис. 6.11). Особенности
эксплуатационных характеристик ТВД определяют более раннее
(начиная с высоты 8— 10 км) уменьшение максимальной скорости по­
лета V\nax и меньшую высоту теоретического потолка Я т. С измене­
нием высоты полета истинная скорость изменяется, и пилоту трудно
удержать в памяти допустимые значения скорости на каждой высоте
полета. Поэтому скорость полета удобно контролировать по указа­
телю приборной скорости, которая не зависит от высоты (при с Уа=
const). Диапазон возможных приборных скоростей и высот полета
показан на рис. 6.11,в.
Влияние температуры наружного воздуха. Если считать баромет­
рическую высоту постоянной, то с увеличением температуры воздуха
на этой высоте его плотность р уменьшается пропорционально 1/7 и
потребная скорость горизонтального полета растет (6.18) пропорцио­
нально У Т 2/Т , = K p ./ f v Потребная тяга (6.15) от температуры воз­
духа не зависит, а потребная мощность (6.17) пропорциональна потреб­
ной скорости полета. Таким образом, влияние температуры воздуха на
Рис. 6.11. Диапазоны характерны х скоростей прямолинейного установившегося
горизонтального полета
!
Рис. 6.12. Зависимость потребных и располагаемых тяг (а ) и мощностей (6 ) от
скорости (Я, т = const, T t < T 2< T 3)
диапазон скоростей и высот прямолинейного установившегося гори­
зонтального полета, как и высоты полета Н, сказывается только через
плотность воздуха р. С увеличением температуры кривые Р г, „ (V)
смещаются вправо вдоль оси скоростей пропорционально плотности
воздуха, которая, в свою очередь, пропорциональна У Т г! Тх. Кривые
Мг. п(У) смещаются, кроме того, еще и вверх вдоль оси мощностей
(так как N r_„ = Я г. пV) пропорционально У Т г! Тг (рис. 6.12).
Изменение температуры наружного воздуха при постоянном баро­
метрическом давлении вызывает соответствующее изменение плотно­
сти воздуха, что при постоянной скорости полета влияет на расход
воздуха через тракт двигателя и его тягу. С повышением температуры
наружного воздуха тяга двигателей уменьшается, что выражается в
опускании кривых располагаемых тяг и мощностей вниз. Повышение
температуры воздуха может привести к тому, что горизонтальный по­
лет станет невозможным, так как располагаемые тяга и мощность бу­
дут меньше потребных, например при температуре воздуха Т 3. При
повышении температуры воздуха потребные скорости прямолинейного
установившегося горизонтального полета Ут т т и VT т а х увеличива­
ются. Как и при увеличении высоты полета, увеличение температуры
наружного воздуха приводит к сужению диапазона скоростей полета,
к уменьшению избытка тяги (мощности).
Теоретический потолок с ростом температуры воздуха уменьшает­
ся вследствие уменьшения располагаемой тяги (мощности). С достаточ­
ной для практики степенью точности можно принять, что с увеличе­
нием температуры воздуха на 1 °С теоретический потолок уменьшает­
ся на 50—60 м.
Топливорегулирующая аппаратура многих авиационных двигате­
лей при отклонении температуры от стандартной сохраняет заданную
частоту вращения ротора п, увеличивая подачу топлива при пониже­
нии температуры и уменьшая подачу топлива при ее повышении. Н о
сохранение частоты вращения ротора двигателя не означает сохране­
ния постоянства тяги (мощности). Располагаемые тяга Р р и мощность
/Vр двигателей уменьшаются.
Потребная скорость горизонтального полета при изменении темпе­
ратуры окружающего воздуха на величину At
^ т С А + Д ^ ^тСА
где Т СА и Т с
— Т^~к----’
(6.29)
— зн ачен и я температуры воздуха в условиях стандарт
ной атмосферы СА и у в у с л о в и я х , отличных от стандартных.
Влияние полетной массы т. Из формулы (6.18) следует, что потреб­
ная скорость прямолинейного установившегося горизонтального по­
лета изменяется пропорционально ~y G— y'm g при прочих неизмен­
ных условиях, т. е. если скорость полета при
равна Р\, то при С2
скорость полета
V2~
^1
V ° 2 / 'g i
=
~Vmi im 1 .
Потребная тяга прямолинейного установившегося горизонтального
полета P r. n = mg l K, поэтому изменение полетной массы приводит
к изменению потребной тяги, определяемому соотношением Р г. П2 =
~ ^г, и — ■ Таким образом, с увеличением полетной массы каждая
т J
точка кривой Р.г (К) сместится относительно соответствующей точки
кривой Р х ( V ) вправо (вдоль оси скоростей) пропорционально отноше­
нию \ f т 2/ т 1 и вверх (вдоль оси тяг) пропорционально отношению
т г, т 1 (рис. 6.13, а). Соответственно с увеличением полетной массы
каж дая точка кривой Л/г. п (У) сместится вправо (вдоль оси скоростей)
пропорционально отношению Y m ^ m i и вверх пропорционально оттгУ~т
ношению — ~
(рис. 6.13, б), поскольку потребная мощность Л/г. п =
m 1V m 1
Р Г.
Г
V
п у Г. п -
Из рис. 6.13 видно, что с увеличением полетной массы потребные
скорости VT mln и Vmax увеличиваются, диапазон скоростей горизон-
Рис. 6.13. Кривые потребных и располагаемых тяг (а) и мощностей ( б) при р а з ­
личных полетных массах самолета ( t f = c o n s t , m2< m i )
Рис. 6.14. Кривые потребных и располагаемых тяг (т. H = const)
тального полета при увеличении полетной массы сужается. Вследствие
роста потребных тяг избытки тяги АР и мощности A N с увеличением
полетной массы уменьшаются, что ведет к уменьшению высоты теоре­
тического полета. С достаточной для практики степенью точности мож­
но считать, что с увеличением полетной массы на 20 % VT mm, VaK и
КаВ возрастают примерно на 10 %. Конфигурация самолета, отказ
одного двигателя и обледенение влияют на диапазон скоростей и высот
горизонтального полета, изменяя лобовое сопротивление самолета Х„
и связанную с ним потребную тягу Р Г, п, а такж е подъемную силу са­
молета Y Согласно уравнениям (6.13 и 6.14), это приводит к измене­
нию характеристик прямолинейного установившегося горизонтального
полета. Отклонение механизации крыла и выпуск шасси (штриховая
кривая) сопровождаются увеличением лобового сопротивления само­
лета и подъемной силы. Потребная скорость и тяга установившегося
прямолинейного горизонтального полета изменяются, что отраж а­
ется в соответствующем изменении кривых потребных тяг (рис.
6.14, а).
Обледенение самолета увеличивает лобовое сопротивление и вызы­
вает более ранний срыв потока (вследствие искажения формы несущих
поверхностей и ухудшения чистоты поверхностей), снижение распола­
гаемой тяги силовой установки (вследствие обледенения входных уст­
ройств двигателей и лопастей воздушных винтов). Изменение характе­
ристик прямолинейного установившегося горизонтального
полета
при обледенении показано на рис. 6.14, в штриховыми линиями. О тказ
одного из двигателей в полете увеличивает лобовое сопротивление, по­
требную тягу, уменьшает подъемную силу (прекращается обдувка
крыла потоком от воздушного винта отказавшего двигателя) и распо­
лагаемую тягу. На рис. 6.14, б кривые потребных и располагаемых
тяг при отказе двигателя показаны штриховыми линиями. О тклоне­
ние механизации, обледенение, отказ одного из двигателей приводят
к сужению диапазона скоростей и высот прямолинейного установив­
шегося горизонтального полета, к уменьшению избытка тяги (мощно­
сти).
Диапазон скоростей от Ктпип до Vmax и высот от Н = 0 до Н т
прямолинейного установившегося горизонтального полета, опреде­
ляемый предельными возможностями самолета, в практике летной
эксплуатации ограничивается условиями обеспечения безопасно­
сти полетов. Единые нормы летной годности гражданских воздушных
судов (ЕНЛГС) устанавливают ограничения минимальной и макси­
мальной скорости полета,, а такж е высоты полета для всех транспорт­
ных самолетов. Ограничения для конкретного типа самолета с учетом
требований ЕН ЛГС и особенностей самолета устаналивает разработ­
чик самолета. Эти ограничения указываются в РЛЭ самолета.
Ограничение минимальной скорости полета. Прямолинейный
установившийся горизонтальный полет самолета на минимальной тео­
ретической скорости Vr min, которой соответствует критический угол
атаки а кр и максимальный коэффициент С у тах подъемной силы (6.25),
принципиально возможен. Однако он опасен возможностью свалива­
ния самолета из-за развития срыва воздушного потока на крыле и по­
явления неуправляемого движения. Поэтому из соображений безопас­
ности полетов минимальные скорости прямолинейного установившего­
ся полета ограничиваются минимально допустимой скоростью
(6.30)
где сг/йДОИ — допустимое значен и е коэффициента подъемной си л ы , соответ­
ствую щ ее допустимому углу атаки а д о п .
С учетом соотношения (6.30) получим формулу минимально допусти­
мой приборной скорости прямолинейного установившегося горизон­
тального полета
(6 .31 )
При полете на этой скорости должны обеспечиваться приемлемая
но оценке пилота-испытателя устойчивость самолета и управляемость
по тангаж у, крену и рысканию. Согласно ЕНЛГС, допустимый угол
атаки а доп, соответствующий прямолинейному установившемуся
горизонтальному полету со скоростью Kmln доп, должен быть по край­
ней мере на 3° меньше, чем некоторое предельное значение угла ата­
ки “ пред- Предельным углом атаки а преД выбирается обычно угол
сваливания а с. Под сваливанием понимается возникшее в результате
развития срыва потока на крыле не произвольное, а периодическое
или колебательное движение самолета относительно любой из тех его
осей, заметное для пилота и непарируемое без уменьшения угла атаки.
Таким образом, углом сваливания а с называется минимальный угол
атаки самолета, при котором происходит сваливание в рассматривае-
мой конфигурации при значении
полетной массы самолета т, при
положении центра масс самолета
лсх, работе силовой установки в ре­
жиме полетного малого газа (ПМГ)
в установившемся прямолинейном
W
горизонтальном полете. Углу атаки
сваливания а с соответствует ско­
Рис. 6.15. Приращение угла атаки
рость сваливания. Скоростью сва­ крыла при воздействии восходящего
ливания Vc называется минималь­ порыва ветра (f} = c o n st)
ная скорость самолета в рассматри­
ваемой конфигурации для рассматриваемого значения полетной массы
самолета, центровки и режима работы силовой установки, соответст­
вующего ПМГ. Таким образом, допустимый угол атаки в прямоли­
нейном горизонтальном установившемся полете а доп < а с — 3°. Д о­
пустимая минимальная скорость при полете по маршруту должна
удовлетворять условию V,,,lit доп > 1.3 Vc, т. е. быть по крайней
мере на 30—40 % больше скорости сваливания.
Увеличение угла атаки является результатом ошибки пилотиро­
вания или воздействия внешнего фактора, например восходящего по­
рыва ветра. По этой причине введено ограничение минимально допу­
стимой скорости по порыву. Если самолет, имеющий скорость V и угол
атаки а , попадет в восходящий порыв, имеющий скорость W (рис. 6.15),
то угол атаки самолета возрастет на величину
Да ж t g Д а = Г / К .
(6 .3 2 )
В результате угол атаки а + Л а может стать больше допустимого
а доп- Из выражения 6.32 следует, что чем больше скорость вертикаль­
ного порыва W и меньше скорость установившегося полета V (чем
больше угол атаки а), тем больше приращение угла атаки Л а. Отсюда
следует, что для ограничения приращения угла атаки необходимо ог­
раничивать минимально допустимую скорость установившегося пря­
молинейного горизонтального полета и скорость вертикального поры­
ва ветра.
Согласно ЕНЛГС, на крейсерских режимах полета, а также на ре­
жимах набора высоты и снижения по маршруту должен обеспечивать­
ся такой запас по углу атаки до а доп, который не превышается при
мгновенном попадании в восходящий порыв ветра, имеющий индикатор­
ную скорость W-t — 9 м/с при высоте полета Н — 7 км и W t = 9—0,5
(Н — 7) м/с при Н > 7 км, но во всех случаях W t > 6 , 5 м/с, т.е.
Wi
а д оп
И р .п Ч -
п
Vi
5 7 ,3 ,
(6 .3 3 )
где а г п — угол атаки в прям о л и н ейн о м у стан о ви вш ем ся го ри зо н т ал ь н о м
полете.
При этом приращение нормальной перегрузки А пу при выходе на
угол а поп не должно быть менее 0,5. Минимально допустимому значе­
нию угла атаки ссдоп соответствует минимальная допустимая скорость
прямолинейного установившегося горизонтального полета l/mln доп
(рис. 6.16). Нормами летной годности предусматриваются еще ряд
критериев, по которым ограничивается минимальная скорость прямо­
линейного установившегося горизонтального полета, например ограни­
чение по сохранению устойчивости и управляемости и др. Из всевоз­
можных минимальных допустимых скоростей, получаемых по различ­
ным критериям, выбирается наибольшая скорость Утшдоп. которая и
считается минимально допустимой. Как правило, минимально допусти­
мая скорость прямолинейного установившегося горизонтального по­
лета устанавливается большей, чем граничная скорость, разделяющая
первые и вторые режимы полета. Д ля самолетов с ТРД Д V m i n д о п >
> I7™, а для самолетов с ТВД l/mln яоп > Уэк- Д ля современных тран­
спортных самолетов граничная
скорость
Vrp > (1,4 -4- 1,8) Vc.
Ограничение максимальной скорости полета. Максимальная ско­
рость полета ограничивается максимальной эксплуатационной ско­
ростью Утах э, которую пилот в условиях нормальной эксплуатации
не должен преднамеренно превышать. Значение максимальной экс­
плуатационной скорости приводится в Руководстве по летной эксплуа­
тации самолета (РЛЭ).
Согласно ЕН ЛГС, скорость Угаахэ должна быть меньше расчет­
ной предельно допустимой скорости УП1ах доп, назначаемой с учетом
того, что Vmaxa может непреднамеренно повышаться вследствие оши­
бок пилотирования, встречи с большими порывами ветра и струйными
течениями или вследствие отказа в системе автоматического управле­
ния. Превышение предельно допустимой скорости Vmax доп может
вызвать остаточные деформации и разрушения конструкции самолета,
потерю устойчивости и управляемости, нарушение работы силовой ус186
тановки и т.п. Поэтому ограничение предельно допустимой скорости
Утахдои задается в виде предельных значений, назначаемых из усло­
вия сохранения жесткости и прочности конструкции при воздействии
скоростного напора q = рК2/2, нормальной перегрузки пу — Уд, со­
хранения устойчивости и управляемости самолета и др. Ограничение
предельно допустимой скорости полета по допустимому скоростному
напору вводится из условия сохранения прочности и жесткости конст­
рукции. Аэродинамические нагрузки, действующие на самолет в поле­
те, пропорциональны скоростному напору воздуха, поэтому ограниче­
ние максимального скоростного напора фактически сводится к ограни­
чению аэродинамической нагрузки на элементы конструкции. Д опус­
тимый скоростной напор определяется предельно допустимой скоро­
стью полета:
?доп = _£Ктахдоп^
1
(6 34)
откуда
^ т а х до п {Ч) = У
(6 .3 5 )
С учетом соотношения (6.20) получим формулу предельно допусти­
мой по скоростному напору приборной скорости прямолинейного ус­
тановившегося горизонтального полета
д о п (?) п р ~ Т / ^ д о п / Ро •
(6 .3 6 )
Максимально допустимая по скоростному напору приборная ско­
рость равна 500—700 км/ч.
Превышение максимально допустимой по скоростному напору ско­
рости может привести к остаточной деформации. Например, левое и
правое полукрыло имеют всегда неодинаковую жесткость на изгиб и
кручение из-за различных размеров, формы и других технологиче­
ских отклонений в изготовлении. В результате более слабое полукры­
ло под действием скоростного напора будет больше изгибаться и за­
кручиваться, что приведет к изменению местных углов атаки и пере­
распределению аэродинамической нагрузки по хордам и размаху кры­
ла и непроизвольному кренению самолета. Отклонение элеронов и
связанное с этим перераспределение аэродинамической нагрузки мо­
жет усилить деформацию изгиба и кручения, вызвать явление реверса
элеронов.
Ограничение предельно допустимой скорости по максимально
допустимой эксплуатационной
нормальной
перегрузке
V m ax
доп
определяется из условий турбулентности атмосферы (болтан­
ки). При полете на малых высотах с большой скоростью вертикальные
порывы воздуха могут создать такую нормальную перегрузку п у.
при которой будут нарушены прочность и жесткость конструкции. При
попадании самолета в восходящий воздушный поток (см. рис. 6.15)
(п 1аоп)
187
приращение угла атаки Д а « WIV вызовет приращение нормальной
перегрузки:
Д сИа р И S
с“ Д а р V 2 S
с " ар K S r
20
20
20
(6.37)
Скорость движения воздуха в порыве нарастает не мгновенно, по­
этому в полученную формулу вводится коэффициент Kw = 0,6—0,95,
учитывающий постепенность
изменения
скорости в порыве.
С учетом этого приращение нормальной перегрузки
Д л я самолетов типа Ту-134, Ту-154, Як-42, Ил-62 K w — 0,9.
Т ак как в прямолинейном установившемся горизонтальном полете
нормальная перегрузка п у = Y/G = 1, то допустимая нормаль­
ная эксплуатационная перегрузка будет определяться суммой п эу л 0п—
= 1 + Дп у. С учетом этого из соотношения (6.37) получим формулу
предельно допустимой скорости полета по максимально допустимой
эксплуатационной нормальной перегрузке.
V
ш а х д о п \( 4п д о п )
K w ca P S W
(6 .3 9)
Уо,
Ограничение максимальной скорости по числу М полета обусловле­
но возможностью ухудшения характеристик устойчивости и управля­
емости при М > М* и работы двигателей, рассчитанных на опреде­
ленный диапазон чисел М (обычно М < 1).
При увеличении числа М полета до критического М* и выше на
поверхностях самолета развивается волновой кризис. В результате
перераспределения давления на несущих поверхностях центр давления
резко смещается назад, что является причиной значительного увели­
чения степени статической устойчивости самолета по углу атаки и ухуд­
шения характеристики продольной управляемости. То и другое—не­
ж елательно, так как требуется значительная перебалансировка само­
лета. Действительно, увеличение подъемной силы с увеличением числа
М полета и смещение центра давления назад определяют рост отрица­
тельного (пикирующего) аэродинамического момента тангажа. Д ля
парирования этого момента пилот отклоняет руль высоты (стабилиза­
тора) вверх (штурвал «на себя») и создает противоположно направлен­
ный управляющий момент. У самолетов, не рассчитанных на увеличе­
ние числа М полета до закритических значений, даже полного откло­
нения ш турвала (руля высоты, стабилизатора) может быть недостаточ­
но для парирования пикирующего момента.
Все ограничения скорости задаются, как правило, для максималь­
ной полетной массы, что облегчает пилоту запоминание предельно до­
пустимых скоростей. Предельно допустимые скорости самолета в раз188
личных конфигурациях (взлетной, полетной, посадочной, предпоса­
дочной) различны, что определяется в первую очередь по критерию
жесткости и прочности конструкции. Скорости выпуска и уборки меха­
низации крыла, шасси ограничиваются из условий жесткости и проч­
ности конструкции, устойчивости и управляемости самолета.
Ограничение высоты полета. В области дозвуковых скоростей на­
ибольшая высота прямолинейного установившегося горизонтального
полета ограничивается возможностью создания подъемной силы, рав­
ной силе тяжести самолета при условии, что коэффициент с у < с удоп,
а значит V > Ут т доп- При полете на высотах, близких к практиче­
скому потолку, диапазон скоростей горизонтального полета сужается,
а скорости УП1|П доп и Vmax приближаются к наивыгоднейшей (для
самолетов с ТРД) или к экономической (для самолетов с ТВ Д). Поэто­
му вводится ограничение высоты полета Н лоп(\р) по скорости порыва
ветра W, способного вывести самолет на угол атаки, превышающий
угол а Д0П- Приращение угла атаки при входе самолета в вертикаль­
ный порыв определяется выражением (6.32), из которого следует, что
чем меньше скорости полета и чем больше скорость вертикального по­
рыва, тем больше приращение угла атаки. Допустимый угол атаки
обычно определяется соотношением а доп = а г. „ + Д а < а с — 3°.
В правой части неравенства может быть и другой критерий, опреде­
ляющий допустимый угол атаки, получаемый по результатам летных
испытаний конкретного типа самолета.
6.7, Разгон и торможение самолета в прямолинейном
горизонтальном полете
Интенсивность разгона и торможения самолета в горизонтальном
полете (практически в полете близком к горизонтальному) характери­
зуется ускорением, которое зависит от избыточной тяги:
dV
Р - Р г.п
8 п х„,
dt • = g* ------~------=
а
( 6 -40 )
где Р и Р г п — соответственно т я га силовой устан овки и п о т р е б н а я т я г а ь
установившемся прямолинейном полете; п Ха — т а н г е н ц и а л ь н а я
перегрузка.
Наиболее интенсивным горизонтальный разгон будет при макси­
мальном избытке тяги Д Ртах — Р — Р г. п m t n - При отрицательном
избытке тяги движение самолета будет замедленным. Врем я, потреб­
ное для разгона до заданной скорости или торможения, характеризует
приемистость двигателя.
Точки пересечения зависимостей Р ( V) и Яг. „ (V) показываю т либонаибольшую скорость, до которой возможен разгон в горизонтальном
полете (при Р р (У) максимальную скорость), либо минимальную ско­
рость установившегося прямолинейного горизонтального полета. О г­
раничениями разгона и торможения служ ат такж е м инимальная и
максимальная допустимые скорости.
Время разгона или торможения от заданной начальной скорости
Ко до требуемой скорости Vx\
(6 41)
ts= ----------- dV
{„ gn*«
Д лина участка разгона или торможения находится интегрированием
выражения
d L = V(t)dt,
откуда
t
L = L 0 + J V It) dt.
(6 42)
10
Характеристики разгона самолета в большой степени зависят от вре­
мени приемистости двигателя — интервала времени от начала пере­
мещения Р У Д до достижения заданного режима повышенной тяги
(мощности). Д ля торможения самолета в полете двигатели переводят
в режим полетного малого газа. Д ля повышения лобового сопротивле­
ния могут применяться тормозные щитки, выпуск шасси и др.
Д л я обеспечения полета, близкого к горизонтальному, в процессе
разгона следует соразмерно увеличению скорости уменьшать угол
атаки, а в процессе торможения — увеличивать.
Д о п о л н и т е л ь н а я л и т ератур а
161, с. 3 4 — 60; |3]; с. 11— 35, 4 8 —54; [5]; 1 0 2 - 1 0 5 ; [7]; с. 21 —59, 102— 204;
18]; с. 4 — 10, 18— 28.
К о н т р о л ь н ы е вопросы
1. Ч то тако е ус л о ви я и реж имы полета?
2 . П еречи сл ите основные летно-технические х ар ак т ер и ст и к и самолета
3. И зо б р а зи т е взаим ное полож ен ие связанной, ск оростной и нормальной
си стем ы к оорди нат.
4. Д а й т е определение продо л ьно го и бокового дв и ж е н и я . К аки е этапы поле­
та о п и с ы в а ю т с я у р а в н ен и я м и п родольного и бокового дви ж ен ия?
5. Д а й т е оп ределен ие п е р е гр у зк и .
6 . И з о б р а з и т е схему с и л , действующих на самолет в прямолинейном го ­
р и з о н т а л ь н о м полете. З а п и ш и т е систему уравнений неустановившегося и у стан о­
в и в ш е г о с я г о р и зон т а л ь н ого полета.
7. К а к построить к р и в ы е Ж уко вско го?
8 . И з о б р а з и т е к р ив ы е Ж у к о в с к о г о по тя ге и мощности, у к а ж и т е и поясните
х а р а к т е р н ы е точки на них.
9. Ч т о т а к о е г р а н и ч н а я скорость? Поясните особенности поведения и пило­
т и р о в а н и я самолета в первы х и вторых реж имах г оризон тального полета.
10. П о я с н и т е в л и я н и е высоты полета и тем п ерату ры нар уж н о го воздуха
на д и а п а з о н высот п р ям о л и н ей н о го установивш егося горизонтального полета
11. П о я с н и т е в л и я н и е полетной массы и ко нф и гур ац и и самолета на диапазон
вы со т и ск о ро стей г о р и зо н т а л ь н о г о полета.
12. Д а й т е обоснование ограни чен и й минимально допустимой скорости и в ы ­
со ты п о л ет а.
13. П оясните влияние условий эк с п л у а т а ц и и на х а р а к т е р и с т и к и разгона и
торм ож ени я в прямолинейном г оризон тальном полете.
14. Во с к о л ь к о раз изменяются потребные т я га и ск о р о ст ь , если в р е з у л ь т а ­
те выгорания топ ли в а полетная масса самолета умен ьш и тся на 2 5 % . Ответ:
Р 2 = 0,75 P t \ V2 = 0,87 К,.
15. К ак изменится минимально доп у сти м ая скорость го р и зо н т ал ь н о г о по­
лета, если при выпуске предкрылков допустимый угол ат а к и у вели ч ивается с
16 до 19°.
Исходные данные: а 0 = 0; с“ = 0 , 1
■ ; m = 16 ООО кг; площ адь крыла
У (1
град
S = 70 м2. Ответ: V'min доп уменьшится в 1,09 раза.
16. Рассчитать индикаторную ск о ро ст ь самолета на высоте 10 000 м, если
давление в точке полного тормож ения р 0 = 35 ООО Па, у с л о ви я полета с т а н д ар т ­
ные. Ответ: V,- = 263 км/ч.
Глава 7
НАБОР ВЫСОТЫ И СНИЖЕНИЕ
7.1. Уравнения движения самолета по наклонной траектории
Набор высоты и снижение являются важнейшими эксплуатацион­
ными этапами полета транспортного самолета. В общем случае набор
высоты и снижение — неустановившееся криволинейное движение по
наклонной траектории. Поскольку в нормальном полете отклонение
скорости от заданных значений и отклонение центра масс от расчетной
траектории невелики, то для упрощения изучения рассмотрим устано­
вившееся движение с постоянной скоростью и под постоянным углом
наклона траектории.
Набором высоты называется полет по наклонной траектории с уве­
личением высоты полета. Набор высоты осуществляется после взлета
до высоты круга ( // = 400 м) и далее от высоты круга до высоты задан­
ного эшелона полета по маршруту. Д ля транспортного самолета на­
иболее продолжительным участком траектории набора является набор
высоты от высоты круга до высоты эшелона полета по маршруту. В про­
цессе набора высоты осуществляется разгон самолета до заданной ско­
рости полета по маршруту.
Снижение — полет самолета по наклонной траектории с работаю­
щими двигателями с потерей высоты. Наиболее продолжительным уча­
стком является снижение с высоты эшелона до высоты круга. С высо­
ты круга самолет снижается до ВПП. В процессе снижения скорость
самолета изменяется (увеличивается и уменьшается в зависимости от
программы снижения), скорость полета самолета на высоте круга, а
тем более посадочная скорость меньше скорости полета по марш руту.
Сравнительно небольшие наборы высоты и снижения выполняются
при смене эшелонов полета.
Набор высоты эшелона от высоты круга и снижение с высоты эше­
лона до высоты круга занимают важное место в общем балансе расхода
Рис. 7.1. Схема сил, действующих на самолет при наборе высоты и снижении
топлива и затрат времени на полет, причем, чем меньше расстояние от
аэродрома взлета до аэродрома посадки, тем больше удельный вес
этого этапа. Траектория набора высоты и снижения, близкая к рас­
четной, обеспечивается подбором режима работы силовой установки и
заданием угла атаки. Скорость полета V, угол наклона траектории 0,
вертикальная скорость Vу, высота полета Н контролируются по соот­
ветствующим шкалам пилотажно-командных приборов.
Уравнения движения самолета при наборе высоты. Движение само­
лета по наклонной траектории происходит под действием системы сил
(рис. 7.1). Д ля получения уравнений движения самолета при наборе
высоты спроектируем векторы, входящие в уравнение (6.1) на оси 0 Х к
и O Y k траекторной системы координат. В результате получим уравне­
ния:
d Кн
т ——— = Лн cos ( а — <рР) — Х а — G sin 0Н;
(7 .1 )
d 0Н
т КН ■- - - = Р н sin ( а — фР) + К а — Ge o s 0 Н-
Обычно угол атаки а и угол установки двигателя срр малы, поэтому
с достаточной для практики степенью точности можно считать, что
cos (а — ф,,) « 1, sin (а — фр) « 0. Тогда уравнения (7.1) примут
вид:
т —— !5—= £>н — Х а — G s i n 0 H;
dt
m V H - ~ ^ = y a — G cos в„.
dt
У равнения
(7.1) — (7.3)
описывают
неустановившийся
(7 .2 )
(7 .3 )
(^ 2 = ^ 0 ),
непрямолинейный (^у- Ф 0) набор высоты. При установившемся пря­
молинейном наборе высоты скорость полета и угол наклона траекто192
рии постоянным (— ■= 0,
= 0) и уравнения (7.2 и 7.3) прини­
мают более простой вид:
Рн — Х а -f- G sin 0Н;
(7 .4 )
Y a = G c o s 0 H.
(7 .5 )
Уравнения (7.4) и (7.5) позволяют провести анализ движения само­
лета при установившемся прямолинейном наборе высоты и определить
основные характеристики движения: потребные
скорость и тягу
(мощность) для осуществления полета при различных углах наклона
траектории, вертикальную скорость полета, время, потребное для
набора заданной высоты полета, максимальную высоту полета, кото­
рая может быть достигнута при заданной массе самолета, дальность
полета при наборе высоты, расход топлива для набора заданной вы­
соты и т. п.
Уравнение (7.4) выражает условие сохранения постоянства скоро­
сти полета: если тяга силовой установки Р н уравновешивает сумму ло­
бового сопротивления самолета Х„ и составляющей силы тяжести
G sin 0 Н, то скорость полета К„ остается постоянной. Уравнение (7.5)
выражает условие сохранения постоянства угла наклона траектории
9„. Уравнения (7.4) и (7.5) очевидны и могут быть записаны непосред­
ственно из рассмотрения схемы сил, действующих на самолет при уста­
новившемся прямолинейном наборе высоты (рис. 7.1).
Подставив в уравнение (12.5) вместо подъемной силы Y a ее выра­
жение, получим
(7 .6 )
Из этой формулы можно сделать следующие выводы.
1. Так как соь 0 „ - < 1, то потребная скорость для обеспечения на­
бора высоты меньше скорости горизонтального полета VTmU при одном
и том же угле атаки. Набор высоты осуществляется обычно при 9 „ <
< 15°, поэтому y c o s 0„ « 1 и с достаточной для практики степенью
точности можно принять V H — Vr. u.
2. С изменением высоты полета при наборе высоты плотность воздуха
о изменяется, следовательно, изменяется и потребная скорость. В
практике летной эксплуатации установившимся набором высоты (ус­
тановившемся снижением) называется движение по соответствующей
наклонной траектории с постоянным углом 0„ и постоянной прибор­
ной скоростью V„, Пр. Набор высоты с постоянной приборной скорос­
тью У„.пр = V„ 1/р/ро, строго говоря, не является установившимся,
так как с увеличением высоты полета плотность воздуха р уменьшает­
ся, что вызывает увеличение потребной скорости полета V„ (скорости
относительно воздушной среды).
Подставляя в (7.4) вместо лобового сопротивления Х а его выражение
и учитывая, что при наборе высоты V„ ж Vr> п, получим
S + G s i n 0 H= P r . n + G s i n 0 H.
/ >K==Xa + O s i n 0 „ = c 3Ca
(7 .7 )
Из последнего выражения следует, что потребная тяга для набора вы­
соты больше потребной тяги для горизонтального полета с тем же
углом атаки на величину G sin 0 Н = ЛЯН, называемую потребным
избытком т яги.
Потребная мощность для установившегося набора высоты
\ и = Рн^/ н = ( Р г . п т - ^®1П0н) ^ н = ^ г . п т ^ ^ sin 0Н= Л г.п --GV у н ,
где V yH =
(7 .8)
V sin 0 И — в е р т и к а л ь н а я скорость набора высоты.
Из формулы следует, что потребная мощность для набора высоты
больше потребной мощности для горизонтального полета с тем же уг­
лом атаки на величину потребного избытка мощности АN „ = GVyn.
Уравнения движения самолета при снижении. Проектируя векто­
ры. входящие в векторное уравнение движения центра масс самолета
(6.1) на оси 0 X h и OYf, траекторной системы координат, кото­
рые в принятых условиях (ветер и крен отсутствуют) совпадают с ося­
ми скоростной системы координат, получим уравнения неустанпвившегося снижения (см. рис. 7.1):
' * - ^ p = P - A ' a + G s i n ( - 0 c„ ) ;
(7 .9 )
сн -- - - - — Y а — G cos ( — 9СН).
at
(7 .1 0 )
Учитывая малость угла (а — <рр) и считая 0СН = const и
= 0,
получим уравнения установившегося снижения:
Р с н ~ Х а — О sin Оси»
(7 .1 1 )
Y a = G cos 0СН.
(7 .1 2 )
Эти уравнения, как и уравнения (7.4) и (7.5), можно было бы полу­
чить из уравнений (7.5), подставляя в них соответствующие значе­
ния параметров движения с учетом знаков.
Из уравнения (7.12) можно найти выражение потребной скорости
прямолинейного установившегося снижения
I ’ch = 1 /
V
C,Jа р S
- Ур.п У
^ н ‘
(7 .13 )
Гак как угол снижения, как правило, не превосходит 15°, то можно
считать, что потребная скорость снижения равна потребной скорости
горизонтального полета Усн = Vr. „ при одних и тех же углах атаки,
следовательно, равны и силы лобового сопротивления.
194
Потребная тяга установившегося прямолинейного снижения по­
лучается из уравнения (7.11) с учетом знака угла снижения
^ с н ^ ^ г . п — G sin 6СН.
(7.1 4)
Из уравнения (7.14) следует, что потребная тяга для установившего­
ся прямолинейного снижения меньше потребной тяги установившего­
ся прямолинейного горизонтального полета (меньше силы лобового
сопротивления Х„) на величину G sin 0С„ — m g sin 0ОН.
Потребная мощность силовой установки при прямолинейном уста­
новившемся снижении
^СН= ^СН^СН ~ ^Г.П-- тё Уу сн •
(7 .15 )
откуда следует, что потребная мощность силовой установки для пря­
молинейного установившегося снижения меньше потребной мощно­
сти для обеспечения прямолинейного установившегося горизонталь­
ного полета на величину m g V ye
7.2. Характеристики набора высоты и снижения
Основными характеристиками установившегося прямолинейного
набора высоты и снижения являю тся: угол набора высоты 0 Н и угол
снижения 0СН (угол наклона векторной скорости), вертикальная ско
рость набора высоты V yn и снижения — V ^ h , время набора высоты
и время снижения /сн, дальность полета при наборе высоты L.„ и
снижения L t n , расход топлива на набор высоты т х.„ и снижение
шТ.снРасчетные формулы для определения характеристик набора высо­
ты и снижения получают из уравнений (7.4), (7.5) и (7,11), (7.12).
Угол набора высоты и снижения. Из выражения (7.4)
• /л
Р н --- Х а
А Рн
mg
mg
s i n 0 H= ---------------— ---------- ,
п
1С1
(7. lb)
откуда следует, что угол набора высоты самолета, имеющего полетную
массу т, определяется избытком тяги ЛЯ„. равным разности между
лобовым сопротивлением самолета Х а на данном угле атаки и тягой
силовой установки Р „, заданной пилотом. Чем больше избыток тяги,
тем с большим углом наклона можно выполнить набор высоты.
Угол снижения самолета
. п
Р сн
Ха
__
Sin0CH= -------------------=
mg
А Р сп
---------------- ■
mg
п
7
(/•17)
Так как сила лобового сопротивления самолета Х а при снижении боль­
ше потребной тяги Р ся,то потребный избыток тяги А РС^ отрицателен,
7*
195
Рис. 7.2. Характерные точки на кривых Жуковского для режима набора высоты
с максимальным углом 0ята* :
о-Т Р Д Д ;
б -Т В Д
Тангенс угла набора высоты 0„, выраженный в процентах, называ­
ется градиентом набора высоты
П н = - ~ - 100% = tg 0„ - 100%,
ДL
(7.18)
где Д Н и AL — соответственно п р и ращ е н и я высоты и дальности полета на
рассматриваем ом участке.
Понятие градиента набора высоты широко используется в норматив­
ных документах. Между углом набора высоты и углом тангажа суще­
ствует зависимость: Ф = 0 + а , по которой с достаточной для прак­
тики степенью точности можно рассчитать угол набора высоты. Для
современных транспортных самолетов 0 Н = 5 ...10°.
Градиент снижения г)сн определяется, как абсолютное значение
тангенса угла наклона траектории снижения 0Сн:
Л е н — I tg в е н I 100% .
(7 .19)
Максимальный избыток тяги ДР тзх, а следовательно, и максималь­
ный угол набора высоты (7.16) для самолетов с Т РД Д достигаются на
угле атаки а не, близком наивыгоднейшему углу атаки прямолиней­
ного установившегося набора высоты а Нв> практически а не « а нв.
Д л я самолетов с ТВД углом атаки, соответствующим максимальному
углу набора, является угол, несколько меньший наивыгоднейшего уг­
ла атаки горизонтального полета а нв (рис. 7.2). Режим набора высоты
с максимальным углом набора 0 Ита х приближенно определяется точ­
кой касания кривой Р Г. „ (У) линией эквидистантной кривой распола­
гаемых тяг (штриховая линия).
Снижение самолета с тягой Р сн = 0 (или близкой к нулю, например
при работе двигателей в режиме ПМГ) называется планированием.
Поделив почленно уравнения (7.11) на уравнение (7.12), получим
®сн —• ( Р с н
откуда, приняв Р сн = 0, находим
Х а)
jYa,
(7.20)
Следовательно, чем больше аэродинамическое качество, тем меньше
угол планирования.
Минимальный угол планирования соответствует режиму полета с
максимальным аэродинамическим качеством К тах> которое реализу­
ется при наивыгоднейшем угле атаки а „ в.
С учетом (7.13) скорость полета с минимальным углом планирова­
ли
2 m g cos 0пл. m i n
V
(7.22)
Вертикальная скорость. Вертикальная скорость набора высоты
VyK или снижения — ]/уСн являются составляющими скорости полета
но наклонной траектории, определяемыми в нормальной системе коэрдинат O X g Y gZg. Строго говоря, они должны обозначаться VVg и
и — V у g - ® Динамике полета индекс «g» обычно опускают.
Зависимость вертикальной скорости набора высоты и снижения от
скорости полета V и угла наклона траектории 0 получается из тре­
угольника скоростей (см. рис. 7.1):
V y = V s in
0.
(7 .2 3 )
Подставляя в (7.22) вместо sin 0 его выражения из (7.16) и (7.17), по­
лучим:
V
Vy
'н
= V h - P h ... *
mg
а =
он = к сн - £ ? ■ - * «
mg
= _ „ си
mg
(7-24)
mg
e
mg
_
AJUsa.
(7.25)
mg
Из анализа зависимостей (7.24) и (7.25) следует, что вертикальная ско­
рость набора высоты и снижения самолета, имеющего полетную массу
т, определяется избытком мощности независимо от типа силовой уста­
новки самолета.
Скорость полета, на которой достигается максимальная вертикаль­
ная скорость (максимальный избыток мощности ДМ нтах), называется
наивыгоднейшей скоростью набора высоты
V
V W „ = l / ------(7-26)
е Уан в * н Р 5
Д л я самолетов с ТРД Д наивыгоднейшая скорость набора высоты
больше наивыгоднейшей скорости горизонтального полета, но меньше
крейсерской, т.е. Унв <
Ккс (рис. 7.3, а).
Д л я самолетов с ТВД наивыгоднейшая скорость набора высоты
близка к наивыгоднейшей скорости горизонтального полета (У н в.н *
« У нв). При снижении избыток тяги, избыток мощности, угол наклона
траектории и вертикальная скорость отрицательны. Максимальной
скорости снижения, как следует из (7.25), можно достичь при макси-
мальном избытке мощности AN = V (Рс н — Х а), который соответст­
вует максимально допустимой скорости полета Vc „ = F maXHon. ми­
нимальному значению тяги Р сн т)п (режим полетного малого газа) и
максимальному лобовому сопротивлению самолета Х а — Х а гаах. Мак­
симальная скорость снижения реализуется при экстренном снижении.
Время установившегося набора высоты и снижения. Оно связано
с реализуемой вертикальной скоростью Vyu или Уусн- Поскольку
скорость полета по наклонной траектории зависит от плотности возду­
ха (7.6) и (7.13), то вертикальная скорость изменяется с высотой поле­
та (7.24). Поэтому время At изменения высоты полета АН при движе­
нии по наклонной траектории определяется по среднему значению вер­
тикальной скорости на участке траектории, соответствующей АН:
A t = A H /A V ycp.
(7.27)
Время набора высоты Н или снижения определяется суммой
/= V
Д
а,
(7.28)
где A t t — в р е м я полета на рассматриваемом интервале высоты.
Располагаемые значения вертикальной скорости VyH характеризуют
текущую для каждой высоты и скорости скороподъемность самолета.
Д л я оценки скороподъемности строят зависимости располагаемых зна­
чений V u (V0 для тех же высот, для которых построены кривые Ж уков­
ского для горизонтального полета (рис. 7.4). Зависимость максималь­
ной скорости набора высоты от высоты полета Кй та хн ( ^ ) называется
характеристикой скороподъемности самолета (рис. 7.5). Графическая
зависимость времени набора высоты от высоты полета называется баро­
граммой набора высоты. Обычно характеристику скороподъемности и
барограмму строят совмещенными. Название барограммы набора вы­
соты сложилось исторически, поскольку она может вычерчиваться
Рис. 7.3. Х ара кт е рн ы е точки на кривых Жуковского для реж им а набора высоты
с максимальной вертикальной скоростью:
а — ТРДД; б — ТВД
м ощностей)
(штрихом
показаны
кри вы е , э к ви д и ст а н т н ы е к р и в ы м
располагаемых
V; км/ч
Рис. 7.4. Зависимость располагаемой
вертикальной скорости набора высоты
от скорости
Рис. 7.5. Х арактеристика скороподъ­
емности V v max (Н ) и барограмм а
набора высоты t n ( Н ) для самолета
с
различной
полетной
массой
( я г ,< /л 2< / и 3)
барографом (барометром-самописцем), установленным на борту само­
лета. Так как высота полета и давление воздуха взаимосвязаны, то
для получения барограммы барограф можно проградуировать не по
давлению, а по высоте.
Высота полета Н т, на которой вертикальная скорость набора высо­
ты Vy max н = 0, называется теоретическим потолком. Согласно (7.24),
теоретический потолок соответствует AN н = Л Р „V и= 0, а это воз­
можно только при Л Я Н = 0 и согласно (7.16) при sin 0 Н = 0.
Так как с ростом высоты полета располагаемые избытки тяги Л Р
и мощности AN уменьшаются, то угол набора и вертикальная скорость
уменьшаются, а потребные скорости полета возрастают. Поэтому с уве­
личением высоты полета крутизна барограмм постепенно уменьшает­
ся. На высоте Н твертикальная скорость и угол набора становятся рав­
ными нулю. Достичь теоретического потолка в установившемся полете
самолет не может, так как по мере приближения к нему вертикальная
скорость непрерывно уменьшается и для набора высоты Н т потребо­
вался бы бесконечно большой промежуток времени. Кроме того, по
мере выгорания топлива масса самолета непрерывно уменьшается, и
теоретический потолок медленно увеличивается. В летной эксплуата­
ции введено понятие практического потолка Я пр — высоты, на кото­
рой вертикальная скорость дозвукового самолета V y = 0,5 м/с
(рис. 7.5). С увеличением полетной массы вертикальная скорость
набора на фиксированных высотах и углах атаки, а такж е теоретиче­
ский и практический потолки самолета уменьшаются.
Дальность полета при наборе высоты и снижении. Д альность по­
лета по наклонной траектории — это расстояние L, измеренное в пло­
скости горизонта от точки, соответствующей началу, до точки, соот­
ветствующей окончанию набора высоты (снижения). Она является ин­
тегральной функцией, например, для набора высоты
н —| VHcos 0Нdt.
(7 .2 9 )
о
Д л я практических расчетов интегрирование заменяется сложением.
Д ля этого весь диапазон высот разбивается на п равных интервалов:
AHi = Я 1+1 — H t = 500 м и для каждого i-ro интервала находятся
среднее значение скорости Vcp нг и время полета At ir соответствующие
данным условиям эксплуатации. Дальность полета
п
(7 .30 )
Если полет выполняется при постоянном угле 6, то дальность по­
лета можно определить по более простой формуле, например даль­
ность полета при снижении с высоты Я под углом снижения 0СН опре­
деляется зависимостью
(7.31)
где Н — высота н ачал а сн и ж е н и я .
Подставляя в (7.31) значение tg0CH из выражения (7.20), получим
(7 .32 )
откуда видно, что, управляя тягой двигателя и силой лобового сопро­
тивления, можно менять дальность снижения. С учетом зависимостей
(7.31) и (7.21)
(7.33)
где К — аэродинам ическое качество самолета.
Дальность снижения по аналогии с расчетом набора высоты
п
(7 .34)
Уср i A ti .
i=l
Расход топлива при наборе высоты и снижении. Расход топлива опре­
деляется в летных подразделениях по опыту эксплуатации самолетов
данного типа для различных условий эксплуатации.
Численные значения характеристик набора высоты и снижения
данного типа самолета для различных высот сводят в таблицу для
каждого режима работы двигателей, полетной массы самолета и ско­
рости.
Характеристики неустановившихся режимов набора высоты и
сниж ения. Характеристики неустановившегося движения рассчиты­
вают методами численного интегрирования. Остановимся на качест-
Lch —
200
венном анализе неуетановившихся режимов набора высоты и сниже­
ния самолета.
Из уравнения неустановившегося набора высоты (7.2) можно по­
лучить зависимости угла набора высоты от избытка тяги силовой ус­
тановки, полетной массы и ускорения самолета:
.
„
Р~Х
1
dV
G
q
dt
sm 0 = — ------------------------------ ---— .
(7.3 5)
При установившемся наборе высоты ускорение отсутствует ( ^ = 0),
поэтому можно считать, что sin 0уст = (Р — X a)/G и VyycT = VyCT X
Х (Р — X)IG. Подставляя эти соотношения в формулу (7.35), получим
расчетные зависимости для неустановившегося набора высоты:
s in O = s in 0 vcT — ~ ~
е
Vy*=V„yс
(7.36)
dt
V_ JV_
, - -------—■
g
dt
(7-37)
Из анализа зависимостей (7.36) и (7.37) следует:
если набор высоты происходит с разгоном ( ^ > 0 ) , то sin 0 <
< sin 0уСТ; Vy < V7ifуст. т. е. угол набора и вертикальная скорость на­
бора высоты будут меньше, чем они могли бы быть при установившем­
ся наборе с той же скоростью полета;
если набор высоты происходит с уменьшением скорости ( ^ <С 0),
то sin 0 > s i n 0уст и Vу >
уст, т. е. угол наклона траектории набо­
ра и вертикальная скорость набора высоты будут больше, чем при ус­
тановившемся наборе высоты. В этом проявляется закон сохранения
энергии.
Уравнения (7.36) и (7.37), справедливые для неустановившегося
набора высоты, справедливы и для неустановившегося снижения само­
лета. Подставляя отрицательные значения угла снижения — 0СН—
- 0 С11 и вертикальной скорости — Vдс н, получим уравнения неустано­
вившегося снижения:
sin 0С„ = — sin 0YCT. сн— —— dV, ™ ;
8
Vy—
Vy уст. CH—
1
dt
d
^
■
(7.38)
(7 .3 9 )
Из анализа этих уравнений следует:
если снижение происходит с разгоном (~ ^ CH > 0 ) , то абсолютные
значения угла наклона траектории снижения и вертикальной скорости
увеличиваются;
dV
при снижении с торможением ( ^ С 0) абсолютные значения угла
наклона траектории и вертикальной скорости уменьшаются.
7.3. Поляры скоростей набора высоты и снижения
Поляры скоростей набора высоты и снижения самолета представ­
ляют собой годографы вектора скорости прямолинейного установив­
шегося полета при заданном режиме работы силовой установки по
траекториям с различными углами наклона (рис. 7.6). Они устанавли­
вают взаимную связь скорости полета (угла атаки), угла наклона тра­
ектории, вертикальной и горизонтальной составляющих скорости. По­
ляры скоростей набора высоты и снижения обычно строят в координа­
тах Vyg и V xg, где V yg = Vy = V sin 0; V xg = V x = V cos 0,
a 0 = arc sin ^ (Рис- 7.6).
Д л я этого из начала координат проводят векторы установившейся
скорости полета, соответствующие различным углам атаки, и их кон­
цы соединяют плавной кривой. Угол между вектором скорости и осью
абсцисс — соответственно угол набора высоты или снижения. Проек­
ция вектора скорости на ось абсцисс — это горизонтальная скорость
полета Vх, а проекция его на ось ординат — вертикальная скорость
Vy-
На поляре скоростей набора высоты можно выделить несколько
характерных точек:
точка 1 пересечения поляры с осью абсцисс соответствует макси­
мальной скорости горизонтального полета V x — Vr „ max, так как
Vy = 0;
точка 2 касания поляры и прямой, параллельной оси абсцисс, со­
ответствует наивыгоднейшим значениям угла атаки а нв. н. скорости
^нв.п и максимальной вертикальной скорости набора V j,Hmax'>
точка 3 касания прямой, проведенной из начала координат, соответ­
ствует углу атаки, при котором избыток тяги максимальный (A /’ma*),
и, следовательно, угол набора вы­
соты — также
максимальный
(0„тах ). Эта точка является грани­
цей первых (I) и вторых (II) режи­
мов набора высоты. Каждому ре­
жиму работы двигателей, полетной
массе самолета и высоте соответст­
вует своя поляра. Чем больше ре­
жим работы двигателей, тем выше
расположена поляра скоростей на­
бора высоты. Самая верхняя поля­
ра соответствует набору высоты на
максимальном режиме работы дви­
гателей.
В области, расположенной ни­
же поляры, полет возможен с
разгонов, выше
с уменьшением
Рис. 7.6. Поляра скоростей набора вы­
скорости.
соты и сн ижения
На поляре скоростей снижения
можно выделить следующие харак­
терные точки:
точку 4 касания поляры пря­
мой, проведенной из начала коор­
динат, соответствующую наивыгод­
нейшему углу атаки а нв.сн, при
котором угол наклона траектории
минимальный 0СИ mln. Скорость
установившегося снижения, соот­
ветствующая минимальному углу
Рис. 7.7. Изменение параметров поле­
снижения, называется наивыгод­ т а на первых и вторых реж имах н а ­
бора высоты и снижения
нейшей
скоростью
снижения
^НВ.Сн»
точку 5 касания поляры прямой, параллельной оси абсцисс, соот­
ветствующую углу атаки а гр, который является граничным между пер­
выми и вторыми режимами снижения. Этой точке соответствует ми­
нимальная вертикальная скорость снижения.
Д ля каждого режима работы двигателя, высоты полета, полетной
массы существует своя поляра скоростей снижения. Нижней грани­
цей поляр скоростей снижения является поляра скоростей планирова­
ния, соответствующая режиму нулевой тяги или режиму ПМГ, при
котором тяга считается близкой к нулю. В области, расположенной
ниже любой из поляр, как и при наборе высоты, возможен полет толь­
ко с разгоном, а в области, расположенной выше поляры, — с тормо­
жением.
Поведение самолета на траектории набора высоты при случайном
изменении скорости полета, а также пилотирование самолета практи­
чески аналогичны поведению и пилотированию в горизонтальном по­
лете.
При прямолинейном установившемся наборе высоты со скоростью
полета V nl и углом наклона траектории 0 Н1 (рис. 7.7) тяга силовой ус­
тановки Р „ уравновешивает сумму сил Х а + G sin 0„. При случайном
увеличении скорости полета (например, из-за увеличения скорости
встречного ветра) сила лобового сопротивления самолета Х а возрастет
и образуется отрицательный избыток тяги А Р
под действием кото­
рого скорость самолета будет постоянно уменьшаться до значения
V п . При этом увеличится и подъемная сила самолета, самолет начнет
набирать высоту. Чтобы сохранить прямолинейность полета (постоян­
ный угол наклона 0„) пилот должен уменьшить угол атаки. По мере
приближения к скорости полета V H1 избыток тяги будет стремиться к
нулю.
Если при скорости установившегося набора Vy случайно изменит­
ся высота полета, например самолет отклонится от расчетной траекто­
рии вниз, то «взятием» штурвала на себя и фиксацией его в этом положе­
нии пилот увеличит угол атаки. В результате возрастут подъемная си­
ла и сила лобового сопротивления, что приведет к искривлению траек­
тории вверх, увеличится угол наклона траектории 9 Н, возрастет сум­
ма сил Х а + G sin 0. При неизменной тяге силовой установки будет
выполняться условие P „ = X a + G sin 0, самолет сбалансируется
на скорости V h, несколько меньшей скорости У н, и при угле наклона
0н1 траектории, несколько большем 0 Н1. Если отклонение траектории
полета вниз от заданной сопровождается увеличением скорости вслед­
ствие потери высоты, то после возвращения к заданной траектории
скорость полета возвратится к исходной Ун1.
При полете на вторых режимах (скорость V н2 и углом набора вы­
соты 0н2) появляются особенности поведения самолета и пилотирова­
ния. При случайном уменьшении скорости полета и стремлении пило­
та сохранить заданный угол наклона траектории увеличением угла
атаки увеличится сила Х а и угол 0 Н, что вызовет появление отрица­
тельного избытка тяги, под действием которого скорость полета еще
больше уменьшится.
Если для исправления отклонения самолета вниз от расчетной тра­
ектории пилот применит тот же прием, что и на первых режимах поле­
та, т. е. отклонением ш турвала на себя увеличит угол атаки, то в пер­
вый момент времени, как и на первых режимах полета, подъемная сила
самолета, сила лобового сопротивления и угол набора высоты возрас­
тут. Избыток тяги станет отрицательным, скорость полета будет па­
дать, а угол набора высоты уменьшится. Избыток тяги станет равным
нулю на какой-то промежуток времени только при скорости полета
V»2 и угле 0н2. Таким образом, при наборе высоты на вторых режимах
скорость полета, как и при полете на первых режимах, с уменьшением
угла атаки (штурвал «от себя») растет, а с увеличением угла атаки
(штурвал «на себя») падает. Увеличение угла атаки (штурвал «на
себя») приводит к уменьшению угла наклона траектории, а уменьшение
угла атаки — к увеличению угла наклона траектории.
При снижении самолета на первых режимах полета случайное уве­
личение и уменьшение скорости полета при неизменной тяге силовой
установки и стремлении пилота изменением угла атаки поддержать за ­
данный угол наклона траектории приводят к равновесию сил вдоль
оси О Х к, при котором избыток тяги АР = 0 на скорости полета Vc m .
При случайном отклонении траектории снижения самолета вниз
(при этом скорость полета и угол наклона траектории стали больше,
чем требуемые) и стремлении пилота вывести самолет на заданную тра­
екторию увеличением угла атаки (штурвал на себя) самолет так же,
как и в наборе высоты на первых режимах, придет к установившемуся
прямолинейному полету (Д РСН =■■ 0) при скорости Усн1 и угле 0CHi.
При полете на вторых режимах при увеличении угла атаки (от­
клонением ш турвала на себя) равновесие сил (АРСН = 0) наступит на
скорости У'СП2, меньшей расчетной Vcn2, и угле наклона траектории
0'сн2> большем расчетного 0СН2- Выход на вторые режимы набора вы­
соты и снижения, если они не являются нормальными эксплуатацион­
ными режимами самолета, является результатом грубых ошибок
экипаж а, отказов техники или воздействий ветра. Пилот должен знать
204
и соблюдать установленные РЛЭ ограничения режимов полета. Чтобы
сохранить заданные скорость и угол наклона траектории на вторых
режимах, пилот должен внимательно следить за их изменением и при
уменьшении скорости увеличивать тягу силовой установки.
Д ля вывода самолета из вторых режимов полета необходимо умень­
шить угол атаки и увеличить скорость. Увеличение скорости возмож­
но путем уменьшения угла атаки (уменьшения с Уа) и потери при этом
высоты полета, либо путем увеличения тяги силовой установки. Пер­
вый путь не всегда пригоден на малой высоте. Второй путь предпочти­
тельнее.
7.4. Влияние условий эксплуатации на характеристики
набора высоты и снижения
Влияние высоты полета. Изменение высоты полета сопровождает­
ся соответствующим изменением плотности и температуры наружного
воздуха. Это приводит к изменению потребной скорости и потребной
мощности горизонтального полета, пропорциональному величине
V^Pi/Pa, гДе Pi и Рг плотности воздуха на некоторых высотах
и Я 2.
В результате с увеличением высоты потребная скорость Vr. п и мощ­
ность N r.n горизонтального полета растут, а с уменьшением высоты
полета уменьшаются. Потребная тяга Р г. п горизонтального полета с
изменением высоты полета остается постоянной вплоть до скоростей
и высот полета, при которых самолет входит на закритические числа
М полета.
Поскольку потребные скорости набора высоты и снижения
пропорциональны Уг. „, то по мере изменения высоты полета потреб­
ная скорость набора высоты увеличивается, а потребная скорость сни­
жения уменьшается.
Уменьшение располагаемой тяги и мощности с высотой приводит
к уменьшению избытков тяги АР а и мощности АN „ и соответствую­
щему уменьшению угла набора высоты (7.16) и вертикальной скорости
набора высоты (7.24), что определяет скороподъемность самолета (см.
рис. 7.5)
Влияние полетной массы самолета. Изменение полетной массы
самолета приводит к соответствующему изменению потребной скорости,
которая пропорциональна У т , а такж е к изменению вертикальной
скорости набора высоты (7.24) и угла набора (7.16). Влияние полетной
массы самолета на максимальную вертикальную скорость набора вы­
соты и практический потолок хорошо видно из рис. 7.5. П ри потолке
более 11 ООО м увеличение полетной массы на 1 % уменьшает практи­
ческий потолок на 50—70 м, а при потолке менее 10 ООО м практический
потолок уменьшается на 80— 130 м.
Поскольку изменение полетной массы не влияет на аэродинамиче­
ское качество самолета, то, согласно формуле (7.21), минимальный
угол планирования остается неизменным:
(7 .4 0 )
Современные тяжелые транспортные самолеты в зависимости or мас­
сы полезного груза на борту и топлива могут изменить свою массу на
40 ... 60 %, что существенно сказывается на характеристиках набора
высоты и снижения.
Влияние температуры наружного воздуха. При неизменном баро­
метрическом давлении изменение температуры наружного воздуха вы­
зывает соответствующее изменение плотности воздуха, а следователь­
но, изменение приборной скорости (7.6), (7.13) и потребной мощности
(7.8), (7.15). Потребная тяга от температуры воздуха не зависит
(7.7), (7.14). Кроме того, изменение температуры приводит к соответ­
ствующему изменению располагаемой тяги и мощности силовой ус­
тановки: с увеличением температуры они понижаются, а с понижением
растут. Это приводит к уменьшению угла набора высоты и вертикаль­
ной скорости с ростом температуры и их увеличению с падением тем­
пературы.
Изменение температуры наружного воздуха оказывает влияние
на угол снижения и скорость полета (7.17), (7.22), (7.24).
Влияние конфигурации, отказа одного из двигателей, обледенения.
Влияние перечисленных эксплуатационных факторов проявляется
через изменение силы лобового сопротивления и соответствующие
изменения избытка тяги. Увеличение силы лобового сопротивления
приводит к увеличению потребной тяги и уменьшению избытка тяги и
мощности. В результате время набора высоты и потребная дистанция
увеличиваются, а время снижения и потребная дистанция снижения
уменьшаются.
й,км'
Н
Г
0
Рис. 7.8. Изменение вертикальной ско­
рости набора с высотой полета дли
самолетом с различными типами дви­
гателей:
(
порш т*вы"
н ев ысог ньн ';
поршне
вые высотные; *— ТВД; 4
ТРДД
Рис. 7.9. Изменение скорости набора
с высотой полета четырехдвигатель­
ного самолета:
2. Л
р а б о т а ю т с оот ве тс тве нно дн а. три
и чет ыре д в и г а т е л я
При отказе одного из двигате­
лей увеличивается не только сила
лобового сопротивления, но и
уменьшаются располагаемая тяга
и мощность.
Влияние режима работы дви­
гателей. Изменение режима работы
двигателей вызывает изменение из­
бытков тяги и мощности, а следо­
вательно, угла наклона траекто­
рии и вертикальной скорости. На
Рис. 7.10. Траектории набора пысогы:
высотах 4000 -7 0 0 0 м с увеличе­
/ - ш т ил ь; 2
попутный ветер; Я - вс т р е ч ­
нием тяги силовой установки на
ный ветер
1 % вертикальная скорость увели­
чивается на 1,5—2 %.
Характер изменения вертикальной скорости набора высоты зави­
сит от типа силовой установки (рис. 7.8) и от числа работающих двига­
телей (рис. 7.9). Самолет с поршневым двигателем имеет максималь­
ную вертикальную скорость на границе высотности двигателей. Само­
лет с ТВД с увеличением высоты до некоторого значения увеличивает
вертикальную скорость набора. При дальнейшем увеличении высоты
вертикальная скорость набора постепенно снижается. Вертикальная
скорость самолета с ТРД уменьшается с увеличением высоты полета.
Особенно сильно вертикальная скорость набора начинает уменьшаться
на высотах более 10 000 м (теоретически на Я > 11 000 м).
Из рис. 7.9 видно, что отказ двигателя приводит к уменьшению
скорости набора, высоты, уменьшению теоретического и практическо­
го потолков. При отказе двигателя на высоте, большей практического
потолка, самолет не может производить набор высоты и снижается.
Набор высоты с одним отказавшим двигателем возможен только на вы­
сотах меньших Я „р.
Влияние ветра. В установившемся полете самолета при встречном
и попутном ветре скорость самолета относительно воздуха не изменя­
ется, но увлекаемый воздушной средой, движущейся с некоторой ско­
ростью W относительно поверхности земли, самолет движется относи­
тельно земли с путевой скоростью
Vn = V cos
.
(7 .4 1 )
В результате при попутном ветре путевая скорость увеличивается, а
при встречном уменьшается. При этом дальность полета соответствен­
но увеличивается или уменьшается (рис. 7.10). Угол набора высоты
при встречном ветре увеличивается, а при попутном уменьшается
Время набора заданной высоты и вертикальная скорость от ветра не
зависят.
7.5. Оптимальные режимы набора высоты и снижения
Оптимальные режимы —• режимы, которые обеспечивают экстре­
мум какой-либо величины, служащей критерием. Д ля транспортных
самолетов такими критериями могут быть: максимальные скороподъ­
емность и дальность полета, минимальный уровень шума, минималь­
ный расход топлива и т.д.
Режимы набора высоты. Получение траектории максимальной
скороподъемности (рис. 7.11, кривая 1) связано с обеспечением макси­
мальной вертикальной скорости набора высоты 1Л,Нтах, а следова­
тельно, и минимального времени набора высоты эшелона Нэш. Макси­
мальная вертикальная скорость набора высоты возможна при макси­
мальном избытке мощности A/Vrnax, который достигается при полете на
наивыгоднейшей скорости набора высоты У Нв-н- С увеличением вы­
соты полета приборная скорость, соответствующая максимальной ско­
роподъемности, как правило, уменьшается или остается постоянной.
Причиной этого является смещение максимального избытка мощно­
сти в сторону больших углов атаки (меньших скоростей полета)
вследствие нелинейности изменения располагаемой мощности с увели­
чением высоты полета. С уменьшением скорости полета связано и
уменьшение приборной скорости. Руководством летной эксплуата­
ции некоторых самолетов набор высоты рекомендуется выполнять на
скоростях, больших
Это обусловлено необходимостью увели­
чения запаса по углу атаки на случай воздействия вертикальных по­
рывов.
Скорость полета, которой соответствует максимальная верти­
кальная скорость набора, практически совпадает со скоростью полета
с наименьшей затратой топлива для набора заданной высоты. Полу­
чение траектории набора высоты эшелона при условии обеспечения
наибольшей общей дальности по­
лета (кривая 2) требует увеличе­
Рис. 7.11. Траектории набора высоты:
/ - м аксим ал ь ная скороподъемность; 2 н аибольш ая общ ая дальность; 3 - макси­
м а л ь н ы й уго л н а б о р а и ы с оты
ния скорости полета по сравнению
с Унв.н на 20—50 км/ч. Полет по
траектории 2 дает экономию топ­
лива по сравнению с полетом по
траектории / на ту же дальность,
гак как самолету, выполняющему
полет ио траектории / , после на­
бора высоты эшелона требуется
пролететь участок AL в горизон­
тальном полете.
В последние годы одной из ост­
рейших проблем стала проблема
уменьшения уровня шума, созда­
ваемого самолетом на местности
при наборе высоты и снижении.
Работы по уменьшению уровня шу-
ма ведутся по двум основным направлениям: разработка малошум­
ных двигателей и применение различных инженерных способов сни­
жения шума, например, глушителей; разработка методик малошум­
ного взлета и посадки, предусматривающих движение самолета по наи­
более крутым траекториям и дросселирование двигателей над конт­
рольными точками.
Уровень шума, воспринимаемого на местности, выражается в нойзах — единицах, обозначаемых P N децибел. Эти единицы учитывают
не только излучаемую двигателями акустическую мощность, но и ча­
стотный состав шума. «Пределом переносимости» для человека явля­
ется уровень шума, равный 112 P N децибел. Д ля получения макси­
мального угла набора высоты необходима скорость полета, на которой
избыток тяги максимальный. Но полет с максимальным углом набора
в практике летной эксплуатации самолетов гражданской авиации не
применяется, так как соответствующая ему скорость является гранич­
ной между I и II режимами полета. Поэтому начальный набор высоты
осуществляется по крутым траекториям на безопасной скорости, боль­
шей, чем граничная (рис. 7.11, кривая 3). Рассмотренный режим рас­
считан на набор наибольшей высоты в зоне, непосредственно прилега­
ющей к аэродрому. При этом дросселирование двигателей над точками
прослушивания позволяет достигнуть допустимого уровня шума. Д ля
увеличения крутизны траектории набора используют, например, за­
держку уборки закрылков и полет на наивыгоднейшей скорости на­
бора высоты.
Д ля конкретных самолетов разрабатывают более сложные методики
малошумного взлета (посадки), в которых предусматривают наиболь­
шее снижение режимов работы двигателей, максимальное использова­
ние механизации, разгоны самолета на участках, на которых можно до­
пустить повышенный уровень шума.
Режимы снижения. Этот режим выбирают исходя из нескольких
условий: обеспечения комфорта пассажиров, уменьшения времени сни­
жения и расхода топлива, невыхода за предельные значения числа М
полета.
Д л я обеспечения жизнедеятельности пассажиров и экипаж а в по­
лете на различных высотах в кабине самолета поддерживается необхо­
димое давление воздуха. Д ля обеспечения работы высотной системы
отбирается часть мощности от силовой установки. Согласно медицин­
ским требованиям, установленным из условия комфорта пассажиров,
скорость изменения давления в кабине при изменении высоты полета
не должна превышать 0,18 мм рт. ст./с. Д л я обеспечения этого условия
снижение с высоты эшелона до безопасной высоты может быть выполне­
но за время не менее так называемого предельного времени снижения.
Существующие высотные системы могут обеспечить допустимую
скорость изменения давления в кабине при снижении с эш елона до вы­
соты 6—7 км за некоторое ограниченное (предельное) врем я, а с высо­
ты 5— 7 км до высоты круга- практически мгновенное снижение. Но
такой режим снижения (кривая /, рис. 7.12) неприемлем по условиям
Рис. 7.12.
Барограмма
снижения самолета с вы­
соты эшелона:
/ — т е о р е т и ч е с к а я , п ост рое н ­
н ая с уче т ом во з м о ж н о с т е й
вы со тн ой с и с т е м ы ; 2 — п р а к ­
т ически о с у щ е с т в и м а я
прочности, устойчивости и управляемости самолета, а также комфорта пассажиров. П рак­
тически снижение осуществляется в соответ­
ствии с кривой 2. При возникновении аварий­
ных ситуаций появляется необходимость сни­
ж ения за минимально возможное (предельное)
время). Такое снижение называется экстрен­
ным. Снижение за минимальное время воз­
можно при максимально допустимой верти­
кальной скорости с максимально возможным
углом наклона траектории.
Из формулы (7.17) следует, что угол накло­
на траектории при постоянной скорости
Ха—Р
0CH= a r c s m —- — .
(7 .4 2 ;
Следовательно, максимально возможный угол снижения обеспе­
чивается при минимальной тяге двигателей и максимальном сопротив­
лении самолета. С этой целью при переходе на режим экстренного
снижения устанавливается режим работы двигателей, соответствую­
щий малому газу, и при необходимости выпускаются шасси, гасите­
ли подъемной силы, тормозные щитки. Для выпуска шасси необходи­
мо уменьшить скорость полета до значения, определяемого из условия
прочности конструкции. При гашении скорости полета вертикальная
скорость уменьшается, но после выпуска шасси вследствие роста лобо­
вого сопротивления она увеличивается и общее время снижения умень­
шается.
П илоту следует помнить, что ввод в режим экстренного снижения
должен проводиться плавно, перегрузки не должны быть менее уста­
новленных РЛЭ. Резкий ввод в снижение может привести к выходу за
предельное число М полета, а создание отрицательной или близкой к
ней перегрузки заставляет впоследствии отклонять штурвал на себя,
уменьшая тем самым вертикальную скорость снижения и увеличивая
перегрузки. Вывод из режима снижения должен быть плавным, что­
бы не превысить допустимые эксплуатационные перегрузки, устанав­
ливаемые РЛ Э из условия комфорта пассажиров и прочности конфигу­
рации. Необходимо такж е помнить, что при больших вертикальных
скоростях снижения запаздывание в показаниях барометрических вы­
сотомеров достигает 150—250 м. Если этого не учитывать, может воз­
никнуть критическая ситуация. Д л я каждого типа самолета разрабо­
таны схемы снижения с учетом перечисленных особенностей.
Вы бирая режимы снижения, следует стремиться повысить эконо­
мичность полета, которая определяется часовым расходом топлива и
временем полета. Д л я увеличения вертикальной скорости снижения на
больших высотах необходимо увеличить режим работы двигателя
(чтобы обеспечить работу высотной системы самолета). Это приводит к
•210
увеличению часового расхода топлива и уменьшению времени сниже­
ния. При уменьшении времени снижения расход топлива может ока­
заться меньшим, чем при полете в режиме полетного малого газа.
Д о п о л ни тел ьная литература
[2], с. 29 0— 303; [31 с. 5 4—71; [9],с 92 — 129 [10], с.
2 9 0 — 303
Контрольные вопросы
1. О пределите значения нормальной ск оростной и т а н г е н ц и а л ь н о й п е р е гр у ­
з о к при установивш емся прямолинейном наборе высоты с 0 Н = 30° и у ст ан о ви в ­
шемся п лан и ро ван и и с 0ПЛ = — 30°.
2. Д а й т е обоснование в ли я ни я усл о ви й э к сп л у ат ац и и на х а р а к т е р и с т и к и
набора высоты.
3. Что н азывается наивыгоднейшей скоростью набора высоты и сн и ж ен и я ?
У к а ж и т е точки на п о л я р а х , соответствующ ие им.
4. В чем отлич ия теоретического и практи ческого по толко в самолета?
5. Д ай те обоснование основным реж и м ам набора высоты.
6 . О х а р а к т е р и зу й т е основные реж им ы сн и ж ен и я сам о л ета.
7. К ак вли я е т ветер на х ар а к т ер и ст и к и набора высоты и с н и ж е н и я ?
8 . О бъясните поведение самолета и особенности п и л о т и р о в а н и я во вторых
р еж и м ах набора высоты и сн иж ени я.
9. К ак вли я ет повышение т ем п ера т ур ы н ар у ж н о го в о з д у х а на п р а к т и ч е ­
ский потолок?
10. О пределить потребную скор ость набора высоты с у г л о м а т а к и а , если
потребная скорость горизонтального полета 520 км/ч, угол н а к л о н а тр аек т о р и и
0„ = 10°. Ответ: Vn — 512 км/ч.
11. Рассчитать угол набора высоты самолета с полетной массой 16 000 кг,
если избыток т я ги двигателей Д Р н = 22 000 Н. Ответ: 0 = 8°.
12. О пределить наивыгоднейшую с корость набора высоты, если Суднн-н
— 1,3; G = 240 000 Н и S = 80 м2 ( Н = 0, (> - 1,225 кг/м3). О твет: VIIB.„
- 300 км/ч (72/ м/с).
13. Самолет план и ру ет с высоты 2000 м с углом ат а к и , к о т о р о м у соо тветст­
вует аэродинам ическое качество К.
17. К а к о в а д а л ьн ость п л а н и р о в а н и я ? О т ­
вет: L n}J = 34 км.
Глава 8
КРИВОЛИНЕЙНЫЙ ПОЛЕТ САМОЛЕТА
8.1. Криволинейный полет в горизонтальной плоскости
В общем случае полет самолета имеет пространственный характер^.
Из сложного пространственного криволинейного движения наибольший
интерес представляет полет по криволинейным траекториям в горизон­
тальной и вертикальной плоскостях. Криволинейное движ ение в гори­
зонтальной и вертикальной плоскостях имеет самостоятельное значе­
ние, но изучение элементов этих частных случаев позволяет перейти к
более общему случаю криволинейного движения по пространственным
траекториям.
Из механики известно, что для осуществления криволинейного дви­
жения тела к его центру масс необходимо приложить центростреми­
тельную силу F ц, которая связана с массой т, скоростью V и радиусом
кривизны траектории г соотношением:
F u = m V 2/r .
(8 .1 )
Изменяя значение и направление центростремительной силы, мож­
но осуществить движение тела по различным криволинейным траекто­
риям.
Криволинейный полет самолета в горизонтальной плоскости с по­
воротом траектории на 360° называется виражом. Если угол поворота
траектории меньше 360°, то такой маневр называют разворотом. В прак­
тике летной эксплуатации виражи и развороты обычно выполняют с
креном при угле скольжения, равном или близком к нулю. При рас­
смотрении криволинейного полета в горизонтальной плоскости нас в
первую очередь интересует центростремительная сила, которая ис­
кривляет траекторию. В общем случае она представляет собой алге­
браическую сумму проекций тяги Р и составляющих аэродинамиче­
ской силы планера R A (подъемная сила Y а и боковая сила Z„) на ось
Z K траекторной системы координат.
Если полет выполняется со скольжением без крена (рис. 8.1, а),
то траектория искривляется под действием центростремительной силы
F 4 = Z„ — P s i n p ,
(8 .2 )
приложенной к центру масс и направленной по радиусу к центру кри­
визны траектории.
При вираж е с креном без скольжения (рис. 8.1, б) центростремитель­
ная сила представляет собой проекцию подъемной силы на ось OZK тра­
екторной системы координат
^H = >,aSinVaС8-3)
При вираж е с креном и скольжением (рис. 8.1, в) центростремитель­
ная сила
=
cos у а -\ Y a sin Уа — Р sin Р cos Vn.
(8 .4 )
Угол скольжения р может быть внешним (скольжение выполняется
на внешнее по отношению к траектории полукрыло) или внутренним
(на внутреннее по отношению к траектории полукрыло). В первом
случае скольжение увеличивает центростремительную силу, во вто­
ром -- уменьшает.
Систему уравнений движения центра масс самолета при выполне­
нии наиболее распространенного в практике виража с креном без
скольж ения (см. рис. 8.1, б) можно получить проектированием векто­
ров, входящ их в векторное уравнение (6.1), на оси траекторной (ско­
ростной) системы координат. Динамические уравнения имеют вид:
т -
dV
= Р — Х а\
0 = Ka c o s V a — G;
— т V a>yh = Y a s i n у а .
(8 .5 )
В) хк
/
Ya sinya
Za cosya
PsinJ3CDSy
Уа= У
Гк Уа.
■уа
-
v,
Za
Zk
z
f
Ya s i n y
Psinp
G
Ya.sLnya
-PsLnflcosya
Уа
у=о
^
--------- - Z ,
G
Рис. 8.1. Схема сил, действующих на самолет при в и р аж е (р азвороте):
а — без крена со скольжением на внешнее полукрыло; 6 — с креном без
с креном и скольжением на внешнее полукрыло
скольжения:
в—
Знак минус в левой части третьего уравнения системы (8.5) объясняется тем, что угловая скорость <aUh = - < 0 (здесь г
радиус кривизны траектории).
Вираж, выполняемый с постоянным креном без скольжения и с по­
стоянной скоростью, называется п р а в и л ь н ы м . Д л я правильного вира­
жа система (8.5) преобразуется к виду:
О= /> -* « :
0 = Y a cos V o — G;
(8 .6 )
— m V Wyk — Y a sin y a .
Система (8.6) позволяет полностью проанализировать движение само­
лета при правильном вираже и рассчитать все его характеристики.
Поделив обе части второго уравнения системы (8.6) на G, получим фор­
мулу для расчета нормальной перегрузки при вираже
Yn
а
(8 .7 )
cos Уа
из которой следует, что при у а = у — 0 cos у < 1 и нормальная пере­
грузка при вираж е с креном без скольж ения п у > 1 . Н орм альная
п ерегрузка не зависит от типа самолета и оп ределяется только углом
крена.
Из второго уравнения системы
(8.6) можно найти потребную подъ­
емную силу на вираже
G
К в = -------------- = G п у .
cos у
(8 . 8)
Отсюда следует, что для выполне­
ния правильного вираж а подъем­
ная сила Ув должна превышать
силу тяжести G в п у раз. Зави­
симость
(8.8)
иллюстрируется
рис. 8.2, из которого видно, что
Рис. 8.2. Влияние угла крена на по­
при вираже (развороте) силу тяже­
требную подъемную силу самолета
при правильном в ираж е
сти G уравновешивает только часть
подъемной силы, равная Y„ cos у.
Таким образом, чем больше угол крена, тем большая подъемная сила
необходима для выполнения правильного виража. При неизменной
высоте полета увеличения подъемной силы можно достичь увеличе­
нием угла атаки а и скорости полета.
Если в зависимость (8.8) подставить выражение подъемной силы
Y a, то можно получить формулу потребной для выполнения прав и л ь н ого в и р а ж а скорости
V
При условии,
ЧТО С у ав =
= | /
V
С у а г. п,
2С П\
с Уа
вр5
■
(8-9)
получим
( 8 . 10 )
т. е. потребная для выполнения правильного виража скорость в У п„
раз больше скорости горизонтального полета.
Из первого уравнения системы (8.6) получим, что потребная для
выполнения правильного виража тяга силовой установки
т/2
; Xfi —■Сх
При у сл о в и и , ЧТО С х а „
=
р Vb
р Vr. п
2
2
С Хаг.
( 8 . 11 )
5 п..
п. ПОЛуЧИМ
(8 1 2 )
Я , = Яг.пП».
Потребная для выполнения вираж а тяга больше потребной тяги го­
ризонтального полета в п у раз.
Поделив первое уравнение системы (8.6) на второе, получим фор­
мулу для расчета потребной тяги:
Яя = -
К
1у .
Если вираж выполняется при с Уа = с УаГг п
В~
~ ^Y.rt fty \V.n ~\/ fty
(8.13)
и
,
аг.п> то
Потребная мощность для выполнения вираж а больше потребной
мощности горизонтального полета в п ъ
и!г раза. С учетом (8.13)
N B= P B V B = - ^ А
пу.
(8 .1 5 )
Из уравнения (8.6) с учетом (8.1), а такж е известной из тригоно­
метрии зависимости sin2v + cos2y = 1, найдем радиус, время, путь
самолета на вираже и развороте:
vl
rB~ g t g v
Vl
g ]/n £ _ i '
L B = 2 n r B\ L(f = rB ф;
(8 .1 6 )
tn = L B/ V B\ t(f = L ^ / V B,
где <p — угол разворота.
Выполнение правильного виража требует от пилота постоянного
контроля и выдерживания заданных скорости полета, высоты, нулево­
го угла скольжения, обеспечения координированного отклонения ор­
ганов управления.
8.2. Предельные виражи
Виражи, выполняемые с минимально и максимально допустимыми
скоростями, максимально допустимыми перегрузками и располагае­
мой тягой (мощностью), называются предельными для заданной высо­
ты полета. Область допустимых на заданной высоте полета виражей,
а такж е границы предельных виражей удобно рассмотреть на кривых
Ж уковского, построенных для виражей, выполняемых с различными
нормальными перегрузками (углами крена). Если считать, что скоро­
сти полета соответствуют числам М ■< М*, а кривые Ж уковского для
установившегося прямолинейного горизонтального полета на заданной
высоте известны, то кривые Ж уковского для правильного вираж а на
той ж е высоте можно построить на основании зависимостей (8.10, 8.12,
8.14) для каждого заданного значения перегрузки.
Кривые Ж уковского для прямолинейного установившегося горизон­
тального полета и правильного виража с бесконечно большим радиу­
сом совпадают, так как в обоих случаях у
0 и n,
1. Задаваясь
различными значениями нормальной перегрузки, по формулам (8.10,
8.12 и 8.14) можно рассчитать значения величин VB, Р„, N B для гори­
зонтального полета. С увеличением нормальной перегрузки от п у ~=1
кривая Ж уковского по тяге Р в (У) для вираж а с бесконечным радиу­
сом будет смещаться вправо (вдоль оси скоростей) пропорционально
величине V п у в соответствии с формулой (8.10) и вверх (вдоль оси
тяг) пропорционально величине п у в соответствии с формулой (8.12).
К ривая Ж уковского по мощности N B ( V) будет смещаться вправо про­
порционально У"пv в соответствии с формулой (8.12) и вверх пропор­
ционально Пу/2 в соответствии с
формулой (8.14).
С увеличением нормальной пе­
регрузки минимально допустимые
теоретические скорости виража
^ в . т min
V t m i n г. п
tly
Также
будут увеличиваться. Если соеди­
нить точки Ув.тш 1п ПРИ различных
перегрузках, то получим линию
1—2 (рис. 8.3), являющуюся гео­
метрическим местом точек, соответРис. 8.3. Эксплуатационные ограничествующих минимальной^ теоретичения допустимых реж имов полета при
ской скорости виражей УВ.Т,П]П.
правильном в ир аж е (Я, m=const)
Д л я обеспечения безопасности по­
летов РЛЭ устанавливается мини­
мально допустимая скорость прямолинейного горизонтального по­
лета Кщц. доп, в соответствии с которой по формуле
V'b m in д о п = V m ln д о п ~|/
Пу
рассчитывается минимально допустимая скорость виража. Линией ог­
раничения минимальной скорости полета на вираже будет линия
/ ' - 2 '.
Ограничение виража по перегрузке определяется кривой Р в (V) —
~ Р г. п (Ю^удоп, соответствующей максимально допустимой эксплу­
атационной перегрузке (линия 2 —3). Однако из условия обеспече­
ния комфорта пассажиров, согласно ЕНЛГС, на виражах и разворо­
тах угол крена не должен превышать 30°. Этому углу крена соответ­
ствует нормальная перегрузка п удоп = 1,15. Это требование сущест­
венно сужает область допустимых виражей (разворотов), а ограниче­
ние по перегрузке (по углу крена) устанавливается линией 2 ' — 3'.
С увеличением скорости и высоты полета возможности выполнения ви­
ражей ограничиваются располагаемыми значениями тяги и мощности,
которые, согласно РЛЭ, должны быть меньше, чем N B3Jl. Поэтому
линией ограничения выполнения правильных виражей по располага­
емой тяге и мощности являются не кривые 3 —4, а кривые 3 ’ — 4 ’,
М аксимальная скорость полета на вираже ограничивается из ус­
ловия Vв ш а х д о п ' ~ ^ ш а х Д о п \ / ГЦ- у, ГДе V ^ m a x д о п
М ЯКСИМЗЛЬно допустимая скорость полета, устанавливаемая РЛЭ. Линией огра­
ничения по максимально допустимой скорости является 4 ' —5'. Та­
ким образом, линия Г - - 2 ' —3 ' — 4' — 5' ограничивает область возмож­
ных виражей пассажирских самолетов. Виражи, выполняемые с гра­
ничными значениями скорости, перегрузки и располагаемой тяги
(мощности), являю тся предельными.
Наибольший практический интерес представляет предельный пра­
вильный вираж с минимальным радиусом. Его параметры соответст­
вуют точке 2 '. Согласно выражениям (8.16), при п у = 1,15, у = 30°
•216
значение максимального радиуса виража /"„шт ~ 0,206Ут т ДОц. Гра­
ницы возможных виражей зависят от высоты полета. Так как с уве­
личением высоты диапазон скоростей полета сужается, располагае­
мые тяги (мощности) уменьшаются, а потребные тяги (мощности) уве­
личиваются, то область предельных виражей сужается, и вблизи тео­
ретического потолка она стягивается практически в точку. При этом
перегрузка п , ^ \ , а у = 0, т. е. выполняется вираж с бесконечно боль­
шим радиусом - горизонтальный полет.
8.3. Криволинейный полет в вертикальной плоскости
Криволинейное движение в вертикальной плоскости наблюдается
обычно при переводе самолета после отрыва от ВПП в набор высоты,
из набора высоты в горизонтальный полет, из горизонтального поле­
та в снижение, из снижения — в горизонтальный полет и т.п.
Д ля искривления траектории полета в вертикальной плоскости
пилот при нейтральном положении элеронов (у = 0 ) и постоянном
курсе (гр =■- const) берет штурвал на себя, если траекторию нужно ис­
кривить вверх, или отдает его от себя, если траекторию необходимо
искривить вниз. Отклонение руля высоты создает аэродинамический
управляющий продольный момент, под действием которого самолет
начинает поворачиваться относительно оси OZ связанной системы ко­
ординат, что вызывает соответствующее изменение угла атаки и подъ­
емной силы самолета. Равновесие между подъемной силой и силой тя ­
жести (рис. 8.4) нарушается и под действием центростремительной
силы Fn ~ У а Geos 0, представляющей собою разность между подъем-
Рис. 8.4. Силы, действующие на самолет при криволинейном движении в в ер ти ­
кальной плоскости:
а — п ер е х о д из го р и зо н т ал ьн о го поле та в н або р вы сот ы ; б н е
го п о л е т а в с ни ж ен и е при а > а 0 и а < а о с оот ве тс т ве н но
п е р е х о д из г о р и з о н т а л ь н о
7
в, =0
у\л
г
щ
’
Ха 7777777777777777777777
Рис. 8.5. Характеристики
плоскости:
траектории
при
маневре
самолета
в
вертикальной
о
при п ере ходе из го р и з о н т а л ь н о г о п о лета в н аб ор вы сот ы ; б — при пер еход е из с н и ж е ­
ния в гор и з о н т а л ь н ы й п ол ет
ной силой и составляющей силы тяжести, самолет искривляет траекто­
рию движения в вертикальной плоскости. Продольная п х ~ п Хп
и нормальная п у = п у перегрузки, действующие на самолет, изменя­
ются в зависимости от угла атаки и режима работы двигателя.
В проекциях на оси траекторной (скоростной) системы координат
уравнения движения центра масс самолета в вертикальной плоскости
имеют вид:
т
<1 V
dt
dt
(8 .1 7 )
Первое уравнение системы (8.17) характеризует изменение скоро­
сти в процессе выполнения маневра в вертикальной плоскости, а вто­
рое — изменение угла наклона траектории.
К ак следует из второго уравнения (8.17), искривление траектории
происходит под действием центростремительной силы
Рц — Ya — G cos 0 ,
создаваемой вследствие изменения соотношения между подъемной си­
лой самолета и силой тяжести (за счет нормальной перегрузки),
рис. 8.5. При криволинейном движении самолета в вертикальной пло­
скости изменяется фактический угол атаки вследствие набегания на
самолет дополнительного воздушного потока.
При маневре по восходящей криволинейной траектории (рис.
8.5, а) фактический угол атаки уменьшается, а при маневре по нисходя­
щ е й — увеличивается. Изменение фактического угла атаки приводит к
соответствующему изменению лобового сопротивления. При выполне­
нии маневра по восходящей криволинейной траектории, как следует
из второго уравнения системы (8.17), избыток тяги (разность между
фактической тягой силовой установки Р и суммой сил лобового сопро­
тивления Х а и составляющей силы тяжести G sin 0) может уменьшить­
ся вследствие увеличения угла наклона траектории 0. При этом ско­
рость полета такж е уменьшится.
При выполнении маневра по нисходящей траектории (рис. 8.5.6)
избыток тяги уменьшается за счет роста силы лобового сопротивления
при увеличении угла атаки и уменьшении угла наклона вектора ско­
рости, а также за счет увеличения силы лобового сопротивления при
изменении конфигурации (например, при выпуске шасси, отклонении
за крыл коз).
Системы дифференциальных уравнений движения (8.17) решаются
методами численного интегрирования. Д ля грубых расчетов сущест­
вует ряд эмпирических зависимостей, полученных из этих уравнений.
При этом используют средние значения параметров движения: ради­
уса кривизны траектории гср, скорости движения l7cfl нормальной
перегрузки л йср> угла наклона траектории 0С„.
Среднее значение скорости при вертикальном маневре
l/c p = ~
(V'l + V'a).
где Vi и V 2 — скорости самолета соответственно в начале и конце маневр.!
{точки / и 2, рис. 8.5).
Аналогично рассчитываются средние значения нормальной пере­
грузки п уср. По известному значению скорости Уср и нормальной
перегрузки п уср из второго уравнения системы (8.17) можно опреде­
лить средний радиус кривизны траектории:
V7,
££-------
Л:р
(8 .1 8)
В (п у с р — О
Изменение высоты А// при выполнении маневра в вертикальной
плоскости определяется по формуле
А Н -х
^ сн. ,
2g А Пу
(8 .1 9)
где VyCH — в е р ти к ал ь н ая ск о ро сть сн и ж е н и я ; А п у - - п ри ра щ ен и е н о р м а л ь ­
ной п ерегрузки на маневре.
Время выполнения маневра и дистанцию маневра рассчитывают г\о
следующим зависимостям:
t=
ср ^ —- и Д L — r cp sin | Д0 | .
I'cp
(8 .2 0 )
Из формул (8.18), (8.19) и (8.20) следует, что с увеличением скорости
полета Кср и вертикальной скорости снижения КуС„ и изменения угла
наклона траектории потеря высоты АН и дистанция AL маневра воз­
растают. Уменьшить их возможно путем увеличения нормальной пере­
грузки п у и уменьшения скоростей V и V ycli.
При выводе самолета из снижения, особенно когда скорость поле­
та велика, потребная для выполнения маневра высота АН (потеря вы­
соты) может быть значительной. В связи с этим вывод самолета из сни-
Рис. 8.6. Просадка самолета при переходе из снижения в горизонтальный полет
(о) и увеличение угла атаки при маневре ('>1
жения необходимо начинать на высоте Н с таким расчетом, чтобы он
был закончен на безопасной высоте: Н = Н б - А Н . В практике лет­
ной эксплуатации встречается термин «просадка», под которым пони­
мается потеря высоты А Н п от момента, когда продольная ось самолета
займет горизонтальное положение (и = 0) до момента, когда самолет
перейдет в горизонтальный полет (и = а), рис. 8.6, а. При выводе из
снижения (особенно на больших скоростях полета, например, при
экстренном снижении) необходимо учитывать запаздывание показа­
ний высотомера, а такж е увеличение эффективного угла атаки на ве­
личину Да за счет вертикальной скорости Vy (рис. 8.6, б). Увеличение
угла атаки за пределы а тр вызывает срыв воздушного потока на кры­
ле. При выводе из снижения не рекомендуется допускать скольжение
и крен, так как то и другое приводит к нарушению симметричности
обтекания самолета, возникновению дополнительных аэродинамиче­
ских моментов, усложнению пилотирования, повышению лобового со­
противления, потере скорости.
8.4. Боковой S-образный предпосадочный маневр
При заходе на посадку для устранения боковых линейных и угло­
вых отклонений самолета от осевой линии ВПП выполняют боковой
S-образный маневр. Он осуществляется обычно при посадочной кон­
фигурации самолета и сравнительно малой скорости, что приводит к
ухудшению управляемости. Маневр выполняется на малой и непре­
рывно уменьшающейся высоте при непрерывном изменении показа220
ний всех приборов, дефиците времени, что осложняет его выпол­
нение.
Возможны три основных случая положения самолета относитель­
но осевой линии ВПП (рис. 8.7): самолет находится левее или правее
осевой линии ВПП на расстоянии zs при нулевом угловом отклонении
(рис. 8.7, а); самолет находится на осевой линии, но движется под не­
которым углом i|ig к ней (рис. 8.7, б); самолет отклонен от осевой ли­
нии ВПП на величину zs в боковом направлении и движется под уг­
лом
к ней (рис. 8.7, в). Последний случай является наиболее слож­
ным.
Боковой S-образный маневр выполняют путем двух последователь­
ных координированных разворотов (с креном без скольжения). Н али­
чие скольжения при маневре повышает лобовое сопротивление само­
лета, что приводит к потере скорости, увеличивает вероятность выхо­
да самолета на большие углы атаки. Так как Y a > Р , то эффектив­
ность скольжения в создании боковой центростремительной силы зна­
чительно меньше, чем эффективность крена (см. рис. 8.1). Из этого
можно сделать обоснованный вывод о недопустимости скольжения при
выполнении маневра. При расчете характеристик маневра использу­
ют эмпирические зависимости, получаемые из уравнений криволиней-
Рис. 8.7. Возможные отклонения самолета от оси В П П при з а х о д е на посадку
221
ного полета в горизонтальной плоскости (8.5). Руководствами по лет­
ной эксплуатации ограничиваются допустимые боковые и угловые от­
клонения самолета от оси ВПП, а также высота для безопасного выпол­
нения маневра.
8.5. Пространственное маневрирование самолета
Основным видом пространственного движения самолета являет­
ся движение по восходящей и нисходящей спирали. Если спираль
выполняется с постоянным углом крена и постоянным углом наклона
вектора скорости к горизонту, то такая спираль называется пра­
вильной. Траекторию правильной спирали можно сравнить с винто­
вой линией постоянного радиуса rcu и постоянного шага Д //сП. Р а­
диусом спирали называется перпендикуляр из любой точки спирали до
осевой линии спирали, шагом спирали — изменение высоты за один
виток (рис. 8.8). Вектор скорости центра масс самолета, движущегося
по правильной спирали, постоянно изменяет направление, сохраняя
неизменными угол наклона траектории и вектор скорости. Если рас­
сматривать движение самолета по спирали за короткий промежуток
времени, считая, что радиус спирали достаточно велик, то движение
можно принять прямолинейным по наклонной траектории. В этом
случае скорость движения определяется зависимостью (8.9). Условие
Рис. 8 .8. Схема сил. действую щ их на самолет при полете по нисходящей спирали
222
сохранения постоянства угла наклона вектора скорости к горизонту
9, как следует из рис. 8.8, следующее:
Y а cos у — G cos 0 = 0.
(8 .21 )
Отсюда можно найти зависимость между углом крена, нормальной
перегрузкой и углом наклона вектора скорости при движении по пра­
вильной спирали:
пу = cosO/cosY-
( 8 . 22 )
Условием сохранения постоянства величины скорости при выполне­
нии правильной спирали является равенство тяги двигателей и сил
сопротивления движению:
Р — Х а — G sin 0- -0 .
(8.23)
Равенство (8.23) достигается подбором соответствующего режима рабо­
ты двигателей.
При выполнении правильной спирали вертикальная составляю­
щая скорости Vу
V sin 0 остается постоянной по величине и направ­
лению. Горизонтальная составляющая скорости Vx --- V cos 0 по­
стоянно меняет направление, сохраняя неизменной величину. Искрив­
ление траектории в горизонтальной плоскости происходит под дей­
ствием центростремительной силы
т ( V cos 0 ) 2
Рц — ----------------------- = K a s i n v .
.
(8 .2 4 )
г сп
Подставив в (8.24) вместо величины Y a ее значение, полученное из
(8.22), получим радиус правильной спирали
гс п —
V2 cos 0
Я ttf V
■
(8 .2 5 )
Угловую скорость движения относительно оси спирали можно найти
как отношение горизонтальной скорости полета к радиусу спирали
V cos 0
« с п = ----------------- --
гг.п
£tgV
------ --—
У
•
(8.2(>)
Выполнение правильной восходящей или нисходящей спирали тре­
бует от пилота повышенного внимания и мастерства. Пилот должен по­
стоянно следить за пространственным положением самолета по назем­
ным ориентирам и приборам, правильно сочетать нормальную пере­
грузку, угол крена и угол наклона траектории, следить за постоянст­
вом приборной и вертикальной скорости. Необходимо помнить, что
для ввода самолета в восходящую или нисходящую спираль сначала
следует создать необходимый угол наклона траектории 0, а затем угол
крена у . Скорость полета в процессе выполнения спирали поддержива­
ется постоянной при неизменном режиме работы двигателей подбором
угла наклона траектории 0 при постоянном угле крена, либо подбором
угла крена при постоянном 0, либо одновременным изменением углов
0. 7 и нормальной перегрузки п и. При выводе самолета из спирали
необходимо сначала убрать крен, а затем вывести самолет в горизон­
тальный полет.
При отказе двигателя, приборов или при ошибках в пилотирова­
нии движение самолета по спирали становится неустановившимся.
При нисходящей спирали в этом случае растет вертикальная скорость.
Наличие крена способствует ее увеличению, поэтому всегда при сомни­
тельном поведении самолета на спирали необходимо прежде всего
уменьшить крен. Появление угла скольжения приводит к возникнове­
нию дополнительных сил и моментов, связанных с несимметричным обгекачием самолета. При этом увеличивается лобовое сопротивление,
уменьшается скорость полета, возникает необходимость в дополни­
тельных управляющих воздействиях. Опытные пилоты стараются не
допускать появления скольжения. Заметим, что нарушение режима
установившегося полета по спирали, например нарушение равенства
между тягой силовой установки и лобовым сопротивлением (ЯР=
— Х а), приводит к изменению скорости полета, что, в свою очередь вы­
зывает нарушение равенства сил в вертикальной плоскости Y a cosy =
— G cos 0 и приводит к скольжению самолета на опущенное полукры­
ло.
Доп о л н и т ел ь н ая литер ату ра
121, с. 304 —330; | 6 |, с. 1 0 4 - 1 14; 110], с. 79—94.
К онтрольные вопросы
1. Что я в л я е т с я условием д л я искривления тр аек то рии полета? Изобразите
схему с и л , действующих на самолет при правильном развороте.
2. С р авн и те схемы сил, действующих на самолет при развороте со ск о л ь ж е ­
нием без крена и с креном.
3. Что называется предельным виражом? О бъясните эксплуатационны е
о гр ан и ч е н и я на вираж е.
4. О бъясните в ли я н и е эксп л у ат ац и о н н ы х ф акторов на х арактеристики ви­
р а ж а (р азво ро та).
5. И зо б р ази т е схему си л, действующих на самолет при криволинейном дв и ­
жении в вер ти к а л ь н ой плоскости с перегрузкой больш е единицы.
6 . И зо бр ази те схему сил, действующих на самолет при криволинейном дв и ­
жении в вер ти к ал ь н о й плоскости с перегрузкой меньше единицы. На каких у ч а ­
ст к а х т р а е к т о р и и полета р еал и зу е т ся т ак ая схема сил?
7. С фор м у ли ру й те и дай те обоснование рекомендациям по пилотированию
сам о л ета при к риволин ей ном д в и ж ен ии в вертикальной плоскости.
8 . И зо б р ази т е схему сил, действующих на самолет при выполнении бокового
S -об р азн о го предпосадочного м а н евра, сформулируйте рекомендации по п ило­
ти рован ию .
9. И зо б р ази т е схему сил, действующих на самолет при выполнении п р а в и л ь ­
ной с п и р а л и , дайте обоснование рекомендациям по пилотированию .
10. О предели те н о рм а л ь н ую пер егр узку , подъемную силу на правильном
ии р аж е с креном 30°. П олетная масса самолета 15 000 кг. Ответ: я „ — 1,15; Y а
= 169 050 Н.
11. С кор ост ь го р и зо н т ал ь н о г о
прямолинейного
полета самолета V =
— 450 км/ч. Р ассч итать потребн ую скорость на п р ави л ьно м в и р аж е с углом кре­
на v = 20°. Ответ: V = 464,17 км/ч.
12
При выполнении п р а в и л ь н о г о вираж а со скоростью 320 км/ч н о рм ал ь
ная п е р е г р у з к а п у — 11,1. Р ас сч и т ат ь радиус в и р а ж а . Ответ: г н = 1670,2 м.
Глава 9
ВЗЛЕТ И ПО САДКА
Главной особенностью взлета и посадки является движение самоле­
та по поверхности ВПП. Взлет и посадка — это неустановившиеся ре­
жимы полета, при которых интенсивно изменяются скорость, высота и
угол наклона траектории. Полет выполняется соответственно во взлет­
ной или посадочной конфигурации. Траектории взлета и посадки
включают уже рассмотренные режимы движения самолета по наклон­
ной траектории с постоянным углом наклона, а такж е полет по криво­
линейной траектории в вертикальной плоскости. Поэтому главное вни­
мание будет уделено изучению движения самолета по ВПП.
Взлетом самолета называется движение самолета от начала разбега
до достижения безопасной скорости и высоты (рис. 9.1). Безопасной вы­
сотой по международным нормам считается высота 10,7 м (ЕНЛГС).
Безопасной скоростью V2 является скорость, на которой самолет об­
ладает достаточной устойчивостью и управляемостью для перехода к
следующему этапу — начальному набору высоты. Взлет самолета состо­
ит из двух этапов: разбега по ВПП от момента страгивания до достиже­
ния скорости отрыва К0Тр и разгона от скорости К 0Тр Д° безопасной
скорости взлета V2 с одновременным набором высоты 10,7 м.
Взлетная дистанция Авзл — расстояние по горизонтали, проходи­
мое самолетом от момента страгивания на линии старта до момента на­
бора высоты 10,7 м (над уровнем ВПП в точке отрыва). Таким образом,
Рис. 9.1. Т раектория полного взлета
8 Зак. 2547
взлетная дистанция включает в себя дистанцию разбега L p и дистан­
цию разгона
с набором высоты:
^ в з л = ^-р + ^-1-
(9 .1 )
Разбег до скорости отрыва начинается от линии старта. Самолет дви­
жется сначала на колесах основной и передней опор, постепенно уве­
личивая скорость. При этом угол атаки самолета близок к стояночно­
му а ст. По мере нарастания скорости пилот увеличивает угол атаки с
таким расчетом, чтобы на скорости V r колеса передней опоры отдели­
лись от ВПП и самолет продолжал бы движение на колесах основной
опоры, постепенно увеличивая скорость и угол атаки до значений
Vотр и а отр. Отрыв самолета от ВПП происходит без дополнительного
перемещения ш турвала на себя по достижении скорости отрыва.
Взлет современных самолетов отличается от описанного (классиче­
ского) тем, что практически весь разбег совершается на трех опорах
при угле атаки а « а ст. По достижении скорости подъема колес перед­
ней опоры V r плавным и непрерывным движением ш турвала на себя
пилот поднимает колеса передней опоры над ВПП и без выдерживания
в двухточечном положении выводит самолет на взлетный угол атаки.
Разница в скоростях подъема колес передней опоры и отрыва не пре­
вышает 15 ... 20 км/ч.
После отрыва самолет плавно по криволинейной траектории пере­
водят в набор высоты с последующим увеличением скорости уменьше­
нием угла атаки. Колеса, продолжающие вращение по инерции, затор­
маживаются и на высоте не менее 3 ... 5 м начинается уборка шасси,
скорость самолета продолжает расти и на высоте не более 10,7 м дости­
гает значения безопасной скорости взлета V2. На этом собственно взлет
самолета считается законченным.
Полной взлетной дистанцией L n.B называется расстояние по го­
ризонтали, измеренное от момента страгивания самолета на линии
старта до момента набора высоты 400 м (над уровнем ВПП в точке от­
ры ва). Таким образом, полная взлетная дистанция L „ .B состоит из
дистанции взлета LB3JI и дистанции начального набора высоты L H . н .
^-П. В— ^-ВЗЛ
^-н.н-
(9 .2 )
Дистанция начального набора высоты L,,. н включает в себя три
участка (этапа): Ь 2 — разгон самолета от скорости V2 до скорости,
обеспечивающей безопасный набор высоты с выпущенной механиза­
цией и определенным углом наклона траектории; Ь я — разгон само­
лета до безопасной скорости начала уборки механизации V 3 с одно­
временным набором высоты Н 3 = 120 м; L4— этап, на котором завер­
шается уборка механизации, скорость самолета увеличивается до ре­
комендуемой скорости начального набора высоты V4 с одновременным
набором высоты Н л — 400 м. Скорости V^, У0тр. V2, V 3 и V4 уста­
навливаются для конкретного типа самолета РЛЭ на основании лет­
ных испытаний из условия обеспечения безопасности полетов. Отрыв
колес передней опоры от ВПП на практике происходит только на такой
226
скорости
на которой можно обеспечить надежное управление са­
молета в случае отказа критического двигателя1.
Рекомендуемая скорость отрыва У0Тр выбирается с учетом необхо­
димого запаса по углу атаки до начала сваливания. Согласно требо­
ваниям ЕНЛГС, скорость движения самолета, на которой осуществля­
ется отрыв передней опоры от ВПП,
должна быть в 1,05 раза боль­
ше или равна большей из трех скоростей Vc, Кт1пэ.р или Vmtna.B.
Здесь Vcl — скорость сваливания самолета во взлетной конфигура­
ции, шасси выпущено; Vmln3.p — минимальная эволютивная ско­
рость разбега, при которой в случае отказа критического двигателя
при помощи одних только аэродинамических органов управления обес­
печивается прямолинейное движение самолета по ВПП; Кт шэ.в —
минимальная эволютивная скорость взлета, при которой в случае пол­
ного отказа критического двигателя только одними аэродинамически­
ми органами управления обеспечивается восстановление прямолиней­
ного полета с креном не более 5° без уменьшения мощности работаю­
щих двигателей. Скорость отрыва V orp выбирается с учетом обеспече­
ния запаса по углу атаки до начала сваливания, обеспечения запаса по
углу тангажа с целью предотвращения касания фюзеляжем поверхно­
сти ВПП и обеспечения условий обзора местности экипажу. Опыт экс­
плуатации показывает, что скорость отрыва К 0Тр > 1 ,1 Va- Безопас­
ная скорость взлета выбирается таким образом, чтобы обеспечить безо­
пасные нормируемые градиенты набора высоты на втором этапе пол­
ного взлета. Д ля самолетов, имеющих два или три двигателя, эта ско­
рость выбирается из условия V2 > 1,2 Vcl, а для самолетов, имеющих
более трех двигателей V2 > 1,15 Vcx. На этапе L 2 скорость самолета
увеличивается от скорости V2 до скорости, обеспечивающей безопасный
набор высоты с выпущенной механизацией и заданным градиентом на­
бора высоты. На этапе L 3 достигается безопасная скорость начала убор­
ки механизации V 3, выбираемая из условия V 3 > 1,2 Vc (для самоле­
тов с двумя двигателями) и V3 > 1,15 (для самолетов, имеющих бо­
лее двух двигателей) или V 3 > V'mina.B- Здесь Vc — скорость свалива­
ния в крейсерской конфигурации. По достижении самолетом высоты
120 м и скорости V 3 начинается этап L4 уборки механизации с одновре­
менным увеличением скорости полета. Траектория полета при уборке
механизации, как правило, не сохраняет прямолинейности, самолет
требует перебалансировки. К окончанию этого этапа самолет достига­
ет высоты 400 м и скорости V4 начального набора высоты.
Траектория полного взлета самолета определяется по материалам
летных испытаний и для конкретного типа самолета может иметь неко­
торые особенности. Кроме того, на характер траектории оказываю т
определенное влияние рельеф окружающей местности, ограничения по
уровню допустимого шума на местности, класс аэродрома, наличие
препятствий и т.п. Д ля обеспечения безопасности траектория полета
1 Критический двигатель — это двигатель, отказ которого вы зы вает наиболее
н еблагопри ятн ы е изменения в поведении и условиях пилотирования с а м о л е т а .
на полной взлетной дистанции должна проходить выше линии ограни­
чения препятствий (см. рис. 9.1) и не должна иметь отрицательных
углов наклона вектора скорости. Градиент набора высоты т] =
= tg 0 100 % при нормальном взлете должен быть не менее 5 % на
этапе Z-з и не менее 3 % — на этапе L4. Нормальным считается взлет,
осуществляемый с момента страгивания самолета до выхода на высоту
полета по маршруту при нормальной работе всех двигателей, систем и
агрегатов с использованием предусмотренной РЛЭ техники пилоти­
рования.
9.2. Взлетные характеристики самолета
Схема сил, действующих на самолет. При рассмотрении траектории
и расчете характеристик взлета и посадки рассматривается движение
центра масс самолета, в котором приложены все действующие на него
силы: тяга двигателей Р, сила тяжести G, аэродинамические силы
(подъемная сила Y a и лобовое сопротивление Х а), силы трения F
опор шасси о ВПП, силы реакции опор N (рис. 9.2). Силы F н N дей­
ствуют только при контакте самолета с ВПП. Д ля упрощения задачи
считается, что движение центра масс самолета под действием указан­
ных сил происходит только в вертикальной плоскости, в каждый мо­
мент времени самолет сбалансирован. Движение рассматривается в
траекторной системе координат. Сила трения колес о ВПП зависит от
коэффициентов трения качения колес основных опор / г, колес перед­
ней опоры /„ и силы реакции опор на каждой опоре N. При условии
равенства коэффициентов трения качения всех колес суммарная сила
трения
F—f N,
(9 .3 )
где N — су м м ар н ая си ла р еакци и опор всех колес.
Сила реакции опор N самолета зависит от соотношения между си­
лой тяжести самолета G и подъемной силой У а:
N = Y а — G.
(9 .4 )
При движении самолета по ВПП с малой скоростью, когда подъем­
ная сила Y а = 0, сила реакции опор равна силе тяжести и направле­
на противоположно ей. С увеличением скорости подъемная сила рас-
Рис. 9.2. С хема сил, действую щ их на самолет при движении по В П П :
а — р е а л ь н а я ; б — п р и в е д е н н а я к ц ен т р у м а с с сб а л а н си р о ва н н о го сам о л ет а
228
тет, а сила реакции опор уменьшается. Когда подъемная сила Y a= G ,
сила N = 0. Коэффициент трения качения / колес о ВПП определяет­
ся экспериментально и зависит от покрытия ВПП и его состояния, ри­
сунка протектора колес и давления в пневматиках и т.п. Например,
коэффициент трения качения колеса по сухому бетонному покрытию
равен 0,03—0,035, по влажному бетонному покрытию при наличии незаделанных стыковочных швов и отдельных неровностей на его по­
верхности 0,04—0,05.
При расчетах взлетно-посадочных характеристик самолета поль­
зуются не коэффициентом трения качения /, а приведенным коэффици­
ентом трения / пр = 0,15-4-0,45, учитывающим распределение нагруз­
ки на колеса основных и передней опор.
Уравнения движения самолета. К взлетным характеристикам са­
молета относят скорость отрыва V 0Тр, длину L p и время t p разбега,
безопасную скорость взлета V2, длину воздушного участка траекто­
рии взлета Lx. Уравнения движения центра масс при разбеге с учетом
принятых допущений имеют вид:
m
- ^ = P - X a - / n p /V; 0 = = K o - G - f - J V .
(9 .5 )
В момент отрыва самолета от ВПП сила реакции опор N = 0, а
Y а = G. Если вместо силы Y а подставить ее выражение во второе урав­
нение системы (9.5), то скорость отрыва
/
2G
г р==1/ ---------------- - ■
V
СУ а: 'о т р
(9 .6 )
pS
Подставив в первое уравнение системы (9.5) значение нормальной
реакции опор шасси N, полученное из второго уравнения, найдем ус­
корение самолета на разбеге:
- ^ - 7 Р (У ) -
p ( G- ^ . > - = - A ^ .
dt
т
( 9 . 7)
т
Интегрируя выражение (9.7), получим формулу для расчета вре­
мени разбега
<_=
Р
Vр d V
--------------.
( 9 .8 )
via
Т ак как V d V ■— J„ (V), то длина разбега
dL
Ч тР
V dV
Lx,~ v l 0 W
)
(9 .9 )
Безопасная скорость взлета рассчитывается по формуле
где Суа2 — коэф ф ициент подъемной силы , соответствую щ ий ко н ц у у частка
Характеристики на участках L 2, L 3 и L4 рассчитывают методом чис­
ленного интегрирования или энергетическим аналогично расчету
неустановившегося набора высоты, а на участках криволинейного по­
лета — по уравнениям криволинейного полета в вертикальной плосскости.
Прерванный и продолженный взлет. В процессе взлета самолета
могут возникнуть ситуации, при которых взлет должен быть прекра­
щен. Согласно наставлению по производству полетов в гражданской
авиации СССР, если ВС при взлете отклонилось от заданного направ­
ления и продолжение разбега не обеспечивает безопасности, взлет
должен быть прекращен. Отрыв ВС на скорости, менее расчетной, за­
прещается. При отказе двигателя или при появлении других неисправ­
ностей, угрожающих безопасности полета, если не достигнута скорость
принятия решения, взлет должен быть немедленно прекращен. Ско­
рость принятия решения
— это наибольшая скорость разбега, при
которой в случае отказа критического двигателя возможно как безо­
пасное прекращение, так и безопасное продолжение взлета. Зна­
чение скорости принятия решения должно удовлетворять условию
i n э- р
Выбор скорости принятия решения связывается с отказом крити­
ческого двигателя, так как отказ двигателя требует от экипажа свое­
временных и правильных действий, особых методов пилотирования,
и несвоевременные и ошибочные действия могут привести к тяжелым
последствиям. Поэтому, несмотря на малую вероятность отказа двига­
теля на взлете (по данным мировой статистики она меньше 10~9), эки­
паж должен быть готов к действиям по устранению отказа двигателя.
Важнейшим при этом является принятие решения на прекращение или
продолжение взлета.
Прерванным называется взлет, протекающий как нормальный до
момента отказа двигателя, после чего начинается прекращение взлета
с последующим торможением самолета до полной его остановки на лет­
ной полосе (см. рис. 9.1). Продолженным (завершенным) называет­
ся взлет, протекающий как нормальный до момента отказа двигателя
в процессе взлета, после чего взлет продолжается и завершается с от­
казавшим двигателем.
Потребные дистанции разбега при нормальном L p, прерванном
£р-пр и продолженном L p. n взлете рассчитывают по методикам, при­
веденным в РЛ Э конкретных самолетов с учетом взлетной массы само­
лета, состояния ВПП, температуры наружного воздуха, ветра и т.д.
Располагаемая длина летной полосы (летная полоса — это сумма длин
230
ВПП и концевых полос безопасности) должна быть больше потребной.
Решение о прекращении или продолжении взлета принимают на ос­
новании анализа показаний бортовых приборов, сигнализации отказа
двигателя, оценки поведения и условий пилотирования самолета.
Критерием, по которому командир корабля принимает решение о пре­
кращении или продолжении взлета, является скорость принятия ре­
шения VV Если отказ двигателя произошел на скорости, меньшей Vy,
го прекращение взлета обязательно, так как полет с отказавшим дви­
гателем с последующей посадкой является более рискованным, чем
прекращение взлета на достаточной располагаемой длине ВПП. При
этказе двигателя на скорости, большей, чем Vlt необходимо продол­
жать взлет, так как риск выкатывания самолета за пределы летной по­
лосы может иметь более неблагоприятные последствия, чем продолже­
ние взлета с одним отказавшим двигателем.
Скорости принятия решения соответствуют равные межу собой по­
гребные дистанции движения самолета по ВПП при прерванном взлете
Lp. np и дистанции разбега при продолженном взлете L p. n. Норми­
руемое время распознавания отказа двигателя на взлете, установлен­
ное на основании психофизиологических исследований экипажей, рав­
но 3 с.
9.3. Посадка самолета
Траектория захода на посадку и посадки. Согласно ЕН ЛГС, пол­
ная посадочная дистанция L n,n (рис. 9.3) состоит из участка захода
на посадку L3. „ и собственно посадочной дистанции L noc, т. е.
= L 3.n + i-noc- На участке L3.n самолет движется по наклонной траек­
тории вниз с высоты Н = 400 м до высоты Н „ = 15 м с постоянной ско­
ростью захода на посадку К3.„. Эта скорость должна превышать ско­
рость сваливания самолета в посадочной конфигурации Кс и выбирать-
Рис. 9.3. Схема зах о д а на посадку и посадки
ся из условия К3. п > 1,3 Vc или 1/3.п < 1,05 Уэ.п, где Va_n — мини­
мальная эволютивная скорость посадки. Минимальной эволютивной
скоростью посадки называется такая минимальная скорость, при кото­
рой в случае отказа критического двигателя в режиме прямолинейного
полета без крена и скольжения обеспечивается возможность с помощью
одних только основных аэродинамических органов управления восста­
навливать управление самолетом, а затем сохранять установившийся
прямолинейный полет на этой скорости при крене не более 5°. При этом
градиент снижения не должен превышать 5 %.
В то же время скорость захода на посадку не должна превышать
максимально допустимую скорость в данной конфигурации, выбирае­
мую из условия прочности конструкции. Т акая скорость У3, п позволя­
ет выполнять необходимые маневры по устранению возможных откло­
нений от расчетной глиссады. Угол наклона расчетной глиссады 0ГЛ
должен быть в пределах ■
— 2°40"-=-----3°. Градиент снижения riCH < 5 % .
Так как заход на посадку выполняется в посадочной конфигурации са­
молета (механизация крыла и шасси выпущены), то для обеспечения
допустимой вертикальной скорости снижения режим работы силовой
установки должен быть выше или равным режиму полетного малого га­
за. Необходимо помнить, что корректировка траектории движения
самолета по глиссаде, особенно по уменьшению вертикальной скоро­
сти снижения, должна производиться за счет тяги (мощности) сило­
вой установки и изменения угла атаки. Попытка уменьшить вертикаль­
ную скорость снижения только путем увеличения угла атаки может
привести к увеличению лобового сопротивления, выходу самолета на
вторые режимы полета, что не только усложняет пилотирование, но и
создает предпосылку к сваливанию.
Посадкой называется замедленное движение самолета с высоты
15 м до его остановки после приземления. В настоящее время для
транспортных самолетов приняты две схемы посадки (рис. 9.4).
Первая типовая (классическая) схема посадки. Согласно этой схе­
ме (рис. 9.4, а) самолет достигает высоты Я н со скоростью захода на по­
садку 1/3. п и движется с этой же или постепенно уменьшающейся ско­
ростью по траектории снижения с постоянным углом наклона до высо­
ты начала выравнивания Я выр. С высоты Я выр самолет движется по
криволинейной траектории и переходит от прямолинейной траектории
снижения к траектории с малым углом наклона к поверхности ВПП.
Н а участке выравнивания вследствие постепенного увеличения уг­
л а атаки и появления отрицательного избытка тяги ((Р — Х а —
— G sin 0) < 0) скорость самолета гасится от значения V3, п до ско­
рости Квыд. В ертикальная скорость при этом также уменьшается.
Траектория выравнивания как бы сопрягает глиссаду с траекто­
рией почти параллельной поверхности ВПП. Выравнивание заканчи­
вается на высоте начала выдерживания Я выд и начинается этап вы­
держ ивания. Н а участке выдерживания полет происходит по траекто­
рии, имеющей отрицательный угол наклона менее 1° к поверхности
ВП П. Вследствие непрерывного увеличения угла атаки и роста лобо232
Рис. 9.4. Траектории посадки транспортного самолета:
и — п ерв ая т и п о в а я (к л а с с и ч е с к а я ); 6 — в т о р а я т и п о в а я
вого сопротивления скорость самолета продолжает уменьшаться. Вы­
держивание заканчивается после достижения скорости V „ oc- В кон­
це этапа выдерживания преднамеренное увеличение угла атаки прак­
тически прекращается. Из-за гашения скорости без увеличения угла
атаки равенство Y а — G cos 0 нарушается, самолет постепенно при­
ближается к поверхности ВПП и касается ее колесами главных опор,
начинается этап пробега. Скорость самолета в момент приземления яв
ляется его фактической посадочной скоростью КПос.
Снижение самолета с высоты, на которой прекращено преднамерен­
ное увеличение угла атаки до приземления, называется парашютиро­
ванием. Благодаря уменьшению подъемной силы в конце этапа сниже­
ния вертикальная скорость несколько увеличивается, что приводит к
увеличению фактического угла атаки. Вертикальная скорость самоле­
та в момент приземления в основном определяет нормальную перегруз­
ку — «жесткость» посадки. Чем меньше вертикальная скорость в мо­
мент приземления, тем меньше нормальная перегрузка, тем более
мягкой будет посадка.
Значительное влияние на характеристики движения самолета на
этапе выдерживания оказывает близость земли. Влияние экранирую ­
щего воздействия поверхности ВПП проявляется в уменьшении угла
сноса воздушного потока за крылом, в увеличении фактического угла
атаки, увеличении фактического значения коэффициента подъемной
силы, в уменьшении вертикальной скорости, увеличении длины участ­
ков выдерживания и пробега. Первая фаза пробега после приземле­
ния самолета выполняется на колесах основных опор. При уменьше­
нии скорости до определенного значения угол атаки самолета уменьша­
ется, колеса передней опоры касаются ВПП, и дальнейшее движение
самолета на пробеге осуществляется на трех опорах. При пробеге по
возможности используются все средства торможения: реверсивное уст­
ройство, тормоза колес, тормозные щитки, увеличивающие лобовое
сопротивление, гасители подъемной силы, увеличивающие нагрузку
на колеса и силу трения колес о ВПП и т.п. Применение средств тор­
можения сокращает длину пробега.
Вторая типовая схема посадки (рис. 9.4, б) характерна тем, что,
начиная с высоты Н пос и до Н = 0, самолет движется по криволиней­
ной траектории с постепенным уменьшением, скорости от V3%п ДО ^посСнижение завершается касанием колесами главных опор ВПП и по­
следующим пробегом. Д л я обеспечения безопасности полетов, уменьше­
ния скорости, длины посадочной дистанции для каждого типа самоле­
та разрабатывается своя схема посадки, основанная на рассмотренных
двух типовых схемах. Схема посадки для данного типа самолетов с
учетом требований ЕНЛГС и особенностей самолета устанавливает ха­
рактерные скорости У3. п, Увыр V„oc и высоты Я выр, Я выд.
По условиям безопасности располагаемая длина ВПП должна быть
по крайней мере в 1,5 раза больше потребной посадочной дистанции
^■пос. представляющей сумму воздушного участка LBi> и длины пробе­
га L np. В случае отказа одного из двигателей посадка может быть
прерванной (уход на второй круг) или продолженной.
Посадочные характеристики самолета. К основным посадочным
характеристикам самолета относятся посадочная скорость Vnocf
посадочная дистанция L„oc и дистанция пробега L np.
Посадочная скорость
(9 .1 1 )
где сУаП0С — коэф ф ициент, соответствую щ ий посадочному у гл у атаки и р а в ­
ны й (0 ,7 — 0 ,8) сУаПОС, здесь сУа пос — коэффициент подъемной силы , соответст­
вую щ ей у г л у атак и с в а л и в а н и я в посадочном п олож ении.
Д ли н а пробега
Приближенные характеристики взлета и посадки рассчитывают
по эмпирическим зависимостям [5; 8; 9].
Уход на второй круг. В случае невозможности или небезопасности
посадки выполняют уход на второй круг. Снижение самолета прекра234
ВПП
Рис. 9.5. Т раектории ухода самолета на второй круг
щается и выполняется набор высоты вплоть до высоты круга. Уход
на второй круг с нормально работающими двигателями и с допустимы­
ми центровками не представляет особых сложностей. При отказе од­
ного из двигателей и большой загрузке самолета полет осложняется.
Д ля каждого типа самолета РЛ Э устанавливается своя минималь­
но допустимая высота принятия решения Н 1л с которой можно уйти на
второй круг с соблюдением всех требований безопасности полетов.
Приняты две основные схемы ухода на второй круг: по траектории мак­
симальной скороподъемности (рис. 9.5, а) и с горизонтальным разго­
ном самолета (рис. 9.5, б). Д л я ухода на второй круг командир воз­
душного судна принимает решение на высоте не менее Н г. Началом дей­
ствий экипажа по уходу на второй круг является перемещение РУ Д
работающих двигателей в положение, соответствующее рекомендо­
ванному режиму работы (как правило, взлетный режим). Одновремен­
но с этим убирают шасси, закрылки переводятся в положение, реко­
мендованное РЛЭ, и начинают вывод самолета из режима снижения.
При этом руль высоты отклоняют вверх, самолет движется по криволи­
нейной траектории со снижением до точки 2, в которой переходит в го­
ризонтальный полет (0 = 0) с увеличением скорости. Затем самолет
переходит в криволинейный полет с набором высоты (участок 2 — 3)
и увеличением скорости до значения максимальной скороподъемно­
сти К н в . н , с которой продолжается прямолинейный набор высоты.
Д ля самолетов, имеющих небольшую тяговооруженность при од­
ном отказавшем двигателе, при отказе двух двигателей многодвига­
тельного самолета рекомендуется схема ухода на второй круг с гори­
зонтальным участком разгона. Она отличается от первой тем, что в
режиме горизонтального полета на участке 2—3 самолет разгоняется
до наивыгоднейшей скорости набора высоты 1/„в. н. после чего осущест­
вляется набор высоты с этой скоростью сначала по криволинейной
траектории на участке 3—4, а затем в прямолинейном наборе высоты
круга со скоростью VW
Кроме двух рассмотренных схем ухода на второй круг, возможна
схема ухода по траектории с максимальным углом набора высоты.
Эта схема отличается от первой тем, что на участке 2—3 скорость само­
лета сохраняется постоянной. Участок траектории 2—3 заканчивает­
ся выходом самолета на максимальный безопасный угол набора высо­
ты в этом режиме. В последующем скорость самолета путем уменьше­
ния угла наклона траектории увеличивается до У нв. н.
Д ля некоторых самолетов (например, учебных) широко применя­
ется схема ухода на второй круг с касанием колесами ВПП. Она от­
личается от второй схемы тем, что снижение самолета с высоты приня­
тия решения Н л происходит вплоть до ВПП, после чего самолет, кос­
нувшись колесами основных опор ВПП, выполняет короткий разбег
с увеличением скорости движения до скорости отрыва и начинает
набор высоты.
При возникновении отказов и нарушений режимов полета, при­
водящих к возникновению опасных ситуаций на высотах, меньших,
чем высота принятия решения, выполняют посадку при соблюдении
рекомендуемой РЛЭ техники пилотирования.
Характеристики ухода на второй круг на различных этапах траек­
тории можно рассчитать методами численного интегрирования урав­
нений-, описывающих движение самолета. Д ля приближенного расче­
та характеристик движения пс схеме ухода, приведенной на рис. 9.5,а,
можно использовать зависимости [81.
9.4. Влияние конструктивных факторов и условий эксплуатации
на взлетно-посадочные характеристики самолета
Влияние конструктивных факторов. К конструктивным факторам
относят удельную нагрузку на крыло GIS, тяговооруженность P/G,
механизацию крыла, средства торможения, расположение крыла от­
носительно фюзеляжа. Из формул (9.6, 9.10, 9.11) следует, что увели­
чение удельной нагрузки на крыло приводит к росту потребных ско­
ростей VOTp, Ус „ и Упос, что, в свою очередь, вызывает увеличение
дистанций взлета и посадки.
Тяговооруженность самолета определяет только взлетные характе­
ристики самолета. Повышение тяговооруженности и связанное с ним
увеличение избытка тяги А Р приводит к росту ускорения на различ­
ных участках взлета и к сокращению длины разбега и взлета. Тягово­
оруженность транспортных самолетов равна 0,25—0,35.
М еханизация крыла оказывает значительное влияние на аэроди­
намические характеристики самолета, увеличивая коэффициенты
подъемной силы, лобового сопротивления, изменяя аэродинамическое
качество. Использование механизации на взлете обеспечивает преиму­
щественный рост коэффициента подъемной силы и аэродинамического
качества, а на посадке — увеличение подъемной силы с преимущест­
венным ростом коэффициента лобового сопротивления, снижение аэ­
родинамического качества и скоростей полета на этапах захода на по­
садку и на посадке. Поэтому закрылки на взлете отклоняются в проме236
N
жуточное положение, а на посад­
ке, как правило, на максимальный
угол. Отклоненные гасители подъ­
емной силы и интерцентры на по­
садке повышают не только лобовое
сопротивление, но, нарушая обте­
кание верхней поверхности крыла,
уменьшают подъемную силу, что
приводит к уменьшению аэродина­
мического качества в 8— 10 раз.
При этом уменьшение подъемной
Рис. 9.6. С хем а сил, действующих на
силы приводит к увеличению силы колесо при тормож ении
реакции опор N — Y а — G и уве­
личению силы трения колес о ВПП F = / „ рЛЛ Применяя механиза­
цию крыла, достигают сокращения длины пробега на 25—30% и раз­
бега на 10— 15 %.
К средствам торможения относят тормоза колес, реверсивное уст­
ройство, тормозные щитки и парашюты. Применение торможения ко­
лес позволяет сократить длину пробега в 1,5—2 раза за счет увеличе­
ния сопротивления движению. В процессе торможения на колесо дей­
ствуют два момента сил: вращающий М вр, равный произведению силы
сцепления колеса с поверхностью ВПП Fclx на эффективный радиус
колеса R a, и тормозной М т, создаваемый силой трения в тормозах ко­
лес (рис. 9.6). Вращающий момент зависит от силы реакции опоры
N — ( Y a — G)!n, где п — число колес.
Коэффициент сцепления ц поверхности колес с поверхностью ВПП
зависит от рисунка протектора, материала поверхности и состояния
ВПП. Тормозной момент, возникающий на колесе, зависит от конст­
рукции тормозов колес, давления в тормозной системе, степени обжа­
тия педалей тормозов и работы противогазного устройства. Если вра­
щающий момент больше тормозного, то колесо вращ ается, постепен­
но уменьшая скорость. При этом на ось колеса действует сила торможеГ.
Мт
ния F т = -~L, направленная в сторону, противоположную движению.
“э
Коэффициент трения торможения в этом случае зависит от тормозного
момента и силы реакции опоры: / т = FIN = M T/ N R 3 и по значению
он меньше коэффициента сцепления ц. Если вращающий момент мень­
ше тормозного, то вращение колеса прекращается и оно скользит по
поверхности ВПП.
Движение самолета при невращающихся колесах, т. е. с «юзом», не­
допустимо, так как это может привести к неуправляемому движению
самолета и выкатыванию его за пределы ВПП. Кроме того, это приво­
дит к повышенному износу и повреждению пневматиков. Д л я предо­
твращения проскальзывания колес применяют автоматы торможения,
которые автоматически снижают давление в тормозной системе, когда
тормозной момент по значению приближается к проворачивающему.
Посадка на скользкую ВПП значительно снижает эффективность
торможения колес.
Использование реверсивного устройства (искусственно создается
составляющая тяга двигателя, направленная против движения самоле­
та) при посадке в нормальных условиях сокращает длину пробега на
25—30 %. При посадке на скользкую ВПП реверсивное устройство
является основным средством уменьшения длины пробега.
Расположение крыла относительно фюзеляжа (низкоплан или высокоплан) определяет степень влияния эффекта воздушной подушки
(близости земли) на аэродинамические характеристики самолета, а
следовательно, на характеристики взлета и посадки. В большей степе­
ни эффект воздушной подушки проявляется на низкопланах. Эффект
воздушной подушки более ярко выражен на посадке, чем на взлете,
так как в первом случае по мере приближения самолета к земной по­
верхности он нарастает, а во втором убывает по мере удаления от зем­
ли. Расчет влияния воздушной подушки представляет собой довольно
сложную задачу и требует экспериментальной проверки. По резуль­
татам летных испытаний самолета в РЛЭ приводят соответствующие
рекомендации.
Влияние условий эксплуатации. К эксплуатационным факторам,
оказывающим существенное влияние на взлетно-посадочные характе­
ристики самолета, относят взлетную и посадочную массу, температуру
окружающего воздуха, высоту аэродрома над уровнем моря, уклон
ВПП, ветер.
Взлетная и посадочная масса самолета оказывает непосредственное
влияние на скорости У 0тр и ^пос, ускорения J v и Упр через них на
длину разбега L p и длину пробега L np. Д ля приближенных расчетов
можно принять, что увеличение взлетной массы на 1 % вызывает уве­
личение длины разбега на 2—2,5 % . Практика летной эксплуатации
показывает, что изменение посадочной массы самолета на 1 % приво­
дит к изменению скорости захода на посадку и посадочной скорости
примерно на 0,5 %.
Температ ура окружающего воздуха Т при постоянном атмосферном
давлении вызывает соответствующее изменение плотности воздуха
и через нее оказывает влияние на располагаемую тягу (мощность)
двигателей самолета, характеристики взлета и посадки. С повышением
температуры окружающего воздуха ухудшаются взлетно-посадочные
характеристики самолета.
Изменение температуры воздуха и высоты аэродрома над уровнем
моря приводит к соответствующему изменению плотности воздуха.
С уменьшением плотности воздуха взлетно-посадочные характеристи­
ки ухудш аю тся.
Значительное влияние на взлетно-посадочные характеристики ока­
зывает угол уклона В П П . При угле уклона 0 > 0 самолет движется
на подъем и L v увеличивается, a L np уменьшается. П ри угле укло­
на 0 С 0 самолет движется под уклон, что приводит к уменьшению
L р и увеличению L np. Влияние ветра на длину и время разбега и про238
бега обусловлено тем, что при неизменных потребных истинных ско­
ростях Котр и Vnoc путевая скорость самолета зависит от скорости и
направления ветра. При встречном ветре они уменьшаются, при по­
путном увеличиваются.
Д лина взлетной и посадочной дистанций с учетом встречной или по­
путной составляющих ветра
(9 .1 3 )
где L pW, Lp и Lnр^., Z.np — длина разб ега и п робега при наличии ветра и в
ш тиль соответственно.
Зн ак минус в этих формулах относится к попутному, а знак плюс—
к встречному ветру.
На длину разбега и пробега влияет такж е боковая составляющая
скорости ветра W6. Наличие угла скольжения вызывает появление мо­
ментов крена и рыскания, для парирования которых отклоняют рули.
Отклонение рулей приводит к увеличению лобового сопротивления
самолета, длины разбега и некоторому уменьшению длины пробега.
Д ополнительная л итература
[31, с. 115— 125; [81, с. 6 — 31; 3 9 —85 , 94— 163,
136— 162; 5, с. 5 5 - 8 6 ; [7], с. 2 0 5 —249.
183— 197;
[91, с. 5 7 — 92.
Контрольные вопросы
1. Д айте обоснование о грани чен и ям х а р а к те р н ы х скоростей на тр а е к т о р и и
п олн ого взлета.
2. И зобрази те схем у си л, действую щ их на сам олет при дви ж ен и и по В П П ,
и выведите уравнен ия дви ж ен и я.
3. Н азовите х ар ак тер и сти к и в зл ета. Д ай те о босн овани е в л и я н и я э к с п л у а т а ­
ц ион н ы х ф акторов на них.
4. И зобрази те типовую тр аек то р и ю зах о д а на п о садк у и п о сад к и , у к а ж и т е
х ар ак тер н ы е точки на ней.
5. О бъясните ограни чен и я х ар ак те р н ы х скоростей на т р ае к т о р и и за х о д а н а
п осадк у и посадки.
6. Н азовите х ар ак тер и сти к и п осадки. О бъ ясн и те в л и я н и е э к с п л у а т а ц и о н н ы х
ф акторов на них.
7. И зобрази те разли чн ы е схемы у хода на второй к р у г , п о ясн и те их о со б ен ­
ности.
8. О бъясните вли яни е к о н стр у к ти вн ы х ф акто р о в на в зл етн о -п о сад о чн ы е х а ­
рак тер и сти к и сам олета.
9. С оответствует ли гр ади ент набора высоты т) сам о л ета т р е б о в ан и я м норм
летной годности, если угол н абора высоты на у ч астк е L 3 р авен 6°? О твет: ц =
= 11 %, соответствует.
10. Рассчитать длину р азб ега сам о л ета, если с р е д н я я т я г а си ло во й у с т а н о в к и
91140 Н , скорость отры ва Кот„ = 210 км /ч, аэр о ди н ам и ч еско е к ачеств о Аг0тр==
= 12. Ответ: L p — 447,2 м.
Г л а в а 10
ДАЛЬНОСТЬ И ПРОДОЛЖИТЕЛЬНОСТЬ ПОЛЕТА
10.1. Основные понятия и определения
Основное назначение транспортного самолета состоит в обеспе­
чении перевозки пассажиров и полезного груза на определенное рас­
стояние без угрозы для жизни и здоровья людей. Дальность и продол­
жительность полета — важнейшие летно-технические характеристики
самолета, определяющие его назначение. Дальность и продолжитель­
ность полета конкретного самолета зависят от ряда факторов: массы
полезного груза, запаса топлива, высоты и скорости полета, режима
работы двигателей, регулировки топливных агрегатов двигателей,
состояния поверхности самолета, балансировочного сопротивления
самолета, его герметичности, метода пилотирования, состояния атмо­
сферы (температуры, влажности, плотности, наличия ветра, степени
турбулентности и т.п.).
Дальность полета L — расстояние от места вылета самолета до
места посадки, измеренное вдоль маршрута относительно земной по­
верхности (рис. 10.1). Продолжительностью полета t называется сум­
марное время от начала взлета до посадки самолета. Дальность и про­
должительность полета определяются массой топлива на борту и его
расходом. Различают техническую и практическую дальность и соот­
ветственно продолжительность полета. Техническая дальность — это
расстояние, которое самолет мог бы преодолеть с заданной нагрузкой в
стандартных атмосферных условиях при полной выработке топлива к
моменту посадки. Техническая дальность
( 10 . 1 )
L T — L H~f~ L KC
где L H — д ал ьн о сть полета при наборе высоты с минимальным килом етровы м
расходом то п ли в а; L KC — д ал ьн о сть крейсерского полета по м а р ш р у ту от мо­
мента око н ч ан и я н абора зад ан н о й высоты эш елона до момента н ач ал а сн и ж ен и я;
^■сн — д ал ьн о сть п олета при сн иж ени и , соответствую щ ая м иним альном у к и л о ­
м етровом у р асходу то п л и в а .
В соответствии с формулой (10.1) можно записать уравнение рас­
хода топлива
тТ — тТН-\-тт
Рис. 10.1. О сновны е участки траекто­
рии п олета сам олета
кс т
'“ Т сн •
( 10. 2 )
В технических описаниях само­
летов в табличной или графической
форме приведен расход топлива
на набор высоты т ТИ и снижение
т хс н, дальность и время полета на
этих этапах в зависимости от по­
летной массы, приборной скорости
и высоты.
Техническая дальность полета в практике летной эксплуатации
самолетов не реализуется, так как для обеспечения безопасности по­
летов, кроме расчетной массы топлива, необходимой для выполнения
полета от взлета до посадки, должен быть предусмотрен аэронавига­
ционный запас топлива (АНЗ). Этот запас зависит от аэронавигацион­
ной и метеорологической обстановки по маршруту полета,на аэродро­
ме назначения и на запасных аэродромах. Его рассчитывают в соответ­
ствии с правилами определения АНЗ согласно Наставлению по про­
изводству полетов в гражданской авиации СССР.
Вследствие конструктивных особенностей топливной системы само­
лета на борту всегда остается некоторая невырабатываемая масса
топлива т тнев. Кроме того, некоторая часть топлива расходуется при
рулении самолета, а также на опробование двигателей перед взлетом
т тзем- Дальность полета, рассчитанная с учетом А Н З, невырабатываемого топлива и топлива, расходуемого при рулении самолета и опро­
бование двигателей на земле, называется практической дальностью по­
лета. Наибольшая часть общей дальности полета самолета составляет
дальность полета по маршруту. Поэтому в дальнейшем остановимся
только на влиянии различных факторов на дальность и продолжи­
тельность полета именно на этом этапе траектории, считая, что выпол­
няется либо прямолинейный горизонтальный полет, либо полет по
наклонной траектории («по потолкам»).
Масса топлива, необходимая для полета по маршруту,
тт
кс — т т — (/пт„ + т т сн) — ( т т д н з ^ ~ т т нев~Ь,пт зеда).
(1 0 .3 )
Чтобы по имеющемуся на борту запасу топлива для выполнения
полета по маршруту т Т определить дальность и продолжительность
полета, необходимо знать массу топлива, расходуемую самолетом на
1 км пути и за 1 ч полета. Масса топлива в килограммах, которая рас­
ходуется всеми двигателями самолета при заданной полетной массе
за 1 ч полета на заданном режиме работы двигателей, называется часо­
вым расходом топлива Сч.
Д л я самолетов с ТРД Д часовой расход топлива
Q
т р д
= £
уд
^ = ^УД
^
>
(10-4)
для самолетов с ТВД
СЧгт = С
Na = - ^ N
(Ю .5>
УА
Чв
Лв
к
где Суд и Сулн — удельны й расход то п ли в а (м асса т о п л и в а, р асх о д у ем о го
на единицу тяги или мощ ности); N3 — эф ф ективная м ощ ность силовой у с т а н о в ­
ки; Л в — к. п. д. воздуш ны х винтов.
Километровый и часовой расходы связаны между собой зависимо­
стью
CK = C 4/V,
(10.G )
где V„ = VK= Vrn = V — п у тевая скорость в го р и зо н тал ь н о м (к р ей се р ск о м )
полете п ри отсутствии ветра.
Из последнего выражения с учетом зависимостей (10.4 и 10.5) получа­
ем километровый расход топлива:
у
С к Т Р Д Д = С УД
'к твд =
£ lE ■Пв
= ^ уд
KV
----- —
=
v
’
( 1 0 -7 )
(ю.8>
к
Т]в
Из анализа выражений (15.4, 15.5, 15.7, 15.8) следует, что часовой и
километровый расходы топлива конкретного самолета зависят от ско­
рости, высоты полета, полетной массы, аэродинамического качества,
режима работы двигателей и других эксплуатационных факторов.
Если известно количество выгоревшего топлива d m (эта величина
имеет знак «—», так как масса топлива в полете уменьшается), из­
вестны часовой и километровый расходы топлива, то можно опреде­
лить дальность и продолжительность полета
dт
dm
d L = ----------- ; d t = — ---------.
Сн
Сч
(1 0 .9 )
Интегрируя выражения (10.9), получим зависимости для опреде­
ления дальности и продолжительности прямолинейного установивше­
гося горизонтального полета по маршруту:
тг
т,
M i,т| t W /Tх.igt
m,
mt
rrii
ms
2-5
(,010>
где m 1 h m 2 — м асса сам олета соответственно в н ачале и в конце у ч а с тк а по­
л ета .
Если на рассматриваемом участке горизонтального полета скорость
самолета не была постоянной, то в выражения (10.9— 10.11) вместо те­
кущ их значений С„ и Сч подставляют средние значения С кср и Счср.
Из формул (10.10 и 10.11) можно получить более простые зависи­
мости для практического расчета дальности и продолжительности по­
лета. Запишем их без вывода при условии, что С уд> V к К постоянны:
L„c =
- ~
^ К1
In ------- 2 *-------- ;
M l —
m,
mi
*кс = - ~ - - I n ---------- !------- ,
Сч
( 1 0 . 12 )
КС
m 1 — m-r
(1 0 .1 3 )
где tnr — м асса сам о л ета в н ачале рассм атриваем ого участка к р ей сер ск о го по­
л ета; т Т — м асса и зр асх о д о в а н н о го то п ли в а ( т т = т г — ота); Ск1, С ч1 — к и л о ­
м етровы й и часо во й расх о ды то п ли ва в н ачал е рассм атриваем ого у ч ас тк а .
->42
Если расход топлива в горизонтальном полете не превышает 30 %
полетной массы самолета, то для приближенной оценки дальности и
продолжительности полета используют соотношения:
(1 0 .1 4 )
(10.15)
где С* и С* — километровый и часовой расходы то п л и в а, соответствую щ ие
среднему значению полетной массы сам олета т ср = ^ ( Щ +
Щ)-
Из формул 10.9— 10.15 следует, что дальность и продолжительность
полета зависят от часового и километрового расходов топлива, а так­
же от запаса топлива на борту. Если запас топлива известен, то даль­
ность и продолжительность полета будут определяться только кило­
метровым и часовым расходами топлива. Чем меньше километровый и
часовой расход топлива, тем больше дальность и продолжительность
олета.
Если заданы дальность и продолжительность полета, то потребная
для этого масса топлива рассчитывается по формулам, полученным из
соотношений (10.12 и 10.13):
(1 0 .1 6 )
(1 0 .1 7 )
Заметим, что формулы (10.12) и (10.13) справедливы при поле­
тах «по потолкам» (Суд, V и К постоянны). Если крейсерский полет
происходит при переменных значениях указанных параметров, то
берут средние значения Судср, Vcp и АГср.
10.2. Зависимость дальности и продолжительности полета
от скорости
Рассмотрим влияние скорости на дальность и продолжительность
полета отдельно для самолетов с Т Р Д Д и ТВ Д , поскольку скоростные
и дроссельные характеристики их двигателей имеют существенные раз­
личия.
Самолет с ТРДД. Д ля осуществления прямолинейного установив­
шегося горизонтального полета на заданной высоте с заданной скоро­
стью пилот подбирает такой угол атаки а и такой режим работы двига­
телей (частоту вращения ротора п), при которых выполняется равенст­
во тяги силовой установки лобовому сопротивлению самолета, т. е.
Р р = Р гп. Максимальная допустимая тяга двигателей для полета п^>
маршруту соответствует скорости полета Vmax. Д ля обеспечения по­
лета со скоростями Vt и V2, меньшими Vmax, двигатель дросселирует-
ся так, чтобы кривая P v (V) проходила соответственно через точки А х,
Л 2 (рис. 10.2, а). Д ля уменьшения скорости полета необходимо умень­
шить частоту вращения ротора двигателей п, а это, как видно из
рис. 10.2, б, приводит к росту величины Суд. Обычно регулировка тур­
бореактивных двигателей производится таким образом, чтобы мини­
мальный расход топлива соответствовал режимам работы, близким к
номинальным. Однако с уменьшением скорости полета (рис. 10.2,в)
значение Суд несколько уменьшается. В целом совместное изменение
частоты вращения двигателя п и скорости полета V приводит к некото­
рому изменению удельного расхода топлива Суд. В первом приближе­
нии можно считать, что величина Суд сохраняется постоянной, поэто­
му часовой расход топлива Счтрдд принимается пропорциональным
тяге. Если кривые Р тп (У) и Сч (V) совместить на одном графике
(рис. 10.3), то они не совпадают. Примем, что часовой расход топлива
изменяется в зависимости от скорости так же, как и потребная тяга
прямолинейного установившегося горизонтального полета Р гп. Мини­
мум потребной тяги, а следовательно, и минимум часового расхода топ­
лива достигаются при полете с наивыгоднейшей скоростью.
Несовпадение графических зависимостей часового расхода топ­
лива и потребной тяги горизонтального полета от скорости приводит
к некоторому несовпадению характерных скоростей. Режим полета,
соответствующий минимальному значению Сч, определяется точкой
касания прямой, параллельной оси абсцисс, и кривой Сч ( V). Ско­
рость, соответствующая минимальному часовому расходу топлива,
называется скоростью максимальной продолжительности полета Vt .
Д л я самолетов с Т Р Д Д скорость максимальной продолжительности
полета, как правило, несколько больше наивыгоднейшей скорости
(V t > V нв)• Километровый расход топлива также определяется удельр
ным расходом, потребной тягой и скоростью полета: С„ = Суд
.
Если в первом приближении считать, что изменение скорости полета
и тяги двигателей (частоты вращения) не влияет на изменение величи­
ны Суд, то из последней формулы следует, что километровый расход
будет минимальным, если отношение P rJ V минимально. Как следует
V
Рис. 10.2. К ривы е Ж уко вско го по тяге (а), зависимости удельного расхода то п ­
лива от частоты вращ ения р отора ( б ) и от скорости полета ( в )
Рис. 10.3. Зависимость потребной т я ­
ги и часового расхода топлива от
скорости полета
Рис. 10.4. Зависим ость
потребной
мощности и часового расхода топли­
ва от скорости полета
из рис. 10.3, минимальное значение отношения P TJ V для установив­
шегося прямолинейного горизонтального полета определяется точ­
кой касания кривой Ж уковского и прямой, проведенной из начала ко­
ординат. Точка касания соответствует скорости крейсерского режима
полета 1/кс • Если требуется более точное определение скорости, соот­
ветствующей минимальному километровому расходу топлива, с уче­
том изменения удельного расхода топлива при изменении скоро­
сти, то строят графическую зависимость С к (V) и по ней находят ско­
рость минимального километрового расхода или используют кривую
с ч 00Если кривая Сч (V) известна, то в соответствии с формулой (10.6)
легко построить зависимость С„ (К). Она также имеет явно выражен­
ный минимум, соответствующий скорости, минимального километро­
вого расхода топлива.
Скорость полета, соответствующая минимальному километровому
расходу топлива С к, называется скоростью максимальной дальности
полета.
На кривой Ягп (V) скорость максимальной дальности полета опре­
деляется точкой касания прямой, проведенной из начала координат
(см. рис. 10.3), так как
Скорость максимальной дальности полета для самолетов с Т Р Д Д , как
правило, больше скорости крейсерского полета (V l S* К кс).
Самолет с ТВД. При расчете дальности и продолжительности поле­
та самолета с ТВД, помимо влияния характеристик двигателя, необхо­
димо учитывать влияние характеристики воздушного винта и в пер­
вую очередь его к. п. д.
Рассмотрим полученные ранее (10.5 и 10.8) зависимости часового и
километрового расходов топлива от характеристик турбовинтового
двигателя и скорости полета
^
СУД
ч ТВД —
т1в
к,
Л' п п
.
^
_
СУД
Т В Д ---------*|в
^гп
у
у
■
В первом приближении можно считать, что отношение удельного рас­
хода топлива к к. п. д. воздушного винта постоянно. В таком случае,
как следует из рассматриваемых соотношений, часовой расход топли­
ва с изменением скорости полета изменяется аналогично кривой Ж у­
ковского N r,n (V). Поэтому приближенно можно считать, что мини­
мальный часовой расход топлива Сч и, следовательно, максимальная
продолжительность полета достигаются при минимальном значении
N TU (рис. 10.4),которое соответствует режиму прямолинейного гори­
зонтального полета с экономической скоростью VaK. На самом деле
кривые Сч (К) и N rn ( V) не совпадают. При условии постоянства от­
ношения С удить при изменении скорости полета согласно второй из
рассматриваемых зависимостей минимальный километровый расход
топлива С к, а следовательно, и максимальная дальность крейсерского
полета будут обеспечиваться при минимальном значении отношения
N r J V . Минимальное значение отношения N rn/V определяется точ­
кой касания прямой, проведенной из начала координат к кривой
ЛГгп (V). Эта точка соответствует прямолинейному установившемуся
горизонтальному полету с наивыгоднейшей скоростью К нв.
В действительности с изменением скорости полета отношение Суд д?/
I V не остается постоянным. Увеличение скорости полета на заданной
высоте требует уменьшения степени дросселирования двигателей (уве­
личения режима работы двигателей), что приводит к увеличению пол­
ной мощности силовой установки, реактивной составляющей тяги
двигателей и удельного расхода топлива Суд. С увеличением скоро­
сти полета к. п. д. воздушного винта несколько возрастает и в режиме
крейсерского полета достигает максимального значения. В целом
к.п.д. увеличивается более интенсивно, чем величина Судл/, поэтому
с ростом скорости полета отношение Судуу/г]в уменьшается. В резуль­
тате кривые Сч (I/) и N rn (У) не совпадают. Скорость, соответствую­
щ ая максимальной продолжительности полета, как правило, несколь­
ко больше экономической ( Vt > Кэк), а скорость, соответствующая
максимальной дальности полета, несколько больше наивыгоднейшей
скорости прямолинейного установившегося горизонтального полета
( V l > V HB).
Т ак как удельный расход топлива у самолета с ТВД меньше, чем у
самолета с Т Р Д Д , то часовой и километровый расходы топлива у са­
молетов с Т В Д на 40—60 % меньше, чем у самолетов с Т РД Д , при
прочих равны х условиях.
Н а километровый и часовой расходы топлива значительное влия­
ние оказы ваю т условия эксплуатации самолетов, особенно высота и
скорость полета.
10.3. Зависимость дальности и продолжительности полета
от высоты
Влияние высоты полета на максимальные дальность и продолжи­
тельность полета определяется километровым и часовым расходами
топлива.
Самолет с ТРДД. Д ля изучения влияния высоты на дальность и
продолжительность полета воспользуемся зависимостями часового и
километрового расходов топлива (10.4) и (10.7), кривыми Ж уковского
и зависимостями удельного расхода топлива от высоты полета
(рис. 10.5).
При фиксированных значениях полетной массы самолета и коэф­
фициента Суа потребная тяга прямолинейного установившегося гори­
зонтального полета самолетов с Т Р Д Д с ростом высоты практически
остается неизменной при значениях чисел М < М*, а потребная ско­
рость полета растет (рис. 10.5, а). При этом приборная скорость оста­
ется постоянной.
Удельный расход топлива Суд с ростом высоты полета уменьшается
(рис. 10.5, б). Уменьшение удельного расхода топлива обусловлено
падением температуры окружающего воздуха с ростом высоты, а так ­
же увеличением частоты вращения ротора за счет уменьшения пилотом
степени дросселирования двигателей для обеспечения равенства по­
требных и располагаемых тяг. Снижение температуры воздуха наблю­
дается до высоты 11 км в условиях стандартной атмосферы. Н а высо­
тах более 11 км атмосферное давление и плотность воздуха продолжа­
ют уменьшаться, а температура становится постоянной, что ведет сна­
чала к прекращению снижения удельного расхода топлива, а затем к
его росту. В результате на высотах 10— 12 км минимальный часовой
расход топлива оказывается на 40—60 % меньше, чем при полетах на
уровне моря. При дальнейшем увеличении высоты часовой расход топ­
лива возрастает. Отсюда следует, что наибольшей продолжительности
полета можно достичь на высотах 10 ...12 км.
Километровый расход топлива С к = C4/ V определяется часовым
расходом топлива и скоростью полета. Поскольку часовой расход топ-
Рис. 10.5. Кривые Ж уковского по т я ге ( а) , мощности ( в ) и зависим ость у дел ьн о ­
го расход а топлива от высоты п олета (б)
лива с увеличением высоты до Н = 11 км уменьшается, а потребная
скорость полета увеличивается, то километровый расход топлива с уве­
личением высоты будет уменьшаться, причем более интенсивно, чем
часовой расход топлива. Вследствие роста истинной потребной скоро­
сти прямолинейного установившегося горизонтального полета кило­
метровый расход топлива С к будет уменьшаться и на высотах
Н > 1 1 км, хотя и в меньшей степени. Так как увеличение высоты
полета связано с ростом потребной скорости, уменьшением плотности
воздуха и скорости звука, то на некоторой высоте число М может воз­
расти до значений М ^ М*. При этом развитие волнового кризиса и
рост лобового сопротивления самолета требуют либо увеличения
потребной тяги, либо уменьшения скорости полета до докритических
значений числа М полета. То и другое приводит к увеличению часового
и километрового расходов топлива, к уменьшению дальности и про­
должительности полета.
Как показывают теоретические исследования и практика летной
эксплуатации самолетов, минимальный километровый расход топлива
достигается на так называемой оптимальной высоте H L, которая на
2—3 км меньше высоты практического потолка. Расход топлива при
полете на оптимальной высоте на 50—75% меньше, чем на уровне мо­
ря. Чем больше практический потолок, а следовательно, и H L, тем
■меньше километровый расход топлива. В соответствии с формулой
Ск трдд = СуяР гп/ V километровый расход топлива достигает мини­
мума при минимальном значении произведения Суд на отношение
р
-р 5. Это возможно при наименьших значениях сомножителей. Таким
образом, минимальный километровый расход топлива С к, а следова­
тельно, и наибольшая дальность полета самолета с Т РД Д достигают­
ся при полете на оптимальной высоте Н l с о скоростью V l Самолет с ТВД. С увеличением высоты полета (10.5, в) потребные
мощность двигателей и скорость прямолинейного установившегося го­
ризонтального полета увеличиваются, кривые yVru (У) смещаются
вверх и вправо.
Увеличение высоты полета приводит к уменьшению удельного рас­
хода топлива, как вследствие снижения температуры воздуха до высо­
ты Н = 11 км, так и за счет уменьшения степени дросселирования дви­
гателей. Н а высоте 11 км в условиях стандартной атмосферы удель­
ный расход топлива достигает минимального значения, а при дальней­
шем увеличении высоты полета растет. С высотой полета повышается
к. п. д. воздушного винта т]в вследствие увеличения потребной скоро­
сти полета. В результате отношение Cya/r]B уменьшается более интен­
сивно, чем увеличивается потребная мощность N riI, что приводит к
уменьшению часового расхода с ростом высоты полета. Минимальное
значение часового расхода топлива достигается на высоте ограничения
мощности силовой установки, называемой расчетной высотой Я расч.
Часовой расход топлива самолетов с ТВД на высотах, близких к прак248
тическому потолку, в 1,5—2 раза меньше, чем при полете на уровне
моря.
Таким образом, наибольшая продолжительность полета достигает­
ся на высотах, близких к высоте ограничения мощности двигателя, и
на скорости V l
Высота ограничения мощности двигателя при­
водится в техническом описании.
Километровый расход топлива для самолетов с ТВД С„ твд =
_ £уд Nrn достигает минимального значения на высоте прямолинейЛВ
V
ного установившегося горизонтального полета, на которой произведе­
ние отношения СУд/т1в на N rn/ V минимально. Как видно из рис.
10.5, в, с увеличением высоты полета отношение ^
остается постоян­
ным до высот и скоростей полета, на которых еще не проявляется вол­
новой кризис. Отношение Суд/т]в с увеличением высоты полета умень­
шается и достигает минимума при полете на оптимальной высоте Н l На этой высоте километровый расход топлива в 2—2,5 раза меньше,
чем на уровне моря. Таким образом, наибольшая дальность полета
достигается при полете на оптимальной высоте с истинной скоростью
Vl , которая несколько больше наивыгоднейшей.
10.4. Влияние полетной массы, состояния атмосферы
и отказа двигателя на дальность и продолжительность полета
В предыдущих параграфах рассмотрено влияние на дальность и
продолжительность полета двух важнейших эксплуатационных факто­
ров: скорости и высоты полета. Высота в конкретном полете задается
службой управления воздушным движением, а скорость полета выдер­
живается в соответствии с требованиями РЛЭ самолета. Кроме высоты
и скорости полета, на часовой и километровый расходы топлива,
а следовательно, на продолжительность и дальность полета оказы ­
вают влияние такие факторы, как полетная масса самолета, ветер,
температура воздуха, отказ одного из двигателей, обледенение и др.
Влияние полетной массы. Увеличение полетной массы самолета,
рост потребных скорости, тяги и мощности силовой установки, а сле­
довательно, увеличение часового и километрового расходов топлива
при определенном запасе топлива на борту приводит к уменьшению
дальности и продолжительности полета. В результате выгорания топ­
лива в полете масса самолета может уменьшиться на 20—40 %, что
вызывает соответствующее уменьшение километрового и часового рас­
ходов, поскольку они прямо пропорциональны полетной массе само­
лета (10.4, 10.5, 10.7, 10.8).
Если бы полет выполнялся на неизменной высоте, то по мере умень­
шения полетной массы для уравновешивания силы тяжести самолета
Y а = G с целью поддержания горизонтального полета подъемную си-
лу Y a = Cya
S нужно было бы постепенно уменьшать. Поскольку
плотность воздуха в горизонтальном полете остается постоянной, то
уменьшения подъемной силы можно достигнуть уменьшением скорости
полета V путем снижения режима работы двигателей (увеличением
степени дросселирования) и соответствующим изменением угла атаки.
При этом должна поддерживаться скорость, соответствующая макси­
мальной продолжительности Vt или максимальной дальности V l
полета. В этом случае достигается оптимизация продолжительности
или дальности полета по скорости, но не обеспечивается оптимизация
полета по высоте, даже если в начале горизонтального полета высота
была оптимальной.
Уменьшение полетной массы самолета по мере выгорания топлива
приводит к увеличению теоретического Я т и практического Н пр по­
толков, а следовательно, и оптимальной высоты H l - Очевидно, для
обеспечения максимальной дальности необходимо выполнять полет по
наклонной траектории с постепенным набором высоты с таким расче­
том, чтобы высота поддерживалась оптимальной H l - По мере набора
высоты плотность воздуха р и температура воздуха Т падают, а по­
требная истинная скорость, соответствующая максимальной дальности
полета VL, растет. Поскольку оптимальная высота H L близка к прак­
тическому потолку, то полет с постепенным набором высоты Н L назы­
вается полетом т о потолкам ». При этом, если дальность полета само­
летов равна 8— 10 тыс. км, то увеличение оптимальной высоты полета
составит 4—5 км. Полет по потолкам иногда называют режимом крей­
серского набора высоты.
При полете «по потолкам» уменьшается километровый расход, а
дальность полета увеличивается примерно на 10 % по сравнению с
полетом на постоянной высоте.
Влияние ветра. Будем считать, что самолет совершает горизонталь­
ный полет. Если полет выполняется при отсутствии ветра, то истин­
ная И, земная VK и путевая V п скорости равны. При наличии встреч­
ной или попутной составляющей ветра самолет, совершая полет со
скоростью V относительно воздуха, сносится относительно земной по­
верхности со скоростью ветра W. Путевая скорость
Vn = VK = V ± W .
З н ак «—» относится к встречному ветру.
При скорости полета 200—250 м/с попутный и встречный ветер
(например, при попадании в струйное течение) может соответственно
изменять дальность полета на 20—25 %.
Влияние температуры воздуха. Предположим, что выполняется
прямолинейный горизонтальный полет с постоянной приборной ско­
ростью. При постоянном атмосферном давлении и изменении темпера­
туры воздуха приборная скорость, скоростной напор, а следователь­
но, и потребная тяга силовой установки Р гп = с qS остаются посто-
янными. Но увеличение температуры воздуха приводит к уменьшению
располагаемой тяги двигателей P v (рис. 10.9). Поэтому для сохране­
ния равновесия сил вдоль вектора скорости необходимо выдерживать
равенство Р = Р сп. Д ля этого при повышении температуры воздуха
следует увеличить режим работы двигателей, а при понижении темпе­
ратуры — уменьшить. Естественно, в первом случае часовой расход
топлива увеличится, во втором уменьшится.
Часовой расход топлива при изменении температуры воздуха от
7 \ до Г 2 при известном часовом расходе Сч1 при температуре воздуха
Т , определяется соотношением
(1 0 .1 8)
Таким образом, с увеличением температуры воздуха уменьшается
продолжительность полета, а с понижением температуры увеличи­
вается.
Из анализа соотношений, полученных в разделе 6.5, следует, что
при постоянном скоростном напоре и различных температурах возду­
ха Tj и Т 2 истинные скорости полета определяются соотношением
(1 0 .1 9 )
Подставляя зависимости (10.18) и (10.19) в формулу (10.6), получим
( 10. 20)
Отсюда следует, что при полете с постоянной приборной скоростью тем­
пература воздуха не влияет на километровый расход топлива. Таким
образом, изменение температуры воздуха не влияет на дальность по­
лета.
Влияние отказа двигателя. Отказ одного или нескольких двигате­
лей увеличивает лобовое сопротивление самолета, уменьшает распола­
гаемую тягу силовой установки и скорость. Д л я поддержания скоро­
сти полета при отказе одного из двигателей необходимо увеличить ре­
жим работы остальных двигателей. Если при этом располагаемая тяга
силовой установки больше или равна потребной тяге, то горизонталь­
ный полет возможен на прежней высоте. В противном случае горизон­
тальный полет возможен только на меньшей высоте. При этом уменьше­
ние высоты полета и повышение лобового сопротивления самолета ве­
дут к увеличению часового и километрового расходов топлива, а сле­
довательно, к уменьшению продолжительности и дальности полета.
Заметим, что увеличение режима работы работающих двигателей
при отказе одного из двигателей (уменьшение степени дросселирова­
ния) может сопровождаться уменьшением удельного расхода топли­
ва, а следовательно, и уменьшением часового и километрового рас­
ходов, что ведет к увеличению дальности и продолжительности гори­
зонтального полета даже несмотря на некоторое увеличение лобового
сопротивления самолета за счет выключенного двигателя.
Д о п о л н и тел ьн ая
ли терату р а
[2], с. 369—397; [3], с. 8 6 —99; [5], с. 9 7 — 101; [9], с. 106— 119.
К он трол ьн ы е вопросы
1. Ч то так ое тех н и ч еская и п р акти ч еск ая дальн ость полета?
2. О бъ ясн и те вли ян и е скорости на дальность и продолж и тельность полета.
3. О бъ ясн и те вли ян и е высоты полета на дальность и п родолж ительность по­
л ет а.
4. Ч то так о е о п ти м ал ьн ая высота полета?
5. О бъ ясн и те вли ян и е полетной массы на дальн ость и продолж и тельность
полета?
6 . К ак вы брать реж им н аибольш ей дальности полета?
7. Р ассч и тать д ал ьн о сть горизо н тал ьн о го полета сам олета, если за время
полета вы работан о 2000 к г то п л и в а, километровый расход топлива Ск =
.= 9 ,7 к г/к м , н ач ал ьн ая п о летн ая м асса самолета 16 000 к г. Ответ: Lrn = 220 км.
8 . Р ассч и тать часовой расход топ ли ва Сч2 на эш елоне при тем п ературе
263 К , если при тем п ерату р е 253 К часовой расход СЧ1 = 4 500 кг/ч. Ответ: С ч2=
= 4588 к г/ч .
Глава
11
УСТОЙЧИВОСТЬ, УПРАВЛЯЕМОСТЬ и БАЛАНСИРОВКА САМ ОЛЕТА
В ПРОДОЛЬНОМ ДВИЖЕНИИ
11.1. Основные понятия и определения
При изучении основных режимов полета и летно-технических ха­
рактеристик самолета рассматривалось опорное движение центра масс
под действием сил. Самолет считался сбалансированным и выполнял
заданное пилотом движение по траектории. Сам процесс управления
движением нас не интересовал.
Д л я осуществления заданного управляемого движения пилот
должен обеспечить определенные значения углов атаки, скольжения,
крена, режим работы двигателей, а значит требуемые значения сил
и перегрузок. Так как реальное движение самолета всегда отличается
от идеального вследствие разброса характеристик самого самолета,
неточностей пилотирования, ветровых воздействий и т.п., то задачей
пилота является такж е парирование возмущающих воздействий и со­
хранение параметров движения, близких к заданным.
Раздел динамики полета, в котором изучается процесс управления
самолетом и оценивается возможность его движения по заданной тра-
Рис. 11.1. Устойчивое (а), безразличное ( б ) и неустойчивое ( в ) полож ения равно­
весия дисков, подвешенных на горизонтальную ось, проходящ ую через геометри­
ческий центр А (О — центр масс диска)
ектории в различных условиях полета, называется устойчивостью и
управляемостью.
Состояние самолета в полете, при котором действующие на него
силы и их моменты не вызывают его вращения и не нарушают равно­
мерного прямолинейного движения, называется равновесием. Если
на тело, находящееся в равновесии, не действуют внешние возмущаю­
щие силы, то состояние равновесия будет продолжаться как угодно
долго. Такое состояние на практике не реализуется, так как на тело
всегда воздействуют внешние возмущающие силы. При отклонении те­
ла от положения равновесия, силы, действующие на него, как правило,
изменяются и равновесие сил нарушается. Изменение сил будет вызы­
вать соответствующее движение тела. Если изменившиеся силы тако­
вы, что под их действием тело возвращается к положению равновесия,
то, несмотря на воздействие внешних возмущающих сил, тело будет на­
ходиться вблизи положения равновесия. В этом случае говорят об
устойчивом равновесии. В других случаях изменения сил таковы, что
они вызывают дальнейшее отклонение тела от положения равновесия.
Под действием самого незначительного внешнего возмущения силы из­
меняются так, что тело все более отклоняется от положения равнове­
сия, оно уже не будет оставаться вблизи положения равновесия, а
уйдет далеко от него. Такое положение равновесия называют не­
устойчивым.
Итак, для устойчивости необходимо, чтобы при отклонении тела от
положения равновесия возникали силы, возвращающие тело к перво­
начальному положению. В качестве примера рассмотрим равновесие
диска массой т с центром масс О, не совпадающим с геометрическим
центром А (рис. 11.1, а, в) и совпадающим с геометрическим центром
(рис. 11.1, б). Диск подвешен на горизонтальной оси, проходящей че­
рез геометрический центр А . На него (рис. 11.1, а) действуют силы тя ­
жести G, приложенная в центре масс, и равная ей, но противоположно
направленная сила реакции опоры N . В начальный момент времени
силы G и N взаимно уравновешены, диск находится в состоянии рав­
новесия. Если теперь диск отклонить из исходного положения на не­
большой угол Д(р вправо или влево, то сила тяжести будет уравнове­
шена силой реакции опоры N , но сила тяжести G уже не будет прохо­
дить через точку опоры Л и на плече х создаст момент Gx. Если диск от­
пустить (прекратить действие возмущения), то под влиянием момента
Gx диск будет стремиться самостоятельно возвратиться в исходное по­
ложение равновесия. Момент силы, направленный на восстановление
исходного положения равновесия Аф = 0, называется стабилизи­
рующ им, а такое положение равновесия тела называется устойчивым.
В случае, показанном на рис. 11.1,6, центр масс диска совпа­
дает с его геометрическим центром (масса диска равномерно распреде­
лена по ободу). Под действием внешнего момента диск может повер­
нуться на некоторый угол от исходного положения, и после прекраще­
ния действия внешнего момента равновесие сил тяжести и реакции
опоры сохранится (N = G). При этом линия действия силы тяжести
будет проходить через точку опоры, и момент ее относительно этой
точки будет всегда равен нулю. Такое положение равновесия называ­
ется безразличным (нейтральным).
Рассмотрим положение диска, показанное на рис. 11.1, в. Очевид­
но, даже самое малое отклонение диска на угол Аф из исходного поло­
жения приводит к возникновению момента силы Gx, который стремится
еще больше отклонить диск от исходного положения равновесия, еще
больше увеличить угол Аф. Такое положение равновесия называется
неустойчивым, а момент Gx называется дестабилизирующим. Следу­
ет заметить, что равновесие сил G и N сохраняется и в этом случае.
Д л я обеспечения состояния равновесия самолета в полете пилот
задает соответствующий потребной скорости полета режим работы дви­
гателей и угол атаки. Действующие на самолет моменты тяги двигате­
лей и аэродинамических сил уравновешиваются соответствующими аэ­
родинамическими моментами органов управления, возникающими
при отклонении рулей высоты направления и элеронов. Обычно рав­
новесие самолета в полете рассматривают относительно трех осей свя­
занной системы координат. Если все силы, действующие на самолет
вдоль рассматриваемой оси, взаимно уравновешены, а также уравно­
вешены моменты сил относительно этой оси, т. е. выполняются условия
S / 7= 0 и 1,М = 0, то самолет находится в состоянии равновесия или
балансировки.
Процесс уравновешивания моментов, действующих на самолет,
путем соответствующего отклонения органов управления называ­
ется балансировкой.
Невозмущенное (опорное) движение самолета может быть как пря­
молинейным, так и криволинейным. В реальном (возмущенном) дви­
ж ении самолета выделяют собственное и вынужденное возмущенное
движение самолета. Движение самолета после прекращения действия
возмущения, нарушившего состояние исходного равновесия, называ­
ется собственным возмущенным движением. Оно может быть периоди254
ческим или апериодическим, затухающим или незатухающим. Такое
движение можно получить, если находящемуся в равновесии самолету
сообщить некоторое начальное возмущение, а затем предоставить са­
мому себе. Собственное возмущенное движение самолета наблюдает­
ся после воздействия резкого порыва ветра, отклонения руля, сброса
груза и т.п.
Движение самолета при наличии постоянно действующего возмуще­
ния называется вынужденным возмущенным движением, например,
движение самолета в процессе отклонения руля, изменения конфи­
гурации, постоянного воздействия ветра и т.п. Способность самолета
самостоятельно, без вмешательства пилота сохранять заданный режим
полета и возвращаться к исходному режиму после прекращения
действия возмущения называется устойчивостью. Способность само­
лета реагировать на отклонения органов управления и в ответ на со­
ответствующие действия пилота выполнять любой маневр, предусмот­
ренный условиями летной эксплуатации самолета, называется управ­
ляемостью.
Д ля оценки характера движения самолета в первый момент после
прекращения действия возмущения введено понятие статической
устойчивости. Если диск (рис. 11.1, а) отклонить от исходного поло­
жения равновесия на угол Дер, затем снять возмущение, то под дей­
ствием возникшего стабилизирующего момента силы тяжести Gx
диск будет стремиться возвратиться в исходное положение равнове­
сия. В этом случае диск обладает статической устойчивостью. Д иск
(рис. 11.1, в), отклоненный от исходного положения равновесия даже
на самый малый угол Лф, под действием возрастающего дестабили­
зирующего момента силы тяжести Gx, будет стремиться еще больше от­
клониться от исходного положения равновесия, еще больше увеличить
Л<р. В этом диск статически неустойчив. В рассмотренном случае ста­
билизирующим и дестабилизирующим моментом был момент силы тя ­
жести .
На самолет в полете также действуют стабилизирующие моменты,
которые имеют аэродинамическую природу. Таким образом, если в
первый момент после прекращения действия внешнего возмущения на
самолет действует стабилизирующий момент, определяющий началь­
ную тенденцию движения к исходному положению равновесия, то са­
молет статически устойчив. Наличие дестабилизирующего момента,
определяющего начальную тенденцию движения самолета от исходного
положения равновесия, говорит о его статической неустойчивости.
Понятие устойчивости движения включает начальную тенденцию
движения и процесс движения самолета после прекращения действия
возмущения. Поясним это свойство на примере. Отклоним диск
(рис. 11.1, а) на некоторый угол Лф из положения 1 в положение 2 и
отпустим его. Под действием стабилизирующего момента Gx диск,
преодолевая сопротивление трения о воздух и трения в опоре (сопро­
тивление демпфирующих моментов) и сопротивление инерционного
момента и ускоряя движение, начнет возвращаться в положение 1
Рис. 11.2. Основные типы возмущ енного движения самолета:
а — к о л е б а те л ь н о е ; б — а п е р и о д и ч ес к о е (ш триховой ли н и ей п о к а з а н о неустойчивое д в и ж е н и е )
исходного равновесия. Угол Дер будет уменьшаться и в положении 1
достигнет значения Дф = 0. При этом координата х, а следовательно,
и стабилизирующий момент Gx также станут равными нулю, но ско­
рость диска достигнет наибольшего значения.
Под действием инерционного момента диск «проскочит» положение
устойчивого равновесия 1 и, преодолевая сопротивление демпфирую­
щего момента и действие теперь уже противоположно направленного
стабилизирующего момента, будет постепенно замедлять движение,
увеличивая угол Дф. В положении 3 его угловая скорость станет рав­
ной нулю, а отклонение Дф, координата х, а следовательно, и стаби­
лизирующий момент Gx достигнут своего наибольшего значения с про­
тивоположным знаком. Далее процесс повторится в обратном направ­
лении. Постепенно под действием демпфирующего момента колебания
диска будут затухать, и он возвратится в исходное положение равно­
весия 1. Изменение угла отклонения Дф в процессе колебательного
движения диска описывается синусоидальной кривой с убывающей
амплитудой (рис. 11.2, а, сплошная кривая). Интенсивность затуха­
ния колебаний будет тем больше, чем больше демпфирующий момент.
При очень большом трении (например, если рассматривать движение
диска не в воздухе, а в глицерине) процесс возвращения к исходному
положению равновесия может стать не колебательным, а апериодиче­
ским (рис. 11.2, б, сплошная кривая).
Если рассмотреть процесс собственного движения статически не­
устойчивого диска (см. рис. 11.1, в), то можно заметить, что под действием все возрастающего момента он продолжает с нарастающей ско­
ростью уходить от положения неустойчивого равновесия 1 и самостоя­
тельно к нему не возвратится. Наличие статической неустойчивости
приводит к неустойчивости движения (рис. 11.2, б, штриховая кривая).
Исследования показывают, что наличие статической устойчивости
является необходимым, но недостаточным условием устойчивости дви­
ж ения. Статическая устойчивость еще не гарантирует того, что поло­
жение устойчивого равновесия будет восстановлено. Это объясняется
256
j
тем, что общий результат движения определяется не только стабили­
зирующими моментами, но еще и демпфирующими. Так, если ось
вращения диска (рис. 11.1, а) привести в возвратно-поступательное
движение в плоскости диска, то при некоторой частоте колебаний оси
диск начнет раскачиваться с нарастающей амплитудой и все дальше
будет уходить от положения устойчивого равновесия 1. Изменение уг­
ла отклонения диска от исходного положения равновесия во времени
изображается синусоидальной кривой с нарастающей амплитудой
(рис. 11.2, а, штриховая кривая). Наличие статической устойчивости
диска не обеспечило устойчивость движения.
На самолет в полете, кроме стабилизирующих (дестабилизирую­
щих) моментов, также действуют демпфирующие и инерционные мо­
менты, природа которых будет рассмотрена в последующих главах.
Суммарное воздействие указанных моментов определяет в конечном
итоге устойчивость его движения. Устойчивый самолет обладает дву­
мя ценными качествами. Он сохраняет известную невосприимчивость
к воздействию относительно слабых возмущений, а на более сильные
возмущения, способные нарушить режим балансировки, он отвечает
только такими видами движения, которые обеспечивают быстрое вос­
становление исходного режима полета.
Устойчивость движения самолета зависит от фактических условий
полета ( V , Н. М , а . Р), особенностей аэродинамической компоновки,
положения центра тяжести, конфигурации, режима работы двигате­
лей, степени жесткости конструкции самолета, работы бортовых авто­
матических систем управления, степени фиксации пилотом рычагов
управления. Влияние этих факторов на устойчивость движения не
одинаково, поэтому проводится качественная оценка устойчивости
движения каждого типа самолета, поступающего в массовую эксплуа­
тацию в различных условиях полета.
Как и устойчивость, управляемость самолета оцеливается статиче­
скими и динамическими характеристиками. Она характеризуется уси­
лиями на рычагах управления и отклонениями рычагов, необходимы
ми для осуществления балансировки самолета в различных установив­
шихся режимах полета. Управляемость качественно оценивается спо­
собностью самолета «ходить за рычагами» и характером реакции само­
лета на отклонение органов управления. Оно зависит от характери­
стик устойчивости, особенностей системы ручного и автоматического
управления движением, режима полета, полетной конфигурации.
Количественно управляемость оценивается в процессе летных испыта­
ний на всех эксплуатационных режимах полета, при всех основных ва­
риантах загрузки и конфигурации самолета.
Устойчивость и управляемость относятся к числу особенно важных
физических свойств самолета. От них в значительной мере зависят
безопасность полетов, простота и точность пилотирования, полнота ре­
ализации экипажем технических возможностей самолета. Сопоставляя
понятия устойчивости и управляемости самолета, можно сделать вы­
вод, что они в известной мере противоположны. Устойчивость — спо­
собность самолета сохранять заданный режим полета, а управляе­
мость — изменять его. Вместе с тем между этими характеристиками
существует теснейшая связь. Она заключается в том, что с повыше­
нием устойчивости самолета при прочих неизменных условиях увели­
чиваются потребные перемещения рычагов управления и усилия на
них, необходимые для изменения режима полета. При больших потреб­
ных отклонениях рулей могут быть ограничены маневренные возмож­
ности самолета. При больших усилиях на рычагах управления пи­
лот быстро утомляется при выполнении маневров. О таком самолете
говорят, что он «тяжел в управлении». Но самолетом трудно управлять
и тогда, когда отклонения рулей и усилия, потребные для их отклоне­
ния, слишком малы. В этом случае самолет очень чувствителен к изме­
нению усилий на рычагах, реагирует на малое, иногда непроизволь­
ное перемещение рычага, требуя от пилота большого внимания, точ­
ного и плавного управления. О таком самолете говорят, что он «строг
в управлении».
Таким образом, уменьшение устойчивости самолета сопровождает­
ся, с одной стороны, уменьшением потребных отклонений рулей и не­
обходимых для этого усилий, с другой — усложнением пилотирования
самолета.
Очевидно, что при некотором повышении устойчивости самолета,
«строгого в управлении», улучшится и его управляемость, так как
увеличатся потребные отклонения рычагов управления и усилия на
них. Управление малоустойчивым или неустойчивым самолетом тре­
бует от пилота двойных движений рычагами, например, большого дви­
жения штурвала вперед и тут же движения назад. На устойчивом са­
молете практически отсутствуют двойные движения рычагами. Само­
лет, обладающий хорошей по оценке пилота устойчивостью, реагиру­
ет на управляющие воздействия пилота практически без запаздыва­
ния, чем облегчаются контроль за режимом полета и дозировка потреб­
ных отклонений рычагов управления для поддержания заданного ре­
жима полета и выполнения маневра.
При хорошей устойчивости и управляемости полнее используются
технические возможности самолета, обеспечиваются точность и просто­
та пилотирования, существенно повышается безопасность полетов. При
этом разгружается внимание пилота, уменьшаются психофизиологи­
ческие затраты, сокращается доля полетного времени, расходуемого
непосредственно на поддержание требуемого режима полета.
Понятия управляемость самолета и управление самолетом нетожде­
ственны. Первое является определенным физическим свойством самоле­
та и характеризует «послушность» самолета пилоту. Второе определя­
ет характер воздействия пилота или бортового автомата на соответ­
ствующие органы управления самолета с целью изменения парамет­
ров движения. Понятие управляемость не следует также путать с по­
нятием маневренность. С точки зрения пилота управляемость характе­
ризует «послушность» самолета при повороте вокруг центра масс,
а маневренность оценивается перемещениями центра масс в простран­
стве.
При решении большинства задач устойчивости и управляемости
самолета продольное и боковое движения считаются независимыми и
рассматриваются раздельно. Соответственно устойчивость и у п р авл я­
емость рассматривают в продольном и боковом движении. Знаки углов,
моментов и угловых скоростей положительны, если они соответствуют
вращению самолета по часовой стрелке для наблюдателя, смотря­
щего из начала координат по направлению оси, относительно которой
происходит вращение (рис. 11.3). Н аправления отклонения рычагов
управления и органов управления считаются положительными, если в
результате их отклонения создаются отрицательные моменты.
Обеспечение приемлемых характеристик устойчивости и управля­
емости самолета достигается в процессе конструирования, изготовле­
ния и летных испытаний самолета. Характеристики устойчивости и
управляемости создаваемого самолета исследуют на основе достигну­
того опыта, методами математического моделирования, в процессе
трубного и летного экспериментов. Подробно с этими методами можно
ознакомиться в литературе [3, 7, 11]. Окончательную качественную
оценку устойчивости и управляемости самолета по результатам лет­
ных испытаний дает пилот-испытатель. В своем отзыве он отмечает
достоинства и недостатки самолета в отношении безопасности полета,
доступности самолета пилоту средней квалификации, полного выпол­
нения требований технического задания.
11.2. Статические моменты тангажа
Д ля простоты будем считать, что продольное движение самолета
протекает в вертикальной плоскости, крен и скольжение отсутствуют.
Полет совершается под действием тяги, силы тяжести, аэродинами­
ческих сил и их моментов относительно поперечной оси 0Z, проходя­
щей через центр масс самолета (рис. 11.4). Так как линии действия тяги
силовой установки Р (равнодействующей тяги двигателей) и аэродина­
мической силы планера R a (равнодействующей аэродинамических сил,
распределенных по поверхности планера) в общем случае не проходят
через центр масс самолета, то они создают соответствующие моменты
относительно поперечной оси 0 Z связанной системы координат: мо­
мент тангажа тяги М р г и аэродинамический момент тангажа планера
M z. Результирующий момент тангажа, действующий на самолет при
продольном движении,
УИ„ =уИг + /Ир
(11.1)
2
2*
Знаки моментов, углов, угловых скоростей и ускорений, отклоне­
ний рычагов управления определяются согласно принятому правилу
(см. рис. 11.3). За положительные принимают изменения указанных
параметров, происходящие по направлению часовой стрелки, если смо­
треть по оси 0 Z из центра масс самолета. Отрицательные моменты,
стремящиеся уменьшить угол атаки, называются пикирующими, а
положительные,
стремящиеся увеличить угол атаки, — кадрирую ­
щими .
Проекция аэродинамической силы планера R a на оси ОХ и OY
связанной системы координат называются соответственно продольной
X и нормальной Y силами. В пределах летных углов атаки нормаль­
ная сила близка к подъемной, т. е. Y = Y а. На основании этого в тео­
рии устойчивости и управляемости самолета употребляют термин
«подъемная сила», а на самом деле подразумевают нормальную силу.
Продольная сила X и сила лобового сопротиления Х а на малых
углах атаки примерно равны, на средних углах атаки продольная си­
ла близка нулю, а на больших углах атаки она меняет знак и стано­
вится направленной вперед по средней аэродинамической хорде кры­
ла, тогда как сила лобового сопротивления Х а всегда направлена про­
тив вектора скорости полета.
Подъемная сила самолета складывается из подъемных сил крыла
F „ p, горизонтального оперения F r0 , фюзеляжа Уф и силы ДУ^нт
обусловленной интрференцией частей самолета:
Y — ^ к р + ^ г о + ^ ф - !- ^ У г ИНТ
( 11.2 )
В свою очередь, подъемную силу горизонтального оперения можно
представить в виде двух слагаемых: подъемной силы Уаг0 горизон­
тального оперения, обусловленной только изменением угла атаки са­
молета, и подъемной силы Y B, обусловленной только отклонением
стабилизатора на угол ф и отклонением руля высоты на угол 6В:
(1 1 .3 )
Подъемная сила горизонтального оперения Уаго, обусловленная
углом атаки самолета, во много раз больше, чем сила Y B, поэтому мож­
но считать, что Кго « К аго. Силу Каго включим в состав подъемной си­
лы самолета Y a, а участием сравнительно небольшой силы Y B в обра­
зовании подъемной силы самолета пренебрежем.
Управляющий момент тангажа на самолетах с неподвижным стаби­
лизатором создается при отклонении руля высоты на угол 6В. Н а са­
молетах с управляемым стабилизатором (стабилизатором, изменяющим
свое положение под действием системы управления) управляю щ ий мо­
мент создается при отклонении стабилизатора на угол ф, на самолетах
с подвесным стабилизатором (изменяемым в полете углом установки)—
за счет угла установки ф стабилизатора и отклонения руля высоты
на угол 6В. Д ля последнего случая управляющий момент тангаж а
стаби л и затора и р у л я высоты. Они п о казы в аю т, к а к и зм ен яет с я к о эф ф и ц и ен т
продольного момента m z при изменении у гл о в отк л о н ен и я с т а б и л и з а т о р а <р и
р у л я высоты б„ на 1°.
Таким образом, если стабилизатор или руль высоты отклонены
от исходного положения, как показано на рис. 11.4, то такое откло­
нение согласно правилу знаков считается отрицательным (углы ср и
Ьв отрицательны). При этом на самолет действуют кабрирующие (поло­
жительные) управляющие моменты М ГОг и M BZ. Так как знак момен­
та, создаваемого органом управления, противоположен знаку откло­
нения органа управления, то производные
и /л6® отрицательны.
Отклонение руля высоты или стабилизатора приводит к соответст­
вующему изменению коэффициента управляющего момента тангажа
А т фг = т \ Л<р, или Am BZ = m6®6B. Коэффициенты эффективности
стабилизатора т и руля высоты /л6гв зависят от числа М полета
(рис. 11.5). При приближении числа М полета к числу М* коэффици­
енты эффективности увеличиваются по абсолютному значению, а при
М > М * — уменьшаются, что обусловлено перераспределением дав­
ления на горизонтальном оперении.
Аэродинамический
момент тангажа
М Т= т г
р V2
■Sb,
(П .5 )
создается крылом, фюзеляжем, горизонтальным оперением, гондо­
лами двигателей и т.д.
У
самолетов традиционной компоновочной схемы крыла образует­
ся отрицательный (пикирующий) момент тангажа и для его балансиров­
ки (уравновешивания) горизонтальное оперение (включая руль высо­
ты) должно создавать равный ему, но противоположно направленный
кабрирующий момент. Главную роль в создании этого момента играет
горизонтальное оперение (стабилизатор), осуществляющее как бы гру­
бую балансировку самолета. Это и явилось основанием для включения
подъемной силы Y ro в состав подъемной силы самолета. Тонкая балан­
сировка обеспечивается отклонением руля высоты или стабилизатора.
О тклоняя стабилизатор и руль высоты, пилот балансирует самолет,
взаимно уравновешивая моменты, действующие относительно оси OZ и
обеспечивая равенство
= 0. Зависимость коэффициента аэроди-
Рис. 11.5. Зависим ость коэффициентов
эф ф ективности стаби лизатора т £ и
р у л я вы соты т 6в
от числа М полета
Рис. 11.6. Зависимости коэффициента
аэродинамического момента тан гаж а
от коэффициента подъемной силы при
различных
углах отклонения руля
высоты (о ) и стабилизатора (б)
Рис. 11.7. Схема сил, действующих
на сбалансированный относительно
оси OZ сам олет
=0)
Рис. 11.8. Схема сил, действующ их на
самолет с использованием ф окуса по
углу атаки
намического момента тангажа самолета т г от угла атаки и коэффициен­
та аэродинамической нормальной силы при различных углах отклоне­
ния стабилизатора и руля высоты (рис. 11.6) близки к линейным при
углах атаки а < а тр. Точки пересечения кривых т г (с и) с осью аб­
сцисс соответствуют балансировочному положению руля высоты или
стабилизатора.
Если самолет сбалансирован в продольном движении, то вращение
относительно поперечной силы OZ отсутствует. Самолет участвует
только в поступательном движении под действием системы сил Р, Y,
X, G, которые можно считать приложенными в центре масс (рис. 11.7).
При изменении угла атаки на величину Аа изменяется аэродинами­
ческая сила планера R a , приложенная в центре давления. Продоль­
ная балансировка самолета нарушается, появляется неуравновешен­
ный аэродинамический момент тангажа АМ г, который вызывает по­
ворот самолета относительно оси OZ. Вместе с тем изменение угла ата­
ки обусловливает изменение положения центра давления. Поскольку
определение координат центра давления представляет значительные
трудности, то при решении задач устойчивости и управляемости вво­
дят понятия фокуса крыла F Kр и фокуса самолета F, аналогичные по­
нятию фокуса профиля.
Фокусом крыла называется точка F „ p, расположенная на средней
аэродинамической хорде Ьа, спроектированной на плоскости симмет­
рии самолета, относительно которой момент тангажа остается постоян­
ным при небольших изменениях угла атаки. Фокусом самолета {фоку­
сом по углу атаки) называется точка F, расположенная на линии пере­
сечения плоскости OXZ связанной системы координат с плоскостью
симметрии самолета, относительно которой момент тангажа остается
постоянным при малых изменениях угла атаки.
Так как положение фокуса и центра масс самолета отсчитывается
от носка средней аэродинамической хорды крыла Ь а и выражается в до­
лях (процентах) ее длины, то для удобства спроецируем хорду Ьа на
линию пересечения плоскости O X Z связанной системы координат с
плоскостью симметрии самолета (на ось ОХ связанной системы коорди­
нат).
Если использовать понятие фокуса самолета и перенести аэроди­
намические силы из центра давления в фокус, добавив аэродинамиче­
ский момент тангажа при нулевой подъемной силе /Мог, то получим схе­
му сил и моментов тангажа, приведенную на рис. 11.8. Действительно,
при угле атаки нулевой подъемной силы а 0 подъемная сила самолета
Y a = 0, на самолет действует аэродинамический момент тангажа
(аэродинамический момент тангажа при нулевой подъемной силе),
р V*
Mo z — то z
2----
S b A,
(11.6)
I
создаваемый силой лобового сопротивления относительно фокуса са­
молета. При любом угле атаки (а 0 < а < а тр) в фокусе самолета поя­
вится подъемная сила Y a, которая создаст аэродинамический момент
тангажа
М г = М „
Z+ Y
(Хр—
хт),
(1 1 .7 )
где Хр и х Т — координаты ф окуса и центра масс относительно начала сред­
ней аэроди нам ической хорды к р ы л а (САХ).
Таким образом, аэродинамический момент тангажа
самолета
представляет сумму моментов: момента M nz, не зависящего от угла ата­
ки, и момента Y ( — х т), создаваемого приращением подъемной си­
лы AY а = Y а, которое возникает при изменении угла атаки и прило­
жено в фокусе самолета.
В отличие от центра давления положение фокуса самолета остает­
ся практически постоянным в диапазоне летных углов атаки при
М < М*. В нормальных условиях эксплуатации фокус самолета F
всегда располагается позади центра масс (позади проекции О' центра
масс самолета на В А). Зависимость положения самолета F и фокуса
крыла F KV относительно носка соответствующей проекции средней аэ­
родинамической хорды крыла ЬА от числа М полета показана на
рис. 11.8.
Расстояние от носка проекции ЬА средней аэродинамической хорды
крыла на ось О Х до центра масс самолета, выраженное в процентах (до­
л ях ) длины ЬА, называется центровкой самолета:
*т = - т г - 100% ,
( 1 1 .8)
0А
или
x T = x r lbA .
(1 1 .9 )
Например, если центр тяжести самолета расположен на расстоянии,
равном 1/4 длины проекции ЬА от ее носка, то центровка самолета бу­
дет 25 % (в соответствии с формулой 11.8) или 0,25 (в соответствии с
формулой 11.9).
Центровка пустого самолета приводится в его формуляре. Поло­
жение центра тяжести самолета, а значит и его центровка зависят от
264
массы груза и числа пассажиров,
размещения груза и пассажиров по
длине фюзеляжа, от массы топли­
x F(M)
ва, его размещения и выработки в
процессе полета, положения шасси
Г "
/ * к Рм
\ У
(выпущено, убрано), перемещения
^кр
груза и пассажиров.
||
Определение центровки и ее
* 7 / / / ) / ? / / / / / ' ' ' ' **" ' ' '
177777/lV
y
ЛТ]
контроль осуществляются экипа­
,Хг.П.З
Л
_
l^-T.TVll
жем. При этом достигаются наи­
более приемлемые центровки в
пределах установленного руковод­
Рис. 11.9. В лияние числа М полета на
ством по летной эксплуатации са­ полож ение ф окуса кры ла и фокуса
молета эксплуатационного диапа­ сам олета F
зона центровок. Эксплуатационный
диапазон центровок ограничивается предельно передней х пв и пре­
дельно задней х„з (рис. 11.9). Например, для самолета АН-24 экс­
плуатационный диапазон центровок равен 15—3 2 % , для Ту-154
16,5—32 %, для Ил-62 27—34 % . Определение центровок в практике
летной эксплуатации проводится по номограммам (центровочным гра­
фикам), центровочным линейкам и другими методами. Центровка
оказывает основное влияние на характеристики устойчивости и управ­
ляемости самолета.
Использование понятия фокуса самолета позволяет существенно уп­
ростить подход к определению момента тангаж а. Аэродинамический
момент тангажа М 2, действующий на самолет при угле атаки, отличном
от угла атаки а 0, является алгебраической суммой моментов тангаж а,
создаваемых нормальной Y и продольной X силами, приложенными в
центре давления:
М.^Му^Мх^
Момент тангажа M x z, создаваемый продольной силой X , сравни­
тельно мал, так как плечо силы X относительно оси OZ обычно неве­
лико. При изменении углов атаки в летном диапазоне сила X меняет
знак и на средних углах атаки близка к нулю. Поэтому примем M x t =
= 0. В связи с этим будем считать, что она приложена не в цент­
ре давления, а в фокусе самолета. К ак показывают исследования, та­
кой перенос силы X не вносит существенной ошибки в расчеты продоль­
ной устойчивости и управляемости.
Таким образом, основная доля продольного аэродинамического
момента создается за счет нормальной силы У, зависящей от угла ата­
ки. Поскольку коэффициент аэродинамического момента тангаж а т г в
формуле (11.5) в диапазоне летных углов атаки при скоростях полета,
соответствующих числам М < М * , практически линейно зависит от уг­
ла атаки а и коэффициента аэродинамической нормальной силы с,,
(рис. 11.6), то формулу (11.5) можно привести к виду
М х = т * A a q S b A = m ^ y Асу q S b A)
дтг
с dmz
—— и т У ----- — угловы е
аа
дсу
клона) к ривы х m z(a) и тг(су).
где /м“ =
(1 1 .1 0 )
укоэффициенты (тангенсы угло в на-
Равнодействующая тяги двигателей Р в общем случае не проходит
через центр масс самолета, поэтому возникает момент тангажа от тяги
M pz относительно оси OZ (рис. 11.10). Кроме того, при косой обдувке
воздушного винта (см. рис. 5.8) и косой обдувке входного устройства
ТРД (при набегании воздушного потока под углом к оси двигателя)
на входном устройстве вследствие потери части количества движения
при повороте набегающего потока появляется нормальная составля­
ющая тяги Р у (см. рис. 11.10).
Момент тангажа силы тяги
М р 2 = РУр + РуХр,
( 1 1 . 11)
где у р и х р — соответственно плечи тяги Р и н орм альной составляю щ ей тяги
Ру-
Очевидно, при верхнем относительно центра масс самолета распо­
ложении равнодействующей тяги силовой установки создается пики­
рующий момент, при нижнем — кабрирующий. Значительное влия­
ние на момент тангажа самолета оказывают обдувка частей самолета
струей от воздушного винта ТВ Д , а также воздействие струи ТРД Д .
Используя правило знаков (см. рис. 11.3) применительно к схеме са­
молета, изображенного на рис. 11.8, получим выражение для резуль-
Рис. 11.10. С оставляю щ и е тяги при верхнем (а), нижнем ( б) относительно центра
масс расп олож ен ии дви гателей и косой обдувке Т Р Д Д (в)
тирующего момента тангажа всех
сил, действующих на самолет:
М
=A tfoz
У (Хр
'^т)
Мр
+ ^ ф ^-го + ^ в ^го.
( Н . 12 )
где x F, хт , у р , Lro — координаты
точек
п ри л ож ен и я
соответствую щ их
си л, в зяты е со зн аком « + » и численно
равны е величине плеча силы.
Рис. 11.11. Схема образования стаб и ­
лизирующих моментов тан гаж а с б а ­
лансированного самолета при изм ене­
нии угла атаки
Если
обе части уравнения
(11.12) поделить на произведение
qSbA, то с учетом (11.4) получим уравнение в безразмерной форме,
устанавливающее связь между коэффициентами результирующего
момента тангажа и его составляющими
m R = m oz— C y ( X p —
z
x 1) — m p
z
} -m ‘p Д ф + т 6 в б в ,
%
(11.13)
где m Hz и m oz — коэффициенты резул ьти р у ю щ его аэр о ди н ам и ч еско го мо­
мента т а н га ж а при нулевой подъемной си ле соответственно; су — коэф ф ициент
норм альной аэродинам ической силы ; т ^ — коэф ф ициент момента т а н г а ж а т я ­
ги; Хр = x F/bA — приведенная
сам олета.
к оорди ната ф окуса сам о л ета; х Т — ц ентровка
Уравнение (11.12) определяет соотношение между составляющими
результирующего момента тангажа и позволяет рассчитать результи­
рующий момент.
Стабилизирующий аэродинамический момент тангажа во многом
определяет характеристики устойчивости и управляемости самолета.
Если самолет сбалансирован относительно оси 0 Z , т. е. результиру­
ющий момент тангажа
= 0, то все силы, действующие на самолет,
можно считать приложенными в центре масс, так как в этом случае
вращательное движение отсутствует, самолет движется под действием
системы сил, показанных на рис. 11.7.
Изменение угла атаки, Д а сбалансированного самолета, вызван­
ное некоторым возмущающим воздействием, приводит к появлению в
фокусе самолета приращения подъемной силы Д Y (рис. 11.11), кото­
рое создает приращение аэродинамического момента тангаж а относи­
тельно оси 0 Z :
ДЛ12 = А У (Хр— л:т) = Am z qSbA = m .C,J Ас,, q S b A .
(1 1 .1 4 )
Если центр масс самолета находится впереди фокуса, аэродинамиче­
ский момент тангажа ДМ г будет всегда стабилизирующим, так как
направлен на устранение появившегося изменения угла атаки Д а.
Действительно, увеличение угла атаки Д а приведет к положительному
приросту подъемной силы A Y в фокусе самолета, что вызовет появле­
ние отрицательного (пикирующего) момента тангаж а (— Д M z),
267
направленного на устранение возникшего отклонения угла атаки. При
уменьшении угла атаки на величину — Л а в фокусе появится отрица­
тельное приращение подъемной силы, создающее положительный (кабрирующий) аэродинамический момент AM z, также направленный на
устранение появившегося отклонения угла атаки. Наличие стабили­
зирующего момента тангажа свидетельствует о статической устойчиво­
сти рассматриваемого движения самолета.
11.3. Моменты тангажа, обусловленные вращением самолета
В продольном движении самолет, летящий со скоростью V, одно­
временно вращается вокруг оси 0 Z с угловой скоростью тангажа со2.
В результате сложения поступательного и вращательного движений
местные углы встречи воздушного потока с элементами поверхности
самолета изменятся. Возникнут дополнительные аэродинамические
силы, действующие на отдельные части самолета, которые по правилу
механики можно свести к равнодействующей сил AR, приложенной в
центре масс самолета и моменту AM z относительно поперечной оси
OZ. Величина AR мала, и в расчетах аэродинамических сил ею обычно
пренебрегают. Момент AM z при полете на докритических углах атаки
препятствует вращению, поэтому его называют демпфирующим мо­
ментом тангаж а. Основная часть демпфирующего момента тангажа
M zu>z создается горизонтальным оперением, меньшая часть — крылом и
фюзеляжем. Например, 70—80 % суммарного демпфирующего момен­
та тангажа самолета с прямым крылом создается горизонтальным опе­
рением, остальная часть крылом (15—25%) и фюзеляжем (около5%).
Д оля демпфирующего момента, создаваемого стреловидным крылом и
фюзеляжем, может достигать 40 % суммарного демпфирующего мо­
мента тангаж а.
Рассмотрим составляющие демпфирующего момента тангаж а. При
вращении самолета относительно оси 0 Z с некоторой начальной угло­
вой скоростью
каждая точка самолета приобретает окружную ско­
рость A V y , значение которой возрастает по мере удаления точки от
оси OZ. С такой же скоростью, но в противоположном направлении на­
бегает дополнительный воздушный поток (рис. 11.12), скорость кото­
рого в рассматриваемой точке A V y = Асо2л:, где х — расстояние точки
от оси OZ.
Равнодействующими сил сопротивления воздуха вращению самоле­
та относительно оси OZ в носовой и хвостовой частях фюзеляжа будут
соответственно А К ф ! и А У ф2, которые создают демпфирующий момент
фюзеляжа,
—- A Y ф] /ф! "f" АК фа /ф2 •
Д л я упрощения примем, что средняя окружная скорость горизон­
тального оперения на растоянии Lro от оси OZ будет A V yro. Геомет­
рическое сложение вектора окружной скорости A V yro и вектора ско268
1
ЛУ»
~~1-- -------- 0
СО­
Mzr.aci>z
'ztpcoz
Рис. 11.12. Составляющие аэродинамического демпфирую щ его момента та н га ж а
рости полета дает суммарный вектор скорости воздушного потока
А У, набегающего на горизонтальное оперение под углом атаки,
отличающимся от первоначального угла атаки горизонтального опере­
ния на величину
Даго я» tg Д а го — -
AVU
Изменение угла атаки горизонтального оперения Аа вызывает прира­
щение подъемной силы на величину АКГ0, которая на плече Ьго созда­
ет аэродинамический демпфирующий момент тангажа горизонталь­
ного оперения
r.0<oz, направленный против вращения самолета. Ана­
логично создается аэродинамический демпфирующий момент тангажа
кры ла. Суммарный аэродинамический демпфирующий момент танга­
жа самолета пропорционален угловой скорости вращения:
М,
= М 2 со».
(1 1 .1 5 )
dMz — п р о и зво дн ая, п о казы в аю щ ая , к а к изм енится п р о д о л ь­
dсо.
ный дем пф ирую щ ий момент при вращ ении сам олета с угло во й скоростью <ог .
Если известна производная от коэффициента продольного момента
по угловой скорости вращения, то
М г~т
г
г
г qSb, .
Л
(1 1 .1 6 )
Д л я практических расчетов обычно производной т г г не пользу­
ются. Широко применяется производная от коэффициента продольного
^
и угловойи скорости т “z
момента по безразмерной
г .
Безразмерная угловая скорость м2 связана с угловой скоростью со*
соотношением:
<0
(t)
Производные тг и mz
отрицательны по знаку. Они зависят от
аэродинамической компоновки са­
молета и числа М полета и могут
быть получены расчетным путем
или продувкой колеблющейся мо­
дели самолета в аэродинамической
трубе. Д ля самолетов со стрело­
Рис. 1 1 . ^ З а в и с и м о с т ь
mzz и
производных
от числа М полета
видными крыльями m zz = — 1,5...
.,. — 10. В технических описаниях
(О
самолета производная тг приводится в виде графической зависимо­
сти от числа М полета или от угла атаки (рис. 11.13).
С учетом формул (11.16), (11.17) суммарный демпфирующий мо­
мент тангажа
Мш z = m az ^ z qSbA .
(11.18)
Таким образом, при вращении самолета на пикирование (отрица­
тельное вращение (см. рис. 11.12) возникает противоположно направ­
ленный положительный аэродинамический демпфирующий момент, а
при вращении самолета на кабрирование (положительное вращение)—
отрицательный. Заметим, что демпфирующие моменты не являются
восстанавливающими, так как при возникновении вращения не могут
вернуть самолет в исходное положение, а только препятствуют откло­
нению от него. Действительно, чтобы вернуть самолет в исходное поло­
жение, нужно изменить направление его вращения, но при перемене
знака угловой скорости изменит свой знак и демпфирующий момент.
.Демпфирующий момент исчезает, как только прекращается вращение
самолета (wz = 0 ) . Чем больше площадь горизонтального оперения,
геометрические размеры самолета, тем больше демпфирующий момент
при прочих равных условиях.
Демпфирующий момент тангажа значительно увеличивается при
выпуске механизации вследствие увеличения площади крыла и удале­
ния крайних поверхностей от поперечной оси. При неустановившемся
продольном движении самолета изменение угла атаки во времени а =
— da/ dt вызывает соответствующее изменение скоса потока за крылом.
Скошенный воздушный поток достигает горизонтального оперения не
мгновенно, а с некоторым запаздыванием во времени. Время запазды­
вания At зависит от расстояния от крыла до горизонтального опере­
ния Lr0 и скорости Кго, с которой скошенный воздушный поток (сво­
бодные вихри) сносится от крыла к оперению At = Lr0/ V r o ■ Поэтому
угол скоса потока в области горизонтального оперения в данный мо­
мент времени t будет определяться углом атаки, который имело крыло
раньше в момент времени t
At.
За время At угол атаки крыла изменится на величину Д а =
= — aAt , а угол скоса потока — на величину Де. Вследствие за ­
паздывания скоса потока угол атаки горизонтального оперения будет
отличаться от угла атаки при установившемся движении на величину
Да,,0= — Де. Это служит причиной появления дополнительной
подъемной силы горизонтального оперения
ДКГ0 = с^Г0 Л а Го S ro qro.
(1 1 .1 9 )
Подъемная сила создает момент тангажа, обусловленный запаздыва­
нием скоса потока. Он противодействует изменению угла атаки и на­
правлен в ту же сторону, что и демпфирующий момент тангажа:
ДМ - = — ДКГ0 ЛГ0 =
га
m“ а
pV*
-± —
2
SbAt
(1 1 .2 0 )
где
— коэффициент продольного момента по безразм ерн ой скорости и з­
м енения угла атаки.
Эта производная связана с производной /я" соотношением
где
— в ы раж ает прирост коэф ф ициента момента т а н га ж а при изм енении
у гл а атак и со скоростью 1 рад/с.
В технических описаниях приводится зависимость суммы произ­
водных (mz2 + m f) от числа М полета (см. рис. 11.13).
11.4. Развитие продольного возмущенного движения
Будем считать, что исходным невозмущенным движением самолета
является прямолинейный установившийся горизонтальный полет.
Такое движение возможно, если все силы и моменты, действующие на
самолет, взаимно уравновешены, а внешние возмущения отсутствуют.
Если на самолет подействует внешнее возмущение, то равновесие на­
рушится. Движение самолета под действием возмущения будет вынуж­
денным, а после снятия внешнего возмущения — собственным.
Собственное возмущенное движение самолета. Предположим, что
на самолет кратковременно подействовало внешнее возмущение, на­
пример пилот отклонил штурвал на себя и тут же возвратил его в ис­
ходное положение. Движение штурвала и связанное с ним отклонение
руля высоты вверх приведет к появлению прироста подъемной силы
ДУВ на горизонтальном оперении, которое создаст управляющий мо­
мент A M Zв = A Y BL r0.
Под действием этого момента самолет повернется относительно по­
перечной оси 0 Z и к моменту времени tt изменит угол тангаж а, а сле­
довательно, и угол атаки на величину Д Ф = Д а (рис. 11.14). Посколь­
ку внешнее возмущение больше не действует (нуль высоты возвращен
271
в исходное положение), то с этого момента движение самолета рассмат­
ривается как собственное возмущенное движение. Увеличение угла
атаки самолета на Д а вызовет приращение нормальной силы Д Y , при­
ложенное в фокусе, которое создаст стабилизирующий момент М “ Да,
направленный на устранение появившегося приращения угла атаки.
Под действием этого момента самолет начнет вращаться вокруг оси
OZ, угол атаки будет уменьшаться с некоторой скоростью а . Враще­
ние самолета и изменение угла атаки вызовут появление демпфирую­
щего момента тангаж а M z z Дсог и момента тангажа за счет запазды­
вания скоса потока Л4“ Д а, направленных против вращения самолета.
В момент времени t 2 приращение угла атаки Да станет равно нулю
(самолет возвратился к исходному углу атаки), но угловая скорость
вращения coz достигнет значения, близкого к максимальному, поэтому
самолет проскочит это положение и будет продолжать опускать нос.
Приращение угла атаки станет отрицательным, а направленное вниз
приращение подъемной силы Д Y будет создавать кабрирующий момент.
Теперь все три момента Af“ Да, M z z До* и М% Д а будут стремиться за­
тормозить вращение самолета, и в момент времени t Hопускание носа
О)
’
прекратится. В этом положении со2 = 0; М гг Дюг = 0 и M z Д а = 0,
но стабилизирующий кабрирующий момент М “Да достигнет зна­
чительной величины.
Под действием этого момента самолет начнет поднимать нос, про­
цесс повторится. После нескольких колебаний благодаря действию
указанных моментов самолет практически возвратится в исходное по­
ложение равновесия, т. е. к первоначальному углу атаки. Так ведет се­
бя устойчивый самолет. Рассмотренное движение самолета, как пра­
вило, затухающее, что свойственно статически устойчивому самоле­
ту при достаточном демпфировании.
В соответствии с изменением приращения угла атаки изменяется
приращение подъемной силы Д Y (см. рис. 11.14). Это приводит к на-
Рис. 11.14. С хем а разви ти я продольного короткопериодического движ ения
зу л ьтате кратковрем енного отклонения р у л я высоты
в ре­
Рис. 11.15. Р азвити е продольного движения при ступенчатом отклонении руля
высоты:
/ — кор о тко п ер и о д и ч еск о е д в и ж ен и е
ние ( a « c o n s t , V ^ c o n st)
^ « c o n s t, a ^ c o n s t ;
//
— дликнопериодическое
движ е­
рушению равновесия сил Уа = G, траектория полета искривляется
вверх при ДУ > 0 и вниз при ДУ < 0. Искривление траектории со­
провождается вращением вектора скорости с угловой скоростью dQ/dt,
в результате чего изменяется угол наклона траектории. Посколь­
ку приращение угла атаки определяется разностью A a = A v — Д0,
то при наличии искривления траектории интенсивность затухания при­
ращения угла атаки Д а (/), появившегося в результате воздействия
возмущения, повышается. В этом проявляется демпфирующая роль
подъемной силы.
Вынужденное продольное возмущенное движение самолета. Пред­
положим, что самолет находится в установившемся прямолинейном го­
ризонтальном полете. Пилот слегка отклонил штурвал на себя и за­
фиксировал его в этом положении, что вызвало отклонение руля вы­
соты на некоторый небольшой угол Дб„ (рис. 11.15). Возникший вслед­
ствие отклонения руля высоты управляющий кабрирующий момент
М гк6в вызовет вращение самолета вокруг поперечной оси OZ, что при­
ведет к увеличению угла атаки и положительному приросту подъем­
ной силы ДУ, приложенному в фокусе. Прирост подъемной силы ДУ'
создаст стабилизирующий пикирующий момент М “ Д а. В дальней­
шем процесс будет развиваться с одновременным действием стабили­
зирующего М “ Да, демпфирующего А122 Дсо2 моментов и момента
М “ А а, аналогично рассмотренному на рис. 11.14, с той лиш ь разни­
цей, что после нескольких затухающих колебаний самолет возвратит­
ся не к исходному углу атаки а , а к установившемуся углу атаки
а Уст = а ИСх + Аа (см. рис. 11.15), значение которого определяется
фиксированным отклонением руля высоты 6ВИСХ + АЬВ. При этом са­
молет будет сбалансирован относительно оси OZ на новом угле атаки
a yCr- Так как самолет сбалансирован ( M rz = 0), то точкой прило­
жения подъемной силы У уст = У + ДУ можно считать центр масс
самолета. На самолет будет действовать такая же система сил, как
и при наборе высоты. Скорость полета самолета из-за кратковремен­
ности колебательного процесса перехода от угла атаки а к у г л у атаки
а уст практически не изменится. Под действием прироста подъемной
силы ДУ -- У уст
У сбалансиро­
ванный самолет начнет набирать
высоту, преодолевая составляющую
силы тяжести G sin В (точка /).
Поскольку самолет
статически
устойчив по углу атаки, то откло­
нение угла наклона траектории ДН
будет равно отклонению угла тан­
гажа Ду при Д а = 0.
По мере набора высоты верти­
Рис. 11.16. Х арактер изменения п ар а­
м етров движ ения сам олета при сту­
кальная скорость полета будет
пенчатом отклонении руля высоты
уменьшаться, что приведет к умень­
шению подъемной силы. На неко­
торой высоте полета (точка 2) приращение подъемной силы ДУ станет
равным нулю. Угол наклона траектории относительно плоскости гори­
зонта 0 в этой точке будет максимальным (при практически неизмен­
ном угле атаки). Самолет по инерции б у д е т продолжать набирать высо­
ту, теряя скорость. Потеря скорости приведет к появлению отрицатель­
ного прироста подъемной силы — ДУ (точка 3). Угол наклона траекто­
рии будет уменьшаться, и в точке 4 самолет прекратит набор высоты,
а затем перейдет к снижению с последующим увеличением скорости,
что, в свою очередь, вызовет рост подъемной силы. В некоторой точке 5
прирост подъемной силы ДУ станет равным нулю. Самолет по инерции
будет продолжать снижение с нарастающей скоростью и увеличиваю­
щимся приращением подъемной силы ДУ. Рост подъемной силы приве­
дет к прекращению снижения самолета (точка 6). Далее процесс по­
вторится.
П оскольку в рассматриваемом движении угол а уст = а исх + Д а
стал больше исходного угла атаки, то согласно закономерностям пря­
молинейного установившегося горизонтального полета самолет, из­
меняя параметры движения, должен в конечном итоге перейти к пря­
молинейному установившемуся горизонтальному полету с меньшей ско­
ростью, соответствующей углу а уст, и на большей высоте (рис. 11.16).
П оскольку с высотой полета в рассматриваемом движении плот­
ность воздуха изменяется, то на участках набора высоты подъемная
сила будет уменьшаться не только вследствие уменьшения скорости,
но и вследствие уменьшения плотности воздуха, а на участках сниже­
ния подъемная сила ДУ будет расти за счет увеличения скорости и
плотности воздуха. При снижении прирост величины ДУ будет боль­
ше, радиус искривления траектории и период колебаний уменьшатся.
В зависимости от высоты и скорости полета, аэродинамических харак­
теристик самолета, полетной массы, характеристик устойчивости са­
молета движение центра масс может быть затухающим по скорости или
незатухающим.
Рассмотренное изменение параметров движения позволяет прийти
к выводу, что в продольном возмущенном движении самолета можно
выделить два принципиально различных типа движений:
колебательное движение самолета относительно своего центра масс,
связанное с изменением угла атаки в начале возмущенного движения,
когда скорость центра масс практически можно считать постоянной
(см. рис. 11.14 и рис. 11.15, первая форма движения). Такое движение
называется короткопериодическим. Период короткопериодических
колебаний исчисляется единицами секунд:
колебательное движение центра масс в вертикальной плоскости
при практически неизменном угле атаки, связанное с изменением ско­
рости и проявляющееся после затухания короткопериодического дви­
жения (см. рис. 11.15, вторая форма движения). При этом в каждый мо­
мент времени самолет можно считать сбалансированным по моментам.
Это движение называется длиннопериодическим (фугоидным). Период
длиннопериодических колебаний исчисляется десятками и даже сот­
нями секунд.
С коротко -и длиннопериодическим движением самолета пилот
постоянно сталкивается в летной практике. При отклонении руля вы­
соты угол атаки за 1—3 с может измениться на несколько градусов, а
скорость полета за это время практически не изменится. Следователь­
но, в первые несколько секунд после нарушения продольной баланси­
ровки самолета пилоту необходимо обращать внимание главным обра,юм на изменение угла атаки. Скорость при этом можно считать прак­
тически постоянной. Лишь с течением времени она начнет изменяться.
При этом в зависимости от колебаний скорости угол атаки может из­
меняться в небольших пределах.
Если самолет обладает некоторой медленно развивающейся колебаюльной неустойчивостью в длиннопериодическом движении, то это не
вносит трудностей в управление самолетом и даже может не замечать­
ся пилотом. Пилот располагает достаточным временем, чтобы устра­
нить отклонение самолета от заданного режима. При необходимости
точно выдержать траекторию полета колебательная неустойчивость по­
лета в длиннопериодическом движении или недостаточная устойчивость
потребуют частого вмешательства пилота в управление и вызовет опре­
деленные трудности в пилотировании по приборам.
При выполнении маневра в вертикальной плоскости пилот, как пра­
вило, не ограничивается только отклонением руля высоты. Д л я компен­
сации изменения лобового сопротивления вследствие приращения уг­
ла атаки он изменяет также и тягу двигателей. Наличие двух управ­
ляющих воздействий существенно изменяет характер длиннопериоди­
ческого движения. Это еще больше снижает роль устойчивости в длин­
нопериодическом движении.
Колебательная неустойчивость в короткопериодическом движении
вызывает резко отрицательные отзывы пилота-испытателя. Если корот­
копериодические колебания интенсивны, имеют большую частоту и за­
тухают недостаточно быстро, то управление самолетом затрудняется,
так как пилот не успевает парировать колебания и даже может их уси­
ливать, вводить самолет в раскачку. Из этого следует, что основное и
решающее значение для летной практики имеют характеристики ко­
роткопериодического движения.
В соответствии с характером продольного возмущенного движения
продольную устойчивость самолета можно разделить на два вида: ус­
тойчивость при постоянной скорости и изменяющемся угле атаки, на­
зываемую устойчивостью по перегрузке, и устойчивость при практиче­
ски постоянном угле атаки и изменяющейся скорости, называе­
мую устойчивостью по скорости.
11.5. Продольная устойчивость самолета по перегрузке
Самолет называется устойчивым по перегрузке, если он самостоя­
тельно, без вмешательства пилота стремится сохранить перегрузку
исходного режима полета и возвратиться к ней после прекращения
действия возмущения. При постоянной скорости полета изменение
угла атаки Да сопровождается изменением подъемной силы AY и
нормальной перегрузки:
ДV
Дси qS
Да<?5
Отсюда следует, что понятия «устойчивость по перегрузке», «устойчи­
вость по углу атаки» и «устойчивость по коэффициенту подъемной си­
лы» имеют одинаковый смысл. Термин «устойчивость по перегрузке»
получил в практике наиболее широкое распространение в связи с не­
посредственным восприятием перегрузки пилотом.
Степень продольной статической устойчивости по перегрузке. Б у ­
дем считать, что самолет находится в прямолинейном установившем­
ся полете. Изменение угла атаки на величину Да в результате воздей­
ствия внешнего возмущения приводит к возникновению аэродинамиче­
ского восстанавливающего (стабилизирующего) момента Л1®Да, на­
правленного на сохранение исходного угла атаки. Этот момент опре­
деляет начальную тенденцию движения самолета по тангажу после
устранения действия возмущения и характеризует статическую устой­
чивость самолета по перегрузке. Под статической продольной устой­
чивостью по перегрузке понимают стремление самолета к сохранению
исходного состояния равновесия (исходного угла атаки, исходной нор­
мальной перегрузки).
Рассмотрим, при каких условиях самолет обладает статической
продольной устойчивостью по перегрузке в прямолинейном полете.
Пусть на самолет кратковременно подействовал восходящий порыв
ветра, имеющий скорость W (рис. 11.17). В результате этого угол ата­
ки изменится на величину Д а я# tg a = WIV, что вызовет приращение
подъемной силы ДУ, приложенное в фокусе самолета. В результате
возникнет стабилизирующий момент к м г = М “ Да, направление ко­
торого определяет начальную тенденцию в движении самолета.
Хс > Хт
F
т
G
Рис. 11.17. Реакция самолета на изменение угла атаки:
q
— стати ческ и
у сто йчи вы й;
б — стати ческ и
н е й т р ал ь н ы й ;
в — ст ат и ч е ск и
н еустойч ивы й
Если центр масс самолета О находится впереди фокуса Хр > хт
(рис. 11.17, а), то при увеличении угла атаки (А а > 0 ) на самолет бу­
дет действовать пикирующий момент АМ2< 0, а при уменьшении
( А а < 0) — кабрирующий момент АМ 2 > 0 . В обоих случаях отно­
шение A M J A a < 0, а самолет стремится самостоятельно, без вмеша­
тельства пилота восстановить исходный угол атаки а , т. е. самолет об­
ладает статической устойчивостью по углу атаки (по перегрузке). Ес­
ли обеспечить такую загрузку самолета, при которой центр масс О бу­
дет находиться позади фокуса самолета (рис. 11.17, в), т. е. Xf < х т,
то при увеличении угла атаки ( Д а > 0 ) на самолет будет действовать
кабрирующий момент M z > 0 , а при уменьшении (Д а < 0) — пики­
рующий М г <С 0. В обоих случаях отношение
> 0 . и самолет
стремится еще больше отклониться от исходного состояния равнове­
сия, т. е. он не обладает статической устойчивостью по углу атаки (по
перегрузке). Если центр масс самолета
совпадает с фокусом
(рис. 11.17, б), x f = х т, то при изменении угла атаки момент тангажа
АМ2 = 0. В э т о м случае самолет статически нейтрален, A M J A a —0.
Так как A M Z — AmzqSb A, а величина qS bA всегда положительна,
то знак момента ДМ2 определяется знаком коэффициента момента
Ашг. Поэтому отношение A M J A a можно заменить отношением A m J
/Д а, или равносильным отношением A m J A c y . При решении практиче­
ских задач удобно пользоваться выражением не в конечных прираще­
ниях, а в виде частной производной
ОСу
или т / . Такой подход оправ-
дан, так как при малых величинах Am z и Ас у A m J A c yt a d m j d c y=
С
С
= mzy . Очевидно, если производная т гу < 0 — самолет статически
устойчив, при т гу — 0 нейтрален и при т гу > 0 статически неустой­
чив.
Дифференцируя выражения (11.13) по с у и учитывая, что от коэф­
фициента Су зависит только второе слагаемое, получим количествен­
ную характеристику продольной статической устойчивости самолета
т 2 н = — \ x F— x T).
(1 1 .2 3 )
Частная производная от коэффициента продольного момента по коэфС
фициенту подъемной силы т гу , численно равная расстоянию между фо­
кусом и центром масс самолета, называется степенью (мерой, запасом)
продольной статической устойчивости самолета по перегрузке. Она
выражается в долях средней аэродинамической хорды Ь А (например,
С
с
т / ^ — 0,2) или в процентах ( т / = — 20 %), это означает, что
расстояние между центром масс самолета и фокусом составляет пя­
тую часть средней аэродинамической хорды крыла. Знак минус указы­
вает на то, что фокус самолета находится позади центра масс. Зная
производную mzJ легко перейти к производной от момента тангажа по
коэффициенту подъемной силы M C
zy = тгу q SbA. Производная
показывает, как изменится продольный момент при единичном изме­
нении коэффициента подъемной силы. Если коэффициент с у изменится
на величину Асу, то это приведет к изменению момента тангажа на ве­
личину
А м г = м ‘ и А су = т * Асу
q S bA.
П оскольку величины с у и а в диапазоне летных углов атаки пропорционал* «и»
АМ г — М * А а = m“ Aa q S b A _
Таким образом, статически устойчивый по перегрузке самолет про­
тиводействует изменению угла атаки, какой бы причиной оно не вызы­
валось.
Степень продольной статической устойчивости самолета по пере­
грузке при фиксированном руле высоты. Полученная в форме (11.23)
зависимость
°У
тг = Х р — хТ
отраж ает влияние взаимного положения центра масс и фокуса самоле­
та на степень статической устойчивости по перегрузке без учета кри­
визны траектории полета, например, когда модель самолета закрепле­
на в аэродинамической трубе.
Д л я анализа короткопериодического движения самолета при фик­
сированном руле высоты в квазиустановившемся движении в верти278
Рис. 11.18. Зависимость коэффициента момента тан гаж а от коэф ф ициента аэр о ­
динамической подъемной (нормальной) силы при различных центровках:
а — стати ческ и усто йчи вы й сам о л ет ( т СУ ■<0 ); б — н еустойчивы й с а м о л е т { т СУ > О) и с а м о л е т
Z
с н ей тральной п ро до л ьно й устойчивостью
Z
по п ер е гр у зк е
( т ^СУ —0),
ш триховая
кривая
кальной плоскости с постоянной скоростью используется степень про­
дольной статической устойчивости по перегрузке в форме
с„
“z
тг
On = m ' -f- — — :
(1 1 .2 4 )
где ц — 2m/(f>SbA ) — отн осительн ая плотность сам олета в п р о дольном дв и ­
ж ении (п оказы вает, во сколько р аз м асса сам олета больш е м ассы в о зд у х а , вы ­
тесненного самолетом).
Из выражения (11.24) видно, что величина о„ зависит от взаимного
расположения фокуса и центра масс самолета (слагаемое / л / ) , а так­
же от демпфирования (второе слагаемое). Демпфирование продоль­
ного движения увеличивает статическую устойчивость по перегру­
зке (/Игz < 0), однако основную долю вносит частная производная
mzy . Если производная о п отрицательна, то самолет статически устой­
чив по перегрузке.
В технических описаниях самолетов приводится семейство зависи­
мостей коэффициента аэродинамического момента тангаж а m z от
коэффициента аэродинамической подъемной силы су » с у при раз­
личных конфигурациях, центровках, режимах работы двигателей
(рис. 11.18). Точнее такую зависимость следовало бы назвать зависимо­
стью коэффициента результирующего момента тангаж а от коэффици­
ента подъемной (нормальной) силы тцг — / (сУа)
Семейство кривых mz = / (су ) позволяет определить степень стаС
тической устойчивости по перегрузке т гу для любого режима полета.
Точки пересечения кривых m z = f(cy ) с осью абсцисс определяют
балансировочные значения с уа, при которых т г = 0. Кривая тг =
= f (Суа) характеризуется тем, что тангенс угла наклона касательной,
проведенной в точке, соответствующей режиму равновесия, является
С
отрицательным и производная т / < 0. Действительно, если под
действием возмущения угол атаки возрастет на малую величину
- f Д а (появится положительный прирост ДсУа > 0 ) , то возникнет не­
уравновешенный отрицательный (пикирующий) момент тангажа
(— Д т 2), стремящийся уменьшить угол атаки, т. е. вернуть самолет
в исходное положение равновесия. Если же под действием возмуще­
ний угол атаки уменьшится (АсУа <С 0), то возникнет положительный
(кабрирующий) момент тангажа, также стремящийся вернуть самолет
в исходное положение равновесия. Самолет будет обладать продоль­
ной статической устойчивостью по перегрузке.
Зависимость т 2 = / (сj, ), показанная на рис. 11.18, б, характери­
зуется тем, что тангенс угла наклона касательной в точке, соответству­
ющей режиму равновесия, положителен, и производная тгу > 0 .
В этом случае самолет обладает продольной статической неустойчиво­
стью по перегрузке, так как при увеличении угла атаки на Д а при­
ращение Асу > 0 и появляется неуравновешенный положительный
момент (Д т г > 0 ) , под действием которого угол атаки будет еще боль­
ше увеличиваться, а самолет все дальше отклоняться от исходного по­
ложения равновесия.
Если кривая m2 = f (сУа) параллельна оси абсцисс, то тгу = 0,
самолет будет статически нейтрален (рис. 11.18, б) (штриховая кривая).
В этом случае при малом изменении угла атаки балансировка самоле­
та не нарушится. Численную величину степени продольной статиче­
ской устойчивости по перегрузке для любого угла атаки (сУа) можно
определить непосредственным снятием значений АсУа и Дтг по кри­
вым m z = / ( c y j и вычислением отношения т гу « Атг/АсУа.
Условие устойчивости опорного движения. Наличие продольной
статической устойчивости самолета по перегрузке еще не гарантирует
возвращ ения самолета к исходному режиму полета.
Примем за опорное движение самолета прямолинейный установив­
шийся горизонтальный полет. Воспользуемся упрощенной теорией ко­
роткопериодического движения, основанной на том, что в начале воз­
мущенного движения скорость не успевает заметно измениться и мож­
но считать A V = 0. Тогда решение системы уравнений возмущенного
движения самолета можно привести к виду
Да=Ле
sin (vz / + <р),
(1 1.25)
где А и ф — вели чин ы , о п р едел яем ы е начальными у слови ям и р ассм атр и вае­
мой за д а ч и ; п а — степень з а т у х а н и я продольны х колебан ий (коэфф ициент дем п­
ф и р о в а н и я ); vz — к р у г о в а я часто та собственных колебаний.
Рис. 11.19. Характерист ики короткоп ер иод ичес кого
д виж ения с а м о л ет а
продольного
возм ущ енн ого
Параметры A , tp, па и vz имеют определенный физический смысл и
зависят от возмущающего воздействия на самолет, м ассовы х, инерци­
онных свойств самолета, степени статической устойчивости, высоты
и скорости полета, демпфирующих свойств воздушной среды.
Выражение (11.25) описывает в общем случае колебательный про­
цесс изменения угла атаки во времени, который можно представить
графиком (рис. 11.19). На основании анализа зависимости (11.25)
можно сделать следующие практически важные выводы.
В начальный момент времени t = О величина е “ " а/ = 1 и v2t ==0.
Следовательно, приращение угла атаки А анач
A sin ф, получен­
ное самолетом сразу же после прекращения действия возмущения, оп­
ределяется коэффициентами А и ф, которые, как показывают много­
численные исследованиг,, зависят от массовых и инерционных характе­
ристик самолета и от возмущающего действия. Параметр А — ампли­
туда колебаний по углу атаки в начальный (выбранный исследовате­
лем) момент времени. В каждый последующий момент времени ампли­
туда колебаний определяется сомножителем А е ~ Па*ч который графи­
чески можно представить, как огибающую короткопериодических коле­
баний по углу атаки, изменяющуюся по экспоненциальному закону.
Чем больше значение
тем круче огибающая, тем интенсивнее за т у ­
хают колебания, тем большей устойчивостью опорного движения обла­
дает самолет. При па = 0 амплитуда колебаний становится постоян­
ной: А е ~ Па< — А , самолет обладает нейтральной продольной устой­
чивостью. При п а
0 показатель степени становится положительным,
а амплитуда колебаний А е ~ Па* — возрастающей, самолет становится
неустойчивым.
Таким образом, для обеспечения устойчивости статически устойчи­
вого по перегрузке самолета в продольном движении необходимо, что­
бы степень затухания продольных колебаний была положительной
(па > 0 ) . Степень затухания продольных колебаний самолета зави­
сит от его конструктивных и эксплуатационных факторов и может быть
представлена соотношением
(11.26)
гд е г| = I j m b А — к в а д р а т б е з р а з м е р н о г о р а д и у са ин ер ци и
н о си тел ьн о п оп ер еч н о й оси OZ.
Анализ выражения (11.26) показывает, что степень
дольных колебаний зависит от плотности воздушной
соты полета), конструктивных особенностей самолета
и инерционных характеристик т, /2, а такж е от
свойств среды:
— учитывает роль подъемной силы
са м о л е т а о т­
затухания про­
среды (или вы­
S , Ьл , массовых
демпфирующих
в демпфирован­
ном движении, т^г — влияние демпфирования при вращении самолета
относительно оси OZ, /п“ — влияние демпфирования от запаздывания
скоса потока.
Степень затухания продольных колебаний п а пропорциональна
истинной скорости полета и плотности воздуха, поэтому с уменьшени­
ем скорости полета и плотности воздуха затухание продольных коле­
баний может стать неудовлетворительным. Д ля обеспечения приемле­
мых характеристик затухания колебаний (в широком диапазоне ско­
ростей и высот полета) на самолетах устанавливаются автоматы демп­
фирования.
К руговая частота собственных продольных колебаний самолета оп­
ределяется зависимостью
(11.27)
гд е Q 2 — ч а с т о т а с о б с т в е н н ы х п р о д о л ь н ы х к о л еб а н и й с а м о л е т а без у чета
д е м п ф и р о в а н и я в о з д у ш н о й с р е д ы ( о п о р н а я част ота).
Очевидно, при нейтральной продольной устойчивости самолета
(па = 0) справедливо равенство v2 = Q и, как следует из формулы
(11.25), самолет будет соверш ать колебания по углу атаки Да =
= A sin ф с постоянной амплитудой и частотой.
Ч астота собственных продольных колебаний Q2 так ж е, как и сте­
пень их затухан ия, зависит от конструктивных, массовых, инерцион­
ных, эксплуатационных характеристик самолета:
(11.28)
гд е а п — с т е п е н ь с т а т и ч е с к о й п р о д о л ь н о й у сто й ч и во сти с а м о л е т а (для с т а ­
т и ч е с к и у с т о й ч и в о г о с а м о л е т а э т а в е л и ч и н а от р и ц а т е л ь н а ).
Из формулы (11.28) следует, что с уменьшением скорости полета и
плотности воздуха частота продольных колебаний самолета уменьша­
ется.
Величина Qz значительно больше п а , поэтому на основании (11.27)
можно считать, что vz = Qz. С увеличением демпфирования среды, на­
пример с уменьшением высоты полета при сохранении постоянной ско­
рости полета, степень затухания колебаний п а и их частота £2г возра­
стают.
Таким образом, характер продольного короткопериодического
движения самолета в полной мере определяется степенью затухания
колебаний по углу атаки п а и частотой собственных колебаний Q z.
Чем больше степень затухания и частота колебаний, тем более устой­
чиво опорное движение самолета.
Количественные характеристики устойчивости самолета по пере­
грузке и их нормирование. Согласно Е Н Л Г С , запас продольной ста­
тической устойчивости по перегрузке (хf — х т) для транспортных
самолетов должен быть не менее 10 % . Он устанавливается из условия
обеспечения безопасности полетов на случай воздействия порыва вет­
ра и возможных ошибок пилотирования на наиболее сложном в отно­
шении сохранения устойчивости режиме полета — уходе на второй
круг. Значение предельно задней центровки jeTn3 при уходе самолета
на второй круг (конфигурация самолета посадочная, режим работы
двигателей взлетный), приводимое в руководстве по летной эксп луата­
ции самолета, выбирают с учетом обеспечения указанного запаса про­
дольной устойчивости.
Степень затухания продольных колебаний п а и собственная частота
колебаний Qz полностью определяют характер собственного возм у­
щенного продольного движения самолета. Они удобны в расчетах, но
достаточно сложны. В практике широко используют другие характе­
ристики, однозначно связанные с ними. Рассмотрим наиболее распро­
страненные из них.
Период продольных колебаний
Та = 2 п / а а ъ 2 л / \ а .
(11.29)
К ак следует из (11.28), при увеличении зап аса статической устой­
чивости, уменьшении высоты полета, увеличении скорости полета
частота продольных колебаний Qz увеличивается, что ведет к умень­
шению периода продольных колебаний Т а . Полет на самолете, имею­
щем малый период колебаний и слабое затухание, утомителен. По
уровню комфорта он оценивается отрицательно.
Относительная степень зат ухания колебаний
5 = л«/оа .
(П . 30)
При относительной степени затухания продольных колебаний £ < 1
приращение угла атаки изменяется по колебательному закону, при
I > 1 — по апериодическому. Н аиболее приемлемым, с точки зре­
ния пилота, быстрозатухающим короткопериодическим колебаниям
без больших превышений нормальной перегрузки соответствует зна­
чение I « 0 ,7 .
Коэффициент затухания колебаний тзат — отношение амплитуд
колебаний, измеренных через один период (рис. 11.19):
т зат = Л 1Л42 = е _ П а Г “ .
(11.31)
По оценке пилота затухание колебаний считается удовлетворитель­
ным, если /лзат > 10.
Транспортные самолеты на малых и средних высотах, как прави­
ло, обладают приемлемыми характеристиками затухания короткопериодических колебаний даж е без применения систем автоматического
демпфирования колебаний. На больших высотах применение автомати­
ческих систем демпфирования колебаний становится целесообразным
и даж е необходимым.
Время зат ухания колебаний taaT зависит от степени затухания п а.
Колебания считаются закончившимися, если их амплитуда уменьши­
лась в 20 раз по сравнению с первоначальной:
Л е —" а ^зат = — — .
(11.32)
20
Из выражения (11.32) определяют время затухания колебаний
*а а т = 1 п 2 0 / п в ж З / п в .
(11.33)
Число колебаний i до полного затухания для обеспечения комфорта
пассаж иров и экипаж а должно быть меньше трех.
Влияниг эксплуатационных факторов на устойчивость самолета по
перегрузке. П оскольку отсутствие статической устойчивости ведет к
неустойчивости движения, то влияние эксплуатационных факторов на
устойчивость самолета практически целесообразно рассматривать толь­
ко для статически устойчивого по перегрузке самолета. Степень продольной статической
устойчивости
по
перегрузке
С
—'
т-р — — (хр —
— х Т) зависит от двух величин: относительной координаты фокуса xf
и относительной координаты х Т центра масс самолета (центровки).
Отсюда следует, что целесообразно рассматривать влияние эксплуата­
ционных факторов, связанны х с изменением положения центра масс и
положения фокуса самолета. Положение центра масс определяется
размещением груза на самолете, а фокуса — конструктивными осо­
бенностями самолета, числом М полета, конфигурацией и т.д. Значи­
тельное влияние оказы вает демпфирование воздуха, зависящ ее от вы­
соты и скорости полета.
Н епосредственное влияние центровки самолета на степень его ус­
тойчивости по перегрузке определяет жесткие требования к точному
определению центровки и ее выдерживанию в процессе загрузки само­
лета и летной эксплуатации. При неизменном положении фокуса
смещение центра м асс вперед (уменьшение центровки х Т) приводит к
284
увеличению запаса устойчивости по перегрузке. Увеличение центров
ки обусловливает уменьшение запаса продольной устойчивости и при
совпадении центра масс самолета с фокусом зап ас устойчивости ста­
новится нулевым (см. рис. 11.17, б).
При малых запасах устойчивости самолет слабо сопротивляется из­
менению угла атаки и более медленно восстанавливает исходное поло­
жение равновесия при изменении угла атаки. Он становится более
чувствительным к отклонениям руля высоты (стабилизатора). Н еосто­
рожное отклонение штурвала может вывести самолет за пределы уста­
новленных ограничений по углу атаки (по перегрузке). Пилотирова­
ние самолета, имеющего малый запас устойчивости по перегрузке, тре­
бует от пилота плавного, осторожного отклонения ш турвала. Поэтому
предельно задняя центровка ограничивается из условия обеспечения
устойчивости по перегрузке. Как будет показано, ограничение предель­
но задней центровки устанавливается из условия обеспечения устойчи­
вости по углу атаки при уходе на второй круг.
По мере уменьшения центровки статическая устойчивость самолета
по перегрузке увеличивается, одновременно увеличиваются потреб­
ные балансировочные усилия на рычагах управления и перемещения
рычагов. Соответственно увеличиваются потребные балансировочные
отклонения органов управления. При малых центровках и особенно
на малых скоростях полета (например, при взлете и посадке) расхода
руля высоты даже при полном его отклонении может быть недостаточ­
но для балансировки самолета. Поэтому предельно передняя центров­
ка * т .п . п ограничивается из условия управляемости. Забегая вперед,
отметим, что это ограничение вводится из условия управляемости при
посадке. Так как демпфирующий момент тангаж а от центровки прак­
тически не зависит (11.15), а частота собственных колебаний Q* при­
мерно пропорциональна корню квадратному из m cz « (11.28), то смеще­
ние центра масс вперед приведет к увеличению частоты собственных
колебаний, время затухания колебаний практически не изменится.
Влияние числа М полета проявляется в том, что при увеличении
скорости полета до значений, соответствующ их критическому числу
М* и более, на поверхностях развивается волновой кризис, происхо­
дит перераспределение давления на них, в результате центр давления
и фокус самолета смещаются назад (см. рис. 11.9). Это приводит к рез­
кому увеличению запаса статической устойчивости по перегрузке и по­
явлению пикирующего момента, для парирования которого требует­
ся отклонение штурвала на себя.
Значительное влияние на устойчивость самолета оказы вает его
конфигурация. Выпуск закрылков приводит к увеличению площади кры­
ла и фактического угла атаки, что в целом вы зы вает увеличение подъ­
емной силы крыла. При этом центр давления и фокус крыла из-за
перераспределения давления на нем смещаются назад. Вследствие пре­
имущественного увеличения подъемной силы крыла У кр по сравнению
с подъемной силой горизонтального оперения Y г0 центр давления и
фокус самолета смещаются обычно вперед. В результате зап ас устой­
чивости по перегрузке, как правило, уменьшается. Вы пуск закрыл­
ков приводит, кроме того, к увеличению, а уборка к уменьшению угла
скоса потока, измеренного у горизонтального оперения, что оказывает
соответствующ ее влияние на балансировочный момент Y BL r0 .
Таким образом, выпуск и уборка закрылков приводят к одновре­
менному действию трех факторов: смещению фокуса крыла, увеличе­
нию (уменьшению) его подъемной силы, увеличению (уменьшению)
угла скоса потока е. Действие всех трех факторов вызывает смещение
фокуса самолета, изменение запаса продольной устойчивости mcv,
момента тангаж а и нарушение продольной балансировки.
Д ля самолетов различных компоновочных схем влияние указан­
ных факторов на величину и направление смещения фокуса самолета,
а следовательно, на запас продольной устойчивости не однозначно.
Поэтому при рассмотрении влияния конфигурации самолета и, в част­
ности, влияния выпуска и уборки закрылков, необходимо учитывать
особенности конкретного самолета.
Вы пуск закры лков увеличивает площадь крыла, что вызывает
увеличение продольного демпфирующего момента и более быстрое за­
тухание продольных колебаний самолета.
Выпуск или уборка шасси, как правило, изменяет центровку самоле­
та и аэродинамический момент тангажа за счет прироста силы лобово­
го сопротивления, приложенного ниже центра масс самолета. Р езу л ь­
тирующий момент определяется алгебраической суммой этих моментов.
Т ак , например, у самолета Ан-24 при выпуске шасси центр масс смеща­
ется на 2 — 4 % С А Х назад в зависимости от полетной массы, что при­
водит к соответствующ ему уменьшению запаса продольной статиче­
ской устойчивости хр — х т, нарушению балансировки и появле­
нию кабрирующего момента. Вместе с тем при выпуске шасси возника­
ет сила лобового сопротивления шасси, точка приложения которой на­
ходится ниже центра масс самолета. Это приводит к возникновению
пикирующего момента, что равносильно увеличению степени продоль­
ной статической устойчивости. К ак показывает летная практика, кабрирующий и пикирующий моменты при выпуске шасси практически
равны, поэтому не вызывают существенного изменения запаса стати­
ческой устойчивости самолета.
В лияние работы силовой установки на характеристики статической
устойчивости самолета по перегрузке определяется: местом установки
двигателей, участием двигателей в создании дополнительной подъем­
ной силы крыла и изменении скоса потока у горизонтального опере­
ния, режимом работы двигателей и наличием дополнительных сил,
возникаю щ их при косой обдувке воздушного винта (воздухозаборни­
ка) на полетных у глах атаки. Б олее сильное влияние на характеристи­
ки продольной устойчивости оказы ваю т силовые установки с воздуш­
ными винтами.
О бдувка крыла воздушным потоком от работающего воздушного
винта существенно влияет на аэродинамические силы и скос потока
у горизонтального оперения. Обдувка крыла приводит к увеличению
подъемной силы крыла и смещению фокуса самолета вперед, т. е.
к уменьшению запаса статической устойчивости самолета.
Влияние обдувки крыла растет с увеличением угла атаки и увеличе­
нием режима работы двигателей. С увеличением скорости полета
(уменьшением угла атаки) дестабилизирующее воздействие обдувки
крыла уменьшается, и запас статической устойчивости самолета по пе­
регрузке увеличивается. Кроме того, с увеличением скорости полета и
уменьшением угла атаки крыла уменьшается скос потока в области
горизонтального оперения, что равносильно смещению фокуса само­
лета назад и увеличению запаса статической устойчивости.
Значительное влияние на степень устойчивости самолета по пере­
грузке оказывает фиксация руля высоты. Подъемная сила горизонталь­
ного оперения (стабилизатора) и руля высоты уравновешивают пики­
рующий момент, создаваемый крылом, чем обеспечивается продоль­
ная балансировка самолета. При случайном увеличении угла атаки в
фокусе самолета возникнет приращение подъемной силы, которое соз­
даст стабилизирующий пикирующий момент A Y (хр — дгт), направ­
ленный на устранение этого приращения. Одновременно на такую ж е
величину возрастет угол атаки горизонтального оперения, что приве­
дет к возникновению приращения подъемной силы на горизонтальном
оперении AKr0 и руле высоты АКВ, направленных вверх и создающих
такж е стабилизирующий пикирующий момент (A F ro + А КВ) L r0.
Если руль высоты освободить, то приращение подъемной силы на
руле высоты A F B, вызванное изменением угла атаки самолета, повер­
нет его вверх, и величина ЛК,, уменьшится. В результате уменьшит­
ся стабилизирующий момент тангажа горизонтального оперения, ко­
торый станет равным AY roL rn, что равносильно смещению фокуса
самолета вперед и уменьшению степени статической продольной устой­
чивости по перегрузке. Освобождение руля высоты приводит к про­
дольной статической устойчивости по углу атаки на 2— 6 % по срав­
нению с зафиксированным. У самолетов, имеющих необратимое бустерное управление при свободных рычагах управления, руль высоты не
отклоняется под действием шарнирного момента, а удерживается бу­
стерами неподвижно.
В лияние упругих деформаций конструкции проявляется в том, что
при увеличении скоростного напора конструкция самолета может су ­
щественно деформироваться, в результате чего изменяются аэродина­
мические характеристики самолета, а такж е характеристики устойчи­
вости и управляемости. Основное влияние на характеристики продоль­
ной статической устойчивости самолета оказы ваю т упругие деформа­
ции крыла и фюзеляжа, в меньшей степени влияют упругие деформации
горизонтального оперения.
Изменившиеся в результате деформации кручения крыла угол
атаки а , угол скоса потока е, угловая скорость вращения самолета (ог,
в свою очередь, приводят к изменению подъемной силы, силы лобово­
го сопротивления момента тангажа, создаваемых крылом и горизон­
тальным оперением, демпфирующего момента тангажа, степени про­
дольной устойчивости и затухания, периода колебаний, приращения
нормальной перегрузки.
Изгиб крыла такж е оказывает влияние на характеристики продоль­
ного движения, вызывая в конечном итоге изменение степени продоль­
ной устойчивости и динамических характеристик движения. Изгиб
фюзеляжа под действием массовых и аэродинамических нагрузок при­
водит к повороту оперения относительно оси 0 Z , что вызывает измене­
ние угла атаки Даг.о, аэродинамического момента M zr. 0, степени про-
си
дольной статической устойчивости самолета /л/, динамических харак­
теристик движения.
Деформация изгиба и кручения при различных режимах полета изза нестационарности атмосферных воздействий, а такж е управляющих
отклонений рулей и упругих сил конструкции может иметь колеба­
тельный характер. Приборы, установленные на фюзеляже (например,
автопилот), фиксируют эти колебания, что приводит к погрешностям
измерения параметров движения, а следовательно, и к ошибкам управ­
ления.
11.6. Устойчивость самолета по скорости
Под устойчивостью по скорости понимают способность самолета
сохранять заданную скорость полета и возвращаться к ней самостоя­
тельно без вмешательства пилота (автопилота).
Предположим, что самолет находится в прямолинейном установив­
шемся горизонтальном полете (рис. 11.20, а, б). При случайном увели­
чении скорости, например при попадании самолета во встречный поток
воздуха, подъемная сила Y а и сила лобового сопротивления Х а воз­
растут пропорционально величине ( V + ДУ)2. Равновесие сил вдоль
осей О Х а и O Y a нарушится. Под действием приращения подъемной
силы Д Y a, приложенного в центре масс, самолет начнет набирать вы­
соту с вертикальной скоростью V у. Вектор скорости центра масс изме­
нит угол наклона на величину Д0, что при постоянном угле тангажа й
(равновесие продольных моментов пока не нарушено) приводит к
уменьшению угла атаки на величину Да = Д0 (рис. 11.20, в). Умень­
шение угла атаки приведет к появлению отрицательного приращения
подъемной силы Д У а , приложенного в фокусе, и соответственно воз­
никновению стабилизирующего момента тангажа М “ = Д а . Под дей­
ствием этого момента самолет, проявляя свойство устойчивости, воз­
вратится к прежнему углу атаки, заданному балансировочным откло­
нением руля высоты, и будет продолжать набор высоты с этим углом
атаки. Под действием возросшей из-за увеличения скорости полета си­
лы лобового сопротивления и появившейся составляющей силы тяже288
Рис. 1 1.20. Реакция с ам о л ет а на изменение скорости полета (а) и из менение у г ­
л о в а так и , т а н г а ж а и наклона траектории со от в е т ст в е н н о в то чк а х / (б), 2 (в)
и 3 (г)
сти G sin 0 самолет будет терять скорость, возвращ аясь к ее прежнему
значению (рис. 11.20, а, г).
При случайном уменьшении скорости самолет получит отрицатель­
ное приращение подъемной силы, в результате чего он будет терять вы ­
соту, увеличивая скорость. Поскольку подъемная сила всегда пропор­
циональна скорости, то может показаться, что отношение AY J A .V
будет положительным и самолет всегда будет статически устойчив по
скорости. На самом деле, это не всегда так. Действительно, при числах
М полета, больших М *, центр давления и фокус самолета резко смеща­
ются назад (см. рис. 11.9) и при неизменной балансировке на самолет
действует пикирующий момент тангажа, под действием которого угол
тангаж а и угол атаки уменьшаются, а самолет теряет высоту, увеличи­
вая скорость. Если пилот не вмешивается в управление, то скорость са ­
молета еще более растет, а вследствие уменьшения угла атаки подъем­
ная сила уменьшается. В этом случае отношение А У а/АУ •< 0 , сам о­
лет становится статически неустойчивым по скорости. Пикирующий
момент при смещении фокуса назад может оказаться настолько боль­
шим, что для его парирования даж е полного отклонения руля высоты
может быть недостаточно. Это явление называется затягиванием в пи­
кирование. Область скоростей затягивания в пикирование для транс­
портных самолетов лежит за пределами ограничения максимальной
скорости по числу М полета.
Продольная статическая устойчивость по скорости характеризует
поведение самолета в прямолинейном полете с изменяющейся скоро­
стью при постоянной нормальной скоростной перегрузке. Т а к как из­
менение скорости при постоянной перегрузке сопровождается и из­
менением угла атаки, то коэффициент момента тангажа будет зависеть
не только от угла атаки, но и от скорости полета (числа М). В этом слу­
чае об устойчивости по скорости самолета с фиксированным на баланси­
ровочном значении для исходного режима полета рулем высоты (ста­
билизатором) судят по полной производной коэффициента момента тан­
гаж а, по коэффициенту подъемной силы, которая называется степенью
продольной статической устойчивости по скорости при фиксирован­
ном руле высоты cry. В частности, когда установившимся прямоли­
нейным движением является горизонтальный полет (п у — 0), то
(11.34)
Из условия с у гп — m g/qS при q — 0 ,7 р М 2 формула (11.34) иреобраа
зуется к виду
(II .45)
Из анализа выражения (11.35) следует:
устойчивость самолета по скорости имеет смысл рассматривать толь­
ко при наличии статической устойчивости по перегрузке пг"и < 0;
на докритических скоростях производная
> 0 , поэтому коэф­
фициент продольной статической устойчивости по скорости а у < 0,
т. е. самолет устойчив по скорости;
при дальнейшем увеличении скорости до Л4* и выше производная
щм становится отрицательной. В этом случае наличие устойчивости по
скорости определит знак алгебраической суммы (11.35). Если первое
слагаемое по абсолютному значению больше второго, то самолет, обла­
дающий продольной статической устойчивостью по перегрузке, будет
обладать и продольной статической устойчивостью по скорости при
фиксированном руле высоты (ov < 0 ). Если второе слагаемое по абсо­
лютному значению больше первого, то самолет, обладающий статиче­
ской устойчивостью по перегрузке, будет статически неустойчив по
скорости (ву с 0).
Значение и знак производной a v можно определить по приведенным
формулам или по тангенсу угла наклона моментной диаграммы, пост­
роенной для различных чисел М полета при п Уа = const, бв
const
в точке, соответствующей режиму балансировки по скорости (числу
М) коэффициент т г = 0 (рис. 11.21). В области статической устойчиво­
сти по скорости, соответствующей участкам сплошной кривой, поло­
жительному изменению коэффициента подъемной силы Дс уа соответст290
вует отрицательное изменение коэф­
фициента момента тангажа Атг,
т. е. o v <С 0. В области статиче­
ской неустойчивости по скорости
(участок штриховой кривой) поло­
жительному изменению коэффи­
циента
соответствует положи­
Р и с. 11.21. Зав и си м о сть коэффициента
тельное изменение коэффициента
м омента т а н г а ж а
от коэффициента
момента Атг, т. е. a v > 0 .
подъемной силы при и зм ен я ю щ е м ся
Наличие статической устойчи­
числе M -горизо нтальн ог о полета (Н =
= c o n st, п ; с
яг Су):
вости по скорости необходимое, но
уа *а
недостаточное условие устойчиво­
I — о б л а с т ь статичес кой неу сто й ч и во­
сти
сти движения по скорости. Длинно­
периодическое возмущенное движе­
ние может быть затухающим (самолет обладает устойчивостью дви­
жения по скорости) и незатухающим (движение неустойчиво по ско­
рости). При статической устойчивости самолета по скорости и невме­
шательстве пилота или системы автоматического управления длин­
нопериодическое движение будет затухающим при достаточном демп­
фировании воздушной среды. При полете на больших высотах, когда
демпфирующие свойства воздушной среды ухудш аются, длинноперио­
дическое движение может стать незатухающим (самолет обладает
колебательной неустойчивостью по скорости).
Если пилот или система автоматического управления отклоняют
руль высоты (стабилизатор) для выдерживания горизонтального по­
лета или полета по заданной траектории, то в этом случае перегрузка
n v сохраняется постоянной. Критерием устойчивости длиннопериоди­
ческого движения является условие
- ~ Г (Р — Х а )т < 0 ,
iIV
(1 1 .3 6 )
где Р и Х а — с о о т в е т с т в е н н о т я г а д в и г а т е л е й и с и л а л о б о в о г о с о п р о т и в л е ­
ния с а м о л е т а .
При полете на первых режимах эго условие выполняется, движ е­
ние самолета устойчиво. При полете на вторых режимах производная
■jy (Р — Х п) > 0 ,
и следовательно, длиннопериодическое движение
при выдерживании п у = const или стабилизации угла наклона тр а­
ектории неустойчиво.
Согласно Е Н Л Г С , транспортный самолет должен быть статически
устойчивым по скорости на всех основных эксплуатационных реж и­
мах. Допускается небольшая неустойчивость по скорости только в ди­
апазоне скоростей от Vmax 3 (M) (максимально допустимой эксп луата­
ционной по числу полета) до Vmax Д0 1; (расчетной предельно допусти­
мой скорости). При этом сохраняется устойчивость по перегрузке и
оценке пилота, изменение усилий на ш турвале не является значитель10*
291
ным и опасным с точки зрения предотвращения непреднамеренного
превышения ограничений по скорости.
В продольном длин но периодическом движении при периодах коле­
баний более 20 с допускается нейтральная устойчивость, а при перио­
дах колебаний более 30 с — неустойчивость, если при этом время
удвоения амплитуды составляет не менее 60 с. При таких характеристи­
к ах колебательного длиннопериодического движения проявление не­
устойчивости по скорости пилотом воспринимается, как влияние
турбулентности атмосферы.
11.7. Продольная балансировка самолета
Общие сведения.
Под продольной балансировкой понимается
процесс взаимного уравновешивания моментов относительно попереч­
ной оси OZ путем отклонения органов управления (стабилизатора и
руля высоты). Если самолет сбалансирован, то выполняется условие
2М 2
0. Условие статической балансировки самолета, как следует
из уравнения (11.12),
0 = Л4ог— К (Хр— х-1)л: Ру р + У ъ £-го>
(11.37)
или в безразмерной форме (11.13)
0 = moz— Су {xF —
+т'» Д ф - j - m / 6 В.
(11.38)
Д л я упрощения будем считать, что трг является малой величиной,
тогда выражение (11.38) примет вид
0 = moz— су ( Хр — Х'! )+т'Р Дф ~\ mz B 6 В .
(11.39)
У гол отклонения руля высоты (стабилизатора), необходимый для
балансировки самолета в данном режиме полета, называется баланси­
ровочным. Это отклонение можно определить из уравнения (11.39),
разрешив его относительно 6 В или ф.
Если балансировка самолета осуществляется путем отклонения
руля высоты при неподвижном стабилизаторе, то слагаемое т^Лф в
(11.39) включается в коэффициент момента при нулевой подъемной си­
л е m oz, если ж е балансировка осуществляется управляемым стабили­
затором, то из (11.39) исключается слагаемое т®в6В. Балансировоч­
ные отклонения руля высоты и стабилизатора определяются соотно­
шениями:
Величина с уа в выражениях
<11.40 и 11.41) определяется при
заданных значениях высоты полета
Я , скорости V, нормальной пере­
грузки п у, полетной массы т.
Различаю т два вида продольной
балансировки: при постоянной ско­
рости и высоте полета, но изме­
няющейся нормальной перегрузке,
и при постоянной
нормальной
{обычно равной единице) перегруз­
ке, но изменяющейся скорости.
Остановимся на рассмотрении двух
видов балансировочных зависимо­
стей: 6В (п у) и б„ (К), которые мо­
гут быть получены аналитически из
зависимости (11.40) или в резуль­
тате летных испытаний.
Балансировочная
зависимость
Рис. 11.22. Б а л а н с и р о в о ч н ы е з а в и с и ­
6в (п у). Эта зависимость показыва­
мо сти 6в(пу) д л я у с т о й ч и в о го (сп л о ш ­
ные линии) и н еу сто йч иво го (ш три­
ет, на сколько градусов необходимо
х о в а я линия) с а м о л е т а ( V, W = c o n s t )
отклонить руль высоты для балан­
сировки самолета в прямолиней­
ном горизонтальном установившемся полете при сохранении нормаль­
ной перегрузки п у = 1 (рис. 11.22). Балансировочная кривая строит­
ся по результатам летных испытаний самолета следующим образом.
В прямолинейном установившемся горизонтальном полете при по­
стоянных значениях полетной массы, высоты, угла атаки а и скорости
пилот берет штурвал на себя и фиксирует его в этом положении. Со­
вершив несколько колебаний по углу атаки, самолет занимает новый
установившийся угол атаки а уст = а + Д а, которому соответствуют
подъемная сила У уст = У + ДУ и нормальная перегрузка п уутС =
= п у 4 - А пу. В момент достижения угла атаки а усх фиксируются
значение перегрузки п ууст и соответствующ ее ему значение угла от­
клонения руля выготы 8В. По координатам л уусх и 6„ получается
точка на плоскости. Каждому отклонению руля высоты на новый
угол 6 В при V, т, Н = const соответствую т свои значения а уст и
п у уст, а такж е своя точка на плоскости в координатах п у и 6 В. Л и ­
ния, проведенная через полученные точки, называется балансировоч­
ной кривой.
Значение установившейся перегрузки п ууст зависит от отклонения
руля высоты 6В и стабилизирующего момента ДУ (Х р — х т). При
М < М * положение фокуса самолета практически не изменяется с изменением угла атаки, поэтому зап ас устойчивости т г у = хр — х т по­
стоянен и между величинами 8В и п ууст будет линейная зависим ость.
При уменьшении степени устойчивости т °у уменьшается стабилизи-
о
Рис. 11.23. Типичная б а л ан си р о во ч н а я зависим ость 6 B (V ,)
рующий момент и, чтобы получить такую же перегрузку п у, требует­
ся меньшее балансировочное отклонение руля высоты (6В2 вместо бв1).
Балансировочная кривая для устойчивого самолета имеет отрица­
тельный наклон. Если самолет неустойчив по перегрузке, то для уве­
личения нормальной перегрузки пилот должен такж е взять штурвал на
себя,
перегрузка
возрастет,
но приращение подъемной силы
ЛУ' создаст дестабилизирующий момент, направленный на дальнейшее
увеличение угла атаки. Д л я того чтобы сбалансировать самолет на но­
вом (большем) угле атаки, пилот должен отдать штурвал от себя. Д ля
уменьшения нормальной перегрузки пилот сначала отдает штурвал
от себя, нормальная перегрузка под действием дестабилизирующего
момента уменьшается и для балансировки самолета при новой (мень­
шей) перегрузке требуется отклонение штурвала на себя. Таким обра­
зом, для балансировки неустойчивого по перегрузке самолета от пило­
та требуются двойные движения штурвалом.
Об
устойчивости самолета по перегрузке пилот может судить по его
реакции на отклонение ш турвала: если при небольшом отклонении
ш турвала на себя через некоторое время перегрузка п у уст фиксиру­
ется, то он устойчив; если ж е перегрузка продолжает неограниченно
нарастать, то самолет неустойчив по перегрузке. Т ак как при постоян­
ной скорости и высоте полета между перегрузкой п у, с у и а сущ еству­
ет однозначная зависимость, то на основании балансировочной зави ­
симости 8 В (п у) можно построить зависимость 6 В (а) и 6В (су).
Балансировочная зависимость 6 B(V;). Она показывает, насколько
и в каком направлении следует отклонить руль высоты в процессе пря­
молинейного горизонтального разгона или торможения самолета на
заданной высоте, чтобы сохранить нормальную перегрузку п у - 1
(рис. 11.23).
Д л я получения зависимости 6В (К,) при летных испытаниях пилот
разгон яет (или тормозит) самолет в прямолинейном горизонтальном по­
лете, изменяя режим работы силовой установки. При увеличении ско­
рости увеличиваю тся подъемная сила и перегрузка, поэтому для ба­
лансировки самолета или выдерживания нормальной перегрузки п у= 1
294
пилот должен отдавать штурвал от себя. При этом руль высоты откло­
няется вниз относительно предыдущего положения. На самолет дей­
ствуют пикирующий момент, угол атаки, а следовательно, и подъем­
ная сила уменьшаются, самолет сбалансируется на меньшем угле ата­
ки, и условие п у — 1 будет выполнено. Д ля нескольких фиксирован­
ных значений индикаторной скорости К,- фиксируются потребные от­
клонения руля высоты б„, обеспечивающие нормальную перегрузку
п у = 1. Кривая, соединяющая точки на плоскости, отмеченные по вы­
бранным значениям Кг и соответствующим значениям б„, называется
балансировочной. Балансировочные кривые строят для различных
высот полета, конфигураций самолета, полетных м асс, центровок, раз­
личных режимов работы двигателей и приводят в технических опи­
саниях самолета. По балансировочным кривым можно оценить воз­
можность балансировки самолета в различных эксплуатационных
режимах, определить запасы расхода руля высоты, потребные для вы­
полнения маневра, области неустойчивости по скорости.
Любой точке, лежащей ниже балансировочной кривой, соответст­
вует отклонение руля высоты вверх от балансировочного положения,
обеспечивающее нормальную перегрузку п у> 1 при соответствующей
данной точке скорости. Любой точке, лежащей выше балансировоч­
ной кривой, соответствует отклонение руля вниз от балансировочно­
го и нормальная перегрузка n b < 1. Предположим, что пилот сбалан­
сировал самолет на некоторой индикаторной скорости V i2 и в управле­
ние самолетом не вмешивается. Если скорость самолета случайно
уменьшится до значения Vn (например, самолет попал в попутный по­
ток воздуха), а руль высоты останется в прежнем положении, то подъ­
емная сила станет меньше силы тяжести самолета, а нормальная
перегрузка л ;/< 1. Самолет начнет терять высоту, увеличивая при
этом скорость. При случайном увеличении скорости до значения V i3
и неизменном положении руля высоты подъемная сила станет больше
силы тяжести самолета, перегрузка л у> 1 и самолет начнет набирать
высоту, уменьшая скорость. В обоих случаях скорость самолета будет
стремиться к исходному значению. Это явление наблюдается во всем
диапазоне скоростей от Кг1 до V i2, т. е. на участке, соответствующ ем
/<Э6В
\
положительному наклону балансировочной кривой l-^ - > 0 ) .
При скоростях полета, больших V i4, наклон балансировочных
(д6в
\
кривых становится отрицательным
< 0 1 , что свидетельствует о
потере устойчивости по скорости. Действительно, пусть пилот сбалан­
сировал самолет на скорости V t (при этом М - С М * ) . При увеличе­
нии скорости до значений, соответствующих маслам М > М *, фокус
самолета переместится назад, возникнет пикирующий момент, направ­
ленный на уменьшение угла атаки. Это приведет к уменьшению подъ­
емной силы, потере высоты и еще большему увеличению скорости.
Если пилот сбалансировал самолет на скорости V i5 и произошло
случайное уменьшение скорости до значения К,-4, то ф окус самолета
переместится вперед. На самолет будет действовать кабрирующий мо­
мент, что увеличит угол атаки, подъемную силу, приведет к набору вы­
соты и потере скорости. Д л я балансировки самолета потребуется от­
дать ш турвал от себя.
Е сл и при увеличении скорости пилот вынужден брать штурвал на
себя, а при уменьшении скорости отдавать его от себя, то такой само­
лет не будет выдерживать заданную скорость без постоянного вмеша­
тельства пилота. Д л я изменения скорости в области неустойчивости
(отрицательный наклон балансировочной кривой) от пилота потребу­
ются двойные движения ш турвала. Например, для увеличения скоро­
сти от значения Vi5 пилот должен отклонить штурвал сначала от себя
для уменьшения угла атаки, перегрузки и увеличения скорости за
счет потери высоты, затем на себя — для удержания самолета на
большей скорости. Причем обратное перемещение штурвала будет
больше прямого.
Балансировочные кривые строят обычно для основных эксплуата­
ционных условий полета, оговариваемых в технических описаниях.
Изменение эксплуатационных условий можно учесть либо пересчетом
балансировочных кривых, либо путем качественной оценки влияния
того или иного фактора.
Влияние эксплуатационных факторов на балансировочное отклоне­
ние руля вы соты . Как следует из (11.40), влияние того или иного эскплуатационного фактора на потребное отклонение руля высоты прояв­
ляется через изменение коэффициента сУа, запаса центровки хр — х т и
коэффициента эффективности руля высоты т ° в. Влияние эксплуата­
ционного фактора на балансировочное отклонение руля высоты удоб­
но оценивать по изменению его балансировочного отклонения
Д 6 в = в в1 -
6 в1,
(1 1 .4 2 )
где 6 в1 — и сх о д н о е б а л а н с и р о в о ч н о е о т к ло нение р у л я ;
б в2 — б ананси ров о ч н о е о т к л о н е н и е р у л я , о б у с л о в л е н н о е влияни ем и з у ч а е м о г о ф ак тора.
Рассмотрим влияние центровки. Пусть центровка самолета изме­
нилась и относительная координата центра масс стала не х т1, а х т2Д ействительно, если х т2 > х х1, то запас статической устойчивости са­
молета т°г« = — (хр — х т) уменьшится и для балансировки самолета
потребуется отклонение ш турвала от себя (рис. 11.24). Таким обра­
зом, при увеличении центровки самолета балансировочная кривая
сместится вверх. При уменьшении центровки запас продольной стати­
ческой устойчивости увеличится, что потребует балансировочного от­
клонения руля высоты вверх относительно предыдущего положения.
На рис. 11.25 показаны балансировочные кривые при различных
центровках при полете на постоянной высоте с неизменной полетной
массой с постоянной нормальной перегрузкой п у — 1. К ак следует из
анализа балансировочных кривых, чем меньше центровка, тем больше
зап ас статической устойчивости по перегрузке, тем больше балансиро'296
Рис. 11.2 4. Влияни е центровки на по­
л о ж е н и е балансировочной кривой
Рис. 11.25. Б а л ан с и р о в о ч н ы е за в и с и ­
мости с а м о л е т а при различны х ц ен т­
р о вк ах с а м о л е т а :
I — т °г у > 0 : 2 — т г у -0 \
3 — т ги < 0
вочное отклонение руля высоты вверх, и наоборот. При случайном уве­
личении скорости полета для сохранения нормальной перегрузки п у~ 1
требуется балансировочное отклонение руля высоты вниз.
При увеличении центровки запас статической устойчивости умень­
шается, что выражается в уменьшении угла наклона балансировочной
кривой. Если x f — х Т = 0 (центр масс и фокус самолета совпадают),
то самолет имеет нейтральную статическую устойчивость по перегруз­
ке, балансировочная кривая, соответствующая х т — 40 % Ьа, имеет
нулевой угол наклона. При более задних центровках самолет стано­
вится статически неустойчивым по перегрузке (т\'» > 0 ) , наклон ба­
лансировочной кривой становится положительным (балансировочная
кривая, соответствующая лгх = 50 % Ь а ).
Предельно допустимая передняя центровка определяется требова­
нием достаточности запаса перемещения руля высоты вверх при посад­
ке самолета (на этапе выравнивания). Осложнения условий посадки
(отказы техники, обледенение, боковой ветер и т. п.), ошибки в пило­
тировании могут привести к тому, что запаса расхода руля высоты мо­
жет не хватить для выдерживания требуемых параметров движения
самолета. Единые нормы летной годности самолетов с целью обеспече­
ния безопасности полетов регламентируют запас по отклонению ру­
ля высоты при предельно передней центровке (не менее 10°).
При передних центровках самолета, требующих балансировочного
отклонения руля высоты вверх, подъемная сила К го имеет большие
отрицательные значения, что уменьшает подъемную силу самолета:
У кр — У г„. Д л я восполнения этой потери требуется увеличить скорость
полета за счет увеличения режима работы двигателей. Например, при
уменьшении центровки самолета Т У -1 5 4 на 10 % лобовое сопротивле­
ние самолета за счет увеличения балансировочного отклонения руля
высоты вверх и перестановки стабилизатора увеличивается на 2 % .
Это приводит к увеличению потребной тяги силовой установки и до­
полнительному расходу топлива около 100 кг на каждый час полета.
Следовательно, для экономии топлива предпочтительны более зад­
ние центровки самолета, при которых лобовое сопротивление вследст­
вие уменьшения балансировочного отклонения руля высоты (стабили­
затора) уменьшается. При более задних центровках запас устойчиво­
сти самолета по перегрузке уменьшается. Случайный выход за пре­
дельно заднюю центровку снижает безопасность полетов. Обеспече­
ние экономии авиационного топлива за счет уменьшения балансиро­
вочного сопротивления и обеспечения высокой безопасности полетов
предъявляет жесткие требования к достоверности исходных весовых
данных самолета, топлива и грузов, а также определения центровки.
Согласно Е Н Л Г С , точность определения центровки самолета должна
быть не ниже ± 0 ,5 %.
Влияние полетной массы самолета проявляется в том, что при ее
изменении изменяется потребная подъемная сила. При увеличении по­
летной массы самолета для обеспечения горизонтального полета с нор­
мальной перегрузкой п у — 1 требуется большая подъемная сила, что
при одном и том ж е значении скорости достигается только увеличением
коэффициента с у (угла атаки), для чего пилоту необходимо взять
штурвал на себя. Таким образом, при увеличении полетной массы само­
лета балансировочная кривая смещается вниз. В прямолинейном уста­
новившемся горизонтальном полете выполняется условие
а
_
с Уа
J B - E ^ L c
2
2
!>а
откуда коэффициент подъемной силы
2G
2G
с it я; Су ------------ = ------------- .
"
pK2S
ро
Vj S
,
,
(11 .4 3 )
Из выражения (11.43) следует, что потребное изменение коэффици­
ента подъемной силы для обеспечения горизонтального полета с той
ж е индикаторной скоростью пропорционально изменению полетной
массы самолета.
В лияние реж им а работы силовой установки на балансировочное от­
клонение руля высоты (стабилизатора) проявляется через коэффициент
момента тан гаж а тяги тРг.
Больш инство факторов, обусловленных работой силовой установки,
в значительной степени взаимно компенсируют друг друга. При этом
изменение балансировочного отклонения руля высоты не превышает
3°. Исключение составляю т самолеты с Т В Д , у которых изменение ре­
жима работы силовой установки, косая обувка воздушного винта ока­
зываю т значительное влияние на положение фокуса.
В лияние высоты полета при скоростях, соответствующих числам
М < М *, не влияет на положение балансировочной кривой бв(У(),
так как полет на различных высотах с постоянной индикатор298
ной скоростью не приводит к изме­
нению коэффициента с у. При поле­
тах со скоростями, соответствую­
щими числам М > М *, меняется
запас устойчивости самолета по
перегрузке из-за перемещения фо­
куса самолета назад. Изменение
С
6
коэффициентов т г' . moz. т г тре­
бует изменения балансировочного
Рис. 11.26.
В ли я н и е угла установки
отклонения руля высоты, следова­
ста б и л и з а т о р а
на
балансиро вочное
от клонение руля в ы со т ы
тельно, изменяется положение ба­
лансировочной кривой. Это из­
менение определяется особенностями конкретного самолета.
Влияние положения механизации крыла проявляется в изменении
подъемной силы крыла, угла скоса потока за крылом, подъемной силы
горизонтального оперения, смещении центра давления, а следователь­
но, и фокуса самолета Xf ■ Если фокус самолета смещается вперед, то
запас центровки уменьшается и балансировочное отклонение руля вы­
соты будет более нижним (А6В ;> 0). Отклонение механизации, как пра­
вило, приводит к увеличению скоса потока, для парирования кото­
рого такж е требуется отклонение руля высоты вниз. Оба фактора вызы­
вают смещение балансировочной кривой вверх.
Влияние угла установки стабилизатора проявляется через измене­
ние потребного балансировочного отклонения руля высоты 6 В. Если
для самолета классической компоновочной схемы построить балан­
сировочные кривые для случаев: ф
0 ; tp > 0 и <р < 0 (рис. 11.26),
то отклонение стабилизатора на угол ср > 0 потребует большего от­
клонения руля высоты вверх, балансировочная кривая сместится
вниз. Отклонение стабилизатора на угол ф < ; 0 потребует меньше­
го отклонения руля вверх, балансировочная кривая сместится
вверх.
Установкой стабилизатора на угол ф осущ ествляется грубая ба­
лансировка самолета.
Потребный угол установки стабилизатора выбирают таким, чтобы
расхода руля высоты было достаточно для продольной балансировки
в заданном режиме полета.
Балансировочное отклонение стабилизатора рассчитывают но фор­
муле (17.41). Необходимость балансировочного отклонения стабили­
затора (перестановки) возникает при значительных изменениях режи­
ма полета.
К ак показано на рис. 11.26, на некоторой скорости V г1 при пере­
становке стабилизатора из положения ф
0 в положение ф <С 0 руль
высоты для балансировки самолета необходимо отклонить на значи­
тельный угол вниз, а при перестановке стабилизатора на угол ф > 0 вверх.
11.8. Продольная управляемость самолета
и ее характеристики
Продольная управляемость — способность самолета реагировать на
отклонение органов продольного управления, изменяя угол атаки,
а следовательно, коэффициент подъемной силы и нормальную перегруз­
ку. В ответ на дозированное пилотом или бортовой автоматической си­
стемой управления отклонение руля высоты или стабилизатора само­
лет выполняет определенный маневр в продольном движении. С точ­
ки зрения пилота, продольная управляемость самолета оценивается,
во-первых, значением усилий на штурвале и перемещением штурвала
для выполнения маневра в вертикальной плоскости, во-вторых, «по­
слушностью» самолета, его способностью «ходить за штурвалом». В
соответствии с этим характеристики продольной управляемости при­
нято делить на две группы: статические и динамические.
Статические характеристики продольной управляемости. ОсновЛ 6В
Д 6В
ЛХВ
ДР„
Д Сц
Д Пу
Any
Any
ными из них являю тся: отношения — -, — -, — -, — й, показывающие
потребные отклонение руля высоты Д6В, перемещение штурвала ДЛГВ,
изменение усилия па штурвале А Р В для единичного изменения коэф­
фициента подъемной силы Лс у или нормальной перегрузки А пи.
Эти отношения обычно выражаются в виде
производных
8lu\ &ъу',
Х пи\ р У . Статические характеристики продольной управляемости
самолета получают в результате обработки результатов летных испыта­
ний и приводят в техническом описании самолета. Производная 6в"
называется градиентом отклонения руля высоты по коэффициенту
нормальной силы. Она показывает, на сколько градусов необходимо от­
клонить руль высоты, чтобы изменить коэффициент подъемной силы
на единицу. Можно доказать, что производная 6 ^ = — тгу!тгв за­
висит только от запаса статической устойчивости самолета по пере6
С
грузке т гу и коэффициента эффективности руля высоты т ги, кото­
рые при скоростях, меньших критических, остаются практически по­
стоянными. Следовательно, производная 8ВУ не зависит от скорости
при М < М #.
Производная ЬУ называется градиентом отклонения руля высоты
по перегрузке и показывает, на какой угол необходимо отклонить руль
высоты, чтобы изменить нормальную перегрузку на единицу. Предпо­
ложим, что самолет находится в установившемся прямолинейном го­
ризонтальном полете, тогда выполняется условие Угп = G. При от­
клонении руля высоты на величину Д6В возникнет приращение коэф­
фициента подъемной силы А су и соответствующее приращение подъ­
емной силы Д Y . При этом приращение нормальной перегрузки
AY
А % = —
АУ
Ас у
^ГП
Сугц
<" ■« )
а)<?6п*
S)
-20
x"y
8) Pft
U r;
\j t>
-20
-20
\ J« \
~Ю
ZOO
-10
500
800
V
-10
200
500
800
V
200
500
800
V
Рис. 11.27. Характеристики продольной статической у п р а вл я ем о с ти при р а з л и ч ­
ных центровках
т, Н = c o n st )
С учетом выражения (11.44)
6 .у = -
Д6 „
Дб.
Д пу
Д Су
ьугп
''угп ■
( 1 1.4 5 )
Т ак как величина Ьву не зависит от скорости при М •< М *, то величи­
на 8ВУ изменяется пропорционально коэффициенту с ига. Зависимость
производной 6b'v от индикаторной скорости задается в виде графиков
(рис. 11.27, а).
Производная х У называется градиентом перемещения штурвала
по перегрузке и показывает, на какую величину необходимо переме­
стить штурвал для изменения нормальной перегрузки на единицу.
У статически устойчивого по перегрузке самолета производная Х ъу
отрицательна. Д ля создания положительного приращения перегрузки
требуется отрицательное (на себя) перемещение ш турвала (рис.
11.27, б). Градиент перемещения штурвала по перегрузке
пи
АХ
АД,
Ап у
Д бв
(1 1 .4 6 )
г д е кшв = Д б в/ Д Х в — перед а точ ное о т н о ш ен и е с и с т е м ы ш т у р в а л — р у л ь
в ы с о т ы , п о к а з ы в а ю щ е е на с к о л ь к о г р а д у с о в о т к л о н я е т с я р у л ь в ы с о т ы при п е р е ­
м ещ ен и и ш т у р в а л а на 1 мм (при р а с ч е т а х б е р е т с я р а з м е р н о с т ь 1 м).
У транспортных самолетов коэффициент /гшв обычно постоянный,
что обеспечивает прямую пропорциональную зависимость между гра­
диентами х У и 6 > . При малых значениях х У самолет становится
слишком чувствительным к перемещениям ш турвала, при больш их—
вяло реагирует на перемещение штурвала. Летной практикой устан ов­
лено, что самолет положительно оценивается пилотом, если значение
Х ву больше 40 мм на единицу перегрузки.
Производная Р ъу называется градиентом усилий на штурвале по
перегрузке и показывает, какое дополнительное усилие необходимо
приложить к ш турвалу, чтобы изменить нормальную перегрузку на
единицу (рис. 11.27, в). С вязь производной Р пу с ранее полученными ус­
танавливается зависимостью
ДР„
р°
ДХ„
р° -
( 1 ,-47>
гд е Р * в — г р а д и е н т у си л и й на ш т у р в а л е по пер емещ ению . Он п о к а з ы в а е т ,
к а к и з м е н я е т с я у с и л и е на ш т у р в а л е при его перем ещ ен ии на 1 мм.
При наличии простой механической системы управления усилия на
штурвале пропорциональны шарнирному моменту на руле высоты.
Шарнирный момент зависит не только от угла отклонения руля высоты,
но и от высоты и скорости полета. У современного транспортного само­
лета эти моменты велики и могут быть несоизмеримы с физическими
возможностями пилота, поэтому самолеты оборудуют гидроусилителя­
ми, воспринимающими шарнирные моменты на себя, а шарнирный мо­
мент, воспринимаемый пилотом, создается искусственно при помощи
пружинных загруж ателей с коррекцией градиента по скоростному на­
пору.
При малых значениях градиента P l v самолет слишком чувствителен
к изменениям усилий на штурвале, при больших — самолет стано­
вится тяжелым в управлении. Самолет оценивается пилотом положи­
тельно, если градиент усилий на штурвале по перегрузке Р ву находит­
ся в пределах — (100— 450) Н на единицу перегрузки. Согласно
Е Н Л Г С , усилия на штурвале, потребные дли изменения перегрузки
до максимальной эксплуатационной п эутах и для вывода самолета на
предельно допустимый угол атаки а доп при сбалансированном и
триммированном в крейсерском режиме самолете, должны быть пря­
мыми и по абсолютному значению составлять 300 ... 250 Н. Градиенты
П
п
Р ъу и Х ву при этом по абсолютному значению не должны превышать
100 Н и 50 мм соответственно.
Динамические характеристики продольной управляемости. Стати­
ческие характеристики управляемости не дают полного представления
о реакции самолета на отклонение органов управления. Д л я пилота
не безразлично, в течение какого времени после отклонения руля вы­
соты произойдет потребное изменение перегрузки, а такж е какой ха­
рактер изменения перегрузки во времени имеет самолет. И сследова­
ние реакции самолета на ступенчатое отклонение руля высоты дает
объективную оценку управляемости.
Реакция самолета на скачкообразное отклонение руля высоты со­
гласно нормам летной годности самолетов оценивается тремя основ­
ными параметрами (рис. 11.28):
временем затуханий\— про­
межутком времени, по истёчении
которого величина Лп у будет о т­
личаться от Ап,,
‘ у у с т на 0 ,0 5 , т.
на 5 % ;
4 раб — временем срабатывания —
минимальным промежутком вре­
мени, по истечении которого вели­
чина
Ап у достигает
значения
Ап у
относительным пре­
вышением перегрузки
Atly --- Д Я у / Д у у с т *
где
Д Пу
^ пу ш ах
превышение перегрузки.
(11.48)
^ п у уст
Рис. 11.28 . Изменение нормал ьн ой п е ­
регру зки при ступен чатом отклонении
руля в ы со т ы
Относительное превышение перегрузки определяется собственными
свойствами самолета и демпфирующими свойствами воздушной среды
и может быть выражено через коэффициент затухания колебаний т зат:
1
(1 1 .4 9 )
Я1зат
Большое время затухания колебаний и значительный заброс пере
грузки отрицательно сказываю тся на маневренности самолета.
При плавном отклонении штурвала самолет практически «ходит»
за штурвалом. При резком отклонении штурвала превышение пере­
грузки достигает 0 ,2 — 0 ,3 . Согласно нормам летной годности к эк сп л у ­
атации допускаются самолеты, получившие положительную оценку пи­
лотов-испытателей на всех предусмотренных Руководством по летной
эксплуатации режимах полета. При этом время срабатывания tcv не
должно превышать 4 с, а относительное превышение нормальной
перегрузки Ап узаб должно быть не более 0 ,3 .
Д о п о л н и тел ь н а я
литература
[ 2 ] , с. 1 4 4 — 199; [ 3 ] , с . 1 3 6 — 15 7 ,
с . 1 3 3 — 16 9, 2 2 2 — 2 6 5 ; [ 6 ], с . 4 8 — 5 8 ,
1 7 9 — 2 0 7 , 2 4 3 — 2 9 8 ; 151, с . 1 0 6 — 1 2 4 ; [ 7
1 6 8 — 1 7 3 , 1 9 5 — 2 0 5 ; [ 9 ] , с. 1 6 8 — 19 7 .
К о н т р о л ь н ы е воп р осы
1. Д а й т е о п р е д е л е н и я ,
запишите
и объясите
условия
равновесия и
б а л а н с и р о в к и с а м о л е т а . М о ж н о ли с б а л а н с и р о в а т ь с т а т и ч е с к и н е у с т о й ч и в ы й
самолет?
2 . Ч ем о п р е д е л я е т с я у с т о й ч и в о с т ь д в и ж е н и я с а м о л е т а ?
3 . О б ъ я сн и т е в з а и м о с в я з ь у ст о й ч и в о с т и и у п р а в л я е м о с т и с а м о л е т а .
4. Изобразите схем ы п олож ительны х моментов, у гл ов ы х скор остей , о т к л о ­
нений о р г а н о в и р ы ч а г о в у п р а в л е н и я .
5 . Н а з о в и т е и о б ъ я с н и т е о с н о в н ы е м етоды и с с л е д о в а н и я у с т о й ч и в о с т и и у п ­
равляем ости самолета.
6 . И з о б р а з и т е и с р а в н и т е э к ви ва л ен тн ы е сх е м ы аэ р о д и н а м и ч е с к и х с и л , д е й ­
с т в у ю щ и х на с а м о л е т .
7. О б ъ я с н и т е п р и р о д у а эро динам ически х момен то в т а н г а ж а : с т а б и л и з и р у ­
ю щ е г о , д ем п ф и р ую щ ег о.
8 . П о я с н и т е ф и зи ч е с к у ю к а р т и н у п ро д о л ьн о го в о зм у щ е н н о г о д в и ж е н и я с а ­
м о л е т а при с т у п е н ч а т о м от к л о н ен и и р у л я в ы с о т ы , при у вел и ч е н и и р е ж и м а р а ­
боты д в и г а т е л я , при п оп ад ании с а м о л е т а в поп у тны й пото к в о з д у х а .
9 . Д о к а ж и т е , что с а м о л е т , центр м а сс к о т о р о го р а с п о л о ж е н в пе р еди ф о к у с а ,
с т а т и ч е с к и у ст о й ч и в по у г л у а т а к и .
10. К а к в п ол ете п р о в ер и т ь н ал ич ие ст а т и ч е с к о й у сто йчи во сти с а м о л е т а по
перегрузке?
11. О б ъ я с н и т е п о я в л е н и е но р м ал ьн ой с о с т а в л я ю щ е й т я г и с и л о в о й у с т а н о в ­
ки.
12. И з о б р а з и т е и о б ъ я с н и т е х а р а к т е р н у ю з а в и с и м о с т ь mz ( су ) д л я с т а т и ­
ч еск и у с т о й ч и в о г о и н еу с т о й ч и в о г о с а м о л е т а .
13. З а п и ш и т е и о б ъ я с н и т е х а р а к т е р и с т и к и п род ол ьн о й усто й чи во сти с а м о ­
л е т а . в л и я н и я на них в ы с о т ы п о л ета , ц ентро вк и и с к о р о с т и .
14. К а к э к с п е р и м е н т а л ь н о в полете д о к а з а т ь , что с а м о л е т ст а т и ч е с к и у с т о й ­
чив по с к о р о с т и ?
15. Р а с с ч и т а й т е с т е п е н ь ст а т и ч е с к о й у сто й ч и во сти са м о л е т а по п е р е г р у з к е ,
есл и
хт = 0 , 3 , x F = 0 , 4 5 . О т в е т : m V — — 0 , 1 5 .
16. З а п и ш и т е и о б ъ я с н и т е у с л о в и е с т а т и ч е с к о й у сто йчи во сти с а м о л е т а по
скорости.
17. К а к э к с п е р и м е н т а л ь н о п о л у ч и ть б а л а н с и р о в о ч н ы е за в и с и м о с т и й в( ^ ; )
и 6 В ( пу).
18. И з о б р а з и т е б а л а н с и р о в о ч н ы е за в и с и м о с т и 6 В ( К ; ) и о б ъ я с н и т е при их
иомощи в л и я н и е э к с п л у а т а ц и о н н ы х ф ак тор о в на х а р а к т е р и с т и к и п р од ол ьн о й
управляемости.
19. О п р е д е л и т ь б а л а н с и р о в о ч н о е от к л о н ен и е р у л я высо ты при п о л е т е на
в ы с о т е 8 0 0 0 м (р = 0 , 5 2 5 кг/м3) V = 6 0 0 км/ч, есл и извест н ы : m = 6 0 0 0 0 к г ;
S =
1 4 0 м2;
mz0 — 0 , 1 ; m^'J =
— 0 ,1 5 ;
=
— 1,381
1/рад.
О твет: б „ =
= — 7,6°.
2 0 . Н а з о в и т е с т а т и ч е с к и е и д и н а м и ч еск и е х а р а к т е р и с т и к и п род ол ьн о й у п ­
равляемости.
Глава
12
УСТОЙЧИВОСТЬ, УПРАВЛЯЕМОСТЬ И БАЛАНСИРОВКА САМОЛЕТА
В БОКОВОМ ДВИЖЕНИИ
12.1. Силы и моменты, действующие на самолет в боковом
движении
Статические силы и моменты. При несимметричном обтекании са­
молета воздушным потоком возникают боковые силы, создающие со­
ответствующие моменты относительно осей связанной системы коорди­
нат. Симметрия обтекания самолета потоком нарушается при появле­
нии угла скольж ения вследствие воздействия порыва ветра, отклоне­
ния органов управления рысканием и креном, появления несиммет­
ричной тяги двигателей и т. п.
304
Аэродинамические силы и моменты планера при скольжении рас­
смотрены в разделе 4.4. Так как при изучении устойчивости и управля­
емости самолета используют связанную систему координат O X Y Z ,
го для удобства дальнейшего изложения материала приведем формулы
боковых аэродинамических сил и моментов в связанной системе коор­
динат (рис. 12.1):
аэродинамическая поперечная сила
2 = e i- P £ L S = c g fc S ;
(12.1)
аэродинамический момент рыскания
Му = т у ^
аэродинамический
SI =
ftq.S'/;
(12.2)
Sl = m%(iqSl.
(1 2 .3 )
момент крена
Мх = тх ^
Сила Z, приложенная в фокусе по у гл у скольжения F р, создает
статический аэродинамический момент ры скания
Mu =
z (-V p — xT} ~ c 2 qSl
( * Fp — * т ) = c£
— Х т).
(1 2 .4 )
305
Приравняв правые части выражений (12.2) и (12.4), получим:
(1 2 .5 )
( 12. 6 )
где
=
xF /I и хт =
хт/1 — к оординаты ф о к у са по углу с к о л ь ж е н и я и
I.
центра м а сс, в ы р а ж е н н ы е в д о л я х р а з м а х а крыл а
Аэродинамический момент рыскания М у будет стабилизирующим,
если он направлен на устранение появившегося угла скольжения {5,
или дестабилизирующим, если он направлен на увеличение появивше­
гося угла скольж ения. Аэродинамический момент крена М х будет
стабилизирующим, если он направлен на устранение появившегося
угла крена у, а следовательно, и угла скольжения р. В противном слу­
чае аэродинамический момент крена будет дестабилизирующим.
Силы и моменты двигателей создаются при полете самолета с углом
скольжения |J вследствие косой обдувки воздушного винта и воздухо­
заборника. Природа боковых составляющих тяги Р г аналогична при­
роде нормальных составляю щ их тяги Р у (см. рис. 5 .8 и 11.10), воз­
никающих при косой обдувке воздушного винта и воздухозаборника
при полете с углом атаки а .
Сила P t создает момент рыскания Мр , который равен произведе­
нию этой силы на плечо, а :<нак момента определяется в соответствии с
общим правилом механики (если самолет разворачивается вокруг оси
O Y в сторону правого полукрыла, то момент М р у отрицателен, если
самолет разворачивается в сторону левого полукрыла — положите­
лен).
Управляющие силы и моменты создаются за счет отклонения руля
направления и элеронов. Управляющий момент рыскания создается
при отклонении руля направления. Его значение определяется зависи­
мостью
Мну = ZH L B0 = М * 6Н = т * 6Н q S l ,
(1 2 .7 )
гд е га *н — коэффициен т эф ф ективн ости р у л я н а п р а в л е н и я .
Коэффициент т у зависит от угла отклонения руля направления 6 Н
и угла скльжения р (рис. 12.2). Производная тун отрицательна и по­
казы вает, как изменяется коэффициент момента рыскания при откло­
нении руля направления на 1°. При отрицательном отклонении руля
направления (влево) он создает положительный момент рыскания,
разворачивающий самолет в сторону левого полукрыла (рис. 12.1,а).
Управляющий момент крена создается при отклонении элеронов
(рис. 12.3, а). Отклонение элеронов на угол бэ вызывает перераспре­
деление давления на полукры льях, что приводит к увеличению подъ­
емной силы на полукрыле с отклоненным вниз элероном и уменьшению
306
подъемной силы на полукрыле с
отклоненным вверх элероном. Па­
ра сил АКЭ создает момент крена
М%х = 2 Д К э : э = /М*э 6 Э— тх f>9 qSl,
( 12. 8 )
где
т * э — коэффициент эф ф е кт и в ­
ности э л е р о н о в ; г ч — плечо си л ы
ЛУ'Э.
Коэффициент т х зависит от уг­
ла отклонения элеронов 8Э и угла
скольжения р (рис. 12.3, 6). Произ­
Рис. 12.2. З а в и с и м о с т ь коэффициента
а эродинам ического мо м ен та рыскания
от угл а ск о л ь ж е н и я
при различных
от клонениях руля в ы с о т ы
водная тх отрицательна и показывает, как изменяется коэффициент
момента крена т х при отклонении элеронов на 1°. При отрицательном
отклонении элеронов (штурвал вправо, правый элерон вверх) создает­
ся положительный момент крена, разворачивающий самолет относи­
тельно оси ОХ в сторону правого полукрыла (рис. 12.3, а). При откло­
нении руля направления и элеронов, кроме рассмотренных основных
управляющих моментов, возникают аэродинамические моменты крена
(при отклонении руля направления) и рыскания (при отклонении
элеронов).
Аэродинамический момент крена при отклонении руля направле­
ния создается силой Z H на плече у „ (рис. 12.3, а):
М«
= Z u Ун = м х " бц '
(1 2 .9 )
в|, RSI,
где m н — коэффициент эффективности р у л я н а п р а в л е н и я по к р е н у .
Аэродинамический момент рыскания при отклонении элеронов со з­
дается приращением лобового сопротивления А Х Э:
Мау — 2 Д Х Э г э = т у ° 6 Э q S l,
где т * э
—
коэффициент эф фективности э л е р о н о в по у г л у
(1 2 .1 0 )
рыскания;
гя—
плечо сил ы Д Х...
Рис. 12.3. В озн икновение моментов крена при отклонении ру л я н а п р а в л е н и я i;
элеронов (а) и за в и си м о ст ь коэффициента момента крен а т х о т у г л а с к о л ь ж е н и я
при различных отклонен иях элеронов ( б) (ш триховой линией п о к а з а н ы участки
кривых тг (Р) при б ол ьш их угл ах с к о л ь ж е н и я )
'у
+h CL V ■
Рис. 12.4. С х е м а о б р а з о в а н и я демпф ир ую щег о момен та крена
мо м е нта ры ск а ни я (б) при вращении сам о лет а вокруг оси ОХ
(а) и спирального
Некоторое влияние на боковое движение самолета оказывают мо­
менты рыскания и крена, возникающие за счет угла скоса потока в
области вертикального оперения.
Дополнительные моменты, возникающие при вращении самолета.
Неуравновешенные статические моменты вызывают вращение самолета
относительно осей ОХ и O Y . При этом возникают дополнительные мо­
менты: демпфирующие и спиральные.
Демпф ирующий момент крена возникает при наличии угловой ско­
рости вращения относительно оси ОХ и создается крылом (основная
часть момента), вертикальным оперением (значительная часть) и го­
ризонтальным оперением (незначительная часть):
При вращении самолета относительно оси ОХ с угловой скоростью
каж дое сечение крыла приобретает некоторую окружную скорость
А V у, которая растет по мере удаления сечения от оси ОХ. С такой же
скоростью , но в противоположном направлении, на крыло набегает
дополнительный воздушный поток (рис. 12.4, а), скорость которого в
рассматриваемом сечении А К у = соу г, где z — расстояние сечения от
оси вращения О Х . Сложение векторов скорости V и A V y приводит к
увеличению угла атаки А а в рассматриваемом сечении опускающего­
ся полукрыла и уменьшению его на такое ж е значение в симметрич­
ном сечении поднимающегося полукрыла. Приращение угла атаки
Да »
tg Д а = А1/,y/V
( 12. 12)
Увеличение углов атаки на опускающемся полукрыле и уменьшение
их на поднимающемся приводит к соответствующему увеличению и
уменьшению подъемных сил, что вызывает возникновение демпфиру­
ет
ющего момента крена крыла, направленного против угловой скорости
вращения:
" Л ф - .—
2" ' г'
< ,2 ,3 )
где Л Y — п риращ ение подъемн ой с и л ы на п о л у к р ы л е ; z — р а с с т о я н и е от
оси ОХ до т о ч е к п р и л ож е н и я при ра щ ен и й под ъемной си л ы на п о л у к р ы л ь я х .
Аналогично возникает демпфирующий момент крена горизонтального
оперения.
При вращении самолета вокруг оси ОХ на вертикальное опере­
ние набегает дополнительный воздушный поток со скоростью AV'Z=
= ы ху. В результате сложения скоростей V и ДУ2 образуется прира­
щение угла скольжения Др на вертикальном оперении, что приведет к
появлению поперечной силы ZB0, которая создаст демпфирующий мо­
мент крена вертикального оперения относительно оси ОХ (см, рис.
12.4, а):
Мхвоа>х ~ ^ во L B0.
(1 2 .1 4 )
Суммарный демпфирующий момент крена в соответствии с (12.10)
Мхь>х ^ МхХ Ых = тх Х <ox qSl = mX a x qSl,
где
т
— коэффициент
д ем п ф и р у ю щ ег о
момен та
крена;
( 1 2 . 15)
Мх х — п р о ­
и з во д н а я от д емпф ир ую щ его мо мента к р е н а по у г л о в о й с к о р о с т и к р е н а , п о к а з ы ­
ва ю щ а я д ем пф ирую щ ий момент к р е н а при в р а щ е н и и с а м о л е т а с у г л о в о й с к о р о ­
стью
шх , р а в н ой р ад и ан у в с е к у н д у ; тх х — п р о и зв о д н а я от коэффиц иента д е м п ­
ф ирую щ его момента крен а по у г л о в о й с к о р о с т и .
Так как направление демпфирующего момента противоположно на­
правлению угловой скорости, то производная отрицательна по знаку,
О)
„ (Од.
т. е. т / < 0. В практике обычно пользуются не производной т х ,
а производной по безразмерной угловой скорости со т= с о ж-^- V. В этом
случае выражение (12.15) принимает вид
“т—
м ха х = м х v>x^mx <i>x q S l .
(1 2 .1 6 )
Производные т^х и
получают экспериментально или расчетным
путем и приводят в технических описаниях. На докритических режи­
мах полета эти производные практически не зависят от числа М поле­
та, а в закритических — уменьшаются. На больших углах атаки изза развития срыва потока на опускающемся полукрыле крыло м ож ет
потерять демпфирующие свойства.
Спиральный момент рыскания. Он возникает при вращении само­
лета вокруг продольной оси ОХ и действует относительно нормальной
оси O Y. Спиральный момент рыскания создается в основном крылом и
вертикальным оперением:
При вращении самолета вокруг оси ОХ (рис. 12.4, б) на опускаю­
щемся и поднимающемся полукрыльях возникают приращения углов
атаки. Это приводит не только к изменению нормальных сил A F, но
и к соответствующему приращению продольных сил А Х, направление
которых зависит от угла атаки в каждом сечении: при малых углах ата­
ки они отрицательны, на средних близки к нулю, а на больших поло­
жительны. Продольные силы создают момент рыскания крыла М 1ттх.
направление которого зависит от угла атаки.
Возникающая при вращении самолета вокруг оси ОХ поперечная
сила Z BO (рис. 12.4, б) создает не только демпфирующий момент кры­
ла, но на плече L Ba создает момент рыскания:
( 12. 18)
Мувоа>х = Z „ o L B0.
Суммарный спиральный момент рыскания зависит от углов атаки
на крыле и соотношения моментов рыскания, создаваемых крылом и
вертикальным оперением. В соответствии с выражением (12.17)
м т х = "С *
где
Vs1 = т7
•
( 12 ■19>
т"’х и т'цХ — с о о т в е т с т в е н н о п рои зводн ы е от коэффициента с п и р а л ь н о г о
мо м ента по у г л о в о й ск о р о с т и
ы х и б езр а з м ер н о й у г л о в о й ск о р о сти
При малых углах атаки и угловых скоростях вращения производ­
ная пГух отрицательна, при больших углах атаки и начальных скоро<|)~
етях вращения производная т у > 0 .
Демпфирующий момент рыскания возникает при вращении самоле­
та относительно оси O Y с угловой скоростью соу и препятствует враще­
нию. Он создается фюзеляжем, вертикальным оперением и крылом:
(
12 . 2 0 )
К аж дая точка фюзеляжа при вращении самолета относительно
O Y приобретает окружную скорость
оси
= = М у ф ч > у ~ ^ М у « о ( а у ' 1Г М у к р а > у .
ЛУ2 = ш;/х,
(12.21)
гд е л: — р а с с т о я н и е р а с с м а т р и в а е м о й то чки ф ю з е л я ж а до оси в р а щ е н и я О У .
Н аличие окружной скорости вращения приводит к появлению аэро­
динамических сил, распределенных по поверхности фюзеляжа. Если
равнодействующие аэродинамических сил в носовой и хвостовой ча­
стя х фюзеляжа обозначить соответственно ZфХ и Z ^ , то демпфирую­
щие моменты, создаваемые ими, будут М ф1(ву и Мф2(йу (рис. 12.5, а).
Демпфирующий момент фюзеляжа
Рис. 12.5. С х е м а образован ия д емпф ир ую щ его мо мента р ы ск а н и я
ного мо мента крена (б) при вращении с а м о л е т а вокруг оси OY
(а) и сп и р а л ь­
Одновременно на вертикальном оперении появится дополнительный
угол скольжения
AV__
^вою„
(1 2 .2 3 )
что приведет к образованию поперечной силы ДZ„„ и появлению демп­
фирующего момента рыскания вертикального оперения
= ^ в о ^но-
(1 2 .2 4 )
Скорость обтекания полукрыльев при вращении самолета вокруг
оси 0 Y различна. Это приводит к увеличению аэродинамической силы
лобового сопротивления на полукрыле, которое обтекается с большей
скоростью, и соответствующему уменьшению лобового сопротивления
на противоположном полукрыле. В результате возникает сравнитель­
но небольшой демпфирующий момент рыскания, создаваемый крылом
Таким образом, суммарный демпфирующий момент рыскания, со­
здаваемый фюзеляжем, вертикальным оперением и крылом, определя­
ется соотношением
е>..
ю
а> _
МуЫу = Му ЫУ ~ ту Му q S l — ту wy q S l,
где
(1 2 .2 5 )
rtiyU и т^У — с о о т в е т с т в е н н о п р о и з в о д н ы е о т к оэф ф иц иента д е м п ф и р у ­
ю щ его мо м ен та р ы с к а н и я по у г л о в о й с к о р о с т и и б е з р а з м е р н о й у г л о в о й с к о р о с т и
вращения.
Производная myv отрицательна по знаку. При докритических ско­
ростях полета она сохраняет постоянное значение, а затем уменьша­
ется. Вы ход самолета на большие углы атаки и скольжения приводит
к ухудшению условий обтекания вертикального оперения и уменьше­
нию производной.
Спиральный момент крена возникает при вращении самолета во­
круг оси 0 Y , действует относительно оси ОХ и создается в основном
крылом и вертикальным оперением
^
=
^
kp^
+ M*boV
(12-26)
При вращении самолета относительно оси 0 Y с угловой скоростью
соу скорость воздушного потока, набегающего на полукрыло, идущее
вперед, будет больше, а на полукрыло, идущее назад, — меньше скоро­
сти полета V. Это приводит к увеличению нормальной силы AY у по­
лукрыла, идущего вперед, и уменьшению ее на полукрыле, идущем на­
зад (рис. 12.5, б). Нормальные силы, действующие на полукрыльях,
вызывают появление спирального момента крена крыла
МхкрШу = 2\Уг,
где г — р а с с т о я н и е от т о ч е к
н о р м а л ь н ы х с и л W до оси 0 Y .
(12.27)
п р и л о ж е н и я р а в н о д е й с т в у ю щ и х приращений
При вращении самолета относительно оси 0 Y на вертикальном
оперении возникнет поперечная сила ZB. 0, которая, действуя на пле­
че у в. о, создает спиральный момент крена вертикального оперения
Mxn.otay = ^ b .o г/в.о-
(12.28)
Суммарный спиральный момент крена, создаваемый крылом и вер­
тикальным оперением,
м
10и
&и
= М Х' (о у = т х ' toy q S l ~ m x
w yqSl.
(12.29)
Производная т^у отрицательна по знаку. При М < М* производная
сохраняет практически постоянное значение и растет с увеличением
угла атаки. Влияние запаздывания скоса потока у вертикального
оперения на боковые моменты незначительно, поэтому им обычно пре­
небрегают.
12.2. Условия боковой статической устойчивости самолета
П утевая статическая устойчивость. Стремление самолета самосто­
ятельно, без вмеш ательства пилота устранить приращение угла сколь­
жения, появивш ееся в результате некоторого возмущающего воздей­
стви я, и сохранить заданный угол скольжения называется путевой
или флюгерной устойчивостью.
512
При случайном появлении или
изменении угла скольжения на ве­
личину Ар в фокусе по углу сколь­
жения Fp возникнет приращение
поперечной силы AZ (рис. 12.6),
которое на плече
— х т создаст
момент AM у = AZ (л:^ — х т).
Если центр масс самолета рас­
положен впереди фокуса, то момент
AM у будет стремиться развернуть
самолет на устранение появивше­
гося приращения угла скольжения,
т. е. самолет будет обладать путе­
вой статической устойчивостью. Со­
гласно правилу знаков, при сколь­
жении на правое полукрыло Д р > 0 ,
Рис. 12.6. С х е м а об р а з о в а н и я с т а б и ­
л изир ую щ его м о м ен та рыскания
действует стабилизирующий момент
АМур < 0, при скольжении на ле­
вое полукрыло Ар < О, a A M vp > 0 . В обоих случаях отношение
AMvp/Ap ■< 0, что и является математическим выражением условия
путевой статической устойчивости самолета.
П оскольку момент рыскания A M y = A m y q S l, а произведение
qSl всегда положительно, то знак момента АМ у определяется знаком
коэффициента момента рыскания Л т „ . Тогда условие путевой стати­
ческой устойчивости можно выразить отношением Д/Пу/ДР < 0. Пере­
ходя от отношения конечных приращений к частной производной, по­
лучим
0
или m l <С 0. Последняя форма записи условия путе­
вой статической устойчивости самолета наиболее широко распростра­
нена.
Если центр масс самолета находится позади фокуса по углу сколь­
жения, то самолет не будет обладать путевой статической устойчиво­
стью. Появившийся при скольжении момент рыскания АМ у будет де­
стабилизирующим, направленным на увеличение возникшего угла
скольжения Ар. Отношение Д М у/Др будет положительным, и т у > 0 .
Если центр масс самолета совпадает с боковым фокусом, то m l = 0,
т. е. самолет найтрален.
При центровках, находящихся в пределах допустимых значений,
самолеты обладают путевой статической устойчивостью, центр м асс
находится впереди бокового фокуса и
< 0 . П роизводная т Р на­
зы вается мерой (степенью, запасом) путевой статической устойчивости.
Величина т Р незначительно меняется при изменении числа М полета
(рис. 12.7) и угла атаки, и ее значение находится в пределах — (0,001 -fЧ- 0,0 0 4 ) % .
Степень путевой статической устойчивости можно определить по за ­
висимостям mPy (М) или по зависимостям m y (Р), получаемым экспери­
ментально (рис. 12.8). При определении значения т& по кривой т у (Р)
при любом значении угла скольжения необходимо найти тангенс угла
наклона касательной к кривой в рассматриваемой точке.
Самолет, обладающий путевой устойчивостью, не стремится вы­
держать заданное направление полета, а лишь противодействует из­
менению угла скольжения и подобно флюгеру поворачивается по углу
рыскания самопроизвольно устраняя появившийся угол скольжения.
При Ар ф 0 боковая аэродинамическая сила Z a искривляет траекто­
рию, поворачивая вектор скорости центра масс относительно перво­
начального положения. Д ля выдерживания заданного курса требует­
ся вмеш ательство пилота (автопилота).
Поперечная статическая устойчивость. Способность самолета са­
мостоятельно, без вмешательства пилота сохранять заданный угол
крена назы вается поперечной статической устойчивостью. Предполо­
жим, что действующие на самолет в полете силы и моменты взаимно
уравновешены (самолет находится в состоянии равновесия). В резуль­
тате случайного возмущения появилось приращение угла крена Ау
(рис. 12.9). При этом равновесие моментов не нарушится, но появится
неуравновешенная составляю щ ая силы тяжести G sin v. П°Д действи­
ем которой траектория полета будет искривляться в плоскости XOZ,
перпендикулярной плоскости симметрии самолета. Симметричность об­
текания нарушится, самолет будет скользить на опущенное полукрыло
с углом AfJ. При этом возникнет статический аэродинамический мо­
мент крена АЛ4*, значение и знак которого зависят от угла стреловид­
ности крыла, угла поперечного V крыла, аэродинамической интер­
ференции м еж ду крылом и фюзеляжем, площади крыла.
Если при скольжении на правое полукрыло (Ар > 0 ) возникнет
момент крена, стремящийся повернуть самолет в сторону левого полу­
крыла (АЛ4Х < 0) и устранить образовавшееся приращение угла кре­
на Ау, то самолет обладает статической устойчивостью по крену или
попереч ной статической устойчивостью.
При скольж ении на левое полукрыло (Ар < 0) устойчивого по кре­
ну самолета создается момент АМ х > 0 , направленный в сторону пра­
вого отстающ его полукрыла. В обоих случаях отношение
<Z 0. что и является условием статической поперечной устойчиво/77.
Р и с.
12.7. З а в и с и м о с т ь степени п у те­
вой т ^ и попереч но й
сти от ч и сл а М п о л е т а
314
у сто й чи во­
Рис. 12.8. З а в и си м о ст ь коэффициента
стаб илизирую щ его м о м ен та рыскания
от угла ск ол ьж ен и я ( a , m = c o n s t )
Рис. 12.9. С хема образования ста б ил изиру ю щ е го момента крена при ск ол ьж ении
сти самолета. По аналогии с путевой статической устойчивостью, по­
скольку А М Х = Am ^ S l , условие поперечной статической устойчиво­
сти можно записать как Ат х/А $ < 0, * - ^ < 0 или т ^ С О . Если m%Z>
> 0 , самолет статически неустойчив по крену, а при т £ = 0 — нейтра­
лен.
Таким образом, самолет, обладающий поперечной статической ус­
тойчивостью (по крену), реагирует не на угол крена, а на угол сколь­
жения Ар независимо от причины, вызвавшей его. При этом момент
крена А М Х стремится повернуть самолет относительно оси ОХ в сто­
рону отстающего при скольжении полукрыла. С вя зь между аэродина­
мическим моментом крена М х и углом скольж ения устанавливается
соотношением (12.3). Производная
т% называется степенью (мерой,
запасом) статической поперечной
устойчивости самолета. Значение
т& зависит от числа М полета (см.
рис. 12.7) и угла атаки, а такж е от
конструктивных особенностей само­
лета (стреловидности крыла, попе­
речного V крыла, высоты и пло­
щади вертикального оперения).
Рис. 12.10. З а в и с и м о с т ь коэффиц иента
аэ ро ди н ам и ческо го мо м ента крена от
Производная
в диапазоне
угл а с к о л ь ж е н и я д л я у сто й ч и во го и
летных углов атаки несколько
неу стойчиво го
(ш триховая
кривая)
уменьшается при переходе от больса м о л ет а
ших к малым углам атаки. При увеличении числа М полета до значе­
ний, равных или больших М *, она увеличивается. Значение производ­
ной можно определить по кривым
и кривым т х (Р)
(рис. 12.10), которые приводятся в технических описаниях самолетов.
Совокупность путевой и поперечной статической устойчивости опре­
деляет боковую статическую устойчивость самолета.
12.3. Развитие бокового возмущенного движения
Боковое возмущенное движение подобно продольному возмущен­
ному движению самолета можно разделить на два вида: быстрое (ма­
лое, быстро протекающее) и медленное (большое, медленно протекаю­
щее). Предположим, что самолет, обладающий статической боковой
устойчивостью (тР < 0 и /«Р <С 0), находится в прямолинейном уста­
новившемся полете. На самолет кратковременно подействовало внеш­
нее возмущение, образовался угол скольжения (рис. 12.11). Если пи­
лот не вмешивается в управление, то дальнейшее движение самолета
определяется скоростью полета, характеристиками устойчивости,
инерционностью и свойствами воздушной среды.
Быстрое боковое возмущенное движение. Угол скольжения Р,
появившийся в результате кратковременного возмущающего воздей­
ствия, вызывает стабилизирующий момент рыскания М&Р, направлен-
Р и с. 12.11. И зм ен ен и е у гл ов с к о л ь ж е н и я и крена (а), момен то в р ы ск ан и я
крена ( в ) в к о ро тк оп ери оди ческо м б о к о в о м движении
(б) и
ный на уменьшение угла скольжения (5, и стабилизирующий момент
крена
направленный на создание крена в сторону отстающего
при скольжении полукрыла. Под действием этих моментов самолет
будет поворачиваться вокруг осей OY и ОХ. Появление угловых ско ­
ростей вращения со„ и ых, угловых ускорений со.,, и со* вызовет обра­
зование демпфирующих моментов рыскания М ^у шу и крена М * х со *.
Знаки моментов будут определяться знаками угла скольж ения, угловых
скоростей и угловых ускорений. Знак углового ускорения совпадает
со знаком угловой скорости при ускоренном вращении и противопо­
ложен знаку угловой скорости при замедленном вращении.
Характерные изменения стабилизирующих и демпфирующих момен­
тов можно проследить по рис. 12.11, б, в. Под действием стабилизирую­
щего момента рыскания
самолет начнет поворачиваться с увели­
чивающейся угловой скоростью соу вокруг оси O Y, уменьшая угол
скольж ения. Этому движению препятствует демпфирующий момент
рыскания М^у соу (точка /). Наличие положительного угла ско льж е­
ния приведет к возникновению отрицательного стабилизирующего мо­
мента крена
под действием которого самолет будет вращаться
вокруг оси ОХ, увеличивая угол крена. Этому вращению препятству­
ет демпфирующий момент крена М хх со*.
В момент времени, соответствующий точке 2, угол скольжения р = 0
но угловая скорость ы у приобретет максимальное значение. По инер­
ции самолет проходит это положение. Угол скольж ения |J, угловое
ускорение соу, стабилизирующий момент М у$ изменят знак на проти­
воположный. Самолет будет продолжать движение вокруг оси O Y,
увеличивая отрицательный угол скольжения и замедляя угловую ско­
рость вращения. В момент времени (точка 4) угол скольжения |J, ста­
билизирующий момент М 0(5 и угловое ускорение сой достигают макси­
мального значения, а угловая скорость со„ = 0. Под действием стаби­
лизирующего момента М у$ самолет начнет вращ аться вокруг оси
OY в обратном направлении, уменьшая отрицательный угол ско льж е­
ния. Этому вращению будет препятствовать демпфирующий момент
(точка 5).
В момент времени, соответствующий точке 6 , угол скольж ения р = 0 самолет по инерции проходит это положение и будет продолжать вра­
щение вокруг оси OY в прежнем направлении, увеличивая угол сколь­
жения. Этому вращению препятствует стабилизирующий момент МР(J,
сменивший направление действия, и демпфирующий момент М уу шу,
под действием которых угловая скорость соу уменьш ается. После не­
скольки х колебаний угол скольж ения приблизится к исходному значе­
нию (в нашем случае к значению р = 0). Ч астота колебаний по углу Р
зависит в основном от степени путевой статической устойчивости
самолета, инерционного момента и инерционных свой ств,а время зату ­
хания колебаний — от демпфирующих свойств среды.
Аналогично рассмотренному колебательному путевому движению
самолета развивается колебательное движение по углу крена. В мо­
мент времени, соответствующий точке 0, угол крена у = 0, но наличие
угла скольжения р приводит к возникновению стабилизирующего аэ­
родинамического момента крена AfPp. под действием которого самолет
будет крениться на отстающее при скольжении полукрыло (момент
времени tj). Этому движению препятствует демпфирующий
момент крена. Когда под действием указанных моментов угол скольж е­
ния станет равным нулю (точка 2), стабилизирующий аэродинамиче­
ский момент крена М^Р = 0. В последующий момент времени стаби­
лизирующий момент крена М^р изменяет знак на противоположный и
будет вместе с демпфирующим моментом Л4*хсож препятствовать даль­
нейшему увеличению угла крена. Но самолет по инерции продолжает
увеличение угла крена, замедляя скорость вращения со*. В момент вре­
мени, соответствующий точке 3, угловая скорость со* = 0 и демпфиру­
ющий момент крена М * * © * == 0, угол крена достигает максимально­
го отрицательного значения. Под действием стабилизирующего мо­
мента М &р угол крена начинает уменьшаться.
В момент времени, соответствующий точке 5, угол крена у = 0 ,
но по инерции самолет проходит это положение, угол крена изменит
знак на противоположный. Самолет будет продолжать движение во­
круг оси ОХ, увеличивая положительный угол крена и угловую ско­
рость. Колебательное движение по углу крена так же, как и по углу
скольж ен и я, с течением времени затухает. При этом угол крена прини­
мает некоторое остаточное значение (у Ф 0).
Рассматриваемое движение по углу скольжения мы считаем незави­
симым от движения по углу крена и потому первичным, а колебатель­
ное движение но углу крена — вторичным, зависящим от угла сколь­
жения. В итоге колебания по углу крена отстают от колебаний по углу
скольж ения по фазе до 90°. На характер колебательного короткопери­
одического движения по углам скольжения и крена оказы ваю т влия­
ние такж е боковая составляю щ ая силы тяжести G sin у и боковая аэ­
родинамическая сила ZPр, которые приводят к соответствующему ис­
кривлению траектории. Д л я нормальных условий эксплуатации тран­
спортного самолета эти движения можно считать чисто вращательны­
ми, а траекторию движения центра масс прямолинейной.
Спиральное или медленное боковое движение самолета. Наличие ос­
таточного угла крена после затухания короткопериодического движе­
ния приводит к развитию спирального движения самолета, представ­
ляющ его при постоянном угле крена нисходящую установившуюся
спи раль. Спиральное движение — не обязательно продолжение коле­
бательного. Оно может возникнуть отдельно от колебательного, если
возмущением служ ит отклонение не по углу скольжения, а по углу
крена.
Рис. 12.12. Силы и моменты, д ействую щ ие на с а м о л е т при наличии
угла крена
о с та то ч н о го
Если в исходном прямолинейном невозмущенном полете выполня­
лось условие У„ = G, то при наличии начального угла крена у силе
тяжести G противодействует не подъемная сила Y а, а ее составляю ­
щая У„ cos у (рис. 12.12, а). Так как F ucos 7 С G, то самолет начнет
герять высоту. Снижение самолета приводит к появлению отрицатель­
ного угла наклона траектории 0 , в результате чего нарушится равно­
весие сил вдоль оси ОХ. Появится составляю щ ая силы тяжести G sinO,
которая будет стремиться увеличить скорость полета (рис. 1 2 . 1 2 ,в).
Наличие угла крена приводит такж е к появлению неуравновешенной
составляющей силы тяжести G sin 7 , под действием которой самолет
перемещается (скользит) в плоскости X O Z, искривляя траекторию в
сторону опущенного полукрыла с нарастающей скоростью.
Траектория движения представляет собой нисходящую спираль
переменного радиуса. Скольжение самолета под действием силы
G sin 0 на опущенное полукрыло с переменным углом скольж ения р
приведет к возникновению стабилизирующего аэродинамического мо­
мента рыскания M ffi, под действием которого самолет будет развора­
чиваться относительно оси OY с изменяющейся угловой скоростью o)s ,
стремясь ликвидировать появившийся угол скольжения (рис. 1 2 . 12 , б).
При этом он будет отклоняться от заданного курса на изменяющийся
в процессе полета угол рыскания. Наличие угла скольж ения приво­
дит к возникновению стабилизирующего аэродинамического момента
крена
направленного на уменьшение угла крена. Вращение с а ­
молета по рысканию и крену создаст демпфирующие моменты рыскания
Ыу, крена
и спиральный момент крена
Таким образом, на самолет одновременно действуют моменты, из
которых MPfi и
способствуют увеличению начального (остаточ­
ного) угла крена, а М& Р и M^v соу — его уменьшению. И сследования
показывают, что если отношение моментов удовлетворяет условию
,VfP
> М ® у М $ , т о самолет обладает спиральной устойчивостью.
/3
Обычно условие спиральной устой­
чивости записывается так:
My/3
'Mpvy
>
т ,
8
■тх У /я*.
(1 2 .3 0 )
Самолет, обладающий спиральной
устойчивостью, ликвидирует оста­
точный крен. При этом после уст­
ранения крена самолет отклонится
от первоначального направления
полета на некоторый угол рыска­
ния A Y. Это объясняется тем, что
в процессе устранения крена он
продолжает разворачиваться вок­
руг оси OY в сторону опущенного
полукрыла. Д ля сохранения за­
данного направления полета необ­
ходимо вмешательство в управле­
Рис. 12.13. Т ра ек то рия
са м о л е т а
ние
пилота
или
автопилота
медленном бок о во м д виж ении
(рис. 12.13).
Если условие спиральной устойчивости (12.30) не выполняется, что
присуще самолетам с излишне большой флюгерной устойчивостью, то
в процессе скольжения угол крена самопроизвольно увеличивается.
Самолет движется по спиральной траектории уменьшающегося радиу­
са и со все возрастающей скоростью. Поскольку производные, входя­
щие в выражение (1 2 .3 0 ), зави сят от числа М полета, то, очевидно, ха­
рактеристики спиральной устойчивости зависят от режима полета.
Если траектория движения самолета характеризуется постепен­
ным уменьшением амплитуды боковых отклонений, то такой самолет
обладает спиральной устойчивостью (см. рис. 12.13). В противном слу­
чае самолет спирально неустойчив.
Реакция самолета на отклонение руля направления. Будем счи­
тать, что самолет находится в прямолинейном установившемся горизон­
тальном полете без скольж ения. Предположим также, что самолет
имеет нулевую степень поперечной статической устойчивости ( т Р = 0 )
или оборудован автоматической системой, которая устраняет движе­
ние самолета по крену при отклонении руля направления. Тогда при
отклонении руля направления на некоторый угол 6 Н самолет, облада­
ющий путевой статической устойчивостью, под действием стабилизи­
рующего и демпфирующих моментов рыскания будет совершать зату­
хающие путевые колебания и стабилизируется на некотором угле
скольж ения Руст (рис. 12.14), когда выполнится условие равновесия
моментов М н б„
Быстрое колебательное движение описывается
у н
зависимостью
•320
Степень затухания путевых колебаний повышается с увеличиением
скорости полета и уменьшается с ростом полетной массы
pVS
2т
гд е
по у г л у
(1 2 .3 2 )
— п р о и з в о д н а я от коэффициента п оперечной а э р о д и н а м и ч е с к о й си л ы
скольж ения,
т^У — п р о и з в о д н а я ,
та;
(Л.
учитывающая
д ем п ф и р у ю щ у ю
роль
п оп ереч н о й
силы;
учитывающая влияние путевого демпфирующ его момен­
г'у — Y I*lm P — б езразмер ный р а д и у с инерции в к в а д р а т е , у ч и т ы в а ю щ и й
р о л ь и н е р ц и о н н о го мо мента рыскания с а м о л е т а .
Частота быстрых незадемпфированных путевых колебаний
РSim*
ИГ,,
(1 2 .3 3 )
Частота собственных быстрых путевых колебаний самолета с учетом
демпфирования воздушной среды
vp~
(1 2 .3 4 )
Рис. 12.1 4. М о м ен ты , д ей ствующ ие на с а м о л е т при отклонении р у л я н ап равлен ия
( а ) и изменении у г л а скольж ен ия (б)
Рис. 12.15. М о м ен ты , д ей ств у ю щ и е на самолет при отклонении элеронов
изменении у гл ов ой скорости крена (б)
(а)
и
Из формулы (12.34) следует, что уменьшение плотности воздуха
р при увеличении высоты полета приводит к уменьшению степени за­
тухания пр. Увеличение скорости полета способствует затуханию
колебаний.
Таким образом, при отклонении руля направления самолет, обла­
дающий путевой устойчивостью, совершает быстрые затухающие коле­
бания относительно нормальной оси 0 Y и занимает установившийся
угол скольж ения.
Реакция самолета на отклонение элеронов. Предположим, что са­
молет имеет степень путевой статической устойчивости близкую к ну­
лю (mj) = 0) или на самолете установлена автоматическая система, ус­
траняющая угол скольжения при отклонении элеронов. Тогда при от­
клонении элеронов на некоторый угол 8Э на самолет будет действовать
управляющий момент крена М хэ 6Э, который вызовет вращение са­
молета относительно оси О Х. Одновременно на самолет будет действо­
вать демпфирующий момент крена. Угловая скорость вращения са­
молета будет увеличиваться по экспоненциальному закону до тех пор,
пока не наступит равенство моментов М / 6Э—
При этом угло­
вая скорость вращения относительно продольной оси примет некото­
рое установившееся значение ых уст (рис. 12.15). Угловую скорость
можно определить из условия равенства коэффициентов управляюще­
го и демпфирующего моментов:
тхэ 6Э = — гпх х со*. Отсюда
мхуст------тх
с
,
шх
у
ИЛИ
6Э
т 6Э 2V
ЫхусТ= — А = ---------------
_
ых
I
(1 2 .3 5 )
Таким образом, при отклонении элеронов на постоянный угол бэ
самолет будет вращаться относительно продольной оси с установив­
шейся угловой скоростью (о*уст, которая достигается через несколько
секунд после отклонения элеронов.
П оскольку самолет практически всегда обладает одновременно и
путевой, и поперечной статической устойчивостью, то в чистом виде
путевого колебательного движения и установившейся скорости враще­
ния относительно продольной оси ОХ не получается, так как нали­
чие путевой статической устойчивости приведет к уменьшению угло­
вой скорости шх, а наличие поперечной устойчивости — к уменьше­
нию угла скольжения за счет кренения.
Реакция самолета по крену на отклонение руля направления. От­
клонение руля направления приводит не только к повороту самолета
относительно осей 0 Y (к движению рысканья), но и ОХ (к движению
крена). При этом возможны три случая.
Прямая реакция самолета по крену на отклонение руля направле­
ния, которая свойственна самолету, обладающему на заданном ре­
жиме полета достаточной степенью поперечной статической устойчиво­
сти. При этом стабилизирующий момент крена
Др будет направлен
в сторону отстающего при скольжении полукрыла (см. рис. 12.11,6),
а управляющий момент крена М ХНД 6 Н — в противоположную стоо
^
рону. Если |МдгДР| > | М ,НД 6 Н|, то самолет будет крениться в сто­
рону отклоненной вперед педали. В этом случае самолет обладает пря­
мой реакцией по крену на отклонение руля направления. Она х ар ак ­
терна для большинства режимов летной эксплуатации транспортных
самолетов. При отклонении руля направления самолет равзорачивается относительно оси ОУ, появляется угол скольжения Др и устойчи­
вый самолет по крену стремится устранить появившееся скольж ение
кренением на отстающее полукрыло. Образовавшийся угол крена при­
ведет к нарушению равенства между подъемной силой и силой тяжести
(ycos-y ф. G), что вызовет появление вертикальной скорости снижения
и, следовательно, скольжение на противоположное полукрыло (см.
рис. 12.11, на левое полукрыло, Др < 0).
Если резко отклонить руль направления, то управляющий момент
М хк Д 6 Н увеличивается быстрее, чем стабилизирующий момент м £ Др,
и самолет вначале может крениться в сторону отклоненной назад
педали, а затем по мере увеличения момента М х ЛР направление кре­
нения изменится на противоположное. При плавном отклонении пе­
дали это явление не наблюдается. Если самолет обладает слишком
большим запасом поперечной устойчивости, то незначительное от­
клонение руля направления вы зы вает энергичное кренение самолета.
Такой самолет неудобен в пилотировании и не получает полож итель­
ной оценки пилота-испытателя.
Нейтральная реакция самолета по крену на отклонение руля на­
правления свойственна самолету, имеющему на некоторых реж имах
11*
323
полета сравнительно небольшую степень поперечной статической ус­
тойчивости тР. Если при отклонении руля направления выполняется
равенство моментов крена |М£Др| = |М°нДбн|, то самолет имеет
нейтральную реакцию по крену на отклонение руля направления.
Обратная реакция самолета по крену на отклонение руля направле­
ния свойственна самолету, имеющему на некоторых режимах полета
малую степень поперечной статической устойчивости. При отклоне­
нии руля направления выполняется условие |МРДР| < \М°К Д6Н|.
Под действием разности указанных моментов самолет кренится в сто­
рону отклоненной назад педали. В этом случае говорят, что самолет
имеет обратную реакцию по крену на отклонение руля направления.
Таким образом, нейтральная и обратная реакции самолета по кре­
ну на отклонение руля направления возможны при малой степени по­
перечной статической устойчивости тР и тем более при потере попе­
речной статической устойчивости, когда т$х < 0. Обратная реакция
самолета по крену возможна при полете на закритических скоростях,
когда степень поперечной устойчивости самолета уменьшается (см.
рис. 12.7). Пилот должен учитывать эту особенность самолета и при по­
падании в режим полета, которому соответствует нейтральная или об­
ратная реакция самолета по крену на отклонение руля направления,
проявить необходимую осторожность.
При этом развороты целесообразно выполнять при нейтральном
положении руля направления или строго координированными откло­
нениями элеронов и руля направления. Согласно требованиям норм
летной годности, в условиях полета, признанных допустимыми для
летной эксплуатации, самолет должен обладать прямой реакцией по
крену на отклонение руля направления. При этом не должно быть чрез­
мерного по оценке пилота превышения по углу крена.
12.4. Характеристики боковой устойчивости
Сложный характер бокового возмущенного движения самолета
приводит к необходимости разделения характеристик устойчивости
и управляемости в быстром и медленном боковом движении.
Характеристики устойчивости в быстром боковом движении. Быст­
рое колебательное движение самолета характеризуется тесной взаимо­
связью движений рыскания и крена. Основное влияние на характер
этого движения оказываю т статические характеристики боковой устой­
чивости самолета: степень путевой т$ и степень поперечной статиче­
ской устойчивости /лР. Самолеты в пределах допустимых эксплуата­
ционных режимов обладают статической боковой устойчивостью.
В качестве критериев, характеризующих колебательную форму
движ ения, используют:
время уменьшения амплитуды колебаний вдвое
В
время практически полного затухания колебаний
3
/„о- ж ----:
(1 2 .3 7 )
число колебаний до практически полного затухания
г з а т — ^ з а т / Т 'р ,
гд е
Гр =
(1 2 .3 8 )
2 n/v — период к о л е б а н и й ;
степень затухания колебаний
т затр —
(1 2 .3 9 )
Характеристики путевой устойчивости, за исключением времени
затухания колебаний Лат (не более 12 с во взлетно-посадочных режи­
мах и не более 20 с в крейсерском режиме), пока не нормируются. Они
получают только качественную оценку пилота-испытателя. Быстрое
боковое колебательное движение самолета как с зафиксированным,
так и с освобожденным управлением должно быть устойчивым.
Важнейшей характеристикой быстрого бокового колебательного
движения самолета является коэффициент и — отношение амплитуд
скоростей крена А<лх и рыскания Аа>у:
Практика летной эксплуатации показывает, что самолет получает
положительную оценку пилота, если коэффициент 1 < х < 3. При
сли.’-ч.-ом большой поперечной статической устойчивости гг&к самолет
даже на небольшой угол скольжения реагирует энергичным кренением.
Развивающиеся при этом углы крена приводят к перемещению самоле­
та вдоль оси OZ под действием знакопеременных составляющ их силы
тяж ести G s m y . Неуравновешенная составляю щ ая силы тяжести G sin у
вы зовет дополнительное скольжение и окаж ет влияние на движение
рысканья.
К ак видно из рис. 12.11, скольжение с положительным углом Р вы­
зывает отрицательный угол крена, и наоборот. П оскольку самолет не
только вращается по рысканию и крену, но и перемещается по траек­
тории вдоль поперечной оси OZ, то его движение напоминает шаг конь­
кобежца и получило название «голландского шага». При больших зна­
чениях показателя и движение самолета воспринимается пилотом как
«чистое» знакопеременное колебательное движение по крену.
Если колебательное движение по крену, так же, как и путевое коле­
бательное движение, является затухающим, то самолет обладает ко­
лебательной устойчивостью в быстром боковом движении. Однако на­
личие колебательной устойчивости еще не является достаточным усло­
вием для положительной оценки самолета пилотом. Кроме этого, ко­
лебательное движение должно быстро затухать. При слабом затуха­
нии колебаний с небольшим периодом (менее 3 с) изменение направле­
ния кренения происходит настолько быстро, что пилот затрудняется
в выборе момента вмешательства в управление для парирования этих
колебаний и может ввести самолет в раскачку.
Если самолет введен в раскачку, то необходимо зафиксировать
рычаги управления в положении, близком к балансировочному. Через
несколько секунд самолет, проявляя свойство боковой устойчивости,
возвратится к исходному режиму полета. Так как движение рыскания
по сравнению с движением крена выражено слабо, то определить мо­
мент вмешательства в управление углом рыскания более сложно. Вме­
шательство рулем направления недопустимо из-за большой вероятно­
сти усугубить ситуацию при ошибочных действиях пилота. Если само­
лет выведен в раскачку при выполнении какого-то маневра, то сначала
необходимо устранить колебания, вывести самолет в горизонтальный
полет, а затем продолжить выполнение маневра.
Движение самолета типа «голландский шаг» опытные пилоты реко­
мендуют парировать одним, точно рассчитанным по времени вмеша­
тельства и по величине отклонением элеронов против крена.
При малых значениях показателя х самолет имеет лучшие дина­
мические показатели устойчивости в неспокойной атмосфере. Он ме­
нее интенсивно кренится, период колебательного движения по крену
достаточно велик. При небольших значениях х самолет получает бо­
лее высокую оценку пилота и по управляемости. При отклонении
руля направления самолет менее энергично кренится. Однако при слиш­
ком малых значениях х самолет может стать спирально неустойчи­
вым. П оказатель х зависит от высоты полета и числа М. С увеличением
высоты полета и падением плотности воздуха демпфирующие свой­
ства его ухудш аю тся. Это ведет к более значительному относительному
росту амплитуды колебаний по углу крена, что сопровождается ростом
показателя х . С увеличением числа М полета статическая путевая и
поперечная устойчивость понижаются неравномерно, что приводит к
изменению показателя х .
У современных самолетов естественное демпфирование колебаний
рыскания и крена не всегда достаточно, особенно на больших высотах
полета. Обеспечить приемлемые характеристики боковой устойчиво­
сти только аэродинамической компоновкой не удается. Поэтому сов­
ременные самолеты снабжаются автоматическими устройствами (демп­
ферами рыскания и крена), позволяющими получить необходимую ско­
рость затухания колебаний.
Характеристики устойчивости в спиральном (медленном боковом)
движении. В отличие от колебаний самолета но рысканию и крену в
быстром боковом движении, затрудняющих пилотирование, спираль­
ное движение протекает вяло и слабо ощущается пилотом. П оэто­
му в спиральном движении допускается даж е некоторая неустойчи­
вость.
Согласно нормам летной годности самолетов большие степени устой­
чивости и неустойчивости спирального движения недопустимы. На о с ­
новных режимах полета время удвоения или уменьшения вдвое угла
крена в режиме установившегося разворота при неизменном полож е­
нии рычагов управления должно быть не менее 20 с. Д ля обеспечения
требуемых характеристик устойчивости и управляемости в боковом
движении самолеты оборудуют автоматическими системами (автопи­
лот, автомат устойчивости, демпферы рысканья и крена, загрузочные
устройства, гидроусилители).
12.5. Боковая балансировка и управляемость самолета
Балансировка самолета в прямолинейном установившемся полете
со скольжением. Состояние самолета, при котором все боковые силы,
действующие вдоль оси OZ, и моменты, действующие на самолет от­
носительно осей OY и ОХ, взаимно уравновешены, называется боко­
вым равновесием или боковой балансировкой. Математически условие
боковой балансировки выражается в виде трех равенств: 2 Л 1 У --= 0 ;
= 0 (условие балансировки по моментам) и E F Z= 0 (условие ба­
лансировки по силам). Самолет, находящийся в боковом равновесии,
движ ется в вертикальной плоскости, не вращ аясь относительно осей
О Х и OY.
Нарушение бокового равновесия вызывает скольжение самолета,
которое, в свою очередь, приводит к образованию крена. Больш инство
этапов полета пилот стремится выполнить без скольж ени я, но в неко­
торых случаях, например при отказе одного из двигателей, при заходе
на посадку с боковым ветром и т. п., возникает необходимость в полете
со скольжением. Скольжение можно создать либо отклонением руля на­
правления, либо отклонением элеронов. Д л я обеспечения прямолиней­
ного полета со скольжением, т. е. для обеспечения координированного
скольж ения, необходимы координированные (соответствующие друг
другу) отклонения руля направления и элеронов.
Предположим, что пилоту необходимо выполнить координирован­
ное скольжение на правое полукрыло. Д л я этого пилот перемещением
левой педали от себя на величину Д Х Н отклоняет руль направления
влево на угол Д 6Н(рис. 12.16, а). При этом на руле направления возни­
кает аэродинамическая управляющая сила Z u, которая относительно
нормальной оси OY создает управляющий момент рыскания ,М^нДби =
= m 6uH A 8 HqSl. Под действием этого момента самолет поворачивается
относительно оси 0 Y влево. При этом направление вектора скорости
11 в *
327
центра масс в первые несколько секунд практически не изменится, что
приведет к скольжению на правое полукрыло с углом скольжения
Д р Х ).
Несимметричное обтекание самолета воздушным потоком при сколь­
жении вызывает появление поперечной аэродинамической силы Z a,
приложенной в фокусе по углу скольжения F$. Сила Z a создает отно­
сительно оси O Y стабилизирующий момент рыскания Му А(3 =
= т% AfiqSl, направленный на устранение появившегося угла сколь­
ж ения. Угол скольжения Др и стабилизирующий момент рыскания
Ар будут изменяться до тех пор, пока не наступит равновесие мо­
ментов рыскания:
^ н Дбн+ ^ Д Р = 0;
(12 .4 1 )
т * Дб„ + /пР Др = 0.
(1 2 .4 2 >
Дальнейш ее изменение угла скольжения прекратится.
М?<ГЙ
Р и с . 12.16. С и л ы и мо м ен ты , д е й ств у ю щ и е на са м о лет
скольжении
при координиро ванно м
Из последнего выражения легко определить бал ансировочное от­
клонение руля направления
Д 6Н= — Др
[т^/туи) .
(1 2 .4 3 )
Очевидно, угол скольжения Др будет тем больше, чем на больший
угол Д 6Н отклонен руль направления и чем больше коэффициент его
эффективности т ьц«. Чем больше степень путевой статической устой­
чивости самолета т% тем больше стабилизирующий момент М уДр,
противодействующий изменению угла скольж ения, тем больш е по­
требное отклонение руля направления Д 6Н для обеспечения заданного
угла скольжения Др. Устойчивый в путевом отношении самолет спосо­
бен балансироваться по моментам относительно оси 0 Y при любом от­
клонении руля направления в пределах летных ограничений.
Отклонение руля направления вызовет действие не только путевы х,
но и поперечных моментов. Аэродинамическая сила Z„ приложена вы ­
ше центра масс самолета (рис. 12.16, б), поэтому она создает креня­
щий момент,
бн
«н
Мх Дб ц — тх A8HqSl.
Наличие угла скольжения Др приводит к перераспределению д ав­
ления на полукрыльях, что вызывает появление аэродинамического
стабилизирующего момента
крена М *Д р =
направлен­
ного на устранение угла скольжения кренением н$. отстающее полу­
крыло (в рассматриваемом случае левое).
Таким образом, на самолет будут одновременно действовать два
кренящих момента уИ®нДбн и М%АР- В зависимости от их соотношения
самолет может крениться на правое или левое полукрыло. Будем счи­
тать, что самолет обладает большой поперечной (статической) устой­
чивостью, т. е. (М*Др| > !/И*нДбн|. Тогда при отклонении левой пе­
дали вперед самолет под действием
разности
моментов
|УИ^Др| —
— |Л1®нДбн|будет крениться влево (рис. 1 2 .1 6 ,6 ) со все увеличиваю ­
щимся углом крена. Если выполняется условие |Л4*ДР1 < |Л4хнД бн1>
то самолет будет крениться на правое полукрыло со все возрастающим
углом крена. Равенства указанных моментов достичь практически не
удается. Самолет самостоятельно без вмешательства пилота сбалансироваться под действием указанных моментов относительно оси О Х не
может.
Кренение самолета вызовет появление поперечной составляю щ ей
силы тяжести G sin у, направленной в сторону опущенного при кренении полукрыла. Т ак как сумма сил Z и G sin у намного больше силы
Z „, то силой Z „ можно пренебречь. Под действием сил Z и G sin у тр а­
ектория полета будет искривляться влево и тем сильнее, чем больш е
329
будет угол крена. Так как состав­
ляющая подъемной силы Y cos у
при кренении самолета не уравно­
вешивает силу тяжести G, то са­
молет будет терять высоту и дви­
гаться по спирали все уменьшаю­
щегося радиуса в сторону откло­
ненной вперед педали.
Д ля прекращения вращения са ­
молета по крену необходимо сба­
лансировать самолет по моментам
Рис. 12.17. Б а ла н с и р ов оч н ы е кривые
относительно оси ОХ, для чего сле­
6 Н(Р ) и 6 Э(Р) при координиро ванно м
п ол ете с о ск ол ьж ением
дует отклонить элероны на угол
Л6Эповоротом штурвала в сторону
отклоненной назад педали
создать такой управляющий момент
AS
М °° А6Э
= т °а Д6sflSl, чтобы выполнялось условие поперечной балан­
сировки самолета (рис. 12.16, в):
А?Р Д Р -f -
М * Д 6 „ 4 - Л * , э Д 6 э = 0.
Т ак как AfP
/МА
Л" == m6»qSl;
МX
&э
X = m^aSl\
X
X
(12.43) выражение (12.44) можно записать как
.Р.
-т
&
А0 +
(12.44)
m ^ q Sl, то с учетом
т 3 Дбэ = 0.
(1 2 .4 5 )
Отсюда
Д 6,
др
(1 2 .4 6 )
т 6н
Балансировочные отклонения руля направления А 6Н и элеронов
Дбэ в зависимости от угла скольжения представлены в техничес­
ком описании самолета обычно в виде балансировочных кривых (рис.
12.17).
Равновесие боковых моментов является необходимым, но недоста­
точным условием прямолинейного полета самолета со скольжением.
Д л я обеспечения этого необходимо равновесие сил вдоль поперечной
оси OZ. Как видно из (12.41) и (12.44), условия путевой и поперечной
балансировки самолета могут быть выполнены для любого угла крена.
Но для обеспечения прямолинейного полета крен должен быть строго
определенным, таким, чтобы выполнялось условие равновесия попереч­
ных сил:
или с учетом малости силы Z„,
Z + G s i n y = 0.
(1 2 .4 8 )
Очевидно, что для выполнения условия (12.48) силы Z и G sin у
должны быть направлены противоположно. Направление силы Z оп­
ределяется знаком угла скольжения. При положительном угле скольж е­
ния Др (скольжение на правое полукрыло) сила Z отрицательна. Си­
ла G sin у определяется направлением кренения. При кренении на пра­
вое полукрыло угол крена положителен, а следовательно, положитель­
на сила G sin у. Д л я выполнения условия (12.48), т. е. для обеспечения
прямолинейного полета со скольжением, крен необходимо создавать
в сторону скольжения (см. рис. 12.16, в).
Сила G sin у зависит только от угла крена, а поперечная аэродина­
мическая сила
Z ^ c jp ^ - S
(1 2 .4 9 )
от угла скольжения, скорости и высоты полета. Поэтому при созда­
нии одного и того ж е угла крена на разных приборных скоростях тре­
буются различные углы скольжения: большие — на малых скоростях
и меньшие — на больших.
При прямолинейном полете самолета с креном на него действует
боковая перегрузка, которая определяется углом крена:
G sin v
nz = — Z / G = — ------- ^ - =
G
—
sin y.
(12.50)
Подставляя в (12.50) вместо Z ее значение и преобразуя его, по­
лучим соотношение между углами крена и скольжения:
р
— 2G sin v/(
pi/2 S ) .
(12.51)
Таким образом, для выполнения координированного скольж ения
на заданной высоте, при заданном курсе и скорости пилот, отклоняя
руль направления и элероны, создает такой крен в сторону полукрыла,
на которое осущ ествляется скольжение, при котором направление дви­
жения осталось бы неизменным. При этом для предупреждения потерн
высоты необходимо соразмерно увеличить угол атаки отклонением
штурвала на себя или уравновесить силу тяжести путем увеличения
скорости, уменьшив степень дросселирования двигателей.
Характеристики боковой управляемости. Под боковой управляе­
мостью понимают реакцию самолета на отклонение органов управле­
ния боковым движением. По аналогии с боковой устойчивостью управ­
ляемость представляет собою совокупность путевой и поперечной уп­
равляемости.
Предположим, что самолет сбалансирован в прямолинейном у ста­
новившемся полете со скольжением. Д л я изменения указанного реж и­
ма полета пилот путем координированного отклонения педалей и
штурвала изменяет положение руля направления и элеронов. После
некоторого переходного процесса самолет занимает новый режим ко­
ординированного скольжения, соответствующий новому положению ор­
ганов управления.
Количественными характеристиками боковой статической управля­
емости являются производные б„ и 63, называемые соответственно
градиентами отклонения руля направления и элеронов. Они представ­
ляю т собой отклонения руля направления и элеронов, потребные для
изменения угла скольжения (5 на 1 ° в координированном прямолиней­
ном полете. Эти характеристики можно получить, определив тангенсы
углов наклона кривых 6 „ (Р) и 6Э (Р) (см. рис. 12.17):
Д би
A fig
о
*8 4 > 1 = - ^ р -
« tg Ф2 = - ^ -
о
« в ?.
(1 2 .5 2 )
Градиенты отклонения руля направления можно определить, вычис­
лив производные по углу скольжения из выражений (12.43) и (12.46):
«5 =
(
1
2
.
5
3
)
(1 2 .5 4 )
Анализ полученных зависимостей показывает, что чем больше
степень путевой m l и поперечной т * статической устойчивости, тем
больше по абсолютному значению будут производные
и б|. Д л я еди­
ничного изменения угла скольжения Р в прямолинейном координи­
рованном полете потребуются большие отклонения руля направления
и элеронов. Чем выше эффективность руля направления тхн и элеро­
нов тхэ, тем меньше по абсолютному значению
производные 6» и
бэ. П оскольку производные п/у, тх, ту", т х", тх остаются практи­
чески постоянными в широком диапазоне скоростей полета вплоть до
значений, близких к числу М *, то и производные б„ и
можно счи­
тать постоянными. Это значит, что независимо от высоты и скорости по­
лета для изменения угла координированного скольжения на 1 ° потре­
буется одно и то ж е отклонение руля направления и элеронов.
Производные
и б| применяются при расчетах боковой управля­
емости самолета, но для пилота они неудобны, так как он непосредст­
венно не воспринимает отклонения органов управления и изменения
угла скольж ения. Пилот судит о боковой управляемости по изменению
усилий на педалях и ш турвале, а такж е по отклонению педалей и пово­
роту ш турвала, потребным для изменения углов крена и скольжения.
Поэтому в практике летной эксплуатации используют критерии Рн,
Р э,
и X I. Они представляют собой производные, которые выража332
Рис. 12.18. Балансировочные кривые при коо рди нированном п рямолиней ном п о ­
лете со ск ол ьж е нием :
а — по уси лиям
на
педалях
и ш т у р в ал е ;
б —
по п ер ем ещ ен и ю п е д а л е й и эл ер он ов
ют усилия на педалях, штурвале, а такж е отклонения педалей и штурвала, потребные для изменения угла крена на 1° в полете самолета
с координированным скольжением.
k
В техническом описании самолета приведены балансировочные кри­
вые по усилиям на штурвале и педалях Р э (у), Р п (у), по перемещениям
штурвала и педалей X 3 (v), Х н (у), по отклонениям рулей направления
б „ (у) и элеронов 6„(y) (рис. 12.18), а такж е значения производных P i,
Рэ, бК, 6э при различных углах атаки (рис. 12.19).
Рис. 12.19. З а в и с и м о с т ь градиентов усилий на ш т у р в а л е и п е д а л я х о т и н д и к а т о р ­
ной скор ости ( а ) и градиентов отклонений р у л я н ап равлен ия и э л е р о н о в о т угл а
а таки (б) в прямолинейном коо рди нированном п ол ете с о с к о л ь ж е н и е м
Указанные характеристики боковой управляемости связаны со­
отношениями:
(1 2 .5 5 )
(12.56)
где
« &ЬН1
— п р о и з в о д н а я , х а р а к т е р и з у ю щ а я о т к л о н е н и е р у л я н а­
п р а в л е н и я д л я изм ен ен и я у г л а к р е н а на 1° в к оо рди н и ро ван н о м п рямолиней ном
п о л е т е с о с к о л ь ж е н и е м ; к шн = Д 6Н/ Д Х Н — коэффициент передачи
от п еда­
л ей
к
рулю
направления;
Я нн ж
Л Я Н/ Л Х Н — гр а д и е н т у си л и й на п е д а л я х .
Согласно нормам летной годности, максимальные усилия на рычагах
управления при пилотировании самолета в соответствии с РЛ Э не
должны превышать по абсолютному значению 200 Н при управлении
самолетом по крену и 700 Н — при управлении по курсу. Основным
критерием боковой управляемости является «хождение самолета за
рычагами управления», оценку по которому дает пилот-испытатель.
Д л я обеспечения приемлемых характеристик боковой управляемо­
сти применяют различные способы уменьшения (компенсации) шар­
нирных моментов, среди которых наибольшее распространение полу­
чили устройства осевой и сервокомпенсации. Д ля формирования при­
емлемых характеристик управляемости эти устройства работают сов­
местно с пружинными загруж ателям и. Широкое распространение по­
лучили бустерные системы, а такж е бортовые автоматические системы
улучшения характеристик управляемости.
Характеристиками путевой управляемости являю тся: время сраба­
тывания tcpa6 и относительное превышение по углу скольжения (см.
рис. 12.14, б):
(12 .5 7 )
Рлат — Д р з а б 'Р у с т -
Характеристики поперечной управляемости получаются из анализа
реакции самолета на отклонение элеронов. Разделим левую и правую
части выражения (12.46) на Д6Э. Заменив отношение (ожусх/бэ произ6Э
водной со* , показывающей изменение угловой скорости установивше­
гося вращения самолета при отклонении элеронов на 1°, получим рас­
четную формулу
(1 2 .5 8 )
(ОX
т'X
В технических описаниях самолетов приведены значения произ-
бэ
«
Хэ
/
водной озх или значения равноценных ей производных о * (уста­
н овивш аяся угловая ско р ость крена при повороте штурвала на 1°/с)
и Р * х (усилие на ш турвале для изменения установившейся угловой
скор ости крена на 1°/с). Эти производные являются характеристи,434
ками поперечной управляемости, показывающими реакцию самолета
на отклонение элеронов.
При полете на больших углах атаки возможен срыв потока на
крыле. Это приводит к изменению коэффициента эффективности эле6Э
ронов т х , что вызывает уменьшение со/,
ухудшение или полную
потерю поперечной управляемости.
Дополнительная
литерату ра
|2], с . 2 0 0 — 2 3 3 ; [3], с. 2 0 8 — 2 2 6 , 2 9 9 — 3 2 5 ; |5], с . 1 2 5 — 1 35;
16], с. 1 7 0 — 2 0 4 , 2 6 6 — 2 8 1 ; 17], с. 1 1 9 - 1 2 9 ; [ 9 ], с. 1 9 8 — 2 1 0 ; [ 1 1 ] , с . 7 0 — 106.
К о н т р о л ь н ы е вопросы
1. В к а к о м с л у ч а е на са м о л е т д е й с т в у ю т б о к о в ы е а э р о д и н а м и ч е с к и е с и л ы ?
2. О б ъ я с н и т е причины с о з д а н и я поп еречной с и л ы с и л о в о й у с т а н о в к и .
3. О б ъ я с н и т е вли я н и е с тр е л о ви д н о сти к р ы л а на р а с п р е д е л е н и е а э р о д и н а м и ­
ческой н а г р у з к и по р а з м а х у при с к о л ь ж е н и и .
4. О б ъ я с н и т е в л и я н и е у г л а п оп ер еч н о го V к р ы л а на с т а б и л и з и р у ю щ и й м о ­
мент крена.
5. К а к о б р а з у е т с я момент кр ен а при с к о л ь ж е н и и с а м о л е т а ?
6 . К а к и е момен ты с о з д а ю т с я к р ы л о м и в е р т и к а л ь н ы м о п е р е н и е м при в р а щ е ­
нии с а м о л е т а в о к р у г оси OY7
7 . К а к и е мо менты с о зд а ю т ся к р ы л о м и в е р т и к а л ь н ы м о п е р е н и е м при в р а щ е ­
нии с а м о л е т а в о к р у г оси ОХ?
8 . К а к и е момен ты с о з д а ю т с я при от к л о н ен и и р у л я н а п р а в л е н и я ?
9. И з о б р а з и т е за в и с и м о с т ь ту (Р) и п о я с н и т е ее. К а к в л и я е т на э т у з а в и с и ­
мость о т к л о н е н и е р у л я н а п р а в л е н и я ?
10. И з о б р а з и т е за в и с и м о с т ь тх (р). К а к в л и я е т на нее о т к л о н е н и е э л е р о н о в ?
11. З а п и ш и т е и о б ъ я сните у с л о в и я пу тево й и п оперечной с т а т и ч е с к о й у с т о й ­
чивости с а м о л е т а .
12. К а к з а в и с я т прои зводн ы е
и тJ от ч и сл а М п о л е т а ?
13. И з о б р а з и т е с х е м у си л , д е й с т в у ю щ и х на с а м о л е т при к о о р д и н и р о в а н н о м
п р я м ол и н ей н ом п ол ете с о с к о л ь ж е н и е м . З а п и ш и т е у с л о в и я б а л а н с и р о в к и о т н о с и ­
т е л ь н о осей 0 Y и ОХ.
14. З а п и ш и т е и о б ъ я сните у с л о в и я п р я м о й и об р а т н ой р е а к ц и и с а м о л е т а по
крену на о т к л о н е н и е р у л я н а п р а в л е н и я .
15. И з о б р а з и т е и об ъ я сн и те х а р а к т е р и с т и к и б о к о в о й у п р а в л я е м о с т и с а м о ­
л ета .
16. З а п и ш и т е формулы б о к о в ы х м о м е н т о в , д е й с т в у ю щ и х на с а м о л е т .
17. И з о б р а з и т е и поясн ите и з м ен ен и я п а р а м е т р о в б о к о в о г о в о з м у щ е н н о г о
д в и ж е н и я с а м о л е т а во времени.
18. З а п и ш и т е в ы р а ж е н и е и о б ъ я с н и т е с м ы с л к р и тер и я х .
19. О п р е д е л и т е у го л с к о л ь ж е н и я Р, п о п е р е ч н у ю ( б о к о в у ю ) с и л у и м о мент
р ы с к а н и я при в ст р е ч е с а м о л ет а с б о к о в ы м п о р ы в о м в е т р а у з е м л и , и м е ю щ и м
с к о р о с т ь Wz ----- 2 0 м/с, если V - - 7 0 м/с;
— 0 ,6 8 6 ;
— т р = — 0 ,0 0 4 ;
S = 11 5 м2; т -- 3 7 0 0 0 к г; /
5 2 м. О т в е т ; Р = 0 , 2 8 6 ( 1 6 , 3 ° ) ; Z = 1 9 3 4 7 , 3 Н ;
Му
20532 Н -м .
2 0 . При ра ссл е д о в а н и и а в и а ц и о н н о г о п р о и с ш е с т в и я б ы л о у с т а н о в л е н о , что
при у г л е с к о л ь ж е н и я 11° у го л о т к л о н е н и я э л е р о н о в б ы л р а в е н 9° . О б е с п е ч и в а ­
л а с ь ли при это м п у т е в а я б а л а н с и р о в к а с а м о л е т а , е с л и он о б л а д а е т х а р а к т е р и ­
стиками:
— — 0 ,0 0 1 5 ; т * э =
— 0 , 0 0 1 . О т в е т : П у т е в а я б а л а н с и р о в к а не о б е с ­
п е ч и в а л а с ь , п отр ебн ое от к л о н ен и е э л е р о н о в 6 Э ^
1 6 ,5 ° .
Глава
13
УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ САМОЛЕТА НА ВЗЛЕТЕ И ПОСАДКЕ
13.1. Уравнения движения
Особенности опорного движения. Взлет и посадка — наиболее
сложные этапы полета. Успешность управления самолетом с целью
обеспечения расчетных траекторий взлета и посадки во многом зави­
сит от его устойчивости и управляемости. Вопросы продольной и бо­
ковой устойчивости и управляемости самолета, рассмотренные в
гл. 11 и 12, в полной мере распространяются на воздушные участки
траектории взлета и посадки. Поэтому основное внимание целесооб­
разно уделить рассмотрению особенностей устойчивости и управляемо­
сти самолета при движении по взлетно-посадочной полосе (ВП П ).
Устойчивость и управляемость на взлете и посадке имеют ряд осо­
бенностей, которые оказываю т существенное влияние на поведение и
пилотирование самолета. Эти особенности определяются:
близостью земли, оказывающей влияние на характеристики устой­
чивости и управляемости пере~. изменение аэродинамических характе­
ристик самолета;
ярко выраженным неустановившимся движением;
интенсивным использованием механизации крыла, определяющей
конфигурацию самолета (закрылки, предкрылки, тормозные щитки,
интерцепторы и т. д.);
контактом самолета с поверхностью ВПП и возникновением вслед­
ствие Этого дополнительных сил и моментов, обусловленных связью
колес с В П П .
При этом необходимо учитывать, что массы самолета при взлете и
посадке могут различаться на 40 ... 60 % . Взлет выполняется на взлет­
ном режиме работы двигателей, а посадка на сравнительно малом режи­
ме и д аж е с использованием отрицательной тяги. Состояние ВПП оп­
ределяется метеоусловиями (влаж ная, сухая, обледеневшая и т .д .).
Психофизиологическая нагрузка на экипаж значительно возрастает
по сравнению с другими режимами полета.
Устойчивость и управляемость самолета при движении по ВПП
во многом зави сят от вида шасси. На современных транспортных само­
летах применяются трехопорное шасси, у которого 80 ... 85% нагруз­
ки воспринимается колесами основных опор, а остальная нагрузка —
колесами передней опоры. Движ ение самолета по ВП П осуществляет­
ся с изменяющейся скоростью на двух и трех опорах, что оказывает
значительное влияние на характеристики устойчивости и управляемо­
сти.
Основными возмущающими воздействиями при движении по ВПП
я вл я ю тся : боковой ветер, непроизвольное асимметричное торможение
колес, асимметрия тяг двигателей, управляющие воздействия пилота
{эки п аж а).
Схема сил и моментов, действующих на самолет. Кроме тяги Р и ее
моментов относительно осей связанной системы координат, силы тяж е­
сти G, управляю щ их сил и моментов р ул я направления Л4,,н 6„, руля
высоты М г в 6в и элеронов Мха Ьа на самолет при движении по ВПП
действую т дополнительные силы и моменты, обусловленные контактом
колес с поверхностью ВПП (рис. 13.1).
Силы реакции опор передней Л^п и основных N ол (л евая) и N on
(правая) (силы нормального давления колес передней и основной опор)
определяю тся распределением н агр узки на колеса. Если на самолет не
действую т боковые (поперечные) силы, то силы нормального давления
колес зави сят от разности м еж ду силой тяж ести G и подъемной силой
самолета Y a, а так ж е от распределения этой разности м еж ду колесами
Рис. 13.1. С хе м а сил и моментов, д е й ст ву ю щ и х на с а м о л е т при дви ж е н и и по В П П
337
опор. При наличии поперечных сил н агрузка на опоры перераспреде­
л яется.
При появлении угл а скольж ения р независимо от вызвавшей его
причины возникают поперечная сила Z, приложенная в фокусе по у г ­
л у скольж ен и я, и стабилизирующие моменты рыскания М ^р и крена
М * р. Если самолет скользит на правое полукрыло, то под воздействием
стабилизирующего момента крена М * Р нормальная н агр узка на коле­
сах левой опоры увеличивается на AN, а на колесах правой опоры
уменьш ается на такое ж е значение. К аналогичному эффекту приводит
отклонение элеронов благодаря воздействию управляю щ его аэродина­
мического момента Л 1/6Э.
Несимметричность т я г двигателей вызывает появление момента
ры скания, д ля парирования которого необходимо отклонение руля на­
правления и элеронов. При этом руль направления создаст аэродина­
мические моменты рыскания и крена. Момент крена р ул я направления
М х1<6 „ приводит к соответствующему перераспределению нагрузки на
колесах основной опоры.
Отклонение р ул я высоты вверх и возникновение управляющ его мо­
мента т ан гаж а М гв 6В увеличиваю т н агр узку на колеса основных опор
и уменьш аю т ее на колесах передней опоры. При отклонении руля вы­
соты вниз разгруж аю тся колеса основных опор и загр уж аю тся колеса
передней опоры.
В результате перераспределения нагрузки на колесах основных
опор возникает разность сил трения на них AF = /АЛ? и момент рыс­
кан ья М у ок, увеличивающий появившийся угол скольж ения. Несовпа­
дение направления движ ения колес с плоскостью их вращения при­
водит к появлению угл а увода р к и поперечных сил колес Z 0.„ р,
Z о. и Z n. Углом ввода колес называется угол м еж ду направлением
движ ения самолета и плоскостью вращения колеса. При отсутствии
ветра и при прямолинейном движении самолета угол увода р к равен
у гл у скольж ен ия самолета р:
Z o = 2 g .„ p P + * L P -
( 1 3 .1 )
В общем случае при отсутствии бокового ветра вектор скорости
движ ения самолета может не совпадать с направлением оси ВПП на
угол к ур са ф. Поперечная сила колес передней опоры определяется не
только углом скольж ения р, но и углом поворота колеса 6 П, осуществ­
ляемого пилотом.
Угол увода колес передней опоры определяется суммой угла сколь­
ж ения самолета р и угл а поворота колес передней опоры бп, т - е - Рк-л=
= Р + б „ . С учетом этого поперечная сила колес передней опоры опре­
дел яется выражением
Производные Zn и Zo можно опре­
делить через силы нормального
давления:
г о = С л ' о « С = ^ п> » -
(1 3 .3 )
Поперечные силы колес можно
представить так ж е через коэффи­
циенты поперечной силы
ск г .= скРгк рк и с к г =
(Р + б п ). (1 3 .4 )
Рис. 13.2. За в и с и м о ст ь коэффициента
Коэффициент боковой силы ко­ боковой силы ко леса от у г л а у в о д а и
леса c KZ при небольших угл ах р и состояния ВП П :
/ — с у х а я ; 2 — в л а ж н а я ; 3 — обледеневш ая
6 Плинейно зависит от угл а увода
колеса jiK (рис. 13.2).
Поперечные силы колес создают моменты ры скания Zo fix0
и Zn Р х п, гДе хп и x t. — плечи сил относительно оси OY. Таким об­
разом, результирующий момент ры скания, действующий на самолет
при прямолинейном движении (см. рис. 13.1),
+ ZU '*и + м Р„ + м » ш ,
(1 3 .5 )
где М р — момент р ы с к а н и я от аси м м ет р и и т я г и д в и г а т е л е й и б о к о в ы х соу
с т а в л я ю щ и х т я г и при косой о б д у в к е в о з д уш н о го ви н та и в о з д у х о з а б о р н и к а при
скольжении.
Результирующий момент крена, действующий на самолет в п ря­
молинейном движении по ВПП со скольжением,
MRx-
Ьн+ м ь; Ь э+ г» 1уп + {2*'ПР+ г 1 п) р Во+
д * , ш, о з . б )
где 4 и ( 2 g .„ p -Iо — м о м ен ты к р е н а , с о з д а в а е м ы е п оперечн ы ми си.
лам и к о л ес на плече у а и у 0 ( р а с с т о я н и я от п о в е р х н о с т и В П П до оси ОХ)',
ANzul — момент к р е н а, с о з д а в а е м ы й п р и р ащ е н и е м н о р м а л ь н о й н а г р у з к и на
к о л е с а х о сн о вн ы х опор на плече гш (ш и ри н а ко л еи ш асси ).
Д ви ж ен ие самолета по ВПП на трех опорах соверш ается с углом
атаки , близким к стояночному а ет, а движение на д в у х опорах — с у г ­
лом атаки а « а 0т^- При этом на самолет действую т аэродинамические
моменты: А1“ а , М гвбв, нормальной составляющ ей тяги Mpz. Посколь­
к у при движении самолета на трех опорах вращ ением самолета отно­
сительно оси 0Z можно пренебречь, то влияние колес передней опоры
на момент тан гаж а не учиты вается. Колеса основной опоры создают
момент тан гаж а за счет сил нормального давлен и я Na (х 0 — у 0) и сил
339
трения F0y 0. Результирующий момент тангаж а определяется вы ра­
жением
N( xa
у0)
РоУо-
(^3.7)
При вращении самолета относительно осей связанной системы ко­
ординат, а т а к ж е при криволинейном движении самолета по ВПП до­
бавляю тся демпфирующие моменты.
Демпфирующий момент рыскания создается за счет аэродинамиче­
ских сил и за счет поперечных сил колес шасси, обусловленных изме­
нением поперечных сил при вращении с угловой скоростью (ау. Р е­
зультирую щ ий демпфирующий момент рыскания определяется по фор­
муле
“и
“и
и> у-{-М гу
Ш у.
(1 3 .8 )
Демпфирующий момент тан гаж а создается за счет аэродинамиче­
ских сил, а т а к ж е за счет изменения сил нормального давления и сил
трения на колесах главны х опор. Результирующий демпфирующий мо­
мент т ан гаж а при движении по ВПП определяется выражением
Л% г о>2 = М “ Д а + ( Мг г + М“ ) Д а + М 2ДЛ,о+ AflAF
(13.9)
Уравнения движения самолета по ВПП. При составлении уравне­
ний дви ж ени я по ВПП принимают следующие допущ ения: самолет —
твердое (недеформируемое) тело реальных размеров и постоянной
массы; деформация амортизационных устройств и пневматиков отсут­
ствует; при движении самолета на трех опорах вращение самолета по
угл ам та н га ж а и крена отсутствует. С учетом этого уравнения движ е­
ния самолета по ВПП на трех опорах имеют вид;
Силы и моменты в правых частях системы уравнений (13.10) являю тся
результирую щ ими, определяемыми соотношениями, полученными в
гл. 6, 7, 9, 11, 12, а так ж е формулами (13.1), (13.2), (13.5), (13.6), (13.8),
(13.9). Система уравнений (13.10) дополняется кинематическими соот­
ношениями:
№
— — = ш ; y z = V s i n ( Р - Ч г) .
dz
(1 3.11 )
Если известны отклонения органов управления 6„, 6 Н, бэ, силы и мо­
менты, действую щ ие на самолет, то, решив систему уравнений (13.10)
и (13.11), можно определить скорость V, углы скольж ения (5 и рыскания
340
V
о
7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 : 77
Б
Рис. 13.3. С хе м а сил, действующих на самолет при дви ж е н и и по В П П на к о л ес ах
основных опор колеса
'Р, угловую скорость соу. Исследование устойчивости самолета на
ВПП — довольно сложная задача, так к а к связан а с необходимостью
решения системы дифференциальных уравнений с переменными коэф­
фициентами. Если рассматривать движение самолета на небольшом
участке ВПП, то скорость и коэффициенты дифференциальных ур авн е­
ний можно считать постоянными. Система уравнений превращ ается в
линейную, которая приводится к характеристическому уравнению .
Его решение дает приближенные значения характери сти к устойчиво­
сти и управляемости, или позволяет, не реш ая уравн ен и я, сделать к а ­
чественную оценку устойчивости и управляемости.
Система уравнений еще более упрощ ается, если путевую и про­
дольную устойчивость самолета рассматривать раздельно и независи­
мо одну от другой.
После отрыва колес передней опоры от ВПП самолет продолжает дви ­
ж ение только на колесах основных опор и получает возможность вращ е­
ния относительно оси OZ (рис. 13.3).
Таким образом, продольное движение самолета по ВПП скл ад ы ва­
ется из поступательного движ ения центра масс вдоль оси ОХ и в р а­
щ ательного движения относительно оси 0Z и описывается системой
уравнений:
а— F;
(1 3 .1 2 )
UШ£
It ~ [ f = M Z— Nr (x0— y 0 a ) — F 0 у о.
г д е M z — с ум м ар н ы й момент т а н г а ж а с а м о л е т а в с во б о дн о м по лете н а д по­
в е р х н о ст ь ю В П П во взлетной к о н ф и г у р а ц и и , на том ж е у г л е а т а к и и при в з л е т ­
ном р е ж и м е работы дв и га т е л е й .
У равнения движения на воздушных уч астк ах траектории взл ета
и посадки аналогичны (6.5), описывающим движ ение в вертикальной
плоскости.
13.2. Устойчивость и управляемость самолета
при движении по ВПП
Путевая устойчивость и управляемость. Система уравнений (13.10)
позволяет найти соотношения, выражающ ие степень затухан и я коле­
баний по у г л у ры скания п^ и частоту собственных колебаний
Они дают качественную оценку путевой устойчивости и уп равляем о­
сти самолета при движении по ВПП:
(О
( 1 3 .1 3 )
- - - 4- — —------—
Iy
I„
ly tn V
( 1 3 .1 4 )
В начальной фазе разбега скорость движения, следовательно, эф­
фективность аэродинамических органов управления малы, поэтому
выдерживание направления осущ ествляется управлением колесами пе­
редней опоры и несимметричным торможением колес основных опор.
Под действием внешних возмущений (неровностей ВГ1П, порывов вет­
ра, несимметричного торможения колес, управляющего воздействия
пилота и др.) п оявляется угол скольж ения (3, который становится при­
чиной возникновения боковых сил и моментов (см. рис. 13.1).
Из формулы (13.13) следует,что степень затухани я путевы х коле­
баний
определяется результирующим демпфирующим моментом
(производная М^ у) и демпфированием результирующей поперечной
силы (производная Z|) при криволинейном движении самолета по
ВПП. Ч астота собственных колебаний
относительно оси OY (13.14)
зависит от соотношения результирую щ его стабилизирующего момента
результирую щ его демпфирующего момента, результирующ ей по­
перечной силы.
Таким образом, путевая устойчивость самолета при движении по
ВПП определяется совокупностью стабилизирующих (дестабилизиру­
ющих) п утевы х моментов и демпфирующих моментов. При этом необ­
ходимо учи ты вать следующее. Т ак к а к силы Z 0.„ и Z 0.л колес основ­
ных опор, появляю щ иеся при наличии угл а увода р к, приложены по­
зади центра масс самолета, то они создают стабилизирующий момент,
уменьшающий возникший угол увода р к. Сила Z n колес передней опо­
ры приложена впереди центра масс и оказы вает на самолет дестабили­
зирующее воздействие, стремясь увеличить появившийся уго л увода.
Д естабилизирую щ ее воздействие колес передней опоры можно умень­
шить, переводя его в режим самоориентирования. В тех сл уч ая х , когда
д ля обеспечения выдерж ивания направления движения самолета перед­
ние колеса переводятся в режим управления, необходимо постоянное
вмеш ательство пилота в управление для сохранения направления дви342
ж ен и я. В противном случае дестабилизирующее влияние колес перед­
ней опоры приводит к потере путевой устойчивости самолета.
При увеличении угл а увода колес р к до некоторого критического
значения, начинается скольжение колес по ВПП (боковой юз). Кри­
тический угол увода колеса на сухой бетонной ВПП не превышает 12°,
а на ВПП, покрытой осадками, значительно уменьш ается (см. рис. 13.2).
Пилот не должен допускать больших угл ов увода колес, так
к а к при скольжении колес поперечные силы уменьшаются, что
приводит к уменьшению стабилизирующего воздействия колес основ­
ных опор и потере путевой устойчивости или путевой управляемости.
По мере увеличения скорости растет подъемная сила самолета, что
приводит к уменьшению сил нормального давления и сил трения, в
том числе и их поперечных составляющих Z„ и Z0. Поэтому стабили­
зирую щ ая роль колес основных опор уменьш ается, но одновременно
повыш ается стабилизирующая роль аэродинамического момента ры­
ск ан и я
С ростом скорости увеличивается демпфирующий мо­
мент рыскания M®v (йу, повышается эффективность органов уп р авле­
ния.
Н а скорости Vr , равной 40—70 % скорости отрыва 1 'отр, подни­
м ается передняя опора, самолет продолжает разбег только на основных
опорах. При этом из-за отсутствия дестабилизирующего воздействия
колес передней опоры п утевая устойчивость самолета повыш ается.
Перераспределение н агрузки на колесах основных опор из-за нали­
чия у гл а скольжения и возникновения аэродинамического момента
крен а
приводит к появлению дестабилизирующ его момента со­
противления колес, образованного парой сил A,Fo.np и А Р 0.Л, стре­
мящ ейся развернуть самолет влево и увеличить угол рыскания
(см. рис. 13.1).
Критерием путевой статической управляемости при движении само­
л ета по ВПП является запас у гл а отклонения р ул я направления и
колес передней опоры, значение которого определяется к ак разн ость
м еж ду потребным для балансировки самолета углом отклонения и рас­
полагаемым. Считается, что запас угл а отклонения р ул я направления
долж ен быть не менее 20 %.
Располагаемый угол отклонения колес передней опоры равен
8— 10°. Потребный угол отклонения колес передней опоры 6„ и р ул я
направления б„ находят из условия обеспечения движ ения самолета
параллельно оси ВПП при максимально допустимом боковом ветре.
К ак только суммарная боковая сила, например сила, обусловленная
боковым ветром, становится больше, чем сум м арн ая поперечная сила
ZK сцепления колес с ВПП, начинается скольж ение самолета по ВПП.
С амолет «сдувается» боковым ветром. Д аж е при условии, что
а = 0.
самолет движется по криволинейной траектории и может вы кати ться
за пределы ВПП.
Продольная устойчивость и управляемость. После линеариза­
ции уравнений (13.12) и решения характеристического уравнения по-
лучим выражения д ля расчета степени затухан и я колебаний па и час­
тоты собственных продольных колебаний самолета Qa :
М? + м “г
_
Q l = - [ M “ + Ya ( x 0 + f y 0) + ( G - a Y ) у 0] - j - .
о*, к )
( 1 3 .1 6 )
На основании анализа полученных зависимостей можно сделать сле­
дующие выводы:
продольная устойчивость самолета при движении по ВПП на основ­
ных опорах определяется совокупностью стабилизирующих (дестаби­
лизирующих) и демпфирующих моментов;
с ростом в результате возмущающего воздействия угл а атаки уве­
личивается подъемная сила, а силы нормального давления N0 и силы
трения F0 уменьш аю тся. В результате создается приращение кабрирующего момента, увеличивающее угол атаки . Продольная устойчи­
вость самолета вследствие влияния колес основных опор меньше, чем
в свободном полете. При небольших зап асах продольной статической
устойчивости (например, при задних центровках), достаточной для
осущ ествления свободного полета, запаса устойчивости может не хва­
тить при движении самолета по ВПП, особенно на малых скоростях,
ко гда демпфирующие моменты сравнительно невелики. В этом случае
при воздействии на колеса основной опоры неровностей ВПП самолет
будет иметь значительную продольную р аскач ку и может коснуться
ВПП хвостовой частью фюзеляжа и колесами передней опоры;
при подъеме колес передней опоры угол атаки увеличивается, по­
яв л яется прирост нормальной составляющей тяги Р у. Переднее отно­
сительно центра м асс расположение двигателей обусловливает появ­
ление дестабилизирующего (кабрирующего) момента МРу\
подъем колес передней опоры выполняется на скорости Уд, при
которой эффективность аэродинамических органов достаточно велика.
При отделении колес передней опоры на большей скорости уго л атаки
б уд ет увеличиваться слишком интенсивно и можно легко уп усти ть мо­
мент задерж ки ш турвала. Увеличение у гл а атаки в этом сл уч ае может
привести к касанию ВПП хвостовой частью фюзеляжа;
после отделения колес передней опоры от ВПП пользоваться тор­
мозами колес основных опор н ельзя, так к а к вследствие увеличения
с и я трения колес о ВПП может возникнуть пикирующий момент и
уд ар колес передней опоры о ВПП.
13.3. Особенности устойчивости и управляемости самолета
при движении по ВПП в усложненных условиях
Устойчивость и управляемость при движении по ВПП, покрытой
осадками. Различаю т следующие основные типовые состояния ВПП:
с у х а я ; в л а ж н а я (покры тая пленкой влаги без скопления воды на по344
Рис. 13.4. Схема взаимодействия пневматика с ВПП, покрытой
различных скоростях движения
осадками
при
верхности, толщина слоя воды не превышает средней высоты микроне­
ровностей); мокрая (покрытая водой, толщина слоя которой больше
высоты микронеровностей поверхности ВП П ); покрытая слякотью
(смесью воды со снегом, кристалликами л ьда), плотность которой р ав­
на 0 ,4 —0,9 г/см3; заснеженная (покрытая слоем снега плотностью ме­
нее 0,4 г/см3); обледеневшая (покрытая слоем л ьд а, изморози).
Наличие атмосферных осадков на ВПП в значительной мере ослож­
няет взлет и посадку самолетов, имеющих большие скорости отрыва и
посадки. При движении самолета на большой скорости по влаж ной,
мокрой или покрытой слякотью ВПП может возникнуть явление глис­
сирования (гидроглиссирования). Рассмотрим его физическую сущ ­
ность. Будем считать, что самолет движ ется по ВПП со все возрастаю ­
щей скоростью. При этом колесо вытесняет часть воды (слякоти) и
м еж ду пневматиком и поверхностью ВПП образуется водяной клин
(рис. 13.4, а). По мере увеличения скорости движ ения давление в во дя­
ном клине повышается, что приводит к деформации пневматика и
уменьшению площади соприкосновения его с ВПП. При некоторой
скорости давление в водяном клине возрастает настолько, что пневматик поднимается над поверхностью ВПП (рис. 13.4, в) и не соп ри каса­
ется с ней.
П олусухое трение меж ду пневматиком и поверхностью ВПП (рис.
13.4, б) заменяется жидкостным (трение м еж ду слоями жидкости в
клине). При этом коэффициент трения резко ум ен ьш ается, возникает
глиссирование. Скорость Угл, соответствую щ ая н ачалу этого явлен и я,
н азы вается скоростью начала глиссирования. Если колесо притормо­
зи ть (увеличить степень проскальзывания пневматика относительно
ВПП), то явление глиссирования возникнет на меньшей скорости.
С увеличением ширины пневматика, уменьшением давлен и я в нем, у в е ­
личением толщины слоя воды (слякоти) и плотности слякоти скорость
начала глиссирования уменьш ается.
На скорость начала глиссирования оказы ваю т влияние ш ерохова­
тость и материал ВПП, рисунок протектора пневм атика, располож е­
ние колес, плотность, вязкость, толщина слоя слякоти и т. д. С ум ен ь­
шением коэффициента трения скольж ения д л я сухой ВПП (fCK ж 0 ,8 ,
а д л я мокрой и обледеневшей ВПП fCK » 0,5 и менее) допустимый уго л
поворота колеса передней опоры уменьш ается (см. рис. 13.2).
При скольжении колес боковые силы сопротивления движению
резко уменьш аются, а вместе с ними уменьшаются и стабилизирующее
действие колес основной опоры и путевая устойчивость самолета. По­
этом у при движении по ВПП, покрытой осадками, на скорости, боль­
шей скорости начала глиссирования, необходимо рассчитывать в ос­
новном на аэродинамические органы управления и не допускать боль­
ших угловых отклонений самолета от оси ВПП, чтобы не лишиться
стабилизирующего путевого воздействия колес основной опоры.
Торможение колес не только бесполезно, но и опасно, так к а к са­
молет может потерять устойчивость. Самолеты, оборудованные автома­
тами торможения, обеспечивающими торможение, близкое к оптималь­
ному (качение колес на границе начала скольж ения), позволяют пилоту
осущ ествлять торможение сразу ж е после приземления независимо от
состояния ВПП. Т акое действие на самолете без автоматов торможения
привело бы к глиссированию, выходу из строя пневматиков. Д л я
уменьшения длины пробега по ВГ1П, покрытой осадками, особое зна­
чение имеют реверсирование тяги, отклонение интерцепторов, вы пуск
тормозных щ итков, поскольку эффективность торможения колес сни­
ж ается. Вместе с тем сопротивление движению по ВПП, покрытой осад­
ками, увеличи вается, что эквивалентно повышению коэффициента тре­
ния качения. Потребная дистанция разбега увеличивается. К ак пра­
вило, при взлете самолетов с обледеневших и заснеженных ВПП вы­
вести двигатели на взлетный режим, удерж и вая самолет на тормозах,
не уд ается. Поэтому двигатели на взлетный режим выходят уж е в про­
цессе разбега, что приводит к увеличению потребной дистанции разбега.
При неодновременном выходе двигателей на взлетный режим возникает
несимметричная т я г а и появляется стремление к развороту самолета
относительно оси OY. Значительная несимметричность тяги может
привести к необходимости прекращ ения взлета.
Особенности взлета с боковым ветром. Боковой ветер обусловли­
вает несимметричное обтекание самолета, появление у гл а скольж е­
ния. Наличие у гл а скольж ения |3 « WIV приводит к возникновению
стабилизирующ его момента рыскания Mj^P, уменьшающего угол сколь­
ж ен ия, но приводящ его одновременно к угловому отклонению самолета
относительно оси ВПП (рис. 13.5). Момент крена М^р, возникающий
при скольж ении, приводит к перераспределению сил нормального
давления и сил трения на колесах главных опор. При этом колеса под­
ветренной опоры догруж аю тся. Кренящий момент особенно велик у высокопланов. При скольжении возникает такж е боковая составляю щ ая
сила тяги P z и создается момент рыскания М р у . Вследствие сж атия
пневматика и амортизационных опор шасси появляется крен. Д л я пу­
тевой балансировки самолета необходимо отклонить р ул ь направле­
ния и колеса передней опоры таким образом, чтобы результирующий
момент ры скан ия Мр - 0.
Д л я парирования момента крена М*Р элероны необходимо откло­
н ять против ветра, чтобы M r x
0. Из условий М яу
0 и M rx 0
определяются потребные баланси­
ровочные отклонения руля направ­
ления, колес передней опоры и
элеронов. Б оковая сила Zp стре­
мится сместить («сдуть») самолет с
ВПП. Этому препятствую т боко­
вые силы ZK, возникающие за счет
трения скольж ения. Возможны т а ­
кие сочетания м еж ду скоростью
бокового ветра и состоянием ВПП,
при которых безопасный взлет с а ­
молета станет невозможным, так
к а к управляющ ие моменты от ко­
лес передней опоры и р ул я направ­
ления будут недостаточны для на­
дежного парирования разворачи­
вающего момента
+ M yMvД ля некоторых самолетов допусти­
мые значения бокового ветра уста­
навливаю т меньше расчетных зн а­
чений, полученных из условия у с ­
тойчивости и управляемости само­
лета. Это ограничение устан авли ­
вают из условия прочности шасси.
При взлете с боковым ветром
подъем колес передней опоры для
обеспечения
управляемости не­
сколько затяги вается. При этом
упреждающее отклонение руля на­
правления и элеронов к концу раз­
бега должно быть таким, чтобы при
Рис. 13.5. Силы и моменты, действую­
отрыве от ВПП самолет не получил щие на самолет при движении по
ВПП с боковым ветром
резкого кренения и разворота. Т ак
к а к при контакте самолета с ВПП
часть моментов компенсируется реакцией земли и силами трения, то
пилот не может почувствовать, насколько правильно отклонены р ул ь
направления и элероны для предотвращения кренения и разворота по­
сле отрыва. Н авык в определении необходимого отклонения органов
управления в зависимости от скорости и направления бокового ветра
формируется в процессе тренировок по мере накопления опыта. Н а­
личие угл а скольжения, более поздний подъем колес передней опоры,
балансировочное отклонение органов уп равлени я, применение несим­
метричного торможения колес основной опоры в начале разбега д л я
обеспечения прямолинейного движ ения самолета по ВПП п риводят к
увеличению сопротивления движению самолета, уменьшению ус ко р е­
ния при разбеге, увеличению дистанции разбега.
После четвертого разворота при наличии бокового ветра пилот обе­
спечивает движение самолета по глиссаде таким образом, чтобы в е к ­
тор земной скорости центра масс находился в одной вертикальной пло­
скости с осью ВПП. Снос самолета относительно ВПП боковым ветром
парируется одним из трех методов.
Парирование сноса самолета скольжением на обращенное к ветру
полукрыло. Д л я реализации этого метода пилот, отклоняя руль на­
правления и элероны (рис. 13.6), ориентирует самолет так, чтобы его
продольная ось л еж ал а в одной вертикальной плоскости с осью ВПП.
Самолет движ ется с углом крена и скольжения в вертикальной пло­
скости, проходящей через ось ВПП и вектор земной скорости V K.
Потребные для балансировки самолета в прямолинейном полете со
скольжением углы крена у и скольжения р практически пропорцио­
нальны скорости бокового ветра W. Чем больше скорость бокового
ветра, тем больше потребные отклонения б н и 6Э органов управления.
П оскольку элероны и р ул ь направления отклоняю тся на вполне опре­
деленную д ля балансировки самолета величину, с учетом обеспече­
ния зап аса по у г л у отклонения рулей (согласно ЕНЛГС не менее
10% ) можно определить предельно допустимое значение бокового вет­
ра, при котором самолет может быть сбалансирован.
Крен самолета убирается непосредственно перед приземлением.
При слишком ранней уборке крена боковой ветер может снести само-
лет с ВПП. При запаздывании с
уборкой крена возможно касание
крылом земли, что особенно ве­
роятно для низкопланов, имеющих
отрицательное поперечное V кры ­
л а, либо при приземлении самолета
на колеса только одной основной
опоры. Посадка самолета этим ме­
тодом требует от эки п аж а высокой
точности в работе, что ограничи­
вает его применение.
Парирование сноса от бокового
ветра упреждением в курсе. При
этом методе пилотирования, полу­
чившем наибольшее распростране­
ние в летной практике, вектор зем­
ной скорости самолета лежит в од­
ной вертикальной плоскости с осью
ВПП, а самолет развернут носом
против ветра так , чтобы углы
скольж ения и крена отсутствовали
(рис. 13.7). Угол упреждения г|з по
к у р с у равен у гл у сноса самолета боW
ковым ветром ^ « tg\|> = —. Полет
W
Рис. 13.7. Треугольник скоростей при
происходит практически при ней­ парировании сноса относительно В П П
упреждением в курсе
тральны х положениях элеронов.
Достоинство этого способа — от­
сутствие крена и скольжения и сопутствую щ их им трудностей б а­
лансировки, недостаток — некоторая сложность определения потреб­
ного угл а г|). При изменении бокового ветра в процессе снижения
угол упреждения уточняют кратковременным отклонением р ул я на­
правления, а порывы ветра парируют соответствующими отклонения­
ми элеронов.
При этом способе посадки приземление возможно к а к без устран е­
ния упреждения по к ур су, так и с устранением его. Приземление само­
лета без устранения упреждения по к у р с у (продольная ось самолета
не параллельна оси ВПП) сопровождается большими боковыми н а­
гр узкам и на конструкцию шасси. Возникающие на колесах основной
опоры в момент касания ВПП силы заставляю т самолет самопроиз­
вольно, без вмеш ательства пилота р азверн уться и дви гаться в н ап рав­
лении, параллельном оси ВПП. На сухой ВПП практически не тр еб у­
ется отклонения р ул я направления д л я разворота самолета вдоль оси
ВПП. При посадке самолета на ВПП, покрытую осадками, действую ­
щих на колеса сил трения будет недостаточно д л я полной ликвидации
у гл а упреждения и требуется энергичное отклонение р ул я н ап равл е­
ния. Угол упреждения должен быть устранен до оп ускан ия колес пе-
редней опоры. Этот метод посадки
приводит к повышенному износу
покрышек.
Д л я самолетов, имеющих боль­
шую базу основных опор и высо­
кие опоры, не рассчитанные на
значительные боковые н агрузки ,
требуется устранение угл а уп р еж ­
дения по к у р с у непосредственно
перед приземлением. При этом не­
обходимо учитывать, что слишком
раннее устранение упреждения по
кур су приводит к сносу самолета
боковым ветром относительно оси
ВПП, а слишком позднее начало
устранения упреждения не позво­
ляет полностью устранить имею­
щееся упреждение. Вращение са­
молета относительно нормальной
оси при устранении упреждения
по к ур су связано с появлением и
увеличением угл а скольж ения. Н а­
личие угл а скольжения вызывает
реакцию самолета по рысканию и
крену, что требует своевременной
перебалансировки самолета.
Комбинированный метод. К ак
следует из схемы сил (рис. 13.8),
этот метод сочетает парирование
сноса самолета боковым ветром
скольжением и упреждением по
кур су и имеет недостатки уж е рас­
смотренных методов. Полет само­
лета выполняется со скольжением,
креном и упреждением по к ур су ,
что требует балансировочного от­
клонения р ул я направления и эле­
Рис. 13.8. Схема сил, действующих
ронов.
иа самолет при парировании сноса
При этом углы крена и сколь­
относительно ВПП скольжением и уп­
реждением в курсе (комбинирован­ жения при прочих равны х усло­
виях меньше, чем при пилотирова­
ный метод)
нии первым способом.
Особенности устойчивости и управляемости самолета на остальных
воздуш ны х уч астк ах траектории посадки аналогичны ранее рассмот­
ренным.
13.5. Особенности движения самолета на участках
траектории взлета и посадки
Устойчивость и управляемость на траектории полного
взлета. По
достижении высоты 3 ... 5 м относительно точки отрыва (см. рис. 9.1)
начинают уборку шасси. В процессе уборки перемещаются створки лю­
к а шасси, изменяется интерференция м еж ду шасси и крылом, изменя­
ются обтекание нижней поверхности кры ла потоком, положение цент­
ра масс самолета и фокуса по у гл у атаки . Все это приводит к измене­
нию подъемной силы, силы лобового сопротивления, зап аса продоль­
ной устойчивости, что в сочетании с ошибками пилотирования, небла­
гоприятными воздействиями внешних условий может привести к к а с а ­
нию ВПП в случае, если высота начала уборки шасси будет ниже реко­
мендованной РЛЭ.
Напомним, что избыток тяги ДР при наборе высоты расходуется
для увеличения высоты полета и скорости. Поэтому перевод самолета
в набор высоты на скорости V <С V2 приводит к уменьшению уско р е­
ния и даж е к потере скорости. Это особенно вероятно при взлете с од­
ним отказавш им двигателем, на высокогорных аэродромах и при взле­
те в условиях высоких температур.
При достижении самолетом безопасной высоты и безопасной скоро­
сти начала уборки механизации V 3 >
эки п аж приступает к убор­
ке механизации кры ла. Если уборку механизации кр ы ла, например
уборку закры лков, начать на скорости V', меньшей V 3,то после убор­
ки закры лков самолет окаж ется в области вторых режимов полета
(рис. 13.9).
Наиболее целесообразно выполнить уборку закры лков на скорости
V 3, так к ак после уборки закры лков на этой скорости (она н есколько
больше наивыгоднейшей скорости полета при убранных зак р ы л к ах )
образуется практически максимальный избыток тяги А Р.
Уборка закры лков на скорости V ", большей V 3, нецелесообразна
из экономических соображений, а т а к ж е из соображений устойчиво­
сти и управляемости. Действительно, при уборке закр ы л ко в подъем­
ная сила крыла уменьш ается, а подъемная сила горизонтального опе­
рения остается постоянной или ум еньш ается вследствие уменьш ения
скоса потока за крылом, но в меньшей степени, чем уменьш ение
подъемной силы кры ла. Если пилот не вмеш ивается в уп равлени е, то
самолет опускает нос, уменьшаются угол атаки и подъемная сила, з а ­
медляется прирост вертикальной скорости, скорость набора высоты
сначала уменьш ается, а самолет начинает тер ять высоту (рис. 13.10).
Д л я предотвращения этого при уборке закр ы л ко в пилот долж ен б а­
лансировать самолет. Заметим, что чем больше скорость, на которой
убираются закры лки , тем более значительная продольная перебалан­
сировка необходима.При уборке закр ы л ко в в один прием д а ж е на ско ­
рости V 3 происходит уменьшение вертикальной скорости, у гл а набора
высоты, необходимо большее балансировочное отклонение р у л я высоты .
РЛЭ рекомендуют производить уборку закр ы л ко в в несколько приемов,
Рис. 13.9. Кривые Жуковского при
выпущенных и убранных закрылках
Рис. 13.10. Расчетная траектория на­
бора высоты (1) и траектория при
уборке закрылков (2), если пилот не
вмешивается в управление
а после выполнения каж дого приема разгонять самолет до скорости
близкой к наивыгоднейшей для каждого промежуточного значения
у гл а отклонения закр ы лко в.
Устойчивость и управляем ость на траектории посадки. На высоте
начала выравнивания скорость полета близка к скорости захода на по­
с а д к у . По мере приближения к земле плавным движением ш турвала на
себя пилот отклоняет р ул ь высоты вверх и создает посадочный угол
атаки . С увеличением у гл а атаки скорость самолета, а вместе с ней и
эффективность аэродинамических органов уменьшаются. Чем меньше
скорость полета, тем более энергичные движения органов управления
потребны для обеспечения заданной траектории. При больших перед­
них центровках управляю щ его момента руля высоты М гв 8в может не
х вати ть д ля преодоления инерционного, демпфирующего и стабили­
зирую щ его моментов т ан гаж а для создания посадочного угл а атаки .
П оэтому из условия обеспечения управляемости самолета на посадке
о п ределяется значение предельно передней центровки и не менее чем
10 % -ный зап ас расхода р ул я высоты.
При центровках, близких к предельно передней, для обеспечения
эффективности р ул я высоты рекомендуется увеличить скорость посад­
ки. Ошибка в определении высоты начала выравнивания более 1—2 м,
несоразмерный высоте и скорости полета темп движения ш турвала мо­
гу т привести к вы соком у или низкому выравниванию.
При позднем обнаруж ении высокого выравнивания у неопытных
пилотов может возни кнуть стремление приземлить самолет отдачей
ш тур вал а от себя, что приводит к грубой посадке или опережающему
касанию ВПП колесами передней опоры.
Д л я исправления низкого выравнивания движение ш турвала на
себя д л я создания сам олету предпосадочного угл а атаки должно быть
таки м , чтобы уд ер ж ать самолет на этой высоте и по мере гашения ско­
рости и приближения самолета к земле создать предпосадочное поло­
ж ение. Слишком энергичное движение ш турвала на себя с целью не
допустить преждевременного касания ВПП может привести к взмы­
ванию самолета, слиш ком замедленное — к грубому приземлению на
352
повышенной скорости. При обнаружении взмывания необходимо сораз­
мерным движением ш турвала задерж ать отход самолета от земли, по
мере гашения скорости и снижения придать ему посадочное положе­
ние, плавно отклоняя штурвал на себя.
Повышенная скорость на посадочной траектории, например при
низком выравнивании и недостаточно энергичном движении ш турвала
на себя, может привести к приземлению с опережающим касанием ко­
лесами передней опоры. При последующем опускании на колеса основ­
ной опоры и обратном ходе амортизатора передней стойки увеличи вает­
ся угол атаки до значений, при которых подъемная сила становится
больше силы тяж ести, и самолет взмы вает. Стремление пилота приос­
тановить взмывание приводит иногда к несоразмерной и несвоевре­
менной отдаче ш турвала от себя. О тдавая ш турвал от себя, пилот
не всегда учитывает, что из-за потери скорости эффективность р у л я вы­
соты понижена и угол атаки самолета изменяется не т а к быстро, к а к
хотелось бы. В результате самолет сниж ается с большей вертикальной
скоростью, чем при первом касании ВПП. Взмывание повторяется,
его необходимо парировать после первого отделения самолета от
ВПП.
При заходе на посадку с повышенной скоростью, например при бо­
ковом ветре, необходимо особенно точно выполнить вы равн иван ие и
выдерживание, погасив вертикальную и горизонтльную составляю ­
щие скорости и создав посадочное положение самолету. Если призем­
ление осущ ествляется с креном, то может произойти посадка на коле­
са одной основной опоры. При грубой посадке в этом сл уч ае может
быть нарушена прочность конструкции, поэтому на уч астке вы держ и­
вания необходимо обращать внимание на своевременное парирование
возможных кренов. Вероятность появления кренов возрастает при бо­
ковом ветре.
При посадке с боковым ветром несвоевременное устранение у п р е ж ­
дения по кур су может привести к сносу самолета с оси ВПП (при р ан ­
нем устранении упреждения по кур су) или возникновению бокового
удара (при позднем устранении упреж дения по к у р с у ). У странение
сноса выполняется либо очень короткими поворотами ш тур в ал а д л я
создания крена на наветренное крыло, либо созданием уп р еж ден и я
по кур су.
Это требует от пилота точных, расчетливых действий.
Приземление самолета с боковым ударом при сильном боковом вет­
ре и скользкой ВПП может привести к боковому скольж ению сам оле­
та по ВПП вследствие того, что боковая сила, действую щ ая на сам олет,
превысит поперечную силу сцепления пневматиков с поверхностью
ВПП. Это может быть причиной вы каты ван и я самолета за пределы
ВПП.
Дросселирование двигателей, включение реверсивного устрой ства
тяги приводит к необходимости перебалансировки самолета, что при
полете с малыми скоростями требует от пилота своевременных и точ­
ных управляющ их воздействий.
Особенности устойчивости самолета при уходе на второй круг.
С началом действий эки п аж а по уходу на второй к р у г возникают до­
полнительные моменты т ан гаж а, связанные с переводом двигателей на
взлетный режим, уборкой шасси, изменением угл ов отклонения м еха­
низации, отклонением р ул я высоты вверх для вывода самолета из
сниж ения и перевода в набор высоты. Эти эволюции определяют ярко
вы раж енное неустановивш ееся движение самолета и сложные неста­
ционарные переходные процессы, связанные с перераспределением
аэродинамической н агрузки на крыле и горизонтальном оперении, сме­
щением фокуса и изменением статических и динамических характе­
ристик устойчивости и управляемости. Опыт летной эксплуатации
самолетов показывает, что совокупность факторов, изменяющих про­
дольную устойчивость самолета, приводит, к а к правило, к ухудш е­
нию характери сти к продольной устойчивости. В связи с этим норма­
ми летной годности самолетов устанавливается не менее чем 10 %-ный
зап ас продольной устойчивости.
Неточность пилотирования, сложная метеообстановка (турбулент­
ность атмосферы, обледенение самолета), ошибки в определении ре­
альной центровки могут привести к значительному уменьшению степе­
ни продольной статической устойчивости или д аж е к неустойчивости
сам олета.
Д ополнительная
литература
12], с. 3 3 1 —368; |5], с. 5 5 —86; [9], с. 65—91, 136— 166
К он тр оль н ы е вопросы
1. Изобразите и объясните схему сил и моментов, действующих на самолет
при движ ении на трех опорах.
2. Сравните влияние колес передней и основной опор на путевую устойчи­
вость самолета при движении по ВПП.
3. Изобразите и объясните с х е м у сил, действующих на самолет при д в и ж е ­
нии по В П П на колесах основных опор. Запишите уравнения движения.
4. Д а й т е обоснование вли ян и я эксплуатационных факторов на хар актер и с­
т и к и продольной устойчивости самолета при движении по ВПП на колесах ос­
новных опор.
5. О х ар актер и зуй те типовые состояния ВПП, покрытой осадками, пояс­
ните природу явления гидроглиссирования и рекомендации по пилотированию.
6. Изобразите с х ем у сил, действующих на самолет при движении по ВПП
с б о ко вы м ветром. Объясните рекомендации по пилотированию.
7. Изобразите и объясните с х ем у сил, действующих на самолет при заход е
на п о с а д к у с боковым ветром и парировании сноса скольжением.
8. Изобразите и объясните с х ем у сил, действующих на самолет при заходе
на п о с а д к у с боковым ветром и парировании сноса упреждением в курсе.
9. Назовите основные особенности устойчивости и управляемости самолета
при у х о д е на второй к р у г , обоснуйте ограничение предельно задней центровки и
р екомендации по пилотированию.
10. Объясните наиболее распространенные ошибки эки п аж а на посадке.
Г л а в а 14
КРИТИЧЕСКИЕ РЕЖИМЫ, ОСОБЫЕ УСЛОВИЯ
И ОСОБЫЕ СЛУЧАИ В ПОЛЕТЕ
14.1. Особенности полета на больших углах атаки
Взаимовлияние продольного и бокового движения самолета. В пре­
дыдущих гл авах при изучении динамических свойств самолета мы счи­
тали, что изменение параметров продольного движения не приводит
к изменению параметров бокового движ ения, и наоборот. Это позволи­
ло рассм атривать продольное и боковое движения независимо одно от
другого, что значительно упростило исследование устойчивости и уп ­
равляемости самолета. Однако на некоторых режимах полета, напри­
мер при полете на больших угл ах атаки , взаимовлияние продольного
и бокового движений настолько значительно, что независимое рассмот­
рение этих движений приводит к большим ошибкам.
Причиной взаимовлияния продольного и бокового движений само­
лета является наличие аэродинамических, инерционных и кинемати­
ческих перекрестных связей в этих дви ж ен и ях.
Аэродинамические перекрестные связи проявляю тся в том, что при
изменении угл а атаки и числа М полета запасы поперечной
и путе­
вой т& статической устойчивости изменяю тся. Например, у самолетов
со стреловидным крылом с увеличением угл ов атаки степень попереч­
ной статической устойчивости т& увеличивается и уменьш ается с ув е­
личением числа М полета. С увеличением числа М уменьш ается так ж е
степень путевой статической устойчивости и тем резче, чем на больших
угл ах атаки проходит полет. Это приводит к изменению продольных и
боковых аэродинамических моментов, действующих на самолет.
На больших у гл ах атаки характер обтекания самолета воздушным
потоком и его аэродинамические характеристики претерпевают сущ е­
ственные изменения. На угл ах атаки , близких к критическим, п о явля­
ются местные срывы потока на кры ле, которые при дальнейш ем увел и ­
чении угл а атаки развиваю тся. Это приводит к изменению х ар актер и ­
стик продольного движения (скорости, у гл а наклона траектории, уско ­
рения и т.п .). К ак правило, срыв воздуш ного потока на п олукры льях
несимметричный, что вызывает изменение параметров бокового дви ж е­
ния (углов скольж ения, крена, угл о вы х скоростей и д р .). В свою оче­
редь изменение параметров бокового дви ж ени я, например, у гл а крена
и скольж ения приводит к изменению параметров продольного дви ж е­
ния.
Кинематические перекрестные связи обусловлены изменением и
взаимным влиянием углов атаки и скольж ен ия при энергичном вводе
самолета во вращение вокруг продольной оси. Это взаимодействие ве­
дет к периодическим изменениям угл о в атаки и скол ьж ен и я. При т а ­
ком движении носовая часть ф ю зеляжа будет описывать в пространст­
ве некоторый конус,, осью которого является вектор скорости центра
масс самолета.
Инерционные перекрестные связи обусловлены наличием гироско­
пических моментов вращ аю щ ихся частей (например, ротора дви гате­
л я) при повороте самолета относительно оси, не совпадающей с осью
вращ ения ротора, а так ж е наличием моментов инерции самолета отно­
сительно осей I х, 1 у и 1г. Значения моментов инерции зависят от р аз­
носа массы относительно центра тяжести самолета.
Д л я транспортных самолетов, обладающих сравнительно неболь­
шой маневренностью, малыми угловыми скоростями сох, ыу, шг, на­
иболее существенное значение имеет взаимодействие продольного
и бокового движений, которое на больших у гл а х атаки может приве­
сти к сваливанию самолета, развитию самовращения и входу самолета
в штопор. Вывод самолета из сваливания и штопора требует от пилота
определенных, к а к правило, необычных приемов пилотирования.
Сваливание самолета на больших углах атаки . Транспортные само­
леты совершают полеты обычно в небольшом эксплуатационном диапа­
зоне угл ов атаки . Горизонтальный полет, набор высоты и сн и ж ен а
осущ ествляю тся на у гл а х атаки 1—7°, а взлет и посадка обычно на
у гл а х атаки меньше 10°.
Выход самолета на большие углы атаки, близкие к критическим,
яв л я ется результатом воздействия восходящих потоков воздуха, отка­
зов в системе уп равлени я, интенсивного обледенения или грубых оши­
бок эки п аж а. Пилот располагает четкой информацией о приближении
самолета к недопустимым угл ам атаки. При этом он руководствуется
либо естественными признаками, либо искусственно созданными. К ес­
тественным признакам можно отнести тр яску конструкции или рыча­
гов уп равлени я, покачивания самолета по крен у, кур су и тан гаж у
Причинами этих явлений с л у ж ат зарождающиеся местные срывы псто ка на несущих поверхностях. Естественные признаки можно считать
предупреждающими, если они возникают при а < а доп и не пропада­
ют при дальнейшем увеличении у гл а атаки.
При отсутствии четко выраженных естественных признаков или
д л я их дублирования на самолете создаются искусственные предуп­
реждаю щ ие признаки приближения к недопустимо большим угл ам
ата к и : искусственно во збуж даем ая тряска ш турвала управления, им­
п ульсны е толчки ш турвала вперед, звуковы е сигналы.
Под сваливанием понимают возникшее в результате сры ва пото­
к а на кры ле непроизвольное апериодическое или колебательное дви­
ж ение самолета относительно любой из трех его осей со сравнительно
большими амплитудами угл о вы х скоростей и (или) угловы х ускоре­
ний, не парируемое без уменьш ения угл а атаки самолета.
Местные срывы потока на стреловидном кры ле появляю тся на мень­
ших у гл а х атаки , но развиваю тся с меньшим темпом, чем на прямом
(рис. 14.1, в). М естные срывы потока на стреловидном трапециевидном
кры ле с большим суж ением начинаются в концевых сечениях, а на
прямом и трапециевидном с малым сужением г. корневых частях
356
Рис. 14.1. С хем а с р ы в а потока на прямом ( а ) и стреловидном (б ) кр ы л е, з а в и ­
симость си ( а ) д л я прямого и стреловидного кр ы л ье в (в) и кр и в ы е распреде-
•а
ления коэффициента давления по хорде п р ям ого к р ы л а при р азл и ч ны х
ат а ки (г):
углах
1 — при летны х у г л а х (а< С атр); 2 — при приближении к ср ы ву; 3 — при ср ы ве (а > а т р )
(рис. 14.1, а , б). При срыве потока на прямом кры ле из-за перераспре­
деления аэродинамической н агрузки (рис. 14.1,г) центр давлен и я кры ­
ла смещ ается назад, что приводит к образованию аэродинамического
момента, направленного на уменьшение появивш егося приращения
угл а атаки .
У самолетов со стреловидным крылом распределение аэродинами­
ческой н агрузки при срыве по сечению кры ла такое ж е, но сры в пото­
ка с концевых сечений, отнесенных н азад, приводит к смещению цент­
ра давления кры ла вперед и появлению кабрирую щ его момента, сни­
жению устойчивости по у гл у атаки .
Асимметрия распределения аэродинамической н агр узки на стрело­
видном крыле при скольжении (см. рис. 4.16) обусловли вает большую
склонность самолета со стреловидным крылом к сваливанию на крыло
в отличие от самолета с прямым крылом, имеющим тенденцию при с в а­
ливании к опусканию носа. Скорость распространения сры ва у само­
лета с прямым крылом выше, чем у самолета со стреловидным крылом,
поэтому последний сваливается менее резко. Н аличие у г л а ск о л ьж е­
ния при сваливании вызывает вращ ение относительно осей с в я за н ­
ной системы координат.
Сваливание яв л яется следствием увеличения у гл а ата к и и сры ва
воздушного потока с крыла, а не потери скорости. О днозначная св я зь
м еж д у скоростью и углом атаки имеется только в установивш емся по­
лете. При неустановивш емся движении, например при выполнении
м ан евра с перегрузкой, сваливание может произойти на скорости, зн а­
чительно большей, чем скорость сваливания Vс в установивш емся п ря­
молинейном горизонтальном полете. Действительно, так к а к пуа=
= Y JG , то Y a = Gnya. При угл е атаки сваливания а с последнее вы ­
р аж ен ие примет вид
S = Gnv
о тк уд а
( 14. 1)
Из формулы (19.1) следует, что при пуа > 1 скорость полета при вы ­
полнении маневра в вертикальной плоскости может намного превы­
ш ать скорость Vr . n.e (пропорционально У пуа)- При этом угол атаки
будет равен а с, что к а к . раз и обусловит срыв воздушного потока
с кр ы л а и сваливание.
У стреловидного кры ла в отличие от прямого элероны находятся
в зоне концевого сры ва, что приводит к снижению их эффективности.
Значительное влияние на поведение самолета при сваливании о к а ­
зы вает х ар актер обтекания горизонтального оперения. При полете
на больш их угл ах атаки за крылом образуется турбулентный поток.
Н а м алы х у гл а х атаки , а т а к ж е при увеличении у гл а атаки до зн аче­
ний а доп низко расположенное горизонтальное оперение находится
в турбулентном потоке от кры ла, эффективность горизонтального опе­
рения понижена, потребные расходы руля высоты сравнительно вели­
ки (рис. 14.2, а). При дальнейшем увеличении угл а атаки до а с го­
ризонтальное оперение выходит из зоны турбулентности, его эффектив­
ность и степень продольной статической устойчивости повышаются.
У самолетов с высоко расположенным горизонтальным оперением
эффективность горизонтального оперения сохран яется вплоть до ре­
ж и м а свал и ван и я, так к а к горизонтальное оперение находится вне тур ­
булентного потока от кр ы ла (рис. 14.2, б). В момент сваливания оно
входит в турбулентны й поток от кры ла, эффективность его резко у х у д ­
ш ается. П одъемная сила на горизонтальном оперении ум еньш ается,
что приводит к увеличению кабрирующего момента, появляется не­
устойчивость самолета по п ерегрузке (угол наклона кривой т г (суа)
становится положительным). В результате самолет угл уб л яется в об­
л асть ср ы ва потока. Уменьшение эффективности горизонтального опе­
рения при попадании его в турбулентный поток от кры ла затрудняет
вывод самолета из свал и ван и я.
Х ар ак тер свали ван и я самолета в большой степени зависит от высо­
ты и числа М полета. По мере увеличения числа М изменяется распре­
деление давлен и я по поверхности крыла, увеличиваю тся коэффициент
Рис. 14.2. Х ар а к те р обтекания низко расположенного ( а ) и вы с о ко р асп о л о ж ен ­
ного (б) оперения при вы ходе на большие у г л ы атаки
подъемной силы, градиент давления на верхней поверхности кры ла и
толщина пограничного слоя, что приводит к сры ву потока на кры ле при
существенно меньших угл ах атаки . Например, д л я сам олета Т у -134
при М = 0,6 местные срывы потока начинаются на у гл е а = 11°,
а при М = 0,82 — на угле а ж 5°. При этом срыв потока на крыле
распространяется несимметрично. На больших высотах и числах М из-за
местных срывов потока наблюдаются покачивания самолета с кры ла на
крыло, а так ж е колебания по к у р с у , что является естественным призна­
ком приближения к опасным режимам полета. С валивание протекает
более энергично на малых вы сотах. Например, на высоте 1 км угл о ­
вые скорости м ж и и>у при сваливании в 2—4 раза больш е, чем на высо­
те 10 км.
Чтобы не допустить сваливания самолета, пилот долж ен принять
меры, рекомендованные Руководством по летной эксп л уатац и и сам оле­
та. Если сваливание произошло, то д л я вывода самолета из этого ре­
жима необходимо уменьшить угол атаки . П арировать кренение и с в а­
ливание отклонением элеронов и р ул я направления недопустимо, т а к
к ак это не только не дает эффекта, но и опасно возможностью ввода
самолета в штопор. При полете на больших угл ах атаки , изменяю щ их­
ся во времени, необходимо учиты вать явление аэродинамического ги с­
терезиса (рис. 14.3). Суть его состоит в том, что при одном и том ж е у г ­
ле атаки а аэродинамические характери сти ки самолета о казы ваю тся
различными в зависимости от на­
правления выхода на требуемый
угол атаки: от больших углов к
меньшим (обратный ход) или от
малых углов к большим (прямой
ход). Чем больше скорость измене­
ния угла атаки , тем шире петля
гистерезиса, тем сильнее отличают­
ся аэродинамические характери­
стики при прямом и обратном ходе.
Самовращение крыла на боль­
ших углах атаки . При определен­
ных условиях летной эксплуатации
Рис. 14.3. Зависимость коэффициента
подъемной силы от у г л а а т а к и :
самолет способен входить в режим
------------прямой х о д : ------------обратный ход
устойчивого вращения относитель­
но одной или нескольких осей с в я ­
занной системы координат (входить в штопор). Это связано с особым
свойством кры ла, называемым самовращением, или авторотацией.
Предположим, что самолет выполняет полет на докритическом угл е
атаки а х и под действием некоторого возмущения начал крениться с
угловой скоростью (ох. Тогда в некотором сечении опускающ егося
п о лукр ы л а, находящ емся на расстоянии z от оси ОХ, угол атаки у в е ­
ли чи тся на величину Д а « сoxz/Y, а в симметричном сечении под­
нимающегося полукрыла — уменьшится на ту ж е величину (рис. 14.4).
Т а к к а к на докритических у гл а х атаки большему у гл у атаки соот-
Ри с 14.4. Вл и ян и е у г л а а т а к и на м о м е н т М ^ я о * кры ла:
/ — д ем п ф и р о ван и е; 2 — сам овращ ение
3 60
ветствует большее значение коэффициента нормальной аэродинамиче­
ской силы су сечения, то на опускаю щ емся полукрыле будет действо­
вать больш ая нормальная сила &Y, а на поднимающемся — меньш ая.
В результате возникает демпфирующий момент крена М “ ж/сох,
пре­
пятствующий начавшемуся вращению самолета во кр уг оси ОХ.
Если полет выполняется на закритическом угл е атаки а 2, то кренениес угловой скоростью со*, к ак и на докритических у гл а х атаки , при­
водит к увеличению углов атаки в сечениях опускаю щ егося полукрыла
и уменьшению углов атаки на т у ж е величину в сечениях поднимающе­
гося полукры ла. Но на закритических угл ах атаки из-за срыва воз­
душного потока на опускающемся полукрыле большему у гл у атаки со­
ответствует меньшее значение коэффициента нормальной силы. В ре,.Мг
зультате возникнет аэродинамическии момент крена М х
направ­
ление которого совпадает с направлением начальной угловой скоро­
сти. Под действием этого момента угл о вая скорость ш* будет расти до
тех пор, пока не сравняются коэффициенты нормальной силы правого
и левого полукрыльев. В этом случае вращение будет установивш им­
ся (со* = const).
Таким образом, на закритических угл ах атаки в р езультате дейст­
вия малого начального возмущения крыло входит в режим самовращения (авторотации).
Д ля определения режимов самовращ ения проводится трубный экс­
перимент. на основании которого строится диаграмма самовращ ения
(характеристика самовращения), показываю щ ая установивш ую ся ско­
рость самовращения сиуот (рис. 14.5). Штриховой линией пока­
заны режимы неустойчивого самовращ ения. Д л я некоторого угл а
атаки ос, возможны две угловые скорости установивш егося самовращения to у и сох2. На практике
реализуется обычно большая из
НИХ ( 0) х2) .
Значительное слияние на х ар ак ­
теристики самовращения о казы ва­
ет скольжение. Скольжение на оп у­
скающееся полукрыло называется
внутренним, а на поднимающееся
внешним. Т ак к а к срыв потока бо­
лее интенсивно развивается на от­
стающем полукрыле, то при сколь­
жении на внутреннее полукрыло
возникает дополнительный момент,
препятствующий вращению, а при
внешнем скольжении — способст­
вующий вращению. Поэтому ско­
рость установивш егося самовраще­
ния при скольжении на внешнее
Рис. 14.5. Х ар ак те р и сти ки с а м о в р а щ е ­
ния прямого к р ы л а :
/ — скольж ение о т с у т с т в у е т ;
2 — внешнее
ско л ьж ен и е; 3 — вн утрен н ее ск о л ьж ен и е
крыло (рис. 14.5, кривая 2) больше, чем при внутреннем скольж е­
нии. Стреловидное крыло имеет р яд существенных особенностей самовращ ения, которые определяю тся характером срыва потока и более
сильным вилянием скольж ен ия. Основные из них следующие:
самовращ ение может начаться на углах атаки значительно меньше
критических, особенно при наличии скольжения;
взаимное влияние углов атаки и скольжения обусловливает изме­
нение зон отрыва на крыле и сложный характер поведения стреловид­
ного кры ла на больших угл ах атаки (рис. 14.6);
в зависимости от положения зон отрыва на полукры льях изменяет­
ся скорость самовращения к а к по значению, так и по направлению;
в некотором диапазоне закритических углов атаки самовращение
вообще не возникает или наступает
только при больших начальных
скоростях вращ ения.
Поведение самолета на больших
угл ах атаки значительно сложнее,
чем изолированного кры ла, что
объясняется интерференцией частей
самолета и разнообразием возмож­
ных эволюций самолета в воздухе
по сравнению с изолированным
крылом или моделью самолета,
установленной в аэродинамической
трубе.
Штопор. Способность крыла к
самовращению является основной
причиной штопора самолета. Ш то­
пором называется движение само­
лета по крутой спирали, возни­
кающее при полете на больших
угл ах атаки , сопровождающееся
вращением во кр уг всех трех осей
и частичной или полной потерей
управляемости.
Долгое время причины входа
самолета в штопор оставались не­
известными, поэтому не были отра­
ботаны и методы выведения из
штопора. П ервая удачная попытка
преднамеренного ввода самолета в
штопор и вывода из штопора была
предпринята русским
летчиком
К. К. Арцеуловым в 1916 г. Из-за
Рис. 14.6. В л и ян и е угло в ско л ь ж е н и я
сложности явлений, сопровожда­
и а т а к и на положение зон о тр ы в а
ющих штопор, долгое время не у д а ­
стрело видн о го к р ы л а (а) и х а р а к т е ­
валось теоретически разрешить
р истика с а м о в р а щ е н и я (б)
проблему штопора. Только в конце 20-х годов проф. B .C . Пышновым
было установлено, что причиной штопора яв л я ется самовращение
{авторотация) кры ла. Теоретические исследования В. С. Пышнова и
экспериментальные полеты летчиков-испытателей М. М. Громова.
В. А. Степанченка, В. П. Ч калова и других позволили отработать ме­
тоды управления самолетом в штопоре.
Большинство транспортных самолетов при сваливании опускает
нос. При этом уменьшается угол атаки . Срыв самолета в штопор —
следствие отказов или грубых ошибок в пилотировании и встречает­
ся в практике летной эксплуатации сравнительно редко.
Различаю т устойчивый и неустойчивый штопор. Д л я неустойчи­
вого характерны значительные изменения углов атаки , крена, тан гаж а
и скольж ения, а такж е значений и зн ака угловы х скоростей со v и со„.
В устойчивом штопоре знаки величин со* и cow остаются неизменными,
а их значения могут изменяться. Устойчивый штопор, в котором со.,
и соу остаются практически неизменными, назы вается установивш им­
ся. В установивш емся штопоре самолет дви ж ется по вертикальной
спирали. Штопор, протекающий при положительных закритических
угл ах атаки , называется нормальным', штопор, выполняемый при от­
рицательных закритических у гл а х , — перевернутым.
Взаимодействие аэродинамических и инерционных сил и моментов,
а так ж е неправильное вмешательство пилота в управление может при­
вести к резким изменениям параметров движения самолета в штопоре,
к выходу на большие закритические и малые докритические угл ы ата­
ки, к прекращ ениям вращения, переходам из штопора одного направ­
ления в штопор другого направления, появлению движ ения самолета
типа падения «листом». Непредвиденный штопор самолета возможен
при выходе на большие углы атаки с последующим сваливанием. С ва­
ливание самолета не означает неизбежного попадания самолета в што­
пор. Исправный самолет входит в штопор только в том случае, если
неправильными действиями пилота самолет введен в режим самовращения.
При одновременном вращении самолета по крен у и к у р с у возника­
ет мощный инерционный момент, увеличивающий угол атаки . С те­
чением времени этот момент может уравновеситься пикирующим, воз­
никающим вследствие изменения приращения подъемной силы при
увеличении угл а атаки и изменения положения точки ее приложения.
Опасность попадания самолета в штопор заклю чается в первую оче­
редь в большой потере высоты от момента входа в штопор до момента
выхода. Выполнение строго определенных, своевременных и энергич­
ных действий со стороны пилота обеспечивает надежный вывод само­
лета из штопора.
При попадании в штопор пилот должен преж де всего опреде­
лить направление штопора (правый или левый). В усл о ви ях хорошей
видимости направление вращ ения определяется относительно земной
поверхности по плоскости горизонта. При отсутствии достаточной
видимости плоскости горизонта направление вращ ения определяю т по
12*
363
приборам. Н апример, при правом штопоре авиагоризонт показывает
правый крен, ук азател ь поворота — поворот самолета вправо, шарик
ук аза тел я скольж ения отклонен в сторону, противоположную крену.
Курсовые приборы при штопоре показывают непрерывное изменение
к ур са, вариометр и высотомер — снижение. Чтобы вывести самолет из
штопора, необходимо прекратить самовращение, уменьш ить угол ата­
ки и перевести самолет в режим снижения, из которого перевести его
в горизонтальный полет.
Чтобы прекратить самовращение, необходимо уменьшить угол ата­
ки, но так к а к рул ь высоты находится в турбулизированной зоне и,
к ак крыло, — на закритических у гл ах атаки, то его эффективность по­
нижена, поэтому д аж е при полном отклонении ш турвала от себя не
удается парировать инерционный момент и вывести самолет на мень­
шие углы атаки . Д л я уменьшения инерционного момента необходимо
уменьшить угловы е скорости вращения
и шу. Пользоваться эле­
ронами не только бесполезно, но и опасно, так к ак на больших углах
атаки они находятся в зоне срыва и поэтому неэффективны для созда­
ния момента крен а. Кроме того, при отклонении элеронов изменяется
лобовое сопротивление полукры льев и создается момент М „, который
может привести к внутреннему или внешнему скольжению .
Наиболее надежное и эффективное средство прекращ ения враще­
ния — отклонение руля направления. Поэтому д ля вывода самолета
из нормального штопора необходимо отклонить рул ь направления про­
тив штопора (влево при правом штопоре, вправо при левом штопоре).
Через 0 ,5 —3 ви тка, уд ер ж и вая элероны в нейтральном положении,
необходимо отдать ш турвал полностью от себя. После прекращения
вращ ения все рули следует поставить в нейтральное положение и пос­
ле достаточного увеличения скорости плавно перевести самолет в го­
ризонтальный полет. Особенности вывода из штопора конкретного
типа самолета приводятся в Р уководстве по летной эксплуатации.
14.2. Полет в усложненных условиях
Полет при обледенении. Обледенением называется отложение льда
на обтекаем ы х воздушным потоком поверхностях самолета. Раньше
всего пилот зам ечает образование льда на остеклении кабины. П ракти­
ка летной эксп луатац и и п оказы вает, что наиболее вероятно обледене­
ние при тем п ературах 0 н----- 10° С и ниже и на высотах меньше 500 м.
При очень низких тем п ературах (—304-40°) обледенение не возникает.
Современные транспортные самолеты оборудованы достаточно на­
деж ны ми противообледенительными системами, способными предотвра­
тить обледенение на любых реж имах полета. Несвоевременное вклю­
чение противообледенительной системы, ее отказы , экстремальные у с ­
ловия эксп луатац и и м огут привести к обледенению самолета. Обра­
зование той или иной формы льда (рис. 13.7) зависит от метеорологи­
ческих условий, особенностей работы противообледенительной систе364
Рис. 14.7. Х ар ак те р н ы е формы л ь д а
на крыле и оперении.
а — клиновидный: 6 — рогообразный
(коры тообразны й);
в — барьерны й;
г — из­
морозь
Рис. 14.8. Поляры с а м о л е т а , не обледеневш его в полете ( 1 ) , и при обледенении ( 2 )
мы, состояния поверхности самолета. В атмосфере, содержащ ей к р уп ­
ные капли переохлажденной воды, при тем пературах О-i— 5° вероят­
но образование прозрачного льда клиновидной и корытообразной (рогообразной) формы (рис. 14.7, а, б). При более низких тем пературах
лед матовый, и интенсивность его образования понижена. При работе
противообледенительной системы в экстремальны х метеорологиче­
ских условиях или при неправильной ее эксплуатации возможно об­
разование барьерного льда (рис. 14.7, в), когда капли воды сползают
с обогреваемой части профиля и замерзаю т за ее пределами. При низ­
ких температурах и небольшой влажности атмосферы обледенение
проявляется в виде изморози (рис. 14.7, г).
Обледенение ухудш ает аэродинамические, летно-технические х а ­
рактеристики самолета, а так ж е характеристики устойчивости и у п ­
равляемости. Оно приводит к искажению форм несущих поверхностей,
увеличению их шероховатости, утолщению пограничного слоя, повы­
шению его турбулизации, более раннему появлению местных срывов
потока. В результате коэффициент подъемной силы самолета ум ен ьш а­
ется, лобовое сопротивление увеличи вается, критический угол атаки
и угол атаки тряски уменьшаются, аэродинамическое качество сн и ж а­
ется. Это хорошо видно из сравнения поляр самолета (рис. 14.8). В ре­
зультате снижения аэродинамического качества самолета при обле­
денении увеличиваю тся потребные т я г а и скорость полета.
В результате обледенения входных кромок воздухозаборни ков,
двигателей, лопаток вентилятора и лопастей воздуш ного винта сн и ж а­
ются располагаемая тяга и мощность силовой устан овки, ухудш аю тся
летно-технические характеристики самолета. Обледенение входных
устройств двигателей опасно возможностью попадания отколовшихся куско в льда в двигатель и его повреждением.
При обледелении самолета с прямым крылом и появлении местных
срывов потока с крыла на угл ах атаки самолета (а > а тр) срыва по­
то ка с горизонтального оперения не происходит. Уменьшение вследст­
вие сры ва потока пикирующего момента, создаваемого крылом, приво­
дит к смещению фокуса по у гл у атаки назад и к увеличению запаса
статической устойчивости по у гл у атаки.
Срыв потока на концевых частях стреловидного крыла при обледе­
нении смещает фокус кры ла вперед. В результате фокус по у гл у атаки
т а к ж е смещ ается вперед и соответственно уменьш ается статическая
устойчивость по у гл у атаки .
Скольжение самолета на крыло обусловливает развитие несиммет­
ричного сры ва потока с полукры льев и повышает вероятность свал и ва­
ния самолета на сравнительно небольших у гл ах атаки . При движении
самолета по к р у гу возникает необходимость в уменьшении скорости
полета д л я вы п уска механизации и захода на п осадку. При этом ув е­
личивается угол атаки кры ла и повышается вероятность сваливания.
Угол атаки горизонтального оперения определяется алгебраиче­
ской суммой углов а г. о = а + фг. 0 — е, о ткуда следует, что чем
меньше угол атаки кры ла а и чем больше угол скоса воздушного потока
f . измеренный у горизонтального оперения, тем больше отрицатель­
ный угол атаки осг.0. При обледенении горизонтального оперения
ум еньш ается его критический угол атаки а кр.г. 0- Если при отсутствии
л ь д а угол а кр г о оперения с симметричным профилем равен примерно
— 16°, а отрицательный эксплуатационный угол атаки не превышает
9°, то зап ас по у гл у атаки до угл а атаки начала срыва достаточно ве­
л и к . При сильном обледенении горизонтального оперения отрицатель­
ный критический угол атаки уменьшается (— 9ч--10°) и становится
близким к эксплуатационному.
В ы п уск закры лков приводит к увеличению угл а скоса потока е
и к увеличению отрицательного угл а атаки а г.0. Значительное увели­
чение отрицательного у гл а атаки а г.0 вследствие увеличения ско­
са потока наблю дается у самолетов с низко расположенным горизон­
тальны м оперением при вы п уске закры лков на повышенной скорости
и при больших у гл ах отклонения закры лков. При прочих равны х ус­
л о ви ях угол скоса потока на высокорасположенном оперении меньше,
чем на низкорасположенном.
Увеличению у гл а атаки горизонтального оперения способствует
вращ ение самолета в о к р у г центра масс, вызванное отдачей ш турвала
от себя, п оскольку при вращении на горизонтальное оперение сверху
н абегает дополнительный воздушный поток. Срыв воздушного пото­
к а на горизонтальном оперении приводит к резкому уменьшению
подъемной силы F r .0 и балансировочного аэродинамического момен­
т а У г>0 Lr o, к смещению фокуса по у гл у атаки вперед, уменьшению
366
Рис. 14.9. Зависимость коэффициента
аэродинамического момента т а н г а ж а
от у г л а а т а к и к р ы л а в нормальных у с ­
ловиях ( 1 ) и при обледенении (2)
Рис. 14.10. Перераспределение д а в л е ­
ния на горизонтальном оперении при
сры ве воздуш ного потока (а) и з а ­
висимость усилий на ш т у р в а л е от нор­
мальной
перегрузки при обледен е­
нии (б). Ш три хо вы е линии соответст­
вую т с р ы в у потока
запаса статической устойчивости по у гл у атаки и появлению пикирую­
щего момента.
Вращение самолета на пикирование, являю щ ееся результатом сры­
ва потока с горизонтального оперения и сопровождающееся потерей
высоты, получило название кл евк а. Уменьшение у гл а атаки приводит
к соответствующему изменению коэффициента момента тан гаж а
(рис. 14.9). Т ак к ак угол атаки горизонтального оперения отрицате­
лен, то при уменьшении угл а атаки кры ла и увеличении угл а скоса по­
тока срыв происходит с нижней поверхности горизонтального опере­
ния. При этом наблюдаются перераспределение давления и разрежение
в области руля высоты (рис. 14.10, а). Это вызы вает изменение усилий
на ш турвале. Вместо привычного сопротивления перемещению ш тур­
вала при движении его на себя возникаю т тянущ ие уси л и я, развивает­
ся так называемый «подхват» р ул я высоты, способствующий развитию
клевка (рис. 14.10, б).
Д л я предотвращения срыва потока с горизонтального оперения
при обледенении РЛЭ самолетов с низкорасположенным горизонталь­
ным оперением рекомендуется: не превыш ать установленны е скорости
полета; вы пуск и уборку механизации кры ла соверш ать импульсами
на уго л, меньший, чем при посадке в нормальных усл о ви ях, и на ско­
ростях, не превышающих допустимые; осущ ествлять плавное пилоти­
рование, не д оп уская резких движений ш турвалом, особенно от себя,
из-за опасности увеличения отрицательного у гл а атаки а ,..0.
Д л я обеспечения запаса по у г л у атаки до сры ва потока на кры ле це­
лесообразны увеличение скорости полета (уменьш ение полетных у г ­
лов атаки) и более полный вы п уск механизации кры ла. При обледе­
нении стабилизатора указанные факторы способствуют увеличению от­
рицательного у гл а атаки горизонтального оперения и ср ы ву потока.
При одновременном обледенении крыла и го­
ризонтального оперения эки п аж должен стро­
го выполнять рекомендации РЛЭ, в частности
по выдерживанию скорости полета.
Обледенение передней кромки кры ла у х у д ­
шает поперечную устойчивость и уп равляе­
мость самолета. Скольжение вызывает несим­
метричное перераспределение давления на
кры ле и горизонтальном оперении и может
привести к неожиданному сваливанию. При
безбустерном управлении элеронами усилия
на ш турвале могут стать непривычными для
пилота, возможен «зах ват» элеронов — явле­
ние, по своей природе аналогичное «подхвату»
р ул я высоты.
Рис. 14.11. Зависимость
При обледенении вертикального оперения
коэффициента подъемной
силы от у г л а а т а к и :
срыв потока с его поверхности возможен при
/ — необледеневш ий
са м о ­
сравнительно небольших угл ах скольж ения.
л ет: 2 — 90%
поверхности
сам о л ета
покры то
слоем
Срыв потока приведет к смещению фокуса по
инея толщиной 0.5 м м ; 3 —
у гл у скольжения вперед, к уменьшению, а
В0% поверхности
покрыто
слоем инея толщиной 0 .1 мм
иногда и к потере путевой устойчивости са­
молета. Усилия на педалях ири срыве потока
с вертикального оперения уменьшаются, возможно явление «забега­
ния» педали и перекомпенсации руля направления. В связи с этим
РЛЭ н аклады ваю тся ограничения по угл у скольж ения.
Обледенение самолета, стоящ его на земле, называется наземным
обледенением. В зависимости от погодных условий его поверхности мо­
гут п окры ваться слоем инея, льда, замерзшего и рыхлого снега. При
этом ледяны е отложения располагаю тся несимметрично по поверхности
самолета.
Обледенение приводит к ухудшению аэродинамических хар акте­
ристик самолета (рис. 14.11), к уменьшению коэффициента суа на всех
угл ах ата к и , к увеличению сха, к уменьшению критического угл а ата­
ки. В р езультате ухудш аю тся взлетные характеристики самолета (уве­
ли чи вается потребная скорость отрыва, уменьшаются избыток тяги ,
ускорение на разбеге и увеличивается длина разбега). А нализ вли я­
ния наземного обледенения на взлетные и аэродинамические х ар акте­
ристики самолета позволил выработать следующие рекомендации
э к и п аж у:
недооценка опасности наземного обледенения, стремление обеспе­
чить регуляр н ы й вылет во что бы то ни стало — недопустимы;
никогда не следует рассчитывать на то, что обледенение будет р аз­
рушено от тряски самолета при рулении или под действием встречного
воздуш ного потока. Перед взлетом самолет должен быть очищен от
л ьд а;
контроль за состоянием поверхности необходимо проводить вплоть
до исполнительного старта, д аж е если самолет был обработан противо368
обледенительной жидкостью, поскольку время ее предохраняющего
действия ограничено:
следует избегать попадания самолета под струи двигателей д р у ­
гих самолетов, особенно при наличии на рулевы х дорож ках снега и
слякоти.
Особенности полета в болтанку. Турбулентные зоны в атмосфе­
ре имеют сравнительно небольшую толщину, но значительную протя­
женность. При построении марш рута и выборе эш елона необходимо
учитывать зоны турбулентности с тем, чтобы сократить время н ахож ­
дения в них.
При воздействии восходящего порыва, имеющего скорость W, и по­
стоянном угл е v угол атаки самолета увеличивается на величину Д а
(см. рис. 6.15). Это может привести либо к вы ходу на недопустимо
большие углы атаки а т Д а ^ «д о п при полете на м алы х скоростях,
либо к недопустимому увеличению нормальной перегрузки п у +
~ Дпи > п у доп при полете на больших скоростях. Последнее объяс­
няется тем, что с увеличением скорости полета V при неизменной скоро­
сти порыва W приращение угл а атаки Д а ум еньш ается, но приращение
нормальной перегрузки пропорционально произведению скоростей
VW (6.38).
Изменение нормальной перегрузки при полете в турбулентной
атмосфере носит случайный характер, а отрицательные и положитель­
ные приращения перегрузки имеют один порядок. Отрицательные
приращения перегрузки действуют на экип аж и пассаж иров более не­
благоприятно, чем положительные. Предельно допустимым значением
перегрузки в болтанку из условия обеспечения комфорта пассажиров
является п ерегрузка |Дп#| < 0 ,5 . С лабая болтанка 0,002 < |Д„„|<
< 0,2 вызывает у отдельных пассажиров неприятные ощ ущ ения; ум е­
ренная 0,21 <| Д/!;/|< 0,5 — неприятные ощ ущ ения; ум ер ен н ая 0 ,2 1 <
< |Длу| < 0 ,5 — неприятные ощущения у значительной части п ассаж и­
ров и затрудненность хождения по салону; сильная 0,51 < |Апу |<
<1 — болезненные явления у большинства пассаж иров, хождение по
салону не только затруднено, но и опасно из-за возможности травмиро­
вания.
Пилотирование самолета в условиях слабой и умеренной болтан­
ки не представляет сложности на рекомендованных РЛ Э скоростях,
как в автоматическом, так и ручном режиме уп р авлен и я. Зоны, в ко­
торых возможна сильная болтанка, следует обходить, а при попада­
нии в них необходимо оценить обстановку и выйти из зоны сильной
болтанки. При попадании в зону очень сильной болтанки | A ny | > l
необходимо выключить автопилот и выход из зоны болтанки вы полнять
в режиме ручного управления, строго вы держ и вая рекомендованные
скорости полета, парируя только сильные броски.
Увеличение нормальной перегрузки до предельно допустимы х э к с ­
плуатационных значений пъ
у может произойти в усл о ви ях очень си ль­
ной болтанки, например при попадании самолета в обл асть грозовой
деятельности. Значения п* д ля самолетов с различной полетной мас­
сой, а т а к ж е диапазон скоростей полета в болтанку приведены в
технических описаниях самолета. Необходимо помнить, что превыше­
ние значения пэу более вероятно на малых высотах и больших скоростях
полета, а превышение допустимых углов атаки а доп — на больших
высотах. Поэтому при попадании в болтанку на больших высотах ре­
комендуется уменьшить высоту полета, а при попадании в болтанку на
малых высотах — уменьшить скорость до рекомендованных РЛЭ зна­
чений.
В кучево-дож девы х, особенно в грозовых, облаках скорость вер­
тикальны х порывов достигает 30—50 м/с. Вход в грозовые облака зап­
рещен не только в связи с опасностью попадания в сильный порыв, но
и в связи с опасностью поражения самолета молнией. Попадание само­
лета в область грозовой деятельности может сопровождаться наруше­
нием работы высотомеров, указателей скорости, высотомеров из-за
сильного и скаж ени я обтекающих самолет воздушных потоков турб у­
лентностью. В этих условиях заданный режим полета следует выдер­
ж и вать обеспечением постоянства режима работы силовой установки и
выдерживанием угл а тан гаж а по авиагоризонту.
С увеличением полетной массы (загрузки) самолета уменьшается
приращение нормальной перегрузки (6.28), уменьш ается ощущение
болтанки. О днако это не значит, что повышается безопасность поле­
тов. Увеличение полетной массы приводит к росту н агрузки на эле­
менты конструкции, и допустимая эксплуатационная перегрузка
ум еньш ается.
Кроме восходящ их и нисходящих порывов, на самолет могут дей­
ствовать несимметричные горизонтальные порывы, которые изменяют
угол ско л ьж ен и я. Статически устойчивый самолет реагирует на по­
рыв креном на противоположное полукрыло и разворотом навстречу
порыву. В этом случае начальное возмущение, вызванное горизон­
тальны м боковым порывом, характери зуется углом скольж ения Ар,
вы зы вает боковую п ер егр узку
2 Р ДВ
ze
wz
Anz = ———-- = ——------ - f - .
(1 4 .2 )
Больш ие боковые порывы ветра могут привести к значительным
изменениям угл о в крена, к ур са, скольжения, а при о тказах автома­
тов демпф ирования и автоматов устойчивости на больших высотах —
к ухудш ению или потере устойчивости и управляемости.
Особенности полета самолета при попадании в спутный след впере­
ди летящ его самолета. Летящ ий самолет оставляет за собой область
возмущ енного во здуха, называемую спутным следом. Он образуется
реакти вной струей от двигателей, пограничным слоем, стекающим с
поверхности самолета и вихревыми концевыми ж гутам и . Реактивные
струи от двигателей представляю т собой нагретый газ, который бы370
сгро смеш ивается с окружающими
массами воздуха и на расстоянии
100—200 м за самолетом практиче­
ски рассеивается.
Пограничный слой, сбегающий
с поверхности кры ла, фюзеляжа,
оперения, представляет собой турбулизированную зону, имеющую
небольшую интенсивность. На рас­
стоянии 50— 150 м за самолетом
этот след размы вается. Основная
доля снутного следа создается д в у ­
мя мощными вихревыми концевыми
ж гутам и , образующимися за кры ­
лом вследствие перетекания воз­
душных масс из зоны повышенного
Рис. 14.12. Спутный с л е д самолета
давления (под крылом) в зону по­
ниженного давления (над крылом), образования системы свободных
вихрей, индуцирующих иоле скоростей V’,,, направленных по нор­
мали к вектору скорости. Д альний спутный слет с а м о л е т а - это два
мощных вихревых концевых ж гу т а (рис. 14.12). Расстояние между
осями вихревых ж гутов равно примерно 80 % разм аха кры ла. В их­
ревые концевые ж гуты распространяю тся с некоторым принижением.
Интенсивность каж дого из вихревы х ж гуто в, согласно теореме Ж у­
ковского, можно выразить циркуляцией скорости Г 0. Д л я практиче­
ских расчетов принимают распределение циркуляции вдоль разм аха
крыла эллиптическим, тогда
Г„
mg
(14 .3 )
0,785p/V
Из зависимости (14.3) следует, что интенсивность спутного следа ув е­
личивается с уменьшением полетной массы самолета, с уменьш ени­
ем плотности воздушной среды, скорости полета и р азм ах а кры ла.
Диаметр наиболее активной зоны вихревых ж гуто в сохран яется
практически неизменным в течение 30—50 с, затем начинает посте­
пенно увеличиваться и через 80— 130 с он увеличивается в 2 —3 раза.
Через 140— 180 с вихревые ж гуты распадаю тся и воспринимаются по­
зади летящим самолетом к ак турбулентность слабой интенсивности.
Например, транспортный самолет с полетной массой 150 т на высоте
500 м в посадочной конфигурации со скоростью 240 км/ч имеет сле­
дующие характеристики спутного следа: диаметр каж до го из вихре­
вых ж гутов 3,5 м; через 110 с (на расстоянии около 8 км за самоле­
том) диаметр вихревого ж гута равен примерно 20 м при интенсивности
циркуляции 370 м2/с; принижение спутного следа на удалении 8 км
составляет примерно 150 м; через 150 с (на расстоянии около 10 км за
самолетом) интенсивность вихревы х ж гуто в уменьш ается примерно
в 2,5 раза; через 1 7 0 -1 8 0 с вихревы е ж гуты полностью распадаю тся.
24*
371
Рис. 14.13. Направления моментов крена, действующих на самолет, попавший я
спутный с л е д впереди идущего сам о л е т а
На хар актер распространения епутного следа значительное вли я­
ние оказы вает турбулентность атмосферы. Чем она выше, тем быстрее
распадается спутный след. При взаимодействии с земной поверхно­
стью спутный след распадается значительно быстрее, чем вдали от нее.
Поведение самолета, попавшего в спутный след впереди летящего
самолета, определяется интенсивностью епутного следа, а такж е мас­
сой и характеристиками устойчивости и управляемости. Воздействие
епутного следа (вихревых ж гуто в) может о казаться настолько силь­
ным, что полного отклонения органов управления может быть недоста­
точно д л я того, чтобы преодолеть кренение. Известны случаи катаст­
роф, причиной которых было попадание в спутный след. Легкий само­
лет, попавший в спутный след большого транспортного самолета на
расстоянии 2—4 км, может быть перевернут. Средний самолет, сл у­
чайно попавший в спутный след тяж елого самолета, может получить
значительный угол крена и потерять высоту до 50 м, пока будет выве­
ден на исходный режим полета. Особенно опасно попадание самолета
в спутный след на воздуш ных этапах полной взлетной и посадочной
дистанции.
При входе в спутный след под небольшими углам и на самолет дейст­
вует момент крена, препятствующий входу в след. При невмешатель­
стве пилота в управление самолет самостоятельно с креном выходит
из зоны епутного следа (рис. 14.13). При входе в спутный след под боль­
шими угл ам и самолет испытывает воздействие перегрузки, подобное
воздействию вертикального порыва, и кренится.
Д л я предотвращ ения попадания самолета в спутный след не сле­
д ует ум еньш ать рекомендуемого интервала до впереди идущего само­
л ета. При попадании в спутный след пилот должен отклонением эле­
ронов и р ул я направления удерж и вать самолет от кренения, выходить
372
из зоны спутного следа в сторону первоначального кренения. Если по­
падание в спутный след произошло на глиссаде снижения на высоте,
большей, чем высота принятия решения, то после выхода из спутного
следа необходимо, не тяр яя высоты, уйти на второй к р у г . Т ак к а к спут­
ный след распространяется с принижением, то, оказавш ись позади т я ­
желого самолета, следует стремиться зан ять верхнее относительно не­
го положение.
Особенности взлета и посадки самолета в условиях сдвига ветра и
ливневых осадков. Сдвиг ветра или градиент скорости ветра — это
изменение скорости ветра в атмосфере, измеренное на небольшом рас­
стоянии (30 или 100м). Сдвиг ветра может быть горизонтальным, если
изменения скорости и направления ветра наблюдаются в горизонталь­
ной плоскости, и вертикальным, если скорость и направление ветра
изменяются в вертикальной плоскости. Вертикальный сдвиг ветра мо­
ж ет быть положительным (скорость ветра возрастает с высотой) и от­
рицательным (скорость ветра убы вает с увеличением высоты). Принята
следующая классификация сдвига ветра:
слабый — 0—2 м/с, умеренный — 2—4 м/с. сильный —4—6 м/с,
очень сильный — более 6 м/с.
Сдвиги ветра той или иной интенсивности всегда сущ ествую т
в природе. Наиболее опасна встреча самолета с вертикальны м сдвигом
ветра на небольших высотах на этап ах полных дистанций взлета и по­
садки. Современные представления о сдвиге ветра сводятся к следую­
щему. Наиболее вероятна встреча со сдвигом ветра на м алы х высотах
в области фронта порывов, протяженность которой может достичь
18 ... 28 км перед областью выпадения осадков. Наиболее опасный
сдвиг ветра в микропорыве, представляющий собой небольшой по раз­
мерам (около 2 км) интенсивный нисходящий поток, который при
столкновении с поверхностью земли переходит в круговой вихрь, рас­
пространяющийся во всех направлениях. На м алы х высотах сдвиг
ветра может вызываться дождями и грозами (около 2/3 общего числа к а ­
тастрофических случаев сдвига ветра был связан с ливневыми дож дя­
ми).
Предположим, что самолет, находящ ийся на глиссаде в посадоч­
ной конфигурации, встретился с вертикальны м положительным сдви­
гом ветра (рис. 14.14). Приборная скорость самолета по мере сниже­
ния будет уменьш аться в соответствии с изменением скорости ветра по
высоте. П утевая скорость самолета из-за его инертности практически
остается постоянной. Постепенное уменьшение приборной скорости
полета вызовет увеличение вертикальной скорости сниж ения и угл а
наклона траектории. Если пилот не вмеш ается в уп равлени е, то самолет
отклонится вниз от расчетной глиссады и встретится с землей, н едоле­
тев до ВПП.
Если пилот, заметив падение приборной и увеличение вер ти каль­
ной скоростей, попытается вывести самолет на расчетную глиссаду
путем увеличения только у гл а атаки (у гл а та н га ж а ), то вследствие
увеличения лобового сопротивления самолета приборная скорость еще
интенсивнее будет уменьш аться, а выход самолета на большие углы
атаки может привести к сваливанию .
У держ ать самолет на расчетной глиссаде можно только путем ком­
пенсации потери скорости, увеличив режим работы двигателей. Боль­
шие полетные массы современных транспортных самолетов, .ограниченная приемистость двигателей не позволяют полностью компенсировать
потерю приборной скорости при встрече с большими сдвигами ветра,
что может привести к недопустимым отклонениям самолета от расчет­
ной глиссады. Если бы самолет мог мгновенно изменить скорость поле­
та в соответствии с изменением скорости за счет сдвига ветра, то проб­
лемы сдвига ветра не сущ ествовало бы. Типичным случаем является
встреча со сдвигом ветра в микропорыве (рис. 14.15). По мере прибли­
жения самолета к микропорыву увеличивается встречная составляю­
щая ветра. При движении через микропорыв встречная составляющая
постепенно ослабевает, но увеличивается вертикальная составляющая
ветра, постепенно ослабевая. По мере прохождения микропорыва рас­
тет попутная составляю щ ая ветра. В соответствии с этим траектория
движ ения самолета отклоняется от расчетной глиссады. Встречная и
попутная составляющ ие скорости ветра в микропорыве достигают 20—
40 м/с и более.
С ледовательно, экипаж должен уметь на основе анализа метеооб­
становки распознать потенциально опасные погодные условия, сви­
детельствую щ ие о повышенной вероятности встречи со сдвигом ветра.
Тогда во многих сл уч аях можно будет избежать встречи со сдвигом
ветра или по крайней мере она не будет неожиданной. Кроме того,
экип аж должен быть надежно информирован о наличии в районе аэро­
дрома посадки опасных сдвигов ветра. Пилот должен умело действо-
Рис. 14.14. Т р аектор и и по садки и в з л е т а самолета
(а и в) отр и ц ател ьн о го (б и г ) с д в и г а ве т р а:
в у сл о ви я х
положительного
— - — р а с ч ет н а я т р а е к т о р и я :-------— ф акти ч еская траектория при н евм еш ательстве пилота
в уп р авл ен и е
Рис. 14.15. Т р аектори я движ ения с а м о л е т а через микропорыв:
( и 2 — ф акти ческая и расчетная траектории соответственно (ш триховы е линии со о тветству­
ют траектории взл ета)
вать в условиях сдвига ветра (вовремя увеличить расчетные скорости,
осущ ествлять повышенный контроль за изменением скорости полета и
вертикальной скорости, немедленно парировать возникающие отклоне­
ния от расчетных параметров и заданной траектории с учетом тенден­
ции изменения параметров движ ения, своевременно уйти на второй
кр уг при недопустимых изменениях параметров дви ж ен и я). Необхо­
димо помнить, что увеличение скорости захода на посадку с целью
компенсации влияния сдвига ветра требует увеличения посадочной
дистанции по сравнению с расчетной для нормальных условий посад­
ки.
Влияние ливневых осадков на характеристики дви ж ени я самолета.
Д ож девы е капли увлекаю т за собой частицы в о зд ух а, в результате
создается нисходящий поток воздуха, при встрече с которым самолет
получает дополнительную составляющ ую скорости, направленную
вниз. Д л я обеспечения движения самолета по расчетной траектории
необходимо парировать эту скорость соответствующим изменением у г ­
ла наклона траектории и режима работы дви гателя. С тал к и в аясь с са­
молетом, дождевые капли передают часть кинетической энергии само­
лету и тормозят его движение. Р астек аясь по поверхности, они обра­
зую т неравномерный по толщине слой воды, распределенный по по­
верхности самолета, который уносится набегающим воздуш ным пото­
ком и образуется вновь. Процесс образования и уноса вязк о го водяно­
го слоя нестационарный.
Водяной слой искажает форму поверхностей, в частности форму
профилей кры ла, повышается ш ероховатость поверхности, наблюдает­
ся более ранний переход ламинарного слоя в турбулентны й, срыв по­
тока начинается на меньших у гл а х атаки . Это приводит к ухудш ению
аэродинамических характеристик самолета: уменьшению коэффициен­
та подъемной силы, увеличению коэффициента силы лобового сопро­
тивления главным образом за счет вязкости водяного слоя и роста ко­
эффициента трения, уменьшения аэродинамического кач ества.
Ухудш ение аэродинамических характери сти к сам олета приводит
к соответствующему ухудшению летно-технических х ар актер и сти к:
увеличиваются потребная т я г а , потребная скорость, ум ен ьш ается р ас­
полагаемый избыток тяги и мощности, уменьшаются вертикальная ско­
рость и уго л набора высоты. Попадание водяных капель на лопасти
винта вы зы вает ухудш ение его характеристик (увеличивается момент
сопротивления вращению, уменьшаются тяга и мощность).
Водяные капли, попавшие в тр акт турбореактивного двигателя,
ухудш аю т его характеристики, что, в свою очередь, оказы вает вли я­
ние на летно-технические характеристики самолета. Ливневые осад­
ки, кроме того, ухудш аю т видимость, повышают напряженность рабо­
ты эки п аж а, ухудш аю т устойчивость и управляемость самолета на
ВПП, взлетно-посадочные характеристики самолета. Согласно Н а­
ставлению по производству полетов, взлет и посадка самолетов в усло­
виях ливневы х осадков ограничиваются из условия метеорологической
видимости.
14.3. Полет самолета при отказе одного из двигателей
Развитие движения. Поведение самолета при отказе одного из дви­
гателей зависит от типа силовой установки, места расположения дви­
гателей. их режима работы, режима полета самолета и т.п. Рассмот­
рим поведение самолета при о тказе двигателя во взлетном режиме.
Полученные выводы можно распространить на любой участок траекто­
рии полета самолета с учетом его особенностей. При прочих равных
условиях о тказ турбовинтового двигателя приводит к более неблаго­
приятным последствиям, чем отказ турбореактивного дви гателя, осо­
бенно если воздушный винт не зафлюгируется.
При о тказе одного из д вух двигателей (рис. 14.16, а) на самолет
действую т д ва неуравновешенных момента: момент рыскания Pzp, со­
здаваемый работающим двигателем, и момент рыскания Xzp, создавае­
мый сопротивлением отказавш его дви гателя. Суммарный неуравнове­
шенный момент рыскания
м„ ~-=(РЧ X) zp.
wи
(14.4)
Под действием момента рыскания Мр самолет разворачивается в
сторону отказавш его дви гателя, появляется скольжение на полукры­
ло с работающим двигателем. Наличие угл а скольж ения вызывает по­
явление боковой аэродинамической силы Z, приложенной в фокусе по
у гл у ско л ьж ен и я. Она создает относительно оси 0 Y стабилизирующий
момент ры скан и я УИ^ Др, направленный против момента Мр . ОдноУ о
временно на самолет действует стабилизирующий момент крена МхДр.
В р езул ьтате самолет кренится на крыло с неработающим двигателем.
Наличие угл о вы х скоростей и ускорений относительно осей 0 Y и
ОХ приводит к возникновению демпфирующих моментов рыскания
М уиыи и крена М ххых. Влиянием спиральных моментов пренебрежем.
Под действием совокупности моментов углы крена и скольж ения будут
S76
Рис. 14.16. Силы и моменты, действую щ ие на сам о л е т при о т к а з е одного из днигатслей (а), изменение углов ско л ь ж е н и я и крена во времени ( б ) и балан си р о ­
вочные кривы е (в): --------- -- воздуш ны й пинт не з а ф л ю г и р о в а н ,----------- в о з д у ш ­
ный винт зафлюгирован
изменяться. Изменения углов крена и скольж ения самолета Ан-24
при условии, что пилот не вмеш ивается в управление, показаны на
рис. 14.16, б.
В начальный момент времени после отказа одного из двигателей
более интенсивно растет угол скольж ен ия, затем его рост зам едл яет­
ся и примерно через 4 с угол скольж ения меняет зн ак на противопо­
ложный. При этом угол крена продолжает расти и примерно через 4 с
его значение достигает 50—60°. Такой характер изменения углов крена
и скольжения обусловлен совокупностью моментов ры скания и крена,
действующих на самолет,и в конечном итоге определяется стабилизи­
рующим моментом крена
направленным на увеличение у гл а кре­
на. Увеличение угл а крена приводит к скольжению теперь уж е на оп у­
щенное полукрыло под действием составляющей силы тяж ести G sin у.
Так к а к при кренении составляю щ ая подъемной силы Y cos у не ур а в ­
новешивает силу тяжести G, то самолет начинает тер ять высоту при
увеличивающемся угл е крена, описывая нисходящ ую спираль.
Анализ движения самолета при отказе одного из двигателей позво­
ляет сделать вывод о том, что увеличение у гл а крена опереж ает рост
угл а скольж ения и становится опасным. П оскольку причиной крена
явл яется угол скольж ения, то задача пилота состоит в том, чтобы не
допустить его разви ти я. Но т а к к а к при отказе одного из двигателей изза запазды вания пилота при вмеш ательстве в уп равлени е угол ско л ьж е­
ния постепенно растет, то первоочередной задачей пилота является
борьба с увеличением угл а скольж ения и упреждение кренения само­
лета. У гл о вая скорость крена зависит не только от скорости изменения
угл а скольж ен ия, но и от степени поперечной статической устойчиво­
сти самолета, с увеличением которой самолет на появившийся угол
скольж ения реагирует более энергичным кренением. Необходимо т а к ­
ж е учиты вать, что отказ одного из двигателей приводит к прекраще­
нию обдувки полукрыла и потере из-за этого части подъемной силы,
а так ж е возникновению вследствие этого дополнительного кренящего
момента. При наличии скольж ения возникает дополнительная сила Р г
за счет косой обдувки работающего воздушного винта, создается мо­
мент, направленный на уменьшение появившегося угл а скольж ения.
Если точка приложения силы Р г находится позади центра масс само­
лета, то сила Р г создает момент, уменьшающий угол скольж ения.
Значительное увеличение у гл а скольжения при отказе двигателя
может вы звать останов работающего двигателя из-за нарушения осе­
симметричного входа воздушного потока в воздухозаборник; приве­
сти к значительному увеличению лобового сопротивления самолета,
потере скорости, увеличению у гл а атаки из-за стремления пилота со­
хранить высоту полета без увеличения тяги силовой установки, входу
во вторые режимы полета, перекомпенсации органов управления.
Уменьшение тяги силовой установки требует увеличения режима
работающих двигателей, в противном случае горизонтальный полет на
прежней высоте станет невозможным.
К ак показываю т исследования, при отказе одного из двигателей
пилот активно вмеш ивается в управление самолетом уж е через 0,2 ...
0,5 с. Он энергично отклоняет педаль в сторону, противоположную
отказавш ем у двигателю , устр ан яя тем самым причину крена — сколь­
жение, и парирует возникшее стремление самолета к кренению отклоне­
нием элеронов.
Отклонение р ул я направления вызывает управляющий момент ры­
скан и я М °11 6Н. При достижении равенства моментов Л4®" 6Н и Мр
самолет будет сбалансирован по моментам относительно оси OY :
Р
0;
Р = 0; М ? Р = 0. При этом на самолет будет действовать
неуравновеш енная поперечная сила ZH, под действием которой само­
лет и скривляет траекторию в плоскости XOZ. После балансировки са­
молета пилот может избрать тот или иной способ пилотирования для
продолжения полета с заданным курсом. Рассмотрим основные из
них.
Прямолинейный полет без скольжения. При этом способе пилотиро­
вания (рис. 14.17, а) аэродинамическая сила р ул я направления ZH
уравн овеш и вается противоположно направленной составляющей си­
лы тяж ести G sin у. Необходимый угол крена у создается кратковре­
менным отклонением элеронов. Несмотря на отсутствие у гл а скольж е­
ния, ш арик у к а за т е л я скольж ен ия не будет находиться в центре. При378
а)
CD>Указатель
v
аю
у9
У
-7*^ M о
,
4%
V
& s,
Уэ
Рис. 14.17. Б алансировка с а м ол ета при о т к а з е одного из д ви гат е л е й :
о -• полет с креном без скольж ения; б — полет со скольж ением без крена
чиной этого является то, что ук азател ь скольж ен ия реагирует не на
угол скольж ения, а па поперечную перегрузку
nz ~ Z H,G —G sin у G — sin у .
(1 4 .5 )
Под действием этой перегрузки шарик отклон яется в направлении
кренения (в сторону работающего дви гателя).
Балансировочное отклонение р ул я направления можно определить
— М *и б„ или
из условия равновесия моментов рыскания М/
\X)zf
' ту
6 н — 2— Ы = ^ — ту
6Н
Ро V*
L S I,
о ткуда
«„==■
2 (Р-\ X ) г,.
(1 4 .6 )
п у * Р» S lV f
Из последнего выражения следует, что балансировочное отклоне­
ние р у л я направления 6Нобратно пропорционально к вад р ату индика­
торной (приборной) скорости.
Преимуществом этого метода полета (Р — 0) я в л я е т с я наименьшее
из всех возможных при отказе дви гателя лобовое сопротивление и срав-
нительно небольшие потребные отклонения
(рис. 14.16, в). К ак видно из балансировочных
риваемом методе пилотирования элероны такж е
шой угол. Это необходимо для уравновешивания
ваемого отклоненным рулем направления.
6Н
б .э
Мх б ц ^ А ^ .
органов управления
кривы х, при рассмат­
отклонены на неболь­
момента крен а, созда­
6а и.
j.
т хЛн он
—mЬа кfia
Из последнего выражения легко найти потребное балансировоч­
ное отклонение элеронов
т 6н
‘ - « н — 7— •
(14. 7)
°э
Небольшой угол крена в сторону работающего дви гателя, симметрич­
ного отказавш ем у, не приводит к существенному дискомфорту пасса­
жиров и эки п аж а.
Прямолинейный полет без крена со скольжением. При этом спосо­
бе пилотирования аэродинамическая сила руля направления Z„
уравновеш ивается поперечной аэродинамической силой Zp,
воз­
никающей при скольжении с углом р (рис. 14.17. б).
Д л я компенсации дополнительного стабилизирующего момента ры­
скания Mjjp, появившегося при скольжении, руль направления дол­
жен быть отклонен на угол, больший, чем в предыдущем случае, что
необходимо д л я обеспечения равенства моментов рыскания:
МР,_,
, п
V .
.
- Л,</" (SN ИЛИ
К /.
о/
( Р - - X ) гр -1 - т » р ~ Y ~ -S/
с
—т и
f1^ ' о /
—
— SI,
откуда потребное балансировочное отклонение руля направления
•22 р ( Р \ - Х )
(14. 8)
Ли
Ро
...
\
I» у
Если приборная скорость l',- становится меньше установленных ог­
раничений, это может вы звать недопустимое уменьшение запаса хода
р ул я н аправления. Кроме того, у самолетов, не имеющих гидроусили­
телей, шарнирный момент р ул я направления может настолько воз­
расти, что превысит физические возможности пилотов, произойдет
перекомпенсация руля направления. Наличие угл а скольж ения приво­
дит к появлению момента крена /М^р. для уравновеш ивания которого
требуется отклонение элеронов на уго л, при котором М^Р
— М д:,йэ.
На основании последнего равенства можно определить балансировоч­
ное отклонение элеронов
т л-
Р=
—тх Э
.
о тк уд а
Несмотря на скольжение в сторону отказавш его дви гателя, шарик у к а ­
зател я скольжения находится в центре (боковая перегрузка о тсутству­
ет) .
Из анализа балансировочных кривых (см. рис. 14.16, в) следует,
что при полете самолета без крена со скольжением (Р <Г 0) потребное
отклонение руля направления близко к м аксимальном у. Это предо­
пределяет большие усилия на педалях при безбусгерном управлении.
Наличие угла скольжения создает повышенное лобовое сопротивление
самолета, что ухудш ает летно-технические характеристики.
Балансировочные кривые (см. рис. 14.16. в) показываю т принципи­
альную возможность прямолинейного полета с креном и скольжением
на работающий двигатель (Р >■ 0). При этом балансировочные откло­
нения органов управления сравнительно малы, но угол крена увел и ­
чен по сравнению с рассмотренным ранее.
Рекомендации по методам пилотирования конкретного типа само­
лета при отказе одного дви гателя в различных усло ви ях даются в РЛЭ
с учетом особенностей самолета.
14.4. Особенности взлета и посадки
при отказе одного из двигателей
О тказ двигателя на разбеге или в непосредственной близости от
земли требует от пилота и эки п аж а своевременных и четких действий.
Н еустановивш ееся движение самолета, близость земли, большие р аз­
ворачивающие моменты в случае отказа д ви гател я, повышенная психо­
физиологическая н агрузка услож няю т деятельность эки п аж а.
О тказ двигателя на ВПП при взлете сопровождается уменьшением
тяги , увеличением лобового сопротивления, дистанций разбега и взл е­
та. Возникший при отказе дви гателя момент ры скания Мру
•= (Я 4- X) z вызывает стремление самолета к развороту во кр уг оси
OY в сторону отказавш его дви гателя. П оявивш ийся при развороте
угол скольж ения, а такж е уменьшение подъемной силы на кры ле
вследствие прекращения его обдувки потоком от воздуш ного винта от­
казавш его ТВД приводят к образованию момента крен а, направлен­
ного в сторону отказавш его д ви гателя. При этом норм альная н агр узк а
и сопротивление движению колеса, в направлении которого дей ствует
момент крена, увеличиваю тся и
появляется дополнительный разво­
рачивающий момент.
У самолетов с ТВД разворачи­
вающий и кренящий моменты при
отказе одного из двигателей на
взлете больше, чем у самолетов с
Т РД при прочих равных условиях.
О тказ ТВД может привести не
Рис. 14.18. Зависи м о сть потребных о т ­
только к появлению большого аэро­
клонений р ул я н ап равлен и я
и ко­
динамического сопротивления на
лес передней опоры
от скорости
д в и ж е н и я с а м ол ета по ВПП
нем, но и к образованию отрица­
тельной тяги и момента ры скания.
исновн ая задача пилота при отказе двигателя — уд ер ж ать само­
л ет от разворота, сохранить прямолинейность движ ения. В зависимо­
сти от скорости движ ения самолета по ВПП эффективность р ул я на­
правления и эффективность управления отклонением колес передней
опоры изменяю тся. С увеличением скорости эффективность р ул я на­
правления повыш ается, поэтому потребное балансировочное отклоне­
ние руля направления бн уменьш ается (рис. 14.18). С увеличением
скорости увеличи вается подъемная сила и уменьшается нормальное
давление на колеса, поэтому эффективность отклонения колес передней
опоры ум ен ьш ается, а потребное балансировочное отклонение перед­
ней опоры
увеличивается. Д л я повышения эффективности колес
передней опоры при разбеге его загр уж аю т, отклоняя р ул ь высоты.
Это приводит к уменьшению путевой устойчивости самолета и улучш е­
нию путевой управляем ости, поэтому подъем колес передней опоры при
разбеге затяги вае тся.
При отказе двигателя до скорости
для сохранения направления
дви ж ени я необходимы полное и энергичное отклонение р ул я направле­
ния и соразмерное отклонение колес передней опоры. Кроме того, для
компенсации действия кренящ его момента целесообразно отклонение
элеронов. У силия на педалях при этом могут достичь значительных
величин. П рекращ ать взлет необходимо решительно и энергично, ис­
пользуя все доступные средства торможения, так к ак замедленные и
нереш ительные действия экипаж а м огут привести к выкатыванию само­
л ета за пределы ВПП.
При отказе одного из двигателей на скорости, большей УЛ, для со­
хранения н аправления разбега требую тся энергичные соразмерные от­
клонения р у л я направления и колеса передней опоры, не допускается
уменьш ение реж има работы дви гаталей, а такж е применение несим­
метричного торможения колес главны х опор для сохранения направле­
ния дви ж ен и я. Д л я предотвращения кренения самолета после отры­
ва требуется предварительное (упреждающее) отклонение элеронов.
Естественно, что по мере увеличения скорости движения потребные
отклонения органов управления уменьшаются.
Если один из двигателей отказал на маршруте, то заход на посадку
целесообразно выполнять без скольжения с креном на работающий
дви гатель, выдерж ивая скорость, рекомендуемую РЛЭ. Д л я улучш е­
ния управляемости заход на посадку с одним отказавш им двигателем
рекомендуется выполнять на повышенной скорости. Уточнение расчета
на посадку выполняется изменением тяги симметрично работающих
двигателей. Режим работы дви гателя, симметричного отказавш ем у, со­
ответствует полетному малому газу . При посадке самолета с двум я дви ­
гателями выдерживание скорости движения и уточнение расчета на
п осадку осуществляются работающим двигателем и органами уп р авле­
ния. К ак правило, заход на посадку самолета с одним отказавш им
Т Р Д сложностей не представляет.
О тказ ТВД приводит к более значительным сложностям, особенно,
если воздушный винт не зафлюгирован.
При отказе двигателя на выравнивании увеличение режима работы
двигателей не допускается, так к ак за короткий срок они не успеют
развить мощность, а разворачивающие моменты, действующие на с а ­
молет, увеличатся. Удержание самолета от крена и скольж ения о су­
щ ествляется энергичными отклонениями элеронов и р ул я направле­
ния. После приземления режим работы двигателей необходимо ум ен ь­
шить до минимального.
З аход на посадку и посадка с незафлюгированным воздушным вин­
том отказавш его дви гателя осложняются действием значительного
разворачивающего момента и большими потребными отклонениями р у ­
л я направления и элеронов, увеличивающими лобовое сопротивление
и уменьшающими запас хода рулей.
Крен, создаваемый для балансировки самолета в прямолинейном
полете по глиссаде, перед приземлением должен быть убран. З ап аз­
ды вание с уборкой крена может привести к приземлению самолета на
колеса одной из основных опор, что может вы звать разворот самолета
и касание крылом земли.
Слишком раннее устранение крена может привести к значительно­
м у уводу самолета от оси ВПП.
Д л я уменьшения лобового сопротивления РЛ Э некоторых самоле­
тов рекомендуется выполнять заход на посадку с отказавш им д в и га ­
телем с закры лкам и, отклоненными на промежуточный уго л, а довы п уск закры лков осущ ествлять на конечных этап ах захода на по­
с а д к у , убедившись в точности расчета. Д л я некоторых самолетов довы п уск закры лков не рекомендуется. При посадке закры лки откло­
няю тся на промежуточный уго л.
Д оп олн ительн ая л и т е р а т у р а
[2 ] , с. 3 9 3 - 4 1 1 ; [5 ], с.
2 6 4 — 288.
153— 157; [7], с. 3 3 7 — 3 7 5 ; [9 ], 2 3 3 —2 5 0 ; [111, с.
1. О бъясните п р и р о д у а э р о д и н а м и ч е с к и х , ки н ем атич ески х и и н ерционны х
п е р е кр ес т н ы х с в я з е й .
2. П оясн и те особенности с р ы в а потока на прям ом и стреловидном к р ы л ь я х .
3. О боснуйте особенности с в а л и в а н и я сам о л е т а с пр ям ы м и с тр ело в и дн ы м
кр ы л ом и р ек ом ен дац и и по пилотированию.
4. К а к и е у п р а в л я ю щ и е во здей стви я и почему до лж е н вы п о лн ить пилот д л я
в ы в о д а с а м о л е т а из с в а л и в а н и я ?
5. И зо б рази те к р и в ы е т г {с а ) д л я сам ол етов с низким и в ы с о к и м р асп о л о ­
ж ен и е м го р и з о н т а л ь н о г о о п ерен и я. Д а й т е обоснование особенностей п оведен и я
с ам о л е т а и п и л о т и р о в ан и я при вы ходе на больш ие у г л ы а т а к и .
6 . К а к в л и я е т с к о л ь ж е н и е на с а м о в р ащ ен и е сам о л е т а с п р ям ы м и с т р е л о в и д ­
ным кр ы л ом ?
7. К а к и е у п р а в л я ю щ и е в о з д ей с т ви я , в к а к о й п о следовательности и почему
д о л ж е н вы п о л н и т ь пилот д л я вы вода с а м о л е т а из штопора?
8. Д а й т е о б о сно вани е р ек о м е н д а ц и я м пилоту по п р едотвращ ению с р ы в а
п отока на го р и з о н т а л ьн о м оперении при обледенении.
9. Из к а к и х с о о б р аж ен и й о гр а н и ч и в а ю т ми н и мальн о и м а к с и м а л ь н о д о п у ­
сти мы е скорости п олета при обледенении.
10. О б ъясните я в л е н и я «п о д х в а т а » р у л я вы соты , « з а х в а т а » э л ер о н о в и « з а ­
бега н и я » п едали при обледенении.
11. Д а н т е обосно вани е о гр ан и ч ен и я скорости полета сам о л е т а в б о л т а н к у .
12. О бъясн ите поведение са м о л е т а при попадании в сп утн ы й след.
13. О бъясн ите поведение с а м ол ета и рекомендации по пилотированию .
14. Д а н т е о бо снование вл и ян и ю л и в н е в ы х о с а д к о в на х а р а к т е р и с т и к и в зл ета
и п о садк и .
15. И зо б рази те с х е м у сил и моментов, дей ствую щ их на са м о л е т при о т к а зе
д в и г а т е л я , и о бъ ясн и те поведение с а м о л е т а , если пилот не в м е ш и в а е т с я в у п ­
равление.
16. Д а н т е о бо с н о в ан и я р е к о м е н д а ц и я м по пилотированию при о т к а з е д в и ­
г а т е л я в полете.
1. А р ж а н н и к о в Н. С. , С а д е к о в а Г С. А э р о д и н а м и к а л е т а т е л ь ­
ных а п п а р а т о в . М .: М аш иностроение, 1983. 359 с.
2. А эр оди н ам и к а и д и н а м и к а полета т р а н с п о р т н ы х самолетов/Под ред.
В . В. Ф и л ип п о ва. М .: В о е н и зда т , 1981. 416 с.
3. А эр о м ех а н и к а сам ол ета./ П од ред А. Ф Б о ч к а р е в а и В . В. А н д р и е в с к о г о .
М : М аш иностроение, 1985. 360 с.
4. А эр оги д р о м ех ан ика./ П о д общей ред. А. М. М х и т а р я н а . М .: М а ш и н о ст р о е ­
ние, 1984. 352 с.
5. В а с и н И. С .,.Е г о р о в
В. И. , М у р а в ь е в
Г. Г. А э р о д и н а м и к а
с а м о л е т а Ил-76Т. М .: Т р ан сп о р т, 1983. 165 с.
6 . Д е в и с Д . , П и лоти рован и е больш их р е а к т и в н ы х с а м о л е т о в . М: М а ­
шиностроение. 1975. 367 с.
7. Д и н а м и к а полета/А. М. М х и т а р я н , В. В . У ш а к о в , А. Г. Б а с к а к о в а ,
В , Д . Т р убен ок . М .: М аш иностроение, 1978. 428 с.
8. К о т и к М. Г. Д и н а м и к а в з л е т а н п о сад к и . М .: М аш и н о стр оен и е, 1984.
256 с.
9. Л и г у n Т. И ., С к р и п н и ч е н к о С. Ю. , Ш и ш м а р е в А. В.
А э р о д и н а м и к а са м о л е т а Т у -1 5 4 Б . М .: Т р ан с п о р т, 1985. 263 с.
10. М а т в е е в Ю. И. Т р а е к т о р н ы е зад ач и д и н а м и к и п олета г р а ж д а н с к и х
во з д у ш н ы х с уд о в. Л : О Л А Г А , 1981. 110 с.
11. П а ш к о в с к и й
И. М. У стойчивость и у п р а в л я е м о с т ь с а м о л е т а .
М .: М ашиностроение, 1975. 328 с.
12. П е т р о в
К. П. А э р о д и н а м и к а э л ем е н т о в л е т а т е л ь н ы х а п п а р а т о в
М .: М аш иностроение, 1985. 271 с.
А
Авторотация 151, 360
Атмосфера 6, 9, 13
А эроги дромехан ика 5
Аэроди н ами ка 5, 6, 9, 386, 387
Аэродинамические ха р актери стики :
кры ла бесконечного р а з м а х а 76
7 7 ,8 1 ,8 2 ,8 3 ,8 6
к ры ла конечного р а з м а х а 90, 93, 94
с а м о л е т а 112, 119, 154
стреловидного к р ы л а 95
, частей с а м ол ета 76, 98, 101, 104
Б
Б а л а н с и р о в ка с а м о л е т а :
в боковом дви ж ен и и 327, 377, 380
в продольном
»
292, 343
Б алан си ро воч н ая
кривая
293 294
297, 330
Б алансировочное отклонение органов
у п равлен и я 292, 232, 377, 380
Б а р о г р а м м а набора вы с о ты 199
Б оковое дви ж ен и е 163, 304, 343
Возмущенное движение:
продольное 268, 271, 343
боковое 316, 342, 376
быстрое боковое 316, 377
медленное
»
318, 376
длиннопериодическое 273
короткопериодическое 272
крена 322, 324, 360, 377
р ыскания 321, 363, 377
спиральное 318, 325, 377
Волна:
возмущ ения 27
у д а р н а я 29
Волновой кризис 69, 187
Волновое сопротивление 70, 169, 187
Волновой срыв 69, 74
Время з а т у х а н и я колебаний 284, 325
В ремя сраб а т ы в а н и я 303, 321
Высота:
б езопасная 220
начала выравнивания 232
полета 177, 206
принятия решения 232
В язко сть 10
Г
В
В е тро вы е во зм ущ ен и я 185, 250, 346
369
В з л ет с ам о л е т а :
нормальный 225, 336, 344
прерванный 230, 382
продолженный 230, 382
Вираж:
правильный 213
предельный 215
устан о ви вш и й ся 211
Вихрь 16, 57, 371
В о здуш н ы й винт:
аэродинамические
характери стики
149
геометрические
»
143
кинематические ха р а к т е р и с т и к и 145
к о с а я о б д у в к а 153, 346, 366, 378
р е ж и м а р аботы 151
В о зм ущ аю щ и е в о з д е й с т в и я 250, 253,
346, 369
Гистерезис 360
Годограф:
вектора коэффициента полной аэро ­
динамической силы 84
вектора скорости 202, 203
Градиент набора высоты (сн и ж ен и я)
196
Д
Д авл ен и е 25
Д ал ьн о с т ь полета 240
Д виж ен и е:
возмущенное 250, 255, 346, 369
вращ ательное 16, 18, 316, 342, 376
вы н уж ден н ое 255, 268, 271
длиннопериодическое 273, 275
короткопериодическое 272, 275
опорное 14
поступательное 16
собственное 255
установившееся (стационарное) 14,
157, 191
циркулярное 16
Д и н ам и к а полета 6, 157, 387, 388
Д и а г р а м м а векторн ая, хо р довая 50
Д лина пробега 229
»
разбега 234
3
З акры л о к IcSO
З ах од на п осадку 220, 231, 383
И
И ндуктивное сопротивление 63
Интенсивность напряжения (вихря)
16, 371
Интерференция
аэродинамическая
112, 358
Интерцептор 134
К
К ачество
аэродинамическое 32, 85,
206
Компенсация аэродинамическая 109
Конус возмущения 28
Конфигурация сам ол ета 136, 225, 231
Коэффициент:
вязкости 10
д авл ен и я 50, 60
демпфирования 269, 318, 320
заполнения площади
воздушного
винта 144
з а т у х а н и я 284
полезного действия
воздушного
винта 149
сцепления 237
трения 237
эффективности органа управления
261, 306, 307
Коэффициент аэродинамической си­
лы:
боковой 117, 305
волнового сопротивления 71, 117
индуктивного
»
64, 117
лобового
»
55, 117
нормальной 55, 117
подъемной 55, 117
поперечной 117, 305
продольной 55, 117
профильного сопротивления 58
Коэффициент аэродинамического мо­
м ента:
вертикального оперения 306, 310
горизонтального
»
262, 269
демпфирующего 269, 309, 310
крена 118, 308
кр ы л а 59, 308
рыскания 118, 309, 310
спирального 318
стабилизирую щего 153, 261
т а н г а ж а 118, 269
К ривизна профиля 44, 133
Кризис волновой 69, 169, 178, 186
Критерии подобия 19, 90, 92
Крыло:
аэродинамические
хар акт е р и с т и к и
90, 93, 94
бесконечного р а з м а х а 43, 65
геометрические ха р актери стики 45,
46
конечного р а з м а х а 45, 61, 65
малого удлинения 74, 97
стреловидное 54, 71
Л
Л етно-технические
х ар актери сти к и
самолета:
взлетно-п осадочные 228, 234
вы со та 177, 206, 247
дал ьн о сть 240
скороподъемность 195
Линия т о к а 15
« Л о ж к а » балансировочной кривой 291
М
М ан евр 7
М е т о д мощностей, т я г 172, 173
М е х а н и з а ц и я кр ы л а 130
М омент аэродинамической силы:
вертикального оперения 129, 304,
310
горизонтального
»
260, 2 6 9
крена 107, 128, 308
кр ы л а 59, 129, 308
р ы скани я 118, 306, 309, 310
спиральный 309, 312, 318
т а н г а ж а 118, 262. 269
уп равляю щ ий 261
шарнирный 108
М ощность:
потребная 168, 194
р а с п о л а г а е м а я 171
Н
Набор вы со ты 191
Напор скоростной (ди нам ич еское д а в ­
ление) 23
О
О бледенение 364
О б р а т н а я р еак ц и я с а м о л е т а по к р е ­
ну 323
О бтекание:
внешнего и внутреннего т у п ы х у г ­
лов 31, 32
к р ы л а 71, 74
несимметричное 125
профиля 48
смешанное 70
О б щ ая формула
аэродинамической
силы, момента 53, 59
Оперение 103
О р ган ы уп равления 102. 109
О тры в пограничного слоя 38, 361. 367
Отсос
»
»
135
Оси системы координат 42
П
П а р а м е тр ы :
критические 26
т ор м о ж ен и я 24
Пелена в и х р е в а я 62, 371
П е р е г р уз к а
эксп л у а т а ц и о н н а я
164,
187
Плоскость симметрии 42, 158
П л о щ адь кры ла 45, 53, 59
Подобие аэродинамическое 17
П о л яр а:
второго рода 86
кр ы л а 84
первого рода 86, 93, 121
с ам о л е т а 116, 121, 137
скоростей набора вы соты 202
скоростей сн иж ения 202
Пограничный слой 34, 35
Поток воздуш ны й 14, 48
Потолок полета 199
Прс.Чкрылок 133
Принцип обратимости 14
Пробег 231, 236
Продольное
возмущ енное движ ение
252
Профильное сопротивление 57
Профиль кр ы л а 43
Р
Радиус:
в и р а ж а 215
контрольного сечения воздушного
ви н та 145
Р а з м а х кр ы л а 53
Р а з р е ж е н и е 48, 51
Расп редел ен и е д ав л е н и я по профилю
49
Р е ж и м течения 134
Р е ж и м полета:
второй 174, 203
крейсерский 171
первый 174, 203
уст ан о ви вш и й с я 165, 191
Р е ж и м р або ты д в и г а т е л я 151
С
С а м о в р а щ ен и е
(а в т о р о г а ц и я )
36°
С в а л и в а н и е 184, 355
С ер во ко м п е н сац и я 108
152,
Сдвиг ветра 373
С д у в пограничного слоя 135
С ж и м ае м о ст ь во здух а 10, 19
Сила аэродинамическая:
б оковая 117
индуктивного сопротивления 63
лобового сопротивления 54, 57. 169
нормальная 118, 261
подъемная 54, 55, 261
полная 53
поперечная I 17
продольная 117
Сила:
трения 54, 228, 237
тяги 148, 163
уп р а в л я ю щ а я 108
центростремительная 2 12
Система координат 42, 153, 162
Скорость:
безопасная взлета 226
воздуш ного потока 24
з а х о д а на посадку 228
зем н ая 161
з в у к а 11
индикаторная 26
истинная 24
кр ейсерская 173
линейная при вращении 18
м ак си м ал ьн а я 179
максимально доп устим ая 186
минимально доп устим ая 184
минимальная теоретическая 173
наивыгоднейш ая 173
наивыгоднейш ая набора высоты 197
о бтекания 24
приборная 25
планирования 197
п о ступательн ая 158
потока 24
принятия решения 230
с вал и ван и я 227, 231, 358
у г л о в а я 18, 269, 309
эволютивная 227, 232
Скачок уплотнения 29
Скоростной напор 23
С коростная система координат 42
Скос потока у оперения 271
След спутный 36, 370
Снижение 191
Спираль 222
С редн яя аэро динамическая хо р да 47
Срыв воздуш ного потока 19, 360, 367
Спиральное движение 318, 377
Степень статической устойчивости;
поперечной 315
по у г л у
атаки
(по
перегрузке)
276, 278
путевой 313
С уж ен и е кр ы л а 46
т
Течение:
ламинарное 33
с ве рх звуково е 27
потенциальное 16
установивш ееся 14
турбулентное 33
Толщина пограничного слоя 34
Точка:
о тр ы в а 38
перехода 35, 58
Т р аектори я взлета, посадки 225, 231
Т раекторн ая система координат 161
Триммер 110
Труба аэродинамическая 18
Т р убка:
тока 15
в и х р е ва я 16
Турбулентность 369
Т я г а д ви га т е л я :
потребная 167, 193
р а сп о л ага ем а я 171
ф акти ческая 171
Тяговооруж ен н ость 236
У
Угол ат а ки :
горизонтального оперения 115
истинный 63
крейсерский 173
критический 85, 173
кр ы л а 43
наивыгоднейший 85, 171, 172
са м о л е т а 117
сва л и ван и я 184, 355
экономический 174
Угол:
крена 160
наклона вектора скорости ( т р а е к ­
тории) 162
планирования 196-, 206
пути 162
рыскани я 159, 161
ско ль ж е н и я 43, 125
ско са потока 63, 115
стреловидности 46
т а н г а ж а 161
устан о вки крыла, горизонтального
оперения 115
Удлинение:
кр ы л а 46
ф ю зе л я ж а 98
Управление пограничным слоем 40.
135
Упр авл яемо сть самолета:
в боковом движении 331, 342
в продольном движении 300, 342
Уравнение:
Бернулли 23, 50
неразрывности (постоянства р а с х о ­
д а ) 21
поляры кр ы л а, профиля, с а м о л е т а
81, 82, 84, 92
связи 57
состояния 1 I
Уравнения д в и ж е н и я :
бокового 163
векторного 158
динамические 162, 163, 166
кинематические 160
продольного 162
угло вого (вращ ения моментов) 158
центра масс (поступательного) 157.
158
Условия эксплуатации 8, 177, 205,
236, 249
Ф
Ф окус с а м о л е т а :
по у г л у а т а к и 263
»
»
ско ль ж е н и я 305
Ф орма кр ы л а в плане 43
Ц
Центр д а в л е н и я 53, 88
Ц ентровка с а м о л е т а :
ди ап азо н центровок 264
предельно з а д н я я 265
предельно п ередн яя 265
Ч
Число:
М а х а 12, 21
М а х а критическое 26, 69
Р ейнольдса 20, 34. 36
Ш
Ш аг во здуш н о го винта 145
Штопор 369
Щиток тормозной 135
Э
Элевоны 108
Э л е м е н тар н а я с тр у й ка 15
Элероны 107, 130
Э н ер говоо р уж енн о сть 236
Эффект:
диффузорный 114
концевой 72
серединный 72
ск о л ь ж е н и я 72
экранный 138
От а в т о р а ....................................................................................................................................................
3
Введение ........................................................................................................................................................
5
Р аздел
Глава 1.
I.
АЭРОДИНАМИКА
О сновные
положения
аэродинамики
9
I I
1 2.
1.3.
1.4.
Ф и з и к о -м е х а н и ч е с к и е х а р а к т е р и с т и к и в о з д у х а .............................................
9'
C i роение атмосферы З е м л и ................................................................................................ 12
О сновные с в е д е н и я о во зд уш н о м п о т о к е ..........................................................14
П онятие о подобии я вл е н и й при о бтекании во здуш н ы м потоком т в е р ­
дых т е л ............................................................................................................................................... 17
1.5 Основные у р а в н е н и я д в и ж е н и я в о з д у х а ...............................................................21
1.6, З ав и с и м о ст ь п а р а м е т р о в в о з д у х а от скорости т е ч е н и я ...........................24
1 7 Особенности с в е р х з в у к о в ы х течений г а з а ..........................................................27
1.8. П онятие о пограничном слое
....................................................................................33
Глина 'J. Аэр оди н ами ч ески е силы и мо м енты к р ы л а .
.......................................... 42'
2 1.
2.2.
2.3.
2 .4 .
2 .5 .
Геометр и чески е х а р а к т е р и с т и к и к р ы л а .....................................................................42
О б текан и е профиля к р ы л а н е сж и м а ем ы м во здуш н ы м потоком
. . 48
А э р о д и н а м и ч ес ки е с и лы к р ы л а ...................................................................................... 52
Особенности о б т е к а н и я к р ы л а конечного р а з м а х а ..................................... 61
Особенности о б т е к а н и я профиля и кр ы л а д о з в у к о в ы м и о к о л о з в у ­
ко вы м в о з д у ш н ы м п о т о к о м .................................................................................................662 . 6. Особенности о б т е к а н и я с тр ело ви дн о го к р ы л а и к р ы л а мал о го у д л и ­
нения ......................................................................................................................................................71
Г лава 3.
А э р о ди н а м и ч ес ки е х а р а к т е р и с т и к и осн овн ы х частей с а м о л е т а
76
3 .1 . А э р о д и н а м и ч ес к и е х а р а к т е р и с т и к и к р ы л а ............................................................ 76
■3.2. Центр д а в л е н и я и ф о кус профиля к р ы л а
.......................... ...............................88
3.3. В л и я н и е ч и с л а М полета и геометрии к р ы л а на аэро д и н ам и ч е с ки е
х а р а к т е р и с т и к и ............................................................................................................................. 90
3.4 . А э р о д и н а м и ч е с к и е х а р а к т е р и с т и к и стрело видн о го кр ы л а и к р ы л а
м ал о го у д л и н е н и я .........................................................................................................................94
3 .5. Х а р а к т е р и с т и к и ф ю з е л я ж а ...........................................................................................98
3.6. Х а р а к т е р и с т и к и о р ган о в у п р а в л е н и я .......................................................................102
3.7. Ш арн и р н ы е моменты р у л е й ............................................................................................ 108
Глава 4. А эродинамические
4.1 .
4.2.
4 .3 .
4.4.
характери стики
самолета
, . . ...........................1!2
А э р о д и н а м и ч е с к а я интерференция частей сам ол ета
................................112
А э р о д и н а м и ч е с к а я с и ла п л а н ер а и ее м о м е н т ................................................117
Особенности а э р о д и н а м и ч е с к и х х а р а к т е р и с т и к самолета
..................... 119'
А э р о д и н а м и ч е с к и е си лы и м о м ен ты , действую щ ие на с а м о л е т при
с к о л ь ж е н и и ...................................................................................................................................... 125
4 5. М е х а н и з а ц и я к р ы л а и ее в л и я н и е на а э ро ди н ам и чески е х а р а к т е р и с ­
т и ки . .
.......................................................................... ................
130»
4.6. В л и я н и е ко н ф и гурац и и са м о л е т а на а э р о д и н а м и ч е с к и е х а р а к т е р и с ­
т и к и ........................................................................................................................................................136
4 .7 . Э кр ан и р у ю щ е е в л и я н и е В П П на а э р о д и н а м и ч е с к и е х а р а к т е р и с т и к и
с а м о л е т а .............................................................................................................................................. 138
Глава 5. Характеристики воздуш н ого в и н т а
5.1.
5.2.
5.3.
5.4.
5.5 .
......................................................... 141
Геометри чески е и ки н е м ат и ч е ск и е х а р а к т е р и с т и к и ..................................... 141
А э р о ди н а м и ч ес ки е си лы и к . п. д. в о з д у ш н о г о в и н т а ................................ 147
Р е ж и м ы работы во здуш н о го в и н т а ................................................................................150
С о с т авл я ю щ и е т я г и при косой о б д у в к е в о з д у ш н о г о ви н та
. . . .153
В л и я н и е о б д у в к и сам ол ета по?оком в о з д у х а от в о зд уш н о го ви н та
на его а э ро ди н ам и чески е х а р а к т е р и с т и к и
.......................................................... 154
Раздел II.
Д И Н А М И К А ПОЛЕТА
Глава 6. Прямолиней ный гор и зон тальн ы й п о л ет
6 .1 .
6.2 .
6 .3 .
6 .4 .
6 .5 .
6 . 6.
6 .7 .
157
Общие сведен и я об у р а в н е н и я х д в и ж е н и я с а м о л е т а ................................ 157
У р а в н е н и я го р и зо н т а л ьн о го п о л е т а .............................................................................165
К р и в ы е Ж у к о в с к о г о .................................................................................................................169
П е р в ы е и вто ры е р еж и м ы п о л е т а ...........................................................................174
Д и а п а з о н скоростей и высот го р и з о н т а л ь н о г о п о л е т а ...........................177
Э кс п л у а т а ц и о н н ы е огран и ч ен и я д и а п а з о н а ско р о с те й и вы сот п о ле та 184
Р азгон и тор м о ж ен и е сам ол ета в п р ям ол и н ей н о м го ри зон тал ьн о м по­
лете ......................................................................................................................................................... 189
Глава 7. Набор высоты и снижение
............................................................................ 191
7 .1 .
7 .2 .
7 .3 .
7.4 .
У р а в н е н и я д в и ж е н и я с ам о л ета по н акл о н н о й т р а е к т о р и и
. . . .
191
Х а р а к т е р и с т и к и н абора высоты и с н и ж е н и я
................................................ 195
П о л яр ы скоростей набора вы соты и с н и ж е н и я
...........................................202
В л и я н и е усл о ви й э к с п л у а т а ц и и на х а р а к т е р и с т и к и набора вы с о ты и
с н и ж е н и я ............................................................................................................................................205
7.5. О п тим альн ы е р еж и м ы набора вы соты и с н и ж е н и я
..................................... 208
Глава 8. Криволинейный
8 .1 .
8 .2 .
8 .3 .
8 .4 .
8 .5 .
полет с а м о л е т а .............................................................. 2 1 1
Криволинейный полет в го ри зон тальн о й п л оско сти
................................ 211
П редел ьн ы е в и р а ж и ..................................................................................................................215
К риволинейны й полет в ве р ти к а л ь н о й п л о с ко с ти
..................................... 217
................................................ 220
Б оковой S -образный предпосадочны й м а н е в р
Пространственное м ан е вр и р о ва н и е с а м о л е т а ................................................... 222
Глава 9 . Взлет и п о с а д к а .................................................................................................... 2 2 5
9 .1 .
9 .2 .
9 .3 .
9 .4 .
Т р а е к т о р и я и основные эта п ы в з л е т а ......................................................................225
В зл ет н ы е х а р а к т е р и с т и к и с а м о л е т а ..............................................................................228
П о са д к а с а м о л е т а ........................................................................................................................231
В л и я н и е ко н с тр у к т и в н ы х факторов и у с л о в и й э к с п л у а т а ц и и на
взлетно-посадочные х а р а к т е р и с т и к и с а м о л е т а ....................................................236
Г лава 10 . Дальность и п р одолж и тельн о сть п о л е т а
х0.1.
10.2.
10.3.
10.4.
............................................2 4 0
Основные п оняти я и оп ределен и я
........................................................................... 2 4 0
З ави си м о сть д альн о сти и п р о д о л ж и т ел ь н о с ти п о ле та от с ко ро сти 243
З ав и с и м о сть д альн ости и п р о д о л ж и т ел ь н о с ти п о ле та от вы с о ты 247
В л и я н и е полетной м а с сы , сос т о я н и я атмосферы и о т к а з а д в и г а т е л я
на д ал ьн о сть и п р о д о л ж и тел ь н о сть п о л е т а ......................................................2 49
Г лава J ] .
Устойчивость, уп р а в л я е м о с т ь и б а л а н с и р о в к а с а м о л е т а в про­
дольном д в и ж е н и и ............................................................................................. 2 5 2
1 1.1. Основные п оняти я и о п ред ел ен и я
...................................................................... 2 52
1 1.2. С тати чески е моменты т а н г а ж а .........................................................................................2 6 0
1 1.3. Моменты т а н г а ж а , о б у с л о вл е н н ы е вр ащ ен и ем с а м о л е т а ........................... 2 6 8
1 1 .4.
11.5.
1 1 .6 .
11.7.
11.8.
Р а з в и т и е п р одо л ьн о го во змущ ен н о го д в и ж е н и я
.....................................271
У сто й чи вость с а м о л е т а по п е р е г р у з к е ................................................................... 276
Устойчивость с а м о л е т а по скорости
...............................................................288
П р од о л ьн ая б а л а н с и р о в к а с а м о л е т а .......................................................................292
П р од о л ьн ая у п р а в л я е м о с т ь самолета и ее х а р а к т е р и с т и к и
. . . . 300
Г лава 12. Устойчивость,
у п р а в ля е м о с т ь и баланси ровка само лета в боко­
вом д в и ж е н и и ................................................................................................................304
12.1. С илы и м оменты, д е й ствую щ и е на самолет в боковом дви ж ени и
12.2.
1 2 .3.
1 2 .4 .
1 2.5.
. . 304
У с л о в и я б оковой с тати ческо й устойчивости с а м о л е т а .......................... -312
Р а з в и т и е б о к о в о го во зм ущ ен н о го д в и ж е н и я
............................................... 316
Х а р а к т е р и с т и к и б оковой у с т о й ч и в о с т и ................................................................. 324
Боковая б алан си р овка и управляемость самолета
............................... 327
Г лава 13. У с то й ч и в о с ть
и управляемость
с а м о ле та на взлете и посадке 336
13.1. У р а в н е н и я д в и ж е н и я ......................................................................................................... 336
13.2. У сто й чи вость и у п р а в л я е м о с т ь с а м ол ета при дви ж е н и и по В П П
. 342
13.3. Особенности усто й чи во сти и у п р а в л я е м о с т и с ам о л е т а при д в и ж е ­
нии по В П П в у с л о ж н е н н ы х у с л о в и я х .................................................................344
13.4. Особенности п о са дк и с боковы м ветром
..........................................................348
1.4.3. Особенности д в и ж е н и я с ам о л е т а на у ч а с т к а х тр ае кто р и и в з л е та и
п осадки
.........................................................’............................................................................. 351
Г лава 14.
1 4 .1 .
1 4 .2 .
14.3.
14.4.
Критические реж имы , особые услови я и особые случаи в п олете 355
............................................... 355
Особенности п о л е т а на бол ьш их у г л а х а т а к и
Полет в у с л о ж н е н н ы х у с л о в и я х
......................................................................... 364
П олет с а м о л е т а при о т к а з е одного из д ви га т е л е й
.....................................376
Особенности в з л е т а и посадки при о т к а з е одного из д ви г а т е л е й . 381
С п и с о к л и т е р а т у р ы ............................................................................................................................... 385
Предметный у к а з а т е л ь ........................................................................................................................ 386-
Учебник
Н иколаев Л е в Федорович
АЭРОДИ Н АМ ИКА И ДИНАМИКА
ТРА Н С П О РТ Н Ы Х С А М О Л Е Т О В
ПОЛЕТА
Технический р ед а к то р Р. А. Иванова
К орректор-вычитчик С. М. Лобова
К орректор Р. В. Маркина
ИБ № 4185
С д ан о в набор 26.10.89.
Подписано в п ечать 10.09.90.
Ф о р м а т 6 OX8 8 V16.
Б ум . офс. .V? 2. Гарнитура л и тературн ая. Офсетная печать.
У ел печ. л 24,01.
У ел. кр.-отт. 24.01.
Уч.-над л 27,08.
Тираж 6000 экз
З а к а з 2547
Цена 1 р 20 к.
И зд. Хч 1-1-1/17-7 Хй 4856
О рдена «З н ак П очета» и зд ател ьство «Т РА Н С П О РТ », М осква. Басманный туп ., 6 а
М о ск о вс кая типограф ия № 4 Г осударствен н ого ком итета СССР по печати
129041, М осква. Б. П е р е я с л а в с к а я. 46.