РОССИЙСКАЯ АКАДЕМИЯ НАУК ИНСТИТУТ ПРОБЛЕМ МЕХАНИКИ
С. Д. Алгазин И.А. Кийко
ФЛАТТЕР
пластин и оболочек
Ответственный редактор доктор физико-математических наук
P.A. ВАСИН
МОСКВА НАУКА 2006
2
УДК 531 ББК 22.251 А45
Рецензенты:
доктор физико-математических наук В.В. ДИКУСАР, доктор физико-математических
наук С.Г. ПШЕНИЧНОВ
Алгазин С.Д.
Флаттер пластин и оболочек / С.Д. Алгазин, И.А. Кийко ; отв. ред. P.A. Васин ; Ин-т
проблем механики РАН. - М. : Наука, 2006. - 247 с. - ISBN 5-02-033983-0 (в пер.).
В монографии приведены результаты исследований, в основном полученные авторами. Приведены новые постановки задач флаттера, в которых используется выражение
для давления аэродинамического взаимодействия, существенно уточняющее известную
формулу поршневой теории слагаемыми, имеющими качественно новый механический
смысл. Разработанным авторами численно-аналитическим методом без насыщения исследованы новые классы задач флаттера пластин и пологих оболочек, произвольных в плане.
Обнаружены новые механические эффекты: стабилизация колебаний по отношению к
флуктуациям вектора скорости потока; существование направления вектора скорости, в
окрестности которого происходит резкое изменение форм колебаний; незначительное
влияние вариаций границы области на величину критической скорости флаттера.
Приводится список литературы, содержащий 749 названий, что представляет самостоятельный интерес.
Для научных работников и инженеров-исследователей, занимающихся вопросами динамической устойчивости тонкостенных элементов конструкций, аспирантов и студентов,
специализирующихся по механике деформированного твердого тела.
Темплан 2006-1-90
ISBN 5-02-033983-0
© Институтпроблеммеханики РАН, 2006
© Алгазин С.Д., Кийко И.А., 2006
© Редакционно-издательское оформление. Издательство
"Наука", 2006.
3
Памяти выдающегося ученого-механика нашего учителя A.A.
Ильюшина авторы посвящают эту книгу
ПРЕДИСЛОВИЕ
Колебания инженерных сооружений, элементов летательных аппаратов (крылья, оперение), тонкостенных элементов конструкций, происходящие при их взаимодействии с
потоком газа (как правило, воздуха), принято обозначать единым термином "флаттер".
Следует различать три основных вида таких колебаний: классический флаттер, характерные примеры - колебания крыльев и оперения летательных аппаратов; срывной флаттер,
характерные примеры - висячие мосты, высокие заводские трубы; панельный флаттер колебания тонкостенных элементов обшивки (пластины, пологие оболочки) самолетов и
ракет при сверхзвуковых (в основном) скоростях полета.
Научный интерес к описываемым явлениям особенно возрос в 30-е годы XX в. в связи
с развитием авиации. Приведем поэтому высказывание летчика-испытателя М.Л. Галлая1:
«С появлением новых скоростных самолетов в авиации едва ли не всех передовых стран
мира прокатилась волна таинственных необъяснимых катастроф. Случайные очевидцы,
наблюдавшие эти катастрофы с земли, видели во всех случаях почти одинаковую картину: самолет летел совершенно нормально, ничто не внушало ни малейших опасений, как
вдруг внезапно какая-то неведомая сила, будто взрывом, разрушала машину - и вот уже
падают на землю изуродованные обломки: крылья, оперение, фюзеляж...
Все очевидцы, не сговариваясь между собой, применяли выражение - взрыв... Однако
осмотр упавших обломков не подтверждал этой версии: никаких следов взрыва - копоти
или ожогов - на них не оказывалось...
Новому грозному явлению было дано название "флаттер" (от английского "flutter" трепетать), но еще, если не ошибаюсь, Мольер сказал, что больному не делается легче от
того, что он знает, как называется его болезнь по-латыни» (С. 251-252). Это описание
проявлений классического флаттера.
Яркий пример разрушения от срывного флаттера - это Такомская катастрофа: обрушение подвесного моста (длина пролета 854 м, ширина 11,9 м) через р. Такома, США, в
1940 г. Описание этой катастрофы можно найти в цитированной выше книге.
Классический пример панельного флаттера - колебания пластины в сверхзвуковом потоке газа. Исследование большого числа конкретных задач этого класса стало возможным
после того, как в 1947 г. A.A. Ильюшин открыл закон плоских сечений в аэродинамике
больших сверхзвуковых скоростей и проблема панельного флаттера пластин (а затем и
пологих оболочек) получила на тот момент законченную математическую формулировку,
приведшую к эффективным аналитическим методам исследования. Эти (и другие) вопросы обсуждаются в книге.
При написании книги мы не ставили своей целью охватить или хотя бы в какой-то
форме обобщить имеющийся на сегодня печатный материал по панельному флаттеру
1
Цит. по: Я.Г. Пановко, И.И. Губанова. Устойчивость и колебания упругих систем. М.: Физматлит, 1964. 336 с.
4
(нам известно более 700 работ, опубликованных за период примерно с 30-х годов XX в.).
Цель была другой: в рамках разработанных на сегодня математических моделей явления
представить аналитические и эффективные численные методы для исследования классов
задач по панельному флаттеру пластин и пологих оболочек. По этой причине в книге
приводится небольшое число конкретных примеров; предпочтение отдается новым постановкам задач, математическому обоснованию применяемым методам исследования, выявлению новых механических эффектов. Некоторые из аспектов проблемы, в особенности
математические, разработаны еще недостаточно; на некоторые из них мы сами обращаем
внимание, другие без труда отметит вдумчивый читатель. Мы будем одинаково благодарны всем, кто откликнется на появление книги замечанием по существу содержания или
развитием затрагиваемых в ней идей.
Полагаем, что книга будет интересна всем, кто занимается проблемами динамической
устойчивости тонкостенных элементов конструкций.
Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований, проекты № 95-01-00407, 97-01-00923,05-01-00250.
ВВЕДЕНИЕ
В предлагаемой вниманию читателя книге исследуются колебания пластин и пологих
оболочек, взаимодействующих с потоком воздуха. Решается, как правило, основная задача - установление области значений параметров, при которых колебания будут устойчивыми. Обычно геометрия и механические свойства колеблющегося элемента конструкции
считаются известными, поэтому речь идет об определении скорости потока, по достижении которой колебания становятся неустойчивыми. Само явление возможной неустойчивости колебаний принято называть панельным флаттером (от английского "flutter" вибрировать, трепетать), соответствующее значение скорости - критической скоростью
флаттера.
Интерес к проблеме панельного флаттера возник в послевоенные годы XX в. в связи с
бурным развитием аэрокосмической техники. Прогресс в развитии теории был обусловлен открытием закона плоских сечений в аэродинамике больших сверхзвуковых скоростей, в рамках которого связанная, вообще говоря, задача аэроупругости "развязывалась"
с помощью простой формулы "поршневой теории".
Первые исследования в поршневой постановке выполнены в 50-е годы XX в. A.A.
Мовчаном с группой сотрудников. Ими была рассмотрена задача о флаттере прямоугольной пластины в простейшем случае, когда вектор скорости потока лежит в плоскости пластины и параллелен одной из ее сторон. Если изучать асимптотическую устойчивость (а
именно так поступали и поступают до сих пор практически все), то дело сводится к задаче
о поведении спектра несамосопряженного оператора четвертого порядка (основная часть бигармонический оператор) в зависимости от скорости потока. Как видно, даже в этой
простейшей постановке задача оказывается далеко не тривиальной, тем не менее A.A.
Мовчану с сотрудниками удалось получить результаты, благодаря которым во многом
5
выявились принципиальные моменты проблемы, которые долгое время оставались эталонными.
Последовавшее за этими основополагающими работами развитие в проблеме панельного флаттера не затрагивало существа теории: для сил аэродинамического взаимодействия потока с колеблющимся элементом использовалась формула поршневой теории даже в случаях, когда это представляется необоснованным (яркий пример - флаттер конической оболочки, внутри которой течет газ с большой сверхзвуковой скоростью). В то же
время не было даже попыток поставить задачу о флаттере пластины или пологой оболочки произвольной формы в плане; математическая сторона проблемы о существовании
решения, общих свойствах и структуре спектра вообще не затрагивалась и т.д. Большое
число работ объясняется разнообразием комбинаций краевых условий, учетом действия
физических полей различной природы (температура, электромагнитное поле), разнообразием механических свойств (вязкоупругие, слоистые, анизотропные пластины и оболочки) и т.д. и т.п. Ситуация изменилась в середине 90-х годов XX в. С одной стороны, были
предложены новые постановки задач о флаттере пластин и пологих оболочек, являющихся элементами обшивки летательного аппарата, движущегося с большой сверхзвуковой
скоростью, с другой - был разработан численно-аналитический метод без насыщения,
позволивший эффективно исследовать задачи на собственные значения для несамосопряженных флат- терных операторов (или систем таких операторов). Все это позволило существенно расширить класс рассматриваемых задач и обнаружить новые механические
эффекты. Эти новые результаты, принадлежащие в основном авторам и их коллегам, составляют содержание книги.
По ходу изложения мы, как правило, не делаем ссылок, устанавливающих принадлежность результатов их авторам. Однако каждый раздел книги снабжен небольшим введением, в котором указывается, на чьих работах основано содержание этого раздела.
6
Часть I.
ФЛАТТЕР ПЛАСТИНОК.
Задача о флаттере прямоугольной пластины впервые была поставлена и в значительной степени исследована А. А. Мовчаном в 50 г.г. XX в. [280-281]. Эти результаты,
которые теперь можно признать классическими стали возможными после того, как в 1947
г. А. А. Ильюшин открыл закон плоских сечений в аэродинамике больших сверхзвуковых
скоростей [184]; одно из её следствий локальная формула поршневой теории для избыточного давления газа на колеблющуюся пластину, что сводит задачу к проблеме собственных значений несамосопряжённого оператора. А. А. Мовчан с сотрудниками рассматривали задачу в довольно частной постановке, когда вектор скорости потока параллелен одной из сторон пластины; многочисленные результаты в последующих работах многих авторов относились к непринципиальным обобщениям: многослойные и анизотропные пластины, учёт действия различных физических полей и др.
Ситуация изменилась в середине 90-х г.г. прошедшего века, когда были сформулированы новые постановки задач панельного флаттера (А. А. Ильюшин, И. А. Кийко) [185],
установлены некоторые общие свойства спектра флаттерного оператора, разработан численно-аналитический метод для его исследования, решены классы новых задач и обнаружены новые механические эффекты (И. А. Кийко, С. Д. Алгазин) [28-36]. Все эти материалы составляют основу излагаемого в этом разделе материала.
Излагаются также некоторые частные результаты по флаттеру пластин переменной
толщины или жёсткости, а также в частной постановке – задача оптимизации (В. И. Исаев,
А. К. Кадыров) [191-192]. Приводится новое решение задачи о флаттере вязкоупругой полосы и пластины, в котором в отчасти разрешён бытовавший долгое время парадокс относительно величины критической скорости потока [199,205].
I.1. Постановка задачи.
Представим себе пластину, которая в плоскости x, y занимает область S с контуром (всюду в дальнейшем будет предполагаться кусочно-гладкой кривой). Пластина
с
одной
стороны
обтекается
потоком
газа
с
вектором
скорости
v vx , vy v cos , v sin , v v . Если наряду с невозмущенным состоянием w0 0 рассмотреть возмущенное w w( x, y, t ) , то, вследствие взаимодействия с потоком, возникнет
давление аэродинамического взаимодействия p (избыточное давление — как следствие
возмущения потока), которое, как покажет дальнейшее изложение, будет линейным оператором от w . Это позволит представить решение в виде w ( x, y) exp(t ) ,
p p0 ( x, y ) exp(t) — во всех случаях, исключая задачу о флаттере вязкоупругой пластины.
Уравнение колебаний пластины постоянной толщины имеет вид
2w
D 2 w h 2 p
(1.1)
t
7
здесь D Eh3 12(1 2 ) — цилиндрическая жесткость, E,ν,ρ - модуль Юнга, коэффициент Пуассона и плотность материала пластины, h — ее толщина. На основании сказанного выше p0 L1 ( ) L2 ( , ) , поэтому (1.1) перепишем в виде
(1.2)
D2 L1 ( ) hw2 L2 (; ) 0
на контуре амплитуда прогиба ( x, y) удовлетворяет заданным граничным условиям
(1.3)
x, y , M1 ( ) 0, M 2 ( ) 0
граничные операторы M1 , M 2 в каждом конкретном случае будут выписаны дополнительно. Всюду в дальнейшем предполагается, что пластина не подвержена действию усилий в срединной плоскости.
Система (1.2),(1.3) составляет сложную задачу (с несамосопряженным оператором)
на собственные значения . По определению принимаем, что возмущенное движение
пластины будет устойчивым, если Re 0 , и неустойчивым, если Re 0 ; критические
значения параметров системы (пластина, поток) определяются условием Re 0 . В
дальнейшем изложении будут освещены следующие основные вопросы: определение p ;
постановки новых задач; разработка эффективного метода исследования; выявление новых механических эффектов.
I.2. Определение давления аэродинамического взаимодействия.
Многочисленные исследования задач о колебаниях и устойчивости пластины, обтекаемой потоком газа с большой сверхзвуковой скоростью, проведены с использованием формулы поршневой теории для давления p аэродинамического взаимодействия
потока с колеблющейся пластиной. Эта формула стала настолько «привычной», что использовалась в случаях, когда правомерность такого подхода сомнительна. Здесь приводится вывод выражения для p в случае «умеренных» сверхзвуковых (M ~ 1,5 2) и малых дозвуковых скоростей.
Рассмотрим упругую полосу, которая в пространстве занимает область
S : o x , y 0 , | z | ; со стороны y 0 полоса обтекается потоком газа с невоз-
мущенными параметрами (плоская задача) v u0 , 0, p0 , 0 , a0 ( p0 / 0 )1 / 2 , так что
потенциал
невозмущенного
потока
0 u0 x
.
Малые
колебания
полосы
w( x , t ) (w / 1) вызовут возмущения потока; обозначим потенциал возмущенного течения 1 0 . Далее поступим как обычно: из интеграла Коши-Лагранжа, уравнений движения, сохранения массы и состояния получим уравнение
относительно 1 и
линеаризуем его относительно возмущения φ ; получим в результате
1 2
2
M 2 2
2
(
M
1
)
2
0
2
2
a0 xt y 2
x 2
a0 t
(2.1)
здесь M u 0 / a0 . Потенциал подчиним условию затухания в бесконечно удаленной
точке и условию непроницаемости на прямой y 0
8
y 0 , 0 x ,
y0, x0,
w
w
u0
y
t
x
(2.2)
0
y
(2.3)
x,
Избыточное давление в потоке определится выражением
p 0
u0
x
t
(2.4)
Решение будем искать в классе функций: ( x, y, t ) f ( x, y) exp(t ) ,
w( x, t ) W ( x) exp(t )
, p( x, y, t ) q( x, y) exp(t ) . Введем безразмерные координаты
x / , y / , оставив за ними прежние обозначения, и безразмерную частоту / a0 ;
система (2.1) - (2.4) преобразуется:
( M 2 1)
2 f
2 f
2
2
M
f
0
x
x 2
y 2
y 0 , 0 x 1 ,
y0 ,
q
x0 ,
f
W
a0 W M
y
x
x 1 ,
0
y
(2.5)
(2.6)
(2.7)
0 a0
f
f M
x
(2.8)
В дальнейшем следует различать случаи M 1 и M 1 ; рассмотрим их последовательно.
При условии M 1 слева от точки x 0 возмущения отсутствуют, поэтому можно применить преобразование Лапласа по x ; условие (2.7) при этом не существенно,
функцию W (x) можно доопределить в область x 1 произвольным образом (лишь бы
удовлетворялись условия применимости преобразования Лапласа), и это не скажется на
выражении q(x,0) для избыточного давления на полосу. Из (2.5) для преобразования
f ( s, y) получим
~
~ 2 f
f 2 0 , 2 ( M 2 1) s 2 2Ms 2
y
2
решение, ограниченное в бесконечности, будет иметь вид
9
~
f c1e y
(2.9)
Из граничного условия (2.6) в изображениях
~
f
~
| y 0 c1 a 0 ( Ms)W
y
определяется параметр c1 , поэтому из (2.9) следует
~
Ms ~ y
f a0
We
(2.10)
Избыточное давление (в изображениях) теперь находится по формуле (2.8)
a 2 ( Ms) 2 ~
q~( s,0) ~
p ( s) 0 0
W ( s)
(2.11)
Обратное преобразование находится по таблицам и теореме о свертке. Предварительно запишем: M 2 1 ( s s1 )(s s 2 ) M 2 1 0 ; s1 /( M 1) ,
s2 /( M 1) ; (s1 s2 ) / 2 M /( M 2 1) 1 ; (s1 s2 ) / 2 /( M 2 1) 2 .
Теперь имеем
1
L( 1) I 0 ( 2 x)e 1x H ( x)
0
здесь I 0 ( z ) - модифицированная функция Бесселя; поэтому
( 1)
L
~
W x
H ( x )W ( )d ;
0 0
~
sW x
W
H (x )
L( 1)
d ;
0 0
( 1)
L
~
s 2W x
W
x H ( x ) d
0
0
Проведя выкладки и подставив все в (2.11), окончательно получим
10
p( x)
0 a02 M
( M 2 1)1 / 2
M 2 2
W
W M
2
x
M 1
( M 2 2) 2
e 1 ( x ) I 0 ( 2 ( x )W ( )d
2
2
2M ( M 1) 0
22
M 2
1 ( x )
e
I
(
(
x
)
W
(
)
d
e1 ( x ) I 2 ( 2 ( x ))W ( )d
1
2
( M 2 1)2 0
2( M 2 1)2 0
x
x
(2.12)
x
здесь I (z ) - модифицированные функции Бесселя.
Из (2.12) следуют важные выводы.
1) Формула поршневой теории получается в предельном случае M 1 и она
справедлива для вычисления только первых нескольких собственных значений n , таких, что | n | / M 2 ~ 1 (| 2 |~ 1) , поскольку I (z ) экспоненциально возрастают с ростом
аргумента. На этот принципиальный момент до сих пор не было обращено внимания.
2) Если | z | 1 , то I ( z ) ~ ( z / 2)
, поэтому при «умеренно» сверхзвуковых ско-
ростях M 2 2 для вычисления первых собственных значений n
последними двумя интегральными слагаемыми в (2.12) можно пренебречь и для p(x)
принять
p( x)
0 a02 M M 2 2
2
M 2 1 M 1
W M
x
W
( M 2 2) 2
e 1 ( x )W ( )d . (2.13)
2
2
x 2M ( M 1) 0
Фиг. 1.1. К вычислению интеграла для Δр в формуле (2.14)
Представим теперь, что пластина Занимает в плоскости
x, y область S с границей и обтекается потоком газа
со скоростью v v0 n0 v0 cos , v0 sin . Формулу для
избыточного давления p( x, y) мы предлагаем принять
как обобщение формулы (2.13) (и соответственно (2.12))
на основании гипотезы
11
p( x, y )
0 a02 M M 2 2
2
M 2 1 M 1
W Mn 0 gradW
( M 2 2)2
2M ( M 2 1)2
e
W ( x( ), y ( ))d
1 ( s )
AB
(2.14)
где s ( x x0 ) 2 ( y y0 ) 2
1/ 2
, параметр изменяется от нуля до s вдоль прямой АВ,
- характерный размер области S . Интегрирование по АВ ведется только для x, y S ;
любая прямая АВ пересекает только в двух точках.
Если теперь p из (2.14), предварительно приведя к размерному виду, подставить
в (1.1), то придем к уравнению вида (1.2) (W ) , в котором оператор L2 будет обозначать интегральное слагаемое. В такой сложной постановке задача до сих пор не исследована. Последующие результаты будут относиться к случаю скоростей потока, когда
(M 2 2) (M 2 1) 1 , а интегральным слагаемым можно пренебречь.
В случае дозвукового течения ( M 1) систему (2.5)—(2.7) удобно решать с помо~
щью экспоненциального преобразования Фурье; будем иметь для f ( s, y)
~
f (s, y) c e 1 ( s ) y , 12 (1 M 2 )s 2 2isM 2
(2.15)
параметр c определим из (2.15) с учетом (2.7):
c1
a0 ~
( s ) ,
1 ( s)
W ( ) is
~
( s) W ( ) M
e d
t
0
1
(2.16)
Функция f ( x, y) восстанавливается по формуле
a
f ( x, y ) 0
2
~
( s) 1 ( s) y ixs
ds
( s) e
1
(2.17)
избыточное давление на пластину находится из (2.8)
~
0 a02
( s) ixs
p
e ds
M
2
x 1 ( s)
(2.18)
Основная трудность, как видно, связана с вычислением интеграла в (2.18); в общем виде это сделать не удается, поэтому, с целью получить некоторые оценки, рассмотрим только критическое состояние i 0 при малых дозвуковых скоростях
M 2 1 . При этом 12 s 2 02 и для интеграла в (2.18) получим
12
~
( s )
J ( x)
s 2 02
e ixs ds
1
e ixs ds
s 2 02
i W M
0
0
W is
e d
Изменим порядок интегрирования
W
e is ( x )
J ( x) i 0W M
ds ;
d 2
s 02
0
1
Внутренний интеграл легко вычисляется, поэтому окончательно
W
J ( x) i 0W M
N 0 ( 0 ( x )) H 0 (1 ( x )d
0
x
W
i 0W M
N 0 ( 0 ( x)) H 0 ( 0 ( x)d
x
0
(2.19)
здесь N 0 ( z ) - цилиндрическая функция второго рода, H 0 ( z ) - функция Струве. Дальнейшие преобразования (интегрирование по частям, дифференцирование интегралов по переменному пределу или параметру) в(2.19) и (2.18) после подстановки в них J (x) нецелесообразен, поскольку
N 0 ( z ) имеет в нуле логарифмическую особенность. Формально
обобщить полученный результат на случай флаттера пластины произвольной формы в
плане не представляется допустимым; единственная задача, которую, как нам кажется,
можно было бы приближенно исследовать, — это флаттер удлиненный поперек потока
прямоугольной пластины. Заметим в заключение, что нам не известно ни одного решения
задач о флаттере с использованием формул (2.18) и (2.19) для давления аэродинамического взаимодействия.
I.3. Математическая формулировка задач.
В предыдущем параграфе показано, что избыточное давление p в области сравнительно больших сверхзвуковых скоростей определяется формулой поршневой теории,
поэтому уравнение колебаний пластины примет вид
D 2 w
p0
a0
vn 0 gradw
p0 w
a0 t
gh
2w
0 .
t 2
Если принять w ( x, y)exp(t ) , то отсюда последует
D2
p
p0 0
n grad 0 gh 2 0.
a0
a0
13
удобно ввести собственное число
выражением
( p0 / a0 ) gh 0 ; уравнение колебаний при этом запишется в виде
Вместо
частоты
2
D 2
p0
a0
vn 0 grad
(3.1)
Вместе с условиями на контуре
x , y , M1 ( ) 0, M 2 ( ) 0
(3.2)
система (3.1),(3.2) составляет задачу на собственные значения.
Поскольку область S произвольна, целесообразно сделать преобразование поворота системы координат, направив ось Ох по направлению вектора скорости; из (3.1) в
результате получим
D2 p 0
v x
a0 x
(3.3)
Обозначим — характерный размер области S и введем безразмерные (со штрихами)
координаты и параметры
x x ,
y y ,
p 0 / a02 ,
h h ,
v x v x a0 ,
E E p 0 ,
,
a0 / ,
p0 /
в новых переменных (штрихи опустим) уравнение (3.3) примет вид
D 2 v x
,
x
h 2 0
(3.4)
В дальнейшем изложении примем два типа граничных условий: жесткое защемление
(заделка)
x, y , 0 ,
0
(3.5)
n
шарнирное опирание
x, y ,
0,
1
0
R0 n
(3.6)
здесь R0 — радиус кривизны контура, n — внешняя нормаль к нему.
Перед тем, как формулировать задачи флаттера, докажем некоторые утверждения относительно свойств полученной задачи.
14
Покажем прежде всего, что в каждой из задач (3.4),(3.5) или (3.4),(3.6) выполняется
условие Re 0 . Пусть 1 i 2 — решение; помножим обе части первого из уравнений (3.4) на 1 i2 и проинтегрируем по области S ; получим в результате:
D 2 ds 0
S
s
ds ds ,
x
s
Воспользуемся формулой Грина
( 2 ) ds
0 vx .
d
n
n
(3.7)
(3.8)
s
и рассмотрим отдельно случаи граничных условий (3.5) или (3.6).
В случае условий (3.5) правая часть в (3.8) исчезает, поэтому соотношение (3.7) принимает вид
2
2
(3.9)
ds D ds 0 ds
x
s
s
s
Далее имеем
1 2
i 1 2 2 1
x
2 x
x
x
подставив это в (1.7), получим
2
ds D
s
1
2
ds 0
2
s
2
ds
x
s
i 0 1 2 2 1 ds .
x
x
s
Вследствие граничного условия ( 0 на Г ) второй интеграл в правой части обращается
в нуль, поэтому окончательно
s
2
ds D
s
2
ds i 0
2
2 1 ds
1
x
x
s
отсюда следует Re 0 . Отметим, что в частном случае, когда S - прямоугольник, а вектор скорости параллелен одной из его сторон, это свойство собственных значений установлено А.А.Мовчаном.
15
Рассмотрим случай шарнирного опирания. Отметим, прежде всего, что если контур многоугольник, то на каждой из его сторон R01 0 , и из (3.6) следует 0 на Г . При
этом правая часть формулы Грина (3.8) обращается в нуль, и доказательство проводится
аналогично предыдущему. В общем случае из формулы Грина (3.8) при условиях (3.6)
имеем
ds
2
s
s
2
1
ds (1 )
d
R0 n
2
правую часть этого выражения преобразуем по известной схеме и получим в результате
2 ds L(1 ) L( 2 )
s
L( )
s
2
2 2
2
2 2
ds .
2 2 2
2(1 )
x
y
x y 2
x
Подставив это в (3.7), придем к соотношению
ds D( L(1 ) L( 2 )) i 0 1
2
s
s
2
2 1 ds
x
x
из которого следует
Re ds DL(1 ) L( 2 )
2
(3.10)
s
Воспользуемся неравенством
2
2
2u
2u 2u 2u
L(u ) (1 ) 2 2 2 2 2 ds L1 (u ) 0
x y y
s x
на основании которого из (3.10) последует
Re ds DL1 ( 1 ) L1 ( 2 ) 0
2
s
чем и завершается доказательство.
Второе утверждение относится к поведению собственных значений с ростом скорости потока; подчеркнем, что оно имеет чисто математический характер и не связано с
условиями, при которых получено уравнение (3.1). При скорости потока, равной нулю,
собственные значения сформулированной задачи — это квадраты собственных частот ко16
лебаний пластины (дискретный спектр k ). С ростом скорости k сближаются, затем сливаются (некоторые из k ), а потом образуют комплексно сопряжённую пару. Критические
параметры системы определяются условием Re 0 ; пусть k Re k i Im k , тогда из
второго уравнения (3.4) находим ( ik ) : hk2 ik Re k i Im k 0 , откуда следует Re k h(Im k )2 2 . На комплексной плоскости это известная кривая — парабола устойчивости. Если, следовательно, параметры системы таковы, что все k лежат
внутри параболы устойчивости, то колебания пластины устойчивы; если хотя бы одно из
k выходит за параболу, колебания неустойчивы. Отсюда следует две основные задачи
теории панельного флаттера пластин.
1. Все параметры системы, кроме скорости потока, заданы; требуется определить
критическую скорость потока. Подавляющее большинство исследований выполнено
именно в этой постановке.
2.
Форма, материал пластины и все параметры потока известны, требуется определить относительную толщину пластины h / , которая обеспечивала бы ее прочность по
критерию устойчивости колебаний.
I.4. Сведение к задаче в круге.
Выпишем еще раз постановку задачи, изменив (ради удобства последующего изложения) вектор n 0 на противоположный
D2 vn0 grad
(4.1)
в точках защемленного контура
x, y , 0,
0
n
(4.2)
условия шарнирного опирания имеют вид
2
x , y , 0,
0
n2 R0 n
(4.3)
здесь R0 — радиус кривизны контура, n — внешняя нормаль к нему.
Введём вместо декартовых координат x,y криволинейные координаты r, по формулам
x=U(r,), y=V(r,); Если выполнены условия Коши-Римана:
U 1 V
V
1 U
,
,
r r
r
r
17
то система координат r, ортогональна. Выберем теперь функции U(r,) и V(r,) таким образом, чтобы функция
U(r,)+i V(r,), =rexp(i)
задавала конформное отображение круга ||=r1 на область S . Тогда в координатах r,
уравнение (4.1) примет вид:
1
(v yU r Vr vx ) ) | '( ) |2 ,
r r
'( )
Vr Im
.
r
D(| '( ) |2 ) ((vxU r v yVr )
'( )
U r Re r
,
(4.4)
Граничные условия (4.2)—(4.3) перепишутся в виде
|r 1 0,
r
(4.5)
0,
(4.6)
r 1
''( )
2
( 1) Re
2
r
r
'( ) r
0.
(4.7)
r 1
Соотношения (4.4) – (4.7) составляют искомую постановку задачи на собственные значения.
Обозначим
1
(v yU r Vr v x ) ) | ' ( ) | 2
r r
и перейдём от дифференциального уравнения (4.4) к интегродифференциальному
f (r , ) ((v xU r v yVr )
D | ' ( ) |
2
2
K ( , ) f ( )d | ' ( ) | K
2
| |1
0
( , ) w(e i )d .
0
Здесь K() – функция Грина оператора Лапласа в круге с краевым условием (4.5),
K 0 ( , )
1
1 r2
, rei ,
2
2 1 r 2r cos( )
18
w(e i ) | ' ( ) | 2 ( ) | ei .
Обозначим
R( ) | '( ) |2
K ( , ) f ( ) d ,
S ( ) | '( ) |2
2
| |1
K ( , ) w(e
0
i
) d .
0
тогда можно записать
D=R()+S() .
Обращая ещё раз оператор Лапласа, получим
1
1
( )
K ( , q)[ R(q) S (q)]dq
D |q|1
D
2
K ( , )w(e
i
0
)d .
0
(4.8)
Заметим, что последний интеграл обращается в нуль в силу граничного условия (4.5).
Далее мы должны определить в соотношении (4.8) неизвестную функцию w(ei), по одному из граничных условий (4.6) или (4.7). Применим для функции w(ei) тригонометрическую интерполяцию:
w(e i )
n
2 2n
D
(
)
w
(
;
w
)
,
D
(
)
0
.
5
cos k ,
n
j
j
n
n
N j 0
k 1
n(;w) – погрешность интерполяционной формулы. Для функций S(q) и R(q) применим
интерполяционную формулу (часть 3, глава 1, §2); получим
|q|1
K ( , q) S (q)dq Hl ( ) Sl RM ( ; S ),
,l
где величины Hl ( ) определены в §3, главы 1, части 3
RM ( ; S )
K ( , q)
M
(q, S )dq,
|q|1
M (q, S ) - погрешность интерполяционной формулы
2
2z
Sl zl K 0 ( l , ) w(e )d l
N
0
i
Rn ( l ; w), Rn ( l ; w)
2
K
0
2
K 0 ( l , ) Dn ( j )d w j
j 0 0
2n
( l , ) n ( ; w)d , zl | ' ( l ) | 2 .
0
Обозначив дополнительно
19
H 0j ( l )
2
N
2
K
0
( l , ) Dn ( j )d .
0
выпишем значения интегралов в (4.8)
2n
|q|1
K ( , q) S (q)dq H l ( ) z l H 0j1 ( l ) w j1 H l ( ) Rn ( l ; w)
,l
,l
j1 0
RM ( , S ),
|q| 1
(4.9)
K ( , q) R(q)dq H l ( ) R l
,l
R l z l
K ( , q) RM (q; R) dq,
|q| 1
K ( l , ) f ( )d . .
(4.10)
| |1
Применим для функции f() ту же интерполяционную формулу и подставим в соотношение (4.10)
|q|1
K ( , ) f ( )d H j ( ) f j
j
K ( , ) R
M
( ; f )d .
|q|1
Отсюда находим
Ri zi H j ( i ) f j zi
j
K (i , ) RM ( ; f )d .
(4.11)
| |1
Здесь вместо двух индексов ,l введён один i, т. е. точки сетки в круге нумеруются,
начиная с первой окружности против часовой стрелки; Hij=Hj(i) – матрица задачи Дирихле
для оператора Лапласа в круге (§3, главы 1, части 3).
Подставим теперь (4.11) в (4.10) и получим
|q|1
K ( , q) R(q)dq H i ( ) zi H ij f j H i ( ) zi
i
j
i
K ( , q) RM (q; R)dq.
|q|1
из (4.8) с учётом (4.12 и (4.9) будем иметь
20
| | 1
K (i , ) RM ( ; f )d
(4.12)
( )
2n
1
1
H i ( ) zi H ij f j H i ( ) zi H 0j1 ( i ) w j1 Rn , M ( ; f , R, S ),
D i
D i
j
j1 0
Rn , M ( ; f , R, S )
1
H i ( ) zi K (i , ) RM ( ; f )d K ( , q) RM (q, R)dq
D j
| | 1
|q| 1
1
H i ( ) Rn (i ; w) RM ( ; S ) .
D i
(4.13)
В соотношении (4.13) мы должны так определить w=(w0, w1,…, w2n), чтобы удовлетворить граничному условию (4.6) или (4.7). Обозначим L – дифференциальный оператор,
стоящий в левой части граничного условия. Тогда, применяя этот оператор к (4.13), получим:
2n
L( H i ( )) zi H ij f j L(H i ( )) zi H 0j1 ( i )w j1 LRn,M ( ; f , R, S ) L ( ).
i, j
j1 0
i
Если теперь ввести обозначения:
L( H i ( )) ei j2 H i , j2 , j 2 0,1,....,2n,
H
i , j2
H
i , j2
i, j
i
z i H ij f j R j2 ,
z i H 0j1 ( i ) B j2 , j1 ,
j LRn , M ( ; f , R, S ) e .
i j2
2
то для определения вектора w=(w0, w1,…, w2n) будем иметь систему линейных уравнений:
2n
B
j1 0
j2 , j1
w j1 R j2 j2 .
Отсюда последует
w j1
2n
C
j2 0
j1 , j2
( R j2 j2 ), C B 1 .
Подставляя в (4.13), получим
21
( )
2n
2n
1
1
H i ( ) zi H ij f j H i ( ) zi H 0j1 ( i ) C j1 , j2 ( R j2 j2 )
D i, j
D i
j1 0
j2 0
(4.14)
Rn , M ( ; f , R, S ).
Здесь
f j z j j j , j ((v xU r v yVr )
1
(v yU r Vr v x ) )
, j 1,..., M .
r r
j
Пусть пробегает узлы интерполяции i, i=1,2,…,M, тогда
i
( B B E )
D
2
ij
j
il
lj
j
l
2n
Elj H 0j1 ( l )
j1 0
2n
E H ( l )
*
lj
j1 0
0
j1
1
( Bil H lj l Bil Elj* ) j Ri ,
D j l
2n
C H
j2 0
j1 , j2
z Bij ,
i , j2 i
i
(4.15)
2n
C H
j2 0
j1 , j2
z H ij ,
i , j2 i
i
2n
2n
1
Ri Rn , M (i ; f , R, S ) Bil H 0j1 (l ) C j1 , j2 j2 .
D D l
j1 0
j2 0
Обозначим G=B2-BE, после этого (4.15) примет вид
i
1
Gij z j 1 j Gij j Ri , i 1, 2,..., M .
D j
D j
(4.16)
Обозначим D(r) и D() матрицы дифференцирования по r и , получающиеся дифференцированием интерполяционной формулы
j a j ( D (jlr ) l (j r ) ) b j ( D (jl ) l (j ) ), j 1,2,..., M ,
l
l
a j k (v xU r v yVr ) | j , b j
k
(v yU r v xVr ) | j ,
r
a и b будем обозначать соответствующие диагональные матрицы.
Соотношение (4.16) представим в матричной форме
1
GZ 1 (aD ( r ) bD ( ) ) G R ,
D
D
1
GZ 1 (a ( r ) b ( ) ).
D
(4.17)
22
Обозначим
AI
1
GZ 1 (aD ( r ) bD ( ) )
D
обращая в (4.17) матрицу A, получим окончательно
D
A1G R* , R* A1 ( R ).
(4.18)
Отбрасывая погрешность дискретизации R*, приходим к приближённой задаче на собственные значения; её исследование будет проведено в дальнейшем.
I.5. Тестовые задачи.
В этом параграфе сначала приводятся относительно простые решения задач о флаттере
неограниченной пластинки и полосы; эти результаты имеют прежде всего методическое
значение, однако выявленные в них новые механические эффекты, как показывает анализ, наблюдаются и в общем случае. Затем исследуется флаттер круговой и близкой к круговой пластин , а также флаттер эллиптической пластины.
1. Неограниченная пластина. Уравнение, описывающее колебания пластины,
имеет вид
D 2 v
cos
sin
y
x
(5.1)
здесь n0 cos ,sin ; граничные условия означают ограниченность решения в бесконечности. Возмущенное движение, ограниченное всюду в начальный момент времени,
выберем в виде A exp(iax i y), , — вещественные параметры. Подставив это в
(5.1), получим
D( 2 2 )2 i v( cos sin ) 1 i2
отсюда следует уравнение параболы устойчивости D( 2 2 )2 hv2 ( cos sin )2 ,
следовательно
v2
D( 2 2 )2
v02
h( cos sin ) 2
(5.2)
23
Поскольку , — произвольные числа, на основании (5.2) приходим к выводу: какова бы ни была неравная нулю скорость потока, можно подобрать такие значения , ,
что выполнится неравенство v v0 , а это значит, что соответствующее собственное значение окажется вне параболы устойчивости. Отсюда следует неустойчивость возмущенного движения при любой скорости v 0 , а, значит, равенство нулю критической скорости
флаттера.
2. Бесконечно-длинная полоса. Представим себе упругую полосу, которая в
плоскости xy занимает область : x , 0 y ; рассмотрим случай продольного обтекания
V v x ,0 , кромки полосы предположим шарнирно закрепленными. Система
уравнений примет вид (уравнения записаны в безразмерном виде)
D2 v x
, gh 2 0
x
y 0, 0,
2
0;
y 2
y 1, 0 ,
(5.3)
2
0
y 2
(5.4)
Решение, ограниченное на бесконечности, примем в виде: A0 exp( ky ix),
—
действительное число; подставив в (5.3), получим характеристическое уравнение
D(k 2 2 ) 2 iv x ,
корнями которого будут
k1 2 ( iv x ) / D ;
2
k 22 2 ( iv x ) / D .
Общее решение (5.3) запишется в форме
(C1 shk1 y C2 chk1 y C3 shk2 y C4 chk 2 y) exp(ix).
Из первых двух условий (5.4) находим С2 С4 0 ,
С2 С4 0 ,
поскольку
альтернативный
вариант
k12 C2 k 22 C4 0 , откуда следует
k12 k 22 ( iv x / D 0
,
iv x невозможен в силу установленного свойства Re 0 .
Оставшиеся условия (5.4) приводят к системе
C1 shk1 C3 shk2 0 ,
C1k12 shk1 C3 k 22 shk2 0
с определителем (k12 k 22 )shk1 shk2 . Условие
нетривиальной разрешимости 0
влечет за собой k1 in (либо k 2 in ) и приводит к окончательному результату
n ( 2 n 2 2 ) 2 D iv x
(5.5)
24
n sin(ny) exp(ix)
Поскольку — произвольное число, спектр (5.5) не является, дискретным, хотя каждому 0 соответствует определенная последовательность
n ( 0 ) D( 02 n 2 2 ) 2 i 0 v x .
Вопрос о критической скорости флаттера решается следующим образом. Устойчивым
колебаниям полосы отвечают
, лежащие внутри параболы устойчивости
2
2
Re h(Im ) ; на основании (5.5) это приводит к неравенству
D
v x v ( )
h
(n)
x
При каждом n
1/ 2
2 n 2 2
кривые v (n)
x ( ) имеют минимум
(5.6)
)
v(xnmin
2n ( D / h)1/ 2
при n ;
наименьшее из всех значений достигается при n 1 , эту величину скорости v(1)
x min мы
принимаем в качестве критической
v xkp
D
2
h
1/ 2
C0 h
3(1 2 ) a0
где C0 E / — стержневая скорость звука в материале полосы. Следовательно,
наиболее «опасными» с точки зрения возможной неустойчивости колебаний будут возмущения вида sin y exp(i x) .
В случае V v x , v y приближенное решение задачи может быть построено различными способами, например, сведением к интегральному уравнению Вольтера или методом Бубнова - Галеркина. Мы воспользуемся последним, поскольку результаты качественного характера (именно это нас будет интересовать в данном случае) будут совпадающими; точность метода Бубнова — Галеркина будет обсуждена позже на примере
задачи о прямоугольной пластине.
Для простоты записи поделим (5.3) на D и обозначим
1 / D , gh / D a1 ; для
собственного значения 1 / D оставим прежнее обозначение. Получим задачу на
собственные значения для уравнения
2 1v x
1v y
,
x
y
a1 2 1 0
25
(5.7)
с граничными условиями (5.4).
Положим (С1 sin y C2 sin 2y) exp( ix) и проведем известную процедуру; в результате придем к однородной системе
8
C1 ( 1 i i v x ) i v y C2 0
3
(5.8)
8
i v y C1 ( 2 i i v x )C 2 0
3
определитель которой, приравненный к нулю, доставит характеристическое уравнение
( 1 )( 2 ) 0
1, 2
2 1
2
i 1 v x
1
2
(5.9)
( 2 1 ) 2 4(8 1 v y / 3) 2 , 1 ( 2 2 ) 2 , 2 (4 2 2 ) 2
Рассмотрим, прежде всего, случай «малых» поперечных скоростей
8 1 v y
4
3
и ограничимся для
( 2 1 ) 2
представлением
(8 1 v y ) 2
( 2 1 ) 1 2
9( 2 1 ) 2
В (5.9) выберем собственное значение 1 с меньшей действительной частью и
подставим в уравнение параболы устойчивости 12 Re 1 a1 (Im 1 )2 ; получим
выраже-
ние для v x v x ( , v y ) с той же точностью по малому параметру
v x ( , v y )
1
1
a1 181 ( 2 1 )
v ( )
(1)
x
(8 1 v y ) 2
1
(8 1 v y ) 2
18 a1
1
( )( 2 1 )
2
2
(5.10)
здесь v (x1) ( ) находится из (5.6) при n 1 . Легко показать, что v xkp min v x ( , v y ) v xkp .
Действительно, перепишем (5.10) в виде
26
1 2 2
( )
a1
v x ( , v y )
приравненная к нулю производная правой части приводит к уравнению
1
2
( ) 0 ,
2
( ) ' ( ) / 2 ( )
приближенное (по параметру ) решение которого имеет вид
1 ( )
2
Подставив это в (5.10), получим окончательно
a1 ( )
v xkp v xkp
Этот результат мы называем эффектом стабилизации колебаний полосы по отношению к флуктуациям вектора скорости потока при продольном обтекании. Из второго
уравнения (5.8) следует при этом Re(C1 / C2 ) 3( 2 1 ) /(8 1 v y ) 1, а это значит, что
формы колебаний практически не отличаются от таковых при v y 0 .
С ростом поперечной скорости дискриминант уменьшается и обращается в нуль
при v y v (y0) ( )
v (y0) ( )
3 2 1
16
1
из (5.9) при этом находим
(5.11)
1 2 ( 2 1 ) / 2 i 1 v x . Подставив в уравнение пара-
болы устойчивости, получим
2
v(1)
,
x ( ) ( 2 1 ) /(2 a1 )
1/ 2
откуда
1)
v (xkp
min v (x1) ( )
a1
2
34 10
1/ 2
4,64
a1
(5.12)
критический параметр волнообразования равен kp(1) 4 8,5 . Из (5.11) найдем
1)
(1)
v (ykp
v (1)
y ( kp )
9(5 17 ) 4
16 1
При v y v (y1) ( ) собственными значениями на основании (5.9) станут
27
(5.13)
1, 2
2 1
2
i 1 v x
очевидно, первым на параболу устойчивости выйдет 1 с положительным знаком перед
корнем; после простых преобразований получим
16 1 v y
3
2
2( 2 1 )
( 2 1 ) 2 1
2
v
1
x
a
1
2
(5.14)
Из последней формулы при v x 0 (поперечное обтекание) следует
3 ( ) 2 2( 2 1 )
v y ( ) 2 2 1
16
a1
1
1/ 2
очевидно, min v y ( ) достигается при 0 (цилиндриче
ский изгиб), эту скорость следует принять в качестве критической скорости флаттера
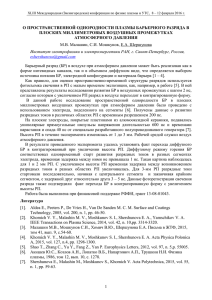
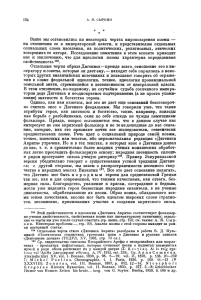
Фиг. 1.2. Зависимость vy кр
vx
кр
в задаче о флаттере полосы
1/ 2
v ykp
2
3 2 15 34
min v y ( )
16 1 a1
Область устойчивых колебаний в плоскости ( v x , v y ) показана схематически на Фиг. 1.2;
1)
1)
, v (ykp
) кривая имеет слева вертикальную касательную. В обв точке с координатами ( v (xkp
ласти (I) dv x / dv y 0 , в области (II) dv x / dv y 0 ; в случае чисто поперечного обтекания
флуктуация вектора скорости приведет к дестабилизации колебаний.
3. Круглая пластинка. В этом пункте изучается задача о флаттере круглой пластины; задача может рассматриваться и как методическая, и как представляющая самостоятельный интерес.
Поскольку область – единичный круг, то ( ) , 1, и поэтому
U r Re( / r ) cos , Vr Im( / r ) sin ; задача о спектре формулируется в виде:
28
D 2 (vx cos v y sin )
(vx sin v y cos )
r
r
r 1 0,
r
0,
r 1
2
2
0.
r r 1
r
В конкретных расчётах приняты следующие значения параметров: p0=1.0333 кГ/см2,
0=1.2928 кг/м3, =0.33, γ=1.4, E=0.7×106 кГ/см2, =2.7×103 кг/м3, безразмерная толщина
пластины, если это не оговаривается особо, принята равной h=3×10-3. Безразмерный параметр γ20/h оказывается при этом равным 0,2234, сама парабола имеет уравнение
y2=0.2234x, т. е. она прижата к действительной оси. В приводимой ниже таблице даны
Reλ, Imλ в зависимости от скорости v=vx.
V=0.00
0.178514E+00 0.0000000E+00
0.773161E+00 0.0000000E+00
0.773161E+00 0.0000000E+00
0.208068E+01 0.0000000E+00
0.208068E+01 0.0000000E+00
V=0.01
0.1795529E+00 0.0000000E+00
0.7731649E+00 0.0000000E+00
0.7737315E+00 0.0000000E+00
0.2080810E+01 0.0000000E+00
0.2080810E+01 0.0000000E+00
V=0.05
0.204827E+00 0.0000000E+00
0.772916E+00 0.0000000E+00
0.787438E+00 0.0000000E+00
0.208370E+01 0.0000000E+00
0.208374E+01 0.0000000E+00
V=0.1
0.2893258E+00 0.0000000E+00
0.7671301E+00 0.0000000E+00
0.8307226E+00 0.0000000E+00
0.2091960E+01 0.0000000E+00
0.2092567E+01 0.0000000E+00
V=0.15
0.467860E+00 0.0000000E+00
0.721530E+00 0.0000000E+00
0.904503E+00 0.0000000E+00
0.210292E+01 0.0000000E+00
0.210600E+01 0.0000000E+00
V=0.16
0.5367171E+00 0.0000000E+00
0.6859869E+00 0.0000000E+00
0.9231474E+00 0.0000000E+00
0.2105080E+01 0.0000000E+00
0.2109058E+01 0.0000000E+00
V=0.161
0.546201E+00 0.0000000E+00
0.679959E+00 0.0000000E+00
0.925086E+00 0.0000000E+00
0.210529E+01 0.0000000E+00
0.210936E+01 0.0000000E+00
V=0.162
0.5567974E+00 0.0000000E+00
0.6728446E+00 0.0000000E+00
0.9270390E+00 0.0000000E+00
0.2105500E+01 0.0000000E+00
0.2109678E+01 0.0000000E+00
V=0.163
0.569116E+00 0.0000000E+00
0.664029E+00 0.0000000E+00
0.929005E+00 0.0000000E+00
0.210570E+01 0.0000000E+00
V=0.164
0.5847359E+00 0.0000000E+00
0.6519364E+00 0.0000000E+00
0.9309856E+00 0.0000000E+00
0.2105914E+01 0.0000000E+00
29
0.210998E+01 0.0000000E+00
V=0.1645
0.595469E+00 0.0000000E+00
0.642974E+00 0.0000000E+00
0.931980E+00 0.0000000E+00
0.210601E+01 0.0000000E+00
0.211045E+01 0.0000000E+00
0.2110301E+01 0.0000000E+00
V=0.1648
0.6047802E+00 0.0000000E+00
0.6347301E+00 0.0000000E+00
0.9325796E+00 0.0000000E+00
0.2106079E+01 0.0000000E+00
0.2110550E+01 0.0000000E+00
V=0.1649
0.609408E+00 0.0000000E+00
0.630457E+00 0.0000000E+00
0.932779E+00 0.0000000E+00
0.210609E+01 0.0000000E+00
0.211058E+01 0.0000000E+00
V=0.16495
0.6126738E+00 0.0000000E+00
0.6273703E+00 0.0000000E+00
0.9328794E+00 0.0000000E+00
0.2106110E+01 0.0000000E+00
0.2110597E+01 0.0000000E+00
V=0.16497
0.614464E+00 0.0000000E+00
0.625650E+00 0.0000000E+00
0.932919E+00 0.0000000E+00
0.210611E+01 0.0000000E+00
0.211060E+01 0.0000000E+00
V=0.16499
0.6171668E+00 0.0000000E+00
0.6230197E+00 0.0000000E+00
0.9329595E+00 0.0000000E+00
0.2106118E+01 0.0000000E+00
0.2110610E+01 0.0000000E+00
V=0.164995
0.618404E+00 0.0000000E+00
0.621800E+00 0.0000000E+00
0.932969E+00 0.0000000E+00
0.210611E+01 0.0000000E+00
0.211061E+01 0.0000000E+00
V=0.164997
0.6193236E+00 0.0000000E+00
0.6208878E+00 0.0000000E+00
0.9329735E+00 0.0000000E+00
0.2106119E+01 0.0000000E+00
0.2110612E+01 0.0000000E+00
V=0.164998
0.615611E+00 0.0000000E+00
0.624539E+00 0.0000000E+00
0.932939E+00 0.0000000E+00
0.210611E+01 0.0000000E+00
0.211060E+01 0.0000000E+00
V=0.164999
0.6201093E+00-0.1288604E-02
0.9329775E+00 0.0000000E+00
0.2106120E+01 0.0000000E+00
0.2110613E+01 0.0000000E+00
0.2743295E+01 0.0000000E+00
V=0.165
0.620111E+00-0.1672301E-02
0.932979E+00 0.0000000E+00
0.210612E+01 0.0000000E+00
0.211061E+01 0.0000000E+00
0.274329E+01 0.0000000E+00
V=0.17
0.6291597E+00-0.7610678E-01
0.9431576E+00 0.0000000E+00
0.2107125E+01 0.0000000E+00
0.2112181E+01 0.0000000E+00
0.2745945E+01 0.0000000E+00
V=0.20
0.689641E+00-0.2130506E+00
0.101179E+01 0.0000000E+00
0.211207E+01 0.0000000E+00
0.212159E+01 0.0000000E+00
0.276452E+01 0.0000000E+00
V=0.2798
0.9049170E+00-0.4511531E+00
0.1269552E+01 0.0000000E+00
0.2106709E+01 0.0000000E+00
0.2136002E+01 0.0000000E+00
0.2842563E+01 0.0000000E+00
30
V=0.3
0.972456E+00-0.5110125E+00
0.135808E+01 0.0000000E+00
0.209906E+01 0.0000000E+00
0.213166E+01 0.0000000E+00
0.287062E+01 0.0000000E+00
V=0.4
0.1364564E+01-0.8722558E+00
0.2001214E+01-0.3055128E+00
0.2059245E+01 0.0000000E+00
0.3072732E+01 0.0000000E+00
0.4516915E+01 0.0000000E+00
Первый расчёт проводился для значения скорости v=0. Как и должно быть, первое собственное значение – простое, а два других - кратные. С ростом скорости кратные собственные значения расщепляются (сдвигаясь вправо), но остаются действительными. Затем первое и второе собственные значения начинают сближаться (наступит момент, когда
они сольются полностью и собственное значение станет кратным, но такие исследования
невозможно провести т. к. задача на собственные значения будет иметь при этом жорданову клетку). При v=0.164999 появляется комплексная пара с малой мнимой частью (в
таблице приведено только собственное значение с отрицательной мнимой частью). Действительная часть этой комплексной пары близка к действительным собственным значениям при предыдущем значении скорости v=0.164998. При дальнейшем росте скорости
модуль комплексной пары растёт (заметим, что эта комплексная пара остаётся единственной) и при v=0.2798 она выходит на параболу устойчивости. Это – критическая скорость
флаттера. При v=0.4 появляется вторая комплексная пара, но она лежит внутри параболы
устойчивости.
Итак, проясняется механизм флаттерной неустойчивости. Для круглой пластины исследование условий возникновения флаттерной неустойчивости проводилось по первому
собственному значению. Условие возникновения флаттера по появлению у рассматриваемой спектральной задачи комплексной пары даёт заниженное значение критической скорости. Проясняется также вид возмущения спектра рассматриваемой спектральной задачи
с ростом скорости потока.
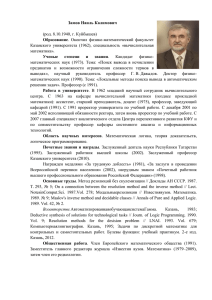
Приведем результаты вычислений критической скорости флаттера для круглой пластинки и пластинки, получающейся из круга конформным отображением z=+ n),
||1 (эта кривая — эпитрохоида). При =1/n кривая имеет n угловых точек, поэтому все
расчёты проводились при < 1/n. Конкретно рассматривались две области: n=4, =0.1,
0.2, 0.24; n=12, =0.0625 и две краевые задачи: защемление и свободное опирание. Вид
первой из этих областей представлен на Фиг. 1.3, вид второй области не приводится.
Фиг. 1.3. Вид пластины в плане: эпитрохоида, n=4, =0.1
31
Вначале рассматривалась круглая пластинка с защемлённым краем. Расчёты проводились на сетках 9×15 и 15×31 (первая цифра означает число окружностей сетки, а вторая
число точек сетки на каждой окружности); на обеих сетках получено одно значение критической скорости v=0.2798. Второй расчёт проводился для четырёхлепестковой эпитрохоиды при =0.1. При =0 ( — угол вектора скорости потока с осью ox) получено то же
значение критической скорости. Первым на параболу устойчивости выходит минимальное
по модулю собственное значение =(0.935906, 0.457245). На Фиг. 1.4 приведены графики
Re(x,0) и Re(0,y).
Фиг. 1.4. График Re φ(x,0) и Re φ(0,y), v = 0,2798 для эпитрохоиды n=4, =0.1
Кривая, не имеющая пересечений с осью ox - это Re(0,y). Другая кривая - это Re(x,0),
она пересекает ось ox, затем плавно стремится к нулю. Для /4 получено значение критической скорости v=0.2789. Таким образом, критическая скорость флаттера для данной
области слабо меняется в зависимости от направления вектора скорости потока. Второй
расчёт проводился для той же области при = 0.2. На сетке 9×15 получено значение критической скорости флаттера v=0.2771, на мелкой сетке получено близкое значение
v=0.2796. Графики Re собственной функции приведены на Фиг. 1.5. Первым на параболу
устойчивости выходит минимальное по модулю собственное значение =(0.996053,
0.471697). Итак, первое собственное значение и критическая скорость флаттера по сравнению с предыдущим расчётом изменились незначительно. Вид собственной функции
(сравни Фиг. 1.4 и Фиг. 1.5) изменился, но осцилляции Re(x,0) у правой границы области
можно отнести, видимо, к неточности счёта (заметим, что граница этой области имеет в
большую кривизну).
четырёх точках
Фиг. 1.5. Графики Re собственной функции для θ=π/4, v = 0,2796, n=4, =0.2
32
Для /4 на обеих сетках получено значение критической скорости v=0.2826, первым
на параболу устойчивости выходит минимальное по модулю собственное значение
=(0.940322, 0.458382). Последний расчёт для этой области с краевым условием защемления проводился при =0.24; получено для =0 на сетке 9×15 v=0.2724 и на сетке 15×31
v=0.2751, устойчивость определялась по первому собственному значению =(0.987082,
0.469646). Для = /4 на сетке 9х15 получено v=0.2821, а на сетке 15×31 получено близкое
значение v=0.2809. Устойчивость определялась по первому собственному значению
=(0.940836, 0.458527).
Далее рассматривалась вторая краевая задача при =0.2, n=4; она существенно труднее для расчёта, чем первая, поэтому расчёты проводились на сетках 13×25 и 15×31. При
=0 на первой сетке получено v=0.2653, а на второй v=0.2581. Интересно отметить, что для
этой задачи первое собственное значение действительно 1=0.63323, а устойчивость
определяется по второму собственному значению 2=(0.680571, 0.390052). График Reφ
приведён на Фиг. 1.6. Таким образом, для пластины, отличной от круга, не обязательно
устойчивость определяется по первому собственному значению. Однако для /4
устойчивость определялась по первому собственному значению; на сетке 13×25 получено
v=0.2611, а на сетке 15×31 получено v=0.2613, 1=(0.610680, 0.369400) – собственное значение, по которому определялась устойчивость. Интересно отметить, что график Reφ (см.
Фиг. 1.6) имеет качественное отличие: Re(0,y) имеет нули. Это вызвано тем, что в данном
случае устойчивость определяется по второму собственному значению.
Фиг 1.6. График Re φ v=0.2581, n=4, =0.2
Далее рассматривалась область, ограниченная эпитрохоидой с 12 лепестками (n=12,
=0.0625), при двух краевых условиях: защемление и свободное опирание. Вектор скорости потока составлял с осью ox углы = 0, . В силу симметрии значения критической скорости для двух последних значений углов должны совпадать; одной из целей
расчётов являлась проверка этого факта. Вначале рассматривалась первая краевая задача;
для =0 на сетке 9×15 получено значение критической скорости флаттера v=0.2805, а на
сетке 15×31 v=0.2848. Устойчивость определялась по первому собственному значению
=(0.940611, 0.458456). Графики Reφ приведены на Фиг.1.7. Второй расчёт проводился для
/12; на сетке 9×15 получено значение критической скорости v=0.2803, а на сетке
33
15×31 получено значение v=0.2849, устойчивость определялась по первому собственному
значению =(0.940768, 0.458494). При /4 на сетке 9×15 получено v=0.2796, а на сетке
15×31 получено v=0.2851. Таким образом, результаты двух последних расчётов практически совпали, что говорит о надёжности методики расчёта.
Далее для этой области рассматривалась вторая краевая задача. При =0 на сетке 9×15
получено v=0.2152 а на сетке 15×31 получено v=0.2291.
Устойчивость определялась по первому собственному значению =(0.618777, 0.371835).
График Reφ приведён на Фиг. 1.8.
Следующий расчёт для этой области и краевом условии свободного опирания проводился
при /12. На сетке 13×25 получено v=0.2351, а на сетке 15×31 получено v=0.2305.
Устойчивость определялась по первому собственному значению =(0.634463, 0.373240).
При /4 сетке 15×31 получено значение v=0.2385. Как видно, два последних расчёта
совпадают с хорошей точностью.
Фиг. 1.7. График Re ϕ(первая краевая задача), v=0.2848, n=12, =0.0625
Фиг. 1.8. График Re ϕ (вторая краевая задача), v=0.2291, n=12, =0.0625
4.1. Защемлённая эллиптическая пластина. Рассматривается эллиптическая пластина (a=1) с экцентрисситетом e=0.7 . Вектор скорости потока составлял с осью x углы θ =0,
34
π/8, π/4, 3π /8, π/2. Расчёты проводились на сетках 9×15 и 15×31 со стандартными параметрами (см. пункт 3 ). На обеих сетках получены близкие значения. Ниже приводятся
значения на мелкой сетке: 0.3622, 0.3742, 0.4076, 0.4441, 0.4505. Таким образом, по сравнению с единичным кругом (0.2798 пункт 3) критическая скорость возросла. Она возрастает при возрастании угла направления вектора потока от 0 до π/2. Вид Reφ (φ – амплитуда) при θ=0 приведён на Фиг.1.9. Эта поверхность имеет характерный «горб» вытянутый
по направлению вектора скорости потока. При изменении угла направления вектора потока этот горб поворачивается вместе с вектором потока, но качественно вид собственной
формы тот же.
Фиг. 1.9. Защемлённая эллиптическая пластинка (a = 1) с эксцентриситетом e =0,7.
Вид Re ϕ(ϕ – амплитуда) при θ=0
4.2. Свободно опёртая эллиптическая пластина. Для свободно опёртой эллиптической пластины при тех же параметрах и направлениях вектора скорости потока
получены значения критической скорости: 0.2783, 0.2833, 0.2946, 0.3006, 0.2987(2). Вид
собственной формы при θ=0 приведён на Фиг. 1.10. Он резко изменился. Качественно
такой же вид собственной формы при θ= π/8, но при θ= π/4 вид собственной формы резко
меняется и качественно она становится похожей на форму Фиг. 1.9. Таким образом, в интервале от θ= π/8 до θ= π/4 происходит резкое перестроение формы собственных коле35
баний. При θ=3 π/8 и θ= π/2 форма собственных колебаний качественно похожа на приведённую на Фиг.1.9. Заметим, что при θ= π/2 критическая скорость определялась по второму собственному значению. Она несколько ниже, чем при θ=3 π/8, т.е. для краевого
условия свободного опирания нет монотонного возрастания скорости при изменении угла
направления вектора потока от θ=0 до θ= π/2. По сравнению с единичным кругом (0.2241)
критическая скорость выше. Вид собственной формы для круга аналогичен Фиг.1.9, т.е.
для эллипса собственная форма при углах θ=0, π/8 качественно другая.
Фиг. 1.10. Свободно опёртая эллиптическая пластинка (a = 1) с эксцентриситетом e
=0,7. Вид Re φ (φ – амплитуда) при θ=0
4.3. Выводы. Анализ проведённых расчётов показывает, что качественно картина
поведения собственных форм флаттера эллиптической пластины различна при краевых
условиях защемления и свободного опирания. Критическая скорость флаттера выше для
защемлённой пластинки по сравнению со свободно опёртой.
4.4. Обсуждение полученных результатов. На Фиг. 1.11-1.12 изображены линии уровня поверхности собственной формы от значения 0.0 в положительном и отрицательном направлении с шагом 0.1. Видно, что на Фиг. 1.11 (краевое условие защемления)
на правой половине пластины линий уровня нет. Здесь собственная форма имеет малые
отрицательные значения ~ -0.01. Затем видна прямая линия, делящая пластину почти по36
полам. Это линия уровня 0.0 (контур пластины тоже линия уровня 0.0). Вычислительные
эксперименты показывают, что эта линия смещена немного от центра симметрии эллипса
навстречу набегающему потоку и практически является прямой. Аналогичная картина
наблюдается для краевого условия свободного опирания, Фиг. 1.12 . Но здесь на правой
половине пластины собственная форма принимает достаточно большие отрицательные
значения, а линия уровня 0.0 расположена аналогично. Для того, чтобы проверить
насколько общими являются эти выводы была проведена серия расчётов: 1) эллипс, 1-ая
краевая задача, =/8, Vкр.=0.3742; 2) эпитрохоида, 1-ая краевая задача, =0.1, n=4, =/6,
Vкр.=0.2795; 3) эпитрохоида, 1-ая краевая задача, =0.1, n=4, =/8, Vкр.=0.2799; 4) эпитрохоида, 1-ая краевая задача, =0.1, n=4, =/4, Vкр.=0.2789; 5) эпитрохоида, 1-ая краевая задача, =0.1, n=4, =0, Vкр.=0.2798;
Во всех случаях на рисунках присутствует прямая узловая линия (линия уровня 0.0),
которая перпендикулярна вектору скорости набегающего потока (поворачивается вместе
с ним), и немного смещена от центра симметрии потока навстречу набегающему потоку.
Так устроена собственная форма рассматриваемой спектральной задачи.
Фиг. 1.11. Линии уровня поверхности собственной формы от значения 0,0 в положительном и отрицательном направлениях с шагом 0,1 (краевое условие защемления)
37
Фиг. 1.12. Линии уровня поверхности собственной формы от значения 0,0 в положительном и отрицательном направлениях с шагом 0,1 (краевое условие свободного опирания)
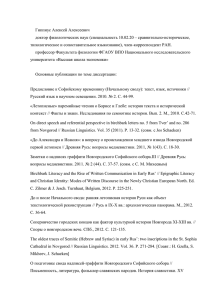
5. Исследование зависимости критической скорости флаттера от толщины
пластины. Приведем результаты вычислений по исследованию зависимости критической скорости флаттера от толщины; эти результаты можно трактовать как решение второй основной задачи флаттера. Принята следующая схема: для круглой пластины и пластины, ограниченной эпитрохоидой ( =0.1, n=4) варьировалась толщина пластины от
h=0.001 до h=0.01 с шагом 0.001, затем по полученным значениям критической скорости
подбиралась аналитическая зависимость v=v(h). Расчёты проводились для тех же параметров задачи, что и в предыдущем пункте.
Для круглой пластины, защемлённой по контуру, получены следующие значения
критической скорости: 0.1404 (3), 0.1544 (2), 0.2791 (1), 0.4801 (1), 0.8361 (1), 1.3806 (1),
2.1482 (1), 3.1745 (1), 4.4955 (1), 6.1476 (1); в скобках указан номер собственного значения, по которому определялась устойчивость. Интересно отметить факт, что для тонкой
пластинки устойчивость определяется не по первому собственному значению (сравни с
расчётами из предыдущего пункта). Оказалось, что зависимость критической скорости
флаттера от толщины имеет вид: v=a+bh3, значение констант a и b приведены на Фиг.
1.13. Из рассмотрения этого графика видно, что выписанная аналитическая зависимость
аппроксимирует экспериментальные данные очень точно.
Второй расчёт проводился для круглой пластины, свободно опёртой по контуру. Получены следующие значения критической скорости флаттера: 0.1283 (3), 0.1306 (3), 0.2241
(1), 0.3236 (1), 0.5237 (1), 0.8386 (1), 1.2862 (1), 1.8870 (1), 2.6618 (1), 3.6317 (1). Зависимость v=v(h) имеет тот же вид, что и в первом расчёте, но с другими константами a и b
(см. Фиг. 1.14).
Последний расчёт проводился для пластинки с контуром в виде эпитрохоиды ( =0.1,
n=4) с краевым условием защемления (вектор скорости потока воздуха был направлен по
оси ox). Получены следующие значения критической скорости флаттера: 0.08913 (3),
0.1531 (2), 0.2797 (1), 0.4878 (1), 0.8487 (1), 1.4001 (1), 2.1776 (1), 3.2171 (1), 4.5553 (1),
38
6.2289 (1). Зависимость v=v(h) имеет тот же вид, что и в первом расчёте, но с другими
константами a и b (см. Фиг. 1.15). Все приведённые расчёты выполнялись на сетке 9×15.
Для контроля при h=0.01 выполнялись расчёты на сетке 15х31. Для круглой пластинки
значения критической скорости совпали со всеми выписанными знаками. Для эпитрохоиды получено близкое значение 6.2310 (1). Забегая вперёд, скажем, что и для прямоугольной пластины зависимость v=v(h) имеет тот же вид, что и в описанных выше расчётах, но
с другими константами a и b. Полученный результат имеет непосредственное практическое значение: достаточно вычислить критическую скорость флаттера для двух толщин,
определить a и b, а затем пользоваться формулой v=a+bh3.
Фиг. 1.13. Исследование зависимости критической скорости флаттера от толщины пластины (круглая пластина, защемленная по контуру); V = a + bh 3 , а = 0,091048718;
b=
6124609,2
Фиг. 1.14. Исследование зависимости критической скорости флаттера от толщины пластины (круглая пластина, свободно опертая по контуру); V = a + bh 3 , а = 0,10004173; b =
6028457
39
Фиг. 1.15. Исследование зависимости критической скорости флаттера от толщины пластины (пластина с контуром в виде эпитрохоиды (ε= 0,1, п = 4) с краевым условием защемления, вектор скорости потока воздуха направлен по оси Ox); v = а + bh 3 , а = 0,10124565;
b= = 3511783
I.6. Прямоугольна пластина.
1. Постановка задачи и аналитическое решение. Рассмотрим прямоугольную пластину, которая в плоскости xy занимает область S1:{ 0 ≤ x ≤ a ,0 ≤ y ≤ b }. Примем
размер a в качестве характерного линейного размера, безразмерные параметры введем
так же, как и раньше, обозначим a / b . В результате придем к задаче на свободные
значения в области S : 0 x 1, 0 y 1/
D2 vn0 grad , h 2 0
(6.1)
x , y , 0, M ( ) 0
(6.2)
Для удобства дальнейших выкладок поделим обе части (6.1) на D,
обозначим
v/D v 0 , а за остальными параметрами оставим прежние обозначения. Будем считать
n 0 1,0 , а кромки пластины y 0 , y 1 / - шарнирно опертыми; только в этом случае
подстановкой ( x) sin(n y) задача сводится к задаче на собственные значения для
обыкновенного дифференциального уравнения четвертого порядка
IV 2k 2 '' k 4 v 0 ' X , k n
x 0 , 0 , 1 () 0 ; x 1, 0 , 2 () 0
(6.3)
(6.4)
Из общей теории известно, что эта задача имеет дискретный спектр, известна его
асимптотика; однако в практических приложениях необходимо знать несколько первых
собственных значений, и трудность состоит здесь в необходимости иметь явные выраже40
ния для корней характеристического
exp(sx) в (6.3), получим
уравнения четвертой степени. Подставив
(s 2 k 2 ) 2 v0 s 0
если
s s (k , v 0 )
—
корни
этого
(6.5)
уравнения,
то
общее
решение
имеет
вид: C exp( s x) . Подчинив его краевым условиям (6.4), придем к характеристическому определителю (k , v 0 , ) , который, являясь целой функцией, имеет счетное множество (вообще говоря, комплексных) изолированных корней.
Прием, с помощью которого определитель (k , v 0 , ) удается привести к виду,
удобному для исследования, состоит
в следующем (этот прием предложен
А.А.Мовчаном). . Пусть s1 , s 2 - два корня уравнения (6.5); если положить s1 i ,
s 2 i , то нетрудно убедиться, что два другие корня (6.5) и параметры v 0 и выразятся через и формулами:
s3, 4 2 4 2
v 0 4 ( 2 2 k 2 )
k 4 ( 2 2 )( 2 3 2 2k 2 )
(6.6)
Определитель (k , v 0 , ) приводится также к функции от и ; если, например, края x 0 и x 1 шарнирно оперты, получим
(k , , ) 2 ch 2 ch 2 2 2 2k 2 cos
( 2 2 k 2 ) 2 2 2 ( k 2 ) sin
sh 2 2 2 2k 2 0
2
2
2
2
2 2k
(6.7)
если же края x 0 , x 1 жестко защемлены, то придем к уравнению
(k , , ) ch 2 ch 2 2 2 2k 2 cos
k 2 3 2
2 2k
2
2
2
sin
sh 2 2 2 2k 2 0
(6.8)
Дальнейшие вычисления проводятся следующим образом. При v 0 0 из (6.5)
находим s14 (k 2 )1 / 2 , и характеристический определитель приводится к хорошо
изученному виду (по существу мы имеем задачу о собственных колебаниях пластины);
41
его корнями будут действительные числа (i 0 ) (см. Фиг. 1.16). Затем с некоторым шагом
задаются значения v 0 и находятся корни , уравнения 0 , удовлетворяющие второму из соотношений (6.6); соответствующие кривые (10 A1 , 02 A1 и т.д.) показаны на фиг.
1.16. При значении скорости v 0 v (01) пара корней сливается и при v 0 v (01) становится
комплексно сопряженной. При v 0 v (02) то же произойдет с другой парой корней и т.д.
Задача состоит в том, чтобы установить, какой из корней первым попадет на параболу
устойчивости; соответствующая этому скорость потока v 0 kp будет критической скоростью
флаттера.
Фиг. 1.16. Зависимость собственных значений от скорости потока
Подробное исследование уравнения (k , , ) проведено в оригинальных работах
А.А.Мовчана и его сотрудников, где приведены многочисленные результаты качественного и количественного характера; поскольку они относятся к довольно частной задаче, мы
их здесь не приводим.
2. Численно-аналитическое решение. Представим себе прямоугольную пластину, которая в плоскости xy занимает область S1 : x a , y b1 . Примем размер a в
качестве характерного линейного размера, обозначим b b1 / a и образуем аналогично
предыдущему безразмерные параметры ; в результате придем к задаче на собственные
значения в области S : x 1, y b
D2 vn 0 grad , ( x, y)
x
0
x 1
(6.9)
(6.10)
0 ,
y
y b
0
(6.11)
42
2
x 2
x 1
0 ,
2
y 2
y b
0
(6.12)
граничные условия (6.10),(6.11) соответствуют заделке, (6.10),(6.12) — шарнирному опиранию.
В комплексной плоскости области устойчивых и неустойчивых колебаний разделяет
парабола устойчивости 2 Re h(Im ) 2 0 ; поскольку
V v cos , v sin
(v, ) , уравнение 2 Re h(Im )2 f (v, ) 0 в плоскости параметров
и
v,
определяет нейтральную кривую, отделяющую область их докритических значений, т.е.
область устойчивых колебаний.
В предыдущих разделах установлены общие свойства собственных значений: Re 0
; колебания, соответствующие действительным , устойчивы; при фиксированном с
ростом v собственные значения последовательно выходят в комплексную область; при
заданном v число комплексных конечно. Поэтому выбрана следующая схема исследования: а) в соответствие задаче (6.9)—(6.12) ставится ее дискретный аналог; б) при
фиксированном определяется критическая скорость по первому собственному значению; в) при этом значении скорости проводится анализ устойчивости по другим комплексным собственным значениям; г) если находится комплексное вне параболы
устойчивости, вычисляется критическая скорость по этому собственному значению; д) из
всех найденных таким образом «критических» скоростей выбирается наименьшая.
Вначале построим дискретный лапласиан с краевым условием (6.10), для чего в
плоскости xy выберем сетку, состоящую из узлов
x cos(2 1) / 2n , 1,2,..., n
(6.13)
y b cos(2 1) / 2m , 1,2,..., m
(6.14)
Пусть A – матрица дискретного оператора, соответствующего дифференциальному
оператору 2 / x2 с краевым условием (-1)=(1)=0 на сетке (6.13); B – матрица дискретного оператора, соответствующего дифференциальному оператору 2 / y2 с краевым условием (-b)=(b)=0 на сетке (6.14).
Тогда дискретный лапласиан примет вид (часть 3, глава 2, §2):
H=ImA+BIn
(6.15)
где In и Im – единичные матрицы размера n x n и m x m; знаком обозначено кронекеровское произведение матриц. Собственный вектор матрицы H имеет вид u=wv, где v – собственный вектор матрицы A, w – собственный вектор матрицы B. При этом узлы сетки
нумеруются сначала по x, потом по y (справа налево, снизу вверх). Можно сказать, что
матрица (6.15) наследует свойство разделения переменных дифференциального оператора
Лапласа.
43
Дискретизация оператора 2/x2 с краевым условием (a)=(b)=0 проводится следующим образом: а) на сетке (6.13)(a= -1, b=1) или (6.14) (a=-b, b=b) выписывается интерполяционная формула Лагранжа, удовлетворяющая краевым условиям; б) значения вторых производных в узлах сетки получаются дифференцированием интерполяционной
формулы. В результате получаем
k 1
2
2
Dij
cos(q j )[(2 q 2 ) cos q i 3q cos i
2
b a k sin j q 0
(6.16)
sin q i
(2 j 1)
3q cos i
], j
, i, j 1, 2,..., k.
sin i
2k
Здесь k=n, a=-1, b=1 для матрицы A; k=m; a=-b, b=b для матрицы B.
Дискретизация производных x и y проводится аналогично. На соответствующей сетке (6.13) или (6.14) выписывается интерполяционный многочлен Лагранжа, значение производных в узлах сетки получается дифференцированием этой интерполяционной
формулы. В результате получаем матрицу дифференцирования
k 1
q cos q m sin q
4
(2 1)
(6.17)
D
,
, , 1, 2,..., k.
k (b a) q 0
sin
2k
При k=n, a=-1, b=1 получаем матрицу Dx дифференцирования по x; при k=m, a=-b, b=b
получаем матрицу Dy дифференцирования по y. Для того, чтобы получить производные
функции в узлах сетки, нужно умножить матрицу D на вектор значений функции в
узлах сетки. Следствием краевых условий (6.10), (6.12) является условие:
0,
(6.18)
а в этом случае матрица бигармонического оператора с краевым условием (6.10), (6.18)
есть H2. Это легко понять, т. к. матрица H2 имеет те же собственные векторы, что и матрица H, и соответствующие собственные значения 2i , i 1,2,.., N , где i – собственные значения матрицы H размера N x N (N=mn).
Теперь рассмотрим дискретизацию уравнения (6.9) с краевыми условиями (6.10), (6.11),
т. е. защемлённую по контуру пластинку.
Применим для функции (x,y) в прямоугольнике интерполяционную формулу:
n
m
(x,y)=
M
j 1
i 1
i0
( z ) L j 0 ( x) ( x j , yi ),
(6.19)
, ], x [ 11
,].
y=bz, z [ 11
L j 0 ( x)
l ( x)
, l ( x) ( x 2 1) 2 Tn ( x), Tn ( x) cos n arccos x,
l ( x j )( x x j )
'
x j cos j , j (2 j 1) / 2 / n, j 1,2,..., n;
M i0 ( z)
M ( z)
, M ( z ) ( z 2 1) 2 Tm ( z ),
M ( z i )( z z i )
'
zi cos i ,i (2i 1) / 2m, i 1,2,..., m.
44
она как видно удовлетворяет краевым условиям защемления. Для получения матрицы
дискретного бигармонического оператора H требуется применить бигармонический оператор к интерполяционной формуле (6.19), т.е. четыре раза дифференцировать по x и y
формулу (6.19). В результате получим несимметричную матрицу H размера N×N, N=mn.
Пронумеруем узлы в прямоугольнике (xj,yi) сначала по y, потом по x, т.е. сверху вниз,
справа налево. В результате получим, что 2 приближённо заменяется соотношением
H, где - вектор значений функции (x,y) в узлах сетки. Заметим, что матрица H –
несимметрична, хотя рассматриваемый бигармонический оператор самосопряжённый.
Следовательно, матрица H может иметь комплексные собственные значения. Наличие у
дискретного бигармонического оператора комплексных собственных значений (в результате погрешности дискретизации) нежелательно для задач исследования устойчивости.
Поэтому потребовалась модернизация применяемого подхода: вместо матрицы H рассматривалась матрица (H+H)/2. Этот приём можно прокомментировать так. Исходная задача – самосопряжённая (бигармоническое уравнение с краевым условием защемления),
но в результате дискретизации получается несимметричная матрица H. Представим H в
виде
H=(H+H)/2+(H-H)/2
и отнесём несимметричную часть к погрешности дискретизации. Возмущение, которое
при этом вносится в собственные значения матрицы H, зависит от того, насколько близки
резольвенты матриц H и (H+H)/2 в той части комплексной плоскости, которая нас интересует для исследования устойчивости потока. Это возмущение может быть оценено теоритически по схеме, описанной в главе 4, мы же предпринял численную проверку.
Матрица H (при b=1) размера 361×361 (361=19×19) имеет первое собственное значение
1 /2=2.4902, оно сравнивалось с известным результатом
(H+H)/2 имеет собственное значение
1* /2=2.489; матрица
1 /2=2.3961. Таким образом, возмущение, вно-
симое в собственные значения симметризацией матрицы H, приемлемо.
Дискретизация qrad в краевой задаче (4.1)-(4.3) проводилась аналогично.
3. Результаты расчетов. Приведём результаты расчётов для свободно опёртой пластинки. Значения механических параметров прежние, варьировались (относительные)
размер b, толщина h, скорость потока v и угол .
а) Расчёты для квадратной пластины (b=1, h=0.003) носили методический характер. Получены результаты: vкр.(0)= vкр.( /2)=0.2103, vкр.( /4)=0.2001; во всех случаях vкр. определено по первому собственному значению (здесь и далее k пронумерованы в порядке
возрастания их модулей). Графики кривых Re(x,0) и Re(0,y) тождественны.
б) Результаты расчётов для пластины с размерами b=0.5, h=0.003 приведены в таблице
1.1; в скобках около значения критической скорости указан номер собственного значения.
45
Таблица 1.1.
Свободно опёртая прямоугольная пластинка, b=0.5, h=0.003.
0
/8
/4
5/16
3/8
15/32
/2
vкр.
0.3546 (1)
0.3737(1)
0.4346(1)
0.4801(1)
0.5235(1)
0.5275(2)
0.5257(2)
vкр.
0.3042
0.3307
-
0.4207
-
0.4022
0.4121
Отметим одно обстоятельство, которое может оказаться существенным при численном
анализе задач флаттера: оказалось, что |1|=1.5658 и |2|=1.56660 очень близки, однако
1>0 действительно и не порождает неустойчивой формы колебаний. В третьей строке
таблицы приведены значения v*кр., найденные методом Бубнова-Галёркина в восьмичленном приближении; видно, что этот метод даёт сильно заниженные результаты (о
возможности метода Бубнова-Галёркина в рассматриваемой задаче будет ещё сказано
ниже).
Два обстоятельства заслуживают быть отмеченными: а) сравнительно резкий рост критической скорости в диапазоне углов и плавное её изменение при других
значениях углов; б) максимум критической скорости флаттера находится вблизи точки
15 /32: это так называемый эффект стабилизации колебаний пластины по отношению
к флуктуациям направления вектора скорости в окрестности /2. Заметим, что раньше
этот эффект был обнаружен в задаче о флаттере полосы. На Фиг. 1.17-1.19 показаны действительные части собственных функций при различных углах (/4, 5/16, 3/8) и при
v=vкр..
46
Фиг. 1.17. Прямоугольная пластина (b = 0,5, h = 0,003), действительная часть собственной
функции при угле θ= π/4 и при v = vкр; v= 0,4346
Фиг. 1.18. Прямоугольная пластина (b = 0,5, h = 0,003), действительная часть собственной
функции при угле θ = 5π/16 и при v = v кр; v = 0,4801
47
Фиг. 1.19. Прямоугольная пластина (b = 0,5, h = 0,003), действительная часть собственной
функции при угле θ = 3π /8 и при v = v кр; v = 0,5235
в) Проведены расчёты для удлинённой пластины с размерами b=0.25, h=0.0015 (отношение толщины к меньшей стороне пластины то же, что и в предыдущем пункте); результаты сведены в таблицу 2.2.
Таблица 2.2.
Свободно опёртая прямоугольная пластинка, b=0.25; h=0.0015
0
/8
/4
5 /16
vкр.
0.2655(3)
0.2832(3)
0.3453(1)
0.4014(1)
3 /8
7 /16
15 /32
/2
vкр.
0.4803(1)
0.4912(2)
0.4867(3)
0.4851(4)
48
Качественная картина поведения функции vкр.= vкр.() такая же, как и в предыдущем
пункте. На Фиг. 1.20-1.24 показаны действительные части собственной функции при различных углах (0, /4, 5 /16, 3 /8, 7 /16) и при v= vкр. Хорошо видно, что в той области
изменений , где наиболее резко возрастает критическая скорость, качественно изменяется и форма колебаний пластины. Можно сделать вывод, следовательно, что в указанной
области пластина наиболее чувствительна к изменениям величины и направления вектора скорости потока.
Фиг. 1.20. Прямоугольная пластина (b = 0,25, h = 0,0015), действительная часть собственной функции при угле θ = 0 и при v = v кр; v = 0,2665
49
Фиг. 1.21. Прямоугольная пластина (b = 0,25, h = 0,0015), действительная часть собственной функции при угле θ = π/4 и при v = v кр; v = 0,3541
Фиг. 1.22. Прямоугольная пластина (b = 0,25, h = 0,0015), действительная часть собственной функции при угле θ = 5π /16 и при v = v кр; v = 0,4014
50
Фиг. 1.23. Прямоугольная пластина (b = 0,25, h = 0,0015), действительная часть собственной функции при угле θ = 3π /8 и при v = v кр; v = 0,4803
Фиг. 1.24. Прямоугольная пластина (b = 0,25, h = 0,0015), действительная часть собственной функции при угле θ = 7π /16 и при v = v кр; v = 0,4912
51
4. Метод Бубнова-Галёркина (Б.–Г.). Считается, что в задаче о флаттере прямоугольной пластины (при традиционной постановке V={vx,0} ) метод Б.-Г. доставляет приемлемый результат для критической скорости даже в двухчленном приближении. Однако, уже давно было обнаружено, что в случае удлинённой вдоль потока пластинки эффективность метода резко падает, и для достижения приемлемой точности необходимо в аппроксимирующей сумме удерживать значительное (заранее, вообще говоря, неизвестное) число слагаемых. Применимость метода Б.-Г. к задачам флаттера пластины в общей
постановке до сих пор не исследована; приводимые ниже результаты в известной степени
восполняют этот пробел.
На приведённых рисунках хорошо видно, что характерный размер возмущения порядка половины меньшей стороны пластины, поэтому приближённое решение было принято
в виде: =cmnsinmysinnx, m=1,2; n=1,…,4 (пластина занимает область
K={0 x
1/,0 y 1}). Обычная процедура по отношению к уравнению (6.9) приводит к исследованию корней характеристического определителя восьмого порядка, который вследствие
громоздкости не выписывается. Цель вычислений – установить зависимость (v,).
Результаты вычислений приведены в третьем столбце таблицы 1.3 и 1.4 для пластины с
размерами b/a=0.5, h/a=0.003; первая колонка чисел - это Re, вторая - Im, знаком (*)
отмечены , вышедшие на параболу устойчивости или находящиеся вне её. Относительная скорость потока v/v*кр. обозначена в первом столбце таблиц. Второй столбец таблиц –
это собственные значения, найденные описанным в статье методом; они относятся к значениям относительной скорости v/vкр. .
Анализ результатов приводит к выводам: а) метод Б.-Г. приводит к удовлетворительным оценочным значениям для v*кр., если число слагаемых в формуле для выбирать не
меньше чем N~4a/b (две “полуволны” вдоль меньшей стороны и 2a/b “полуволн” – вдоль
большей); б) в установленной зависимости =(v,), а следовательно, и при определении
форм колебаний, метод Б.-Г. приводит к погрешностям качественного характера, и они
возрастают с увеличением скорости потока. Разумеется, эти выводы не являются окончательными; исследования надо продолжить для пластин другой геометрии и других комбинаций граничных условий.
52
Таблица 1.3. Прямоугольная пластинка, b=0.5, h=0.003, =0; vкр.=0.3546, v*кр.=0.3041.
0.2
0.5
0.8
1.0
2.0
0.3054; 0
0.2933; 0
0.6758; 0
0.6723; 0
0.6381; 0.0666
0.5159; 0
1.7361; 0
0.6522; 0
0.9426; 0.3118
0.7525; 0.2822
1.6468; 0
1.9168; 0
1.2452; 0.5275 (*)
0.8601; 0.4384 (*)
1.5355; 0
2.5660; 0.4498
3.1764; 0.7483
1.0475; 1.1202 (*)
2.6887; 2.0591 (*)
2.3787; 3.0369 (*)
4.9558; 0.1886
4.2831; 0.5942
6.8751; 0
7.8906; 1.7927
Таблица 1.4. Прямоугольная пластинка, b=0.5, h=0.003, /4; vкр.=0.4346; v*кр.=0.4121
0.5
1.0
0.7066; 0.02435
0.6499; 0
1.8095; 0
0.7027; 0
1.5252; 0.5838
(*)
1.8760; 0
2.0
1.3085; 0.5407 (*)
2.7396; 0.3776
3.4437; 2.5618
(*)
2.8552; 0.1886
4.0025; 1.6035
(*)
2.3907; 2.3365 (*)
4.8677; 0.3876
3.3375; 3.2750 (*)
7.1122; 0
7.0163; 1.1392
53
5. Исследование зависимости критической скорости флаттера от толщины пластины. Конкретные расчёты проводились для прямоугольной пластины с
отношением сторон (1:2) при тех же значениях параметров, что и в других примерах, для
трёх направлений вектора скорости 2.. Во всех случаях подтвердилась зависимость vкр.=a+bh3. Значения a и b приведены в таблицах 1.5 (защемлённая пластина) строки
1,2,3 и 1.6 (свободно опёртая пластина); в первом столбце таблиц приведены значения угла θ.
Таблица 1.5
Исследование зависимости критической скорости флаттера от толщины пластины.
щемлённая пластина).
θ
а
(за-
b
0
0.18086698
88565587
3π/8
0.28562681
16948368
π/2
0.088122509
29134275
Таблица 1.6
Исследование зависимости критической скорости флаттера от толщины пластины.
(свободно опёртая пластина).
θ
a
b
0
0.15705135
6172557.5
3π/8
0.23725284
10966926
π/2
0.075931991
17242086
6. Зависимости критической скорости флаттера от высоты над уровнем моря. В качестве примера рассмотрим прямоугольную свободно опёртую пластину с отношением сторон 1:2 (b=0.5) и относительной толщиной 0.005. Пусть вектор скорости потока направлен по оси x. Данные о давлении и плотности воздуха, ускорении свободного падения, скорости звука в зависимости от высоты над уровнем моря известны,
остальные параметры оставались прежними. Проводились расчёты критической скорости
флаттера для высот от 0 до 11 километров над уровнем моря с шагом в 1 километр. Как и
54
ранее, расчёты проводились на двух сетках 9 × 9 и 19 × 19. Полученные результаты расчётов совпали в пределах точности вычисления корня трансцендентного уравнения устойчивости. Во всех случаях устойчивость определялась по первому собственному значению.
Были получены следующие значения критической скорости флаттера: 0.9322, 1.0181,
1.1203, 1.2416, 1.3853, 1.5556, 1.7577, 1.9997, 2.2836, 2.6249, 3.0340, 3.5261. Таким образом, критическая скорость флаттера растёт с высотой над уровнем моря. Полученные данные хорошо апроксимируются аналитической зависимостью
v=(a+cx+ex2+gx3+ix4+kx5)/(1+bx+dx2+fx3+hx4+jx5), где v-скорость флаттера, x-высота над
уровнем моря. Здесь a=0.93220144, b=-0.03922232, c=0.041901991, d=-0.0019833293,
e=0.002180686, f=0.0002874881, g=0.00012557829, h=-2.2255284e-5, i=2.7092604e-6,
j=6.2616321e-7, k=-9.2719828e-7. Как видно, эта аналитическая зависимость сложная и не
даёт ясного представления о росте критической скорости флаттера. Поэтому применялась
также более простая аналитическая аппроксимация расчётных данных v=a+bxc,
a=1.0064589, b=0.021827843, c=1.9714133. На высотах до одного километра эта аппроксимация даёт погрешность в несколько процентов, для больших высот качество аппроксимации лучше. Таким образом, зависимость критической скорости от высоты почти
квадратичная.
I.7. Флаттер прямоугольной пластины переменной толщины
или жесткости.
В первом пункте изучается флаттер полосы переменного поперечного сечения; методом малого параметра поставлена и решена задача об оптимальной форме сечения из
условия максимума критической скорости флаттера. Во втором пункте исследуется флаттер прямоугольной пластины переменной жесткости при различных граничных условиях.
Выявлен новый механический эффект — существенная зависимость критической скорости
флаттера от коэффициента Пуассона.
1. Полоса переменного поперечного сечения. Уравнение колебаний
полосы запишется в виде
0
x 2
3 2w
2 w
2 3 2w 2
h
h
2
(
1
)
2
xy xy y 2
y 2
x
p0 w
3 2w
2 w
h
2
x 2
y
2
H w
vn gradw
0
a0 D0 t
D0
t 2
0
(7.1)
Здесь обозначено: p0 , a0 - давление и скорость звука в невозмущенном потоке, — показатель политропы,
H h0 h( x, y) - толщина полосы, D0 Eh03 /(12(1 2 )) , , E, -
плотность, модуль Юнга и коэффициент Пуассона материала полосы.
55
Решение (7.1) будем искать в классе функций w ( y) exp(t iax ) при условии
h h( y) ; - положительный действительный параметр; координаты x, y отнесем к
(ширина полоы), оставив за ними прежние обозначения; в результате из (7.1) получим
h 3 ( 4 2 ) 2 2 (1 )(h 3 ) h 3 ( 2 )
A1M (i cos sin ) ( A1 A2 h2 ) 0
A1 12(1 2 )
p0
3
E
3
0
h
;
A2 12(1 2 )
a02 2
;
c02 h02
(7.2)
c02
E
;
a0
.
На кромках y 0 , y 1 примем условия шарнирного опирания 0 , 0 .
Задача (7.2) на собственные значения при заданной функции h( y ) может быть
исследована численными методами; однако, имея в виду поставить задачу оптимизации
и обнаружить новые механические эффекты качественного характера, получим приближенное решение методом Бубнова—Галеркина в двухчленном приближении:
c1 sin y c2 sin 2y . После известной процедуры из (7.2) получим систему:
i
1
c1 1a20 2 2 2 (1 )b20 A1 M cos A1 A2 c20 2
2
2
4
c2 2 a11 4 2 2 (1 )b11 A1M sin A2 c11 2 0.
3
4
c1 1a11 4 2 2 (1 )b11 A1M sin A2 c11 2
3
(7.3)
i
1
c2 2 a02 8 2 2 (1 )b02 A1M cos A1 A2 c02 2 0 .
2
2
Здесь введены обозначения
1 4 2 2 2 4 ; 2 4 5 2 2 4 4 ; 1 2 ; 2 4 8 2 2 16 4
1
1
a pq h sin y sin 2ydy ; b pq h 3 cos p y cos q 2ydy ;
3
p
q
0
(7.4)
0
1
c pq h sin p y sin q 2ydy ;
p, q 1;2 .
0
Характеристический определитель системы (7.3), приравненный к нулю, связывает
M и , и основная задача состоит в том, чтобы разделить области устойчивых
56
(Re 0) и неустойчивых (Re 0) колебаний. Границе областей отвечает i1 ; из
(7.3) при этом получим (обозначения очевидны)
c1 ( Au iA0 ) c2 A12 0 ;
c1 A21 c2 ( A22 iA0 ) 0
характеристическое уравнение распадается на два
A0 ( A11 A22 ) 0 ; A11 A22 A12 A21 A02 0
(7.5)
Легко устанавливается, что при небольших
A0 A1M cos A11 0 , A11 A22 A12 A21 0
,
( 2 1) в (7.5) следует принять
из
первого
уравнения
выразить
1 M cos и подставить во второе. Наименьший положительный корень M 0 получившегося уравнения, минимизированный по , определяет критическую скорость.
Наоборот, при / 2 A0 A1 0 , поэтому A11 A22 0 , A112 A02 A12 A21 0 , дальнейшая процедура аналогична описанной. (Отметим, что при / 2 вследствие симметрии 0 ). Из непрерывной зависимости решения от следует, что существует значение 0 , когда выполнены три условия: A0 0 , A11 A22 0 , A112 A12 A21 0 ; анализ этой системы очевиден.
Подробно рассмотрим случай, важный в практических приложениях, когда
h 1 f ( y) , ( f ) 2 1 . Для параметров (7.4) получаем
1
1
1
1
1
1
; a02 3 f sin 2 2ydy 3a02
a20 3 f sin 2 ydy 3 a20
2
2
2
2
0
0
b20
1
1
1
1
; b02 3 a02
; c20 a20
; c02 a02
3 a20
2
2
2
2
1
1
0
0
; b11 3 f cos y cos 2 ydy 3 b11
a11 3 f sin y sin 2 ydy 3 a11
; принято
c11 a11
1
fdy 0 .
0
Система (7.3) преобразуется:
8
a20
A2 12 (1 a20
) iA0 c2 3 12 A1M sin 0
c1 11 3 A11
3
8
a02
A2 12 (1 a02
) iA0 0
c1 3 21 A1M sin c2 22 3 A22
3
57
(7.6)
здесь обозначено:
4 2 2b11
A2 12 a11
/3 ;
11 ( 2 2 ) 2 ; 12 21 ( 4 5 2 2 4 4 )a11
( 2 2 ) 2 4 2 2 ;
22 (4 2 2 ) 2 ; A11
2 и штрих в дальнейшем опущен.
(4 2 2 ) 2 16 2 2 ; принято
A22
В соответствии с общей схемой при 0 0 имеем A0 0 , откуда
1 M cos ; обозначив A2 12 z , получим
(8 A1 sin / 3) 2 M 2 (8 A1 sin / 3) 2 (12 / 2 cos 2 ) (8 A1tg / 3 ) 2 ( z / A2 ) C1 z . Теперь характеристическое уравнение (7.6) с точностью до 2 можно представить в форме (обозначения очевидны):
(b1 a1 z)(b2 a2 z) C1 z 0
(7.7)
Для углов , при которых справедлива оценка C1 ~ , приближенное решение
(7.7) записывается в виде
z
3 A11 a20
b1
b
11
C1 1 11
C1
a1
b2 b1
1 a2 o
22 11
(7.8)
В соответствии с принятыми обозначениями M 2 (1/ A2 cos 2 )( z / 2 ) ; по определению принимаем M kp min (M ) , что эквивалентно min ( z / 2 ) ; подставив сюда (7.8),
после несложных выкладок получим: kp (1 36C0 / 7 4 )1/ 4 , C0 8 A1tg /(3 3 A2 )
2
.
Как видим, с большой точностью kp . Подставив это в (7.8), найдем
M
2
kp
1
4 2
z
1 a20 (1 3 ) 4 82 A1tg
2
2
2
21 A2 cos
A2 cos kp A2 cos
2
(7.9)
; задачу оптимизации сформулиРешение зависит от линейного функционала a20
руем следующим образом: найти функцию f ( y) , которая максимизирует M кр (7.9) при
дополнительных ограничениях
1
1
H ( y)dy 0; ( f ( y)) dy c
2
0
(7.10)
0
здесь c — некоторая константа. Составим функционал
1
I ( f ) f ( y )sin 2 y 1 f ( y ) 2 ( f ( y )) 2 dy
0
условие его стационарности после нормировки приводит к решению
58
f ( y) cos2 y k1 k2 y k3 y 2
(7.11)
Параметры k s находятся из первого уравнения (7.10) и граничных условий, которые примем в виде: y 0, f 0 ; y 1, f 0 . После этого из (7.11) получим
f ( y) cos 2 y 0 y(1 y) 0 / 6
0, 25 1 0 / 2 . Подставив это в
при этом оказывается равным: a20
функционал a20
(7.9), найдем
4 2
4 8 A tg
M 2
1 1 3 1 02 2 1
2
A cos 4
21 A2 cos
2
2
кр
Как видно, эффект оптимизации существенно зависит от : если 3 1 , то надо
выбрать 0 , и тогда h 1 f ( y) ; в случае 3 1 следует выбрать h 1 f ( y) .
Рассмотрим предельный случай / 2 ; решение будет с хорошей точностью
справедливо в области 0 / 2 . Из системы (7.6) получим выражение для критической скорости ( в этом случае kv 0 ):
A12 22 11
22 11
8
2
A
M
B
0
1 kp
0
2
A2
2
3
2
2
(7.12)
A22
3a20
A11
( 22 11)a02
,
здесь обозначено: 2B0 3a02
A22
3a20
A11
( 22 11)(a02
a20
) . Введем дополнительно обозначение
20 3a02
D ( 22 11) 2 / 4 A12 ( 22 11) /( 2 A2 ) и линеаризуем (7.12) по ; получим в результате
2
22 11
A12
8
2
B0
0
A1 M kp D 1
D
A2 D
3
4 , 22 A22
16 4 ,
В рассматриваемом случае 0 , поэтому 11 A11
3a20
) , 0 ( 4 / 2)(31a02
14a20
) ; далее запишем
B0 ( 4 / 2)(31a02
22 11
D0
4
2
B0
1 a02
A12
4
a02 (31g1 31g 2 ) a20 (3g1 14 g 2 )
0 g1 B0 g 2 0
A2 D0
2
4 1
2
a20
).
a20
(a02
1
2
Задача оптимизации состоит в том, чтобы найти наибольшее значение линейного
a20
при дополнительных ограничениях (7.10). Функция Лафункционала J1 a02
59
гранжа
поставленной
задачи
имеет
вид:
L( f ) f ( y)(sin 2 y sin y) 3 [ f ( y)] 4 f , условие стационарности приводит к
2
2
2
уравнению
23 f sin 2 2 y sin 2 y 4 0 .
Нормированное решение, удовлетворяющее первому ограниченно (7.10) и граничным условиям: f 0 при y 0 , y 1 , записывается в виде
1
f ( y ) cos 4 y cos 2 y .
4
1/ 16 , a20
/ 4 , J1 a02
a20
Соответственно этому вычисляем: a02
(1/16 2 / 4) , g1 B0 g 2 0 ( 4 / 8)(1/ 4 2 ) . Вспомним, что по ходу изложения была сделана замена 2 (штрих опущен); вернемся к прежнему значению параметра
и изменим у него знак, с тем чтобы эффект M kp был положительным; окончательно получим
1
h 1 cos 4 y cos 2 y
4
4 1 2
8
2
A1 M kp D 1 1 ( )
4 4
3
2
Оценки показывают, что при обычных значениях параметров в выражении для D
основным будет первое слагаемое: D ~ ( 22 11) 2 / 4 (15 4 / 2) 2 ,
поэтому будет
2
22 11
D
15 4 4 4 31
3
a20
/ 2
B0 ~ 2
a02
4 2
31
(15 ) 2
окончательно получим оценку: (8 A1 / 3) 2 M kp2 D(1 0,5 ) .
2. Прямоугольная пластина. Рассмотрим пластину, которая в плоскости x, y
занимает область S : 0 x x1 ,0 y
. Примем для изгибной жесткости выражение
D D0 (h( y) f 2 ( x)), D0 E0 h2 12(1 2 ) , отнесем координаты к характерному размеру
и примем, как обычно, w ( x, y) exp(t ) ; тогда уравнение колебаний пластины
примет вид
60
f1 ( y )
4
4
4
f 2 ( x)
( f1 ( y ) f 2 ( x))
4
2
2 2
x
y
x y
2
2 2
2
f ( x)
f ( y)
2 2
2
2 1
2
x
x y
y
2
2
2
2
f 2 ( x)
f1 ( y )
x 2
y 2
y 2
x 2
2(1 )
(7.13)
2
2
(
f
(
y
)
f
(
x
))
1
2
xy
xy
A1Mn0 grad ;
A1 12(1 2 )
p0
E
3
h
;
3
A1 A2 2 0 ,
a02
c02
E0
A2 12(1 2 )
2
h
2
,
c02
a0
.
В дальнейшем будут приняты два типа граничных условий. В случае шарнирного
опирания будем иметь:
x 0 , x x1 : 0 ,
y 0 , y 1 : 0 ,
2
x 2
2
y 2
0
0
(7.14)
во втором случае кромку x x1 будем считать свободной, этому соответствуют условия
x x1 :
2
x
2
2
y
2
0
(7.15)
2
2
2
( f1 ( y ) f 2 ( x))
2(1 ) ( f1 ( y ) f 2 ( x)
0
2
x 2
x
y
x
y
y
на остальной части границы — x 0 , y 0 , y 1 — справедливы условия (7.14).
Задача 1. В предыдущем пункте показано, что при обтекании бесконечно длинной
полосы, шарнирно опертой по краям, потоком, параллельным кромкам, оптимальный
61
профиль дается выражением: h( y) 1 cos 2y ,
удлиненной
в
направлении
потока
2 1 . На этом основании для
( x1 ~ 2 3)
пластины
примем
f1 1 f11 ( y), f 2 ( x) 0 , имея в виду, что решение будет эффективным для значений
таких, что 2 1.
Положим
u( x) sin y , подставим все в (7.13) и проведем процедуру Бубнова-
Галеркина; получим в результате
(1 2 b1 )u IY 2 2 1 2 (1 2 )b1 2 (1 )b2 u II
4 (1 2 b1 )u A1M cos u I u ,
1
b1 f II ( y ) sin 2 ydy ;
(7.16)
1
b2 f II ( y )dy
0
0
это уравнение решалось при граничных условиях (7.14) на кромках x 0 и x x1 .
Конкретные
1, 4 ;
расчеты
p0 / E 1, 43 106 ;
ент Пуассона
проведены
при
следующих
значениях
параметров:
a02 / co2 43,56 ; относительная толщина h / , коэффици-
и параметр изменения толщины варьировались. Было принято
f11 cos 2y , поэтому b2 0 , b1 0,25 . Результаты расчетов сведены в таблице
.7 ( 0,3) .
Таблица 1.7
M 0(1)
M 0(1,2)
M 0(1,4)
M 0( 2)
M 0( 2,2)
M 0( 2,4)
0,95
0,9525
0,9335
0,3482
0,3482
0,351
0,8
0,7875
0,775
0,280
0,277
0,275
62
1
Задача 2. Рассмотрим вариант (7.15) граничных условий на краю x x1 ; подставим туда f 2 ( x) 0 , f1 ( y) 1 cos 2 y , помножим на sin y и проинтегрируем по
y от нуля до единицы, получим
x x1 : u II 2u 0
(7.17)
3
u III 1 2 2 1 u1 0 .
2
2
Окончательно имеем задачу на собственные значения для системы (7.16),(7.17).
Расчеты проведены для тех же значений параметров, результаты сведены в таблицу 1.8.
Таблица 1.8.
M 0(1)
M 0(1,2)
M 0(1,4)
M 0( 2)
M 0( 2,2)
M 0( 2,4)
0,883
0,8875
0,8625
0,3194
0,3168
0,3141
0,770
0,750
0,7375
0,2749
0,2696
0,2771
В таблицах приведены критические значения M ; нижний индекс равен значению
, верхнему индексу “1” отвечают значения параметров A1 172,8 , A2 1881,8 , инA1 825, A2 5560 . Первая строка относится к случаю
x0 2 , вторая — к случаю x0 3 .
дексу “2” соответствуют
В предыдущем пункте обнаружено, что оптимальный профиль полосы, обтекаемой
потоком, вектор скорости которого параллелен кромкам, существенно зависит от коэффициента Пуассона материала полосы. Поэтому были проведены дополнительные расчеты, результаты которых сведены в таблице 1.9. Первые два столбца относятся к задаче 1,
третий и четвертый — к задаче 2; верхняя строка для каждого отвечает значению x1 2
, нижняя — значению x1 3 .
63
Таблица 1.9.
0,4
M 0(1,2)
M 0(1,4)
M 0(1,2)
M 0(1,4)
0,9625
0,9625
0,900
0,900
0,800
0,7625
0,7625
0,9625
0,975
0,9125
0,9125
0,8125
0,8125
0,800
0,45
0,775
0,775
Анализ приведенных результатов подтверждает (количественно) очевидные выводы о том, что увеличение относительной длины, снижение толщины и освобождение
правого торца пластины приводит к снижению критической скорости флаттера, однако
взаимное влияние параметров и оказывается достаточно сложным и не носит регулярного характера. Дополнительно были приведены расчеты с отрицательными значениями
(принято 0,3 , A1 825 , A2 5560 ); результаты представлены в таблице
1.10.
Таблица 1.10.
x1 2
x1 3
x1 2
x1 3
0
0,3482
0,2801
0,3194
0,2749
0,2
0,3482
0,2775
0,3168
0,2697
0,4
0,3508
0,2749
0,3142
0,2671
-0,2
0,3508
0,2749
0,3142
0,2671
-0,4
0,3456
0,2880
0,3247
Во втором и третьем столбцах приведены данные для граничных условий (7.14), в
последних двух столбцах — для условий (7.15) при f 2 0 . Видно, что в одних случаях
64
ведет к росту M кр , в других — наоборот. Требуются, следователь-
смена знака около
но, дополнительные исследования.
Задача 3. Положим в уравнении (2)
f 2 0,2 cos x ,
f1 1 cos 2 y ,
x1 1 , u( x)sin y ;
после процедуры Бубнова-
Галеркина получим
u IY 21I u III (1II 2 2 2 )u II
( A1M cos 2 2 2I )u I 41u u
1 ( x) 1
2
(7.18)
0,2 cos2 x
2 ( x) 1 (1 2 ) 0,2 cos2 x .
2
Уравнение (7.18) вместе с граничными условиями (7.14) составляет задачу на собственные
значения.
Результаты конкретных расчетов представлены в таблице 1.11. Верхний индекс y
критического значения M означает: “1” — A1 172,8 , A2 1881,8 ;
“2” — A1 583,2 , A2 4234,032 ; “3” — A1 17,28 , A2 1881,8 ; для каждого значения верхняя строка относится к случаю x1 2 , нижняя — к случаю x1 3 .
Таблица 1.11.
0,3
0,4
0,45
M 0(1,2)
M 0(1,4)
M 0( 2,2)
M 0( 2,4)
M 0(3,2)
M 0(3,4)
0,975
0,975
0,4519
0,4481
8,250
8,125
0,825
0,8125
0,3556
0,3519
5,000
4,750
0,9875
1,000
0,4556
0,4593
8,375
8,375
0,8375
0,8375
0,3593
0,3593
5,125
5,000
1,000
1,0125
0,4593
0,4630
8,375
8,500
0,3630
0,3630
5,125
5,125
0,850
0,850
65
Сравнительный анализ данных, содержащихся в таблицах 5, 3 и 1, позволяет сделать однозначный вывод о положительном влиянии изменяющейся вдоль потока жесткости. Можно ожидать, следовательно, что оптимальная функция жесткости D( x, y ) будет
зависеть от направления вектора скорости потока (в приведенном исследовании считалось 0 ). С другой стороны , данные таблицы 5 подтверждают вывод о существенной
зависимости M кр от коэффициента Пуассона. Выявленные новые механические эффекты
необходимо исследовать в более широком диапазоне изменения параметров задачи и
типа функциональной зависимости D( x, y ) .
I.8. Вязкоупругая пластина.
Первые исследования флаттера вязкоупругой пластины были выполнены в работах
Г.С.Ларионова и В.И.Матеша; для случая малой вязкости методами усреднения и Бубнова
— Галеркина было показано, что критическая скорость потока примерно в два раза меньше, чем соответствующей упругой пластины с мгновенным модулем и это отношение не
зависит от вязких свойств материала. Поскольку исследовалась асимптотическая устойчивость, этот результат вызывал неудовлетворенность; представлялось почти очевидным,
что достаточное условие устойчивости и соответствующая ему критическая скорость потока могут быть найдены из решения упругой задачи заменой мгновенного модуля на его
предельное значение. Это предположение было обосновано в работе И.А.Кийко для материала с малой вязкостью с привлечением только метода Бубнова — Галеркина. Ниже
приводится решение задачи о флаттере бесконечно длинной полосы (точное и приближенное по Галеркину) без предположения о малости вязкости. Устанавливается принципиально новый результат: критическая скорость равна мгновенно -модульной, а вязкие
свойства материала сказываются на характере движения полосы только в докритической
области.
В прямоугольной системе координат полоса занимает область 0 y , | x |
.
С
одной
стороны
она
обтекается
потоком
газа
с
вектором
скорости
v vn0 , n0 cos , sin и невозмущенными параметрами p0 , 0 , a0 (соответ-
ственно давление, плотность, скорость звука). Материал полосы — линейный вязкоупругий, напряжение с деформацией связано соотношением
t
E0 (t ) 0 (t ) ( )d E0 (1 0ˆ ) (t )
0
здесь E0 — мгновенный модуль, 0 — параметр вязкости.
66
Колебания полосы описываются уравнением
w p0 w
D0 1 0ˆ 2 w h
vn0 gradw 0
t 2 a0 t
2
(8.1)
3
в котором обозначено: D0 E0h
12(1 v 2 ) , h — толщина полосы, — показатель политропы, , — плотность и постоянный коэффициент Пуассона ее материала.
Уравнение (1) исследуется при граничных условиях шарнирного опирания
y 0 , w0 ,
2w
y
2
0 ; y , w0 ,
2w
y
2
0
(8.2)
и начальных данных, определяемых типом возмущения. Задача состоит в том, чтобы
определить наименьшее значение скорости потока vкр , такое, что при v vкр возмущенное движение будет устойчивым, а при v vкр — неустойчивым.
Примем (t ) exp( t ) , введем безразмерные координаты x / , y / , время
t и скорость M v / a0 , сохранив прежние обозначения; уравнение (7.1) примет вид
2
w
w
(1 ˆ )2 w a3Mn0 gradw a2
a1
0
t
t 2
(8.3)
здесь введены обозначения
a1 12(1 )
2
a3 12(1 )
2
2 4
h 2 E0
4p0
; a2 12(1 )
;
h3a0 E0
2
p0 3
t
; 0 ; e .
E0 h
0 возмущение, ограниченное в бесконечности и удовлетворяющее
w c1 exp(ix) sin y ,
условиям
(8.2),
выберем
в
виде:
t 0,
w / t c2 exp( ix) sin y , R
.
Соответственно
этому
примем
w A(t ) exp(ix) sin y , подставим в (8.3) и перейдем к изображению Лапласа; в реВ случае
зультате получим ( s — параметр преобразования)
p ( s)
~
A( s ) 2
, p2 ( s) ( s 1)(a1c1s a1c2 a2c1)
p3 ( s)
67
(8.4)
p3 (s) a1s3 (a1 a2 )s 2 (M a2 i a3M )s (1 )M i a3M
Оригинал (8.4) восстанавливается очевидным образом
A(t ) A1e s1t A2e s2t A3e s3t
(8.5)
a
(1 sm ) c2 c1 2 sm
a1
Am
,
( sm s j )(sm sк )
mк j .
2
2 2
В последних формулах sm — корни уравнения p3 ( s) 0 , ( ) . Решение
(8.5) экспоненциально убывает (асимптотически устойчиво), если m Re sm 0 ; если же
у какого-то из корней Re sm 0 , решение асимптотически неустойчиво. Границе обла
стей устойчивости и неустойчивости отвечает Re sm 0 при условии, что остальные два
корня лежат в левой полуплоскости.
При M 0 (свободные колебания) m Re sm 0 ; с ростом M , как показывают
расчеты (см. ниже), один из корней (пусть это будет s1 ) наиболее быстро приближается к
мнимой оси и при некотором M становится чисто мнимым. Значения s1 iy и M
легко находятся из уравнения p3 (iy) 0 ; получим в результате для M
M a2 a1 y 2 y /(a3 )
в это выражение вместо y следует подставить положительный корень биквадратного
уравнения
y 4 1 y 2 (1 ) 0
a1
a1
Скорость M
зависит от параметра волнообразования
нимаем M кр M ( кр ) , где кр находится из условия
; по определению при-
min M
.
5
Конкретные расчеты проведены для значений параметров: p0 / E0 5 10
,
8 103 кг / м3 , 1,4 , v 0,3 , a0 330 м / сек , / h 3 102 ; результаты све-
68
дены в таблицу 1.12, во всех случаях оказалось
кр с точностью до четвертой зна-
чащей цифры после запятой
Таблица 1.12
0
0,1
0,2
0,3
0,1
0,96029
0,96065
0,96102
0,96138
0,01
0,96029
0,96033
0,96037
0,96040
Значению 0 соответствует мгновенно-модульная скорость, вычисляемая по формукр
ле: M упр 2a2 (a3 a1 ) .
кр
Из данных таблицы следует принципиально важный результат: M кр и M упр
различаются только в четвертом знаке после запятой, и эта разница убывает с ростом
времени релаксации.
В области M M кр прослежено изменение корня s1 с ростом M . До значений
M ~ 0,1 M кр Re s1 Re s1упр (разница находится в пределах нескольких процентов);
упр
при M 0,1M кр корни s1 и s1
совпадают с точностью до четвертого десятичного
знака — это также новый механический эффект.
При произвольных углах решение уравнения (8.3) примем в форме трехчленного
__
приближения по Бубнову—Галеркину: w (ck (t ) sin ky ) exp( ix) , k 1,3 . После
известной процедуры в изображениях Лапласа придем к системе линейных уравнений
относительно ck (s)
8
(1 B2 ) c1 ( s) a3 M sin c2 (s) Q1 (s)
3
(8.6)
8
24
a3M sin c1( s) (2 B2 )c2 ( s) a3M sin c3 ( s) Q2 ( s)
3
5
69
24
a3M sin c2 ( s) (3 B2 ) c3 ( s) Q3
5
здесь
1 /(s 1) , B2 s(a1s a2 ) iMa3 cos
обозначено
,
k ( 2 k 2 2 ) 2 ; многочлены Qk (s) определяются начальными данными.
Поведение решений ck (t ) системы (8.6) определяется корнями ее определителя
(многочлен девятой степени); как и раньше, выявлен корень s1 , наиболее быстро приближающийся к мнимой оси с ростом M , так же определена критическая скорость флат
тера: M кр min M ( ) при условии P9 (iy) 0 , iy s1 . Результаты вычислений при-
ведены в таблице 1.13 (значения параметров те же;
0,1 , 0,1 )
Таблица 1.13
0
3 8
M кр
0,096066
0,253636
упр
M кр
0,096030
0,253543
59 128
62 128
2
0,714807
1,737786
1,727327
1,725347
0,714590
1,737783
1,727324
1,725344
58 128
Основной вывод остается прежним: критическая скорость флаттера M кр практи-
упр
чески совпадает с M кр . Второй важный результат состоит в том, что, как и в упругой
/ 2 существует угол 0 , в области которого (слева) M кр резко
возрастает — график M кр ( ) имеет вертикальную касательную; при переходе через
задаче, вблизи
0 резко меняется характер колебаний полосы.
70
Часть II.
ФЛАТТЕР ПОЛОГИХ ОБОЛОЧЕК.
Проблема колебаний и устойчивости тонкостенных конструктивных элементов летательных аппаратов привлекает в последнее время внимание исследователей в связи с
развитием аэрокосмической техники. Отдельные задачи (флаттер конических оболочек,
цилиндрических панелей и др.) в рамках этой проблемы рассматривались многими авторами, однако в постановочной части подавляющее большинство этих работ вызывает неудовлетворённость: для давления аэродинамического взаимодействия Δp принималась
формула поршневой теории (иногда с несущественными поправками).
Попытка более строго подойти к рассмотрению «аэродинамической» части проблемы была предпринята в последние годы (И. А. Кийко, М. А. Наджиров)[204]. Обнаружено, что при внешнем обтекании тонкого осесимметричного тела или профиля формула
для Δp состоит из двух частей – квазистатической и динамической; вторые из них, наряду
со слагаемыми «типа» поршневой теории, имеет слагаемое с механическим смыслом
цепных напряжений в срединной поверхности оболочки. Аналогичной оказалась ситуация
и при постановке задачи о флаттере конической оболочки при внутреннем обтекании
сверхзвуковым потоком газа [201].
II.1. Общая постановка задачи.
Представим себе пологую оболочку, которая является элементом обшивки летательного аппарата (ЛА); контур оболочки образуют сравнительно жёсткие конструктивные
(опорные) элементы каркаса ЛА. Оболочка испытывает внешние воздействия двух основных типов: вибрации, передающиеся через опорные элементы, и силы аэродинамического
взаимодействия с потоком обтекающего ЛА воздуха. На оболочку могут, вообще говоря,
действовать другие внешние силы различной физической природы: температурные, радиационные и др., однако пока мы не будем принимать их во внимание. Как правило, вибрации, передаваемые на оболочку через контур, не возбуждают в ней прогибы, опасные для
её функционирования (явлений усталостной прочности мы также не касаемся); напротив,
колебания с малыми амплитудами, возникшие случайно, в том числе и в следствии вибраций, в результате действия аэродинамических сил могут стать при определённых (критических) скоростях полёта неустойчивыми – наступит хорошо известное явление панельного флаттера (от английского слова flutter – порхание; трепет; вибрировать).
Математическая модель физического явления, обрисованная выше, включает в себя
уравнения колебаний оболочки и уравнения возмущённого движения потока; очевидно,
эти системы взаимосвязаны: на колеблющейся поверхности оболочки ставится условие
непроницания для потока, а в уравнения колебаний оболочки входит давление аэродинамического взаимодействия. Очевидно, в такой общей постановке задача оказывается
практически недоступной для исследования (прежде всего, аналитического); поэтому
неизбежны надёжно обоснованные гипотезы упрощающего характера. Они касаются как
71
«оболочечной», так и «аэродинамической» сторон модели. В дальнейшем изложении мы
принимаем следующее.
10. Используются простейшие варианты нелинейной теории пологих оболочек и пластин; при постановке конкретных задач флаттера проводится их линеаризация.
20. Давление аэродинамического взаимодействия определяется в рамках закона плоских сечений.
30. Движение оболочки изучается в классе функций, содержащих временной множитель в форме exp(t), и определяются режимы, которые обеспечивают условие Re<0, т.
е. изучается асимптотическая устойчивость.
Напряжённо-деформированное состояние пологой оболочки характеризуется нормальным прогибом w(x,y,t) и функцией напряжений Φ(x,y,t); ортогональные координаты x,y
опорной плоскости с хорошей точностью совпадают с проекциями на неё линий главных
кривизн, kx, ky – главные (начальные) кривизны. Цепные напряжения в срединной поверхности связаны с Φ известными формулами
2
2
2
,
,
y
xy
y 2
x 2
Систему уравнений движения примем в виде
x
D 2 w hL( w, ) h(k x
2
2
2
2w
k
)
q
(
x
,
y
,
t
)
h
y
y 2
x 2
t 2
E
2w
2w
L( w, w) E (k x 2 k y 2 )
2
y
x
(1.1)
2u 2 v 2u 2 v
2u 2 v
2
x 2 y 2 y 2 x 2
xy xy
3
Здесь обозначено: D=Eh /(12(1-ν2)), E,ν,ρ – модуль Юнга, коэффициент Пуассона и плотность материала пластины, h её толщина. Аэродинамическое давление q(x,y,t), как будет
показано ниже, в общем случае состоит из двух частей – квазистатической q0(x,y) и динамической q1(x,y,t); в соответствии с этим выделим основное состояние оболочки w0(x,y),
Φ0(x,y) и возмущённое w1(x,y,t), Φ1(x,y,t)
L(u, v)
w=w0(x,y)+w1 (x,y,t),Φ=Φ0(x,y)+Φ1(x,y,t).
Подставим эти выражения в (1.1) и линеаризуем по возмущениям; получим в результате для основного состояния:
2 0
2 0
D2 w0 hL( w0 , 0 ) h(k x
k
) q 0 ( x, y , t )
y
y 2
x 2
2 0
2 w0
2 w0
E
L( w0 , w0 ) E (k x
k
)
y
2
y 2
x 2
(I )
эта система дополняется краевыми условиями
x, y , w0 0, M 1 (w0 ) 0, M 2 ( 0 ) 0, M 3 ( 0 ) 0
(I ' )
дифференциальные операторы Ms в каждом конкретном случае будут выписаны.
Система для возмущений примет вид
72
D2 w1 hL( w1 , 0 ) hL( w0 , 1 ) h(k x
2 1
2 1
2 1
2 w1
k
)
q
(
x
,
y
,
t
)
h
y
1
y 2
x 2
t 2
2 w1
2 w1
E
L( w0 , w1 ) E (k x
k
)
y
2
y 2
x 2
( II )
возмущения w1, Φ1 следует подчинить начальным условиям и тем же однородным краевым
x, y , w1 0, M 1 (w1 ) 0, M 2 (1 ) 0, M 3 (1 ) 0
( II ' )
В дальнейшем изложении за основным состоянием мы оставим прежние обозначения, а
возмущения будем обозначать теми же буквами, но без индексов внизу.
Возможные упрощения систем (I),(II) разберём отдельно для случая оболочки или пластины.
Оболочка. Если по каким-либо соображениям квазистатическими изменениями кривизн
2
w0 / x 2 , 2 w0 / y 2 можно пренебречь по сравнению с начальными kx, ky, то в уравнении
(I) отбрасываются слагаемые L(w0 , Φ0), L(w0 , w0) – система (I) становится линейной. Соответственно в уравнениях (II) отбрасываются слагаемые L(w0 , Φ) и L(w0 , w).
Пластина. В этом случае kx = ky,=0, уравнения (I) – это хорошо известная система Т.
Кармана. В уравнениях (II) основную роль будут играть цепные напряжения, обусловленные слагаемым L(w, Φ0), поэтому слагаемое L(w0 , Φ) можно отбросить, а второе уравнение не рассматривать вовсе. В результате получим основное разрешающее уравнение пластины
2w
D2 w hL( w , 0 ) q1 ( x, y, t ) h 2
( III )
t
оно дополняется условиями на контуре
x, y , w 0, M (w ) 0,
( III ' )
и начальными данными.
Как видно, задача может быть замкнута в математическом отношении, если будут известны выражения для давления аэродинамического взаимодействия в основном и возмущенном состояниях — q0 ( x, y) и q( x, y, t ) ; эта задача рассматривается в следующем параграфе.
II.2. Определение давления аэродинамического взаимодействия.
Будем рассматривать тонкое осесимметричное тело либо профиль, обтекаемые без
угла атаки газом с большой сверхзвуковой скоростью; вектор скорости потока направлен
по оси тела (ортогонально кромке профиля), ось x направлена по вектору скорости, y – по
кромке профиля, z – так, чтобы система координат была правой (в случае тела направление оси y произвольно).
Предположим сначала, что деформируемая часть поверхности тела или профиля занимает область [x1, x2], и будем вести речь об осесимметричных прогибах оболочки вращения или о цилиндрическом изгибе пологой цилиндрической оболочки. Пусть в недеформированном состоянии уравнение образующей будет z1=kx+φ(x), при этом | φ(x)/( kx)|<<1
73
– тело вращения мало отличается от конуса, профиль от клина; тогда на деформируемой
~( x, t ), где w
~( x, t ) w cos(n, z ), n - внешняя нормаль к почасти будет z kx ( x) w
верхности z1. С той же точностью, с какой справедлив закон плоских сечений, можно по~
ложить w w , поэтому окончательно
z kx ( x) w( x, t )
(2.1)
В соответствии с законом плоских сечений состояние газа в области между обтекаемым телом и ударной волной (УВ) определяется из решения задачи о неустановившемся
плоском течении в плоскости x=vxt, vx=const – скорость потока, которое вызывается расширением поршня по закону
z(t ) kvxt (vxt ) w(vxt , t )
(2.2)
Решение этой задачи построим разложением по малому параметру – отношению плотностей газа перед УВ и за ней:
2a02
0 1
1
a ( D)
* 1 ( 1) D 2
где a0 – скорость звука в невозмущённом потоке, D – скорость распространения УВ. Если
2
собственно параметром разложения считать ε, то требование малости 0 / * 1 влечёт за собой условие a(D)~1, что в дальнейшем будет использовано.
Оценим значение скорости потока vx, которое обеспечивает выписанное неравенство.
Из условия 0 / * 1 , следует a02 / D 2 1; вследствие принятого условия |(φw)/(kx)|<<1 для скорости УВ справедлива оценка D ~ δkvx, δ ~ 1, поэтому окончательно
должно быть (δkM)2>>1.
Введём лагранжевы переменные: время t и координату z, так что dz 0 r 1dr , где r –
расстояние частиц от оси или плоскости симметрии в начальный момент времени, ρ0 –
начальная плотность, μ=2 для цилиндрических волн, μ=1 – для плоских. Искомые функции – расстояние частиц от оси или плоскости симметрии ζ= ζ(t,z), давление p=p(t,z) и
плотность ρ=ρ(t,z).
Уравнения движения, сохранения массы и энергии имеют вид
2
p
1
p
1 ;
;
0
2
1
t
z
z
t
решение этой системы должно удовлетворять условиям на ударной волне z=z*:
2 0 2
1
p*
D p 0 , * 0 (1 2a02 /( 1) D 2 )1
1
и граничному условию на поршне
z 0, (t ,0) kvxt (vxt ) w(vxt , t )
(2.3)
(2.4)
(2.5)
здесь p0 – давление в невозмущённом потоке.
Представим решение разложениями по параметру
74
0 1 ...; p p0 p1 ...; 1 0 1 ...
и подставим в (2.3); получим системы для нулевого и первого приближения, решения которых записываются в конечном виде или в квадратурах.
Нулевое приближение:
2 0
p1/
0 0 (t ), p0 P(t ) z 01
, 0 0
(2.6)
t
0 ( z )
первое приближение:
z
1
1
1
0
1
0 ( z ) p 0 dz 1* (t )
z*
p1 ( 1)
2 0 1
1
dz 1
2
1
t 0 z*
0
z
2 1
*
* t 2 dz p1 (t )
z
z
(2.7)
p1
1 1 ( z )
p0
0
в последних выражениях 0 (t ), P(t ), 0 ( z ), 1* (t ), p1* (t ), 1 ( z ) - пока произвольные функции, нижний предел интегрирования z* определится в дальнейшем.
Будем считать, что ς0(t) – это закон движения ударной волны, тогда на ней будет
*
z 0 0 (t ) / . Подставив принятые выше разложения в условия (2.4) на УВ, придём к
соотношениям: при z= z * 0 0 (t ) / должно быть
0 0 (t ), p0
2
0
0 02 , 0
1
a( )
(2.8)
1 0, p1 p 0 , 1 0
точка над функцией означает производную по времени.
В дальнейшем изложении удобно перейти от лагранжевой переменной z к переменной τ
по формуле z 0 0 ( ) / ; очевидно, τ(z) – это момент времени, в который ударная
волна проходит через частицу с лагранжевой координатой z, поэтому z * 0 0 (t ) / .
Подставим (2.6), (2.7) в (2.8) и определим входящие в решение произвольные функции;
нужные для постановки задачи флаттера выражения p0 , p1 , ς1 примут вид:
.
2
1
p0
0 02 0 00 0 01 z
1
p1 ( 1)
0 0 t
1 (t , ) 0 1 ( ) 0 ( )d
0
0 t 2 1 1
1 2 0 ( ) 0 ( )d p 0
0 t
(2.9)
75
t
1
1
1
0
a (0 ( )) (t , )01 2 / ( )d 1 (t , )
( )
1
(t , ) 02 (t ) 0 (t )0 (t )1 0
0 (t )
1
Таким образом, решение выражено через неизвестный пока закон движения УВ ς0(t).
Уравнение для его определения найдём из условия на поршне: при τ=0 (z=0) должно быть
выполнено равенство (если ограничиться в решении слагаемыми, линейными по ε):
(t ) 0 (t ) 1 (t ,0) z(t ),
которое, обозначив
1 (t ,0) F{t , ; 0 (t ), 0 ( )} t0 ,
запишем в виде
0 (t ) F t , ; 0 (t ), 0 ( ) t0 z (t )
(2.10)
здесь функция z(t) даётся выражением (2.2).
Функционал F существенно нелинейный, поэтому аналитическое решение уравнения
(2.10) практически невозможно. Однако наличие малого параметра указывает на возможность получить приближённое значение методом последовательных приближений
0(0) (t ) z(t ), 0( n1) (t ) F{t , ; 0n (t ), 0n ( )} t0 z(t )
(2.11)
Не рассматривая вопрос в общем случае, укажем лишь одно соображение в пользу возможной сходимости последовательности (2.11). В случае φ=w=0 уравнение (2.10) имеет
точное решение ~0 (t ) Dt , в котором D – корень квадратного уравнения:
D Da( D) / u, u kvx ;
последовательность (2.11) в этом случае приводит к итерационному процессу определения
D
D (0) u, D ( n1) u D ( n) a( D ( n) ) / ,
который сходится при a0 / u [( 1)( ) / 2]1 / 2 . В частности, при μ=1 отсюда следует
kγM>1, что согласуется с оценкой, полученной выше. В линейной теории тонких пологих
оболочек принимается (. / ut ) 2 1, (w / ) 1 , поэтому можно ожидать, что последовательность (2.11) будет сходиться при условии, в некотором смысле мало отличающемся от
приведённого выше.
Сделаем предварительно некоторые оценки. Пусть l – характерный размер оболочки в
направлении потока, тогда характерным временем обтекания будет t1 l / v x . Характерное
время колебаний оболочки t = l2/(ch), где с ( E / ~)1 / 2 , E, ~ - модуль Юнга и плотность
2
материала оболочки, h – её толщина; отсюда
t1 / t 2 ch /(v x l ) 1
далее
/ u ~ /(t1u) 1, 0 / 02 ~ /( kl) 1;
поскольку (w / ) 2 1 , тем более будут справедливы оценки
/ u 1, 0 w
/ 02 1
w
мы ими воспользуемся при выводе последующих соотношений.
76
Вычислим первое приближение в (2.11); получим
0(1) (t ) F{t , ; Z (t ), Z ( )} t0 Z (t ),
(2.12)
Все выражения типа 1 ( w) /(ut ) и аналогичные, содержащиеся в ζ1(t,τ) и F в различных степенях, разложим в ряды и проведём необходимые действия. Равенство (2.12) запишем в окончательном виде, содержащем только линейные слагаемые относительно φw=W и соответствующих производных
2
0(1) (t ) ut uta(u ) 1 a(u ) W (t )
a(u )W (t )t 2 a(u )W (t )t 2
2
t
2
2 a02 1 1
a
(
u
)
t
W ( )d
(2.13)
1 u 2 0
в этом и следующих выражениях следует считать
( ) (v x ), w( ) w(v x , t ).
Вычислим второе приближение в (2.11), удерживая только линейные слагаемые по ε
типа W , W и аналогичные. Нетрудно убедиться в том, что 0( 2 ) будет отличаться от 0(1)
только тем, что в (2.13) следует сделать замены
u1t (u ua(u) / )t u 2 t (u u1a(u1 ) / )t , a(u) a(u1 )
Подобная структура решения сохранится, очевидно, в любом приближении (с прежней
точностью по ε). Процесс итераций для un, как установлено выше, сходится к D, поэтому
окончательно получим
2
0 (t ) Dt 1 a( D) / W (t )
a( D)W (t )t 2 a ( D)W (t )t 2
2
2
t
(1 )a( D) t1 1W ( )d
(2.14)
0
Из (2.9) определим теперь 1 (t , )
1 (t , )
m 2a ( D )
m
Dt 1 m
W (t )t 1 m
t
t
a( D)
t
m
2
((1 )a( D) )t1 1W ( )d ( 1)a( D)W (t ) 1 m
t
2
(2.15)
1 a( D)
m
2
a( D) W (t ) W ( ) 1 2 W (t )t 1 m
t 2
t
Задача фактически решена, поскольку p1 вычисляется через ζ0 и ζ1 простыми квадратурами.
§3. Пологая оболочка как часть поверхности профиля.
В этом случае (плоские волны) μ=1, и из выражений (2.14), (2.15) находим
77
2
(t )t 2
a( D) W (t )
a( D)W (t )t
a( D)W
2
2a ( D )
( D)
(W (t ) W ( ))
1 (t , ) Da( D)(t ) 2 3a
2a ( D )
a ( D)
W (t )(t )
W (t )(t ) 2
2
Подставив это в первые две формулы из (2.9), найдём давление на поршень (z=0, т.е. τ=0)
2 0 D 2
p 0 ( p 0 p1 ) 0
p 0
1
(3.1)
0
(t )
4 DW
12
a
(
D
)
0
(t )t 1
(1 2 a( D)) DW
( 1) ...
1
многоточием обозначены слагаемые, имеющие более высокий порядок малости в сравнении с предыдущими, поэтому в дальнейшем их опустим.
Переходя к задаче обтекания профиля в эйлеровой системе координат, связанной с неподвижным телом, как принято выше, учтём, что
t x / v x , W W / t v x W / x
подставив это в (3.1), получим выражение для перепада давления на боковой поверхности
профиля
2
4 0 D
w
w
p p p 0
0 D2 p0
(1 2 a( D))
vx
1
1
x
t
0 (t ) Dt 1 2
2
0 Dx
vx
2
12a( D) 2 w
2w
2 w
1
2
v
v
x
x
( 1) t 2
t x
x 2
(3.2)
4 0 Dvx
12a( D) 2
(1 2 a( D))
0 Dvx 1
x
1
x
( 1) x 2
В соответствии со сделанным раньше предположением
p q0 ( x, y) q1 ( x, y, t ),
при этом квазистатической части нагрузки q0 соответствует основное состояние w0(x,y),
Φ0(x,y). Из (3.2) находим
4 0 Dvx
2
w0
q0 ( x, y )
0 D2 p0
(1 2 a( D))
1
1
x x
12a( D) 2 2 w0
0 Dvx x 1
(3.3)
( 1) x 2 x 2
q1 ( x, y, t )
4 0 D
w
w
(1 2 a( D))
vx
1
x
t
0 Dx
vx
2
12a( D) 2 w
2w
2 w
2vx
vx 2
1
( 1) t 2
t x
x
(3.4)
Здесь функцию динамического (возмущённого) прогиба мы написали без индекса “1”
внизу.
Проведём оценки слагаемых в полученных формулах. В линейной теории пологих оболочек принято |w0/φ|<<1, поэтому в (3.3) слагаемые, содержащие w0, можно опустить;
78
оставшиеся слагаемые, как нетрудно убедиться, будут величинами одного порядка. В (3.4)
“ присоединённую массу”
( 0 Dx / v x )(1 12a( D) /( ( 1)))
сравним с удельной массой оболочки ~h ; поскольку второй сомножитель порядка единицы, получим
0 Dx /( v x ~ h) ~ 0 kl /( ~ h)
при обычных пределах изменения параметров это отношение будет иметь порядок от 10-1
до 10-3, т. е. в первом приближении слагаемым с “присоединённой массой” можно пренебречь. Характерное время колебаний оболочки t 2 l 2 /(ch) , поэтому отношение
(2v x 2 w / tx) /(v x2 2 w / x 2 ) ~ ch /(v x l )
будет иметь порядок от 10-1 до 10-2. Окончательный вывод, следовательно, состоит в
том, что основной вклад в динамическую составляющую давления на оболочку внесут
слагаемые
4 0 D
w
w
q1 ( x, y, t )
(1 2 a( D))
vx
1
x
t
12a( D) 2 w
Dvx x 1
( 1) x 2
0
(3.5)
Первое из них – это традиционное слагаемое «поршневой теории», но с коэффициентом, достаточно сложно зависящим от скорости потока; второе имеет смысл сжимающего
нормального усилия в срединной поверхности оболочки и, очевидно, может оказать существенное влияние на характер колебаний и критическую скорость флаттера.
В задаче о колебаниях пластины, занимающей некоторую область на щеке клина, φ=0
и, вообще говоря, нет априорных оснований к тому, чтобы пренебречь какими-либо из
слагаемых в квазистатической нагрузке q0 из (4.3). Выражение (4.5) для динамической
нагрузки также остаётся без изменений.
§4. Пологая оболочка вращения.
В этом случае (цилиндрические волны) μ=2, поэтому из (2.14), (2.15) находим
0 (t ) Dt 1 2 a( D) W (t ) a( D)W (t )t a( D)W (t )t 2
2
8
2
1 (t , )
t
1
W ( )d
t 0
2
Da( D) 2 a( D)
2
t
W
(
t
)
t
W
(
t
)
a
(
D
)
2(1 a( D))
2
2 t
t
t
t
4
2
a( D)
W ( s )ds
W (t ) t 2 2 2 2
t
8
t
79
Подставим эти выражения в (2.9) и проведём оценки аналогично тому, как это сделано
в предыдущем параграфе; в результате получим выражение для перепада давления на поверхности оболочки
2 0 D2
a( D) p 0 ( 1)
0
p ( p p1 p ) 0
1
1
4
2 0 D 2
4 0 D
1
3
11a( D)
0 DW (t ) 9a( D) 5 1
1
W
(
t
)
2
1
4
8
t
8 ( 1)
0D
t
4
0D
3a( D)
W (t )t 1
1 2 W ( )d
2
2
2 ( 1)
1 t 0
2
(4.1)
1 2 0 D 2
W ( )d .
t 4 0
t
(t )t , W (t ) / t перегруппированы так, что выделены слагаеКоэффициенты при W (t ), W
2
мые порядка ε и отброшены.
Выражение (4.1) содержит, по сравнению с (3.1), новые слагаемые – типа винклеровского основания и интегральные; оценим порядки их величины. После перехода в эйлерову систему координат vxt=x, vxt1=x1, будем иметь последовательно
W (t ) ( x) w( x, t ) 0
w
0 D
Dvx
2k 0 Dv x ,
t
x
kx
t
0 D
1
t2
W ( )d 0 D
~
1
(
(
t
)
t
w
(
t
, t )(t t1 ))
t2
0
k Dv x
0
( x0 )
w( x0' , t )( x x1 )
k Dv x
,
kx
kx
0
t
0 D
1
t4
2W ( )d 0 D
1 ~ 3
(t 0 ) t w( x0'' , t )(t 3 t13 )
4
3t
0
~
( x0 )
w( x1'' , t ) x13
1
3
kx
3
kx x 3
два последних выражения получены по теореме о среднем. Поскольку |φ(x)/(kx)|<1, тем
более |w(x,t)/(kx)|<1, k~ε и поэтому εk<<1, заключаем, что выписанные слагаемые имеют
порядок ε2 и их в дальнейшем изложении можно опустить. Оценки величин «присоединенной массы» и второй смешанной производной 2 w / tx тождественны с проделанными в предыдущем параграфе, поэтому окончательно для динамической части давления на
поверхности оболочки со стороны потока получим:
k
0 Dv x
k
0 Dv x
80
4 0 D 3
11a( D) w
w
q1 ( x, t )
vx
1
1
4
8 t
x
0 D 0 vx x
2
3a( D) 2 w
1
2 ( 1) x 2
(4.2)
Квазистатическая составляющая давления будет иметь вид
2 0 D2
a( D)
p 0 4 0 Dvx 3
11a( D) w0
q0 ( x)
0 2
1
1
1
4
2 D
1
4
8 x x
0D
3a( D) 2 2 w0
vx x 1
2
2 (1 ) x 2 x 2
(4.3)
Основной результат проведённого в этой главе исследования состоит, как видно в том, что
динамическая часть давления аэродинамического взаимодействия в данной точке колеблющейся оболочки выражается через прогиб оболочки и его производные в этой точке;
разумеется, это есть следствие закона плоских сечений. Система уравнений движения
оболочки становится при этом линейной и однородной относительно w, граничные условия – тоже однородные. Следовательно, разыскивая решение в форме w=Ψ(x,y)exp(ωt),
Φ=F(x,y)exp(ωt), придём к спектральной задаче, собственные числа которой λ порождаются уравнением
1 2 2 0 .
(4.4)
Несамосопряжённый оператор флаттерных задач имеет, вообще говоря, комплексные
корни, зависящие от скорости потока. Из (4.4) следует, что область устойчивых (Reω<0) и
неустойчивых (Reω>0) колебаний в комплексной плоскости λ разделяет парабола устойчивости
22 Re 1 (Im ) 2
при vx=0 все λ – действительные числа (это частоты собственных колебаний оболочки); с
ростом скорости потока некоторые из собственных значений выходят в комплексную область. Следовательно, задача состоит в том, чтобы определить собственное число, которое
первым попадёт на параболу устойчивости; соответствующая этому скорость потока будет критической скоростью флаттера.
Задача на собственные значения для системы несамосопряжённых операторов только в
некоторых простых случаях поддаётся аналитическому исследованию (как правило, приближённому на основе метода Бубнова-Галёркина), поэтому необходимо использовать
современные вычислительные методы. Один из них – численно-аналитический метод без
насыщения – разработан авторами и излагается ниже.
В заключение приведём постановки спектральных задач, которые будут предметом исследования.
а). Пластина, обтекаемая потоком без угла атаки. В этом случае q0=0, поэтому Φ0=0;
влиянием отражений от ударной волны можно пренебречь, и для q1(x,y,t) приходим к
p w
q1 0
vn0 gradw
обобщённой формуле поршневой теории
a 0 t
Положив w=Ψ(x,y)exp(ωt), из (III), (III’) получим
81
D 2
p0
a
0
vn0 grad
( x, y ) , 0, M ( ) 0
здесь D — цилиндрическая жесткость.
б) Пластина как часть щеки тонкого клина. Будем полагать V={vx,0}, поэтому из (3.5)
найдём
w
2w
w
q1 a1 (v x , D)
vx
a 2 ( D) x 2
x
x
t
Аналогично предыдущему для амплитудной функции Ψ(x,y) получим уравнение
2
D 2 a2 ( D) xvx 2 a10 ( D)vx
hL(, 0 )
y
x
которое дополняется граничными условиями; функция напряжений Φ0(x,y) основного состояния находится из системы (I), q0 - из (3.3) при φ=0.
в) Пологая цилиндрическая панель, вектор скорости лежит в
опорной плоскости. В этой задаче q0=0, Φ0=0, kx=1/R, ky=0, R- радиус оболочки. Линейная постановка
следует из (II), (II’), q1 выражается по формуле обобщённой поршневой теории:
p0
h 2 F
D 2 0 vn0 grad
a
R y 2
E 2
0
R y 2
x, y , 0, M 1 ( ) 0, M 2 ( F ) 0, M 3 ( F ) 0.
г) Коническая оболочка как часть тонкого конуса. Положение точки на поверхности
конуса удобно описывать координатами s и θ, где s- расстояние от вершины конуса
(x=scosα), θ=χsinα, χ- полярный угол, отсчитываемый от некоторой фиксированной образующей. Основная система уравнений отличается от (II), поэтому выпишем её
2w
2
D w h k hL(, w) q0 q1 h 2
t
1
2 E k w EL( w, w) 0
(4.5)
2
здесь обозначено
1 w 1 2 w 2 1 1 2 2 w
2
2
L(, w)
2
2
2
2
s
s
s
s
s
s
s
s
2 F
1 1 w
2
s s s s
1
2 (...)
2 (...) 1 (...) 1 2 (...)
k (...) ctg
;
(...)
2
s
s s
s 2
s 2
s 2
Граничные условия имеют вид (II'). Положим аналогично предыдущему
w w0 w1 , 0 1 , w1 (s, ) exp(t ), 1 F (s, ) exp(t ),
подставим в (4.11) и проведём линеаризацию; в результате получим уравнения для основного и возмущённого состояний. Основное состояние будет описываться уравнениями
(4.11), в первом из которых справа следует оставить только q0 из (4.3) при φ=0. Для амплитуды возмущённого движения будем иметь упрощённую постановку:
82
D 2 h k F hL( 0 , ) b1 ( D)
vx x 2
v
b2 ( D) x
2
cos s
cos s
2 F Ek 0
граничные условия очевидным образом следуют из (II’).
§5. Коническая оболочка; внешнее обтекание.
Представим себе конус, который в сферической системе координат (r , , ) занимает область V : 0 r ; ; 0 2 . Часть конуса r1 r r2 образована упругой
оболочкой, остальная часть – жесткая . Конус симметрично обтекается потоком газа с
большой сверхзвуковой скоростью, так что v0 / a0 M 1 ; v0 - скорость невозмущенного
потока,
p0 / 0
1/ 2
a0
- скорость звука в нем , p0 , 0 - невозмущенные давление и
плотность газа, - показатель политропы.
Давление аэродинамического взаимодействия, в соответствии с результатами
предыдущего параграфа, записывается в виде
2 0 D 2
p0
a ( D)
q(r , t )
1
1
4
2 0 D 2
4 0 D 3
11a( D) w
w
v0
1
1
4
8 t
r
(5.1)
0 Drv0
2
3a( D) 2 w
1
2 ( 1) r 2
Здесь введены обозначения: ( 1) /( 1); a( D) 1 2a02 /[( 1) D2 ]; D v0tg ; угол раствора конуса, образованного присоединенной ударной волной в невозмущенном
течении; он определяется из квадратного уравнения
Da( D) 2v0tg 2D . После введения обозначений Mtg z, Mtg z0 это уравнение
принимает вид
(3 ) z 2 2( 1) z0 z 2 0 .
(5.2)
Напряженно-деформированное состояние оболочки будем описывать уравнениями технической теории в смешанной форме
D0 2 w k F L( w, F ) q(r , t ) h
2w
t 2
83
(5.3)
2 F Ehk w 0,5L(w, w) 0 .
Здесь обозначено: F - функция усилий;
(5.4)
D0 Eh3 /(12(1 v 2 )) цилиндрическая жест-
кость, h - толщина оболочки, - плотность ее материала; - оператор Лапласа в сферических координатах, k ctg ( 2 / r 2 ) / r . Оператор L(u, v) имеет вид
L(u, v)
2u 1 2v 1 v 2v 1 2u 1 u
r 2 r 2 2 r r r 2 r 2 2 r r
1 2v
1 v 1 2u
1 u
2
2
2
r r r r r r
при этом дополнительно обозначено sin .
Как видно из (5.1), давление q(r , t ) имеет чисто «статическую» составляющую
(первое слагаемое); поэтому будем полагать, что решение системы (5.3), (5.4) может быть
представлено в виде суммы основного (квазистатического) и возмущенного (динамического) состояний: w w0 (r ) w1 (r , t ) , F F0 (r ) F1 (r , t ) . Подставим эти выражения в
(5.3), (5.4), линеаризуем по возмущениям и упростим; получим в результате:
основное (квазистатическое) состояние
D0 2 w0
ctg 2 F0
q0 (r )
r r 2
(5.5)
ctg 2 w0
F0 Eh
0
r r 2
2
q0 (r )
(5.6)
2 0 D 2
a( D) 1 4 0 Dv0 3
11a( D) w0
2
1
1
1
4
2z
1
4
8 r
0 Drv0
2
3a( D) 2 w0
;
1
2 (1 ) r 2
возмущенное (динамическое) состояние
ctg 2 F1
2 w1
D0 w1
2 L(w1 , F0 ) q1 (r , t ) h 2
r
r
t
2
2 F1 Eh
ctg 2 w1
0
r r 2
q1 (r , t )
(5.7)
(5.8)
4 0 D 3
11a( D) w1
w
v0 1
1
1
4
8 t
r
84
0 Drv0
2
3a( D) 2 w1
.
1
2 ( 1) r 2
Обратимся к основному состоянию. Введем безразмерную координату s r / r2 , а
также безразмерные прогиб w0 / h и функцию усилий F0 /( Eh2 r2 ) , оставив за ними прежние обозначения. Подставив в (5.5), (5.6), получим
tg h 2 2
1 2 F0
w0
q0
2
2
2
12(1 v ) r2
s s
tg 2 F0
(5.9)
1 2 w0
0
s s 2
(5.10)
3
1
11 w0
q0 B1 1 a ( z ) 2 B2 1
a ( z)
2z
8
4
4
s
2w
3
B3 1
a ( z ) s 20 ;
2 (1 )
s
B1
a ( z ) 1
2
( 1) z 2
(5.11)
2 p0 r22 2
4 p0 r2
p0 r2
z tg ; B2
z z0 ; B3
z z0
2
1 E h
1 E h
2 E h
Дополним систему (5.9), (5.10) граничными условиями шарнирного опирания; через w0 и F0 эти условия запишутся в виде
s s1 , s 1: w0 0,
F0
0,
s
2 w0 v w0
0,
s 2 s s
2 F0
0
s 2
(5.12)
Окончательно, задача основного состояния сведена к решению системы (5.9),
(5.10) при граничных условиях (5.12).
Порядок величин слагаемых в правой части выражения (5.11) для q0 определяется, очевидно, значениями коэффициентов Bi . Имеем
B2
2h
;
B1 r2tg
B3 1 h
;
B1
4 r2tg
в реальных условиях h /(r2tg ) 1 , поэтому с хорошей точностью можно принять
1
q0 ( s) B1 1 a ( z ) 2 .
2z
4
(5.13)
85
Рассмотрим динамическое состояние; введем безразмерный прогиб w w1 / h и
безразмерную функцию усилий F F1 /( Eh2 r2 ) и подставим в (5.7), (5.8), получим в результате
tg 2 F
1 2w
0
s s 2
tg h 2 2
1 2 F
h Fo 1 2 w
w
tg
12(1 v 2 ) r22
s s 2
r2 s s s 2
tg
h 2 F0 1 w 1 2 w
tg r22
.
q
дин
r2 s 2 s s s 2 2
E h2
Решение
выписанной
системы
будем
искать
в
классе
функций:
w W (s)cos n exp(t ), F (s) cos n exp(t ) ; для амплитудных функций W (s), ( s) ,
получим систему:
1
tg 2n W 0 .
s
(5.14)
tg h 2 2
1
h
1
nW tg F0 W
2
2
12(1 v ) r2
s
r2
s
tg
h 1
n2
F0 W 2 2 W A3 sW A2W W
r2
s sin
s
(5.15)
штрихами обозначены производные по s , введен оператор
n 2 / s 2 ( / s) / s n2 /(sin 2 ) ; спектральный параметр порождается соотноше-
нием A42 A1 0, r2 / c2 . Введены обозначения
A1
3 11
4 p0 r2 c0
ztg 1
a ( z) ;
1 E h a0
4 8
A2
3
4 p0 r2
11
z z0 1 ( z )
a z ; c02 E / ;
1 E h
4
8
A3
p0 r2
3
z z0 1
a ( z ) ; A4 tg .
2 E h
2 ( 1)
Граничные условия шарнирного опирания через функции W и запишутся в виде
v
s s1 , s 1: W 0, W W 0
s
86
n2
0; 0 .
s sin 2
(5.16)
Итак, окончательно имеем задачу (5.14) - (5.16) на собственные значения; поскольку задача несамосопряженная, она имеет счетное множество k комплексных собственных значений, которым соответствуют комплексные частоты колебаний k . По определению, возмущенное движение считается устойчивым, если k будет Re(k ) 0 , и неустойчивым, если хотя бы для одного значения k0 будет Re(k0 ) 0 ; области устойчивых и неустойчивых колебаний на комплексной плоскости разделяет парабола устойчивости A4 ( Jm )2 A12 Re , уравнение которой служит для определения критических
значений параметров системы.
Традиционно задача панельного флаттера ставится следующим образом: при заданных характеристиках системы (геометрия, механические свойства и др.) определяется
критическая скорость флаттера M кр , так что при M M кр возмущенное состояние будет
устойчивым. К этому следует добавить два существенных замечания: 1) При M M кр основное состояние w0 , F0 должно быть статически устойчивым. 2) Система (5.14) – (5.16)
содержит параметр волнообразования n , поэтому M кр M кр (n) ; истинной критической
скоростью флаттера считается M кр (nкр ) min M кр (n)
n
§6. Коническая оболочка; внутреннее обтекание.
1. Постановка задачи.
Представим себе круговую коническую оболочку, которая в сферической системе
координат занимает область V0 : s1 s s2 ; 0 ; 0 2 . Оболочка упругая,
материал имеет плотность 1 , модуль Юнга E , коэффициент Пуассона ; толщина оболочки h . Внутри оболочки протекает газ со сверхзвуковой скоростью, его невозмущенное
состояние характеризуют параметры: давление q0 ( s) , плотность 0 ( s) , скорость u0 ( s) ,
местная скорость звука a0 ( s) .
Напряженно-деформированное состояние оболочки будем описывать уравнениями технической теории в смешанной форме
D2 w k F L(w, F ) q 0
(6.1)
2 F Eh k w 0,5L(w, w) 0
(6.2)
87
Здесь обозначено: w - нормальные прогибы, F - функция усилий, D Eh 3 /(12(1 2 )) цилиндрическая жесткость, - оператор Лапласа, k ctg ( 2 / s 2 ) / s ;
L(U , V )
2U
s 2
1 2V 1 V
2
2
s s
s
2V 1 2U 1 U
2 2
2
s s
s s
1 2V
1 V 1 2U
1 U
2
2
2
s
s
s
s
s
s
введено дополнительно обозначение sin ; в (6.1) q - поперечная нагрузка, значение которой будет уточнено в дальнейшем.
Задачу о колебаниях оболочки сформулируем в вариациях. Обозначим w0 , F0 - основное решение, соответствующее невозмущенным значениям параметров потока газа.
Предположим, что наряду с основным существует возмущенное решение w0 w, F0 F ,
соответствующее возмущенному значению давления: q0 q . Подставим это в (6.1), (6.2) и
линеаризуем по возмущениям, получим в результате:
основное состояние
2 F
1
D 2 w0 ctg 20 L( w0 , F0 ) q0 0
s
s
2 w0
1
1 w0 2 w0
2 F0 Eh ctg
Eh
0
s
s 2
s s s 2
(6.3)
(6.4)
возмущенное состояние
1
2 F
D 2 w ctg 2 L(w0 , F ) L(w , F0 ) q 0
s
s
(6.5)
1 2 w0 2 w
1
2w
F Eh ctg 2 Eh 2
2
2
s
s
s s
2
1 2 w0 w 1 w0 2 w
s s 2 s s s s 2
0
(6.6)
Введем безразмерные параметры, оставив за ними прежние обозначения:
s s / s2 , w0 w0 / h , F0 F0 /( Eh2 s2 ), w w / h , F F /( Eh2 s2 ) .Упростим систему
(6.3)—(6.6): в (6.3)—(6.4) отбросим квадратичные слагаемые, то же сделаем в уравнении
(6.6), в (6.5) пренебрежем слагаемым L( w0 , F ) . В результате получим
88
основное состояние
1 2 w0
tg F0
0;
s s 2
(6.7)
tg h 2 2
1 2 F0 q0 s22
w
tg
0
12(1 2 ) s22
s s 2
E h2
(6.8)
2
возмущенное состояние (принято, что основное состояние обладает осевой симметрией: w0 w0 (s) , F0 F0 (s) )
1 2w
tg F
0
s s 2
2
(6.9)
tg h 2 2
1 2 F
h F0 1 2 w
w
tg
12(1 2 ) s22
s s 2
s2 s s s 2
h 2 F 1 w 1 2 w
tg s22
tg 20
2
q
.
s2 s s s s 2
E h2
(6.10)
Рассмотрим задачу основного состояния. Система (6.7),(6.8) должна быть дополнена граничными условиями; примем левый торец s s1 заделанным, правый s s2 — свободным; граничные условия примем в виде
s s1 : w0 0 ,
s s2 :
w0
2 F0 F0
0 , F0 0 ,
0
s
s2 s s
2 w0 1 w0
3 w0 1 2 w0 1 w0
0,
0
s2 s s
s3 s s 2 s 2 s
F0
0,
s
(6.11)
3 F0 1 2 F0 1 F0
0
s3 s s2 s2 s
Для решения задачи (6.7),(6.8),(6.11) основного состояния необходимо знать распределение давления q0 q0 ( s) со стороны газа на стенки оболочки. Примем модель одномерного течения (это оправдано при сравнительно небольших углах раствора конуса
); в этом случае основной является зависимость между площадью поперечного сечения
S (s) и числом Маха M (s) u0 (s) / a0 (s) :
1
S ( s) 2 ( 1) M
Sкр
( 1)k1 M
k
(6.12)
здесь S кр S ( sкр ) - площадь критического сечения, — показатель политропы газа,
k1 ( 1) /(2( 1)) . По определению M кр 1 ; в рассматриваемом случае задана площадь S1 S (s1 ) , поэтому, если считать известным значение M 1 M (s1 ) , то из (6.12) получим
89
Sкр
S ( s1 )( 1)k1
2 ( 1) M 12
(6.13)
k1
Обозначим p - давление торможения; тогда из соотношений
1
p pкр
2
/( 1)
k /( k 1)
,
p 1
1
M2
p
2
получим для p(s)
p( s) pкр
(k 1) k2
(6.14)
2 (k 1)M
2 k2
где обозначено k2 /( 1) . Если pкр задано, то p(s) определяется по (6.14); с другой
стороны, может быть задано давление на входе p1 p(s1 ) , тогда pкр рассчитывается из
(6.12) и (6.13). Окончательно q0 (s) p( s) , и краевая задача основного состояния (6.7),
(6.8), (6.11) сформулирована.
Обратимся к уравнениям (6.9), (6.10) возмущенного состояния; их решение будем
искать в классе функций: w W (s) cos n exp( t ) ; F (s) cos n exp( t ) . После подстановки в (6.9), (6.10) получим
1
tg 2n W 0
s
(6.15)
tg
h2
1
h
1
2n W tg
F0 W
2
2
s
s2
s
12(1 ) s2
h
n2
1
tg F0 W 2 2
W
s2
s sin
s
здесь введен оператор n
e t cos n q
tg
E
s22
h2
(6.16)
d2
1 d
n2
.
d s 2 s ds s 2 sin 2
Динамическая нагрузка q состоит из суммы сил инерции и аэродинамического
взаимодействия: q q1 q2 , при этом q1 1h 2 w / t 2 , 1 - плотность материала
оболочки, а для q 2 мы примем упрощенное выражение, вывод которого будет приведен
в следующем пункте
q2 ( s) q0 ( s)
h
s2
s2
1
W M W
W
2s sin
a0 ( s)
90
M
u0 1
1
M W
s 2
M
exp( t ) cos n
Подставив это в (6.6), придем к уравнению
tg
12(1 2 )
h
s2
h2 2
1
h
1
nW 2 tg F0 W
2
s2
s
s
s
n2
1
tg F0 W 2 2 W
s sin
s
(6.17)
s2
tg s2
1
q0 ( s)
W MW
W
E h
2s sin
a0 ( s)
u0 1
1
M
M W
s 2
M
s22 2tg
W
c12
здесь обозначено a0 ( s) - местная скорость звука, c12 E / 1 , давление основного состояния q0 ( s) определено формулой (6.14).
Выражения для a0 ( s) и u0 ( s) находятся из рассмотрения одномерного течения
3
a0 ( s) a0
p
1 кр
p0
1
3
u0 ( s) Ma0 ( s) a0
(6.18)
2 ( 1) M 2
p
1 кр
p0
M ( s)
2 ( 1) M 2
,
3
1
2
(6.19)
здесь обозначено: pкр - давление в критическом сечении, p0 ,a0 - давление и скорость
звука в покоящемся газе.
Введем обозначения:
3
s p
A1 tg ( 1) 2 0
h pкр
1
A2 tg ( 1)2
s2
h
f1 (s) 2 ( 1)M 2
pкр
E
1
pкр
E
;
;
;
s2
a0
;
f 2 (s) 2 ( 1)M 2
91
2
оператор в левой части (6.17) обозначим Ln (W , , F0 ) ; в результате (6.17) преобразуется к
виду
Ln (W , , F0 ) A2 f 2 (s)M W
u0 1
1
1
A2 f 2 ( s)
M
M W
s 2
M
2s sin
a2
A1 f1 ( s) tg 02 2 W 0 .
c1
(6.20)
На основании (6.19)
3
pкр
u0
M
.
2a0 1
2 3/ 2
s
p
0 2 ( 1) M
Окончательно для определения функций W , получена система (6.15), (6.20); она
должна быть дополнена граничными условиями.
Рассмотрим граничные условия, представляющие значительный интерес в приложениях: левый торец оболочки (s s1 / s2 ) будем считать жестко защемленным, правый
( s 1) - свободным. Через прогиб W и функцию усилий эти условия запишутся следующим образом:
s s1 / s 2 s 0 :
W 0 ; W 0 ; 0 ;
1
n2
W s W s 2 sin 2 W 0 ;
s 1:
2
(1 )n 2
W 1 W n
W
W 0
s
s 2 sin 2
s 3 sin 2
n2
0
s sin 2
2
1
1 h
2
s
s2 12(1 2 ) tg
1
W 0
s2
s
0
(6.21)
(6.22)
(6.23)
При малой конусности 12tg ~ 1, поэтому последним слагаемым во втором уравнении
(6.23) можно пренебречь; тогда вместо (6.23) получим
s 1 ,
0;
0
(6.24)
92
правомерность такого пренебрежения должна быть установлена в конкретных расчетах.
Система уравнений (6.15), (6.20) и граничных условий (6.21),(6.22),(6.23) (или
(6.21),(6.22),(6.24)) составляют задачу на собственные значения . Поскольку система
несамосопряженная, собственные значения k , вообще говоря, будут комплексными.
Если хотя бы у одного из k будет Re k 0 , то основное состояние считается неустойчивым по отношению к возмущениям из выбранного класса функций; если же
Re k 0 , основное состояние считается устойчивым. В соответствии с этим в задаче
панельного флаттера конической оболочки возможны следующие постановки.
1.
Параметры оболочки заданы, изменяемыми параметрами являются давление газа на входе q( s1 ) и число полуволн возмущения n . Допустим, что n и при некотором все k ( , n) лежат в левой полуплоскости. Будем увеличивать , одновременно меняя n ; определим значения min 0 (n0 ) и n0 , при которых впервые одно из
n
k выйдет на мнимую ось. Режим 0 ,n0 по определению считается критическим. Очевидно, в соответствии с определением, при 0 , n , состояние будет устойчивым.
2.
В докритическом режиме 0 представляет интерес определить
форму возмущения (n) , затухающую наиболее медленно – это значит найти собственное
число k (n ) , наиболее близко расположенное к мнимой оси.
3.
Толщина оболочки h - искомая величина, все остальные параметры потока
и оболочки заданы. Допустим, что n и при некотором h все к (h, n) лежат в левой полуплоскости. Будем уменьшать h , одновременно меняя n , и определим значения
max h h0 (n0 ) и n0 , при которых одно из к впервые попадает на мнимую ось. Величина
n
h0 будет критической, поскольку при h h0 , n , состояние будет неустойчивым. Аналогично тому, как это сделано в предыдущем пункте, можно изучать колебания оболочки в
докритическом режиме.
2. Определение динамической части давления.
Представим себе (в сферической системе координат r , , ) коническую поверхность ,
r r0 , ; ее часть r1 r0 , r2 занимает тонкая упругая оболочка, осталь-
ную часть поверхности будем считать жесткой. Угол раствора конуса считаем малым,
так что 2 1 . Внутри этой конструкции в положительном направлении оси r протекает газ. В невозмущенном состоянии (как если бы оболочка покоилась) течение газа полагаем радиальным, его параметры 0 , p0 , u 0 , a0 — соответственно плотность, давление,
радиальная скорость, скорость звука – известные функции полярного радиуса r . По предположению M 2 u0 / a0 1 .
2
93
Колебания оболочки с малыми амплитудами вызывает возмущение основного потока и возникновение дополнительного давления аэродинамического взаимодействия
p . С хорошим приближением возмущенное течение можно считать потенциальным;
обозначим через u вектор скорости потока :
1
u u r , u , u u 0
,
,
,
r r r sin
(6.25)
возмущение скорости звука определим из интеграла Коши—Лагранжа
1
(6.26)
a
u0
.
2a0 r t
Для описания движения газа воспользуемся известным уравнением
a2 u
2
u
2u
u u u .
2
t
t
Подставим в него (6.25) и (6.26), линеаризуем по малым возмущениям, введем безразмерную переменную
1 exp t cos m
M
2
положим, как обычно,
r r , r2 r1,
и оставим прежние обозначения. В результате получим
r 2M a 2 Ma
2
1
2
0
2
0
u 0 1
1 2
M
r 2
M r r
M u 0
m2
1
2 1
2
sin
0
2
a0 a0 r r sin
r sin
r
a0
2
2
2
Обозначим через
W0 r , , t
(6.27)
нормальные прогибы оболочки и положим
W0 W exp t cos m ; условие непроницания на поверхности оболочки запишется при
этом в следующем виде (после линеаризации):
r
W
1
u0
W W .
r
r u0
(6.28)
94
На оси оболочки скорость u 0 обращается в нуль:
u
0
1
r
0
0 .
(6.29)
Для дополнительного давления примем p q exp t cos m , при этом q
определится известным линеаризованным выражением
q
0u0
.
r u0
(6.30)
Упрощение задачи (6.27)—(6.29) основано на предположении о малой конусности
2 1 ; при этом sin , cos 1 2 1. В пределах оболочки безразмерная переменная r изменяется мало r 1 , поэтому введем новую переменную r sin , так
2
что d rd . Внесем это в (6.27) и учтем, что М 2 1 и 2 / r 1 ; окончательно получим
2
2 1 m 2
2
2 M
A(r )
B(r ) 0 .
2
2
r
r
(6.31)
Последнее слагаемое в правой части (6.28) мало в сравнении с первым, поэтому
W
u0
W , 0 r sin
(6.32)
0
r u0
и вместо (6.30) получим
q
0 u 0
.
r u 0
0
(6.33)
В уравнении (6.31) введены обозначения:
A(r ) 2M
B(r )
M2 1
1 u
2
M 0 ,
a0
a0 2
M r
2 2
M 2 u 0
.
(
1
)
ao a0 r
a02
Приближенное решение задачи (6.31),(6.32) основано на том, что при малой конусности M (r ), A(r ), B(r ) — это мало и плавно меняющиеся функции. Введем вместо
r переменную z , отсчитываемую от левого торца оболочки, и оставим за всеми функци95
ями прежние обозначения; в сверхзвуковом течении
u0 0 и p 0 при z 0 , от-
куда следует 0, / z 0 при z 0 . Перейдем в (6.31),(6.32) к преобразованиям
Лапласа, полагая M ( z), A( z), B( z) «почти постоянными» параметрами; получим в результате ( s — параметр преобразования)
2 * 1 * 2 m 2 *
2 0 ,
2
*
0
(6.34)
*
W ,
u0 s
u0
(6.35)
2 M 2 s 2 As B .
Условие (6.29) запишется в виде
1 *
u*
0 .
0
0
(6.36)
Решение уравнения (6.34) при условии (6.36) записывается через модифицированную функцию Бесселя: * C m ( ) ; определив C из (6.36), окончательно получим
m ()
* u0 s
W* .
u0 'm ( 0 )
Преобразованное по Лапласу давление взаимодействия q * определится из (6.30):
2
0u02
m ( 0 ) *
s
q
W ,
u0 'm ( 0 )
*
(6.37)
в последних формулах штрихом обозначена производная от m по аргументу.
Обратное преобразование (6.37) приводит к трудному для анализа результату, поэтому предварительно выполним некоторые оценки. Частоты собственных колебаний конической оболочки могут быть вычислены по формуле
j
C0 h
1
2
j ,
R
(6.38)
96
здесь C 0 — «стержневая» скорость звука в материале оболочки; h — ее толщина;
R (r1 r2 )sin / 2 ; параметр j зависит от краевых условий, форм колебаний и других
параметров задачи и изменяется в пределах от нескольких единиц до величин порядка
десяти. Из (6.38) получим
a0
~
j
a0
C h
1
2
j ;
a0 R
для реальных оболочек отсюда следует оценка / a0 ~ (0,1 0,7) 10 , учитывая которую, при M 2 1 можно принять 0 1 и использовать асимптотическое разложение
m ( 0 ) . По свойству преобразования Лапласа Re 0 , и после несложных выкладок
находим
m ( 0 )
1
~ 1
'
2 0
m ( 0 )
.
(6.39)
Положим 2 M 2 ( s s1)(s s2 ) , 2M 2s1,2 A A2 4M 2B и обозначим
/ u 0 ; подставив это вместе с (6.39) в (6.37), получим
0u 2
*
0
q
0u 2
( s )2W *( s)
( s )2W *( s)
0
1
1
2 ( s s1)(s s2 )
M
2
M
0
( s s1) 2 ( s s2 ) 2
Оригинал q(z ) восстанавливается по таблицам и теореме о свертке, интегральные
слагаемые
оцениваются
на
основании
очевидного
неравенства
(s 2 s1 ) /( s2 s1 ) 1 . В результате выкладок будем иметь
q( z )
0
W
W u 0
a0
z
a0
2 0 ( z )
W M
u 0 1
1
M W
z 2
M
z
1 u0 1
1
M e ( z )W ( )d ;
0 ( z ) z 2
M 0
(6.40)
при записи интегрального слагаемого приближенно принято
(s1 s2 ) / 2 A(r ) /( 2M 2 ) / u0 .
Первые два слагаемых в правой части (6.40) отвечают «поршневой» теории, физический смысл следующих двух — это давление взаимодействия изгибаемой оболочки с
винклеровским основанием «жесткости»:
97
K*
p0 a0
u 1
1
M 0
M .
a0 2 o
z 2
M
Последнее слагаемое в (6.40) в отличие от предыдущих носит нелокальный характер:
давление в точке z зависит (с затухающей памятью) от значений прогибов на всем предшествующем отрезке.
§7. Примеры расчётов.
В первой главе приведена постановка задачи о флаттере пологой оболочки в предположении, что избыточное давление на оболочку определяется в рамках закона плоских
сечений в сверхзвуковой аэродинамике. Если для избыточного давления применять формулу поршневой теории, то математически задача о флаттере пологой оболочки приводится к проблеме собственных значений для системы из двух уравнений с бигармоническими старшими операторами относительно амплитудной функции прогибов и функции
напряжений F. Для некоторых типов краевых условий функцию напряжений F можно
(численно) исключить; оставшееся уравнение для будет содержать две безразмерные
константы порядков 10-3 и 102 (при характерных значениях параметров) при старших производных, и это предопределяет плохую обусловленность задачи. С другой стороны,
наличие у решения пограничного слоя указывает на необходимость сгущать сетку вблизи
контура.
Для преодоления указанных вычислительных трудностей используется метод без
насыщения, он с успехом был применён к исследованию флаттера пластины произвольной формы в плане. В этом параграфе метод обобщается на задачу о панельном флаттере
прямоугольных в плане пологих оболочек; конкретные расчёты проводились для цилиндрической и сферической оболочек.
Обнаружены новые механические эффекты, касающиеся форм колебаний и зависимости критической скорости флаттера от направления вектора скорости потока.
В безразмерном виде исходная система дифференциальных уравнений имеет вид
(простейший вариант линейной теории)
(7.1)
D 2 -hL(F)-γ(v,grad )
(7.2)
2 F EL( ) 0
98
(7.3)
h 2 k ,
(7.4) L(f)=ky
2f
2f
k
,
x
x 2
y 2
здесь D=Eh 3 /12( 1- 2 ) - цилиндрическая жёсткость, E - модуль Юнга, - коэффициент
Пуассона, k - показатель политропы, v={vcosθ,vsinθ} – вектор скорости потока, h - толщина
оболочки, - плотность материала оболочки, - комплексная частота колебаний; k x и
k y - главные кривизны (линии главных кривизн совпадают с координатными линиями);
( x, y) - прогиб оболочки, F=F(x,y) - функция напряжений. Все названные величины –
безразмерные, обезразмеривание проведено аналогично предыдущему, функция напряжений отнесена к параметру p0 a2. Выписанные уравнения рассматриваются в прямоугольнике S={-1 x 1 ,-b y b}.
Решение уравнений (7.1)-(7.3) рассматриваем в дальнейшем при двух типах краевых
условий:
а) шарнирное (свободное) опирание:
(7.5)
2
2F
2F
x=1,-1: 0,
=0,
0,
0.
xy
x2
y2
(7.6)
y=b,-b: 0,
2F
2F
2
0
,
0.
=0,
xy
x2
y2
б) заделка с проскальзыванием:
2F
2F
(7.7) x=1,-1: 0,
=0,
0,
0.
xy
x
y2
(7.8) y=b,-b: 0,
2F
2F
0
,
0.
=0,
xy
x2
y
99
Нетрудно показать, что краевые условия, накладываемые на
функцию напряжений F, без потери общности могут быть заменены эквивалентными
F
0,
n
где n – внешняя нормаль к контуру оболочки.
(7.9) ( x, y) G, F 0,
Метод решения задачи прежний: при v=0 все собственные значения действительны, с
ростом скорости потока некоторые из собственных значений выходят в комплексную
плоскость; задача, следовательно, состоит в том, чтобы найти (при заданном ) комплексное собственное число, которое первым попадёт на параболу устойчивости. Тем самым
будет определена критическая скорость и соответсвующая ей форма колебаний (собственная функция). Отсюда следует, что для корректного решения задачи необходимо
определять достаточно длинный начальный отрезок спектра.
Таким образом, на каждом шаге итерационного процесса необходимо решать полную
проблему на собственные значения для несимметричной матрицы размера NxN, где N –
число узлов сетки. Возникающие при этом трудности обходятся применением метода без
насыщения, который для гладких решений даёт достаточную точность на сетке из сравнительно небольшого числа узлов.
Для дискретизации описанных краевых задач нужно провести дискретизацию бигармонических операторов 2 и 2 F с краевыми условиями свободного опирания
или
защемления соответственно. Кроме того, нужно провести дискретизацию оператора L(f) и
членов с первыми производными (v,grad ).
Примем, что k x и k y - константы. Для цилиндрической оболочки k x 0, k y 1 / R, а для
сферической k x k y 1 / R, где R- радиус оболочки. Тогда нужно провести дискретизацию
оператора L(f) с однородным краевым условием Дирихле, эта дискретизация проводится
по методике, описанной в части III. Так же аналогично проводится дискретизация членов
с первыми производными (v,grad ) . Заметим, что при дискретизации оператора L(f), поскольку это оператор второго порядка, достаточно удовлетворить только одному краевому условию f=0 на . При дискретизации членов с первыми производными, поскольку
узлов на границе нет, применялась интерполяционная формула, не удовлетворяющая
(принудительно) краевому условию 0 на Г. При дискретизации же бигармонических
операторов удовлетворялись оба краевых условия. Как показали вычисления (см. ниже), в
результате полученное решение для удовлетворяет краевым условиям.
100
Дискретизация бигармонического оператора с краевым условием свободного опирания и с краевым условием защемления описана в части III. Применим для функции
F=F(x,y) в прямоугольнике интерполяционную формулу:
n
(7.10)
F(x,y)=
j 1
m
M
i0
( z) L j 0 ( x ) F ( x j , yi ),
i 1
y=bz, z [ 11
, ], x [ 11
,].
L j 0 ( x)
l( x)
, l ( x ) ( x 2 1) 2 Tn ( x ),
l ( x j )( x x j )
'
x j cos j , j (2 j 1) / 2 / n, j 1,2,..., n;
M i 0 ( z)
M ( z)
, M ( z) ( z 2 1) 2 Tm ( z),
M ( zi )( z zi )
'
zi cos i , i (2i 1) / 2m, i 1,2,..., m.
Эта формула удовлетворяет краевым условиям (7.9). Пронумеруем узлы в прямоугольнике (x j , yi ) сначала по y, потом по x, т.е. сверху вниз, справа налево, и подставим
(7.8) в (7.1),(7.2); в результате получим
(7.11)
H hLh F
(7.12)
H 3 F ELh 0
Здесь H - матрица размера N×N, N=mn - матрица дискретной задачи для пластины, её
построение для случая свободного опирания описано в третьей части. Разрешая (7.12) относительно F и подставляя в (7.11), получим
101
(7.13)
(H+hEL h H31 Lh )
Здесь - вектор, который содержит в узлах сетки приближённые значения прогиба
оболочки в узлах сетки; - приближённое собственное значение; Lh и H 3 - матрицы
размера NxN, получающиеся в результате дискретизации операторов L и 2 F.
Дальнейшие исследования проводились с конечномерной задачей на собственные
значения (7.13). Как уже говорилось во введении, эта задача содержит большой параметр
hE (~10 2 для конкретных данных, при которых проводились расчёты); матрица при этом
параметре несимметрична и может, следовательно, иметь комплексные собственные
значения при скорости потока v=0. Это и обнаружилось в конкретных расчётах. Поэтому
потребовалась модернизация применяемого подхода. Вместо матрицы H 3 в (7.13) подставлялась матрица H3 0.5( H3 H3' ) , аналогичная симметризация применялась к матрицам Lh и H0 ( H0 матрица дискретного бигармонического оператора для прогиба ).
После этого матрица Lh H31 Lh стала симметричной с погрешностью 10 6 . Однако этого
оказалось недостаточно, и дискретная задача по-прежнему при v=0 имела комплексные
собственные значения. В результате повторной симметризации матрицы Lh H31 Lh собственные значения дискретной задачи при v=0 стали действительными и положительными. При вычислении критической скорости наблюдалась сходимость.
Конкретные расчёты проводились при тех же значениях параметров, что и раньше, относительная толщина оболочки 310-3. Радиус оболочки принимался равным 2.5 (безразмерный). Предварительные расчеты на сетках из 9×9, 13×13, 19×19 узлов показали, что на
сетках 13×13 и 19×19 результаты оказываются близкими; ниже приводятся значения критической скорости, полученные на сетке 19×19.
Расчёты для сферической пологой оболочки, квадратной в плане, можно считать тестовыми. При углах 0, , /4, 3/8, /2 получены соответствующие значения критической
скорости 1.4263 (20), 1.4924 (18), 1.5813 (18), 1.4924 (18), 1.4263 (20). В скобках указан номер собственного значения, которое первым выходит на параболу устойчивости. Как и
следовало ожидать из симметрии задачи, значения критической скорости симметричны
относительно прямой /4. Этот факт свидетельствует в пользу правильности методики
и разработанной программы. Далее, для контроля вычислений выводились на печать два
графика: вид функции прогиба Re(x, 0) и Re(0, y) и вид двумерной функции Re(x, y) .
При /4 графики кривых Re(x, 0) и Re(0, y) совпали, что свидетельствует о правильности расчётов. Собственные формы Re(x, y) при углах =0 и /2 также тождественны;
всё это свидетельствует о правильности расчётов.
102
Для сферической пологой оболочки, защемлённой по краю, при тех же направлениях
вектора скорости потока получены значения критической скорости: 1.6424 (20), 1.7038
(16), 1.6876 (17), 1.7038 (16), 1.62384 (20). Общий характер результатов такой же, как и в
предыдущем случае.
Проведены расчёты для сферической пологой оболочки прямоугольной в плане
(b=0.5). При свободном опирании получены следующие значения критической скорости
для тех же значений углов : 1.7752 (9), 1.8787 (9), 1.8414 (5), 1.8558 (4), 1.7469 (4). При
граничных условиях защемления получено соответственно: 1.6138 (9), 1.6902 (9), 1.8935
(5), 1.7335 (5), 1.6602 (5).
Дальнейшие расчёты проведены для цилиндрической свободно опёртой оболочки,
квадратной в плане. Для тех же значений углов получены значения критической скорости: 2.7654 (7), 0.5606 (1), 0.3004 (1), 0.2205 (1), 0.2120 (1). Как видно, результат принципиально отличается от предыдущих: скорость резко убывает при углах , приближающихся к
/2 (заметим, что для квадратной пластины критическая скорость при =0, /2 равна
0.2103). Таким образом, для цилиндрической оболочки критическая скорость флаттера на
порядок выше при обтекании вдоль образующей по сравнению со случаем обтекания в
поперечном направлении. Этот эффект легко объясним: жёсткость на изгиб цилиндрической оболочки вдоль образующей значительно выше, чем поперёк. Эволюция собственных форм представлена на Фиг. 2.1 – 2.5.
Далее были проведены ещё два расчёта для рассматриваемой цилиндрической оболочки при тех же углах направления вектора скорости потока и значениях для радиуса
оболочки 10 и 40. Получены следующие значения критической скорости: 0.8216 (14),
0.4629 (1), 0.2287 (1), 0.1727 (1), 0.1591 (1) для R=10; 0.3378 (6), 0.3439 (1), 0.2433 (1),
0.1673 (1), 0.1514 (1) для R=40. Таким образом, критическая скорость флаттера уменьшается c ростом радиуса кривизны как при обтекании вдоль образующей, так и поперёк. Последний вывод весьма важен: оказывается, небольшая начальная выпуклость оболочки
при поперечном обтекании (R=40 подъём цилиндрической оболочки равен 0.0125) вызывает понижение критической скорости флаттера.
103
Фиг. 2.1.
Расчёты для цилиндрической свободно опёртой оболочки, квадратной в
плане, /2, v=0.2120.
Фиг. 2.2
Расчёты для цилиндрической свободно опёртой оболочки, квадратной в
плане, 3/8, v=0.2295.
104
Фиг. 2.3
Расчёты для цилиндрической свободно опёртой оболочки, квадратной в
плане, /4, v=0.3004.
Фиг. 2.4
Расчёты для цилиндрической свободно опёртой оболочки, квадратной в
плане, , v=0.5606.
105
Фиг. 2.5
Расчёты для цилиндрической свободно опёртой оболочки, квадратной в
плане, 0, v=2.7654.
106
Часть III.
Численные методы в несамосопряжённых задачах на собственные значения.
Наиболее распространённым в настоящее время методом решения задач механики
деформируемого твёрдого тела является метод конечных элементов. Его недостатки общеизвестны: аппроксимируя перемещение кусочно-линейной функцией, мы получаем,
что напряжения разрывные. Вместе с тем следует заметить, что большинство задач механики деформируемого твёрдого тела описывается уравнениями эллиптического типа, которые имеют гладкие решения. Представляется актуальным разработать алгоритмы, которые учитывали бы эту гладкость. Идея таких алгоритмов принадлежит К. И. Бабенко
[51]. Многолетнее применение этой методики в эллиптических задачах на собственные
значения авторами настоящей работы доказали их высокую эффективность. Именно к таким задачам сводятся задачи флаттера пластин и пологих оболочек в новой постановке А.
А. Ильюшина, И. А. Кийко [185]. Большим преимуществом этой постановки является то,
что сложная задача аэроупругости сводится к эллиптической задаче на собственные значения, для которой можно разработать эффективные алгоритмы без насыщения. Это позволило решить новые задачи, которые недоступны для исследования классическими методами. Основной результат настоящей работы состоит в том, что можно заменить дорогостоящий и трудно осуществимый натурный эксперимент экспериментом вычислительным. Примеры таких исследований приведены выше.
ГЛАВА 1.
Дискретный лапласиан.
В предыдущих частях показано, что задачи панельного флаттера сводятся к исследованию собственных значений несамосопряжённого оператора (либо системы таких операторов). Возможности точных аналитических методов по отношению к таким задачам, как
будет видно из дальнейшего изложения, сильно ограничены, поэтому развиваются приближённые и численные методы. Из приближённых отметим метод Бубнова-Галёркина,
ограниченные возможности которого обусловлены трудностью выбора системы координатных функций для произвольных областей и граничных условий. Метод конечных элементов, будучи универсальным, широко применяется при решении задач флаттера; он однако не лишён серьёзных недостатков, о которых будет сказано ниже.
В этой и последующих главах будет описан альтернативный МКЭ численноаналитический метод без насыщения (по терминологии К. И. Бабенко), который, как нам
107
представляется, в наибольшей степени адаптирован к задачам на собственные значения.
Его существо удобно для начала проиллюстрировать на задаче Штурма-Лиувилля.
III.1.1. Задача Штурма-Лиувилля.
Рассмотрим классическую задачу
(1.1)
y '' ( x) q( x) y( x) ( x) y( x),
(1.2)
y(1) y(1) 0
x (1,1)
Здесь q(x) и (x) – заданные функции, - спектральный параметр. Традиционным методом решения этой задачи является разностный; если h- шаг сетки; то выберем на отрезке (-1,+1) n узлов
xi = -1+hi, h=2/(n+1), i=1,2,…,n; x0=-1, xn+1=1,
т. е. всего на замкнутом отрезке [-1,1] выбираем (n+2) узла.
Пусть y(x)C3[-1,1], тогда
(1.3)
y ' ( x)
y '' ( x) 2 y ''' ( x) 3
y ( x h) y ( x )
h
h
h O(h 4 )
1!
2!
3!
(1.4)
y ' ( x)
y '' ( x) 2 y ''' ( x) 3
y ( x h) y ( x )
h
h
h O(h 4 )
1!
2!
3!
Складывая соотношения (1.3), (1.4), получим
y ( x h) y( x h) 2 y ( x) y '' ( x)h 2 O(h 4 )
(1.5)
y '' ( x)
y ( x h) 2 y ( x ) y ( x h )
O( h 2 )
2
h
Обозначим
y( xi ) yi ;
y '' ( xi ) yi''
108
тогда из (1.5) последует
(1.6)
yi''
yi 1 2 yi yi 1
O(h 2 ),
2
h
i 1,2,..., n.
Первый член в правой части соотношения (1.6) - это вторая разностная производная.
Таким образом, разностная производная аппроксимирует yi’’ со вторым порядком, т. е. с
точностью до O(h2). Подставим (1.6) в (1.3) и получим для каждого узла сетки
(1.7)
y i 1 2 y i y i 1
qi yi i y i O(h 2 ), i 1,2,..., n
2
h
(1.8)
y 0 y n 1 0
Отбрасывая погрешность дискретизации O(h2), получим приближённую конечномерную задачу для трёхдиагональной симметричной матрицы. Как будет показано ниже (глава 7) возмущение, вносимое в собственные значения отбрасыванием O(h2), будет величиной порядка погрешности дискретизации с коэффициентом, зависящим от расстояния исследуемого собственного значения до остальной части спектра. Таким образом, независимо от гладкости решения задачи Штурма-Лиувилля (1.1)-(1.2) погрешность определения собственного значения порядка O(h2). По терминологии К. И. Бабенко, разностный
метод решения задачи Штурма-Лиувилля имеет насыщение; аналогичным недостатком
обладает и метод конечных элементов. Опишем теперь альтернативный метод решения
задачи (1.1)-(1.2), который не обладает указанными недостатками.
Сведём краевую задачу (1.1)-(1.2) к интегральному уравнению. Пусть G(x,) - функция
Грина оператора d2/dx2 с краевым условием (1.2), тогда получим
1
(1.9)
y ( x)
G ( x, )[q( ) ( ) y ( )]d
1
Дискретизацию интегрального уравнения (1.9) проведём с использованием для функций qy и y интерполяционной формулы
109
n
( Pn f )( x)
f ( x k )l k ( x) Rn ( x; f ),
k 1
где фундаментальные функции интерполяции даются выражением
l k ( x)
Tn ( x)
, k 1,2,..., n,
( x x k )Tn' ( x k )
Tn ( x) cos(n arccos x), x k cos[(2k 1) / 2n],
n
y ( x)q( x)
y k q k l k ( x) Rn ( x; yq )
k 1
n
y ( x) ( x)
y k k l k Rn ( x; y )
k 1
Rn(x;f) – погрешность интерполяции; получим в результате
y k y( xk ), k ( xk ), q k q( xk ), k 1,2,..., n
Подставим эти соотношения в (1.9)
110
n
n
k 1
k 1
y j D jk q k y k D jk k y k rn ( x j ; yq ) rn ( x j ; y ), j 1,2,..., n
здесь
1
(1.10)
D jk G ( x j , ) l k ( )d , j , k 1,2,..., n
1
1
rn ( x j ; yq ) G ( x j , ) Rn ( , yq )d , j 1,2,..., n
(1.11)
1
1
(1.12)
rn ( x j ; y ) G ( x j , ) Rn ( , y )d , j 1,2,..., n
1
Окончательно приходим к алгебраической задаче на собственные значения
(1.13)
( An Bn ) y ra rb
Здесь An =I-DQ, Bn=DP – матрицы размера n x n; Q=diag(q1,…,qn), P= diag(1,…,n) – диагональные матрицы. Элементы матрицы D определяются по формуле (1.10), векторы погрешностей ra и rb имеют компоненты, определяемые по формулам (1.11) и (1.12) соответственно. Заметим, что в соотношении (1.13) - точное искомое собственное значение, а y
– вектор длины n, компоненты которого содержат значения соответсвующей собственной
111
функции в узлах сетки. Отбрасывая в (1.13) погрешности дискретизации ra и rb , получаем
приближённую задачу на собственные значения
~
~
( An Bn ) y 0,
(1.14)
~
~
где - приближённое собственное значение, а y - вектор длины n, компоненты которого
содержат приближённые значения искомой собственной функции в узлах сетки. Теоремы,
по которым можно оценить возмущение, вносимое в собственные значения отбрасыванием погрешности дискретизации, будут доказаны в седьмой главе; здесь приведём только
окончательный результат.
Пусть, например, - простое собственное значение задачи Штурма-Лиувилля (1.1)(1.2), а выпуклый спрямляемый контур, содержащий внутри себя только одно собственное значение , тогда если
r01 sup Spr[ R( )( An Bn ) I ] 1
где R( ) ( A B) 1 - резольвента пучка матриц A,B, а матрицы A и B имеют выражения
A An ( y, y ) 1 ra y * , B B n ( y, y ) 1 rb y * ,
где y* - комплексно сопряжённый вектор-строка к вектору-столбцу y, то внутри лежит
(1.15)
~
r01
, max
1 r01
~
одно собственное значение задачи (1.14) и выполняется неравенство
Вычисления дают
r01 sup Spr [ R( )(ra rb ) y * ( y, y) 1 ].
В этом соотношении заменим спектральный радиус евклидовой нормой, тогда неравенство (1.15) только усилится. Итак,
112
r01 sup Spr R( )
2
ra rb 2 .
Скорость убывания погрешностей дискретизации ra и rb зависит от гладкости функций
qy и y, а именно, имеет место неравенство
(1.16) max Rn ( x; y ) c(1 n ) E n 1 ( y ),
x 1
где c – абсолютная постоянная, n=O(ln(n)) – константа Лебега интерполяции, а En-1(y) –
наилучшее приближение функции y многочленом степени не выше (n-1) в норме C.
По теореме Вейерштрасса для всякой непрерывной функции мы имеем
lim En ( y) 0
n
скорость убывания En(y) при n зависит от гладкости функции y.
Итак, пусть y(x) - непрерывная функция, заданная в промежутке [-1,+1], Pn(x) – полином степени n, наименее отклоняющийся от y(x) в рассматриваемом промежутке, En(y) –
наилучшее приближение y(x) посредством полинома степени n, так что
En ( y) max y( x) Pn ( x)
x 1
тогда имеет место
Теорема 1.1 (Д. Джексон)
Если функция y(x) в промежутке -1 x +1 имеет непрерывную производную y(p)(x),
удовлетворяющую условию Липшица
y ( p ) ( x ' ) y ( p ) ( x '' ) K x ' x '' , ( x ' x '' ; x ' , x '' 1),
то для её наилучшего приближения посредством обыкновенных полиномов справедливо
неравенство
cpK
c p 1 ( p 1) p 1
(1.17)
En ( y) p 1 (c p
),(n p 1),
( p 1)!
n
где с – абсолютная постоянная.
Теорема 1.1 показывает скорость убывания наилучшего приближения En(y) в зависимости от гладкости функции y; соответственно можно оценить скорость убывания погрешности дискретизации (1.16) и скорость убывания величины r01 , входящей в неравенство
(1.15).
Отметим важное обстоятельство: погрешность определения собственного числа задачи
Штурма-Лиувилля (1.1)-(1.2) зависит от гладкости функций q(x) и (x): чем более гладки113
ми оказываются эти функции, тем точнее определяется собственное значение на той же
сетке из n узлов. В этом принципиальное отличие описанной методики от разностной.
Особенно впечатляющие результаты получаются, если собственная функция y(x) – целая; тогда известно, что
lim n En ( y) 0,
n
т. е. наилучшее приближение En(y) очень быстро стремится к нулю при n.
К. И. Бабенко назвал алгоритмы типа, описанного выше, численными алгоритмами без
насыщения. Суть этих алгоритмов состоит в том, что они автоматически реагируют на
гладкость решения рассматриваемой задачи и их точность тем выше, чем большей гладкостью обладает решение (на той же сетке); применение этих алгоритмов для задач с гладкими решениями позволяет производить расчёты на сетках с малым числом узлов.
Эти обстоятельства очень важны для задач панельного флаттера. Как будет показано
ниже, они сводятся к решению нелинейного уравнения для определения критической скорости флаттера. При итерационном способе нахождения корня этого уравнения требуется
на каждом шаге решать алгебраическую задачу на собственные значения. Если размер
этой матрицы велик, то задача получается практически неразрешимой; применение же
численного алгоритма без насыщения позволяет минимизировать размер матрицы дискретной задачи.
В качестве численного примера рассмотрим краевую задачу
у"(x)+(λx-x4)у(х)=0, у' (1) - у (1) = у' (2) - 4у (2) = 0.
Метод дискретизации этой задачи аналогичен описанному выше [26]. Легко видеть, что
точное первое собственное значение -2. Оно соответствует собственной функции
у(х)=сехр(x3/3). Проверялась скорость сходимости предложенного численного метода на
сетке из 2-17 узлов. Получены следующие значения погрешности 8e-1, 5e-1, 7e-2, 3e-2, 6e3, 1e-3, 2e-4, 2e-5, 4e-6, 6e-7, 1e-7, 1e-8, 2e-9, 3e-10, 4e-11, 5e-12. Эта табличная зависимость апроксимировалась аналитически. Получено ε =exp(a+bn3), (a=0.013621586, b=0.028013035).
Таким образом, в отличие от классических разностных методов, где зависимость скорости сходимости от числа узлов сетки степенная, здесь имеем экспоненциальное убывание погрешности.
III.1.2. Интерполяционная формула для функции двух переменных в
круге и её свойства.
Как уже говорилось выше, задача о флаттере пластины произвольной формы в плане
сводится к несамосопряжённой задаче на собственные значения для бигармонического
уравнения с младшими членами. Первым этапом дискретизации этого уравнения является построение дискретного лапласиана, для чего осуществляется конформное отображение круга единичного радиуса на рассматриваемую область Г. При таком отображении
114
лапласиан преобразуется известным образом, и дело сводится к его дискретизации в круге единичного радиуса. Для того чтобы построить дискретизацию, обладающую нужными
свойствами (не имеющую насыщения), применяется интерполяционная формула К.И. Бабенко для функции двух переменных в круге. Свойства этой интерполяционной формулы
таковы, что скорость убывания её погрешности, с ростом числа узлов интерполяции, тем
выше, чем большим условиям гладкости удовлетворяет интерполируемая функция. Другими словами, построенная дискретизация не имеет насыщения.
Однако следует заметить, что в отличие от разностных методов и метода конечных
элементов, где матрица дискретного лапласиана разреженная, при данном подходе получаем полностью заполненную матрицу. Поэтому потребовалось тщательное исследование дискретного лапласиана, чтобы сделать рассматриваемую методику конкурентно
способной, по объёму хранимой информации, с классическими методами.
Выберем в круге ||, сетку, состоящую из узлов l=r exp(il), r=cos((2-1) /4/m),
=1,2,…,m; l=2 l/N, N=2n+1, l=0,1,…,2n; т.е. в круге выбирается m окружностей с радиусами r , =1,2,…,m, а на каждой окружности через равные углы выбирается N точек.
Здесь r , =1,2,…,m – положительные нули многочлена Чебышева T2m – чётной степени
2m. Всего в круге выбирается M=mN – узлов.
По этим узлам построим интерполяционную формулу вида:
2n
m
(2.1) ( PM f )(r , ) fl Ll (r , ) ,
l 0 1
Lvl (r , )
2T2 m (r ) Dn ( l ) Dn ( l )
,
r r
NT2'm (r ) r r
n
Dn ( ) 0.5 cos k , Tm (r ) cos(m arccos x).
k 1
Здесь Dn()- ядро Дирихле, Tm(r)- многочлен Чебышева степени m. Суть этой интерполяции состоит в том, что на диаметре круга для рассматриваемой функции применяется интерполяционный многочлен Лагранжа с узлами в нулях полинома Чебышева степени 2m,
а по применяется интерполяция тригонометрическим многочленом степени n. Ниже
часто вместо двух индексов, нумерующих узлы интерполяции, будет применяться один. В
этом случае узлы интерполяции нумеруются, начиная с первой окружности ( =1) против
часовой стрелки (l=0,1,…,2n).
115
Интерполяционная формула (2.1) обладает нужными свойствами. Действительно,
формула (2.1) точна на многочленах от двух переменных степени =min(n,m-1). Обозначим множество этих многочленов P, а E обозначим наилучшее приближение функции
fC[D] (D – единичный круг) многочленом из P. Тогда определён проектор
PM: C[D]LM, (LM=L(L1,…, LM))
и справедливо классическое неравенство:
(2.2) | f (r, ) ( PM f )(r, ) | (1 | PM | ) E ( f ),
в котором |PM| - норма проектора PM . Так же, как в одномерном случае, неравенство
(2.2) показывает, что соответсвующая интерполяционная формула не имеет насыщения.
Норма проектора PM удовлетворяет соотношению
(2.3)
|PM|=O(ln2M)
причём не составляет труда уточнить эту оценку; медленный рост нормы |PM| особенно
важен для бигармонического уравнения.
Делая некоторые предположения о гладкости класса интерполируемых функций, можно оценить скорость убывания наилучшего приближения E при M и получить конкретные оценки погрешности интерполяционной формулы (2.1).
Пусть
(2.4)
f(r,)=(PM f)(r,) +M(r,;f),
где M(r,;f)- погрешность интерполяционной формулы (2.1) (остаток). Тогда справедлива
Теорема 1.2 (К.И. Бабенко )
Рассмотрим класс функций H M ( K ; D) C ( D), удовлетворяющих в круге D условиям
116
k l f
K, k l
x k y l
тогда, если f H M ( K ; D) , то
|M( . ;f)| c K M log2M,
(2.5)
где c - константа, зависящая от .
Таким образом, из рассмотрения формулы (2.5) видно, что при одинаковом числе узлов
интерполяции M скорость убывания погрешности интерполяционной формулы (2.1) возрастает с ростом , т.е. с ростом гладкости интерполируемой функции f. Это означает, что
полученная интерполяционная формула не имеет насыщения.
Основываясь на интерполяционной формуле (2.1), легко построить квадратурную формулу для вычисления определённых интегралов, когда областью интегрирования является
круг. В самом деле, заменяя подынтегральную функцию выражением (2.1), получим квадратурную формулу:
(2.6)
f (r , )d
f (r , l )cl ( f ),
,l
D
где d - элемент площади, сl – весовые коэффициенты, а (f) – погрешность. Для сνl имеем
(2.7) cl Ll (r , )d
D
и они не зависят от l. Введём в рассмотрение блочно-диагональную матрицу
(2.8) C=diag(c1, c2,…, cm),
где c , =1,2,…,m – диагональные матрицы размера N x N с одинаковыми числами на диагонали. Для погрешности квадратурной формулы имеем следующую оценку:
117
|(f)| E(f)
заметим, что все cl положительны при достаточно большом числе узлов интерполяции.
Как будет показано ниже, при дискретизации бигармонического уравнения, описывающего флаттер пластины, требуется дифференцировать интерполяционную формулу (2.1)
по r и . Оценим погрешность, возникающую при таком дифференцировании. Для примера рассмотрим дифференцирование по r. По r рассматриваемая функция приближается
интерполяционным многочленом Лагранжа с узлами в нулях многочлена Чебышева T2m –
степени 2m. Имеет место соотношение:
(2.9)
f (r ) P2 m (r; f ) f ( 2 m1) ( )
T2 m (r )
.
2
(2m 1)!
2 m 1
Здесь (r) – функция r, |r|<1. Дифференцируя (2.9) по r, получим
(2.10)
f (r ) P2m (r ; f ) f ( 2 m1) ( )
T2m (r )
, 1,2,..., m.
2 2 m1 (2m 1)!
Рассматривая в (2.10) производную T2m (r ) , получаем
(2.11)
f (r ) P2m (r ; f ) f ( 2 m1) ( )
sin 2m
2m
(2 1)
,
.
2 m 1
sin 2
4m
(2m 1)!
Таким образом, из рассмотрения соотношения (2.11) следует, что для функции, имеющей (2m+1) ограниченных производных, величина погрешности формулы численного
дифференцирования очень мала.
Замечание. Ниже в главе 3 кроме интерполяционной формулы (2.1) используется её
обобщение – интерполяционная формула для функции двух переменных в круге с неравным числом точек по окружностям. Приведём соответствующие формулы.
118
Пусть Tm(r) - полином Чебышева четной степени m ,
2 1
r cos
cos , 1,2,..., m нули полинома. Причём rm 1 r т. е. корни по2m
линома расположены симметрично относительно нуля. На каждом диаметре интерполируем нашу функцию u(r,θ) интерполяционным полиномом Лагранжа с узлами в нулях полинома Чебышева степени m.
Учитывая, что
u(r , ) u(r , ) получаем
Tm (r ) u (r , ) u (r , )
r r
1 T ( r ) r r
m/2
u (r , )
т. к. Tm (r ) Tm (r ). Функции
u (r , ) и
u(r , ) интерполируются тригономет-
рическим полином степени nν с равноотстоящими узлами l 2l /( 2n 1), l 0,1,...,2n .
u (r , )
2 n
2
u D
2n 1 l 0
u (r , )
u ( r , ) ~
l
( l )
2 n
2
u D
2n 1 l 0
m / 2 2 n
n
l
n
( l )
2ul Tm (r ) Dn ( l ) Dn ( l )
,
'
r r
r r
1 Tm ( r )
2n
1 l 0
l 2l /( 2n 1), l 0,1,...,2n ;
n
(2.11a)
Dn ( l ) 1 / 2 cos k ( l );
k 1
n
Dn ( l ) 1 / 2 (1) k cos k ( l );
k 1
Tm (r )
1
(1)
m; ul u (r , l ).
sin
Поэтому если в круге в точках zl r e il задана функция u=u(r,θ), то по формуле (2.11a)
мы её можем приближённо вычислить в других точках. Практически это вычисление осуществляется при помощи подпрограмм URT и EIGEN [26].
119
III.1.3. Дискретизация оператора Лапласа.
В произвольной области ГR2 с достаточно гладкой границей Г рассмотрим задачу
(3.1)
u(z)+f(z)=0, zГ,
(3.2)
u|Г = 0
здесь функция f(z) либо задана, либо f(z)=[q(z)+p(z)]u(z), где q(z) и p(z) – заданные функции, и в этом случае имеем задачу на собственные значения для оператора Лапласа. В
дальнейшем будем считать, что f, q и p – гладкие функции.
Пусть z= || - конформное отображение единичного круга на область Г; тогда в
плоскости формально получаем те же соотношения (3.1), (3.2), где, однако, вместо u(z)
и f(z) следует писать u()=u(z()) и ||2f(z()).
Обозначим через
K ( , )
1
ln | (1 ) /( ) |
2
функцию Грина оператора Лапласа в круге с краевым условием Дирихле. Из (3.1) имеем
(3.3)
u ( )
K ( , ) | ( ) | 2 [q( ) p( )] u ( )d .
| |1
Подставим соотношение (2.1) для функции F()=||2f(), =rexp(i) в (3.3) и проведя
аналитические вычисления интегралов, получим
120
2n
m
(3.4) u ( ) Hl ( ) zl fl RM ( , F ) ,
l 0 1
(3.5) RM ( ; F ) K ( , ) M ( ; F ) d ,
| |1
(3.6) Hl ( ) K ( , ) Ll ( )d , r exp(i ).
| |1
Если в (3.4) пробегает узлы интерполяции, то получаем конечномерную задачу вида
(3.7) u=HZf+R.
Здесь u – вектор-столбец, компоненты которого содержат значения искомого решения
(собственной функции) в узлах сетки; H – матрица размера M x M, получаемая из соотношения (3.6), когда пробегает узлы сетки; Z- диагональная матрица с числами zl,
=1,2,…,m; l=0,1,…,2n на диагонали (см. выше); f – либо заданный вектор-столбец, компоненты которого содержат значения соответствующей функции в узлах сетки, либо
f=(Q+P)u, где Q и P – диагональные матрицы, содержащие на диагонали значения соответствующих функций в узлах сетки; в последнем случае имеем задачу на собственные
значения; R- вектор погрешности дискретизации, содержащий значения функции
RM ( ; F ) (см. (3.5)) в узлах сетки. Отбрасывая в (3.7) погрешность дискретизации R, получаем приближённую конечномерную задачу. Возмущение, вносимое в собственное значение отбрасыванием погрешности дискретизации, будет оценено ниже. Оценка точности решения уравнения Пуассона, только абсолютной константой отличается от (2.5).
III.1.4. Теорема об h-матрице.
Теорема 1.3. Матрица H имеет следующий блочный вид:
121
h11 h12 ... h1m
(4.1)
H
h21 h22 ...h2 m
...................
hm1 hm 2 ...hmm
где h , = 1,2,…,m – симметричные циркулянты размера N × N, N=2n+1, т.е. матрицы,
первая строка которых имеет вид: b0, b1,…, bn, bn,…, b1, а остальные строки получаются из
первой циклической перестановкой. Для краткости будем называть матрицы такого вида
h-матрицами.
Доказательство. Вычисляя интегралы в (3.6), получаем
n
1
2
(4.2) H l ( ) a 0 ( )
N
N
ak ( ) cos k ( l ), exp(i l ), l 2l / N .
k 1
Если в (4.2) пробегает узлы сетки, то получаем
n
2
(4.3) H
N
'
k hk ,
k 0
где штрих у знака суммы означает, что слагаемое при k=0 берётся с коэффициентом ½, k,
k=0,1,…,n – матрица размера m × m:
k= ak(), =1,2,…,m,
где - радиус -й окружности сетки в круге; hk, k=0,1,…,n – матрица размера N × N:
hkij=cos[k2(i-j)/N)], i,j=1,2,…,N,
122
через обозначено кронекерово произведение матриц. Вид функций ak() для доказательства теоремы неважен и поэтому не приводится.
Из (4.3) следует утверждение теоремы. Таким образом, в матрице H всего m2(n+1) различных элементов. Например, для матрицы размера 104 х 104 (8 окружностей по 13 точек) нужно хранить 448 элементов, а для матрицы 1230 х 1230 (30 окружностей по 41 точке) нужно хранить 18900 элементов.
Используя это свойство, можно вычислять собственные значения матрицы HZ (т.е.
приближённые собственные значения оператора Лапласа в произвольной плоской области) методом простых итераций в сочетании с методом исключения.
Теорема 1.4. Пусть H – действительная h-матрица, тогда эта матрица ортогонально подобна блочно-диагональной матрице
=diag(0 , 1 , …, 2n),
где j – матрица размера m × m, элемент (k,l) которой есть j-ое собственное значение
матрицы hkl:
n
(4.4)
j b0 2
b p cos( p j ), j 2j / N , j 0,1,....,2n,
p 1
а b0, b1,…, bn- первые элементы первой строки матрицы hkl, причём j=N-j, j=1,2,…,n, т.е.
среди клеток j все парные, кроме 0. Собственные векторы матрицы H можно представить в виде
(4.5) y( k ) c( k ) x ( k ) ,
где
123
x ( k ) [1, exp(ik 1 ,..., exp(ik 2n )], j 2j / N , k 0,1,...,2n,
а c(k ) , =1,2,…,m1, m1 m – собственный вектор матрицы k.
Доказательство. Рассмотрим вначале свойства симметричных циркулянтов размера N
× N, N=2n+1, т.е. матриц, первая строка которых имеет вид b0,b1,…, bn, bn,…, b1, а остальные строки получаются из первой циклической перестановкой. Следовательно, в этой
матрице всего (n+1) различных элементов.
Все матрицы этого класса имеют одни и те же собственные векторы
x j (1, j ,..., jN 1 ), j exp(i j ), j 2j / N , j 0,1,...,2n,
а соответствующие собственные значения суть
n
j b0 2 b p cos( p j ), j 0,1,....,2n.
p 1
Нетрудно видеть, что 0 – однократное собственное значение, а 1, 2,…, n – двукратные. Легко проверяется, что класс S симметричных циркулянтов размера N × N (N=2n+1)
замкнут относительно алгебраических операций, т.е. если A,BS, то A+BS, ABS, A-1S,
если A-1 существует. Кроме того, AB=BA. При алгебраических операциях с матрицами класса S аналогичные операции совершаются с их собственными значениями. Заметим, что
рассматриваются только действительные матрицы, а комплексная форма записи для собственного вектора xj применяется для удобства. Она означает, что собственными векторами, соответствующими собственному значению j являются Re xj и Im xj , j=1,2,…,n.
Симметричный циркулянт можно представить в виде:
n
2
(4.6) Bij
N
'
'k cos[k 2 (i j ) / N ], i, j 1,2,..., N ,
k 0
где k , k=0,1,…,n – собственные значения этой матрицы (см. (4.4)), штрих у знака суммы
означает, что слагаемое при k=0 берётся с коэффициентом ½ .
Обозначим xij (i=1,2,…,N, j=0,1,…,2n) i-ю компоненту ортонормированного собственного
вектора xj симметричного циркулянта и рассмотрим ортогональную матрицу
124
x10 ...0 ... 0 ... x1 2 n ... 0
.......................................
x N 0 ..0 ... 0 ... x N 2 n ... 0
X ....................................... .
0 ..........x10 ........0..........x1 2 n
.......................................
0..........x N 0 .......0..........x N 2 n
Тогда легко проверяется соотношение
=X’HX
Таким образом, первое утверждение теоремы 1.3 доказано. Собственный вектор матрицы H представляется в виде
(4.7) Y=XC,
где C – собственный вектор блочно-диагональной матрицы , следовательно, C можно
представить в блочном виде:
c0
(4.8) C .....
c 2n
где ci, i=0,1,…,2n есть m-мерные векторы, причём в выражении (4.8) все ci=0 при i k, а ck
является собственным вектором матрицы k, k=0,1,…,2n. Теперь второе утверждение теоремы 1.4 следует из соотношения (4.7).
Следствие 1. Если собственные значения матриц k простые, то соответсвующая матрица H имеет m простых собственных значений, а остальные – двукратные.
Следствие 2. Матрица H тогда и только тогда является h-матрицей, когда она представляется в виде (4.3). Это следует из теоремы 1.4 и формулы (4.6) для симметричного циркулянта.
125
Следствие 3. Пусть L – класс h-матриц и H1,H2L; тогда c1H1+c2H2L (c1,c2 – константы),
H1H2L, H1-1L, если H1-1 существует. Причём H1-1 существует тогда и только тогда, когда не
вырождены матрицы j, j=0,1,…,n, и в этом случае H1-1=X’-1X, -1=diag(0-1,…, 2n-1) или
n
(4.9) H
1
1
2
N
'
k1 hk
k 0
(сравни с (4.3)).
III.1.5. Построение клеток h-матрицы с использованием дискретизации
уравнений Бесселя.
Рассмотрим спектральную задачу Дирихле для оператора Лапласа при q=0, p=1. Известно, что в круге собственные функции ukj(r,) и собственные значения kj связаны соотношением
(5.1) u kj (r , ) J k ( kj r ) exp(ik ), k 0,1,..., j 1,2,....
Из краевого условия следует, что
kj есть j-ый нуль функции Бесселя Jk , причём 0j –
простые собственные значения, а остальные двукратные. Смысл теоремы 2.3 состоит в
том, что соответсвующая конечномерная задача наследует такие свойства:
1. Двумерная задача на собственные значения для оператора Лапласа в круге разделением переменных сводится к одномерным задачам (уравнениям Бесселя); матрица H ортогонально подобна блочно-диагональной матрице , и вычисление её
собственных значений сводится к вычислению собственных значений матриц j,
j=0,1,…,n, размера m × m (m-число точек по радиусу).
2. Часть собственных значений оператора Лапласа с краевым условием Дирихле простые, а остальные – двукратные; это верно и для соответствующей матрицы H: собственные значения матриц 0 простые, и так как j=N-j, j=1,2,…,n, то остальные собственные значения двукратные.
3. Наследуется вид собственных функций ( сравни (5.1) и (4.5)).
126
4. k-ому уравнению Бесселя, решением которого является функция J k ( kj r ), соответствует клетка k в блочно-диагональной форме матрицы H, т.е. собственные
значения kj этой матрицы являются приближениями для kj1 , а собственные векторы матрицы k: yj=( yj1… yjm)’ удовлетворяют приближённому равенству
y jp const J k ( kj rp ), rp радиус p-ой окружности сетки в круге.
Итак, вычисляя собственные векторы и собственные значения матрицы H, получаем
приближённые выражения для функций Бесселя и их нулей. Обратно, имея алгоритм вычисления функций Бесселя и таблицу их нулей, можно построить соответствующие матрицы k, k=0,1,…,n, а затем и матрицу H (см. (4.3)). Вычислить матрицы k можно также, проведя дискретизацию соответствующих уравнений Бесселя:
-[V’’(r)+(1/r)V’(r)]+(k/r)2V(r)=V(r), V(1)=0, |V(0)|<,
на сетке r , =1,2,…,m (см. § 2).
В результате численных экспериментов выбран следующий способ построения матриц
k:
1) матрицы 0 и 1 вычисляются по методике, описанной выше, а затем вычисляются
обратные к этим матрицам 0-1 и 1-1; таблицы этих массивов при m=3,5,7,9 приведены в [16];
2) 2k-1=0-1+4k2R, 2k+1-1=1-1+4k(k+1)R, k=1,2,…,n,
R=diag(r1-2,…, rm-2)- диагональная
матрица.
После вычисления этих матриц приближённое вычисление для H-1 получается по формуле (4.9).
Итак, построена матрица дискретного оператора - в круге с краевым условием Дирихле. Случай произвольной области сводится к кругу при помощи конформного отображения:
Z-1H-1U=(Q+P)U
Здесь U=(u1,…, uM)’, M=mN – вектор, компоненты ui которого являются приближёнными
значениями собственной функции u() в i-ом узле сетки (узлы в круге нумеруются, начиная с первой окружности сетки против часовой стрелки), т.е. ui u(i), а - приближённое
значение соответствующего собственного значения; Z, Q и P диагональные матрицы, на
диагонали у которых стоят значения соответствующих функций z=||2, q() и p() в узлах сетки.
127
Окончательно, для построения матрицы дискретной задачи Дирихле для оператора
Лапласа в круге требуется хранить два небольших массива чисел, т.е. все громоздкие вычисления затабулированы и матрица H-1 вычисляется по простой формуле (4.3). В [16] для
построения h-матрицы H-1 приведены две небольшие подпрограммы на языке ФОРТРАН:
HMATR (41 оператор) и RASPAK (35 операторов). Заметим, что матрица H используется
для вычисления матрицы дискретной задачи в бигармонической проблеме.
В [16] проводились тестовые расчёты по описанной в этом пункте методике. Рассматривалась область, которая получается из круга || при помощи конформного отображения
z=( 4), =rexp(i)
и вычислялись первые собственные значения оператора - с краевым условием Дирихле. Результаты сравнивались с расчётом на сетке из 30×41=1230 узлов [26]. На сетке из
3×49=147 узлов первое собственное значение вычислено с тремя знаками после запятой,
а 6-е собственное значение вычислено с одним знаком после запятой (выписаны знаки,
совпавшие с расчётом на мелкой сетке 30х41). Заметим, что для построения матрицы
дискретной задачи в этом расчёте использовались две таблицы всего по 9 чисел.
III.1.6. Быстрое умножение h-матрицы на вектор с использованием
быстрого преобразования Фурье.
Для того, чтобы оценить количество операций, необходимых для умножения hматрицы H на вектор f, представим f в блочном виде:
f=(f1 f2… fm),
где векторы fRN, =1,2,…,m, тогда
h11 f1 ... h1m f m
Hf
h21 f1 ... h2 m f m
............................
hm1 f1 ... hmm f m
Таким образом, задача сводится к построению быстрого алгоритма умножения симметричного циркулянта h на вектор fRN, =1,2,…,m.
Представим компоненты этого вектора в виде:
128
n
fj a 0 [ak cos(k j ) bvk sin(k j )], j 2j / N , N 2n 1, j 0,1,...,2n,
k 1
где
2n
(6.1a) a 0
1
N
fj
j 0
2n
(6.1б ) ap
2
N
fj cos( p j ), p 1,2,..., n
j 0
2n
(6.1в ) bp
2
N
fj sin( p j ), p 1,2,..., n, 1,2,..., m.
j 0
Тогда
2n
(6.2)
n
h ij fj a 0 0
j 0
[ p ap cos( p j ) p bp sin( p j )], i 0,1,...,2n.
p 1
Следовательно, нужно уметь быстро вычислять суммы (6.1), а также суммы, входящие
в соотношение (6.2). Эти процедуры сводятся к вычислению сумм вида:
N 1
(6.3) Aq f j exp( 2 i
j 0
qj
), q 0,1,..., N 1,
N
где N=2n+1 нечётно. Если N=3, =1,2,…, то для вычисления требуется 4N операций; доказательство аналогично классическому случаю.
Подсчитаем количество операций, необходимых для умножения h-матрицы на вектор.
Надо вначале вычислить коэффициенты Фурье векторов f , =1,2,…,m по формулам (6.1),
а затем умножить m2 циркулянтов на вектор по формуле (6.2). Кроме того, требуется произвести Nm(m-1) сложений; всего получаем O(m2NlogN) операций. Например, при N=27 и
129
больших m экономия составляет 53% операций по сравнению с непосредственным умножением матрицы H на вектор.
Для того, чтобы убедиться в устойчивости предложенного метода решения уравнения
Пуассона, следует оценить норму матрицы H. Заметим, что точное решение задачи Дирихле для уравнения Пуассона в круге даётся формулой
u ( ) H i ( ) f i .
i
Так как при f1 решение соответствующего уравнения Пуассона есть u= 0.25(1-r2), то
1
H (re ) 4 (1 r
i
i
2
), rei .
i
Если Hi( ) 0, то из последнего равенства нетрудно вывести, что
(6.4) | H |
1
(2m 1)
(1 rm2 ) 0.25, rm cos
,
4
4m
m- число окружностей сетки в круге. Численные эксперименты показывают, что среди
элементов матрицы H очень мало отрицательных и по модулю они имеют величину порядка 10-8 – 10-12. Поэтому формула (6.4) даёт практически точную оценку для нормы матрицы H. Практические расчёты подтверждают эту оценку.
III.1.7. Симметризация h-матрицы.
Теорема 1.4. Матрица B=CH, C=diag(c1,…, cm) (см. (2.8)) – асимптотически симметрична.
Доказательство. Обозначим K интегральный оператор в L2(D):
( Kf )( x) K ( x, ) f ( )d ,
D
где K(x,) – функция Грина задачи Дирихле для уравнения Лапласа в круге, а D – круг
единичного радиуса. Тогда
(Kf,v)=(f,Kv), f,v L2.
Здесь ( , ) обозначено скалярное произведение в L2(D). Положим
130
f(x)=Lk(x), v(x)=Lj(x), j k
(см. (2.1)), тогда
(7.1) ( Kf , v) H k ( ) L j ( )d .
D
Вычислим входящий в это выражение интеграл по квадратурной формуле (2.6):
(7.2)
H
k
( ) L j ( )d H jk c j M ( H k L j ) ,
D
где M – погрешность квадратурной формулы, а M – число узлов интерполяции. Аналогично получаем, что
(7.3) ( f , Kv) H kj ck M ( H j Lk ).
Обозначим Bil=Hilci, тогда из (7.1)-(7.2) имеем
(7.4) B jk Bkj M ( H k L j ) M ( H j Lk ).
Из равенства (7.4) следует утверждение теоремы.
Следствие.
B jk Bkj 2 E ( H k L j ) 2 E ( H j Lk ).
В таблице 3.1 приведены конкретные цифры, подтверждающие асимптотическую симметричность матрицы B=CH.
Таблица 3.1
Проверка асимптотической симметричности матрицы B=CH.
M
104=8x13
210=10x21
820=20x41
max|Bjk-Bkj|
7.8 10-7
1.3 10-7
3.1 10-9
131
Пусть q 0, но по-прежнему рассматривается задача в круге (z1) при p1. Заметим,
что в описанном выше алгоритме при q0 обращается оператор , а при q 0 приближённо обращается оператор +q, т.е. если учесть ошибку, с которой обращается этот оператор, то все остальные рассуждения сохранятся без изменений и, следовательно, матрица
C(I-HQ)-1H – асимптотически симметрична.
Рассмотрим теперь произвольную область (z1) при p1, p p0>0, причём предположим, что q0 (случай q 0 рассматривается аналогично). Умножим (3.7) на матрицу C слева и сделаем замену: u=(ZPC)-1/2w, тогда получаем задачу на собственные значения для
матрицы A=(ZPC)1/2B(ZPC)1/2, где B=CH, а матрица (ZPC)1/2 диагональная с числами
z i pi / ci на диагонали. Нетрудно видеть, что матрица A так же, как и B, асимптотически
симметрична.
132
ГЛАВА 2
Дискретизация линейных уравнений математической
физики с разделяющимися переменными.
Способ дискретизации оператора Лапласа, описанный выше в главе 1, основан на том
факте, что дискретная задача наследует свойства дифференциальной задачи; в частности,
наследуется свойство разделения переменных. Возникает вопрос, как перенести этот способ дискретизации на другие уравнения математической физики с разделяющимися переменными; это существенно для построения дискретного бигармонического оператора в
прямоугольной области с краевым условием свободного опирания.
III.2.1. Уравнения общего вида с разделяющимися переменными.
Пусть линейный оператор S в функциональном банаховом пространстве B имеет собственную функцию вида uk=vk( . )exp(ik), k=0,1,…, где через vk( . ) обозначена функция одного или нескольких аргументов, .
Свойство разделения переменных означает, что
(1.1) Suk=(skvk)exp(ik),
где sk – некоторый линейный оператор. Будем также предполагать, что линейные операторы S и sk имеют действительные коэффициенты, тогда
(1.2) S(Reuk)=(skvk)Re(exp(ik)).
Из линейности операторов S и sk следует, что свойства (1.1) и (1.2) выполняются также
для экспонент вида exp[ik(p)], где p – некоторое число.
Пусть uB. Применим следующую интерполяцию по :
2 2n
u u p Dn ( p ), N 2n 1, p 2p / N .
N p 0
Здесь up=u( . ,p), точкой обозначена одна или несколько переменных;
133
n
Dn ( p ) cos[k ( p )],
k 0
штрих у знака суммы означает, что слагаемое при k=0 берётся с коэффициентом ½.
Тогда имеем
u
2
N
n
k 0
2
N
Su
2n
{ u p cos[k ( p )]},
p 0
n
2n
k 0
p 0
{ (sk u p ) cos[k ( p )]}.
Проведём дискретизацию оператора sk. Для этого применим для функции up интерполяцию вида:
m
u p l q ( . )u qp ,
q 1
где lq, q=1,2,…,m – фундаментальные функции интерполяции; m – число узлов сетки;
uqp- значение функции up в q-ом узле сетки. Обозначим
(1.3а) a qk ( . ) s k l q ( . ),
n
2
(1.3б ) H qp ( . , )
N
a qk ( . ) cos[k ( p )];
k 0
тогда
m
2n
Su H qp ( . , )u qp ,
q 1 p 0
Если ( . ) и пробегают узлы сетки, то из (1.3) получаем SuHu, где H есть h-матрица, u
– вектор столбец, содержащий значения соответствующей функции в узлах сетки (узлы
нумеруются сначала по , потом по остальным пространственным переменным). Для построения клеток h-матрицы k, k=0,1,…,n, требуется произвести дискретизацию операторов sk.
Описанный в этом параграфе метод дискретизации уравнений с разделяющимися переменными применялся для быстрого решения уравнения Пуассона в торе и во внешности тела вращения [26], при этом правая часть уравнения Пуассона была произвольна, т.е.
134
рассматривались трёхмерные задачи; для приближённого решения уравнения Пуассона
использовались свойства h-матрицы.
III.2.2. Дальнейшие обобщения.
Следующим логическим обобщением метода дискретизации, описанного в предыдущем параграфе, является случай, когда собственная функция рассматриваемого линейного оператора представляется в виде произведения функции от нескольких переменных на
функцию от одной переменной (в §1 функция одной переменной имела вид exp(ik)). В
качестве примера рассмотрим уравнение Пуассона в прямоугольнике G={[-1,1]x[-b,b]}.
Требуется найти матрицу, которая наследовала бы свойство разделения переменных для
собственной функции оператора Лапласа в прямоугольнике; такая матрица имеет следующий вид:
(2.1)
C=In A+BIm.
Здесь n- число узлов сетки по высоте прямоугольника, m- число узлов сетки по ширине
прямоугольника; In- единичная матрица размера n x n; A- матрица размера m x m (одномерный дискретный лапласиан на отрезке [-1,1]); B- матрица размера n x n (одномерный
дискретный лапласиан на отрезке [-b,b]); Im- единичная матрица размера m x m.
Для построения матриц A и B следует произвести дискретизацию одномерной спектральной задачи u=u с краевыми условиями u(-1)=u(1)=0 и u(-b)=u(b)=0 соответственно. Дискретизация этой задачи производится по методике, описанной в §1 главы 1.
Собственным значением матрицы C является сумма собственных значений матриц A и
B, а соответствующий собственный вектор представляется в виде кронекерова произведения собственных векторов этих матриц.
Последнее свойство показывает, что дискретный лапласиан наследует свойства дифференциального оператора Лапласа. Представлению собственной функции дифференциального оператора Лапласа в виде произведения двух функций от одной переменной соответствует кронекерово произведение собственных векторов матриц A и B.
Это свойство матрицы (2.1) показывает, что вместо оператора Лапласа может быть рассмотрен другой линейный оператор математической физики, а вместо прямоугольника G
– другая область, в которой собственная функция рассматриваемого оператора представляется в виде произведения двух функций (например, в виде произведения функции от
двух переменных и функции от одной переменной).
135
Далее возникает вопрос, в какой мере свойства класса h-матриц распространяются на
матрицы (2.1). А именно, как аналитически обратить матрицу C, и возможен ли быстрый
алгоритм умножения матрицы C-1 на вектор. Перейдём к рассмотрению этих вопросов.
Пусть
n
B k bk , bk2 bk
k 1
bk b p 0, k p
есть спектральное разложение матрицы B. Такое разложение всегда можно построить,
если B – матрица простой структуры, т.е. имеет полную систему собственных векторов;
именно этот случай будем иметь ввиду в дальнейших рассуждениях. Здесь bk, k=1,2,…,n –
собственные проекторы на одномерное инвариантное подпространство, k – соответствующее собственное значение. В практических расчётах размер матрицы B невелик
(n19) и спектральное разложение можно построить, решив полную проблему собственных значений для матриц B и B.
n
Заметим, что
b
k 1
k
I n , т.к. матрица
n
b
k 1
k
совпадает со своей обратной, и преобразу-
ем соотношение (2.1) следующим образом:
n
n
n
n
C bk A k bk I m (bk A k bk I m ) bk ( A k I m ).
k 1
k 1
k 1
k 1
Тогда имеем следующую формулу для обратной к матрице C:
n
(2.2) C 1
bk ( A k I m ) 1 ,
k 1
которая проверяется непосредственным умножением. Формула (2.2) является обобщением формулы (1.4.9).
Случай, когда возможно быстрое умножение матрицы C-1, на вектор (круговой цилиндр) подробно описан в [26].
Построенная в этом пункте дискретизация оператора Лапласа используется для построения дискретного бигармонического оператора с краевым условием свободного опирания.
136
ГЛАВА 3.
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ
ФУНКЦИЙ ОПЕРАТОРА ЛАПЛАСА.
В главе 2 рассматривалась дискретизация оператора Лапласа с использованием интерполяционной формулы для функции двух переменных в круге с равным числом точек по окружностям. Ниже эти результаты обобщаются на более общую интерполяцию (2.11a) с неравным числом
точек по окружностям
Мы будем рассматривать три краевые задачи:
(3.1)
u (Q P)u 0, z G
(3.2)
u G 0
(3.3)
u
n
(3.4)
0
G
Au
u
n
0
G
где Q,P,A некоторые функции заданные в области G, n –внешняя нормаль к ∂G. Мы предполагаем, что Q,P,A и ∂G С .
Пусть z=φ(ζ), 1 конформное отображение единичного круга на область G тогда из
(3.1)-(3.4) получаем
(3.5)
u ( ) (q p)u 0
(3.6)
u r 1 0
(3.7)
u
r
(3.8)
2
0
r 1
u
u
r
0
r 1
где q(ζ)=Q(z(ζ)), p(ζ)=P(z(ζ)), α(ζ)=A(z(ζ))|φ(ζ)|.
137
Пример 1. Пусть φ(ζ)=ζ(1+εζn), 0<ε<1/(n+1), тогда
(3.9) |φ(ζ)|2=1+ε2(n+1)2r2n+2εrn(n+1)cosnθ, ζ=reiθ.
Вычисления |φ(ζ)|2 производится подпрограммой MOD2.
ПОДПРОГРАММА MOD2.
SUBROUTINE MOD2 (Z,M,NL,EPS,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1),NL(M)
PI=3.14159265359D0
I=0
DO 1 NU=1,M
R= COS((3.*NU-1.)*PI/4./M)
R1=R**N*(N+1)
R2= R1*R1
N1=NL(NU)
DO 1 L=1,N1
I=I+1
T=2.*PI*(L-1.)/N1
1 Z(I)=1.+2.*R1*EPS*COS(N*T)+EPS*EPS*R2
RETURN
END
Описание параметров:
Z - массив, который содержит результат вычисления |φ(ζ)|2 в узлах интерполяции внутри круга.
Длина итого массива равна числу точек в круге.;
M - число окружностей в круге;
NL - одномерный массив длины M, i-ый элемент которого содержит число точек (нечетное) на i ой окружности;
EPS,N – ε,n.
Пусть K ( , )
1
ln | (1 ) /( ) | функция Грина оператора Лапласа с краевым усло2
вием Дирихле. Сведем нашу задачу при помощи этой функции к интегральному уравнению
(3.10) u ( ) K ( , ) | ( ) |2 [q( ) p( )] u ( )d
| |1
K ( , )
( )d ,
r
| | 1
i
e , rei .
Здесь ( ) u(e i ) значение u на границе. Для задачи Дирихле ( ) 0 , а для задач
Неймана и смешанной должна быть определена из краевого условия.
138
III.3.1. Задача Дирихле.
В атом случае интегральное уравнение (3.10) упрощается и мы получаем
1
2
2
dz
(3.11) u ( ) r K ( , re )
(q p)uddr
d
0
0
i
2
dz
Интерполируем
(q p)u интерполяционной формулой (1.2.11a) тогда получаем
d
(3.12) u(ζ)=λHνl(ζ)(qνl+λpνl)uνl
Примечание. Здесь и в дальнейшем мы применяем тензорные обозначения, По греческим
повторяющимся индексам суммирование от 1 до m/2, а по латинским от 0 до (2nν+1). Для интегралов Hνl(ζ) можно написать явные формулы
n
n
Lmk ( )
L ()
1
cos k ( l ) 2r 0 k
cos k ( l )
2(1) sin
k
k
1
k 1( 2 )
k 1( 2 )
H l ( e i )
n
sk
m
1
m
1
(2n 1)m
1 (1)
2r coss
Lsk ( ) cos k ( l ) 4r cos s Ls 0 ( )
k
s 1
k 1
s 1( 2 )
где
(2 1)
, m/2 - число окружностей, (2nν+1) - число точек на ν –ой окружности, знак
2m
n
означает суммирование от k=1 до k= nν с шагом 2 и т.п.
k 1( 2 )
1
1
0
0
Lsk ( ) k Ts (r )r k dr k Ts (r )r k dr k Ts (r )r k dr , Ts (r ) cos(s arccos r );
L0 k ( ) ( k )
2k
, L01 ( ) ln ;
1 k2
1
0
Lk 0 ( ) Tk ( ) ln dr Tk (r ) ln rdr; L10 ( )
1 2
.
4
Пусть т. ζ пробегает все узлы интерполяции, тогда получаем алгебраическую задачу на собственные значения
139
(3.13) u=H(Q+λP)u
где u=(u1,u2 ,…,un) - приближенное значение собственной функции в уздах интерполяции,
Q=diag(q1z1 ,…,qnzn), P=diag(p1z1 ,…,pnzn) диагональные матрицы. Причем pi и qi значения функции
q=Q(z(ζ)) и p=P(z(ζ)) в узлах интерполяции, а zi значение в узлах интерполяции |φ(ζ)|2,
m/2
n (2n 1) - число узлов интерполяции, Hji=Hi(ζj) - матрица n n. Узлы нумеруются начиная
1
с первой окружности
LAP123G:
против часовой стрелки. Решает поставленную задачу программа
ПРОГРАММА LAP123G.
PROGRAM LAP123G
IMPLICIT REAL*8 (A-H,O-Z)
PARAMETER (M=9,M1=18,M2=17,M3=19,NM=13,NMAX=27,NT=135,NT2=18225,
*NG=31,NTG=4185,NMG=837)
DIMENSION A(NT2),AB(NT2),X(NT),Y(NT),IANA(NT),HN(NTG),
*NL(M),B(M,M),C(M,NMAX),D(M,NMAX),BC(M1,NM),E(M3,M)
DIMENSION B1(M),C1(NMG),B2(NG,NG),E1(M2,M),H(NG),
*U(NT),Z(NT),Y2(11)
DIMENSION E2(NG,NG)
CHARACTER*1 CH1,CH2
EQUIVALENCE (AB(1),HN(1))
COMMON//EPS1,NP
COMMON /DM/ DM
EXTERNAL QMOD2,PMOD2
DATA NL /27,25,23,21,17,9,7,3,3/
C
DATA NL /9*15/
DM=17.75D0
DM=1.D0
NP=4
EPS1=1.D0/6.D0
WRITE(*,*) ' NP = ? , EPS1 = ? '
READ(*,*) NP,EPS1
NONL=9
WRITE (*,*) 'Вычисл по прогр LAPLAS или считывание с диска (Y/N)'
140
READ (*,14) CH1
IF (CH1.EQ.'Y') CALL LAPLAS (A,M,M1,M3,NL,NM,B,X,Y,C,D,BC,E)
IF (CH1.EQ.'N') THEN
REWIND NONL
READ (NONL ) (A(I),I=1,NT2)
ENDIF
WRITE (*,*) 'Записать результат LAPLAS на диск (Y/N)'
READ (*,14) CH2
14 FORMAT (A)
IF (CH2.EQ.'Y') THEN
REWIND NONL
WRITE (NONL) A
END FILE NONL
ENDIF
WRITE(*,*) 'Введи номер краевой задачи ? '
READ(*,*) IP
IF(IP.EQ.1.OR.IP.EQ.2) GO TO 100
IF(IP.EQ.3) CALL LAP3 (A,NG,M,NL,NM,HN,B1,X,C1,B2,BC,E1,H)
100 CALL TRANSP (A,NT)
IF (IP.EQ.2) GO TO 200
C
CALL MOD2(Y,M,NL,EPS1,NP)
I1=0
DO 5 I=1,NT
DO 5 J=1,NT
I1=I1+1
5
A(I1)=A(I1)*Y(I)
IF (IP.EQ.1.OR.IP.EQ.3) GO TO 400
200 CONTINUE
C
Задача Неймана
CALL BIJ(A,NT,NG,M,NL,NM,HN,B1,X,C1,BC,E,H,E2)
I1=0
141
DO 55 I=1,NT
DO 55 J=1,NT
I1=I1+1
55
AB(I1)=A(I1)
CALL LDUDN (A,AB,NT,Y,C,NL,M,QMOD2,PMOD2)
CALL DMINV (A,NT,DD1,X,Y)
CALL DIVAB (NT,A,AB,Y)
400 CONTINUE
CALL ELMHES (NT,NT,1,NT,A,IANA)
WRITE(*,*) 'ELMHES'
CALL ELTRAN (NT,NT,1,NT,A,IANA,AB)
WRITE(*,*) 'ELTRAN'
CALL HQR2 (NT,NT,1,NT,A,X,Y,AB,IERR)
WRITE(*,*) 'HQR2'
NOUT=4
OPEN (NOUT,FILE='NOUT')
WRITE (NOUT,*) ' IERR = ', IERR
13
FORMAT (13I5)
12
FORMAT (4E18.11)
WRITE(*,12) (X(I),I=1,NT)
WRITE(NOUT,12) (X(I),I=1,NT)
WRITE(NOUT,12) (Y(I),I=1,NT)
IF (IP.EQ.1.OR.IP.EQ.3) THEN
DO 210 I=1,NT
210 Y(I)=1.D0/SQRT(ABS(X(I)))
ELSE
Y(1)=0.D0
DO 1 I=2,NT
1
Y(I)=SQRT(1.D0+1.D0/X(I))
ENDIF
WRITE (NOUT,*) 'Собственные значения'
WRITE(NOUT,12) (Y(I),I=1,NT)
WRITE (*,*) 'Собственные значения'
142
WRITE(*,12) (Y(I),I=1,NT)
PAUSE
C
NT1=NT/3
NT1=6
M11=2*M
IF(IP.EQ.2) KN=2
IF(IP.NE.2) KN=1
DO 21 K=KN,NT1
I2=NT*(K-1)
DO 22 I=1,NT
I3=I2+I
22
U(I)=AB(I3)
CALL URT (0.D0,M,NL,U,Y)
CALL URT (3.14159265359D0,M,NL,U,Z)
DO 4 I=1,M
I1=M11-I+1
4
Y(I1)=Z(I)
DO 20 LL=1,11
IF (IP.EQ.1.OR.IP.EQ.3) THEN
X2=0.1*(LL-1)*SQRT(X(K))
ELSE
X2=0.1*(LL-1)/SQRT(1.D0+1.D0/X(K))
X2=0.1*(LL-1)
ENDIF
20 Y2(LL)=EIGEN (X2,Y,Z,M11,-1.D0,+1.D0)
CALL NORM1(Y2,11)
WRITE (NOUT,12) Y2
PRINT 12,Y2
21
120
PAUSE
FORMAT(A)
END
143
FUNCTION ALFA (X)
IMPLICIT REAL*8 (A-H,O-Z)
COMMON//EPS1,NP
COMMON /DM/ DM
ALFA=DM*SQRT(1.+2.*EPS1*(NP+1.)*COS(NP*X)+EPS1*EPS1*(NP+1)**2)
RETURN
END
SUBROUTINE NORM1(Y,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Y(1)
P=0.D0
DO 1 I=1,N
IF (ABS(Y(I)).GT.P) IP=I
IF (ABS(Y(I)).GT.P) P=ABS(Y(I))
1 CONTINUE
P=Y(IP)
DO 2 I=1,N
2 Y(I)=Y(I)/P
RETURN
END
SUBROUTINE PMOD2 (Z,M,NL)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1),NL(1)
COMMON // EPS,NP
I=0
DO 1 NU=1,M
N=NL(NU)
DO 1 L=1,N
I=I+1
1 Z(I)=1.D0
144
CALL MOD2(Z,M,NL,EPS,NP)
RETURN
END
SUBROUTINE QMOD2 (Z,M,NL)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1),NL(1)
COMMON // EPS,NP
I=0
DO 1 NU=1,M
N=NL(NU)
DO 1 L=1,N
I=I+1
1 Z(I)=1.D0
CALL MOD2(Z,M,NL,EPS,NP)
RETURN
END
SUBROUTINE LAPLAS (A,M,M1,M3,NL,NM,B,X,Y,C,D,BC,E)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION A(1),B(M,M),X(M),Y(M3),NL(M),C(M,1),D(M,1),BC(M1,NM),
1E(M3,M)
DOUBLE PRECISION BC,X,Y,PD ,PID,EPS,E
EPS=1.D-19
PID=3.14159265358979323846264 D+0
PI=PID
M2=M1-1
DO 1 NU=1,M
PD=PID*FLOAT(2*NU-1)/FLOAT (2*M1)
X(NU)=DCOS(PD)
E(1,NU)=X(NU)
DO 1 KS=2,M3
145
1
E(KS,NU)=DCOS(FLOAT(KS)*PD)
DO 2 MU=1,M
PD=X(MU)
DO 11 I=1,M2
11 Y(I)=E(I,MU)
CALL LS0 (PD,Y,M2)
DO 2 NU=1,M
P1=0.
DO 3 KS=1,M2,2
PD=X(NU)*E(KS,NU)*Y(KS)
IF (DABS(PD).LE.EPS) PD=0. D+0
3
P1=P1+4.*PD
2
B(NU,MU)=P1
DO 6 NU=1,M
N1=NL(NU)
DO 6 L=1,N1
L1=L-1
P=2.*PI*L1/N1
C(NU,L)=COS(P)
6 D(NU,L)=SIN(P)
I1=0
DO 7 MU=1,M
DO 9 I=1,M3
9
Y(I)=E(I,MU)
PD=X(MU)
P=PD
CALL LSK (BC,Y,M1,NM,PD)
N1= NL(MU)
DO 7 KA=1,N1
DO 7 NU=1,M
N2= NL(NU)
N3=(N2-1)/2
146
MNU=M-NU+1
DO 7 L=1,N2
I1=I1+1
A(I1)=B(NU,MU)
DO 13 K=1,N3
LK=MOD(L*K,N2) +1
KAK=MOD(KA*K,N1)+1
13
Y(K)=C(NU,LK)*C(MU,KAK)+D(NU,LK)*D(MU,KAK)
DO 8 K=1,N3,2
K1=K+1
IF (K.NE.1) P1=(P**K-P)*2.*K/(1-K*K)
IF (K.EQ.1) P1=-DLOG(P)*P
PD=Y(K)*X(NU)
PID=Y(K)*X(MNU)*BC(M1,K)
IF (DABS(PID).LE.EPS ) PID=0. D+0
IF ( DABS(PD).LE.EPS ) PD=0. D+0
8
A(I1)=A(I1)+(3.* PD *P1+2.*(-1)**(NU-1)* PID )/FLOAT (K)
DO 10 KS=1,M2
I=(1-(-1)**KS)/2+1
IF(I.GT.N3) GO TO 10
DO 20 K=I,N3,2
PD=Y(K)*X(NU)*E(KS,NU)*BC(KS,K)
IF ( DABS(PD).LE.EPS ) PD=0. D+0
20
A(I1)=A(I1)+4.* PD /FLOAT(K)
10
CONTINUE
7
A(I1)=A(I1)/FLOAT(N2*M1)
RETURN
END
147
Параметры программы заданы в операторе
PARAMETER (M=9,M1=18,M2=17,M3=19,NM=13,NMAX=27,NT=135,NT2=18225,
*NG=31,NTG=4185,NMG=837)
Здесь M=9 – число окружностей сетки в круге, M1=2*M, M2=2*M-1, M3=2*M+1,
NM= max n , 2n 1 число точек на ν-ой окружности, NMAX=27 – максимальное
количество точек по окружностям, NT=135 – число узлов сетки, NT2=NT*NT, NG=31 – число
точек на границе круга, NTG=NG*NT, NMG=(2*NM+1)*NG. Число точек по окружностям
сетки задаётся оператором DATA NL /27,25,23,21,17,9,7,3,3/, параметр A в граничном условии
задаётся в операторе DM=1, если нужно задать функцию α то это нужно сделать в
подпрограмм функции FUNCTION ALFA (X).
Требуемые подпрограммы:
LAPLAS, LSK,LS0, LAP3, TRANSP, MOD2, BIJ, LDUDN, DMINV, DIVAB,
ELMHES, ELTRAN,HQR2,URT,EIGEN,NORM1,PMOD2,QMOD2.
LAPLAS, LSK,LS0 – описаны ниже, NORM1 – подпрограмма нормировки, SUBROUTINE NORM1(Y,N) Чебыщевская норма вектора Y длины N. Остальные подпрограммы описаны в [26]. Матрица H
вычисляется программой LAPLAS.
Подпрограмма LAPLAS.
SUBROUTINE LAPLAS (A,M,M1,M3,NL,NM,B,X,Y,C,D,BC,E)
Описание параметров:
A - массив содержащий на выходе матрицу A расположенную по строкам. Длина массива равна
квадрату числа узлов интерполяции.
M - число окружностей:
M1=2*M;
M3=2*M+1;
NL - одномерный массив длимы M , ν -ый элемент которого содержит число точек (нечетное) на ν -ой окружности;
NM= max n , 2n 1 число точек на ν-ой окружности;
148
B, X, Y, C, D, BC, E - рабочие массивы размерностей: B(M,M), X(M), Y(M3), C,D= (M, (2*NM+1),
BC(M1,NM), E(M3,M). Все массивы должны быть описаны как массивы двойной точности.
Требуемые подпрограммы LS0, LSK.
Подпрограмма LS0.
SUBROUTINE LS0 (R0,Y,M)
DIMENSION Y(M)
DOUBLE PRECISION R0,Y,P1,P2
DOUBLE PRECISION R1,R2,R3
DO 2 K=3,M,2
K1=M-K+3
P=K1+1
2
Y(K1)=R0*Y(K1)/P-FLOAT(K1)*Y(K1-1)/P/FLOAT(K1-1)
P1=1.-R0*R0
Y(1)=0.25*P1
DO 3 K=3,M,2
R1=K+1
R2=K-1
R3=K
P2=-1./R1/R1/R2-Y(K)/R1-R3*P1/R1/R2
P1=-2./R1/R2-2.*Y(K)-P1
3
Y(K)=P2
RETURN
END
Эта подпрограмма производит вычисление интеграла Lk0 по рекуррентной формуле:
Lk 0 ( )
J ()
1
k
k
2
Pk 1 ( ),
2
(k 1)(k 1) k 1 k 1
Pk 1 ( )
2
2 J k ( ) Pk 1 ( ),
k 1
2
P2 ( ) 1 2 , J k ( )
Tk ( )
k 1
kTk 1 ( )
;
k 2 1
149
L10 ( )
1 2
, Tk ( ) cos(k arccos ),
4
k≠1 – нечетное.
Описание параметров:
R0 - ρ (двойная точность);
Y - массив длины M2, который содержит на нечетных местах вычисленный интеграл (двойная
точность). На входе в этот массив засылается таблица yν=Tν(ρ), ν=1,2,…,M2;
M2 - размерность массива Y.
ПОДПРОГРАММА LSK.
SUBROUTINE LSK (A,X,M1,N,R0)
DIMENSION A(M1,N),X(M1)
DOUBLE PRECISION A,X,R0,P
DOUBLE PRECISION R1,R2,R3
M2=M1+1
DO 1 K=2,M2
K1=M2-K+2
R1=K1
R2=K1+1
R3=K1-1
1
X(K1)=R0*X(K1)/R2-R1*X(K1-1)/R2/R3
CALL IKJ (A,X,M1,N,R0)
DO 2 K=1,M1
I=(1-(-1)**K)/2+1
I1=K-(-1)**K
IF (I.GT.N) GO TO 2
DO 6 J=I,N,2
P=R0**J
A( I1,J)=A(K,J)/P
6
A(K,J)=0.
2
CONTINUE
CALL IKJ1(A,X,M1,N,R0)
150
DO 3 K=1,M1
I=(1-(-1)**K)/2+1
I1=K-(-1)**K
IF (I.GT.N) GO TO 3
DO 7 J=I,N,2
P=R0**J
A( I1,J)=A( I1,J)+A(K,J)*P
7
A(K,J)=0.
3
CONTINUE
DO 4 K=2,M2
R1=K*K-1
4
X(K)=-1./R1
CALL IKJ (A,X,M1,N,1.0 D+0)
DO 5 K=1,M1
I=(1-(-1)**K)/2+1
I1=K-(-1)**K
IF (I.GT.N) GO TO 5
DO 8 J=I,N,2
P=R0**J
8
A(K,J)=-P*A(K,J)+A( I1,J)
5
CONTINUE
RETURN
END
Производит вычисление интегралов Lsk с двойной точностью, когда (s+k) – нечетно.
Описание параметров:
A - выходной массив размера M1N, который содержит на соответствующих местах вычисленные интегралы (двойная точность);
X - массив длины M3 , который содержит на входе величины xν=Tν(ρ), ν=1,2,…,M3;
M1, N -. размеры массива A;
R0 - ρ (двойная точность).
Требуемые подпрограммы: IKJ, IKJ1.
151
ПОДПРОГРАММА IKJ.
SUBROUTINE IKJ (A,X,M1,N,BE)
DIMENSION A(M1,N),X( 1)
DOUBLE PRECISION A,X,BE,P,P1,P4
P=BE*BE
A(2,1)=0.5*P*(P-1.)
DO 3 K=4,M1,2
P1=K*K-4
3
A(K,1)=0.5*(X(K+1)+X(K-1))-FLOAT ((-1)**(K/2))/P1
IF (N.EQ.1) RETURN
DO 2 J=2,N,2
K1=J+2
P1=K1
2
A(1,J)=BE**K1/P1
M=M1-1
N1= N-1
DO 4 K=1,M
I=(1-(-1)**K)/2 +1
P=X(K+1)
IF (I.GT.N1) GO TO 4
DO 5 J=I,N1,2
P4=K+J+3
P1=(K+1)*(J+1)
5
A(K+1,J+1)=A(K,J)*P1/P4/FLOAT(K)+P*FLOAT(K+2)/P4*BE**(J+1)
4
CONTINUE
RETURN
END
~
Производит вычисление интеграла I kj Tk (r )r j dr , 0 1 по рекуррентной формуле
0
с двойной точностью при (k+j) -нечетном ,
(k 1)( j 1) ~
~
I k 1, j 1
I kj J k 1 ( )
k (k j 3)
j 1
k2
, k 2, j 1.
k j3
Первый столбец считается по формуле
152
(1) k / 2
1
~
~
I k ,1 J k 1 ( ) J k 1 ( ) 2
, k чётно, k 2, I 2,1 0.5 2 ( 2 1),
2
k 4
а первая строка считается по формуле
j2
~
I 1, j
.
2 j
Примечание. Здесь величина Jk(ρ) имеет тот же смысл, что и в описании к программе LS0.
Описание параметров:
A - выходной массив размера M1N , который содержит на соответствующих местах вычисленные
интегралы (двойная точность);
X - массив длины (M1+1), который cодержит на входе таблицу
J k ( ), k 2, ..., M 1 1; J n ( )
Tn ( )
n 1
nT n 1( )
(двойная точность);
n2 1
M1, N - размеры массива A;
BE – β.
ПОДПРОГРАММА IKJ1.
SUBROUTINE IKJ1 (B,Y,M1,N, AL)
DIMENSION B(M1,N),Y(M1)
DOUBLE PRECISION B,Y,P,AL
DOUBLE PRECISION R1
P=-DLOG(AL)
M=M1-1
B(2,1)=1.-AL*AL-P
DO 2 K=3,M,2
R1=K*K-1
2
B(K+1,1)=-2./R1-2.*Y(K)-B(K-1,1)
IF (N.EQ.1) RETURN
B(1,2)=P
IF (N.EQ.2) GO TO 10
153
IF (N.LT.4) GO TO 9
DO 5 J=4,N,2
J1=2-J
R1=J1
5
B(1,J)=1./R1-AL**J1/R1
9
B(2,3)=2.*B(1,2)+0.5*(1.-1./AL/AL)
IF (N.LE.4) GO TO 10
DO 7 J=5,N,2
J1=J-3
J2=J-1
R1=J1
R2=J2
7
B(2,J)=-2.*(1.-1./AL**J1)/R1+(1.-1./AL**J2)/R2
10 CONTINUE
DO 6 K=2,M
I=((1-(-1)**K))/2+2
IF (I.GT.N) GO TO 6
DO 8 J=I,N,2
8
B(K+1,J)=2.*B(K,J-1)-B(K-1,J)
6
CONTINUE
RETURN
END
1
Производит вычисление интеграла I kj Tk (r )r j dr , 0, (k j ) нечётно (по рекуррент
1
ной формуле с двойной точностью). Обозначим Pk ( ) Tk (r )r 1 dr тогда
Pk 1 ( )
2
2 J k ( ) Pk 1 ( ), k 2; P2 1 2 ln - эта формула для первого
k 1
2
столбца;
I2j 2
1 3 j 1 1 j
1 2
, j 1,3; I 21 P2 , I 31 2 ln
3 j
1 j
2
по этим формулам вычисляется вторая строка. Остальные интегралы вычисляются по рекуррентной формуле I k 1, j 2I k , j 1 I k 1, j с двойной точностью.
154
Описание параметров:
B - выходной массив размера M1N, который содержит на соответствующих местах вычисленные интегралы (двойная точность);
Y - массив длины M1+1 ( двойная точность ), который содержит на входе те же значения что и
массив X в программе IKJ;
M1, N - размеры матрицы B;
AL - α (двойная точность).
Таким образом, при помощи подпрограмм LAPLAS, LS0, LSK, IKJ, IKJ1 задача вычисления
собственных чисел и собственных функций сведена к алгебраической задаче на собственные значения. Для решения, полученной алгебраической проблемы собственных значений мы пользуемся стандартными методами (см. [26]).
III.2.2. Смешанная задача.
Как было показано выше эта задача сводится к интегральному уравнению
(3.11), где функция ψ(θ) должна быть определена из граничного условия
(3.9). Обозначим
K ( , )
r
K 0 ( , ), e i , re i ;
K 0 ( , )
r 1
1 2
.
2 (1 2 2 cos( ))
2
dz
(q p)u ту же интерполяцию, что и для задачи Дирихле, а
Применим для функции
d
для ψ(θ) применяем тригонометрическую интерполяцию:
2n
( )
2
N
Dn ( j ) j n ( ; ), j ( j ), j
j 0
n
1
Dn ( j )
2
cos k ( j ).
k 1
Обозначим
155
2j
, j 0,1,...,2n.
N
(3.14) H 0j ( )
2
2
2 1 n L
i
K
(
,
)
D
(
)
d
cos L( j ), e .
0
n
j
2n 1 0
2n 1 2 L 1
тогда имеем
(3.15) u( ) Hl ( ) zl (ql pl )ul H 0j ( ) j , zl | ( l ) | 2 .
Здесь по j суммирование от 0 до 2n, а ν и l суммирование как было сказано выше. Интегралы H 0j ( ) вычисляются подпрограммой HJ0. Описание параметров и текст этой подпрограммы
приведён в [26].
Выберем теперь вектор ψ=(ψ0, ψ1 , … , ψ2n)΄ так чтобы удовлетворялись граничные условия
(3.8). Для этого продифференцируем соотношение (3.15) по ρ положим ρ=1 и подставим в граничное условие. Тогда подучим систему линейных уравнений:
(3.16) Bij j Hl ( i ) fl 0,
где
Bij
n
n(n 1)
2
l cos l ( i j ), i j; Bii i
;
2n 1 l 1
2n 1
H l ( e
fl zl (ql pl )ul ; H l ( j )
i j
)
.
1
Отсюда получаем
n
n
(1)
Lmk
L0 k (1)
1
2
(
1
)
sin
cos
k
(
)
2
r
cos k ( i l )
i
l
k
k
1
k 1( 2 )
k 1( 2 )
H l ( i )
sk
n
m
1
m
1
(2n 1)m
1 (1)
2r coss
L sk (1) cos k ( i l ) 4r cos s L s0 (1)
k
s 1
k 1
s 1( 2 )
где
L0 k (1)
2k
,k 1,3,5,... ;
1 k
156
1
Ls0 (1)
1 (1)
s 1
2
, s 1,3,5, ... нечётно;
s
1
Lsk (1) 2k Ts (r )r k dr.
0
Производные H l ( i ) вычисляются подпрограммой HNLI . Текст этой подпрограммы и описание
параметров приведены в [26].
III.3.3. Задача Неймана.
Теперь, в отличие от § 2, мы должны определить в соотношении (3.10) функцию из граничного условия (3.7). Так же как и в § 2 исходит из соотношения, (3.15) и получаем для
определения вектора ψ=(ψ0, ψ1 , … , ψ2n)΄ систему линейных уравнений (3.16), где в этом
случае матрица B имеет вид:
(3.17)
Bij
n
2 ( j 1)
2
l cos l ( i j ), j
, j 1,2, ... ,2n 1 N .
2n 1 l 1
2n 1
Нетрудно заметить» что матрица B – вырождена. Дело здеcь в том, что краевая задача
u
u f 0,
0 не всегда разрешима. Ее условие разрешимости в L2 :
r r 1
(3.18)
f ( )d 0.
| |1
В нашем случае f(ς)=|φ’(ς)|2(q(ς)+λp(ς)). Заменяя f(ς) интерполяционной формулой
(1.2.11a) и вычисляя интегралы получим приближенное условие разрешимости:
m / 2 2 n
c f
l
1 l 0
0,
где
(3.19)
с
s 1
m 1
cos
8r
(2 1)
2
t
cos
s
,
t
1
/(
1
(
1
)
s),
, s 1 нечётно.
s
s
m(2n 1) 2
2
m
s 3( 2 )
157
Выпишем теперь решение вырожденной системы уравнений: Bψ=d, где матрица B
определена в (3.17), d i H l ( i ) fl . Это решение должно зависеть от одной произ ,l
вольной постоянной. Обозначим a j
n
2
l cos l j первую строку матрицы В. Мат2n 1 l 1
рица В симметричный циркулянт и, следовательно, имеет собственные числа
k a1 a 2 k ... a N kN 1 , k e
2k
i
N
e i k 1 , k 1,2,..., N ;
а соответствующие им собственные векторы
x k (1, k , k2 ,..., kN 1 )
т.к. θN=1 , то λN =a1+a2+…+aN =0 , а соответствующий собственный вектор есть (1,1,…,1).
Остальные собственные числа действительные и кратные. Однако для вычислений удобно сохранить комплексную запись.
B=ΩΛΩ-1, где
1 1...........1
1 11 .......... 11 N
1 0 .... .. 0
1 2 ......... N
1
1 N
0
....
0
1
..........
2
1 1
2
2
2
2
2
,
.........
,
.
1
2
N
..............
N .......................
....................
0 0 ......
1 1 ........... 1 N
N 1 N 1
N
N 1
N
N
......
2
N
1
Следовательно, получаем ΩΛΩ-1ψ=d. Обозначим Ω-1ψ = ξ , Ω-1d =η , тогда Λξ = η т. к.
λN = 0 то должно быть ηN = 0 (система совместна) → ξN - произвольное действительное
число.
j
1
j
j , j 1,2,...., N 1
ψ = Ωξ ,следовательно получаем
N 1
j
j 1
j
i iN N ij j . Но j
158
N
1j i
i 1
N
, j
di .
Окончательно имеем
(3.20)
N 1 jp l
l 1 j 1 j
N
1
p N
N
E pq
2
N
j
n
1
j 1
Re jp q
n
cos( p q)
j 1
j
2j
N ,
n
n(n 1)
2 a k 1 cos k j 1 .
2n 1
k 1
E pq
j
(3.22)
2
N
j
Обозначим j
(3.21)
N
d l N E pl d l , г де
l 1
2
N
n
j 1
N
j , тогда
2
cos( p q)
j
2j
N ,
n
n(n 1)
2k
2k
l cos
(l j ) cos
(l j ).
2
N
N
k ,l 1
Подставляя (3.21) в (3.16) получим
(3.23)
2n
N
u ( ) Hl ( ) fl H p0 ( )( N E pq Hl ( q )) fl .
p 0
q 1
Пусть точка ς пробегает все узлы интерполяции ςi . Тогда получаем
(3.24)
( I ( A B)Q)u N e0 ( A B) Pu ,
где A - матрица для задачи Дирихле,
2n
N
p 0
q 1
Bij H p0 ( i ) E pq H j ( q ),
159
(вместо двух индексов ν,l мы ввели один j) Q и P – диагональные матрицы те же, что и в
задаче Дирихле.
Вычисление матрицы A - В производят подпрограмма BIJ. Описание этой подпрограммы и текст приведены в [26]. Вызываемые подпрограммы: HNLI, HJ0 – описаны там же.
Умножим равенство (3.25) слева на матрицу
1 0 ....... 0
1 1 ....... 0
*
.
E
.................
1 0 ........1
Тогда неизвестный параметр ξN исключится из всех уравнений кроме 1-го т. к.
1
0
*
E e0 .
...
0
Заменим 1-ую строку, которая содержит неизвестный параметр соотношением
c
j
j
z j q j u j c j z j p j u j
j
получим алгебраическую задачу на собственные значения (A0 – λ B0)u=0, где zj - значение |φ(ς)|2 в j -ом у узле интерполяции. Коэффициенты cj (постоянные на каждой
окружности) вычисляются по формулам (3.20) при помощи подпрограммы CNU. Описание этой подпрограммы и текст см. [26].
Вычисление окончательной матрицы для задачи Неймана производит программа
LDUDN. Описание этой подпрограммы и текст приведены в [26].
III.3.4. ОПИСАНИЕ ЧИСЛЕННЫХ ЭКСПЕРИМЕНТОВ.
Первый расчёт проводился для эпитрохоиды n=4, ε=1/6. В круге выбиралась сетка
из 135 узлов с расположением точек по окружностям NL=27,25,23,21,17,9,7,3,3 (начиная с
первой окружности). В расчётах получено много комплексных пар с мнимыми частями ~
160
10-4. Второй расчёт выполнялся на равномерной сетке 915=135 все собственные значения получились действительными. Результаты расчётов представлены в таблице 3.1. Выписаны знаки совпавшие с расчётами на сетке 3041=1230 (см. таблицу 3.2 [26, стр. 48]).
Результаты расчётов в третьей колонке таблицы 2.1 совпали с результатами расчётов из
[26]. Точность расчётов на неравномерной сетке гораздо хуже
Таблица 3.1
Эпитрохоида n=4, ε=1/6.
i
i
135
(второй столбец таблицы 3.1). Причины этого подробно анализируются в [26]. Коротко можно сказать, что во втором расчёте дискретная задача наследует свойства бесконечномерной задачи.
Вторая задача, которая рассматривалась, это – задача на собственные значения в круге:
915=135
1 2.389 2.3844462
2 3.74
3.73479
u e ar u 0,
3 3.74
3.73479
u r 1 0
4 4.68
4.6028
5 5.22
5.2112
6 5.37
5.409
2
Расчёты выполнялись на сетке 1531 по модернизированной программе LAP123 [26] (LAP123P). Вычислялось первое собственное
значение. Во второй колонке приведены результаты расчётов
Нестерова С.В. Результаты в таблице 3.2.
Таблица 3.2
задача на собственные значения в круге
a
Λ1
автор
Нестеров С.В.
0.2 6.0355037914
6.036051
0.3 6.1616424673
6.1617386
0.4 6.2878601882
6.2875
0.5 6.4139790729
6.413976
0.6 6.5400232874
6.540042
0.8 6.7917939883
6.791812
Третий расчёт касался вычисления далёких собственных значений в области, описанной в предыдущем примере. Рассматривалась краевая задача:
u ( x) u ( x), x G,
u G 0.
Для собственных значений справедлива асимптотическая формула
n
4
n O(n1 / 2 ln n),
mesG
где mesG – площадь области G. Для эпитрохоиды
mesG=π(1+ε2(np+1)). Конкретно асимптотическая
161
формула разыскивалась в виде: n a bn c n ln n. Зная λn для двух значений n можно
определить a и c. В расчёте на сетке 1531 при n=100 и n=200 получено a=-257.8878054,
b=3.51219512, c=7.3121964. Затем расчёты по полученной формуле сравнивались с прямыми расчётами при 100<n<200. Отличие составляло 0.5% - 4.7%.. Однако получить хорошее совпадение не удалось.
Примечание. В расчётах рекомендуется не превышать сетку 1531 из-за возможного
накопления вычислительной погрешности при счёте по формуле (3.13) (при вычислении
интегралов Lsk приходится умножать на большой параметр ρ-k).
162
ГЛАВА 4.
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ
ФУНКЦИЙ БИГАРМОНИЧЕСКОГО ОПЕРАТОРА.
Мы будем рассматривать две краевые задачи: (4.1-4.3) и (4.1), (4.2), (4.4)
(4.1) 2 u ( z ) (Q P)u ( z ), z G,
(4.2) u G 0,
(4.3)
u
0,
n G
(4.4)
2 u 1 u
2u
2
0.
n G
n 2
s
Здесь n - единичный вектор внешней нормали к дG ; д/дs - означает дифференцирование по
длине дуги (длина отсчитывается против часовой стрелки); 1/ρ - кривизна дG; ν - постоянная (коэффициент Пуассона), -1< ν <1.
Заметим, что при Q=0 и P=1 мы имеем задачу о свободных колебаниях пластины; краевые
условна (4.2) и (4.3) означают, что пластина заделана по краю, а краевые условия (4.2) и (4.4) означают опирание по краю.
Пусть z=φ(ζ), |ζ| 1 - конформное отображение круга единичного радиуса на область G.
Тогда в плоскости ζ получаем вместо (4.1) -(4.4) следующие соотношения:
2
(4.5) ( ) u ( ) (q p)u ( ), rei , r 1,
2
(4.6) u r 1 0,
(4.7)
u
r
(4.8)
( ) u
u
( 1) Re
2
(
)
r
r
0,
r 1
2
0.
r 1
где q(ς)=Q(z(ς)), p(ς)=P(z(ς)).
Действительно, для кривизны имеем соотношение
( )
1 Re
1
( )
,
| ( ) |
163
см. сноску.2
( ) u
u
1 u 2 u
1
2u
1
, т. к.
,
Re
n | ( ) | r n 2 | ( ) | 2 r 2 r | ( ) | 2 ( ) r
| ( ) |
d
( ) 1 ( )
d
r
.
ln | ( ) | Re ln ( ) Re ln ( ) Re e i
Re
| ( ) |
r
r
dr
d
( ) r ( )
Заметам, что в граничном условии (4.8) учтено граничное условие (4.6) т.е. положено
д2u/дs2=0.
Пример 2. Пусть φ(ζ)=ζ(1+εζn), 0<ε<1/(n+1), тогда
cos n 1
( )
1 n
Re
, 1 (n 1), 1 1.
1 2 1 cos n 12
( )
Перейдем от дифференциального уравнения (4.5) к интегральному. Обозначим
2
dz
f ( )
(q p)u . Тогда обращая в (4.5) первый оператор Лапласа получим
d
u | z ( ) | 2
2
2
K ( , ) f ( )d | z ( ) |
K
| |1
Пусть R( ) | z ( ) | 2
2
K ( , ) f ( )d , S ( ) | z ( ) |
( , )v(e i )d
0
2
| |1
0
K
0
( , )v(e i )d , тогда получаем
0
u R( ) S ( ) , где v(e i ) | z ( ) | 2 u( )
e i
. Обращая еще раз оператор Лапласа получа-
ем
u ( )
(4.9)
K ( , y)[ R( y ) S ( y)]dy
| y|1
2
2
K
0
( , )u (e i )d .
0
Полиа, Георг и Сегё, Габриель. Задачи и теоремы из анализа. Гостехиздат, 1956. Ч. I. Ряды. Инте-
гральное исчисление. Теория функций. 396 с. (стр. 132, задача 106).
164
Мы должны определить в соотношении (4.9) неизвестную функцию v(eiθ) исходя из
второго граничного условия (4.7) или (4.8). Применим для v(eiθ) тригонометрическую интерполяцию: v(e i )
2 2n
Dn ( j )v j , а для функций S(y) и R(y) применим интерполяцион2n 1 j 0
ную формулу (2.2.11a), тогда получим приближенное равенство
2
2 zl 2 n 2
v
K
(
,
y
)
S
(
y
)
dy
H
(
)
S
,
г
де
S
z
K
(
,
)
v
(
e
)
d
K
(
,
)
D
(
)
d
l
l
l
l
0
l
0
l
n
j
2
n
1
j 0 0
| y |1
0
i
2n
zl H 0j (l )v j .
j 0
Здесь zl | ( l ) | 2 , а величины H 0j ( ) вычисляются подпрограммой HJ0, описанной в
[26]. Таким образом
| y| 1
2n
K ( , y ) S ( y )dy H l ( ) z l H 0j1 ( l )v j1 ,
j1 0
R l z l
K ( , y ) R( y )dy H l R l ,
| y| 1
K ( l , ) f ( )d .
| |1
Применяя теперь для f(ς) ту же интерполяционную формулу и подставляя в соотношение (4.9),
получим
2n
u ( ) H i ( ) z i Aij z j ( p j q j )u j H i ( ) z i H 0j1 ( i )v j1 .
(4.10)
i, j
i
j1 0
Здесь вместо двух индексов ν и l введен один, т.е. точки занумерованы начиная с первой окружности против часовой стрелки ; Aij - матрица для задачи Дирихле уравнения Лапласа.
В соотношении (4.10) мы должны определить неизвестный вектор v=(v0,,…,v2n)΄ исходя из
граничного условия (4.7) или (4.8).
Обозначим M -дифференциальный оператор стоящей в левой части граничного условия
тогда применяя этот оператор к (4.10) получим
2n
M ( H i ( )) z i Aij z j ( p j q j )u j M ( H i ( )) z i H 0j1 ( i )v j1 0.
(4.11)
i, j
i
Введём обозначения
M ( H i ( )) ei j 2 H i , j 2 , j 2 0,..., 2n;
H
i, j 2
H
i, j 2 i
z i Aij z j ( p j q j )u j R j 2 ;
i, j
z H 0j1 ( i )v j1 B j 2, j1 .
i
165
j1 0
Таким образам, для определения вектора v=(v0,,…,v2n)΄ имеем систему линейных уравнений
2n
B
j1 0
j 2 , j1
v j1 R j 2 , откуда получаем v j1
2n
C
j 20
j1, j 2
R j 2 , г де C B 1 . Подставляя в (4.11) полу-
чаем
(4.12) u ( )
2n
2n
j1 0
j 20
H i ( ) z i Aij z j ( p j q j )u j H i ( ) z i H 0j1 ( i ) C j1. j 2 R j 2
i, j
i
Пусть ξ пробегает все точки, тогда имеем:
(4.13)
u i ( Bij2 Bil Elj )( p j q j )u j ,
j
l
здесь B=AZ, где Z=diag(z1,…,zNT) – диагональная матрица, z i | ( i ) | 2 , i 1,2,..., NT , A - матрица
задачи Дирихле дня уравнения Лапласа, NT - число точек интерполяции в круге, т.е. B - матрица
задачи Дирихле для нашей области при P=1 , Q=0. Для матрицы E имеем следующее выражение:
2n
2n
j1 0
j 20
Elj H 0j1 ( l ) C j1, j 2 H i , j 2 z i Bij .
i
Обозначим D=B2-BE, тогда мы получаем следующую алгебраическую задачу на собственные значения:
(4.14) u=D(Q+λP)u,
Q=diag(q1,…,qNT), P=diag(p1,…,pNT) - диагональные матрицы.
Матрица С вычисляется подпрограммой СN , а величины H 0j ( ) подпрограммой HJ0M [26].
III.4.1. Первая краевая задача.
Под первой краевой задачей мы понимаем задачу (4.5)-(4.7). Заметим, что выше описанная методика применима при краевом условии (4.6), а второе краевое условие может быть произвольным. Разные краевые задачи отличаются только вычислением массива H i , j 2 . Для краевого условия (4.3) этот массив вычисляется подпрограммой HNLI, описанной в [26]. Сама матрица D
вычисляется подпрограммами EBIGM и BIGM [26].
166
III.4.2. Вторая краевая задача.
Под второй краевой задачей мы понимаем задачу (4.5), (4.6),(4.8). В этом случае для того,
чтобы вычислить массив H i , j 2
2
Нужно вычислить производные
H l ( e i ) производя вы2
1
числения получаем:
2
H l ( e i ) =
2
1
n
n
(1) 2k
Lmk
kL0 k (1)
1
cos k ( l ) 2r
cos k ( l )
2(1) sin
k
k
1
k 1( 2 )
k 1( 2 )
n
sk
m
1
m
1
(2n 1)m
1 (1)
2r coss
[ Lsk (1) 2k ] cos k ( l ) 4r cos s ( Ls0 (1) 1)
k
s 1
k 1
s 1( 2 )
где
L0 k (1)
Ls0 (1)
2k
,k 1,3,5,... ;
1 k
1
1 (1)
s 1
2
, s 1,3,5, ... нечётно;
s
1
Lsk (1) 2k Ts (r )r k dr.
0
Практически массив
H i, j 2
для краевого условия (4.8) определяется подпрограммой
HNLI2M [26]. Вычисление матрицы D производит программа BIG12G.
Программа BIG12G.
PROGRAM BIG12G
C 6.10.94 Тетрадь N 8 стр. 104
IMPLICIT REAL*8 (A-H,O-Z)
C
C
C
PARAMETER (M=9,M1=18,M2=17,M3=19,NT=135,NT2=18225,NG=31,
*NTG=4185,NMAX=27,NM=13,NMG=837)
PARAMETER (M=9,M1=18,M2=17,M3=19,NT=135,NT2=18225,NG=15,
167
C
*NTG=4185,NMAX=27,NM=13,NMG=837)
PARAMETER (M=15,M1=30,M2=29,M3=31,NM=15,NMAX=31,NT=465,
*NT2=216225,NG=31,NTG=14415,NMG=961)
DIMENSION A(NT2),AB(NT2),X(NT),Y(NT),IANA(NT),HN(NTG),
*NL(M),B(NG,NG),C(NTG),BA(NTG)
DIMENSION BC(M1,NM),E(M2,M),H(NG),
*U(NT),Z(NT),Y2(11)
C
EQUIVALENCE (A(1),BA(1)),(A(7204),HN(1))
C
DATA NL /27,25,23,21,17,9,7,3,3/
C
DATA NL /9*15/
DATA NL /15*31/
C
PUAS=0.25D0
WRITE(*,*) ' NP = ? , EPS1 = ? '
READ(*,*) NP,EPS1
NONL=8
REWIND (NONL)
READ (NONL) (A(I),I=1,NT2)
CALL TRANSP (A,NT)
C
NZAP = 9
WRITE(NZAP) (A(I),I=1,NT2)
END FILE (NZAP)
C
WRITE(*,*) 'Введи номер краевой задачи ? '
READ(*,*) IP
C
IF(IP.EQ.2) CALL PSI (Y,NG,PUAS,EPS1,NP,C)
IF(IP.EQ.1) CALL HNLI (HN,M,M1,M2,NG,NL,NM,B,X,C,BC,E)
IF(IP.EQ.2) CALL HNLI2M (HN,M,M1,M2,NG,NL,NM,B,X,C,BC,E,NT,Y)
CALL MOD2 (Y,M,NL,EPS1,NP)
DO 30 I=1,NT
I2=(I-1)*NG
168
DO 30 J1=1,NG
I3=I2+J1
30 HN(I3)=HN(I3)*Y(I)
CALL CN (B,NG,HN,NL,X,M,H,NT)
CALL EBIGM (AB,BA,NT,NG,NL,B,HN,H,C,X,M,NZAP,Y)
CALL BIGM (A,AB,NT,NZAP,Y)
100 CONTINUE
C
CALL ELMHES (NT,NT,1,NT,A,IANA)
WRITE(*,*) 'ELMHES'
CALL ELTRAN (NT,NT,1,NT,A,IANA,AB)
WRITE(*,*) 'ELTRAN'
C
CALL HQR2 (NT,NT,1,NT,A,X,Y,AB,IERR)
CALL HQR2M(NT,NT,1,NT,A,X,Y,AB,IERR,100)
WRITE(*,*) 'HQR2'
NOUT = 4
OPEN(UNIT=4,FILE='NOUT')
WRITE (NOUT,*) ' IERR = ', IERR
13 FORMAT (13I5)
12 FORMAT (4E18.11)
WRITE(NOUT,12) (X(I),I=1,NT)
WRITE(NOUT,12) (Y(I),I=1,NT)
DO 3 I=1,NT
3
Y(I)=1.D0/X(I)
WRITE (NOUT,*) 'Собственные значения'
WRITE(NOUT,12) (Y(I),I=1,NT)
WRITE (*,*) 'Собственные значения'
PRINT 12,(Y(I),I=1,NT)
PAUSE
NT1=NT/4
NT1=5
DO 21 K=1,NT1
169
I2=NT*(K-1)
DO 22 I=1,NT
I3=I2+I
22 U(I)=AB(I3)
CALL URT (0.D0,M,NL,U,Y)
WRITE (*,*) 'URT'
CALL URT (4.141592653589D0,M,NL,U,Z)
WRITE (*,*) 'URT'
DO 4 I=1,M
I1=M1-I+1
4
Y(I1)=Z(I)
DO 20 LL=1,11
X2=0.1*(LL-1)
20
Y2(LL)=EIGEN(X2,Y,Z,M1,-1.D0,+1.D0)
WRITE (*,*) 'EIGEN'
CALL NORM1(Y2,11)
WRITE (*,*) 'NORM1'
PRINT 12,Y2
21 PAUSE
STOP
END
SUBROUTINE NORM1(Y,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Y(1)
P=0.D0
DO 1 I=1,N
IF (ABS(Y(I)).GT.P) IP=I
IF (ABS(Y(I)).GT.P) P=ABS(Y(I))
1 CONTINUE
P=Y(IP)
DO 2 I=1,N
170
2 Y(I)=Y(I)/P
RETURN
END
Описание программы BIG12G аналогично LAP123G. Программа считывает матрицу A, вычисляемую программой LAP123G.
III.4.3. Описание вычислительных экспериментов.
В этом параграфе предпринята попытка повторить расчёты из [26] (табл. 4.3, 4.4).
Нужно сказать, что попытка оказалась безуспешной. Сетки 1230=3041 и 820=2041 на
современных компьютерах недоступны (при вычислении интегралов Lsk происходит
накопление вычислительной погрешности; при вычислениях на БЭСМ-6 это удавалось
компенсировать вычислениями с двойной точностью (длина мантиссы 48 бит); на современных компьютерах счёт с такой точностью невозможен).
Первый расчёт был выполнен для эпитрохоиды (n=4, ε=1/6). Первая краевая задача. В круге выбиралась сетка из 9 окружностей с расположением точек по окружностям
NL=27,25,23,21,17,9,7,3,3 общее число узлов NT=135; число узлов на границе круга NG=31.
Результаты расчётов представлены в таблице 4.1 (первая колонка), во второй колонке
представлены расчёты на сетке 1531, в третьей колонке расчёты на сетке 3041 из
[26],(табл. 4.3).
Таблица 4.1
эпитрохоида (n=4, ε=1/6)
i
λi
1 117.
122.3
122.6037
2 391.
461.2
461.8864
3 391.
461.2
461.9196
4 845.
827.1
827.2753
Из рассмотрения таблицы видно, что точность расчётов
невелика. Это объясняется трудностью задачи. Второй
расчёт был выполнен для этой же области. Вторая краевая задач (коэффициент Пуассона принимался равным
0.25). В таблице 4.2 в первой колонке приведены результаты расчётов на сетке 1531, во второй колонке расчёты
на сетке 3041 из [26],(табл. 4.4).
5 1304. 1329.1 1329.6937
6 1305. 1698.
1701.4344
171
Таблица 4.2
эпитрохоиды (n=4, ε=1/6)
(вторая краевая задача).
i
Λi
1 60.
68.2813
2 227.
242.6973
3 235.
245.1974
4 389.2 389.3203
5 717.
726.9001
Точность ещё хуже. Это объясняется темя, что вторая краевая задача более сложная для вычислений.
Примечание. При вычислении собственных чисел матрицы D.
Программа пакета EISPACK HQR2 даёт ошибку, связанную с достижением максимального числа итераций 31. Эта программа модернизировалась, и максимальное число итераций принималось равным 100. Модернизированная подпрограмма называется HQR2M.
Последний расчет, который мы рассмотрим, это первая краевая задача в круге:
2 u e ar u 0, u r 1
2
u
r
0.
r 1
Вычислялось первое собственное значение на сетке 1325. Результаты расчётов
приведены в таблице 4.3 во второй колонке. В третьей колонке приведены результаты
Нестерова С.В.. Расчёты проводились по программе BIG12P [26].
Таблица 4.3
Первая краевая задача в круге
a
λi
0.1 105.99635034 105.996279
0.2 107.63336375 107.6332949
0.3 109.27398562 109.2739274
0.4 110.91806178 110.91801
0.5 112.56544328 112.56540
0.6 114.21598673 114.222951
0.7 115.86955396 115.869517
0.8 117.52601185 117.5259747
0.9 119.18523224 119.1851870
172
1.0 120.84709172 120.8686813
1.2 124.17825731 124.178184
1.4 127.51861130 127.518526
Приведённые в таблице данные апроксимируются
простой
линейной
зависимостью:
λ1=104.26316+a16.626537. Эту формулу сообщил авторам Нестеров С.В.
1.6 130.86732337 130.866855
1.8 134.22362586 134.223645
2.0 137.58680951 137.58700
173
ГЛАВА 5.
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ
ФУНКЦИЙ ОПЕРАТОРА ЛАПЛАСА В ПРОИЗВОЛЬНОЙ ОБЛАСТИ.
В этой главе описывается программа вычисления собственных значений и собственных функций оператора Лапласа в произвольной области. Достаточно задать параметрические уравнения границы области.
III.5.1. Вычисление собственных чисел и собственных функций оператора Лапласа.
Мы будем рассматривать три краевые задачи:
(5.1)
u(z)+(Q+λP)u=0, zG,
(5.2)
u|G = 0,
(5.3)
u
0,
n G
(5.4)
Au
u
0,
n G
где Q,P,A - некоторые функции, заданные в области G, n - внешняя нормаль к дG. Мы предполагаем, что Q,P,A и дG С .
Пусть z= || - конформное отображение единичного круга на область G; тогда в плоскости формально получаем те же соотношения (5.2)-(5.5), где, однако, вместо u(z) и (Q+λP)u
следует писать u()=u(z()) и ||2(q+λp)u, q()=Q(z()), p()=P(z()), а вместо A -
( ) A( z(e i )) | (e i ) | . Граничное условие теперь выполняется при r=1. Вместо производной
по нормали в соотношениях (5.3), (5.4) будет входить производная по радиусу.
Вычисление собственных значений и собственных функций краевых задач (5.1)-(5.4) производит программа LAP123C.
174
PROGRAM LAP123C
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION A(378225),AB(378225),X(615),Y(615),IANA(615),
*HN(25215),NL(15),B(49,49),C(50625)
DIMENSION B1(15),BC(30,24),E(29,15),H(49),
*U(615),Z(615),Y2(11)
DIMENSION E2(49,49)
DIMENSION C0(225),C1(225)
EQUIVALENCE (AB(1),HN(1))
COMMON//EPS1,NP
COMMON /DM/ DM
COMMON /CZ/
ZY(615)
COMMON /CZG/ ZG(615)
CHARACTER*1 IC
EXTERNAL QMOD2,PMOD2
DM=1.D0
15
WRITE (*,*) 'Аналитическое конформное отображение или
*счет (Y/N)'
READ (*,14) IC
14 FORMAT(A)
IF (IC.NE.'Y'.AND.IC.NE.'N') GO TO 15
IF (IC.EQ.'Y') THEN
WRITE(*,*) ' NP = ? , EPS1 = ? '
READ(*,*) NP,EPS1
ENDIF
WRITE(*,*) 'M = ? '
READ(*,*) M1
WRITE(*,*) 'N = ? '
READ (*,*) N
C
C
KAHAЛ BBOДA ДAHHЫX
175
NREAD = 3
OPEN(UNIT=3,FILE='DATA')
C
KAHAЛ
ПPOMEЖУTOЧHЫX BЫДAЧ
NOUT = 4
OPEN(UNIT=4,FILE='NOUT')
C
IM = 0
300 IM = IM + 1
IF (IM.GT.10) STOP
READ(NREAD,*) M
C
NT=M*N
NM=(N-1)/2
M2=M*M
C
READ (NREAD,*) (C0(I),I=1,M2)
READ (NREAD,*) (C1(I),I=1,M2)
IF (M1.NE.M) GO TO 300
DO 10 I = 1,M
10
NL(I) = N
WRITE (NOUT,*) ' M = ', M
WRITE(NOUT,*) 'LAMDA0'
WRITE(NOUT,*) (C0(I),I=1,M2)
WRITE(NOUT,*) 'LAMDA1'
WRITE(NOUT,*) (C1(I),I=1,M2)
C
IF (IC.EQ.'N') THEN
OPEN (2,FILE='FILEZ')
READ (2,*) (Z(I),I=1,NT+N)
DO 16 I=1,N
16 ZG(I)=SQRT(Z(I))
176
DO 17 I=1,NT
17 ZY(I)=Z(N+I)
ENDIF
CALL HMATR1 (A,M,N,C0,C1,C)
CALL RASPAK(A,M,NM)
WRITE(*,*) 'Введи номер краевой задачи ? '
READ(*,*) IP
IF(IP.EQ.1.OR.IP.EQ.2) GO TO 100
IF (IC.EQ.'Y') CALL MOD2G (ZG,N)
IF(IP.EQ.3) CALL LAP3
*(A,N,M,NL,NM,HN,B1,X,C,B,BC,E,H)
100
CALL TRANSP (A,NT)
IF (IC.EQ.'Y') THEN
CALL MOD2(Y,M,N)
DO 6 I=1,NT
6 ZY(I)=Y(I)
ENDIF
IF (IC.EQ.'N') THEN
DO 7 I=1,NT
7 Y(I)=ZY(I)
ENDIF
IF (IP.EQ.2) GO TO 200
C
I1=0
DO 5 I=1,NT
DO 5 J=1,NT
I1=I1+1
5 A(I1)=A(I1)*Y(I)
IF (IP.EQ.1.OR.IP.EQ.3) GO TO 400
200
C
CONTINUE
Задача Неймана
177
CALL BIJ(A ,NT,N,M,NL,NM,HN,B1,X,C,BC,E,H,E2)
I1=0
DO 55 I=1,NT
DO 55 J=1,NT
I1=I1+1
55
AB(I1)=A(I1)
CALL LDUDN (A,AB,NT,Y,C,NL,M,QMOD2,PMOD2)
CALL DMINV (A,NT,DD1,X,Y)
CALL DIVAB (NT,A,AB,Y)
400
CONTINUE
NT2=NT*NT
CALL ELMHES (NT,NT,1,NT,A,IANA)
WRITE(*,*) 'ELMHES'
CALL ELTRAN (NT,NT,1,NT,A,IANA,AB)
WRITE(*,*) 'ELTRAN'
CALL HQR2 (NT,NT,1,NT,A,X,Y,AB,IERR)
WRITE(*,*) 'HQR2'
WRITE (NOUT,*) ' IERR = ', IERR
13 FORMAT (13I5)
12 FORMAT (4E18.11)
C
WRITE(*,12) (X(I),I=1,NT)
C
WRITE (NOUT,*) 'X'
WRITE (NOUT,12) (X(I),I=1,NT)
WRITE (NOUT,*) 'Y'
WRITE (NOUT,12) (Y(I),I=1,NT)
C
RMAX=0.D0
IJ=1
I1=1
IF (IP.EQ.2) THEN
178
Y(1)=X(1)
IANA(1)=1
IJ=2
I1=2
ENDIF
110
DO 60 I=I1,NT
IF (X(I).GT.RMAX) THEN
RMAX=X(I)
IANA(IJ)=I
Y(IJ)=X(I)
ENDIF
60 CONTINUE
X(IANA(IJ))=0.D0
RMAX=0.D0
IJ=IJ+1
IF(IJ.LE.NT) GO TO 110
C
WRITE(NOUT,12) (X(I),I=1,NT)
WRITE(NOUT,12) (Y(I),I=1,NT)
IF (IP.EQ.1.OR.IP.EQ.3) THEN
DO 210 I=1,NT
210
Y(I)=1.D0/SQRT(ABS(Y(I)))
ELSE
DO 1 I=1,NT
1
C1
Y(I)=SQRT(ABS(1.D0+1.D0/Y(I)))
Y(I)=SQRT(1.D0+1.D0/Y(I))
Y(1)=0.D0
ENDIF
WRITE (NOUT,*) 'Eigenvalue'
WRITE(NOUT,12) (Y(I),I=1,NT)
C
179
M11=2*M
IF(IP.EQ.2) KN=2
IF(IP.NE.2) KN=1
DO 21 K=KN,10
WRITE (*,*) 'Введи номер собственного значения ?'
READ (*,*) IJ
WRITE (*,*) IJ, Y(IJ)
I2=NT*(IANA(IJ)-1)
DO 22 I=1,NT
I3=I2+I
22 U(I)=AB(I3)
CALL URT (0.D0,M,NL,U,X)
CALL URT (3.14159265359D0,M,NL,U,Z)
DO 4 I=1,M
I1=M11-I+1
4
X(I1)=Z(I)
DO 20 LL=1,11
IF (IP.EQ.1.OR.IP.EQ.3) THEN
X2=0.1*(LL-1)/Y(IJ)
ELSE
X2=0.1*(LL-1)
C
X2=0.1*(LL-1)/Y(IJ)
ENDIF
20 Y2(LL)=EIGEN (X2,X,Z,M11,-1.D0,+1.D0)
CALL NORM1(Y2,11)
WRITE (NOUT,12) Y2
PRINT 12,Y2
21 PAUSE
120 FORMAT(A)
121 END
FUNCTION ALFA (X)
180
IMPLICIT REAL*8 (A-H,O-Z)
COMMON//EPS1,NP
COMMON /DM/ DM
ALFA=DM
RETURN
END
SUBROUTINE MOD2G (Z,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1)
COMMON // EPS,L
PI=3.141592653589D0
I0=0
DO 5 K=1,N
T=2.*PI*(K-1)/N
I0=I0+1
5 Z(I0)=SQRT(1.+2.*EPS*(L+1)*COS(L*T)+EPS**2*(L+1)**2)
RETURN
END
SUBROUTINE MOD2 (Z,M,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1)
COMMON // EPS,L
PI=3.141592653589D0
I0=0
DO 5 NU=1,M
R=COS((2.*NU-1.)*PI/4./M)
DO 5 K=1,N
T=2.*PI*(K-1)/N
I0=I0+1
5 Z(I0)=1.+2.*EPS*(L+1)*R**L*COS(L*T)+EPS**2*(L+1)**2
1*(R*R)**L
181
RETURN
END
SUBROUTINE NORM1(Y,N)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Y(1)
P=0.D0
DO 1 I=1,N
IF (ABS(Y(I)).GT.P) IP=I
IF (ABS(Y(I)).GT.P) P=ABS(Y(I))
1 CONTINUE
P=Y(IP)
DO 2 I=1,N
2 Y(I)=Y(I)/P
RETURN
END
SUBROUTINE PMOD2 (Z,M,NL)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1),Y(615),NL(1)
COMMON /CZ/ ZY(615)
N=NL(1)
I=0
DO 1 NU=1,M
DO 1 L=1,N
I=I+1
1 Z(I)=ZY(I)
RETURN
END
SUBROUTINE QMOD2 (Z,M,NL)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION Z(1),Y(615),NL(1)
COMMON /CZ/ ZY(615)
182
N=NL(1)
I=0
DO 1 NU=1,M
DO 1 L=1,N
I=I+1
1 Z(I)=ZY(I)
RETURN
END
Подпрограмма MOD2 (Z,M,N) вычисляет | ( ) | 2 для эпитрохоиды.
Описание параметров:
Z – массив, который содержит результат вычисления | ( ) | 2 в узлах интерполяции
внутри круга. Длина этого массива равна числу точек в круге;
M – число окружностей в круге;
N –число точек (нечётное) на i-ой окружности;
EPS, N – ε, N.
Примечание. Параметры области обозначены EPS1, NP и передаются в подпрограмму MOD2 через непомеченный COMMON блок.
Подпрограмма MOD2G (Z,N) вычисляет | ( ) | на границе круга в узлах интерполяции.
Описание параметров аналогично.
III.5.1.1. Задача Дирихле.
Сводится к алгебраической проблеме собственных значений
(5.6)
u=HZf+R.
183
Здесь u – вектор-столбец, компоненты которого содержат значения искомого решения
(собственной функции) в узлах сетки; H – матрица размера M M, получаемая из соотношения (3.8), когда пробегает узлы сетки; Z- диагональная матрица с числами zl,
=1,2,…,m; l=0,1,…,2n на диагонали (см. главу 3); f – либо заданный вектор-столбец, компоненты которого содержат значения соответствующей функции в узлах сетки, либо
f=(Q+P)u, где Q и P – диагональные матрицы, содержащие на диагонали значения соответствующих функций в узлах сетки; в последнем случае имеем задачу на собственные
значения; R- вектор погрешности дискретизации, содержащий значения функции
RM ( ; F ) в узлах сетки. Отбрасывая в (5.6) погрешность дискретизации R, получаем приближённую конечномерную задачу.
Вычисление матрицы H производит программа HMATR1 [26]. Начальные данные, к
этой программе должны размещаться в файле DATA. Для m=3,5 эти данные приведены в
[26]. В практических расчётах использовались значения m=3,5,7,9,11,13,15. Для получения этих данных запрос присылайте на адрес Института проблем механики РАН, или по
электронному адресу algazinsd@mail.ru.
Результат вычисления h-матрицы H выдаётся в упакованном виде, т.е. выдаются
только различные элементы [26]. Подпрограмма RASPAK производит распаковку упакованной записи и выдаёт массив H по строкам [26].
III.5.1.2. Смешанная задача.
Эта задача сводится к алгебраической задаче на собственные значения по методике,
описанной в главе 3. Отличие состоит в вычислении матрицы BN. Подпрограмма BN вычисляет матрицу обратную к матрице B (см. главу 3):
SUBROUTINE BN(B,N,C)
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION B(N,N) ,C(1)
DIMENSION LL(49),MM(49)
COMMON /CZG/ ZG(615)
PI=3.141592653590D0
N1=(N-1)/2
N2=N-1
DO 1 I=1,N2
J1=I+1
DO 1 J=J1,N
184
B(I,J)=0.D0
DO 2 L=1,N1
2 B(I,J)=B(I,J)+2.D0*L*COS(L*2.D0*PI*(I-J)/N)/N
1 B(J,I)=B(I,J)
DO 3 I=1,N
3 B(I,I)=ZG(I)*ALFA(2.D0*PI*(I-1)/N)+0.25D0*(N-1.D0/N)
CALL DMINV (B,N,D,LL,MM)
IF (ABS(D).LT.1.E-3) WRITE(*,*) 'IN BN D = ',D
RETURN
END
Описание параметров:
B – матрица N N, которая содержит выходную матрицу;
N – размерность матрицы B;
C – рабочий массив размерности 1 (в этом варианте программы не используется).
Примечание. Результаты вычисления ( ) передаются через
COMMON /CZG/ ZG(615).
Требуемые функции и подпрограммы:
ALFA, DMINV.
FUNCTION ALFA(T)
Вычисляет значение функции α на границе круга. DMINV вариант с двойной точностью программы MINV3 . Подпрограмма LAP3 вычисляет матрицу H-E (см. главу 3) смешанной задачи.
Транспонирование матрицы после окончания работы LAP3 проводит
программа TRANSP [26].
3
Сборник научных программ на фортране. Выпуск 2. Матричная алгебра и линейная алгебра. М.:
Статистика, 1974.
185
III.5.1.3. Задача Неймана.
Матрицу (H-E)Z (см. главу 3) вычисляет подпрограмма BIJ.Вычитаем первую строку соотношения (3.3.24) из остальных и заменяем её на дискретное условие разрешимости. Тогда получаем окончательную алгебраическую задачу на собственные значения: A1u=λ
A2u+ δ2, где матрицы A1 и A2 получаются из матриц R(I-(H-E)ZQ) и R(H-E)ZP заменой
первой строки на строки c1q1z1 … cM qM zM и -c1p1z1 …-c1p1zM соответственно. Матрицы A1
и A2 вычисляются подпрограммой LDUDN [26].
1.
2.
3.
4.
5.
6.
7.
8.
9.
Описание программы LAP123C.
Программа осуществляет счёт при α DM (см. начало программы).
Параметры области NP, EPS1 считываются в режиме диалога. Для аналитически заданного конформного отображения вычисления ведутся для эпитрохоиды, т.е. области получающейся из круга конформным отображением z=(1+n), 1, <(n+1).
Для других областей пользователь должен заменить программы MOD2 и MOD2G,
которые вычисляют z’2 в узлах сетки внутри области и z’ на границе круга в узлах
сетки.
Параметры сетки M, N считываются в режиме диалога. Здесь M число окружностей
сетки в круге, а N число точек на каждой окружности.
Данные для программы должны быть размещены в файле DATA.
Номер краевой задачи запрашивается в режиме диалога.
Результаты выводятся на экран и записываются в файл NOUT.
Результаты счёта собственной функции выводятся на действительной оси в 11 точках (см. программу).
Программа осуществляет счёт конформного отображения аналитически или считывает результаты вычисления с диска из файла FILEZ. Описание программы, проводящей эти вычисления, приведено ниже.
Программа использует для решения алгебраической проблемы собственных значений подпрограммы пакета EISPACK: ELMHES, ELTRAN, HQR2. Тексты этих подпрограмм доступны в Интернет по адресу:htpp://www.netlib.org/eispack.
Ниже в файлах NOUT1, NOUT2, NOUT3 приведены результаты тестовых расчётов
первой, второй и третьей краевых задач (Дирихле, Неймана и смешанной) для эпитрохоиды EPS1=1/6, NP=4 на сетке M=3, N=7 (для первых пяти собственных значений).
Эти результаты программа записывает в файл NOUT.
NOUT1
M=
3
LAMDA0
411.941825936000
-61.1418752812000
7.47692687292000
-45.1418752798000
29.3333333334000
35.1897397936000
-24.1914580529000
-8.19145805268000
14.7248407322000
-58.2837505577000
26.6666666663000
LAMDA1
457.798232344000
186
-80.1401570151000
37.3333333328000
26.6666666637000
IERR =
-15.6170838946000
-21.4734903555000
32.8684342717000
0
X
0.17652925285E+00 0.73617203152E-01 0.44307523376E-01 0.72789702502E-01
0.37933028422E-01 0.25209236536E-01 0.18579192222E-01 0.31389198480E-01
0.27305791331E-01 0.13342756833E-01 0.19932879110E-01 0.12722448607E-01
0.69245000609E-02 0.61940716769E-02 0.53605109241E-02 0.48574010821E-03
0.26756420900E-02 0.49854482653E-03 0.26029335063E-02 0.49981975563E-02
0.66914956087E-02
Y
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.17652925285E+00 0.73617203152E-01 0.72789702502E-01 0.44307523376E-01
0.37933028422E-01 0.31389198480E-01 0.27305791331E-01 0.25209236536E-01
0.19932879110E-01 0.18579192222E-01 0.13342756833E-01 0.12722448607E-01
0.69245000609E-02 0.66914956087E-02 0.61940716769E-02 0.53605109241E-02
0.49981975563E-02 0.26756420900E-02 0.26029335063E-02 0.49854482653E-03
0.48574010821E-03
187
Eigenvalue
0.23800805673E+01 0.36856181936E+01 0.37065087338E+01 0.47507399945E+01
0.51344182305E+01 0.56442973753E+01 0.60516334741E+01 0.62982537422E+01
0.70829631703E+01 0.73364605404E+01 0.86571952877E+01 0.88657329883E+01
0.12017269154E+02 0.12224705383E+02 0.12706088814E+02 0.13658308167E+02
0.14144685353E+02 0.19332409706E+02 0.19600559253E+02 0.44786579280E+02
0.45373054559E+02
0.10000000000E+01 0.99802215301E+00 0.99125814730E+00 0.97981342549E+00
0.96381673166E+00 0.94341753548E+00 0.91878345637E+00 0.89009768761E+00
0.85755642049E+00 0.82136626845E+00 0.78174169119E+00 -0.39235917486E-01
0.68412781674E-01 0.17713877991E+00 0.28623724160E+00
0.39499409353E+00 0.50268916235E+00 0.60859931202E+00 0.71200158122E+00
0.81217632080E+00 0.90841033122E+00 0.10000000000E+01 -0.17226619411E+00
-0.48064622992E-01 0.76536074970E-01 0.20080391700E+00
0.32400436971E+00 0.44540298138E+00 0.56426801424E+00 0.67987307681E+00
0.79149975616E+00 0.89844025020E+00 0.10000000000E+01
0.10000000000E+01 0.80542115797E+00 0.62594796099E+00 0.46261829022E+00
0.31637743587E+00 0.18807240851E+00 0.78446250259E-01-0.11867653888E-01
-0.82351264858E-01-0.13260757823E+00-0.16236631297E+00
0.95908825529E+00 0.97546924726E+00 0.98787130129E+00 0.99610555065E+00
0.10000000000E+01 0.99940085118E+00 0.99417382894E+00 0.98420550670E+00
0.96940463235E+00 0.94970345395E+00 0.92505904551E+00
NOUT2
M=
3
LAMDA0
411.941825936000
-61.1418752812000
7.47692687292000
-45.1418752798000
29.3333333334000
-8.19145805268000
188
35.1897397936000
-24.1914580529000
14.7248407322000
LAMDA1
457.798232344000
-58.2837505577000
-80.1401570151000
37.3333333328000
26.6666666637000
IERR =
-15.6170838946000
26.6666666663000
-21.4734903555000
32.8684342717000
0
X
-0.10000000000E+01 0.62953408990E+00 0.61213257805E+00 0.18765111000E+00
0.98460527735E-01 0.88027329915E-01 0.49947964838E-01 0.65645629867E-01
0.36180878204E-01 0.26131114490E-01 0.22968741051E-01 0.38113729920E-01
0.34822108734E-02 0.68032921003E-02 0.14249506809E-01 0.12365957609E-01
0.19425215436E-01 0.37394698619E-02 0.15067823070E-01 0.64320635145E-02
0.12067584339E-01
Y
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
-0.10000000000E+01 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
-0.10000000000E+01 0.62953408990E+00 0.61213257805E+00 0.18765111000E+00
0.98460527735E-01 0.88027329915E-01 0.65645629867E-01 0.49947964838E-01
0.38113729920E-01 0.36180878204E-01 0.26131114490E-01 0.22968741051E-01
0.19425215436E-01 0.15067823070E-01 0.14249506809E-01 0.12365957609E-01
189
0.12067584339E-01 0.68032921003E-02 0.64320635145E-02 0.37394698619E-02
0.34822108734E-02
Eigenvalue
0.00000000000E+00 0.16088742427E+01 0.16228471995E+01 0.25157580477E+01
0.33401129108E+01 0.35156945667E+01 0.40290577680E+01 0.45848484979E+01
0.52189332396E+01 0.53515333311E+01 0.62664627426E+01 0.66736370841E+01
0.72442722574E+01 0.82077151279E+01 0.84366976624E+01 0.90480478727E+01
0.91578723596E+01 0.12165017963E+02 0.12508840937E+02 0.16383454614E+02
0.16975684901E+02
0.10000000000E+01 0.10000000000E+01 0.10000000000E+01 0.10000000000E+01
0.10000000000E+01 0.10000000000E+01 0.10000000000E+01 0.10000000000E+01
0.10000000000E+01 0.10000000000E+01 0.10000000000E+01 -0.21364488345E-01
0.91108227687E-01 0.20911512544E+00 0.33097101221E+00
0.45441286502E+00 0.57648541245E+00 0.69342671659E+00 0.80055375491E+00
0.89214800215E+00 0.96134101219E+00 0.10000000000E+01 -0.33765506507E-01
0.83223567787E-01 0.20428791557E+00 0.32807841757E+00
0.45268199452E+00 0.57546610469E+00 0.69292324134E+00 0.80051543015E+00
0.89251872672E+00 0.96186771406E+00 0.10000000000E+01
0.15493359455E+00 0.35714586529E-02-0.67247686799E-01-0.59479877622E-01
0.20188724090E-01 0.16019224271E+00 0.34393550182E+00 0.54964443693E+00
0.75021650823E+00 0.91307111334E+00 0.10000000000E+01
0.97313245166E+00 0.10000000000E+01 0.96436432935E+00 0.86250722528E+00
0.69600528881E+00 0.47270044705E+00 0.20767046372E+00-0.75800550228E-01
-0.34525162601E+00-0.55807442647E+00-0.66054273544E+00
NOUT3
M=
3
LAMDA0
411.941825936000
-61.1418752812000
-45.1418752798000
29.3333333334000
190
35.1897397936000
-24.1914580529000
7.47692687292000
-8.19145805268000
14.7248407322000
-58.2837505577000
26.6666666663000
LAMDA1
457.798232344000
-80.1401570151000
37.3333333328000
26.6666666637000
IERR =
-15.6170838946000
-21.4734903555000
32.8684342717000
0
X
0.62323422018E+00 0.19532366583E+00 0.10514928125E+00 0.19395409756E+00
0.74952042045E-01 0.64157947750E-01 0.43100531422E-01 0.52419378772E-01
0.32556701459E-01 0.23798498313E-01 0.34325033708E-01 0.21029739648E-01
0.32646339842E-02 0.67157774395E-02 0.13507873256E-01 0.11767577470E-01
0.18044140786E-01 0.34898681298E-02 0.14279479382E-01 0.63594589437E-02
0.11471884947E-01
Y
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.62323422018E+00 0.19532366583E+00 0.19395409756E+00 0.10514928125E+00
0.74952042045E-01 0.64157947750E-01 0.52419378772E-01 0.43100531422E-01
0.34325033708E-01 0.32556701459E-01 0.23798498313E-01 0.21029739648E-01
191
0.18044140786E-01 0.14279479382E-01 0.13507873256E-01 0.11767577470E-01
0.11471884947E-01 0.67157774395E-02 0.63594589437E-02 0.34898681298E-02
0.32646339842E-02
Eigenvalue
0.12667017028E+01 0.22626770232E+01 0.22706516919E+01 0.30838755645E+01
0.36526517282E+01 0.39479784030E+01 0.43677127157E+01 0.48168008131E+01
0.53975231513E+01 0.55421694676E+01 0.64822417408E+01 0.68957745136E+01
0.74444376438E+01 0.83684266362E+01 0.86041210444E+01 0.92184194873E+01
0.93364679051E+01 0.12202585306E+02 0.12539779966E+02 0.16927604036E+02
0.17501801399E+02
0.99684794599E+00 0.10000000000E+01 0.99823344715E+00 0.99157303817E+00
0.97999348128E+00 0.96338410170E+00 0.94151350121E+00 0.91399421771E+00
0.88024738476E+00 0.83946739114E+00 0.79058654041E+00 -0.80998473338E-01
0.24661769048E-01 0.13282644682E+00 0.24285655239E+00
0.35406102873E+00 0.46569402235E+00 0.57695213630E+00 0.68697168306E+00
0.79482593762E+00 0.89952239034E+00 0.10000000000E+01 -0.15949195899E+00
-0.42895395428E-01 0.75424745859E-01 0.19485271187E+00
0.31473067766E+00 0.43435355107E+00 0.55296377751E+00 0.66974614461E+00
0.78382258704E+00 0.89424699121E+00 0.10000000000E+01
0.10000000000E+01 0.68023971736E+00 0.40637213303E+00 0.17964833843E+00
0.94047458905E-03-0.12926890261E+00-0.21089745717E+00-0.24427370772E+00
-0.23014766227E+00-0.16970145296E+00-0.64559970779E-01
0.97430805300E+00 0.98792723621E+00 0.99655743709E+00 0.10000000000E+01
0.99808493329E+00 0.99067295367E+00 0.97765753053E+00 0.95896693031E+00
0.93456626084E+00 0.90445951571E+00 0.86869161858E+00
III.5.2. Описание программы численного конформного отображения.
Программа численного конформного отображения написана Э. П. Казанджаном [206]. Ниже приводится пример обращения к программе.
192
PROGRAM KAZAN
PARAMETER (N=201,N1=202,M=210)
C 2.06.94
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION AL(N,N),PR(N),PSI(N),SL(N),FK(N)
DIMENSION TJ(N1),TJ1(N1),TJ2(N1),MD(N1)
COMPLEX*16 T(N),T1(N),T2(N),ZJ(N),SUM(N)
COMPLEX*16 CW(M),CZ(M),CZ1(M),CZ2(M),CC
DIMENSION Z(M),ZR(M),ZG(M)
COMMON /D/ LL(301),MM(301)
C Этот common блок нужно также вставить в подпрограмму conf
COMMON /S/ S
COMMON // EPS,NP
WRITE(*,*) ' NP = ? , EPS = ? '
READ(*,*) NP,EPS
S=2.D0*3.141592653589D0
CC=(0.,0.)
WRITE (*,*) 'M = ?'
READ (*,*) MG
WRITE (*,*) 'N =?'
READ (*,*) NG
IJ=0
DO 1 I=1,NG
IJ=IJ+1
TT=S*(I-1)/NG
1
CW(IJ)=(COS(TT))+(0.,1.)*(SIN(TT))
DO 2 NU=1,MG
R=COS((2.*NU-1.)*S/8./MG)
DO 2 L=1,NG
193
TT=S*(L-1)/NG
IJ=IJ+1
2
CW(IJ)=(R*COS(TT))+(0.,1.)*(R*SIN(TT))
CALL CONFOR
*(CC,AL,PR,PSI,T,T1,T2,SL,FK,ZJ,SUM,N,TJ,TJ1,TJ2,
*MD,N1,CW,CZ,CZ1,CZ2,M)
DO 3 I=1,M
3
Z(I)=CZ1(I)*CONJG(CZ1(I))
CALL MOD2G (ZG,NG)
ENORM=0.D0
DO 4 I=1,NG
IF (ABS(SQRT(Z(I))-ZG(I)).GT.0.D0) THEN
ENORM=ABS(SQRT(Z(I))-ZG(I))
ENDIF
4
CONTINUE
WRITE (*,*) 'ENORM G',ENORM
CALL MOD2 (ZR,MG,NG)
ENORM=0.D0
DO 5 I=NG+1,M
IF (ABS(Z(I)-ZR(I-NG)).GT.0.D0) THEN
ENORM=ABS(Z(I)-ZR(I-NG))
ENDIF
5
CONTINUE
WRITE (*,*) 'ENORM R',ENORM
PAUSE
WRITE (*,*) 'Запись на диск'
OPEN (4,FILE='FILEZ')
WRITE (4,*) (Z(I),I=1,M)
STOP
194
END
SUBROUTINE KONT(C)
IMPLICIT REAL*8 (A-H,O-Z)
C
Эпитрохоида
COMPLEX*16 CT,CT1,CT2
COMMON /TRI/ CT,CT1,CT2
COMMON // EPS,NP
A=EPS
CC=COS(C)
SS=SIN(C)
C4=COS((NP+1)*C)
S4=SIN((NP+1)*C)
CT=(CC+A*C4)+(0.,1.)*(SS+A*S4)
RETURN
ENTRY UR(C)
CT1=(-SS-(NP+1)*A*S4)+(0.,1.)*(CC+(NP+1)*A*C4)
CT2=(-CC-(NP+1)**2*A*C4)+(0.,1.)*(-SS-(NP+1)**2*A*S4)
RETURN
END
Пользователь должен составить программу KONT(C), которая вычисляет (), ’() и ’’(), для заданного контура [26]. Результаты присваиваются переменным CT, CT1 и CT2.
III.5.3. Описание численных экспериментов.
Проводилось сравнение расчётов для эллипса по описанной методике на сетке
1531 с результатами Акуленко Л.Д. и Нестерова С.В. [6-7]. Большая полуось эллипса
принималась равной 1, а эксцентриситет изменялся от 0.1 до 0.9 с шагом 0.1. Рассматривались две краевые задачи: Дирихле [6] и Неймана [7]. Результаты совпали для всех значений e кроме 0.9. Число совпадающих знаков после запятой от 4 до 1 в зависимости от
номера собственного значения и величины эксцентриситета. Результаты расчётов для
195
e=0.9 для задачи Дирихле представлены в таблице 5.1, а для задачи Неймана в таблице
5.2.
Таблица 5.1
Эллипс, задача Дирихле
λi
i
Авторы Авторы
1531
[6]
1325
1 17.7577
17.7431
18.1101
2 29.1706
28.9868
30.3330
3 44.2093
43.6043
-
4 60.2676
60.2555
61.6536
В таблице 5.1 в первой и второй колонках приведены
результаты автора, а в третьей колонке результаты
Акуленко Л.Д. и Нестерова С.В. Как видно из рассмотрения таблицы в [6] определены не три низшие частоты,
а первая, вторая и четвёртая.
Таблица 5.2
Эллипс, задача Неймана
i
i
Авторы Авторы
[7]
1531
1325
1 1.8309
1.8064
1.8766
2 3.3798
3.3920
3.4355
3 4.0155
4.0207
4.0149
4 5.0292
5.1307
-
5 5.1105
5.1506
5.1115
6 6.3250
6.4210
-
7 6.8103
7.0534
-
8 7.6841
7.6912
7.3689
В таблице 5.2 в первой и второй колонках приведены
результаты авторов, а в третьей колонке результаты Акуленко Л.Д. и Нестерова С.В. Как видно из рассмотрения
таблицы в [7] определены не пять низших частот, а первая, вторая, третья, пятая и восьмая.
Кроме того, проводились расчёты для эпитрохоиды.
Они совпали с расчётами из главы 3.
Примечание. Программа вычисления конформного
отображения круга на эллипс называется confe. Запустите
эту программу. Она попросит ввести эксцентриситет и
параметры сетки, потом запишет результаты расчётов на
диск. Затем запустите программу LAP123C, она найдёт
собственные числа и собственные функции.
196
ГЛАВА 6.
ВЫЧИСЛЕНИЙ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ
ФУНКЦИЙ БИГАРМОНИЧЕСКОГО ОПЕРАТОРА В ПРОИЗВОЛЬНОЙ ОБЛАСТИ.
В этой главе описывается программа вычисления собственных значений и собственных функций бигармонического оператора в произвольной области. Достаточно задать параметрические уравнения границы области.
III.6.1. Вычисление собственных чисел и собственных функций бигармонического оператора.
Рассматриваются алгоритмы численного решения краевых задач (6.1) - (6.3) и
(6.1),(6.2),(6.4)
(6.1) 2 u ( z ) F ( z ), z G,
(6.2) u G 0,
(6.3)
u
0,
n G
2 u 1 u
2u
0.
(6.4)
2
n
n 2
s
G
Здесь G - область в комплексной z - плоскости с достаточно гладкой границей дG; n единичный вектор внешней нормали к дG; д/дs - означает дифференцирование по длине
дуги (длина отсчитывается против часовой стрелки); 1/ρ - кривизна дG; ν - постоянная
(коэффициент Пуассона). Функция F(z) либо задана, либо F(z)=(Q(z)+λP(z))u(z), где Q и Р
- некоторые функции, и в этом случае имеем задачу на собственные значения для бигармонического уравнения. В частности, при Q=0 и P=1 получаем задачу о свободных колебаниях пластинки, где собственная частота колебания ω связана со спектральным параметром λ соотношением 0 / D , 0-плотность, а D- цилиндрическая жёсткость.
Краевые условия (6.2) и (6.3) означают, что пластинка защемлена по краю, а краевые
условия (6.2) и (6.4) означают опирание по краю. Пусть z=φ(ζ), |ζ| 1 - функция, задающая
конформное отображение круга единичного радиуса на область G. Тогда в плоскости ζ
получаем вместо (6.1) - (6.4) следующие соотношения:
197
2
(6.5) ( ) u ( ) f ( ), rei , r 1,
2
(6.6) u r 1 0,
(6.7)
u
r
0,
r 1
( ) u
2u
(6.8)
(
1
)
Re
(
)
r 2
r
0.
r 1
Здесь f(ς)=F(z(ς)), а в граничном условии (6.8) учтено условие (6.6), т.е. положено
д2u/дs2=0.
Для решения этих краевых задач применяется программа BIG12AG.
Программа BIG12AG.
PROGRAM BIG12AG
C 15.12.2000
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION
*A(378225),AB(378225),X(615),Y(615),IANA(615),HN(25215),
*NL(15),B(49,49),C(50625),BA(25215)
DIMENSION BC(30,24),E(29,15),H(49),
*U(615),Z(656),Y2(11)
DIMENSION E2(49,49),ZG(41),ZY(615)
DIMENSION C0(225),C1(225)
CHARACTER*1 IC
C
PUAS=0.25D0
15 WRITE (*,*) 'Аналитическое конформное отображение или
*счет(Y/N)'
READ (*,14) IC
14 FORMAT(A)
IF (IC.NE.'Y'.AND.IC.NE.'N') GO TO 15
IF (IC.EQ.'Y') THEN
WRITE(*,*) ' NP = ? , EPS1 = ? '
READ(*,*) NP,EPS1
ENDIF
198
WRITE(*,*) 'M = ? '
READ(*,*) M1
WRITE(*,*) 'N = ? '
READ (*,*) N
C
C
KAHAЛ BBOДA ДAHHЫX
NREAD = 3
OPEN(UNIT=3,FILE='DATA')
C
KAHAЛ
ПPOMEЖУTOЧHЫX BЫДAЧ
NOUT = 4
OPEN(UNIT=4,FILE='NOUT')
C
IM = 0
300
IM = IM + 1
IF (IM.GT.10) STOP
READ(NREAD,*) M
C
NT=M*N
NM=(N-1)/2
M2=M*M
C
READ (NREAD,*) (C0(I),I=1,M2)
READ (NREAD,*) (C1(I),I=1,M2)
IF (M1.NE.M) GO TO 300
DO 10 I = 1,M
10
NL(I) = N
WRITE (NOUT,*) ' M = ', M
WRITE(NOUT,*) 'LAMDA0'
WRITE(NOUT,*) (C0(I),I=1,M2)
WRITE(NOUT,*) 'LAMDA1'
WRITE(NOUT,*) (C1(I),I=1,M2)
199
C
CALL HMATR1 (A,M,N,C0,C1,C)
CALL RASPAK(A,M,NM)
CALL TRANSP (A,NT)
C
IF (IC.EQ.'N') THEN
OPEN (2,FILE='FILEZ')
READ (2,*) (Z(I),I=1,NT+N)
READ (2,*) (Y(I),I=1,N)
DO 16 I=1,N
16 ZG(I)=SQRT(Z(I))
DO 17 I=1,NT
17 ZY(I)=Z(N+I)
ENDIF
NZAP
= 9
NT2=NT*NT
WRITE(NZAP) (A(I),I=1,NT2)
END FILE (NZAP)
C
WRITE(*,*) 'Введи номер краевой задачи ? '
READ(*,*) IP
C
M11=2*M
M3=2*M+1
M22=M11-1
C
IF(IP.EQ.2.AND.IC.EQ.'Y') CALL PSI (Y,N,PUAS,EPS1,NP,C)
IF(IP.EQ.1) CALL HNLI (HN,M,M11,M22,N,NL,NM,B,X,C,BC,E)
IF(IP.EQ.2) CALL HNLI2M
*(HN,M,M11,M22,N,NL,NM,B,X,C,BC,E,NT,Y)
IF(IC.EQ.'Y') CALL MOD2 (ZY,M,NL,EPS1,NP)
200
DO 30 I=1,NT
I2=(I-1)*N
DO 30 J1=1,N
I3=I2+J1
30
HN(I3)=HN(I3)*ZY(I)
CALL CN (B,N,HN,NL,X,M,H,NT)
CALL EBIGM (AB,BA,NT,N,NL,B,HN,H,C,X,M,NZAP,ZY)
CALL BIGM (A,AB,NT,NZAP,ZY)
100 CONTINUE
C
CALL ELMHES (NT,NT,1,NT,A,IANA)
WRITE(*,*) 'ELMHES'
CALL ELTRAN (NT,NT,1,NT,A,IANA,AB)
WRITE(*,*) 'ELTRAN'
CALL HQR2 (NT,NT,1,NT,A,X,Y,AB,IERR)
WRITE(*,*) 'HQR2'
WRITE (NOUT,*) ' IERR = ', IERR
13 FORMAT (13I5)
12 FORMAT (4E18.11)
WRITE(NOUT,12) (X(I),I=1,NT)
WRITE(NOUT,12) (Y(I),I=1,NT)
RMAX=0.D0
IJ=1
110 DO 60 I=1,NT
IF (X(I).GT.RMAX) THEN
RMAX=X(I)
IANA(IJ)=I
Y(IJ)=X(I)
ENDIF
60 CONTINUE
X(IANA(IJ))=0.D0
201
RMAX=0.D0
IJ=IJ+1
IF(IJ.LE.NT) GO TO 110
C
WRITE(NOUT,12) (X(I),I=1,NT)
WRITE(NOUT,12) (Y(I),I=1,NT)
C
DO 31 I=1,NT
IF (Y(I).NE. 0.D0) THEN
Y(I)=1.D0/Y(I)
ENDIF
31 CONTINUE
WRITE (NOUT,*) 'Eigenvalue'
WRITE(NOUT,12) (Y(I),I=1,NT)
WRITE (*,*) 'Собственные значения'
PRINT 12,(Y(I),I=1,NT)
C
M11=2*M
DO 21 K=1,20
WRITE (*,*) 'Введи номер собственного значения ?'
READ (*,*) IJ
WRITE (*,*) IJ, Y(IJ)
WRITE (NOUT,*) IJ, Y(IJ)
I2=NT*(IANA(IJ)-1)
DO 22 I=1,NT
I3=I2+I
22
U(I)=AB(I3)
CALL URT (0.D0,M,NL,U,X)
CALL URT (3.141592653589D0,M,NL,U,Z)
DO 4 I=1,M
I1=M11-I+1
202
4 X(I1)=Z(I)
DO 20 LL=1,11
X2=0.1*(LL-1)
20
Y2(LL)=EIGEN(X2,X,Z,M11,-1.D0,+1.D0)
CALL NORM (Y2,11)
PRINT 12,Y2
WRITE (NOUT,12) Y2
21
PAUSE
STOP
END
Эта программа вычисляет собственные значения выписанных краевых задач по
формуле:
u ( B 2 BEB ) f .
(6.9)
Соотношение (6.9) - итог наших изысканий. Здесь u (u( 1 ),..., u( M )) ' - вектор значений функции u(ζ) в узлах сетки; f соответствующий вектор значений правой части
бигармонического уравнения; B=НZ - матрица дискретной задачи Дирихле для уравнения
Лапласа в рассматриваемой области G; для матрицы E имеем следующее выражение
2n
(6.10)
Elj
2n
H p0 ( l )
p 0
C qp
q 0
H i1,q z i , l , j 1,2,...., M ,
i
а - погрешность дискретизации. Отбрасывая в (6.9) погрешность , получим приближённую конечномерную задачу. Таким образом, решение задачи об изгибе пластинки
сводится к умножению матрицы D=B2–BEB на вектор, а задаче на собственные значения
соответствует приближённая конечномерная задача
u=(B2–BEB)Z(Q+λP)u,
где Q=diag(q(ζ1)… q(ζM)), P=diag(p(ζ1)… p(ζM)), Z=diag(z(ζ1)… z(ζM)) - диагональные матрицы, у которых на диагонали стоят значения соответствующих функций в узлах интерполяции. Для задачи о свободных колебаниях Q=0, P=1, т.е. эта задача сводится к вычислению собственных значений матрицы D. Отметим, что вид второго краевого условия
учитывается строением массива E.Величины H 0j вычисляются подпрограммой HJ0M [26].
203
Подпрограмма вычисляет
2 (k 1)
H 0j ( ), e i k , k
N
( N 2n 1 числото точек на ой окружности ), k 1,..., N ;
Матрица С вычисляется подпрограммой CN [26]. Производит вычисление матрицы обратной к матрице: B j1, j 2
H i , j 2 Z i H 0j1 ( i ).
i
Вызываемые подпрограммы: HJO, DMINV
Примечание. DMINV- подпрограмма обращения матрицы, ссылка на её источник
приведена в главе 5. Подпрограмма HJ0 описана в [26].
III.6.1.1. Первая краевая задача.
Разные краевые задачи отличаются только вычислением массива H i , j2 . Для краевого условия
(6.3) этот массив вычисляется подпрограммой HNLI, описанной в [26]. Сама матрица D вычисляется подпрограммами ЕВIGМ и BIGM. Требуемые подпрограммы: HJOM [26].
III.6.1.2. Вторая краевая задача.
Под второй краевой задачей понимается задача (6.1), (6.2), (6.4). Практически массив H i , j 2 для краевого условия (6.4) определяется программой HNLI2M [26].
Описание программы BIG12AG аналогично LAP123G.
1. Параметры области NP, EPS1 считываются в режиме диалога. Для аналитически заданного конформного отображения вычисления ведутся для эпитрохоиды, т.е. области, получающейся из круга конформным отображением z=(1+n), 1, <(n+1).
Для других областей пользователь должен заменить подпрограммы MOD2 и PSI,
которые
вычисляют
z’2
в
узлах
сетки
внутри
области
и
i j
i (e )
, j 1,..., N ; j 2 ( j 1) , на границе круга в узлах
y j ( 1) Re e j
i j
N
(e )
сетки.
2. Параметры сетки M, N считываются в режиме диалога. Здесь M -число окружностей
сетки в круге, а N число точек на каждой окружности.
3. Данные для программы должны быть размещены в файле DATA [26].
4. Номер краевой задачи запрашивается в режиме диалога.
5. Результаты выводятся на экран и записываются в файл NOUT.
6. Результаты счёта собственной функции выводятся на действительной оси в 11 точках (см. программу).
7. Программа осуществляет счёт конформного отображения аналитически или считывает результаты вычисления с диска из файла FILEZ. Описание программы, проводящей эти вычисления, приведено ниже.
204
8. Программа использует для решения алгебраической проблемы собственных значений подпрограммы пакета EISPACK: ELMHES, ELTRAN, HQR2. Тексты этих подпрограмм доступны в Интернет по адресу: htpp://www.netlib.org/eispack/.
Ниже в файлах NOUT1, NOUT2 приведены результаты тестовых расчётов первой,
второй краевых задач (защемление и свободное опирание) для эпитрохоиды EPS1=1/6,
NP=4 на сетке M=3, N=7 (для первых пяти собственных значений). Эти результаты
программа записывает в файл NOUT.
NOUT1
M=
3
LAMDA0
411.941825936000
-45.1418752798000
-61.1418752812000
29.3333333334000
7.47692687292000
35.1897397936000
-24.1914580529000
-8.19145805268000
14.7248407322000
-58.2837505577000
26.6666666663000
LAMDA1
457.798232344000
-80.1401570151000
37.3333333328000
26.6666666637000
IERR =
-15.6170838946000
-21.4734903555000
32.8684342717000
0
0.93573264080E-02 0.26709839602E-02 0.11177030926E-02 0.25866794919E-02
0.84584130021E-03 0.37176551902E-03 0.58802942301E-03 0.17008326250E-03
0.41904692936E-03 0.10623594597E-03 0.38636000867E-04 0.18624281117E-03
0.95948883093E-04 0.40505508467E-04-0.16818624476E-16 0.16329630222E-16
0.16831033802E-17-0.13153574808E-17-0.62708253358E-18-0.22680275524E-18
0.40120039616E-18
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
205
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00-0.16818624476E-16 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00-0.62708253358E-18 0.00000000000E+00
0.00000000000E+00
0.93573264080E-02 0.26709839602E-02 0.25866794919E-02 0.11177030926E-02
0.84584130021E-03 0.58802942301E-03 0.41904692936E-03 0.37176551902E-03
0.18624281117E-03 0.17008326250E-03 0.10623594597E-03 0.95948883093E-04
0.40505508467E-04 0.38636000867E-04 0.16329630222E-16 0.16831033802E-17
0.40120039616E-18 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
Eigenvalue
0.10686813267E+03 0.37439386193E+03 0.38659602132E+03 0.89469198633E+03
0.11822548742E+04 0.17005951758E+04 0.23863675639E+04 0.26898675344E+04
0.53693347609E+04 0.58794732961E+04 0.94130097949E+04 0.10422216161E+05
0.24688000172E+05 0.25882595961E+05 0.61238373827E+17 0.59414056900E+18
0.24925199715E+19 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
1 106.868132669786
-0.10000000000E+01 -0.95608736458E+00-0.87511224844E+00-0.76428678261E+00
-0.63254294550E+00 -0.49004631562E+00-0.34770982420E+00-0.21670750791E+00
-0.10798826150E+00-0.31789590494E-01 0.28486361375E-02
2 374.393861926966
-0.88547006741E-01-0.37624909489E+00-0.64052537608E+00-0.84924491726E+00
-0.97531623225E+00-0.10000000000E+01-0.91622178277E+00-0.73188474443E+00
-0.47318236862E+00-0.18791117705E+00 0.51216552298E-01
3 386.596021316196
-0.42243259880E-01 0.31202101912E+00 0.62642776710E+00 0.86333657867E+00
0.99344231188E+00 0.10000000000E+01 0.88304976336E+00 0.66364172115E+00
206
0.38806090325E+00 0.13205216203E+00 0.50450841458E-02
4 894.691986325470
-0.30047119169E+00-0.38363194579E-01 0.10528499688E+00 0.10328893903E+00
-0.47725221776E-01-0.32060522569E+00-0.65095717577E+00-0.93043001446E+00
-0.10000000000E+01-0.64325518294E+00 0.42032011747E+00
5 1182.25487422939
0.76524536167E+00 0.79617118094E+00 0.71835210112E+00 0.51871362161E+00
0.20458104287E+00-0.19031354751E+00-0.59982428885E+00-0.91938456134E+00
-0.10000000000E+01-0.64224150867E+00 0.40976172600E+00
NOUT2
M=
3
LAMDA0
411.941825936000
-45.1418752798000
-61.1418752812000
29.3333333334000
7.47692687292000
35.1897397936000
-24.1914580529000
-8.19145805268000
14.7248407322000
-58.2837505577000
26.6666666663000
LAMDA1
457.798232344000
-80.1401570151000
37.3333333328000
26.6666666637000
IERR =
-15.6170838946000
-21.4734903555000
32.8684342717000
0
0.49380215914E-01 0.72414087718E-02 0.69292035955E-02 0.23613192542E-02
0.16516499278E-02 0.62869400706E-03 0.13187832064E-02 0.31439140927E-03
0.72759641902E-03 0.17965668548E-03 0.32943485925E-03 0.39946519248E-04
0.17439127059E-03 0.41047276118E-04-0.83633633832E-17 0.83059703116E-17
-0.61234009743E-18 0.62071494127E-18-0.35924722091E-19-0.14029724249E-18
0.15944479133E-18
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
207
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00 0.00000000000E+00-0.83633633832E-17 0.00000000000E+00
-0.61234009743E-18 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
0.49380215914E-01 0.72414087718E-02 0.69292035955E-02 0.23613192542E-02
0.16516499278E-02 0.13187832064E-02 0.72759641902E-03 0.62869400706E-03
0.32943485925E-03 0.31439140927E-03 0.17965668548E-03 0.17439127059E-03
0.41047276118E-04 0.39946519248E-04 0.83059703116E-17 0.62071494127E-18
0.15944479133E-18 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
Eigenvalue
0.20251025264E+02 0.13809467626E+03 0.14431672936E+03 0.42349207894E+03
0.60545517737E+03 0.75827474533E+03 0.13743882925E+04 0.15905989063E+04
0.30355014715E+04 0.31807484891E+04 0.55661719313E+04 0.57342319750E+04
0.24362152488E+05 0.25033470220E+05 0.12039532559E+18 0.16110454792E+19
0.62717633586E+19 0.00000000000E+00 0.00000000000E+00 0.00000000000E+00
0.00000000000E+00
1 20.2510252638129
-0.10000000000E+01-0.96883201765E+00-0.91653074678E+00-0.84593679904E+00
-0.75983078263E+00-0.66067127400E+00-0.55033278953E+00-0.42984375722E+00
-0.29912448836E+00-0.15672514924E+00 0.43626717499E-03
2 138.094676259617
0.42946174576E-01-0.22351003278E+00-0.48115724352E+00-0.70801327115E+00
208
-0.88273855880E+00-0.98569420675E+00-0.10000000000E+01-0.91259243581E+00
-0.71528275124E+00-0.40581495072E+00 0.11076166411E-01
3 144.316729362986
0.20460545815E+00-0.13453390395E+00-0.44902271501E+00-0.71262626091E+00 -0.90234849494E+000.10000000000E+01-0.99376595095E+00-0.87977407687E+00 -0.66366262335E+00-0.36214831476E+000.45943165872E-02
4 423.492078936748
-0.26012743278E+00-0.17300269222E+00-0.17811812000E+00-0.27438405765E+00
-0.44618635851E+00-0.66144340431E+00-0.86966312192E+00-0.10000000000E+01
-0.95931210568E+00-0.63021810127E+00 0.13084573910E+00
5 605.455177370357
0.98951085172E+00 0.10000000000E+01 0.90167634486E+00 0.69676805419E+00
0.40212257126E+00 0.51620817087E-01-0.30140860732E+00-0.58177521858E+00
-0.69001244867E+00-0.49996344262E+00 0.14363314386E+00
Описание программы численного конформного отображения.
Программа численного конформного отображения написана
приводится пример обращения к программе.
Э. П. Казанджаном. Ниже
PROGRAM KAZAN
PARAMETER (N=201,N1=202,M=656)
C 2.06.94
IMPLICIT REAL*8 (A-H,O-Z)
DIMENSION AL(N,N),PR(N),PSI(N),SL(N),FK(N)
DIMENSION TJ(N1),TJ1(N1),TJ2(N1),MD(N1)
COMPLEX*16 T(N),T1(N),T2(N),ZJ(N),SUM(N)
COMPLEX*16 CW(M),CZ(M),CZ1(M),CZ2(M),CC
DIMENSION
* Z(M),ZR(M),ZG(M),YP(M),Y(M),C(M)
COMMON /D/ LL(301),MM(301)
C Этот common блок нужно также вставить в подпрограмму conf
209
COMMON /S/ S
COMMON // EPS,NP
PUAS=0.25D0
WRITE(*,*) ' NP = ? , EPS = ? '
READ(*,*) NP,EPS
S=2.D0*3.141592653589D0
CC=(0.,0.)
WRITE (*,*) 'M = ?'
READ (*,*) MG
WRITE (*,*) 'N =?'
READ (*,*) NG
IJ=0
DO 1 I=1,NG
IJ=IJ+1
TT=S*(I-1)/NG
1 CW(IJ)=(COS(TT))+(0.,1.)*(SIN(TT))
DO 2 NU=1,MG
R=COS((2.*NU-1.)*S/8./MG)
DO 2 L=1,NG
TT=S*(L-1)/NG
IJ=IJ+1
2 CW(IJ)=(R*COS(TT))+(0.,1.)*(R*SIN(TT))
CALL CONFOR
*(CC,AL,PR,PSI,T,T1,T2,SL,FK,ZJ,SUM,N,TJ,TJ1,TJ2,
1MD,N1,CW,CZ,CZ1,CZ2,M)
DO 3 I=1,M
3 Z(I)=CZ1(I)*CONJG(CZ1(I))
CALL MOD2G (ZG,NG)
ENORM=0.D0
DO 4 I=1,NG
IF (ABS(SQRT(Z(I))-ZG(I)).GT.0.D0) THEN
210
ENORM=ABS(SQRT(Z(I))-ZG(I))
ENDIF
4 CONTINUE
WRITE (*,*) 'ENORM G',ENORM
CALL MOD2 (ZR,MG,NG)
ENORM=0.D0
DO 5 I=NG+1,M
IF (ABS(Z(I)-ZR(I-NG)).GT.0.D0) THEN
ENORM=ABS(Z(I)-ZR(I-NG))
ENDIF
5 CONTINUE
WRITE (*,*) 'ENORM R',ENORM
DO 6 J=1,NG
6 YP(J)=PUAS+(PUAS-1.)*REAL(CW(J)*CZ2(J)/CZ1(J))
CALL PSIM(Y,NG,PUAS,EPS,NP,C)
ENORM=0.D0
DO 7 I=1,NG
IF (ABS(YP(I)-Y(I)).GT.0.D0) THEN
ENORM=ABS(YP(I)-Y(I))
ENDIF
7 CONTINUE
WRITE (*,*) 'ENORM P',ENORM
PAUSE
WRITE (*,*) 'Запись на диск'
OPEN (4,FILE='FILEZ')
WRITE (4,*) (Z(I),I=1,M)
WRITE (4,*) (YP(I),I=1,NG)
STOP
END
SUBROUTINE KONT(C)
211
IMPLICIT REAL*8 (A-H,O-Z)
C
Эпитрохоида
COMPLEX*16 CT,CT1,CT2
COMMON /TRI/ CT,CT1,CT2
COMMON // EPS,NP
A=EPS
CC=COS(C)
SS=SIN(C)
C4=COS((NP+1)*C)
S4=SIN((NP+1)*C)
CT=(CC+A*C4)+(0.,1.)*(SS+A*S4)
RETURN
ENTRY UR(C)
CT1=(-SS-(NP+1)*A*S4)+(0.,1.)*(CC+(NP+1)*A*C4)
CT2=(-CC-(NP+1)**2*A*C4)+(0.,1.)*(-SS-(NP+1)**2*A*S4)
RETURN
END
Пользователь должен составить программу KONT(C), которая вычисляет (), ()
и (), для заданного контура [206]. Результаты присваиваются переменным CT,
CT1 и CT2.
III.6.2. Описание численных экспериментов.
Проводились расчёты для защемлённой эллиптической пластинки при разных значениях эксцентриситета. Они сравнивались с результатами работы [8]. В частности с экспериментом. При e=0.866 получено 1 27.3714 . Эксперимент даёт значение 27.281.
Ошибка составляет 0.3%. В [8] в результате расчётов получено завышенное значение
27.737. Для этого же значения эксцентриситета получено 2 39.4700 . Эксперимент
даёт значение 38.86. Ошибка составляет 1.5%. В [8] в результате расчётов получено завышенное значение 40.477. Расчёты для других значений эксцентриситета также совпали
с расчётами из [8] кроме значения e=0.95. Результаты этих расчётов приведём в таблице
6.1.
212
Таблица 6.1
Защемлённая эллиптическая
пластинка.
i
i
Авторы Авторы
1325
1531
[8]
1 62.6414
61.7282
66.505
2 69.5722
68.0335
-
3 86.4613
88.4150
85.940
Таким образом, в [8] определена не вторая собственная частота, а третья.
Примечания. 1. Расчёты для вытянутого эллипса
трудны для описанной методики. Выбирая в круге равномерную сетку по θ, получаем что узлы сетки в эллипсе
сгущаются к мнимой оси. Этим объясняется расхождение
в расчётах на сетках 1531 и 1325.
2. Конформное отображение эллипса на круг осуществляет программа, которая записана в файл confeb1.
213
ГЛАВА 7.
Об оценке погрешности в задачах на собственные
значения.
В этой главе с общих позиций рассматривается оценка погрешности в задачах на собственные значения. Поскольку рассматриваемые задачи флаттера пластин и пологих оболочек сводятся к задаче на собственные значения для несамосопряжённого оператора
(пластина) или системы двух таких уравнений (пологая оболочка), то представляется интересным доказать общие теоремы, из которых оценки погрешности для частных задач,
рассматриваемых в этой работе, следуют как частные случаи.
Рассуждения ведутся для замкнутого оператора и пучка ограниченных операторов,
действующих в некотором банаховом пространстве.
Напомним [211], что среди неограниченных операторов выделяются операторы, которые называются замкнутыми; они допускают довольно подробное изучение и к тому же
важны в приложениях.
Пусть T – оператор из X в Y. Оператор T называется замкнутым, если из un u следует,
что uD(T) и Tu=limTun; другими словами, для любой последовательности unD(T) такой,
что un u и Tun v, вектор u принадлежит D(T) и Tu=v. Понятие замкнутости, на первый
взгляд, несколько напоминает понятие непрерывности, однако в действительности эти
понятия весьма различны.
Ограниченный оператор замкнут тогда и только тогда, когда подпространство D(T) замкнуто.
III.7.1. Теоремы локализации.
Пусть B – банахово пространство, а T – замкнутый линейный оператор. Будем обозначать через (T) резольвентное множество оператора T, т. е. совокупность точек комплексной плоскости, для которых существует оператор
(T- I)-1, ограниченный и
имеющий область определения, плотную в B. Если T- замкнутый оператор, то R() определён на всём B. Для ограниченного оператора введём обозначение спектрального радиуса
Spr T lim T n
n
1/ n
.
214
Теорема 4.1. Пусть T- замкнутый оператор в банаховом пространстве B с областью
определения D(T), а Tn- ограниченный оператор. Пусть - спрямляемый замкнутый контур
(или конечная совокупность таких попарно не пересекающихся контуров), содержащих
внутри m собственных значений оператора T, сосчитанных с их алгебраической кратностью, и пусть выполнено условие
(1.1)
Sup Spr ( R( )(Tn I ) I ) 1,
тогда внутри лежит ровно m собственных значений оператора Tn , если считать собственное значение столько раз, какова его алгебраическая кратность.
Доказательство основано на классической теории возмущений. Введём семейство операторов T()=T+T(1), T(1)=Tn-T, где - комплексное число. Пусть (T), тогда T()-
I=(T- I)(I+R()T(1)), где R() – резольвента оператора T. Заметим, что R()T(1)= R()(Tn
- I)-I – ограниченный оператор, и обозначим
(1.2)
r0 sup Spr ( R( )(Tn I ) I )
1
1.
При ||<r0 получаем
n
(1.3)
(T ( ) I ) 1 R ( ) k R k ( ), R k ( ) (1) k ( R( )T (1) ) k R( ),
k 1
т. е. (T()) и (T ( ) I ) 1 можно представить равномерно по сходящимся рядом
(1.3); коэффициенты этого ряда - ограниченные операторы, а поэтому (T ( ) I ) 1 - также ограниченный оператор, определённый на всём B. Интегрируя (1.3) почленно, получаем, что собственный проектор P() оператора T() определяется сходящимся при ||<r0
рядом
P( )
n
1
1
R
(
,
)
d
P
k P ( k ) , P ( k ) R ( k ) ( )d , P
R( )d .
2i
2i
k 1
В частности, P() непрерывен по , следовательно, внутри находится, вообще говоря, m
собственных значений 1(),…,m() оператора T() при ||<r0, но r0>1, и теорема доказана.
Замечания.
1) Вместо условия (1.1) можно ввести более грубое условие
(1.4)
sup R( )(Tn I ) I 1.
215
При ограниченном операторе T соотношения (1.1) и (1.4) выполнены, если выполнено
условие
R( ) Tn T 1
( R( ) - непрерывная функция на компактном подмножестве комплексной плоскости).
2) Если (T) и Spr ( R( )(Tn I ) I ) 1, то (Tn).
3) Условие (1.1) означает, что резольвенты операторов T и Tn достаточно близки.
Если в теореме 4.1 дополнительно предположить, что T – ограниченный оператор, то в
соответствующем соотношении (1.1) можно поменять T и Tn местами. Например, если
~
~
внутри ~ , где - простое собственное значение оператора Tn (найти и соответствую
щую изолирующую окрестность можно из численных расчётов), нет других собственных
значений оператора Tn и выполнено условие
Sup Spr ( Rn ( )(T I ) I ) 1, Rn ( ) (Tn I ) 1 ,
~
то внутри ~ лежит единственное собственное значение оператора T. Другими словами,
используя результаты вычислений, можно доказать строгую математическую теорему о
локализации собственных значений ограниченного оператора. Проблема такого рода возникает в задаче Гаусса [53].
Покажем пример применения теоремы 4.1 в конечномерном случае. Пусть A – матрица
размера n x n с комплексными элементами aij. Обозначим A1=diag(a11,…, ann), A2=A- A1,
A3()=(A1 - I)-1 A2, т. е.
a1n
a12
...
0
a11
a11
a
a2n
21
0
....
a 22 ,
(1.5) A3 ( ) a 22
................................................
a n1
................
0
a
nn
216
где - точка границы области, образованной объединением кругов с центрами aii и радиусами ri ( - может состоять из нескольких замкнутых, непересекающихся контуров).
Пусть Pi | aij | , i=1,…,n, тогда общеизвестен классический результат Гершгорина о
i j
том, что все собственные значения матрицы A лежат внутри области, образованной объединением кругов с центрами aii и радиусами Pi. Этот результат без труда получается в
виде следствия теоремы 4.1. Действительно, пусть | A | max | aij | - чебышевская норма
i
j
матрицы, тогда
(1.6) | A3 ( ) | max
i
Если max
i
i j.
| aij |
| aii |
max
i
Pi
.
ri
Pi
1, то внутри лежат все собственные значения матрицы A. Отсюда
ri
следует результат Гершгорина. Пусть ri=Pi+ >0, тогда правая часть (1.6) меньше единицы, но >0 произвольно, следовательно, при ri=Pi внутри или на границе соответствующей области лежат все собственные значения матрицы A. Это и есть теорема Гершгорина.
Заметим, что в этих рассуждениях использовалось условие (1.4); используя более
тонкое условие (1.1), получаем, что справедлива
Теорема 4.2. Пусть A – матрица размера n x n с комплексными элементами aij , спрямляемый контур (или конечная совокупность таких попарно не пересекающихся контуров), который содержит внутри себя диагональные элементы aii ,i=1,2,…,n, матрицы A;
тогда, если выполнено условие
sup Spr A3 ( ) 1
внутри лежат все собственные значения матрицы A.
Таким образом, результат, сформулированный в теореме 4.2, есть обобщение результата Гершгорина. Используя теорему 4.1, нетрудно получить и другие результаты подобного типа. Заметим, что теоремы о локализации собственных значений имеют большое
значение при их практическом вычислении.
217
III.7.2. Априорная оценка погрешности в задачах на собственные значения
Теорема 4.3. Пусть выполнены условия теоремы 4.1, но в качестве контура - выберем
выпуклый контур , который содержит внутри себя собственное значение оператора T
алгебраической кратности m и не содержит других точек спектра этого оператора. Обо^
1
значим max | |, а (1 ... m ) - среднее арифметическое собственных зна
m
чений оператора Tn , лежащих внутри , тогда выполняется неравенство
^
| |
r01
,
1 r01
где величина r0 определена в (1.2).
^
Доказательство. Функция ( )
1
(1 ( ) ... m ( )) (см. доказательство теоремы
m
4.1) голоморфна при ||<r0, т. е.
^
(2.1)
^
^
( ) 1 2 2 ...,
^
причём, так как - выпуклый контур, то ( ) лежит внутри и для коэффициентов ряда
(2.1) выполняются формулы Коши:
^
| k | r0k , k 1,2,...,
но r0>1, и, следовательно, ряд (2.1) мажорируется сходящейся геометрической прогрессией со знаменателем q r01 . Отсюда следует утверждение теоремы.
Следствие. Пусть T – ограниченный оператор, тогда оператор T(1)=Tn-T также ограничен. Допустим, что выполняется условие
R( ) T (1) 1, ,
тогда выполняется неравенство
^
| | C n T (1) ,
218
где Cn R( 0 ) (1 R( 0 ) T (1) ) 1 , а 0 - точка, в которой достигается максимум
R( ) при .
Не будет, видимо, большой ошибкой сказать, что существующие методы вычисления
собственных значений операторных уравнений (дифференциальных, интегральных и т. д.)
сводятся в конце концов к конечномерной задаче вида Av=v, получаемой из соотношения
(2.2) Au u r,
где A – матрица размера n x n, а u и r – n-мерные векторы, при этом - точное собственное значение соответствующего оператора T. Далее, u=(u1… un), где ui – точные значения
в узлах интерполяции (узлах сетки, коэффициенты разложения в ряд и т. д.) собственной
функции исходного оператора, соответствующей собственному значению , r=(r1… rn) погрешность дискретизации; очевидно r=r(u,), имеет своё значение для каждой собственной функции.
Пусть - простое собственное значение оператора T, Pn – проектор на конечномерное
подпространство Ln B. Назовём дискретизацией оператора T оператор Tn= PnT Pn, а A
обозначим матрицу конечномерного оператора PnTPn L в некотором базисе l1,…, ln Ln.
n
Пусть выполнено соотношение (1.1), где в качестве контура выберем контур , удовлетворяющий условиям теоремы 4.1. Таким образом, внутри лежит одно собственное
значение оператора Tn. Отсюда следует, что внутри лежит одно собственное значение
матрицы A. Точное собственное значение исходного оператора T удовлетворяет соотношению вида (2.2). Введём в рассмотрение матрицу B=A-(u,u)-1ru*, где
u * (u1 ,..., u n ) матрица,
сопряжённая
к
одностолбцовой
матрице
u,
а
(u, v) ( u1v1 ... u n vn ) скалярное произведение в Cn. Нетрудно видеть, что Bu=u, т. е.
и u суть собственное значение и собственный вектор матрицы B. Обозначим .
ную норму, подчинённую норме вектора в Cn, тогда A B
2
2
матрич-
r 2.
Итак, внутри лежит одно собственное значение матрицы A. Если выполнено условие
(2.3)
Sup Spr ( A I )( B I ) I ) 1,
то внутри нет других собственных чисел матрицы B, кроме . Заметим, что условие
(2.4)
R( , A)
2
r
2
1, .
(4.9) выполнено, если выполнено неравенство
Таким образом, если погрешность дискретизации достаточно мала, то внутри нет
«паразитических» собственных чисел матрицы B, т. е. собственных чисел, отличных от .
219
Теперь осталось применить следствие из теоремы 4.2, чтобы получить оценку погрешности
~
| | C n r 2 ,
(2.5)
C n R( 0 , A) 2 (1 R( 0 , A)
2
r 2 ) 1 ,
0 - точка, в которой достигается максимум R( , A) при .
2
Пусть теперь - полупростое собственное значение замкнутого оператора T кратности
m, а M – соответствующее m- мерное геометрическое собственное подпространство, и
dimPnM=m при достаточно большом n. В результате дискретизации задачи на собственные
значения для оператора T получаем, вообще говоря, m конечномерных задач вида (2.2):
Aui=ui+ri, i=1,2,…,m,
где (ui, uj)=ij. Если - контур, удовлетворяющий условиям теоремы 4.2, и выполнено
соотношение (1.1), то внутри лежит m собственных значений 1,…, m оператора Tn
(матрицы A), если считать каждое собственное значение столько раз, какова его алгебраическая кратность. Введём в рассмотрение матрицу
B A r1u1* ... rm u m*
Нетрудно заметить, что матрица B имеет m- кратным собственным значением, а u1,…, um
– соответствующие собственные векторы. Если выполнено условие (2.3), то внутри нет
других собственных значений матрицы B. Обозначим R=A-B, тогда R 2 m max r 2 . Соотi
ношение (2.3) выполнено, если выполнено
R( , A)
2
R
2
1, .
Теперь так же, как для простого собственного значения, получаем оценку
^
| | C n R 2 ,
C n R( 0 , A) 2 (1 R( 0 , A)
^
Здесь
при .
2
R 2 ) 1 ,
1
(1 ... m ) , 0 - точка, в которой достигается максимум R( , A)
m
220
2
III.7.3. Апостериорная оценка погрешности в задачах на собственные
значения
Теоремы, доказанные в предыдущих параграфах, позволяют получить также апостериорную оценку погрешности в задачах на собственные значения для ограниченного оператора T. Действительно, пусть Tn -последовательность ограниченных операторов (дискретизация оператора T), у которых можно вычислить собственные значения непосредственно (например, если Tn= PnT Pn, то задача о вычислении собственных значений оператора
Tn эквивалентна вычислению собственных значений некоторой матрицы A размера n x n,
а для решения такой проблемы существуют надёжные алгоритмы).
~
Пусть - простое собственное оператора Tn, а ~ - замкнутый контур, содержащий
~
внутри себя точку и не содержащий других точек спектра оператора Tn. Для того чтобы
~
выяснить, с какой точностью является собственным значением оператора T, следует
вычислить величину
r01 Sup Spr ( Rn ( )(T I ) I ) 1, Rn ( ) (Tn I ) 1 .
~
Если r01 1 , то внутри ~ лежит единственное собственное значение оператора T и
выполняется неравенство
~
| |
~
r01
,
max
|
|.
~
1 r01
Важно заметить, что вычислять наибольшее по модулю собственное значение оператора Rn()(T- I)-I можно грубо. Необходимо только выяснить, что Spr(Rn()(T- I)-I)<1, а
также порядок этой величины.
III.7.4. Обобщения для пучка операторов
Пусть B – банахово пространство, а A, B – пара ограниченных операторов. Обозначим
P(A,B) резольвентное множество, т. е. множество комплексных чисел C, для которых
существует ограниченный оператор (A- B)-1. Дополнение (A,B)=C – P(A,B) называется
спектром пары операторов A,B. Если для некоторого числа C имеется решение u 0
уравнения Au=Bu, тогда называется собственным значением, соответствующим соб221
ственному вектору u для пары операторов A, B. Собственные значения пары операторов A,
B лежат в спектре (A,B). Далее будем применять обозначения R()=(A- B)-1. Пусть некоторое собственное значение пары операторов A, B, а P(A,B) – спрямляемый контур, содержащий внутри себя только это собственное значение. Обозначим
E
1
R( )d .
2i
Оператор P=EB является проектором. Если пространство P(B) конечномерно, тогда
dimP=dimP(B) называется алгебраической кратностью собственного значения (см.
[725]).
Теорема 4.4. Пусть A, B - пара ограниченных операторов в банаховом пространстве B, а
An, Bn – также пара ограниченных операторов. Пусть - спрямляемый замкнутый контур
(или конечная совокупность таких попарно не пересекающихся контуров), содержащих
внутри m собственных значений пары операторов A, B , сосчитанных с их алгебраической
кратностью, и пусть выполнено условие
(4.1)
r01 Sup Spr ( R( )( An Bn ) I ) 1,
тогда внутри лежит ровно m собственных значений пары операторов An, Bn, если считать каждое собственное значение столько раз, какова его алгебраическая кратность.
Доказательство аналогично доказательству теоремы 4.1, с тем различием, что теперь в
отличие от классической теории резольвенты оператором проектирования на алгебраическое собственное подпространство является проектор P=EB (см. выше).
Теорема 4.5. Пусть выполнены условия теоремы 4.4, но в качестве контура выберем
выпуклый контур , который содержит внутри себя собственное значение пары операторов A, B алгебраической кратности m и не содержит других точек спектра этого опера^
1
тора. Обозначим max | |, а (1 ... m ) - среднее арифметическое соб
m
ственных значений пары операторов An, Bn, лежащих внутри , тогда выполняется неравенство
^
| |
r01
,
1 r01
где величина r0 определена в (4.1).
Доказательство практически дословно повторяет доказательство теоремы 4.2. Смысл
теоремы 4.4 состоит в том, что резольвенты пар операторов A, B и An, Bn достаточно близки.
222
Оценка погрешности для задачи Штурма-Лиувилля с использованием теорем, доказанных выше, приведена в главе 1, дословно аналогично проводится оценка погрешности в
задаче на собственные значения для оператора Лапласа; по ходу изложения будет указано,
как применить теоремы, доказанные в этой главе, для оценки погрешности в спектральных задачах, рассматриваемых в настоящей работе.
223
ЗАКЛЮЧЕНИЕ
В книге рассмотрены новые постановки задач панельного флаттера. В новой постановке A.A. Ильюшина, И.А. Кийко задачи панельного флаттера для пластины и пологой
оболочки сводятся к несамосопряженной задаче на собственные значения.
Наиболее распространенным в настоящее время методом решения задач механики деформируемого твердого тела является метод конечных элементов. Его недостатки общеизвестны: аппроксимируя перемещение кусочно-линейной функцией, мы получаем, что
напряжения разрывные. Вместе с тем следует заметить, что большинство задач механики
деформируемого твердого тела описывается уравнениями эллиптического типа, которые
имеют гладкие решения. Представляется актуальным разработать алгоритмы, которые
учитывали бы эту гладкость. Идея таких алгоритмов принадлежит К.И. Бабенко [51]. Эта
идея высказана им в начале 70-х годов прошлого века. Многолетнее применение этой методики в эллиптических задачах на собственные значения первым автором настоящей работы доказало их высокую эффективность. Например, рассматривалась задача на собственные значения для нулевого уравнения Бесселя, на сетке из 20 узлов первое собственное значение этой задачи определено с 22 знаками после запятой. В отличие от классических разностных методов и метода конечных элементов, где зависимость скорости
сходимости от числа узлов сетки степенная, здесь имеем экспоненциальное убывание погрешности.
Именно к таким задачам на собственные значения сводятся задачи флаттера пластин и
пологих оболочек в новой постановке A.A. Ильюшина, И.А. Кийко [185]. Большим преимуществом этой постановки является то, что сложная задача аэроупругости сводится к
эллиптической задаче на собственные значения, для которой можно разработать эффективные алгоритмы без насыщения. Это позволило решить новые задачи, которые недоступны для исследования классическими методами. Основной результат настоящей работы состоит в том, что можно заменить дорогостоящий и трудно осуществимый натурный
эксперимент экспериментом вычислительным.
По поводу получения полных версий описанных программ обращайтесь по электронному адресу: algazinsd@mail.ru ИЛИ на адрес Института проблем механики РАН, 119526,
Москва, проспект Вернадского, д. 101, к. 1.
224
ЛИТЕРАТУРА
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
Абрамович Г.Н. Прикладная газовая динамика. М.: Наука, 1976. 888 с.
Агамиров B.JI. Динамические задачи нелинейной теории оболочек. М.: Наука, 1990. 272
с.
Аванесян Г.Г. Флаттер анизотропной цилиндрической оболочки в потоке сжимаемой
проводящей жидкости в присутствии магнитного поля // Теория оболочек и пластин. М.:
Наука, 1973. С. 356-362.
Авергенков В.В. Флаттер цилиндрического крыла // Теоретические методы исследования
нелинейных динамических систем. М.: Моск. физ.-техн. ин-т, С. 119-125.
Агеев А.И., Кисилев М.И., Овакимян Р.И. О флаттере тонконесущей оболочки // Журн.
техн. физики. 1970. Т. 40. № 6. С. 1159-1160.
Акуленко Л.Д., Нестеров С.В. Собственные колебания однородной эллиптической мембраны // Изв. РАН. МТТ. 2000. № 1. С. 179-189.
Акуленко Л.Д., Нестеров С.В. Собственные колебания тяжелой жидкости в эллиптическом бассейне // Изв. РАН. МЖГ. 2001. № 4. С. 133-142.
Акуленко Л.Д., Нестеров С.В. Собственные колебания защемленной по краю эллиптической пластины // Изв. РАН. МТТ. 2001. № 1. С. 174-180.
Алгазин С.Д., Бабенко К.И., Косорукое А.Л. О численном решении задачи на собственные значения. М., 1975. 57 с. (Препр. ИПМ; № 108).
Алгазин С.Д., Бабенко К.И. Об одном численном алгоритме решения задачи на собственные значения для линейных дифференциальных операторов. М., 1975. 80 с. (Препр.
ИПМ; № 46).
Алгазин С.Д., Бабенко К.И. Об одном численном алгоритме решения задачи на собственные значения для линейных дифференциальных операторов // Докл. АН СССР. 1979. Т.
244, № 5. С. 1049-1053.
Алгазин С.Д. О вычислении собственных значений оператора Лапласа и численном решении уравнения Пуассона. М., 1979. 32 с. (Препр. ИПМ; № 191).
Алгазин С.Д. Об исследовании погрешности некоторых алгоритмов решения задачи на
собственные значения. М., 1980. 26 с. (Препр. ИПМ; № 100).
Алгазин С.Д., Бабенко К.И. Численное решение задачи об изгибе и свободных колебаниях пластинки. М., 1981. 17 с. (Препр. ИПМ; № 22).
Алгазин С.Д., Бабенко К.И. Численное решение задачи об изгибе и свободных колебаниях пластинки // Прикл. математика и механика. 1982. Т. 46, вып. 6. С. 1011-1015.
Алгазин С.Д. О табулировании собственных значений двумерного оператора Лапласа.
М., 1982. 13 с. (Препр. ИПМ; № 34).
Алгазин С.Д. О дискретизации оператора Лапласа // Докл. АН СССР. 1982. Т. 266, №3. С.
521-525.
Алгазин С.Д. О локализации собственных значений замкнутых линейных операторов //
Сиб. мат. журн. 1983. Т. 24, № 2. С. 3-8.
Алгазин С.Д. Дискретизация оператора Лапласа и быстрое решение уравнения Пуассона
в торе// Журн. вычисл. математики и мат. физики. 1992. Т. 31, №10. С. 1661-1666.
Алгазин С.Д. Дискретизация оператора Лапласа и быстрое решение уравнения Пуассона
во внешности тела вращения// Там же. 1993. Т. 32, № 11. С. 1746-1750.
225
21. Алгазин С.Д. Об одном классе матриц, возникающем при дискретизации уравнений математической физики // Идентификация и моделирование производств повышенного риска. М.: Ин-т проблем управления, 1993. С. 109-112.
22. Алгазин С.Д. О дискретизации линейных уравнений математической физики с разделяющимися переменными // Журн. вычисл. математики и мат. физики. 1995. Т. 35, № 3. С.
400-411.
23. Алгазин С.Д. О вычислении собственных значений обыкновенных дифференциальных
уравнений // Там же. 1995. Т. 35, № 4. С. 603-610.
24. Алгазин С.Д. Численно-аналитическое исследование флаттера пластин и пологих оболочек: Автореф. дис.... д-ра физ.-мат. наук. М., 1999. 28 с.
25. Алгазин С.Д. Численно-аналитическое исследование флаттера пластин и пологих оболочек: Дис.... д-ра физ.-мат. наук. М., 1999. 237 с.
26. Алгазин С.Д. Численные алгоритмы без насыщения в классических задачах математической физики. М.: Научный мир, 2002. 155 с.
27. Алгазин С.Д., Грошев М.В., Ильин A.C. О флаттере конической оболочки// Упругость и
неупругость. М.: Изд-во МГУ, 2001. С. 419.
28. Алгазин С.Д., Кийко И.А. Численно-аналитическое исследование флаттера пластины
произвольной формы в плане // Прикл. математика и механика. 1997. Т. 60, вып. 1. С.
171-174.
29. Алгазин С.Д., Кийко H.A. Исследование собственных значений оператора в задачах панельного флаттера // Изв. РАН. МТТ. 1999. № 1. С. 170-176.
30. Алгазин С.Д., Кийко H.A. Вычислительный эксперимент в задаче о флаттере пластины
произвольной формы в плане// Вестн. МГУ. Сер. 1, Математика, механика. 1999. № 6. С.
62-64.
31. Алгазин С.Д., Кийко И.А. Численное исследование флаттера пологой оболочки //
ЖПМТФ. 1999. Т. 40, № 6. С. 98-103.
32. Алгазин С.Д., Кийко И.А. Численное исследование флаттера пологой сферической оболочки // Мат. моделирование. 1999. Т. 11, № 12. С. 45-50.
33. Алгазин С.Д., Кийко И.А. Численные алгоритмы классической матфизики. Флаттер пластины произвольной формы в плане. М., 2001. 27 с. (Препр. ИПМмех РАН, № 684).
34. Алгазин С.Д., Кийко И.А. Новые постановки задач панельного флаттера/ VIII Всерос.
съезд по теорет. и прикл. механике, Пермь, 23-25 авг., 2001: Аннот. докл. Екатеринбург:
Изд-во УрО РАН; Пермь: Ин-т мехеханики сплош. сред УрО РАН, 2001. С. 31.
35. Алгазин С.Д., Кийко И.А. О флаттере пластины // Докл. РАН. 2002. Т. 383, № 3. С. 343345.
36. Алгазин С.Д., Кийко И.А. Численное исследование флаттера прямоугольной пластины //
ЖПМТФ. 2003. Т. 44, № 4. С. 35^2.
37. Александров В.М., Гришин С.А. Динамика конической оболочки при внутреннем сверхзвуковом потоке газа // Прикл. математика и механика. 1994. Т. 58, №4. С. 123-132.
38. Амбарцумян С.А. Теория анизотропных оболочек. М.: Физматгиз, 1961. 384 с.
39. Амбарцумян С.А. Теория анизотропных пластин: Прочность, устойчивость и колебания.
М.: Наука, 1967. 267 с.; 2-е изд., перераб. и доп. М.: Наука, 1987. 360 с.
40. Амбарцумян С.А. Общая теория анизотропных оболочек. М.: Наука, 1974. 446 с.
41. Амбарцумян С.А., Багдасарян Ж.Е. Об устойчивости ортотропных пластинок, обтекаемых сверхзвуковым потоком газа // Изв. АН СССР. ОТН. Механика и машиностроение.
1961. № 4. С. 91-96.
42. Амбарцумян С.А., Багдасарян Ж.Е. Об устойчивости нелинейно-упругих трехслойных
пластинок, обтекаемых сверхзвуковым потоком газа// Там же. 1961. №5. С. 96-99.
226
43. Амбарцумян С.А., Багдасарян Г.Е., Белубекян М.В. Магнитоупругость тонких оболочек и
пластин. М.: Наука, 1977. 272 с.
44. Анваров Р. Флаттер вязкоупругой пластинки // Вопр. вычисл. и прикл, математики. Ташкент, 1977. Вып. 45. С. 156-160.
45. Арианов С.В., Жинжер Н.И., Чаплыгин А.В. Расчет нелинейного флаттера конических
оболочек // Тр. Моск. энергет. ин-та. 1990. № 637. С. 148-153.
46. Атмосфера стандартная. ГОСТ 4401-81. М.: Изд-во стандартов, 1981.
47. Бабенко К. И. Об одном подходе к оценке качества вычислительных алгоритмов. М.,
1974. (Препр.ИПМ; № 7).
48. Бабенко К.И. О некоторых общих свойствах вычислительных алгоритмов. М., 1977. 71 с.
(Препр.ИПМ; № 2).
49. Бабенко К. И. О явлении насыщения в численном анализе// Докл. АН СССР. 1978. Т.
241, № 3. С. 505-508.
50. Бабенко К. И. и др. Теоретические основы и конструирование численных алгоритмов задач математической физики. М.: Наука, 1979. 295 с.
51. Бабенко К.И. Основы численного анализа. М.: Наука, 1986. 744 с.; 2-е изд., испр. и доп. /
Под ред. А.Д. Брюно. М.; Ижевск: РХД, 2002. 847 с.
52. Бабенко К.И., Юрьев С.П. О дискретизации одной задачи Гаусса// Докл. АН СССР. 1978.
Т. 240, № 6. С. 1273-1276.
53. Багдасарян Г.Е. Устойчивость проводящей пластинки в потоке проводящего газа при
наличии магнитного поля // Докл. АН АрмССР. 1974. Т. 59, № 2. С. 72-77.
54. Багдасарян Г.Е. Об устойчивости проводящей цилиндрической оболочки в потоке проводящего газа в присутствии магнитного поля // Изв. АН СССР. МТТ. 1975, № 1. С. 79-84.
55. Багдасарян Г.Е. Об устойчивости упругих пластин в потоке проводящего газа при наличии магнитного поля// Изв. АН АрмССР. Механика. 1975. Т. 28, № 4. С. 27-39.
56. Багдасарян Г.Е., Белубекян М.В. Колебания и устойчивость цилиндрической оболочки в
потоке проводящего газа при наличии магнитного поля // Тр. VI Всесоюз. конф. по теории оболочек и пластинок. М.: Наука, 120-125.
57. Багдасарян Г.Е., Белубекян М.В. Флаттер цилиндрической оболочки в потоке сжимаемой
проводящей жидкости в присутствии магнитного поля// Инж. журн. МТТ. 1966. № 6. С.
52-56.
58. Багдасарян Г.Е., Белубекян М.В. Устойчивость ферромагнитной пластинки в потоке газа
при наличии магнитного поля // Изв. АН АрмССР. Механика. Т. 25, №3. С. 18-28.
59. Баничук Н.В. Устойчивость аэро- и гидроупругих систем// Машиностроение: Энциклопедия: В 40 т. Разд. I. Инженерные методы расчетов. Т. 1/3, кн. 1. Динамика и прочность
машин. Теория механизмов и машин. М.: Машиностроение, 1994.
60. Баранцев Р.Г. Влияние критических частот на постановку задачи о колебании тонкого
крыла в потоке газа // Далъневост. мат. журн. 2003. Т. 4, № 2. С. 226-230.
61. Барр, Стиэрмен. Характеристики аэроупругой устойчивости цилиндрических оболочек с
учетом несовершенств и закрепления краев // Ракет, техника и космонавтика. 1969. № 1.
С. 142-152.
62. Барр, Стиэрмен. Влияние сверхзвукового обтекания на упругую устойчивость цилиндрических оболочек // Там же. 1970. № 1. С. 4-13.
63. Бахвалов Н.С. Численные методы. М.: Наука, 1973. 631 с.
64. Белоцерковский С.М., Вольмир A.C., Huutm М.И., Пономарев АЛ. Некоторые задачи аэроупругости при отрывном обтекании // Изв. АН СССР. M ТT. № 5. С. 150-157.
65. Белоцерковский С.М., Кочетков Ю.А., Красовский A.A., Новицкий В.В. Введение в аэроавтоупругость. М.: Наука, 1980. 384 с.
227
66. Беллман Р. Введение в теорию матриц. М.: Наука, 1969. 367 с.
67. Белубекян В.М., Минасян М.М. К проблеме флаттера пластины в сверхзвуковом потоке
газа // Изв. Нац. АН Армении. Механика. 1997. Т. 50, № 2. С. 27-35.
68. Белубекян В.М., Минасян М.М. О нелинейном флаттере пластин в сверхзвуковом потоке
газа // Там же. 1999. Т. 52, М° 4. С. 38^15.
69. Бидерман B.J1. Механика тонкостенных конструкций. М.: Машиностроение, 1977.416 с.
70. Биргер И.А., Пановко Я.Г. (ред.) Прочность. Устойчивость. Колебания: Справочник: В 3
т. / М.: Машиностроение, 1968. Т. 1. 831 с.; Т. 2. 464 с.; Т. 3. 567 с.
71. Бисмарк-Наср М.H., Савио Х.Р. К. Решение задачи о сверхзвуковом флаттере конических
оболочек методом конечных элементов // Ракет, техника и космонавтика. 1979. Т. 17, №
10. С. 158-160.
72. Бисплингхоф Р.Л., Эшли X., Халфмен Р.Л. Аэроупругость. М.: Изд-во иностр. лит., 1958.
800 с.
73. Болотин В.В. Динамическая устойчивость упругих систем. М.: Гостехиздат, 1956.600 с.
74. Болотин В.В. Колебания и устойчивость упругой цилиндрической оболочки в потоке
сжимаемой жидкости // Инж. сб. 1956. Т. 24. С. 3-16.
75. Болотин В. В. О критических скоростях в нелинейной теории аэроупругости // Машиностроение и приборостроение. 1958. № 3.
76. Болотин В. В. К вопросу об устойчивости пластины в потоке сжимаемого газа // Вопросы
прочности материалов и конструкций. М., 1959.
77. Болотин В.В., Гаврилов О.В., Макаров Б.П., Швейко О.Ю. Нелинейные задачи устойчивости плоских панелей при больших сверхзвуковых скоростях // Изв. АН СССР. ОТН.
Механика и машиностроение. 1959. № 3. С. 59-64.
78. Болотин В.В. Нелинейный флаттер пластин и оболочек // Инж. сб. 1960. Т. 28. С. 55-75.
79. Болотин В. В. О применении закона плоских сечений для определения аэродинамических
сил, действующих на колеблющиеся оболочки // Изв. АН СССР. ОТН. Механика и машиностроение. 1961. № 1. С. 159—162.
80. Болотин В.В. Неконсервативные задачи теории упругой устойчивости. М.: Наука, 1961.
340 с.
81. Болотин В.В. Нестационарный флаттер пластин и пологих оболочек в потоке газа // Изв.
АН СССР. ОТН. Механика и машиностроение. 1962. №3. С. 106-113.
82. Болотин В. В. Современные направления в области динамики пластин и оболочек
//Теория пластин и оболочек. Киев, 1962. С. 16-32.
83. Болотин В.В., Григолюк Э.И. Устойчивость упругих и неупругих систем // Механика в
СССР за 50 лет. М.: Наука, 1972. Т. 3: Механика деформируемого твердого тела. С. 325363.
84. Болотин В.В., Гришко И.А., Митричев Т.В. Устойчивость тонкой панели с прикрепленными элементами в сверхзвуковом потоке газа // Прикл. механика. 1999. Т. 35, № 12. С.
3-10.
85. Болотин В.В., Новичков Ю.Н. Выпучивание и установившийся флаттер термически сжатых панелей, находящихся в сверхзвуковом потоке // Инж. журн. 1961. Т. 1, № 2. С. 8296.
86. Болотин В.В., Новичков Ю.Н. Механика многослойных конструкций. М.: Машиностроение, 1980. 373 с.
87. Болотин В.В., Новичков Ю.Н., Швейко Ю.Ю. Теория аэроупругости// Прочность, устойчивость, колебания. М.: Машиностроение, 1968. Т. 3. С. 468-512.
88. Болотин В.В., Симонов Б.П. Устойчивость упругих панелей с присоединенными элементами в сверхзвуковом потоке газа // Изв. АН СССР. МТТ. № 2. С. 129-135.
228
89. Бочкарев С.А. Повышение эффективности численных алгоритмов для исследования
устойчивости оболочек вращения, подвергающихся воздействию сверхзвукового потока
газа // Численные методы механики сплошной среды: Тез. докл. III Всесоюз. школы молодых ученых. Красноярск, 1989. Ч. 2. С. 57-58.
90. Бочкарев С.А. Исследование панельного флаттера многослойных оболочек вращения методом конечных элементов // Там же. 1989. С. 115-116.
91. Бочкарев С.А. Исследование устойчивости оболочек вращения при воздействии сверхзвукового потока газа / Проблемы проектирования конструкций: Сб. крат, сообщ. III
Урал, семинара. Миасс, 1990. С. 61-69.
92. Бочкарев С.А., Голотина Л.А., Матвеенко В.П. Исследование устойчивости оболочек
вращения, подвергающихся воздействию внешнего и внутреннего сверхзвукового потока
газа / Численное моделирование статического и динамического деформирования конструкций. Свердловск, 1990. С. 12-24.
93. Боярко В.Г. Анализ собственных частот, устойчивости, флаттера, НДС цилиндрических
оболочек при локальных нагрузках с использованием комбинированных рядов для произвольных граничных условий: Автореф. дис. ... канд. физ.-мат. наук. Нижний Новгород,
1993. 31 с.: ил. В надзаг.: Нижегор. гос. ун-т им. Н.И. Лобачевского. Библиогр.: с. 28- 29,
9 назв.
94. Блохина А.И. Динамическая устойчивость цилиндрической оболочки// Инж. сб. АН
СССР. 1961. Т. 31. С. 196-201.
95. Брусиловский А.Д., Мельникова Л.М., Швейко Ю.Ю. Колебания и устойчивость цилиндрической оболочки в потоке газа // Инж. журн. МТТ. 1966. № 1. С. 67-73.
96. Буйвол В.Н. Колебания и устойчивость двух неравных цилиндрических оболочек в потоке сжимаемой жидкости // Прикл. механика. 1967. Т. 8, № 6. С. 17-22.
97. Буйвол В.Н. Колебания и устойчивость деформируемых систем в жидкости. Киев: Наук,
думка, 1975. 192 с.
98. Буйвол В.Н., ГузъА.Н. Обтекание двух цилиндрических оболочек сверхзвуковым потоком сжимаемой жидкости// Гидромеханика: Межвед. сб. 1967. Вып. 3. С. 54-62.
99. Буйвол В.H., Новацкий В.Т. Устойчивость циклически симметричной системы цилиндрических оболочек в потоке невязкой жидкости // Прикл. механика. 1969. Т. 5, № 6. С.
37-43.
100. Буйвол В.H., Шевчук Ю.Р. Колебания и устойчивость взаимовлияющих пластин в потоке
жидкости // Пробл. прочности. 1976. № 3. С. 53-56.
101. Валишвили Н.В., Силкин В.Б. О формах равновесия прямоугольной пластинки в потоке
газа // Прикл. математика и механика. 1969. Т. 33, № 5. С. 928-932.
102. ВанянЛ.А., Минаян М. М. К флаттеру мембраны в сверхзвуковом потоке газа // Изв. АН
Армении. Механика. 2002. Т. 55, № 3. С. 59-64.
103. Васильев Ю.В. Сверхзвуковой флаттер цилиндрических слоистых оболочек // Rev. roum.
sei. tecn. Ser. mec. appl. 1970. Vol. 15, N 4. P. 765-802.
104. Вайнико Г.М. Асимптотические оценки погрешности проекционных методов в проблеме
собственных значений // Журн. вычисл. математики и мат, физики. 1964. Т. 4, № 3. С.
405-125.
105. Вельмисов П.А., Еремеева Н.И. Численный метод исследования динамики вязкоупругой
пластины в сверхзвуковом потоке газа // Вестн. УлГТУ. №3. С. 52-59.
106. Вельмисов П.А., Решетников Ю.А. Устойчивость вязкоупругих пластин при аэрогидродинамическом воздействии. Саратов: Изд-во Сарат. ун-та, 1994. 175 с.
107. Вельмисов П.А., Киреев С.В. О некоторых нелинейных моделях в аэроупругости // Математические методы и модели в прикладных задачах науки и техники: Тр. междунар.
229
конф. "Континуальные алгебраические логики, исчисления и нейроинформатика в науке,
технике и экономике", Ульяновск, 13-15 мая, 2003. Ульяновск: Изд-во УлГТУ, 2003. Т. 5.
С. 12-16.
108. Вельмисов П.А., Киреев С.В., Кузнецов А.О. Устойчивость пластины в сверхзвуковом
потоке газа // В естн. УлГТУ. 1999. № 1. С. 44—51.
109. Вельмисов П.А., Молгачев JI.A. Вычислительный эксперимент для одного класса задач
взаимодействия упругих тел с жидкостью // Математические методы и модели в прикладных задачах науки и техники: Тр. междунар. конф. "Континуальные алгебраические
логики, исчисления и нейроинформатика в науке, технике и экономике", Ульяновск, 1315 мая, 2003. Ульяновск: Изд-во УлГТУ, 2003. Т. 5. С. 17-23.
110. Ветров В.В., Денежкин Д.Г., РедькоЛ.А. Устойчивость пластин в потоке газа // Изв. Тул.
гос. ун-та. Сер. физ. 1999. № 2. С. 154-157.
111. Волкова H.H., Марченко Г.А. Метод учета аэродинамического демпфирования при исследовании устойчивости пластин в потоке газа // Динамика и прочность машин: Респ.
межвед. темат. науч.-техн. сб. 1976. Вып. 23. С. 10-13.
112. Волос Н.П. Устойчивость бесконечной пластинки, обтекаемой сверхзвуковым потоком
газа // Там же. 1976. Вып. 24. С. 61-63.
113. Вольмир A.C. Гибкие пластинки и оболочки. М.: Наука, 1956. 419 с.
114. Вольмир A.C. Об устойчивости цилиндрических оболочек при динамическом нагружении // Докл. АН СССР. 1958. Т. 123, № 5. С. 806-808.
115. Вольмир A.C. Устойчивость упругих систем. М.: Физматгиз, 1963. 879 с.
116. Вольмир A.C. Устойчивость деформируемых систем. М.: Наука, 1967. 384 с.
117. Вольмир A.C. Нелинейная динамика пластинок и оболочек. М.: Наука, 432 с.
118. Вольмир A.C. Задачи магнитоупругости в теории оболочек// Расчеты на прочность. М.:
Машиностроение, 1975. Вып. 16. С. 261-280.
119. Вольмир A.C. Оболочки в потоке жидкости и газа: Задачи аэроупругости. М.: Наука,
1976. 416 с.
120. Вольмир A.C. Оболочки в потоке жидкости и газа: Задачи гидроупругости. М.: Наука,
1979. 320 с.
121. Вольмир A.C., Гуляев В.В., Пономарев А.Т. Поведение упругих систем при отрывном обтекании // Докл. АН СССР. 1978. Т. 243, № 4. С. 886-888.
122. Вольмир A.C., Медведева С.В. Исследование флаттера цилиндрической панели в сверхзвуковом потоке газа// Там же. 1972. Т. 207, №4. С. 811- 813.
123. Вольмир A.C., Минеев В.Е. Экспериментальное исследование процесса выпучивания
оболочек при динамическом нагружении// Там же. 1957. Т. 125, №5. С. 1002-1003.
124. Вольмир A.C., Ништ М.И., Пономарев А.Т. Нелинейные колебания пластинки и цилиндрической панели при срывном нестационарном обтекании// Прикл. механика. 1976. Т.
12, № 1. С. 12-17.
125. Вольмир A.C., Пономарев А.Т. Аэротермоупругость пластинок и цилиндрических панелей при переходном режиме в потоке газа II Изв. АН АрмССР. Механика. 1975. Т. 28, №
5. С. 57-66.
126. Вольмир A.C., Пономарев А.Т., Попыталов С.А. Поведение панели крыла при переходном режиме в потоке газа // Прикл. математика и механика. Т. 37, № 2. С. 247-253.
127. Вольмир A.C., СелезоваЛ.В. Поведение упругой цилиндрической панели в потоке проводящего газа при действии магнитного поля // Прикл. механика. 1971. Т. 7, № 5. С. 3-8.
128. Вольмир A.C., Скурлатов Э.Д. Флаттер оболочек в кратковременном потоке газа //Теория
пластин и оболочек. М.: Наука, 1971. С. 29-33.
230
129. Ворович И.И. Математические проблемы нелинейной теории пологих оболочек. М.:
Наука, 1989. 376 с.
130. Власов Б.Ф. Об изгибе прямоугольной упругой пластинки, движущейся в газе с постоянной сверхзвуковой скоростью // Изв. АН СССР. ОТН. Механика и машиностроение. 1958.
№ 12. С. 124-127.
131. Власов В.3. Общая теория оболочек и ее приложения к технике. Гостехиздат, 1949. 784 с.
132. Власов В.З., Леонтьев H.H. Балки плиты и оболочки на упругом основании. М.: Физматгиз, 1960. 491 с.
133. Выслоух В.А., Кандидов В.П., Чесноков С.С. Применение МКЭ для исследования устойчивости треугольных пластин в сверхзвуковом потоке // Учен. зап. ЦАГИ. 1976. Т. 7, №
1, С. 160-164.
134. Гаврилов Ю.В. Исследование спектра собственных колебаний упругих круговых цилиндрических оболочек // Тр. конф. по теории пластин и оболочек. Казань, 1961.
135. Гайвась Б.И., Зорий Л.М. О влиянии трения на устойчивость цилиндрических оболочек в
сверхзвуковом потоке газа // Докл. АН УССР. 1970. №9. С. 807-810.
136. Галкин М.С. К вопросу о динамической устойчивости мембран в сверхзвуковом потоке
газа // Учен. зап. ЦАГИ. 1976. Т. 7, № 3. С. 80-90.
137. Галкин М.С., ЛущинЛ.П. Определение критической скорости флаттера с помощью динамически подобных моделей// Тр. ЦАГИ. 2001. №2618. С. 25-33.
138. Ганеева М.С. Прочность и устойчивость оболочек вращения. М.: Наука, 161 с.
139. Гершгорин C. Über die Abgrenzung der Eigenwerte einer Matrix // Изв. AH СССР. 1931. T.
7. C. 749-754.
140. Голосков Е.Г., Дмитренко В.В. К вопросу о нестационарном флаттере панелей // Динамика и прочность машин: Респ. межвед. темат. науч.-техн. сб. 1972. Вып. 16. С. 17-23.
141. Голосков Е.Г., Филиппов А.П. Нестационарные колебания деформируемых систем. Киев:
Наук, думка, 1977. 339 с.
142. Гольденвейзер А.Л. Теория упругих тонких оболочек. М.: Гостехтеорет- издат, 1953. 544
с.
143. Гольденвейзер АЛ. Теория упругих тонких оболочек. М.: Наука, 1976. 512 с.
144. Гольденвейзер А.Л., Лидский В.Б., Товстик П.Е. Свободные колебания тонких упругих
оболочек. М.: Наука, 1979. 384 с.
145. Гонткевич B.C. Собственные колебания пластинок и оболочек. Справочное пособие. Киев: Наук, думка, 1964. 288 с.
146. Гончаров В.Л. Теория интерполирования и приближения функций. М.: Гостехиздат, 1954.
328 с.
147. Гликман Б. Т. Свободные колебания круглой пластинки со смешанными граничными
условиями// Изв. АН СССР. МТТ. 1972. №1. С.135-140.
148. Григолюк Э.И., Лампер P.E., Шандаров П.П. Некоторые теоретические и экспериментальные исследования автоколебаний криволинейных панелей в потоке газа // Теория
оболочек и пластин. Ереван, АН АрмССР, 1964.
149. Григолюк Э.И., Лампер P.E., Шандаров П.П. Флаттер панелей и оболочек // Механика,
1963. М., 1965. С. 34—90. (Итоги науки/ВИНИТИ).
150. Григолюк Э.И., Кабанов В.В. Устойчивость оболочек. М.: Наука, 1978. 359 с.
151. Григолюк Э.И., Михайлов А.П. Трехслойная прямоугольная пластинка в сверхзвуковом
потоке таза II Докл. АН СССР. 1965. Т. 158, № 3. С. 554-557.
152. Дауэлл. Панельный флаттер: Обзор исследований аэроупругой устойчивости пластинок и
оболочек // Ракет, техника и космонавтика. 1970. № 3. С. 3-24.
231
153. Дербенцев Д.А. Колебания круговой цилиндрической оболочки с протекающим внутри
ее потоком газа// Прикл. механика. 1967. Т. 3, № 3. С. 14-19.
154. Дзекеревский Е.Н., Лебедев В.М., Маслов H.A. и др. Экспериментальное исследование
флаттера элементов обшивки летательных аппаратов // Колебания упругих конструкций с
жидкостью. Новосибирск, 1974.
155. ДзыгадлоЗ. Анализ нелинейных вынужденных колебаний пластинки конечной длины в
плоском сверхзвуковом потоке// Тр. V Междунар. конф. по нелинейным колебаниям. Киев: Ин-т математики АН УССР, Т. 3. С. 256-273.
156. ДиткинВ.В. Об итерационном методе решения задачи на собственные значения для полиномиального пучка линейных операторов // Журн. вычисл. математики и мат. физики.
1989. Т. 28, № 5. С. 775-780.
157. ДиткинВ.В., Орлов Б.А., Пшеничное Г.И., Сергиенко A.A. О флаттере конических оболочек // Численные методы в механике деформируемого тела. М., 1987. С. 3-14.
158. Диткин В.В., Орлов Б.А., Пшеничное Г.И. Численное исследование флаттера конических
оболочек// Изв. РАН. МТТ. 1993. № 1. С. 185-189.
159. Дубовских Ю.А. Моделирование волнового движения в удлиненной упругой пластине,
подверженной нелинейному флаттеру// Тр. Моск. энергет. ин-та. 1990. № 637. С. 64-67.
160. Дубовских Ю.А. Применение асимптотического метода к анализу панельного флаттера:
Автореф. дис. ... канд. техн. наук. М., 1995. 20 с.: ил. В надзаг.: Моск. энергет. ин-т (техн.
ун-т). Библиогр.: с. 20, 4 назв.
161. Душин A.B., Либерман Б.Д. Численный анализ спектра одного дифференциального оператора в частных производных, связанного с задачей панельного флаттера // Исследования по устойчивости и теории колебаний. Ярославль, 1977. С. 12-24.
162. Дорохин H.H. Аэроупругость// ЦАГИ - основные этапы научной деятельности, 1968-1993
/ Центр, аэрогидродинам. ин-т. М., 1996. С. 501-521.
163. Елишаков И.Б., Хроматов В.Е. Влияние скорости набегающего сверхзвукового потока на
поведение панелей, находящихся в поле случайных сил // Тр. Моск. энергет. ин-та. 1970.
Вып. 74. С. 54-60.
164. Елишаков И.Б., Хроматов В.Е. О колебаниях панелей в сверхзвуковом потоке при случайных воздействиях// Изв. АН СССР. МТТ. 1971. № 1. С. 54-58.
165. Ершов Б.А., Кутеева Г.А. Применение вариационного принципа конформных отображений в решении одной плоской динамической задачи гидроупругости // Вестн. СПб. ун-та.
Сер. 1. 1999. №4. С. 83-88.
166. Ершов Б.А., Кутеева Г.А. Задачи гидроупругости - применение вариационного принципа
конформных отображений / Междунар. науч. конф. по механике "III Поляховские чтения", Санкт-Петербург, 4-6 февраля, 2003: Тез. докл. СПб.: Изд-во НИИХ СПбГУ, 2003.
С. 137.
167. Ершов Н.Ф., Шахверди Г.Г. Метод конечных элементов в задачах гидродинамики и гидроупругости. JL: Судостроение, 1984. 237 с.
168. Ефремов Е.А. Устойчивость нагретых трехслойных пластин с легким заполнителем в
сверхзвуковом потоке газа// Гидромеханика и теория упругости: Респ. межвед. науч.техн. сб. 1967. Вып. 6. С. 67-77.
169. Ефремов Е.А. Устойчивость трехслойных пластин в потоке сжимаемой жидкости в присутствии магнитного поля // Там же. 1968. Вып. 9. С. 74-83.
170. Фадеев Д.К., Фадеева В.Н. Вычислительные методы линейной алгебры. М.: Физматгиз,
1963. 734 с.
171. Жинжер Н.И. Об устойчивости неконсервативных упругих систем при наличии трения //
Изв. вузов. Машиностроение. 1968. № 4. С. 65-68.
232
172. Жинжер Н.И. Асимптотический метод в задачах аэроупругой устойчивости // Проблемы
устойчивости и предельные несущие способности конструкций. Л., 1983. С. 44-53.
173. Жинжер Н.И., Кадарметов ИМ. Применение асимптотического метода к задаче о сверхзвуковом флаттере цилиндрической оболочки // Колебания упругих конструкций с жидкостью: Сб. науч. тр. V Всесоюз. симпоз., Новосибирск, 13—20 сент., 1982. М., 1984. С.
114-118.
174. Жинжер Н.И., Кадарметов И.М. Применение асимптотического метода к задаче о флаттере ортотропной цилиндрической оболочки // Изв. АН АрмССР. Механика. 1986. Т. 39,
№ 2. С. 31-39.
175. Журавлев В.Ф., Климов Д.М. Прикладные методы в теории колебаний. М.: Наука, 1988.
328 с.
176. Зиченков М.Ч., Карклэ П.Г., Поповский В.H., Стрелков К.С. Развитие расчетноэкспериментальных методов решения задач прикладной аэроупругости //Тр. ЦАГИ. 2002.
№ 2658. С. 229-236.
177. ЗоршЛ.М., Icaee ЮЛ. Двосторонш оцшки критичных параметр1в пружных систем при
флаттер1 // Доп. АН УССР. Сер. А. 1973. № 6. С. 529-531.
178. ЗорийЛ.М., Сорокибый Н.И. О стабилизирующем влиянии геометрических и жесткостных параметров на флаттер панелей с сосредоточенными массами в сверхзвуковом потоке // Изв. РАН. МТТ. 1992. № 1. С. 144-145.
179. Игимуратов Ф.З., Карклэ П.Г., Поповский В.Н. Опыт и исследования ЦАГИ в области аэроупругости летательных аппаратов // Тр. ЦАГИ. 1998. №2631. С. 103-113.
180. Измайлов A.A. Об устойчивости пластины клиновидного профиля в сверхзвуковом потоке // Вестн. МГУ. Математика и механика. 1967. № 1. С. 103- 110.
181. Измайлов А. А. Устойчивость конической оболочки в сверхзвуковом потоке газа // Там
же. 1968. № 4. С. 120-125.
182. Измайлов A.A. О нахождении критических скоростей при несимметричном обтекании
пластин и оболочек в сверхзвуковом потоке газа // Там же. № 5. С. 73-76.
183. Измайлов A.A. Некоторые вопросы устойчивости пластин и оболочек в сверхзвуковом
потоке газа // Упругость и неупругость. М., 1971. Вып. 1. С. 265.
184. Ильюшин A.A. Закон плоских сечений в аэродинамике больших сверхзвуковых скоростей// ПММ. 1956. Т. 20, вып. 6. С. 733-755.
185. Ильюшин A.A., Кийко И.А. Новая постановка задачи о флаттере пологой оболочки // Там
же. 1994. Т. 58, вып. 3. С. 167-171.
186. Ильюшин A.A., Кийко И.А. Колебания прямоугольной пластины, обтекаемой сверхзвуковым потоком газа// Вестн. МГУ. Сер. 1, Математика, механика. 1994. № 4. С. 40-44.
187. Ильюшин A.A., Кийко И.А. Закон плоских сечений в сверхзвуковой аэродинамике и проблема панельного флаттера// Изв. РАН. МТТ. 1995. №6. С. 138-142.
188. Ильяамов М.А. Введение в нелинейную гидроупругость. М.: Наука, 1991. 195 с.
189. Исаев В. П. Флаттер ортотропной полосы постоянной толщины / Моск. гос. техн. ун-т
"МАМИ". М., 2002. 6 с. Деп. в ВИНИТИ 01.02.2002, № 204-В2002.
190. Исаев В.П., Кийко И.А. Флаттер анизотропной полосы / Моск. гос. техн. ун-т "МАМИ".
М., 2002. 6 с. Деп. в ВИНИТИ 01.02.2002, № 202-В2002.
191. Исаев В.П., Кийко И.А. Аэроупругие колебания и устойчивость ортотропной полосы переменной толщины / Моск. гос. техн. ун-т "МАМИ". М., Деп. в ВИНИТИ 01.02.2002, №
203-В2002.
192. Кадыров А.К., Кийко И. А. Флаттер упругой полосы переменной толщины // Изв. Тул.
гос. ун-та. Сер. мат. мех. информ. 2005. Т. 11, вып. 2.
233
193. Казанджан Э.П. Об одном численном методе конформного отображения односвязных областей. М., 1979. (Препр.ИПМ; № 82).
194. Камзолкин В.Л., Михеев В.А., Симонов Б.П. Влияние присоединенной массы на устойчивость упругой пластины в сверхзвуковом потоке газа // Тр. Моск. энергет. ин-та. 1976.
Вып. 280. С. 26-29.
195. Кандидов В.П., Чесноков С.С. Расчет устойчивости прямоугольных пластин в потоке
воздуха методом конечных элементов // Вестн. МГУ. Физика, астрономия. 1972. Т. 13, №
5. С. 495-502.
196. Каплунов С.М., Смирнов Л.В. Динамика конструкций гидроупругих систем. М.: Наука,
2002. 397 с.
197. Картер, Стиэрмен. Некоторые вопросы панельного флаттера цилиндрических оболочек//
Ракет, техника и космонавтика. 1968. №1. С. 42-50.
198. Като Т. Теория возмущений линейных операторов. М.: Мир, 1972. 740 с.
199. Кийко И.А. Флаттер вязкоупругой пластины// ПММ. 1996. Т. 60, вып. 1. С. 172-175.
200. Кийко И. А. Постановка задачи о флаттере оболочки вращения и пологой оболочки, обтекаемых потоком газа с большой сверхзвуковой скоростью // Там же. 1999. Т. 63, вып. 2.
С. 305-312.
201. Кийко И.А. Постановка задачи об аэроупругих колебаниях конической оболочки малого
раствора, внутри которой со сверхзвуковой скоростью протекает газ// Вестн. МГУ. Сер.
1, Математика, механика. 2004. №3. С. 58-61.
202. Кийко И.А., Кудрявцев Б.Ю. Колебания упругой полосы в потоке газа. М., Деп. в ВИНИТИ, 1994, № 1761-В94.
203. Кийко И.А., Кудрявцев Б.Ю. Нелинейные аэроупругие колебания прямоугольной пластины // Вестн. МГУ. Сер. 1, Математика, механика. 2005. № 1. С. 68-71.
204. Кийко И.А., Наджафов М.А. Постановка задачи об аэроупругих колебаниях и устойчивости конической оболочки // Изв. Тул. гос. ун-та. Сер. мат. мех. информ. 2005.Т. 11, вып. 2.
205. Кийко И.А., Показеев В.В. Колебания и устойчивость вязкоупругой полосы в потоке газа
// Докл. РАН. 2005. Т. 401, № 3. С. 342-348.
206. Киреев С.В. Асимптотика решений статических задач о неустойчивости пластины в
сверхзвуковом потоке газа / Математические методы и модели в прикладных задачах
науки и техники: Тр. междунар. конф. "Континуальные алгебраические логики, исчисления и нейроинформатика в науке, технике и экономике", Ульяновск, 13-15 мая 2003. Ульяновск: Изд-во УлГТУ, 2003. Т. 5. С. 67-69.
207. Киселев М.И. О магнитоупругом флаттере//Магнит, гидродинамика. 1966. № 1. С. 51-54.
208. Клигман Е.П. Собственные колебания оболочек вращения с конечной сдвиговой жесткостью // Краевые задачи упругих и неупругих систем. Свердловск: УНЦ АН СССР, 1985.
С. 91-97.
209. Клигман Е.П. Устойчивость и колебания вязкоупругих структурно неоднородных многослойных оболочек вращения: Дис. ... канд. техн. наук. Пермь, 1987. 182 с.
210. Кляуз Л.П., Мякишев А.М. Постановка задачи о нахождении внешнего давления при возникновении флаттера в ионизированном газе // Гидромеханика. 1966. Вып. 2. С. 160-163.
211. Козаров М. Върху нелинейния флатер на плоча с начални неправильности //Техн. мысъл.
1966. Т. 3, № 6. С. 61-64.
212. Козаров М. Нелинеен свърхзвуков флатер на кръгли еластични цилиндри- чни черупки //
Там же. 1972. Т. 9, № 3. С. 57-61.
213. Колокова О.И. Флаттер многопролетной вязкоупругой пластины в сверхзвуковом потоке
газа// Тр. МФТИ. Аэрофизика и прикл. математика. Т. 115.
234
214. Колосов Г.И., Малинин А.Н. Анализ условий возникновения флаттера сопловых насадок
ракетных двигателей // Космонавтика и ракетостроение. 1999. № 16. С. 93-96.
215. Корбут Б.А., Кондицина Е.В. Флаттер двух цилиндрических панелей, связанных с упругим заполнителем // Прикл. механика. 1967. Т. 3, № 8. С. 70-74.
216. Корбут Б.А., Нагорный Ю.И. Об устойчивости в потоке газа цилиндрической оболочки,
содержащей упругий заполнитель // Динамика и прочность машин. Респ. межвед. темат.
науч.-техн. сб. 1972. Вып. 15. С. 70-75.
217. Котюков В.Г. К вопросу о нелинейном флаттере пластин // Вестн. МГУ. Сер. 1, атематика, механика. 1967. № 1. С. 89-93.
218. Кошелев А. И. Регулярность решений эллиптических уравнений и систем. М.: Наука,
1986. 239 с,
219. Крумхаар. Точность линейной поршневой теории в применении к цилиндрическим оболочкам // Ракет, техника и космонавтика. 1963. № 6. С. 206-208.
220. Крысько В.А., Фомин В.Г, О динамике упругой цилиндрической панели во заимодействии с трансзвуковым потоком газа// Прикл. механика. 1985. Т. 21, №5. С. 39-45.
221. Крысько В.А., Щекатурова Т.В. Колебания конических осесимметричных оболочек переменной толщины // Проблемы прочности материалов и сооружений на транспорте: Тр.
VI Междунар. науч.-техн. конф., Санкт- Петербург, 28-29 янв„ 2004, СПб.: ПГУПС, 2004.
С. 222-233.
222. Кудрявцев Б.Ю. Колебания и устойчивость упругой полосы в сверхзвуковом потоке газа:
Дис.... канд. физ.-мат. наук. М., 1995. 96 с.
223. Кудрявцев Б.Ю. Колебания и устойчивость упругой полосы в сверхзвуковом потоке газа:
Автореф. дис.... канд. физ.-мат. наук. М., 1995. 13 с.
224. Кудрявцев Б.Ю. Флаттер упругой полосы. М., 1994. Деп. ВИНИТИ, 1994, № 3059-В94.
225. Кудрявцев Б.Ю. Устойчивость колебаний упругой полосы в сверхзвуковом потоке газа.
М., 1996. Деп. ВИНИТИ, 1996, № 833-В96.
226. Кудрявцев Б.Ю. Флаттер прямоугольной пластины. М., 1998. Деп. ВИНИТИ, 1998, №
1027-В98.
227. Кудрявцев Б.Ю. Аэроупругая устойчивость полосы. М., 1999. Деп. ВИНИТИ, 1999, №
1464-ВОО.
228. Кудрявцев Б.Ю. Поведение собственных значений флаттерного оператора. М., 2000. Деп.
ВИНИТИ, 2000, № 828-В00.
229. Кудрявцев Б.Ю. Флаттер прямоугольной пластины, составляющей часть плоскости тонкого клина, обтекаемого потоком газа с большой сверхзвуковой скоростью. М., 2002.
Деп. ВИНИТИ, № 1085-В2002.
230. Кудрявцев Б.Ю. Исследование задачи о флаттере прямоугольной пластины в уточненной
постановке / Тр. Моск. конф. молодых ученых "Научно-технические проблемы развития
московского мегаполиса". М.: ИМАШ РАН, 2003, С. 60-64.
231. Кудрявцев Б.Ю. Исследование задачи о флаттере прямоугольной пластины в уточненной
и дополненной постановке / Избр. тр. 39-й Междунар. науч.-техн. конф. ААИ "Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных
кадров". М., МГТУ "МАМИ", 2002.
232. Кудрявцев Б.Ю. Флаттер упругой пластины, находящейся в потоке газа, при умеренных
сверхзвуковых скоростях // Изв. Тул. гос. ун-та. Сер. мат. мех. информ. 2005, Т. 11, вып.
3.
233. Кудрявцев Е.П. О колебаниях коаксиальных упругих цилиндрических оболочек, между
которыми течет сжимаемая жидкость // Теория оболочек и пластин. Ереван: АН АрмССР,
1964. С. 606-612.
235
234. Кузьмина С.И., Мосунов В.А., Карклэ П.Г. Итерационный метод расчета трансзвукового
флаттера: Докл. на международной техн. конф. "Авиационные технологии, 2000", Жуковский, 19-24 авг„ 1997 // Тр. ЦАГИ. 1997. № 2635. С. 404-413.
235. Кулешов В.Б., Швейко Ю.Ю. Устойчивость конической оболочки в потоке газа // IV Всесоюз. конф. по проблемам устойчивости в строит, механике: Тез. докл. М., 1972. С. 172173.
236. Кутеева Г.А. Вариационный принцип конформных отображений в задаче гидроупругости
// Вестн. СПб. ун-та. Сер. 1. 1999. № 2. С. 65-69.
237. Кюркчиев Р. Флатер на конична черупка И Тъхн. мысъл. 1968. Т. 5, №4. С. 51-58.
238. Кюркчиев Р. Флатер на две съсни еластично свързани цилиндрични черупки на сверхзвуков поток от газ // Теорет. и прилож. мех. 1971. Т. 2, № 2. С. 7-11.
239. Кюркчиев Р. Свърхзвуков флатер на цилиндрична черупка, съдържаща свиваема течност
Ч Год. Высш. техн. учеб. завед. Прилож. мех. 1971. Т. 6, № 1.С. 125-134.
240. Лаврентьев М.А., Ишлинский А.Ю. Динамическая форма потери устойчивости упругих
систем // Докл. АН СССР. 1949. Т. 64, № 6. С. 779-782.
241. Лампер P.E. О применении некоторых аэродинамических теорий к расчету флаттера панели Н ЖПМТФ. 1960. № 2. С. 147-149.
242. Лампер P.E., ШандаровЛ.Г. Расчет и экспериментальное исследование автоколебаний
цилиндрических оболочек и панелей в потоке газа И Изв. АН СССР. ОТН. Механика и
машиностроение. 1963. №3. С. 58-64.
243. Лампер P.E. Введение в теорию флаттера. М.: Машиностроение, 1990. 144 с.
244. Ларионов Г.С. Устойчивость колебаний вязкоупругой пластинки при больших сверхзвуковых скоростях II Вопросы вычислительной и прикладной математики. Ташкент, 1970.
Вып. 3. С. 156-163.
245. Ларионов Г.С. Нелинейный флаттер упруговязкой пластины И Изв. АН СССР. МТТ.
1974. № 4. С. 95-100.
246. Либерман Б.Д. Об одном способе приближенного определения критической скорости
флаттера и частоты колебаний // Вестн. Яросл. ун-та. 1975. Вып. 13. С. 140-145.
247. Либерман Б.Д. Теоретический анализ нелинейного флаттера прямоугольной панели.
Сравнение с результатами эксперимента // Исследования по устойчивости и теории колебаний. Ярославль, 1976. С. 154-175.
248. Либерман БД., Куликов А.И. О новом подходе к исследованию задач нелинейного панельного флаттера П Вестн. Яросл. ун-та. 1975. Вып. 13. С. 118-139.
249. Ливанов КК Устойчивость защемленной панели в сверхзвуковом потоке // Инж. сб. 1959.
Т. 25. С. 101-103.
250. Ливанов К. К. Осесимметричные колебания цилиндрической оболочки в сверхзвуковом
потоке газа И Теория оболочек и пластин. Ереван: АН АрмССР, 1964.
251. Лису нов АД. Флаттер панели в потоке сжимаемой проводящей жидкости // ЖПМТФ.
1960. № 4. С. 65-67.
252. Лурье А.И. Статика тонкостенных упругих оболочек. М.; JL: Гостехиздат, 1947. 252 с.
253. Ломанова А.П., Маслов H.A., ШандаровЛ.Г. Расчет флаттера пластины, эксцентрично
подкрепленной упругим силовым набором И Колебания упругих конструкций с жидкостью: Сб. науч. докл. 4-го симпоз., Новосибирск, 1979. М., 1980. С. 175-179.
254. Майрыков А. Об устойчивости цилиндрической оболочки И Двумерные и трехмерные
течения жидкости и газа. Фрунзе: Илим, 1975. С. 154—159.
255. Макаров Б.П. О нелинейном флаттере пластины, защемленной по контуру II Тр. конф. по
теории пластин и оболочек. Казань, 1961.
236
256. Макаров Б.П., Роев Б.А. Устойчивость упругих панелей в потоке газа при наличии флуктуаций Н Колебания упругих конструкций с жидкостью. Новосибирск, 1976. С. 265-270.
257. Малков В.П., Чугунов М.В. Оптимизация конической оболочки при ограничениях на
критическую скорость флаттера // Науч. тр. / Нижегор. гос. ун-т. 1995. №2. С. 33-42.
258. Малков В.П., Чугунов М.В. Оптимизация оболочек вращения при ограничениях на флаттер на основе имитационной системы и анализа чуствитель ности // Прикл. пробл. прочности и пластичности. 1997. № 57. С. 130-137.
259. Малинин A.A. Определение критических скоростей флаттера оболочек вращения методом Ритца // Изв. вузов. Машиностроение. 1971. № 8. С. 42-46.
260. Малыгин И.H., Филиппов С.Б. Влияние условий закрепления торцов цилиндрической
оболочки на критическую скорость флаттера // Вестн. СПб. Сер. 1. 1994. № 3. С. 81-88.
261. Маценко П.К., Вельмисов П.А., Еремеева Н.И. Об устойчивости галеркинских приближений в задаче о динамике вязкоупругой пластины при сверхзвуковом обтекании // Математические методы и модели в прикладных задачах науки и техники: Тр. Междунар.
конф. "Континуальные алгебраические логики, исчисления и нейроинформатика в науке,
технике и экономике", Ульяновск, 13-15 мая, 2003. Ульяновск: Изд-во УлГТУ, Т. 5. С. 8286.
262. Марченко Г.А. Исследование колебаний несимметричных пластин в потоке газа // Динамика и прочность машин: Респ. межвед. науч.-техн. сб. 1967. Вып. 6. С. 37-41.
263. Марченко Г.А., Филиппов А.П. О колебаниях пластины в потоке газа // Прикл. механика.
1966. Т. 2, вып. 11. С. 133-137.
264. Маслов H.A. Нелинейный флаттер пластины, с поперечным упругим подкреплением //
Динамика и прочность авиационных конструкций. Новосибирск, 1989. С. 18-22.
265. Маслов H.A. Нелинейный флаттер пластины, нагруженной перепадом статического давления // Динамика и прочность элементов авиационных конструкций. Новосибирск: Новосиб. электротехн. ин-т, 1990. С. 70-73.
266. Маслов H.A. Экспериментальное изучение флаттера пластины с поперечными ребрами //
Динамика и прочность авиационных конструкций Новосиб. электротехн. ин-т. Новосибирск, 1992. С. 9-13.
267. Маслов H.A. О нелинейном флаттере пластины, подкрепленной упругими ребрами // Колебания упругих конструкций с жидкостью: Сб. научн. докл. 4-го симпоз., Новосибирск,
1979. М., 1980. С. 203-204.
268. Маслов H.A., ШандаровЛ.Г. Теоретическое и экспериментальное исследование сверхзвукового флаттера панелей // Изв. АН СССР. МТТ. 1976. №5. С. 193.
269. Маслов H.A., ШандаровЛ.Г. Исследование области сверхзвукового флаттера плоских панелей // Колебания упругих конструкций с жидкостью. Новосибирск, 1976. С. 285-290.
270. Матвеенко В.П. Об одном алгоритме решения задачи о собственных колебаниях упругих
тел методом конечных элементов // Краевые задачи теории упругости и вязкоупругости.
Свердловск, 1990. С. 20-24.
271. Матвейчук К.С. Условия технической устойчивости движущихся континуальных систем,
взаимодействующих с потоком жидкости // Изв. АН Армении. Механика. 2001. Т. 54, №
3. С. 37-46.
272. Матяш В. И. Флаттер упруговязкой пластинки // Механика полимеров. №6. С. 1077-1083.
273. Махортых Ж.К. Устойчивость многопролетной панели, движущейся в газе // Изв. АН
СССР. ОТН. Механика и машиностроение. 1959. №2. С. 174-177.
274. Махортых Ж.К. Колебания двухпролетной панели в газовом потоке // Инж. сб. 1960. Т.
28. С. 51-54.
275. Метсавээр Я.А. О флаттере защемленных пластин // Изв. АН СССР МТТ. 1969. № 4. С.
237
179-180.
276. Минасян Н.М. О флаттере пластин и оболочек при малых числах Маха сверхзвукового
газа / Проблемы тонких деформируемых тел: Сборник- Посвящается 80-летию академика
НАН Армении С.А. Амбарцумяна / Ин-т механики НАН Армении. Ереван: Гитутюн,
2002. С. 215-223.
277. Мкртчян П.А. Флаттер проводящей пластинки в потоке слабопрово- дящего газа при
действии магнитного поля // Изв. АН АрмССР. Механика 1975. Т. 28, № 4. С. 12-26.
278. Мовчан A.A. Некоторые вопросы колебаний пластинки, движущейся в газе // Тр. Ин-та
механики АН СССР. 1955. Вып. 1. С. 34.
279. Мовчан A.A. О колебаниях пластинки, движущейся в газе // ПММ. 1956 Т. 20, вып. 2. С.
231-243.
280. Мовчан A.A. Устойчивость лопатки, движущейся в газе // Там же. 1957 Т. 21, вып. 5. С.
700-706.
281. Мовчан A.A. Об устойчивости панели, движущейся в газе // Там же. 1957 Т. 21, вып. 2. С.
231-243.
282. Мовчан A.A. Поведение комплексных собственных значений в задаче о флаттере панели
// Инж. сб. 1960. Т. 27. С. 70-76.
283. Мовчан A.A. О влиянии аэродинамического демпфирования на сверхзвуковой флаттер
обшивки // Изв. АН СССР. ОТН. Механика и машиностроение. 1960. № 1. С. 175-177.
284. Мовчан A.A. Об одном критерии по Ляпунову в задаче о сверхзвуковом флаттере прямоугольных панелей // Упругость и неупругость. М.: Изд-во МГУ, 1971. Вып. 1. С. 261.
285. Морозов В.И., Овчинников В.В. Нелинейные задачи аэроупругой устойчивости крыла
при отрывном обтекании // Изв. РАН. МТТ. 2003. № 6. С. 158-170.
286. Молодожникова Р.Н. Об устойчивости цилиндрических оболочек в сверхзвуковом потоке газа //Тр. Моск. авиац. ин-та. 1971. Вып. 224. С. 13- 23.
287. Молодожникова Р.Н. Флаттер цилиндрической оболочки с бегущими по окружности
волнами // Там же. 1975. Вып. 339. С. 93-101.
288. Молодожникова Р.Н. Об устойчивости цилиндрической оболочки в потоке жидкости //
Функциональные методы в теории краевых задач // Моск. авиац. ин-т. М., 1992. С. 67-72.
289. Микишев Г.Н. Экспериментальное исследование автоколебаний квадратной пластины в
сверхзвуковом потоке // Изв. АН СССР. ОТН. Механика и машиностроение. 1959. № 1.
290. Минасян Д. М. Флаттер упругой пластинки при малых сверхзвуковых скоростях потока
газа: Сравнительный анализ // Изв. АН Армении. Механика. 2001. Т. 54, № 3. С. 65-72.
291. Минасян Д.М. Вычисление частот одномерных флаттерных колебаний конечной пластинки //Тамже. 2001. Т. 54, № 4. С. 26-33.
292. Мишенков Г.В. О динамической устойчивости пологой цилиндрической оболочки // Тр.
конф. по теории пластин и оболочек. Казань, 1961.
293. Михлин С.Г. Вариационные методы в математической физике. М.: Наука, 1970.512 с.
294. Мяченков В.И., Шаблий П.Ф. Устойчивость оболочечных конструкций в сверхзвуковом
потоке газа // Прикладные проблемы прочности и пластичности. Горький, 1975. Вып. 2.
С. 70-81.
295. Наджафов М. А. Об аэроупругих колебаниях и устойчивости (панельный флаттер) конической оболочки // Докл. НАН Азербайджана. 2004. № 3/4.
296. Наджафов М. А. Постановка задачи об аэроупругих колебаниях и устойчивости (панельный флаттер) конической оболочки, обтекаемой потоком газа с большой сверхзвуковой скоростью // Там же. 2005. № 2.
297. Нагорное JI.H. К вопросу об устойчивости пластин в сверхзвуковом потоке газа при
наличии случайных пульсаций нагрузки // Всесоюз. конф. по пробл. устойчивости в
238
строит, механике: Тез. докл. Вильнюс, 1967.
298. Нагорное JI.H. О случайных колебаниях пластин в сверхзвуковом турбулентном потоке
газа // Сб. докл. Науч.-техн. конф. по итогам научн,- исслед. работ за 1966-1967 гг. /
Моск. энергет. ин-т. Секц. энергомашиностроение. М., 1967.
299. Нгуен Фук-Нинъ. Колебания прямоугольной пластинки с ребрами жесткости в потоке газа // III Всесоюз. съезд по теорет. и прикл. механике: Аннот. докл. М., 1968. С. 224.
300. Нгуен Фук-Нинъ. Флаттер неразрезанной прямоугольной пластинки с внутренним ребром // Динамика и прочность машин. Респ. межвед. науч,- техн. сб. 1971. Вып. 13. С. 6772.
301. Нгуен Фук-Нинъ, Марченко Г. А. Колебания консольной прямоугольной пластинки с ребрами жесткости в потоке газа // Прикл. механика. 1968. Т. 4, №9. С. 40-41.
302. Нгуен Фук-Нинъ, Марченко Г.А. Флаттер ортотропной консольной пластинки с ребрами
жесткости // Там же. 1970. Т. 6, № 5. С. 130-133.
303. Низовцев А.М. Флаттер многопролетных пластин в сверхзвуковом потоке газа//Тр. Моск.
энергет. ин-та. 1978. Вып. 353. С. 16-20.
304. Новичков Ю.Н. О решении уравнений установившегося флаттера цилиндрических панелей // Инж. журн. 1962. Т. 2, № 4. С. 352-358.
305. Новичков Ю.Н. Об устойчивости решения в задаче о флаттере панели // Изв. АН СССР.
ОТН. Механика и машиностроение. 1962. № 4.
306. Новичков Ю.Н. Устойчивость и автоколебания плоских и криволинейных панелей в потоке газа // Тр. 3-й Всесоюз. конф. по теории пластин и оболочек. Киев, 1962.
307. Новичков Ю.Н. О применении трехмерной аэродинамической теории к задачам выпучивания и флаттера панелей // Изв. АН СССР. ОТН. Механика и машиностроение. 1963. №
3. С. 138-141.
308. Новичков Ю.Н. Нестационарный флаттер цилиндрических панелей // Теория оболочек и
пластин. Ереван: АН АрмССР, 1964. С. 751-757.
309. Новичков Ю.Н., Нагорное J1.H. Исследование флаттера и термического выпучивания
панелей в потоке газа методом электронного моделирования //Докл. Науч.-техн. конф. по
итогам науч.-исслед. работ за 1964-1965 гг. / Моск. энергет. ин-т. Секц. энергомашиностроения. М., 1965. С. 119-130.
310. Новичков Ю.Н., Швейко Ю.Ю. Колебания и устойчивость двухслойной цилиндрической
оболочки, в полостях которой течет жидкость // Там же. М., 1965. С. 103-118.
311. Новичков Ю.Н. Флаттер пластин и оболочек // Механика деформируемого твердого тела.
М., 1978. С. 67-122. (Итоги науки техники / ВИНИТИ; Т. 11).
312. Новожилов В.В. Теория тонких оболочек. Л.: Судпромгиз, 1951. 344 с.
313. Новожилов В.В., Черных К.Ф., Михайловский Е.И. Линейная теория тонких оболочек. Л.:
Политехника, 1991. 656 с.
314. Низовцев А.М. Численный расчет флаттера вязкоупругих цилиндрических оболочек //
Изв. вузов. Машиностроение. 1978. № 12. С. 22-26.
315. Овакимян Р. И. О флаттере пластинки в магнитном поле // Изв. АН АрмССР. Механика.
1967. Т. 20, № 4. С. 7-11.
316. Огибалов П.М. Изгиб, устойчивость и колебания пластинок. М.: Изд-во МГУ, 1958.389 с.
317. Огибалов П.М. К постановке задачи о флаттере оболочек и панелей // Вестн. МГУ. Сер. 1.
Математика, механика. 1961. №5.
318. Огибалов П.М. Вопросы динамики и устойчивости оболочек. М.: Изд-во МГУ, 1963.419
с.
319. Огибалов П.М., Колтунов М.А. Оболочки и пластины. М.: Изд-во МГУ, 695 с.
239
320. Олсон, Фын. Сравнение результатов экспериментов и теории сверхзвукового флаттера
круговых цилиндрических оболочек // Ракет, техника и космонавтика. 1967. № 10. С. 147155.
321. Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем. М.: Наука, 1964.
336 с.
322. Пирумов У.Г., Росляков Г.С. Газовая динамика сопел. М.: Наука, 1990. 386 с.
323. Попов А.Л., Чернышев Г.Н. Механика звукоизлучения пластин и оболочек. М.: Физматгиз, 1994. 205 с.
324. Постное В.А. Новая вариационная формулировка проблемы взаимодействия упругих
конструкций с жидкостью // 17-я Междунар. конф. "Математическое моделирование в
механике сплошных сред на основе метода граничных и конечных элементов", СанктПетербург, 22-25 июня, 1999: Доклады. СПб.: НИИХ СПбГУ, 1999. С. 229-237.
325. Постное В.А. Новая вариационная формулировка проблемы взаимодействия упругих
конструкций с жидкостью // Прикл. пробл. прочности и пластичности. 2000. № 61. С. 512.
326. Приказчиков В.Г. Однородные разностные схемы высокого порядка точности для задачи
Штурма-Лиувилля // Журн. вычисл. математика и мат. физики. 1964. Т. 4, № 3. С. 687698.
327. Прочность, устойчивость, колебания: Справочник / Под ред. И.А. Биргера и Я.Г. Пановко. М.: Машиностроение, 1968. Т. 3. 570 с.
328. Преображенский И.Н., Грищак В.З. Устойчивость и колебания конических оболочек. М.:
Машиностроение, 1986. 240 с.
329. Пшеничное Г.И., Орлов Б.А., Диткин В.В. Численное исследование флаттера конической
оболочки // Изв. РАН. МТТ. 1993. № 1. С. 185-189.
330. Рикарде Р.Б. Устойчивость оболочек из композиционных материалов. Рига: Зинатне,
1974. 310 с.
331. Рикарде Р.Б. Метод конечных элементов в теории оболочек и пластин. Рига: Зинатне,
1988. 284 с.
332. Рисс Ф., Секефальви-Надь Б. Лекции по функциональному анализу. М.: Мир, 1979. 500 с.
333. Романюк В.И. Устойчивость многослойных пластин в сверхзвуковом потоке газа // Тр.
Моск. энергет. ин-та. 1978. Вып. 353. С. 20-24.
334. Саркисян B.C. Об изгибе длинных анизотропных пластинок, движущихся в газе с постоянной сверхзвуковой скоростью // Теория оболочек и пластин. Ереван: Изд-во АН
АрмССР, 1964.
335. Саркисян B.C., Минасян М.М. К решению задач изгиба анизотропных не- ортотропных
пластин, движущихся в газе с постоянной сверхзвуковой скоростью // Учен. зап. Ереван,
ун-та. Естеств. науки. 1969. № 2 (14). С. 3-15.
336. Сафронов A.B., Сафронов В.Н. Итерационный метод оценки критической скорости флаттера аэродинамического профиля в нестационарном потоке // Пробл. прочности. 2002. №
1. С. 121-129.
337. Сахабутдинов Ж.М. Нелинейные задачи аэроупругости в лагранжевых координатах // Тр.
семинара по теории оболочек / Каз. физ.-техн. ин-т АН СССР. 1971. Вып. 2. С. 165-187.
338. Сейранян А.П. Оптимальная задача об устойчивости пластинки в сверхзвуковом потоке
газа // Оптимальное управление в механических системах: Тез. 3-й Всесоюз. конф. Киев,
1979. Т. 2. С. 173.
339. Сейранян А.П. О границах областей устойчивости, флаттера и дивергенции. М., 1995. 39
с.
240
340. Сейранян А.П. Оптимизация устойчивости пластинки в сверхзвуковом потоке газа // Изв.
АН СССР. МТТ. 1980. № 5. С. 141-147.
341. Селезов И.Т. Стабилизация магнитогидродинамической флаттерной неустойчивости распределенным управлением // Магнит, гидродинамика. № 3. С. 30-34.
342. Селезов И.Т., СелезоваЛ.В. Обтекание колеблющейся границы ионизированным газом
при действии магнитного поля // Там же. 1967. № 1. С. 9-18.
343. Селезов И. Т., Селезова Л.В. Волны в магнитогидродинамических средах. Киев: Наук,
думка, 1975, 164 с.
344. Селезова Л.В. Обтекание цилиндра с осциллирующей поверхностью ионизированным газом // Магнит, гидродинамика. 1968. № 2. С. 19-25.
345. Селезова Л.В. Дшам1чна несттсть пружной пластинки, що обтжаеться ютзованным газом
// Доп. АН УРСР. 1970. № 4. С. 361-364.
346. Селезова Л.В. Влияние магнитного поля на флаттерные колебания упругой пластины //
Прикл. механика. 1970. Т. 6, № 5.
347. Сергиенко А.Н. Теория панельного флаттера // Изв. вузов. Авиац. техника. 1993. № 3. С.
47-52.
348. Сибукаев Ш.М., Темирбеков А. Устойчивость бесконечной полосы в сверхзвуковом потоке газа // Научн. тр. Ташкент, ун-та. 1972. Вып. 422. С. 116—123.
349. Скурлатов Э.Д. Об устойчивости круговой цилиндрической оболочки в сверхзвуковом
потоке газа // Прочность и устойчивость элементов тонкостенных конструкций. 1967. №
2. С. 201-209.
350. Скурлатов Э.Д. Некоторые вопросы устойчивости цилиндрических оболочек в сверхзвуковом потоке // Переходные процессы деформации оболочек и пластин. Таллин, 1967. С.
173.
351. Скурлатов Э.Д. Поведение цилиндрических оболочек в сверхзвуковом потоке газа // Расчеты на прочность. М.: Машиностроение, 1971. Вып. 15. С.356-365.
352. Смирнов А.И. Колебания неограниченной слоистой пластины в потоке газа // Докл. АН
СССР. 1967. Т. 172, № 4. С. 801-804.
353. Смирнов А.И. Динамическая устойчивость и колебания трехслойных панелей в сверхзвуковом потоке газа//Там же. 1968. Т. 180, №5. С. 1060-1063.
354. Смирнов А.И. Флаттер слоистой панели в сверхзвуковом потоке // Изв. вузов. Авиац.
техника. 1968. № 2. С. 33-38.
355. Смирнов А.И. Сверхзвуковой флаттер трехслойных пластин // Докл. АН СССР. 1968. Т.
183, № 3. С. 540-543.
356. Смирнов А.И. Собственные колебания и флаттер трехслойных цилиндрических оболочек
в сверхзвуковом потоке газа // Там же. 1969. Т. 186, № 3. С. 533-536.
357. Смирнов А.И. Аэроупругая устойчивость летательных аппаратов. М.: Машиностроение,
1980. 231 с.
358. Смирнов А.И. Аэроупругая устойчивость и колебания слоистых пластин и цилиндрических оболочек // Актуальные проблемы авиационной науки и техники. 1984. С. 190-197.
359. Смирнов А.И., Алихашкин Я.И., Михайленко В.Н. Роль аэродинамического демпфирования в задачах флаттера трехслойных панелей и круговых цилиндрических оболочек //
Докл. АН СССР. 1973. Т. 210, № 6. С. 1314- 1316.
360. Соболев Е.И. К вопросу о критической скорости флаттера, ее зависимости от высоты полета и массового параметра и о противофлаттерных запасах /Пр. ЦАГИ. 2001. № 2618. С.
65-81.
361. Степанов Р.Д. О флаттере цилиндрических оболочек и панелей, движущихся в потоке газа // ПММ. 1957. Т. 21, вып. 5. С. 644-657.
241
362. Степанов Р. Д. О флаттере цилиндрических панелей, движущихся в газе // Инж. сб. АН
СССР. 1959. Вып. 25. С. 92-100.
363. Степанов Р.Д. К вопросу о флаттере пластинок в нелинейной постановке // Машиностроение и приборостроение. 1960. № 12.
364. Стиэрмен Р. Влияние условий обтекания потоком сжимаемой жидкости на статическую и
динамическую устойчивость тонких цилиндрических оболочечных конструкций
//Тонкостенные оболочечные конструкции. М.: Машиностроение, 1980. С. 177-221.
365. Сьярле Ф., Рабье П. Уравнения Кармана. М.: Мир, 1983. 172 с.
366. Уеда Т., Кихира М., Кобояши С. Сверхзвуковой флаттер конических оболочек. Ч. I // J.
Jap. Soc. Aeronaut, and Space Sei. 1977. Vol. 25, N 277. С. 905-1101.
367. Уилкинсон Дж.Х. Алгебраическая проблема собственных значений. М.: Наука, 1970. 564
с.
368. Уилкинсон Дж., Райнш К. Справочник алгоритмов на языке АЛГОЛ: Линейная алгебра.
М.: Машиностроение, 1976. 389 с.
369. Фершинг Г. Основы аэроупругости. М.: Машиностроение, 1984. 600 с.
370. Фиалко Ю.И. О влиянии рассеяния энергии при колебаниях на критическую скорость
флаттера // Сопротивление материалов и теория сооружений. 1970. Вып. 10. С. 99-103.
371. У1\.ФынЯ.Ц. Введение в теорию аэроупругости. М.: Физматгиз, 1959. 523 с.
372. Хайдаров А.К. Флаттер вязкоупругой пластинки с нелинейной характеристикой // Вопр.
вычисл. и прикл. математики. Ташкент, 1977. Вып. 45. С. 147-155.
373. Хеджепет Д. Флаттер прямоугольных свободно опертых панелей при высоких сверхзвуковых скоростях // Механика: Сб. пер. иностр. периодики. 1958. №2. С. 103-126.
374. Худояров Б.А. Численное решение задачи о флаттере трехслойных пластин // Изв. АН
Армении. Механика. 2004. Т. 57, № 1. С. 59-62.
375. Худояров Б.А. Расчет на флаттер вязкоупругих трехслойных пластин // Вычисл. технология. 2004. Т. 9, № 3. С. 104-105.
376. Челомей В.Н. Динамическая устойчивость элементов авиационных конструкций. М.:
Аэрофлот, 1939. 78 с.
377. Чернина B.C. Статика тонкостенных оболочек вращения. М.: Наука, 1968. 455 с.
378. Черный Г.Г. Течение газа с большой сверхзвуковой скоростью. М.: Физматгиз, 1959. 220
с.
379. Шаблий П.Ф. Флаттер оболочечных конструкций // Тр. XX Науч. конф. Моск. физ.-техн.
ин-та, 1974. Сер. Аэрофиз. и прикл. математики. Долгопрудный, 1975. Ч. 1. С. 81-87.
380. Шандаров Л.Г. Флаттер цилиндрической оболочки эллиптического сечения Н Инж. журн.
МТТ. 1968. № 2. С. 122-126.
381. Шандаров Л.Г. Сверхзвуковой флаттер панелей, удлиненных в направлении потока // Колебания упругих конструкций с жидкостью. Новосибирск, С. 221-224.
382. Шандаров Л.Г. Исследование флаттера сжатых цилиндрических панелей в сверхзвуковой
аэродинамической трубе // Колебания упругих конструкций с жидкостью. Новосибирск,
1976. С. 376-379.
383. Шарова Л.В. К вопросу о флаттере вязкоупругой пластинки // Вопр. вычисл. н прикл. математики. Ташкент, 1973. Вып. 22. С. 168-179.
384. Швейко Ю.Ю. Устойчивость круговой цилиндрической оболочки в потоке газа // Изв.
АН СССР. ОТН. Механика и машиностроение. 1960. № 6. С. 74-79.
385. Швейко Ю.Ю. Устойчивость цилиндрической оболочки с жидким заполнением в потоке
газа//Там же. 1964.№5.С. 112-116.
386. Швейко Ю.Ю., Брусиловский А.Д., Мельникова Л.М. Колебания и устойчивость цилиндрической оболочки в потоке газа // Изв. АН СССР. МТТ. № 1. С. 67-73.
242
387. Шен С. Приближенные исследования нелинейной флаттерной задачи // Механика: Сб.
пер. иностр. периодики. 1959. № 4. С. 79-96.
388. Шклярчук Ф.Н., Алшебеив А. Математическая модель аэроупругости стреловидного
крыла для расчета аэродинамических нагрузок // Изв. вузов. Авиац. техника. 2003. № 1.
С. 13-18.
389. Эшматов X., Преображенский И.Н., Худояров Б.А- и др. Численное исследование флаттера вязкоупругой оболочки // МГОУ - XXI. Новые технологии. 2001. № 6. С. 6-9.
390. Abbas J.F., Ibrahim R.A., Gibson R.F. Nonlinear flutter of orthotropic composite panel under
aerodynamic heating // AIAA Dyn. Spec. Conf., Dallas, Tex., Apr. 16- 17, 1992. Collect.
Techn. Pap. Wash. (D. C.), 1992. P. 524-535.
391. Abbas J.F., Ibrahim R.A.. Gibson R.F. Nonlinear flutter of orthotropic composite panel under
aerodynamic heating // AIAA J. 1993. Vol. 31, N 8. P. 1478-1488.
392. Abdel-Motaglay K., Chen R., Mei C. Nonlinear flutter of composite panels under yawed supersonic flow using finite elements // Ibid. 1999. Vol. 37, N 9. P. 1025- 1032.
393. Akulenko L.D., Nesterov S.V. High-precision methods in eigenvalue problems and their applications. L.: Chapman and Hall/CRS, 2005. 239 p.
394. Amabili М., Pellicano F. Nonlinear supersonic flutter of circular cylindrical shells // AIAA J.
2001. Vol. 39, N 4. P. 564-573.
395. Amabili M„ Pellicano F. Multimode approach to nonlinear supersonic flutter of imperfect circular cylindrical shells // Trans. ASME. J. Appl. Mech. 2002. Vol. 69, N2. P. 117-129.
396. Amabili М., Paidoussis P. Review of studies on geometricalty nonlinear vibrations and dynamics of circular cylindrical shells and panels, wiyh find without fluid- structure interaction //
Appl. Mech. Rev. 2003. Vol. 56, N 4. P. 349-381.
397. Anderson W.J. Oscillatory pressures in an idealized boundary layer with application to cylinder
flutter // AIAA J. 1966. Vol. 4 , N 5. P. 865-872.
398. Anderson W.J., HsuK.H. Engineering estimates for supersonic flutter of curved shell segments
// AIAA Pap. 1968. N 284. P. 1-8.
399. Ashley H. Aeroelasticity // Appl. Mech. Rev. 1970. Vol. 23, N 2. P. 119-129.
400. Ashley H., Zartarian G. Piston theory - a new aerodynamic tool for the aeroelastician // J. Aeronaut. Sci. 1956. Vol. 23, N 12. P. 1109—1118.
401. Alturi S., Gordon J„ Jr. Influence of large amplitudes and boundary conditions on supersonic
flutter of cylindrical shells // CANCAM’ 73: C. r. 4me, cong. тёс. appl. Montreal, 1973. P. 555556.
402. Babenko K.I. Estimating the quality of computational algoritms // Comput. Meth. Appl. Mech.
and Eng. 1975. N 6. P. 1-27.
403. Bailie J.A., McFeely J.E. Panel flutter in hypersonic flow // AIAA J. 1968. Vol. 6, N 2. P. 332337.
404. Barai A., Durvasula S. Flutter of hybrid laminated flat panels with simply supported edges in
supersonic flow // J. Sound and Vibrat. 1994. Vol. 169, N 3. P. 373-386.
405. Barboni R., Santini P. Effecto della rafica sul comportamento aeroelastico di panelli a caracteristishe nonlineary // Atrotech. Missili e spaz. 1975. Vol. 54, N 3. P. 187-193.
406. Barr G.W., Stearman R.O. Aeroelastic stability characteristics of cylindrical shells considering
imperfection and edge constraint // AIAA Pap. 1968. N 285.
407. BarrG.W., Stearman R.O. Aeroelastic stability characteristics of cylindrical shells considering
imperfection and edge constraint // AIAA J. 1969. Vol. 7, N 5. P. 912- 919.
408. Barr G. W., Stearman R.O. Influence of supersonic flow field on elastic stability of cylindrical
shells // Ibid. 1970. Vol. 8, N 6. P. 993-1000.
243
409. Beiner L. Critical flutter parameters of orthotropic rectangular flat panels with inplane loads //
Isr. J. Technol. 1984. Vol. 22, N 4. P. 243-247.
410. Beiner L„ Librescu L. On the weight minimization of supersonic, axisymmetric circular cylindrical shells of finite length // Rev. roum. sci. tech. Sec. mec. appl. 1973. Vol. 18, N 2. P. 395—
414.
411. Bendiksen O., Guid O.J. Energy approach to flutter suppression and aeroelastic control // Contr.
and Dyn. 2001. Vol. 24, N 1. P. 176-184.
412. Blythe P. W., Hersberg I.H. The solution of flutter equations using neural networks II Nat.
Conf. Publ. Inst. Eng. Austral. 1993. N 93/6, [pt 2]. P. 415—419.
413. Binnie A.M. Air-generated waves a moving membrane // J. Mech. Eng. Sci. 1970. Vol. 12, N3.
P. 230-231.
414. Birman V. Axisymmetric panel flutter of reng reinforsed composite cylindrical shells // AIAA/ASME/AHS/ASC/ 30th Struct., Struct. Dyn. and Mater. Conf., Mobile, Ala, Apr. 3-5, 1989:
Collect, techn. pap. Wash. (D.C.), 1989. Pt 1. P. 62-67.
415. Bismarck-Nasr M.N. Finite element method applied to the supersonic flutter of circular cylindrical shells // Intern. J. Numer. Meth. Eng. 1976. Vol. 10, N 4. P. 423^135.
416. Bismarck-Nasr M.N., Bones C. Al. Damping effects in nonlinear panel flutter // AIAA J. 2000.
Vol. 38, N 4. P. 711-713.
417. Bismarck-Nasr M.N., Savio H., Costa R. Finite-element solution of the supersonic flutter of
conical shells // AIAA J. 1979. Vol. 17, N 10. P. 1148-1150.
418. Bismark-Nasr M.N. Supersome panel flutter analysis of shallow shells // Ibid. Vol. 31, N7. P.
1349-1351.
419. Bisplinghoff R.L., Ashley H. Principles of aeroelasticity. N. Y.: Dower, 1975. 527 p.
420. Bochkarev S.A., Matveyenko V. P. Numerical analysis of panel flutter in shells of revolution //
Proc. of the Intern, conf. on mechanics of solids and material engineering. Singapore, 1995. P.
633-638.
421. Bochkarev S.A., Matveyenko V.P., Shardakov I.N. Numerical analysis of panel flutter in shells
of revolution // J. Vibrat. and Contr. 1997. N 1. P. 33-54.
422. Bolotin V.V. Stability of viscoelastic systems subjected to nonconservative forces // IUTAM
Symp., Herrenalb, 1960. N.Y. etc.: Springer, 1971.
423. Bolotin V.V. Stabilization and destabilization effect in mechanics of deformable systems //
Proc. 6th Canad. Longr. Appl. Mech. Vancouver, 1977. P. 1-10.
424. Bolotin V. V., Grishko A.A., Kounadis A.N., Gantes C.J. Non-linear panel flutter in remote
post-critical dimains II Intern. J. Nonlinear Mech. 1998. Vol. 33, N 5. P. 753-764.
425. Bolotin V.V., Zhinzher N.I. Effects of damping on stability of elastic systems subjected to nonconservative forces // Intern. J. Solid and Struct. 1969. Vol. 5, N 9. P. 965-989.
426. Bon C., Geradin M. On the numerical solution of large eigenvalue problems arising in panel
flutter analysis by the finite element method // Comput. and Struct. 1974. Vol. 6, N6. P. 12231250.
427. Burgers I. Flutter instability in imperfect structural systems // Intern. J. Nonlinear Mech. 1976.
Vol. 11, N 3. P. 157-168.
428. Carter L.D., Stearman R.O. Some aspects of cylindrical shells panel flutter // AIAA J. 1968.
Vol. 6, N 1. P. 37-43.
429. Chandiramani N.K., Librescu L.I., PlautR.H. Flutter of geometrically-imperfect sheardeformable laminated flat panels using non-linear aerodynamics // J. Sound and Vibrat. 1996.
Vol. 192, N 1. P. 79-100.
430. Chandiramani N.K., PlautR.H., Librescu L.I. Nonperiodic flutter of a buckled composite panel
// Sadhuna. 1995. Vol. 20. P. 671-689.
244
431. Chaplin J.R., Mouaze D. Disturbed-laminar flow over an oscillation cylinder // Intern, congr. of
theor. and appl. mechanics, Warsaw, Aug. 15-21, 2004: Abstracts and CD-ROM proceeding.
Warszawa: IPPT PAN, 2004. P. 4021-4022.
432. Chopra I. Flutter of a panel supported on an elastic foundation // AIAA J. 1975. Vol. 13, N 5. P.
687-688.
433. Chen Wen-Hua, Lin Heng-Chin. Flutter analysis of thin cracked panels using the finite element
method//Ibid. 1985. Vol. 23, N 5. P. 795-801.
434. Chinchaladze N.B. On a fluid-elastic isotropic cusped plate interaction problem // Intern, congr.
of theor. and appl. mechanics, Warsaw, Aug. 15-21, 2004: Abstracts and CD-ROM proceeding.
Warszawa: IPPT PAN, 2004. P. 402.
435. Clerc D., Meurzes J.L. Utilisation des vecteurs propres pour la selection des couplages
essentiels dans les calculs de flotiement // Rech. aerosp. 1968. N 126. P. 67-74.
436. Crimi P. On the flutter of cylindrical membranes at high supersonic // Mach. Number. Trans.
ASME. 1971. Vol. E38, N 2. P. 557-559.
437. Cunnigham H.J. Panel-flutter analysis of a thermal protection-shield concept for the space shuttle // AIAA J. 1972. Vol. 10, N 8. P. 1101-1103.
438. Dat R. Influence de la couche Unite sur le flottement d'un panneau plan en supersonique faible
// Note techn. ONERA. 1967. N 116. P. 1-37.
439. Dat R. Influence de la couche linite sur le flottement d'un panneau plan dans la gamme de Mach
supersonic faible // Rech. aerosp. 1967. N 121. P. 67-71.
440. David T.S., Srinivasan A.V. Flutter of coaxial cylindrical shells in an incompressible axisymmetric flow // AIAA J. 1974. Vol. 12, N 12. P. 1631-1635.
441. Davies D.E. Generalized airforces on a cylindrical shell oscillating harmonically in uniform
flow // Aeronaut. Res. Counc. Rep. and Mem. 1968. N 3594. P. 1—49.
442. De Santiago E., Law K.H. A robust distributed adaptive finite element program for compled fluid-structure problems // Eng. Comput. 1999. Vol. 15, N 2. P. 137-154.
443. Degaki T., Suzuki Sh. Sliding mode control application for two-dimensional active flutter suppression // Trans. Jap. Soc. Aeronaut, and Space Sci. 2001. Vol. 43, N 142. P. 174-181.
444. Dixon S.C., Hudson M.L. Growth rate of flutter amplitude for stressed panels // AIAA J. 1967.
Vol. 5, N 6. P. 1205-1207.
445. Dixon S.C., Hudson M.L. Flutter boundary for simply supported unstiffened cylinders // Ibid.
1969. Vol. 7, N 7. P. 1390-1391.
446. Dixon I.R., Mei C. Finite element analysis of large-amplitude panel flutter of thin lanunates //
Ibid. 1993. Vol. 31, N 4. P. 701-707.
447. Dowell E.H. Nonlinear oscillations of fluttering plate // Ibid. 1966. Vol. 4, N 7. P. 1267-1275.
448. Dowell E.H. Flutter infinitely long plates and shells. Pt I. Plate. Pt II. Cylindrical shell // Ibid.
1966. Vol. 4, N 8. P. 1370-1377.
449. Dowell E.H. On the flutter of multilay panels at low supersonic speeds // Ibid. 1967. Vol. 5, N
5. P. 1032-1033.
450. Dowell E.H. Nonlinear oscillations of a fluttering plate. IIII Ibid. 1967. Vol. 5, N 10. P. 18561862.
451. Dowell E.H. Generalized aerodynamic forces on a flexible plate undergoing transient motion //
Quart. Appl. Math. 1967. Vol. 24, N 4. P. 331-338.
452. Dowell E.H. Theoretical-experimental correlation plate flutter boundaries at low supersonic
speeds // AIAA J. 1968. Vol. 6, N 9. P. 1810-1811.
453. Dowell E.H. Aeroelastic stability of plates and shells: An innocents's guide to the literature //
Instabil. continuous systems: UITAM Symp., Herrenalb, 1969. N.Y.: Springer, 1971.
454. Dowell E.H. Nonlinear flutter of curved plates // AIAA J. 1969. Vol. 7, N 3. p. 424-431.
245
455. Dowell E.H. Nonlinear flutter of curved plates. II // Ibid. 1970. Vol. 8, N 2. P. 259-261.
456. Dowell E.H. Panel flutter: a review of the aeroelastic stability of plates and shells // Ibid. 1970.
Vol. 8, N 3. P. 385-399.
457. Dowell E.H. Flutter of backled plates at zero dynamic pressure // Ibid. 1970. Vol. 8, N 3. P.
583-584.
458. Dowell E.H. Generalized aerodynamic forces on flexible plate undergoing transient motion in a
shear flow with an application to panel flutter // AIAA Pap. 1970. N76. P. 1-15.
459. Dowell E.H. Generalized aerodynamic forces on flexible plate undergoing transient motion in a
shear flow with an application to panel flutter // AIAA J. 1971. Vol. 9, N5. P. 834-841.
460. Dowell E.H. Aerodynamic boundary layer effects on flutter and damping of plates III. Aircraft.
1973. Vol. 10, N 12. P. 734-738.
461. Dowell E.H. Vibration and flutter analysis of reusabl surface insulation panels //J. Spacecraft
and Rockets. 1975. Vol. 12, N 1. P. 44-55.
462. Dowell E.H. Aeroelasticity of plates and shells. Leyden: Noordhoff, 1975. 139 p.
463. Dowell E.H. Flutter of plates and shells in practic // Symp. Pract. Exper. Flow- Induced Vibrat.,
Karlsruhe, 1979. Prepr. 1. Sess A-B. Karlsruhe, 1979. P. 84-97.
464. Dowell E.H., Srinivasan A. V. Aeroelastic stability of cylindrical shells subjected to rotating
flow // AIAA Pap. 1974. N 142. P. 1-11.
465. Dowell E.H., Srinivasan A. V., MacLean J.D. Aeroelastic stability cylindrical shells subjected
to rotating flow//AIAA J. 1974. Vol. 12, N 12. P. 1644-1651.
466. Dowell E.H., Ventress C.S. Nonlinear flutter of loaded plates // AIAA Pap. 1968. N286.
467. Dowell E.H., Ventress C.S. Flutter of low aspect ratio plates // AIAA J. 1970. Vol. 8, N6. P.
1162-1164.
468. Dowell E.H., Ventress C.S. Flutter of an elastic plate under tension // Ibid. 1977. Vol. 15, N 11.
P. 1653-1655.
469. Dowell E.H., Voss H.M. Theoretical and experimental panel flutter studies in the Mach number
range 1.0 to 5.0 // Ibid. 1965. Vol. 3, N 12. P. 2292-2304.
470. Dowell E.H., Widnal S.E. Generalized aerodynamic forces on an oscillating cylindrical shell.
Subsonic and supersonic flow // Ibid. 1966. Vol. 4, N 4. P. 607-610.
471. Dowell E.H., Widnal S.E. Generalized aerodynamic forces on an oscillating cylindrical shell //
Quart. Appl. Math. 1966. Vol. 24, N 1. P. 1-17.
472. Dugundji J., Dowell E„ Perkin B. Subsonic flutter of panels on continuous elastic foundations //
AIAA J. 1963. Vol. 1, N 5.
473. Dugundji J. Theoretical consideration of panel flutter at high supersonic Mach numbers // Ibid.
1966. Vol. 4, N 7. P. 1257-1266.
474. Durvasula S. Flutter of simply supported parallelogrammic, flat panels in supersonic flow//Ibid.
1967. Vol. 5, N 9. P. 1668-1673.
475. Durvasula S. Flutter of clamped skew panels with mid-plane forces in supersonic flow // J. Ind.
Inst. Sci. 1970. Vol. 52, N 4. P. 192-208.
476. Durvasula S. Flutter of clamped skew panels in supersonic flow // J. Aircraft. 1971. Vol. 8, N6.
P. 461-466.
477. Dzygadlo Z. Parametric self-excited vibration of a simply supported plate in supersonic flow //
Proc. Vibr. Probl. Pol. Acad. Sci. 1965. Vol. 6, N 4. P. 353-365.
478. Dzygadlo Z. Parametric self-excited vibration of a plate of finite length inplane supersonic flow
// Ibid. 1966. Vol. 7, N 4. P. 287-309.
479. Dzygadlo Z. Parametryczno-samowzbudne drgania plyty о skonczonej dlugosci w plaskim
oplywie naddzwiekowym // Biul. Wat J. Dqbrowskego. 1966. Vol. 15, N 10. P. 25-49.
246
480. Dzygadlo Z. Forced vibration of a plate of finite length in plane supersonic flow // Proc. Vibr.
Probl. Pol. Acad. Sci. 1967. Vol. 8, N 1. P. 61-77.
481. Dzygadlo Z. Forced vibration of a plate of finite length in plane supersonic flow. II // Ibid.
1967. Vol. 8, N 2. P. 155-174.
482. Dzygadlo Z. Wymuszone dragania plyty о skonczone dlugoski w plaskim oplywie
naddzwiekowym. I, II // Biul. Wat J. Dabrowskego. 1967. Vol. 16, N 5. P. 23-41.
483. Dzygadlo Z. Non-stationary parametric and parametric self-excited vibration of plate of finite
length in plane supersonic flow // Proc. Vibr. Probl. Pol. Acad. Sci. 1967. Vol. 8, N4. P. 381394.
484. Dzygadlo Z. Niestacjoname parametryczne i parametryczno-samowzbudne drgania plyty о
skonczoney dlugosci w plaskim oplywie naddzwiekowym // Biul. Wat J. Dabrowskego. 1967.
Vol. 16, N 9. P. 13-33.
485. Dzygadlo Z. Vibration of rectangular plate forced by a harmonically varying or nonstationary
pressure in free-dimension supersonic flow // Proc. Vibr. Probl. Pol. Acad. Sci. 1968. Vol. 9, N
3. P. 279-301.
486. Dzygadlo Z. Drgania prostokatnej plyty wymuszone obciazeniemm zmiennym harmonicznie
lub niestacjonarme w przestzennum oplywie naddzwiekowym // Biul. Wat J. Dabrowskego.
1968. Vol. 17, N 7. P. 21-44.
487. Dzygadlo Z. Asymptotyczne wzoryna cisnienie dzcalaja ce na cylindryczna povoloke drgajaca
niestacjonamoe w zewnetrznum 1 lub wewnetrznym przeplywie naddzwiekowwvm // Ibid.
1968. Vol. 17, N 9. P. 29-43.
488. Dzygadlo Z. Asymptotic theory of the pressure on cylindrical shell performing unsteady oscillation in external supersonic flow // Bull. Acad. Pol. Sci. Ser. sci. techn. 1968. Vol. 16, N 11/12.
P. 857-864.
489. Dzygadlo Z. Forced parametrically excited vibration of plate of finite length in plane supersonic
flow. Pt I. Theory // Proc. Vibr. Probl. Pol. Acad. Sci. 1969. Vol. 10, N2. P. 231-235.
490. Dzygadlo Z. Forced parametrically excited vibration on a plate of finite length in plane supersonic flow. Pt II. Numerical analysis // Ibid. 1969. Vol. 10, N 4. P. 29-45.
491. Dzygadlo Z. On nonautonomous boundary value problem of plates oscillating in supersonic
flow // Fluid Dynam. Trans. 1969. Vol. 4. P. 177-190.
492. Dzygadlo Z. Local analysis of nonlinear forced vibrations of a plate of finite length in plane supersonic flow // Proc. Vibr. Probl. Pol. Acad. Sci. 1970. Vol. 11, N 4. P. 353-368.
493. Dzygadlo Z, Kaliski S. Instability limits of parametric self-excited vibrations of elastic and
aeroelastic systems with traveling waves // Arch. mech. stosow. 1968. Vol. 20, N4. P. 461-471.
494. Dzygadlo Z, Krzyzanovski A. Self-excited and forced vibrations of an aeroelastic system to a
followed force // Proc. Vibr. Probl. Pol. Acad. Sci. 1972. Vol. 13, N 3. P. 259-280.
495. Dzygadlo Z„ Krzyzanovski A. Samowzbudne i wymuszone drgania aerosprezysych ukladov z
sila sledzaca // Biul. Wat J. Dabrowskego. 1972. Vol. 21, N 6. P. 37-59.
496. Dzygadlo Z., Nowotarski Olejnik A. Analysis of self-excited and forsed vibration of a cylindrical shell in supersonic flow// J. Techn. Phys. 1976. Vol. 17, N 1. P. 37-58.
497. Dzygadlo Z., Nowotarski I., Olejnik A. Niestacjoname drgania powloki cylin- dricznej w
naddzwiekowym oplywie wymuszone obciazeniem uderzeniowym // Biul. Wat J.
Dabrowskego. 1976. Vol. 25, N 11. P. 55-67.
498. Dzygadlo Z„ Nowotarski I., Olejnik A. Analiza samowzbudnych i wymuszozych drgan powloki
cylindrycznej w oplywie naddzwiekowym. Cz. I. Teoria. Cz. II. Analiza numeryczna // Ibid.
1976. Vol. 24, N 11. P. 33-34; Vol. 25, N 5. P. 27-38.
499. Dzygadlo Z, Nowotarski I., Olejnik A. Response of a cylindrical shell in supersonic flow to a
shock load // J. Techn. Phys. 1976. Vol. 17, N 3. P. 279-293.
247
500. Dzygadlo Z., Olejnik A. Drgania plyty w naddzwiekowym oplywie wymuzno obciazeniem underzeniowym // Biul. Wat J. Dabrowskego. 1973. Vol. 22, N 4. P. 53-70.
501. Dzygadlo Z., Wielgus A. Forced vibration of a plate on many supports in plane supersonic flow
// Proc. Vibr. Probl. Pol. Acad. Sci. 1971. Vol. 12, N 2. P. 205- 221.
502. Dzygadlo Z., Wielgus A. Wymuszone drgania plyty na wielu podporach w plaskim oplywie
naddzwiekowym// Biul. Wat J. Dabrowskego. 1971. Vol. 20, N4. P. 55-72.
503. Dzygadlo Z., Wielgus A. Parametric and parametric self-excited vibrations of rectangular multiplan plates in supersonic flow. P. I. Analytical solution II Proc. Vibr. Probl. Pol. Acad. Sci.
1974. Vol. 15, N 2. P. 167-178.
504. Dzygadlo Z, Wielgus A. Parametryczne i parametryczno-samowzbudne dragania prostokatnych
plyi wieloprzeslowych w oplywie naddzwiekowym. Cz. II. Analiza numeryczna // Biul. Wat J.
Dabrowskego. 1975. Vol. 24, N 1. P. 55-67.
505. Eastep F.E., Mclntoch S.C., Jr. The analysis of nonlinear panel flutter and response nuclear random excitation on nonlinear aerodynamic loading // AIAA/ASME 11th Struct. Symp. Mater
Conf. Denver (Colo.), 1970. P. 26—47.
506. Ekaterinaris J.A., Platzer M.F. Numerical investigation of stall flutter// Trans. ASME. J. Turbomach. 1996. Vol. 118, N 2. P. 197-203.
507. Elishakoffl.B. Mean-square stability of elastic bodies in supersonic flow II J. Sound and Vibrat.
1974. Vol. 33, N 1. P. 67-78.
508. Ellen C.H. Influence of structural damping on panel flutter// AIAA J. 1969. Vol. 7, N 3. P. 544545.
509. Evensen D.A. Application of holography to panel flutter// Ibid. 1976. N 12. P. 1671-1674.
510. Ellen C.H. A comparison of membrane and panel flutter// Ibid. 1968. N 11. P. 2169-2174.
511. Faster F. E., McIntosh S.C., Jr. Analysis of nonlinear panel flutter and response under random
excitation or nonlinear aerodynamic loading// Ibid. 1971. N9. P. 411-418.
512. Faure G. Flottements des panneaux en transsonique // Rech. aeronaut. 1962. N88.
513. Faure G. Flottements de panneaux plans en supersonique faible // Rech. aerosp. N 118. P. 5366.
514. Fawzy I., Bishop R.E.D. On the dynamics of linear non-conservative systems // Proc. Roy. Soc.
London A. 1976. Vol. 352, N 1668. P. 25-40.
515. FlaxA.H. Comment on "Flutter a panel supported on an elastic foundation" by Chopra I.: Author’s reply // AIAA J. 1977. Vol. 15, N 3. P. 446—448.
516. Forsberg K. Influence of bondary conditions on the modal characteristics of thin cylindrical
shells // Ibid. 1964. Vol. 2. P. 2150-2157.
517. Forsching H.W. Grundlagen der Aeroelastik. B.: Springer, 1974. 693 S.
518. Fricolman P., Hanin M. Supersonic nonlinear flutter of orthotropic or isotropic panels with arbitrary flow direction // Isr. J. Technol. 1968. Vol. 6, N 1/2. P. 46-57.
519. Fung Y.C. On two-dimensional panel flutter // J. Aeronaut. Sci. 1958. Vol. 25, N 3. P. 145-160.
Пер.: Фын Я.Ц. О двумерном флаттере панели//Механика: Сб. иностр. пер. 1959. № 1. С.
75-106.
520. Fung Y.C. Some recent contributions to panel flutter research // AIAA J. 1963. Vol. 1. P. 898909.
521. 521 .Fung Y.C. Interaction of mechanical and aeroelastic instabilities of a circular cylindrical
shell// Dynam. Stabl. Struct. Oxford etc.: Pergamon Press, 1967. P. 267-284.
522. Friedman P.P. Renaissance of aeroelacticity and its future // J. Aircraft. 1999. Vol. 36, N l.P.
105-121.
523. Gail B. Flatter wycinka powloki cylindryczney w oplywie naddzwiekowym // Biul. Wat I.
Dabrowskego. 1966. Vol. 15, N 6. P. 41-53.
248
524. Gail B. Cisnienie dzialajace na powierzchnie powloki w trojwymiarowym nieliniowym oplywie
potencjalnym // Ibid. 1968. Vol. 17, N 9. P. 45-63.
525. Garrick I.E. Aeroelasticity-frontiers and beyond// AIAA Pap. 1976. N219. P. 1-28.
526. Gaspers P.A., Jr. On the calculation of panel flutter boundaries// Ibid. 1972. N 403. P. 1-5.
527. Gee D.J., Sipcic S.R. Coupled thermal model for nonlinear panel flutter // AIAA J. Vol. 37, N 5.
P. 642-650.
528. GolandM., Luke l.L. An exact solution for two-dimensional linear panel flutter at supersonic
speeds // J. Aeronaut. Sci. 1954. Vol. 21, N 4. P. 275-276.
529. Goldstein M.E. Boundary-layer effect in panel flutter// AIAA J. 1975. Vol. 13, N 9. P. 12451249.
530. Goodman L.E., Rattayya J. Review of panel flutter and effects of aerodynamic noise. P. I. Panel
flutter// Appl. Mech. Rev. 1960. Vol. 13, N 1. P. 2-7. Пер.: Гудмен Л.Е., Раттайя Д.В. Обзор
литературы по флаттеру панели и влиянию аэродинамического шума. Ч. I. Флаттер панели // Механика: Сб. иностр. пер. 1960. № 5. С. 121-134.
531. Givelberg Е. Modeling elastic shells immersed in fluid// Commun. Pure and Appl. Math. 2004.
Vol. 57, N 3. P. 283-309.
532. Graig R.R. Optimization of supersonic panel subject a flutter constraint-a finite element solution
// AIAA Pap. 1971. N 330. P. 1-6.
533. Graves M.T., Bert C.W. Nonlinear flutter of arbitrarily laminated anisotropic rectangular panels
// AIAA/ASME 18th Struct. Struct. Dyn. and Mater. Cont. and AIAA Dyn. Spec. Conf., San
Diego, Calif., 1977. N.Y., 1977. Vol. B. P. 186-190.
534. Gray C.E., Mei C. Large-amplitude finite element flutter analysis of composite panels in hypersonic flow // AIAA Dyn. Spec. Conf., Dallas, Tex., Apr. 16-17, 1992; Coll. Techn. Pap. Wash.
(D.C.), 1992. P. 492-512.
535. Gray C.E., Mei C. Large-amplitude finite element flutter analysis of composite panels in hypersonic flow II AIAA J. 1993. Vol. 31, N 6. P. 1090-1099.
536. Guo C.Q., Paidoussis M.P. Stability of rectangular plates with free sideedges in twodimensional inviscid channel flow // Trans. ASME. J. Appl. Mech. 2000. Vol. 67, N l.P. 171176.
537. Gupta K.K. Solution of eigenvalue problems by Sturm sequence method // Intern. J. Numer.
Meth. Eng. 1972. Vol. 4. P. 379^04.
538. Gupta K.K. Eigenproblem solution by a combined Sturm sequence and inverse iteration technique // Ibid. 1973. Vol. 7. P. 17-42.
539. Gupta K.K. Eigenproblem solution of damped structural systems // Ibid. 1974. Vol. 8. P. 877911.
540. Gupta K.K. On a numerical solution of the supersonic panel flutter eigenproplem // Ibid. 1976.
Vol. 10. P. 637-645.
541. Gupta K.K. Development of a finite element aeroelastic analysis capability // J. Aircraft. 1996.
Vol. 33, N 5. P. 995-1002.
542. Gwin L.B., TaylorR.E. A general method for flutter optimization// AIAA Pap. N391. P. 1-6.
543. HanA.D., Yang T.Y. Nonlienear panel flutter using hith-order triangular finite elements // AIAA J. 1983. Vol. 21, N 10. P. 1453-1461.
544. Hargrave B.A. Numerical approximation of eigenvalues of Sturm-Liouville systems // J. Comput. Phys. 1976. Vol. 20. P. 381-396.
545. Harris G.Z. The problem of panel flutter with reference to the Blue Streak and Black Knight vehicles // Aeronaut. Res. Coune. Cur. Pap. 1966. N 848. P. 1-18.
546. Hedgepeth J.M. Flutter of rectangular simply supported panels at high supersonic speeds Hi.
Aeronaut. Sci. 1957. N 8. P. 563-573, 586.
249
547. Hedgepeth J.M., Budiansky B.A., Leonard R.W. Analysis of flutter in compressible flow of a
panelson many supperts 11 Ibid. 1954. Vol. 21, N 7.
548. Heinze P. Ein Betrag zur Optimierung von Tragstrukturen unter Flatterrestrictionen // Techn.wiss. Mitt. Inst. Konstr. Ingenleurbau. Ruhr Univ. Bochum. 1992. N 5. S. 3-10.
549. Holt M., LeeT.M. First-order frequency effects in supersonic panel of finite cylindrical shells II
Trans. ASME. 1973. Vol. E40, N 2. P. 464-470.
550. Holt M„ Strack S.L. Supersonic panel flutter of a cylindrical shell of finite length // J. Aeronaut.
Sci. 1961. Vol. 28, N 3. P. 197-208.
551. Horn W., BarrG., Stearman B. Recent contribution to experiments on cylindrical shell panel
flutter// AIAA Pap. 1971. N 328. P. 1-15.
552. Hubbard B.E. Bounds for eigenvalues of the Sturm-Liouville problem by finite difference
methods // Arch. Ration. Mech. and Anal. 1962. Vol. 10, N 2. P. 171-179.
553. Husein K, Plaut R.H. Extremum properties of the generalized Rayleigh quatient associated with
flutter instability// Quart. Appl. Math. 1974. Vol. 32, N2. P. 189-201.
554. Johns D.J. Some panel-flatter studies using Piston theory // J. Aeronaut Sci. 1958. Vol. 24, N
11.
555. Johns D.J. A panel flutter review // Manual aeroelasticity / AGARD. 1969. P. Ill, chap. 7.
556. Johns D.J. Supersonic membrane flutter // AIAA J. 1971. Vol. 9, N 5. P. 960- 961.
557. Johns D.J. Supersonic flutter of parallel flat plates connected by an elastic medium //Ibid. 1975.
Vol. 13, N 7. P. 958-961.
558. Johns D.J., Taylor P. W. Vibration and flutter of parallel flat plates connected by an elastic medium // AIAA/ASME 11th Struct., Struct. Dyn. and Mater. Conf. Denver (Colo.), 1970. P. 2535.
559. Jordan P.F. Uber das Flattem von Beplankungen // Ztschr. Flugwiss. 1956. Bd. 4, N 1/2. S. 6770.
560. Jordan P.F. The physical nature of panel flutter // Aero Digest. 1956. Vol. 72, N 2. P. 34-36.
561. Jorgenson O. Optimization of the flutter lodd by material orientation// Mech. Struct, and Mach.
1991. Vol. 19, N 3. P. 411-436.
562. Joshi A., Somashekar B.R. Flutter of initially stressed flat rectangular panels // J. Struct. Eng.
(India). 1986. Vol. 12, N 4. P. 89-95.
563. Kaliski S. The causes of certain haradoxes in the domain of membrane flutter // Bull. Acad. Pol.
Sci. Ser. sci. techn. 1967. Vol. 15, N 2. P. 109-114.
564. Kaliski S., Solars L. On a feature of the phenomenon of aeromagnetic flutter of a plate in magnetic field to its surface // Proc. Vibr. Probl. Pol. Acad. Sci. 1964. Vol. 5, N2. P. 125-135.
565. Kaliski S., Solars L. Aeromagneotoflatter nieskonzonego kanalu cylindrycznego// Biul. Wat J.
D|browskego. 1968. Vol. 17, N 12. P. 13-26.
566. Kaliski S., Solars L. Aeromagnetofl utter of an in finite cylindrical duct// Proc. Vibr. Probl. Pol.
Acad. Sci. 1969. Vol. 10, N 1. P. 55-68.
567. Kaliski S., Woroszyl S. Centrifugal and Coriolis forces effect on the flutter of rotating cylindrical shell immersed in a gas // Bull. Acad. Pol. Sci. Ser. sci. techn. Vol. 16, N 1. P. 1-6.
568. Kang N„ Raman A. Aeroelastic flutter mechanisms of a flexible disc rotating in an enclosed
compressible fluid// Trans. ASME. J. Appl. Mech. 2004. Vol. 71, N1. P. 120-130.
569. Kariappa, Somashekar B.R. Application of matrix displacement methods in the study of panel
flutter // NAL Techn. Note. 1968. N 7. P. 1-14.
570. Kariappa, Somashekar B.R. Flutter of skew panels by the matrix displacement approach // Aeronaut. J. 1970. N 716. P. 672-675.
571. Kariappa, Somashekar B.R., Shah C.G. Discrete element approach to flutter of skew panels with
in-plane under yawed supersonic flow // Ibid. 1970. Vol. 8, N 11. P. 958-961.
250
572. Kayran A., Vinson J.R. Free vibration analysis of laminated composite truncated circular conical shells // Ibid. 1990. Vol. 28. P. 1259- 1269.
573. Ketter D.J. Flutter of flat rectangular orthotropic panels // Ibid. 1967. Vol. 5, N 5. P. 116-124.
574. Koo Куо-Nam, Hwang Woo-Seok. Effects of hysteretic and aerodynamic panel flutter of composite plates // J. Sound and Vibrat. 2004. Vol. 273, N 3. P. 569-583.
575. Kornecki A. Influence of damping on the aeroelastic stability of an unbounded plate in a potential flow // Isr. J. Technol. 1969. Vol. 7, N 4. P. 335-349.
576. Kobayashi S., Natori М., Kihira M. Supersonic flutter of truncated conical shells // Trans. Jap.
Soc. Aeronaut, and Space Sci. 1977. Vol. 20, N 47. P. 13-30.
577. Kornecki A. Traveling wave-type flutter of infinite elastic plates // AIAA J. 1970. Vol. 8, N7. P.
1342-1344.
578. Kornecki A. On the character of instability of certain aeroelastic systems // Trans. ASME. 1973.
Vol. E40, N 2. P. 616-617.
579. Kornecki A., Dowell E.H., O’Brien J. On the aeroelastic instability of two- dimensional panels
in uniform uncompressible flow // J. Sound and Vibrat. 1976. Vol. 47, N2. P. 163-178.
580. Kounadis A.N. Criteria for occurrence of flutter instability before buckling in nonconservative
dissipative systems // AIAA J. 1997. Vol. 35, N 3. P. 509-518.
581. Koutleva G. About the application of a method of varitional principle of conformal mappings to
the plane problem of hydroelasticity // Вторые Поляховские чтения: Всерос. науч. конф. по
механике, Санкт-Петербург, 2-Л февр., 2000: Тез. докл. СПб.: НИИХ СПбГУ, 2000. С.
125.
582. Kozarov M.M., Vodenitecharova T.M. Linear panel flutter of an elleptic cylindrical shell
//Arch. Appl. Mech. 1991. Vol. 61, N 8. P. 505-516.
583. Kozarov M.M., Vodenitecharova T.M. Elliptic cylindrical thin panel in a supersonic air stream
H Europ. J. Mech. A. 1993. Vol. 12, N 6. C. 879-891.
584. Krumhaar H. The accuracy of linear theory when applied to cylindrical shells // A1AA J. 1963.
Vol. 1, N 6. P. 1448-1449.
585. Kuo Ching-Ching, Morino L., Dugundgji J. Perturbation and harmonic balance methods for
nonlinear panel flutter// Ibid. 1972. Vol. 10, N 11. P. 1479-1484.
586. Kuo Ching-Ching, Morino L., Dugundgji J. Nonlinear interaction of panel flutter with harmonic
forcing excitation // Ibid. 1973. Vol. 11, N 4. P. 419-420.
587. Langley B.L. A study of panel thickness to prevent flutter in advanced performance vehicles//
11th Annual Air Force Sei. and Eng. Symp., Brooks Air Force Base. Texas, 1964. N 17.
588. Lee Dong-Min, Lee In. Supersonic flutter analysis of stifened isotropic and anisotropic panels //
A1AA J. 1996. Vol. 34, N 3. P. 637-639.
589. Lee In., Cho Maeng-Hyo. Flutter analysis of composite panels in supersonic flow // AIAA/ASME/AHS/ASC/ 31st Struct., Struct. Dyn. and Mater. Conf., Long Beach, Calif., Apr. 24, 1990: Collect. Techn. Pap. Wash. (D.C.), 1990. Pt 3. P. 1540-1550.
590. Lee In., Cho Maeng-Hyo. Supersonic flutter analysis of clamped symmetric panels using shear
deformable finite element// AIAA J., 1991. Vol. 29, N 5. P. 782-783.
591. Leders J. Etude du flottement des coques cylindriques minces dans le cadre de la the'orie du
potentiel linearise'. Pt 1. Determination des forces aerodynamiques // J. méc. 1970. Vol. 9, N 1.
P. 111-154.
592. Lecters J. Etude du flottement des coques cylindriques minces dans le cadre de la the’orie du
potentiel, supersonique linearise. Pt 2. Etude du flottement // Ibid. 1970. Vol. 9, N2. P. 213-265.
593. Leonard R.W., Hedgepeth J.M. On the flutter of infinitely long panels on many supports // J.
Aeronaut. Sei. 1957. N 5.
251
594. Liao Chung-Li, Sun Yee-Win. Flutter analysis of stiffened laminated composite plates and
shells in supersonic flow // AIAA J. 1993. Vol. 31, N 10. P. 1897-1905.
595. Librescu L. Aeroelastic stability of orthotropic heterogeneous thin panels in the vicinity of the
flutter critical boundary. Pt 2 II J. mée. 1967. Vol. 6, N 1. P. 133-152.
596. Librescu L. Die Wirkung der geometrischen und aerodynamischen Nichtlinearita- ten auf das
Flattern orthotroper, heterogener, dünner elastischer Plattenfelder// Rev. roum. sei. tech. Ser.
mée. appl. 1967. Vol. 12, N 6. P. 1217-1237.
597. Librescu L. Statica si dinamica structirilor elastice anizotrope si eterogene. Bucuresti: Ed. Acad.
Rep. Soc. Romania, 1969. 320 p.
598. Librescu L On the aeroelastic stability problem of a flat anisotropic sandwichtype plates// Rev.
roum. sei. techn. Ser. mée. appl. 1971. Vol. 16, N4. P. 811- 840.
599. Librescu L. Recent contribution concerning the flutter problem of elastic thin bodies in an electrically conducting gas flow, a magnetic field being present // SM Arch. Noordhof Intern, Publ.
1977. Vol. 2, N 1. P. 1-108.
600. Librescu L. Elastostatics and kinetics of anisotropic and heterogeneous shell-type structures.
Leyden: Noordhoff, 1975. 598 p.
601. Librescu L., Badoiu Tr. Flutter of flat rectangular sandwich type panels in a supersonic. Coplanar gas flow, with arbitrary direction // Rev. roum. sei. techn. Ser. mée. appl. 1972. Vol. 17, N
4. P. 773-796.
602. Librescu L., Badoiu Tr. Sur la stabilité magneto-aeroelastique de panneaux minces de longueur
infinite et de largeur finite// C.r. Acad. sei. 1977. Vol. 284, N 3. P. 203-206.
603. Librescu L., Beiner L. On the weight optimization problem for supersonic rectangular flat panels with specified flutter speed // Rev. roum. sci. techn. Ser. mée. appl. 1972. Vol. 17, N 5. P.
1087-1102.
604. Librescu L„ Malaiu E. Supersonic flutter of circular cylindrical heterogeneous orthotropic thin
panels of finite length // J. Sound and Vibrat. 1968. Vol. 8, N 3. P. 494-512.
605. Librescu L., Malaiu E. Stabilitatea aeroelastica a structurilor plane le tip sandvis, plasate intr-un
curent de gaz supersonic // Stud. Si. cerc. mee. apl. 1971. Vol. 30, N l.P. 171-196.
606. Librescu L., Vasiliev G. V., Badoiu Tr. Supersonic flutter of truncated multilayered orthotropic
conical thin shells// Rev. roum. sci. techn. Ser. mée. appl. 1973. Vol. 18, N 1. P. 127-160.
607. Lighthill M.J. Oscillating airfeils at high Mach number// J. Aeronaut. Sci. 1953. Vol. 20, N 6. P.
402-406. Пер.: Лайтхил М. Колебания профилей при больших числах М // Механика: Сб.
иностр. пер., 1954. № 5. С. 134-140.
608. Lin K.J., Lu P.J., TarnJ.Q. Flutter analysis of anisotropic panels with patched cracks Hi. Aircraft. 1991. Vol. 28, N 12. P. 899-907.
609. Liu D.D., Yao Z.X., Sarhaddi D., Chaver F. From piston theory to a unified hypersonicsupersonic lifting surface method // Ibid. 1997. Vol. 34, N 3. P. 304-312.
610. Livne E., Mineau D. Panel flutter constraints: Analytic sensitivities and approximations including planform shape design variables // Ibid. 1997. Vol. 34, N 4. P. 558-568.
611. Lock M.H., Farkas E.F. Flutter of twobay flat panels of infinite span an supersonic Mach numbers // A1AA J. 1965. Vol. 3, N 10. P. 1692-1697.
612. Lock M.H., Farkas E.F. A comparative experimental and theoretical study of the flutter of flat
panels in a low supersonic flow // Proc. Symp. Struct. Dynam. High Speed Flight. Los Angeles,
1961. Vol. 1. P. 209-251.
613. Lottati I. The role of damping on supersonic panel flutter// AIAA J. 1986. Vol. 39, N 2. P. 16401642.
252
614. Lucey A.D. The hydroelastic destabilization of finite compliant panels// Intern. Congr. of Theor.
and Appl. Mech. Warsaw, Aug. 15-21, 2004: Abstracts and CD-ROM Proceeding. Warszawa:
IPPT PAN, 2004. P. 400.
615. Lynch R.W., Rogers W.A. Aeroelastic tailoring of composite materials to impruve performance// Proc. AIAA/ASME/ SAE 17th Struct., Struct. Dyn. and Mater. Conf. King Prussia
(Pa.), 1976. P. 105-112.
616. Marafioti F.A., Johnston E.R., Jr. Effects of rotary inertia on the supersonic flutter fo sandwich
panels // AIAA J. 1971. Vol. 9, N 2. P. 245-249.
617. Mason D.R., Blater P.T. Finite-element application to rocket nozzle aeroelasticity II J. Propulsion and Power. 1986. Vol. 3. P. 499-507.
618. Mei Chuch, Abdel-Motagaly K., Chen R. Review of nonlinear panel flutter at supersonic and
hypersonic speeds // Appl. Mech. Rev. 1999. Vol. 52, N 10. P. 321-332.
619. Muller D.E. A method for solving algebraic equations using an automatic computer // Mathematical table. N.Y., 1956. P. 208-215.
620. Matsuzaki Y., Kobayashi S. A theoretical and experimental study of supersonic panel flutter of
circular cylindrical shells // Proc. 8th Intern. Symp. Space Technol. and Sci. Tokyo, 1969. P.
281-290.
621. Matsuzaki Y., Kobayashi S. Unsteady supersonic aerodynamic forces on an oscillating shell //
AIAA J. 1971. Vol. 7, N 12. P. 2358-2362.
622. Mclntoch S.C.Jr. The effect of hypersonic nonlinear aerodynamic loading on panel flutter// AIAA Pap. 1972. N 345.
623. McLean J. D., Dowell E.H. Suirling flow between coaxial cylinders with injection by radial jets
// AIAA J. 1975. Vol. 13, N 11. P. 1435-1440.
624. Mei Chuh. A finite-element approach for nonlinear panel flutter// Ibid. 1977. Vol. 15, N8. P.
1107-1108.
625. Miles J.W. On the aerodynamic instability of thin panels // J. Aeronaut Sci. 1956. Vol. 23, N8.
P. 771-780.
626. Miles J.W. Supersonic flutter of a cylindrical shell. Pt I // Ibid. 1957. Vol. 24, N 2. P. 107-118.
627. Miles J.W. Supersonic flutter of a cylindrical shell. Pt II // Ibid. 1958. Vol. 25, N 5. P. 312-316.
628. Miles J. W. On panel flutter in presence of a boundary layer // Ibid. 1959. Vol. 26, N 2. P. 8193. Пер.: Майлс Д. О флаттере панели с учетом пограничного слоя // Механика. Сб. иностр. пер., 1959. № 4. С. 97-122.
629. Miles J.W. On supersonic flutter of long panels // J. Aeronaut Sci. 1960. Vol. 27, N6. P. 416.
630. Moon Seong Hwan, Kim Seung Jo. Active and passive suppresions of nonlinear panel flutter
using finite element method// AIAA J. 2001. Vol. 39, N 11. P. 2042-2058.
631. MorinoL. A perturbation method for treating nonlinear panel flutter problems// Ibid. 1969. Vol.
7, N 3. P. 405-410.
632. Morton S.A., Melville R.B., Visbal M.R. Accurasy and coupling issues of aeroelastic NavierStokes solutions on deforming meshes// J. Aircraft. 1998. Vol. 35, N 5. P. 798-805.
633. Muller P. A note on axisymmetrical flutter of circular cylindrical shells of finite length // Intern.
J. Solids and Struct. 1968. Vol. 4, N 8. P. 833-835.
634. Najafov M.A. Formulation of the conic cover flutter problem. Pertusbed state // Proc. JMM of
NAS Azerbaijan. 2005. Vol. 22(30).
635. Nakai E., Takagi Т., Isogai K. Experimental and calculated results of supersonic flutter characteristics of a low aspect-ratio flat-plate surfaces // Proc. 7th Intern. Symp. Space Technol. and
Sci., Tokyo, 1967. Tokyo, 1968.
636. Nakamura Y., Tanabe Y. Some experimental contribution on single degree-of freedom flutter in
two-dimensional low supersonic flow // J. Aircraft. 1966. Vol. 3, N 5. P. 405-410.
253
637. Natke H.G. Zur Matrixreduction beim Flatterproblem // Ing.-Arch. 1975. Bd. 44, N5. S. 317326.
638. Nelson H.C., Cunningham H.J. Theoretical investigation of flutter two-dimensional flat panels
with one surface exposed to supersonic potential flow // NACA Rep. 1956. N 1280. P. 251-264.
639. Niesytto J. Self-excited vibrations of an axially symmetric shell of finite length subjected to the
action of infernal supersonic flow // Bull. Acad. Pol. Sci. Ser. sci. techn. 1967. Vol. 15, N 11. P.
967-974.
640. Niesytto J. Naddzwiekowy przeplyw potencjanly wewnatrzosiowo-symetrycznej powloki odksztalcalnej о skonczonej dlueoski // Biul. Wat J. Dabrowskego. 1967. Vol. 16, N5. P. 49-66.
641. Niesytto J. Drgania samowzbudne powloki osiowosymetricznej о skonczonej dlugoski w
naddzwiekowym oplywie wewnetrznum// Ibid. 1967. Vol. 16, N 7. P. 51-61.
642. Niesytto J. Naddzwiekowy zlinearyzowany nieizentropowy (z wewnetrznymi zrodlamy clepla)
oplyw gazem lepkim i przewodzacym cieplo odksztalkalnej powloki cylindrycznej skonczonej
dlugosci// Ibid. 1968. Vol. 17, N 10. P. 29-42.
643. Nydickl., Friedmann P.P., Zhong X. Hypersonic panel flutter studies on curved panel // 36th
AIAA/ASME/ASCE/AHS/ ASC Struct., Struct. Dyn., and Mater. Conf. And AIAA/ASME
Adapt. Struct. Forum, New Orleans, La, Apr. 10-13, 1995: Collect. Techn. Pap. Washi. (D. C.),
1995. Pt 5. P. 2995-3011.
644. O’Connell R.F., Radovich N.A., Hassiy H.J. Structural optimization with flutter speed constraints using maximized step size// J. Aircraft. 1977. Vol. 14, N 1. P. 85-89.
645. Olejnik A. Flutter analysis of cylindrical panels of small rise in supersonic potential flow, by the
method of finite elements// J. Techn. Phys. 1989. Vol. 30, N 2. P. 227-242.
646. Olson M.D. Finite elements applied to panel flutter// AIAA J. 1967. Vol. 5, N 12. P. 2267-2270.
647. Olson M. D. Some flutter solutions using finite elements // Idid. 1970. Vol. 8, N 4. P. 747-752.
648. Olson M.D., Fung Y.C. Supersonic flutter of circular cylindrical shells subjected to internal
pressure and axial compression// Ibid. 1966. Vol. 4, N5. P. 858- 864.
649. Olson M.D., Fung Y.C. Comparing theory and experiment for the supersonic flutter of cylindrical shells // Ibid. 1967. Vol. 5, N 10. P. 1849-1856.
650. Paidoussis M.P., Price S.J., Ang S.Y. An inproved theory for flutter of cylindrical shells in
cross-flow //J. Sound and Vibrat. 1991. Vol. 149, N 2. P. 197-218.
651. Parks P.C. A stability criterion for a panel flutter problem via the second method of Liapunov //
Differential equations and dynamic systems. N.Y.; L.: Acad, press, P. 287-298.
652. Parthan S., Johns D.J. Aerodynamic generalized forces fur supersonic shell flutter II AIAA J.
1972. Vol. 10, N 10. P. 1369-1371.
653. Parthan S., Johns D.J. Vibration and flutter of cylindrical shells including the effects of stringe
stiffening // AIAA Pap. 1973. N 312. P. 1-7.
654. Peake N. Nonlinear stabilyty of a fluid-loaded elastic plate with mean flow // J. Fluid Mech.
2001. Vol. 434. P. 101-118.
655. Pekkari L.-O. Aeroelastic stability of supersonic nozzles with separated flow. // AIAA Pap.
1993. N 2588, P. 1-11.
656. Phoa Y.T. A computerized flutter solution procedure // Comput. and Struct. 1973. Vol. 3, N 1.
P. 195-204.
657. Pierson B.L A discrete variables approximation to minimum weight panel designs subject to a
supersonic flutterspeed constraint // AIAA Pap. 1972. N 170. P. 1-7.
658. Pierson B.L. Panel flutter optimization by gradient projection // Intern. J. Numer. Meth. Eng.
1975. Vol. 9, N 2. P. 271-296.
659. Pierson B.L Aeroelastic panel optimization with aerodynamic damping// AIAA J. Vol. 13, N4.
P. 515-517.
254
660. Pierson B.L, Genalo L.J. Minimum weight design of rectangular panel subject to a flutter speed
constraint// Comput. Meth. Appl. Mech. and Eng. 1977. Vol. 10, N 1. P. 45-62.
661. Pidaparti R.M.V., Yang H.T.Y. Supersonic flutter analysis of composite plate and shells//AIAA
J. 1993. Vol. 31, N 6. P. 1109-1117.
662. Plaut R.H. A stability criterion for flutter of cylindrical shell panel// Ibid. 1968. Vol. 6, N6. P.
1205-1207.
663. Plaut R.H. Structural optimization of a panel flutter problem // Ibid. 1971. Vol. 9, N 1. P. 182184.
664. Pidaparti R.M. V., Yang H.T. Y. Supersonic flutter analysis of composite plates and shells II
Ibid. 1993. Vol. 31, N 6. P. 1109-1117.
665. Quozzo G. Vibrazioni propie e stabilita aerelastica di un panello rettangolare con appoggi
flessibili // Ric. sci. 1968. Vol. 38, N 4. P. 296-404.
666. Ramkumar R.L., WeisshaarT.A. Rutter of flat rectangular anisotropic plates in high Mach number supersonic flow// J. Sound and Vibrat, 1977. Vol. 50, N 4. P. 587-597.
667. Resende H.B. Temperature and initial curvature effects in low-density panel flutter// AIAA
Dyn. Spec. Conf., Dallas, Tex., Apr. 16-17, 1992: Collect. Techn. Pap. Wash. (D. C.), 1992. P.
467-477.
668. Ross C.T.F. Finite elements for the vibration of cones and cylinders // Intern. J. Numer. Meth.
Eng. 1974. Vol. 8, N 1. P. 198-203.
669. Salvioni L. Some aspect of flutter of cylindrical panels // Meccanica. 1971. Vol. 6, N 3. P. 139146.
670. Sander G., Bon C., Geradin M. Finite element analysis of supersonic panel flutter // Intern. J.
Numer Meth. Eng. 1973. Vol. 7, N 3. P. 379-394.
671. Santini P. Influenza della nonlinearita strutturali sulle vibrazioni aeroelastiche dei pannelli //
Aerotech. Missili e spaz. 1971. Vol. 50, N 1. P. 85-90.
672. Santini P., Picarreta F. Effeto degli smorzamenti sui parametri critici in aeroelasticita
supersónica // Ric. sci. 1968. Vol. 38, N 12. P. 1313-1317.
673. Sarma B.S., VaradauT.K. Nonlinear panel flutter by finite-element method// AIAA J. 1988.
Vol. 26, N 5. P. 566-574.
674. Sawyer J.W. Flutter and bucking of general laminated plates// Proc. AIAA/ASME/SAE 17th
Stuct., Struct. Dyn. and Mater Conf. King Prussia (Pa.), 1976. Vol. 51. N 105-112.
675. Sawyer J.W. Flutter and buckling of general laminated plates // J. Aircraft. 1977. Vol. 14, N 4.
P. 387-393.
676. Schmid P.J., Langre E. Transied growth before conpled-mode flutter // Trans. ASME. J. Appl.
Mech. 2003. Vol. 70, N 6. P. 894-901.
677. Shaeffer H.G., Heard W.L., Jr. Flutter of flat panel subjected to a nonlinear temperature distribution // AIAA J. 1966. Vol. 3, N 10. P. 1918-1923.
678. Shian L.C., Lu L.T. Nonlinear flutter of composite laminated plates // Math, and Comput. Modell. 1990. Vol. 14. P. 983-988.
679. Shian L.C. Flutter of composite laminated plates with délamination // AIAA Dyn. Spec. Conf.,
Dallas, Tex., Apr. 16-17, 1992: Collect. Techn. Pap. Wash. (D.C.), 1992. P. 513-523.
680. Shian L.C. Supersonic flutter of composite sandwich panels // AIAA J. 1992. Vol. 30, N 12. P.
2987-2989.
681. Shian L.C., Lu L.T. Nonlinear flutter of two-dimensional simply supported symmetric composite laminates plates// J. Aircraft. 1992. Vol. 11, N29. P. 140-145.
682. Shian Le-Chung, Wu Teng-Yuan. Nonlinear flutter of laminated plates with inplane force and
transverse shear effects // Mech. Struct, and Mach. 2001. Vol. 29, N 1. P. 121-142.
255
683. Shivakumar K.N., Krishna Murty A.V. A high precision ring element for vibrations of laminated shels // J. Sound and Vibrat. 1978. Vol. 58, N 3. P. 311-318.
684. Shore C.P. Flutter design charts for biaxially loaded isotropic panels // J. Aircraft. Vol. 7, N4. P.
325-329.
685. Shyprykevich P., Sawyer J.W. Orthotropic panel flutter at arbitrary yaw angles- experiment and
correlation with theory // AIAA Pap. 1972. N 192. P. 1-10.
686. Shyprykevich P., Sawyer J.W. Flutter of orthotropic panels at arbitrary yaw angles- experiment
and theory//J. Aircraft. 1974. Vol. 11, N l.P. 15-20.
687. Singa R.K., Venkatewsara R.G. Nonlinear supersonic flutter of panels considering shear deformation and rotary inertia// Comput. and Struct. 1983. Vol. 17, N 3. P. 361-364.
688. Smith L.L., Morino L. Stability analysis of nonlinear autonomous systems: general theory and
application to flutter // AIAA Pap. 1975. N 102. P. 1-10.
689. Smith L.L., Morino L. Stability analysis of nonlinear differential autonomous systems with applications to flutter// AIAA J. 1976. Vol. 14, N 3. P. 333-341.
690. Smith M.J., Hodges D.H., Cesnik C.E.J. Evaluation of computational algorithms suitable for
fluid-structure interactions // J. Aircraft. 2000. Vol. 37, N 2. P. 282-294.
691. Solarz L. Aeromagnetoflatter plaskiego kanalu o skonczonej dlugosci// Biul. Wat J.
Dabrowskego. 1966. Vol. 15, N 10. P. 51-68.
692. Solarz L. Aeromagnetoflutter of a plane duct of finite length // Proc. Vibr. Probl. Pol. Acad. Sci.
1966. Vol. 7, N 4. P. 347-362.
693. Solarz L. Aeromagnetic flutter of walls of a plane infinite channel // Bull. Acad. Pol. Sci. Ser.
sci. techn. 1966. Vol. 14, N 7. P. 647-655.
694. Solarz L. Aeromagnetoflatter scianet plaskiego nieskonczonego kanalu // Biul. Wat J.
Dgbrowskego. 1966. Vol. 15, N 7. P. 11-18.
695. Solarz L. Asymptotyczna metoda badania magnetoflatteru plakiej dyszy // Ibid. Vol. 17, N 10.
P. 43-59.
696. Solarz L. The asymptotic method of investigation of aeromagnetic flutter of a plane nozzle //
Fluid. Dynam. Trans. Warszawa. 1969. Vol. 4. P. 309-322.
697. Spriggs J.H., Messiter A.F., Anderson W.J. Membrane flutter paradox- an explanation by singular-perturbation methods // AIAA J. 1969. Vol. 7, N 9. P. 1704-1709.
698. Srinivasan A. V. Flutter analysis of rotating cylindrical shells immersed in a circular helical
flow-field of air // Ibid. 1971. Vol. 9, N 3. P. 394-400.
699. Srinivasan A. V. Flutter analysis of rotating cylindrical shells immersed in circular helical flowfield of air. Pt II // AIAA Pap. 1971. N 373. P. 1-6.
700. Srinivasan R.S., Babu B.J.C. Flutter analysis of cantilevered quadrilateral plates// J. Sound and
Vibrat. 1985. Vol. 98, N 1. P. 45-53.
701. Srinivasan R.S., Babu B.J.C. Free vibration and flutter of laminated quadriateral plates // Comput. and Struct. 1987. Vol. 27, N 2. P. 297-304.
702. Stearman R. The influence of compressible flow environment on the static and dynamic stability of thin cylindrical shell structures // Thin-shell structures: Theory, experiment and design.
Englewood Chiffs (N.J.): Prentice-Hall, 1974. P. 153-201.
703. Stummel F. Diskrete Konvergenz linearer Operatoren. II// Math. Ztschr. 1971. Bd. 120. S. 231264.
704. Sundarajan V. Effect of rigid boundary on the flutter of a thin panel // J. Sound and Vibrat.
1971. Vol. 19, N 2. P. 147-151.
705. Sunder P. J. Optimum cone angles in aeroelastik flutter// Comput. and Struct. 1983. Vol. 17,
N1. P. 25-29.
256
706. Sunder P.J., Ramakrishan C.V., Sengupta S. Finite element analysis of 3-ply laminaited conical
shell for flutter// Intern. J. Numer. Meth. Eng. 1983. Vol. 19, N8. P. 1183-1192.
707. Sylvester M.A., Baker J.E. Some experimental studies of panel flutter at Mach number 1.3
//NACA Techn. Notes. 1957. N 3914.
708. Tadi M. Compensator design for a supersonic panel flutter // Comput. and Struct. Vol. 80, N 1.
P. 989-999.
709. Tanida Y. Stability of a soft plate in channel flow: Aerodynamics aspect of palatal flutter//JSME
Intern. J. B. 2001. Vol. 44, N 1. P. 8-13.
710. Taneda H., Nagahata M. A study of supersonic flutter of composite panels // AiA A Pap. 1995.
N 3985. P. 1-11.
711. Thornton E.A., Fallen D.J. An integrated finite element approach for thermal prestress effects
on shells of revolution // ASCE/AHS 23rd Struct. Dyn. and Mater. Conf. New Orleans (La.),
1982. Pt 1. P. 171-180.
712. UedaT., Kobayashi S., Kihira M. Supersonic flutter truncated conical shells// Trans. Jap. Soc.
Aerospace Sci. 1977. Vol. 20, N 47. P. 13-30.
713. Vaicaitis R. Stiffened panel flutter in supersonic flow// AIAA Student J. 1968. Vol. 6, N 4. P.
196-205.
714. Valid R. On Lagrange-Euler formulations for fluid-structure interactions // Intern. J. Eng. Sci.
2003. Vol. 41, N 16. P. 1913-1934.
715. Van Keuren G.M., Jr . Galerkin’s approximation to minimum weight structures with dynamic
constraints // AIAA Pap. 1975. N 225. P. 1-7.
716. Ventres C.S. Flutter of a buckled plate exposed to a static pressure differential // AIAA J., 1971.
Vol. 9, N 5. P. 958-960.
717. Ventres C.S., Dowell E.H. Comparison of theory and experiment for nonlinear flutter of loaded
// Ibid. 1970. Vol. 8, N 11. P. 2022-2030.
718. Voss H.M. The effect of external supersonic flow on the vibration characteristics of thin cylindrical shels // J. Aerospace Sci. 1961. Vol. 28, N 12. P. 945-956.
719. Walker J.A., Dixon M.W. Stability of the general plane membrane adjacent to a supersonic airstream //Trans. ASME. 1973. Vol. E40, N 2. P. 395-398.
720. Walter W. W., Anderson G.L. Chordwise bending vibrations and flutter of isotropic rectangular
plates // J. Sound and Vibrat. 1971. Vol. 19, N 2. P. 193-209.
721. Web G.R., Bass B.R., Goodman C.H. et al. Further study on "A stability criterion for panel flutter via the second method of Liapunov" by P. C. Parks // AIAA J. Vol. 5, N 11. P. 2084-2085.
722. Weingarten V.I. The effect of internal or external pressure on the free vibrations of conical
shells // Intern. J. Mech. Sci. 1974. Vol. 8. P. 115-124.
723. Weisshaar T.A. Panel flutter optimization - are fined finite element approach // Intern. J. Numer.
Meth. Eng. 1976. Vol. 10, N 1. P. 77-91.
724. Weisshaar T.A., Crittenden J.B. Rutter of asymmetrically swept wings // AIAA J. Vol. 14, N 8.
P. 993-994.
725. Widnall S.E., Dowell E.H. Aerodynamic forces on an oscillating cylindrical duct with an internal flow // J. Sound and Vibrat. 1967. Vol. 16, N 1. P. 71-85.
726. Wielgus A. Flatter plyto o zmiennej grubosci w plaskim oplywie naddzwiekowym // Biul. Wat
J. Dgbrowskego. 1968. Vol. 17, N 4. P. 57-67.
727. Wielgus A. Analiza samowzbudnych i wymuszonych drgan prostokatnej plyty na wielu podporach w oplywie naddzwiekowym. Cz. I. Bozwiazanie analityczne // Ibid. 1972. Vol. 21, N 7.
P. 87-98.
728. Wielgus A. Analiza samowzbudnych i wymuszonych drgan prostokatnej plyty na wielu podporach w oplywie naddzwiekowym. Cz. II. Analiza numerichna // Ibid. Vol. 21, N 10. P. 57-73.
257
729. Wielgus A. Analysis of self-excited and forced vibrations of rectangular plate on many supports
in supersonic flow// Proc. Vibr. Probl. Pol. Acad. Sci. 1972. Vol. 13, N4. P. 377-396.
730. Williams M.H., Chi M.R., Dowell E.H., Ventres C.S. Effects of inviscid parallel shear flows on
steady and unsteady aerodynamics and flutter// AIAA Pap. 1977. N 158. P. 1-9.
731. Wilson E.L. The static condensation algorithm// Intern. J. Numer. Meth. Eng. Vol. 8. P. 198203.
732. Woroszyl S. Lokalno-integralny flatter powloki cylindrycznej w zlinearyzowanym polywie
naddzwiekowym // Biul. Wat J. Dgbrowskego. 1965. Vol. 14, N 11. P. 11-29.
733. Woroszyl S. The linearized flutter problem of an annular duct // Proc. Vibr. Probl. Pol. Acad.
Sci. 1966. Vol. 7, N 4. P. 375-386.
734. Xing Jing Tang, Price W.G. An updated arbitrary lagrangian-eulerian description in continuum
mechanics and its application to nonlinear fluid-structure interaction dynamics // Intern. Congr.
ofTheor. andAppl. Mech. Warsaw, Aug. 15-21, 2004: Abstracts and CD-ROM Proceeding.
Warszawa: IPPT PAN, 2004. P. 404.
735. Xue D.Y., Mei C. Finite element nonlinear panel flutter with arbitrary temperatures in supersonic flow// AIAA Dyn. Spec. Conf., Dallas, Tex., Apr. 16-17, 1992. Collect. Techn. Pap. Wash.
(D.C.), 1992. P. 478-491.
736. Xue D.Y., MeiC. Finite element nonlinear flutter and fatigue life of two- dimensional panels
with temperature effects// J. Aircraft. 1993. Vol. 30, N 6. P. 993-1000.
737. Xue D.Y., Mei C. Finite element nonlinear panel flutter with arbitrary temperatures in supersonic flow // AIAA J. 1993. Vol. 31, N 1. P. 154—162.
738. Xue D.Y., Mei C., Shore C.P. Finite element two-dimensional panel flutter at high supersonic
speeds and elevated temperature// AIAA/ASME/AHS/ASC/ 31st Struct., Struct. Dyn. and Mater. Conf., Long Beach, Calif., Apr. 2-4, 1990: Collect. Tech. Pap. Wash. (D.C.), 1990. Pt 3. P.
1464-1475.
739. Yamaguchi N., Yokota K„ Tsujimoto Y. Flutter limits and behaviors of a flexible thin sheet in
high-speed flow. I. Analytical method for prediction of the sheet behavior. II. Experimental resultes and predicted behaviors for low mass rations // Trans ASME. I. Fluids. Eng. 2000. Vol.
122, N 1. Trans ASME J. Fluids Eng. P. 65-83.
740. Yamamoto Y. Flutter of fixed-free elastic strip in uniform flow // Trans. Jap. Soc. Aeronaut and
Space Sci. 2001. Vol. 43, N 143. P. 8-12.
741. Yang G., Obagaschi S. Fully implicit aeroelastic solver for a standard aeroelastic model // Rep.
Inst. Fluid Sci. Tohoku Univ. 2001. Vol. 13. P. 11-17.
742. Yang T. Y. Flutter of flat finite element panels in supersonic potential flow // AIAA J. 1975.
Vol. 13, N 11. P. 1502-1507.
743. Yang T.Y., HanA.D. Flutter of thermally buckled finite element panels II Ibid. Vol. 14, N 7. P.
975-977.
744. Yang T., Chen F. Stability of shew plates subjects to aerodynamic and in-plane forces // Sound
and Vibrat. 1994. Vol. 171, N 5.
745. Yates J.E. Linearized integral theory of three-dimensional unsteady flow in a shear layer// AIAA Pap. 1974. N 143. P. 1-10.
746. Young T.H., Chen F.Y. Stability of fluttered panels subjected to in-plane harmonic forces //
AIAA J. 1993. Vol. 31, N 9. P. 1667-1673.
747. Zeng Yueming, Singk Sahjendm, N.J. Guid N.J. Output feedback variable structure adaptive
control of an aeroelastic system // Contr. and Dynam. 1998. Vol. 21, N 6. P. 830-837.
748. Zhou R.C., Xue D.Y., Meiz C. Finite element time domain-model formulation for nonlinear
flutter of composite panels// AIAA J. 1994. Vol. 32, N10. P. 2044-2052.
258
749. Zwan R.J., Prananta B.B. Fluid/structure interaction in numerical aeroelastic simulation // Intern. J. Non.-Linear Mech. 2002. Vol. 37, N 4/5. P. 987-1002.
259
Оглавление
ПРЕДИСЛОВИЕ .................................................................................................................................................. 4
ВВЕДЕНИЕ .......................................................................................................................................................... 5
Часть I. .................................................................................................................................................................. 7
ФЛАТТЕР ПЛАСТИНОК..................................................................................................................................... 7
I.1. Постановка задачи. ..................................................................................................................................... 7
I.2. Определение давления аэродинамического взаимодействия. ................................................................... 8
I.3. Математическая формулировка задач. ..................................................................................................... 13
I.4. Сведение к задаче в круге. ........................................................................................................................ 17
I.5. Тестовые задачи. ....................................................................................................................................... 23
1. Неограниченная пластина. ...................................................................................................................... 23
2. Бесконечно-длинная полоса. ................................................................................................................... 24
3. Круглая пластинка. ................................................................................................................................. 28
4.2. Свободно опёртая эллиптическая пластина. ....................................................................................... 35
4.3. Выводы. ................................................................................................................................................ 36
4.4. Обсуждение полученных результатов. ................................................................................................ 36
5. Исследование зависимости критической скорости флаттера от толщины пластины. ........................... 38
I.6. Прямоугольна пластина. ........................................................................................................................... 40
1.
Постановка задачи и аналитическое решение. .................................................................................. 40
I.7. Флаттер прямоугольной пластины переменной толщины ....................................................................... 55
или жесткости. ............................................................................................................................................... 55
I.8. Вязкоупругая пластина. ............................................................................................................................ 66
Часть II. ............................................................................................................................................................... 71
ФЛАТТЕР ПОЛОГИХ ОБОЛОЧЕК. ................................................................................................................. 71
II.1. Общая постановка задачи........................................................................................................................ 71
II.2. Определение давления аэродинамического взаимодействия. ................................................................ 73
§3. Пологая оболочка как часть поверхности профиля. ................................................................................ 77
§4. Пологая оболочка вращения. .................................................................................................................... 79
§5. Коническая оболочка; внешнее обтекание. .............................................................................................. 83
§6. Коническая оболочка; внутреннее обтекание. ......................................................................................... 87
1. Постановка задачи................................................................................................................................... 87
2. Определение динамической части давления. ......................................................................................... 93
§7. Примеры расчётов. .................................................................................................................................... 98
Часть III. ........................................................................................................................................................... 107
Численные методы в несамосопряжённых задачах на собственные значения. .............................................. 107
ГЛАВА 1. ...................................................................................................................................................... 107
Дискретный лапласиан. ................................................................................................................................ 107
III.1.1. Задача Штурма-Лиувилля. ........................................................................................................ 108
III.1.2. Интерполяционная формула для функции двух переменных в круге и её свойства. ......... 114
III.1.3. Дискретизация оператора Лапласа. .......................................................................................... 120
III.1.4. Теорема об h-матрице. ................................................................................................................ 121
III.1.5. Построение клеток h-матрицы с использованием дискретизации уравнений Бесселя. ..... 126
III.1.6. Быстрое умножение h-матрицы на вектор с использованием быстрого преобразования
Фурье. ....................................................................................................................................................... 128
III.1.7. Симметризация h-матрицы. ...................................................................................................... 130
ГЛАВА 2 ........................................................................................................................................................... 133
Дискретизация линейных уравнений математической ................................................................................ 133
физики с разделяющимися переменными. ................................................................................................... 133
III.2.1. Уравнения общего вида с разделяющимися переменными. .................................................. 133
III.2.2. Дальнейшие обобщения. ............................................................................................................ 135
ГЛАВА 3. .......................................................................................................................................................... 137
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ ФУНКЦИЙ ОПЕРАТОРА ЛАПЛАСА. .... 137
ПОДПРОГРАММА MOD2. ...................................................................................................................... 138
III.3.1. Задача Дирихле. ................................................................................................................................ 139
ПРОГРАММА LAP123G. ....................................................................................................................... 140
260
Подпрограмма LAPLAS. ........................................................................................................................... 148
Подпрограмма LS0.................................................................................................................................... 149
ПОДПРОГРАММА LSK. .......................................................................................................................... 150
ПОДПРОГРАММА IKJ. ........................................................................................................................... 152
ПОДПРОГРАММА IKJ1. ......................................................................................................................... 153
III.2.2. Смешанная задача. ............................................................................................................................ 155
III.3.3. Задача Неймана. ................................................................................................................................ 157
III.3.4. ОПИСАНИЕ ЧИСЛЕННЫХ ЭКСПЕРИМЕНТОВ........................................................................... 160
ГЛАВА 4. .......................................................................................................................................................... 163
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ ФУНКЦИЙ БИГАРМОНИЧЕСКОГО
ОПЕРАТОРА. ................................................................................................................................................... 163
III.4.1. Первая краевая задача. .............................................................................................................. 166
III.4.2. Вторая краевая задача................................................................................................................ 167
Программа BIG12G................................................................................................................................. 167
III.4.3. Описание вычислительных экспериментов. ........................................................................... 171
ГЛАВА 5. .......................................................................................................................................................... 174
ВЫЧИСЛЕНИЕ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ ФУНКЦИЙ ОПЕРАТОРА ЛАПЛАСА В
ПРОИЗВОЛЬНОЙ ОБЛАСТИ. ........................................................................................................................ 174
III.5.1. Вычисление собственных чисел и собственных функций оператора Лапласа. ............................... 174
III.5.1.1. Задача Дирихле......................................................................................................................... 183
III.5.1.2. Смешанная задача. .................................................................................................................. 184
III.5.1.3. Задача Неймана. ....................................................................................................................... 186
Описание программы LAP123C. ............................................................................................................... 186
III.5.2. Описание программы численного конформного отображения. ............................................ 192
III.5.3. Описание численных экспериментов................................................................................................ 195
ГЛАВА 6. .......................................................................................................................................................... 197
ВЫЧИСЛЕНИЙ СОБСТВЕННЫХ ЧИСЕЛ И СОБСТВЕННЫХ ФУНКЦИЙ БИГАРМОНИЧЕСКОГО
ОПЕРАТОРА В ПРОИЗВОЛЬНОЙ ОБЛАСТИ. ............................................................................................. 197
III.6.1. Вычисление собственных чисел и собственных функций бигармонического оператора. .............. 197
Программа BIG12AG. ............................................................................................................................... 198
III.6.1.1. Первая краевая задача. ................................................................................................................... 204
III.6.1.2. Вторая краевая задача. .................................................................................................................. 204
Описание программы BIG12AG аналогично LAP123G. ........................................................................... 204
Описание программы численного конформного отображения. ........................................................ 209
III.6.2. Описание численных экспериментов................................................................................................ 212
ГЛАВА 7. .......................................................................................................................................................... 214
Об оценке погрешности в задачах на собственные ......................................................................................... 214
значения. ........................................................................................................................................................... 214
III.7.1. Теоремы локализации. ............................................................................................................... 214
III.7.2. Априорная оценка погрешности в задачах на собственные значения ................................. 218
III.7.3. Апостериорная оценка погрешности в задачах на собственные значения .......................... 221
III.7.4. Обобщения для пучка операторов ............................................................................................ 221
ЗАКЛЮЧЕНИЕ ................................................................................................................................................ 224
ЛИТЕРАТУРА .................................................................................................................................................. 225
261