МИНОБРНАУКИ РОССИИ
Федеральное государственное автономное образовательное
учреждение высшего профессионального образования
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Инженерно-технологическая академия (ТРТИ)
Институт
РАДИОТЕХНИЧЕСКИХ СИСТЕМ И УПРАВЛЕНИЯ
Кафедра
ВСТРАИВАЕМЫХ СИСТЕМ
ОТЧЁТ ПО РАБОТЕ НА ПРАКТИЧЕСКИХ ЗАНЯТИЯХ
по дисциплине:
«Проектирование локальных микропроцессорных систем».
На тему: «Тензорезистивные интеллектуальные датчики давления с
применением линейных пространственных элементов».
Выполнил:
студент группы Р–102
28,05,2015
Проверил: к.т.н., доцент каф. ВиРС
Таганрог 2021 г.
И.П. Иванов
Е.В. Удод
2
СОДЕРЖАНИЕ
ВВЕДЕНИЕ............................................................................................................. 4
1 ФОРМИРОВАНИЕ ХАРАКТЕРИСТИК ОБЪЕКТА НАБЛЮДЕНИЯ ... 6
1.1 Описание объекта ........................................................................................ 6
1.2 Таблицы характеристик объекта наблюдения и измеряемых
переменных ......................................................................................................... 7
1.3 Содержание информационного объекта. ................................................. 8
2 СИНТЕЗ ФУНКЦИОНАЛЬНОЙ СТРУКТУРЫ УСТРОЙСТВА ............ 9
2.1 Функционально-модульная структура .................................................... 9
2.2 Блочная структура ..................................................................................... 10
2.3 Организация во времени опроса чувствительных элементов и
обработки данных ............................................................................................ 11
3 РАЗРАБОТКА АЛГОРИТМОВ РАБОТЫ СИСТЕМЫ ........................ 13
3.1 Постановка задачи компенсации температурной погрешности ...... 13
3.2 Описание модели вычисления давления с использованием
линейного пространственного элемента ..................................................... 13
3.3 Алгоритм работы системы ....................................................................... 14
3.3.1 Алгоритм функционирования ТИДД ................................................... 14
3.3.2 Алгоритм проверки данных на достоверность ................................... 18
3.3.3 Базовый алгоритм преобразования значений сигналов каналов
давления и температуры в значение давления при использовании
линейных пространственных элементов ...................................................... 20
3.3.4 Алгоритм определения области разбиения ГХ по температуре ....... 22
3.3.5 Алгоритм определения области разбиения ГХ по давлению ............ 24
3.3.6 Алгоритм вычисления значения давления с использованием
линейных пространственных элементов ...................................................... 25
4 ВЫБОР ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ, ВХОДЯЩИХ В ТИДД 27
4.1 Определение предельно допустимых погрешностей исходя из
баланса погрешностей ..................................................................................... 27
4.2 Оценка предельно допустимой погрешности чувствительных
элементов, входящих в ТИДД ........................................................................ 27
4.2.1 Описание компьютерной модели ......................................................... 27
4.2.2 Результаты компьютерного моделирования ........................................ 30
4.3. Выбор чувствительных элементов ........................................................ 31
3
5 ВЫБОР СЕТЕВОГО ИНТЕРФЕЙСА И ПРОТОКОЛА ........................... 33
6 ВЫБОР АЦП И МИКРОКОНТРОЛЛЕРА .................................................. 36
6.1 Расчет разрядности АЦП .......................................................................... 36
6.2 Оценка объема требуемой памяти для хранения программы ТИДД
.............................................................................................................................. 36
6.3 Оценка объема оперативной памяти ..................................................... 37
6.4 Расчет требований к быстродействию микроконтроллера ............... 37
6.5 Выбор микроконтроллера ........................................................................ 40
7 РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ СТРУКТУРНОЙ СХЕМЫ ............. 42
ЗАКЛЮЧЕНИЕ ................................................................................................... 44
СПИСОК ЛИТЕРАТУРЫ .................................................................................. 46
ПРИЛОЖЕНИЯ .................................................................................................. 47
ПРИЛОЖЕНИЕ А
ЭКСПЕРИМЕНТАЛЬНЫЕ ЗНАЧЕНИЯ
ПРОСТРАНСТВЕННОЙ ФУНКЦИИ ПРЕОБРАЗОВАНИЯ
ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА .............................................................. 48
ПРИЛОЖЕНИЕ Б ТЕКСТ КОМПЬЮТЕРНОЙ МОДЕЛИ В
МАТЕМАТИЧЕСКОЙ СРЕДЕ MATLAB ....................................................... 52
ПРИЛОЖЕНИЕ В ЭЛЕКТРИЧЕСКАЯ СТРУКТУРНАЯ СХЕМА ......... 58
4
ВВЕДЕНИЕ
Современное промышленное производство, нефтегазовая отрасль,
коммунальное хозяйство, авиация, автомобилестроение и многие другие отрасли деятельности человека широко используют прецизионные датчики
давления. Высокоточные измерения давления дают возможность более качественного регулирования технологических процессов, снизить вероятность
возникновения аварийных ситуаций, а так же повысить качество мониторинга объѐмов потребляемых ресурсов.
Большинство современных датчиков давления строятся на основе тензорезистивного чувствительного элемента, в этой связи, главный вопрос
обеспечения высокой точности измерений связан с уменьшением температурной погрешности таких датчиков. Температурная погрешность тензорезистивного чувствительного элемента возникает из-за изменения сопротивления тензорезистора и упругих параметров титана с изменением температуры. В результате температурного воздействия происходит значительный
дрейф нуля, а так же сужение диапазона изменения выходного сигнала канала давления. Эти изменения приводят к ошибке при измерении давления в
промышленном диапазоне температур порядка 12–18% [1].
Одним из направлений минимизации влияния температуры на точность
измерения давления является применение математической модели градуировочной характеристики тензорезистивного чувствительного элемента, базирующейся на разбиении градуировочной характеристики на области по давлению и температуре и аппроксимации каждой из этих областей линейными
пространственными элементами. Все математические вычисления осуществляются микроконтроллером входящим в состав датчика.
Курсовой проект содержит 7 разделов.
В первом разделе проводится анализ объекта наблюдения, приводится
его описание и таблицы характеристик объекта наблюдения.
Во втором разделе определены решаемые тензорезистивным интеллектуальным датчиком давления функции и компоненты, из которых он будет
строиться. В этом разделе так же рассматривается организация работы изделия во времени.
Третий раздел посвящѐн разработке алгоритмов системы. В нѐм приведѐн общий алгоритм работы системы, алгоритм проверки на достоверность
считанных значений и алгоритм вычисления значения давления с применением линейных пространственных элементов.
В четвѐртом разделе производится оценки погрешностей системы с использованием компьютерного моделирования и на их основе выбираются
чувствительные элементы давления и температуры для построения ТИДД.
5
Пятый раздел посвящѐн выбору сетевого протокола и интерфейса.
В шестом разделе выбирается разрядность микроконтроллера и АЦП,
оцениваются требуемые объѐмы памяти для хранения программы и объѐма
оперативной памяти. В этом разделе осуществляется оценка вычислительной
сложности микропроцессорного алгоритма работы ТИДД и на основе проведѐнных оценок выбирается микроконтроллер.
Седьмой раздел посвящѐн синтезу структурной электрической схемы
тензорезистивного интеллектуального датчика давления.
В заключении приводятся выводя о проделанной работе и достигнутым
результатам.
В приложении приводятся типичные зависимости сигналов каналов
давления и температуры от давления и температуры, и текст компьютерной
модели в математической среде MATLAB.
6
1 ФОРМИРОВАНИЕ ХАРАКТЕРИСТИК ОБЪЕКТА НАБЛЮДЕНИЯ
1.1 Описание объекта
Газопроводы городского газового хозяйства в зависимости от назначения подразделяю на транзитные, распределительные и ответвления. Транспортировка газа по городскому газопроводу допускается при давлении до 1,2
МПа.
Городские газопроводы считаются:
низкого давления при P менее 0,005 МПа включительно;
среднего давления при P от 0,005 до 0,3 МПа включительно;
высокого давления при P > 0,3 МПа.
В газовом хозяйстве заводов черной металлургии разрешается прокладка газопроводов как межцеховых, так и внутрицеховых с рабочим давлением P < 0,6 МПа.
Газопроводы низкого давления предназначаются для подачи газа к жилым домам и общественным зданиям, а также к коммунально-бытовым предприятиям. Газопроводы среднего давления через ГРП снабжают газом газопроводы низкого давления, а также газопроводы промышленных и коммунально-бытовых предприятий. По газопроводам высокого давления газ поступает в местные ГРП крупных промышленных предприятий.
Городские системы газоснабжения представляют собой комплекс сооружений, состоящий из источника Газоснабжения, газопроводов низкого,
среднего и высокого давления, газораспределительных станций, ГРП и ГРУ,
подземных хранилищ газа, средств телемеханизации.
По числу ступеней давления системы газоснабжения подразделяются
на одноступенчатые – с подачей газа различным потребителям только по газопроводам одного давления; двухступенчатые с подачей газа потребителям
по газопроводам двух давлений: среднего и низкого, высокого и низкого, высокого и среднего; трехступенчатые с подачей газа потребителям по газопроводам низкого, среднего и высокого – до 0,6 МПа (6 кгс/см2); многоступенчатые с подачей газа потребителям по газопроводам четырех давлений: высокого – до 1,2 МПа (12 кгс/см2) и до 0,6 МПа (6 кгс/см2), среднего и низкого.
Трехступенчатые и многоступенчатые системы газоснабжения применяют
для газоснабжения крупных городов.
Объектом наблюдения является трехступенчатая система газоснабжения с подачей газа потребителям по газопроводам низкого, среднего и высокого давления до 0,6 МПа. Таким образом, разрабатываемый тензорезистивный интеллектуальный датчик давления (ТИДД) имеет рабочий диапазон измеряемого давления от 0 до 600 КПа.
7
На газопровод установлен тензорезистивный интеллектуальный датчик
давления. Передача показаний с датчика осуществляется по сетевому протоколу на расстояние до 1000м. Тип объекта – механический. Объект функционирует в промышленном диапазоне температур от минус 40оС до 80оС.
В состав объекта входят:
- трубопровод;
- газ под давлением до 0,6 МПа.
Целевой функцией объекта является передача газа потребителю при
изменении температуры от минус 40оС до 80оС.
Функционирующий объект работает в следующих режимах:
- рабочий;
- предаварийный;
- аварийный.
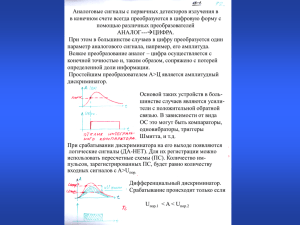
Мнемосхема объекта наблюдения представлена на рисунке 1.1.
1000м
ТИДД
газ
газопровод
Рисунок 1.1 – Мнемосхема объекта наблюдения
На мнемосхеме объекта наблюдения показано…..
1.2 Таблицы характеристик объекта наблюдения и измеряемых
переменных
Параметры входной и выходной переменных приведены в таблице 1.1:
Таблица 1.1 – Характеристики объекта наблюдения и входных переменных
Наименование входной переменной
давление
Обозначение переменной
P
Единицы измерения
Па
Диапазон измерения
0 – 600 КПа
Диапазон рабочих температур
минус 40 оС +80 оС
Наименование выходной переменной
напряжение
Обозначение переменной
U
Единицы измерения
В
Диапазон измерения
0 – 110 мВ
8
1.3 Содержание информационного объекта.
Целью обработки информации в ИКСМ является формирование информационного объекта, отдельно либо в различных сочетаниях содержащего:
текущие значения электрических сигналов
текущие значения физических переменных, измеренные в единицах
физических величин
текущие состояния физических переменных < S ,S ,…,S >;
x1i
x 2i
xDi
экстраполированные на k шагов значения физических переменных,
преобразованные в единицы физических величин
прогнозируемые на k шагов состояния физических переменных
<S
,S
,…,S
>
x1(i+k)
x2(i+k)
xD(i+k)
текущее значение функции наблюдения Y , описывающей поведение
i
объекта наблюдения;
текущее состояние объекта наблюдения S ;
Yi
прогнозируемое на k шагов значение функции наблюдения Y
прогнозируемое на k шагов состояние S
Y(i+k)
(i+k)
;
объекта наблюдения.
Приведенное содержание информационного объекта ИКСМ мониторинга,
во-первых, является не полным, т.к. например, в нем отсутствуют рекомендации оператору об управляющих воздействиях на объект,
во-вторых, информация носит обобщающий характер и слабо отражает
особенности объекта наблюдения проектируемого изделия.
Поэтому при проектировании ИКСМ необходимо уделять достаточно
внимания разработке конкретных информационных объектов, не ограничиваясь формальным подходом.
9
2 СИНТЕЗ ФУНКЦИОНАЛЬНОЙ СТРУКТУРЫ УСТРОЙСТВА
Температура
Давление
2.1 Функционально-модульная структура
Функционально-модульная структура предназначена для описания
процессов обработки информации и физических процессов в графической
форме.
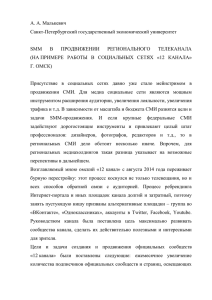
Базовое представление о функционировании ТИДД можно показать на
примере функционально-модульной структуры, представленной на
рисунке 2.1.
Отображение
измеряемых
значений на
ЖКИ
Сигнал
канала
давления
Преобразование
давления в
электросигнал
Аналоговая
обработка
сигнала
давления
АЦпреобразование
сигнала канала
давления
Проверка на
достоверность
сигнала канала
давления
Преобразование
температуры в
электросигнал
Аналоговая
обработка
сигнала
температуры
АЦпреобразование
сигнала канала
температуры
Проверка на
достоверность
сигнала канала
температуры
Сигнал
какнала
температуры
Преобразование в
значение физ. вел.
с использованием
линейных
пространственных
элементов
Формирование
пакета данных
Передача в
сетевой канал
Рисунок 2.1 – Функционально-модульная структура ТИДД
Для обеспечения возможности реализации проблемных, системных и
коммуникационных функций в блок-схеме ТИДД предусмотрены модули выполняющие соответствующие функции:
- преобразование температуры и давления в электрический сигнал;
- аналоговая обработка сигналов каналов давления и температуры;
- АЦ-преобразование сигналов каналов давления и температуры;
- проверка на достоверность сигналов каналов давления и
температуры;
- преобразование в значение физической величины с использование
модели градуировочной характеристики построенной на основе линейных
пространственных элементов;
- формирование пакета данных;
- сетевой обмен.
Функциональные модули реализованы программно-аппаратно.
10
Преобразование температуры и давления в электрический сигнал осуществляется чувствительными элементами ТИДД.
В модуле аналоговой обработки генерируются опорные напряжения для
аналого-цифрового преобразователя (АЦП), а так же фильтруются и усиливаются сигналы каналов давления и температуры.
На следующем этапе электрические сигналы поступают на АЦП, которое переводит значение сигнала в двоичный код.
Проверка на достоверность и преобразование в значение физической
величины, с использованием пространственной градуировочной характеристики, а так же формирование пакета данных производится в микроконтроллерном модуле.
Модуль сетевого обмена производит передачу пакетов данных по сетевому каналу.
Сигнал
давления
ЧЭ канала
давпения
ЧЭ канала
температуры
Сигнал
температуры
Температура
Давление
2.2 Блочная структура
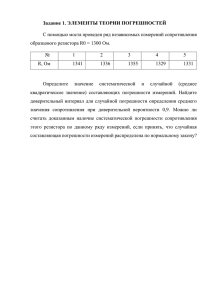
Структуру ТИДД можно представить в виде отдельных блоков, выполняющих определенные преобразования, решающих проблемные, функциональные и системные задачи. В соответствии с этим разработана блочная
структура ТИДД, представленная на рисунке 2.2.
ПАБ
Аналоговая
обработка
сигнала
давления
Аналоговая
обработка
сигнала
температуры
Генерация
опорного
напряжения для
АЦП
Сетевой
канал
АЦП
Блок
микрокон
троллера
Блок
сетевого
интерфейса
ЖКИ
Рисунок 2.2 – Блочная структура ТИДД
Чувствительные элементы (ЧЭ) осуществляют преобразование давления и температуры в электрические сигналы.
Прецизионный аналоговый блок (ПАБ) производит аналоговую обработку сигналов каналов давления и температуры и генерацию опорных
напряжений для аналого-цифрового преобразователя (АЦП).
АЦП по командам микроконтроллера преобразует поступающее с выхода ПАБ напряжение в двоичный код.
Микроконтроллер получает с АЦП данные, осуществляет проверку на
достоверность, преобразует сигналы каналов давления и температуры в дав-
11
ление с использованием линейных пространственных элементов, накапливает
результаты обработки, в результате чего создаѐтся информационный объект,
протоколирует и посылает пакеты данных в сетевой канал через блок сетевого интерфейса.
2.3 Организация во времени опроса чувствительных элементов и
обработки данных
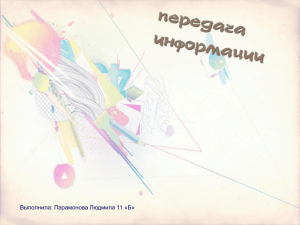
Временная диаграмма работы устройства представлена на рисунке 2.3.
АЦ-преобразование
сигнала канала
температуры
АЦ-преобразование
сигнала канала
давления
Проверка на
достоверность
значения сигнала
канала давления
Проверка на
достоверность
значения сигнала
канала
температуры
Расчет значений
давления с
использованием
линейных
пространственных
элементов
Отображение на
ЖКИ
Создание
информационного
объекта
Передача данных
tАЦП
tПНД
tВЫЧ
tЖК tСИО tПЕР
tАЦП
ТТИДД
Т
Рисунок 2.3 – Временная диаграмма работы ТИДД
t
12
Работа ТИДД связана со съемом показаний с ЧЭ, обработкой полученной информации, проверкой данных на достоверность, построением модели
с использованием градуировочных характеристик, накоплением и передачей
данных по сетевому каналу. Следовательно, время опроса, обработки и выдачи будет иметь следующие составляющие:
ТТИДД = tАЦП + tПНД + tВЫЧ + tЖК + tСИО + tПЕР ,
(2.1)
где: ТТИДД – время одного цикла съема и обработки сигналов с каналов давления и температуры;
Т – шаг дискретизации вычисления значения давления (температуры);
ТТИДД < Т,
1
T
10 f max
fmax=20Гц ,
ТТИДД < 5мс
tАЦП – время последовательного АЦ-преобразования сигналов с каналов
давления и температуры. Минимальное время АЦ-преобразования можно
выбрать исходя из того, что современные АЦП последовательного приближения имеют частоту дискретизации от 100К до 1М отсчетов/с. 12-разрядное
АЦП, входящее в состав MSP430 имеет частоту дискретизации 200 000 отсчетов/с. Учитывая, что для более стабильного преобразования желательно
использовать
меньшую
частоту,
оценим
минимальное
время
АЦ–преобразования как:
1
1
t ÀÖÏÄ t ÀÖÏT
k
2 0,00001 c 10 ìêñ ,
FÀÖÏ
200000
tАЦП= tАЦПД+ tАЦПТ ≈20 мкс;
tПНД – время проверки на достоверность (tПНД<< tАЦП);
tВЫЧ – время обработки микроконтроллером, расчет значений давления
с использованием градуировочных характеристик;
tЖК – время вывода информации на ЖКИ;
tСИО – время создания информационного объекта;
tПЕР – время передачи информации по сетевому каналу.
Расчеты длительности операций будут произведены далее.
Передача информации по сети будет осуществляться по запросу с вышестоящего уровня, этот запрос будет устанавливать флаг запроса передачи
по сети. После завершения обработки текущего изменения будет формироваться пакет информации для передачи, содержащий адрес текущего датчика,
количество проведѐнных измерений давления и их результаты. После формирования пакета осуществляется его передача по сети, часть этих операций
может осуществляться уже при проведении следующей серии измерений.
13
3 РАЗРАБОТКА АЛГОРИТМОВ РАБОТЫ СИСТЕМЫ
3.1 Постановка задачи компенсации температурной погрешности
Одной из наиболее важных проблем при разработке датчиков давления
является решение задачи компенсации дополнительной погрешности, возникающей из-за температурного влияния. Эта погрешность связанна со снижением чувствительности измерительного преобразователя при повышении
температуры, вызванного в основном уменьшением сопротивления полупроводниковых резисторов, образующих тензомост. Например, изменение температуры в диапазоне от минус 40ºС до 80ºС, может привести к изменению
выходного напряжения чувствительного элемента на 36% [7].
Решение данной проблемы в интеллектуальном датчике могут обеспечить специализированные пространственные модели градуировочные характеристики. Для этого в качестве модели градуировочной характеристики
предлагается использовать систему локальных линейных пространственных
элементов [1].
На точность вычисления давления с помощью мультисегментной пространственной градуировочной характеристики влияет выбор размеров локальных пространственных элементов.
При построении модели градуировочной характеристики необходимо
определить размер пространственных элементов, выбрав шаг разбиения рабочей области по давлению и температуре. Чем меньше будет шаг разбиения,
а соответственно, размер линейного пространственного элемента (ЛПЭ), тем
точнее возможно вычислить значение давления [1].
В приложении А приведены типичные зависимости сигналов каналов
давления и температуры от давления и температуры. При построении данных
таблиц использовались:
изменение температуры от минус 40оС до +80оС с шагом 5оС;
рабочий диапазон давления от 0 до 600 КПа с шагом 60 КПа.
3.2 Описание модели вычисления давления с использованием линейного
пространственного элемента
Для достижения прецизионной точности измерения значения физической величины в ТИДД возможно использование мультисегментной модели
градуировочной характеристики с линейными пространственными элементами [1].
Выбор модели градуировочной характеристики с линейными пространственными элементами обоснован простотой, скоростью вычислений и относительно небольшим объемом памяти для хранения аппроксимирующих ко-
14
эффициентов, что имеет большое значение при построении датчика на основе
микроконтроллеров и его работе в режиме реального времени [1]. Построение градуировочной характеристики в виде системы плоскостей позволяет
упростить вычисления в микроконтроллере и скорректировать методическую
погрешность.
Модель градуировочной характеристики датчика в виде системы элементарных пространственных элементов базируется на применении элементарной плоскости, описываемой выражением:
P= A+B1UP+B2UT ,
(3.1)
где Р – значение давления в физических величинах;
UP и UT – значения сигналов, снимаемых с каналов давления и температуры чувствительного элемента;
A, B1, B2 – коэффициенты аппроксимации, постоянные для каждой подобласти области определения UT градуировочной характеристики.
Исходной информацией для построения градуировочной характеристики являются массивы градуировочных данных канала давления и канала температуры, полученные при испытаниях сенсора в требуемых диапазонах изменения давления и температуры.
3.3 Алгоритм работы системы
3.3.1 Алгоритм функционирования ТИДД
Базовый алгоритм функционирования ТИДД показан на рисунке 3.1.
Алгоритм отражает особенности реализации процедур инициирования
АЦ-преобразования, считывания преобразованных цифровых значений сиг~
~
налов каналов давления U P и температуры U T , вычисления значений давления, накопления результатов измерений и сетевого обмена.
В схему алгоритма введены следующие обозначения:
количество АЦ-преобразований для формирования информаN
ционного объекта;
флаг приведения начала измерений к системному времени.
Ft
Устанавливается службой системного времени в начале каждой миллисекунды системного времени;
счетчик программного таймера. Декрементируется службой
СТТ –
системного времени один раз в начале каждой миллисекунды
системного времени до достижения нуля;
~
текущее значение сигнала канала
давления
после
U Pi –
АЦ-преобразования;
15
~
U Ti –
текущее значение сигнала канала температуры после АЦпреобразования;
текущее значение давления;
Рi –
~
PK(U P ,T) – функция пересчета значения давления с учетом термокомпенсации;
флаг завершения циклограммы измерений и готовности реFо
зультатов измерений, размещенных в буфере памяти МЕМORY
для выдачи в локальную сеть. Сбрасывается программно после
считывания информации из буфера;
флаг запроса передачи по сети.
Fnet
16
1
Начало
2
3
2
2
2
N=0
Инициализация счетчика АЦ-преобразований для
формирования информационного объекта
Начало нового цикла измерений
3
Нет
Ft=0
Программный сброс флага привязки к системному времени
Ft=1
Ожидание установки флага Ft системным таймером
4
Да
Начало нового АЦ-преобразования
5
CTT=T
Инициализация счетчика-таймера T цикла измерений
6
АЦпреобразование
~ ~
пары U Pi , U.Ti
7
Проверка на
достоверность
8
~
~
Pi P ( U Pi ,U Ti )
9
P==>MEMORY
10
N=N+1
Пересчет результатов АЦ-преобразований в значения
измеряемого давления с учётом температурной погрешности
Пересылка результатов очередного измерения (АЦпреобразования) в буфер памяти
Наращивание числа проведенных вычислений значения
давления
2
1
Рисунок 3.1 – Алгоритм функционирования ТИДД. Лист 1. Всего листов – 2
17
1
1
11
Нет
Fo=1
Завершений измерения, результаты вычисления давления
расположены в буфере памяти, и могут быть отправлены по
стети
Fin=0
Завершить выполнение измерений?
12
Да
13
Конец
Нет
14
Fnet=1
Нет
15
Поступил запрос на передачу информации по сети?
Да
CTT=0
16
Подготовка и
передача
сетевого пакета
Да
1
2
Нет
17
CTT=0
Начать новое измерение?
Да
1
3
Рисунок 3.1 – Продолжение. Лист 2
Следует отметить, что после запуска ТИДД происходит первоначальное
накопление информации, при этом операции, требующие предысторию, не
осуществляются. Пуск измерений выполняется автоматически после инициализации ТИДД. Затем осуществляется привязка момента начала измерений к
началу очередной миллисекунды системного времени. После этого начинается выполнение цикла измерений.
Устанавливается счетчик количества АЦ-преобразований (N) для формирования информационного объекта. Поступившие на вход АЦП значения
сигналов каналов давления и температуры подвергаются АЦ-преобразованию
и проверке на достоверность. После чего пересчитываются в значения физической величины давления с применением линейных пространственных элементов. Затем наращивается счетчик N. Результаты выполненных преобразований записываются в буфер памяти МЕМORY для передачи по запросу в сетевой канал.
Если в процессе обработки поступил запрос на передачу по сети и был
установлен флаг Fnet в единицу, то после обработки происходит подготовка и
передача сетевого пакета, и обнуляется счетчик N.
18
При достижении обратного счетчика CTT значения 0 будет начат новый
цикл измерений.
3.3.2 Алгоритм проверки данных на достоверность
На рисунке 3.1 в блоке 7 осуществляется проверка на достоверность.
Проверку на достоверность производят для снижения влияния импульсной
помехи, возникающей из-за сильных электромагнитных наводок и обрывов
или коротких замыканий в канале связи чувствительных элементов и микроконтроллера.
Для
определения
достоверности
результата
текущего
АЦ-преобразования находится разница между текущим и предыдущим результатом АЦ-преобразования. Если полученная разница не превышает максимально допустимое значение Dmax , то полученное значение достоверное.
Если же полученная разница превышает
то текущее
Dmax ,
АЦ-преобразование является недостоверным и заменяется на предыдущее
достоверное значение АЦ-преобазования. В случае трѐх недостоверных АЦпреобразований подряд ТИДД считается неисправным, хотя продолжает работу в штатном режиме.
Модуль максимально возможного значения величины изменения кодов,
полученных в результате двух последовательных АЦ-преобразований измеряемой величины, можно определить как:
(3.2)
Dmax ( Dìàêñ Dìèí ) sin( f ìàêñ t ) ,
где Dмакс – максимально возможное значение кода после выполнения АЦпреобразования измеряемой величины;
Dмин – минимально возможное значение кода после выполнения АЦпреобразования измеряемой величины;
fмакс – верхняя граничная частота спектра измеряемого сигнала;
Δt – величина интервала времени между двумя последовательными АЦпреобразованиями измеряемой величины.
Например, для двенадцатиразрядного АЦП принято: Dмакс=4090,
Dмин=5 и fмакс=20Гц. Известно также время между смежными АЦпреобразованиями измерительного сигнала давления Δt = 5мс. В результате
расчета по формуле (3.2) получаем ΔDmax = 22,39. Для предотвращения
ложного срабатывания алгоритма проверки на достоверность связанного с
наличием шумовой помехи в сигнале, выберем ΔDmax = 25.
В случае, если АЦП будет иметь разрядность отличную от двенадцати,
то необходимо пересчитать модуль максимально возможного значения величины изменения кодов по выражению 3.2.
Приведѐм на рисунке 3.2
алгоритм проверки значений
АЦ-преобразований на достоверность.
Если в результате проверки на достоверность выявили недостоверность
текущего АЦ-преобразования канала давления или температуры выставляется флаг недостоверности соответствующего АЦ-преобразования.
19
Начало
Ввод исходных
данных
Считывание количества
предыдущих недостоверных
значений канала давления (KОД)
~
~
U Pi U P(i -1)
да
( K oД 1 ) D max
нет
KoД=0
KoД=KoД+1
~
~
U Pi U P(i
- 1)
KoД=3
да
KoД=0
нет
Установка флага неисправности
в канале давления
Считывание количества
предыдущих недостоверных
значений канала температуры (KОТ)
~
~
U Ti U T(i - 1)
да
( K oT 1 ) D max
нет
KoТ=0
KoТ=KoТ+1
~
~
U Ti U T(i - 1)
KoT=3
нет
да
KoT=0
Установка флага неисправности
в канале температуры
Конец
Рисунок 3.2 - Алгоритм проверки данных на достоверность
20
3.3.3 Базовый алгоритм преобразования значений сигналов каналов давления
и температуры в значение давления при использовании линейных
пространственных элементов
При построении алгоритмов вычислений значений давления с компенсацией температурной погрешности для микроконтроллеров следует учитывать
ограничения связанные с [1]:
ограниченным набором арифметико-логических операций, например, отсутствует операция деления;
сокращѐнными форматами обработки данных (8-, 16-битные разрядные стеки);
представлением чисел, с фиксированной точкой, целыми числами и
их обработкой в целочисленной арифметике;
необходимостью введения масштабных коэффициентов для обеспечения высокоточных вычислений с данными, различающимися на несколько
порядков;
использованием для обработки в микропроцессоре данных сформированных АЦП, чаще всего в виде 10-, 12-, 14-разрядных чисел.
Поэтому используем масштабирование выражения (3.1):
~
~
~
~
B1ЛПЭU P B2 ЛПЭU T
~
AЛПЭ
M B (M)
~
ЛПЭ
,
(3.3)
PЛПЭ
M A(M)
ЛПЭ
~
где PЛПЭ – значение давления, вычисленное с использованием линейных
пространственных элементов,
~
~
~
AЛПЭ , B1ЛПЭ , B2 ЛПЭ – масштабированные коэффициенты аппроксимации,
вычисленные заранее,
M A(M) , M B (M) – масштабные коэффициенты.
ЛПЭ
ЛПЭ
На рисунке 3.3 представлен алгоритм вычислений значений давления с
использованием линейных пространственных элементов.
21
1
Начало
Ввод исходных данных:
~ (M)
~
~ (M)
– коэффициенты
AЛПЭ
, B1(M)
ЛПЭ , B2 ЛПЭ
аппроксимации;
M *B , M *A – степени двойки масштабных
коэффициентов;
~
~
U (TгрЛПЭ ) ,U P(грЛПЭ ) – массивы граничных
значений областей сигналов;
NPЛПЭ, NTЛПЭ – количество границ областей
разбиения ПГХ по давлению и температуре.
(M)
ЛПЭ
Нет
2 Поступили значения
~ ~
U T ,U P ?
Да
3
4
5
6
7
(M)
ЛПЭ
Ожидание оцифрованных
значений сигналов U~T , U~P
для вычислений значений
давления
Определение области разбиения ГХ по температуре.
Определение области разбиения ГХ по давлению.
Считывание коэффициентов аппроксимации,
соответствующих найденной области разбиения ГХ.
Вычисление значения давления с использованием
линейного пространственного элемента с учѐтом
масштабирования.
Сохранение вычисленного масштабированного
значения давления.
8
Конец
Рисунок 3.3 – Блочная структура алгоритма вычислений значений давления
с использованием линейных пространственных элементов
Для вычисления значений давления с применением линейных пространственных элементов требуется хранить в памяти микроконтроллера:
22
~
~
~
AЛПЭ , B1ЛПЭ , B2ЛПЭ – заранее вычисленные и промасштабированные коэффициенты аппроксимации,
M *B , M *A – степени двойки масштабных коэффициентов,
(M)
ЛПЭ
(M)
ЛПЭ
U~P( грЛПЭ ) – массив граничных значений областей разбиения градуировочной характеристики по давлению,
U~ (TгрЛПЭ ) – массив граничных значений областей разбиения градуировочной характеристики по температуре,
NPЛПЭ, NTЛПЭ – число границ областей разбиения градуировочной характеристики (ГХ) по давлению и температуре.
После поступления на обработку сигналов каналов давления и температуры определяется область разбиения ГХ по температуре и давлению, соответствующая поступившим значениям сигналов каналов давления и температуры. Зная текущую область разбиения ГХ, считывается из памяти микроконтроллера значения коэффициентов аппроксимации. Используя считанные
коэффициенты аппроксимации рассчитываем значение давления по выражению (3.3), которое после этого сохраняются в памяти микроконтроллера для
дальнейшей передачи по сетевому каналу.
3.3.4 Алгоритм определения области разбиения ГХ по температуре
Блочная структура алгоритма определения области разбиения ГХ по
температуре представленного на рис. 3.3 блоком 3 приведѐна на рис. 3.4.
Алгоритм определения области разбиения ГХ по температуре, которой
принадлежат текущие значения сигналов каналов давления и температуры,
базируется на том, что сигнал канала температуры не зависит от изменения
давления. Соответственно, массив граничных значений областей сигналов
канала температуры является одномерный, а для определения области разбиения ГХ по температуре, соответствующей текущим значениям сигналов каналов давления и температуры, достаточно найти область разбиения ГХ по
~
температуре, в которой поступившее значение сигнала U T будет меньше значения верхней границы области разбиения ГХ по температуре, и больше либо
равно значению нижней границы области разбиения ГХ по температуре. Так
как с ростом температуры происходит увеличение сопротивления терморезистора, а следовательно, уменьшение уровня сигнала канала температуры
верхняя граница области разбиения ГХ по температуре будет иметь меньший
индекс, чем нижняя. При составлении данного алгоритма использовалась индексация массивов с 1.
23
Начало
Установка счѐтчика выбора области
разбиения ГХ по температуре
j=1
Да
Проверка сигнала канала
температуры на равенство или
превышение максимально
допустимого значения 1-й области
разбиения ГХ
~
~
)
U T U T( (грЛПЭ
1)
Нет
Нет
~
~
)
U T U T( (грЛПЭ
j)
Проверка, принадлежит ли
поступившее значение сигнала с
канала температуры текущей
области разбиения ГХ по
температуре
Да
Нет
~
~
)
U T U T( (грЛПЭ
j 1 )
Да
Текущие значение сигнала U~T
принадлежит j-й области разбиения
ГХ по температуре
j P( гр ) j
1
Переход к следующей области
разбиения ГХ
j=j+1
Нет
Проверка, достигнута ли
последняя граница областей ГХ
по температуре?
j=NTЛПЭ
Да
Текущее значение сигнала U~T
принадлежит области максимальных
значений разбиения ГХ по
температуре
j P( гр ) N TЛПЭ 1
1
~
j
( гр )
P
Текущие значение сигнала U T
находиться в 1-й области
разбиения ГХ по температуре
1
1
Конец
Рисунок 3.4 – Блочная структура алгоритма определения области
разбиения ПГХ по температуре
24
3.3.5 Алгоритм определения области разбиения ГХ по давлению
Блочная структура алгоритма определения области разбиения ГХ по
давлению представленного на рисунке 3.3 блоком 4 приведѐна на рис. 3.5.
Начало
Нет
i=1
Установка счѐтчика выбора области
разбиения ГХ по давлению
~
~
)
U P U P( грЛПЭ
( 1 , j ( гр ) )
Сравнение значения сигнала канала
давления с максимально
допустимым значением
P
Да
Текущие значение сигнала U~P
принадлежит первой области
разбиения ГХ по давлению
iP( гр ) 1
1
2
Нет
~
~
)
U P U P( грЛПЭ
( i , j ( гр ) )
P
Проверка, принадлежит ли
поступившее значение сигнала с
канала давления текущей области
разбиения ГХ по давлению
Да
Нет
~
~
)
U P U P( грЛПЭ
( i 1 , j ( гр ) )
P
Да
i
( гр )
P
i
Текущие значение сигнала U~P
принадлежит области разбиения
ГХ по давлению с номером i
1
i=i+1
Нет
i=NPЛПЭ
Да
2
i
( гр )
P
N PЛПЭ 1
Переход в следующую область
разбиения ГХ
Проверка, достигнута последняя
граница областей ГХ по давлению?
Текущее значение сигнала U~P
принадлежит области разбиения
ГХ для максимальных давлений
1
Конец
Рисунок 3.5 - Блочная структура алгоритма определения области разбиения
ГХ по давлению
25
Так как сигнал канала давления зависит от изменения давления и температуры, массив граничных значений областей разбиения ГХ по давлению
будет двумерный. Алгоритм определения области разбиения ГХ по давлению,
~
~
которой принадлежат текущие значения сигналов UT и U P , основан на монотонности изменения сигнала канала давления от давления при фиксированной температуре. Используя найденную ранее область разбиения ГХ по температуре, найдем область разбиения ГХ по давлению, в которой поступившее
~
значение сигнала U P будет меньше значения верхней границы области разбиения ГХ по давлению, и больше либо равно значению нижней границы области разбиения ГХ по давлению.
Следует учесть, что индексация массивов при составлении этого алгоритма осуществлялась с 1.
После нахождения области разбиения ГХ, соответствующей поступившим значениям сигналов каналов давления и температуры, и считывания необходимых коэффициентов аппроксимации вычисляются значения давления.
3.3.6 Алгоритм вычисления значения давления с использованием линейных
пространственных элементов
Блочная структура алгоритма вычисления масштабированного значения
давления с использованием линейных пространственных элементов и с использованием выражения (3.3) представленного на рис. 3.3 блоком 6 приведѐна на рис. 3.6.
26
Начало
~ ~ M)
~
P1 B2( ЛПЭ
U
( i ( гр ) , j ( гр ) ) T
Вычисление масштабированного
произведения
~ ~ M)
~
P2 B1(ЛПЭ
U
( i ( гр ) , j ( гр ) ) P
Вычисление масштабированного
произведения
P
P
P
P
~ ~ ~
P3 P1 P2
Арифметический сдвиг
*
вправо на M B
разрядов
~
двоичного значения P3
(M)
ЛПЭ
~( M )
~
~
PЛПЭ AЛПЭ
P3
( i ( гр ) , j ( гр ) )
P
P
Арифметический сдвиг
вправо на M *A разрядов
~
двоичного значения PЛПЭ
(M)
ЛПЭ
Нет
Последний
отброшенный
разряд =1?
Вычисление масштабированной суммы
Демасштабирование вычисленного
значения
Вычисление масштабированного
значения текущего давления
Демасштабирование вычисленного
значения
Округление P~ЛПЭ до ближайшего
целого
Да
~
~
PЛПЭ PЛПЭ 1
Конец
Рисунок 3.6 – Блочная структура алгоритма вычисления значения давления с
использованием линейных пространственных элементов
В результате выполнения алгоритмов приведенных на рисунках 3.3 –
3.6 будет вычислено значение давления с компенсацией влияния температуры по текущим значения сигналов с чувствительных элементов.
27
4 ВЫБОР ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ, ВХОДЯЩИХ В ТИДД
4.1 Определение предельно допустимых погрешностей исходя из баланса
погрешностей
Выбор датчиков осуществляется с учетом многих параметров: точности, стоимости, потребляемой электроэнергии, скорости преобразования, выходному напряжения и так далее. Одним из наиболее важных параметров
датчика является его погрешность преобразования, поэтому, выбор датчика
начнѐм с определения его предельно допустимой погрешности.
Запишем баланс погрешностей для ТИДД:
(4.1)
Согласно [1] при верном подходе к масштабированию выражения (3.1),
описывающего линейный пространственный элемент, применение вычислений в целочисленном формате не приведѐт к существенному увеличению погрешности. Учитывая это, оценим аналитически предельно допустимые
трансформированную, методическую и инструментальную погрешности:
0.9 0.9 0.3% 0.27% ,
0.1 .
4.2 Оценка предельно допустимой погрешности чувствительных
элементов, входящих в ТИДД
Для оценки предельно допустимой погрешности датчика необходимо
оценить трансформированную погрешность ТИДД. Такая оценка может производиться аналитическим либо компьютерным способом. Использование
аналитического способа в данном случае затруднено, так как для этого придется проанализировать все функции, составляющие математическую модель
в градуировочной характеристики, что согласно [1] составляет порядка 240
функциональных зависимостей. Поэтому, оценку трансформированной и методической погрешности, выбор погрешности датчика проведѐм с использованием компьютерных оценок.
4.2.1 Описание компьютерной модели
Для компьютерного моделирования вычисления значений давления с
использование линейных пространственных элементов используем типичные
экспериментальные значения градуировочной характеристики тензорезистивного чувствительного элемента и терморезистора, приведѐнные в приложении А. Если выбранные в ходе работы чувствительные элементы будут
иметь отличную от приведенной градуировочную характеристику, выводы,
полученные в результате компьютерного моделирования, не изменятся. Но
при программировании ТИДД необходимо заново рассчитать коэффициенты.
28
Графически градуировочную характеристику тензорезистивного чувствительного элемента можно показать на рисунках 4.1 – 4.3.
Рисунок 4.1 – График пространственной градуировочной характеристики
тензорезистивного чувствительного элемента
Рисунок 4.2 – График зависимости канала давления от температуры
29
Рисунок 4.3 – Изменение сигнала ЧЭ от давления при минимальной и
максимальной температурах
Математическую модель составим с использованием языка программирования математической системы MATLAB. На начальном этапе работы программы из файла coefficient.mat считываются значения ранее рассчитанных
без использования масштабирования коэффициентов аппроксимации, значения сигнала канала давления и температуры, и эталонные значения давления.
Значения давления изменяются в диапазоне от 0 до 600 КПа с шагом 60 КПа,
значения температуры находятся в диапазоне от минус 40оС до 80 оС с шагом
5 оС. При расчѐте коэффициентов аппроксимации использовался шаг по давлению 120КПа. Значения, не участвующие в расчѐте коэффициентов аппроксимации, будут использоваться для оценки погрешности вычислений значений давления в не узловых точках градуировочной характеристики.
Затем из всего множества значений сигнала каналов давления и температуры выбирается пара для преобразования в значения давления с использованием линейных пространственных элементов. Для этих значений осуществляется нахождение текущей области разбиения градуировочной характеристики по температуре согласно алгоритму, приведѐнному на рисунке 3.4.
Далее с использованием алгоритма показанного на рисунке 3.5 определяется
область разбиения ГХ по давлению, соответствующая текущим значениям
сигналов каналов давления и температуры и по алгоритму, приведѐнному на
рисунке 3.6, вычисляется значение давления с использованием линейных
пространственных элементов. Затем оценивается погрешность вычисления
значения давления с использованием линейных пространственных элементов.
Операции определения области определения разбиения градуировочной ха-
30
рактеристики по температуре и давлению и вычисление значений давления с
использованием линейных пространственных элементов осуществляется для
всех значений сигналов каналов давления и температуры считанных из файла
coefficient.mat.
Для оценки влияния погрешности данных каналов давления и температуры на точность вычисления давления, производим наложение на сигнал с
канала давления или температуры или на сигналы с обоих каналов погрешность, с шагом 0,01% от диапазона изменения сигнала текущего канала и
производим оценку погрешности вычисления значений давления. Текст компьютерной модели в математической среде MATLAB приведѐн в
приложении Б.
4.2.2 Результаты компьютерного моделирования
На представленных ниже рисунках показаны результаты моделирования вычисления значений давления с применением линейных пространственных элементов в математической среде MATLAB по данным содержащим погрешность.
Рисунок 4.4 – Зависимость погрешности вычислений значений давления от
погрешности исходных данных
По зависимости погрешности вычислений значения давления от погрешности исходных данных, представленной на рисунке 4.4 можно оценить
31
методическую, трансформированную погрешности вычисления значений
давления.
На рисунке 4.4 при относительной погрешности датчика равной 0 получим оценку методической погрешности, в данном случае она равна
0.114%, что соответствует результатам приведѐнным в литературе [1].
Верхний график на рисунке 4.4 показывает зависимость погрешности
вычисления значений давления от величины погрешности присутствующей
одновременно в сигналах каналов давления и температуры.
Согласно рисунку 4.4 необходимо выбрать чувствительные элементы
сигналов каналов давления и температуры с погрешностью не выше 0.15%. В
этом случае методическая погрешность (εμ) составит 0,114%, трансформированная погрешность (εν) составит 0.156%, а суммарная погрешность вычисления значений давления в ТИДД не превысит 0.3%.
4.3. Выбор чувствительных элементов
Для упрощения процесса разработки и производства ТИДД в качестве
чувствительных элементов целесообразно выбрать уже готовые чувствительные элементы (датчики, первичные преобразователи) известных фирм производителей включающие в себя и аналоговый модуль.
В таблице 4.1 приведены характеристики нескольких чувствительных
элементов давления [8,9,10].
Таблица 4.1 – Характеристики чувствительных элементов давления
Фирма производитель
Motorola
Honeywell
DRUCK
Тип датчика
MPX5700
4040PC100G1A
РМР4000
Рабочий диапазон, кПа
0…700
0…690
0…700
Чувствительность, мВ/кПа
6,4
3,86
4,9
Погрешность измерений, %
±2,5
±0,1
±0,04
Диапазон рабочих
-40...+125
-40...+125
-20...+80
температур, °С
Выходное напр. Usp, В
0…4,5
0…4
0…5
Напр. питания, В
5,0
5,0
от 9 до 30 В
Проанализировав таблицу 4.1 выберем чувствительный элемент
Honeywell 4040PC100G1A, так как он, в отличии от остальных, удовлетворяет
требованиям по точности и диапазону рабочих температур.
В таблице 4.2 приведены характеристики нескольких чувствительных
элементов (датчиков, первичных преобразователей) температуры [11].
32
Таблица 4.2 – Характеристики чувствительных элементов температуры
Фирма
NATIONAL
NXP
Honeywell
производитель
Semiconductor Semiconductors
LM35CA
Наименование
703-101BBB-A00
LM75AD.112
Тем. диапазон, °C
-50...130
-40...100
–55...+150
Погрешность, %
Напряжение
питания, В
±0,12
±0,72
±1,6
5
4,0...30,0
2,5...5,5
Проанализировав таблицу 4.2 выберем чувствительный элемент
Honeywell 703-101BBB-A00, так как он удовлетворяет требованиям по погрешностям.
33
5 ВЫБОР СЕТЕВОГО ИНТЕРФЕЙСА И ПРОТОКОЛА
После приема и обработки значений сигналов давления и температуры
снятых ТИДД с объекта наблюдения необходимо организовать их передачу
по сетевому каналу на расстояние до 1000 метров. Для этого необходимо выбрать логический протокол и тип последовательного интерфейса, обеспечивающие передачу данных с требуемыми для разработки параметрами.
Для сравнения основные характеристики наиболее часто используемых
протоколов приведены в таблице 5.1.
Таблица 5.1 – Основные характеристики протоколов
CAN
HART
MODBUS
PROFIBUS
Шина с термиСтруктура
Точка–точка,
Звезда,
Линия,
наторами на
сети
звезда.
шина.
дерево.
концах.
Витая пара, сиСпециальный
Экранироловые линии
физический
ванная и неэлектропередаЭкранироинтерфейс не
экранироСреда печи, радиоканал, ванная витая
определен.
ванная витая
редачи
оптоволокно,
пара.
Наиболее распара, оптикоаксиальный
пространен
ческий какабель.
RS-485.
бель.
Длина со15 датчиков
15 м - RS232
от 100 м до
единитель30 м - 5000 м
0,7 км-1,8 км 1200 м - RS485
1,2 Км
ной линии
Скорость
1 Мбит/с
0,6 КБит/с
12 Мбит/с
до 1,2 Кбит/с
передачи
10 Кбит/с
19,2КБит/с
9,6 Кбит/с
Принцип
Доступ к канаорганизаMaster-Slave
MASTERMASTERлу с коллизияции коммуSLAVE
SLAVE
ми.
никации
МаксиЧисло узлов: до 15 датчиков
мальное
127 на сегменте на одной ликоличество
нии.
устройств
247 SLAVEузлов
32 узла на
сегмент
(всего до
127)
Адресация
Жестко установленные адреса устройствузлов
Жестко
установленные адреса
Жестко установленные адреса устройствузлов.
Жестко
установленные адреса
Питание
устройств
по линии
связи
зависит от среды передачи
да
зависит от среды передачи
да
34
Для передачи данных с ТИДД был выбран протокол Modbus, представляющий собой локальную вычислительную сеть для промышленных предприятий. Специальный физический интерфейс для данного протокола не
определен. Наиболее часто используют RS-485. Так как в разрабатываемом
устройстве передача будет осуществляться на расстоянии 1000м, был выбран
RS485, поддерживающий длину кабеля 1200м. Скорость передачи по протоколу Modbus от 0,6 КБит/с до 19,2 КБит/с. Кроме того этот протокол использует принцип организации коммуникации MASTER-SLAVE и максимальное
количество узлов 247 SLAVE-узлов. А при использовании на физическом
уровне RS–485, задачи канального уровня, решают программным путем.
Стандарт RS-485 был совместно разработан двумя ассоциациями производителей: Ассоциацией электронной промышленности (EIA- Electronics
Industries Assotiation) и Ассоциацией промышленности средств связи (TIATelecommonications Industry Assotiation). EIA некогда маркировала все свои
стандарты префиксом «RS» (рекомендованный стандарт).
Стандарт RS-485 и RS-422 имеют много общего и поэтому их часто
путают. В таблице 5.2 приведены характеристики этих стандартов. RS-485,
определяющий двунаправленную полудуплексную передачу данных, являются единственным стандартом EIA/TIA, допускающие множественны приемники и драйверы в шинных конфигурациях. C другой стороны, RS-485 определяет единственный однонаправленный драйвер с множественными приемниками. Элементы RS-485 обратно совместимы и взаимозаменяемы со своими двойниками из RS-422[3].
35
Таблица 5.2 - Сравнительные характеристики стандартных физических
интерфейсов
Параметр
RS-422
RS-485
Режим работы
Дифференц.
Дифференц.
Допустимое число Tx и Rx
1 Tx 10 Rx
32 Tx 32 Rx
Максимальная длина кабеля
1200м
1200м
Максимальная скорость передачи данных
10Мбит/с
10Мбит/с
Минимальный выходной диапазон драйве±2 В
±1,5 В
ра
Максимальный выходной диапазон драй±5 В
±5 В
вера
Максимальный ток короткого замыкания
150 мА
250 мА
драйвера
Сопротивление нагрузки Тх
100 Ом
54 Ом
Чувствительность по входу Rx
±200 мВ
±200 мВ
Максимальное входное сопротивление Rx
4 кОм
12 кОм
Диапазон напряжений входного сигнала
±7 В
От -7 до +12 В
Rx
Уровень логической единицы Rx
>200 мВ
>200 мВ
Уровень логического нуля Rx
>200 мВ
>200 мВ
Последовательный интерфейс RS-485 обладает требуемыми параметрами, в частности передачей данных с максимальной скоростью 10 Мбит/с,
на максимальное расстояние 1200 м. Помимо этого, RS-485 поддерживает
многоточечные соединения, обеспечивая создание сетей с количеством узлов
до 32, и обладает возможностью увеличения расстояние передачи еще на
1200 м и расширения количества узлов до 64 засчет использования повторителей.
Исходя из анализа требований к интерфейсам обмена данными, имея
сравнительные характеристики стандартных физических интерфейсов, представленных в таблице 5.2, для передачи данных в сетевой канал выбрали последовательный интерфейс RS-485.
36
6 ВЫБОР АЦП И МИКРОКОНТРОЛЛЕРА
6.1 Расчет разрядности АЦП
Для исключения влияния инструментальной погрешности на точность
ТИДД необходимо выбрать разрядность АЦП, достаточную для заданной
точности измерений. Для расчета разрядности АЦП воспользуемся формулой:
X X min
1
N E log 2 max
дат
где Е – функция округления до ближайшего большего целого,
Xmax, Xmin – минимальное и максимальное значение измеряемой величины,
Δдат – максимальная погрешность выбранного датчика,
ρ≤0.5 – коэффициент.
Определим предельно допустимую абсолютную погрешность выбранного чувствительного элемента давления:
( P P )
( 600000 0 )0.1
ä max vim ä
600 Ïà .
100
100
Следовательно, для канала давления необходимо выбрать разрядность
АЦП равную:
600000 0
N ä E log 2
1 12.
0,5 600
Определим предельно допустимую абсолютную погрешность выбранного чувствительного элемента температуры:
( T T )
( 80 ( 40 ))0.12
T max vim ä
0.144o C .
100
100
Следовательно, для канала температуры необходимо выбрать разрядность АЦП равную:
80 ( 40 )
NT E log 2
1 12.
0,5 0.144
Исходя из приведѐнных расчѐтов, выберем разрядность АЦП – 12 бит.
Учитывая, что в микроконтроллере будут обрабатываться минимум двенадцати битные данные, а коэффициенты аппроксимации имеют размер 16 бит, желательно выбрать 16-разрядный микроконтроллер, либо придется использовать удвоенную разрядную сетку при применении 8-разрядного микроконтроллера, что приведет к увеличению объема математических операций.
6.2 Оценка объема требуемой памяти для хранения программы ТИДД
Для выбора микроконтроллера необходимо оценить требуемый объѐм
памяти для хранения рабочей программы. Программа съѐма, обработки и передачи информации в ТИДД включает в себя рассчитанные заранее коэффи-
37
циенты аппроксимации. В рассмотренном случае в памяти микроконтроллера
будет храниться массивы масштабированных коэффициентов аппроксимации
~
~
~
( AËÏÝ , B1ËÏÝ , B2 ËÏÝ ), каждый из которых состоит из 5 строк и 24 столбцов, в
которых хранятся 16 битные данные [1]. Так же в памяти микроконтроллера
необходимо хранить два 16-битных коэффициента масштабирования. Следовательно, для хранения исходных данных потребуется 3 5 24 2 2 2 724
байта. Кроме того в программной памяти микроконтроллера необходимо хранить код программы. Оценить размер программы без написания программы
затруднительно, так как потребует задание требуемого языка программирования, выбора типа микроконтроллера, способов адресации, реализации переходов, математических операций и так далее. Кроме того следует учесть, что
программа в ходе разработки ТИДД может существенно модернизироваться.
Поэтому для оценки общего размера памяти для хранения программы ТИДД
увеличим объѐм памяти необходимый для хранения коэффициентов аппроксимации в четыре раза. Следовательно, для хранения программы ТИДД потребуется 2896 байта.
6.3 Оценка объема оперативной памяти
В оперативную память входят все данные, которые необходимо хранить
во время работы устройства. Такими данными являются текущие и предыдущие значения сигналов, полученных с каналов давления и температуры, номера текущей области разбиения ГХ по давлению и температуре, левая и
правая границы области разбиения ГХ (четыре шестнадцати битных значения), три найденных коэффициента аппроксимации, до пяти значений вычисленных значений давления и семь значений флагов. В сумме получается 51
байт. Кроме того, в памяти необходимо хранить пакет для сетевого обмена,
который будет составлять порядка 120 байт. Итого минимально необходимый
объем памяти составит 171 байт. Но для обеспечения модернизации ТИДД и
облегчения работы программиста увеличим это значение втрое. Исходя из
этого необходимо выбрать микроконтроллер с объемом оперативной памяти
не менее 512 байт.
6.4 Расчет требований к быстродействию микроконтроллера
Для выбора микроконтроллера необходимо оценить его требуемое
быстродействие. Расчет быстродействия микроконтроллера основывается на
оценке объема вычислительной сложности алгоритма работы ТИДД. Объем
вычислительной сложности определяется подсчѐтом количества машинных
операций по наиболее длинной ветви алгоритма функционирования ТИДД
приведенного на рисунке 3.1, по которой строится граф, вершины которого
представляют собой команды, отражающие детальное описание вершин ал-
38
горитма, а дуги определяют логическую последовательность выполнения команд. При этом вершина может отображать как одну команду, так и группу
однотипных команд.
Приведѐм в таблице 6.1 количество машинных циклов затрачиваемых
при выполнения различных команд для типичного микроконтроллера [6].
Таблица 6.1 – Количество машинных циклов затрачиваемых при выполнения
различных команд
Группы однотипных команд
Количество машинных циклов
Возврат из прерывания (ВП)
5
Получение прерывания (ПП)
6
1–4
Засылка (ЗА)
в зависимости от выбранного
способа адресации
Суммирование (СЛ)
4
Вычитание (ВЧ)
4
Умножение (У)
6
Подготовка цикла (ПЦ)
2
Конец цикла (КЦ)
2
Сравнение (СР)
6
Безусловный переход (БП)
3
Наращивание переменной (НП)
1
Арифметический сдвиг переменной (СП)
1
Приведѐм на рисунке 6.1 граф наиболее длинной ветви общего алгоритма функционирования ТИДД.
4
4
6
4
ЗА
ЗА
ПП
ЗА
4
1
4
6
6
3
ЗА
НП
ЗА
СР
СР
БП
АЦП
Пров. дост.
Выч. давл.
Сетевой
обмен
Рисунок 6.1 – Граф наиболее длинной ветви общего алгоритма
функционирования ТИДД
Для реализации наиболее длинной ветви общего алгоритма
функционирования ТИДД потребуется 42 машинных тактов. Следует учесть,
39
что в данном графе не приведены операции связанные с проверкой данных на
достоверность и вычислением значений давления с использованием
линейных пространственных элементов.
Приведѐм на рисунке 6.2 граф наиболее длинной ветви алгоритма
проверки данных на достоверность (рисунок 3.2).
4
4
4
4
4
6
6
3
1
4
ЗА
ЗА
ЗА
ВЧ
СЛ
У
СР
БП
НП
ЗА
6
3
4
4
4
4
4
4
4
СР
БП
ЗА
ЗА
ЗА
ЗА
ЗА
ВЧ
СЛ
6
6
3
1
4
6
3
4
4
У
СР
БП
НП
ЗА
СР
БП
ЗА
ЗА
Рисунок 6.2 – Граф наиболее длинной ветви алгоритма проверки данных на
достоверность
Для реализации наиболее длинной ветви алгоритма проверки данных
на достоверность потребуется 114 машинных тактов.
Приведѐм на рисунке 6.3 граф наиболее длинной ветви алгоритма вычислений значений давления с использованием линейных пространственных
элементов (рисунок 3.3 – 3.6).
4
6
6
1
6
6
6
4
ЗА
СР
СР
НП
СР
СР
СР
ЗА
максимум 13*23
машинных циклов
БП
3
4
6
6
1
6
6
6
4
ЗА
СР
СР
НП
СР
СР
СР
ЗА
максимум 13*4
машинных циклов
БП
3
4
6
4
6
4
1
4
4
1
6
1
ЗА
У
ЗА
У
СЛ
СП
ЗА
СЛ
СП
СР
НП
Рисунок 6.3 – Граф наиболее длинной ветви алгоритма вычислений значений
давления с использованием линейных пространственных элементов
40
Для реализации наиболее длинной ветви алгоритма вычислений
значений давления с использованием линейных пространственных элементов
потребуется 527 машинных тактов.
Из анализа рисунков 6.1 – 6.3 можно сделать вывод, что для реализации
съѐма и обработки информации в ТИДД потребуется минимум 683
машинных цикла. Кроме того следует учесть что для реализации сетевого
обмена необходимо подготовить пакет, для этого потребуется порядка 14
операций засылки (более точное число операций будет определено при
окончательном выборе набора информации передаваемой по сети), это
добавит к общему числу машинных циклов ещѐ 56 машинных цикла.
В результате для проведения одного цикла измерений и сетевого
обмена микроконтроллеру необходимо выполнить 739 машинных цикла
(NМЦ).
Для расчѐта требуемого быстродействия микроконтроллера определим
время обработки информации, для этого из общего времени дискретизации
вычисления значения давления (ТТИДД) равному 5мс необходимо вычесть
время АЦ–преобразования сигнала канала давления и температуры. В
результате максимальное время, затраченное на обработку информации
составит порядка 4.98мс.
Рассчитаем максимальное время одного машинного цикла при работе
ТИДД:
TÒÈÄÄ ÒÀÖ 4.98 ìñ
t
6.8 ìêñ .
N ÌÖ
739
Следовательно, микроконтроллер, входящий в ТИДД должен
выполнять 1.5∙105 операций в секунду, то есть его производительность
должна быть не меньше 0.15 mips.
Следует учесть, что для модернизации ТИДД и упрощения написания
программы желательно иметь запас по быстродействию микроконтроллера.
6.5 Выбор микроконтроллера
Для подключения к микроконтроллеру каналов давления и температуры, жидкокристаллического индикатора потребуется минимум 10 портов ввода/вывода. Для организации обмена по сети необходим UART.
Выдвинутым требованиям удовлетворяют несколько микроконтроллеров различных производителей. Все они представлены в таблице 6.2.
41
Atmega128
ATmega16
Fujitsu
MB90F474
Производительность (mips)
Разрядность
данных
ОЗУ (kb)
Flash ROM (kb)
Количество
портов
ввода/вывода, шт
Наличие UART
Наличие SPI
Разрядность
АЦП
Диапазон
рабочих
температур
MSP430F149
Технические
характеристики
Требуемый
Таблица 6.2 – Сравнительные характеристики микроконтроллеров
0.15
8
16
8
16
16
16
8
8
16
0.512
2.896
2
8
4
128
1
16
16
256
10
48
54
32
84
+
+
+
+
+
+
+
+
+
+
12
12
10
10
10
-40..80°С
-40..85°С
-40..85°С
-40..85°С
-40..85°С
Так как MSP430F149 имеет в ставе 12-битное АЦП, разрядность 16 бит
и достаточные объѐмы памятей, то для построения ТИДД целесообразно выбрать именно его.
42
7 РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ СТРУКТУРНОЙ СХЕМЫ
На основе требований, предъявленных в техническом задании, а также
с учетом характеристик выбранных чувствительных элементов и микроконтроллера разработана структурная электрическая схема тензорезистивного интеллектуального датчика давления.
ТИДД функционально состоит из прецизионного аналогового модуля
(ПАМ) и контроллера ТИДД (рисунок 7.1). ПАМ выполняет функции усиления, фильтрации и измерения аналоговых сигналов с чувствительного элемента датчика. Контроллер ИММ реализует аналого-цифровое преобразование и цифровую обработку выходных сигналов ПАМ, вычисление значения
давления с использованием линейных пространственных элементов, передачу
информации по сетевому каналу выдачу и ряд других функций.
Функционально в ПАМ следует выделить три основных компонента:
схему аналоговой обработки сигнала канала давления (САОСД), схема аналоговой обработки сигнала канала температуры (САОСТ) ЧЭ, учитывая результаты выбора датчиков, следует отметить, что эти части ПАМ реализованы в
выбранных датчиках. Так же в ПАМ включен ИОН – источник опорного
напряжения, аналого-цифровых преобразователей из состава контроллера
ИММ.
Контроллер ТИДД построен на основе цифрового микроконтроллера
MSP430F149 выбранного ранее.
В состав МПМ входят АЦП, SPI, разъем JTAG для внутрисхемной отладки и программирования и модуль цифрового интерфейса (МЦИ) для организации сетевого обмена.
Структурная схема ТИДД приведена на рисунке 7.1.
Ud-
Ud+
Рисунок 7.1 – Структурная схема ТИДД
GNDpr
Emost
RTEMP
~ 220В
Интерфейс подключения ЧЭ
САОСТ
САОСД
ПАМ
AGND +3В DGND
Блок питания
ИОН
K2
(UD)
GNDpr
EOP
LDAC-
SDIN
SYNC-
SCLK
K4
K3
K1
TEMP
ADP
AD
(UD)
(AD)
DGND
+3В
+5В
VEREF-
VEREF+
NLDAC
MOSI
SCL
NSTE0
AC6
AC5
AC4
AC3
AC2
AC1
XOUT
МИКРОКОНТРОЛЛЕР
P5.0 P5.1 P5.2 P5.3 P5.4 P5.5 P5.6 P5.7
7328КГц
XIN
SPI*
АЦП
VCC AVCC
AC0
Вывод на ЖКИ
USART1
JTAG
P3.4
P3.5
URXD1
UTXD1
JTAG
(TDO,
TDI,
TCK,
TMS)
RESET
P2.0 P2.2
Сброс
(RS485)
МЦИ
Блок
преобразователей
сетевого интерфейса
Разъем JTAGинтерфейса
Схема
сброса
+3В
МПМ
Контроллер ТИДД
RSCTS-B
RSRXD-A
RSRTS-Y
RSTXD-Z
Сетевой
интерфейс
43
44
ЗАКЛЮЧЕНИЕ
Курсовая работа посвящена разработке тензорезистивного интеллектуального датчика давления с применением линейных пространственных элементов. В результате анализа технического задания были сформированы требования к ТИДД. Проанализированы характеристики объекта наблюдения.
Проанализировано влияние температуры на точность вычисления значения
давления, и подтверждѐн выбор способа снижения этого влияния.
В результате проведенной работы разработаны функциональномодульная структура и блочная структура элементов системы и определена
организация работы ТИДД во времени. Также было разработано алгоритмическое обеспечение работы ТИДД, оценены погрешности, возникающие при
съѐме и обработки информации в ТИДД, и на основе этих оценок выбраны
чувствительные элементы входящие в состав ТИДД. В результате оценок
требований предъявляемых к микроконтроллеру ТИДД был выбран микроконтроллер MSP430F149. В завершении работы разработана структурная
электрическая схема системы.
Разработанный ТИДД обеспечивает съѐм информации с чувствительных
элементов давления и температуры, и вычисление по ней значения давления с
компенсацией температурной погрешности и дальнейшую передачу вычисленного значения давления по сети, и отображение на жидкокристаллическом
индикаторе.
Работа выполнена в соответствии с требованиями технического задания.
В таблице 1 приведѐм наиболее значимые технические характеристики
разработанного ТИДД.
45
Таблица 1 – Таблица технических характеристик
Характеристика
Значение
о
Диапазон рабочих температур
От минус 40 С до 80 оС
Диапазон рабочих давлений
От 0КПа до 600КПа
Приведѐнная относительная
погрешность вычисления значения
0.3%
давления
Пространственная модель на основе
Используемая модель
применения линейного
градуировочной характеристики
пространственного элемента
Основой для построения канала
Honeywell 4040PC100G1A
давления служит прибор
Основой для построения канала
Honeywell 703-101BBB-A00
температуры служит прибор
Выбранный микроконтроллер
MSP430F149
12-разрядное АЦП, встроенное в
Тип АЦП
микроконтроллер MSP430F149
Тип интерфейса связи
RS-485
Используемый протокол для
Modbus
передачи информации по сети
46
СПИСОК ЛИТЕРАТУРЫ
1. Пьявченко О.Н., Мокров Е.А., Панич А.Е., Клевцов С.И., Пьявченко А.О., Удод Е.В., Федоров А.Г. Методы, модели, алгоритмы и архитектуры
прецизионных интеллектуальных датчиков давления. – Таганрог: Изд-во
ТТИ ЮФУ, 2007. – 130 с.
2. Пьявченко О.Н. Проектирование локальных микрокомпьютерных
систем. – Таганрог: Изд-во ТРТУ, 2005. – 238 с.
3. Пьявченко О.Н., Пьявченко А.О. Схемотехнические решения и
элементарная база интеллектуальных микропроцессорных модулей: Учебное
пособие. – Таганрог: Изд-во ТРТУ, 2006. – 236 с.
4. Пьявченко О.Н. Руководство к лабораторным работам по курсу
"Проектирование
микрокомпьютерных
систем
промышленной
электроники". — Таганрог : Изд-во ТРТУ, 2003
5. Пьявченко О.Н.,Чернов Е.И., Самойличенко Е.А., Писаренко О.А.
Руководство к лабораторным работам №3,4. Обмен данными в локальной
лабораторной сети микроконтроллеров AVR и ПК с использованием
интерфейсов RS 232, RS 485 и протокола MODBUS. – Таганрог: Изд-во ТТИ
ЮФУ, 2007. – 35 с.
6. Семейство микроконтроллеров MSP430x1xx. Руководство пользователя: Пер. с англ. – М.: Серия «Библиотека Компэла». ЗАО «Компэл»,
2004. – 368 с.
7.
Слива Е. Коррекция по температуре измерительных преобразователей физических величин на базе микроконтроллера MSP430F149 фирмы
Texas Instruments.// http://chipinfo.ru/literature/chipnews/200105/3.html
8. Датчики
давления
производства
NXP
Semiconductors.\\
http://www.domko.ru/item.php?code_id=1981977
9. Полупроводниковые
датчики
компании
http://www.efo.ru/cgi-bin/go?2288
10. Датчики
давления
фирмы
http://www.chipinfo.ru/literature/chipnews/200004/38.
11. Линейка
датчиков
температуры
компания
http://www.platan.ru/news/news.shtml?code=8977
Моторола.\\
Honeywell.\\
Honeywell.\\
47
ПРИЛОЖЕНИЯ
48
ПРИЛОЖЕНИЕ А
ЭКСПЕРИМЕНТАЛЬНЫЕ ЗНАЧЕНИЯ ПРОСТРАНСТВЕННОЙ
ФУНКЦИИ ПРЕОБРАЗОВАНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА
49
Таблица П.А.1 – Значения экспериментальных сигналов канала давления
Эталонные
значения
давления
P (КПа)
0
60
120
180
240
300
360
420
480
540
600
Значения сигнала UP, мВ и при различных температурах для
прямой и обратной ветви
о
–40 С
–35 оС
–30 оС
–25 оС
–20 оС
UPпр UPобр UP UPобр UPпр UPобр UP UPобр UPпр UPобр
-10,02 -9,91 -8,30 -8,29 -7,03 -7,02 -6,23 -6,21 -5,02 -5,02
1,24 1,35 2,83 2,84 3,97 3,99 4,68 4,71 5,75 5,76
12,50 12,59 13,95 13,96 14,96 14,97 15,57 15,59 16,52 16,52
23,78 23,85 25,07 25,08 25,97 25,98 26,47 26,49 27,30 27,30
35,07 35,13 36,20 36,22 36,98 36,99 37,37 37,40 38,08 38,09
46,34 46,41 47,34 47,35 47,99 48,01 48,28 48,31 48,86 48,86
57,64 57,70 58,48 58,49 59,02 59,03 59,19 59,21 59,66 59,66
68,95 68,98 69,62 69,64 70,03 70,04 70,12 70,14 70,45 70,45
80,21 80,21 80,76 80,77 81,06 81,06 81,03 81,05 81,25 81,25
91,51 91,53 91,90 91,91 92,08 92,08 91,95 91,96 92,03 92,02
102,82 102,82 103,04 103,04 103,09 103,09 102,86 102,86 102,83 102,83
Продолжение таблицы П.А.1
Эталонные Значения сигнала UP, мВ и при различных температурах для
значения
прямой и обратной ветви
о
давления
–15 С
–10 оС
–5 оС
0 оС
5 оС
P (КПа) UPпр UPобр UP UPобр UPпр UPобр UP UPобр UPпр UPобр
0
-3,88 -3,87 -2,82 -2,81 -2,06 -2,06 -0,97 -0,97 -0,11 -0,11
60
6,78 6,79 7,72 7,73 8,34 8,35 9,28 9,29 10,08 10,07
120
17,43 17,44 18,24 18,26 18,71 18,72 19,54 19,54 20,26 20,26
180
28,08 28,09 28,77 28,79 29,06 29,07 29,78 29,79 30,45 30,45
240
38,74 38,76 39,31 39,33 39,49 39,50 40,04 40,05 40,65 40,65
300
49,40 49,41 49,84 49,86 49,72 49,73 50,35 50,36 50,85 50,84
360
60,07 60,08 60,40 60,42 60,19 60,19 60,65 60,66 61,05 61,05
420
70,74 70,75 70,95 70,96 70,62 70,63 70,87 70,88 71,26 71,26
480
81,41 81,41 81,50 81,51 81,06 81,07 81,25 81,26 81,48 81,48
540
92,08 92,09 92,04 92,05 91,48 91,49 91,53 91,54 91,68 91,69
600
102,76 102,76 102,60 102,60 101,88 101,88 101,81 101,81 101,89 101,89
50
Продолжение таблицы П.А.1
Эталонные Значения сигнала UP, мВ и при различных температурах для
значения
прямой и обратной ветви
о
о
давления
10 С
15 С
20 оС
25 оС
30 оС
P (КПа) UPпр UPобр UP UPобр UPпр UPобр UP UPобр UPпр UPобр
0
0,67 0,67 1,48 1,49 1,84 1,85 2,80 2,80 3,55 3,55
60
10,73 10,74 11,41 11,41 11,70 11,71 12,52 12,53 13,16 13,16
120
20,81 20,82 21,36 21,37 21,57 21,57 22,27 22,28 22,77 22,78
180
30,90 30,91 31,32 31,33 31,44 31,45 32,02 32,03 32,41 32,42
240
40,98 40,99 41,33 41,33 41,33 41,33 41,76 41,77 42,01 42,02
300
51,08 51,09 51,30 51,30 51,21 51,22 51,53 51,53 51,68 51,68
360
61,17 61,18 61,26 61,26 61,11 61,11 61,29 61,30 61,31 61,32
420
71,28 71,29 71,28 71,29 70,99 71,00 71,06 71,07 70,95 70,96
480
81,37 81,38 81,27 81,26 80,90 80,91 80,83 80,84 80,61 80,61
540
91,48 91,48 91,25 91,26 90,80 90,81 90,61 90,62 90,28 90,29
600
101,58 101,58 101,24 101,24 100,70 100,70 100,38 100,38 99,94 99,94
Продолжение таблицы П.А.1
Эталонные Значения сигнала UP, мВ и при различных температурах для
значения
прямой и обратной ветви
о
о
давления
35 С
40 С
45 оС
50 оС
55 оС
P (КПа) UPпр UPобр UP UPобр UPпр UPобр UP UPобр UPпр UPобр
0
3,93 3,93 4,37 4,38 5,07 5,07 5,59 5,59 6,08 6,08
60
13,45 13,45 13,70 13,71 14,41 14,41 14,88 14,88 15,26 15,26
120
22,96 22,96 23,06 23,07 23,75 23,76 24,16 24,17 24,46 24,47
180
32,48 32,49 32,43 32,44 33,12 33,13 33,47 33,47 33,66 33,66
240
42,01 42,01 41,83 41,83 42,52 42,52 42,77 42,77 42,88 42,89
300
51,55 51,56 51,22 51,22 51,90 51,91 52,09 52,10 52,10 52,10
360
61,09 61,09 60,61 60,62 61,31 61,32 61,42 61,42 61,31 61,31
420
70,65 70,65 70,06 70,07 70,71 70,72 70,75 70,75 70,55 70,55
480
80,21 80,21 79,54 79,53 80,14 80,14 80,07 80,08 79,76 79,77
540
89,76 89,76 88,93 88,94 89,55 89,55 89,41 89,41 89,01 89,01
600
99,33 99,33 98,42 98,42 98,77 98,77 98,74 98,74 98,22 98,22
51
Окончние таблицы П.А.1
Эталонные
значения
давления
P (КПа)
0
60
120
180
240
300
360
420
480
540
600
Значения сигнала UP, мВ и при различных температурах для
прямой и обратной ветви
о
о
60 С
65 С
70 оС
75 оС
80 оС
UPпр UPобр UP UPобр UPпр UPобр UP
UPобр UPпр UPобр
6,41 6,41 6,70 6,70 6,95 6,95 7,20 7,21 7,30 7,31
15,51 15,51 15,72 15,73 15,90 15,90 16,06 16,07 16,10 16,10
24,62 24,63 24,75 24,76 24,84 24,85 24,94 24,95 24,89 24,89
33,73 33,73 33,78 33,79 33,81 33,81 33,82 33,82 33,68 33,69
42,86 42,86 42,82 42,83 42,76 42,77 42,70 42,71 42,48 42,49
51,97 51,98 51,87 51,88 51,73 51,73 51,59 51,59 51,30 51,30
61,11 61,12 60,91 60,92 60,70 60,70 60,47 60,48 60,10 60,11
70,23 70,23 69,96 69,97 69,67 69,67 69,29 69,3 68,91 68,92
79,36 79,36 79,02 79,02 78,63 78,64 78,19 78,2 77,74 77,74
88,50 88,50 88,07 88,07 87,60 87,61 87,07 87,08 86,54 86,55
97,62 97,63 97,12 97,12 96,58 96,58 95,97 95,98 95,36 95,37
Таблица П.А.2 – Значения сопротивлений терморезистора
Температура Rтр кОм
–40 оС
2,951
о
–35 С
3,072
о
–30 С
3,195
о
–25 С
3,313
о
–20 С
3,435
о
–15 С
3,564
о
–10 С
3,701
о
–5 С
3,824
о
0 С
3,957
Температура
5 оС
10 оС
15 оС
20 оС
25 оС
30 оС
35 оС
40 оС
45 оС
Rтр кОм
4,099
4,26
4,399
4,535
4,702
4,853
5,003
5,163
5,306
Температура
50 оС
55 оС
60 оС
65 оС
70 оС
75 оС
80 оС
Rтр кОм
5,48
5,67
5,83
6,009
6,184
6,365
6,554
52
ПРИЛОЖЕНИЕ Б
ТЕКСТ КОМПЬЮТЕРНОЙ МОДЕЛИ В МАТЕМАТИЧЕСКОЙ СРЕДЕ
MATLAB
53
clear
clc
close all
%========================================
%Конфигурирование модели
%Tvet=1 прямая ветвь давления
%Tvet=2 обратная ветвь давления
%Tvet=3 усреднѐнныйе значения давления
Tvet=3;
%Амплитуда случайного шума в процентах от максимального значения сигнала
MAnoiseUp=5;
%Неделать масштабирование
notMX=1;
%========================================
%Загрузка заранее подготовленных коэффициентов
load coefficient.mat
clear A_CP B1_CP B2_CP Upgr_CP Utgr_CP kprT %Удалиние данных для праболического полинома
%========================================
%Выбор исходных данных согласно текущей ветви ГХ
if Tvet==1;
Up_isx=Up_isx_pr;
end
if Tvet==2;
Up_isx=Up_isx_obr;
end
if Tvet==3;
Up_isx=(Up_isx_obr+Up_isx_pr)/2;
end
Up=Up_isx;
P=P_isx;
Ut=Ut_isx;
T=T_isx;
%========================================
%Определение размеров массивов
Ng=size(Up_isx);
Nv=Ng(2);
Ng(:,2)=[];
%========================================
%Анализ исходных данных
Fig1=figure('position',[0 305 468 400],'Name','Анализ исходных данных',...
'NumberTitle','off');
set(gca,'FontSize',14);
set(gca,'linewidth',2);
hold on
for i=1:Ng
gr1=plot(T_isx,Up_isx(i,:),'--kd');
set(gr1,'markersize',5);
set(gr1,'linewidth',2);
text2{i,1}=int2str(P_isx(Ng-i+1,1));
text1{i,1}='P = ';
leg=strcat(text1,text2);
54
legend(leg,0);
end
set(gca,'xtick',T);
set(gca,'ytick',Up_isx(:,1));
xlabel('T (°С)');
ylabel('U_P (мВ)');
axis([min(T_isx),max(T_isx),min(min(Up_isx))-0.05*(max(max(Up_isx))min(min(Up_isx))),max(max(Up_isx))+0.05*(max(max(Up_isx))-min(min(Up_isx)))]);
title('Зависимость канала давления от температуры');
grid on
clear leg text2 text1
%-------------------------------------Fig2=figure('position',[100 305 468 400],'Name','Анализ исходных данных',...
'NumberTitle','off');
set(gca,'FontSize',14);
set(gca,'linewidth',2);
for i=1:Ng
Pv(i)=P_isx(i,1);
end
hold on
gr1=plot(Pv,Up_isx(:,1),'--kd');
set(gr1,'markersize',8);
set(gr1,'linewidth',2);
text2{1,1}=int2str(T_isx(1));
text1{1,1}='T = ';
gr1=plot(Pv,Up_isx(:,Nv),'-ko');
set(gr1,'markersize',8);
set(gr1,'linewidth',2);
text2{2,1}=int2str(T_isx(Nv));
text1{2,1}='T = ';
leg=strcat(text1,text2);
legend(leg,0);
set(gca,'xtick',P_isx);
set(gca,'ytick',Up_isx(:,1));
xlabel('P (КПа)');
ylabel('U_P (мВ)');
grid on
axis([min(P_isx),max(P_isx),min(min(Up_isx))-0.05*(max(max(Up_isx))min(min(Up_isx))),max(max(Up_isx))+0.05*(max(max(Up_isx))-min(min(Up_isx)))]);
%-------------------------------------Fig3=figure('position',[200 305 468 400],'Name','Графическое представление исходной ГХ',...
'NumberTitle','off');
set(gca,'FontSize',14);
Ut_isxV=Ut_isx;
T_isxV=T_isx;
for i=1:Ng-1
Ut_isxV=[Ut_isxV;Ut_isx];
T_isxV=[T_isxV;T_isx];
end
Pv=P_isx;
for i=1:Nv-1
Pv=[Pv,P_isx];
end
gr1=surf(Up_isx,Ut_isxV,Pv);
set(gr1,'linewidth',2);
% colormap([white]);
%Сделать график чѐрнобелым
axis([min(min(Up_isx)),max(max(Up_isx)),min(min(Ut_isx)),max(max(Ut_isx)),0,600]);
55
xlabel('U_P (мВ)');
ylabel('U_T (кОм)');
zlabel('P (Па)');
%-------------------------------------%========================================
%Коэффициенты масштабирования
if notMX==1
M_A_CL=1;
M_B_CL=1;
else
M_A_CL=2^2;
M_B_CL=2^12;
end
%========================================
TREW=1;
for AnoiseUp=[0:0.01:MAnoiseUp]; %Перебор уровней погрешностей
AnoiseUt=AnoiseUp;
for Tnoise=1:3;
%Перебор каналов имеющих погрешность
%%------------------------------------------------------------------------------------%%
%Если Tnoise=0, то не накладывать шум
%Если Tnoise=1, то накладывать погрешность на сигнал с канала давления
%Если Tnoise=2, то накладывать погрешность на сигнал с канала температуры
%Если Tnoise=3, то накладывать погрешность на сигнал с канала давления и температуры
%========================================
%Наложение погрешности
clear Up Ut
if Tnoise==1
Up=Up_isx+(AnoiseUp/100)*(max(max(Up_isx))-min(min(Up_isx)))*1;
Ut=Ut_isx;
end
if Tnoise==3
Up=Up_isx+(AnoiseUp/100)*(max(max(Up_isx))-min(min(Up_isx)))*1;
Ut=Ut_isx+(AnoiseUt/100)*(max(max(Ut_isx))-min(min(Ut_isx)))*-1;
end
if Tnoise==2
Ut=Ut_isx+(AnoiseUt/100)*(max(max(Ut_isx))-min(min(Ut_isx)))*-1;
Up=Up_isx;
end
%========================================
%Расчѐт давления с компенсацией, с использованием линейной
%пространственной модели апроксимации
%Оценка погрешностей
for i=1:Ng
for j=1:Nv
%========================================
%Нахождение подобласти по температуре
jgr=max(size(T))-1;
if Ut_isx(1)<Utgr_CL(2)
%Прямая или обратная зависимость канала температуры?
if Ut_isx(j)<=Utgr_CL(1)
jgr=1;
end
for L=1:max(size(T))-2
if Ut_isx(j)>=Utgr_CL(L)
56
if Ut_isx(j)<=Utgr_CL(L+1)
jgr=L;
end
end
end
else
if Ut_isx(j)>=Utgr_CL(1)
jgr=1;
end
for L=1:max(size(T))-2
if Ut_isx(j)<=Utgr_CL(L)
if Ut_isx(j)>=Utgr_CL(L+1)
jgr=L;
end
end
end
end
%========================================
%Нахождение подобласти по давлению
NgrP=size(Upgr_CL);
NgrP=NgrP(1,1)-1;
igr=NgrP;
if Up_isx(i,j)<=Upgr_CL(1,jgr)
igr=1;
end
for L=1:NgrP
if Up_isx(i,j)>=Upgr_CL(L,jgr)
if Up_isx(i,j)<=Upgr_CL(L+1,jgr)
igr=L;
end
end
end
%========================================
%Вычисление давления и оценка погрешности
P_CL(i,j)=A_CL(igr,jgr)+B1_CL(igr,jgr)*Up(i,j)+B2_CL(igr,jgr)*Ut(j);
Otn_CL(i,j)=abs(100*((P_isx(i,1)-P_CL(i,j))/max(P_isx)));
end
end
clear i j igr jgr L
%========================================
%Сохранение максимального значения погрешности
MaxOtnCL(TREW,Tnoise)=max(max(abs(Otn_CL)));
clear Otn_CL
end
TREW=TREW+1;
end
Fig3=figure('position',[300 305 468 400],'Name','Зависимость погрешности расчѐта от погрешности
датчика',...
'NumberTitle','off');
set(gca,'FontSize',14);
AnoiseUp=[0:0.05:MAnoiseUp];
%Построение графиков
57
gr1=plot(AnoiseUp,MaxOtnCL(:,1),'k--')
hold on
gr2=plot(AnoiseUp,MaxOtnCL(:,2),'k:')
gr3=plot(AnoiseUp,MaxOtnCL(:,3),'k-')
%Установка толщины линии
set(gr1,'linewidth',2);
set(gr2,'linewidth',2);
set(gr3,'linewidth',2);
%Установка границ окна
axis([0,MAnoiseUp,0,max(max(MaxOtnCL))]);
%Метки
xlabel('Относительная погрешность датчика');
ylabel('Относительная погрешность вычислений значений давления');
grid on
legend('Погрешность на сигнале канала давления','Погрешность на сигнале канала температуры','Погрешность на сигналах каналов давления и температуры',0);
clear i j igr jgr
clc
58
ПРИЛОЖЕНИЕ В
ЭЛЕКТРИЧЕСКАЯ СТРУКТУРНАЯ СХЕМА