Тип - Институт прикладной математики им. М.В. Келдыша РАН
реклама

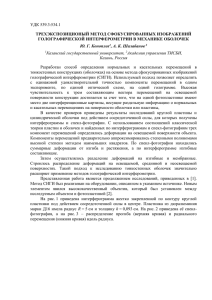
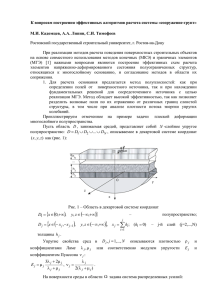
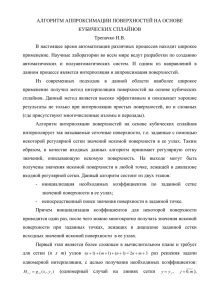
РОССИЙСКАЯ АКАДЕМИЯ НАУК Ордена Ленина Институт Прикладной Математики им. М.В. Келдыша М.П. Галанин, С.А. Лазарева, Е.Б. Савенков Метод конечных суперэлементов для решения трехмерных задач теории упругости. Численное исследование Москва – 2006 Аннотация Проведено численное исследование метода конечных суперэлементов (МКСЭ) на примере решения трехмерных задач теории упругости. Реализованы различные варианты МКСЭ и проведен их сравнительный анализ. Варианты основаны на задании способа интерполирования следов решения конечными элементами на границах суперэлементов. Для модельной задачи выполнено сравнение МКСЭ с обычным методом конечных элементов. Получены количественные данные об ошибках. Исследуемые варианты показали свою эффективность при правильном выборе способа построения и реализации расчетной схемы МКСЭ. M. Galanin, S. Lazareva, E. Savenkov Finite Superelement Method for the solution of the 3d elasticity problems. The numerical investigation Abstract The results of numerical investigation of Finite Superelement Method (FSEM) for the solution of the 3d elasticity problems are given. Different variants of FSEM are being considered, and their comparative analysis is being carried out. The variants are based on the finite element interpolation techniques on a superelements boundaries. FSEM and FEM efficiency comparison is presented for the model problem. Quantity error data are obtained. When choosing the correct way of constructing and realization the FSEM calculation scheme, the investigated method is of high efficiency. СОДЕРЖАНИЕ Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 § 1. Постановка модельной задачи. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4 § 2. Варианты МКСЭ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 § 3. Интерполяция следов решения конечными элементами . . . . . . . . . . . . . . . . . . . . . . . . 9 § 4. Результаты расчетов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 1. Зависимость точности от типа интерполяции . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 2. Сравнение МКСЭ и МКЭ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 3. Демонстрационный расчет. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 Список литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 2 Введение Метод конечных суперэлементов (МКСЭ) предложен в работах Л.Г. Страховской и Р.П. Федоренко [1] и развит затем в последующих работах [2 – 6] как метод дискретизации задач, позволяющий учитывать их мелкомасштабные неоднородности. Существует широкий класс задач, решение которых содержит резкие неоднородности, проявляющиеся на мелких пространственных масштабах не только по отношению к размеру области, но и по отношению к приемлемому шагу сетки H. Такие неоднородности задачи иногда могут быть выделены явно, как, например, инородные включения в композитных материалах, стержни в ядерном реакторе и т.п. Численное решение этих задач сеточными методами требует специальных сеток для разрешения особенностей. Для этого необходимо использовать либо адаптивные к решению сетки, сгущающиеся в окрестности особенностей, либо достаточно мелкие сетки с шагом h и огромным количеством точек. Первый вариант требует применения специальных алгоритмов, второй – соответствующей памяти ЭВМ. В то же время проявления этих особенностей зачастую являются локальными, сосредоточенными в мелкомасштабных подобластях. Подтверждением тому является характерный вид многих типичных решений задач математической физики. Для решения подобных задач и предложен метод конечных суперэлементов. В соответствии с МКСЭ [1 – 6] расчетная область разбивается на некоторое количество подобластей-суперэлементов (СЭ) таким образом, чтобы особенности решения задачи были целиком сосредоточены внутри суперэлементов, а на их границах решение являлось достаточно гладкой функцией. Каждый СЭ оснащается системой “базисных” функций, которые являются решениями рассматриваемого уравнения в СЭ с некоторыми граничными данными. Решение задачи ищется как линейная оболочка построенной таким образом системы “базисных” функций. Это позволяет, с одной стороны, использовать грубую СЭ сетку, а с другой, за счет выбора специальных “базисных” функций учиты3 вать особенности решения. При этом дифференциальные свойства искомой функции и ее следов на границах СЭ существенно различны. Такой след может являться достаточно гладкой функцией. Его значения в узлах СЭ сетки дают весьма полное представление о поведении функции на границах СЭ, но не во всей области. Эффективность рассматриваемого метода напрямую зависит от качества аппроксимации следов решения на границах СЭ [1 – 6]. При практическом использовании МКСЭ встает вопрос о выборе подходящего метода интерполяции следа искомой функции на этих границах. Представляет интерес определение зависимостей ошибок МКСЭ от выбранного способа интерполяции. В настоящей работе представлены результаты численного исследования МКСЭ. Проведен сравнительный анализ различных вариантов МКСЭ на примере решения модельной задачи линейной теории упругости в пространственно-трехмерной области. Рассмотренные варианты алгоритма основаны на различных способах задания интерполяции конечными элементами следов искомого решения на границах СЭ. Выполнено сравнение МКСЭ и МКЭ и получены количественные данные об ошибках. В целом настоящая работа продолжает численное исследование МКСЭ, проведенное в [6]. Работа выполнена при частичной финансовой поддержке Российского фонда фундаментальных исследований (проект РФФИ № 06 - 01 - 00421). § 1. Постановка модельной задачи Рассмотрим систему уравнений теории упругости в перемещениях в неограниченном пространстве R3: ( 2 )graddiv u rot rot u X 0 . (1.1) Здесь , – коэффициенты Ламе, u неизвестный вектор перемещений, X – вектор массовых сил. Найдем решение системы (1.1) при наличии в пространстве источника массовых сил с потенциалом υ вида: 4 X grad υ, (1.2) ( grad υ) r ( r ) , ( grad υ) ( grad υ) 0 , где – плотность массы, – дельта-функция Дирака, ( grad υ) r , ( grad υ) , ( grad υ) – компоненты градиента потенциала grad υ в сферических координатах (r , , ) . Наряду со сферической будем рассматривать декартову прямоугольную 12 систему координат Ox1 x2 x3 . При этом r ( x1 1 ) 2 ( x2 2 ) 2 ( x3 3 ) 2 , где точка (1 , 2 , 3 ) – центр сферической симметрии. Искомый вектор перемещений имеет следующие компоненты [7]: ur 1 , u 0, u 0, 4 2 r 2 xi i ui , i 1,3. 4 2 r 3 (1.3) Здесь (ur , u , u ) – компоненты вектора перемещений в сферической системе координат, ui – компоненты вектора перемещений в системе координат Ox1 x2 x3 . Определим расчетную область R3 с кубическим отверстием малого размера и границей (рис. 1a). Область представляет собой куб со сторонами длиной L , перпендикулярными осям Oxi . Центр кубического отверстия расположен в точке . В области будем решать систему уравнений теории упругости (1.1). На всей границе заданы компоненты перемещений ui : ui xi i 4 2 r 3 , i 1,3 . Точное решение такой задачи совпадает с ограничением на расчетную область решения (1.3) системы уравнений в неограниченной области. 5 Рис. 1a. Область . Рис. 1b. Разбиение области на суперэлементы, K 3 8 . Таким образом, имеем следующую модельную задачу: A u ( 2 )graddiv u rot rot u 0 x , ui (x) (x) (1.4) xi x , i 1,3 , 4 2 r 3 где вектор x определяет координаты точки в расчетной области, а функция задает граничные условия. Модельная задача поставлена в прямоугольной системе координат Ox1 x2 x3 . § 2. Варианты МКСЭ В соответствии с МКСЭ [1 – 6] разобьем расчетную область на K 3 подобластей-суперэлементов плоскостями, перпендикулярными осям координат Oxi (рис. 1b): K3 k , k l , если k l . k 1 Каждый суперэлемент представляет собой куб со стороной L K . Кубическое отверстие расположено в центре одного из этих суперэлементов. Аппроксимацию неизвестного поля перемещений внутри каждого суперэлемента осуществляем одинаковым образом. Подробно варианты аппроксима6 ции методом конечных суперэлементов будем описывать внутри одного суперэлемента k . Каждый компонент поля перемещений u внутри суперэлемента k аппроксимируем независимо. Находим его в виде линейной комбинации некоторого числа компонент “базисных” вектор-функций Φi i(1) , i(2) , i(3) : T u j (x) ai( j ) i( j ) (x) , x k , j 1,3 , (2.1) i где ai ai(1) , ai(2) , ai(3) T – векторы коэффициентов разложения. Здесь через i( j ) обозначена j -тая компонента “базисной” функции с номером i и через ai( j ) – j -тая компонента i -го вектора коэффициентов. “Базисные” функции Φ i (см. [1 – 6]) являются решениями системы уравнений рассматриваемой модельной задачи (1.4) внутри суперэлемента, а на его границе совпадают с некоторыми функциями φi i(1) , i(2) , i(3) : A Φi (x) 0 x k / k , Φi ( x) x k φi ( x) xk (2.2) . Функции φi будем называть граничными базисными функциями. Полученное таким образом приближенное решение внутри каждого суперэлемента k заведомо удовлетворяет дифференциальному уравнению исходной задачи (1.4). На границах суперэлементов рассмотренная схема МКСЭ позволит обеспечить непрерывность аппроксимации перемещений. Каждый из компонентов перемещений на границе суперэлемента k аппроксимируем следующим образом [1 – 6]: n u j (x) ci( j )i (x) , x k , j 1,3 . (2.3) i 0 Здесь i – некоторый набор скалярных функций, одинаковый для каждой из компонент u j ; ci( j ) – неизвестные коэффициенты разложения. Соотношения 7 (2.1) и (2.3) связаны следующими зависимостями: 3(ij)k (x) i (x) kj , ci( j ) a3( ij) j , n (x) 3(nj) j (x) , где ( j) i k 1,3 , j 1,3 , i 0, n , – j -тая компонента i -той граничной базисной функции φi , kj – сим- вол Кронекера. Величину n, определяющую число членов разложения (2.3), будем называть числом степеней свободы суперэлемента, соответствующим одному компоненту поля перемещений. Функция 0 в разложении (2.3) учитывает граничные условия исходной задачи на границе отверстия. Она совпадает с граничными условиями (1.4) на этой границе и доопределена нулем на внешней границе суперэлемента. Оставшиеся функции i на границе отверстия обращаются в нуль. Способы их задания на внешней границе суперэлемента определяют рассмотренные в работе различные варианты МКСЭ. Их подробное описание приведено ниже (см. раздел 3). Неизвестные коэффициенты разложения (2.1) ai , следуя алгоритму метода, находим путем использования процедуры МКСЭ из уравнений, формально совпадающих с уравнениями метода Бубнова-Галеркина [2 – 6]. В качестве базисных и пробных функций выбираем функции Φi : a u, Φi 0 , i 1, 3n , где a , – билинейная форма, соответствующая задаче (1.1), a u, v A u v d . Эти уравнения приводят к следующей системе линейных алгебраических уравнений: 8 n 3 a i 1 m 1 ( m) i a , ( m) i a 3 (l ) j m 1 ( m) 0 , (jl ) , j 1, 3n , l 1,3 . В соответствии с приведенным выше алгоритмом МКСЭ каждый компонент u j искомого поля перемещений аппроксимируется одинаково (см. соотношение (2.3)). Далее будем использовать символ u для некоторого такого компонента, опуская индекс j в его обозначении. Обозначим след компонента u на границе суперэлемента k символом : (x) u (x) x , x k . Тогда соотношение (2.3) переписывается следуk ющим образом: n (x) cii (x) , x k , (2.4) i 0 где ci ci( j ) при фиксированном j. Различные варианты МКСЭ, исследуемые в данной работе, представлены различными способами задания множества i , определяющего граничные базисные функции φi на внешней границе суперэлемента (см. (2.2)). Корректное задание интерполяции следа решения при помощи функций i (2.4) обеспечит сходимость приближенного решения к решению исходной задачи (см. [2– 6]). Воспользуемся интерполяцией конечными элементами на внешней границе суперэлемента. В этом случае для функций i возможно обеспечить выполнение дельта-свойства метода конечных элементов (МКЭ) (см. [8 – 11]). Это позволяет при реализации МКСЭ достаточно просто задавать граничные условия первого рода на и обеспечивать непрерывность “базисных” функций Φ i при переходе между различными суперэлементами. § 3. Интерполяция следов решения конечными элементами Разобьем внешнюю границу суперэлемента k на треугольные конечные элементы (прямоугольные треугольники). На каждой грани куба- суперэлемента расположено одинаковое число таких конечных элементов (КЭ) 9 (см. рис. 2). На этой сетке построим варианты интерполяции следа решения конечными элементами. Они основаны на различных способах задания функций формы. Ниже будут рассмотрены следующие варианты функций формы [8 – 11]: линейная, квадратичная, кубическая, кубическая “сокращенная”, кубическая эрмитового типа и кубическая “сокращенная” эрмитового типа. Интерполянты i в представлении (2.4) являются глобальными базисными функциями метода конечных элементов, соответствующими одному из этих вариантов задания функций формы. Следует отметить значение термина “глобальные”. Интерполянты i задают граничные базисные функции φi на границе суперэлемента. Постановка (2.2) ясно показывает, что после локального определения некоторой функции формы непосредственно внутри конечного элемента необходимо задать в качестве интерполянтов i определяемые ею базисные функции метода конечных элементов глобально по всей области k . Таким образом исключается наличие разрывов граничных базисных функций в поставленных краевых задачах (2.2). Этот факт, вообще говоря, создает некоторое неудобство задания i на внешней границе суперэлемента k . “Базисные” функции Φ i , определяемые краевыми задачами (2.2), при реализации алгоритма рассчитаны приближенно. Для их расчета внутри каждого суперэлемента использован метод конечных элементов с линейными функциями формы на тетраэдрах с некоторым характерным шагом . На рис. 3 показана проекция этой сетки на внешнюю границу суперэлемента k . Она будет использована для дискретизации различных интерполянтов i , которые на этой границе необходимо рассчитывать приближенно. Для уменьшения влияния вычислительной погрешности их расчета разбиение внешней поверхности суперэлемента на конечные элементы согласовывалось с разбиением области внутри этого суперэлемента на тетраэдры (см. рис. 3). А именно, ребра и узлы построенной конечно-элементной сетки на границе k расположены лишь на 10 ребрах и узлах проекции мелкой сетки из тетраэдров на эту границу соответственно. Рис. 2a. Разбиение внешней границы куба-суперэлемента на КЭ. Рис. 2b. Одна из граней кубасуперэлемента с разбиением на КЭ. Рис. 3a. Разбиение на КЭ внешней границы суперэлемента и проекция на нее мелкой сетки из тетраэдров. Рис. 3b. Часть одной из граней СЭ с разбиением на КЭ и проекцией мелкой сетки из тетраэдров. Опишем используемые в данной работе варианты задания функции формы на построенной треугольной сетке (рис. 2). Пусть t j – узлы этой сетки и N – число всех узлов на внешней границе суперэлемента k . Линейный случай (вариант (а)) Простейший вариант выбора функций i – линейные внутри каждого треугольника базисные функции: i (x) 1 2 x1 3 x2 , где x x1 , x2 ( e ) (3.1) и j const , j 1,3 . Здесь (e ) k – область, занимаемая треугольником с некоторым номером e . Такие базисные функции принимают в узлах треугольной сетки t j , j 1, N , значения 11 i (t j ) ij и однозначно ими определяются. Результирующая величина (t j ) c j в соотношении (2.4) есть значение следа компонента поля перемещений в точке t j . Это задание обеспечивает непрерывность следа компонента поля перемещений при переходе между соседними треугольниками (e) на внешней границе k . Непрерывность внутри каждого такого треугольника очевидно следует из (3.1). Число степеней свободы суперэлемента, соответствующее одному компоненту поля перемещений, равно n N . Степенями свободы являются следы компонентов поля перемещений в узлах рассматриваемого суперэлемента. Каждый узел t j обладает одной такой степенью свободы. Конечные элементы более высокого порядка обладают рядом важных преимуществ и способны удовлетворительно воспроизводить решение более широкого класса задач (см., например, [11]). Существует несколько основополагающих способов построения таких элементов на полиномиальном базисе. В работе реализованы функции формы, использующие лагранжев базис и эрмитов базис с заданием частных производных в узлах элемента. На функциях, использующих эрмитов базис, более высокий порядок элемента достигается на меньшем числе узлов путем увеличения требований на гладкость. Рассмотрим использованные в работе способы интерполяции конечными элементами высокого порядка, использующие лагранжев базис (варианты интерполяции (b) – (d)). Квадратичный случай (вариант (b)) Функция i – полный полином 2-го порядка внутри каждого треугольника, содержащего i-тый узел. На остальной области границы суперэлемента функция i доопределена нулем. Для построения такого полинома к вершинам треугольников добавляются дополнительные узлы, которые помещаются в середины сторон треугольников (рис. 4b). 12 Такие функции принимают в узлах t j , j 1, N , значения i (t j ) ij и однозначно определены ими. Результирующая величина (t j ) c j в соотношении (2.4), аналогично случаю (a), есть значение следа компонента поля перемещений в точке t j . Такое задание обеспечивает непрерывность следа компонента поля перемещений на границе суперэлемента k . Число степеней свободы суперэлемента, соответствующее одному компоненту поля перемещений, равно n N . Степенями свободы являются следы компонентов поля перемещений в узлах рассматриваемого суперэлемента. Каждый узел t j обладает одной такой степенью свободы. Кубический случай (вариант (c)) Функция i – полный полином 3-го порядка внутри каждого треугольника, содержащего i-тый узел. На остальной области границы суперэлемента i 0 . Для построения полинома к вершинам треугольников добавляются по два узла на каждую сторону треугольника, расположенные симметрично. Еще один узел добавляется в центр тяжести треугольника (рис. 4c). Функции i принимают в узлах t j , j 1, N , значения i (t j ) ij и однозначно определены ими. Результирующая величина (t j ) c j в соотношении (2.4), аналогично уже рассмотренным случаям (a),(b), есть значение следа компонента поля перемещений в точке t j . Такое задание обеспечивает непрерывность следа компонента поля перемещений на границе суперэлемента k . Число степеней свободы суперэлемента, соответствующее одному компоненту поля перемещений, равно n N . Степенями свободы являются следы компонентов поля перемещений в узлах рассматриваемого СЭ. 13 1 0.9 0.8 0.8 0.7 0.7 0.6 0.6 0.5 0.5 y y 1 0.9 0.4 0.4 0.3 0.3 0.2 0.2 0.1 0.1 0 0 0.1 0.2 0.3 0.4 0.5 x 0.6 0.7 0.8 0.9 0 1 1 1 0.9 0.9 0.8 0.8 0.7 0.7 0.6 0.6 0.5 0.5 0.4 0.4 0.3 0.3 0.2 0.2 0.1 0.1 0 0 0.1 0.2 0.3 0.4 0.5 x 0.6 0.7 0.8 0.9 0.1 0.2 0.3 0.4 0.5 x 0.6 0.7 0.8 0.9 1 Рис. 4b: случай функций формы (b) y y Рис. 4a: случай функций формы (a) и (f) 0 0 1 Рис. 4c: случай функций формы (c) 0 0.1 0.2 0.3 0.4 0.5 x 0.6 0.7 0.8 0.9 1 Рис. 4d: случай функций формы (d) 1 0.9 0.8 0.7 y 0.6 0.5 Рис. 4. Узлы конечно-элементной сетки внешней границы СЭ для различных случаев задания функций формы. 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 x 0.6 0.7 0.8 0.9 1 Рис. 4e: случай функций формы (e) Каждый узел t j обладает одной такой степенью свободы. Кубический случай. “Сокращенный” интерполянт (случай (d)) Неизвестные c j рассмотренного ранее кубического элемента (случай (c)), соответствующие расположенным в центрах треугольников узлам, можно ис14 ключить из системы метода конечных элементов (см., например, [11]). В этом случае получится “сокращенный” кубический элемент лагранжевого типа. Такой интерполянт представляет собой неполный полином 3-го порядка внутри каждого треугольника с непрерывным продолжением за его стороны. По сравнению с предыдущим случаем (с) элемент является более привлекательным для реализации, порождая более легкий для построения вычислительный алгоритм и генерацию сетки. При построении такого интерполянта к вершинам треугольников добавляются по два узла на каждую сторону треугольника (рис. 4d). В остальном его характеристики совпадают со случаем (с). Опишем еще один важный способ построения пространства кубических функций. Перейдем к описанию использованной в данной работе конечноэлементной аппроксимации на эрмитовом базисе (случаи (e) – (f)). Кубический случай. Эрмитов тип (случай (e)) Функция i – полный полином 3-го порядка внутри каждого треугольника, содержащего i-тый узел. На остальной области границы суперэлемента i 0 . Вводится только один дополнительный узел – в центр тяжести треугольника (рис. 4e). Кроме компонент поля перемещений в узлах t j , такой суперэлемент в качестве степеней свободы содержит дополнительные параметры интерполяции. В данном случае грани куба-суперэлемента перпендикулярны осям координат. Степени свободы суперэлемента в узле t j содержат частные производные x j , xk при принадлежности этого узла грани суперэлемента, перпен- дикулярной оси Oxi для всех возможных i 1,3 . Здесь (i, j, k) – любая перестановка индексов (1, 2, 3). Узлы t j , лежащие в центрах тяжести треугольников, имеют только одну степень свободы – след компонента перемещений. Число таких степеней свободы суперэлемента n, соответствующее одному компоненту поля перемещений, обозначим через . 15 Пусть pi (t j ) – множество всех степеней свободы узла t j , i 1, . Тогда полный полином третьего порядка в каждом треугольнике однозначно определяется значениями pi (t j ) ij . Результирующая величина (t j ) c j в соотношении (2.4) есть значение следа компонента поля перемещений в точке t j или одной из его частных производных в этой точке. Такое задание обеспечивает непрерывность следа и указанных выше частных производных следа компонента поля перемещений в узлах t j суперэлемента. В частности – непрерывность всех частных производных xi , i 1,3 , в его угловых узлах. Кубический случай. Эрмитов тип. “Сокращенный” интерполянт (случай (f)) Неизвестные c j рассмотренного ранее кубического элемента эрмитового типа (e), соответствующие расположенным в центрах треугольников узлам, можно исключить из системы метода конечных элементов (см., например, [11]). В каждом треугольнике останутся только неизвестные, соответствующие трем вершинам (рис. 4a). Такой интерполянт внутри каждого треугольника представляет собой неполный полином 3-го порядка, непрерывно продолжается за его стороны и обеспечивает непрерывность частных производных в узлах аналогичным образом с предыдущим вариантом (e). По сравнению с предыдущим элементом (e) он является более привлекательным при реализации алгоритма, порождая более легкий для построения вычислительный алгоритм и генерацию сетки. В остальном характеристики этого элемента совпадают со случаем (e). Подобные элементы (варианты (a) - (f)) более высокого порядка редко используются на практике и поэтому здесь не рассматриваются. Для большей 16 наглядности все использованные в данной работе интерполянты сведены в таблицу 1. Граничные условия исходной задачи добавляются в систему метода конечных элементов непосредственно из (1.4). При использовании элементов эрмитового типа частные производные следа можно задавать, дифференцируя известное нам граничное условие по направлениям, касательным к границе, – аналитически или численно. В работе реализовано численное представление вида: (t ) (t i ) , ti i j x j j где t j – граничные узлы СЭ сетки, задает граничное условие (см. (1.4)), j 1,3 , i 1, N и j e j , – шаг мелкой сетки дискретизации следа , e j – j-тый орт системы координат Ox1 x2 x3 . Непосредственно способ построения функций i в треугольнике реализован с помощью представления необходимых выражений для полиномов в барицентрических координатах. Достоинством такого подхода является заведомо невырожденная матрица безотносительно расположения элементов в пространстве. Кроме того, вычисления повторяются для довольно большого числа треугольников, так что подобное задание помогает избежать накопления ошибки расчетов [10]. Описание построений и указанных выше свойств, касающихся реализованных конечных элементов, можно найти в [8 – 14]. Тип интерполянта (a) Линейный (b) Квадратичный Табл. 1. Используемые интерполянты i . Порядок Число степеЧисло Характеристика Порядок конечного ней свободы степеней полиномиального учитываемых элемента треугольника свободы базиса производных СЭ, n 1 3 N лагранжев 0 2 6 N лагранжев 0 (c) Кубический 3 10 N лагранжев 0 (d) Кубический 2 9 N лагранжев 0 17 (e) (f) сокращенный Кубический Кубический сокращенный 3 10 эрмитов 1 2 9 эрмитов 1 § 4. Результаты расчетов 1. Зависимость точности от типа интерполяции Будем рассматривать модельную задачу со следующими параметрами. Область характеризуется размером L 2 , центр отверстия расположен в точке (1 , 2 , 3 ) (3 2, 3 2, 3 2) , длина стороны кубического отверстия равна Lhole 4 9 . Заданы следующие характеристики материала: 100 ; E [2(1 )] и E [(1 )(1 2 )] , где E 1, 0.33 . Зафиксируем число суперэлементов в области: K 3 23 8 . Отношение размера отверстия к размеру одного суперэлемента составляет 4 9 . Будем задавать различные способы интерполяции на внешней границе СЭ. При этом шаг конечно-элементной сетки внешней границы суперэлемента обозначим H (рис. 2). Модельная задача (1.1), (1.2) решена численно с использованием МКСЭ в прямоугольных координатах x1 x2 x3 . “Базисные” функции МКСЭ (2.2) рассчитаны приближенно с использованием МКЭ с характерным шагом 1 18 . Получены приближенные значения u1 , u2 , u3 . Эти значения сравнены с точным решением (1.3). Относительная ошибка расчета приведена в норме С () : ur (x) ur( ex ) (x) u ( ex ) r (x) max ur (x) ur( ex ) (x) x max ur( ex ) (x) , (4.1) x где u r – радиальная компонента приближенного решения и ur( ex ) – радиальная компонента точного решения (1.3) модельной задачи. Для определенности все результаты приведены на примере лишь одной радиальной (относительно системы координат с центром в т. (1 , 2 , 3 ) ) компоненты решения, рассчитанной из соотношения ur u12 u22 u33 . 18 Рассмотрим зависимость относительной ошибки полученного приближенного решения от числа узлов в суперэлементе N. Графики зависимостей приведены на рис. 5а. Рис. 5b отражает ту же зависимость в логарифмическом масштабе, а табл. 2 показывает соответствующие значения коэффициентов линейной регрессии. В табл. 3 сведены значения относительных ошибок и некоторые характеристики использованных интерполянтов для данного разбиения. Рассмотрим другой вариант подобной задачи. Пусть число суперэлементов равно K 3 53 125 . Стороны области имеют длину L 5 . Центр отверстия расположен в точке с координатами (1 , 2 , 3 ) (7 2, 7 2, 7 2) , Lhole 2 9 . По - прежнему шаг 1 18 . Отношение размера отверстия к размеру одного суперэлемента составляет 4 9 и совпадает с параметром предыдущей задачи. Характеристики материала совпадают с указанными выше. Табл. 2. Значения коэффициентов линейной регрессии. Значение коэффициента линейной регрессии Тип интерполянта Линейный (а) 1.4745 Квадратичный (лагр. тип) (b) 1.2849 Кубический (лагр. тип) (c) 1.8020 Кубический сокращенный (d) 1.6357 (лагр. тип) Кубический (эрмит. тип) (e) Кубический сокращенный (f) 1.6909 2.0488 (эрмит. тип) Исследуем те же зависимости для некоторых интерполянтов (варианты (a), (b), (d) и (f)). График зависимости относительной ошибки полученного решения от числа узлов в суперэлементе N приведен на рис. 6. В табл. 4 сведены значения относительных ошибок. Табл. 3. Значения относительных ошибок. 19 Тип интерполянта Линейный (a) Квадратичный (b) (лагр. тип) Кубический (c) (лагр. тип) Кубический (d) сокращенный (эрмит. тип) Кубический (e) (эрмит. тип) Кубический (f) сокращенный (лагр. тип) Число КЭ треЧисло стеугольников Et на пеней своодной грани супе- боды однорэлемента и шаг H го СЭ, n Относительная ошибка Число узлов N 1,396E+00 1,281E-01 5,808E-02 3,529E-02 1,723E-01 5,187E-02 1,024E-02 2,451E-01 9,478E-03 5,754E-03 6,027E-01 5.434E-02 1.117E-02 8 26 56 98 26 98 218 56 218 488 8 26 56 Et = 2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 Et =32, H= 1/32 Et =2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 Et = 2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 Et = 2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 8 26 56 98 26 98 218 56 218 488 32 88 220 3.266E-01 3.575E-02 3,104E-01 3,344E-02 9,156E-03 20 74 44 170 380 Et = 2, H= 1/2 Et =8, H= 1/8 Et = 2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 44 148 44 170 380 Табл. 4. Значения относительных ошибок. Название интерполянта Линейный (a) Квадратичный (лагр. тип) (b) Кубический сокращенный (лагр. тип) (d) Кубический сокращенный (эрмит. тип) (f) Число Число КЭ трестепеней угольников Et на свободы одной грани супеодного СЭ, рэлемента и шаг H n Относительная ошибка Число узлов N 1,443E-01 1,063E-02 6,031E-03 3,376E-03 3,359E-03 8 26 56 26 98 Et = 2, H= 1/2 Et =8, H= 1/8 Et =18, H= 1/18 Et = 2, H= 1/2 Et =8, H= 1/8 8 26 56 26 98 1,493E-03 44 Et = 2, H= 1/2 44 2,852E-03 8 Et = 2, H= 1/2 32 2. Сравнение МКСЭ и МКЭ Модельные задачи, описанные выше для K 3 23 8 и K 3 53 125 , реше20 ны также обычным методом конечных элементов с линейными функциями формы на тетраэдрах при различных характерных размерах сетки (шаг h): h 1 20 , h 1 36 . Вычислены значения относительных ошибок полученных приближенных решений (4.1). Сравним точность МКСЭ и обычного МКЭ на примере этих двух модельных задач. На рис. 7, 8 представлены зависимости относительных ошибок от величины N, подсчитанные ранее в § 4-1, а горизонтальными линиями отмечены величины ошибок, полученные при решении тех же задач с помощью МКЭ. Значения ошибок сравнены в табл. 5. Табл. 5. Сравнение относительных ошибок МКЭ и МКСЭ. Модельная задача Ошибки МКЭ K3 = 8 2.2338E-02, h = 1/36 и 5.5073E-02, h = 1/20 K3 = 125 Минимальная ошибка МКСЭ 5,754E-03, H = 1/18 1,493E-03, H= 1/2. Общее число суперэлементных узлов в расчетной области при использовании МКСЭ составляет от 27 до ~ 3 103 узлов для модельной задачи с K 3 8 и от 216 до ~ 6 103 узлов для модельной задачи с K 3 125 . При этом число конечно-элементных узлов при расчете “базисных” функций в одном СЭ равно ( 1)3 6859 . При использовании обычного МКЭ число конечно-элементных узлов во всей расчетной области, в соответствии с выбранными значениями h, лежит в промежутке от 7 104 до 6 106 . 3. Демонстрационный расчет Ниже на рис. 10, 11 приведены результаты расчета трехмерной задачи теории упругости, являющиеся хорошим примером резкого улучшения качества полученного численного решения при использовании интерполяции высокого порядка. Расчетная область характеризуется несколькими мелкомасштабными неоднородностями (рис. 9). Характерный размер области L 3 . 21 Рис. 5. Зависимость относительной ошибки от числа узлов N в СЭ при K3 = 8. 22 Рис. 6. Зависимость относительной ошибки от числа узлов N в СЭ при K3 = 125. Область содержит кубическое отверстие с Lhole 1 2 и центром в точке 1 2, 3 2, 5 2 , а также дискретные включения отличного материала с модулями упругости E 6.5 , 0.25 . Включения имеют форму куба или параллелепипеда. Кубическое включение расположено в центре области, длина его стороны равна 1 2 . Включения в форме параллелепипедов находятся в точках с координатами 1 2, 3 2, 3 2 и 3 2, 3 2, 5 2 , их размеры по осям x1 , x2 , x3 составляют 1 4, 1 2, 1 4 и 1 2, 1 4, 1 4 соответственно (см. рис. 9). Уравнения теории упругости в перемещениях (1.1) при отсутствии массовых сил дополнены граничными условиями вида: ui (x) 1 для всех x на границе отверстия, i 1,3 ; ui (x) 0 для всех x на внешней границе области , i 1,3 . Задача решена методом конечных суперэлементов при K 3 33 27 с интерполяцией следов решения при помощи функций формы линейного типа (разд. 3, случай интерполяции (a)), а также лагранжевых функций формы квад23 ратичного и сокращенного кубического типа (разд. 3, случаи интерполяции (b), (d)). Рис. 7. Сравнение точности МКЭ и МКСЭ для модельной задачи при K3 = 8. Рис. 8. Сравнение точности МКЭ и МКСЭ для модельной задачи при K3 = 125. 24 Рис. 9. Расчетная область для демонстрационного расчета. На приведенных ниже рисунках показаны линии уровня полученной радиальной компоненты перемещения в сечении x2 3 2 (см. рис. 10 – 11). Рис. 10. Линии уровня полученного численного решения ur в сечении x2 3 2 при использовании линейной интерполяции следа решения на границах СЭ. 25 Рис. 11. Линии уровня полученного численного решения ur в сечении x2 3 2 при использовании квадратичной лагранжевой интерполяции следа решения на границах СЭ. Рис. 12. Линии уровня полученного численного решения ur в сечении x2 3 2 при использовании сокращенной кубической лагранжевой интерполяции следа решения на границах СЭ. 26 Полученные при использовании кубической и квадратичной лагранжевой интерполяции сходны друг с другом и сильно отличаются от линейной (рис. 10 – 12). Это позволяет говорить о том, что в последних двух случаях решение “близко” к точному. Заключение Представлены результаты численного исследования МКСЭ на примере решения задач пространственной теории упругости. Реализованы различные варианты алгоритма МКСЭ и проведен их сравнительный анализ. Использованные варианты основаны на различном задании способа интерполирования следов решения конечными элементами на суперэлементных границах. Опробованы различные способы задания функции формы МКЭ при аппроксимации следов поля перемещений на границах суперэлементов. Для модельной задачи выполнено сравнение МКСЭ с МКЭ для различных характерных размеров сетки. Получены количественные данные об ошибках. Исследуемые варианты показали свою эффективность при правильном выборе способа построения расчетной схемы МКСЭ. Список литературы 1. Федоренко Р.П. Введение в вычислительную физику. – М.: МФТИ, 1994. – 528 с. 2. Галанин М.П., Савенков Е.Б. О связи метода конечных суперэлементов Федоренко и проекционно-сеточных методов // Препринт ИПМ им. М.В.Келдыша РАН. 2001. № 67. 3. Галанин М.П., Савенков Е.Б., Темис Ю.М. Метод конечных суперэлементов для задач теории упругости // Препринт ИПМ им. М.В. Келдыша РАН. 2004. № 38. 4. Галанин М.П., Савенков Е.Б. Совместное использование метода конечных элементов и метода конечных суперэлементов // Препринт ИПМ им. М.В. Келдыша РАН. 2004. № 13. 5. Галанин М.П., Савенков Е.Б. Метод конечных суперэлементов для задачи о скоростном скин-слое // Препринт ИПМ им. М.В. Келдыша РАН. 2004. № 3. 27 6. Галанин М.П., Лазарева С.А., Савенков Е.Б. Численное исследование метода конечных суперэлементов на примере решения задачи о скважине для уравнения Лапласа // Препринт ИПМ им. М.В. Келдыша РАН. 2005. № 79. 7. Новацкий В. Теория упругости. – М: Мир, 1975. – 872 с. 8. Зенкевич O. Метод конечных элементов в технике. – М: Мир, 1975. – 271 с. 9. Митчелл Э., Уэйт Р. Метод конечных элементов для уравнений с частными производными. – М: Мир, 1981. – 216 с. 10. Renard Y. Description of Finite Element and Integration Methods [Electronic resource] : a generic finite element library in C++ (Getfem++) / Documentation. – Part 3, 2006. – Mode Access : http://www-gmm.insa-toulouse.fr/getfem/ 11. Zienkiewicz O.C., Taylor R.L. The finite element method. – John Wiley & Sons Inc, 2000. – Vol.1: The Basis. – 708 p. 12. Zienkiewicz O.C., Taylor R.L. The finite element method. – John Wiley & Sons Inc, 2000. – Vol.2: Solid Mechanics. – 476 p. 13. Стрэнг Г., Фикс Дж. Теория метода конечных элементов. М. – Мир, 1977. – 351 c. 14. Сьярле Ф. Метод конечных элементов для эллиптических задач. М. – Мир, 1980. – 511 c. 28