")
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
ЛУГАНСКОЙ НАРОДНОЙ РЕСПУБЛИКИ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ЛУГАНСКОЙ НАРОДНОЙ РЕСПУБЛИКИ
«ЛУГАНСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ИМЕНИ ВЛАДИМИРА ДАЛЯ»
Кафедра автоматизации и компьютерно-интегрированных технологий
ИНФОРМАЦИОННЫЕ СИСТЕМЫ СРЕДСТВ
АВТОМАТИЗАЦИИ
КОНСПЕКТ ЛЕКЦИЙ
Часть 1
(электронное издание)
УТВЕРЖДЕНО
на заседании кафедры автоматизации и
компьютерно-интегрированных технологий
Протокол №15 от 15.01.2020
Луганск 2020
УДК 621.3
Конспект лекций по дисциплине «Информационные системы средств
автоматизации» для студентов, обучающихся по направлению подготовки
15.04.04 «Автоматизация технологических процессов и производств». / Сост.:
А.Г. Кратинов – Луганск: изд-во ЛНУ им. В. Даля, 2020. – 115 с.
В конспекте лекций изложены основные теоретические положения по
дисциплине «Информационные системы средств автоматизации». Освещены
вопросы функционирования и разработки распределенных информационноуправляющих систем.
Конспект лекций предназначен для студентов, обучающихся по
направлению 15.04.04 «Автоматизация технологических процессов и
производств». Магистерская программа 15.04.04.01 «Информационное
обеспечение систем автоматизированного управления технологическими
процессами и производствами».
Составитель
А.Г. Кратинов, доц.
Отв. за выпуск
А.В. Колесников, доц.
Рецензент
С.С.Стоянченко, доцент кафедры
информационных и управляющих систем.
© Кратинов А.Г.
© ГОУ ВПО ЛНР «ЛНУ им.
В. ДАЛЯ», 2020
Лекция 1.
МЕСТО И РОЛЬ РИУС В СОВРЕМЕННЫХ КИБЕРНЕТИЧЕСКИХ
СИСТЕМАХ
1. Кибернетический подход в создании и развитии САУ
2. Понятие информационно-управляющей системы
3. Эволюция информационно-управляющих систем.
4. Распределенные системы автоматизации
Традиционная теория автоматического управления при построении
САУ базируется на следующей последовательности: формальное описание
объекта управления и устройства управления → формирование критериев
управления объектом → непосредственное проектирование САУ.
Очевидно, что при поэтапной реализации описанной цепочки, характер
возникающих подзадач и способов их решения всецело определялся
выбранной структурой и видом формального описания объекта управления
(ОУ) и устройства управления (УУ), образующих управляющую систему.
Исторически сложилось так, что специалисты в области ТАУ основное
внимание уделяли заключительному этапу, стремясь синтезировать закон
управления, обеспечивающий приемлемый либо оптимальный режим
работы ОУ. Оптимизация управления всегда была ключевой проблемой
классической ТАУ, а при ее решении подразумевалось, что управляющая
система описана в точных терминах формальной моделью, адекватно
отражающей ее реальное состояние и процесс взаимодействия с внешней
средой. Очевидно, что несложная модель управляющей системы вела к
сравнительно простым методам решения задачи синтеза САУ данным
объектом.
Однако,
повсеместное
упрощение
и
линеаризация
при
представлении реальных технологических процессов зачастую приводило к
созданию
САУ,
работоспособных
только
«на
бумаге»,
т.е.
в
гипотетическом мире, который описывался выбранной формальной
идеализированной моделью управляющей системы. Таким образом, модель
управляющей системы является отправной точкой, от выбора которой
зависит качество и работоспособность реальной САУ.
Модели управляющих систем создавались и модифицировались по
мере ужесточения требований к САУ и усложнения технологических
процессов. Зачастую, новый вид модели управляющей системы порождал
новые критерии управления и новые методы синтеза САУ. Можно дать
множество видов классификаций моделей управляющих систем: по
функциональному
назначению,
по
виду
математического
описания
элементов системы, по характеру изменения физических величин и т.д.[8].
Однако, поскольку нас интересует происхождение интеллектуальных САУ,
отличительной
чертой
которых
является
реализация
процедур
взаимодействия с внешней средой, имитирующих в той или иной степени
человеческие действия и мыслительные процессы, дадим упрощенную
классификацию моделей управляющих систем именно с этой точки
зрения [9].
Исходя из характера информационного взаимодействия ОУ с внешней
средой можно выделить три класса моделей управляющих систем,
различаемых по объему используемой в процессе управления информации:
автономные – системы, не использующие непосредственной
информации о реальных внешних возмущающих воздействиях, т.е. системы
«замкнутые» относительно внешнего мира;
формализованные – системы, использующие информацию о реальных
внешних возмущающих воздействиях в виде идеализированных
формальных математических моделей, т.е. системы, существующие в
техническом субъективном внешнем мире;
информационные – системы, использующие непосредственную
информацию о реальных внешних возмущающих воздействиях, т.е.
системы, существующие в реальном внешнем мире.
Системы первого типа – это системы, которые послужили основой
становления
теории
автоматического
управления
(первоначально
называвшейся теорией автоматического регулирования).
Основной задачей, решаемой в то время, была задача автоматической
стабилизации определенных физических величин Y _ – вектора выходных
переменных ОУ, характеризующих режим работы объекта управления. В
процессе функционирования систем автоматической стабилизации на
человека-оператора (лицо, принимающее решение - ЛПР) возлагались
функции определения вектора входных переменных G _ , задающих режим
функционирования объекта (в данном случае в автоматическом режиме –
это желаемые значения выходных переменных ОУ, так называемые уставки
регуляторов). Поддержание желаемых значений выходных переменных
осуществлялось путем подачи на вход ОУ вектора управляющих
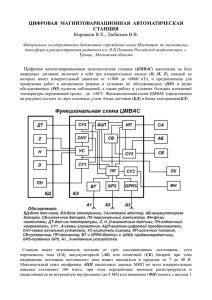
воздействий U _ , формируемых устройством управления(рис.1.1,1.2).
С одной стороны, решения ЛПР по определению уставок далеко не
всегда являлись оптимальными и оперативными для технологического
процесса. С другой стороны, именно участие имеющего опыт ЛПР в
технологическом
процессе
позволяло
в
определенной
степени
нивелировать недостаточную адекватность модели управляющей системы.
На самом деле такая САУ имеет опосредованную через ЛПР связь с
окружающим
миром,
поскольку
человек
может
воспринимать,
анализировать и делать выводы, оперируя любой, в том числе и
неформализованной информацией о состоянии как самой управляющей
системы, так и процессов ее взаимодействия с реальным внешним миром.
Однако, при работе в автоматическом режиме, без участия ЛПР, эта
неявная связь утрачивается и управляющая система становится полностью
автономной. К данному классу относятся разомкнутые системы (рис.1.1) и
замкнутые системы с управлением по отклонению (рис.1.2).
Рис.1.1. Разомкнутая автономная система управления
В основном, САУ данного типа решали проблемы устойчивости и
локального оптимального управления, т.е. обеспечения соответствия
уставки регулятора и выхода ОУ согласно какому-либо критерию
оптимальности
(минимизации
времени
переходного
процесса,
минимизации максимального перерегулирования в системе, минимизации
суммарного квадратичного отклонения уставки и выхода ОУ и т.п.).
Рис.1.2. Замкнутая автономная САУ
Расширение круга научно-технических задач, решаемых методами
ТАУ,
а
также
стремление
к
полной
автоматизации
управления
технологическими процессами, породило следящие управляющие системы
(системы, у которых вектор выходных переменных соответствует любым,
заранее неизвестным изменениям вектора входных переменных) и системы
программного
управления
(системы,
у
которых
вектор
входных
переменных, представляет функцию времени, синтезируемую неким
техническим
устройством).
Источником
входных
переменных
управляющей системы в этом случае являлось не ЛПР, а техническая схема,
технологический процесс, исследуемое физическое явление, принимаемый
системой сигнал и т.п., т.е. непосредственно сам окружающий САУ
реальный мир. Системы стабилизации также усложнялись, приобретали
многоуровневую иерархическую структуру, вследствие чего источником
вектора входных переменных в системах стабилизации все чаще становился
не человек, а автоматическое устройство верхнего уровня. Таким образом
утрачивалась возможность опосредованного получения и преобразования
информации о реальном мире за счет оперативного участия в процессе
управления человека – единственного на тот момент «устройства»,
способного воспринимать и адекватно реагировать на непредсказуемые
возмущающие воздействия со стороны внешнего мира. Данного недостатка
автономных систем в некоторой мере были лишены разработанные далее
формализованные системы.
Системы второго типа – формализованные системы, используют в ходе
своей работы информацию о внешнем мире, представленную в виде
некоторого формального описания: детерминированного, стохастического,
логического и т.п. Таким образом внешний мир для такой системы
представляется в виде некой приближенной формализованной модели. К
данному
классу
относятся
разомкнутые
и
замкнутые
системы
стабилизации, слежения и программного управления с дополнительной
явной и (или) скрытой коррекцией по возмущению (рис.1.3).
Явная коррекция подразумевает наличие датчиков возмущения и
дополнительного корректирующего УУ. Под скрытой коррекцией по
возмущению следует в данном случае понимать синтез УУ с учетом
формального описания реальных возмущений и управляющих систем
соответствующими моделями (стохастические САУ, системы оценивания,
интервальные САУ, робастные САУ, САУ с нестабильными параметрами,
инвариантные САУ).
Такая САУ уже учитывает влияние внешнего мира, но эффективность
ее
функционирования
будет
формализованной
модели
внешней
к
среды
напрямую
взаимодействия
реальному
его
зависеть
от
управляющей
состоянию.
близости
системы
Образно
и
говоря,
формализованные системы видят все окружающее в «кривом зеркале»
количественного описания явлений, а далеко не все явления и процессы
реального мира можно описать количественно с достаточной степенью
точности. Поэтому для реальной оценки ситуации во внешнем мире и
принятия адекватных решений по прежнему требуется участие ЛПР в
процессе управления. Дальнейшее развитие идеи создания управляющих
систем, способных приспосабливаться непосредственно к реальному
внешнему
миру
без
участия
человека
привело
к
построению
информационных управляющих систем.
Понятие
информационно-управляющей
информационно-управляющих систем.
Зарождение
системы.
информационно-управляющих
систем
Эволюция
(ИУС)
происходило в начале пятидесятых годов. Компьютеры тогда делались на
громоздкой элементной базе и были крайне ненадёжны. Для нормальной
работы таким машинам требовались идеальные условия эксплуатации. В
СССР разработкой управляющих ЭВМ занимались в двух институтах: в
институте электронных управляющих машин (ИНЭУМ) и в институте точной
механики и вычислительной техники (ИТМиВТ). В конце 50-х годов
двадцатого века был разработан УВК М40 для работы в составе системы
ПРО. Позднее был разработан УВК М4 для управления комплексом РЛС. М4 была одной из первых в СССР машин, построенных на базе отечественных
транзисторов и полупроводниковых диодов. Разработанная позднее УВК М7
использовалась для управления энергоблоками ГРЭС (Щекинская и
Славянская ГРЭС). В середине 60-х годов была разработана агрегатная
система
средств
вычислительной
техники
(АСВТ)
специально
для
автоматизации технологических процессов. В 70-е годы появились первые
управляющие вычислительные машины семейства СМ-ЭВМ. Первые версии
машин этой серии были основаны на серии АСВТ, позднее в СССР взяли
курс на копирование западных образцов вычислительной техники. Семейство
СМ-ЭВМ, начиная с СМ-3, было построено на базе американского
компьютера PDP-11 фирмы DEC. Проблема разработки теории, принципов
построения и применения управляющих машин была поставлена в СССР
членом-корреспондентом АН СССР И.С. Бруком в 1957 – 1958 гг.
Управляющие
ЭВМ
разрабатывались
и
выпускались
предприятиями
Минприбора СССР и других министерств, занимавшихся промышленной
автоматизацией. Средства промышленной автоматики в СССР были
объединены Государственной системой промышленных приборов и средств
автоматизации (ГСП), определяющей принципы организации ИУС, функции,
аппаратные и программные средства сопряжения.
С появлением компьютерных сетей, примерно в 70-е годы, появилась
возможность строить распределенные или сетевые ИУС. Появление
интегральных микросхем и микропроцессоров дало возможность приблизить
ИУС непосредственно к объекту управления или даже встроить в него ЭВМ.
Так появились первые встроенные системы (Embedded System). Постепенно,
по мере удешевления элементной базы, увеличения степени её интеграции и
повышения уровня надёжности вычислительных устройств, появилась
возможность устанавливать ЭВМ в различные места объекта управления,
объединяя все вычислительные узлы в единую сеть. В процессе дальнейшего
развития появились так называемые киберфизические системы (КФС, по
англ. Cyber Physical System, CPS). КФС характеризуются глубоким
сращиванием
с
механическими,
оптическими,
химическими
и
биологическими системами. Таким образом, по степени проникновения
вычислительной системы в объект управления можно выделить:
− Информационно-управляющие системы (ИУС) ;
− Распределенные информационно-управляющие системы (РИУС);
− Встроенные системы (Embedded System,ES);
− Сетевые встроенные системы (Networked Embedded System,
NES);
− Киберфизические системы (КФС).
Киберфизическая система—специализированная вычислительная система,
имеющая физические средства взаимодействия (электрические, химические,
оптические, механические, биологические и т. п.) с объектом контроля и
управления, выполняющая одну функцию. В качестве вычислительной
платформы для реализации киберфизической системы может использоваться
любое компьютерное оборудование, включая оборудование класса SOHO
(например, персональный компьютер, смартфон или планшет). В последнее
время, из-за прогресса в области вычислительной техники, смысл термина
‘встроенная система’ достаточно сильно видоизменился и размылся. По мере
развития техники происходила эволюция обозначения класса управляющих
компьютерных
систем:
от
информационно-управляющей
системы—к
встроенной, от встроенной—к встроенной сетевой, а от встроенной
сетевой—к киберфизической. В процессе развития происходила плавная
интеграция вычислительной системы и объекта управления. Если первые
информационно-управляющие
системы
представляли
собой
систему,
практически не связанную с объектом управления, то современные
киберфизические
системы
очень
тесно
интегрированы
с
объектом
управления.
Эволюция понятия «Встроенные системы» во временном контексте
1. Информационно-управляющие системы, управляющие вычислительные
комплексы
(УВК),
преимущественно
централизованные
системы
удалённые от объекта управления, 60-е годы.
2. Встроенные вычислительные системы (embedded systems), компактные
вычислительные системы встроенные в объект управления, конец 70-х
годов.
3. Распределенные встроенные системы управления, контроллерные сети
(networked embedded control systems) - NECS / РИУС, конец 90-х годов.
4. Кибер-физические системы (Cyber Physical Systems ), 2000-е годы
Информационно-управляющая
система
(ВсС)—система
система
специального
(ИУС)
или
назначения,
встроенная
в
которой
вычислительный элемент полностью встраивается в устройство, которым она
управляет. В отличие от универсального компьютера, встроенная система
выполняет одну или несколько предопределенных задач, обычно с очень
конкретными требованиями.
В техническом смысле встроенная система взаимодействует с
окружающей средой контролируемым образом, удовлетворяя целому ряду
требований
на
своевременности.
способность
Как
реагировать
правило,
она
в
должна
смысле
качества
удовлетворять
и
таким
требованиям как стоимость, потребляемая мощность и использование
ограниченных физических ресурсов.
Распределенная
информационно-управляющая
система
-
пространственно-рассредоточенная система. Такие системы характеризуются
наличием слабой связи между компонентами. Слабо связанная система—
система, в которой интенсивность обмена данными в рамках одного
вычислительного
данными
между
процесса
разными
значительно
выше интенсивности
вычислительными
процессами.
обмена
Тенденция
усложнения ВсС проявляется в том, что большинство систем реализуются в
виде многопроцессорных распределенных ВС или контроллерных сетей. Это
дополнительно усложняет задачу проектировщика. Рассмотрим основные
свойства современных распределенных ВсС:
− множество взаимодействующих узлов: более двух (интерес сегодня
представляют системы с единицами тысяч взаимодействующих встроенных
компьютеров);
− работа в составе систем управления без участия человека.
В таких системах оператор может присутствовать, он может получать
информацию и частично иметь возможность воздействовать на работу
системы, однако основной объем работ по управлению выполняет
распределенная
ВсС.
Степень
функциональной
и
пространственной
децентрализации управления может изменяться в широких пределах.
- Вычислительные элементы ВсС выполняют задачи, отличные от задач
вычислений и коммуникаций общего назначения.
-Распределенные ВсС используются в составе масштабных технических
объектов (например, самолет или здание) или взаимодействуют с объектами
естественной природы (например, комплексы мониторинга окружающей
среды).
-Распределенные ВсС могут характеризоваться узлами с ограниченным
энергопотреблением,
иметь
фиксированную
или
гибкую
топологию,
выполнять критичные для жизнедеятельности человека функции, требовать
высокотехнологичной реализации или создаваться как прототип.
Распределенные системы автоматизации
С ростом количества датчиков, увеличением площади территории, на
которой
расположена
алгоритмов
автоматизированная
управления
становится
система
и
более
усложнением
эффективным
применение распределенных систем [Bertocco, Vyatkin -Хазарадзе].
Распределенные системы состоят из множества территориально
разнесенных контроллеров и модулей ввода-вывода. При таком подходе
структура распределенной системы и структура алгоритма ее работы
становятся подобны структуре самого объекта автоматизации, а функции
сбора,
обработки
данных,
управления
и
вычисления
оказываются
распределенными среди множества контроллеров. Каждый контроллер
работает со своей группой устройств ввода-вывода и обслуживает
определенную часть объекта управления. В частности, технологическое
оборудование, как правило, выпускается с уже встроенными ПЛК. Тенденция
децентрализации управления и приближения контроллеров к объектам
управления является общей для всех систем автоматизации и отчасти навеяна
успехами объектно-ориентированного программирования. Кроме того,
сосредоточенная
система
является
частью
или
частным
случаем
распределенной, поэтому появление распределенных систем является
следствием естественного развития от частного к общему.
Распределенную систему управления (РСУ, DCS - Distributed Control
System) можно определить как систему, состоящую из множества устройств,
разнесенных в пространстве, каждое из которых не зависит от остальных, но
взаимодействует с ними для выполнения общей задачи [Bonastre]. В
предельном случае элементы системы могут находиться на разных
континентах земного шара, а связь между ними может выполняться через
интернет. В качестве "множества устройств" могут выступать любые
микропроцессорные устройства, например, ПЛК или разнесенные в
пространстве модули ввода-вывода одного контроллера. Однако в последнем
случае только сбор данных можно рассматривать как распределенный, в то
время как функция управления является сосредоточенной в одном
контроллере.
Максимальные преимущества распределенной системы достигаются,
когда контроллеры работают автономно, а обмен информацией между ними
сведен до минимума.
Распределенная
система
имеет
следующие
характеристики,
отличающие ее от сосредоточенной:
большее быстродействие благодаря распределению задач между
параллельно работающими процессорами;
повышенную надежность (отказ одного из контролеров не влияет на
работоспособность других);
большую устойчивость к сбоям;
более простое наращивание или реконфигурирование системы;
упрощенную процедуру модернизации;
большую
простоту
проектирования,
настройки,
диагностики
и
обслуживания благодаря соответствию архитектуры системы архитектуре
объекта управления, а также относительной простоте каждого из модулей
системы;
улучшенную помехоустойчивость и точность благодаря уменьшению
длины линий передачи аналоговых сигналов от датчиков к устройствам
ввода;
меньший объем кабельной продукции, пониженные требования к
кабелю и более низкая его стоимость;
меньшие расходы на монтаж и обслуживание кабельного хозяйства.
распределенная система смягчает также требования к операционным
системам (ОС) реального времени (см. раздел "Программное обеспечение"),
поскольку
задачи
распределены
между
параллельно
работающими
контроллерами, на каждом из которых установлена отдельная ОС.
Лекция 2.
Структурное построение РИУС
План лекции
1. Структура РИУС.
2. Характеристика основных подсистем и модулей.
3. Особенности режима реального времени в РИУС.
Структура РИУС
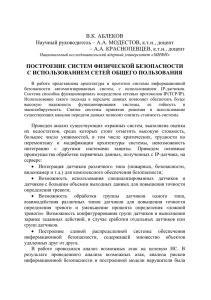
Основными подсистемами типовой индустриальной РИУС являются
(см. рис. 2.1):
− Оконечные устройства: датчики (sensor) и исполнительные устройства
(actuator), подключенные к объекту управления.
− Подсистема управления процессом: логические контроллеры, устройства
сопряжения с объектом (УСО), панели оператора.
−
Подсистема
диспетчерского
управления,
в
том
числе
системы
диспетчерского управления и сбора данных (Supervisory Control And Data
Acquisition, SCADA), серверы печати, серверы СУБД, шлюзы в смежные
системы и др.
− Коммуникационная подсистема – специальные или адаптированные
универсальные вычислительные сети.
Рис. 2.1 Структура РИУС
Оконечные устройства
Оконечные устройства являются портом доступа вычислительных
систем
к
электрическому
или
механическому
оборудованию
контролируемого объекта. Оконечные устройства подразделяются на
датчики и исполнительные устройства. Датчики преобразуют и нормируют
физические характеристики объекта управления (положение, перемещение,
температуру, давление, ток, напряжение и др.) в электрическую величину
или цифровой код для ввода в управляющую систему через УСО.
Исполнительные устройства—реле, силовые электронные ключи, двигатели,
соленоиды, электромагнитные клапаны и т. п. Оконечные устройства обычно
интегрируются в состав конструкции управляемого объекта и подключаются
к УСО с помощью аналоговых или цифровых интерфейсов. Элементы
исполнительных устройств могут конструктивно объединяться с УСО,
например, реле или твердотельные ключи. В современных системах
развивается направление объединения УСО с оконечными устройствами.
Например, двигатель со встроенным контроллером и внешним цифровым (в
том числе сетевым) интерфейсом; или датчик со встроенным контроллером и
внешним цифровым в том числе сетевым) интерфейсом. Такие оконечные
устройства называют интеллектуальными приводами или датчиками. Также
часто
в
технической
«ориентированный».
литературе
Например,
используется
Ethernet
определение
ориентированный
датчик
температуры, Ethernet ориентированный модуль ввода-вывода и пр.
Подсистема управления процессом
Логические контроллеры
Логические
контроллеры—вычислительные
модули,
управляющие
и
координирующие работу части или всей РИУС, то есть задающие логику
функционирования
обеспечением
РИУС.
логического
Алгоритм
работы
контроллера.
задается
программным
Программирование
обычно
осуществляется конечным пользователем или специалистами фирм –
интеграторов АСУ ТП. на специальных технологических языках (например,
на языке релейных схем, функциональных блоков и других). Через
локальные или удаленные УСО логические контроллеры считывают
показания датчиков и управляют исполнительными устройствами - реле,
двигателями, соленоидами и т. п. Логические контроллеры, используемые в
РИУС, имеют разъемы подключения локальных УСО, имеют порты
различных интерфейсов связи с удаленными УСО (RS485, CAN, Profibus DP,
Interbus-S, LON и др.), производительные сетевые порты (Ethernet, Profibus)
для связи с другими логическими контроллерами, с панелями оператора, со
SCADA-системами. В последнем случае широко используется интерфейс
USB.
Рис. 2.2: Логический контроллер Advantech APAX-6572 [6].
Устройства сопряжения с объектом
Устройства сопряжения с объектом (УСО), которые также называют
модулями
ввода-вывода,
выполняют
функции
адаптера
датчиков
и
исполнительных устройств. Они имеют специальные аппаратные каскады
сопряжения с оконечными устройствами и поддерживают алгоритмы
управления ими. УСО могут выполнять функции первичной обработки
данных с датчиков: фильтрацию, усреднение и накопление. УСО являются
подчиненными по отношению к логическим контроллерам и самостоятельно
не реализуют каких-либо алгоритмов контроля объекта управления.
Локальные или мезонинные УСО.
Локальные или мезонинные УСО конструктивно выполнены в виде
модулей расширения, вставляющихся в слоты логического контроллера. От
такой конструкции, по аналогии с архитектурной конструкцией, пошло
название 'мезонинные УСО’ или просто 'мезонины'. Обычно локальные УСО
подключены к периферийной шине логического контроллера в качестве
устройств ввода-вывода. В большинстве случаев это параллельная шина
(например, VME, PC104, CompactPCI), но могут использоваться и
последовательные периферийные интерфейсы.
Удаленные или сетевые УСО.
Удаленные
или
сетевые
УСО
взаимодействуют
с
логическим
контроллером по сетевому каналу и являются конструктивно независимыми
от логических контроллеров. В качестве сетевых каналов используются
специальные интерфейсы, такие как RS485, CAN, Profibus DP, Interbus-S,
LON и др. Удаленные УСО поддерживают мощные, но достаточно сложные
в реализации коммуникационные протоколы, что увеличивает сложность и
стоимость проектирования удаленных УСО по сравнению с локальными. По
сравнению
с
локальными
УСО,
удаленные
УСО
чаще
являются
завершенными, автономно функционирующими контроллерами, которые
могут реализовывать в том числе и простейшие функции регулирования без
участия
логических
контроллеров,
но
обычно
остаются
не
программируемыми конечным пользователем.
Модули ввода аналоговых сигналов.
Существует огромное разнообразие датчиков (температуры, влажности,
давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты,
момента, освещенности, шума, объема, количества теплоты, тока, уровня и
др.), см. [Фрайден], которые преобразуют физическую величину в
электрический
сигнал.
Если
параметры
сигнала
не
согласуются
с
параметрами входа аналого-цифрового преобразователя (АЦП) или не
соответствует стандарту (например, входной величиной АЦП является
напряжение в диапазоне 0...10 В, а датчик (термопара) имеет выходное
напряжение в диапазоне от 0 до 100 мВ), то используют измерительный
преобразователь,
который
обеспечивает нормализацию сигнала датчика
(приведение к стандартным диапазонам изменения, обеспечение линейности,
компенсацию
погрешности,
усиление
и
т.
п.).
Измерительные
преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП
или ЦАП (цифро-аналоговый преобразователь), а также микропроцессор для
линеаризации
аналоговой
характеристик
части
датчика
системы.
В
и
компенсации
последнее
погрешностей
время
получили
распространение цифровые датчики, объединяющие в себе первичный
преобразователь
физической
величины
в
электрический
сигнал,
измерительный преобразователь и АЦП. Примером могут служить датчики
температуры DS18B20 фирмы Dallas Semiconductor, у которых выходной
сигнал является цифровым и соответствует спецификации интерфейса 1-Wire
(www.maxim-ic.com).
Для
аналогового
ввода
в
ввода.
(универсальные)
или
компьютер
Модули
аналоговых
ввода могут
специализированные.
сигналов
быть
служат модули
общего
Примером
применения
универсального
модуля ввода является NL-8AI (pdf 1,2 Мб)серии RealLab!, который
воспринимает сигналы напряжения в диапазонах ±150 мВ, ±500 мВ, ±1 В, ±5
В, ±10 В и тока в диапазоне ±20 мА. Примером специализированного модуля
является модуль ввода сигналов термопар NL-8TI фирмы НИЛ АП, который
работает только с термопарами и содержит встроенные во внутреннюю
память модуля таблицы поправок для компенсации нелинейностей термопар
и температуры холодного спая.
Модули ввода дискретных сигналов.
Кроме модулей аналогового ввода широко распространены модули
дискретного ввода, которые не содержат АЦП и позволяют вводить сигналы,
имеющие два уровня (например, сигналы от концевых выключателей,
датчиков открывания двери, пожарных датчиков, охранных датчиков
движения и т. п.). Уровни входных сигналов модулей дискретного ввода
могут изменяться в диапазоне, как правило, 0...24 В или 0..220 В. Модули с
входом 220 В используются, например, для регистрации наличия напряжения
на клеммах электродвигателя или нагревательного прибора.
Отдельное место занимают устройства счетного ввода, которые имеют
дискретный вход и позволяют считать количество или частоту следования
импульсов. Их используют, например, для измерения скорости вращения
вала электродвигателя или подсчета продукции на конвейере.
Устройства вывода (модули вывода) позволяют выводить дискретные,
частотные или аналоговые сигналы. Дискретные сигналы используются,
например, для включения электродвигателей, электрических нагревателей,
для
управления
клапанами,
фрамугами,
насосами
и
другими
исполнительными устройствами. Частотный сигнал используется обычно для
управления средней мощностью устройств с большой инерционностью с
помощью широтно-импульсной модуляции.
Известны три вида дискретных сигналов:
1. Двухпозиционные – сигналы, которые отражают положение контактов
переключателя. Они служат для получения информации об агрегатах и
механизмах
по
принципу
«включено-выключено».
Эти
сигналы
используются для переключения режимов работы оборудования, а также для
контроля схем релейной защиты;
2. Инициативные – сигналы от датчиков, вызывающие прерывание
программы. От двухпозиционных сигналов они отличаются временной
характеристикой:
крутой
передний
фронт,
малая
длительность
и
необходимость быстрой реакции на сигнал такого датчика. Инициативные
сигналы должны поступать в контроллер прерываний.
3. Числоимпульсные – сигналы от счетчиков электроэнергии, от дозаторов
различных материалов, от интеграторов-расходомеров.
Каждое изменение дискретного сигнала должно быть передано для
дальнейшей обработки в МК. Дискретный сигнал, характеризующий
состояние позиционного объекта контроля, отражает либо положение
контактов переключателя, либо уровень напряжения. В первом случае для
преобразования положения контактов переключателя в уровень напряжения
с целью передачи их состояния в МК последовательно с контактами
включается источник напряжения и резистор ограничения тока. Чтобы
предотвратить разрыв в цепи, параллельно контактам датчика подключается
еще один дополнительный
резистор. Сигнал позиционного датчика
поступает в пороговое устройство, параметры выходного сигнала которого
должны соответствовать логическим сигналам МК. Для фильтрации помех в
линии связи и исключения "дребезга" механических контактов на входе
пороговой схемы ставится RC-фильтр с постоянной времени Тф=2-3 мс.
Каждый
двухпозиционный
сигнал
изменяет
состояние
одного
бита
дискретного входа МК.
Сбор информации о состоянии дискретных датчиков осуществляется
периодическим опросом порта ввода дискретных сигналов, для чего в
команде опроса должен быть указан адрес этого порта. Для выяснения
состояния бита, связанного с конкретным датчиком, можно использовать
команды логического умножения или сдвига искомого бита в знаковый
разряд слова.
Информация о текущем состоянии дискретного 2-х позиционного
датчика обычно предназначена для обеспечения различных логических
условий в алгоритмах контроля и управления, для отображения на экране
дисплея информации о состоянии агрегатов и механизмов.
Типовые операции обработки 2-х позиционных сигналов заключаются в
получении признаков переключения технологических агрегатов и их
режимов, вычислении времени работы оборудования в различных режимах
или его простоя, расчете коэффициентов использования оборудования.
К дискретным сигналам, как уже было сказано, относятся инициативные
сигналы, вызывающие прерывание рабочей программы МК и переход к
программе,
обслуживающей
это
прерывание.
Устройство
ввода
инициативных сигналов имеет блок контроля изменения состояния входных
сигналов, который выдает сигнал готовности при появлении перепада в
любом разряде входного регистра из "1" в "0" или наоборот. Когда этот
сигнал поступает в контроллер прерывания, анализируется причина
прерывания и запускается программа его обработки.
С помощью число-импульсных датчиков вводится информация от
счетчиков электроэнергии, интеграторов-расходомеров, дозаторов других
источников импульсных сигналов. Устройство ввода число-импульсных
сигналов - это двоичный счетчик, содержимое которого прочитывается
периодически с постоянной частотой либо по прерыванию от сигнала
"переполнение", который вырабатывается при заполнении определенной
части счетчика.
Среди модулей ввода дискретных сигналов можно назвать, например,
устройства фирмы Advantech такие, как ADAM-4051, ADAM-4053.
ADAM-4051 – модуль цифрового ввода на 16 каналов с индикацией и
входным напряжением до 50 В постоянного тока.
ADAM-4053 – модуль цифрового ввода также на 16 каналов с входным
напряжением до 30 В.
Рис. 2.3. Локальный модуль ввода-вывода Advantech APAX-5028
Риc. 2.4. Модуль удаленного ввода-ввода Advantech ADAM-4117
ПРИМЕРЫ УСТРОЙСТВ Advantech ADAM
В качестве примера из широкого класса устройств удаленного сбора
данных предлагается рассмотреть модули фирмы Advantech. Устройства
серии ADAM-4000, 5000, 6000 и 7000, предназначенные для построения
территориально-распределенных
систем сбора данных
и
управления,
обеспечивают выполнение следующих функций: аналоговый ввод-вывод,
дискретный ввод-вывод, первичное преобразование информации, приём
команд от удалённой вычислительной системы и передача в её адрес
преобразованных данных с использованием интерфейса RS-485 или Ethernet.
Особенности режима реального времени в РИУС.
Система
реального
времени—вычислительная
система
с
гарантированным временем реакции на события.
Система реального времени (СРВ)—вычислительная система, в которой
время формирования выходного воздействия является существенно важным.
Примеры СРВ: управление технологическими процессами, встроенные
вычислительные
системы,
кассовые
торговые
системы
и
т.
д.
Принципиальное отличие информационных систем (Information Technology)
от систем реального времени (real-time) в трактовке параметра реакция входвыход.: .The right answer late is wrong. (Правильный ответ поздно =
неправильный.). К особенностям ИУС относится необходимость обеспечения
надежности,
безопасности
и
гарантированного
времени
реакции.
Соблюдение гарантированного времени ответа обычно называют работой в
реальном времени. Исходя из того, что ОС РВ работает в ИУС, к ОС РВ
предъявляются аналогичные требования. ИУС получает информацию об
объекте управления посредством датчиков. В ответ на полученную
информацию ИУС вырабатывает управляющие сигналы и передает их
объекту управления через УСО. Время, протекающее между получением
информации от ОУ и выдачей сигнала управления от ИУС, мы назовем
временем реакции РИУС.
Система реального времени не обязательно должна быть быстрой. Это
распространенное
заблуждение.
Система
реального
времени
должна
выдавать управляющие сигналы в ответ на информацию, поступающую от
датчиков, в гарантированные промежутки времени. По степени важности
последствий несоблюдения времени реакции обычно выделяют две группы
систем реального времени:
− Система мягкого реального времени;
− Система жесткого реального времени.
В первом случае, несоблюдение требований реального времени не является
катастрофическим по отношению к цели работы СРВ. Во втором случае,
несоблюдение требований реального времени приводит к невозможности
выполнения целевой функции системы.
Лекция 3.
Структурирование информационных потоков
в многоуровневой сетевой АСУТП.
1. Многоуровневые сетевые структуры в АСУТП.
2. Критерии структурирования информационных потоков.
3. Варианты интеграции локальных систем ЧПУ.
Задача создания АСУП и АСУТП в гибком автоматизированном
производстве, а тем более их слияние, рассматривается в контексте
вертикальной и горизонтальной интеграции локальных систем управления
основным
и
вспомогательным
производственным
оборудованием
и
вычислительных средств, осуществляющих решение задач АСУП и АСУТП.
Такой
подход
информационного
позволяет
осуществить
пространства
в
рамках
идею
создания
нескольких
единого
иерархических
уровней: непосредственного управления единицами производственного
оборудования;
группового
управления
оперативного
диспетчирования;
оборудованием;
уровнем
уровнем
организационной
и
технологической подготовки и учета хода производства. Ниже в конце
лекции приведены возможные структуры современной АСУТП.
Приведенная четырехуровневая или трехуровневая (при совмещении
двух верхних или отсутствии уровня группового управления оборудованием
) иерархия долгое время оставалась наиболее распространенной. Развитие
вычислительной техники и, в частности, использование сетевых принципов
построения систем управления производством расширили число уровней как
в верх, так и вниз. Сверху появилась возможность создания на основе Webтехнологий
уровня
связи
с
глобальной
сетью
Internet,
снизу
–
дополнительного уровня датчиков и исполнительных устройств на основе
применения одной из сетевых технологий Fieldвus.
АСУТП по сути является пространственно распределенной системой,
поэтому применение сетевых принципов построения систем управления
является более органичным, позволяет повысить надежность и живучесть
системы за счет гибкости структуры, на качественно новом уровне
обеспечивает известные принципы создания АСУ: системности, развития,
совместимости, стандартизации и унификации, эффективности.
При разработке таких сложных сетевых структур, как
системы
управления гибким автоматизированным производством, должны быть
удовлетворены определенные требования к их структуре, функциональной
реализации, процедурам обмена данными. Решение подобных задач связано,
прежде всего, с одной стороны, с рациональным структурированием
информационных потоков, а с другой – с техническими возможностями
осуществления
такого
структурирования.
Фактически
речь
идет
о
необходимости рациональной декомпозиции сложной интегрированной
системы управления на ряд подсистем при сохранении информационной
совместимости.
В системах с централизованным управлением структурирование
информационных
потоков
сводилось
к
жесткому
закреплению
вычислительных средств за определенными функциональными задачами и в
обеспечении необходимых каналов связи. Возможны различные подходы к
обоснованию распределения функций АСУ по устройствам и уровням.
Например, достаточно распространенным на этапе предварительной оценки
требуемой мощности вычислительных средств является критерий минимума
приведенных затрат, хотя , как известно, априорное определение параметров
вычислительного
процесса
не
представляется
возможным.
Более
эффективными в данном случае могут оказаться методы имитационного
моделирования, позволяющие исследовать не только эксплуатационные
характеристики ГПС, но и успешно моделировать коммуникационную среду
–
локальные
сети,
обеспечивающие
обмен
информацией
между
компонентами ГПС.
При создании исходной модели сети предприятия, которая должна
охватывать все подразделения, участвующие в производственном процессе,
необходимо
осуществить
предварительное
структурирование
информационных потоков, исходя из общих принципов рационального
построения
организации
сетевых
коммуникаций.
однородных
Важнейшими
информационных
параметрами
потоков
и
для
создания
соответствующих локальных сетей, «подсетей» и сетевых сегментов
являются:
- характер трафика (данные, текст, графика, мультимедиа);
- формат и размер сообщений;
- динамические
требования
к
обмену
сообщениями
(скорость
передачи, время реакции, допустимая задержка распространения и
задержка передачи, периодичность передачи);
- метод доступа к среде передачи данных.
В соответствие с однородностью перечисленных параметров в
системах управления гибким автоматизированным производством можно
выделить несколько типов локальных сетей: сети административных служб,
сети инженерных служб, сети управления производством, сети реального
времени.
В
сетях
административных
служб
циркулируют,
приказы,
распоряжения, письма, электронная почта и пр. Такие сети должны обладать
достаточной пропускной способностью в зависимости от числа абонентов,
гарантировать пиковые нагрузки при передаче сообщений объемом от
единиц до 100К и обеспечивать время реакции в несколько секунд.
Для сетей инженерных служб помимо передачи обычных текстовых
файлов и цифровой информации характерным является циркулирование
больших файлов графической информации объемом от одного до 10 Мбайт и
более. И если требования к времени реакции также как и в сетях
административных служб ограничивается способностями оператора и
должно составлять 1-2 с., то требования к пропускной способности и
надежности неизмеримо выше.
В сетях управления производством основную часть трафика занимает
информация проблемно-ориентированного характера: файлы управляющих
программ для оборудования с ЧПУ, файлы технологических заданий,
непосредственно команды управления,
отчеты о ходе технологического
процесса, статусы, данные для визуализации состояния рабочих позиций и
пр. Объем таких файлов может составлять от единиц Кбайт до 0,5-1 Мбайт.
Поскольку информация в таких сетях адресуется не только обслуживаемому
персоналу, но и автоматическому оборудованию, реактивность сети должна
быть высокой и составлять десятые доли секунды. Требования к пропускной
способности и надежности сети – высокие
В случае использования в сетях инженерных служб и сетях управления
производством
телевизионных
систем
наблюдения
за
ходом
производственных процессов должны быть предусмотрены меры по
обеспечению соответствующей скорости передачи данных.
В сетях реального времени, представляющих нижний уровень системы
управления, передаваемый трафик составляют оцифрованные сигналы с
датчиков,
коды
управляющих
команд,
статусы,
а
также
команды,
осуществляющие синхронизацию процессов. Размеры файлов не велики и
составляют от десятков байт до нескольких десятков Кбайт, ряд сообщений
могут иметь всего несколько бит. Однако требуемое время реакции сети
самое минимальное – от сотых до несколько десятых долей секунды. Время,
предоставляемое для опроса датчиков должно быть минимальным, порядка
10 мкс. Скорости передачи в таких сетях могут быть небольшими, т.к. между
выполнением отдельных команд наблюдаются значительные промежутки
времени, к тому же, элементы автоматики производственного оборудования
значительно инерционнее, чем мир компьютерных сетей. Более важным в
данном случае оказывается метод организации доступа к сетевым ресурсам.
С точки зрения надежности процесса управления, предпочтительными
являются детерминированные методы доступа, которые могут быть
обеспечены упомянутыми технологиями
Fieldbus. На уровне управления
производством требование детерминированности доступа не стоит так
жестко, а в сетях административных и инженерных служб вовсе не является
обязательным. Это обстоятельство послужило одной из причин широкого
применения на этих уровнях технологии Ethernet с вероятностным методом
доступа к среде передачи данных.
В настоящее время количество освоенных и активно применяемых
сетевых технологий Fieldbus превышает несколько десятков. Многие из них
позволяют организовывать двухуровневые стрктуры, как например, сети LIN
и CAN. Критерии их выбора и включения в общую структуру системы
управления остаются теми же, что упоминались выше. Дополнительно
необходимо подчеркнуть, что эти технологии, как правило, предполагают
передачу короткобитных сообщений, используют разные режимы обмена
информацией («ведущий-ведомый», «клиент-сервер», «режим подписки»), а
также используют различные системы цифрового кодирования. Необходимо
также учитывать физические ограничения выбираемой технологии на число
узлов и длину сегментов, соизмеряя их с планировкой размещения
оборудования на производственных площадях. Важным критерием также
является
наличие
сетеориентированных
и
доступность
датчиков
или
приобретения
стандартных
соответствующих
интерфейсов
для
подключения к датчикам и исполнительным устройствам, а также наличие
модулей связи с другими промышленными сетями и сетью вышестоящего
уровня.
Влияние инерционных процессов в сетях нижнего уровня системы
управления, связанных с последовательностью обработки информации,
особенностями
применяемых
протоколов
при
передаче
данных,
возникновение задержек в каналах контроля и управления требуют
специальной оценки в каждом конкретном случае и могут быть уточнены
путем моделирования. Так, например, в работе [3] показано, что при
использовании сетевой технологии Profibus и распределенного алгоритма
управления
в
САУ
территориально-распределенным
объектом
удовлетворительное качество управления достигается, если длительность
цикла управления составляет не более 30% от периода дискретности. В
противном
случае
возникают
потери
качества
управления
за
счет
запаздывания в каналах измерения и управления.
Определение информационных потоков на производственном уровне
требует выбора способов интеграции локальных систем управления. В
механообрабатывающем
программного
производстве
управления
–
это
металлорежущими
устройства
числового
станками
(УЧПУ).
Привалируют два технических решения их интеграции в единую систему
управления. Если число станков на производственном участке не велико (до
восьми), то необходимо, чтобы УЧПУ были снабжены сетевыми адаптерами
и имели порт для промышленного Ethernet, что дает возможность
организовать отдельный независимый участковый или цеховой «сегмент
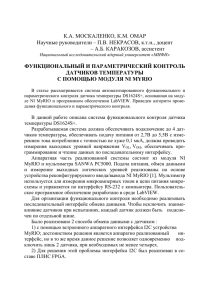
ЧПУ» (Рис. 3.1 а). Если же количество станков велико, то есть все основания
для организации уровня группового управления оборудованием на основе
системы класса DNC c требуемым количеством последовательных портов,
как правило, 8,16 или 24 (Рис. 3.1 б). Возможны также и комбинированные
решения.
Ethernet
а)
Ethernet
б)
УЧПУ1
...
RS232
DNC
УЧПУn
УЧПУ1
. . . УЧПУn
Рис.3.1. Варианты интеграции локальных систем управления
оборудованием.
Решение задачи структурирования информационных потоков требует
глубокой проработки каждого иерархического уровня – определения
количества
пользователей,
выделения
сегментов,
рабочих
групп,
определения требуемой пропускной способности для отдельных участков
сети,
требований
к
линиям
связи,
серверному
коммуникационному
оборудованию и определения мест их размещения. Это дает возможность
создать первоначальную топологическую схему, увязав ее с планом
размещения как производственного, так и компьютерного оборудования для
ее последующего моделирования программными средствами.
Выводы.
В
качестве
основного
принципа
структурирования
информационных потоков предлагается принцип однородности с точки
зрения характера трафика, формата и размеров сообщений, динамических
требований к обмену сообщениями, методов доступа к среде передачи
данных.
Корпоративная
база данных
ERP –
система
Клиентские приложения
…
Корпоративная сеть
Корпоративная сеть (TCP/IP)
БД реального времени
Центральная
диспетчерская
www портал
EAM система
Технологический сервер
Локальные АРМ-ы
Локальная сеть
Центральная
заводская
лаборатория
Ethernet (цех)
Ethernet (участок)
Ethernet (участок)
Fieldbus
Fieldbus
Цехх 1
Цех 2
Цех N
MES приложение
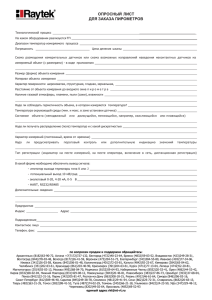
1: Уровень приложения информационной сети предприятия
Информационная система
управления предприятием
«SAP/R3», «Галактика» и др.
Технологические пульты руководителей и гл. специалистов
Главный
инженер
Главный
технолог
Главный
энергетик
Главный
метролог
Начальник
АСУ
2: Уровень информационных систем АСУ ТП предприятия
Центральная диспетчерская станция
(резервированная)
Центральный
оперативно-технологический
сервер данных (резервированный)
3: Уровень цеховых систем АСУТП / АСКУ
АРМ АСУТП автоматический
или ручной ввод данных
АРМ АСУТП
вспомогательного производства
АРМ систем коммерческого и
технологического учета
энергоресурсов
Сервер БД, система ERP
клиентские приложения
БД реального времени
SCADA приложения
MES - система
Управление
фондами
WEB - сервер
Промышленные шины
Пром. шина
Пром. шина
Рис. 3.2. Обобщенная схема интегрированной информационной системы
предприятия
Лекция 4.
Характеристика подсистем РИУС.
План лекции
1. Элементы интерфейса оператора.
2. Коммуникационная подсистема.
3. Подсистема диспетчерского управления.
4. Сети датчиков и исполнительных устройств.
5. Сети управления процессом.
6. Требования к архитектуре РИУС.
Элементы интерфейса оператора.
Панели оператора и другие элементы интерфейса оператора (Human-Machine
Interface, HMI) реализуют функции отображения текущих режимов и
параметров работы системы, позволяют переключать эти режимы, вводить
новые значения параметров. Панели оператора могут быть символьными или
графическими, могут иметь механическую встроенную или выносную
клавиатуру или управляться с помощью сенсорной экранной панели (Touch
Panel, Touch Screen). Кроме панелей оператора часто используются
простейшие модули индикации без функций ввода или модули управления:
кнопочные пульты, джойстики. Панели обычно выполнены как независимый
модуль, для монтажа в панель приборного шкафа, в настенный или
настольный корпус. Панели оператора бывают
- периферийные,
- сетевые,
-совмещенные с логическим контроллером.
Периферийные панели оператора подключаются к логическому контроллеру
с помощью периферийных интерфейсов, RS232 (чаще), USB.
Сетевые имеют встроенный сетевой адаптер Ethernet, ProfiBus, RS485, CAN
или другой и могут располагаться удаленно от логического контроллера.
Панели, совмещенные с логическим контроллером реализуют функции обоих
модулей (панели и контроллера) одновременно.
Подсистема диспетчерского управления
Подсистема диспетчерского управления обеспечивает расширенный набор
средств управления работой сложных РИУС. К ним относятся отображение и
протоколирование состояния объекта управления и самой РИУС, индикация
экстренных
ситуаций,
архивирование
протоколов
работы
системы,
взаимодействие со смежными компьютерными системами иного назначения
и т. п. Диспетчерское управление не обеспечивает режим реального времени.
Ключевым элементом подсистемы диспетчерского управления обычно
является SCADA. Обычно SCADA представляет собой стандартный
персональный компьютер в офисном или индустриальном исполнении со
специальным программным обеспечением. Взаимодействие с логическими
контроллерами выполняется через локальную сеть: чаще через сеть Ethernet,
реже через специализированные контрольные сети.
Функции серверов печати, серверов хранения данных, сетевых шлюзов в
несложных системах возлагаются на компьютеры SCADA. В сложных
системах эти функции переносятся на отдельные вычислительные машины.
Коммуникационная подсистема
Коммуникационная
подсистема
(КПС)
РИУС—специализированная
вычислительная сеть, ориентированная на решение задач интеграции:
− Отдельных вычислительных узлов (контроллеров, панелей оператора и
рабочих станций, серверов и т. д.) в кластеры (кластер управления
технологической установкой, контроля отдельного помещения и т. д.).
− Кластеров в функциональные подсистемы (управления процессом,
диспетчерского управления и др.).
(отдельные выч. Устр – кластер) (кластеры – функц. подсистемы)
− Функциональных подсистем в единую РИУС.
− Несколько смежных РИУС между собой или РИУС со смежными
подсистемами.
КПС является структурным и функциональным скелетом РИУС, во многом
определяет
топологию,
параметры,
характеристики
и
возможности
модернизации РИУС. Соответственно структура КПС похожа на структуру
РИУС в целом.
В соответствии с выделением различных функциональных уровней и задач
КПС, перечисленных выше, КПС также не является однородной и
монолитной, а представляет собой комплекс связанных между собой
подсетей.
Наиболее
жесткие
и
специфичные
требования
предъявляются
к
коммуникационной подсистеме уровней оконечных устройств и управления
процессом. Соответственно на этих функциональных уровнях выделяются
два типа сетей:
− Сети датчиков и исполнительных усройств (механизмов)
− Сети управления процессом (Process Network).
Сети датчиков и исполнительных устройств
Сети датчиков и исполнительных устройств (sensor-actuator network
(bus)) предназначены для организации взаимодействия УСОс логическими
контроллерами. По ним в реальном времени передаются данные, полученные
от
датчиков,
передаваемых
и
команды
для
данных/пакетов
исполнительных
соответственно
устройств.
будут
Размеры
небольшими—
единицы/десятки байт (например, шина CAN 2.0 передает пакеты до 8 байт,
протокол
ModBus
ориентирован
на
передачу
битов,
байтов
или
двухбайтовых слов), но будут высокие требования по времени (задержке)
доставки—единицы/десятки миллисекунд. С другой стороны, требования
дешевизны, эксплуатация в условиях сильных помех и другие факторы
приводят к тому, что скорость передачи в каналах таких сетей находится на
уровне от десятков Кбит/сек до единиц Мбит/сек. Т. к. к одному логическому
контроллеру могут подключаться много УСО (до нескольких десятков), то,
чтобы уменьшить число проводов и разъемов у логического контроллера, в
качестве SA-net широко используются шины (Bus), например, CAN 2.0,
ModBus over RS485, 1-Wire Bus (uLAN). В связи с развитием систем
мониторинга объектов, контроля передвижения людей/товаров/грузов и иных
подобных систем, требующих сбора информации с большого (сотни и
тысячи) числа датчиков по каналам со сложной топологией, в последнее
время выделился отдельный подкласс сетей датчиков (Sensor Net) и, в
частности, беспроводные сети датчиков (Wireless Sensor Net). Для них
характерна ячеистая (сотовая) структура (mesh network), двойственная
функция узлов сети – они выступают и как узлы сбора информации и как
коммутаторы
сети,
в
каждом
таком
узле
наличествуют
функции
динамической маршрутизации.
Сети управления процессом
Сети управления процессом (Process Network) объединяют несколько
логических
контроллеров
и
обеспечивают
процесс
распределенных
вычислений и управления. К сетям уровня управления процессом также
предъявляются требования передачи данных в реальном масштабе времени, с
минимальными задержками, в жестких условиях эксплуатации: в этом они
похожи на SA-Net. С другой стороны, блоки данных, передаваемые
логическими контроллерами, могут достигать больших объемов—уровня
единиц-десятков килобайт, т. к. логические контроллеры концентрируют
данные от многих УСО. Для удовлетворения перечисленных требований и,
учитывая достаточную вычислительную мощность логических контроллеров,
коммуникации
уровня
Process
Network
удобно
строить
на
базе
универсальных сетей типа Ethernet, что часто и делается. Однако сети
Ethernet не являются сетями реального времени и могут использоваться в
приложениях Soft Real Time (низший уровень требований реального времени
функционирования) только в режиме нагрузки единиц процентов. В случае
Hard Real Time—требований (жесткое реальное время), сети Process Network
строятся на базе специализированных каналов, например, LON, CAN,
ProfiBus, Interbus-S, Fieldbus Foundation и других. В последнее время часто
пытаются использовать на уровне процесса каналы беспроводной связи,
например, GSM/GPRS, IEEE 802.15.4/ZigBee и другие. Т. к. и сети датчиков и
исполнительных
устройств,
и
сети
управления
процессом
обычно
применяются на промышленных, транспортных и иных подобных объектах,
как говорят «в поле», то за ними закрепилось общее название «полевые» сети
или шины.—FieldNet/FieldBus. В некоторых случаях к FieldNet/Bus относят
только сети уровня управления процессом, т. е. FieldBus считают
эквивалентом ProcessNetwork. Кроме того применяются термины ControlNet
(управляющие сети) и CellNet (сети ячейки или кластера), также
обозначающие сети класса Process Network. В несложных системах
подуровни объединяются в одну сеть, чаще на базе протоколов типа SensorActuator Network, т. к. не эффективно поддерживать в простых УСО
достаточно мощные сетевые каналы и сложные протоколы уровня Process
Network.
На уровне диспетчерского управления обычно используется сеть
Ethernet. В качестве шлюза между сетью управления процессом и
диспетчерского управления выступает логический контроллер с несколькими
сетевыми портами или SCADA-система. Чтобы использовать SCADAсистемы различных разработчиков с любыми типами низовых контроллеров
и
сетей,
были
разработаны
унифицированные
протоколы
между
подсистемами
(уровнями)
управления
процессом
и
диспетчерского
управления. Наибольшее распространение получил протокол OPC.
В системах небольшой сложности сеть подсистемы диспетчерского
управления и подсистемы управления процессом делают объединенной.
Достаточно часто для связи логических контроллеров с УСО, с панелями
управления или со SCADA используются периферийные интерфейсы RS232
или RS422. Это делается ради упрощения и удешевления системы.
Компьютер обычно является «мозгом» автоматизированной системы. Он
принимает сигналы датчиков, исполняет записанную в него программу и
выдает необходимую информацию в устройство вывода. Коммуникации
между
компьютером
и
устройствами
ввода-вывода
выполняются
через последовательные интерфейсы, например, USB, CAN, RS-232, RS-485,
RS-422, Ethernet или параллельный интерфейс LPT.
Рис. 4.1. Простейший вариант локальной централизованной
автоматизированной системы с одним компьютером и одним
устройством ввода и вывода
В автоматизированных распределенных управлящих системах вместо
компьютера или одновременно с ним используются программируемые
логический контроллеры (ПЛК). Типовыми отличиями ПЛК от компьютера
является специальное конструктивное исполнение (для монтажа в стойку,
панель, на стену или в технологическое оборудование), отсутствие
механического жесткого диска, дисплея и клавиатуры. Контроллеры также
имеют малые размеры, расширенный температурный диапазон, повышенную
стойкость
к
вибрации
и
электромагнитным
излучениям,
низкое
энергопотребление, защищены от воздействий пыли и воды, содержат
сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют
увеличенное количество коммуникационных портов. В контролерах, в
отличие от компьютеров, как правило, используется операционная система
реального времени (например, Windows CE, QNX).
В последнее время наметилась тенденция стирания грани между
компьютером
и
контроллером.
С
одной
стороны,
контроллеры
(например, NLcon-CE (pdf 1,2 Мб) фирмы НИЛ АП или WinCon фирмы ICP
DAS) позволяют подключить монитор, мышь и клавиатуру, с другой
стороны, появилось большое количество промышленных компьютеров,
которые имеют специальное конструктивное исполнение и другие свойства,
характерные для контроллеров. В связи с этим в дальнейшем мы будем
употреблять термины "компьютер", и "контроллер" как синонимы, и это
будет ясно из контекста.
Требования к архитектуре распределенной управляющей системы
Автоматизированная система призвана облегчить труд человека,
расширить его функциональные возможности или заменить полностью, если
это возможно. Поэтому архитектура систем автоматизации во многом
напоминает строение человека: роль органов чувств выполняют датчики,
роль рук, ног и органов речи - исполнительные устройства, роль мозга компьютер или контроллер. Благодаря такой аналогии архитектура системы
автоматизации становится понятной любому человеку на интуитивном
уровне. Однако при разработке конкретной системы возникает множество
сложных практических вопросов, касающихся стандартизации, безопасности,
коммерческой эффективности, технологичности, точности, надежности,
совместимости, технического сопровождения, и т. п., которым посвящены
последующие главы книги.
В настоящей главе рассмотрены только самые общие (архитектурные)
принципы построения систем промышленной автоматизации.
Архитектура автоматизированной системы - это наиболее абстрактное
ее представление, которое включает в себя идеализированные модели
компонентов системы,
а
также
модели
взаимодействий
между
компонентами. Элементы*архитектуры находятся во взаимосвязи, образуя
единую автоматизированную систему и обеспечивая решение поставленной
задачи автоматизации на архитектурном уровне. В то же время архитектура
оставляет достаточно свободы для выбора конкретных технических решений
[Клир].
Поэтому
правильно
спроектированная архитектура
допускает
множество технических реализаций путем выбора различных компонентов
архитектуры и методов взаимодействия между ними.
Элементами архитектуры являются модели (абстракции) датчиков,
устройств
ввода-вывода,
компьютеров,
измерительных
интерфейсов,
преобразователей,
ПЛК,
промышленных
сетей,
протоколов,
исполнительных устройств, драйверов, каналов передачи информации.
Архитектуру создает архитектор [Клир]. Основным требованием к
архитектору
является
функционирования
знание
объекта
предметной
автоматизации)
и
области
(принципов
знание
технических
характеристик аппаратных и программных средств, используемых для
построения системы.
При построении архитектуры должны быть заложены следующие
свойства будущей автоматизированной системы:
слабая связанность элементов архитектуры между собой (т. е.
декомпозицию системы на части следует производить так, чтобы поток
информации через связи был минимален и через них не замыкались контуры
автоматического регулирования);
тестируемость (возможность
установления
факта
правильного
функционирования);
диагностируемость (возможность
нахождения
неисправной
части
системы);
ремонтопригодность (возможность восстановления работоспособности
за минимальное время при экономически оправданной стоимости ремонта);
надежность (например, путем резервирования);
простота обслуживания и эксплуатации (минимальные требования к
квалификации и дополнительному обучению эксплуатирующего персонала);
безопасность (соответствие требованиям промышленной безопасности
и технике безопасности);
защищенность
системы от
вандалов
и
неквалифицированных
пользователей;
экономичность (экономическая
эффективность
в
процессе
функционирования);
модифицируемость (возможность перенастройки для работы с другими
технологическими процессами);
функциональная расширяемость (возможность
ввода
в
систему
дополнительных функциональных возможностей, не предусмотренных в
техническом задании);
наращиваемость (возможность
автоматизированной
системы
увеличения
при
увеличении
размера
размера
объекта
автоматизации);
открытость (см. раздел "Понятие открытой системы");
возможность переконфигурирования системы для работы с новыми
технологическими процессами;
максимальная длительность
жизненного
цикла системы
без
существенного морального старения, достигаемая путем периодического
обновления аппаратных и программных компонентов, а также путем выбора
долгоживущих промышленных стандартов;
минимальное время на монтаж и пуско-наладку (развертывание)
системы.
Архитектура системы может быть различной в зависимости от
решаемой задачи автоматизации. Такими задачами могут быть:
мониторинг (продолжительные
измерение
и
контроль
с
архивированием полученной информации);
автоматическое управление (в системе с обратной связью или без нее);
диспетчерское
управление (управление
с
помощью
человека-
диспетчера, который взаимодействует с системой через человеко-машинный
интерфейс);
обеспечение безопасности.
Любая из перечисленных задач может выполняться на большом
расстоянии между объектом автоматизации и системой. В этом случае
говорят о задачах телемеханики (дистанционные измерение, управление,
сигнализация). Однако, в связи с тем, что каналы дистанционной связи
(интернет,
радиоканал,
оптико-волоконный
канал,
проводной
канал)
органично входят практически в любую систему автоматизации, задачу
телемеханики все реже выделяют как самостоятельную.
Построение любой АСУ** начинается с декомпозиции (деления на
части)
системы
на
подсистемы.
Декомпозиция
может
быть
функциональной (алгоритмической) или объектной.
При объектной декомпозиции используются распределенные системы
управления, когда каждый объект автоматизации оборудуется локальным
технологическим контроллером, решающим задачи в пределах этого объекта.
При функциональной декомпозиции систему автоматизации делят на части,
группируя сходные функции, и для каждой группы функций используют
отдельный контролер. Оба вида декомпозиции могут быть использованы
совместно. Выбор способов декомпозиции является творческим процессом и
во многом определяет эффективность будущей системы.
Объектная
декомпозиция объекта
автоматизации
используется
в
современных SCADA-пакетах, см., например [Аблин]. Она аналогична
объектной
декомпозиции,
программировании (ООП),
используемой
основными
в объектно-ориентированном
признаками
которой
являются
абстрагирование, инкапсуляция, модульность, иерархическая организация
[Буч]. Классам ООП соответствуют контроллеры (ПЛК), объектам контроллеры
с
заданными
свойствами
(параметрами), инкапсуляция
соответствует сокрытию конкретной реализации (например, с помощью
функциональных
блоков
языка IEC 61131-3
(см.
раздел"Программное
обеспечение")); благодаря инкапсуляции существенно упрощается структура
системы с точки зрения системного интегратора и тем самым уменьшается
количество возможных ошибок. Модульность обеспечивается модульностью
аппаратного обеспечения системы, иерархичность естественным путем
вытекает из требований заказчика.
Независимо от метода декомпозиции, основным ее результатом должно
быть представление системы в виде набора слабо связанных частей. Слабая
связь между частями системы означает отсутствие между ними обратных
связей или малость модуля петлевого усиления при наличии таких связей, а
также отсутствие интенсивного обмена информацией.
Программные
модули,
реализующие
отдельные
функции
в
разных
контроллерах, могут взаимодействовать между собой по промышленной сети
с
помощью
технологии
СОМ
CORBA консорциума OMG [Причард]
[Ньюкомер].
Для
распределенных
разработки
систем
или SOAP
заказного
управления
фирмы
консорциума
программного
используют
Microsoft,
W3C
обеспечения
специальную
среду
разработки систем реального времени [Kim] или стандартное программное
обеспечение
на
основе
технологии DCOM фирмы Microsoft (см.
раздел "Программное обеспечение"). В статье [Perez-Aragon] приводится
пример системы, в которой разные функции управления представлены в виде
компонентов, написанных с помощью CORBA, распределенных между
разными контроллерами либо сгруппированных в одном из них. В работе
[Sunder] предлагается способ построения архитектуры системы на основе
"ячеек
автоматизации", при
котором
на разных
уровнях
иерархии
используются одни и те же ячейки с одним и тем же программным
обеспечением, что делает систему однородной несмотря на иерархичность и
поэтому снижает трудоемкость ее проектирования и обслуживания.
Более подробно программное обеспечение систем автоматизации будет
рассмотрено в разделе "Программное обеспечение".
Лекция 5.
Варианты архитектурного построения РИУС.
План лекции
1. Простейшая система.
2. Одноуровневая архитектура.
3. Многоуровневая архитектура.
Изображенная на рис. 5.1 система в зависимости от ее назначения и
программного обеспечения может быть системой сбора данных, системой
диспетчерского или автоматического управления, системой контроля,
испытаний, диагностики и т.д. Это простейший вариант автоматизированной
системы, построенной на основе одного компьютера, устройств вводавывода, датчиков и исполнительных устройств (актуаторов).
На рис.
5.1 датчики
подсоединены
к
одному
многоканальному
измерительному преобразователю. Однако различные типы датчиков могут
требовать различных типов преобразователей или работать вообще без них.
Некоторые типы интеллектуальных датчиков имеют интерфейс RS-485 и
могут подключаться непосредственно к компьютеру (контроллеру), как,
например, датчики серии NL-1S фирмы НИЛ АП.
Системы мониторинга (наблюдения) за физическими процессами не
содержат исполнительных устройств или используют электромагнитные
(реже полупроводниковые) реле для коммутации измерительных цепей.
Обычный офисный компьютер в стандартной конфигурации имеет два
порта USB, один СОМ-порт, один принтерный порт LPT и порт Ethernet,
который
появляется
после
установки
в
компьютер
Ethernet-платы.
Количество USB портов можно увеличить с помощью USB хабов, а
количество COM-портов - с помощью преобразователя USB в COM
(см.www.RealLab.ru/Interface_Converters.htm). Промышленные компьютеры и
контроллеры
обычно
имеют
несколько
портов
RS-485,
RS-422
и
оптоволоконный порт. Для применения оптического канала с офисным
компьютером к нему можно подключить оптоволоконный преобразователь
интерфейса. Все перечисленные порты можно использовать для обмена
информацией межу компьютером и внешними устройствами (рис. 5.2).
Рис. 5.2. Для подключения устройств ввода-вывода
могут быть использованы все порты компьютера
Для увеличения дальности передачи сигнала по линии связи до 1,2 км
можно использовать преобразователи интерфейсов RS-232 в RS-485 или RS422, а также интерфейс «токовая петля» (см. раздел "Промышленные сети и
интерфейсы").
Внешние устройства, не имеющие гальванически изолированного
порта,
обычно
подключают
к
компьютеру
через
изолирующие преобразователи интерфейсов, которые защищают компьютер
от случайного попадания высокого напряжения в случае аварии или
небрежного обращения. Примером изолирующего преобразователя для порта
RS-232 может быть оптический изолятор OI-232-1000 (см. описание: pdf 200
Кб) фирмы НИЛ АП c напряжением изоляции 1000 В.
Если к компьютеру необходимо подключить еще одно устройство, а
свободных портов не осталось, то можно использовать разветвители
интерфейсов.
Распространены
разветвители
интерфейсов USB (их
еще
называют хабами) и RS-232. Устройство, имеющее интерфейс RS-232, можно
подключить
к
USB
порту
компьютера,
если
использовать
преобразователь USB в RS-232.
К компьютеру могут быть подключены не только специализированные
модули ввода-вывода, но и многие измерительные приборы широкого
применения. Например, вольтметр HP 34401A имеет интерфейс RS-232 и
может
быть
подключен
к
компьютеру
и
программам,
поддерживающим COM-технологию (например, MS Excel) с помощью СОМобъекта
RL232man
фирмы НИЛ
АП
(рис.
5.2),
подробнее
см.
раздел "Программное обеспечение".
Типовыми применениями описанной системы может быть домашняя
автоматизация [Богданов], испытательный стенд для тестирования серийной
продукции [Денисенко], лабораторные работы в ВУЗе, локальное управление
технологическим процессом, контроль температуры в теплице или элеваторе,
см. "Примеры применения" на вебсайте НИЛ АП.
Одноуровневая распределенная система
5.2. Распределенная система с общей шиной
Архитектура распределенной системы промышленной автоматизации
на основе общей шины показана на рис. 5.2. Для того, чтобы получить
данные из модуля или контроллера, компьютер (или контроллер) посылает в
шину его адрес и команду запроса данных. Микропроцессор, входящий в
состав каждого модуля или контроллера, сверяет адрес на шине с его
собственным адресом, записанным в ПЗУ, и, если адреса совпадают,
исполняет следующую за адресом команду. Команда позволяет считать
данные, поступающие на вход устройства, или установить необходимые
данные на его выходе.
Распределенная система с общей шиной порождает две новые
проблемы по сравнению с топологией "точка-точка”: необходимость
адресации устройств и необходимость ожидания в очереди. Добавление
адреса в коммуникационный пакет снижает скорость обмена при коротких
сообщениях, а обмен по общей шине приводит к тому, что каждое
устройство для передачи сообщения должно ждать, когда шина станет
свободной. Это замедляет скорость обмена между устройствами по
сравнению с топологией "точка-точка". Задержка в сетях с большим
количеством
устройств
становится
существенным
ограничением
на
применение топологии с общей шиной [Kim] в некоторых приложениях, в
частности, в случае ПИД-регулирования, когда задержка в сети ограничивает
тактовую частоту работы контура регулирования. Для таких случаев
используют
локальные
подсети
или
локальные
технологические
контроллеры.
Распределенные системы позволяют также решить следующую
проблему.
С ростом количества датчиков в системе, показанной на рис. 5.1,
увеличивается число и суммарная длина проводов, соединяющих датчики с
устройством ввода. Это приводит не только к росту стоимости кабельного
оборудования, но и к проблемам, связанным с электромагнитными
наводками, особенно если датчики распределены по большой площади
(например, в промышленной теплице датчики распределены по площади
около 6 Га, а в элеваторе число датчиков достигает 3...5 тыс. шт.). В
распределенной системе модули ввода-вывода изготавливаются с небольшим
количеством входов (обычно от 1 до 16), а сами модули располагаются
вблизи места установки датчиков. Увеличение количества датчиков (входов)
достигается путем наращивания числа модулей и объединения их с помощью
общей шины. Это сокращает общую длину проводов в системе, а также
длину проводов с аналоговыми сигналами.
Связь
отдельных
устройств
в
распределенной
системе
может
осуществляться с помощью любой промышленной сети, см. раздел
"Промышленные сети и интерфейсы". Наиболее распространены в России
сетиProfibus, что связано с популярностью изделий фирмы Siemens, а также
сети Modbus с физической шиной RS-485 благодаря распространенности
модулей и контроллеров фирм ICP DAS, Advantech и НИЛ АП. За последние
годы стремительно возросло количество используемых сетей Ethernet
(точнее, Industrial Ethernet) в качестве промышленных сетей при скорости
передачи 10, 100 и 1000 Мбит/с.
Некоторые модули ввода-вывода, входящие в состав распределенных
систем, позволяют по команде из компьютера выполнять функции
автоматического регулирования (например, модули NL-8TI, NL-16AI фирмы
НИЛ АП). Для этого в них посылают значение уставки и параметры ПИДрегулятора
(пропорциональный,
дифференциальный
и
интегральный
коэффициенты), затем команду запуска процесса регулирования. Наличие
ПИД-регулятора в модулях распределенной системы позволяет осуществить
локальное регулирование (например, поддержание стабильной температуры
в камере тепла и холода), разгрузив общую шину для выполнения других
задач.
Распределенные системы строятся, как правило, из коммерчески
доступных
компонентов
(ПЛК,
модулей
ввода-вывода,
датчиков,
исполнительных устройств). Однако для однотипных тиражируемых систем
может быть выгодно строить специализированные системы, состоящие из
полностью заказных (вновь спроектированных) аппаратных и программных
средств [Garcia]. Граница целесообразности такого подхода определяется
объемом выпуска изделий.
Программирование
выполняется
стандартными
распределенных
систем
автоматизации
средствами,
рассмотренными
в
разделе
"Программное обеспечение".
* Валидация - подтверждение соответствия системы требованиям ее
назначения. Выполняется с участием потребителя. Не путать с верификацией
- доказательством достоверности. Валидация - это верификация с участием
потребителя (терминология стандарта ИСО 9001)
** Отображение - закон, по которому каждому элементу одного
множества
ставится
в
соответствие
единственный
элемент
другого
множества
Многоуровневая архитектура
Промышленная сеть может быть подключена не только к одному
компьютеру, но и к сети компьютеров, например, к локальной сети Ethernet
(5.3) или глобальной сети Internet. Такая архитектура автоматизированной
системы удобна при коллективной работе с системой автоматизации или для
связи технологического уровня АСУ с управленческим. Например, при
использовании системы с архитектурой, показанной на рис. 5.3, температуру
в теплице или в силосах элеватора одновременно могут наблюдать дежурный
оператор, главный инженер и директор хозяйства. На алюминиевом заводе
[Хазарадзе] информация о ходе протекания процесса электролиза алюминия
используется на 50 рабочих местах локальной компьютерной сети.
Рис. 5.3. Типовая современная распределенная система автоматизации,
включающая три уровня иерархии
Доступ любого компьютера сети к устройствам ввода-вывода или
контроллерам
осуществляется
с
помощью
ОРС-сервера
(см.
раздел
"Программное обеспечение" и [Iwanitz]). OPC серверы могут располагаться
на нескольких компьютерах или контроллерах и доступ к любому из них
может осуществляться с любого компьютера сети. Пример архитектуры
такой системы показан на рис. 5.3. Она является достаточно общей и широко
используется как для лабораторной автоматизации, так и для автоматизации
технологических
процессов.
Отдельные
промышленные
сети
на рис.
5.3 могут иметь различные протоколы и содержать оборудование разных
производителей, а также различную физическую среду передачи данных оптоволокно, медные провода, радиоэфир (через радио- или GSM-модемы) и
др. Обычно ОРС сервер работает только с одним или несколькими портами
ввода-вывода компьютера, к каждому из которых подключена одна
промышленная сеть, поэтому количество ОРС серверов в системе меньше
или
равно
количеству
промышленных
сетей.
Благодаря
наличию
сети Ethernet в систему легко могут быть включены серверы баз данных,
коммуникационные серверы, веб-серверы, принтеры, плоттеры, АТС, факсы,
технологическое оборудование и другие устройства с Ethernet-интерфейсом
[Шехтман].
Основой программного обеспечения, установленного на компьютерах
сети, являются SCADA пакеты - программные средства диспетчерского
управления и сбора данных. В контроллерах исполняются загрузочные
модули программ, генерируемые средствами визуального программирования
ПЛК на языках стандарта МЭК 61131-3, (см. раздел "Программное
обеспечение").
Системы управления с многоуровневой архитектурой обычно строятся
по объектному принципу, когда структура системы выбирается подобной
структуре объекта автоматизации, а каждая подсистема является локальной,
т.е. все обратные связи замкнуты в пределах этой подсистемы. Каждая
локальная подсистема выполняет отдельную функцию, задаваемую логикой
функционирования всей системы. Объектный принцип построения позволяет
упростить проектирование многоуровневой системы и обеспечить ее
структурную (архитектурную) надежность.
Анализ сложных систем управления позволяет выделить в них
несколько
однородных
уровней
иерархии,
показанных
на рис.
5.4.
Здесь WAN -"Wide Area Network" - глобальная сеть, LAN - "Local Area
Network" - локальная сеть.
Низший (нулевой) уровень включает в себя датчики и исполнительные
устройства
(актуаторы):
датчики
температуры,
давления,
концевые
выключатели, дискретные датчики наличия напряжения, измерительные
трансформаторы, реле-пускатели, контакторы, электромагнитные клапаны,
электроприводы и др. Датчики и актуаторы могут иметь интерфейсы типа
AS-интерфейс (ASI), 1-Wire или CAN, HART и др. Морально устаревшими
интерфейсами нулевого уровня являются аналоговые интерфейсы 4...20 мА,
0...20 мА, 0...5 В и др. В настоящее время наметилась устойчивая тенденция к
использованию интеллектуальных датчиков, которые имеют цифровой
интерфейс,
встроенный
микроконтроллер,
память,
сетевой
адрес
и
выполняют автоматическую калибровку и компенсацию нелинейностей
датчика. Интеллектуальные датчики в пределах сети должны обладать
свойством взаимозаменяемости, в частности, иметь один и тот же протокол
обмена
и
физический
интерфейс
связи,
а
также
нормированные
метрологические характеристики и возможность смены адреса перед заменой
датчика.
Первый
уровень состоит
из
программируемых
логических
контроллеров и модулей аналого-цифрового и дискретного ввода-вывода,
которые обмениваются информацией по промышленной сети (Fieldbus)
типа Modbus RTU, Modbus TCP, Profibus и др. Иногда модули ввода-вывода
выделяют в отдельный уровень иерархии.
Рис. 5.4. Уровни иерархии современной АСУ [Lian]
Второй (диспетчерский) уровень состоит из рабочих станций компьютеров
с человеко-машинным
интерфейсом (ЧМИ, HMI - Human
Machine Interface), наиболее распространенными вариантами которого
являются SCADA-пакеты. Диспетчер(оператор) осуществляет наблюдение за
ходом технологического
процесса или
управление им с помощью
мнемосхемы на экране монитора компьютера. Диспетчерский компьютер
выполняет также архивирование собранных данных, записывает действия
оператора, анализирует сигналы системы технической диагностики, данные
аварийной
и
технологической
сигнализации,
сигналы
срабатывания
устройств противоаварийных защит, а также выполняет часть алгоритмов
управления
технологическим
процессом.
Благодаря
объединению
диспетчерских компьютеров в сеть наблюдение за процессами может быть
выполнено с любого компьютера сети, но управление, во избежание
конфликтов, допускается только с одного компьютера или функции
управления
разделяются
между
несколькими
компьютерами.
Права
операторов устанавливаются средствами ограничения доступа сетевого
сервера. Важной частью второго уровня являются также базы данных
реального времени, являющиеся хранилищами информации и средством
обмена с третьим уровнем иерархии системы управления.
Третий уровень (уровень управления цехом) появляется как средство
интеграции системы АСУ ТП с АСУП - автоматизированной системой
управления предприятием. АСУП, в зависимости от размеров корпорации,
может включать еще более высокий (четвертый) уровень и обеспечивать
интеграцию с высшим руководством, которое может быть расположено в
различных странах и на разных континентах земного шара. На уровне АСУП
решаются следующие задачи:
ERP (Enterprise
Resource
- планирование
Planning)
ресурсов
предприятия;
MRP (Manufacturing
Resource
- планирование
Planning)
ресурсов
технологических подразделений предприятия;
MES (Manufacturing
Execution
- управление
Systems)
производственными ресурсами;
HRM (Human Resource Management) - управление человеческими
ресурсами;
EAM (Enterprise
Asset
Management)
- управление
основными
фондами, техническим обслуживанием и ремонтами.
Количество уровней АСУ зависит от величины предприятия.
В последние годы большой интерес вызывало использование интернеттехнологий
в
корпоративного
задачах
управления,
управления,
но
причем
даже
на
не
только
уровне
на
уровне
технологического
оборудования. Для этих целей используются web-серверы, которые могут
быть расположены как на обычных персональных компьютерах, так и
непосредственно в контроллерах или модулях ввода-вывода (так называемые
микро web-серверы). С помощью любого web-браузера, например, Internet
Explorer, можно управлять технологическими процессами, открыв на микровеб-сервере интернет-страничку с мнемосхемой технологического процесса.
Лекция 6.
Организация взаимодействия элементов
РИУС.
1. Организация общей памяти.
2. Организация связи между компонентами РИУС
3. Виды топологий, классификация и характеристика протоколов.
Организация общей памяти
Общая память используется для взаимодействия между несколькими вычислителями. Устройства ввода-вывода могут быть как активные—выступают в роли активных вычислителей, так и пассивные—
выступают в роли РП. В отличие от многопроцессорных централизованных систем, в РИУС вычислители имеют свою личную память и
ПО, а так же разделяемую память, которая используется для обмена
данными и служебной информацией (например, для синхронизации).
Системы с общей памятью обычно обладают высоким быстродействием каналов связи за счет малого времени доступа к памяти.
Бывают следующие основные варианты систем с общей памятью:
− С общей шиной с разделением времени;
− С перекрестным переключателем;
− С многовходовой памятью.
.Поверх. структур с физически разделяемой памятью может
быть реализовано логическое представление разделяемой памяти, упрощающее и делающее более эффективными процедуры
доступа к общей памяти:
− Логическое представление общей памяти с виртуальной памятью;
− Логическое представление общей памяти с почтовым ящиком.
Разделяемая память с временным разделением шины.
Это простейшая схема с общим коммуникационным путем, связывающим элементы системы. Общая шина (как и память) является
разделяемым ресурсом, и в составе активных устройств должны быть
средства диспетчеризации ее использования (например, поддерживающие приоритетные или FIFO дисциплины доступа).
Рис. 6.1: Вычислительная система с общей шиной.
Достоинства:
− Простая (в основном пассивная шина) система коммутации;
− Легко добавлять новые узлы (модульность системы).
Недостатки:
− Значительная общая стоимость аппаратуры (в каждом узле — арбитр);
− Выход из строя шины приводит к неработоспособности всей системы;
− Суммарная скорость потоков данных в системе ограничена пропускной
способностью шины, что ограничивает расширение числа узлов.
Конфигурация с разделением шины имеет наименьшую эффективность
комплексирования, используется в системах небольшой размерности с
относительно невысокими требованиями к производительности.
Разделяемая память с перекрестным переключателем.
В данной конфигурации каждое устройство имеет отдельную магистраль. Такая схема называется перекрестной матрицей, коммутатором или
кроссбаром. Структурные элементы системы (процессоры, память, УВВ)
требуют минимальной логики связи с шиной, так как не осуществляют сами
арбитраж.
Функции
арбитража
осуществляет
переключатель-матрица.
Достоинства:
Рис. 6.2: Разделяемая память с перекрестным переключателем
(коммутатором).
− Комплексируемые узлы—простейшие, без логики арбитража;
− Высокая скорость и эффективность обмена за счет многопоточности;
− Несложно повысить надежность переключателя за счет введения в него
избыточности.
Недостатки:
− Высокая сложность и стоимость переключателя-матрицы, растущая
экспоненциально при увеличении ее размерности.
Система
с
перекрестным
переключателем
используется
в
высоко-
эффективных, реконфигурируемых, надежных системах.
Система с многовходовой памятью
В данной системе, в отличие от предыдущих вариантов, логика
управления доступом к пассивным устройствам (памяти, УВВ) реализована в
составе их устройств управления. Любой из пассивных элементов имеет
несколько портов, по одному для подсоединения каждого активного
устройства.
Достоинства:
− Низкая реактивность, высокая скорость обмена и, как результат, высокая
производительность системы;
− Простота подключения активных элементов (вычислителей);
Недостатки:
− Наиболее сложные элементы (ИМС) памяти;
− Большое количество коммутаций;
− Ограниченное число комплексируемых вычислителей.
Системы с многовходовой памятью широко распространены в одноплатных
МП РИУС, в силу доступности ИМС памяти. Блоки многовходовой памяти
встраиваются в современные ПЛИС, что повышает популярность подобного
подхода к комплексированию.
На логическом уровне доступ к РП для всех рассмотренных вариантов может
быть модифицирован (но не обязательно) по двум основным сценариям:
−
Виртуальная
РП.
В
данном
случае
происходит
настраиваемое
преобразование адреса от процессора в адрес памяти таким образом, чтобы
коммутировать каналы взаимодействия (разделяемые блоки в памяти)
различных вычислителей. При этом узлы вычислители существуют в своем
виртуальном
адресном
пространстве,
не
зная
текущей
физической
конфигурации памяти,
а часто и узлов с которыми взаимодействуют.
− РП типа ‘почтовый ящик’. В данном случае достигается та же цель—
скрытия физической конфигурации памяти и узла-адресата, но при этом не
требуется
процедура
ретрансляции
адреса—используются
несложные
процедуры арбитража: FIFO, LIFO.
Общие недостатки систем с РП. :
− Большое число коммутационных линий (применяются в основном
параллельные шины);
− Пространственная локализованность.
Организация связи между компонентами РИУС
Классификация протоколов по способу доступа к среде Media access control
(MAC) это уровень управления доступом к среде, относящийся ко второму
уровню модели OSI. MAC обеспечивает адресацию и механизмы управления
доступом к каналам, что позволяет нескольким узлам общаться между собой.
По способу доступа к среде можно выделить три группы протоколов (см.
рис. 6.3):
− Протоколы со случайным доступом;
− Протоколы с управляемым доступом;
− Протоколы с уплотнением (образованием каналов).
Рис. 6.3: Классификация протоколов по способу доступа.
Виды топологий.
По топологии, выделяют следующие варианты объединения:
− Шина (магистраль);
− Кольцо (петля);
− Звезда;
− С коммутатором (в том числе, каждый с каждым);
− Смешанная (сложная) топология (Mesh).
Системы с шинной топологией.
Система на базе разделяемой шины (РШ) или магистрали представляет собой
структуру, в которой комплексируемые системы связаны и взаимодействуют
через общий канал с помощью сквозной адресации приемников и/или
передатчиков. Каждое сообщение в системе содержит уникальные адреса,
которые позволяют отличать их друг от друга по пункту назначения или
системе источнику. Так же может использоваться только идентификатор
сообщения, без адреса, и приемник сам решает—принимать или нет
сообщение с данным идентификатором.
Шина может быть параллельной или последовательной. Параллельные
шины используются в жесткосвязанных, пространственно локализованных
системах,
последовательные—в
слабосвязаных,
с
пространственно
разнесенными модулями. В последние годы начинают превалировать
последовательные шины, в том числе и в одноплатных системах (например,
шина LVDS или PCI Express).
Управление шиной может быть двух видов:
− Централизованное—управление прохождением по шине сообщений
(доступом к шине) выполняется одним выделенным узлом.
Функции централизованного управления выполняет либо выделенный
контроллер шины, либо один из узлов, совмещающий управление шиной с
иными прикладными функциями. Управление может подразумевать или
собственно передачу сообщения — ретрансляцию от источника к приемнику,
или только координацию этого процесса, когда пересылка данных идет
напрямую от источника к приемнику;
−
Децентрализованное—логика
распределена
по
координирующий
всем
узлам
порядок
управления
системы.
использования
в
значительной
Отсутствует
шины
и
единый
степени
центр,
синхронизацию
взаимодействующих узлов. В связи с этим, узлы сами должны поддерживать
механизмы множественного доступа, например, с временным или частотным
разделением, со случайным доступом и арбитражем.
Производительность систем с РШ в разной степени определяется шириной
полосы пропускания физического канала, скоростью передачи данных,
числом узлов, методами доступа, протоколом, средним и максимальным
трафиком в системе, его равномерностью.
Петлевые системы.
Классические петлевые (кольцевые) системы содержат однонаправленный
канал связи, замкнутый в виде петли или кольца. Узлы подключаются к петле
с помощью специальных сетевых интерфейсов (адаптеров), которые в свою
очередь включены в разрыв кольцевого канала связи, умеют пропускать
транзитом 'чужие’ сообщения, передавать и принимать 'свои'. 'Свои' и
'чужие’ сообщения приемник различает по адресу, содержащемуся в
сообщении. Посланное сообщение проходит по кольцу от узла к узлу, пока
не дойдет до узла-адресата или не вернется к передатчику. Соответственно,
сообщение удаляется или приемником (1-й вариант) или передатчиком,
пройдя круг (2-й вариант). В обоих вариантах приемник,
приняв сообщение со своим адресом, проверяет ошибки в сообщении по
контрольному коду и, если проверка прошла успешно, приемник принимает
сообщение на обработку. Если обнаружена ошибка —
отклоняется.
Квитирование
сообщения—уведомление
об
сообщение
успешном
принятии или ошибке в принятом сообщении—для первого варианта
выполняется протоколами более высокого уровня путем посылки нового
сообщения, но уже от приемника передатчику.
Во втором случае, когда передатчик не снимает сообщение с петли,
квитанция вставляется в специальное поле сообщения, и передатчик,
получивший обратно сообщение, прошедшее петлю, знает, было ли принято
сообщение и были ли в нем ошибки. Второй вариант также позволяет
передавать широковещательные сообщения, так как сообщение проходит
через все узлы петли. Установка квитанций при этом осуществляется по
принципу логического ИЛИ: ошибка хоть в одном узле приводит к установке
признака ошибки сообщения.
Достоинства:
− Отсутствует проблема маршрутизации, так как существует единственный
путь передачи сообщений.
− Достаточно просто реализовать передачу широковещательных
сообщений (см. описание выше).
− На базе петлевых систем можно просто реализовать системы с различным
вариантом доступа: запрос-ответ или с произвольным доступом узлов.
− Петлевые системы характеризуются высокой производительностью, так как
имеется возможность одновременной передачи данных между различными
парами узлов по различным сегментам сети.
− В классическом варианте петли
используются однонаправленные
физические каналы и симплексный режим передачи. Это существенно
упрощает аппаратуру связи, позволяет избежать проблем организации
множественного доступа к каналу и, соответственно, упростить контроллеры
сетевого интерфейса. Можно использовать популярные физические каналы
«точка-точка», не допускающие многоточечного подключения, например,
RS232 или RS422.
− Если узлы расположены в пространстве .друг за другом., то суммарная
длина проводных линий в петле значительно меньше, чем, например, для
звездообразных топологий, при сохранении таких достоинств как каналы
.точка-точка.. Это упрощает монтаж и резко снижает стоимость системы.
− Можно строить сети значительной протяженности и площади охвата, так
как длина каждого физического сегмента будет невелика, что ограничивает
использование шинных систем.
− Упрощается механическое подключение кабелей—не требуется делать
отводы проводов от шины для подключения узлов сети.
Недостатки:
− Потенциально невысокая надежность. Узким местом является разрыв
кольца при выходе из строя любого узла сети. В связи с этим сетевой
интерфейс (СИ), реализующей прием, передачу или ретрансляцию пакетов
стараются делать автономно функционирующим относительно основного
вычислителя, чтобы при выходе из стоя последнего СИ работал и кольцо не
разрывалось. СИ делают относительно простым, но с повышенными
требованиями к надежности функционирования, а также предусматривается,
чтобы даже при выходе из строя СИ разрыв петли физически ‘закорачивался',
и аварийный узел исключался из цепочки. Кроме этих базовых мер
существуют и другие подходы к повышению надежности петлевой системы
(см. ниже).
− Высокая и равномерная загрузка всех узлов сети: даже если передает
один—в ретрансляции сообщений участвует несколько или все узлы сети.
Обычно эту .сетевую. нагрузку возлагают на СИ, не затрагивая самих узлов.
При этом относительно высока сложность сетевых функций в каждом узле (в
СИ): узел должен выступать как передатчик, приемник, буфер-накопитель,
маршрутизатор.
− Большое количество сегментов, к каждому из которых должен быть доступ
при наладке и техническом обслуживании системы. Для шинной топологии
достаточно доступа в одной точке, из которой можно проводить мониторинг
всей сети и опрос любого узла.
Петлевые системы широко используются в управляющих системах,
требующих значительной площади охвата. В силу хорошо проработанных
методов повышения надежности, петли часто используют в системах с
повышенными требованиями к надежности.
Для популярных типов сетей СИ выпускаются в виде завершенных
микросхем-контроллеров, например, для сети Interbus.
С точки зрения организации доступа к каналу существуют три базовых
типа петель: петли Ньюхолла, Пирса и петля с введением задержки.
Системы с топологией звезда.
В звездообразных системах один узел S (ведущий, переключатель, центр
звезды) связан выделенными коммуникационными каналами (лучами) с
несколькими
периферийными
вычислителями.
При
этом
ведущий
вычислитель выполняет функции коммутатора передаваемых данных между
периферийными узлами, функции мастера сети:
принимает и обрабатывает запросы на передачу от периферийных узлов,
определяет приоритеты, отключает лучи при их неисправности, и, кроме
того, может выполнять функции .рабочего. вычислителя.
При необходимости передачи сообщения от узла A к узлу B, первый
посылает запрос переключателю S, тот передает запрос B и дожидается его
готовности (он может быть занят связью с другим узлом C или просто не
готов к приему данных), после чего устанавливает канал связи A-B.
В
звездообразных
системах
могут
применяться различные способы
установки связи:
− По опросу со стороны ведущего;
− По прерыванию со стороны периферийных узлов.
Достоинства:
− Высокая надежность при отказе лучей и периферийных узлов.
Отказ луча не мешает работе остальной системы.
− Невысокие требования по пропускной способности каналов, так как
обычно для каждого узла используется свой выделенный канал и нет
необходимости уплотнения данных, передаваемых несколькими узлами.
− Нет конкуренции и конфликтов при доступе к каналу между узлами.
Недостатки:
− Большое количество линий связи;
− Сложность узла-переключателя: большое число канальных интерфейсов,
высокая
производительность,
чтобы
обслуживать
много
каналов
одновременно;
− Ненадежность при отказе переключателя.
Иерархические системы.
Системы с иерархической конфигурацией имеют древовидную структуру.
Каждый уровень—система с одним из рассмотренных ранее методов
комплексирования: звездообразная, кольцевая или шинная. Подсистемы
связаны через узел-шлюз. Иерархические системы применяются в основном
там, где прикладная задача также имеет иерархический характер: на
каждом уровне выполняется часть общей функции системы, а результаты
работы используются на верхнем уровне. Передача данных и команд между
нижестоящей и вышестоящей подсистемой идет через узел-шлюз, причем в
вышестоящей системе виден только этот узел. Если же возможны
произвольные
связи
между
вычислителями
различных
уровней,
то
иерархическая организация неэффективна. В управляющих системах могут
выделяться следующие уровни: сбора показаний с датчиков, управления
(контроллеров), центрального диспетчерского отображения данных и
управления, другие.
Достоинства:
− Выделение классов прикладных задач позволяет выбрать конфигурацию и
параметры
каждого
уровня
так,
чтобы
максимально
эффективно
использовать распределенную систему при решении именно этих задач;
− Отключение (неисправность) подсистем ('веток’) не приводит к остановке
всей системы;
Недостатки:
−
Выход
из
строя
узла-шлюза
или
идущего
к
нему
сверху
коммуникационного канала приведет к отключению всех нижестоящих
подсистем;
− Высокая загрузка узла-шлюза функциями .концентратора. подсистемы,
особенно
если
нижестоящими
требуется
установить
(функции
коммутации).
связь
Это
вышестоящих
требует
узлов
с
повышенной
вычислительной мощности узлов-шлюзов.
Системы с коммутацией.
В
реальных
системах
структура
логических
связей
между
комплексируемыми вычислителями может быть нерегулярна и неустойчива,
и при этом невозможно установить физические связи соответственно
логическим. Например, нельзя все узлы подключить к общей шине или
нельзя установить между каждой парой логически взаимодуйствующих узлов
физический канал точка-точка, в пределе простроить полносвязную систему.
В таких случаях строятся сети с коммутацией:
данные от передатчика к приемнику передаются через промежуточные
коммутирующие узлы. В принципе, системы 'кольцо', 'звезда’ и ‘дерево’
являются частными случаями систем с коммутацией.
Существует несколько вариантов коммутирующих сетей, в зависимости от
уровня сетевой модели ISO, на котором эти функции поддержаны:
− Коммутация каналов—на физическом уровне. Между приемником и
передатчиком через транзитные узлы устанавливается сквозной физический
канал
связи,
используемый
Достоинство—высокая
монопольно
скорость
передачи
на
время
сеанса
данных.
связи.
Недостаток—
значительное время доступа к каналу, невозможность параллельной передачи
нескольких информационных потоков.
− Коммутация кадров (канальный уровень). Сообщение разбивается на
кадры, которые передаются независимо друг от друга.
Транзитные узлы коммутируют кадры, могут их временно сохранять,
проверять достоверность, направлять по разным маршрутам. Коммутация
кадров требует простых коммутаторов, так как используются кадры
фиксированного,
небольшого
размера,
которые
проще
и
быстрее
обрабатывать. Однако обычно требуется однородный физический/канальный
протокол во всех сегментах сети. В управляющих сетях такой метод
применяется в системах взаимодействия контроллеров с оконечными
устройствами.
− Коммутация пакетов (сетевой уровень) аналогична коммутации кадров, но
используются сетевые пакеты. Коммутация пакетов более гибкая, допускает
пакеты различной длины, базируется на гетерогенных физических каналах,
но требует больших затрат в коммутаторах и дороже. В управляющих
системах используется для связи мощных контроллеров между собой и с
другими системами, например, офисными сетями.
− Коммутация сообщений (прикладной уровень) предполагает полную
сборку прикладного сообщения из пакетов в каждом транзитном узле. Это
требует
значительной
вычислительной
мощности
коммутаторов,
но
позволяет проверять безошибочность сообщения 'на маршруте', объединять
подсистемы с различным сетевым уровнем, устанавливать многоточечные
связи. В управляющих системах используется достаточно редко: в случаях
повышенных требований к эффективности использования канала и для связи
разнородных подсистем.
Протоколы со случайным доступом
Протокол с множественным доступом и определением коллизий. Наиболее
часто встречающаяся модификация—шина CSMA/CD (Carrier Sense Multiple
Access with Collision Detection—Множественный доступ c обнаружением
несущей
и
определением
коллизий).
Относится
к
системам
с
децентрализованным управлением. Каждый узел такой шины может
инициализировать передачу. Перед началом передачи узел проверяет,
свободна ли шина (обнаружение несущей), и если да—начинает передачу, а
если шина занята—ждет окончания передачи пакета другим узлом. В
процессе передачи, если она начата одновременно несколькими узлами,
возникают конфликты на шине. Конфликты определяются либо самим узлом
передатчиком, который прослушивает линию и сравнивает то, что он
передает и что реально в линии, либо могут использоваться специальные
устройства
для
обнаружения
централизованного
‘столкнувшиеся’
Повторную
управления.
узлы
попытку
конфликтов,
При
что
обнаружении
прекращают передачу и
делают
через
является
некоторый
элементом
конфликта
освобождают
временной
шину.
интервал,
различный и псевдослучайный для каждого узла. Например, в сетях Ethernet
интервалы вычисляются как функция предыстории конфликтов данного узла.
По прошествии этого интервала узел снова пробует передавать. Таким
образом,
удачная
передача
пакета
будет
определяться
некоторой
вероятностью, уменьшающейся при росте трафика различных узлов [10].
Достоинства:
− Логически неограниченное число узлов. Подключение новых узлов не
требует перенастройки системы.
− Высокая пропускная способность: нет затрат на передачу маркеров,
синхронизирующих и других служебных пакетов, нет сложных, медленных
механизмов
разрешения
конфликтов.
Максимальная
ограничивается только параметрами среды передачи.
Недостатки:
− Недетерминированность максимального времени передачи;
− Непригодность для систем РМВ с жесткими ограничениями.
скорость
Лекция 7.
ПОДСИСТЕМА СБОРА И ПЕРВИЧНОЙ ОБРАБОТКИ
ИНФОРМАЦИИ
План леции
1. Принципы компоновки Комплекса технических средств.
2. Обоснование,
выбор
модулей
подсистемы
сбора
и
первичной
первичной
обработки
обработки аналоговых сигналов
Практические примеры.
Как
уже
отмечалось,
подсистема
сбора
и
информации предназначена для опроса аналоговых и дискретных датчиков с
обработкой и анализом информации об объекте управления. Исходными
данными для определения структуры подсистемы контроля является
совокупность
измеряемых
переменных
ТП
и
оборудования,
набор
измерительных устройств, которые могут быть использованы в качестве
источников исходной информации.
Комплекс технических средств ввода аналоговых сигналов в управляющий
компьютер подбирается в зависимости от вида измеряемой физической
переменной, от удаленности датчиков, вида и уровня выходных сигналов
датчиков. В каналах измерения, помимо датчиков, должна присутствовать
следующая аппаратура: нормализаторы (Н), преобразователи физических
сигналов в ток или напряжение (П), усилители (У), аппаратные RC-фильтры
(Ф), преобразователи аналоговых сигналов в цифровые коды (АЦП),
коммутаторы (mux). Принципы компоновки технических средств ввода
аналоговой информации представлены на рис. 7.1, на котором датчики
объединены в три группы.
В первую группу собраны удаленные на значительное расстояние от
промышленного компьютера (ПК) датчики D1,…,Dn, предназначенные для
сбора информации о технологических параметрах одной физической
природы. Вторая группа – датчики D1,…,DN. Они, как и датчики первой
группы существенно удалены от ПК, но измеряют сигналы различной
физической природы. И, наконец, датчики третьей-й группы, расположенные
вблизи ПК и предназначенные для измерения технологических параметров
различной физической природы.
П - преобразователи физической величины в ток для 1-ой и 2-й группы и в
напряжение для 3-й.
D1
.
.
.
1-я гр.
Dn
D1
.
.
.
2-я гр.
H11
H1n
m
u
x
П1
У
П2
У
Пn-1
У
П
У
Ф
H2
Ф1
H21
.
.
.
МДвыв
m
u
x
ПК
АЦП
3-я гр.
DN
ПN
У
D1 .
.
D .
П1
H31
m
Пm
H3m
ФN
H2N
Ф1
Фm
m
u
x
У
Рис. 7.1. Принцип компоновки технических средств ввода аналоговой
информации
Н1 - нормализатор 1-го типа для смещения уровня сигнала датчика в
заданный диапазон измерения.
Н2 - нормализатор 2-го типа - устройство для преобразования тока в
напряжение.
Н3 - нормализатор для компенсации холодного спая термопар, для
компенсации нелинейности характеристик датчиков.
Ф - аппаратные
предназначенные
RC-фильтры,
для
устранения
радиопомех и помех промышленной частоты.
Обоснование выбора модулей подсистемы сбора и первичной
обработки аналоговых сигналов
Исходными данными к выбору комплекса технических средств
подсистемы сбора и первичной обработки информации (ПСОИ) являются
требования, сформулированные в техническом задании на разработку
АСУТП.
Различают требования:
- по техническим характеристикам, среди которых можно выделить
требования к точности и быстродействию применяемых устройств;
- по эксплуатационным характеристикам, главным из которых является
требование по надежности;
- по
технико-экономическим
характеристикам,
обуславливающим
требования по стоимости.
На основании анализа схемы компоновки технических средств ПСОИ (см.
рис. 7.1) можно представить цепочку аппаратных средств i-го канала
измерения в виде рис.7.2.
Датчик
датчi
нормализатор
нормi
Усилитель
усi
Аппаратный
фильтр
фi
АЦП
АЦПi
МK
Рис. 7.2. Цепочка аппаратных средств i-го канала измерения
Выбор каждого из устройств определяется перечисленными выше
требованиями. Заданную в ТЗ ±Δy тз - точность измерения и представления
i
технологической
переменной
yi
распределяют
между
аппаратными
средствами представленной на рис. 8.3 цепочки блоков по значимости
вносимой каждым блоком погрешности.
Погрешности измерения и преобразования информации указанной
цепочки являются случайными величинами, подчиняющимися определенным
законам
распределения.
микроконтроллера МК
2 ,
σвхi
Для
оценки
погрешности
на
входе
можно воспользоваться следующим выражением,
записанным для цепочки аппаратных средств
i-го канала измерения по
рис. 8.3:
2 = σ2
σвхi
датчi
В
выражении
(43)
(43)
2
2 +σ 2
+σнормi
+σ2усi +σфi
АЦПi
предполагается,
что
погрешности
отдельных
аппаратных блоков не зависят друг от друга, а их величины определяются
классом точности каждого аппаратного средства. Наиболее ответственными
блоками с точки зрения вносимых погрешностей будут датчик и аналогоцифровой преобразователь, поскольку выбор нормализатора, усилителя и
фильтра достаточно высокоточными существенно не повлияет на общую
стоимость аппаратных средств, но позволит пренебречь их влиянием на
точность канала измерения.
Нормализаторы
представляют
собой
резисторы,
включаемые
как
потенциометры. Их погрешность будет тем меньше, чем выше класс
точности, и в сравнении с другими погрешностями ею можно пренебречь.
В качестве усилителей обычно используют прецизионные операционные
усилители с коррекцией дрейфа нуля и с полосой пропускания до 50 Гц.
Требуемый коэффициент усиления зависит от уровня сигнала на входе
усилителя и от расстояния, на которое передается сигнал.
Для фильтрации помех промышленной частоты используются одно- или
двухзвенные RC-фильтры (интегрирующие цепочки). Полоса пропускания fпр
такого фильтра зависит от времени опроса датчика Топрi:
fпр=0,2/Топрi.
Поскольку частоты полезных сигналов в АСУТП находятся в пределах 1
Гц, то, выбрав высокоточные элементы в этих фильтрах, можно также
пренебречь их аппаратными погрешностями. Следовательно, погрешность на
входе МК
2 = σ2
σвхi
датчi
+σ2АЦПi .
(44)
Для выбора датчика и АЦП необходимо задать коэффициенты (0 – 0,6) –
долю общей погрешности, приходящейся на датчик, т.е.
σ
датчi
= χ ×σтз
(45)
и ρ (0 – 0,5) – долю погрешности датчика, приходящейся на АЦП, т.е.
σ АЦПi = ρ×σ
датчi
(46)
так, чтобы произведение ρχ располагалось в диапазоне:
0 < ρχ ≤ 0,4.
(47)
При этом остальная величина допустимой погрешности измерений в i-м
канале должна быть отдана ошибкам вычисления в микроконтроллере по
алгоритмам первичной обработки информации. Из выражения (47) следует,
что, задаваясь значениями коэффициентов ρ и χ, можно выбрать датчик и
определить разрядность АЦП. В частности, чем меньше будет χ, тем точнее,
но и дороже, будет датчик, а чем меньше будет ρ, тем с большей разрядной
сеткой потребуется АЦП. К примеру, задавая χ=0,6, т.е. выбирая недорогой,
но грубый датчик, из выражения (46) при ρχ=0,12 получим ρ=0,2.
Следовательно, чтобы обеспечить высокую точность при плохом датчике,
необходимо увеличивать разрядную сетку АЦП и, конечно, вычислителя.
Улучшения точности в этом случае добиваются применением программ
усреднения или сглаживания, позволяющих ослабить низкочастотный шум в
η (2-10) раз.
Выбор датчика.
Исходные данные:
- условия эксплуатации,
- диапазон изменения технологической переменной Dy,;
- абсолютная величина допустимой точности измерения: Δy доп
дат χΔy тз либо
допустимая относительная погрешность в %: δдоп
дат χδ утз ;
доп
0,1Тоу , где Тоу
- допустимая инерционность Tдат
мин
мин
- минимальная
доп
постоянная времени в передаточной функции объекта управления, Tдат
-
допустимая величина постоянной времени датчика.
Обычно датчики выбирают в два этапа. На первом - по условиям
эксплуатации определяется тип датчика, к примеру,
термопара или
термосопротивление. На втором - из справочника находят типоразмер
датчика и все его характеристики, а именно:
- физическая величина, измеряемая чувствительным элементом датчика,;
- диапазон измерения по паспортным данным Dпсп
, причем диапазон
y
дат
изменения технологической переменной должен находиться в интервале
1 2
;
Dy = - Dпсп
удат
3 3
доп
псп
доп
- погрешность измерения Δyпсп
дат Δy дат или δ дат δ дат ;
псп
доп
псп
- инерционность датчика Tдат
, где Tдат
- постоянная времени датчика,
Tдат
гот
равная 0, 3t гот
дат , t дат - время готовности датчика выдать первое измерение,
определяемое по его паспортным данным;
вх
- крутизна статической характеристики yвых
дат = К дат y дат . Из серии однотипных
датчиков подбирают тот, у которого крутизна КДАТ наибольшая;
- выходной сигнал датчика с указанием его диапазона, к примеру, токовый
в диапазоне 0 – 5 мА, (0 – 20 мА) или напряжение в диапазоне 0 – 10 В.
Если выход датчика имеет другую физическую природу, например,
изменение сопротивления или частотный, то после датчика следует ставить
преобразователь (см. рис. 7.1), обеспечивающий унифицированный сигнал:
токовый или напряжение.
Пример 1. Выбрать датчик измерения температуры воздуха в
производственном помещении, изменяющейся в пределах (10 – 35 оС),
точность измерений не ниже ±0,5 оС, выходной сигнал должен быть
унифицированным (ток в диапазоне 0 – 5 мА или напряжение 0 – 10 В),
постоянная времени объекта управления – порядка 3000 с.
Решение.
1. Выразим требуемую точность в заданном диапазоне изменения
температур в относительных единицах или в %:
δyтз
±0,5o C
=
= ±0,02 или 2% .
25o C
2. Зададимся коэффициентом χ, равным 0,6. При этом потребуется датчик,
обеспечивающий точность измерения δдоп
дат = 1, 2% .
3. По условиям эксплуатации выбираем тип чувствительного элемента –
термосопротивление (ТС).
4. Выписываем из справочника параметры ТС с подходящими данными,
как это показано в табл. 5.
Таблица 5. Параметры ТС
Типоразмер
ТС
Диапазон
измерения
Инерционность
Погрешность
гот
дат
δпсп
дат
ТСМ-8012
(0 – 50) оС
240 с
±0,1%
ТСП-085
(0 – 100) оС
9с
±0,1%
ТСП-763
(0 – 100) оС
240 с
±0,1%
t
Примечание: в типоразмере ТС буква М соответствует медному, П платиновому термосопротивлениям.
Поскольку постоянная времени объекта управления значительная по
величине, то инерционностью любого из указанных в таблице
чувствительных элементов можно пренебречь. Следовательно,
основываясь на критерии меньшей стоимости при одинаковой точности,
выбираем термосопротивление ТСМ-8012. Для обеспечения токового
выхода используем преобразователь в виде компенсационного моста
КСМ4, обеспечивающего точность 0,25%.
При этом погрешность датчика составит:
2псп
2псп
δпсп
0,01 + 0,0625 = ±0,933% < δ доп
дат = δ тсм + δ ксм =
дат ,
что даст следующее значение абсолютной погрешности процесса
измерения
псп
Δy псп
дат = δ дат
Dпсп
yдат
100
= ±0,933×
50o C
= ±0.466o C.
100
В результате выбора датчика из его паспортных данных становятся
псп
псп
известными диапазон измерения Dпсп
yдат и точность Δy дат ; δ дат . Эти значения
наряду с выбранной величиной коэффициента ρ
позволяют определить
длину разрядной сетки АЦП.
Выбор АЦП.
псп
псп
Исходные данные: диапазон измерения Dпсп
yдат ; точность датчика Δy дат ; δ дат ;
величина коэффициента : 0<0,5.
АЦП
характеризуется
разрядностью,
быстродействием
помехозащищенностью. Длина разрядной сетки АЦП N y
АЦП
и
рассчитывается в
соответствии с выражением:
Dпсп
удат 3
N y АЦП = E log 2
+
1
,
2×ρ× Δу псп
дат
(47)
в котором операция Е{…} означает округление результата до ближайшего
целого в большую сторону, а коэффициент
2
3
появляется из-за разницы в
вычислении дисперсий погрешностей датчика и АЦП. Так как погрешность
датчика подчиняется нормальному закону распределения, а погрешность
АЦП – равномерному, то дисперсии соответствующих погрешностей будут
равны:
σ
2
дат
Δу
=
псп 2
дат
9
Следовательно, учитывая, что σ 2
=
АЦП
Δу .
=
2
, σ АЦП
2
АЦП
12
ρ2σ 2дат , величину младшего разряда АЦП
можно определить как
Δy АЦП =
2
ρΔy псп
дат
3
(48)
Нужно заметить, что если расчеты погрешностей ведутся в относительных
единицах или в процентах, то в качестве диапазона измерения Dпсп
в
yдат
формуле (47) следует брать либо 1, либо 100%.
Пример 2. Определить разрядность АЦП для преобразования аналогового
сигнала измерения температуры в код с помощью выбранного в примере 1
датчика температуры при , равном 0,1.
Решение.
На основании выражения (47) и данных примера 1 получаем:
N
АЦП
50o C 3
100% 3
= E log 2
+ 1 = E log 2
+ 1 = 10 .
o
2×
0,1×
0,466
C
2×
0,1×
0,933%
При этом, как следует из (48), величина младшего разряда АЦП составит
0.054оС,
а
среднеквадратическое
значение
погрешности
на
входе
вычислителя с учетом (44)
σвх = σ 2
датч
+ σ2
АЦП
Δy 2
Δy 2
=
датч
9
+
АЦП
12
= 0.494o C .
Пример 3. Оценить погрешность на входе МП в относительных единицах
при
измерении
температуры
термосопротивлением
ТСМ-8012
(см.
пример 1), имеющим по паспортным данным относительную погрешность
δ=0,1%. В качестве преобразователя применить компенсационный мост
КСМ4 с погрешностью δ=0,25%. Для преобразования унифицированного
сигнала в код использовать 16-разрядный АЦП. Определить значения
коэффициентов и .
Решение.
1. Определим относительную погрешность АЦП, принимая максимально
возможную измеряемую величину за 100%
δ АЦП =
2. Учитывая
то,
компенсационного
что
100%
= 0,0015% .
216 -1
погрешности
моста
термосопротивления
подчиняются
нормальному
и
закону
распределения, а погрешность АЦП – равномерному закону, вычислим
среднеквадратичное значение погрешности на входе МП как
2
δ2АЦП
δ2тс δкпм
σвх =
+
+
= 0,0836% .
9
9
12
3. При этом коэффициенты и соответственно равны:
χ=
σ 2АЦП
σ датч δ датч 0.933%
=
=
= 0.47 , ρ =
σ тз
δтз
2%
σ 2дат
Представленные
в
примерах
расчеты
=
9δ2АЦП
= 0,0014 .
12δ2дат
показывают,
как
оценивать
погрешности в абсолютных и относительных единицах. При этом в формулу
(44) необходимо ввести коэффициент пересчета
k прс =
Dпсп
дат
2
N АЦП
-1
,
(49)
величина которого будет зависеть от разрядности АЦП и от того, в каких
единицах проведены расчеты. Например, при NАЦП=10 и диапазоне датчика
100(%)
Dпсп
= 0,0978 Если же диапазон датчика и
дат , представленном 100 %, k прс =
10
2 -1
все
k прс =
погрешности
50(o C)
= 0,0489 .
210 -1
рассчитываются
в
абсолютных
величинах,
то
Следовательно, формула (44) примет вид:
2 = σ2
σвхi
датчi
k2 .
АЦПi прс
(50)
+ σ2
Как было отмечено выше, помимо разрядности, важную роль при выборе
АЦП играют его быстродействие и помехозащищенность. Быстродействие
АЦП и его помехозащищенность связаны обратно пропорциональной
зависимостью, т.е. чем выше помехозащищенность, тем больше потребуется
времени на преобразование аналоговой величины в код. Так как для
технологических процессов не требуется высокое быстродействие, то
выбирают
АЦП
интегрирующего
типа,
имеющий
высокую
помехозащищенность и время преобразование порядка 100 мс.
Выбор микроконтроллера. Критерием выбора обычно является минимум
длины разрядной сетки АЛУ микроконтроллера (МК) при обеспечении
заданного быстродействия и минимальной стоимости.
Из практики и технической литературы известно, что вычисления в МК
должны
выполняться
с
точностью,
превышающей
точность
АЦП.
Удовлетворить этому требованию можно, либо выбрав разрядность АЛУ
большей разрядности, чем у АЦП, на величину d, т.е.
(51)
N АЛУ = NуАЦП + d
либо выполняя расчеты на меньшей разрядности, но с удвоенной точностью.
В последнем случае обязательна проверка по требуемому быстродействию,
при этом в последующем выражении перед слагаемым ТВЫЧ должна стоять
цифра 2:
Тцикла = Твыч + Тобм + ТАПД Тц доп
(52)
где Тцикла - время цикла, равное времени между опросом i-го датчика и
выдачей информации по i-му каналу измерения; ТВЫЧ - время вычислений в
цикле по принятым алгоритмам; ТОБМ - время обмена информацией при
вычислениях между ОЗУ и ПЗУ; ТАПД - время прохождения информации
через аппаратуру передачи данных в i-м канале измерения; Тц
доп
- допустимое
время цикла между двумя соседними опросами датчика.
Выбирая разрядность АЛУ МК в соответствии с выражением (51),
необходимо так подбирать величину d, чтобы значение NАЛУ было кратно
байту.
В настоящее время рынок МК достаточно обширен, поэтому подобрать
МК в соответствии с предложенным критерием несложно, однако затем
необходимо оценить точность вычислений по принятым алгоритмам с
учетом всех погрешностей, возникающих в МК (см. разд. 2.6 части 2).
Известно, что длина разрядной сетки АЛУ определяется требуемой
точностью вычислений. Чтобы определить какую погрешность в точность
представления измеряемой переменной вносит вычислитель, необходимо
знать алгоритмы первичной обработки аналоговой информации.
Лекция 8.
Обзор отечественной и зарубежной микросхемотехники РИУС.
План лекции
1. Модули ввода-вывода серии NL. Общая характеристика.
2. Отличие от аналогов
3. Состав серии NL
4. Конструкция модулей.
5. Технические данные и назначение.
6. Сеть на базе RS-485 и модулей серии ADAM-4000.
Модули ввода-вывода серии NL выпускаются в двух модификациях: с
протоколом Modbus RTU и с протоколом DCON (совместим с сериями
ADAM,
I-7000).
Подключаются
к
любому
компьютеру
или
ПЛК,
например, NLcon-CE. Серия NL может быть использована для построения
распределенных систем управления с числом каналов ввода-вывода до 4 000
шт.
Модули ввода-вывода серии NL программно и аппаратно совместимы с
модулями
ввода-вывода
аналогичного
назначения
ADAM-4000,
I-
7000, NuDAM и др. и характеризуются следующими свойствами:
поддерживают
Российские
ГОСТы
на
термопары
и
термопреобразователи сопротивления;
имеют 11 видов защиты от небрежного использования и аварийных
ситуаций (см. руководство по эксплуатации);
имеют широкий диапазон рабочих температур (от -40 до +70 °С)
благодаря
использованию
более
дорогой
расширенным температурным диапазоном;
элементной
базы
с
маркировка
и
руководство
по
эксплуатации
соответствуют Российским ГОСТам (обязательными требованиями
является маркировка знаком соответствия, указание № разрешения
Ростехнадзора, сведений об изготовителе, даты изготовления, отметки
ОТК в паспорте, указание серийного номера изделия, и все это должно
быть на русском языке);
использованы интеллектуальные ключи для построения дискретных
выходов (у аналогов - обычные транзисторы);
подробно и корректно описаны технические характеристики на
русском языке;
имеют аппаратные средства диагностики обрыва и к.з. датчиков;
имеют уменьшенную потребляемую мощность (менее 0,6...1 Вт);
большинство
модулей
ввода
выполняют
также
функцию
изолированного дискретного вывода, а модули дискретного вывода
имеют также и дискретные входы. Это позволяет использовать модули
серии NL для реализации алгоритма локального релейного или ПИД
регулирования, в качестве локальных технологических контроллеров;
каждый модуль имеет 26 контактов, в то время как аналоги имеют
только 20 контактов. Это позволило увеличить количество каналов
ввода-вывода
и
реализовать дополнительные
функциональные преимущества, описанные выше, выполнить входы
модуля полнофункциональными и равноценными;
имеют возможность "горячей замены", т. е. без предварительного
отключения питания;
двойной сторожевой таймер выполняет рестарт устройства в случае
его "зависания" и провалов питания, а также переводит выходы в
безопасные состояния при "зависании" управляющего компьютера;
групповая
гальваническая изоляция
входов и
групповая изоляция
выходов с тестовым напряжением изоляции 2500 В;
повышенная
степень
защиты
от
воздействий статического
электричества ;
модуль аналогового ввода NL-8AI имеет опцию 16 одиночных
аналоговых каналов ввода.
На
модули
ввода-вывода
серии
NL
имеется разрешение
Ростехнадзора и сертификат утверждения типа средств измерений.
Модули серии NL являются интеллектуальными (микропроцессорными)
компонентами распределенной системы сбора данных и управления. Они
обеспечивают
аналого-цифровое,
цифро-аналоговое
преобразование
информации и ввод-вывод дискретных сигналов, счет импульсов, измерение
частоты, преобразование интерфейсов и другие функции, необходимые для
построения
эффективных
систем
управления
производственными
процессами в жестких условиях эксплуатации. Модули соединяются между
собой, а также с управляющим компьютером или контроллером с помощью
промышленной сети на основе интерфейса RS-485. Управление модулями
осуществляется через порт RS-485 с помощью набора команд в ASCII кодах.
Все модули имеют режим программной юстировки и могут быть
использованы в качестве средств измерений.
Модули не содержат механических переключателей. Все настройки модулей
выполняются программно из управляющего компьютера (контроллера).
Программно устанавливаются: диапазон измерения, формат данных, адрес
модуля, скорость обмена, наличие бита контрольной суммы, параметры
юстировки. Настроечные параметры запоминаются в ЭППЗУ и сохраняются
при выключении питания.
Некоторые
модули
контролировать
имеют
светодиодный
технологический
параметр
дисплей,
что
непосредственно
позволяет
в
месте
установки модуля, а не на управляющем компьютере.
Все
модули
имеют
два
сторожевых
таймера,
один
из
которых
перезапускает модуль в случае его "зависания" или провалов напряжения
питания, второй переводит выходы модуля в безопасные состояния при
"зависании" управляющего компьютера.
Набор команд каждого модуля состоит из примерно 20...50 различных
команд. Команды передаются в стандартных ASCII кодах, что позволяет
программировать
модули
с
помощью
практически
любого
языка
программирования высокого уровня. Модули также имеют протокол обмена
Modbus RTU, см. документ "Протокол Modbus RTU в модулях NL, NL-Ex,
CL" (НИЛ АП). Там же описана процедура смены протокола DCON на
Modbus RTU и обратно.
Модули выполнены для применения в жестких условиях эксплуата-ции, при
температуре окружающего воздуха от гальванической изоляции с испытательным напряжением изоляции 2,5 кВ
(ГОСТ 12997-84): один уровень - между входами и портом RS-485, второй
уровень - между выходами и портом RS-485.
Модули могут быть использованы, например, для решения следующих задач:
компьютерное управление исполнительными механизмами (печами,
электродвигателями, клапанами, задвижками, фрамугами и т.п.) с
обратной связью и без;
управление светом, кондиционированием воздуха, котельными, и т.п.;
контроль и регистрация температуры в теплицах, элеваторах, печах для
закалки стали, испытательных камерах тепла и холода, в различных
технологических процессах;
стабилизация температуры в термостатах, термошкафах, котлах, жилых
зданиях, теплицах, на элеваторах и т.п.;
автоматизация стендов для приемо-сдаточных и других испытаний
продукции, для диагностики неисправностей при ремонте, для
автоматизированной генерации паспортных данных неидентичной
продукции;
научные
исследования
отображение
построение
и
медленно
многомерных
разработки,
меняющихся
запись
в
компьютер
физических
температурных,
силовых,
и
процессов,
световых,
вибрационных, шумовых и других полей.
Модули имеют несколько модификаций: без светодиодного дисплея и с ним,
в дополнительном корпусе со степенью защиты IP65 и без него, с разъемом
для шины SPI и без него; кроме того, модуль NL-8TI имеет две модификации
с разными наборами типов термопар.
Отличие от аналогов
Все модули серии NL программно и аппаратно совместимы с модулями
аналогичного назначения ADAM, ICPDAS, NuDAM и др., однако отличаются следующим:
-ли
сопротивления;
количеству и качеству защиты от небрежного
использования и аварийных режимов работы системы. Модули серии NL
имеют 11 видов защиты (см. 3.1);
-8AI и NL-8TI позволяют устанавливать для каждого канала
свой диапазон измерений или тип датчиков;
диапазоном рабочих температур (от -
вывода, а модули дискретного вывода имеют также и дискретные входы. Это
позволяет использовать модули серии NL для реализации алгоритма
локального релейного или ПИД регулирования, а также в качестве локальных технологических контроллеров;
ыми (у анало-гов
из-за недостаточного количества клемм часть входов, которые по смыслу
должны быть дифференциальными, выполнены с общим прово-дом, а также
введены джамперы для переключения входов);
и имеют толь-ко
20 контактов. Это позволило реализовать дополнительные функцио-нальные
преимущества, описанные выше;
позволяющим назначать разным каналам модуля различные юстировочные
коэффициенты. Это позволяет подключать к входам модулей различные
источники сигналов, для которых нет специализированных преобразователей
(датчики влажности, рН-метры, анемометры и т.п.).
Данное руководство описывает модули NL-8TI, NL-4RTD и NL-8AI (см. п.
"Состав серии NL"). Усиление модулей регулируется программно в широких пределах, обеспечивая работу со всеми типами термопар и терморезистивных преобразователей по ГОСТ Р 8.585-2001 и ГОСТ 6651. Градуировочные таблицы, приведенные в указанных ГОСТах, записаны в ЭППЗУ
микроконтроллера, расположенного внутри каждого модуля. В комплекте с
модулями может поставляться ОРС сервер, позволяющий управлять модулем
от всех SCADA программ, совместимых со стандартом ОРС, в том числе
Genesis32, MasterSCADA, Trace Mode, LabView, а также с Matlab, MS Excel и
др.
Примеры
применения
программных
компонентов
описаны
на
прилагаемом компакт-диске.
Состав серии NL
В состав серии NL входят следующие модули:
NLcon-1AT - программируемый логический контроллер;
NL-8TI - 8 каналов ввода сигналов термопар, 2 дискретных выхода;
NL-4RTD - 4 канала для термопреобразователей сопротивления, 3 дискретных выхода;
NL-8AI - 8 дифференциальных или 16 одиночных аналоговых входов, 3
дискретных выхода;
NL-4AO - 4 канала аналогового вывода;
NL-16DO - 16 каналов дискретного вывода; 3 дискретных ввода;
NL-16DI - 16 каналов дискретного ввода, 2 дискретных вывода;
NL-16HV - 16 каналов ввода сигналов ~220В, 2 дискретных вывода;
NL-8R - 8 каналов электромагнитных реле 220В 2А;
NL-2C - 2 канала счетчика/частотомера, 4 канала дискретного вывода;
NL-232C, NL-485C, NL-422C - конвертеры интерфейсов RS232-RS485/422.
NL-485C - повторитель (ретранслятор) интерфейса RS485;
NL-2SG - модуль ввода сигналов тензодатчиков;
NL-16AIF - скоростной модуль аналогового ввода.
Модули имеют модификации с дисплеем и без и могут поставляться в дополнительном корпусе со степенью защиты IP65.
Конструкция модулей.
Модуль состоит из основания, печатной платы и крышки, которая
прикрепляется к основанию двумя винтами, и съемных клеммных колодок.
Крышка не предназначена для съема потребителем.
Съемные клеммные колодки позволяют выполнить быструю замену модуля
без отсоединения подведенных к нему проводов. Для отсоединения
клеммной колодки нужно силой вытащить колодку из ответной части,
остающейся в модуле.
Корпус выполнен из ударопрочного полистирола методом литья под
давлением. Внутри корпуса находится печатная плата. Монтаж платы
выполнен по технологии монтажа на поверхность.
Для крепления на DIN-рейке используют пружинящую защелку, которую
оттягивают в сторону от корпуса с помощью отвертки, затем надевают
корпус на 35-мм DIN-рейку и защелку отпускают. Для крепления к стене
можно использовать отрезок ДИН-рейки, которая закрепляется двумя
шурупами на стене, затем не ней закрепляется модуль с помощью его
защелки.
Модули можно также крепить один сверху другог.
Рис. 8.1.
Модули построены на следующих основных принципах:
наличие не только входов, но и выходов (для обеспечения возможности
локального управления);
новейшая элементная база с температурным диапазоном от -40 до +85°С;
поверхностный монтаж;
групповая пайка в конвекционной печи со строго контролируемым
температурным профилем;
утолщенный корпус из ударопрочного полистирола;
возможность
расширения
функциональных
возможностей
путем
подключения дополнительных плат через шину SPI (по заказу).
Модуль спроектирован таким образом, что никакие действия персонала в
пределах разумного не могут вывести его из строя. Поэтому квалификация
персонала влияет только на быстроту освоения работы с модулем, но не на
его надежность и работоспособность.
Модуль не имеет цепей, находящихся под опасным для жизни напряжени-ем,
если он не подсоединен к внешним цепям с высоким напряжением.
Технические данные и назначение
Эксплуатационные свойства
Модули характеризуются следующими основными свойствами:
-8AI и NL-8TI позволяют устанавливать для каждого канала
свой диапазон измерений или тип датчиков (в режиме ASCII);
от -
o неправильного подключения полярности источника питания;
o превышения напряжения питания;
o перенапряжения по входу;
o короткого замыкания по выходу;
o перегрузки по току нагрузки;
o перенапряжения по выходу;
o перегрева выходных каскадов;
o электростатических разрядов по выходу, входу и порту RS-485;
o выбросов напряжения при индуктивной нагрузке;
o перегрева выходных каскадов порта RS-485;
o короткого замыкания клемм порта RS-485;
агностика к.з. и обрыва датчиков;
ного
отключения питания;
"зависания" и провалов питания, а также переводит выходы в безопасные
состояния при "зависании" управляющего компьютера;
тестовым
напряжением
изоляции
2500
В.
Постоянно
действующее
напряжение, приложенное к изоляции, не может быть более 300В (среднеквадратическое значение);
соединенной с источником питания и портом RS-485 (см. рис. 5.1 - рис. 5.3).
Изоляция обеспечивает защиту модуля и соединенного с ним оборудования
от высокого синфазного напряжения, которое допусти-мо на входных
клеммах. Изоляция защищает также модуль от разно-сти потенциалов между
"землей" источника сигнала и приемника, которая может возникнуть при
наличии недалеко расположенного мощного оборудования;
яжение питания в диапазоне от 10 до 30 В;
-8AI).
-ты от
шкалы. Тип формата выбирается программно;
-485, бит/с: 1200 и менее; 2400, 4800, 9600,
19200, 38400, 57600, 115200. Выбирается программно;
дискретного вывода могут выполнять функцию автономного локаль-ного
релейного или ПИД регулирования;
ченном питании;
- IP20;
Устройства распределенного сбора данных и управления серии ADAM
В качестве примера из широкого класса устройств удаленного сбора
данных предлагается рассмотреть модули фирмы Advantech. Устройства
серии ADAM-4000, 5000, 6000 и 7000, предназначенные для построения
территориально-распределенных
систем сбора данных и
управления,
обеспечивают выполнение следующих функций: аналоговый ввод-вывод,
дискретный ввод-вывод, первичное преобразование информации, приём
команд от удалённой вычислительной системы и передача в её адрес
преобразованных данных с использованием интерфейса RS-485 или Ethernet.
На рис. 8.2 представлена структурная схема сети на базе RS-485 и
модулей серии ADAM-4000. Сеть последовательной передачи данных,
благодаря наличию преобразователя RS-232 в RS-422/485 ADAM-4520 и
повторителя ADAM-4510, может объединять до 256 устройств. Модули
серии ADAM-4000 предназначены для построения распределенных систем
сбора данных и управления и представляют собой компактные и
интеллектуальные устройства обработки сигналов датчиков, специально
разработанные для применения в промышленности.
ПК
4080d
DD
4013
4014d
D
4011
4510
4060
4050
4520
(4052)
RS-232
4021
Рис. 8.2. Структурная схема сети на базе RS-485 и модулей серии ADAM4000
Наличие встроенных микропроцессоров позволяет им осуществлять
нормализацию сигналов, операции аналогового и дискретного ввода-вывода,
отображение данных и их передачу (или прием) по интерфейсу RS-485. Все
модули имеют гальваническую развязку по цепям питания и интерфейса RS485, программную установку параметров, командный протокол ASCII и
сторожевой таймер. Питание модулей осуществляется нестабилизированным
напряжением 10…30 В постоянного тока. Диапазон температур: рабочий –
10…+70°С, хранения –25…+80°С. Относительная влажность — до 95% без
конденсации влаги.
В показанной на рис. 8.2 сети, помимо упомянутых выше блоков,
используются следующие модули:
- 4080D – модуль, предназначенный для измерения частоты или
используемый в качестве счетчика импульсов;
- 4013 – модуль ввода сигналов от термосопротивлений (платиновых и
никелевых). Диапазон входящих сигналов ± 15 мВ, ± 50 мВ, ± 100 мВ, ± 150
мВ, 1 или 2,5В, I = ± 20 мА. Диапазон измерения tº С:
- для платиновых: ± 100ºС, 0 ÷ 100ºС, 0 ÷ 200ºС, 0 ÷ 600ºС;
- для никелевых: 0 - 100ºС, -80 + 100ºС?
время преобразования в АЦП равно 100 мс (без учета времени командного
опроса и выдачи информации). Погрешность модуля 4013 0,05%;
- 4021 – модуль вывода аналоговых сигналов;
- 4060 – модуль релейного выхода, коммутирующий сигналы до 40 В;
- 4050 – модуль дискретного ввода/вывода. Подсистема ввода: количество
каналов ввода – 7, логический 0 не более 1 В, логическая 1 - от 3,5 до 30 В,
вытекающий ток не более 1 мА. Подсистема вывода: количество каналов 8,
коммутируемое напряжение U до 30 В; Р=0,4 Вт;
- 4014D – модуль ввода аналоговых сигналов в виде напря-жения мВ, В и
тока в мА;
- 4011 – модуль ввода сигналов от термопар (мВ и В до 2,5В и мА до
20мА); имеется 14 режимов, отличающихся типом и диапазоном входного
сигнала.
Модуль аналогового ввода ADAM-4011
Существенно сократить номенклатуру КТС подсистемы сбора и первичной
обработки информации (см. рис. 7.1) можно, использовав, например, модуль
аналогового ввода ADAM-4011. Этот модуль может быть дистанционно
настроен на один из 14 режимов ввода, которым соответствуют различные
типы и диапазоны входного сигнала (сигналы термопар различных типов, ток
в мА, напряжение в мВ или в В), имеет компенсацию ЭДС холодного спая.
АЦП
этого
модуля,
построенное
с
использованием
сигма-дельта
преобразования, имеет 16 разрядов, управляется микропроцессором (МП),
который преобразует цифровые отсчеты АЦП в значения следующих
форматов: инженерные единицы, проценты полной шкалы, дополнительный
код или Омы. После получения запроса на передачу данных от ведущего узла
сети на базе RS-485 МП передает отсчет в требуемом формате в адрес
ведущего узла сети.
Как видно из рис. 8.3, модуль аналогового ввода ADAM-4011 содержит все
элементы рассмотренной выше подсистемы, но обладает большими
возможностями и лучшей точностью. Он имеет программную настройку для
работы с термопарами, с малыми напряжениями и токами. К тому же, у него
есть 2 цифровых выхода (аварии по верхней и нижней границам измеряемого
сигнала) и 1 цифровой вход для подсчета счетчиком событий до 65535
изменений логического состояния канала дискретного ввода.
Рис. 8.3. Цепочка блоков
Лекция 9.
Алгоритмы первичной обработки данных в ПСОИ.
План лекции
1. Масштабирование.
2. Пересчет в технические единицы.
3. Проверка на достоверность.
4. Сглаживание.
5. Проверка на технологические границы.
В любой автоматизированной системе перед принятием решения должен
быть выполнен анализ сигналов, поступивших по каналам связи от датчиков.
Прежде всего, должна быть выполнена проверка этих сигналов на
достоверность,
чтобы
выявить
нарушения,
как
в
канале
передачи
информации, так и в работе датчиков. Среди таких нарушений можно назвать
случайную импульсную помеху, обрыв или короткое замыкание. К тому же
датчики могут иметь статические ошибки, нелинейные характеристики или
зашумленный выходной сигнал, что скажется на точности измерения. Для
получения
корректных
значений
результатов
измерения
применяют
алгоритмы первичной обработки такие, как масштабирование, пересчет в
технические единицы, проверка на достоверность, сглаживание, проверка на
технологические границы.
Проверка на достоверность. Благодаря выполнению этого алгоритма,
обнаруживаются и устраняются импульсные помехи, выявляется обрыв или
короткое замыкание в канале связи и формируется сообщение о нарушениях
оператору-технологу. В зависимости от того, меняется ли технологическая
переменная во времени или остается постоянной, требования по проверке
будут отличаться. 1)Если переменная по ходу технологического процесса
изменяется и известна допустимая скорость этого изменения, то проверку на
достоверность осуществляют по условию:
xik - xi(k-j)
Tvi
< VDi ,
(53)
где i - номер датчика; k - номер отсчета; VDi - допустимая скорость
изменения
технологической переменной xi; Tvi – временной интервал
проверки на достоверность по скорости изменения, связанный со временем
опроса датчиков Tопрi соотношением:
Tvi = jTопрi .
(54)
Величина j не должна быть меньше трех, поскольку заключение о
недостоверности сигнала принимается после трех кратного нарушения
условия (53).
2)В случае постоянства технологической переменной xi должны быть
известны верхняя XBi и нижняя XHi допустимые границы её отклонений,
определяемые, обычно, из технологических инструкций и по условиям
эксплуатации.
Так,
например,
допустимые
изменения
температуры
перегретого пара в парогенераторе составляют (460 – 550)оС при
номинальном значении 540 оС [60]. Следовательно, выход единичного
измерения
или
серии
измерений
за
указанные
границы
должен
рассматриваться как нарушение. Чтобы его обнаружить, необходимо
выполнить проверку следующего неравенства:
XHi < xik < XBi .
(55)
Проверка сигналов на достоверность заключается в следующем: если
условия (53) или (55) не выполняются, то содержимое счетчика нарушений
увеличивается на 1, неверное значение показаний датчика заменяется
последним достоверным, и проверяется следующее показание датчика с
более мелким шагом опроса. Процедура проверки повторяется. Если трижды
подряд не выполняются неравенства (53) или (55, то по знаку разностей (xik -
xik(k-j)) или (xik - XGi) принимается решение о нарушении связи в i-м канале
(при отрицательном знаке) или неисправности датчика этого канала (при
положительном знаке). Во второй скобке XGi - та граница, по которой не
выполняется условие (55). После обнаружения ошибки фиксируется время
нарушения, его причина и включается резервный канал или резервный
датчик.
Сглаживание. Обычно по ходу технологических процессов возникают
помехи с частотами, близкими или равными частотам полезного сигнала.
Примером такой помехи могут быть погрешности измерения. Устранить их
аппаратными фильтрами не удается, но можно ослабить, и весьма
существенно, программным путем, реализуя алгоритм скользящего или
экспоненциального сглаживания.
Оценим каждый из них с точки зрения расхода памяти и быстродействия, а
также покажем, как следует вычислять параметры сглаживания перед
запуском этих программных модулей.
Под быстродействием рассматриваемых алгоритмов будем понимать
готовность каждого из них выдать 1-е значение сглаженного сигнала с
заданным уровнем ослабления помехи i.
Алгоритм скользящего среднего определится формулой:
1 Mi
xcik =
xi(Мi +k-j) ,
M i j=1
(56)
где Mi – параметр сглаживания, величина которого определяет количество
отсчетов
xij (j = 1,Mi ) ,
взятых для вычисления одного сглаженного значения xcik.
Раскроем формулу (56) для частных значений k, а именно:
xci1 =
1
(xi1 + xi2 + ...xi(Mi ) ) ,
Mi
(57.а)
xci2 =
1
(xi2 + xi3 + ...xi(Mi +1) ) ,
Mi
(57.б)
xci3 =
1
(xi3 + xi4 + ...xi(Mi +2) )
Mi
(57.г)
и т.д.
Принцип скользящего окна поясняется формулами (57.а) - (57.г), из
которых следует, что для вычисления очередного сглаженного значения
записанная в Mi ячейках памяти информация сдвигается влево, и в
освободившуюся ячейку заносится новый отсчет датчика. После чего
выполняются процедуры суммирования Mi отсчетов и умножения на
коэффициент 1/Mi. Из анализа алгоритма (56) следует, что для его
реализации потребуется Mi+2 ячейки памяти, а время готовности алгоритма
выдать с заданной точностью 1-е сглаженное значение составит
t ск.ср. = Mi Tопрi .
(58)
Величина параметра сглаживания Mi вычисляется по заданному значению
коэффициента ослабления помех i, который, в свою очередь, представляет
собой отношение:
ηi =
σ 2xi
σ 2xci
,
(59)
где σ 2xi - дисперсия помех в отсчетах датчиков xik, σ 2xci - дисперсия помех в
сглаженных, вычисленных в соответствии с алгоритмом (56) значениях xcik.
Чтобы оценить величину Mi, представим каждую из переменных, входящих в
выражения (56), (57) как:
xik = mo xi + Δxik ,
xcik = mo xi + Δxcik
(60)
Подставляя (60) в (56) или (57) и вычитая из результата подобные
уравнения, записанные относительно математических ожиданий, получим
уравнения относительно абсолютных значений погрешностей, которые будут
идентичны выражениям (56) и (57) соответственно, например:
Δxci1 =
1
(Δxi1 + Δxi2 + ... + Δxi(Mi ) ) .
Mi
Предполагая,
коррелированны
что
и
значения
погрешностей
характеризуются
в
дисперсией
соседних
σ 2xi
точках
можно
не
записать
следующее уравнение относительно дисперсии погрешности сглаживания:
σ 2xci =
1
×(σ 2xi + σ 2xi + ... + σ 2xi )
2
Mi
Mi
или
σ 2xci =
σ 2xi
1
2
(M
×σ
)
=
.
i
xi
M i2
Mi
Следовательно, с учетом выражения (60) значение параметра сглаживания
для i–го датчика
Mi=i..
(61)
Экспоненциальное
сглаживание.
Для
экспоненциального
сглаживания алгоритм имеет вид:
xcik = xci(k-1) + αi (xik - xci(k-1) )
при
начальном
значении
xci0=0
и
диапазоне
(62)
изменения
параметра
сглаживания: 0<i<1.
Следует отметить, что в реальных условиях в результате вывода
технологического процесса или технического объекта в установившийся
режим работы становится известным желаемое значение контролируемой
или регулируемой переменной, которое ранее было обозначено как mox .
i
Именно эта величина и может быть использована в качестве начального
значения xci0.
Величина параметра определяет длительность переходных процессов и
качество сглаживания. Чем меньше , тем лучше сглаживание, но тем
большее время потребуется для получения сглаженного значения xcik с
заданным ослаблением помехи i.
Поэтому, как и в предыдущем алгоритме сглаживания, возникает задача
нахождения значения параметра сглаживания i и времени готовности
алгоритма (62) вычислить 1-е сглаженное значение xcik с принятым
коэффициентом ослабления помех i.
Для определения параметра сглаживания i перейдем в выражении (62) к
дисперсиям погрешностей измерений, принимая те же допущения, что и для
алгоритма (56), тогда
σ 2xci = (1- α i )2 σ 2xci + α i2σ 2xi .
Откуда
1
αi
=
ηi
2 - αi
,
(63)
или
αi =
2
ηi + 1
(64)
Выражение (64) позволяет рассчитать параметр i для алгоритма
экспоненциального сглаживания, если задан коэффициент ослабления помех
i. Алгоритм (62) можно представить не в рекуррентной форме, а в виде
суммы следующего вида:
xcik = αi [xik + 1-αi xi(k-1) + 1-α i xi(k-2) + 1-α i xi(k-3) + ... + 1-α i x i1] .
2
3
k-1
Считая, что погрешности измерения в каждом отсчете i–го датчика не
коррелированны, приходим к аналогичному уравнению относительно
дисперсий этих погрешностей, т.е.
σ2xci = αi2{[1+(1-αi )2 +(1-αi )2×2 +(1-α i )2×3 + ... +(1-α i )2×(k-1) ]σ x2i }
Выражение в квадратных скобках можно записать как сумму
убывающей
геометрической
прогрессии
Sk =
a1 (1- qk )
1- q
со
знаменателем
q = (1 - α i )2 Следовательно,
σ
2
xci
1- (1- α i )2k 2
1- (1- α i )2k 2
=α
σx = αi
σ xi .
1- (1- α i )2 i
2 - αi
2
i
В результате на основании формул (63) и (65) получаем
(65)
1
1- (1- α i )2k
= αi
ηi
2 - αi
(66)
В выражении (66) член (1- αi )2k с ростом k стремится к нулю, приближаясь к
(63). Задаваясь степенью приближения δ, можно вычислить значение k,
которое будет определять количество рекуррентных вычислений в алгоритме
(62), и, следовательно, время получения первого сглаженного значения при
заданном коэффициенте ослабления (59).
На основании сказанного из равенства (1- αi )2k = δ находим
lnδ ,
k i = E 0,5
ln(1- α i )
(67)
откуда ясно, что первое сглаженное значение будет получено с заданной
точностью в соответствии с алгоритмом (62) спустя время
lnδ
t экс.сгл = k i Tопрi = E
0, 5Tопрi .
ln(1 - α i )
(68)
Как следует из (68), это время будет возрастать с увеличением точности
вычислений δ. Достоинством алгоритма экспоненциального сглаживания, по
сравнению со скользящим окном, является малый объем памяти, хотя он
значительно дольше входит в установившийся режим.
Выбор того или иного алгоритма зависит от конкретных требований к
быстродействию и объему памяти, сформулированных в ТЗ на разработку
системы.
На рис. 9.1 приведены графики изменения сигналов, построенные с
помощью пакета MatLab по результатам работы программ в соответствии с
описанными выше алгоритмами.
В качестве исходного массива данных по i-му каналу измерения был
использован массив нормально распределенных чисел с заданными
параметрами. На рис. 9.1.а представлен график этого массива, но с
наложением в произвольных точках импульсных помех, обрыва и короткого
замыкания. После отработки программы «Проверка на достоверность» был
получен
массив,
представленный
на
рис. 9.1.b.
Этот массив
затем
обрабатывался программами «Скользящее среднее» и «Экспоненциальное
сглаживание». Задавая различные значения коэффициента ослабления i,
рассчитав параметры сглаживания Mi и i можно было проверить работу
предложенных алгоритмов. В частности, представленные на рис. 9.1.c и
рис. 9.1.d графики соответствуют расчетным значениям =М=10 и =0,18.
При этом величина k=17 при при заданной точности =0,001.
20
a)
10
0 Dispersiya:1045.0078
0
50
100
150
20
b)
Signal v kanale izmereniya
200
250
300
350
400
450
500
Signal posle proverki
10
0 Dispersiya:0.89051; Korotkoe zamikanie na otschete:310; Obriv v kanale na otschete:397
0
50
100
150
200
250
300
350
400
450
500
20
Sglajivaniye skolzjashim srednim
c)
10
0 Dispersiya:0.087716; Neksper:10.1522; Tckcp=10*Topr
0
50
100
150
200
250
300
350
400
20
Exponencialnoye
sglajivaniye
d)
450
500
450
500
10
0 Dispersiya:0.087969; Neksper:10.123; Tekssgl=17.2117*Topr
0
50
100
150
200
250
300
350
400
Рис. 9.1. Графики изменения сигналов, построенные с помощью пакета
MatLab
Экспериментальное
значение
коэффициента
ослабления
,
как
подтвердило моделирование, получилось равным заданному с точностью
(1.2-1.5)%.
Пересчет в технические единицы. Для представления операторутехнологу реальных значений технологических переменных существуют
формулы пересчета, вид которых определяется типом датчиков.
Если у датчика линейная градуировочная характеристика (см. рис. 9.2), как
например, у датчиков уровня, давления, то пересчет осуществляется в
соответствии со следующим выражением:
xik = Xiмин +
Xiмин - Xiмакс
2
N АЦПi
-1
xik = Xiмин + k прсi xik ,
(6 9 )
в котором черточкой над переменной ( xik ) обозначен её цифровой код,
индекс i относится к номеру канала измерения, индекс k – к номеру отсчета в
этом канале.
xi
ximax
ximin
xi
xi-k
2NАЦП
Рис. 9.2. Линейно-градуировочная характеристика
При нелинейной характеристике, например, квадратичной пересчет
выполняется по следующей формуле:
xik = X
2
iмин
+
2
2
Xiмин
- Xiмакс
2
N АЦПi
-1
xik .
(70)
Подобной характеристикой обладают обычно датчики расхода.
Для многих датчиков градуировочная характеристика предсталяется в
виде степенного ряда
n
xik = a j xikj , j4..
(71)
j=0
Например,
для
датчиков
температуры
достаточно
степень
аппроксимирующего полинома j брать не более двух.
Проверка на технологические границы. Эта проверка является одним из
основных элементов контроля хода
ТП. Контроль производится путем
сравнения текущего значения технологической переменной xik с заданными
значениями верхней XBi и нижней XHi границ [56]. При нарушении этих
границ программа выдает признак нарушения
γ ik 1 ,
фиксирует время
нарушения, сообщает оператору-технологу о нарушении и посылает все
данные в архив.
Чтобы предупредить повторные переключения признака ik, когда
значение технологической переменной колеблется вблизи одной из границ,
вводится полоса гистерезиса i, равная, например, 5% от диапазона
изменения этой переменной. В результате признак нарушения границы
вырабатывается в соответствии с условиями:
g ik = 1 при xik XBi или xik XH i ,
g ik = 0 при XHi + di g i(k-1) xik XBi - di g i(k-1)
(72)
Подобная проверка предусмотрена и в SCADA-системе TRACE MODE.
Но, помимо зоны гистерезиса, в TRACE MODE предусмотрена зона
предупреждения по предаварийной ситуации.
Рекомендуемая литература:
1. Парфенова Е.В., Информационные технологии / Е.В. Парфенова - М. :
МИСиС, 2018. - 56 с. - ISBN -- - Текст : электронный // ЭБС "Консультант
студента" : [сайт]. - URL : http://www.studentlibrary.ru/book/misis_0020.html
(дата обращения: 05.01.2020).
2. Кузьмин В.В., Современные методы и средства формирования
измерительных сигналов в АСУТП : учебник / Кузьмин В. В. - Казань :
Издательство КНИТУ, 2017. - 276 с. - ISBN 978-5-7882-2223-3 - Текст :
электронный
//
ЭБС
"Консультант
студента"
:
[сайт].
-
URL
:
http://www.studentlibrary.ru/book/ISBN9785788222233.html (дата обращения:
05.01.2020).
3.
Васильева
М.Ю.,
Синтез
линейных
систем
автоматического
управления в среде MATLAB : учебно-методическое пособие / М.Ю.
Васильева, А.А. Усманова, И.Г. Габдрахманов, А.И. Валиев - Казань :
Издательство КНИТУ, 2018. - 176 с. - ISBN 978-5-7882-2270-7 - Текст :
электронный
//
ЭБС
"Консультант
студента"
:
[сайт].
-
URL
:
http://www.studentlibrary.ru/book/ISBN9785788222707.html (дата обращения:
05.01.2020).
Учебное издание
КОНСПЕКТ ЛЕКЦИЙ
по дисциплине
«Информационные системы средств автоматизации »
для студентов направления подготовки
15.04.04 «Автоматизация технологических процессов и производств»
Составители:
Александр Глебович Кратинов,
Редактор
Техн. редактор
Оригинал-макет
И. И. Иванова
С. К. Николаева
В. В. Сидоров
Подписано в печать ________
Формат 60×841/16 Бумага типограф. Гарнитура Times.
Печать офсетная. Усл. печ. л.______. Уч.-изд. л. ______.
Тираж ____ экз. Изд. № ______. Заказ № _______. Цена договорная.
Издательство Луганского национального
университета имени Владимира Даля
Свидетельство о государственной регистраци издательства
МИ-СРГ ИД 000003 от 20 ноября 2015г.
Адрес издательства: 91034, м. Луганск, кв. Молодежный, 20а
Телефон: 8 (0642) 41-34-12, факс. 8 (0642) 41-31-60
E-mail: [email protected] http: www. dahluniver.ru