1
Херсонський морський інститут
кафедра «Суднові електричні системи та автоматика суден»
Шифр № __________
«Затверджено»
Реєстр. № __________
Проректор з науково-педагогичної
роботи
___________________
Бень А.П.
«____» _______________ 200___ р.
КОНСПЕКТ ЛЕКЦІЙ
з дисципліни «Електрообладнання суден та його експлуатація»
з напряму
1003 «Судноводіння і енергетика суден»
за спеціальністю
6.100300 «Експлуатація суднових
енергетичних установок”
м. Херсон
2
Конспект лекцій дисципліни „Електрообладнання суден та його експлуатація” розробив у відповідності з навчальним планом стандарту вищої
освіти підготовки бакалавра напряму 1003 „Судноводіння і енергетика суден” за спеціальністю 7.100302 „Експлуатація суднових енергетичних установок” в.о. доцента кафедри „Суднові електричні системи та автоматика су
ден” Миронов В.В.
Рецензенти :
кафедра «Електрообладнання суден» МНМУ, д-р техн. наук професор
Шевченко В.В.
кафедра «__________________________” ХНТУ, к.т.н. професор Яким
чук Г.С.
Конспект розглянутий та ухвалений на засіданні кафедри СЕСАС
« » _______________р.
протокол № _
Завідуючий кафедрою СЕСАС професор, д.т.н. _________ Ісаєв Є.О.
Методист навчально-методичного відділу _________ Сіденко Т.О.
«___» ____________ 20__р.
Конспект ухвалений Радою факультету «Судноводіння і енергетика
суден»
«____» _____________ 20__р.
протокол № ____
Голова Ради факультету
«Судноводіння і енергетика суден»
___________
Тригуб С.М.
Начальник навчально-методичного відділу _____ Сокол І.В.
3
ПРЕДИСЛОВИЕ
Конспект лекций составлен в соответствии с учебной программой дисциплины
„Электрооборудование судов и его эксплуатация” для специальности 7.100302 «Эксплуатация судовых энергетических установок” морских высших учебных заведений 3-го уровня аккредитации.
В конспекте рассмотрены вопросы современного состояния электрооборудования
судов и тенденции его развития.
Конспект содержит основы теории, описание устройства и анализ эксплуатационных свойств различных видов судового электроборудования.
Порядок изложения учебного материала облегчает усвоение курса и наиболее
полно отвечает современному состоянию и тенденциям развития электрооборудования
судов.
Значительное место в конспекте лекций отведено практическим вопросам, связанным со специфическими условиями работы судового электрооборудования, его технического использования и обслуживания.
При составлении конспекта лекций были использованы международные и национальные морские нормативные документы, в том числе:
1. Международная конвенция по подготовке моряков и несению вахты (STCW-78);
2. Международный кодекс по подготовке моряков и несению вахты ( CODE-95 );
3. Правила классификации и постройки морских судов ( Правила Регистра );
4. Правила технической эксплуатации морских и речных судов Украины. Раздел
«Электрооборудование», КНДЗ 31.2.002.07-96;
5. Международная Конвенция по охране человеческой жизни на море ( SOLAS-74);
6. Правила предотвращения загрязнения с судов ( МАРПОЛ-73/78 ).
В конспекте использован обширный справочный материал, который должен помочь студентам при расчете и выборе различных видов судового электрооборудования
из справочников и каталогов.
В конспект включены контрольные вопросы, имеющие целью сосредоточить внимание студентов на наиболее важные особенности изучаемой темы.
Все советы, замечания и пожелания по данному пособию будут приняты автором с
благодарностью.
4
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ
АБ – аккумуляторная батарея
АБЛ – автоматическая буксирная лебедка
АВ – автоматический выключатель
АГ – аварийный генератор
АД – асинхронный двигатель
АДГ – аварийный дизель-генератор
АР – автоматический рулевой
АРН – автоматический регулятор напряжения
АРЧ – автоматический регулятор частоты
АСДН – автоматизированная система диагностики и наладки
АСУ – автоматизованная система управления
АТР – автоматический рулевой типизированного ряда
АШЛ – автоматическая швартовная лебедка
АЦП – аналого-цифровой преобразователь
АЭРЩ – аварийный электрораспределительный щит
БСГ – бесщеточный синхронный генератор
ВГ - валогенератор
ВУ – выпрямительное устройство
ВРШ – винт регулируемого шага
ВФШ – винт фиксированного шага
ГА – генераторный агрегат
ГД – главный двигатель
Г – Д – генератор - двигатель
ГНВ – генератор начального возбуждения
ГПМ – грузоподъемные механизмы
ГПТ – генератор постоянного тока
ГРЩ – главный распределительный щит
ГЭД – гребной электродвигатель
ГЭРЩ - главный электрический распределительный щит
Д – двигатель ( электрический )
ДГ – дизель-генератор
ДП – дополнительный полюс
ДПТ – двигатель постоянного тока
ДЭГУ – дизель-электрическая гребная установка
ИМ – исполнительный механизм
КЗА – коммутационно-защитная аппаратура
КН – корректор напряжения
КО – компенсационная обмотка
КПД – коэффициент полезного действия
КСУ – комплекс систем управления
МЭК – Международная электротехническая комиссия
5
НУВ – неуправляемый выпрямитель
ОВГ – обмотка возбуждения генератора
ОУ – обмотка управления
ПД – приводной двигатель
ПТБ – правила техники безопасности
ПТЭ – правила технической эксплуатации
ПУ – пульт управления
ПЭ – приемник электроэнергии
РУ – рулевое устройство
РЩ – распределительный щит ( электрический )
РЭГ – рулевой электрогидравлический привод
РЭП - рулевой электропривод
РЭМ - рулевой электромеханический привод
САУ – система автоматизированного управления
СВАРН – система самовозбуждения и автоматического регулирования напряжения
СГ – синхронный генератор
СТД – система технической диагностики
СТС – судовые технические средства
СУ – система управления
СЭО – судовое электрооборудование
СЭП – судовой электропривод
СЭС – судовая электростанция
СЭУ – судовая энергетическая установка
СЭЭС - судовая электроэнергетическая система
ТАД – трехфазный асинхронный двигатель
ТВД – тиристорный возбудитель двигателя
ТГ – турбогенератор
ТИ – техническое использование ( электрооборудования )
ТК – трансформатор компаундирования
ТО – техническое обслуживание ( электрооборудования )
ТПЧ – тиристорный преобразователь частоты
ТФК – трансформатор фазового компаундирования
ТЭ – техническая эксплуатация ( электрооборудования )
ТЭГУ – турбоэлектрическая гребная установка
УВ – управляемый выпрямитель
ФПБ – фидер питания с берега
ЦАП – цифро-аналоговый преобразователь
ЦПУ – центральный пост управления
ЩЭСБ – щит электроснабжения с берега
ЭВМ – электронная вычислительная машина
ЭГК – электрогидравлический кран
ЭДС – электродвижущая сила
ЭП – электропривод
6
ЭЭ – электроэнергия
ЯШУ – якорно-швартовное устройство
7
ВВЕДЕНИЕ
Дисциплина „Электрооборудование судов и его эксплуатация” имеет первостепенное значение в образовательно-профессиональной подготовке судовых механиков.
Абсолютное большинство судовых технических средств ( СТС ) морских судов
электрифицировано и автоматизировано, поэтому их эффективная эксплуатация невозмож
на без освоения данной дисциплины.
Эта дисциплина закладывает основы знаний судового электрооборудования и систем управления ним, его технического использования и обслуживания.
Необходимость фундаментальных знаний судовыми механиками судовой электротехники и ее составной части - судового электрооборудования, определяется, прежде всего, нуждами производства.
1. Краткий исторический очерк развития судового электрооборудования.
Комплексы СУ СТС. Классы автоматизации судов А1, А2, А3
Первым примером применения на судах электричества принято считать использоние гальванических батарей для вращения гребных колес прогулочной лодки. Эти батареи были установлены на лодке в 1834 г. русским академиком Б. С. Якоби. Они позволяли пеедвигаться по Неве навстречу течению со скоростью около 4 км/ч.
Реальному применению электроприводов на судах долгое время мешало отсутствие
надёжных и экономичных источников электроэнергии - генераторов и ее потребителей –
вначале электроосветительных приборов, а затем и электродвигателей.
Лишь после разработки в 70-х гг. 19 века и начала производства электрических машин постоянного тока работы по внедрению электричества на судах восстановились.
В 1886 г. на крейсерах «Адмирал Нахимов», «Адмирал Корнилов» и «Лейтенант
Ильин» были установлены первые электрические вентиляторы.
В 1892 г. на броненосном крейсере «Двенадцать апостолов» установили электро
привод рулевого устройства.
В 1897 г. на транспорте «Европа» применили первую электролебедку.
В 1898—1903 гг. были электрифицированы рулевые и якорные устройства крейсе
ров «Громобой» и «Паллада».
В 1903—1904 гг. на Сормовском заводе построили первые дизель-электроходы
«Вандал» и «Сармат».
Все судовые электрические установки того времени работали на постоянном токе
при напряжении, как правило, не превышавшем 110 В.
Переход на переменный ток на судах стал возможным благодаря работам русского
учёного М.О. Доливо-Добровольского, который в 1889 г. построил простой и надёжный
асинхронный трёхфазный электродвигатель.
В 1908 г. на минном заградителе «Амур» установили трехфазные двигатели для
вентиляторов и водоотливных насосов.
В 1909—1911 гг. переменный ток внедрили на линейных кораблях типа «Севастополь».
В 1920 г. был принят так называемый план ГОЭЛРО ( Государственный план электрификации России ), разработанный русским учёным-электротехником Кржижановским
Г.М., который предусматривал создание в России сети гидро- и теплоэлектростанций с
суммарной мощностью 3 млн. кВт. Выполнение этого плана позволило электрифицировать промышленность и сельское хозяйство.
В период 30-40 гг. ХХ столетия происходило быстрое развитие электрификации
страны – были построены мощные гидро- и тепловые электростанции, заводы по производ
ству электрических машин и электрооборудования.
В период с 1960 по 1970 г. осуществляется переход к использованию на судах пере
8
менного тока. Это стало возможным благодаря началу выпуска специально для судов гене
раторов 3-фазного переменного тока и асинхронных двигателей серии МАП ( морской
асинхронный полюсопереключаемый ) с 2-мя и 3-мя скоростями.
Одновременно разрабатывались и внедрялись на судах системы автоматизированого и автоматического управления и контроля различными видами судового электрооборудования ( см. ниже ).
На судах отечественного производства устанавливались различного рода такие си
стемы – навигационные, управления главными и вспомогательными двигателями, судовыми электроприводами и др.
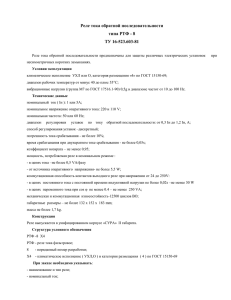
В 70-х годах ХХ столетия для судов отечественной постройки был создан базовый
комплекс СУ СТС типа «Залив- М» ( рис. В.1 ).
Рис. В.1. Структурная схема КСУ СТС типа «Залив- М»
В эту систему входят СУ следующими СТС:
1. «Прибой» – вспомогательными механизмами, обслуживающими ГД;
2. «Ижора-М» – электроэнергетической системой;
3. «Нарочь-М» – общесудовыми системами;
4. «Ильмень» – грузовыми операциями на танкерах;
5. «Виктория» – системой инертных газов на танкерах;
6. «Шипка» – приема и обработки информации.
Для электроснабжения всех этих систем используется система «Тангенс».
Системы комплекса связаны не только между собой, но и с локальными СУ, такими как ДАУ ГД, ДАУ ДГ.
Объем автоматизации механической установки судов, на которых был установлен
комплекс «Залив- М», соответствовал знаку автоматизации А1 в символе класса судна.
В зависимости от объема автоматизации механической установки, Правила Регистра устанавливают 3 знака автоматизации в символе класса судна А1, А2, А3, а именно:
А1 – судно, за исключением пассажирского, объем автоматизации механической
установки которого позволяет эксплуатацию без вахты в машинных помещениях и
центральном посту управления;
А2 – судно, объем автоматизации механической установки которого позволяет эксплуатацию без вахты в машинных помещениях, но с вахтой в центральном посту
управления;
А3 – судно с мощностью главных механизмов 1500 кВт ( 2040 л.с. ) и менее, объ
ём автоматизации механической установки которого сокращен, но позволяет эксплуатацию без вахты в машинных отделениях.
Современные морские суда снабжены микропроцессорными СУ СТС, позволяющи
ми успешно решать основную задачу морского судоходства.- безаварийную и экономичную эксплуатацию судов.
При проектировании и производстве судового электрооборудования приходится
решать две взаимоисключающие задачи:
1. повышение уровня автоматизации электрооборудования;
9
2. упрощение их обслуживания.
Для решения этих задач судовое электрооборудование должно развиваться в следующих направлениях:
1. автоматизация отдельных механизмов с последующим их объединением в автоматизированные системы, управляемые при помощи микропроцессорных систем;
2. повышение производительности механизмов и судна в целом за счёт выбора оптимальных скоростей переработки грузов;
3. повышение надёжности и ресурса электрооборудование за счёт улучшения конструкции механизмов и аппаратов управления;
4. снижение трудозатрат на обслуживание за счёт унификации элементов и применения блочных конструкций.
2. Международные морские нормативные документы, определяющие уровень
подготовки судовых механиков в части эксплуатации СЭО
На большинстве транспортных судов есть штатная должность электромеханика, который несет непосредственную ответственность за техническую эксплуатацию судового
электрооборудования.
Тем не менее, в соответствии с национальными морскими документами, такими как
Устав службы на судах морского и речного флота Украины, ПТЭ СТС и др., общую ответственность за правильную техническую эксплуатацию судового электрооборудования несет именно старший механик судна.
Международная морская организация ( IMO – ИМО ), определяющая основные направления развития морского судоходства, приняла в 1978 и 1995 годах два основных документа в части подготовки и дипломирования моряков:
1. международную Конвенцию о подготовке и дипломировании моряков и несении вахт 1978 г. ( ПДМНВ – 78, STCW – 78 );
2. международный Кодекс о подготовке и дипломировании моряков и несении
вахт 1995 г. ( КПДМ – 95, CODE – 95 ).
Оба документа обязательны для стран, подписавших эти документы. Выполнение
требований этих документов позволяет морякам какого-либо государства работать без
ограничений на любом судне мирового флота ( Украина присоединилась к ПДНВ-78 в
1996 году, Закон Верховного Совета Украины №464-96/ВР от 1 ноября 1996 года ).
Оба документа содержат таблицы минимальных требований к компетентности судо
вых специалистов – судоводителей, судовых механиков и радиоспециалистов при выполнении ими определённых функций на трёх уровнях :
1. обслуживания ( для рядового состава );
2. эксплуатации ( для вахтенных помощников и механиков );
3. управления ( для капитанов и старших помощников; старших и вторых механи
ков ).
Упомянутые минимальные требования изложены в таблицах А-III/1 для вахтенных
механиков ( уровень эксплуатации ) и А-III/2 для вторых и старших механиков ( уровень
управления ). Содержание же таблиц А-III/1 и А-III/2 одинаково.
Извлечение из ПДНВ-78 и Кодекса-95
Таблица А-III/1
Функция 5: Электрооборудование, электронная аппаратура и системы управления
на уровне эксплуатации
Колонка 1
Колонка 2
Колонка 3
Колонка 4
КОМПЕТЕНТНОСТЬ
ЗНАНИЯ,
ПОНИМАНИЕ И
ПРОФЕССИОНАЛИЗМ
МЕТОДЫ
ДЕМОНСТРАЦИИ
КОМПЕТЕНТНОСТИ
КРИТЕРИИ ДЛЯ
ОЦЕНКИ
КОМПЕТЕНТНОСТИ
10
Эксплуатация
преобразователей,
генераторов и
систем управления
Генераторная
установка
1. надлежащие
начальные знания и
навыки в области
электротехники;
2. подготовка к
работе, пуск,
нагрузка и переход с одного на
другой
преобразователь или
генератор;
3. обнаружение
характерных
неисправностей и
действия по
предотвращению
повреждений.
Экзамен и оценка
доказательства,
полученного на
основе одного или
более из
следующего:
1. одобренный стаж
работы на судне;
2. одобренный стаж
подготовки
на учебном судне;
3. одобренная
подготовка на
тренажёре, если это
применимо;
4. одобренная
подготовка с
использованием
лабораторного
оборудования.
Операции планируются и выполняяются в соответствии
с установленными
правилами и процедурами по обеспечению безопасности
эксплуатации
Системы управления
Обнаружение
характерных неисправностей
и действия по
предотвращению
повреждений.
Подготовка выпускников высших морских учебных заведений на образовательно профессиональном уровне «бакалавр» должна соответствовать требованиям Таблицы АIII / 1 , а на уровне «специалист» - требованиям Таблицы А- III / 2.
В странах СНГ к судам с традиционно обслуживаемым машинным отделением относятся суда без класса автоматизации или с классом автоматизации А-2, а с периодически безвахтенно обслуживаемым машинным отделением - суда с с классом автоматизации
А-1.
Таким образом, знание электрооборудования , электронной аппаратуры и систем
управления СТС является неотъемлемой частью профессиональной подготовки судовых
механиков.
3. Международные и национальные морские классификационные общества.
Функции Регистра Украины
Все без исключения направления развития морского судоходства – проектирование и постройка судов, безопасность мореплавания, предотвращение загрязнения моря и
береговой черты с судов, спасение человеческой жизни на море и др. регламентируются
соответствующими Положениями, Конвенциями, Меморандумами и другими международными морскими нормативными документами.
Контролируют выполнение этих документов международные и национальные надзорные организации, к основным из которых принадлежат:
1. Регистр России;
2. Английский Ллойд;
3. Американское бюро судоходства;
11
4. Норвежское бюро Веритас;
5. Французское бюро Веритас;
6. Японское классификационное общество;
7. Итальянский Регистр.
Объем надзорной деятельности устанавливается Правилами классификационных
обществ, например, в России и Украине - Правилами Регистра.
По состоянию на 2007 г. Украина не имеет собственных Правил Регистра и ее моркие организации использует Правила Регистра России.
Познакомимся с направлениями деятельности Регистра более подробно.
Регистр является государственным органом технического надзора и классификации гражданских судов. Кроме того, Регистр по поручению и от имени правительства
Украины или по поручению правительств других стран осуществляет в пределах своей
компетенции технический надзор за выполнением требований международных конвенций, соглашений и договоров, в которых участвуют упомянутые страны.
Регистр устанавливает технические требования, обеспечивающие:
1. условия безопасного плавания судов в соответствии с их назначением;
2. охраны человеческой жизни и надлежащей перевозки грузов на море и на внут
ренних водных путях;
3. предотвращения загрязнения с судов,
а также
4. осуществляет технический надзор за выполнением этих требований;
5. производит классификацию судов;
6. удостоверяет валовую и чистую вместимости морских судов и обмерные характеристики находящихся под надзором Регистра судов внутреннего плавания, определенные в результате обмера судов.
Надзорная деятельность осуществляется на основании издаваемых Регистром Правил и имеет целью определить, отвечают ли Правилам и дополнительным требованиям
суда и контейнеры, подлежащие надзору, а также материалы и изделия, предназначенные
для постройки и ремонта судов и их оборудования.
Применение и выполнение Правил и дополнительных требований является обязанностью проектных организаций, судовладельцев, контейнеровладельцев, судоверфей, а
также предприятий, которые изготовляют материалы и изделия, подлежащие надзору Реги
стра.
Толкование требований Правил и других нормативных документов Регистра является компетенцией только Регистра.
Надзорная деятельность Регистра не заменяет деятельности органов технического
контроля судовладельцев, судоверфей и заводов-изготовителей.
Регистр осуществляет технический надзор за следующими морскими судами и подлежащими его техническому надзору судами внутреннего плавания в постройке и в
эксплуатации:
.1. пассажирскими, наливными судами, предназначенными для перевозки опасных
грузов, а также буксирами, независимо от мощности главных двигателей и валовой
вместимости;
.2. самоходными судами, не указанными в .1, с мощностью главных двигателей 55
кВт ( 75 л.с ) и более;
.3. судами, не указанными в .1. и .2., валовой вместимостью 80 рег. т и более, либо
мощностью энергетического оборудования 100 кВт и более.
Регистр осуществляет технический надзор за судовыми холодильными установками с точки зрения безопасности судов, надлежащей перевозки грузов, предотвращения
озоноразрушающего действия холодильных агентов на окружающую среду, а также
осуществляет классификацию холодильных установок судов.
Регистр осуществляет надзор за судовыми грузоподъемными устройствами грузо-
12
подъемностью 1 т и более.
Регистр по особому согласованию может осуществлять также надзор за другими
судами, установками и устройствами, не перечисленными выше.
Технологические и специальные устройства судов рыболовных, кабельных, технического флота и специального назначения не подлежат надзору Регистра, за исключением
оборудования, перечисленного в соответствующих частях Правил.
Регистр осуществляет технический надзор за контейнерами при их изготовлении и
эксплуатации.
Регистр рассматривает и согласовывает проекты стандартов и других нормативных
документов, связанных с его деятельностью.
Регистр может осуществлять экспертизы и участвовать в экспертизах по техническим вопросам, входящим в круг его деятельности.
Регистр издает Регистровую книгу морских судов, в которой содержатся основные
технические данные судов и сведения об их классификации.
За выполненные работы Регистр взимает плату, которая назначается в соответствии с тарифами.
4. Условия работы судового электрооборудования. Требования Правил
Регистра к судовому электрооборудованию
Судовое электрооборудование по сравнению с береговым работает в более трудных условиях.
Береговое электрооборудование установлено в определенной географической точке, т.е. оно не перемещается в пространстве и круглый год находится в одном и том же
климатическом поясе.
Судовое электрооборудование перемещается вместе с судном, и в течение одного
рейса ( 30-40 суток ) может побывать во всех климатических поясах Земного шара ( напри
мер, при переходе из Антарктиды в Мурманск ).
Для судового электрооборудования характерны следующие условия эксплуатации:
1. периодическое пребывание в тропиках, арктических водах и средних широтах,
при этом средняя продолжительность пребывания в тропиках за год составляет 170 сут;
2. непрерывное пребывание в состоянии повышенной относительной влажности (от
70 до 100 %).
При этом в машинных отделениях в течение длительного времени относительная
влажность составляет до 80 % при высоких температурах, а на палубах - меняющаяся вла
жность вплоть до циклического ежесуточного выпадения росы при средней температуре
за сутки до 30 °С;
3
3. приблизительно постоянное содержание солей в воздухе: 3—5 мг на 1 м ;
3
4. высокое содержание паров нефти в машинных отделениях: до 20 мг на 1 м
воздуха;
5. интенсивное скопление конденсата: воды в палубных механизмах и нефтепродук
тов в машинно-котельных механизмах;
6. оседание на поверхностях соли — в неблагоприятных условиях до 0,2 мм за сутки;
7. работа в условиях повышенной вибрации и периодических ударных нагрузок,
связанных с сотрясением корпуса от ударов волн или при плавании во льдах.
Кроме того, для палубного оборудования добавочными условиями являются:
1. полное обледенение при пребывании в арктических водах;
2. периодическое обливание морской водой, эквивалентное поливу из шланга под
4
давлением 9,8*10 Па ( 1at ) с расстояния 1,5 м;
3. в отдельных случаях полное кратковременное погружение под набегающую волну;
13
4. дополнительный кратковременный нагрев за счет солнечной радиации в тропиках (до 5 °С сверх предельной температуры воздуха) и ионизация под воздействием озона
3
плотностью до 40 мкг/м .
Статистика эксплуатации судов основных транспортных океанских линий показы
вает, что общее время пребывания судна в тропиках составляет примерно 160 сут в год;
при этом ходовое время судна - около 150 сут, из них 60 сут в тропиках, стояночное время 210 сут, из них 100 сут в тропиках.
Среднее наибольшее время стоянки в тропиках 10 сут. Средняя температура возду3
ха Мирового океана в зоне тропиков составляет 20 °С при абсолютной влажности 15 г/м .
У берегов Индии и Индонезии средняя температура равна 25 °С при абсолютной
3
влажности 20 г/м .
Поэтому морские нормативные документы предъявляют к СЭО повышенные требо
вания.
Эти требования содержатся в Правилах Регистра и в основном сводятся к следую
щему:
1. электрическое оборудование на судах должно надежно работать в условиях относительной влажности воздуха 75±3% при температуре +45±2°С или 80±3% при темпера
туре +40±2°С, а также при относительной влажности воздуха 95±3% при температуре
+25±2°С;
2. конструктивные части электрического оборудования должны изготовляться из
материалов, устойчивых к воздействию морской атмосферы, или должны быть надежно
защищены от вредного воздействия этого фактора;
3. электрическое оборудование должно надежно работать при вибрациях с частота
ми от 2 до 80 Гц, а именно: при частотах от 2 до 13,2 Гц с амплитудой перемещений ± 1
мм и при частотах от 13,2 до 80 Гц с ускорением ±0,7 g;
4. электрическое оборудование, установленное на источниках вибрации (дизели,
компрессоры и т.п.) или в румпельном отделении, должно надежно работать при вибраци
ях от 2 до 100 Гц, а именно: при частотах от 2 до 25 Гц с амплитудой перемещения ±1,6
мм и при частотах от 25 до 100 Гц с ускорением ±4,0 g;
5. электрическое оборудование должно надежно работать также при ударах с уско
рением ± 5,0 g и частоте в пределах от 40 до 80 ударов в минуту;
6. электрическое оборудование должно безотказно работать при длительном крене
судна до 15° и дифференте до 5°, а также при бортовой качке до 22,5° с периодом 7 - 9 с и
килевой до 10° от вертикали;
7. аварийное оборудование должно, кроме того, надежно работать при длительном
крене до 22,5°, дифференте до 10°, а также при одновременном крене и дифференте в указанных выше пределах;
8. электрическое оборудование должно обладать соответствующей механической
прочностью и устанавливаться в таком месте, где нет опасности механического повреждения.
Для выполнения перечисленных выше условий судовое электрооборудование долж
но иметь соответствующее устройство ( конструкцию ).
Рассмотрим требования к конструкции судового электрооборудования более подробно.
5. Требования морских нормативных документов к конструкции судового
электрооборудования
Основные сведения
Конструкцию судового электрооборудования разрабатывают с учётом 4-х факторов:
14
1. климатических условий района эксплуатации ( плавания );
2. предполагаемого места размещения электрооборудования непосредственно на
судне;
3. степени защищенности обслуживающего персонала от соприкосновения с токоведущими или вращающимися частями электрооборудования, находящегося внутри её
корпуса;
4. степени защищённости корпуса электрооборудования от попадания внутрь воды.
Рассмотрим поочередно выполнение перечисленных выше требований на практике
( пп. 6.1, 6.2, 6.3 и 6.4 ).
6.1. Классификация судового оборудования в зависимости от климатических
условий района плавания
Соответствующими стандартами установлена следующая классификация судового
оборудования в зависимости от климата района плавания:
1. оборудование судов ограниченного района плавания с умеренно холодным климатом ( европейская часть ), обозначаемая буквой М;
2. оборудование судов неограниченного района плавания, обозначаемое буквами
ОМ.
Классификация судового оборудования в зависимости от климата района плавания
приведена в таблице В1.
Таблица В.1.
Классификация судового оборудования в зависимости от климата района
плавания
Климатическое исполнение
Для районов с умеренным и холодным
климатом *( + 40ºС… - 45ºС )
Для районов с тропическим морским
климатом** ( выше + 40ºС )
Для неограниченного района плавания
Обозначения в
странах СНГ
Международные
обозначения
М
М
Т
Т
ОМ
МU
Для всех климатических районов
на суше и на море
В
W
* К этим районам относятся моря и океаны севернее 30º северной широты
** К этим районам относятся моря и океаны, расположенные между 30º
северной широты и 30º южной широты
Таким образом, суда неограниченного района плавания ( океанские ), периодически переходящие из северных широт в южные и наоборот, имеют электрооборудование
класса ОМ.
6.2. Классификация электрооборудования в зависимости от места расположения на судне
Судовое электрооборудование расположено на самых разных пространствах судна
и в разных помещениях.
Место расположения электрооборудования определяется видом механизма.
Например, электроприводы палубных механизмов – якорно-швартовных и грузовых устройств, траповых и шлюпочных лебедок, расположены на открытых палубах и под
15
вержены прямому воздействию воды.
Электроприводы механизмов, расположенных в машинном отделении, например,
пожарных насосов, насосов, обеспечивающих работу главного двигателя, лишены прямого воздействия воды, но остаются под воздействием остальных неблагоприятных факторов – повышенной влажности, вибрации, ударов и др.
Электрооборудование, расположенное в ЦПУ – разного рода системы управления
и контроля, а также главный электрораспределительный щит, работают в наиболее комфортных условиях, т.к. помещение ЦПУ отапливается ( или охлаждается, в зависимости
от района плавания ) и вентилируется.
Условные обозначения категорий размещения электрооборудования на судне приве
дены в таблице В.2.
Таблица В.2.
Категории размещения электрооборудования на судне
Обозначение
категории
Характеристика места размещения электрооборудования
места
1
На открытом воздухе
2
На открытом воздухе или в помещениях, где колебания температу
ры и влажности воздуха незначительно отличаются от колебаний
на открытом воздухе
3
В помещениях с естественной вентиляцией без искусственного
климата
4
5
В отапливаемых или охлаждаемых и вентилируемых помещениях
В помещениях с повышенной влажностью, где возможно длительное наличие воды или частая конденсация влаги на стенах или
потолке
6.3. Классификация электрооборудования в зависимости от степени защищенности обслуживающего персонала от соприкосновения с его токоведущими или вращающимися частями и степени защищённости корпуса электрооборудования от попадания внутрь воды
Условные обозначения степени защищенности обслуживающего персонала от соприкосновения с токоведущими или вращающимися частями электрооборудования, находящегося внутри её корпуса и степени защищённости корпуса электрооборудования от
попадания внутрь воды объединены и состоят из латинских букв IP ( от первых букв английских слов «International Protection», что означает «Международная система защиты
корпуса электрооборудования» ) и двух последующих цифр.
Первая цифра обозначает степень защищенности обслуживающего персонала от
соприкосновения с токоведущими или вращающимися частями электрооборудования.
Цифровые значения степеней такой защиты приведены в таблице В.3.
Таблица В.3.
Степени защиты судового электрооборудования от соприкосновения с токо
ведущими или вращающимися частями
Первая
цифра
условного
Степень защиты
16
обозначения
0
1
2
3
4
5
6
специальная защита отсутствует
от проникновения внутрь корпуса большого участка поверхности
человеческого тела, например, руки, и от проникновения твёрдых
тел размером свыше 50 мм
от проникновения внутрь корпуса пальцев или предметов длиной
не более 80 мм и твердых тел размером свыше 12 мм
от проникновения внутрь корпуса инструментов , проволоки и др.
предметов диаметром или толщиной более 2,5 мм и от проникновения твердых тел размером более 1,0 мм
от проникновения внутрь корпуса проволоки и твёрдых тел размером более 1,0 мм
проникновение внутрь корпуса пыли не предотвращено полностью
, однако количество попавшей пыли не должно нарушить работу
изделия
проникновение пыли предотвращено полностью
Вторая цифра обозначает степень защищенности электрооборудования от попада
ния внутрь воды. Цифровые значения степеней такой защиты приведены в таблице В.4.
Таблица В.4.
Степень защищенности электрооборудования от попадания внутрь воды
Вторая цифра условного обозначения
0
1
2
3
4
5
6
7
8
Степень защиты
защита отсутствует
от капель воды, падающих вертикально
от капель воды при наклоне оболочки до 15º
от дождя, падающего под углом 60º к
вертикали
от брызг, попадающих на корпус под лю
бым углом
от водяных струй, попадающих на корпус под любым углом
от волн воды
при погружении в воду: вода не должна
попасть внутрь корпуса в количестве,
достаточном для повреждения изделия, при
определённых стандартами значениях
давления воды и времени нахождения под
водой
то же, что и в п.7, но при длительном погружении в воду:
Название
исполнения кор
пуса
электрооборудования
открытое
каплезащищённое
каплезащищённое
брызгозащищённое
брызгозащищённое
брызгозащищённое
водозащищённое
погружное ( герметичное )
погружное ( герметичное )
Правила классификации и постройки морских и речных судов ( Регистр )
устанавливают зависимость степени защищённости электрооборудования от типа судовых
помещений. Эта зависимость приведена в таблице В.5.
Таблица В.5.
17
Зависимость степени защищённости электрооборудования от типа судовых
помещений
№№
1
2
3
4
5
6
7
8
9
10
11
12
Тип судового помещения
Помещение главного распределительного щита
Жилые, общественные и служебные помеще
ния и относящиеся к ним коридоры, вестибюли,
трапы, кроме перечисленных ниже
Каюты, салоны, детские комнаты и т.п. на пасса
жирских судах
Умывальные, туалетные, гальюны, раздевальные, камбузы, сушильные, провизионные кладовые и т.п.
Бани, душевые, ванные, прачечные, посудомоеч
ные, заготовительные, по обработке продуктов
промысла и лова
Кладовые: шкиперские, прозодежды, запчастей,
мастерских, фонарные, малярные, а также тамбуры и коридоры, примыкающие к этим помеще
ниям
Закрытые рулевые, штурманские, радио- и
трансляционные рубки и т.п.
Аварийных дизель-генераторов и пожарных
насосов
Специальные электрические
1Помещения машинные, котельные и электрического оборудования
1Холодильных машин, рулевых машин, агрегатные для палубных механизмов, насосные на
сухогрузных судах
1Места, где может скапливаться негорючая пыль
( трюма, склады и т.п. )
1Открытые палубы
Характеристика
помещения
Сухое отапливаемое
Сухие
Степень
защиты
IP00
IP20
Сухие
IP30
С повышенной
влажностью
IP44
Особо сырые
Влажные
IP55
IP23
Сухие
IP22
С повышенной
влажностью
IP23
Сухие, при возможности отапливаемые
С повышенной
влажностью
С повышенной
влажностью
IP10
Особо сырые
IP55
Заливаемые водой
IP56
Затопляемые
IP68
Опасные
IP68
IP23
IP23
13
14
15
1Помещения и пространства, где оборудование
работает под водой
1Помещения с горючей пылью, угрожающей
взрывом
В зависимости от особых условий эксплуатации, дополняющих перечисленные выше, могут использоваться и иные буквенные обозначения исполнение корпусов судового электрооборудования . Эти обозначения приведены в таблице 6.
Таблица В.6.
6.4. Классификация судового оборудования в зависимости от особых условий
работы эксплуатации
№п/п Обозначение Наименование
исполнения исполнения
1
ММ
Маломагнитное
Характерные признаки конструктивного
исполнения
Оборудование изготовлено из маломагнит-
18
2
ВЗГ
3
УВ
ных материалов или ограничивается его
магнитное поле при помощи встроенных
ферромагнитных устройств
Взрывозащищенное Исполнение корпуса оборудования исключает возможность воспламенения окружаю
щей взрывоопасной среды
Ударовибростойкое, Оборудование предназначено для работы в
ударовибропрочное условиях, характеризующихся наличием
вибрации и ударов
Классификация судового электрооборудования в зависимости от способа
монтажа электрических машин
Конструктивное исполнение электрических машин по способу монтажа (крепление
и сочленение) и условное обозначение этих исполнений в технической документации
установлены ГОСТ 2479-79.
Условное обозначение состоит из двух букв латинского алфавита IM и четырех
цифр:
IM
Х Х Х Х
,
1 2 3 4
где: первая цифра - конструктивное исполнение:
1 – на лапах с подшипниковыми щитами ( с пристроенным редуктором );
2 - на лапах с подшипниковыми щитами, с фланцем на подшипниковом щите (или
щитах);
3 - с фланцем на одном подшипниковом щите (или щитах), с цокольным фланцем;
4 - без лап с подшипниковыми щитам с фланцем на станине;
5 - без подшипниковых щитов;
6 - на лапах с подшипниковыми щитами и со стояковыми подшипниками;
7 - на лапах со стояковыми подшипниками (без подшипниковых щитов);
8 - с вертикальным валом, кроме rpyпп от IM1 до IM4;
9 - специального исполнения по cnocoбу монтажа.
Вторая и третья цифры — способы монтажа (пространственное положение машины и направление конца вала, причем в обозначении направления конца вала (3-я цифра );
цифра 8 обозначает, что машина может pаботать при любом из направлений конца вала,
определенных цифрами 8 - 7, а цифра указывает, что направление конца вала машины отлично от определенных цифрами с 0 до 8.
В этом случае направление конца вала указывается дополнительно в технической
документации.
Четвертая цифра обозначает исполнена конца вала электрической машины.
0 - без конца вала;
1 - с одним цилиндрическим концом вала;
2 - с двумя цилиндрическими концам вала;
3 - с одним коническим концом вала;
4 - с двумя коническими концами вала;
5 - с одним фланцевым концом вала;
6 - с двумя фланцевыми концами вала
7 - с фланцевым концом вала на стороне D и цилиндрическим концом вала на сто
роне N, причем под стороной D понимается при одном конце вала для двигателей – при
водная, а для генераторов – приводимая сторона; при двух концах вала - сторона с концом вала большего размера, а при равных диаметрах для машин на лапах с коробкой выво
дов, расположенных не сверху,- сторона, с которой коробка выводов видна справа;
8 - прочие исполнения конца вала.
Таблица В.7..
19
Примеры условного обозначения форм конструктивного исполнения электрических машин
Группа исполнения
IM1
Машины на лапах с подшипниковыми щитами
Конструктивное исполнение
С двумя подшипниковыми
щитами, на лапах, вал горизонтальный с цилиндрическим концом
То же, вал вертикальный с
цилиндрическим концом,
направленным вниз
На лапах, с фланцем на одном подшипниковом щите,
доступном с обратной стороны, вал горизонтальный с
цилиндрическим концом
На лапах, с фланцем на одном подшипниковом щите,
недоступном с обратной сто
роны, ( или щитах ), вал горизонтальный с цилиндрическим концом, направлен
ным вверх
IM3
С двумя подшипнковыми
Машины без лап с подшип- щитами, с фланцем на стониковыми щитами, с флан- роне D, доступном с обратцем на одном подшипнико- ной стороны, вал горизонвом щите ( или щитах )
тальный с цилиндрическим
концом
С двумя подшипнковыми
щитами, с фланцами, доступ
ными с обратной стороны на
обоих подшипниковых щитах, вал вертикальный с
цилиндрическими концами
IM4
С двумя подшипнковыми
Машины без лап с фланцем щитами, с фланцем на стона станине
роне D, доступном с обратной стороны, вал горизонтальный с цилиндрическим
концом
С одним подшипниковым
щитом, с фланцем на сторо
не N, доступном с обратной
стороны; вал вертикальный
с цилиндрическим концом,
направленным вверх
IM5
Без станины с ротором, вал
Машина без подшипникогоризонтальный с цилиндри
вых щитов
ческим концом
IM2
Машины на лапах с подшипниковыми щитами с
фланцем на подшипнико
вом щите ( или щитах )
Обозначение
IM1001
IM1011
IM2001
IM2131
IM3001
IM3001
IM4001
IM4731
IM5001
20
IM6
Машина с подшипниковыми щитами и стояковыми
подшипниками
IM7
Машины со стояковыми
подшипниками ( без
подшипниковых щитов )
IM8
Машины с вертикальным
валом, кроме машин групп
от IM1 до IM4
IM9
Машины специального
исполнения по способу
монтажа
Со станиной на лапах, с ротором, без вала
IM5410
На лапах с двумя подшипниковыми щитами, с одним
стояковым подшипником на
стороне D, без фундаментной плиты
Со станиной на лапах с фундаментной плитой, с одним
стояковым подшипником на
стороне N, с одним подшипниковым щитом
Без фундаментной или опор
ной плиты, станина на лапах, с одним стояковым под
шипником
IM6000
IM6211
IM7001
С фундаментной плитой на
приподнятых лапах, с двумя
стояковыми подшипниками
IM7610
C подпятником и направляя
ющим подшипником, распо
ложенным под ротором, с
валом, без маховика
C подпятником и направляя
ющим подшипником, распо
ложенным над ротором, с
валом, без маховика
IM8201
Встраиваемое исполнение с
цилиндрической станиной (
или без станины ), с двумя
подшипниковыми щитами,
вал горизонтальный с цилин
дрическим концом
С двумя подшипниковыми
щитами на лапах в горизонтальной плоскости, вал вертикальный с цилиндрическим концом
IM9001
IM8411
IM9631
6.6. Классификация судового электрооборудования в зависимости от режимов
работы
Основные сведения
Судовое электрооборудование будет работать надежно, если оно не только правиль
но сконструировано, но и правильно используется.
СЭО используется правильно, если оно соответствует условиям работы судового
механизма, устройства и т.п.
Поясним сказанное на примере условий работы электродвигателей.
21
Например, электродвигатели насосов и вентиляторов работают с постоянной нагрузкой, при неизменном токе.
В то же время электродвигатели грузоподъемных механизмов работают в более тяжелых условиях – с частыми пусками, сопровождающимися бросками тока.
Ясно, что использовать в грузоподъемных механизмах электродвигатели, предназначенные для насосов или вентиляторов нельзя – они быстро сгорят.
Если, наоборот, использовать для насосов или вентиляторов электродвигатели,
предназначенные для грузоподъемных механизмов, можно, но нецелесообразно – они окажутся недоиспользованными по мощности, т.к. вместо работы в тяжелых условиях ( с бро
сками токов ) они станут работать в легких ( с постоянной нагрузкой )..
Иначе говоря, каждому виду СЭО соответствует «свой», определенный режим рабо
ты. Тот или иной режим работы электрооборудования полностью зависит от технологических условий работы механизма. Иначе говоря, механизм «навязывает» электрооборудованию ( например, электродвигателю ) свои условия работы – как работает механизм, так
должен работать и электродвигатель.
Приведем основные сведения, связанные с понятием «режим работы электрооборудования», применительно к электродвигателям.
Это объясняется тем, что основную часть производимой на судне электроэнергии
( до 85…90% ) потребляют именно электродвигатели.
Международная система классификации режимов работы электродвигателей
Режим работы электродвигателей - это установленный порядок чередования периодов, характеризуемых величиной и продолжительностью нагрузки, отключений, торможения, пуска и реверса во время его работы.
Для иллюстрации этих режимов работы используют нагрузочные диаграммы, представляющие собой зависимость параметра, характеризующего нагрузку приводного двига
теля от продолжительности t отдельных циклов, составляющих работу электропривода в
течение определенного периода времени.
К параметрам, характеризующим нагрузку приводного двигателя электропривода,
относят:
1. полезную мощность Р;
2. полезный момент ( момент на валу ) М;
3. силу потребляемого тока I.
Существующие международные стандарты устанавливают 8 режимов работы электрооборудования, обозначаемых S1…S8.
Существующие международные стандарты устанавливают 8 режимов работы электрооборудования, обозначаемых S1…S8 ( табл В.7 ).
Таблица В.7.
Режимы работы электрооборудования
Название режима
Обозна- Примеры судовых электроприводов
чение
1
Продолжительный
S1
Вспомогательные механизмы ГД,
вентиляторы МО и трюмные, рулевое
устройство
2
Кратковременный
S2
Лебедки шлюпочные и траповые,
якорно-швартовные устройства
3
Повторно-кратковременS3
Грузоподъемные механизмы
ный
( лебедки, краны, порталы )
4
Повторно-кратковременный, с S4
Грузоподъемные механизмы
определенным числом
( лебедки, краны, порталы )
включений в час
5
Повторно-кратковременный, с S5
Грузоподъемные механизмы
электрическим торможением
( лебедки, краны, порталы )
22
6
7
8
Перемежающийся с
длительностью цикла 10 мин
Повторно-кратковременный с
частыми реверсами при
электрическом торможении
Перемежающийся с двумя и
более частотами вращения
S6
-
S7
Грузоподъемные механизмы
( лебедки, краны, порталы )
S8
-
На судах, в основном, применяются электрооборудование первых трех режимов, а
именно:
1. продолжительного S1;.
2. кратковременного S2;
3. повторно-кратковременного S3.
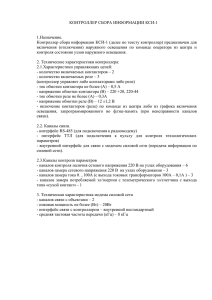
Продолжительный режим S1
Продолжительным называют режим, при котором температура двигателя τ за время
работы поднимается от температуры окружающей среды θ 0 до установившейся θ уст
( рис. В.2, а ).
Рис. В.2. Нагрузочные диаграммы и кривые нагрева двигателя при продолжительном S1 ( а ), кратковременном S2 ( б ) и повторно-кратковременном
S3 ( в ) режимах работы
Двигатель используется по мощности полностью, если установившаяся температура θ уст равна максимально допустимой для класса изоляции θ доп ( таблица 1 ).
Таблица В.8.
Класс изоляции
А
Е
В
F
Н
С
Предельная температура, ºС
105
120
130
155
180
>180
На судах морского флота применяют изоляцию таких классов:
1. для обмоток статоров – изоляцию классов Н и В;
2. для обмоток роторов – изоляцию классов Н, В и F.
Двигатель не используется по мощности полностью, если установившаяся темпера
тура θ уст меньше максимально допустимой для класса изоляции θ доп .
Двигатель перегружен, если установившаяся температура θ уст больше максималь
23
но допустимой для класса изоляции θ доп . Такой режим недопустим, т.к. приводит к высы
ханию и порче изоляции. Для предотвращения такого режима применяют электротепловые реле, отключающие двигатель от сети.
На судах в режиме S1 работают насосы главного двигателя, вентиляторы МО, насосы электрогидравлической рулевой машины и др. Продолжительность работы электрообо
рудования в режиме S1 составляет от десятков часов до десятков суток.
Кратковременный режим S2
Кратковременным называют режим, при котором температура двигателя τ за время
работы не успевает подняться до установившейся температуры θ уст , но за время паузы
уменьшается до температуры окружающей среды θ 0 ( рис. В.2, б ).
Для этого режима применяют количественный показатель : «длительность работы».
Стандарты устанавливают 3 значения длительности работы электродвигателей: 10,
30 и 60 мин.
На судах в кратковременном режиме работают шлюпочные и траповые лебёдки
( длительность работы 10 мин ) и якорно-швартовные устройства ( длительность работы
30 мин ).
Повторно-кратковременный режим S3
Повторно-кратковременным называют режим, при котором температура двигателя
τ за время работы не успевает подняться до установившейся температуры θ уст , а за
время паузы не успевает уменьшаться до температуры окружающей среды θ 0 ( рис.В2., в
).
Этот режим состоит из чередующихся кратковременных рабочих периодов t раб и
пауз t 0 . Время цикла t ц = t раб + t 0 не должно превышать 10 мин. В противном случае
наступает кратковременный режим работы S2.
Для этого режима применяют количественный показатель «продолжительность
включения двигателя».
Продолжительностью включения двигателя ( ПВ, ПВ% ) называют отношение времени работы двигателя к времени цикла, выраженное в относительных единицах или процентах :
ПВ = t раб / t ц , или ПВ% = ( t раб / t ц )*100%.
Стандарты устанавливают 4 значения ПВ% : 15, 25, 40 и 60%. Чем больше
ПВ%, тем большую часть времени цикла работает двигатель.
На судах в повторно-кратковременном режиме работают двигатели грузовых лебё
док и кранов.
Например, три обмотки статора электродвигатель типа МАП621-4/8/24 ОМ1 с номи
нальными скоростями 170, 700 и 1400 об/мин имеют такие значения ПВ%: 15, 40 и 40.
Это означает, что обмотка первой скорости ( ПВ% = 15% ) не предназначена для
длительной работы и используется как разгонная, для выхода на вторую скорость.
В то же время обмотки вторая и третья скорости ( ПВ% = 40% ) – рабочие, исполь
зуемые для перемещения груза с достаточно большими скоростями.
7. Условия выбора электродвигателей для судовых электроприводов
Таких условий четыре:
1. номинальное напряжение выбранного двигателя и напряжение судовой сети
должны быть одинаковыми;
24
2. режимы работы выбранного электродвигателя и механизма должны быть одина
ковыми;
3. номинальная ( по справочнику ) и расчётная ( по расчёту )мощности двигателя
должны быть одинаковыми;
4. номинальная ( по справочнику ) и расчётная ( по расчёту ) частоты вращения
двигателя должны быть одинаковыми.
При нарушении 1-го условия двигатель сгорит ( если напряжение сети больше напряжения двигателя ) или будет развивать пониженный момент ( если напряжение сети
меньше напряжения двигателя ).
При нарушении второго условия двигатель окажется либо перегруженным, либо
недогруженным.
Например, если выбрать для брашпиля ( режим S2, 30 мин ) двигатель продолжительного режима, последний не успеет за 30 мин работы нагреться до максимально допустимой классом изоляции температуры, т.е. не будет полностью использован по мощности.
Если выбрать в качестве для электродвигателя охлаждающего насоса главного
двигателя ( режим S1 ) двигатель кратковременного режима ( например, S2, 30 мин ), он
за короткое время перегреется и выйдет из строя.
При нарушении 3-го условия двигатель окажется либо перегруженным, либо недогруженным. Например, если выбирать двигатель, номинальная мощность которого меньше расчётной, он окажется перегруженным. Лучше выбрать двигатель с небольшим запасом по мощности.
Нарушение 4-го условия на практике неизбежно, т.к. трудно выбрать двигатель,
номинальная скорость которого в точности совпадает с расчётной.
В этом случае считают выбор удовлетворительным, если номинальная скорость
отличается от расчётной не более чем на ± 5%.
Неодинаковость скоростей электродвигателя и механизма ухудшает условия работы как электродвигателя, так и механизма, и может стать причиной аварии электропривода.
Приведем пример. У центробежного насоса его основные параметры – напор Н
3
( м ), подача Q ( м / час ) и мощность P ( кВт ) прямо пропорциональны соответственно
первой, второй и третьей степени частоты вращения:
2
3
Н ≡ ω, Q ≡.ω , Р ≡.ω .
Отсюда следует, что если скорость электродвигателя больше номинальной скорости насоса, например, на 10%, т.е. ω' = 1,1 ω н , то новые значения напора, подачи и мощно
сти составят соответственно
Н' ≡ ω' = 1,1 Н н ,
Q' ≡.( ω')
3
2
= ( 1,1)
3
2
Q н = 1,21 Q н ,
Р' ≡.( ω') = ( 1,1 ) Р н = 1,331 Р н ,
т.е. напор увеличится на 10%, подача – на 21%, а мощность насоса ( равная мощно
сти электродвигателя ) - на 31%.
В результате увеличения напора возможен разрыв трубопровода или повреждение
арматуры ( клапанов ), а увеличение мощности, развиваемой электродвигателем, приведет
к перегрузке и последующему его отключению тепловыми реле.
Наоборот, если скорость электродвигателя менше номинальной скорости насоса,
например, на 10%, т.е. ω' = 0,9 ω н , то новые значения напора, подачи и мощности составят соответственно
Н' ≡ ω' = 0,9 Н н ,
25
Q' ≡.( ω')
3
2
= ( 0,9)
2
Q н = 0,81 Q н ,
3
Р' ≡.( ω') = ( 0,9 ) Р н = 0,729 Р н ≈ 0,73 Р н ,
т.е. напор уменьшится на 10%, подача – на 19%, а мощность насоса ( равная мощности электродвигателя ) - на 27%.
В результате уменьшения напора и подачи возможны нарушения в работе системы,
которую „обслуживает” насос. В то же время электродвигатель окажется недогруженным
( недоиспользованным ) по мощности ( это - бальзам на сердце электромеханику ).
8. Системы буквенно-цифровых обозначений электрооборудования
Промышленность выпускает различные виды электрооборудования сериями.
Серия – это группа или ряд предметов, однородных или обладающих общим признаком ( БСЭ, 1990 г., том 32, стр. 1195 ).
Сериями выпускаются, например, электродвигатели, коммутационно-защитные
аппараты ( автоматические выключатели, контакторы, реле и т.п. ), рулевые машины и др.
Соответствующие государственные стандарты устанавливают системы буквенноцифровых обозначений электрооборудования, в том числе судового.
В качестве примера рассмотрим систему буквенно-цифровых обозначений типоразмеров асинхронных электродвигателей серии 4А.
Серия 4А является массовой серией асинхронных двигателей, рассчитанных на
применение в различных областях народного хозяйства, в том числе, на судах морского и
тралового флота для привода вспомогательных механизмов ( вентиляторов и насосов ),
механизмов рыбообрабатывающих цехов рыбопромысловых судов и т. п.
Эта серия охватывает ряд типоразмеров электродвигателей мощностью от 0,06 до
400 кВт.
В серии принята следующая система обозначений:
4А Х Х Х Х Х Х Х
= = = = = = = =,
1
2 3 4 5 6 7 8
где: 1 – обозначение серии ( четвёртая серия асинхронных двигателей );
2 - исполнение двигателя по способу защиты: буква Н – исполнение IP23,
отсутствие буквы означает исполнение IP44;
3- исполнение асинхронного двигателя по материалу станины и щитов:
А – станина и щиты алюминиевые, Х – станина алюминиевая, щиты чугунные;
отсутствие буквы – станина и щиты чугунные или стальные;
4 – установочный размер по высоте оси вращения, мм
5 – установочный размер по длине станины: буквы S, М или L ( S –от “short» меньший, М – от «middle” – средний, L – от «long” – больший );
6 – длина сердечника: А – меньшая, В – большая при условии сохранения
установочного размера; отсутствие буквы означает, что при данном установочном
размере ( S, M или L ) выполняется только одна длина сердечника;
7 – число полюсов электродвигателя;
8 – климатическое исполнение и категория размещения электродвигателя на судне.
Пример. Объяснить значение букв и цифр в обозначении асинхронного электро
двигателя 4АНХ225S4ОМ2.
4А - четвёртая серия асинхронных двигателей;
Н – защитное исполнение корпуса типа IP23 ( брызгозащищённое );
Х - станина алюминиевая, щиты чугунные;
225 - высота оси вращения, мм;
S – меньший установочный размер по длине станины;
4 – число полюсов асинхронного электродвигателя;
26
ОМ – двигатель предназначен для эксплуатации в неограниченных районах
плавания;
2 - двигатель предназначен для размещения на открытом воздухе или в помещениях, где колебания температуры и влажности воздуха незначительно отличаются от колебаний на открытом воздухе.
Следует обратиь особое внимание на такой параметр, как установочный размер по
высоте оси вращения ( в данном примере – это высота оси вращения, равная 225 мм ).
Если высоты осей вращения валов механизма ( например, насоса ) и электродвигателя неодинаковы, установка механизма и насоса на общей раме затрудняется.
9. Международная система единиц физических величин
История единиц физических величин насчитывает столько веков, сколько существу
ет «gomo sapiens», т.е. человек разумный ( к этому определению понятию относимся и мы
с вами - наверное ).
За три тысячи лет в древнем Египте уже применялись довольно точно установленные и узаконенные единицы длины, площади и веса. Строительство ирригационных систем, возведение храмов и дворцов, сооружение гигантских пирамид было бы невозможно
без измерений.
На протяжении веков возникали, применялись и исчезали разные системы измерения физических величин. В разных странах эти системы были разными. Например, в Анг
лии, США и других англоязычных странах применялась дюймовая система измерения
длины, в странах Европы - метрическая
Разнобой и хаос в области измерения физических величин осложнял торговлю отдельно взятых стран и тем более международную торговлю. При обмене научно-техниче
ской информацией, изготовлении механизмов и устройств позникали очень серьезные
проблемы.
Вопрос о создании Международной системы единиц впервые был поднят еще в
1913 г. на V Генеральной конференции по мерам и весам ( ГКМВ ). Однако подготовка
Международной системы единиц вступила в практическую стадию лишь в середине XX
века и завершилась принятием в 1960 году ныне существующей системы СИ ( System
International ) измерения единиц.
В соответствии с действующими стандартами ( ГОСТ 8.417-81 и СТ СЭВ 1052-78 )
установлены три вида единиц: основные, дополнительные ( табл. В.9 ) и производные
( табл. В.10 )
Таблица В.9.
Основные и дополнительные единицы СИ
Величина
Единица
Наименование
Наименование
Размерность
Длина
Масса
Время
Сила электрического
тока
Термодинамическая
температура
Плоский угол
L
M
T
I
метр
килограмм
секунда
ампер
Обозначение
Международное
m
kg
s
A
θ
кельвин
K
К
-
радиан
rad
рад
Русское
м
кг
с
А
Таблица В10.
Производные единицы СИ
27
Величина
Единица
Наименование
Наименование
Размерность
Скорость
LT
Угловая скорость
T
Частота
LT
Сила, вес
LMT
Давление
L
Энергия, работа,
количество
теплоты
Мощность, поток
энергии
Момент силы
Электрическое на
пряжение, электрический потенци
ал, электродвижущая сила
Электрическая
емкость
Электрическое
сопротивление
Электрическая
проводимость
Количество
электричества
Напряженность
электрического
поля
Абсолютная
диэлектричеcкая
проницаемость
Поток магнитной
индукции,
магнитный поток
Магнитная
индукция
Индуктивность,
взаимная
индуктивность
Напряженность
магнитного поля
Абсолютная
магнитная
проницаемость
1
метр в секунду
1
2
1
2
MT
Hz
Гц
ньютон
N
Н
паскаль
Pa
Па
J
Дж
2
2
ватт
W
Вт
2
2
ньютон-метр
N*m
Н*м
T I
вольт
V
В
2 2
фарад
F
Ф
ом
Ω
Ом
сименс
S
См
кулон
C
Кл
3 1
вольт на метр
V/m
В/м
1
фарад на метр
F/m
Ф/м
вебер
Wb
Вб
2 1
I
тесла
T
Тл
2 2
генри
H
Гн
ампер на метр
A/m
А/м
генри на метр
H/m
Гн/м
2
L M
2
1
4 1
MT
I
3 2
2
L MT I
2
M
1
T
3 2
I
TI
LMT
3
I
M
2
L MT
LMT
2
L T
L
рад/с
джоуль
L MT
L
rad/s
2
L MT
L
радиан в
секунду
герц
2
L MT
L
2
Обозначение
Междуна- Русское
родное
m/s
м/с
1
4 2
T I
2 1
I
I
I
LMT
2 2
I
28
Десятичные кратные и дольные единицы, а также их наименования и обозначения
образуются с помощью множителей, приставок и обозначений, приведенных в таблице
В11.
Таблица В11.
Множители и приставки для образования десятичных кратных и дольных единиц
Множитель
10
18
экса
Обозначение приставки
Международное
Русское
E
Э
10
15
пета
P
П
10
12
тера
T
Т
10
9
гига
G
Г
10
6
мега
M
М
10
3
кило
k
к
10
2
гекто
h
г
10
1
дека
da
да
1
деци
d
д
2
санти
c
с
3
милли
m
м
6
микро
μ
мк
9
нано
n
н
12
пико
p
п
15
фемто
f
ф
18
атто
a
а
10
10
10
10
10
10
10
10
Приставка
10. Единицы, часто применяемые в судовой электротехнике
Единицы измерения скорости при поступательном движении
При поступательном движении скорость движущихся масс называется «линейная
скорость», обозначается латинской буквой «υ» и измеряется в «м/с» ( метр в секунду ) или
«м/мин» ( метр в минуту ).Например, скорость подъёма груза электропривода лебёдки υ =
= 30 м/мин.
На практике применяют внесистемные ( не соответствующие системе СИ ) единицы измерения скорости, например, километр в час ( км/ч ), узел = 1852 м /ч ( 1852 м – длина морской мили ) и др.
Единицы измерения скорости при вращательном движении
При измерении скорости вращающихся масс применяют два наименования скорости:
1. «частота вращения», обозначается латинской буквой «n» и измеряется в
«об/мин» ( оборот в минуту ). Например, частота вращения двигателя n = 1500 об/мин.
Эта единица скорости – внесистемная, т.к. в ней используется внесистемная едини
ца времени, а именно – минута ( в системе СИ время измеряется в секундах ).
Тем не менее эта единица до сих пор широко применяется на практике. Например,
в паспортных данных электродвигателей скорость вала указывается именно в об/ мин.
29
2. «угловая скорость», обозначается латинской буквой «ω» и измеряется в
1
«рад/с» ( радиан в секунду ) или, что одно и то же, с ( секунда в минус первой степени ).
1
Например, угловая скорость электродвигателя ω = 157 с .
Напомним, что радиан – вторая, кроме знакомого нам пространственного градуса
( º ), единица измерения углового расстояния, равная 360º / 2π = 360 / 2*3,14 = 57º36' ( пять
десят семь градусов и 36 минут ).
Впервые возникла в расчетах, где часто встречалось число 360º / 2π.
Эта единица скорости – системная, т.к. в ней используется системная единица времени, а именно – секунда.
На практике надо уметь быстро переходить от одной единицы скорости к другой и
наоборот.
Поэтому выведем соотношение между этими двумя единицами.
Угловая скорость ( через частоту вращения ):
ω = 2 πn / 60 = n / ( 60 / 2 π ) = n / 9,55 ≈ n / 10 ( В.1 ).
Частота вращения ( через угловую скорость ):
n = 60 ω / 2 π = 60 ω / 2*3,14 = 9,55 ω ≈ 10 ω
( В.2 ).
Приведем два примера.
Пример №1.
В паспорте электродвигателя указана номинальная скорость вала n = 1500 об/мин.
Найти угловую скорость вала этого электродвигателя.
Угловая скорость вала
1
ω =n / 9,55 = 1500 / 9,55 = 157 ≈ 150 с .
Пример №2.
В паспорте электродвигателя указана угловая скорость вала электродвигателя
1
ω = 314 с .
Найти частоту вращения вала этого электродвигателя.
Частота вращения вала
n = 9,55 ω = 9,55*314 = 3000 ≈ 3140 об/ мин.
Единицы измерения давления
В качестве единицы измерения на судах применяются две единицы:
2
1. техническая атмосфера ( ат, аt ), при этом 1at = 1 кгс/см ( читается так: один килограмм-сила на квадратный сантиметр );
2
2. паскаль ( Па, Ра ), при этом 1Па = 1Н/м ( читается: один ньютон на квадратный .
метр ).
Поскольку паскаль – мелкая единица, на практике применяют более крупную:
6
1 МПа ( один мегапаскаль ), при этом 1 МПа = 10 Па.
Соотношение между этими единицами такое:
2
4
1 аt = 1 кгс/см = 9,8*10 Па = 0,098 МПа ≈ 0,1 МПа
1 МПа = 10,204 at ≈ 10 at.
Пример №3.
2
Давление воды в системе составляет Р = 4 кгс/см ( 4 технических атмосферы ).
Перевести это давление в мегапаскали.
2
Р = 4 кгс/см ≈ 4*0,1 = 0,4 МПа
30
Пример №4. Давление воздуха в баллонах пускового воздуха составляет 4 МПа.
Перевести это давление в технические атмосферы.
Р = 4 МПа ≈ 4*10 ≈ 40 at.
11. Рекомендации по изучению дисциплины
При работе с конспектом лекций необходимо использовать источники, перечисленные в «Списке литературы» в конце конспекта.
Изучение дисциплины предполагает неуклонное выполнение следующих составных частей этой работы:
1. постоянное посещение лекций, лабораторных и практических занятий, а также
дополнительных занятий и консультаций;
2. постоянное ведение конспекта лекций, что предполагает умение конспектировать материал как во время занятий под руководством преподавателя, так и вне занятий;
3. использование методических указаний для самостоятельной работы по изучению материала программы и выполнению домашних заданий всех видов;
3. использование научной, учебной и справочной литературы, а также международных и национальных морских нормативных документов и документов классификационных обществ ( Регистра, Ллойда, Веритас, и т.п. ).
Контрольные вопросы
1. Какие факторы определяют необходимость знания судовыми механиками элект
рооборудования судов?
2. Какие международные и национальные морские документы регламентируют
объем знаний судовыми механиками электрооборудования судов?
3. Каково содержание документов STCW-78 и CODE-95? Как расшифровать название этих документов?
4. Когда Украина присоединилась к ПДНВ-78? Приведите номер документа
5. Перечислите знания, понимание и профессионализм судомехаников в соответствии с функцией 5 таблиц А-III/1 STCW-78 и CODE-95
6. Назовите основные этапы развития судового электрооборудования
7. Когда и благодаря чему произошел переход СЭО с постоянного тока на перемен
ный?
8. Из каких СУ состоит КСУ СТС типа „Залив-М”? Каково назначение каждой
системы?
9. От чего зависит знак автоматизации ( А1, А2 или А3 ) в символе класса судна?
10. Каков объем автоматизации СЭУ для судов классов А1, А2, А3?
11. В каких направлениях будет развиваться СЭО в XXI веке?
12. Каковы условия работы СЭО? Приведите 5 числовых показателей
13. Каковы требования морских нормативных документов к условиям работы СЭО?
14. Как классифицируется СЭО в зависимости от климатических условий района
плавания?
15. Как классифицируется СЭО в зависимости от места расположения на судне?
16. Как классифицируется СЭО в зависимости от степени защищенности обслуживающего персонала от соприкосновения с его токоведущими или вращающимися частями
и степени защищенности корпуса СЭО от попадания внутрь воды?
17. Приведите примеры судовых служебных и жилых помещений с их краткой
характеристикой и степенью защиты
18. Как классифицируется СЭО в зависимости от особых условий работы?
19. Что такое «режим работы электрооборудования»? Какое число режимов работы
электрооборудования устанавливают международные нормативные документы? Приведите их условное буквенно-цифровое обозначение
31
20. Что такое режим работы электрооборудования S1? Каковы количественные па
раметры этого режима? Какие судовые электроприводы работают в режиме S1?
21. Что такое режим работы электрооборудования S2? Каковы количественные па
раметры этого режима? Какие судовые электроприводы работают в режиме S2?
22. Что такое режим работы электрооборудования S3? Каковы количественные па
раметры этого режима? Какие судовые электроприводы работают в режиме S3?
23. Перечислите условия выбора СЭО для судовых электроприводов
24. Расшифруйте условное буквенно-цифровое обозначение асинхронного двигате
ля типоразмера 4А225М6ОМ2 IP68 ( 4АНХ250S4ОМ2 IP00, 4А160L4ОМ2 IP23,
4А125S4ОМ2 IP44 )
25. Каким образом классифицируются электрические машины по способу
монтажа? Приведите примеры
26. Каковы условия выбора электродвигателя для определенного электропривода?
К чему приводит нарушение условий? Приведите примеры.
27. Перечислите составные части работы студента с конспектом
32
РАЗДЕЛ 1. СУДОВЫЕ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИЕ
СИСТЕМЫ
1. ОБЩАЯ ХАРАКТЕРИСТИКА СУДОВЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ
СИСТЕМ
1. Классификация судового электрооборудования
Электроэнергию, производимую судовыми электростанциями, потребляют многочисленные приемники ЭЭ, в совокупности образующие судовое электрооборудование.
В зависимости от назначения, различают следующие виды судового электрообору
дования:
1. электроэнергетические системы;
2. электрические приводы;
3. гребные электрические установки;
4. системы контроля;
5. системы и устройства связи, управления и сигнализации;
6. электрическое освещение и электронагревательные приборы.
Электроэнергетические системы предназначены для производства и распределения электроэнергии. Эти системы состоят из источников электроэнергии – дизель- и
турбогенераторов, электрораспределительных щитов, а также кабельных и проводных
распределительных сетей.
Электрические приводы предназначены для приведения в движение разного рода
механизмов.
Различают следующие виды судовых электроприводов:
1. рулевые;
2. якорно-швартовные ( брашпили и шпили, автоматические швартовные лебедки)
3. грузоподъёмные ( грузовые лебёдки и краны, лифты );
4. судовые нагнетатели ( насосы, вентиляторы, компрессоры );
5. механизмы специального назначения.
К последним относят электроприводы:
1. подруливающих устройств ( на многих типах современных судов );
2. систем кренования и дифферента ( на ледоколах и судах ледокольного типа );
3. успокоителей качки ( на пассажирских судах, судах-паромах );
4. систем откренивания судов ( на судах типа ро-ро );
5. буксирных лебедок ( на буксировочных судах и ледоколах ).
Гребные электрические установки предназначены для приведения в движение
гребного винта ( винтов ).
Различают ГЭУ постоянного, переменного и двойного рода тока. На последних
переменный ток сети преобразуется в постоянный ток, который далее полается на гребные
электродвигатели постоянного тока. Иначе говоря, в таких ГЭУ используются два рода
тока – переменный и постоянный, отсюда название – установки двойного рода тока.
ГЭУ применяют на судах, где требуется плавное и в широких пределах изменение
скорости движения судна, а также частое изменение направления движения судна посредством реверса гребных электродвигателей ).
К таким судам относятся ледоколы, паромы, транспортные суда ледокольного типа,
в том числе с атомными паропроизводящими установками.
Системы контроля предназначены для автоматического сравнения измеряемых
параметров, характеризующих контролируемый объект, например, главный двигатель, со
значениями этих параметров (уставками), принятыми за нормальные или допустимые. На
судах системы контроля объединены с системами управления объектов в единое целое системами централизованного контроля.
33
Современные микропроцессорные системы контролируют до нескольких тысяч па
раметров – давление, температуру, уровень, скорость и др.
Разновидностью систем контроля являются системы технической диагностики
(СТД), которые на основании результатов измерений выдают обобщенные сведения о
состоянии объекта, характере неисправностей и способах их устранения. В СТД широко
используются вычислительные и логические устройства.
Системы и устройства связи, управления и сигнализации предназначены для обеспечения внутрисудовой связи, в основном, при помощи телефонов, дистанционного управления судовыми объектами, например, главными двигателями из рулевой рубки, и различных видов сигнализации - служебной, авральной и специальной
К последней относятся системы пожарной и трюмной сигнализации.
Электрическое освещение и электронагревательные приборы предназначены для
создания необходимых комфортных условий работы и жизни экипажа.
К приборам электрического освещения относятся светильники с лампами накалива
ния и люминисцентными, осветительные и сигнальные прожекторы и др.
К электронагревательным приборам относят приборы сопротивления – электропли
ты, утюги, грелки, калориферы, водо- и маслонагреватели, хлебопекарные печи, котлы для
приготовления пищи, а также индукционные ( микроволновые печи ) и радиационные (
лампы инфракрасного излучения ). Последние обеспечивает глубокий прогрев крупных
устройств, поэтому их рационально использовать при сушке электрических машин.
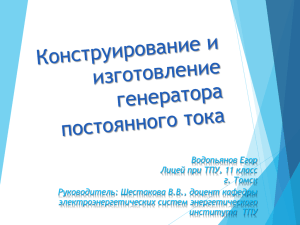
2. Расположение основных элементов электрооборудования на судне
Расположение основных элементов электрооборудования на судне небольшого
водоизмещения изображено на рис. 1.1.
Рис. 1.1. Схема размещения основных элементов электрооборудования на судне:
1 - главный электрораспределительный щит; 2 - главный двигатель; 3 – механизм
изменения шага винта; 4 - кормовой шпиль; 5 - рулевая машина; 6 - распределительный щит; 7 - буксирная лебедка; 8 - аварийная электростанция; 9 - распределительный щит сигнально-отличительных огней; 10 - радиорубка; 11 - грузовая лебедка; 12 - носовой шпиль; 13 - подруливающее устройство; 14 - гиропост; 15 -гиро
компас; 16 - генераторная выгородка
Главный электрораспределительный щит 1 ( ГЭРЩ ) расположен в машинном
отделении в генераторной выгородке 16. На современных судах ГЭРЩ расположен в ЦПУ
( центральный пост управления ). ЦПУ представляет собой звукоизолированный отсек, в
34
котором размещены пульт управления главным двигателем, блоки систем сигнализации и
контроля и др.
Непосредственно от главного распределительного щита получают питание особо
ответственные приемники электроэнергии – распределительный щит 6 рулевой машины 5,
носовой и кормовой шпили 12 и 4, буксирная лебедка 7, подруливающее устройство большой мощности 13 с механизмом изменением шага винта 3, гиропост 14, в котором уста
новлен гирокомпас 15, распределительный щит сигнально-отличительных огней 9.
На шлюпочной палубе в отдельном помещении находится аварийная электростанции 9, состоящая из аварийного дизель-генератора ограниченной мощности со стартерным ( от батарей ) пуском и аварийного распределительного щита, от которого получают
питание радиостанция, находящаяся в помещении радиорубки 10, средства навигации и
связи и другие ответственные приемники.
В машинном отделении ( рис. В. 2 ) находятся механизмы, обеспечивающие движение судна, производство электроэнергии и работу основных судовых систем: пожарной,
балластной, осушительной, топливной и др., а также бытовых систем – пресной и забортной воды и др.
Основная часть этих механизмов электрифицирована и потребляет до 80-90% электроэнергии.
Рис. 1.2. Расположение механизмов в машинном отделении:
1. главный двигатель ( main propulsion engine );
2. валоповоротное устройство ( main engine shaft turning device );
3. насос забортной воды охлаждения главного двигателя ( main-engine sea-water
cooling pump );
4. насос пресной воды охлаждения главного двигателя ( main-engine fresh-water
35
cooling pump );
5. резервный насос охлаждения главного двигателя ( emergency main engine cooling
pump );
6. насос циркуляционной смазки главного двигателя ( main-engine lubricating oil
pump );
7. фильтр забортной воды главного двигателя ( main-engine sea-water filter );
8. фильтр масла для главного двигателя ( main-engine lubrication oil filter );
9. топливоподкачивающий насос ( fuel-oil supply pump);
10. испаритель паровой ( steam evaporator );
11 глушитель пускового воздуха главного двигателя ( main-engine starting air
damper );
12. питательный насос ( feed water pump );
13. циркуляционный насос утилизационного котла ( hot well circulating pump);
14. вакуумная опреснительная установка ( vacuum evaporating installation );
15. насос перекачки котловой воды ( boiler water transfer pump );
17. подогреватель топлива ( fuel oil neater );
18. сепаратор масла ( lubricating oil separator );
19. подогреватель масла перед сепарацией ( preseparation oil heater );
20. насос перекачки топлива ( fuel oil transfer pump );
21. насос перекачки масла ( lubricating oil transfer pump );
22. насос забортной воды охлаждения вспомогательных механизмов ( auxiliary
machinery sea-water cooling pump );
23. насос пресной воды охлаждения вспомогательных механизмов ( auxiliary
machinery fresh water cooling pump );
24. резервный насос охлаждения вспомогательных механизмов ( auxiliary
machinery emergency cooling pump );
25. ручной топливный насос ( manually operated fuel-oil pump );
26. дизель генератор ( diesel-generator );
27. баллон пускового воздуха ( starting air tank );
28. ящик для ветоши ( waste collector );
29. сепаратор дизельного топлива ( diesel oil separator );
30. стол-верстак иа одно рабочее место ( work table for one person );
32. вентилятор осевой ( axial ventilator );
33. насос пожарный fire ( water pump );
35. осушительно-балластный насос ( bildge pump);
36. насос доочистного фильтра ( prefilter pump );
37. фильтр забортной воды ( sea-water filter );
38. насос санитарной мытьевой воды ( sanitary washing water-pump );
39. пневмоцистерна забортной воды ( pneumatic sea-water intake tank );
40. пневмоцистерна пресной воды pneumatic ( freshwater tank );
41. санитарно-бытовой водонагреватель ( water-heater for domestic needs );
42. насос горячей мытьевой воды ( hot washing water pump );
43. отопительный агрегат ( heating system set );
44. трап подъемный ( ladder );
45. монорельс ( monorail );
46. валовая линия ( propeller shaft tunnel );
47. цистерна сбора шлама ( ash-collecting tank );
48. бачок продувания фильтра ( filter air tank );
49. бачок разбора масла ( service lubricating oil tank );
50. цистерна отстойная дизельного топлива ( diesel oil separating tank );
51. цистерна отстойная для тяжелого топлива ( heavy fuel oil separating tank );
53. бак мерный топливный ( fuel oil measuring tank );
36
55. цистерна грязного топлива и масла ( used-up fuel-oil and lubricating-oil tank );
56. сепаратор моторного топлива ( diesel oil separator );
57. кингстонный ящик ( sea-valve box );
58. главный трубопровод забортной воды ( main sea-water piping );
59. вентиляционный воздухопровод ( ventilating air-pipe-line );
60. насос охлаждения рефрижераторных машин ( refrigerating engines cooling pump).
3. Основные термины и определения в СЭЭС
В судовой электротехнике, как и в других отраслях народного хозяйства, применяются многочисленные государственные стандарты ( ГОСТ ).
В частности, применение таких стандартов позволяет унифицировать ( сделать однообразными ) основные термины и определения в СЭЭС, что дает возможность судовым
специалистам разговаривать на одном, понятном всем таким специалистам, техническом
языке.
Приведем основные стандартные термины и определения в СЭЭС.
Судовая электроэнергетическая система - это совокупность судовых электротех
нических устройств, предназначенных для производства, преобразования, распределения
электроэнергии и питания ею судовых приемников (потребителей).
Такая система состоит из трех основных частей: судовых электрических станций
(основные и аварийные), силовой электрической сети, сети приемников. Сами приемники в состав СЭЭС не входят.
Судовая электрическая станция - это энергетический комплекс, состоящий из
источников электроэнергии и ГРЩ, к которому они подключены.
Источниками электроэнергии на судах являются ГА и АБ. В качестве ГА применя
ют дизель-генераторы, турбогенераторы, валогенераторы ( генераторы с приводом от
гребного вала), утилизационные турбогенераторы ( генераторы с приводом от утилиза
ционной турбины).
По назначению источники электроэнергии подразделяют на основные, резервные и
аварийные: основные предназначены для работы в любом режиме СЭЭС, резервные - для
обеспечения резерва мощности системы, аварийные - для работы в аварийном режиме
СЭЭС. На большинстве транспортных судов деление источников электроэнергии на
основные и резервные условно, так как резервным генератором может быть любой из
основных.
Аварийные источники используют при выходе из строя основных. Они обеспечива
ют электроэнергией наиболее ответственные приемники (средства навигации и связи,
освещение, рулевое устройство и др.) и поэтому имеют ограниченную мощность. В
качестве аварийных источников применяют ДГ и АБ.
Для передачи электроэнергии от источников к приемникам используют линии
электропередачи, состоящие из кабелей, проводов и шин. По способу передачи
электроэнергии линии электропередачи подразделяются на фидерные и магистральные.
Фидерная линия электропередачи включается между источником электроэнергии и
РЩ или между двумя РЩ, или между РЩ и приемником электроэнергии.
Магистральная линия - это такая линия электропередачи, параллельно с которой
по ее длине подключается ряд РЩ и отдельных приемников электроэнергии.
Для распределения электроэнергии используют электрораспределительные щиты,
которые подразделяют на главные, аварийные, групповые, электроснабжения с берега и
др.
Судовые электрические сети
Совокупность распределительных щитов и линий электропередачи образует электрические сети. Судовые электрические сети подразделяют на силовые, сети приемников и
аварийные.
37
Силовая электрическая сеть начинается от ГРЩ и заканчивается у приемников или
преобразователей электроэнергии. Последние служат для преобразования рода тока,
частоты или числа фаз; к ним относятся выпрямительные устройства для питания
электроприводов и заряда аккумуляторов, вращающиеся или статические преобразователи
частоты и др. Силовые электрические сети, в свою очередь, подразделяются на фидерные,
магистральные и магистрально-фидерные. В перечисленных сетях для передачи
электроэнергии используют соответственно или фидеры, или магистрали, или фидеры и
магистрали одновременно.
Сеть приемников - это электрическая сеть, предназначенная для распределения
электроэнергии среди одинаковых приемников, а также электрическая сеть, отделенная от
силовой сети преобразователями электроэнергии (последние входят в данную сеть). Под
одинаковыми понимают приемники, одинаковые по назначению и другим признакам.
Аварийная электрическая сеть предназначена для передачи электроэнергии от
аварийного источника к приемникам при выходе из строя линий электропередачи силовой
сети или исчезновении напряжения на гаммах ГРЩ.
Режим работы судна (ходовой, маневров, аварийный и др.) определяет количество
и мощность включенных приемников электроэнергии, создающих нагрузку СЭЭС. Под
последней понимают суммарную потребляемую активную мощность приемников,
включенных в данном режиме работы СЭЭС. Нагрузку СЭЭС определяют расчетом или
по приборам (выражают в киловаттах или мегаваттах).
Работу приемников в каждом режиме обеспечивают включенные источники
электроэнергии, суммарную активную мощность которых называют включенной
мощностью СЭЭС. Разность между значениями включенной мощности и нагрузкой
называют в к л ю ч е н н ы м р е з е р в о м м о щ н о с т и СЭЭС. С увеличением значения
включенного резерва работа СЭЭС становится более надежной, но менее экономичной.
Наиболее напряженные режимы работы СЭЭС обеспечивают несколько
источников электроэнергии, включенных на параллельную работу. Различают
кратковременную и длительную параллельную работу: кратковременная имеет место при
переводе нагрузки с одного источника электроэнергии на другой, длительная - во всех
остальных случаях. Если схемой ГРЩ параллельная работа не предусмотрена, то реализу
ется раздельная работа источников электроэнергии.
Каждая СЭЭС характеризуется конфигурацией, структурой, схемой, состоянием,
режимами работы, параметрами и показателями.
К о н ф и г у р а ц и я С Э Э С - это топографическое изображение расположения
входящих в нее электрических станций, кабельных трасс, шинопроводов,
преобразователей, распределительных щитов и приемников электроэнергии (на плане
судна или виде сбоку).
С т р у к т у р а С Э Э С - это краткая характеристика основных ее элементов с
указанием их основных связей и параметров.
С х е м а С Э Э С - это условное графическое изображение элементов СЭЭС и их
связей (структурное, общее или расположения). Отдельные элементы СЭЭС могут
изображаться на схемах (принципиальных, функциональных, подключений и
соединений).
Состояние СЭЭС может быть нормальным или ненормальным. При нормальном
состоянии СЭЭС обеспечивает производство и распределение электроэнергии требуемого
качества от основных или резервных источников между приемниками. Отклонение от
такого состояния называется ненормальным состоянием СЭЭС (например, КЗ в любой
точке системы, перегрузка отдельных элементов, отключение части источников или
приемников электроэнергии, недопустимые изменения параметров электроэнергии). К
ненормальному состоянию относят и аварийное состояние СЭЭС, при котором основная
электростанция обесточена, а производство и распределение электроэнергии между
наиболее ответственными приемниками обеспечивает аварийный дизель-генератор.
38
Р е ж и м р а б о т ы С Э Э С может быть установившимся или переходным. При
установившемся режиме СЭЭС работает при постоянных параметрах или медленных их
изменениях в заданных пределах. При переходном режиме происходит быстрое изменение
параметров и переход от одного установившегося режима к другому.
К п а р а м е т р а м С Э Э С относят напряжение, ток, мощность, частоту, сопротив
ление изоляции, коэффициент мощности и т. д.
О с н о в н ы м и п о к а з а т е л я м и С Э Э С являются надежность и живучесть,
качество электроэнергии, масса и габаритные размеры, строительная стоимость,
эксплуатационные расходы, уровень автоматизации, уровень унификации и др.
4. Классификация СЭЭС
Классифицируют СЭЭС по следующим признакам:
у с т а н о в л е н н о й м о щ н о с т и ГА - малой ( 0,5-5 МВт ), средней ( 5-10 МВт
) и большой ( свыше 10 МВт ) мощности;
с т е п е н и а в т о м а т и з а ц и и - автоматизированные с дистанционным и
программным управлением. Автоматизированные СЭЭС с дистанционным управлением
имеют простые средства автоматизации специализированного назначения (например,
системы пуска РДГ, устройства синхронизации генераторов и распределения нагрузки). В
состав СЭЭС с программным управлением входят общесудовые ЭВМ или, гораздо чаще,
узкоспециализированные мини-ЭВМ, позволяющие реализовать сложные законы
управления СЭЭС по различным программам в зависимости от режима работы судна;
к о л и ч е с т в у э л е к т р о с т а н ц и й - системы с одной, двумя и большим
количеством электростанций;
с в я з и С Э Э С с С Э У - на автономные, с отбором мощности от СЭУ и единые
с СЭУ.
Последние 2 признака являются определяющими для структурных схем СЭЭС.
5. Структурные схемы судовых электроэнергетических систем ( СЭЭС )
На структурных схемах СЭЭС показывают основные функциональные части электроэнергетических систем, их назначение и взаимосвязь.
А в т о н о м н ы е С Э Э С имеют автономные, т. е. независимые от СЭУ,
источники электроэнергии - ДГ или ТГ. На большинстве транспортных судов автономная
СЭЭС состоит из основной и аварийной электростанций (рис. 1.3). Основные генераторы
G1-G4 приводятся во вращение дизелями Д или турбинами Т. Приводным двигателем аварийного генератора АГ, по правилам Регистра СССР, должен быть дизель.
Приемники получают от ГРЩ электроэнергию непосредственно ( П1), через РЩ
(П2-П6), через понижающий трансформатор Т и РЩ (П7-П8), а также преобразователи
электроэнергии - выпрямительное устройство ВУ или тиристорный преобразователь часто
ты ТПЧ.
39
Рис. 1.3. Структурная схема автономной СЭЭС с одной основной и одной аварийной
электростанциями
Электрическая связь между ГРЩ и АРЩ в нормальных режимах работы осуществ
ляется через кабельную перемычку ( 3-жильный кабель ) Х, в рассечке которой находится
контакт К мощного контактора. Катушка этого контактора питается непосредственно от
шин ГРЩ, поэтому при наличии напряжения на шинах ГРЩ контактор включен и его
контакт замкнут. По перемычке электроэнергия передается в направлении от основной
электростанции к аварийной. При обесточивании ГРЩ контактор теряет питание и его
контакт К, размыкаясь, разъединяет шины АРЩ и ГРЩ.
Одновременно начинается автоматический пуск АДГ с последующим подключени
ем его к шинам АРЩ. Тем самым обеспечивается практически бесперебойное питание от
ветственных приемников П12-П14, подключенных к АРЩ.
Рис. 1.4. Структурная схема СЭЭС
с отбором мощности от СЭУ
Рис. 1.5. Структурная схема единой СЭЭС
Отбор мощности от СЭУ может осуществляться применением в составе электростанций ВГ и УТГ ( рис. 1.4 ). Валогенераторы приводятся во вращение через механическую передачу П от судового валопровода или непосредственно от ГД. Применение передачи вызвано тем, что частота вращения валопровода или ГД в несколько раз меньше номинальной частоты вращения выпускаемых промышленностью генераторов.
Утилизационные турбогенераторы УТГ получают пар от УК, использующих тепло
ту отработавших газов ГД.
ВГ могут применяться как на теплоходах, так и на паротурбинных судах, УТГ только на теплоходах. Практически применение УТГ возможно при мощности ГД свыше
6,5 МВт, валогенераторные установки целесообразно использовать при мощности ГД до
40
11-15 МВт, при большей мощности экономически оправдано применение комбинированных турбовалогенераторных блоков, включающих ВГ и УТГ.
Основным недостатком систем отбора мощности является зависимость их работы
от частоты вращения гребного вала.
При использовании ВГ на судах с ВФШ изменение скорости судна, т. е. изменение
частоты вращения валопровода, приводит к пропорциональному изменению частоты тока
и напряжения ВГ. Это затрудняет или делает почти невозможной параллельную работу
ВГ с автономными генераторами, а при остановке ГД требует быстрого включения
резервного генератора взамен ВГ.
Для стабилизации параметров тока ВГ при изменении скорости судна в пределах
100-70 % номинальной применяют электромеханические и статические тиристорные преобразователи, объемные гидропередачи и наиболее совершенные дифференциальные
электро- и гидромеханические регулируемые передачи.
На судах с ВРШ конструкция валогенераторной установки упрощается, так как
частота вращения валопровода неизменна. УТГ благодаря тепловой инерции УК, а также
возможности регулирования расхода пара продолжают нормально функционировать в
течение 5-20 мин после остановки ГД.
Рассмотренные системы отбора мощности целесообразно применять на судах, совершающих длительные переходы с постоянной или мало изменяющейся скоростью.
При этом экономится топливо, уменьшается среднегодовая наработка ГА, что
увеличивает интервал времени между работами по ТО и ремонту основных генераторов.
Все это приводит к снижению эксплуатационных расходов. Разрабатываемые в настоящее
время системы глубокой утилизации теплоты позволяют в ходовом режиме полностью
обеспечить потребности судна не только в электроэнергии, но и в теплоте.
Е д и н о й С Э Э С называется система, объединенная с СЭУ (рис. 1.5). Единые
СЭЭС применяют на судах с электродвижением, на которых от шин ГРЩ питаются как
гребные электродвигатели М1 и М2, так и приемники электроэнергии П1-ПЗ. К таким
судам относятся плавучие краны, земснаряды и др., на которых значение мощности,
потребляемой ГЭУ в ходовом режиме судна, соизмеримо с мощностью, потребляемой
технологическим оборудованием во время стоянки. Единые СЭЭС применяют также на
некоторых ледоколах, пассажирских и промысловых судах с ВРШ.
6. Структурные схемы судовых электростанций ( СЭС )
Структура СЭС должна обеспечивать параллельную и раздельную работу генераторов, прием питания с берега, защиту генераторов и линий электропередачи от токов КЗ,
возможность снятия напряжения на отдельных секциях ГРЩ при ТО и ремонте, а также
экономичную работу электростанции. Современные суда имеют разнообразные структурные схемы СЭС, которые можно свести к двум типам:
1. с одной системой сборных шин;
2. с двумя системами сборных шин.
На большинстве транспортных судов с мощностью электростанции до 3 МВт и
напряжением 400 В применяют СЭС с о д н о й с и с т е м о й сборных шин (рис. 1.6).
Рис. 1.6. Структурная схема СЭС с одной системой сборных шин
41
Система состоит из секций I-V. Секции I, II служат для подключения генераторов
G1-G4 и наиболее ответственных приемников. При помощи секционного автоматического
выключателя QS1 можно осуществлять раздельную или параллельную работу генераторов
в разных сочетаниях. Переключатель QS2 обеспечивает поочередное подключение к
секции I или II распределительной секции III, от которой питаются приемники,
работающие в основном на стоянке. Через автоматический выключатель QF6 возможно
снабжение судна электроэнергией с берега. Приемники напряжением 220 В (электронагревательные приборы, освещение и др.) получают электроэнергию от секций IV и V.
Если секционный выключатель QS3 включен, возможна параллельная или
поочередная работа трансформаторов Т1 и Т2 на объединенные шины секций IV и V.
Наличие секционных аппаратов QS1- QS3 позволяет снимать напряжение с любой
секции при ТО.
На большинстве транспортных судов СЭС имеют 3…4 основных ГА, для каждого
из которых выделяется отдельная секция шин в средней части ГРЩ, а крайние секции
используются для приемников электроэнергии. Для коммутации секций применяют как
АВ, так и разъединители. Последние представляют собой рубильники без дугогашения и
не допускают размыкания шин под нагрузкой.
При мощности СЭС свыше 3 МВт и невозможности размещения на судне несколь
ких электростанций применяют СЭС с двумя системами сборных шин, электрически несвязанных между собой (рис. 1.7).
Рис. 1.7. Структурная схема СЭС с двумя системами сборных шин
Приемники электроэнергии равномерно распределены между обеими системами.
Группа приемников П1 (например, научное оборудование) питается от верхней системы
шин, а общесудовые приемники П2 - от нижней. Подобная система высоконадежна,
маневренна в работе и удобна при ремонте. Однако двойной комплект АВ для каждого
генератора увеличивает размеры ГРЩ и удорожает стоимость судовой электростанции.
Кроме приведенных выше схем, возможны иные варианты построения структурных схем cудовых электростанций ( рис. 1.8 ).
42
Рис. 1.8 . Структурные схемы судовых электростанций транспортных судов
На рис. 1.8 изображены:
а ) СЭЭС с тремя ДГ и одним АДГ ( рис. 1.8, а );
б ) СЭЭС с тремя ДГ, одним ТГ и одним АДГ ( рис. 1.8, б );
в ) СЭЭС с четырьмя ДГ и одним АДГ( рис. 1.8, в ).
Там же:
1, 2 – соответственно основные и резервные приемники электроэнергии ходового
режима;
3 – фидер электроснабжения с берега;
4 – приемники стояночного режима;
5 – приемники освещения;
6 – бытовые приемники электроэнергии.
7. Параметры СЭЭС
К основным параметрам СЭЭС относят род тока, частоту и напряжение.
Род тока
Р о д т о к а оказывает значительное влияние на особенности и свойства СЭЭС. На
современных судах применяют 3-фазный переменный ток и только в отдельных случаях
для питания специальных приемников используют постоянный ток. Это объясняется тем,
что электрооборудование переменного тока лучше обеспечивает выполнение основных
требований, предъявляемых к судовым электроустановкам.
Основными приемниками электроэнергии на судах являются электродвигатели, по-
43
требляющие до 80 % вырабатываемой электроэнергии.
Асинхронные 3-фазные электродвигатели по сравнению с двигателями постоянно
го тока имеют меньшие массу (на 30-40 %), габаритные размеры (на 20-30 %) и стоимость
(в 2-4 раза), более надежны, требуют меньших эксплуатационных расходов.
Двигатели постоянного тока имеют хорошие регулировочные свойства, однако на
большинстве судов 70-80 % механизмов не требуют плавного регулирования частоты
вращения.
В ЭП, где необходимо регулирование частоты вращения (грузовые лебедки, краны,
якорно-швартовные устройства), применяют 2- и 3-скоростные АД с короткозамкнутым,
реже - с фазным роторами. Внедрение на судах тиристорных преобразователей частоты
позволит обеспечить плавное и экономичное регулирование частоты вращения ЭП переменного тока.
Распределительные устройства постоянного и переменного тока по массе, размерам и стоимости примерно одинаковы.
Линии электропередачи переменного тока несколько больше по суммарной массе,
объему и стоимости, чем постоянного тока, так как на переменном они выполняются в
основном 3-жильными кабелями, а на постоянном -2-й 1-жильными.
Внедряемая на судах аппаратура автоматического управления электроприводами с
бестоковой и бесконтактной коммутацией на базе полупроводниковых приборов проще,
надежней по сравнению с аппаратурой на постоянном токе и требует минимальных затрат
на уход и обслуживание.
Частота переменного тока
Ч а с т о т а п е р е м е н н о го тока на большинстве судов составляет 50 Гц, а на
некоторых судах иностранной постройки - 60 Гц. Переход на повышенную частоту позво
ляет снизить массу и размеры СЭО. Так, при частоте 400 Гц суммарная масса и размеры
всех элементов СЭЭС вместе с приемниками электроэнергии в 2-3 раза меньше, чем при
частоте 50 Гц. Поэтому СЭЭС повышенной частоты (400 Гц) используют на судах, где
массогабаритные показатели являются решающими - это суда на подводных крыльях и
воздушной подушке.
Повышение частоты СЭЭС транспортных судов проблематично по ряду причин.
Электрические машины, трансформаторы и электромагнитные аппараты при частоте 400
Гц по сравнению с частотой 50 Гц создают более высокий уровень шума и радиопомех,
имеют большую стоимость и меньшую надежность.
Опыт эксплуатации АД при частоте 400 Гц и с частотами вращения 6000 и 8000
об/мин показал, что упомянутые АД не могут быть использованы для большой группы
судовых электроприводов с частыми пусками (грузовых лебедок, кранов и др.). Это объяс
няется увеличением времени разгона до номинальной частоты вращения и высокими тем
пературными напряжениями в АД при разгоне.
Напряжение
Н а п р я ж е н и е С Э Э С большинства транспортных судов составляет 380 В.
Увеличение напряжения существенно уменьшает массу кабелей и кабельных трасс
вследствие уменьшения площади поперечного сечения, так как с ростом напряжения
уменьшается ток, передаваемый по кабелю.
Вместе с тем с увеличением напряжения увеличиваются токи КЗ, растут масса и
размеры РУ, повышается опасность поражения обслуживающего персонала электрическим током.
Поэтому окончательному выбору значения напряжения должно предшествовать
сравнение технико-экономических показателей нескольких вариантов СЭЭС с разными
напряжениями.
В настоящее время разрабатывается коммутационно-защитная аппаратура с повы
44
шенной коммутационной способностью и устойчивостью к токам КЗ. Это в сочетании с
токоограничивающими фидерными и секционными реакторами позволит увеличить
напряжение до 6,3 кВ и мощность СЭЭС до 36 МВт.
Уровни напряжений на судах
Правила Регистра устанавливают следующие значения напряжений переменного и
постоянного тока:
для источников электроэнергии ( генераторов, преобразователей ) - 400 и 230 В при
частоте 50 Гц, 460 и 270 В при частоте 60 Гц, 230 В на постоянном токе;
для приемников электроэнергии - 380, 220, 42, 24 и 12 В при частоте 50 Гц, 250 В
при частоте 60 Гц, 220, 24 и 12 В на постоянном токе.
Уровень применяемого напряжения зависит от назначения приемника электроэнергии. Для силовых приемников, цепей управления, нагревательных и отопительных приборов служебных помещений используют напряжение 380 В.
Напряжение 220 В переменного и постоянного тока применяют для отопительных
приборов в каютах, освещения, сигнализации, розеток в сухих помещениях.
Переносные инструменты и ручные пульты управления выполняют на напряжение
42 В переменного и 24 В постоянного тока.
В помещениях с повышенной влажностью применяют переносные светильники
напряжением 24 В, а в особо сырых - напряжением 12 В переменного и постоянного тока.
В специальных электрических установках (гребные и др.) Правила Регистра допускают применение напряжения до 11 кВ переменного и до 1,2 кВ постоянного тока.
8. Качество электроэнергии, производимой СЭЭС
К а ч е с т в о э л е к т р о э н е р г и и - это совокупность свойств электроэнергии,
обусловливающих ее пригодность для нормальной работы судовых приемников.
Приемники потребляют электроэнергию от судовых источников непосредственно или
через преобразователи. Качество электроэнергии оказывает существенное влияние на
режимы работы приемников, источников и линий электропередачи. Поэтому упомянутое
качество характеризуют показателями, перечень которых и допустимые значения
большинства из них установлены Правилами Регистра СССР.
П о к а з а т е л и к а ч е с т в а электроэнергии определяют в период швартовных и
ходовых испытаний отдельно для установившихся и переходных режимов.
В установившемся режиме работы показатели (%) качества электроэнергии следу
ющие:
длительное отклонение напряжения ΔU - относительная разность между
фактическим U и номинальным U ном значениями напряжения:
ΔU = [( U - U ном ) / U ном ]*100
( 1.1 );
длительное отклонение частоты Δf - относительная разность между фактическим
f и номинальным f ном значениями частоты:
Δ f = [( f - f ном ) / f ном ]*100
( 1.2 );
коэффициент k d искажения синусоидальности кривой напряжения - отношение
квадратного корня из суммы квадратов действующих значений высших гармонических
составляющих напряжения U ν к действующему значению основной гармонической
составляющей U 1 :
kd = [ (
U 2 ) / U 1 ]100
2
( 1.3 );
45
коэффициент k u несимметрии (небаланса) напряжения в 3-фазной системе относительная разность между максимальным U max и минимальным U min значениями
линейного напряжения:
k u = [(U max - U min) / U ном ]100
( 1.4 );
В переходных режимах показатели (%) качества электроэнергии следующие:
кратковременное отклонение напряжения Δ U t - относительная разность между
минимальным U min или максимальным U max и номинальным U ном значениями
напряжения:
- Δ U t = [(U min - U ном ) / U ном ]100
( 1.5 );
+ Δ U t = [(U max - U ном ) / U ном ]100
( 1.6 );
кратковременное отклонение частоты Δ f t - относительная разность между мини
мальным f min или максимальным f max и номинальным f ном значениями частоты:
- Δ f t = [( f min - f ном ) / f ном ]100
+ Δ f t = [( f max - f ном ) / f ном ]100
( 1.7 );
( 1.8 ).
О с н о в н ы е п р и ч и н ы от к л о н е н и я напряжения частоты заключаются в
ограниченной мощности СЭЭС и несовершенстве АРН и АРЧ.
Эти отклонения изменяют режим работы приемников электроэнергии. Например,
при снижении напряжения сети до U = 0,95 U ном вращающий момент АД уменьшается
на 10 %, а потребляемый ток увеличивается на 11 %. Колебания напряжения могут вызвать ложные срабатывания защитных устройств источников и приемников электроэнер
гии, настроенных на номинальное напряжение.
Колебания частоты тока приводят к практически пропорциональным изменениям
частоты вращения ТАД и сопряженных с ними механизмов.
Искажение синусоидальности кривой напряжения обусловлено влиянием как источ
ников, так и приемников электроэнергии. В СГ это искажение объясняется невозможностью получения на практике распределения магнитной индукции в воздушном зазоре по
синусоидальному закону. Напомним, что для получения синусоидальной ЭДС генератора
увеличивают зазор под краями полюсов.
В специфических группах приемников электроэнергии, таких, как статические преобразователи частоты, искажение синусоидальности кривой напряжения объясняется использованием в них нелинейных элементов - полупроводниковых диодов, тиристоров и
др. Работа этих приемников связана с образованием несинусоидальных токов, замыкающихся через СГ и линии электропередачи. Возникающие высшие гармонические составляющие тока вызывают дополнительный нагрев СГ, электродвигателей и линий электропередачи, уменьшение вращающего момента АД и приводят к сбоям в работе устройств
электроавтоматики.
Один из путей подавления высших гармоник - применение мощных фильтров L и
LС-типов.
Несимметрия напряжения в 3-фазных системах обусловлена наличием 1-фазных
приемников электроэнергии, основную часть которых составляют светотехнические при
боры. Упомянутая несимметрия проявляется как дополнительное увеличение отклонений
напряжения и неблагоприятно сказывается на работе АД и особенно радиоэлектронной
аппаратуры.
46
9. Приемники электроэнергии СЭЭС
Основные сведения
Приемник электроэнергии - это устройство, предназначенное для преобразования
электроэнергии в другой вид энергии.
Приемники электроэнергии обеспечивают безопасность плавания, безаварийную
работу энергетической установки, сохранность грузов и нормальные бытовые условия
экипажа. На многих судах - лихтеровозах, ледоколах, паромах, земснарядах, плавкранах электроэнергия применяется для привода гребных винтов и специальных технологических
механизмов.
Классификация приемников электроэнергии
Приемники электоэнергии классифицируют по трем основным признакам:
1. назначению;
2. степени важности ( ответственности );
3. режиму работы.
По н а з н а ч е н и ю приемники электроэнергии делят на следующие группы:
средства навигации и связи - гирокомпас, лаг, эхолот, радиолокаторы, радиопелен
гаторы, радиостанция;
механизмы судовых систем и устройств - насосы, вентиляторы, компрессоры;
палубные механизмы - грузовые лебедки и краны, рулевое устройство, брашпили, шпили,
автоматические швартовные лебедки;
бытовые механизмы и приборы - климатическая установка, оборудование камбуза,
прачечной;
электрическое освещение.
По с т е п е н и в а ж н о с т и приемники электроэнергии подразделяют на 3
группы:
особо ответственные приемники, перерыв в питании которых может привести к
аварии судна и гибели людей. К ним относятся радио- и навигационное оборудование в
соответствии с Правилами по конвенционному оборудованию морских судов, рулевое
устройство, пожарный насос, аварийное освещение и др. На грузовых судах валовой
вместимостью 300 рег. т и более, а также на некоторых других судах приемники этой
группы питаются практически бесперебойно от основной, а при ее обесточивании - от
аварийной электростанции;
ответственные приемники, обеспечивающие работу СЭУ, управление судном и
сохранность груза. В эту группу входит основная часть судовых приемников
электроэнергии - насосы, вентиляторы, компрессоры, якорные и швартовные механизмы,
грузовые устройства, средства внутрисудовой связи и сигнализации и др. Эти приемники
получают питание во всех режимах работы основной СЭС;
малоответственные приемники, допускающие перерыв питания в аварийных
ситуациях или при перегрузке СЭС - бытовая вентиляция, камбузное оборудование и др.
По р е ж и м у р а б о т ы различают приемники электроэнергии с продолжительным S1, кратковременным S2, повторно-кратковременными S3-S5 и перемежающимися
S6-S8 режимами.
В продолжительном режиме работают ЭП насосов постоянной подачи, вентиляторов, компрессоров, воздуходувок и др.; в кратковременном - ЭП шпилей, брашпилей,
шлюпочных и траповых лебедок; в повторно-кратковременных - грузовые лебедки и
краны; в перемежающихся - технологическое оборудование судов технического флота.
Основную полю производимой электроэнергии на судах потребляют ЭД. Для ЭП постоянного тока,
работающих в продолжительном режиме, применяют электродвигатели общесудового исполнения серий П
47
и 2П в диапазонах мощностей 0,1 - 200 кВт и частот вращения 750-3000 об/мин для серии П и 750-4000
об/мин для серии 2П.
Для ЭП переменного тока используют асинхронные электродвигатели серии 4А в диапазонах мощ
ностей 0,1 - 315 кВт с пятью уровнями синхронных частот вращения ( 600, 750, 1000, 1500 и 3000 об/мин).
Для приемников кратковременного и повторно-кратковременного режимов с большой частотой
включений, тяжелыми условиями пуска и частыми реверсами на постоянном токе применяют электродвига
тели серии ДПМ мощностью до 100 кВт, серии Д800 мощностью 120-350 кВт и серии ДП мощностью 136540 кВт, а на переменном токе -асинхронные электродвигатели серии МАП в диапазоне мощностей 1-100
кВт.
Электродвигатели серии 2П могут питаться от тиристорных преобразователей постоянного тока,
серии МАП в специальном исполнении — от тиристорных преобразователей частоты с регулируемой
частотой в пределах 5-80 Гц для 1-скоростных и 5-20 Гц для обмоток малой скорости 2- и 3-скоростных ЭД.
Электродвигатели серии ВМАП являются взрывозащищенной модификацией электродвигателей
серии МАП, устанавливаются в судовых помещениях, где возможно образование взрывоопасных смесей
газов и паров, и выдерживают до 20 внутренних взрывов без утраты работоспособности.
Эксплуатационные качества приемников электроэнергии
Э к с п л у а т а ц и о н н ы е к а ч е с т в а приемников электроэнергии оказывают
существенное влияние на режим работы СЭЭС.
Прямой пуск АД при недостаточной суммарной мощности включенных генераторов приводит к понижению частоты тока и провалам напряжения, что может повлечь выпа
дение генератора из синхронизма, остановку ПД генератора, а также отключение работаю
щих машин и механизмов. Для ограничения пусковых токов АД применяют пуск переклю
чением со "звезды" на "треугольник", а также автотрансформаторный, реакторный и другие способы пуска.
Асинхронные электродвигатели, работающие с недогрузкой, перегружают сеть и
генераторы реактивными токами, не позволяя использовать полностью мощность генераторов. Эффективным способом компенсации реактивной мощности является применение
конденсаторных батарей с автоматическим регулированием емкости, подключаемых к
шинам СЭС.
Не выключенные вовремя приемники ЭЭ перегружают судовую электростанцию и
линии электропередачи, снижают степень электро- и пожаробезопасности.
Контрольные вопросы
1. Перечислите основные типы СЭО
2. Перечислите условия работы СЭО
3. Какие нормативные документы определяют условия производства и эксплуатации СЭО?
4. Что такое Регистр? Каковы функции Регистра?
5. Перечислите требования нормативных документов к характеристикам СЭО
6. Перечислите требования нормативных документов к конструкции СЭО
7. Каким образом классифицируется СЭО в зависимости от климатических условий
плавания?
8. Каким образом классифицируется СЭО в зависимости от места расположения на
судне?
9. Каким образом классифицируется СЭО в зависимости от степени защищенности
обслуживающего персонала и корпусов СЭО?
10. Каковы назначение и состав СЭЭС?
11. Перечислите источники электроэнергии, применяемые на судах.
12. Каким образом классифицируются электрораспределительные щиты?
13. По каким признакам классифицируются СЭЭС?
14. В чем состоит различие автономных, с отбором мощности от СЭУ и единых с
СЭУ электроэнергетических систем?
15. Каковы возможные режимы работы СЭС с одной системой сборных шин?
16. Каковы достоинства и недостатки СЭО постоянного и переменного тока?
48
17. Почему СЭС с повышенной частотой тока нашли ограниченное применение?
18. По каким признакам классифицируются судовые приемники электроэнергии?
19. Каким образом эксплуатационные качества приемников электроэнергии влияют
на режим работы СЭС? Приведите примеры.
20. Перечислите показатели качества ЭЭ
21. Поясните понятие «приемник электроэнергии». По каким признакам характеризуются приемники ЭЭ?
22. В чем состоит разница между особо ответственными, ответственными и неответ
ственными приемниками ЭЭ? Каким образом снабжаются электроэнергией эти три категории приемников?
23. Как влияют эксплуатационные качества приемников ЭЭ на режим работы судовой электроэнергетической установки?
2. РЕЖИМЫ РАБОТЫ СЭЭС. ГЕНЕРАТОРНЫЕ АГРЕГАТЫ
1. Режимы работы судна
Правильный выбор мощности и количества ГА судовой электростанции позволяет
обеспечить бесперебойное и экономичное снабжение приемников электроэнергией
заданного качества. Нагрузка СЭС, создаваемая приемниками, не является постоянной, а
зависит, в основном, от режима работы судна. Поскольку работу СЭО в каждом режиме
работы судна обеспечивает СЭЭС, названия режимов работы судна и работы СЭЭС одина
ковы.
Для морских и речных судов Правилами Регистра Украины установлены следующие режимы работы судна, а значит, и СЭЭС:
1. ходовой;
2. маневров;
3. аварийный - во время пожара, пробоины корпуса или других влияющих на без
опасность плавания судна условий при работе основных источников электроэнергии;
4. другие режимы в соответствии с назначением судна.
Такими режимами являются:
1. для транспортных судов - стоянка без грузовых операций и стоянка с грузовыми
операциями;
2. пассажирских судов - стоянка без пассажиров и стоянка с пассажирами;
3. судов технического флота - стоянка без работы технологического оборудования
и стоянка с его работой;
4. ледоколов - стоянка и ход во льдах;
5. буксиров - стоянка и ход с буксировкой.
Режим работы судна определяет основные группы включенных в любой момент
времени приемников электроэнергии.
В х о д о в о м режиме включены приемники, обеспечивающие работу СЭУ,
средств навигации и связи, а также создающие нормальные бытовые условия экипажа.
В режиме м а н е в р о в, возникающих при проходе узкостей, входе в порт и
выходе из него, перешвартовке и т. д., работают все приемники ходового режима и
дополнительно могут быть включены ЭП брашпиля, шпиля и компрессора пускового
воздуха ГД. Однако при комплектации СЭС этот режим обычно не учитывают вследствие
его непродолжительности, а также из-за того, что на маневрах для обеспечения
максимальной безопасности плавания всегда включают резервный ГА.
В режиме с т о я н к и б е з г р у з о в ы х о п е р а ц и й включены приемники,
удовлетворяющие нужды экипажа, обеспечивающие работу приводных двигателей ГА,
механизмов вспомогательного котла и др.
В режиме с т о я н к и с г р у з о в ы м и о п е р а ц и я м и дополнительно включаются грузовые лебедки или ( и ) краны.
49
В а в а р и й н о м режиме с работой основных источников электроэнергии нагрузка СЭС увеличивается, так как к приемникам электроэнергии, обеспечивающим ходовой
режим, добавляются новые. Например, тушение пожара нередко связано с поступлением
больших объемов воды внутрь отсеков и судовых помещений, поэтому одновременно с
пожарными насосами могут быть включены также балластные и осушительные. При этом
нагрузку СЭС можно частично уменьшить путем отключения малоответственных
приемников. В случае необходимости включают резервный генератор.
В а в а р и й н о м р е ж и м е с работой аварийного источника электроэнергии от
АРЩ, в течение 18 часов получают питание особо ответственные приемники, обеспечива
ющие безопасность экипажа в случае аварии, вызвавшей прекращение работы основных
источников электроэнергии: аварийное освещение, средства навигации и связи; пожарный
насос; сигнально-отличительные фонари сигнала «Не могу управляться», системы
сигнали
зации обнаружения пожара и др.
2. Режимы работы приемников электроэнергии
В каждом эксплуатационном режиме приемники могут работать непрерывно, перио
дически и эпизодически.
Н е п р е р ы в н о работающими приемниками считаются многократно или одно
кратно включаемые приемники, время работы которых составляет 70-100 % продолжительности режима (17-24 ч в сутки). К ним относятся ЭП масляных, топливных,
охлаждающих, конденсатных насосов, вентиляторов МО и грузовых трюмов и т. д.
К п е р и о д и ч е с к и работающим приемникам относятся многократно включаемые приемники, суммарное время работы которых находится в пределах 15- 70 % продолжительности режима (3,5-17 ч в сутки). К ним относятся ЭП питательных насосов вспомогательного котла, санитарных насосов, компрессоров и т. д., периодически включаемые
для поддержания и регулирования уровня, давления, температуры.
Э п и з о д и ч е с к и работающие приемники - это однократно или многократно
включаемые приемники, суммарное время работы которых менее 15 % продолжительно
сти режима (не более 3,5 ч в сутки). Как правило, момент включения этих приемников
можно заранее устанавливать. К ним относятся ЭП балластных, осушительных, пожарных
насосов (при использовании последних для скатывания палубы) и др.
Нагрузка СЭС в любой момент времени определяется количеством и мощностью
включенных приемников электроэнергии, что в свою очередь зависит не только от
режима работы судна, но и от района плавания, времени года, состояния моря, характера
выполняемых технологических процессов и т. д.
Таким образом, характер изменения нагрузки СЭС относится к категории
случайных процессов, описание которых проводится с использованием математического
аппарата теории вероятностей.
3. Методы определения мощности СЭС
3.1. Основные сведения
К основным методам определения мощности СЭС относятся вероятностные,
статического моделирования, аналитический и табличный.
В е р о я т н о с т н ы е методы в свою очередь подразделяют на следующие:
статистических испытаний, массового обслуживания и числовых характеристик.
Метод статистических испытаний позволяет получить наибольшее и вероятные
промежуточные значения мощности СЭС непосредственно в виде чисел. Для этого состав
ляют вероятностную модель задачи, решение которой с изменяемыми по случайному
закону исходными данными многократно повторяют на ЭВМ. При этом заранее ограничи-
50
ваются небольшим числом и диапазоном изменения параметров, которые оказывают
наибольшее влияние на мощность СЭС.
Метод массового обслуживания применяют при расчете относительно несложных
по построению СЭС с ограниченным числом приемников, нагрузка которых в основном
изменяется ступенчато.
Метод числовых характеристик более универсален, его используют для расчета
СЭС с большим числом приемников и произвольным характером изменения нагрузки.
Метод с т а т и ч е с к о г о моделирования основан на применении вычислитель
ных машин для построения статической модели, воспроизводящей схему замещения СЭС.
Каждый элемент такой модели соответствует элементу реальной СЭС: источнику ЭДС,
трансформаторам, активным, индуктивным и емкостным сопротивлениям и др. Элементы
модели могут соединяться по разным схемам, а их параметры - регулироваться в широких
пределах. Соответствующие электроизмерительные приборы позволяют определять значе
ния токов, напряжений, мощностей в различных точках схемы замещения. Статические
модели применяют, в основном, для расчета установившихся режимов работы СЭС.
Аналитический метод расчета нагрузки разработан на основе обобщения статистических материалов по эксплуатации электростанций ряда серий построенных судов.
В инженерной практике до настоящего времени широко применяют табличный
(детерминированный) метод расчета нагрузки, при котором нагрузка СЭС определяется
отдельно в каждом характерном режиме работы судна.
3.2. Табличный метод определения мощности СЭС
Этот метод так назван потому, что для определения мощности СЭС используется
таблица нагрузок СЭС ( таблица 2.1 ).
Таблица нагрузок предназначена для расчета нагрузки судовой электростанции в
каждом из режимов работы судна ( электростанции ), предусмотренных Правилами Регистра для данного типа судна.
Примерный вид таблицы приведен ниже ( таблица 2.1 ).
Таблица 2.1. ( левая часть )
Таблица нагрузок судовой электростанции
Исходные данные
Наименование приемников электроэнергии
n,
шт.
1
1
2
3
4
5
6
7
8
9
10
11
12
13
2
Рулевое устройство
Брашпиль
Шпиль
Краны грузовые
Лебедки грузовые
Вентиляторы трюмов
Насосы пресной воды главного двигателя
Насосы забортной воды главного двигателя
Топливные насосы главного двигателя
Масляные насосы главного двигателя
Насосы пресной воды вспом. двигателей
Насосы забортной воды вспом. двигателей
Топливные насосы вспом. двигателей
3
2
1
1
4
8
16
2
2
2
2
2
2
2
Р
м ех
кВт
4
35
50
38
40
34
6
26
30
18
20
20
6
8
,
Р
2н
квт
,
cos
φ
ηн
н
%
5
6
7
38
52
41
43
37
7
28
31
19
22
22
7
9
0,86
0,89
0,88
0,88
0,85
0,78
0,82
0,85
0,8
0,82
0,82
0,78
0,79
88
90
89
90
88
86
88
86
76
78
78
80
82
,
51
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Масляные насосы вспом. двигателей
Главный компрессор
Подкачивающий компрессор
Компрессор хозяйственных нужд
Насосы топливоперекачивающие
Сепараторы топлива
Сепараторы масла
Валоповоротное устройство
Насосы санитарной воды
Насосы бытовые пресной воды
Питательные насосы котлов
Циркуляционные насосы котлов
Вентиляторы машинного отделения
Вентиляторы котельного отделения
Пожарные насосы главные
Пожарный насос вспомогательный
Насосы балластные
Насосы осушительные
Компрессор системы кондиционирования
Насосы системы кондиционирования
Вентиляторы системы кондиционирования
Камбузные плиты
Электродвигатели камбуза
Электропечь хлебопекарная
Рефрижераторная установка
Радиооборудование
Электронавигационные приборы
Электродвигатели мастерской
Освещение ( лампы накаливания )
Освещение ( люминисцентные лампы )
Другое моторное оборудование
…
…
…
A
B
( Рп. р Рн. р )
и реактивная Q = ( Qп. р Qн. р )
Cуммарная активная Р =
мощности периодически и непрерывно работающих приемников
То же, с учетом коэффициента одновременности режима
Р 0 = k 0. р Р и Q 0 = k 0 Q 0. р
C
То же, с учетом потерь в линии: активная Р
реактивная Q
D
р = Q 0 и полная S р =
р=kп Р0 ,
Pр 2 Q
мощности
Средневзвешенный коэффициент мощности режима
cos
ср
=Р
р/S р
2
р
2
1
1
1
2
2
2
1
2
2
2
2
6
2
2
1
2
2
2
2
2
1
3
1
5
1
3
3
4
45
26
6
7
8
6
12
5
6
4
5
15
12
50
25
40
36
28
14
6
4
3
6
4
10
4
4
50
38
200
5
47
28
7
9
9
7
14
6
8
5
7
17
14
52
27
42
38
30
16
8
3
4
6
5
12
5
5
50
38
220
0,69
0,89
0,82
0,78
0,79
0,79
0,78
0,79
0,75
0,78
0,69
0,78
0,79
0,79
0,89
0,82
0,88
0,86
0,84
0,8
0,79
1,0
0,65
1,0
0,65
0,74
0,69
0,69
1
0,9
0,8
68
90
88
80
82
82
80
74
78
80
68
80
75
75
90
88
90
88
87
74
81
100
65
100
68
72
68
68
100
100
88
52
Таблица 2.1. ( правая часть )
Таблица нагрузок судовой электростанции
Ходовой режим
Режим маневров и
др.
n
Pi
8
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
kо
k3
η
p
cosφ
Режим работы
i 1
m
9
10
11
12
13
14
p
Р,
кВт
Q,
кВА
р
15
16
Режим работы
Общая
потребляема
я мощность
m
17
18
kо
k3
19
20...
53
35
36
37
38
39
40
41
42
43
…
…
…
A
B
C
Р
Q
P0
Q0
Р
Q
р
S
D
р
р
cosφ ср
Колонки таблиц заполняются так:
1. номера приёмников электроэнергии по порядку;
2. наименование приёмников электроэнергии;
3. общее количество однотипных приёмников электроэнергии n, шт.;
4. установленная мощность одного механизма Р м ех , кВт;
5. номинальная мощность одного электродвигателя Р 2 н , кВт;
6. номинальный коэффициент мощности электродвигателя cos φ н ;
7. номинальный коэффициент полезного действия электродвигателя η н , %.
В колонку 8 вносят суммарную мощность, потребляемую всеми электродвигателями данного приемника из сети, которую рассчитывают по формуле
n
Pi
i 1
= ( Р 2н / η н ) n
( 2.1 ),
где: Р 2 н - номинальная мощность двигателя, кВт ( колонка 5 );
η н - номинальный КПД двигателя ( колонка 7 ), выраженный в относительных единицах ( для чего значение КПД двигателя делят на число 100 );
n - общее количество однотипных приёмников электроэнергии, шт ( колонка
3 ).
Далее таблица нагрузок развёртывается по эксплуатационным режимам работы
судна: ходовой, манёвров ( съёмка с якоря ), аварийный, стоянка с грузовыми операциями.
В каждом режиме приёмники электроэнергии работают в одном из 3-х режимов:
1. эпизодический,
2. периодический;
3. непрерывный.
В эпизодическом режиме ( ЭР ) приёмники включаются одно- или многократно,
общее время работы - менее 3,5 часов в сутки ( 15% времени суток ). К таким приемникам
относятся: брашпиль, шпиль, подкачивающий компрессор, компрессор хозяйственных
нужд, валоповоротное устройство, пожарные насосы главные и вспомогательные в режи-
54
ме маневров, электродвигатели камбуза, электропечь хлебопекарная и др.
В периодическом режиме ( ПР ) приёмники включаются многократно, общее время
работы – от 3,5 до 17 часов в сутки ( 15 - 70% ). К таким приемникам относятся: главный
компрессор в режиме маневров и аварийном, топливоперекачивающие насосы, сепараторы топлива и масла, пожарные насосы главные и вспомогательные в ходовом и аварийном
режимах, насосы санитарной и пресной воды, питательные насосы котлов, балластные и
осушительные насосы, компрессор системы кондиционирования, рефрижераторная
установка, камбузные плиты, радиооборудование, электродвигатели мастерской и др.
В непрерывном ( НР ) режиме приёмники включаются одно- или многократно, общее время работы – от 17 до 24 часов в сутки ( 70 - 100% ). К таким приемникам относятся: рулевое устройство, грузовые лебедки и краны, вентиляторы трюмов, топливные и мас
ляные главного и вспомогательных двигателей, циркуляционные насосы котлов, вентиляторы машинного и котельного отделений, насосы и вентиляторы системы кондиционирования, освещение ( лампы накаливания и люминисцентные ), другое моторное оборудование.
В колонки 9, 17, 25, 33 и 41 вносят условное обозначение режима работы приёмни
ка – «ЭР» - эпизодический, «ПР» - периодический, «НР» - непрерывный.
В колонки 10, 18, 26, 34 и 42 вносят число m однотипных приемников, работающих
в данном режиме. Это число зависит от степени ответственности приемника и режима
работы судна.
На судах особо ответственные и ответственные судовые механизмы и устройства
резервируются.
Например, на каждом судне установлено 2 рулевых электропривода, в ходовом режиме работает один из них ( m = 1 ), в то же время в режиме маневров, особенно когда
судно проходит узкости, работают оба электропривода ( m = 2 ).
Резервируются насосы главного двигателя – по два топливных, масляных, пресной
и забортной воды, поэтому в режимах ходовом, маневров, аварийном работает по одному
из них ( m = 1 ).
Сказанное выше справедливо и для насосов вспомогательных двигателей ( дизельгенераторов ).
При стоянке с грузовыми операциями следует считать, что все грузовые устройства ( лебедки и краны ) работают одновременно, и т.п.
В режимах ходовом, маневров и аварийном, когда работает главный двигатель,
включена большая часть вентиляторов МО, в то же время на стоянке часть из них
может быть отключена и т.д.
В колонки 11, 19, 27,35 и 43 вносят значение коэффициента одновременности рабо
ты однотипных приемников
kо = m / n
( 2.2 ),
где: m - число однотипных приемников, работающих в данном режиме ( колонка
10 ),
n - общее количество однотипных приёмников электроэнергии ( колонка 3 ).
Значение коэффициент одновременности, в основном, зависит степени ответственности приемника и режима работы судна
Для единичного потребителя всегда k о = 1 / 1 = 1.
В то же время особо ответственные и ответственные судовые механизмы и устройства резервируются.
Например, на каждом судне установлено 2 рулевых электропривода, в ходовом ре-
55
жиме работает один из них, поэтому коэффициент одновременности k о = m / n = 1 / 2 =
0,5. В то же время в режиме маневров, особенно когда судно проходит узкости, работают
оба электропривода, поэтому коэффициент одновременности k о = m / n = 2 / 2 = 1.
Резервируются насосы главного двигателя – по два топливных, масляных, пресной
и забортной воды, поэтому в режимах ходовом, маневров, аварийном работает по одному
из них, для этих насосов k о = 1 / 2 = 0,5.
Сказанное выше справедливо и для насосов вспомогательных двигателей ( дизельгенераторов ).
В режимах ходовом, маневров и аварийном включена большая часть вентиляторов
МО, в то же время на стоянке часть из них может быть отключена и т.д.
В колонки 12, 20, 28, 36 и 44 вносят значение коэффициента загрузки к з электро
двигателя в данном режиме, который в общем виде находят по формуле
кз= k k
( 2.3 ),
1
где: k = Р
1
м ех
/ Р
2н
2
- коэффициент использования двигателя ( колонки 4 и 5
таблицы нагрузок индивидуального задания ),
k =Р
/ Р м ех - коэффициент загрузки механизма в данном режиме,
2
где: Р
мех.ф
Р
м ех
мех.ф
- фактически потребляемая мощность механизма;
- установленная мощность механизма ( колонка 4 ).
Значение коэффициента загрузки механизма k зависит от режима работы судна.
2
Поскольку на стадии проектирования СЭЭС фактическую загрузку механизма
определить невозможно, значение k выбирают из таблицы 2.2 . В ней приведены обоб2
щенные значения коэффициентов загрузки разных механизмов. Эти значения получены в
результате эксплуатации большого числа серий судов разных типов ( сухогрузные, для
перевозки наливных грузов, универсальные и др. ).
Таблица 2.2.
Коэффициенты загрузки механизмов ( k ) в разных режимах
2
Приемники
электроенергии
1
Рулевое устройство
Брашпиль
Краны, лебедки
Насосы главного
двигателя
Сепараторы
Насосы котельной
установки:
конденсатный
циркуляционный
ходовой
маневров
Режимы
стоянка
2
0,3...0,4
0,8...0,9
3
0,4...0,6
0,7...0,9
0,7...0,8
4
-
стоянка с
аварийный
грузовыми с работой
операциями основной
электростанции
5
6
0,4...0,6
0,5...0,8
0,7...0,8
0,6…0,8
-
0,4…0,6
0,4…0,6
-
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
0,8...0,9
56
питательной воды
Насос пожарный
Насос балластноосушительный
Компрессор главный
Компрессор
подкачивающий
Вентиляторы
Кондиционеры
Плиты камбуза
Мастерская
Навигационное
оборудование
Зарядный агрегат
Сеть освещения
Радиооборудование
0,5...0,7
0,8...0,9
0,5...0,7
0,8...0,9
0,5...0,7
-
0,5...0,7
-
0,5...0,7
1,0
0,7...0,9
-
0,7...0,9
0,8...0,9
0,7...0,9
-
0,7...0,9
-
0,8...0,9
-
0,7...0,9
0,8…1,0
0,7…0,8
0,5...0,9
0,3…0,4
0,8…1,0
0,7…0,8
0,5...0,9
0,3…0,4
0,7...0,9
0,8…1,0
0,7…0,8
0,5...0,9
0,3…0,4
0,7...0,9
0,8…1,0
0,7…0,80,5...0,9
0,3…0,4
0,7...0,9
0,6...0,8
0,4...0,6
0,7...0,9
0,6...0,7
0,5…0,6
0,5...0,7
0,6...0,7
0,5…0,6
0,7...0,9
0,6...0,8
0,2...0,3
0,7...0,9
0,6...0,8
0,2...0,3
0,5...0,7
0,7...0,8
0,7...0,8
0,3…0,4
В колонки 13, 21, 29, 37 и 45 вносят значение коэффициента полезного действия
электродвигателя в данном режиме η , которое находят ( рис.2.1, а ) в зависимости от
p
коэффициента загрузки к з ( колонки 12 и др. ).
На рис. 2.1, а следует принять, что значения этого коэффициента отложены по оси
абсцисс, т.е. к з = Р о.е. ( о.е. – относительные единицы ).
Если коэффициент загрузки электродвигателя к з ≥ 0,75, то можно принять cosφ =
= cosφ н ( т.е. не пользоваться рис. 2.1, а ).
В колонки 14, 22, 30, 38 и 46 вносят значение коэффициента мощности электродвигателя в данном режиме cosφ , которое находят ( рис. 2.1, б ) в зависимости от коэффиp
циента загрузки к з ( колонки 12 и др. ).
На рис. 2.1,б следует принять, что значения этого коэффициента отложены по оси
абсцисс, т.е. к з = Р о.е. ( о.е. – относительные единицы ).
Если коэффициент загрузки электродвигателя к з ≥ 0,6, то можно принять sinφ =
= sinφ н ( т.е. не пользоваться рис. 2.1, б ).
Рис. 2.1. Зависимость коэффициента полезного действия η ( кривые 1 ) и
коэффициента мощности cosφ ( кривые 2 ) асинхронных двигателей от коэффици-
57
ента его загрузки к з ( мощности Р о.е , выраженной в относительных единицах о.е ):
а ) для двигателей мощностью до 10 кВт; б ) для двигателей мощностью 10…75 кВт
В колонки 15, 23, 31, 39 и 47 вносят значение суммарной потребляемой однотипны
ми приёмниками активной мощности в данном режиме
n
Р = kо * кз* P
где: k о , к з и
n
Pi
( 2.4 ),
i
i 1
- значения, указанные в колонках соответственно 11, 12 и 8.
i 1
В колонки 16, 24, 32, 40 и 48 вносят суммарную потребляемую однотипными при
ёмниками реактивную мощность
Q = Р*tg φ = Р* tg ( arc cosφ ),
при этом значение tg φ находят по значению коэффициента мощности cos φ при
помощи калькулятора или тригонометрических таблиц.
После заполнения всех колонок и строчек находят итоговые значения ( нижняя
часть таблицы нагрузок ( строчки «А», «В», «С» и «D»):
строчка «А»
n
суммарные значения активной Р = (
n
Рп.р
+
i 1
n
Q = ( Q п.р +
i 1
n
i 1
i 1
Р н. р ) и реактивной
Q н. р ) мощностей для периодически и непрерывно
работающих приёмников;
строчка «В»
те же значения мощностей Р 0 и S 0 , с учётом коэффициента одновременности работы приёмников в каждом режиме
n
Р 0 = к0.р (
i 1
Рп.р +
n
i 1
n
Р н. р ) и Q 0 = к0.р ( Q п.р +
i 1
n
i 1
Q н. р ).
где коэффициент одновременности режима к0.р характеризует вероятность одновременной работы всех приемников в данном режиме ( таблица 2.3 )
:
Таблица 2.3
Значения коэффициента одновременности работы приемников электроэнергии
в зависимости от режима работы судна ( электростанции )
коэффициент
одновременности
режима к0.р
Строчка «С»
Режимы работы судна ( электростанции )
ходовой
маневров стоянка без стоянка с
аварийный
грузовых
грузовыми с работой
операций
операциями основной
электростанции
0,8...0,9
0,75...0,8
0,7…0,75
0,75...0,8
0,9...1,0
58
те же значения мощностей Р р и S р с учётом коэффициента потерь мощности в
линии к п
Р р = к п * Р0, S р = S0
( 2.5 ),
значение которого зависит от водоизмещения судна, а именно: для малых судов
( водоизмещением до D = 2000 р.т ) к п = 1,02, для средних ( D = 2000…10000 р.т) к п =
1,03, для крупных ( D>10000 р.т) к п = 1,04.
полная ( кажущаяся ) мощность ( кВ*А )
Р2 р Q2 р
Sр=
Строчка «D»
средневзвешенный коэффициент мощности каждого режима
cos φ
=Рр/Sр
ср
Значение cos φ
1. если cos φ
ной мощности;
2. если cos φ
ср
ср
ср
( 2.6 ).
( 2.7 ).
влияет на порядок выбора генераторов по мощности, а именно:
≥ cos φ н выбираемого генератора, то генератор выбирают по актив< cos φ н выбираемого генератора, то генератор выбирают по реак-
тивной мощности.
Технические характеристики судовых синхронных генераторов приведены в Прило
жении 2.
При этом следует учесть, что у генераторов серий МСК, МСС, ГСС, ГМС, 2СН
cos φ ном = 0,8, а у генераторов серии ТК2-2 cos φ ном = 0,7.
Результаты расчета мощности СЭС в каждом режиме работы судна используются
для выбор количества и мощности генераторов в этих режимах.
3.3. Выбор количества и мощности генераторов в режимах работы судна
Правильный выбор состава генераторов позволяет обеспечить безаварийную и экономичную работу СЭС. Для выбора используют результаты расчета нагрузки СЭС во всех
режимах работы.
Общую установленную мощность генераторов находят по режиму с наибольшим
значением нагрузки, после чего приступают к выбору количества и мощности генераторов
в каждом режиме. Для этого намечают несколько вариантов состава генераторов СЭС,
Сравнивают их по технико-экономическим показателям и выбирают оптимальный
вариант.
При выборе необходим учитывать т р е б о в а н и я П р а в и л Р е г и с т р а :
1. на каждом судне должно быть не менее двух основных источников электроэнер
гии, причем одним из них может быть ВГ;
2. мощность генераторов должна быть такой, чтобы при выходе из строя любого из
них оставшиеся обеспечили питание ответственных приемников электроэнергии в режимах ходовом, аварийном и маневров;
3. суммарная мощность всех генераторов переменного тока должна быть достаточной для пуска самого мощного АД в случае выхода из строя любого генератора.
Кроме того, при выборе генераторов руководствуются следующим:
1. нагрузка выбранных генераторов при работе в продолжительных режимах (ходо-
59
вой, стоянка) должна составлять 70- 90 % номинальной, а при работе в кратковременных
режимах (маневров, аварийный) нагрузка ДГ может быть снижена до 50-60 %, ТГ - до 4050 %, ВГ - до любого уровня;
2. количество генераторов СЭС в большинстве случаев составляет 2-4, при этом 2
или 3 генератора продолжительно работают параллельно, а один находится в резерве.
3. целесообразно выбирать генераторы одного типа, что обеспечивает взаимозаменяемость деталей и узлов генераторов, а также облегчает их ТО;
4. установка стояночного ДГ меньшей мощности по сравнению с основными в боль
шинстве случаев нецелесообразна;
5. увеличение количества генераторов посредством уменьшения единичной мощно
сти позволяет повысить их загрузку, но усложняет схему СЭС и затрудняет обслуживание
электростанции.
Мощность аварийных источников электроэнергии определяется количеством и
мощностью особо ответственных приемников, перечень которых оговаривается
Правилами Регистра СССР.
3.4. Экономическая эффективность СЭС
Э ко н о м и ч е с к у ю э ф ф е к т и в н о с т ь СЭС на стадии проектирования опре
деляют сравнением для 2-3 вариантов комплектации судовой электростанции значений
приведенных затрат, сроков окупаемости и себестоимости электроэнергии.
Приведенные затраты 3 = Э + 0,15К, где Э - годовые эксплуатационные расходы;
К - капитальные вложения. В сумму капитальных вложений (строительную стоимость)
обычно включаются прейскурантная цена оборудования СЭС, транспортные расходы и
расходы на монтаж. Эксплуатационные расходы образуются затратами на амортизацию,
ремонт, топливо, смазочные материалы и обслуживание СЭС.
Судовые электростанции во всех режимах должны работать надежно и экономич
но, причем приоритет отдается надежности. На практике это означает, что ГА электростан
ции во всех или большинстве режимов работы недогружены по мощности, что ведет к
перерасходу топлива: при мощности дизеля 75 и 50 % номинальной удельный расход
топлива составляет соответственно 102-105 % и 107-112 % номинального.
3.5. Методы повышения экономичности СЭС
Повысить экономичность СЭС можно разными способами.
На стадии проектирования этого добиваются тщательной проработкой вариантов
комплектации СЭС с целью обеспечения в каждом режиме загрузки генераторов по верх
ним пределам допускаемых нагрузок, включением в состав генераторов ВГ и УТГ.
Валогенераторные установки не получили должного распространения на транспорт
ных судах, однако широко применяются на промысловых, что связано с возможностью
обеспечения работы траловых лебедок при помощи ВГ в режиме малого хода судна.
Примером удачно спроектированных можно считать СЭС некоторых серий теплоходов отечественной и зарубежной постройки, на которых ходовой режим обеспечивается
работой одного УТГ.
Для повышения экономичности СЭС в процессе эксплуатации можно рекомендовать следующее:
1. в каждом режиме обеспечивать загрузку генераторов по верхним пределам, для
чего своевременно устранять избыточный запас мощности СЭС отключением одного или
нескольких генераторов;
2. уменьшать время нахождения энергетической ( силовой ) и других установок в
состоянии готовности, при котором включена группа мощных приемников электроэнергии ( охлаждающие насосы пресной и забортной воды, масляные, топливные и др. );
3. исключать работу СТС в режиме холостого хода, для чего своевременно отключать их;
60
4. предотвращать кратковременные увеличения нагрузки, при которых автоматически пускается резервный ДГ;
5. при групповых стоянках (например, на ремонте) организовывать снабжение элек
троэнергией нескольких судов от СЭС одного судна.
Возможность питания судна с берега должна решаться в каждом отдельном случае,
так как стоимость электроэнергии при энергоснабжении с берега может оказаться выше,
чем производимой на судне. Определенный эффект может дать нормирование для серий
судов расхода электроэнергии и его учет при помощи счетчиков электроэнергии.
4. Генераторные агрегаты
4.1. Основные сведения
Генераторным агрегатом называют устройство, предназначенное для производства
электроэнергии и состоящее из приводного двигателя и самого генератора.
На современных судах применяют 3 типа ГА, получившие название в соответствии
с типом ПД: дизель-генераторы, турбогенераторы и газотурбогенераторы.
Выбор типа ГА определяется типом энергетической установки, обеспечивающей
ход судна. Такой подход позволяет получить оптимальные технико-экономические
показатели обоих комплексов - энергетической и электроэнергетической установок.
На п а р о х о д а х, где энергетической установкой является комплекс котел паровая турбина, применяют ТГ и ДГ. Турбогенераторы получают пар в ходовом режиме
от главных котлов, а на стоянке - от вспомогательного или дежурного главного с
пониженными паропроиз-водительностью и давлением. Дизель-генераторы могут быть
использованы как в ходовом режиме, работая параллельно с ТГ, так и на стоянке, при
остановленных ТГ.
На т е п л о х о д а х, где СЭУ представляет комплекс с двигателем внутреннего
сгорания, применяют ДГ. При мощности ГД свыше 11-15 МВт целесообразно применение
УТГ, который использует теплоту отработавших газов ГД.
4.2. Приводные двигатели генераторных агрегатов
На судах в качестве приводных двигателей СГ и ГПТ применяют дизели, а также
паровые и газовые турбины.
Д и з е л ь - поршневой двигатель внутреннего сгорания с воспламенением от
сжатия. Пуск двигателя проводится сжатым воздухом или при помощи электростартера,
получающего питание от АБ. Тем самым обеспечивается автономность работы и быстрота
пуска (до 30 с), что позволяет широко использовать ДГ в качестве основных, резервных и
аварийных источников электроэнергии. Дизели более экономичны по сравнению с
турбинами, достаточно надежны и просты в эксплуатации. Ресурс судовых дизелей
относительно высок и составляет 30-40 тыс. ч.
К недостаткам дизелей следует отнести их малую перегрузочную способность (не
более 10 % номинальной мощности в течение 1 ч) и неравномерность хода, отрицательно
влияющую на устойчивость параллельной работы ДГ. Для уменьшения неравномерности
число цилиндров дизеля должно быть четным, кроме того, часто на его валу устанавлива
ют маховик. Для соединения генераторов и дизелей применяют эластичные и жесткие
муфты. Генераторы некоторых типов прикрепляют к дизелю фланцем, поэтому они имеют
один подшипник.
Т у р б и н а - двигатель с вращательным движением рабочего органа - ротора,
преобразующий в механическую работу кинетическую энергию пара, газа или воды.
Паровые турбины перед пуском должны быть прогреты, причем время прогрева достига
ет 1 ч. Они менее экономичны, чем дизели, вследствие 2-кратного преобразования
энергии, однако имеют повышенную перегрузочную способность (до 20 % номинальной
61
мощности), значительно надежней дизелей и имеют больший ресурс (до 50 тыс. ч). Равномерность вращения ротора обеспечивает устойчивость параллельной работы ТГ.
Поскольку паровые турбины имеют частоты вращения до 14 тыс. об/мин, а генера
торы - 1000,1500 и 3000 об/мин, между турбиной и генератором устанавливают редуктор.
Газовые турбины соединяют в себе достоинства дизеля и паровой турбины. Они
автономны в работе, так как конструктивно выполнены вместе с камерой сгорания и
компрессором, не требуют прогрева перед пуском, время пуска составляет 30-50 с. Эти
турбины имеют небольшие размеры и массу, относительно большой ресурс (до 20 тыс. ч),
надежны. К их недостаткам относят большой удельный расход топлива и повышенную
шумность.
5. Генераторы переменного тока
5.1. Эксплуатационные характеристики
На современных судах в качестве генераторов переменного тока применяют 3-фаз
ные СГ.
Наиболее важные эксплуатационные свойства СГ можно оценить при помощи
внешних и регулировочных характеристик.
В н е ш н я я х а р а к т е р и с т и к а - это зависимость напряжения на выводах
обмотки статора генератора от тока нагрузки при номинальной частоте вращения и
постоянных значениях тока возбуждения и коэффициента мощности, т.е . U ( I ) при n =
= n ном = const, I в = const, cosφ = const (рис. 2.2, а ).
Иначе говоря, эта характеристика показывает, насколько хорошо генератор «держит» напряжение при изменении тока нагрузки, создаваемого приемниками электроэнергии.
Наклон внешней характеристики, или статизм (%), определяется изменением
напряжения при переходе от режима холостого хода к номинальному:
Δ U = [ ( U х. х - U ном ) / U ном ]*100
( 2.8 ),
где U х. х и U ном - напряжения соответственно холостого хода и номинального.
Рис. 2.2. Внешние ( а ) и регулировочные ( б ) характеристики СГ при разных
нагрузках: 1 – активной; 2 – активно-индуктивной; 3 – активно-емкостной
При активной нагрузке (см. рис. 2.2, а, кривая 1) увеличение тока нагрузки от I = 0
до I = I ном приводит к уменьшению напряжения, что объясняется увеличением падения
напряжения в обмотке статора и усилением размагничивающего действия реакции якоря
по поперечной оси.
При активно-индуктивной нагрузке (см. рис. 2.2, о, кривая 2) уменьшение напряже
ния при набросе нагрузки наблюдается в большей степени, так как с увеличением тока
усиливается размагничивающее действие реакции якоря по продольной оси.
В случае активно-емкостной нагрузки (см. рис. 2.2, а, кривая 3) увеличение тока
вызывает увеличение напряжения вследствие усиления подмагничивающего действия
продольной составляющей реакции якоря.
62
Из сравнения проведенных внешних характеристик следует, что напряжение СГ
зависит не только от значения, но и от характера тока нагрузки. Изменение напряжения
СГ при переходе от режима холостого хода к номинальному положительно при активной
и индуктивной нагрузках и отрицательно при емкостной.
Для равномерного распределения реактивной нагрузки при параллельной работе
СГ необходимо иметь возможность изменять наклон характеристик и перемещать их
параллельно самим себе. Наклон внешней характеристики устанавливается в процессе
настройки АРН и при работе не изменяется. Параллельное перемещение характеристики
обеспечивается установлением нового фиксированного значения тока возбуждения при
помощи реостата возбуждения при ручном регулировании или автоматического
регулятора напряжения. При увеличении тока возбуждения внешняя характеристика
перемещается вверх, при уменьшении - вниз.
Р е г у л и р о в о ч н а я х а р а к т е р и с т и к а - это зависимость тока возбужде
ния от тока нагрузки при номинальной частоте вращения и постоянных значениях
напряжения на выводах генератора и коэффициента мощности, т. е. т.е . I в ( I ) при U =
= U ном = const, n = n ном = const, cosφ = const (рис. 2.2, б). Эти характеристики представ
ляют собой как бы зеркальное отображение внешних характеристик.
При активной нагрузке увеличение тока нагрузки вызывает уменьшение напряже
ния генератора (см. рис. 2.2, а, кривая 1), поэтому для поддержания этого напряжения ток
возбуждения надо увеличить (см. рис. 2.2, б, кривая 1).
При активно-индуктивной нагрузке напряжение уменьшается в большей степени,
чем при активной, поэтому для сохранения равенства U = = U ном = const ток возбужде
ния приходится увеличивать также в большей степени (см. рис. 2.2, б, кривая 2).
При активно-емкостной нагрузке ток возбуждения необходимо уменьшать (см. рис.
2.2, б, кривая 3), так как увеличение тока нагрузки приводит к увеличению напряжения.
Регулировочные характеристики используются, в основанном, в двух случаях:
1. при переводе и распределении реактивной накгрузки синхронных генераторов;
2. при расчете и построении автоматических регуляторов напряжения ( АРН ).
5.2. Системы возбуждения синхронных генераторов
На судах для стабилизации напряжения СГ применяют различные системы
возбуждения и автоматического регулирования напряжения, в которых изменение тока
возбуждения происходит автоматически.
Сведения об АРН подробно изложены ниже ( раздел 1.3. «Системы регулирования
частоты вращения ГА и напряжения генераторов»).
Поэтому ограничимся рассмотрением систем возбуждения СГ, которые бывают
трех видов: с независимым возбуждением, с самовозбуждением и смешанная (рис. 2.3).
63
Рис. 2.3. Принципиальные схемы систем возбуждения СГ:
а – независимой; б – с самовозбуждением; в – смешанная ( бесщеточный
синхронный генератор )
При н е з а в и с и м о м в о з б у ж д е н и и (рис. 2.3, а) в качестве источника воз
буждения используется возбудитель В - генератор постоянного тока небольшой мощности
с параллельной обмоткой возбуждения ОВВ, сидящий чаще всего на одном валу с синх
ронным генератором СГ. Регулятор возбуждения R р.г предназначен для регулирования
напряжения вручную. Применение в качестве возбудителя добавочной электрической
машины постоянного тока усложняет конструкцию и снижает надежность СГ.
Такая система применялась до начала 60-х годов XX столетия.
Создание мощных и надежных полупроводниковых вентилей обеспечило переход
на с а м о в о з б у ж д е н и е СГ, при котором мощность для цепи возбуждения отбирается
от 3-фазной обмотки статора СГ и подается в обмотку возбуждения ОВГ через трансформатор Т и выпрямитель UZ (рис. 2.3, б).
В обоих выше рассмотренных случаях на валу СГ находятся 2 контактных кольца с
установленными на них щетками, что усложняет конструкцию и снижает надежность гене
раторов. Для облегчения работы щеточного аппарата напряжение возбуждения уменьшают до нескольких десятков вольт (например, при помощи трансформатора), но одновременно увеличивают ток возбуждения. Это позволяет сохранить мощность цепи возбуждения в необходимых пределах ( 5-10 % номинальной мощности СГ).
Указанных недостатков лишены бесщеточные СГ, имеющие с м е ш а н н о е
в о з б у ж д е н и е (рис. 2.4 ).
Судовые бесщеточные СГ могут быть выполнены с асинхронным ( рис.2.3, в ) и
синхронным возбудителем.
БСГ с асинхронным возбудителем ( рис. 2.3, в ) устроен так. В общем корпусе БСГ
находятся два генератора – основной синхронный и вспомогательный асинхронный. Вспо
могательный по отношению к основному является его возбудителем, его мощность – не
более 10% от номинальной мощности основного генератора.
Основной генератор имеет на статоре 3-фазную обмотку 1, соединенную
«звездой», а на явновыраженных полюсах ротора – обмотку возбуждения постоянного
тока 2.
Вспомогательный генератор имеет две 3-фазных обмотки: обмотку статора 5 и обмотку ротора 4.
Принцип действия БСГ состоит в следующем. При вращении ротора БСГ возникающая в 3-фазной обмотке статора 1 ЭДС подается на обмотку статора 5 асинхронного генератора. В результате в обмотке статора возникает вращающееся магнитное поле ( такое
же, как при подаче напряжения на обмотку статора 3-фазного асинхронного двигателя ).
Это поле пересекает вращающуюся вместе с ротором 3-фазную обмотку 4 и индуктирует в ней 3-фазную ЭДС, которая через выпрямитель 2 подается на обмотку возбуждения 2 основного генератора. Полупроводниковые диоды выпрямителя 2 закреплены на
роторе, т.е. вращаются вместе с ним.
БСГ с синхронным возбудителем устроен примерно так же. В общем корпусе БСГ
находятся два синхронных генератора – основной и вспомогательный. Вспомогательный
по отношению к основному является его возбудителем, его мощность – не более 10% от
номинальной мощности основного генератора.
Основной генератор имеет на статоре 3-фазную обмотку, соединенную «звездой», а
на явновыраженных полюсах ротора – обмотку возбуждения постоянного тока.
Вспомогательный генератор по отношению к основному имеет обращенную ( «перевернутую» ) конструкцию – у него на явновыраженных полюсах статора находится обмотка возбуждения постоянного тока , а на роторе - 3-фазная обмотка , соединенная «звез-
64
дой».
Принцип действия БСГ состоит в следующем. При вращении ротора БСГ возникающая в 3-фазной обмотке статора ЭДС выпрямляется и через регулятор напряжения пода
ется на обмотку возбуждения возбудителя.
При этом в обмотке ротора индуктируется 3-фазная ЭДС, которая через выпрями
тель подается на обмотку возбуждения основного генератора. Полупроводниковые диоды
выпрямителя 2 закреплены на роторе, т.е. вращаются вместе с ним.
Таким образом, система возбуждения БСГ сочетает характерные признаки систем с
независимым возбуждением (имеется возбудитель в виде синхронного или асинхронного
вспомогательного генератора ) и самовозбуждением (мощность для возбуждения возбуди
теля отбирается от обмотки статора основного генератора ).
5.3. Основные типы судовых СГ
На судах отечественной постройки применяют СГ следующих серий: МСК – морской синхронный с кремнийорганической изоляцией, МСС - морской синхронный с само-возбуждением, ГМС - генератор морской синхронный, ГСС - генератор синхронный с самовозбуждением, СБГ - судовой бесщеточный генератор и др.
Судовые СГ выполняют на напряжения 400 и 230 В, с соединением обмоток статора соответственно по схемам "звезда" и "треугольник", в диапазоне мощностей 30-2000
кВт при номинальном коэффициенте мощности соsφ ном = 0,8.
Серии построены по принципу нарастания мощности при среднем коэффициенте
нарастания 1,25-1,5, что облегчает выбор числа и мощности ГА и обеспечивает экономич
ную работу СЭС во всех режимах работы судна. Частоты вращения генераторов составляя
ют 500, 750,1000, 1500 и 3000 об/мин. В качестве ПД применяют дизели (при частоте вращения генератора 750 - 1500 об/мин) или турбины (при 1000, 1500 и 3000 об/мин).
Судовые СГ выпускают в горизонтальном исполнении на лапах, с одним свобод-ным концом вала для соединения с турбиной через редуктор или при помощи муфты - с
дизелем. Возможно фланцевое исполнение СГ. Самовентиляция осуществляется по замкнутому и разомкнутому циклам. Изоляция обмоток генераторов классов В, Р и Н. Режим
работы СГ всех типов продолжительный ( S1 ).
В зависимости от типа и мощности СГ при номинальных напряжении, частоте и
рабочей температуре выдерживают перегрузку по току 10 % номинального в течение 60120 мин, 25 % в течение 10-30 мин, 50 % в течение 1-5 мин. Без механических и тепловых
повреждений генераторы выдерживают 3-фазное КЗ в течение 5-10 с, при этом ударный
ток КЗ не превосходит 14-17-кратного значения амплитуды номинального тока, а устано
вившийся ток КЗ составляет не менее 3- 4-кратного значения номинального тока.
5.4. Техническое обслуживание и ремонт судовых генераторов
Техническое обслуживание судовых генераторов
Целью ТО является обеспечение исправного технического состояния ГА и длительное поддержание их эксплуатационных характеристик на заданном уровне.
Объем, характера и сроков проведения работ устанавливают Правила технической
эксплуатации морских и речных судов Украины, часть 6 «Электрооборудование».
В соответствии с упомянутыми ПТЭ, различают три вида технического обслуживания электрических машин, в том числе и генераторов:
1. ТО: без разборки (ТО № 1);
2. ТО с частичной разборкой (ТО № 2);
3. ТО с полной разборкой (ТО № 3).
При ТО № 1 необходимо: вскрыть смотровые и вентиляционные отверстия; осмотреть контактные кольца (коллекторы), щеточный аппарат и обмотки статора и ротора
(якоря); затянуть доступные контактные и крепежные соединения; очистить доступные
65
места и фильтры от загрязнений, продуть генератор сжатым воздухом давлением не более
0,2 МПа.
При ТО № 2 необходимо выполнить работы в объеме, предусмотренном ТО № 1, и
дополнительно: вскрыть и очистить коробку выводов; протереть доступные места
ветошью, смоченной в рекомендованном моющем средстве; при необходимости изменить
полярность колец СГ; при необходимости просушить обмотки и покрыть изношенные
места изоляции эмалью; осмотреть подшипники и их смазку, при необходимости добавить
смазку того же сорта.
При ТО № 3 необходимо выполнить работы в объеме ТО № 1 и ТО № 2, а также
дополнительно: промыть обмотки статора и ротора (якоря); отремонтировать поврежден
ные места изоляции обмоток, пропитать их лаком и покрыть эмалью, после чего просушить; при необходимости проточить и отшлифовать контактные кольца (коллекторы); про
верить динамометром значение нажатия на щетки, при необходимости отремонтировать
щеточный аппарат; заменить смазку в подшипниках; при необходимости окрасить внутренние и наружные поверхности статора и ротора; проверить сопротивление изоляции
обмоток по отношению к корпусу и между собой.
После выполнения каждого вида ТО необходимо проверить генератор в режиме
холостого хода в течение 1 ч. При этом следует контролировать: напряжение генератора,
биение колец и работу щеточного аппарата, температуру нагрева корпуса и подшипников,
отсутствие постороннего шума и недопустимой вибрации.
После выполнения ТО № 3 дополнительно испытывают генератор при номинальной нагрузке в течение 6 ч.
Периодичность ТО синхронных генераторов должна составлять:
1. при ТО № 1 - 2-3 мес;
2. при ТО № 2 - 6-12 мес;
3. при ТО № 3 - 48-96 мес.
Периодичность ТО генераторов постоянного тока в среднем в 2 раза меньше, что
объясняется более тяжелыми условиями работы, вызванными наличием щеточного
аппарата.
Работы по ТО выполняют члены судового экипажа, ремонтные бригады и береговые подразделения в соответствии с планом-графиком технического обслуживания
(ПГТО), утверждаемым службой судового хозяйства пароходства. В ПГТО указывают
состав работ, их периодичность, трудоемкость и исполнителей работ.
Ремонт судовых генераторов
Цель ремонта состоит в восстановлении до необходимого уровня частично или пол
ностью утраченных технико-эксплуатационных характеристик генераторов.
Различают 2 вида планово-предупредительного ремонта:
1. текущий;
2. капитальный.
При текущем ремонте выполняют работы по восстановлению и замене преимущественно быстроизнашивающихся деталей и узлов, а при капитальном - работы по восстано
влению и замене частей и узлов, связанные с большими объемами сопутствующих работ.
Текущий ремонт проводят во время стоянки судна на заводе и без вывода судна из
эксплуатации, а капитальный ремонт - как правило, с выводом судна из эксплуатации.
Ремонтные работы проводят члены экипажа, а также работники баз технического
обслуживания (БТО) и электроремонтных цехов судоремонтных предприятий.
Организация ТО и ремонта должна соответствовать требованиям комплексной системы ТО и ремонта судов (РД 31.20.50- 87).
Внедрение на судах автоматизированных систем технической диагностики и про-
66
гнозирования позволит перейти от регламентированного ТО и ремонта, предполагающего
строгую периодичность ТО и ремонтов, к обслуживанию по фактическому состоянию
СТС. Это позволит значительно уменьшить трудозатраты и сократить численность экипажей.
Контрольные вопросы
1. Перечислите основные режимы работы судна, укажите их характерные
особенности
2. Чем отличаются друг от друга непрерывно, периодически и эпизодически работа
ющие приемники электроэнергии?
3. Назовите особенности основных методов расчета мощности СЭЭС
4. В чем состоит суть расчета мощности СЭС табличным методом? Чем заканчивается расчет?
5. Перечислите основные требования Правил Регистра к выбору количества и мощ
ности судовых генераторов
6. В чем заключаются достоинства и недостатки дизелей, паровых и газовых турбин?
7. Каким образом и почему характер нагрузки СЭС влияет на напряжение СГ?
8. Каковы характерные признаки и свойства разных систем возбуждения СГ?
9. Какие значения токов перегрузки и в течение какого времени должны выдерживать СГ и ГПТ?
10. Перечислите основные особенности судовых СГ
11. Чем отличаются друг от друга ТО1, ТО2 и ТО3?
12. Какова цель ремонта СЭО? Каковы виды ремонтов СЭО и в чем их особенности?
1.3. СИСТЕМЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ГЕНЕРАТОРНЫХ АГРЕГАТОВ И НАПРЯЖЕНИЯ ГЕНЕРАТОРОВ. ПАРАЛЛЕЛЬНАЯ
РАБОТА ГЕНЕРАТОРОВ
1. Системы регулирования частоты вращения ГА
1.1. Необходимость использования АРЧ
Изменение нагрузки СЭС, например, включение мощных приемников электроэнер
гии ( пожарного насоса, компрессора пускового воздуха, работа грузовых лебедок и т.п. )
вызывает изменение величины тормозного электромагнитного момента генераторов и, как
следствие, изменение частоты вращения приводных двигателей генераторов.
В свою очередь, это приводит к изменению частоты тока и напряжения синхронных генераторов, что неблагоприятно сказывается на работе приемников электроэнергии.
Особенно чувствительны к провалам напряжения 3-фазные асинхронные двигатели
у которых вращающий электромагнитный момент прямо пропорционален квадрату напряжения. Поэтому провалы напряжения могут привести к остановке ( насосы, вентиляторы )
и даже реверсу ( грузовые лебедки, краны, брашпили ) электродвигателей.
Провалы напряжения неблагоприятно сказываются на работе люминисцентных све
тильников, которые при этом гаснут. В то же время для восстановления нормального свечения им необходимо несколько десятков секунд или даже минут ( в зависимости от типа
лампы ).
Поэтому приводные двигатели генераторов – дизели и турбины, обязательно снабжают автоматическими регуляторами частоты вращения.
1.2. Основные характеристики АРЧ
67
Основное требование к ПД генераторных агрегатов любого типа - сохранение
частоты вращения вала ПД, что необходимо для стабилизации частоты тока генераторов.
Поэтому ГА снабжают АРЧ, для которых регулирующим воздействием является
изменение подачи топлива (пара), а регулирующим органом - топливная рейка у дизелей и
паровпускной клапан у турбин.
К основным характеристикам АРЧ относятся регуляторные и скоростные.
1.3. Регуляторные характеристики АРЧ
Регуляторная характеристика представляет собой зависимость частоты вращения n
приводного двигателя от мощности Р генератора при фиксированном положении
регулирующего органа – рейки топливного насоса ( рис. 3.1).
Рис. 3.1. Астатическая ( 1 ) и статическая ( 2 ) регуляторная характеристики
приводных двигателей генераторных агрегатов
Основным параметром регуляторной характеристики является наклон или статизм
в(%)
δ = [ ( n х. х - n ном ) / n х. х ]100
( 3.1 ),
где n
х. х
и n
ном
- частоты вращения соответственно холостого хода и номиналь-
ная, об/мин.
Для астатической характеристики δ = 0, т. е. частота вращения приводного двигателя ГА не зависит от нагрузки генератора (см. рис. 2.1, характеристика 1). Иначе говоря,
определенному значению частоты вращения ПД соответствует множество значений мощности генератора. Это не позволяет обеспечить пропорциональное распределение активных нагрузок параллельно работающих синхронных генераторов.
Иначе говоря, ПД с астатической регуляторной характеристикой нужно применять
только при одиночной работе ГА с целью идеальной стабилизации частоты вращения ПД.
При параллельной работе ПД должны иметь статическую регуляторную характери
стику ( пояснение см. ниже ).
1.4. Скоростные характеристики АРЧ
К скоростным характеристикам АРЧ относятся внешние и частичные ( ограничи
тельные ).
Внешней характеристикой называется зависимость мощности ДВС N e от частоты
вращения вала n при подаче топлива, соответствующей номинальной мощности дизеля.
На рис. 3.1, а при частоте вращения n = n ном ( т.е. при n % = 100% ) мощность дизеля N e %
= 100%.
При уменьшении частоты вращения ( но неизменной подаче топлива ) мощность ди
зеля уменьшается. На рис. 3.1, а при работе дизеля на внешней характеристике 1 и уменьшении частоты вращения до минимально допустимого значения n min = 25% n ном мощность дизеля N e % ≈ 45%.
Поскольку работа двигателя по внешней характеристике сопровождается дымным
выпуском, высоким расходом топлива, высокой температурой выпускных газов и наруше-
68
нием теплового равновесия дваигателя, в эксплуатации работа на внешней предельной характеристике или даже на отдельных точках этой характеристики не допускается
Частичной характеристикой называется зависимость мощности ДВС N e от частоты
вращения вала n при подаче топлива, соответствующей меньшим номинальной значениям
мощности дизеля.
Частичная характеристика лежит ниже внешней и определяет верхний предел поля
допустимых наибольших мощностей при длительной работе двигателя и без дымления.
Обычно параметры внешних и частичных характеристик выражают в процентах (
рис. 3.2, 3.3 ) или относительных единицах.
Поле возможных режимов работы ДВС совместно с генератором электрической
энергии (рис. 3.2 ) расположено в интервале n'—n'' допустимого отклонения частоты вращения генератора от номинального значения ( на рис. 3.2 заштриховано).
Рис.3.2. Характеристики ДВС,
работающего совместно с
генератором: 1 – внешняя
( при номинальной мощности ); 2, 3 – частичные
Рис. 3.3. Совмещенные характеристики ДВС и генератора:
1 – внешняя ДВС; 2 - частичная
ДВС; 3, 4 – нагрузочные генератора при уменьшении нагрузки
( 3 ) и номинальной нагрузке ( 4 )
Из рис. 3.2 видно, что при уменьшении электрической нагрузки до значения N 2
или N3 двигатель должен перейти на частичные внешние характеристики 2 или 3, для чего
надо уменьшить подачу топлива..
Для оценки работы двигателя с генератором обычно рассматривают их совмещенные характеристики (рис. 3.3 ).
Если принять, что точка А пересечения внешней характеристики 1 ДВС и нагрузоч
ной характеристики 4 генератора представляет номинальный режим работы, a Δn – допустимое изменение частоты вращения, то очевидно, что даже незначительное уменьшение
нагрузки генератора (характеристика 3) повлечет за собой изменение частоты вращения,
выходящее за намеченную границу (новый режим работы устанавливается в точке В).
Для обеспечения заданного диапазона частоты вращения нужно при новой нагрузке генератора перейти на новую частичную характеристику 2 двигателя, тогда новый режим работы установится в точке С.
Для перехода на частичную характеристику 2 при незначительном уменьшении нагрузки и увеличении частоты вращения следует воздействовать на рейку топливных насосов в сторону уменьшения подачи, а при увеличении нагрузки на генератор и понижении
частоты вращения — в сторону увеличения подачи топлива.
Для этой цели на приводной двигатель, работающий совместно с генератором, уста
навливают регулятор, который может поддерживать один скоростной режим в пределах
69
допустимого изменения частоты вращения Δn.
Дизель-генератор и регулятор частоты вращения образуют замкнутую систему авто
матического регулирования, которая обеспечивает автоматическое поддержание частоты
вращения коленчатого вала двигателя с заданной степенью точности.
По классификационным признакам и назначению существуют различные типы
регуляторов (табл. 3.1).
1.5. Классификация АРЧ
В настоящее время принята следующая классификация АРЧ ( таблица 3.1.).
Таблица 3.1.
Классификация регуляторов частоты вращений вала приводных двигателей ГА
Тип регулятора
Выполняемые функции
По назначению и режимности работы
Однорежимный
Поддерживает один скоростной режим
Двухрежимный
Поддерживает два скоростных режима ( минимально
устойчивой и номинальной частоты вращения )
Всережимный
Поддерживает любой скоростной заданный режим двигателя
( выше минимально устойчивой частоты вращения )
Предельный
Включается в работу только в случае превышения
номинальной частоты вращения
Механический
Гидравлический
Электрический
По типу измерительной части регулятора
Входной сигнал ( частота вращения ) преобразуется измерителем регулятора в механическое перемещение
Входной сигнал ( частота вращения ) преобразуется в энергию
давления масла
Входной сигнал ( частота вращения ) преобразуется в электрическую величину ( напряжение или ток ) и механическое пере
мещение
По способу воздействия измерительного устройства на регулирующий орган
Прямого действия
Перемещение рейки ТНВД происходит только за счет энергии,
сообщаемой ей измерительной частью регулятора
Непрямого действия
Выходной сигнал измерительной части регулятора передается
на топливную рейку усиленным ( через усилитель )
По количеству входных сигналов
Одноимпульсные
Работает по отклонению только одной величины ( частоты
вращения )
Двухимпульсные
Работает по отклонению двух величин ( частоты вращения и
Активной нагрузки генератора )
По виду регуляторной характеристики
Астатический
Поддерживает частоту вращения постоянной при любых нагруз
ках
Статический
Поддерживает частоту вращения коленчатого вала дизеля в
установленных пределах Δn при изменении нагрузки
Комбинированный
В зависимости от настройки может работать как по статической, так и по астатической характеристике
По осуществляемому закону регулирования
Интегральный
Отклонение частоты вращения влияет только на скорость пере( И - регулятор )
мещения рейки ТНВД
70
Пропорциональный
Отклонение частоты вращения влияет только на величину пере
( П – регулятор )
мещения рейки топливных насосов
ПропорциональноОтклонение частоты вращения влияет на величину и скорость
интегральный
перемещения рейки топливных насосов
( ПИ- регулятор )
По типу обратных связей
С жесткой обратной
Осуществляет пропорциональный закон регулирования ( П – ре
связью
гулятор ). Регуляторная характеристика статическая
С гибкой обратной
Осуществляет пропорционально-интегральный закон регулиросвязью
вания ( ПИ – регулятор ), Регуляторная характеристика астатическая.
1.6. Применение разных типов АРЧ
Применение того или иного вида АРЧ зависит от условий работы ГА ( одиночная,
параллельная работа ) и от требований, предъявляемых к точности регулирования частоты
вращения ГА.
Например, АРЧ, обеспечивающие работу приводных двигателей ГА по астатическим характеристикам, применяют только при одиночной работе ГА и называют астатическими. Такие регуляторы называют также интегральными, или регуляторами И-типа. У
них отклонение частоты вращения влияет только на скорость перемещения рейки ТНВД.
АРЧ, предназначенные для обеспечения параллельной работы ГА, должны работать только по статическим характеристикам. Для статической характеристики δ > 0, т.
е. частота вращения ПД уменьшается с увеличением нагрузки генератора (см. рис. 2.1,
характеристика 2).. Такие регуляторы называют статическими а также пропорциональны
ми или регуляторами П-типа. У них отклонение частоты вращения влияет только на величину перемещения рейки топливных насосов
Регуляторы, обеспечивающие работу ПД по астатической и статической характеристикам, называют универсально-статическими. Такие регуляторы называют также пропор
ционально-интегральными или регуляторами ПИ-типа. У них отклонение частоты вращения влияет как на величину, так и на скорость перемещения рейки топливных насосов.
В зависимости от изменяемых величин различают АРЧ одно- и двухимпульсные.
Одноимпульсные АРЧ изменяют подачу топлива при изменении частоты и потому
снабжаются центробежными (частоты вращения вала) или электрическими (частоты тока)
датчиками.
Двухимпульсные АРЧ дополнительно снабжены датчиком активного тока, поэтому
у них подача топлива зависит как от частоты вращения ( тока ), так и от активной нагрузки. Точность стабилизации частоты вращения у них лучше, чем у одноимпульсных, но
при этом усложняется схема управления АРЧ.
В зависимости от наличия усиления различают АРЧ прямого и непрямого действия. В АРЧ прямого действия датчик частоты вращения воздействует на регулирующий
орган непосредственно, а в АРЧ непрямого действия - через усилитель (сервомотор).
АРЧ прямого действия применяются для ГА небольшой мощности. На большинст
ве современных судов применяются двухимпульсные ГА.
Более подробная классификация АРЧ приведена в таблице 3.1.
1.7. Изменение положения регуляторных характеристик АРЧ
Для равномерного распределения активных нагрузок при параллельной работе СГ
необходимо иметь возможность:
1. изменять наклон ( статизм ) регуляторных характеристик;
2. перемещать характеристики параллельно самим себе.
71
Наклон ( статизм ) характеристик устанавливается в процессе настройки АРЧ и в
процессе эксплуатации не изменяется.
Параллельное перемещение характеристики обеспечивается установкой регулирую
щего органа в новое фиксированное положение. Если этому положению соответствует уве
личение подачи топлива (пара), регуляторная характеристика перемещается вверх, если
уменьшение - вниз.
Таким образом, параллельное перемещение регуляторных характеристик происходит каждый раз после включения генератора на шины с целью последующего перевода
или распределения активной нагрузки.
Изменяют положение регулирующего органа с помощью серводвигателя – электрического двигателя постоянного или переменного тока небольшой мощности.
Управление серводвигателем осуществляется вручную (оператором) или автоматически. Для обеспечения устойчивой параллельной работы генераторов и равномерного
распределения активной нагрузки статизм регуляторных характеристик дизелей должен
быть не менее 3 %.
Регуляторы, имеющие гибкую обратную связь по частоте вращения, совмещают
свойства статического и астатического регуляторов, однако не могут применяться при
параллельной работе ДГ. В этом случае используют регуляторы, которые имеют жесткую
обратную связь с регулируемой степенью статизма. Такие регуляторы являются универсальными.
1.8. Требования Правил Регистра к ПД ГА
Двигатели, предназначенные для привода генераторов, должны удовлетворять следующим требованиям:
каждый двигатель, приводящий в действие генератор, должен иметь регулятор
частоты вращения, характеристики которого должны удовлетворять следующим требова
ниям:
.1. при мгновенном сбросе 100% нагрузки генератора кратковременное изменение
частоты вращения двигателя не должно превышать 10% расчетной частоты вращения;
.2. при мгновенном набросе нагрузки от нулевой до 50% расчетной нагрузки генера
тора, а также при последующем (после достижения установившейся частоты вращения)
набросе оставшихся 50% нагрузки генератора кратковременное изменение частоты
вращения двигателя не должно превышать 10% расчетной частоты вращения.
.3. при параллельной работе генераторов переменного тока в диапазоне от 20 до
100% общей нагрузки распределение ее на каждый генератор должно происходить пропорционально их мощности и не должно отличаться более чем на 15% от расчетной
нагрузки большего из генераторов или на 25% от расчетной нагрузки рассматриваемого
генератора в зависимости от того, что меньше;
.4. при любых нагрузках от нулевой до 100% расчетной нагрузки генератора устано
вившаяся частота вращения двигателя не должна превышать расчетную более чем на 5%;
.5. установившаяся частота вращения при сбросах и набросах нагрузки генератора
должна достигаться не менее чем за 5 с;
.6. установившаяся частота вращения не должна колебаться более чем на ±1% частоты вращения, соответствующей конкретной установившейся нагрузке генератора.
Регулятор частоты вращения приводного двигателя аварийного генератора должен
иметь характеристики, удовлетворяющие требованиям пункта .1. при сбросе и набросе
100% нагрузки генератора.
Регулятор частоты вращения должен иметь устройство для местного и дистанцион
ного изменения частоты вращения в пределах ± 10%.
В дополнение к регулятору частоты вращения каждый приводной двигатель мощно
стью 220 кВт и более должен иметь отдельный предельный выключатель, отрегулирован-
72
ный таким образом, чтобы частота вращения двигателя не могла превысить расчетную
более чем на 15%.
Предельный выключатель, включая его приводной механизм, должен быть незави
симым от регулятора частоты вращения.
Генераторы должны рассчитываться на непрерывную работу с учетом снижения
мощности при эксплуатации судна.
При коротких замыканиях в судовой сети генераторы должны обеспечивать величи
ну установившегося тока короткого замыкания, достаточную для срабатывания защитных
устройств.
У генераторов с независимым приводом должно обеспечиваться регулирование напряжения в пределах, указанных в разделе 9.5 и 9.6 настоящего пособия.
1.9. Требования Правил Регистра к распределение активной и реактивной
нагрузки при параллельной работе генераторов
Основными приемниками электроэнергии СЭС являются асинхронные двигатели.
Они создают для судовых генераторов активно-индуктивную нагрузку. Такую нагрузку
можно представить состоящей из активной и индуктивной частей.
Как известно из курса электрических машин, при параллельной работе синхронных
генераторов активную нагрузку изменяют изменением подачи топлива приводных двигателей генераторов, а реактивную – изменением тока возбуждения генератора.
Изменение подачи топлива обеспечивают АРЧ дизелей ( турбин ), изменение тока
возбуждения – АРН генераторов, в состав которых входят специально предназначенные
для этой цели реактивные компенсаторы ( компенсаторы реактивной мощности ).
Поэтому Правила Регистра устанавливают требования к распределению как активной, так и реактивной нагрузки.
Требования к распределению активной нагрузки состоят в следующем::
1. при набросе (сбросе) 100 %-ной нагрузки изменение частоты вращения ПД не
должно превышать ± 10 % номинального значения, а установившаяся частота вращения
не должны отличаться более чем на ± 5 % номинальной (это требование одинаково для
турбин и дизелей, за тем исключением, что у дизелей наброс нагрузки проводится в 2
ступени, по 50 % каждая);
2. колебания частоты вращения (размах) ДГ при нагрузках 25-100 % номинальной
должны находиться в пределах ± 1 % номинальной;
3. должна обеспечиваться возможность местного и дистанционного изменения ча
стоты вращения в пределах ± 10 % номинальной.
Более подробно работа АРЧ рассматривается ниже ( см. п. «Распределение нагрузки между параллельно работающими генераторами» ).
Требования к распределению реактивной нагрузки такие.
1. генераторы переменного тока, предназначенные для параллельной работы, долж
ны снабжаться такой системой компенсации реактивного падения напряжения, чтобы во
время параллельной работы распределение реактивной нагрузки между генераторами не
отличалось от пропорциональной их мощности более чем на 10% номинальной
реактивной нагрузки наибольшего генератора или не более чем на 25% номинальной
мощности наименьшего генератора, если это значение меньше вышеуказанного.
2. при параллельной работе генераторов переменного тока и нагрузке от 20 до100%
номинальной мощности могут быть допущены колебания тока в пределах ±15% номиналь
ной величины тока наибольшего генератора.
2. Системы возбуждения и автоматического регулирования напряжения
синхронных генераторов
2.1. Причины, влияющие на напряжение судовых синхронных генераторов
73
На напряжение судовых синхронных генераторов влияют 3 причины:
1. частота вращения ПД ( дизеля, турбины );
2. изменение тока нагрузки генератора;
3. нагрев при работе обмоток статора и ротора генератора.
Рассмотрим действие этих причин более подробно.
1. При изменении частоты вращения ПД изменяются сразу два параметра синхронного генератора:
1. частота тока генератора
f=
pn
60
2. ЭДС обмотки статора генератора
Е = 4,44 f w Ф,
где р – число пар полюсов на роторе генератора ( величина постоянная );
n – частота вращения приводного двигателя генератора, об / мин;
4,44 – постоянный коэффициент;
f – частота переменного тока;
w – число витков фазной обмотки ( величина постоянная );
Ф – магнитный поток возбуждения генератора.
Из приведеннях формул следует, что при уменьшении частоты вращения ПД умень
шаются частота тока генератора, его ЭДС, а значит, и напряжение, и наоборот.
2. Основными приемниками ЭЭ на судах являются асинхронные двигатели. Они
создают для синхронных генераторов активно-индуктивную нагрузку.
Действие активной и индуктивной составляющих тока нагрузки ( тока обмотки
статора ) проявляется по разному. Так, при увеличении тока нагрузки:
.1. активная составляющая увеличивает тормозной электромагнитный момент генератора, что приведет к уменьшению скорости ПД и снижению напряжения СГ;
.2. индуктивная составляющая ослабляет магнитный поток генератора, что также
приводит к уменьшению его напряжения.
Таким образом, при набросе нагрузки каждая составляющая тока нагрузки снижает
напряжение генератора.
3. При работе генератора его две обмотки - обмотка статора и обмотка возбуждения
( на роторе ), нагреваются, потому сопротивление обмоток увеличивается. В результате
увеличивается падение напряжения на активном сопротивлении обмотки статора, а также
и уменьшается ток возбуждения. В обоих случаях напряжение генератора уменьшается.
2.2. Компенсация действия причин, вызывающих изменение напряжения
синхронных генераторов
Современные АРЧ и АРН позволяют успешно компенсировать действие причин,
вызывающих изменение напряжения генераторов. При этом, в случае, если действие каких-либо причин не в состоянии компенсировать АРЧ, это делает АРН.
Например, если АРЧ дизеля ( турбины ) работает ненадежно, имеющийся в схеме
АРН генератора узел частотной коррекции ( см. ниже ) изменяет в нужном направлении
ток возбуждения генератора, поэтому напряжение получается стабильным.
Так, в случае, если частота вращения приводного двигателя генератора меньше номинальной, что приводит к уменьшению частоты тока и напряжения генератора, этот узел
увеличивает ток возбуждения и тем самым восстанавливает напряжение.
Стабилизацию напряжения при изменении тока нагрузки по величине и характеру
обеспечивает одновременное действие АРЧ и АРН.
Например, при набросе нагрузки на генератор АРЧ увеличивает подачу топлива,
компенсируя увеличение тормозного электромагнитного момента генератора и стабилизи
74
руя частоту тока, а АРН увеличивает ток возбуждения генератора, восстанавливая напряжение до номинального ( см. ниже ).
Стабилизацию напряжения при нагреве генератора обеспечивается при помощи узла температурной компенсации в составе АРН ( см. ниже ). При нагреве этот узел автоматически увеличивает ток возбуждения генератора, восстанавливая напряжение до номинального.
2.3. Требования международных и национального классификационных
обществ к судовым АРН
Числовые значения показателей качества электроэнергии регламентируются правилами и нормами различных классификационных обществ и организаций.
Соблюдение этих значений гарантирует надежную и экономичную работу потребителей.
Общие требования, предъявляемые к cудовым СГ, первичным двигателям и регуля
торам напряжения с целью получения во всех рабочих режимах электроэнергии
требуемого качества, заключаются в том, что должна быть обеспечена:
1. заданная степень надежности;
2. требуемая точность поддержания напряжения и частоты при изменении режима
нагрузки от холостого хода до номинальной;
3. устойчивость параллельной работы генераторов с различными соотношениями
их мощностей.
Приводные двигатели, генераторы и их регуляторы должны обеспечивать необходи
мые качественные и количественные показатели в переходных процессах (набросы и сбро
сы нагрузок, короткие замыкания и т. д.).
Надежность работы СЭС достигается выбором элементов СЭУ с высокими
показателями надежности, мощностью и числом генераторов.
Правила Регистра требуют, чтобы на каждом судне было предусмотрено не менее
двух основных источников энергии (за исключением судов с ограниченным районом
плавания при мощности источника тока менее 20 кВт).
Мощность основных источников электрической энергии должна быть такой, чтобы
при выходе из строя любого источника оставшиеся обеспечивали питание систем,
необходимых для движения и безопасности судна в ходовом или аварийном режиме.
Суммарная мощность и мгновенная перегрузочная способность всех агрегатов
переменного тока, питающих судовую сеть, должна быть достаточной для пуска самого
мощного электродвигателя с наиболее трудным пуском в случае выхода из строя любого
из имеющихся генераторов. При этом не должно быть понижения напряжения и частоты,
вызывающего выпадение из синхронизма, остановку приводного двигателя генератора, а
также самопроизвольное отключение работающих машин и аппаратов.
В правилах Японского классификационного общества указывается, что мощность и
число судовых генераторов должны быть достаточными для обеспечения необходимого
режима нагрузки, для движения (безопасности судна даже при невозможности использо
вания одного из генераторов).
Американское бюро судоходства требует, чтобы все океанские суда, использующие
электричество для вспомогательных нужд и освещения, должны иметь не менее двух вспо
могательных генераторов.
Мощность генератора или генераторов должна быть достаточной для обеспечения
необходимого режима нагрузки на ходу в нормальных условиях при любом генераторе,
находящемся в резерве.
Требования основных классификационных обществ к точности поддержания напря
жения ±Δ U ( % ), наибольшему допустимому провалу ( забросу ) напряжения в переходном режиме ± Δ Umax( % ) и времени восстановления напряжения t в ( с ) приведены в
таблице 3.2.
75
Таблица 3.2.
Требования основных классификационных обществ к качественным показателям электроэнергии
Классификационное Точность поддержаобщество
ния напряжения
±Δ U, ( % )
Регистр России
±2,5% при измене
нии нагрузки от 0 до
номинальной при
номинальном cosφ
Английский Ллойд
±2,5% при измене
нии нагрузки от 0 до
номинальной при
номинальном cosφ
Американское бюро ±4% во всем диапасудоходства
зоне изменения нагрузки
Норвежское бюро
±2,5% во всем диаВеритас
пазоне изменения
нагрузки
Французское бюро
±2,5% при измене
Веритас
нии нагрузки от 0 до
номинальной
Японское классифи ±1,5% без компенса
кационное общест- ции реактивной мощ
во
ности и ±4% при ком
пенсации и измене
нии нагрузки от 0 до
номинальной величи
ны
Германский Ллойд
-
Наибольший допустимый провал ( заброс ) напряжения
± Δ Umax, ( % )
- 15%….+20% при
набросе и сбросе на
грузки величиной
60% I н и с cosφ = 0,4
Время восстановления напряжения t
в (с)
- 15% при набросе
нагрузки величиной
60% I н и с cosφ =
= 0…0,4
1…1,5 с точностью
± 3% U н ( при набросе нагрузки 35%
Iн )
1,5 с точностью
± 3% U н
*
- 15%*
- 15% при набросе
3 с точностью
50% нагрузки с cosφ ± 3% U
н
не более 0,4
*
-
- 15% при набросе
3
50% нагрузки с cosφ
не более 0,4
Итальянский
- 15% при набросе
1…1,5
Регистр
60% нагрузки с cosφ
не более 0,4
МЭК ( Международ ±2,5% при измене
- 15% при набросе
1 c точностью
ная электротехнинии нагрузки от 0 до нагрузки I = 60% I
± 3% U н
н
ческая комиссия )
номинальной
с cosφ не более 0,4
Достигнутые наибо ±1%
±10% при набросе
0,3
лее высокие резуль
100% и сбросе 50%
таты эксплуатации
нагрузки
* В правилах оговаривается: в системе не должно быть понижения напряжения при пуске
наиболее мощного потребителя, которое могло бы повлечь выпадение из синхронизма,
остановку первичного двигателя, а также самопроизвольное отключение работающих
машин и аппаратов.
76
2.4. Требования Правил Регистра к сохранению работоспособности судовых
приемников электроэнергии при колебаниях напряжения и частоты тока сети
Правила Регистра предъявляют жесткие требования к качеству электроэнергии
( величине напряжения, частоты тока и др. ), выполнение которых обеспечивают АРЧ
дизелей ( турбин ) и АРН судовых генераторов.
Однако на практике возможны нарушения этих требований вследствие, например,
износа топливных насосов, старения полупроводниковых приборов в составе АРН и т.п.
Поэтому судовые приемники электроэнергии должны сохранять работоспособность даже при отклонениях питающего напряжения и частоты тока от номинальных
значений, указанных в табл. 3.3.
Таблица 3.3.
Допускаемые для судовых приемников электроэнергии отклонения (%) напряжения и
частоты от номинальных значений
Параметр
Длительное
Кратковременное
Напряжение
Частота
Примечание:
* в течение 1,5 с;
* в течение 5 с.
+ 6…-10
±5
+ 20…-30*
± 10**
3. Принципы построения систем автоматического регулирования напряжения
Основные сведения
Основной функцией АРН является стабилизация напряжения СЭС посредством
изменения тока возбуждения генератора.
Кроме того, схемы АРН дополняются устройствами, обеспечивающими надежное
самовозбуждение СГ на холостом ходу и контурами коррекции напряжения по частоте и
температуре генератора.
Все комплектное устройство, обеспечивающее самовозбуждение генератора и стабилизацию его напряжения, будем называть системой возбуждения и автоматического
регулирования напряжения ( СВАРН ).
В СВАРН часть энергии переменного тока отбирается с выводов генератора, регулируется элементами АРН, преобразуется в энергию постоянного тока и подается в обмотку возбуждения генератора ( см. выше 2. РЕЖИМЫ РАБОТЫ СЭЭС. ГЕНЕРАТОРНЫЕ
АГРЕГАТЫ, п. 5.2 «Системы возбуждения СГ» )..
СВАРН СГ могут быть построены по одному из следующих принципов регулирования тока возбуждения:
1. по отклонению регулируемой величины – напряжению генератора;
2. по возмущающему воздействию – току нагрузки ( прямое компаундирование )
или току нагрузки и коэффициенту мощности ( прямое фазовое компаундирование );
3. по отклонению регулируемой величины и по возмущающему воздействию
( комбинированные системы ).
3.2. Системы АРН, действующие по возмущению.
Для синхронных генераторов под возмущением понимают изменение тока нагрузки
по значению и характеру ( амплитуде и фазе ).
Обязательным признаком таких систем является наличие в составе СВАРН трансформатора ( фазового ) компаундирования ТК ( рис. 3.4, а).
77
Рис. 3.4. Система возбуждения и автоматического регулирования напряжения с
регулированием по возмущению: а – принципиальная схема; б – векторная диаграмма
магнитных потоков ТК при изменении тока нагрузки по значению ( амплитуде ); в – то же,
при изменении тока нагрузки по характеру ( фазе )
На общем магнитопроводе ТК расположены первичные обмотки тока wт, напряжения wн и вторичные, суммирующие обмотки wc.
Векторы магнитных потоков обмоток ТК совпадают с векторами токов соответствующих обмоток.
Значение вектора магнитного потока Фт, создаваемого обмотками wт , определяется значением тока нагрузки генератора, а его направление совпадает с направлением вектора полного тока генератора I (рис. 3.4, б).
Значение и направление вектора Фн не зависят от тока нагрузки генератора и определяются сопротивлением цепи обмоток w н. В данном случае благодаря включению компаундирующего элемента (дроссель L) вектор тока и магнитного потока в обмотках w н
отстает от вектора напряжения генератора примерно на угол 90° (рис. 3.4, б).
Магнитные потоки Фт и Фн создают в совокупности суммарный магнитный поток
Фс = Фт + Фн, который пересекает суммирующую обмотку и индуктирует в ней переменную ЭДС.
Эта ЭДС выпрямляется при помощи выпрямительного мостика UZ, вследствие чего
через обмотку возбуждения СГ протекает постоянный ток возбуждения.
В соответствии с соотношением Е = сωФ, чем больше ток возбуждения, тем больше магнитный поток Ф и тем больше ЭДС СГ.
На практике изменение тока нагрузки генератора происходит одновременно как по
значению, так и характеру.
Для упрощения объяснения рассмотрим изменение тока нагрузки поочередно,
сначала по его значению ( рис. 3.4, б ) , а затем по характеру ( рис. 3.4, в ).
В случае увеличения тока нагрузки СГ без изменения фазы (см. рис. 3.4, б) ( φ =
= соnst ) напряжение генератора может уменьшиться, однако вместе с током нагрузки
увеличится магнитный поток обмоток тока до значения Ф'т. Соответственно увеличится
магнитный поток суммирующих обмоток Фс до значения Ф'с. Ток возбуждения СГ
возрастет, и напряжение восстановится до номинального значения.
Таким образом, в СГ токовые обмотки wт выполняют ту же роль, что последовательная обмотка возбуждения в генераторах постоянного тока смешанного возбуждения, а
именно: компенсировать своим магнитным потоком потерю напряжения вследствие увели
чения нагрузки. Напомним, что именно благодаря наличию последовательной обмотки
возбуждения генераторы постоянного тока смешанного возбуждения не нуждаются в авто
матических регуляторах напряжения и поэтому применяются в качестве основных генераторов, предназначенных для производства электроэнергии.
78
В случае изменения тока нагрузки генератора по фазе при постоянном его значении
(рис. 3.4 в) ( I = соnst ) изменяется размагничивающее действие продольной составляющей магнитного потока реакции статора. В результате ЭДС генератора также изменит
свое значение. На диаграмме в связи с увеличением индуктивной составляющей тока
вектор Фт переместится в положение Фт". Суммарный магнитный поток увеличится до
значения Фс"> Фс. Ток возбуждения СГ увеличится, а напряжение стабилизируется.
Регулирование тока возбуждения СГ по значению и характеру ( амплитуде и фазе )
тока нагрузки называется амплитудно-фазовым компаундированием. В переводе с английского глагол to compound означает «смешивать», в данном случае, смешивать магнитные
потоки токовых обмоток и обмоток напряжения и получать суммарный магнитный поток,
пересекающий витки суммирующих обмоток.
В рассмотренной схеме суммирование воздействий тока нагрузки и напряжения
выполнено электромагнитным путем, т.е. суммированием магнитных потоков токовых
обмоток Фт и обмоток напряжения Фн при помощи трансформатора компаундирования
ТК.
Значительные размеры и масса ТК ухудшают массогабаритные показатели СЭС,
кроме того, мощная магнитная система ТК увеличивает время переходных процессов.
Принципиально возможно суммирование воздействий тока нагрузки и напряжения
электрическим путем, т.е. суммированием не магнитных потоков, а напряжений, одно из
которых пропорционально току нагрузки, а второе – напряжению генератора. Обычно такое суммирование применяют для генераторов небольшой мощности – до нескольких
десятков кВт.
3.3. Системы АРН , действующие по отклонению
В АРН под отклонением ( регулируемой величины ) понимают отклонение напря
жения по отношению к номинальному.
В таких системах исключен ТК, а АРН работает как корректор напряжения КН
( рис. 3.5, а ).
Принцип действия системы состоит в том, что корректор КН измеряет истинное
значение напряжения СГ, и в случае его отклонения вырабатывается управляющий сигнал, который через регулирующий элемент ( например, управляемый выпрямитель UZ)
изменяет в нужную сторону ( корректирует ) ток возбуждения СГ.
Рис. 3.5. Система возбуждения и автоматического регулирования
напряжения с управлением по отклонению:
а - с корректором напряжения; б - комбинированная.
Кроме того, через КН д о п о л н и т е л ь н о осуществляется коррекция напряжения СГ по температуре и частоте.
Также в КН включается узел (контур) для автоматического распределения реактив
ных нагрузок при параллельной работе СГ.
Системы, действующие по отклонению напряжения, не имеют в своем составе ТК, что
делает их более компактными. Такие системы имеют лучшее быстродействие, чем системы с ТК.
3.4. Комбинированные СВАРН
79
В схемах этих систем имеются ТК и КН (рис. 3.5, б). С помощью ТК регулирование
выполняется с недостаточной точностью, обычно ± 3,5 – 4%, а применение КН повышает
точность регулирования до ±1,5 - 2%. Поэтому в целом комбинированные СВАРН обладают высокой точностью стабилизации напряжения СГ.
Принцип действия комбинированной системы состоит в том, что ток с выхода КН
поступает на обмотку управления w у , расположенную на магнитопроводе ТК. Как правило, при отключенном КН напряжение генератора увеличено (примерно на 10 % номинального). Ток обмотки w у размагничивает трансформатор компаундирования, уменьшая результирующий магнитный поток. В случае применения управляемого выпрямителя UZ
корректор напряжения может воздействовать непосредственно на его систему управления.
Схемы КН и их элементная база отличаются большим разнообразием: они выполня
ются на базе магнитных усилителей или с применением полупроводниковых устройств.
Вне зависимости от типа СВАРН, основную часть схемы СВАРН дополняют устройствами, предназначенными для повышения устойчивости параллельной работы и
компенсации влияния на напряжение СГ колебаний частоты вращения ПД и нагрева СГ.
К таким устройствам относятся:
1. реактивные компенсаторы или компенсаторы реактивной мощности;
2. контуры частотной коррекции;
3. контуры температурной компенсации.
4. Реактивные компенсаторы
Основные сведения
Реактивный компенсатор – это электротехническое устройство, предназначенное
для автоматического распределения реактивных нагрузок между параллельно работающими синхронными генераторами.
Распределять реактивную нагрузку между параллельно работающими генераторами можно двумя способами:
1. вручную;
2. автоматически.
В первом случае оператор ( электромеханик или вахтенный механик ) одновременно поворачивает рукоятки реостатов возбуждения обоих генераторов в разные стороны - у
нагружаемого генератора по часовой стрелке, у разгружаемого – против часовой стрелки.
При повороте рукоятки по часовой стрелке сопротивление реостата уменьшается, а
ток возбуждения увеличивается, что приводит к увеличению реактивной части тока нагруз
ки, т.е. этот генератор принимает на себя реактивную нкгрузку.
При повороте рукоятки против часовой стрелки происходит обратный процесс.
Сами рукоятки реостатов возбуждения выведены на лицевую часть секции каждого
генератора ( генераторной секции ).
Автоматическое распределение реактивной нагрузки, как сказано выше, выполняет
сам реактивный компенсатор.
Однако, вне зависимости от того, вручную или автоматически переводится нагрузка, для ее перевода надо увеличить или уменьшить ток возбуждения генератора.
Изменение тока возбуждения приводит к перемещению внешних характеристик
генераторов параллельно самим себе – при увеличении тока возбуждения характеристика
перемещается вверх, при уменьшении тока возбуждения – вниз..
Основной причиной неравномерного распределения реактивных нагрузок является
разный наклон ( статизм ) внешних характеристик параллельно работающих генераторов,
даже если они одного типа.
Напомним, что наклон внешней характеристики, или статизм (%), определяется
изменением напряжения при переходе от режима холостого хода к номинальному:
80
Δ U = [ ( U х. х - U ном ) / U ном ]*100
( 3.1 ),
где U х. х и U ном - напряжения соответственно холостого хода и номинального.
Рис. 3.6. Внешние характеристики СГ с разным статизмом
При этом меньшему статизму ( наклону ) характеристики соответствует больший
ток нагрузки I 1 > I 2 , что следует из сравнения внешних характеристик 1 и 2 (рис. 3.6 ).
Таким образом, при одинаковом напряжении U ном на шинах ГЭРЩ генераторы
нагружены по разному – 1-й перегружен, а 2-й недогружен.
Регулирование реактивных нагрузок может осуществляться двумя способами:
1. вручную;
2. автоматически.
Для ручного распределения реактивных нагрузок надо увеличить ток возбуждения
генератора с меньшим током нагрузки и одновременно уменьшить у генератора с большим током нагрузки. При этом внешние характеристики СГ переместятся параллельно
самим себе: характеристика 2 вверх, до положения характеристики 2', а характеристика 1
вниз, до положения характеритики 1'. Изменение токов возбуждения надо прекратить в
точке А, в которой реактивные нагрузки обоих генераторов равны.
Автоматическое регулирование реактивных нагрузок обеспечивают специальные
устройства - реактивные компенсаторы ( компенсаторы реактивной мощности ).
Процесс перемещения внешних характеристик 1 и 2 в положение 1', 2' одинаков
Как при ручном, так и автоматическом регулировании. Разница состоит лишь в том, что
характеристики перемещаются при ручном регулировании характеристики за счет измене
ния токов возбуждения генераторов вручную, а при автоматичеком – путем автоматического изменения токов возбуждения генераторов.
4.2. Схемы реактивных компенсаторов
Реактивные компенсаторы включают только на время параллельной работы СГ, а
при одиночной отключают.
Для этого служит переключатель режимов работы генератора, имеющий два поло
жения:
1. одиночная работа генератора;
2. параллельная работа генератора.
Переключатель установлен на каждой генераторной секции ГЭРЩ.
Конструктивно реактивный компенсатор представляет собой часть ( блок ) автоматического регулятора напряжения синхронного генератора.
Различают два вида реактивных компенсаторов:
1. статический;
2. астатический.
Схемы реактивных компенсаторов показана на рис. 3.7, а и 3.7, в.
81
Рис. 3.7. Реактивные компенсаторы: а, б ) схема статического компенсатора
и его векторная диаграмма; в - схема астатического компенсатора
Реактивный статический компенсатор ( рис. 3.7, а ) состоит из трансформатора тока
ТА в фазе А и компаундирующего резистора R. Падение напряжения Ū r на этом резисторе прямо пропорционально току I а фазы А и совпадает с этим током по фазе. Это напряжение суммируется с линейным напряжением Ū вс , после чего суммарное напряжение
управления Ū у = Ū са + Ū вс поступает на вход корректора напряжения КН ( векторная
диаграмма на рис. 3.7, б ). С выхода КН выпрямленное напряжение поступает в схему
ТФК.
Допустим, индуктивная составляющая тока нагрузки СГ увеличилась, вектор тока
фазы А повернулся на угол φ 1 > φ и занимает положение, обозначенное на рис. 3.7, б вектором I а1 . При этом на такой же угол повернется вектор напряжения Ū r1 , вследствие
чего длина вектора напряжения управления увеличится до значения Ū у1 > Ū у .
С помощью КН ток возбуждения генератора будет уменьшен,
В то же время в компенсаторе второго параллельно работающего генератора происходит обратный процесс, т.е. его ток возбуждения увеличивается. Этот процесс закончится тогда, когда реактивные токи обоих генераторов станут одинаковыми.
Описанное выше устойчивое распределение реактивных нагрузок возможно при
статизме характеристик в 3…4%.
При меньшем статизме устойчивость распределения нагрузок нарушается, тогда
применяют уравнительные соединения между обмотками возбуждения СГ, компенсирую
щие неравенство токов возбуждения ( см. ниже )
При перераспределении реактивных нагрузок одновременно изменяется напряжение, ухудшается процесс стабилизации, причем чем больше статизм характеристик, тем в
большей степени изменяется напряжение.
Для устранения этих недостатков применяют астатические компенсаторы с комбинированным управлением (рис. 3.7, в). В схемах таких компенсаторов резисторы R2 соеди
нены уравнительным соединением УС.
В режиме одиночной работы СГ вспомогательный контакт QF автоматического вы
ключателя разомкнут, поэтому уравнительное соединение отключено.
На вторичной обмотке трансформатора ТА возникает ЭДС, значение которой пропорционально току нагрузки фазы А. Под действием ЭДС возникают токи i = i , кото1
2
рые по полуобмоткам трансформатора TV текут встречно, не наводя ЭДС во вторичной
обмотке трансформатора.
При параллельной работе СГ контакт QF замкнут. Если нагрузки генераторов одинаковы, то в контурах их компенсаторов протекают одинаковые токи i , на резисторах
2
R2 создаются одинаковые падения напряжения Ur 2 , и через уравнительную связь УС ток
протекать не будет.
82
При перегрузке 1-го СГ в контуре его компенсатора значения токов i и i
1
2
будут
больше, чем в контуре компенсатора 2-го СГ. Теперь на резисторе R2 схемы компенсатора
1-го СГ падение напряжения окажется больше, чем на резисторе R2 компенсатора 2-го
СГ. Через УС между резисторами R2 компенсаторов потечет уравнительный ток, который
на этих резисторах создает дополнительное падение напряжения Δ Ur 2 .
В схеме компенсатора 1-го СГ напряжение Δ Ur 2 . будет действовать согласно ЭДС
трансформатора ТА, что приведет к увеличению тока i . В это же время в компенсаторе
2
2-го СГ напряженке Δ Ur 2 . будет действовать встречно ЭДС трансформатора ТА и ток i
2
уменьшится. Во вторичных обмотках трансформатора TV возникнут ЭДС противо
положной фазы и корректоры напряжения генераторов выработают противоположные
управляющие сигналы: в СВАРН 1-го СГ ток возбуждения будет уменьшен ( уменьшение
реактивной нагрузки ), а в СВАРН 2-го СГ увеличен ( увеличение реактивной нагрузки ).
Если реактивный компенсатор в составе АРН отсутствует, пропорциональное распределение реактивных нагрузок обеспечивают при помощи т.н. уравнительных связей
( см. ниже, рис. 3.23 и пояснение к нему ).
5. Контуры коррекции напряжения синхронных генераторов
5.1. Основные сведения
То соrrect ( англ. ) – исправлять, нейтрализовать ( вредное влияние ), делать замеча
ние, регулировать, править ( корректуру ) (англо-русский словарь Мюллера, 9-е издание )..
Применительно к системам АРН, следует использовать второе значение этого гла
гола – нейтрализовать.
Контуром коррекции напряжения называется электротехническое устройство,
предназначенное для устранения ( нейтрализации ) влияния на напряжение генератора
двух факторов:
1. колебаний скорости приводных двигателей генераторов ( дизелей, турбин );
2. нагрева обмоток статора и ротора самого генератора.
Контуры коррекции изготовляются в виде блока, дополнительного по отношению к
самому автоматическому регулятору напряжения.
Корректоры предназначены не для регулирования напряжения – эту задачу выполняет сам автоматический регулятор напряжения, а для повышения точности регулирования напряжения, предварительно отрегулированного автоматическим регулятором.
Если АРН не имеет корректора напряжения, то точность регулирования напряжения ( отклонение от номинального ) обычно составляет ±3,5% номинального.
Если АРН дополнен корректором, то точность регулирования напряжения составля
ет ±1,5% номинального.
Характерным признаком неисправности корректора являетя заброс напряжения
генератора до 430…450 В ( см. ниже «Схема СВАРН генераторов типа МСС» )..
5.2. Контуры частотной коррекции
Частота переменного тока СГ определяется выражением
f=
pn
,
60
где р – число пар полюсов ротора СГ ( величина постоянная );
n – частота вращения ротора, об / мин.
Отсюда следует, что любое изменение скорости ПД генератора – дизеля или турбины, автоматически приводит к изменению частоты тока СГ.
В свою очередь, изменение частоты тока вызывает прямо пропорциональное изме-
83
нение ЭДС СГ ( В )
Е = 4,44fwФ,
где 4,44 – постоянный коэффициент;
f – частота переменного тока, Гц;
w – число витков фазной обмотки статора генератора;
Ф – магнитный поток, Вб.
При этом изменяется напряжение на зажимах генератора ( В )
U = E – Iz,
где I – ток нагрузки ( ток обмотки статора ), А;
z – полное ( кажущееся ) сопротивление фазной обмотки статора, Ом.
Чем больше частота тока, тем больше ЭДС и напряжение СГ, и наоборот.
Для стабилизации значения ЭДС и напряжения надо при повышении частоты тока
уменьшать магнитный поток Ф ( и наоборот ), тогда ЭДС Е не изменится:
Е = 4,44↑fw↓Ф = const.
Для изменения магнитного потока надо изменять ток возбуждения генератора.
Для этого в схему КН включается контур частотной коррекции ( рис. 3.8 ).
Рис. 3.8. Принципиальная схема контура частотной коррекции
Обычно это контур типа L – C, настроенный на определенную резонансную частоту, при которой контур имеет минимальное сопротивление. Например, если контур L – C
настроен на частоту 80 Гц, то при повышении частоты СГ (при f ном = 50 Гц) сопротивление контура уменьшится и корректор уменьшит ток возбуждения и напряжение СГ.
5.3. Контуры температурной компенсации
При работе СГ его обмотка статора и обмотка возбуждения нагреваются, их сопротивление увеличивается.
Увеличение активного сопротивления обмотки статора приводит к увеличению
полного сопротивления обмотки
Z = R Xl ,
где: R – активное сопротивление обмотки статора, Ом;
X l - индуктивное сопротивление обмотки статора, Ом.
При этом увеличивается падение напряжения на обмотке статора Iz, что приводит к
уменьшению напряжения на зажимах СГ.
Увеличение сопротивления обмотки ротора приводит к уменьшению тока возбуж
дения
2
2
Iв =
Uв
Rв
,
где U в - напряжение возбуждения СГ, В;
R в - сопротивление обмотки возбуждения, Ом.
Уменьшение тока возбуждения приводит к уменьшению магнитного потока Ф,
ЭДС и напряжения СГ.
Таким образом, нагрев обмоток статора и возбуждения снижает напряжение синхронных генераторов.
84
Для температурной компенсации используют полупроводниковые приборы, сопротивление которых зависит от температуры – терморезисторы. Эти приборы встраивают в
лобовые части обмотки статора СГ ( терморезистор RК на рис. 3.9).
Рис. 3.9.Принципиальная схема температурной коррекции
При нагреве обмоток напряжение СГ уменьшается, в то же время нагревается и резистор RК: его сопротивление увеличивается, и на входе КН напряжение уменьшится.
Корректор напряжения СВАРН увеличивает ток возбуждения СГ, в результате
напряжение СГ также увеличится
6. Система возбуждения и автоматического регулирования напряжения
синхронных генераторов типа МСС
Устройство АРН
Генераторы типа МСС установлены на большом количестве судов отечественной
постройки. Схема их СВАРН представляет собой комбинированную систему стабилизации напряжения. Она сравнительно проста и показала себя надежной в эксплуатации.
К основным элементам, входящим в систему, относятся ( рис. 3.10 ):
1. синхронный генератор G;
2. трансформатор компаундирования ТК;
3. блок силовых выпрямителей UZ1, который включен на напряжение суммирую
щей обмотки w c и подает питание на обмотку возбуждения генератора ОВ;
4. генератор начального возбуждения ГНВ с выпрямителем UZ2;
5. управляемый дроссель с рабочими обмотками w р и обмоткой управления w у
( дроссель отбора тока ДОТ );
6. компенсатор реактивной мощности с трансформатором тока ТА, компаундирую
щим резистором R3 и выключателем SА;
7. резистор термокомпенсации RК;
8. автоматический выключатель QF генератора;
9. выключатель тока возбуждения QS,
10. подстроечные ( дополнительные ) резисторы R1, R2.
Рассмотрим устройство и принцип действия основных узлов схемы СВАРН.
Трансформатор компаундирования ТК
На каждом стержне магнитопровода ТК размещены 4 обмотки: 2 первичные – токо
вая wт и напряжения wн , и 2 вторичные – суммирующая wc и напряжения w.
Назначение и принцип действия первых трех обмоток - wт, wн и wc объяснены выше, вторичная обмотки w входит в состав узла распределения реактивных нагрузок и, кроме того, обеспечивает коррекцию по напряжению и, вместе с терморезистором RK , коррекцию по температуре ( см. ниже ).
У стержня, на котором расположена обмотка напряжения w н , установлен магнитный шунт, который увеличивает индуктивное сопротивление этих обмоток. Поэтому векторы тока и магнитного потока Ф н обмоток w н отстают от вектора напряжения генератора
на угол примерно 90º ( рис. 3.10, б ).
85
Дроссель отбора тока ( ДОТ )
Как следует из схемы, пониженное при помощи ТК линейное напряжение U BC
обмотки w через резисторы R3 и R1 поступает на вход выпрямительного мостика UZ3, с
выхода которого выпрямленное напряжение через резистор R2 и терморезистор RK пода
ется на обмотку управления wу дросселя отбора тока ДОТ.
ДОТ представляет собой 3-фазный дроссель с тремя стержнями, на каждом из них
находится рабочая обмотка. Эти обмотки соединены в «звезду». Они включены параллель
но по отношению к суммирующей обмотке wc, т.е. выполняют роль своеобразного 3-фазного шунта переменного тока.
Как следует из схемы, суммирующая обмотка служит источником питания двух обмоток – обмотки возбуждения генератора через мостик UZ1 и трех рабочих обмоток wр
непосредственно.
Принцип действия ДОТ состоит в следующем: при изменении тока в его обмотке
управления wу изменяется степень подмагничивания сердечника, что приводит к измене
нию индуктивного сопротивления его рабочих обмоток wр. Например, при увеличении
тока в обмотке управления wу сердечник дросселя дополнительно подмагничивается, что
приводит к уменьшению индуктивного сопротивления рабочих обмоток wр, а значит, по
закону Ома, к увеличению тока в них.
Увеличенный ток рабочих обмоток протекает через суммирующую обмотку wc и
увеличивает падение напряжения на ней. В результате напряжение на выходе суммирующей обмотки уменьшается, что приводит к уменьшению тока возбуждения генератора в
обмотке ОВГ и снижению напряжения на зажимах генератора.
Таким образом, при увеличении тока в обмотке управления wу ДОТ напряжение
генератора уменьшается, и наоборот.
86
Рис. 3.10. Система возбуждения и автоматического регулирования напряжения СГ
типа МСС: а – принципиальная схема; б – векторная диаграмма магнитных потоков
ТК ; в – векторная диаграмма напряжений корректора напряжения
Самовозбуждение генератора
Процесс самовозбуждения синхронных генераторов протекает следующим образом.
Полюса ротора СГ имеют небольшой магнитный поток, который называют остаточ
ным Ф ост .
При пуске ПД ротор СГ начинает вращаться, поэтому вместе с полюсами СГ этот
поток вращается, пересекает проводники обмотки статора и индуктирует в ней небольшую, порядка 20…30 В остаточную ЭДС. Эта ЭДС поступает в обмотку напряжения w н
ТК.
В результате в суммирующей обмотке wc появляется вторичная ЭДС величиной в
несколько вольт ( пара обмоток w н и wc работает как обычный понижающий трансформатор, в котором w н - первичная обмотка, а wc – вторичная ).
Эта ЭДС поступает на мостик UZ1, при помощи которого выпрямляется.
В результате в обмотке возбуждения генератора G возникает ток возбуждения, что
приводит к резкому увеличению магнитного потока полюсов ротора. ЭДС обмотки стато
ра увеличивается, что вызывает увеличение напряжения на обмотках w н и wc ТК, а значит,
к увеличению тока возбуждения генератора.
87
Далее описанный процесс увеличения тока возбуждения генератора повторяется.
Напряжение на зажимах генератора также увеличивается.
Процесс самовозбуждения закончится в одном из двух случаев:
1. вследствие насыщения полюсов ротора, при этом напряжение на зажимах генератора составляет 430…460 В ( в зависимости от типа генератора ) при номинальном напряжении 400 В;
2. вследствие введения в цепь обмотки возбуждения генератора регулировочного
реостата, при помощи которого можно изменять напряжение от нуля до максимального.
В данной схеме описанный процесс самовозбуждения невозможен, потому что при
малых напряжениях на входе мостика UZ1 ( в начале процесса самовозбуждения ) прямое
сопротивление диодов мостика велико. Иначе говоря, мостик UZ1 представляет собой
своеобразную «пробку» на пути увеличения тока возбуждения генератора.
Поэтому для обеспечения начального самовозбуждения в данной схеме использован генератор начального возбуждения ГНВ
Генератор начального возбуждения ГНВ
ГНВ предназначен для устойчивого начального возбуждения генератора G.
ГНВ представляет собой 1-фазный генератор переменного тока с сильными постоянными магнитами на статоре ( т.е. у него нет обмотки возбуждения на магнитных полюсах статора ) и выходной обмоткой на роторе. Ротор ГНВ сидит на одном валу с ротором
СГ.
Процесс начального самовозбуждения СГ протекает следующим образом.
После пуска ПД роторы СГ и ГНВ начинают разгоняться. При этом мощный магнитный поток полюсов ГНВ пересекает обмотку ротора ГНВ и наводит в ней 3-фазную
ЭДС, которая выпрямляется при помощи мостика UZ2 и после выпрямления поступает на
обмотку возбуждения ОВГ СГ.
В результате в обмотке статора СГ индуктируется 3-фазная ЭДС, которая через обмотку напряжения w н трансформируется в суммирующую обмотку w c , выпрямляется при
помощи мостика UZ1 и после выпрямления поступает на обмотку возбуждения ОВГ СГ.
При этом ток возбуждения СГ увеличивается, что приводит к увеличению 3-фазной
ЭДС обмотки статора, а значит, к увеличению прямого напряжения на диодах мостика
UZ1 до значения, при котором диоды начинают пропускать ток ( для кремниевых диодов
это напряжение составляет порядка 1 В ).
Как следует из схемы, выходные напряжения мостиков UZ1 и UZ2 направлены
встречно. Поэтому в номинальном режиме работы СГ, когда напряжение на выходе мости
ка UZ1 больше напряжения на выходе мостика UZ2, последний «запирается» и далее в работе схемы не участвует.
Амплитудно-фазовое компаундирование
Процесс амплитудно-фазового компаундирования поясняется с помощью векторной диаграммы, представленной на рис. 3.10, б.
Как следует из диаграммы, вектор магнитного потока Фн обмотки напряжения wн
отстает от вектора фазного напряжения генератора U на угол 90º, что объясняется большим индуктивным сопротивлением этой обмотки, обусловленным действием магнитного
шунта ТК.
Рассмотрим регулирование напряжения по величине ( амплитуде ) и характеру ( фа
зе ) поочередно.
Регулирование напряжения по величине ( амплитуде ) тока нагрузки
Рассмотрим регулирование напряжения при изменении тока нагрузки по амплитуде
( величине ).
88
При некотором токе нагрузки магнитный поток Фт токовой обмотки wт ТК отстает
от напряжения генератора U на угол φ.
Этот поток суммируется с магнитным потоком Фн обмотки напряжения wн ( по пра
вилу параллелограмма ), в результате суммарный магнитный поток этих двух обмоток Фс
пересекает витки суммирующей обмотки wc, наводя в последней некоторую ЭДС взаимоиндукции.
Эта ЭДС поступает на вход мостика UZ1 и выпрямляется, вследствие чего через об
мотку возбуждения генератора ОВГ протекает ток, обеспечивающий необходимое напряжение на зажимах генератора.
Если ток нагрузки увеличится, то напряжение генератора уменьшится. Однако при
этом вектор магнитного потока токовой обмотки wт увеличится от прежнего значения Фт
до нового значения Ф'т , что приведет к увеличению магнитного потока суммирующей
обмотки wc от значения Фс до значения Ф'с , а значит, к увеличению ЭДС в этой обмотке и
тока возбуждения.
В результате напряжение генератора восстановится.
Регулирование напряжения по характеру ( фазе ) тока нагрузки
Если ток нагрузки, не изменяясь по величине, станет более индуктивным, напряже
ние генератора уменьшится из-за усиления размагничивания генератора идуктивной составляющей тока нагрузки, протекающего через обмотку статора генератора.
Однако при этом вектор магнитного потока токовой обмотки wт , не изменяясь по
величине, повернется на больший угол φ1( φ1>φ ), т.е. переместится из положения, занима
емого вектором Фт , в положение вектора Ф''т что приведет к увеличению магнитного пото
ка суммирующей обмотки wc от значения Фс до значения Ф''с , а значит, к увеличению
ЭДС в этой обмотке и тока возбуждения.
В результате напряжение генератора восстановится.
Коррекция по отклонению напряжения от заданного значения
Напомним, что основную роль в стабилизации напряжения играет ТК, с помощью
которого отклонение напряжения от заданного значения не превышает ± 3,5%.
Для повышения точности регулирования до ± 1,5%.в схеме использована коррекция по отклонению напряжению.
Узел коррекции по напряжению работает так.
При уменьшении напряжения генератора уменьшается линейное напряжение UВС
на вторичной обмотке w ТК. При этом уменьшается ток в обмотке управления wу дросселя
отбора тока ДОТ, что приводит ( см. объяснение работы ДОТ выше ) к увеличению тока
возбуждения генератора и восстановлению напряжения.
Коррекция по температуре
При повышении температуры обмоток статора и ротора напряжение генератора
уменьшается. Однако при этом одновременно увеличивается сопротивление терморезисто
ра RK, что приводит к уменьшению тока в в обмотке управления wу дросселя отбора тока
ДОТ. В результате ( см. объяснение работы ДОТ выше ) ток возбуждения генератора увеличивается, и напряжение генератора восстанавливается.
Компенсатор реактивной мощности
В состав компенсатора входят: трансформатор тока ТА, компаундирующий резистор R3 и выключатель SА.
Первичная обмотка ТА включена в линейный провод фазы А. В цепь вторичной
обмотки включен последовательно компаундирующий резистор R3.
Переключатель SA имеет два положения – «Одиночная работа генератора» и «Па
раллельная работа генератора».
89
При одиночной работе генератора выключатель SА включен, его контакт замкнут и
шунтирует вторичную обмотку трансформатора тока ТА и компаундирующий резистор
R3. Поэтому компенсатор реактивной мощности не работает.
При параллельной работе СГ выключатель SА разомкнут. Теперь через вторичную
обмотку ТА и резистор R3 протекает ток вторичной обмотки, создающий на резисторе R3
падение напряжения
Ū R 3 = Ī 2 A R3,
где Ī 2 A - ток вторичной обмотки ТА, прямо пропорциональный току фазы А генератора;
R3 – сопротивление компаундирующего резистора.
Резистор R3 и вторичные фазные обмотки «В»и «С» ТК соединены последовательно, поэтому на вход выпрямителя UZ3 поступает напряжение управления U у = Ū CB + Ū
R3 .
При таком напряжении управления ток Ī A обмотки статора генератора отстает от
напряжения на некоторый угол φ.
При увеличении реактивной ( индуктивной ) составляющей тока генератора вектор
тока фазы А, не изменяясь по величине ( на диаграмме – по длине ), повернется на угол φ 1
и займет положение вектора Ī' A .
Одновременно с вектором тока повернется на такой же угол вектор напряжения
Ū R 3 , который займет положение вектора Ū' R 3 . При этом напряжение управления увеличится до значения U' у = Ū CB + Ū' R 3 .
Это ( см. выше «Дроссель отбора тока ДОТ» ) приведет к уменьшению ЭДС генера
тора, и часть индуктивной нагрузки автоматически перейдет на второй генератор.
Резисторы R1, R2, R3
Генераторы серии МСС выпускают на номинальные напряжения 400 и 230 В.
Резистор R1 предназначен для настройки схемы СВАРН на эти два разных напряже
ния – сопротивление этого резистора максимально при напряжении 400 В и минимально
при напряжении 230 В. В обоих случаях на вход мостика UZ3 поступает примерно одинаковое напряжение.
Резистор R2 предназначен для регулировки напряжения холостого хода генератора
– чем больше сопротивление этого резистора, тем меньше ток в обмотке управления w у и
тем больше напряжение холостого хода генератора ( см. выше «Дроссель отбора тока
ДОТ» ). При этом внешняя характеристика генератора U ( I ) переместится вверх параллельно самой себе, т.е напряжение генератора при холостом ходе и при работе под
нагрузкой будет больше, чем при прежнем значении сопротивления резистора R2.
Резистор R3 предназначен для изменения статизма ( наклона ) внешней характеристики генератора. Такое изменение позволяет обеспечить равенство токов нагрузки однотипных генераторов при их параллельной работе.
При увеличении сопротивления резистора R3 падение напряжения на нем Ū R 3 так
же увеличивается, что приводит к увеличению напряжения управления U у = Ū CB + Ū
R 3 и, в конечном счете, к увеличению статизма ( наклона ) внешней характеристики
( см. выше «Дроссель отбора тока ДОТ» ).
Параметры регулирования
СВАРН данного типа обеспечивает стабилизацию напряжения СГ с отклонением
±2,5 % номинального при условиях: установившегося температурного режима; изменении
90
тока нагрузки от 0 до номинального значения; изменении коэффициента мощности от 0,7
до 0,9; колебаниях частоты вращения ПД в пределах ±2 % номинальной.
При параллельной работе СГ обеспечивается пропорциональное распределение
реактивных нагрузок с отклонением не более ± 10 % номинальной реактивной нагрузки
наибольшего генератора.
При прямом пуске АД наибольшей мощности время восстановления напряжения
составляет не более 0,8 с.
Настройка СВАРН
Настройку СВАРН начинают на холостом ходу путём регулирования воздушного
зазора между магнитным шунтом и магнитопроводом ТК.
Необходимо, чтобы при частоте тока 51 Гц и отключенном регулируемом дросселе
ЭДС генератора составляла Е = (1,10…1,13)U ном .
После этого включают цепь дросселя и резистором R2 уставки устанавливают
нужное значение ЭДС (при включенном выключателе SA).
Затем, переводя подвижной контакт резистора R2 в крайние положения, проверяют
диапазон изменения уставки (от 1,02 до 0,93 U ном ).
Если диапазон регулирования нужно сместить ( например, при переходе от напря
жения 400 В к напряжению 230 В, или наоборот ), то это делают с помощью резистора R1.
Далее генератор нагружают. Если при этом наблюдается резкое падение напряжения, то чередование фаз подключения обмотки wн изменяют.
7. Бесщеточные синхронные генераторы
Одним из трудоемких при обслуживании узлов системы CВАРН СГ является контактно-щеточный аппарат. При работе генераторов контактные кольца и щетки изнашиваются значительно быстрее, чем другие части генератора. При работе генератора от щеток
появляется угольная пыль, которая оседает на обмотках генератора и щеточном устройстве.
Для повышения надежности САРН и уменьшения трудоемкости их обслуживания
были разработаны бесщеточные системы возбуждения.
В качестве примера рассмотрим блок-схему СВАРН БСГ фирмы АSEA ( Швеция )
( рис. 3.11 ).
Рис. 3.11. Блок-схема СВАРН БСГ фирмы АSEA
Блок-схема СВАРН БСГ фирмы АSEA ( рис. 3.11 ) включает в себя:
1. основной возбудитель ОВ, питающий обмотку возбуждения ОВГ через управляемый трехфазный выпрямительный мост 1;
2. вспомогательный возбудитель 4;
3. регулятор напряжения 2.
91
Оба возбудителя синхронного типа. Управление тиристорами осуществляется регу
лятором через импульсные трансформаторы, первичные обмотки которых неподвижны, а
вторичные расположены на валу генератора.
Вспомогательный возбудитель имеет две обмотки статора, одна из которых питает
обмотку возбуждения основного возбудителя через выпрямительный мост 3, а другая пода
ет вспомогательное напряжение на регулятор.
Все элементы схемы, кроме потенциометра для установки величины напряжения
генератора, установлены на генераторе. Потенциометр монтируется на ГРЩ.
Система обеспечивает точность поддержания напряжения в пределах ( ± 3..5%) номинального при изменении режима нагрузки от 0 до номинальной величины и cos φ от 0
до 1 ( рис. 3.12 ).
Рис.3.12. Внешние характеристики БСГ фирмы ASEA
Время восстановления напряжения при провале, равном 15% номинального составляет 0,1 с.
8. Характерные неисправности СВАРН
При любых неисправностях СВАРН нарушается режим возбуждения.
Например, если СГ не возбуждается, то возможны обрыв цепи ОВГ или выпрями
теля UZ1 или их повреждение.
Замкнутый в режиме пуска выключатель гашения поля QS закорачивает обмотку
возбуждения генератора ОВГ и также исключает процесс самовозбуждения. Такие выклю
чатели предназначены для снятия напряжения с обмотки возбуждения генератора в случае, если необходимо выполнить ремонтные работы при вращающемся роторе ( например, прошлифовать кольца на роторе ). Поскольку при этом отсутствует ток возбуждения,
напряжение обмотки статора генератора также равно нулю.
При обрывах в цепях обмоток wн и wс , а также выпрямителей UZ1 и UZ2 напряжение холостого хода генератора будет пониженным.
При обрывах в цепи обмотки wу напряжение СГ будет повышенными и может достичь значения 430…450 В ( заброс напряжения ).
9. Параллельная работа синхронных генераторов
9.1. Особенности параллельной работы
Под параллельной понимают работу двух или более генераторов на общую сеть.
Необходимость в параллельной работе может возникнуть в следующих случаях:
1. если мощность одного генератора недостаточна для обеспечения заданного
эксплуатационного режима работы судна;
2. при проходе узкостей, входе в порт и выходе из него, когда включение резервного генератора повышает живучесть СЭС и тем самым безопасность мореплавания;
92
3. при переводе нагрузки с одного генератора на другой с целью остановки одного
из генераторных агрегатов для ТО, ремонта и др.
В настоящее время параллельная работа генераторов является основным режимом
работы СЭС.
Отметим основные особенности параллельной работы генераторов:
1. обеспечивается бесперебойность в снабжении электроэнергией приемников путем включения резервного генератора взамен вышедшего из строя;
2. достигается наиболее полная загрузка генераторов путем своевременного отклю
чения одного или нескольких из них при уменьшении общей нагрузки СЭС;
3. увеличиваются токи КЗ, в связи с чем повышаются требования к электродинами
ческой и термической устойчивости коммутационно-защитной аппаратуры;
4. усложняется система управления СЭС вследствие применения узлов синхронизации, распределения активных и реактивных нагрузок, защиты от перехода СГ в двигательный режим и др.
Регистр предъявляет следующие требования к генераторам, предназначенным для
параллельной работы:
1. отношение номинальных мощностей генераторов не должно превышать 3:1 (в
противном случае параллельная работа генераторов будет неустойчивой);
2. степень неравномерности активных и реактивных нагрузок генераторов не долж
на превышать ±10 % номинальных активной и реактивной мощностей меньшего из парал
лельно работающих генераторов.
Пропорциональное распределение активной нагрузки параллельно работающих
генераторов обеспечивается применением функционально специализированных устройств
распределения мощности (например, типа УРМ в системе "Ижора") или регуляторами частоты вращения ПД, а реактивной нагрузки - системами самовозбуждения и автоматического регулирования напряжения совместно с устройствами статизма и уравнительными
связями.
9.2. Понятия «перевод нагрузки» и «распределение нагрузки»
Параллельная работа генераторов используется для выполнения двух видов техно
логических операций, возникающих в процессе эксплуатации СЭЭС:
1. перевод нагрузки;
2. распределение нагрузки.
Под переводом нагрузки понимают действия персонала, имеющие конечной целью
остановку работающего генераторного агрегата с целью последующей профилактики или
ремонта.
Для перевода нагрузки с одного генератора на другой подготовленный к работе генератор включают на параллельную работу с работающим, после чего уменьшают нагрузку на работающем генераторе и одновременно увеличивают нагрузку на подключенном.
Процесс перевода нагрузки прекращают в тот момент времени, когда нагрузка на
отключаемом генераторе уменьшится до нуля, после чего выключают его АВ и останавливают приводной двигатель.
Под распределением нагрузки понимают разделение общей нагрузки судовой элект
ростанции между параллельно работающими генераторами. При этом нагрузку надо распределять прямо пропорционально номинальным мощностям генераторов.
Для распределения нагрузки подготовленный к работе генератор включают на параллельную работу с работающим, после чего уменьшают нагрузку на работающем генера
торе и одновременно увеличивают нагрузку на подключенном.
Процесс распределения нагрузки прекращают в тот момент времени, когда нагрузка на каждом генераторе станет одинаковой, если генераторы имеют одинаковые номинальные мощности, либо прямо пропорциональной номинальной мощности каждого гене
ратора.
93
При переводе и распределении нагрузки нарузку изменяют:
1. у генераторов постоянного тока - изменением тока возбуждения;
2. у генераторов переменного тока:
а ) активную нагрузку – изменением подачи топлива;
б ) реактивную нагрузку – изменением тока возбуждения.
Для контроля перевода и распределения нагрузки используют щитовые электроизмерительные приборы, установленные на секции каждого генератора:
1. на постоянном токе – амперметры;
2. на переменном токе – киловаттметры ( для активной нагрузки ) и амперметры
( для реактивной нагрузки ).
Пример.
Какой должна быть нагрузка на каждом из двух параллельно работающих генераторов, если их номинальные мощности Р н1 = 320 кВт и Р н 2 = 400 кВт, а нагрузка электростанции Р э.с = 576 кВт?
Решение
1. коэффициент загрузки судовой электростанции
k з. эс =
Рэ.с
576
=
= 0,8
Рн1 Рн 2 320 400
2. нагрузка первого генератора
Р 1 = k з. эс * Р н1 = 0,8*320 = 256 кВт
3. нагрузка второго генератора
Р 2 = k з. эс * Р н 2 = 0,8*400 = 320 кВт
Проверка.
1. В сумме нагрузки первого и второго генератора должны дать значение, равное
нагрузке электростанции, т.е.
Р 1 +Р 2 = Р э.с .
2. находим сумму нагрузок генераторов
Р 1 + Р 2 = 256 + 320 = 576 кВт
3. поскольку условие п.1 выполнено, нагрузка распределена правильно.
10. Синхронизация синхронных генераторов
10.1. Основные сведения
Подготовка СГ к включению на параллельную работу и сам процесс включения на
зываются синхронизацией.
Существует три способа синхронизации
1. точная;
2. грубая;
3. самосинхронизация.
Эти способы рассмотрены ниже.
10.2. Условия синхронизации синхронных генераторов
Для безударного включения СГ на параллельную работу необходимо выполнить
следующие условия синхронизации:
1. равенство напряжения U c сети и ЭДС Е г подключаемого генератора, т. е.
|U c | = | Е г | .
2. равенство частот сети f c и подключаемого генератора f
г
, т. е. f c = f
г
.
94
3. совпадение по фазе одноименных векторов фазных напряжений обоих генераторов, или, иначе, равенство нулю угла сдвига по фазе указанных векторов, т. е. φ = 0°.
4. одинаковый порядок чередования фаз 3-фазных генераторов, т.е. А c - В c -С c и
А г -В г - С г . На практике это означает, что выводы А, В и С каждого генератора должны
при включении на шины, подключаться к шинам соответственно А, В и С ГЭРЩ.
Объясним, как проверяется выполнение этих условий и что надо делать при их наРушении.
Для проверки выполнения первого условия используют вольтметр с переключате
лем, позволяющим поочередно измерить напряжение на шинах ( сети ) и на зажимах
генератора, включаемого на шины.
Если напряжение подключаемого генератора больше ( меньше ) напряжения на ши
нах, то поступают так:
1. при ручном регулировании вручную уменьшают ( увеличивают ) ток возбуждения подключаемого генератора при помощи реостата возбуждения, рукоятка которого выведена на лицевую часть генераторной панели каждого генератора;
2. при автоматическом управлении уменьшают ( увеличивают ) ток возбуждения
воздействием на регулятор уставки напряжения автоматического регулятора напряжения
( АРН ) генератора, рукоятка которого выведена на лицевую часть генераторной панели
каждого генератора.
Для проверки выполнения второго условия используют частотомер с переключателем, позволяющим поочередно измерить частоту напряжения на шинах ( сети ) и на зажимах генератора, включаемого на шины.
Если частота тока подключаемого генератора больше ( меньше ) частоты тока на
шинах, то у подключаемого генератора уменьшают ( увеличивают ) подачу топлива дизелю поворотом рукоятки управления серводвигателя в сторону «Меньше» ( «Больше» ).
Эта рукоятка выведена выведена на лицевую часть генераторной панели каждого
генератора.
Для проверки выполнения третьего условия используют ламповый или стрелочный
синхроноскоп. Включить генераторный автомат надо в момент, когда погаснут все 3 лампы ( если синхроноскоп включен по схеме «на темноту» ), либо верхняя ( если синхроноскоп включен по схеме «на вращение огня» ), либо если стрелка синхроноскопа займет
положение «12 часов».
Проверка выполнения четвертого условия в процессе эксплуатации судна не делается. Это объясняется тем, что необходимый порядок подключения генераторов к шинам
обеспечивают специалисты-электромонтажники судоверфи.
Поэтому судовым электромеханикам нет надобности проверять выполнение этого
условия.
Однако после выполнения ремонтно-профилактических работ, в ходе которых гене
ратор отсоединялся от шин ГЭРЩ, проверка выполнения этого условия обязательна.
Если все условия синхронизации выполнены, то включение генератора на шины
ГРЩ будет безударным, а сам генератор после включения останется работать в режиме
холостого хода.
10.3. Последствия нарушений условий синхронизации.
От того, какое именно условие не выполнено, зависят последствия нарушения
условий синхронизации. Рассмотрим поочередно нарушение каждого из перечисленных
условий.
1. При нарушении первого условия | U c | ≠ | E г |.
В этом случае в замкнутой цепи, образованной последовательно включенными через шины ГЭРЩ обмотками статоров СГ, возникнет т.н. уравнительный ток.
Этот ток, протекая через обмотки статоров обоих генераторов, подмагничивает ге-
95
нератор с меньшим напряжением и размагничивает генератор с большим напряжением.
В результате напряжения параллельно включенных генераторов выравняются.
Вместе с тем уравнительный ток нагружает обмотки статоров обоих генераторов,
нагревая их и линии электропередачи между генераторами и не позволяя использовать генераторы по току полностью.
2. При нарушении второго условия синхронизации f г ≠ f c .
Сразу после включения генератора на шины возникнет переходный процесс, характер которого зависит от значения разности частот обоих генераторов.
Если разность частот менее 0,75 Гц, то после подключения генератора его ротор со
вершит несколько колебательных движений ( качаний) с постепенно убывающей амплитудой и затем под действием собственной синхронизирующей мощности втянется в синхронизм.
После этого роторы обоих генераторов станут вращаться с одинаковой скоростью.
Если эта разность составляет несколько герц, ротор подключенного генератора может не войти в синхронизм и будет перемещаться относительно ротора другого генератора.
Возникающие при этом механические толчки на валу могут привести к тому, что
не только подключенный генератор не войдет в синхронизм, но могут выпасть из синхронизма другие параллельно работающие генераторы.
3. Последствия нарушения третьего условия ( φ ≠ 0°) зависят от взаимного положения роторов в момент включения генератора на параллельную работу.
Рассмотрим 3 характерных случая:
а ) генератор включен при положении стрелки синхроноскопа «без пяти минут 12
часов» ( при этом стрелка синхроноскопа должна вращаться по часовой стрелке ).
В этом случае он сразу же перейдет в генераторный режим и снимет часть нагрузки
с работающего генератора.
При этом на валах обоих генераторов возникнут динамические моменты: тормозно
го характера у подключенного генератора и подкручивающего у работающего.
После этого надо постепенно подачу топлива увеличивать у подключенного генера
тора и одновременно уменьшать у работающего. В момент времени, когда показания кило
ваттметров обоих генераторов станут одинаковыми, надо перестать изменять подачу топлива.
б ) генератор включен при положении стрелки синхроноскопа «пять минут после
12 часов».
В этом случае он сразу же перейдет в двигательный режим и добавит нагрузку на
работающий генератор.
При этом на валах обоих генераторов возникнут динамические моменты: подкручи
вающий у подключенного и тормозной у работающего генератора.
В результате «подкручивания» подключенный генератор может пойти «вразнос» и
и будет отключен защитой по обратной мощности.
Если защита не сработала, что может быть при небольшом, неопасном значении
обратной мощности подключенного генератора, надо сразу после включения начать увели
чивать подачу топлива у подключенного генератора и уменьшать у работающего.
В момент времени, когда показания киловаттметров обоих генераторов станут одинаковыми, надо перестать изменять подачу топлива.
в ) генератор включен на шины при положении стрелки синхроноскопа «6 часов».
В этом случае ротор подключенного генератора «перевернут» по отношению к ротору работающего.
При этом в замкнутой цепи, образованной последовательно включенными через
шины ГЭРЩ обмотками статоров СГ, напряжение работающего генератора и ЭДС подключенного суммируются ( совпадают по фазе ).
Поскольку обмотки статоров имеют незначительное сопротивление, под действием
96
двойного напряжения U c + E г = 220 + 220 = 440 В в цепи возникнет ток короткого замыкания.
В результате отключится один или оба автоматических выключателя ( в последнем
случае судно обесточится ).
Из сказанного следует, что процесс синхронизации генераторов - достаточно ответ
ственный.
В соответствии с Правилами технической эксплуатации электрооборудования судов, именно вахтенный механик должен выполнять все действия, связанные с синхронизацией, переводом и распределением нагрузки при параллельной работе генераторов.
Судовой электромеханик включает на параллельную работу генераторы только в
двух случаях – при использовании методов грубой синхронизации или самосинхронизации.
11. Методы синхронизации синхронных генераторов
Существует 3 метода синхронизации: точной, грубой и самосинхронизации.
Каждый из методов может выполняться вручную, полуавтоматически или автоматически.
На современных судах наиболее часто применяют метод точной синхронизации, реже грубой синхронизации и крайне редко - самосинхронизации. Такое различие объясняется
особенностями каждого способа.
11.1. Метод точной синхронизации
Суть метода состоит в том, что подключаемый генератор включается на шины
ГРЩ с соблюдением всех условий синхронизации.
Выполнение первого условия на практике осуществляется автоматически, так как
СГ снабжены системами самовозбуждения и автоматического регулирования напряжения
СВАРН (рис. 3.13 ).
Рис. 3.13. Принципиальная схема точной синхронизации
Равенство частот достигается подгонкой частоты подключаемого СГ к частоте работающего. Для этого на панели управления ГРЩ располагают реверсивные переключатели SB1 и SB2 , при помощи которых включают серводвигатель М1 или М2 регулятора
частоты вращения подключаемого СГ в ту или иную сторону.
Визуальный контроль за выполнением первых двух условий ( равенство напряже
ний и частот ) на практике выполняется одновременно, поочередным подключением к
каждому генератору вольтметра РV и частотомера РF переключателем S2.
Совпадение по фазе одноименных векторов фазных напряжений проверяется при
помощи cтрелочного синхроноскопа ЕS и достигается при одинаковом положении рото-
97
ров работающего и подключаемого генераторов по отношению к статорам. Для этого воздействуют короткими импульсами на серводвигатель регулятора частоты вращения подключаемого СГ, добиваясь момента, когда стрелка синхроноскопа расположится вертикально, напротив отметки на шкале прибора ( «на 12 часов» ). В этот момент времени
включают СГ на шины при помощи автоматического выключателя QF1 ( QF2 ).
При точном соблюдении условий синхронизации включение СГ на шины будет без
ударным, а сам генератор после включения останется работать в режиме холостого хода.
После этого подключенный СГ нагружают активной нагрузкой, одновременно разгружая другой, для чего увеличивают подачу топлива (пара) у подключаемого ГА и одновременно уменьшают у другого.
Распределяют активную нагрузку пропорционально номинальным активным мощ
ностям генераторов и контролируют при помощи киловаттметров РW1 и РW2, обычно
включаемых через трансформаторы тока ТА1 и ТА2 и напряжения ТV4 и TV5.
Распределение реактивной нагрузки происходит автоматически путем воздействия
систем самовозбуждения и автоматического регулирования напряжения СВАРН обоих
генераторов на токи возбуждения. При этом ток возбуждения подключенного СГ автома
тически увеличивается, а другого уменьшается.
Пропорциональность распределения реактивной нагрузки проверяется при помощи
килоамперметров РA1 и РA2, т. е. косвенно, так как эти приборы показывают полные, а не
реактивные токи генераторов. Если у двух однотипных СГ одинаковы показания киловатт
метров РW1 и РW2 (т. е. одинаковы активные токи) и неодинаковы показания килоамперметров РA1 и РA2, значит, неодинаковы реактивные токи.
Из всего изложенного следует, что включение СГ на параллельную работу представляет собой довольно трудную задачу. Основная трудность заключается в определении
момента совпадения по фазе напряжений СГ, включаемых на параллельную работу. Для
определения указанного момента при автоматической точной синхронизации используют
синхронизаторы, а при точной синхронизации вручную применяют синхроноскопы.
11.2. Синхроноскопы
На практике применяют синхроноскопы двух типов: на лампах накаливания и на
основе сельсинов.
Ламповые синхроноскопы
В ламповых 3-фазных синхроноскопах лампы накаливания включают по одной из
двух схем: "на погасание" или "на вращение огня" ( рис. 3.14 ).
В схеме "на погасание" каждая лампа НL1, НL2 и НLЗ включается между одноимен
ными фазами сети и генератора (рис. 3.14, а ).
Рис. 3.14. Схемы ламповых синхроноскопов на «погасание» ( а ) и «вращение огня»
Генераторный АВ включают в момент погасания ламп.
В схеме "на вращение огня" лампа НL включается между одноименными фазами, а
лампы НL2 и НL3 - "накрест", т. е. между разноименными фазами генератора и сети (рис.
3.15, б).
98
Лампы загораются поочередно, причем частота "вращения огня" пропорциональна
разности частот генератора и сети, а направление вращения определяется . знаком этой
разности. По направлению "вращения огня" можно определить, как надо изменять частоту
вращения подключаемого генератора, чего нельзя сделать при использовании схемы "на
погасание".
Автоматический выключатель включают при погасании лампы НL1.
На судах, где применяется схема «на вращение огня», лампы синхронизации распо
лагают в вершинах равностороннего треугольника, причем лампа НL1 расположена в
верхней вершине треугольника.
Схема «на вращение огня» предпочтительнее, т.к. она, кроме определения необходимого момента включения генератора на шины ( погасла лампа НL1 ), дополнительно по
зволяет определить соотношение скоростей вращения ПД обоих генераторов ( т.е. у како
го именно генератора скорость больше или меньше ).
Рассмотрим характерные случаи, которые могут возникунуть в процессе сихрониза
ции. Таких случаев – четыре.
1. В схеме на «погасание» все три лампы постоянно горят с одинаковым накалом.
Это означает, что роторы обоих генераторов вращаются с одинаковой скоростью,
но занимают по отношению друг к другу неодинаковые положения. Такой режим работы
генераторов называется «Синхронно-несинфазный».
Включать нашины подключаемый генератор нельзя.
В этом случае поступают так: увеличивают или уменьшают подачу топлива под
ключаемому дизель-генератору, добиваясь восстановления мигания ламп с минимальной
частотой. В момент времени, когда все три лампы погаснут, включают АВ подключаемого
генератора.
2. В схеме на «вращение огня» лампа, находящаяся в вершине треугольника ламп в
верхней части генераторной секции, горит постоянным накалом.
Это свидетельствует о наступлении синхронно-несинфазного режима ( см. выше ).
В этом случае поступают так, как в предыдущем случае, т.е. : увеличивают или
уменьшают подачу топлива подключаемому дизель-генератору, добиваясь восстановления «вращения огня». В момент времени, когда верхняя лампа погаснет, включают АВ
подключаемого генератора.
3. При штатной схеме «на вращение огня» одновременное погасание ламп означа
ет, что у подключаемого генератора нарушен порядок чередования фаз. Поэтому вместо
схемы «на вращение огня» получилась схема «на погасание».
В этом случае надо перебросить на подключаемом генераторе два любых линейных
провода, после чего убедиться, что штатная схема «на вращение огня» восстановилась.
4. Аналогично, если при штатной схеме на «погасание» получается «вращение ог
ня», причина та же – нарушен порядок чередования фаз подключаемого генератора. В
этом случае поступают так, как указано выше - надо перебросить на подключаемом генера
торе два любых линейных провода, после чего убедиться, что штатная схема «погасание»
восстановилась.
Стрелочные синхроноскопы
Стрелочный синхроноскоп электромагнитной системы типа Э1605 изображен на
рис. 3.15.
99
Рис. 3.15. Синхроноскоп электромагнитной системы:
а – схема механизма; б – принципиальная схема
Неподвижная часть измерительного механизма синхроноскопа типа Э1605 электро
магнитной системы ( рис. 3.15, а) состоит из трех катушек. Катушки 3, 5 имеют форму ра
мок, расположенных под углом 120° одна относительно другой. Третья катушка 4 цилинд
рической формы расположена внутри катушек 3, 5.
Подвижная часть прибора изготовлена в виде оси 1, к которой прикреплены сердеч
ники-лепестки 2, 6 из тонких пластин электротехнической стали. Ось и сердечники-лепест
ки образуют 2-образную конструкцию. Катушки 3 и 5 включены на 3 фазы синхронизируе
мого генератора (рис. 3.15, б) и создают вращающийся магнитный поток, частота вращения которого пропорциональна электрической частоте генератора.
Катушка 4, на которую подается линейное напряжение сети (второго генератора),
создает пульсирующий магнитный поток. В приборе возникает суммарное эллиптическое
магнитное поле, которое намагничивает подвижную часть прибора. При неравенстве частот сети и генератора ось эллиптического магнитного поля и подвижная часть прибора
вращаются с угловой скоростью, пропорциональной разности частот. Направление
вращения зависит от знака скольжения.
При равенстве частот ось суммарного магнитного потока и ось прибора неподвижны.
Совпадению по фазе векторов напряжений генератора и сети соответствует только
одно положение подвижной части прибора, отмеченное вертикальной чертой посередине
шкалы прибора.
По одну сторону от черты имеется надпись "Быстрее", по другую - "Медленнее".
Если стрелка прибора вращается в сторону надписи "Быстрее", надо уменьшить частоту
вращения подключаемого генератора и наоборот. В момент совмещения стрелки с вертикальной чертой включают АВ генератора.
Если стрелка прибора неподвижна и не находится на вертикальной отметке, это сви
детельствует о наступлении синхронно-несинфазного режима работы генератора (режим
"зависания").
Суть этого режима состоит в том, что роторы обоих генераторов вращаются с одинаковой скоростью ( синхронно ), но занимают по отношениям к статорным обмоткам генераторов разные положения ( векторы ЭДС обоих генераторов не находятся в фазе ).
В этом случае необходимо увеличить или уменьшить подачу топлива ( пара ) ПД
подключаемого генератора, после чего добиться момента, когда стрелка синхроноскопа
займет вертикальное положение, и включить АВ этого генератора.
100
11.3. Метод грубой синхронизации
Метод заключается в том, что генератор подключают на шины ГРЩ не прямо, как
при точной синхронизации, а через токоограничивающее реактивное сопротивление X ,
p
включенное в каждую фазу (рис. 3.16, а). Это сопротивление называется реактором.
Грубую синхронизацию выполняют в следующем порядке:
1. уравнивают частоты и напряжения СГ, что проверяют при помощи частотомера
РF и вольтметра РV;
2. в произвольный момент времени замыкают контакт КМ2 (КМ1), тем самым
включая генератор G2 (G1) на шины ГРЩ через реактор x ;
p
3. через несколько секунд, в течение которых генератор втягивается в синхронизм,
включают АВ QF2 (QF1) и размыкают контакт КМ2 (КМ 1).
Рис. 3.16. Схемы грубой синхронизации ( а ) и замещения для одной фазы ( б )
Поскольку включение генератора на шины выполняют в произвольный момент
времени, роторы СГ, а значит, векторы напряжения сети Ū c и ЭДС Ē г подключаемого
генератора в момент включения могут занимать любое взаимное положение.
Поэтому включение СГ сопровождается бросками тока и механическими ударами
на валу, которые ограничиваются реактором до безопасных значений. Сам же метод
иногда называют методом несинхронного включения СГ.
Сопротивление реактора рассчитывают исходя из наиболее тяжелого случая вклю
чения, когда положение роторов СГ отличается на 180°. При этом векторы Ū c и ЭДС Ē
г
Ū
в контуре, образованном статорными обмотками генераторов, совпадают по фазе, т. е.
c
+Ē
г
≈2Ū
c
.
Тогда наибольшее значение тока в момент включения определится по схеме замещения ( рис. 3.16, б ):
I вкл. max = 2 U c / (x + x с + x г )≤ ( 2,5…3,5 ) I ном ,
p
где I
ном
- номинальный ток генератора.
На многих судах грубая синхронизация СГ выполняется полуавтоматически: уравнивание напряжений генераторов обеспечивают автоматические регуляторы напряжения,
примерное уравнивание частот выполняет оператор ( электромеханик или вахтенный меха
101
ник ), а выбор момента включения генератора на шины при Ū
c
+Ē
г
= 0 обеспечивает
аппаратура схемы синхронизации.
К достоинствам метода можно отнести простоту, надежность и непродолжительность.
Метод допускает погрешность при уравнивании напряжений генераторов до ±10 %
номинального и частот до ± (3-4) % номинальной.
При правильном расчете и выборе реактора втягивание включенного генератора в
синхронизм происходит в течение 1,5-3,0 с, а провал напряжения не превышает 20 % номинального.
Процесс синхронизации длится недолго, поэтому реактор рассчитывают на непродолжительную работу. Сопротивление реакторов зависит от мощности синхронизируемых
СГ и обычно составляет несколько Ом, а масса - десятки килограммов.
Генераторы синхронизируются с сетью поочередно, поэтому для их включения на
шины ГРЩ используют один и тот же реактор.
11.4. Метод самосинхронизации
При самосинхронизации (рис. 3.17 ) подключаемый СГ разгоняют до частоты вращения, отличающейся от синхронной на 2-5 %. Обмотка возбуждения генератора ОВГ от
ключена от источника возбуждения (разомкнут контакт КМ2) и замкнута на разрядный
резистор R (замкнут контакт КМ1).
р
В произвольный момент времени невозбужденный генератор при помощи автоматического выключателя QF2 подключают на шины и одновременно или с незначительной
задержкой подают возбуждение (замыкается контакт КМ2 и размыкается КМ1).
Далее генератор втягивается в синхронизм под действием синхронизирующей мощ
ности Р сх .
В момент включения на шины ЭДС невозбужденного генератора Е г = 0, поэтому
максимальное значение тока включения будет вдвое меньше максимального тока при
синхронизации возбужденного генератора и составит ( 2,0-4,5) I ном .
Рис. 3.17. Схема самосинхронизации
Провалы напряжения достигают 50 % номинального, а втягивание в синхронизм
заканчивается через несколько секунд после включения СГ на шины.
Разрядный резистор R предназначен для исключения перенапряжений в обмотке
р
возбуждения ОВГ в момент включения СГ на шины.
Метод самосинхронизации прост и непродолжителен по времени. Недостатками ме
тода являются провалы напряжения и удары на валу генераторов. Поэтому самосинхронизация может применяться в СЭЭС, включенная мощность которых значительно превышает мощность единичного СГ (например, в гребных электрических установках).
12. Синхронизаторы
102
Основные сведения
Электротехническое устройство, предназначенное для автоматического включения синхронного генератора на параллельную работу ( на шины ), называется синхронизатором.
Синхронизаторы обеспечивают практически безударное включение СГ на шины
методом точной синхронизации.
Существующие АС допускают включение СГ при неточном выполнении условий
синхронизации, что позволяет ускорить процесс синхронизации и одновременно упростить схему самого АС.
Синхронизация считается возможной, если отклонения от условий синхронизации
имеют такие значения:
1. разность напряжений генератора и сети ΔU < (0,10…0,12) Uном ( при напряжении
на шинах 400 В напряжение подключаемого генератора может составлять 360…352 В );
2. разность частот Δf < (0,005…0,015) fном ( при частоте 50 Гц на шинах частота
тока подключаемого генератора может составлять 49,75…49,25 Гц );
3. угол сдвига фаз одноименных векторов фазных напряжений генератора и сети
φ < 10°.
В СЭЭС напряжение генераторов поддерживается постоянным при помощи АРН.
Поэтому на долю аппаратуры, осуществляющей синхронизацию, остаются процессы подгонки частоты и определение момента выдачи сигнала на включение АВ генератора. Этот
сигнал надо подавать с некоторым опережением по времени ( tоп) относительно момента
совпадения фаз, потому что АВ генератора имеет собственное время срабатывания ( tавт).
По принципу действия различают два вида АС:
1. с постоянным временем опережения;
2. с постоянным углом опережения.
На практике нашли применение АС первого типа, которые, вне зависимости от раз
ности частот обоих генераторов, выдают сигнал на включение АВ генератора всегда с одним и тем же временем опережения tоп, равным времени срабатывания tавт автоматического выключателя подключаемого генератора.
При соблюдении этого условия ( tоп = tавт ) включение генератора на шины получается безударным ( «мягким» ).
В качестве примера рассмотрим автоматический синхронизатор типа БСГ.
12.2. Блок синхронизации генераторов типа БСГ
Блок входит в состав СУ СЭЭС типа "Ижора-М" и предназначен для включения СГ
на параллельную работу методом точной синхронизации с предварительной автоматической подгонкой частоты подключаемого генератора к частоте работающего ( рис. 3.18 ).
Рис. 3.18. Функциональная схема блока синхронизации БСГ
Блок выдает сигнал на включение АВ при разности напряжений генераторов ΔU <
0,12 Uном ( при ΔU = 0,12*400 = 48 В допускаемое напряжение включения составляет не
103
менее 352 В ), разности частот Δf = 0,2 Гц…0,6 Гц ( т.е. допускаемая частота составляет не
менее 49,8…49,4 Гц ) и угле сдвига фаз одноименных векторов напряжений генераторов
φ < 10°.
Элементной базой блока в основном являются микросхемы (логические элементы,
генераторы импульсов, счетчики, дешифраторы, триггеры и др.).
Рассмотрим устройство блока и взаимодействие его отдельных узлов ( рис.3.18 ).
Напряжение работающего генератора G1 подается на трансформаторы ТV1 и ТVЗ,
подключаемого G2 - на трансформатор ТV2.
Пониженное трансформатором ТVЗ напряжение поступает на узел питания УП, с
выхода которого стабилизированное напряжение +5 В и нестабилизированное + 27 В
подается на остальные узлы схемы.
С выходов трансформаторов ТV1 и ТV2 напряжения поступают на вход узла УСН
сравнения напряжений и входы формирователей Ф1 и Ф2.
При ΔU > 0,12 Uном с выхода узла УСН на вход узла УС синхронизации поступает
запрет на синхронизацию в виде логического нуля.
Формирователи Ф1 и Ф2 напряжения предназначены для получения импульсов на
пряжений двух видов: длинных (продолжительность равна половине периода напряжения
генератора), коротких (продолжительность определяется параметрами схемы формирователя). Частоты импульсов обоих видов одинаковы и равны частоте работающего (подключаемого) генератора. Импульсы 1-го вида поступают на вход узла УС, 2-го - на вход узла
УПЧ подгонки частоты.
Кварцевый генератор UZ вырабатывает импульсы стабильной частоты 100 кГц,
поступающие на вход триггера DТ, работающего в режиме делителя частоты. С выхода
триггера импульсы частотой 50 кГц поступают на входы узлов УС и УПЧ.
Узел УУ установки предназначен для приведения всех триггеров БСГ в необходи
мое исходное состояние при включении питания блока.
Узел подгонки частоты вырабатывает сигналы на увеличение или уменьшение ча
стоты подключаемого генератора, а при достижении допустимой разности частот выдает
сигнал "Δf в норме" в виде логической единицы, поступающей на вход узла УС.
Узел синхронизации выдает сигнал на включение АВ генератора при условии, что
значения разности напряжений ΔU и частот Δf, а также угла φ сдвига фаз напряжений генераторов находятся в установленных пределах.
Для повышения надежности схемы синхронизации в ней используется 2 блока БСГ,
выходы которых в виде замыкающих контактов электромагнитных реле включены по схеме совпадения И, т. е. последовательно. Поэтому включение генератора на шины возможно при условии, что оба блока одновременно выдадут одинаковые сигналы на включение
генератора.
13. Распределение активной нагрузки
13.1. Основные сведения
Если включить СГ на параллельную работу с соблюдением перечисленных выше
условий, он останется работать в режиме холостого хода.
Поэтому вслед за включением генератора на шины его надо нагрузить, при этом
распределяя нагрузку между включенными СГ пропорционально их номинальным активным мощностям.
Распределение активной нагрузки осуществляют путем изменения подачи топлива
(пара), т. е. по регуляторным характеристикам ПД. Равномерность распределения зависит
от наклона (статизма) характеристик (рис. 3.19 ).
104
Рис. 3.19. Регуляторные характеристики приводных двигателей СГ при
распределении активных нагрузок
Предположим, что для каждого из двух приводных двигателей по отдельности были сняты регуляторные характеристики 1 и 2, которые изображены на рис. 3.19.
После включения генераторов на параллельную работу их угловые скорости должны быть одинаковы и равны, например, номинальной угловой скорости ωном . Напомним,
что если угловые скорости приводных двигателей неодинаковы, то, значит, неодинаковы
частоты тока генераторов ( например, f1 ≠ f 2, 49 ≠ 51 Гц ), что недопустимо при парал
лельной работе.
Как следует из рис. 3.19, одинаковой угловой скорости ωном соответствуют разные
значения активной мощности генераторов, а именно: для генератора со статической харак
теристикой 1 это значение равно Р , а для генератора с характернистикой 2 – Р ( чтобы
2
1
найти эти значения мощности, надо при значении скорости ω = ωном провести вспомогательную горизонтальную прямую до ее пересечения с характеристиками 1 и 2, а затем эти
точки пересечения спроектировать на горизонтальную полуось активных мощностей ).
При этом меньшему наклону ( меньшему статизму ) характеристики соответствует
большая активная нагрузка генератора, что следует из сравнения регуляторных характери
стик 1 и 2.
Таким образом, при одинаковой (номинальной) частоте вращения ω ном активная
нагрузка 1-го генератора составляет Р , а второго - Р ,причем Р > Р .
1
2
1
2
Для того чтобы распределить активные нагрузки и в то же время оставить частоту
генераторов неизменной, надо увеличить подачу топлива (пара) на ГА, имеющий меньшую нагрузку, и одновременно уменьшить подачу топлива (пара) на ГА большей нагрузкой.
При этом регуляторные характеристики переместятся параллельно самим себе:
характеристика 2 второго ГА вверх, а характеристика 1 первого ГА вниз.
Изменение подачи топлива (пара) следует прекратить в момент, когда характеристи
ки пересекутся в точке А. Каждый генератор будет нагружен одинаковой мощностью: Р 3
=(Р
1
+Р
2
) / 2.
13.2. Системы распределения активной нагрузки с базовым генератором
Важной особенностью систем автоматического распределения активной нагрузки
является выделение так называемого базового генератора, у которого исключают воздействие серводвигателя на топливную рейку дизеля. По этой причине положение регуляторной характеристики базового генератора не изменяется.
Выделение базового генератора связано с тем, что без него частота системы из нескольких параллельно работающих СГ становится неопределенной и произвольно изменяется в обе стороны от номинальной. Переходный процесс становится колебательным, а
работа системы распределения нагрузки - неустойчивой.
По отношению к базовому остальные генераторы являются подстраиваемыми.
105
Рис. 3.20. Система автоматического распределения активных нагрузок СГ:
а – структурная схема; б – регуляторные характеристики приводных двигателей СГ
При автоматическом распределении активной нагрузки (рис. 3.20, а ) используют
датчики активного тока В1 и В2, подключаемые к генераторам через трансформаторы напряжения ТV1 и ТV2 и трансформаторы тока ТА1 и ТА2.
Выходы этих датчиков соединены последовательно, а напряжения на выходах направлены встречно. Такой способ соединения выходов называют дифференциальной схемой.
Результирующий сигнал в виде напряжения определенного значения и полярности
поступает на вход усилителя А2, на выход которого подключен серводвигатель М2 привод
ного двигателя подстраиваемого генератора G2.
Серводвигатель М1 приводного двигателя базового генератора G1 не связан с уси
лителем А2, что исключает воздействие на него со стороны системы автоматического
распределения активных нагрузок.
В исходном состоянии базовый G1 и подстраиваемый G2 генераторы нагружены
каждый мощностью P , т. е. общая нагрузка составляет 2P Этому состоянию соответст
1
1
вует точка А (рис. 3.20, б).
При увеличении общей нагрузки до значения ( Р
2
+ Р 3 ) угловая скорость обоих
генераторов уменьшится до ω и нагрузка базового генератора составит Р , подстраивае
2
2
мого - Р 3 .
Равновесие между напряжениями на выходах датчиков В1 и В2 нарушится, поэтому серводвигатель М2 начнет уменьшать подачу топлива дизеля ПД2.
Регуляторная характеристика 2 подстраиваемого генератора переместится вниз и
займет положение характеристики 2'.
Новое состояние равновесия наступит в точке В пересечения характеристик 1 и 2'.
При этом положение регуляторной характеристики базового генератора не изменилось.
Каждый генератор нагружен одинаковой мощностью: Р = ( Р + Р 3 ) / 2.
4
2
Угловая скорость обоих генераторов также одинакова и составляет ω 3 .
Наличие зон нечувствительности регуляторов частоты вращения ПД генераторов
приводит к тому, что нагрузки параллельно работающих генераторов распределяются с
некоторой погрешностью ΔР, значение которой не должно превышать ±10 % номинальной активной мощности наибольшего генератора.
13.3. Системы распределения активной накгрузки с повышенной точностью
регулирования скорости
Недостатком рассмотренной выше системы автоматического распределения актив
106
ной нагрузки ( рис. 3.20 ) является изменение частоты вращения СГ при изменении нагруз
ки.
Рис. 3.21. Регуляторные характеристики приводных двигателей при распределении
активных нагрузок СГ с сохранением частоты
.
Если требуется повышенная стабильность частоты, серводвигатель М1 приводного
двигателя ПД1 генератора G1 включается через усилитель А1 на датчик частоты В ( рис. 3.
20, а ).
Пусть в исходном состоянии общая нагрузка СЭС составляет 2 P , регуляторные
1
характеристики 1 и 2 пересекаются в общей точке А.
При номинальной угловой скорости ω ном каждый генератор нагружен мощностью
P .
1
Увеличение нагрузки СЭС до значения 2Р
2
сопровождается снижением угловой
скорости и возникновением токов в усилителях А1 и А2 ( см. рис. 3.20, а). Включение сер
водвигателей М1 и М2 приведет к параллельному смещению регуляторных характеристик
и восстановлению частоты. Работа серводвигателей прекратится в момент времени, когда
характеристики пересекутся в точке В ( рис. 3.21 ).
Подобное пропорциональное распределение активной мощности с сохранением
частоты ранее выполняли устройства типа УРЧН (устройства автоматического регулирова
ния частоты и распределения активной нагрузки), которые применялись совместно с датчиком частоты.
В связи с внедрением новых типов 2-импульсных регуляторов частоты вращения
ПД задача поддержания частоты исключена из функций автоматизированных устройств
СЭС.
В настоящее время распределение активных нагрузок выполняют устройство распределения мощности типа УРМ в системе "Ижора" ( включено постоянно, пока работает
генератор) и блок распределения нагрузок генератора типа БРНГ в системе "Ижора-М".
14. Распределение реактивной нагрузки
14.1. Основные сведения
Распределение реактивной нагрузки при параллельной работе СГ проводится путем
изменения тока возбуждения генераторов: у перегруженного генератора ток возбуждения
уменьшают, а у недогруженного - увеличивают.
При ручном перераспределении реактивных нагрузок ( если нет АРН или он не работает ) токи возбуждения изменяют при помощи ручных реостатов ( регуляторов ) возбуждения, маховички которых выведены на лицевую часть генераторной секции каждого
генератора.
При наличии АРН распределение реактивных нагрузок осуществляется автоматиче
107
ски, при помощи компенсаторов реактивной нагрузки.
Равномерность распределения зависит от наклона внешних характеристик СГ, при
чем меньшему наклону характеристики соответствует больший ток нагрузки, что следует
из сравнения внешних характеристик 1 и 2 ( рис. 3.22 ).
Рис. 3.22. Внешние характеристики СГ при распределении реактивных нагрузок
Предположим, что для каждого из генераторов по отдельности были сняты внеш
ние характеристики 1 и 2, которые изображены на рис. 3.22.
После включения генераторов на параллельную работу их угловые скорости должны быть одинаковы и равны, например, номинальной угловой скорости ωном . Напомним,
что если угловые скорости приводных двигателей неодинаковы, то, значит, неодинаковы
частоты тока генераторов ( например, f1 ≠ f 2, 49 ≠ 51 Гц ), что недопустимо при параллельной работе.
Как следует из рис. 3.21, одинаковой угловой скорости ωном соответствуют разные
значения тока генераторов, а именно: для генератора с внешней характеристикой 1 это
значение равно I , а для генератора с характеристикой 2 – I ( чтобы найти эти значе2
1
ния токов, надо при значении скорости ω = ωном провести вспомогательную горизонтальную прямую до ее пересечения с характеристиками 1 и 2, а затем эти точки пересечения
спроектировать на горизонтальную полуось активных мощностей ).
При этом меньшему наклону ( меньшему статизму ) характеристики соответствует
больший ток нагрузки генератора, что следует из сравнения внешних характеристик 1 и 2.
При одинаковом номинальном напряжении U ном ток нагрузки 1-го генератора составляет I , а 2-го - I , причем I
1
2
1
>I .
2
Для того чтобы распределить реактивные нагрузки и в то же время оставить напряжение СГ неизменным, надо увеличить ток возбуждения генератора с меньшим током нагрузки и одновременно уменьшить у генератора с большим током нагрузки.
При этом внешние характеристики СГ переместятся параллельно самим себе: харак
теристика 2 вверх, а характеристика 1 вниз. Изменение токов возбуждения надо прекратить в точке А ( рис. 3.22 ), где реактивные нагрузки равны.
14.2. Автоматическое распределение реактивной нагрузки СГ
При параллельной работе СГ автоматическое распределение реактивной нагруз
ки обеспечивают реактивные компенсаторы ( см. п. 4. Реактивные компенсаторы ).
В отсутствие реактивных компенсаторов реактивную нагрузку распределяют при
помощи т.н. уравнительных связей ( рис. 3.23 ).
108
Рис. 3.23. Принципиальная схема различных способов подключения
уравнительных связей между параллельно работающими СГ
Для однотипных генераторов с одинаковым номинальным напряжением возбуждения уравнительную связь устанавливают между обмотками возбуждения, т. е. на стороне
постоянного тока. При замыкании контактов КМ1 обмотки возбуждения соединяются параллельно, поэтому любое изменение напряжения на одной из них автоматически приводит к такому же изменению напряжения на другой.
Уравнительные соединения применяют также на стороне переменного тока. Для СГ
одинаковой мощности могут быть установлены уравнительные соединения между выходными обмотками L3 компаундирующих трансформаторов. При замыкании контактов КМ2
эти обмотки соединяются параллельно, поэтому изменение напряжения на одной из них
вызовет такое же изменение напряжения на другой.
Для СГ разной мощности, имеющих разные напряжения возбуждения, применяют
дополнительные обмотки L4 с одинаковыми выходными напряжениями. Если реактивные
нагрузки СГ одинаковы, то в уравнительных проводах, соединяющих эти обмотки, токи
не протекают. При изменении реактивной нагрузки одного из генераторов возникающие
между обмотками L4 уравнительные токи будут подмагничивать магнитопровод одного
из компаундирующих трансформаторов и размагничивать магнитопровод другого, что
приведет к выравниванию реактивных нагрузок генераторов.
15. Параллельная работа генераторов постоянного тока
15.1. Условия включения генераторов постоянного тока на параллельную
работу
Таких условий 2:
1) полярность напряжения на зажимах подключаемого генератора должна соответствовать полярности напряжения шин;
2) ЭДС подключаемого генератора должна равняться напряжению на шинах.
Пусть на шины включен генератор G1, а генератор G2 вводится в работу (рис. 3.24,
а).
109
Рис. 3.24. Принципиальная схема параллельной работы генераторов постоянного
тока смешанного возбуждения (а), схемы замещения цепей обмоток якорей при
соответствии ( б) и несоответствии (в) полярности шин и генератора
Если оба условия выполнены, то после включения генератора G2 на шины в цепи,
образованной последовательно соединенными обмотками якорей генераторов, ЭДС Е г и
напряжение U c действуют встречно и взаимно компенсируются (рис. 3.24, б).
Поэтому ток якоря подключенного генератора
1 а 2 = ( Е г - U c )/ R а 2 = 0.
Это означает, что после включения генератор G2 останется работать в режиме холо
стого хода.
15.2. Последствия нарушения условий включения ГПТ на параллельную
работу
При нарушении 1-го условия положительный вывод генератора G2 соединяется с
отрицательной шиной, а отрицательный зажим -с положительной (рис. 3.24, в).
При этом в цепи обмоток якорей генераторов ЭДС Е г и напряжение U c действу
ют согласно, следствие чего в указанной цепи возникнет результирующая ЭДС
ΔЕ = Е г + U c ≈ 2 U c .
Под действием этой ЭДС через обмотки якорей, имеющие небольшое сопротивление, потечет ток КЗ.
Соответствие полярности зажимов генератора и полярности шин обеспечивается
при монтаже генератора во время постройки судна и в дальнейшем не проверяется.
Последствия нарушения 2-го условия зависят от соотношения ЭДС генератора и
напряжения на шинах.
При Е г > U c ток якоря подключенного генератора 1 а 2 = ( Е г - U c )/ R а 2 > 0.
. Это означает, что включенный генератор перейдет из режима холостого хода в
генераторный и примет на себя часть нагрузки работающего генератора.
Включение на шины сопровождается толчком на валу включенного генератора
тормозного характера, что объясняется действием электромагнитного момента генерато
ра:
М эм = k1 а 2 Ф,
где k - конструктивный коэффициент; Ф- магнитный поток.
В то же время на работающем генераторе нагрузка спадет, поэтому на его валу возникнет ускоряющий динамический момент, на что отреагирует регулятор частоты вращения дизеля, который уменьшит подачу топлива, скорость стабилизируется.
110
При Е г < U c ток якоря генератора 1 а 2 = ( Е
г
- U c )/ R а 2 < 0.
Это означает, что после включения генератор станет работать в двигательном
режиме и создаст дополнительную нагрузку на работающий генератор.
Электромагнитный момент включенного генератора М эм = k( - ) 1 а 2 Ф < 0, т. е.
совпадает по направлению с моментом ПД, который вследствие этого может пойти "вразнос". Для отключения генератора, перешедшего в такой режим, применяют реле обратного тока ( РОТ ).
Выполнение 2-го условия проверяется при помощи вольтметра, поочередно подключаемого к шинам и выводам включаемого генератора.
Включение генератора на шины проводится в следующем порядке:
1. генератор G2 приводится во вращение с номинальной частотой;
2. при помощи регулировочного реостата R
устанавливают на зажимах генера
рг 2
тора ЭДС Е г = U c .;
3. подключают генератор на шины при помощи автоматического выключателя
QF2.
После включения на шины генератор G2 нагружают, распределяя нагрузку между
генераторами пропорционально номинальной мощности каждого из них.
15.3. Перевод и распределение нагрузки
Воздействуя на регуляторы возбуждения генераторов R
рг1
и R
рг 2
в цепях парал-
лельных обмоток возбуждения L2, осуществляют распределение нагрузки.
При этом увеличивают ток возбуждения у генератора G2 и уменьшают у генератора G1. Такое одновременное и противоположное по характеру изменение токов возбуждения не только обеспечивает распределение нагрузки, но позволяет сохранить постоянство напряжения на шинах:
U=
E1 g 1 E 2 g 2
g1 g 2 g н
≈ const,
где Е , Е - ЭДС генераторов; g , g , g н - проводимости ветвей с генераторами
1
2
1
2
G1, G2 и ветви с эквивалентным сопротивлением нагрузки R н сети.
При переводе нагрузки с одного генератора на другой поступают так же, как и при
распределении нагрузки, т.е. увеличивают ток возбуждения включенного генератора и
уменьшают ток возбуждения работающего генератора.
Отличие перевода от распределения нагрузки состоит в том, что при переводе нагрузки с одного генератора на другой надо прекратить изменять токи возбуждения в тот
момент, когда ток нагрузки разгружаемого уменьшится до нуля. После этого разгруженный генератор отключают от шин. Для контроля токов нагрузки обоих генераторов служат щитовые амперметры.
Перевод нагрузки применяют в случае, если работающий генератор надо отключить от шин с целью профилактики самого генератора или его ПД.
15.4. Уравнительная шина
Для обеспечения устойчивой параллельной работы генераторов смешанного возбуждения последовательные обмотки L1 соединяют параллельно при помощи уравнитель
ной шины УШ.
Уравнительная шина действует так.
Если ЭДС одного из генераторов возрастет ( например, вследствие увеличения ча-
111
стоты вращения ПД ), то увеличится ток нагрузки этого генератора. Часть этого тока пойдет по последовательной обмотке другого генератора. Магнитный поток этого генератора
возрастет, его ЭДС также увеличится, и поэтому увеличится его ток нагрузки.
В результате нагрузка автоматически распределится между генераторами пропорци
онально номинальной мощности каждого из них.
При обрыве уравнительной шины случайное увеличение ЭДС любого генератора
приведет к увеличению его тока нагрузки. Этот ток, протекая по последовательной обмотке, еще больше увеличит ЭДС этого генератора, что, в свою очередь, приведет к дальнейшему увеличению тока нагрузки. Второй генератор при этом будет разгружаться.
Из приведенного примера следует, что устойчивая параллельная работа генераторов смешанного возбуждения без уравнительной шины невозможна.
Контрольные вопросы
1. Каковы основные причины изменения частоты вращения ГА в процессе работы?
2..Что такое регуляторная характеристика ПД ГА? Чем отличаются астатическая и
статическая регуляторные характеристики?
3. Что такое универсально-статические регуляторы?
4. В чем состоит отличие одно- и двухимпульсных АРЧ?
5. По каким основным параметрам и как именно классифицируются АРЧ ГА?
6. Перечислите основные виды регулирования АРЧ ГА
7. Что такое внешние и частотные характеристики АРЧ ГА?
8. Каковы основные требования Правил Регистра к ПД ГА?
9. Каковы основные требования классификационных обществ к судовым системам
АРН СГ?
10. Перечислите основные принципы построения АРН судовых СГ
11. Дайте краткую характеристику СВАРН по возмущению. Что такое ТФК?
12. Дайте краткую характеристику СВАРН по отклонению напряжения. Для чего
предназначен корректор напряжения?
13. Каковы особенности комбинированных СВАРН?
14. Каково назначение реактивных компенсаторов? На какой параметр СГ они
воздействуют?
15. Что такое статизм внешней характеристики СГ? Чем отличаются астатическая и
статическая внешние характеристики СГ?
16. В чем состоит назначение и принцип действия контуров частотной коррекции
АРН СГ? На какой параметр СГ они воздействуют?
17. В чем состоит назначение и принцип действия контуров температурной коррек
ции АРН СГ? На какой параметр СГ они воздействуют?
18. Опишите устройство СВАРН СГ типа МСС и назначение отдельных узлов
19. Как происходит самовозбуждение в СВАРН СГ типа МСС?
20. Каково назначение генератора начального возбуждения СВАРН СГ типа МСС?
21. Объясните процесс амплитудно-фазового компаундирования в СВАРН СГ типа
МСС
22. Каким образом осуществляется коррекция по отклонению напряжения и температуры в СВАРН СГ типа МСС?
23. Как работает компенсатор реактивной мощности в СВАРН СГ типа МСС?
24. В чем состоят характерные неисправности САРН? Как настраивают СВАРН?
25. Объясните устройство и принцип действия БСГ
26. Какие типы возбудителей применяют в БСГ?
27. Каковы особенности параллельной работы генераторов?
28. Каковы последствия нарушений условий синхронизации СГ?
29. Объясните суть методов точной, грубой и самосинхронизации СГ и назовите
область применения каждого
112
30. Чем отличаются схемы «на погасание» и «на вращение огня» ламповых синхро
носкопов? Какой тип схемы Вы бы выбрали?
31. От чего зависит в ламповых синхроноскопах направление "вращение огня" и
частота мигания ламп?
32. Что такое синхронно-несинфазный режим? Как вывести подключаемый генера
тор из этого режима?
33. Объясните устройство и принцип действия стрелочного синхроноскопа
34. При помощи регуляторных характеристик ПД ГА объясните, как распределяет
ся активная нагрузка СГ с одновременным сохранением частоты вращения ПД ГА
35. Что такое «базовый генератор» в системе автоматического распределения реактивных нагрузок? Какую роль он выполняет?
36. При помощи внешних характеристик СГ объясните, как распределяется реактив
ная нагрузка при параллельной работе СГ
37. Каково назначение уравнительных связей между СГ? Какие виды этих связей
применяют на практике?
38. Каковы условия параллельной работы генераторов постоянного тока и послед
ствия нарушений этих условий?
39. Каково назначение уравнительной шины при параллельной работе ГПТ?
40. Чем отличаются перевод и распределение нагрузки? Как осуществляется пере
вод и распределение нагрузки при параллельной работе ГПТ?
1.4. СУДОВЫЕ РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА И КОММУТАЦИОННО-ЗАЩИТНАЯ АППАРАТУРА
1. Судовые распределительные устройства
Судовые электрораспределительные устройства - это комплектные электротехнические устройства в виде щитов с аппаратами управления, защиты и сигнализации, предназначенные для приема и распределения электроэнергии между приемниками.
1.1. Классификация судовых распределительных устройств
Судовые электрораспределительные устройства классифицируют по следующим
основным признакам:
а ) по назначению
главный, предназначенный для присоединения источников электроэнергии к судовой силовой сети, управления их работой и распределения электроэнергии;
аварийный, являющийся частью аварийной СЭС и предназначенный для присоединения аварийных источников электроэнергии к аварийной сети, управления их работой и
распределения электроэнергии;
групповой, предназначенный для распределения электроэнергии между группой
приемников одинакового назначения;
приемника, предназначенный для подачи электроэнергии на отдельный приемник, а
также управления его работой;
электроснабжения с берега, предназначенный для присоединения судовой сети судна к береговой электрической сети или сети другого судна;
генераторный, предназначенный для передачи электроэнергии от генератора к
определенному ГРЩ, а также для местного управления генератором в тех случаях, когда
генератор и ГРЩ размещены в разных отсеках судна (от генераторного щита могут получать электропитание отдельные приемники электроэнергии);
соединительный электрический ящик (щит), представляющий собой судовое электрораспределительное устройство, предназначенное для соединения электрических цепей;
113
сигнализации и контроля, предназначенный для подачи сигналов (звуковых,
световых) о состоянии контролируемых помещений, установок, систем, ЭП и других
объектов;
б ) по месту раположения на судне
районный, предназначенный для распределения электроэнергии в пределах определенного архитектурного района судна и обеспечивающий электроэнергией несколько отсечных щитов;
отсечный, предназначенный для распределения электроэнергии в пределах отсека
судна;
в ) по конструктивному исполнению на каркасные и блочные. Щиты в каркасном
исполнении изготовляют, как правило, по индивидуальным чертежам, что затрудняет их производство и увеличивает стоимость. Блочные РЩ выпускают в виде нормализованных серий на напряжении 30 В постоянного тока и 220 и 380 В при частоте 50 и 400
Гц переменного тока. При необходимости из отдельных блочных ящиков можно комплектовать РЩ любых размеров и для любой схемы.
г ) по степени защищенности от воздействия окружающей среды различают защищенные ( IР21 ), брызгозащищенные ( IР23 ) и водозащищенные ( IР55 ) распределительные устройства. Ввод кабелей в щиты брызгозащищенного исполнения выполняют снизу
через отверстия с обрамлениями, исключающими повреждение оболочки кабелей, а в щиты водозащищенного исполнения - через индивидуальные или групповые сальники.
д ) по роду тока различают РЩ постоянного и переменного 1- и 3-фазного тока;
е ) по наличию коммутационно-защитной аппаратуры все РЩ подразделяют на 2
типа: без выключающих устройств и с выключающими устройствами.
В РЩ без выключающих устройств содержатся только предохранители типа ИП
постоянного тока напряжением 30 В и типа ПК переменного тока напряжением 380 В.
Такие РЩ применяют на маломерных судах.
В обозначение РЩ входит тип, количество групп и номинальный ток предохрани
телей.
Например, ЩИПК2-50 [Щ - щит; ИП - предохранители типа ИП; К -для маломерных судов ( катера); 2 - количество групп; 50 - номинальный ток, А].
Обычно РЩ с выключающими устройствами бывают двух видов:
1. с пакетными выключателями и предохранителями;
2. с автоматическими выключателями.
РЩ первого вида, как правило, не применяют для питания 3-фазных АД. Это объяс
няется тем, что при перегорании предохранителя в одной фазе наступает 1-фазный режим
работы АД с последующим его перегревом и выходом из строя. В то же время срабатывание АВ вследствие КЗ в любой фазе приводит к полному отключению асинхронного двига
теля от питающей сети.
Районные, отсечные и групповые РЩ применяют в сетях постоянного тока напря
жением 220 В при частоте 400 Гц. В качестве выключающих устройств в перечисленных
РЩ используют АВ типов АК-50 и АС-25.
1.2. Принципиальные схемы распределительных щитов
114
Рис. 4.1. Принципиальная схема распределительного щита
Рассмотрим принципиальная схема РЩ с четырьмя АВ типа АК-50 ( рис. 4.1).
Питающий фидер подключают к выводам А, В, С, а отходящие к приемникам фиде
ры - к выводам 1 -12 в нижней части щита.
Цепь сигнальной лампы HL защищена предохранителями FU. Внутрь РЩ встроены защитные конденсаторы С1-СЗ. Дверца РЩ соединена с заземленным корпусом РЩ
гибкой перемычкой. Принципиальные схемы других щитов отличаются от приведенной
количеством АВ и числом полюсов каждого из них.
Щиты электроснабжения с берега выпускают на ток 100-3000 А и напряжения 220
В постоянного тока и 220 и 380 В переменного тока частотой 50 и 400 Гц. Внутри корпуса
щита находится АВ типа А3700Р (АМ8, АМ15) или только выводы (при длине кабеля меж
ду ЩЭСБ и ГРЩ менее 10 м ).
Щит электроснабжения с берега типа ЩПБ 3-фазного переменного тока с АВ типа
А3700Р (рис. 4.2) снабжен фазоуказателем Р с переключателем SA, служащими для провер
ки порядка чередования фаз береговой сети, и сигнальной лампой HL. Цепи фазоуказателя
и сигнальной лампы защищены от токов КЗ предохранителями FU1 и FU2. Эти щиты обы
чно располагают в носовой или кормовой части судна на главной или вышерасположенной палубе.
Рис. 4.2. Принципиальная схема щита электроснабжения с берега
Щиты сигнализации и аппаратуры сигнализации типов ЩС и ЩАС имеют блочную конструкцию и выполняются путем набора в унифицированные корпуса щитов модулей из полупроводниковых элементов. Это позволяет получить необходимые виды звуко-
115
вой и световой сигнализации. Щиты этих типов выпускаются на напряжения 24 В постоян
ного и переменного тока, 127, 220 и 380 В переменного тока (число контролируемых цепей от 2 до 16).
Контрольные щиты КЩ в зависимости от типа могут иметь 2-3 встроенных электро
измерительных прибора (например, вольтметр, амперметр и частотомер), а также сигнальную лампу и переключатель к вольтметру. Эти щиты выпускают на напряжения до 320 В
постоянного тока и до 380 В переменного тока.
1.3. Требования Правил Регистра к схемам ГЭРЩ
При разработке схем главных электрораспределительных щитов руководствуются
нормативными документами, основными из которых являются „Правила классификации и
постройки морских судов” ( Правила Регистра ), „правила технической эксплуатации
судового электрооборудования” и др.
Основные рекомендации по разработке схемы ГЭРЩ можно свести к следующим.
В соответствии с Правилами Регистра, при нормальной работе основной электро
станции от шин ГЭРЩ по отдельным фидерам должны питаться такие приемники:
.1. электрические приводы рулевых устройств;
.2. электрические приводы якорного устройства;
.3. электрические приводы пожарных насосов;
.4. электрические приводы осушительных насосов;
.5. электрические приводы компрессоров и насосов спринклерной ( пожарной )
системы;
.6. гирокомпас;
.7. щит холодильной установки грузовых трюмов;
.8. электрические приводы агрегатов возбуждения электрической гребной установ
ки;
.9. секционные щиты основного освещения;
.10. щит радиостанции;
.11. щит навигационных приборов;
.12. щит сигнально-отличительных фонарей;
.13. секционные щиты и распределительные устройства питания других потребите
лей ответственного назначения, объединенных по принцип однородности выполняемых
функций ( например, грузовые краны, лебедки и др.);
.14. распределительные устройства объединенного пульта управления;
.15. щит станции автоматической сигнализации обнаружения пожара;
.16. электрические приводы механизмов обеспечивающих работу главных механиз
мов;
.17. щиты электрических приводов грузовых швартовных, шлюпочных и других
устройств вентиляции и нагревательных приборов;
.18. устройства управления винтом регулируемого шага;
.19. зарядные устройства стартерных аккумуляторных батарей и батарей, питающих ответственные устройства;
.20. щиты питания электрических приводов закрытия водонепроницаемых дверей и
устройств, удерживающих противопожарные двери в открытом состоянии, а также щиты
сигнализации о положении и закрытии водонепроницаемых и противопожарных дверей;
.21. щит холодильной установки системы углекислотного тушения низкого давления;
.22. щиты освещения ангаров и светотехнического оборудования посадочных пло
щадок для вертолетов;
.23. другие, не перечисленные выше потребители - по требованию Регистра.
Допускается питание потребителей, перечисленных в .4, .6, .10, .11, .12, .15, .16, .18,
116
.19, .20 от распределительных устройств, указанных в .13 или .14, по отдельным фидерам,
имеющим коммутационные и защитные устройства.
Все остальные приемники электроэнергии должны получать питание через
вторичные распределительные щиты.
В случае секционирования шин ГЭРЩ необходимо обеспечить секционирование
шин 220 В на случай отключения секционного ABB на шинах ГЭРЩ. Деление ГЭРЩ на
секции позволяет поочередно произвести обслуживание оборудования секций.
Для каждого генератора принято выделять свою секцию.
На каждом фидере, отходящем от ГЭРЩ, ставят автоматические выключатели.
Если механизмы ответственного назначения с электрическими приводами установлены
в двойном или большем количестве, то, по крайне мере, один из этих электрических
приводов должен получать питание по отдельному фидеру от ГРЩ.
На электрические приводы остальных таких механизмов допускается подавать
питание от секционных щитов или специальных распределительных устройств, предназначенных для питания ответственных приемников.
Если сборные шины на ГЭРЩ разделены на секции с помощью межсекционных
разъединительных устройств, то электрические приводы, секционные щиты, специальные
распределительные устройства или пульты, установленные в двойном или большем
количестве или питаемые по двум фидерам, должны быть подключены к разным секциям
ГЭРЩ. Один из фидеров рулевого электропривода должен получать питание от
аварийного распределительного щита.
Из соображений надежности к ГЭРЩ нецелесообразно подключать большее
количество фидеров.
Питание приемников мощностью менее 45 кВт осуществляют от РЩ.
Приемники, работающие на стоянке, подключают к отдельной секции, соединенной со щитом электроснабжения с берега (ЩЭБ); менее ответственные приемники, допускающие отключение при перегрузке генераторов, группируют. Для уменьшения
нагрева ГЭРЩ рекомендуется наиболее мощные приемники подключать ближе к
источникам.
В целях повышения надежности электроснабжения ответственных приемников
целесообразно предусмотреть для них при потере напряжения автоматическое переключение с одного фидера на другой.
При разработке схемы ГЭРЩ предварительно определяют число панелей ГРЩ
(генераторных, управления, приемников). При этом, как правило, для каждого
генераторного автоматического выключателя (АВ) требуется отдельная панель. АВ
приемников с учетом их габаритов группируют по 12-24 шт. на панель. Часть
выключателей приемников можно устанавливать также на генераторных панелях (по 68 АВ).
Для решения вопроса электрификации судна следует предусмотреть резервные
автоматические выключатели. Число их обычно не превышает 10 % от общего числа
выключателей на ГРЩ. Номинальный ток расцепителя резервного выключателя берут
равным номинальному току расцепителя, наиболее часто встречающемуся на данной
панели ГРЩ.
Окончательно число панелей уточняют после выбора и проверки всех аппаратов. При
небольших размерах ГРЩ панели 220 В конструктивно объединяют с панелями 380 В.
Принципиальные схемы ГЭРЩ разрабатываются и изготовляются отдельно для
каждой серии судов.
1.4. Схема главного распределительного щита
Главный электрораспределительный щит выполнен как цельная конструкция, но
разбит на отдельные секции (рис. 4.3 ).
117
Рис. 4.3. Принципиальная схема ГЭРЩ переменного тока
Имея заранее изготовленные отдельные типовые секции, можно собрать ГРЩ на
любое число генераторов и питающих линий. Это значительно ускоряет и удешевляет их
производство, транспортировку и погрузку.
На каждый генератор предусмотрена отдельная генераторная секция II (иногда одна секция на два генератора).
Контроль и управление работой генераторов обеспечивают приборы и аппараты,
установленные на генераторной секции:
1. автомат генератора АГ для коммутации генератора с шинами щита и защиты его;
2. ручной регулятор напряжения РРН генератора;
3. блоки системы автоматического регулирования напряжения генератора БСАРН;
4. переключатель серводвигателя ПСД, позволяющий изменять подачу топлива или
пара приводному двигателю генератора для изменения активной нагрузки генератора;
5. устройство гашения поля УГП генератора, которое в аварийных случаях позволя
ет быстро отключить обмотку возбуждения генератора и погасить его э. д. с. до нуля;
6. реле перегрузок РП, которое сигнализирует о перегрузке генератора, а иногда
дает импульс на автоматическое отключение малоответственных потребителей с целью
разгрузки генератора;
7. реле обратной мощности РОМ воздействует на автомат АГ и отключает генератор от шин, если он перешел в двигательный режим;
8. контрольно-измерительные приборы (КИП): амперметр, вольтметр, киловаттметр, фазометр ( φ ) и частотомер (Hz). Для включения перечисленного оборудования
установлены трансформаторы тока ТрТ и напряжения (на схеме не показаны).
Назначением распределительных секций I является главным образом управление
потребителями, получающими питание от ГРЩГ и контроль за ними.
В связи с этим на распределительных секциях установлены автоматы АВ, а также
амперметры А для измерения нагрузки потребителей. Амперметры установлены только на
питающих линиях наиболее мощных потребителей или с помощью переключателей П мо
гут переключаться для контроля нагрузки нескольких потребителей.
В секции управления III установлены приборы для контроля и включения генераторов на параллельную работу:
1. синхроноскоп S;
118
2. прибор для автоматической синхронизации ПАС;
3. электроизмерительный прибор Q для измерения сопротивления изоляции;
4. автомат АА для подключения аварийного щита к ГРЩ;
5. автомат АБ, подающий питание с берега;
6. аппарат Р для разъединения шин при раздельной работе генераторов;
7. контрольно-измерительные приборы:
V - вольтметр,
Hz - частотомер,
Фу – фазоуказатель ( указатель порядка чередования фаз ).
На этой же секции могут быть установлены другие аппараты и приборы, не связан
ные с постоянной работой генераторов или потребителей (например, устройство автома
тического включения резервного генератора УАВР, прибор защиты от работы при обры
ве провода одной питающей фазы с берега и при снижении напряжения с берега ЗОФН и
т. д.).
1.5. Схема генераторной секции ГЭРЩ
На рис. 4.4. показана схема генераторной секции ГЭРЩ.
Рис. 4.4. Принципиальная схема генераторной секции ГЭРЩ
После пуска генератора и самовозбуждения на его зажимах появляется э. д. с, о чем
сигнализирует желтая лампа ЛЖ, получающая питание через трансформатор напряжения
Тр и вспомогательный контакт (блок-контакт) автомата генератора АГ.
Автомат генератора АГ имеет электродвигательный привод для включения (на схеме не показан). Если нажать на кнопку Вкл, то с помощью этого электродвигателя про-
119
изойдет включение автомата.
Желтая лампа погаснет, а загорится зеленая ЛЗ, сигнализирующая о том, что генератор возбужден и включен на шины.
Далее включают необходимые потребители и с помощью переключателя ПСД и
ручного регулятора РРН осуществляют подрегулирование частоты и напряжения (при
параллельной работе генераторов с помощью ПСД и РРН осуществляют распределение
нагрузки).
В дальнейшем стабилизацию электрических параметров генератора осуществляют
блоки БСАРН.
В случае перегрузки генератора на обмотках трансформатора тока ТрТ возникает
повышенный ток, срабатывает реле перегрузки РП и своим замкнувшимся контактом пода
ет сигнал в схему разгрузки генератора.
Происходит автоматическое отключение неответственных потребителей ( бытовая
вентиляция, камбуз ), и срабатывает сигнализация. На некоторых судах срабатывание реле
РП приводит только к срабатыванию сигнализации, а решение о способе разгрузки принимает электромеханик.
При недопустимо больших токах перегрузок генератора или короткого замыкания
на шинах ГРЩ срабатывают реле максимального тока РМ, катушки которых расположены
в автомате генератора АГ. Это приводит к отключению автомата от шин.
В очень редких случаях может произойти разрушение оболочки питающего кабеля
генератора, и тогда возникает короткое замыкание между генератором и автоматом АГ.
Ток короткого замыкания 6удет проходить между генератором и местом короткого
замыкания, не проходя по автомату; последний, естественно, не сработает.
В такой обстановке нужно переключатель устройства гашения поля УГП перевести
в другое положение (на схеме - вправо).
Тогда на обмотку возбуждения генератора напряжение не подастся, она замкнется
на разрядный резистор R и ЭДС генератора упадет да нуля.
При включении на параллельную работу один из генераторов может перейти в дви
гательный режим и начинает развивать механический момент, действующий в сторону
вращения приводного электродвигателя, разгоняя его ( разнос ).
В этой аварийной ситуации срабатывает реле обратной мощности РОМ; его замкнувшийся контакт включает питание на выводы 1, 2 автомата АГ и автомат отключается.
Кнопка ОТК шунтирует контакт реле РОМ: для отключения автомата нажимают на
кнопку.
1.6. Требования Правил Регистра к конструкции распределительных
устройств
Конструкция электрораспределительных устройств должна выполняться таким образом, чтобы она обеспечивала защиту от свободного прикосновения к токоведущнм частям с лицевой и боковых сторон.
Всю аппаратуру и устройства с открытыми токоведущими частями следует устанав
ливать за лицевой панелью, а приводы автоматов, шкафы измерительных приборов, глазки сигнальных ламп - на лицевой панели щитов. Здесь же разрешается устанавливать
только ту аппаратуру, в которой нет открытых токоведущих элементов или, в крайнем
случае, эти элементы имеют, защитные оболочки.
Ко всем судовым аппаратам, устройствам, контактным соединениям, смонтированным на щитах, должен битв свободный доступ для наблюдения, ремонта и обслуживания
в процессе эксплуатации.
За установленными на палубе приставными щитами длиной до 3 м должны быть
проходы не менее 0,6 м; если же длина щита превышает 3 м, проход за ним должен быть
сквозным. Двери распределительных щитов должны открываться наружу или быть
сдвижного (вагонного) типа.
120
На лицевой и задних сторонах каркасных щитов длиной от 0,6 м и более устанавли
ваются поручни из изолирующего материала (дерево, пластмасса и др.). Поручни могут
устанавливаться в горизонтальном или вертикальном положении, причем в последнем
случае расстояние между соседними поручнями должно быть не более 1100мм.
Высота электрораспределительных щитов независимо от их назначения не должна
превышать 2000 мм.
Измерительные приборы размещаются на высоте 1500 - 1850 мм от уровня палубы
(настила).
Расположение предохранителей и автоматов на щитах должно обеспечивать их
обслуживание с лицевой стороны на высоте не ниже 200 мм и не выше 1800 мм от уровня
палубы. Установка предохранителей с задней стороны щита допускается в том случае,
когда у главного распределительного щита имеется постоянная вахта, а также когда
предохранители являются добавочными устройствами к автоматическим выключателям
для защиты от токов короткого замыкания и защиты контрольных и вспомогательных
цепей.
Шины распределительных устройств окрашиваются в следующие цвета.
переменный ток: шина фазы А - зеленая; шина фазы В - желтая; шина фазы С – фиолетовая; шина нулевая (нулевой провод) - серая; заземляющее соединения - черные;
постоянный ток: шина положительного полюса - красная; шина отрицательного
полюса - синяя; шина уравнительного назначения - белая; заземляющие соединения
(провод) - черные.
На коммутационной, защитной, регулирующей, измерительной, сигнальной аппара
туре и других устройствах, установленных на щите, должны быть таблички с четкими над
писями об их назначении. Около клемм отходящих фидеров должны быть таблички с наи
менованием фидера, а у предохранителей или автоматов, включающих эти фидеры, - с
указанием их назначения и номинальной силы тока.
На внутренней стороне дверцы распределительного щита (на лицевой панели каркасного щита) должна быть схема коммутации с указанием наименовании отходящих фидеров.
Главные распределительные щиты должны иметь освещение передней лицевой
панели и освещение за щитом, при этом питание одной части светильников должно осуще
ствляться от шин данного щита, а другой части - от сети аварийного освещения.
При мощности электростанции, не превышающей 25 кВт, допускается установка
однопанельных главных распределительных щитов, в том числе приставного или навесно
го типа.
На ГРЩ должна быть обеспечена возможность измерения сопротивления изоляции
электроустановки, находящейся под напряжением, а также должно быть устройство, сигна
лизирующее о наличии напряжения на кабеле питания с берега.
Для контроля за работой ответственных потребителей на распределительном щите
в питающем фидере должен быть установлен амперметр. Допускается установка амперметров с переключателями, но не более чем на шесть положений.
Электрораспределительные щиты должны иметь защитные конденсаторы для устра
нения помех радиоприему.
2. Коммутационные аппараты распределительных устройств
2.1. Основные сведения
Различают два вида электрических аппаратов распределительных устройств:
1. коммутационные;
2. коммутационно-защитные.
121
Коммутационными называются аппараты ручного действия, предназначены только
для коммутации электрических цепей, т.е. их включения, выключения и переключения.
Защитные функции, например, защиту цепей от токов короткого замыкания, токов перегрузки, эти аппараты не выполняют.
К коммутационным аппаратам относятся рубильники, выключатели ( неавтоматиче
ские ) и переключатели.
Коммутационно-защитными называются аппараты ручного или дистанционного
действия, предназначены как для коммутации электрических цепей, так и для их защиты.
К ним относятся автоматические выключатели ( см. ниже ).
2.2. Рубильники, выключатели и переключатели
Основные сведения
Рубильники, пакетные выключатели и переключатели – это коммутационные аппа
раты ручного действия, предназначенные для включения, отключения и переключения
электрических цепей под нагрузкой ( под током ).
Эти аппараты лишь коммутируют электрические цепи, но не защищают их, например, от токов короткого замыкания, токов перегрузки и т.п.
Совмещают в себе функции коммутации и защиты т.н. коммутационно-защитные
аппараты ( см. ниже ).
Рубильники
Рубильником называется электрический аппарат с ручным приводом, предназначен
ный для замыкания и размыкания электрических цепей под током.
Устройство рубильника показано на рис. 4.5.
Рис. 4.5. Рубильник:
1 – зажимные пружины; 2 – неподвижный контакт; 3 – рукоятка; 4 – главный
контакт; 5 – отрывная пружина; 6 – дугогасительный контакт
Рубильник имеет два медных подвижных контакта: главный 4 и дугогасительный 6,
а также один неподвижный - 2. Неподвижный контакт имеет щелевидную форму и снаб
жен нажимными пружинами 1. Контакты 4 и 6 приводятся в движение рукояткой 3 из
изоляционного материала.
Для включения рубильника рукоятку поворачивают в напрпавлении протв часовой
стрелки. Первым в щель контакта 2 войдет контакт 6, а при дальнейшем движении рукоят
ки до упора – контакт 4. Плотное обжатие контакта 4 внутри контакта 2 обеспечивают
нажимные пружины.
При выключении порядок размыкания контактов обратный – сначала из щели вый
дет главный контакт 4, и ток будет протекать через дугогасительный контакт 6. При
дальнейшем повороте рукоятки по часовой стрелке пружина 5 будет растягиваться до тех
пор, пока зажимные пружины способны удержать контакт 6 в щели контакта 2.
В конце поворота рукоятки контакт 6 под действием пружины выйдет из щели, при
чем размыкание контактов 2 и 6 происходит практически мгновенно. Тем самым резко
ускоряется гашение дуги в воздухе.
Из сказанного следует, что в процессе размыкания контактов обгорает именно дуго
гасительный контакт, а поверхность главного контакта сохраняется целой.
122
При обгорании дугогасительный контакт легко заменяется.
При токах 600 А и выше вместо медных дугогасительных контактов применяют
медно-графитные.
К рубильникам относят рубящие переключатели и разъединители.
Устройство переключателей и разъединители во многом схоже с устройством рубильников.
Рубящий переключатель предназначен для замыкания, размыкания и переключения электрических цепей под током.
Разъединитель предназначен для замыкания и размыкания электрических цепей
без тока.
Разъединители применяют на судах в качестве секционных выключателей на ГРЩ.
При помощи этих выключателей шины ГРЩ делятся на несколько участков, которые при
нормальной работе электрически через разъединители соединены между собой, образуя
единую систему шин.
Если же надо обесточить какой-либо участок ГРЩ, например, для выполнения про
филактических работ, соответствующий разъединитель выключают, предварительно сняв
нагрузку с отключаемого участка ( обычно путем отключения автоматов приемников элек
троэнергии ).
Рубящие переключатели применяют в мощных понижающих трансформаторах для
плавного регулирования напряжения. С помощью этих переключателей изменяют число
витков первичной обмотки трансформатора, в результате изменяется напряжение на вторичной обмотке.
Выключатели и переключатели
Основные сведения
Судовые выключатели и переключатели – это коммутационные аппараты ручного
управления, состоящие из собранных в пакеты секций с контактами. Поэтому они получили название «пакетные».
Пакетные выключатели предназначены для включения и выключения цепей посто
янного и переменного тока.
Пакетные переключатели предназначены для переключения упомянутых цепей.Некоторые типы переключателей, кроме переключения, позволяют включать и выключать
питание переключаемых цепей.
Пакетные выключатели и переключатели делятся по таким признакам:
1. по числу полюсов – на одно-, двух- и трехполюсные;
2. по способу исполнения корпуса – открытые, защищенные и герметические.
Переключатели выполняются на два или три направления.
Пакетные выключатели и переключатели изготовляются на номинальные токи от
10 А до 400 А
Пакетные выключатели
Пакетный двухполюсный выключатель изображен на рис. 4.6.
123
Рис. 4.6. Пакетный двухполюсный выключатель:
а – общий вид; б – пакет выключателя; в – схема; 1 – крышка; 2 – рукоятка; 3 –
изоляторы; 4 – неподвижные контакты; 5 - фибровые шайбы; 6 – подвижные
контакты
Выключатель имеет два пакета ( рис. 4.6, а ), каждый из которых ( рис. 4.6, б ) вклю
чает в себя подвижный латунный контакт 6 в виде лепестка, два неподвижных контакта 4
и корпус 3 из изоляционного материала.
В исходном положении ось подвижного контакта 6 расположена горизонтально,
поэтому этот контакт соединяет через себя левый и правый неподвижные контакты 4. Таму состоянию контактов соответствует схема на рис. 4.6, в ( нижняя ).
При повороте рукоятки выключателя на 90º по часовой стрелке подвижный контакт устанавливается вертикально, поэтому цепь через контакты 6 и 4 обрывается. Такому
му состоянию контактов соответствует схема на рис. 4.6, в ( верхняя ).
При помощи пружины в верхней части выключателя ( не показана ) контакты разкаются мгновенно при подходе рукоятки к положению, близкому к 90º. Такое мгновенное
размыкание контактов способствует уменьшению их обгорания.
Пакетные переключатели
Устройство и принцип действия пакетных переключателей те же, что и пакетных
выключателей. Отличие состоит в форме подвижных контактов ( рис. 4.7 ).
Как видно из рис.4.7, двухполюсный переключатель на три направления имеет четыре контакта, расположенных в направлении сверху вниз. Каждый контакт выполнен в
виде цельного лепестка, состоящего из двух частей в виде линий с поперечными черточками.
При этом угол раствора линий верхнего и третьего сверху контактов составляет
135º, второго и четвертого - 90º.
Схема на рис. 4.7. позволяет поочередно подключить к выходным проводам С 1 , С
2 одну из трех питающих сетей с выводами соответственно 1Л 1 , 1Л 2 , 2Л 1 , 2Л 2 и 3Л1 .
В положении контактов, изображенном на рис. 4.7, провод 1Л 1 соединен с проводом С 1 через первый сверху подвижный контакт, провод 1Л 2 с проводом С 2 - через третий сверху контакт. Иначе говоря нагрузка, подключенная к выводам С 1 , С 2 , подключена
к первой сети с выводами 1Л 1 , 1Л 2 . Это положение на корпусе переключателя обозначе-
124
но как «I».
Рис. 4.7. Принципиальная электрическая схема двухполюсного переключателя на
три направления: ):
0, I, II, III – положения рукоятки переключателя; 1Л 1 , 1Л 2 - провода первой питающей сети; 2Л 1 , 2Л 2 - провода второй питающей сети; 3Л 1 , 3Л 2 - провода третьей питающей сети; С 1 , С 2 - провода нагрузки
При повороте рукоятки на 90º по часовой стрелке все четыре подвижных контакта
также повернутся на этот угол. В результате через второй и четвертый сверху подвижные
контакты с выводами С 1 , С 2 соединятся выводы 2Л 1 , 2Л 2 ( положение «II» ).
При повороте рукоятки еще на 90º по часовой стрелке через второй и четвертый
сверху подвижные контакты с выводами С 1 , С 2 соединятся выводы 3Л 1 , 3Л 2 ( положение «III» ).
При установке рукоятки в положение «0» все четыре подвижных контакта размыкаются.
Пакетные выключатели и переключатели имеют такие свойства:
1. малые габариты;
2. удобство в монтаже;
3. высокая вибро- и ударостойкость;
4. отсутствует выброс наружу газов и пламени ( т.к. дуга в них гасится в замкну
том пространстве);
5. быстрый износ контактной системы и приводного механизма.
Например, допустимое число операций «включено-выключено» при токах от 100
до 400 А и напряжении 220 В – не более 10 000.
2.3. Универсальные переключатели
Универсальные переключатели – это облегченные командоконтроллеры, предназначенные для нечастого переключения контактов в цепях управления и электроизмерительных приборов. Частота переключений – не более 100 вкл / мин.
125
Рис. 4.8. Универсальный переключатель серии УП:
1- рукоятка управления; 2 – секции ( 6 шт. )
Переключатели собираются из отдельных контактных секций, изолированных друг
от друга пластмассовыми перегородками ( рис. 4.8 ) .
Контактная секция ( рис. 4.9 ) состоит из двух подвижных контактов 5, одного неподвижного контакта 4 и комплекта кулачковых шайб 9 из изоляционного материала.
Рис. 4.9. Секция переключателя серии УП:
1- пластмассовая перегородка; 2 – контактная планка; 3 – винт; 4 – неподвижный
контакт; 5 – подвижные контакты ( 2 шт. ); 6 – серебряные напайки; 7 – скобы; 8 –
зажимы; 9 – кулачковые шайбы; 10 – главный валик
Неподвижные контакты закрепляются на общей пластмассовой планке 2, а подвиж
ные крепятся к скобам 7. Кулачковые шайбы жестко насажены на главный валик 10, про
ходящий через секции.
При повороте валика кулачки шайб поворачивают скобы 7 с подвижными контактами, в результате чего последние могут замыкаться или размыкаться. Количество секций
в переключателе, формы профилей шайб и их взаимное расположение определяются программой переключений в схеме управления.
В зависимости от схемы соединений контакты переключателей УП имеют одно-,
двух- или четырехкратный разрыв тока.
126
Рис. 4.10. Монтажная схема универсального переключателя ( а ) и таблица
замыканий его контактов ( б )
На рис. 4.10 показана монтажная схема шестисекционного переключателя ( верхний рисунок ) и таблица замыканий его контактов в шести положениях ( нижний рисунок
): при нулевом положении рукоятки ( 0º ), повороте на - 45º, -90º ( против часовой стрелки
), при повороте на +45º, +90º и +135º ( по часовой стрелке ).
Например, контакты №1 и №12 замкнуты только при повороте рукоятки переключателя на +90º, контакты №2 и №11 замкнуты при повороте рукоятки на -90º, и т.д.
Максимальное число секций в одном переключателе не более 16. Фиксация положе
ния обеспечивается с помощью звёздочки и ролика, укреплённого на рычаге с пружиной.
Переключатели УП изготавливаются с фиксацией рукоятки в каждом положении
или с пружинным самовозвратом ее в нулевое положение . Рукоятки имеют либо овальную, либо револьверную ( рис. 4.8 ) форму.
2.4. Универсальные переключатели без разрыва тока
Универсальные переключатели типов КФ ( ключ флотский ) и ПФУ ( переключатель флотский универсальный ) отличаются от переключателей типа УП главным образом
тем, что они позволяют производить переключения как с разрывом, так и без разрыва тока
( рис. 4.11 ).
127
Рис. 4.11. Секция универсального переключателя с переключением без разрыва
тока:
1 – центральный валик; 2 – подвижный контактный мостик ( контакт ); 3 – неподвижные контакты; А, В, С – цепи тока
Переключатели КФ и ПФУ собираются из пластмассовых секций. На каждой секции ( рис. 4.11, слева ) укреплены неподвижные контакты 3. Подвижный контактный мостик 2, связанный механически с центральным валиком 1, помещается внутри секции. В
зависимости от конфигурации контактного мостика получают ту или иную диаграмму
замыканий контактов.
В исходном положении ( рис. 4.11, а ) ток перетекает из цепи А в цепь В. При повороте рукоятки переключателя на +30º ( рис. 4.11, б ) часть тока из цепи А продолжает
попадать в цепь В, а другая часть – в цепь С, т.е. начальная цепь тока А – В ( рис. 4.11, а )
сохраняется и в этом положении. При повороте рукоятки на +45º ( рис. 23, в ) весь ток из
цепи А переключается в цепь С.
Переключатели без разрыва тока применяют в качестве щитовых переключателей
амперметров для контроля тока в нескольких цепях переменного тока. Через контакты
безобрывных переключателей общий на несколько цепей амперметр подключается ко
вторичной обмотке очередного трансформатора тока, в то время как вторичные обмотки
остальных трансформаторов тока, по условиям ПТБ, должны оставаться замкнутыми.
2.5. Промышленные типы пакетных выключателей и переключателей
Промышленность выпускает пакетные выключатели и переключатели типов ПВМ,
ППМ, ВПКМ, ГВПМ, ВГПМ, ГППМ и серии ПК. Все они рассчитаны на переменный ток
частотой 50 Гц, напряжением 380 В и постоянный ток до 220 В.
Условное обозначение типоисполнения этих коммутационных аппаратов ( кроме
аппаратов серии ПК ) имеет четыре символа */** / ***/****, имеющих такое значение:
* - тип апппарата и защитное исполнение корпуса : ПВМ – пакетный выключатель
открытого исполнения; ППМ - пакетный переключатель открытого исполнения; ВПКМ пакетный выключатель защищенного исполнения; ГПВМ и ВГПМ - пакетный выключатель герметического исполнения; ГППМ - пакетный переключатель открытого исполнения;
** - число полюсов: 2 – два полюса; 3 – три полюса;
*** - номинальный ток ( при напряжении 220 В постоянного и переменного тока
указан без скобок, при напряжении 380 В переменного тока – указан в скобках ): 10 – 10 А
( 6 А ); 25 – 25 А ( 16 А ); 63 – 63 А ( 40 А ); 100 – 100 А ( 63 А ); 250 – 250 А ( 160 А ); 400
– 400 А ( 250 А );
**** - число направлений переключений ( только для переключателей ): Н2 – два
направления; Н3 – три направления.
Пример 1.
128
Условное обозначение ПВМ3-10 расшифровывается так:
ПВМ - пакетный выключатель открытого исполнения;
3 – трехполюсный;
10 – номинальный ток контактов – 10 А при напряжении 220 В постоянного и
переменного тока ( 6А при напряжении 380 В переменного тока ).
Пример 2.
Условное обозначение ГПВМ2-63 / Н2 расшифровывается так:
ГПВМ - пакетный переключатель герметического исполнения;
2 – двухполюсный;
63 – номинальный ток контактов – 63 А при напряжении 220 В постоянного и
переменного тока ( 40А при напряжении 380 В переменного тока );
Н2 – на два направления.
3. Коммутационно-защитная аппаратура распределительных устройств
3.1. Автоматические выключатели
Автоматическими называются выключатели, предназначенные для автоматического отключения электрических цепей при аварийных ситуациях.
В нормальных условиях работы они используются для нечастых включений и отключений этих цепей.
К аварийным ситуациям относят:
1. короткое замыкание;
2. перегрузку ( по току );
3. недопустимое ( по условиям эксплуатации ) снижение напряжения сети.
3.2. Классификация АВ
Автоматические выключатели классифицируют по ряду признаков:
1. по назначению:
а ) универсальные – способные выполнять задачи различного характера ( дистанционное включение и отключение, защиту от коротких замыканий с выдержкой времени
при срабатывании и без нее, защиту от перегрузок, снижения или исчезновения напряжения, коммутацию сигнальных цепей и др. );
б ) установочные – способные выполнять более узкие задачи ( защиту от токов
короткого замыкания и токов перегрузки );
2. по роду тока :
а ) постоянного тока;
б ) переменного тока;
в ) постоянно-переменного тока ( используются в сетях как постоянного, так и пере
менного тока );
3. по числу полюсов:
а ) однополюсные;
б ) двухполюсные;
в ) треполюсные;
4. в зависимости от времени срабатывания при коротком замыкании:
а ) неселективные, отключающиеся мгновенно;
б ) селективные, отключающиеся с выдержкой времени.
Примечание: В селективных автоматах выдержка времени обеспечивается путем
добавления замедлителя, который называют селективной приставкой. Иначе говоря, селективная приставка – это реле времени ( электромеханическое, электронное и др. ).
Селективные выключатели применяют для защиты генераторов . Задержка отклю-
129
чения выключателя генератора ( не более 1 с ) необходима для того, чтобы генераторы
не отключался пусковыми токами мощных электродвигателей.
5. по типам расцепителей:
а ) с максимальным расцепителем ( защита только от токов короткого замыкания );
б ) с комбинированным расцепителем ( защита от токов короткого и токов перегруз
ки );
в ) с минимальным расцепителем ( отключает выключатель при провале напряжения );
г ) с дистанционным расцепителем;
Примечание: расцепитель – часть выключателя, воздействующая непосредственно
на механизм его отключения при критических параметрах защищаемой цепи ( токе, напря
жении ).
6. по типу привода:
а ) ручной;
б ) электромагнитный;
в ) электродвигательный.
3.3. Устройство автоматического выключателя
Выключатели состоят из следующих основных элементов:
1. главной контактной системы ( главных контактов );
2. дугогасительной системы;
3. привода;
4. расцепляющего устройства;
5. расцепителей;
6. вспомогательных контактов.
Рассмотрим устройство выключателя на токи свыше 200 А, изображенного в
упрощенном вид ( рис. 4. 12 ).
Рис. 4.12. Принципиальная схема автоматического выключателя на токи
свыше 200 А:
130
1. дугогасительный контакт; 2 – дугогасительная камера; 3 – главные неподвижные
контакты; 4 – тепловой расцепитель ( с биметаллической пластиной ); 5 – электромагнитный расцепитель ( реле максимального тока ); 6 – минимальный расцепитель
( реле минимального напряжения ); 7 – независимый расцепитель ( промежуточное
реле ); 8 – рукоятка выключателя; 9 – упор; 10, 12 – «ломающиеся» рычаги; 11 – катушка дистанционного включения автомата; 13 – отключающая пружина; 14 - шунт
Главная контактная система выключателя состоит из трех главных контактов 3 –
двух неподвижных и одного подпружиненного подвижного, и дугогасительного контакта
1. Через главные контакты проходит ток электрической цепи, которую автомат защищает.
Дугогасительный контакт защищает главные контакты от воздействия электрической дуги
при их размыкании.
Дугогасительная система представляет собой съемную камеру 2, которая закрепле
на на оси О . Для осмотра контактов камеру можно поднять вверх поворотом вокруг оси
2
О по часовой стрелке. На рис. 4.12 камера показана в рабочем положении.
2
Привод выключателя предназначен для его включения и отключения. Данный выключатель имеет ручной и электромагнитный привод.
В состав привода входят рукоятка выключателя 8, «ломающиеся» рычаги 10, 12 и
катушка 11 дистанционного включения автомата. Отключение выключателя происходит
при помощи пружины 13 после разъединения расцепляющего устройства.
Расцепляющее устройство предназначено для механического воздействия на привод автомата при его отключении. На рис. 4.12 это устройство условно показано в виде
рычага в форме перевернутой буквы «Т».
Расцепители представляют собой реле той или иной конструкции, механически воз
действующие на расцепляющее устройство. Таких расцепителей на рис. 4.12 показано
четыре:
1. электромагнитный расцепитель ( по току ) в виде реле максимального тока 5;
2. тепловой расцепитель ( по току ) в виде теплового реле с биметаллической пластиной 4;
3. минимальный расцепитель ( по напряжению ) в виде реле напряжения 6;
4. независимый расцепитель в виде промежуточного реле 11.
Вспомогательные контакты на рис. 4.12 не показаны. Обычно вспомогательные
контакты расположены внутри съемного коммутатора , который пристраивают к корпусу
выключателя. Подвижный шток коммутатора механически связан с подвижной частью
выключателя, поэтому при включении выключателя вспомогательные контакты переключаются. Эти контакты используют в цепях сигнализации и контроля.
Исходное состояние выключателя
На рис. 4.12 все части автомата показаны в исходном ( отключенном ) состоянии.
Положение рукоятки 8 и “ломающихся” рычагов 10 и 12 обозначено пунктирными линия
ми. Под действием отключающей пружины 13 дугогасительный контакт 1 и подпружинен
ный подвижный главный контакт 3 разомкнуты.
Включение выключателя
Включить выключатель можно двумя способами:
1. вручную;
131
2. дистанционно.
При ручном включении рукоятку выключателя 8 поворачивают вокруг оси О 3 по
часовой стрелке до упора. При этом перемещаются дугогасительный контакт 1 и главный
подвижный контакт 3.
Первым из них замкнется контакт 1 с расположенным напротив него подпружиненным вторым вспомогательным контактом, вследствие чего через них образуется
начальная цепь тока:
верхний неподвижный контакт 3 – вспомогательные контакты 1 – перемычка ( жгутик ) – нижний неподвижный контакт 3 – шунт 14 – катушка реле максимального тока 5.
Когда рукоятка 8 дойдет до упора, подвижный контакт 3 замкнется с неподвижными, вследствие ток станет протекать через главные контакты 3, минуя дугогасительные 1:
верхний и нижний неподвижные контакты 3 – шунт 14 – катушка реле максимального тока 5.
Ломающиеся рычаги 10 и 12 займут положение, обозначенное сплошной линией.
При дистанционном включении подается питание на катушку электромагнита 11,
якорь которого перемещается и воздействует на рычаги 10 и 12 так же, как при ручном
включении. После включения выключателя питание с катушки 11 снимается, однако выключатель остается включенням ( см. ниже “Механизм свободного расцепления”).
Отключение выключателя
Отключить выключатель можно тремя способами:
1. вручную;
2. дистанционно;
3. автоматически.
При ручном отключении рукоятку 8 резко переводять в положение “выключено”.
При движении рукоятки вначале разомкнутся главные контакты 3, поэтому ток
цепи станет протекать через дугогасительные контакты 1. Возникшая при этом дуга будет
воздействовать на поверхность этих контактов, в то время как главные уже разомкнулись.
Тем самым продлевается срок службы главных контактов. Дугогасительные контакты легко снимаются, поэтому их по мере обгорания быстро заменяют.
При дистанционном отключении подают питание на катушку 7 независимого расце
пителя. Этот расцепитель выполнен в виде реле напряжения, поэтому его якорь механически воздействет на привод, а через него – на рычаги 10 и 12. Автомат при этом отключается.
На судах дистанционное отключение выключателей применяют в тех случаях, когда возникла аварийная ситуация и необходимо срочно отключить какой-либо приемник
электроэнергии. Например, при пожаре в МО должны дистанционно отключаться вентиля
торы, а также масляные и топливные насосы, находящиеся в МО. Места дистанционного
отключения, по Правилам Регистра, должны находиться вне шахты МО, чаще всего – на
мостике и в коридорах рядом со входом в МО.
Автоматическое отключение возможно в трех случаях:
1. при коротком замыкании;
2. при перегрузке цепи;
3. при недопустимом снижении напряжения.
При коротком замыкании ток в катушке реле максимального тока 5 увеличивается
до значения, при котором якорь реле механически воздействует на привод выключателя.
Последний мгновенно ( без выдержки времени ) отключает выключатель.
132
При перегрузке цепи увеличивается ток в шунте 14 и падение напряжения на нем.
Это напряжение снимается на нагревательный элемент , вследствие чего биметаллическая пластина изгибается и механически воздействует на привод выключателя. Последний
отключает выключатель с выдержкой времени, обратно пропорциональной квадрату тока
( см. “Тепловые реле” ).
.
При недопустимом снижении напряжения в сети якорь реле минимального напряжения 6 отпадает и механически воздействует на привод выключателя. Последний отключает выключатель мгновенно.
Рассмотрим некоторые ответственные узлы выключателей более подробно. К таким узлам относятся:
1. механизм свободного расцепления, а также расцепители:
2. максимальный;
3. минимальный;
4. независимый;
5. комбинированный.
3.4. Механизм свободного расцепления АВ
Механизмом свободного расцепления АВ называют кинематическую систему, пред
назначенную для выполнения двух функций:
1. мгновенное отключение выключателя;
2. исключение возможности удержания контактов во включенном положении с
помощью привода при аварийных режимах работы защищаемой цепи.
Под моментным отключением выключателя понимают размыкание его контактов с
большой скоростью, не зависящей от скорости движения привода.
Под аварийными режимами работы цепи понимают короткое замыкание в ней, перегрузку цепи по току и недопустимое снижение напряжения в цепи.
Рис. 4.13. Механизм свободного расцепления:
а - исходное состояние; б – положение “включено”; в - положение “выключено
автоматически”; 1 – подвижный контакт; 2 – неподвижный контакт; 3 – отключаю
щая пружина расцепителя; 4 – упор; 5 - “ломающиеся” рычаги; 6 – рукоятка автома
тического выключателя; 7 – шток; 8 – катушка электромагнита; 9 – якорь
Сам механизм свободного расцепления представляет собой систему шарнирно-связанных рычагов 5 , соединяющих привод включения ( рукоятку ) 6 с подвижным контак
том 2, который соединен с отключающей пружиной 3.
Катушка 6 электромагнита включена последовательно в цепь главных контактов
автомата 1 и 2, через которые проходит рабочий ток потребителя, например, двигателя.
В верхнем роложении рукоятки 6 ( рис. 4.13, а ) автомат включен, его контакты 1
и 2 замкнуты и удерживаются в таком состоянии рычагами 5, соединенными шарнирно,
и упора 4; при этом пружина 3 растянута.
133
При коротком замыкании в сети или в устройстве, получающем питание через
главные контакты автомата, ток в катушке 8 достигает значения, при котором якорь 9
выталкивается вверх и своим штоком 7 ударяет по рычагам 5, «переламывая» их в шар
нире.
Пружина 3, лишенная упора рычагами 5, сжимается и размыкает контакты 1 и 2
( рис. 4.13, б ). До тех пор, пока ток в катушке 8 не снизится до значения менее уставки
автомата, шток 7 не допустит включения автомата.
После устранения короткого замыкания автомат следует включить. Для этого
рукоятку 6 необходимо отвести вниз ( рис. 4.13, в ), при этом рычаги 5 выпрямятся, а
упор 4 будет удерживать их в таком состоянии. Затем рукоятку следует перевести в
верхнее положение, при котором контакты 1 и 2 замкнутся, а пружина 3 останется
натянутой.
В некоторых типах автоматов возможно дистанционное управление ( т.е. включение и отключение автомата ) посредством электромагнита или электродвигателя. В
этом случае включение и отключение автомата выполняется кнопками «Пуск» и «Стоп»
( красного цвета ).
В автоматических выключателях отечественного производства, например, выклю
чателях типа АК-50 ( А – автоматический выключатель, К – Курский завод-изготовитель, 50 – значение номинального тока ( А ) последнего по мощности в серии выключа
теля ), при коротком замыкании рукоятка 8 устанавливается в среднее положение, что
позволяет судовому электромеханику быстро найти выключатель, отключившийся
автоматически.
В случае автоматического выключения автомат разрешается включить повторно
только в случае его ложного срабатывания ( Правила технической эксплуатации морских и речных судов. КНДЗ 31.2.002.07-96 ). Однако на практике не всегда можно опреде
лить истинную причину отключения выключателя. Поэтому электромеханики обычно
поступают так: повторно включают выключатель; если же он вновь выключится, тогда его не включают до тех пор, пока не будет найдена и устранена причина его
отключения.
4. Расцепители автоматических выключателей
4.1. Основные сведения
Расцепитель – часть выключателя, воздействующая непосредственно на механизм
его отключения при критических параметрах защищаемой цепи ( токе, напряжении ).
Расцепители представляют собой реле или элементы реле, встроенные в выключатель с использованием его элементов или приспособленные к его конструкции.
Расцепители выполняют на базе обычных электромагнитных реле ( тока, напряжения ). Однако в последнее время все чаще применяются расцепители на базе статических
электронных реле. Электронная часть этих реле контролирует ту или иную физическую
величину, но в их выходной цепи все равно включено электромагнитное реле, якорь которого воздействует на механизм расцепления.
Любой автоматический выключатель обязательно имеет электромагнитный расцепитель максимального тока, мгновенно отключающий выключатель при коротком замкании ( рис. 4.14 и 4.15 ).
В некоторых типах выключателей, кроме электромагнитного, применяется электротепловой, отключающий выключатель с выдержкой времени в зоне токов перегрузки.
Такой расцепитель называют комбинированным ( рис. 4.16 ). Следует заметить, что
автоматические выключатели с одним электротепловым расцепителем не выпускаются.
Аппарат, имеющий только электротепловой расцепитель, называют электротепловым реле
( ниже см. “Реле электротепловые” ).
Дополнительно выключатели могут снабжаться расцепителями:
134
минимальными ( минимального или нулевого напряжения ) – для автоматического
отключения выключателя при снижении напряжения ниже допустимого уровня или его
исчезновении( рис. 4.17 и 4.18 );
независимыми – для дистанционного отключения выключателя путем подачи на
пряжения на катушку расцепителя ( рис. 4.19 и 4.20 ).
Рассмотрим поочередно устройство и принцип действия каждого упомянутого расцепителя.
4.2. Электромагнитный расцепитель АВ
Электромагнитный расцепитель предназначен для отключения выключателя токами короткого замыкания, Его часто называют максимальным расцепителем. По устройству и принципу действия – это реле максимального тока.
Рис. 4.14. Принципиальная схема максимального расцепителя:
1 – рукоятка включения; 2 – удерживающий рычаг; 3 – отключающий рычаг; 4 –
регулировочная пружина; 5 – отключающая пружина; 6 – катушка; 7 – якорь; 8 –
подвижный контакт; 9 – неподвижный контакт
В исходном состоянии выключатель включен, ток цепи меньше тока уставки. При
этом удерживающий рычаг 2 находится в зацеплении с отключающим рычагом 3. Подвиж
ный 8 и неподвижный 9 контакты замкнуты, и через них и токовую катушку 6 протекает
ток.
При коротком замыкании ток в катушке увеличивается и якорь 7, преодолевая противодействие регулировочной пружины 4, перемещается вниз. Якорь воздействует на
отключающий рычаг 3 и выводит его из зацепления с удерживающим рычагом 2.
Подвижный контакт 8 под действием отключающей пружины 5 поворачивается в
направлении против часовой стрелки и размыкается с неподвижным 9.
Рукоятка включения выключателя 1 устанавливается в промежуточное положение, по которому легко определить, что выключатель отключился автоматически.
135
Рис. 4.15. Кинематическая схема максимального расцепителя:
1 – шина, 2 – сердечник; 3 – якорь, 4 – отключающий валик; 5 – отключающая пружина; 6 – отключающий рычаг; 7 – плечо отключающего валика; 8 – регулировочная гайка
На рис. 4.12 изображена показана одна из конструкций максимального расцепителя.
В ней в качестве катушки реле максимального тока используется токоведущая шина 1, на которую надет сердечник 2. На якоре 3 реле укреплен отключающий рычаг 6, находящийся в зацеплении с отключающим валиком 4. Отключающая пружина 5 отттягивает отключающий рычаг 6 вниз.
При коротком замыкании якорь 3 притягивается к сердечнику 2. Отключающий ры
чаг 6, преодолевая противодействие регулировочной пружины 5, поворачивается по часовой стрелке вокруг оси О 1 и ударяет по выступающему плечу 7 отключающего валика 4.
Валик поворачивается в направлении против часовой стрілки вокруг оси О 2 , что приводит к размыканию контактов выключателя.
Значение тока срабатывания ( тока уставки ) регулируют при помощи гайки 8. Чем
сильней при помощи этой гайки растянута пружина 5, тем ток уставки больше, и наоборот. С пружиной связана стрелка-указатель, скользящая вдоль шкалы , проградуированной в долях номинального тока, например, 0,7; 1,0; 1,5; 1,7; 2,0.
4.3. Комбинированный расцепитель АВ
Комбинированный расцепитель предназначен для отключения выключателя как
токами короткого замыкания, так и токами перегрузки и поэтому содержит электромагнит
ное и электротепловое реле.
136
Рис. 4.16. Кинематическая схема комбинированного расцепителя:
1 – шунт; 2 – биметаллическая пластина; 3 – регулировочный винт электротеплово
го реле; 4 – отключающий валик; 5 – якорь; 6 – токопровод; 7 – сердечник; 8 – регу
лировочные гайки электромагнитного реле
Электротепловое реле включает в себя нагревательный элемент – шунт 1, биметаллическую пластину 3 и регулировочный винт 3.
При перегрузке количество тепла, выделяемое в шунте, увеличивается. Биметаллическая пластина изгибается и винтом 3 поворачивает отключающий валик 4 по часовой
стрелке вокруг оси О 1 . Выключатель отключается.
Электромагнитное реле включает в себя сердечник 7, якорь 5, а в роли катушки вы
ступает токопровод ( участок шины ) 6.
При коротком замыкании якорь 5 притягивается к сердечнику 7 и поворачивает
отключающий валик 4 по часовой стрелке вокруг оси О 1 . Выключатель отключается.
Ток уставки электротеплового реле регулируют винтом 3, при помощи которого
изменяют начальное расстояние между головкой винта и отключающим валиком: чем это
расстояние больше, тем ток уставки больше, и на оборот.
Ток уставки электромагнитного реле регулируют перемещением гаек 8 вверх или
вниз по резьбе. Тем самым изменяют начальное расстояние между якорем 5 и сердечником 7. Чем это расстояние больше, тем ток уставки больше, и на оборот.
4.4. Минимальный расцепитель АВ ( по напряжению )
В соответствии с Правилами Регистра, минимальный расцепитель АВ предназначен:
1. для отключения АВ генератора при снижении напряжения ниже напряжения
уставки ( обычно от 70 до 10% номинального напряжения ). При этом расцепитель должен
отключить АВ с выдержкой времени ( чтобы исключить ложные отключения АВ при крат
ковременных провалах напряжения, например, вследствие пуска мощных приемников
электроэнергии – пожарного насоса, главного компрессора, брашпиля и др. );
2. для исключения включения АВ, если напряжение подготовленного к включению
генератора менее 85% номинального. При этом расцепитель должен сработать мгновенно.
137
Рис. 4.17. Принципиальная схема минимального расцепителя:
1 – рукоятка включения; 2 – удерживающий рычаг; 3 – отключающий рычаг; 4 –
регулировочная пружина; 5 – отключающая пружина; 6 – катушка; 7 – якорь; 8 –
подвижный контакт; 9 – неподвижный контакт
Принципиальная схема минимального расцепителя устроена так же, как максималь
ного ( рис. 4.15 ), за единственным исключением – вместо токовой катушки в данной схе
ме используется катушка напряжения. В цепь последней включена кнопка SB «Отключе
ние».
При нормальном напряжении отключающий рычаг 3 находится в зацеплении с
удерживающим рычагом 2.
При снижении напряжения якорь 7 под действием пружины 4 перемещается вверх,
при этом отключающий рычаг 3 выходит из зацепления с удерживающим рычагом 2.
Контакты размыкаются, выключатель отключается.
Схема работает аналогично при нажатии кнопки SB «Отключение».
Рис. 4.18. Кинематическая схема минимального расцепителя:
1, 8, 9 – рычаги; 2- сердечник; 3 – катушка; 4 – якорь; 5 – регулировочная пружина;
6 – защелка; 7 – отключающий валик; 10 – промежуточный валик механизма сво
бодного расцепления; 11- регулировочная гайка
Минимальный расцепитель представляет собой реле минимального напряжения.
Реле состоит из сердечника 2, катушка 3 и якоря 4. Якорь через рычаги 8 и 1 механически
связан с отключающим валиком 7. Регулировочная ( она же – отключающая ) пружина 5
растянута и стремится оторвать якорь от сердечника. Защелка 6 находится в механиче-
138
ском зацеплении с промежуточным валиком 10 механизма свободного расцепления.
При снижении напряжения ( или отключении катушки ) якорь реле под действием
пружины 5 отрывается от сердечника. Рычаг 1 перемещается вниз и поворачивает отключающий валик 7 вокруг оси О 2 по часовой стрелке. При этом контакты выключателя размыкаются.
Одновременно рычаг 9 нажимает на нижний край защелки 6, которая повернется во
круг оси О 3 в направлении против часовой стрелки и освободит промежуточный валик
10 механизма свободного расцепления. В результате рукоятка выключателя повернется и
установится в среднее положение “Автоматическое отключение”.
Напряжение отключения расцепителя регулируют гайкой 11. Чем сильней зажата
эта гайка, тем при большем напряжении якорь оторвется от сердечника ( уставка увеличи
вается ), и наоборот.
4.5. Независимый расцепитель
Предназначен для дистанционного отключения выключателя оператором.
Иначе говоря, отключение выключателя с таким расцепителем не зависит от элект
рических параметров, например, тока или напряжения цепи, отсюда название – «независимый» ( от электрических параметров цепи ) расцепитель.
Рис. 4.19. Принципиальная схема независимого расцепителя:
1 – рукоятка включения; 2 – удерживающий рычаг; 3 – отключающий рычаг; 4 –
регулировочная пружина; 5 – отключающая пружина; 6 – катушка; 7 – якорь; 8 –
подвижный контакт; 9 – неподвижный контакт
Принципиальная схема независимого расцепителя устроена так же, как минимального ( рис. 4.18 ), за единственным исключением – в цепи катушки напряжения кнопка SB
«Отключение» имеет замыкающий контакт ( на рис. 4.18 – размыкающий ).
В исходном состоянии ток через катушку напряжения 6 не протекает, отключающий рычаг 3 находится в зацеплении с удерживающим рычагом 2. Контакты замкнуты,
выключатель включен.
При необходимости отключить выключатель нажимают кнопку SB, через катушку
6 протекает ток, якорь реле 7, преодолевая противодействие пружины 4, перемещается
вниз и разобщает рычаги 3 и 2. Контакты размыкаются, выключатель отключается.
139
Рис. 4.20. Кинематическая схема независимого расцепителя:
1 – сердечник; 2 – катушка; 3 – якорь; 4 – защелка; 5 – промежуточный валик
механизма свободного расцепления
Кинематическая схема независимого расцепителя устроена так же, как минимально
го, за исключением: в исходном состоянии якорь реле 3 не притянут к сердечнику 1.
При подаче питания на катушку реле якорь 3 притягивается к сердечнику 1 и ударя
ет по нижней части защелки 4. Защелка поворачивается вокруг оси О 1 в направлении про
тив часовой стрелки и освободит промежуточный валик 10 механизма свободного расцепления В результате рукоятка выключателя повернется и установится в среднее положение
“Автоматическое отключение”.
В отличие от минимального расцепителя, в независимом расцепителе напряжение
срабатывания не регулируется.
5. Характеристики автоматических выключателей
Основной характеристикой автоматических выключателей является защитная или
время-токовая ( рис. 4.21 ).
Защитной называется зависимость времени отключения выключателя от тока, т.е.
t ( I ).
Защитные характеристики выключателей зависят от типа расцепителя или, если их
несколько, расцепителей выключателя.
Рассмотрим 3 вида характеристик выключателя:
1. с электромагнитным ( максимальным ) расцепителем ( рис. 4.21, а );
2. с тепловым расцепителем ( рис. 4.21, б );
3. с комбинированным расцепителем ( рис. 4.21, в ).
Рис. 4.21. Защитная характеристика автоматического выключателя с разными
видами расцепителей: а – электромагнитным; б – тепловым; в - комбинированным
140
Если автомат снабжен только максимальным расцепителем, то он не отключается
до тех пор, пока ток контролируемой цепи не возрастет до значения I ≥ 1,5 I
( рис. 4.21,
ном
а ). Например, если кратность тока I / I
ном
= 1, т.е. ток цепи – номинальный, время
срабатывания выключателя t = ∞ ( т.е выключатель не сработает ).
При токе I ≥ 1,5 I
ном
выключатель отключается, причем время срабатывания t
= 0,03 с. Это время в зоне токов короткого замыкания ( т.е. при I > 1,5 I
величины тока к.з., т.е. оно одинаково при I = 2, 3, 4 I
ном
ном
=
ср
) не зависит от
, и т.д.
Малое время срабатывания является весьма ценным свойством автоматических
выключателей, т.к. сводит к минимуму последствия протекания тока к.з. , например, нагрев обмотки статора асинхронного двигателя при межвитковом замыкании в ней и т.п.
Это время определяется механической инерционностью всех движущихся частей выключа
теля.
Если автомат снабжен только тепловым расцепителем, то он не отключается при
токах, меньших или равных номинальному ( рис. 4.21, б ), но в зоне перегрузок, т.е. при
токе I > I
, отключается с выдержкой времени, обратно пропорциональной квадрату
ном
тока. Например, при кратности тока I / I
200 с, а при кратности I / I
ном
ном
= 2, время срабатывания выключателя t
= 4 это время составляет t
ср
ср
==
= 50 с. Иначе говоря, ток
увеличился в 2 раза, а время срабатывания уменьшилось в 4 раза.
Примечание: промышленность не выпускает автоматические выключатели с одним
только тепловым расцепителем, поэтому предыдущий абзац имеет условный характер
Если автомат снабжен комбинированным расцепителем, то его защитная характери
стика ( рис. 4.21, в ) представляет собой сочетание рассмотренных выше двух характеристик на рис. 4.21, а и 4.21, б.
Работе теплового расцепителя соответствует кривая abc, электромагнитного – a'b'c',
комбинированного – abb'c'.
При токах нагрузки, меньших 1,5 I
, работает только тепловой расцепитель, т.к.
ном
уставка электромагнитного расцепителя больше уставки теплового расцепителя. При токах нагрузки, превышающих уставку электромагшнитного расцепителя, работает только
электромагнитный расцепитель, т.к. тепловой расцепитель имеет при этих токах большее
время срабатывания.номинальный.
6. Промышленные типы автоматических выключателей
6.1. Основные сведения
Промышленные автоматические выключатели предназначены:
1. для автоматического отключения электрических цепей в аварийных случаях;
2. для нечастых включений и отключений электрических цепей при нормальних
условиях работы.
К аварийным случаям относят:
1.короткое замыкание в электрической цепи;
2. перегрузку ( по току ) электрической цепи.
Автоматические выключатели могут иметь два вида токовых расцепителей:
141
1. электромагнитные, срабатывающие мгновенно при токах короткого замыкания в
2...20 раз больше номинального;
2. комбинированные, имеющие в одном корпусе электромагнитный и тепловой
расцепители. Тепловой расцепитель отключает автоматический выключатель при
токах перегрузки, превышающих номинальный в 1,25...1,8 раза.
Автоматические выключатели только с тепловым расцепителем не выпускаются.
Для защиты электрических цепей только от токов перегрузки служат тепловые
реле ( см. ниже ).
Короме токовых расцепителей, автоматические выключатели могут иметь минимальный расцепитель ( по напряжению ), отключающий выключатель при снижении
напряжения до определенного значения.
В соответствии с требованиями Регистра, наличие этого расцепителя обязательно
в генераторных автоматических выключателях.
В большинстве типов автоматических выключателях для приемников электроэнергии этот расцепитель отсутствует, кроме выключателей типа АКЗ.
В зависимости от времени срабатывания при коротком замыкании, автоматические
выключатели делят на два вида:
1. неселективные, срабатывающие без выдержки времени;
2. селективные, срабатывающие с выдержкой времени.
Неселективные автоматические выключатели применяют для защиты приёмников
электроэнергии – электродвигателей, нагревательных и осветительных приборов.
Неселективные автоматические выключатели в пластмассовом защитном корпусе
называют установочными.
Селективные автоматические выключатели применяют для защиты генераторов
постоянного и переменного тока. Задержка отключения выключателя ( не более 1 с ) необ
ходима для того, чтобы генератор не отключался пусковыми токами мощных электродви
гателей.
Для получения такой задержки используют т.н. селективную приставку – электромеханическое или электронное реле максимального тока, срабатывающее с выдержкой
времени.
На судах применяются генераторные выключатели серий АМ, АМ-М, В, В-М и
выключатели для приемников электроэнергии серий А3100, А3500, А3700, АК50, АК63,
АКЗ и др.
Буква „М” в обозначении серии генераторных выключателей означает, что данные
выключатели, кроме ручного, имеют электродвигательный ( моторный ) привод для дистанционного включения и отключения выключателя.
В совокупности эти серии охватывают отрезок шкалы с токами от 0,6 до 5500 А и
напряжеиями до 500 В переменного тока и 440 В постоянного тока.
Специально изготовленные АВ могут работать в условиях тропического климата,
При этом в обозначение типа АВ добавляется буква «Т». Используются также АВ различных зарубежных фирм.
6.2. Автоматические выключатели генераторов
Автоматические выключатели этой группы предназначены для коммутации и защи
ты генераторов СЭС.
Рассмотрим устройство и принцип действия генераторного автоматического выклю
чателя серии АМ.
Автоматические выключатели серии АМ ( рис. 4.22 ) выпускают 2- и 3-полюсными
на токи 800…5500 А.
Номинальные токи максимальных расцепителей могут отличаться от номинальных
токов АВ. Так, в АВ типа АМ8 с I ном = 800 А могут устанавливаться максимальные расце
пители на номинальные токи 130, 190, 260, ..., 800 А.
142
Автоматический выключатель состоит из отдельных устройств:
1. контактной системы;
2. привода;
3. механизма свободного расцепления;
4. расцепителей;
5. коммутатора.
Рис. 4.22. Автоматический выключатель серии АМ
Контактная система АВ каждого полюса состоит из комплекта главных и дугога
сительных контактов.
Главные неподвижные контакты 5 и 20 в местах касания с подвижными имеют
вставки из серебряных пластин. Подвижный контакт-ролик 6, окантованный серебром,
при повороте вала 19 с помощью выдвижного рычага вкатывается между неподвижными
контактами, образуя надежный контакт. Несколько раньше кулачок, насаженный на вал
19, через ролик поворачивает дугогасительный контакт 17, который замыкается со вторым
контактом 12.
При включении АВ первыми замыкаются дугогасительные контакты 17, 12, а затем - главные. При отключении АВ размыкание контактов происходит в обратной последо
вательности: роликом 18 последними размыкаются дугогасительные контакты. Этим исключается появление электрической дуги на главных контактах.
При замыкании контактов 17, 12 возникает дуга, создающая силы электродинамиче
ского отталкивания. Для гашения этих сил дугогасительные контакты снабжены компенса
ционным устройством.
Контакт 12 сможет поворачиваться относительно оси 13 на небольшой угол, и его
положение в разомкнутом состоянии фиксируется пружиной 11. Стойка 9 имеет прорезь
10, заполненную изоляционной прокладкой, и ток дугогасительных контактов направля-
143
ется по наружной кромке стойки 9 через ось 13, контакт 12 и далее через контакты 17 и 20
(путь тока на рис. 5.4 показан стрелками).
Между стойкой 9 и контактом 12 возникают силы электродинамического отталкива
ния.
Сила давления тем больше, чем больше протекающий ток через контакты. Так обеспечивается надежное соприкосновение дугогасительных контактов даже во время появле
ния дуги.
Возникающая дуга удлиняется, движется по дугогасительным рогам 14, 16 и попа
дает в асбоцементную дугогаси-тельную камеру 15 с прорезями. Здесь дуга охлаждается и
гаснет.
Должны выдерживаться указанные на чертеже зазоры между рогом 14, контактом
12 и укрепленной на нем контактной медно-графитовой пластиной. При отсутствии этих
зазоров ухудшаются условия гашения дуги.
Привод АВ может быть ручным (выполнен с помощью рукоятки) или электромеха
ническим (с помощью электродвигателя, работающего через редуктор).
В первом случае для включения АВ рукоятку опускают вниз (до отказа), затем быстрым движением переводят ее вверх (до отказа). При выключении рукоятку резко перево
дят в нижнее положение.
Электродвигательным приводом управляют с помощью выносных кнопок.
Механизм свободного расцепления - это система рычагов, валиков и пружин, через
которые момент, приложенный к рукоятке, или момент ЭД передается на вал 19.
При включении АВ взводятся пружины механизма свободного расцепления. Если
какие-либо из защит будут в это время воздействовать на отключающий валик 21, то меха
низм свободного расцепления не даст возможности АВ включиться.
Отключение АВ происходит под действием отпущенных пружин.
Остальные устройства АВ называются пристройками. Их число и виды определяют
ся вариантом исполнения АВ. К пристройкам относятся максимальные расцепители ( защита от токов КЗ или перегрузок), замедлители (реле времени), независимый и мини
мальный расцепители, коммутатор.
Автоматические выключатели серии АМ имеют максимальный расцепитель для от
ключения токов КЗ. Магнитопровод 8 расцепителя находится на токоведущей части кон
такта 5 и изолирован от него изоляционной втулкой 7.
У АВ типа АМ8 магнитопровод заменен токовой катушкой. При возникновении то
ка КЗ магнитный поток в магнитопроводе становится достаточным для преодоления усилий противодействующих пружин и притяжения подвижного якоря 4 магнитопровода.
Якорь 4 через кронштейн и ролик воздействует на рычаг. Возникает момент вращения селективного вала 21. Начинает действовать замедлитель (расположен с другой стороны АВ и на рис. 5.4 не показан).
Замедлитель бывает часовым или анкерным. Только после истечения его выдержки
времени валик 21 повернется так, что его кронштейн с роликом нажмет на пластину 3.
При этом поворачивается отключающий валик 2, который через механизм свободного расцепления отключит АВ.
В схемах судовых генераторов обычно устанавливают 2 токовые защиты:
1. от токов КЗ;
2. от токов перегрузки.
АВ всегда имеют защиту от токов КЗ, а защита от перегрузок может выполняться
другими устройствами, работающими не на отключение генератора, а на отключение малоответственных потребителей ( камбуз, бытовая вентиляция и пр. ).
Только по специальному заказу могут изготовляться АВ с дополнительными макси
мальными расцепителями, работающими в зоне перегрузок (на рис. 4.23 : I - зона перегру-
144
зок; II - зона КЗ, начинается при I = 2 I
ном
).
Рис. 4.23. Время-токовая ( ампер-секундная ) характеристика защит АВ серии АМ:
I – зона перегрузок; II – зона коротких замыканий
Винтом I (см. рис. 4.22 ), изменяя натяжение противодействующей пружины, мож
но изменять границу зоны КЗ.
Замедлитель АВ может быть настроен на различные уставки срабатывания: 0,18,
0,38, 0,63 с (см. рис. 4.23). При возникновении любого тока больше 2I ном валик 21 через валик 2 отключит АВ с выдержкой времени, на которую настроен замедлитель.
Время срабатывания не зависит от значения тока: достаточно, чтобы он был более
2I ном .
Наличие трех уставок по времени позволяет называть АВ селективным (избиратель
ным). Уставка по времени данного АВ согласуется с уставками других АВ электроэнерге
тической системы с таким расчетом, чтобы при возникновении КЗ в определенной точке
первым отключился ближайший АВ, сохраняя работоспособность остальной части систе
мы.
При изготовлении АВ с защитой в зоне перегрузок применяют термобиметаллические расцепители. Они позволяют получить характеристику СD (см. рис.4.23). Время изги
бания биметаллического элемента и отключения АВ зависит от тока перегрузки.
Независимый расцепитель АВ служит для мгновенного отключения генератора.
При нажатии на кнопку отключения подается питание на катушку 23 расцепителя (см.
рис. 4.22 ). Подвижный якорь расцепителя преодолевает усилие пружины 22 и освобожда
ет рычаг 24, который под действием пружины 25 ударяет по рычагу с роликом отключаю
щего вала 2, в результате АВ отключается.
При включении АВ вместе с валом поворачивается включающий вал 26 и насажен
ный на него кулачок через отводку с роликом возвращает рычаг 24 в исходное состояние.
Собачка якоря расцепителя вновь удерживает рычаг 24.
Минимальный расцепитель (на рис. 4.22 не показан) служит для отключения АВ
при снижении напряжения ниже допустимого. Кроме того, если генератор возбудился до
напряжения ниже 0,8 U ном , то минимальный расцепитель при попытке включить АВ
вновь его отключит. Катушка 23 минимального расцепителя находится под напряжением
генератора и якорь расцепителя притянут. При U < U ном расцепитель отпускает якорь,
освобождается рычаг, воздействующий на отключающий валик 2, и АВ отключается.
Коммутатор представляет собой набор вспомогательных контактов, переключае
мых рычагами вместе с валами 19 и 26. Контакты коммутатора переключают цепи
сигнализации и управления СЭС (например, лампы "Г1 включен", "Г2 выключен").
145
6.3. Электродвигательный привод автоматического выключателя серии АМ
Этот привод изображен на рис. 4.24.
Рис. 4.24. Схема управления автоматическим выключателем серии АМ
В состав привода входят:
1. коллекторный электродвигатель М переменного тока;
2. электромагнитная муфта УС, соединяющая двигатель с редуктором, через который взводятся пружины механизма свободного расцепления;
1. электромагнита YА включения;
2. независимого (минимального) расцепителя КV1;
3. путевых (конечных) выключателей SQ1 и SQ2, работающих одновременно с
главными контактами АВ;
6. контактов SF1-SF4, управляемых механизмом взвода пружин.
На cхеме также изображены:
1. QF - - контактная система АВ;
2. FА – максимальные расцепители;
3. КV2- минимальный расцепитель.
Каждое включение или отключение АВ происходит за счет энергии взведенных
пружин. После срабатывания АВ собирается цепь пуска двигателя М, взводятся пружины
для следующего включения (отключения) АВ и двигатель отключается.
На рис. 4.24 состояние схемы соответствует положению АВ со взведенными пру
жинами. При нажатии на кнопку "Пуск" электромагнит YА освобождает взведенные пру
жины, АВ включается и контакт SQ1 размыкается, а контакт SQ2 переключается в поло
жение 1, обеспечивая пуск двигателя М.
В конце взвода пружин контакты SF1, SF2 размыкаются, а SF3, SF4 замыкаются:
- электродвигатель М отключается.
При нажатии на кнопку "Стоп" поступает питание на минимальный расцепитель
КV1, АВ выключается: контакт SQ1 замыкается, а SQ2 переключается в положение 2 и
через замкнутый контакт SF3 включается двигатель М взвода пружины.
В конце взвода контакты SF1-SF4 возвращаются в состояние, показанyое на схеме,
и двигатель отключается.
Собственное время отключения АВ не превышает 0,08 с, взвод цружин - примерно
10 с. При снижении напряжения на 20-30 % номинального с выдержкой времени 2 с (соз
дается цепью С-R2-RЗ) расцепитель КV2 прямым воздействием на отключающий вал 19
(см. рис. 4.24 ) отключит АВ.
Допускается 10 включений АВ подряд, затем требуется 30-минутный перерыв.
Ручной резервный взвод механизма АВ осуществляется вращением съемной рукоят
146
ки. После взвода поворотом рукоятки включения АВ можно включить (выключить).
При техническом обслуживании АВ следует обращать внимание на состояние контактных поверхностей. Наплавления металла на контактах удаляют бархатным напильником. Со всех деталей удаляют пыль и нагар. Проверяют чистоту дугогасительных камер,
правильность их установки, плавность работы механизма свободного расцепления. При
обслуживании АВ с частичной разборкой проверяют усилия нажатия контактов, их провалы, испытывают в работе все защиты.
Автоматические выключатели приемников электроэнергии
Основные сведения
АВ приемников электроэнергии устроены проще по сравнению с АВ генераторов,
что объясняется более простыми условиями их работы.
Большая часть серий АВ приемников имеет максимальные ( от токов к.з. ) либо ком
бинированные ( от токов к.з. и токов перегрузки ) расцепители.
Все без исключения типы АВ приемников не имеют замедлителей, т.е. при коротком замыкании отключаются мгновенно. Напомним, что генераторные АВ имеют замедлитель, который называют селективной приставкой. Иначе говоря, селективная приставка
– это реле времени ( электромеханическое, электронное и др. ). Задержка отключения АВ
генераторов ( не более 1 с ) необходима для того, чтобы генераторы не отключались
пусковыми токами мощных электродвигателей.
Стремление соединить в одном АВ все три вида защит, необходимые приемникам
электроэнергии – максимальную ( от токов к.з. ), тепловую ( от токов перегрузки ) и по
снижению напряжения ( нулевую ) привело к созданию автоматических выключателей
серии АКЗ290М4. В этих АВ встроены: 3 максимальных электромагнитных расцепителя
к.з. ), тепловой расцепитель с тремя тепловыми элементами ( от токов перегрузки ) и мини
мальный расцепитель ( отключает АВ при снижении напряжения питающей сети до 25%
номинального ).
В качестве примера рассмотрим устройство автоматических выключателей серий
А3300 ( рис. 4.25 ) и АК50 ( рис. 4.26 ).
6.5. Выключатели приемников электроэнергии серии А3300
Выключатели серии А3300 применяются в сетях постоянного и переменного тока.
Они предназначены для автоматического отключения контролируемых ими цепей при токах короткого замыкания и токах перегрузки, в также для нечастых коммутаций этих цепей.
Автоматы выпускаются двух- и трехполюсные на номинальные токи до 600 А.
Основными узлами автоматов являються - контактная система, дугогасительное устройст
во, механизм свободного расцепления, максимальный и тепловой расцепители, корпус.
Контактная система каждого полюса автомата на токи до 200 А состоит из одной
пары контактов 6, 7. Автоматы на большие токи имеют отдельно главные и дугогасительные контакты. Контакты автоматов выполняются из металлокерамики, нажатие их обеспе
чивается пружинами.
Дугогасительное устройство представляет собой съемную камеру 11 со стальной
деионной решеткой 12.
Механизм свободного расцепления 16 выполнен в виде системы рычагов с пружиной. Он обеспечивает мгновенное замыкание и размыкание контактов, не зависящее от
скорости движения рукоятки 15, а также мгновенное размыкание контактов при срабатыва
нии расцепителя.
О коммутационном положении автомата можно судить по положению рукоятки 15:
после включения и отключения автомата воздействием на рукоятку последняя занимает
соответственно верхнее и нижнее положение, а после отключения расцепителем – промежуточное.
147
Рис. 4.25. Автоматический выключатель серии А3300:
1, 4 – шины теплових элементов; 2 – биметаллические пластины; 3 – гибкий провод
ник; 5 – контактодержатель; 6, 7 – подвижный контакт; 7 – неподвижный контакт; 8 – медные шины; 9 – пластмассовое основание; 10, 26 – выводы; 11 – дугогасительная камера;
12 - стальне пластины; 13 – медное основание главных подвижных контактов; 14 – крыш
ка; 15 – рукоятка включения; 16 – механизм свободного расцепления; 17 – рычаг; 18 – мак
симальный расцепитель; 19 – собачка; 20 – удерживающая рейка; 21 – регулировочные
винты; 22 – якорь расцепителя; 23 – возвратная пружина; 24 – токовая катушка; 25 – сердечник расцепителя
Комбинированный расцепитель состоит из двух элементов: электромагнитного 18 и
теплового 2. Первый представляет собой электромагнитное реле и служит для отключения
токов короткого замыкания с временем срабатывания выключателя t ср = 0,012…0,05 сек,
а второй – тепловое реле и служит для отключения токов перегрузки с обратно зависимой от токов выдержкой времени. Максимальные расцепители являются сменными и
устанавливаются в каждый полюс выключателя.
При срабатывании электромагнитный и тепловой расцепитель поворачивает удерживающую рейку 20, которая освобождает рычаг 17 механизма свободного расцепления,
что приводит к отключению выключателя.
Токи уставки элементов расцепителя устанавливаются заводом и в процессе эксплу
атации не регулируются.
148
Электромагнитный элемент имеет уставку I ср = 5 I н на постоянном токе и I ср =
= ( 7…14 ) I н на переменном, а тепловой I ср = ( 1,3…1,4 ) I н , где I н - номинальный ток
расцепителя.
Корпус выключателя выполняется из пластмассы.
6.6. Выключатели приемников электроэнергии серии АК50
Выключателисерии АК50 рассчитаны на переменный ток частотой 50 Гц, напряжением 400 В и постоянный ток напряженим до 320 В.
Выключатели серии АК50-400 рассчитаны на переменный ток частотой 400 Гц и на
пряжением 400 В.Эти выключатели можно применять в цепах переменного тока частотой
50 Гц.
Выключатели выпускаются двух- и трехполюсные на номинальные токи от 0,6 до
50 А с с такими максимальними расцепителями:
1. электромагнитными, обеспечивающими защиту от токов к.з.;
2. электромагнитными с гидравлическим замедлителем, обеспечивающими защи
ту от токов к.з. и перегрузки ( т.е. с комбинированной защитой )
Кроме того, АВ типа АК50 могут выпускаться без расцепителей, в качестве неавто
матических выключателей.
Рассмотрим устройство комбинированного расцепителя ( рис. 4.26 ).
Рис. 4.26. Контактное устройство (а) и максимальный разделитель (б) автоматического выключателя серии АК50
Максимальный расцепитель с гидрозамедлителем ( рис. 4.26, б ) состоит из немаг
нитной трубки 1, на которой находится катушка 5.
Катушка включена последовательно с контактами АВ, и через нее протекает комму
тируемый ток.
Трубка заполнена кремнийорганической жидкостью (масло с добавкой кремния).
В неподвижной втулке 2 закреплена пружина 8, соединенная с плунжером 3. Сердечник 4 расцепителя закреплен в трубке неподвижно, а якорь 6 при достаточном усилии
может быть притянутым к сердечнику 4, и тогда коромысло 7 будет воздействовать на механизм отключения АВ.
При небольших токах перегрузки якорь 6 может притянуться к сердечнику 4 только после того, как плунжер, растягивая пружину, подойдет к сердечнику и обеспечит необ
ходимую индукцию.
При больших токах перегрузки якорь 6 притягивается к сердечнику 4 еще до полно
149
го приближения плунжера 3, а при КЗ якорь притягивается к сердечнику без участия плун
жера 3.
При токе 1,35 I н расцепитель срабатывает в течение 30 мин, при токе 6I н - за
3…20 с, а при токе отсечки 10I н - за 0,04с.
Расцепители без замедлителя, обычно настраиваемые на токи (5…10) I н , срабаты
вают мгновенно.
Контактное устройство всех АВ типа АК50 рассчитано на токи 50 А, но в АВ могут
устанавливаться расцепители на разные токи (от 0,6 до 50 А).
Автоматические выключатели типов АЗЗ0 и АК50 удобны в эксплуатации, их кон
такты не требуют зачистки.
После отключения АВ максимальным расцепителем рукоятку нужно перевести в
крайнее нижнее положение (происходит зацепление механизма АВ) и затем переводом
рукоятки вверх включить АВ.
Если АВ отключит работающий приемник, то разрешается его включить повторно.
После второго отключения следует выяснить причину срабатывания защиты.
7. Предохранители
Основные сведения
Плавкие предохранители применяют для защиты электрических цепей и элементов
электроустановок от токов короткого замыкания или токов перегрузок.
Плавким предохранителем называют электрический апарат, предназначенный для
размыкания электрической цепи путем расплавления металлической вставки.
Плавкая вставка включается последовательно в контролируемую цепь и при достижении током определенного значения плавкая вставка плавится и разрывает цепь.
Наиболее распостраненные материалы для плавких вставок - цинка и ( реже ) сереб
ро.
В большинстве случаев предохранители применяют для защиты от токов короткого
замыкания неответственных цепей. К таким цепям относятся сети освещения, нагреватель
ные и осветительные приборы, а также, в соответствии с Правилами Регистра, электродви
гатели мощностью менее 0,5 кВт.
Предохранители крайне нежелательно применять для защиты от токов короткого
замыкания 3-фазных асинхронных двигателей. Это объясняется тем, что при коротком
замыкании в обмотке статора может сгореть только один предохранитель, а двигатель
продолжит работу на двух фазах.
При этом скорость двигателя уменьшится, а ток обмотки статора увеличится, двига
тель может сгореть.
Любой предохранитель состоит из корпуса и патрона. Внутри патрона находится
плавкая вставка.
При этом в один и тот же корпус можно поместить от 3 до 6 патронов на разные токи.
На судах применяются предохранители типов ПР, ПДС ( ПД ), ПН и ПК.
Устройство и принцип действия предохранителей
Трубчатые предохранители типа ПР-2 ( рис. 4.27 ) выпускаются на номинальные
токи от 15 до 1000 А двух габаритов: с коротким патроном для напряжений до 220 В по
стоянного тока и с длинным патроном для напряжений до 500 В. При переменном токе
380 В могут применяться предохранители обоих габаритов.
150
В этом случае первые будут обеспечивать пониженню, а вторые – повышенную раз
рывную способность.
Рис. 4.27. Трубчатые предохранители типа ПР-2:
а – патрон на номинальные токи 15...60 А: 1 – фибровая трубка; 2 – плавкая
вставка; 3 – латунная втулка; 4 – латунный колпачок
б – патрон на номинальные токи 100...160 А: 1 – фибровая трубка; 2 – плавкая
вставка; 3 – латунная втулка; 4 – латунный колпачок; 5 – подкладная шайба; 6 – медные
ножи
в – формы плавких вставок
Патроны предохранителей изготовляются из фибровой трубки 1, к концам которой
крепятся латунные втулки – наконечники 3. На наконечники на резьбе навинчиваются
латунные колпачки 4.
В предохранителях до 60 А ( рис. 4.27, а ) колпачки служат цилиндрическими контактами и одновременно обеспечивают зажатие отогнутых концов плавкой вставки 2.
Предохранители на токи более 60 А ( рис. 4.27, б ) имеют медные контактные ножи
6. К ним с помощью болта и гайки крепятся концы плавкой вставки. Чтобы исключить
проворачивание ножей, предусмотрена подкладная шайба 5 с пазами.
Плавкая вставка вставка представляет собой цинковую пластинку, суженную в одном или нескольких местах ( рис. 4.27, в ). Такая конструкція обеспечивает перегорание
вставки при коротких замыканиях в суженных местах, т.е. деление дуги на части, что способствует гашению дуги. Кроме того, электрическая дуга нагревает фибру, вызывая интенсивное выделение газов из ее поверхности. Давление внутри патрона повышается, и
дуга быстро гаснет.
Пробочные предохранители типа ПДС на токи от 6 до 350 А и ПД на ток 600 А при
меняют в цепах постоянного тока напряженим до 350 В и переменного тока частотой 50
Гц до 380 В.
Предохранители типа ПДС имеют корпуса из стеатита ( стеатит – спрессованный
тальк ), типа ПД – из фарфора.
151
Рис. 4.28. Предохранители типа ПД и ПДС:
1- застекленное отверстие ; 2 – головка; 3 – контрольный глазок; 4, 10 – контактные колпачки; 5 – патрон; 6 – пружинное кольцо; 7 – плавкая вставка; 8 – засыпка;
9 – контактная гильза, 11 – контактная шайба; 12 – гетинаксовая шайба; 13 – основание;
14 – внешний контакт
Предохранитель состоит из контактной гильзы 9 с фарфоровым или стеатитовым
основаним 13 и патрона 5 с плавкой вставкой. Патрон закрепляется головкой 2, навиниваемой на контактную гильзу 9. Контактная гильза изолируется от токоведущей шины
гетинаксовой шайбой 12. Наружное кольцо 6 предотвращает самоотвинчивание головки.
Патрон с плавкой вставкой представляет собой полый фарфоровый цилиндр, на
торцах котрого укреплены контактные колпачки 4, 10. Между колпачками расположена
плавкая вставка из одной или нескольких проволочек и контрольная константановая
проволочка, связанная с контрольным алюминиевым глазком 3.
Полость цилиндра заполнена кварцевым песком с добавленим мраморной крошки,
мела и талька. При коротких замыканиях в цепи контрольная проволочка перегорает с
плавкой встакой и контрлльный глазок выбрасывается расположенной под ним пружиной.
Исправность плавкой встаки контролируется по положению глазка через застекленное отверстие 1.
Электрическая дуга, содержащая пары метала, под действием повышенного давления перемещается в засыпку 8, дробится, охлаждается и гаснет. Давление повышается за
сет выделения из засыпки при высокой температуре водяных паров и углекислого газа.
Рис. 4.29. Предохранитель типа ПК
Трубчатые предохранители типа ПК рассчитаны на переменный и постоянный ток
напряженим до 250 В ( длина предохранителей = 30 мм ) и до 600 В ( = 45 мм ).
Устройство предохранителя приведено на рис. 3.
8. Реле защиты
8.1. Основные сведения
Автоматические выключатели генераторов и приемников электроэнергии обеспечи
вают максимальную ( от токов к.з. ), тепловую ( от токов перегрузки ) и минимальную ( по
снижению напряжения ) защиты при помощи отдельных узлов, являющихся частью АВ.
152
На долю отдельно устанавливаемых в ГРЩ или ПУ реле остаются функции защиты
генераторов от перехода в двигательный режим, что возможно при параллельной работе, а
также функции ступенчатой защиты от перегрузок способом отключения менее ответст
венных приемников ( защита Мейера ). Иногда устанавливают дополнительные защиты,
например, отключающие защиты при понижении напряжения или обрыве одной фазы при
питании судна с берега.
Реле защиты могут быть электромагнитной, индукционной и других систем, а так
же электронными.
В последнем случае реле защиты часто изготовляют в виде отдельных защитных
блоков, выполняющих несколько защитных функций, или защитные электронные устройства входят в общий комплекс автоматизации СЭС, например устройство токовой защиты
УТЗ, устройство включения резерва УВР, защиты от обрыва фазы и пониженного напряже
ния ЗОФН в системе управления СЭЭС "Ижора".
Рассмотрим некоторые из типов реле защиты.
8.2. Реле тока
Основные сведения
Реле тока представляют собой разновидность защитных реле. Они делятся на
3 вида:
1. реле максимального тока;
2. реле обратного тока;
3. реле минимального тока.
Реле минимального тока применяются в электроприводах постоянного тока для
отключения электродвигателя в случае обрыва поля ( обрыва цепи параллельной обмотки
возбуждения ), при котором ток обмотки якоря увеличивается в десятки раз по сравнению
с номинальным. В данном пособии они не рассматриваются.
Электромагнитное реле максимального тока изображено на рис. 4.30.
Рис. 4.30. Устройство электромагнитного реле тока:
1 – катушка; 2 – сердечник катушки; 3 – якорь; 4 – регулировочный винт; 5 –
регулировочная гайка; 6, 7, 10 и 11 – контакты; 8 – амортизирующие пружины
контактов; 9 – изолирующие колодки; 12 – отключающая пружина
Катушка 1 из толстого провода надета на сердечник 2, закрепленный на Г- образной скобе. К верхней части скобы на призме прикреплен якорь 3 в виде изогнутой прямоугольной пластины. На правой части пластины расположены изолирующие колодки 9 с
амортизирующими пружинами 8 и подвижными контактами 7 и 10.
Исходное положение якоря фиксируется регулировочным винтом 4 и отключающей пружиной 12. Степень растяжения пружины 12 можно изменять при помощи регулировочной гайки 5. Например, при вращении гайки по часовой стрелке пружина 12 растягивается, т.е. усилие в ней, отрывающее якорь от сердечника, увеличивается.
В исходном положении подвижный контакт 10 соединяет между собой неподвиж-
153
ные контакты 11. В то же время подвижный контакт 7 и неподвижные 6 разомкнуты.
Если ток в катушке увеличивается, якорь 3, преодолевая противодействие пружины
12, притягивается к сердечнику 2. Правая часть якоря с контактами 7 и 10 приподымается,
при этом контакт 7 соединяет через себя контакты 6, а контакт 10, наоборот, размыкает
цеь тока через контакты 11.
У реле на постоянном токе все участки магнитной цепи – якорь, сердечник и др.,
выполняется из литой электротехнической стали, на переменном токе – из отдельных листов стали толщиной 0,35…0,5 мм ( для уменьшения потерь на вихревые токи ). Кроме
того, в верхнюю часть сердечника реле переменного тока впрессовывают короткозамкну
тый виток. Устройство остальных деталей не зависит от рода тока.
Промышленность выпускает несколько серий токовых реле. Эти серии отличаются
номинальным током катушки, количеством и сочетанием замыкающих и размыкающих
контактов и пределами регулирования тока срабатывания. К основным сериям относятся
такие : РМ, РЭМ20, РЭМ65 и РЭМ650.
8.3. Реле обратного тока
Реле обратного тока применяются в судовых электростанциях постоянного тока
для отключения генератора при его переходе в двигательный режим.
Реле обратного тока не является токовым реле в прямом понимании, потому что
оно имеет две катушки: токовую и напряжения ( рис.4.31 ).
Рис. 4.31. Реле обратного тока типа ДТ: 1 – противодействующая пружина; 2 – контактный рычаг; 3 – неподвижный контакт; 4 – токовая катушка; 5 – катушка напряжения;
6 – сердечник; 7 – полюса; 8 - якорь
Токовая катушка 4 включается в контролируемую цепь ( обмотки якоря генератора
) последовательно и имеет несколько витков ( десятков витков ) толстого провода. Эта катушка располагается на сердечнике реле 6.
Катушка напряжения 8 включается в контролируемую цепь параллельно и имеет не
сколько сотен ( тысяч ) витков тонкого провода. Эта катушка располагается на поворотном цилиндрическом якоре 7, имеющем возвратную пружину 1. Якорь связан с контакт
ным рычагом 2, на конце которого находится подвижный контакт.
Магнитные потоки обеих катушек создают вращающий электромагнитный момент,
стремящийся повернуть якорь реле в определенном направлении.
В генераторном режиме этот момент направлен против часовой стрелки, поэтому
пружина 1 сжата, а контакты 2 и 3 разомкнуты.
При переходе генератора в двигательный режим направление тока в его обмотке
якоря, а значит, токовой катушке реле, изменяется на противоположное. В результате
якорь, преодолевая противодействие пружины, поворачивается по часовой стрелке.
Контакты 2 и 3 замыкаются, подавая питание на катушку расцепителя генераторного автомата. Генератор отключается о шин ГРЩ.
154
В соответствии с Правилами Регистра, уставка реле обратного тока должна составлять от 2 до 15% номинального тока генератора, вне зависимости от типа приводного дви
гателя ( т.е. одинакова для дизель-генераторов и турбогенераторов ).
Уставку реле ( ток срабатывания ) регулируют при помощи пружины 1 – чем сильней растянута пружина, тем уставка реле больше, и наоборот. Значение обратного тока
определяют по щитовому амперметру в момент отключения генератора. Этот амперметр
имеет несколько делений ниже отметки «0» на шкале.
Промышленность выпускает реле обратного тока серии ДТ-110.
Технические данные реле приведены в таблице.
Технические данные реле серии ДТ-110
Тип реле
Контакты
ДТ-111
1 з.к.
ДТ-115
1 з.к.
ДТ-112
1 з.к.
ДТ-116
1 з.к.
ДТ-113
1 з.к.
ДТ-117
1 р.к.
Номинальный ток, А
6, 12, 25
50, 100, 150, 200, 300
400, 600, 800
400, 600, 800
1600
1600
Примечание
1. обмотка напряжения реле рассчитана на 48 В, поэтому при использовании реле
с напряжением 110 и 220 В последовательно с катушкой включается добавочный резистор
2. реле ДТ-113 и ДТ-117 ( на ток 1600 А ) не имеют на магнитопроводе отдельной
токовой катушки ( на рис. 3 катушка имеет номер 4 ), в качестве последней используется
непосредственно шина.
8.4. Реле обратной мощности типа ИМ-149
Принцип действия реле обратной мощности такой же, как у бытового счетчика
электроэнергии.
Основной частью реле является индукционный механизм, состоящий алюминиево
го диск 9 и катушки 1 напряжения и катушки 2 тока. Катушка 1 включается на линейное
напряжение и выполнена из тонкого провода с большим числом витков, а катушка 2 вклю
чена последовательно в цепь с током нагрузки и состоит из нескольких витков толстого
провода, способного выдержать ток нагрузки.
При включении реле магнитные потоки катушек 1 и 2 пересекают диск и индуктируют в нем вихревые токи.
Взаимодействие этих токов и магнитных потоков катушек 1 и 2 вызывает появление электромагнитного момента М = kIUcosφ, пропорционального активной мощности
генератора Р =
3 IUcosφ.
155
Рис. 4.32. Индукционное реле обратной мощности (а, б)
В генераторном режиме диск реле повернут влево до упора. Через шестерню 8 ше
стерня 4 повернута вправо и подвижный контакт 7, установленный на ней, максимально
удален от контактов 5.
При переходе СГ в двигательный режим векторы тока и магнитного потока электро
магнита 2 изменят направление на 180°, поэтому момент вращения диска изменяет свое
направление.
Подвижная часть реле поворачивается в другую сторону до замыкания контактов 5,
через которые поступает питание на отключающий расцепитель АВ генератора.
Вместе с генератором отключается и реле, механизм которого под действием спиральной пружины 6 возвращается в исходное положение.
Для регулировки выдержки времени срабатывания реле изменяют положение подвижного контакта 7 на шестерне 4 относительно контактов 5, ориентируясь по шкале 3.
Минимальному расстоянию между контактами 7 и 5 соответствует выдержка времени 2 с
срабатывания реле, наибольшему расстоянию - 12 с.
Поля постоянных магнитов 10 во время движения диска создают противодействую
щий момент подвижной части прибора.
Для регулировки значения обратной мощности токовую обмотку 2 переключают на
разное число витков, тем самым обеспечивая три значения уставки срабатывания реле, а
именно: 6,4; 9,6 или 12 % номинальной активной мощности.
Реле ИМ-149 включаются через трансформаторы тока ТА (рис. 4.32, б). Номинальный ток вторичных обмоток (обмоток 2 реле) составляет 5А. Подбирая ТА по значениям
тока первичной обмотки, реле можно использовать для генераторов разных мощностей.
8.5. Реле перегрузки типа ИМ-145
Конструктивно оно не отличается от реле ИМ-149. Движение диска у этих реле на
чинается тогда, когда ток генератора увеличится до значения тока уставки срабатывания.
В отличие от реле обратной мощности контакты этих реле замыкают цепи АВ менее ответственных приемников.
8.6. Бесконтактное реле обратного активного тока типа РОТ-51/401
Реле этого типа изображено на рис. 4.33.
Оно предназначено для защиты ГА переменного тока от перехода в двигательный
режим при параллельной работе. Реле имеет 3 уставки по обратному току: 5, 10 и 15 %
номинального активного тока контролируемой сети. Уставки изменяют переключением
выводов 3- 6 на трансформаторе тока ТА.
156
Рис. 4.33 Реле обратного тока типа РОТ-51/401:
а – принципиальная схема; б – векторная диаграмма напряжений и токов
Реле (рис. 4.33, а) состоит из измерительной части, собранной на кольцевом модуля
торе ( на диодах VD1-VD4) и согласующих трансформаторах тока ( ТА) и напряжения
(ТV), реле времени (R10, С6-С9), исполнительной части (VТ2-VТ4) и устройства "отсечки"
(VТ1).
Рис. 4.34. Принципиальная схема кольцевого модулятора реле РОТ-51/401
Кольцевой модулятор с трансформаторами тока ТА и напряжения ТV представляет
собой фазочувствительный выпрямитель ФЧВ.
157
Выпрямленное выходное напряжение ФЧВ прямо пропорционально току нагрузки
генератора ( току вторичной обмотки трансформатора тока ТА ), а полярность напряжения
изменяется на обратную при переходе генератора в двигательный режим ( когда изменяет
ся на 180º фаза тока во втоичной обмотке трансформатора тока ТА ).
Трансформатор тока ТА включен в фазу С, а трансформатор напряжения TV- на
линейное напряжение U BC (рис. 4.33, б). При помощи конденсатора С2 вектор напряжения трансформатора ТV cдвигут на 30° относительно вектора U BC .
Таким образом, вектор опорного напряжения, создаваемого трансформатором ТV,
совпадает с вектором активного тока фазы С. Так как U TV >> U
, измерительная часть
TA
схемы будет реагировать на активный ток.
При работе контролируемого источника электроэнергии в генераторном режиме на
рис. 4.34 мгновенные полярности ЭДС e и e в первый полупериод обозначены в кру2
1
жочках Так как e
2
> e , то направление токов через резисторы R6 , R7 и кольцевой моду
1
лятор будет определяться мгновенной полярностью e .
2
Ток i протекает по цепи: точка 7 - R8-R6 - точка а - R4 - VD2 - точки 9 и 10 - С2 1
точка 8.
Этот ток пропорционален сумме ЭДС ( e
2
+ e ), так как эти ЭДС действуют
1
согла
сно.
В это же время ток i протекает по цепи: точка 7 - R8 - R7 – RЗ - VDЗ - точки 11 и
2
10 - С2- точка 8. Ток i
2
пропорционален разности ЭДС ( e
2
- e ), так как эти ЭДС дейст
1
вуют встечно.
Следовательно, i > i , и падение напряжения U R 6 на резисторе R6 больше, чем
1
напряжение U
R7
2
на резисторе R7. Мгновенная полярность напряжения в точках а, в бу-
дет определяться мгновенной полярностью падения напряжения на R6, а именно: «минус»
в точке «а» и «плюс» в точке «в».
Во второй полупериод мгновенные полярности ЭДС на рис. 4.34 обозначены в квад
ратиках. Токи через R6 и R7 будут течь в противоположном направлении, причем i > i .
2
1
Мгновенная полярность в точках «а» и «в» определится мгновенной полярностью
падения напряжения на резисторе К7, через который течет ток i . В точке «а», как и в пер
2
вый полупериод, «минус», а в точке «в» - «плюс».
В этом режиме работы генератора под действием напряжения постоянного тока в
точках «а» и «в» измерительной части схемы ток течет через диод VD9, а конденсаторы
С'З, С4 не заряжены.
При переходе генератора в двигательный режим вектор тока поворачивается отно
сительно вектора напряжения на 180°, поэтому мгновенные полярности е изменятся
1
относительно мгновенных полярностей е
2
на противоположные.
Полярность напряжения в точках «а» и «в» тоже изменится на противоположную
(в точке «а» будет «плюс», в точке «в» - «минус»). Теперь конденсаторы СЗ, С4 зарядятся
с указанной на схеме полярностью.
Напряжение U ав через диод VD10 (см. рис. 4.33) подается на R10 и один из вклю
ченных конденсаторов С6-С9.
158
Время заряда конденсатора до напряжения срабатывания исполнительной части
схемы находится в обратной зависимости от напряжения U ав , а следовательно, от обратного активного тока. Переключением конденсаторов С6-С9 изменяют выдержку времени
срабатывания реле в пределах 1-5 с.
Напряжение на выходе реле времени сравнивается с падением напряжения на рези
сторе R12. При равенстве этих напряжений прекращается протекание тока управления
транзистором VT2, в результате он закрывается, а составной транзистор VТЗ, VТ4 открыва
ется.
Заряжается конденсатор С11 и открывается тиристор V5, через который замыкается
ток отключения АВ генератора.
Устройство "отсечки" служит для формирования выходного сигнала реле с мини
мальной выдержкой времени при обратном токе генератора большем, чем ток уставки. В
таком режиме работы г.енератора напряжение выпрямителя UZ1 становится больше напря
жения стабилизации стабилитрона VD7 и начинает течь ток управления транзистором
VТ1.
Под действием напряжения U ав ток потечет по цепи: VТ1-VD8-R11-R14-R17-VD13.
Падение напряжения на R14 оказывается достаточным для закрытия VТ2, в результате реле срабатывает за 50-80мс.
Когда напряжение на вторичной обмотке трансформатора тока ТА достигнет значения, равного напряжению пробоя диодов VD5 и VD6, они пробиваются.
Вторичная обмотка трансформатора ТА теперь замкнута через стабилитроны, и про
текающий по этой цепи ток оказывает размагничивающее действие на сердечник трансформатора, вследствие чего трансформатор продолжает работать на линейном участке характеристики намагничивания.
9. Требования Правил Регистра к уставкам реле защиты от обратного тока
или обратной мощности
Значения уставок реле защиты от обратного тока или обратной мощности приведе
ны в таблице 8.2.1. Правил Регистра.
Табдица 8.2.1. Пределы уставок защиты от обратного тока или обратной мощности
( в % от номинальной мощности генератора ) в зависимости от привода генератора
Род тока
Пределы уставок защиты от обратного тока или обратной
мощности ( в % от номинальной мощности генератора )
Турбина
Двигатель внутреннего сгорания
Переменный 2…6
8…15
Постоянный 2…15
2…15
Поскольку на большинстве судов применяется переменный ток, а в качестве при
водных двигателей генераторов используются двигатели внутреннего сгорания, полезно
запомнить пределы уставок от обратной мощности, а именно: 8…15% номинальной
мощности генератора.
Проверку и регулировку срабатывания реле (устройств) защиты ГА от обратной
мощности рекомендуется выполнять в следующем порядке:
.1. один из ГА, предназначенных для параллельной работы, нагрузить на 40-60% от
номинальной мощности, затем включить на параллельную работу второй ГА, защита кото
рого регулируется;
.2. воздействуя на регуляторы частоты вращения первичных двигателей, постепен-
159
но перевести второй ГА в двигательный режим, наблюдая за величиной повышения мощ
ности работавшего на нее ГА и следя за величиной, при которой реле (устройство) защиты
от обратной мощности сработает;
.3. отрегулировать при необходимости уставку срабатывания, которая должна нахо
диться в пределах 2-6% номинальной мощности у турбогенераторов и 8-15% номинальной
мощности у дизель-генераторов.
Время срабатывания реле, зависящее от величины обратной мощности, регулирует
ся по шкале замедлителя. Если время срабатывания устройств защиты не зависит от
величины обратной мощности, то устройства регулируют на срабатывание без выдержки
времени, после чего по шкале времени устанавливается необходимая выдержка.
Проверку срабатывания реле защиты ГА от обратного тока и регулировку этих
реле следует производить аналогично. При достижении величины обратного тока, равной
2-15% номинального тока генераторов, реле должны сработать.
Пример.
При переводе синхронного генератора номинальной мощностью Р 2 н = 400 кВт в
двигательный режим реле обратной мощности сработало при значении Р о. м = 45 кВт.
Рассчитать уставку реле и сравнить ее с уставкой, допускаемой Правилами Регистра.
Решение
1. уставка реле равна
Ро. м
Р2 н
*100% =
45
*100% = 11,25%.
400
В данном примере уставка реле находится в диапазоне 8,,,15%, допускаемого Правилами Регистром.
10. Техническая эксплуатация распределительных устройств и аппаратов
10.1. Техническое обслуживание распределительных устройств
При эксплуатации распределительных устройств (РУ) и пультов управления (ПУ)
выполняются:
.1. включение и выключение генераторов и потребителей электроэнергии;
.2. поддержание номинальных значений напряжения и частоты тока работающих
генераторов (при отсутствии автоматических регуляторов напряжения и частоты);
.3. перевод нагрузки с одного из параллельно работающих генераторов на другие и
обеспечение экономичной работы электроэнергетической системы;
.4. перевод нагрузки с судовых генераторов на электроснабжение от берего вой
сети и обратно в соответствии с РД 31.21.81-79 «Инструкция по электроснабжению судов
от береговых сетей» (с перерывом или без перерыва электроснабжения в зависимости от
принятой на судне схемы);
.5. наблюдение за показаниями измерительных приборов, контролирующих параметры генераторов, береговой сети и потребителей (напряжение, частоту, ток, мощность,
сопротивление изоляции и др.);
.6. контроль за работой средств коммутации, защиты, сигнализации и блокировки;
.7. контроль нагрева шин и токоведущих частей аппаратов и приборов;
.8. контроль вибрации и шума аппаратов и приборов:
.9. поддержание в чистоте РУ и ПУ.
При подготовке РУ к действию после продолжительного нерабочего периода необ
ходимо:
.1. произвести внешний осмотр и убедиться в отсутствии на токоведущих частях
посторонних предметов, влаги и пыли;
.2. проверить состояние контактных соединений и крепежа;
160
.3. убедиться, что все АВ и другие коммутационные аппараты отключены;
.4. проверить правильность действия всех аппаратов путем включения их без тока;
.5. проверить наличие в предохранителях штатных плавких вставок (элементов);
.6. убедиться в чистоте и целости диэлектрических ковриков у РУ и ПУ.
Потребители электроэнергии, которые могут получать питание как непосред
ственно от ГРЩ, так и через аварийный распределительный щит (АРЩ), должны, как пра
вило, получать питание через АРЩ, во всех условиях эксплуатации.
При плавании в сложных условиях не рекомендуется без крайней необходимости
выполнять какие-либо переключения и проверки на ГРЩ, АРЩ и ПУ.
Двери ГРЩ, и распределительных щитов (РЩ) должны быть заперты. Ключи от
ГРЩ, и АРЩ должны находиться у старшего электромеханика, а также непосредственно у
ГРЩ (или в ЦПУ, если там размещен ГРЩ) и АРЩ.
Включение и отключение АВ с ручным приводом должны производиться непрерыв
ным движением их рукояток до крайних положений (упоров). Не допускается оставлять
рукоятей АВ в промежуточном положении.
Включение АВ после их автоматического отключения (срабатывания) производится переводом рукояток в положение «Отключено», а затем - в положение «Включено».
Примечание. В АВ с электродвигательным приводом пружинного механизма реко
мендуется убедиться по указателю электродвигателя конечным выключателем.
Положение контактов АВ определяется только по специальным устройствам или
сигнальным лампами
При ложном срабатывании АВ необходимо их снова включить. При повторном
срабатывании включение АВ разрешается только после устранения причины, вызвавшей
срабатывание.
При срабатывании АВ из-за перегрузки или короткого замыкания в защищаемой
цепи до повторного включения следует устранить причину срабатывания, осмотреть АВ и
устранить при необходимости последствия срабатывания. Если требуется немедленное
повторное включение АВ, их осмотр должен быть произведен при первой возможности.
Заклинивание, а также работа АВ со снятыми дугогасительными камерами запреща
ется.
Временное выведение из действия или блокировка расцепителей АВ допускается
при необходимости только для предотвращения аварийной ситуации.
Для каждого предохранителя в РУ и ПУ должны быть указаны его назначение и
величина тока плавкой вставки (элемента)
Необходимо использовать только штатные плавкие вставки (элементы). Резервные
плавкие вставки (элементы) и клещи для извлечения предохранителей должны находиться
в РУ и ПУ.
Пробочные предохранители должны быть всегда плотно ввернуты. Запрещается
подкладывать под плавкие вставки (элементы) какие-либо металлические прокладки или
проволоку.
В случае срабатывания (расплавления) плавкой вставки (элемента) ее следует заменить; при повторном срабатывании замена разрешается только после устранения причины, вызвавшей срабатывание.
Правильность положения стрелок измерительных приборов относительно шкал
следует проверять не реже одного раза в месяц. Стрелки отключенных амперметров,
вольтметров и ватт метров должны показывать «0»; щитового мегомметра - ∞; стрелки
частотомеров и фазометров могут находиться в любом положении.
Продолжительность включения стрелочных синхроскопов, щитовых мегаомметров
и вольтметров для измерения сопротивления изоляции сетей определяется схемами
конкретных приборов и инструкциями по их эксплуатации.
Подготовка к работе ГРЩ включает в себя следующие операции:
1. Произвести проверку состояния ГРЩ, обеспечив соблюдение следующих усло-
161
вий:
- отсутствие в ГРЩ посторонних предметов; инструмента, крепежа и т.д.;
- чистота, отсутствие влаги на аппаратах, узлах, деталях ГРЩ и их надежное креп
ление; контактные соединения шин надежно затянуты, не наблюдается никакого ослабле
ния крепежа отдельных частей ГРЩ.
2. Произвести проверку сопротивления изоляции в следующем порядке:
.1. включить все коммутационные аппараты главной цепи и подключений к элект
роэнергетической системе (ЭЭС);
.2. отключить установленный на щите мегомметр;
.3. измерение сопротивления изоляции производить мегомметром М 110/М по
ГОСТ 23706-79. Если сопротивление изоляции ГРЩ совместно с ЭЭС окажется ниже
установленной нормы (0,5 МОм), следует произвести измерение сопротивления изоляции
ГРЩ отдельно от внешней схемы.
Если при этом сопротивление изоляции ГРЩ окажется ниже 1 МОм, то щит надо
сушить. Сушка производится нагретым до 80-85°С воздухом, который вводится в ГРЩ
снизу.
Если сушкой не удается увеличить сопротивление изоляции ГРЩ, то необходимо
проверить изоляцию каждого отдельного участка цепи, а затем и каждого аппарата. После
обнаружения детали или участка с низкой изоляцией, необходимо устранить причину или
заменить деталь новой.
3. Перед подачей напряжения на все автоматы, переключатели и выключатели
установить в нулевое или отключенное положение.
4. Включить источник питания.
Технический осмотр без разборки ( ТО №1 ) рекомендуется проводить не реже 1
раза в 6 мес. При этом удаляют загрязнения со щита и его аппаратуры, затягивают контак
ты, проверяют работу аппаратуры ручного управления.
Технический осмотр с частичной разборкой ( ТО №2 ) проводят не реже 1 раза в
год, дополнительно зачищают контакты, заменяют изношенные детали, доводят до нормы
сопротивление изоляции, регулируют аппараты. Затем ГЭРЩ проверяют в действии под
нагрузкой.
При выполнении ТО №№1, 2 с ГЭРЩ полностью снимают напряжение, шины зако
рачивают перемычками и заземляют. Если это невозможно, то ГРЩ обесточивают по частям.
10.2. Техническое обслуживание автоматических выключателей
При эксплуатации автоматических выключателей необходимо:
. 1. проверить и затянуть при необходимости контактные и крепежные соединения;
.2. проверить исправность пружин и заменить изношенные пружины;
.3. проверить наличие смазки в редукторе электродвигательного привода, подшипниках и шарнирных соединениях, при необходимости смазать трущиеся части рекомендованной смазкой;
.4. удалить с поверхностей контактов копоть и наплавления;
.5. проверить одновременность замыкания и отсутствие перекоса контактов; величины контактного нажатия главных и дугогасительных контактов, зазоров и провалов
контактов в соответствии с указаниями инструкций по эксплуатации;
.6. осмотреть и очистить дугогасительные камеры;
.7. убедиться в исправной работе и свободном движении подвижных частей АВ при
ручном включении и отключении;
.8. проверить срабатывание АВ при воздействии на механизм расцепления отклю
чающих разделителей;
.9. проверить работу механических указателей АВ (коммутационного положения,
состояния пружинного механизма, срабатывания расцепителей и др.);
162
.10. проверить состояние контактов, исправность работы устройств безопасности и
механических фиксаторов положений АВ втычного исполнения.
Наплавления, образующиеся на рабочих поверхностях контактов, следует зачищать
бархатным напильником, не нарушая формы контактов. Применение наждачного полотна
(бумаги) и полировка контактов не допускаются.
Нагар и копоть, образующиеся на контактах с серебряными накладками, удаляются
ветошью, смоченной рекомендованным моющим средством.
Потемнение серебряных накладок не является признаком их неисправности. При
сильном обгорании или износе рабочих поверхностей накладки или контакты следует
заменить.
При включении АВ первыми должны замыкаться дугогасительные контакты, затем
предварительные (при наличии) и последними главные контакты. При отключении АВ
размыкание контактов должно происходить в обратной последовательности.
В АВ, где дугогасительные контакты замыкаются только в процессе включения и
отключения, расстояние до дугогасительных контактов (зазор) должно быть равно 1-1,2
мм.
Величина контактного нажатия измеряется динамометром; отсчет производится в
момент выпадания бумажной полоски, помещенной между контактами.
При осмотре дугогасительных камер АВ следует удалить пыль и частицы металла
и убедиться, что пластины деионных решеток не деформированы, а внутренние поверхности камер не обгорели. Если стенки камер имеют значительный по площади и глубине
обгар, а металлические пластины большое оплавление, камеры следует заменить.
Проверку срабатывания АВ от воздействия отключающих расцепителей, а также
действия механических замедлителей срабатывания допускается выполнять путем ручного воздействия на якоря расцепителей при включенных АВ.
Действие дистанционного и минимального расцепителей рекомендуется проверять
включением и выключением цепей их питания; одновременно проверяется невозможность
включения АВ, если якоря минимальных расцепителей не притянуты.
Особое внимание при ТО АВ втычного исполнения следует обращать на обеспечение необходимого нажатия контактов и отсутствие их перегрева; о недопустимом перегреве может свидетельствовать потемнение контактов.
Для предотвращения возможного недопустимого перегрева контактов постоянно
включенных АВ вследствие ухудшения состояния контактных поверхностей и увеличения
переходного сопротивления, необходимо не реже одного раза в 3 мес. несколько раз включить и выключить АВ в обесточенном состоянии.
Если причиной ложных срабатываний АВ при пусках электродвигателей или при
длительном протекании токов, не превышающих номинальных токов расцепителей АВ,
являются заниженные уставки срабатывания тепловых таковых расцепителей или длитель
ное повышение температуры воздуха, окружающего АВ, допускается увеличение уставок
срабатывания расцепителей при наличии средств регулирования с градуированной шкалой или указателей «больше» - «меньше».
При отсутствии таких средств или указателей либо неэффективности регулирования уставок рекомендуется заменить АВ аналогичными резервными с ближайшими большими номинальными токами расцепителей.
При ТО АВ генераторов и ответственных потребителей рекомендуется проверить и
при необходимости отрегулировать уставки и время срабатывания расцепителей перегруз
ки, минимального напряжения и средств защиты ГА от обратной мощности (тока), в том
числе отдельные комбинированные защитные устройства защиты ГА.
Примечания:
1. Указанные проверки и регулировки должны выполняться не реже одного раза в 4
года, как правило, специализированной береговой организацией.
2. Проверки и регулировки средств защиты ГА от обратной мощности (тока) долж
163
ны выполняться не реже одного раза в год старшим электромехаником совместно с механиком по заведованию.
Проверка расцепителей перегрузки может быть выполнена посредством:
.1. непосредственной нагрузки ГА судовыми потребителями или специальными нагрузочными устройствами;
.2. специальных приборов или стендов проверки защит;
.3. изменения тока во вторичных обмотках трансформаторов тока (питающих расцепители или защитное устройство) от постороннего источника и других косвенных
методов.
Проверка минимальных расцепителей напряжения может быть выполнена с помощью автотрансформаторов.
Проверка и регулировка комбинированных устройств защиты генераторов должны
выполняться в соответствии с инструкциями по эксплуатации.
Проверка и регулировка полупроводниковых расцепителей АВ должны выполняться с помощью специальных технических средств.
10.3. Техническое обслуживание выключателей и предохранителей
При эксплуатации пакетных выключателей (переключателей) необходимо обеспечить:
.1. отсутствие заеданий валиков и их четкую фиксацию в каждом положении;
.2. надежность контактных соединений.
При эксплуатации выключателей (переключателей) рубящего действия необходимо обеспечить:
.1. плотность зажатия в клеммах шин и проводов для предотвращения перегрева
контактных соединений;
.2. надежность заземления нетоковедущих частей аппаратов, монтируемых на лице
вой стороне щита.
Ножи и губки выключателей (переключателей) рубящего действия при наличии на
них оплавлений и борозд следует зачистить бархатным напильником, после чего все контактные поверхности протереть сухой ветошью.
При обслуживании трубчатых предохранителей следует обеспечить надежность
контактов между плавкими вставками (элементами) и их держателями. Признаками плохо
го контакта могут быть потемнение контактных поверхностей и обугливание корпусов.
Запрещается заменять плавкие вставки (элементы) под напряжением. Если трубчатые предохранители не могут быть отключены выключателями, их следует снимать и уста
навливать только при помощи специальных клещей или ручек.
Контрольные вопросы
1. По каким признакам классифицируются судовые РУ?
2. Каковы требования Правил Регистра к схемам ГЭРЩ?
3. Какие электроизмерительные приборы и КЗА размещены на секциях ГЭРЩ:
а ) распределительной; б ) генераторной; в ) контроля параметров?
4. Каковы требования Правил Регистра к конструкции ГЭРЩ?
5. Какие виды ТО и в какие сроки рекомендуется проводить для ГЭРЩ?
6. Каково назначение, устройство и принцип действия рубильников, выключателей и переключателей?
7. Для чего предназначены переключатели сенрии УП?
8. Каковы эксплуатационные свойства пакетных выключателей и переключателей?
9. В чем отличие УП без разрыва тока от УП обычного исполнения? Где применяются УП без разрыва тока?
10. Каково назначение АВ? По каким признакам они классифицируются?
11. В чем отличие селективных АВ от неселективных? Где применяются селектив-
164
ные АВ? Неселективные АВ?
12. Из каких основных элементов состоит АВ? Каково их назначение?
13. Для чего предназначен, как устроен и действует механизм свободного расцепле
ния АВ?
14. Перечислите виды расцепителей АВ
15. Как устроен и действует электромагнитный расцепитель АВ?
16. Как устроен и действует комбинированный расцепитель АВ?
17. Как устроен и действует минимальный расцепитель АВ?
18. Как устроен и действует независимый расцепитель АВ?
19. Нарисуйте и объясните защитные характеристики АВ с электромагнитным, тепловым и комбинированным расцепителями
20. Объясните устройство и принцип действия АВ типа АМ. Как регулируется
уставка по току короткого замыкания?
21. Объясните время-токовую характеристику защит АВ типа АМ
22. В чем отличие АВ генераторов от АВ приемников ЭЭ? Что такое селективная
приствка генераторных АВ?
23. Какие виды защит обеспечивает АВ типа АК3290 М4?
24. Объясните устройство и принцип действия АВ типа А3300. Как регулируется
уставка по току короткого замыкания?
25. Объясните устройство и принцип действия АВ типа АК50. Как регулируется
уставка по току короткого замыкания? Как устроен и работает электрогидравлический
замедлитель?
26. Объясните назначение, устройство и принцип действия предохранителей типов
ПР-2, ПД, ПДС и ПК
27. Объясните назначение, устройство и принцип действия реле максимального,
минимального и обратного тока
28. Как устроено и действует реле обратной мощности типа РОМ? Как регулируется уставка по обратной мощности?
29. Объясните работу схемы реле обратного тока типа РОТ-51/401
30. В чем состоит ТО РУ?
31. В чем состоит ТО АВ?
32. В чем состоит ТО выключателей и предохранителей?
1.5. АВАРИЙНОЕ ЭЛЕКТРОСНАБЖЕНИЕ
1. Аварийные электростанции
1.1. Состав приемников электроэнергии аварийных электростанций
Аварийная СЭС предназначена для подачи питания на ответственные приемники
электроэнергии при аварийном состоянии основной судовой электростанции ( обесточива
нии судна ).
'
При выходе из строя основной электростанции от шин АЭРЩ должны питаться
следующие приемники:
а ) от шин АРЩ непосредственно:
.1. пожарный насос;
.2. электрооборудование, обеспечивающее работу пеногенераторов пожарной систе
мы;
.3. аварийное освещения;
.4. средства внутренней связи и оповещения, необходимые в аварийных условиях;
.5. системы авральной сигнализации, сигнализации обнаружения пожара и устройства управления и сигнализации о положении противопожарных дверей;
.6. устройства закрывания водонепроницаемых дверей, сигнализации их положения
165
предупреждения их закрывания;
б ) от шин АРЩ с пульта управления судном, расположенного в рулевой рубке:
.7. сигнально-отличительные фонари, фонари сигнала «Не могу управляться» и дру
гие фонарей, требуемые действующими Международными правилами предупреждения
столкновения судов;
.8. средства внутренней связи и оповещения, а также авральная сигнализация;
.9. соответствующее радио- и навигационное оборудование;
.10. системы сигнализации обнаружения пожара.
.11. лампы дневной сигнализации, звуковые сигнальные средства (свистки, гонги и
др. ) и остальные виды сигнализации, требуемые в аварийных состояниях.
При выходе из строя обеих электростанций – основной и аварийной, автоматически должен включаться третий источник электроэнергии – аккумуляторная батарея напря
жением 12 ( 24 ) В, от которой питается ограниченное число приемников небольшой мощности:
.1. аварийное освещения и необходимые сигнально-отличительные фонари;
.2. все средства внутренней связи и оповещения, необходимые в аварийных услови
ях;
.3. системы авральной сигнализации и сигнализации обнаружения пожара;
.4. лампы дневной сигнализации, звуковые сигнальные средств (свистки, гонги и
др.).
Приемники, перечисленные в .2, .3 и .4, могут не питаться от общей ( единой ) аккумуляторной батареи, если они имеют собственные аккумуляторные батареи, обеспечива
ющие их питание в течение требуемого времени.
1. 2. Размещение аварийной СЭС
Аварийная СЭС состоит из источника энергии и распределительного щита, располо
женных в специальном помещении.
Аварийная СЭС устанавливается на всех самоходных судах, кроме тех, у которых
основными источниками электроэнергии являются АБ, при условии, что, по крайней мере,
одна из них по емкости и расположению отвечает требованиям, предъявляемым к аварийному источнику.
Помещение аварийной СЭС должно находиться выше палубы переборок, вне шахты машинных помещений и в корму от таранной переборки. Выход из этого помещения
должен вести непосредственно на открытую палубу.
На многих судах аварийная СЭС устанавливается в отдельном помещении на шлюпочной палубе. Однако на некоторых типах судов, например, УПС, аварийная СЭС установлена в служебном помещении на главной палубе.
1.3. Особенности электроснабжения грузовых и пассажирских судов
Мощность аварийной судовой электростанции должна быть достаточной для одновременного электроснабжения всех своих приемников электроэнергии.
Источником электроэнергии аварийной СЭС может быть ДГ или АБ.
Аккумуляторные батареи должны включаться в аварийную сеть при отключении
напряжения в основной сети.
На пассажирских судах аварийная СЭС должна сохранять работоспособность в течение 36 ч, на грузовых судах неограниченного и ограниченного районов плавания 1, вало
вой вместимостью 300 рег. т и более - 18ч.
На грузовых судах аварийная СЭС обеспечивает электроэнергией сети аварийного
освещения, сигнально-отличительные фонари, сети авральной сигнализации, внутренней
связи и сигнализации, необходимые при аварии, радио- и навигационное оборудование,
166
системы обнаружения пожара, звуковые сигнальные средства, пожарный насос и рулевое
устройство (на время 10 или 20 мин).
Пуск АДГ может быть ручным или автоматическим, во 2-м случае АДГ должен
пуститься и принять номинальную нагрузку за время, не превышающее 45 с.
Если не предусмотрен автоматический пуск или нагрузка может быть принята за
время более 45 с, должен быть предусмотрен кратковременный аварийный источник энергии.
Таким источником является АБ, которая без дополнительного заряда в течение 30
мин обеспечивает питанием сети аварийного освещения, сигнально-отличительные фонари, сети авральной сигнализации и внутренней связи, необходимые при аварии, системы
обнаружения пожара в помещениях судна, звуковые сигнальные средства и лампы дневной сигнализации.
1.4. Принципиальная схема АЭРЩ
При аварийном состоянии основной СЭС аварийная электростанция становится
автономным и единственным источником электроэнергии на судне.
В нормальном режиме работы судна АДГ не работает, но часть коммутационных
устройств щита аварийной СЭС используют для подачи питания от ГРЩ, при разряде
подключаются на заряд АБ, контролируют сопротивление изоляции.
В этом режиме приемники аварийной СЭС получают питание от ГРЩ, а в аварийном режиме они переключаются на электроснабжение от АДГ.
На рис. 5.1 представлена упрощенная схема одного из вариантов АРЩ аварийной
СЭС.
Рис. 5.1. Принципиальная схема АРЩ
В неаварийном режиме на его шины от ГРЩ по двум кабелям подается напряжение 380 В и по одному - 220 В.
С помощью кнопки SB5 или SB6 включается один из контакторов КМ1 или КМ2.
На шины 220 В можно подать питание от шин 380 В через трансформатор TV, авто
матический выключатель QF2 и контактор КМЗ. Размыкающие вспомогательные контакты КМЗ и КМ4 исключают одновременное включение напряжения 220 В от ГРЩ и от шин
380 В через TV.
В аварийном режиме пускается АДГ и его генератор G подключается на шины 380
В через автоматический выключатель QF1.
Конструктивно представленная схема щита смонтирована в 4-панельном щите. На
его панелях установлены кнопки управления контакторами, контрольно-измерительные
приборы с переключателями, кнопки проверки пуска АДГ, устройство контроля сопротивления изоляции, кнопки включения АВ генератора.
Нагрузка аварийной СЭС контролируется общим амперметром, наиболее мощные
приемники электроэнергии имеют отдельный амперметр с переключателем.
167
Зарядные статические устройства стартерных батарей АДГ и аппаратура СВАРН
установлены в щите или отдельно в помещении аварийной СЭС.
Требования Правил Регистра СССР к стабилизации напряжения АДГ менее
жесткие (допускается погрешность ±3,5 % номинального напряжения), поэтому СВАРН
аварийной СЭС выполнена по простейшей схеме (обычно без корректора напряжения ).
1.5. Источники питания аварийных СЭС
Источниками питания аварийных СЭС переменного тока являются 3-фазные СГ.
Для повышения надежности аварийных генераторов их СВАРН упрощают, для чего:
1. исключают корректоры напряжения;
2. исключают ручные регуляторы напряжения ( реостаты возбуждения );
3. применяют электрическое ( а не электромагнитное ) суммирование сигналов,
пропорциональных напряжению и току нагрузки, что позволяет исключить из СВАРН гро
моздкий ТК.
4. на многих судах в качестве АГ используют бесщеточные СГ, не имеющие щеточного аппарата.
В качестве примера рассмотрим СВАРН АГ фирмы «Эльмо» ( Германия ) ( рис. 5.2
).
Рис. 5.2. Схема СВАРН АДГ фирмы «Эльмо»:
а – принципиальная электрическая схема; б – векторная диаграмма токов СВАРН
Система возбуждения АДГ фирмы "Эльмо" (ГДР) с генератором типа SSED имеет
свои конструктивные и схемные особенности .
Все элементы СВАРН установлены непосредственно в цилиндрическом корпусе
генератора со стороны, противоположной приводу (за щеточным аппаратом). Такое решение привело к увеличению длины корпуса генератора и объединению СВАРН с ним в
единый блок.
В комплект СВАРН (рис. 5.2, а) входят трансформатор тока ТА, дроссель L, выпря
митель UZ и защитный выпрямитель VD.
Первичные обмотки трансформатора ТА включены не на выходе СГ, а с противопо
ложной стороны.
Компаундирующий дроссель L состоит из общего 3-стержневого магнитопровода,
между стержнями которого и верхним ярмом имеется регулируемый воздушный зазор.
Сигналы по току и напряжению суммируются в электрической цепи (без общего
трансформатора)/
Процесс амплитудно-фазового компаундирования поясняется векторной диаграмм
мой (рис. 5.2, б).
Достигается стабильность напряжения с погрешностью ±2,5 % номинального напря
жения во всем диапазоне нагрузок при cosφ = 0,5…0,9.
168
Ограничитель напряжения VD представляет собой выпрямитель из восьми селеновых элементов. На участке проводимости характеристика VD более крутая, чем у германи
евых диодов выпрямителя UZ, поэтому при перенапряжениях на стороне постоянного тока (при КЗ и в переходных режимах) сопротивление выпрямителя VD значительно уменьшается, ток замыкается через него, чем и достигается защита выпрямителя UZ. Диоды выпрямителя UZ выбраны с 3-кратным запасом по току, поэтому СВАРН имеет достаточную
надежность.
Элементы СВАРН хорошо охлаждаются, находясь в потоке воздуха, втягиваемого
крылаткой генератора в его корпус.
В цепи ОВГ не установлен ручной регулятор напряжения, поэтому значение напряжения СГ настраивается на фирме-изготовителе путем регулирования воздушного зазора
в дросселе. Для настройки СВАРН в судовых условиях генератор нагружают активным
током 80-100 %
1. 6. Схема программного управления пуском АДГ
На судах отечественной постройки установлены унифицированные системы программного управления пуском АДГ ( системы автозапуска АДГ ), с дизелями типов 1Д6150М (мощность 100 кВт), 6Ч12/14 (50 кВт) и 4Ч10,5/13 (25 кВт).
После обесточивания судна автоматизированная СУ АДГ обеспечивает выполнение такой программы пуска, включения АДГ на шины АЭС и приема нагрузки:
1. отключение фидеров питания щита аварийной СЭС от ГЭРЩ;
2. прокачку масла в смазочной системе дизеля;
3. перемещение рейки регулирования подачи топлива в положение минимальной
подачи;
4. включение стартера, вращающего дизель;
5. исключение повторного включения стартера при удавшемся пуске;
6. обеспечение еще двух включений стартера в случае неудавшегося пуска;
7. при удавшемся пуске перемещение рейки регулирования подачи топлива в поло
жение номинальной подачи;
8. включение АВ после возбуждения генератора с одновременным приемом нагруз
ки ранее включенных приемников или прием нагрузки в 2 ступени;
9. возвращение системы автоматического пуска АДГ в исходное состояние;
10. прерывание программы пуска и возврат СУ в исходное состояние в случае
включения питания основной СЭС.
Программа пуска может быть реализована с помощью электромеханических контак
тных устройств или электронной схемы.
В 1-м случае при аварии основной СЭС включается ЭД программного устройства,
который через замедляющий редуктор вращает кулачковый валик. Последний, в определенной последовательности, с заданными промежутками времени переключает контакты,
которые, в свою очередь, управляют реле и другими устройствами, обеспечивающими
пуск АДГ и включение нагрузки.
Во 2-м случае с помощью электронной схемы реализуется программа управления
контактной частью схемы пуска АДГ и включения нагрузки.
Система состоит из пульта с кнопками для ручного пуска и сигнальными устройствами, блока автоматического управления и элементов, смонтированных на дизеле.
Устройство программного управления пуском (рис. 5.3 ) получает питание от аккумуляторной батареи GB, имеющей несколько выводов (это позволяет получить необходимые для работы схемы напряжения разных значений).
169
Рис. 5.3. Схема программного управления пуском АДГ
Исходное состояние схемы
В исходном состоянии (в неаварийном режиме) на трансформатор TV поступает на
пряжение от ГРЩ, включается реле KV контроля напряжения и его контакт повторно пре
рывает цепь реле KV4 пуска (она прервана также закрытым в этом режиме транзистором
VT19).
Через резисторы Rl, R3 на транзистор VT1 подано напряжение отрицательного смещения, однако он открыт более высоким напряжением управления выпрямителя UZ1. В
открытом состоянии сопротивление транзистора VT1 близко к нулю, на нем нет падения
напряжения.
На эмиттер и базу транзистора VT2 поданы напряжения практически одинаковых
потенциалов, поэтому он закрыт.
Через R5 на эмиттер -базу транзистора VT3 поступает напряжение положительного
смещения, поэтому этот транзистор открыт. Через него заряжен конденсатор С2, через R8
течет ток управления транзистора VT4, и он открыт, а транзистор VT5 закрыт.
Через транзистор VT6 течет ток управления, создаваемый падением напряжения на
резисторе R12, через который течет ток нагрузки выпрямителя UZ2. Транзистор VT7 закрыт.
Состояние остальной части схемы изменяется при переключении транзистора VT7.
Так как он закрыт, конденсатор С4 не заряжен и транзистор VT8 тоже закрыт.
На коллектор - эмиттер транзистора VT8 не поступает напряжение, поэтому, несмотря на то, что он закрыт, на нем нет падения напряжения и транзистор VT9 тоже закрыт.
Транзистор VT10 закрыт, так как на него поступает напряжение отрицательного
смещения батареи. Так как VT10 закрыт, конденсатор С5 не заряжен, поэтому VT11 тоже
закрыт. На его коллекторно-эмиттерном переходе создается падение напряжения, которое
является напряжением управления транзистора VT12, и он открыт.
Протекающий через VT12 ток создает на резисторе R27 падение напряжения, которое компенсирует напряжение отрицательного смещения батареи, и транзистор VT13 открыт. Через него текут токи управления транзисторов VT14, VT15, они открыты.
170
На базу транзистора VT16 подан отрицательный потенциал с коллектора транзистора VT15, поэтому VT16 закрыт.
На транзисторах VT17 и VT18 собрана схема мультивибратора MB. С коллектора
транзистора VT16 на базу транзистора VT17 подан положительный потенциал, следователь
но, VT17 закрыт (соответственно VT18 открыт). Через R39 на транзистор VT19 поступает
напряжение отрицательного смещения батареи, и он закрыт.
Работа схемы после обесточивания основной СЭС
При обесточивании основной СЭС исчезает напряжение на трансформаторе TV,
отключается реле контроля напряжения KV и его замкнувшийся контакт подготавливает к
включению реле KV4 пуска.
Закрывается VT1, так как выпрямитель UZ1 обесточен, открывается VT2. На резисторе R5 создается падение напряжения, которое больше напряжения положительного
смещения батареи, и VT3 закрывается.
Транзистор VT4 не закрывается, конденсатор С2, разряжаясь через базу - эмиттер
транзистора VT4, еще 30 с будет создавать ток управления. Так формируется выдержка
времени всего цикла работы схемы автоматического пуска.
Транзистор УТ5 остается закрытым. Выпрямитель UZ2 обесточен, и на резисторе
R12 нет падения напряжения, следовательно, транзистор VТ6 закрывается, а VТ7 открывается.
Начинается заряд конденсатора С4, и в течение времени заряда (3 с) конденсатор
шунтирует цепь управления транзистора VТЗ: он остается закрытым.
Через открытый VТ7 на коллектор - эмиттер транзистора VТ8 подается напряжение
батареи и, так как он закрыт, на нем возникает падение напряжения.
Открывается VТ9, возникает падение напряжения на резисторе R21, открывается
VТ10, и включается реле КV1 прокачки масла, которое включит на 3 с электродвигатели
масла М1 и топлива М2 (рис. 5.4, а).
Через VТ10 (см. рис. 5.3) мгновенно заряжается конденсатор С5, открывается VТ11.
Закрывается VТ12, поэтому на R27 не создается падения напряжения и VТ13 закрывается.
Состояние транзисторов VТ14, VТ15 не изменяется, потому что через открытый
VТ10 продолжают протекать их токи управления.
Через 3 с прекращается заряд конденсатора С4, открывается VТ8, закрываются VТ9
и VТ10: реле прокачки масла отключается.
Рис. 5.4. Принципиальные схемы пуска АДГ ( а ) и включения нагрузки ( б )
171
Транзистор VТ11 остается открытым, потому что через его базу - эмиттер разряжается конденсатор С5. Транзисторы VТ12, VТ13 остаются закрытыми.
Так как транзистор VТ10 закрыт, то закрываются транзисторы VТ14, VТ15.
Открывается VТ16, и мультивибратор МВ начинает работать в следующем режиме:
1. 3 с открыт транзистор VТ17;
2. затем 2 с он закрыт и открыт VT18;
3. с 4-й по 16-ю секунду (включительно) трижды открывается VТ17 с промежутка
ми в 2 с.
Когда транзистор VТ17 находится в открытом состоянии, на резисторе R39 возника
ет падение напряжения и открывается VТ19, трижды включается реле КV4.
Если пуск удался с 1-й попытки, то реле КV5 удавшегося пуска и центробежное реле КR разомкнут свои контакты, и реле КV4 не сработает повторно при отработке мультивибратором еще двух циклов.
Через 16 с момента обесточивания закончится разряд конденсатора С5, транзистор
VТ11 закроется, транзисторы VТ12-VТ15 откроются, VТ16 закроется, в результате МВ отключится.
В промежутке времени с 17-й по 30-ю секунду в схеме никаких изменений не про
исходит.
Через 30 с прекратится разряд конденсатора С2, закроется VТ4, откроются VТ5 и
VТ6, закроется VТ7.
Остальная часть схемы возвращается в исходное состояние.
В случае восстановления питания от ГЭРЩ транзисторы VТ1-VТ5 переключаются,
но на резисторе R12 останется падение напряжения, создаваемое током выпрямителя UZ2,
поэтому транзисторы VТ6-VТ19 не переключатся.
Всю схему программного управления можно представить как состоящую из переключающих реле Р1, Р2 и реле времени РВ1-РВЗ.
Принципиальные схемы пуска АДГ и включения нагрузки
В нормальном режиме напряжение с шин ГЭРЩ подается на реле КV8 (рис. 5.4, б),
включаются контакторы КМ2, КМЗ и промежуточное реле КV7.
Приемники 1-й и 2-й ступеней включаются на напряжение ГЭРЩ. Автоматический
выключатель QF1 включен, но аварийный генератор отключен от шин щита контактором
КM1.
При обесточивании основной СЭС отключаются контакторы КМЗ и КМ2, начинает
работать схема программного управления автоматическим пуском АДГ, но до момента
включения аварийного генератора G судно остается обесточенным.
На 3 с включается реле КV1, его контакты подают питание на двигатели прокачки
масла М1 и подачи топлива М2 (см. рис. 8.4, а), причем М2 передвигает рейку подачи топлива в положение минимальной подачи.
Далее через VТ19 подается питание на реле КV4 пуска, его контакты замыкаются в
цепи реле К А. Напряжение батареи GВ подается на стартер M3, и начинается проворачивание дизеля.
Если пуск удался, то с увеличением частоты вращения АДГ возбуждается маломощ
ный вспомогательный генератор G1, навешенный на дизель, и включается реле КV5
удавшегося пуска.
Через его контакты вновь подается питание на двигатель M2, и он передвигает рей
ку в положение номинальной подачи топлива, после чего замыкается конечный выключа
тель SQ.
Включается промежуточное реле КVЗ, его размыкающий контакт отключает двига
тель регулирования подачи топлива, а замыкающий через промежуточное реле КV6 обеспечивает подачу питания на контактор КМ1, в результате приемники 1-й ступени подклю
172
чаются на напряжение аварийного генератора G.
В конце цикла работы схемы программного управления закрывается транзистор
VТ7 (см. рис. 8.3), выключается реле КV2, включаются реле КV7 и контактор КМ2, при
этом приемники 2-й ступени включаются на шины щита аварийной СЭС.
Если АДГ не пускается, то включается тревожная сигнализация (ее элементы на
схеме не показаны).
Ручное управление пуском АДГ
Ручной пуск АДГ осуществляется с помощью кнопок SB1 и SB2.
Уход и обслуживание аварийной СЭС
Так как аварийная СЭС является .наиболее ответственным устройством судна, то
ей уделяется особое внимание: каждую неделю злектромеханик с механиком по заведованию проверяют исправность всех элементов, наличие топлива, воздуха в пусковых баллонах, степень заряда АБ, а также выполняют пробные пуски АДГ (обычно проводят ручной
пуск на воздухе, пуск с помощью кнопок SB1 и SB2, пуск через программное устройство).
Один раз в 6 мес выполняют пробный пуск и включение аварийной СЭС в режиме
обесточивания судна.
2. Обеспечение непрерывности электроснабжения
2.1. Основные сведения
По степени важности приемники электроэнергии подразделяют на 3 группы:
1. особо ответственные приемники, перерыв в питании которых может привести
к аварии судна и гибели людей.
К ним относятся радио- и навигационное оборудование в соответствии с Правилами по конвенционному оборудованию морских судов, рулевое устройство, пожарный насос, аварийное освещение и др. На судах приемники этой группы питаются практически
бесперебойно от основной, а при ее обесточивании - от аварийной электростанции;
2. ответственные приемники, обеспечивающие работу СЭУ, управление судном и
сохранность груза. В эту группу входит основная часть судовых приемников электроэнергии - насосы, вентиляторы, компрессоры, якорные и швартовные механизмы, грузовые
устройства, средства внутрисудовой связи и сигнализации и др. Эти приемники получают
питание во всех режимах работы основной СЭС;
3. малоответственные приемники, допускающие перерыв питания в аварийных
ситуациях или при перегрузке СЭС - бытовая вентиляция, камбузное оборудование и др.
Для обеспечения непрерывности электроснабжения приемников электроэнергии
применяют следующие способы:
1. установка на судне аварийной электростанции, от шин которой получают пита
ние особо ответственные приемники электроэнергии;
2. резервирование приемников, один из которых, находящийся в работе, считается
основным, а другой – резервным. К таким приемникам относятся, например, рулевые элек
троприводы, устанавливаемые в румпельном отделении в двойном количестве;
3. питание приемников по отдельным фидерам, из которых один проложен от
ГЭРЩ, а другой – от вторичного РЩ или АЭРЩ. При этом фидеры получают питание от
разных секций ГЭРЩ, разнесенных на достаточное расстояние друг от друга. Например,
рулевые приводы получают питание по двум фидерам, один из которых подключен к
ГЭРЩ, а второй – к АЭРЩ. Эти фидера проложены вдоль разных бортов судна;
4. автоматическое переключение питания одиночного приемника электроэнергии с
одного фидера на другой, и др.
Рассмотрим некоторые из этих способов
173
2.2. Обеспечение непрерывности электроснабжения при помощи аварийной
СЭС
Рассмотрим структурную схему СЭЭС с одной основной и одной аварийной СЭС
( рис. 5.5 )
Рис. 5.5. Структурная схема СЭЭС с одной основной и одной аварийной СЭС
В состав схемы входят:
1. главный электрораспределительный щит ( ГРЩ ), от которого получают питание ответственные и малоответственные П1…П11 приемники электроэнергии;
2. аварийный электрораспределительный щит ( АРЩ ), от которого получают питание особо ответственные приемники П12…П14;
3. аккумуляторная батарея ( АБ ) аварийного освещения, от которой получают питание, в основном, светильники малого аварийного освещения ( МАО ) и некоторые другие приемники электроэнергии ( авральная сигнализация и т.п. ) П15…П17.
Внутрь ГРЩ и АРЩ встроены контакторы переменного тока соответственно К1 и
К2, катушки которых подключены к шинам ГРЩ ( К1 ) и АРЩ ( К2 ).
Контактор К1 – 3-полюсный, контактор К2 – 2-полюсный.
При нормальной работе основной электростанции катушка контактора К1 получает
питание от шин ГРЩ, поэтому контактор К1 включен, и его 3 контакта замкнуты.
Через эти контакты к шинам ГРЩ подключены шины АРЩ.
Следовательно, при наличии напряжения на шинах ГРЩ есть напряжение и на шинах АРЩ. Поэтому группы приемников электроэнергии – П1…П11 и П12…П14 получают
питание от основных генераторов G1…G4 СЭС.
Поскольку катушка контактора К2 получает питание от шин АРЩ, этот контактор
включен, а его размыкающие контакты разомкнуты. Поэтому приемники П15…П17 отклю
174
чены от аккумуляторной батареи АБ.
При выходе из строя основной электростанции напряжение на шинах ГРЩ пропадает, поэтому контактор К1 отключается и размыкает свои контакты. Тем самым шины
ГРЩ и АРЩ рассоединяются.
По Правилам Регистра, после обесточивании шин ГРЩ должен произойти автоматический пуск АДГ ( в течение не более 45 с ) с последующим его включением на шины
АРЩ. Следовательно, в течение 45 с шины АРЩ обесточены, поэтому контактор К2 отключен, а через его замкнувшиеся контакты К2 от батареи АБ аварийного освещения полу
чают питание приемники П15…П17, в том числе светильники аварийного освещения напряжением 12 ( 24 В ).
После пуска АДГ и его включения на шины АРЩ восстанавливается питание приемников П12…П14. Кроме того, повторно включается контактор К2, его контакты размыкаются, отключая от АБ приемники П15…П17. Аварийные светильники 12 ( 24 ) В отключены.
При выходе из строя аварийной электростанции контактор К2 отключается и через
его замкнувшиеся контакты К2 вновь получают питание приемники П15…П17 напряжением 12 ( 24 ) В.
Контактор К1 выполняет важную функцию – рассоединяет шины ГРЩ и АРЩ при
выходе из строя основной электростанции. Если бы этого контактора не было, т.е. шины
ГРЩ и АРЩ были бы постоянно соединены, то при обесточивании основной электростанции и включении АДГ на шины АРЩ все без исключения судовые приемники П1…П14
стали бы получать питание от шин АРЩ.
Поскольку мощность АДГ невелика ( обычно не более 150 кВт ), одновременное
включение на шины АРЩ этих приемников привело бы к перегрузке АДГ и его отключению.
2.3. Обеспечение непрерывности электроснабжения переключением питания
приемников электроэнергии
Обеспечение непрерывности электроснабжения переключением питания на
контактных элементах
Переключение питания с одного фидера на другой используется в схемах управления рулевыми электроприводами ( рис. 5.6 ).
Рис. 5.6. Схема автоматического переключения питания рулевыми приводами
По Правилам Регистра, питание на рулевой привод подается от шин ГЭРЩ через 2
автоматических выключателя, расположенных на разных половинах ГЭРЩ.
При подготовке РЭП к работе электромеханик вначале включает один автоматический выключатель, например, выключатель левого борта, а затем другой, правого борта.
При включении АВ левого борта появляется напряжение на линейных проводах
Л1, Л2, Л3 левого борта. При этом катушка контактора КМ1 получает питание от линейных проводов Л2 и Л3 левого борта. Контактор КМ2 включается, его главные контакты
175
КМ1 замыкаются, подавая питание в схему РЭП. Одновременно размыкается вспомогательный контакт КМ1 в цепи катушки контактора КМ2 правого борта.
Поэтому при включении АВ правого борта контактор КМ2 включиться не может –
в цепи его катушки разомкнут контакт КМ1.
Если исчезнет питание на фидере левого борта, например, вследствие отключения
АВ этого борта, катушка контактора КМ1 обесточивается, контактор отключается.
Он размыкает главные контакты КМ1, но одновременно замыкает вспомогательный контакт КМ1 в цепи катушки контактора КМ2. Последний включается, замыкает глав
ные контакты КМ2, восстанавливая подачу питания в схему РЭП, и одновременно размыкает вспомогательный контакт КМ2 в цепи катушки контактора КМ1.
Отсюда следует, что для восстановления подачи питания по фидеру левого борта
надо не только включить АВ левого борта, но и отключить АВ правого борта ( чтобы замк
нулся контакт КМ2 в цепи катушки контактора КМ1 ).
После этого можно повторно включить АВ правого борта.
Далее работа схемы повторяется.
Рассмотренная схема построена на контактных элементах – электромагнитных
контакторах КМ1 и КМ2.
Обеспечение непрерывности электроснабжения переключением питания
приемников электроэнергии на бесконтактных элементах
Развитие полупроводниковой техники позволило перейти от контактных к бесконтактным элементам, например, симметричным тиристорам, или, иначе, симисторам ( рис.
5.7 ).
Рис. 5.7. Схема бесконтактного автоматического переключения сетей
В состав силовой части схемы входят:
1. сети основная и резервная;
2. группы симисторов VS1…VS3 и VS4…VS6;
3. приемники электроэнергии ПЭ.
В состав схемы управления входят:
1. Т1, Т2 - понижающие трансформаторы Т1, Т2, предназначенные для питания
176
цепей управления симисторами;
2. UZ1, UZ2 - выпрямительные мостики, для получения постоянного тока цепей
управления;
3. VD1, VD2 – cтабилитроны ( пороговые элементы );
4. VD3…VD15 – полупроводниковые диоды;
5. D1 – cимметричный триггер R-S-типа;
6. D2 – элемент задержки переключения симисторов;
7. С1…С3 – конденсаторы;
8. SB – выключатель управления.
Схема работает так.
Вначале питание подается в основную сеть.
На выходе UZ1 появляется напряжение, достаточное для пробоя стабилитрона VD1
Через пробитый VD1 образуется цепь тока управления вспомогательного тиристора VS7:
«плюс» на правом выводе UZ1 – пробитый VD1 – диод VD3 – резистор R3 –
управляющий электрод – катод VS7 – «минус» на левом выводе UZ1.
Тиристор VS7 открывается, вследствие чего пробивается стабилитрон VD2, через
который и резистор RP1 образуется цепь тока:
«плюс» на правом выводе UZ1 – пробитый VD2 – открытый VS7 – потенциометр
RP1 – «минус» на левом выводе UZ1.
На RP1 создается падение напряжения.
При включении выключателя управления SB это напряжение устанавливает триггер D1 в исходное состояние, при котором на прямом выходе Q триггера D1 появляется
напряжение, отпирающее вспомогательный тринистор VS8 в цепях управления силовыми
тринисторами VS1…VS3.
Последние открываются, напряжение основной сети поступает к приемникам ПЭ.
После этого включают резервную сеть
При снижении напряжения основной сети на 10% и более стабилитрон VD2 запира
ется, и триггер переключается во второе состояние, при котором на инверсном выходе Q
триггера D1 появляется напряжение, отпирающее вспомогательный тринистор VS9 в цепях управления силовыми тринисторами VS4…VS6.
Включение этих тринисторов искусственно задерживается на небольшой промежу
ток времени ( несколько десятых с ) для того, чтобы ранее успели закрыться тринисторы
VS1…VS3.
Коммутирующий конденсатор С1 предназначен для запирания вспомогательных
тринисторов VS8 и VS9.
Конденсаторы С2 и С3 являются фильтрующими, для сглаживания пульсаций
выпрямленного напряжения мостиков UZ1 и UZ2.
Рассмотренные автоматические переключатели сетей выпускаются серийно. Их
маркировка состоит из букв АПС, номера серии ( величины ) – от 2 до 6, шифров значений
напряжений ( 2 – 220 В. 3 – 380 В ) и частоты ( 1 – частота 50 Гц, 2 – частота 400 Гц ).
Например, АПС331 расшифровывается так: АПС - автоматический переключатель сетей,
первая цифра 3 – третьей величины ( тока ), вторя цифра 3 – для сетей напряжением 380 В,
1 – частота 50 Гц.
Бесконтактные АПП ( устройства автоматического переключения питания ) отлича
ются от рассмотренного АПС только наличием защиты асинхронного двигателя.
3. Судовые аккумуляторы и гальванические элементы
3.1. Основные сведения
Кислотные и щелочные АБ применяют на судах для питания электроэнергией сетей
управления автоматических устройств, аварийного освещения, авральной и пожарной сиг
нализации, радио- и телефонной связи, отличительных огней, для пуска дизелей с помо-
177
щью электростартеров.
На некоторых типах речных суда и судов смешанного класса плавания судовые ще
лочные аккумуляторы с суммарным напряжением 110 В используют в качестве аварийно
го источника электроэнергии для рулевых машин.
Электрический аккумулятор - это химический источник электроэнергии. Его действие основано на обратимых электрохимических процессах.
Во время заряда аккумулятора электрическая энергия зарядного устройства превращается в химическую энергию, которая накапливается в аккумуляторе.
Если к аккумулятору подключить приемник электроэнергии, то аккумулятор будет
разряжаться, т. е. его химическая энергия вновь будет превращаться в электрическую. Такие процессы заряда-разряда аккумулятора повторяются неоднократно.
Аккумуляторная батарея состоит из нескольких электрохимических элементов, соб
ранных в общий корпус (см. рис. 8.5, 8.6) и включенных по определенной схеме.
Обычно в аккумуляторной батарее несколько банок, в каждой банке блоки положительных и отрицательных пластин соединены параллельно.
Электродвижущая сила Е аккумулятора - разность потенциалов положительного и
отрицательного электродов при разомкнутой внешней цепи. Значение Е зависит, главным
образом, от состояния активной массы пластин и состава электролита, но не зависит от
размеров пластин аккумулятора.
Электролиты - это растворы кислоты или щелочи в дистиллированной воде. Состо
яние электролита характеризуется его плотностью. Плотность щелочи и кислоты больше
плотности воды, поэтому определенной концентрации кислоты или щелочи в воде соответ
ствует определенная плотность электролита.
Напряжение U аккумулятора - разность потенциалов положительного и отрицатель
ного электродов при замкнутой внешней цепи (при этом в цепи протекает ток).
Напряжение отличается от ЭДС значением падения напряжения внутри аккумулято
ра, которое определяется внутренним сопротивлением R вн аккумулятора и током, проходящим через него.
При заряде аккумулятора U больше ЭДС Е, при разряде - меньше. Конечное напря
жение аккумулятора при его разряде - напряжение, ниже которого аккумулятор разряжать
не рекомендуется исходя из условий длительной эксплуатации.
Внутреннее сопротивление аккумулятора, состоящее из сопротивлений электролита, пластин и сепаратора (перфорированный изолятор между пластинами), непостоянно:
при разряде и понижении температуры оно увеличивается.
Емкость С аккумулятора - количество электричества, которое может дать полностью заряженный аккумулятор при разряде неизменным током определенного значения до
конечного напряжения:
С=I t ,
р
где I
t
р
р
р
- ток разряда, А;
- продолжительность разряда, ч.
Емкость аккумулятора зависит от количества активной массы и конструкции пластин, количества и концентрации электролита, температуры, степени изношенности аккумулятора, наличия примесей в электролите и многих других факторов.
Заряженный аккумулятор подвержен саморазряду в результате протекающих побоч
ных реакций, утечек тока через корпус и т. д. (например, саморазряд кислотных аккумуляторов составляет 1 % их емкости в сутки).
Поэтому для аккумуляторов периодически следует проводить контрольно-трениро
вочные циклы разряда – заряда.
178
Гальванические элементы
Гальванические элементы (ГЭ) отличаются от аккумуляторов необратимостью элек
трохимического процесса разряда ( являются устройствами 1-разового использования).
Постоянная готовность ГЭ к работе позволяет применять их в переносных радиоустройствах, комбинированных измерительных приборах, электрических фонарях и спасательных средствах ( плотиках, поясах и жилетах ).
Гальванические элементы разделяют на сухие и водоналивные (активируемые), по
форме исполнения - на баночные и галетные. Наиболее распространены марганцево-цин
ковые ГЭ.
Сухой баночный ГЭ состоит: из анода - угольного стержня, окруженного активной
массой (оксидом марганца в смеси с графитом); цинкового катода - цилиндрической или
прямоугольной банки; электролита - желеобразного хлорида аммония. Банка сверху
залита смолой.
Сухой галетный ГЭ состоит из спрессованного из активной массы (оксид марганца
с графитом) анода в виде прямоугольного брикета, пропитанной электролитом (хлорид
аммония) картонной диафрагмы и пластинчатого цинкового катода. Элемент заключен в
поливинилхло-ридный корпус.
Сухие ГЭ подвержены саморазряду, поэтому их сохранность не превышает 1,5 года. Выпускают сухие ГЭ для различных температурных условий.
Водоналивной марганцево-цинковый ГЭ заполнен кристаллическим хлоридом аммония: только после добавления пресной или дистиллированной воды хлорид аммония
превращается в электролит и ГЭ может работать. Водоналивной медно-магниевый ГЭ работает на хлоридном электролите и активизируется морской водой, что позволяет использовать его в устройствах световой сигнализации и радиостанциях спасательных средств
(плотиков, жилетов и т. д.).
3.2. Кислотные аккумуляторы
Маркировка батарей
В странах СНГ маркировка наносится на батарею и должна содержать:
1. товарный знак предприятия-изготовителя;
2. условное обозначение батареи;
3. знаки полярности: плюс «+» и минус «-«;
4. дату изготовления ( месяц, год );
5. обозначение технических условий батарей конкретного типа;
6. номинальную емкость в ампер-часах на батареях с общей крышкой;
7. номинальное напряжение в вольтах на батареях с общей крышкой;
8. клеймо технического контроля;
9. максимальная масса батареи ( без электролита ) по техническим условиям.
Условное обозначение батарей
Батареей называют группу отдельных аккумуляторов ( банок ), соединенных определенным образом – последовательно, параллельно или по смешанной схеме.
В приведенных ниже таблицах условное обозначение батарей состоит из типа и
исполнения.
Обозначение типа состоит из цифр и букв, которые означают следующее:
1. 3 или 6 – число последовательно соединенных аккумуляторов;
2. СТ – стартерная;
3. цифры после букв – номинальная емкость при 20-часовом режиме разряда, А*ч
( ампер-часы ).
После обозначения типа батареи указываются буквы, обозначающие:
179
материал моноблока ( корпуса ): Э – эбонит; Т – термопласт;
материал сепараторов: М – мипласт; Р – мипор;
Обозначение исполнения батарей состоит из букв А или Н, которые означают следующее: А – с общей крышкой; Н – несухозаряженная.
Пример. В батарее типа 6СТ – 50А цифры и буквы обозначают следующее:
6 – число последовательно соединенных аккумуляторов с общим напряжением 6 х
х 2 = 12В; СТ – стартерная; 50 – емкость в Ач; А – с общей крышкой.
Устройство кислотных аккумуляторов
Кислотный аккумулятор изображен на рис. 5.8.
Рис. 5.8. Кислотный аккумулятор: а – пластины; б – общий вид
Кислотный аккумулятор (рис. 5.8 ) состоит из эбонитового или пластмассового
корпуса 5, отрицательных 1 и положительных 4 пластин, собранных с помощью соедини
тельных мостиков (бареток) 3 в полублоки, и электролита, в который погружены пластины.
С помощью борнов 2 (полюсных выводов) и межэлементных соединений (перемычек) 6 блоки пластин соединяют в электрическую цепь. Для изоляции разноименных пластин в аккумуляторе применяют сепараторы из различных пластмасс, на крышках аккумулятора устанавливают вывинчивающиеся пробки 7, в нижней части пластины опираются
на изоляционные призмы 8.
Положительные и отрицательные пластины отливают в виде решеток из химически
чистого свинца с 5-10 %-ной присадкой сурьмы. Решетки пластин заполняют активными
массами: активная масса положительных пластин состоит из свинцового сурика Рb02 и
сульфата аммония, отрицательных - из свинцового глета (губчатый свинец) с добавлением
сернокислого бария. Отрицательные пластины механически более прочны, поэтому в блоке их на одну больше, они располагаются с обеих сторон.
Электролитом служит раствор химически чистой серной кислоты в дистиллирован
ной воде.
Когда серную кислоту вливают в воду, в результате химической диссоциации часть
молекул кислоты распадается на положительные и отрицательные ионы Н 2 и SO 4 .
Таким образом в электролите присутствуют ионы-носители электрического заряда
и целые молекулы кислоты Н SO .
2
4
Во время разряда аккумулятора в нем протекают следующие реакции:
у отрицательных пластин Рb + SO = Рb SO ,
4
у положительных пластин РbО
2
4
+ Н + Н SO = Рb SO + 2 Н О.
2
2
4
4
2
Положительные и отрицательные ионы электролита вступают в реакцию с активны
180
ми массами пластин, изменяя их состав и отдавая электрический заряд на пластину. На
всех пластинах образуется сульфат свинца Рb SO .
4
Количество ионов SO 4 в электролите уменьшается; поэтому его плотность в процессе разряда заметно снижается.
Аккумулятор будет источником электроэнергии до тех пор, пока текут реакции
разряда, а они возможны, если еще не вся активная масса пластин РbО и Рb превращены
2
в Рb SO , т. е. пока в растворе есть ионы. Полный разряд не рекомендуется.
4
При подключении аккумулятора к источнику постоянного тока под действием за
рядного тока протекают обратные реакции заряда:
у отрицательных пластин Рb SO + Н = Рb + Н SO ;
4
у положительных пластин Рb SO
В результате Рb SO
4
4
2
2
4
+ 2 Н О + SO = РbО + 2 Н SO .
2
4
2
2
4
распадается на исходные материалы пластин, и в раствор
выделяется кислота, поэтому плотность увеличивается до исходного значения (1,24-1,31
3
г/см ) в зависимости от климатических условий), причем ЭДС заряженного аккумулятора
составляет 2,1 В.
Опытным путем установлена зависимость между ЭДС и плотностью электро
лита для кислотного аккумулятора:
Е = 0,84 + d,
где d : плотность электролита, г/см3.
Напряжение аккумулятора в режимах разряда и заряда:
Uр = 0,84 + d – Iр Rвн ,
Uз = 0,84 + d + Iз Rвн ,
где: Iр – ток разряда, А;
Iз – ток заряда, А;
Rвн – внутреннее сопротивление аккумулятора.
Обычно принимают Rвн = 0,005 Ом.
Эксплуатация кислотных аккумуляторов
При нормальном обслуживании кислотных аккумуляторов сульфат свинца Рb SO
4
образующийся на пластинах, полностью распадается в конце заряда, и аккумулятор
восстанавливает свою емкость.
Если в течение нескольких суток полностью или частично разряженный аккумулятор не зарядить, то Рb SO может перекристаллизироваться в крупнозернистую соль того
4
же химического состава. Такой сульфат не распадается при последующем заряде.
Аккумулятор начинает "кипеть", так как реакции распада сульфата свинца не проте
кают и энергия источника расходуется на нагрев электролита. Возникает так называемый
процесс сульфатации пластин, в результате аккумулятор теряет часть емкости.
Во избежание сульфатации кислотные АБ нужно держать всегда заряженными, что
требует постоянного ухода за ними.
По сравнению с щелочными аккумуляторами кислотные имеют и преимущество:
низкое (примерно в 10-15 раз меньше, чем у щелочных) внутреннее сопротивление Rвн .
Поэтому только кислотные аккумуляторы могут использоваться в качестве стартер
ных, так как большие разрядные токи Iр создают сравнительно малое падение напряжения
на аккумуляторе: ΔU = Iр Rвн. В результате аккумулятор при разряде практически сохраня
ет напряжение: Uр= Е- ΔU .
Нормальным током разряда кислотной АБ считается ток, составляющий около
10 % емкости АБ, т.е. Iр = С / 10.
181
Например, для батареи 6СТЭ-128 нормальный ток разряда Iр = С / 10 = 128 / 10 =
12,8 А.
Полную емкость АБ отдает за 10 ч: С = 12,8*10 = 128 А-ч.
При работе со стартером эта АБ разряжается током 300-400 А за короткое время.
Для аккумулятора такой режим неблагоприятен, так как при обильном выделении Рb SO
4
может возникнуть деформация пластин и возможно выпадение активной массы.
Стартерный режим при температуре 30ºС может длиться не более 5,5 мин, а при
температуре -18ºС - всего 2 мин. Полную емкость аккумулятор, конечно, не отдает, но его
напряжение понижается до 1,5В.
При эксплуатации кислотных АБ необходимо обеспечить нормальные режимы раз
ряда и заряда, наблюдать за плотностью электролита, поддерживать чистоту батарей, так
как загрязнение увеличивает степень саморазряда.
Приготовление электролита и заряд кислотных АБ
Электролит приготовляют в чистой стеклянной, фарфоровой, эбонитовой или эма
лированной посуде. В воду осторожно вливают кислоту, размешивая раствор стеклянной
или эбонитовой палочкой.
Раствору нужно дать остыть до температуры 25ºС. Обычно плотность электролита
3
предварительно устанавливают 1,4 г/см , затем перед заливкой в аккумулятор плотность
доводят до нормы.
При вводе в эксплуатацию новых АБ после заливки электролита в течение 3-6 ч да
ют возможность активной массе пластин хорошо пропитаться, проверяют уровень
электролита в банках и заряжают током, несколько меньшим 10 % емкости.
Через каждый час проверяют температуру и плотность. В случае нагрева выше 45º
С прекращают заряд и охлаждают АБ до 35ºС.
Конец заряда определяют по обильному выделению газа ("кипению"), а также по
постоянству напряжения и плотности электролита в течение последних 2 ч заряда.
В конце заряда напряжение достигает 2,75-2,80 В на каждой банке.
Разряд кислотных АБ
В режиме разряда по напряжению аккумулятора можно ориентировочно определить степень его заряженности: при напряжении 2,0-1,9 В аккумулятор полностью
заряжен; при 1,9-1,8 В заряжен на 75 %; при 1,8-1,7 В заряжен на 50 %; при 1,7-1,6 В
заряжен на 25 %; при 1,6-1,5 В полностью разряжен.
Для повышения надежности кислотных АБ, а также с целью предотвращения замер
зания электролита (когда плотность понижена) их рекомендуют разряжать не более чем на
50 %.
Систематический перезаряд АБ, во время которого в аккумуляторах действуют повышенные температуры, вызывает разрушение активной массы.
Постоянный недозаряд способствует возникновению процесса сульфатации, призна
ками которого являются повышение напряжения в начале заряда, преждевременное "кипение", незначительное повышение плотности в процессе заряда, повышение температуры и
быстрое понижение напряжения в процессе разряда.
Сульфатированный аккумулятор разряжают, заменяют электролит дистиллированной водой и заряжают током, составляющим 0,5 нормального тока заряда, до достижения
постоянства плотности и напряжения в течение 6 ч при обильном газовыделении. Затем
плотность доводят до номинального значения.
Загрязнение электролита посторонними примесями (например, при использовании
нестандартной кислоты ) приводит к разрушению активных масс пластин, у таких АБ
наблюдается повышенный саморазряд.
182
Неправильное подключение АБ или ее отдельных банок в зарядную цепь может
привести к изменению полярности пластин.
Правила обслуживания аккумуляторов предусматривают еженедельный осмотр АБ
и аккумуляторных помещений.
Ежемесячно проводится протирка аккумуляторов, проверка уровня электролита,
плотности, выполняется заряд.
Режимы и периодичность зарядов АБ определяются условиями их эксплуатации и
соответствующими инструкциями.
3.3. Щелочные аккумуляторы
Маркировка батарей
В странах СНГ маркировка наносится на батарею и должна содержать:
1. товарный знак предприятия-изготовителя;
2. условное обозначение батареи;
3. знаки полярности: плюс «+» и минус «-«;
4. дату изготовления ( месяц, год );
5. обозначение технических условий батарей конкретного типа;
6. номинальную емкость в ампер-часах на батареях с общей крышкой;
7. номинальное напряжение в вольтах на батареях с общей крышкой;
8. клеймо технического контроля;
9. максимальная масса батареи ( без электролита ) по техническим условиям.
Условное обозначение щелочных батарей
Батареей называют группу отдельных аккумуляторов ( банок ), соединенных опре
деленным образом – последовательно, параллельно или по смешанной схеме.
В приведенных ниже таблицах условное обозначение батарей состоит из типа и ис
полнения.
Обозначение типа состоит из цифр и букв, которые означают следующее:
1. 5, 10, 32 или 64 – число последовательно соединенных аккумуляторов (банок);
2. КН – кадмиево-никелевая;
3. ЖН – железоникелевая;
4. цифры после букв – номинальная емкость при 20-часовом режиме разряда, А-ч
( ампер-часы ).
Обозначение исполнения состоит из букв, которые обозначают следующее:
1. Б – безламельная.
Пример. В батарее типа 10КН-100 цифры и буквы обозначают следующее:
10 – число последовательно соединенных аккумуляторов с общим напряжением
10 х 1,2 = 12В; КН – кадмиево-никелевая; 100 – емкость в А-ч.
Устройство щелочных аккумуляторов
Если кислотные аккумуляторы используют в качестве стартерных, то для питания
прочих низковольтных устройств применяют щелочные кадмиево-никелевые и железоникелевые аккумуляторы (они одинаковы по конструкции и составу электролита).
Корпус 9 щелочного аккумулятора (рис. 5.9 ) изготовляют сварным из листовой ста
ли, покрытой никелем.
Технология изготовления положительных 4 и отрицательных 11 пластин одинакова: их выполняют из тонких перфорированных листов стали в виде ламелей-футляров 3,
в которые помещается активная масса 1.
183
Гидрат окиси никеля Ni(ОН)3 служит активной массой положительных пластин ще
лочных аккумуляторов обоих типов.
Активная масса отрицательных пластин у кадмиево-никелевых аккумуляторов состоит из смеси губчатого кадмия с железом, а у железо-никелевых - из смеси химически
активного железа (губчатого железа) с его окислами и небольшого количества окиси
ртути.
В электрохимических процессах участвуют кадмий Cd или железо Fe, а присадки
улучшают электрохимические свойства масс.
Рис. 5.9. Устройство щелочного аккумулятора: 1 – активная масса; 2 –
палочки распорные эбонитовые; 3 – ламель-футляр; 4 – положительные пластины;
5 – вывод; 6 – пробка; 7 – вывод; 8 – крышка стальная; 9 – корпус аккумулятора; 10
– баретки ( соединительные мостики ); 11 – отрицательные пластины; 12 – контактные пластины; 13 – эбонитовые пластины; 14 – стойки.
С помощью контактных пластин 12 и соединительных бареток 10 пластины собира
ют в блоки и через выводы 5, 7 соединяют с внешней цепью.
В стальной крышке 8 расположены пробки 6, в которых устроены небольшие отвер
стия для вентиляции.
Изоляция пластин одна от другой и от корпуса достигается установкой распорных
эбонитовых палочек 2 и эбонитовых пластин 13 со стойками 14.
У кадмиево-никелевых аккумуляторов крайние пластины всегда положительные, у
железоникелевых отрицательные.
При сборе в батарею аккумуляторы монтируют на изоляционных прокладках в общем деревянном или пластмассовом ящике и надежно изолируют от корпуса судна.
Электролитом служит раствор едкого кали КОН или натра NaOН в дистиллированной воде плотностью 1,19-1,21 г/см3 с небольшой добавкой едкого лития с небольшой добавкой едкого лития КОН, который увеличивает срок службы аккумуляторов в 2-2,5 раза.
Реакции разряда-заряда (на примере кадмиево-никелевого аккумулятора) следую
щие:
у положительных пластин Ni (ОН3 ) + К ↔ Ni (ОН)2 + КОН;
у отрицательных пластин Cd + 2OН ↔ Сd(ОН)2.
184
Образовавшиеся при разряде гидроокиси Ni(ОН)2 и Сd(ОН)2 не обладают какимилибо отрицательными свойствами, поэтому щелочные аккумуляторы могут длительное
время находиться в разряженном состоянии, следовательно, их обслуживание упрощается.
Так как ионы К+ и ОН- или целые молекулы КОН присутствуют в левых и правых
частях уравнений реакций, плотность электролита в процессе разряда-заряда почти не
изменяется.
ЭДС заряженного аккумулятора составляет 1,35 В, при разряде уменьшается до 1 В
( это зависит от состояния активных масс пластин и в меньшей степени от плотности элек
тролита и температуры эксплуатации).
Напряжение заряженного аккумулятора составляет 1,25 В, разряжают его до напря
жения не ниже 1,1 В.
Например, батарея 10 КН-100 (кадмиево-никелевая батарея, собранная из 10 банок,
общей емкостью 100 А-ч) имеет номинальное напряжение U = 12,5 В.
Номинальным зарядным током считается ток Iз = С / 4= 25 А продолжительностью 6 час.
Номинальным разрядным током считается ток Iр = С / 8 = 12,5 А продолжительностью 8 час.
Допускается 1-часовой режим разряда током Iр = 100 А.
Внутреннее сопротивление щелочных аккумуляторов Rвн = 0,03—0,05 Ом, т.е. в
десятки раз больше внутреннего сопротивления кислотных аккумуляторов, у которых Rвн
= 0,005 Ом. Поэтому щелочные аккумуляторы нельзя использовать в стартерном режиме.
Эксплуатация щелочных АБ
Приготовление электролита и заряд щелочных АБ
Для пользования в судовых условиях едкие кали КОН и натр N304 поставляются в
жидком (плотностью 1,41 г/см3) или твердом (иногда с добавкой едкого лития) виде.
Для приготовления электролита пригодна дождевая и питьевая вода. После растворения щелочи в железной, стеклянной или пластмассовой посуде раствор выдерживают в
течение 3-6 ч до полного осветления.
Осветленную часть раствора при температуре не выше 30ºС доводят до нужной
плотности и заливают в аккумулятор.
Во избежание поглощения электролитом углекислого газа из воздуха в каждый
аккумулятор вливают несколько капель вазелинового масла или керосина.
После заливки нового аккумулятора электролитом его выдерживают в течение 2-10
ч (для пропитки пластины) до появления начального напряжения.
Затем проводят 2- 4 цикла заряд-разряд в соответствии с инструкцией.
Смену электролита выполняют через каждые 100-150 рабочих циклов, а также при
хранении аккумулятора без действия сроком более одного года или при использовании
его при температуре ниже - 20ºС. Перед сменой электролита аккумулятор разряжают до 1
В, промывают и немедленно заливают электролитом.
Кроме нормальных 6-часовых режимов заряда при Iз = С / 4 = 0,25С, через каждые
10 циклов (примерно 1 раз в месяц) или после глубоких разрядов делают усиленный заряд
тем же током, но в течение 12 ч.
При зарядах температура аккумулятора не должна превышать 45°С. В начале заря
да напряжение аккумулятора составляет 1,4-1,45 В, в конце - 1,75-1,95 В.
Конец заряда характеризуется бурным выделением газа и постоянством ЭДС акку
мулятора.
Разряд щелочных АБ
185
При разряде аккумулятора в 8-часовом или более длительном режиме ( Iр = С / 8 )
напряжение не должно уменьшиться ниже 1,1 В, при 1-часовом режиме разряда – ниже
0,5 В.
После 100-150 циклов работы проводят контрольно-тренировочные циклы, предусматривающие непрерывные и полные заряды-разряды с заменой электролита.
Если в конце этих циклов за 6 ч разряда током Iр = С / 8 напряжение уменьшается
до 1 В и ниже, аккумулятор подлежит замене.
Наличие примесей в электролите, отсутствие в нем присадки едкого лития, система
тические недозаряды, глубокие разряды, утечка тока и работа при температурах выше 35
ºС могут быть причиной понижения емкости щелочных АБ.
Работа при повышенных токах, низком уровне электролита и наличии неплотностей на выводах может, вызвать перегрев аккумулятора.
При КЗ, утечках тока и накоплении осадков аккумулятор может иметь пониженное
напряжение.
В небольших количествах выпускаются никель-кадмиевые безламельные щелочные аккумуляторы, у которых активная масса наносится на стальную решетку пластин и
спекается.
У этих аккумуляторов Rвн = 0,005 Ом, т.е. такое же, как и кислотных АБ. Поэтому
они могут работать с большими разрядными токами со стабильным напряжением, но срок
их службы мал (примерно 300 циклов).
В марку такого аккумулятора добавляется буква Б ( безламельный ).
Серебряно-цинковые аккумуляторы обладают высокой стабильностью напряжения
при больших разрядных токах и имеют малые массу и габаритные размеры. Однако их
стоимость высока, а ресурс довольно низок (до 100 циклов). Эти аккумуляторы имеют
Rвн = 0,001 Ом, Е = (1,7-4,4) В, напряжение в заряженном состоянии U = 1,6-1,5 В.
Серебряно-кадмиевые аккумуляторы обладают несколько худшими рабочими
характеристиками, но в эксплуатации выдерживают до 500 циклов.
3.4. Выбор и размещение аккумуляторов
Тип аккумуляторов, их количество и параметры определяются их назначением на
судне.
Для увеличения напряжения АБ соединяют последовательно, для обеспечения ре
жимов работы с большими токами - параллельно.
Разрядная емкость (А-ч) аккумуляторной батареи для сетей освещения и сигнализа
ции
С 1 = РТ / U,
где Р - потребляемая мощность, Вт;
Т - длительность электроснабжения, ч;
U- номинальное напряжение батареи, В.
Для питания электростартеров устанавливают две АБ, причем емкости одной из
них должно хватать на 6 пусков длительностью 5 с.
Емкость (А-ч) одной стартерной батареи
С 2 =1 ст пt п ,
где 1 ст - ток стартера (принимается равным 400 А);
n - число пусков;
t п - длительность пуска, ч.
Учитывая ухудшение свойств аккумуляторов в процессе эксплуатации, их расчет
ную емкость несколько увеличивают.
Аккумуляторные батареи малого аварийного освещения, связи, пожарной и аварий
186
ной сигнализации размещают в специальных помещениях выше палубы переборок, вне
шахты МО, с выходом на открытую палубу.
Батареи другого назначения мощностью более 2 кВт или напряжением выше безопасного размещают в аналогичном помещении или на открытых палубах в аккумулятор
ных ящиках.
При мощности 0,2-2 кВт АБ устанавливают в ящиках, внутри корпуса судна (кроме
жилых помещений), а при мощности менее 0,2 кВт - в таких же помещениях без специаль
ных ящиков.
Совместная установка щелочных и кислотных АБ недопустима.
Аккумуляторы размещают на стеллажах, их надежно закрепляют.
Для вентиляции воздухом со всех сторон аккумулятора должен быть обеспечен зазор не менее 15 мм.
Во время работы АБ могут выделять взрывоопасный газ, поэтому аккумуляторные
помещения, шкафы и ящики оборудуют приточно-вытяжной вентиляцией.
Через аккумуляторные помещения не прокладывают транзитные кабели и трубопро
воды, в них устанавливают взрывобезопасные светильники с вынесенными наружу выклю
чателями.
При снижении температуры ниже 5ºС помещения отапливают паровыми грелками.
Установка электрических грелок запрещена.
3.5. Зарядно-питающие устройства аккумуляторов
Инструкции заводов-изготовителей предусматривают заряд АБ в режиме постоянства тока (иногда в 2 ступени).
Такой режим заряда обеспечивает наибольший срок службы АБ.
Для того чтобы зарядный ток Iз не изменялся на протяжении всего цикла заряда,
нужно увеличивать зарядное напряжение Uз, так как по мере заряда батареи ее ЭДС
увеличивается, а при Iз = соnst зарядный ток будет уменьшаться.
Проще заряжать АБ при неизменном напряжении Uз. Этот режим протекает с
уменьшающимся Iз. Его технически обеспечить проще, так как Uз = соnst, но такой заряд
менее благоприятен для АБ.
Так как большинство судов построено с СЭЭС переменного тока, то для заряда АБ
требуются преобразователи переменного тока в постоянный ( выпрямительные устройства
).
Их собирают на статических выпрямителях или тиристорах UZ (рис. 5.10 ), только
на старых судах можно встретить вращающиеся преобразователи переменно-постоянного
тока.
187
Рис. 5.10. Принципиальная схема зарядно-питающего устройства с автоматическим управлением
Большинство зарядных устройств работают параллельно с АБ, заряжая их и поддер
живая напряжение на приемниках. Такой режим работы ЗУ называется буферным.
При отключении зарядных устройств АБ продолжает энергоснабжение приемников
электроэнергии.
Зарядные устройства не включают непосредственно на стартер.
Комплекс оборудования, обеспечивающий заряд АБ, а иногда и одновременное питание низковольтных приемников, называется зарядно-питающим устройством.
Схемы и конструктивное исполнение ЗПУ отличаются большим разнообразием.
На рис. 5.10 показано ЗПУ с автоматическим зарядным устройством АZ.
В ЗПУ входят также электродвигатель М вентилятора аккумуляторного помещения с пускателем КМ2, аккумулятором GB и РЩ.
При наличии напряжения 380 В нажатием на кнопку SВ1 включают схему заряда и
двигатель М. При его перегрузке с помощью тепловых реле FР1, FР2 отключаются М и
зарядное устройство АZ.
Таким образом предотвращается накопление взрывоопасных газов в аккумуляторной.
Выпрямительное устройство UZ собрано на диодах и тиристорах. Сигнал управления зарядным током создается трансформатором тока ТА.
Блок БУ автоматического управления зарядным током имеет переключатель, позво
ляющий перейти на ручное управление.
Напряжение ЗПУ одновременно поступает на аккумуляторы и РЩ. Блок управления собран на операционных усилителях.
Переключателем SА можно выбрать один из трех режимов его работы.
Первый режим (Uз = 25…27 В) нормального заряда и второй (Uз =27…31 В) ускоренного заряда фактически обеспечивают заряд с ручным управлением.
Регулирование напряжения в указанных пределах осуществляется переменным
резистором RP.
В третьем, автоматическом, режиме в зависимости от значения зарядного тока напряжение изменяется автоматически в пределах 25…31 В.
188
Приемники, получающие питание от РЩ, могут работать при таких колебаниях
напряжения питания.
При КЗ на выходе выпрямителя UZ автоматически увеличивается угол управления
тиристорами и напряжение ЗПУ уменьшается до безопасного для приемников значения.
Контроль параметров заряда осуществляется по амперметру РА1 и вольтметру РV,
контроль нагрузки - по амперметру РА2.
Повышенной надежностью и другими высокими эксплуатационными качествами
обладают зарядные агрегаты типа ВАКЗ (выпрямительный агрегат, кремниевый, зарядный). Например, агрегат типа ВАКЗ-1-4-40М (морской, напряжение питания 220/380 В,
частота 50 Гц, номинальная мощность 1 кВт) обеспечивает автоматическую стабилизацию
зарядного тока в диапазоне 3…25 А при автоматическом изменении напряжения на выходе от 12 до 40 В.
Схема зарядного агрегата собрана на шести тиристорах, управляемых по значению
зарядного тока.
На рис. 5.11 показаны схемы более простых ЗПУ с ручным регулированием значения зарядного тока.
Рис. 5.11. Принципиальная схема зарядно-питающих устройств с ручным
управлением:
а – с переключающим контактором; б – с секционированием первичной обмотки
трансформатора
При наличии напряжения 220 В (рис. 5.11, а) включается реле КV и при нажатии на
кнопку SВ1 включается контактор КМ.
Через его замкнувшиеся контакты и регулировочные резисторы RP протекает ток
заряда аккумуляторов.
С помощью шунтов RS и переключателя SА контролируют ток заряда.
При отсутствии напряжения 220 В контактор КМ, потеряв питание, переключает
аккумуляторы GВ1, GВ2 в последовательную цепь и на приемники.
В схеме ЗПУ, представленной на рис. 5.11, б, регулирование напряжения заряда вы
полняется с помощью переключателя SА, подключенного к секционированным первичным обмоткам трансформатора TV питания.
В обычном режиме контакторы КМ1 и КМ2 находятся под напряжением. Через выпрямитель UZ заряжается батарея GВ и одновременно напряжение поступает на цепи сигнализации.
189
В аварийном режиме контакторы обесточиваются, заряд аккумуляторной батареи
GВ прекращается: теперь ее электроэнергия расходуется на питание сетей сигнализации и
малого аварийного освещения МАО.
3.6. Правила техники безопасности при эксплуатации аккумуляторов
Так как в аккумуляторе имеются химически опасные вещества и в процессе работы
выделяются взрывоопасные газы, технике безопасности следует уделять особое внимание.
Серная кислота, попавшая на кожу, вызывает ожоги, а ее пары, попадая в дыхатель
ные пути, вызывают раздражение или ожог слизистой оболочки.
Попавшую на кожу кислоту или электролит нейтрализуют 5 %-ным водным
раствором соды или 10 %-ным водным раствором нашатырного спирта.
Попадание щелочи на кожу или слизистую оболочку вызывает разрушение ткани
(появление язв). Особо опасно попадание даже малых количеств щелочи в глаза.
Попавшую на кожу или в глаза, щелочь удаляют путем промывания раствором
борной кислоты ( 10%-ный - для кожи, 2 %-ный - для глаз) и большим количеством
воды, после чего необходимо обратиться к врачу.
Во время работы с электролитами нужно пользоваться специальной одеждой: шерс
тяной костюм, резиновый фартук, очки, перчатки, сапоги.
Необходимо соблюдать особую осторожность при разливе кислоты и дроблении
щелочи.
Все работы, связанные с монтажом или демонтажем, можно проводить только при
отключенных АБ, а если применяется пайка или газовая резка, то АБ следует разрядить и
хорошо проветрить помещение.
Пользоваться металлическим инструментом надо с большой осторожностью, так
как оставленные на аккумуляторе металлические предметы могут вызвать КЗ и взрыв.
Контрольные вопросы
1. Перечислите основные требования Правил Регистра аварийным электростанцииям
2. Какие судовые устройства и системы являются приемниками электроэнергии
аварийной СЭС?
3. Как осуществляется питание приемников аварийной СЭС в нормальном режиме
работы судна?
4. Используя схему ( рис. 5.1 ), назовите назначение всех коммутационных устройств
5. Какие функции выполняются с помощью программы автоматического пуска
АДГ?
6. Используя схему, объясните, как формируется выдержка времени всего цикла
автоматического пуска АДГ.
7. Как действует схема, с помощью которой обеспечивается предварительная прокачка масла в смазочной системе АДГ?
8. Используя схему ( рис. 5.4), объясните порядок включения нагрузки после авто
матического пуска АДГ
9. Как устроены гальванические элементы?
10. Как устроен кислотный аккумулятор?
11. Используя химические реакции, объясните процессы, происходящие в кислотном аккумуляторе при его разряде и заряде.
12. В чем заключается процесс сульфатации кислотного аккумулятора и каковы его
последствия?
13. Как устроен щелочной аккумулятор?
14. Назовите основные достоинства и недостатки кислотных и щелочных аккумуля
торов
190
15. Рассчитайте зарядный ток аккумуляторов 6СТК-180 и 5НКН-68
16. Как определить расчетную емкость аккумуляторных батарей?
17. Перечислите основные правила техники безопасности, которые необходимо соблюдать при обслуживании аккумуляторов
18. Какие виды зарядных устройств применяются на судах? Чем они отличаются
друг от друга?
1.6. РАСПРЕДЕЛЕНИЕ ЭЛЕКТРОЭНЕРГИИ ПО СУДНУ
1. Судовые электрические сети
1.1. Классификация электрических сетей
Электрические сети предназначены для распределения и передачи электроэнергии
и состоят из электрораспределительных щитов и линий электропередачи. Электрические
сети подразделяют на силовые, аварийные и приемников.
Силовая электрическая сеть предназначена для распределения электроэнергии на
участках от ГРЩ до приемников или преобразователей электроэнергии. Различают следу
ющие типы силовых электрических сетей: фидерную, магистральную и магистральнофидерную ( рис. 6.1 ).
Рис. 6.1. Принципиальные схемы силовых электрических сетей:
а – фидерная; б – магистральная; в – магистрально-фидерная
В случае использования фидерной сети (рис. 6.1, а) ответственные и наиболее мощные приемники П1 и П2 получают питание непосредственно от ГРЩ по отдельным фидерам, а приемники ПЗ-П8 - от электрораспределительных щитов (районного РРЩ1, отсечных ОРЩ1-ОРЩЗ и групповых ГрРЩ1-ГрРЩ2, соединенных с ГРЩ фидерами.
При использовании магистральной сети (рис. 6.1, б) приемники электроэнергии
П1-П6 получают питание от электрораспределительных щитов РЩ1-РЩЗ или магистраль
ных коробок МК1-МКЗ, присоединенных параллельно к магистральным линиям МЛ1МЛЗ.
На современных судах применяют смешанную, магистрально-фидерную сеть (рис.
6.1, в). В этой сети приемники П1 получают питание по фидерам, а приемники П2-П5 - по
магистральным линиям МЛ1 и МЛ2.
1.2. Сравнение свойств судовых электрических сетей
Сравним свойства разных типов силовых электрических сетей.
Фидерная сеть более надежна по сравнению с магистральной, так как при повреж
191
дении любого фидера лишается питания отдельный приемник или группа приемников, в
то время как при повреждении магистральной линии прекращается питание всех приемни
ков или части их (в зависимости от места повреждения линии).
Вместе с тем фидерная сеть имеет увеличенную массу по сравнению с магистральной. Ее применяют для питания отдельных ответственных приемников или групп приемников (например, рулевого и якорного устройств, механизмов СЭУ).
Магистральную сеть используют в основном для питания неответственных приемников (например, сети освещения). При этом к одной линии электропередачи (магистрали) подключают светильники и розетки в нескольких смежных помещениях.
Магистрально-фидерная сеть соединяет достоинства и недостатки фидерной и
магистральной сетей.
Выбор того или иного типа силовой сети зависит от ряда факторов, среди которых
наиболее существенными являются назначение судна, мощность его электроэнергетической системы, а также количество и распределение приемников электроэнергии.
Аварийная электрическая сеть предназначена для распределения электроэнергии
на участке от АРЩ до приемников, перечень которых определен Правилами Регистра.
Электрическая сеть приемников предназначена для распределения электроэнергии
от определенного распределительного щита или преобразователя электроэнергии до одно
именных приемников. К таким сетям относят сети основного освещения, аварийного осве
щения, переносного освещения, сеть установок слабого тока, сеть радиотрансляции и др.
Сеть основного освещения применяется для снабжения электроэнергией осветитель
ных приборов и получает питание, как правило, от электрораспределительных щитов различного назначения: наружного освещения, освещения МО, служебных и пассажирских
помещений и др.
Напряжение сетей основного освещения составляет 220 В (реже 127 В). Правила
Регистра СССР допускают применение этих сетей для питания маломощных бытовых
электроприборов (каютных вентиляторов, холодильников и др.), а также электрических
грелок.
Сеть аварийного освещения является составной частью сети основного освещения.
Эта сеть получает питание от АРЩ и поэтому снабжается электроэнергией практически
бесперебойно: при нормальном режиме работы основной электростанции от ГРЩ через
шины АРЩ, а при выходе ее из строя от АДГ. При обесточивании основной и аварийной
электростанций автоматически включается сеть аварийного освещения напряжением 12
или 24 В, питающая от АБ ограниченное количество осветительных точек в постах управ
ления, коридорах и проходах.
Сеть переносного освещения применяется для снабжения электроэнергией перенос
ных светильников напряжением 12 или 24 В, позволяющих усилить местную освещенность при проведении ТО или ремонтных работ. Для получения указанных напряжений
используют понижающие трансформаторы соответствующей мощности.
Сеть установок слабого тока обеспечивает работу телефонов внутренней связи,
машинных телеграфов, рулевых указателей, звонковой и пожарной сигнализации и других
приемников ограниченной мощности.
Сеть радиотрансляции соединяет радиотрансляционный узел с громкоговорителями, установленными в различных помещениях судна.
Электрические сети выполняют изолированными от корпуса судна.
Исключение составляют электрические сети маломерных судов (небольших буксиров, катеров, мотоботов и др.), на которых допускается применение корпуса судна в
качестве второго провода при напряжениях до 30 В переменного и 55 В постоянного тока.
Передачу электроэнергии постоянного и 1-фазного переменного тока осуществляют 2-проводными линиями электропередачи, а 3-фазного тока - 3-проводными ( редко 4проводными) линиями электропередачи. В последнем случае линия электропередачи состоит из трех фазных и одного нулевого провода и применяется на плавсредствах {дебар-
192
кадерах, брандвахтах и др.), получающих электроснабжение с берега.
2. Судовые кабели и провода
2.1. Основные сведения
Передача электрической энергии в силовых и осветительных сетях и телефонная
связь осуществляются при помощи кабелей и проводов.
Кабель состоит из одного или нескольких изолированных проводников, заключенных в общую защитную, а поверх нее герметичную оболочки. Кабели можно прокладывать в сырых помещениях и на открытой палубе.
Провод по сравнению с кабелем имеет облегченную защитную оболочку. Поэтому
провода прокладывают только в сухих и отапливаемых помещениях.
Кабели и провода для силовых и осветительных установок рассчитывают на напряжение до 700 В переменного или 1000 В постоянного тока, для телефонных установок - на
напряжение 100 В постоянного тока.
Помимо судовых проводов, внутри приборов и аппаратуры применяют изолирован
ные монтажные провода, допускающие непосредственную прокладку по металлическим
деталям. Для соединения антенны судовой радиостанции с антенным вводом применяют
разновидность неизолированных проводов - антенные канатики.
К кабелям и проводам предъявляется ряд требований, обусловленных особенностями прокладки и эксплуатации: повышенная гибкость (что важно при прокладке трасс в
ограниченных по размеру судовых помещениях); электрическая прочность изолирующих
оболочек; негорючесть; стойкость к воздействию воды, масла и др.
Токоведущие жилы скручивают из отдельных отожженных медных проволок с пло
щадью поперечного сечения от 0,35 до 625 мм2 для силовых кабелей и проводов и 1 мм2
для телефонных проводов.
Жилы заключены в изолирующую оболочку из резины, поливинилхлоридного пластиката и полиэтилена, стекловолокна, фторопласта-4 и др.
Наружные защитные оболочки кабелей изготовляют из маслобензостойкой, не распространяющей горения резины, шлангового поливинилхлоридного пластиката и свинца.
Поверх изолирующей оболочки кабели и провода могут иметь металлические оболочки
различного назначения.
Для уменьшения помех радиоприему применяют экранирующие оболочки из медной луженой проволоки, охватывающие весь кабель, жилы внутри кабеля экранируют металлизированной бумагой.
Для защиты от механических повреждений используют неэкранирующую оплетку
из стальной оцинкованной проволоки (панцирную оплетку) или металлическую броню из
стальной ленты или проволоки. Лента (проволока) наматывается спирально и образует
сплошной цилиндрический слой. Допускается применение кабелей с оболочками из меди,
чистого свинца и его сплавов.
Обозначение кабелей и проводов состоит из марки, числа жил и площади их поперечного сечения, значения допустимого напряжения (например, кабель КНРЭ 3x25-500).
Буквы в марке обозначают:
1. для кабелей силовых приемников и осветительных приборов: К - кабель, Н - него
рючий, Р - резиновая изоляция жил и наружная оболочка, П - оплетка из стальных оцинко
ванных проволок ( «панцырь» ), Э - экранированный, М - морской, Б - изоляции на основе
бутилкаучука, В - поливинилхлоридная оболочка, О - облегченный, к - устойчивый к воздействию коррозии.
На судах для таких приемников применяют кабели типов КНРк, КНРП, КНРЭ,
КБН, КБНЭ, КОВЭ (при неподвижной прокладке) и РШМ, НРШМ (при подвижной).
2. для кабелей управления, связи, телефонии (в дополнение к указанным выше обо
значениям): С - судовой, М - малогабаритный, Т - телефонный.
193
К таким кабелям относятся кабели типов КНРТ, КНРТП, КНРТЭ, КНРЭТЭ и др.
Если буква Э находится внутри марки кабеля, то это означает, что экранируется
одна или несколько жил, если в конце марки, то экранируется весь кабель.
Судовые кабели и провода имеют, как правило, многопроволочные жилы, что
увеличивает их гибкость и исключает переломы жил вследствие вибрации и других
механических воздействий.
Количество жил в различных кабелях составляет 1, 2, 3, 4, 5, 7, 10, 12, 14, 16, 19, 24,
27, 30, 33, 37, 41, 44, 48, 52 и 61, что удовлетворяет потребностям судовых электрических
сетей любого назначения.
В сетях постоянного и 1-фазного переменного тока используют 1- и 2-жильные
кабели, причем применение 2-жильных кабелей с площадью поперечного сечения более 6
мм2 считается нерациональным.
В сетях 3-фазного переменного тока применяют, как правило, 3-жильные кабели с
площадью поперечного сечения не свыше 240 мм2 (с целью облегчения монтажа), а для се
тей внутренней связи, цепей управления и контрольных цепей используют многожильные
кабели.
Внедрение новых видов изоляции с повышенными тепловыми нагрузками (бутилрезиновая, кремнийорганическая, минеральная и др.) позволяет уменьшить массу кабельных сетей вследствие уменьшения толщины изоляционных оболочек и одновременно увеличить срок службы кабелей. Последнее позволяет обойтись без трудоемкого и дорогосто
ящего ремонта кабельных трасс в течение всего периода эксплуатации судна.
Следует заметить, что применение на судах кабелей с минеральной изоляцией проблематично. Такие кабели представляют собой медную трубку, внутри которой запрессованы в непроводящей окиси магния одна или несколько медных жил. Эти кабели огнестой
ки, компактны, долговечны, однако их недостатком является отсутствие гибкости.
2.2. Расчет кабелей по току нагрузки, их выбор и проверка
Надежность СЭО во многом определяется состоянием изолирующих оболочек кабе
лей и проводов, которое зависит в основном от характера и продолжительности тепловых
процессов при нагреве оболочки током жилы.
Теория тепловых процессов достаточно сложна и используется на стадии разработки образцов кабельной продукции. Она позволяет по заданной площади поперечного сечения жилы и известным тепловым характеристикам изоляции оболочки определить значение длительно допустимого тока жилы.
На практике приходится решать обратную задачу, которую упрощенно можно сфор
мулировать так: по заданному или рассчитанному значению тока найти площадь поперечного сечения жилы кабеля. Для этого используют готовые таблицы норм токовых нагрузок кабелей и проводов.
Выбор кабеля дополняют проверкой его на потерю напряжения в линии.
2.3. Определение расчетных токов кабелей.
Расчетный ток (А) кабеля, питающего:
а ) двигатель постоянного тока
I
3
расч
= 10 Р ном k з / ( U
ном
η
ном
)
( 6.1 ),
б ) трехфазный асинхронный двигатель
I
3
расч
= 10 Р ном k з / (
3 U ном η
ном
cosφ ном )
( 6.2 ),
где Р ном - номинальная мощность двигателя, кВт;
k з - коэффициент загрузки двигателя;
U ном - номинальное напряжение двигателя (для асинхронного двигателя линей
194
ное), В;
η
- номинальный КПД двигателя;
ном
cosφ
ном
- номинальный коэффициент мощности асинхронного двигателя;
группу приемников постоянного тока
n
I
расч
=kо
I
+I
i 1
( 6.3 ),
зап
где k о - коэффициент одновременности работы приемников, питающихся от
данного фидера;
n - число приемников;
n
I -
сумма полных токов всех п приемников, питающихся от данного фидера, А;
i 1
I
зап
- ток запасных ответвлений, А;
группу приемников переменного тока
n
I
ф
=kо
n
( I ai ) 2 ( I p ) 2
i
i 1
( 6.4 ),
i 1
где: k о - коэффициент одновременности работы однотипных приемников в данном
режиме;
n
I ai
i 1
= I1
расч
cosφ 1 + I 2
расч
cosφ 2 + ….+ I n
расч
cosφ n - арифметическая сумма ак-
тивных составляющих расчетных токов приемников электроэнергии;
n
I pi
i 1
= I1
расч
sinφ 1 + I 2
расч
sinφ 2 + ….+ I n
расч
sinφ n - арифметическая сумма реак-
тивных составляющих расчетных токов приемников электроэнергии
расчетный ток 3-фазного трансформатора принимают равным номинальному
I
расч
= I 2 н = ( S 2 н *10 3 ) / (
3* U
1н
н
)
( 6.5 ),
где S 2 н - номинальная мощность генератора, кВ*А;
10 3 - коэффициент перевода киловатт в ватты;
U - номинальное первичное напряжение генератора ( линейное ), В.
1н
2.4. Выбор площади поперечного сечения жил кабелей
.
Для выбора площади поперечного сечения жил кабелей используют таблицы норм
токовых нагрузок (табл. 6.1 ). Эти нагрузки допускаются при прокладке не более 6
кабелей в одном пучке или в 1 ряд с плотным прилеганием одного к другому, или в 2 ряда,
независи
мо от числа кабелей, но при условии, что между группой или пучком из 6 кабелей имеется
свободное пространство для циркуляции воздуха.
Таблица 6.1.
Длительные допустимые токовые нагрузки ( А ) одножильных кабелей и проводов
для температуры окружающей среды + 45ºС
Номинальное
Изоляционный материал
Поливинил- ПоливинилБутиловая
Этиленпро-
Силиконовая
195
сечение
жилы,
мм
2
1
1,5
2,5
4
6
10
16
25
35
50
70
95
120
150
185
240
300
хлорид
хлорид тепрезина
пиленовая
лостойкий
резина
Максимальная рабочая допустимая температура жилы, ºС
60
75
80
85
8
13
15
16
12
17
19
20
17
24
26
28
22
32
35
38
29
41
45
48
40
57
63
67
54
76
84
90
71
100
120
120
87
125
140
145
105
150
165
180
135
190
215
225
165
230
260
275
190
270
300
320
220
310
340
365
250
350
390
415
290
415
460
490
335
475
530
560
резина или минеральная изоляция
95
20
24
32
42
55
75
100
135
165
200
255
310
360
410
470
-
Если фактические условия отличаются от перечисленных нормированных, вводят
поправочные коэффициенты k … k .
4
1
Коэффициент k учитывает изменение условий прокладки кабелей (при прокладке
1
более 6 кабелей или при отсутствии свободного пространства между ними k = 0,85).
1
Коэффициент k
2
учитывает изменение числа жил в кабеле ( для 2-жильных кабе-
лей k = 0,85, для 3- и 4-жильных k = 0,7).
2
2
Коэффициент k 3 - учитывает изменение режима работы по отношению к длитель
ному (при кратковременном режиме k 3 = 1,06…1,46, при повторно-кратковременном
k 3 = 1,24…1,51).
Коэффициент k
4
- учитывает отличие температуры окружающей среды от норми
рованной 45 ºС ( для температур 35…85ºС k = 1,29…0,45 ).
4
Площадь поперечного сечения жил кабеля выбирают из условия
I
≥ k k k 3 k I доп
( 6.6 )
расч
где I
расч
1
2
4
,
- расчетный ток кабеля, А;
I доп - допустимый ток нагрузки для кабеля с выбранной площадью поперечного
сечения жил при нормированных условиях эксплуатации.
Если приведенное выше условие не соблюдается, то по табл. 2 выбирают ближайшее большее значение площади поперечного сечения кабеля и соответствующее ему новое значение I доп , затем повторяют расчет.
2.5. Проверка кабелей на потерю напряжения
196
Напряжение на выводах приемника электроэнергии всегда меньше напряжения на
шинах ГРЩ вследствие потерь напряжения в линии между ГРЩ и приемником.
В линиях электропередачи постоянного тока потеря напряжения численно равна
арифметической разности напряжений в начале и конце линии, причем понятия "потеря
напряжения" и "падение напряжения" равнозначны.
В линиях передачи переменного тока потеря напряжения численно равна арифмети
ческой разности модулей (т. е. полных значений) напряжений в начале и конце линии, а
падение напряжения определяется геометрической разностью напряжений в начале и
конце линии.
Потеря напряжения ( %) в линии электропередачи постоянного тока
2
5
ΔU =( 2*10 I l ) / ( γsU н ) или ΔU = ( 2*10 Р l) / ( γsU
1
2
н
) ( 6.7 ),
где 2 – коэффициент, учитывающий наличие двух проводов линии;
I - ток приемника, А;
l - длина линии, м;
2
γ = 48,1 м/( Ом*мм ) - удельная проводимость меди при 65ºС;
2
s - площадь сечения жилы кабеля, мм ;
U н - номинальное напряжение приемника, В;
Р - потребляемая из сети мощность приемника, кВт.
1
В сетях переменного тока потеря напряжения имеет активную и реактивную (индук
тивную) составляющие, причем последней можно пренебречь, так как при частоте тока 50
Гц она значительно меньше активной.
С учетом этого потеря напряжения (%) в 1 -фазной линии электропередачи
переменного тока
2
ΔU =( 2*10 I l cosφ ) / ( γsU н )
( 6.8 ),
или
5
ΔU =( 2*10 Р l ) / ( γsU
1
2
н
)
( 6.9 ),
Потеря напряжения в каждом проводе 3-жильного кабеля при номинальном токе
ΔU = ( 3*10 2 I Lcos φ ) / ( γsU н )
( 6.10 ),
н
или
ΔU = (
5
3*10 Р l ) / ( γsU
1
2
н
)
( 6.11 ),
где: I - ток двигателя ( генератора), А;
L – длина кабеля, м;
cos φ - номинальный коэффициент мощности двигателя ( генератора);
н
γ = 48,1– удельная проводимость меди при температуре + 65° С, м / Ом*мм 2
s - площадь поперечного сечения жилы выбранного кабеля, мм 2 ;
U н - номинальное ( линейное ) напряжение двигателя ( генератора), В.
Если полученное в расчете значение потери напряжения в линии окажется больше
допускаемого, надо из таблицы выбрать кабель с ближайшим большим значением попереч
ного сечения жил и повторить расчет.
В случае если линия электропередачи обеспечивает электроэнергией несколько
приемников, потеря напряжения определяется отдельно для каждого участка, в пределах
которого площадь сечения и ток не изменяются.
Тогда для наиболее удаленного приемника потеря напряжения в линии определит
ся суммой потерь на отдельных участках
ΔU = ΔU + ΔU + …+ ΔU n
( 6.12 ).
1
2
197
2.6. Требования Правил Регистра к значениям падения напряжения в линиях
электропередач
Правила Регистра устанавливают такие нормы падения напряжения ΔU( %) при
номинальном токе нагрузки приемников электроэнергии ΔU :
%
1. на участке генератор – ГЭРЩ ( АРЩ ) - ΔU
%
≤ 1%;
2. на участке ГЭРЩ – приемник электроэнергии:
а ) для приемников освещения и сигнализации при напряжении выше 55 В - ΔU
%
≤5%;
б ) для приемников освещения и сигнализации при напряжении 55 В и ниже 55 В ΔU ≤10%;
%
в ) для силовых, нагревательных и отопительных приемников независимо от напряжения - ΔU ≤7%;
%
г ) для силовых приемников с кратковременным ( S2 ) или повторно-кратковремен
ным режимом работы независимо от напряжения - ΔU ≤10%;
%
д ) на клеммах асинхронного двигателя при прямом пуске - ΔU
%
≤25%.
2.7. Методы прокладки кабелей
На судах кабели и провода прокладывают в виде кабельных трасс, состоящих из от
дельных кабелей или групп кабелей. Последние образуют ряды и пучки.
Рис. 6.2. Способы прокладки
кабелей: а – 1-рядный; 2 – 2-рядный; в - пучком
Рис. 6.3. Кассета со скользящим
замком
Ряд - это группа кабелей, имеющая общее крепление, в которой каждый кабель
соприкасается с двумя соседними, кроме крайних (рис. 6.2, а).
Если группа кабелей состоит из двух рядов, не разделенных зазором и имеющих
общее крепление, то прокладка называется 2-рядной (рис. 6.2, б).
Если в группе 3 и более рядов, кабели образуют пучок (рис. 6.2, в).
При прокладке отдельных кабелей применяют скобы, скоб-мосты и перфорирован
ные панели.
При прокладке рядов и пучков кабелей применяют специальные подвески, называе
мые кассетами (рис. 6.3).
Кассета состоит из П-образного корпуса 1 и подвижного замка 2, который переме
щается вверх или вниз вдоль корпуса кассеты в зависимости от ее заполнения.
198
Кассеты приваривают к корпусу судна на определенном расстоянии одна от другой
по длине трассы, их можно устанавливать вертикально, горизонтально и наклонно.
Пучки кабелей в кассеты укладывают без крепления, что значительно ускоряет и
упрощает монтажные работы. Кассетами и скобами крепят кабели с площадью поперечно
го сечения пучка соответственно до 400 и 150 см2. Применяется также свободная укладка
кабелей в трубы и желоба.
Кабельные трассы должны быть по возможности прямыми, доступными для
осмотра и обслуживания.
Места изгиба кабелей должны иметь определенное значение внутреннего радиуса
R: обычно R = ( 2…10)d, где d - внешний диаметр кабеля.
Для снижения трудоемкости монтажа не рекомендуется применять 1-жильные кабели с площадью сечения жилы более 240 мм2, а также 2- и 3-жильные кабели с площадью
сечения жил более 120 мм2.
Поэтому при прокладке трасс для мощных приемников допускается замена одного
кабеля несколькими одинаковыми с сохранением суммарной площади сечения жил в фазе
или полюсе.
При прокладке кабельных трасс стремятся к минимальному числу пересечений, а в
местах пересечений устанавливают мостики, чтобы избежать взаимного касания трасс.
При прокладке кабелей, идущих параллельно переборкам, подверженным запотеванию, между кабелями и переборками должно оставаться свободное пространство.
Расстояние кабельных трасс от наружной обшивки, противопожарных и водонепро
ницаемых переборок должно быть не менее 20 мм, от двойного дна и от цистерн топлива
и масла - не менее 50 мм, от источников тепла - не менее 100 мм.
Во взрывоопасных помещениях и пространствах разрешается прокладывать кабели
предназначенные только для электрического оборудования, установленного в этих помещениях и пространствах.
При этом электрическое оборудование должно быть взрывозащищенного исполне
ния: искробезопасного ( Ехi ), с оболочкой под избыточным давлением (Ехр), с взрывоне
проницаемой оболочкой ( Ехd ) или повышенной надежности против взрыва (Ехе).
Допускается прокладка транзитных кабелей через упомянутые помещения и пространства при условии, что кабели имеют металлическую броню или оплетку, покрытую неметаллической оболочкой, свинцовую оболочку с дополнительной механической защитой.
Не рекомендуется прокладывать кабели под настилом, если же такая прокладка необходима, кабели должны прокладываться в металлических трубах или в закрытых канналах.
В местах трассы, где возможны разрыв или повреждение кабеля вследствие деформации корпуса судна из-за волнения моря или нагрева, устраивают компенсационные петли, внутренний диаметр которых должен составлять не менее 12 наружных диаметров
кабеля.
При прокладке через водонепроницаемые переборки применяют сальники для оди
ночных кабелей и кабельные коробки для пучков кабелей.
Прокладка кабелей через палубы выполняется в металлических трубах (стояках)
или металлических стаканах. Проходы кабелей через водонепроницаемые переборки и палубы должны надежно быть уплотнены, для чего кабельные коробки заполняют уплотнительными массами, стойкими к воздействию огня, воды и нефтепродуктов, не дающими
усадок и нарушений герметичности в процессе эксплуатации.
Металлические или броневые оболочки кабелей должны быть надежно заземлены,
т. е. электрически соединены с корпусом судна. Для заземления применяют медный провод или металлические скобы, плотно прилегающие к оболочке кабеля. Если кабель прохо
дит через кабельный сальник, для заземления применяют кольца, находящиеся внутри
сальника.
199
Для образования ответвлений от судовых кабелей и проводов применяют разветви
тельные (крестовые) коробки, внутри которых электрическое соединение кабелей проводят при помощи винтовых зажимов.
Для маркировки кабелей и проводов применяют бирки - латунные или фибровые
пластинки, прикрепленные к кабелю узким пояском из латуни или оцинкованной стали.
На пластинки наносят необходимые маркировочные надписи.
3. Защита приемников электроэнергии и электрических сетей
3.1. Основные сведения
Режимы работы электрических сетей и приемников электроэнергии взаимосвязаны.
Это объясняется тем, что электрические сети и приемники связаны гальванически, а ток
нагрузки приемника протекает по цепи: источник электроэнергии - кабель (провод) –
приемник.
Нарушение нормального режима работы приемника сопровождается нарушением
режима работы электрической сети, связанной с этим приемниом.
Справедливо и обратное утверждение. Например, межвитковое замыкание в обмот
ке статора АД приводит к увеличению тока как в поврежденной фазе АД, так и в линейном проводе, соединенном с этой фазой.
Подобно этому обрыв линейного провода электрической сети вызывает 1-фазный
режим работы АД, сопровождаемый увеличением тока в двух остальных фазах АД и линейных проводах.
3.2. Защитные устройства электрических сетей и приемников электроэнергии
Надежность работы приемников электроэнергии и электрических сетей в нормальном и аварийном режимах обеспечивается комплексом мероприятий, в том числе примене
нием защитных устройств, обеспечивающих защиту от токов КЗ, токов перегрузки, понижения напряжения, обрыва фазы и др.
В качестве ЗУ применяют предохранители, селективные и установочные АВ, реле
и др. Развитие полупроводниковой техники позволило перейти от ЗУ, которые обеспечива
ли один, определенный вид защиты, к устройствам, совмещающим в одном изделии несколько видов защит, - тем самым возможно обеспечить полноту, быстродействие и надеж
ность защит.
ЗУ электрических двигателей должны быть следующих видов: от токов КЗ, токов
перегрузки, самопроизвольного повторного пуска ЭД при восстановлении напряжения
после обесточивания или снижения напряжения до 60 % и менее (нулевая защита).
Исключение составляют ЭД электрогидравлических рулевых устройств, для которых предусмотрена защита только от токов КЗ, а вместо защиты от перегрузки устанавливается сигнализация и не допускается применение нулевой защиты. Последнее обеспечива
ет повторный автоматический пуск ЭД после восстановления напряжения, тем самым повышается надежность работы рулевого устройства.
ЗУ трансформаторов от токов КЗ и токов перегрузки устанавливают в цепях первичных обмоток. Для трансформаторов мощностью до 6,3 кВ*А допускается применение
только предохранителей.
ЗУ измерительных и регистрирующих приборов и контрольных ламп должны обеспечивать защиту от токов КЗ. Допускается применение устройств для ограничения токов
КЗ.
ЗУ от обрыва фазы устанавливаются в цепи фидера питания с берега и предназна
чены для его отключения при обрыве фазы. Тем самым исключается массовый выход из
строя судовых 3-фазных АД вследствие перегрузки по току при работе в 1-фазном
режиме.
Этот вид защиты может быть построен на операционном усилителе DА типа
140УД1В (рис.6.4, а).
200
Принцип действия ЗУ основан на сравнении двух напряжений: входного U вх и
опорного U оп , приложенных соответственно к инверсному 9 и прямому 10 входам усили
теля DA.
Напряжение U вх получено при помощи схемы выпрямления на диодах VD1-VDЗ и
пропорционально току фидера питания с берега.
Рис. 6.4. Принципиальная схема защитного устройства от обрыва фазы ( а )
и графики напряжений ( б, в, г, д )
Напряжение U оп создано током, протекающим по цепи:
"+" 6,3 В - потенциометр RР1 - корпус,
и снимается с нижней части потенциометра.
Дифференциальное входное напряжение Δ U = U вх - U оп между входами 9 и 10
имеет полярность большего из этих напряжений.
При нормальном режиме работы береговой сети U вх > U оп (рис. 9.4, б), поэтому
напряжение Δ U имеет полярность: "+" на входе 9, "-" на входе 10.
Через входы усилителя DА протекает ток по цепи:
"+" схемы выпрямления - R4 - вход 9 - вход 10 - R5-RР1 - "-" схемы выпрямления.
На выходе усилителя DA существует небольшое отрицательное напряжение U вых1
(рис. 6.4, в), недостаточное для включения реле КV1.
При обрыве фазы токи в исправных фазах одинаковы по значению и сдвинуты на
180º.
При этом в промежутках времени Δ t входное напряжение уменьшается до значе
ния U вх < U оп (рис. 6.4, г), вследствие чего полярность напряжения Δ U изменяется на
обратную.
Через входы усилителя DA потечет ток обратного направления по цепи:
"+" 6,3 В -верхняя часть RР1-R5- вход 10 - вход 9 - VD4 - корпус.
На выходе усилителя DA напряжение скачком изменится от U вых1 до U
вых2
(рис.
6.4, д).
При этом включается реле КV1, замыкающее свои контакты в цепи независимого
расцепителя АВ питания с берега, который отключает береговую сеть от судна.
201
Диодный ограничитель напряжения на диоде VD4 предназначен для ограничения
напряжения на входе 9 до безопасного значения при токах перегрузки и КЗ в цепи фидера
питания с берега.
При номинальном токе фидера ток через VD4 не протекает, так как прямое напряжение на диоде меньше порогового, при котором диод открыт.
При увеличении тока в цепи фидера увеличивается выпрямленное диодами VD1VDЗ напржение, вследствие чего напряжение на R4 становится больше порогового. Через
резистор R4 и открытый диод протекает ток, создающий на VD4 практически неизменное
напряжение. Последнее объясняется тем, что при увеличении выпрямленного напряжения
одновременно возрастает падение напряжения на R4.
Входящие в состав СУ СЭЭС "Ижора" и "Ижора-М" устройства защиты от обрыва
фазы и сигнализации о снижении напряжения типа ЗОФН недостаточно надежны в эксплу
атации и требуют доработки.
3.3. Избирательность ( селективность ) защиты электрических сетей
Это свойство защиты состоит в отключении в кратчайшее время поврежденного
участка сети с сохранением бесперебойного снабжения электроэнергией остальных.
Рис. 6.5. Избирательная защита участков электрической сети: « — принципиальная
схема; б — временная диаграмма
Пусть работу приемников электроэнергии обеспечивает генератор G2, а генератор
G1 отключен (рис. 6.5, а). Включены АВ: генератора QF4, секционный QF3, распределительного щита QF2 и отдельного приемника QF1.
Точками К1-К4 обозначены возможные места (ступени) КЗ.
При КЗ на любой из ступеней должен отключиться только один из перечисленных
АВ.
Избирательность ( селективность ) защиты сети можно получить настройкой ЗУ по
времени отключения или току срабатывания.
Избирательность защиты по времени отключения достигается при выполнении
условия
t < t < …t n
( 6.13 ),
1
где t , t , …, t
1
2
n
2
время отключения АВ на соответствующем участке сети.
Таким образом, быстрее остальных должен отключаться АВ, наиболее удаленный
от генератора.
Например, при КЗ в точке К1 первым должен отключиться выключатель QF1 (рис.
9.5, б). Нарушение этого условия приводит к необоснованному отключению неповрежденных участков сети и затрудняет поиск поврежденного участка.
Избирательность защиты по времени невозможно обеспечить при помощи установочных АВ, отключающих токи КЗ практически мгновенно, так как собственное время
срабатывания всех аппаратов этого типа примерно одинаково и не регулируется.
Поэтому установочные АВ применяют для защиты наиболее удаленных от генера
торов участков электрической сети (в основном фидеров с приемниками электроэнергии).
202
Создать систему избирательной защиты по времени позволяют селективные АВ
типов АМ и АМ-М, снабженные замедлителями расцепления с такими уставками на сраба
тывание в зоне токов КЗ: 0,18; 0,38; 0,63 и 1,0 с.
Указанные уставки обеспечивают возможность построения 5-ступенной системы
защиты по времени при условии, что на последней ступени применен установочный АВ с
собственным временем срабатывания t авт < 0,03 с.
Избирательность по времени можно получить при помощи предохранителей. Для
этого необходимо, чтобы номинальные токи плавких вставок предохранителей на защищенных смежных участках сети отличались не менее чем на 3-4 ступени применяемого ро
да номинальных токов: 6, 10, 15, 20, 25, 60, 80, 100, 125, 160, 200, 225, 300, 350, 430, 500 и
600 А.
Избирательность защиты по. току срабатывания достигается при выполнении
условия
i <i <…in
( 6.14 ),
1
где i , i
1
2
2
… i n - токи срабатывания ( отключения ) ЗУ на отдельных участках
сети.
Таким образом, ток отключения ЗУ должен уменьшаться по ступеням защиты в
направлении от источника электроэнергии к приемникам.
Однако практически добиться полной избирательности по току не всегда возможно
вследствие того, что токи КЗ отдельных участков электрической сети могут достигать значений, при которых происходит одновременное отключение АВ на двух-трех защищаемых смежных участках.
4. Сопротивление изоляции кабелей и проводов
Основные понятия
Под сопротивлением изоляции понимают способность изолирующей оболочки кабеля или провода противодействовать протеканию через нее электрического тока.
В качестве материалов этих оболочек используются различные видал резины – бутиловая и силиконная, а также лакоткани, асбестоткани, лакостскло, поливинил, кремнийорганические материалы. Они отличаются друг от друга упругостью оболочек и теплостойкостью.
В идеальном случае ток через оболочку кабеля или провода не должен протекать.
Однако судовые кабеля и провода работают в неблагоприятных условиях, в результате чего в процессе эксплуатации сопротивление их изоляции понижается.
К основным таким условиям относятся:
1. повышенная влажность и наличие солей в воздухе, вследствие чего молекулы сосоленой солей проникают через оболочку вплоть до токонесущих жил;
2. тепловое старение изоляции, вызванное нагревом изоляции теплом, выделяющимся в жилах кабелей или проводов при протекании тока. На поверхности изоляции и в
ее глубине образуются трещины, через которые соленая вода проникает внутрь оболочки;
3. механические воздействия на оболочки кабелей и проводов вследствие вибрации и ударов, повреждающие не только наружную часть оболочки, но и ее внутренние
части;
4. загрязнение оболочек кабелей и проводов маслами и нефтепродуктами, разъедающими эти оболочки. Нередко в составе этих веществ содержатся частички металлов, что
приводит к образованию т.н. токоведущих мостиков между наружной частью оболочки и
жилами.
Понижение сопротивления изоляции опасно по двум причинам:
1. повышается опасность поражения человека электрическим током:;
2. понижается пожарная безопасность вследствие возможного пробоя изоляции
рядом расположенных проводников с током, что приводит к образованию цепей коротко
203
го замыкания.
Поэтому на судах вопросам контроля сопротивления изоляции и поддержания ее на
необходимом уровне придается особенное значение.
В частности, лица вахтенной службы должны не менее одного раза за вахту проверять величину сопротивления изоляции судовой сети при помощи щитового мегаомметра.
Кроме того, не менее одного раза в месяц электромеханик обязан измерить сопротивление изоляции отключенных от сети приемников электроэнергии при помощи переного мегаомметра. с обязательной записью результатов измерений в специальный «Журнал замеров сопротивления изоляции», который после выполнения измерений представляется на подпись старшему механику судна.
Морские нормативные документы – Правила Регистра, Правила технической эксплуатации устанавливают предельные ( минимальные ) значения сопротивления изоляции
судового электрооборудования, ниже которых эксплуатировать электрооборудование
нельзя ( таблица 6.3 ).
Таблица 6.3.
Нормы сопротивления изоляции
Электрооборудование
Сопротивление изоляции в нагретом состоянии, МОм
нормальное
минимально
допустимое
Электрические машины
0,7
Магнитные станции, пусковые устройства
0,5
0,2
Щиты (главные, аварийные, распределительные), пульты управления (при отключенных внешних цепях, сигнальных лампах указателей заземления, вольтметрах и
др.) напряжением, В:
до 100
101-500
0,3
1,0
0,06
0,2
Аккумуляторные батареи (при отключенных приемниках)
напряжением, В:
до 24
0,1
25-220
0,5
0,02
0,1
Фидер кабельной сети напряжением, В:
освещения:
до 100
101-220
силовой
100-500
0,3
0,5
1,0
0,06
0,2
0,2
Цепи управления, сигнализации и контроля напряжением,
В:
до 100
0,3
101-500
1,0
0,06
0,2
0,2
204
4.2. Сопротивление изоляции кабелей и проводов. Виды изоляции.
Изолирующие оболочки кабелей и проводов не являются идеальными диэлектриками. Это означает, что через оболочку любого провода протекает ток утечки I , источниут
ком которого является генератор СЭС или любой другой источник электроэнергии.
Сопротивление оболочки провода протеканию упомянутого тока называется сопротивлением изоляции
R из =
U
I ут
( 6.15 ),
где U - напряжение источника электроэнергии.
Рис. 6.6. Схемы электрических сетей постоянного (в) и переменного (б) тока с
различными видами сопротивления изоляции
Различают 2 вида сопротивления изоляции ( рис. 6.6, а ):
1. отдельного провода относительно корпуса r ( r );
1
2. между токоведущими жилами r
Поэтому ток утечки I
ут
I'
12
2
.
имеет 2 составляющие:
ут
=U/(r +r )
( 6.16 )
= U / (r
( 6.17 ),
2
1
и
I''
ут
12
)
причем
I
ут
= I'
ут
+ I''
ут
( 6.18 )
.
В сетях переменного тока ток утечки имеет активную и емкостную составляющие.
Наличие последней объясняется тем, что жила и корпус судна образуют своеобразные об
кладки конденсатора, между которыми заключен диэлектрик - оболочка кабеля.
Поэтому полное сопротивление Z изоляции провода относительно корпуса образовано параллельно соединенными активным r и емкостным x c сопротивлениями (рис. 6.6,
б).
Токи утечки каждого элемента длины кабеля, замыкаясь через источник, образуют
параллельные ветви. Поэтому чем длиннее линия, тем больше параллельных ветвей для
указанных токов и тем меньше сопротивление изоляции линии.
Токи утечки создаются не только линиями электропередачи, но также источниками
и приемниками электроэнергии через сопротивление изоляции обмоток электрических
машин.
Поэтому одновременное включение большого числа приемников, каждый из которых имеет достаточно высокое сопротивление изоляции, может привести к значительному
снижению сопротивления изоляции судовой сети.
205
Токи утечки, помимо тока жилы, вызывают дополнительный нагрев изоляции и
ускоряют ее старение. Поэтому нагрев изоляции токоведущих жил кабелей и проводов не
должен превышать пределов температур (ºС), допускаемых классом изоляции ( таблица
6.2 ).
Таблица 6.2 .
Предельная температура изоляционных оболочек
Буквенное обозначение класса изоляции Предельная температура оболочки
А
105
Е
120
В
130
F
155
Н
180
С
> 180
Систематический контроль сопротивления изоляции может проводиться как при
снятом напряжении, так и при его наличии на электрооборудовании.
5. Измерение сопротивления изоляции
5.1. Измерение сопротивления изоляции СЭС, не находящегося под напряжением
На судах для измерения сопротивления изоляции обесточенного СЭО применяют
специальные электроизмерительные приборы - переносные мегаомметры типов М1101,
М1102, БМ-1 и БМ-2.
Принцип действия этих приборов заключается в искусственном создании и последу
ющем измерении тока утечки, значение которого зависит от сопротивления изоляции.
Поэтому мегаомметры имеют источник утечки (источник питания) и измерительное устройство со шкалой, проградуированной в килоомах или мегаомах.
5.2. Индукторный мегаомметр типа М1101
Индукторный мегаомметр типа М1101 изображен на рис. 6.7
Рис. 6.7. Индукторный мегаомметр М1101:
206
а - принципиальная схема; б, в - схемы замещения при измерении сопротивления
изоляции в положениях соответственно ".МОм" и "кОм"; г - шкала
Индукторный мегаомметр типа М1101 (рис. 6.7, а) снабжен встроенным генератором (индуктором) переменного тока G с ручным приводом.
Напряжение генератора, выпрямляемое несимметричной мостовой схемой на диодах VD1, VD2, конденсаторах С1, С2, подается на измерительное устройство ИУ логометрического типа с рабочей 1-1 и противодействующей 2-2 рамками.
Обе рамки и укрепленная с ними на одной оси стрелка образуют подвижную систе
му, поворачивающуюся внутри поля постоянного магнита N – S.
Вращающиеся моменты обоих рамок направлены противоположно, причем по часо
вой стрелке у противодействующей рамки.
На лицевой части прибора имеются зажимы 3 (земля), Л (линия), Э (экран) и пере
ключатель S1 с двумя положениями: «МОм» и «кОм». Провод, идущий изнутри прибора к
зажиму Л, экранирован, причем экранирующая оболочка соединена с зажимом Э.
На схеме переключатель S1 находится в положении «МОм». При вращении рукоят
ки генератора G образуются 2 параллельные ветви (рис. 6.7, б) с токами
I =U/(R +R +R3 ) и I =U/(R
+ R + R x + R ) ( 6.19 ),
1
где R
4
11
11
и R
2 2
2
2 2
2
1
- сопротивления соответственно измерительной и противодейству
ющей рамок.
В ветви с током I
2
сопротивления R
x
иR
2 2
соединены последовательно.
Из соотношений, приведенных для токов I и I , следует, что с уменьшением R
1
x
ток I не изменяется, а ток I
1
2
2
увеличивается.
Поэтому угол поворота подвижной части прибора α = k I / I
2
при R
x
1
увеличивается и
= 0 становится наибольшим, а стрелка прибора устанавливается в крайнее правое
по
ложение напротив отметки "0" верхней шкалы (рис. 6.7, г).
Если переключатель S1 перевести в положение «кОм», измеряемое сопротивление
R x относительно участка цепи с измерительной рамкой 2-2 подключается параллельно
(рис. 6.7, в) и при R
x
= 0 замыкает рамку накоротко. Вращающий момент измерительной
рамки уменьшается до нуля, стрелка прибора под действием вращающего момента рабочей рамки поворачивается против часовой стрелки и устанавливается напротив отметки
"0" нижней шкалы.
5.3. Безындукторный мегаомметр типа БМ-1
Безындукторный мегаомметр типа БМ-1 (рис. 6.8) более удобен в эксплуатации,
так как вместо генератора с ручным приводом источником питания в нем служит батарея
GВ из трех сухих элементов общим напряжением 4,8 В.
207
Рис. 6.8. Принципиальная схема безындукторного мегаомметра БМ-1
При нажатии кнопки SВ, вмонтированной в один из двух щупов прибора, питание
от батареи подается на мультивибратор, собранный на транзисторах VТ1 и VТ2, резисторах R2-R6 и конденсаторах С1, С2.
Мультивибратор представляет собой генератор периодических импульсов прямо
угольной формы. После нажатия кнопки SВ мультивибратор включается и далее работает
автоматически, генерируя прямоугольные импульсы.
Эти импульсы через транзисторы VТЗ и VТ4, работающие в ключевом режиме, подаются поочередно на одинаковые половины w и w первичной обмотки трансформато1
2
ра ТV.
При этом через коллектор - эмиттер транзистора VТЗ (VТ4), половину обмотки
w ( w ) первичной обмотки и контакты кнопки SВ протекает пульсирующий ток i
2
1
(i
2
1
).
В результате во вторичной обмотке w 3 индуцируется переменная ЭДС, поступаю-
щая на умножитель напряжения на конденсаторах СЗ-С5 и диодах VDЗ-VD6.
Умножитель напряжения одновременно выполняет функцию выпрямителя, поэтому в измерительной цепи протекает выпрямленный ток i 3 .
В состав этой цепи входят резисторы R7-R10, переключатель SА пределов измерения сопротивлений, микроамперметр РR, шкала которого проградуирована в мегаомах, и
измеряемое сопротивление R x .
Переменные резисторы служат: R1 - для установки стрелки прибора на нулевую
отметку (до начала измерений); R6 - для получения необходимого значения тока базы
транзисторов VТ1 и VТ2. Диоды VD1 и VD2 обеспечивают температурную стабилизацию
режима работы этих транзисторов.
5.4. Правила измерения сопротивления изоляции
Правила измерения сопротивления изоляции заключаются в следующем. Сначала
проверяют исправность мегаомметра, для чего соединяют накоротко зажимы «Л» ( «линия» ) и «З»( «земля», т.е. корпус ) и, вращая рукоятку, убеждаются в установке стрелки
прибора на нулевую отметку.
Затем отключают напряжение с объекта измерения, после чего обязательно проверя
ют отсутствие напряжения исправным индикатором.
Отсчет сопротивления изоляции следует проводить через 1 мин после приложения
рабочего напряжения мегаомметра.
Считается, что по истечении этого времени закончится заряд емкостей объектов из-
208
мерений -электрических сетей или машин, и токи утечки через емкости, создающие погрешности измерений, уменьшатся до нуля.
После окончания измерений необходимо снять с сети заряд кратковременным заземлением жил или их соединением между, собой. Это позволит избежать поражения
человека электрическим током при случайном прикосновении к жилам.
5.5. Измерение сопротивления изоляции кабелей и проводов
Для измерения сопротивления изоляции линии относительно корпуса мегаомметр включают между корпусом судна и поочередно каждой жилой кабеля (источники тока и приемники должны быть отключены). При этом измеряют не истинное, а эквивалентное сопротивление изоляции, которое всегда меньше истинного.
Рис. 6.9. Схемы измерения сопротивления изоляции и замещения при измерении
относительно корпуса (а, б) и между жилами (в, г)
Например, в 2-проводной линии (рис. 6.9, а) эквивалентное сопротивление изоляции провода 1 относительно корпуса образовано двумя параллельными ветвями (рис. 6.9,
б). Поэтому измеряется не сопротивление r провода 1 относительно корпуса, а эквива1
лентное сопротивление
R =r (r
1
1
12
+r
2
)/(r
1
+r
2
+r
12
)<r
1
( 6.20 )
.
Для измерения сопротивления изоляции между проводами линии мегаомметр вклю
чают поочередно между парами проводов.
В 2-проводной линии (рис. 6.9, в) эквивалентное сопротивление изоляции R обра
12
зовано двумя параллельными ветвями (рис. 9.9, г), поэтому
R =r (r1 +r )/(r1 +r 2 +r
12
12
2
12
)<r
12
( 6.21 ).
При измерении относительно корпуса сопротивления изоляции кабеля с влажной
или загрязненной поверхностью через рабочую рамку мегаомметра протекает дополнительно поверхностный ток утечки.
Для исключения влияния последнего на изолирующую оболочку кабеля накладыва
ют несколько витков проволоки, соединяя их с зажимом Э (рис. 6.10).
Рис. 6.10. Схема измерения сопротивления изоляции кабеля с влажной
или загрязненной поверхностью
Во всех случаях измерения сопротивления изоляции жилы относительно корпуса к
жиле присоединяют отрицательный полюс мегаомметра (зажим Л – «линия»), а к корпусу
- положительный (зажим З – «земля», т.е. корпус судна ).
При нарушении этого правила в месте присоединения вывода мегаомметра к жиле
возникает явление электролиза, приводящее к увеличению в указанном месте переходного
сопротивления и вносящее погрешность в результате измерения.
209
Измерение сопротивления изоляции обмоток электрических машин и трансформаторов проводится так же, как и линий электропередачи. Последние должны быть
отключены, а сопротивление изоляции каждой обмотки необходимо измерять отдельно.
5.6. Типы переносных мегаомметров
Выходное напряжение мегаомметров должно соответствовать напряжению измеряемой сети. Если напряжение мегаомметра значительно больше напряжения сети, возможен пробой изоляции при измерениях, если меньше, измеренное прибором сопротивление
изоляции будет больше действительного.
Поэтому выпускают мегаомметры пяти модификаций, отличающихся выходными
напряжениями и наибольшими значениями измеряемого сопротивления (табл. 6.4).
Таблица 6.4.
Номинальные данные мегаомметров для измерения изоляции электрических сетей
с различным напряжением
Напряжение сети, В
Выходное напряжение
прибора, В
Верхний предел измерения,
МОм
24
110-250
400
1000
> 1000
100
250
500
1000
2500
100
300
500
1000
3000
5.7. Измерение сопротивления изоляции СЭО, находящегося под напряжением
Сопротивление изоляции электрических сетей, находящихся под напряжением, из
меряют с включенными приемниками посредством щитовых вольтметров и мегаомметров.
Рис. 6.11. Схемы измерения сопротивления изоляции электрических сетей
постоянного (а) и переменного (б, в) тока
В сетях постоянного тока (рис. 6.11, а) на ГРЩ устанавливают вольтметр РV с
известным внутренним сопротивлением R вн > 100 кОм.
При помощи 2-полюсного переключателя S проводят 3 измерения напряжения: в
положении 1 измеряют напряжение U судовой сети, в положении 2 - напряжение U меж1
ду положительной шиной и корпусом, в положении 3 – напряжение U
2
между отрица-
тельной шиной и корпусом.
Эквивалентное сопротивление изоляции сети относительно корпуса рассчитывают
210
по формуле
r c = R вн (
U
-1)
U1 U 2
( 6.22 ).
Иногда этот метод называют «метод 3-х отсчетов».
В сетях переменного тока (рис. 6.11, б) используют схему с тремя вольтметрами
РV1-РVЗ, соединенными в "звезду" (нулевая точка заземлена).
Если сопротивление изоляции каждого провода одно и то же, т.е. r = r = r 3 , то
1
2
при нажатии на кнопку S показания вольтметров будут одинаковыми и равными фазному
напряжению.
При уменьшении сопротивления изоляции показания вольтметра, соединенного с
поврежденным проводом, уменьшаются, а двух других увеличиваются.
Например, при замыкании провода 1 на корпус (r = 0) показания вольтметра РV1
1
уменьшатся до нуля, так как указанный вольтметр замкнут накоротко параллельно вклюxенным r , а вольтметры РV2 и РVЗ покажут линейные напряжения.
1
Недостаток схемы состоит в том, что при равномерном уменьшении сопротивления
изоляции всех трех проводов показания вольтметров не будут изменяться.
Кроме того, схема не позволяет определить значение сопротивления изоляции про
водов непосредственно в единицах сопротивления ( т.е. в кОм или МОм ).
Последнего недостатка лишены схемы, в которых применяют щитовые мегаомметры разных типов.
В основу работы этих приборов положен метод наложения постоянного тока на
сеть переменного тока.
В схеме, показанной на рис. 6.11, в, для получения постоянного тока используется
непосредственно сеть переменного тока, напряжение которой выпрямляется диодами VD.
Для ограничения токов утечки I
последовательно с диодами включены резисто
ут
ры R. В качестве измерительного прибора использован миллиамперметр РR постоянного
тока, шкала которого проградуирована в килоомах.
5.8. Автоматизированные методы контроля сопротивления изоляции
Для автоматизированного контроля сопротивления изоляции электрических сетей
применяют разные методы, однако наибольшее распространение получил метод наложе
ния постоянного тока на контролируемую сеть переменного тока. Этот метод использован
в блоке контроля изоляции типа БКИ-2, входящем в СУ СЭЭС "Ижора-М".
Этот блок предназначен для непрерывного автоматического контроля
сопротивления изоляции двух электрически не связанных сетей напряжением до 400 В как
под напряжением, так и при обесточивании. Такими сетями обычно являются силовая
напряжением 380 В и освещения напряжением 220 В, поэтому блок БКИ-2 имеет 2
одинаковых по устройству канала.
211
Рис. 6.12. Принципиальная схема канала контроля силовой сети напряжением 380
В блока контроля изоляции БКИ-2
Канал контроля силовой сети 380 В (рис. 6.12) питается от указанной сети, напряже
ние которой понижается до 220 В при помощи трансформатора напряжения ТV1, а затем
до 150 и 27 В соответственно трансформаторами ТV2 и ТVЗ.
Напряжение 150 В предназначено для создания тока утечки I
через измеряемое
ут
сопротивление изоляции, поэтому выпрямляется при помощи выпрямителя UZ2.
Для стабилизации напряжения и тем самым исключения ложных срабатываний
блока в схеме использован параметрический стабилизатор напряжения на стабилитронах
VD11-VD12 и резисторе R2. Конденсатор С2 выполняет функцию фильтра.
Стабилизированное напряжение 150 В подается на измерительную цепь, которая
включает в себя резисторы R22-R25 уставок сопротивления изоляции, резисторы RЗ-R8,
переключатель уставок SА1 и фильтрующие конденсаторы СЗ, С4.
Напряжение 27 В предназначено для питания исполнительной части блока, постро
енной на транзисторах VТ1-VТ4 и реле напряжения КV. При этом на участке схемы с тран
зисторами VТ1-VТЗ используется стабилизированное, а на участке с VТ4 нестабилизиро
ванное напряжение.
Транзисторы VТ2 и VТЗ образуют пороговый элемент - триггер Шмитта.
Переключатель SА1 имеет 4 положения, соответствующие четырем значениям
(уставкам) сопротивления изоляции контролируемой сети: 200, 100, 50 и 25 кОм.
Кнопка SА2 служит для проверки исправности блока.
Электрическая сеть с включенными в нее источниками и приемниками электроэнер
гии имеет определенные значения эквивалентного сопротивления изоляции относительно
корпуса (r , r , r 3 ) и эквивалентного активного сопротивления ( R э1 R э 2 R э 3 ).
1
2
212
На практике 2-е из названных сопротивлений значительно меньше 1-го, поэтому
можно принять R э1 = R э 2 = R э 3 = 0, что равнозначно соединению между собой проводов 1,2,3.
Тогда резисторы r , r
1
2
, r 3 окажутся соединенными параллельно, и при r =
1
= r = r 3 = r эквивалентное сопротивление изоляции электрической сети r э = r /3.
2
Иначе говоря, при заданном равенстве сопротивлений проводов 1, 2, 3 относитель
но корпуса, т.е. при r = r = r 3 эквивалентное сопротивление сети будет в 3 раза мень1
2
ше.
Работа канала
Канал работает следующим образом.
При включении блока под действием напряжения 150 В образуется цепь тока
утечки:
"+" UZ2 -контакт 1 переключателя SА1-R22-R6-R5 - контакт 2 переключателя SА1R8 - корпус - параллельно соединенные r , r , r 3 - провод 3 -контакты 3,1 кнопки SА21
2
R2 - "-" UZ2.
Ток утечки создает на участке (R22 + R6) измерительной цепи напряжение U вх ,
которое подается на эмиттерный повторитель на транзисторе VТ1, образующий вход исполнительной части блока.
Повторитель имеет большое входное сопротивление. Это позволяет исключить
шунтирующее действие элементов исполнительной цепи на упомянутый участок измерительной цепи и тем самым избежать ложных срабатываний блока.
При сопротивлении изоляции сети, большем заданного переключателем SА1 сопротивления уставки, ток утечки невелик, поэтому напряжение U вх недостаточно для пробоя
стабилитрона VD13. Поэтому ток через резистор R14 и падение напряжения на нем равны
нулю, закрыт транзистор VТ2 и открыт VТЗ. Последний шунтирует вход транзистора VТ4,
поэтому VТ4 закрыт, катушка реле КV обесточена.
При снижении сопротивления изоляции сети до значения, меньшего уставки, ток
утечки I
увеличивается до значения, при котором U вх становится достаточным для
ут
пробоя VD13.
Последний пробивается, при этом образуется цепь тока базы транзистора VТ1:
"+" UZ2 - R13 - база - эмиттер транзистора VТ1- VD13-R14-R5 - контакт 2 переключателя SА1-R8 - корпус -параллельно соединенные r , r , r 3 - провод 3 - контакты 3, 1
1
2
кнопки SА2-К2- "-" UZ2.
Транзистор VТ1 открывается, вследствие чего через R1, коллектор-эмиттер транзистора VТ1, VD13, R14 потечет ток, создавая на R14 напряжение, опрокидывающее триггер
Шмитта на транзисторах VТ2, VТЗ.
Напряжение на выходе закрытого VТЗ увеличивается до напряжения пробоя стабилитрона VD14, поэтому через R19 и R21 потечет ток и падение напряжения на R21 станет
достаточным для отпирания транзистора VТ4.
При этом получит питание реле КV, включающее цепи сигнализации.
Для контроля исправности блока нажимают 2-полюсную кнопку SА2, через контакты 1, 2 которой в измерительную цепь вместо r 1 , r , r 3 вводится резистор R7, имитиру
2
ющий снижение сопротивления изоляции сети.
Если блок исправен, включается реле КV и одновременно загорается сигнальная
лампочка HL, цепь которой образована контактами 4,5 кнопки SА2.
213
Для определения поврежденного элемента сети на ГРЩ поочередно отключают фидеры (если это возможно по условиям эксплуатации) до тех пор, пока не будет обнаружен
фидер, отключение которого привело к восстановлению сопротивления изоляции.
Дальнейший поиск проводится, как правило, на обесточенном СЭО при помощи
переносного мегаомметра и отнимает немало времени.
5.9. Автоматическая система диагностирования изоляции
Разработанная в последнее время система диагностирования изоляции сводит к ми
нимуму время поиска поврежденного участка или элемента электрической сети. В состав
системы входят 4 блока (рис. 6.13).
Рис. 6.13. Структурная схема автоматической системы диагностирования изоляции
СЭЭС
Функциональный блок БФ совмещает функции источника питания остальных блоков системы и блока формирования контрольных напряжений с последующей выдачей их
в судовую сеть и на обесточенные элементы СЭЭС. Кроме того, это блок выдает в измери
тельный блок БИ напряжения, пропорциональные токам утечки всей СЭЭС и ее отдельных элементов.
В блоке БИ указанные напряжения преобразовываются и измеряются. С выхода
этого блока напряжения, пропорциональные активным сопротивлениям изоляции всей
СЭЭС и ее отдельных элементов, поступают на вход контролирующего блока БК, в котором сравниваются с напряжениями уставок.
При снижении сопротивления изоляции до недопустимого уровня блок БК разреша
ет работу выходного блока БВ.
Последний включает сигнализацию, указывает номер элемента СЭЭС с дефектом
изоляции и регистрирует результаты контроля.
Описанная система позволяет автоматизировать отключение элементов СЭЭС с по
ниженной изоляцией и одновременное включение резервных. Ее применение в качестве
подсистемы управления СЭЭС дает возможность практически бесперебойно снабжать
электроэнергией СТС, и в первую очередь средства, обеспечивающие безопасность
плавания.
5. Сушка электрических машин
6.1. Основные сведения
Электрические машины подвергаются сушке после пропитки и в том случае, если
они были залиты пресной водой или отсырели.
Перед сушкой машину необходимо тщательно очистить и продуть воздухом. Очень
отсыревшие или обильно залитые пресной водой машины следует вначале сушить методом внешнего нагревания ( cм. ниже, п. 28 «Сушка внешним нагреванием» )
Электрическим током следует сушить только те машины, в которых сопротивление
изоляции составляет не менее 0,01 МОм (если оно меньше, может произойти пробой изоляции). При сушке током корпус машины должен быть надежно заземлен.
При низком сопротивлении изоляции особую опасность представляет сушка постоянным током, так как при этом наблюдается явление электролиза.
214
При любых способах сушки нагревание не должно производиться быстро во избежание местных перегревов, вызывающих механические напряжения в изоляции, интенсив
ное парообразование, повышение давления внутри изоляции и ускоренное ее старение.
Типовые кривые изменения сопротивления изоляции и температуры во время
сушки показаны на рис. 6.14.
Рис. 6.14. Кривые изменения сопротивления изоляции ( 1 ) и температуры ( 2 )
при сушке обмоток
Сопротивление изоляции обмоток электрических машин снижается в начальный
период сушки, а в дальнейшем возрастает и становится постоянным. Сушку прекращают
после того, как сопротивление изоляции при постоянной температуре будет практически
неизменным в течение 2 - 3 ч. В исключительных случаях сушка машины может быть
прекращена, когда сопротивление изоляции достигло значения 0,5 МОм.
Отсыревшие машины после сушки рекомендуется пропитать электроизоляционными лаками и покрыть эмалью.
Сушку после пропитки и покрытия осуществляют в соответствии с температурными режимами, указанными для данных лаков и эмалей.
При длительной сушке электрических машин температура шарикоподшипников не
должна превышать 80 "С.
Не разрешается форсировать сушку превышением наибольших допустимых темпе
ратур или более быстрым повышением температуры в начале сушки. В начале сушки тем
пературу и сопротивление изоляции измеряют через каждые 15 - 30 мин, а после достиже
ния установившейся температуры - через 1 ч.
6.2. Способы сушки электрических машин
Различают 5 видов сушки электрических машин:
1. током короткого замыкания;
2. индукционными токами;
3. постоянным или однофазным переменным током;
4. внешним нагреванием;
5. на основе электрокинетического эффекта.
6.3. Сушка синхронных генераторов методом короткого замыкания
При этом способе фазные обмотки статора генератора замыкаются накоротко через
амперметры рА ( рис. 6.15 ).
215
Рис. 6.15. Схема сушки синхронных генераторов током короткого замыкания
Для сушки вращают ротор генератора при помощи дизеля ( турбины ) и одновременно подают в обмотку возбуждения ток возбуждения I в .
При этом в обмотке статора индуктируется ЭДС
Е = с* ω*Ф,
где с – конструктивный коэффициент машины ( величина постоянная );
ω – угловая скорость вала;
Ф – магнитный поток обмотки возбуждения.
По закону Ома, ток обмотки статора прямо пропорционален ЭДС Е.
Необходимое значение тока сушки, равное 0,5…0,8 номинального, устанавливают
изменением тока возбуждения I в ( т.е. магнитного потока Ф ) при помощи реостата R, а
при необходимости, дополнительно – изменением угловой скорости вала ω.
Температуру нагрева обмотки проверяют, измеряя температуру нагрева проволочных бандажей лобовых частей обмотки – она не должна превышать 100°С
6.4. Сушка методом индукционного нагрева
Этот метод основан на использовании явления электромагнитной индукции.
На статор (станину) электрической машины наматывают специальную намагничивающую обмотку, через которую пропускают переменный ток (рис. 6.16 ).
Рис. 6.16. Схема сушки электрических машин методом индукционного нагрева
Ротор машины должен быть удален.
Переменный магнитный поток индуктирует в железе сердечника статора токи Фу
Ко ( вихревые токи ), вызывающие нагрев сердечника. Тепло от сердечника передается
обмоткам статора.
Для повышения экономичности сушки рекомендуется утеплить статор (станину)
брезентом.
Температура обмоток регулируется периодическим включением и отключением
намагничивающей обмотки.
216
6.5. Сушка обмоток электрических машин постоянным или однофазным переменным током
Для сушки асинхронного двигателя посторонним источником постоянного или
однофазного переменного тока используют схемы на рис. 6.17.
.
Рис. 6.17. Схемы соединения 3-фазных обмоток при сушке асинхронного двигателя
источником постоянного тока ( а ) или однофазного переменного тока ( б )
Сушка постоянным током применяется, если начала и концы обмоток фаз статора
выведены в коробку электродвигателя. При этом ток пропускается последовательно через
обмотки всех фаз (рис. 6.17, а).
Включение и выключение источника постоянного тока во избежание пробоя изоля
ции обмоток должно производиться только через реостат. Интенсивность сушки регулиру
ется изменением тока или периодическим отключением его.
Сушка переменным применяется, если соединения между обмотками фаз двигателя
выполнены внутри него и на щиток коробки выводов выведены только три конца
В этом случае ток подается попеременно на каждую пару выводок с переключении
ем через каждый час и перестановкой перемычки (рис. 6.17, б и в).
При этом ток пропускается, как указано на рис. 6.17, б (при соединении обмоток
треугольником) и 6.17, в (при соединении обмоток звездой).
Значение тока сушки устанавливают равным 0,5 - 0,7 номинального значения тока
электродвигателя. При однофазном токе значение напряжения, подводимого к электродви
гатели, должно составлять 0,2 - 0,1 номинального значения напряжения электродвигателя.
Ротор электродвигателя должен быть неподвижен.
6.6. Сушка электрических машин внешним нагреванием
Способ рекомендуется для всех машин и обязателен при сушке сильно отсыревших
машин. В этом случае в качестве источника теплоты применяются воздуходувки, электро
нагревательные элементы и лампы накаливания.
В последнем случае очень эффективен метод сушки инфракрасным облучением
при помощи специальных сушильных ламп; этот метод ускоряет процесс сушки и позволяет вести ее при более низких температурах, не ухудшая диэлектрических и механиче
ских свойств изоляционных материалов. При этом происходит непосредственная передача
лучистой энергии обмоткам.
Специальные сушильные лампы в отличие от обычных имеют меньшую температу
ру накала, что увеличивает срок их службы до 10 000 ч. Эти лампы выпускаются промышленностью мощностью 200, 500 и 1000 Вт и снабжаются рефлектором с хорошей отражательной способностью, обеспечивающим более полное использование лучистого потока и
равномернее распределение его.
Наиболее удобно сушить электрическую машину внешним нагреванием в закрытом ящике. В судовых условиях не всегда возможно изготовить ящик, поэтому в процессе
сушки ограничиваются укрытием машины брезентом, не допуская сближения брезента
217
с горячими деталями.
При сушке внешним нагревом температура ближайших к источнику теплоты частей машины не должна быть более 100 °С.
6.7. Сушка электрических машин на основе электрокинетического эффекта
Сущность электрокинетического эффекта (электроосмоса) заключается в следующем: если увлажненный диэлектрик поместить в постоянное электрическое поле между
двумя электродами, то влага в капиллярах будет перемещаться от положительного полюса
к отрицательному.
Это объясняется тем, что под действием электрических сил свободные ионы водорода, связанные с молекулами воды, перемещаются и направлении поля.
Достигнув катода - корпуса машины, аппарата или арматуры, оболочки кабеля, положительные ионы разряжаются, образуя свободную воду, которая выделяется на корпусах электрооборудования и оболочках кабелей.
Для создания требуемого электрического поля на токоведущие жилы подается
поло
жительный потенциал, а на корпус - отрицательный.
При этом способе сушки используются выпускаемые промышленностью приборы
типов ЭСКИ-М и УАКИ, в которых используется явление электроосмоса.
7. Защита от помех радиоприему
7.1. Источники помех
Такими источниками на судах могут быть эхолоты, гидролокаторы, а также ЭП, в
состав которых входят статические преобразователи электроэнергии на тиристорах.
Все эти устройства потребляют из сети энергию в виде последовательных импульсов, создающих вокруг устройств электромагнитные колебания высокой частоты.
Колебания помех попадают в радиоприемную аппаратуру как через наружные антенные устройства, так и по питающим кабелям судовой электросети.
Источниками помех радиоприему являются также искрящие щетки электрических
машин. Они создают электромагнитные колебания практически неограниченного спектра
частот, перекрывающего все диапазоны радиоприема.
Искрение возникает и при размыкании контактов выключателей и переключателей,
контакторов, реле и других электромагнитных аппаратов.
7.2. Методы защиты от помех радиоприему
На судах нашли широкое применение следующие методы:
1. рациональный выбор мест установки электрических устройств и прокладки
кабельных трасс;
2. применение шунтирующих цепочек, встроенных или приставных фильтров;
3. экранирование кабелей и проводов;
4. заземление СЭО.
Электрические устройства, создающие помехи радиоприемнику, должны располага
ться на возможно большем расстоянии от судовых средств радиосвязи в помещениях,
металлические части конструкций которых являются естественным экраном.
Кабели эхолотов, гидролокаторов и других устройств, несущие импульсы большой
силы тока, должны прокладываться в металлических трубах отдельно от других кабелей.
В электромагнитных аппаратах применяют шунтирующие цепочки С- и LC-типа
(рис. 6. 18, а, б), включенные параллельно контактам аппаратов.
Встроенные фильтры, чаще всего С-типа, являются составной частью конструкции
электрических устройств и обеспечивают их индивидуальную или групповую защиту.
Конденсаторы С1, С2 машин постоянного тока (рис. 6.18, в), располагаемые в ко-
218
робке выводов, являются средством индивидуальной защиты.
Групповую защиту осуществляют конденсаторы, встраиваемые внутрь корпусов
РЩ.
Приставные фильтры типов ФЕ и ФИЕ ( рис. 6. 18, г, д) выпускают в виде законченных изделий в корпусе брызгозащищенного исполнения. Буквы в типе фильтров
обозначают: Ф - фильтр, Е - емкость, И -индуктивность.
Рис. 6. 18. Схемы защиты от помех радиоприему при помощи шунтирующих
цепочек С-типа ( а ) и LС-типа (б), встроенных конденсаторов (в), приставных
фильтров типа ФЕ (г) и ФИЕ (д), экранирования кабеля (е)
Фильтры применяют для подавления помех радиоприему в диапазоне 0,16-150 МГц
в электрических сетях постоянного и переменного тока и включают в рассечку кабеля,
т. е. последовательно с линией электропередачи.
Выводы 1-1 соответствуют входу, выводы 2-2 - выходу фильтров.
Номинальные токи фильтров составляют 4, 10, 20 и 70 А. Основной характеристи
кой фильтра является эффективность, показывающая, во сколько раз фильтр снижает уровень помех. Эффективность фильтров ФЕ и ФИЕ составляет 15-100 ед„ причем большей
эффективностью обладают фильтры типа ФИЕ.
Экранирование кабелей и проводов проводят при помощи наружной металлической оболочки, которую обязательно заземляют, т. е. электрически соединяют с корпусом
судна на обоих концах кабеля или провода (рис. 6. 18, е).
Эту оболочку по отношению к токоведущей жиле кабеля можно рассматривать как
вторичную обмотку трансформатора, первичной обмоткой которого является жила.
Высокочастотная составляющая тока i жилы создает электромагнитное поле, ко1
торое пересекает экранирующую оболочку и наводит в ней вторичную ЭДС той же частоты. Поэтому в короткозамкнутой цепи «экранирующая оболочка - корпус судна» протекает ток i , который создает собственное высокочастотное электромагнитное поле, направ2
ленное навстречу электромагнитному полю тока жилы и практически компенсирующее
его.
Заземленные металлические корпуса электрических машин, приборов, аппаратов и
др. представляют собой естественные экраны.
Для снижения уровня помех наряду с заземлением оболочек кабелей добиваются
непрерывности экранирования, т. е. электрического соединения оболочек кабелей не только с корпусом судна, но и с заземленными металлическими корпусами и кожухами
устройств.
Допустимые уровни напряжений электрических помех на зажимах электрических
устройств - источников помех - устанавливаются Правилами Регистра.
Например, допустимый уровень помех частотой 1 МГц в районах ниже главной
палубы составляет 3,9 мВ, выше главной палубы - 0,78 мВ, на палубе рулевой рубки - 0,07
мВ.
8. Техническая эксплуатация судовых электрических сетей
219
8.1. Особенности технической эксплуатации судовых электрических сетей
Техническую эксплуатацию электрических сетей регламентируют следующие
основные руководящие документы (РД):
1. в обычной эксплуатационной обстановке - РДЗ 1.21.30-83 "Правила технической
эксплуатации судовых технических средств";
2. при электроснабжении с берега во время стоянки в портах - РД 31.21.81 - 79
"Инструкция по электроснабжению судов от береговой сети";
3. при электроснабжении с берега во время стоянки на судостроительном или
судоремонтном заводе - РД 31.83.03-67 "Правила по электробезопасности ремонтируемых
и строящихся судов ".
На судах, помимо стационарных, могут применяться временные электрические
сети.
Использование последних допускается в следующих случаях:
1. для подключения изотермических контейнеров и зерноперегружателей, подключения лихтеров и толкаемых составов;
2. электроснабжения судна от береговой сети во время стоянок в портах и на
судоремонтных заводах;
3. в аварийных случаях.
Техническое обслуживание имеет целью поддержание исправного технического состояния электрических сетей.
Все кабельные сети должны тщательно осматриваться не реже 1 раза в 6 мес. При
этом проверяют: наличие и состояние защитных кожухов и состояние кабелей, уложенных
в желобах и трубах; исправность защитных оболочек кабелей (в них не должно быть прожогов, разрывов и вмятин); нагрев кабелей; исправность заземлений металлических оплеток кабелей; отсутствие масла и топлива на кабелях; состояние окраски и
антикоррозионных покрытий кабелей.
Одновременно проверяют прочность крепления перемычек и шин защитных зазем
лений. Переходное сопротивление между заземляющим винтом и оболочкой кабеля,
измеренное омметром, не должно превышать 0,01 Ом.
Кабельные проходные коробки и групповые сальники необходимо проверять на
герметичность всякий раз, когда возникает подозрение в нарушении их герметичности, и
не реже 1 раза в 4 года.
Окраска кабелей, конструкций их крепления и кожухов на открытых палубах и в
трюмах проводится не реже 1 раза в 4 года силами единой технической службы под руководством боцмана.
Важнейшим эксплуатационным параметром электрических сетей является
сопротивление изоляции, измерение которого должно проводиться не реже 1 раза в сутки
при помощи щитового мегаомметра.
Независимо от этого необходимо не реже 1 раза в месяц измерять при помощи пере
носного мегаомметра сопротивление изоляции всего электрооборудования, включая кабельные сети. Результаты измерений вносят в журнал технического состояния электрообо
рудования.
Ремонт электрических сетей чаще всего заключается в замене поврежденных участков кабельной трассы или их сращивании с одновременной установкой кабельной муфты. В последнем случае необходимо разрешение Регистра .
8.2. Электробезопасность при обслуживании электрических сетей
Электробезопасность при обслуживании электрических сетей регламентируется
Правилами техники безопасности, а также Правилами Регистра. В соответствии с последними, установлены следующие значения безопасного напряжения на судах:
1. 55 В между полюсами постоянного тока;
220
2. 55 В между фазами или между фазами и корпусом судна при переменном токе.
При этом под безопасным понимают напряжение, не представляющее опасности
для обслуживающего персонала.
Степень поражения человека электрическим током зависит от ряда факторов, главными из которых считают силу тока, его род и частоту, продолжительность воздействия
приложенного напряжения и др.
Смертельно опасной силой тока обычно считается 100 мА при частоте 50-60 Гц.
Электрическое сопротивление человеческого организма при чистой и сухой поверхности
кожи составляет десятки кОм, а при загрязненной и влажной коже уменьшается до 0,6-1,0
кОм.
Наибольшую опасность представляют также контакты с токоведущими частями,
при которых ток проходит через важнейшие жизненные центры организма - сердце, легкие, мозг.
Опасность поражения электрическим током во многом зависит от характера поме
щения, в котором находятся или работают люди.
В этом отношении судовые помещения делят на 3 категории:
1. помещения с повышенной опасностью, которым присуще одно из следующих
условий: повышенная влажность (более 75 %); высокая температура (более 30 °С); токопроводящие палубы и настилы; возможность одновременного контакта человека с металлическими корпусами электрооборудования и металлическими предметами, заземленными на корпус судна.
К таким помещениям относятся камбузы, провизионные кладовые, МКО и румпель
ные отделения.
2. помещения особо опасные, которым присущи одновременно 2 или более перечис
ленных выше условий, а также при наличии сырости (при относительной влажности до
100 %) или химически активной среды (едких паров, газов, жидкостей), способных разрушить изоляцию токоведущих частей.
К таким помещениям относятся коффердамы, танки, цистерны, прачечные, бани и
др.
3. Помещения, не имеющие условий, создающих повышенную или особую опасность.
Для надежного обеспечения электробезопасности на судах предусматривают целый
комплекс мероприятий:
1. ограничение напряжения в главных цепях и цепях управления до 230 В постоянного тока и 400 В переменного тока (кроме судов с ГЭУ), до 42 В для переносных инструментов, до 12 В для ручных переносных светильников.
2. ограничение выбора систем распределения электроэнергии.
На судах применяют 3-проводные системы с изолированной или компенсированной нейтралью.
При 1-фазном касании токоведущих частей в системе с изолированной нейтралью
значение тока, протекающего через тело человека, меньше, чем в системах с заземленной
нейтралью (оно определяется в основном электрической емкостью электросети относительно корпуса).
При компенсации нейтрали сила тока значительно уменьшается.
3. Использование СЭО в морском исполнении, а также надежную изоляцию и закрытие токоведущих частей.
4. Применение защитного заземления, т. е. электрического соединения с корпусом
судна корпусов электрических машин, металлических частей кожухов, корпусов пускоре
гулирующей аппаратуры и распределительных устройств, светильников, измерительных
приборов и др., работающих при напряжении свыше 12 В.
Человек, прикоснувшийся к заземленному корпусу электродвигателя М, оказавшемуся под напряжением, окажется включенным параллельно замыкающей перемычке X
221
( рис. 6.19 ).
Рис. 6.19. Схема защитного заземления корпуса приемника электроэнергии
Сопротивление перемычки во много раз меньше сопротивления тела человека.
Поэтому основная часть тока замыкания будет проходить через перемычку в виде тока I
x
, а ток через тело человека I ч будет мал.
На схеме резисторами r , r , обозначено сопротивление изоляции проводов 1 и 2
1
2
относительно корпуса.
5. Использование защитных устройств, снимающих напряжение при проникновении человека в опасную зону; применение индивидуальных защитных средств и изолированного инструмента, а также устройств защитного отключения и замыкания, компенсато
ров токов замыкания и др.
Для защиты от статического электричества используют материалы, имеющие удель
ное электрическое сопротивление не более 106 Ом*см, т. е. не являющиеся диэлектрическими, и тщательно заземляют оборудование на корпус судна.
Перед началом работ с частичным или полным снятием напряжения электротехнический персонал обязан выполнить следующие мероприятия:
1. осуществить необходимые отключения;
2. вывесить запрещающие плакаты "Не включать - работают люди!"; проверить
отсутствие напряжения на токоведущих частях заведомо исправным индикатором (при
этом отсутствие напряжения должно быть проверено между фазами и на каждой фазе по
отношению к заземленным частям);
3. непосредственно после проверки отсутствия напряжения, в необходимых случаях, наложить переносные заземления;
4. вывесить плакат "Работать здесь".
При аварийных работах на неотключенных токоведущих частях необходимо:
1. работы выполнять только вдвоем (со страхующим).
2. токоведущие части, на которых не предусматриваются работы, оградить
диэлектрическими матами и.др.;
3. работать в комбинезоне с рукавами, застегнутыми у кистей, в головном уборе,
диэлектрических галошах или стоять на диэлектрическом коврике;
4. пользоваться электроинструментом с изолированными рукоятками.
8.3. Пожарная безопасность при обслуживании электрических сетей
Пожарная безопасность обеспечивается соблюдением ПТЭ СТС и правил техники
безопасности.
Температура отдельных частей электрооборудования и оболочек кабелей и проводов не должна превышать допустимую классом изоляции.
Необходим систематический контроль состояния сопротивления изоляции электро
оборудования и электрических сетей.
222
Категорически запрещается использовать бензин и другие легковоспламеняющиеся
жидкости для протирания коллектора, щеток и других частей электрических машин, находящихся под напряжением.
В коммутационно-защитных аппаратах должны быть исправные дугогасительные
устройства.
Токи уставок расцепителей АВ и плавких вставок должны соответствовать расчетному току нагрузки.
В аккумуляторных помещениях нельзя пользоваться открытым огнем, в них следует применять светильники взрывобезопасного исполнения с вынесенными наружу выключателями. Включают вентилятор до начала заряда АБ и выключают спустя некоторое
время после окончания заряда, что позволяет избежать образования взрывоопасной смеси
выделенных при заряде газов и воздуха.
Необходимо тщательно проверять состояние опрессовки, пропайки кабельных нако
нечников и плотность их закрепления на контактных шпильках.
Следствием неплотной опрессовки или некачественной пропайки является плохой
контакт между жилой и наконечником. В таких местах резко увеличивается переходное
сопротивление и количество выделяемой в нем теплоты, что может привести к пожару
электрооборудования.
На нефтеналивных судах, помимо обычных защитных заземлений, применяют заземление корпуса судна, т. е. электрическое соединение корпуса с заземлением на берегу
или с корпусом другого судна.
После постановки судна к причалу заземляющий кабель подают на берег и надежно
соединяют с береговым трубопроводом. Затем включают рубильник в цепи заземляющего
кабеля, тем самым уравнивая потенциалы корпуса судна и берегового трубопровода.
Отключают заземляющий кабель в обратном порядке.
Таким образом, соединение и рассоединение трубопроводов проводятся при зазем
ленном корпусе судна, что позволяет избежать искрообразования между фланцами обоих
трубопроводов в момент их касания или разделения вследствие разности потенциалов
берегового трубопровода и корпуса судна.
Контрольные вопросы
1. В чем заключаются достоинства и недостатки радиальной, магистральной и
смешанной систем распределения электроэнергии?
2. Чем отличаются судовые кабели от проводов?
3. Почему для защиты АД предпочтительнее применять АВ, а не предохранители?
4. Назовите общие требования к защитным устройствам.
5. Каким образом обеспечивается избирательность защиты электрических сетей по
времени и току?
6. Как влияют на сопротивление изоляции судовой сети длина кабельных трасс и
количество включенных приемников электроэнергии?
7. Почему стрелка мегаомметра типа М1101 отклоняется в разные стороны при из
мерении R x на диапазонах "кОм" и "МОм"?
8. Каким образом исключается влияние исполнительной части блока БКИ-2 на
результат контроля сопротивления изоляции?
9. Каковы основные особенности автоматической системы диагностирования
изоляции?
10. Перечислите методы сушки электрических машин. В чем особенность каждого
из них?
10. Каким образом подавляются высокочастотные помехи радиоприему при
заземлении оболочек кабелей?
11. Перечислите основные меры электро- и пожаробезопасности при обслуживании
электрических сетей.
223
1.7. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ СУДОВЫМИ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИМИ СИСТЕМАМИ
1. Системы управления СЭЭС
1.1. Классификация систем управления СЭЭС
Управление СЭЭС во всех режимах работы судна обеспечивается системой управления, представляющей собой функционально и конструктивно законченное устройство
или совокупность нескольких связанных подсистем, каждая из которых выполняет одну
или несколько функций.
В настоящее время на транспортных судах применяют различные СУ СЭЭС, которые принято классифицировать по следующим признакам:
1. структуре - системы в виде двух автономных подсистем, одна из которых обеспечивает автоматизированное дистанционное управление ПД генераторов, а другая выпол
няет синхронизацию генераторов, распределение нагрузки и др.; в виде единой СУ, обеспе
чивающей выполнение в полном объеме необходимых функций управления, контроля и
защиты СЭЭС;
2. использованию ЭВМ - системы, в которых используется общесудовая управляющая ЭВМ и системы, использующие функционально специализированные ЭВМ (возможно использование обоих типов ЭВМ с разделением функций между ними);
4. элементной базе - системы, построенные на элементах релейно-контакторных,
полупроводниковых, микроэлектронных в виде больших интегральных схем (БИС), а
также на основе ЭВМ и микропроцессоров (в СУ СЭЭС современных судов используется
смешанная элементная база).
1.2. Структурная схема системы управления СЭЭС
Обощенная структурная схема системы управления СЭЭС показана на рис. 7.1.
Рис. 7.1. Структурная схема системы управления СЭЭС
Построение СУ СЭЭС осуществляют по иерархическому принципу, в соответствии
с которым более низкому уровню иерархии соответствует меньшее число однотипных
решаемых задач или алгоритмов.
На структурной схеме подобной СУ СЭЭС ( рис. 7.1. ) можно выделить следую-
224
щие уровни иерархии:
верхний IV - уровень КСУ СТС, на котором обеспечивается управление судна в
целом оператором (судоводителем). На этом уровне задается режим работы СЭЭС
(ходовой, маневров и др.), от которого зависит количество используемых ГА, приоритет
включения резервных ГА и мощных приемников электроэнергии и т. д. (в качестве АУУ
КСУ СТС может использоваться общесудовая мини-ЭВМ);
групповой III - уровень отдельных технологических систем, одной из которых
является СУ СЭЭС. На этом уровне выполняются следующие функции: изменение состава
работающих ГА в соответствии с режимом работы судна, выбор очередности пуска
резервных ГА и обеспечение программированного пуска мощных приемников, вывод
судна из обесточенного состояния, защита СЗЗС от шкоь КЗ и др. В качестве АУУ СУ
СЭЭС может использоваться специализированная микроЭВМ;
локальных СУ II, включающий системы управления отдельными ГА. На этом
уровне обеспечиваются: управление приводными двигателями ГА (поддержание в
состоянии резерва, пуск, остановка, контроль и защита) по сигналу от АУУ СУ СЭЭС или
по команде оператора группового уровня III из ЦПУ, синхронизация и распределение
нагрузки между параллельно работающими генераторами, регулирование частоты;
локальных средств автоматизации /, включающий регуляторы частоты и напряжения,
устройства защиты, блокировки и др.;
воздействий 0, включающий исполнительные органы (серводвигатели топливных
насосов и паровпускных клапанов ПД ), датчики (частоты вращения, температуры и др.)
управляемых объектов (дизелей, турбин и генераторов), органы ручного управления и др.
Рациональной по структуре системой управления СЭЭС считается такая, которая в
случае отказа обеспечивает работоспособность СЭЭУ при помощи локальных средств
автоматизации.
На судах со знаком автоматизации А2 объем автоматизации СЭЭС соответствует
совокупности функций звеньев трех нижних уровней (0, I и II), а со знаком А1 - всех пяти
уровней.
В качестве примера рассмотрим систему управления СЭЭС типа "Ижора-М".
1.3. Система управления СЭЭС типа "Ижора-М"
Система обеспечивает управление СЭЭС в следующем объеме:
1. автоматический пуск и остановка резервного ГА;
2. автоматическая синхронизация;
3. распределение нагрузки;
4. стабилизация напряжения и частоты ГА и др.
С помощью схемы ( рис. 7.2 ) определим последовательность некоторых автоматических операций.
225
Рис. 7.2. Структурная схема автоматизированной СЭЭС типа «Ижора-М»
Предположим, что на шины ГРЩ включен базовый генератор G1, а в резерве находится генератор G2. Выбор резервного генератора проводят путем установки переключателя "Выбор резерва" на щите управления ЭЭУ в ЦПУ в необходимое положение (на схеме не показан).
Резервный ГА находится в режиме «горячего резерва», при котором обеспечивает
ся поддержание дизеля в предпусковой готовности посредством автоматизированного подогрева масла в смазочной системе и охлаждающей воды.
При увеличении нагрузки на генераторе G1 до (0,85…0,90) Р ном напряжение U
1
на одном из двух выходов блока измерителя активного тока БИАТ1, подключенного к
генератору G1 при помощи трансформаторов напряжения ТV4 и тока ТА2, становится
достаточным для появления на выходе 1 блока БКЗГ1 контроля загрузки генератора
сигнала на включение резервного генератора.
Этот сигнал поступает в систему ДАУ2, которая обеспечивает автоматический пуск
дизеля резервного ГА.
При достижении дизелем частоты вращения, близкой номинальной, автоматически
включается блок БСГ синхронизации генераторов, который воздействует на серводвигатель М2 подачи топлива резервного ГА и подгоняет его частоту вращения к частоте враще
ния базового ГА.
Если разность частот и напряжений обоих генераторов находится в допустимых
пределах, БСГ выдает сигнал на включение генераторного автоматического выключателя
QF3, после чего отключается. Одновременно выходы блоков БИАТ1 и БИАТ2 обоих
генераторов с напряжениями U и U 3 соединяются последовательно, результирующий
2
сигнал в виде напряжения ΔU = U - U 3 определенной полярности поступает на вход
2
блока БРНГ распределения нагрузок генераторов.
В зависимости от полярности напряжения на выходе блока БРНГ серводвигатель
М2 резервного ГА включается в направлении на увеличение или уменьшение подачи
топлива. Тем самым обеспечивается пропорциональное распределение активной нагрузки
между параллельно работающими генераторами.
Система "Ижора-М" предусматривает включение резервного ГА не только при перегрузке базового ГА, но и в других случаях: при обесточивании шин ГЭРЩ, снижении
частоты вращения ГД или давления пара перед турбогенератором, по сигналу "Неисправность" из системы "Роса-М" работающего ДГ.
226
Если включение резерва мощности не предусмотрено, автоматическая разгрузка
генераторов проводится путем отключения неответственных приемников. При увеличении нагрузки на любом из работающих генераторов до (1,0…1,1)Р ном отключение проис
ходит в 2 ступени с выдержкой времени между ними. При нагрузке (1,3…1,5)Р
ном
обе сту
пени отключаются без выдержки времени. Для этого используют выходы 3 блоков БКЗГ
обоих генераторов.
Система управления СЭС обеспечивает автоматическую блокировку пуска из ходовой рубки мощных приемников в случаях, когда электростанция не имеет запаса мощности (при работе одного генератора, при работе двух генераторов с нагрузкой свыше 0,7 Р
). Для блокировки пуска используются выходы 2 блоков БКЗГ1 и БКЗГ2 и блок ББП
ном
блокировки пуска мощных приемников. При этом в ходовой рубке загорается световое
табло "Пуск запрещен". При необходимости пуска мощных приемников необходимо пред
варительно провести пуск резервного ГА из ЦПУ со щита управления СЭС, после чего
включать мощные приемники (пожарный насос и др.) из ходовой рубки с промежутками
времени 0,8-3,8 с между пусками.
Пуск мощных приемников не блокируется в следующих режимах: при работе трех
и более генераторов, при работе двух генераторов с нагрузкой на каждом, не превышающей 70 % номинальной активной мощности.
При уменьшении нагрузки на каждом параллельно работающем генераторе до 30 %
номинальной один из блоков БКЗГ (или оба одновременно) выдает сигнал в ЦПУ на свето
вое табло "Нагрузка 30 %". Решение об отключении одного из генераторов принимает опе
ратор.
На судах с двумя электростанциями непрерывность электроснабжения ответственных приемников обеспечивается путем их переключения с одной СЭС на другую при помощи устройства типа УПП.
При электроснабжении судна с берега для защиты судовых приемников от обрыва
фазы и сигнализации о снижении напряжения применяется устройство типа ЗОФН. При
обрыве фазы ЗОФН выдает сигнал на отключение АВ питания с берега (QF1), а при сниже
нии напряжения до 85 % номинального включает световой и звуковой сигналы (НL1 и
НА1).
Система самовозбуждения и автоматического регулирования напряжения СВАРН
обеспечивает: в режиме холостого хода самовозбуждение генератора при достижении частоты вращения 90-95 % номинальной, в режиме нагрузки автоматическое регулирование
напряжения.
При параллельной работе генераторов СВАРН дополнительно обеспечивает пропор
циональное распределение реактивной нагрузки.
Визуальный контроль мощности, напряжения и частоты генераторов осуществляют
при помощи узкопрофильных электроизмеритель-ных приборов на лицевой части ГРЩ.
Щитовые вольтметр и частотомер при помощи общего переключателя поочередно
могут подключаться к каждому генератору и шинам ГРЩ, что позволяет уменьшить коли
чество щитовых приборов. При отклонении напряжения и частоты генератора от
заданных значений блок БКПГ контроля параметров генератора с выдержкой в несколько
секунд включает световой НL2 (НLЗ) и звуковой НА2 (НАЗ) сигналы.
1.4. Структура микропроцессорных систем управления СЭЭС
Широкое внедрение малогабаритных и быстродействующих микропроцессорных
средств обработки информации обеспечило создание принципиально новых СУ СТС.
В общем случае в состав микропроцессорных СУ (рис. 7.3 ) входят: объект управления ОУ (например, ДГ или СГ); пульт управления ПУ; микро-ЭВМ; интерфейсные (сог-
227
ласующие) устройства ИУ1 и ИУ2; датчики Д; усилители мощности УМ; исполнительные
механизмы ИМ; блок индикации БИ (в большинстве случаев он встроен в ПУ, но на рис.
7.3 показан отдельно с целью упрощения структурной схемы).
Помимо перечисленных компонентов, в состав таких СУ входят каналы передачи
данных, контроллеры и др.
МикроЭВМ - вычислительная машина, представляющая собой совокупность микро
процессора МП, -устройств ввода УВв и вывода УВыв информации, запоминающих устройств ОЗУ и ПЗУ.
Процессором ЭВМ называется устройство для автоматической обработки цифровой информации по заданному алгоритму.
Процессор, выполненный в виде одной или нескольких микросхем с высокой степе
нью интеграции, называется микропроцессором.
Микропроцессоры СУ обычно выполняют ограниченный объем арифметических
операций, что позволяет упростить структуру и свести к минимуму размеры МП.
В состав МП входят: арифметико-логическое устройство АЛУ, устройство управле
ния УУ и рабочие регистры РР.
Рис. 7.3. Структурная схема микропроцессорной системы управления
Арифметико-логическое устройство предназначено для выполнения арифметических и логических операций.
К первым из них относятся сложение, вычитание, преобразование двоичных чисел
и др., ко вторым - инверсия, конъюнкция, дизъюнкция и др.
Это устройство построено на сумматорах, элементная база которых состоит из 1разрядных сумматоров, регистров сдвига, инверторов и т. д. на основе интегральных микросхем.
Устройство управления обеспечивает выполнение операций в определенной после
довательности, заданной алгоритмом, а также связи микропроцессора с ОЗУ, ПЗУ, УВв и
УВыв.
Элементной базой УУ являются дешифраторы на основе интегральных микросхем.
Рабочие регистры, служащие для временного хранения и преобразования данных и
команд, строятся на типовых элементах - триггерах и логических схемах И, ИЛИ, НЕ.
Запоминающие устройства реализуют прием, хранение и выдачу информации и
программ ее обработки. Их подразделяют на постоянные ( ПЗУ ) и оперативные ( ОЗУ ).
Постоянные запоминающие устройства ПЗУ используют для хранения программ
работы МЛ и констант, причем информация, заложенная в ПЗУ, не теряется при отключе
нии питания.
Оперативные запоминающие устройства ОЗУ применяют для хранения данных,
.которые обрабатываются при помощи МП.
228
Для построения запоминающих устройств используют кольцевые ферритовые сердечники или БИС.
Характерной особенностью микроЭВМ является наличие стековой памяти.
Стеком называют запоминающее устройство "магазинного" типа, ячейки которого
заполняются последовательно (одна за другой). Аналогично, ячейка за ячейкой, происходит вывод информации из стека.
Таким образом, перемещение чисел внутри стека напоминает перемещение патронов внутри магазина пистолета.
Стековая память позволяет упростить обработку программ и повысить быстродейст
вие АЛУ. В качестве стека может использоваться отдельная микросхема или просто часть
ОЗУ.
В сложных микропроцессорных системах для хранения больших объемов информа
ции используют внешние запоминающие устройства, конструктивно не объединенные с
блоками ЭВМ и реализуемые на магнитных лентах, дисках или барабанах.
Устройства ввода и вывода информации предназначены для ввода обрабатываемой информации в МП, вывода и наглядного представления обработанной информации.
Для ввода информации используют пульты управления с клавиатурой, выключате
лями, переключателями и т. д., а также пишущие машинки и телетайпы с перфопристав
ками, оптические считывающие устройства и др. Для вывода информации применяют
бумажные ленты с цифровым и бук-венно-цифровым текстом, графиками, а также
дисплеи, экраны, табло, микрофильмы и др.
Совокупность информационных каналов микроЭВМ называется шинами.
Шины выполняют в виде пучка проводов или печатной схемы и подразделяют на 3
вида: адресные, данных и управления.
Шина адресная ША предназначена для передачи адреса ячейки памяти с данными
или командой от микропроцессора к ОЗУ, ПЗУ, УВв и УВыв. С помощью ША открывается
или выбирается правильный тракт для электрического соединения между собой отдельных компонентов микропроцессорной системы. Эту шину называют 1-направленной, так
как информация поступает в одном направлении - от МП к перечисленным выше компонентам.
Для микропроцессоров типов 8080, 8085, применяемых в судовых СУ, характерна
16-разрядная ША, состоящая из 16 физических линий, выводы которых обозначают А 0 …
А 15 .
Шина данных ШД - это 2-направленная линия для обмена данными между отдельными компонентами микроЭВМ.
Для микропроцессоров типов 8080, 8085 характерны 8-разрядные ШД, их выводы
обозначают А 0 …А 7 .
Шина управления ШУ предназначена для передачи тактовых, синхронизирующих
сигналов, а также информации о состоянии (статусе) компонентов микроЭВМ.
Часть линий ШУ является 1-направленной, часть - двунаправленной, поэтому на
рис. 7.26 направленность этой шины не обозначена.
У микропроцессоров типов 8080, 8085 на этой шине действуют сигналы SYNC
("Синхронизация"), DBJN ("Ввод данных") и др.
Объединение различных компонентов микропроцессорной СУ должно проводиться
с учетом характера и временных параметров сигналов на стыках между компонентами.
Чтобы сигналы были совместимыми, применяют вспомогательные устройства,
называемые интерфейсными. Эти устройства можно разделить на 2 группы.
Первая группа обеспечивает подключение ОЗУ, ПЗУ, УВв и УВыв к шинам МП и
решает задачи синхронизации и управления шинами, а также выборки компонентов, обеспечивающих своевременную передачу данных между МП и выбранным компонентом.
229
Вторая группа обеспечивает «стыковку» микроЭВМ с внешними компонентами
(например, с периферийными устройствами, каналами передачи данных, контроллерами)
и преобразование внешних сигналов в сигналы, совместимые с сигналами на шинах, а также обратное преобразование.
Так, если датчики Д имеют аналоговые выходные сигналы, интерфейсное устройст
во ИУ1 может представлять собой АЦП. В то же время для управления работой механизма ИМ (например, серводвигателем ПД генератора) могут использоваться аналоговые сигналы. В этом случае интерфейсное устройство ИУ2 представляет собой ЦАП.
В общем случае совокупность унифицированных технических и программных
средств, используемых для сопряжения компонентов в вычислительной системе или между системами, называют интерфейсом.
В настоящее время на базе микроЭВМ разработаны и успешно эксплуатируются
микропроцессорные СУ, обеспечивающие автоматическое управление комплексами судовых систем и механизмов (например, энергетической и электроэнергетической установками).
В качестве примера рассмотрим устройство и работу микропроцессорной системы
управления СЭЭС типа АSА-S.
1.5. Микропроцессорная СУ СЭЭС типа АSА-S
Система предназначена для автоматического управления судовой электроэнергетической установкой из четырех ГА ( рис. 7.4 ).
В качестве ГА используются ДГ и ВГ, причем параллельная работа ВГ и ДГ предусмотрена в течение непродолжительного времени (до 15 с).
Рис. 7.4. Функциональная схема микропроцессорной системы управления ASA-S
Система включает связанные между собой микроЭВМ дизеля (DMR), микроЭВМ
генератора (GMR) и устройство защиты ГА (АGS).
МикроЭВМ типа К1510 разработаны фирмой "Роботрон" (б. ГДР).
230
Функции системы
Система обеспечивает:
1. автоматическое включение и отключение ТА в заданном оператором порядке;
2. автоматические нормальный и экстренный пуски ГА, контроль времени пуска;
3. автоматическую синхронизацию и включение ГА на параллельную работу, конт
роль времени синхронизации;
4. автоматическую остановку работающих ГА при снижении частоты тока и напряжения с последующими экстренным пуском 1-го резервного ГА и нормальным пуском 2го резервного ГА;
5. регулирование частоты и распределение активной нагрузки при параллельной
работе ГА;
6. опрос запаса мощности работающих ГА перед включением мощных приемников
электроэнергии;
7. защиту генераторов от токов перегрузки и КЗ;
8. циклический обегающий контроль параметров дизелей и генераторов и цифровую индикацию аварийно-предупредительных сигналов;
9. циклический контроль исправности модулей системы.
Устройства микроЭВМ
МикроЭВМ системы построены на 55 модулях 17 различных типов и включают в
себя следующие устройства (рис. 7.4 ):
1. центральное вычислительное ДВУ (модули ZVЕ1 и ZVЕ2);
2. запоминающее (модули OSS, РFS и ZVZ соответственно оперативной, постоян
ной и стековой памяти);
3. ввода-вывода информации (модули АSI-Е, АSI-А, DAR, DAZ);
4. аналого-цифровые преобразователи (модули АDU101 и АDU102);
5. измерения периодов и разности фаз напряжений (модуль РРМ001);
6. дополнительных функций (модуль RÜB) и др.
Устройства АSI-Е, АSI-А, DAR и RÜB и отношению к МП являются интерфейсны
ми.
Информация о состоянии СЭЭС
Информация о режимах работы СЭС, видах управления и состоянии ГА поступает
на шины микроЭВМ от органов управления (выключателей и переключателей, кнопок) на
пульте управления СЭС и различных датчиков через модули РGА, АSI-Е, ADU, АMU и
РРМ.
Датчики системы управления
В системе АSА-S применяются датчики двух видов:
1. с дискретными выходными сигналами;
2. с аналоговыми выходными сигналами.
Дискретные сигналы ( логические «0» или «1» ) получаются при помощи 2-позиционных датчиков, блок-контактов АВ генераторов, контактов кнопок и реле.
Эти сигналы поступают на шины микроЭВМ через согласующее устройство, образованное релейными модулями РGА и модулем АSI-Е ввода данных процесса.
Всего релейных модулей 10, в каждом модуле 28 реле. Таким образом, в систему
АSА-S может поступать информация от 280 2-позиционных датчиков.
Из 7 модулей ввода данных 2 относятся к системе управления генераторами (GMR)
и 5 к системе управления дизелями (DMR).
При этом 2 модуля (по одному от каждой системы) участвуют в обмене информаци
ей между обеими микроЭВМ, а в остальные через контактные соединения XI и Х2 поступа
ют дискретные сигналы от модулей РGА.
231
Аналоговые сигналы в виде тока, напряжения, частоты, угла сдвига по фазе получа
ются при помощи трансформаторов тока и напряжения и преобразуются в дискретные
модулями АМU001, АDU101, АDU102 и РРМ001.
С выходов перечисленных модулей информация поступает непосредственно на
шины микроЭВМ, без применения специальных устройств ввода.
Краткая характеристика модулей системы
Модуль АMU001 представляют собой аналоговый мультиплексор и обеспечивает:
1. преобразование токов I … I генераторов в пропорциональные им напряжения
1
4
U ( I );
2. преобразование линейных напряжений U
RS
иU
TR
к виду U 90 , удобному для
последующего ввода в микроЭВМ с целью определения в последней активной нагрузки
генератора перемножением тока и напряжения генератора;
3. поочередное подключение каналов тока к модулю АDU101 при помощи мультиплексора на логических элементах и двунаправленных ключах.
Модуль АDU101 представляет собой аналого-цифровой преобразователь ( АЦП ) и
предназначен для преобразования синусоидальных напряжений U , U ( I ), U 90 в дискретные сигналы U
TR
,U
TR
( I ) и U 90TR , а также запоминания мгновенных значений U и
U ( I ).
Указанные сигналы передаются на вход модуля АDU102.
Модуль АDU102 преобразует аналоговые сигналы U и U ( I ) в цифровые коды,
передаваемые на шины микроЭВМ.
Модуль РРМ001 предназначен для измерения периодов напряжений генераторов
U …U
и судовой сети U c , а также для измерения разности фаз напряжений сети и
1
4
подключаемого генератора.
Полученная цифровая информация поступает в микроЭВМ, которая при синхронизации рассчитывает момент подачи импульса на включение АВ генератора.
Модули ZVЕ1 и ZVЕ2 образуют центральное вычислительное устройство ЦВУ,
предназначенное для обработки информации, поступающей по шинам данных в микропро
цессор типа U808D (в модуле ZVЕ1).
Микропроцессор организует обмен информацией:
1. между внутренней памятью МП и внешней стековой памятью;
2. между памятью и интерфейсными модулями;
3. между интерфейсными модулями.
Обмен данными и адресами внутри МП осуществляется через шины D0…D7.
Для запоминания информации используются регистры АR0…АR7 и АR8…АR15.
Работа ЦВУ происходит по командам программы, хранящейся в модуле РFS.
Модули PFS и OSS, выполняющие функции соответственно ПЗУ и ОЗУ, образуют
основную память микроЭВМ.
Модуль PFS содержит "жесткую", т. е. не изменяемую в ходе процесса управления,
программу работы микроЭВМ и константы. Программа вводится в модуль при помощи
специального программирующего устройства и поэтому допускает многократное
изменение при вводе.
В системе АSА-S установлены 7 моду лей PFS с общим объемом памяти 28 Кбайт.
Модуль OSS содержит данные процесса, поступающие в него через МП из модулей
АSI-Е, АDU102, РРМ001.
Модуль OSS имеет 3 состояния:
1. хранение данных процесса (команда ВЕRNTL=0);
2. запись (по команде S=1 происходит запись информации из модуля OSS в мо-
232
дуль ZVE1);
3. чтение (по команде L=1 происходит считывание информации в обратном поряд
ке).
В систему АSА-S входят 2 модуля OSS, по одному в каждой микроЭВМ.
Помимо постоянной памяти, микроЭВМ содержит стековую, построенную на моду
ле ZVZ.
Стековая память является внешней по отношению к внутренней памяти МП.
Она используется для временного хранения информации, находившейся в МП, при
прерывании основной программы.
Перевод информации из МП в модуль ZVZ проводится по команде PUSH ( толкай ).
Освободившиеся в МП регистры общего назначения используются для выполнения
подпрограмм (например, при проверке исправности модулей).
Возвращение информации из модуля ZVZ в МП выполняется по команде РОР после
выполнения подпрограммы.
Вывод информации
Для вывода данных процесса управления используют 7 модулей DAR (на рис. 7.4
не показаны), из которых 4 используются в системе управления генераторами GMR, а
остальные в системе управления дизелями DMR.
Вывод данных происходит по команде OUT с дополнением номера модуля (напри
мер, OUT 21). Данные процесса передаются из модуля ZVЕ1 в модуль DAR по шинам
АR0…АR7.
Для цифрового отображения информации каждая микроЭВМ снабжена модулем
цифровой индикации DAZ. Информация выводится на табло с 7-сегментными светодиод
ными индикаторами.
Выведенные числа отображают аварийные сигналы процесса или цифровые коды
неисправности (например, коду 3902 соответствует неисправность модуля ZVZ).
Обмен информацией между микроЭВМ
В процессе работы системы АSА-S необходим обмен информацией между обеими
микроЭВМ (например, такой, как "запрос синхронизации", "неудавшийся пуск" и др.).
Для этого в системе имеется 2 канала сопряжения микроЭВМ, образованные моду
лями АSI-А и АSI-Е.
Обмен данными происходит периодически, при помощи специальных временных
программ. На время выполнения программы обмена (0,4 с) основная программа прерывает
ся.
Расширение функций управления
Расширение функций управления системы АSА-S выполняет модуль дополнительных функций RÜВ.
Этот модуль циклически (через каждые 0,4 и 6,4 с) вырабатывает сигналы INТЗ=0
и INT2=0 прерывания основной программы, поступающие в модуль ZVЕ2/
По сигналу INТЗ=0 включается подпрограмма ввода данных в микроЭВМ от моду
ля АSI-Е, по сигналу INT2=0 - подпрограмма проверки модулей системы АSА-S.
После выполнения подпрограмм действие основной программы восстанавливается.
Для проверки исправности модулей нажимают кнопку SHO101. При этом на выходе модуля RÜВ появляется сигнал ВЕRNT=1, поступающий в модуль ZVЕ1, после чего
модули ZVЕ1 и ZVЕ2 формируют сигнал INTO прерывания основной программы.
Алгоритмические языки системы
В рассмотренной системе запись команд выполнена на алгоритмическом языке ассемблера с помощью слов, их частей или символов.
В качестве примера приведем некоторые команды МП и укажем их назначение:
233
1. RЕАDУ ("Готов") - организация обмена данными между МП и ОЗУ и ПЗУ, а также между МП и УВв и УВыв (см. рис. 7.3 );
2. INТЕ ("Прерывание разрешено") - разрешение прерывания основной программы
в случае начала выполнения определенной подпрограммы (например, самодиагностирова
ния);
3. HOLD ("Захват") - перевод адресной шины и шины данных в отключенное от
МП состояние;
4. INТ ("Запрет прерывания") - запрет прерывания основной программы;
5. RESЕТ ("Сброс") - сброс счетчика команд на ноль;
6. WAIТ ("Ожидание") - перевод МП в режим ожидания или прерывания основной
программы;
7. DBIN ("Ввод данных") - подтверждение перевода шины данных в режим ввода
данных;
8. SYNС ("Синхронизация") - синхронизация работы МП с ОЗУ, ПЗУ, УВв и УВыв
и др.
Устройства защиты
Устройство защиты генераторов АGS системы АSА-S, устанавливаемое на каждом
генераторе, обеспечивает следующие виды защит:
1. от токов перегрузки отключением в 2 ступени неответственных приемников;
2. от токов КЗ;
3. от перехода СГ в двигательный режим;
4. от обрыва фазы;
5. по максимальному напряжению.
Во всех этих случаях выдается сигнал на отключение АВ генератора.
Кроме того, устройство выдает сигнал в микроЭВМ в следующих случаях:
1. при наступлении режима "блек-аут" (снижение напряжения на 20 % или частоты на 10 %, обрыв фазы или увеличение напряжения выше номинального);
2. превышении номинальной частоты вращения ГА.
Проверка исправности модулей устройства выполняется через каждый час автома
тически или вручную.
Цикл проверки занимает 12 с. Неисправные модули определяются при помощи
цифровых кодов на табло модуля DAZ001.
2. Надежность, диагностирование и прогнозирование технического состояния
СУ СЭЭС
2.1. Основные сведения о надежности
Важнейшим требованием, предъявляемым к СУ СЭЭС, является надежность.
Составные части современных СУ СЭЭС - функциональные устройства, узлы и блоки – по
строены на электронной аппаратуре. Поэтому надежность упомянутых СУ определяется
надежностью электронной аппаратуры.
Надежность аппаратуры - это свойство аппаратуры, заключающееся в способности
безотказно выполнять заданные функции при сохранении своих основных характеристик
в установленных пределах.
Неисправность аппаратуры, без устранения которой выполнение всех или хотя бы
одной из основных функций аппаратуры невозможно, называется отказом. Отказы могут
быть частичными, когда аппаратура перестает выполнять одну или несколько из основных
функций, и полными, когда прекращается выполнение всех функций.
Надежность аппаратуры обеспечивается сочетанием свойств безотказности, долго
вечности, ремонтопригодности и сохраняемости.
234
Безотказность - это свойство аппаратуры сохранять работоспособное состояние в
течение некоторого времени или некоторой наработки. Основными показателями безотказ
ности являются: наработка на отказ, интенсивность отказов, вероятность безотказной рабо
ты.
Долговечность - это свойство аппаратуры сохранять работоспособное состояние до
наступления предельного состояния при установленной системе ТО и ремонта.
Основными показателями долговечности являются: ресурс (время) до среднего или
капитального ремонта, назначенный (суммарный) ресурс, назначенный (календарный)
срок службы.
Ремонтопригодность - это свойство аппаратуры поддерживать и восстанавливать
работоспособное состояние при соответствующем ТО и ремонтах. Основными показателя
ми ремонтопригодности являются: вероятность восстановления работоспособного состояния и среднее время восстановления.
Сохраняемость - это свойство аппаратуры сохранять значения показателей безотказности, долговечности и ремонтопригодности во время и после хранения и транспортировки.
Из перечисленных свойств надёжности важнейшим является безотказность.
Рассмотрим более подробно основные показатели безотказности.
Наработка на отказ - это время нормальной работы аппаратуры между двумя
смежными отказами.
Чтобы оценить среднюю наработку на отказ некоторого экземпляра аппаратуры,
его испытывают до 10-15 отказов, восстанавливая работоспособность образца после каждого из них. Средняя наработка (ч) при таком эксперименте определится как частное от
деления времени t c испытания на количество отказов п за этот срок:
T
ср
=tc /n
( 7.1 ).
Интенсивность отказов - величина, значение которой обратно средней наработке
на отказ (1/ч):
λ. = 1 / T
( 7.2 ).
ср
Чем больше интенсивность отказов, тем менее надежна аппаратура.
Рис. 7.5. График вероятности безотказной работы аппаратуры СУ
Вероятность безотказной работы - это вероятность того, что в пределах заданной
наработки отказ объекта не возникнет, обычно подчиняется экспоненциальному закону
распределения (рис. 7.5 ):
P 0 = ехр [- ( t / T )]
( 7.3 ).
ср
Как следует из графика, вероятность безотказной работы наибольшая (P 0 = 1) при
t/T
ср
= 0 (аппаратура не работала) и наименьшая (Р 0 = 0) при t / T
аппаратуры примерно в .5 раз больше наработки на отказ).
ср
≈ 5 (время работы
235
2.2. Факторы, влияющие на надежность аппаратуры СУ СЭЭС
Существенное влияние на надежность аппаратуры оказывают климатические условия, уровень подготовки обслуживающего персонала и качество ТО и ремонта, режим работы аппаратуры, продолжительность ее эксплуатации.
Для уменьшения влияния климатических условий аппаратуру выпускают в соответ
ствующем исполнении (например, тропическом).
Опыт показывает, что до 20 % всех отказов электронной аппаратуры происходит по
вине обслуживающего персонала, поэтому квалификация персонала, а также объем и каче
ство технической документации, придаваемой к аппаратуре, находятся в прямой связи со
степенью надежности аппаратуры.
Интенсивность отказов при эксплуатации аппаратуры с малыми нагрузками сущест
венно снижается, а при частых включениях и выключениях значительно увеличивается.
Продолжительность эксплуатации аппаратуры условно можно разделить на 3 этапа.
На первом, называемом периодом приработки и составляющем десятки или сотни
часов, наблюдается повышенная интенсивность отказов, что объясняется технологически
ми недоработками и недостаточным освоением аппаратуры.
Второй этап (тысячи часов) характеризуется постоянной интенсивностью отказов,
которые носят случайный характер и лишь частично обусловлены изнашиванием элемен
тов и ухудшением их параметров.
Третьему этапу (сотни часов) соответствует повышенная интенсивность отказов,
что объясняется естественным старением элементов резисторов, конденсаторов, механиче
ских и электрических узлов, ухудшением изоляции и т. д.).
2.3. Связь надежности и условий работы СЭЭС. Способы повышения надежности
Надежность сложных СУ, к которым относятся СУ СЭЭС, необходимо не только
оценивать по рассмотренным выше показателям, но и связывать с разными уровнями
качества и эффективности их функционирования.
Например, отказ или повреждение одного из генераторов не приводит к перебоям в
снабжении электроэнергией приемников.
Выход из строя двух генераторов вызывает необходимость в ограничении потребля
емой энергии путем отключения неответственных приемников.
При отказе основной электростанции аварийная способна обеспечить электроэнер
гией ответственные приемники.
Для повышения надежности СУ СЭЭС применяют разные способы, в их числе резервирование отдельных устройств, блоков и узлов, обеспечение дополнительных связей
между элементами СУ СЭЭС.
Высокую степень надежности имеют кибернетические (самонастраивающиеся)
системы, в которых отказ какого-либо элемента сопровождается перераспределением его
функций между другими работоспособными элементами без изменения уровня эффектив
ности работы системы.
Одним из важных средств обеспечения и поддержания надежности СУ СЭЭС
является их диагностирование.
2.4. Диагностирование и прогнозирование технического состояния СУ СЭЭС
Диагностирование СУ СЭЭС заключается в изучении признаков неисправностей, а
также разработке методов и средств обнаружения и локализации этих неисправностей.
Диагностирование осуществляется либо путем внешнего осмотра, либо при помощи диагностической аппаратуры или диагностической программы.
Информация, накопленная в процессе диагностирования СУ, используется для прогнозирования технического состояния этих систем.
236
Задача прогнозирования заключается в оценке степени работоспособности или в
оценке вероятности отказа на некотором предстоящем этапе эксплуатации СУ.
Решение этой задачи позволяет: правильно планировать ТО и ремонты оборудова
ния (по фактическому состоянию); своевременно заменять или ремонтировать блоки и
узлы СУ, имеющие повышенную вероятность отказа; правильно комплектовать набор запасных частей блоков.
В настоящее время созданы специализированные устройства для поиска неисправ
ностей в блоках СУ СЭЭС, а также контрольно-измерительные комплексы для проверки и
восстановления работоспособности блоков и модулей СУ с однотипными логическими
элементами (например, комплекс КИК-1).
Более широкими возможностями обладает автоматизированная система АСДН
диагностирования и наладки судовых СУ.
Эта система предназначена для диагностирования и наладки блоков СУ, использующих элементную базу разных типов: микросхемы ТТЛ и К-МОП структур, логические элементы серий "Логика-Т", "Транслог", "Урсалог" и аналогичные им.
Работой
системы
АСДН (рис. 7.6 ) управляет устройство функциональностатического контроля УФСК "Логикой", представляющее собой процессор системы.
Блок управления БУ предназначен для хранения оперативной судовых систем
управления АСДН информации и выполнения программы управления.
Накопитель диагностической информации НДИ служит для длительного хранения
программ работы АСДН и диагностической информации.
Рис. 7.6. Функциональная схема автоматизированной системы диагностики
и наладки судовых систем управления АСДН
Устройство УВВИ ввода-вывода информации обеспечивает загрузку в память систе
мы АСДН программ ее работы и диагностической информации, а также вывода и докумен
тирования диагностической информации.
В состав УФСК входит также блок БИ индикации.
Устройство УС сопряжения предназначено для согласования характеристик управляющих сигналов УФСК с характеристиками сигналов блоков СУ СЭЭС.
В это устройство входит блок БСК сопряжения компараторов, который формирует
характеристики входных сигналов блоков СУ, а также блок БСФ сопряжения формирователей, который формирует характеристики выходных сигналов АСДН, поступающих в
блоки СУ.
Блок БИМ имитаторов и нагрузок предназначен для создания имитирующих сигналов датчиков на входах и нагрузок на выходах блоков СУ с последующим диагностированием блоков.
Внедрение на флоте СУ СЭЭС с ЦВМ позволяет значительно расширить возможно
сти подобных систем.
Применяемая на судах отечественной постройки СУ СЭЭС типа "Ижма-Б", помимо
традиционных задач управления и контроля СЭЭС, позволяет решать задачи диагностирования и прогнозирования в следующем объеме:
237
1. автоматическая регистрация состояния, параметров и неисправностей СЭЭС и ее
СУ;
2. диагностирование СЭЭС и ее СУ;
3. автоматическая выдача рекомендаций о способах устранения неисправностей в
СУ;
4. использование в управлении результатов диагностирования оборудования СЭЭС.
2.5. Характерные неисправности СУ СЭЭС
Опыт эксплуатации отечественных СУ СЭЭС типов "Ижора" и "Ижма" показал,
что они имеют невысокие показатели контролеспособности и ремонтопригодности.
В этих СУ отсутствует сигнализация о неисправности каждого функционального
устройства. Обслуживающему персоналу приходится затрачивать длительное время на
определение неисправностей в СУ и их устранение.
Для организации ТО СУ и ее элементов необходимы универсальные приборы с
большим внутренним сопротивлением, осциллографы, вспомогательное оборудование и
специальная оснастка.
В системе управления СУ СЭЭС типа "Ижора-М" предусмотрен регламентный контроль исправности всех блоков, которые скомпонованы в стандартных типовых кассетах и
легко заменяются при неисправностях.
В СУ СЭЭС фирм "Стромберг", АSЕА (например, АHIM, GENA-С) элементная
база построена на логических элементах.
Функциональные модули этих СУ выполнены на стандартных печатных платах,
что дает возможность доступа к отдельным узлам и элементам модулей с целью проверки
и ремонта.
Перечисленные выше СУ имеют встроенный контроль самой системы и блоков, а
также контрольные точки для диагностирования.
Тем не менее поиск и устранение неисправностей связаны с большими трудозатра
тами.
Основными причинами этого являются:
1. усложнение схем управления вследствие применения интегральных схем;
2. неполнота практических рекомендаций по методам поиска и устранения дефектов в технической документации;
3. неполнота номенклатуры контрольно-измерительных приборов, устройств и ин
струментов, недостаточный опыт обслуживающего персонала по отысканию неисправностей и их устранению.
Виды и доля (%) в общем количестве неисправностей, вызывающих отказы в работе СУ СЭЭС на логических элементах, приведены в таблице 7.1.
Таблица 7.1.
Доля отдельных видов неисправностей СУ СЭЭС
Вид неисправности
Обрывы, межвитковые замыкания в обмотках, замыкание контактов,
увеличение сопротивления контактов реле и контакторов
Доля , %
15…20
Обрывы, пробои в полупроводниковых приборах
Износ элементов
Нарушение изоляции
Поломки механические
Заедания механические
Обрывы в местах пайки и выводных соединениях
Нарушения регулировки
15…20
10…15
5…10
5…10
3…5
3…5
8…10
238
Прочие
3…5
Опыт эксплуатации СУ СЭЭС показал, что наибольшие трудозатраты на поиск неисправностей свойственны электронным схемам возбуждения СГ, блокам синхронизации
и распределения нагрузки.
Наибольшие трудозатраты на устранение неисправностей присущи АВ генераторов
вследствие сложности кинематики и блокам автоматизированного управления ДГ.
Способы устранения неисправностей СУ СЭЭС и их отдельных элементов приведены в технической документации.
2.6. Техническая эксплуатация автоматизированных устройств
Техническая эксплуатация и ответственность за исправное состояние автоматизиро
ванных устройств возлагаются на членов судового экипажа, в заведовании которых они
находятся:
1. на судовых механиков в части пневматических, гидравлических и механических
средств автоматизации в соответствии с их заведованием;
2. на электромехаников в части электрических средств автоматизации, в том числе
электрических элементов, конструктивно входящих в состав перечисленных выше средств
автоматизации.
На судах со знаком автоматизации А1 в символе класса Регистра или соответствую
щими знаками автоматизации иностранных классификационных обществ организация тех
нического использования СТС должна соответствовать требованиям Положения об эксплу
атации судов без постоянного присутствия вахтенного персонала в центральном посту управления и машинных отделениях.
Вне зависимости от знака автоматизации при эксплуатации автоматизированных
устройств обязательно выполнение ПТЭ СТС и инструкций.
Ввод автоматизированных устройств в режим автоматического или дистанционно
го управления выполняют после проведения работ по подготовке средств автоматизации к
действию.
Указанные средства должны использоваться в полном объеме, соответствующем
присвоенному судну знаку автоматизации и принятой форме вахтенной службы.
Ввод в действие автоматизированных устройств после продолжительного нерабоче
го периода, ТО с выводом из действия или ремонта должен выполняться механиком по за
ведованию с участием электромеханика.
При вводе в действие автоматизированных устройств необходимо:
1. убедиться в готовности технических средств к действию;
2. установить органы управления в исходное положение;
3. включить питание и по сигнальным лампам и штатным контрольно-измерительным приборам убедиться в подаче напряжения;
4. убедиться в правильности действия автоматизированных устройств по лампам
исполнительной сигнализации или при помощи других средств контроля после изменения
положения органов управления или нажатия кнопки "Пуск".
Проверка функциональных узлов автоматизированных устройств должна проводиться в порядке, установленном инструкциями завода-изготовителя.
При ежедневном осмотре электрооборудования электромеханик обязан:
1. провести внешний осмотр автоматизированных устройств и отдельных узлов, обращая внимание на их чистоту, отсутствие посторонних предметов, потеков жидкостей,
коррозионных и механических повреждений, а также закрытие крышек и дверей;
2. проверить исправность сигнальных ламп, находящихся в действии, и заменить
неисправные.
При обнаружении выхода контролируемых или регулируемых параметров, времен-
239
ных задержек, уставок срабатывания за пределы установленных значений необходимо в
возможно короткий срок выполнить настройку и регулировку средств автоматизации
(механиком по заведованию совместно с электромехаником или специализированной бере
говой организацией).
В случае систематических отказов автоматизированных устройств соответствую
щее донесение направляется судовладельцу.
Отключение автоматизированных устройств и переход на ручное управление прово
дятся с разрешения старшего механика и с ведома вахтенного механика при ТО или ремон
те, а также для устранения неисправностей.
При выводе из действия автоматизированных устройств необходимо:
1. установить органы управления в положение, соответствующее выключенному
состоянию;
2. убедиться в правильности выполнения команды по лампам исполнительной
сигнализации или при помощи других средств контроля;
3. выключить питание.
При исчезновении питания или возникновении неисправностей в работе автоматизированных устройств, а также при появлении сигналов, причину которых лица вахтенной
службы определить не в состоянии, необходимо сообщить об этом электромеханику.
При обесточивании судна вахтенный механик и электромеханик должны принять
все меры к немедленному восстановлению работы автоматизированных устройств, руководствуясь инструкциями, которые должны быть разработаны судовладельцем для каждо
го типа судна и вывешены в машинном отделении (ЦПУ).
При непосредственной угрозе затопления автоматизированных устройств они долж
ны быть выведены из действия.
Контрольные вопросы
1. По каким характерным признакам классифицируются современные СУ СЭЭС?
2. Перечислите операции, выполняемые на разных уровнях иерархии СУ СЭЭС
3. Каков объем автоматизации управления СЭЭС, выполняемый СУ СЭЭС типа
«Ижора-М»?
4. При каких условиях выдается команда на включение резервного ДГ в СУ СЭЭС
типа «Ижора-М»?
5. В чем состоит блокировка пуска из ходовой рубки мощных приемников в СУ
СЭЭС типа «Ижора-М»?
6. При каких условиях не блокируется пуск мощных приемников в СУ СЭЭС типа
«Ижора-М»?
7. Каково назначение устройства ЗОФН в СУ СЭЭС типа «Ижора-М»?
8. Назовите составные части микропроцессорной системы управления
9. Что такое «процессор»? «микропроцессор»?
10. Каково назначение арифметико-логического устройства, устройства управления
и рабочих регистров микропроцессорной системы управления?
11. Какие виды запоминающих устройств используются в микропроцессорных
системах управления? Какова их элементная база?
12. Объясните функции устройств ввода-вывода информации микропроцессорных
систем управления?
13. Каково назначение шин микропроцессорных систем управления? Какие виды
шин применяются в этих системах?
14. Каково назначение интерфейсных устройств микропроцессорных систем
управления?
15. Каковы функции микроЭВМ DMR и GMR в системе АSА-S?
16. Каковы функции системы АSА-S?
17. Какие виды датчиков применяются в системе АSА-S?
240
18. Каким образом выводится информация в системе АSА-S?
19. Как осуществляется обмен информацией между микроЭВМ DMR и GMR в системе АSА-S?
20. Какой алгоритмический язык использован в в системе АSА-S? Приведите несколько команд на этом языке
21. Какие функции выполняет защитное устройство AGS системы АSА-S?
22. Что такое безотказность, ремонтопригодность, сохраняемость, наработка на отказ аппаратуры?
23. Какие факторы влияют на надежность аппаратуры? Каковы способы повышения надежности аппаратуры?
24. В чем заключается диагностирование и прогнозирование технического состояния СУ СЭЭС?
25. В чем состоит техническая эксплуатация автоматизированных устройств?
26. Каковы действия обслуживающего персонала при вводе в работу и выводе из
нее автоматизированных устройств?
241
РАЗДЕЛ 2. СУДОВЫЕ ЭЛЕКТРИЧЕСКИЕ ПРИВОДЫ
2.1. ОСНОВЫ ТЕОРИИ ЭЛЕКТРОПРИВОДА
1. Основные понятия
1.1. Понятие „электрический привод”
В науке, технике и производстве в области электропривода применяют следующие термины и определения понятий ( ГОСТ 16593-79 ).
Электрическим приводом называется электромеханическая система, предназначенная для приведения в движение исполнительных органов рабочей машины и управления
этим движением.
В общем случае электропривод состоит из 4-х устройств ( рис.8.1 ):
1. преобразовательное;
2. электродвигательное;
3. передаточное;
4. управляющее.
Рис. 8.1. Структурная схема электропривода
Преобразовательное устройство предназначено для преобразования рода тока,
напряжения и частоты тока питающей сети и передачи преобразованных параметров в
электрическую часть электропривода. Поэтому оно включается между питающей сетью и
электрической частью электропривода.
В качестве преобразовательных устройств используются:
1. для преобразования рода тока – выпрямители, преобразующие переменный ток
в постоянный;
2. для преобразования напряжения – трансформаторы, преобразующие переменное напряжение одного значения в переменное напряжение другого значения той же часто
ты;
3. для преобразования частоты тока – преобразователи частоты, преобразующие
переменный ток одной частоты в переменный ток другой, регулируемой частоты.
Рассмотрим поочередно преобразовательные устройства.
Выпрямители
На судах выпрямители применяют в электроприводах, использующих в качестве
источника механической энергии двигатель постоянного тока. К таким электроприводам
относятся:
1. якорно-швартовные – брашпили;
2. грузоподъёмные – грузовые лебёдки и краны;
242
3. гребные электрические установки, предназначенные для движения судна.
Мощность этих электродвигателей составляет десятки и сотни кВт.
Трансформаторы
Трансформаторы в судовых электроприводах, как правило, не применяются. Однако они нашли самое широкое применение на берегу. Здесь от высоковольтных линий
электропередач с напряжениями в сотни киловольт питаются предприятия с электроприводами напряжением 380 и 660 В.
Преобразователи частоты
На судах статические тиристорные преобразователи частоты применяются в электроприводах переменного тока. К таким электроприводам относятся, в основном, грузоподъёмные тяжеловесные устройства и гребные электрические установки.
Электродвигательное устройство предназначено для преобразования электрической энергии в механическую или, в некоторых системах судовых электроприводов
( система генератор – двигатель ), механической энергии в электрическую.
К электродвигательным устройствам относят электродвигатели постоянного и
переменного тока, а также универсальные ( переменно-постоянного тока ). Последние
нашли на судах ограниченное применение, в основном, в электроприводах вентиляторов
мощностью до 250…300 Вт.
Передаточное устройство предназначено для передачи механической энергии от
электродвигателя к исполнительному органу механизма.
К передаточным устройствам относят механические , гидравлические и другие передачи. Передаточные устройства применяют в грузоподъёмных, якорно-швартовных и
рулевых механизмах Например, в электроприводе грузовой лебёдки передаточным устрой
ством является редуктор, расположенный между электродвигателем и грузовым барабаном лебёдки.
Простейшие по устройству электроприводы, например, вентиляторы и центробежные насосы, не имеют передаточного устройства, т.к. у них крылатка насажена
непосредственно на вал электродвигателя.
Управляющее устройство предназначено для управления преобразовательным
электродвигательным и передаточным устройствами. При помощи управляющего устройства задают необходимый режим работы всего электропривода, например, пуск, остановку, реверс, изменение скорости и др. Например, в электроприводе грузовой лебёдки
управляющее устройство состоит из командоконтроллера ( с рукояткой управления ) и
станции управления, внутри корпуса которой находятся коммутационные и защитные
электрические аппараты – контакторы, реле, предохранители и др.
В сложных современных судовых электроприводах составной частью управляющего устройства являются бортовые компьютеры, которые получают информацию от
задатчиков и датчиков обратной связи и вырабатывают сигналы управления в соответствии с заданными алгоритмами ( программами ).
При этом, в качестве задатчиков используются рукоятки управления тремя механизмами крана ( подъём, поворот, стрела ), связанные с потенциометрами, в качестве
датчиков – большое количество чувствительных элементов, измеряющих вес груза,
давление в системе гидравлики, силу тока, определяющих положение рабочих органов
перечисленных механизмов и многое другое.
1. 2. Классификация электроприводов
Электроприводы классифицируются ( различаются ) по нескольким признакам.
243
Рассмотрим основные признаки.
По области применения различают 2 вида электроприводов:
1. береговые;
2. судовые.
По роду тока различают 2 вида электроприводов:
1. постоянного тока;
2. переменного тока.
Переход судовых электроприводов на переменный ток завершился в начале 60-х
годов 20 столетия. Это стало возможным после начала производства ( в б. СССР ) электрических машин , предназначенных специально для работы на судах. Такие электрические машины называют машинами морского исполнения.
По способу передачи энергии от электродвигателя к механизму различают 3 вида
электроприводов:
1. групповой;
2. одиночный;
3. многодвигательный.
Групповым называют электропривод, в котором один электродвигатель приводит в
движение несколько исполнительных механизмов. Пример: токарный станок, в котором
электродвигатель вращает патрон с заготовкой и одновременно перемещает суппорт
станка с бабкой, в которой зажат резец. Суппорт при этом движется поступательно ( влево
– вправо ) вдоль станины станка. На судах групповые приводы применяются крайне редко.
Одиночным называют электропривод, в котором электродвигатель приводит в
движение только один исполнительный механизм. Пример: электропривод насоса или
вентилятора, в котором крылатка насажена непосредственно на вал электродвигателя.
Многодвигательным называют электропривод, в котором каждый рабочий орган
механизма приводится в движение отдельным электродвигателем. Пример: электропривод грузового крана, имеющий 3 механизма – подъёма груза, поворота и изменения
вылета стрелы. Каждый из этих механизмов имеет «свой» электродвигатель.
По степени автоматизации различают 3 вида электроприводов:
1. неавтоматизированные;
2. автоматизированные;
3. автоматические.
В неавтоматизированном электроприводе человек участвует на всех стадиях
управления электроприводом. Пример: электропривод вентилятора, управляемый при
помощи поста управления с двумя кнопками «Пуск» и «Стоп». Оба действия – пуск и
остановка, выполняет человек путём нажатия соответствующей кнопки.
В автоматизированном электроприводе функции управления разделены между
человеком и управляющим устройством. Обычно человек задаёт программу работы
электропривода, остальное же выполняет управляющее устройство.
Пример: электропривод грузовой лебёдки с 3-мя скоростями. Пусть оператор (
лебёдчик ) резко перевёл рукоятку командоконтроллера из нулевого положения сразу в 3е в направлении «Подъём». Двигатель при этом включится не на 3-й скорости, а на 1-й,
что позволит избежать поломки редуктора, а далее разгон электродвигателя произойдёт
постепенно, с задержкой при переходе с 1-й скорости на 2-й, а затем со 2-й к 3-ю. Эту
задержку обеспечивают два реле времени, входящие в состав управляющего устройства.
В автоматическом электроприводе роль человека сводится лишь к наблюдению
за работой электропривода.
244
Пример: автоматический рулевой. На начальном этапе участие человека заключает
ся в подаче питания на рулевой электропривод ( электромеханик ) и в выведении судна на
требуемый курс, например, при помощи штурвала ( рулевой матрос или вахтенный помощ
ник ). После этого на тумбе управления рулевым электроприводом ( мостик ) переключатель видов управления устанавливают в положение «Автомат». В зависимости от условий
плавания, такой режим может длиться от нескольких часов до нескольких десятков суток.
По возможности изменения скорости различают 2 вида электроприводов:
1. нерегулируемый, не предусматривающий изменение скорости;
2. регулируемый, имеющий 2 и более скоростей.
Пример нерегулируемого электропривода: электропривод вентилятора, управление
которым состоит только в пуске и остановке, а скорость не регулируется.
Примеры регулируемого электропривода: 1. электропривод грузовой лебёдки с 3мя скоростями ; 2. электропривод якорно-швартовного устройства с 6-ю скоростями.
По возможности изменения направления вращения различают 2 вида электро
приводов:
1. нереверсивный;
2. реверсивный.
Пример нереверсивного электропривода: электропривод вентилятора, управление
которым состоит только в пуске и остановке, а направление вращения не изменяется.
Примеры реверсивного электропривода: 1. электропривод грузовой лебёдки с 2-мя
режимами: «подъём» и «спуск» ; 2. электропривод якорно-швартовного устройства с 2-мя
режимами: «травить» и «выбирать».
По назначению различают 5 видов судовых электроприводов:
1. рулевые;
2. якорно-швартовные ( брашпили и шпили );
3. грузоподъёмные ( грузовые лебёдки и краны, лифты );
4. электроприводы судовых нагнетателей ( насосы, вентиляторы, компрессоры );
5. механизмов специального назначения.
К последней группе относят электроприводы:
1. подруливающих устройств;
2. систем кренования и дифферента;
3. успокоителей качки;
4. систем откренивания судов;
5. автоматические швартовные лебедки.
Подруливающие устройства предназначены для повышения манёвренности судов. С их помощью судно может перемещаться лагом ( бортом ) и даже совершать полный
оборот на месте. Такие устройства применяют на обычных транспортных судах, а также
на судах – паромах, предназначенных для перевозки колёсной техники.
Системы кренования и дифферента применяют на ледокольных судах, для освобо
ждения судна, зажатого во льдах и придания корпусу судна необходимой осадки.
Системы успокоителей качки применяют , в основном, на пассажирских судах и
морских паромах, в условиях, когда качка достигает 35…40º. С помощью успокоителей
Удается уменьшить амплитуду качки до 5…7º.
245
Системы откренивания судна применяют на судах с горизонтальным способом
погрузки ( суда типа ро-ро ) для выравнивания крена. Применение этих систем повышает
безопасность грузовых операций и обеспечивает надёжность работы въездной аппарели.
Автоматические швартовные лебедки применяют на судах с целью поддержания постоянного усилия в швартовном канате при стоянке судна в порту или на рейде.
При увеличении натяжения каната лебедка включается и потравливает канат до тех пор,
пока усилие в канате не уменьшится до заданного. При уменьшении натяжения каната
лебедка включается и набивает канат до заранее заданного усилия.
1.3. Силы и моменты, действующие в системе электропривода
Статические моменты
Определение «статический момент»
В состав каждого электропривода входит рабочая машина, например, насос, грузовая лебедка, рулевая машина и т.п.
Каждая такая машина имеет рабочий орган, предназначенный для выполнения
полезной работы. К рабочим органам относят: у насоса - крыльчатку , у грузовой лебедки
- крюк для подвески груза ( гак ), у рулевого устройства - перо руля и т.п.
Таким образом, к валу электродвигателя электропривода приложены два момента:
электромагнитный момент самого двигателя и момент, создаваемый рабочей машиной и
передачей ( если она есть ). Последний называется статическим моментом.
Важно подчеркнуть, что статический момент имеет чисто механический характер.
Направление действия статических моментов
В зависимости от выполняемой электроприводом операции каждый из них может
быть как движущим, так и тормозным.
Движущими или положительными называют моменты, направленные в сторону
движения и вызывающие или способствующие ему.
Тормозные или отрицательные моменты направлены навстречу движению и препятствуют ему.
1.4. Виды статических моментов
Различают два вида статических моментов: активные ( потенциальные ) и реактивные.
Активным называют момент, который вне зависимости от направления движения
всегда действует в одну сторону. Такой момент создают, например, масса поднятого
груза, силы упругости предварительного сжатых, растянутых или скрученных упругих тел
и др.
В системе координат ω ( М ) связь угловой скорости ω и статического момента М
показана при помощи вертикальной линии, проходящей через 1-й и 4-й квадранты
( рис. 8.2, а ).
Рис. 8.2. Активный ( а ) и реактивный ( б ) статический моменты
246
Действительно, если считать, что активный момент создан подвешенным грузом,
то статический момент М ст = G*R = const ( G – вес груза, R – радиус барабана лебедки ).
Он имеет одно и то же значение при любой скорости, в том числе при скорости,
равной нулю.
Кроме того, направление этого момента не зависит от направления перемещения
груза ( вверх или вниз ), что объясняется тем, что действие силы тяжести груза также не
зависит от того, поднимают или опускают груз. Как известно, сила тяжести всегда направ
лена к центру Земли.
Реактивным называют момент, возникающий как реакция среды на движение
электромеханической системы. Поэтому он действует только во время движения и всегда
навстречу ему. Поэтому при изменении направления движения реактивный момент изменяет направление действия и во всех случаях будет тормозным ( отрицательным ).
Такой момент создают силы трения, например, трение крыльчатки вентилятора о
воздух, трение шестерней в редукторе и т.п.
В системе координат ω ( М ) связь угловой скорости ω и статического момента М
показана при помощи вертикальных линий, проходящих через 1-й и 3-й квадранты ( рис.
8.2, б ).
В общем случае статический момент представляет собой алгебраическую сумму
моментов во всех частях рабочей машины. Если в электроприводе вентилятора статический момент создается только в результате трения крыльчатки о воздух и имеет реактивный характер, то в электроприводе лебедки действую одновременно два момента – активный, созданный подвешенным грузом, и реактивный, созданный силами трения в редукторе и в самом двигателе.
Поэтому в общем случае статический момент механизма находится как алгебраиче
ская сумма реактивного и активного моментов, т.е.
М ст = ±М 0 ± М
( 8.1 ).
2
1. 5. Приведение статических моментов к валу электродвигателя
В простых по устройству механизмах рабочий орган соединен с электродвигате
лем непосредственно ( напрямую ).
Например, в электроприводе насоса его крыльчатка закреплена непосредственно
на валу электродвигателя. В этом случае статический момент , созданный крыльчаткой
насоса, равен полезному моменту на валу электродвигателя. Иначе говоря, передача энер
гии от электродвигателя к насосу происходит без потерь энергии.
В более сложных по устройству механизмах, например, лебедках, брашпилях и
т.п. используют передачи ( редукторы ). В этом случае в передаче возникают потери энер
гии, в результате чего статический момент механизма и полезный момент двигателя
неодинаковы ( больше полезный момент двигателя ) .
Между тем, для того, чтобы подобрать электродвигатель под механизм, надо
предварительно рассчитать полезный момент двигателя по заранее заданным параметрам
параметрам механизма и передачи.
Такой расчет полезного момента двигателя по заданным параметрам механизма
и передачи называют приведением статического момента ( механизма ) к валу электродви
247
гателя.
Рассмотрим такой расчёт на примере упрощенного электропривода лебёдки,
состоящего из электродвигателя М, одноступенчатого редуктора Р и грузового
барабана Б ( рис. 8.3 ).
Рис. 8.3. Кинематическая схема электропривода лебёдки: М – электродвигатель,
Р – редуктор, Б – грузовой барабан
Пусть предварительно заданы параметры механизма и передачи, а именно:
статический момент механизма М ст , а также коэффициент полезного действия
передачи η и её передаточное число ί.
Далее рассуждаем так.
Мощность на валу электродвигателя
Р дв = ω дв * М
2
(1)
Мощность на валу механизма
Р ст = ω ст * М ст
(2)
Мощности Р дв и Р ст связаны через коэффициент полезного действия передачи:
η = Р ст / Р дв
(3)
Подставим в формулу ( 3 ) правые части формул ( 1 ) и ( 2 ):
η = ω ст * М ст / ω дв * М
2
(4)
Из формулы ( 4 ) найдем момент на валу электродвигателя
М = (ω ст * М ст ) / ( η* ω дв ) = М ст / ( η*ί ) ( 5 ),
2
где: ί = ω дв / ω ст - передаточное число передачи ( редуктора ).
Анализ формулы приведенного момента
Момент на валу электродвигателя тем больше, чем больше статический момент
М ст и чем меньше кпд η и передаточное число ί передачи.
1. 6. Режимы работы электроприводов
В зависимости от изменения скорости электропривода, различают два режима его
работы
1. установившийся или статический режим, при котором скорость не изменяется;
2. переходный или динамический режим, при котором скорость изменяется.
Переходный режим может возникнуть в таких случаях:
248
1. при изменении параметров двигателя, например, при регулировании скорости
изменением сопротивления в цепи обмотки якоря;
2. при изменении параметров механизма, например, при изменении подачи насоса;
3. при изменении параметров судовой сети, например, при колебаниях напряжения.
В динамическом режиме, в дополнение к ранее рассмотренным электромагнитному
моменту двигателя М и статическому моменту механизма М ст , на валу двигателя возникает дополнительный, т.к. называемый динамический момент М дин .
Появление этого момента объясняется действием сил инерции всех без исключения
движущихся частей электропривода. Например, в электроприводе лебедки динамический
момент появляется вследствие инерции якоря электродвигателя, шестерней редуктора,
грузового барабана и самого груза.
Динамический момент, возникающий под действинм сил инерции, увеличивает
время переходных процессов, например, время пуска и остановки электропривода.
Для уменьшения динамического момента в двигателях специального исполнения
уменьшают диаметр ротора и одновременно, для сохранения мощности двигателя, увеличивают его длину. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки элекитропривода, а
значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми ( от грузового крана ).
1. 7. Механические характеристики электродвигателей
Понятие «механическая характеристика электродвигателя» было приведено выше.
Повторим и разовьем это понятие.
Механической характеристикой двигателя, независимо от рода тока, называют зави
симость угловой скорости вала двигателя ω ( далее – двигателя ) от электромагнитного мо
мента двигателя М, т.е зависимость ω (М).
Здесь следует сделать важное замечание: в соответствии с уравнением моментов
М = М ст , в установившемся режиме электромагнитный момент двигателя определяется
величиной статического момента механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма – чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот. Иначе говоря, для любого двигателя входной величиной является момент механизма, а выходной –
его скорость.
Различают естественные и искусственные механические характеристики электро
двигателей.
Естественная механическая характеристика - это зависимость ω ( М ), снятая при
нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети
и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относят:: на постоянном токе – напряжение, на переменном – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные характеристики можно получить путем изменения параметров само
го двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя посто
янного тока или в цепь обмотки статора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных
характеристик. Число последних зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
249
Искусственные механические характеристики применяются для получения таких
режимов работы двигателя, как регулирование скорости, реверс, электрическое торможе
ние, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
Рис. 8.4. Естественная механическая ( а ) и угловая ( б ) характеристики синхрон
ного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки
статора
Естественная механическая характеристика синхронного двигателя ( рис. 8.1, а ) –
абсолютно жесткая, потому что ее жесткость
β = ΔМ / Δω = ΔМ / 0 = ∞.
Иначе говоря, при изменении электромагнитного момента М двигателя в широких
пределах скорость двигателя не изменяется.
Cтабильность скорости ротора синхронного двигателя объясняется при помощи
угловой характеристики синхронного двигателя θ ( М ) следующим образом ( рис.8.14, б ).
Если механическая нагрузка к ротору не приложена, то оси ротора и вращающегося
магнитного поля обмотки статора совпадают, т.е. θ = 0° ( точка 0 на рис. 8.14, б ).
Электромагнитный момент двигателя М = 0, двигатель работает в режиме холостого хода.
Если приложить к валу двигателя механическую нагрузку и увеличивать ее, то ротор под действием механической нагрузки станет отставать от магнитного поля обмотки
статора на все больший угол θ. Чем больше механическая нагрузка на валу, тем больше
этот угол и тем больше вращающий электромагнитный момент двигателя.
Такое одновременное увеличение вращающего момента двигателя, вызываемое уве
личением тормозного момента механизма как раз и обеспечивает стабильность скорости
двигателя ( на рис. 8.4, а участок характеристики от М = 0 до М = М ).
кр
Однако постоянство скорости двигателя сохраняется до тех пор, пока угол θ≤90°.
При θ = 90° двигатель развивает критический ( максимальный ) момент М ( точка А на
кр
рис. 8.4, а ).
Если при θ = 90° вновь увеличить механическую нагрузку ( θ > 90° ), электромагнитный момент двигателя станет уменьшаться ( отрезок АВ угловой характеристики ), т.е
этот момент окажется меньше тормозного момента механизма. В результате скорость рото
ра двигателя станет уменьшаться, и в конце концов ротор остановится.
Поскольку при этом скорость ротора меньше скорости вращающегося магнитного
поля обмотки статора, говорят, что двигатель выпал из синхронизма.
Как следует из угловой характеристики двигателя, условие выпадения двигателя из
синхронизма такое: : θ≤90°.
На практике номинальный угол θ н = 20…40°.
Область применения синхронных двигателей: на судах – в качестве гребных электродвигателей, вращающих винты; на берегу – для привода мощных механизмов, например, компрессоров на газоперекачивающих станциях.
250
Рис. 8.5. Естественная механическая характеристика двигателя постоянного тока
параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока паралельного возбуждения ( рис. 8.5 ) – жесткая, потому что ее жесткость
β = ΔМ / Δω ≤ 10%.
Это означает, что при изменении электромагнитного момента двигателя в широких
пределах его скорость достаточна стабильна ( т.е. изменяется незначительно ).
Такие двигатели применяются там, где при изменении нагрузки механизма в широких пределах скорость двигателя не должна изменяться резко - в электроприводах насосов, вентиляторов и т.п.
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения ( рис. 8.6 ) – мягкая, потому что ее жесткость
β = ΔМ / Δω > 10%.
Это означает, что при изменении электромагнитного момента двигателя даже в небольших пределах его скорость изменяется значительно.
Рис. 8.6. Естественная механическая характеристика двигателя постоянного тока
последовательного возбуждения
Напомним две характерные особенности этого двигателя:
1. при уменьшении механической нагрузки на валу или ее отсутствии ( М = М
х. х
)
скорость двигателя резко увеличивается, двигатель «идет вразнос». Поэтому этот двигатель нельзя оставлять без нагрузки на валу;
2. При пуске двигатель развивает пусковые моменты М п гораздо большие, чем у двигателей других типов.
Эти двигатели не применяются на судах, но применяются на берегу, например, в
электротранспорте, в частности, в троллейбусах, где они не остаются без нагрузки на валу
и где нужны большие пусковые моменты ( при трогании троллейбуса с места ).
251
Рис. 8.7. Естественные механическиея характеристики двигателей постоянного
тока смешанного возбуждения: 1- с параллельно-последовательным возбуждением;
2 - с последовательно- параллельным возбуждением
Естественная механическая характеристика двигателя постоянного тока смешанного возбуждения является промежуточной между характеристиками двигателей паралельного и последовательного возбуждения, т.к. магнитный поток возбуждения создается совместным действием обеих обмоток – параллельной и последовательной.
Различают два вида двигателей смешанного возбуждения:
1. с параллельно-последовательным возбуждением, у которых основную часть результирующего магнитного потока создает параллельная обмотка ( до 70%, остальные
30% - последовательная );
2. с последовательно- параллельным возбуждением, у которых основную часть результирующего магнитного потока создает последовательная обмотка ( до 70%, остальные
30% - параллельная ).
Поэтому график механической характеристики двигателя первого вида более жесткий, чем у двигателя второго вида.
Обе механические характеристики - мягкие, потому что их жесткость
β = ΔМ / Δω = ΔМ / 0 > 10%.
На судах двигатели смешанного возбуждения применяются в регулируемых электроприводах – лебедках, кранах, брашпилях и шпилях.
Естественная механическая характеристика асинхронного двигателя имеет два
участка – нерабочий ( разгонный ) АВ и рабочий ВСD ( рис. 8.8 ).
Рис. 8.8. Естественная механическая характеристика асинхронного двигателя
При пуске двигатель развивает пусковой момент М п ( отрезок ОА ), после чего раз
гоняется по траектории АВС до точки С. При этом на участке АВ одновременно увеличиваются как скорость, так и момент, в точке В двигатель развивает максимальный момент
М max . На участке ВС скорость продолжает увеличиваться, а момент уменьшается,
вплоть до номинального ( точка С ). На участке BC двигатель перегружен, т.к. в любой
точке этого участка электромагнитный момент двигателя больше номинального ( М >
> М н ).
В нормальних условиях двигатель работает на участке СD, жесткость которого
β = ΔМ / Δω < 10%.
Это означает, что при изменении момента в широких пределах скорость двигателя
изменяется незначительно.
Асинхронные двигатели нашли самое широкое применение на судах с электростанцией на переменном токе.
Промышленность выпускает специально для судов асинхронные двигатели разных
252
серий, например, 4А…ОМ2 ( четвертая серия асинхронных двигателей ), МАП ( морской
асинхронный полюсопереключаемый ), МТF ( c фазным ротором ) и др.
При этом двигатели серии 4А – односкоростные, серии МАП – двух- и трехскорост
ные, серии МТF – число скоростей определяется схемой управления ( до 5 скоростей ).
1.8. Механические характеристики исполнительных механизмов
Если для любого электродвигателя входной величиной является статический момент механизма, а выходной – его скорость, то для механизмов, наоборот, входной величи
ной является скорость ω ( от двигателя ), а выходной – статический момент механизма М
.
ст
Это означает, что при любом изменении скорости механизма ( двигателя ) будет
изменяться его статический момент М ст .
Зависимость статического момента механизма М ст от его угловой скорости ω назы
вается механической характеристикой механизма - М ст ( ω ).
Таким образом, система координат для изображения механических характеристик
механизмов – это М ст ( ω ).
Различают два вида механических характеристик:
1. крановые, когда при изменении скорости в широких пределах статический мо
мент не изменяется ( рис. 8.9, характеристика 1 ).
Такая характеристика описывается уравнением
М ст = сonst
( 6 ),
.
т.е. момент не зависит от скорости.
2. вентиляторные, у которых статический момент пропорционален квадрату скоро
сти ( рис. 8.9, характеристика 2 ).
Такая характеристика описывается уравнением
М ст = М 0 + ΔМ
( 7 ),
где М 0 - момент холостого хода;
2
ΔМ = сω - момент, создаваемый рабочим органом механизма при выполнении
полезной работы ( с – постоянный коэффициент, ω – угловая скорость вала механизма ).
Рис. 8.9. Механические характеристики механизмов: а – в системе координат
М ст ( ω ); б - в системе координат ω (М)
Крановые характеристики имеют механизмы грузовых кранов, лебедок, брашпилей, т.е. механизмов, работа которых связана с преодолением действия силы тяжести.
Статический момент таких механизмов
М ст = GD/2 = const
( 8 ),
где G – вес груза ( у брашпилей – весом якоря с якорь-цепью );
253
D – диаметр грузового ( у брашпилей – якорного ) барабана.
Вентиляторные характеристики имеют центробежные вентиляторы, насосы и др.
У таких механизмов условия пуска – легкие, т.к. при пуске на валу механизма есть
небольшой момент холостого хода М 0 , создаваемый силами трения в элементах привода.
Однако по мере разгона статический момент механизма резко увеличивается за
2
счет того, что к моменту холостого хода добавляется момент ΔМ = сω , создаваемый си
лами трения рабочего органа ( крыльчатки ) о среду ( у вентиляторов – воздух, у насосов
– перекачиваеая жидкость ).
Таким образом, для изображения механических характеристик двигателей применя
ют систему координат ω (М), механических характеристик механизмов – «перевернутую»
систему М ст ( ω ).
Применение разных систем координат для двигателей и механизмов создает трудно
сти при рассмотрении электромеханических свойств электропривода в целом, состоящего
из электродвигателя и механизма.
Поэтому на практике для изображения механических характеристик двигателей и
механизмов принята единая система координат ω (М), т.е система, принятая для механических характеристик электродвигателей.
В этой системе координат механические характеристики механизмов показаны на
рис. 8.19, б.
1.9. Изменение скорости электродвигателей
Различают два вида изменения скорости электродвигателя:
1. естественное;
2. искусственное.
Под естественным понимают изменение скорости электродвигателя, возникшее в
результате изменения статического момента механизма.
При естественном изменении скорости электродвигатель работает на своей естественной механической характеристике.
Под искусственным понимают изменение скорости электродвигателя, возникшее в
результате изменения параметров питающей сети или самого электродвигателя при помощи схемы управления электродвигателя.
Под параметрами сети понимают:
1. на постоянном токе – напряжение питающей сети;
2. на переменном токе - напряжение и частота питающей сети.
Под параметрами электродвигателя понимают:
1. на постоянном токе – изменение сопротивления цепи обмотки якоря или параллельной ( независимой ) обмотки возбуждения;
2. на переменном токе - изменение сопротивления цепи обмотки статора или обмотки фазного ротора.
Если многоскоростной асинхронный двигатель имеет на статоре несколько обмоток ( обычно 2….3 ) с разным числом пар электромагнитных полюсов, то механические
характеристики, соответствующие работе двигателя на каждой скорости, являются естественными.
При искусственным изменении скорости электродвигатель работает на искусственной механической характеристике.
Искусственные механические характеристики предназначены для изменения ( регу
лирования ) скорости электродвигателя в соответствии с технологическими особенностями работы механизма. Например, электроприводы грузовых лебедок на постоянном токе
могут иметь до 6 скоростей, на переменном токе – обычно 3 скорости.
Следует сделать важное замечание: при работе двигателя на искусственной характеристике одновременно может происходить и естественное изменение скорости электро
254
двигателя вследствие изменения статического момента механизма.
Например, при выбирании якоря при помощи ЯШУ скорость электродвигателя,
работающего на искусственной характеристике вначале может быть большой, а затем, по
мере увеличения натяжения якорь-цепи, будет постепенно уменьшаться, вплоть до полной
остановки электродвигателя с его переходом в режим стоянки под током.
При естественном изменении скорости возникает процесс саморегулирования элекродвигателей постоянного и переменного тока.
1. 10. Саморегулирование электродвигателей
Любое изменение статического момента механизма ( т.е. механической нагрузки на
валу рабочего органа электропривода ) автоматически приводит к такому же изменению
электромагнитного момента двигателя в результате возникающего при этом процесса
саморегулирования электродвигателя.
Под саморегулированием понимают автоматическое изменение электромагнитного
момента двигателя вследствие изменения момента механизма.
Рассмотрим процесс саморегулирования двигателя постоянного тока при помощи
логической цепочки:
М мех ↑→ ω дв ↓→ Е дв = с ω дв Ф↓→ М дв = = с I а.дв Ф↑
(9)
Словами: при увеличении механической нагрузки на валу ( механического момента ) скорость электродвигателя ω дв , а значит, значение противоэлектродвижущей силы
обмотки якоря двигателя Е дв = с ω дв Ф уменьшаются, что приводит к увеличению тока
якоря двигателя I а.дв = ( U – E дв ) / R а.дв и его электромагнитного момента М дв =
= с I а.дв Ф.
Сравнивая начало логической цепочки ( увеличение механического момента ) и её
конец ( увеличение электромагнитного момента двигателя ), можно сделать вывод:
увеличение механического момента на валу автоматически привело к увеличе
нию электромагнитного момента двигателя.
При этом скорость электродвигателя уменьшилась, а ток увеличился.
Аналогичную цепочку можно записать и для саморегулирования асинхронного
двигателя переменного тока.
Такая взаимосвязь механической нагрузки на валу и электромагнитного момента
двигателя объясняется действием закона сохранения энергии – чем больше нагрузка механизма, тем больше нагрузка электродвигателя.
1.11. Устойчивость работы электропривода
Электропривод представляет собой электромеханическую систему, которая должна
работать устойчиво.
Электропривод работает устойчиво в установившемся режиме.
Напомним, что установившимся режимом электропривода называется такой, при
котором скорость привода не изменяется, потому что вращающий электромагнитный момент двигателя механизма равен тормозному моменту механизма:
М = М ст .
Поясним это на примере ( рис. 8.10, а ).
255
Рис. 8.10. Совмещенные механические характеристики электродвигателя и
механизмов
На рис. 8.10, а изображены механические характеристики: электродвигателя 1;
лебедки ( крана ) 2; центробежного насоса 3.
Точка пересечения механических характеристик электродвигателя и механизма как
раз и соответствует установившемуся режиму работы привода, потому что именно в этой
точке угловая скорость электродвигателя равна угловой скорости механизма, и, аналогично, вращающий электромагнитный момент двигателя равен тормозному моменту механиз
ма.
Пусть один и тот же электродвигатель, имея механическую характеристику 1, поочередно используется в электроприводе крана ( характеристика 2 ), а затем - насоса ( характеристика 3 ).
Тогда двигатель будет работать устойчиво либо со скоростью ω c 2 ( кран ), либо со
скоростью ω c 3 ( насос ).
Для проверки устойчивости систему надо перевести из статического режима работы в динамический, создав внешнее возмущающее воздействие.
Таким воздействием может служить: для лебедки скачкообразное увеличение веса
груза, для насоса – скачкообразное изменение степени открытия клапана.
Напомним, что систему называют устойчивой, если она, будучи выведена из состояния равновесия и предоставлена самой себе, с течением времени вернется к старому уста
новившемуся состоянию или перейдет в новое такое состояние.
На устойчивость электроприводов влияет множество факторов, к основным из которых относятся:
1. эксплуатационные характеристики электродвигателей;
2. изменение параметров питающей сети и самого двигателя.
Рассмотрим поочередно действие каждого из перечисленных факторов на устойчивость работы электропривода
1.12. Влияние на устойчивость работы электродвигателя его эксплуатационных характеристик
В качестве примера рассмотрим основную эксплуатационную характеристику асин
хронного электродвигателя – механическую ω ( М ), т.е. зависимость угловой скорости
двигателя от его электромагнитного момента ( рис. 8.10, б )..
На этой характеристике выделим два участка – рабочий 9-3 и нерабочий 3-6.
На участке 9-3 двигатель работает устойчиво, на участке 3-6 – неустойчиво.
Объясним сказанное более подробно.
256
Вначале рассмотрим участок 9-3.
Пусть двигатель устойчиво работает в точке 4, т.е. со скоростью ω ст и электромагнитным моментом М = М ст .
Внесем в работу двигателя внешнее возмущение, а именно: с помощью сторонних
( например, механических ) сил разгоним двигатель до точки 7, после чего уберем эти
силы.
Как после этого поведет себя двигатель?
Чтобы ответить на этот вопрос, надо сравнить величину двух моментов – вращающего электромагнитного двигателя М и тормозного статического механизма М ст .
Если в точке 4 оба момента были одинаковы ( это обеспечивало установившийся
режим работы привода с постоянной скоростью ), то в точке 7 электромагнитный момент
М двигателя уменьшился, а тормозной статический М ст не изменился.
Иначе говоря, в точке 7 тормозной момент М ст оказался больше вращающего М.
В результате двигатель начнет тормозиться по участку 7-4, причем по мере приближения к точке 4 электромагнитный момент двигателя возрастает и в точке 4 снова уравняется со статическим.
В точке 4 вновь наступит установившийся режим.
Таким образом, на участке 4-7 двигатель, выведенный внешним возмущением из
установившегося режима, вернулся в прежнее состояние после прекращения действия
внешнего возмущения.
Значит, на участке 4-7 асинхронный двигатель работает устойчиво.
Рассуждая аналогично, можно показать, что так же устойчиво двигатель работает
на участке 4-8. На этом участке сторонними силами надо тормозить ротор двигателя до
точки 8, в которой момент двигателя М станет больше статического М ст . В результате,
после прекращения действия внешнего возмущения, двигатель станет разгоняться и вернется в точку 4.
Теперь рассмотрим работу двигателя на участке 3-6.
Пусть двигатель устойчиво работает в точке 1, т.е. со скоростью ω' ст и электромагнитным моментом М = М ст .
Внесем в работу двигателя внешнее возмущение, а именно: с помощью сторонних
( например, механических ) сил разгоним двигатель до точки 2, после чего уберем эти силы.
Сравним в точке 2 величину двух моментов – вращающего электромагнитного дви
гателя М и тормозного статического механизма М ст .
В этой точке электромагнитный момент М двигателя увеличился, а тормозной статический М ст не изменился.
Иначе говоря, в точке 2 вращающий момент М оказался больше тормозного момен
та М ст .
В результате двигатель начнет разгоняться по участку 2-3-8-4 до точки 4, в которой
наступит установившийся режим.
Таким образом, в результате действия внешнего возмущения двигатель не вернулся
в старое, исходное состояние ( точка 1 ), а перешел в новое установившееся ( точка 4 ).
Значит, работа двигателя на участке 1-3 – неустойчива.
Рассуждая аналогично, можно показать, что так же не устойчиво двигатель работа
ет на участке 1-6.
Если двигатель перевести из точки 1 в точку 5, принудительно затормозив ротор
сторонними силами, то в точке 5 электромагнитный момент двигателя станет меньше статического. Поэтому, если убрать внешние силы, двигатель станет тормозиться и остановит
257
ся в точке 6. В этой точке наступит установившийся режим стоянки под током.
Таким образом, в результате действия внешнего возмущения двигатель не вернулся
в старое, исходное состояние ( точка 1 ), а перешел в новое установившееся ( точка 6 ).
Значит, работа двигателя на участке 1-6 – неустойчива.
Получим условие устойчивой и неустойчивой работы асинхронного двигателя.
На участке 9-3 ( устойчивая работа ) жесткость механической характеристики
М
< 0,
α=
т.е. при увеличении момента М ( ΔМ > 0 ), например, при переходе из точки 7 в
точку 4, скорость падает ( Δω < 0 ), и наоборот.
На участке 3-6 ( неустойчивая работа ) жесткость механической характеристики
М
> 0,
α=
т.е. при увеличении момента М ( ΔМ > 0 ), например, при переходе из точки 1 в
точку 2 скорость также увеличивается, ( Δω > 0 ), и наоборот.
Таким образом, двигатель работает устойчиво на участке механической характери
стики, где жесткость отрицательна (α < 0 ) и неустойчиво на участке, где жесткость положительна ( α > 0 ).
Влияние на устойчивость электропривода напряжения сети.
Опрокидывание эектродвигателя
Рассмотрим влияние напряжения сетина устойчивость электропривода перемен
ного тока.
При глубоких провалах напряжения сети работа асинхронного двигателя становит
ся неустойчивой – двигатель может опрокинуться.
Под опрокидыванием понимают аварийный режим асинхронного двигателя; при котором он останавливается или реверсирует. Условие опрокидывания такое:
М'
< М ст ,
кр
где М'
кр
- критический момент двигателя при пониженном напряжении;
М ст - статический момент механизма.
Иначе говоря, опрокидывание наступит, если критический момент двигателя станет
меньше статического момента механизма.
Напомним, что критический момент асинхронного двигателя пропорционален
квадрату напряжения:
2
М
кр
=с
U1
f12
,
где U 1 и f 1 - соответственно напряжение и частота тока питающей сети.
Отсюда следует, что при допускаемом Правилами Регистра провале напряжения
сети, равном 15% ( U' = 0,85U н ) , новое, пониженное значение критического момента
составит
2
U
М н = ( 0,85 ) 2 М н = 0,7225 М н ≈ 0,7 М н .
М' =
кр
Uн
Последствия опрокидывания зависят от характера статического момента механиз
ма, а именно:
258
1. при реактивном статическом моменте двигатель останавливается и переходит в
режим стоянки под током ( насосы, вентиляторы );
2. при активном статическом моменте двигатель вначале останавливается, затем
реверсирует и под действием веса начинает разгоняться в направлении на спуск с возра
стающей скоростью ( грузоподъемные механизмы и якорно-швартовные устройства ).
Рис. 8.11. Переходные процессы при опрокидывании двигателя: а – при реактивном
статическом моменте ( насос, вентилятор ); б – при активном статическом моменте ( лебедка, брашпиль )
Рассмотрим процесс опрокидывания двигателя при реактивном моменте механизма
( рис. 8.11, а ).
До провала напряжения двигатель работает на естественной механической характеристике ( ЕМХ ) в точке А с постоянной скоростью ω ст .
При провале напряжения двигатель переходит из точки А на ЕМХ в точку В на искусствен
ной механической характеристике ( ИМХ ). Скорость электродвигателя не успевает измениться вследствие инерции движущихся частей электропривода, поэтому в точке В скорость
такая же, как и в точке А.
Поскольку в точке В момент двигателя М в меньше момента механизма М ст , двига
тель начинает уменьшать скорость до точки С. В этой точке критический ( максимальный ) момент двигателя М'
< М ст , поэтому двигатель продолжит уменьшать скорость до точки
кр
Д.
В этой точке двигатель остановится и будет стоять под током с моментом короткого замыкания М к. з до тех. пор, пока не сработает тепловая защита.
Механизмы с активным статическим моментам ( грузовые лебёдки, брашпили) при
опрокидывании реверсируют под действием веса груза или якоря.(рис.8.11, б ).
Переходный процесс при провале напряжения сначала протекает так же, как в предыдущем случае.
Однако после перехода двигателя в точку Д, двигатель не остановится, а сразу же реверсирует и станет разгоняться в обратном направлении ( точки F , F , F 3 ). Поскольку
1
2
знак электромагнитного момента двигателя не изменился, т.е. направлен в сторону подъёма
груза, двигатель перейдёт в режим тормозного спуска и будет стараться уменьшить скорость спуска груза
259
Однако при этом скорость спуска груза будет непрерывно увеличиваться. Это объясняется
тем, что величина тормозного момента двигателя по мере перехода из точки F в точку F и
1
2
далее в точку F 3 непрерывно уменьшается ( М < М < М 3 ).
1
2
Если электродвигатель своевременно не отключить от сети и не затормозить механическим тормозом, это приведёт к аварии.
1.14. Способы повышения динамической устойчивости САЭП
Для повышения динамической устойчивости САЭП применяют такие способы:
1. использование быстродействующих автоматических выключателей и предохранителей, практически мгновенно отключающих цепи при коротком замыкании в них;
2. использование быстродействующих автоматических регуляторов напряжения,
которые практически мгновенно устраняют провалы напряжения и тем самым предотвращают массовое отключение электродвигателей устройствами нулевой защиты ( по снижению напряжения );
3. использование вместо нулевой защиты по напряжению ( с кнопками «Пуск» и
«Стоп» ) минимальной, допускающей автоматическое повторное включение двигателя
после восстановления напряжения до номинального;
4. использование в схемах электроприводов электрических и механических блоки
ровок, исключающих возникновение неноминальных ( аварийных ) режимов ( например,
блокировка по весу груза в электроприводах ГПМ, отключающая схему управления при
попытке подъема груза, большего номинального, и др. );
5. использование в судовых электроприводах электродвигателей с повышенными
пусковыми моментами – с двумя обмотками на роторе ( двухклеточных ), с фазным ротором и т.п.
Контрольные вопросы
1. Приведите определение «электрический привод», Что такое «судовой электропривод»?
2. Каково назначение преобразовательного, электродвигательного, передаточного и
управляющего устройств электропривода? Приведите примеры этих устройств
3. По каким признакам и как именно классифицируются электроприводы?
4. Назовите основные события и их даты, связанные с историей развития электроприводов
5. Перечислите основные ( базовые ) параметры электропривода и объясните их
суть
6. Назовите единицы измерения скорости при поступательном и вращательном
движении частей электропривода, системные и внесистемные
7. Выведите формулу полезного момента электродвигателя по его паспортным
данным
8. Что такое диапазон регулирования скорости? В каких единицах он измеряется?
9. Что такое механическая характеристика электродвигателя? Механическая характеристика механизма? В каких системах координат строятся графики этих характеристик?
10. Приведите понятие «статический момент». Какие виды статических моментов
существуют в электроприводе лебедки при подъеме холостого гака? Номинального груза?
11. Напишите уравнения моментов электропривода лебедки для трех режимов:
подъем груза; силовой спуск; тормозной спуск груза. Объясните роль каждого момента,
входящего в уравнения
12. Для чего выполняется приведение статических моментов к валу электродвигате
ля?
260
13. Что такое «момент инерции» движущегося тела? Как именно влияет этот момент на работу электропривода?
14. Что такое «приведение моментов инерции к валу электродвигателя»? С какой
целью оно выполняется?
15. В чем состоит отличие приведения статических моментов к валу электродвигате
ля от приведения моментов инерции к валу электродвигателя?
16. Изобразите механические характеристики 6 типов электродвигателей переменного и постоянного тока и сравните их по степени жесткости
17. Какова область применения синхронных и асинхронных двигателей, а также
двигателей постоянного тока с независимым, параллельным, последовательным и смешан
ным возбуждением?
18. Изобразите графики крановой и вентиляторной характеристик и объясните особенности каждой
19. Объясните особенности режимов работы электродвигателя в каждом из 4-х
квадрантов системы координат ω ( М )
20. Каковы особенности таких режимов работы электропривода: торможение при
подъеме; силовой спуск; тормозной спуск?
21. Чем отличается электромеханическая характеристика электродвигателя от меха
нической?
22. Объясните физический смысл уравнения механической характеристики электро
двигателя постоянного тока
23. Объясните, как влияют на режим работы электропривода изменение напряжения питающей сети, изменение параметров самого двигателя, изменение параметров механизма
24. Что такое «саморегулирование» двигателя постоянного тока? Приведите логиче
скую цепочку, поясняющую это физическое явление
2.2.СПОСОБЫ ПУСКА, РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ
И ТОРМОЖЕНИЯ СУДОВЫХ ЭЛЕКТРОПРИВОДОВ. КОММУТАЦИОННО-ЗАЩИТНАЯ АППАРАТУРА И И СИСТЕМЫ УПРАВЛЕНИЯ САЭП
1. СПОСОБЫ ПУСКА, РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЯ
СУДОВЫХ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
1. Способы пуска электродвигателей постоянного тока
1.1. Основные сведения
Для пуска электродвигателей постоянного тока применяют два способа:
1. прямой пуск;
2. реостатный пуск.
1.2. Прямой пуск
При прямом пуске двигатель включается непосредственно в сеть ( рис. 9.1 ), для
чего вручную ( при ручном управлении ) или при помощи аппаратуры ( при автоматизированном пуске ) замыкают контакты К1 и К2..
261
Рис. 9.1. Прямой пуск двигателя: а – схема пуска; б – пусковая диаграмма
При этом ток I, потребляемый двигателем из сети, в точке «А» разделяется на 2 тока: ток обмотки якоря I a и ток обмотки возбуждения I в . В точке «В» эти два тока соединяются. Следовательно, через каждый из контактов, К1 и К2, протекает один и тот же
ток I.
По Правилам Регистра, прямой пуск электродвигателей допускается при условии,
что номинальная мощность двигателя не превышает 0,5 кВт, т.е. Р 2 н ≤ 0,5 кВт.
Такое ограничение мощности объясняется тем, что при прямом пуске пусковой ток
якоря двигателя превышает номинальный в десятки раз.
Объясним это на примере.
Пусть электродвигатель имеет такие данные: напряжение U = 220 В, номинальная
противоЭДС обмотки якоря Е н = 210 В, сопротивление обмотки якоря двигателя R a =
= 1 Ом.
Тогда номинальный ток якоря
I а. н =
U Eн
Rа
=
220 210
= 10 А.
1
При пуске скорость якоря ω = 0, поэтому противоЭДС обмотки якоря
Е = сωФ = с0Ф = 0
( с – конструктивный коэффициент, величина постоянная, ω – угловая скорость
якоря, Ф – магнитный поток, созданный параллельной обмоткой возбуждения L ).
Тогда пусковой ток якоря
I а. п =
U Eн
Rа
=
U 220
=
= 220 А.
Rа
1
Таким образом, пусковой ток якоря I а. п = 220 А превышает номинальный I а. н =
= 10 А в 22 раза, что недопустимо.
Сказанное подтверждается графиком электромеханической характеристики двигателя ω ( I ) на рис. 9.1, б. При пуске двигатель переходит из точки «0» ( начало координат )
в точку «А», в которой пусковой ток I а. п ( отрезок «ОА» ) гораздо больше номинального.
После пуска двигатель начнет разгоняться, в обмотке якоря появится и станет увеличиваться противоЭДС обмотки якоря ↑Е = с↑ωФ, а ток якоря – уменьшаться.
Процесс пуска прекратится в точке «В», в которой скорость якоря и ток якоря
имеют номинальные значения: ω = ω н , I а = I а. н .
Из сказанного следует, что причина больших пусковых токов – отсутствие противо
ЭДС обмотки якоря в момент пуска, когда якорь неподвижен. Такие токи вызывают ухудшение коммутации вплоть до возникновения кругового огня на коллекторе, а также провалы напряжения сети, нарушающие нормальную работу остальных приемников электро-
262
энергии
Допускаемые по условиям коммутации значения пусковых токов не должны превы
шать номинальный более чем в 2,5 раза, т.е. не должно нарушаться соотношение
I а. п ≤ 2,5 I а. н
Выясним, как можно уменьшить пусковые токи.
Как следует из формулы пускового тока якоря
I а. п =
U
,
Rа
его можно уменьшить двумя способами:
1. увеличить знаменатель, т.е. увеличить при пуске сопротивления цепи обмотки
якоря ( реостатный пуск );
2. уменьшить числитель, т.е. уменьшить при пуске напряжение на обмотке якоря.
Рассмотрим поочередно эти два способа.
1.3. Реостатный пуск
Схема реостатного пуска изображена на рис. 9.2.
Рис. 9.2. Реостатный пуск двигателя: а – схема пуска; б – пусковая диаграмма
При пуске замыкаются контакты К1 и К2, контакт К3 разомкнут. Через контакты
К1 и К2 на обмотку якоря «А» и параллельную обмотку возбуждения «L» подается питание сети, а через разомкнутый контакт КМ3 в цепь обмотки якоря вводится пусковой рези
стор R п , поэтому полное сопротивление обмотки якоря увеличивается до значения
( R а + R п ).
Двигатель развивает пусковой ток
I а. п = I 2 =
U
≤ 2,5 I а. н
Rа R п
На электромеханической характеристике ω( I ) двигатель переходит из точки «0» в
точку «А», после чего начинает разгоняться по участку «АВ» характеристики.
В точке «В», при токе I 1 ( обычно I 1 = 1,1…1,2 I а. н ) контакт К3 замыкается, вследствие чего двигатель с броском тока переходит из точки «В» в точку «С» и далее продолжает разгоняться до точки «D», в которой наступит установившийся номинальный режим.
Бросок тока при переходе точки «В» в тоску «С» объясняется тем, что при замыкании контакта К3 сопротивление цепи обмотки якоря скачком уменьшается от значения ( R
а + R п ) до значения R а .
Рассмотренная схема пуска была упрощена ( для облегчения понимания процесса
263
пуска ) тем, что для пуска использовалась одна ступень пускового резистора.
На практике для ручного пуска применяют пусковые реостаты ( отсюда название
этого способа – реостатный ), имеющие несколько ступеней.
Перед пуском маховичок реостата должен быть повернут влево до упора, при пуске его поворачивают по часовой стрелке, постепенно выводя ступени пускового резистора
из цепи обмотки якоря двигателя ). Сам процесс пуска не должен превышать 6…8 с.
Нельзя оставлять маховичок реостата в промежуточном положении, при котором
в цепи обмотки якоря останутся ступени пускового реостата, т.к. они сгорят.
Эти ступени рассчитаны лишь на кратковременное протекание через них пускового
тока.
2. Способы регулирования частоты вращения электродвигателей постоянного тока
2.1. Основные сведения
Рассмотрим способы регулирования частоты вращения электродвигателей постоянного тока на примере электродвигателя с независимым ( параллельным ) возбуждением.
Уравнение естественной механической характеристики двигателя имеет вид
ω=
MR a
U
,
kФ (kФ) 2
где ω – угловая скорость якоря;
U – напряжение на обмотке якоря;
.k – постоянный коэффициент;
Ф – магнитный проток обмотки ( обмоток ) возбуждения;
М – электромагнитный момент электродвигателя;
R a - cопротивление обмотки якоря электродвигателя.
Из уравнения следует, что скорость двигателей с независимым ( параллельным )
возбуждением можно регулировать тремя способами:
1. изменением напряжения на обмотке якоря двигателя U;
2 изменением сопротивления цепи обмотки якоря R а ;
3. изменением магнитного потока полюсов Ф.
Первый способ регулирования – изменением напряжения на обмотке якоря, приме
няется только для двигателей с независимым возбуждением в т.н. «системах генератор –
двигатель» ( см. ниже ).
Второй способ – изменением сопротивления цепи обмотки якоря, на практике
осуществляется путем введения добавочных резисторов последовательно с обмоткой
якоря.
Этот способ позволяет изменить скорость двигателя только вниз от основной, при
чем с увеличением сопротивлений скорость двигателя уменьшается. Это объясняется увеличением падения напряжения в добавочных резисторах и уменьшением напряжения на
зажимах якоря.
Положительное качество данного способа регулирования - его простота, т.к. он
осуществляется путем введения ( выведения ) ступеней регулировочного реостата в цепь
обмотки якоря двигателя.
Основным недостатком способа является большой расход энергии в добавочных
резисторах.
Этот способ применяется в электроприводах грузоподъемных механизмов и якорно-швартовных устройств на постоянном токе.
Третий способ – изменением магнитного потока полюсов, на практике осуществляется путем введения добавочных резисторов последовательно с параллельной обмоткой
возбуждения. При этом магнитный поток возбуждения уменьшается, а скорость якоря
264
увеличивается.
Скорость двигателей, специально сконструированных для работы с регулируемым
потоком, может превышать номинальную в три раза и более, скорость остальных двигателей повышается на 10 - 20 %. Верхний предел скорости ограничен условиями коммутации, механической прочности или нагревом двигателя.
Положительное качество данного способа регулирования - его экономичность,
т.к. расход электроэнергии в регулировочном резисторе мал из-за небольшого значения
тока возбуждения в цепи параллельной обмотки.
Основными недостатками способа являются возможность регулирования скорости
только вверх от номинальной, а также увеличение тока якоря во столько раз, во сколько
раз ослаблен магнитный поток.
Последняя особенность не позволяет применять этот способ регулирования при работе электропривода с номинальным моментом, т.к. при ослаблении потока ток якоря пре
высит номинальный, что недопустимо.
Поэтому этот способ регулирования применяется в электроприводах грузоподъемных механизмов и якорно-швартовных устройств для получения высоких скоростей при
перемещения холостого гака ( грузовые лебедки и краны ) или швартовного каната ( брашпили, шпили ), т.е. при небольшой нагрузке на валу электродвигателя.
2.2. Регулирование скорости в системе «генератор – двигатель» ( Г – Д )
Система Г-Д как минимум состоит из трех электрических машин:
1. исполнительного электродвигателя М2, приводящего в действие механизм;
2. генератора G1, питающего исполнительный ЭД;
3. приводного электродвигателя Ml, вращающего якоря генератора G1 и образующего с ним так называемый преобразователь.
Машины М2 и G1 - постоянного тока с независимым возбуждением.
Несмотря на это, система Г-Д может применяться при любом роде тока питающей
сети.
Если сеть постоянного тока, то в качестве приводного двигателя М1 применяют ЭД
параллельного возбуждения, а обмотки возбуждения всех машин получают питание от
сети.
Если сеть переменного тока, используют асинхронный приводной ЭД. Для питания
обмоток возбуждения L1G1 и LM2 в этом случае применяют четвертую машину – возбуди
тель G2. Это небольшой генератор постоянного тока с самовозбуждением. Он приводится
во вращение тем же приводным электродвигателем М1 , что и генератор G1 ( рис. 9.3 ).
Рис. 9.3. Схема системы генератор – двигатель
Система действует следующим образом.
Сначала пускают приводной ЭД М1, якорь которого затем вращается постоянно в
одну сторону с неизменной скоростью. Потом при помощи регулировочного резистора
( реостата возбуждения ) RP3 возбуждают возбудитель G2, создающий неизменное напряжение.
265
От него получают питание независимые обмотки возбуждения исполнительного
электродвигателя LM2 и генератора L1G1.
В цепь первой включен регулировочный резистор RP2, в цепь второй – регулировочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке
L1G1.
Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор RP2
- выведен.
Для пуска М2 переключатель SA устанавливают в одно из рабочих положений и
постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1G1.
Последний возбуждается и подает плавно возрастающее напряжение на якорную
обмотку М2. По цепи якорей G1 и М2 протекает ток.
Так как М2 возбужден, его якорь начинает вращаться, и по мере возрастания напряжения, подведенного к его якорю, увеличивается угловая скорость. При полностью выведенном резисторе RP1 напряжение G1 и угловая скорость М2 номинальные.
Для реверса переключателем SA изменяют направление тока в обмотке возбуждения L1G1. Генератора изменяет полярность напряжения, ток якорной цепи изменяет направление, и исполнительный двигатель М2 реверсируется.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки
возбуждения L1G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и
напряжение генератора уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается ( характеристики 3, 2 и 1 на
рис. 9.4 ).
Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмотки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбуждения, при этом скорость ЭД увеличивается ( характеристики 5, 6 и 7 на рис. 9.4 ).
Рассмотренная система называется «система Г – Д в чистом виде» и на практике не
применяется. Это объясняется тем, что при работе с номинальным напряжением на якоре
М2 внезапная остановка этого якоря ( например, под винт попала льдина ) приводит к резкому увеличению тока якорей двигателя М2 и генератора G1 до значения, равного пусковому.
Рис. 9.4. Механические характеристики исполнительного двигателя
в системе генератор – двигатель: 4 – естественная; 3, 2 и 1 – искусственные,
полученные уменьшение напряжения на обмотке якоря М2; 5, 6 и 7 –искусственные, полученные ослаблением магнитного потока М2
Кроме того, такое увеличение тока приводит к увеличению нагрузки на приводной
двигатель генератора. Это особенно опасно, если генератор G1 приводится во вращение
дизелем. Как известно, дизели крайне чувствительны к перегрузкам ( не более 10% мощности в течение 1 часа ).
Поэтому на судах применяют систему Г-Д с противокомпаундным генератором.
266
Она отличается от системы Г-Д в чистом виде тем, что генератор, помимо независимой
обмотки возбуждения L1G1, снабжен еще одной обмоткой возбуждения – противокомпаундной обмоткой L2G1, включенной последовательно в цепь якоря G1 и выполняющей
функции жесткой обратной связи по току ( на рис. 9.3 место включения обмотки L2G1 по
казана при помощи стрелок, т.е. последовательно в цепь главного тока ).
Ее намагничивающая сила F п направлена встречно намагничивающей силе F н обмотки независимого возбуждения L1G1, т. е. она действует на генератор размагничивающе.
Общий магнитный поток возбуждения генератора создается разностью намагничивающих сил обеих обмоток.
При нормальной нагрузке намагничивающая сила обмотки L1G1 значительно боль
ше, чем обмотки L2G1, и генератор развивает ЭДС, как в обычной системе Г-Д.
При перегрузке разность намагничивающих сил обмоток уменьшается, магнитный
поток и ЭДС генератора снижаются, напряжение, подведенное к ЭД, падает, и угловая
скорость ЭД становится меньше.
При остановке якоря исполнительного двигателя М2 ЭДС генератора G1 настолько
уменьшается, что ток стоянки оказывается в пределах кратковременно допустимого, обыч
но равного ( 2,2…2,5) I а. н .
Система Г-Д обладает исключительно хорошими регулировочными свойствами и
позволяет регулировать скорость в пределах 1 : 30. Регулирование получается плавным,
так как из-за сравнительно небольших токов возбуждения можно сделать регулировочные
резисторы с большим количеством ступеней.
Систему Г – Д применяют в электроприводах мощностью более 75…80 кВт – тяжеловесных лебедках и кранах, брашпилях, а также на судах с ГЭУ для привода гребного
винта.
Существенный недостаток системы Г - Д – большое количество установленных эле
ктрических машин.
Развитие полупроводниковой техники позволило перейти от рассмотренной системы Г – Д к т.н. системам «управляемый вентильный преобразователь – двигатель», или,
сокращенно, системам УВП – Д ( рис. 9.5 ).
2.3. Регулирование скорости в системе двойного рода тока ( УВП – Д )
В таких системах исполнительный двигатель постоянного тока получает питание
от судовой сети через управляемый вентильный преобразователь ВП ( рис. 9.5 ).
Рис. 9.5. Структурная схема тиристорного электропривода постоянного тока
В качестве вентилей используются управляемые полупроводниковые диоды –
тиристоры.
В общем случае такой электропривод состоит из следующих основных элементов:
1. силовой трансформатор Тр;
2. вентильный преобразователь ВП;
267
3. сглаживающий фильтр СФ;
4. электродвигатель М;
5. система управления СУ.
Силовой трансформатор Тр служит для согласования номинального напряжения
двигателя с выходным напряжением преобразователя.
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных
пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с
нулевым выводом ( рис. 9.6, а ) или двухполупериодные мостовые схемы ( рис.9.6., б ).
Рис. 9.6. Схемы включения якоря двигателей постоянного тока на вентильный
преобразователь: с нулевым выводом ( а ); мостовая ( б )
В таких схемах обмотки возбуждения двигателей обычно получают питание от общей сети переменного тока через маломощные однофазные выпрямители.
Сглаживающий фильтр ( дроссель Др на рис.9.6 ) предназначен для уменьшения
пульсаций выпрямленного напряжения. При этом улучшаются условия коммутации и
уменьшается нагрев обмотки якоря двигателя.
Система управления СУ изменяет угол отпирания тиристоров α. Вследствие чего
изменяется выпрямленное напряжение на якоре исполнительного двигателя, а значит, и
его скорость
При этом, при малых скоростях якоря этот угол близок к 90º, а для разгона якоря
СУ непрерывно уменьшает этот угол. При номинальном ( наибольшем ) напряжении на
якоре угол α = 0º.
Механические характеристики двигателя при разных значениях угла отпирания
тиристоров α приведены на рис. 9.7.
Они подобны механическим характеристикам исполнительного двигателя в системе Г – Д ( рис. 9.4 ).
Рис. 9.7. Электромеханические характеристики двигателя при разных
значениях угла α
268
На рис. 9.7 штриховой линией показана граница между режимами непрерывного
( справа от пунктирной линии ) и прерывистого ( слева от этой линии ) токов якоря двигателя.
Электромеханические характеристики имеют такие особенности:
1. при уменьшении угла отпирания тиристоров от α = π / 2 = 90º ( характеристика
2 ) до α 1 = 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в
двигательном режиме;
2. при увеличении угла α свыше 90º ( характеристика 1 ) ток якоря двигателя не
изменяет направление, но двигатель реверсирует и переходит в режим тормозного спуска.
при котором электромагнитный момент двигателя, направленный на подъем, ограничивает скорость спуска тяжелого груза или судового якоря с якорь-цепью.
3. Электрическое торможение двигателей постоянного тока
3.1. Основные сведения
В электроприводах различают механическое и электрическое торможение.
Под механическим понимают торможение электропривода при помощи тормозных
устройств, принцип действия которых основан на использовании трения.
Механическое торможение обеспечивает полную остановку электропривода и его
фиксацию в заторможенном состоянии. Этот вид торможения применяется в судовых электроприводах, работа которых связана с преодолением действия силы тяжести – грузоподъёмных и якорно-швартовных.
Под электрическим торможением понимают создание на валу электродвигателя
электромагнитного момента, направленного навстречу вращению якоря ( ротора ). Для
электрического торможения применяют специальные узлы в схемах управления электроприводами.
Как правило, электрическое торможение применяют не для полной остановки электропривода, а для предварительного уменьшения скорости до такой, при которой можно начинать механическое торможение.
Например, существующие электромагнитные тормоза серий ДПМ постоянного то
ка и ТМТ переменного можно отключать при начальной скорости не более 750 об /мин.
Значит, в электроприводе 3-скоростной лебёдки со скоростями 3000, 1500 и 750 об
/ мин нельзя начинать торможение со скоростей 3000 и 1500 об / мин, иначе на валу
двигателя возникнут большие динамические усилия, которые могут повредить двигатель,
передачу и сам механизм. Кроме того, из-за увеличенного трения тормоз будет перегре
ваться и быстро изнашиваться.
Электрическое торможение применяют, в основном , в электроприводах судовых
грузоподъемных механизмов, работающих с частыми пусками и остановками.
Различают 4 вида электрического торможения:
1. динамическое;
2. рекуперативное;
3. торможение противовключением при активном статическом моменте;
4. торможение противовключением при реактивном статическом моменте.
На судах из перечисленных видов торможения, в основном, применяется динамиче
ское и рекуперативное.
3.2. Динамическое торможение двигателя параллельного возбуждения
В схеме динамического торможения ( рис. 9.8, а ) используются контакт КТ тормозного контактора контакт КЛ линейного. Эти контакты всегда находятся в
противоположном состоянии: если замкнут контакт КЛ, разомкнут контакт КМ, и наоборот.
269
Рис. 9.8. Схема ( а ) и механические характеристики ( б ) при динамическом
торможении двигателя постоянного тока
До начала торможения, при работе двигателя, контакт КЛ замкнут, контакт КТ разом
кнут. Двигатель подключен к сети и вращается со скоростью ω ст .
Ток в обмотке якоря
Iа =(U–E)/rа ,
где: Е = k ω ст Ф - противоЭДС обмотки якоря, прямо пропорциональная скорости
двигателя ω ст .
Этот ток протекает через якорь в направлении слева направо ( в соответствии с по
лярностью напряжения питающей сети ).
Для торможения размыкают контакт КЛ и замыкают КТ. При размыкании контакта
КЛ двигатель отключается от сети, поэтому напряжение на обмотке якоря U = 0.
При замыкании контакта КТ к обмотке якоря двигателя подключается тормозной
токоограничивающий резистор r т , причём обмотка якоря и резистор соединены последовательно.
Ток в такой цепи определяется по закону Ома
I а = ( U – E ) / ( r а + г т ) = ( 0 - Е ) / ( r а + г т ) = - Е / ( r а + г т ).
В этой формуле ток якоря имеет знак «минус», значит, направление тока в обмотке
якоря изменилось на обратное - справа налево.
Изменение направления тока приводит к изменению знака электромагнитного
момента двигателя М = k( - I а )Ф <0, этот момент становится тормозным.
Двигатель переходит на искусственную тормозную характеристику во 2-м квадранте и постепенно уменьшает скорость. По мере уменьшения скорости уменьшается противо
ЭДС Е = k ωФ, ток якоря и электромагнитный момент.
В момент остановки якоря ( точка 0 на механической характеристики ) скорость
ω = 0, противоЭДС Е = 0, ток якоря I а = 0 и электромагнитный момент двигателя М = 0.
При реактивном статическом моменте ( насос, вентилятор ) процесс торможения
закончится в точке 0.
При активном статическом моменте процесс может иметь продолжение, а именно:
если в точке 0 двигатель не затормозить, он под действием груза реверсирует и станет раз
гоняться в обратном направлении до скорости ω т .
Полярность противоЭДС изменится на обратную, т.к. Е = k( - ω)Ф < , поэтому
также на обратное изменится направление тока якоря
I а = - ( - Е ) / ( r а + г т ) = Е / ( r а + г т ) > 0.
Поэтому изменится на обратный знак электромагнитного момента, т.е. он вновь
стал вращающим, направленным на подъём. При этом двигатель работает в режиме тормоз
270
ного спуска, притормаживая груз и ограничивая скорость спуска груза значением скорости
ω ст ( точка А ).
Особенности торможения:
1. простота торможения, т.к. для его получения нужен тормозной контактор КТ и
тормозной резистор;
2. торможение позволяет полностью остановить якорь ( т. «0» на рис. 9.8, б );
3. торможение широко применяется в электроприводах грузоподъемных механизмов для предварительного сброса скорости перед срабатыванием основного, электромагнитного тормоза, обеспечивающего полную остановку груза.
3.3. Рекуперативное торможение двигателя постоянного тока
Известно, что электрические машины обратимы, т.е. одна и та же электрическая
машина может работать как генератор, так и электродвигатель.
При рекуперативном торможении электродвигатель переходит в генераторный режим. При этом двигатель преобразует механическую энергии, полученную от движущих
ся частей привода, в электрическую, которую двигатель возвращает в судовую электрическую сеть.
Рекуперативное торможение наступает в следующих случаях:
1. при движении электровоза под уклон ( что невозможно в судовых условиях );
2. при переходе двигателя с большей скорости на меньшую ( происходит каждый
раз автоматически );
3. при опускании тяжелых грузов.
В любом из этих случаев выполняется одно и то же условие рекуперативного тормо
жения: противоЭДС обмотки якоря двигателя Е = сωФ должна cтать больше напряже
ния питающей сети U.
В этом случае ток якоря двигателя
I а = ( U – E ) / r а < 0,
т.е. изменяет свой знак на обратный.
Поэтому изменяет свой знак и электромагнитный момент двигателя М = с ( - I а )Ф,
который становится тормозным.
В судовых условиях рекуперативное торможение может наступить при спуске тя
желого груза, когда двигатель переходит в режим генератора, преобразуя механическую
энергию опускающегося груза в электрическую энергию, возвращаемую в сеть;
Однако использование возвращаемой в судовую сеть энергии практически невозможно вследствие кратковременности работы двигателя в генераторном режиме ( с учетом ограниченной высоты трюма ).
Более того, это торможение опасно тем, что при одновременном переходе большого числа грузовых лебедок в режим рекуперативного торможения возможен переход гене
раторов судовой электростанции в двигательный режим с последующим их отключением по обратному току ( при помощи реле обратного тока ). При этом судно обесточивается. Такие случаи имели место на судах типа «Ленинский комсомол».
Поэтому на судах этой серии параллельно обмоткам якорей двигателей лебедок
стали включать реле максимального напряжения, которые при напряжении на якоре U =
225…235 В, т.е. при переходе лебедок в режим рекуперативного торможения, отключали
питание судовой сети от данной лебедки.
В то же время на электротранспорте электроэнергия, возвращаемая в сеть при реку
перативном торможении, позволяет уменьшить общий расход электроэнергии на 15…20%
При этом электровозы, идущие под уклон и работающие в режиме рекуперативного
торможения, питают электроэнергией электровозы, идущие на подъем.
Положительная роль рекуперативного торможения при спуске тяжелых грузов со
стоит в том, что тормозной электромагнитный момент двигателя стабилизирует скорость
271
спуска груза, не позволяя ему разгоняться свыше определенной скорости.
4. Реверс двигателей постоянного тока
4.1. Основные сведения
Под реверсом понимают изменение направления вращения двигателя на обратное.
Как следует из формулы электромагнитного момента двигателя М = сI a Ф, изменить знак момента можно двумя способами:
1. изменить направление тока в обмотке якоря, не изменяя знак магнитного потока
( т.е. не изменяя направление тока в обмотке возбуждения ), при этом М = с ( - I a )Ф< 0;
2. изменить направление тока в обмотке возбуждения , не изменяя направление тока
в обмотке якоря, при этом М = сI a ( - Ф ) < 0.
4.2. Реверс изменением направления тока в обмотке якоря
Для реверса двигателя первым способом применяют схему реверсивного мостика,
состоящую из контактов В1, В2 «Вперёд» и H1, H2 «Назад» ( рис. 9.9 ).
Рис. 9.9. Схема реверса двигателя постоянного тока изменением направления
тока в обмотке якоря
Пары контактов В1-В2 и Н1-Н2 замыкаются поочерёдно. При направлении «Вперёд» замкнуты контакты В1 и В2, цепь тока через обмотку якоря такая: «плюс» - В1 – об
мотка якоря - В2 - «минус».
При направлении «Назад» замкнуты контакты H1 и Н2, цепь тока через обмотку
якоря такая: «плюс» - H1 - обмотка якоря - Н2 - «минус».
Таким образом, при работе «Вперёд» ток через обмотку якоря протекал в направле
нии сверху вниз, при работе «Назад» - снизу вверх. При этом направление тока в параллельной обмотке возбуждения не изменялось.
Реверс изменением направления тока в параллельной обмотке возбуждения
Для реверса двигателя вторым способом применяют ту же схему реверсивного мостика, однако меняют местами обмотку якоря и обмотку возбуждения ( рис. 9.10 ).
Рис. 9.10. Схема реверса двигателя постоянного тока изменением направления
тока в обмотке возбуждения
272
При направлении «Вперёд» замкнуты контакты В1 и В2, цепь тока через обмотку
возбуждения такая: «плюс» - В1 - обмотка возбуждения - В2 - «минус».
При направлении «Назад» замкнуты контакты H1 и Н2, цепь тока через обмотку
возбуждения такая: «плюс» - H1 - обмотка возбуждения - Н2 - «минус».
Таким образом, при работе «Вперёд» ток через обмотку возбуждения протекал в на
правлении сверху вниз, при работе «Назад» - снизу вверх.
При этом направление тока в обмотке якоря не изменялось.
Однако этот второй способ на практике не применяют из-за недостатков:
1. при переключении контактов В1, В2 и H1, H2 существует момент времени, когда контакты К1, К2 уже разомкнулись, а контакты Н1,Н2 ещё не замкнулись.
В этот момент ток в обмотке возбуждения равен 0, поэтому магнитный поток Ф, а
значит, и противоЭДС обмотки якоря Е = k*ω*Ф = 0.
При этом ток якоря двигателя увеличивается до значения
I a = ( U – E ) / R a = ( U – 0 ) / R a = U / R a = I к. з ,
который в десятки раз больше номинального, что недопустимо;
2. одновременно в обмотке возбуждения индуктируется ЭДС самоиндукции
е l = - L*dI в / dt
которая в десятки раз больше напряжения сети из-за крайне малого значения времени dt,
в течение которого ток возбуждения убывает до нуля ( т.к. контакты В1, В2 и Н1,Н2 переключаются практически мгновенно).
Под действием этой ЭДС происходит пробой изоляции витков обмотки возбуждения.
Следует обратить внимание на то, что при изменении полярности напряжения
питающей сети двигатель постоянного тока не реверсирует.
Иначе говоря, при переброске на двигателе концов питающего кабеля реверс не
происходит.
Это объясняется тем, что при переброске концов одновременно изменяется направление тока как в обмотке двигателя, так и в параллельной обмотке возбуждения, а знак
электромагнитного момента не изменяется:
М' = с ( - I )( - Ф ) = М
a
Рис. 9.11. Схема включения двигателя постоянного тока при прямой ( а ) и
обратной ( б ) полярности напряжения питающей сети
На рис. 9.11, а ток якоря I и ток возбуждения I в протекают в направлении слева
a
направо, а при изменении полярности – в направлении справа налево ( рис. 9.11, б ).
273
Реверс при этом не происходит.
Сказанное подтверждается на рис. 9.11, в и 9.11, г .
На рис. 9.11, в произвольно выбрана полярность полюсов N и S и направление тока
в верхнем проводнике ( крестик ) и нижнем ( точка ). Направление электромагнитных сил
F
иF
найдено по правилу левой руки. Якорь вращается в направлении против чаэм 1
эм 2
совой стрелки.
Если изменить полярность питающей сети, то одновременно изменится полярность
полюсов ( на рис. 9.11, г верхний полюс – S, а нижний – N ) и направление тока в обмотке
якоря ( в верхнем проводнике – точка, в нижнем – крестик ).
Применяя правило левой руки, находим, что направление электромагнитных сил F
иF
не изменилось, реверс не произошел.
эм 1
эм 2
2. СПОСОБЫ ПУСКА, РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЯ
СУДОВЫХ ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА
1. Способы пуска электродвигателей переменного тока
1.1. Основные сведения
Для пуска асинхронных электродвигателей переменного тока применяют два
способа:
1. прямой пуск;
2. пуск при пониженном напряжении;
3. реостатный пуск.
Рассмотрим особенности каждого способа пуска.
Прямой пуск короткозамкнутых асинхронных двигателей нормального
исполнения
При прямом пуске двигатель включается непосредственно в сеть ( рис. 9.12 )
Рис. 9.12. Схема прямого пуска асинхронного двигателя
Для двигателей, у которых пусковой момент меньше номинального, должны быть
приняты меры для уменьшения статического момента механизма на время пуска. Например, при пуске насоса клапан на всасывающей магистрали должен быть открыт частично,
тогда подача насоса при пуске будет меньше номинальной.
При прямом пуске пусковые токи превышают номинальный, в зависимости от типа
двигателя, в 4…7 раз. Такие токи вызывают провалы напряжения в судовой сети, что может
привести к массовому отключению работающих двигателей.
Поэтому Правила Регистра допускают прямой пуск двигателей такой мощности, что
бы провал напряжения был не более 15% от U н ( т.е. напряжение в сети 380 В при пуске
не должно быть меньше U' = 0,85 U н = 0,85*380 = 323 В ).
1.3. Прямой пуск короткозамкнутых асинхронных двигателей специального
исполнения
К короткозамкнутым асинхронным двигателям специального исполнения относят
274
ся:
1. двигатели с повышенным скольжением;
2. глубокопазные;
3. двухклеточные.
По сравнению с асинхронными двигателями нормального исполнения эти двигате
ли имеют улучшенные пусковые свойства, а именно:
1. пониженные пусковые токи;
2. увеличенные пусковые моменты.
Объясним, каким образом получены эти свойства.
Из теории электрических машин известно, что электромагнитный момент асинхрон
ных электродвигателей определяется выражением
М = сI' 2 cosψ 2 Ф,
где с – конструктивный коэффициент ( величина постоянная );
I' 2 - т.н. приведенный ( к обмотке статора ) ток ротора;
ψ 2 - угол сдвига по фазе между векторами ЭДС обмотки ротора Е' 2 и приведенным
током I' 2 ;
I' 2 cosψ 2 - активная составляющая тока ротора;
Ф – значение вращающегося магнитного потока обмотки статора.
Если сказать проще, то электромагнитный момент двигателя тем больше, чем больше активная составляющая тока ротора, а для ее увеличения надо увеличивать активное сопротивление проводников обмотки ротора.
Увеличение активного сопротивления обмотки ротора, помимо увеличения пускового момента двигателя, дает и второе преимущество: уменьшение пусковых токов.
Таким образом, увеличивая активное сопротивление обмотки ротора, можно убить
сразу двух зайцев:
1. увеличить пусковой момент двигателя,
2. уменьшить пусковой ток двигателя.
Такими положительными свойствами обладают т.н. двигатели с улучшенными пусковыми свойствами. К последним относятся асинхронные двигатели:
1. с повышенным скольжением;
2. с глубокими пазами на роторе;
3. с двойной беличьей клеткой на роторе;
4. с фазной обмоткой на роторе ( с фазным ротором ).
Асинхронные двигатели с повышенным скольжением по сравнению с обычными
асинхронными двигателями имеют увеличенный пусковой момент ( рис. 9.14 ). Для этого
искусственно уменьшают сечение проводников обмотки ротора, вследствие чего увеличива
ется их активное сопротивление, а значит, активная составляющая тока ротора и электро
магнитный момент двигателя, прямо пропорциональный этой составляющей ( см. выше ).
Рис. 9.14. Механические характеристики асинхронных двигателей обычного
исполнения ( 1 ) и с повышенным скольжением ( 2 )
Недостатком этих двигателей является пониженная ( по сравнению с двигателями
обычного исполнения ) скорость вращения ротора.
275
У двигателей с глубоким пазом обмотка на роторе выполнена в виде стержней
прямоугольного профиля с высотой h, превосходящей ширину b в 15…20 раз ( рис. 9.15 )
Увеличение активного сопротивления обмотки ротора при пуске объясняется поверхностным эффектом.
Рис. 9.15. Глубокопазная обмотка ротора ( а ) и кривая распределения тока по
высоте паза ( б )
Суть этого явления состоит в том, что на переменном токе основная часть тока про
водника вытесняется на его поверхность. Это объясняется тем, что индуктивное сопротив
ление центральной части проводника гораздо больше по сравнению с сопротивлением поверхностного слоя.
При пуске частота тока в роторе f 2 = 50 Гц, нижняя часть проводника обмотки ротора имеет увеличенное индуктивное сопротивление, поэтому пусковой ток вытесняется в
верхнюю часть, Это равнозначно уменьшению площади его поперечного сечения, т.е. увеличению активного сопротивления. В результате уменьшается пусковой ток и одновремен
но увеличивается пусковой момент.
При номинальной скорости и небольшой частоте тока ротора (1.. .3 Гц) поверхностный эффект пропадает, ток распределяется равномерно по высоте проводника.
В двухклеточных асинхронных двигателях ( рис. 9.16 ) использованы оба способа
повышения активного сопротивления.
Рис. 9.16. Двухклеточная обмотка ротора асинхронного двигателя ( а ) и его
механические характеристики: пусковой обмотки ( 1 ), рабочей обмотки ( 2 )
и 1- механическая характерис
Эти двигатели имеют пусковую обмотку П , которая работает как обмотка ротора
двигателя с повышенным скольжением, и рабочую Р, которая работает как глубокопазная.
Эксплуатационные показатели перечисленных выше двигателей специального исполнения хуже, чем у двигателей нормального исполнения, в частности, у них ниже коэффициент полезного действия, коэффициент мощности cosφ, а стоимость выше.
На судах из перечисленных выше трех типов двигателей специального исполнения
используется только один – двигатель с двумя клетками. Такие двигатели установлены в
электроприводах грузовых лебедок на судах польской постройки ( типа «Муром» ).
1.4. Реостатный пуск двигателей с фазным ротором
Асинхронные двигатели с фазным ротором пускают в ход с помощью резисторов,
включаемых в цепь ротора, что позволяет уменьшить пусковой ток и увеличить пусковой
276
момент двигателя ( рис. 9.17 )..
Рис. 9.17. Схема пуска асинхронного двигателя с фазным ротором
Для пуска двигателя включают линейный контактор КЛ, через контакты которого
обмотка статора двигателя подключается к питающей сети «напрямую».Контакты КУ1 и
КУ2 контакторов ускорения при пуске должны быть разомкнуты. Тем самым последовательно в каждую из трех фазных обмоток ротора вводятся обе ступени добавочных ( пус
ковых ) резисторов r д1 и r д 2 . Эти ступени увеличивают общее ( эквивалентное ) сопро
тивление цепей фазных обмоток ротора, что ( см. выше ) приводит, с одной стороны, к
уменьшению пускового тока, с другой – к увеличению пускового момента.
Когда двигатель разгонится до скорости 30-40% номинальной, отключают первую
ступень r д1 , для чего замыкают контакты КУ1.
Двигатель с броском тока продолжает разгоняться, и при скорости 60-70% номинальной отключают вторую ступень r д 2 , для чего замыкают контакты КУ2.
Двигатель после отключения резисторов r д1 и r д 2 продолжает разгоняться до номи
нальной скорости.
Отключение резисторов можно производить вручную – при помощи контроллеров,
или полуавтоматически – при помощи более сложных про устройству магнитных станций.
Следует отметить, что, кроме указанных достоинств – увеличенный пусковой момент, меньший пусковой ток, двигатели специального исполнения имеют существенные
недостатки:
1. более сложное устройство обмоток роторов;
2. наличие щеточного устройства у двигателей с фазным ротором, снижающее
надежность двигателя;
3. худшие эксплуатационные характеристики, а именно - меньшие значения коэф
фициента полезного действия и коэффициента мощности.
На судах из перечисленных выше типов двигателей специального исполнения огра
ниченное применение нашли двигатели с двумя клетками на роторе – в электроприводах
грузовых лебедок ( суда польской постройки типа «Муром» ), и более широкое применение – двигатели с фазным ротором. Их применяют на многих сериях судов в электроприво
дах грузовых кранов и брашпилей.
1.5. Пуск при пониженном напряжении на обмотке статора
Для уменьшения пусковых токов применяют схемы пуска при пониженном напряже
нии:
1. включением резисторов в цепь обмотки статора ( рис. 9.13, а);
2. включением индуктивных сопротивлений в цепь обмотка статора (рис. 9.13, б);
3. включением обмотки статора через автотрансформатор ( рис.9.13, в );
4. переключением обмотки статора со «звезды» на «треугольник» ( рис.9.13, г ).
277
Рис. 9.13. Схемы пуска асинхронного двигателя при пониженном напряжении
В схеме на рис. 9.13, а при пуске замкнуты контакты линейного контактора КЛ, поэтому обмотка статора подключается к питающей сети через пусковые токоограничивающие резисторы СП. После того, как двигатель наберет обороты, а пусковой ток уменьшится до безопасных значений ( обычно 2…2,5 номинального ), схема управления замыкает
контакты второго контактора – ускорения КУ, при этом двигатель подключается к сети
«напрямую».
В схеме на рис. 9.13, б для ограничения пусковых токов последовательно с обмоткой статора включены токоограничивающие рабочие обмотки дросселя насыщения Др.
Его обмотка управления ОУ питается постоянным током через понижающий трансформатор Тр и выпрямитель Вп.
При пуске индуктивное сопротивление рабочих обмоток дросселя должно быть
максимальным, поэтому ток в обмотке управления ОУ должен быть минимальным. Для
этого ползунок резистора поста управления ПУ должен находиться в крайнем правом положении.
После пуска ток в обмотке управления ОУ постепенно увеличивают, для чего пере
мещают ползунок ПУ влево. Индуктивное сопротивление рабочих обмоток постепенно
уменьшается.
Когда ползунок ПУ перемещен влево до упора, пуск закончен. При таком положении ползунка индуктивное сопротивление рабочих обмоток дросселя практически равно
нулю, что равнозначно прямому подключению обмотки статора к питающей сети.
В схеме на рис. 9.13, в использованы два контактора – регулировочный КЛ1 и линейный КЛ2, а также автотрансформатор АТр.. При пуске включается контактор КЛ1, при
замыкании нижних контактов которого образуется нулевая точка «звезды» трех фазных
обмоток автотрансформатора, а через верхние контакты подается питание питающей сети
на верхние выводы этих обмоток.
В момент пуска ползунки автотрансформатора должны находиться в крайнем нижнем положении, при этом обмотка статора асинхронного двигателя закорочена через нижконтакты КЛ1, т.е. напряжение на ней равно нулю. Поэтому скорость ротора также равна
нулю, ротор неподвижен.
Для пуска ползунки автотрансформатора постепенно перемещают вверх, при этом
напряжение, снимаемое с обмоток автотрансформатора на обмотку статора также постепенно увеличивается. Поэтому скорость двигателя также увеличивается.
Пуск закончен, если ползунки автотрансформатора перемещены в крайнее верхнее
положение. При этом на обмотку статора подается полное напряжение питающей сети, автотрансформатор не нужен.
В этот момент времени включается линейный контактор КЛ2 и отключается регулировочный КЛ1. При замыкании контактов КЛ2 обмотка статора двигателя подключается к питающей сети «напрямую», а при размыкании контактов КЛ1 автотрансформатор
отключается от обмотки статора двигателя ( он уже выполнил свою роль ).
278
В схеме на рис. 9.13, г использован линейный контактор КЛ и переключатель «звезда»-«треугольник» П. Для пуска включают линейный контактор КЛ, через замыкающиеся контакты которого напряжение питающей сети подается на верхние выводы обмотки
статора двигателя АД. После этого переводят переключатель в нижнее положение «звезда». При этом нижние выводы обмотки статора соединяются вместе, в нулевую точку,
обмотка статора соединена «звездой».
После того, как двигатель наберет обороты и перестанет увеличивать скорость, переключатель переводят в верхнее положение «треугольник». Двигатель с броском тока
переключается со «звезды» на «треугольник», после чего разгоняется на «треугольнике»
до скорости, зависящей от статического момента механизма.
Этот способ нашёл самое широкое применение на судах ввиду его простоты ( не
требуются резисторы, индуктивные сопротивления или автотрансформаторы ) и эффектив
ности - пусковой ток уменьшается в 3 раза.
Следует особо подчеркнуть, что переключение обмотки статора со «звезды» на
«треугольник» применяется для пуска, а не для регулирования скорости асинхронного
двигателя. Это объясняется тем, что скорость двигателя на «треугольнике» незначительно
больше скорости на «звезде».
Все 4 рассмотренные выше схемы пуска при пониженном напряжении имеют один
и тот же принципиальный недостаток: резкое уменьшение пускового момента двигателя,
поскольку электромагнитный момент двигателя пропорционален квадрату напряжения.
Например, если при пуске напряжение понижено до значения U' = 0,8U н , то пуско
вой момент двигателя составит
2
2
М' п = (U' / U н ) *М н = ( 0,8 ) * М н = 0,64 М н ( т.е. 64% М н ).
Иначе говоря, при провале напряжения на 20% двигатель уменьшает пусковой момент на 36% ( 64% = 100% – 36% ).
Поэтому пуск при пониженном напряжении можно применять для механизмов, у
которых на малых скоростях статический момент невелик. К таким механизмам относятся
центробежные насосы и вентиляторы, у которых статический момент пропорционален
квадрату скорости ( т.е. на малых скоростях мал и статический момент ).
2. Способы регулирования частоты вращения 3-фазных асинхронных двигателей
2.1. Основные сведения
Формула частоты вращения асинхронного двигателя имеет вид
n = 60f ( 1 – s ) / р,
где:
n – частота вращения, об/мин;
f – частота тока питающей сети;
s – скольжение ротора ( относительное отставание ротора от магнитного поля обмотки статора );
р – число пар полюсов.
Из формулы следует, что регулировать скорость асинхронного двигателя можно
тремя способами:
1. изменением частоты тока питающей сети;
2. изменением скольжения;
3. изменением числа пар полюсов.
Кроме того, существует 4-й способ – изменением напряжения на обмотке статора.
Коротко объясним особенности каждого способа регулирования
Регулирование скорости изменением частоты тока питающей сети – плавное, но
требует применения громоздких и дорогих тиристорных преобразователей частоты. На су-
279
дах этот способ нашел ограниченне применение, в основном, в электроприводах тяжеловесных лебёдок, грузовых и портальных кранов.
Регулирование скорости изменением скольжения применимо только для двигателей
с фазным ротором, т.к. осуществляется введением резисторов в цепь фазного ротора. Регу
лирование плавное, но требует применения громоздких пускорегулировочных реостатов,
в которых выделяется большое количество тепла.
На судах этот способ нашел ограниченне применение, в основном, в электроприво
дах тяжеловесных лебёдок и кранов, а также в брашпилях.
Регулирование скорости изменением числа пар полюсов применяют только для двигателей с короткозамкнутым ротором. Теоретически его можно применить и для двигателей с фазным ротором, но в этом случае одновременно с переключением в обмотке статора необходимо производить аналогичные переключения и в обмотке ротора. Это вызовет
недопустимое усложнение конструкции и увеличение массо-габаритных параметров двигателя.
Недостаток регулирования – его ступенчатость ( в соотношении 1:2:4 или 1:2:6 ) и
высокая стоимость полюсопереключаемых электродвигателей.
Область применения на судах – самая распостранённая, в электроприводах грузовых лебёдок и кранов, а также брашпилей и шпилей.
Регулирование скорости изменением напряжения на обмотке статора на судах не
нашло широкого применения из-за 2-х недостатков:
1. требуется отдельное устройство ( регулятор напряжения ), позволяющее плавно
изменять его выходное напряжение как по величине, так и по фазе;
2. при понижении напряжения возникает опасность опрокидывания двигателя, т.к.
при этом резко ( в квадрате ) уменьшается вращающий момент двигателя.
Область применения на судах – ограниченная, в основном, в системах судовой эле
ктроавтоматики ( рулевые приводы и авторулевые ) для изменения скорости двухфазных
асинхронных двигателей мощностью до 150-200 Вт.
На судах до сих пор наиболее распостраненный способ регулирования – путем изменения числа пар полюсов. Он применяется в електроприводах грузоподъемных механизмов и якорно-швартовных устройств.
Регулирование скорости изменением числа пар полюсов обмотки статора.
Принцип получения разного числа пар полюсов
Фазные обмотки статора, уложенные в пазы сердечника статора, представляют
собой мощные электромагниты. Уменьшая число пар полюсов обмотки статора, можно
увеличивать скорость двигателя, и наоборот, в соответствии с выражением
n = 60f ( 1 – s ) / р.
Для получения несколько скоростей электродвигателя применяют два способа:
1. размещают на статоре отдельные обмотки в количестве, равном числу скоростей.
Эти обмотки имеют разное число пар полюсов и при работе двигателя включаются поочередно. Например, на судах применяются двигатели серии МАП на две или три скорости (
М – морской, А – асинхронный, П – полюсопереключаемый );
4. размещают на статоре обмотку, схему которой можно изменять по одному из
двух вариантов:
а ) переключение обмотки со «звезды» на «двойную звезду»;
б ) переключение обмотки со «треугольника» на «двойную звезду».
Этот второй способ получения нескольких скоростей широко применяется на судах
иностранной постройки ( особенности на судах, построенных в ФРГ ).
У таких двигателей, допускающих изменение схемы обмотки, каждая фазная обмот
280
ка состоит из двух одинаковых частей ( секционных групп ) с выводами Н1-К1, Н2-К2 ( Н
– начало, К – конец ).
Объясним принцип изменения числа пар полюсов на примере только одной фазной
обмотки ( рис. 9.18 ).
Рис. 9.18. Схема переключения секционных групп обмотки статора с последовательного ( а ) на параллельное ( б ) соединение; Н и К – начала и концы
секционных групп
Пусть секционные группы соединены последовательно при помощи перемычки
К1 – Н2, а на выводы Н1 и К2 подается питание ( рис. 9.18, а ). Задавшись произвольно вы
бранным направлением тока в сторонах секций ( обозначено стрелками ) , перенесем эти
направления в поперечные сечения проводников секций в верхней части в виде крестиков
и точек.
По правилу буравчика найдем направление магнитных силовых линий вокруг каждого проводника с током. Рядом расположенные силовые линии позволят определить
положение электромагнитных полюсов обмотки статора. На рис. 9.18, а таких полюсов –
четыре ( 2р = 4 ), поэтому синхронная частота вращения ротора составит
n c = 60f / р = 60*50 / 2 = 1500 об / мин.
При переходе от последовательного соединения к параллельному надо соединить
перемычками выводы Н1 и К2 ( а не Н1 и Н2 ) и К1 и Н2 ( а не К1 и К2 ) ( рис. 9.18, б ).
Повторяя сделанные выше рассуждения, можно найти, что при переходе от последовательного к параллельному соединению секционных групп число полюсов уменьшилось в 2 раза ( 2р = 2 ), поэтому синхронная частота вращения ротора составит
n c = 60f / р = 60*50 / 1 = 3000 об / мин.
.
2.3. Регулирование скорости асинхронного двигателя изменением числа пар
полюсов путем переключения обмотки статора со «звезды» на «двойную звезду»
При переключении обмотки статора первым способом двигатель при пуске включа
ют в сеть по схеме «звезда» ( рис.9.19, а ), этом питание сети подается на выводы С1, С2 и
С3. Секционные группы Н1-К1 и Н2-К2 в каждой из трех фазных обмоток соединены
последовательно.
281
Рис. 9.19. Схемы включения и механические характеристики асинхронного
двигателя при переключении обмотки статора со «звезды» на «двойную звезду»
( а ) и с «треугольника» на «двойную звезду» ( б )
Для перехода на «двойную звезду» поступают так:
а ) снимают питание с выводов С1, С2 и С3;
б ) при помощи контактов первого трехполюсного контактора соединяют вместе вы
воды Н1 и К2;
в ) при помощи контактов второго трехполюсного контактора подают питание на
средние выводы С4, С5 и С6 фазных обмоток
В результате этих переключений секционные группы в каждой фазной обмотке сое
диняются параллельно, в целом образуя две «звезды», включены параллельно.
Переходный процесс протекает по траектории «0АВСD». При пуске двигатель
включают «звездой», при этом он переходи из точки «0» в точку «А», развивая пусковой
момент, выражаемый отрезком «0А».
Поскольку в точке «А» пусковой момент больше номинального М н1 , двигатель раз
гоняется по участку «АВ». В точке «В» наступает установившийся режим на «звезде».
При переключении обмотки на «двойную звезду» двигатель при постоянстве скоро
сти переходит из точки «В» в точку «С», после чего разгоняется до точки «D», в которой
наступает установившийся режим на «двойной звезде».
При всех переключениях двигатель необходимо использовать полностью, т.е.
зависящий от нагрузки ток статора I должен быть равен номинальному I н , на который
рассчитана обмотка статора.
При переходе со «звезды» на «двойную звезду мощность и скорость увеличивают
ся в 2 раза, но момент двигателя не изменяется ( отсюда название способа - «регулирование скорости при постоянном моменте» ).
2.4. Регулирование скорости асинхронного двигателя изменением числа пар
полюсов путем переключения обмотки статора с «треугольника» на «двойную
звезду»
При переключении обмотки статора вторым способом двигатель при пуске включа
ют в сеть по схеме «треугольник» ( рис.9.19, б ), этом питание сети подается на выводы
С1, С2 и С3. Секционные группы Н1-К1 и Н2-К2 в каждой из трех фазных обмоток соединены последовательно.
Для перехода на «двойную звезду» точно так же, как в предыдущем случае, а имен-
282
но:
а ) снимают питание с выводов С1, С2 и С3;
б ) при помощи контактов первого трехполюсного контактора соединяют вместе вы
воды Н1 и К2;
в ) при помощи контактов второго трехполюсного контактора подают питание на
средние выводы С4, С5 и С6 фазных обмоток
В результате этих переключений секционные группы в каждой фазной обмотке сое
диняются параллельно, в целом образуя две «звезды», включены параллельно.
При переходе с «треугольника» на «двойную звезду:
1. мощность увеличивается на 16%, т.е. почти не изменяется ( отсюда название
способа - «регулирование скорости при постоянной мощности» );
.
2. скорость увеличивается в 2 раза;
3. момент двигателя уменьшается почти в 2 раза ( М эм.дв. зв = 0,58 М эм.тр ).
На судах регулирование скорости переключением обмотки статора со «звезды» на
«двойную звезду» применяют в грузоподъемных механизмах, т.к. при этом способе крити
ческий момент двигателя не изменяется и потому отсутствует опасность опрокидывания
двигателя. В то же время такая опасность существует при переключением обмотки статора с «треугольника» на «двойную звезду», потому что момент двигателя уменьшается почти в 2 раза ( М эм.дв. зв = 0,58 М эм.тр ).
.
На судах переключение обмотки статора с «треугольника» на «двойную звезду»
применяют ограниченно, в электроприводах якорно-швартовных устройств для получения
последней, самой высокой скорости, которая используется для перемещения свободного
( ненагруженного ) швартовного каната.
3. Электрическое торможение асинхронных двигателей
3.1. Основные сведения
Электрическое торможение применяют только в электроприводах судовых грузоподъемных механизмов, с целью «сброса» скорости перед срабатыванием основного тормо
за. Тем самым облегчается работа основного тормоза, а именно: уменьшаются износ тормозных колодок и их нагрев.
Кроме того , электрическое торможение ограничено применяют в некоторых сиcтемах судовой электроавтоматики, например, авторулевых типа АТР, АИСТ и др.
Различают 5 видов электрического торможения асинхронных двигателей:
1. динамическое;
2. рекуперативное;
3. торможение противовключением при активном статическом моменте;
4. торможение противовключением при реактивном статическом моменте.
5. однофазное.
Из всех видов торможения на судах чаще всего применяется рекуперативное ( в
электроприводах грузоподъемных механизмов ).
3.2. Рекуперативное торможение асинхронных двигателей
В судовых условиях рекуперативное торможение наступает в двух случаях:
1. всякий раз при переходе с большей скорости на меньшую;
2. при спуске тяжелого груза.
Рассмотрим оба случая поочередно.
Рекуперативное торможение при переходе с большей скорости на меньшую
283
Рассмотрим процесс рекуперативного торможения на примере перехода с «двойной
звезды» на «звезду» ( рис. 9.20 ).
Рис. 9.20. Рекуперативное торможение при переходе с «двойной звезды» на
«звезду»
Перед началом торможения двигатель работает в точке «А» в установившемся режиме, при котором вращающий электромагнитный момент двигателя равен тормозному
статическому механизма, М = М ст , скорость двигателя постоянна и соответствует точке
«А». Например, пусть частота вращения ротора n = 2940 об / мин, а скорость вращения
магнитного поля обмотки статора n c = 3000 об / мин, т.е. ротор отстает от магнитного поля.
Для торможения двигателя отключают обмотку «двойной звезды» и включают обмотку «звезды». Двигатель при постоянстве скорости ( n = 2940 об / мин ) переходит из
точки «А» в точку «В».
На «звезде» скорость вращения магнитного поля обмотки статора n c = 1500 об /
мин, а сам ротор по инерции вращается с прежней скоростью n = 2940 об / мин, т.е. обгоня
ет магнитное поле обмотки статора. Начиная с точки «В» и на участке «ВСD» асинхронный двигатель переходит в генераторный режим, преобразуя механическую энергию, полу
чаемую от движущихся масс привода, в электрическую, возвращаемую в судовую сеть.
При этом знак электромагнитного момента двигателя изменяется на противоположный, т.е. этот момент становится тормозным.
.
Поэтому, начиная с точки «В», к валу двигателя приложены два тормозных момента – статический М ст механизма и электромагнитный М двигателя.
Под совместным действием этих моментов двигатель быстро уменьшает скорость
ротора по траектории «ВСD», причем в точке «D» скорость ротора уменьшается до скоро
сти вращения магнитного поля обмотки статора n c = 1500 об / мин.
Поскольку в точке «D» скорости ротора и магнитного поля одинаковы, двигатель в
этой точке переходит режим идеального холостого хода, его электромагнитный момент
М = 0.
Однако в точке «D» к валу двигателя остается приложенным второй тормозной момент – статический момент механизма М ст . Под действием последнего скорость ротора
продолжает уменьшаться, и на отрезке «DE» станет меньше скорости магнитного поля обмотки статора. Двигатель перейдет из режима идеального холостого хода в обычный дви
гательный режим, причем переходный процесс закончится в точке «Е».
Особенности торможения:
1. торможение наступает при условии: ротор обгоняет магнитное поле обмотки
статора, т.е. n > n c ;
2. при торможении асинхронный двигатель работает как асинхронный генератор,
преобразуя механическую энергию, получаемую от движущихся масс привода, в электри
284
ческую, возвращаемую в судовую сеть;
3. тормозной момент на валу двигателя сохраняется только на отрезке «ВСD» меха
нической характеристики «звезды»;
4. рекуперативное торможение при переходе с большей скорости на меньшую широко применяется в электроприводах судовых грузоподъемных устройств, для предварительного сброса скорости перед наложением основного электромеханического тормоза.
3.4. Рекуперативное торможение при спуске тяжелого груза
Рассмотрим процесс рекуперативного торможения при спуске тяжелого груза
( рис. 9.21 ).
.
Рис. 9.21. Рекуперативное торможение при спуске тяжелого груза
Для получения этого вида торможения двигатель включают в направлении на
«спуск», сразу же переводя привод в режим силового спуска.
При пуске двигатель развивает пусковой момент М п , который направлен согласно
со статическим моментом механизма М ст .
Под совместным действием этих моментов двигатель быстро набирает скорость по
траектории «АВС», причем в точке «С» скорость ротора увеличивается до скорости вращения магнитного поля обмотки статора.
Поскольку в точке «С» скорости ротора и магнитного поля одинаковы, двигатель в
этой точке переходит режим идеального холостого хода, его электромагнитный момент
М = 0.
Однако в точке «С» к валу двигателя остается приложенным второй тормозной момент – статический момент механизма М ст . Под действием последнего скорость ротора
продолжает увеличиваться , и на отрезке «СD» станет больше скорости магнитного поля
обмотки статора. Двигатель перейдет из режима идеального холостого хода в режим подъ
ема груза, причем переходный процесс закончится в точке «D».
Т.о., на отрезке «СD» электромагнитный момент двигателя направлен на подъем, а
фактически происходит спуск груза. Поэтому электромагнитный момент является тормозным, его роль заключается в том, что он стабилизирует скорость спуска груза, не давая
грузу разгоняться свыше скорости, соответствующей точке «D».
Особенности торможения:
1. торможение наступает при условии n > n c , т.е. ротор обгоняет магнитное поле
обмотки статора;
2. при торможении асинхронный двигатель работает как асинхронный генератор,
преобразуя механическую энергию, получаемую от движущихся масс привода, в электри
ческую, возвращаемую в судовую сеть;
3. тормозной момент на валу двигателя сохраняется только на отрезке «АВС» меха
285
нической характеристики «звезды»;
4. рекуперативное торможение при спуске тяжелого груза ограничено применяется
в электроприводах судовых грузоподъемных устройств с целью стабилизации скорости
опускания груза.
4. Реверс 3-фазных асинхронных электродвигателей
Для реверса 3-фазного асинхронного электродвигателя надо поменять местами ( пе
реключить ) два любых линейных провода.
При этом поменяется порядок чередования фаз обмотки статора, что приведет к изменению направления вращения ( реверсу ) магнитного потока обмотки статора.
Рис. 9.22. Прямое ( а ) и обратное ( б, в, г ) направление вращения ротора
3-фазного асинхронного двигателя
На рис. 9.20, а изображена схема, соответствующая условному прямому направлению вращения ротора двигателя ( по часовой стрелке ). Из схемы следует, что выводы
питающей сети и обмотки статора соединены попарно, а именно: вывод L1 соединен с
выводом U1, вывод L2 - с выводом V1, вывод L3 – с выводом W1 ( L1- U1, L2 - V1, L3 – W1 ).
На рис. 9.22, б переброшены линейные провода L1 и L2 , на рис. 9.22, в – провода L2
и L3, на рис. 9.22, г - провода L1 и L3. В каждом из этих случаев на обмотке статора меняет
ся порядок чередования фаз питающей сети ( по отношению к рис. 9.22, а ), и двигатель
реверсирует.
Поэтому на практике не имеет значения, какие именно два линейных провода будут переброшены ( переключены ).
Для реверса асинхронного двигателя применяют 2-полюсные или 3-полюсные реверсивные контакторы ( рис. 9.23 ).
.
Рис. 9.23. Схема реверса 3-фазного асинхронного двигателя при помощи 2-полюсных ( а ) и 3-полюсных ( б ) реверсивных контакторов
В схеме на рис. 9.23, а использованы 2-полюсные реверсивные контакторы КМ1 и
КМ2, на рис. 9.23, б – треполюсные. В обеих схемах для реверса переключаются линей
ные провода L1 и L2. В схеме на рис. 9.23, б правый контакт контактора КМ1 и левый кон
286
такт контактора КМ2 включены параллельно друг другу, т.е. поочередно подключают к
выводу W1 обмотки статора один и тот же провод L3 как при прямом, так и обратном
направлении вращения ротора двигателя.
Схема на рис. 9.23, а позволяет использовать менее дорогие 2-полюсные контакторы, но имеет повышенную опасность для обслуживающего персонала, т.к. линейный провод L3 постоянно подключен к обмотке статора двигателя.
3. КОММУТАЦИОННО-ЗАЩИТНАЯ АППАРАТУРА СУДОВЫХ ЭЛЕКТРОПРОИВОДОВ
1. Электрические аппараты
1.1. Основные сведения
Аппарат ( от латинского «apparatus» - оборудование ) – прибор, техническое устрой
ство, приспособление.
Коммутация ( от латинского «commutatio» - перемена ) – процесс переключения
электрических цепей.
Коммутационный аппарат ( англ. - switchgear ) – аппарат, предназначенный для
переключения электрических цепей.
На современных судах все механизмы электрифицированы. Это означает, что они
приводятся в движение при помощи электродвигателей. Для управления электродвигателями применяют электрические аппараты. Простейшим таким аппаратом является
рубильник, при помощи которого вручную включают или выключают электродвигатель.
В общем случае электрическим аппаратом называют электротехническое устрой
ство, предназначенное для управления электрическими токами или механическими нагрузками электрооборудования.
При этом под управлением электрическим током понимают коммутацию, стабилизацию, регулирование и преобразование электрического тока.
1.2. Классификация электрических аппаратов
В настоящее время существует множество разновидностей самих аппаратов и выполняемых ими функций, что делает невозможным классификацию аппаратов по одному
какому-либо признаку.
Поэтому на практике электрические аппараты классифицируют по 8 основным при
знакам:
1. области применения;
2. назначению;
3. принципу действия;
4. напряжению;
5. конструктивному исполнению;
6. способу управления;
7. режиму работы;
8. наличию перемещающихся ( подвижных ) контактов.
1. По области применения электрические аппараты делятся на 2 группы ( публи
кация 50 ( 441 ) Международной электротехнической комиссии ):
1. аппаратура распределительных устройств;
2. аппаратура управления.
При этом к аппаратуре распределительных устройств относят аппараты, применяемые при генерировании, передаче, распределении и преобразовании электроэнергии, а к
аппаратуре управления – аппараты, применяемые для управления аппаратами распредели
тельных устройств.
Иначе говоря, аппараты распределительных устройств используют в силовых цепях, а аппараты управления – в цепях управления. Часто аппараты управления называют
командоаппаратами.
287
К силовым относят цепи, содержащие элементы, предназначенные для производства, передачи, распределения и преобразования электроэнергии, в частности:
1. на постоянном токе – цепи обмоток якорей электродвигателей;
2. на переменном токе – цепи обмоток статоров асинхронных электродвигателей
с короткозамкнутым ротором, а также цепи обмоток роторов асинхронных двигателей с
фазным ротором.
К цепям управления относят вспомогательные цепи аппарата, предназначенные для
его управления, например, цепь катушки контактора.
2. По назначению электрические аппараты делятся на 4 вида:
1. коммутационную – для включения и отключения электрических цепей ( рубильники, неавтоматические выключатели, переключатели, разъединители и др. );
2. защитную – для защиты электрических установок в режимах, отличных от номи
нальных ( предохранители, автоматические выключатели, реле тока, напряжения, мощно
сти, конечные и путевые выключатели, и др. );
3. пуско-регулировочную – для пуска и регулирования различных параметров
электрических установок ( пускатели, пусковые и пуско-регулировочные реостаты,
регуляторы возбуждения и др. );
4. контролирующую – для контроля заданных режимов работы электрических
установок ( реле температуры, давления, уровня, частоты вращения и др. ).
3. По принципу действия электрические аппараты делятся на 4 вида:
1. электромагнитные ( реле тока, напряжения и др.);
2. индукционные ( реле обратной мощности );
3. тепловые ( тепловые реле );
4. контактно-механические ( контроллеры, командоконтроллеры, конечные
выключатели ).
4. По напряжению электрическая аппаратура делится на низковольтную ( до 230 В
) и высоковольтную ( свыше 230 В ).
5. По конструктивному исполнению электрические аппараты делятся на 4 вида:
1. открытые, не имеющие защитного корпуса и встраиваемые внутрь
распределительных щитов, магнитных станций и т.п.;
2. брызгозащищенные, имеющие легкий корпус, защищающий от попадания
брызг;
3. водозащищенные, находящиеся внутри корпуса, защищающего от проникновения воды при помощи резиновых прокладок;
4. герметичные, предназначенные для работы под водой при определенном давлении.
6. По способу управления различают электрическую аппаратуру:
1. ручного управления ( кнопочные посты управления, контроллеры, командокон
троллеры и др. );
2. автоматического управления ( автоматические пускатели, станции управления и
др. ).
7. По режиму работы различают электрическую аппаратуру продолжительного
( S1 ), кратковременного ( S2 ) и повторно-кратковременного ( S3 ) режима работы. В режиме S1 работают электроприводы вентиляторов и некоторых насосов, в режиме S2 –
якорно-швартовные устройства, шлюпочные и траповые лебедки, в режиме S3 - грузовые
лебедки и краны. Всего же режимов работы – 8 ( S1…S8 ),4 – повторно-кратковременный,
включая пуск; S5 – повторно-кратковременный, включая электрическое торможение; S6 –
продолжительный при переменной нагрузке; S7 – продолжительный , включая электрическое торможение, S8 – режим работы при периодическом изменении частоты вращения и
нагрузки ). Однако судовые электроприводы работают, в основном, в режимах S1, S2 и S3.
288
8. По наличию перемещающихся ( подвижных ) контактов электрические аппа
раты делятся на 2 группы( ГОСТ 17703 – 72 ) :
1. контактные;
2. бесконтактные.
В контактных аппаратах переключение электрической цепи происходит путем
перемещения контактных деталей аппарата относительно друг друга, а в бесконтактных –
без такого перемещения деталей аппарата. В качестве контактных деталей применяются
подвижные и неподвижные медные контакты , бесконтактных – полупроводниковые
приборы – транзисторы и тиристоры.
2. Командоаппараты
2.1. Основные сведения
Командоаппаратами называют устройства, предназначенные для переключения
цепей управления электроприводами под воздействием оператора или механизма.
К командоаппаратам относятся:
1. кнопочные посты управления;
2. командоконтроллеры;
3. универсальные переключатели;
4. путевые и конечные выключатели.
2.2. Кнопочные посты управления
Кнопочный пост управления – это электротехническое устройство, состоящее из
одной и более кнопок управления. Кнопочные посты управления тельферов – передвижных тележек для перемещения поршней главного двигателя, имеют 9 кнопок управления.
Кнопка управления ( кнопочный элемент ) – это коммутационный аппарат с ручным
приводом.
Различают 2 типа кнопок:
1. кнопки с самовозвратом;
2. кнопки с самоудержанием.
В кнопках с самовозвратом имеется возвратная пружина, возвращающая контакт
кнопки в исходное состояние после прекращения нажатия кнопки ( рис. 9.24, а ).
289
Рис. 9.24. Конструктивные формы кнопочных постов: а - кнопочный элемент; б –
открыто утопленный пост; в – защищенный кнопочный пост; 4 – водозащищенный
кнопочный пост; 1 – основание; 2 – лицевая панель; 3 – шпильки стяжные; 4 –
кнопка «Пуск»; 5 – кнопка «Стоп»; 6 – толкатели; 7 – возвратные пружины
Кнопочный пост с двумя кнопками «Пуск» и «Стоп» ( рис. 9.24,б ) состоит из параллельно расположенных основания 1 и лицевой панели 2 , жестко соединенных при помощи шпилек 3. На основании закреплены кнопочные элементы 4 - «Пуск» и 5 – «Стоп».
Каждый элемент включает в себя пару контактов - подвижный и неподвижный, толкатель
6 ( шток ), возвратную пружину 7 и собственно кнопку.
Если кнопка не нажата, то пара контактов кнопки «Пуск» разомкнута, а кнопки
«Стоп» замкнута. При нажатии кнопки «Пуск» подвижный контакт перемещается и замыкается с неподвижным, в этом месте образуется цепь тока. При нажатии кнопки «Стоп»
подвижный и неподвижный контакты размыкаются, в этом месте образуется разрыв цепи.
Если кнопку ( любую ) отпустить, подвижные контакты под действием пружины
возвращаются в исходное состояние.
Таким образом, кнопка «Пуск» имеет замыкающий контакт, а кнопка «Стоп» - размыкающий.
Условное обозначение кнопок показано на рис. 9.25. Наличие самовозврата обозна
чается при помощи небольшого треугольника, обращенного вершиной верх.
Рис. 9.23. Кнопки нажимные «Пуск» - а , «Стоп» - б и вытяжная - в
На рис. 9.25, а, б, в, верхняя часть изображения кнопок в виде буквы «П» обозначает направление движения подвижной части кнопок. Таким образом, кнопки «Пуск» и
«Стоп» надо нажимать в направлении сверху вниз, а вытяжную – вытягивать за её головку ( при вытягивании ее контакт замыкается ).
2.3. Командоконтроллеры
Командоконтроллер – это командоаппарат ручного управления, предназначенный
для частого переключения контактов в цепях управления.
В зависимости от типа, командоконтроллеры имеют до 12 рабочих положение и до
12 цепей. Каждому рабочему положению соответствует определенный рабочий режим,
например, «травить», «лево», «скоростной спуск», «выбирать», «право», «тяговый подъем» и т.п. Число цепей определяется схемой управления электропривода – чем больше
функций выполняет схема, тем больше число цепей.
Основным элементом контроллера является переключающее устройство ( рис.
9.26 ).
290
Рис. 9.26. Переключающее устройство командоконтроллера: 1 – вал; 2 – кулачковая
шайба; 3 – ролик; 4 – пластмассовый рычаг; 5 – ось; 6 – пружина; 7 – подвижные контакты
8 – неподвижные контакты
Переключающее устройство состоит из вала квадратного сечения 1, который поворачивается вручную рукояткой управления. На валу закреплены пластмассовые кулачко
вые шайбы 2 определенного профиля. Контактная система включает неподвижные
контакты 8 и подвижные контакты мостикового типа 7, закрепленные на пластмассовом
рычаге 4, который прижимается к кулачковой шайбе пружиной 6. Рычаг сидит на оси 5.
Поворот рукоятки управления вызывает поворот вала 1 с кулачковыми шайбами 2.
Если при этом ролик 3 попадает во впадину шайбы, подвижный и неподвижный контакты
замыкаются ( на рис. 9.26 - правая пара контактов ). Выход ролика из впадины приводит к
размыканию контактов ( на рис. 9.26 – левая пара контактов ).
Каждое положение рукоятки аппарата фиксируется специальным храповым устрой
ством, состоящим из подпружиненного ролика и шестерни в виде звездочки. Ролик связан с корпусом аппарата, а звездочка находится на валу 1. Фиксированное положение
рукоятки наступает при попадании ролика внутрь выемки на звездочке.
Командоконтроллеры могут иметь 4, 6 или 12 кулачковых элементов ( пар контактов ) и от 1 до 6 положений рукоятки в одну сторону.
Командоконтроллер серии КМ-200 в сборе показан на рис. 9.27.
Рис. 9.27. Командоконтролер типа КМ-200: 1 – вал; 2 – кулачковые шайбы; 3 –
пружина; 4 – ось рычага; 5 – рычаги; 6 – ролики; 7 – контакты
Положение контактов и их количество указывается в специальной таблице замыканий контактов ( рис. 9.28 ).
291
Рис. 9.28. Таблицы замыканий контактов: верхняя – с крестиками; нижняя – с
точками
Эту таблицу можно изобразить двумя равнозначными способами:
1. в виде таблицы с крестиками;
2. в виде таблицы с точками.
Таблица с крестиками ( рис. 9.28, верхняя часть ) состоит из колонок и строчек.
В крайней левой колонке указаны номера подвижных контактов от 1 до 7. В осталь
ных колонках указаны номера нулевого и рабочих положений рукоятки командоконтроллера. Нулевое положение обозначено цифрой «0», а рабочие положения – цифрами 1, 2, 3
и 4 в обоих направлениях - «Назад» и «Вперед».
В строчках напротив номеров контактов крестиками или пустыми клетками обозначается состояние контакта, а именно: если в каком-либо положении рукоятки контакт
замкнут, в клетке стоит крестик, если контакт разомкнут – клетка пустая.
Например, контакт №1 замкнут только в нулевом положении ( «0» ) и разомкнут во
всех рабочих ( «1», «2», «3», «4» в направлениях «Выбирать» и «Травить»).
Контакт №2 разомкнут в нулевом положении, но замкнут во всех рабочих.
Контакт №3 разомкнут в нулевом положении и в положениях 1, 2, 3 и 4 в направле
нии «Назад», но замкнут в положениях 1, 2, 3 и 4 в направлении «Вперед», и т.д.
Таблица с точками ( рис. 9.28, нижняя часть ) состоит из вертикальных пунктирных
линий и строчек с точками. Номера вертикальных линий 0, 1, 2, 3 и 4 ( в обе стороны )
соответствуют положениях рукоятки командоконтроллера, а точки равнозначны крестикам - если в каком-либо положении рукоятки контакт замкнут, на вертикальной линии
стоит точка, если контакт разомкнут – точки нет.
Например, контакт №1 замкнут только в нулевом положении, т.к. на вертикальной
линии «0» стоит точка, и разомкнут во всех рабочих «1», «2», «3», «4» в направлениях
«Выбирать» и «Травить» - на вертикальных линиях точки отсутствуют.
2.4. Конечные и путевые выключатели
292
Конечным выключателем называют аппарат, предназначенный для остановки электропривода в предельном ( конечном ) положении механизма.
Например, механизм стрелы грузового крана имеет два конечных выключателя,
один из которых отключает двигатель при подходе стрелы к крайнему верхнему положению, а другой – к крайнему нижнему.
Путевым выключателем называют аппарат, предназначенный для управления элек
троприводом в промежуточном положении механизма.
Путевые выключатели не отключают электропривод, а переводят его на меньшую
скорость перед подходом к предельному положению. Например, механизм перемещения
портального крана вдоль стенки причала имеет два путевых выключателя, каждый из которых переводит электропривод этого механизма с большей скорости на меньшую при
подходе на один – два метра к крайнему положению. Остановку электропривода в крайних положениях выполняют конечные выключатели.
На судах путевые выключатели применяют в рулевых устройствах для включения
сигнальных ламп положения пера руля: в нулевом положении горит лампа белого цвета, в
рабочих положениях горят лампы красного цвета «Лево руля» и белого цвета «Право
руля».
По устройству конечные и путевые выключатели делятся на 3 типа:
1. нажимные;
2. рычажные;
3. шпиндельные.
Нажимные выключатели
Нажимные выключатели, как правило, применяют в качестве конечных ( рис. 9.29 )
Рис. 9.29. Принципиальная схема нажимного выключателя:
1 – неподвижные контакты; 2 – нажимное устройство; 3 – упор механизма
На штоке нажимного устройства 2 находятся два мостиковых подвижных контакта,
электрически не связанных друг с другом. В исходном положении верхний подвижный
контакт соединяет через себя левый и правый неподвижные контакты.
При подходе рабочего ( движущегося ) органа механизма упор 3 надавливает на
шток нажимного устройства 2, шток опускается вниз. При этом размыкаются верхние контакты и замыкаются нижние.
Рычажные выключатели
В рычажных выключателях переключение контактов осуществляется воздействием
упора механизма 1 на рычаг выключателя 2 ( рис. 9.30 ).
293
Рис. 9.30. Принципиальная схема рычажного выключателя:
1 – упор механизма; 2 – рычаг выключателя
В исходном состоянии выключателя его контакты замкнуты.
При подходе рабочего органа механизма к крайнему положению упор 1 механизма
надавливает на Г-образный рычаг выключателя 2. Последний, сжимая пружину, поворачивается в направлении против часовой стрелки, в результате чего контакты выключателя
размыкаются.
На судах рычажные конечные выключатели применяют в электроприводе механизма изменения вылета стрелы грузовых кранов. Внешний вид такого выключателя изображен на рис. 9.31.
Рис. 9.31. Рычажный конечный выключатель: 1 – упор механизма; 2 – ролик; 3 –
рычаг
Контактный валик внутри выключателя связан с рычагом 3, на конце которого нахо
дится ролик 2. При набегании на ролик 2 упора механизма 1, рычаг 3 поворачивается на
30º, вследствие чего один контакт выключателя размыкается, а другой – замыкается.
При отводе упора назад возвратная пружина устанавливает рычаг в вертикальное
положение.
Шпиндельные конечные выключатели
Шпиндельные выключатели применяют в электроприводах судовых лебедок и
кранов в механизме подъема для контроля длины троса, смотанного с грузового барабана.
Выключатели останавливают электродвигатель, когда на барабане остается 2 – 3
шлага троса.
В отсутствие выключателя двигатель полностью смотает трос с барабана и,не останавливаясь, начнет наматывать его на барабан с изломами и перехлестами, что недопустимо.
Рис. 9.32. Принципиальная схема шпиндельного выключателя:
1 – винт; 2 – гайка; 3 – шток; 4, 5 – ролики кулачкового механизма; 6,8 – подвижные кон-
294
такты, 7,9 – неподвижные контакты; М – электродвигатель; Р – редуктор; КЛ, КП – реле
«Лево», «Право»
Вращение электродвигателя М через редуктор Р передается винту 1. На винт надета прямоугольная гайка 2, имеющая в верхней части сквозное отверстие. Через это отверстие проходит шток 3. Поэтому при работе электродвигателя гайка поступательно перемещается вдоль винта влево или вправо, в зависимости от направления вращения вала двигателя.
В исходном состоянии контакты 6,7 получает питание катушка промежуточного
реле КЛ «Лево», через контакты 8,9 – реле КП «Право».
При достижении гайкой 2 , например, крайнего левого положения, контакты 6 и 7
размыкаются, реле КЛ «Лево» отключается и своими контактами производит необходимые изменения в схеме управления электроприводом.
В результате электродвигатель останавливается. Поскольку контакты 7,9 остаются
замкнутыми, сохраняется возможность работы электродвигателя в обратном направлении.
3. Контроллеры
3.1. Основные сведения
Контроллер – от английского глагола «to control» - управлять.
Контроллером называется многоступенчатый аппарат управления с ручным приводом, подвижные контакты которого переключаются по заданной программе при повороте
его приводного вала.
В зависимости от назначения, контроллеры делятся на два вида:
1. силовые ( чаще – просто «контроллер» );
2. командоконтролеры.
Силовыми называются контроллеры, предназначенные для коммутации силовых
цепей. Токи в силовых цепях составляют единицы – десятки ампер. Например, контролле
ры серий КВ1 и КВ2 коммутируют токи от 10 до 60 А.
Командоконтроллерами называются контроллеры, предназначенные для коммутации цепей управления. Токи в таких цепях составляют десятые доли - единицы ампер.
Например, командоконтроллеры серий КВ0, КН и КТ рассчитаны на ток 10 А.
3.2. Силовые контроллеры
Силовые контроллеры применяют для пуска, реверса, регулирования скорости,
торможения и остановки двигателей в электроприводах грузоподъёмных механизмов при
мощности двигателя до 10…12 кВт и электроприводах якорно-швартовных механизмов
при мощности до 20 кВт.
Различают два вида силовых контроллеров:
1.барабанные;
2.кулачковые.
Силовой барабанный контроллер
Силовой барабанный контроллер изображен на рис. 9.33.
295
Рис. 9.33. Силовой барабанный контроллер: 1 – медные сухарики; 2 – неподвижные
контакты; 3 – стальная рейка; 4 – зажимы; 5 – маховик; 6 – вал; 7 – кулачковые шайбы; 8 –
медные пластины
Контроллер имеет литой корпус, закрытый крышкой с резиновым уплотнением. С
маховиком 5 механически связан вертикальный вал 6, на котором смонтированы кулачковые изоляционные шайбы 7 с привинченными к ним медными подвижными контактами 8.
Эти контакты выполнены в виде сегментов разной длины, напротив которых распо
ложены на стальной рейке 3 изолированные от нее неподвижные контакты 2. Каждый такой контакт на одном конце конце имеет сухарик – привинченный медный съемный контакт 1, а на другом – зажимы 4 для подключения кабелей.
Сегменты расположены по высоте барабана в определенном порядке.
Принцип действия контроллера состоит в следующем.
При повороте барабана сухарики 1 cкользят по сегментам 8, замыкаясь или размыкаясь с ними, что приводит к необходимым переключениям в схеме управления электроприводом.
Барабанные контроллеры имеют следующие недостатки:
1.большой вес и габариты;
2.недостаточно плотный скользящий контакт между подвижными и неподвижными контактами.
В 60-е годы ХХ века на смену барабанным контроллерам пришли кулачковые.
Силовой кулачковый контроллер
Устройство силового кулачкового контроллера показано на рис.9.34.
296
Рис. 9.34. Силовой кулачковый контроллер:
а – общий вид; б – контактное устройство;
1 – дугогасительный рог; 2 – полюсные наконечники; 3 – асбоцементная камера;
4 – подвижный контакт; 5 – суппорт; 6 – пружина контакта; 7 – рычаг; 8 – ролик;
9 – пружина; 10 – дугогасительная катушка; 11 – сердечник катушки; 12 – неподвижный контакт
С маховиком контроллера в виде штурвала ( рис. 9.34, а, нижняя проекция ) механи
чески связан вал, на котором смонтированы кулачковые шайбы с переменным профилем
( отсюда название этого типа контроллера – кулачковый ).
Против каждой кулачковой шайбы на неподвижной изоляционной панели расположены контактные устройства ( рис. 9.34, б ).
Контактное устройство представляет собой рычаг 7, на одном конце которого на
оси закреплен подпружиненный суппорт 5 с подвижным контактом 4. На втором конце
рычага размещён ролик 8, находящийся во впадине шайбы. На этот конец рычага давит
пружина 9, заставляя подвижный контакт 4 надавливать на неподвижный контакт 12.
При повороте маховика ролик 8 выходит из впадины шайбы и попадает на её выступ. При этом шайба надавливает на ролик, заставляя рычаг повернуться по часовой
стрелке вокруг оси. Верхний край рычага сжимает пружину 9, а нижний отводит подвижный контакт 4 от неподвижного 12, контакты размыкаются.
Углы поворота вала с шайбами фиксируются в определенных положениях с помощью храпового устройства. Профиль кулачковых шайб определяет программу управления
электроприводом – пуск, первая скорость, вторая скорость, остановка и т.п.
Дугогасительное устройство постоянного тока состоит из последовательной искро
гасительной катушки 10, сердечника катушки 11, полюсных наконечников 2, дугогаситель
ного рога 1 и асбестоцементной камеры 3.
На переменном токе дугогашение обеспечивается установкой между кулачковыми
элементами асбестоцементных перегородок, которые препятствуют перекрытию дугой
рядом расположенных полюсов аппарата.
Контактные устройства цепей управления устроены и работают аналогичным обра
зом, но их контакты – не пальцевые, а мостиковые и без дугогашения.
4. Контакторы
Основные сведения
Коммутация ( от лат. сommutatio - перемена ) – переключение электрических цепей
297
Контактором называется электромагнитный аппарат дистанционного действия,
предназначенный для частых переключений силовых электрических цепей.
Контакторы предназначены для выполнения следующих основных операций по
управлению судовыми электроприводами:
1. пуск и остановка;
2. изменение скорости;
3. изменение направления вращения ( реверс );
4. электрическое торможение двигателей.
На судах контакторы работают в тяжелых условиях: при повышенной вибрации,
сотрясениях, ударах и наклонах, высокой влажности и колебаниях температуры.
Поэтому к конструкции контакторов предъявляются повышенные требования: простота устройства, износоустойчивость, влаго- и нагревостойкость, брызго- и водозащищенность, способность устойчиво работать при кренах и дифферентах.
4.2. Классификация контакторов
Контакторы классифицируются по таким основным признакам:
1. по роду тока – на контакторы постоянного, переменного и постоянно-переменного тока;
2. по числу полюсов ( контактов ) – одно-, двух- и трехполюсные;
3. по положению главных контактов – с замыкающими, размыкающими и теми и
другими одновременно;
4. по номинальному току главных контактов ( в зависимости от типа и величины
контактора ) и др.
4.3. Основные системы контакторов
К основным системам контакторов относятся:
1. главных контактов;
2. вспомогательных контактов;
3. электромагнитная;
4. дугогасительная.
Рассмотрим эти системы подробней.
4.4. Устройство и принцип действия контактора
Рассмотрим устройство и принцип действия контактора, изображенного в упрощен
ном виде ( рис. 9.35 ).
Система главных контактов состоит из двух главных контактов - неподвижного 1 и
подвижного 2.
Система вспомогательных контактов включает в себя подвижный контакт 4 и неподвижные контакты 10-11 и 12-13.
В электромагнитную систему входят сердечник 6 с катушкой 7 и якорь 5.
Дугогасительная система, для упрощения объяснения, на рис. 9.35 не показана, но
ее устройство и принцип действия объясняются ниже.
В исходном положении ( рис. 9.35, а ) катушка 7 обесточена, отключающая пружи
на 9 притягивает нижнюю часть якоря к изоляционной плите 14.
Главные контакты 1 и 2 разомкнуты, а контактная пружина 3 сжата между верхней
частью якоря и контактом 2 с небольшим усилием.
Подвижный контакт 4 замыкает вспомогательные контакты 10 и 11, два других таких контакта 12 и 13 разомкнуты.
298
Рис.9.35. Электромагнитный контактор: 1 – неподвижный контакт; 2 – подвижный
контакт; 3 - контактная пружина; 4 – подвижный вспомогательный контакт;
5 – поворотный якорь; 6 – сердечник электромагнита; 7 – катушка электромагнита;
8 – гибкая перемычка; 9 – отключающая пружина; 10-11, 12-13 - неподвижные
контакты; 14 – изоляционная плита ( основание )
Если на катушку 7 подать напряжение, катушка создаст в сердечнике 6 магнитный
поток. В результате якорь 5 притянется к сердечнику ( рис. 9.35, б, в ). При этом подвижный контакт 2 замкнется с неподвижным контактом 1, контакты 10-11 разомкнутся, а 1213 замкнутся.
На рис 9.35, б показано промежуточное положение якоря, при котором между
нижней частью якоря и сердечником сохраняется воздушный зазор. В этом положении отключающая пружина 9 растянута не полностью, а контактная пружина 3 сжата не полностью, и поэтому сила давления контакта 2 на контакт 1 невелика.
На рис. 9.35, в показано конечное положение якоря, при котором нижняя часть
якоря плотно прижата к сердечнику ( нет воздушного зазора ), а контактная пружина 3
заставляет подвижный контакт 2 плотно прижаться к неподвижному 1.
При снятии питания с катушки 7 магнитный поток в сердечнике исчезнет и якорь 5
под действием отключающей пружины 9 и собственного веса отпадет от сердечника. При
этом главные контакты 1 и 2 разомкнутся, а вспомогательные переключатся: контакты 1011 замкнутся, а 12-13 разомкнутся ( рис. 9.35, а ).
Основное назначение контактной пружины 3 состоит в том, чтобы обеспечить необходимое по условиям эксплуатации нажатие подвижного контакта 2 на неподвижный 1.
Кроме того, она выступает как амортизатор, смягчая удар подвижного контакта по неподвижному при включении контактора.
Степень сжатия регулировочной пружины можно изменять при помощи регулировочной гайки ( на рис. 9.35 не показана ).
В рассмотренном контакторе применена магнитная система с поворотным якорем
( более подробно – ниже ). Осью, на которой поворачивается якорь, здесь служит грань
призмы.
4.5. Назначение контактов
Контакты предназначены для непосредственной коммутации электрических цепей.
В зависимости от того, в каких цепях находятся контакты, различают главные и вспомога
тельные контакты.
Главные контакты предназначены для коммутации силовых цепей. К силовым цепям относят цепи с токами в десятки и сотни ампер, например, цепи обмотки якоря двигателей постоянного тока, обмоток статора и ротора 3-фазных асинхронных двигателей и
др.
299
Часто такие цепи называют цепями сильного или главного тока.
Вспомогательные контакты предназначены для коммутации цепей управления, сиг
нализации и контроля. К цепям управления относят цепи катушек контакторов и реле,
сигнализации – сигнальных лампочек и звуковых приборов ( звонков, ревунов и т.п. ),
контроля – тепловых и температурных реле, конечных выключателей и т.п.
Значение тока в таких цепях не превышает нескольких десятков ампер ( обычно
же - доли ампера или единицы ампер ). Поэтому такие цепи часто называют цепями слабо
го тока.
Устройство
Конструкции контактов чрезвычайно разнообразны. В контакторах судового испол
нения применяют, в основном, контакты двух типов:
1. пальцевые;
2. мостиковые.
Рис. 9.36: пальцевые ( а ) и мостиковые ( б ) контакты; А – провал контактов;
В – раствор контактов; 1 – подвижный мостиковый контакт; 2 – неподвижный контакт
Пальцевые контакты по форме напоминают согнутый палец, т.е. имеют изогнутую
форму ( рис. 9.36, а ). Такая форма обеспечивает перекат и проскальзывание одного кон
такта по другому при включении контактора. Это приводит к стиранию изолирующей
оксидной пленки и грязи с поверхности контакта, т.е. к самоочистке контактов.
Кроме того, места прилегания контактов и их размыкания отдалены друг от друга
( на рис. 9.36, а, место прилегания расположено выше ). Это означает, что поверхность
контактов в месте прилегания более ровная, чем в месте размыкания, в котором контакты
обгорают и оплавляются вследствие действия дуги.
Оплавление приводит к тому, что площадь соприкосновения контактов резко умень
шается, поэтому переходное сопротивление ( между подвижным и неподвижными контак
тами ) и , соответственно, нагрев контактов увеличивается. В результате возможно приваривание контактов друг к другу ( сваривание контактов ).
Чтобы уменьшить износ , на медные контакты наваривают серебряные накладки в
виде плоских круглых пятачков. Серебро почти не окисляется и переходное сопротивление таких контактов изменяется незначительно. Однако серебро мягче меди, поэтому эти
контакты изнашиваются быстрее и стоят дороже.
В последнее время во многих типах современных контакторов применяют более
износостойкие металлокерамические контакты.
Мостиковые контакты ( рис. 9.36, б ) по форме напоминают мостик, соединяющий
два берега ( в данном случае – два неподвижных контакта ). У таких контактов перекатыва
ние и проскальзывание минимально, поэтому для предотвращения образования оксидной
пленки поверхность мостиковых контактов часто покрывается тонким слоем серебра.
300
4.6. Изображение контактов
При изображении контактов применяют следующие правила:
1. подвижные контакты изображается в виде отрезка прямой, наклоненной под углом
30º к горизонтали ( вертикали );
2. неподвижные контакты изображаются в виде отрезка прямой, составляющей продолжение изображения провода, либо в виде двух отрезков прямых, расположенных под
углом 90º;
3. на схемах контакты изображаются в положении, принятом за начальное, при котором схема обесточена;
4. допускается выполнение контактов в зеркальном изображении.
Ниже изображены основные типы контактов контакторов:
1. замыкающий ( рис. 9.37, а );
2. размыкающий ( рис. 9.37, б );
3. переключающий ( рис.9.37, в ).
Каждый тип контакта может иметь два изображения, в зависимости от того, как
расположены на схеме провода, подходящие к неподвижным контактам. Например, на
рис. 9.37, а изображен один и тот же тип контакта – «замыкающий», на левой части этого
рисунка провода, подходящие к неподвижным контактам 2 и 3, расположены горизонталь
но, а на правой – вертикально.
Рис. 9.37. Контакты: замыкающий ( а ), размыкающий ( б ) и переключающий ( в );
1 – подвижный контакт; 2,3 – неподвижные контакты; F – сила, действующая на
подвижный контакт при включении контактора
Название того или иного типа контакта зависит от того, какое положение займёт
подвижный контакт после включения контактора.
Для этого применяют такое правило:
при включении контактора сила F действует на подвижный контакт в направлении сверху вниз или слева направо.
Поясним это на примерах.
На рис. 9.37, а ( левая часть ) подвижный контакт 1 в начальном состоянии разомкнут, однако при включении контактора он под действием силы F займет горизонтальное
положение . При этом он соединит через себя неподвижные контакты 2 и 3, т.е. замкнет
электрическую цепь, отсюда название – «замыкающий».
Аналогично, на правой части рисунка 9.37, а подвижный контакт 1 в начальном
состоянии разомкнут, но после включения контактора он под действием силы F займет
вертикальное положение и соединит через себя неподвижные контакты 2 и 3.
Подвижный контакт 1 на рис. 9.37, б в начальном состоянии замкнут , однако при
включении контактора он займет вертикальное ( левая часть рис. 9.37, б ) или горизонтальное ( правая часть рис. 9.37, б ) положение, т.е. разомкнет электрическую цепь, отсюда название – «размыкающий».
Подвижный контакт 1 на рис. 9.37, в в начальном состоянии образует электрическую цепь с неподвижным контактом 2, однако при включении контактора он переключа-
301
ется и образует электрическую цепь с неподвижным контактом 3, отсюда название –
«переключающий».
4.7. Электромагнитная система контакторов
В общем случае электромагнитная система контактора состоит из 4-х элементов (
рис. 9.55 ):
1. скобы;
2. якоря;
3. катушки;
4. сердечника.
По характеру движения якоря различают 2 типа контакторов:
1. с поворотным якорем ( рис. 9.38, а, б );
2. прямоходовые ( рис. 9.38, в, г ).
Рис. 9.38. Магнитные системы контакторов: а, б – с поворотным якорем; в, г – с
прямоходовым якорем ( 1 – скоба, 2 – якорь, 3 – катушка, 4 – сердечник ); стрелками показано направление движения якорей при включении контакторов
При подаче питания в контакторах первого типа якорь поворачивается на определенный угол, т.е. совершает криволинейное движение, в контакторах второго типа –
перемещается вверх или вниз, т.е. совершает поступательное движение.
В контакторах с поворотным якорем осью, вокруг которой поворачивается якорь,
служит грань трехгранной призмы ( рис. 9.38, а ) или стальная цилиндрическая ось (
рис.9.38, б). Направление движения якоря при подаче питания на катушку обозначено
стрелками.
4.8. Катушки контакторов
У контакторов постоянного тока якорь и скоба имеют форму плоских пластин, а
сердечник якоря – цилиндрическую ( круглую ) форму. На сердечник надевается катушка,
поэтому форма отверстия внутри катушки контактора постоянного тока повторяет форму
сердечника ( т.е. отверстие – круглое ).
У контакторов переменного тока якорь и сердечник выполняются в виде буквы
302
«Ш», причем форма поперечного сечения якоря и сердечника – прямоугольная ( квадратная ). Катушка надевается на средний стержень сердечника, поэтому отверстие внутри
катушки имеет квадратную форму.
Кроме того, катушки контакторов постоянного тока вытянуты в длину, а контакторов переменного тока, наоборот, имеют приплюснутую прямоугольную форму.
Катушки контакторов называются втягивающими. Они обеспечивают включение и
удержание якоря в притянутом состоянии. При отключении катушки якорь возвращается
в исходное состояние под действием отключающей пружины ( у прямоходовых контакторов ) и собственного веса ( у контакторов с поворотным якорем ). При этом контакты размыкаются ( или переключаются ).
Втягивающая катушка контакторов постоянного тока питается постоянным током,
переменного тока – переменным или постоянным током. В последнем случае переменный
ток сети предварительно выпрямляется при помощи полупроводниковых диодов.
Материал катушек контакторов – медные изолированные проводники. Диаметр
и число проводников зависят от мощности контактора и составляют от десятых долей мм
до 2-3 мм и от сотен до нескольких тысяч витков.
4.9. Короткозамкнутые витки
Через катушки контакторов переменного тока протекает переменный синусоидальный ток. Это означает, что в моменты времени, когда ток в катушке проходит через нулевые значения, якорь контактора под действием отключающей пружины и собственного
веса стремится отпасть.
Однако из-за механической инерции якорь не успевает полностью отпасть от сердечника и при восстановлении тока в катушке вновь притягивается к нему. В результате
якорь непрерывно вибрирует и гудит. При вибрации ослабевает контактное нажатие, а
также увеличивается ток в катушке. В результате возможно сваривание контактов, а срок
службы катушки резко сокращается.
Для устранения описанного явления на крайние стрежни Ш-образного сердечника
устанавливают короткозамкнутые медные или латунные витки. Эти витки обычно охваты
вают 2/3 или половину ( рис. 9.39 ) сечения стержня.
Рис. 9.39. Короткозамкнутый виток: Ф – магнитный поток катушки; Фв –
магнитный поток короткозамкнутого витка.
4.10. Дугогасительная система контакторов
При размыкание электрической цепи, как правило, возникает дуговой разряд ( дуга
) между контактами.
Открытая дуга имеет высокую температуру ( до 5000 – 10 000º К ), что приводит к
выделению большого объема светящихся газов и перегреву самих контактов.
Поверхность контактов обгорает, оплавляется, делается неровной, бугристой. Площадь прилегания контактов уменьшается, что приводит к увеличению переходного сопротивления контактов и усилению их нагрева. При этом увеличивается износ контактов и
сокращается срок службы аппарата.
Кроме того, в пламени дуги происходят опасные для аппаратов химические процес-
303
сы. Пары меди контактов, попадая в пламя дуги, окисляются там при высокой
температуре и поглощают кислород воздуха. Образующийся при этом азот соединяется с
парами воды и кислородом, образуя азотную кислоту HNO3. Капли этой кислоты могут
образовать проводящие «мостики» между токоведущими частями в таких местах, куда ни
дуга, ни ее пламя не могут попасть.
Для гашения дуги применяют дугогасительные устройства, использующие разные
принципы гашения:
1. магнитное дутье, при помощи дугогасительной катушки;
2. гашение при помощи дугогасительных камер;
3. гашение дуги в масле, и др.
На транспортных судах нашли применение первые два способа, на судах с электродвижением – все три.
Гашение дуги магнитным дутьем
При магнитном дутье используется дугогасительная катушка, включаемая последовательно с контактами и расположенная в непосредственной близости с ними ( рис. 9.40 ).
Рис. 9.40. Магнитное гашение электрической дуги: 1 – электрическая дуга; 2 –
дугогасительная катушка; 3 – сердечник катушки; 4 – полюсные наконечники ; 5 –
контакты ( нижний – подвижный, верхний – неподвижный ); 6 – дугогасительная
камера; 7 – дугогасительный рог; F – электромагнитная сила, действующая на дугу
Принцип магнитного гашения дуги состоит в следующем.
Ток, протекающий через контакты 5 и витки катушки 2, создает магнитный поток,
замыкающийся через сердечник катушки 3, полюсные наконечники 4 ( в виде металличе
ских плоских пластин - «щёк» ) и воздушный промежуток между ними. Направление сило
вых линий магнитного поля катушки найдено по правилу охвата катушки и обозначено
штриховыми линиями.
Правило охвата применяется для определения направления магнитного потока
катушки с током и состоит в следующем: если правой рукой охватить катушку так,
чтобы четыре вытянутых пальца руки располагались по направлению тока в ней, то
отогнутый большой палец покажет направление магнитных силовых линий в катушке.
При размыкании контактов возникает дуга, которая проводит ток прежнего направления. Дугу можно рассматривать как проводник с током, находящийся в магнитном поле.
На такой проводник действует электромагнитная сила Лоренца, направление которой находят по правилу левой руки.
Правило левой руки применяется для определения направления электромагнитной
силы, действующей на проводник с током и состоит в следующем: если левую руку распо
ложить так, чтобы магнитные силовые линии поля входили в ладонь, а четыре вытяну-
304
тых пальца располагались по направлению тока, то отогнутый большой палец левой руки
покажет направление электромагнитной силы.
В данном примере эта сила F направлена вверх от контактов. Под действием этой
силы дуга быстро перемещается по контактам от места возникновения к к верхним краям,
а затем перебрасывается одним концом ( на рис. 9.40, б – правым ) на дугогасительный
рог 7.
Одновременно дуга как бы выдувается магнитным полем вверх и вталкивается в
узкую часть дугогасительной камеры 6.
Данный способ гашения дуги был объяснен на примере контактора постоянного
тока.
Однако этот способ применяется также в контакторах переменного тока с тяжелыми условиями работы – частыми включениями и отключениями. В таких условиях работа
ют электроприводы грузовых лебедок и кранов.
В этих контакторах через дугогасительную катушку протекает переменный ток.
Однако электромагнитная сила F= В*I* имеет одно и то же направление при в любой
полуволне такого тока. Это объясняется тем, что в отрицательную полуволну переменного тока одновременно изменяется как направление тока в дуге, так и направление силовых линий магнитного поля дуги.
Алгебраическое объяснение этому такое:
в положительную полуволну F = (+ В)*(+I)* > 0, в отрицательную F = (- В)*(-I )* > 0.
4.11. Гашение дуги в дугогасительных камерах
Гашение дуги в дугогасительных камерах применяется как на постоянном, так и на
переменном токе. Физические процессы, возникающие при этом, имеют много общего, но
есть и некоторые отличия. Поэтому гашение дуги при помощи камер рассмотрим поочередно для постоянного, а затем переменного тока.
Вне зависимости от рода тока, корпуса камер изготовляются из дугостойких материалов – асбоцемента ( применялся ранее, сейчас запрещен ), керамики и др.
4.12. Гашение дуги в контакторах постоянного тока
Выше ( рис.9.40, а ) было показано, что под действием электромагнитной силы F
дуга выдувается в узкую часть дугогасительной камеры 6 ( рис.37, б, нижний рисунок ),
длина дуги при этом сильно увеличивается, дуга растягивается. Это увеличивает поверх
ность теплоотдачи, а значит, охлаждает дугу. Кроме того, часть тепла отбирается у дуги
стенками щели дугогасительной камеры. В результате дуга быстро остывает и гаснет.
Из сказанного следует, что дуга, перемещаясь по поверхности контактов, не успевает сильно нагреть их и на рабочую часть контактов почти не действует. Наиболее сильно обгорают верхние, нерабочие части контактов и съёмный дугогасительный рог. Этот
рог по мере обгорания заменяют новым.
4.13. Гашение дуги в контакторах переменного тока
В контакторах переменного тока основным способом гашения дуги является приме
нение дугогасительных камер с деионной решеткой ( рис. 9.41 ). Корпус камеры изготов
лен из дугостойкого материала – асбестоцемента, керамики и др. ( на рис. 9.41 корпус не
показан ).
305
Рис. 9.41. Гашение дуги в камере с деионной решеткой: 1 – подвижный контакт, 2
– неподвижный контакт; 3 – стальные пластины ( решетка ), f – электродинамические силы
Такая камера так же, как камера контактора постоянного тока, имеет узкую щель, в
верхней части которой устанавливаются омедненные стальные пластины 3, не касающие
ся одна другой. Эти пластины как бы образуют решетку, отсюда название – деионная решетка. Расстояние между пластинами – не менее 2 мм.
Принцип действия такой камеры состоит в следующем.
Выдуваемая внутрь камеры дуга попадает на изолированные стальные пластины и
разбивается на ряд коротких дуг. Каждая из них после этого движется самостоятельно –
одна быстрее, другая медленнее. При этом образуются П-образные контуры, в которых
электродинамические силы f cтремятся сместить опережающие дуги вверх, а отстающие –
вниз. Дуга растягивается, что увеличивает поверхность теплоотдачи, а значит, охлаждает
дугу.
Кроме объясненного электродинамического эффекта, в металлической решетке про
исходит электрофизический процесс - деионизация пламени дуги.
5. Реле тока и напряжения
5.1. Основные сведения
Реле тока и напряжения применяют в электрических цепях для контроля величины
тока и напряжения. Реле тока рассмотрены ранее ( см. п 4. «Судовые распределительные
устройства и коммутационно-защитная аппароатура», пп. 4.31 «Реле тока» )
Реле напряжения применяют в узлах защиты электроприводов постоянного и пере
менного тока по снижению напряжения ( см. ниже ).
5.2. Реле напряжения
Основные сведения
Реле напряжения представляют собой разновидность защитных реле. Они делятся
на 2 вида:
1. реле минимального напряжения;
2. реле максимального напряжения.
Устройство и принцип действия реле напряжения
Устройство и принцип действия реле напряжения такой же, как и реле тока, за одним исключением: на сердечнике размещена катушка напряжения, выполненная тонким
проводом и имеющая большое число витков ( до нескольких тысяч ). Кроме того, эта катушка включается параллельно цепи, напряжение которой контролируется.
Реле минимального напряжения предназначены для отключения контролируемой
цепи при недопустимом снижении напряжения на ней ( провале напряжения ). Применение этих реле обязательно в схемах судовых и береговых электроприводов. Более подробные сведения о реле минимального напряжения приведены ниже в 1.3.2 «Защита по сниже
306
нию напряжения «.
Реле максимального напряжения отключают контролируемую цепь при недопустимом повышении напряжения на ней ( заброс напряжения ). На практике забросы напряжения случаются гораздо реже, чем провалы и имеют непродолжительный характер, т.е. не
опасны для работы электроприводов.
Реле максимального напряжения применялись в электроприводах грузовых лебедок на постоянном токе на судах типа «Ленинский комсомол». На этих судах наблюдалось
такое явление: при спуске груза одновременно несколькими лебедками двигатели лебедок
переходили в режим рекуперативного торможения с возвратом энергии в сеть. При этом
генераторы судовой электростанции переходили в двигательный режим и отключались
при помощи реле обратного тока. Судно обесточивалось.
Для того, чтобы избежать обесточиваний, параллельно якорям двигателей включались катушки реле напряжения. Как только при спуске груза напряжение на якоре увеличивалось до 235…240 В ( за счет увеличения противоэ.д.с обмотки якоря на больших
скоростях ), реле напряжения срабатывало и отключало двигатель лебедки от сети.
6. Промежуточные реле
Основные сведения
Промежуточные реле применяются в системах управления электроприводами
постоянного и переменного тока.
Они предназначены для выполнения следующих функций:
1. передача команд от низковольтных органов управления к аппаратуре основной
цепи управления;
2. усиление сигналов команд и размножение командных импульсов.
3. связь между бесконтактными элементами судовой автоматики и выходными
цепями систем управления электроприводами.
6.2. Промежуточное реле типа МКУ-48
В качестве примера рассмотрим реле типа МКУ-48, имеющее 2 пары переключающих контактов ( рис. 9.42 ).
307
Рис. 9.42. Промежуточное реле типа МКУ-48:
а – устройство; б – электрическая схема;
на верхнем рисунке: 1 – отключающая пружина; 2 – якорь; 3 – контактные группы
( контакты ); 4 – сердечник; 5 – катушка;
на нижнем рисунке: 1, 2, 3, 4, 5, 6 – номера выводов контактов; 7, 8 – номера выводов катушки
В исходном состоянии напряжение на катушке 5 реле отсутствует, якорь 2 оттягивается от сердечника4 пружиной 1 ( рис. 9.42, а ). Замкнуты пары контактов 1-2 и 4-5.
При подаче напряжения на катушку реле якорь притягивается, подвижные контакты 1 и 4 переключаются, образуя новые цепи: 1-3 и 4-6.
Мощность, потребляемая катушкой, около 3 Вт на постоянном токе и 5 В*А на
переменном. Напряжение катушки 12, 24, 48, 60, 110 и 220 В постоянного тока и 24, 110,
127, 220 и 380 в на переменном. Габариты реле 64,5х25 мм, масса – 360 г, зачехленного –
600 г.
7. Реле времени
7.1. Основные сведения
Реле времени предназначены для создания выдержки времени при коммутации
слаботочных цепей управления, сигнализации и контроля.
В зависимости от принципа действия, различают пять типов реле времени:
1. электродвигательные;
2. электромеханические
3. электромагнитные;
308
4. бесконтактные;
5. пневматические.
7.2. Электродвигательные реле времени
В электродвигательных реле выдержка времени создается за счет замедления,
получаемого в редукторе синхронного двигателя и реле .
Реле позволяет устанавливать различную выдержку времени в шести или
трех независимых цепях. Диапазон уставок выдержки времени зависит от исполнения
реле и может быть от 2 сек до 24 ч.
Недостатком реле является наличие большого числа движущихся частей, что умень
шает надежность и увеличивает трудозатраты на обслуживание.
Поэтому на судах электродвигательные реле времени не применяются.
7.3. Электромеханические реле времени
Основным элементом электромеханических реле времени является механический
замедлитель – часовой или маятниковый механизм.
Электромеханическое реле времени с анкерным ( часовым) механизмом показано
на рис. 9.43.
Рис. 9.43. Электромеханическое реле времени с анкерным ( часовым) механизмом :
1 – груз; 2 – ось; 3 – шестерня; 4 – зубчатая рейка; 5 – винт; 6 – пружина; 7 –
- рычаг; 8 – цилиндрический сердечник ; 9 – контакты; 10 – храповое колесо
Реле работает так.
При подаче напряжения на катушку электромагнита соленоидного типа сердечник
8 втягивается и через рычаг 7 стремится переместить рейку с косыми зубьями 4 по часовой стрелке в направлении контактов 9. При этом пружина 6 сжимается.
Рейка 4 своими зубьями зацеплена с храповым колесом 10, кторое через систему
зубчатых колес 3 удерживается от быстрого перемещения анкерным механизмом 2.
Скорость вращения шестерни 3 определяется частотой колебаний маятника 1,
подвешенного к оси 2: за одно колебание маятника шестерня поворачивается на один зуб.
Частота колебаний маятника зависит от положения груза 1: чем выше груз, тем
меньше длина маятника и тем больше частота его колебаний. Таким образом, при
поднятии груза 1 время прохождения рейки 4 до замыканеия контактов сокращается, а
при опускании - увеличивается.
При снятии напряжения с обмотки электромагнита рейка 4 под действием пружины
6 возвращается в исходное положение. Этот процесс происходит без замедления, так как
косые зубья рейки и храпового колеса этому не препятствуют.
309
Таким образом, в реле времени с анкерным механизмом замедление происходит
только при срабатывании.
Уставку времени этого реле изменяют перемещением груза 1 на маятнике и винтом
5, который определяет величину хода рейки 4.
Диапазон уставок выдержки времени зависит от исполнения реле и может быть
от 0,5 сек до 10 сек.
В зависимости от типа реле, его катушка может включаться в сеть как постоянного,
так и переменного тока.
7.4. Электромагнитные реле времени
Следует сразу же отметить два отличия электромагнитных реле от электродвигательных и электромеханических, рассмотренных выше:
1. катушка реле питается только постоянным током;
2. выдержка времени реле начинается с момента отключения катушки от сети.
Напомним, что катушки электродвигательных и электромеханических могли питаться как постоянным, так и переменным током, а выдержка времени начиналась с момен
та подачи питания на катушку.
Электромагнитные реле применяют в схемах на переменном токе, но в этом случае
катушку реле включают в сеть через выпрямительный мостик.
Рис. 9.44. Электромагнитное реле времени: а ) – устройство реле; б ) влияние
демпфера на время отпускания реле; 1 - катушка; 2 – сердечник; 3 – гильза;
4 – возвратная пружина ; 5 – регулировочная гайка; 6 – якорь; 7 - прокладка
немагнитная
Электромагнитное замедление основано на применении демпфера – элемента, замедляющего электромагнитные процессы. В качестве такого демпфера используют медную или алюминиевую гильзу 3 ( кольцо ), надетую на стержень магнитопровода 2
( рис. 9.44, а ) или непосредственно на катушку реле. На рис. 9.44, а якорь реле 6 показан в
притянутом состоянии.
Выдержка времени в этом реле начинается с момента отключения катушки реле от
питающей сети. При отключении катушки 1 её уменьшающийся магнитный поток Ф индуктирует в гильзе ( демпфере ) ЭДС взаимоиндукции ( как во вторичной обмотке транс
форматора, если считать катушку реле первичной обмоткой ).
Согласно правилу Ленца, ток в гильзе от этой ЭДС имеет такое направление, что
создаваеиый им магнитный поток гильзы направлен согласно с убывающим магнитным
потоком Ф. Это замедляет убывание потока в магнитопроводе реле так, что он достигнет
величины, при которой реле отпускает якорь за время большее, чем при отсутствии демпфера.
Это иллюстируется графиками убывания магнитного потока ( рис. 9.44, б ) при отсутствии демпфера ( график 1 ) и при наличии демпфера ( график 2 ). Сравнивая эти
графики, видим, что время отпускания якоря реле с демпфером t
больше времени
отп 2
310
отпускания этого реле без демпфера t
отп1
.
Время отпускания реле ( рис. 9.44, а ) можно регулировать, изменяя толщину латунной ( немагнитной ) прокладки 7 на якоре 6: с уменьшением толщины прокладки время
t
увеличивается. Это объясняется тем, что с уменьшением немагнитного зазора δ
отп 2
( толщина прокладки ) магнитное сопротивление потоку понижается и величина его возра
стает. Поэтому время на его уменьшение до значения Ф
, при котором происходит отпускание якоря, увеличивается.
Еще одним средством регулирования t
отп
отп
является изменение натяжения возврат
ной пружины 4 посредством гайки 5: чем меньше натяжение пружины, тем больше t
отп
( рис. 9.44, график 3 ).
Электромагнитные реле постоянного тока типа РЭВ 810 имеют замедление от 0,25
до 3,8 с.
7.5. Электронные реле времени
Электронные реле используют свойство конденсатора медленно заряжаться или
разряжаться через резистор.
Эти реле имеют 2 основных узла:
1. элемент формирования выдержки времени, построенный на конденсаторе;
2. обычное электромагнитное реле.
В качестве примера рассмотрим принципиальную схему конденсаторного реле.
Рис. 9.45. Принципиальная схема конденсаторного реле времени
В состав реле входят источник питания GB, транзисторы VT1 и VT2, реле напряже
ния KV, выключатель питания SA1 и управляющий контакт SA2.
В исходном состоянии контакты SA1 и SA2 замкнуты. Конденсатор С заряжен от
источника питания с полярностью, обозначенной на схеме. Транзистор VT1 открыт, поскольку по цепи «+GB»– R2 – SA2 – SA1 – « - GB»протекает ток базы этого транзистора.
Через резистор R2, эмиттер-коллектор открытого VT1, резистор R1 и выключатель
SA1 протекает ток, создающий на R2 небольшое падение напряжения. Это напряжение
является входным для транзистора VT2, но недостаточно для того, чтобы открыть его.
Поэтому ток через катушку реле KV не протекает.
Если управляющий контакт разомкнуть, то основная цепь базового тока VT1 через
контакт SA1 нарушится. Однако появится новая цепь базового тока VT1:
«+С» - R2 – эмиттер-база VT1 – « -С», обусловленная разрядом конденсатора С.
Когда конденсатор разрядится, транзистор VT1 закроется, а VT2 откроется.
Реле KV включится, а его контакты переключатся: левый замкнётся, а правый
разомкнётся.
Таким образом, выдержка времени этого электронного реле равна промежутку времени от момента размыкания контакта SA2 до момента переключения контактор реле
KV. На практике эта выдержка равна 3…5 с.
7.6. Пневматические реле времени
311
Устройство пневматического реле времени показано на рис. 9.46.
Рис. 9.46. Пневматическое реле времени:
1- сердечник электромагнита; 2 – катушка электромагнита; 3 – рычаг электромагни
та; 4 – мембрана; 5 – регулировочный винт; 6 – калибровочное дроссельное отвер
стие; 7 – обратный клапан; 8 – камера воздушная; 9 – пружина; 10 – шток; 11 –
возвратная пружина; 12 - контакты
Основным элементом реле является замедлитель в виде воздушной камеры 8, разде
ленной на верхнюю и нижнюю части эластичной мембраной 4.
При подаче напряжения на катушку 2 якорь электромагнита ( виде буквы «Т» ) опу
скается вниз и втягивается в сердечник 1. При этом вместе с якорем опускается шток 10 под действием силы собственного веса и пружины 9.
Но это процесс происходит медленно, по мере заполнения верхней части воздушной камеры 8 наружным воздухом через калибровочное дроссельное отверстие 6.
Когда шток 10 опустится на якорь электромагнита ( в виде буквы «Т» ), он своим
рычагом 3 надавит на верхний подвижный контакт 12, который замкнется с нижним контактом.
Таким образом происходит замедление при срабатывании реле ( при подаче питания на катушку электромагнита ).
При снятии питания с катушки электромагнита якорь ( в виде буквы «Т» ) вместе
со штоком 10 под действием возвратной пружины 11 поднимется, т.е. вернется в исходное
положение. Этот процесс проходит быстро, благодаря открытию обратного клапана 7, так
что воздух из камеры 8 будет выходить не только через отверстие 6, но и через отверстие
обратного клапана 7.
Уставка времени срабатывания реле выполняется посредством винта 5, путем изменения размера дроссельного отверстия 6: чем меньше отверстие, тем больше время срабатывания.
Промышленность выпускает пневматические реле типа РВП ( Р – реле, В - времени, П - пневматическое ) с замедлением до 180 с.
7.7. Графическое изображение контактов реле времени
При графическом изображении контактов реле времени основное изображение
контактов, принятое для контакторов и реле, дополняется полусферой в виде “парашюта”,
расположение которой позволяет определить тип контакта.
При этом используется мнемоническое “правило парашюта” : если при перемещение контакта купол “парашюта” наполняется “воздухом”, контакт переключается с задерж
кой по времени.
Различают 6 типов контактов реле времени ( рис. 9.47 ):
1. замыкающий с выдержкой времени при замыкании ( рис. 1 );
312
2.
3.
4.
5.
6.
замыкающий с выдержкой времени при размыкании ( рис. 2 );
размыкающий с выдержкой времени при замыкании ( рис. 3 );
размыкающий с выдержкой времени при размыкании ( рис. 4 );
замыкающий с выдержкой времени при замыкании и размыкании ( рис. 5 );
размыкающий с выдержкой времени при замыкании и размыкании ( рис. 6 ) .
Рис. 9.47. Графическое изображение контактов реле времени
В качестве примера рассмотрим контакт на рис. 9.47-1.
В исходном состоянии реле отключено и контакт разомкнут. При включении реле
контакт станет перемещаться сверху вниз, при этом “купол” будет “наполняться воздухом”, потому контакт замкнётся не сразу, а с выдержкой времени.
Если отключить реле, контакт с “куполом”станет перемещаться снизу вверх, при
этом наружная, выпуклая часть “купола” свободно обтекается “воздухом”, поэтому выдер
жки времени при перемещении контакта нет. Значит, этот контакт размыкается без выдер
жки времени.
На рис.9.47-2 в исходном состоянии реле отключено, контакт реле разомкнут. При
включении реле контакт станет перемещаться сверху вниз, при этом “купол” будет обтекаться “воздухом”, потому контакт замкнётся без выдержки времени.
Если отключить реле, контакт с “куполом”станет перемещаться снизу вверх, при
этом внутренняя , выпуклая часть “купола” станет наполняться “воздухом”, поэтому контакт разомкнется не сразу, а с выдержкой времени.
Рассуждая аналогично и применяя “правило парашюта”, легко разобраться в принципе работы остальных четырех контактов.
8. Реле с герметизированными магнитоуправляемыми контактами
( герконы )
Основные сведения
Слово «геркон» образовано первыми частями слов «герметизированный» и «контакт». По сравнению с обычными электромагнитными реле, герконы имеют повышенные
быстродействие и надежность, что становиттся понятным при изучении устройства и
принципа действия герконов ( рис. 9.48 ).
Герконовые реле
Устройство простейших герконовых реле показано на рис. 9.48.
Рис. 9.48. Герконовые реле: а ) управляемое током в катушке; б ) управляемое
постоянным магнитом; 1 – контакты; 2 - колба
313
Герконовое реле состоит из герметичной стеклянной колбы 2, в которую запаяны
два контакта 1. Сами контакты выполнены в виде плоских пружинящих пластин ( полос )
из сплава пермаллой, обладающего высокой магнитной проницаемостью.
Если геркон поместить внутрь катушки с током ( рис. 9.48, а ) или вблизи постоян
ного магнита ( рис. 9.48, б ), то внешний магнитный поток катушки или магнита, проходя
через контакты 1, намагничивает их. При этом происходит смыкание ( замыкание ) кон
тактов.
При отключении катущки или удалении постоянного магнита контакты геркона,
блпгодаря своей упругости, разомкнутся.
Рис. 9.49: а ) – многоконтактное герконовое реле; б ) применение герконов в тепло
вых реле
Если внутрь катушки поместить несколько герконов, то получится многоконтактное герконовое реле ( рис. 9.49, а ).
Герконы применяют в тепловых реле ( рис. 9.49, б ). В этом случае постоянный маг
нит помещают на биметаллической пластине, которая при нагревании изгибается в сторону геркона, и его контакты замыкаются
Помимо герконовых реле с замыкающими контактами существуют герконовые реле с размыкающими контактами. Такое реле кроме катушки включает в себя постоянный
магнит.
Пока на катушку реле не подано напряжение, контакты геркона под действием
магнитного поля постоянного магнита замкнуты. При подаче напряжения на катушку
магнитное поле катушки действует навстречу магнитному полю постоянного магнита,
резко ослабляя его. Поэтому контакты реле под действием сил упругости размыкаются.
Особенности герконов:
1. большая частота включения, т.к. нет массивного якоря ( до 100 включений в
сек);
2. высокая надежность ( т.к. контакты коммутируют в инертном газе или вакууме,
т.е. не загрязняются и не окисляются );
3. возможность применения во взрывоопасных средах ( т.к. переключение контактов происходит внутри герметично запаянного стеклянного баллона );
4. малая коммутационная и перегрузочная способность и низкая электрическая
прочность межконтактного промежутка.
Герконы применяются в системах управления, контроля и сигнализации, например,
в электроприводах в качестве выходного элемента логических устройств, включающего
или отключающего электродвигатель ( вместо более сложного тиристорного усилителя ).
Кроме того, герконы применяются в системах защиты от несанкционированного
проникновения в жилые и служебные помещения ( от воришек ).
Их можно применять в путевых выключателях. В этом случае на контролируемом
объекте помещают постоянный магнит, при приближении которого к геркону контакты
реле переключаются.
На судах герконы нашли ограниченное применение.
314
9. Электротепловые реле
9.1. Основные сведения
Электротепловыми называют реле, работа которых основана на тепловом действии электрического тока.
В соответствии с законом Джоуля-Ленца: количество тепла, выделяемого в провод
нике, прямо пропорционально квадрату тока I, сопротивлению проводника R и времени t
2
протекания тока через проводник ( Q = I Rt ).
При коротком замыкании в нагревателе теплового реле сразу выделяется большое
количество тепла, но биметаллическая пластина не может равномерно прогреться по все
му объему ( явление тепловой инерции ).
Поэтому срабатывание тепловых реле происходит не мгновенно, а через время,
составляющее 4…20 мин от момента начала перегрузки.
Иначе говоря, тепловые реле имеют тепловую инерцию, поэтому их нельзя применять для защиты цепей от токов короткого замыкания.
Защита при коротком замыкании защита должна срабатывать мгновенно ( предохранители, автоматические выключатели, реле максимального тока мгновенного действия ).
Различают два типа электротепловых реле;
1. токовые;
2. температурные.
9.2. Токовые тепловые реле
У этих реле чувствительным к теплу элементом является биметаллическая пластина ( рис. 9.50 ).
Рис. 9.50. Биметаллическая пластинка
Биметаллическая пластина состоит из двух слоев металлов с разными коэффициентами линейного расширения α 1 и α 2 . Слои металла соединяются либо сваркой, либо прокаткой в горячем состоянии. При нагревании пластина изгибается в сторону металла с
меньшим коэффициентом линейного расширения. Изгиб пластины используется для воздействия на контакты реле.
При производстве биметаллических пластин применяют материалы с низким коэффициентом линейного расширения, например, железониеклевый сплав инвар, и с высоким
коэффициентом – хромоникелевые, молибденоникелевые и немагнитные стали.
Устройство и принцип действия теплового реле
В упрощенном виде электротепловое реле изображено на рис. 9.51, а, б.
315
Рис. 9.51. Электротепловое реле:
а – при нормальном токе; б – при токе, превышающем нормальный; в – времятоковая характеристика реле;
1 – биметаллическая пластина; 2 – нагреватель; 3 – защелка; 4 – пружина; 5 – толка
тель; 6 – подвижный контакт; 7 – теплоизоляционная камера
Как следует из рис. 9.51, а биметаллическая пластина 1 заключена вместе с нагревателем 2 в теплоизоляционную камеру 7. Эта камера позволяет свести к минимуму
передачутепла от нагревателя к остальным деталям реле.
Верхний конец пластины прикреплен к неподвижной Г-образной скобе из изоляционного материала, нижний же конец упирается в горизонтальное плечо двухплечей защелки 3. Снизу это плечо подпружинено пружиной 4.
На вертикальном плече защелки закреплен подвижный контакт 6, который при нормальном токе ( рис. 9.51, а ) электрически соединен с неподвижным, и через эти два кон
такта протекает ток I.
При перегрузке количество тепла нагревателе увеличивается, биметаллическая
пластина изгибается, ее нижний конец переместится вправо ( рис. 9.51, б ) и освободит
защелку 3. Последняя под действием пружины 4 повернется и разомкнет контакты реле.
На практике это приводит к отключению двигателя. Поскольку при неработающем
двигателе ток через нагреватель не протекает, биметаллическая пластина остывает. Но
войти в зацепление с защелкой пластина сама не сможет ( реле без самовозврата ).
Для возврата защелки в исходное положение нужно нажать пальцем на кнопку толкателя 5.
Основной характеристикой теплового реле является время-токовая ( рис. 9.51, в ).
По горизонтальной оси отложена кратность контролируемого тока ( по отношению
к номинальному ), по вертикальной – время срабатывания теплового реле.
Тепловые реле выбираются по условию: номинальный ток выбранного реле
должен равняться номинальному току двигателя или любого иного потребителя.
В этом случае кратность тока нагрузки I ср / I н = 1, и как следует из рис. 9.51, в,
характеристика реле не пересекается с пунктирной вертикальной линией, для которой
I ср / I н = 1. Это означает, что время срабатывания реле t ср = ∞, иначе говоря, если через
реле протекает его номинальный ток, реле не сработает.
Если ток нагрузки станет больше номинального, реле сработает. При этом время
срабатывания реле обратно пропорционально квадрату тока.
Такая зависимость объясняется тем, что тепловое реле срабатывает всегда при
одном и том же количестве выделенного в нагревателе тепла:
316
2
Q = I R t = const,
где: I – ток нагрузки;
R – cопротивление нагревателя;
t – время протекания тока через нагреватель.
Отсюда следует
2
t= Q/I R
Приняв Q = const ( т.к. реле срабатывает всегда при одном и том же количестве
выделенного тепла ) и R = const ( примем сопротивление нагревателя не зависящим от
температуры ), получим :
2
t≡ 1/I ,
т.е. время срабатывания теплового реле обратно пропорционально квадрату тока ( а не
току в первой степени ).
Как следует из рис. 56, в, если ток нагрузки в 2 раза больше номинального , т.е.
I ср / I н = 2, время срабатывания реле составит t 1 , если в 4 раза больше, т.е. I ср / I н =
= 4 – время срабатывания t 2 .
Тепловые реле встраивают в магнитные пускатели, станции управления и др., т.е.
реле находится в одном месте, а потребитель электроэнергии, например, электродвигатель
- в другом.
Это означает, что электротепловые эти реле контролируют нагрев косвенно - через
ток приемника электроэнергии, а не непосредственно, через температуру приемника.
Поэтому при работе в северных широтах холодное реле, имеющее температуру
окружающей среды, при возникновении перегрузки двигателя может не успеть сработать,
и двигатель сгорит.
В то же время в тропиках нагретое воздухом реле будет срабатывать даже тогда,
когда перегрузки двигателя нет. Нормальная работа электропривода станет невозможной
из-за постоянных отключений электродвигателя.
Развитие полупроводниковой техники позволило создать температурные реле, кото
рые реагируют непосредственно на нагрев приемника электроэнергии.
9.3. Температурные тепловые реле
У этих реле чувствительным к теплу элементом является полупроводниковый
прибор – терморезистор.
Терморезистор – прибор, сопротивление которого зависит от температуры прибора.
Терморезисторы встраивают в лобовые части обмотки статора двигателя. Это
означает, что в любой терморезистор имеет такую же температуру, что и обмотка статора.
В температурных тепловых реле применяют два типа терморезисторов – позисторы
и термисторы. Позисторы имеют положительный температурный коэффициент сопротивления, а термисторы – отрицательный.
Это означает, что при нагреве сопротивление позисторов увеличивается ( рис. 9.52,
а, график 1 ), а термисторов – уменьшается ( рис. 9.52, а, график 2 ).
Поскольку терморезисторы не имеют контактов, их применяют в сочетании с обычными электромагнитными реле KV ( рис. 9.52, б ).
317
Рис. 9.52: а - зависимость сопротивлений терморезисторов R от температуры Tº
( 1 – для позистров, 2 – для термисторов ); б – принципиальная схема температурной защиты электродвигателя; в – схема включения контактора КМ при использовании термистора; г – то же, при использовании позистора
Реле питается от судовой сети через понижающий трансформатор TV и выпрямительный мостик UZ. Последовательно с катушкой реле включены три терморезистора RK.
Контакты реле KV включены в цепь катушки линейного контактора двигателя КМ.
Схема на рис. 9.52, в применяется для позисторов и работает так: при нормальной
температуре обмотки двигателя сопротивление позисторов мало, поэтому ток в катушке
реле KV достаточен для включения реле. Реле замыкает свой контакт KV1 и поэтому
линейный контактор включен, двигатель работает.
При повышении температуры обмотки сопротивление позисторов увеличивается,
ток в катушке реле KV уменьшается. Якорь реле отпадает, контакт KV1 размыкается,
катушка КМ обесточивается, а двигатель отключается от сети.
Схема на рис. 9.52, г применяется для термисторов. При нормальной температуре
обмотки двигателя сопротивление термисторов велико, поэтому ток в катушке реле KV
мал и недостаточен, чтобы якорь реле притянулся к сердечнику. Поэтому контакт KV3
замкнут, через катушку КМ протекает ток. Контактор включен, двигатель работает.
При повышении температуры обмотки сопротивление термисторов уменьшается,
ток в катушке реле KV увеличивается. Реле включается и размыкает свой контакт KV2.
Катушка КМ обесточивается, а двигатель отключается от сети.
9.4. Промышленные типы токовых электротепловых реле
Промышленность выпускает токовые электротепловых реле в виде серии ТРТ
( Т – тепловые, Р – реле, Т - типизированного ряда ).
Рассмотрим устройство реле серии ТРТ ( рис. 9.53 ).
318
Рис. 9.53. Тепловое реле серии ТРТ: 1 – корпус; 2 – механизм уставки по току; 3 –
кнопка ручного возврата реле; 4 – ось изоляционной колодки; 5 – мостиковый контакт; 6 –
неподвижные контакты ( 2 шт. ); 7 - колодка изоляционная; 8 – цилиндрическая пружина;
9 -– биметаллическая пластина; 10 – ось биметаллической пластины
Реле имеет пластмассовый корпус 1, в котором смонтированы все детали. Биметаллическая пластина 9 имеет U- образную форму и укреплена на оси 10. Эта пластина
состоит из двух параллельных металлических полосок из разнородных материалов, между
которыми запрессован нагреватель из нихромовой проволоки.
На правый конец пластины опирается цилиндрическая пружина 8. Другой конец
пружины опирается на пластмассовую треугольную уравновешенную колодку 7, на которой размещен подвижный контакт 6. Выше контакта 6 расположены два неподвижных
контакта 5. Колодка 7 может поворачиваться вокруг оси 4.
Левый конец биметаллической пластины соединен с механизмом уставки 2, позволяющим регулировать ток уставки реле путем изменения первоначальной деформации пла
стины.
Нагревательный элемент реле включается в рассечку линейного провода, поэтому
ток нагрузки I протекает через нагреватель, а ток управления I у - через контакты теплового реле . В качестве тока управления может быть ток катушки линейного контактора
асинхронного двигателя.
При токах перегрузки, равных или больших токов уставки, верхняя часть U-образной пластины смещается вправо и поворачивает изоляционную колодку, которая скачкообразно поворачивается против часовой стрелки вокруг оси 4. В результате подвижный и
неподвижные контакты размыкаются, двигатель отключается от сети.
Данный тип реле имеет самовозврат, т.е. после остывания биметаллическая пластина возвращается в исходное состояние. Время самовозврата - не более 180 с. При необходимости ускорить возврат реле в исходное состояние можно нажать кнопку 3 самовозврата, но не ранее чем через 60 с после срабатывания реле.
Регулирование уставки ( тока срабатывания реле )
Уставку тепловых реле серии ТРТ изменяют при помощи механизма уставки. При
перемещении рукоятки 3 механизма по часовой стрелке ( рис. 9.53 ) левый край U-образной пластины перемещается влево, и наоборот. Тем самым регулируют номинальный ток
реле в пределах ± 15% номинального тока, в 3 ступени по ± 5% каждая.
319
Значение номинального тока и другие данные реле указаны на медной бирке на кор
пусе реле.
10. Реле контроля неэлектрических величин
10.1. Основные сведения
Реле контроля неэлектрических величин или, иначе, механические реле предназначены для контроля неэлектрических величин: давления, уровня, частоты вращения, изменения направления вращения и т.п.
Реле контроля неэлектрических величин называются датчиками.
В настоящее время на смену механическим реле пришли электронные. Тем не менее на многих судах мирового флота механические реле по-прежнему применяются.
10.2. Реле давления
Реле давления предназначены для работы в сосудах, не сообщающихся с атмосфеи реагируют на изменение давления рабочего тела ( воздуха, воды, масла и т.п. ) в системе.
Устройство реле давления показано на рис. 9.54.
Рис. 9.54. Реле давления: 1 – мембрана; 2 – поршни; 3 – подушки; 4 – регулировочные пружины; 5 – регулировочные гайки; 6 – рычаги контактной системы; 7 – опоры
контактной системы; 8, 13 – подвижные контакты; 9, 10, 11, 12 – неподвижные контакты
На рис. 9.54 изображено сдвоенное реле давления, состоящее из двух одинаковых
частей – реле минимального давления ( слева ) и реле максимального давления ( справа ).
Давление рабочего тела ( воды, воздуха, масла ) через резиновую мембрану 1 пере
дается на поршни 2, которые упираются своими колонками в подушки 3. На подушки на
жимают пружины 4, надетые на вертикальные стержни. В верхней части стержней нареза
на резьба и надеты регулировочные гайки 5.
С подушками связаны рычаги контактной системы. Один конец рычага ( правый
для левого реле ) лежит на опоре 7, второй ( левый ) через толкатель воздействует на подвижный контакт 8 микропереключателя ( микропереключатель – это выключатель с очень
малым ходом подвижных частей ).
При изменении давления, например, увеличении, оба поршня с подушками перемещаются вверх, вследствие чего рычаги 6 контактной системы станут поворачиваться – на
левом реле по часовой стрелке, на правом – против. В результате подвижный контакт 8
будет оставаться замкнутым с контактом 9, а подвижный контакт 13 разомкнется с неподвижным 11. Поскольку пара контактов 13 – 11 находится в цепи катушки линейного кон
тактора двигателя, последний отключится и остановится.
При понижении давления происходит обратный процесс. При снижении давления
320
до минимального контакт 8 замыкается с контактом 10, в результате чего двигатель включается.
Из сказанного следует, что правое реле – это реле максимального давления, левое –
минимального. Это же подтверждает положение регулировочных гаек 5 – левая гайка
находится вверху стержня, поэтому левая регулировочная пружина сжата слабо. В то же
время правая гайка опущена ниже левой, т.е. сильней зажата. Поэтому правая регулировоч
ная пружина зажата сильней, чем левая.
Поэтому переключение контактов 8 и 9 будет происходить в диапазоне малых давлений, а контактов 13 и 11 – в зоне больших.
Следует отметить, что мембрана 1 выполняет две функции:
1. через нее передается давление рабочего тела на остальную часть реле;
2. она служит для предотвращения проникновения воды, масла, воздуха внутрь
корпуса реле.
Промышленные типы реле давления
Промышленность выпускает разные типы реле давления. На судах широко приме
няются сдвоенные реле давления типа РДК-57 ( Р – реле, Д – давления, К – корабельное ).
При помощи этого реле на судах контролируют давление воздуха, воды и масла.
Рис. 9.55. Реле давления типа РДК-57:
1 – корпус реле; 2 – поршень; 3 – регулировочные гайки; 4 – кожух; 5 - регулиро
вочные пружины; 6 – микропереключатель; 7 – стержень; 8 – подушка; 9 –
мембрана
В корпусе реле размещены два одинаковых реле – максимального и минимального
давления ).
Устройство реле показано на рис. 9.55.
В корпусе 1, закрытом кожухом 4, находятся две мембраны 9 ( на рис. 9.55 видна
одна ). К ним снизу подведена трубка, соединенная с сосудом, в котором давление может
изменяться.
Сверху к мембранам прилегают два поршня 2, упирающиеся своими колонками в
подушки 9. На подушки нажимают две пружины 5, надетые на стержни 1. Сжатие пружин
регулируется гайками 3.
При увеличении давления в системе оба поршня приподымаются вверх, вследствие
321
чего контакты микропереключателя 6 максимального давления размыкаются, отключая
насос или компрессор.
При снижении давления оба поршня опускаются вниз, вследствие чего контакты
микропереключателя минимального давления замыкаются, включая насос или компрессор.
Следует отметить, что замыкание и размыкание контактов одного и того же микропереключателя происходит при разных значениях давления. Так, на одном из судов были
получены такие результаты:
2
1. реле минимального давления замыкало контакты при Р = 2кг*с / см и размыка2
2
ло при давлении Р = 2, 5 кг*с / см ( разница – 0,5 кг*с / см );
2
2. реле максимального давления размыкало контакты при Р = 4 кг*с / см и замы2
2
кало при давлении Р = 3,6 кг*с / см ( разница – 0,4 кг*с / см );
.
Недостаток данного реле состоит в том, что реле не имеет шкал с делениями для
регулирования минимального и максимального давления. Для регулирования приходится
использовать контрольный манометр со шкалой.
10.3. Реле скорости
Реле скорости (частоты вращения ) предназначено для контроля частоты вращения.
На судах отечественной постройки такие реле применяют в системах дистанционного
пуска вспомогательных и аварийного дизель-генераторов.
В зависимости от принцип действия, различают три типа реле скорости:
1. центробежное;
2. индукционное;
3. электронное.
Ниже рассматриваются первые два типа этих реле. Модификаций электронных
реле скорости довольно много, их схемы достаточно сложны и должны изучаться на
конкретном судне.
Рис. 9.56. Центробежное реле скорости: 1 – вал, 2,3 – втулки; 4, 5, 6, 7 – рыча
ги; 8 - пружина; 9 – рычаг; 10- ось рычага; 11, 12 – подвижные контакты, 13, 14, 15, 16 –
неподвижные контакты
Принцип действия реле скорости основан на применении центробежных сил F ,
1
322
стремящихся отбросить вращающиеся массы в направлении от оси вращения к периферии
( наружу ). Поэтому данное реле называется центробежным.
На вращающемся валу 1 находятся муфты 2 и 3. Муфта 2 посажена на вал свободно, муфта 3 жестко закреплена на валу при помощи гайки ( справа ).
К муфтам 2 и 3 шарнирно присоединены рычаги 4, 5, 6 и 7, образующие параллелограм. В местах соединения рычагов 4-5 и 6-7 находятся грузики массой m1 = m 2 . На валу
между втулками находится пружина 8.
В положении, показанном на рис.61, вал вращается с определенной скоростью, при
которой Г-образный рычаг 9 воздействует на подвижные контакты 11 и 12 с силой F 2 .
При этом контакт 11 замыкает через себя неподвижные контакты 13 и 14. Контакты 15, 16
разомкнуты.
При увеличении скорости вала центробежные усилия F 1 , действующие на грузики,
возрастают, в результате форма параллелограма становится вытянутой. При этом подвижная муфта 2, сжимая пружину 8, перемещается вдоль вала вправо. Рычаг 9 поворачивается
вокруг оси 10. При этом подвижный контакт 11 размыкает контакты 13 и 14, а контакт 12
– соединяет контакты 15 и 16.
Индукционное реле
Индукционное реле ( рис.9.57 ) предназначено для контроля скорости и направления вращения вала. Такие реле применяются как в схемах автоматического управления
дизелями и турбинами, так и ( реже ) в схемах торможения противовключением асинхронных короткозамкнутых двигателей.
Рис. 9.57. Реле скорости и направления вращения: 1 – постоянный магнит; 2 –
обмотка ротора; 3 – ротор; 4 – пружины; 5 – контактная система
Основной элемент реле – постоянный магнит с полюсами С и Ю, сидящий на валу.
Этот магнит помещен внутрь полого ротора 3 с короткозамкнутой обмоткой 2. Ротор связан с рычагом, управляющим подпружиненными подвижными контактами.
При вращении постоянного магнита к короткозамкнутой обмотке индуктируется
э.д.с., под действием которой в обмотке возникает ток ротора. Взаимодействие этого тока
и вращающегося магнитного потока полюсов С и Ю приводит к образованию электромагнитного момента ротора. Ротор поворачивается и передает через рычаг усилие на контакты 5, которые при достижении валом определенной скорости переключаются.
При изменении направления вращения вала ротор повернется в другую сторону, в
результате контакты 5 переключатся в ином порядке.
Данное реле называют индукционным, т.к. принцип действия реле основан на использования явления электромагнитной индукции ( если перемещать магнитное поле отно
323
сительно проводника, в последнем индуктируется э.д.с. либо, наоборот, если перемещать
проводник в магнитном поле, в проводнике наводится э.д.с. ).
10.4. Реле уровня
Реле уровня предназначены для контроля уровня жидкости в ёмкостях, соединённых с атмосферой.
Различают 3 вида реле уровня:
1. поплавковые;
2. индукционные;
3. конденсаторные ( с элементами электроники ).
Ниже рассматривается поплавковое реле уровня типа РП 52.
Рис. 9.58. Поплавковое реле уровня: 1 – поплавок; 2 – рычаг; 3 – крышка цистерны;
4 – подшипник; 5 – тяга; 6 – контактное устройство
Это реле предназначено для дистанционного автоматического включения ( отключения ) насосов цистерн пресной или забортной воды – при понижении уровня насос вклю
чается, при повышении – отключается.
Чувствительным ( к уровню воды ) элементом реле является пустотелый поплавок
1, закреплённый на конце рычага 2. Второй конец рычага соединен с пальцем, который
может поворачиваться в подшипнике 4.
Подшипник смонтирован на основании, закрепленном на крышке цистерны 3,
сквозь прорезь в которой пропущен рычаг. С пальцем рычага при помощи тяги 5 соединён
валик контактного устройства 6, состоящего из двух микропереключателей.
При изменении уровня жидкости поплавок перемещается вверх или вниз, что в
крайних положениях вызывает переключение контактов соответствующего микропереклю
чателя.
Недостатком реле этого типа является возможность ложного срабатывания при качке судна. Чтобы избежать таких срабатываний, в схемах управления электроприводами
насосов используют дополнительное реле времени, задерживающие на 6…8 с включение
насоса при изменении уровня при качке.
6. Тормозные устройства
11.1. Основные сведения
Тормозные устройства предназначены для механического затормаживания вала
исполнительного механизма с целью точной остановки механизма и для его удержания в
строго фиксированном положении.
На судах тормозные устройства применяют в электроприводах механизмов, работа
которых связана с преодолением действия силы тяжести, а именно – в грузоподъемных и
якорно-швартовных устройствах.
В зависимости от особенностей конструкции, различают три типа тормозных
устройств:
1. ленточные;
324
2. дисковые;
3. колодочные.
Составная часть тормозных устройств – тормозные электромагниты различаются:
1. по роду тока, питающего намагничивающую катушку – на электромагниты по
стоянного и переменного тока ( одно- и трехфазного );
2. по величине перемещения ( ходу ) якоря – на длинноходовые ( с вертикальным
перемещением якоря до 120 мм ) и короткоходовые ( с горизонтальным перемещением
якоря на 3…5 мм ).
11.2. Ленточные тормозные устройства
Ленточное тормозное устройство показано на рис. 9.59.
Рис.9.59. Ленточное тормозное устройство:
1 – катушка тормозного электромагнита; 2 – якорь тормозного электромагнита; 3 –
стальная тормозная лента; 4 – двухплечий поворотный рычаг; 5 – груз; 6 – тормозной
шкив; 7 – ось поворота рычага
Тормозная лента 3 охватывает тормозной шкив 6. Оба конца ленты 3 прикреплены
к рычагу 4. На ленте с внутренней стороны, обращенной к тормозному шкиву, наклеены
фрикционные ( тормозные ) накладки из материала с высоким коэффициентом трения
( ферродо ). Тормозной шкив посажен на вал двигателя.
В исходном состоянии ток в катушке 1 отсутствует, поэтому под действием груза 5
левое плечо рычага опущено, а правое приподнято. В таком состоянии лента 3 плотно
охватывает тормозной шкив 6, вал двигателя заторможен.
При протекании тока через катушку электромагнита 1 якорь 2 втягивается внутрь
катушки и поворачивает рычаг 4 вокруг оси 7 по часовой стрелке. Тормозная лента ослабе
вает и освобождает тормозной шкив – двигатель растормаживается.
В процессе эксплуатации тормозные накладки стираются, поэтому тормозной момент постепенно уменьшается. Это может привести к тому, что вал двигателя перестанет
затормаживаться. В этом случае, до замены накладок, можно вновь увеличить тормозной
момент перемещением груза 5 влево.
На судах ленточные тормозные устройства нашли ограниченное применение, в
основном, в электроприводах якорно-швартовных устройств.
11.3. Дисковые тормозные устройства
Дисковые тормозные устройства широко применяются в электроприводах судовых
грузоподъемных и якорно-швартовных устройств.
На судах иностранной постройки применяют однодисковые тормоза постоянного
тока, на судах отечественной постройки – многодисковые тормоза переменного тока.
Принцип действия тормозов постоянного и переменного тока одинаков, хотя их электромагнитные системы различны.
325
Торможение происходит в результате трения вращающихся дисков с наклеенным
фрикционным материалом о стальные диски - промежуточные и нажимной. Последние
надеты на штыри, укрепленные внутри корпуса тормоза, и поэтому могут перемещаться
вдоль вала двигателя в обе стороны на несколько миллиметров.
Вращающиеся диски надевают на втулки, которые закреплены на валу двигателя.
Втулки имеют шлицы, в которые входят зубья на ободе диска. Такой способ соединения
дисков и втулок позволяет быстро снять сработавшийся диск и заменить его новым.
Между корпусом и подвижным сердечником установлена главная тормозная пружи
на, которая в обесточенном тормозе прижимает подвижные тормозные диски к неподвиж
ным и тем самым обеспечивает торможение вала электродвигателя.
При подаче напряжения на катушку электромагнита его якорь притягивается к сердечнику и сжимает пружину. При этом подвижные части тормоза отходят от неподвижных, вал электродвигателя освобождается.
В качестве примера рассмотрим устройство и принцип действия электромагнитного дискового тормоза переменного тока типа ТМО-3 ( рис. 9.60 ).
Рис. 9.60. Электромагнитный дискового тормоза переменного тока типа ТМО-3:
1 – подшипниковый щит двигателя; 2, 4 – втулки; 3 – вал двигателя; 5 – тормозные диски
( 2 шт .); 6 – штыри ( 4 шт. ); 7 – фрикционные кольца ( накладки ); 8 – промежуточные
диски ( 2 шт. ); 9 – нажимной диск; 10 – регулировочные гайки; 11 – кожух тормоза; 12 –
гайка; 13 – главная пружина; 14 – штырь; 15 – ось эксцентриковой рукоятки; 16 - съемная
эксцентриковая рукоятка; 17 – упорное кольцо; 18 – электромагнитные катушки тормоза;
19 – неподвижный диск; 20 – Ш-образное ярмо; 21 – якорь; 22 – коробка выводов; 23 – короткозамкнутые витки
Тормоз выполняется в виде отдельного устройства, прикрепляемого к специально
приспособленному для этого подшипниковому щиту 1 асинхронного двигателя со стороны, противоположной приводному механизму.
На конец вала 3 двигателя напрессована втулка 2 со шлицами на наружной поверхности . На этой втулке по шлицам свободно перемещается втулка 4 с двумя тормозными дисками 5. С обеих сторон каждого диска приклеены фрикционные кольца 7 из
материала с высоким удельным коэффициентом трения ( называется «ферродо» ).
В подшипниковый щит запрессованы четыре направляющих штыря 6, на которые
насажены два промежуточных стальных диска 8 и нажимной диск 9. Левый промежуточ-
326
ный диск 8 находится между торцом фланца двигателя и левым тормозным диском, а пра
вый - между тормозными дисками 5.
На нажимной диск 9 надавливает мощная пружина 13, которая плотно сжимает все
диски и прижимает их к стенке подшипникового щита 1. Поэтому вал двигателя заторможен.
На штырях 6 при помощи гаек 10 закреплен неподвижный диск 19. На нем смонти
рованы четыре электромагнита переменного тока , магнитная система которых состоит из
Ш-образного ярма 20, якоря 21 и катушки 18. На крайних стержнях ярма находятся корот
козамкнутые витки 23, предотвращающие вибрацию якорей при протекании переменного
тока через катушку. Якоря электромагнитов прикреплены к нажимному диску.
Однофазные катушки соединены попарно-последовательно и включены по схеме
открытого треугольника. Такое включение позволяет получить максимальное тяговое усилие. Питание к катушкам подводится через клеммную коробку 22.
Снаружи тормоз закрыт кожухом 11.
При протекании тока через катушки 18, якоря электромагнитов притягиваются к
ним. Вместе с якорями перемещается вправо нажимной диск, сжимая при этом пружину.
Промежуточные и тормозные диски раздвигаются, и вал двигателя получает возможность
свободно вращаться.
В соответствии с требованиями Правил Регистра, тормоз снабжен устройством для
ручного растормаживания вала двигателя. Оно состоит из штыря 14, ввернутого в гайку
12, расположенную с внутренней стороны нажимного диска 9. На выходящем наружу
конце штыря на оси 15 закреплена поворотная эксцентриковая рукоятка 16.
Для того, чтобы растормозить вал двигателя, рукоятку перемещают из нижнего в
верхнее положение. При этом штырь с гайкой перемещаются вправо, заставляя переместиться в том же направлении нажимной диск. Далее тормоз работает так же, как описано
выше при протекании тока через катушки.
По мере эксплуатации тормозного устройства фрикционные кольца стираются,
при этом увеличивается ход якоря и уменьшается втягивающее усилие электромагнитов.
Это приводит к нечеткой остановке груза ( проскальзывание после отключения тормоза ),
а в случае значительного стирания – к тому, что растормаживание двигателя не произойдет.
Если ход якоря больше допустимого, регулируют тормоз таким образом:
1. вручную растормаживают вал двигателя переводом рукоятки 16 из нижнего в
верхнее положение;
2. отдают регулировочные гайки 10 и перемещают нажимной диск влево на рассто
яние, при котором ход диска будет находиться в пределах, указанных в паспорте тормозно
го устройства;
3. зажимают регулировочные гайки и возвращают рукоятку 16 в нижнее положение.
При сильных ударах, сопровождающих включение или отключение тормоза, следу
ет ослабить степень сжатия пружины 13 при помощи упорного кольца 17. Через это кольцо на резьбе проходит штырь 17. При вращении рукоятки 16 по часовой стрелке кольцо
перемещается вправо, разжимая пружину. Положение неподвижного диска 19 при этом не
изменяется, т.к. оно зафиксировано при помощи гаек 10. По этой причине не изменяется и
ход якоря.
Дисковые тормозные устройства имеют от 2 до 5 тормозных дисков, ход дисков –
начальный 1…2,5 мм, максимальный ( в результате стирания на дисках тормозного мате
риала ) 2…5 мм.
В процессе ТО тормозов проверяют степень износа и чистоту фрикционных колец,
очищают от грязи внутреннюю часть тормоза при помощи ручного меха. Одновременно
подтягивают болтовые соединения, в трущиеся части добавляют смазку, заменяют диск с
изношенными накладками, измеряют сопротивление изоляции ( не менее 1МОм ).
327
11.4. Колодочные тормозные устройства
Основные сведения
Тормозными элементами в колодочных тормозах являются стальной шкив и чугун
ные тормозные колодки с приклепанными к ним фрикционными накладками. Торможение
возникает при прижимании тормозных колодок к шкиву с помощью тормозной пружины.
Привод растормаживания бывает двух видов:
1. электромагнитный;
2. электрогидравлический.
Рассмотрим поочередно оба вида тормозов.
11.5. Колодочный тормоз с электромагнитным приводом
Устройство колодочного тормоза с электромагнитным приводом показано на рис. 9.61.
Рис. 9.61. Колодочный тормоз с электромагнитным приводом:
1 – тормозной электромагнит; 2 – пружина; 3 – тормозной шкив; 4 – рычаги; 5 –
тормозные колодки; 6 – винт; 7 – регулировочная гайка
Этот тормоз состоит из основания, на котором закреплены на осях два рычага 4. К
средней части к рычагам прикреплены на осях чугунные тормозные колодки 5 с приклёпанными к ним изнутри фрикционными накладками Эти колодки прижаты к поверхности
стального тормозного шкива 3. Шкив 3 закреплен на шпонке на валу электродвигателя.
Рычаги 4 в верхней части имеют сквозные отверстия с прямоугольной резьбой, через которые проходит горизонтальный шток тормозного электромагнита в виде винта 6.
Внутри отверстий нарезана резьба с разным шагом – в одном отверстии с левым, в другом
– с правым.
На винт надета мощная цилиндрическая пружина 2, концы которой соединены с
каждым рычагом при помощи двух полуосей.
В исходном состоянии ток в катушке электромагнита отсутствует и пружина сжата
с определенным усилием. Это усилие через рычаги передается на тормозные колодки, которые плотно прижимаются к поверхности тормозного шкива, вал двигателя заторможен.
При подаче напряжения на катушку электромагнита якорь электромагнита втягивается и заставляет винт 6 повернуться на несколько оборотов. При этом верхние концы рычагов 4 раздвигаются ( т.к. отверстия в них имеют разную резьбу – левую и правую ) и
освобождают тормозные колодки 5. Пружина растягивается и усилие в ней возрастает.
Тормозные колодки освобождаются, вал двигателя оттормаживается.
328
При снятии напряжения, винт под действием пружины поворачивается в обратном
направлении, рычаги 4 возвращаются в исходное состояние и прижимают тормозные
колодки к поверхности стального шкива.
Для регулирования тормозного момента служит гайка 7 на правом конце винта 6.
Колодочные тормозные устройства выпускаются с электромагнитами постоянного
и переменного тока. В зависимости от типа устройства, диаметр тормозного шкива составляет d = 100…700 мм, максимальный ход тормозных колодок h = 3…4,5 мм, тормозной
момент Mт = 11…8000 Н*м.
Область применения на судах: электроприводы грузоподъемных и якорно-швартовных устройств.
11.6. Колодочный тормоз с электрогидравлическим приводом
Этот тормоз содержит электрогидравлический толкатель, в котором перемещение
исполнительного органа ( штока ) происходит под давлением масла.
В судовых электроприводах применяются электрогидравлические толкатели серии
ТГ ( рис. 9.62 ).
Рис. 9.62. Электрогидравлический толкатель:
1 – асинхронный двигатель; 2 – корпус толкателя; 3 – поршень; 4 – цилиндр; 5 –
- верхняя крышка; 6 – промежуточная крышка; 7 – шток; 8 – каналы в корпусе
толкателя; 9 – центробежный насос; 10 – клеммная колодка двигателя; 11 – кабельная
воронка
В нижней части толкателя находится асинхронный двигатель 1 с короткозамкнутым ротором, погруженный в трансформаторное масло. Выводы обмотки статора двигателя подключены изнутри к клеммной колодке 10, а питание к ней подводится через кабель
ную воронку 11.
К верхнему фланца двигателя прикреплен толкатель 2, корпус которого заполненный маслом. В нижней части корпуса расположено колесо 9 центробежного насоса, закреп
ленное на валу двигателя.
В корпус толкателя встроен цилиндр 4, внутри которого находится поршень 3 со
329
штоком 7. Верхний конец штока имеет квадратную головку, при помощи которой шток
связан с приводом колодочного тормоза ( привод показан на рис. 9.81 ).
Сверху цилиндр закрыт промежуточной крышкой 6, на которую опирается цилинд
рическая головка 5. Крышка 6 имеет отверстия, через которые цилиндр 4 сообщается с
вертикальными боковыми каналами 8.
Цилиндр 4, каналы 8 и нижняя часть корпуса толкателя заполнены трансформаторным маслом марки АМГ-10.
В исходном состоянии на шток 7 со стороны пружины колодочного тормоза действует сила, направленная сверху вниз. Поэтому шток 7 и поршень 3 занимают положение,
изображенное на рисунке.
При включении асинхронного двигателя центробежный насос 9 начинает вращать
ся и нагнетает масло под поршень 3. Поршень со штоком за счет избыточного давления
перемещаются вверх. Масло, находящееся над поршнем, вытесняется через отверстия в
крышке 6 в каналы 8 и далее засасывается под центробежное колесо насоса.
В результате поршень и шток поднимаются в крайнее верхнее положение и останав
ливается. Перемещение штока приводит к перемещению колодок тормоза и освобождению тормозного барабана.
В дальнейшем, при работе насоса давление масла на поршень не изменяется вследствие перепуска масла из верхней части цилиндра в нижнюю часть корпуса толкателя.
При отключении электродвигателя насос останавливается, а поршень со штоком
опустятся вниз по действием пружин колодочного тормоза и собственного веса. При этом
масло из полости над поршнем перетекает в полость под ним.
Рассмотренное устройство не позволяет регулировать время подъема и величину
перемещения штока, что может понадобиться, например, вследствие стирания тормозных
накладок на колодках. При необходимости такого регулирования толкатель дополняют
дроссельным клапаном, ход и положение которого можно регулировать.
Электрогидравлические толкатели применяются в колодочных тормозах с электрогидравлическим толкателем ( рис. 9.63 ).
Рис. 9.63. Колодочный тормоз с электрогидравлическим толкателем:
1 – тормозной шкив; 2 – колодки; 3 – рычаги; 4 – шток толкателя; 5 – пружина.
При включении электродвигателя насоса толкателя шток 4 перемещается вверх и
поворачивает Г-образный рычаг. В результате этого пружина 5 сжимается и освобождает
колодки, двигатель растормаживается.
Как следует из приведенного выше описания принципа действия толкателя ( рис.
330
9.80 ), растормаживание и затормаживание колодок происходит не сразу, а постепенно,
что обеспечивает плавность движения колодок. Поэтому толкатели особенно часто приме
няют в механизмах поворота башни крана, чтобы избежать раскачки груза, которая неиз
бежно возникает при резком растормаживании или затормаживании башни.
4. СИСТЕМЫ УПРАВЛЕНИЯ САЭП. СИСТЕМА ЕСКД. ТИПОВЫЕ УЗЛЫ, СХЕМЫ И
УСТРОЙСТВА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
1. Системы управления САЭП
1.1. Основные сведения
Под управлением электроприводом понимают выполнение операций, осуществляющих пуск, регулирование скорости, торможение, реверсирование и остановку двигателя,
а также его защиту, производимых в целях поддержания или соответствующего изменения режима работы привода.
Под системой управления электроприводом понимают электротехническое устрой
ство, предназначенное для выполнения перечисленных выше операций и изготовленное
чаще всего в виде металлического шкафа с аппаратурой управления ( контакторами, реле,
защитными устройствами, элементами автоматики и т.п. ).
В зависимости от уровня автоматизации, т.е. от степени участия человека в процессе управления, различают три вида систем управления:
1. неавтоматизированного ( ручного) управления ( сокращенного названия нет );
2. автоматизированного управления ( САУ ) ;
3. автоматического управления ( АСУ ).
Неавтоматизированное (ручное) управление осуществляют непосредственным
воздействием оператора на аппарат ручного управления: пусковой или пускорегулировоч
ный реостат, выключатель или контроллер.
В системах автоматического управления ( САУ ) управление объектом осущестля
ется без участия человека, пример – авторулевой.
В системах автоматизированного управления ( АСУ ) человек ( группа людей ) является самостоятельным звеном управления в составе системы управления, пример – система управления судовой атомной энергетической установкой.
1. 2. Элементная основа систем управления
В зависимости от элементной основы систем автоматики различают электроприводы с релейно-контактным, электромашинным и бесконтактным управлением.
В соответствии с этим можно назвать следующие применяющиеся в настоящее
время системы управления электроприводами.
Системы релейно-контакторного управления состоят из двигателя постоянного
или переменного тока, магнитного пускателя или контроллера, командоконтроллера и
ящиков сопротивлений ( в схемах на постоянном токе ).
Систему генератор—двигатель ( Г—Д ) применяют в электродвигателях большой
и средней мощности с плавным регулированием скорости в широких пределах.
Систему Г—Д с питанием цепей возбуждения от ЭМУ, которые используют в
качестве возбудителей и подвозбудителей — это так называемая каскадная система возбуждения ( рис. 9.64 ) крупных генераторов и двигателей. Каскадная система возбуждения позволяет уменьшить габаритные размеры аппаратов и облегчить процесс управления.
331
Рис. 9.64. Система Г- Д с каскадным возбуждением ( а ), система Д – Г – АД
( б ), асинхронно-вентильный каскад ( в ) и система МУ – Д ( г )
Систему ЭМУ—Д применяют в установках небольшой мощности (до 10 кВт),работающих с частым реверсированием.
Систему частотного регулирования асинхронного двигателя с использованием
машинного преобразователя частоты (система Д—СГ—АД) применяют в многодвигательных приводах с одинаковым режимом работы двигателей ( рис. 9.64, б ).
Систему тиристорный преобразователь — двигатель (ТП—Д) в настоящее время
во многих случаях используют вместо системы Г-Д.
Асинхронно-вентильный каскад служит для регулирования скорости асинхронно
го двигателя с фазным ротором на основании опорной ЭДС ротора ( рис.9.64, в). Этот и
большое число других каскадов применяют в установках большой мощности, где необходима реализация мощности скольжения асинхронного двигателя.
Система магнитный усилитель – двигатель ( МУ – Д ) позволяет с помощью малой мощности управления контролировать скорость, ток и напряжение двигателей по стоянного тока ( рис.9.64, г ). На судах применяется ограниченно, в системах автомати ки.
Система источник тока — двигатель ( ИТ—Д ) с применением преобразователя
источника ЭДС в источник тока позволяет регулировать электромагнитный момент
двигателя изменением потока полюсов и обеспечивает его работу на абсолютно мягкой
механической характеристике.
Микропроцессорные системы управления – рассматриваются ниже более подробно.
1.3. Микропроцессорные системы управления. Основные сведения
Микропроцессорные системы управления активно внедряются на современных су
дах.
Применяемые релейно-контакторные системы управления представляют собой
аппаратно реализованный алгоритм управления электроприводом, состоящий из логиче
ской и силовой частей.
Для каждого ЭП разрабатывается самостоятельная схема управления, позволяю
щая выполнять определенные функции. Эти устройства, работающие на жесткой логи
ке, имеют серьезные недостатки, которые затрудняют решение сложных задач управле
ния, не создают гибкости в работе и не решают задачи оптимизации процессов.
Такие недостатки отсутствуют у программируемых устройств логического управ
ления. К ним относятся микропроцессоры и построенные на их основе микроЭВМ, а
также программируемые контроллеры. Если в релейно-контактор-ных системах управ
332
ления ЭП используют аналоговые регуляторы с фиксированными уставками срабатыва
ния, то в микропроцессорных системах применяется цифровая информация в двоичном
коде.
Источником информации о состоянии ЭП являются датчики тока, напряжения,
температуры, скорости и др. Для обработки информации в МП сигналы с этих датчи
ков преобразуются в цифровой двоичный код. Процесс преобразования обычно осуще
ствляется в 3 этапа.
Первый этап - преобразование сигналов разной физической природу в напряжение постоянного тока.
Вторым этапом является нормализация сигнала. Это понятие включает в себя
комплекс мер по улучшению качества сигнала, повышению достоверности содержащей
ся в сигнале информации. Сюда входит усиление сигнала, подавление и фильтрация
помех, согласование уровня сигнала с номинальным уровнем преобразователя аналогкод.
Наконец, третий этап - соответственно аналого-цифровое преобразование. Так
как аналоговой величиной здесь является напряжение, то речь идет о преобразовании
напряжения в двоичный код.
В большинстве тиристорных ЭП управление силовым преобразователем осуществляется аналоговыми сигналами.
Поэтому после обработки информации МП требуется ее обратное преобразова
ние из цифровой формы в форму импульса напряжения постоянного тока требуемых уровня и полярности. Эта операция осуществляется цифроаналоговым преобразователем.
1.4. Структурная схема микропроцессорной системы управления электроприводом
В состав микропроцессорной системы управления ЭП входят следующие блоки и
устройства (рис.9.65 ):
Рис. 9.65. Структурная схема микропроцессорной системы управления
электроприводом:
УС – устройство связи; УВУ устройство связи УС со старшей по иерархии ЭВМ или с оператором.
В УС используются преобразователи кодов, пульт управления с устройством
отображения информации;
управляющее вычислительное устройство УВУ, состоящее из аппаратных
средств АС и программного обеспечения ПО.
Аппаратные средства - это по существу комплекс жестко закоммутированных
автоматов, который за счет использования специальных программ становится функцио
нальным узлом специфического применения.
333
В системе управления УВУ занимает центральное место, вырабатывая управляю
щие сигналы на основании директив, поступающих через УС от ЭВМ следующего по
иерархии уровня и сигналов с датчиков, установленных в устройствах, которые перечислены ниже;
устройство жесткой логики УЖЛ, представляющее собой систему отдельных
жестко закоммутированных блоков управляющей аппаратуры.
Эта аппаратура служит для автономного управления процессом в случае выхода
из строя ЭВМ, а также при необходимости вмешательства обслуживающего персонала
в ходе управления процессом.
В ряде случаев эти блоки или часть их участвуют в автоматическом режиме рабо
ты, если от системы требуется высокое быстродействие. Выходные сигналы УЖЛ
поступают на входы источника питания ИП и силового преобразователя СП;
управляемый источник силового питания, в качестве которого может быть управ
ляемый или неуправляемый выпрямитель.
В отдельных тиристорных преобразователях функции ИП и СП совмещают.
Жирными стрелками на рис. 9.65 отмечено направление потока электроэнергии в двига
тельном и рекуперативном режимах, светлыми - потоки информации. Управляющие сиг
налы ИП получает от УВУ и УЖЛ, в обратном направлении следует диагностическая и
сигнальная информация;
силовой преобразователь СП, обычно представляющий управляемый выпрямитель или инвертор в преобразователе частоты. Поток электроэнергии в СП также 2сторонний (в зависимости от режима двигателя).
Управляющие сигналы поступают от УЖЛ и УВУ, а в обратном направлении
следует диагностическая и сигнальная информация;
электродвигатель ЭД, включающий в себя, кроме двигателя, также датчики
скорости, тока и температуры обмоток;
передаточное устройство механизма ПУМ и рабочий орган РО механизма
(например, цепная звездочка на брашпиле).
Для выявления функциональных взаимосвязей в системе рассмотрим процесс
прохождения информации.
Основным информационным и управляющим компонентом системы является
УВУ, в качестве которого могут применяться микроЭВМ или программируемый Контроллер. На входы УВУ информация поступает от ЭВМ соседнего по иерархии уровня.
Связь УВУ с устройствами системы осуществляется с помощью аналоговых,
цифровых и импульсных сигналов.
Для этого в состав УВУ вводятся аналого-цифровые, цифроаналоговые, цифроимпульсные, импульсно-цифровые преобразователи.
Для связи с оператором применяются устройства ввода-вывода: пульт с дисплеем или без него, печатающее устройство и т. п.
На УВУ поступает информация с датчиков о ходе процессов и состоянии параметров ИП и СП. Эта информация используется для коррекции управляющих сигналов
и для контроля работоспособности.
Двигатель, передаточное устройство и рабочий орган также оборудуются датчи
ками состояния. Информация с них постоянно или по запросу подается на УВУ, где
используется в качестве сигналов обратных связей или диагностических сообщений.
1.5. Архитектура микропроцессора
Микропроцессор как управляющее устройство является составной частью в
системе управления автоматизированным ЭП. Рассмотрим сначала функциональный
состав и принцип действия МП как комплексного программно-управляемого
элемента.
334
Рис. 9.66. Структурная схема модели микропроцессора
Микропроцессор представляет собой единое устройство в виде некоторого «чер
ного ящика» ( 9.66, а ), имеющего внешние входы и выходы для рабочей информации
(данные D, D') и для команд управления данными (X).
Внутри МП происходят 2 процесса:
1. обработка данных, при котором поступающие в данные D подвергаются логическим и вычислительным операциям и в новом качестве D' выводятся из МП;
2. управление обработкой данных на основании заранее составленной программы
(X).
В соответствии с указанными процессами в составе МП можно выделить 2 основных функциональных блока - блок операций БО и блок управления БУ ( рис. 9.66, б).
Основным является блок операций, так как именно он реализует функциональное
назначение МП.
Блок управления обеспечивает правильное функционирование БО, при этом поступающая программа работы МП в виде последовательности команд X. преобразуется БУ
с учетом сигналов Yo, оповещающих о состоянии БО, в серию управляющих сигналов Y,
воздействующих на БО.
В своей работе МП взаимодействует с внешними устройствами, которые совмест
но с ним образуют микропроцессорную систему управления МСУ некоторым объектом
ОУ (рис. 9.87, в).
Источником исходных данных и программы являются соответственно запоминающие устройства данных ЗУД и команд ЗУ К.
Приемником обработанных данных служит так называемое устройство ввода-вывода УВВ, через которое обработанная цифровая рабочая информация D' в преобразованном виде как выходное управляющее воздействие Uy поступает на объект управления.
Из ОУ в УВВ поступает информация о состоянии объекта управления в виде
сигналов обратных связей Uo.
В МСУ поток рабочей информации может иметь не только прямое направление (от ЗУД и к УВВ), но и обратное (от УВВ к МП и к ЗУД). Это дает возможность
обмена информацией между ЗУД, БО и УВВ, позволяет обрабатывать данные обратных связей и запоминать результаты операций.
Совместная взаимосвязанная работа всех устройств и блоков в МСУ обеспечивается системой управляющих сигналов Yn Yo.
Необходимая согласованность действий во времени блоков МП и МСУ достигается с помощью синхронизирующих импульсов Хс, поступающих от генератора высокостабильной частоты.
2. ЕДИНАЯ СИСТЕМА КОНСТРУКТОРСОЙ ДОКУМЕНТАЦИИ. КЛАССИФИКАЦИЯ,
ПОСТРОЕНИЕ И ПРАВИЛА ЧТЕНИЯ ЭЛЕКТРИЧЕСКИХ СХЕМ
335
2.1. Основные сведения
Схемой ( от греч. Schema – наружный вид, форма ) называют чертеж, на котором
условными графическими обозначениями показаны составные части изделия или установки и соединения или связи между ними.
Схемы электроприводов применяются на стадиях их разработки, изучения и эксплу
атации.
В первой половине 20-го столетия не существовало общих правил построения схем
электрооборудования, каждый завод-изготовитель имел собственные правила. Это приво
дило к серьезным затруднениям при монтаже и наладке сложного сборного электроборудования, отдельные части которого были изготовлены на разных заводах.
Поэтому в промышленности, в том числе и электротехнической, постоянно проводилась работа по унификации ( однообразию ) правил построения схем. Эта работа завершилась введением в 70-х годах общесоюзной системы стандартов, которая получила назва
ние «Единая система конструкторской документации», сокращенно - ЕСКД.
В частности, этой системой в области электротехники установлены классификация,
построение и правила чтения электрических схем.
Единая система конструкторской документации ( ЕСКД ) – это совокупность стандартов, основная часть которой введена в 1971 г. и продолжает действовать до сих пор.
Соблюдение стандартов ЕСКД является обязательным на территории страны, нарушение
стандартов преследуется по закону ( до одного года лишения свободы ).
Следует понимать, что ЕСКД – это национальная система стандартов, действующая в пределах территории Украины и других стран СНГ. В иных странах действуют аналогичные системы – в Канаде, США, Англии, Германии, отличные от ЕСКД. Например,
резистор в стандартах Англии изображается в виде плоской пружинки ( гармошки ), в стра
нах СНГ – в виде прямоугольника, и т.п.
Поэтому Международная электротехническая комиссия ( МЭК ) проводит постоянную работу, направленную на разработку стандартов, одинаковых для всех стран.
2.2. Классификационные группы ЕСКД
Стандарты ЕСКД разбиты на 10 классификационных групп:
0 – общие положения;
1 – основные положения;
2 – классификация и обозначение изделий в конструкторских документах;
3 – общие правила выполнения чертежей;
4 – правила выполнения чертежей изделий машиностроения и приборостроения;
5 - правила обращения конструкторской документации ( учет, хранение, дублирование, внесение изменений );
6 – правила выполнения эксплуатационной и ремонтной документации;
7 – правила выполнения схем;
8 – правила выполнения документов строительных, судостроения и горных;
9 – прочие стандарты.
2.3. Система обозначений стандартов
Обозначение стандартов ЕСКД строится по классификационному принципу. В общем виде обозначение любого стандарта ЕСКД следующее:
ГОСТ 2. А – ВС – DE,
где: ГОСТ – государственный стандарт ( в сокращении );
2 – класс стандартов ( ЕСКД присвоен класс 2 );
А – номер классификационной группы;
ВС – порядковый номер стандарта в группе от 01 до 99;
DE – год регистрации стандарта.
336
Например, государственный стандарт «ЕСКД. Схемы. Виды и типы. Общие
требования к выполнению» имеет обозначение: ГОСТ 2.701 – 74.
2.4. Классификация и обозначение схем
Классификацию и обозначение схем устанавливает стандарт ГОСТ 2.701 – 74.
«ЕСКД. Схемы. Виды и типы. Общие требования к выполнению».
Ниже изложены основные положения этого стандарта.
1. в зависимости от видов элементов и связей, входящих в состав изделия, виды
схем имеют такие наименования и буквенные коды:
электрические – Э;
гидравлические – Г;
пневматические – П;
газовые – ( кроме пневматических ) – Х;
кинематические – К;
вакуумные – В;
оптические – Л;
энергетические – Р;
комбинированные ( совмещенные ) – С;
2. в зависимости от основного назначения типы схем имеют такие наименования и
цифровые коды:
структурные – 1;
функциональные – 2;
принципиальные – 3;
соединений ( монтажные ) – 4;
подключений – 5;
общие – 6;
расположения – 7;
объединенные – 0.
2.5. Краткая характеристика типов схем
Структурная схема определяет основные функциональные части изделия, их
назначение и взаимосвязи.
Рис. 1. Структурная схема электропривода
На этих схемах прямоугольниками изображают основные функциональные части
электропривода с указанием стрелками направления сигналов управления и обратных
связей. Наименование элементов установки указывают внутри прямоугольников.
В качестве примера на рис. 1 приведена структурная схема автоматизированного
электропривода постоянного тока, где AS – задающее устройство; AW – суммирующий
элемент; U – управляемый преобразователь; М – электродвигатель; ПУ – передаточное
устройство; ИО – исполнительный орган рабочей машины и BV – датчик обратной связи
по скорости.
Эти схемы разрабатываются на начальном этапе проектирования электроприводов,
а в условиях эксплуатации - для общего ознакомления с электроприводом.
В электротехнике структурная схема обозначается «Э1».
337
Функциональные схемы служат для разъяснения процессов, протекающих в отдельных функциональных цепях электропривода или в электроприводе в целом.
Отдельные элементы допускается изображать прямоугольниками. Все элементы
должны иметь наименования, обозначения или тип и соединяться между собой функциональными связями или конкретными соединениями. Электрические соединения ( кабели,
провода ) изображаются одинарными прямыми линиями, механические – пунктирными
или сдвоенными параллельными линиями.
Рис. 2. Функциональная схема электропривода
На рис. 2 приведены следующие обозначения: СИФУ – система импульсно-фазово
го управления тиристорами преобразователя U; BR – тахогенератор; RP – задающий потен
циометр; А – усилитель; LM – обмотка возбуждения двигателя М.
Эти схемы используют для изучения принципов работы электроприводов, а так
же при их наладке, контроле и ремонте в процессе эксплуатации.
В электротехнике функциональная схема обозначается «Э2».
Принципиальная ( полная ) схема определяет полный состав элементов и связей
между ними и дает детальное представление о принципах работы электропривода.
338
Рис. 3. Принципиальная электрическая схема электропривода
Сами элементы в схеме изображаются с помощью условных графических обозна
чений и располагают в порядке, облегчающем чтение схемы, без учета действительного
размещения их в установке или изделии ( разнесенным способом ).
Каждому элементу на схеме присваивается буквенно-цифровое позиционное обозначение, составленное из буквенного обозначения и порядкового номера, например КМ2
( контактор электромагнитный, второй номер ).
Поскольку элементы схемы обычно изображают разнесенным способом, например, катушка контактора – в одном месте, а его контакты – в другом , необходимо, чтобы
все его части ( катушки, главные и вспомогательные контакты ) имели одно и то же позиционное обозначение, присвоенное данному элементу, а именно: если катушка контактора
обозначена КМ2 ( КМ – общее обозначение катушек электромагнитных контакторов, 2 –
порядковый номер контактора в схеме электропривода ), то контакты этого контактора
обозначаются как КМ2.1, КМ2.2, КМ2.3 и т.д. ( т.е. 1-й, 2-й, 3-й и т.д. контакт в схеме
электропривода ).
В принципиальных схемах коммутационные элементы показывают для электроприводов в отключенном состоянии:
1. контакты электромагнитных контакторов и реле – в положении, соответствую
щем обесточенному состоянию втягивающей катушки;
2. контакты аппаратов защиты – в положении, в котором они находятся до срабатывания защиты;
3. контакты контроллеров и командоаппаратов – в нулевом положении аппаратов и при отсутствии механического воздействия на них;
339
4. рубильники и автоматы – в отключенном состоянии.
В принципиальных схемах выделяют два вида электрических цепей:
1. главные;
2. вспомогательные.
К главным относят цепи, предназначенные для подачи электроэнергии к машине
или другой части установки в целях преобразования одного вида энергии в другой или для
изменения ее параметров. Обычно к главным относят цепи обмоток якорей двигателей
постоянного тока, обмоток статоров асинхронных двигателей и т.п. Токи в таких цепях
составляют десятки и сотни ампер. На практике такие цепи также называют «силовые»
или «цепи сильного тока».
К вспомогательным относят цепи управляющих, усиливающих и информационных устройств. Обычно к таким цепям относят цепи катушек контакторов и реле, сигнальных лампочек и т.п. Токи в таких цепях составляют от десятых доли ампера до нескольких
ампер. На практике такие цепи также называют «цепи слабого тока».
В принципиальных схемах электроприводов постоянного тока главные цепи обы
чно вычерчивают в верхней части чертежа, вспомогательные – ниже главной цепи.
В схемах электроприводов переменного тока цепи главные цепи изображают в
левой части чертежа, вспомогательные – в правой.
Вспомогательные цепи представляют собой параллельные развернутые ( обычно
горизонтальные ) линии с различными полюсами на концах при постоянном токе и с раз
личными фазами на концах при переменном токе.
Для большей наглядности главные цепи следует показывать жирными линиями,
цепи управления – тонкими. Элементы, включенные в цепь, вычерчивают линиями той же
толщины, что и цепь.
Допускается функциональные группы и части схемы выделять штрихпунктирной линией.
Для упрощения схемы рекомендуется несколько линий связи сливать в общую ли
нию ( групповую ) с нумерацией каждой линии на обоих концах одинаковыми числами.
На схемах приводят текстовую информацию, содержащую различные пояснения
( например, наименования сигналов и функциональных групп, таблицы коммутации много
позиционных переключателей ).
Рис. 4. Развертка замыкания контактов командоаппарата
Если в качестве поста управления использован командоконтроллер, на схеме при
водят развертку с обозначением контактов и положений командоаппаратов ( рис. 4 ). На за
мыкание того или иного контакта в каком-либо положении ( 1-м, 2-м или 3-м ) указывает
жирная точка на вертикали, соответствующей данному положению. Например, на рис. 4
контакт К1 замкнут только в положении «0» ( в нулевом ), контакт К2 замкнут только в
340
1-м, 2-м и 3-м положениях в направлении «Подъем» и разомкнут во всех остальных.
Возможен следующий порядок чтения принципиальных схем электропривода:
1. дают краткую характеристику всех используемых в электроприводе электрических машин и аппаратов;
2. рассматривают главные цепи и цепи управления. По назначению включенных
в каждую цепь элементов определяют способы пуска, регулирования скорости и торможения, а также виды защиты элементов привода от аварийных режимов работы;
4. с помощью таблицы коммутации контактов поста управления выявляют обтекамые током цепи, а следовательно, и режимы работы электропривода при различных положениях штурвала или рукоятки поста управления.
Принципиальными схемами пользуются для изучения принципов работы электро
приводов, а также при их наладке, контроле и ремонте. Схемы служат основанием для
разработки других конструкторских документов, например, схем соединений ( монтажных
) и чертежей. Для облегчения перехода от принципиальной схемы к схеме соединений
обозначения всех элементов на обеих схемах должны строго соответствовать друг другу.
В электротехнике принципиальная схема обозначается «Э3».
Схема соединений ( монтажная ) показывает соединения внутри составных
частей изделия ( шкафов управления, магнитных станций и т.п. ) и определяет провода,
жгуты, трубопроводы, которыми осуществляются эти соединения, а также места их присо
единения и ввода ( платы, зажимы, разъёмы и т.п. ).
341
Рис. 5. Схема соединений электропривода ( соответствует схеме на рис. 4 )
Схемами соединений пользуются при разработке других конструкторских
документов, в первую очередь чертежей, определяющих прокладку и способы крепления
проводов, жгутов, кабелей или трубопроводов в изделии, а также для выполнения
присоединений. Схемы используются также при контроле, эксплуатации и ремонте изделий в процессе эксплуатации.
В электротехнике схема соединений обозначается «Э4».
Схема подключений показывает внешние подключения составных частей электропривода с определением соединительных проводов и кабелей электропривода.
На схемах подключений панели, шкафы управления и др., вычерчивают в виде
пустых прямоугольников или внешних очертаний, а их входные элементы, например,
кабели и т.п., показывают условными графическими изображениями.
Схемами пользуются при разработке других конструкторских документов, а также для выполнения подключений изделий и при их эксплуатации.
342
Рис. 6. Схема подключений электропривода ( соответствует схемам на рис. 4 и 5 )
В электротехнике схема подключений обозначается «Э5».
Общая схема
На общей схеме изображают устройства и элементы, входящие в комплекс, а
также соединяющие их провода, жгуты и кабели. Устройства и элементы изображают в
виде прямоугольников, Допускается изображать элементы ( обмотки статора, резисторы,
диоды ) в виде условных графических обозначений или упрощенных внешних очертаний,
а устройства ( усилители, генераторы и т.п. ) – в виде упрощенных внешних очертаний.
Схемами пользуются при выполнении монтажных, наладочных и ремонтных
работ.
В электротехнике схема обозначается «Э6».
Схема расположения определяет относительное расположение составных частей изделия ( установки ), а при необходимости также жгутов, проводов, кабелей, трубопроводов и т.п.
Схемы расположения могут быть выполнены на разрезах конструкций, разрезах
или планах помещений или в аксонометрии.
Схемами пользуются при разработке других конструкторских документов, а
также при эксплуатации и ремонте изделия.
Схемами пользуются при разработке других конструкторских документов, а
также при эксплуатации и ремонте изделия.
В электротехнике схема обозначается «Э7».
Объединенная схема – схема, когда на одном конструкторском документе выполняют схемы двух или нескольких типов, выпущенных на одно изделие.
Схемами пользуются при разработке других конструкторских документов, а
также при эксплуатации и ремонте изделия.
343
Наименование и код объединенной схемы определяется ее видом и объединенными типами схем, например, схема электрическая соединений и подключения – Э0, схема
гидравлическая структурная и принципиальная Г0, и т.д..
2.6. Условные графические изображения элементов электрических схем
Основные сведения
Электротехнические устройства и их элементы в электрических схемах изображаются в виде условных графических обозначений, регламентируемых государственными
стандартами по Единой системе конструкторской документации ( ЕСКД ).
Стандарты устанавливают графические обозначения общего применения для электрических, гидравлических, пневматических и кинематических схем и специальные обозначения для каждого вида схем, в том числе электрических.
Обозначения общего применения
Обозначениям общего применения приведены на рис. 4.1…4.8.
Рис. 4.1. Обозначения постоянного и переменного тока, способы соединения
обмоток
На рис. 4.1 показаны такие обозначения:
а – ток постоянный с положительной «+» и отрицательной «-« полярностями; б –
общее обозначение переменного тока; в - общее обозначение переменного тока с указанием числа фаз «m», частоты «f» и напряжения «U», например, трехфазный переменный ток
частотой 50 Гц и напряжением 380 В ( на изображении можно указывать только «m» или
«f» или «U»; г – однофазная обмотка; д – трехфазная обмотка с соединением в
треугольник, звезду и зигзаг.
Рис. 4.2. Обозначение линий электрической связи
На рис. 4.2 показаны такие обозначения:: а – линия электрической связи ( провод,
кабель ); б – электрическое соединение линий; в – пересечение линий связи; г – группа
линий электрической связи числом «n»; д – однолинейное изображение трехпроводной
линии электрической связи; е – многолинейное изображение линий электрической связи с
указанием всех линий ( в данном примере – трех ).
Примечание: при изображении линий электрической связи толщины линий «b»
выбираются от 0,18 до 1,4 мм в зависимости от выбранного формата чертежа и размеров
условных графических обозначений элементов. Всего на чертеже рекомендуется применять не более трех типоразмеров линий по толщине – тонкую «b», утолщенную «2b» и тол
стую «3b» или «4b».
344
Рис. 4.3. Изображение линий электрической связи
Группа линий, имеющая разное функциональное назначение, может объединяться
в линию групповой связи, изображенную толстой сплошной линией ( рис. 4.3, а ) с ее ответвлениями ( рис. 4.3, б ) и пересечениями ( рис. 4.3, в ).
Слияние линий электрической связи в групповую можно осуществлять под углом
90 или 45º ( рис. 4.3, в ).
Линия электрической связи может соединяться с заземление ( рис. 4.3, г ) и корпусом электротехнического устройства ( рис. 4.3, д ).
Линия экранирования показывается штриховой линией ( рис. 4.3, е ).
Рис. 4.4. Изображение линий механической связи
Линия механической связи изображается штриховой линией ( рис. 4.4, а ), ее соединения – с точкой ( рис. 4.4, б ), пересечения – без точки ( рис. 4.4, в ).
При небольшом расстоянии между устройствами, имеющими механическую связь,
где линию механической связи изобразить штриховой линией невозможно, ее допускается
изображать двумя сплошными параллельными линиями.
Рис. 4.5. Изображение потоков электрической энергии или электрического сигнала
Поток электрической энергии или электрического сигнала изображается линией со
стрелкой в одном ( рис.4.5, а ) или в обоих направлениях ( рис.4.5, б ).
Направление движения также изображается линией со стрелкой. Прямолинейное
движение в одном направлении ( одностороннее ) – по рис. 4.5, в, в обоих направлениях ( возвратное ) – по рис. 4.5, г, прерывное с выстоем одностороннее – по рис. 4.5, д,
возврат ное – по рис. 4.5, е, с ограничением одностороннее – по рис. 4.5, ж, возвратно-по
ступательное – по рис. 4.5, з.
Рис. 4.6. Обозначение разных видов вращательного движения
Вращательное движение в одном или другом направлении – по рис. 4.6, а, возвратное – по рис. 4.6, прерывное с выстоем – по рис. по рис. 4.6, в, одностороннее с
ограничением – по рис. 4.6, г, качательное – по рис. 4.6, д.
345
Рис. 4.7. Обозначение элементов электропривода и управляющих устройств
Общее обозначение привода – по рис. 4.7, а, электромашинный привод – по рис.
4.7, б, электромагнитный – по рис. . 4.7, в, гидравлический – по рис. . 4.7, г, ручной – по
рис. . 4.7, д, с нажатием кнопки – по рис. . 4.7, е, с поворотом кнопки или рукоятки – по
рис. . 4.7, ж, с рычагом – по рис. . 4.7, з, ножной – по рис. . 4.7, и.
Рис. 4.8. Изображение муфт, тормозов и фиксирующих механизмов
Неразъемная муфта – по рис. 4.8, а, включающая – по рис. 4.8, б, отключающая –
по рис. 4.8, в. Общее изображение тормоза – по рис. 4.8, г, действующего при включении
– по рис. 4.8, д, при отключении – по рис. 4.8, е. Фиксирующий механизм – по рис. 4.8, ж,
а с защелкой – по рис. 4.8, з.
Изображение электрических машин
Рис. 4.9. Изображение электрических машин
При изображении электрических машин используют упрощенный и развернутый
способы построения условных графических изображений. При упрощенном способе обмотки статора и ротора машин переменного тока изображаются в виде окружностей ( рис.
4.9, а…г ), внутри которых можно указывать схему соединения обмотки, например, обмот
ки статора – в звезду, а ротора – в треугольник ( рис. 4.9, г ).
Выводы обмоток показываются в однолинейном и многолинейном изображениях.
При однолинейном изображении выводы показываются одной линией, с указанием
на ней количества выводов, например, трехфазные машины с короткозамкнутым ротором
( рис. 4.9, а ) и с фазным ротором ( рис. 4.9, б ).
При многолинейном изображении показываются все линии в соответствии с числом фаз, например, трехфазные ( рис. 4.9, в, г ). Выводы можно располагать с любой стороны изображения.
При развернутом способе обмотки статора и фазного ротоа изображаются в виде
цепочек полуокружностей и располагают с учетом геометрического сдвига осей фазных
обмоток ( рис. 4.9, д ) или без него ( рис. 4.9, ж ).
Допускается использовать смешанное изображение, например, обмотку статора –
развернутым способом, обмотку ротора – упрощенным ( рис. 4.9, д или е ) и наоборот
( рис. 4.9, ж).
346
Рис. 4.10. Изображение синхронных машин
В синхронных машинах обмотки изображают также упрощенным ( однолинейным,
многолинейным ) или развернутым способом, но с указанием конструкции ротора.
Например, синхронная трехфазная машина с обмоткой возбуждения на явнополюсном роторе ( рис. 4.10, а, б ) или на неявнополюсном ( рис. 4.10, в, г ) роторе и обмоткой
статора, соединенной в звезду ( рис. 4.10, а, б ) или в треугольник ( рис. 4.10, в, г ).
При наличии на роторе короткозамкнутой пусковой обмотки ( демпферной клетки )
она изображается, как у асинхронных машин ( рис. 4.10, д, е ).
Рис. 4.11. Изображение машин постоянного тока
В машинах постоянного тока ( рис. 4.11 ) обмотка якоря изображается в виде окруж
ности со щетками, а обмотка возбуждения - в виде ценочек полуокружностей, количество
которых определяет вид обмотки.
Двумя полуокружностями изображают обмотку добавочных полюсов ( рис. 4.11, а )
тремя – обмотку последовательного возбуждения (рис.. 4.11, б ) и четырьмя – обмотку параллельного ( рис. 4.11, г ) и независимого возбуждения ( рис. 4.11, д,е ).
Располагают обмотки якоря и возбуждения с учетом ( рис. 4.11, в, е ) или без учета
( рис. 4.11, б, г, д ) направления магнитного поля, создаваемого обмоткой.
Изображение трансформаторов
Рис. 4.12. Изображение трансформаторов
При изображении трансформаторов также используются упрощенный однолинейный и многолинейный и развернутый способы.
При упрощенных способах обмотки трансформаторов напряжения ( рис. 4.12, а, б )
и автотрансформаторов ( рис. 4.12, е ) изображаются в виде окружностей, а выводы – при
однолинейном способе – одной линией с указанием количества выводов, например, трех
( рис. 4.12, а ), при многолинейном – всеми линиями, определяющими число фаз, например, трехфазные ( рис. 4.12, б, е ).
347
Внутри окружностей может указываться схема соединения обмоток, например,
звезда – треугольник ( рис. 4.12, б ).
При развернутом способе обмотки изображаются в виде цепочек полуокружностей,
количество которых для автотрансформаторов не устанавливается, для трансформаторов –
три окружности на одну обмотку, например: однофазные трансформатор ( рис. 4.12, в ) и
автотрансформатор ( рис. 4.12, ж ) с магнитопроводом.
В трансформаторах тока первичная обмотка выполняется в виде утолщенной линии, выделенной точками, а вторичная – упрощенным способом в виде окружности ( рис.
4.12, и ) или развернутым способом двумя полуокружностями ( рис. 4.12, к ).
Изображение катушек индуктивностей, реакторов и магнитных усилителей
Рис. 4.13. Изображение катушек индуктивностей, реакторов и магнитных
усилителей
Катушки индуктивности, реакторы и магнитные усилители изображаются также
упрощенным и развернутым способами, но наибольшее распостранение получил развернутый способ, когда их обмотки изображаются в виде цепочек полуокружностей, например: катушка индуктивности, реактор без магнитопровода ( рис. 4.13, а ), с магнитопрово
да без зазора ( рис. 4.13, б ) и с воздушным зазором ( рис. 4.13, в ), магнитоэлектрическим
сердечником ( рис. 4.13, г ) и с выводами ( рис. 4.13, д ).
В схемах питания электроприводов используется реактор ( рис. 4.13, е ). Магнитный усилитель изображается совмещенным способом, например, усилитель с двумя магни
топроводами, с двумя рабочими и одной управляющей обмотками ( рис. 4.13, ж ), и разнесенным способом, при котором рабочая обмотка ( рис. 4.13, з ) и обмотка управления
( рис. 4.114, и ) изображены раздельно.
Изображение контактов
Рис. 4.14. Способы изображения контактов
Коммутационные устройства и контактные соединения, куда входят контакты выключателей, контакторов и реле, имеют общее обозначение контактов: замыкающего
( рис. 4.14, а ), размыкающего ( рис. 4.14, в ) и переключающего ( рис. 4.14, д ).
Изображения контактов разрешается изображать в зеркально-повернутом положении: замыкающего ( рис. 4.14, б ), размыкающего ( рис. 4.14, г ) и переключающего ( рис.
4.14, е ).
В основании подвижной части контактов разрешается ставить незачерненную точку ( рис. 4.14, и…л ).
348
Контакты аппаратов с ручным возвратом изображаются согласно рис. 4.14, ж и з.
Изображение выключателей
Рис. 4.15. Изображение выключателей
Выключатели изображаются с точкой в основании подвижного контакта ( рис.
4.15): однополюсный – по рис. 4.15, а, многополюсный в однолинейном изображении – по
рис. 4.15, б и в многолинейном – по рис. 4.15, в.
Автоматический выключатель ( автомат ) изображается с указанием типа расцепителя. Например, однополюсный максимального тока ( рис. 4.15, г ) или трехполюсный
минимального ( рис. 4.15, д ). В зависимости от вида выключателя на его контакте указывается вид воздействия, например выключатель кнопочный ( рис. 4.15, е, ж ) и выключатель путевой ( рис. 4.15, з, и ) с замыкающими и размыкающими контактами сооветственно.
Изображение контактов контакторов, реле и командоаппаратов
Рис. 4.16. Изображение контактов контакторов, реле и командоаппаратов
Силовые контакты изображаются без дугогашения ( рис. 4.16, а ) и с дугогашением
( рис. 4.16, б ).
Вспомогательные контакты контакторов и контакты реле изображаются согласно
общему обозначению ( см. рис. 4.14 ).
Контакты реле времени изображаются с указанием выдержки времени при срабаты
вании ( рис. 4.16, в ) и при возврате ( рис. 4.16, г ) реле.
Размыкающий контакт электротеплового реле изображается в виде рис. 4.16, д или
с указанием фиксирующего механизма и кнопки возврата ( рис. 4.16, е ), если необходимо
подчеркнуть их наличие.
Многопозиционные переключатели ( командоконтроллеры, универсальные переключатели изображаются с указанием каждого положения, замыкание в котором указывается точкой, например переключатель на два положения без самовозврата ( рис. 4.16, ж ),
один контакт которого замкнут в первом положении, а другой – во втором.
Изображение контактных соединений
Рис. 4.17. Контактные соединения
349
Контактные соединения бывают: неразборные ( рис. 4.17, а ), разборные ( рис. 4.17,
б ), разъемные ( рис. 4.17, в ), в которых различают штырь ( рис. 4.17, г ) и гнездо ( рис.
4.17, д ), скользящие по линейной ( рис. 4.17, ж ) и по кольцевой ( рис. 4.17, з ) поверхностям. Колодка зажимов изображается по рис. 4.17, е.
Изображение воспринимающей части электромеханических устройств
Рис. 4.18. Воспринимающая часть электромеханических устройств
Общее обозначение воспринимающей части электромеханических устройств, т.е.
катушек электромагнитов, воспринимающей части электротепловых реле имеет вид прямо
угольника ( рис 4.18 ).
Обозначения однофазных обмоток выполняются по рис. 4.18, а, а трехфазных обмо
ток – по рис. 4.18, б.
При необходимости можно указывать вид обмотки, например, обмотку тока – по
рис. 4.18, в, а обмотку напряжения – по рис. 4.18, г, а также вид устройства, например,
реле времени, работающего с замедлением при срабатывании – по рис. 4.18, д и при отпускании – по рис. 4.19, е.
Воспринимающее устройство электротеплового реле изображается по рис. 4.18, ж,
электромагнитная муфта – по рис. 4.18, з.
Изображение плавких предохранителей, резисторов, конденсаторов
Рис. 4.19. Изображение плавких предохранителей, резисторов, конденсаторов
Плавкий предохранитель изображается по рис. 4.19, а. Постоянный резистор изобра
жается без отводов и с отводами ( рис. 4.19, б, в ). Шунт изображается в виде рис. 4.19, г.
В переменном резисторе подвижный контакт обозначается стрелкой( рис. 4.19, д ).
Конденсаторы изображаются с постоянной ( рис. 4.19, ж ) и переменной ( рис. 4.19,
з ) емкостью. Полярные электролитические конденсаторы изображают по рис. 4.19, и, неполярные – по рис. 4.19, к.
Изображение полупроводниковых приборов
350
Рис. 4.20. Изображение полупроводниковых приборов
На рис. 4.20, а – изображен полупроводниковый диод, на рис. 4.20, б – стабилитрон
на рис. 4.20, в – транзистор с электропроводностью типа р-n-р, на рис. 4.20, г - транзистор
с электропроводностью типа n-р-n, на рис. 4.20, д – тиристор с управлением по катоду.
Однофазная мостовая выпрямительная схема с диодами ( мостик Греца ) может изо
бражаться в развернутом ( рис. 4.20, е ) и упрощенном виде ( рис. 4.20, ж ).
Изображение фотоэлектрических приборов
Рис. 4.21. Изображение фотоэлектрических приборов
На рис. 4.21 приведены изображения фотоэлектрических приборов с фотоэлектриче
ским эффектом: фоторезистор ( рис. 4.21, а ), фотодиод ( рис. 4.21, б ), диодный фоторезистор ( рис. 4.21, в ), фототранзистор типа р-n-р ( рис. 4.21, г ), диодная оптопара ( рис. 4.21,
д ), тиристорная оптопара ( рис. 4.21, е ) и резисторная оптопара ( рис. 4.21, ж ).
Изображение источников света и сигнальных приборов
Рис. 4.22. Изображение источников света
Источники света в виде осветительных и сигнальных ламп накаливания изображе
ны на рис. 4.22.
При изображении сигнальных ламп секторы допускается зачернять ( рис. 4.22, б ),
т.к. сигнальные лампы имеют небольшую мощность в 10…25 Вт и соответственно небольшой световой поток.
Для сигнализации применяются также акустические приборы: электрозвонок ( рис.
4.22, в ), электросирена ( рис. 4.22, г ), электрогудок ( рис. 4.22, д ).
Полупроводниковый светоизлучающий диод показан на рис. 4.22, е.
Изображение логических элементов
Рис. 4.23. Изображение логических элементов
Двоичные логические элементы изображаются в виде основного поля ( рис. 4.23, а )
351
с прямыми входами ( слева на рис. 4.23, б ) и выходами ( справа на этом же рисунке ), с
инверсными входами и выходами, т.е. функция «НЕ» ( рис. 4.23, в ).
В верхней половине поля изображения логических элементов указываются функции, выполняемые элементом: & - «И», 1 – «ИЛИ», задержка ( рис. 4.23, ж ), усилитель
( рис. 4.23, з ), пороговый элемент ( рис. 4.23, и ), Т-триггер ( рис. 4.23, и ).
В комбинационных логических элементах выделяется дополнительное поле: левое
( рис. 4.23, г ), правое ( рис. 4.23, д ) и левое и правое с обозначением входов выходов и
указанием функции ( рис. 4.23, е ).
Общие дополнительные замечания
Изображения, приведенные на рис. 4.1…4.22, согласно стандартам могут быть повернуты на угол 90º в любом направлении ( по часовой стрелке и против ), т.е. приведенные изображения на вертикальных линиях связи можно использовать для горизонтальных
линий и наоборот.
Размеры условных графических обозначений могут быть увеличены при необходимости выделить ( подчеркнуть ) особое или важное значение соответствующего элемента
( устройства ) или с целью размещения внутри изображения квалифицирующих символов
или дополнительной информации, или уменьшены для повышения компактности.
Размеры, как и форматы чертежа, выбираются в зависимости от объема и сложности чертежа, особенностей выполнения ( репродуцирования или микрофильмирования ) и
необходимости выполнения его средствами электронной вычислительной техники.
2.7. Условные буквенно-цифровые обозначения элементов электрических схем
Каждому устройству, их элементам, функциональным частям на схемах присваивается буквенно-цифровое обозначение, состоящее из буквенного обозначения и порядкового номера, проставленного после буквенного обозначения одинаковой с ним высоты.
Рекомендуется применять одно- и двухбуквенные обозначения, приведенные в таблице 1, где первая буква означает род элемента и вторая – его функциональное назначение.
Таблица 1. Буквенные коды элементов электрических схем
Код
А
В
Пример
ВВ
ВЕ
ВС
ВК
ВL
ВР
ВR
ВV
С
D
DA
DD
DS
DT
Е
ЕН
EL
Вид элемента ( устройства )
Устройства ( усилители и др. )
Преобразователи неэлектрических величин в электрические ( кроме
генераторов и источников питания ) и наоборот
Датчик магнитострикционный
Сельсин-приёмник
Сельсин-датчик
Тепловой датчик
Фотоэлемент
Датчик давления
Датчик частоты вращения ( тахогенератор )
Датчик скорости
Конденсаторы
Интегральные схемы
Аналоговые микросхемы
Цифровые микросхемы, логические элементы
Устройства хранения цифровой информации
Устройства задержки
Элементы различные, для которых не установлено специальных буквенных обозначений
Нагревательный элемент
Осветительная лампа
352
F
FA
FP
FS
FU
FV
G
GB
Н
НА
НL
K
КА
КН
КК
КМ
КР
КТ
КV
М
Р
РА
РС
РF
РJ
РК
РS
РТ
РV
РW
Q
QF
QK
R
RK
RP
RS
RU
S
SA
SB
SL
SP
SQ
SR
ST
Т
ТА
ТS
ТV
U
UR
UJ
UZ
V
Разрядники, предохранители, защитные устройства
Дискретный элемент защиты по току мгновенного действия
То же, инерционного действия
Элемент инерционного и мгновенного действия
Плавкий предохранитель
Дискретный элемент защиты по напряжению, разрядник
Генераторы, источники питания
Батареи
Устройства индикаторные и сигнальные
Прибор звуковой сигнализации
Прибор световой сигнализации
Реле, контакторы, пускатели
Реле токовое
Реле указательное
Реле электротепловое
Контактор, магнитный пускатель
Реле поляризованное
Реле времени
Реле напряжения
Двигатели
Приборы и устройства, измерительные и испытатель
ные, регистрирующие и дифференцирующие устройства
Амперметры
Счётчики импульсов
Частотомер
Счётчик активной энергии
Счётчик реактивной энергии
Регистрирующий прибор
Часы
Вольтметр
Ваттметр
Выключатели и разъединители в силовых цепях
Автоматический выключатель
Короткозамыкатель
Резисторы
Терморезистор
Потенциометр
Шунт измерительный
Варистор
Устройства коммутационные для цепей управления, сигнализации и
измерительных
Выключатель или переключатель
Выключатель кнопочный
Выключатель, срабатывающий от уровня
Выключатель, , срабатывающий от давления
Выключатель, , срабатывающий от положения ( путевой )
Выключатель, , срабатывающий от частоты вращения
Выключатель, , срабатывающий от температуры
Трансформаторы
Трансформатор тока
Стабилизатор электромагнитный
Трансформатор напряжения
Преобразователи электрических величин в электрические
Модулятор, демодулятор
Дискриминатор ( фазочувствительный выпрямитель )
Преобразователь частоты, выпрямитель, инвертор
Приборы электровакуумные и полупроводниковые
353
Диод, стабилитрон
Электровакуумный прибор
Транзистор
Тиристор
Контактные соединения
Скользящий контакт, токосъёмник
Штырь
Гнездо
Разборное соединение
Устройства механические с электрическим приводом
Электромагнит
Тормоз с электромагнитным приводом
Муфта с электромагнитным приводом
Электромагнитные плиты и патроны
Электромагнитный золотник
VD
VL
VT
VS
Х
ХА
ХР
ХS
ХТ
Y
YА
YВ
YС
YН
YV
Если в рекомендациях отсутствуют необходимые двухбуквенные обозначения, то
следует на основе однобуквеного кода прибавленим второй буквы латинского алфавита
сформировать новое обозначение, смысл которого следует объяснить на поле схемы, либо
воспользоваться однобуквенным кодом, что предпочтительнее.
После двухбуквенного кода и порядкового номера элемента допускается использовать дополнительное буквенное обозначение, определяющее функциональное назначение
элемента, приведенное в таблице 2.
Таблица 2. Буквенные коды функционального назначения
Буквенный код
А
В
С
D
F
G
Н
J
L
М
N
Р
Q
R
S
Т
V
W
Функция элемента ( устройства )
Вспомогательный
Направление движения ( вперед, назад, вверх, вниз и т.п )
Считающий
Дифференципующий
Защитный
Испытательный
Сигнальный
Интегрирующий
Толкающий
Главный
Измерительный
Пропорциональный
Cостояние ( старт, стоп, ограничение )
Возврат, сброс
Запоминание, запись
Синхронизация, задерика
Скорость ( ускорение, торможение )
Сложение
Х
Умножение
Y
Z
Аналоговый
Цифровой
5.8. Прочтение буквенно-цифровых обозначений элементов электрических
схем
На всех видах схем любой элемент – резистор, катушка контактора, измерительный
прибор и др., имеет буквенно-цифровое обозначение.
Это обозначение состоит из одной или двух букв и чисел. Буква ( буквы ) обозначают код данного элемента, а числа ( цифры ) – порядковый номер этого элемента в
данной схеме.
354
Например, буквенно-цифровое обозначение КТ2 означает следующее: КТ – реле
времени, 2 – второе по порядку в данной схеме.
В случае изображения на схеме составных частей элементов электрических схем
после основного цифрового обозначения через точку ставится дополнительное, обозначаю
щее порядковый номер этой составной части.
В этом случае расшифровка обозначений цифр и букв выполняется в обратном
порядке, т.е. буквенные символы и цифры прочитываются в направлении справа налево.
Например, буквенно-цифровое обозначение КМ5.4 означает следующее: КМ –
катушка электромагнитного контактора, порядковый номер контактора в схеме – 5,
порядковый номер контакта контактора в схеме – 4.
Прочитывается же это обозначение так: четвертый контакт пятого по счету электро
магнитного контактора.
5.9. Условные функциональные обозначения на аппаратуре всех видов
Рис. 1. Плюс, положительная полярность. Для обозначения соединителей
положительной полярности, подключающих источник постоянного тока
Рис. 2. Минус, отрицательная полярность. Для обозначения соединителей отрицательной полярности, подключающих источник постоянного тока
Рис. 3. Постоянный ток. Для обозначения соединителей, подключающих аппаратуру к источнику постоянного тока, а также для указания, что аппаратура работает только на
постоянном токе
Рис. 4. Переменный ток. Для обозначения соединителей, подключающих аппарату
ру к источнику переменного тока, а также для указания, что аппаратура работает только
на переменном токе
Рис. 5. Преобразователь переменного тока в постоянный. Для обозначения преобразователя переменного тока в постоянный и соответствующих соединителей
Рис. 6. Преобразователь постоянного тока в переменный. Для обозначения преобразователя постоянного тока в переменный и соответствующих соединителей
Рис. 7. Корпус, шасси. Для обозначения соединителей, подключенных к корпусу
или шасси
Рис. 8. Заземление, масса. Для обозначения соединителей заземления
355
Рис. 9. Заземление, защитное. Для обозначения соединителей заземления, создающих защиту от поражения электрическим током
Рис. 10. Прибор II класса защиты. Для обозначения аппаратуры, соответствующей требованиям техники безопасности, определенным для аппаратуры II класса ( защиты )
Рис. 11. Предохранитель. Для обозначения коробок предохранителей и указания
их места
Рис. 12. Сигнальная лампа. Для обозначения переключателя, при помощи которого включают и выключают сигнальную лампу
Рис. 13. Лампа освещения, подсветка. Для обозначения переключателей, управляющих источником света
Рис. 14. Включено. Для обозначения включения сети, выключателей сети или их
положения, соответствующего включению сети
Рис. 15. Выключено. Для обозначения выключения сети, выключателей сети или
их положения, соответствующего выключению сети
Рис. 16. Включено / выключено, кнопочный переключатель с двумя фиксированными положениями. Для обозначения выключателя, включающего или выключаю
щего сеть. Каждое положение выключателя фиксировано.
Рис. 17. Готовность к включению, дежурный режим. Для обозначения выключателя ( или его положения ), при помощи которого часть аппаратуры приводится в состояние «готовность к включению». На судах дежурный режим называют «стенд-бай» («standby»)
Рис. 18. Ножной переключатель, педаль. Для обозначения соединителей, к которым подключается ножной переключатель
356
Рис. 19. Переключатель каналов программ. Для обозначения переключателей,
кправляющих выбором канала, программы
Рис. 20. Старт, пуск, приведение в действие. Для обозначения переключателей
старта, пуска, приведения в действие
Рис. 21. Быстрый пуск. Для обозначения переключателя или регулирующего элемента, посредством которого рабочая скорость ( нормальный режим ) достигается без значимой задержки
Рис. 22. Остановка, блокировка. Для обозначения переключателя, при помощи
которого движение, например, перемещение ленты прекращается
Рис. 23. Быстрая остановка, стоп. Для обозначения регулирующих элементов,
при помощи которых процесс, программ, ход ленты останавливается без значимой задерж
ки
Рис. 24. Пауза, перерыв. Для обозначения переключателя, действие которого перемещение ( например, ленты ) прерывается при помощи тормозной системы и отключения
Рис. 25. Эффект или действие в направлении к исходной точке, нормальный
режим. Для обозначения переключателей эффекта или действия в направлении к действительной или воображаемой исходной точке, знаку, отметке, например, одновременное
приведение нескольких параметров аппаратуры к заранее выбранным значениям
Рис. 26. Автоматическое управление. Для обозначения переключателя ( или его
положения ), посредством которого аппаратура приводится в режим автоматического
управления
Рис. 27. Ручное управление. Для обозначения переключателя ( или его положения
), посредством которого аппаратура приводится в режим ручного управления
Рис. 28. Дистанционное управление. Для обозначения переключателя ( или его
положения
357
Рис. 29. Регулирование. Для обозначения элемента, подлежащего регулированию,
устанавливающего соответствующее значение величины. Значение величины
увеличивается с увеличением высоты фигуры
Рис. 30. Регулирование высоких звуковых частот. Для обозначения регулирующих элементов высоких звуковых частот
Рис. 31. Регулирование низких звуковых частот. Для обозначения регулирующих элементов низких звуковых частот
Рис. 32. Музыка. Для обозначения положения «музыка» переключателя «речь /
музыка»
Рис. 33. Звук. Для обозначения переключателей, регулирующих элементов и
соединителей, относящихся к звуковой информации
Рис. 34. Баланс. Для обозначения регулировки баланса стереоканалов
Рис. 35. Синхронизация. Для обозначения соединителей, переключателей и регули
рующих элементов, предназначенных для управления аппаратурой, работающей синхронно, например, подключение синхронизатора кинопроектора
Рис. 36. Фильтр ( пропускание ) высоких частот. Для обозначения фильтра высоких частот, а также связанных с ним переключателей и регулирующих элементов
Рис. 37. Фильтр ( пропускание ) низких частот. Для обозначения фильтра низких
частот, а также связанных с ним переключателей и регулирующих элементов
Рис. 38. Фильтр полосно-заградительный, режекторный. Для обозначения полос
но-заградительного фильтра , а также связанных с ним переключателей и регулирующих
элементов
Рис. 39. Фильтр средних частот, полосовой. Для обозначения полосового фильтра , а также связанных с ним переключателей и регулирующих элементов
Рис. 40. Тюнер, радиоприемник. Для обозначения соединителей, переключателей
и регулирующих элементов радиоприемника, тюнера
358
Рис. 41. Вход. Для обозначения входных соединителей, когда необходимо различие
между входами и выходами
Рис. 42. Выход. Для обозначения выходных соединителей, когда необходимо разли
чие между входами и выходами
Рис. 43. Тонкомпенсация. Для обозначения переключателей и регулирующих элементов, позволяющих компенсировать физиологическую кривую слышимости
Рис. 44. Усилитель. Для обозначения соединителей, переключателей и регулирующих элементов усилителя. Для обозначения усилителя, заключенного в защитный корпус
Рис. 45. Часы, реле времени. Для обозначения переключателей и регулирующих
элементов в часах, реле времени, таймерах
Рис. 46. Монофонический, моно. Для обозначения монофонического воспроизведения ( записи ) звука. Для обозначения положения «моно» на переключателях «моно /
стерео». Применяется также на этикетках грампластинок
Рис. 47. Стереофонический. Для обозначения стереофонического воспроизведения
( записи ) звука. Для обозначения положения «стерео» на переключателях «моно / стерео».
Применяется также на этикетках грампластинок
Рис. 48. Магнитофон. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для магнитофона
Рис. 49. Стереофонический магнитофон. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для стереофонических магнито
фонов
Рис. 50. Головные телефоны. Для обозначения соединителей, переключателей и
регулирующих элементов, предназначенных для головных телефонов
Рис. 51. Головные телефоны стереофонические. Для обозначения соединителей,
переключателей и регулирующих элементов, предназначенных для головных стереофонических телефонов
359
Рис. 52. Головные телефоны с микрофоном. Для обозначения соединителей, пере
ключателей и регулирующих элементов, предназначенных для головных телефонов с миколфоном
Рис. 53. Микрофон. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для микрофонов
Рис. 54. Микрофон стереофонический. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для стереофонических микрофонов
Рис. 55. Наушник. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для наушника
Рис. 56. Громкоговоритель. Для обозначения соединителей, переключателей и
регулирующих элементов, предназначенных для громкоговорителя
Рис. 57. Запись ( регистрация ) на носителе информации. Для обозначения пере
ключателя его положения, в котором аппаратура включается на запись
Рис. 58. Воспроизведение записи с носителя информации. Для обозначения переключателя или его положения, в котором аппаратура включается на воспроизведение с
носителя информации
Рис. 59. Стирание записи с носителя информации. Для обозначения переключате
ля или его положения, в котором происходит стирание информации, записанной на носите
ле
Рис. 60. Контроль входных данных во время записи или регистрации на носителе информации. Для обозначения регулирующего элемента, посредством которого
производится контроль входных данных во время записи или регистрации
Рис. 61. Контроль входных данных после записи или регистрации их на носителе информации. Для обозначения регулирующего элемента, посредством которого
производится контроль входных данных после записи их или регистрации
Рис. 62. Контроль входных данных во время их воспроизведения. Для обозначения регулирующего элемента, посредством которого производится контроль входных
360
данных во время их воспроизведения
Рис. 63. Блокировка записи. Для обозначения управляющего элемента блокирующей схемы, предназначенной для предотвращения случайного воспроизведения записи.
Рис. 64. Отметчик ( маркер ). Для обозначения управляющего элемента, при помо
щи которого отметка ( например, сигнал, перфорация, специальный код ) может быть зарегистрирована на носителе информации
Рис. 65. Отсечка носителя. Для обозначения управляющего элемента системы отсечки, например, в устройствах копирования и монтажа бумажной, магнитной, перфорированной ленты
Рис. 66. Постоянный и переменный ток. Для обозначения соединителей, подклю
чающих аппаратуру к источнику постоянного или переменного тока, а также для указания, что аппаратура работает на постоянном и переменном токе
Рис. 67. Кварц. Для обозначения органов управления кварцевыми резонаторами
Рис. 68. Включено / выключено, кнопочный переключатель с одним фиксиро
ванным положением. Для обозначения переключателя, включающего или выключающего сеть. Положение «Выкл.» является фиксированным, положение «Вкл.» осуществляется
только при нажатии переключателя
Рис. 69. Звонок. Для обозначения переключателя, управляющего звонком
Рис. 70. Гудок. Для обозначения переключателя, управляющего гудками, звуковыми сигнализаторами тревоги
Рис. 71. Вентилятор. Для обозначения переключателя, управляющего вентилятором
Рис. 72. Заземление бесшумное. Для обозначения соединителей заземления, обеспечивающих минимальные шумы аппаратуры от заземления
Рис. 73. Эквипотенциальность. Для обозначения соединений, предназначенных
для приведения нескольких узлов аппаратуры к единому потенциалу
361
Рис. 74. Выпрямитель ( без указания типа ). Для обозначения соединителей и
регулирующих элементов, связанных с выпрямительными устройствами
Рис. 75. Трансформатор. Для обозначения соединителей, переключателей и регулирующих элементов, предназначенных для управления силовыми трансформаторами
Рис. 76. Движение в одном направлении. Для обозначения регулирующего элемента, в результате действия которого объект перемещается в указанном направлении
Рис. 77. Движение в двух направлениях. Для обозначения регулирующего элемента, в результате действия которого объект перемещается в двух указанных направлениях
Рис. 78. Движение, ограниченное в двух направлениях. Для обозначения элемен
та, в результате действия которого объект перемещается в двух направлениях в определенных пределах
Рис. 79. Действие от исходной точки. Для обозначения регулирующего элемента,
посредством которого происходит перемещение объекта ( эффекта ) от исходной (
действительной или мнимой ) точки
Рис. 80. Действие по направлению к исходной точке. Для обозначения регулирующего элемента, посредством которого происходит перемещение объекта ( эффекта ) к
исходной ( действительной или мнимой ) точке
Рис. 81. Действие в двух направлениях от исходной точки. Для обозначения регу
лирующего элемента, посредством которого происходит перемещение объекта ( эффекта )
от исходной ( действительной или мнимой ) точки
Рис. 82. Последовательное действие от исходной точки и обратно. Для обозначения регулирующего элемента, посредством которого происходит последующее перемещение объекта ( эффекта ) от исходной точки ( действительной или мнимой ) и обратно
Рис. 83. Одновременное действие от исходной точки и обратно. Для обозначения регулирующего элемента, посредством которого происходит одновременное переме
щение объекта ( эффекта ) от исходной точки и обратно
Рис. 84. Установка минимума. Для обозначения регулирующего элемента, посред
362
ством которого устанавливается минимальное значение величины, например, баланс
мостовой схемы, минимум отклонения измерительного прибора, индикатора и т.п.
Рис. 85. Установка максимума. Для обозначения регулирующего элемента, посредством которого устанавливается максимальное значение величины, например, настройка, максимальное отклонение измерительного прибора, индикатора и т.п.
Рис. 86. Режекторный резонансный фильтр ( волновая ловушка ). Для обозначения регулирующего элемента, управляющего режекторным резонансным фильтром
Рис. 87. Фильтр полосно-заградительный с переменной полосой заграждения
( полосой пропускания ). Для обозначения регулирующего элемента, управляющего полосно-заградительным фильтром с переменной полосой пропускания
Рис. 88. Фильтр полосовый с переменной средней частотой. Для обозначения
регулирующего элемента, управляющего полосовым фильтром с переменной средней
частотой
Рис. 89. Фильтр полосовый с переменной полосой пропускания ( селективная
регулировка ). Для обозначения регулирующего элемента, управляющего полосовым
фильтром с переменной полосой пропускания
3. Типовые узлы и схемы автоматического управления электродвигателей
3.1. Стандартные защиты судовых электроприводов
В соответствии с Правилами Регистра, любой судовой электропривод должен
иметь три вида защитных устройств:
1. от токов короткого замыкания;
2. от токов перегрузки;
3. по снижению напряжения ( нулевая или минимальная ).
Для отдельных видов электроприводов возможно применение дополнительных видов защиты или сигнализации вместо защиты. Например, в рулевых электроприводах при
меняется защита от токов короткого замыкания, при перегрузке включается сигнализация,
при снижении напряжения срабатывает не нулевая, а минимальная защита, обеспечивающая автоматическое повторное включение электропривода после восстановления напряже
ния ( более подробно см. ниже, тема «Рулевые электроприводы» ).
Рассмотрим эти защитные устройства более подробно.
Защиты от токов короткого замыкания
Под коротким замыканием понимают такой аварийный режим работы электрической
цепи, при котором ток превышает номинальный в несколько раз Такой ток способен повредить элементы цепи.
К основным причинам возникновения токов короткого замыкания относятся такие:
1. перегрузка электрической цепи;
363
2. тепловое старение изоляции;
3. человеческие ошибки при проведении работ с электрооборудованием.
Перегрузка электрической цепи может возникнуть при включении в данную сеть прием
ника электроэнергии, мощность которого превышает расчетную.
Такое включение чаще всего случается в старых береговых сетях, в которые, по мере
эксплуатации, дополнительно включались новые приемники электроэнергии, на которые сеть
не рассчитана.
В электроприводах перегрузка электрической цепи может иметь механический характер, например, при включении насоса с зажатыми после ремонта сальниками, при подъеме
лебедкой груза, большего номинального и т.п.
Тепловое старение изоляции неизбежно во всех электрических устройствах, имеющих
изоляцию - трансформаторах, электрических машинах, системах автоматики. В результате
тепловой пробой переходит в электрический, при котором касаются друг друга соседние оголенные проводники.
Человеческие ошибки при проведении работ с электрооборудованием можно снизить,
если не допускать к работам неквалифицированный или недостаточно подготовленный персонал. Если персонал квалифицированный, достаточно неукоснительно соблюдать Правила
технической эксплуатации электрооборудования судов и Правила техники безопасности.
Последствия токов короткого замыкания
Последствия токов короткого замыкания такие:
1. выделение в проводниках большого количества тепла, вследствие чего повреж
дается их изоляция;
2. дополнительно, в электрических машинах и трансформаторах повреждаются обмотки из-за действия электродинамических сил, действующих на рядом расположенные проводни
ки.
Требования Правила Регистра к защитным устройствам от токов короткого
замыкания
По Правилам Регистра:
1. защита от токов короткого замыкания должна устанавливаться в каждой фазе системы
переменного тока, а также в каждом изолированном полюсе системы постоянного тока;
2. уставки защитных устройств от токов короткого замыкания должны быть не менее
200% номинального тока;
3. срабатывание должно быть мгновенным или с выдержкой времени, необходимой для
получения соответствующей избирательности.
Защитные устройства мгновенного действия применяют для приемников электроэнергии - электродвигателей, нагревательных, осветительных и бытовых приборов.
Защитные устройства с выдержкой времени приме няют для защиты генераторов.
Выдержка времени ( не более 1с) необходима для того, чтобы генераторы не отключались
большими пусковыми токами мощных электродвигателей, например, компрессоров, мощных
насосов, якорно-швартовных устройств и т.п.
Схемы защиты от токов короткого замыкания
На судах в качестве защитных устройств от токов короткого замыкания применяют:
1. предохранители;
2. автоматические выключатели;
3. реле максимального тока.
Все эти устройства действуют мгновенно.
Например, собственное время срабатывания автоматических выключателей в сред-
364
нем 0,03 с, реле максимального тока - 0,015 с, предохранителей - сотые доли секунды,
причем время сгорания плавкой вставки тем меньше, чем больше ток короткого замыкания.
Рис. 111. Схемы защитных устройств от токов короткого замыкания: а - с предохра
нителями; б - с автоматическим выключателем; в - с реле максимального тока
В схеме с предохранителями ( рис. 111, а ) предохранители должны устанавливаться в каждом линейном проводе ( требование Правил Регистра ).
Предохранители не следует применять для защиты от токов короткого замыкания в
обмотках статора 3-фазных асинхронных двигателей. Это объясняется тем, что при коротком замыкании в обмотке статора может сгореть только один предохранитель. При этом двигатель останется работать на 2-х фазах, его скорость уменьшится, а ток увеличится, двигатель
может сгореть.
Кроме того, в комплекте с предохранителями обязательно применение трехполюсного
выключателя, при помощи которого нужно включать и отключать двигатель.
Поэтому для защиты от токов короткого замыкания 3-фазных электродвигателей
предпочтительней применять автоматические выключатели ( рис. 111,6). Они выполняют
функции одновременно коммутационных и защитных устройств.
При коротком замыкании в любой фазной обмотке асинхронного двигателя все три
контакта выключателя размыкаются одновременно.
Автоматические выключатели применяются в сетях переменного и постоянного тока.
Реле максимального тока мгновенного действия (рис. 111, в) применяют также в
сетях переменного и постоянного тока.
Схема работает так.
При подаче напряжения на выводы А и В начинает протекать ток через параллельную
обмотку возбуждения L. Никакие другие цепи не образуются.
При нажатии кнопки SB1 «Пуск» через контакты этой кнопки образуется цепь тока
катушки линейного контактора КМ.
Контактор включается и замыкает три контакта: главные КМ.1 и КМ.2 и вспомогательный КМ.З.
При замыкании главных контактов образуется цепь тока якоря через катушки реле
КА1, КА2. Происходит прямой пуск двигателя.
Вспомогательный контакт КМ.З шунтирует кнопку SB1 «Пуск», после чего ее
можно отпустить.
При коротком замыкании в цепи обмотки якоря реле КА1 ( КА2) притягивает
якорь, вследствие чего контакт КА1 ( КА2) размыкается, отключая катушку контактора
КМ.
Все три контакта - KM.l, KM.2 и КМ.З - размыкаются. При размыкании КМ.1 и
КМ.2 обмотка якоря отключается, двигатель останавливается.
При этом контакты КМ1 и КМ2 замыкаются, но катушка контактора КМ не может
Получить питание, т.к. в ее цепи два разрыва: разомкнуты контакты кнопки SB1 «Пуск» и
разомкнут контакт КМ.З.
Поэтому для повторного пуска двигателя надо нажать кнопку SB1 «Пуск».
Защиты от токов перегрузки
365
Причины и последствия токов перегрузки
Под перегрузкой понимают увеличение тока двигателя не более чем в два раза больше
по сравнению с номинальным ( ток, превышающий номинальный более чем в два раза,
считается током короткого замыкания ).
Основной причиной появления токов перегрузки является длительное превышение
нагрузки двигателя со стороны механизма - насоса, вентилятора, грузовой лебедки и т.п.
При систематических перегрузках двигателя происходит ускоренное старение изо
ляции обмоток, что в конечном счете приводит к ее повреждению и возникновению межвиткового короткого замыкания.
Для защиты от токов перегрузки применяют электротепловые реле, описанные выше (
см. 1.1.10).
Схема защиты от токов перегрузки
Схема защиты от токов перегрузки показана на рис. 112
Рис. 112. Схема защиты от токов перегрузки
Схема работает следующим образом.
При перегрузке двигателя размыкается контакт теплового реле КК1 ( КК2 ). При
этом обрывается цепь катушки линейного контактора КМ, вследствие чего размыкаются
главные контакты в силовой части схемы и вспомогательный, включенный параллельно
кнопке SB1 «Пуск».
Двигатель отключается от сети, поэтому ток через нагревательные элементы КК1, КК2
в цепи обмотки статора перестает протекать.
Через З...4 мин контакт КК1 (КК2 ) вследствие остывания нагревательного элемента замкнется, но в этой же цепи остается разомкнутым контакт кнопки SB1 «Пуск».
Поэтому для повторного пуска двигателя надо нажать кнопку SB1 «Пуск».
Надо обратить внимание на то, что в схеме использованы только два тепловых реле,
нагревательные элементы которых включены в левый и правый провода Л1 и ЛЗ. Однако,
если увеличится ток в среднем проводе Л2, это автоматически вызовет увеличение тока в
проводах Л1 и ЛЗ.
Поэтому Правила Регистра допускают включение тепловых реле в две фазы из трех (
как на рис. 110 ). На многих судах иностранной постройки тепловые реле включают во все
три фазы.
Защиты по снижению напряжения
Причины и последствия снижения напряжения
Снижение напряжения питающей сети неблагоприятно сказывается на работе элект
роприводов.
Причины снижения напряжения сети разные, к основным из них относятся такие:
1. пуск мощного асинхронного двигателя, мощность которого соизмерима с мощностью генератора, включенного на шины ГРЩ ( например, компрессора );
2. одновременное включение нескольких мощных грузовых лебедок ( кранов )
или других мощных механизмов;
366
3. уменьшение скорости приводного двигателя генератора – дизеля или турбины.
Поддерживать напряжение сети стабильным должны автоматические регуляторы
частоты ( АРЧ ) и напряжения ( АРН ). Однако современные АРЧ и АРН действуют с замедлением и допускают большие провалы напряжения.
Особенно чувствительны к снижениям напряжения 3-фазные асинхронные двигатели, у которых вращающий электромагнитный момент прямо пропорционален квадрату на2
пряжения сети: М ≡ U . Это означает, что при провале напряжения до значения
эм
0,8 U
ном
( 80% ) новое значение электромагнитного момента составит
М'
эм
≡ ( 0,8 U
ном
)
2
М
эм.ном
= 0,64 М
эм.ном
.
Иначе говоря, при провале напряжения на 20% момент уменьшился до 64%, т.е.
практически на одну треть.
Такое уменьшение момента может привести к аварии. Например, если провал напряжения произошел при подъеме якоря из воды, якорь станет опускаться.
При работе насосов, вентиляторов, компрессоров провал напряжения может приве
сти к их остановке, а при восстановлении напряжения начнется их затяжной повторный
пуск под нагрузкой. При таком пуске перегреваются обмотки статора и ротора, вплоть до
их сгорания.
Поэтому в мировой практике при снижении напряжения сети до определенного
значения ( в среднем до 60% номинального ) электропривод должен отключаться.
Различают два вида защиты по снижению напряжения:
1. минимальная;
2. нулевая.
Для лучшего понимания разделим процесс изменения напряжения на две части:
1. первоначальное снижение напряжения, вызванное, например, набросом нагрузки;
2. последующее повышение напряжения, вызванное работой автоматического регулятора напряжения или ( и ) автоматического регулятора частоты.
Обе защиты на первом этапе, при снижении напряжения действуют одинаково –
отключают электропривод.
Однако на втором этапе - при последующем восстановлении напряжения минималь
ная защита включает электропривод, а нулевая – нет. Иначе говоря, минимальная защита
обеспечивает автоматическое повторное включение ( АПВ ) электропривода, а нулевая –
нет.
Минимальная защита применяется в электроприводах, перерыв в работе которых
приводит к аварии – например, в рулевых устройствах.
Нулевая защита применяется во всех остальных ( кроме рулевых ) судовых электро
приводах, перерыв в работе которых не приводит к аварии. К этой части электроприводов относятся лебедки, краны, компрессоры, якорно-швартовные устройства и др.
В то же время повторное самопроизвольное ( автоматическое ) включение таких
электроприводов после восстановления напряжения может привести к аварии.
Таким образом, нулевая защита должна обладать двумя свойствами:
1. при снижении напряжения отключать электропривод;
2. при восстановлении напряжения исключать автоматическое включение электро
привода.
Схемы защит по снижению напряжения
Минимальная защита
367
Вначале, как более простую, рассмотрим минимальную защиту, которая применяет
ся только в рулевых электропривода ( рис. 109, в ).
Рис. 109. Защиты по снижению напряжения: а, б – нулевая; в – минимальная.
Катушка контактора КМ питается от линейных проводов В и С. При номинальном
напряжении сети контактор включен, через его главные контакты КМ1…КМ3 подается
питание на обмотку статора двигателя М.
При снижении напряжения до недопустимого ( обычно до 60% номинального )
якорь контактора отпадает, контакты КМ1…КМ3 размыкаются, двигатель отключается
от сети.
При восстановлении напряжения до номинального ток в катушке КМ становится
номинальным, контактор включается, происходит повторный пуск двигателя.
Таким образом, данная схема обеспечивает автоматическое повторное включение электродвигателя после восстановления напряжения.
Нулевая защита
Вариант №1
Схема защиты на рис. 109, а, применяется в случае, если в ней только один или
два ( реверсивных ) контактора.
Для включения двигателя в сеть нажимают кнопку SB1 «Пуск», вследствие чего
включается линейный контактор КМ, который замыкает главные контакты КМ1...КМ3 и
вспомогательный КМ4.
Если после этого кнопку SB1 отпустить, ток в катушке КМ контактора поддержива
ется через вспомогательный контакт КМ4.
При снижении напряжения до недопустимого якорь контактора отпадает, контакты
КМ1…КМ3 размыкаются, двигатель отключается от сети и останавливается.
Кроме того, размыкается контакт КМ4, поэтому ток в катушке КМ контактора исче
зает.
При восстановлении напряжения до номинального ток в катушке КМ появится
только после нажатия кнопки SB1 «Пуск».
Таким образом, данная схема исключает автоматическое повторное включение
электродвигателя после восстановления напряжения. Пуск возможен только при участии
человека.
Вариант №2
Схема на рис. 109, б применяется как часть более сложной схемы управления в эле
ктроприводах, с числом контакторов более двух. К таким электроприводам относятся
грузовые лебедки и краны, якорно-швартовные устройства и другие, управляемые при
помощи командоконтроллера.
368
Как следует из схемы, рукоятка командоконтроллера имеет 5 положений: нерабочее «0» и по два рабочих «I» и «II» в обе стороны ( «Вперед» - «Назад» ).
В исходном положении «0» контакт SA командоконтроллера замкнут. Поэтому при
подаче напряжения на зажимы А и В ( род тока не играет роли ) через этот контакт образу
ется цепь тока катушки реле напряжения KV.
Реле KV включается и замыкает три своих контакта: KV1, KV2 и KV3. Контакт
KV1 шунтирует контакт SA ( но только в нулевом положении ), через контакты KV2 и
KV3 поступает питание на остальную часть схемы управления.
Схема готова к работе.
При работе, например, в направлении «Вперед», рукоятку командоконтроллера
выводят из положения «0» и устанавливают в положение «I». При этом контакт SA размыкается, но остается замкнутым контакт KV1. Через него катушка KV продолжает получать
питание из сети.
При переводе рукоятки в положение «II» схема не изменяется.
При снижении напряжения ниже допустимого якорь реле KV отпадает, все три его
контакта размыкаются.
При размыкании контакта KV1 ток в катушке реле KV пропадает, а при размыкании контактов KV2 и KV3 снимается питание с остальной части схемы управления. Двига
тель отключается от сети и останавливается.
При восстановлении напряжения до номинального ток в катушке КМ появится
только после возврата рукоятки командоконтроллера в нулевое положение. Только тогда
замкнется контакт SA, через который снова получит питание катушка реле KV и повторно
замкнутся контакты KV1, KV2 и KV3.
.
Таким образом, и эта схема исключает автоматическое повторное включение
электродвигателя после восстановления напряжения. Пуск возможен только при участии
человека ( надо нажать кнопку SB1 «Пуск» ).
Схема нулевой защиты с аварийным выключателем
У электроприводов, управляемых при помощи командоконтроллера, заедание руко
ятки в промежуточном положении может привести к аварии, т.к. электродвигатель не оста
навливается.
Чтобы избежать аварии, в цепь катушки реле напряжения KV включают пакетный
выключатель S1 ( рис. 110 ). Этот выключатель называют аварийным или выключателем
управления. Выключатели устанавливают на тумбе командоконтроллера сбоку или сверху.
Рис. 108. Схема нулевой защиты с аварийным выключателем S1
При работе этот выключатель постоянно включен, поэтому включено реле напряже
ния KV. Через контакт KV:2 этого реле питание подается на основную часть схемы управ
ления.
В случае возникновения аварийной ситуации оператор ( лебедчик ) выключает S1.
Реле KV теряет питание и размыкает контакты KV:2 и KV:1.
При размыкании контакта KV:2 снимается питание с основной части схемы управления, двигатель отключается от сети и затормаживается.
369
Размыкание контакта KV:1 делает невозможным включение реле KV до тех пор,
пока не замкнется контакт SM1 командоконтроллера, т.е. пока не рукоятка командоконтроллера не будет возвращена в нулевое положение.
После этого реле KV получит питание и можно продолжить работу.
Выключатели управления могут быть одно- или двухполюсными.
Управление 3-фазным асинхронным двигателем с одного и двух постов
Схема управления 3-фазного асинхронного двигателя с одного и двух постов управ
ления приведена на рис. 103.
Рис. 103. Схема управления 3-фазного асинхронного двигателя с одного ( а ) и двух
( б ) постов управления
Схема управления 3-фазным асинхронным двигателем с одного поста
управления
Схема ( рис. 103, а ) предусматривает пуск и остановку двигателя при помощи кнопочного поста, состоящего из кнопок «Пуск» и «Стоп». Эта схема применяется для управления наиболее простых судовых электроприводов – насосов, вентиляторов, шлюпочных
и траповых лебедок и т.п.
Элементы схемы
Силовая часть:
1. А, В, С – линейные провода;
2. КМ1…КМ3 – главные контакты линейного контактора КМ;
3. М – обмотка статора 3-фазного асинхронного двигателя
Схема управления:
1. SB1 – контакты кнопки «Пуск»;
2. SB2 – контакты кнопки «Стоп»;
3. КМ4 – вспомогательный контакт контактора КМ.
Подготовка схемы к работе
Для подготовки схемы к работе подают питание на линейные провода А, В, С. При
этом не образуются какие-либо электрические цепи, например, цепь тока через катушку
контактора КМ ( т.к. разомкнуты контакты кнопки SB1 «Пуск») или цепь тока через трехфазную обмотку статора ( т.к. разомкнуты контакты КМ1…КМ3 ).
Пуск
Для пуска нажимают кнопку SB1 «Пуск», её контакты замыкаются и через них
образуется цепь тока катушки контактора КМ:
линейный провод С – замкнувшиеся от нажатия на кнопку контакты кнопки SB1 –
контакты кнопки SB2 – катушка контактора КМ - линейный провод В.
370
Контактор включается и замыкает три главных контакта КМ1…КМ3 и один вспомо
гательный КМ4.
При замыкании главных контактов напряжение сети поступает на обмотку статора,
двигатель начинает вращаться.
При замыкании вспомогательного контакта шунтируется кнопка SB1 «Пуск». Пока
эта кнопка остается нажатой, ток катушки контактора протекает как через ее контакты,
так и, параллельно, через контакт КМ4.
Как только контакт КМ4 замкнется, кнопку SB1 можно отпустить, ее контакты
размыкаются, но останется цепь тока катушки КМ через контакт КМ4:
линейный провод С – вспомогательный контакт КМ4 – контакты кнопки SB2 – катушка контактора КМ - линейный провод В.
Если бы вспомогательный контакт КМ4 отсутствовал, то после отпускания кнопки
SB1 «Пуск» ток в катушке КМ исчез, контактор КМ отключился и двигатель остановился.
Иначе говоря, в отсутствие контакта КМ4 двигатель вращался бы только при нажатой кнопке SB1 «Пуск» и останавливался при отпускании этой кнопки .
Теперь понятно назначение контакта КМ4 : он оставляет двигатель включенным,
если отпустить кнопку SB1 «Пуск».
Остановка
Для остановки двигателя нажимают кнопку SB2 «Стоп», ее контакты размыкаются, поэтому катушка КМ теряет питание.
Контактор КМ отключается, при этом размыкаются его главные КМ1…КМ3 и вспо
могательный КМ4 контакты.
При размыкании главных контактов обмотка статора двигателя отключается от сети, двигатель останавливается.
При размыкании вспомогательного контакта КМ4 цепь катушки КМ4 обрывается
во втором месте ( первый обрыв – разомкнулись контакты кнопки SB2 ).
Если кнопку SB2 «Стоп» отпустить, ее контакты замкнутся, но останутся разомкну
тыми контакты КМ4, поэтому катушка КМ останется обесточенной.
Таким образом, размыкание контакта КМ4 не позволило восстановить цепь катушки КМ после отпускания кнопки SB2 «Стоп».
Роль вспомогательного контакта КМ4
Из сказанного выше следует, что контакт КМ4 придал схеме управления свойство
памяти. Теперь схема «запоминает» команды: при нажатии кнопки «Пуск» двигатель
включается, при нажатии кнопки «Стоп» двигатель отключается. Поэтому после нажатия
кнопки «Пуск» и включения электродвигателя эту кнопку можно отпустить.
Схема управления 3-фазным асинхронным двигателем с двух постов управления
Эта схема ( рис. 103, б ) отличается от рассмотренной выше наличием второго поста управления, состоящего из кнопок SB3 «Пуск» и SB4 «Стоп».
Следует обратить внимание, что контакты обеих кнопок «Пуск» включены параллельно друг другу, а кнопок «Стоп» - последовательно.
Такое включение кнопок позволяет включить двигатель при нажатии любой кнопки – SB1 или SB3, и остановить двигатель нажатием кнопки SB2 или SB4.
Местное и дистанционное управление электроприводами. Правила Регистра
Местным называется управление электроприводом при помощи кнопочного поста
управления, находящегося в непосредственной близости от электропривода.
Дистанционным называется управление электроприводом при помощи кнопочно-
371
го поста управления, находящегося на некотором удалении от электропривода.
Управление с двух постов применяют для электроприводов ответственных приемников электроэнергии – рулевых приводов, некоторых насосов и вентиляторов.
Например, по Правилам Регистра, пуск и остановка электродвигателей привода
руля должны осуществляться из румпельного отделения ( местное управление ) и из рулевой рубки ( дистанционное управление ).
В некоторых случаях пост дистанционного управления может состоять только из
одной кнопки «Пуск» или «Стоп».
Например, электродвигатели погружных осушительных и аварийных пожарных
насосов должны иметь устройства дистанционного пуска, расположенные выше палубы
переборок. Значит, пост дистанционного управления состоит из кнопки «Пуск». Этот
пост может находиться в рулевой рубке.
В то же время электродвигатели топливных и маслоперекачивающих насосов и сепараторов топлива и масла должны отключаться дистанционно из мест, находящихся
вне помещений этих насосов и вне шахты машинного отделения, но в непосредственной
близости от этих помещений. Такой пост дистанционного управления состоит из кнопки
«Стоп». Этот пост обычно располагается в коридоре при входе в машинное отделение.
Такое расположение постов дистанционного управления:
1. сводит к минимуму время, необходимое для включения или отключения электропривода ( не надо спускаться в машинное отделение ) и тем самым способствует повышению живучести судна при затоплении судовых помещений или пожаре в машинном отделении;
2. исключает необходимость нахождения человека в машинном отделении, у поста
местного управления, в условиях пожара в этом отделении или его частичного затопления.
3.3. Схема автоматического пуска асинхронного двигателя переключением
обмотки статора со звезды на треугольник
Основные сведения
Пуск двигателя переключением со звезды на треугольник уменьшает пусковой ток
в 3 раза. Поэтому этот способ пуска применяют для крупных асинхронных двигателей,
прямое включение которых вызывают большие провалы напряжения судовой сети.
Недостатком способа является уменьшение пускового момента в 3 раза, поэтому
его применяют в электроприводах, допускающих при пуске уменьшение рабочих параметров ( у компрессора – давления, у насоса – подачи и т. п. )
Схема пуска
Схема пуска асинхронного двигателя переключением со звезды на треугольник
приведена на рис. 120.
372
Рис. 120. Схема пуска асинхронного двигателя переключением со звезды на
треугольник
Основные элементы схемы:
1. QS – рубильник;
2. QF - автоматический выключатель;
3. М - асинхронный электродвигатель ;
4. FU – предохранитель цепей управления;
5. SB1 – кнопка «Пуск»;
6. SВ2 - кнопка «Стоп»;
6. KТ - реле времени электромеханическое;
7. КМ1 – контактор нулевой точки «звезды»;
8. КМ2 – контактор «треугольника».
Выдержка времени электромеханического реле КТ начинается с момента подачи
питания на катушку реле.
Подготовка схемы к работе
Для подготовки схемы к работе включают рубильник QS1 и автоматический выклю
чатель QF.
Схема готова к работе.
Работа схемы
Для пуска электродвигателя нажимают кнопку SВ1 «Пуск», после чего схема рабо
тает автоматически.
При нажатии кнопки SВ1 включаются реле времени КТ и контактор нулевой точки
«звезды» КМ1. Последний соединяет в общую точку выводы С4, С5 и С6 обмотки статора.
Происходит пуск двигателя при соединении обмотки статора в «звезду»
С этого же момента начинается отсчет выдержки времени реле времени КТ.
Как только эта выдержка закончится, реле КТ переключает свои контакты: верхний
размыкается, отключая катушку контактора КМ1, а нижний замыкается, включая контактор «треугольника» КМ2.
Главные контакты КМ2 замыкаются, соединяя попарно выводы С1 и С6, С2 и С4,
С3 и С8, тем самым образуя схему «треугольника»
Пуск закончен.
Вспомогательный контакт КМ1 включен в цепь катушки контактора КМ2. Также
вспомогательный контакт КМ2 включен в цепь катушки контактора КМ1.
373
Это сделано для того, чтобы исключить одновременное включение обоих контакторов, при котором происходит короткое замыкание в цепи обмотки статора.
3.4. Схема автоматического пуска асинхронного электродвигателя через
пусковые резисторы в цепи обмотки статора
Основные сведения
Пуск асинхронного двигателя через пусковые резисторы в цепи обмотки статора
предназначен для уменьшения пусковых токов. При прямом пуске ( без резисторов ) пусковой ток превышает номинальный в 4…7 раз, что вызывает большие провалы напряжения судовой сети, а при частых пусках - перегревает обмотки статора и ротора.
Недостатком способа является уменьшение пускового момента вследствие уменьшения напряжения на обмотке статора , поэтому его применяют в электроприводах, допускающих при пуске уменьшение рабочих параметров ( у компрессора – давления, у насоса
– подачи и т. п. )
Схема пуска
Схема автоматического пуска асинхронного электродвигателя в функции времени
через пусковые резисторы приведена на рис. 121.
Рис. 121. Схема автоматического пуска асинхронного электродвигателя в функции
времени через пусковые резисторы
На рис. 121 приняты такие обозначения:
1. А, В, С – линейные провода;
2. КМ1.1…КМ1.3 – главные контакты линейного контактора КМ1;
3. R - пусковые резисторы ( 3 шт., по одному в каждом линейном проводе );
п
4.
5.
6.
7.
8.
SB1, SB2 – кнопки соответственно «Пуск» и «Стоп»;
КМ1 – линейный контактор;
КМ2 – контактор ускорения;
КТ – электромагнитное реле времени ( с демпфером );
UZ – выпрямительный мостик ( мостик Греца ).
Подготовка схемы к работе
Для подготовки схемы к работе подают питание на линейные провода А, В, С.
При этом переменное напряжение от фаз В и С поступает на вход выпрямительного
мостика UZ по цепи:
провод С – размыкающий контакт КМ1.6 линейного контактора – левый вывод мо
374
стика – правый вывод мостика – провод В.
На выходе мостика появляется выпрямленное напряжение с полярностью : «плюс»
на верхнем выводе, «минус» на нижнем, вследствие чего через катушку КТ потечет ток по
цепи - «плюс» на мостике – катушка КТ - «минус» на мостике.
Реле КТ включается и мгновенно размыкает контакт КТ1 в цепи катушки контактора ускорения КМ2.
Таким образом, в исходном состоянии включено только реле времени КТ.
Работа схемы
Для пуска нажимают кнопку SВ1 «Пуск». Через контакты кнопки получет питание
катушка линейного контактора КМ1.
Контактор включается и замыкает главные контакты в силовой части схемы, вследствие чего обмотка статора подключается к линейным проводам А, В и С через пусковые
резисторы R.
Одновременно переключаются вспомогательные контакты контактора КМ:
1. верхний контакт КМ1 замыкается и шунтирует кнопку SB1 «Пуск»;
2. cредний контакт КМ1 замыкается в цепи катушки контактора ускорения КМ2,
но контактор не включается, т.к. в цепи его катушки разомкнут контакт КТ;
3. нижний контакт КМ1 размыкается, снимая питание с мостика UZ, вследствие
чего обесточивается катушка реле времени КТ.
С этого момента начинается выдержка времени реле КТ. Когда выдержка закончится, реле КТ замыкает свой контакт в цепи катушки контактора ускорения КМ2.
Контактор КМ2 включается и замыкает свои главные контакты, которые шунтируют пусковые резисторы R.
Двигатель с броском тока переходит на естественную механическую характеристику и разгоняется до скорости, зависящей от статического момента механизма. Если этот
момент равен номинальному, двигатель разгонится до номинальной скорости, если
меньше номинального – до скорости, большей номинальной, если больше номинального (
что недопустимо ) – до скорости, меньшей номинальной.
На практике выдержка времени реле КТ – 1…2 сек.
Остановка
Для остановки двигателя нажимают кнопку SB2 «Стоп». Катушка линейного контактора КМ1 теряет питание, все 6 контактов контактора ( 3 – главных и 3
вспомогательных ) занимает положение, показанное на схеме.
Двигатель отключается от сети и останавливается.
3.5. Схема автоматического пуска асинхронного двигателя с фазным
ротором через пусковые резисторы в цепи обмотки ротора
Основные сведения
Пуск асинхронного двигателя через пусковые резисторы в цепи обмотки ротора
предназначен для уменьшения пусковых токов. При прямом пуске ( без резисторов ) пусковой ток превышает номинальный в 4…7 раз, что вызывает большие провалы напряжения судовой сети, а при частых пусках - перегревает обмотки статора и ротора.
Как известно из курса «Судовые электрические машины», электромагнитный мо
мент асинхронного двигателя прямо пропорционален активной составляющей тока ротора
М = с*I' *cosψ *Ф ≡ I' *cosψ ,
2
2
Где: с – конструктивный коэффициент;
I' - приведенный ток ротора;
2
2
2
375
ψ - угол отставания тока ротора от э.д.с. обмотки ротора;
2
Ф – магнитный поток;
I' *cosψ - активная составляющая тока ротора.
2
2
Поскольку при пуске в ротор вводятся резисторы с большим активным сопротивле
тием, ток ротора получается практически активным, что увеличивает пусковой момент
двигателя до необходимого значения.
На судах асинхронные двигатели с фазным ротором нашли ограниченное примене
ние, в основном, в электроприводах грузовых кранов и якорно-швартовных устройст ( бра
шпилей ).
Схема автоматического пуска асинхронного электродвигателя в функции вре
мени через пусковые резисторы
Схема автоматического пуска асинхронного электродвигателя в функции времени
через пусковые резисторы приведена на рис. 122.
Рис. 122. Схема автоматического пуска асинхронного электродвигателя в функции
времени через пусковые резисторы
На рис. 122 приняты такие обозначения:
1. QF – автоматический выулючатель;
2. КМ – линейный контактор;
3. КМ1, КМ» и КМ3 – контакторы ускорения;
4. SB1 – кнопка «Пуск»;
5. SB2 – кнопка «Стоп»;
6. R , R и R - пусковые резисторы в цепи ротора.
п1
п2
п3
Особенность схемы состоит в том, что для обеспечения выдержки времени к контакторам пристроены маятниковые реле времени.
376
Подготовка схемы к работе
Для подготовки схемы к работе включают автоматический выключатель QF.
После этого схема готова к работе.
Работа схемы
Для пуска нажимают кнопку SВ1 «Пуск». Через контакты кнопки получет питание
катушка линейного контактора КМ1.
Контактор включается и замыкает главные контакты в силовой части схемы, вследствие чего обмотка ротора подключается к линейным проводам А, В и С через пусковые
резисторы.
Одновременно мгновенно замыкается вспомогательный контакт, который шунтиру
ет кнопку SB1 «Пуск», после чего ее можно отпустить.
При этом напряжение подается на обмотку статора двигателя и он начинает вращаться при полностью введенном пусковом реостате на первой искусственной
характеритике.
Контакт КМ реле времени, включенный последовательно с катушкой контактора
ускорения КМ1, пока не замкнут – он замкнется только через некоторое время.
Как только выдержка времени реле, пристроенного к контактору КМ закончится,
контакт КМ в цепи катушки контактора КМ1 замкнется, вследствие чего контактор К
включится и замкнет два главных контакта КМ1, которые зашунтируют первую ступень
пускового резистора R .
п1
Двигатель с броском тока перейдет на вторую искусственную характеристику п
продолжит разгон.
Далее работа схемы повторяется.
Как только выдержка времени реле, пристроенного к контактору КМ1 закончится,
контакт КМ1 в цепи катушки контактора КМ2 замкнется, вследствие чего контактор КМ2
включится и замкнет два главных контакта КМ2, которые зашунтируют вторую ступень
пускового резистора R .
п2
Двигатель с броском тока перейдет на третью искусственную характеристику и про
должит разгон.
Как только выдержка времени реле, пристроенного к контактору КМ2 закончится,
контакт КМ2 в цепи катушки контактора КМ3 замкнется, вследствие чего контактор КМ3
включится и замкнет два главных контакта КМ2, которые зашунтируют третью и
последнюю ступень пускового резистора R .
п3
Двигатель с броском тока перейдет на естественную характеристику и продолжит
разгон до номинальной скорости.
Для остановки двигателя нажимают кнопку SB2 «Стоп». Линейный контактор К
отключается. При этом размыкаются главные контакты в цепи обмотки статора,
вследствие чего двигатель отключается от сети.
Одновременно размыкается вспомогательный контакт КМ, включенный параллельно кнопке SB1 «Пуск», вследствие чего отключаются контакторы ускорения КМ1, КМ2 и
КМ3.
Схема готова к повторному пуску.
4. Типовые комплектные устройства судовых электроприводов
4.1. Основные сведения
Комплектными называются электротехнические устройства, выполненные в виде
конструктивно законченного изделия и предназначенные для управления электроприводами.
377
К комплектным устройствам относятся:
1. пусковые и пускорегулировочные реостаты;
2. магнитные пускатели;
3. магнитные станции ( станции управления );
3. магнитные контроллеры.
4.2. Реостаты
Реостатом называют аппарат ручного управления, предназначенный для плавного
или ступенчатого изменения под током значений сопротивления резисторов.
Конструктивно в состав реостата, кроме самого резистора, входит переключающее
устройство, состоящее из неподвижных контактов и скользящей по ним контактной щетки.
В зависимости от назначения, различают следующие виды реостатов:
1. пусковые – для пуска электрических двигателей постоянного и переменного тока;
2. регулировочные – для регулирования тока возбуждения двигателей постоянного
тока и генераторов постоянного и переменного тока ( их также называют «реостаты возбуждения» и «регуляторы возбуждения» );
3. пускорегулировочные – для пуска и регулирования частоты вращения двигате
лей постоянного тока.
Промышленность выпускает реостаты в вид серий.
Электрические схемы пусковых, регулировочных и пускорегулировочных реостатов приведены в источнике: Миронов В.В., «Электрические аппараты», конспект лекций
для курсантов высших морских учебных заведений, Херсон, 2005 г., 326 стр.
4.3. Магнитные пускатели
Основные сведения
Магнитный пускатель – это комплектный аппарат, предназначенный для дистанционного управления электродвигателями и их защиты.
Магнитные пускатели классифицируют по таким признакам:
1. роду тока - переменного и постоянного тока;
2. возможности реверса - нереверсивные и реверсивные;
3. числу питающих сетей – одно- и двухсетевые.
Последние предусматривают автоматическое переключение на резервную сеть
питания при обесточивании основной.
Нереверсивный магнитный пускатель
Конструктивно нереверсивный магнитный пускатель представляет собой металлическую коробку, внутри которой располагаются следующие аппараты и устройства:
1. контактор;
2. два тепловых реле;
3. кнопочный пост управления с двумя кнопками «Пуск» и «Стоп».
Исполнение корпуса пускателя брызго- или водозащищённое ( соответственно IP23
или IP44 ).
Схема пускателя ( рис.129 ) предусматривает выполнение таких действий:
1. пуск и остановку электродвигателя;
2. защиту электродвигателя.
Поясним действие схемы управления электродвигателем в такой последовательности:
1. подготовка схемы к работе;
2. работа схемы.
378
3. действие защит.
Рис. 129. Принципиальная электрическая схема нереверсивного
магнитного пускателя
Элементы схемы
На рис. 129 приняты такие обозначения:
в силовой части:
1. Л1, Л2, Л3 – линейные провода питающей сети;
2. КМ1…КМ3 – главные контакты линейного контактора КМ;
3. КК1, КК2 – нагревательные элементы тепловых реле;
4. М – обмотка статора асинхронного двигателя;
в схеме управления:
1. FU – предохранители, для защиты цепи катушки КМ от токов к.з.;
2. КК1, КК2 – размыкающие контакты тепловых реле;
3. КМ – катушка линейного контактора;
4. SB1 – кнопка «Пуск»;
5. SB2 – кнопка «Стоп»
Подготовка схемы к работе
Для подготовки схемы к работе подают питание на линейные провода Л1, Л2 и Л3.
После этого никакие электрические цепи не образуются. Схема готова к работе.
Работа схемы
Пуск
Для пуска нажимают кнопку SB1 «Пуск». При этом возникает цепь тока через катушку линейного контактора КМ:
линейный провод Л2 – верхний предохранитель FU – размыкающий контакт теплового реле КК2 – катушка КМ – размыкающие контакты кнопки SB2 – замыкающие контак
ты кнопки SB1 “Пуск” – размыкающий контакт теплового реле КК1 – нижний предохранитель FU – линейный провол Л3.
Контактор включается, при этом:
1. замыкаются главные контакты КМ1...КМ3 в силовой части схемы, вследствие
чего двигатель включается в сеть;
2. замыкается вспомогательный контакт КМ4, после чего кнопку “Пуск” можно
отпустить.
После отпускания кнопки ток катушки контактора КМ будет протекать через вспомогательный контакт КМ4.
379
Таким образом, этот контакт предназначен для удержания контактора КМ во включенном состоянии после отпускания кнопки “Пуск”.
Если по каким-либо причинам этот контакт не пропускает ток, то при нажатии
кнопки “Пуск” двигатель включится, а после отпускания – отключится.
Остановка
Для остановки электродвигателя нажимают кнопку SB2 “Стоп”. Контакты этой
кнопки размыкаются, поэтому цепь тока через катушку КМ пропадает.
Контактор КМ отключается, при этом:
1. размыкаются главные контакты КМ1...КМ3 – двигатель отключается от сети;
2. размыкается вспомогательный контакт КМ4.
Если отпустить кнопку SB2 “Стоп”, ее контакт замкнется. Однако после этого контактор КМ не включится, т.к. разомкнуты контакт КМ4 и контакт кнопки SB1 Пуск».
Для повторного пуска надо нажать кнопку SB1 «Пуск».
Защиты
Схема предусматривает 2 вида защит:
1. от токов перегрузки при помощи тепловых реле КК1, КК2;
2. по снижению напряжения при помощи контактора КМ.
Под перегрузкой понимают увеличение тока обмотки статора двигателя выше номи
нального. Основная причина перегрузки двигателя состоит в перегрузке механизма.
Например, перегрузка грузовой лебёдки возникает при подъёме груза большего,
чем предусмотрено грузоподъёмностью лебёдки.
Защита от токов перегрузки работает так.
При перегрузке тепловое реле КК1 ( или КК2 ) размыкает свой контакт в цепи
катушки линейного контактора КМ.
Контактор КМ отключается, при этом:
1. размыкаются главные контакты КМ1...КМ3 – двигатель отключается от сети;
2. размыкается вспомогательный контакт КМ4.
Снижение напряжения приводит к уменьшению вращающего момента и скорости
двигателя, вследствие чого увеличивается ток обмотки статора. При глубоких провалах
напряжения ( до 60% и менее ) возможны более тяжелые последствия: остановка и стоянка под током электроприводов насосов, вентиляторов и компрессоров, или, что ещё опаснее, реверс электродвигателей грузовых лебёдок или брашпилей.
Потому при снижении напряжения до недопустимих значений схемы управления
отключают двигатель от питающей сети.
Защита по снижению напряжения работает так.
При снижении напряжения до 60% и менее якорь контактора КМ отпадает под действием пружины или собственного веса, поэтому его главные и вспомогательный контакты размыкаются. Двигатель отключается от сети.
При восстановлении напряжения до 80% и более самопроизвольное включение кон
тактора КМ невозможно, потому что разомкнуты вспомогательный контакт КМ4 и контак
ты кнопки SB1“Пуск”.
Для повторного пуска надо нажать кнопку SB1 ( «Пуск» ).
Таким образом, рассмотренная защита по снижению напряжения исключает автома
тическое повторное включение двигателя после восстановления напряжения. Такая защита называется нулевой.
380
Реверсивный магнитный пускатель
Схема пускателя ( рис.130 ) предусматривает выполнение таких действий:
1. пуск и остановку электродвигателя;
2. реверс;
2. защиту электродвигателя.
Поэтому он имеет два реверсивных контактора: КМ1 «Вперёд», КМ2 «Назад» и три
кнопки : SB1 «Вперёд», SB2 «Назад» и SB3 «Стоп».
Рис. 130. Принципиальная электрическая схема реверсивного магнитного пускателя
Работа схемы
Для пуска двигателя в направлении «Вперед» нажимают кнопку SB1, при этом
включается контактор КМ1 «Вперёд». Далее схема работает так, как в предыдущей схеме.
Для реверса двигателя надо сначала нажать кнопку SB3 «Стоп», и дождавшись
остановки электродвигателя, нажать кнопку SB2 «Назад». При этом меняются местами
линейные провода А и С, поэтому двигатель реверсирует.
Защиты о токов перегрузки и по снижению напряжения работают так же, как в предыдущей схеме.
Блокировка одновременного включения реверсивных контакторов
Кроме защит, в схеме предусмотрен узел, исключающий одновременное включение реверсивных контакторов КМ1 и КМ2.
Такое включение приводит к двойному металлическому короткому замыканию в
линии электропередачи.
Действительно, если предположить, что одновременно замкнуты контакты
КМ1.1…КМ1.3 контактора КМ1 и КМ2.1…КМ2.3 контактора КМ2, то образуются две параллельные цепи короткого замыкания:
а ) линейный провод А – контакт КМ1.1 – контакт КМ2.3 – линейный провод С;
б ) линейный провод А – контакт КМ2.1 – контакт КМ1.3 - линейный провод С.
При этом образуется цепь тока короткого замыкания, протекающего через линей
ные провода А и С и далее – через фазные обмотки А и С статора синхронного генератора.
При этом возможно повреждение линии электропередачи и обмотки статора генера
тора, а также сваривание контактов, попавших в цепь короткого замыкания, т.е. КМ1.1,
КМ2.3 и КМ2.1 и КМ1.3.
Обмотка статора двигателя не повреждается, т.к. ток короткого замыкания протека
ет минуя ее.
Чтобы избежать одновременного включения реверсивных контакторов , в цепь ка-
381
тушки контактора КМ1 «Вперёд» включают размыкающие контакты КМ2:5 контактора
КМ2 «Назад», и наоборот, в цепь катушки контактора КМ2 включают размыкающие
контакты КМ1:5 контактора КМ1 «Вперед».
Теперь при включенном, например, контакторе «Вперед» случайное нажатие кноп
ки SB2 «Назад» не приведёт к включения контактора КМ2 «Назад», поскольку в цепи его
катушки разомкнут вспомогательный контакт КМ1:5 контактора «Вперед».
Аналогично работает схема при включенном контакторе «Назад».
Описанная электрическая блокировка дополняется механической, при помощи коромысла, поворачивающегося на оси. Если один из контакторов включён, его якорь пере
мещается и поворачивает коромысло в положение, в котором якорь другого контактора
заклинен.
Промышленные типы магнитных пускателей
Промышленность выпускает магнитные пускатели переменного тока серий
ПМГ1000, ПМТ1000, ПММ и постоянного тока серий ПП1000…ПП5000.
На судах применяются магнитные пускатели серии ПММ, рассчитанные на
переменный ток частотой 50 Гц, напряжением 380 В.
Втягивающие катушки пускателей рассчитаны на номинальные напряжения 127,
220 и 380 В переменного тока.
Режимы работы пускателей – продолжительный ( S1 ), кратковременный ( S2 ) и
повторно-кратковременный ( S3 ) с частотой включений до 600 в час при ПВ = 40%.
Условные обозначения типоисполнений пускателей ПММ */**/***/****/
расшифровываются так:
ПММ – пускатель магнитный морской;
*/ : 1 - первая величина, номинальный ток 25 А; 2 - вторая величина, номинальный
ток 50 А; 3 – третья величина, номинальный ток 100 А; 4 - четвертая величина, номиналь
ный ток 150 А;
**/ : исполнение по роду защиты от воздействия окружающей среды: 0 – открытое;
1 – брызгозащищенное; 2 – водозащищенное;
***/: исполнение по направлению вращения электродвигателя: 1 – нереверсивный;
2 – реверсивный;
****/: исполнение по наличию в пускателе дополнительных элементов: 0 – без
дополнительных элементов; 1 – с предохранителями; 2 – с кнопками управления; 3 – с
кнопками управления и пакетным переключателем; 4 - с предохранителями и пакетным
переключателем.
Пример.
Условное обозначение типоисполнения пускателя ПММ 2213 расшифровывается
так:
ПММ 2213 – магнитный пускатель морской второй величины ( номинальный ток
50 А ), водозащищенный, нереверсивный, с кнопками управления и пакетным переключателем.
4.4. Станции управления и магнитные контроллеры
Станцией управления ( магнитной станцией ) называют комплект релейно-контакторной аппаратуры, собранный на общем основании и установленный в металлическом
ящике.
Магнитным контроллером называется электротехническое устройство, состоящее
из станции управления и командоконтроллера.
Станции управления и магнитные контроллеры широко применяют для управления
электроприводами постоянного и переменного тока различных судовых механизмов.
Например, станции управления переменного тока типов ПМХ5300 и ПМХ5100
предназначены для управления 3-фазными асинхронными двигателями с короткозамкну-
382
тым ротором с номинальными токами от 90 до 650 А.
В зависимости от типа, они выполняют следующие функции:
1. прямой пуск двигателя или пуск переключением со звезды на треугольник;
2. реверс двигателя.
Для управления станциями служат кнопочные посты управления, встроенные в
корпус станции ( местное управление ) или находящиеся вне его ( дистанционное управле
ние ). В нереверсивных станциях используются кнопки «Пуск» и «Стоп», в реверсивных –
«Вперед», «Назад» и «Стоп».
При выборе станции управления или магнитного контроллера для конкретного
вида электропривода следует учитывать такие факторы:
1. требования, предъявляемые к работе схемы ( необходимость реверса, одной или
нескольких скоростей, регулирование скорости в требуемых пределах, электрическое тор
можение и экстренная остановка, различные виды защиты и т.п. );
2. род тока, напряжение и частоту питающей сети;
3. мощность управляемого электропривода;
4. условия работы станции ( режимы работы: продолжительный S1, прерывистопродолжительный S4, кратковременный S2, повторно-кратковременный S3, степень защи
щености от воздействия окружающей среды: брызго- ( IP23 ) и водозащищенные ( IP46 ).
Контрольные вопросы
1. Какие способы пуска ДПТ применяют в САЭП? В чем состоит основной недоста
ток прямого способа пуска ТАД?
2. Нарисуйте схему реостатного пуска ДПТ и объясните процесс пуска при помощи
электромеханических характеристик ДПТ
3. Каковы основные особенности системы Г – Д? Для каких САЭП она применяется?
4. Каковы особенности системы двойного рола тока УВП – ДПТ? Каким образом
регулируется скорость ДПТ в таких системах? Что такое инверсный режим работы ДПТ в
этой системе?
5. В чем особенности регулирования скорости ДПТ изменением сопротивления цепи обмотки якоря? Нарисуйте электрическую схему и механические характеристики и
объясните процесс регулирования скорости этим способом. Для каких САЭП он применяется?
6. Каковы особенности регулирования скорости ДПТ ослаблением магнитного
потока? В каких САЭП и для чего применяется этот способ регулирования?
7. Для чего в САЭП используется электрическое торможение? Какие виды электрического торможения ДПТ применяется в САЭП и для чего?
8. Нарисуйте электрическую схему и механические характеристики ДПТ при дина
мическом торможении и с их помощью объясните процесс торможения. В каких САЭП и
для чего применяется этот способ торможения?
9. Нарисуйте электрическую схему и механические характеристики ДПТ при рекуперативном торможении и с их помощью объясните процесс торможения. В каких САЭП
и для чего применяется этот способ торможения?
10. Нарисуйте электрическую схему и механические характеристики ДПТ при торможении противовключением с активным статическим моментом и с их помощью объясните процесс торможения. В каких САЭП и для чего применяется этот способ торможения?
11. Нарисуйте электрическую схему и механические характеристики ДПТ при торможении противовключением с реактивным статическим моментом и с их помощью объя
сните процесс торможения. Почему этот способ торможения не применяется в САЭП ?
12. Перечислите возможные способы реверса ДПТ. Объясните, почему при перебро
ске концов питающей сети реверс не происходит
383
13. Какие способы пуска ТАД применяют в САЭП? Объясните особенности каждого способа пуска
14. Нарисуйте схемы пуска ТАД при пониженном напряжении и объяснте работу
каждой из них
15. Объясните физические процессы, происходящие при пуске ТАД с улучшенными пусковыми свойствами: с повышенным скольжением, глубокопазных, двухклеточных
и с фазным ротором
16. Какие способы регулирования скорости ТАД применяются в САЭП? Назовите
область применения каждого их них
17. Нарисуйте механические характеристики и объясните особенности регулирования скорости ТАД изменением частоты тока питающей сети, В каких типах САЭП этот
способ применяется?
18. Нарисуйте механические характеристики и объясните особенности регулирования скорости ТАД изменением активного сопротивления цепи фазного ротора. В каких
типах САЭП этот способ применяется?
19. Нарисуйте механические характеристики и объясните особенности регулирования скорости ТАД изменением числа пар полюсов путем переключения обмотки статора
со звезды на двойную звезду. В каких типах САЭП этот способ применяется?
20. Нарисуйте механические характеристики и объясните особенности регулирования скорости ТАД изменением числа пар полюсов путем переключения обмотки статора с
треугольника на двойную звезду. В каких типах САЭП этот способ применяется?
21. В чем сходство и отличие энергетических параметров ТАД ( скорости, момента,
мощности ) двух способов регулирования скорости изменением числа пар полюсов:
а ) переключением обмотки статора со звезды на двойную звезду;
б ) переключением обмотки статора с треугольника на двойную звезду?
22. Нарисуйте механические характеристики и объясните особенности регулирования скорости ТАД изменением напряжения на обмотке статора. В каких типах САЭП этот
способ применяется?
23. Что такое «опрокидывание» ТАД? При каком условии оно наступает?
24. Каковы последствия опрокидывания ТАД при реактивном статическом моменте? При активном статическом моменте?
25. Нарисуйте электрическую схему и механические характеристики ТАД при дина
мическом торможении и с их помощью объясните процесс торможения. В каких САЭП и
для чего применяется этот способ торможения?
26. Нарисуйте механические характеристики ТАД при переходе с большей скорости на меньшую и с их помощью объясните процесс рекуперативного торможения. В каких САЭП и для чего применяется этот способ торможения?
27. Нарисуйте электрическую схему и механические характеристики ТАД при спуске тяжелого груза и с их помощью объясните процесс рекуперативного торможения. В ка
ких САЭП и для чего применяется этот способ торможения?
28. Нарисуйте механические характеристики ТАД при торможении противовключе
нием с активным статическим моментом и с их помощью объясните процесс торможения.
В каких САЭП и для чего применяется этот способ торможения?
29. Нарисуйте механические характеристики ТАД при торможении противовключе
нием с реактивным статическим моментом и с их помощью объясните процесс торможения. Почему этот вид торможения в САЭП не применяется?
30. Нарисуйте механические характеристики ТАД при однофазном торможении и с
их помощью объясните процесс торможения. В каких САЭП и для чего применяется этот
способ торможения?
31. Нарисуйте схемы реверса 1-, 2- и 3-фазных ТАД и объясните их работу.
32. По каким основным признакам и как именно классифицируются электрические
аппараты?
384
33. Что такое кнопочный пост управления? Сколько отдельных кнопок могут иметь
отдельные кнопочные посты?
34. Как устроены электромагнитные самоудерживающиеся кнопки? Где применяются такие кнопки?
35. Нарисуйте условное графическое изображение кнопок «Пуск», «Стоп» и вытяж
ной
36. Что такое командоконтроллеры? Как устроено их переключающее устройство?
37. Что представляют собой таблицы замыканий контактов командоаппаратов?
Как ими пользоваться?
38. Как устроены нажимные, рычажные и шпиндельные выключатели? Где они
применяются? В чем состоит разница между путевыми и конечными выключателями?
39. Что такое контроллер? В чем состоит разница между контроллером и командоконтроллером?
40. Для чего предназначены и как классифицируются контакторы?
41. Какие системы относятся к основным у контакторов постоянного и переменно
го тока?
42. Как устроена и работает контактная система контакторов постоянного тока?
43. В чем состоит разница между главными и вспомогательными контактами контакторов? Объясните устройство и принцип действия пальцевых и мостиковых контактов
44. Нарисуйте замыкающий, размыкающий и переключающий контакты контактных аппаратов и объясните их работу
45. Для чего предназначена, как устроена и работает электромагнитная система
контакторов? Почему у контакторов перменного тока такая система набирается из отдельных листов электротехнической стали?
46. Чем отличаются поворотные якоря контакторов от прямоходовых?
47. Объясните назначение, устройство и принцип действия короткозамкнутого
витка контакторов переменного тока? К каким последствиям приведет повреждения витка, например, образование в нем трещины?
48. Объясните назначение, устройство и принцип действия дугогасительной систе
мы контакторов переменного тока?
49. Объясните назначение, устройство и принцип действия дугогасительной систе
мы контакторов постоянного тока?
50. Что такое «магнитное дутье»? Каков механизм действия дугогасительных камер?
51. Для чего предназначены и как устроены реле напряжения? Как регулируется
уставка этих реле?
52. Для чего предназначены и как устроены промежуточные реле?
53. Для чего предназначены и как устроены реле электромеханические, электромагнитные и пневматические реле времени? Как регулируется уставка этих реле?
54. Нарисуйте шесть типов контактов реле времени и объясните их работу. Что
такое «правило парашюта»?
55. Каковы назначение, устройство и принцип действия герконов? В каких САЭП
они применяются?
56. В чем состоит разница между токовыми и температурными электротепловыми
реле?
57. Объясните назначение, устройство, принцип действия и токо-временную харак
теристику токового электротеплового реле. Как регулируется уставка этого реле?
58. Объясните назначение, устройство и принцип действия температурного токово
го электротеплового реле. Какие типы полупроводниковых приборов применяются в таких реле? Как регулируется уставка таких реле?
59. Почему электротепловые реле нельзя применять для защиты приемников эле
385
ктроэнергии от токов короткого замыкания? Какие защитные устройства предназначены
для защиты электрических цепей от токов короткого замыкания?
60. Каковы назначение, устройство и принцип действия реле давления? Как регулируется уставка таких реле?
61. С какой целью в САЭП применяются реле контроля скорости? Объясните уст
ройство и принцип действия центробежного и индукционного реле скорости. Как регули
руется уставка этих реле?
62. Объясните назначение, устройство и принцип действия поплавкового реле
уровня. Как регулируется уставка этого реле?
63. Как работает ленточное тормозное устройство? Кто из членов экипажа отвеча
ет за исправное техническое состояние устройства? В каких САЭП оно применяется?
63. Для чего предназначены, как устроены и работают дисковые тормозные устройства ( на примере электромагнитного дискового тормоза переменного тока типа ТМО3 )? Каким образом регулируется воздушный зазор? Как поступить, если судно
обесточено, а груз надо опустить на палубу?
64. Как устроен и работает колодочный тормоз с электромагнитным приводом? В
каких САЭП он применяется?
65. Объясните назначение, устройство и принцип действия электрогидравлического толкателя ( на примере толкателя типа ТГ )?
66. Каким образом классифицируются режимы работы ЭП? Чем отдичаются друг
от друга режимы S1, S2 и S3? Приведите примеры САЭП, работающих в этих трех режимах
67. Что произойдет, если для насоса забортной воды ГД выбрать электродвигатель
с режимом работы S2?
68. Что произойдет, если для электропривода брашпиля выбрать электродвигатель
с режимом работы S1?
69. Перечислите классы изоляции обмоток электрических машин и соотаетствующие им предельные значения температуры нагрева обмоток
70. Каковы условия выбора электродвигателей для САЭП?
71. Что такое «управление» ЭП?
72. Что такое «система управления ЭП»?
73. Каковы уровни автоматизации управления САЭП?
74. Перечислите виды элементной базы САЭП
75. В чем преимущество микропроцессорных СУ перед другими видами СУ?
76. Объясните устройство микропроцессорной СУ и взаимодействие узлов, входящих в ее состав
77. Объясните структурную схему микропроцессора и взаимодействие узлов, входящих в его состав
2.3. ЭЛЕКТРОПРИВОДЫ РУЛЕВЫХ УСТРОЙСТВ
1. Рулевые электроприводы
1.1. Общая характеристика рулевых электроприводов
Управляемость является одним из важнейших качеств современного судна. Она
может быть обеспечена различными способами и средствами:
1. кормовыми рулями;
2. гребными винтами;
3. водометными движителями;
4. крыльчатыми движителями;
5. подруливающими устройствами.
Нередки случаи совместного использования некоторых из названных устройств.
На морских транспортных судах основным средством обеспечения активного
386
маневрирования объекта являются кормовые рули, перекладка которых осуществляется
посредством электропривода.
Маневренные качества объекта, включающего в себя комплекс: корпус - руль винты могут быть полностью реализованы только при надлежащей работе привода руля и
системы управления.
Рулевой электропривод является наиболее ответственным электроприводом на
судне. От его безотказного и качественного действия зависит безопасность мореплавания,
сохранность судна, экипажа и груза. Это обстоятельство определяет необходимость наибо
лее жестких требований к рабочим характеристикам привода как при проектировании и
комплектации, так и в регламентных мероприятиях по поддержанию сохранности этих
характеристик в процессе эксплуатации.
1.2. Принцип действия руля
При установившемся прямолинейном движении судна руль, находящийся в диамет
ральной плоскости, испытывает с обеих сторон одинаковое давление набегающих струй
воды.
Рис. 10.1. Силы, действующие на судно при отклонении руля
При отклонении руля на угол α (рис. 10.1 ) равновесие нарушается. На поверхности пера руля, обращенной к набегающему потоку, силы давления увеличиваются.
Поле давления может быть представлено равнодействующей силой R, приложенной в центре давления. Направление действия силы R в первом приближении удобно
считать нормальным относительно плоскости пера руля.
Равнодействующая сила R может быть разложена на дне составляющие х и y по
взаимно перпендикулярным осям, одна из которых располагается по линии курса судна, а
другая - нормально к ней.
Поместим в центр тяжести судна - в точку О - две взаимно уравновешивающиеся
силы у1 и у2, равные и параллельные боковой силе у.
Силы у1 и у составляют пару сил, плечо которой примерно можно считать равным
половине длины судна L. Они образуют момент, поворачивающий судно в сторону
перекладки руля
Мпов = у
L
2
( 10.1 ),
Этот момент и определяет поворот судна при отклонении руля.
Сила у2, называемая силой дрейфа, сносит судно боком во внешнюю сторону
описываемой им дуги и создает из-за наличия метацентрической высоты крен судна.
Сила х создает дополнительное сопротивление движению судна ( тормозит его ).
Таким образом, задача поворота судна сводится к перекладке пера руля в
необходимую сторону на угол, определяющий нужную эффективность управляющего
воздействия.
Обобщенная сила R одновременно создает противодействующий момент на
баллере руля, который является нагрузкой для электропривода.
387
1.3. Состав рулевого электропривода
Угловое перемещение руля, необходимое для поворота судна, осуществляется с помощью силового электропривода.
Электроприводом производится перекладка руля, его остановка, реверсирование,
регулирование скорости и т. д. В состав рулевого электропривода входит исполнительный
электродвигатель ИД, передаточный механизм (рулевая машина) РМ, система управления
рулем , система контроля ( 10.2 ).
Рис. 10.2. Структурные схемы управления судном:
а – с использованием РЭМ-привода; б - с использованием РЭГ-привода;
I – ручное управление; II – автоматическое управление; III – управляющая
программа; IV – изготовка; С – судно; Р – руль; ПУ – пост управления рулем; У усилитель; ИД – иполнительный двигатель; ИМ – исполнительный механизм
( насоса в электрогидравлических рулевых машинах ); Н – насос переменной или
постоянной производительности ( в электрогидравлических рулевых машинах);
РМ – рулевая машина; СРУ – счетно-решающее устройство ( навигационный
комплекс ); А – аксиометр ( рулевой указатель ); К – репитер гирокомпаса
( сельсин-приемник гирокомпаса )
На рис. 10.2 показана общая структурная схема управления судном, где
выходными звеньями являются руль Р и судно С.
Система управления включает в себя следующие элементы:
1. ПУ - пост управления ( командное устройство ).
Основной пост располагается в рулевой рубке. Он имеет переключатели для
перехода на предусмотренные виды ручного или автоматического управления рулем и
элементы контроля исправного состояния наиболее важных звеньев привода;
2. У – усилитель.
Усилитель может быть линейный, полупроводниковый, релейный, электромашинный (генератор с приводным электродвигателем), магнитный, гидравлический,
комбинированный;
3. СРУ - счетно-решающий судовой навигационный комплекс, вырабатывающий
алгоритм управления, автоматически контролирующий выполнение маневров в
соответствии с заданной навигационной программой.
Наиболее часто используются системы стабилизации судна на прямом курсе, где
СРУ вырождается в систему автоматического регулирования по отклонению курсового
угла.
Все элементы такой системы комплектуются в колонке основного поста
управления.
Рис. 10.2, а характеризует структуру рулевого электромеханического (РЭМ)
привода Здесь перекладка руля производится непосредственно исполнительным
двигателем, который работает в повторно-кратковременном режиме с частыми пусками и
торможениями.
На рис. 10.2, б представлена общая структура рулевого электрогидравлического
(РЭГ) привода, где ИД вращает с постоянной скоростью насос Н. Управление рулем
388
производится посредством сервомеханизма ИМ, изменяющего подачу масла на
гидравлическую рулевую машину РМ.
Система контроля служит для проверки исполнения задания (действия) по
перекладке руля и результатов его воздействия на судно. В систему контроля входит
рулевой указатель - аксиометр А, позволяющий определить положение пера руля
относительно диаметральной плоскости, и репитер гирокомпаса К, показывающий курс
судна и его изменение. В современных рулевых приводах информационные приборы
контроля встраиваются в пост управления.
1.4. Классификация рулевых электроприводов
Используемые на транспортных судах рулевые электроприводы отличаются большим многообразием. Это связано с конструктивными особенностями рабочего органа,
режимом работы основного электрооборудования, видом механических связей между
исполнительным электродвигателем и рулем, степенью автоматизации управления и т. д.
Ниже приводится разделение рулевых электроприводов по группам в соответствии
со следующими основными признаками:
1. По гидродинамическим особенностям руля.
Руль определяет не только управляемость судна, но и нагрузку рулевого
электропривода и возможные режимы его работы.
На морских транспортных судах в качестве кормовых рулей в настоящее время
чаще используются обыкновенные рули, которые разделяются по таким признакам:
а ) по форме пера и степени компенсации:
1. простые;
2. балансирные;
3. полубалансирные.
б ) по профилю руля:
1. пластинчатые;
2. удобообтекаемые ( профильные ).
Профильность руля сравнительно мало влияет на нагрузочные характеристики
привода, но является важным элементом, улучшающим ходкость судна, уменьшая общее
сопротивление его движению.
Компенсация руля используется для общего уменьшения момента на баллере, что
облегчает условия работы рулевого электропривода.
Вместе с тем при компенсированном руле ограничивается количество точек
закрепления пера руля, что снижает прочность и надежность рулевого комплекса.
Поэтому на судах ледового плавания, ледоколах стремятся применять простые
рули, ось вращения которых проходит по передней кромке, что обеспечивает возможность
увеличения числа подшипников на рудерпосте для создания наиболее прочного
подвижного сочленения.
2. По типу механической передачи между рабочим органом и рулевым
исполнительным двигателем (ИД).
Вид передаточного механизма определяет характер работы рулевого ИД, степень
его энергетического использования и особенности электрифицированной системы
управления.
Рулевые электромеханические (РЭМ) приводы - секторные, редукторные. В них
рулевой ИД жестко через кинематический механизм связан с баллером руля.
Управление перекладкой производится непосредственным включением и
отключением двигателя, характер работы которого прерывистый.
Регулирование перекладки производится посредством изменения частоты
вращения рулевого ИД.
Рулевые электрогидравлические ( РЭГ ) приводы. В них рулевой ИД непрерывно
вращает насос, от которого при необходимости перекладки происходит управляемая
389
подача рабочей жидкости на гидравлическую рулевую машину.
В настоящее время используются рулевые машины плунжерные, лопастные, с
качающимися цилиндрами.
В зависимости от принятого принципа регулирования подачи масла на рулевую
машину (объемного или дроссельного) применяются насосы переменной или постоянной
подачи.
Для более мощных систем характерен объемный принцип регулирования,
осуществляемый посредством специального электрического или электромеханического
сервопривода.
В кинематике сервопривода для целей эффективности регулирования подачи масла
насосом применяются: рычажные, кулачковые и электрические дифференциалы.
При дроссельном регулировании подача масла происходит включением золотника
с ручным или электромагнитным приводом.
Таким образом, в РЭГ-приводах регулирование перекладки руля происходит на
гидравлической стороне механизма передачи при постоянном вращении вала
исполнительного электродвигателя. В качестве последних применяются наиболее простые
и дешевые асинхронные машины с короткозамкнутым ротором. Управление ими
заключается только в дистанционном пуске при изготовке рулевого приводя к действию.
3. По степени автоматизации управления рулевые электроприводы разделяются
на приводы:
1. простого;
2. следящего;
3. автоматического действия.
Простое действие или управление по времени.
При простом управления в качестве органов управления используют кнопки «Лево
руля», «Право руля» или вертикально расположенный рычаг управления ( «джостик» ).
Руль перекладывается все то время, пока нажата одна из кнопок или рычаг выведен
из нейтрального положения ( наклонен в нужную сторону ). Перекладка прекращается,
если отпустить кнопку или вернуть рукоятку поста в исходное - нулевое положение.
Отсюда название – управление по времени.
Об угловом состоянии руля в каждый момент времени судят по рулевому
указателю - аксиометру.
Таким образом, простое управление является неавтоматизированным.
Следящее действие или управление по пути.
При следящем управления в качестве органа управления используют штурвал
поста управления в рулевой рубке.
При повороте штурвала на определенный угол в необходимую сторону ( влево или
вправо относительно нулевого положения ) перо руля повернется на такой же ( или
пропорциональный ) угол и автоматически остановится.
Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением
штурвала, отсюда название – следящее управление.
При этом угол поворота пера руля тем больше, чем больше угловое расстояние (
путь ) , описанное штурвалом, отсюда второе название – управление по пути.
Из сказанного следует, что у каждому положению штурвала после отработки
соответствует определенное положение руля.
Таким образом, следящее управление является полуавтоматическим – на первом
этапе управления участвует человек ( поворачивает вручную штурвал ), на втором используются элементы автоматики ( сельсин-датчик руля в румпельном отделении ),
обеспечивающие автоматическую ( без участия человека ) остановку руля.
Аксиометр является средством дополнительного контроля положения руля.
Автоматическое действие. Рулевой привод обеспечивает выполнение заданной
программы перемещения судна. В частном, наиболее простом случае, решается задача
390
стабилизации судна на прямом курсе.
В качестве органов управления используются элементы автоматики: сельсинытрансформаторы ( поста управления в рулевой рубке, пера руля в румпельном отделении,
насоса Холла в исполнительном механизме ), тахогенераторы и др. .
4. По роду тока в системе питания, ИД и схемы управления.
Принципиально рулевые электроприводы могут комплектоваться для работы как
от сети переменного, так и от сети постоянного тока.
В рулевых электромеханических приводах ( РЭМ-приводах или секторных )
широко используется система генератор - двигатель.
При формировании управляющего сигнала в автоматическом и следящем режимах
в современных схемах предпочтительнее применяются элементы переменного тока
( сельсины-трансформаторы, магнитные усилители и т.п. ).
2. Электромеханические передачи
Обычно применяют механические приводы трех типов: винтовые, секторные и
штуртросовые. На морских судах основное применение получили секторные передачи
(рис. 10.3 ).
Рис. 10.3. Рулевой электропривод с секторной передачей
Электродвигатель 1 через червяк 2 и червячное колесо 3 вращает цилиндрическую
шестерню 5, входящую в зацепление с зубчатым сектором 6. Сектор надет на верхнюю
391
часть баллера руля 8 и свободно на нем поворачивается влево и вправо от диаметральной,
плоскости на 35-40°.
Ниже сектора на баллер надет и закреплен шпонкой румпель 7, который соединен с
сектором двумя буферными пружинами 4, играющими роль амортизаторов. Они защищают механизм от динамических усилий, возникающих при ударах волн о перо руля.
Аварийный ручной привод руля выполнен при помощи штурвальных колес 13, враща
ющих вертикальный вал, на котором находится шестерня 14. Маховичком 15 ее вводят в
зацепление с малым сектором 12, соединенным с баллером шпонкой.
Румпель можно закрепить неподвижно в любом положении стопорными колодками 10, прижимаемыми к ее секторной части винтом 9 с рукояткой-трещоткой 11. Это
бывает нужно в случае выхода из строя рулевою механизма.
Червячная пара - самотормозящаяся, так как КПД ее равен 0,5. Эта непременная
особенность рулевых приводов вызвана необходимостью удержать руль, переложенный
на борт во время движения судна в том положении, в каком он оказался после остановки
ЭД.
Передаточное число для секторных приводов находится в пределах 1500-2500. Общий КПД передачи обычно составляет 0, 4…0,5, а мощность рулевого ЭД не превышает
70 кВт.
Секторные передачи распространены на судах среднего и малого водоизмещения.
3. Электрогидравлические передачи
3.1. Основные сведения
Увеличение водоизмещения и скорости судов требует увеличения моментов на бал
лере рулей. Значения моментов для больших современных судов измеряется тысячами и
десятками тысяч килоньютоно метров ( кН*М ). Например, на японских сепертанкерах
дедвейтом 500 тыс. т максимальный момент на баллере достигает 10 000 кН*м.
При таких значениях моментов механические ( секторные ) передачи становятся
громоздкими и неэффективными из-за значительных затрат энергии.
Поэтому на современных судах применяют гидравлические рулевые машины,
которым присущи следующие достоинства:
1. возможность получения практически неограниченных моментов на баллере;
2. плавное и точное регулирования привода;
3. малые вес и размеры.
Эти достоинства позволили разработать гидравлические рулевые машины с небольшими моментами на баллере и тем самым вытеснить механические рулевые машины.
Промышленность выпускает гидравлические рулевые машины в виде типизированного ряда с номерами Р01-Р36, причем рулевые машины типов Р01…Р10 имеют насосы
постоянной подачи, а остальные рулевые машины – насосы регулируемой подачи ( табли
ца 10.1. ).
Таблица 10.1.
Технические характеристики гидравлических рулевых машин типизированого ряда
Тип
Р01
Число Число
Число ци- Номинальрулей насосов линдров
ный крутящий момент,
кН*м
1
1
Насосы постоянной подачи
2
6,2
Давление
масла в
цилиндрах, МПа
Мощность
электродви
гателя
насоса, кВт
Масса
рулевой
машины, кг
6,8
0,7
650
392
Р02
Р03
Р04
Р05
Р06
Р07
Р08
Р09
Р10
2
1
2
1
2
1
2
1
2
1
1
1
1
1
1
1
1
1
Р11
Р12
Р13
Р14
Р15
Р16
Р17
Р18М1
Р21М1
Р22
Р24
Р26
Р36
1
2
1
2
1
1
1
1
1
1
1
2
1
1
1
1
1
2
2
2
2
2
2
2
2
2
2
6,2
2
9,8
2
9,8
2
15,7
2
15,7
2
24,5
2
24,5
2
39,2
2
39,2
Насосы переменной подачи
2
61,8
2
61,8
2
9,8
2
9,8
4
157
4
245
4
392
4
620
4
1950
4
1570
4
2500
2
620
4
1200
9,8
6,8
9,8
6,8
9,8
6,8
9,8
6,8
9,8
0,7
0,7
0,7
2,2
2,2
2,2
2,2
3,2
3,2
660
770
790
940
890
1140
1140
1630
1705
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
9,8
8
8
8
8
11
18
27
40
65
95
60
8
55
2690
2620
3230
3350
5000
6750
12100
14250
25400
28200
-
Примечание:
1 кН*м = 100 кгс*м = 0,1 Т*м ( тонно-метр );
2
1 МПа = 10 кгс/ см = 10 at ( at – техническая атмосфера ).
3.2. Насосы гидравлических рулевых машин
Подача масла для работы рулевой машины осуществляется от специального насоса,
который вращается непрерывно исполнительным электродвигателем.
В зависимости от возможности регулирования подачи, насосы рулевых машин
делятся на два вида:
1. насосы постоянной подачи;
2. насосы переменной подачи.
Вид используемого насоса определяет качественные особенности всей схемы
управления рулем.
3.3. Насосы постоянной подачи
Насосы постоянной подачи бывают трех видов:
1. шестеренчатые;
2. роторно-шиберные;
3. червячные.
На судах чаще всего используются шестеренчатые насосы ( рис. 10.4 )
393
Рис. 10.4. Шестеренчатый насос типа Р3-30:
1 – корпус; 2, 23 – шестерни на ведущем роторе с правой и левой нарезкой;
3, 6 – установочные кольца; 4, 8 – винты для закрепления установочных колец 3 и
6; 5 – задняя крышка насоса; 7, 22 – шариковые подшипники; 9, 10 - шестерни на
ведомом роторе с правой и левой нарезкой; 11, 13 – валы ведомого и ведущего
роторов; 12 – передняя крышка насоса; 14 – прилив коруса; 15 – подпятник
чугунный; 16 – амортизаторы резиновые; 17 – крышка чугунная; 18 – пята; 19, 20 –
кольца резиновое уплотняющее и стальное упорное; 21 – пружина.
Насос Р3-30 – одоступенчатый двухшестеренный насос с нижним расположением
ведущего ротора.
К основным его деталям относятся:
1. чугунный корпус 1;
2. ведущий ротор 13;
3. ведомый ротор 11;
4. передняя крышка 12;
5. задняя крышка 5.
Ведущий ротор 13 представляет собой стальной вал, на котором шпонкой
закреплены две шестерни с косым зубом – с левой нарезкой 23 и правой нарезкой 2.
На вал ведомого ротора 11 насажены такие же шестерни 9 и 10, из которых
шестерня 9 закреплена шпонкой, а шестерня 10 сидит свободно, что дает ей возможность
самоустанавливаться.
От осевого смещения шестерни 9 и 2 предотвращаются установочными кольцами 3
и 6, закрепленными винтами 4 и 8.
Каждая пара шестерней, силящих на одном валу, образует шевронную шестерню.
Роторы насоса опираются на шариковые подшипники 7 и 22, которые смазываются
как и другие трущиеся детали, перекачиваемой жидкостью.
Детали торцевого уплотнения вала ведущего ротора расположены в приливе 14
корпуса. В него входят пята 18, чугунный подпятник 15 с резиновыми амортизаторами 16,
два кольца – стальное упорное 20 и резиновое уплотняющее 19, пружина 21 и чугунная
крышка 17.
При работе насоса, когда его ведущие шестерни 2 и 23 вращаются по часовой
стрелке, нагнетание жидкости происходит в направлении справа налево.
Для предотвращения повышения давления в нагнетательной полости сверх
допустимого в верхней части насоса предусмотрен предохранительно-перепускной клапан
( он хорошо виден на левой проекции рисунка ).
3.4. Насосы переменной подачи
Насосы переменной подачи предназначены:
394
1. для создания необходимого рабочего давления в гидравлической системе
рулевых машин,
2. для изменения скорости и направления перекладки пера руля.
В зависимости от принципа действия, насосы переменной подачи делятся на два
вида:
1. радиально-поршневые;
2. аксиально-поршневые.
Радиально-поршневые насосы
Радиально-поршневые насосы часто называют насосами Холла, по имени изобретателя этого вида насоса переменной подачи
.
Устройство радиально-поршневого насоса
Устройство насоса Холла показано на рис. 10.5.
Рис. 10.5. Принцип действия радиально-плунжерного насоса регулируемой подачи
( насоса Холла ):
1 – барабан; 2 – нижняя полость насоса; 3 – плунжер; 4 – цилиндр; 5 – верх
няя полость насоса; 6 – ползун; 7 – корпус насоса; 8 – манипулятор;
а ) исходное положение барабана;
б ) барабан смещен влево, полость 5 нагнетательная, полость 2 всасывающая; в )
барабан смещен вправо, полость 2 нагнетательная, полость 5 всасывающая.
В неподвижном корпусе насоса 7 асинхронным двигателем вращается
звездообразный ротор. Он состоит из 5…11 радиально расположенных цилиндров. На
рис. 10.5 показан ротор с семью цилиндрами 4.
Внутри каждого цилиндра есть плунжер ( поршень ) 3, связанный шарнирно с
ползуном 6. При вращении ротора ползуны скользят по внутренней поверхности
барабана 1.
395
Этот барабан не вращается, но может перемещаться влево или вправо при помощи
специального рычага – манипулятора 8. При этом ось ротора остаётся на месте (
напомним, что ротор насоса вращается приводным асинхронным двигателем ) .
Полость ротора разделена перегородкой на верхнюю 5 и нижнюю 2 части. Каждая
часть соединена магистралями с трубопроводами «а» и «б» рулевой гидравлической маши
ны ( см. ниже рис. 10.9. Принципиальная схема гидравлической рулевой машины ).
Принцип действия насоса
В исходном состоянии ось ротора и ось барабана совпадают ( рис. 10.5, а ).
Смещение оси барабана 1 по отношению к оси ротора называют эксцентриситетом
и обозначают греческой буквой ε ( эпсилон ). На практике ε = 15…20 мм.
Поскольку в исходном состоянии оси ротора и барабана совпадают, ε = 0.
При этом плунжеры 3 вращаются вместе с цилиндрами 4, не перемещаясь
радиально внутри последних.
Объём масла внутри каждого из цилиндров 4 одинаков, поэтому давление масла в
полостях 5 и 2 равно нулю. На рис. 10.8 эти объемы, заполненные маслом, зачернены.
Если при помощи манипулятора 8 сместить барабан 1, например, влево ( рис. 10.5,
б ), то возникнет эксцентриситет ε > 0.
При этом плунжеры цилиндров, находящиеся выше горизонтальной оси (
изображена пунктиром ), станут перемещаться внутри своих цилиндров по направлению к
центру ротора, вытесняя масло внутрь верхней полости 5 и, далее, в магистраль «а». Эта
магистраль станет нагнетательной.
В то же время плунжеры цилиндров, расположенные ниже горизонтальной оси, под
действием центробежных усилий, станут перемещаться в направлении от центра ротора, а
образующиеся под ними пустоты станут заполняться маслом из нижней полости 2.
В результате в этой полости давление упадёт, поэтому магистраль «б» станет
всасывающей.
Вследствие этого рулевая машина начнёт поворачивать перо руля в направлении
против часовой стрелки.
Если манипулятором сместить барабан 5 вправо ( рис. 10.5, в ), то, рассуждая
аналогично, можно показать, что полость 5 станет всасывающей, а полость 2 –
нагнетательной.
При этом руль повернётся в обратную сторону.
Чем больше эксцентриситет, тем больше ход плунжеров и тем больше объём масла
( подача ), перемещаемого в цилиндрах насоса и магистралях рулевой машины. Значит,
тем больше скорость перекладки руля.
Из сказанного следует, что насос Холла имеет две особенности:
1. изменение направления перемещения барабана приводит к перекладке руля на
другой борт ( реверсу );
2. изменение величины смещения барабана ( эксцентриситета насоса ) приводит к
изменению скорости перекладки руля.
Для дистанционного управления манипулятором применяют электромеханические
или электрогидравлические передачи, называемые исполнительным механизмом ( ИМ ).
При ручном ( аварийном ) управлении манипулятор перемещают вручную при
помощи рукоятки снаружи корпуса ИМ, по командам с мостика.Угол поворота пера руля
контролируют по указателю положения пера руля, расположенному в румпельном
отделении ( второй указатель находится в рулевой рубке на мостике )
Аксиально-поршневые насосы
Аксиально-поршневой насос регулируемой подачи изображен на рис. 10.6.
396
Рис. 10.6. Аксиально-поршневой насос регулируемой подачи:
а – кинематическая схема; б – схема работы насоса
На рис. 10.6 изображены:
1. золотниковая коробка;
2. втулка золотниковой коробки;
3. рычажная система;
4. валик управления;
5. шестерня;
6. рычаг обратной связи;
7. вал насоса;
8. эксцентрический вибратор;
9. силовые цилиндры ( 2 шт. );
10. вал управления;
11. поворотная люлька насоса;
12. блок цилиндров;
13. нуль-установитель;
14. коническая пара шестерней;
15. зубчатое колесо;
16. приводной вал насоса.
Гидравлическая система аксиально-поршневого насоса ( рис. 10.6, а) включает
следующие элементы: основной насос регулируемой подачи; шестеренный насос;
золотниковую коробку и гидравлический усилитель, включающий в себя силовые
цилиндры и рычажную систему, клапанное устройство, состоящее из двух подпиточных
(сливного и предохранительного) клапанов; нуль-установители; распределительную
коробку и фильтр.
Регулирующим органом насоса является люлька.
Принцип действия указанной системы следующий.
Вал насоса 7 , получая вращение от ЭД, передает его через кардан блоку 12 с
цилиндрами, а также через шестерню 5 зубчатому колесу 15, надетому на приводной вал
16 шестеренного насоса.
Рабочая жидкость, нагнетаемая шестеренным насосом, расходуется на восполнение ее утечек из замкнутого объема: насос - магистральные трубопроводы –
гидроцилиндры рулевой машины.
Шестеренный насос всасывает рабочую жидкость из корпуса основного насоса,
служащего одновременно резервуаром рабочей жидкости, и нагнетает ее в систему
через фильтр.
397
После фильтра рабочая жидкость направляется по трубопроводам к
распределительной коробке, воздействует на переключающий золотник и открывает
себе доступ в нуль-установители 13 и в золотниковую коробку 1 гидроусилителя, а избыток рабочей жидкости сливается через сливной клапан.
Нуль-установители 13 предназначены для вывода люльки насоса в среднее
(нулевое) положение при включении насоса и для удержания люльки в этом положении, пока насос не работает. Это нужно для того, чтобы последующее включение
проводилось при среднем положении люльки (это уменьшает пусковую мощность ЭД ).
При поступлении рабочей жидкости в цилиндры нуль-установителей штоки их
убираются, сжимая пружины, что дает возможность люльке 11 насоса свободно
поворачиваться на цапфах на угол 30º в обе стороны от среднего положения при помощи
гидравлического усилителя мощности и вручную ( силовое управление насосом ).
Гидроусилитель состоит из золотниковой коробки 1, двух силовых цилиндров 9 и
рычажной системы 3. При смещении золотника в ту или иную сторону открывается
доступ рабочей жидкости в один из силовых цилиндров. Золотник смещают поворотом
вала управления 10 и рычажной системой.
Под давлением рабочей жидкости поршень, находящийся в одном силовом
цилиндре, перемешается, например, влево и при помощи шатуна поворачивает люльку 11
насоса. Одновременно с этим поршень второго силового цилиндра перемещается
поворачивающейся люлькой вправо и вытесняет рабочую жидкость из полости
цилиндра через золотниковую коробку в корпус насоса.
При этом рычаг 6 обратной связи возвращает золотник в среднее положение,
доступ рабочей жидкости в силовой цилиндр прекращается и люлька останавливается.
Поэтому, чтобы поставить люльку на нужный угол, надо повернуть валик 4
управления на тот же угол (передаточное число рычажной системы равно единице).
Для более точной установки валика управления втулке 2 золотниковой коробки
сообщена осевая вибрация, осуществляемая при помощи эксцентрикового вибратора 8,
получающего вращение от вала 16 шестеренного насоса через коническую пару 14.
Когда люлька насоса занимает среднее положение, то вращение вала 7 насоса не
вызывает возвратно-поступательного движения поршней в цилиндрах 12, и подачи
рабочей жидкости в гидроцилиндры привода рулевой машины не происходит.
Поворот люльки насоса создает наклон оси блока цилиндров 12 к оси вала 7 ( рис.
10.6, 6), и при его вращении поршни, находящиеся в цилиндрах блока, начинают
совершать возвратно-поступательное движение. За один оборот вала насоса каждый
поршень делает один ход вперед и один назад.
Поршни, выходя из цилиндров, всасывают рабочую жидкость в цилиндры, а
двигаясь внутрь, нагнетают из цилиндров.
Перемена направления движения поршня происходит в момент нахождения его в
горизонтальной диаметральной плоскости блока цилиндров. Поршни, находящиеся по
одну сторону этой плоскости, будут нагнетать рабочую жидкость в гидроцилиндры
рулевой машины, а поршни, находящиеся по другую сторону, всасывать.
При отклонении люльки в другую сторону поршни гидроцилиндров рулевой машины будут перемещаться в обратном направлении, так как сторона всасывания и
сторона нагнетания меняются местами и направление перекладки руля изменяется.
Угол отклонения люльки, зависящий от угла поворота валика 4 управления,
определяет подачу насоса и скорость перекладки руля. С увеличением угла поворота
возрастают подача насоса и скорость перекладки руля.
Валик поворачивают прибором ИМ ( исполнительный механизм ),
установленным на корпусе насоса и входящим в комплект аппаратуры электрической си
стемы управления.
Прибор получает сигнал на поворот валика насоса при задании угла перекладки с
пульта управления.
398
Сигнал обратной связи, пропорциональный углу поворота руля от РД,
установленного на приводе к баллеру, поступает в пульт системы управления со
знаком, противоположным знаку сигнала задания.
В результате суммирования прямого и обратного сигналов валик насоса,
повернутый на тот или иной угол при задании, будет возвращен в среднее нейтральное
положение при подходе руля к заданному углу поворота. При этом подача масла
насосам, а следовательно, и перекладка руля прекращаются.
Работа системы управления более подробно рассмотрена ниже (при изложении
принципа действия авторулевых ).
В приборах ИМ предусмотрена также рукоятка для возможности ручного аварий
ного (местного) управления, которое используют при выходе из строя аппаратуры
дистанционной системы электрического управления, а также при опробовании рулевой
машины из румпельного помещения. Таким образом, все управление рулем сводится к
необходимому воздействию на люльку.
Как правило, электрогидравлические рулевые машины (исключая самые малые)
имеют по 2 насоса. Один из них основной, другой- резервный. Все нормированные
свойства рулевой системы обеспечиваются при работе одного насоса.
Вместе с тем в сложных условиях плавания с целью повышения надежности в
действие могут быть введены 2 насоса. Так как подача при этом удваивается, то скорость
перекладки руля при двух работающих насосах увеличивается.
В РЭП также иногда используются насосы постоянной подачи.
Рулевые машины с насосом постоянной подачи
Рулевая машина с насосом постоянной подачи изображена на рис. 10.7.
Рис. 10.7. Рулевая машина с насосом постоянной подачи:
1 – привод баллера руля;
2 – масляный трубопровод с арматурой;
3 – гидромотор постоянной подачи;
4 – распределительный золотник;
5 – насосный агрегат;
6 – соединительная муфта;
7 – электродвигатель насоса.
Рулевая машина состоит из следующих основных узлов: привода баллер руля 1, на-
399
сосного агрегата 5, электродвигателя насоса 7, масляного трубопровода с арматурой 2.
Насосный агрегат крепится непосредственно к раме рулевой машины и состоит из
насоса ( гидромотора ) постоянной подачи 3, соединительной муфты : и распределительно
го золотника 4.
Когда распределительный золотник выводится из среднего ( нейтрального ) положения в рабочее, соответствующее заданному направлению передачи, нагнетательный тру
бопровод насоса окажется соединенным с одним из цилиндров привода, а силовой трубопровод – со вторым цилиндром.
Насос создает поток масла в системе главного трубопровода к цилиндру силового
привода, который производит перекладку руля в требуемом направлении.
В перерыве между перекладками руля насос перепускает масло через рагрузочную
щель распределительного золотника.
3.6. Рулевые машины с насосами переменной подачи
В зависимости от принципа действия, различают три вида гидравлических рулевых
машин:
1. плунжерные;
2. лопастные;
3. с качающимися цилиндрами.
3.7. Плунжерные рулевые машины
Плунжерные рулевые машины по числу плунжеров ( цилиндров ) делятся на два
вида:
1. двухплунжерные ( двухцилиндровые );
2. четырехплунжерные ( четырехцилиндровые ).
Рассмотрим поочередно эти два вида рулевых машин.
Рулевой электропривод с 2-плунжерной гидравлической передачей (рис. 10.8 ) состоит из электродвигателя 1, насоса 2, гидравлических цилиндров 3.
Рис. 10.8. Устройство электрогидравлического 2-плунжерного рулевого привода:
1 – электродвигатель насоса; 2 – насос; 3 – гидравлический цилиндр; 4 – клапан
предохранительный перепускной; 5 – баллер руля; 6 – трубопровод; 7 – манипулятор насоса
Принцип действия передачи с насосом переменной подачи состоит в следующем.
При нейтральном положении манипулятора 7 насос работает вхолостую, не вызывая нагнетания рабочей жидкости ни в правую, ни в левую ветвь трубопровода 6. При
этом баллер руля 5 остается неподвижным.
Отклонение манипулятора в ту или иную сторону вызывает нагнетание рабочей
жидкости в соответствующий гидравлический цилиндр 3 и отсасывание ее из противоположного цилиндра. Благодаря этому плунжеры цилиндров начнут перемещаться и по-
400
ворачивать румпель 5 в заданную сторону.
Движение плунжеров будет продолжаться до тех пор, пока манипулятор не возвра
тится в нейтральное положение, при котором давление в цилиндрах станет одинаковым.
Во избежание чрезмерного повышения давления в рабочих цилиндрах в случае
заклинивания рулевого привода устанавливают предохранительный перепускной клапан
4, автоматически открывающийся при давлении жидкости, превышающем рабочее на 1015 %.
Для больших моментов на баллере руля устанавливают проверенные на практике
надежные 4-плунжерные приводы. Направление и угловую скорость баллера руля регули
руют насосом переменной подачи или реверсированием и изменением частоты вращения
электродвигателя при использовании насоса постоянной подачи.
Принципиальная схема четырехплунжерной рулевой установки представлена на
рис. 10.5.
В румпельном отделении на фундаментах симметрично относительно баллера руля
устанавливаются четыре цилиндра 1, 10 и 2, 8. Оси цилиндров параллельны.
В цилиндрах перемещаются плунжеры 3, 6 и 9, 16, которые попарно связаны
между собой специальной соединительной рамой.
Рис. 10.9. Принципиальная схема четырехплунжерной рулевой машины:
I – подача и слив масла
Внутри рамы располагаются муфты 4, 14 с двумя цапфами и подшипниками на
каждой, обеспечивающими свободное вращение вокруг вертикальных осей. В отверстие
муфты с бронзовой втулкой входит цилиндрический хвостовик румпеля 13.
Румпель закреплен на баллере руля тремя шпонками.
При перемещении плунжеров в разные стороны происходит поворот баллера руля,
сопровождающийся скольжением хвостовиков румпеля в муфтах, а также поворотом
муфт в вертикальных цапфах.
Боковые усилия, возникающие на румпеле при его выходе из диаметральной
плоскости через ползуны 5, 12 соединительных рам, воспринимаются параллельными
направляющими 7, 15, закрепленными жестко на фундаменте или цилиндрах. Благодаря
этому предотвращается возможный изгиб плунжерной пары.
Расположенные накрест цилиндры 1, 8, и 2, 10 попарно соединены
трубопроводами, объединенными в две общие магистрали а и б.
Для поворота руля, например, против часовой стрелки нужно по магистрали «а»
подать масло под давлением в цилиндры 1,8, при этом в связи с изменением объема из
401
цилиндров 2, 10 масло будет сливаться по трубопроводу «б»
Плунжеры 9, 16 переместятся вправо, а плунжеры 3, 6 - влево.
При изменении направления поворота баллера трубопровод «б» становится
нагнетающим, а трубопровод «а» - сливным.
Давление в цилиндрах определяется преодолеваемыми усилиями в плунжерах,
которые зависят от момента на баллере руля. Для предотвращения утечки масла на
выходе цилиндров устанавливаются специальные набивки — уплотнения, кожаные или из
маслостойкой резины.
При возникновении чрезмерных давлений (например, при ударах волны,
попадании льдин на перо руля) через дроссель 11 происходит перепуск масла из одной
полости в другую. Это поглощает энергетический всплеск внешней нагрузки и ослабляет
динамические воздействия на детали привода.
Перемещение плунжеров на одно и то же расстояние определяет неодинаковый
угол поворота баллера. Наибольший поворот на единицу длины хода плунжеров будет
при расположении румпеля в диаметральной плоскости.
При бортовых положениях, как следует из кинематики привода, угловой поворот
баллера на единицу длины перемещения плунжеров будет минимальным.
Поэтому
передаточное
число
плунжерной
гидравлической
передачи
представляется переменным.
Система трубопроводов и клапанов четырехплунжерной рулевой установки
позволяет при необходимости выводить из эксплуатации любую пару прессов, сохраняя,
хотя и не полностью, работоспособность машины.
На небольших судах при сравнительно малом моменте на баллере руля
устанавивают двухплунжерные гидравлические рулевые машины. Для них характерно
отсутствие резервирования в силовой части привода и наличие дополнительного
изгибающего момента на голове баллера руля, который нагружает верхний опорный
подшипник баллера и повышает потери в передаче.
В отечественном судостроении наиболее широко используются именно
плунжерные рулевые машины, обладающие высокой надежностью, экономичностью,
особенно при высоком давлении в прессах, и способные преодолевать значительные
нагрузочные моменты.
Разработан типизированный ряд гидравлических рулевых машин для моментов на
баллере от 6,3 до 2500 кН-м, который практически удовлетворяет возникающие
потребности.
3.8. Лопастные рулевые машины
Наряду с плунжерным рулевым приводом применяют лопастные ( рис. 10.10,
10.11 ).
Лопастные рулевые машины обладают сравнительно с плунжерными лучшими
массогабаритными характеристиками.
По числу лопастей различают два вида рулевых машин:
1. двухлопастные;
2. трелопастные.
Рассмотрим устройство двухлопасной рулевой машины( рис. 10.10 ).
В корпусе гидродвигателя 1 на баллере руля 2 устанавливают лопасти 3. Перемыч
ки и лопасти разделяют рабочий объем на четыре полости А, Б, В, Г.
Рабочая жидкость по трубопроводам 4 поступает одновременно или в полости А, Г
или в полости Б, В, перемещая лопасти и вращая баллер руля. Полости расположены под
углом 180°, что уравновешивает давление жидкости на внутренние стенки корпуса.
402
Рис. 10.10. Устройство 2-лопастного гидродвигателя рулевой машины:
1 – корпус гидродвигателя; 2 – баллер руля; 3 – лопасти; 4 - трубопроводы
Рассмотренный рулевой привод применяется на судах малого и среднего водоизмещения.
На более крупных судах используются трехлопастные рулевые машины. Основные
поставщики таких машин - фирмы АЕГ (ФРГ), «Фриденбо» (Норвегия) разработали
нормализованные ряды таких машин с моментом на баллере до 400 кН-м ( 40 Тм ).
Принципиальная схема 3-лопастной рулевой машины показана на рис. 10.11.
Рис. 10.11. Схема 3-лопастной рулевой машины
Трехлопастной ротор 1, являющийся румпелем, насажен на верхнюю часть головы
баллера 2. Этот ротор помещен в цилиндр 3, разделенный тремя перемычка
ми 4.
Последние делят общий объем цилиндpa на три рабочие полости, каждая из
которых делится лопастью ротора на две части А и Б. Цилиндр крепится к палубе
посредством амортизирующего устройства.
При нагнетании масла в полость А и сливе его из полости Б ротор и баллер будут
поворачиваться против часовой стрелки. При подаче масла в полость Б – наоборот.
Подвод и слив масла производятся через перемычки цилиндра от общих
магистралей «а» и «б», связанных с насосом. В днище и крышке силового цилиндра предумотрены сальниковые уплотнения из маслостойкой резины. Уплотнения имеются также
403
между зеркалом цилиндра и торцом каждой лопасти и между перемычками и ступицей
ротора.
Для ограничения утла поворота ротора в одной из лопастей имеется пружинный
двухсторонний клапан 5, который сообщает полости А и Б между собой при достижении
предельных значений перекладки руля.
Наличие сложных уплотнений снижает объемный к.п.д. машины, ограничивает
допустимые рабочие давления масла до 4,00 - 6,50 МПа ( 40-65 at ), что является
недостатком привода, не позволяющим его использовать при моментах на баллере,
превышающих 400-500 кН*м.
3.9. Поршневые машины с качающимися цилиндрами
Рулевые машины рассматриваемого типа используются в отечественном и
иностранном судостроении.
Типовая схема привода с двумя рабочими цилиндрами, наиболее распространенная
на морских судах, показана на рис. 10.12.
Рис. 10.12. Кинематика рулевой машины с качающимися цилиндрами
Цилиндры 3 имеют проушины с бронзовыми втулками и через вертикальные
шкворни 2 связаны с фундаментом 1. Шкворни 2 являются осью поворота цилиндра.
В цилиндрах размещаются поршни 4, штоки 5 которых связаны с двухплечным
румпелем 7. Штоки и поршни имеют специальные уплотнения, резиновые или кожаные
набивки 6.
Цилиндры двойного действия: обе полости А и Б являются рабочими. Каждый силовой цилиндр используется как для прямой, так и для обратной перекладки руля.
При подаче масла в полость А и сливе из полости Б происходит перекладка руля
почасовой стрелке. При подаче масла в полость В — наоборот.
Полости А и Б обоих цилиндров связаны трубопроводом через клапанную распределительную коробку. Следует заметить, что во втором цилиндре рабочая полость А
имеет шток аналогично полости Б первого цилиндра.
Углы качания цилиндров, хотя и различны, но даже при бортовых положениях
руля ±35° не превышают 4 - 5°. Поэтому суммарные объемы подачи и слива жидкости
практически одинаковы.
Вместе с тем, учитывая равенство давлений масла в полостях нагнетания и
404
меньшую поверхность поршня со стороны штока, усилия, передаваемые на каждое плечо
румпеля, будут различаться, что вызывает появление хотя и небольшой, дополнительной
изгибающей силы на голове баллера.
Подвод масла к рабочим полостям каждого цилиндра производится через
герметичное шарнирное соединение внутри шкворня 2 или посредством гибких полипропиленовых шлангов, как это принято при производстве рулевых машин данного типа в
ГДР.
4. Механизмы управления насосами постоянной подачи
4.1. Дроссельный механизм с управляющими электромагнитами
В качестве примера рассмотрим один из возможных вариантов механизма управления - дроссельную систему с управляющими электромагнитами ( рис. 10.20).
Рис. 10.20. Принципиальная схема дроссельного сервопривода с управляющими
электромагнитами для управления насосами постоянной подачи
Органом смены направления подачи масла на выходе в каналах а и б, связанных с
цилиндрами рулевой машины, является гидрозолотник ГЗ.
В цилиндре 3 располагается поршень 4, который выходными штоками 6 может
перемещаться и занимать три разных положения. Штоки связаны с соленоидными
электромагнитами YV1 и YV2, обеспечивающими возможность дистанционного управления.
При выключенных электромагнитах посредством пружин поршень устанавлиается
в среднем положении, что показано на рис. 10.20. В этом случае масляные каналы
гидрозолотника связывают всасывающую и нагнетающую магистрали насоса Н,
постоянно вращаемого электродвигателем М. Магистрали а, б силовых цилиндров
рулевой машины перекрыты. Масло забирается насосом из бака 5 и сливается снова в бак.
Вместимость бака должна быть достаточной, чтобы обеспечить отвод тепла, выделяемого
в данном режиме холостой прокачки масла.
В технике гидропривода описываемая система относится к классу гидравлических
сервомеханизмов дроссельного управления. Этим устройствам свойственны:
быстродействие, большой коэффициент усиления, высокая долговечность и надежность в
работе.
При подаче питания в электромагнит YV2 поршень смещается вправо, его секция 1
устанавливается в средней части цилиндра, обеспечивая связь магистралей насоса и
цилиндров рулевой машины. Причем магистраль а становится напорной, а магистраль б сливной. Происходит перекладка руля на правый борт.
При отключении электромагнита YV2 золотник 4 возвращается в исходное
положение, перекладка прекращается.
405
Включением электромагнита YV1 поршень перемещается влево. В среднюю часть
цилиндра становится секция 2. Напорной становится магистраль б. Руль перекладывается
на левый борт.
Описываемая принципиальная система применена для управления рулем
теплоходов типа «Инженер Мачульский».
Имеются схемы, в которых перемещение золотника осуществляется посредством
сервогидропривода или вручную. В некоторых случаях рассматриваемый механизм сам
используется как один из промежуточных каскадов управления сервоприводом устройств
большой выходной мощности. Например, на лесовозах типа «Иршалес», танкерах серии
«Леонардо да Винчи» дроссельный сервопривод используется для управления насосами
регулируемой подачи.
4.2. Дроссельный механизм с электромашинным приводом
Применяется в отечественных авторулевых АТР, «АИСТ», «Печора», авторулевых
«Функверк Кёпеник», выпускаемых в ГДР. На рис. 10.19 показана схема кинематического
механизма, имеющего заводской индекс ИМ-2, предназначенного для управления
насосами нерегулируемой подачи в схеме АТР.
Рис. 10.21. Кинематическая схема исполнительного механизма ИМ-2 для
управления насосами постоянной подачи РЭГ-приводов
Электродвигатель 1 через шестеренчатую механическую передачу 4 перемещает
выходную рейку 5, связанную с дросселирующим золотником. При отключении электродвигателя пружинами 6 нулевого установителя золотник возвращается в исходное положе
ние.
Для уменьшения времени возврата и соответственно сокращения выбега руля кинематическая связь серводвигателя 1 и рейки 5 на этот период может быть разорвана посред
ством электромагнитной муфты 2. Исследования показали, что эффективность работы
муфты сравнительно невелика. Поэтому в управляющих механизмах авторулевых
«АИСТ», «Печора» от ее использования отказались.
406
Максимальное перемещение выходного органа регулируется механическим
ограничителем 9.
Пружинная муфта проскальзывания 3 исключает стоянку серводвигателя под
током при достижении предельного положения.
Рукоятка 10 служит для местного ( аварийного ) ручного управления рулем
непосредственно из румпельного отделения.
Обратная связь по положению управляющей рейки осуществляется от сельсинатрансформатора 8.
5. Механизмы управления насосами переменной подачи
5.1. Основные сведения
Для перекладки руля в электрогидравлических системах с насосом переменной
подачи требуется сместить манипулятор насоса (создать эксцентриситет). Это достигает
ся вспомогательным сервоприводом, в котором используются передачи электрического и
гидравлического типов.
При электрической системе передачи оперативные функции в румпельном отделе
нии выполняет ЭД, называемый серводвигателем.
При гидравлической системе передачи для воздействия на манипулятор использу
ют гидравлический серводвигатель (типа толкателя). Процесс перекладки руля при управлении сервоприводом содержит 4 основные операции:
1. включение сервопривода;
2. отключение в положении, когда задана максимальная подача насоса;
3. обратное включение сервопривода ( реверс );
4. отключение его точно в позиции нулевой последовательности.
Точная остановка манипулятора в нейтральном положении в условиях, когда
сервопривод обладает свойством выбега после отключения благодаря запасенной энергии в движущихся частях, при описанном способе методом отдельных операций практи
чески невозможна.
Поэтому для упрощения способа управления рулем, обеспечения устойчивости
управления сервопривод снабжают кинематическим устройством, связывающим задающий орган, манипулятор насоса и баллер руля.
Рассмотрим некоторые из таких механизмов.
5.2. Механизм управления НПП типа ИМ-1
Предполагает структуру, где отрицательной обратной связью в автоматическом и
следящем режимах охватывается сервопривод. Используется в РЭГ-приводах вновь
строящихся судов с рулевыми машинами типизированного ряда.
Прибор ИМ-1 по устройству аналогичен ИМ-2 (см. рис. 10.21), у которого выходом
является не рейка 5, а поворотный валик 7. Последний имеет пружинный нуль-установитель и связан с золотником управляющего гидромеханизма поворота люльки насоса.
При простом управлении режимная стабилизация достигается четкой работой
пружинного нуль-установителя, снимающего подачу гидронасоса при отключении
серводвигателя.
В следящем режиме напряжение сельсин-трансформатора 8 характеризует положение управляющего органа. Это напряжение и является электрической обратной связью,
замыкающей контур, состоящий из усилителя и сервопривода.
Сервомеханизм размещается на насосе и воздействует на манипулятор через встроенный промежуточный гидроусилитель.
На эксплуатируемых судах широко используется схема механизма управления, где
обратной связью охвачены рулевая машина и насос переменной подачи, что соответствует
структурной схеме рис. 10.18. Эта обратная связь механическая, жесткая. Выполняется
посредством специальных кинематических устройств, предопределяющих относительную
407
близость размещения насоса и рулевой машины.
5.3. Механизм управления НПП с рычажным дифференциалом
Приводы с таким типом управления (рис. 10.22) установлены на многих судах,
например на теплоходах серий «Михаил Калинин», «Выборг», «Красноград», лесовозах
типа теплоход «Волго-лес» и др.
Рулевой привод имеет два насоса переменной подачи HI (H2 - не показан), каждый
из которых вращается своим исполнительным двигателем М1(М2).
Тяга 1 манипуляторов является общей для обоих насосов; при необходимости они
могут работать на рулевую машину одновременно.
Рассмотрим принцип действия кинематического механизма, разбив процесс управ
ления па ряд простых операций.
Рис. 10.22. Схема управления гидравлической рулевой машиной с рычажным
дифференциалом
Перекладка руля задается включением электрического серводвигателя МЗ (М4).
Через дифференциальный редуктор ДФР вращается винтовой шпиндель 3, который
перемещает по горизонтали каретку 2.
Пусть, например, каретка переходит из точки г в точку д. Дифференциальный
рычаг ДР, связанный с кареткой, поворачиваясь вокруг неподвижной точки в, смещает
тягу 1 манипулятора насоса H1.
Начинается подача масла в гидроцилиндры рулевой машины, руль перекладывается по часовой стрелке. Тягой обратной связи 4 дифференциальный рычаг ДР, поворачиваясь вокруг точки д, смещает манипулятор в сторону нейтрального положения, достигнув
которого в точке ж, перекладка прекращается.
Изменение направления подачи насоса и соответственно обратная перекладка руля
происходит при перемещении каретки в другую сторону.
Значение эксцентриситета насоса равно 15 - 25 мм; тяга манипулятора, пройдя это
расстояние, доходит до упора. Перемещение в этих пределах обычно соответствует
заданию перекладки руля на 4 - 5°.
При задании больших углов, когда манипулятор достигает положения упора,
дифференциальный рычаг ДР при перемещении каретки будет поворачиваться в шарнире
связи его с управляющей тягой насоса. Движение будет происходить из-за сжатия или
растяжения пружины Пр, являющейся составной частью рычага 4.
При углах, больших 4 - 5°, перекладка на основной части пути ведется при максимальной подаче насоса, примерно с постоянной скоростью. Лишь при подходе к заданно-
408
му положению за 4 - 5° подача насоса постепенно снимается.
Пружина Пр одновременно оказывает демпфирующее действие при ударных
нагрузках на баллере. При случайных отклонениях баллера, через рычаг ДР, задается
необходимая подача насосу и положение восстанавливается.
В динамике, когда перемещение каретки и баллера происходит одновременно,
дифференциальный рычаг суммирует оба движения и задает подачу насосу,
эквивалентную разностному положению каретки и баллера в каждый данный момент.
Повышенная скорость каретки сравнительно с баллером всегда обеспечивает
выход насоса на максимальную подачу при больших углах перекладки.
Действительный угол руля контролируется по аксиометру, работающему от баллера через датчик ВС1. При управлении оператор следит за движением каретки по аксиометру заданного положения, датчик которого ВС2 связан через редуктор со шпинделем.
Сельсины-приемники, электрически связанные с ВС1 и ВС2, совмещаются в одном
двухстрелочном приборе заданного и действительного положений.
Дистанционное управление осуществляется посредством серводвигателей, местное
- штурвалом 5.
В схемах автоматического действия элементы обратной связи В, путевые и конечные выключатели SQ конструктивно представляются одним блоком 6, механически связан
ным не с отрабатывающим органом - баллером, а с задающим - кареткой.
Мощность электрических серводвигателей составляет 0,3—0,8 кВт.
5.4. Механизм управления НПП с кулачковым дифференциалом
Применяется в отечественных рулевых машинах РЭГ-2, РЭГ-3.
Показан на рис. 10.23.
Рис. 10.23. Кинематическая схема рулевого сервомеханизма с кулачковым
дифференциалом
Механизм управления включает в себя дифференциальный редуктор ДР,
связанный через червячные зацепления с электрическими серводвигателями МЗ, М4, соответственно правого и левого борта.
Через промежуточные передачи КПЗ, КП1 (КП2 — на правый борт) управляющее
действие передается на шестерню 1 кулачкового дифференциала КД1, который и является
элементом, суммирующим движения задающего валика (шестерня 1) и валика обратной
связи (шестерня 3).
409
Обратная связь (0С1) выполнена в виде зубчатого колеса, обкатывающегося по
рейке, закрепленной на ползунах рулевой машины. В дифференциальном кулачковом
редукторе ДР1 при повороте сателлита 2 получает перемещение жестко связанный с ним
профильный кулачковый диск 4.
Диск 4 находится в кулачковом зацеплении с рейкой манипулятора насоса H1.
Поворот кулачка 4 вызовет линейное перемещение манипулятора, причем зависимость
между углом поворота диска и сдвигом манипулятора нелинейная, определяемая не
только профилем кулачкового зацепления, но и диаметром диска.
Перемещение манипулятора будет происходить при малых углах поворота диска
(соответствующих 4 - 5° поворота руля). При углах, больших 4 - 5°, линейно движущийся
кулачок 5 выходит из углубления и скользит по ребру диска 4. Таким образом подача
насоса нарастает только при малых углах поворота кулачкового элемента и остается
постоянной при больших углах.
Угол поворота кулачка 4 будет равен разности углов поворота задающей шестерни
1 и шестерни обратной связи 3. В исходном положении эта разность равна нулю.
Кулачковый диск стоит в положении, когда насос не имеет подачи.
При работе задающая шестерня 1 посредством одного из серводвигателей, управля
емого из рулевой рубки, перемещается на некоторый угол, соответствующий
необходимой перекладке руля.
Угол поворота контролируется по двухстрелочному аксиометру, один из сельсинов-приемников которого связан с сельсином-датчиком ВС2, работающим от задающего
валика. Вместе с шестерней 1 повернется и кулачковый диск 4. Обеспечивается смещение
манипулятора и соответствующая подача насоса. Руль будет перекладываться в заданном
направлении.
По каналу обратной связи шестерня 3 будет перемещать кулачковый диск в
обратном направлении.
Подача насоса прекратится, когда положение отрабатывающей шестерни 3 будет
строго соответствовать положению управляющей шестерни 1, т. е. когда руль переложится на заданный угол.
В схемах управления следящего и автоматического действия обратная связь по
углу перекладки руля вводится не от баллера, а от задающего валика. От него также
приводится в действие путевой механизм с конечными выключателями.
5.5. Гидравлические и комбинированные механизмы управления НПП
Вместо электрического сервопривода с редуктором ДФР и шпинделем некоторые
фирмы применяют гидравлические или комбинированные механизмы ( рис. 10.24 ).
410
Рис. 10.24. Сервомеханизмы РЭГ-приводов:
электрогидравлический ( комбинированный )
а
–
гидравлический;
б
–
На рис. 10.24, а показан сервоцилиндр 2, шток поршня которого 1, связанный с диф
ференциальным рычагом, аналогично каретке, своим перемещением задает эксцентриситет насоса.
Подача масла в сервоцилиндр 2 осуществляется через золотниковое устройство по
схеме, аналогичной рис. 10.20. Сервопривод питается от специального малого шестеренча
того насоса, обычно встраиваемого в главный насос переменной подачи.
На рис. 10.24, б представлен электрический сервопривод с промежуточным
гидроусилителем.
Такая схема широко используется в отечественных рулевых системах (РЭГ-8).
Гидроусилитель состоит из золотника 2 и силового цилиндра, шток поршня которого 1
действует на управляющий рычаг манипулятора насоса. Дифференциальный рычаг 5
обеспечивает жесткую обратную связь между золотником и рабочим поршнем.
Передвигая с помощью серводвигателя М и рычажной системы золотник 2, сообща
ют полости цилиндра 3 со вспомогательным насосом.
Шток поршня при перемещении возвращает через рычаг 5 золотник в нейтральное
положение. Дифференциальный рычаг 5 в гидроусилителе превращает его в следящее
устройство, где положение выходной каретки 1 всегда четко связано с перемещением
входного рычага 6, на который через редуктор 4 воздействует серводвигатель М.
Поэтому датчики аксиометра заданного положения руля ВС2, конечные выключатели, элементы обратной связи В связаны непосредственно с входным органом гидроусилителя.
Мощность серводвигателей составляет 10 - 15 Вт. В качестве двигателей используются хорошо управляемые и регулируемые бесконтактные высоконадежные двухфазные
асинхронные машины с полым ротором ( двигатели Феррариса ).
6. Исполнительные устройства систем управления гидравлических рулевых
машин
6.1. Основные сведения
К исполнительным устройствам систем управления гидравлических рулевых
машин относятся:
411
1. серводвигатели;
2. электромагнитные муфты;
3. пружинные нулевые установители.
6.2. Серводвигатели
Серводвигатели – это электрические двигатели мощностью 10…15 Вт, предназначенные для перемещения рабочих органов насосов переменной подачи.
Такими органами является:
1. у радиально-плунжерных насосов ( Холла ) – барабан;
2. у аксиально-плунжерных насосов – поворотная люлька.
Если при помощи серводвигателя вывести барабан насоса из нулевого положения
( повернуть люльку ), перо руля начинается поворачиваться, если же вернуть барабан (
люльку ) в исходное ( нулевое ) положение, перо руля остановится.
В качестве серводвигателей используются 3- и 2-фазные асинхронные двигатели.
На судах отечественного производства используются 2-фазные асинхронные двига
тели серии АДП ( А – асинхронный, Д – двигатель, П – полый ротор ) ( рис .*** ).
.
Рис. *** Асинхронный двигатель серии: а – устройство; б – схема включения;
1 – внешний статор; 2 – обмотка возбуждения ( управления ); 3 – полый ротор;
4 – внутренний статор; 5 – вал; 6 – подшипниковый щиток
Двигатель имеет два статора – внешний 1 и внутренний 4. Последний закреплен на
одном из подшипниковых щитков и служит для уменьшения магнитного сопротивления
на пути основного магнитного потока.
На внешнем статоре двигателя уложены две обмотки: обмотка возбуждения ОВ и
обмотка управления ОУ. Оси этих обмотки расположены под углом 90°, поэтому их магнитные потоки сдвинуты в пространстве на такой же угол.
На обмотку возбуждения подается стабильное напряжение U 1 величиной 36, 40 или
110 В ( в зависимости от типа двигателя ).
На обмотку управления ОУ с выхода усилителя системы управления РЭП ( магнитного или электронного ) подается напряжение управления U 2 , которое может изменяться
как по величине, так и по фазе.
В щель между внешним и внутренним статорами вставлен полый ротор 3, который
сидит на валу 5. Вал свободно вращается на подшипниках, установленных в щитках 6.
Ротор выполнен в виде тонкостенного латунного стакана, что позволило свести к
минимуму его инерционность – ротор быстро разгоняется и быстро останавливается.
В цепь обмотки возбуждения включен конденсатор С, поэтому ток в этой обмотке
сдвинут на 90° ( в сторону опережения ) по отношению к току в обмотке управления.
Такой двойной сдвиг – обмоток на статоре на 90° ( в пространстве ) и токов в них
на 90° ( электрических – на векторной диаграмме ) позволил получить при помощи этих
обмоток вращающееся магнитное поле.
Это поле при вращении пересекает стенки полого ротора и индуктирует в них ЭДС
В роторе возникает ток, который, взаимодействуя с вращающимся магнитным полем,
вызывает образование электромагнитного момента – ротор начинает вращаться.
412
Скорость ротора тем больше, чем больше напряжение U 2 на обмотке управления.
Если фазу этого напряжения изменить на обратную ( на 180°), ротор реверсирует.
6.3. Электромагнитные муфты
Электромагнитные муфты – это электромагнитные аппараты, предназначенные для
разрыва или переключения механической связи между двумя валами – ведущим ( со сторо
ны серводвигателя ) и ведомым ( со стороны манипулятора насоса ).
Муфты выпускаются двух типов: МЭС (соединяющие) и МЭП (переключающие).
Электромагнитная муфта типа МЭС (рис. *** ) состоит из корпуса 1 с закрепленной внутри катушкой 2, валика 8 ( вдоль него по специальным пазам перемещается якорь
4 с фрикционным диском 6 ). На валик 8 насажен шарикоподшипник 7, на внешней обойме которого закреплено зубчатое колесо 5.
Рис. Устройство электромагнитной муфты типа МЭС:
1 – корпус; 2 – катушка; 3 – пружина; 4 – якорь ( подвижная часть ) муфты;
5 – зубчатое колесо; 6 – фрикционный диск; 7 – шарикоподшипник; 8 - валик
Принцип действия муфты состоит в следующем.
При подаче питания на катушку 2 муфта срабатывает, то есть якорь 4, преодолевая
сопротивление пружины 3, втягивается в катушку, а фрикционный диск 6 прижимается к
торцу зубчатого колеса 5. Следовательно, вращение от валика 8 будет передаваться на
зубчатое колесо 5.
Если питание снять, якорь 4 под действием пружины 3 переместится в первоначальное состояние, а фрикционный диск 6 освободит зубчатое колесо.
У реверсивной (переключающей) муфты МЭП при срабатывании электромагнита
фрикционный диск освобождает одно зубчатое колесо и прижимается к другому.
6.4. Нулевые установители
Пружинные нулевые установители предназначены для автоматического возвращения рабочего органа насоса – барабана ( люльки ) в нулевое положение после отключения
серводвигателя.
Как следует из принципа действия насосов переменной подачи, для поворота руля
надо при помощи серводвигателя вывести барабан ( люльку ) насоса из нулевого положе
ния, а для остановки руля – вернуть барабан ( люльку ) в нулевое положение.
Для такого возврата можно включить серводвигатель в обратном направлении ( реверсировать ). Однако при этом усложняется схема управления РЭП.
Поэтому на практике применяют более простой способ возврата барабана ( люльки
) насоса – размещают между серводвигателем и манипулятором:
1. электромагнитную муфту сухого трения типа МЭС ( МЭП );
2. пружинный нулевой установитель.
Электромагнитная муфта ( см. выше ) состоит из двух половин, одна из которых
вращается на ведущем валу ( со стороны серводвигателя ), вторая – на ведомом ( со сторо
ны манипулятора насоса ). Если серводвигатель включен, обе половины муфты соединены
413
между собой, поэтому вращение вала серводвигателя перемещает манипулятор насоса.
Пружина установителя одним концом прикреплена к корпусу исполнительного
механизма, а вторым – к тяге манипулятора насоса. Поэтому при работе серводвигателя
смещение манипулятора из нулевого положения в любую сторону заставляет эту пружину
растягиваться.
Если серводвигатель выключается, половины муфты разобщаются, т.е. вал серводвигателя отсоединяется от манипулятора насоса, а растянутая пружина установителя
возвращает манипулятор, а с ним и барабан ( люльку ) насоса в нулевое положение.
Иначе говоря, принцип действия пружинного нулевого установителя такой же, как
у двери с пружиной. Пока дверь открыта, пружина растянута, стараясь закрыть дверь.
Если отпустить дверь, она закроется под действием пружины.
7. Приводные электродвигатели насосов постоянной и переменной подачи
Предназначены для непрерывного вращения насоса постоянной или переменной
подачи с постоянной угловой скоростью.
Мощность электродвигателя через гидравлическую передачу передается на перо
руля. Вращающий момент на баллере руля зависит от водоизмещения судна – чем больше
водоизмещение, тем больше вращающий момент. Таким образом, мощность приводных
электродвигателей насосов зависит от водоизмещения судна и может составлять от нескольких десятков кВт ( для судов водоизмещением около 10 000 б.р.т. - 50-70 кВт ) до нескольких сот кВт.
Наибольшее распространение в качестве приводных двигателей насосов рулевых
приводов имеют 3-фазные короткозамкнутые асинхронные электродвигатели.
8. Нагрузочные диаграммы рулеых электроприводов
Нагрузочной диаграммой называют график зависимости момента на баллере руля
от угла поворота пера руля, т.е. М б ( α ).
Эти диаграммы строят для трех харакитерных ьрежимов работы судна, а именно:
1. режим при ходе судна по курсу;
2 .маневренный режим;
3. режим при заднем ходе судна.
Для построения диаграмм используют формулы М б ( α ), которые приведены
ниже.
После построения и анализа эти диаграммы используют для расчета мощности эле
ктродвигателя рулевого привода.
Рассмотрим особенности нагрузочных диаграмм для разных режимов работы
судна более подробно.
Наиболее напряженным является режим маневрирования, так как руль перекладывается на максимальные углы и на баллере возникают максимальные моменты сопро
тивления.
Для правильной эксплуатации рулевого ЭД, а также для выбора его мощности
необходимо знать его нагрузочную диаграмму при работе в наиболее напряженном
режиме. Учитывая специфику работы ЭД в рулевых машинах с механической и
гидравлической передачей, нагрузочные диаграммы рассмотрим для каждой из них.
Электроприводы с механической передачей
Нагрузочная характеристика рулевого исполнительного ЭД представляет собой
зависимость момента на валу ЭД от угла поворота руля: М (α). Момент на валу ЭД
определяется моментом нагрузки на баллере руля и потерями на трение в механизме
передачи, которые обусловлены данной нагрузкой.
При прямом ходе пера руля момент ЭД
414
М = М б / ( ι*η ),
(10.2)
где ι -передаточное число механической передачи;
η - прямой КПД передачи.
Передаточное число и КПД определяют как произведения соответствующих
значений каждого элемента передачи.
При обратном ходе пера руля момент ЭД
М = М б η' / ι ,
(10.3)
где η' = 2 – 1 / η - обратный КПД передачи.
Так как передачи РЭП всегда содержат самотормозящий элемент, то прямой и
обратный КПД не равны ( η ≠ η' ), причем η' < 0.
При обратном ходе пера руля отрицательный момент на баллере руля и отрица
тельный КПД обусловливают согласно формуле (40) положительный момент на валу ЭД.
Иначе говоря, несмотря на стремление пера руля самому повернуться в направлении пе
рекладки, т. е. диаметрали, ЭД все же приходится работать в двигательном режиме,
преодолевая сопротивление трения в элементах передачи, расположенных между валом
ЭД и самотормозящимся элементом.
Построение точных нагрузочных диаграмм аналитическим путем весьма затруд
нительно, в частности из-за того, что КПД передачи — величина переменная, зависящая от нагрузки.
Поэтому для практических расчетов удовлетворяются приближенными нагрузочными диаграммами ( рис.10.13 ).
Рис. 10.13. Приближенные нагрузочные диаграммы рулевого электропривода:
а – для простого руля; б – для балансирного и полубалансирного рулей;
в – при заднем ходе
Максимальный момент М max при прямом ходе руля и переднем ходе судна
определяют по формуле ( 10.2 ), подставляя в нее КПД, соответствующий наибольшей
нагрузке М б max (этот КПД обычно известен).
Момент М
при обратном ходе пера руля и при переходе через диаметральную
0
плоскость принимают равным ( 0,1…0,3 ) М max . Это же значение момента принимается
на участке от 0 до α для балансирных рулей. Нижний предел относится к простым
1
рулям, а верхний - к балансирным и полубалансирным.
Это объясняется тем, что трение в ненагруженном приводе не зависит от типа
руля, в то время как у рулей с балансирной частью значения М б max значительно снижены
и для получения того же значения М
0
следует брать большую часть от М max .
Изменение же момента на участках от α max до α = 0 для простых рулей и до α
для балансирных принимают прямолинейным.
1
415
При заднем ходе судна плечо сил давления по сравнению с передним ходом
увеличивается, что способствует увеличению моментов на баллере.
Однако при практических расчетах РЭП ограничиваются лишь нагрузочными
диаграммами рулевого устройства при переднем ходе, так как из-за уменьшенной
скорости заднего хода, обычно принимаемой υ з. х = ( 0,5…0,7 ) υ п. х , значение М б .з max <
М б . max .
Для морских судов максимальное значение угла перекладки руля α max = 30...35°.
9. Структурные схемы управления судов с использованием электромеха
нического и электрогидравлического рулевых приводов
9.1. Основные сведения
Изменение направления подачи масла от насоса на рулевую машину, необходимое
для перекладки руля, производится специальным управляющим устройством –
сервомеханизмом.
В РЭГ-приводах с насосами постоянной подачи оконечный каскад сервомеханизма
представляет собой дросселирующий золотник, посредством которого насос связывается с
рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через
промежуточный гидроусилитель.
В приводах с насосами переменной подачи сервомеханизм включает в себя
электрический двигатель - серводвигатель, связанный через кинематическую передачу с
манипулятором насоса.
Весьма часто в состав управляющей кинематики включают гидроусилитель, что
существенно снижает мощность электрического серводвигателя.
9.2. Структурная схема простого управления рулевым электроприводом
Напомним, что при простом управления в качестве органов управления
используют кнопки «Лево руля», «право руля» или рычаг управления ( «джостик» ).
Руль перекладывается все то время, пока нажата одна из кнопок или рычаг вы
веден из нейтрального положения. Перекладка прекращается, если отпустить кнопку или
вернуть рукоятку поста в исходное - нулевое положение.
Об угловом состоянии руля в каждый момент времени судят по рулевому
указателю - аксиометру.
Обобщенная разомкнутая схема ручного управления рулем по времени показана на
рис. 10.17.
Здесь представлены: РМ - рулевая машина; Н - насос переменной подачи (ГЗ гидрозолотник в системе управления с насосом нерегулируемой подачи); ГУ – гидроусили
тель; СР - серводвигатель; У - электрический усилитель.
Рис. 10.17. Обобщенная разомкнутая система ручного управления РЭГ-приводом
416
При простом управлении рулем контур регулирования разомкнут. При подаче
управляющего напряжения U вх последовательно отрабатывают все звенья и начинается
перекладка руля.
Шток поршня гидроусилителя ГУ жестко связан с манипулятором насоса Н.
Перемещение манипулятора ограничено. Поэтому пропорциональность между движением
золотника гидроусилителя и ходом его поршня характерна только при сравнительно малых
перемещениях.
При снятии управляющего напряжения U вх серводвигатель СР останавливается, но
подача насоса Н не прекращается.
Для остановки руля необходимо, чтобы серводвигатель включением в обратную
сторону сместил манипулятор насоса в исходное положение. Таким образом, разовая
перекладка руля содержит четыре операции:
1. включение серводвигателя;
2. его остановку;
3. включение серводвигателя в обратном направлении;
4. его остановку.
Поворот руля на заданный угол описанным способом даже опытному оператору (
например, рулевому матросу ) выполнить практически невозможно.
Для нормальной работы требуется, чтобы при снятии входного управляющего
сигнала U вх = 0 серводвигатель занимал исходное положение, что соответствует
прекращению подачи масла на рулевую машину.
В некоторых современных отечественных схемах управления (АТР, АИСТ) это
делается специальным пружинным нуль-установителем, задача которого вернуть
серводвигатель или, точнее, золотник гидроусилителя ГУ в нулевое положение ( е з = 0)
после отключения.
Иностранные фирмы часто используют сервопривод с электромагнитным
управлением. Золотник такого привода всегда имеет пружинный самовозврат.
Таким образом, простое управление рулем по структурной схеме рис.10.17
принципиально возможно.
Для этого требуется только, чтобы элементы сервопривода автоматически
возвращались в исходное положение после отключения серводвигателя.
9.3. Структурная схема следящего управления рулевым электроприводом
Напомним, что при следящем управления в качестве органа управления
используют штурвал поста управления в рулевой рубке.
При повороте штурвала на определенный угол в необходимую сторону ( влево или
вправо относительно нулевого положения ) перо руля повернется на такой же ( или
пропорциональный ) угол и автоматически остановится.
Иначе говоря, перо руля повторяет поворот штурвала, как бы следит за движением
штурвала, отсюда название – следящее управление.
При этом угол поворота пера руля тем больше, чем больше угловое расстояние (
угловой путь ) , описанное штурвалом, отсюда второе название – управление по пути.
Из сказанного следует, что у каждому положению штурвала после отработки
соответствует определенное положение руля.
Таким образом, следящее управление является полуавтоматическим – на первом
этапе управления участвует человек ( поворачивает вручную штурвал ), на втором этапе
используются элементы автоматики ( сельсин-датчик руля в румпельном отделении ),
обеспечивающие автоматическую ( без участия человека ) остановку руля.
Аксиометр является средством дополнительного контроля положения руля.
Система следящего управления может быть создана путем замыкания входа и выхода
разомкнутой системы (рис. 10.16 ) через соответствующие преобразующие устройства.
417
Внутри следящего контура оказываются последовательно включенными два
интегрирующих звена СР и РМ. Такие системы являются структурно неустойчивыми. Для
придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой
обратной связью.
Широко распространены схемы (рис. 10.18 ), где обратной связью охвачены два
звена: рулевая машина РМ и насос регулируемой подачи.
Рис. 10.18. Структурная схема
механической обратной связью
следящего
управления
РЭГ-приводом
с
Образование внутреннего следящего контура превращает интегрирующее и
апериодическое звенья, характерные для гидравлического привода, в обобщенное
колебательное звено, передаточная функция которого имеет следующий вид:
где К 6 — коэффициент усиления обратной связно масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя.
Решение характеристического уравнения, соответствующего данной передаточной
функции , показывает, что при соблюдении условия 4T 1 K 1 K 2 K 6 < 1 оба корня уравнения
будут отрицательными и вещественными, поэтому движение руля при управления со
стороны сервопривода будет носить апериодический характер.
При обратном соотношении в рулевом электроприводе возникают автоколебания,
т.е. перо руля даже в отсутствие управляющего сигнала совершает самопроизвольные
колебания влево-вправо по отношению к диаметральной плоскости судна.
Для подавления автоколебаний в схему управления рулевым электроприводом
вводят отрицательную обратную связь по выходному напряжениию, при помощи которой
часть сигнала ( напряжения ) с выхода оконечного каскада усилителя подают в
противофазе на вход усилителя.
В результате коэффициент усиления усилителя по напряжению ( а значит, и по
мощности ) уменьшается, но достигается главное – исчезают автоколебания пера руля.
При подаче сигнала α з на вход суммирующего устройства А баллер руля
повернется на соответствующий угол α.
Таким образом, задача следящего управления рулем превращается в задачу
синфазного поворота поста управления ПУ и выходного органа сервомеханизма (СР, ГУ)
αз .
Общая схема следящего управления рулем распадается на два независимых
замкнутых контура I и II.
Поворот поста управления ПУ на некоторый угол вызывает перемещение выхода
сервомеханизма на тот же угол, что в свою очередь определит угол перекладки руля. Элементы К 7 и К 8 являются преобразователями углового поворота в эквивалентные
электрические сигналы.
418
При углах перекладки α = α з -а 0 > 5°, поворот манипулятора насоса ограничивается (ε max ).
Движение же задающего органа α з может продолжаться из-за наличия специальной аккумулирующей пружины. Следовательно, при больших углах перекладки насос
работает с максимальной подачей и начинает снижать ее за 5° до подхода к заданному
положению.
При разомкнутом контуре II возможно простое управление рулем.
Постом управления непосредственно на вход усилителя подается управляющий
сигнал. Серводвигатель СР через ГУ или, в случае его отсутствия, через кинематический
механизм перемещает на некоторый угол α з задающий элемент, угол поворота которого
после отработки определит положение руля.
Контроль перекладки производится по двухстрелочному аксиометру заданного и
действительного положения руля. Датчики аксиометра связаны соответственно с
заданным α з и фактическим α углами поворота пера руля. Отключение серводвигателя
производится по достижении α з требуемого значения.
Рассмотренные решения по обеспечению устойчивости работы системы
управления рулевого электропривода (см. рис. 10.18) не являются единственно
возможными. За последнее время появились новые структурные схемы управления рулем
(АТР, АИСТ), где для обеспечения структурной устойчивости в следящем и
автоматическом режимах обратной связью охватывается не рулевая машина, а
серводвигатель (рис. 10.19 ).
Рис. 10.19. Структурная схема управления РЭГ-приводом с электрической
обратной связью
Эти схемы комплектуются аксиально-поршневыми насосами типа IIД. Поворот
люльки насоса осуществляется встроенным гидроусилителем, управление которым
производится поворотным золотником. Поэтому выход от серводвигателя СР имеет не
линейное, а угловое перемещение γ з .
Передаточная функция эквивалентного звена внутреннего контура найдется так:
Этой передаточной функции соответствует характеристическое уравнение второго
порядка. Вещественные и отрицательные корни этого уравнения определяют условия
устойчивости контура и отсутствие колебательных процессов в динамическом режиме.
Численно эти условия выразятся неравенством 4T 4 K 4 K 5 2 K 7 <1.
Повышению устойчивости способствует снижение постоянной времени
сервопривода. Поэтому в схемах такого рода наиболее широко применяются двухфазные
асинхронные электродвигатели с полым ротором, имеющие малый маховой момент.
Увеличение коэффициента усиления усилителя повышает точность обработки, но
отрицательно сказывается на устойчивости.
При работе в следящем режиме общий сигнал, подаваемый на вход усилителя,
419
состоит из трех составляющих:
U вх = U 8 - U 7 - U 6 ,
где U 8 - напряжение, пропорциональное повороту α пу поста управления;
U 7 - напряжение, пропорциональное перемещению γ з золотника гидроусилителя;
U 6 - напряжение, пропорциональное углу α поворота пера руля.
В согласованном положении, когда α = 0, U 7 = 0 (γ з = 0, насос не имеет подачи) U
8=
U 6 . При задании перекладки перемещением поста управления равновесие U 8 = U 6
нарушается (например, U 8 > U 6 ).
Люлька насоса поворачивается, появляется напряжение U 7 , которое стремится
компенсировать утраченное равновесное состояние.
При малых углах перекладки ( до 5° ) U 7 уравновешивает U 8 , и серводвигатель в
этом случае останавливается.
По мере поворота руля происходит увеличение U 6 , так что сумма (U 6 + U 7 )
становится больше U 8 . Серводвигатель изменяет направление вращения. Насос уменьшает подачу. В новом согласованном положении U 7 = 0, равновесие восстанавливается U 8 =
= U6 .
Поворот золотника гидроусилителя γ з не превышает 15 - 30°. При учете масштабных соотношений, принятых в схеме формирования управляющего сигнала U вх , это
соответствует углу поворота руля 5 - 10°.
Поэтому при перекладке на большие углы после выхода насоса на максимальную
подачу параметр U 7 сохраняет постоянное значение, соответствующее принятому предельному повороту золотника γ з max .
Суммарное напряжение U 6 + U 7 не уравновешивает задающее U 8 и на
серводвигателе СР образуется положительный управляющий сигнал. Серводвигатель развивает
вращающий момент.
В то же время золотник гидроусилителя достиг конечного положения и его дальней
ший поворот невозможен.
Для облегчения теплового режима работы серводвигателя в кинематической связи
между ним и золотником предусматривается пружинная муфта проскальзывания .
При подходе к заданному положению ( α = 4 - 5°) серводвигатель останавливается,
и в дальнейшем обратным вращением уменьшает подачу насоса от максимальной до нуля,
так же как и при перекладке на малые углы.
10. Виды управления рулевыми электроприводами
По характеру формирования управляющего сигнала различают 4 вида управления
рулевыми приводами:
1. простое;
2. следящее;
3. автоматическое;
4. аварийное.
При простом управлении используют кнопки «Лево руля», «Право руля» или вертикально расположенный рычаг ( «джостик» ), который можно наклонять влево или вправо.
420
При нажатии какой-либо кнопки или наклоне рычага начинается перекладка руля.
Для остановки руля надо отпустить нажатую кнопку или вернуть рычаг в вертикальное
положение.
Таким образом, кладка пера руля продолжается все то время, пока нажата кнопка
или наклонен рычаг. Поэтому этот вид управления называют управлением по времени.
Для возврата руля в прежнее положение ЭД реверсируют нажатием другой
кнопки или наклоном рычага в противоположную сторону.
Положение руля определяется визуально по шкале рулевого указателя ( аксиометра ).
В этой системе при перекладке руля в сторону от диаметральной плоскости и обратно следует осуществить 4 операции ( на примере рычага ): перекладку рычага в сторону ( например, вправо ), возврат его в среднее положение, перекладку в обратную
сторону ( влево ) и возврат опять в среднее положение.
При следящем управлении используют штурвал. При повороте штурвала, например, вправо на определенный угол, начинается перекладка пера руля. При повороте пера
руля на угол, заданный штурвалом, перо руля остановится автоматически. Таким образом, перо руля как бы следит за поворотом штурвала, отсюда название – «следящее управ
ление».
Поскольку угол поворота пера руля равен ( или пропорционален ) углу поворота
штурвала, этот вид управления называют управлением по пути ( пройденному
штурвалом при его повороте ).
Штурвал механически связан со стрелкой, указывающей заданное положение
руля. После отработки руль автоматически перекладывается на требуемый угол, что
может быть проверено по аксиометру. В некоторых случаях указательные стрелки задан
ного и действительного положений руля работают на общую шкалу совмещенного (
сдвоенного ) аксиометра.
Для перекладки руля к борту и обратно рулевому нужно совершить только 2 опе
рации: переложить штурвал на нужный угол и вернуть его в нулевое положение. У
Следящее управление значительно проще и удобнее, требует меньшей затраты
физических сил и внимания.
При автоматическом управлении удержание судна на курсе осуществляется автоматически, без участия человека. Предварительно рулевой матрос, по команде вахтенного
помощника ( старшего помощника, капитана ) выводит судно на необходимый курс,
используя простое или следящее управление.
После этого, в момент, когда судно на заданном курсе, а перо руля - в диаметральной плоскости, переключатель видов управления на тумбе рулевого устройства переводят
в положение «Автоматическое управление» ( «Автомат» ).
На судах с центральной ЭВМ автоматическое управление предполагает задание
угла перекладки руля по определенной программе, разрабатываемой автоматически
судовым счетно-вычислительным комплексом ( составной частью центральной ЭВМ )
в зависимости от решаемых навигационных или иных задач.
В настоящее время на транспортных судах применяют наиболее простые рулевые автоматы, обеспечивающие автоматическую стабилизацию судна на заданном курсе.
Применение авторулевых позволяет:
1. сократить численность экипажа;
2. за счет уменьшения углов кладки руля увеличить среднюю скорость судна и
уменьшить путь, проходимый судном ( в среднем на 2,5-3% по сравнению с ручным управлением ).
Внимание!
421
Современные авторулевые при работе на «Автомате» позволяют изменить
курс судна в нужную сторону простым поворотом штурвала, без перехода на следящее или простое управление. Такая необходимость во внезапном изменении курса
может возникнуть, например, при расхождении со встречным опасно маневрирующим судном.
Аварийное управление применяют тогда, когда остальные виды управления –
простое, следящее и автоматическое, отказали.
На судах с секторными рулевыми приводами аварийное управление осуществляют
при помощи сдвоенного штурвала ( см. рис. 10.3. Рулевой привод с секторной передачей )
На судах с гидравлическими рулевыми машинами аварийное управление осуществляют воздействием вручную на манипулятор барабана насоса Холла. При этом ротор
насоса Холла должен вращаться ( т.е. при обесточивании судна этот вид управления не
действует – в отличие от секторного рулевого привода ).
11. Требования Конвенции SOLAS-74 и Правил Регистра к РЭП
11.1. Основные определения
1. Главный и вспомогательный рулевые приводы
Главным называется привод, предназначенный для управления судном в нормальных условиях эксплуатации.
Вспомогательным называется привод, предназначенный для управления судном в
случае выхода из строя главного рулевого привода.
2. Силовой агрегат рулевого привода
Силовым агрегатом рулевого привода называют механизмы, предназначенные для
создания энергии, необходимой для поворота руля.
Силовым агрегатом электрического ( секторного ) рулевого привода является электродвигатель с относящимся к нему электрооборудованием.
Силовым агрегатом электрогидравлического рулевого привода является электродвигатель с относящимся к нему электрооборудованием и соединённым с ним насосом.
3. Система управления
Системой управления называют устройство, предназначенное для передачи
команд с ходового мостика к силовым агрегатам рулевого привода.
Системы управления рулевым приводом включают:
1.
датчики и приёмники положения пера руля;
2.
электродвигатели с насосами;
3.
органы управления электродвигателями ( кнопки, штурвал, авторулевой );
4.
кабели и трубопроводы.
11.2. Основные требования к рулевым электроприводам
1. Повреждение любого рулевого привода – главного или вспомогательного, не должно
выводить из строя другой;
2. Конструкция рулевых приводов должна обеспечивать переход при аварии с
главного рулевого привода на вспомогательный за время не более 2 минут;
3. Рулевые приводы должны обеспечить непрерывную работу рулевого устройства в наиболее тяжёлых условиях эксплуатации ( при частой смене курса, при движении в
битом льде, в штормовых условиях );
4. Конструкция рулевого привода должна исключать возможность его повреждения при работе судна на максимальной скорости заднего хода;
5. Главный электрический или электрогидравлический рулевой привод, состоя-
422
щий из одного или более силовых агрегатов, должен получать питание по двум отдельным
фидерам, проложенным непосредственно от главного распределительного щита разными
трассами. Фидеры должны прокладываться разными трассами, по возможности на максимальном расстоянии друг от друга в горизонтальном и вертикальном направлении;
6. В случае применения в главном распределительном щите секционированных
сборных шин питание каждого фидера должно осуществляться от разных секций. Один из
фидеров может получать питание через аварийный распределительный щит.
7. Если рулевое устройство имеет вспомогательный электрический или электрогидравлический привод допускается его питание осуществлять от фидеров главного
электропривода. Каждый фидер должен быть рассчитан на питание всех электрических двигателей, которые нормально присоединены к нему и работают одновременно.
8. Если предусматривается переключающее устройство, позволяющее подавать
питание на любой электрический двигатель или на сочетание их от одного или другого
фидера, такие фидеры должны быть рассчитаны на наиболее тяжелые условия нагрузки, а
переключающее устройство должно устанавливаться в румпельном помещении.
9. При неисправности работающего силового агрегата рулевого привода другой
агрегат должен приводиться в действие автоматически или вручную с поста, расположен
ного на ходовом мостике.
10. На всех судах, имеющих рулевые устройства при выходе из строя основного
источника питания силовой установки рулевого привода должно быть обеспечено автома
тическое подключение питания в течение 45 с от аварийного источника электрической
энергии или от другого независимого источника, установленного в румпельном помещении и предназначенного только для этой цели.
11. Для судов валовой вместимостью 10000 рег. т и более мощность этого источника должна обеспечивать непрерывное питание рулевого привода, а также связанной с ним
системы дистанционного управления и указателей положения пера руля в течение не менее 30 мин, а для всех других судов - в течение не менее 10 мин.
12. Режим работы электрических двигателей приводов средств активного управления судном ( подруливающие устройства ) должен соответствовать предусмотренным
условиям работы всего устройства, но, по крайней мере, двигатели должны отвечать
кратковременному режиму работы в течение не менее 30 мин.
13. Электрический и электрогидравлический привод рулевого устройства должен
обеспечивать:
.1. перекладку руля (поворотной насадки) с 35° одного борта на 30°
другого борта за время 28 с при действии расчетного момента рулевого привода на
руль;
.2. непрерывную перекладку руля с борта на борт в течение 30 мин для каждого
агрегата при полностью погруженном руле и максимальной скорости переднего хода,
соответствующей этой осадке;
.3. непрерывную работу в течение 1 ч при наибольшей эксплуатационной скорости
переднего хода и при перекладке руля на угол, обеспечивающий 350 перекладок в час;
.4. возможность стоянки электрического двигателя под током в течение 1 мин с
нагретого состояния (только для рулей с непосредственным электрическим приводом);
.5. надлежащую прочность электрического привода при усилиях, возникающих при
максимальной скорости заднего хода судна;
.6. мощность вспомогательных рулевых приводов должна обеспечивать перекладку
пера руля (поворотной насадки) с 15° одного на 15° другого борта за время не более 60 с.
.7. двигатели рулевых приводов должны допускать перегрузку по моменту не менее 1,5 момента, соответствующего расчетному, в течение одной минуты.
14. Рекомендуется, чтобы была обеспечена возможность перекладки руля при средней скорости заднего хода.
423
15. Пуск и остановка электрических двигателей привода руля, кроме электрических
двигателей рулей с непосредственным электрическим приводом, должны осуществляться
из румпельного помещения и из рулевой рубки.
16. Пусковые устройства должны обеспечивать повторный автоматический запуск
электрических двигателей при восстановлении напряжения после перерыва в подаче пита
ния.
17. В рулевой рубке и у поста управления главными механизмами должна быть
предусмотрена световая и звуковая сигнализация:
.1. об исчезновении напряжения, обрыве фазы и перегрузке в цепи питания
каждого силового агрегата;
.2. об исчезновении напряжения в цепи питания системы управления;
.3. о минимальном уровне масла в любой из цистерн гидравлической системы.
Кроме того, должна быть предусмотрена индикация о работе электродвигателей
силовых агрегатов рулевого привода.
18. Системы управления электроприводами рулевого устройства должны получать
питание от силовой цепи рулевого привода в румпельном помещении или непосредственно от шин распределительного устройства, питающего эту силовую цепь.
19. В румпельном помещении должны быть предусмотрены средства отключения
любой системы управления с мостика от рулевого привода, который она обслуживает.
20. Каждая система дистанционного управления должна иметь собственную незави
симую цепь передачи сигналов управления исполнительному механизму рулевого привода.
6. Направление вращения штурвала или движения рукоятки управляющего аппа
рата должно соответствовать направлению перекладки пера руля.
21. В системе кнопочного ( простого ) управления кнопки должны быть расположены таким образом, чтобы включение кнопки, находящейся с правой стороны, обеспечивало движение пера руля вправо, а находящейся с левой стороны - движение его влево.
22. К установке допускаются авторулевые, воздействующие на рулевую машину по
средством собственной системы передачи или использующие для этого штатную ручную
систему управления рулевым приводом, а также адаптивные авторулевые.
11.3. Основные требования к авторулевым
Автоматическим рулевым ( авторулевым ) называют прибор, предназначенный для
автоматического управления рулевым приводом с целью удержания судна на заданном
курсе.
Авторулевые относятся к оборудованию судов, на которое распостраняются требования Международной конвенции по охране человеческой жизни на море ( SOLAS-74 ).
К основным требованиям относятся следующие:
1. авторулевой должен удерживать судно на курсе:
.1. с точностью ±1º при скорости не менее 6 узлов;
.2. при амплитуде рыскания не более 1º при состоянии моря до 3 баллов и 4º - до 5
баллов;
2. авторулевой должен иметь устройство, прекращающее кладку пера руля при 35º
на каждый борт;
3. должна быть световая сигнализация о наличии питания в схеме;
4. должна быть световая сигнализация об используемом виде управления;
5. должна быть световая и звуковая сигнализация о перегрузке рулевого привода;
6. рекомендуется иметь звуковую сигнализацию о недопустимых отклонениях от
заданного курса при автоматическом управлении;
7. система управления авторулевым должна быть самосинхронизирующейся, т.е.
исключать дополнительные действия при переходе с одного вида управления на другой;
424
8. на пульте авторулевого должно быть простое и надёжно действующее устройство для ручного управления рулём в виде штурвала или кнопочного поста управления с
кнопками «Лево», «Право»;
9. переход с автоматического управления на ручное должен осуществляться одной
манипуляцией в течение не более 3 с при любом положении руля;
10. в авторулевых рекомендуется иметь устройство, которое при автоматическом
управлении позволяет изменять курс по крайней мере на ±10º без перехода на ручное
управление;
11. в авторулевых рекомендуется иметь 2 выносных поста управления, позволяющих при автоматическом управлении выполнить экстренный поворот на любой угол,
вплоть до полной циркуляции;
12. пульт автоматического и ручного управления должен находиться в диаметральной плоскости судна, чтобы исключить его влияние на магнитный компас;
13. выносные пульты управления должны находиться на крыльях мостика или в
других местах, удобных для немедленного перехода на управление с этих постов.
12. Системы управления рулевыми электроприводами
12.1. Основные сведения
Ниже рассматриваются
три характерных системы управления рулевыми
электроприводами:
1. простого управления, при помощи кнопок «Лево руля», «Право руля»;
2. следящего управления, при помощи штурвала;
3. автоматического управления.
12.2. Система простого управления секторным рулевым электроприводом
Основные сведения
Схема простого управления рулевым электроприводом по системе Г – Д применяется на транспортных судах типов «Волго-балт» и «Волго-Дон» ( рис. 10.23 ).
Схема предназначена для управления рулевым электроприводом при помощи кноочного поста с кнопками «Лево», «Право» и «Ускорение». Такой вид управления называется простым..
Кнопки «Лево», «Право» задают направление перекладки пера руля, кнопка «Ускорение» при её нажатии увеличивает скорость перекладки пера руля.
425
Рис. 10.25. Схема простого управления РЭП судов типа «Волго-Балт»
Силовая часть схемы
В данной схеме применена система генератор-двигатель, включающая в себя:
1. приводной асинхронный двигатель с короткозамкнутым ротором М1;
2. генератор постоянного тока смешанного возбуждения G;
3. двигатель постоянного тока независимого возбуждения М2.
Генератор G имеет на главных полюсах 3 обмотки:
1. независимую НОГ - L1C;
2. последовательную ( противокомпаундную ) ПКО - L2C.
3. параллельную ПрОВ - L3C;
Двигатель М2 имеет на главных полюсах независимую обмотку LM2.
Обмотки якорей генератора и двигателя соединены последовательно.
Магнитные потоки независимой НОГ и ПрОВ параллельной обмоток генератора G
направлены согласно и намагничивают генератор. Последовательная обмотка L2C включе
на с переброшенными выводами, поэтому её магнитный поток направлен встречно магнит
ным потокам параллельной и независимой обмоток, т.е. эта обмотка размагничивает генератор.
Таким образом, результирующий магнитный поток генератора
Ф рез = ( Ф ног + Ф пров ) - Ф пко.
Такое включение обмоток генератора G позволяет получить его крутопадающую
внешнюю характеристику ( рис. 10.24, а ).
426
Рис. 10.26. Внешняя характеристика генератора G с ПКО ( а ); механическая
характеристика исполнительного двигателя М2 ( б )
Напряжение генератора передаётся на обмотку якоря исполнительного электродвигателя М2, поэтому механическая характеристика двигателя ( рис. 10.24, б ) повторяет
внешнюю характеристику генератора.
Как следует из графиков внешней и механической характеристик, описанное выше
включение обмоток возбуждения генератора позволяет ограничить ток стоянки двигателя
I ст ( например, при заклинивании пера руля ) и равный ему ток короткого замыкания
генератора I к. з до безопасных значений ( обычно ток стоянки I ст ≤ 2,5 I ном по условиям коммутации ).
Для питания независимых обмоток генератора L1C и двигателя LМ2 используются
2 одинаковых трансформаторно-выпрямительных блока ( ТВБ ).
Каждый блок состоит из понижающего трансформатора Т1 ( Т2 ) и выпрямительного мостика V1 ( V2 ). При работе схемы один из блоков – рабочий, второй – резервный.
Для переключения блоков служит 4-полюсный переключатель S6. На схеме контак
ты переключателя 1…8 находятся в положении «В работе левый ТВБ, в резерве правый
ТВБ .
Параллельно обмоткам возбуждения L1С, L3С и LМ2 включены разрядные резисторы соответственно R4, R6 и R5 , предназначенные для уменьшения перенапряжений на
этих обмотках при их отключении. Эти перенапряжения возникают на обмотках под действием ЭДС самоиндукции при снятии питания с обмоток ( отключении обмоток ).
Последовательно с обмотками L3С и LМ2 включены регулировочные резисторы
соответственно R3 и R2, предназначенные для получения необходимого значения токов
возбуждения генератора ( резистор R3 ) и двигателя ( R2 ).
Ползунки этих резисторов перемещают только при настройке рулевого привода.
Основные элементы схемы
1. кнопка SB1 «Пуск» для включения приводного двигателя М1;
2. кнопка SB2 «Стоп» для остановки приводного двигателя М1;
3. КМ – катушка линейного контактора;
4. F1, F2, F3 – размыкающие контакты ( р.к. ) тепловых реле ( нагревательные эле
менты F1, F2, F3 включены последовательно в линейные провода А, В, С );
5. Н1 – сигнальная лампочка «Питание на схему подано» ( от шин ГРЩ );
6. Н2 - сигнальная лампочка «Приводной двигатель М2 включён»;
7. Н3 - сигнальная лампочка зеленого цвета «Право руля»;
8. Н4 - сигнальная лампочка белого цвета «Руль в диаметрали»;
9. Н5 - сигнальная лампочка красного цвета «Лево руля»;
10. Т1, Т2 – понижающие трансформаторы;
11. V1, V2 – выпрямительные мостики;
427
12. S6 – переключатель трансформаторно-выпрямительных блоков;
13. L1-C1, L2-C2 – фильтры на выходе выпрямительных мостиков, для уменьшения пульсаций выпрямленного напряжения;
14. S2 – сдвоенная кнопка «Лево»;
15. S1 – сдвоенная кнопка «Право»;
16. S3 – кнопка «Ускорение», для увеличения скорости перекладки руля;
17. S7 – контакты конечного выключателя «Лево»;
18. S8 – контакты конечного выключателя «Право»;
19. РV – вольтметр, для контроля напряжения на выходе выпрямительных мостиков;
20. R1 – подстроечный резистор в цепи независимой обмотки возбуждения L1С геенератора G;
21. R2 - подстроечный резистор в цепи независимой обмотки возбуждения LМ2
исполнительного двигателя М2;
22. R3 – подстроечный резистор цепи параллельной обмотки возбуждения L3С
генератора G;
23. R4 – разрядный резистор, для защиты независимой обмотки возбуждения L1C
генератора G от перенапряжений при размыкании контактов кнопок «Лево» или «Право»;
24. R5 – разрядный резистор, для защиты независимой обмотки возбуждения LМ2
двигателя М2 от перенапряжений при переключении контактов переключателя S6;
22. R6 – разрядный резистор, для защиты параллельной обмотки возбуждения
генератора G от перенапряжений при размыкании контактов кнопок «Лево» или «Право»;
23. RS – шунт, для подключения амперметра рА;
24. рА – амперметр для измерения тока главной цепи;
25. S8 – контакты путевого выключателя «Руль в диаметрали»;
26. S7 - контакты путевого выключателя «Право руля»;
27. S9 - контакты путевого выключателя «Лево руля »;
28. F4, F5 – предохранители в цепи катушки контактора КМ и сигнальных лампочек Н1, Н2;
29. F6, F9 - . предохранители в цепи первичной обмотки трансформатора Т2;
30. F7, F8 - . предохранители в цепи первичной обмотки трансформатора Т1;
31. F10, F11 - предохранители в цепях сигнальных лапочек Н3, Н4, Н5.
Подготовка схемы к работе
Для подготовки схемы к работе включают автоматический выключатель рулевого
устройства на ГРЩ ( на схеме не показан ).
Загорается сигнальная лампочка Н1 ««Питание на схему подано».
Затем нажимают кнопку S4 «Пуск», включается линейный контактор КМ.
Замыкаются главные контакты КМ ( включается приводной двигатель М1 ) и пере
ключаются вспомогательные контакты.
Верхний ( на схеме ) вспомогательный контакт КМ шунтирует кнопку «Пуск», после чего её можно отпустить; средний контакт КМ размыкается, отключая лампочку Н1
««Питание на схему подано», а нижний замыкается, включая лампочку Н2 «Двигатель М1
включён».
Приводной двигатель М1 вращает якорь генератора G.
Через контакты S6.1, S6.3 и предохранители FU7, FU8 напряжение сети поступает
на первичную обмотку трансформатора Т1. Вторичное напряжение выпрямляется мостиком V1.
При этом образуются цепь независимой обмотки возбуждения LM2 двигателя M2:
«плюс» на левом выводе V1 – контакт S6.5 – LM2 ( параллельно – R5 ) – R2 контакт S6.7 – дроссель L1 - «минус» на правом выводе V1;
и цепь тока через вольтметр рV:
428
плюс» на левом выводе V1 – контакт S6.5 – FU13 – катушка вольтметра pV – F12 контакт S6.7 – дроссель L1 - «минус» на правом выводе V1.
Двигатель возбуждается, а вольтметр показывает напряжение на выходе мостика
V1. При необходимости это напряжение можно изменить в нужную сторону при помощи
подстроечного резистора R2.
Схема готова к работе.
Работа схемы
Пусть необходимо положить руль на левый борт.
При нажатии сдвоенной кнопки S2 «Лево» образуется цепь тока через независимую обмотку возбуждения генератора L1С:
плюс» на левом выводе V1 – S6.5 – S2.1( верхний ) – S1.2 – S7 - L1С ( параллельно
– через R4) - R1 – S1.1 ( нижний ) – S2.2 ( нижний ) – S6.7 – L1 - «минус» на правом
выводе V1.
Генератор G возбуждается, исполнительный двигатель М2 начинает перекладывать
перо руля.
Перекладка продолжается до тех пор, пока не будет отпущена кнопка S2 или ( если
эта кнопка своевременно не отпущена ) не разомкнётся контакт конечного выключателя
S7 «Лево».
Аналогично работает схема при нажатии кнопки S1 «Право».
Если надо ускорить кладку, нажимают кнопку S3 «Быстрее», которая шунтирует
резистор R1. Ток возбуждения генератора в обмотке L1C и напряжение генератора G
увеличиваются, скорость перекладки возрастает.
С баллером руля механически связаны путевые выключатели S7, S8 и S9. Если
перо руля находится в диаметральной плоскости, замкнуты контакты S8, горит лампочка
Н4 белого цвета.
C началом кладки руля вправо контакт S8 размыкается ( гаснет лампочка Н4 ) и
замыкается контакт S7, загорается лампочка Н3 зелёного цвета.
При перекладки руля влево контакт S8 размыкается ( гаснет лампочка Н4 ), замыка
ется контакт S9, загорается лампочка Н5 красного цвета.
Лампочки Н3, Н4, Н5 встроены в верхнюю часть рулевой тумбы, по ним рулевой
матрос контролирует фактическое направление перекладки пера руля.
По Правилам Регистра, конечные выключатели S7 и S8 прекращают кладку пера
руля при углах 32-33º.
12.3. Система следящего управления гидравлическим рулевым приводом
Бесконтактная схема управления гидравлическим рулевым приводом применяется
на пассажирских судах типа «Александр Пушкин».
На рис. 10.27 показана схема только следящего управления.
Описание схемы управления
Силовая часть схемы
Силовая часть схемы включает в себя:
1. ИД1 – приводной двигатель, вращающий насос переменной производительности ( насос Холла ).
Схема управления
Схема управления включает в себя :
1. Тр1 – силовой трасформатор 380 / 220 В;
2. Тр2 – трансформатор питания обмоток управления ОУ1…ОУ4 магнитных
усилителей МУ1…МУ4;
429
3. сельсин-трансформатор поста управления ПУ;
4. сельсин-трансформатор насоса Холла ОС2 ( второй датчик обратной связи );
5. тахогенератор ТГ;
6. сельсин-трансформатор руля ОС1 ( первый датчик обратной связи );
7. серводвигатель руля СР;
8. магнитные усилители МУ1….МУ4;
9. выпрямительные мостики 8 и 9 ( в учебнике Головина «Судовые электрические
приводы» неправильно обозначены как ФЧВ, т.е. фазочувствительный выпрямитель ).
Рис. 10.27. Схема следящего управления РЭП судов типа «А. Пушкин»
Силовой трансформатор Тр1
Первичная обмотка трансформатора подключена к фидеру напряжением 380 В,
питающему приводной двигатель ИД насоса Холла.
От вторичной обмотки Тр1 питаются 4 цепи:
1. цепи параллельно включенных обмоток возбуждения:
а ) сельсина-трансформатора поста управления ПУ – обмотка 6;
б ) сельсина-трансформатора ОС2 насоса Холла – обмотка 5;
в ) тахогенератора ТГ – обмотка 3 ( эта обмотка включена через небольшой
автотрансформатор АТр, позволяющий регулировать напряжение на ней );
г ) сельсина-трансформатора руля ОС1 – обмотка 7;
2. первичная обмотка трансформатора ТР2;
3. обмотка возбуждения 1 серводвигателя руля СР ( последовательно с ней включены конденсатор С и резистор R );
4. цепи рабочих обмоток реверсивного магнитного усилителя, построенного на
четырех магнитных усилителях МУ1…МУ4.
Электрические машины в схеме
430
Сельсин-трансформатор поста управления ПУ
Состоит из статора и ротора. На статоре находится однофазная обмотка возбуждения 6, на роторе – трехфазная обмотка, соединенная в звезду ( рис. 10.27 ).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен со штурвалом.
Этот сельсин предназначен для получения напряжения, пропорционального углу
поворота штурвала.
Если штурвал, а значит, и ротор сельсина находятся в нулевом положении, выходная ЭДС сельсина е1 = 0.
Если штурвал повернуть в определенную сторону, на выходе сельсина ПУ появится ЭДС е1, величина которой пропорциональна углу поворота штурвала, а фаза зависит от
направления поворота штурвала.
Иначе говоря, если штурвал повернуть в другую сторону относительно нулевого
положения, фаза ЭДС е1 изменится на 180º.
Сельсин-трансформатор насоса Холла ОС2
Состоит из статора и ротора. На статоре находится однофазная обмотка возбуждения 5, на роторе – трехфазная обмотка, соединенная в звезду ( рис. 10.27 ).
Из трех фазных обмоток одна не используется, поэтому две другие по схеме соеди
нены последовательно.
Ротор сельсина-трансформатора ПУ механически соединен с ротором серводвигателя руля СР ( на схеме эта связь показана пунктирной линией между роторами СР и ОС2
).
Ротор СР механически ( через тягу манипулятора насоса Холла ) связан с барабаном насоса Холла, значит, ротор сельсина ОС2 также связан механически с барабаном
насоса Холла.
Этот сельсин предназначен для получения напряжения, пропорционального смеще
нию барабана насоса Холла ( эксцентриситету насоса ).
Если барабан насоса, а значит, и ротор сельсина находятся в нулевом положении,
выходная ЭДС сельсина е2 = 0.
Если барабан насоса выведен из нулевого положения в определенную сторону, на
выходе сельсина ОС2 появится ЭДС е2, величина которой пропорциональна эксцентриситету насоса, а фаза зависит от направления смещения барабана.
Иначе говоря, если барабан сместить в другую сторону относительно нулевого
положения, фаза ЭДС е2 изменится на 180º.
Напомним, что чем больше эксцентриситет насоса, тем больше подача ( давление )
насоса и тем больше скорость перекладки пера руля.
Тахогенератор ТГ
Состоит из статора и полого ротора ( на рис. 10.27 заштрихован ). На статоре находятся две обмотки, сдвинутые в пространстве по углом 90º - обмотка возбуждения 3 и
выходная обмотка с ЭДС е3 . Ротор механически связан с валом серводвигателя руля СР (
эта связь показана при помощи пунктирной линии между роторами СР и ТГ ).
Тахогенератор предназначен для получения ЭДС е3, прямо пропорциональной ско
рости вращения вала серводвигателя СР
Действительно, из формулы ЭДС е3 = с*ω*Ф следует, что при постоянном магнитном потоке Ф обмотки возбуждения 3 эта ЭДС е3 ≡ ω.
При изменении направления вращения ротора тахогенератора фаза ЭДС е3 изменяется на 180 электрических градусов.
Основной характеристикой тахогенератора является зависимость выходного напря
431
жения Uвых ( в данном случае – выходной ЭДС е3 ) от скорости вращения ротора ω ( рис.
10.28 ).
Рис. 10.28. Зависимость выходного напряжения тахогенератора от скорости вращения ротора при полном ( характеристика 1 ) и ослабленном магнитном потоке ( характеристика 2 ).
Характеристика имеет две особенности:
1. величина выходного напряжения Uвых прямо пропорциональна скорости вращения ротора ω, поэтому график характеристики представляет собой прямую линию;
2. при изменении направления вращения ротора тахогенератора ( реверсе ) фаза
переменного выходного напряжения Uвых изменяется на 180 электрических градусов ( см.
участок характеристики, расположенный в третьем квадранте ).
В данной схеме ( рис. 10.27 ) при помощи автотрансформатора АТр можно
изменять магнитный поток возбуждения тахогенератора.
Пусть характеристика 1 получена при полном магнитном потоке Ф тахогенератора
( ползунок АТр находится в крайнем верхнем положении ).
Если при помощи автотрансформатора АТр уменьшить магнитный поток возбужде
ния тахогенератора ( переместить ползунок АТр вниз ), то, как следует из формулы ЭДС
е3 = с*ω*Ф, значения этой ЭДС при тех же ( т.е. одинаковых ) скоростях вращения ротора
будут меньше, чем при полном магнитном потоке.
Поэтому ослабленному магнитному потоку обмотки возбуждения 3 соответствует
характеристика 2.
Сельсин-трансформатор руля ОС1
Состоит из статора и ротора. На статоре находится однофазная обмотка возбуждения 6, на роторе – трехфазная обмотка, соединенная в звезду. Из трех фазных обмоток
одна не используется, поэтому две другие по схеме соединены последовательно.
Ротор сельсина-трансформатора ОС1 механически соединен с баллером руля.
Этот сельсин предназначен для получения напряжения, пропорционального углу
поворота пера руля.
Если перо руля в диаметральной плоскости, значит, ротор сельсина находится в
нулевом положении, выходная ЭДС сельсина е4 = 0.
Если перо руля повернется в определенную сторону, на выходе сельсина появится ЭДС е4, величина которой пропорциональна углу поворота пера руля, а фаза зависит от
направления поворота пера руля.
Иначе говоря, если перо руля будет повернуто в другую сторону относительно
нулевого положения, фаза ЭДС е4 изменится на 180º.
Серводвигатель руля СР
Состоит из статора и полого ротора, который на рис. 10.27 заштрихован. На
статоре находятся две обмотки - обмотка возбуждения 1 и обмотка управления 2.
Обмотка возбуждения 1 получает питание от вторичной обмотки трансформатора
Тр1, обмотка управления 2 получает питание с выхода мостовой схемы на четырех магнит
432
ных усилителях ( устройство и принцип действия мостовой схемы отдельно объясняется
ниже ).
Основной характеристикой серводвигателя является зависимость скорости вращения ротора СР ω от напряжения управления Uу на обмотке 2 ( рис. 10.29 ).
Рис. 10.29. Зависимость скорости вращения ротора серводвигателя руля СР от
напряжения на обмотке управления 2
Этот серводвигатель предназначен для перемещения ( через гидроусилитель, на
рис. 10.27 не показан ) барабана насоса Холла.
Чем быстрее вращается ротор, тем быстрее перемещается барабан насоса Холла,
тем быстрее нарастает давление в системе гидравлики рулевой, тем больше скорость
перекладки пера руля.
С одной стороны, это хорошо, но с другой быстрое нарастание давления в системе
гидравлики может вызвать гидравлический удар, при котором возможно повреждение
клапанов и даже разрыв масляного трубопровода.
Чтобы избежать таких ударов, в схеме используется тахогенератор ТГ, который
уменьшает скорость вращения ротора СР и тем самым позволяет избежать возникновения
гидравлических ударов. Более подробное объяснение действия тахогенератора в схеме
приведено ниже.
Реверсивный магнитный усилитель
Устройство
Реверсивный магнитный усилитель состоит из четырех магнитных усилителей
МУ1…МУ4, включенных по так называемой мостовой схеме ( рис. 10.27 ).
Эта схема изображена в несколько ином виде на рис. 10.30.
433
Рис. 10.30. Мостовая схема реверсивного магнитного усилителя
Как известно из курса электротехники, мостовой называется схема, имеющая четыре «плеча» и две диагонали.
Применительно к данной схеме, «плечами» являются четыре магнитных усилителя
МУ1…МУ4, а диагоналями – питающая ( с точками «А» и «В») и выходная ( с точками
«С» и «D» ).
На входную диагональ ( точки «А» и «В» ) подается напряжение 127 В со вторичной обмотки трансформатора Тр1, с выходной ( точки «В» и «С» ) снимается напряжение
на обмотку управления 2 серводвигателя руля СР.
На рис. 10.30 обмотки управления ОУ магнитных усилителей МУ1…МУ4 не
показаны.
Магнитные усилители
На сердечнике каждого магнитного усилителя ( рис. 10.27 ), например, МУ1, находятся две рабочие обмотки РО1 и РО2 и обмотка управления ОУ.
Рабочие обмотки при помощи диодов VD1 и VD2 включены по схеме с внутренней
положительной обратной связью.
Суть этой схемы состоит в том, что рабочие обмотки из-за диодов пропускают ток
поочередно, каждая в «свою» половину периода переменного напряжения. Иначе говоря,
ток в любой рабочей обмотке – выпрямленный однополупериодный.
Как известно из курса электротехники, такой ток имеет две составляющие:
1. переменную с частотой 50 Гц;
2. постоянную.
Переменная состаляющая тока позволяет рабочей обмотке сохранить индуктивное
сопротивление Xl = 2π*f*L, где f = 50 Гц, L – индуктивность рабочей обмотки.
Постоянная же составляющая создает дополнительное ( помимо обмотки управления ОУ ) подмагничивание сердечника МУ и тем самым увеличивает коэффициент усиления МУ по току.
Обмотки управления ОУ1…ОУ4 ( рис. 10.27 ) включены попарно-последовательно
на выходные напряжения мостиков 8 и 9: с выхода мостика 8 питаются обмотки ОУ2 и
ОУ4, с выхода мостика 9 – обмотки ОУ1 и ОУ3.
Принцип действия
В исходном состоянии выпрямленные мостиками напряжения U8 и U9 одинаковы,
т.е. U8 = U9 ( рис. 10.27 ).
В этом случае токи управления во всех четырех обмотках управления ОУ1……О4
также одинаковы. Это означает, что степень подмагничивания сердечников магнитных
усилителей одинакова, т.е. одинаковы индуктивные сопротивления всех восьми рабочих
обмоток РО1…РО2.
При этом мост уравновешен, выходное напряжение между точками «С» и «D» равно нулю ( точка «0» на рис. 10.31 ).
434
Рис. 10.31. Зависимость выходного напряжения мостовой схемы
( на обмотке 2 СР ) от соотношения между напряжениями U8 и U9
Поскольку это напряжение снимается на обмотку управления 2 серводвигателя
руля, серводвигатель не вращается.
Если в результате поворота штурвала ( см. ниже ) напряжение U8 увеличится, а
напряжение U9 уменьшится, ток в обмотках управления ОУ2 и ОУ4 увеличится, а в
обмотках ОУ1 и ОУ3 уменьшится.
При этом индуктивные сопротивления рабочих обмоток усилителей МУ2 и МУ4
уменьшатся, а усилителей МУ1 и МУ3 увеличатся.
В результате на выходе магнитного усилителя ( точки «С» и «D» ) появится напряжение определенной фазы, величина которого тем больше, чем больше отличаются напря
жения U8 и U9 ( на рис. 10.31 – это участок характеристики в первом квадранте ). Ротор
серводвигателя станет вращаться в определенном направлении.
Если штурвал повернуть в другую сторону, наоборот, напряжение U8 уменьшится,
а напряжение U9 увеличится. Мост снова выйдет из уравновешенного состояния, но при
этом фаза выходного напряжения на обмотке управления 2 серводвигателя изменится на
180º ( на рис. 10.31 – это участок характеристики в третьем квадранте ).
В результате ротор серводвигателя станет вращаться в противоположном направлении.
Работа схемы
Исходное состояние
В рулевых электроприводах под исходным состоянием понимают такое, при котором штурвал находится в нулевом положении, а перо руля – в диаметральной плоскости.
В данной схеме ( рис. 10.27 ) в этом исходном состоянии:
1. ЭДС е1 = о, т.к. штурвал находится в нулевом положении;
2. ЭДС е4 = 0, т.к. перо руля находится в диаметральной плоскости;
3. ЭДС е2 = 0, т.к. барабан насоса Холла находится в нулевом положении;
4. ЭДС е3 = 0, т.к. ротор серводвигателя руля не вращается.
Поскольку эти четыре ЭДС отсутствуют, на вход мостика 8 поступает напряжение U1 с верхней вторичной полуобмотки трансформатора Тр1, на вход мостика 9 – напря
жение U2 c нижней вторичной полуобмотки этого же трансформатора.
Поскольку на мостиках 8 и 9 одинаковы входные переменные напряжения, значит
одинаковы выходные выпрямленные напряжения.
Поэтому токи в парах обмоток управления ОУ2+ОУ4 и ОУ1+ОУ3 одинаковы, мост
на магнитных усилителях МУ1…МУ4 уравновешен, напряжение на выходе моста, снимае
мое на обмотку управления 2 серводвигателя руля, отсутствует. Ротор серводвигателя
руля СР неподвижен.
Работа схемы
Для упрощения объяснения рассмотрим работу схемы ( рис. 10.27 ) без тахогенератора ТГ ( его работа объясняется отдельно ниже ).
Поскольку тахогенератор исключен, в схеме остались четыре электрические
машины:
1. сельсин-трансформатор поста управления ПУ;
2. сельсин-трансформатор руля ОС1;
3. сельсин-трансформатор насоса Холла ОС2;
4. серводвигатель руля СР.
Напомним следующее:
435
1. ротор сельсина-трансформатор поста управления ПУ механически связан со
штурвалом ( мостик );
2. ротор сельсина-трансформатора руля ОС1 механически связан с баллером руля (
румпельное отделение );
3. ротор сельсина-трансформатор насоса Холла ОС2 механически связан с ротором
серводвигателя руля СР ( румпельное отделение ).
При этом серводвигатель руля СР и сельсин-трансформатор насоса ОС2 размещены внутри коробки блока, который называется исполнительным механизмом насоса ( ИМ
).
Исполнительный механизм пристроен к корпусу насоса Холла и предназначен для
перемещения барабана насоса Холла.
Для упрощения объяснения работу схемы при следящем управлении разделим на
две части:
1. работа схемы при повороте штурвала;
2. работа схемы при повороте пера руля.
При этом между первой и второй частью нет перерыва во времени, т.е. обе части
являются половинами единого процесса, который начинается с поворота штурвала, а
заканчивается поворотом руля и его остановкой.
Работа схемы при повороте штурвала ( рис. 10.27 )
При повороте штурвала на определенный угол, например, вправо, ротор сельсинатрансформатора поста управления ( ПУ ) поворачивается, и на его выходе появляется ЭДС
е1. Условное мгновенное направление этой ЭДС на рис. 10.23обозначено стрелкой ( слева
направо ).
Эта ЭДС совпадает по фазе с напряжением U2 и противоположна по фазе напряжению U1.
Поэтому на входе мостика 9 напряжение увеличится от значения U9 = U2 ( в исходном состоянии ) до значения U9 = U2 + е1.
Напротив, на входе мостика 8 напряжение уменьшится от значения U8 = U1 ( в исходном состоянии ) до значения U8 = U1 - е1.
Поэтому ток в паре обмоток ОУ1+ОУ3 увеличится, а в паре обмоток ОУ2+ ОУ4
уменьшится. В результате мостовая схема магнитного усилителя на МУ1……МУ4 выйдет
из состояния равновесия, и на выходе этой схемы, т.е. на обмотке управления 2 СР, появит
ся напряжение, величина которого прямо пропорциональна углу поворота штурвала, а фаза зависит от направления поворота штурвала ( при повороте штурвала в другую сторону
фаза этого напряжения изменится на 180º ).
Серводвигатель СР начинает вращаться и при этом через гидроусилитель ( на схеме не показан ) станет выводить барабан насоса Холла из нулевого положения и одновре
менно поворачивать ротор сельсина-трансформатора насоса Холла ОС2.
На выходе этого сельсина появится ЭДС е2, фаза которой противоположна фазе
ЭДС е1.
Как только возрастающая по мере вывода барабана ЭДС е2 достигнет значения
ЭДС е1, обе ЭДС скомпенсируют друг друга, и напряжения на входах мостиков 8 и 9
станут одинаковыми.
В результате токи в обмотках управления ОУ1+ОУ3 и ОУ2+ОУ4 станут одинаковыми, мостовая схема вернется в состояние равновесия, и напряжение на обмотке управле
ния 2 уменьшится до нуля.
Серводвигатель СР остановится, успев вывести барабан насоса Холла из нулевого
положения.
Из сказанного выше становится понятным назначение сельсина-трансформатора
насоса Холла ОС2 – остановить барабан насоса в смещенном ( рабочем ) положении.
436
Продолжение - работа схемы при повороте пера руля( рис. 10.27 )
Поскольку барабан насоса смещен относительно нулевого положения, начинается
кладка пера руля.
При повороте руля на выходе сельсина-трансформатора руля появится ЭДС е4,фаза
которой противоположна ЭДС е1. Поскольку перед этим две ЭДС - е1 и е2 скомпенсирова
ли друг друга, их результирующее действие равно нулю. Условно можно считать, что эти
ЭДС отсутствуют.
Поскольку ЭДС е4 совпадает по фазе с напряжением U1 и противоположна по фазе
напряжению U2 ( cмотри направление стрелок при ЭДС е4 и напряжениях U1 и U2 ), напря
жение U8 увеличится до значения U8 = U1 + е4 , а напряжение U9 уменьшится до значения
U9 = U2 – е4 .
Поэтому ток в паре обмоток ОУ1+ОУ3 уменьшится, а в паре обмоток ОУ2++ ОУ4
увеличится.
В результате мостовая схема магнитного усилителя на МУ1……МУ4 повторно
выйдет из состояния равновесия, и на выходе этой схемы, т.е. на обмотке управления 2 СР
появится напряжение противоположной фазы ( по отношению к напряжению, возникшему
сразу после поворота штурвала - см. выше ).
Серводвигатель СР реверсирует и станет возвращать в исходное положение барабан насоса Холла и, одновременно, ротор сельсина-трансформатора насоса Холла ОС2.
По мере возвращения барабана насоса в исходное положение подача насоса, а зна
чит, скорость перекладки пера руля непрерывно уменьшаются.
При движении ротора сельсина-датчика насоса Холла выходная ЭДС сельсина е2
также непрерывно уменьшается.
Таким образом, на этой второй части работы схемы ЭДС е4 на выходе сельсинатрансформатора руля ОС1 увеличивается вследствие поворота пера руля ( е4 ↑ ), а ЭДС е2
уменьшается вследствие возврата ротора сельсина-трансформатора насоса ОС2 в нулевое
положение (е2 ↓ ).
Величина же ЭДС е1 на выходе сельсина-трансформатора ПУ не изменяется, т.к.
штурвал после поворота удерживается в этом положении рулевым матросом.
В момент времени, когда перо руля отработает заданный штурвалом угол, барабан
насоса Холла возвращается в исходное положение. Поэтому ЭДС е2 сельсина-трансформа
тора наососа ОС2 равна нулю (е2 = 0 ), а ЭДС е4 компенсирует ЭДС е1.
С этого момента времени на входах мостиков восстанавливаются одинаковые напряжения U8 = U9, мост повторно возвращается в уравновешенное состояние, при котором
напряжение на обмотке 2 становится равным нулю. Серводвигатель останавливается.
В результате перо руля повернуто на угол, заданный штурвалом, и остановлено.
Кладка пера руля окончена.
Как видно из объяснения, барабан насоса Холла при помощи серводвигателя руля
СР возвратно-поступательное движение: сначала был выведен из исходного состояния,
остановлен, а затем возвращен в исходное состояние.
Описанный процесс происходит при повороте штурвала на небольшие углы, до
значения ±5º.
Работа схемы управления при углах поворота пера руля свыше ±5º
При повороте штурвала на углы, большие ±5º, серводвигатель СР включает ся ( см.
выше ) , смещает барабан насоса Холла до упора и останавливается ( стоянка под током ).
Поскольку ЭДС е1 сельсина-трансформатора ПУ гораздо больше, чем ЭДС е2
сельсина-трансформатора насоса, мост на магнитных усилителях МУ1…МУ4 остается
рассогласованным, поэтому на валу серводвигателя руля СР сохраняется момент стоянки
под током , удерживающий барабан насоса Холла в выведенном состоянии.
При этом подача насоса Холла максимальная и постоянная, а скорость поворота
пера руля максимальная.
437
Такой режим сохраняется до тех пор, пока разность углов поворота роторов сельси
нов ПУ и ОС1 не уменьшится до 5º.
В этот момент времени сумма ЭДС ( е2 + е4 ) скомпенсирует ЭДС е1. На входах
выпрямительных мостиков 8 и 9 восстановятся одинаковые напряжения U8 = U9. Мост на
магнитных усилителях МУ1…МУ4 вернется в состояние равновесия, а момент на валу
серводвигателя руля СР уменьшится до нуля.
Поскольку в этот момент времени барабан насоса Холла остается смещенным,
кладка пера руля продолжится.
Поэтому продолжающееся за счет поворота руля непрерывное увеличение ЭДС е4
приведет к изменению соотношения между напряжениями U8 и U9, а значит, к изменению
фазы напряжения на обмотке 2 серводвигателя руля СР.
Серводвигатель реверсирует и станет возвращать барабан насоса Холла в исходное состояние.
Далее процесс происходит так же, как описано выше, подача насоса Холла и скорость движения пера руля постепенно уменьшаются, вплоть до возврата бараба-на насоса
в исходное положение, при котором перо руля останавливается.
Роль тахогенератора ТГ
Если надо резко изменить курс, например, для того, чтобы разойтись со встречным
судном, штурвал поворачивают сразу на большой угол.
При таком повороте штурвала, т.е. при задании сразу больших углов кладки, проис
ходит такое же резкое рассогласование моста на магнитных усилителях МУ1…МУ4.
При этом на обмотке 2 сразу же возникает большое напряжение, и серводвигатель
станет выводить барабан насоса Холла с большой скоростью. Подача насоса Холла, а значит, давление масла в системе гидравлики рулевой машины станут быстро увеличиваться,
в системе возникает гидравлический удар.
В результате возможен разрыв трубопровода или повреждение прокладок клапанов
на рулевой машине ( авария ).
Чтобы уменьшить скорость серводвигателя, в схеме используется тахогенератор
ТГ. Ротор тахогенератора механически связан с ротором серводвигателя, а фаза выходной
ЭДС е3 тахогенератора противоположна фазе ЭДС е1 сельсина-трансформатора поста
управления ПУ.
Узел с тахогенератором ТГ работает следующим образом.
При резком повороте штурвала ЭДС е1 скачкообразно увеличивается, поэтому начальная скорость ротора серводвигателя руля СР будет максимальной.
Однако такой же будет и скорость вращения ротора тахогенератора. Значит, ЭДС
е3 также будет максимальной. Действуя в противофазе с ЭДС е1, эта ЭДС е3 снизит скорость ротора серводвигателя руля СР.
Аналогично работает тахогенератор, если резко вернуть штурвал в нулевое положе
ние.
В этом случае ЭДС сельсина-трансформатора поста управления ПУ е1 резко уменьается до нуля, но остается ЭДС е4 на выходе сельсина-трансформатора руля ОС1.
В результате эта ЭДС уже не компенсируется при помощи ЭДС е1, мост рассогласуется, серводвигатель включается и перемещает барабан насоса Холла из исходного состояния в противоположное тому, которое было вызвано поворотом штурвала.
При этом перо руля станет возвращаться в нулевое положение.
Поскольку серводвигатель реверсировал, ротор тахогенератора вращается в обрат
ную сторону, и фаза ЭДС е3 изменяется на обратную ( на рис. 10.27 стрелка при ЭДС е3 на
правлена слева направо ).
В этом случае фаза ЭДС е3 противоположна фазе ЭДС е4 . Поэтому действие основ
ного сигнала, в данном случае, ЭДС е4 будет ослаблено.
438
В результате барабан насоса Холла будет перемещаться плавно, что позволит и в
этом случае избежать гидравлических ударов в рулевой машине.
При небольших углах поворота штурвала гидравлические удары не возникают. В
этом случае тахогенератор способствует плавному движению руля и его мягкой остановке.
12.4. Система автоматического управления рулевым электроприводом
Отклонение судна от заданного курса воспринимается гирокомпасом ГК (рис. 10.32
), который через датчик повернет ротор сельсина-приемника курса СП.
Последний через необратимую передачу НП поворачивает вал механического
дифференциала МД. На второй вал механического дифференциала от штурвала подается заданное значение курса α з . На выходном (третьем) валу МД получается разность
между заданным и истинным значениями курса, которая характеризуется углом отклонения от заданного курса α.
Рис. 10.32. Структурная схема авторулевого
Выходной вал МД поворачивает датчик курса ДК, который вырабатывает напряже
ние
U1 = k1 α
( 10.11 ),
пропорциональное углу рассогласования судна по курсу. Это напряжение является основным управляющим сигналом.
Два других управляющих сигнала вырабатываются в блоке коррекции БК, включающем в себя дифференцирующее ДУ и интегрирующее ИУ устройства.
Дифференцирующее устройство вырабатывает сигнал
U 2 = k 2 dα/d t
( 10.12 ),
пропорциональный скорости отклонения от заданного курса. Сигнал этого устройства
предназначен для компенсации энергии поворота судна, т. е. для уменьшения его инер
ции путем отрицательной закладки руля.
Сигнал, вырабатываемый интегрирующим устройством, пропорционален инте
гралу от угла отклонения судна по времени
t
U3= k3
dt
( 10.13 ),
0
Этот сигнал возникает при появлении внешних несимметричных сил ( волны, ветра ) и
делает кладки пера руля несимметричными. Тем самым компенсируется снос судна с
курса в результате действия односторонних сил.
Таким образом на входе усилителя У суммируются 3 сигнала (пропорциональный
углу отклонения судна, его производной и интегралу ), образуя напряжение управления
439
t
U у = k 1 α + k 2 dα/dt + k 3
dt
( 10.14 ),.
0
Поэтому закон регулирования напряжения U у в сокращенном виде записывают так
ПИД. Это означает, что напряжение управления имеет 3 составляющие - пропорциональ
ную ( П ) в виде напряжения U 1 , интегральную ( И ) в виде напряжения U 3 , и дифферен
циальную ( Д ) в виде напряжения U 2 .
Напряжение управления U у подается на вход усилителя У, откуда усиленный сигнал поступает на исполнительный двигатель ИД, который поворачивает управляющий
орган насоса Н рулевой машины РМ.
Насос рулевой машины в соответствии с положением управляющего органа при
водит в движение поршни силовых цилиндров СЦ, которые будут поворачивать руль
на угол β.
При повороте руля приходит в движение рулевой датчик РД, имеющий механическую связь с баллером, вырабатывающий сигнал отрицательной обратной связи
U4 = k4 β
( 10.15 ),.
Этот сигнал вычитается из управляющего сигнала, а поэтому ограничивает угол
перекладки руля и вместе с сигналом U 1 обеспечивает удержание судна на заданном кур
се (по закону незатухающих колебаний).
Исполнительный двигатель ИД связан с управляющим органом насоса через
исполнительный механизм. В зависимости от типа РМ в комплект авторулевого может
входить исполнительный механизм ИМ-1 или ИМ-2.
В приборе ИМ-1 выходной валик имеет вращательное движение на некоторый
угол ε, а в приборе ИМ-2 выходной валик совершает поступательное перемещение на
некоторую величину l.
Значение смещения определяет подачу насоса, а соответственно и скорость пере
кладки руля. Таким образом,
ε = kdβ/dt
( 10.16 ),,
поэтому датчик ДН обратной связи по насосу, механически связанный с ИД, выра
батывает сигнал
U 5 = k 5 kdβ/d
( 10.17 ),
Этот сигнал отрицательной обратной связи вычитается из управляющего сигнала и служит для уменьшения автоколебаний пера руля.
Процесс управления судном для удержания его на заданном курсе можно
представить следующим образом.
При отклонении судна от заданного курса выработанный авторулевым управля ющий сигнал поступает через усилитель на ИД. Последний приводит в движение управляющий орган и датчик ДН, вырабатывает сигнал U 5 , который вычитается из управляющего сигнала усилителя.
Когда при определенном смещении управляющего органа насоса значение сигнала отрицательной обратной связи станет равным управляющему сигналу на входе усилителя, разность напряжений станет равной нулю, а следовательно, и напряжение,
подаваемое на ИД, тоже станет равным нулю.
Двигатель остановится, а управляющий орган насоса будет повернут на определенный угол. Насос рулевой машины в соответствии с управляющим органом приведет в
движение поршни СЦ рулевой машины, которые будут поворачивать руль.
При повороте руля рулевой датчик РД вырабатывает сигнал U 4 , который
вычитается из управляющего сигнала усилителя.
Поскольку в рассматриваемый момент разность сигналов на усилителе была рав-
440
на нулю, то под действием сигнала обратной связи РД усилитель будет вырабатывать
напряжение противоположной фазы, ротор ИД будет вращаться в обратную сторону и
перемещать управляющий орган насоса к нулевому положению.
При этом сигнал U 5 обратной связи датчика ДН насоса будет соответственно
уменьшаться.
Когда управляющий орган насоса вернется в нулевое положение, рулевая машина прекратит движение, руль остановится в определенном положении, сигнал датчика
ДН будет равен нулю, сигнал датчика РД будет равен по значению управляющему напря
жению U у и противоположен по знаку. Разность сигналов на входе усилителя опять будет равна нулю.
Под действием момента, создаваемого рулем, судно начнет возвращаться на заданный курс и в связи с этим значение управляющего напряжения U у уменьшается. Это
приводит к нарушению равенства сигналов и под действием напряжения, определяемого
полярностью сигнала U 4 рулевого датчика, ИД начинает смещать регулирующий орган
насоса в противоположную сторону.
В результате обеспечивается возврат руля в диаметральную плоскость, когда
судно оказывается на заданном курсе.
13.Электроприводы специального назначения
13.1. Основные сведения
Электроприводы специального назначения ( ЭСН ) делят на 2 группы:
1. электроприводы, улучшающие мореходные качества судов;
2. электроприводы, выполняющие технологические операции, специфические для
данного типа судна.
К первой группе ЭСН относятся:
подруливающие устройства;
успокоители качки.
Ко второй группе относятся:
1. системы кренования и дифферента;
2. системы откренивания судов;
3. автоматические буксирные лебёдки.
Подруливающие устройства предназначены для повышения манёвренности судов.
С их помощью судно может перемещаться лагом (бортом ) и даже совершать полный
оборот на месте. Такие устройства применяют на обычных транспортных судах, а также на судах
- паромах, предназначенных для перевозки колёсной техники.
Системы успокоителей качки применяют, в основном, на пассажирских судах
и морских паромах, в условиях, когда качка достигает 35.. .40°. Предназначены для умень
шения амплитуды качки судов и , таким образом, повышения их остойчивости.
Системы кренования и дифферента применяют на ледокольных судах, для борьбы с
заклиниванием корпуса судна во льдах и придания корпусу судна необходимой осадки. С их помощью можно раскачивать судно с борта на борт или изменять осадку ( например, подвсплывать ) и тем самым освобождать корпус судна, зажатый во льдах.
Системы откренивания судна применяют на судах с горизонтальным способом погрузки ( суда типа ро-ро ) для выравнивания крена. Применение этих систем повышает без
опасность грузовых операций и обеспечивает надёжность работы въездной аппарели.
441
Автоматические швартовные лебёдки( АШЛ ) применяют на судах любых типов
для обеспечения постоянного натяжения швартовных канатов в условиях, когда изменяется осадка
судна.
Последнее возможно при приливах и отливах, а также при погрузке и выгрузке судна.
Одновременно они используются как якорно-швартовные устройства, т.е. для работы как со
швартовными, так и с якорными канатами ( для перемещения швартовных канатов и
подъёма и спуска якорей).
Подруливающие устройства
Основные сведения
Сила давления воды на перо руля определяется таким выражением
N = Cn
2
2
S
( 10.18 ),,
где C n - безразмерный коэффициент нормальной силы;
3
ρ = 1025 кг / м – массовая плотность воды;
υ – скорость набегающего на перо руля потока, м / с;
2
S – площадь пера руля, м .
Как следует из ( 10.18 ), сила давления воды на перо руля прямо пропорциональна
квадрату скорости.
Отсюда следует, что при движении судна малыми ходами сила давления воды на
перо руля резко уменьшается, судно перестает слушаться руля. Поэтому на малых ходах
применяют подруливающие устройства.
Подруливающие устройства предназначены для повышения манёвренности судна
при движении судна с малой скоростью, например, при проходе каналов и узкостей, а
также при подходе к причалу или отходе от него.
Эти устройства позволяют судну двигаться бортом ( лагом ), разворачиваться на
месте, менять курс на малых ходах и значительно уменьшать радиус разворота судна.
Подруливающие устройства представляют собой цилиндрическую трубу ( туннель ), расположенную в плоскости миделя ( т.е. в поперечной плоскости корпуса судна )
и свободно сообщающуюся с водой.
Внутри трубы находится винт с приводным электродвигателем. При работе
электродвигателя винт создаёт поперечную силу ( упор ), направленную перпендикулярно
корпусу судна.
Подруливающие устройства обычно устанавливают в носовой части судна, при их
работе нос судна уходит вправо или влево относительно курса. На крупных судах могут
быть несколько подруливающих устройств, расположенных в носовой, средней и
кормовой частях судна.
Эти устройства используют винты двух видов:
1. с фиксированным шагом ( ВФШ );
2. с регулируемым шагом ( ВРШ ).
Угол поворота лопастей ВФШ не изменяется.
Угол поворота лопастей ВРШ можно изменять, что приводит к изменению
тяги. При этом скорость электродвигателя винта не изменяется, что значительно упрощает
схему управления ВРШ.
Для управления ПУ применяют электрические, электрогидравлические и реже
пневматические системы управления.
Устройство и принцип действия подруливающего устройства с ВРШ
К основным деталям устройства относятся ( рис. 10.33 ):
1 – кронштейны ( 2 ), для крепления устройства к стенкам туннеля;
2 – обтекатель, для уменьшения сопротивления винта потоку воды;
442
3 – корпус подруливающего устройства;
4 – рычаг серводвигателя преобразователя шага винта ( угла разворота лопастей );
5 – вертикальный вал, для передачи вращающего момента от электродвигателя к
винту;
6 – люк для смены лопастей;
7 – туннель;
8 – поворотная лопасть винта.
Рис. 10.33. Подруливающее устройство с винтом регулируемого шага :
Подруливающее устройство находится в туннеле 7 в носовой части судна и
подвешено на двух кронштейнах 1.
Винт вращается двумя электродвигателями через редуктор ( не показан ),
вертикальный вал 5 и коническую передачу ( на рис. 10.33 показана пунктиром в средней
части ).
Устройство для изменения шага винта показано на функциональной схеме ( рис.
10.34 )
Функциональная схема электропривода подруливающего устройства с ВРШ
К основным деталям устройства относятся ( рис. 10.34 ):
Рис. 10.34. Функциональная схема электропривода подруливающего устрой-
443
ства с ВРШ
ЛПШ – линейный преобразователь шага, для преобразования угла поворота
лопастей винта в пропорциональное напряжение ;
ДНШ – датчик нулевого шага, представляет собой конечный выключатель,
контакты которого замкнуты только при нулевом шаге лопастей винта;
М – приводной электродвигатель винта, для вращения винта;
ПП – переключатель постов управления;
ПУ1- пост управления на крыле левого борта;
ПУ2 – то же, в рулевой рубке;
ПУ3- то же, на крыле левого борта;
ПУ0 – то же, в ЦПУ;
РУ – распределительное устройство ( щит электропитания );
РШ – регулятор шага винта, для выработки напряжения, ;
ЭГП – электрогидравлический преобразователь;
РЗ – распределительный золотник;
1 – рычаг, для передачи информации о положении лопастей в ЛПШ и ДНШ;
2 – сервомотор, для создания усилия, поворачивающего лопасти винта;
3 – шток сервомотора, для передачи усилия от поршня сервомотора 2 к кондуктору
5;
4 – коническая зубчатая передача, для передачи вращающего момента
электродвигателя на ступицу винта ( т.е. для вращения винта );
5 – кондуктор, устройство для непосредственного разворота лопастей винта.
Работа системы управления
Подготовка системы управления к работе
Для подготовки системы управления к работе:
1. подают питание 380 В переменного тока в распределительное устройство РУ в рулевой рубке;
2. включают нажатием кнопок «Пуск» насосы смазочного масла и гидропри
вода, а также оба приводных двигателя подруливающего устройства.
Винт начинает вращаться, но упора не создаёт, т.к. в исходном положении шаг
винта равен нулю;
3. выбирают необходимый пост управления, для чего нажимают кнопку «Принятие управления» на корпусе выбранного поста, при этом загорается сигнальный светодиод
«Управление принято». Для переключения постов управления служит переключатель
постов ПП.
Система готова к работе.
Ввод системы в действие возможен при условии, что шаг винта равен нулю. Для
контроля истинного значения шага винта каждый ПУ имеет светодиоды, которые
загораются в положениях 0; 25; 50; 75 и 100% номинального шага винта в обоих
направлениях.
Работа системы управления
Система управления представляет собой следящую систему, которая обеспечивает
поворот лопастей на заданный с поста управления шаг винта.
Необходимый шаг задаётся при помощи рукоятки поста управления.
Пусть выбран пост управления ПУ2 в рулевой рубке.
При повороте рукоятки ПУ2 на необходимый угол сигнал из ПУ2, пропорциональный углу, поступает в переключатель постов ПП, в котором преобразуется в напряжение,
пропорциональное заданному углу ( заданное напряжение ).
444
С выхода ПП напряжение поступает в электрогидравлический преобразователь
ЭГП, выводящий шток распределительного золотника РЗ из нулевого положения.
При этом масло под давлением поступает через золотник в одну из полостей
сервомотора 2, например, в левую. Шток сервомотора перемещается вправо и через
кондуктор 5 начинает разворачивать лопасти винта. При этом величина перемещения
штока пропорциональна истинному углу поворота лопастей.
В первый момент времени скорость поворота лопастей максимальная.
Перемещение штока через рычаг обратной связи 1 передаётся в линейный
преобразователь шага ЛПШ. Этот преобразователь преобразует перемещение штока в
пропорциональное напряжение обратной связи,
фаза которого противоположна
заданному напряжению.
В преобразователе ЛПШ эти два напряжения вычитаются, при этом напряжение на
выходе ЛПШ, равное их разности, начинает, по мере поворота лопастей, уменьшаться.
В результате золотник ЭГП под действием возвратной пружины ( не показана )
начинает возвращаться в исходное положение, уменьшая подачу масла в цилиндр
сервомотора 2. Это приводит к уменьшению скорости поворота лопастей.
Когда лопасти повернутся на заданный угол, напряжение обратной связи достигнет
значения, равного заданному, поэтому напряжение на выходе ЛПШ исчезнет. При этом
золотник вернется в исходное положение, шток 3 остановится.
Система управления готова к заданию нового угла поворота лопастей.
Успокоители качки
Основные сведения
В штормовых условиях крен судна достигает 35-40º. Поэтому на пассажирских судах и паромах устанавливают специальные устройства – успокоители качки ( УК )
.
УК представляют собой несущие крылья симметричного профиля, располо
женные с двух бортов на скуле судна в районе плоскости миделя ( рис. 10.35 ). Часто эти
крылья называют: «бортовые рули».
Эти рули закреплены на баллере. Баллер – стальной горизонтальный вал ,
предназначенный для передачи вращающего м