М.М.Кацман
Электрические
машины
Издание третье,
исправленное
Рекомецдовано
Министерством образования Российской Федерации
в к ачестве учеб1ШКа для сrуденrов учреждений
среднего профессионального образования, обучающихся
по специальностям «Электротехника»
МОСКВА
2001
УДК 621.313
ББК 31.26
К30
Р е ц е н з е н т: Е.П. Рудобаба (Московский вечерний
электромеханический техникум им. Л.Б. Красина)
К 30
Кацман М.М.
Электрические машины: Учеб. для студентов сред. проф.
учебных заведений. - 3-е изд., испр.- М.: Высш. шк.;
Издательский центр «Академия,>; 2001.-463 с.: ил.
ISBN 5-06-003661-8 (Высшая школа)
ISBN 5-7695-0705-5 (Издат. центр <<Академию>)
В книге рассматриваются теория, принцип действия, устройство и
анализ режимов работы электрических машин и трансформаторов как
общего, так и специального назначения, получивших распространение в
различных отраслях техники. Второе издание вышло в 1990 r.
Для студентов электротехнических специальностей среднш профес­
сиональных учебных заведений. Может быть полезна студентам вузов.
УДК 621.313
ББК 31.26
ISBN 5-06-003661-8
ISBN 5-7695-0705-5
© ГУП «Издательство «Высшая школа,,, 2001
Оригинал-макет данного издания является собственностью издательства «Высшая
школа,, и его репродуцирование (воспроизведение) любым способом без согласия
издательства запрешено.
- П едисповие
Книга написана в соответствии с учебными про­
граммами предмета «Электрические машины» для
специальностей «Электрооборудование промышлен­
НЪIХ предприятий и установок», «Электромашино­
строение» для средних специальнъIХ учебнъIХ заве­
дений и содержит основы теории, описание конст­
рукций и анализ эксплуатациоюп,IХ свойств транс­
форматоров и электрических машин, а также необ­
ходимое количество примеров решения задач, что
должно способствовать лучшему пониманию учеб­
ного материала.
В книге принят следующий порядок изложения
учебного материала: трансформаторы, аси:нхршrnые
машины, синхронные машины, коллекторные маппшы.
Наряду с элеюрическими машинами и 1J)ансформа­
торами общего назначения в книге рассмО'IJ)еНЫ неко­
торые виды этих уС1J)ойств специального назначения.
При подготовке 1J)етьеrо издания устранены об­
наруже1шые ошибки и неточности; некоторые пара­
графы переработаны с целью придания им большей
четкости изложения; добавлен новый материал, со­
ответствующий современному взгляду на теорию и
практику элеК1J)ОМашиностроения; добавлены новые
примеры решения задач; исключен устаревший ма­
териал. При изложении материала книги основной
упор сделан на раскрьпие физической сущности яв­
лений и процессов, определяющих рабоrу транс­
форматоров и электрических машин.
Известно, что самостоятельное решение задач в
процессе изучения предмета является эффективным
средством более глубокого усвоения теоретического
материала. Исходя из этого, учебник содержит задачи
для самостоятельного решения по всем разделам курса.
При этом каждая задача имеет до десяти вариантов ис­
ходных данных. Эти задачи могут быть использованы
как в качестве домашних заданий С'I)'денrам, так и при
вьшолнении обязательных КОН1J)ОЛЪНЪIХ работ, преду­
СМО'IJ)еННЪIХ учебными планами.
Все замечания и пожелания можно направлять
по адресу: 101430, Москва, ГСП-4, Неглинная ул.,
29114, издательство «Высшая школа».
Автор
3
-Введение
§ 8.1. Назначение электрических маwин и
трансформаторов
Электрификация - это пшрокое внедрение в про­
мьшmеmюсть, сельское хозяйство, транспорт и бьп
электрической энергии, вырабатываемой на мощных
электростанциях, объединенных ВЫСОКОВОЛЬПIЫМИ
· электрическими сетями в энергетические системы.
Электрификация осуществляется посредством
электротехнических изделий, производством кото­
рых занимается электротехническая промышлен­
ность. Основной отраслью этой промышленности
является электромашиностроение, занимающееся
разработкой и производством электрических машин
и трансформаторов.
Электрическая машина представляет собой
электромеханическое устройство, осуществляющее
взаимное преобразование механической и электри­
ческой энергии. Электрическая энергия в ы р а б а т ы в а е т с я на электростанциях электрическими
машинами - генераторами, преобразующими меха­
ническую энергию в электрическую. Основная часть
электроэнергии (до 80 %) вырабатывается на тепло­
вых электростанциях, где при сжигании химическо­
го топлива (уголь, торф, газ) нагревается вода и пе­
реводится в пар высокого давления. Последний
подается в турбину, где, расширяясь, приводит ро­
тор турбины во вращение (тепловая энергия в тур­
бине преобразуется в механическую). Вращение ро­
тора турбm1ы передается на вал генератора (тур­
богенератора). В результате электромагнитных про­
цессов, происходящих в генераторе, механическая
энергия преобразуется в электрическую.
Процесс производства электроэнергии на атом­
ных электростанциях аналогичен тепловым, с той
лmпь разницей, что вместо химического топлива
используется ядерное.
Процесс выработки электроэнергии на гидрав­
лических электростанциях состоит в следующем:
вода, поднятая плотиной на определенный уровень,
сбрасьmается на рабочее колесо гидротурбины; по­
лучаемая при этом механическая энергия путем
вращения колеса турбины передается на вал элек­
трического генератора, в котором механическая
энергия преобразуется в электрическую.
4
В процессе п о т р е б л е н и я электрической энергии проис­
ходит ее преобразование в другие виды энергий (тепловую, меха­
ническую, химическую). Около 70 % электроэнергии используется
для приведения в движение станков, механизмов, транспортных
средств, т. е. для преобразования ее в механическую энерппо. Это
преобразование осуществляется электрическими машинами электродвигателями.
Электродвигатель - основной элемент электропривода рабо­
чих машин. Хорошая управляемость электрической энергии, про­
стота ее распределения позволили широко применить в промыш­
лешюсти многодвигательный электропривод рабочих машин,
когда отдельные звенья рабочей машm1ы приводятся в движение
самостоятельными двигателями. Многодвигательный привод зна­
чительно упрощает механизм рабочей машm1ы (уменьшается чис­
ло механических передач, связывающих отдельные звенья маши­
ны) и создает большие возможности в автоматизации различных
технологических процессов. Электродвигатели широко применя­
ют на транспорте в качестве тяговых двигателей, приводящих во
вращение колесные пары электровозов, электропоездов, троллей­
бусов и др.
За последнее время значительно возросло применение элек­
трических машин малой мощности - микромашин мощностью от
долей до нескольких сотен ватт. Такие электрические машm1ы ис­
пользуют в устройствах автоматики и вычислительной техники.
Особый класс электрических машин составляют двигатели
для бытовых электрических устройств - пьmесосов, холодильни­
ков, вентиляторов и др. Мощность этих двигателей невелика (от
единиц до сотен ватт), конструкция проста и надежна, и изготов­
ляют их в больших количествах.
Электрическую энерrmо, вырабатываемую на электростан­
циях, необходимо передать в места ее потребления, прежде всего
в крупные промышленные центры страны, которые удалены от
мощных электростанций на многие сотни, а иногда и тысячи ки­
лометров. Но электроэнергmо недостаточно передать. Ее необ­
ходимо распределить среди множества разнообразных потреби­
телей - промышлеш1ых предприятий, транспорта, жилых
зданий и т. д. Передачу электроэнергии на большие расстояния
осуществляют при высоком напряжении (до 500 кВ и более), чем
обеспечиваются минимальные электрические потери в линиях
электропередачи. Поэтому в процессе передачи и распределения
электрической энергии приходится неоднократно повышать и
понижать напряжение. Этот процесс выполняется посредством
электромагнитных устройств, называемых трансформаторами.
Трансформатор не является электрической машиной, так как его
работа не связана с преобразованием электрической энергии в
механическую и наоборот; он преобразует лишь напряжение
электрической энергии. Кроме того, трансформатор - это ста­
тическое устройство, и в нем нет никаких движущихся частей.
Однако электромагнитные процессы, протекающие в трансфор5
маторах, аналогичны процессам, происходящим при работе
электрических машин. Более того, электрическим машинам и
трансформаторам свойственна единая природа электромагнит­
ных и энергетических процессов, возникающих при взаимодей­
ствии магнитного поля и проводника с током. По этим причинам
трансформаторы составляют неотъемлемую часть курса элек­
трических машин.
Ограсль науки и техники, занимающаяся развитием и произ­
водством электрических машин и трансформаторов, назьmается
электромашиностроением. Теоретические основы электромаши­
ностроения бьши заложены в 1821 г. М. Фарадеем, установившим
возможность преобразования электрической энергии в механиче­
скую и создавшим первую модель электродвигателя. Важную роль
в развитии электромашиностроения имели работы ученых Д. Мак­
свелла и Э. Х. Ленца. Дальнейшее развитие идея взаимного преоб­
разования электрической и механической энергий получила в ра­
ботах выдающихся русских ученых Б. С. Якоби и М. О. Доливо­
Добровольскоrо, которыми бьmи разработаны и созданы конст­
рукции электродвигателей, пригодные для практического исполь­
зования. Большие заслуги в создании трансформаторов и их прак­
тическом применении принадлежат замечательному русскому
изобретателю П.Н. Яблочкову. В начале ХХ столетия бьmи созда­
ны все основные виды электрических машин и трансформаторов и
разработаны основы их теории.
В настоящее время отечествеююе электромашиностроение дос­
тигло значительных успехов. Если в начале текущего столетия в
России фактически не бьmо электромашиностроения, как самостоя­
тельной отрасли промьшmенности, то за последние 50--70 лет бьmа
создана отрасль электротехнической промышленности - электро­
машиностроение, способная удовлетворять потребности нашего
развивающегося народного хозяйства в электрических машинах и
трансформаторах. Бьmи подготовлены кадры квалифшщрованных
электромашиностроителей - ученых, инженеров, техников.
Дальнейший технический прогресс определяет в качестве ос­
новной задачи закрепление успехов электромашиностроения путем
практического внедрения последних достижений электротехники в
реальные разработки устройств электропривода для промьшmенных
устройств и изделий бьповой техники. Осуществление этого требу­
ет перевода производства на преимуществеюю интенсивный путь
развития. Главная задача состоит в повъппеmш темпов и эффектив­
ности развития экономики на базе ускорения научно-технического
прогресса, технического перевооружения и реконструкции произ­
водства, интенсивного использования созданного производственно­
го потенциала. Значительная роль в решении этой задачи отводится
электрификации народного хозяйства.
При этом необходимо учитьmать возрастающие экологические
требования к источникам электроэнергии и наряду с тращщион­
ными способами развивать экологически чистые (альтернативные)
способы производства электроэнергии с использованием энергии
6
сошща, ветра, морских приливов, термальных источников. Широ­
ко внедряются автоматизирова1rnые системы в различные сферы
народного хозяйства. Основным элементом этих систем является
автоматизирова1rnый электропривод, поэтому требуется опере­
жающими темпами наращивать вьmуск автоматизированных элек­
троприводов.
В условиях научно-технического развития большое значе­
ние приобретают работы, связанные с повышением качества
выпускаемых электрических машин и трансформаторов. Реше­
ние этой задачи является важным средством развития междуна­
родного экономического сотрудничества. Соответствующие
научные учреждения и промышленные предприятия России ве­
дут работы по созданmо новых видов электрических машин и
трансформаторов, удовлетворяющих современным требовани­
ям к качеству и технико-экономическим показателям выпус­
каемой продукции.
§ В.2. Электрические маwины электромеханические преобразователи
энерrии
Изучение электрических машин основано на знаниях физиче­
ской сущности электрических и магнитных явлений, излагаемых в
курсе теоретических основ электротехники. Однако преЖде чем
приступиrь к изученшо курса «Электрические машины», напом­
ним физический смысл некоторых законов и явлений, лежащих в
основе принципа действия электрических машин, в первую оче­
редь закона электромагнитной индукции.
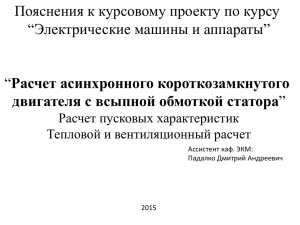
Рис. В.1. К понятиям об «элементарном генерато­
ре)) (а) и «элементарном двигателе)) (б)
В процессе работы электрической машины в режиме генера­
тора происходит преобразование механической энергии в элек­
трическую. Природа этого процесса объясняется законом элек­
тромагнитной индукции: если внешней силой F воздействовать на
помеще1rnый в магнитное поле проводник и перемещать его (рис.
В.1, а), например, слева направо перпендикулярно вектору индук­
ции В магнитного поля со скоростью v, то в проводнике будет на­
водиться электродвижущая сила (ЭДС)
Е = Вlv,
(В.1)
7
где В - магнитная индукция, Тл; / - активная длина проводника,
т. е. длина его части, находящейся в магнитном поле, м; v - ско­
рость движения проводника, м/с.
Для определения направления ЭДС следует воспользоваться
правилом «правой руки» (рис. В.2, а). Применив это правило, оп­
ределим направление ЭДС в проводнике (от нас). Если концы
проводника замкнуты на внешнее
01
сопротивление R (потребитель), то
под действием ЭДС в проводнике
возникнет ток такого же направле­
ния. Таким образом, проводник в
магнитном поле можно рассматри­
вать в этом случае как элементар­
ный генератор.
В результате взаимодействия
тока
1 с магнитным полем возника­
Рис. В.2. Правила «правой
ет действующая на проводник элек­
руки» и «левой руки»
тромагнитная сила
Fэм = Bll.
(В.2)
Направление силы Fэм можно определить по правилу «левой
руки» (рис. В.2, б). В рассматриваемом случае эта сила направлена
справа налево, т. е. противоположно движенmо проводника. Та­
ким образом, в рассматриваемом элементарном генераторе сила
Fэм является тормозящей по оmошенmо к движущей силе F.
При равномерном движении проводника F = Fэм• Умножив обе
части равенства на скорость движения проводника, получим
Fv = F;M v •
Подставим в это выражение значение Fэм из (В.2):
Fv = Bllv = EI.
(В.З)
Левая часть равенства определяет значение механической
мощности, затрачиваемой на перемещение проводника в магнит­
ном поле; правая часть - значение электрической мощности, раз­
виваемой в замкнугом коmуре электрическим током 1. Знак равен­
ства между этими 11астями показывает, что в генераторе
механическая мощность, затрачиваемая внешней силой, преобра­
зуется в электрическую.
Если внешнюю силу F к проводнику не прикладывать, а от ис­
точника электроэнергии подвести к нему напряжение И так, чтобы
ток I в проводнике имел направление, указанное на рис. В.1, 6, то
на проводник будет действовать только электромагнигная сила
F,м· Под действием этой силь1 проводник начнет двигаться в маг­
нитном поле. При этом в проводнике индуцируется ЭДС с направ­
лением, противоположным напряженmо И. Таким образом, часть
напряжения И, приложеююго к проводнику, уравновешивается
ЭДС Е, наведенной в этом проводнике, а другая часть составляет
падение напряжения в проводнике:
8
U=E+lr,
где r - электрическое сопротивление проводника.
Умножим обе части равенства на ток/:
Ul=El+I2 r.
Подставляя вместо Е значение ЭДС из (В.1 ), получим
или, согласно (В.2),
(В.4)
UI = Blul + l 2 r ,
(В.5)
Из этого равенства следует, чrо электрическая мощность ( UJ),
пос'I)'Пающая в проводник, частично преобразуется в механиче­
скую (F3"v), а частично расходуется на покрытие электрических
потерь в проводнике (ir). Следовательно, проводник с током, по­
меще1rnый в магниrном поле, можно рассматривать как элемен­
тарный электродвигатель.
Рассмотре1rnые явления позволяют сделать вывод: а) для
любой электрической машины обязательно наличие электропро­
водящей среды (проводников) и магнитного поля, имеющих воз­
можность взаимного перемещения; 6) при работе электрической
машины как в режиме генератора, так и в режиме двигателя од­
новременно наблюдаются индуцирование ЭДС в проводнике,
пересекающем магнитное поле, и возникновение силы, дейст­
вующей на проводник, находящийся в магнитном поле, при про­
текании по нему электрического тока; в) взаимное преобразова­
ние механической и электрической энергий в электрической
машине может происходить в любом направлении, т. е. одна и та
же электрическая машина может работать как в режиме двигате­
ля, так и в режиме генератора; это свойство электрических ма­
шин называют обратимостью. Принцип обратимости электри­
ческих машин бьm впервые установлен русским ученым
Э. Х. Ленцем.
Рассмотренные «элементарные» электрические генератор и
двигатель отражают лишь принцип использования в них основ­
ных законов и явлений электрического тока. Что же касается
конструктивного исполнения, то большинство электрических
машин построено на принципе вращательного движения их под­
вижной части. Несмотря на большое разнообразие конструкций
электрических машин, оказывается возможным представить себе
некоторую обобщенную конструкцию электрической машины.
Такая конструкция (рис. В.3) состоит из неподвижной части 1,
называемой статором, и вращающейся части 2, называемой ро­
тором. Ротор располагается в расточке статора и отделен от него
воздушным зазором. Одна из указанных частей машины снабже­
на элементами, возбуждающими в машине магнитное поле (на­
пример, электромагнит или постоянный магнит), а другая имеет обмотку, которую будем условно называть рабочей об9
моткой машины. Как неподвижная часть машины (статор), так и
подвижная (ротор) имеют сердечники, вьшолненные из магнит­
но-мягкого материала и обладающие небольшим магнитным со­
противлением.
Если электрическая машина работает в режиме генератора, то
при вращении ротора (под действием приводного двигателя) в
проводниках рабочей обмотки наводится ЭДС и при подключении
потребителя появляется элек­
трический ток. При этом меха­
ническая энергия приводного
двигателя преобразуется в элек­
трическую. Если машина пред­
назначена для работы в качестве
электродвигателя, то рабочая
обмотка машины подключается
к сети. При этом ток, возникший
в проводниках обмотки, взаиРис. В.3. Обобщенная конСiруктив- модействует с магнитным полем
пая схема электрической машины и на роторе возникают электромагнитные силы, приводящие
ротор во вращение. При этом электрическая энергия, потребляе­
мая двигателем из сети, преобразуется в механическую энерпnо,
затрачиваемую на вращение какого-либо механизма, станка и т. п.
Возможны также конструкции электрических машин, у кото­
рых рабочая обмотка расположена на статоре, а элемеmы, возбу­
ждающие магнитное поле, - на роторе. ПрИIЩШI работы машины
при этом остается преЖIШМ.
Диапазон мощностей электрических машин весьма широк от долей ватт до сотен тысяч киловатт.
§ В.З. Классификация электрических маwин
Использование электрических машин в качестве генераторов
и двигателей является их главным применением, так как связано
исключительно с целью взаимного преобразоваIШЯ электрической
и механической энергий. Применение электрических машин в раз­
личных отраслях техники может иметь и другие цели. Так, по­
требление электроэнергии часто связано с преобразованием пере­
менного тока в постоянный или же с преобразованием тока
промышленной частоты в ток более высокой частоты. Для этих
целей применяют электромашинные преобразователи.
Электрические машш1ы используют также для усиления мощ­
ности электрических сигналов. Такие электрические машины на­
зывают электромашинными усwщтелямu. Электрические маши­
ны, используемые для повьIШеIШЯ коэффициента мощности
потребителей электроэнергии, называют синхронными компенса­
торами. Электрические машш1ы, служащие для регулироваIШЯ
напряжения переменного тока, называют индукционными регуля­
торами.
10
Очень разнообразно применение микромашин в устройствах
автоматики и вычислительной техники. Здесь электрические ма­
шины используют не только в качестве двигателей, но и в качестве
тахогенераторов (для преобразования частоты вращения в элек­
трический сигнал), сельсинов, вращающихся · трансформаторов
(для получения электрических сшналов, пропорциональных углу
поворота вала) и т. п.
Из приведенньrх примеров видно, сколь разнообразно разде­
ление электрических машин по их назначенmо.
Рассмотрим классификацшо электрических -машин по прин­
ципу действия, согласно которой все электрические машины раз­
деляются на бесколлекторные и коллекторные, различающиеся
как принципом действия, так и конструкцией. Бесколлекторные
машины - это машины переменного тока. Они разделяются на
асинхроннь1е и синхроннь1е. Асинхроннь1е машинь1 применяются
преимущественно в качестве двигателей, а синхроннь1е - как в
качестве двигателей, так и в качестве генераторов. Коллекторные
машины применяются главным образом для работы на постоян­
ном токе в качестве генераторов или двигателей. Лишь кшшектор­
ные машинь1 небольшой мощности делают универсальцыми дви­
гателями, способными работать как от сети постоянного, так и от
сети переменного тока.
Электрические машинь1 одного принципа действия могут раз­
личаться схемами включения либо другими признаками, влияю­
щими на эксплуатационные свойства этих машин. Например,
асинхроннь1е и синхроннь1е машинь1 могут быть трехф азными
(включаемыми в трехфазную сеть), конденсаторными или одно­
ф азными. Асинхроннь1е машинь1 в зависимости от конструкции
обмотки ротора разделяются на машины с короткозамкнутым ро­
тором и машинь1 с фазным ротором. Синхроннь1е машинь1 и кол­
лекторные машИНЬI постоянного тока в зависимости от способа
создания в них маrнигного поля возбуждения разделяются на ма­
шинь1 с обмоткой возбуждения и машинь1 с постоянньхми магни­
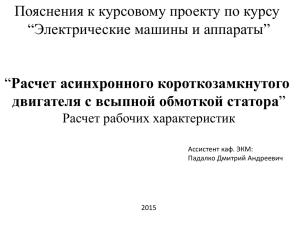
тами. На рис. В.4 представлена диаграмма классификации элек­
трических машин, содержащая основные виды электрических
машин, получившие наибольшее применение в современном элек­
троприводе. Эrа же классификация электрических машин поло­
жена в основу изучения курса «Электрические машиньш.
Курс «Электрические машины» помимо собственно электри­
ческих машин предусматривает изучение трансформаторов.
Транс форматоры являются статическими преобразователями элек­
троэнергии переменного тока. Отсугствие каких-либо вращаю­
щихся частей придает трансформаторам конструкцию, принципи­
ально отличающую их от электрических маn:rин. Однако принцип
действия трансформаторов, так же как и принцип действия элек­
трических машин, основан на явлении электромагнитной индук­
ции, и поэтому многие положения теории трансформаторов со­
ставляют основу теории электрических машин переменного тока.
11
ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ
бесколлекторные
коллекторные
с обмоткой
возбуждения
с постоянными
магнитами
реактив­
ные
гистере­
зисные
бесконтакт­
ные БДПТ
Рис. В.4. Классификация электрических машин
Электрические машины и трансформаторы - основные элемешы
любой энергетической системы или установки, поэтому для спе­
циалистов, работающих в сфере производства или эксплуатации
электрических машин, необходимы знания теории и понимание
физической сущности электромагюпных, механических и тепло­
вых процессов, протекающих в электрических машинах и транс­
форматорах при их работе.
Раздел
•
•
•
•
•
1
ТРАНСФОРМАТОРЫ
Трансформаторы широко при­
меняются в системах передачи
и распределения электроэнер­
гии. Известно, что передача
электроэнергии на дальние
расстояния
осуществляется
Группы соединения при высоком напряжении
(до
обмоток
500 кВ и более), благодаря
и параnnеnьная
чему значительно уменьшают­
работа
ся электрические потери в ли­
трансформаторов
нии электропередачи. Полу­
чить такое высокое напряже­
ние в генераторе невозможно,
Трехобмоточные
поэтому электроэнергия после
генератора подается на повы­
трансформаторы
шающий трансформатор, в ко­
и авто­
тором напряжение увеличива­
трансформаторы
ется до требуемого значения.
Это напряжение должно быть
тем выше, чем больше протя­
Переходные
женность линии электропере­
процессы
дачи
чем больше переда­
в трансформаторах ваемаяи по
этой линии мощ­
ность. Например, при переда­
че электроэнергии мощностью
Трансформаторные 106 кВт на расстояние 1000 км
устройства
необходимо напряжение 500 кВ.
специального
В местах распределения элек­
назначения
троэнергии между потребите­
лями устанавливают понижаю­
щие трансформаторы, которые
понижают напряжение до тре­
буемого значения. И наконец,
в местах потребления элек­
троэнергии напряжение еще
раз понижают посредством
трансформаторов до 220, 380
или 660 В. При таком напря­
жении электроэнергия пода­
ется непосредственно потре­
бителям - на рабочие места
Рабочий процесс
трансформатора
предприятий и в жилые поме­
щения. Таким образом, элек­
троэнергия переменного тока
в процессе передачи от элек­
тростанции к потребителям
подвергается трех-, а иногда и
четырехкратному трансфор­
мированию. Помимо этого ос­
новного применения транс­
форматоры используются в
различных электроустановках
(нагревательных,
сварочных и
v
т. п.), устроиствах автоматики,
связи и т. д.
Рабочий процесс
- трансформатора
Глава 1 •
§ 1.1. Назначение и области применения
трансформаторов
Трансформатором называют статическое элек­
тромагнитное устройство, имеющее две (или более)
индуктивно связанные обмотки и предназначенное
для преобразования посредством явления электро­
магнитной индукции одной (первичной) системы
перемет-юго тока в другую (вторичную) систему
переменного тока.
В общем случае вторичная система переменного
тока может отличаться от первичной любыми пара­
метрами: значениями напряжения и тока, числом
фаз, формой кривой напряжения (тока), частотой.
Наибольшее применение в электротеХIШЧеских ус­
тановках, а также в энергетических системах пере­
дачи и распределения электроэнергии имеют сило­
вые трансформаторы, посредством которых изме­
няют значения переменного напряжения и тока. При
этом число фаз, форма кривой напряжения (тока) и
частота остаются неизмешп,1ми.
В зависимости от назначения трансформаторы
· разделяют на силовые трансформаторы общего на­
значения и трансформаторы специального назначе­
ния. Силовые трансформаторы общего назначения
применяются в линиях передачи и распределения
электроэнергии, а также в различных электроуст­
ройствах для получения требуемого напряжения.
Трансформаторы специального назначения характе­
ризуются разнообразием рабочих свойств и конст­
руктивного исполнения. К этим: трансформаторам
относятся печные и сварочные трансформаторы,
трансформаторы для устройств автоматики (пик­
трансформаторы, импульсные, умножители частоты
и т.п.), испытательные и измерительные трансфор­
маторы и т. д.
При изучении данного раздела будем иметь в
виду силовые трансформаторы общего назначения,
за исключением гл. 5, в которой рассмотрены неко­
торые виды трансформаторов специального назна­
чения.
15
§ 1.2. Принцип действия трансформаторов
Простейший силовой трансформатор состоит из магнитопро­
вода (сердечника), вьшолненного из ферромагнитного материала
(обычно листовая электротехническая сталь), и двух обмоток, рас­
положенных на стержнях магнитопровода (рис. 1.1, а). Одна из
обмоток, которую называют первичной, присоединена к источнику
переменного тока Г на напряжение U1 • К другой обмотке, назы5)
ф
Рис. 1.1. Электромагнитная (а) и принципиальная (б) схемы
трансформатора
ваемой вторичной, подкmочен потребитель Zw Первичная и вто­
ричная обмотки трансформатора не имеют электрической связи
друг с другом, и мощность из одной обмотки в другую передается
электромагниmым путем. Магнитопровод, на котором располо­
жены эти обмотки, служит для усиления индуктивной связи между
обмотками.
Действие трансформатора основано на явлении электромаг­
нитной индукции. При подкmочении первичной обмотки к источ­
нику перемеmюго тока в витках этой обмотки протекает перемен­
ный ток i1 , который создает в магнитопроводе переменный
магнитный поток Ф. Замыкаясь в магнитопроводе, этот поток сце­
пляется с обеими обмотками (первичной и вторичной) и индуцирует в них ЭДС:
в первичной обмотке ЭДС самоиндукции
е1 = -w1 (dФ/dt),
во вторичной обмотке ЭДС взаимоиндукции
е2 = -widФ/dt),
(1.1)
(1.2)
где w1 и w2 - число витков в первичной и вторичной обмотках
трансформатора.
При подкmочении нагрузки Zн к выводам вторичной обмотки
трансформатора под действием ЭДС е2 в цепи этой обмотки созда­
ется ток i2, а на выводах вторичной обмотки устанавливается на­
пряжение U2• В повышающих трансформаторах U2 > U1, а в поI-Ш­
жающих U2 < U1.
Из (1.1) и (1.2) видно, что ЭДС е 1 и е2, наводимые в обмотках
трансформатора, отличаются друг от друга лишь за счет разного
числа витков w1 и w2 в обмотках, поэтому, применяя обмотки с
16
требуемым соотношением виrков, можно изготовить трансформа­
тор практически на любое отношение напряжений.
Обмотку трансформатора, подключенную к сети с более вы­
соким напряжением, называют обмоткой высшего напряжения
(ВН); обмотку, присоединенную к сети меньшего напряжения, обмоткой низшего напряжения (НН).
На рис. 1.1, б показано изображение однофазного трансфор­
матора на прmщипиальных электрических схемах.
Трансформаторы обладают свойством обратимости: один
и тот же трансформатор можно использовать в качестве повы­
шающего и понижающего. Но обычно трансформатор имеет
определенное назначение: либо он повышающий, либо - по­
нижающий.
Трансформатор - это аппарат переменного тока. Если же его
первичную обмотку подключить к источнику постоянного тока, то
магнитный поток в магнитопроводе трансформатора также будет
постоянным как по величине, так и по направлению [(dФ/dt) = О],
поэтому в обмотках трансформатора не будет наводпгься ЭДС, а
следовательно, электроэнергия из первичной цепи не будет пере­
даваться во вторичную.
Классифицируют трансформаторы по нескольким признакам:
п о н а з н а ч е н и ю - силовые общего и специального на­
значения, импульсные, для преобразования частоты и т. д.;
п о в и д у о х л а ж д е н и я - с воздушньrм (сухие транс­
форматоры) и масляньrм (масляные трансформаторы) охлаждени­
ем (см.§ 1.3);
п о ч и с л у т р а н с ф о р м и р у е м ы х ф а з - однофазные
и трехфазные;
п о ф о р м е м а гн и т о п р о в о д а - стержневые, броне­
вые, бронестержневые, тороидальные;
п о .ч и с л у о б м о т о к н а ф а з у -двухобмоточнь1е, мно­
гообмоточнь1е.
§ 1.3. Устройство трансформаторов
Современный трансформатор состоит из различнь�х конструк­
тивнь�х элементов: магнитопровода, обмоток, вводов, бака и др.
Магнитопровод с насаженньrми на его стержни обмотками состав­
ляет активную часть трансформатора. Остальные элемепгы
трансформатора называют неактивными (вспомогательными) час­
тями. Рассмотрим подробнее конструкцmо основнь�х частей
трансформатора.
Магнитопровод. Магнитопровод в трансформаторе выполня­
ет две функции: во-первь�х, он составляет магнигную цепь, по ко­
торой замыкается основной магнитный поток трансформатора, а
во-вторь�х, он предназначен для установки и крепления обмоток,
отводов, переключателей. Магнитопровод имеет шихтованную
конструкцию, т. е. он состоиr из тонких (обычно тоmциной 0,5 мм)
17
стальных Шiастин, покрьпых с двух сторон изолирующей пленкой
(например, лаком). Такая конструкция мапштопровода обуслов­
лена стремлением ослабигь вихревые токи, наводимые в нем пе­
ременным магнитным потоком, а следовательно, уменьшить
величину потерь энергии в трансформаторе.
2
-
а)
1
.f
ФА
,,., �
i
-
11
•Фв
'
- .... з
.t
Фе
-
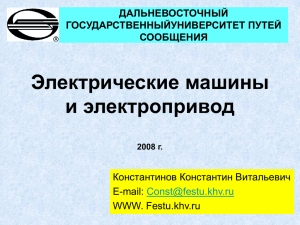
Рис. 1.2. Магнитопровод трехфазного трансформатора стержневого
типа с обмотками
Силовые трансформаторы вьmолняются с магнитопроводами
трех типов: стержневого, броневого и бронестержневого.
В магнитопроводе с т е р ж н е в о г о т и п а (рис. 1.2, а) вер­
тикальные стержни 1, на которых расположены обмотки 2, сверху
и снизу замкнуты ярмами 3. На каждом стержне расположены об­
мотки соответствующей фазы и проходит магнитный поток этой
фазы: в крайних стержнях - поrоки ФА и Фе, а в среднем стержне поток Ф8. На рис. 1.2, 6
показан внешний вид
а)
магнитопровода. При
этом стержни имеют
ступенчатое сечение,
вписываемое в круг
диаметром d (рис. 1.3 ).
Стержни трансформа­
торов большой мощ­
ности имеют много
ступеней, что обеспе­
чивает лучшее запол­
Рис. 1.3. Форма сечения стержней:
нение сталью площади
а - трансформаторов малой и средней мощности; внутри обмотки. Для
6--трансформаторов большой мощности
лучшей теплоотдачи
иногда между отдель­
ными пакетами стержня оставляют воздушные зазоры шириной
5-6 мм, служащие венrиляционными каналами.
Магнитопровод б р о н е в о г о т и п а представляет собой
разветвлеIШуЮ конструкцшо со стержнем и ярмами, частично
18
прикрывающими («бронирующими») обмотки (рис. 1.4). Магнит­
ный поток в стержне магнитопровода броневого типа в два раза
больше, чем в ярмах, каждое из которых имеет сечение, вдвое
меньшее сечения стержня. Из-за технологической сложности изго­
товления магнитопроводы броневого типа не получили широкого
распространения, их применяют Л1ШIЬ в силовых трансформаторах
весьма малой мощности (радиотрансформаторы).
В . трансформаторах большой мощное- aJ
ти применяют б р о нестержневую
конструкцию
IПIIIIГ---магнитопровода (рис. ftlllllllll _J�.IIIIID�2
1.5), которая хотя и
требует
несколько
повышенного расхода
электротехнической
стали, но позволяет Рис. 1.4. Однофазный трансформатор броневого
типа:
уменьшить
высоту
а - устройство; б - внешний вщ
магнитопровода (Ньс <
< Нс), а следовательно, и высоту трансформатора. Это имеет важное значение при
транспортировке трансформаторов.
По способу сочленения стержней с ярмами различают стыко­
вую и шихтованную конструкции стержневого магнитопровода
(рис. 1.6).
!
!
6)
гп--,
1
1
i
гп---1
1 1
1 1
! 1
1
•1
L___, L___J
Рис. 1.5. Магнитопроводы бронестержневых трансформаторов:
а - однофазного; б - трехфазного
При с т ы к о в о й к о н с т р укц и и (рис. 1.6, а) стержни и
ярма собирают раздельно, насаживают обмотки на стержни, а за­
тем приставляют верхнее и нижнее ярма, заранее проложив изоли­
рующие прокладки между стыкующими элементами, с целью ос­
лабления вихревых . токов, возникающих при взаимном
перекрьпии листов стержней и ярм. После установки двух ярм
всю конструкцию прессуют и стягивают вертикальными шпиль­
ками. Стыковая конструкция хотя и облегчает сборку магнитопро­
вода, но не получила распространения в силовых трансформаторах
из-за громоздкости стяжных устройств и необходимости механи19
ческой обработки стыкующихся поверхностей для уменьшения
магнитного сопротивления в месте стыка.
Ши х т о в а н н а я к о н с т р у кц и я магнитопроводов сило­
вых трансформаторов показана на рис. 1.6, 6, когда стержни и яр­
ма собирают слоями в переплет. Обычно слой содержит 2-3 лис­
та. В настоящее время магнитопроводы силовых трансформаторов
изготовляют из холоднокатаной
электротехнической стали, у
О}
которой магниmые свойства
вдоль направления прокатки
листов лучше, чем поперек. По­
этому при шихтованной конст­
рукции в местах поворота лис­
тов на 90° появляются «зоны
несовпадения»
направления
прокатки с направлением маг­
нитного потока. На этих участ­
Рис. 1.6. Стыковая (а) и шихтован­ ках набmодаются увеличение
ная (6) конструкции магнитопро­ магнитного сопротивления и
водов
рост магнитнь�х потерь. С це­
лью ослабления этого явления
применяют для шихтовки пла­
СТШIЪI (полосы) ·со скошенньIМИ краями. В этом случае вместо
прямого стыка (рис. 1.7, а) получают косой стык (рис. 1.7, б), у
которого «зона несовпадения» гораздо меньше.
Недостатком магнитопроводов шихтованной конструкции яв­
ляется некоторая сложность сборки, так как для насадки обмоток
на стержни приходигся расшихтовьmать верхнее ярмо, а затем по­
сле насадки обмоток вновь его заmихтовьmатъ.
-
Зона несо8пооения
й)
о)
t
Рис. 1.7. «Зоны несовпадения» при пря­
мом (а) и косом (6) стыках
Рис. 1.8. Опрессовка ярма
Стержни магнитопроводов во избежание распушения опрес­
совьmают (скреIUIЯЮТ). Делают это обычно наложением на стер­
жень бандажа из стеклоленты или стальной проволоки. Стальной
бандаж вьmолняют с изолирующей пряжкой, что исключает соз­
дание замкнутъ�х сталънъ�х витков на стержнях. Бандаж наклады­
вают равномерно, с определенньIМ натягом. Для опрессовки ярм 3
20
и мест их сочленения со стержнями 1 используют ярмовые балки
2, которые в местах, выходящих за крайние стерЖIШ (рис. 1.8),
стягивают шпильками.
Во избежание возникновения разности потеJЩИалов между
металлическими частями во время работы трансформатора, что
может вызвать пробой изолядиоlПIЪIХ промежутков, разделяющих
эти части, магнитопровод и детали его креШiения обязательно
заземляют. Заземление осуществляют медными лентами, встав­
ляемыми между стальными пластинами мапштопровода одними
кшщами и прикрепляемыми к ярмовым балкам другими кшщами.
Магнитопроводы трансформаторов малой мощности
(обычно мощностью не более 1 кВ·А) чаще всего изготовляют
из узкой ленты электротехнической холоднокатаной стали пу­
тем навивки. Такие магнитопроводы делают разрезными (рис.
1.9), а после насадки обмоток собирают встык и стягивают спе­
циальными хомутами.
aJ
нн
ь) .---------.
Е:шm::,нн
i:==>BH
нн
"""=rс.вн
вн
Рис. 1.9. Ле1ПОчные раз­
резные магнитопроводы
��t;;>HH
Рис. 1.10. Концентрическая (а) и дисковая
(б) обмотки трансформаторов
Обмотки. Обмотки трансформаторов средней и большой
мощности вьmолняют из обмоточных проводов круглого или пря­
моугольного сечения, изолироваlПIЪIХ хлопчатобумажной пряжей
или кабельной бумагой. Основой обмотки в большинстве случаев
является бумажно-бакелитовый цилиндр, на котором крепятся
элементы (рейки, угловые шайбы и т. п.), обеспечивающие обмот­
ке механическую и электрическую прочность.
По взаимному расположению на стержне обмотки разделяют
на кшщентрические и чередующиеся. К о н ц е н т р и ч е с к и е
о б м о т к и вьmолняют в виде цилиндров, размещаемых на
стержне концентрически: ближе к стержню обычно располагают
обмотку ИН (требующую меньшей изоляции от стержня), а сна­
ружи - обмотку ВН (рис. 1.1О, а).
Ч е р е д ующ и е с я ( д и с к о в ы е ) о б м о т к и выполняют
в виде отдельных секций (дисков) ИН и ВН и располагают на
стержне в чередующемся порядке (рис. 1.1О, 6). Чередующиеся
обмотки применяют весьма редко, лшпь в некоторьIХ трансформа­
торах специального назначения.
21
Ко1Щепrрические обмотки в конструктивном отношеmrn раз­
деляют на несколько ТШiов. Рассмотрим некоторые из них.
1. Цилиндрические однослойные или двухслойные обмотки
из провода прямоугольного сечения (рис. 1.11, а) используют
главным образом в качестве обмоток НН на номинальный ток
ДО 800 А.
а)
tJ)
Рис. 1.11. Конструкция концентрических обмоток
2. Винтовые одно- и многоходовые обмотки выполняют из
нескольких параллельных проводов прямоугольного сечения.
При этом витки укладывают по винтовой линии, имеющей один
или несколько ходов (рис. 1.11, б). Для того чтобы все парал­
лельные проводники одинаково нагружались током, выполняют
транспозицию (перекладку) этих проводников. При транспози­
ции стремятся, чтобы в пределах одного витка каждый провод­
ник занимал все положения. Транспозиция может быть группо­
вой (рис. 1.12, а), когда параллельные провода делятся на две
группы и перестановка осуществляется группами, и общей, ко­
гда меняется взаимное расположение всех параллельных про­
водов (рис. 1.12, б).
3. Непрерывные обмотки (рис. 1.11, в) состоят из отдель­
ных дисковых обмоток (секций), намотанных по спирали и со­
единенных между собой без пайки, т. е. выполненных «непре­
рывно». Если обмотка выполняется несколькими параллель­
ными проводами, то в ней применяют транспозицию проводов.
22
Непрерывные обмотки, несмотря на некоторую сложность из­
готовления, получили наибольшее применение в силовых
трансформаторах как в качестве обмоток ВН, так и в качестве
обмоток НН. Это объясняется их большой механической проч­
ностью и надежностью.
В трансформаторах
с масляным охлажден и е м магнитопровод с об�
мотками помещен в бак, наб�)
полненный трансформаторным маслом (рис. 1.13).
Трансформаторное
масло, Рис. 1.12. Транспозиция в винтовых
обмотках
омывая обмотки 2 и 3 и магнитопровод 1, отбирает от них
теплоrу и, обладая более высокой теплопроводностью, чем воздух,
через стенки бака 4 и трубы радиатора 5 отдает ее в окружающую
среду. Наличие трансформаторного масла обеспечивает более на­
дежную рабоrу высоковольтных трансформаторов, так как элек­
трическая прочность масла намного выше, чем воздуха. Масляное
охлаждение mпенсивнее воздушного, поэтому габариты и вес
масляных трансформаторов меньше, чем у сухих трансформаторов
такой же мощности.
В трансформаторах мощностью до 20-30 кВ·А применяют
баки с гладкими стенками. У более мощных трансформаторов для
увеличения охлаждаемой поверхносm стенки бака делают ребри­
стьrми или же применяют трубчатые баки. Масло, нагреваясь,
поднимается вверх, а охлаждаясь, опускается вниз. При этом мас­
ло циркулирует в трубах, что способствует более быстрому его
охлаждению (см. § 31.5).
Для компенсации объема масла при изменении темпераrу­
ры, а также для защиты масла от окисления и увлажнения при
контакте с воздухом в трансформаторах применяют расшири­
тель 9, представляющий собой цилиндрический сосуд, установ­
ленный на крышке бака и сообщающийся с ним. Колебания
уровня масла с изменением его температуры происходят не в
баке, который всегда заполнен маслом, а в расширителе, сооб­
щающемся с атмосферой.
В процессе работы трансформаторов не исключена возмож­
ность возникновения в IШХ явлений, сопровождающихся бурным
выделением газов, что ведет к значительному увеличению давле­
ния внутри бака, поэтому во избежание повреждения баков транс­
форматоры мощностью 1000 кВ·А и выше снабжают выхлопной
трубой, которую устанавливают на крышке бака. Нижним концом
труба сообщается с баком, а ее верхний конец заканчивается
фланцем, на котором укреплен стеклянный диск. При давлении,
превышающем безопасное для бака, стеклянный диск лопается и
газы выходят наружу.
В трубопровод, соединяющий бак масляного трансформ.tгора
с расширителем, помещено газовое реле. При возникновении в
23
трансформаторе значительных повреждений, сопровождаемых
обильным выделением газов (например, при коротком замыкании
между витками обмоток), газовое реле срабатывает и замыкает
конrакты цепи управления выкточателя, который откmочает
трансформатор от сети. Обмотки трансформатора с внешней це­
пью соединяют вводами 7 и 8. В масляных трансформаторах для
вводов обычно используют проходные фарфоровые изоляторы.
· Рис. 1.13. Устройство трансформатора с масляным охлажде-
нием
Такой ввод снабжен металлическим флаIЩем, посредством кото­
рого он крепится к крышке или стенке бака. К дну бака прикреп­
лена тележка, позволяющая перемещать трансформатор в преде­
лах подстанции. На крышке бака расположена рукоятка
перекточателя напряжений 6 (см.§ 1.15).
Свойства трансформатора определяются его номинальными
параметрами: 1) номинальное первичное линейное напряжение
И� ном , В или кВ; 2) номинальное вторичное линейное напряжение
И2ном (напряжение на выводах вторичной обмотки при откточен­
н:ой нагрузке и номинальном первичном напряжении), В или кВ;
3) номинальные линейные токи в первичной l1 но м и вторичной l2ном
обмотках, А; 4) номинальная полная мощность Sн ом, кВ·А (для од­
нофазного трансформатора sном = И1ном /lном , ДЛЯ трехфазного Sн ом = ✓3 Ulном/lном ).
24
Номинальные mmейные токи вычисляют по номинальной
мощности трансформатора: для трехфазного трансформатора
1
-
ом
lн
-
з
sном 1о
з
• /
- sном 1о
2ном -:-[/,,
2 ном
\ном
✓J U
•
✓J
,
(1.3)
где Sном - номинальная мощность трехфазного трансформатора,
кВ·А.
Каждый трансформатор рассчитан для вкточения в сеть пе­
ременного тока определенной частоты. В России трансформаторы
общего назначения рассчитаны на частоту/= 50 Гц (в некоторых
других странах/= 60 Гц), в устройствах автоматики и связи при­
меняют трансформаторы на частоты 50, 400 или 1ООО Гц.
Пример 1.1. Номинальные значеЮ1Я первичного и вторичного напряжений
однофазного трансформатора И�ном = 11О кВ, И2ном = 6,3 кВ, номинальный пер­
вичный ток /1ном = 95,5 А. Опредеmпь номинальную мощность трансформатора
Sном и номинальный вторичный ток /2ном•
р е Ш е НИ е. Номинальная МОЩНОСТЬ трансформатора stIOИ = И1ном/lном=
=110·95,5=10500 кВ·А. Номинальный вторичный ток /2ном = Sном /И2ном=
=10500/6,3=1666 А.
§ 1.4. Уравнения напряжений трансформатора
Основной переменный магнитный поток Ф в магнитопроводе
трансформатора, сцепляясь с витками обмоток w 1 и w2 (см. рис.
1.1), наводит в них ЭДС [см. (1.1) и (1.2)]
е1 = -w1 (dФ/dt); е2 = -widФ/dt).
Предположим, что магнитный поток Ф является синусоидаль­
ной функцией времени, т. е.
ф = ф mах sinrot,
(1.4)
где Фmах - максимальное значение потока.
Тогда, подставив (1.4) в формулу ЭДС е 1 и дифференцируя,
получим
(1.5)
е\ = -ФW1 Ф mах cosrot.
Но так как cosrot = -sin(rot-тr./2) , то
е1 = row1 Фmax sin(rot-тr./2).
(1.6)
По аналогии,
е2 = ФW2 Фmах sin(rot-тr./2) .
(1.7)
Из (1.6) и (1.7) следует, что ЭДС е1 и е2 отстают по фазе от по­
тока Ф на угол тr.12. Максимальное значение ЭДС
(1.8)
25
Разделив Etmax на ✓2 и подставив ro = 2п/ , получим дейст­
вующее значение первичной ЭДС (В):
( 1.9)
Е1 = Elmax/✓2 =(2п/✓2 )wJФ max= 4,44w.JФm■x.
Аналогично, для вторичной ЭДС
(1.10)
Е2 =4, 44w2 /Фmax .
Оrnошение ЭДС обмотки высшего напряжения к ЭДС обмотки
низшего напряжения называют коэффициентом трансформации:
k=E1 /E2 =w1 /w 2 •
(1.11)
При практических расчетах коэффициент трансформации с
некоторым допущением принимают равным отношению номи­
нальных напряжений обмоток ВН и НН: k::::: U�ном /U2н0м .
ф
Рис. 1.14. Магнитные потоки в однофазном трансформаторе
Токи /1 и /2 в обмотках трансформатора помимо основного
магнитного потока Ф создают маrmпные потоки рассеяния Ф"1 и
Ф"2 (рис. 1.14), каждый из которых сцеплен с витками ЛШIIЬ собст­
венной обмотки и индуцирует в ней ЭДС рассеяния. Эти ЭДС в
первичной и вторичной обмотках таковы:
е"1 =-L" 1 (di1 /dt); е"2 =-L"idi2 /dt ),
где L"1 и L"2 - индуктивности рассеяния.
Так как МЩ"'НИПIЬiе потоки рассеяния замыкаются главным об­
разом в немаrmпной среде (воздух, масло, медь), магmпная про­
ницаемость которой постоЯШiа, то и индуктивности L" 1 и L"2 мож­
но считать постоянными.
Действующие значения ЭДС рассеяния пропорциональны то­
кам в соответствующих обмотках:
(1.12)
где х 1 и х2 - индуктивные сопротивления рассеяния первичной и
вторичной обмоток соответственно, Ом (знак минус в этих выра­
жениях свидетельствует о реактивности ЭДС рассеяния).
Таким образом, в каждой из обмоток трансформатора индуци­
руются по две ЭДС: ЭДС от основного потока Ф и ЭДС от потока
рассеяния (Ф"1 в первичной обмотке и Ф"2 во вторичной обмотке).
26
Для первичной цепи трансформатора, вкточенной в сеть на
напряжение U1 , с учетом падения: напряжения: в активном сопро­
тивлении первичной обмотки r1 можно записать уравнение напря­
жений по второму закону Кирхгофа:
lJ\ + Е1 +Eal = jJ1j'
и ли, перенеся ЭДС Ё1 и Ёа1 в правую часть уравнения и выразив
ЭДС рассеяния через индуктивное сопротивление рассеяния х 1 ,
получим уравнение напряжений для первичной цепи трансф орма­
тора:
(1.13)
ЭДС первичной обмотки Е1 , наведенная основным магнитным
потоком Ф, представляет собой ЭДС самоиндукции, а поэтому на­
ходится в противофазе с подведенным к первичной обмотке на­
пряжением U1 •
Обычно индуктивное Д1 х1 и активное i1 1j падения напряже­
ния невелики, а поэтому с некоторым приближением можно счи­
тать, что подведенное к трансформатору напряжение U1 уравно­
вешивается ЭДС Е1 , т. е.
(1.14)
Для вторичной цепи трансформатора, замкнутой на нагрузку с
сопротивлением Zн, уравнение напряжений имеет вид
(1.15)
Ё2 +Ea2 = i2r2 +i2Zн ,
т. е. сумма ЭДС, наведе1rnых во вторичной обмотке (Е2 + Ёа2 ),
уравновешивается суммой падений напряжений ( i2r2 + i2 z") .
Здесь r2 - активное сопротивление вторичной обмотки. Падение
напряжения на нагрузке i2 zн представляет собой напряжение на
выводах вторичной обмотки трансформатора:
(1.16)
/2 Zн = U2 •
Приведем уравнение (1.15) к виду, аналогичному уравнению
ЭДС для первичной цепи (1.13). При этом учтем выражения (1.12)
и (1.16) и получим уравнение напряжений для вторичной цепи
трансформатора:
(1.17)
Из этого уравнения следует, что напряжение на выходе на­
груженного трансформатора отличается от ЭДС вторичной обмот­
ки на величину падения напряжений в этой обмотке.
Пример 1.2. Имеете.я однофазный трансформатор (рис. 1.14) номинальной
мощностью Sном = 100 кВ·А и номинальными напряжеНЮIМи И1ном = 6000 В и
И2ном = 400 В при частоте тока f = 50 Гц; действующее значение напряжения,
приходящеес.я на один виток обмоток, И.кr = 5 В.
Определиrь: числа витков обмоток трансформатора w 1 и w2; поперечное се­
чение обмоточных проводов ·первичной q1 и вторичной q2 обмоток, если плот27
ность тока в этих проводах Л = 4, 0 А/мм2; площадь поперечного сечения стержня
магнитопровода Qc-r, если максимальное значение маrнитной шщукции в стержне
Вет= 1,4 Тл.
Реш е н и е. По номинальным значениям напряжений И1ном и И2но" опреде­
ляем числа витков в обмотках:
W1 =U1 -/U•.,, =6000/5=12 00; Wz =Uzном /и•.,, =400/5=80.
Номинальные значения токов в обмотках:
3
/\ном =Sном /U1 =100·10 /6000=16,7 А; /2ном =Sнo.,/Uz =100-103/400=250 А.
Поперечные сечения обмоточных проводов:
q1 =/1но.,/Л = 16,7/4=4,175 мм 2; q2 =/2ном/Л =250/4=62,5 мм2.
Основной магнитный поток в стержне определим, используя выражение
( 1.1 О) и учитывая, что номинальное вторичное напряжение Uzно;. =Е2 :
Фm■х =E2 /(4,44jw2) = 400/(4,44-50· 80) = 0,0225 Вб.
Поперечное сечение стержня магнитопровода
Qc-r =Фmох /(kс Вст )=О,0225/(0,93·1,4)=0,0 17 м2, 1
rде kc= 0,93 - коэффициеш заполнения шихтованного стержня сталью, учиты­
вающий увеличение сечения стержня прослойками изоляционного лака между
стальными полосами.
§ 1.5. Уравнения маrнитодвижущих сил и токов
Предположим, что трансформатор работает в режиме холо­
стого хода (рис. 1.15, а), т. е. к зажимам его первичной обмотки
подведено напряжение U1 , а вторичная обмотка разомкнуга
(И1 = О). Ток /0 в первичной обмотке при этих условиях называют
током холостого хода.
Магнитодвижущая сила (МДС) /0w 1, созданная этим током,
наводит в магнитопроводе трансформатора основной магнитный
поток, максимальное значение которого
2
(1.18)
Ф mах = ✓ Iow1/ �,
где R.. - магнитное сопротивление магнитопровода.
При замыкании вторичной обмотки на нагрузку Zн (рис. 1.15, б) в
ней возникает ток /2. При этом ток в первичной обмотке увеличи­
вается до значения /1.
Теперь поток Фmах создается действиями МДС /1w 1 и /2w2:
(1.19)
Ф mах =(✓
2/J\i)01 w1 +j2 W2 ).
Этот поток можно определить из (1.9):
Ф mах = E1 /(4,44w1 /),
или, принимая во внимание, что И1 :::::: ( -Ё1 ), получим
(1.20)
Фmах :::::: И1 /( 4,44fiv1 ).
Из (1.20) следует, что значение основного магнитного потока
Ф практически не зависит от нагрузки трансформатора, так как
напряжение И1 неизменно. Однако следует иметь в виду, что это
28
положение является приближе1шым и оnюсится к случаям нагруз­
ки, не превышающим номинальную. Объясняется это тем, что по­
ложение о неизменности потока Ф принято на основании уравне­
ния U1 ::::: (-Ё1 ), которое не учитывает падений напряжения в
первичной цепи [сравните с (1.13)].
Принятое положение Ф = const позволяет приравнять выраже­
ния (1.18) и (1.19):
О}
tJJ
-
---
i,
1.
�
Рис. 1.15. Режимы холостого хода (а) и нагрузки (б) в однофазном
трансформаторе
/
/
(✓2 l\i)iow1 = ( ✓2 l\i)01 w1 + j2 w2 )
а
р
и получить у внение МДС трансфор матора:
(1.21)
i0w1 = i1 w1 + i2 w2 .
Преобразуя (1.21), можно МДС первичной обмотки j1 w1 пред­
ставить в виде суммы двух составляющих:
i1 w1 = i0w1 +(-i2 w2 ).
Составляющая i0w1 наводит в магнитопроводе трансформа­
тора основной мапштный поток Ф, а составляющая - /2 iv2 урав­
новешивает МДС вторичной обмотки i2 w2 •
Воздействие МДС вторичной обмотки трансформатора i2w2
на основной магнитный поток Ф можно объяснить с помощью
правила Ленца. В соответствии с этим правилом наведенная в об­
мотке ЭДС создает в этой обмотке такой ток, который своим маг­
нитным действием направлен против причины, вызвавшей появ­
ление этой ЭДС. Причиной наведения ЭДС Е2 во вторичной
обмотке трансформатора является основной мапштный поток Ф,
поэтому ток во вторичной обмотке /2 создает МДС i2 w2 , направ­
ленную встречно потоку Ф, т. е. находящуюся с ним в противофа­
зе и стремящуюся ослабить этот поток. Если бы обмотка w2 бьша
замкнута накоротко или на чисто индуктивное сопротивление и
при этом не обладала активным сопротивлением, то ток j2 отставал бы по фазе от ЭДС Ё2 на угол \/1 2 = 90° и вся МДС i2 w2 ока­
зьmала бы на мапmтопр овод размагничивающее действие. Но в
реальных условиях вторичная обмотка замкнута на сопротивление
29
нагрузки Zн = r" ± jx" , да к тому же она сама обладает а ктивным
сопротивлением r2• Поэтому фазовый сдвиг тока i2 от ЭДС Ё2
отличается от 90° и с основным магнитным потоком Ф взаимодей­
ствует не вся МДС i2w2 , а тппъ ее реактивная составляющая.
При
а к т и в н о -и н д у к т и в н о й
н а г р у з к е, когда
Zн = r" + jx" и ток нагрузки i2 отстает по фазе от ЭДС вторич­
ной обмотки Е2 на угол \j/ 2 , МДС /2w2 своей реактивной (инду ктивной) составляющей i2P w2
оказъmает на магнитопровод
Фmо,.
трансформатора размагничи­
вающее действие:
i2p W2 = i2 W2 sin \\1 2 ,
где i2P = i2 sin \j/ 2 - реактив­
ная составляющая тока нагрузки.
На рис. 1.16, а представ­
лена векторная диаграмма
МДС для случая активноиндуктивной нагрузки трансформатора. На диаграмме вектор ЭДС вторичной обмотки Ё2 отстает по фазе от вектора основного магнитного потока Ф max на
угол 90°, а вектор МДС вторичной обмотки i2 w2 отстает по фазе
от ЭДС Е2 на угол '11 2 (рис. 1.16, а). Из вьшолненных на этой
диаграмме построений видно, чrо реактивная (индуктивная) со­
ставляющая МДС вторичной обмотки i2Pw2 находится в противоРис.1.16. ВекторныедиаrраммыМДС
трансформатора при активно-шщук­
тивной (а) и акmвно-емкостной (б)
наrрузках
фазе с основным магнитным потоком Ф mах , т. е. оказъmает на маг­
нитопровод трансформатора размагничивающее действие.
Анализируя работу трансформатора, необходимо отметить, чrо
при нагрузке трансформатора в пределах ноМШiалъного значения
основной магнипп.rй поток Ф изменяется весьма незначительно и
принятое ранее положение Ф � const вполне допустимо. Происходит
это потому, что МДС вторичной обмотки i2 w2 , реактивная состав­
ляющая которой оказъmает на магнитопровод размагничивающее
действие, компенсируется составляющей первичной МДС:
(-i2 w2 )=i1 w1 -i0 w1 •
(1.22)
При колебаниях тока нагрузки трансформатора i2 изменяется
МДС вторичной обмотки i2 w2 , а это вызьmает соответствующие
изменения МДС первичной обмотки /1 w1 за счет ее составляющей i2w2 • Что же касается составляющей МДС холостого хода i0 w1 ,
то ее значение остается практически неизмеюп,�м, достаточным
..
30
для создаJШЯ в магнитопроводе трансформатора основного маг­
нигного потока Ф:::: const.
При а к т и в н о-е м к о с т н о й н а г р у з к е трансформатора,
когда Zн = rн - jхн и ток нагрузки i2 опережает по фазе ЭДС Ё2
на угол \Jf 2 , реактивная (емкостная) составляющая МДС вторич­
ной обмотки i2P w2 совпадает по фазе с основным -магнитным потоком Ф max и подмагничивает магнитопровод трансформатора
(рис. 1.16, б). В этом случае, так же как и при активно­
индуктивной нагрузке [см. (1.22)], составляющая первичной МДС
( - j2 w2 ) компенсирует действие вторичной МДС j2w2 •
Разделив уравнение МДС (1.21) на число витков w 1 , получим
(1.23)
jo = jl + j2 w2 /w1 , или jo = jl + j2,
где i2 = i2 w2 /w1 - ток нагрузки (вторичный ток), приведенный к
числу витков первичной обмотки.
Другими словами, это такой ток, который в обмотке с числом
витков w 1 создает такую же МДС, что и ток /2 во вторичной об­
мотке w2, т. е. /2w1 =liw2 /w1 )w1 =/2 w2 .
Преобразовав выражение {1.23), получим уравнение токов
трансформатора:
(1.24)
Из этого уравнения следует, что первичный ток /1 можно рас­
сматривать как сумму двух составляющих: составляющую 10, соз­
дающую МДС /0w1, необходимую для наведения в магнитопроводе
основного магнитного потока Ф, и составляющую -/2 , которая,
создавая МДС - /2 w1 , компенсирует МДС вторичной обмотки /2w2
трансформатора. Такое действие составляющих первичного тока
приводит к тому, что любое изменение тока нагрузки /2 сопровож­
дается изменением первичного тока /1 за счет изменения его со­
ставляющей - /2 , находящейся в противофазе с током нагрузки /2 •
Основной магнитньIЙ поток Ф является переменнi,1м, а поэто­
му магнитопровод трансформатора подвержен систематическому
перемагничиванию. Вследствие этого в магнитопроводе транс­
форматора имеют место магнитные потери от гистерезиса и
вихревых токов, наводимых переменным магнитным потоком в
пластинах электротехнической стали. Мощность магнитных по­
терь эквивалентна активной составляющей тока х.х. Таким обра­
зом, ток х.х. имеет две составляющие: реактивную lop, представ­
ляющую собой намагничивающий ток, и активную Ioa,
обусловленную магнитными потерями:
.J
(1.25)
10 = /�а + /�Р .
Обычно активная составляющая тока х.х. невелика и не пре­
вышает 0,10 от /0, поэтому она не оказьmает заметного влияния на
токх.х.
31
На рис. 1.17 представлена векторная диаграмма, на которой
показаны векторы тока х.х. j0 и его составляющих j0 и jop . Угол
о, на который вектор основного магнитного потока Фшах отстает
по фазе от тока i0 , называют углом магнитных потерь. Нетрудно
заметигь, что этот угол увеличивается с ростом активной состав­
ляющей тока х.х. loa, т. е. с ростом магнитных потерь в магниrо­
проводе трансформатора.
Сила тока х.х. в трансформаторах большой и средней мощности соответственно составляет 2-10%
Io
от ноМШiального первичного тока. По­
этому при нагрузке, близкой к номи­
нальной, пренебрегая током 10 и пре­
тах образуя (1.22), получим
(1.26)
11/ 12 = W2/W1 '
т. е. токи в обмотках трансформатора
обратно пропорциональны числам вит­
ков этих обмоток: ток больше в обмот­
ке с меньшим числом витков и меньше в
обмотке с большим числом витков. По­
этому обмотки НН выпоJПIЯЮТ проводом
Рис. 1.17. Разложение тока
большего сечения, чем обмотки ВН,
х.х. на составляющие
имеющие большее число витков.
1
§ 1.6. Приведение параметров вторичной
обмотки и схема замещения приведенного
трансформатора
В общем случае параметры первичной обмотки трансформа­
тора отличаются от параметров вторичной обмотки. Эта разница
наиболее ощутима при больших коэффициентах трансформации,
что затрудняет расчеты и построение векторных диаграмм, так как
в этом случае векторы электрических величин первичной обмотки
значительно отличаются по своей длине от одноимешn,�х векторов
вторичной обмотки. Указашn,1е затруднения устраняются приве­
дением всех параметров трансформатора к одинаковому числу
витков, обычно к числу витков первичной обмотки Wt. с этой це­
лью все величины, характеризующие вторичную цепь трансфор­
матора, - ЭДС, напряжение, ток и сопротивления - пересчиты­
вают на число витков w1 первичной обмотки.
Таким образом, вместо реального трансформатора с коэффи­
циентом трансформации k = w1 /w2 получают эквивалентный
трансформатор с k = w1 /w2 = 1 , где w2 = w1 • Такой трансформатор
называют приведенным. Однако приведение вторичнъIХ парамет­
ров трансформатора не должно отразиться на его энергетических
показателях: все мощности и фазовые сдвиги во вторичной обмот­
ке приведеmюго трансформатора должны остаться такими, как и в
реальном трансформаторе.
32
Так, электромагmrrnая мощность вторичной обмотки реально­
го трансформатора Е2 12 должна бьпь равна электромагнитной
мощности вторичной обмотки приведенного трансформатора:
(1.27)
Е2 12 = Е212•
Подставив значение приведенного тока вторичной обмотки
/� = liwzlw1) в (1.27), получим: формулу приведенной вторичной
ЭДС:
12
(1.28)
Е2 = Е2 = !l.!:i Е2 = Е2 !:i.
/2 W2
W2
/2
Так как И2 12 :а:: И212, то приведенное напряжение вторичной
обмотки
(1.29)
Из условия равенства потерь в активном сопротивлении вто­
ричной обмотки имеем IJr2 = J2 2r2. Определим приведеmюе ак­
тивное сопротивление:
2
2
(1.30)
ri_ = ri/ 2 / 12) = riw1 /w2 ) .
Приведешюе индуктивное сопротивление рассеяния вторич­
ной обмотки определяют из условия равенства реактивных мощ/'2 1
ностеи� /2
2х2 = 2 х2 , откуда
(1.31)
х2 =xiw1 /w2 ) 2 .
Приведенное полное сопротивление вторичной обмотки
трансформатора
Z� =r;+ jx; =(r2 +jx 2 )(w1 /w2 ) =ZiwJw2 ) • (1.32)
Приведенное полное сфротивление нагрузки, подкmоченной
на вьmоды вторичной обмо#lf,
"" определим по2 аналогии с (1.32):
Z� =Zн (w1 /w2 ).
(1.33)
1I Уравнения напряжений и токов для приведенного трансформатора имеют вид
.
.
.
.
..
.
И1 =(-E1 )+/1 Z1 =(-Е1 )+Jl1 x 1 +/1 1j;
1
1 -i1 Z' Ё'-1°i' 1 -i'r.1
U'-Ё
(1.34)
2- 2
2 2- 2
2 x2
22•
jl = jO +(-i2) •
ти
уравнения
устанавливают
аналитическую связь между па­
Э
раметрами трансформатора во всем диапазоне нагрузок от режима
х.х. до номинальной.
Еще одним средством, облегчающим исследование электро­
магнитных процессов и расчет трансформаторов, является приме­
нение электрической схемы замещения приведенного трансфор­
матора. На рис. 1.18, а представлена эквивалентная схема приве­
денного трансформатора, на которой сопротивления r и х условно
вьrnесены из соответствующих обмоток и вкmочены последова­
тельно им. Как было установлено ранее, в приведенном трансфорзз
2
2
'
•
в;
маторе k = 1, а поэтому - ЁI = . В результате точки А и а, а так­
же точки Х и х на схеме имеют одинаковые потеJЩИалы, что по­
зволяет электрически соедшrnть указа1rnые. точки, получив Тобразную схему замещения приведенного трансформатора (рис.
1.18, б). В электрической схеме замещения трансформатора маг­
нитная связь между цепями заменена электрической.
Схема замещения при­
веденного трансформатора
удовлетворяет всем урав­
нениям ЭДС и токов при­
веденного трансформатора
(1.34) и представляет со­
бой совокупность трех
ветвей: первичной - со­
и,
противлением Z1 = r1 + jx1
z.;
r.
и током /1 ; намагничивающей - сопротивлеIШем
Zm =rт + Jxm и током
Рис. 1.18. Эквиваленmая схема (а) и схема
(
замещеIШЯ б) приведенноrо трансформатора j0 ; вторичной - с двумя
сопротивлениями: сопро­
тивлением собственно вторичной ветви Z2 = r2 + jx2 и сопротивлеIШем нагрузки Z� = r� ± jx� и током - /2 . Изменением сопротивлеЮ1Я
нагрузки Z� на схеме замещения мшуr бьпъ воспроизведены все ре­
жимы работы трансформатора.
Параметры ветви намапшчивания Zm =rm + jxm определяются
током х.х. Наличие в этой ветви активной составляющей rт обу­
словлено магнитными потерями в трансформаторе (см.§ 1.14).
Все параметры схемы замещения, за исключеIШем Z�, явля­
ются постоянными для данного трансформатора и могут быть оп­
ределены из опьrrа х.х. и опьпа к.з. (см. §1.11).
§ 1.7. Векторная диаrрамма трансформатора
Воспользовавшись схемой замещения приведенного транс­
форматора и основными уравнениями напряжений и токов ( 1.34),
построим векторную диаграмму трансформатора, наглядно пока­
зывающую соопюшения и фазовые сдвиги между токами, ЭДС и
напряжениями трансформатора. Векторная диаграмма - графиче­
ское выражение основных уравнений приведенного трансформа­
тора (1.34).
Построение диаграммы (рис. 1.19, а) следует начинать с век­
тора максимального значения основного магнитного потока
ф mах = EJ(4,44Jw1 )•
о,
34
Вектор тока j0 опережает по фазе вектор потока Ф max на угол
а векторы ЭДС Ё1 и Ё2 отстают от этого вектора на угол 90°
[см. (1.6) и (1.7)]. Далее строим вектор i2. Для определения угла
сдвша фаз между Е2 и i 2 следует знать характер нагрузки. Пред­
положим, чrо нагрузка трансформатора а к т и в н о - и н д у к т и в н а я. Тогда вектор i2 отстает по фазе от Е2 на угол
'11 2 = arctg
х'2 +х'
" ,
(1.35)
r{+r:
определяемый как характером внешней нагрузки, так и собствен­
ными сопротивлениями вторичной обмотки.
Для построения век­
Ji,.r,
тора вторичного напряа)
i,z, J.
жения U2 необходимо из
r'i
вектора ЭДС Е2 вычесть
векторы !Шдений . напря­
жения j/2x2 и 12r2 . С
этой целью из конца век­
тора Е2 опускаем пер­
пендикуляр на напр�е­
ние вектора тока 12 и
отклад ываем на нем век­
тор - ji2x2. Затем прово­
дим прямую, параллель­
1.19. Векторные диаграммы трансфор­
ную i 2, и на ней откла­ Рис.
матора при активно-индуктивной (а) и ак­
дываем вектор -I;r;.
тивно-емкостной (б) нагрузках
1;z�
,
вектор
Построив
треугольник
получим
внутреюmх падений напряжения во вторичной цепи. Затем из точки
О проводим вектор lf2 = Е2 - i2z2 , который опережает по фазе ток
i2 на угол q> 2 = arctg(x;/r:).
Вектор первичного тока строим как векторную сумму:
i 1 = i 0 +(-i2). Вектор - i2 проводим из конца вектора i0 противоположно вектору i 2. Построим вектор И1 = -Ё{ + }i1 x 1 + i11j, для че­
го к вектору - Е{ , опережающему по фазе вектор потока Ф шах на 90°,
прибавляем векторы внутреюmх падений напряжения первичной об­
мотки: вектор i11j , параллельный току i1 , и вектор }i1 x 1 , опережаю­
щий вектор тока i1 на угол 90°. Соединив точку О с концом вектора
i1 z1 , получим вектор И1 , который опережает по фазе вектор тока i1
на уrол q> 1 •
Иногда векторную диаграмму трансформатора строят с целью
определения ЭДС обмоток. В этом случае задаmn.�ми являются
параметры вторичной обмотки: U2, 12 и cosq> 2• Зная w1 /w2, опре35
деЛЯIQт И2 и i2 , а затем строят вектор ы этих величин под фазо­
в ым углом <р2 друг к другу. Вектор ЭДС Е2 = Е1 получают г ео­
метрическим сложением вектора напряжения U2 с падениями на­
пряжения во вторичной обмотке:
Ё2 = И2 + д2х2 + i2r2 •
В случае а к т и в н о - е м к о с т н о й нагрузки векrорная диа­
грамма трансформатора имеет вид, показанный на рис. 1.19, б. Поря­
док построения диаграммы остается прежним, но вид ее несколько
изменяется. Ток i2 в этом случае опережает по фазе ЭДС Е2 на угол
\j/ 2 = arctg
х'2 -х'
(1.36)
"
r; +r:
При значиrелъной емкостной составляющей нагрузки падение
напряжения в емкОС111ой составляющей сопроmвления нагрузки и
шщукгивное падение напряжения рассеяния во вторичной обмотке
частично компенсируют друг друга. В результате напряжение И2
может оказаться больше, чем ЭДС Ё2. Кроме того, реактивная (опе­
режающая) составляющая вторичного тока i2P = i2sin '1' 2 совпадает
по фазе с реактивной составляющей тока х.х. i0P , т. е. оказьmает на
мапnпопровод трансформатора подмагничивающее действие.
Это ведет к уменъmеншо первичного тока i1 по сравнению с
его значением при активно-индуктивной нагрузке, когда состав­
ляющая i2P оказъmаетразмагничивающее влияние (рис. 1.19, а).
§ 1.8. Трансформирование трехфазного тока
и схемы соединения обмоток трехфазных
трансформаторов
Трансформирование трехфазной системы напряжений можно
осуществить тремя однофазными трансформаторами, соединен­
нъrми в т р а н с ф о р м а т о р н у ю г р у п п у (рис. 1.20, а). Однаб)
а}
с
о
а
ь
с
о
Рис. 1.20. Трансформаторная rpyIШa (а) и трехфазный трансформатор (б)
36
ко относиrельная громоздкость, большой вес и повьппенная стои­
мость - недостаток трансформаторной группы, поэтому она при­
меняется только в установках большой мощности с целью умень­
шения веса и габариrов единицы оборудования, что важно при
монтаже и транспортировке трансформаторов.
\
о/ r-::-?:-,
l@i о 1
1Р.
� 1 11 1 А с_
l_�_J �
dJ
Ф."
flD" fl0°
110
Рис. 1.21. Трехстержневой маrmпопровод и векторные диаграммы
В установках мощностью примерно до 60 ООО кВ·А обычно
применяют т р е х ф а з н ы е т р а н с фар м а тар ы (рис. 1.20, 6),
у которых обмотки расположены на трех стержнях, объединенных
в общий магнитопровод двумя ярмами (см. рис. 1.2). Но получен­
ный таким образом магнитопровод является несимметричным:
магниrное сопротивление потоку средней фазы Фв меньше маг­
нитного сопротивления потокам крайних фаз ФА и Фе (рис. 1.21, а).
Так как к первичным обмоткам трехфазного_ тра�сфор�атора
подводиrся симметричная система напряжений ИА , И8 и Ис , то
в магнитопроводе трансформатора возникают магниrные потоки
Ф А , Ф в и Ф с , образующие также симметричную систему (рис.
1.21, 6). Однако вследствие магниrной несимметрии магнитопро­
вода намагничивающие токи отдельных фазовых обмоток не равны: намагничивающие токи обмоток крайних фаз ( joA и ioc)
больше намагничивающего тока обмотки средней фазы i08 • Кро­
ме того, токи i0A и ioc оказьmаются сдвинуть1ми по фазе относи­
тельно соответствующих потоков Ф А и Ф с на угол а. Таким об­
разом, при симметричной системе трехфазного напряжения,
подведенного к трансформатору, токи х.х. образуют несиммет­
ричную систему (рис. 1.21, в).
Для уменьшения ма.гн:иmой несимметрии трехстержневого маг­
нитопровода, т. е. уменьшения ма.гн:иmого сопротивления потокам
крайних фаз, сечение ярм делают на 10--15% больше сечения стерж­
ней, что уменьшает их магнитное сопротивление. Несимметрия токов
х.х. трехстержневого трансформатора пракmчески не отражается на
работе трансформатора, так как даже при небольшой нагрузке разли­
чие в значениях токов /А, Iв и Ic становится незаметным.
Таким образом, при симметричном пиrающем напряжении и
равномерной трехфазной нагрузке все фазы трехфазного транс­
форматора, выполненного на трехстержневом магниrопроводе,
практически находятся в одинаковых условиях. Поэтому рассмотЗ7
репные въппе уравнения напряжений, МДС и токов, а также схема
замещения и векторные диаграммы могут быть использованы для
исследования работы каждой фазы трехфазного трансформатора.
Обмотки трехфазных трансформаторов принято соединять по
следующим схемам: звезда; звезда с нулевым выводом; треуголь­
ник; зшзаг с нулевым выводом. Схемы соединения обмоток
трансформатора обозначают дробью, в числигеле которой указана
схема соединения обмоток ВН, а в знаменателе - обмоток НН.
Например, У/Л означает, что обмотки ВН соещrnены в звезду, а
обмотки НН - в треугольник.
Соединение в зигзаг
применяют только в транс­
О} 0 Q 6
С
6}
форматорах специального
назначения, например в
6
трансформаторах для вы­
прямителей (см.§ 5.2). Для
въmолнения
соединения
каждую фазу обмотки НН
делят на две части, распо­
лагая их на разных стерж­
нях. Указаш1ые части обРис. 1.22. Соединение обмоток в зигзаг моток соедШIЯIОт так,
чтобы конец одной части
фазной обмотки бъm при­
соединен к концу другой части этой же обмотки, расположешюй
на другом стержне (рис. 1.22, а). Зшзаr назъmают равноплечным,
если части обмоток, располагаемые на разных стержнях и соеди­
няемые последовательно, одинаковы, и неравноплечными, если эти
части неодинаковы. При соедШlении в зшзаг ЭДС отдельных час­
тей обмоток геометрически вычитаются (рис. 1.22, б).
Вьmоды обмоток трансформаторов принято обозначать сле­
дующим образом: обмотки ВН - начало обмоток А, В, С, соответ­
ствующие концы Х, У, Z; обмотки НН - начала обмоток .а, Ь, с,
соответствующие кшщы х, у, z.
При соединении обмоток звездой линейное напряжение больше фазного ( Un = ✓ЗUФ ), а при соединении обмоток треугольни­
ком линейное напряжение равно фазному ( Ил = ИФ ).
Отношение линейных напряжений трехфазного трансформа­
тора определяется следующим образом:
Схема соединения
обмоток
Отношение ли-
нейных напряжений
YN
Л/У
Л/ л
У/Л
w1/w2
wi /(✓3w2 )
w1/w2
✓3 w1 /w2
Таким образом, оmошение линейных напряжений в трехфаз­
ном трансформаторе определяется не только оmошением чисел
витков фазных обмоток, но и схемой их соединений.
38
Пример 1.3. Трехфазный трансформатор номинальной мощностъю Sном =
= 100 кВ·А вкmочен по схеме У/Л. При Э'IОМ ооюmальные линейные напряжения на
входе и выходе трансформаrора соответствеНЖ> равны: И1..,.. = 3,0 кВ, И2,юм = 0,4 кВ.
Опредеmпь соотношение виrков w/w2 и номинальные значение фазных токов в
первичной /1 Ф и вторичной /2Ф обмотках.
Р е ш е н и е. Фазные напряжения первичных и вторичных обмоток
=3,о/Jз=1,73 кВ, И2Ф =Иzном =0,4 кВ.
И1Ф =И1
Требуемое соотношение витков в трансформаторе w1/w2 = И1Ф/И2Ф =
= 1,73/0,4 =4,32.
Номинальный фазный ток в первичной обмотке (соединенной в звезд у)
/lф = /lном =sном /(✓ЗИ1ном)=100/(✓З -3,О)=19,3 А.
НоюmальньlЙ фазный ток во вrоричной обмотке (соединеююй в треугольник)
I2ф = I2нoи l.fi = Sном /(ЗИ2ном ) = 100/(3 ·О,4)=83,3 А.
Таким образом, соотношение фазных токов 12+/ 1Ф =83,3/19,3 = 4,32 равно
соотношению витков в обмотках трансформатора.
..,j-Гз
/
§ 1.9. Явления при намагничивании
магнитопроводов трансформаторов
Допустим, что к первичной обмотке трансформатора подведе­
но синусоидальное напряжение. При этом поток в магнитопро­
воде также будет синусоидальным: Ф = Ф mах sinrot. Однако вслед­
ствие насыщения магниmый поток трансформатора не пропор­
ционален намагничивающему току. Поэтому при синусоидальном
потоке Ф намагничивающий ток i является несинусоидальным.
Для определения формы кривой этого тока i0P = f(t) воспользуемся кривой намагничивания магнитопровода Ф = f( ioP) и графи­
ком изменения потока Ф =./(t).
о)
а)
ф
2
__,;_;;
._
t
2.
f
r
;a,.j
__,2
;J
t
iop
-� 2
'-1 Т/2.
t
;;.J
4 t
Рис. 1.23. Построение графика намагничивающего тока (а) и разложение
ero на составляющие (б)
На рис. 1.23, а дано построение графика намагничивающего
тока i0P = f(t). Здесь в левом верхнем квадранте показана сину39
соидальная кривая Ф = fit), а в верхнем правом квадранте - кри­
вая намагничивания Ф = /(i0P ) материала магнитопровода. Для
получения графика намагничивающего тока i0P = f(t), располо­
женного в правом нижнем квадранrе, пос'I)'Пают следующим об­
разом. На графике Ф = fit) выбирают ряд точек 1, 2, 3, проецируют
их на кривую намагничивания и определяют значения намагничи­
вающего тока, соответствующие выбраIПIЫМ значениям магнитно­
го потока. Затем проводят вертикальные линии через точки 1, 2, 3
на оси iop в правый нижний квадрант до пересечения с горизон­
тальными линиями, проведеmn.rми из точек 1, 2, 3 на оси времени
этого квадранта, и получают геометрическое место точек кривой
намаrnичивающего тока i0P = f(t). Из сделанных построений
видно, что при синусоидальной форме кр ивой Ф = fit) намагничи­
вающий ток имеет пикообразную форму. В целях упрощения по­
строений в этом случае воспользовались кривой намагничивания
Ф = f ( i0P ) , построенной без учета гистерезиса.
После разложения несинусоидальной кривой тока iop на сину­
соидальные составляющие (рис. 1.23, б) видно, что в этом токе
кроме основной (первой) гармоники i0p I ярко выражена третья
гармоника iop 3.
Так, в трансформаторе с магнитопроводом из высоколегиро­
ванной стали при индукции В = 1,4 Тл ашmитуда третьей гармо­
ники составляет примерно 30% ашmитуды основной гармоники
намагничивающего тока. Сказанное относится лmпь к реактивной
составляющей тока х.х., так как активная составляющая ioa являет­
ся синусоидальной. Обычно ioa не превьппает 10% от /0, поэтому с
некоторым приближением можно принять, что кривая тока х.х.
i0 = f(t) не отличается от кривой i0P = J(t).
§ 1.10. Влияние схемы соединения обмоток
на работу трехфазных трансформаторов
в режиме холостого хода
Из уравнений токов третьей гармоники в трехфазной системе
iАЗ = /Зmах sinЗrot;
iвз = /Зmах sinЗ(rot-120° ) = /Зmах sinЗrot;
(1.37)
°
iсз = /Зmах sin 3(rot + 120 ) = /Зmах sin Зrot }
видно, что эти токи в тобой момент времени совпадают по фазе,
т. е. имеют одинаковое направление. Этот же вьmод распространя­
ется на все высшие гармоники тока, кратные трем, - 3, 9, 15 и
т. д. Это обстоятельство оказьmает существенное влияние на про­
цессы, сопровождающие намагничивание сердечников при транс­
формировании трехфазного тока.
Рассмотрим особенности режима холостого хода трехфазных
трансформаторов для некоторых схем соединения обмоток.
40
Соединение YN0• Если напряжение подводиrся со стороны об­
моток, соедине1mых звездой без нулевого вывода (рис. 1.24, а), то то­
ки третьей гармоники (и кратные трем - 9, 15 и т. д.), совпадая по
фазе во всех трех фазах, будут равны нуmо. Объясняется это отсуrст­
вием нулевого провода, а следовательно, отсутствием выхода из ну­
левой точки. В итоге токи третьей и крwrны:е трем гарм01rnки будуг
Рис. 1.24. Направление токов третьей гармоники для различных схем соединения обмоток
взаимно компенсироватьФ
ся и намапmчивающий
ток трансформатора окажется синусоидальным, но Ф=� +
магнитный поток в маг­
ниrопроводе окажется не­
синусоидальным (упло­
щенным) с явно вы:ра­
жешп,�м потоком третьей
гармоШIКИ Ф3 (рис. 1.25).
Потоки третьей гар­
МОШIКИ не моrуг замк­
нуться в трехстержневом
магЮ1ТОпроводе, так как
i
ОНИ СОВпадаlОТ ПО фазе,
т. е. направлены встречно. Рис. 1.25. Построение графика маrnитного
Эrи потоки замыкаются потока при синусоидальной форме намагничивающего тока
через воздух (масло) и
металлические стенки бака (рис. 1.26). Большое магниrное сопроrnв­
ление потоку Фз ослабляет его величину, поэтому наводимые потока­
ми Ф3 в фазных обмотках ЭДС третьей гармоШIКИ невелики и обычно
их амплиrуда не превьппает 5-7% от амплиrуды основной гармоIШ­
ки. На пракrике поток Ф3 учиrьmают лишь с точки зрения потерь от
вихревых токов, шщуцируемых этим потоком в стенках бака. Напри­
мер, при индукции в стержне МагЮIТОпровода порядка 1,4 Тл потери
от вихревых токов в баке составляют около 10% от потерь в магниго­
проводе, а при индукции 1,6 Тл эти потери возрастают до 5�5%.
В случае 1J'ансформаторной группы, состоящей из трех одно­
фазных трансформаторов (см. рис. 1.20, а), магюrrопроводы от­
дельных фаз магнитно не связаны, поэтому магнитные потоки
третьей гармоники всех трех фаз беспрепятственно замыкаются
(�:юток каждой фазы замыкается в своем магнитопроводе). При
этом значение потока Ф3 может достигать 15-20% от Ф 1•
41
Несинусоидальный маrшrmый поток Ф, содержащий кроме
основной гармоники Ф 1 еще и третью Фз,
Ф = Ф1 sinrot + Ф3 sinЗrot
(1.38)
наводит в фазных обмотках несинусоидальную ЭДС
е = -wdФ/dt = rowФ 1 sin(rot-1t/2)+ ЗrоwФ 3 sin(Зrot-1t/2) = е1 + е3 • (1.39)
Повъппенная частота 3ro маrнитноrо потока Ф3 приводит к
появлению значительной ЭДС е3, резко увеличивающей амшш­
rудное значение фазной ЭДС обмотки при
том же ее действующем значении (рис.
1.27), чrо создает неблагоприятные усло­
вия для электрической изоляции обмоток.
Амптпуда ЭДС третьей гармоники в
трансформаторной группе может дости­
гать 45--65% от амплиrуды основной гар­
моники. Однако следует отметить, что ли­
нейные ЭДС (напряжения) остаются
Рис. 1.26. Пуrи замыка­ синусоидальными и не содержат третьей
IШЯ магнитных потоков
гармоники, так как при соединении обмо­
третьей гармоники в
трехстержневом малm­ ток звездой фазные ЭДС езл, е38 и е3с, сов­
падая по фазе, не создают линейной ЭДС.
топроводе
Объясняется это тем, что линейная ЭДС
при соединении обмоток звездой определяется разностью фазных
ЭДС. Так, для основной гармоники (рис. 1.28, а) линейная ЭДС
Е�лв = -Е�л + Е�в = ✓ЗЕ1А ·
Что же касается линейной ЭДС третьей и кратных трем гар­
моник, то ввиду совпадения по фазе фазных ЭДС этих гармоник
(рис. 1.28, б) получим
ЕЗАв = Езв - ЕзА =О·
е
Если первичная обмотка
.трансформатора является обмот­
кой НН и ее нулевой вьmод при­
соединен к нулевому вьmоду гене­
ратора (см. рис. 1.24, б), то
намагничивающие токи фаз соа)
5)
Е1с ;!..tA
,,, Е ',,
,,,
,,,,,,,,,,
,,,
ЁзАt
tзвt
Е
Езс
1 ЕзАв =О
Е 1В
♦-EJA
Рис. 1.28. Векторные диаграммы
ЭДС основной (а) и третьей (6)
гармоник трехфазного трансфор­
матора
42
t
Рис. 1.27. Форма графика фаз­
ной ЭДС трансформаторной
rpymп,1 при соединении обмо­
ток УN
держат третьи гармоники. Эrи токи совпадают по фазе [см. (1.37)],
а поэтому все они направлены либо от трансформатора к генера­
тору, либо наоборот. В нулевом проводе будет протекать ток, рав­
ный 3 i3• При этом магнитный поток трансформатора, а следова­
тельно, и ЭДС в фцзах будуr синусоидальны.
Соединения, при которых обмотки какой-либо стороны
трансформатора (НН или ВН) соединены в треуrольник. Эти
схемы соещmения наиболее желательны, так как они лишены не­
достатков рассмотренных ранее схем.
Допустим, что в треуголышк соединены первичные обмотки
трансформатора. Тогда ток третьей гарм01шки беспрепятствеmю
замыкается в з�ом контуре фазных обмоток, соеД1П1енных в
треуголышк (см. рис. 1.24, в). Но если намагничивающий ток со­
держит третью гармонику, то магниrные потоки в стержнях, а
следовательно, и ЭДС в фазах практически синусоидальны.
Если же вторичные обмотки трансформатора соеД1П1ены в
треугольник, а первичные - в звезду, то ЭДС третьей гармоники,
наведеш1ые во вторичных обмотках, создают в замкнуrом контуре
треугольника ток третьей гармоники. Этот ток создает в магнито­
проводе магmrrные потоки третьей гармоники Ф23, направлеШ1Ые
встречно потокам третьей гармоники от намагничивающего тока
Ф 13 (по правилу ЛеЮ{а). В итоге результирующий поток третьей
гармоники Ф рез 3 = Ф 13 + Ф 23 значительно ослабляется и практиче­
ски не влияет на свойства трансформаторов.
§ 1.11. Опытное определение параметров
схемы замещения трансформаторов
Полученная в § 1.6 электрическая схема замещения (см. рис.
1.18, б) позволяет с достаточной точностью исследовать свойства
трансформаторов в любом режиме. Использоваmiе этой схемы при
определеmш характеристик имеет наибольшее практическое зна­
чение для трансформаторов мощностью 50 кВ·А и выше, так как
исследование таких трансформаторов методом непосредственной
нагрузки связано с некоторыми техническими трудностями: не­
производительным расходом электроэнергии, необходимостью в
громоздких и дорогостоящих нагрузочных устройствах.
Определение параметров схемы замещения Z1 = r1 + jx1 ,
Zm = rm + Jxm , Z2 = r; + Jx; возможно либо расчетным (в процессе
расчета трансформатора), либо опытным путем. Ниже излагается
порядок определения параметров схемы замещения трансформа­
тора опьпным путем, сущность которого состоит в проведеmш
опьпа холостого хода (х.х.) и опьпа короткого замыкания (к.з).
Опыт холостого хода. Холостым ходом называют режим ра­
боты трансформатора при разомкнуrой вторичной обмотке
( Z" = оо, /2 = О). В этом случае уравнения напряжеmш и токов
(1.34) принимают вид
43
�• =���•) +!i� x1 +i0
_
,
И20
-Ez , 1. - lo.
1;
r
(1.40)
}
Так как полезная мощность при работе трансформатора вхо­
лос1)'Ю равна нулю, то мощность на входе трансформатора в ре­
жиме х.х. Р0 расходуется на магнитные потери в магнитопроводе
Рм, (потери на перемагничиваIШе магнитопровода и вихревые токи) и электрические потери в меди Ilri (потери на нагрев обмотки
при прохождении по ней тока) одной лшпь первичной обмотки.
Однако ввиду небольшого значения тока 10 , который обычно не
превышает 2-10% от l1ном, электрическими потерями Ilri можно
пренебречь и считать, что вся мощность х.х. представляет собой
мощность магнитных потерь в стали магнитопровода. Поэтому
магнитные потери в трансформаторе принято называть поте­
рями холостого хода (см. § 1.14).
а)
б)
....____ 1@20 и�
а
А
:х
х
·�•-, 1Е:
W Р" J ,..._
о
J
""Wu,
J �.
�о
С
Рис. 1.29. Схемы опыта х.х. трансформаторов однофазного (а),
трехфазного (б)
Опыт х.х. однофазного трансформатора проводят по схеме,
изображенной на рис. 1.29, а. Комплект электроизмерительных
приборов, включенных в схему, дает возможность непосредствен­
но измерить напряжение U1 , подведенное к первичной обмотке;
напряжение И2о на вьmодах вторичной обмотки; мощность х.х. Ро
и ток х.х. /о.
Напряжение к первичной обмотке, трансформатора обычно
подводят через однофазный реrулятор напряжения РНО, позво­
ляющий плавно повышать напряжение от О до 1,15И1ном• При этом
через приблизительно одинаковые интервалы тока х.х. снимают
показания приборов, а затем строят характеристики х.х.: зависи­
мости тока х.х. /0, мощности х.х. Ро и коэфф1ЩИента мощности х.х.
cos<p 0 от первичного напряжения И1 (рис. 1.30).
Криволинейность этих характеристик обусловлена состоянием
магнитного насыщения магнитопровода, которое наступает при
некотором значении напряжения И1 •
В случае опыта холостого хода с трехфазным трансформато­
ром напряжение U1 устанавливают посредством трехфазного реrу­
лятора напряжения РНТ (рис. 1.29, б). Характеристики х.х. строят
по средним фазным значениям тока и напряжения для трех фаз:
(1.41)
lo = Uoa + lоь + loc)/3;
44
(1.42)
И1 =(И1а +И1 ь +И1с)/3.
Коэффициенr мощности для однофазного трансформатора
Р,
COS<j>o = -0- ;
(1.43)
И1Iо
для трехфазного трансформатора
Р,' + Р,"
Р,о
(1.44)
COS<j>o = о о = __
-'
3U1/0
ЗU1/0
где Р0 и Р0' - пока­
Io
зания
однофазных А
10 ном=20,5Аг<
ваттметров; И1 и /о 20
фазные значения на­
t
Ро
пряжения и тока.
Вт
�OSflo
По да�rnым опы­
та х.х. можно опре­
Io
100
делить: коэффициенr
=6' �Br..
\Ро1 ,н
l
трансформации
о,з
J 'i
\
k = U1 /U20 = w1 /w2 ; fO
500
\ /1
ток х.х. при И1ном (в
0,2
проценrах от номи­
)
300
нального первичного
� '\
тока)
0,1
1},
��
)
o
=
100
i Uоном / /lном IОО;
,.,,,,, DDS(f0.,.,;D,D�
(1.45) о
40
80
12.0
160 U1 , В
. потери х.х. Р0•
трехфазном
В
Рис. 1.30. Характеристики х.х. трансформатора
трансформаторе токи
х.х. в фазах неодинаковы и образуют несимметричную систему
(см. § 1.8), поэтому мощность Р0 следует измерять двумя ваттмет­
рами по схеме, изображенной на рис. 1.29, 6. Падение напряжения
в первичной ветви схемы замещения в режиме х.х. /0(1j +jx1 )
(рис. 1.31) составляет весьма незначительную веЛИЧШI)', поэтому,
не допуская заметной ошибки, можно пользоваться следующими
выражениями для расчета параметров ветви намагничивания:
(1.46)
zm = И1 / /0 ;
(1.47)
rm = Zm COS<j)o;
1
:
!
(1.48)
хт = .Jz� - r� .
Обычно в силовых трансформаторах общего назначения сред­
ней и большой мощносm при номинальном первичном напряже­
нии ток х.х. i0 = 10+0,6%.
Если же фактические значения тока х.х. /оном и мощности х.х.
Роном, соответствующие номинальному значеншо первичного на­
пряжения И� ном, заметно превышают величины этих параметров,
45
указанные в каталоге на данный тип трансформатора, то это сви­
детельствует о неисправности этого трансформатора: наличие ко­
роткозамкнутых витков в обмотках либо замыкании части Wiастин
магнигопровода.
Пример 1.4. На рис. 1.30 приведены характеристики холостого хода
(/0�юм = 20.S А; СОS<ронои= 0,08) ч,ехфазJIOro трансформаrора с данными: Sнои =
= 100 кВ·А; И,нои/И2нои = 6,3/0,22 кВ;
соединение обмоток YN. Опредешrrь
параметры ветви намагничивания схезамещения трансформатора zm, rm и
Рис. 1.31. Схема замещения транс- хмы
т и ток холостого хода при номиформатора в режиме х.х.
нальном фазном напряжении на стороне обмоток НН U2Ф = 12 7 В.
Р е ш е н и е. Полное сопротивление ветви намагничивания по (1.4 6)
zm = Иu1 / 10 = 127/20,5 = 6,;1. Ом;
х2
9--C:::J,--'VV-\..--t---C�__,....,,.,.,__-O
lz
=О u.
U1
;o
активное сопротивление ветви намагничивания по (1.47)
rm =zm COS(j)oнoи =6,2·0,08=0,49 Ом;
ющуктивное сопротивление ветви намагничивания по (1.48)
хт =Jz;,-r,; =J6,22 -0,492 =6,18 Ом.
Ток холостого хода по (1.45)
i0 =([0 //2нои )lОО = (20,5/264)100 = 7,8%,
rде номинальное значение тока в обмотке НН
/2нои =Sно"10 /(✓З ·И2но,.)=100-10 /(✓З -220) = 264 А.
Здесь И2нои - линейное значение вторичного напряжения.
3
3
Опыт короткого замыкания. Короткое замыкание транс­
форматора - это такой режим, когда вторичная обмотка замкнута
накоротко (zн = О), при этом вторичное напряжение U2 =О.В усло­
виях эксплуатации, когда к трансформатору подведено номиналь­
ное напряжение И� ном, короткое замыкание является аварийным
режимом и представляет собой большую опасность для трансфор­
матора (см.§ 4.1).
При опьпе к.з. обмотку низшего напряжения однофазного
трансформатора замыкают накоротко (рис. 1.32, а), а к обмотке
высшего напряжения подводят nонижеmюе напряжение, посте­
петю повЬШiая его регулятором напряжения РНО до некоторого
значения Ик.ном, при котором токи к.з. в обмотках трансформатора
становятся равными номинальным токам в первичной ( /1к = l�ном)
и вторичной ( /2к = /2ном ) обмотках. При этом снимают показания
приборов и строят характеристики к.з., представляющие собой
зависимость тока к.з. l1к, мощности к.з. Рк и коэффициента мощно­
сти соs<р к от напряжения к.з. Ик (рис. 1.33).
В случае трехфазного трансформатора опьп проводят по схе­
ме, показанной на рис. 1.32, б, а значения напряжения к.з. и тока
к.з. определяют как средние для трех фаз:
46
Uк =(UкА +UкВ+Uке)/3;
11 • =(Ir.A +I.в +1,с)/3 .
Коэффициент мощности при опьrrе к.з.
соsфк = Р.,_/(ЗUJ1к ).
(1.49)
(1.50)
{1.51)
а)
w ,
к
V
р"�и"
1в:
Рис. 1.32 Схемы опьпа к.з. трансформаторов однофазного (а), трехфазного_ (6)
При этом активную
мощность трехфазного cos 'Рк
Рк
А
к• Вт
трансформатора измеря­
10 2500
ют методом двух вапмеr­
I,к =I,но1:1= 9, 5А
ров. Тогда мощность к.з.
pl(.H ,t/: 21508Т-,
Рк = Р: +Р:'. {1.52)
8 2000
I,к / lr
В (1.52) Р: и Р:' / РкJ 111 6 1500
показания однофазных
ватrметров, Вт.
/ / 1
Напряжение, при ко­ 0,5 COS �рк= О,4
,J
j
1 4 1000
тором токи в обмотках
1
,J�
трансформатора при опы­
1
те равны номинальным
1
V
2 500
назьmают
значениям,
V _,.
1
номинальным напряже­
Uк,ном=,191 i'-J.
Lнием короткого замы­
о
кания и обычно выра­
50
100
150 200 Uк,В
жают его ,в % от
Рис. 1.33. Характеристики к.з. трансформа­
номинального:
тора
,,
а
,., ,
,,.
,,
'
(1.53)
Для силовых трансформаторов ик = 5+10% от И1ном•
Как следует из (1.20), магнитный поток в магнитопроводе
трансформатора пропорционален первичному напряжению U1 •
Но так как это напряжение при опыте к.з. составляет не более
10% от И�ном, то такую же небольшую величину составляет
магнитный поток. Для создания такого магнитного потока тре­
буется настолько малый намагничивающий ток, что значением
его можно пренебречь. В этом случае уравнение токов ( 1.2 4)
принимает вид
(1.54)
47
а схема замещения трансформаторов для опыта к.з. не содержит
ветви намагничивания (рис. 1.34, а). Для этой схемы замещения
можно заrmсать уравнение напряжений
(1.55)
Uк = i1 v.(1j +r:i}+ }i1к (х 1 +х2) ,
или
(1.56)
и.=i.. r. + Ji.• x. = i..z..
Поmюе сопротивление трансформатора при опыте к.з.
(1.57)
Zк = rк +Jx .,
где rк и Хк - активная и индуктивная
составляющие сопротивления к.з. Zк.
Воспользовавшись уравнениями
Uк
токов (1.54) и напряжений (1.55), для
опьпа к.з. построим векторную диа­
грамму трансформатора (рис. 1.34, б).
б)
Построение этой диаграммы начина­
ют с вектора напряжения к.з.
и.= ilк zк . Затем под углом <р. к
-jz,Zi
вектору Uк проводят вектор тока к.з.
i1к = - i2к • Построив векторы падений
l,кZ,
�апряже� в первичной обмотке
'«
11 .'i и j/1к х 1 и векторы падения на­
пр�ения в� вторичной обмотке
- /2кr2 и - j/2кх2, получают прямо­
треугольник АОВ, называе­
угольный
Рис. 1.34. Схема замещения
мый треугольником короткого замы­
(а) и векторная диаграмма
(б) .рансформатора в режи­ кания. Стороны этого треугольника
ме к.з.
будут:
·-
ов = i1 к 'i + i2. r2 = j\к к = и..а ;
r
ВА = i1.JX1 + Ji2.x2 = j\к хк =
Здесь
ОА = i1к zк =и•.
и..р;
и. =-Jи;,а +и;,р,
(1.58)
где Ик.а и Ик.р- активная и реактивная составляющие напряжения
к.з.,В.
Полное, активное и индуктивное сопротивления схемы заме­
щения при опъпе к.з.:
(1.59)
zк =Vк //\ к ;
(1.60)
r. = z. соs<рк ;
х.
48
=
.J z�
r;
(1.61)
Получе1rnые значения сопротивлений rк и Zк, мощности Рк, ко­
эффшщента мощности соs<р к и напряжения к.з. Ик следует при­
вести к рабочей температуре обмоток +75 °С:
(1.62)
rк1S =rк[l+a(75°-0,)];
(1.63)
Zк1s = .Jr:1s + х; ;
(1.64)
COS (j) к7S = rк1S /Z к1S ;
(1.65)
Ик7S = Uк1s Zк1s /И1ном )100 ·
Здесь rк - активное сопротивление к.з. при температуре 0 1;
а = 0,004 - температурный коэффШ.tИент для меди и алюмm-mя.
Так как при опьrrе к.з. основной поток Фmах составляет всего
лшпь несколько процентов по сравнению с его значением при но­
минальном первичном напряжении, то магнитными потерями, вы­
зываемыми этим потоком, можно пренебречь. Следовательно,
можно считать, что мощность Рк, потребляемая трансформатором
при опьпе к.з., идет полностью на покрьпие электрических потерь
в обмотках трансформатора:
Р,, = I/к 'i + /12кr; = I/к rк .
Мощность к.з. приводят к рабочей температуре обмоток
+75 °С:
(1.66)
Пример 1.5. Результаты измерений при опьпе короткого замыкания трех­
фазного трансформатора мощностью 100 кВ·А линейными напряжениями
6,3/0,22 В, соединением обмоток У/У приведены в табл. 1.1 (напряжение подво­
дилось со стороны ВН). Построиrь характеристики короткого замыкания: зависимость тока k.з. /1к, мощности k. з. Р. и kоэффю.щенrа мощности cos<P. от
напряжения kороткоrо замьпсания И..
Р е ш е н и е. Ниже приведен расчет значений параметров опьпа kОроткоrо
замыкания, соответствующих номинальному (фазному) напряжению k.з. И.....,м =
= 190 в, при kотором TOk k.З, 1. = JIIIOИ =S�ю../(-Гзи•..,.. )=100/(-Гз-6,3)=9,15 А
(измерение 4 в табл. 1.1 ).
Та б л ица 1.1
№
измерения
1
2
3
4
и... ,в
И.в,В
И.с,В
/к.4, в
l.в,В
l.c,B
Р.,Вт
64
105
147
191
63
105
146
189
62
103
145
190
2,9
5,1
3,0
5,0
7,0
9,2
3,1
5,0
7,2
9,1
190
513
1040
1780
7).
9,2
Среднее (для трех фаз) значение фазного напряжеНЮI к.з. по (1.49)
ULIIOИ =(191+189+190)/3=190 в.
Среднее (для трех фаз) значение тоkЗ k.з. по (1.50)
11• =(9,2 + 9,2 +9,1)/3= 9,15 А
Параметры схемы замещеЮIЯ трансформатора при опьпе коротkоrо замыка49
IOIJI: полное сопротивление k.З. по (1.59) z. =И"ж,-../11ж,-.. =190/9,15=20,8 Ом;
из выражеЮ1J1 мощности k.з. Р. =112.,r. определим активное сопротивление 1<.з.:
2
r. =Р./(3/1 ,ю-..) =1780/(3· 9,152 )=1),
Ом;
индуктивное сопротивление к.з. по (1.61)
2---7-,1-2 =19,6 Ом.
ПрИНJ1в температуру 0 1 = 20 °С, полученные значения величин приводим к
рабочей температуре обмоток +75 °С: активное сопротивление к. з. по (1.62)
r. 1, = 7,1(1 + 0,004(75 - 20)] =8,6 Ом;
полное сопротивление k.з.
х. =Jz�-r; =./�2-8,-8-
МОЩНОСТЬ
k.З. ПО (1.66)
✓
2
z.1, = 8,6 + 19,6 2 = 21,5 Ом;
Р.1, =3/12.r.7, = 3 · 9,15 2 • 8,6 = 2160 Вт;
коэффициенr мощности по (1.64)
cosq,.7, = r.1,/z.15 = 8,6/21,5=0,40;
напряжение к.з. по (1.65)
и.н = (J1 .z.н/И1но-..)100=(9)5 · 21,5 · ..fз/6300)100 =5,4%.
В ТЗkОМ же пор.ядkе рассчшываем параметры опьrrа к.з. для других значе­
ний тока к.з. Результаты расчета заносим в табл. 1.2 , а затем строим характери­
стики kороткоrо замыкания (см. рис. 1.33 ).
Та б л ица 1.2
№
измерения
1
2
3
4
и.,в
65
108
152
190
11" А
3
5
7
9,15
Р.1,, Вт
230
620
1260
2160
cosq,.7,
0,40
0,40
0,40
0,40
§ 1.12. Упрощенная векторная диаграмма
трансформатора
Векторная диаграмма нагружешюго трансформатора (см.
рис. 1.19) наглядно показывает соотношеIШе между параметрами
трансформатора. Из-за сложности эта диаграмма не может быть
использована для практических расчетов. Для упрощения диа­
граммы и придания ей практического значения в силовых транс­
форматорах, работающих с нагрузкой, близкой к номинальной,
пренебрегают током х.х. и считают, что i1 = -i2• Полученная в
этом случае ошибка вполне допустима, так как ток /0 по сравне­
нию с токами /1 и /2 невелик (см. § 1.14). При сделанном допу­
щении схема замещения трансформатора приобретает упрощен­
ный вид, так как не имеет ветви намагничивания и состоит
50
только из последовательных участков rк = 'i + r2 и хк = х1 + х2
(рис. 1.35, а).
Соответственно упрощенной схеме замещения построена и
упрощенная векторная диаграмма (рис. 1.35, б), в которой прямо­
угольный треуголыmк АВС представляет собой треугольник к.з.,
стороны которого соответственно равны:
BC=j1 rк ; CA=i,Zк ; АВ=i1 х к .
. .,
5)
I,=-I 2
А
а)
°'I
�,
i,•-t;
-и;
_
rк
,
Zн
Рис. 1.35. Упрощенные схемы замещения (а) и
векторная диаграмма (б) трансформатора
Упрощенную векторную диаграмму трансформатора строят
по заданным значениям напряжения И1ном, тока l1ном , коэффи­
циента мощности соs<р2ном и параметрам треугольника к.з. Ик,
Ик .а И Ик .р•
Порядок построения упрощенной векторной диаграммы следующий (рис. 1.36). На оси ординат строят вектор тока j1 = -i2,
затем под углом <р2 строят вектор
напряжения - И2 . Треугольник к.з.
А 'В'С' строят таким образом, чтобы
точка С' совместилась с точкой на­
чала координат, а катет С'В' - с
осью ординат. Затем этот треуголь­
ник переносят, совмещая точку С с
коIЩом вектора - И2 , а стороны
оставляя параллельными исходному треугольнику А 'В'С'. Получают Рис. 1.36. Построение упротреугольник АВС. После этих по- щенной векторной диаграммы
строений из начала осей координат
(точка О) проводят вектор первичного (фазного) напряжения U1 и определяют угол фазового сдвига
<р1 между первичным током j1 и первичным напряжением И1 •
51
§ 1.13. Внеwняя характеристика трансформатора
При колебаниях нагрузки трансформатора его вторичное на­
пряжение U2 меняется. В этом можно убедиться, воспользовав­
шись упрощенной схемой замещения трансформатора (см. рис.
1.35) , из которой следует, что И2 = и\ ном -jlzк .
Изменение вторичного напряжения трансформатора при уве­
личении нагрузки от х.х. до номинальной является важнейшей ха­
рактеристикой трансформатора и определяется выражением
иl ном -И2 ·100 .
л
(1.67)
ином =
Ulном
Для определения ЛИном воспользуемся
упрощенной
векторной
диаграммой
трансформатора, сделав на ней следующее
дополнительное построение (рис. 1.3 7). Из
точки А опустим перпендикуляр на продолжение вектора получим точку D.
С некоторым допущением будем с'Пffатъ,
что отрез?к BD . представляет собой раз­
ность И� ном -U2 = BD = BF + FD, где
BF = ик.а COS<p 2 ; FD = ик,р sinq, 2 , тогда
иlном -И2 =Ик.аСОS<р 2 +UK.psinq, 2 . (1.68)
о
Изменение вторичного напряжения
Рис. 1.37. К выводу
(
1.67)
с учетом (1.68) примет вид
формулы ЛИном
и� ,
(1.69)
Обозначим (Ик.а/И1ном )100 = ик.а; (Ик.р/И1ном )100 = uк.р, тогда
выражение изменения вторичного напряжения трансформатора
при увеличении нагрузки примет вид
ЛUном = ик.а COS<j> 2 + uк.р sinq, 2 .
(1.70)
Выражение (1.70) дает возможность определить изменение
вторичного напряжения mппъ при номинальной нагрузке транс­
форматора. При необходимости расчета изменения вторичного
напряжения для тобой нагрузки в выражение (1.70) следует вве­
сти коэффициент нагрузки, представляющий собой относительное
значение тока нагрузки р = 12 / /2ном :
(1.71)
Из выражения (1. 71) следует, что изменение вторичного на­
пряжения ЛИ зависит не только от величины нагрузки трансфор­
матора (r3), но и от характера этой нагрузки (q,2).
52
На рис. 1.38, а представлен график зависимости ли= /(Р)
при cos<p2 = const, а на рис. 1.38, б - график ли= /(cos<p 2 ) при
J3 = const. На этих графиках отрицательные значения ли при рабо­
те трансформатора с емкосnюй нагрузкой соответствуют повы­
шению напряжения при переходе от режима х.х. к нагрузке. Имея
В Виду, ЧТО ик.а = Uк СОS<р к , ик.р = Uк Sin<p к , получим еще ОДНО вы­
ражение для расчета изменения вторичного напряжения при то­
бой нагрузке:
ли= J3и. (cos<p. cos<p2 + sin <р. sin<р 2 ) = Ри. cos( Q>. - <р 2 ). ( 1.72)
б)
а)
4' и, о/. .--т---т-....---,--т---,,
5 t--+---+---t
fl---:.�..-=!
о �r-:�l---:Jl-:-,f-1
Рис. 1.38. Зависимость ЛИ от величины нагрузки
(а) и коэффициента мощносm нагрузки (6) трех­
фазного трансформатора (100 кВ·А, 6,3/0,22 кВ,
Uк = 5,4%, COS(j)• = 0,4)
Из (1.72) следует, что наибольшее значение изменения напря­
жения ли = ик имеет место при равенстве углов фазового сдвига
<р 2 = <р к , когда cos(<р к - q> 2 ) = 1.
Зависимость вторичного напряжения и2 трансформатора от
нагрузки /2 называют внешней характеристикой. Напомним, что в
силовых трансформаторах за номинальное вторичное напряжение
принимают напряжение на зажимах вторичной обмотки в режиме
х.х. при номинальном первичном напряжении (см.§ 1.3).
Вид внешней характеристики (рис. 1.39) зависиr от характера на­
грузки трансформатора ( cos<p2 ). Внеш­
и
mою харакгерисгику трансформатора
можно построиrь по (1.72) пуrем расче­
та лидля разных значений J3 и cos<р 2 .
Пример 1.6. Для трансформатора, дан­
ные которого приведены в примерах 1.4 и 1.5,
(см.§ 1.11), определиrь изменение вторичного
напряжения при номинальной нагрузке (13 = 1)
с коэффmщентом мощности cosc:p 2 = 0,8 для
нагрузок двух характеров: активно-индук­
тивной и активно-емкостной.
о
0,5
1
/J "'12/lrнo�
Рис. 1.39. Внешние характе­
рисmки трансформатора
53
Реше н и е. Из примера 1.4 имеем: и.7, =5,4%; cosq>.7, =0,4; sinq>.н = 0,92 .
По (1.72) при cosq>2 = 0,8 и sinq>2 =0,6 получим:
ДЛJ1 активно-индуктивной наrрузки ли= 5,4(0,4 · 0,8 + 0,92 · 0,6) = 4,65% ;
ДЛJ1 активно-емкостной наrрузки ли=5,4[0,4 • 0,8 + 0,92 • (--0,6)] = -1,2% .
В результате аналогичных расчетов, проделанных при Р = 0+1,2, для наrру­
зок с cosq>2 , равным 0,7; 0,8; 0,9 и 1,0, получены данные, по которым построены
графики ли= ЛР) , представленные на рис 1 38, а.
Наибольшее изменение напряжеНЮJ соответствует активно-индуктивной на­
грузк е с cosq>2 = cosq>.7, = 0,40 и коэффю.щеmу наrрузки Р = 1 (перегрузка
трансформатора недопустима) ли.,,.х = и..н = 5,4% (см рис. 1.38, б)
§ 1.14. Потери и КПД трансформатора
В процессе трансформирования· электрической энергии часть
энергии теряется в трансформаторе на покрьпие потерь. Потери в
трансформаторе разделяются на электрические и магнитные.
Электрические потери. Обусловлены нагревом обмоток
трансформаторов при прохождении по этим обмоткам электриче­
ского тока. Мощность электрических потерь Рэ пропорциональна
квадраrу тока и определяется суммой электрических потерь в пер­
вичной Р31 и во вторичной Рэ2 обмотках:
2
( 1. 73)
Р., = />.,1 + />.,2 = ml{1j + т/2 r2 ,
где т - число фаз трансформатора (для однофазного трансфор­
матора т = 1, для трехфазного т = 3).
При проектировании трансформатора величину электрических
потерь определяют по (1.73), а для изготовленного трансформато­
ра эти потери определяют оm,пным путем, измерив мощность к.з.
(см.§ 1.11) при НОМШiальных токах в обмотках Рк.ном:
2
(1.74)
� =J3 -Р...ном•
где 13- коэффициенr нагрузки (см.§ 1.13).
Электрические потери назьmают переменными, так как их ве­
личина зависит от нагрузки трансформатора (рис. 1.40).
Магнитные потери. Происходят главным образом в мапппо­
проводе трансформатора. Причина этих потерь - систематическое
перемагничивание магнитопровода переменным магниmым полем.
Это перемапmчивание вызьmает в магнитопроводе два вида мапшт­
ных потерь: потери от гистерезиса Pr, связанные с затратой энергии
на уничтожение остаточного магнетизма в ферромапnmюм материа­
ле мапштопровода, и потери от вихревых токов Рв.т, наводимых пере­
менным магнmным полем в пластшmх магнитопровода:
рм = � +Рв.т •
С целью уменьшения магнитнъ�х потерь мапштопровод транс­
форматора выполняют из мапnmю-мягкого ферромаmиrного мате­
риала - тонколистовой элекrротехнической стали. При этом магни­
топровод делают шихтованным в вЩJ,е пакетов из тонких пластин
(полос), изолированных с двух сторон тонкой пленкой лака.
54
Магнитные потери от гистерезиса прямо пропорциональны
частоте перемагничивания магнитопровода, т. е. частоте перемен­
ного тока ( Р.- = f ), а магнитные потери от вихревых токов пропорциональны квадрату этой частоты ( Р..т = /2 ). Суммарные маг­
нитные потери принято считать пропорциональными частоте тока
в степени 1,3, т. е. Рм = / 1• • ВеЛИЧШiа магнитных потерь зависит
3
а.)
5)
Р,., ;Р3
.
кВт
�
2,0
Р"
t,5
•
.
t,O
�
0,5
о
.
р
Рис. 1.40. Зависимость потерь трансформатора от его нагрузки (а) и
энергетическая диаграмма (б) трансформатора
также и от магнитной индук­
ции в стержнях и ярмах магнитопровода ( Р., = В2 ). При
неизменном первичном напря­
жении (И1 = const) магнитные
потери постоянны, т. е. не за­
висят от нагрузки трансфор­
матора (рис. 1.40, а).
При проектировании транс­
ft
форматора магнитные потери
определяют
по
значеюпо Рис. 1.41. График зависимости КПД
удельных мапnrrных потерь Руд,
трансформатора от нагрузки
происходящих в 1 кг тонколистовой электротехнической стали при значениях мапnrrной индукции
1,0; 1,5 или 1,7Тл и частоте перемаmичивания 50 Гц:
(1.75)
Рм = �д (В/Вх )2 (//50)1' G,
3
где В - фактическое значение магнитной индукции в стержне или
ярме магнитопровода трансформатора, Тл; Вх - магнитная индук­
ция, соответствующая принятому значеmпо удельных магнитных
потерь, например Вх = 1,0 или 1,5 Тл; G- масса стержня или ярма
магнитопровода, кг.
Значения удельных магнитных потерь указаны в ГОСТе на
55
тонколистовую электротехническую сталь. Например, для стали
марки 3411 тоmцшюй 0,5 мм при В= 1,5 Тл и/= 50 Гц удельные
магнип1ые потери P1,s1s0= 2,45 Вт/кг.
ДrnI изготовленного трансформатора магнитные потери опре­
деляют опытным путем, измерив мощность х.х. при номин альном
первичном напряжении Р оном (см.§ 1.11).
Таким образом, активная мощность Р 1 , пос'I)'Пающая из сети в
первичную обмотку трансформатора, частично расходуется на
электрические потери в этой обмотке Р 31• Переменный магнитный
поток вызывает в магнитопроводе трансформатора магнитные по­
тери Рм• Оставшаяся после этого мощность, называемая электро­
магнитной мощностью Р,м= Pi - Р,1 - Рм , передается во вторич­
ную обмотку, где частично расходуется на электрические потери в
этой обмотке Р32• Активная мощность, ПОС'I)'Пающая в нагрузку
трансформатора, �= Pi - }: Р , где }: Р= Р, 1 + Рм + Р,2 - суммар­
ные потери в трансформаторе. Все виды потерь, сопровождающие
рабочий процесс трансформатора, показаны на энергетической
диаграмме (рис. 1.40, б).
Коэффициент полезного действия трансформатора определя­
ется как опюшение активной мощности на выходе вторичной об­
мотки Р2 (полезная мощность) к активной мощности на входе пер­
вичной обмотки Р 1 (подводимая мощность):
(1.76)
Т\= �/Pi= (Pi - }:Р)/Pi= 1- }:Р/Pi.
Сумма потерь
(1.77)
L р= Раном + 132Р...ном ·
Активная мощность на выходе вторичной обмотки трехфазно­
го трансформатора (Вт)
(1.78)
�= ✓ЗИ2 l2 COS<j> 2= f3Sном cosq, 2 '
где Sном= ✓3И2ном /2ном. - номинальная мощность трансформато­
ра, В·А; /2 и И2 - линейные значения тока, А, и напр яжения В.
Учитьmая, что Pi= � +}: Р, получаем выражение для расчета
КПД трансформатора:
J3Sном COS<p2
(1.79)
Т\ =
jЗSном COS(j)2 + Раном + 13 2 Р...ном
Анализ выражения (1.79) показывает, что КПД трансформато­
ра зависит как от величш1ы (13), так и от характера ( cosq, 2 ) на­
грузки. Эта зависимость итпострируется графиками (рис. 1.41).
Максимальное значение КПД соответствует нагрузке, при которой
2
магнип1ые потери равны электрическим: Раном = 13' Р...ном ' отсюда
значение коэффициента нагрузки, соответствующее максимальному КПД,
(1.80)
131= .JРоном / Р...ном
56
Обычно КПД трансформатора имеет максимальное значение
при Р' = 0,45+0,65. Подставив в (1.79) вместо Р значение Р' по
(1.80), получим выражение максимального КПД трансформатора:
Р'Sном COS<pz
(1.81)
+ 2Р.О,юм
Помимо рассмотрешюго КПД по мощности иногда пользуют­
ся понятием КПД по энергии, который представляет собой отно­
шение количества энергии, отданной трансформатором потреби­
теmо W2 (кВт·ч) в течение года, к энергии W1, полученной им от
питающей электросети за это же время:
11э = W2/w;
КПД трансформатора по энергии характеризует эффектив­
ность эксплуатации трансформации.
Пример 1.7. Опредетпь КIЩ и построиrь rрафики зависимосm 11 = ЛР)
11m■x = n.•s
1-'
,юм COS<f>z
трехфазноr о транс формат орамощносrью 100 кВ·А, напряжением 6, 3/0;22 кВ по дан­
ным опъrrо в х.х. ( см. пример 1.4) и к.з. ( см. пример 1. 5): Роtюм = 60 5 Вт,
Р•. tюм = 2160 Вт). Расчет выполниrь для дв ух значений коэффшщента мощности
наrрузки: 0,8 и1,0 .
Р еше ние. Для по стро еНИJJ rрафико в 11 = ЛР) вычис ляем КПД дл я ряда
значений коэффициента наrрузки р, равных 0,2 5; 0,50; 0,7 5 и 1,0.
Ре зульт аты расчета приведены в т абл .1.3.
Та б л ица 1. 3
р 2Р
кпд,%, при COS(j)z
COS(j)z =1
COS(j)z =0,8
Вт
97,0
739
134
96, 5
0,2 5
97, 8
1145
540
0,50
97,3
1 815
97,1
97,6
1210
0,7 5
27 55
97,3
21 50
1,0
96,6
Прим е ч а ни.я: 1) Р' =./605/2160 = 0, 53 [см. (1. 80)]; 2) Роном = 60 5 Вт.
р
J<.НОМ
'
r_p, Вт
Максимальное значени е КПД по (1.81):
при COS(j)2 = 0, 8
Тlmix
при cos(l)2 =1,0
=
0, 53 -100-10 3 - 0, 8
= 0,972' или97,2%;
О.53-100-10 3 ·О'8 + 2-60 5
0,53 -100·10 3 ·1, О
=0 978 или97, 8%.
Тlmax 0,53·100•10 3 ·1,0+2-60 5 • '
Таким о бразом, КПД выше при активной наrрузке.
§ 1.15. Реrулирование напряжения
трансформаторов
Обмотки ВН понижающих трансформаторов снабжают реrули­
ровочными ответвлениями, с помощью которых можно получить ко­
эффmщент трансформации, несколько отличающийся от номиналь57
ного, соответствующего номинальному вторичному напряжеюпо при
номинальном первичном. Необходимость в этом объясняется тем, что
напряжения в разных точках линии электропередачи, куда мoryr бьпъ
вкточены понижающие трансформагоры, отличаются друг от друга
и, как правило, от номинального первичного напряжения. Кроме того,
напряжение в mобом месте линии может изменяться из-за колебаний
й
Но пж rn
eниe tш
�
� бr:
6
fJ
А
в
J но номинальному ИJШ незначпrельно отличаться от
хs
У.
�1
�
него, то возможность изX
ZJ
�,,
r1r.
А,
z
менения
коэффШU1ента
трансформац�ш становигся
z;
l
У.
х.
необходимой. Регулиро1tz,
вочные ответвления делают в каждой фазе либо
вблизи нулевой точки, ли­
бо посередине обмотки. В
Рис. 1.42. Схемы обмоток трехфазных
трансформаторов с реrулировочными от­ первом случае на каждой
ветвлениями
фазе делают по три ответвления (рис. 1.42, а), при
этом среднее ответвление соответствует номинальному коэффШU1ен­
ту трансформации, а два других - коэффщиенrам трансформац�ш,
отличающимся от номинального на ±5%. Во втором случае обмотку
разделяют на две части и делают шесгь ответвлений (рис. 1.42, б). Эrо
дает возможность кроме номинального коэффШU1еша трансформа­
ции получить еще четыре дополнительных значения, отличающихся
от номинального на ±2,5 и ±5%.
Переюпочать ответвления обмоток можно при откmоченном от
cern трансформаторе (перекточение без возбуждения - ПБВ) ИJШ
же без откточения трансформагора (регулирование под наrрузкой РПН). Для ПБВ применяют пе­
ректочатели ответвлений (рис.
Стержень
1.43). На каждую фазу устанав­
mmают по одному перекточа­
телю, при этом вал, вращающий
конrаюные кольца переюпоча- х3
телей по всем фазам одновре- х1
меюю, связан посредством
штанги с рукояткой б на крьпп­
ке бака трансформагора (см.
рис. 1.13).
Принцип Pilli основан на
изменении
коэффШU1еша
трансформац�ш посредством х
Контактное кольцо
регулировочных ответвлений.
Однако переключение с одного Рис. 1.43. Перекточатель ответвлений ПБВ
ответвления на другое осущест-
j,
58
J
i,
J
::,
i
�
'
вляют без разрыва цепи рабочего тока. С этой целью обмотку каждой
фазы снабжают специальным перекmочающим устройством, состоя­
щим из реактора Р, двух конrакrоров с конrактами Kl и Ю и пере­
кmочателя с двумя подвижными конrактами Пl и П2 (рис. 1.44, а).
В рабочем положении оба подвижных конrактора переключа­
теля находятся на одном ответвлении, конгакты Kl и К2 замкнуты
и рабочий ток направлен параллельно по двум половинам обмотки
реактора. Если возникла необходимость переключения с одного
а)
2.
з.
кг
4.
Рис. 1.44. Последовательность переюпочения контактов под
нагрузкой
ответвления на другое, например с Х1 на Х3, то разомкнутся кон­
тактъ1 конгактора Kl (положение 1 на рис. 1.44, б), подвижный
конгакт П1 переключателя обесточенной ветви переводится на
другое ответвление и конrактъ1 конгактора Kl вновь замыкаются
(положение 2). В этом положении часть обмотки между ответвле­
ниями Х1 и Х3 оказьmается замкнутой. Однако ток в цепи переклю­
чающего устройства не достигает большого значения, так как он
ограничивается сопротивлением реактора Р. В таком же порядке
осуществляется перевод подвижного контакта К2 с ответвления Х1
на ответвление Х3 (положения 3 и 4), после чего процесс переклю­
чения заканчивается. Аппаратура РПН располагается в общем баке
с трансформатором, а ее переключение автоматизируется или
осуществляется дистанционно (со щита управления). Трансформа­
торы с РПН обычно рассчитаны для регулирования напряжения в
пределах 6-10%.
При весьма значительных мощностях трансформатора аппара­
тура РПН становится слишком громоздкой. В этом случае приме­
няют регулирование напряжения с помощью вольтдобавочного
трансформатора, состоящего из трансформатора ПТ, включенно­
го последовательно, и регулировочного автотрансформатора РА с
переключающим устройством ПУ (рис. 1.45).
Напряжение вторичной обмотки ЛИ трансформатора ПТ сум­
мируется с напряжением линии Ил1 и изменяет его до значения
Ил2 =ил\+ ли. Величина ли может изменяться посредством РА.
При этом переключателем продольного регулирования (ППР)
59
ли
можно изменять фазу
на ±180°, так что одно положение IШР
будет соответствовать увеличешпо напряжеIШЯ
Ил.2 = Ил1 +ЛИ, а
.
другое - уменьшешпо напряжеIШЯ Ил2 = Илl - ЛИ. Кроме того,
возможнь1 и другие способы фазового воздействия на ЛИ , например комбинация различных
� iJ
схем соединения трехфазных
обмоток (звезда, треугольник)
в волътдобавочном трансфор­
маторе, создающая фазовые
·
Uл •�
сдвиги
относительно Ил1
РА
Uл,
на углы 60, 120 и 90° (поперечное реrулирование). В этих
случаях изменение ЛИ влияет
не только на значение, но и на
Рис. 1.45. Схемы вкmочения вольт- фазу напряжени я Ил2 •
ли
добавочного трансформатора
Контрольные вопросы
1. Каков принцип работы трансформатора?
2. Почему трансформаторы не работают от сети постоянноrо тока?
3. Из каких частей состоиr активная часть трансформатора? Каковы их назна­
чение и конструкция?
4. Каково назначение трансформаторноrо масла?
5. Как определип. номинальные токи и номЮ1альное вторичное напряжение
трансформатора?
6. Почему с увеличением тока наrрузки трансформатора увеличивается ток в
ero первичной обмотке?
7. Что такое приведенный трансформатор?
8. Объясните порядок построения векторной диаrраммы трансформатора:.
9. При каких условиях и почему вторичное напряжение трансформатора стано­
виrся больше ЭДС?
10. Чем объясняется несимметрия токов х.х. в трехфазном трансформаторе?
11. Как mмениrся отношение линейных напряжений трехфазноrо трансформа­
тора, если ero обмотки перекmочить со схемы Л/У на У/ Л?
12. Будет ли mменяться ток х.х. и как при увеличении или уменьшении сечения
стержней маrниrопровода?
13. На что расходУется активная мощностъ, потребляемая трансформатором при
опьпах х.х. и к.з.?
14. Как опытным путем опредеmпь напряжение к.з. трансформатора?
15. К какой обмотке целесообразно подводиrь напряжение при опьпе х.х., а к
какой - при опьrrе к. з.? Объясните, почему.
16. Измените.я ли основной маrниrньlЙ поток и ток х.х., если трансформатор
вкmочиrь в сеть с частотой выше или ниже номЮ1альной?
17. Объясните принцип реrулирования напряжения под наrрузкой.
18. Каков порядок перекmочения ко�пактов перекmочающеrо устройства при
реrулировании напряжения под наrрузкой?
19. Объясните назначение и принцип работы вольтдобавочноrо трансформатора.
Группы соединения
-обмоток
и параллельная
работа
трансформаторов
гnава 2 •
§ 2.1. Группь1 соединения обмоток
До сих пор при построении векторных диаграмм
трансформатора счиrалось, что ЭДС фазы обмотки
ВН ЕАХ и обмотки ИН Ёах совпадают по фазе. Но
это справедливо лишь при условии намотки первич­
ной и вторичной обмоток трансформатора в одном
направлении и одноименной маркировке выводов
этих обмоток, как показано на рис. 2.1, а. Если же в
трансформаторе изменить направление обмотки l-П-1
или же переставить обозначения ее выводов, то ЭДС
Еах окажется сдвинутой по фазе относительно ЭДС
ЁАХ на 180° (рис. 2.1, 6). Сдвш фаз между ЭДС ЁАХ
и Еах принято выражать группой соединения. Так
как этот сдвш фаз может изменяться от О до 360°, а
кратность сдвша составляет 30°, то ДJIЯ обозначения
группы соединения принят ряд чисел: 1, 2, 3, 4, 5, 6,
7, 8, 9, 10, 11 и о.
Угол смещения вектора линейной ЭДС обмотки
ИН по отношению к вектору линейной ЭДС обмотки
ВН определяют умножением числа, обозначающего
группу соединения, на 30°. Угол смещения отсчить1вают от вектора ЭДС обмотки ВН по часовой стрел­
ке до вектора ЭДС обмотки ИН. Например, группа
соединения 5 указьmает, что вектор ЭДС ИН отстает
по фазе от вектора ЭДС ВН на угол 5·30° = 150° .
Для лучшего понимания принятого обозначения
групп соединения пользуются сравнением с часами.
При этом вектор ЭДС обмотки ВН соответствует
минуmой стрелке, установленной на цифре 12, а
векrор ЭДС обмотки ИН - часовой стрелке (рис. 2.2).
Так же необходимо иметь в виду, что совпадение по
фазе векторов ЭДС ЕАХ и Ёах , эквивалентное сов­
падению стрелок часов на циферблате, обозначается
группой О (а не 12). Кроме того, следует помнить,
что за положительное направление вращения векто­
ров ЭДС принято их вращение против часовой
стрелки.
61
Таким образом, в однофазном трансформаторе возможны
лшпъ две группы соедm1ения: группа О, соответствующая совпадению по фазе ЁАХ и Ёах , и группа 6, соответствующая сдвигу
фаз между Ё,а и Ёах на 180°. Из этих групп ГОСТ предусматривает лшпъ группу О, она обозначается И--0.
5)
а)
Еа;:,;
о·
\Ё�х
____,
,во•
Ёа:r.
Рис. 2.1. Группы соединения обмоток однофазных транс­
dюрматоров:
а - группа IlI- О; 6- группа И - 6
Гр!JnпО 0
Гр!Jппа 6
Группа tt
Группа 5
Рис. 2.2. Сравнение положения стрелок часов с обозначением
групп соединения
Применением разных способов соедm1ения обмоток в трех­
фазных трансформаторах можно создать 12 различных групп со­
единения. Рассмотрим в качестве примера схему соединений
«звезда-звезда» (рис. 2.3, а). Векторные диаграммы ЭДС показывают, что сдвиг между линейными ЭДС ЁАв и Ёаь в данном слу­
чае равен нулю. В этом можно убедиться, совместив точки А и а
при наложении векторных диаграмм ЭДС обмоток ВН и IШ. Сле­
довательно, при указашn,хх схемах соединения обмоток имеет ме­
сто группа О; обозначается YN--0. Если же на стороне lШ в ну­
левую точку соединить зажимы а, Ь и с, а сЮ1Мать ЭДС с зажимов
х, у и z, то ЭДС Ёаь изменит фазу на 180° и трансформатор будет
принадлежать группе 6 (YN-6) (рис. 2.3, 6).
При соедm1ении обмоток «звезда-треугольник», показашюм
на рис. 2.4, а, имеет место группа 11 (У/Л-11). Если же поменять
местами начала и кшщы фазньхх обмоток IШ, то вектор Ёаь по­
вернется на 180° и трансформатор будет относиться к группе 5
(У/Л-5) (рис. 2.4, 6).
При одm1аковьхх схемах соедm1ения обмоток ВН и llli, на­
пример У N и ЫЛ, получают четные группы соединения, а при
62
�
Рис. 2.3. Схемы соединения обмоток и векторные диаграммы:
а - ДЛJ1 группы У/У-О; 6 - для группы У/У-6
�
0---,0,:,:---oZ
В
,-+...,...---11-::--+с"";,,А�
Рис. 2.4. Схемы соединения обмоток и векторные диаграммы:
а-ДЛJ1 группы У/Л-11; 6-ДЛJI rpyrmы У/Л-5
соедШiе1ШЯ), можно получить по две производные rруппы. На­
пример, если в трансформаторе с rруппой соедШiеlШЯ У/У-{)
(рис. 2.3, а) выводы обмотки НН перемаркировать и вместо после­
довательности аЬс принять последовательность саЬ, то вектор
ЭДС ЁаЬ повернется на 120°, при этом получим rруппу соеДШiе­
lШЯ У/У--4. Если же вьmоды обмоток НН перемаркировать в по­
следовательность Ьса, то �ектор Ёаь повернется еще на 120° , а
всего на 240° ; получим rруппу У/У-8.
Аналогично от основной rруппы 6 путем круговой перемарки­
ровки получают производные rруппы 1О и 2, от основной rруппы
11 - производные rруппы 3 и 7, от основной rруппы 5 - произ­
водные rруппы 9 и 1.
Основные rруппы соеДШiеlШЯ имеют некоторое преимущест­
во перед производными, так как предусматривают одноименную
маркировку вьmодов обмоток, расположенных на одном стержне.
Это уменьшает верояnюсть ошибочных присоеДШiеШIЙ. Однако
63
не все группы соединения имеют практическое применение в
трехфазных трансформаторах. ГОСТ определяет схемы и группы
соединения, применяемые для силовых двухобмоточных транс­
форматоров общепроМЪПWiеmюго назначения (рис. 2.5).
Соединяя обмотки НН в зш-заг в сочетании с соединением об­
мотки ВН в звезду или треугольник, можно получить практически
Скены сое�инени11.о6ноток ДиоероииыОекmО!dЭд С !/ио4ные
щ iШ
8Н
в с
А
.I
А� 8� С�
i
1
t'
')
1
)
О
1
"
1
J.
1А ув1 1С)
'
)
)1
z
Аш
х
у
вн
Hff
!J
А АС
аА,
l
blill
I Ч l
)
1' 1 1'
у
нн
z
l
�
1Ш
Мй [IJ
Х
!J
6
8
/J
А Ас
8
ААС
/j
000.1HOlltHUR
.t>,
Х:-о
�-11
6
а[>,
%
ьу,
"1j
i
)r-c
% - jj
ААС а
-11
8
А6С
l
Рис. 2.5. Схемы и rруппы соединеюtЯ обмоток ч,ехфазных двухобмоточных
трансформаторов
тобой угол сдвига фаз между ЭДС обмоток ВН и НН. Этого дос­
тигают разделением обмотки НН на две части (см. § 1.11) с раз­
личным соотношением витков в этих частях, а следовательно, и с
различным значением угла f3 (см. рис. 1.22, б).
При изготовлении или в процессе эксплуатации трансформа­
торов иногда возникает необходимость в опытной проверке груп­
пы соединения. Существует несколько методов такой проверки, но
наиболее распространены методы фазометра и вольтметра.
64
Метод фазометра. Основан на непосредственном измерении
угла фазового сдвига между соответствующими линейными на­
пряжениями (ЭДС) обмоток ВН и НН с помощью фазометра <р,
вюпоченного по схеме, показаююй на рис. 2.6, а. Параллельную
обмотку фазометра U-U подкmочают к стороне ВН, а последова­
тельную обмотку /-/ - к стороне НН. Для оrраничения тока в
последовательной обмотке 01
ь;
1 ___._
ее подключают через добаА
вочное сопротивление rдоб•
Затем трансформатор вюпо­
чают в сеть с симметрич­
ным трехфазным напряже­
нием. Для удобства измере­
ний желательно, чтобы фа­
зометр имел полную (360°)
шкалу.
х у z
х у z
Метод
вольтметра. Рис. 2.6. Проверка группы соединения
Непосредственного изме­
УN---0 методами фазометра (а) и
рения угла фазового сдвига
вольтметра (6)
между линейными напря­
жениями (ЭДС) этот метод не дает. Это косвенный метод и осно­
ван на измерении вольтметром напряжений (ЭДС) между одно­
имеш1ыми выводами обмоток ВН и НН. Если проверяют rруппу
соединения УN--0 (рис. 2.6, 6), то, соединив проводом выводы А
и а, измеряют напряжение ИЬ-в (между вьmодами Ь и В) и Ис-с
(между вьmодами с и С). Если предполагаемая rруппа соединения
УN--0 соответствует фактической, то напряжения (В)
(2.1)
Иь-в = ис-С =UаЬ (kп -1),
где kn = UАв/UаЬ - отношение линейных напряжений (ЭДС) ВН
и НН, т. е. коэффIЩИент трансформации линейных напряжений
(ЭДС).
Если проверяют rруппы соединения 6, 11 или 5, то для про­
верки измереш1ых значений напряжений пользуются формулами:
rруппаУN-6
(2.2)
U6_8 =Uc-c =Иху (kп +1);
rруппаУ/Л-11
(2.3)
U6_8 =Uc-c =ИаЬ 1- ✓Зkп + k;;
rруппаУ/Л -5
✓
Иь-в = ис-С = UаЬ ,J1 + ✓Зkп + k; .
(2.4)
Здесь ИаЬ и Uxy - линейные напряжения на выводах обмоток
нн,в.
Если условия равенства напряжений по привоДИМЫМ форму­
лам не соблюдаются, то это свидетельствует о нарушениях в мар­
кировке вьmодов трансформатора.
65
§ 2.2. Параллельная работа трансформаторов
ПарШ1Лельной работой двух или нескольких трансформато­
ров называется работа при параллельном соединении их обмоток
как на первичной, так и на вторичной сторонах. При параллельном
соединении одноиме1rnые зажимы трансформаторов присоеДШIЯ­
ют к одному и тому же проводу сети (рис. 2.7, а).
Q)
с _____________
в _____________
А----t-+--...++---++­
Rер6ичнаR"
С6mь
1
1
.... 1
; :J,Ц
/
�11
10
L
/JторичниR 1
сеть
6)
L
с----+-.....--++---+++-
Ь----+----++---++--
ll---.....____,.___....,__
Тр!
Ь
-
С
--
:
1
.J
c-+--+-_.,----f-�.....-
b--t-.....,________
а-----------
Рис. 2.7. Включение трансформаторов на параллельную работу
Применение нескольких параллельно вкточе1m:ых трансфор­
маторов вместо одного трансформатора суммарной мощности не­
обходимо для обеспечения бесперебойного энергоснабжеIШЯ в
случае аварии в каком-либо трансформаторе или отюnочения его
для ремонта. Это также целесообразно при работе трансформа­
торной подстанции с переменным rрафиком наrрузки, например
когда мощность нагрузки значиrельно меняется в различные часы
суток. В этом случае при уменьшении мощности наrрузки можно
отюnочиrь один или несколько трансформаторов для того, чтобы
нагрузка трансформаторов, оставшихся вкточеннь�ми, бьmа близ­
ка к номинальной. В итоге эксплуатационнь1е показатели работы
трансформаторов (Ю1Д и cosq> 2 ) будут достаточно высокими.
Для того чтобы наrрузка между параллельно работающими
трансформаторами распределялась пропорционально их номи­
нальнь�м мощностям, допускается параллельная работа двухобмо­
точных трансформаторов при следующих условиях:
1. При одинаковом первичном напряжении вторичные на­
пряжения должны быть равны. Другими словами, трансформа­
торы должнь1 иметь одинаковые коэффициенты трансформации:
k1 = kп = kш = .... При несоблюдении этого условия, даже в режиме
х.х., между параллельно вкточенными трансформаторами возни­
кает уравнительный ток, обусловленнь1й разностью вторичных
напряжений трансформаторов ЛИ (рис. 2.8, а):
(2.5)
/(zk1 + zk11 ),
iyv =
где Zk1 и Zkп - внуrреmше сопротивления трансформаторов.
ли
66
При нагрузке трансформаторов уравmпельный ток наклады­
вается на нагрузочный. При этом трансформатор с более высоким
вторичным напряжением х.х. (с меньшим коэффициентом транс­
формации) оказьmается перегруженным, а трансформатор равной
мощности, но с большим коэффициентом трансформации - не­
догруженным. Так как перегрузка трансформаторов недопустима,
то приходится снижать общую нагрузку. При
о)
значительной разmще коэффшщентов транс- а)
формации нормальная работа трансформаторов становится практически невозможной.
Однако ГОСТ допускает вюпочение на па­
А
раллельную работу трансформаторов с раз- 41 •
U211
ЛИЧНЬТhШ коэффициентами трансформации,
если разmща коэффициентов трансформации
не превышает ±0,5% их среднего значения:
о
о
Лk=[(k1 -kп)/k]100% � 0,5%,
.J
(2.6) Рис. 2.8. Появление
напряжения ЛИ при
где k = k1 k11 - среднее геометрическое несобmодении усло­
значение коэффициентов трансформации.
вий вюnочения транс­
2. Трансформаторы должны принад­ форматоров на па­
лежать к одной группе соединения. При раллельную работу
несоблюдении этого условия вторичнь1е ли­
нейные напряжения трансформаторов окажутся сдвинутыми по фа­
зе относительно друг друга и в цепи трансформаторов появится раз­
ностное напряжение ли, под действием которого возникнет значи­
тельный уравнительный ток. Так, если вюпочить на параллельную
рабоrу два трансформатора с одmiаКовьIМИ коэффшщентами транс­
формации, но один из них принадлежит к нулевой (YN--0), а дру­
гой - к одиннадцатой (У/Л-11) группам соединения, то линейное
напряжение и21 первого трансформатора будет больше линейного
напряжения и211 второго трансформатора в ✓3 раз ( и21 /и211 = ✓3 ).
Кроме того, векторы этих напряжений окажутся сдвинутьIМИ по фа­
зе относительно друг друга на угол 30° (рис. 28, б). В этих условиях
во вторичной цепи трансформаторов появится разностное напряже­
ние ли. Для определения величинь1 ли воспользуемся построениями рис. 28, б: отрезок ОА равен ✓3 и2п /2 или, учитьmая, что
и2 11 = и2
получим ОА = О,5и21• Следоват ельно, треугольник ,
образованный векторами напряжений U21, U211 и ЛИ -равнобед­
ренный, а поэтому разностное напряжение ли= и211 • Появление
такого разностного напряжения привело бы к возникновению во
вторичной цепи трансформаторов уравmпельного тока, в 15-20
раз превышающего номинальный ток нагрузки, т. е. возникла бы
аварийная ситуация. Величина ли становится еще большей, если
трансформаторы принадлежат нулевой и шестой группам соедине­
ния (ли= 2и2 ), так как в этом случае векторы линейньIХ вторич­
ных напряжений окажутся в противофазе (см. рис. 2.3, б).
J.Jз,
67
3. Трансформаторы должны иметь одинаковые напряже­
ния к. з.: ик , = ик1, = Uк1п = ... . Соблюдение этого условия необхо­
димо для того, чrобы общая нагрузка распределялась между
трансформаторами пропорционально их номинальным мощно­
стям.
С некоторым приближением, пренебрегая токами х.х., можно
параллельно вюпоченные трансформаторы заменить их сопротив­
лениями к.з. Zк1 и Zк11 и тогда от схемы, показанной на рис. 2.9, а,
можно перейти к эквивале1ПНой схеме (рис. 2.9, б). Известно, что
токи в параллельных ветвях распределяются обратно пропорцио­
нально их сопротивлениям:
(2.7)
/1 / /11 = Zk11 /Zk1 .
и
Умножим обе части равенства (2.7) на Iпномино,.JU,ном ном).,
левую часть - на Ин м /Ин м , а правую часть - на 100/1 00, полу­
чим
I,Iпноминомином _ Zk11/ПномИном100
/11 I, оми м ином zkl I,н м ином100
Затем преобразуем полученное равенство, имея в виду сле­
дующее: I,Ин м = S1 и /11Ином = S11 - фактическая нагрузка пер­
вого и второго трансформаторов соответственно, В·А;
I,номИном = s,ном и lпномИном = Sпном - номинальные мощности
В·А;
этих
трансформаторов,
U1ном Zк1 /Ином)lОО = и,к
И
( I11номzк1, /Ином )100 = Uпк - напряжения к.з. трансформаторов, %.
В результате получим
(2.8)
(S,/S1ном ):(S11 /S11ном)=ик11 /И.,1 •
о
н
о
но
о
о
или
(2.9)
S;JS:, = Uк11 /Uк1 ,
где S1 = S1 /S1ном , S11 = S11 /Sпном - соответственно относительные
мощности (нагрузки) первого и второго трансформаторов.
Из соотношения (2.9) следует, что относительные мощности
(нагрузки) паршzлельно работающих трансформаторов обратно
пропорциональны их напряжениям к.з. Другими словами, при не­
равенстве напряжений к.з. параллельно работающих трансформа­
торов больше нагружается трансформатор с меньшим напряжени­
ем к.з. В итоге это ведет к перегрузке одного трансформатора (с
меньшим ик) и недогрузке другого (с большим ик)- Чтобы не до­
пустить перегрузки трансформатора, необходимо снизить общую
нагрузку. Таким образом, неравенство напряжений к.з. не допус­
кает полного использования по мощности параллельно работаю­
щих трансформаторов.
Учитьmая, чrо практически не всегда можно подобрать транс­
форматоры с одинаковыми напряжениями к.з., ГОСТ допускает
включение трансформаторов на параллельную работу при разнице
68
напряжений к.з. не более чем 10% от их среднего арифметиче­
ского значения. Разница в напряжениях к.з. трансформаторов
тем больше, чем больше эти трансформаторы отличаются друг
от друга по мощности. Поэтому ГОСТ рекомендует, чтобы от­
ношение номинальных мощностей трансформаторов, включен­
ных параллельно, было не бо­
aJ5}_
лее чем 3:1.
Помимо соблюдения ука­
занных трех условий необхо­
димо перед включением транс­
форматоров на параллельную
работу проверить порядок че­ Рис. 2.9. К понятию о распределе­
редования фаз, который должен нии наrрузки при параллельной
быть одинаковым у всех транс­ работе трансформаторов
форматоров.
Соблюдение всех перечисленных условий проверяется фази­
ровкой трансформаторов, сущность которой состоит в том, что
одну пару, противоположно расположеШIЫХ зажимов на рубиль­
нике (см. рис. 2.7, б), соединяют проводом и вольтметром V0 (ну­
левой вольтметр) измеряют напряжение между оставшимися несо­
едине1rnыми парами зажимов рубилыm:ка. Если вторичные
напряжения трансформаторов равны, их группы соединения оди­
наковы и порядок следования фаз у них один и тот же, то показа­
ния вольтметра V0 равны нулю. В этом случае трансформаторы
можно подключать на параллельную работу. Если вольтметр V0
покажет некоторое напряжение, то необходимо выяснить, какое из
условий параллельной работы нарушено. Необходимо устранить
это нарушение и вновь провести фазировку трансформаторов.
Следует отметить, что при нарушении порядка следования фаз
вольтметр V0 покажет двойное линейное напряжение. Это необхо­
димо учитьmать при подборе вольтметра, предел измерения кото­
рого должен бьпъ не менее двойного линейного напряжения на
вторичной стороне трансформаторов.
Общая нагрузка всех включенных на параллельную работу
трансформаторов S не должна превышать суммарной номиналь­
ной мощности этих трансформаторов: s" Lsномх.
Распределение нагрузки между параллельно работающими
трансформаторами определяется следующим образом:
:U3,
- ,
- ,п ЗJ,
(2.10)
где Sx - нагрузка одного из параллельно работающих трансфор­
маторов, кВ·А; S - общая нагрузка всей параллельной группы,
кВ·А; Uкх -напряжение к.з. данного трансформатора, %; S мх - но­
минальная мощность данного трансформатора, кВ·А.
В выражении (2.10)
но
(2.11)
69
Пример 2.1. Три трехфазных трансформатора с одинаковыми группами со­
единения вкmочены параллельно (см. рис. 2.7, а) на общую нагрузку 5000 кВ·А
Трансформаторы имеют следующие данные Sнo..i = 1000 кВ·А, и11 = 6,5%, Sном11 =
= 1800 кВ·А, ип1 = 6,65%, Sно..�п = 2200 кВ·А, и1111 = 6,3%. Определить наrрузку
каждого трансформатора
Р е ш е н и е. По (2.11) определим
'f,(Sнoмx/u.r)= 1000/6,5+1800/6,65+ 2200/6;3= 775 .
По (2.1 О) определим наrрузку каждого трансформатора:
S1 =5000-1000/(6,5·775)=995 кВ·А;
S11 == 5000 · 1800/(6,65 · 775) = 1755 кВ·А;
Sm = 5000 · 2200/(6,3 · 775) = 2250 кВ·А,
т. е. третий трансформатор оказался переrруже1mым на
[(2250- 2200)/2200]100 = 2,3%.
Для устранения этой перегрузки следует сюшпь внешюою нагрузку транс­
форматоров на 2,3%, т. е. уменьшить ее до S' = S- 2,ЗS/100 = 5000-2,3-5000/100 = 4885 кВ·А.
В этом случае суммарная мощн()СТь трансформаторов будет использована
ЛШIIЬ на 97,7%.
Контрольные вопросы
1.
2.
3.
4.
Что такое группа соединения и как она обозначается?
Какие группы соединения предусмотрены ГОСТом?
Как из основной группы соединения можно получить производную?
Как изменится отношение mmейных напряжеЮiЙ трансформатора, если ну­
левую группу соединения изменить на 11-ю?
5. Какие условия необходимо соблюдать при вкmочении трансформаторов на
параллельную рабту?
6. Что такое фазировка трансформатора и как она выполняется?
э • Трехобмоточные
- трансформаторы
и авто­
трансформаторы
Глава
§ 3.1. Трехобмоточные трансформаторы
В трехобмоточном трансформаторе на каждую
трансформируемую фазу приходится три обмотки.
За ношmалъную мощность такого трансформатора
принимают номинальную мощность наиболее на­
гружаемой его обмотки. Токи, напряжения и сопро­
тивления других обмоток приводят к числу витков
этой, наиболее мощной обмотки. Прmщип работы
трехобмоточного трансформатора по существу не
отличается от прmщипа работы обычного двух.обмо­
точного трансформатора.
Существуют трехобмоточные трансформаторы с
одной первичной и двумя вторичными обмотками и
трансформаторы с двумя первичными и одной вто­
ричной обмотками.
Рассмотрим основные уравнения, особеююсти
работы и область применеЮIЯ трехобмоточного транс­
форматора с одной первичной обмоткой, имеющего
наибольшее распространение (рис. 3.1, а). Первич­
ная (наиболее мощная) обмотка этого трансформа­
тора является намагничивающей и создает в магни­
топроводе магнитный поток, который сцеIUIЯется с
двумя вторичными обмотками и наводит в них ЭДС
Ё2 и Ё3 • Аналогично двух.обмоточному трансфор­
матору запшпем для трехобмоточного трансформа­
тора уравнение МДС:
i,w, + i2w2 + i3w3 = i0w1 •
(3.1)
Разделив (3.1) на w1, получим уравнения токов:
i, + i2 + i3 = i0 ;
(3.2)
i2 = i2 /k,2 ; i; = iэ fkl) .
(3.3)
Здесь k1 2 = w1 /w2 - коэффициенr трансформа­
ции между обмотками w 1 и w2; k13 = w1 /w3 - коэф­
фициенr трансформации между обмотками w, и wз.
Пренебрегая током х.х. /0 , получим упрощеююе
уравнение токов трехобмоточноrо трансформатора:
71
(3.4)
Экономическую целесообразность применения трехобмоточ­
ных трансформаторов можно объясmпь тем, что, как это следует
из (3.4), первичный ток трехобмоточного трансформатора равен не
арифметической, а геометрической сумме приведе1rnых вторич­
ных токов. Учитывая это равенство, а также и то, что нагрузка на
вторичные обмотки достигает номинального значения не одновре­
менно, первичную обмотку трехобмоточного трансформатора рас­
считьmают на мощ­
6)
OJ
ность, меньшую ариф­
метической
суммы
номинальных мощ­
ностей обеих вторич­
ных обмоток. Еще од­
но ДОСТОШIСТВО трех­
обмоточного трансРис. 3.1. Трехобмоточный 1J>Шlсформатор с од- форматора состоит в
том, что он фактичесной первичной и двумя вторичными обмотками
ки заменяет два двухобмоточных.
Обмотки трехобмоточного трансформатора располагают на
стержне обычно концентрически (рис. 3.1, б), при этом целесооб­
разнее двустороЮiее расположение вторичных обмоток относи­
тельно первичной, тогда первичной является обмотка 2, а вторич­
ными - обмотки 1 и 3. В этом случае взаимное влияние
вторичных обмоток заметно ослабевает.
На крупнь�х электростанциях Шiогда применяют трехобмоточнь1е
трансформаторы с двумя первичньIМИ обмотками (к каждой из них
подключается генератор) и одной вторичной (or нее отходит линия
элеюропередачи). Обычно это установки большой мощности, а по­
этому в них примеНЯIОГ однофазные трехобмоточнь1е трансформато­
ры, соедm:1енные в трансформаторную грушху (см. рис. 1.20, а).
§ 3.2. Автотрансформаторы
Автотрансформатор - это такой вид трансформатора, в кото­
ром помимо магнитной связи между обмотками имеется еще и
электрическая связь. Обмотки обычного трансформатора можно
включить по схеме автотрансформатора, для чего выход Х обмот­
ки wАХсоединяют с вьmодом а обмотки w ox (рис. 3.2). Если выводы
Ах подключить к сети, а к выводам ах подключить нагрузку Zн, то
получим п о н и ж ающи й автотрансформатор. Если же выводы
ах подключить к сети, а к вьmодам Ах подключить нагрузку Zн, то
получим п о в ыш аю щ и й автотрансформатор.
Рассмотрим подробнее работу понижающего автотрансформа­
тора. Обмотка Wox одновременно является частью первичной об­
мотки и вторичной обмоткой. В этой обмотке проходит ток /12 •
Для точки а запишем уравнение токов:
72
(3.5)
или
(3.6)
т. е. по вигкам wш проходиr ток /12, равный разности вторичного /2
и первичного /1 токов. Если коэфф1П1Иенr трансформации авто­
трансформатора kл = wAxfwш немногим больше едишщы, то токи
/1 и /2 мало отличаются друг от друга, а их разность составляет
а)
о)
ф-
"V
~и,
~U2
Рис. 3.2. Элек­
тро магни тная (а)
и принципиальа
ная ф(б) схемы
одно азного по­
тнижающего авторансформатор
х
небольшую величину. Эrо позволяет вьmолнить витки Wш прово­
дом уменьшенного сечения.
Введем понятие проходной мощности автотрансформатора,
представляющей собой всю передаваемую мощность Sпр =И2 /2 из
первичной цепи во вторичную. Кроме того, различают еще рас­
четную мощность Sрасч, представляющую собой мощность, пере­
даваемую из первичной во вторичную цепь магнитным полем.
Расчетной эту мощность называют потому, что размеры и вес
трансформатора зависят от величинь1 этой мощности. В транс­
форматоре вся проходная мощность является расчетной, так как
между обмотками трансформатора существует лишь магнитная
связь. В автотрансформаторе между первичной и вторичной цепя­
ми помимо магнитной связи существует еще и электрическая.
Поэтому расчетная мощность составляет лишь часть проходной
мощности, другая ее часть передается между цепями без участия
магнитного поля. В подтверждение этого разложим проходную
мощность автотрансформатора Snp =И2 /2 на составляющие. Вос­
пользуемся для этого выражением (3.5). Подставив это выражение
в формулу проходной мощности, получим
Sпр =И2/2 =И2 (/1 +/I2 )=И2 /1 +И2/12 =Sэ + Sрасч• (3.7)
Здесь S3 =И2 /1 - мощность, передаваемая из первичной це­
пи автотрансформатора во вторичную благодаря электрической
связи между этими цепями.
73
Таким образом, расчетная мощность в автотрансформаторе Sрасч =
= И2/12 составляет тппь часть проходной. Эго дает возможность для
изготовления автmрансформатора использовать мапnпопровод
меньшего сечения, чем в трансформаторе равной мощности.
Средняя дmrna виrка обмотки также
Sэ/S11p
становится меньше; следовательно, умень­
f,O
шается расход меди на выполнение обмотки
автотрансформатора. Одновременно умень­
0,8 \
шаются магнитнь1е и электрические потери,
0,6 \
а КПД автотрансформатора повышается.
0,4
Таким образом автотра н сформатор по
.... ....... сравнению с 'Iрансформатором равной мощ­
0,2
ности обладает следующими преимущества2 J l/ 5 кА ми: меньшим расходом активНЬIХ материалов
(медь и электротехническая сталь), более
Рис. 3.3. Зависимость высоким КПД, меньшими размерами и стои­
S.)Sпр от коэффициен- мостью. У автотрансформаторов большой
трансформ аЦIШ
та
КПД достигает 99,7%.
автотрансформатора мощности
Указа1rnые преимущества автотранс­
форматора тем значительнее, чем больше мощность S1, а следова­
тельно, чем меньше расчетная часть проходной мощности.
Мощность S1, передаваемая из первичной во вторичную цепь
благодаря электрической связи между этими цепями, определяется
выражением
',
(3.8)
т. е. значение мощности S1 обратно пропорционально коэффици­
е:mу трансформации автотрансформатора kл .
Из графика (рис. 3.3) видно, что применение автотрансформа­
тора дает заметнь1е преимущества по сравнению с двухобмоточ­
ным трансформатором лшпь при небольших значениях коэффици­
ента трансформации. Например, при kл = 1 вся мощность
автотрансформатора передается во вторичную цепь за счет элек­
трической связи между цепями (S./Snp = 1).
Наиболее целесообразно применение ·автотрансформаторов с ко­
эффициешом 'IJ)ансформации kл � 2. При большом значении коэф­
фициента трансформации преобладающее значение имеют недостатки авТО'Iрансформатора, состоящие в следующем:
в с
1. Большие токи к.з. в случаях понижающе­ А
ь
го автотрансформатора: при замыкании точек а
их (см. рис. 3.2, а) напряжение И1 подводится
ЛШIIЬ к небольшой части витков Аа, которые
обладают очень мальIМ сопротивлением к.з. В
этом случае автотрансформаторы не м01уr за­
щитить сами себя от разрушающего действия
токов к.з. (см. § 4.1), поэтому токи к.з. должны х
z
lj
ограничиваться сопротивлением других элемен­ Рис. 3.4. Трех­
тов электрической установки, включаемых в фазный
авто­
цепь автотрансформато ра.
трансформатор
74
2. Электрическая связь стороны ВН со стороной llli; это тре­
. бует усиленной электрической изоляции всей обмотки.
3. При использовании автотрансформаторов в схемах пониже­
ния напряжения между проводами сети llli и землей возникает
напряжеIШе, приблизительно равное напряженmо между проводом
и землей на стороне ВН.
4. В целях обеспечения элек­
тробезопасности обслуживающего
персонала нельзя применять авто­
трансформаторы для понижения
з
напряжения сетей ВН до значений
llli, подводимого непосредственно
к потребителям.
Силовые автотрансформаторы
широко применяют в линиях пере­
дачи и распределения электроэнер­
гии для связи сетей смежных на­
пряжений, например 110 и 220, 220
и 500 кВ и др. Такие автотрансфор­
маторы обычно вьmолняют на
большие мощности (до 500 МВ·А и Рис. 3.5. Реrулировочный одно­
выше). Обмотки трехфазных авто- фазный авrоq,ансформатор:
трансформаторов обычно соединя­ 1 - ручка для перемещения кон­
ют в звезду (рис. 3.4).
тактной щетки; 2 - щеткодержа­
Автотрансформаторы
приме- теm.; 3 - обмотка
няют в электроприводе переменного
тока для уменьшения пусковых токов двшателей значительной
мощности (см. § 15.2), а также для регулировки режимов работы
электрометаллургических печей. Автотрансформаторы малой
мощности применяют в устройствах радио, связи и автоматики.
Широко распространены автотрансформаторы с перемен­
ным коэффициентом трансформации. В этом случае автотранс­
форматор снабжают устройством, позволяющим реrулировать ве­
личину вторичного напряжения путем изменения числа витков wах
(см. рис. 3.2). ОсущесТШIЯется это либо переключателем, либо с
помощью скользящего контакта (щетки), перемещаемого непо­
средственно по зачищенньrм от изоляции витками обмотки. Такие
автотрансформаторы, назьmаемые реrуляторами напряжения, мо­
гут бьrrь однофазньrми (рис. 3.5) и трехфазньrми.
Контрольные вопросы
1.
2.
3.
4.
Каковы досrоинсrва трехобмоточных трансформаторов?
Перечислиrе достоинсrва и недостатки автотрансформаторов.
Зависят ли достоинсrва автотрансформатора от коэффшtИента трансформа­
ции? Объясните, почему.
Объясниrе устройство автотрансформатора с переменным коэффшtИентом
трансформации.
Глава 4 • Переходные
�процессы
в трансформаторах
§ 4.1. Переходные процессы
при включении и при внезапном
коротком замь1кании
трансформаторов
При переходе трансформатора из одного уста­
новившегося режима в другой возникают переход­
ные процессы. Так как каждый установившийся ре­
жим характеризуется определенным значением
энергии электромагнитных полей, то в течение пе­
реходного процесса происходит изменение энергии
этих полей. Наибольший практический интерес
представляют переходные процессы при вюпочении
трансформатора и коротком замыкании на зажимах
вторичной обмотки.
атора в сеть. В этом
чение трансформ
Вклю
случае
результирующий
магнитный
поток можно
рассматривать как сумму трех составляющих:
Ф=Фуст +Ф пер ±Фост ,
(4.1)
где Фvст - маmиmый поток установившийся; Фпео ..­
магнитный поток переходного процесса; Фост магнитный поток остаточного магнетизма, направ­
ленный либо согласно с установившимся потоком
(знак«+»), либо встречно ему (знак«-»).
Магниrный поток переходного процесса заrу­
хающий и постоянен по направленmо.
Наиболее благопрюцный случай вюnочения
трансформатора в сеть будет при потоке остаточно­
го магнетизма, направленном встречно установив­
шемуся потоку, и мгновенном значении первичного
напряжения и, = О. При этом магнитный поток уста­
новившийся Фvст будет максимальным, так как он
отстает по фазе от напряжения на угол приблизи­
тельно 90° (рис. 4.1, а). Магнитный поток Ф стано­
вится наибольшим приблизительно через половину
периода после вюnочения трансформатора. Если
магнитопровод трансформатора не насыщен, то в
момент вюnочения трансформатора в первичной об­
мотке появится намагничивающий ток, пропорцио­
нальный магнитному потоку. Если же магнитопро­
вод трансформатора насьпцен, то при вюпочении
76
трансформатора намагничивающий ток вюпочения достигает зна­
чительной силы, называемой сверхтоком холостого хода. Из по­
строений, сделанных на кривой намагничивания (рис. 4.1, б), вид­
но, что при магнигном потоке,- превышающем в два раза
установившееся значение Ф = 2Фуст, сверхток холостого хода дос­
тигает силы, во много раз превы­
шающей установившееся значе­ О)
ф
ние тока х.х. (/1вкл >> /о). При наи­
более неблагоприятных условиях и,
сверхток х.х. может в 6---8 раз
превысить номинальное значение
первичного тока.
Так как длительность пере­
ходного процесса невелика и не
превышает нескольких периодов
переменного тока, то ток вкmоче­
ния для трансформатора не опасен.
Однако его следует учиrывать при
регулировке аппараwы защиты,
чтобы в момент вкmочения транс­
форматора не произ01wю его не­
правильного отюпочения от сети.
1"f(JI 1
Бросок тока вкmочения следует
также учиrывать при наличии в Рис. 4.1. Графики переходных
цепи первичной обмотки транс­ процессов при вюпочении транс­
форматора чувствительных изме­ форматора (а) и определение
рительных приборов. Во избежа­ тока вюпочения трансформатора
ние поломки этих приборов нужно по кривой намагничивания (б)
до вкmочения трансформатора в
сеть шунrировать их токовые обмотки.
Внезапное короткое замыкание на зажимах вторичной об­
мотки трансформатора. Оно возникает из-за различных неисправно­
стей: механического повре)!Щения изоляции или ее элеюрического
пробоя при перенапряжениях, ошибочных действиях обслуживающе­
го персонала и др. Короткое замыкание - это аварийный режим, ко­
торый может привести к разрушешnо трансформатора.
При внезапном коротком замыкании на зажимах вторичной
обмотки в трансформаторе возникает переходный процесс, сопро­
вождаемый возникновением большого мгновенного тока к.з. iк.
Этот ток можно рассматривать как результирующий двух токов:
установившегося тока iк.уст и тока переходного процесса iк.пер, по­
стоянного по направлению, но убывающего по экспоненциально­
му закону
iк = iк.уст + iк.пер•
(4.2)
Наиболее неблагоприятные условия к.з. м01уr быть в момент,
когда мгновенное значение первичного напряжения равно нуmо
(и1 = О). На рис. 4.2 построена кривая тока к.з, iк для этого условия.
Ток внезапного к.з. (ударный ток) может достигать двойного зна77
чения установившегося тока к.з. и в 20--40 раз превышать номи­
нальное значение тока.
Переходный процесс при внезапном к.з. у трансформаторов
малой мощности длиrся не более одного периода, а у трансформа­
торов большой мощности - 6-7 периодов. Затем трансформатор
переходит в режим установившегося к.з., при этом в обмотках
протекают токи iк.уст, значения коi
-с---.торых хотя и меньше тока iк при
и,
переходном процессе, но все же
во много раз превышают номи­
нальное значение тока. Через не­
сколько секунд срабатьшают за­
щитнъ1е устройства, отюпочаю­
щие трансформатор от сети. Но
несмотря на кратковремешюсть
процесса к.з., он представляет со­
бой значительную опасность для
Рис. 4.2. Графихи переходных обмоток трансформатора: во­
процессов при внезаmюм к.з.
первых, чрезмерно большой ток
к.з. резко повышает температуру
обмотки, чrо может повредиrь ее изоляцmо; во-вторых, резко уве­
личиваются электромагниmые силы в обмотках трансформатора.
Значение удельной электромагниmой силы, действующей на
витки обмоток, определяют произведением магнитной индукции
поля рассеяния в;, на ток i в витке обмотки:
(4.3)
F = B0 i,
где F- удельная электромагниmая си.да, Н/м.
Но с увеличением тока растет также и индукция поля рас­
сеяния, поэтому сила растет пропорционально квадрату тока
(F= i2 ). Так, если в витке ток i = 100 А и индукция В,,= 0,1 Тл,
то F = О,1 ·100 = 10 Н/м. Такая си­
ла не вызывает заметных дефор­
маций витков обмотки. Но если
при внезапном к.з. бросок тока
достигнет значения iк, превы­
шающего номинальный ток в 30
раз, то электромагнитная сила
возрастет в 900 раз и станет рав­
ной 9000 Н/м. Такая сила может
вызвать значительные механиче­
ские разрушения в трансформато­
ре (рис. 4.3). Все это необходимо
учитывать при проектировании
трансформаторов и создавать дос­
таточно прочные конструкции об­
моток и надежное их крепление на
Рис. 4.3. Разрушение обмоток
сердечниках.
трансформатора при к.з.
78
§ 4.2. Перенапряжения в трансформаторах
и защита от перенапряжений
В нормальных условиях эксrmуатации трансформатора между
отдельными частями его обмоток, а также между обмотками и за­
земленными магнитопроводом и корпусом действуют синусои­
дальные напряжения номинальной частоты, не представляющие
опасности для электрической изоляции. Однако периодически
возникают условия, при которых между указанными элементами
трансформатора появляются перенапряжения. В зависимости от
причин, их порождающих, перенапряжения разделяются на два
вида: внутрешше и вне1Ш1Ие.
Внутренние перенапряжения. Возникают либо в процессе
коммугациоmп,�х операций, например отключения или включения
трансформатора, либо в результате аварийных процессов (корот­
кое замыкание, дуговые замыкания на земmо и др.). Значение
внутреннего перенапряжения обычно составляет (2,5+3,5)Ииом•
Внешние (атмосферные) перенапряжения. Обусловлены
атмосферными разрядами: либо прямыми ударами молний в про­
вода или опоры линий электропередач, либо грозовыми разряда­
ми, индуцирующими в проводах линии электромагнитные волны
высокого напряжения. Значение перенапряжения в этом случае
может достигать нескольких тысяч киловольт.
На процессы, происходящие в трансформаторе при перена­
пряжениях, существенное влияние оказьmает скорость нарастания
волны напряжения. При подходе волны напряжения к трансфор­
матору напряжение между зажимом обмотки и землей нарастает
весьма быстро. При этом скорость нарастания напряжения в зна­
чительной степени влияет на вид схемы замещения обмотки. При
напряжении промышленной частоты схема замещения обмотки
имеет вид ряда последовательно соединеmп,�х индуктивных и ак­
тивнь�х сопротивлений элементов этой обмотки (рис. 4.4, а). При
подходе к трансформатору периодической волнь1 перенапряжения,
вызванной коммугациоmп,IМИ процессами, скорость нарастания
напряжения настолько увеличивается, что на процессы, происхо­
дящие в трансформаторе, оказьmают влияние емкостнь1е связи
между элементами обмотки и между обмоткой и заземлеmп,�м
магнитопроводом (рис. 4.4, б). Наконец, при атмосфернь�х перена­
пряжениях, когда к трансформатору устремляется апериодический
импульс с крутым передним фронтом ПФ (рис. 4.5), при котором
напряжение между вводом трансформатора и землей достигает
наибольшего значения за (1-2)·10� с, индуктивные сопротивле­
ния в схеме замещения становятся настолько большими, что их
влиянием можно пренебречь и считать схему замещения обмотки
состоящей только из попе�чньIХ емкостей между элементом об­
мотки и магнитопроводом (землей) C'L и продольных емкостей
между смежньIМи элементами обмотки cd (рщ:. 4.4, в).
Рассмотрим подробнее процессы в трансформаторе при атмо­
сферных перенапряжениях, так как эти перенапряжения наиболее
79
опасны. Обмотка в этом случае по ornoшemno к быстро нарас­
тающему напряжешпо представляет собой некоторую входную
емкость Свх, которая обусловливает входное (емкостное) сопро­
тивление трансформатора Хвх, В начальный момент подхода вол­
ны, когда скорость нарастания напряжения огромна ( du/dt ➔ оо ),
входное сопротивление практически равно нулю (хвх ➔ О), т. е.
трансформатор эквивалентен короткозамкнутому концу ЛШIИИ
передачи. При этом
напряжение на входе
трансформатора сна­
чала падает до нуля,
затем, по мере зарядки
ц
О f
Z
J 4·to·t,C
Рис. 4.4. Схемы замещения обмоток транс- Рис. 4.5. Перенапряжеформатора
ние в виде импульса
емкости Свх, повышается и достигает двукратной величшп,1 ам­
плитуды импульса, а волна напряжения отражается от трансфор­
матора. В этот период трансформатор эквивалентен разомкнутому
концу линии передачи (рис. 4.6). Напряжение, возникающее меж­
ду обмоткой и магнитопроводом (землей), создает токи через по­
перечные емкости Cq, при этом токи в продольных емкостях Cd по
мере приближения к концу обмотки (точка Хна рис. 4.4) умень­
шаются. Это приводит к неравномерному распределеюпо напря­
жения вдоль обмотки. Характер начального распределения напря­
жения вдоль обмотки зависит от двух причин: от состояния
нейтральной точки трансформатора (это точка Х, которая заземле­
на на рис. 4.7, а и изолирована на рис. 4.7, б) и от соотношения
емкостей Cq и Cd, определяемого коэффIЩИентом
(4.4)
При а ;;;i. 5, что соответствует реальным трансформаторам,
начальное распределение напряжения не зависит от состояния
нейтральной точки и весьма неравномерно, достигая макси­
мального значения на начальных элементах обмотки. Это соз­
дает опасность для изоляции между начальными элементами
обмотки. При уменьшении а распределение напряжения вдоль
обмотки становится более равномерным, особенно при зазем­
ленной нейтрали, хотя наибольшее значение напряжения оста­
ется неизменным.
80
Через некоторое время после подхода волны к обмотке все
точки обмотки приобретут установившийся потенциал. При
этом распределение напряжения вдоль обмотки, называемое
конечным, будет соответствовать кривым при а = О, показан­
ным на рис. 4. 7.
Следовательно, между
начальным и конечным
распределением напряже­
ния имеет место переход­
ный процесс, связанный с
затухающими электромаг­
нитными
1
колебаниями, � �.
/
I�
обусловленными индуктив­
�
ностью, емкостью и актив­
ным сопротивлением об­ Рис. 4.6. Подход (а) и отражение (6)
мотки. За время переходно­ волны напряжения при атмосферном
го процесса напряжение перенапряжении трансформатора
каждой точки обмотки меняется и в отдельные моменты времени достигает значений,
превышающих наибольшее его значение при начальном рас­
пределении напряжения. На рис. 4.8 представлена кривая изме­
нения напряжения точки А (см. рис. 4.7, а) обмотки за время
переходного процесса. Затухающий характер кривой обуслов­
лен потерями в активном сопротивлении обмотки.
Наибольшее напряжение возникает на изолированном конце
обмотки (точка Х при изолированной нейтрали) и может достигать
значения их = 1,9U , где И - максимальное напряжение на обмот­
ке при начальном распределении напряжения. Таким образом,
наибольшую опасность для изоляции обмотки (межвитковой и от­
носительно земли) представляет собой переходный колебательный
процесс.
В автотрансформаторах из-за наличия электрической связи
между первичной и вторичной цепями возможна передача волн
напряжения из одной
5)
а)
сети в другую со зна­
чительным усилени­
ем их по амплитуде.
К мерам по за­
щите трансформато­
ров от перенапряже­
ний относятся внеш­
0,2
няя защита - при­
-1..-...+-��......::�_,x/Z менение
заземлен­
А
w w J i • • r.- x
ных тросов и вен­
:r
тилънъIХ разрядников
Рис. 4.7. Начальное распределение напряжения (эти меры позволяют
по длине обмотки при заземленной (а) и изоли­ ограничить амплиту­
рованной (б) нейтралях
ду волн напряжения,
ikAn-, �
_!_,с,
eo
-----�--+--�
r:•
81
подходящих к трансформатору) и внутренняя защпrа - усиление
изоляции входных витков; установка емкостных колец и электро­
статических экранов (емкосrnая компенсация); применение обмо­
ток с пониже1rnым значением коэффициента а [см. (4.4)]. Цель
последних двух мероприятий внутренней защпrы сводится к
сближению начального и конечного распределения напряжения.
При этом практически устраняется переходный колебательный
процесс.
Емкостные кольца пред­
ставляют собой разомкнутые
u,,,/U
шайбообразные экраны, изго­
1,4
товляемые из металлизирован­
ного электрокартона. Этими
1,2
кольцами прикрывают начало и
конец обмотки, тем самым под­
нимают кривую начального
напряжения,
t распределения
Рис. 4.8. Изменение потеIЩИала приближая ее к кривой конеч­
одной точки обмотки трансформа­ ного распределения.
тора относительно земли в течение
Уменьшение неравномер­
переходного процесса
носm начального распределения напряжения и сближение
его с конечным распределением достш-аются применением в
трансформаторах дополнительных электростатических экранов в
виде разомкнутых металлических колец (витков), охватывающих
начальную часть обмотки и соединенных с ее вводом. Такой экран
создает дополнигельные емкости С,., через которые заряжаются
поперечные емкости Сч в обход продольных емкостей Cd (рис. 4.9, а).
б}
U.fll
__.._.z
,.___.___._
0,20
41
A�i,x
з,,р.и
Рис. 4.9. Роль электростатич<;:скоrо экраJiа
В результате кривая начального распределения напряжения J (рис.
4.9, б) значительно спрямляется и становится по'fГи такой же, как
и кривая конечного распределения 2 для обмоток с заземленной
нейтралью.
Трансформаторы с изолирова1mой нейтралью также моrуг
снабжаться электростатическими экранами, но в этом случае при­
меняют специальные устройства - импидоры, вкmочаемые между
82
нейтралью и землей. Это устройство содержиг емкость, вюпочен­
ную параллельно разряднику и реактору, которая при волновых
процессах заземляет нейтраль трансформатора, а при промышлен­
ной частоте имеет большое сопротивление и практически изоли­
рует нейтраль.
Контрольные вопросы
1. Каковы причины возникновеНИJ1 сверхтока холостоrо хода?
2. Как влияет состояние маrнитноrо насыщеНИJ1 маrниrопровода на силу тока
вкmочения трансформатора?
3. Каковы наиболее неблаrоприятные условия внезапноrо короткоrо замыкания
трансформатора?
4. Какова продолжительность переходноrо процесса при внезапном коротком
замыкании трансформатора?
5. Какие вццы перенапряжений возможны в трансформаторе?
6. В чем состоит внешня.я и внутреННJ1J1 защита трансформаторов от перена­
пряжений?
7. Каково назначение дополниrельных электростатических экранов в транс­
форматоре?
Глава s • Трансформаторные
- устройства
специального
назначения
§ 5.1. Трансформаторы
с плавн1::.1м реrулированием напряжения
Для IШавного реrулирования напряжения воз­
можно применение скользящих по поверхности вит­
ков обмотки конrактов, аналогично тому, как это
сделано в реrулировочном автотрансформаторе (см.
рис. 3.5). При этом IШавность реrулировки ограни­
чивается значением напряжения между двумя смеж­
ными витками (0,5-1,0 В). По такому прmщипу
выполняют однофазные и трехфазные трансформа­
торы и автотрансформаторы мощностью до 250
кВ·А. Однако наличие скользящих конrактов снижа­
ет надежность и ограничивает применение этих
трансформаторов.
Более надежны бесконrакп1ые конструкции ре­
rулировочных трансформатоРQв. Рассмотрим неко­
торые из них.
Трансфор матор с подвижным сердечником.
Первичная обмотка этого трансформатора выполне­
на из двух катушек, уложенных в кольцевых выем­
ках магнитопровода (рис. 5.1, а). Катушки w{ и w{'
включены так, что создают магнип1ые потоки, на­
правленные встречно друг друrу. Внутри неподвиж­
ной части магнитопровода расположен подвижный
сердечник ПС со вторичной обмоткой w2• При сред­
нем положении ПС в обмотке w2 не наводится ЭДС,
так как действие первwmых катушек взаимно ком­
пенсируется.
При смещении ПС влево или вправо от среднего
положения вторичной обмотки в последней наво­
дится ЭДС ЛЁ. При этом фаза (направление) ЛЁ
зависит от того, в зоне какой из первичных катушек
находится вторичная обмотка: при перемещении
этой обмотки из зоны одной первичной катушки в
зону другой катушки фаза ЭДС ЛЁ изменится на
180° . Если такой трансформатор включить в сеть
аналогично вольтдобавочному трансформатору (см.
§ 1.15), как это показано на рис. 5.1, 6, то, изменяя
84
положение . сердечника вторичной обмотки (ПС), можно плавно
реrулировать вторичное напряжение (продольное реrулирование)
2 =И1 ±ЛЁ.
Трансформатор, регулируемый под магничиванием шун­
тов. В последнее время получили применение трансформаторы и
автотрансформаторы, реrулируемые подмапrnчиванием шунтов и
обозначаемые соответственно TPШll и APШll.
и
Рис. 5.1. Трансформатор с подвижным сердечником
Рассмотрим прИIЩШI действия однофазного трансформатора
TPШll. Магнитопровод трансформатора состоит из четырех
стержней (рис. 5.2, а): двух крайних, назьmаемых главными
стержнями, и двух средних, назьmаемых шунтами. Первичная
обмотка состоит из трех ка'l)'Шек: две ка1)'ШКИ ( w{ г и w{�) распо­
ложены на главных (крайних) стержнях и одна ка'l)'ШКа ( w1 ш) на шунгах. При этом все три ка'l)'ШКИ соединены последовательно
и согласно. Вторичная обмотка также состоит из трех последова­
тельно соединенных ка'l)'ШеК ( w2г , w:z'г и w2ш ), расположенных
аналогично первичным, но ка'l)'ШКа w2ш вюпочена встречно отно­
сительно ка'l)'Шек w2г и w2� .
Кроме ка'l)'Шек переменного тока TPIШI имеет две ка'I)'ШКИ
постоянного тока - ка'l)'ШКИ подмагничивания wn, расположен­
ные на шунтах и соединенные последовательно.
При вкточении первичной обмотки в сеть переменного тока
ка1)'ШКИ w{г и w{� создают переменный магнитный поток Фг, ко­
торый замыкается по главным стержням и ярмам, сцепляется с
ка'l)'ШКамИ w2г и w:z'r и наводит в них ЭДС Ё2г и Ё2� . Катушка
w1 ш также создает переменный магнитный поток Ф ш , разделен­
ный на две части, каждая из которых замыкается по одному из
шунтов и одному из главных стержней. При этом в одном из
стержней (правом) потоки Ф r и ½Ф ш складьmаются, а в другом
(левом) - вычитаются. Магнитный поток Фш , сцепляясь с ка85
'I)'ШКОЙ w2w, наводит в ней ЭДС E2w, но так как w2w вкmочена
встречно вторичным ка1)'ШКам главных стержней, то напряжение
на выходе трансформатора
(5.1)
И2 = Ё2r + Ё2� -Ё2ш.
При прохождении постоянного тока по ка1)'ШКам подмагни­
чиваIШЯ Wn возрастает магнитное насыщение шунтов, при этом их
магнитное сопротивление увеличивается и магниmый поток Фw
Ol
(!,
,,,
Фr о.sФ
\
ur,;•
-
��►
���
w;,.
w,,
�
►
- "'• .
- �щ,
.
.
q_.
.....-
.
:UГ,r
1
r
6)
,4sФ.
_l
o
.. щ,
�
1
�
-+
llf,�
�
fl.
Рис. 5.2. Трансформатор, реrулируемый подмагничиванием
шунтов
уменьшается. В итоге уменьшается ЭДС Ё2ш , что ведет к pocry
вторичного напряжения (5.1) . Следовательно, плавному измене­
нию постоянного тока в цепи подмагничивания соответствует
плавное изменение напряжения на выходе TPillll (рис. 5.2, б).
Электрическое управление вторичным напряжением транс­
форматора упрощает дистанционное управление трансформатором
или же его автоматизацию. Наряду с однофазными существуют
трехфазные TPillll и APillll.
§ 5.2. Трансформаторы для выпрямительных
установок
Во вторичнь1е обмотки этих трансформаторов вкmочены вен­
тили - устройства, обладающие односторонней проводимостью.
Рассмотрим рабоrу однофазного трансформатора в схеме од­
нополупериодного выпрямления (рис. 5.3, а). Ток во вторичной об­
мотке этого трансформатора i2 является пульсирующим, так как он
создается только положительными полуволнами вторичного на­
пряжения U2 (рис. 5.3, б). Этот пульсирующий ток имеет две со­
ставляющие: постоянную
2
(5.2)
Id = (✓/1t){U2 / R.i)
86
и переменную
(5.3)
= i2 - Jd ·
Пренебрегая током х.х. и учигьmая (5.3), уравнение МДС рас­
сматриваемого трансформатора можно записать в виде
i1w1 +i2w2 = i1w1 +inepw2 + 1aw2 =О.
(5.4)
В первичную обмотку трансформируется ЛШIIЬ переменная
составляющая вторичного тока (5.3), поэтому МДС ldw2 остается
iпер
6}
о
D
и
i
и
i,
t
111
Рис. 5.3. Трансформатор в схеме выпрямления
неуравновешенной и создает в магниrопроводе трансформатора
постояШIЪIЙ магнитный поток Фd, называемъIЙ потоком вынуж­
денного намагничивания. Этот поток вызьmает допоmштельное
магнитное насыщение элементов магниrопровода; для того чтобы
это насыщение не превьппало допустимого значения, необходимо
увеличить сечение сердечников и ярм. Эта мера приводит к увели­
чению расхода стали и меди, т. е. ведет к повьппени:ю габаритов,
веса и стоимости трансформатора. Этот недостаток однофазной
однополупериодной схемы распространяется и на трехфазную од­
нополупериодную схему при соединении вторичной обмотки
трансформатора по схеме «звезда-звезда с нулевым выводом>>
(рис. 5.3, в). В этом случае магнитньIЙ поток вынужденного на­
магничивания Фd значительно меньше, так как, действуя одновре­
менно во всех трех стержнях магнитопровода, он замыкается вне
магниrопровода - через медь, воздух, стенки бака - аналогично
третьим гармоникам основного магнитного потока (см. рис. 1.26).
Однофазную однополупериодную схему примеюцот лишь для ма­
ломощнь�х выпрямителей, что объясняется не только недостатком,
вызванным наличием потока Фd, но и значительными пульсациями
87
выпрямлеmюго тока. Трехфазная однополупериодная схема со­
ещmения вторичной обмотки в звезду с нулевым выводом также
ограничивается вьшрямителями небольшой мощности. Если же
вторичную обмотку соедШIИТЪ в равноплечий зигзаг с нулевым
выводом (см. рис. 1.22), то недостатки однополупериодной схемы
вьшрямления, обусловленные возникновением потока Фd, устра­
няются. Объясняется это тем, что при соещmении в равноплечий
зигзаг (см. § 1.8) на каждом стержне оказываются две вторичные
ка'I)'ШКИ со встречным соединением. При трехфазной однополупе­
риодной схеме ток Id, проходя по всем фазам вторичной обмотки,
создает в каждом стержне два потока Ф,/2, но так как эти потоки
направлены в разные стороны, то они взаимно уравновешиваются.
Это достоинство схемы соединения обмоток в зигзаг позволяет
применять трехфазную однополупериодную схему при значитель­
ных мощностях.
В двухполупериодных схемах, когда, ток во вторичной цепи
трансформатора создается в течение обоих полупериодов, условия
работы трансформатора оказьmаются намного лучше и неуравно­
вешенной МДС не возникает.
Другим обстоятельством, нежелательно влияющим на рабоrу
трансформаторов в схемах выпрямления, является несинусоидаль­
ная форма токов в обмотках. В результате в первичной и вторич­
ной обмотках появляются токи высших гармоник, ухудшающие
эксплуатационные показатели трансформатора, в частности сни­
жающие его КПД.
Количественно влияние различных причин на рабоrу трансфор­
маторов в схемах выпрямлеШIЯ зависит от ряда факторов: схем вы­
прямления, наличия сглаживающего фильтра, характера нагрузки.
В связи с тем что первичный и вторичный токи трансформа­
торов имеют разные действующие значения (из-за их несинусои­
далъности), расчетные мощности первичной и вторичной обмоток
одного И того же трансформатора неодинаковы (Slном 'Ф s2ном ). По­
этому ДJIЯ оценки мощности трансформатора, работающего в вы­
прямительной схеме, вводятся понятия типовой мощности
(5.5)
ST = 0,5(S,ном +S2ном > = 0,5(/,ноыU, ном +/2номи2ном>
и коэффициента типовой мощности
kт= Sт /Рdном •
{5.6)
где выходная мощность, т. е. мощность, пос'I)'Пающая в потреби­
тель постоянного тока,
{5.7)
рdном = Udном/dном
в номинальном режиме (при номинальных напряжениях Ud ном и
ТОКе /d ном).
Типовая мощность трансформатора всегда больше его выход­
ной мощности, т. е. kr > 1. Объясняется это тем, что при тобой
схеме вьшрямления U2 > Ud и /2 > ld.
88
Из этого следует, чrо габаригы и вес трансформаторов для
выпрямителей всегда больше, чем у трансформаторов такой же
выходной мощности, но при СШl)'СОидальных токах в обмотках.
Это объясняется тем, чrо в трансформаторах, работающих в вы­
прямигельных схемах, полезная мощность определяется постоян­
ной составляющей вторичного тока Id, а нагрев обмоток - пол­
ным вторичным /2 и первичным /1 токами, содержащими высшие
гармонические.
При выборе трансформатора для выпрямительной установки
или же при его проектировании необходимо знать значение коэффициеmа kг.
Значение переменного напряжения на выходе вторичной об­
мотки трансформатора, необходимого для получения заданного
номинального значения постояшюго напряжения Иd ном, определя­
ется выражением
(5.8)
где ku - коэффшщеm напряжения.
Значения коэффшщеmов напряжения ku и тm1овой мощности
kг для некоторых наиболее распространенных схем выпрямления
приведены нюке.
Схемы вьmрямлеШIЯ
Однофазнwr однополупериоДНWI ...............
Однофазная двухполупержщная мocroВWI .....
Однофазнwr двухполупериоднwr с нулевым
вьшодом ··········································· ········
Трехфазнwr с нулевым выводом .......••......
Трехфазнwr мoc-roВWI ............................ ,.
ku
2,22
1,11
k,
3,09
1,23
1,11
0,855
0,427
1,48
1,345
1,05
Сравнение различных схем выпрямления показьmает, чrо
лучшее использование трансформатора обеспечивается в мосто­
вых схемах выпрямления, для которых коэффициеm k, имеет ми­
нимальные значения.
§ 5.3. Трансформаторь� для автоматических
устройств
Импульсные трансформаторы. Применяются в устройствах
импульсной техники для изменения амплиrуды импульсов, ис­
ключения постоянной составляющей, размножения импульсов и
т. п. Одно из основных требований, предъявляемых к импульсным
трансформаторам, - минимальное искажение формы трансфор­
мируемых импульсов.
Для выяснения пршщипиальной возможности трансформиро­
вания кратковременных однополярных импульсов рассмотрим
идеальный трансформатор (без потерь и паразитных емкостей),
работающий без нагрузки. Допустим, на вход этого трансформа­
тора поступают однополярные импульсы прямоугольной формы
89
продолжиrельностью fи с периодом Т(рис. 5.4, а). Первичный кон1УР трансформатора обладает некоторой постояшюй времени
't = 4 /'i , обусловленной индуктивностью этого контура.
Рассмотрим случай, когда постоянная времени намного мень­
ше продолжительности импульса: 't << fн. При этом график перО)
6)
tlf
-
и, t"
и,
и,
т
-r:IJ� -
t
т
=-
И
�ri-1.,...______J_ i,g_�
-- I -,
Uz
p,w1a1.1 _-;lrnm_.--.1W1L..--,,:•� 11
.,
12
t
t
t
ом транс форматоре
Рис. 5.4. Графики напряжения в импульсн
вичного тока i1 = ./(t) имеет вид кривой, отличающейся от прямо­
угольника. Кривая же вторичного напряжения и2 =./(t) значиrельно
искажена. При этом в интервале времени 1-2 напряжение И2 = О,
так как при t1 = const ЭДС е2 = M(di/dt) =О, где М- взаимная
индуктивность между обмотками. СледовRiельно, при 't << lи транс­
формирование импульсов невозможно.
Рассмотрим другой случай, когда 't >> fи, Этот случай более
реален, �ак как продолжительность импульсов обычно не превы­
шает 10 с. Теперь, когда импульс и� прекращается еще до окон­
чания переходного процесса в первичной цепи, импульсы на вы­
ходе трансформатора и2 не имеют значительных искажений (рис.
5.4, б). При этом отрицательная часть импульса легко устраняется
включением диода во вторичную цепь трансформатора.
Рассмотренные явления выявляют ЛШIIЪ принщmиальную воз­
можность трансформирования кратковремешп.IХ однополярнь�х им­
пульсов без особых искажений их формы. При более подробном рас­
смотрении работы импульсного трансформатора элеюромаmиrnые
процессы в нем оказьmаются намного сложнее, так как на них зна<ш­
тельное ВЛИЯJШе оказывают явление гистерезиса, вихревые токи, па­
разиrnые емкостные связи (между витками и обмотками) и индукrив­
носrи рассеяния обмоток. Для ослабления нежешпельного влияния
перечислешп.IХ факторов импульсные трансформаторы проектируют
90
таким образом, чrобы ОШI работали с mrnейной маmиmой харакгери­
стикой, т. е. с таким значеШ1ем мапnпной индукции в сердечнике,
при котором рабочая точка расположена ниже зоны мапnпного на­
сьnцения на кривой намагничивания Iрансформатора. Кроме того,
магнитный маrериал сердечника должен обладать небольшой оста­
точной индукцией (малой коэрциrивной силой). Для поЮ1Жения оста­
точной иццуктивносm магЮIТОпровод импульсного Iрансформатора
б}
t,
8)
Ф, =Фш+ Фz
г)
.
Фz
,:,i
'
е,
t
Рис. 5.5. Пик-трансформаторы с активным сопротивлением (а, б) и
магнитным шунтом (в, г)
в некоторых случаях снабжают небольIIШМ воздушным зазором. С
этой же целью иногда применяют подмагничиваЮlе Iрансформатора
постоя1шым током, полярность которого противоположна полярносm
Iрансформируемых импульсов. Эго мероприяmе позволяет снизить
мапппную индукцию в сердечнике в интервале между импульсами.
МагШ1ТОпроводы импульсных Iрансформаторов изготовляют
из магнитных материалов с повышешюй магнитной проницаемо­
стью (холоднокатаная сталь, железоникелевые сплавы и др.) при
тотцине ленть1 0,02--0,35 мм. Иногда магниrопровод делают из
феррита.
Чтобы уменьшить паразитнь1е емкости и индуктивности рас­
сеяния обмоток, их стараются делать с небольшим числом витков.
При этом малая продолжительность импульсов позволяет выпол­
нять обмотки импульсных трансформаторов проводом уменьшен­
ного сечения (применять повышенные плотности тока), не вызы­
вая недопустимых перегревов. Последнее способствует уменьше­
нию габаритов импульсных трансформаторов.
91
Пик-трансформаторы. Предназначены для преобразования
напряжения синусоидальной формы в импульсы напряжения пи­
кообразной формы. Такие импульсы напряжения необходимы в
цепях управления тиристоров, тиратронов и др. ПрИIЩИП работы
пик-трансформатора основан на явлении магниnюго насьпцения
ферромагнкmоrо материала.
П и к-т р а н с ф о р м а т о р с а к т и в н ы м с о п р о т и в л е ­
н и е м. Первичную обмотку трансформатора подюпочают к сети
синусоидального напряжения U1 через большое активное добавочное
сопротивление Rдоо (рис. 5.5, а). Маmиmую индукцию выбирают та­
кой, чrобы мапmтопровод находился в состоянии сильного маmит­
ного насьпцения. Однако намагничивающий ток i1 при этом будет
иметь синусоидальную форму, так как ero значение определяется со­
противлением Rдо5- Магнитный поток Ф в малnrrопроводе изменяется
по уплощенной кривой (рис. 5.5, б), а вторичная ЭДС
е2 = -w2Ф/dt
(5.9)
имеет пикообразную форму (штриховая кривая), достигая макси­
мальных (пиковых) значений в моменты времени, когда магнит­
ный поток Ф и ток i 1 проходят нулевые значения, т. е. когда скоро­
сти их изменения максимальны.
П и к - т р а н с ф о р м а т о р ы с м а г н и т н ы м ш у н т о м.
Вторичная обмотка (рис. 5.5, в) расположена на стержне уменьшенно­
го сечения, находящемся в состоянии сильного маrниmоrо насьпце­
ния (кривая потока� имеет уплощенную форму). Остальные участки
мапmтопровода мапmmо не насьпцены, а поэтому кривая потока
Ф 1 = Фш + Ф2 имеет синусоидальную форму (рис. 5.5, г). УIШощенная
форма кривой � =j(t) обеспечивает получение пикообразной формы
вторичной ЭДС-шrриховая кривая [см. (5.9)].
Магнитопроводы пик-трансформаторов изготовляют обычно
из железоникелевого сплава (пермаллоя).
Преобразователи частоты. Распространение получили
трансформаторы, с помощью которых возможно удвоение или ут­
роение частоты переменного тока.
Рассмотрим работу трансформатора, увеличивающего частоту
переменного тока в три раза. Такой трансформатор называется
утроителем частоты. Он состоит из трех однофазных трансфор­
маторов, работающих при сильно насьпценном магнитопроводе.
Первичные обмотки трансформаторов соединены звездой, а вто­
ричные - последовательно (рис. 5.6).
Как бьшо показано в § 1.9, намагничивающий ток трансфор­
матора помимо основной содержит третью гармонику с частотой
fз = З}i. При соединении обмоток звездой токи третьей гармоники
взаимно уравцовешиваются и тогда в составе магнитного потока
появляется третья гармоника Ф3 • В трехстержневом магнитопро­
воде потоки этой гармоники ослаблены. Но в утроителе частоты
магнитопроводы однофазных трансформаторов работают незави­
симо, поэтому потоки Ф3 в них достигают больших значений и
наводят во вторичных обмотках ЭДС третьей гармоники е3• Так
92
(
как ЭДС е3 во всех фазных обмотках совпадают по фазе, то на вы­
ходе угроителя частоты устанавливается напряжение И3, равное
алгебраической сумме ЭДС е3 частотой /з == Зfi. Что же касается
ЭДС первой гармоники, то хотя она и наводится в фазных обмот­
ках угроителя, но в составе напряжения на выходе угроителя она
отсутствует, так как при сдвиге фаз между ЭДС в 120° их алгеб­
раическая сумма равна нуmо.
Для сIШЖения падения
напряжения во вторичных
обмотках при нагрузке по­
следовательно с обмотками
вкmочают конденсатор С,
емкость которого компенси­
рует индуктивность обмоток.
УвеличеШ1е частоты в
большее число раз можно
осушествигь
применеimем
fJ:Jf
нескольких трансформаторов
Рис. 5.6. Утроитель частоты
для преобразования частоты,
вкmоченных один за другим
(каскадно). Однако этот способ повышеШIЯ частоты экономически нецелесообразен, так как свя­
зан со значиrелъной з.праrой активных материалов.
i
§ 5.4. Трансформаторы дпя дуговой
электросварки
Трансформатор для дуговой электросварки, обычно называемый
сварочным трансформатором, представляет собой однофазный двух­
обмоточный понижающий трансформатор, преобразующий напряже­
ние сеш 220 или 380 В в напряжение 00-70 В, необходимое для на-
б)
Uz
Uz
q
о ,____...........,..___._
2rfn
iтак
Рис. 5.7. Схема вюпочения (а) и внепnше характеристики (б)
трансформатора для электродуговой сварки
93
дежноrо зажигания и устойчивого горения электрической дуги между
металлическим электродом и свариваемыми дегалями.
Специфика работы сварочного трансформт-ора состоит в преры­
вистом режиме его работы: зажиганию электрической дуги предше­
ствует короткое замыкание вторичной цеIШ трансформатора, а обрьm
дуги создает режим холостого хода. Номинальный режим работы
трансформатора соооветствует устойчивому гopemno электрической
дуги. Для ограничения тока в сварочном трансформаторе прш�яты
меры, суть которых сводится к увеличению шщуктивного сопрогив­
ления. С этой целью первичную обмотку трансформатора располага­
ют на одном стержне, а вторичную - на другом. Эrо ведет к росту
ма.гнmного рассеЯIШЯ, а следовательно, к увеJШЧению шщуктивного
сопроmвления обмоток. Другой мерой является включение во вторич­
ную цепь трансформатора последовательно шщукrивной юпушки дросселя Др (рис. 5.7, а), представляющего собой кmушку из медного
провода прямоугольного сечения, расположенную на стальном маг­
mrrопроводе. Дроссель снабжен устройством типа «вшrr--f'айка»,
позволяющим вращением вшrrа перемещать ярмо так, что воздупrnый
зазор б между ярмом и стержнями меняется ог о :::: О до о = оmax • При
этом мшmмальному значению о соответствует наибольшее шщуктив­
ное сопропmление дросселя, а следовательно, :минимальное значение
рабочего тока 12 = /2min, а максимальному значению о= omax наименьшее шщуктивное сопроmвление дросселя и максимальное
значение рабочего тока 12 = /2max . Повьппенное индуктивное сопро­
тивление обмоток и наличие дросселя Др обеспечивают сварочному
трансформатору круто падающие внешние характеристики И2 = flJ2),
необходимые для устойчивого горения электрической .цуги (рис. 5.7, б).
Изменяя величину воздушного зазора о в дросселе Др можно плавно
менять угол наклона внешних характеристик: при о :::: О наклон ха­
рактеристики наибольший (график J), а при о:::: o max наклон характе­
ристики минимальный (график 2). Рабочий ток сварочного трансфор­
матора /2 соответствует напряжению электрической дуги Ид :::: 30 В.
В некоторых конструкциях сварочных трансформт-оров дроссель
совмещают с трансформатором. Зна1ШТельное индуктивное сопро­
тивление сварочного трансформаrора ведет к снижению его коэффи­
циента мощности cos<p, который обычно не превьШiает 0,4-{),5.
Контрольные вопросы
1. . Or чего зависит фаза ЭДС во вторичной обмотка трансформатора с подвижНЪIМ сердечником?
·
2. Объясните взаимодействие магнитных потоков в ТРШll.
3. Какова причина возникновения магнитного потока вынужденного намагни­
чивания в трансформаторе вьmрямиrельной установки?
4. Что такое тюювая мощность трансформатора?
5. В каких условИJIХ вьmрямления обеспечивается наШJУЧшее использование
мощности трансформатора?
6. Что делают для снижених остаточной ющукции в импульсном трансформаторе?
Разд е л
2
•
Принцип действия
бескоппекторных
машин
переменного тока
•
Принцип
выполнения
обмоток статора
•
Основные типы
обмоток статора
•
Магнитодвижущая
сипа
. обмоток статора
ОБЩИЕ ВОПРОСЫ
ТЕОРИИ
БЕСКОЛЛЕКТОРНЫХ
МАШИН
Электрические машины пере­
менного тока составляют ос­
нову современной электро­
энергетики как в сфере
производства, так и в сфере
потребления электрической
энергии. За небольшим ис­
ключением все эти машины
являются бесколлекторными.
Существует два вида бескол­
лекторных машин переменно­
го тока: асинхронные и син­
хронные машины. Отличаясь
рабочими свойствами, эти
машины имеют конструктив­
ное сходство, и в основе их
теории лежат некоторые об­
щие вопросы, касающиеся
процессов и явлений, связан­
ных с рабочей обмоткой обмоткой статора. Поэтому,
прежде чем перейти к под­
робному изучению асинхрон­
ных и синхронных машин, це­
лесообразно
рассмотреть
общие вопросы теории этих
машин. Как асинхронные, так
и синхронные машины обла­
дают свойством обратимости
(см. § В.2), т. е. каждая из них
может работать как в режиме
генератора, так и в режиме
двигателя. Однако первона­
чальное знакомство с этими
машинами полезно начать с
рассмотрения принципа дей­
ствия синхронного генератора
и принципа действия асин­
хронного двигателя. Это даст
возможность получить необ­
ходимое на данном этапе
95
изучения представление об
устройстве этих машин и про­
исходящих в них электромаг­
нитных процессах. Данный
раздел посвящен изучению
принципа действия бескол­
лекторных машин переменно­
го тока в основных их режи­
мах,
устройства
обмоток
статоров этих машин и про­
цесса наведения ЭДС и МДС
в них.
Глава 6 • Принцип действия
-.:;:;:J бесколлекторных
машин
переменного тока
§ 6.1. Принцип действия синхронного генератора
Для изучения прШЩШiа действия синхрошюго
генератора воспользуемся упрощенной моделью
синхрошюй машины (рис. 6.1). Неподвижная часть
машm1ы, назьmаемая статором, представляет собой
полый шихтоваШIЫЙ циmmдр J (сердечник статора)
с двумя продольными пазами на внутренней поверх­
ности. В этих пазах расположены стороны витка 2,
являющегося обмоткой статора. Во внутренней
полости сердечника статора расположена вращаю­
щаяся часть машины - ротор, представляющий
собой постоянный магнит 4 с полюсами N и S, за­
крепленный на валу 3. Вал ротора посредством ре- .
менной передачи механически связан с приводным
двигателем (на рисунке не показан). В реальном
синхронном генераторе в качестве приводного дви­
гателя может бьпь использован двигатель внутрен­
него сгорания либо турбина. Под действием вра­
щающего момента приводного двигателя ротор
генератора вращается с частотой п 1 против часовой
стрелки. При этом в обмотке статора в соответствии
с явлением электромагнитной индукции наводится
ЭДС, направление которой показано на рисунке
стрелками. Так как обмотка статора замкнута на на­
грузку Z, то в цепи этой обмотки появится ток i.
В процессе вращения ротора магнитное поле по­
стоянного магнита также вращается с частотой п 1, а
поэтому каждый из проводников обмотки статора
попеременно оказьmается то в зоне северного (N)
магнитного полюса, то в зоне южного (S) магниrnо­
го полюса. При этом каждая смена полюсов сопро­
вождается изменением направления ЭДС в обмотке
статора. Таким образом, в обмотке статора синхрон­
ного генер�тора наводится переменная ЭДС, а по­
этому ток i в этой обмотке и в нагрузке Z также пе­
ремеШIЬIЙ.
Мгновенное значение ЭДС обмотки статора в
рассматриваемом синхронном генераторе (В)
(6.1)
е = Bs2lv = Bs2lтtD1 n1 /60,
97
где В8 - маrниrная индукция в воздушном зазоре между сердеч­
ником статора и полюсами ротора, Тл; l - активная длина одной
пазовой стороны обмотки статора, м; v = 1tD1 n1 /60 - скорость
движения полюсов ротора оmосиrельно статора, м/с; D 1 - внут­
ренний диаметр сердечника статора, м.
Эrа формула показывает, что при неизмешюй частоте враще-
-l,
z
Рис. 6.1. Упроще1П1ая модель cШIXpolllloro генератора
ния ротора форма кривой переменной ЭДС обмотки якоря опреде­
ляется исключиrельно законом распределения маrниrной mщук­
ции В8 в зазоре. Если бы график маrниrной индукции в зазоре
представлял собой синусоиду ( В8 = Bmax sina ), то ЭДС генератора
была бы синусоидальной. Однако получить синусоидальное рас­
пределение индукции в зазоре практически невозможно. Так, если
воздушный зазор S постоянен (рис. 6.2), то магниrная индукция В8
в воздушном зазоре распределяется по трапецеидальному закону
(кривая J), а следовательно, и график ЭДС генератора представля­
ет собой трапецеидальную кривую. Если края полюсов скосить
так, чтобы зазор на краях полюсных наконечников был равен Drnax
(как это показано на рис. 6.2), то график распределения магниmой
индукции в зазоре приблизится к синусоиде (кривая 2), а следова­
тельно, и график ЭДС, наведенной в обмотке генератора, прибли­
зиrся к синусоиде.
Частота ЭДС синхронного генератора Ji (Гц) прямо пропор­
циональна частоте вращения ротора п 1 (об/мин), которую принято
назьmать синхронной частотой вращения:
J; = рп1 /60.
(6.2)
98
Здесь р - число пар поmосов; в рассматриваемом генераторе
два поmоса, т. е. р = 1.
ДrnI получения промышленной частоты ЭДС (50 Гц) ротор та­
кого генератора необходимо вращать с частотой п 1 = 3000 об/мин,
тогда/,. = 1 ·3000/60 = 50 Гц.
Постоя1rnые магниты на роторе применяются ЛШIIЬ в син­
хронных генераторах весьма малой мощности (см.§ 23.1), в боль­
шинстве же синхронных генера­
торов для получения возбуж­
дающего магнитного поля при­
меняют обмотку возбуждения,
располагаемую на роторе. Эта
<'о
обмотка подкmочается к источ­
нику постоянного тока через
"'-c,t;:
скользящие контакты, осуществ­
ляемые посредством двух кон­
тактных колец, располагаемых на
валу и изолированных от вала и
друг от друга, и двух неподвиж­
ных щеток (рис. 6.3).
Как уже отмечалось, привод­ Рис. 6.2. Графики распределения
ной двигатель (ПД) приводит во маmипюй ин.цукции в воздушном
вращение ротор синхронного ге­ зазоре синхроmюrо генератора
нератора с синхронной частотой
п 1• При этом маrнипюе поле ротора также вращается с частотой п 1
и индуцирует в трехфазной обмотке статора переменные ЭДС Ел,
Ев, Ее, которые, будучи одинаковыми по значению и сдвинутыми
по фазе оmосительно друг друга на Уз периода (120 эл. град), об­
разуют трехфазную симметричную систему ЭДС.
подкmочением
С
с, сг CJ
нагрузки в фазах обмот­
ки статора появляются
токи Iл, 18, Ic. При этом
трехфазная обмотка ста­
тора создает вращаю­
щееся маrниmое поле.
Частота вращения этого
поля равна частоте вра­
щения ротора генерато­
ра (об/мин):
п. = f. 60/р. (6.3)
10
><
t::,
Таким образом, в
Рис. 6.3. Элеюромагнитная схема син­
хроmюrо генератора
синхронном генераторе
поле статора и ротор
вращаются синхронно,
отсюда и название
синхронные машины.
99
§ 6.2. Принцип действия асинхронного двигателя
Неподвижная часть асинхроmюго двшателя - статор - име­
ет такую же конструкцию, что и статор синхронного генератора
(рис. 6.3). В расточке статора расположена вращающаяся часть
двшателя - ротор, состоящий из вала, сердечника и обмотки
(рис. 6.4). Обмотка ротора представляет собой короткозамкнутую
конструкцию (см. § 10.2), состоящую из восьми атоминиевых
стержней, расположенных в
продольных пазах сердечни­
ка ротора, замкнуrых с двух
сторон по торцам ротора
кольцами
атоминиевыми
(на рисунке эти кольца не
показаны). Ротор и статор
разделены воздушным зазо­
ром. �При вюпочении обмот­
ки статора в сеть трехфазно­
го тока возникает вращаю­
щееся мапштное поле ста­
тора, частот� вращения ко­
торого п, определяется вы­
ражением (6.3).
Вращающееся поле ста­
тора (поmосы N, и S1 ) сцепРис. 6.4. К Щ>mщипу действия асин- ляется как с обмоткой статохронного двигателя
ра, так и с обмоткой ротора
и наводит в lillX ЭДС. При этом ЭДС обмотки статора, являясь ЭДС
самоиндукции, действует встречно при1юженному к обмотке напря­
жению и ограничивает значение тока в обмотке. Обмотка ротора
замкнута, поэтому ЭДС ротора создает в стержнях. обмотки ротора
токи. Взаимодействие этих токов с полем статора создает на рото­
ре электромагнитные силы Fэм , направление которых определяют
по правилу «левой руки». Из рис. 6.4 видно, что силы Fэм стремят­
ся повернуrь ротор в направлении вращения магнитного поля ста­
тора. Совокупность сил Fэм создает на роторе электромагнпrный
момент М, приводящий его во вращение с частотой n2• Вращение
ротора посредством вала передается исполнительному механизму.
Таким образом, электрическая энергия, поступающая из сети в
обмотку статора, преобразуется в мехаIШЧескую энергию враще­
ния ротора двшателя.
Направление вращения магнитного поля статора, а следова­
тельно, и направление вращения ротора зависят от порядка следо­
вания фаз напряжения, подводимого к обмотке статора. Частота
вращения ротора n2, называемая асинхронной, всегда меньше час­
тоты вращения поля n 1 , так как только в этом случае происходит
наведение ЭДС в обмотке ротора асинхронного двшателя.
Таким образом, статор синхронной машинь1 не отличается от
статора асинхронной машинь1, и выполняют .они одинаковую
100
функцию: при появлеюrn в обмотке статора тока возникает вра­
щающееся магнипюе поле и в этой обмотке наводится ЭДС.
Именно по этой причине изучение прИlЩИПа выполнения и конст­
рукции обмоток статора, а также изучение электромагнитных про­
цессов, связанных с наведением в обмотке статора ЭДС и возник­
новением
вращающегося
маrнитного
поля,
должно
предшествовать изучению специфических вопросов теории
асинхронных и синхронных машин.
Контрольные вопросы
Объясните прющип действия генератора перемеmюrо тока.
Чем определяется форма графика ЭДС синхронного генератора?
Каково назначение контактных колец и щеток в синхронном генераторе?
Объясните прющип действия асинхроmюrо двигателя.
Может ли ротор асинхронного двигателя вращаться синхронно с вращаю­
щимся полем?
6. Какие функции выполняет обмотка статора в синхронном генераторе и в
асинхронном двигателе?
1.
2.
3.
4.
5.
Глава 7 •
с:::�::#1 Принцип
выполнения
обмоток
статора
§ 7.1. Устройств� статора
бесколлекторнои маwинь1
и основные понятия об обмотках статора
102
Статор бесколлекторной машш1ы перемеююго
тока (рис. 7.1) состоит из корпуса 1, сердечника 2 и
обмотки 3. Сердечник статора имеет шихтоваlШ)'Ю
конструкцmо, т. е. представляет собой пакет пла­
стин, получеюп,�х методом штамповки из листовой
электротехнической стали. Пластины предваритель­
но покрывают с двух сторон тонкой изоляциоююй
пленкой, например слоем лака. На внутренней по­
верхности сердечника статора имеются продольные
пазы, в которьIХ располагаются проводники обмотки
статора. Обмотка статора выполняется из медных
обмоточных проводов круглого или прямоугольного
сечения.
Требования к обмотке статора в основном сво­
дятся к следующему: а) наименьший расход обмо­
точной меди; б) удобство и минимальные затраты в
изготовлении - технолоrичность; в) форма кривой
ЭДС, наводимой в обмотке статора, должна быть
практически синусоидальной.
Применительно к генераторам переменного тока
это требование обусловлено тем, что при несину­
соидальной ЭДС генератора в электрической цепи
появляются высшие гармоники тока, оказывающие
вредное влияние на работу всей энергосистемы: воз­
растают потери, возникают опасные перенапряже­
ния, усиливается вредное влияние линий электропе­
редачи на цепи связи. Применительно к двигателям
переменного тока требование к СIШ)'соидальности
ЭДС обмотки статора также весьма актуально, так
как несинусоидальность ЭДС ведет к росту потерь и
уменьшеншо полезной мощности двигателя.
Многофазная обмотка статора состоит из т 1 фазных обмоток. Например, трехфазная обмотка
(т1 = 3) состоит из трех фазнь�х обмоток, каждая из
которых занимает Z1 /3 пазов, rде Z1 - общее число
пазов сердечника статора. Каждая фазная обмотка
представляет собой разомкнутую систему проводни-
ков. Элемеmом обмотки является катушка, состоящая из одного
или нескольких витков. Элемеmы катушки, располагаемые в па­
зах, называют пазовыми сторонами 1, а элементы, расположенные
вне пазов и служащие для соединения пазовых сторон, называют
лобовыми частями 2 (рис. 7.2). Часть дуги внутренней расточки
статора, приходящаяся на один полюс, называется полюсным де­
лением (м):
(7.1)
,=тr.D1 /(2p),
где D 1 - внутренний диаметр
статора, м; 2р - число полюсов.
Расстояние между пазовыми
сторонами катушки, измеренное
по внутренней поверхности стато­
ра, называется шагом обмотки по
пазам у 1 • Шаr обмотки выражают
в пазах. Шаr обмотки называется
полным или дuаметршtьным, если
он равен полюсному делению:
(7.2)
у, =Z1 /(2p)=-r.
В этом случае ЭДС витка оп­ Рис. 7.1. Статор бесколлектор­
ределяется арифметической сум­ ной машины переменного тока
мой ЭДС, наведенных в сторонах
этого витка (рис. 7.3):
Если же шаr обмотки
меньше полюсного деления
(у 1 < ,), то он называется уко­
роченным. У катушки с укоро­
ченным шагом ЭДС меньше,
чем у катушки с полным ша­
гом.
Обмотка статора состоит,
как правило, из большого чис­
ла катушек, соединенных ме­
жду собой определенным об­
разом. Для удобного и
наглядного изображения ка­
Р11с. 7.2. Расположение катушек в тушек и их соединений поль­
пазах сердечника статора
зуются развернутыми схемами обмоток. На такой схеме
цилиндрическую поверхность
статора вместе с обмоткой условно развертывают на плоскости, а
все катушки изображают одновитковыми в виде прямых линий.
Простейшая трехфазная обмотка статора двухполюсной ма­
шины состоит из трех катушек (А, В, С), оси которых смещены в
пространстве относительно друг друга на 120 эл. град, т. е. на ½
103
полюсного деления (рис. 7.4). Такая обмотка называется сосре­
доточенной. Каждая катушка здесь представляет собой фазную
обмотку.
В соответствии с ГОСТом выводы трехфазных обмоток стато­
ра обозначают следующим образом:
Первая фаза ...... начало С 1 - конец С 4
Вторая фаза ......
» С2 - » С5
Третья фаза ......
» СЗ - » Сб
Конструкция обмотки статора в значительной мере влияет на свойства машины
переменного тока, в первую очередь на ее
стоимость, КПД и рабочие характеристики.
Рис. 7.3. При диамет­ § 7.2. Электродвижущая сила катушки
ральном шаге ЭДС в
Вращающееся магнитное поле, сце­
пазовых сторонах ка­
пляясь
с катушками обмотки статора,
направлены
тушки
наводит в них ЭДС. Мгновенное значе­
согласно
ние ЭДС (В) одной катушки с число:-.,
ВИТКОВ 1Vк
(7.3)
eк=Bli2/mvк,
rде Вё - маrнmная индукция в воздушном зазоре между статоро:-.1
и ротором электрической машины, Тл;
(7.4)
v = rcD1 n1 /60 = -с2рп,/60= 2тf..
линейная скорость движения магнитного поля относительно
неподвижной катушки, м/с; rcD, = т2р - длина поверхности рас­
точки статора.
С учетом (7.4) мгновенное значение ЭДС катушки
(7.5)
11
2
4
5
бi
1 Cf
Сб С2 Ct,
CJ
CJ 1
1
1111111
J
Рис. 7.4. Сосредоточенная трехфазная обмотка:
а - расположение каrушск в пазах статора; б - развернуrая
схема обмотки
104
Как уже отмечалось, форма кривой ЭДС е" зависит искmочи­
тельно от графика распределения индукции В0 в воздушном зазо­
ре. Однако даже при неравномерном зазоре (см. рис. 6.2) график
индукции остается несинусоидальным. Поэтому ЭДС катушки ек
также несинусоидальна и наряду с первой ( основной) синусои­
дальной гармоникой ЭДС содержит ряд высших синусоидальных
гармоник.
't
еиt
Рис. 7.5. Разложение трапецеидальной кривой ЭДС в гар­
монический ряд
В связи с тем что кривая ЭДС симметрична относительно оси
абсцисс, она содержит лишь нечетные гармоники (1, 3, 5 и т. д.). С
некоторым приближением, прШIЯВ форму кривой ЭДС е трапецеи­
дальной (рис. 7.5), можно записать следующее выражение гармо­
нического ряда:
4Е .
1 . З . З
.
е=-(smasmro 1 t+2sm
asm ro 1 t+
па
3
1. ·
.
1 .
.
smvasmvro 1 t) ,
(7.6)
+2sm5 asm5 ro 1 t+ ... +2
5
V
где v - номер гармоники; ro 1 - угловая частота основной гармо­
ники.
Из (7.6) видим, что с ростом номера гармоники ее амплmуда
· уменьшается пропорционально величине sin va/ v2 , а частота
fv = f. v, т. е. растет пропорционально номеру гармоник и. Поэто­
му практическое влияние на форму кривой ЭДС оказывают гармо­
ники не выше седьмой. Таким образом, задача получения в обмот­
ке статора синусоидальной ЭДС сводиrся к устранению или
значительному ослаблению высших синусоидальных гармоник, в
первую очередь третьей, пятой и седьмой.
Из§ 1.10 известно, что токи и ЭДС третьей гармоники во всех
фазах трехфазной обмотки совпадают во времени (по фазе). По105
этому в линейной ЭДС (напряжении) при схемах соединеIШЯ об­
моток звездой или треугольником третья гармоника отсутствует.
Все, что касается третьей гармоники, распространяется и на выс­
шие гармоники ЭДС, номера которых кратны трем (9, 15 и т. д.).
Рассмотрим вопрос о возможности устранения или значитель­
ного ослабления гармоник выше третьей, главным образом пятой
Рис. 7.6. Укорочение шага обмотки на 1/5't
или седьмой. Допустим, что кривая распределения магнитной ин­
дукции В8 в воздушном зазоре несинусоидальна и наряду с первой
гармоникой В1 содержит пятую В5 (рис. 7.6, а). Если при этом об­
мотка выполнена с диаметральным шагом (v1 = т), то ЭДС первой
и пятой гармоник (е 1 и е5) в обеих сторонах каl)'ШКИ (витка) (рис.
7.6, б) складываются арифметически. В этом случае результирую­
щая ЭДС каl)'ШКИ ек.д, а следовательно, и ЭДС всей обмотки наря­
ду с первой содержат и пятую гармонику.
Если же шаг катушки укоротить на Ys поmосного деления,
т. е. прШIЯть его равным
у1 = ( 4/5)т = О,Sт ,
то ЭДС пятой гармоники е5, хотя и наводятся в пазовых сторонах
катушки, будут находиться в противофазе относительно друг дру­
га. В итоге сумма этих ЭДС в каl)'ШКе будет равна нуmо (рис. 7.6, в)
и ЭДС катушки будет содержать лишь первую (основную) ЭДС е 1,
т. е. она станет практически синусоидальной.
106
АналоГИ1П-10, для )'НИ'ПОЖения ЭДС седьмой гармоники тре­
буется укорочение шага катушки на ½ поmосного деления т, т. е.
принимаем шаг катушки равным
у1 = ( 6/7)т· = О,857т .
Отношение шага у 1 к поmосному делению называют относи­
тельным шагом обмотки f3 = у1 /т. Обычно относиrельный шаг
принимают J3 == 080+0,89, что обеспечивает значиrельное ослабле­
ние ЭДС высших гармоник.
Из построений, приведе1шых на рис. 7.6, видно, что уменьше­
ние шага катушки на величину относительного укорочения
Е = 1- f3 вызьmает ослабление не только ЭДС высших гармоник,
но и ЭДС первой (основной) гармоники. Объясняется это тем, что
при диаметральном шаге (у1 == т) ЭДС первой гармоники Е1кд (рис.
7.6, б) равна арифметической сумме ЭДС, наводимых в пазовых
сторонах катушки (Е1 к.д = 2Е1 ), а при у корочени и шага на величину
Е (рис. 7.6, в) ЭДС в пазовых сторонах катушки оказываются сдви­
нутыми по фазе относиrельно друг друга на угол Е· 180° и ЭДС ка­
тушки Е1ку определяется геометрической суммой:
(7.7)
Е1ку =в.+ в. cos(E · 180° ) < Еlкд .
Уменьшение ЭДС катушки при укорочении ее шага на вели­
чину Е = 1- f3 учитьmается коэффициентом укорочения. шага
ky = Ек.у / Ек.д . Для первой гармоники
ky1 =sin(JЗ-90° ).
Для ЭДС тобой гармоники
kyv = sin( vJ3 · 90° ) .
(7.8)
(7.9)
Ниже приведены значения коэффициентов укорочения ky" в
зависимости от относиrельного шага J3 обмотки для различных
гармоник ЭДС:
Относительный шаг ........ ........
Коэффициент укорочения ky,, :
1-я гармоника ...............
5-я
7-я
))
))
. . .. . . . . . . . .. . .
. ..............
4/5
6/7
1
0,951
0,000
0,573
0,975
0,433
0,000
1,000
1,000
1,000
В закmочение следует отметить, что укорочение шага обмотки
по пазам возможно лишь в двухслойньrх обмотках (см. § 7.1). Од­
нослойные обмотки выполняются с диаметральным шагом, поэто­
му ЭДС, наводимые в них, содержат в значительной мере высшие
гармоники 5-го и 7-го порядка. Это ограничивает применение од­
нослойных обмоток в асинхронньrх двигателях мощностью более
15-22 кВт.
107
§ 7.3. Электродвижущая сила катуwечной rруппы
Обмотки статора разделяются на сосредоточенные и распре­
деле1rnые. При сосредоточенной обмотке все катушки одной фа­
зы, приходящиеся на поmос и образующие катушечную группу,
укладываются в двух пазах, т. е. сосредоточиваются вместе и об­
разуют одну большую катушку. Примером такой обмотки может
служить трехфазная обмотка, представленная на рис. 7.4. По ряду
причин сосредоточенные обмотки не получили распространения.
Одна из причин - необходимость вырубки в пластинах статора
пазов большой площади, необходимой для размещения значитель­
ного числа пазовых сторон. Это ведет к необходимости увеличе­
ния наружного диаметра статора, а следовательно, к увеличенmо
размеров машшп,1.
В распределенных обмотках все катушки равномерно рас­
положены по периметру расточки статора. При этом катушки
каждой фазы, приходящиеся на полюс, т. е. катушки каждой
катушечной группы, занимают более двух пазов, например че­
тыре, шесть и т. д.
Весьма важным параметром обмотки статора является число
пазов, приходящихся на полюс и фазу:
q1 = Z1 /(2pm1 ),
(7.10)
где т 1 - число фаз в обмотке (для трехфазной обмотки т 1 = 3 ).
В сосредоточенной обмотке, где на пару поmосов приходится
два паза каждой фазы, а всего пазов Z1 = 2рт1 , число пазов на по­
тое и фазу Ч� = 1. В распределенной обмотке q1 > 1. В распреде­
ленной двухслойной обмотке статора число катушечных групп в
каждой фазе равно числу полюсов 2р, а общее число катушечных
групп трехфазной обмотки А= 2рщ_. При этом число катушек в
катушечной группе равно q1• Однако сосредоточенные и распре­
деленные обмотки различаются не только конструкцией. Имеется
также разтща и в величине и форме графиков ЭДС, наведенных в
сосредоточенной и распределенной обмотках. Для разъяснения
обратимся к рис. 7.7, где показаны две одновитковые катушки
фазной обмотки, сосредоточе1rnые в двух пазах (а), и такие же две
катушки, образующие катушечную группу и распределенные в
четырех пазах (б).
В случае с о с р е д о т о ч е нно й обмотки (рис. 7.7, а) ЭДС,
наведенные в двух катушках, совпадают по фазе; в этом случае
ЭДС катушечной группы Ег.с равна арифметической сумме ЭДС
катушек:
(7.11)
' Ег.с = Ек\ + Ек2 •
В случае р а с п р е д е л е н н о й обмотки обе катушки сдвШiу­
ты в пространстве относительно друг друга на пазовый угол у. По­
этому ЭДС, наводимые в катушках катушечной группы, оказались
сдвинутыми по фазе относительно друг друга на угол у (рис. 7.7, 6).
108
Исходя из этого ЭДС катушечной груrmы распределенной обмот­
ки Ег.р равна геометрической сумме ЭДС катушек, число которых
равно q1:
•
ql
•
Er.p = LЕк
1
Как видно из приведенных на рис. 7.7 векторных диаграмм,
ЭДС катушечной группы сосредоточенной обмотки Erc больше,
Рис. 7. 7. К понятюо о коэффициенте распределения
чем ЭДС при распределенной обмотке Er.p . Уменьшение ЭДС ка­
тушечной группы при переходе от сосредоточенной обмотки к
распределенной распространяется на ЭДС не только первой, но и
высших гармоник. Для количественной оценки этого уменьшения
ЭДС пользуются коэффициентом распределения обмотки, пред­
ставляющим собой отношение ЭДС:
kp = (Er.p /Er.c) < 1.
Коэффициент распределения обмотки для первой гармоники
_ sin(0, 5q1 y)
(7.12)
k
pl - q1 sin( О, 5у) '
где у - угол сдвига по фазе между векторами пазовых ЭДС, т. е.
ЭДС, наводимых в проводниках, лежащих в соседних пазах стато­
ра, эл. град:
у =360p/Z1•
(7.13)
Так как угол сдвига по фазе между векторами пазовых ЭДС
для v-й гармоники в v раз больше пазового угла у, то коэффициеш
распределения обмотки для тобой гармоники ЭДС равен
sin(0,5 vq1 y)
.
(7.14)
k v=
Р q1 sin(0,5 vy)
109
Ниже приведены значения коэффшщеmа распределения для
первой, третьей, ruпой и седьмой гармоник ЭДС:
Число пазов на
ПОJПОС И фазу q 1 • ••
Коэффициеш
распределения kp:
1-я гармоЮП{а
3-я )) .............
5-я » .............
7-я .............
))
1
2
3
4
5
6
00
1,000
1,000
1,000
-1,000
0,966
0,707
0,259
-0,259
0,960
0,667
0,217
-0,178
0,958
0,654
0,204
-0,157
0,957
0,646
0,200
-0,149
0,956
0,644
0,197
-0,145
0,955
0,636
0,191
-0,136
Из приведе1rnых да1rnых видно, что увеличение q 1 вызывает
сравнительно небольшое уменьшение коэффшщента распределе­
ния для основной гармоники и значительное уменьшение его для
высших гармоник.
§ 7 .4. Электродвижущая сила обмотки статора
Мгновенное значение ЭДС катушки статора по (7.5)
ек = В5 4tlftwк.
Если принять закон распределения магнитной индукции в
воздушном зазоре синусоидальным ( В5 = Bmax sin ro I t ), то макси­
мальное значение ЭДС катушки
Е кmах = Bmax 4tlfiw к .
(7.15)
При синусоидальном законе распределения среднее значение
магнитной индукции Вер = (2/1t)Bmax , откуда
Bmax =(1t/2)Bep ·
(7.16)
Тогда с учетом (7.15) и (7.16) получим
Е к mах = 2пВер tifiwк .
(7.17)
Переходя к действующему значению ЭДС, получим
Е к = Eкmaj✓2 =(2п/✓2 )Вер t/J; Wк ·
(7.18)
Произведение полюсного деления t на длину / представляет
собой площадь поmосного деления, т. е. площадь магнитного по­
тока одного поmоса. Тогда произведение Вер т/ = Ф, т. е. равно ос­
новному магнитному
потоку статора. Учить1вая это, а также то,
2
что 2п/ ✓ = 4,44 , получим выражение действующего значения
ЭДС катушки с диаметральНЬIМ шагом (у 1 = t):
Ек = 4,44ФJ;w к .
(7.19)
Для определения ЭДС обмотки фазы статора необходимо ЭДС
катушки Ек умножить на число последовательно соединенных ка110
rушек в фазной обмотке статора. Так как число каrушек в кату­
шечной rpyrme равно q1 , а число катушечных rpyrm в фазной об­
мотке равно 2р, то фазная обмотка статора содержит 2pq 1 катушек.
Имея в виду, что число последовательно соединенных витков
в фазной обмотке w1 = 2pq1 wк , получим ЭДС фазной обмотки ста­
тора (В):
(7.20)
В этом выражении k001 - обмоточный коэффшщенг для ос­
новной гармоники, учитывающий уменьшение ЭДС основной
гармоники, наведенной в обмотке статора, обусловленное укоро­
чением шага обмотки и ее распределением. Значение обмоточного
коэффшщенrа определяется произведением коэффшщенга укоро­
чения ky 1 и распределения kp1 :
(7.21)
koбl = kyl kpl .
Для обмоток с диаметральным шагом ko6 1 = ki,1.
Выражение (7 .20) определяет значение ф а з н о й ЭДС об­
мотки статора. Что же касается л и н е йн о й ЭДС, то ее значение
зависит от схемы соединения обмотки статора: при соединении
звездой Е1 л = ✓ЗЕ1 , а при соединении треугольником Е1л = Е1 •
Пример 7.1. Статор трехфазного асЮ1Хронноrо двигателя (см. рис. 7.1) с
внуrренним диаметром D1 = 435 мм, длиной/= 270 мм имеет число пазов Z1 = 60.
Шаг обмотки статора по пазам у1 = 12, число витков в каl)'Шке обмотки статора
w� = 2. Определить ЭДС одной фазы обмотки, если мапnпная индукция в воз­
душном зазоре В6 = 0,75 Тл, а частота переменного токаfi = 50 Гц; 2р = 4.
Реш е н и е. 1. Поmосное деление
t = тtD1 /(2p) =тt435/4= 341 мм,
ИJШ в зубцовыхделениях t= Z 1 /(2p)= 60/4 =15 .
2. Оrносительныйшаг обмотки
р= У1 /t =12/15= 0,80 .
3. Коэффициент укороченияшага обмотки по (7.8)
ky1 =sin(P · 90° ) = sin(0,80-90° ) = 0,951 .
4. Число пазов на поmос и фазу по (7.10)
q1 = Z./(2pm1 )= 60/( 4· З)= 5 .
5. Пазовый утоп по (7.13)
'У =360p/Z1 =360-2/60=12 эл. rрад.
6. Коэффициент распределения обмотки по (7.12)
sin(0,5q1 y) sin(0,5·5·12)
=0 957 _
=
k 1=
q1 sin(0,5y) 5sin(0,5 · 12)
Р
7. Обмоточный коэффициент по (7 .21)
koбl = ky! kpl = 0,951-0,957= 0,91.
8. Основной магнитный поток
6
Ф=(2/тt)Bi1tl0- =(2/тt)0,75•270•341•10 -t, =0,044 Вб.
111
9. Число последовательно соединеЮ1Ьrх внrков в обмоnе фазы
WI = 2pql w• =4•5•2=40.
10. ЭДС обмо"IХИ фазы статора по (7.20)
Е1 = 4,44Ф_t; w1 k001 =4,44 • 0,044 · 50 · 40 · 0,91=357 В.
Значение линейной ЭДС этой обмотки зависит от схемы ее соединения: при
соединении звездой Ел= .JiE1 = .Jз .357=618 В, а при соединении треугольни­
ком Ел= Е1 =357 В.
§ 7_5_ Зубцовые гармоники ЭДС
Наличие зубцов и пазов на по­
верхности статора создает неравно­
мерность воздушного зазора. По
этой причине все гармшшческие
составляющие магнmного поля,
обусловленные несинусоидалъно­
стью кривой магнmной индукции
(см. рис. 6.2), приобретают зубча­
'I)'Ю форму. Каждая из этих иска­
жешn.IХ гармоник индуцирует в
обмотке статора две ЭДС: собст­
веmюй частоты_fv и зубцовую.
Рис. 7 .8. График магнитной ин­
Практическое влияние на ра­
дукции основной гармоники В1, боту машины может оказать зуб­
· искаженной зубцовой гармони­ цовая ЭДС поля основной гармо- ·
кой Вz
пики (рис. 7 .8). Мгновенное
значение этой ЭДС
(7.22)
ez = Ezmax sinro 1 tcos2Qro 1 t,
или, учитьmая, что sinro 1 tcos2Qro 1 t=0,5sin(ro 1 t+ 2Qro 1 t)+
+ 0,5sin( ro I t-2Qro I t) , получим
ez = 0,5Ezmax[sin(2Q+ l)ro 1 t-sin(2Q-l)ro 1 t],
(7.23)
где Q = Zi /(2p) - число пазов на полюс.
Из (7.23) следует, что зубцовая ЭДС от основной гармони­
ки поля может быть разложе­
на
на две составляющие с
iL.; и,�, ...Li
1
одинаковыми амплитудными
значениями, но разными час­
тотами:
Л =(2Q+l).t;;
(7. 4 )
2
Л'=(2Q -l).t;.
l"
'С
Например, при 2р = 4, Z1 =
Рис. 7.9. Скос пазов (а) и скос по­ = 24 и fi = 50 Гц основная гар­
моника поля вызывает зубцо­
люсного наконечника (6)
вые ЭДС, частота которых:
1
.!
112
t<;I
��
(13-я гармоника);
Л =(2·6+1)50=650 Гц
(11-я гармоника).
Л'= (2 ·6-1)50 = 550 Гц
Вредное действие зубцовых гармоник ЭДС выражается в том,
что они вызывают дополниrельные потери в машине и, имея по­
вьШiенную частооу, оказьmают мешающее влияние на лшши связи.
Так как сокращение шага обмотки по пазам у1 всегда кратно
числу зубцов, то оно не позволяет уменьшить зубцовые гармоники
ЭДС. Эффективное средство ослабления зубцовых гармоник ЭДС
- скос пазов или скос полюсНЬIХ наконечников (в синхронных
машинах). Обычно этот скос составляет одно зубцовое деление
(рис. 7.9). При скосе пазов или полюсных наконечников ЭДС, ин­
дуцируемые в ряде последовательных точек по длине проводlШКа,
будут сдвинутыми по фазе относительно друг друга. Это ведет к
уменьшению ЭДС проводника, учитьmаемой коэффициентом ско­
са пазов
kск =
2tsin(vc·90°/t)
7tVC
'
(7.25)
где t и с - в зубцовых делениях.
При скосе пазов на одно зубцовое деление t1 для первой гар­
моники коэффициент kcкJ R: 1 , а для гармоник зубцового порядка
kcкv << 1. Например, при 2р = 4, Z1 = 48 и скосе пазов на одно зуб­
цовое деление (с = 1) для основной гармоники (v = 1) коэффици­
ент скоса пазов kcкI = 0,995 , для зубцовой гармоники (v = 13) ко­
эффициент kскlЗ = 0,590.
Контрольные вопросы
Что такое шаг обмотки по пазам и какой должна бьпь его величина?
На какие rармоюtЧеские составляющие можно разложить несинусоидальную
кривую ЭДС, наведеЮiой в обмотке статора?
3. Какие применяются средства подавления высших rармоIШК ЭДС в обмотке
статора?
4. Каким образом можно ослабить зубцовые гармоники ЭДС в обмотке стаrора?
1.
2.
а • Основные типы
-обмоток
статора
Глава
§ 8.1. Трехфазные двухслойные обмотки
с цель1м числом пазов
на полюс и фазу
Обмотки статора машин переменного тока по
своей конструкции разделяются на двух- и одно­
слойные. В двухслойной обмотке пазовая сторона
катушки занимает половину паза по его высоте, а
другую половину этого паза занимает пазовая сто­
рона другой катушки (рис. 8.1, а). В однослойной
обмотке статора пазовая сторона любой катушки
занимает весь паз (рис. 8.1, б).
Рассмотрим пршщип выполнения трехфазной
двухслойной обмотки с целым числом пазов на по­
люс и фазу q 1, равным 2; 3; 4 и т. д. В этом случае
обмотка каждой фазы занимает q 1 пазов в пределах
каждого полюсного деления. Таким образом, для
образования трехфазной обмотки зубцовый слой
сердечника статора в пределах каждого полюсного
деления следует разделить на три зоны по q 1 пазов в
каждой зоне.
Рассмотрим порядок построения развернутой
схемы трехфазной двухслойной обмотки статора на
примере обмотки, имеющей следующие данные:
число фаз т 1 = 3, число полюсов 2р = 2, число пазов
в сердечнике статора Z1 = 12, шаг обмотки по пазам
диаметральный, т. е. у, = 't.
Шаг обмотки у1 = Z1 /(2p) = 12/2 = 6 пазов; число
пазов на поmос и фазу q1 = Z1 /(m1 2p)=12/(3· 2) = 2
паза; пазовый угол у =360p/Z1 =360-1/12=30 эл.
град. Угол сдвига между осями фазных обмоток
составляет 120 эл. град, поэтому сдвиг между на­
чалами фазных обмоток А, В и С, выраженный в
пазах, л = 120/у = 120/30 = 4 паза.
На развернутой поверхности статора размечаем
пазы (Z1 = 12) и полюсные деления (2р = 2), а затем
размечаем зоны по q 1 = 2 паза для всех фаз (рис. 8.2,
а); при этом расстояние между зоной какой-либо
фазы в одном полюсном делении и зоной этой же
фазы в другом полюсном делении должно быть рав­
но шагу обмотки у1 = 6 пазов.
114
Далее отмечаем расстояние между началами фазных обмоток
л = 4 паза. Изображаем на схеме (рис. 8.2, б) верхние (сшюшные
линии) и нижние (пунктирные линии) пазовые стороны катушек
фазы А (ка'I)'ШКИ 1, 2, 7 и 8). Верхшою сторону катушки 1 (паз J)
лобовой частью соединяем с нижней стороной этой же катушки
(паз 7), которую, в свою очередь, присоединяем к верхней стороне
катушки 2 (паз 2). Верхнюю сторону катушки 2 (рис. 8.2, б) также
лобовой частью соединяем
с нижней стороной этой же
катушки (паз 8) и получаем
первую катушечную груп­
пу обмотки фазы А (НJAKJA).
Аналогично получаем
вторую катушечную груп­
пу фазы А, состоящую из
последовательно
соеди- Рис. 8.1. Расположение пазовых сторон
пенных катушек 7 и 8 двухслойной (а) и однослойной (б) об­
(Н2А- К2А). Катушечные моток статора
грутmы соединяем последовательно встречно, для чего KJA присоединяем к К2А. Присое­
динив начало первой катушечной rрутmы НJА к выводу обмотки
CI, а начало второй катушечной группы Н2А - к выводу С4, по­
лучаем фазную обмотку А.
Приступаем к соединенmо пазовых сторон катушек фазы В:
катушек 5 и 6 (первая катушечная группа) и катушек 11 и 12 (вто­
рая катушечная группа). Проделав то же самое с катушками фаз­
ной обмотки С и соединив катушечные группы этих фазных обмо­
ток, так же как это бьmо сделано в фазной обмотке А, получим
фазные обмотки фазы В (С2-С5) и фазы С (СЗ--Сб). В оконча­
тельном виде развернутая схема трехфазной обмотки представле­
на на рис. 8.2, в.
Двухслойные обмотки в электрических машинах переменного
тока получили наибольшее распространение. Это объясняется ря­
дом их достоинств, из которых главным является возможность
любого укорочения шага обмотки, что дает, в свою очередь, воз­
можность максимально приблизить форму кривой ЭДС к синусои­
де (см.§ 7.3). Однако двухслойные обмотки не лишены недостат­
ков - это затруднения в применении станочной укладки обмотки,
а также трудность ремонта обмотки при повреждении изоляции
пазовых проводников нижнего слоя.
Катушечной группой называют ряд последовательно со­
единенных между собой катушек, которые лежат в соседних
пазах и принадлежат одной фазной обмотке. Каждая катушеч­
ная группа имеет q 1 последовательно соединенных катушек.
Количество катушечных групп в фазной обмотке равно числу
полюсов. Общее количество катушечных групп в двухслойной
обмотке равно 2рт1.
Катушечные группы каждой фазы обмотки статора мшуг
115
быть соединены последовательно или параллельно, что влияет на
число параллельных ветвей в обмотке.
На рис. 8.2, б показано последовательное соединение двух ка­
'I)'Шечных гpyrm фазной обмотки, для чего необходимо нижний
конец первой ка'I)'Шечной группы (KJA) соединиrь с нижним кон­
цом второй ка'I)'Шечной группы (К2А), а верхние концы вьmести к
К28
---....
--.........__,._.. к,в
кtс
•----11-----+---.....,.KZC
CI
С5
cs
cz
Рис. 8.2. Порядок построения развернутой схемы трехфазной
двухслойной обмотки статора: Z1 = 12, 2р = 2,у1 = 6, q 1 = 2
зажимам фазной обмотки (Cl-C4). При таком соединении кату­
шечных групп ЭДС фазной обмотки представляет собой сумму
ЭДС всех ка'I)'Шечных групп.
На рис. 8.3, а показано последовательное соединение четырех
ка'I)'Шечных групп. Первая и вторая группы соединены нижними
концами, вторая и третья группы соединены верхними концами,
третья и четвертая - нижними, а к вьmодам фазной обмотки при­
соединены верхние концы первой и четвертой ка'I)'Шечных групп.
При последовательном соединении Ка'I)'Шечных групп каждая
фазная обмотка независимо от- числа поmосов машины содержит
одну параллельную ветвь (а 1 = l). Двухслойная обмотка в каждой
фазе имеет 2р ка'I)'Шечных групп, поэтому, соединив все группы
параллельно, получим обмотку, состоящую из 2р параллельных
ветвей (а 1 = 2р).
На рис. 8.3, б показано параллельное соединение четырех ка116
'I)'Шечн:ых групп: к одному выводу обмотки (CJ) подкmочены
верхние к01щы нечетных групп (J и IJJ) и нижние к01щы четных
групп (JJ и IV), оставшиеся концы ка'I)'Шечных групп присоещrnе­
нь1 к другому выводу фазной обмотки (С4). Такой порядок при­
соединения групп объясняется следующим: ЭДС рядом лежащих
каrушечных групп одной фазной обмотки сдвинуты по фазе друг
относительно друга на
180° , так как эти кату­
шечные группы распо­
ложены под разноимен­
нъ�ми потосами. Поэто­
му, чтобы ЭДС рядом
лежащих каrушечных
групп фазной обмотки
совпали по фазе, прихо­
дится их присоедШIЯТЪ
меняя КОIЩЫ.
Если половину ка1)'Шечных групп каждой
фазной обмотки соеди­
шпъ последовательно в
одну ветвь, а затем две
ветви соединить парал­
лельно, то получим по­
следовательно-параллель­
ное (смешанное) соеди­ Clo--+---.-----...,_____.._
нение ка'I)'Шечных гpyrm: с� о--------------с двумя параллельными Рис. 8.3. Способы соединения каrушечных
ветвями в фазной об­
групп
мотке (а1 = 2). Чтобы
ЭДС параллельных ветвей бьmи одинаковы, в каждую параллель­
ную ветвь включают каrушечные группы через одну. Таким обра­
зом, в одной параллельной ветви оказываются все четные кату­
шечные группы, а в другой - все нечетные (рис. 8.3, в).
С5
Cf
Сб
cz
CJ
Сч
Рис. 8.4. Развернутая схема трехфазной двухслойной обмотки статора с
укороченным шагом:
Z1 = 24; 2р = 4; Yt = 5
117
Пример 8.1. Вьmоmnпь развернуrую схему трехфазной двухслойной об­
мотки с относиrельным укорочением шага Р = 0,83 при следующих данных:
2р = 4, Z1 = 24, соединение ка'l)'Шечных rрупп последовательное.
Реш е н и е. Число пазов на поmос и фазу по (7.10)
q.= z./(2 рт.)=24/(4-3)=2.
Пазовый угол по (7.13)
у= 360p/Z1 = 360-2/24 = 30 эл. град.
Сдвиг между осями фаз (в пазах)
л = 120/у = 120/30 = 4.
Шаг обмотки по пазам
У1 = PZ./2p = 0,83-24/4 = 5.
На рис. 8.4 изображена развернуrа.я схема этой обмотки.
',
§ 8.2. Трехфазная двухслойная обмотка
с дробным числом пазов
на полюс и фазу
В мощных многопотосных синхро1rnых генераторах (гидро­
генераторах) (см. гл. 19) практически невозможно вьmолнить об­
мотку статора с числом пазов на потос и фазу q 1 > l, равным це­
лому числу, так как для этого потребовалось бы иметь на статоре
слишком большое число пазов Z1 = 2pm 1q 1• В этом случае обмотку
статора вьmолняют с д р о б н ы м q 1• Такие обмотки имеют неко­
торое преимущество перед обмотками с целым q 1, так как позво­
ляют при небольших значениях q 1 получить ЭДС практически си­
нусоидальной формы.
Обмотки статоров с дробным q 1 в двигателях переменного rо­
ка применяют главным образом при серийном производстве, когда
для изготовления пластин сердечника статора двигателей с раз­
личным числом потосов используют один штамп. При этом одно
из значений 2р дает q 1 � ц. ч. (целое число).
Дробное значение q 1 может бьrrь представлено в виде
q1 = а + Ь/с = ( ас + Ь )/ с .
(8.1)
При этом очевидно, что числа Ь, с и ас + Ь не имеJОт общего
делителя.
С учетом (8.1) число пазов статора
(8.2)
Z1 = 2pmiq1 = 2рт1 (ас+ Ь)/с.
Если с не кратно т 1, то обмотка с дробным q 1 эквивалентна
обмотке с целым q1 экв= ас+ Ь. Так как q1 экв больше действитель­
ного (дробного) q 1 в с раз [см. (8.1)], то и эквивалентное число па­
зов Z1 экв больше действительного Z1 в с раз. Так, двухполюсная
трехфазная обмотка статора с Z1 = 9 имеет число пазов на полюс и
фазу
q1 =Z1 /(2pm1 )=9/(2·3)=1½,
или, согласно (8.3),
118
q1 =(ас+ Ь)/с = (2+ 1)/2 = 1½,
где а = 1, с = 2, Ь = 1.
ДJIЯ этой обмотки эквивалентные параметры будуг
q1эl<В =q1 c = l½-2=3; Z�экв =Z1 c=9-2=18.
Изобразив зубцы эквиваленпюго статора с Z1 экв = 18 (рис. 8.5, а)
и разбив их поmосные деления на фазные зоны, пронумеруем пазы
реального статора (Z1 = 9). Эти пазы расположатся между эквива-
Jmim�
�
l..,
/ в
\с
А
"
N�
•
'!
2
.....
J
1
1
С5
-тт- - -- - - - -
1
r. Ц
1!П П
Ct
1
�
I
С6
в
/
\с
A
I
1
'
6l
С2
.....
1
1
!
'
·
....
п1
1
lwi
81 l
-- - - - 1
1
С4
1
•
,
CJ
Рис. 8.5. Трехфазная обмотка статора с дробным q 1
летными пазами. Из разметки пазов видно, что каждая фазная
обмотка состоит из двух катушечных групп, при этом одна груrша
состоит из двух катушек, а другая - из одной. Изобразив кату­
шечные группы фазы А (рис. 8.5, б), соединяем их последователь­
но (встречно) и обозначаем вьшоды этой фазной обмотки CJ и С4.
Аналогично вьшолняем схемы фазных обмоток фаз В и С.
В рассмотренном примере в обмотке с q1 = 1½ каждая кату­
шечная группа состоит из двух не равных по числу катушек час­
тей: в одной части катушечной группы - одна катушка, а в дру­
гой - две катушки. Таким образом, в каждой катушечной группе
имеет место чередование катушек, обозначаемое 1-2. Если дроб­
ная часть q 1 отличается от ½, то чередование катушек в каждой
катушечной группе будет другим [10].
Чередование катушек в катушечной группе подчиняется сле­
дующему правилу: количество цифр чередования равно знамена­
телю неправильной дроби с [см. (8.1)], а сумма этих цифр равна
числитеmо неправильной дроби ас + Ь.
119
§ 8.3. Однослойные обмотки статора
Трехфазная обмотка. В однослойных обмотках каждая сто­
рона ка'I)'IПКИ полностью запоJШЯет паз сердечника статора (см.
рис. 8.1, б). При этом число катушечных групп в каждой фазе рав­
но числу пар полюсов, так что общее число катуше<rnьIХ групп в
· однослойной обмотке равно рт 1•
Однослойные обмотки статоров разделяют на концентриче­
ские и шаблонные. В к о н це н т р и ч е с к о й обмотке катушки
каждой ка'I)'Шечной груrmы имеют разную ширину и располагаются
концентрически. Шаги обмотки у ка'I)'Шек, входящих в ка'I)'Шечную
гpyrmy, неодинаковы, но их среднее значение Ytcp = Z1 /(2 р) .
а)�
t
Cf
1
�l ;дi �� r� �
5
С5 С!
1
1 11 12 IЗ 14 15 16 17 18 19 20 21 22 ZЗ 4
CJ
С4
С5
Рис. 8.6. Трехфазная однослойная обмотка статора с распо­
ложением лобовых частей в двух IШоскостях:
а - развернутая схема; 6 - расположение лобовых частей
Так, для трехфазной однослойной концентрической обмотки с
Z1 = 24; 2р = 4 имеем Ytcp =24/4=6 пазов; q1 =Z1 /(2pm1 )=
=24/(4 • 3) = 2 . Следовательно, ктушечная rруппа каждой фазной
обмотки состоиr из двух расположеmп,IХ концентрически катушек.
Шаги этих ка'I)'Шек: у11 = 7 и у12 =5 . Развернутая схема этой обмот­
ки (2р = 4; Z1 = 24; q 1 =2;у1ср = 6) представлена на рис. 8.6, а.
Рассмотренную однослойную обмотку назьmают двухплоско­
стной, так как лобовые части катушек этой обмотки имеют раз­
ный вьmет и располагаются в двух плоскостях (рис. 8.6, б). Такая
120
конструкция обмотки позволяет избежать пересечения лобовых
частей катушек, принадлежащих разным фазам. При нечетном
числе пар поmосов число групп лобовых частей будет также не­
четным. В этом случае одну iатушечную гpyrmy приходится де­
лать переходного размера с двоякоизогнутой лобовой частью.
ПрименеIШе различных по размеру катушек, образующих ка­
тушечные группы, ведет к тому, что катушечные грушп,1 кшщен­
трических обмоток имеют разпые электрические сопротюще- а)
ния. Это следует учитывать при
определении размеров катушек
катушечных групп, образующих
фазную обмотку. Необходимо,
чтобы все фазные обмотки име­
ли одинаковое сопротивлеIШе,
для чего оIШ должны содержать
. одинаковое_ число различных по
размерам катушечных групп.
Основное достоинство одно­
слойньIХ кшщентрических об­
Ct Сб С2 Сч-03 С5
моток - возможность примене­
ния станочной укладки. Этим
,, ,/¾!
б)
объясняется широкое примене­
ние этого типа обмотки статора
в асинхронньIХ двигателях
мощностью до 18 кВт, произ­
водство которьIХ обычно имеет
Рис 8.7. Трехфазная однослойная
массовый характер.
Недостаток кшщентриче- шаблонная обмотка статора
ских обмоток - наличие катушек различm,IХ размеров, что несколько усложняет ручное изго­
товление обмотки. Этот недостаток отсутствует в ш а б л о н н ы х
однослойньIХ обмотках, так как их катушки имеют одинаковые
размеры и моrут изготовляться на общем шаблоне. Кроме того,
все катушки таких обмоток имеют одинаковые сопротивления, а
лобовые части получаются короче, чем в к01щентрических обмот­
ках, что уменьшает расход меди.
В качестве примера рассмотрим шаблонную обмотку (рис. 8.7, а)
двухпоmосной машины с тремя катушками в катушечной группе.
Трапецеидальная форма секций облегчает расположеIШе лобовых
частей обмотки (рис. 8.7, б).
Основным недостатком всех типов однослойньIХ обмоток яв­
ляется невозможносп. применения в них катушек с укороченным
шагом, что необходимо для улучшения рабочих,свойств машин
переменного тока (см.§ 7.2).
Однофазная обмотка. Эту обмотку статора выполняют ана-.
логично одной фазе трехфазной обмотки, с той лишь разницей,
что катушки этой обмотки занимают ½ пазов сердечника статора.
121
Такая конструкция обмотки делает ее наиболее экономичной, так
как заполнение оставшихся ½ пазов статора увеличило бы расход
меди на изготовление обмотки в 1,� раза, т. е. на 50 %, а ЭДС об­
мотки возросла бы тппь на 15%.
Для однофазной обмотки (m 1 = 1),
занимающей ½ пазов на статоре , форму­
ла коэффш.щента распределения (см: § 7.3)
имееrвид
sin(60° v)
(8.3)
q1 sin(60v/q1 )
Для третьей гармоники ЭДС ( v = 3)
ЧИСЛИТеЛЬ выражения (8.3) sin 60° V =
= sin180° = О. Из этого следуеr, что в
однофазной обмотке, занимающей ½
пазов на статоре, отсутствуеr третья
гармоника ЭДС. На рис. 8.8 показана
схема однофазной однослойной обмот­
ки. Однофазные обмотки могут быть и
двухслойными.
kpv =
Cf
С4
Рис. 8.8. Однофазная од­
нослойная обмотка ста­
тора:
2р = 2; z. = 12; q. = 4
§ 8.4. Изоляция обмотки статора
Электрическая изоляция обмотки - наиболее отвеrственный
элемент электрической машины, в значительной степени опреде­
ляющий ее габаритъ1, вес, стоимость и надежность.
Пазовые стороны
обмотки статора рас­
положены в пазах
2
(рис. 8.9), которые мо- а)
гут бьпь полузакры­
ТЬIМИ (а), полуоткры­
тыми (б) И ОТКрЫТЬIМИ
3
J
(в). Перед укладкой
проводников 4 обмот- ·
4ки поверхность паза
прикр!>1вают пазовой
5
5
(корпусной) изоляцией
6
6
2 в виде пазовой коро­
бочки. Этот вид изо­
ляции должен иметь
Рис. �.9. Пазы статора
не только достаточную
электрическую, но и необходимую механическую прочность, та1<
как на него действуют значительные механические силы, возни­
кающие в процессе работы машины, а особенно в процессе уклад­
ки (уплоrnения) проводников обмотки в пазах. В нижней части
паза располагают прокладку 1.
122
Электрическая изоляция проводников друг от друга обеспечи­
вается вuтковой изодяцией, в качестве которой в машШiах напря­
жением до 660 В используют изоляцию обмоточных проводов, а
при напряжеmrn 6000 В и вьппе эта изоляция требует усиления на
каждом проводнике специальной витковой изоляцией. В двух­
слойных обмотках между слоями укладывают прокладку 3. Паз
закрывают клином 6, под который обычно также кладут изоляци­
онную прокладку 5.
Способ изоляции паза и применяемые изоляционные материа­
лы зависят от типа обмотки, ее рабочего напряжения и температу­
ры перегрева. При выборе электроизоляцишmых материалов для
изоляции паза необходимо, чтобы все материалы имели оДШiако­
вую н а г р е в о с т о й к о с т ь.
Изоляционные материалы, применяемые в обмотках электри­
ческих машин и трансформаторов, разделяют на пять классов на­
гревостойкостu, отличающихся друг от друга предельно допус­
тимой температурой нагрева:
Класс наrревостойкости изоля-
ции ·······•··························
Предельно допустимая температура, 0С , ......................... ·
Расчетная рабочая темперm:ура
обмотки, 0С ...........................
А
Е
в
F
н
105
120
130
155
180
75
75
75
115
115
..
Класс изоляции определяет также значение расчетной рабочей
температуры при расчете активного сопротивления обмотки.
В последние годы для обмоток статоров при напряжении до
660 В преимуществеmю применяют провода с эмалевой изоляцией
марок ПЭТВ и ПЭТ-155 круглого и прямоугольного сечений. Ос­
новным изоляционным материалом для обмоток статоров служат:
в низковольтных мalliliНax (до 660 В) - пленкосинтокартон, элек­
тронит, лакотканесmодопласт, а в высоковольтных машинах (6000
В и выше) - стеклосmодопластовая ленrа, стеклотекстолит и т. п.
С целью улучшения использования габарита машШiы жела­
тельно, чтобы изоляция обмотки в пазах занимала меньше места.
Для оценки использования площади паза пользуются коэффи­
циентом заполнения паза изолированными проводниками
(8.4)
kп = Nnl d�Js�,
где Nп1 - число проводников в пазе; dиз - диаметр изолироваШiо­
го проводника, мм; S� - площадь паза, занимаемая обмоткой (без
учета клина), мм2 •
При использоваюш обмоточных проводов круглого сечения
(пазы полузакрыгые) для ручной укладки обмотки k" = 0,70+0,75,
для машинной укладки на статорообмоточных станках k" = 0,70+0,72.
В высоковольтных машШiах пазы статора делают открыrыми, так
как только в этом случае можно обеспечить надежную пазовую
изоляцию.
123
Контрольные вопросы
1.
Начертиrе развернутую схему трехфазной двухслойной обмотки статора с
последовательным соеД1mением ка'I)'Шечных rpyrm для одного из приведен­
ных ниже вариантов:
Варианты ............. ..
Число поmосов 2р .....
Число пазов z,
........ .
2.
3.
4.
5.
6.
2
24
2
4
24
3
6
36
4
4
36
5
2
18
6
2
36
7
2
30
8
8
48
9
4
48
10
4
30
Как измените.я ЭДС обмотки с 2р = 6, если последовательное соединение ее
JСа'I)'Шечных rpyrm изменип. на параллельное? Начертиrе схемы этих соеди­
нений.
Почему лобовые части однослойных кшщентрических обмоток располагают
в нескольких плоскостях?
Каковы достоинства и недостатки двухслойных и однослойных обмоток ста­
торов?
Почему однофазную обмотку статора укладывают в 2/3 пазов?
Как раздетuотс.я электроизоляционные материалы по наrревостойкости?
Магнитодвижущая
-сипа
обмоток
статора
Глава 9 •
§ 9.1.· Маrнитодвижущая сила
сосредоточенной обмотки
При анализе МДС обмоток будем исходить из
следующего:
а) МДС обмоток переменного тока изменяется
во времени и вместе с тем распределена по перимет­
ру статора, т. е. МДС является функцией не только
времени, но и пространства;
б) ток в обмотке статора синусоидален, а следо­
вательно, и МДС обмотки является синусоидальной
функцией времени;
в) воздушный зазор по периметру статора по­
стоянен, т. е, сердечник ротора цилиндрический;
г) ток в обмотке ротора отсутствует, т. е. ротор
не создает магнитного поля.
Рассмотрим двухпоmосную машину переменного
тока с сосредоточешюй однофазной катушкой обмот­
ки статора с шагому1 = t (рис. 9.1, а). При прохожде­
юm тока по этой обмотке возникает магнmный поток,
который, замыкаясь в магнитопроводе, дважды пре­
одолевает зазор б между статором и ротором.
В связи с тем что обмотка статора сосредоточе­
на в двух пазах, график МДС этой обмотки имеет
вид двух прямоугольников: положительного и отри­
цательного (рис. 9.1, 6). Высота каждого из них Fк
соответствует МДС, необходимой для проведения
мапnrmого потока через один воздуuшый зазор б, т. е.
✓2/ w
F.._ =0,5/1 maxwк =0,5
1
.._
,
(9.1)
где /1 -действующее значение тока катушки.
Для сосредоточенной обмотки МДС можно раз­
ложить в гармонический ряд, т. е. представить в ви­
де суммы МДС, имеющих синусоидальное распре­
деление в пространстве:
/(а)=
+ .!.cos5a-...±_!..cos va) ,
iП F.._ (cosa - .!.соsЗа
V
3
5
где а -пространс�ею1ый угол (рис._ 9.1, 6).
(9.2)
Из (9.2) следует, что МДС сосредоточенной обмотки стато­
ра содержит основную и высшие нечетные гармоmtJЩ, амплитуды
которых обратно пропорциональны порядку гармоники v.
Мгновею�ые значения тобой гармоники МДС зависят от про­
странственного положения ее орДimат относительно начала отсче­
та пространственного угла а (рис. 9.1, б). Эта зависимость у раз­
ных гармоник различна, т. е. гармоники МДС имеют разную
периодичность в пространстве, определяемую законом cos va .
. Поэтому гармоники МДС назьшают пространственными.
2Т
'i:
а
а'
2Я
. 1Х
Рис. 9.1. МДС однофазной сосредоточенной обмотки статора
Гармоники МДС имеют и временную зависимость, поскольку
по ка'I)'Шке проходит перемеЮIЫЙ ток. Но временная зависимость
у всех гармоник одинакова и определяется частотой тока в катуш­
ке. Следовательно, все пространствею�ые гармоники пропорцио­
нальны sin rot .
Рассмотрею�ые нами в предыдущих главах гармонические со­
ставляющие тока и ЭДС назьшают временны.ми гармониками.
Временная периодичность у· этих' гармоник определяется номером
гармоники (7.6).
Амплитуда первой пространственной гармоники МДС по (9.2)
4
4
✓2
(9.3)
Fк\ =-Fк =--/1 wк =0,9/1 w1< .
7t
7t 2
Амплитуда пространственной гармоники v-го порядка
Fкv = Fк1 /v = 0,9/1 wк /v.
(9.4)
Зависимость МДС тобой гармоники от времени и простран­
ственного угла а определяется выражение�
126
fкv = ±Fкv sinrotcos va.
(9.5)
с увеличением номера гармоники растет ее пространственная
периодичность. Поэтому число поmосов пространственной гармо­
ники МДС равно 2pv = 2pv.
Полезный магнитный поток в машине переменного тока соз­
дает основная гармоника МДС, а высшие пространственные гар­
моники МДС обычно оказьmают на мащину вредное действие
(действие высших гармоник МДС рассмотрено в последующих
главах).
·
§ 9.2. Магнитодl!ижущая сила
распределенном обмотки
На рис. 9.2, а показана катушечная rpyrrna обмотки статора,
состоящая из трех катушек. График .МДС основной гармоники ка­
ждой из этих катушек представляет собой синусоиду, максималь­
ное значение которой (Fк1) совпадает с осью соответствующей ка'I)'ШКИ, поэтому между векторами МДС катушек Fi кt , F'zкt и F'зк t
имеется пространственный сдвиг на угол у' , равный пазовому уг­
лу смещения катушек обмотки относительно друг друга у' .
Рис. 9.2. МДС основной гармоники распределенной обмотки
статора
График МДС основной гармоники всей катушечной rpyrrnы
представляет собой также синусоиду, полученную сложением ор­
динат синусоид МДС катушек, составляющих катушечную груп­
пу. Максимальное значение этого графика Fr1 совпадает с осью
·
·
средней катушки.
Переходя к векторному изображению гармоник МДС, видим,
что амплитуда МДС катушечной группы основной гармоники
(рис. 9.2, б) определяется геометрической суммой векторов ампли127
тудных значений МДС катушек: F'rl = Fi к1 + Fi к 2 + F� кз, Т. е. анало­
ГИЧНО определенmо ЭДС катушечной группы (см. рис. 7.7, б). Раз­
ница состоит mппъ в том, что векторы ЭДС катуш ек смещены от­
носительно друг друга на у - угол сдвига фаз этих ЭДС
относительно друг друга (временной угол), а при сложении МДС
угол у' является пространственным углом смещения амплитуд­
ных значений МДС катушек (у' = у ).
Если все катушки катушечной группы сосредоточигь в двух
пазах (у' = О ), то результирующая МДС будет определяться
арифметической суммой МДС катушек, т. е . �1 = F;,_1 q1 •
Таким образом, распределение катушек в нескольких пазах
ведет к уменьшенmо МДС катушечной группы, которое учигыва­
ется коэффициентом распределения обмотки (см. § 7.3 ). Для МДС
основной гармоники это уменьшение невелико, но для высших
пространственных гармоник оно значиrельно.
Амплитуда пространственной гармоники катушечной группы
распределенной обмотки
( 9.6)
Frv = Fкvqlkpv =(0,9/v)/1wк q1 kpv •
где k,,v - коэффициент распределения.
Например, амплитуда основной гармоники МДС
(9.7)
Если машина имеет несколько пар поmосов (р > 1), то при q 1,
равном целому числу, в силу симметрии обмотки график МДС на
каждой паре полюсов будет повторяться, поэтому (9 .6), выведен­
ное для катушечной группы, справедливо и для МДС фазной об­
мотки FФ. Заменим в (9.6) число витков катушки Wк на число вит- .
ков фазной обмотки w 1 • Для однослойной · обмотки при
последовательном соединении всех катушек w1 =pq1 wк , откуда
Wк = W1 /(pql ) .
Используя (9.6) и (9.8), получим
, FФv =(0,9/v)/1w 1kpv/P;
для основной гармоники
Fф\ =0,9 /1W1kp 1/P·
(9 .8)
( 9.9)
(9.10)
Здесь /1 - ток в обмотке фазы. При последовательном соеди­
нении всех катушек фазной обмотки /1 = /к .
Выражение (9 .9) справедливо и для двухслойнь�х обмоток, для
которых w1 =2pq1wк , так как число витков в катушке двухслойной обмотки wк.двухсл, пазовая сторона которой занимает половину
паза, в два раза меньше числа витков катушки однослойной об­
мотки wк.односл, т. е. wк.двухсл = О, Swк.односл.
128
Выражение (9.9) справедливо также и при параллельном со­
единении Ка'I)'Шечных гpyrrn, когда число последовательно соеди­
не1rnых витков в обмотке фазы уменьшается в а раз, при этом ток
в обмотке увеличивается во столько же раз (здесь а - число па­
раллельных ветвей в обмотке статора).
Эффективными средствами подавления высших пространст­
венньIХ гармоник являются: укорочение шага обмотки (см. § 7.2),
применеlШе распределенной обмотки (см. § 7.3) и скос пазов (см.
§ 7.5). Уменьшение амплитуды основной гармоники МДС обмотки
статора учитьщается обмоточным коэффIЩИентом k0б [см. (7.21)].
Что же касается скоса пазов, то он практически не влияет на
величину основной гармоники МДС (см.§ 7.5).
С учетом изложенного амплиrуда МДС обмотки фазы статора
Fфv = (0,9/v)/1 W1 k06 v /р;
(9.11)
для ОСНQВНОЙ гармоники
(9.12)
МДС однофазной обмотки статора прямо пропорциональна
перемеmюму току в этой обмотке ( FФ1 1 ). Переменнь1й ток в
течение каждого периода принимает различные мгновенные зна­
чения + /1max до -/Imax . Следовательно, МДС однофазной обмот­
ки пульсирует с частотой токаfi, принимая различнь1е мгновенные
значения (от + FФ1 до - FФ1) на каждом полюсном делении. При
этом все гармонические составляющие этой МДС пульсируют с
одинаковой частотой.
=/
§ 9.3. Маrнитодвижущая сила
трехфазной обмотки статора
При включении трехфазной обмотки статора в сеть трехфаз­
ного тока в обмотках фаз появятся токи, сдвинутые по фазе (во
времени) относительно друт друта на 120 эл. град (рис. 9.3, а):
;А = IAmax sinrot; iв = IBmax sin(rot -120° ); ic = IСтах sin(rot - 2400) .
(9.13)
Ток каждой обмотки создает пульсирующую МДС, а совокуп­
ное действие этих МДС создает результирующую МДС, вектор
которой вращается относительно статора.
Принцип образования вращающейся МДС рассмотрим на про­
стейшей трехфазной двухпоmосной обмотке, каждая фаза которой
состоит из одной катушки (q1 = 1). Фазные обмотки соединены
звездой и включены в сеть трехфазного тока (рис. 9.4). Проведем
ряд построений вектора МДС трехфазной обмотки, соответст­
вующих различнь1м моментам времени, отмеченньIМ на графике
рис. 9.3, а цифрами О, 1, 2, 3. В момент времени О ток в фазе Ара129
вен нуmо, в фазе В имеет отрицательное направление, а в фазе С положительное. Эти направления тока отмечаем на рис. 9.3, 6. За­
тем в соответствии с указа1mыми в пазовых сторонах обмотки на­
правлениями токов определяем направление вектора МДС F1
трехфазной обмотки статора (вектор направлен вертикально вниз).
В момент времени 1 ток в обмотке фазы В равен нуmо, в обмотке
а)
А
в
с
о)
А--......--- ----- - ---- ----- д
8---+--...
--+----+---+---t-..----1----1t-C
----- __..,.___.. ------в
c-----..--....
=
i.A
сх
i8 0
ic=O
= о•
Рис. 9.3. Принцип получения вращающейся МДС
фазы А имеет положительное направление, а в обмотке фазы С отрицательное направление. Сделав построения, аналогичные мо-.
мету времени О, вщим, что вектор МДС F1 повернулся относи­
тельно своего положения в момент в]>емени О на 120° по часовой
стрелке. Проведя такие же построения для моментов времеIШ 2 и
3, вщим, что вектор F1 каждый раз поворачивается на 120 ° и за
один период переменного тока делает полный оборот (360°).
Если частота тока в обмотке статора J; = 50 Гц, то вектор
МДС вращается с частотой 50 об/с. В общем случае частота вра­
щения вектора МДС п 1 - синхро1П1ая частота вращения - прямо
пропорциональна частоте тока fi и обраmо пропорциональна чис­
лу пар полюсовр обмотки статора [см. (6.3)]:
п1 = fi 60/р.
Значения синхронных частот вращения для промышленной
частоты переменного тока.fi = 50 Гц приведены ниже:
Число пар поmосов р...
СШIХроЮ1ая частота
вращеЮIЯ п 1 , об/мЮI .. . . •
130
l
3000
2
З
1500 · 1000
4
5
6
750
600
500
Вращающаяся МДС создает в расточке статора вращающееся
магнигное поле. При необходимости измеmrгь направление вра­
щения МДС нужно измеmrгь порядок следования токов в обмотке.
Так, в рассмотрешюм примере (см. рис. 9.3) порядок следова­
ния токов в фазных обмотках бьm А-В-С. При этом МДС вра- щалась по часовой стрелке. Если порядок следования токов в фаз­
НЪIХ обмотках измениrъ (А-С­
etfAI
В), то МДС трехфазной обмотки
будет вращаться против часовой
стрелки. Для изменения порядка
следования токов в обмотках фаз
необходимо поменять места при­
соединения к сети двух прово­
дов, отходящих от зажимов об­
мотки статора (см. рис. 10.1, а, в).
Изменение направления тока во
всех трех обмотках фаз не изме­
няет направления, вращения поля
статора.
Для определения амплитуды
основной гармоники МДС трех­
Рис. 9.4. Статор с трехфазной
фазной обмотки необходимо
обмоткой
сложить основные гармоники
МДС обмоток фаз, оси которьIХ
смещены в пространстве относительно друг друга на 120 эл. град:
JA = �. sinro,tcosa = 0,5� 1 [sin(ro 1 t-a)+sin(ro,t
+а)];
°
°
fв = FФ1 sin(ro,t-120 )cos(a-120 )= 0,5FФ.[sin(ro 1 t-а)+
+sin(ro,t +а-240° )];
fc = FФ, sin(ro 1 t-2400)cos(a-240° )= 0,5FФ1 [sin(ro,t-a)+
+sin(ro 1 t +а-120° )].
Следовательно, МДС трехфазной обмотки
где
J; = fл + fв + fc = 1,5FФ, sin(ro 1 t-a)= F; sin(ro,t-a), (9.14),
(9.15)
- амплитуда основной гармоники МДС трехфазной обмотки, т. е.
амплитуда МДС трехфазной обмотки на один полюс при симмет­
ричной нагрузке фаз равна 1 , 5 амплитуды МДС обмотки фазы [см.
(9.12)].
В общем случае число фаз в обмотке статора равно т,: тогда
амплитуда МДС т 1 -фазной обмотки на один полюс (А)
F; = О,5щFФ, = О, 45щ/1 w1 k061 /р.
(9.16)
131
§ 9.4. Круговое, эллиптическое
и пульсирующее магнитные поля
Вращающееся магнитное поле статора может быть круговым
и эллИIПИЧеским. К р у r о в о е поле характеризуется тем, что
пространствеm1ый вектор маrнипюй индукции этого поля враща­
ется равномерно и своим ко�ом описывает окружность, т. е. зна­
чение вектора индукции в mобом его пространствеююм положе­
нии остается неизменным.
Круговое вращающееся поле создается многофазной обмоткой
статора, если векторы магнигной индукции каждой фазы одинако­
вы, т. е. представляют собой симметричную систему. В трехфаз­
ной обмотке собmодение этого условия обеспечивается тем, что
фазные обмотки делают одинаковыми, а их оси смещают в про­
странстве относительно друг друга на 120 эл.град и вюпочают в
сеть с симметричным трехфазным напряжением.
Круговое вращающееся поле может быть получено и посред­
ством двухфазной обмотки статора. Для этого оси обмоток фаз
смещают в пространстве на 90 эл.град и питают эти обмотки тока­
ми, сдвинутьrми по фазе относительно друг друга на 90°. Значение
токов должно быть таким, чтобы МДС обмоток были равны.
,этихЕсли
же изложе1rnые условия не собmодаются, т. е. если век­
'торы магнитной индукции обмоток фаз не образуют симметрич­
ной системы, то вращающееся поле статора становится э л л и п т и ч е с к и м: пространствеm1ый вектор магнитной индукции В
этого поля в различные моменты времени не остается постоянным
и, вращаясь неравномерно ( ro = var ), своим ко�ом описывает эл­
липс (рис. 9.5, а). Эллиптическое вращающееся магнитное поле
содержит обратно вращающуюся составляющую, которая меньше
основной (прямо вращающейся) составляющей.
Таким образом, вектор магнитной индукции эллиптического
поля в mобом его пространственном положении можно пре�ставить в виде суммы векторов ма�ниrnьrх индукций: прямого В0Р и
обратного Бобр маmитных полей: в = впр + iзобр при iзпр > iзобр •
Для пояснения обратимся к рис. 9.5, б, на котором показано
разложение вектора вращающегося эллиптического поля для че­
тырех моментов времени, соответствующих точкам а, Ь, с, d на
кривой, описываемой вектором индукции этого поля (четверть
оборота поля). Наибольшее значение вектор индукции результирующего поля iзmax (точка а) имеет при совпадении в пространст­
ве векторов прямого В0Р и обраnюго В0бр полей (положения 1 и 1').
Наименьшее значение вектора индукции iзmin (точка d) соответст.
.
вует Встречному направлению Векторов Впр И Вобр (ПОЛОЖеНИЯ 4 И
4'). Значения вектора индукции в точках Ь и с соответствуют положеIШЯМ 2 И 3 вектора Впр И ПОЛОЖеlШЯМ 2' И 3 1 вектора Вобр •
132
Обрапюе магниmое поле неблагоприятно влияет на свойства
машmtы перемешюго тока, например в двигателях оно создает
противодействующий (тормозной) электромагнитный момент и
ухудшает их эксплуатациош1ые свойства.
В трехфазной машине мапшгное поле будет эллшпическим,
если обмотку. статора вюпочиrь в сеть с несимметричным трех-
Рис.
· 9.5. Раз.цожение эллиптического и пульсирующего магнитных полей
на два круговых вращающихся
фазным напряжением или если обмотки фаз статора несиммет­
ричны (имеют неодинаковые сопротивления или разное число
витков). Поле также будет эллшпическим при неправильном со­
единеmш фазных обмоток статора - начало и конец одной из фазных ?бмоток «перепутаньD>. В этом случае iзmax = зiз/2 и iзmin = iз/2 ,
где В - вектор магниmой индукции кругового вращающегося поля
данной обмотки при правильном соединеmm фаз (рис. 9.5, а).
Если прямая и обратная составляющие магнитного поля рав­
ны, то результирующее поле становится п у л ь с и р у ю щ и м. Век­
тор индукции этого поля неподвижен в пространстве (рис. 9,5, в) и
лишь
изменяется
во времени от + Bmax до - Bmax (когда векторы
.
.
Вор И Вобр СОВПадают ПО направленmо), проходя через нулевое
значение (когда векторы вор и iзобр направлены встречно). Пуль­
сирующее_ магнитное поле создает однофазная обмотка, вюпочен­
. ная в сеть переменного тока (см. § 16.1).
§ 9.5. Высwие пространственные rармоники
маrнитодвижущей силы трехфазном обмотки
Поmосное деление МДС высших пространственных. гармоник
обратно пропорционально номеру гармоники: ,: v = 1:/v. Поэтому
пространственная периодичность этих гармоник растет пропор­
ционально номеру гармоники (см. рис. 9.1). Учитывая изложеmюе,
заШШiем уравнение МДС третьей гармоники фазных обмоток:
133
fзА = FЗА sin ro1tcos3a;
fзв = f;8 sin(ro 1 t-120°)cos3(a-120°) = F;A sin(ro 1 t-1200)cos3a;
fзс = F;c sin(ro 1t-240° )cos3(a-240°) = F;A sin(ro 1t-240° )соsЗа,
откуда МДС третьей гар!dоники трехфазной обмотки
(9.17)
fз = fзА + fзв + fзс = О,
т. е. результирующая МДС третьей гармоники в трехфазной об­
мотке статора при симметричной нагрузке фаз равна нулю. Это
распространяется также и на высшие гармоники, кратные трем (9,
15 и др.). МДС высших гармоник оставшихся номеров (5, 7 и др.)
ослабляются распределением обмотки в пазах, укорочением шага
катушек и скосом пазов.
МДС высших гармоник многофазной обмотки статора вращающиеся. При этом частота их вращения nv в v раз меньше
частоты вращения МДС основной гармоники:
n v =n1 /v.
(9.18)
Направление вращения этих МДС зависит от номера rармшшки:
МДС гармоник порядка 6х + 1 вращаются согласно с МДС основной
гармоники - прямовращающиеся МДС, а МДС порядка 6х - 1 вра­
щаются встречно МДС основной гармоники - обратновращаю­
щиеся МДС (здесь х = 1, 2, 3, ... ).
Вращающиеся магнитные поля, созданные высшими гармони­
ческими составляющими МДС, индуцируют в обмотке статора
ЭДС основной частотыjj. Действительно, частота ЭДС, наведен­
ной магнитным полем любой пространственной гармоники,
(9.19)
fv = nv Pv /60 = n, pv/( V • 60) = /i,
где Pv = pv; nv = п, /v.
Контрольные вопросы
1. Почему гармонические составляющие МДС обмотки статора называют про­
странственными?
2. Какие методы подавлеНИJI высших пространствеюiых rармоюпс применяют в
машШiах переменного тока?
3. Какова зависимость частоты вращеНИJI МДС обмотки статора от частоты то­
ка и числа полюсов в обмотке статора?
4. Как измениrь направление вращеНИJI МДС обмотки статора?
S. Каково относиrельное значение маrюпной индукщш обратной составляю­
щей поля статора при круговом, эллшпическом и пульсирующем маrюrrных
полях?
Раздел
•
3
АСИНХРОННЫЕ
МАШИНЫ
Режимы работы
и устройство
асинхронной
маwины
Асинхронные машины полу­
чили наиболее широкое при­
менение в современных элек­
трических установках и явля­
. ются самым распространенным видом бесколлекторных
электрических машин пере­
менного тока. Как и любая
• Магнитная цепь
электрическая машина, асин­
асинхронной
хронная машина обратима и
маwины
может работать как в генера­
торном, так и в двигательном
режимах. Однако преоблада­
ющее применение имеют
асинхронные двигатели, со­
• Рабочий процесс
ставляющие основу совре­
трехфазного
менного электропривода. Об­
асинхронного
ласти применения асинхрон­
двигателя
ных двигателей весьма широ­
кие - от привода устройств
автоматики и бытовых элек­
до привода круп­
• Электромагнитный троприборов
ного горного оборудования
момент и рабочие (экскаваторов, дробилок, мель­
характеристики
ниц и т. п.). В соответствии с
асинхронного
этим мощность асинхронных
· двигателя
двигателей, выпускаемых элек­
тромашиностроительной про­
мышленностью,
сос-тавляет
диапазон от долей ватт до ты­
сяч киловатт при напряжении
• Опытное опреде•
пение параметров питающей сети от десятков
вольт до 10 кВ. Наибольшее
и расчет рабочих
применение
имеют трехфаз­
характеристик
ные асинхронные двигатели,
асинхронных
рассчитанные на работу от
двигателей
сети промышленной частоты
(50 Гц). Асинхронные двига­
тели специального примене­
ния изготовляются на повы­
шенные частоты переменного
135
•
Пуск и регулиро­
вание частоты
вращения трех­
фазных
асинхронных
двигателей
•
Однофазные
и конденсаторные
асинхронные
двигатели
•
Асинхронные
машины
специального
назначения
•
Основные типы
серийно
выпускаемых
асинхронных
двигателей
тока (200, 400 Гц и более).
Основное внимание в данном
разделе уделено изучению
трехфазных асинхронных дви­
гателей общего применения.
Но в конце раздела рассмот­
рены однофазные и конден­
саторные .(двухфазные) асин-­
хронные двигатели, а таюке
двигатели специального на­
значения - линейные, испол­
нительные и др.
. '
Режимы работы
и
- устройство
асинхронной
машины
Глава10•
§ 10.1. Режимы работы
асинхронной маwины
В соответствии с пршщипом обратим:ости элек­
трических машин (см. § В.2) асинхршrnые маunшы
мoryr работать как в двшательном, так и в генератор­
ном режимах. Кроме того, возможен еще и режим
· электромапnпного торможения противовюпочением.
Двигательный режим. Прmщип .действия
трехфазного асинхрошюго двигателя рассмотрен в
§ 6.2. При вкmочении обмотки статора в сеть трех­
фазного тока возникает вращающееся магнитное
поле, которое, сцепляясь с короткозамкнутой обмот­
кой ротора, наводит в ней ЭДС. При этом в стерж­
нях обмотки ротора появляются токи (см. рис. 6.4).
В результате взаимодействия этих токов с вращаю­
щимся магнитным полем на роторе возникают элек­
тромагнirrные силы. Совокупность этих сил создает
электромагнитный вращающий момент, под дейст­
вием которого ротор асинхронного двигателя при­
ходит во вращение с частотой п2 < п 1 в сторону вра­
щения поля статора. Если вал асинхронного
двигателя механически соединить с валом какого­
либо исполнительного механизма ИМ ( станка, подъ­
емного крана и т. п.), то вращающий момент двига­
теля М, преодолев противодействующий (нагрузоч­
ный) момент Мнагр исполнительноtо механизма,
приведет механизм во вращение. Следовательно,
электрическая мощность Р1 , пос'I)'Пающая в двига­
тель из сети, в основной своей части преобразуется в
механическую мощность Р2 и передается исполни­
тельному механизму ИМ(рис. 10.1, б).
Весьма важным параметром асинхронной ма­
шины является скольжение - величина, характери­
зующая разность частот вращения ротора и вра­
щающегося поля статора:
(10.1)
s=(n1 -п2 )/п1 •
Скольжение выражают в долях единицы либо 1!
процентах. В последнем случае величину, получен­
ную по (10.1), следует умножить на 100.
137
Вполне очевидно, что с увеличением нагрузочного момента на
валу ас:инхрошюго двигателя частота вращения ротора n2 ум еш,­
шается. Следоватеm,но�скольжение асинхронного двигателя зави­
сит от механической нагрузки на валу двигателя и может изме­
няться в диапазоне О < s � l.
При вкmочении асинхронного двигателя в сеть в начальш1й
момеm времени ротор под влиянием сил Шiерции неподвижен
----•
а)
8)
5)
-s
о
Ггнгроторный
ргЖU/"1
Д6vгательнь1и
ргжин
O<S<I
Рис. 10.1. Режимы работы асинхронной машины
(п2 = О). При этом скольжение s равно едиюще. В режиме работы
· двигателя без нагрузки на валу (режим холостого хода) ротор
вращается с частотой лишь немного меньшей синхронной частоты
вращения п 1 и скольжение весьма мало отличается от нуля ( s � О).
Скольжение, соответствующее НОМШiальной нагрузке двигателя,
называют номинальным скольжением S м• Для асШIХрош1ых дви­
гателей общего назначения Sном = 1+8%, при этом для двигателей
большой мощности Sном = 1%, а для двигателей малой мощности
Sном = 8%.
Преобразовав выражение (10.1), получим формулу для опре­
деления асШIХронной частоты вращения (об/МШI):
(10.2)
n2 =n1 (1-s) .
но
Пример 10.1. Трехфазный асинхронный двигатель с числом поmосов 2р = 4
работает от сети с частотой токаfi = 50 Гц. Определить частоl)' вращения двиrа138
теля приномЮ1альной нагрузке, если скольжение при этом составляет 6%.
Решен ие. Синхроннм частота вращеНWJ по (6.3)
п1 = /1 •60/р = 50·60/4 = 1500 об/мЮ1.
Номинальнм частота вращеНИJ1 по (10.2)
пно., = п1 (1-sно., ) = 1500(1-0,06) = 1412 об/мин.
Генераторный режим. Если обмотку статора вкmочить в
сеть, а ротор асинхроmюй машины посредством приводного дви­
гателя ПД (двщsатель внутреннего сгорания, турбина и т. п.}, яв­
ляющегося источником механическ.ой энергии, вращать в направ­
лении вращения магюпного поля статора с частотой п2 > n1, то
направление движения ротора относительно поля статора изме­
нится на обрапюе (по сравненmо с двигательным режимом работы
этой машины), так как ротор .будет о б г о н я т ь поле статора.
При этом скольжение станет отрицательным, а ЭДС, наведеIШая в
обмотке ротора, изменит свое направление. Электромагнитный
момент на роторе М также изменит свое направление, т. е. будет
направлен встречно вращающемуся магнитному поmо статора и
станет тормозящим по опюшенmо к вращающемуся моменту при­
водного двигателя М1 (рис. 10.1, а). В этом случае механическая
мощность приводного двигателя в основной своей части будет
преобразована в электрическую активную мощность Р2 перемен­
ного тока. Особенность работы асинхронного генератора состоит в
том, что вращающееся магнитное поле в нем создается реактивной
мощностью Q трехфазной сети, в которую вюпочен генератор и
куда он отдает вырабатьшаемую активную мощность Р2• Следова­
тельно, для работы асинхронного генератора необходим источник
переменного тока, при подкmочении к которому происходит воз­
буждение генератора, т. е. в нем возбуждается вращающееся маг­
нитное поле.
Скольжение асинхронной машины в генераторном режиме
. может изменяться в диапазоне - оо < s < О , т. е. оно может прини­
мать mобые отрицательные значения.
Режим торможения противовключением. Если у работаю­
щего трехфазного асинхронного двшателя поменять местами то­
бую пару подходящих к статору из сети присоединительных про­
водов, то вращающееся поле статора изменит направление
вращения на обрапюе. При этом ротор асинхронной машины под
действием сил инерции будет продолжать вращение в прежнем
направлении. Другими словами, ротор и поле статора асинхронной
машины будут вращаться в противоположных направлениях. В
- этих условиях электромагнитный момент машины, направленный
в сторону вращения поля статора, будет оказывать на ротор тор­
мозящее действие (рис. 10.1, в). Этот режим работы асинхронной
машины назьшается электромагнитным торможением проти­
вовключением. Активная мощность, поступающая из cern в машину
при этом режиме, частично затрачивается на компенсацmо механиче­
ской мощности вращающегося ротора, т. е. на его торможение.
139
В режиме электромагниrного торможения частота вращения
ротора является отрицательной, а поэтому скольжение приобрета­
ет положительные значения больше едиющы:
(10.3)
s = [п1 -(-п2 )]/п1 = (п1 + п2 )/п1 > 1.
Скольжение асинхронной машины в режиме торможения про­
тивовкточением может изменяться в диапазоне 1 <s < +оо, т. е.
оно может принимать mобые положительные значения больше
едиющы.
Обобщая изложенное о 'режимах работы асинхронной маши­
ны, можно сделать вывод: характерной особенностью работы
асинхронной машины является неравенство частот вращения маг­
нитного поля статора п 1 и ротора п2, т. е. наличие скольжения, так
как только в этом случае вращающееся магнитное поле наводит в
обмотке ротора ЭДС и на роторе возникает электромагнитный
момент. При этом каждому режиму работы асинхронной машины
соответствует определенный диапазон изменений скольжения, а
следовательно, и частоты вращения ротора.
Из рассмотренных режимов работы наибольшее практическое
применение получил двигательный режим асинхронной машины,
т. е. чаще используют асинхронные двигатели, которые составля­
ют основу современного электропривода, выгодно отличаясь от
других электродвигателей простотой конструкции и высокой на­
дежностью. Поэтому теорию асинхронных машин принято изла­
гать применительно к асинхршmым двигателям.
§ 10.2. Устройство асинхронных двигателей
Как уже отмечалось (см.§ 6.2), асинхронный двигатель состо­
ит из двух основных частей, разделенных воздушным зазором:
неподвижного статора и вращающегося ротора. Каждая из этих
частей имеет сердечник и обмотку. При этом обмотка статора
включается в сеть и является как бы первичной, а обмотка ротора -:­
вторичной, так как энергия в нее поступает из обмотки статора за
счет мапnпной связи между этими обмотками.
По своей конструкции асинхршrnые двигатели разделяются на
два вида: двигатели с короткозамкнуть1м ротором и двигатели с
фазным ротором. Рассмотрим устройство трехфазного асинхрон­
ного двигателя с короткозамкнутым ротором (рис. 10.2). Двига­
тели этого вида имеiот наиболее широкое применение.
Неподвижная часть двигателя - статор - состоит из корпуса
11 и сердечника 1О с трехфазной обмоткой (см. гл. 8). Корпус дви­
гателя отливают из алюминиевого сплава или из чугуна либо де­
лают сварным. Рассматриваемый двигатель имеет закрьпое обду­
ваемое исполнение. Поэтому поверхность его корпуса имеет ряд
продольных ребер, назначение которых состоит в том, чтобы уве­
личить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий ших­
тованную конструкцию: отштампова"!I1'1е листы из тонколистовой
140
электротеХIШЧеской стали толщиной обычно 0,5 мм покрьпы сло­
ем изоляционного лака, собраны в пакет и скреплены специаль­
нъrми скобами или продольными сварными швами по наружной
поверхности пакета. Такая конструкция сердечника способствует
значительному уменьшению вихревых токов, возникающих в
процессе перемагничивания сердечника вращающимся магнитнъ1м
Рис. 10.2. Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором:
1 - вал; 2, б - подшипники; 3, 7 - подшипниковые щиrы; 4 - коробка выво­
дов; 5 - венrилятор; 8 - кожух веиrИЛJ1тора; 9 - сердечюtК ротора с короткозамкнуrой обмоткой; 1 О - сердечюtК статора с обмоткой; 11 - корпус; 12 лапы
полем. На внутренней поверхности сердечника статора имеются
продольные пазы, в которых расположены пазовые части обмотки
статора (см. рис. 8.1 ), соединенные в определенном порядке лобо­
выми частями, находящимися за пределами сердечника по его
торцовым сторонам.
В расточке статора расположена вращающаяся часть двигате­
rui - ротор, состоящий из вала J и сердечника 9 с короткозамк­
нутой обмоткой. Такая обмотка, называемая «беличье колесо»,
представляет собой ряд металлических (атоминиевых ИJШ мед­
ных) стержней, расположенных в пазах сердечника ротора, замк141
нуrых с двух сторон короткозамыкающими кольцами (рис. 10.3, а).
Сердечник ротора также имеет шихтованную конструкцию, но
листы ротора не покрыты изоляционным лаком, а имеют на сво�й
поверхности тонкую менку окисла. Это является достаточной
изоляцией, ограничивающей вихревые токи, так как величина их
невелика из-за малой частоты перемагничивания сердечника рото-
Рис. 10.3. Короткозамкнутый ротор:
а - обмотка «беличья клетка», б - ротор с обмоткой, выпол­
неЮ1ой методом лиrья под давлением; J - вал; 2 - коротко­
замыкающие ко}JЬца; 3 - вентИЛJ1ционные лопатки
ра (см. § 12.1). Например, при частоте сети 50 Гц и ноМШiальном
скольжении 6% частота перемагничивания сердечника ротора со­
ставляет 3 Гц.
Короткозамкнутая об­
мотка ротора в большинстве
двигателей выполняется за­
ливкой собранного сердеч­
ника ротора расплавленным
алюмшmевым сплавом. При
этом одновременно со
у
стержнями обмотки отли­
ваются короткозамыкающие
кольца и вентиляциоюrые
лопатки (рис. 10.3, б).
Вал ротора вращается в
подшшrnиках качения 2 и 6,.
расположе1rnых в подшип­
Рис. 10.4. Расположение выводов об­ никовых щигах 3 и 7.
мотки статора (а) и положение пере­
Охлаждение двигателя
мычек при соединении обмотки стато­
осуществляется
методом об­
ра звездой и треугольником (б)
дува наружu:ой оребренной
поверхности корпуса. Поток
воздуха создается центробежным вентилятором 5, прикрытым ко­
жухом 8. На торцовой поверхности этого кожуха имеются отвер­
стия для забора воздуха. Двигаrели мощностью 15 кВт и более
помимо закрьпого делают еще и защищенного исполнения с внут­
ренней самовентиляцией. В подшипниковых щитах этих двигате­
лей имеются отверстия (жалюзи), через которые воздух посредст­
вом вентилятора прогоняется через внутреннюю полость
двигателя. При этом воздух «омывает» нагретые части (обмотки,
д
142
сердечники) двигателя и охлаждение получается более эффектив­
ным, чем при наружном обдуве.
К01щы обмоток фаз выводят на зажимы коробки выводов 4.
Обычно асШIХронные двигатели предназнач�ны для включения в
трехфазную сеть на два разных напряжения, отличающиеся в ✓3
раз. Например, двигатель рассчитан для включения в сеть на наа)
111
&1
Рис. 10.5. Принципиальные схемы вюпочения трех­
фазных асинхронных двигателей с короткозамкну­
тым (а) и фазным (6) ротором
пряжения 380/660 В. Если в сети шmейное напряжение 660 В, то
обмотку статора следует соединить звездой, а если 380 В, то тре­
угольником. В Qбоих случаях напряжение на обмотке каждой фа­
зы будет 380 В. Выводы обмоток фаз расnолагают на панели та­
ким образом, чтобы соедШiения обмоток фаз бьшо удобно
выполнять посредством перемычек, без перекрещивания послед­
них (рис. 10.4). В некоторых двигателях небольшой мощности в
коробке выводов имеется лишь три зажима. В этом случае двига­
тель может бьrrь вюпочен в сеть на одно напряжение (соединение
обмотки статора такого двигателя звездой или треугольником вы­
полнено внутри двигателя).
Монтаж двигателя в месте его установки осуществляется либо
посредством лап 12 (см. рис. 10.2), либо посредством фла�ща. В
последнем случае на подшипниковом щите (обычно со стороны
выступающего к01ща вала) делают фланец с отверстиями для кре­
пления двигателя на рабочей машине. Д11я предохранения обслу­
живающего персонала от возможного поражения электрическим
током двигатели снабжаются болтами заземления (не менее двух).
Пршщипиальная схема вюпочения в трехфазную сеть асШIХронно­
го двигателя с короткозамкнутым ротором показана на рис. 10.5, а.
Другая разновидность трехфазных асинхронных двигателей - ·
двигатели с фазным ротором - конструктивно отличается от
рассмотренного двигателя главным образом устройством ротора
(рис. 10.6). Статор этого двигателя также состоит из корпуса 3 и
.сердечника 4 с трехфазной обмоткой. У него имеются подшипни­
ковые щиты 2 и 6 с под1ШПIНИКами качения J и 7. К корпусу. 3
143
прикреrтены лаIП,I 10 и коробка вьmодов 9. Однако ротор имеет
более сложную конструкцию. На валу 8 закреплен шихтованный
сердечник 5 с трехфазной обмоткой, выполненной аналогично об­
мотке статора. Эrу обмотку соединяют звездой, а ее концы при­
соединяют к трем контактным кольцам 11, расположенным на ва­
лу и изолированным друг от друга и от вала. Для осуществления
электрического коН'Гакта с обмоткой вращающегося ротора на ка­
ждое контактное кольцо 1
(рис. 10.7) накладывают
обычно две щетки 2, распола-,
гаемые в щеткодержателях
3. Каждый щеткодержатель
снабжен пружинами, обес­
печивающими прижатие ще­
ток к контактному кольцу с
определенным усилием.
Асинхронные двигатели
с фазным ротором имеют
более сложную конструк - Рис. 10.7 Расположение щеткодержацию и менее надежны, но
телей
они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с корот­
козамкнутым ротором (см. гл. 15). Прmщшшалъная схема вклю­
чения в трехфазную сеть асинхроmюго двигателя с фазным рото­
ром показана на рис. 10.5, б. Обмотка ротора этого двигателя
соединена с пусковым реостатом ПР, создающим в цепи ротора
добавочное сопротивление Rдоб•
На корпусе асинхронного двигателя прикреrтена табличка, на
которой указаны тип двигателя, завод-изготовитель, год выпуска и
номинальные данные (полезная мощность, напряжение, ток, ко­
эффициент мощности, частота вращения и КПд).
Контрольные вопросы
1.
Z.
3.
4.
5.
6.
Что такое скольже1Ше асинхроююй машины?
Каков диапазон изменения скольжения асинхронной машины в различных
режимах ее работы?
С какой целью обмотку статора асинхронного генератора подкmочают к сети
трехфазного тока?
Каким образом асинхронный двигатель можно перевесrи в режим электро­
магнитного торможения?
Объисните конструкцию короткозамкнуrоrо и фазового роторов.
Трехфазный асинхроюп,1й двигатель предназначен для работы при напряже­
lШJIХ сети 220/380 В. Как следует соедиюпь обмотку статора этого двигателя
при напряжении сети 220 В и как - при напряжении 380 В?
Магнитная цепь
� асинхронной
машины
rпава 11 •
§ 11.1. Основные понятия
Магниrодвижущая CJllla обмотки статора созда­
ет магнитный поток, который замыкается через эле­
ме1пы магниrной системы машшn,1. Магнитную
систему асинхрошюй машины назьmают неявнопо­
люсной (рис. 11.1), так как она не имеет явно выра­
женных магнитных поmосов (сравните с рис. 20.1).
Количество магнитных поmосов в неявнопоmосной
магниrной системе определяется числом поmосов в
обмотке, возбуждающей магнитное поле, в данном
случае в обмотке статора. Магнитная система маши­
ны, состоящая из сердечников статора и ротора,
представляет собой разветвленную симметричную
магнитную цепь. Например, магнитная система че­
тырехпоmосной машшn,1 состоит из четырех одина­
ковых ветвей, в каждой из которых замыкается по­
ловина магнитного потока одного поmоса (рис.
11.1). В двухпоmосной машине таких ветвей две, в
шестипоmосной - шесть и т. д. Каждая из таких
ветвей образует неразветвленную магнитную цепь,
которая и является предметом расчета. На рис. 11.2
представлена магниrная цепь неявнопоmосной ма­
шины. Здесь видны участки магнитной цепи: воз­
душный зазор о, зубцовый слой статора hz1 , зубцо­
вый слой ротора hz2, cmmкa ротора Lc2 , спинка
статора Lc1 • Замыкаясь в магнитной цепи, магнитный
поток проходит воздушный зазор и зубцовые слои
статора и ротора дважды.
Каждый из перечислеш1ых участков оказывает
магниrному потоку некоторое магнитное сопротив­
ление. Поэтому на каждом участке магниrной цепи
затрачивается часть МДС обмотки статора, назы­
ваемая магнитным напряжением:
L F = 2F5 + 2.F,. 1 + 2.F,. 2 + Fc\ + �2 ,
( 11.1)
где I F - МДС обмотки статора на пару полюсов в
режиме х.х., А; Fa, Fz 1, Fz2, Fc1 и Fc2 - магнитные
напряжения соответственно воздушного зазора, зуб­
цовьrх слоев статора и ротора, спинки статора и ро­
тора, А.
146
Таким образом, расчет МДС обмотки статора на пару поmосов
сводиrся к расчеrу магнитных напряжений на всех участках маг­
нигной цепи.
Полученное в результате расчета магнитной цепи значение
МДС на пару поmосов L F позволяет определить намагничиваю­
щий ток (основную гармонику) обмотки статора:
Рис. 11.1. Магнитное поле четырех­
поmосной асинхронной машины
Рис. 11.2. Магнитная цепь асин­
хронной машины
1. =
PLF
(11.2)
0;9m1 W1 koбl
Исходным параметром при расчете магнитной цепи асин­
хронного двигателя является максимальная магнигная индукция в
воздушном зазоре Bf>. Величину Bf> пршmмают по рекомендуемым
значениям в зависимости от наружного диаметра сердечника ста­
тора D1 нар и числа пошосов 2р. Например, при D1 нар = 300+800 мм
рекомендуемые значения Bf> = 0,80+1,1 Тл соответственно. При
этом для двигателей с большим 2р принимают большие значения Bf>.
,
Магнигная индукция. Bf> определяет магниrную нагрузку дви, гателя: при слшпком малом Bf> магнигная система двигателя не­
догружена, а поэтому габаригные размеры двигателя получаются
неоправданно большими; если же задаться чрезмерно большим
значением Bf>, то резко возрасrут магнигные напряжения на участ­
ках магнитной системы, особешю в зубцовых слоях статора и ро­
тора, в результате возрастет намагничивающий ток статора 11 µ и
снизигся КПД двигателя (см. § 13 .1).
Для изготовления сердечников статора и ротора асинхрон­
ных двигателей обычно применяют холоднокатаные изотроп­
ные листовые электротехнические стали, обладающие одинако­
вой магнитной проводимостью вдоль и поперек проката листов
(табл 11.1).
µ
147
Таб л ица 11.l
Марка
стали
2013
2312
2411
Краткая характеристика
Холоднокатаная ИЗО1J)ОШ1ая,
содержащая до 0,4 % кремЮU1
Холоднокатаная ИЗО1J)ОШ1ая,
содержащая 1,8-2,8 % кремЮUI
Холоднокатаная ИЗО1J)ОШ1ая,
содержащая 2,8-3,8 % кремЮU1
Область применеЮUI
Двиrатели мощносrью до 60--90 кВт, напряжением до 660 В
Двигатели мощностью 100--400 кВт, напряжением до 660 В
Двигатели мощносrью свьШJе
400 кВт, напряжением 6 юm 1 О кВ
§ 11.2. Расчет маrнитной цепи
асинхронноrо двиrателя
Расчет магнитной цепи электрической машины состоит .в ос­
новном в определении магнитных напряжений для всех ее участ­
ков. Магнитное напряжение Fx для mобого участка магнитной це­
пи равно произведеншо напряженности поля на этом участке Нх на
его длину lx,
Fx = Hix •
(11.3)
Участки магнитной цепи различаются конфшурацией, разме­
рами и материалом. Наибольшее магнитное напряжение в воздуш­
ном зазоре Напряженность магнитного поля в воздушном зазоре
7
Н6 = В6 /µ 0 , тде µ 0 = 4п/10- Гн/м. Расчетная длина зазора
16 = ok6 , где k6 - коэффициент воздушного зазора, учитывающий
увеличение магнитного· сопротивления зазора, вызваmюе зубчато­
стью поверхностей статора и ротора, ограJШЧИВающих воздушный
зазор в асинхронном двигателе (k6 > 1). Учитывая это, получим вы­
ражение магнитного напряжения воздушного зазора (А):
Fr, = 0,8Ввоk6103 ,
(11.4)
где о - значение одностороннего воздушноrо зазора, мм.
Обычно магнитное напряжение двух воздушных зазоров, вхо­
дящих в расчетную часть магнитной цепи асинхронного двигателя
(рис. 11.2), составляет 70-85% от суммарной МДС на пару полю­
сов L F . Из этого следует, насколько значительно влияние вели ­
чш1ы воздушного зазора о на свойства двигателя. С увеличением о
. МДС L F значительно возрастает, что ведет к увеличению намаг­
ничивающего тока статора_!� [см. (11.2)]; а следовательно, ведет к
росту потерь и снижению К.l IД двигателя. И наоборот, с уменьше­
нием о уменьшается IF, что ведет к росту КПД, т. е. двигатель
становится более экономичньrм в эксплуатации. Однако при
слишком малых зазорах о усложняется изготовление двигателя (он
становится менее технологичньrм), так как требует более высокой
точности при обработке деталей и сборке двигателя. При этом
снижается надежность двигателя. Объясняется это тем, что при
о.
148
очень малых зазорах б возрастает вероятность возникновения не­
равномерносm зазора и, как следствие, вероятность задевания ро­
тора о статор.
Кроме воздушного зазора все остальные участки магнитной
цепи двигателя вьmолнены из ста.тш (зубцовые слои статора hz 1 и
ротора hz2, спинки статора Lc 1 и ротора Lc2). Непосредственнь1й
расчет магmпных напряжений для
этих участков затруднен, так как из-за
магнитного насьпцения ста.тш между
напряженностью магнитного поля Нх
и магнитной индукцией Вх нет прямой 0,75
пропорциональности. Поэтому для 0,5
определения напряженности Нх по
полученному значеmпо магнитной О,25
индукции Вх необходимо пользоваться
о-__.,_..._.....,_
.......__
0,25 0,5 0,75 1,0
Е F*
таблицами намагничивания Н = f(B)
для данной марJЧI электротехничес­ Рис. 11.3. Магнитная харак­
кой стали.
теристика асинхронной ма­
Асинхронные двигатели проек­
ш1щы
тируют таким образом, чтобы их'
магнитная система была магнитно насыщена. На рис. 11.3
, представлена магнитная характеристика асинхронного двигате­
ля Ф. =JC'[,F.) , представляющая собой зависимость относи­
тельного значения основного магнитного потока Ф. = Ф/Ф ном
от относительного значения МД С L,F. = IF/IFнoм . Здесь Фном
и L Fном -номинальные значения основного магнитного потока и
МДС обмотки статора в режиме холостого хода, соответствующие
заданному значению магнитной индукции В0• Магнитная характе­
ристика в начальной части прямолинейна, а затем, когда в магнит­
ной системе наступает магнитное насьпцение, она искривляется.
Степень насьпцения магнитной цепи машины количествеюю
хараю:еризуется коэффициентом магнитного насыщения, кото­
рый может быть определен по магнитной характеристике сле­
дующим образом. Из начала координат проводим прямую - каса­
тельную к маrnитной характеристике - • до пересечения с
отрезком Ьа в точке с (рис. 11.3). Коэффициент магнитного насы­
щения определяется как оmошение отрезка Ьа, представляющего
собой полную МДС ( LF. = 1 ), к отрезку Ьс, представляю щему
собой магнитное напряжение удвоенного воздушного зазора
( 2Рв. = 2Рв /I Fном ):
kµ = Ьа/ Ьс = 1/(2F's•).
( 11.5)
Обычно для асинхронных машин kµ = 1,2+1,5.
Пример 11.1. Воздушный зазор ч�ех:Фазноrо асинхроююrо двшателя о = 0,5 мм,
максимальное значение магниrной иццукции В0 = 0,9 Тл. Обмотка статора четы­
рехпоmосная, число последовательно соединенных витков в обмотке одной фазы
w1 = 130, обмоточный коэффициенr k00 1 = 0,91. Определить значение намапшчи149
ваюiцеrо тока обмотки craropa 111,1, если коэффициеш воздушноrо зазора k6 = 1,38,
а коэффициеш маmиrноrо насьпцения kµ = 1,4.
Реше н и е. Маrниrное напряжение воздушноrо зазора по (l l.4)
F6 = О,8В11Бk11 ·103 = 0,8-0,9·0,S·l,38·103 =497 А.
Так как коэффициеш малnпноrо насыщения k" ="I,F,ю,./(2Fi,) , то МДС
обмотки
сrатора в режиме х.х. на пару поmосов
.
I;FIIOM = 2F5k1,1 = 2-497•1,4 = 1392 А.
Намагничивающий ток �атора по (11.2)
/11,1 = pI;F,ю,./(0,9m1 w1 k001 )= 2·1392/(0,9·3·130·0,91)= 8,7 А.
Если воздушный зазор данноrо двиrателя увеличиrь на 20%, т. е. принять
Б = 0,6 мм (при прочих неизме1шых условиях), то намаrничивающий ток статора
станет равным 11µ = 10,4 А , т. е. он возрастет пропорционально увеличению воздушноrо зазора.
§ 11.3. Магнитные потоки рассеяния
асинхронной маwины
Помимо основного (главного) мапштноrо потока Ф, который
сцепляется с обмотками статора и ротора (рис. 11.4), в асинхрон­
ной машине имеется еще два магнитных потока, назьmаемьrх по­
токами рассеяния: магнитный поток рассеяния. статора Ф01 и
магнитный поток рассеяния. ротора Ф02• Каждый из этих потоков
рассеяния сцепляется лишь с собственной обмоткой и наводит в
ней ЭДС рассеяния: в обмотке статора Е01, в обмотке ротора Е02•
Наличие маrнитньrх потоков рассеяния обусловливает индук­
тивности рассеяния в обмотке статора L01 и в обмотке ротора La2, а
следовательно, и индуктивные сопротивления, называемые шщук­
тивными сопротивлениями рассеяния: х1 = m 1 L01 - индуктивное
сопротивление рассеяния. обмотки статора; х2 = m 2 L02 - ин­
дуктивное сопротивление рассеяния. обмотки ротора. Здесь ro 1 и
ro2 - угловые частоты токов в обмотках статора и ротора.
Индуктивное сопротивление рассеяния обмотки статора (Ом)
8
Здесь
Х1 =l,58·10- f./;1W:лi/(pq1).
(11.6)
(11.7)
- коэффициент магнитной проводимости рассеяния обмотки ста­
тора; лп1, лд1 и Ал� - коэффициенты магнитной проводимости па­
зового, дифференциального и лобового рассеяния статора.
Индуктивное сопротивление рассеяния обмотки ротора опре­
деляется выражениями, зависящими от типа обмотки ротора. Для
короткозамкнутой обмотки при неподвижном роторе (Ом)
9
(11.8)
Х2 = 7,9·10- /il;2 Л 2 .
Здесь
(11.9)
150
-. коэффициенr магнигной проводимости рассеяния коротко­
замкнутой обмотки ротора: лп2, лд2, Лкл и Лек - коэффициенты
магнигной проводимости рассеяния пазового, диффереициально­
го, короткозамыкающих колец и скоса пазов короткозамкнутого
ротора.
Если же ротор фазный и его обмотка вьmолнена по пmу об­
мотки статора, то индуктивное сопротивление (Ом) рассеяния этой
обмотки х2Ф при неподвижном роторе (s = 1) определяется выраже­
нием, аналогичным (11.6);
(11.10) ·
Х2 = 1,58·10-s J;(2w:л 2Ф /(pq2 ),
где
(11.11 )
Ф6z
Рис. 11.4. Магнитные потоки рассеяния асинхронной машины
В выражениях (11.6) и (11. 10) расчеmая длина сердечников стато­
ра lн и ротора 1,1 - в миллиметрах.
Для расчета коэффициентов магнитной проводимости поль­
зуются выражениями, приводимыми в руководствах по расчету
электрических машин, например в [5] или [15].
§ 11.4. Роль зубцов сердечника
в наведении ЭДС и создании
электромагнитного момента
Как извесmо, поверхности сердечников статора и ротора со­
стоят из зубцов и пазов, при этом пазовые стороны обмоток рас­
положены в пазах, где магнитная индукция намного меньше, чем в
зубцах. Однако условия наведения ЭДС в обмотке не меняются и
остаются такими же, как если бы пазовые стороны обмотки бьmи
расположены на гладкой поверхности сердечника. Объясняется
это свойством непрерывности магнитных линий. Согласно этому
.свойству, магниmые линии вращающегося магнитного поля пере­
ходят из одного зубца в другой и пересекают пазовые проводники
обмотки, лежащие в пазах между зубцами, наводя в них ЭДС.
Интересно отметить, что электромагнитная сила, возникаю151
щая при взаимодействии тока в проводе, лежащем в пазу сердеч­
ника, с внешним магнитным полем, приложена главным образом
не к проводу, а к зубцам, образующим стенки паза. Это явление
переноса механических сил с проводов на зубцы объясняется воз­
никновением по н д е р о м о т о р н ы х с и л, которые появляются
в магнитном поле на гра­
i =O
6}
а)
нице раздела двух сред с
разной магнитной про­
ницаемостью и всегда
F.
направлены от среды с
большей магнитной про­
ницаемостью к среде с
меньшей магнитной про­
ницаемостью (в рассмат­
риваемом случае из зуб­
ца в паз).
Рис. 11.5 Электромаrнитm.Iе силы на зуб­
Для пояснения этого
явления рассмотрим два
цах ротора
зубца с напряженностью
поля Но в каждом и отно­
сительной магнитной проницаемостью µr и паз между этими зуб­
цами высотой hz и длиной l;. При gтсутствии тока в проводнике
пондеромоторные силы
(11.12)
Fi = F; �0,5µ0 (µr -l)HJ/Л,
а результирующая пондеромоторная сила Fn = F; - Fi = О (рис:
11.5, а).
С появлением тока i в fIJ)оводнике напряженность Н1 поля в
левой стенке паза уменьшится, а напряженность Н2 в правой уве­
личится (рис. 11.5, 6):
(11.13)
где
,
(11.14)
- напряженность поля от тока i.
В этом случае с учетом (11.13) и (11.14) результирующая пон­
деромоторная сила (Н), действующая на стенку правого зубца,
� = F;-F; �0,5µo(µr -l)l;hz [(H0 +Н)2 -(Н0 -Н) 2 ]=
· (11.15)
= 2µ0 (µr -l)H0 Нl;hz = µ0 (µr -l)H0l;i.
Сила (Н), действующая непосредственно на проводник в пазу,_
(11.16)
�P �µ0 Hof;i,
т. е. она в µr -1 раз меньше силы, действующей на зубец сердечника.
При реальных значениях магнитной индукции в зубцах сер­
дечника сила, действующая на зубец Fn, в 50--100 раз больше си­
лы, действующей на проводник, расположенный в пазу Fпр•
'
152
Контрольнь1е вопросы
1.
2.
3.
Из каких участков состоиr мarIOПIOIJI цепь асинхроююй машш1ы?
Какова цель расчета магнитной цепи асинхроююй машины?
Как влияет выбор значеНИJ1 маrюпной шщукции в воздушном зазоре на
свойства асШIХронноrо двиrаrеля?
. 4. Какие марки листовых электротехнических сталей применяют в асинхронных двиrаrелях?
5. Что учиrывает козффшtИент воздушного зазора?
6. Как определить козффшtИент маrниrноrо насыщения?
7. Чем обусловлены шщухrивные сопротивления рассеяния обмоток статора и
ротора асинхронного двиtателя?
8. Почему злектромаrниrные силь1 в асинхронном двиппеле приложены глав­
ным образом к зубцам сердечЮIК8, а не к �оводам обмотки?
глава 12• Рабочий процесс
- трехфазного
асинхронного
двигателя
§ 12.1. Уравнения напряжений
асинхронноrо двиrателя
_ Как следует из прmщипа действия асинхроююrо
двигателя (см.§ 6.2), обмотка ротора не имеет элек­
трической связи с обмоткой статора. Между этими
обмотками существует только магнитная связь, и
энерrия из обмотки статора передается в обмотку
ротора магнитным полем. В этом отношении асин­
хронная маШШiа аналогична трансформатору: об­
мотка статора является первичной, а обмотка ротора вторичной.
В процессе работы асинхронноrо двигателя токи
в обмотках статора и ротора создают две маrнито­
движущие силы; МДС статора и МДС ротора. Со­
вместным действием эти МДС наводят в магнитной
системе двигателя результирующий маrнитный по­
ток, вращающийся относительно статора с синхрон­
ной частотой вращения п 1 • Так же как и в трансфор­
маторе, этот маrнитный поток можно рассматривать
состоящим из основного потока Ф, сцепленноrо как
с обмоткой статора, так и с обмоткой ротора (маг­
нитный поток взаимоиндукции), и двух потоков рас­
сеяния: Фа1 - потока рассеяния обмотки статора и
Ф02 -потока рассеяния обмотки ротора (см.§ 11.3).
Рассмотрим:, какие ЭДС наводят указанные потоки в
обмотках двигателя.
Электродвижущие силы, наводимые в об­
мотке статора. Основной маrнитный поток Ф, вра­
щающийся с частотой п1 , наводит в неподвижной
обмотке статора ЭДС Е1 , значение которой опреде­
ляется выражением [см. (7.20)] Е1 = 4,44J;Фw1 k061 •
Магнитный поток рассеяния Ф01 наводит в об­
мотке статора ЭДС рассеяния, значение которой оп­
ределяется ондуктивным падением напряжения в
обмотке статора:
(12.1)
Ё0, =-Д1х1 ,
где х1 - индуктивное сопротивление рассеяния фазной обмотки статора [см. (11.6)], Ом.
154
Для цепи обмотки статора асинхронного двигателя, вюпочен­
ной в сеть с напряжением U1 , заrшшем уравнение напряжений по
второму закону Кирхгофа:
(12.2)
где i1 1j - падение напряжения в активном сопротивлении обмотки статора r1 •
После переноса ЭДС Ё1 и Ёа1 в правую часть уравнения
(12.2) с учетом (12.1) получим уравнение напряжений обмотки
статора асШIХронного двигателя:
и\ =(-Ё,)+ ji x, +i r,
1
1
(12.3)
Сравнив полученное уравнение с уравнением (1.13), видим,
что оно не отличается от уравнения напряжений для первичной
цепи трансформатора.
Электродвижущие силы, наводимые в обмотке ротора. В
процессе работь1 асинхронного двигателя ротор вращается в сто­
рону вращения поля статора с частотой п2• Поэтому частота вра­
щения подя статора относительно ротора равна разности частот
вращения (п 1 - п 2). Основной магнитный поток Ф, обгоняя ротор с
частотой вращения ns = ( п1 - п2 ) , шщуцирует в обмотке ротора.
ЭДС
(12.4)
.где h - частота ЭДС E2s в роторе, Гц; w2 - число последователь­
но соединенных витков одной фазы обмотки ротора; k062 - обмо­
точный коэффициент обмотки ротора.
Частота ЭДС (тока) в обмотке вращающегося ротора пропор­
циональна частоте вращения магниrного поля относительно ротора ns = n1 -n2, назьmаемой частотой скольжения:
/2 = pn.f60 = р(п1 - п2)/60 ,
или
р(п1 -n2 ) п, _ рп1 п1 -п2 _ *
(12.5)
f2 _
-Jls,
·
60
п, 60 ·.п1
т. е. частота ЭДС (тока) ротора пропорционш,ьна скольжению,
Для асШIХронных двигателей общепромышлешюго назначения эта
частота обычно невелика и приfi = 50 Гц не превышает несколь.:
ких герц, так при s = 5% частотаh = 50·0,05 = 2,5 Гц.
Подставив (12.5) в (12.4), получим
(12.6)
Здесь Е2 - ЭДС, наведенная в обмотке ротора при скольже­
нии s = 1, т. е. при неподвижном роторе, В.
Поток рассеяния ротора Фа2 индуцирует в обмотке ротора
ЭДС рассеяния, значение которой определяется индуктивным па­
дением напряжения в этой обмотке:
155
(12.7)
Е,а2 =-д2Х2S,
где х2 - индуктивное сопротивление рассеяния обмотки ротора
при неподвижном роторе [см. (11.8)], Ом.
Обмотка ротора асинхрошюrо двигателя электрически не свя­
зана с вне1Ш1ей сетью и к ней не подводится напряжение. Ток в
этой обмотке появляется искmочителъно за счет ЭДС, наведешюй
основным магнитным потоком Ф. Поэтому уравнение напряжений
для цепи ротора асинхронного двигателя по второму закону
Кирхгофа имеет вид
Ё2s + Ёа2 = i2r2 •
где r2 - активное сопротивление обмотки ротора.
С учетом (12.6)и (12.7) получим
(12.8)
· Ё2s - Д2х2s - i2r2 =О.
Разделив все слагаемые равенства (12.8) на s, получим
(12.9)
· Ё2 - Д2х2 - i2 r2 /s = О
- уравнение напряжений для обмотки ротора.
§ 12.2. Уравнения МДС и токов
асинхронноrо двиrателя
Основной магнитный поток Ф в асинхронном двигателе
создается совместным действием МДС обмоток статора F1 и
ротора F2:
(12.10 )
где Rм - магнитное сопротивление магнитной цепи двигателя по­
току Ф; F0 - результирующая МДС двигателя, численно равная
МДС обмотки статора в режиме х.х. [см. (9.16)]:
(12.11)
F0 = 0,45щ/0 w1 k001 /р;
/0 - ток х.х. в обмотке статора, А.
МДС обмоток статора и ротора на один лотос в режиме на­
груженного двигателя
. · f; = 0,45т1 /1 w1 k061 /р ;
(12.2)
F2 = 0,45m2/2w2 k002/ р, ·
где т2 - число фаз в обмотке ротора; k002 - обмоточный коэффи­
циеш обмотки ротора.
При изменениях нагрузки на валу двигателя меняются токи в
·статоре /1 и роторе /2• Но основной магнитный поток Ф при этом
сохраняется неизменным, так как напряжение, подведенное к об­
мотке статора, неизменно (U1 = const) и почти полностью уравно­
вешивается ЭДС Е1 обмотки статора [см. (12.3)]:
(12.13)
И1 r::.(-Ё1 ).
156
Так как ЭДС Е, пропорциональна основному магmпному по­
току Ф [см. (7.20)], то последний при изменениях нагрузки остает­
ся неизмеЮПdМ. Этим и объясняется то, что, несмотря на измене­
� �С f, и F2, результирующая МДС остается неизменной, т. е.
F0 = F; + F;, = const.
Подставив вместо F0, F, и F2 их значения по (12.11) и (12.12),
получим
0,45m)0w1 k061 / р = 0,45m),w, k061 /р +0,4517½j2w2 k002 /p.
Разделив это равенство на "'1 w1k06 1 /р, определим уравнение
токов асинхронного двигателя:
(12.14)
где
i2 = j2 m2
2koб2
(12.15)
m1W1koбl
- ток ротора, приведенный к обмотке статора.
Преобразовав уравнение (12.14), получим уравнение токов
статора асинхронного двигателя
(12.16)
, i1 = i0 +(-i2),
W
из которого следует, чrо ток статора в. асинхронном двигателе j1
.
имеет две составляющие: /0 - намагничивающую (почти постоянную) составляющую ( /0 � /1µ ) и - i2 -переменную состав­
ляющую, компенсирующую МДС ротора.
Следовательно, ток ротора /2 оказьmает на магнитную систему
двигателя такое же размагничивающее влияние, как и ток вторич­
ной обмотки трансформатора (см. § 1.5). Таким образом, mобое
изменение механической нагрузки на валу двшателя сопровожда­
ется соответствующим изменением тока в обмотке · статора / 1 , так
как изменение этой нагрузки двшателя вызьmает изменение
скольжения s. Это, в свою очередь, влияет на ЭДС обмотки ротора
[см. (12.6)], а следовательно, и на ток ротора /2• Но так как этот ток
оказьmает размагничивающее действие на магнитную систему
двшателя, то его изменения вызьmают соответствующие измене­
ния тока в обмотке статора / 1 за счет составляющей -/2. Так, в
режиме холостого хода, когда нагрузка на валу двигателя отсутст­
вует и s � О , ток /2 � О . В этом случае ток в обмотке статора
j, � j0• Если же ротор двшателя затормозить, не откmочая обмот­
ки статора от сети (режим короткого замыкания), то скольжение
s = 1 и ЭДС обмотки ротора Е2,; достигает своего наибольшего
значения Е2• Также наибольшего значения достигнет ток /2, а сле­
довательно, и ток в обмотке статора /1 •
157
§ 12.3. Приведение параметров обмотки
ротора и векторная диаrрамма
асинхронноrо двиrателя
Чтобы векторы ЭДС, напряжений и токов обмоток статора и
ротора можно бьmо изобразиrь на одной векторной диаграмме,
следует параметры обмотки ротора привести к обмотке стато­
ра, т. е. обмотку ротора с числом фаз т2, обмоточным коэффJЩИ­
еmом k062 и числом витков одной фазной обмотки w2 замеюпь об­
моткой с т1, W1 и koбt• При этом мощности и фазовые сдвиги
векторов ЭДС и токов ротора после приведения должны остаться
такими же, что и до приведения. Пересчет реальных параметров
обмотки ротора 1;1а приведе:нны:е вьmолняется по формулам, анало­
гичным формулам приведения параметров вторичной обмотки
трансформатора (см. § 1.6).
При s = 1 приведенная ЭДС ротора
E2=E2ke ,
(12.17)
где ke = Е1 /Е2 =k061 w1 /(k062 w 2 ) - коэффJЩИент трансформации
напряжения в асинхронной машине при неподвижном роторе.
Приведешп,ш ток ротора
(12.18)
где k; = m1w1 k061 /(m2w 2k06 2 )= m1 ke / т2 - коэффJЩИеlП трансфор­
мации тока асинхрошюй машины.
В отличие от трансформаторов в асинхронных двигателях ко­
эфф1ЩИенть1 трансформации напряжения и тока не равны
( ke :1:- k; ). Объясняется это тем, что число фаз в обмотк!iх статора и
ротора в общем случае не одинаково ( m1 :1:- т2 ). ЛШпъ в двигателях
с фазным ротором, у которых m1 = т2, эти коэффJЩИенты равны.
Активное и индуктивное приведешп,1е сопротивления обмотки
ротора:
r2 = rz ke k;;
(12.19)
X1,=X2ke ki .
Следует обратиrь внимание на некоторую специфику опреде­
ления числа фаз m2 и числа витков w2 для короткозамкнугой об­
мотки ротора (см. рис. 10.3). КаждьIЙ стержень этой обмотки рас­
сматривают как одну фазу, а поэтому число витков одной фазы
короткозамкнутой обмотки ротора w2 = 0,5 ; обмоточный коэффи­
циенr такой обмотки k00 2 = 1, а число фаз т 2 = Z2, т. е. равно числу
стержней в короткозамкнугой обмотке ротора.
Подставив в (12.9) приведе:нны:е значения параметро'в обмотки
ротора Е2, /2, r2 и х2, получим уравнение напряжений обмотки
ротора в приведенном виде:
Ё'2 -1'i2'x'2 -l·'r.'/s-0
2 2
- •
158
(12.20)
Величину r1,/s можно представигь в виде
r2 r2s + , = , , 1- s
r2 =--r2 r2 +r2 --,
(12.21)
s s s
s
тогда уравнение ЭДС дJl!l цепи ротора в приведенных параметрах
примет вид
О= Ё2 - ji2x2 -i2r2- i2 r2(1-s)/s.
Для асинхронного двига­
теля (так же как и для транс­
li.
форматора) можно построиrъ
векторную диаграмму. Осно­
i,z,
ванием для построения этой
-t,
диаграммы являются уравне­
ние токов (12.14) и уравнения
напряжений обмоток статора
(12.3) и ротора (12.22).
Угол сдвига фаз между
ЭДС Ё2 и током i2
(12.22)
\Jl 2 = arctg(x2s/rn.
Так как векторную диа­
грамму асинхронного двига­
теля строят по уравнениям
напряжений и токов, анало­
гичным уравнениям транс­
форматора, то порядок по­
Рис. 12.1. Векторная диаграмма
строения этой диаграммы та­
асинхронного двигателя
кой же, что и векторной диа­
граммы трансформатора ( см.
§ 1.7).
На рис. 12.1 представлена векторная диаграмма асинхронного
двигателя. От векторной диаграммы трансформатора (см. рис.
1.19) она отличается тем, что сумма падений напряжения в обмотке ротора (во вторичной обмотке) уравновешивается ЭДС Ё2 об­
мотки неподвижного ротора (п2 = О), так как обмотка ротора замк­
нуга
накоротко.
Однако
если
падение
напряжеIШЯ
ОА = i2r2 (1- s)/s рассматривать как напряжение на некоторой
активной нагрузке r2(1-s)/s, подкточенной на зажимы непод­
вижного ротора, то векторную диаграмму асинхронного двигателя
можно рассматривать как векторную диаграмму трансформатора,
на зажимы вторичной обмотки которого подключено переменное
активное сопротивление r2 (1- s)/s. Иначе говоря, асинхронный
двигатель в электрическом отношении подобен трансформато­
ру, работающему на чисто активную нагрузку. Активная мощ­
ность вторичной обмотки такого трансформатора
159
(12.23)
представляет собой полную механическую мощность, развивае­
мую асинхро1mым двигателем.
Уравнениям напряжений и токов, а также векторной диаграм­
ме асинхронного двигателя соответствует электрическая схема
замещения асинхронного двигателя.
На рис. 12.2, а
представлена Т-образ­
ная схема замещения.
и,
Магнитная связь обмо­
ток статора и ротора в
асинхроююм двигателе
6)
на схеме замещения
заменена электрической
связью цепей статора и
ротора. АI<тивное со­
.Z'.m
и,
противление r2 (1- s )/s
можно рассматривац,
как внешнее сопротивРис. 12.2. Схемы замещения асинхронного ление, включенное в
двигателя
обмотку неподвижного
.ротора. В этом случае
асинхршmый двигатель аналогичен трансформатору, работающе­
му на активную нагрузку. Сопротивление r2 (1-s)/s - единст­
ве1mый переменный параметр схемы. Значение этого сопротивле­
ния определяется скольжением, а следовательно, механической
нагрузкой на валу двигателя.. Так, если нагрузочный момеm на
валу двшателя М2 = О, то скольжение s � О . При этом
r2 (1- s )/s = оо , что соответствует работе двигателя в режиме х.х.
Если же нагрузочный момеm на валу двшателя превышает его
вращающий момеm, то ротор останавливается (s = 1). При этом
r2 (1- s )/s = О , что соответствует режиму к.з. асинхронного дви­
гателя.
Более удобной для практического применения является Г-об­
разная схема замещения (рис. 12.2, б), у которой намагничиваю­
щий коmур ( zm = rm + Jxm ) вынесен на входные зажимы схемы
замещения. Чтобы при этом намагничивающий ток /0 не изменил
своего значения, в этот коmур последовательно включают сопро­
тивления обмотки статора r 1 и х 1• ПолучеШiая таким образом схе­
ма удобна тем, что она состоит из двух параллельно соедине1шых
котуров: намагничивающего с током i0 и рабочего с током -.i� .
Расчет параметров рабочего котура Г-образной схемы заме­
щения требует уточнения, что достигается введением в расчетные
формулы коэффициента с1 (рис. 12.2, б), представляющего собой
отношение напряжения сети И1 к ЭДС статора Е1 при идеальном
холостом ходе (s = О) [1]. Так как в этом режиме ток холостого
QJ
160
r.
хода асинхрошюго двигателя весьма мал, то U1 оказьmается лишь
немногим болыце, чем ЭДС Е1 , а их отношеIШе с1 = U 1/ Е1 мало
отличается от едишщы. Для двшателей мощностью 3 кВт и более
с 1 = 1,05+ 1,02, поэтому с целью облегчения анализа выражеIШЙ,
характеризующих свойства асинхронных двшателей и упрощения
практических ·расчетов, примем с1 = 1. Возникшие при этом не­
точности не превысят значеIШЙ, допустимых при теХIШЧеских
расчетах. Например, при расчете тока ротора 12 эта ошибка соста, вит от 2 до 5 % (меньшие значения относятся к двшателям большей мощности).
Воспользовавшись Г-образной схемой замещения и приняв
с1 = 1, запишем выражеIШе тока в рабочем копrуре:
/'2
И1
✓
- [r1 +r2 +r2 (1-s)/s]2 +(х1 +х2)2 '
или с учетом (12.21) получим
(12.24)
ul
,
(12.25)
- ('i +r;/s)2 +(х 1 +х�)2
Знаменатель выражения (12.25) представляет собой· полное
сопротивлен;ие рабочего копrура Г-образной схемы замещения
асинхронного двшателя.
f'2
✓
Контрольные вопросы
1. В чем сходсrво и в чем различие между асШ1ХрОнным двшателем и lр&нсформатором?
2. Почему с увеличением механической наrрузки на вал асШ1ХрОнноrо двшателя возрастает поч>ебляемая из сети двm-ате11ем мощность?
3. Каков порядок ПОСlрОеЮIЯ векrорной диаrраммы двшателя?
4. В чем отличие Г-образноif схемы замещеЮIЯ от Т-образной?
:=z» Эпектромаrнитный
момент и рабочие
Гпава 13•
Ct:
1
характеристики
асинхронного
двиrатепя
§ 13.1. Потери и КПД
асинхронноrо двиrателя
Преобразование электрической энергии в меха­
ническую в асШIХрошюм двшателе, как и в других
электрических машш-1ах, связано с потерями энер­
гии, поэтому полезная мощность на выходе двшате­
ля Р2 всегда меньше мощности на входе (потребляе­
мой мощности) Р1 на веЛИЧШI)' потерь "[,Р:
� = Pi- "[,Р.
(13.1)
Потери r, Р преобразуются в теплоту, что в ко­
нечном итоге ведет к нагреву машины. Потери в
электрических машинах разделяются на основные и
добавочные. Основные потери включают в себя
магнитные, электрические и механические.
Магнитные потери Рм в асШIХронном двшателе
вызваны потерями на гистерезис и потерями на вих­
ревые токи, происходящими в сердечнике при его
перемагничивании. ВелИЧШiа магнитных потерь
пропорциональна частоте перемагничивания � = fr, ,
где Р = 1,3+1,5. Частота перемагничивания сердеч­
ника статора равна частоте тока в сети (f=Ji), а частота
перемагничивания сердечника ротора / = fz = J;•.
При частоте тока в сети fi = 50 Гц и номинальном
скольжении Sном = 1+8% частота перемагничивания
ротора f = /2 = 2+4 Гц, поэтому маrnиmые потери в
сердечнике ротора настолько маль1� что их в практи­
ческих расчетах не учитывают.
Электрические потери в асШIХронном двшателе
вызваны нагревом обмоток статора и ротора прохо­
дящими по ним токами. Величина ЭТИХ потерь про­
порциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
'2
=m/1 'i;
электрические потери в обмотке ротора
/2
/'2 1
D
�1
r,2 = т2 2 '2 = Щ
162
2 �2 •
(13.2)
(13.3)
Здесь r, и r2 - активные сопротивления обмоток фаз статора и
ротора пересчитанные на рабочую темпера1У])у 0 раб (см.§ 8.4):
r1 =1j 10 [1+а(0 раб -20)]; r2 =r2_20 [1+а(0 раб -20)], (13.4)
где r, _20 и r2.20 - активные сопротивления обмоток при темпераrу­
ре 0 1 = 20 °С; а - темпераl)'Рный коэффШ{Иент, для меди и алю­
миния а = 0,004.
Электрические потери в роторе прямо пропорциональны
скольженшо:
�2 =S�м ,
(13.5)
где Рэм - элеюромаппnная мощность асинхронного двшателя, Вт:
�м= Р�-(Рм +�,) .
(13.6)
Из (13.5) следует, чrо работа асинхрошюго двигателя эконо­
мичнее при малых скольжениях, так как с ростом скольжения рас­
тут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо пере­
численных электрических потерь имеют место еще и электричес­
рtе потери в щеточном контакте �-щ =3/2 ЛИщ /2 , где Uщ =2,2 В­
переходное падение напряжения на пару щеток.
Механические потери Рмех - это потери на трение в подшип­
никах и на вентиляцию. ВелИЧШiа этих потерь пропорциональна
квадраrу частоты· вращения ротора ( Рмех = п; ). В асинхро1rnых
двшателях с фазным ротором механические потери происходят еще и
за счег трения между щетками и конrакrными кольцами ротора.
Добавочные потери включают в себя все виды трудноучиты­
ваемых потерь, вызванных действием высших гармоник МДС,
пульсацией магнитной индукции в зубцах и другими причинами. В
соответствии с ГОСТом добавочные потери асинхронных двига­
телей принимают равными 0,5% от подводимой к двигатеmо мощ­
ности Р1:
(13.7)
�об = 0,005Pi .
При расчеге добавочных потерь для неноминальноrо режима
следует пользоваться выражением
2
(13.8)
I;:об = �обf3 •
где 13 = 11 / /1ном - коэффШ{Иент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
(13.9)
""f.P = рм + �1 + Рз2 + рмех +�об ·
На рис. 13; 1 представлена энергетическая диаграмма асин­
хронного двигателя, из которой видно, чrо часть подводимой к
двигатеmо мощности Pi = т1 V1 11 cos<p, 1 затращщаегся в статоре на
магнитные Рм и электрические Рэ, потери. Оставшаяся после этого
электромагнитная мощность Рэм [см. (13.6)] передаегся на ротор,
163
где частично расходуется на электрические потери Р 32 и преобра­
зуется в полную механическую мощность Р{ . Часть мощности
идет на покрьпие механических Р мех и добавочных потерь Рдоб, а
оставшаяся часть этой мощности Р2 составляет полезную мощ1щсть цвигателя.
У ас�ююго двигателя КIЩ
rt=P,_/P._=1-"I,P/P._.
(13.10)
Электрические потери в об­
мотках Рэ1 И Рэ2 ЯВЛЯIОТСЯ п е р е ­
м е н н ы м и потерями, так как их
величина зависит от наrрузки двиРа, гателя, т. е. от значений токов в
обмотках статора и ротора [ см.
(13.2) и (13.3)]. Переменными яв-·
ляются также и добавочные потери
( 13 .8). Что же касается магнитных
рм и механических рмех, то они
практически не зависят от нагруз­
ки (исключение составляют двига­
тели, у которых с изменением на­
грузки в ' широком диапазоне
меняется частота вращения).
Коэффшщенr полезного дей­
ствия асинхрошюrо двигателя с
изменениями нагрузки также ме­
Рис. 13.1. Энергетическая дна- няет свою величину: в режиме хо­
грамма асинхронного двигателя лостоrо хода КПД равен нуmо, а
затем с ростом нагрузки он увели­
чивается, достигая максимума при нагрузке (О,7+0,8)Рном • При
дальнейшем увеличении нагрузки КПД незначительно снижается,
а при перегрузке (Р2 > Рном) он резко убывает, что объясняется IПI­
тенсивным ростом переменных потерь (Р31 + Рэ2 + Рдоб), величина
которых пропорциональна квадра1)' тока статора, и уменьшением
коэффшщенrа мощности. График зависимости КПД от нагрузки
тt = /(Р) для асинхро1mых двигателей имеет вид, аналогичньш
представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных -асинхронных двигателей общего назначения
при номинальной нагрузке составляет: для двигателей мощностью
от 1 до 10 кВт Тl ном = 75+88%, для двигателей мощностью более
10 кВт Тl ном = 90+94%.
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напря­
жением 660 В I]>И соединении обмоток статора звездой. При номинальной на­
грузке он потреt>ляет из сети мощность Р 1 = 16,7 кВт при коэффициенте мощно­
сти cos ср 1 = 0,87. Частота вращения ntюм = 1470 об/мин. Требуется определить
КПД двигателя 'll ном , если маrюпные потери Р.. = 265 Вт, а механические потери
Р,щ = 123 Вт. Активное сопротивление фазы обмотки стаrора r1_20 = 0,8 Ом, а
IOiaCC наrревостойкости ИЗОЛЯЦИИ двиrаrеля F (рабочая темперюура ераб = 115 °С).
164
Реше н ие. Ток в фазе обмотки статора
_ Pi103
16,7 · 103
16,8 А,
Ilнои---'--- .
3•380•0,87
т.И1 COS(l) 1
rде И1 =660/.Jз=380 В.
Сопротивление фазы обмотки статора, пересчитаююе на рабочую темпера­
туру 0раб = 115 °С, ПО (13.4)
r1 = r1_20[1+а.(Орвб -20)] = 0,8(1 +0,004(115-20)] = 1,1 Ом.
Электрические потерив обмотке статора по (13.2)
Р, 1 = m1 ifнoи'i = 3· 16,8 2 • 1,1 = 931 Вт.
Электромагнитная мощность двигателя по (13.6)
3
Р,.. = Pi-(P.. +Р, 1 )=16,7-10 -(265+931)=15504 Вт.
Номинальное скольжение sно.. = (п1 -n-)/n1 = (1500-1470)/1500 = 0,020 .
Электрические потери в обмотке ротора по (13.5)
Рэ2 =sно"Р,.. =0,020-15504=310 Вт.
Добавочные потери по (13.7)
Рдоб =0,005Pi =0,005-16,7-10 3 =83 Вт.
Суммарные потери по (13.9)
IP= Р., +Р.1 +Р.2 +Р.,.х +Рдо5 = 265 +931 +310 +123+ 83=1712 Вт.
КIЩдвиrателя в номинальном режиме по (13.10)
flном =l-1;P/f>i =l-1712/(16,7-10 3 )=0,898 , ИЛИ 89,8%.
Коэффициеш полезного действия является одIШМ из основ­
ных параметров асинхронного двшателя, определяющим его энер­
гетические свойства - экономичность в процессе эксплуатации.
Кроме того, КПД двшателя, а точнее величина потерь в нем, рег­
ламентирует темnераrуру нагрева его основных частей и в первую
очередь его обмотки статора. По этой причине двигатели с IШзким
КПД (при одинаковых условиях. охлаждения) работают при более
высокой темпера'I)'ре нагрева обмотки статора, что ведет к сниже­
юпо их надежности и долговечности (см. § 8.4 ).
§ 13.2. Электромаrнитный момент и
механические характеристики
асинхронного двиrателя
Электромагнитный момеш асинхроmюrо двигателя создается
взаимодействием тока в обмотке ротора с вращающимся магнит­
ным полем. Электромагнитный момеш М пропорционален элек­
тромагнитной мощности:
(13.11)
где
ro 1 = 2пп1 /60 = 21tJ; /р
(13.12)
- угловая синхронная скорость вр�щения.
165
Подставив в (13.11) значение электромалmтной мощности по
(13.5), получим
(13.13)
т. е. электромагнитный момент асинхронного двигателя пропор­
ционален мощности электрических потерь в обмотке ротора.
Если значение тока ротора по выражеюпо (12.25) подставить в
(13.13), то получим формулу электромагниmого момента асин.
хронной машины (Н·м):
щu2,
i r2P
·М(13.14)
2
2
1t
1j
+
- 2 fts[( r2/s) +(х1 + х2) ].
Параметры схемы замещения асинхроююй машины r1 , r2 , х1 и
х; , входящие в выражение (13.14), являются п о с т о я н н ы м и,
так как их значения при изменениях нагрузки машины остается
практически неизменными. Также постоянными можно считать
напряжение на обмотке фазы статора U1 и частотуJi.В выражении
момента М единственная переменная величина - скольжение s,
которое для различных режимов работы асинхронной машины
может пршшмать разные значения в.диапазоне от + оо до - оо (см.
рис. 10.1).
Рассмотрим зависимость момента от скольжения М = f{s) при
U1 = const, J1 = const и постоянных параметрах схемы замещения.
Э1у зависимость принято назьmать механической характеристи­
кой асинхронной машины. Анализ выражения (13 .14), представ­
ляющего собой аналитическое выражение механической характе­
ристики М=./(s), показьmает, что при значениях скольжения s = О
и s = оо электромагниmый момент М = О. Из этого следует, что
механическая характеристика М=.f(s) имеет максимум.
Для определения величины критического скольжения sкр, со.:
ответствующего максимальному момеmу, необходимq взять пер­
вую производную от (13.14) и приравнять ее нулю: dM/ds =.О.В
результате
,...
sкр = ±r,;_/,J�,-2-+_(_x_1 _+_x_2_)_2.
(13.15)
Подставив значение критического скольжения (по 13.15 ) в
выражение электромагниmого момента (13.14), после ряда преоб­
разований получим выражение максимального момента (Н·м):
щU/р
(13.16)
М =±
±
2 +(х +
2
. max
.J
1j
+
1t
4
]
[
)
,
ft
х
2
.
1j
В (13.15) и (13.16) знак пmос соответствует двигательному, а
знак минус - генераторному режиму работы асинхронной машины.
Для асинхронных машин общего назначения активное сопро­
тивление обмотки статора r 1 намного меньше суммы индуктивных
сопротивлений: r 1 << (х 1 + х2). Поэтому, пренебрегая величиной
r1, получим упрощенные выражения критического скольжения
166
sкр �±r2/(x1 +х2),
и максимального момеmа (Н·м)
Мrn ax =±
м
Генераторнь,й
режи,.,
t '
·f
-s
·S
к
(13.17)
mpfp
(13.18)
41tft (х1 + Х2) .
жин
... ,
рмозной режим
протиВо хлюvе11ием
s
·Мтах r -М
Рис. 13.2. Зависимость режимов работы асинхронной
машины от скольжения
Анализ выражения (13.16) показывает, что максимальный мо­
мент асинхронной машины в генераторном режиме больше, чем в
двшателъном (Mrnax г > Mrnax д). На рис. 13.2 показана механическая
характеристика асинхроmюй машины М = ./{s) при И1 = const. На
этой характеристике указаны зоны, соответствующие различным
режимам работы: двигательный режим (О < s � 1), когда электро­
магнитный моменr М является вращающим; генераторный режим
( - оо < s < О) и тормозной режим противовкmочением (1 < s < + оо ),
когда электромагнитный момент М является тормозящим.
Из (13.14) следует, что электромагнитный момент асинхрон­
ного двшателя пропорционален квадрату напряжения сети:
М = uf . Эrо в значительной степеIШ отражается на эксплуатаци­
оннъ�х свойствах двшателя: даже небольшое снижение напряже­
ния сети вызывает заметное уменьшение вращающего момента
асинхронного _двигателя. Например, при уменьшении напряжения
сети на 10% относительно номинального (И1 = О,9Ином) электро­
магнитный момент двшателя ум�нъшается на 19%:
М' =0,9 2 М=О,81М, где М - момент при номинальном напря­··
жении сети, а М - момент при пониженном напряжении.
Для анализа работы асинхронного двшателя удобнее восполь­
зоваться механической характеристикой М = ./{s), представлеююй
на рис. 13.3. При включении двшателя в сеть магнитное поле ста167
тора, не обладая инерцией, сразу же начинает вращение с син­
хронной частотой п 1 , в то же время ротор двигателя под влиянием
сил инерции в начальный момент пуска остается неподвижным
(п2 = О) и скольжение s = 1.
Подставив в (13.14) скольжение s = 1, получим выражение
пускового момента асинхроююго двшателя (Н·м):
.
2
щи,r;р
(13.19)
м " - 21tft[(1j +r2)2 +(х1 +х2) 2 ] ·
Под действием
м
А
этого момента начи­
нается вращение ро­
тора двигателя, при
скольжение
этом
уменьшается, а вра­
щающий момент воз­
1·
растает в соответст­
1 с:
1�
вии с характеристи­
1
кой М == j{s). При
s критическом сколь­
О Sном Sкр
жении s
момент
Рис 13.3. Зависимость элеюромаrmmюго мо- достигает крмаксималь­
мента асинхроююrо двигателя от скольжения наго значения Мmax• .С
дальнейшим нараста­
нием частоты вращения (уменьшением скольжения) момент М на­
чинает убывать, пока не достшнет установившегося значения,
равного сумме противодействующих моментов, приложе1шых к
ротору дВиrателя: момента х.х. М0 и полезного нагрузочного мо­
мента (момента на валу двшателя) М2, т. е.
(13.20)
М = М0 + М2 = М�т.
Следует иметь в виду, что при скольжениях, близких к едини­
це (пусковой режим двшателя), параметры схемы замещения
асинхронного двигателя заметно изменяют свои значения. Объяс­
няется это в основном дВумя факторами: усилением магниrного
насыщения зубцовых слоев статора и ротора, что ведет к умень­
шению индуктивных сопротивлений рассеяния х1 и х2, и эффек­
том вытеснения тока в стержнях ротора, что ведет к увеличению
активного сопротивления обмотки ротора r2. Поэтому параметры
схемы замещения асинхронного дВИГателя, используемые при рас­
чете электромагнитного момеmа по (13.14), (13.16) и (13.18), не могут
быrь использованы для расчета пускового момента по (13.19).
Статический момент М� равен сумме противодействующих
моментов при равномерном вращении ротора (п2 = const). Допус­
тим, что противодействующий момент на валу двшателя М2 соот­
ветствует номинальной нагрузке дВшателя. В этом случае устано­
вившийся режим работы дВИГателя определится точкой на
механической характеристике с координатами М = Мном и s = Sном,
168
где Мном и Sном - номинальные значения электромагнитного мо­
мента и скольжения.
Из анализа механической характеристики также следует, что
устойчивая работа асинхронного двигателя возможна при
скольжениях меньше критического (s < sкр), т. е. на участке ОА
механической характеристики. Дело в том, что именно на этом
участке изменение нагруз� на валу дВИГателя сопровождается
соответствующим изменением электромагнитного момента. Так,
если дВиrатель работал в номинальном рехиме (Мном; Sном), то име­
ло место равенство моментов: Мном = М0 + М2• Если произошло
увеличение нагрузочного момента М2 до значения М2 , то равен­
ство моментов нарушится, т. е. Мном < М0 + М2 , и частота враще­
ния ротора начнет убывать (скольжение будет увеличиваться). Это
приведет к росту электромагнитного момента до значения
М' = М0 + М2 (то чка В), после чего режим работы дВигателя
вновь станет установившимся. Если же при работе двигателя в
номинальном режиме произойдет уменьшение нагрузочного мо­
мента до значения М2 , то равенство моментов вновь нарушится,
но теперь вращающий момент окажется больше суммы противо­
действующих: Мном > М0 + М2 . Частота вращения ротора начнет
возрастать (скольжение будет уменьшаться), и это приведет к
уменьшеюпо электромагнитного момента М до значеюtя
М" = М0 + М2' (точка С); устойчивый режим работы будет вновь
восстановлен, но уже при других значениях Ми s.
Работа асинхронного дВиrателя становится неустойчивой при
скольжениях s � sкр. Так, если электромагнитный моменr дВиrате­
ля м = Mmax, а скольжение s = Sкр, то даже незначительное увели­
чение нагрузочного моменrа М2, вызвав увеличение скольжения s,
приведет к уменьшению электромагнитного момента М За этим ·
последует дальнейшее увеличение скольжения и т. д., пока сколь­
жение не достигнет значения s = 1, т. е. пока ротор двигателя не
остановится.
Таким образом, при достижении электромагнитным момен­
том миксимш,ьного значения наступает предел устойчивой ра­
боты асинхронного двигателя. Следовательно, для устойчивой
работы двигателя необходимо, чтобы сумма нагрузочных момен­
тов, действующих на ротор, бьmа меньше максимального момен­
та: Mr:r =(М0 + М2 )< Mmax . Но чтобы работа асинхронного дви­
гателя бьmа надежной и чтобы случайные кратковременнъ1е
перегрузки не вызьmали остановок двигателя, необходимо, чтобы
он обладал п е р е г р у з о ч н о й с п о с о б н о с т ь ю. Перегрузоч­
ная способность двигателя
определяется отношением макси­
мальцоrо момента Mmax к номинальному Мном• Для асинхронных
дВигателей общего назначения перегрузочная способность составляет = Mmax l мном = 1,7+2,5.
л.
л.
tб9
Следует также обратить внимание на то, что работа двигателя
при скольжении s < Sкр, т. е. на рабочем участке механической ха­
рактеристики, является наиболее экономичной, так как она соот­
ветствует мальIМ значениям скольжения, а следовательно, и мень­
шим значениям электрических потерь в обмотке ротора Р32 = sPэм•
Пример 13.2. Рассчиrать данные и построить механическую характеристику
м. =.f(s) трехфазного асШIХронноrо двигателя с короткозамкнуrым ротором nma
4А160М4У3 номинальной мощностью 18 ,5 кВт, напряжеинем 220/38 0 В, часто­
. той вращения 1 465 об/мин. Параметры схемы замещения этого двигателя:
r1 = 0,263 Ом, х 1 = 0,5 21 Ом, r2 =0,158 Ом, х2 = 0,892 Ом. Перегрузочная спо­
собность двигателя л. = 2,3, кратность пускового момента М,./Мж,.. = 1,0.
Р еше н и е. Для получения данных, необходимых для построения механи­
ческой характеристики двигателя, определяем номинальный электромаrюпный
М..,,.., пусковой М0 и максимальный МПW< моменты, а также два промежуrочных
значения момента при скольжениях s > s"".
Номинальное скольжение по (10.1) sно.. =(15 00- 1465)/15 00 = 0,023 .
Номинальный электромаrюпный момент по (1 3. 14)
3·220 2 · 0,158 ·2
=l2lH·м.
21t5 0 . 0,023- [(0,263 + 0,1 58/0,Q23)2 + (0,521+ 0,892)2 ]
Пусковой момент двигателя М0 Мж,.. = 1 21 Н·м.
Максимальный момент двигателя Mmax =л.Мно., =2,3·1 21 =278 Н·м.
Критическое скольжение по (13.1 7) s"" = 0,158/(0,5 21 + 0,892) = 0,11 2 .
Электромаrюпные моменты при скольжениях s = 0,2, s = 0,4 и s = 0,1 по
(1 3.1 4):
Мном =
�
2
3-220 -О'158 -2
М0 2 236 Н·м;
• - 2п50 ·0,2((0,263+ 0,158/0,2)2 + (0,521 + 0,892)2 ]
3· 2202 · 0,158 ·2
М0 4 =
=l5 0 Н·м·
• 21t5 0 · 0,4[(0,263 + 0,158/0,4)2 +(0,521 + 0,892)2 )
•
3-2202 ·0,158 ·2
=93,6 Н·м.
21t5 0 · О,7[(0,263 + 0,158/0, 7)2 + (0,5 21 + 0,892)2 ]
Результаты вычислений
s ................. .
М,Н·м . . . . . ... ..
М. =М!Мmах .. .
О 0,023
О. 121
О 0,44
0,11 2
278
1 ,0
0,20
236
0,85
0,4
150
0,54
0,7
93,6
0,34
1,0
121
0,44
Механическая ха'рактеристика м. = .f(s), посrроенная по этим данным, при­
ведена на рис 1 3.4.
Применение формулы (13.14) для расчета механических ха­
рактеристик асинхронных двигателей не всегда возможно, так как
параметры схемы замещения двигателей обычно не приводятся в
каталогах и справочниках, поэтому для практических расчетов
обычно пользуются упрощенной формулой момента. В основу
этой формулы положено допущение, что активное сопротивление
обмотки статора асинхронного двигателя r1 = О, при этом
170
2
M=Mmax-----.
s/sкp +sкr,/s
Крmическое сколъже1Ше определяют по формуле
(13.21)
(13.22)
s-.p =s_(л+ ✓л2 -1).
Расчет мехаIШЧеской харщперистики намного упрощается,
если его вести в оmосиrелъных единицах м. = М!Мmах• В этом
случае уравнеIШе механической характеристики имеет вид
2
(13.23)
М. = --s/sкr, +sкr,/s
Пример 13.3. Рассчиrать механическую характеристику трехфазноrо асин­
хронного двигателя типа 4А160М4У3 (18,5 кВт, 1465 об/мин, л. = 2,3, М,/М..,м =
= 1,0) в относиrелъных единицахм. =j(s) rю упрощенной формуле (13.23) и rюлучен­
ные результаты сравниrь с данными, рассчиrанными в примере 13.2.
Р е ш е н и е. Критическое скольжение по (13.22)
s -.P =0,02'3(_2,3+J2,з2 -1)=0,100-.
Оrносительное значение моментам. при скольжениях:
S м =0,023; S = 0,100;
м"
s=0,2; s=0,4; s=0,7;
r -, 1\.
2
0,85
м. =
0 46·
ном
0,023/0,1+ 0,1/0,Q23 ' ,'
1
2
0,54
М. = ----1;
0,44 -т-0,1/0,1 + 0,1/0,1
1,,'
0,34 -•
2
М.•o,z -0 80·
0,2/0,1 + 0,1/0). - ' '
!
0,1 0,2 0,3 D,li 0,5 0,6 0,7 о.в о.з S
2
м.04 =----=О,47 ;
' 0,4/0,1 + 0,1/0,4
Рис. 13.4. Механическая ха­
рактеристика асинхронного
2
=0).8.
двигателя типа 4А160М4УЗ
М.01· =----0,7 /0J,. + 0,1/0,7
..,
-.p
-+-- '-�"' ----�·----
Результаты расчета
м•.......................
0,023
0,46
нению с расчетом
примера 13.2 ........ .
-4,3
s ·•···•···•·····•·······••
Ошибка, % по срав­
0,1
1,0
0,2
0,80
0,4
0,47
0,7
0,28
+5,9
-6,8
+16,6
ПрименеIШе упрощешюй формулы (13.23) наиболее целесо­
образно при расчете рабочего участка механической характери­
стики .при скольжениях s < sкр, так как в этом случае величина
ошибки не превьппает значений, допустимых для технических
расчетов. При скольжениях s > sкr, ошибка может достигать 1517%. Это подтверждается расчетами примера 13.3.
17 1
§ 13.3. Механические характеристики
асинхронного двигателя при изменениях
напряжения сети и активного
сопротивления обмотки ротора
Из (13.14), (13.16) и (13.19) видно, что электромагнитный мо­
мент асинхрошюго двигателя, а также его максимальное и пуско­
вое значения пропорциональны квадрату напряжения, подводимого к обмотке статора: М И12 •
м
В то же время анализ выраже­
м;о,
ния (13.15) показьmает, что
значение критического сколь­
жения не зависит от напряже­
м:..ак ния U1• Это дает нам возмож­
ность построить механические
характеристики М = j{_s) для
разных значений напряжения
И1 (рис. 13.5), из которых сле­
дует, что колебания напряже­
ния сети U1 опюсительно его
0 S"S S' Sкр
t s номинального
значения И1 ном
Рис. 13.5. Влияние напряжения на сопровождаются не только
вид механической характеристики изменениями максимального и
пускового моментов, но и изасинхронного двигателя
менениями частоты вращения
ротора. С уменьшением напряжения сети частота вращения ротора
снижается (скольжение увеличивается). Напряжение U1 влияет на
значение максимального момента Mmax, а также на перегрузочную
способность двигателя л. = Mmax / Миом . Так, если напряжение И1
понизилось на 30%, т. е. И1 = О,7И1 ном, то максимальный момент
асинхронного двигателя уменьшится более чем вдвое:
М�ах = 0,72 Mmax = 0,49Mmax . На сколько же уменьшится перегру­
зочная способность двигателя? Если, например, при номинальном
напряжении сети перегрузочная способность л. = Мmax / Мном = 2 ,
то при понижении напряжения на 30% перегрузочная способность
двигателя л,' = M�ax l мном = 0,49 Mmax l миом= 0,49· 2 = 0,98, т. е .
. двигатель не в состояюш нести даже номинальную нагрузку.
Как следует из (13.16), значение максимального момента дви­
гателя не зависит от активного сопротивления ротора r2. Что же'
касается критического скольжения sкр, то, как это видно из (13.15),
оно пропорционально сопротивленmо r2. Таким образом, если в
асинхронном двигателе постепешю увеличивать активное сопро­
тивление цепи ротора, то значение макс·имального момента будет
оставаться неизме1rnым, а критическое скольжение будет увеличи­
ваться (рис. 13.6). При этом пусковой момеm двигателя Мп воз­
растает с увеличением сопротивления r2 до некоторого значения.
На рисунке это соответствует сопротивленmо r2111 , при котором
=
172
пусковой момент равен максимальному. При дальнейшем увели­
чении сопротивления r2 пусковой момент уменьшается.
Анализ графиков М = f{s), приведенных на рис. 13.6, также
показьmает, что изменения сопротивления ротора r2 сопровождаются изменениями частоты вращения: с увеличением r2 при не­
изменном нагрузочном моменте Mcr скольжение увеличивается,
т. е. частота вращения уменьшается (точки 1, 2, З и 4).
м
,,.iш
t"zп
----:;,"80;-,
-'
'
ш,,,,
,,,,
п!Я
fl/1
s
S.п Sш Spr
Рис. 13.6. Влияние активноrо сопротивлеНЩI обмотки ротора
на механическую характеристику асинхронноrо двиrателя
Влияние акпшного сопротивления обмотки ротора на форму ме­
ханических характеристик асинхронных двиrателей используется при
проектировании двигателей. Например, асШIХр<>нные двиrатели об­
щего назначения должны иметь «жесткую» скоросmую характери­
сmку (см. рис. 13.7), т. е. работа1Ь с неболыШIМ: номиналып,IМ сколь­
жением. Эrо дОСТШ'аеrся применением в двшателе обмотки ротора с
мальrм активным сопротивлением r2 . При этом двилпель имеет бо­
лее высокий КПД за счет снижения элеюрических потерь в обмотке
ротора (Рэ2 = m,_J2 2 r2 ). Выбранное значение r2 доmкно обеспечить·
двигатеmо ч,ебуемое значение пускового момента. При необходимо­
сти полущпъ двигатель с повьппенным значе1П1ем пускового моменrа
увеличивают активное сопротивление обмотки ротора. Но при этом
получают двиrатель с больuшм значе1П1ем номинального скольжения,
а следовательно, с меньшим КГЩ.
Рассмотренные зависимости М =j(Ui) и М = f(ri) имеют также
большое практическое значение при рассмотрении вопросов пуска и
реrулирования часготы вращения асинхроцных двигателей (см. гл. 15).
§ 13.4. Рабочие характеристики
асинхронноrо двиrателя
Рабочие характеристики асинхронного двигателя (рис. 13.7)
представляют собой графически выраженные зависимости часто­
ты вращения п2, КПД Т}, полезного момента (момента на валу) М2,
173
коэффшщенrа мощности cos<p 1 и тока статора /1 от полезной
мощнос m Р2 при и, = const иfj = const.
Скоростная характеристика п2 =.f(P2). Частота вращения ро­
тора асШIХроююго двигателя
п2 =n1 (1-s).
""z• 1,, n2 ,о6/нии
cosy,; 71
Н·м А
Скольжение по (13.5)
s"=� 2 /�м, (13.24)
20 в tt.00
т. е. скольжение дви15
6 gqq--•---------- о,6 гателя, а следовательно, и его частота вра-.
щения определяются
,о 4 1--i1r--+--1-.""'"--+------1-�D,'4 оnюшением электри­
ческих потерь в рото­
2
5
�2 ре к электромагниrnой
мощносm рэм• пренебрегая электричес­
D .__.________________,.,..,_.....,,.. О
кими потерями в рото­
О
О
2
3
4 Р,.,l(Вт
ре в режиме холостого
Рис. 13.7. Рабочие характеристики асинхрон­ хода, можно принять
ного двигателя
Рэ2 = О, а поэтому
и
ичения
нагрузки
на валу двигателя
уве
о
ме
л
ре
s0 � О п20 :::: п1 • П
отношение (13.24) растет, достигая значений 0,01--0,08 при но­
минальной нагрузке. В соответствии с этим зависимость
п2 = .l{P2) представляет собой кривую, слабо наклоненную к оси
абсцисс. Однако при увеличении активного сопротивления ротора
r2 угол наклона этой кривой увеличивается. В этом случае изме­
нения частоты вращения п2 при колебаниях нагрузки Р2 возраста­
ют. Объясняется это тем, что с увеличением r2 возрастают элек­
трические потери в роторе [см. (13.3)].
Зависимость М2 =,КР2). Зависимость полезного момеmа на валу
двшателя М2 от полезной мощносm Р2 определяется выражением
(13.25}
М2 = �/ro 2 = 60�/{2тtп2 ) == 9,55�/п2 ,
где Р2
полезная мощность, Вт;
ro 2 = 2 тt/2/60 - угловая частота враще­
ния ротора.
Из этого выражения следует, что если
п2 = const, то график М2 =fj_(P2) представля­
ет собой прямую линию. Но в асинхрон­
ном двигателе с увеличением нагрузки Р2
вращения ротора уменьшается, а
Ф частота
io
поэтому полезный моменr на валу М2 с
Рис. 13.8. Векторная увеличением нагрузки возрастает не­
диаграмма асинхронно­ сколько быстрее нагрузки, а следователь­
го двигателя при не­ но, график М2 = j(P2) имеет криволинейбольшой нагрузке
ный вид.
р4
Зависимость cos (1)1 =.l(P2). В связИ'с тем что ток статора /1 имеет
реактивную (:индуктивную) составляющую, необходимую для созда­
ния магниnюго поля в статоре, коэффициенr мощноС'Пf асинхроню,�х
двигателей меньше единицы. Наименьшее значение коэффициенrа'
мощнОС'Пf соответствует режиму х.х. c s r.p ,
Объясняется это тем, что ток х.х. /0 при
f � ....c __,..-.-----,--.---�
любой нагрузке остается практически
неизменю,хм. Поэтому при малых на­
грузках двшагеля ток статора невелик
и в значиrельной часm является реак- о,б
тивньхм ( /1 � /0 ). В ре зультате сдвиг по
фазе тока статора j1 относительно на­
пряжения И1 получается значиrельньхм
О
0,8 �/Рнон
0,1;
( <р 1 � <р0 ), лmпь немнопIМ меньше 90°
(рис. 13.8). Коэффициенr мощности Рис. 13.9. Зависимость cos<p 1
асинхроню,IХ двигателей в режиме х.х. от наrрузки при соединении
обычно не превьппает 0,2. При увели­ обмотки статора звездой (J)
чеюш нагрузки на валу двигателя рас- и треугольником (2)
. тег активная составляющая тока /1 и
коэффициенr мощнОС'Пf возрастает, дос11:шui наибольшего значения
(О,8�,90) при нагрузке, близкой к ноМШiалъной. Дальнейшее уве­
личение нагрузки сопровождается уменьшением cos<p1, что объясня­
ется возрастанием шщуктивного сопротивления ротора (Х:сУ) за счет
увеличения скольжения, а следовательно, и частоты тока в роторе. В
целях повьппения коэффициенrа мощнОС'Пf асинхроШIЬIХ двигателей
чрезвычайно важно, чтобы двшm:ель работал всегда или по крайней
мере значительную чаС1Ъ времени с нагрузкой, близкой к ноМШiалъ­
ной. Эrо можно обеспечиrъ лmпъ при правильном выборе мощности
двигателя. Если же двигатель работает значительную часть времени
недогружеНIО,JМ, то для повьппения cos<pi целесообразно подводимое
к двигателю напряжение И1 уменьшиrь. Например, в двигателях, ра­
ботающих при соединеюш обмотки статора треугольником, это мож­
но сделать пересоединив обмотки статора в звезду, что вызовет
уменьшение фазного напряжения в ✓3 раз. При этом магниmый по­
ток стаrора, а следовательно, и намагничивающий ток уменьшаются
примерно в ✓3 раз. Кроме того, активная составляющая тока статора
несколько увеличивается. Все это способствует повьппеншо коэффи­
ци:енrа мощности двигателя. На рис. 13 .9 представлены графики зави­
симости cos<p 1 iiCинxpomюro двигателя от нагрузки при соединении
обмоток статора звездой (кривая 1) и треугольником (кривая 2).
§ 13.5. Электромаrнитные моменты
от высших пространственных rармоник
маrнитноrо поля асинхронноrо двиrателя
Ранее было установлено, чго МДС трехфазной обмотки стато­
ра помимо основной гармоники содержит ряд высших простран175
ственных гармоник (см.§ 9.5). Каждая из этих гармоник создает в
машине вращающееся магнитное поле, частота вращения которого
в v раз меньше частоты вращения поля основной гармоники [см.
(9.18)]. При этом высшие пространстве1rn:ые гармоники МДС по­
рядка v = 6х + 1 создают п р я м о в р а щ а ю щ и е с я (прямые) по­
ля, а гармоники порядка v = 6х- 1 - о б р а т н о в р а щ а ющи е ­
с я (обратнъ1е) поля.
Асинхронные моменты. Магнитнъ1е поля от высших про­
странственнъIХ гармоник, сцепляясь с обмоткой ротора, наводят в
ней ЭДС и создают в двигателе собственные электромагнитные
асинхронные моменты. Эти моменты ухудшают свойства двигате­
ля, поэтому их принято называть п а р а з и т н ы м и. При рассмот­
рении выражения электромагнитного момента и механической
характеристики асинхронного двигателя (см.§ 13.2) имелось в ви­
ду действие лшпъ магнитного поля основной гармоники. Если же
учесть влияние высших пространственнъIХ гармоник поля, то кри­
вая электромагнитного момента (см. рис. 13.3) окажется искажен­
ной. В зависимости от направления и частоты вращения nv маг­
нитного поля высшей пространственной гармоники и направления
создаваемого ею электромагнитного момеша Mv высшие про­
странственные гармоники поля могут создать в асинхронном дви:­
гателе три режима: д в и г а т е л ь н ы й р е ж и м, если поле выс­
шей гармоники прямовращающееся и частота его вращения nv > п2, а
направление момента Mv положительное, т. е. он направлен со­
гласно с моментом основной гармоники М; г е н е р а т о р н ь1 й
р е ж и м, если поле высшей гармоники прямовращающееся и час­
тота его вращения nv < п2, а направление момента Mv отрицатель­
ное, т. е. он направлен встречно момеmу основной гармоники М;
т о р м о з н о й р е ж и м, если поле высшей гармоники обратно в­
ращающееся, а Mv отрицательный, т. е. направлен встречно мо­
меmу основной гармоники М.
На рис. 13.10, а представлены графики моментов асинхронного
двигателя Mv = j{s) от прямого поля седьмой гармоники и обратного
поля пятой гармоники, где s - скольжение ротора относительно поля
основной гармоники. Обратное поле пятой гармоники при s = 071 соз­
дает отршщтельный момеш Мs (тормозной режим); прямое поле
седьмой гармоники при 0,857 < s < 1 создает положительный момеш
¾ (двигательный режим), а при s < 0,857 - отрицательный моменr
М7 (генераторный режим). Сложив ординаты момешов М7 и М5 с ор­
динатами момента основной гармоники М, получим кривую резуль­
тирующего асинхронного момента (рис. 13.1О, б):
(13.26)
«Провал» кривой момента М� (участок при 0,7 < s < 0,85, на
котором М� < Mcr) затрудняет процесс разгона двигателя и может
вызвать «застревание» ротора на малой частоте вращения.
Наибольшую опасность представляют собой паразитные
асинхроннъ1е моменты при короткозамкнутой обмотке poropa, так
176
как в этом случае токам, наведенным высшими г-армониками маг­
нитного поля в стержнях ротора, оказывается небольшое электри­
ческое сопротивление. В двигателях с фазным ротором действие
паразитных асинхронных моментов намного слабее.
Заметное влияние на форму кривой электромагнитного момента
оказывают асинхронные паразиrные моменrы от гармоник поля зуб­
цового порядка (обусловленных наличием зубцов на сппоре и роторе):
vz1 =(Z1 /p)±1; vz2 =(Z2/p)±1.
(13.27)
aJI
--
. ,,,,� , ....
oi--н •=��===::_::===ff1 т:::::tr,-,-1и
�
5
1 s
��� -1,'{1,22..s
1
6}
1
1
1
1
н
1 11 ''-(нs
1
1
1
1
1
1
1
1
1
1
1
1
1
0,7 0,85 1
О S110�
0,5
Рис. 13.10. Асинхронные момеmы от основной и выс­
ших (5-й и 7-й) гармоник поля
Нс�
М,:�
Рис. 13.11. Влияние взаимного расположения в пространстве потосов высших пространственных гармоник поля
статора и ротора на направление синхронного момента:
а - сЮ1Хрою1ый моменr положиrелъный, б - сЮ1Хра1mый мо­
менr ОтрШIЗТеЛЪНЫЙ
Эффективное средство ослабления влияния высших гармшmк
поля на свойства двигателей-скос пазов ротора в пределах зубцово­
го деления. В этом случае ЭДС в стержнях ротора от зубцовых гармо­
ник поля статора снижаются почти до нуля. Действие высших гармо­
ник поля ослабляют также правшп,ным выбором числа пазов статора
Z 1 и ротора Z2• Рекомеццуется сооmошение Z2 � l,25(Z 1 ± р).
177
Синхронные моменты. Между вращающимися магниrными
полями высших пространстве1шых гармоник статора и ротора,
имеющими одинаковый порядок, возникают силы магнитного
взаимодействия. Результатом этого взаимодействия является воз­
никновение синхронного момента Mcv• В общем случае поля ста­
тора и ротора от высших пространственных гармоник вращаются с
разными частотами ( nv1 ::;:. nv2 ), а поэтому направление синхрошю­
го момента Мсv меняется в зависимости от взаимного расположен:й.Я
магнитных полюсов взаимодействующих полей. Обычно частота
изменения знака момента Mcv велика, и из-за большой инерции
ротора этот момент не оказывает заметного влияния на вращение
ротора. Но при некоторой частоте вращения ротора поля высших
гармоник статора и ротора начинают вращаться с одинаковой час­
тотой вращения ( nvl = nv2 ). В ЭТОМ Случае направление СИНХрОННОГО
момента Мсv становиrся стабwп,ны:м. В зависимости от взаимного
расположения маrюпных полюсов мапшmых полей момент Мсv мо­
жет бьпъ положительным или отрицаrельным (рис. 13.11).
СинхроШ1Ъ1е моментъ1 в асинхронном двигателе нежелатель­
ны, т. е. являются паразитными, так как они могут вызвать прова­
лы в механической характеристике двигателя. Наибольшего зна­
чения синхрош1ые моментъ1 достигают при наличии зубцовых
гармоник поля статора и ротора одинакового порядка, т. е. при
vz1 = Vz2. СинхроШ1Ъ1е моменты наиболее опасны при следующих
соотношениях пазов статора и ротора (Z1 и Z2):
(13.28)
Z1 = Z2; Z1 - Z2 = -±2.р.
. Особенно нежелательно равенство числа пазов на статоре и
роторе (Z1 = Z2), так как это может привести к «прилипанmо» ро­
тора к статору: зубцы ротора силами магнитного тяжения удержи'"
ваются под зубцами статора. У:меньшенmо синхроШIЪIХ моментов­
способствует скос пазов на роторе.
Контрольные вопросы
1. Какие виды потерь имеют место в асинхронном двигателе?
2. Почему маrниrные потери в сердечнике ротора не учитывают?
3. На какие виды потерь влияют величина воздушноrо зазора и толщина пла­
стин сердечника статора?
4. Используя данные примера 13.1 и задавшись значениями тока статора /1 =
= 0,5, 0,75, 1,l511ном, определите соответствующие значения КПД и построй­
те rрафик Т) = j(P2); при расчетах примите следующие значения коэффициен­
та мощности: COS(j)щ� = 0,4' СОS(/)щп = 0,6; COS(/)1.1,JS = 0,8.
5. Почему rрафик 11 =j(P2) не выходит из начала координат?
6. Почему при наrрузках двиrателя меньше номинальной ero cosip 1 имеет низ­
кие значения?
7. При :каких условиях высшие пространственные гармоники поля создают в
асинхронном двиrателе двиrательный, rенераторный и тормозной режимы?
8. Какими причинами может бьпь вызван «провал» в механической характери­
стике?
9. При :каких условиях может происходить «прилипание)) ротора к статору?
10. Какими мерами можно ослабить паразитные моменты в двиrателе?
гпава14• Опытное определение
8 :::=:::;::з параметров
и расчет рабочих
характеристик
ас.-нхронных двигателей
§ 14.1. Основнь1е понятия
'
Существует два метода получеIШЯ даЮIЫХ для
построеIШЯ рабочих характеристик асинхро1шых
двшателей: метод непосредствеIШой нагрузки и
косвеmn.IЙ метод. Метод непосредственной нагруз­
ки заюпочается в опьrmом исследовании двигателя в
диапазоне нагрузок от холостого хода до режима
номинальной нагрузки с измерением необходимых
параметров. Эrот метод обьгrnо применяется для
двшателей мощностью не более 10--15 кВт. С рос­
том мощности двшателя усложняется задача ero на­
грузки, растут непроизводительный расход электро­
энергии и загрузка электросети•. Применение этого
метода ограничивается еще и тем, что не всегда
представляется возможным создать испьпательную
установку по причине отсутствия требуемого обору­
доваIШЯ и недопустимости перегрузки электросети.
Широкое применение получил более универсальный
косвенный метод, применение которого не ограни­
чивается мощностью двшателя. Эrот метод закmо­
чается в вьmолнении двух экспериментов: - опыта
холостого хода и опьrщ короткого замыкания.
Опьпы х.х. и к.з. асинхронных двшателей в ос­
новном аналогичны таким же опьпам трансформа­
торов (см. § 1.11). Но они имеют и некоторые осо­
беIШости, обусловлеmn.1е главным образом нали­
чием у двигателя вращающейся части - ротора.
Кроме того, при переходе из режима х.х. в ·режим
к.з. параметры обмоток двшателя (активные и ин­
дуктивные сопротивления) не остаются неизме1шы­
ми, что объясняется зубчатой поверхностью статора
и ротора. Все это создает некоторые затруднения в
проведении опьпов и в последующей обработке их
результатов.
Искmочение составляют установки, содержащие несколько элеК1рических машин, вкmочеЮ1ЫХ по схеме с частич­
ным возвратом элеК1роэнерrии в сеть.
•
179
§ 14.2. Опыт xonocтoro хода
Питание асинхроmюго двигателя при опъпе х.х. осуществля­
ется через :индукционный регулятор напряжен ия ИР (рис. 14.1)
или регулировочный автотрансформатор, позволяющие изменять
напряжение в широких пределах. При этом вал двигателя должен
быть свободным от механической нагруз�.
Опъп начинают с повышенного на­
пряжения питания И1 = 1,15И� ном, затем
постепенно понижают напряжение до
О,4U1ном так, чтобы снять показания при­
боров в 5-7 точках. При этом один из
замеров должен соответствовать номи­
нальному напряжеюпо И1ном • Измеряют
линейные значения напряжений и токов и
вычисляют их средние значения:
иср = (UAB +Иве +ИсА )/3; (14.1)
l0cp = (JOA + 10в + Ioc )/3 , (14.2)
а затем в зависимости от схемы соедине­
ния обмотки статора определяют фазные
значения напряжения и тока х.х.:
при соединении в звезду
И1 = Uср /Гз; 10 =/ер ;
(14.3)
Рис. 14.1. Схема вюпоче­
при соединении в треугольник
ния трехфазного асин­
(14.4)
И1 = Иср ; lo = locp/✓3 ·
онного двигателя при
хр
опытах
х.х. и к.з.
Ватrметр W измеряет активную мощ­
ность Р0, потребляемую двигателем в режиме х.х., которая вюпочает в
себя электрические потери в обмотке статора щlg tj , магнитные по­
тери в сердечнике статора Рм и механические потери Рмех (Вт):
(14.5)
Ро = Щfg1j + рм + рмех •
Здесь r1 · - активное сопротивление фазы обмотки статора
(Ом), измеренное непосредственно после отюпочения двигателя от
сети, чтобы обмотка не успела охладиrься.
Сумма магниrnых и механических потерь двигателя (Вт)
(14.6)
Pi; = Рм + Р,.•х = Po-m/J'i.
Коэфф1ЩИент мощности для режима х.х.
(14.7)
cosc:p 0 = Р0 /(тр1 10 ).
По результатам измерений и вычислений строят характери­
стики х.х. /о, Ро, Ро И COS(j)o = f(И1 ), на которых о�ечают значе­
ния величин /оном, Роном, Раном и СОS(/)ооом , соответствующих номи­
нальному напряжеюпо И1ном (рис, 14.2).
'
180
.
Если график Р0 = f(U1 ) прод,;олжиrь до пересечения с осью
ординат (U1 = О), то получим величину потерь Рмех•
Это разделение магниmых и механических потерь основано
на том, что при неизмеmюй частоте сети.fi частота вращения дви­
гателя в режиме х.х. п0, а ·следовательно, и механические потери
Р мех неизменны. В то же время магнитный поток Ф прямо пропорРо,
Вт
30
/
I
f,5
��Ч----"---i
200 1,0
СО5 'Ро
0,5
....
<i:i
с::,
(00 0,5
11
':---'--=-:--�---'---&..;:::..L---1.___,JO
о
50
fOD
150
250
и,, В
Рис. 14.2. Характеристики х.х. трехфазного асинхронного
двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
ционален ЭДС статора Е1 • Для режима х.х. И1 :::: Е1 , а поэтому при
U1 = О и магнитный поток Ф = О, а следовательно, и магнитные
потери Рм = О.
Определив величину механических потерь Р мех, можно вычис­
лиrь магнитные потери (Вт):
Рм
= Ро- Рмех •
(14.8)
Для acШIXpomn.IX двигателей с фазным ротором в опьпе холо­
стого хода определяют коэфф1ЩИенr трансформации напряжений
�ежду обмотками· статора и ротора. Этот коэфф1ЩИенr с доста­
точной точностью может бьпь определен по отношению средних
арифметических линейных (междуфазовых) напряжений статора к
аналогичным напряжеIШЯм ротора.
§ 14.3. Опь,т короткого замыкания
Схема соединений асинхрошюго двигателя при опьпе к.з. ос­
тается, как и в опьпе х.х. (см. рис. 14.1). Но при этом измеритель­
ные приборы должны бьпь выбраны в соответствии с пределами
измерения тока, напряжения и мощности. Ротор двигателя �ледует
жестко закрепить, предварительно установив его в положение, со­
ответствующее среднему току к.з. С этой целью к двигатеmо под181
водят небольшое напряжение (Ик = О,1И1ном) и, медленно повора­
чивая ротор, следят за показанием амперметра, стрелка которого
будет колебаться в зависимости от положения ротора двигателя.
Объясняется это взаимньхм смещением зубцовых зон ротора и ста­
тора, вызьmающего колебания индуктивных сопротивлений обмо­
ток двигателя.
Предельное значение тока статора при опьпе к.з. устанавли­
вают исходя из допустимой токовой нагрузки питающей сети и
возможности провести опьп в минимальный срок, чтобы не вы�
звать опасного перегрева двигателя. Для двигателей мощностью
до 1 кВт возможно проведение опьпа начиная с номинального на­
пряжения Ик = И1ном• В этом случае предельный ток Iк = (5+7)х11 н ом•
Для двигателей большей мощности сила предельного тока /к =
= (2,5+5)х/1но м • При вьmолнении опыта к.з. в учебных целях можно
ограничиться предельным током Iк = (1,5+2,5)х/1ном••При выполне­
lЦШ опьпа к.з. желательно соединение обмотки статора звездой.
Определив диапазон изменения тока статора при опыте к.з.,
опьп начинают с предельного значения этого тока, установив на
индукционном регуляторе соответствующее напряжение к.з. Ик.
Затем постепенно снижают это напряжение до значения, при кото­
ром ток Iк достигнет нижнего предела установленного диапазона
его значений. При этом снимают показания приборов для 5-7 то­
чек, одна из которых должна соответствовать номинальному току
статора (/к = l1ном). Продолжительность опьпа должна бъпь мини­
мально возможной. С этой целью измеряют nшпъ одно линейное
напряжение (например, UкАв), так как некоторая несимметрия ли­
нейнъrх напряжений при опъпе к.з. не имеет значения. Линейные
токи измеряют хотя бы в двух линейньrх проводах (например, /кА и
/кВ). За расчетное значение тока к.з. принимают среднее арифме­
тическое этих двух значений. После снятия последних показаний
приборов двигатель следует отключигъ и сразу же произвести за­
мер активного сопротивления фазы обмотки статора r./ , чтобы
определить темпера'I)'ру обмотки. Линейные напряжения и токи
пересчитьmают на фазные Ик и Iк по формулам, аналогичным
(14.3) и (14.4).
Ваттметр W измеряет активную мощность к.з. Рк. По полу­
ченным значениям напряжений Ик, токов Iк и мощностей Рк вы­
числяют следующие параметры:
коэффициент мощности при к.з.
cos�" = Р,,/(т.ИJк );
(14.9)
полное сопротивление к.з. (Ом)
(14.10)
активные и индуктJШНЫе составляющие этого сопротивления
(Ом)
rк = z к COS(j)к;
(14.11)
хк = z;-rк2•
(14.12)
182
✓
Измере1П1Ые и вычисле1rnые величины заносят в табтщу, а за­
тем строят характеристики к.з.: Iк; Рк и соs<р к = /(Ик ) (рис. 14.3).
При опыте к.з. обмотки двигателя быстро нагреваются до ра­
бочей температуры, так как при неподвижном роторе двшатель не
веlfГилируется. Темпераwу (0С) обмотки 0 1 обычно определяют
Рк,
Вт
800
Iк,А
8
600 6
40
ц
200
г
COS 'fк
0,4
о
20
Рис. 14.3. Характеристики к.з. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
по сопротивлению фазы 'i' , измеренному непосредственно после
проведения опъпа, по формуле
е, =[(1j'-'i.20){2ss/'i_20)J+20,
(14.13)
где r1.2o - сопротивление фазы обмотки статора в холодном со­
стоянии ( обычно при темпераwе 20 °С), Ом.
Если же температура обмотки оказалась меньше расчетной
рабочей температуры О 2 для соответствующего класса нагрево­
стойкости изоляции двигателя (см.§ 8.4), то активное сопротивле­
ние к.з. rк (Ом) перес:читьmают на рабочую температуру:
(14.14)
rк = r:[1 + а(0 2 -е. )] ,
где r: - активное сопротивление к.з. при температуре 0 1 , отли­
чающейся от расчетной рабочей; а = 0,004.
Затем перес1ШТЬmают на рабочую температуру полное сопротивление к.з. zк = rк2 + х; , напряжение к.з. Ик = lкZк и мощность
к.з. Рк = n;I;rк .
На характеристиках к.з. (рйс. 14.3) отмечают значения вели­
чин Рк.номИк.ном, соответствующих току к.з. Iк = l1ном•
Ток и мощность к.з. пересчитьшают на номинальное напряже­
ние И1ном:
✓
. (14.15)
183
2
(14.16)
Р:,;::, Р.,._ном(И�ном/Ик.ном ) ·
Следует иметь в виду, что такой пересчет является прибли­
. жemn,IМ, так как при Ик = И,ном наступает магнитное насыщение
сердеЧIШКов (особенно зубцовых слоев) статора и ротора; это при­
водит к уменъшеншо индуктивного сопротивления Хк, что не учи. тывается формулами (14.15) и (14.16). Кратность пускового тока
равна Jпflном •
Электромагнитная мощность в режиме к.з., передаваемая на
ротор двигателя, равна электрическим потерям в обмотке ротора ·
Р э2к, поэтому электромагнитный момент при опыrе к.з. (Нм)
Мк,;::, Мп = Р.э2к/rо1 = (Р.,._ном -�,к - Рм_к)/rо,,
где �lк = п;J;_ном'i - электрические потери в обмотке статора при
опьпе к.з.
Магнитные потери при опьпе к.з. Рм.к приближенно опреде­
ляют по характеристикам х.х. (см. рис. 14.2) при напряжении И1 = Ик.
В режиме х.х. магнитный поток Ф больше, чем в режиме к.з., но
если в режиме х.х. маrнитнъ1е потери происходят только в сердеч­
нике статора (см.§ 13.1), то в режиме к.з. (s = 1) маrнитнъ1е потери
происходят еще и в сердечнике ротора, так какh =Ji.
Начальный пусковой момент получают пересчетом момента
Мк на начальный пусковой ток /0 :
2
М0 М.,_ (/0 / J.,_ ) .
Затем определяют кратность пускового момента МпfМн ом .
�
§ 14.4. Круговая диаграмма.
асинхронного двиrателя
Представим схему замещения асинхроmюrо двигателя (рис.
12.2, б) в упрощенном виде (рис. - 14.4), где Ri = 1j + rm ,
Х1 =х 1 +х т ; R2 =1j +c1 r2/s и Х2 =х 1 +с1х2. Ветвь намагничива­
ния .Ri + jX1 не содержит переменных параметров, поэтому век. торная диаграмма для нее содержит ЛШIIЬ два вектора: вектор тока
j0 и вектор напряжения U1 , сдвШiуrые по фазе относительно друг
друга на угол <р 0 (рис. 14.5, а). Что же касается рабочей ветви
R2 + jX2, то она содержит перемеmn,IЙ параметр R2• Диаграмму
для этой ветви удобно представить в виде прямоугольного тре­
угольника напряжений АВС, у которого катеть� АВ и ВС представляют собой ШiдуКТИВНОе падение напряжения UL = Д2 Х2 и актив­
ное падение напряжения Ия = j2 R2 , а гипотенуза АС - · вектор
приложенного напряжения И1 =Ия+ jUL , (рис. 14.5, б).
Разделив каждую сторону треугольника АВС на Х2, получим
треугольник HDC, в котором катет HD изображает вектор тока
- j2 (рис. 14.5, в). Под углом <р 2 = arctg(X2/ R2) к вектору тока
184
- /2 в положительн ом направлеmm оси ординат пр оведем вектор
напряжения U1 • Ecriи изменить активное сопротивление R2, то из­
мениrся и ток в цеIШ, а катеты займут новое положение: HD1 и
D1C. Но гипотенуза U1 /X2 треугольника останется неизменной.
Таким образом, новый режим работы электрической цепи будет
определен на диаграмме положением точки D1 • Если же активное
сопротивление цепи изменять в uшроких пре­
делах (от нуля до бесконечности), то вектор i,
тока - i2 будет зациматъ различные положения
на диаграмме, оrmсывая своим концом (точка
D) окружность диаметром и,/ Х2 • При R2 = О l /
(нагрузка чисто шщуктивная) точка D совмес- 't
о-+----­
1ИГСЯ с точкой С. При R2 = оо ток i2 =О, а поэтому точка D совместнrся с точкой Н При Рис. 14.4. Упрощен­
mобом промежуrочном значеmm сопротивле- ная схема замеще­
асинхронного
ния R2 конец вектора тока - i2 занимает раз­ ния
двигателя
личные положения на окружности HDC, 'кото­
рую принято называть окружностью токов.
Полученная диаграмма называется круговой. Если же совместить
диаграммы, показанные на рис. 14.5, а и 6, то получим круговую диа­
грамму схемы замещения на рис. 14.4 или, чrо одно и то же, схемы
замещения, изображенной на рис. 12.2, 6, т. е. круговую диаграмму
асинхронного двигателя (рис. 14.5, г). Сложив векторы токов /0 и
- i2 , получим векто� тока статора i1 , сдвинутого по фазе оmоси­
тельно напряжения U1 на угол q> 1 • Диаметр окружности токов круго­
вой диаграммы НС= (U1 / хк )/т; , где т1 - масшrаб тока, А/мм.
и,
а)
о
С'1
6)
8)
-�
и,
� Io А � С
u,
г)
i.!,
с
Рис 14.5. К обоснованию круговой диаграммы асинхронного двигателя
Построение круговой диаграммы. Для построения круговой
диаграммы асШIХронного двигателя необходимо знать: напряже ­
ние сети (фазное) U1 , ток холостого хода (фазный) /0, )ТОЛ сдвига
фаз q> 0 между i0 и U1 , ток короткого замыкания Iк.ном; а также со. противление к.з. Zк = rк + jхк .
Если построение диаграммы ведется при расчете двигателя, то
необходимые параметры определяются в процессе расчета. Если
же круговую диаграмму нужно построить для готового двигателя,
185
то необходимо для определения исходных параметров диаграммы
воспользоваться результатами опьпов х.х. и к.з.
Круговую диаграмму строят в следующем пор,щке. Проводят
оси координат и на оси ординат строят вектор напряжения И1
(рис. 14.6). Выбрав масштаб тока m; (А/мм), проводят вектор тока
j0 (отрезок ОН) под углом <р 0 к оси ординат. Из точки Н, назы­
ваемой точкой х.х., соответствующей скольжеmпо s = О, проводят
\ прямую, параллельную оси абсцисс, на которой откладывают от­
резок НС, равный диаметру окружности токов (мм)
(14.17)
D; =(И1 /х.,,.)/т;,
Е
г
t
1
1
1
1
F
с
Рис 14.6. Круговая диаграмма асинхронного двигателя
Для обеспечения достаточной точности при последующем ис­
пользоваIШИ круговой диаграммы сJiедует принять масштаб тока
m; таким, чтобы диаметр D; бьm не менее 200 мм, при этом все по­
строения следует вести остро отточенным карандашом.
Разделив отрезок НС на две равные части, получаем точку 01 ,
из которой радиусом D; /2 проводим полуокружность. Затем из
точки Н в масштабе токов проводят дугу радиусом, эквивалент­
.ным току к.з. Iк.ном• В месте пересечения этой дуги и полуокружно­
сти токов получаем точку К, называемую точкой к.з. Соединив
�чки Н и К, получаем вектор тока короткого замыкания
/к.ном = /п . Точке Кна диаграмме соответствует скольжение s = 1.
На средней части отрезка 01 С отмечаем трчку F, в которой
.восставляем перпендикуляр к диаметру НС. На этом перпендику­
ляре отмечаем отрезок
(14.18)
Из точки Н через точку F1 проводим прямую до пересечения с
окружностью в точке Т. Точка Т соответствует скольженmо
s = ±оо (ротор вращается по часовой стрелке или против нее с бес­
конечно большой скоростью).
Таким образом, на круговой диаграмме отмечены три харак­
терные точки: Н (s = О), К (s = 1) и Т ( s = ±оо ). Между этими точ186
ками расположены три зоны .возможных режимов асинхроююй
машины. При обходе окружности токов по часовой стрелке этим
режимам соответствуют:
а) дуга ЯК-двигательный режим (s = 0+1);
б) дуга КТ-тормозной режим (s == 1+ оо .);
в) дуга ТСН(вкточая не показанную на рис. 14.6 нижюою по­
луокружность) -генераторный режим ( s = - оо +О).
Соедиmm точки Н и К, получим линию полезной мощности
НК, соединив точки Н и Т, получим линию электромагнитной
мощности нт.
Точка Е на круговой диаграмме соответствует максимальному
моменту, т. е. критическому скольжению sкр. Положение этой точ­
ки определяется следующим образом: из точки 01 опускают пер­
пендикуляр на линию электромагнитной мощности НТ и продол­
жают его до пересечения с окружностью токов в точке Е.
Рассматриваемая круговая диаграмма является упрощенной,
так как она построена при предположении постоянства активных и
индуктивных сопротивлений схемы замещения асинхронного дви­
гателя. Однако эти сопротивления при изменениях нагрузки дви­
гателя меняют свои значения. Объясняется это тем, что с ростом
нагрузки усиливается магнитное насыщение зубцQвых слоев ста­
тора и ротора, что ведет к уменьшению индуктивных сопротивле­
ний х 1, Хт и х2. Кроме того, рост нагрузки двигателя сопровожда­
ется увеличением скольжения, а следовательно, и увеличением
частоты тока в обмотке ротора. Это является причиной усиления
эффекта вьпеснения тока [см. § 15.3] - явления, вызывающего
увеличение активного сопротивления обмотки ротора r2 . Практи­
ка применения упрощенной круговой диаграммы показывает, что
ошибка от применения упрощенной круговой диаграммы стано­
вится заметной при скольжениях s > s кр, а при скольжениях, пре­
вышающих О,�,5, эта ошибка недопустима.
§ 14.5. Построение рабочих характеристик
асинхронного двигателя
по круговой диаграмме
Рассмотрим порядок действий при определении параметров
асинхронного двигателя, характеризующих номинальный режим
его работы, а также прИIЩШI построения рабочих характеристик
двигателя посредством круговой диагра!14МЬ! (рис. 14.6). Участок
диаграммы, соответствующий рабочему режиму двигателя,· слиш­
ком мал (на рис. 14.6 он-обведен пунктирной рамкой), поэтому для
дальнейших поясне_ний воспользуемся его более крупнь1м изобра­
жением на рис. 14.7.
Ток статора. Из точки О в масштабе токов щ строят вектор
тока статора i, так, чтобы конец этого вектора (точка D) лежал на
окружности токов (рис. 14.6):
(14.19)
OD= /1 /щ,
187
Затем, соедшmв точку D с точкой Н, получают треугольник
токов ODH, стороны которого определяют токи: ток х.х.
j0 ·= т;ОН, приведеm1ый ток ротора j2 = m;HD и ток статора
jI =m;OD.
Далее, опустив перпендикуляр из точки D на ось абсцисс (Da),
получают прямоугольный треугольник ODa, из которого находят
активную и реактивную составляющие тока статора:
(14.20)
i18 = m;Da; /1Р = т;Оа.
D /
й,
Если U1 = const, а /1 cosq> 1 = /13 , то
мощность· РI прямо пропорциональна ак­
тивной
составляющей · тока
статора
( Pi = /13 ). На круговой дИаграмме значение
/18 определяется отрезком Da, поэтому под­
ведеШiая мощность (Вт)
Pi = mPDa,
(14.21)
где тР = mI UIm1 - масштаб мощности,
Вт/мм.
Подведенную мощность отсчитьmают
от оси абсцисс, которую назьmают линией
подведенной мощности РI , до заданной точ­
Рис. 14.7. Рабочий ки на окружности токов.
Полезная мощность. Полезную мощ­
участок
круговой
ность Р2 двигателя на круговой диаграмме
диаграммы
определяют отрезком, измеренным по вер­
тикали от окружности токов до линии полезной мощности. Для
заданной точки на окружности токов
� ="1>Db.
(14.22)
Электромаmитная мощность и электромаmитный момент.
Электромагниmую мощность и электромагниrnый моменr на круго­
вой диаграмме определяют отрезком, измереm1ым по вертикали от
окружности токов до линии зпектромагниmой мощности. Для задан­
ной точки D на окружности токов электромагнитная мощность (Вт)
�м = "1>Dc;
'
(14.23)
электромагнитный моменr (Нм)
М = тмDс,
(14.24)
где тм = 9,55тi> /п1 - масштаб моменrа, Н·м/мм.
Коэффициент мощности. Д11я определения коэффициента
мощности cos<p 1 на оси ординат строят полуокружность произ­
вольного диаметра O/(см. рис. 14.6). Для заданной точки на ок­
ружности токов cos<p 1 = Oh/Of. Для удобства расчета обычно
принимают Of= 100 мм. :В этом случае cos<p 1 = Oh/100.
188
КПД двигателя. Если определять КПД как отношение полез­
ной мощности Р2 к подведеmюй мощности Р1 , то с учетом (14.22)
и (14.21) получим
11=Db/Da.
(14.25)
Однако определение КПД этим способом дает заметную по­
грешность, так как он не учитьmает все виды потерь в двигателе.
Поэтому КПД целесообразнее определять по (13.9) и (13.10), ис­
пользуя результаты опытов холостого хода и короткого замыкания
(см.§ 14.2 и 14.3): сумма магнитных и механических потерь
(14.26)
(Рм + Рмех )= Рен -mjfilj;
электрические потери в обмотке статора определяют по (13.2), а в
обмотке ротора - по (13.3); добавочные потери Рдоб, согласно
ГОСТу, при работе двшателя в номинальном режиме составляют
0,5% от подводимой к двшателю мощности. Принято считать, чrо
добавочные потери пропорциональны квадра'I)' тока /1 , тогда до­
бавочные потери при любой (неноминальной) нагрузке
(14.27)
Переrрузочная способность двигателя. Для определения мак­
симального момента двигателя следует из точки 01 опустить перпен­
дикуляр на лшmю электромагнитной мощности и продолжиrь его до
пересечения с окружностью токов (точка Е). Из точки Е (см. рис. 14.6)
проводят прямую, параллельную оси ординат, до пересечения с лини­
ей электромапппной мощности (точка N). Тогда отрезок EN в мас­
штабе моментов определит значение максимальноrо момента:
Mmax = m,.. EN.
(14.28)
Если точка D на окружности токов сооnетствует номиналь­
ному ре�, то перегрузочная способность двигателя
(14.29)
Mmax / Мном =EN/Dc.
Скольжение. Скольжение двигателя обычно определяют как
отношение мощностей по (13.24): s = Р.д/ Р,,.. , где Рэм определяют
по (14.23).
Рабочие характеристики. Задавшись рядом значений тока
статора 0,511ном; 0,75 l1ном; l1ном; 1,15 l1ном, строят векторы этих то­
ков.и получают на окружности токов ряд точек (D1 , D2, D3 и D4).
Для каждой из них определяют все необходимые для построения
рабочих характеристик значения (см. рис. 13.7)-.
§ 14.6. Аналитический метод расчета
. рабочих характеристик
асинхроннь1х двигателей
Рассмотренный графический метод расчета рабочих характе­
ристик асинхронных двигателей с применением круговой диа­
граммы имеет существенный недостаток - необходимость по189
строения этой диаграммы и неизбежную неточность как при по­
строении, так и при ее последующем использовании, связанные с
дополнительными построениями, измерениями отрезков и т. п.
Аналитический метод расчета рабочих характеристик не преду­
сматривает каких-либо графических изображений и измерений, а
некоторое увеличение объема математических вычислений при
условии применения простейшей вычислительной техники не вы­
зывает каких-либо затруднений.
Аналитический метод расчета основан на схеме замещения
асинхроmюго двигателя (рис. 12.2, б). Исходными при этом явля­
ются паспортные даm1ые двигателя_ (Рном, И1 ном, n2ном) и результаты
вьmолнения опьпов холостого хода и короткого замыкания (см.
§ 14.2 и 14.3).
Расчет ведут в следующем порядке.
Определяют приведенное активное сопротивление ротора (Ом):
(14.30)
r2 = rк -lj,
а затем критическое скольжение:
(14.31)
и номинальное скольжение:
(14.32)
Sном = (n1 - п2ном )/п, •
Задавшись рядом значений скольжения (всего 6-7 значений,
в том числе номШJ;альное Sном и критическое sкр), определяют не­
обходимые для построения рабочих характеристик величины.
Эквивалентное активное сопротивление (Ом)
(14.33)rэк =lj +r2 /s.
Эквивалентное полное сопротивление рабочего котура схе­
мы замещения (Ом)
(14.34)
Коэффшщеm мощности рабочего контура схемы замещения
cos<p 2 = rэк fZ3к .
(14.35)
Приведенный ток ротора, (А)
(14.36)
12 = И1fzэк
и его активная и реактивная составляющие (А)
;
(14.37)
/23 = /2 COS <р2
.
'
l2, р = l2SШ(j)2 •
0,4.38)
Активная и реактивная составляющие тока статора (А)
11а = loa + l2a ;
(14.39)
(14.40)
. l1p = lop + l2p ·
Здесь /0а = /0 cos<p 0 - активная составляющая тока холостого
хода; /0Р = /0 sin<p 0 - реактивная составляющая этого тока.
190
Ток в обмотке статора (А)
2(14.4 l)
/1 = .J�l-/8 _+_/_1 P ••
Коэффициеm мощности двшателя
cosq> 1 = /1 af /1 •
{14.42)
Потребляемая двигателем мощность (Вт)
(14.43)
Pi = тр1 118 •
Электрические потери статора Р31 определяют по (13.2), элек­
тром:апппную мощность Рэм - по (13.6), электромагнитный мо­
меm М - по (13.11}, электрические потери в роторе Р32 - по
(13.5), добавочные потери Рд00 - по (13.7) и (13.8).
Полезная. мощность двигателя (Вт)
(14.44}
Pi = �м - �2 -Рмех - Рдоб,·
где Рмех -:-- механические потери, Вт; их определяют из опьпа хо­
лостого хода (см. рис. 14.2).
Коэффициеm полезного действия двигателя определяют по
(13.10), частоту вращения ротора� по (10.2). Полезный момент
(момент на валу) двигателя (Н·м)
(14.45)
М2 = 9,55Pi/n2 •
Результаты расчета сводят в табmщу (см. табл. 14.1), а затем
строят рабочие характеристики двшателя (см. рис. 13.7).
Пример 14.1. Трехфазный асинхршmый двигатель имеет паспортные дан­
нь1е: Рном =3,0 кВт, Ином 220/380 В, /1 ,.,м = 6,3 А, nном = 1430 об/мин. Активное
сопротивление фазы обмотки статора при рабочей темпера1)1)е r1 = 1,70 Ом. Ха­
рактеристики х.х. двигателя приведены на рис. 14.2 (/оном 1,83 А, Роном = 300 Вт,
Ро'ном = 283 Вт, Рмех = 200 Вт, соs<р0ном 0,24, обмотка статора соединена звез­
дой). Характеристики к.з. приведены на рис. 14.З (Р•.ном = 418 Вт, Ик.ном = 59,5 В,
I•.,.,м = 6,3 А, СОS(j)•.ном = 0,372).
Требуется рассчиrать даннь1е и построить рабочие характеристики двигателя и определить переrрузочную его способность.
Ре ш е н и е. Активная и реактивная составляющие тока х.х.
100 = 10 СОS(j)оном = 1,83 · 0,24 = 0,44 А,
/0Р = /0 sin<p0нoм =1,83·0,97=1,77 А.
Полное сопротивление к.з. по (14.1 О)
Z1 =И"ном //1.ном =59,5/6,3=9,45 Ом,
его активная и реактивная составляющие по (14.11) и (14.12)
r. = z" СОS(j)._ном = 9,45 • 0,372 = 3,5 Ом,
=
=
=
2
х,. = Jz; -r; = J9,45 - 3,5 2 = 8,8
Ом.
Приведенное активное сопротивление ротора по (14.30)
r2= r,. -'i = 3,5-1,7=1,8 Ом.
Критическое скольжение по ( 14.31)
sкр =r;/x,. =1,8/8,8= 0,20 .
Номинальное скольжение по (14.32)
sном =(n1 -n2ном )/n1 = (1500-1430)/1500 = 0,046 .
191
Маrниrные потери по (14.8)
_Рм = Р� - Рмех = 283- 200 = 83 Вт.
Задаемся следующими значеЮLЧми скольжения: 0,01, 0,02, 0,03, 0,046, 0,06 и
0,20. Результаты расчета приведены в табл. 14.1. Рабочие характеристики двига­
теля представлены на рис. 13.7.
Перегрузочная способность двигателя л = Мmax / Моюм = 38,7/21,4 = l,81 .
Та б л ица 14.1
. Значения параметров при
скольжении s
r2/s, Ом
r,. =lj +r;/s, Ом
=з... = �о
r),., +хк ' м
cosq, 2 = r,./z,.
/2 = U1/z,• .А
/21 = /2 cosq, 2 , А
/2Р = /2 sinq, 2 , А
/11 = /01 + /21 ,А
l1p = lop + l2p ,А
✓/�
/1 =
1 +Ii. ,А
COS<p 1 = /11 //1
J-; = m1 U1 /11 , Вт
Р, 1 = 1111 /�r1 , Вт
Р,., = J-; -Р, 1 - Р., , Вт
M=·P,., /w 1 .Н·м
Р.,2 = sP,., , Вт
Р 2 = (J.//Jном)2
Р;об = Р Р,,об.ном • Вт
l'z = Р.,., - Р,2 - Р"0, - Рдоб , Вт
ТJ = P2/Pi
112 = 111 (1-s), об/мин
М2 = 9,55Pz/n2 , Н·м
2
Контрольные вопросы
0,01
ню
181,7
182
0,998
1,21
1,21
0,08
1,65
1,85
2,48
0,66
0,02
0,03
0,046
0,06
0,20
90
_91,7
92,0
60
61,7
62,5
39,1
42,0
30
31,7
33,2
10,1
11,8
15,5
·о,996
2,39
0,987
3,52
3,47
0,51
3,91
2,34
4,55
0,971
5,24
5,09
1,25
5,54
3,02
6,30
0,955
6,63
6,33
1,95
6,77
3,72
7.70
0,760
14,20
10,7
9.20
11,10
10,9
15,5
0,88
3652
200
0.88
4468
302
0,71
7326
1225
6080
38,7
2,38
· 0,19
2,82
1,96
3,43
0,82
40,8
....
1089
1861
31,0
60,0
0,86
2580
105
975
6,2
10
0,15
1718
10,9
34
0,29
2392
15,3
72
0,52
3369
151
1,0
4083
26,0
245
1.44
2,7
5,2
9,4
18
26
762
0,70
1485
4,9
1479
0,79
1470
9,6
2110
0,82
1455
13,8
3000
0,82
1430
20,0
3612
0.81
1410
24,5
21,4
--
�
-
-
-
1. Какие существуют методы получения данных для построения рабочи.,..: харак­
теристик асинхронных двигателей?
2. Чем ограничивается применение метода непосредственной нагрузки?
3. Как определить величину механических и магнитных потерь двигателя по
характеристикам х.х.?
Пуск и регулироваliие
1С ::::;::ц■ частоты вращения
трехфазных
асинхронных
двигателей
глава 15•
§ 15.1. Пускдвиrателей
с фазным ротором
Пусковые свойства двиrателей. Пуск асин­
хроююго двшателя сопровождается переходным
процессом, обусловленньIМ переходом ротора и ме­
ханически связаШ11,IХ с ним частей исполнительного
механизма из состояния покоя в состояние равно­
мерного вращения, когда вращающий момент двша­
теля уравновешивается суммой противодействую­
щих моментов, действующих на ротор двшателя.
Пусковые свойства двшателя определяются в
первую очередь значением пускового тока In или его
кратностью /Jlном и значением пускового момента
Mn или его кратностью МJМном• Двшатель, обла­
дающий хорошими пусковьIМи свойствами, развива­
ет значительный пусковой момент при сравнительно
небольшом пусковом токе. Однако получение такого
сочетания пусковых параметров в асинхронном дви­
гателе сопряжено с определеннь�ми трудностями, а
иногда оказьmается невозможнь�м.
В нач;альный момент пуска скольжение s = 1, по­
этому, пренебрегая током х.х., пусковой ток можно
определить из (12.25), подставив s = 1:
/п =UJ.J('i +r{)2 +(X1 +х2>2 .
Пусковой момент по (13 .19)
(15.1)
т1 и12r2P
21tf.[(1j +r{)2 +(х1 +х2>2 ].
Из (15.1) и (13.19) следует, что улуtШIИТь пуско­
вые свойства двшателя можно увеличением актив­
ного сопротивления цепи ротора r; , так как в этом
случае уменьшение пускового тока сопровождается
увеличением пускового момента. В то же время на­
пряжени� U1 по-разному влияет на пусковые пара­
метры двшателя: с уменьшением U1 пусковой ток
уменьшается, что благоприятно влияет на пусковые
свойства двшателя, но одновременно уменьшается
Мп =
,
193
пусковой моменr. Целесообразность применения того или шюго
способа улучшения пусковых свойств двигателя определяется
конкреnrыми условиями эксплуатации. двигателя и требованиями,
которые предъявляются к его пусковым свойствам.
Помимо пусковых значений тока lп и моменrа Мп пусковые
свойства двигателей оцениваются еще и такими показателями:
продолжительность и rmавность
пуска, сложность пусковой опе­
рации, ее экономичность (стои­
мость и надежность пусковой ап­
паратуры и потерь энергии в ней).
Пуск двнrателей с фазным
ротором. Наличие конrактных
колец у двигателей с фазным ротором
подюпочить к
0 �,
R"2 R.2 обмоткепозволяет
2
ротора пусковой реостат
Рис. 15.1. Зависимость пускового (ПР). При этом активное сопро­
момеmа от активного сопротив- тивление цепи ротора увеличива­
ления цепи ротора
ется до значения R2 = r2 + r; , где
r;
электрическое сопротивление пускового реостата, приве­
денное к обмотке статора. Влияние возросшего значения активно­
го сопротивления на пусковой моменr двигателя Мп следует из
(13.19). Это влияние графически показано на рис. 15.1, из которого
видно, что если при отсутствии ПР, т. е. при активном сопротив­
лении цепи ротора R2 = r2 , пусковой моменr М" = М"0, то при
введении в цепь ротора добавочного активного сопротивления
r;06 , когда R2 = r2 + r;06 , пусковой момент возрастает и при
�• = ri, + r;00 = х 1 + х2 достигает наибольшего значения Мп.наиб• При
R2 > х 1 + х 2 пусковой момент уменьшается.
При выборе сопротивления пускового реостат-а rдоб исходят из
условий пуска двигателя: если двигатель вкmочают при значи­
тельном нагрузочном моменте на валу, сопротивление пускового
реостата rдоб выбирают таким, чтобы обеспечить наибольший пус­
ковой момент (см. график при r2ш на рис. 13.6); если же двигатель
вюпочают при небольшом нагрузочном моменrе на валу, когда
пусковой момент не имеет решающего значения для пуска, оказы­
вается целесообразным сопротивл:ение ПР rдоб выбирать несколько
больше значения, соответствующего наибольшему пусковому моменгу, т. е. чтобы R2 > х 1 + х2. В этом случае пусковой момент
оказывается несколько меньшим наибольшего значения Мп.mах, НО
зато пусковой ток значшельно уменьшается (см. график при r21 v
на рис. 13.6).
На рис. 15.2, а показана схема включения ПР в цепь фазного ро­
тора. В процессе пуска двигателя сrупени ПР переюпочают таким
образом, чrобы ток ротора оставался приблизигельно неизменным, а
среднее значение пускового момента было близко к наибольшему.
-
194
На рис. 15.2, б представлен график изменеIШЯ пускового мо­
мента асШIХронного двигателя при четырех ступенях пускового
реостата. Так, в начальный момеm пуска (первая С'I)'Пень реоста­
та) пусковой момент равен Мп=х• По мере разгона двигателя его
момент уменьшается по кривой 1. Как только значение момента
уменьшится до значения Mпmin, рычаг реостата переводят на втоо) 1
6)
Рис. 15.2. Схема включения пускового реостата (а) и построение графика
пускового момента (б) асинхронного двигателя с фазным ротором
,
рую С'I)'ПеНЬ и сопротивление реостата уменьшается. Теперь зави­
симость М = j{s) выражается кривой 2 и пусковой момент двигате­
ля вновь достигает Мпmах• Затем ПР перекточают на третью и на
четвертую С'I)'ПеНИ (кривые 3 и 4). После того как электромагнит­
ный моменr двигателя уменьшится до значеIШЯ, равного значению
противодействующего мрмента на валу двигателя, частота враще­
IШЯ ротора достигнет установившегося значеIШЯ и процесс пуска
двигателя будет закончен. Таким образом, в течение всего процес­
са пуска. значение пускового момента остается приблизительно
постоянным, равным Мп .ср• Следует иметь в виду, что при слишком
быстром переюпочении С'I)'Пеней реостата пусковой ток может
достигнугь недопустимо больших значеюm.
Пусковые реостаты состоят из кожуха, рычага с перекточаю­
щим устройством и сопротивлеюm, вьmолненньIХ из металличе­
ской проволоки или ленты, намотанной в виде спирали, или же из
чугунного литья. Пусковые реостаты рассчитаны на кратковре­
менное протекание тока, а поэтому рычаг пускового реостата
нельзя долго задерживать на промежуточнь�х ступенях, так как
сопротивлеIШЯ реостата могуг перегореть. По окончании процесса
пуска, когда рычаг реостата находится на последней ступени, об­
мотка ротора замкнута накоротко.
В закmочение отметим, что в асинхроннь�х двигателях с фаз­
ным ротором обеспечивается наиболее благоприятное соотноше­
ние между пусковым моментом и пусковым током: большой пус­
ковой момент при небольшом пусковом токе (в 2-3 раза больше
номинального). Недостатками пусковь�х свойств двигателей с
фазным ротором являются некоторая сложность, продолжитель195
ность и неэкономичность пусковой операции. Последнее вызыва­
ется необходимостью применения в схеме двшателя пускового
реостата и непроизводительным расходом электроэнергии при его
нагреве.
§ 15.2. Пуск двиrателей
с короткоэамкнуть1м ротором
Пуск непосредственным включением в сеть (рис. 15.3).
Этот способ пуска, отличаясь простотой, имеет существенный не­
достаток: в момент подключения двшателя к сети в обмотке ста­
тора возникает большой пусковой ток, в 5-7 раз превьШiающий
номинальный ток двшателя. При небольшой инерционности ис­
полниrельноrо механизма частота вращения двшателя быстро
достигает установившегося значения и пусковой ток также быстро
спадает, не вызывая перегрева обмотки статора. Но такой значи­
тельный бросок тока в питающей сети может вызвать в ней замет­
ное падение напряжения. Однако этот способ пуска благодаря
своей простоте получил наибольшее применение для двигателей
а)
б)
М l
Рис. 15.3. Схема непосредствеmюrо вюпочения в сеть
(а) и rрафщи изменения тока и момента при пуске (6)
асинхроmюrо двигателя с короткозамкнутым ротором
мощностью до 38-50 кВт и более (при достаточном сечеIЩИ жил
токоподводящего кабеля). При необходимости уменьшения пуско­
вого тока двшателя применяют какой-либо из способов пуска ко­
роткозамкнутых двигателей при поШIЖенном напряжении.
Пуск при пониженном напряжении. В соответствии с (15.1)
пусковой ток двигателя пропорционален подведенному напряже­
нию U1, уменьшение которого вызьmает соответствующее умень­
шение пускового тока. Существует несколько способов пониже­
ния подводимого к двигателю напряжения. Рассмотрим некоторые
из них.
Для асинхронных двшателей, работающих при соединении
обмоток статора треугольником, можно применить пуск переклю196
чением обмотки статора со звезды на треугольник (рис. 15.4, а).
В момент подкmочения двшателя к сети переюпочатель ставят в
положение «звезда», при котором обмотка статора оказывается
соединешюй в звезду. При этом фазное напряжение на статоре
· понижается в ✓З раз. Во столько же раз уменьшается и ток в фаз­
ных обмотках двшателя (рис. 15.4, 6). Кроме того, при соединении
обмоток звездой линейный ток равен фазному, в то время как при
соединении этих же обмоток треугольником линейный ток больше
фазного в ✓З раз. Следовательно, переключив обмотки статора
о)
о
о
Рис. 15.4. Схема вюпочения (а) и графики изменения мо­
мента и тока (фазного) при пуске (б) асинхронного двига­
теля с короткозамкнуrым ротором переюпочением обмотки статора со звезды на треугольник
звездой, мы добиваемся уменьшения линейного тока в ( ✓З )2 = 3
раза. После того как ротор двшателя разгонится до частоты вра­
щения, близкой к установившейся, переключатель быстро перево­
дЯТ в положение ю-реугольник» и фазные обмотки двшателя ока­
зьmаются под номинальным напряжением. Возникший при этом
бросок тока до значения J�л является незначительным.
Рассмотренный способ пуска имеет существенный недостаток уменьшение фазного напряжения в ✓3 раз сопровождается
уменьшением пускового момента в три раза, так как, согласно
(13.19), пусковой момент асинхронного двигателя прямо пропор­
ционален квадрату напряжения И1 • Такое значительное уменьше­
ние пускового момента не позволяет uрименять этот способ пуска
для двшателей, включаемых в сеть при значительной нагрузке на
валу.
ОписанньiЙ способ понижения напряжения при пуске приме­
ним лишь для двшате]Jей, работающих при соединении обмотки
статора треугольником. Более универсальным является сцособ
пуска понижением подводимого к двигателю напряжения посред­
ством реакторов (реактивных катушек - дросселей). Порядок
197
включения двигателя в этом случае следующий (рис. 15.5, а). При
разомкнутом рубильнике 2 включают рубильник J. При этом ток
из сети пос'I)'Пает в обмотку статора через реакторы Р, на которых
происходит падение напряжения Дпхр (где Хр - шщуктивное сопротивление реак­
тора, Ом). В резуль­
а)
.
тате на обмотку ста­
тора подается пони­
женное напряжение
Иi = И1ном - ji" xP .
После разгона ро_двигателя
· тора
включают рубиль­
ник 2 и подводимое
к об�отке статора
напряжение оказы­
вается номиналь­
ным.
Недостаток это­
Рис. 15.5. Схемы реакторного (а) и автотранс­
форматорного (б) способов пуска асинхронных го способа пуска
состоиr в том, что
двигателей с короткозамкнутым ротором
уменьшение напряжения в Иj/И1ном раз сопровождается уменьшением пускового
момента Мп в (Иj/И1ном )2 раз.
При пуске двигателя через понижающий автотрансформа,­
тор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий
обмотки автотрансформатора звездой, а затем включают рубиль­
ник 2 и двигатель оказывается подключенным на пониженное на­
пряжение Uj. При этом пусковой ток двигателя, измереннь1й на
выходе автотрансформатора, уменьшается в Кл раз, где Кл - ко­
эффициент трансформации автотрансформатора. Что же касается
тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К� раз по сравнению с пусковым
током при непосредственном включении двигателя в сеть. Дело в
том, что в понижающем автотрансформаторе первичный ток
меньше вторичного в Кл раз и поэтому уменьшение - пускового тока при автотрансформаторном пуске составляет Кл Кл = Ki раз.
Например, если кратность пускового тока асинхронного двигателя
при · непосредственном его включении в сеть составляет
/" / /1ном = 6, а напряжение сети 380 В, то при автотрансформатор­
ном пуске с понижением напряжения до 220 В кратность пусково2
го ТОКа В СеТИ /�/ /lном = 6/(380/220) = 2.
После первоначального разгона ротора двигателя рубильник 1
размыкают и автотрансформатор превращается в реактор. При
этом напряжение на вьmодах обмотки статора несколько повыша-
,
198
ется, но все же остается меньше номинального. Включением ру­
бильника 3 на двигатель подается поЛЕ:ое напряжение сети. Таким
образом, автотрансформаторный пуск проходит тремя С'I)'Пенями:
на первой С'I)'ПеНИ к двигателю подводится напряжение И1 =
= {О,50+0,60)И1ном, на второй - И1 = (0,70+0,80)И1ком и, наконец,
на третьей С'I)'ПеНИ к двигателю подводиrся ноМШiальное напря­
жение И1ном •
Как и предыдущие способы пуска при понижеююм напряже­
нии, автотрансформаторный способ пуска сопровождается умень­
шением- пускового момента, так как значение последнего прямо
пропорционально квадраrу напряжения. С точки зрения уменьше­
ния пускового тока автотрансформаторный способ пуска лучше
реакторного, так как при реакторном пуске пусковой ток в пи­
тающей сети уменьшается в U:/И�ном раз, а при автотрансформаторном - в (И{ /И�ком )2 раз. Но некоторая сложность пусковой
операции и повышенная стоимость пусковой аппаратуры (пони­
жающий автотрансформатор и переключающая аIШаратура) не­
сколько ограничивают применение этого способа пуска асинхрон­
ных двигателей.
§ 15.3. Короткозамкнутые
· асинхронные двигатели
с улучwеннь1ми
пусковыми характеристиками
Стремление улучшить пусковые свойства асинхронных двига­
телей с короткозамкнутым ротором привело к созданию асин­
хроннъIХ двигателей с особой конструкцией ротора: двигателей с
глубокими пазами на роторе и двигателей с двумя короткозамкну­
тыми клетками на роторе.
Двигатель с глубокими пазами на роторе. Ог обычного
асинхронного двигателя этот двигатель отличается тем, что у него
пазы ротора сделаны в виде узких глубоких щелей, в которые
вложены стержни обмотки ротора, представляющие собой узкие
полосы. С обеих сторон эти стержни приварены к замыкающим
кольцам. Обычно глубокий паз имеет соотношение размеров
hn / bn = 9+ 1 О, где hп, Ьп - высота и ширина паза.
В момент включения двигателя, когда частота тока в роторе
имеет наибольшее значение (h = J.), индуктивное сопротивление
нижней части каждого стержня . значиrельно больше верхней.
Объясняется это тем, что нижняя часть стержня сцеплена с боль­
IIШМ числом магниrных силовых линий поля рассеяния (рис. 15.6, а).
На рис. 15.6, б показан график распределения плотности пусково­
го тока в стержне ротора с глубокими пазами по высоте стержня.
Из этого графика следует, что почти весь ток ротора проходит по
верхней части стержня, поперечное сечение которой намного
меньше сечения всего стержня. Это равноценно увеличению ак­
тивного сопротивления стержня ротора, что, к.µ< известно, способ199
ствует рос'!)' пускового момента двигателя и некоторому ограни­
ченmо пускового тока (см.§ 15.2).
Таким образом, двшатель с глубокими пазами на роторе об­
ладает благоприятным сооnюшением пусковых параметров:
большим пусковым моментом при сравнительно небольшом пус­
ковом токе. По мере нарастания частоты вращения ротора частота
тока в роторе убьmает(h. = sjj). В связи с этим уменьшается индук­
тивное сопротивление обмотки ротора х2 = /2 • Распределение
плотности тока по высоте стержня в том случае становится более
равномерным, что ведет к уменьшенmо активного сопротивления
ротора. При работе двшателя с ноМ1П1альной частотой вращения,
Пуск
h Работа
А, А/нм. 2
Рис 15.6 Ротор с глубокими пазами:
а - уе1ройство, б - распределеЮ1е плотности тока ротора по высоте стержня
при пуске и при работе двшателя
когда h << jj, процесс «вьпеснения» тока практически прекраща­
ется и двшатель работает, как обычный короткозамкнуrый.
Эффект вьпеснения тока хорошо проявляется при пазах рото­
ра б у т ы л о ч н о й формы (рис. 15.7). В этом случае «вытесне­
ние» тока происходит в верхшою часть паза, имеющую меньшее
сечение, а следовательно, большее активное со­
противление. · Применение •. пазов буrьmочной
формы позволяет сократить высоту пазов ротора,
а следовательно, уменьшить диаметр ротора по
сравнению с глубокопазным ротором.
Двигатель с двумя клетками на роторе.
Еще лучшими пусковыми свойствами обладают
\.
асинхршшые двигатели с двумя короткозамкну­
Рис 15.7. Буrы­ тыми клетками на роторе (рис. 15.8, а): рабочей
лочная форма клеткой 1, стержни которой расположены в ниж­
стержней рото- нем слое, и пусковой клеткой 2, стержни которой
ра
расположены в верхнем слое, ближе к воздушно­
му зазору. Стержни пусковой клетки обычно вьшолняют из латуни
или бронзы - материалов, обладающих более высоким, чем у ме­
ди, активным сопротивлением. Индуктивное сопротивление рас­
сеяния пусковой клетки невелико, так как ее стержни расположе­
ны вблизи воздушного зазора и к тому же с двух сторон имеют
200
воздушные щели (рис. 15.8, б). Стержни рабочей клеткн выполня­
ют из меди, и по сравненmо со стержнями пусковой клетки они
имеют большее сечение. Это обеспечивает рабочей клетке малое
активное сопротивление. Но зато индуктивное сопротивление ра­
бочей клеrки больше, чем у пусковой, особенно в начальный период
пуска, когда частота тока в роторе сравниrельно велика ( /2 � /,_ ).
а;
h
2
А,А/нн'
Рис. 15.8 Двухклеточный ротор:
а - устройсrво; б - распределе1Ше плотносrи тока в рабочей и пусковой клет­
ках при пуске и работе двигателя
В моменг пуска двигателя ток ротора проходиг в основном по
верхней (пусковой) клетке, обладающей малым индуктивным со­
противлением. При этом плотность тока в стержнях пусковой
клетки намного больше плотности тока в стержнях рабочей клетки
(рис. 15.8, б). Повьппенное активное сопротивление этой клетки
обеспечивает двигателю значительный
пусковой момент при пони­
м
женном пусковом токе. По мере
увеличени,�: частоты вращения ро­
тора уменьшается частота тока в
роторе, при этом индуктивное со­
противление рабочей клетки уменьшается и распределение плотности
тока в стержнях пусковой и рабо­
чей клеток становится почти одиs паковым.
В итоге происходит переРис. 15.9. Механическая ха- распределение вращающего момента
рактеристика двухклеточного между клетками: если в начальный
асинхронного двигателя
период пуска момеm создается
главным образом 'токами пусковой
клетки, то по окончании периода пуска вращающий момент создается
в основном токами рабочей клетки. Так как активные сопротивления
клеток ротора неодинаковы, то зависимость М = .f(s) этих клеток изо­
бражается разными кривыми (рис. 15.9). Максимальное значение мо­
мента пусковой клетки вследствие ее повьппенного активного сопро­
тивления смещено в сторону скольжений, близких к единице.
Вращающие момешы от обеих клеток направлены в одну сторону,
поэтому результирующий момеш двшателя равен сумме момеmов
пусковой Mri.к и рабочей Мраб.к клеток м = �n.к + мрабк .
201
.
Двига�ли с двумя метками на роторе по сравнению с асинхрошп,rми двигателями обычной конструкщш имеют повышенную
стоимость, что объясняется сложностью конструкщш.
§ 15.4. Реrулирование частоты вращения
асинхронных двигателей
Частота вращения ротора асинхроююrо двигателя
(15.2)
n2 = n1 (1-s)=(Ji60/p)(l-s).
Из этого выражения следует, что часто-rу вращения ротора
асинхронного двигателя можно регулировать изменением какой­
либо из трех величин: скольжения s, частоты тока в обмотке ста­
тора fi или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения s
возможно тремя способами: изменением подводимого к обмотке
статора напряжения, нарушением симметрии этого напряжения и
изменением
активного сопротивления обмотки ротора.
·
Регулировка частоты вращения изменением скольжения про­
исходит только в нагруженном двигателе. В режиме холостого
хода скольжение, а следовательно, и частота вращения остаются
практически неизмешп,rми.
· Регулирование частоты вращения изменением подводи­
мого напряжения. Возможность этого способа регулирования:
подтверждается графиками М = fi.s), построешп,rми для разных
значений U1 (см. рис. 13 .5). При неизменной нагрузке на валу дви­
гателя увеличение подводимого к двигателю напряжения вызыва­
ет рост частоты вращения. Однако диапазон регулирования часто­
ты вращения получается небольшим, что объясняется узкой зоной
устойчивой работы двигателя; оrраничешп,rм значением критиче­
ского скольжения и недопустимостью значительного превышения
номинального значения напряжения. Последнее объясняется тем,
что с превышением номинального напряжения возникает опас­
ность чрезмерного перегрева двигателя, вызванного резким увели­
чением электрических и магниmых потерь. В то же время с
уменьшением напряжения U1 двигатель утрачивает перегрузочную
способность, которая, как известно, пропорциональна квадра-rу
напряжения сети (см.§ 13.2).
Подводимое к двшателю напряжение изменяют либо реrули­
ровочньrм автотрансформатором, либо реакторами, включаемыми
в разрьm линейных проводов.
Узкий диапазон регулирования и неэкономичность (необхо­
димость в дополнителып,IХ устройствах) ограничивают область
применения этого способа регулирования частотъ1 вращения.
Регулирование частоты вращения нарушением симметрии
подводимого напряжения. При нарушении симметрии подводи­
мой к двшателю трехфазной системы напряжения вращающееся
поле статора становится элmmтическим (см.§ 9.4). При этом поле
приобретает обратную составляющую (встречное поле), которая
202
создает момент М06р, направленный·встречно вращающему момен­
'I)' Мпр· В итоге результирующий электромапnпный момент двша­
теля уменьшается (М = Мпр - Мобр)Механические характеристики двигаrеля при этом способе реrу­
лирования располагаются в зоне между характеристикой при симмет­
ричном напряжении (рис. 15.10, а, кривая J) и характеристикой при
однофазном питании дви­
гателя (кривая 2) - пре­
А В С
делом несимметрШI трех- а)
5)
м
фазного напряжения.
Для реrулировки не­
,
симметрШI подводимого
напряжения можно в цепь
одной из фаз вкmочитъ 11.
однофазный реrулировоч- i:
ный автотрансформатор
Sм11 .S,nu Sxp
(АТ) (рис. 15.10, б). При
15.10. Механические характеристики
)1-iеньшеНШ1 напряжения Рис.
и схема включения (6) асинхронного
на выходе АТ несиммет­ (а)
двигателя при реrулировании частоты
рия увеличиваеrся и час­ вращения изменением симметрии трехфаз­
тurа вращения ротора ной системы
уменьшается. Недостат­
ками этого способа реrулирования являются узкая зона реrулирова­
ния и уменьшение КПД двшателя по мере увеличения несимметрии
напряжения. Обычно этот способ регулирования частоты вращения
применяют mппь в двшателях малой мощности.
Регулирование частоты вращения изменением активного
сопротивления в цепи ротора. Этот способ реrулирования часто­
ты вращения возможен лmпъ в д}!шателях с фазным ротором. Ме­
ханические характеристики асинхронного двшателя, построенные
для различных значений активного сопротивления цепи ротора
(см. рис. 13.6), показьmают, что с увеличением активного сопро­
тивления ротора возрастает скольжение, соответствующее задан­
ному нагрузочному момеН'I)'. Частота вращения двшателя при
этом уменьшается. Зависимость скольжения (частоты вращения)
от активного сопротивления цепи ротора выражается формулой,
полученной преобразованием (13.13):
,
(15.3)
Практически изменение активного сопротивления цепи ротора
достшается вкmочением в цепь ротора реrулировочного реостата
(РР), подобного пусковому реостаrу (ПР) (см. рис. 15.2), но рас­
считанного на длительный режим работы. Электрические потери в
роторе пропорциональ ны скольжению (Рэ2 = sРэм), поэтому умень­
шение частоты вращения (увеличение скольжения) сопровождает­
ся ростом электрических потерь в цепи ротора и снижением КПД
двигателя. Так, если при неизменном нагрузочном моменте lla ва­
лу двшателя увеличить скоm.жение от 0,02 до 0,5, что соответст203
вует уменьшению частоты вращения примерно вдвое, то потери в
цепи ротора составят ПОЧ'Гlf половину электромагнитной мощно­
сти двигателя. Эго свидетельствует о неэкономичности рассмат­
риваемого способа регулирования. К тому же необходимо иметь в
виду, что рост потерь в роторе сопровождается ухудшением усло­
вий венrиляции из-за снижения частоты вращения, что приводит к
-перегреву двигателя ( см. § 31.1).
Рассматриваемый способ
регулирования имеет еще и тот
м
недостаток, что участок меха­
нической характеристики, со­
ответствующий устойчивой ра­
боте двигателя, при введении в
цепь ротора добавочного со­
противления становится более
пологим и колебания нагрузоч­
ного момента на валу двигате­
s ля сопровождаются значигель­
�+-+---1�---_.__ ными изменениями частоты
n2 вращения ротора. Эго илmост­
Рис. 15.11. Влияние сопротивления рирует рис. 15.11, на котором
цепи ротора на колебания частоты видно, что если нагрузочный
вращения при изменении нагрузки
моменr двигателя изменигся на
лмсr = м;т - м;�' то изменение частоты вращения при вьmеденном регулировочном реостате
( r; = О) составит Лп21, а при введенном реостате - Лп211• В послед­
нем случае изменение частоты вращения значительно больше.
Но несмотря на указанные недостатки, рассмотреmп.IЙ способ ре­
гулирования частоты вращения широко применяется в асинхронных
двигателях с фазным ротором. В зависимости от конструкции регули­
ровочного реостата этот способ реrулирования частоты вращения
может бьпъ плавm,IМ (при плавном изменении сопротивления РР) или
. С1)'Пенчатым (при С1)'Пенчатом изменении сопротивления РР).
Способ обеспечивает реrулирование частоты вращения в ши­
роком диапазоне, но только вниз от синхронной частоты враще­
ния. Вместе с тем он обеспечивает двигателю улучшеннь1е пуско­
вые свойства {см. § 15 .1).
Регулирование частоrы вращения изменением частоты тока
в статоре. Эгот способ регулирования (частотное реrулирование) ос­
нован на изменении синхронной частоты вращения п1 = f,, 60/ р .
Для осуществления этого способа регулирования необходим
источник питания двигателя переме1rnым током с регулируемой
частотой. В качестве таких источников могут применяться элек­
тромашиннь1е, ионные или полупроводниковые преобразователи
частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно
изменить частоту тока.fi. Но с изменением частоты /., = rо 1 р/(2тс)
будет изменяться и максималъm,JЙ момент [см. (13.18)]. Поэтому для
204
сохранения неизмеmп,IМИ перегрузочной способносm. коэффIЩИенrа
мощности и КПД двшателя на требуемом уровне необходимо одно­
временно с изменением частотыjj изменять и напряжение питания U1 •
Характер одновремешюго изменения Ji и И� зависит от закона изме­
нения моменrа нагрузки и определяется уравнением
(15.4)
и:/и1 ·= (J..'/f. )✓ М'/ м,
где U1 и М- напряжение и момент при частотеJi; и: и М' напряжение и момент при частоте f.' .
Если частота вращения двшателя регулируется при условии
постоянства момента нагрузки ( М = М' = const), то подводимое
к двшатето Jiапряжение необходимо изменять пропорционально
измененшо частоты тока:
(15.5)
При этом мощность двшателя увеличивается пропорциональ­
но нарастанmо частоты вращения. Если же регулирование произ­
водится при условии постоянства мощности двигателя
- ( �м = Mro 1 = const), то подводимое напряжение следует изменять
в соответствии с законом
(15.6)
Частотное регулирование двшателей позволяет Шiавно изме­
нять частоту вращения в широком диапазоне (до 12: 1). Однако
источники питания с регулируемой частотой тока удорожают ус­
тановку. Поэтому частоmое регулирование до последнего времени
применялось в основном _ для одновременного регулирования
группы двигателей, работающих в одинаковых условиях (напри­
мер, рольганговых двигателей). Но благодаря развитию силовой
полупроводниковой техники в последние годы созданы устройства
частоmого регулирования, технико-экономичские показатели ко­
торых оправдывают их индивидуальное применение для регули­
рования частоты вращения одиночных двигателей.
Использование асинхршmых двигателей, укомплектованных
такими устройствами для частоmого регулирования, наиболее це­
лесообразно в пожаро- и взрывоопасных средах (химическая и
нефтеперерабатывающая промьппленность), где применение кол­
лекторных двигателей (см. гл. 29) недопустимо.
Реrулироваиие частоты вращения изменением числа по­
люсов обмотки статора. Этот способ регулирования частоты
вращения дает с'I)'ПеНЧа1)'Ю регулировку. Так, приjj = 50 Гц и р =
= 1+5 пар полюсов можно получить следующие синхронные час­
тоты вращеНЩ1: 3000, 1500, 1000, 750,600 об/мин.
Изменять число полюсов в обмотке статора можно либо ук­
ладкой на статоре двух обмоток с разным числом полюсов, либо
укладкой на статоре од'ной обмотки, конструкция которой позво­
ляет путем переюпочения катушечных групп получать различное
число полюсов. Последний способ получил наибольшее применение.
205
Принцип преобразования четырехпоmосной обмотки в двух­
полюсную (для одной фазы) показан на рис. 15.12: при последова­
тельном согласном соединении двух катушек возбуждаемое ими
магниrное поле образует четыре полюса (рис. 15.12, а); при по­
следовательном встречном (рис. 15.12, б) или параллельном со­
единениях (рис. 15.12, в) - два поmоса. Таким образом, прИIЩШI
образования полюсно перекmочаемой обмотки основан на том, что
1 .
а) � 't"
-1�
1
N
CI
1
1
't 't f. б)
1 1
! !.. • 1. --1 1· • 1 • --1
\t \ SI ! f.VP}
' S ! i (.J] 1� i
2�4
С4
11
-;;
1
2р= 2
-r
С4
8)
1
,: ·
1;
i�1
С/
С4
Рис 15.12. Схемы вкточения оомотки статора на разное число
полюсов
каждая фаза обмотки делится на части (катушечные rpyrmы), из­
меняя схему соединения которых получают разное число полюсов.
Возможны два режима работы асШIХршmых двигателей с полюсно перекmочаемыми обмотками:
р е ж и м п о с т о я н н о г о м о м ен т а (рис. 15.13, а)- при
перекmочении двигателя с одной частоты вращеIШЯ на другую
вращающий момент на валу двигателя М2 остается неизменным, а
мощность Р2 изменяется пропорционально частоте вращения п2 :
а)
6)
BCt BCZ 8С3
4CI 4С2 4CJ
м,
о----------......
",r
"10 п
'м2 = coпst
BCI 8С2 8С3
4CI 4С2 4CJ
,,,
о---�---_,__._
n11
rr,u__
п
P2 =coпst
Рис. 15.13. Схемы переюпочения числа полюсов и механиче­
ские характеристики в режимах постоянного мом�нта (а) и
постоянной скорости (б)
206
(15.7)
р е ж и м п о с т о ян н о й м о щ н о с т и (рис. 15.13, б)-при
переюпочении двигателя с одной частоты вращения на другую
мощность Р2 остается примерно одmiаковой, а момеm на валу М2
изменяется соответственно изменен;mо частоты вращения п2:
(15.8)
М2 =9,55Pjn2 •
Если на статоре расположить две потосно переключаемые
обмотки, то получим четырехскоросmой двшателъ. Однако воз­
можно применение и одной обмотки, допускающей пуrем пере­
юпочения ка'I)'ШеЧНЫХ групп получение до четь1рех вариантов
различных чисел полюсов. Например, асинхршшый двшателъ ти­
па 4А180М12/8/6/4 имеет на статоре обмотку, допускающую пере­
юпочение на 12, 8, 6, 4 полюса.
Реrулирование частоты вращения изменением числа полюсов
на статоре применяют исюпочителъно в асинхронных двигателях с
короткозамкнутым ротором, так как число потосов в обмотке это­
го ротора всегда равно числу полюсов статора и для изменения
частоты вращения достаточно измениrь число полюсов в обмотке
статора. В случае же фазного ротора приumосъ бы и на роторе
применить поmосно переключаемую обмотку, что привело бы к
недопустимому усложненшо двигателя.
Контрольные вопросы
1. Какими показателями характеризуются пусковые свойства асинхронных дви­
гателей?
2. Каковы досrоинства и недостатки пусковых свойств асинхронных двигателей?
3. Как лучше, с_ точки зрения улучшения пусковых свойств, уменьшить пуско­
вой ток: снижением подводимого к двигателю напряжения или увеличением
активного сопротивления.в цепи обмотки ротора?
4. Каковы достоинства и недостатки пуска асинхронных двигателей непосред­
ственным включением в сеть?
S. Какие существуют способы пуска асинхроюu.�х двигателей при пониженном
напряжении?
6. В чем сущность эффекта вьпеснения тока и почему он возникает при пуске
двигателя и почти исчезает при ero работе?
7. Почему буrьmочна.я форма паза ротора способствует лучшему про.явлеюпо
эффекта вытеснения тока?
8. Перечислиrе способы регулирования частоты вращения асинхроюu.�х двига­
телей и дайте им сравюпельную оценку.
9. Почему при частотном регулировании частоты вращения одновременно с
частотой тока необходимо измен.ять напряжение?
Однофазные
- и конденсаторные
асинхронные
двигатели
Глава 16 •
§ 16.1. Принцип действия
м пуск однофазноrо
асинхронноrо двиrателя
По своему устройству однофазный асинхронный
двигатель аналогичен трехфазному и состоит из ста­
тора, в пазах которого уложена однофазная обмотка
(см. рис. 8.8)► и короткозамкнутого ротора. Особен­
ность работы однофазного асинхронного двигателя
заключается в том, что при вюпочеJШИ однофазной
обмотки статора Cl-C2 в сеть (рис. 16.1) МДС ста­
тора создает не вращающийся, а пульсирующий маг­
ниrный поток (см. § 9.4) с амп.лmудой Фmах, изме­
няющейся от +Фmах до -Фmах• При этом ось
магнитного потока остается неподвижной в про­
странстве.
Для объяснения принципа действия однофаз­
ного двигателя пульсирующий поток Фmах разло­
жим на два вращающихся в противоположные
стороны потока Фщ1 и Ф06р (рис. 16.2), каждый из
которых. равен O,SФmax и вращается с частотой
(об/мин)
ппр = побр = J; 60/р = п1 •
Уславимся счигать поток Фпр, вращающийся в на,­
правлении вращения ротора, прямым, а поток Ф06р обратным. Допустим, что ротор двигателя вращает­
ся против часовой стрелки, т. е. в направлении пото­
ка �пу•
частота вращения ротора п2 меньше частоты
вращения магнитного поля статора п 1 , поэтому
скольжение ротора оmосительно вращающегося по­
тока Фпр будет
(16.1)
ОбратньIЙ поток Ф06Р вращается противополож­
но ротору, поэтому частота вращения ротора п2 от­
носительно Ф06р - отрицательная. В этом случае
скольжение ротора оmосительно Ф00р определится
· ·
выражением
208
s
обр
= п1 -(-п2 ) = п1 +п2 = п1 +п1 - п1 +п2 =
n1
n1
2п1 - n1 - n2
n1
= 2-s •
{16.2)
п1
п1
Прямое поле наводит в обмотке ротора ЭДС E2np, а обраmое по­
ле - ЭДС Е2обр. Эти ЭДС создают в обмотке ротора токи /2пр и 12 06µ •
Извесmо, что частота тока в роторе пропор­
циональна скольжению (h = sfi.). Так как Snp < Sобр,
то частота тока /206Р намного больше частоты тока
/2"Р. Так, для однофазного двигателя с п 1 = 1500
об/мин, п2 = 1450 об/мин иfi. = 50 Гц получим:
snp = (1500-1450)/1500 = 0,033;
f2пр = 0,033-50 = 1,8 Гц;
=
soop = (1500 + 1450)/1500 = 1,96;
f200P = 1,96 · 50 = 9 8 Гц.
Индуктивное сопротивление обмотки ротора
току /2обр во много раз больше ее активного сопроРис. 16.1.
тивления (потому чтоf206Р >> hпр)- Ток J206P являет- Схема вкточения одно­
ся почти 'Шсто индуктивным, оказывающим силь­
фазного
ное р а з м агн и ч и в а ю щ е е д е й с т в и е на асинхронно­
обратное поле Фоор . В результате обраmое поле и го двигателя
обусловленный им момент М06Р оказьmаются зна­
чительно ослабленными и ротор однофазного двигателя вращается
в направлении прямого поля под действием момента
(16.3)
Рис. 16.2. Ра:щожение пульсирующего магнитного потока на два вра­
щающихся
На рис. 16.3 представлен график зависимости вращающего
момента М в функции скольжения s = Sn • Этот график получен
путем наложения графиков Мпр = ./{sпр) и Мобр = ./{s05p). При малых
209
значениях скольжения s, что соответствует работе двигателя в
пределах номинальной нагрузки, вращающий момеm М создается
главным образом моменrом Мпр•
При Snp = Sобр = 1 моменrы Мпр и М06р равны, а поэтому пу ско­
вой момент однофазного двшателя равен нуmо. Следовательно,
однофазный асинхр01rnый двигатель не может самостоятельно
прийти во вращение при подкmочении его к сети, а нуждается в
первоначальном толчке, так как лишь при s :/:- 1 на ротор двигателя
действует вращающий момеm М = Мпр - Мобр•
s
rf
i д CI
i
А
flgcк
С4
2
Оп
Рис. 16.3. Механические характе­
ристики однофазного асинхронного
двигателя
Л1
Рис. 16.4. Схема однофазного
асинхронного двигателя с пусковой
обмоткой
ПриведеШ1Ые на рис. 16.3 зависимости моменrов показьmают,
что однофазный асинхронный двигатель не создает пускового мо­
менrа. Чтобы этот момеm появился, необходимо во время пуска
двигателя создать в нем в р а щ а ю щ е е с я магнитное поле. С
этой целью на статоре двигателя помимо р а б о ч е й обмотки А
применяют еще одну обмотку - п у с к о в у ю В. Эrи обмотки
располагают на статоре обычно так, чтобы их оси были смещены
оrnосительно друг друга на 90 эл. град. Кроме того, токи в обмоrках статора iА и i8 должны бьпь сдвинуrы по фазе оrnосительно
друг друга. Для этого в цепь пусковой обмотки вкmочают ф а з о с м е щ а ю щ и й э л е м е н т (ФЭ), в качестве которого могуr
быть применены активное сопротивление, индуктивность или ем­
кость (рис. 16.4). По достижении частотой вращения значения,
близкого к номинальному, пусковую обмотку В откmочают с по­
мощью реле. Таким образом, во время пуска двигатель является
двухфазным, а во время работы - однофазным.
Для получения вращающегося магнитного поля посредст­
вом двух обмоток на статоре, смещенных относительно друг
друга на 90 эл. град, необходимо соблюдать следующие усло­
вия (рис. 16.5):
а) МДС рабочей и пусковой обмоток РА и F8 должны быть
равны и сдвинуты в пространстве оrnосительно друг друга на 90
эл. град;
210
6) токи в обмотках статора iA и i8 должны бьпь сдвинуты по
фазе относиrельно друг друга на 90°.
При строгом соблюдении указаш1ых условий вращающееся
поле статора является круговым, что соответствует наибольшему
вращающему момеmу. При частичном нарушении какого-либо из
:условий поле статора становкrся эллиптическим, содержащим об­
ратную составляющую (см. рис. 9.5, б). Обратная составляющая
поля создает тормозi
ной момент и у худшает пусковые свойства двигателя.
Из векторных диаrрамм, приведе1mых
на рис. 16.6, видно, что
активное сопротивле­
ние и индуктивность в
качестве ФЭ не обес­
печивают получения
фазового сдвига между
токами в 90°. Лшпь
только емкость С в
качестве ФЭ обеспе­
1
чивает фазовый сдвиг
\jl = 90° . Значение этой
' _«=�во• 1
сс=о•
емкости выбирают та­
1
ким, чтобы ток пуско�
I
вой обмотки iв в мо­
мент пуска (s = l) опе­
режал �о фазе напря- ·
ос" go•
се= z10•
жение U1 на угол q>в , Рис. 16.5. Получение вращающегося малnпного
угол
дополняющий
поля двух.фазной системой токов
°
<р А ДО 90 :
о
\jl =q>A +<р в =90 .
Если при этом обе обмотки создают одинаковые по значеншо
МДС, то в начальный период пуска вращающееся поле окажется
круговым и двигатель будет развивать значительный начальный
пусковой момент. Однако применение емкости в качестве ФЭ час­
то оrраничивается значительными габаритами конденсаторов, тем
более что для получения кругового поля требуются конденсаторы
значительной емкости. Например, для однофазного двигателя
мощностью 200 Вт необходима емкость 30 мкФ при рабочем на­
пряжении 300-500 В.
Получили распространение однофазные двигатели с активным
сопротивлением в качестве ФЭ. При этом повьпnенное активное
сопротивление пусковой обмотки достигается тем, что она вьmол­
няется проводом уменьшенного сечения (по сравненшо с прово-
:
1
•t
r· •
---=--
211
дом рабочей обмотки). Так как эта обмотка вкmочена на непро­
должигельное время (обычно несколько секунд), то такая ее кон­
струкция впоJПiе допустима. Пусковой момент таких двигателей
обычно не превышает номинального, но это вполне приемлемо
при пуске Щ3ИГателей при небольшой нагрузке 1ta валу.
�1i;
.
У,
1,.
/6
� 0
•
.
U,�·
,
�
{,о
/А
!р
l}
6)
6)
DJ
.
1,
�li,
Н/Н.
11
• 2ht'�+-fl\d---Н�d-l
11)
,О
'f
IA
"'-'
1"
l"'Н'rr-"'-<-t-t"ll--+-.+a/
qs
Рис. 16.6. Сравнение свойств фазосмещающих элементов:
1 .1
а - активное сопротивление, б - ющуктивность, в - емкость, г- механиче­
ские характеристики двшателя при различных фазосмещающих элементах; 1 активное сопропmление; 2 - емкосrь
Применение емкости в качестве ФЭ позволяет получить пус­
ковой момент Мп = (1,6+2,О)Мном• На рис. 16.6, г приведены меха­
нические характерисnпси однофазного асШIХронного двигателя
при различных ФЭ. Для большей наглядности значения.момента
даны в относительных единицах.
§ 16.2. Асинхроннь1е
конденсаторные двигатели
АсШIХроШIЫЙ конденсаторный двигатель имеет на статоре две
обмотки, занимающие одинаковое число пазов и сдвинутые в про­
.странстве ОП1осиrельн0 друг друга на 90 эл. град. Одну из обмоток главную - вюnочают непосредственно в однофазную сеть, а дру­
гую - вспомогательную - вюnочают в эту же сеть, но через ра­
бочий конденсатор Сраб (рис. 16.7, а).
В отличие от рассмотренного ранее однофазного асШIХронно­
rо двигателя в конденсаторном двигателе вспомогательная обмот­
ка после пуска не отюпочается и остается вюnоченной в течение
всего периода рабо�, �и этом емкость Сраб создает фазовый
сдвиг между токами /А и I8•
Таким образом, если однофазный асШ1Хр01rnый двигатель по
окончании процесса пуска работает с пульсирующей МДС стато­
ра, то конденсаторный двигатель - с вращающейся. Поэтому
конденсаторные двигатели по своим свойствам приближаются к
трехфазным двигателям.
Необходимая для получения кругового вращающегося поля
емкость (мкФ)
(16.4)
212
при этом отношение напряжений на главной UA и на вспомога­
тельной Ив обмотках должно бьпъ
UA /U8 =tgq> A :,t:l.
Здесь <р А - угол сдвига фаз· между током iА и напряжением
UA при круговом поле; k=ro 8 k8 /(wA kA ) - коэффициеm транс-
ъ-.......----�----_., s
Рис. 16.7. Конденсаторный двигатель:
а __:_ с рабочей емкостью, б - с рабочей и пусковой емкостями, в . механические харакrеристики; J - при рабочей емкости, 2 - при ра­
бочей и пусковой емкосrях
формации, представляющий собой отношение эффективных чисел
витков вспомогательной и главной обмоток; kA и kв - обмоточные
· коэффициенrы обмоток статора.
Анализ (16.4) показьmает, что при заданных коэффициенrе
ансформа
тр
ции k и отношении напряжений ИА /И8 емкость Сраб
обеспечивает получение кругового вращающегося поля лишь при
одном, вполне определенном режиме работы двигателя. Если же
изменится режим (нагрузка), то изменятся и ток IA и фазовый угол
<р А , а следовательно, и Сраб, соответствующая круговому поmо.
Таким образом, если нагрузка двигателя отличается от расчетной,
то вращающееся поле двигателя становится эллиптическим и ра­
бочие свойства двигателя ухудшаются. Обычно расчет Сраб ведут
для номинальной нагрузки или близкой к ней.
Обладая сравнительно высокими КПД и коэффициентом
мощности ( cos<p 1 = 0,80+0,95), конденсаторные двигатели имеют
неудовлетворительные пусковые свойства, так как емкость Сраб
обеспечивает круговое поле лшпь при расчетной нагрузке, а при
пуске двигателя поле статора эллиптическое. При этом пусковой
момеm обычно не превышает О,5Мном•
Для повьппения пускового момеmа параллельно емкости Сраб
вюпочают емкость Спуск, назьmаемую пусковой (рис. 16.7, б). Вели­
чину Спуск выбирают, исходя из условия получения кругового поля
статора при пуске двигателя, т. е. получения наибольшего пуско­
вого момеmа. По окончании пуска емкость Спуск следует отклю­
чить, так как при небольших скольжениях в цепи обмотки статора,
содержащей емкость С и индуктивность L, возможен р е з о н а н с
н а п р я ж е н и й, из-за чего напряжение на обмотке и на конденса­
торе может в два-три раза превысить напряжение сети.
213
При выборе пmа конденсатора следует помнить, что его рабо­
чее напряжение определяется ампшпудным значением синусои­
дального напряжения, приложеююго к конденсатору Ис, При кру­
говом вращающемся поле это напряжение (В) превышает
напряжение сети И1 и определяется выражением
Ис =U1 ✓l+k2 •
(16.5)
Конденсаторные
6)
а)
иногда
А------- двигатели
назьmают двухфаз­
С-+--+---+·c--+--+----­
ными, так как об­
D--+--+---+-мотка статора этого
двигателя содержит
две фазы. Двухфаз­
ные двигатели могут
работать и без кон­
денсатора
или д!'У­
·
l),20
гого ФЭ, если к фа­
U
:.�
зам обмотки статора
�IC
подвести
двухфаз­
�е
А
ную систему напря­
с
А
с
жений (два напря­
Рис 16.8. Схемы включения двухфазного двига­ жения,
одинаковые
теля в трехфазную сеть
по значеншо и час­
тоте, но сдвинутые
.
по фазе относиrельно друг друга на 90°). Для получения двухфаз­
ной системы напряжений можно воспользоваться трехфазной ли­
нией с нулевым проводом, вкmочив обмотки статора так, как по­
казано на рис. 16.8, а: одну обмотку - на линейное напряжение
ИАв, а другую - на фазное напряжение Ис через автотрансфор­
матор АТ (для выравнивания значения напряжений на фазных об­
мотках двигателя). Возможно вкmочение двигателя и без нулевого
провода (рис. 16.8, б), но в этом случае напряжения на обмотках
двигателя будут сдвинуты по фазе на 120°, что приведет к некоторому ухудшеншо рабочих свойств двигателя.
________
},-------,
, _______
о� о�:
§ 16.3. Работа трехфазно�о асинхронного
двиrателя от однофазном сети
Трехфазный асинхронный двигатель может быrь использован
для работы от однофазной сети. В этом случае такой двигатель
вкточают как конденсаторный по одной из схем рис. 16.9.
Значение рабочей емкости Сраб (мкФ) при частоте переменно­
го тока 50 Гц можно ориентировочно определить по одной из
формул: для схемы, изображенной на рис. 16.9 а,
сраб r::: 2700/,/Uc ;
(16.6)
на рис. 16.9, б
214
(16.7)
на рис. 16.9, в
(16.8)
Сраб r::: 4800 /1 /U с •
Здесь /1 - но­
lj)
минальный (фазный) й)
ток в обмотке стато­
ра, А; Ис - напря­
жение однофазной
сети, В.
При подборе ра­
бочей емкости не­
обходимо следить за
тем, чтобы ток в
обмотках
фазных
статора при устано­
вившемся режиме
Рис 16.9. Схемы соединения обмотки статора
работы не превы­ трехфазного асинхронного двшателя при вкmо­
чении его в однофазную сеть
шал номинального
значения.
Если пуск двигателя происходит при значительной нагрузке"
на валу, то паралелльно рабочей емкости Сраб следует вюпочить
пусковую емкость
(16.9)
Сп= (2,5+3,О)Сраб•
В этом случае пусковой момент становится равным номиналь­
llому. При необходимости дальнейшего увеличения пускового
момеmа следует прlЩЯТЬ еще большее значение пусковой емкости
(Сп � 8Сраб).
Большое значение для надежной работы асШIХроmюго двига­
теля в качестве конденсаторного имеет правильный выбор кон­
денсатора по напряжению. Следует иметь в виду, что габариты и
стоимость конденсаторов определяюfся не только их емкостью, но
и рабочим: напряжением. Поэтому выбор конденсатора с большим
«запасом» по напряжению ведет к неоправданному увеличению
габаритов и стоимости установки, а включение конденсаторов на
напряжение, превьпuающее допустимое рабочее напряжение, при­
водит к преждевременному выходу из строя конденсаторов, а сле­
довательно, и всей установки.
При определении напряжения на конденсаторе при вюпочении
двигателя по одной из рассмотренных схем необходимо иметь в
виду следующее: при включении двигателя по схеме рис. 16.9, а
напряжение на конденсаторе равно U к r::: 1,3Uc, а при включении
двигателя по схемам рис. 16.9, б и в это напряжение равно
ИК r::: 1,ISU C .
В схемах конденсаторных двигателей обычно применяют бу­
мажные конденсаторы в металлическом герметичном корпусе
прямоугольной формы типов КБГ - МН или БГТ (термостойкие).
215
На корпусе конденсатора указаны емкость и рабочее напряжение
постоянноrо тока. При вкточении такоrо конденсатора в сеть пе­
ременноrо тока следует уменьшить примерно в два раза допусти­
мое рабочее напряжение. Например, если на конденсаторе указано
напряжение 600 В, то рабочее напряжение переменноrо тока сле­
дует считать 300 В.
Пример 16.1. Опредеmпь значение рабочей емкости Ср•б• необходимой для
работы трехфазного асинхронного двигателя типа АВО52-4 от однофазной сети
напряжением U� = 220 В. Номинальные данные двигателя: Роом = 80 Вт, напряже­
ние 220/380 В, ток сети /100м = 0,56/0,32 А.
Р еше н и е. Напряжение сети 220 В соответствует соединению обмотки
статора в треугольник, поэтому принимаем схему вюпочения двигателя в одно­
фазную сеть по рис. 16.9, в. Номинальный (фазный) ток статора /1 = 0,32 А.
Рабочая емкость по (16.8) Ср•б = 4800 · 0,32/220 = 6,98 'мкФ. При этом рабочее напряжение конденсатора и. RO 1,15 · 220 = 250 в. Принимаем в качестве Сраб
батарею из двух параллельно соединеюn.JХ конденсаторов типа КБГ-МН емко­
стью по 4 мкФ каждый (емкость батареи 8 мкФ) на рабочее напряжение 600 В.
При использовании трехфазноrо двшателя в однофазном кон­
денсаторном режиме ero полезная мощность обычно не превыша­
ет 70-80 % номинальной мощности, а при однофазном режиме
без рабочей емкости полезная мощность двигателя не превышает
60 % ero номинальной мощности.
§ 16.4. Однофазный двиrатель
с экранированными полюсами
Для создания пускового момента в асинхронных двигателях
· малой мощности применяют конструкцию с явно выраженными
экранированными полюсами (рис. 16.10, а), на которых распола-
Рис. 16.1 О. Асинхр01rnый двигатель с экранирова1rnыми лотосами
rают однофазную обмотку. Полюсы 1 имеют расщеплеШiуЮ на
две части конструкцию, при этом на одну из частей каждого по­
люса надет короткозамкнутый виток (экран) в виде-медного коль­
ца 2. Ротор двшателя короткозамкнутьrй.
216
При включении обмотки статора в сеть пульсирующий поток
наводит в короткозамкнуrом виrке (экране) ток, препятствующий
нарастанию магниrного потока и вызывающий фазовый сдвиг по­
.тока в этой части поmоса (рис. 16.10, б). В результате потоки в
обеих частях каждого полюса оказьmаются сдвШIУfЫМИ по фазе
относительно друг друга, что, в свою очередь, приводит к образо­
ванию в двигателе вращающегося мапmтного поля. Часто для
улучшения пусковых и рабочих характеристик двигателя между
полюсами помещают магнитные шунты в виде стальных шшсти­
нок, замыкающих края полюсных наконечников поmосов статора.
Асинхронные двигатели с экранщюванными полюсами нере­
версивны - ротор всегда вращается в направлении от неэкрани­
рованной части полюса к экранированной. Обычно эти двш-атели
изготовляют мощностью не более 100 Вт и применяют для приво­
да устройств, не требующих большого пускового момеmа (элек­
тропривод вентиляторов, электропрошрывателей и т. п.). Отечест­
венной промышленностью изготовляются асШIХроцные двигатели
с экранированными полюсами серии АД...Е, предназначенные для
привода приборов с вентиляторной нагрузкой. Эти двигатели
мощностью от 2,5 до 25 Вт рассчитаны на рабсnу от сети напря­
жением 220 В частотой 50 Гц. Краmость пускового момеmа этих
двигателей МufМном = 0,5+0,6.
Контрольные вопросы
1.
2.
3.
4.
5.
Почему однофазный дв1П'8Тель не создает пускового моменrа?
С какой целью в цепь пусковой обмотки двигателя вкmочают ФЭ?
Чем отличается однофазный двигатель от коцденсаторного?
Как можно повысиrь пусковой момент в коцденсаторном двигателе?
С какой целью в асинхронном двигателе с экранированными поmосами эти
поmосы делают расщепленными?
Асинхронные
-машины
специального
назначения
глава 17 •
§ 17.1. Индукционный реrуnятор
напряжения и фазореrуnятор
Индукционный регулятор напряжения (ИР}
представляет собой асинхронную мaпnrny с фазным
ротором, предназначенную для плавного регулиро­
вания напряжения. Рассмотрим рабо'I)' трехфазного
ИР, получившего преимущественное применеIШе.
Ротор ИР заторможен посредством червячной пере­
дачи, которая не только удерживает его в заданном
положеmm, но и позволяет плавно поворач ивать его
оmосиrелъно статора. Обмотки статора и ротора в
ИР имеют автотрансформаrорную связь (рис. 17 .1, а),
поэтому ИР иногда назьmают поворотным авто­
трансформатором.
НапряжеIШе сети U1 подводится к обмотке ротора,
при этом ротор создает вращающееся магниmое поле,
наводящее в обмотке ротора ЭДС Ё1 = -U1, а в обмотке статора-ЭДС Ё2 (рис. 17.2, а}.
Фазовый сдвиг этих ЭДС оmосиrельно друг
друга зависит от взаимного пространственного по­
ложения осей обмоток статора и ротора, определяе­
мого углом а. При а = О оси обмоток совпадают,
вращающееся поле одновременно сцепляется с
обеими обмотками и ЭДС Ё1 и Ё2 совпадают по
фазе (при этом Ё2 и U1 находятся в противофазе).
При а = 180 эл. град ЭДС Ё1 и Ё2 окажутся в про­
тивофазе ( Ё2 и U1 совпадают по фазе}. Если пре­
небречь внуrренними падеIШЯМИ напряжения, то
напряжеIШе на выходе ИР определяется геометриче­
ской суммой:
(17.1)
При повороте ротора концы векторов Ё2 и U2
описьmают окружность (рис. 17.2, б), при этом U2
изменяется от U2min = U1 - Ё2 при а = О до
U2max = U1 + Ё2 при а = .180 эл. гра д (рис. !_7.2, в).
218
Поворот ротора осуществляется либо вручную штурвалом, либо
дистаIЩИошю вюпочением исполнительного двигателя.
ИР применяются во всех случаях, rде необходима плавная ре­
rулировка напряжения, например в лабораторных исследованиях.
Фазорегулятор (ФР). Предназначен для изменения фазы вто­
ричного напряжения относительно первичного при неизменном
вrоричном напряжении.
6)
C•m•
"
В отличие от ИР об- а)
мотки ротора и статора
ФР электрически не
С2
соединены друг с дру­
гом, т. е. имеют транс­
форматорную связь (см.
рис. 17.1, б), поэтому
ФР иногда называют
поворотным
форматором.
транс-
Изменение фазы
вторичного напряже­
осуществляется
ния
поворотом ротора от­
носительно статора.
C:J
С/
Первичной обмоткой в
К наtрgзкв
ФР обычно является
К нагру3кв
обмотка статора. Фа­ Рис. 17.1. Схемы соединения индукциошюго
зореrуляторы приме­ реrулятора напряжения (а) и фазореrулятора (6)
няются в устройствах
автоматики (для фазового управления) и измерительной технике
(для проверки ватrметров и счетчиков).
§ 17.2. Асинхронный преобразователь частоты
Как известно, частота тока в роторе асинхронной машины за­
висит от скольжения (h = sjj). Это свойство асинхронных машин
используется в асинхронных преобразователях частоты (АПЧ).
а)
и,.
о)
i,
О
1/5 9U 135 180 ее
Рис. 17 .2. Векторные диаграммы индукциоююrо
реrулятора напряжения
219
Обмотку статора АПЧ подкmочают к трехфазной сети с часто­
той/�, а ротор приводят во вращение приводным двигателем (ПД)
в направлеюm против вращения поля статора (рис. 17.3). В этом
случае в обмотке ротора наводится ЭДС Е2 частотойh > Ji, так как
скольжение s > 1. Указанная ЭДС через кошактные кольца и щетки создает на выходе АПЧ
__....,__....,__ Сеть cf,
напряжение. Если требуется
получить на выходе АПЧ на­
пряжение частотой h < Ji, то
Сет• cf, ротор вращают в направлении
вращения поля статора с час­
тотой вращения п2 < п 1 (при
этом s < 1).
Мощность на выходе
Рис. 17.З. Схема вюпочения асинхронноrо преобразователя частоты АПЧ складывается из электромаrниrной мощности Рэм,
передаваемой в обмотку ротора вращающимся полем статора, и
механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм +
+ Рпд. Соотношение между мощностями Рэм и Рпд зависит от
скольжения. Так, при работе АПЧ со скольжение_м s = 2 эти мощ­
ности равны и ротор половину мощности получает от статора, а
половину - от приводного двигателя. При необходимости плав­
ной регулировки частоты на выходе АПЧ в качестве приводного
двигателя применяют электродвигатель с плавной реrулировкой
частоты вращения, например двипrrель постоянного тока (см. гл. 29).
Однако чаще всего АПЧ используют для получения определенной
частоты тока h и в качестве приводного применяют асШIХронн:ый
или СШIХрОIШЫЙ (см. гл. 22) двигатель.
§ 17.3. Электрические маwинь1 синхронной связи
В современной технике часто возIШКает необходимость в син­
хронизации вращения или поворота осей механизмов. Эта задача
успешно решается с помощью системы синхронной связи.
Синхронной связью называют электрическую связь, которая
обеспечивает одновременное вращение или одновременный пово­
рот двух (или более) находящихся на расстоянии друг от друга и
механически не связанных валов. Распространены два вида систем
синхронной связи: система «электрического вала» (синхронного
вращения) и система «передачи угла» (синхронного поворота).
Системы электрического вала применяют для сШIХронного
(одновременного) вращения нескольких механизмов, имеющих
значительные нагрузочные моменты на валу. Для привода таких
механизмов применяют обычные асинхронные двигатели с фаз­
НЬIМ ротором. При этом обмотки роторов электрически соединяют
друг с другом, а обмотки статоров включают в общую сеть трех­
фазного тока.
Системы передачи угла (сШIХронного поворота) применяют
для дистаJЩИонного управления или контроля положения в про220
странстве каких-либо устройств. Обычно такая система вьшолня­
ется на небольших асинхро1ШЫХ машинах (однофазных: шш трех­
фазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины. Та­
кой сельсm1 имеет однофазную обмотку возбуждения и трехфаз­
ную обмотку синхронизации, соединенную звездой. Одна из обмо­
ток располагается на роторе. а другая - на статоре.
Цепь 6озl11жt1ени11
сп
Рис. 17.4. Схема синхронной передачи
Простейшая синхроIШая передача, называемая индикаторной,
содержит два сельсина: сельсm1-датчик (Сд) и сельсm1-приемник
(СП) (рис. 17.4). При вюпочении обмоток возбуждения в сеть на
напряжение И1 в каждом из сельс1mов создается магнитный поток
возбуждения Ф. В обмотке синхронизации СД этот поток наводит
ЭДС Ед, а в обмотке синхронизации СП - ЭДС Е0 • Эти ЭДС на­
правлены встречно. Если роторы СД и СП занимают о д и н а к о ­
в ы е положения относительно своих статоров, то Ед = Е0 и систе­
ма находится в равновесии. Если же ротор СД повернуть на
некоторый угол а.д, то ЭДС в обмотке синхронизации СД изменит­
ся, равенство ЭДС нарушится ( Ед 'Ф Е0 ) и в цепи синхронизации
появится результирующая ЭДС
ЛЕ=Ед +Е0 •
(17.2)
которая создаст ток синхронизации
(17.3)
/с =ЛЕ/(Zд +Zn +Zл )•
где Zд, Z0 и Zл - сопротивления обмоток синхронизации СД и СП
и сопротивление линейных проводов, Ом.
Ток синхронизации датчика взаимодействует с потоком воз­
буждения и создает на роторе СД электромагнитный момеm, на­
правленный встречно поворо'I)' ротора датчика, т. е. момеm, про­
тиводействующий механизму, поворачивающему ротор СД на
заданный угол а.д,
Ток синхронизации СП также взаимодействует с магнитным
потоком возбуждения и создает электромагнитный момеm, на221
правленный в сторону поворота ротора СД. Под действием этого
момеша, назьmаемого синхронизирующим, ротор приемника со­
вершает поворот на угол а.0 � а.д . После этого ротор СП займет
такое же положение оmосиrельно статора, чго и ротор СД, и в
системе восстановится равновесие, так как ЭДС Е0 и Ед станут
одинаковыми. Если ротор СД вновь повернуть на некоторый угол,
то этот же угол поворота будет воспроизведен приемником. При
вращеmm ротора датчика ротор приемника также будет вращаться
с такой же частотой. Однако угол поворота, установле1rnый ед,
воспроизводится ротором СП с некоторой ошибкой - рассогласо­
ванием. Для поворота ротора приемника необходимо, чгобы син­
хронизирующий момеш, действующий на этот ротор, преодолел
противодействующий моменr, обусловленный силами трения в
подшишmках и на кошактных кольцах, а иногда еще и полезной
нагрузкой на валу приемника. Ошибка в воспроизведении угла
поворота оценивается углом рассогласования
(17.4)
0=а.:ц -а. 0 •
Ротор СП синхронно следует за ротором СД, но угол рассо­
гласования между роторами сельсинов всегда имеется и тем
больше, чем больше противодействующий моменr на валу СП.
Угол рассогласования обычно не превышает 2,5 °, а у сельсинов
высокой точности он не более 0,75°.
Значение синхронизирующего момента на роторе приемника
м. = м.m1Xsin0,
(17.5)
где Ц max - максимальное значение синхронизирующего момен­
та, соответствующее углу рассогласования 90°.
По конструкции сельсины разделяют на контактные, у кото­
рых обмотка на роторе соединена с внешней цепью через контакт­
ные кольца и щетки, и бесконтактные, не имеющие на роторе об­
моток.
К о н т а к т н ы е сельсш:ы в прИIЩШiе не отличаются от асин­
хронных двигателей с фазным ротором. На рис. 17.5 показано уст­
ройство контактного сельсина. Статор / и ротор 2 этого сельсина
неявнополюсные, и поэтому обе обмотки сельсина распределен­
ные. Наличие на роторе двух контактных колец 3 указьmает на
расположение на роторе обмотки возбуждения.
В некоторых конструкциях статор или ротор делают с явно
выраженными полюсами, чго способствует повышению синхрони­
зирующего момента. Наличие контактных колец - основной не­
достаток контактных сельсинов, так как это ведет к неустойчиво­
сти параметров сельсина и снижению его надежности.
Бе с к о н т а к т н ы е сельсины получили широкое примене­
ние в системах синхронного поворота благодаря своей высокой
надежности. Эти сельсины не име�от скользящих кошактов, так
как их обе обмотки расположены на статоре (рис. 17 .6). Ротор 5
бескошактного сельсина представляет собой цилиндр из ферро­
магнитного материала, разделенный немагнитной прослойкой на
222
две магнитно изолировmшые части, образующие поmосы. Аmоми­
ний, который заливают в ротор, является магниmой изоляцией и
одновремешю материалом, скреIШЯЮщим части ротора. С торцо­
вых сторон сельсина расположены тороидальные сердечники J,
вьmоJП1енm,1е из тонколистовой электротехнической спuш. Внут-
Рис. 17.5. Устройство контактного сельсина
реШIЯЯ поверхность этих сердеЧНЮ<ов расположена над ротором, а
к их внешней поверхности примыкают стержни вне1Ш1его магни­
топровода 4. Однофазную обмотку возбуждения сельсина вьшол­
няют в виде двух дисковых ка'I)'Шек 2, расположенных с противо­
положных сторон статора по оси сельсина между обмоткой
синхронизации 3 и то­
5
J
1 2
роидальными сердеч­
никами.
В процессе работы
сельсина пульсирую­
щий магнитный поток
возбуждения замыкает­
ся в магнитной системе
сельсина, сцеIIЛЯЯсь с
трехфазной обмоткой
синхронизации на ста­
торе. Пуrь замыкания
Рис. 17.6. Конструктивная схема бескон­
потока показан на ри­
тактного сельсина
сунке пунктирной ли­
нией. Как видно из этого рисунка, магнитный поток, замыкаясь в магнитопроводе, про­
ходит через воздушный зазор четь1ре раза. По этой прИЧШiе для
создания требуемого магниmого потока в бесконтактном сельсине
необходима значительная МДС. Эrо является причиной повЬШiеН­
ных габариrов бесконтакпюго сельсина по сравнешпо с конrакmым.
§ 17.4. Асинхроннь1е исполнительные двиrатели
В системах управления, регулирования и контроля широко
примеНЯIОТся управляемые электродвигатели небольшой мощно223
сти. С помощью этих двигателей осуществляется преобразование
электрического сигнала в механическое перемещение - вращение
вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительны м дви­
гателям, определяется спецификой их работы: частые пуски, ре­
версы, постоянно изменяющаяся частота вра­
щения. Основные требования - отсутствие
самохода, т. е. •самоторможение при снятии
сигнала управления; широкий диапазон реrу­
лирования частоты вращения; линейность ха­
1l •
рактеристик; большой пусковой момент; малая
l_j
мощность управления; быстродействие (мало­
с
О!/
m1ерциошюсть).
На статоре асШ1Хронного исполнительного
двигателя
двухфазная обмотка
Рис. 17-7• Схема (см. § 16.2).расположена
Одна из фазных обмоток - обин
вюпочения ас ­
хроmюrо испотrn­ мотка возбуждения (ОВ) - постоянно вюnо­
телъноrо двигателя чена в сеть с напряжением И1, а на друг ую обмотку управления (ОУ)- напряжение (сиг­
нал управления) Ис подается лиmь при необходимости вюnочения
двигателя (рис. 17:7).
Для работы двухфазного ИД необходимо вращающееся маг­
нитное поле, непременным условием возникновения которого яв­
ляется наличие пространственного и временного сдвигов между
МДС фазных обмоток статора. Пространственный сдвиг указан­
ных МДС обеспечивается конструкцией обмотки статора, при ко­
торой оси фазных обмоток сдвинуrы в пространстве относиrелъно
друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг
МДС создается либо питанием обмотки статора двухфазной сис­
темой напряжений (см. § 16.2), либо вюnочением в цепь ОУ фа­
зовращателя - устройства, позволяющего получать различные
фазовые сдвиги напряжения на его выходе относиrельно напряже­
ния на входе, т. е. относительно напряжения на обмотке возбуж­
дения, либо вюnочением последовательно в цепь ОВ емкости С
(рис. 17.7).
Последний способ включения ИД применяют наиболее часто.
Обычно значение емкости С выбирают из условия получения кру­
гового поля при пуске двигателя. По окончании пускового перио­
да двигатель работает с эллшпическим вращающимся полем.
В процессе уцравления двигателем изменяют сигнал Ис на ОУ,
при этом меняется как значение (амплитуда) МДС этой обмотки,
так и ее фазовый сдвиг относительно МДС обмотки возбуждения.
Поэтому рассматриваемый способ управления ИД называют ам­
i и.I
о z;
плитудно-фазовым.
Одно из основных требований к ИД - отсутствие самохода.
Известно, что обычные асШIХронные двигатели имеют небольшое
активное сопротивление обмотки ротора и работают с малым кри­
тическим скольжением (см.§ 13.3). Такие двигатели непригодны в
качестве исполнительных, так как они обладают самоходом, т. е.
224
при снятии СШ'Нала управления двшатель будет продолжать рабо­
тать как однофазный. Эrо итпострирует рис. 17.8, а, на котором
точка А определяет режим работы двигателя с нагрузочным мо­
менrом Миом при наличии сигнала управления. При снятии сигнала
управления поле статора становиrся пульсирующим (обмотка воз-
Рис. 17 .8. Устранение самохода в асинхронном исполни­
тельном двlП'!ПеЛе
буждения постоянно вюпочена в сеть) и режим работы двигателя
определяется точкой В на характеристике однофазного двигателя.
При этом электромапnпный момент двигателя останется положи­
тельным. Если же увеличить активное сопротивление ротора, то
форма кривых прямого Мпр, обратного Мofjp и уезультирующеrо
М = Мпр_ + М05р моментов изменится (рис. 17.8, 6): максимумы мо­
ментов Мпр и Мо5р сместятся в область бQЛыпих скольжений (sкр > 1).
Теперь после прекращения СШ'Нала управления, т. е. при переходе
двигателя в однофазный режим, электромагнитный момент стано­
вится отрицательным Мт (точка В) и оказывает на ротор тормо­
зящее действие, не допуская самохода.
К испоmmтелъным двигателям предъявляется также требова­
ние малоинерционности (быстродействия}, т. е. при подаче сигна­
ла упрщения ротор двигателя должен очень быстро достшать
установившейся частоты вращения. Вьmолнению этого требова­
ния способствуют увеJШЧение пускового момента, уменьшение
синхронной частоты вращения поля статора и снижение момента
Шiерции ротора. При повышенных частотах питающего напряже­
ния (больших синхронных частотах вращения) ИД с ротором
обычной (короткозамкнуrой) конструкции из-за значительного
момента Шiерции последнего не обладают требуемым быстродей­
ствием. В этом случае применяют асШIХронные исполнительные
двигатели с полым немагнитным ротором (рис. 17.9). Полый не­
магнигный ротор представляет собой тонкостенный атоМШIИевый
стакан 2, что, с одной стороны, обеспечивает ротору повышенное
225
активное сопротивление, а с другой - весьма небольшой момеm
инерции.
Двшатель имеет два статора: внешний 1 с обмоткой и внуr­
ренний 3 без обмотки, входящий внутрь полого стакана ротора.
Внутренний статор необходим для уменьшения магнитного сопро­
тивления основному магнитному потоку.
По сравнению с· исполни­
тельными двшателями обычной
конструкции двшатели с полым
немагнитным ротором имеют
повьппенные габариты и невысо­
кий КПД. Это объясняется по­
вьппенным зазором между на­
5
внутренним
ружным
и
статорами, который складывает­
ся из толщины стенки стакана
ротора и двух воздушных зазо­
Рис. 17.9. Асинхронный двига­ ров. Как извесmо, увеличение
тель с полым немагнитным рото- воздушного зазора способствует
ром:
роС1)' намапшчивающеrо тока
1 - внешний статор; 2 - стакан . двшателя: и сIШЖению его КПД.
ротора; 3 - внуrренний статор; 4обмотка статора; 5 - вал; 6 - втул- _
ка крепления стакана ротора
§ 17.5. Линейнь.1е асинхроннь.1е двигатели
Подвижная часть линейного двигателя совершает поступа­
тельное движение, поэтому применение этих двшателей для при­
вода рабочих машин с поступательным движением рабочего орга­
на позволяет упростить кинематику механизмов, уменьшить
потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромаr­
ниmые (соленоИДНЬ1е), магнитоэлектрические (с применением
постоянного магнита), электродинамические и асинхронные.
Асинхроннь1е (индукционные) линейные двшатели благодаря
простоте конструкции и высокой надежности получили наиболь­
шее применение.
Для объяснения принципа работь1 линейного асинхронного
двигателя обратимся к асинхронному двшатеmо с вращательным
движением ротора. Если статор этого двшателя (рис. 17.10, а)
мысленно «разрезать» и «развернуть» так, чтобы он образовал ду­
гу с углом а. (рис. 17.10, б), то диаметр ротора увеличится. При
этом мы получим асинхронный двшатель с д у r о в ы м статором.
Частота вращения (об/мm1) магниmого поля статора этого двша­
теля (синхронная частота)
(17.6)
226
где п? - синхроШiая частота вращения обычного (до «разреза­
ния») асинхроШiого двигателя, об/мин; а - угол дуги статора,
рад.
Из ( 17.6) следует, что, изменяя угол а, можно получить дуго­
вой асинхронный двигатель на любую синхроШiую частоту меньше частоты вращения п�. Дуговые двигатели применяют для без­
привода
редукторного
устройств, требующих небольших частот враще- OJ
ния, исключив применение сложного и трудоемкого редуктора.
Если же «разрезанный» статор развернуть в
шюскость, то получим
асинхронный
линейный
6)
двигатель (рис. 17.10, в).
Принципиальное конст­
lо ь
руктивное отличие линей­
�
ного асинхрошюго двидуговом и лигателя от асинхронного Рис. 17.1 О. К понятиям отелях
нейном двша
двигателя с вращательным двmкением ротора
состоит в том, что первичный элемент линейного двигателя (ин­
дуктор) создает не вращающееся, а б е г у щ е е магнmное поле и
подвижная часть двигателя с короткозамкнутой обмоткой (или без
нее), называемая вторичным элементом, перемещается вдоль сво­
ей оси. Скорость бегущего поля в линейном двигателе (м/с)
(17.7)
v1 =2"ift =ftLc/P,
где fi - частота тока в обмотке статора, Гц; 't - поmосное деле­
ние, м; L c -длина статора (индуктора), м.
ПрШЩШI действия линейного асинхронного двигателя осно­
ван на том, что бегущее поле индуктора, сцепляясь с короткозамк­
нутой обмоткой вторичного элемента двигателя, наводит в ней
ЭДС. Возникающие в стержнях этой обмотки токи взаимодейст­
вуют с бегущим полем индуктора и создают на индукторе и вто­
ричном элементе электромагнитные силы, стремящиесх линейно
переместиrь подвижную часть двигателя относительно неподвиж­
ной. В некоторых конструкциях линейных двигателей подвижной
частью является индуктор, а в некоторых - вторичньхй элемент,
назьmаемый в этом случае бегунком. Если вторичньхй элемент ли­
нейного двигателя невозможно изготовить с короткозамкнутой
обмоткой, то применяют вторичные элементы в виде полосы из
меди, алюминия или ферромаmигной стали. Наиболее удовлетво­
рительными получаются характеристики линейного двигателя при
с о с т а в н о м вторичном элементе, например выполненном в ви­
де полосы из ферромагнитной стали, покрытой слоем меди.
е
227
Основной недостаток асШIХроШIЫХ двшателей с разомкнутым
статором - дуговых и линейных - явление краевого эффекта,
представляющего собой коМIDiекс электромапmтных процессов,
обусловлеШIЫХ разомкнутой конструкцией статора. К нежела­
тельным последствиям краевого эффекта в первую очередь следу­
ет отнести появление «паразитных» тормозных усилий, наnрав­
ле1шых против движения подвижной части двшателя, и
возникновение поперечных сил, стремящихся сместить подвиж1 ную часть двшателя в поперечном направлении. Кроме того, краевой эффект вызывает
2 ряд других нежелательных явлений, ухуд­
шающих рабочие характеристики линейных
двигателей.
Линейные асинхронные двшатели при­
меняют для привода заслонок, ленrочных
конвейеров, подъемно-транспортных .меха4 низмов. На рис. 17.11 показано устройство
линейного асШIХронноrо двигателя привода
5 тележки
подъемного крана. На тележке 3
расположен индуктор линейного двшателя,
6 состоящий из шихтованного сердечника 6, в
пазах которого расположена обмотка 5. На­
правляющая для колес 2 представляет собой
Рис. 17 .11. Линей- стальную балку 1, к нижней части которой
вый ас
й
стальная полоса 4. Бегущее
двшателъ инхронны
привода прикреплена
магнитное
поле
индуктора наводит в сталь­
тележки подъе:мноrо ной полосе 4 вихревые
токи. Электромагкрана
нитные силы, возникающие в результате
взаимодействия этих токов с магнитным полем индуктора, пере­
мещают индуктор (тележку) вдоль стальной полосы 4.
Линейные асинхроШIЫе двигатели значительной мощности
применяют на транспорте в качестве тяговых двигателей. ОдШI из
вариантов такого двигателя показан на рис. 17.12. Здесь индуктор
2 двшателя подвешен к транспорmому средству 1, а стальная полоса
3 установлена вертикально на основании пуrи между рельсами. В
этой конструкции поперечная сила Fп, вызванная краевым эффектом,
используется полезно, так как она уменьшает силу давления на несу­
щие оси и колеса и, как следствие, уменьшает трение качения.
.,
Ви8 А
3
2
Рис 17.12. Линейный асинхронный двшателъ привода железнодорожно­
го транспортного средства
228
Контрольные вопросы
1. В чем различие между схемами соединения индукционного реrулятора на­
пряжения и фaзoperyrurropa?
:Z. Сколько раз напрsжение на выходе ИР достигнет наибольшего значения за
один оборот ротора. если обмотка имеет 2р = 6?
3. В каком направлении следует вращать ротор АПЧ, чтобы на выходе полу­
чmъ ЭДС частотой, большей частоты тока в сети?
4. Какую доmо мощности на выходе АПЧ сосrавиr мощносrь приводного дви­
гателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе- 100 Гц?
5. Объясниrе рабО'lу сельсинов в ицдикаторной системе передачи. Чем вызвана
ошибка в воспроизведении угла поворота?
6. Чем обеспечивается отсуrствие самохода в асинхронном исполниrельном
двигателе?
7. Объясниrе принцип работы асинхронного mmейного двигателя.
8. Что такое краевой эффект и каковы его нежелаrельные дейсrвия в линейном
асинхронном двигателе?
Основные типы
■:=5 серийно
rпава18•
выпускаемых
асинхронных
двигателей
§ 18.1. Низковольтные
асинхронные двигатели
АсШ1Хрош1ые дв1rn1тели широко применяются
во всех отраслях народного хозяйства. Объясняется
это простотой их конструкции, надежностью в рабо­
те и удовлетворительными рабочими характеристи­
ками. Кроме того, асинхроШ1Ые двшатели отличаются
невысокой стоимостью по сравнению с электродвига­
телями ПОСТОЯШIОГО тока (см.§ 24.2).
Значительная часть асШIХрОШIЫХ двигателей
применяется для привода механизмов с неизменной.
частотой вращения. Так, например, более 80% всех
асинхронных двигателей общепромьпuленного на­
значения используют для привода вентиляторов, на­
сосов, транспортеров и обрабатывающих станков устройств, не требующих реrулирования частоты
вращения приводного двигателя.
Электрические маппmы, используемые в народ­
ном хозяйстве, выпускаются с е р и я м и. Серия
электрических маппm представляет собой ряд элек­
трических машин возрастающей мощности, имею­
щих однотшшую конструкцию и удовлетворяющих
общему комплексу требований.
Электрические маппmы, предназначе1П1Ые для
массового применения, выпускаются е д и н ы м и
с е р и я м и. Для электрических маппm единых серий
характерны высокий уровень унификации деталей и
узлов и их максимальная взаимозаменяемость. С
этой целью одни и те же штампованные Шiастины
статоров и роторов используют в маппmах разной
мощности, применяя разную длину пакетов. По мере
развития науки и техники, совершенствования, тех­
нологии, создаIШЯ новых электротехнических мате­
риалов разрабатываются новые, более совершеш1ые
серии электрических маппm.
Наряду с едиными сериями промышленностью
изготовляются и другие серии маппm, главным об­
разом специального назначения: краново-металлур­
rические, судовые, тяговые и т. п.
230
Серия т рехфазных асинхронных двигателей 4А. Единая се­
рия 4А охватьmает диапазон мощностей от 0,06 до 400 кВт. В ос­
нову разделения двигателей на типоразмеры положен конструк­
тивный параметр - высота оси вращения h, определяемая
расстоянием от оси вращения (для машин с горизонтальной осью
вращения) до опорной плоскости (рис. 18.1). Двигатели единой
серии 4А изготовляются с высотами оси вращения 50, 56, 63, 71,
80, 90, 100, 112, 132, 160, 180, 200, 225, 250,
280, 315, 355 мм. Двигатели каждой высоты
оси вращения выполняются двух тшюразме­
ров с разной длиной пакетов сердечников, но
одинаковым штампом пласпm этих сердечни­
ков. Двигатели изготовляются на синхронные
частоты вращения 3000,1500,1000,750,600 и
Рис 18.1. Высота
500 об/мин.
оси вращения
Двигатели единой серии 4А изготовляются в двух испОJmениях: закрытый обдуваемый
(рис. 18.2, а) и защшценный с внуrреIШей самовентиляцией (рис.
18.2, б). Двигатели закрытого исполнения всего диапазона осей
вращения изготовляются с короткозамкнутым ротором, а осей
вращения 200, 225 и 250 мм - еще и с фазным ротором ( 4АК).
Двшатели защищешюrо испоJШения изготовляются с короткозамкну­
тым ротором (4АН) при высоте оси вращения h ;;3о 160 мм,а при вы­
соте оси вращения h ;;3о 200 мм- еще и с фазным ротором (4АНК).
Рис 18.2. АсинхроШIЫе двигатели серии 4А
а - закрытого обдуваемого исполнеНЮI, 6 - защищенного исполнеНЮI
В двигателях единой серии с высотами оси вращения от 50 до
132 мм применяется изоляция класса наrревостойкости В, а в дви­
гателях с высотами оси вращения от 160 до 355 мм - изоляция
класса наrревостойкости F.
Асинхронные двигатели единой серии 4А предназначены для
самого широкого применения во всех отраслях народного хозяй­
ства и помимо основного имеют несколько электрических моди­
фикаций и специализированных исполнений.
231
Двигатели основного исполнения предназначены для привода
механизмов, не предъявляющих особых требований к пусковым
характеристикам, сколъженшо, энергетическим показателям и т. д.
Предполагается, чrо окружающая среда в месте их установки не
взрывоопасна, не содержит токопроводящей пыли, агрессивных
газов и паров в кшщентрациях, разрушающих металл и изоляцшо.
Двигатели предназначены для работы от сети частотой 50 Гц и
напряжения согласно табл. 18.1.
Таблица 18.1
Мощность
двиrателя,кВт
0,06--0,37
0,55-11
15-110
132--400
Номинальное напряжение, В.
220и380
220, 380и660
220/380и380/660
380/660
Схема соединеНИ11 обмотки
сrатора
ВЫВОДНЫХ
ЛИJП1У
3
ЛN
6
Число
концов
Различают следующие электрические модификации двигате­
лей: а) двигатели с повьШiенным скольжением, с <<МЯГКОЙ>> меха­
нической :характеристикой; 6) двигатели с повьШiенным пусковым
моментом (двойная клетка на роторе); в) многоскоростные двига­
тели - на две, три и четыре часто1ЪI вращения в диапазоне от 500
до 3000 об/мин; г) двшатели на частоrу 60 Гц, имеющие частоrу
вращения на 20% вьппе, чем двшатели основного исполнения при
той же мощности.
По конструктивному исполнению двшатели разделяются на:
а) малошумные, имеющие повьппенный скос пазов (1,5 зубцовых
деления), увеличенный воздушный зазор, пластмассовый вентиля­
тор; 6) встраиваемые двигатели (4АВ) для встраивания в станки и
механизмы; в) двигатели со встроенной темпера'I)'рной защитой
для привода механизмов, работающих со значительными пере­
грузками, частыми пусками и т. д.; в лобовые части обмоток ста­
тора установлены терморезисторы, которые при перегреве выдают
сигнал на отюпочение двшателя.
По условиям окружающей среды двшатели разделяются на: а)
двшатели тропического исполнения, предназначенные для ра601ЪI
в условиях влажного или сухого тропического климата; в них
применены тропикоустойчивая изоляция и аmикоррозионное по­
крытие всех деталей; б) двшатели влагоморозостойкого исполне­
ния, предназначенные для ра601ЪI при окружающей темпера'I)'ре
до -40 °С и относиrельной влажности до 100% при температуре
+25 °С; в) двигатели химостойкого исполнения, предназначенные
для работы в условиях температуры окружающей среды ±40 °С,
относиrельной влажности до 80% при темпера'I)'ре +25 °С и нали­
чии химически активной невзрывоопасной среды; в них примене­
ны химостойкие изоляционные материалы и антикоррозионные
покрытия всех деталей.
232
Серия т рехфазных асинхронных двигателей АИ. Асин­
хронные двшатели cep1m АИ общепромъшшенного назначения с
высотами осей вращения от 45 до 355 мм мощностью от 0,025 до
315 кВт разработаны в рамках Международной организации по
экономическому и научно-техническому сотрудничеству в элек­
тротехнической промьппленности (ИНТЕРЭЛЕКТРО). Двигатели
изготовляются на напряжение 220/380 и 380/660 В, частотой тока
50 Гц. Возможно изготовление двигателей на частоrу тока 60 Гц.
По степени защиrы двигатели этой серии имеют исполнения: за­
крытый обдуваемъIЙ для всех высот оси вращения или защшцен­
НЪIЙ с внутренней самовентиляцией для высот оси вращения от
160 ДО 355 ММ.
В отличие от серии 4А в двигателях серии АИ более широко
· применены высокопрочные алюминиевые сплавы и пластмассы и
использована более совершенная система ве1ПИЛЯЦИИ обеспечи­
вающая снижение температуры нагрева двигателей при номиналь­
ной нагрузке на 10--20 °С по сравнению с двигателями серии 4А.
Для наиболее массового отрезка cep1m с высотами осей вращения
от 71 до 100 мм применены: подшипники с улучшенными виброа­
кустическими характеристиками. Улучшение вентиляционного и
поДШШIНИКовых узлов обеспечило двигателям серии АИ снижение
уровня шума при их работе и повышение надежности.
§ 18.2. Высоковольтные асинхроннь1е двиrатели
Для привода ряда промышленных установок требуются двига­
тели большой мощности: 500, 800, 1000 кВт и более. Обычно
асинхршmые двигатели такой мощности делают высоковольтны­
ми - на 6000 или 10 ООО В.
Рассмотрим некоторые серии высоковольтных двшателей
большой мощности. Трехфазные асинхронные двигатели с корот­
козамкнуrым ротором серии АН2 применяют для привода меха­
низмов, не требующих рехулирования частоты вращения, напри­
мер веНТШIЯТоров, насосов и т. п. Двигаrели этой серии изготов­
ляются мощноС'IЪЮ от 500 до 2000 кВт при частоте вращения
(синхронной) 1000, 750, 600, 500 и 375 об/мин. Двигатели предна­
значены: для вкmочения в трехфазную сеть напряжением 6000 В,
частотой 50 Гц. Двигатели серии АН2 изготовляются с горизон­
тальным расположением вала на двух щиrовых подшипниках ка­
чения, имеют защищенное исполнение. Корпус статора и поДШШI­
никовые щиrы сварные (рис. 18.3, а) из листовой стали.
Обмотка статора петлевая двухслойная с укороченным шагом.
Класс нагревостойкости изоляции В. Обмотка ротора двухклеточ­
ная (рис. 18.3, б), пусковая клетка (верхняя) выполнена из ла'I)'Н­
ных стержней, рабочая клетка (нижняя) - из медных стержней.
Короткозамыкающие кольца раздельные и для обеих клеток сде­
ланы из меди. Способ охлаждения - аксиально-радиальная само­
вентиляция (см.§ 31.3).
233
Асинхронные двигатели серии АН32 также являются высоко­
вольтными (6000 В), но в отличие от двшателей серии АН2 имеют
закрытое исполне1Ше с принудительной вентиляцией от посторон­
него вентилятора (см. § 31.3). Двигатели этой серии имеют мощ­
ность ОТ 500 ДО 2000 кВт.
Асинхронные двшатели серии АТД2 имеют мощность от 1000
до 5000 кВт; напряже1Ше пигаwя 6000 В. В отличие от ранее рас-
Рис. 18.3. Внешний вид (а) и устройство (б) асинхронного двшателя се-
рии АН2
смотре1rnых двигатели этой серии вьmолняются со стояковыми
поДШШIНИКами скольжения. Система вентиляции двигателей ра­
диальная симметричная, разомкнутая или замкнутая (см. § 31.3).
Теruювое состояние двигателей серий АТД2 контролируется
термометрами сопротивления, вставленными в лобовые части об­
мотки статора. К01щы проводов от этих термометров выведены на
зажимы коробки выводов. При температуре нагрева обмоток, пре­
вышающей допустимую, электрический сигнал от термометров
можно использовать для автоматического отключения двигателя.
§ 18.3. Крановые и метамургические
асинхронные двигатели
Для привода крановых мехаIШЗмов общепромышле1П1ого :на­
значения, а также других агрегатов, работа которых характеризу­
ется частыми пусками и остановками, большими кратностями пе­
регрузок, применяют крановые трехфазные асинхрош1ые
двигатели серий МТF (с фазным ротором) и МТКF (с коротко­
замкнутым ротором).
Для привода мехаIШЗмов металлургического производства и
других устройств, работающих в условиях повышеlПIЫХ темпера­
тур окружающей среды, применяют металлургические трехфазные
двигатели серий МТН (с фазным ротором) и МТКН (с коротко­
замкнутым ротором).
234
Основным номинальным режимом двшателей указанных се­
рий является повторно-кратковремешn,IЙ режим с относительной
продолжигелъностью вюпочения ПВ = 40 % (см. § 31.2).
Двшатели серий МТКF и МТКН изготовляются с коротко­
замкнутым ротором повышенного активного сопротивления (об­
мотка ротора выполняется заливкой алюминиевым сплавом АМГ).
Это обеспечивает двигателям значигелъную величину пуско­
вого момеша (МulМном = 3,0+3,5) и позволяет пускать их непо-
Рис. 18.4. Устройство трехфазного асинхронноrо двигателя серии МГН с
фазным ротором
средствеШ1ЫМ вюпочением в сеть 11а номинальное напряжение се­
ти. Кроме того, эти двшатели имеют повышенную перегрузочную
способность {МmахfМном = 3,3+3,5).
Двшатели указанных серий изготовляют на напряжение
220/380 и 500 В при частоте тока 50 Гц. Двшатели выполняют на
частоты вращения (сШIХро1П1Ые) 1000, 750 и 600 об/мин.
Крановые двшатели имеют изоляцию класса нагревостойко­
сти F, а металлургические - класса нагревостойкости Н. В ос­
тальном коне1рукция двшателей одинакова.
Так как двшатели предназначены для работы в среде с по­
вышенной запыленностью, то основным их исполнением явля­
ется закрытое обдуваемое. Станина и подшипниковые щиты чугунные.
В двшателях с фазным ротором серий MTF и МТН приме­
нены медные кошактные кольца. На каждое кольцо наложены
две медно-графитовые щетки марки MI. На рис. 18.4 показано
устройство (продольный разрез) двигателя серии МТН с фаз­
ным ротором.
235
Контрольные вопросы
1.
2.
3.
4.
5.
Что такое серия электрических машин?
Что являете• характерным Д11J1 единых серий электрических машин?
Каковы характерные признаки асинхронных ДВШ'ателей серии 4А?
Почему двигатели большой мощности делают высоковольтными?
Каковы области применеНШJ и особые свойства асинхронных двиrателей се­
рий М1F, МТКF, МТН и МТКН?
Ра зд е л
4
•
Способы
возбуждения
и устройство
синхронных
машин
•
Магнитное попе
и характеристики
синхронных
генераторов
•
Параллельная
работа
синхронных
генераторов
•
Синхронный
двиrатепь
и синхронный
компенсатор
•
Синхронные
машины
специального
назначения
СИНХРОННЫЕ
МАШИНЫ
Синхронные машины
это
бесколлекторные машины пе­
ременного тока. По своему
устройству они отличаются от
асинхронных машин лишь
конструкцией ротора, который
может быть явнополюсным
или неявнополюсным. Что же
касается свойств, то синхрон­
ные машины отличаются син­
хронной частотой вращения
ротора (n2 = n1 = const) при
любой нагрузке, а также воз­
можностью регулирования ко­
эффициента мощности, уста­
навливая такое его значение,
при котором работа синхрон­
ной машины становится наи­
более экономичной. Синхрон­
ные машины обратимы и
могут работать как в режиме
генератора, так и в режиме
двигателя. Синхронные гене­
раторы составляют основу
электротехнического оборудо­
вания электростанций, т. е.
практически вся электроэнер­
гия вырабатывается синхрон­
ными генераторами. Единич­
ная мощность современных
синхронных генераторов дос­
тигает миллиона киловатт и
более. Синхронные двигатели
применяются главным обра­
зом для привода устройств
большой мощности. Такие
двигатели по своим технико­
экономическим показателям
превосходят двигатели других
типов. В крупных электроэнер­
гетических установках синхрон-
2з1
ные машины иногда исполь­
зуются в качестве компенса­
торов - генераторов реак­
тивной мощности, позволяю­
щих повысить коэффициент
мощности всей установки. В
данном разделе рассмотрены
главным образом трехфазные
синхронные машины. Приве­
дены таюке сведения по неко­
торым типам синхронных дви­
гателей весьма малой мощ­
ности, применяемым в уст­
ройствах автоматики и при­
борной техники.
Способы
- возбуждения
и устройство
синхронных
маwин
глава 19•
§ 19.1. Возбуждение
синхронных маwин
При рассмотрении прmщипа действия сШI­
хроmюго генератора (см. § 6.1) было установлено,
что на роторе синхроmюго генератора расположен
источник МДС (индуктор), создающий в генераторе
магнитное поле. С помощью приводного двигателя
(ПД) ротор генератора приводиrся во вращение с
синхронной частотой п 1• При этом магнитное поле
ротора также вращается и, сцепляясь с обмоткой
статора, наводиr в ней ЭДС.
Синхронные двигатели конструктивно почти не
отличаются от синхронных генераторов. Они также
состоят из статора с обмоткой и ротора. Поэтому
независимо от режима работы любая синхронная
машина нуждается в процессе в о з б у ж д е н и я наведения в ней магнитного поля.
Основным способом возбуждения синхршшых
машин является электромагнитное возбуждение,
сущность которого состоит в том, что на полюсах
ротора располагают обмотку возбуждения. При про­
хождении по этой обмотке постоянного тока возни­
кает МДС возбуждения, которая наводиr в магнит­
ной системе машины магнитное поле.
До последнего времени для пиrания обмотки
возбуждения применялись специальные генераторы
постоянного тока независимого возбуждения (см.
§ 28.2), назьmаемые возбудителями В (рис. 19.1, а),
обмотка возбуждения которого (ОБ) получала пита­
ние постоянного тока от другого генератора (парал­
лельного возбуждения), называемого подвозбудиrе­
лем (ПВ). Ротор синхронной машины и якоря
возбудителя и подвозбудиrеля располагаются на
общем валу и вращаются одновременно. При этом
ток в обмотку возбуждения синхронной машины
ПОС1J'Пает через контактные кольца и щетки. Для
регулирования тока возбуждения применяют регу­
лировочные реостаты, включаемые в цепи возбуж­
дения возбудиrеля (ri ) и подвозбудителя (r2).
239
В синхроlПIЫХ генераторах средней и большой мощности про_.
цесс реrулирования тока возбуждения автоматизируют.
В синхроlПIЫХ генераторах большой мощности - турбогене­
раторах (см.§ 19.2) - шюгда в качестве возбудиrеля применяют
генераторы перемеmюго тока шщукторного пша (см. § 23.6). На
выходе такого генератора вюпочают полупроводниковый выпряа)
б)
Cf
r,
Рис. 19.1. Коиrактная (а) и бескоиrактная (б) системы электромагнитного возбуждения синхронных генераторов
митель. Реrулировка тока возбуждения СШ1Хронноrо генератора в
этом случае осуществляется изменением возбуждения индуктор­
ного генератора.
Получила применение в сШ1Хро1П1ЫХ генераторах бескон­
тактная система элеюпромагнитного возбуждения. при которой
синхронный генератор не имеет контактных колец на роторе.
В качестве возбудителя и в этом случае применяют генератор
переменного тока (рис. 19.1, б), у которого обмотка 2. в которой
наводиrся ЭДС (обмотка якоря), расположена на роторе, а обмот­
ка возбуждения J расположена на статоре. В результате обмотка
якоря возбудиrеля и обмотка возбуждения синхронной машины
оказьmаются вращающимися и их электрическое соединение осу­
ществляется непосредственно, без контактных. колец и щеток. Но
так как возбудиrель является генератором переменного тока, а об­
мотку возбуждения необходимо питать постоянным током, то на
выходе обмотки якоря возбудиrеля вюпочают полупроводниковый
преобразователь 3, закреШiенный на валу синхронной машины и
вращающийся вместе с обмоткой возбуждения синхронной маши­
lШ и обмоткой якоря возбудиrеля. Питание постоЯШIЪIМ током
обмотки возбуждения J возбудиrеля осуществляется от подвозбу­
дителя (ПВ) - генератора постоянного тока.
Оrсутствие скользящих контактов в цепи возбуждения син­
хронной машины позволяет повысить ее эксплуатационную на­
дежность и увеличить :КПД.
В синхроlПIЫХ генераторах, в том числе гидрогенераторах ( см.
§ 19.2). получил распросчтнение принцип самовозбуждения (рис.
19.2. а). когда энергия переменного тока, необходимая для возбу240
ждения, отбирается от обмотки статора синхроmюго генератора и
через понижающий трансформатор и ВЫIIрямительный полупро­
водниковый преобразователь (IПI) преобразуется в энергшо по­
стояmюго тока. Пршщип самовозбуждения основан на том, что
первоначальное возбуждение генератора происходиr за счет
остаточного магнетизма мапппопровода ма�шrnы.
б) ~J
тн
Рис. 19.2. ПрИIЩIШ самовозбуждения синхронных rенера­
торов
На рис. 19.2, б представлена структурная схема автоматиче­
ской системы самовозбуждения синхронного генератора (СГ) с
выпрямительным трансформатором (ВТ) и тиристорным преобра­
зователем (ТП), через которые электроэнергия переменного тока
из цеIШ статора СГ после преобразования в постоянный ток пода­
ется в обмотку возбуждения. Управление тиристорным преобразо­
вателем осуществляется посредством автоматического реrулятора
возбуждения АРБ, на вход которого пос'I)'Пают сигналы напряже­
ния на выходе СГ (через трансформатор напряжения ТН) и тока
нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок
защиты БЗ, обеспечивающий защиrу обмотки возбуждения и ти­
ристорного преобразователя m от перенапряжений и токовой пе­
регрузки.
В современных синхронных двигателях для возбуждения
применяют тиристорные возбудительные устройства, вкmочае­
мые в сеть переменного тока и осуществляющие автоматическое
управление током возбуждения во всевозможных режимах работы
двигателя, в том числе и переходных. Такой способ возбуждения
является наиболее надежным и экономичным, так как КПД ти­
ристорных возбудительных устройств выше, чем у генераторов
постоянного тока. Промышленностью вьmускаются тиристорные
возбудиrельные устройства на различные напряжения возбужде­
ния с допустимым значением постоянного тока 320 А.
Наибольшее распространение в современных сериях синхрон­
ных двигателей получили возбудиrельные тиристорные устройст­
ва типов ТЕS-320/48 (напряжение возбуждения 48 В) и ТЕS-320/75
(напряжение возбуждения 75 В).
241
Мощность, затрачиваемая на возбуждение, обычно составляет
от 0,2 до 5% полезной мощности машины (меньшее значение от­
носится к машинам большой мощности).
В синхронньIХ машинах малой мощности находит применение
пршщип возбуждения постоянными магнитами, когда на роторе
машинь1 располагаются постоЯШIЫе магниты. Такой способ воз­
. буждения дает возможность избавить машину от обмотки возбуж­
деЮIЯ. В результате конструкция машинь1 упрощается, становится
более экономичной и надежной. Однако из-за дефицитности мате­
риалов для изготовления постоЯННЬIХ мапmтов с большим запасом
магнитной энергии и сложности их обработки применение возбу­
ждеШIЯ постоянньIМИ магнитами ограничивается лшпъ машинами
мощностью не более нескольких киловатт (см. §23.1).
§ 19.2. Типы синхронных маwин и их устройство
Синхронная машина состоит из неподвижной части - ста­
тора - и вращающейся части - ротора. Статоры синхронньIХ
машин в принципе не отличаются от статоров асинхроННЬIХ двига­
телей (см. гл. 7), т. е. состоят из корпуса, сердечника и обмотки
(см. рис. 7.1).
Конструктивное исполнение статора синхронной маmинь1 мо­
жет быть различным в зависимости от назначения и габаритов
маmинь1. Так, в многопоmосньIХ машинах большой мощности при
наружном диаметре сердечника статора более 900 мм пластинь1
сердечника делают из отдельных сегментов, которые при сборке
образуют цилиндр сердечника статора. Корпуса статоров крупно­
габарИТНЬIХ машин делают разъемными, что необходимо для
удобства транспортировки и монтажа этих машин.
Роторы синхронньIХ машин могут иметь две прmщипиально
различающиеся конструкции: явнопоmосную и неявнополюсную.
В энергетических установках по производству электроэнергии
переменного тока в качестве первичн:ьIХ (приводньIХ) двигателей
синхронных генераторов применяют в основном три вида двигате­
лей: паровые 1У])бШIЫ, гидравлические 1У])бШIЫ либо двигатели
внутреннего сгорания (дизели). Применение mобого из перечис­
ленных двигателей принципиально влияет на конструкцшо син­
хронного генератора.
Если приводным двигателем является гидравлическая турби­
на, то синхроннь1й генератор называют ги д р о г е н е р а т о р о м.
Гидравлическая 1У])бина обычно развивает небольшую частоту
вращеШIЯ (60--500 об/мин), поэтому для получеЮ1Я переменного
тока промъШIЛенной частоты (50 Гц) в гидрогенераторе применя­
ют ротор с большим числом поmосов. Роторы гидрогенераторов
имеют явнополюсную конструкцию, т. е. с явно выражеННЬIМИ ло­
тосами, при которой каждый поmос вьmолняют в виде отдельного
узла, состоящего из сердечника J, поmосного наконечника 2 и по­
mосной катушки 3 (рис. 19.3, а). Все поmосы ротора закреплены
на ободе 4, являющемся также и ярмом магнитной системы маши242
ны, в котором замыкаются потоки полюсов. Гидрогенераторы
обычно изготовляются с вертикальным расположением вала
(рис. 19.4).
Паровая турбина работает при большой частоте вращения,
поэтому приводимый ею во вращение генератор, называемый
тур б о г е н е р ат о р о м, является быстроходной сШIХронной ма-
Рис. 19.3. Конструкция роторов синхронных маШШI:
а - ротор с явно выраженными поmосами; 6 - ротор с неявно
выражею1ыми ооmосами
2
J
Рис. 19.4. Гидрогенератор Братской ГЭС (225 МВт, 15,8 кВ,
125 об/мин):
1 - корпус статора; 2 - сердечник статора; 3 - поmос ротора; 4 - обод
ротора; 5 - rрузонесущая крестовина
243
шиной. Роторы этих генераторов выполняют либо двухпо­
люсными (п 1 = 3000 об/МШI), либо четырехполюсными (п1 = 1500
об/МШI).
В процессе работы турбогенератора на его ротор действуют
значительные цеmробежные силы. Поэтому по условиям механи­
ческой прочности в турбогенераторах применяют неявнопо2
Рис 19.5. Турбогенератор:
1 - возбудиrель, 2 - корпус, 3 - сердечник статора, 4 - секции водородноrо
охлаждения, 5 - ротор
люсный ротор, имеющий вид удлиненного стального циmщдра с
профрезерованными на поверхности продольными пазами для об­
мотки возбуждения (см. рис. 19.3, б). Сердечник неявнополюс­
ного ротора изготовляют в виде цельной стальной поковки вместе
с хвостовиками (концами вала) шш же делают сборным.2 Обмотка
возбуждения неявнопоmосного ротора занимает лишь /3 его по­
верхности (по периметру). Оставшаяся 1/3 поверхности образует
полюсы. Для защиты лобовых частей обмотки ротора от разруше­
ния действием ценrробежных сил ротор с двух сторон прикрыва­
ют стальными бандажными кольцами (каппами), изготовляемыми
обычно из немагнитной стали.
Турбогенераторы (рис. 19.5) и дизель-генераторы изготовляют
с горизонтальным расположением вала. Дизель-генераторы рас­
считывают на частоту вращения 600-1500 об/МШI и въmоJШЯЮТ с
явнополюсным ротором (рис. 19.6).
Большую rруппу синхронных машин составляют синхронные
двигатели, которые обычно изготовляются мощностью до не­
скольких тысяч киловатт и предназначены для привода мощных
веIПИЛЯТОров, мельниц, насосов и других устройств, не требую­
щих регулирования частоты вращения. Рассмотрим устройство
синхроmюго двигателя серии СДН2 (рис. 19.7). Двигатели этой
серии изготовляются мощносгью от 315 до 4000 кВт при частотах
244
рращения от 300 до l ООО об1МИJJ и предназяачеиьт Ш!.11 ь.ключения ь
сеть частотой 50 Гц прн: н:апрmкешш 6 Jill,.
Серд� статора 4 1 заnрессованIОdй. в аалыюй корпус t со­
стош из пакетов-сеrмеитов, собраниых иэ mrампованных листов
элекгротехнической стали ТОJПЦИНОЙ O t: 5 мм" Д�,я � охлвж.�
j
\
"'
Рис 19.. 6. Сннхро.нный генера.wр (дmсль--rенератор}:
1 - EGR1'П1'Rble � 2 - щеnщдерuтмн, J - 1JOJ1IOCJ1U К81)'QDЩ ротора,
4 -- JIDJIJOCJШЙ � j - � � 6 - ·•еJП'ИЛЯ'tlР; 7- вал
деИШI дв.иnnе.л.1 11UеТЪ1 рщделеm.I радиаJIЪВЪ[МЯ венmлщиоННЬI­
ми ·хаиалами шириной no 1 О мм. ()бмоn.:а сrат-ора 11 М}'XCJIOЙllaJI
с укороченным шаrом (см. rn.. 7). Сердечниm поmооое 11 ротора
Iфeill"l'CЯ к остову 3 IПШIЛЬIСаJr;Ш 5. 06.матn ротора-сосr-ояr m nо­
mосных катуша:. .Кom.a.IC'I'Иble кольца 8 кpemnci: .на ко� ва.nа. На
роторе ШrteIOТC.I лОП8ТkИ 6 цеmробежиоrо ве�. Стояко:ьые
ll:OдJIDIШНllkJI СКОJП;Ж-е.и:в..1 2 м: 7 устав:ов.лепы на ПОДIЬИПIШКОВЫХ.
ПОJlУЩИ.U!.'Х 1 и _9. Двигатель с торцовых: сторо1t прикрьrr -ста:rь­
RЫМИ щитам.� 13. В обnuпнсе J О корпуса !WеIОТСЯ" венrил1J..Щон�
ИЫ·е окна, прnttрыт:ые аалюзй. На ооJСовой nоверхности корnуса
pacпOJimkelta коробка ·ВЬ[u<щов 14. В00,буж,ц,еяие д�мгателеn
24.S
2
Рис 19.7. Устройство синхронного двигателя серии СДН2
осуществляется от тиристорных преобразователей с автоматиче­
ским регулированием тока возбуждения при пуске и остановке
двшателей.
На рис. 19.8 показано более подробно устройство элемеша
синхронного двшателя, характерное для большинства конструк­
ций. На вал 1 посажен шихтованный обод 2, на котором посредст­
вом Т-образного хвостовика крепится сердечник поmоса 3, вьшол-
Рис 19.8. Поmос синхронного двигателя
пенный заодно с поmосным наконечником. Сердечники поmосов
изготовлены из шrампованных листов конструкционной стали
толщиной 1,0 или 1,5 мм. Хвостовик полюса запирается в про­
дольном пазе обода посредством клиньев 9. Возможно также
крепление полюсов к ободу посредством «ласточкина хвоста»
(см. рис. 19.З) или шпилек. Стальные щеки 4, стягиваемые
шпильками, предотвращают распушение пакета поmоса ротора.
Щеки имеют заплечики, удерживающие поmосную катушку
ротора 5.
В пазах поmосных наконечников расположены ла'I)'ННЫе или
медные стержни 6 пусковой (успокоиrелъной) обмотки, замкнутые
с двух сторон сегмешами 7.
Между наружной поверхностью поmосного наконечника и
внутренней поверхностью сердечника статора 8 имеется воздуш­
ный зазор. По оси полюса этот зазор б минимален, а на краях максимален бmах. Такая конфигурация поmосного наконечника не­
обходима для синусоидального распределения маrниrной индук­
ции в воздушном зазоре. Она достигается тем, что поверхность
полюсного наконечника имеет радиус R<(Д. -W)/2, где D1 диаметр расточки сердечника статора.
247
Контрольные вопросы
1. Какие существуют способы возбуждения синхронных машин?
2. Объясниrе назначение тиристорwrо преобразователя в системе самовозбуждения синхронноrо генератора.
3. Объисюrrе устройсrво .явнопоmосных и неявнопmосных роторов.
4. Объисниrе устройство синхронноrо двигателя серии СДН2.
5. Какие примеНJ1ЮТси способы креwiения оотосов в синхронных ивmпотос­
ных машинах?
6. Чем обеспечивается неравномерный воздушный зазор в синхронной маши­
не?
Магнитное поле
· - и характеристики
синхронных
генераторов
rпава20•
§ 20.1. Маrнитная цепь
синхронной маwины
В режиме х.х. синхроmюй машины, т. е. при от­
суrствии тока /1 в обмотке статора, магнитное поле
создается лшпь МДС обмотки возбуждения Fво•
Форма графика распределения индукции в зазоре
явнополюсной машины в , этом случае зависиr от
конфшурации полюсных : наконечников полюсов
ротора. Для придания этой кривой формы, близкой к
синусоидальной, воздушный зазор делают неравно­
мерным, увеличивая его на краях полюсных нако­
нечников (см. рис. 6.2).
Основной магниmый поток явнополюсной син­
хронной ма1шm:ы, замыкаясь в магнитной системе
машины, сцепляется с обмоткой статора. Как и в
асинхршmых неявнополюсных машинах (см. § 11.1 ),
магниmая система явнополюсной синхронной ма­
шины представляет собой разветвлеШl)'Ю симмет­
ричную магниmую систему (рис. 20.1, а), состоя­
щую из 2р параллельных ветвей. Каждая из таких
ветвей представляет собой неразветвлеШl)'Ю маг­
ниmую цепь, содержащую одну пару полюсов (рис.
20.1, б). Основной магниmый поток Ф, замыкаясь в
магниmой цепи, проходит ряд участков (рис. 20.2):
воздушный зазор о, зубцовый слой статора hz1 , зуб­
цовьIЙ слой ротора h-z2, полюс ротора hm, спинку ста­
тора L1 и спинку ротора (обод) Lоб•
Сумма магmrmых напряжений на всех перечис­
ленных участках магmrmой цепи определяет МДС
обмотки возбуждения на цару полюсов в режиме х.х.
(А):
F80 = 'f.F= 2F11 +2�1 + 2�2 +2Fm +fc1 +F05 ,
(20.1)
де
,
г Fo Fz1, F-z2, Fт, Fc 1 и F00 - соответственно маг­
mrmые напряжения зазора, зубцовых слоев статора
и ротора, полюсов, спинки статора и обода, А.
Порядок расчета магmrmых напряжений на уча­
стках магmrmой цепи в принципе такой же, как и
при расчете магmrmой цепи асинхронной машшп,1
249
(см. гл. 11 ). При расчете магнитного напряжения' полюсов и cmrn­
ки ротора необходимо иметь в виду, что маГНИ1111,IЙ поток на этих
участках несколько больше основного магнигного потока Ф на
величину потока рассеяния ротора Ф0, представляющего собой
небольшую часть общего потока полюсов Фm, не проходящего че­
рез зазор о, замыкающегося в межполюсном пространстве:
Фт =Ф+Ф., =Ф(l+Ф/Ф ., )=Фа т ,
(20.2)
где crm -коэффициент магниrного рассеяния полюсов ротора.
б)
Рис. 20.1. Магнитная система явнополюсной синхрон­
ной машины
Рис. 20.2. Участки магнитной цепи явноnолюсной
синхронной машины
где
Д,ЛЯ сШ1Хрош1ых явнополюсных машин коэффициент
CJm = 1 + 0,2kµI ,
(20.3)
(20.4)
- коэффициент магнитного насыщения сердечника статора син­
хронной машины;
.Fio =2Fi, +2�1 +�1
- сумма магниrных напряжений в сердечнике статора и воздушном зазоре, А.
250
Для синхр01rnых явнопоmосных машин коэфф1ЩИенr магюп­
ного рассеяния поmосов ротора crm = 1,1+1,4 в зависимости от сте­
пени магюпного насьпцения мапmтопровода машшп,1 и числа по­
mосов (с ростом числа поmосов 2р уменьшается межпоmосное
пространство ротора машинь1 и магнитное рассеяние увеличивает­
ся). После расчета магнитной цепи синхронной машшn.1 строят
магнитную характеристику машины, аналогичную представленной
на рис. 11.3. Используя МДС обмотки возбуждения в режиме х.х.
L F, путем дополнительных расчетов определяют МДС обмотки
возбуждения при нагрузке Fв.н• Обычно Fв.н = (2,0+2,2) I:F.
Полученное значение МДС Fв.н позволяет рассчитать число
витков в поmосной Ка1)'ШКе ротора:
(20.5)
w._. = F..н/(21.),
где /8 - ток в обмотке возбуждения синхронной машшn.1, А.
§ 20.2. Маrнитное поле синхронной машины
В настоящей главе рассматривается трехфазный синхр01rnый
генератор, работающий на симметричную нагрузку так, что все
фазы обмотки нагружены равномерно, т. е. в них наводятся одина­
ковые ЭДС и проходят равные по значенmо и сдВШIУТЬiе по фазе
относительно друг друга на угол 120° токи. Из гл. 9 известно, что в
этих условиях трехфазная обмотка статора создает вращающуюся
синхронно с ротором МДС, максимальное значение которой опре­
деляется выражением (9.16):
}j = 0,45m1 11 w1 k061/р.
Как будет показано в § 20.3, вектор МДС статора может зани­
мать разные пространственные положения относиrельно оси по­
mосов ротора.
В неявнопоmосной синхронной маШШiе воздушный зазор рав­
номерен, а поэтому пространственное положение вектора МДС
статора относиrельно оси поmосов ротора не влияет на величину и
rр�фик распределения магнитного поля статора.
В явнопоmосной сШIХронной маШШiе воздушный зазор нерав­
номерен из-за наличия значительного межпоmосного пространст­
ва, не заполненного сталью (рис. 20.3), и магниrное сопротивле­
ние потоку статора Фd по продольной оси dd намного меньше
магнитного сопротивления потоку статора Фq, по поперечной оси
qq. Поэтому велИЧШiа индукции магнитного поля статора и график
ее распределения в воздушном зазоре в явнопоmосных машинах
зависят от пространственного положения вектора МДС обмотки .
статора F1 или его составляющих.
Так, амплитуда основной гармоники индукции магнитного
поля статора по продольной оси B1d1 больше амплитуды основной
гармоники индукции поля по поперечной оси B1q1 :
251
(20.6)
где В1 - амплитудное значение магнитной индукции поля статора
при равномерном зазоре; kd и kq - коэфф1ЩИенгы формы поля
статора (якоря) по продольной и поперечной осям.
Коэфф1ЩИенгы kd и kq определяют степень уменьшения ам­
плитуды основной гармоники поля статора (якоря) по продольной
1;'
Рис. 20.3. Магнитные поля сгатора синхронной явнополюсной ма­
шины по продольной (а) и поперечной (6) осям
и поперечной осям, обусловлеШ1ую неравномерностью воздушно­
го зазора в машинах с явнополюсньzм ротором.
Значения lci! и kq зависят от отношения максимального и ми­
нимального воздушных зазоров S max /8, от относительной величи­
ны зазора 8/t , а также от коэфф1ЩИента полюсного перекрьпия
aj. При равномерном зазоре (8 = const) отношение S max /8 = 1. По­
люсное деление t определяют по (7.1). Коэффшщент полюсного
перекрьrгия a j = bp /t, где Ьр - ширина полюсноr9 наконечника
(см. рис. 19.8).
252
При равномерном воздушном зазоре ( S max /S = 1) и весьма ма­
лой его относиrельной величине (Цт.::::: О) коэффициеlПЫ формы
поля определяются выражениями
(.20.7)
kd =[тта; +sin(a;180° )]/тт;
°
(20.8)
kq = [па; -sin(a;180 )]/1t.
Из (20.7) и (20.8) видим, что при а; = 1, т. е. при неявнопоmосном
роторе, kd = kч = 1.
OJ�бJ
-1�1 .«
--1
.•
«
I\
•1 1• :
1
Ч�ЙII�u
l.LЩ,..................................
.L-.L,jll........................
т-,--,....-�
d•�
�..._
:
1
о
Рис. 20.4. Магнитные поля возбуждения неявнопотосной (а) и
'ЯВНОПОJПОСНОЙ (б) СШIХронных машин
Обмотка возбуждения СШIХро:нной машины при прохождении
по ней тока /8 создает МДС на пару поmосов (А):
(20.9)
F...н =: /8 2Wк.в.
При этом форма магнитного поля возбуждения в зазоре ма­
шш1ы зависиr от конструкции ротора. Ампmпуда основной гар­
моники этого поля Вв t определяется коэффициенrом формы поля
возбуждения
(20.10)
.где Вв - максимальное значение магнитной Ш1Д)'КЦИИ поля воз­
буждения (рис. 20.4).
Для неявнопоmосного ротора коэффициенr формы поля воз­
буждения (рис. 20.4, а)
(20.11)
где у= 2а/т, - отношение обмотанной часm поmоса ротора ко
всему поmосному деленшо. Обычно у = 0,67+0,80. Наименьшее
содержание высших гармоник поля соответствует у= 0,75.
Для явнопо.тiюсного ротора при равномерном зазоре и Б/t ::::: О
коэффициент формы поля возбуждения (рис. 20.4, б)
k1 =4sina;90° /1t.
(20.12)
253
Увеличение зазора на краях поmосов способствует приближе­
нию коэффициента lc_r к единице, т. е. приближает форму кривой
индукции поля к синусоиде.
При неравномерном воздушном зазоре значения коэффициен­
тов формы поля определяют по графикам, приводимым в руково­
дствах по расчету синхроm-1ых машuн [5 и 15].
§ 20.3. Реакция якоря синхронной машины
В процессе работы нагружешюго синхрошюго · генератора в
нем одновремешю действуют МДС возбуждения Fв0 [см. (20.1)] и
статора (якоря) F1 [см. (9.15)], при этом МДС статора (якоря) воз­
действует на МДС возбуждения, усиливая или ослабляя поле воз­
буждения или же искажая его форму. Воздействие МДС обмотки
статора (якоря) на МДС обмотки возбуждения назьmается реакци­
ей якоря. Реакция якоря оказьmает влияние на рабочие свойства
,синхрошюй машины, так как изменение магнитного поля в маши­
не сопровождается изменением ЭДС, наведеmюй в обмотке стато­
ра, а следовательно, изменением и ряда других величин, связан­
ных с этой ЭДС. Влияние реакции якоря на рабооу сШIХронной
машины зависит от значения и характера нагрузки.
СинхроШ-1Ь1е генераторы, как правило, работают на смешан­
ную нагрузку (активно-индуктивную или активно-емкостную). Но
для выяснения вопроса о влиянии реакции якоря на работу син­
хроmюй машины целесообразно рассмотреть случаи работы гене­
ратора при нагрузках предельного характера, а имешю: активной,
индуктивной и емкосmой. Воспользуемся для этого векторными
диаграммами МДС. При построении этих диаграмм следует иметь
в виду, что вектор ЭДС Ё0 • uндуцируемой магниmым потоком
возбуждения в обмотке статора, отстает по фазе от вектора этого
потока (а следовательно, и вектора МДС F80 ) на 90° . Что же каса­
ется вектора тока в обмотке статора /1 , то он может занимать по
отношеншо к вектору Ё0 различные положения, определяемые
углом '1' 1 в зависимосm от вида нагрузки.
Активная наrрузка ( 'l' i = О). На рис. 20.5, а представлены
статор и ротор двухпоmосного генератора. На статоре показана
часть фазной обмотки. Ротор явнопоmосный, вращается против
движения часовой стрелки. В рассматриваемый момею; времени
ротор занимает вертикальное положение, что соответствует максимуму ЭДС Ё0 в фазной обмотке. Так как ток при активной на­
грузке с о в п а д а е т по фазе с ЭДС, то указанное положение ро. тора соответствует также и максимуму тока. Изобразив линии
магнитной индукции поля возбуждения (ротора) и линии магнитной индукции поля абмотки статора, видим, что МДС статора ft.
направлена перпендикулярно МДС возбуждения F,,0 • Этот вывод
также подтверждается векторной диаграммой, построешюй для
254
этого же случая. Порядок построения этой диаграммы следующий:
в соответствии с пространственным положением ротора генератора проводим вектор М ДС возбуждения F'80 ; под углом 90° к этому
вектору в сторону отставания проводим вектор ЭДС Ё0 , наведен­
ной магнитным полем возбуждения в обмотке .статора; при
подюпочении чисто активной нагрузки ток в обмотке статора i1
Ф•gо• J, 1.'
Рис. 20.5. Реакция якоря синхронного генератора при активной
(а), индуктивной (б) и емкостной (в) нагрузках
совпадает по фазе с ЭДС Ё0 , а nоэтому векrор МДС Р;. , создаваемый
этим током, сдвШIУf в пространстве относиrельно вектора F80 на 90°.
Такое воздействие МДС статора (якоря) Р;. на МДС возбуж­
дения Fв0 вызовет искажения резульшрующего поля машш1ы:
магнитное поле машины ослабляется под набегающим краем по­
люса и усиливается под сбегающим краем полюса (рис. 20.6).
Вследствие насыщения магнитной цепи резульшрующее магнит­
ное поле машины несколько ослабляется. Объясняется это тем,
что размагничивание набегающих краев полюсных наконечников
и находящихся над ними участков зубцового слоя статора проис­
ходит беспрепятствешю, а подмагничивание сбегающих краев по­
люсных наконечников и находящихся над ними участков зубцово­
го слоя статора ограничивается мапmтным насыщением этих
элементов магнитной цепи. В итоге результирующий магнитный
поток машины ослабляется, т. е. магнитная система несколько
размагничивается. Это ведет к уменьшению ЭДС машины Е1 •
Индукrивная нагрузка ( \JI 1 = 90°). При чисто индуктивной
нагрузке генератора ток статора i1 о т с т а е т по фазе от ЭДС Ё0
на 90°. Поэтому он достигает максимального значения лишь после
поворота ротора вперед на 90° относительно его положения, соответствующего максимуму ЭДС Ё0 (см. рис. 20.5, б). При этом
255
МДС fr.. действует вдоль оси поmосов ротора встречно МДС воз­
буждения F'80 • В этом мы также убеждаемся, построив векторную
диаграмму.
Такое действи� МДС статора F1 ослабляет поле маш1rnы. Сле­
довательно, реакция якоря в синхронном генераторе при чисто
индуктивной нагрузке оказывает продольно-размагничивающее
действие.
В отличие от реакции якоря
при активной нагрузке в рассмат­
риваемом случае магнитnое поле
не искажается.
наг�уз ка
Емкостная
( \j/ = -900 ). Так как ток /1 при
q
q емкостной нагрузке опережает по
фазе ЭДС Ё0 на 90°, то своего
наибольшего значения он дости­
гает раньше, чем ЭДС, т. е. когда
ротор займет положение, показан­
ное на рис. 20.5, в. Магнигодвижущая
сила статора fr.. так же, как
Рис. 20.6. Магнитное поле сиихронного генератора при актив- и в предыдущем случае, действует
по оси поmосов, но теперь �же
ной наrрузке
согласно с МДС возбуждения Fво .
При этом происходит усиление магнипюго поля возбуждения.
Таким образом, при чисто емкостной нагрузке синхронного гене­
d
ратора реакция якоря оказывает продольно-намагничивающее
действие. Магшпное поле при этом не искажается.
Смешанн�я нагрузка.
При смешаннои нагрузке cШI­
io хронного генератора ток статоi,
i,
f,11 ра i1 сдвинуr по фазе ornocи1
--1q тельно ЭДС Ё0 на угол \j/ 1 ,
значеЮIЯ которого находятся в
пределах О< \j/ 1 < ±900 . Для
выяснеЮIЯ вопроса о влиянии
Fв.о
jd
fo.o F,11 id
реакции якоря при смешанной
Рис. 20.7. РеаКЦИJJ якоря при сме­
нагрузке воспользуемся диа­
шанной наrрузке
граммами МДС, представлен­
ными на рис. 20.7.
При активно-индуктивной нагрузке (рис. 20.7, а) вектор fr.. от­
стает от вектора Е0 на угол О< \/1 1 < 90° . Разложим вектор F1 на
две составляющие: продольную составляющую МДС статора
F; d = F; sin \j/ 1 и поперечную составляющую МДС статора
F; 9 = F; cos\j/ 1 • Такое же разложение МДС якоря F1 на составляюа)
о)
�----
256
щие можно сделать в случае активно-емкостной нагрузки (рис.
20.7, б). Поперечная составляющая МДС статора F19, представ­
ляющая собой МДС реакции якоря по поперечной оси, пропор­
циональна активной составляющей тока нагрузки 19 = /1 cos '1' , т. е.
(20.13)
F;q = Fi cos \Jf 1'
а продольная составляющая МДС статора (якоря) F1d, представляю­
щая собой МДС реакции якоря по продольной оси, пропорциональна
реактивной составляющей тока нагрузки ld = 11 sin \Jf 1 , т. е.
(20.14)
При этом если реактивная составляющая тока нагрузки отста­
ет по фазе от ЭДС Е0 (нагрузка активно-индуктивная), то МДС
F1d размагничивает генератор, если же реактивная составляющая
тока id опережает по фазе ЭДС Е0 {нагрузка активно-емкостная),
то МДС F1d подмагничивает генератор.
Направление вектора Fid относиrельно вектора F'в0 определяет­
ся характером реакции якоря, который при токе нагрузки i1 , о т ­
е т а ющ е м по фазе от ЭДС Е0 , является размагничивающим, а при
!оке i1 , о п е р еж а ющ е м по фазе ЭДС Ё0, - подмаrничивающим.
Пример 20.1. Опредеmпь продольную и поперечную coCТ8ВJlJIIOщиe МДС
статора (якоря) 'I])ехфазноrо синхроююrо генератора номинальной мощностью
150 кВ·А при напряжении 6,3 кВ, если его четырехпоmосная обмотка статора с
обмоточным коэффш.щенrом k,,c;1 = 0,92 содержиr в КЮJЩОЙ фазе по w1 = 312 послtЩо­
вателъно соедине1mых виrков. Наrрузка генератора номинальная при cos lj/ 1 = 0 ,8.
Реше н и е. Ток нагрузки номинальный
f1 = Stюj('ГзU!ном ) = 150/( ✓З· 6,3) = 13,76 А.
Максимальное значение МДС 'I])ехфазной обмотки статора по (9 .15)
fi = l,35/1w1k00i /р =1,35·13,76·312·0 ,92/2 = 2666 А.
Поперечная составляющая МДС статора по (20.13)
F;q = fi cos lj/ 1 = 2666· 0 ,8 = 2133 А.
Продольная составляющая МДС статора по (20.14)
Fid = Fi sin lj/ 1 = 2666 · 0,6 = 1600 А.
Маrнитодвижущие силы реакции якоря по продольной F1d и
поперечной F19 осям создают в магнитопроводе синхронной ма­
шины магнитные потоки реакции якоря. Основные гармоники
этих потоков: по продольной оси
(20.15)
Ф1d = Fid/ � = Fi sin \Jf i /�;
по поперечной оси
фlq = E°i9 / � = F. COS\j/i/ �,
(20.16)
где Rмd и Rмч - магнитные сопротивления синхронной машm1ы
потокам основной гармоники по продольной и поперечной осям.
257
В неявнополюсной машине воздушный зазор по периметру
расточки статора равномерен, а поэтому маrнкrные сопротивле­
ния по продольной и поперечной осям равны (Rм,1 = R,.,!J. = R,..).
Магнитные потоки реакции якоря, сцеIUIЯЯсь с. оомоткой ста­
тора, наводят в этой обмотке ЭДС реакции якоря:
по продольной оси
(20.17)
Ё,d =-jidxa =-ji,xa sinчi 1 ;
по поперечной оси
(20.18)
Ё1q = -jiqxa = -ji1 xa COS Ч' 1•
Здесь Ха - индуктивное сопротивление реакции якоря, представ­
, ляiощее собой главное индуктивное сопротивление обмотки ста­
тора
(Ом):
2
D1l; (w1 koб1)
(20.19)
s"'бi. kµ р ,
где D1 - внутренний диаметр сердечника статора, м; l; - расчет­
ная длина сердечника статора, м; б - воздупrnый зазор, м.
В явнополюсных синхронных машинах магнитные сопротлв­
ле1ШЯ машины потокам основной гармоники по продольной и по­
перечной осям не одинаковы (Rмч > Rм,1):
(20.20)
R...ti = R,./kd ;
(20.21)
R.щ = R,./kq '
где R,., - магнитное сопротивление ма�шmы при равномерном
воздушном зазоре по всему периметру расточки статора.
Это обстоятельство оказьmает влияние на значения магнигных
потоков реакции якоря, а следовательно, и на ЭДС реакции якоря.
Количественно это влияние учкrьmается коэффициенrами формы
поляkd иkq :
(20.22)
Ё1d =-jii:lxakd = -ji1xш1 sin \j/ 1 ;
(20.23)
Ё1q = -jiqxakq = -ji1 xaq cos Ч'�.
Здесь хш1 и Xaq - индуктивные сопротивления реакции якоря явно­
поmосной машины: по продольной оси
а
х �2,5-10-6 lniJ1'I
по поперечной оси
(20.24)
(20.25)
\
§ 20.4. Уравнения напряжений синхронноrо
rенератора
Напряжение на выводах генератора, работающего с наrрузкой, от­
личается от напряжения этого генератора в режиме х.х. Это объясняет­
ся влиянием ряда причин: реакцией якоря, магниrnым потоком рассея­
ния, падением напряжения в акrnвном сопротивлении обмотки статора.
Как бьmо установлено, при работе нагруженной синхронной
258
машины в ней возникает несколько МДС, которые, взаимодейст­
вуя, создают результирующий магнитный поток. Однако при учете
факторов, влияющих на напряжение синхронного генератора, ус­
ловно исходят из предположения независимого действия всех
МДС генератора, т. е. предполагается, 1fГО каждая из МДС создает
собственный магниrnый поток.
Но следует оометиrъ, чrо такое представление не соответс-mует
физической сущносm явлений, так как в одной магнитной системе
возникает один JПШIЪ магнитный поток - результирующий. Но в
данном случае предположение независимости маrниmых потоков
дает возможность лучше понять влияние всех факторов на рабоrу
синхронной маппmы.
Итак выясним, каково же влияние магнитодвижущих сил на
рабО'I)' я в н о п о лю с н о г о синхронного генератора.
1. МДС обмотки возбуждения Fв0 создает магниrный поток
возбуждения Ф0, который, сцепля.я:сь с обмоткой статора, наводит
в ней основную ЭДС генератора Е0•
2. МДС реакции якоря по продольной оси F1 d создает магнит­
ный поток Ф1d, который наводит в обмотке статора ЭДС реакции
якоря E1 d [см. (20.22)], значение которой пропорционально индук­
тивному сопротивлению реакции якоря по продольной оси хш1 [см.
(20.24)]. Это сопротивление характеризует уровень влияния реак­
ции якоря по продольной оси на работу синхронного генератора.
Так, при насьпценной магнитной системе машины магнитный по­
ток реакции якоря Ф 1 d меньше, чем при ненасьпценной магнитной
системе. Объясняется это тем, что поток Ф 1 d почти полностью
проходит по стальным участкам магниrопров,ода, преодолевая не­
большой воздушный зазор (см. рис. 20.3, а), а поэтому при маг­
нитном насьпцении сопротивление этому потоку заметно возрас­
тает. При этом индуктивное сопротивление x1 d уменьшается.
3. МДС реакции якоря по поперечной оси F1 q создает магнит­
ный поток Ф1ч, который наводит в обмотке статора ЭДС Е1 ч [см.
(20.23)], значение которой пропорционально индуктивному сопро­
тивлению реакции якоря по поперечной оси Xaq [см. (20.25)]. Со­
противление Xaq не зависит от магнитного насьпцения машины, так
как при явнополюсном роторе поток Ф 1 ч проходит в основном по
воздуху межполюсного пространства (см. рис. 20.3, б).
4. МагнитньIЙ поток рассеяния обмотки статора Фа1 (см. рис.
11.4) наводит в обмотке статора ЭДС рассеяния Еа1 , значение ко­
торой пропорционально индуктивному сопротивлению рассеяния
фазы обмотки статора х1:
(20.26)
Eal = -д1 Х1 •
5. Ток в обмотке статора /1 создает активное падение напря­
жения в активном сопротивлении фазы обмотки статора r1 :
(20.27)
(;а \ = i1 r1 .
Геометрическая сумма всех перечислеm1ых ЭДС, наведе1rnых
в обмотке статора, определяет напряжение на выходе синхронного
генератора:
259
(20.28)
Здесь :Е Ё - геометрическая 'сумма всех ЭДС, наведенных в об­
мотке статора результирующим магниmым полем машины, обра­
зованным совместным действием всех МДС (Fв.о, F1d, F1q) и пото­
ком рассеяния статора Фа�•
, Акrивное сопротивление фазы обмотки статора r1 у СШIХршrnых
машин средней и большой мощности невелико, и поэтому даже -при
номинальной наrрузке падение напряжеIШЯ 11r1 составляет настолько
малую величину, чrо с некоторым допущением можно принягь
11r1 =О.Тогда уравнение (20.28) можно записать в виде
(20.29)
U1 :=::: "i,Ё = Ё0 + Ё1d + Ё1q + Ёа\.
Выражения (20.28) и (20.29) представляют собой уравнения
напряжений явнополюсного синхронного генератора.
В н е я в н о п о лю с н ы х синхронных генераторах реакция
якоря характеризуется полной МДС статора F1 без разделения ее _
по осям, так как в этих маШШiах магниrnые сопротивления по
продольной и поперечной осям одинаковы. Поэтому ЭДС статора
в неявнопоmосных маШШiах Е1 , равная индуктивному падению
напряжения в обмотке статора, пропорциональна индуктивному
сопротивлению реакции якоря ха [см. (20.19)], т. е.
(20.30)
Ё1 = -Д,ха .
Поток реакции якоря Ф 1 и поток рассеяния статора Фа1 созда­
ются одним током 11 [сравните (20.26) и (20.30)], поэтому индук­
тивные сопротивления Ха и х 1 можно рас�матривать как суммарное
индуктивное сопротивление
хе =ха +х.,
представляющее собой синхронное сопротивление неявнополюс­
ной машины. С учетом этого ЭДС реакции якоря Е1 и ЭДС рассея­
ния Еа1 следует рассматривать также как сумму
(20.31)
Ёс = Ё1 + Ёа\ = -jilxa + (-ji1 x1 ) = -ji1xc ,
представляющую собой синхронную ЭДС неявнополюсной машины.
С учетом изложенного уравнение напряжений неявнополюс�
ного синхронного генератора имеет вид
(20.32)
lf1 = "i,Ё- i11j = Ё0 + Ёс - i1 1j
ШIИ
(20.33)
§ 20.5. Векторные диаrраммы синхронного
rенератора
Воспользовавшись уравнением ЭДС (20.28), построим век­
торную диаграмму я в н о п о лю с н о r о синхронного генератора,
работающего на активно-индуктивную нагрузку (ток i1 отстает по
фазе от ЭДС Ё0 ). Векторную диаграмму-строят на основании сле260
дующих данных: ЭДС генератора в режиме х.х. Е0 ; тока нагрузки
i1 и его угла сдвша 'V i относительно ЭДС Ё0 ; продольного Xat1 и
поперечного хШ/ индуктивных сопротивлений реакции якоря; ак­
тивного сопротивления фазной обмотки статора r1.
При СИММ�1J>ИЧНОЙ нагрузке генератора диаграмму строят
шппь для однои фазы.
�
ю Е,. �
r., t'11
Е,4
i,,,
-i,,;
U1
�)
d
l,1
,)
о
Рис. 20.8. Векторные диаграммы явнопоmосного (а и б) и неявнополюс­
ноrо (в и г) синхронных: генераторов:
а и в - при акmвно-ющуктивоой НЗI])УЗКе; б и г- при акrивно-емкостной НЗI])УЗКе
Рассмотрим порядок построения векторной диаграммы (рис.
20.8, а). В произвольном направлении откладываем вектор ЭДС
Ё0 и под углом ЧJ 1 к нему - вектор тока i1 • Последний разло­
жим на составляющие: реактивную id = i1 sinЧJ 1 -и активную
iч = i1 cos ЧJ 1 • Далее, из коIЩа вектора Ё0 откладываем векторы
ЭДС Ёld = -jidxшf , E1q = -}iЧ хШ/ ; Ё01 = -}i1 x1 ; И81 = -i1 'i.
Соедmmв конец вектора U81 = -i1'i с точкой О, получим век­
тор напряжения И1 , значение которого равно геометрической
сумме векторов ЭДС [см. (20.28)].
При построении векторной диаграммы генератор�, работаю­
щего на а к т и в н о -е м ко с т н у ю н а г р у з к у (ток 11 опережа­
ет по фазе ЭДС Ё0 ), вектор тока i1 откладьmают влево от вектора
ЭДС (рис. 20.8, б), а направление вектора Ё1d устанавливают со­
гласно с направлением вектора ЭДС Ё0 , так как при емкоспюм ха­
ракrере нагрузm реакция якоря имеет подмагничивающий харакrер.
В остальном порядок построения диаграммы остается прежним.
Векторную диаграмму синхронного н е я в н о п о л ю с н о г о
генератора строят на основании уравнения {20.32), при этом вектор Ео ОТКЛ:аДЬШаIОТ ПОД углом \J1 I К Вектору ТОКа jl {рис. 20.8, 6).
261
Следует отметиrь, 'ПО построеш1ые векторные диаграммы не
учитывают насьпцения магнитной цепи, поэтому огражают лШIIЪ
качественную сторону явлеШIЙ. Но тем не менее эти диаграммы
дают возможность сделать следующие вьmоды: основным факто­
ром, влияющим на изменение напряжения нагруженного генера�
тора, является продольная составляющая магнитного потока якоря, создающая ЭДС Ё1d ; при работе генератора на активно­
индуктивную нагрузку, т. е. с током /1 , отстающим по фазе от
ЭДС Ё0 , нщ1ряжение на въmода:х обмотки статора U1 с увеличе­
нием нагрузки уменьшается, 'По объясняется размагничивающим
влиянием реакции якоря. При работе генератора на активноемкостную нагрузку (с током i1 , опережающим по фазе ЭДС Ё0 )
напряжение U1 с увеличением нагрузки повышается, 'ПО объясня­
ется псщмаrничивающим :влиянием реакции якоря (рис. 20.8, г).
§ 20.6. Характеристики синхронного генератора
Свойства синхронного генератора определяются характери­
стиками холостого хода, короткого замыкания, внешними и реrу­
лировочными.
· Характеристика холостого хода синхронного генератора.
Представляет собой график зависимости напряжения на выходе
генератора в режиме х.х. И1 = Е0 от тока возбуждения /в0 при п 1 =
= const. Схема вкmочения синхронного генератора для снятия ха­
рюqеристики х.х. приведена на рис. 20.9, а. Если характеристики х.х.
различных синхрош1ых генераторов изобразить в относительных
едшmцах Е. = f(l8.), то эти харакгеристики мало отличаются друг
от друга и будуr очень схожи с нормальной характеристикой х.х.
(рис. 20.9, б), которую используют при расчетах синхрошn,�х машин:
Е. .........
/ • ••••••••
8
0,58
0 ,5
1,0
1,0
1,21
1,5
1,33
2,0
1,40
2,5
1,46
3,0
1,51
3,5
Здесь Е. = Е0 /И� ном - относительная ЭДС фазы обмотки ста­
тора; 18• = Iв0 / Iв0н�м - относительный ток возбуждения;
Iвоном - ток возбуждения в режиме х.х., соответствующий ЭДС
х.х. Ео = иlном.
Характеристика короткого замыкания. Характеристику
трехфазного к.з. получают следующим образом: вьmоды обмотки
статора замыкают накоротко (рис: 20.1 О, а) и при вращении ротора
с частотой вращеш1Я п1 постепенно увеличивают ток возбуждения
до значения, при котором ток к.з. превЪШJает номинальный рабо­
чий ток статорной обмотки не более чем на 25% U1к = 1,25/1иом)­
Так как в этом случае ЭДС обмотки статора имеет значение, в не­
сколько раз меньшее, чем в рабочем реж име генератора, и, следо­
вательно, основной магнитный поток весьма мал , то магнитная
262
цепь машшп,1 оказывается ненасыщенной. По этой причине ха­
рактеристика к.з. представляет собой прямую линшо (рис. 20.1О,
б). Активное сопротивление обмотки статора невелико по сравне­
нию с ее индуктивным сопротивлением, поэтому, принимая r1 � О ,
можно считать, что при опъrrе к.з. нагрузка синхронного генерато­
ра (его собстве1шые обмотки) является чисто индуктивной. Из
этого следует, чщ при опыте к.з. реакция якоря синхронного гене­
ратора имеет продольно-размагничивающий характер (см.§ 20.3).
Векторная диаграм­
aJ
ма, построенная для ге­
Cf
cz С3 Е"
нератора при опыте
f,&
� ,,,,,,,.
трехфазного к.з., пред­
,,,.,
ставлена на рис. 20. 1 О,
,,2
в. Из диаграммы вид/
но, что ЭДС Ёк , инду­
J
о,,
цируемая в обмотке ста­
тора, полностью урав0,t, J
новешивается
ЭДС
1
продольной реакции
о 0,5 1,5 2,5 3,5 1,.
якоря "Ёld = -jidxad и
рассеяния
ЭДС
Ёа, = -ji1x1 :
Рис. 20.9. Опыт холостого хода синхронного
.
.
.
генератора
Ек = Eld +Eal ·
При этом МДС
6)
обмотки возбуждения
имеет как бы две со­
ставляющие: одна ком­
пенсирует падение напряжения ji1x1 , а дру­
гая компенсирует раз­
QL....___....___
ом
Iв.к
к.н
магничивающее влия­
lе.
�е реакции якоря
jldxad .
l
Характерисmки к.з.
:�•
и х.х. дают возможность
Е6 1
значения
определигь
токов возбуждения, со­
i ,�
ответствующие указан­
короткого замыкания син­
составляющим Рис. 20.1 О. Опыт
ным
хронного генератора
МДС возбуждения. С
этой целью характерисmки х.х. и к.з. строят в одних осях (рис. 20.11), при этом на оси ор..­
динат отмечают mносительные значения напряжения х.х.
Е. = Ео /И�ном и тока к.з. /к• = /\ к / /lном . На оси ординат отклады­
вают отрезок ОВ,выражающий в масштабе напряжения относи-
,
..,
..
263
тельное значение ЭДС рассеяния Ё61• =- ji1х1 /И1"0м. Затем точку В
сносят на характеристику х.х. (точка в� ) и опускают перпендикуляр
В'D на ось абсцис. Получешш.я точка D разделила ток возбуждения
lrlJнoм на две части: lвх -ток возбуждения, необходимый для компенсации падения напряжения ji1x�, и iв,1 -ток возбуждения, компен­
сирующий продольно-размагничивающую реакцию якоря.
Один из важных параметров
синхронной мапшны - отно­
шение
короткого
замыкания
(ОКЗ), которое представляет
собой оrnошение тока возбуж­
дения lв0ном, соответствующего
8
номштльному напряжеюпо при
х.х., к току возбуждения lв.к.ном,
...ё
соответствующему номиналь­
ному току статора при опьпе к.з.
(рис. 20. 10, б):
ОКЗ = lвОном / /в.к.пом . (20.34)
Для турбогенераторов
Рис. 20.11. Определение состав­
ляющих ток а к.з.
ОКЗ = 0,4+0,7; для гидрогене­
раторов ОКЗ = 1,0+1,4.
ОКЗ имеет большое практическое значение при оценке
свойств синхронной машины: машшп,1 с мальIМ ОКЗ менее устой­
чивы при параллельной работе (см. гл. 21), имеют значительные
колебания напряжения при изменениях нагрузки, но такие маши­
ны имеют меньшие габариты и, следовательно, дешевле, чем ма­
шшп,1 с большим ОКЗ.
Внешняя характеристика. Представляет собой зависимость
напряжения на выводах обмотки статора от тока нагрузки:
И1 = fUi) при Iв = const; cos<p 1 = const; n1 = nном = const. На рис.
• 20.12, а представлены внешние характеристики, соответствующие
различным по характеру нагрузкам синхронного генератора.
При а к т и в н ой нагрузке ( cos<p 1 = 1) уменьшение тока на­
грузки 11 сопровождается ростом напряжения U1, что объясняется
уменьшением падения напряжения в обмотке статора и ослабле­
нием размаmичивающеrо действия реакции якоря по поперечной
оси. При и н д у к т и в н ой нагрузке ( cos<p 1 < 1; инд.) увеличение
U1 при сбросе нагрузки более интенсивно, так как с уменьшением
тока /1 ослабляется размаmичивающее действие продольной со­
ставляющей реакции якоря (см. § 2Q.З). Однако в случае ем к о с т н ой нагрузки генератора.( соs<р 1 < 1; емк.) уменьшение 11 со­
провождается· уменьшением напряжения U1 , что объясняется
ослаблением подмаrничивающеrо действия продольной состав­
ляющей реакции якоря.
Изменение напряжения синхрошюrо генератора, вызванное
сбросом номинальной нагрузки при /8 = const и п 1 = const, называ264
ется номинальным изменением (повышением) напряжения (%):
U
{20.35)
ЛUном = Ео - lном ·100.
и, ном
При емкосmой нагрузке генератора сброс нагрузки вызывает
уменьшение напряжения, а поэтому ЛИ1ном отрщателъно.
В процессе. эксплуатации синхронного генератора напряжение U1
при колебаниях наrрузки поддерживаеrся неизменным посредством
быстродейсгвующих авrомаmческих реrуляторов. Однако во избежа­
ние повреждения изоляций обмоrки ли_ не должно превьШiать 50%.
а)
и,
1,
Рис. 20.12. Вн ешние (а) и регулировочные(6) характеристики син­
хрошшго генерато ра
Реrулировочная характеристика. Она показывает, как следует
изменять ток возбуждения генератора при изменениях нагрузки, что­
бы напряжение на зажимах генератора оставалось неизмеmю равным
номинальному: Iв = ./{/,) при U1 = И1ном = const; п, = nном = const и
, cos<p 1 = const. На рис. 20.12, б представлены реrулировочные харак­
теристики синхроmюго генератора. При а к т и в н о й нагрузке
( cos<p 1 = 1) увеличение тока наrрузки /1 сопровождается уменьшени­
ем напряжения U1, поэтому для поддержания этого напряжения неиз­
менным по мере увеличения тока нагрузки /1 следует повышать ток
возбуждения. И н д у к т и в н ы й характер нагрузки( cos<p 1 <1; шщ.)
вызывает более резкое понижение напряжения U1 (рис. 20.12, а), по­
этому ток возбуждения Iв, необходимый для поддержания U1 = U,ном,
следует повьпnать в большей степеIЩ. При е м к о с т н о м же харак­
тере наrрузки ( cos<p 1 < 1; емк.) увеличение нагрузки сопровождается
ростом напряжения U1, поэтому для поддержания Ui = U,ном ток воз­
буждения следует уменьшать.
О
lном I,
1tном
§ 20.7. Практическая диаграмма ЭДС
синхронного генератора
Изменение напряжения синхронного генератора ЛИном при
сбросе номинальной нагрузки можно определить графически 265
построеI-Шем практической диаграммы ЭДС. Предположим, что
синхронный генератор работал в режиме номинальной нагрузки, а
затем нагрузка бьmа полностью сброшена, но частота вращения и
ток возбуждения при этом остались неизменными. Напряжение
генератора после сброса нагрузки возросло на ЛИном • Для оп­
ределения этого значения проделаем следующее (рис. 20.13): в
f* lк*
р
-----х
нон ,
., r,
1
"'
Рис. 20.13. Практическая диаrрамма ЭДС
одних осях координат построим: характеристики холостого хода и
коротк_оrо замыкания. Затем на оси ординат построим вектор
ОА = и, ном и под· углом <р 1 к вектору ОА проведем вектор тока
i,ном . Прибавив к вектору и,ном векторы падения напряжения
i,ном'i и j(.,,.,x1 , найдем ЭДС нагруженного генератора:
(20.36)
Ён.r = И,ном + j\ном'i + д1ном Х1 ·
Перенося точку В на характеристику х.х. (точка С), проведем
ординату CD. Полученный на оси абсцисс отрезок OD определяет
ток возбуждения /�, необходимый для создания ЭДС нагруженно­
го генератора Ен.r. Но при работе генератора без нагрузки_ его
ЭДС Е0 больше, чем ЭДС Ен.г, на значение ЭДС продольной реак­
ц ии якоря E1d, т. е. Ё0 = Ён.r + Ё,d •
Для учета Ё,d определим ток возбуждения iвd , соответст­
вующий продольно-размагничивающему действию реакции якоря.
Проделав необходимые построения, определяем iвd = LG (рис.
20.13). Затем из точки D под углом <pj = q, 1 + у к CD проводим век­
тор DM = iвd . Из центра О радиусом ОМ опишем дугу до пересе­
чения с осью абсцисс в точке N. Тогда ON = iв.ном - ток возбуж266
дения, соответствующий ЭДС Ё0 = NP. Проведя из точки А па­
раллельно оси абсцисс тmию AR, получим
ЛUном == NP-NR ·100= Ео -И�ном ·100.
NR
Пример 20.2. Посrрошь прак­
тическую диаграмму ЭДС ДЛJ1
трехфазного синхронного rенератора и опредеmпь повышение на­
пряжения при сбросе наrрузки.
Генератор имеет следующие дан­
ные: Р..,.. = 500 кВт;
= 230 В;
COS(/)1 = 0,8; Х1 = 0,04 Ом; r1 =
= 0,0015 Ом; окз - 1,4; харакrери­
сmка х.х. оормальная (см. § 20.6),
обмоrка сrатора соединена звездой.
Р е ш е н и е. Для построения
характеристики к.з. определим
относиrельный ток возбуждения
I....,юм•, соответствующий номи­
нальному току нагрузки. Из (20.34)
получим
I• ._..,м /la0w,м =i/ОКЗ= 1/1.4=0, 715.
Номинальный ток rенератора
и........
И,ном
-R
1
1
1
1
1
1
Рис. 20.14. Определение ЛИном
3
500·1 03
Р,_ 10
_
l1 ном m1 U1♦. СОS(/) ,юм 3-230·0,8 905 А
ном
1
Активное падение напряжения
/1,юмr1 = 905· 0,0015=1,36 В.
Иццуктивное падение напряжения
/1но.,_jх1 = 905j0, 04 =:= j36,2 В.
Выразим получеш1ые величины в относиrельных едиющах:
/lномr1 /U1ном =1,36/230= 0,0059; /lнoмjXI /U1,_ =36)./230=j0,}57.
Так как индуктивное падение напряжения в 0,157/0,0059 = 26 раз больше ак­
тивного, то активным падением напряжения можно пренебречь. Между напряжением И�ном и током ilиом уrол сдвиrа фаз составляет <р 1 = arccos0,8 = 3 7° .
Произведя построения в изложенном выше порядке, получим практическую
диаграмму ЭДС (рис. 20.14), из которой определяем величину повышения напря­
жения при сбросе нагрузки:
NP NR · 00 1,28-1 _
ЛUном =· 1 =
100=28%
1
NR
Все построения на диаграмме (рис. 20.14) выполнены в относительных еди-
ющах.
§ 20.8. Потери и КПД синхроннь1х маwин
· Преобразование энергии в синхронной машине связано с по­
терями энергии. Все виды потерь в синхронной машине разделя­
ются на основные и добавочные.
О с н о в н ы е п о т е р и в синхронной машине слагаются из
электрических потерь в обмотке статора, потерь на возбуждение,
26 7
магнитных потерь и механических потерь.
Электрические потери в обмотке статора (Вт)
(20.37)
� 1 = 1niI/1j,
rде r1 - активное сопротивление одной фазы обмотки статора при
расчетной рабочей темпера"I)'])е, Ом.
Потери на возбуждение (Вт):
а) при возбуждении от отдельного возбудительного устройства
Р., = I;r8 + ЛUш/в,
(20.38)
активное сопротивление обмотки возбуждения при рас­
где r8
четной рабочей темпера"I)'])е, Ом; ЛИщ = 2 В - падение напряже­
ния в щеточном контакте щеток;
6) пр� возбуждении от генератора постоянного тока (возбуди­
теля), сочлененного с валом синхронной машины,
(20.39)
Рв = (l;rв + ЛИщ/в )/ТJ в •
где ТJв = 0,80+0,85 - КПД возбудителя.
Магнитные потери синхронной машины происходят в сердеч­
нике статора, который подвержен перемагничиванию вращаю­
щимся маrнитным полем. Эти потери состоят из потерь от гисте­
резиса Рг и потерь от вихревых токов Рв.т:
Рм = Рг + Ра.т(20.40)
Механические поrери (Вт), равные сумме поrерь на трение в под­
шипниках и потерь на ве1ПИЛЯЦШО (при самовентиляции машины),
-
✓
. рмех �з,68���у 103/,
rде
,
(20.41)
(20.42)
- окружная скорость на поверхности полюсного наконечника ро­
тора, м/с; /1 - конструктивная длина сердечника статора, мм.
До 6 а в о ч н ы е п о т е р и в синхронных машинах разделя­
ются на два вида: пульсационные потери в поmосных наконечни­
ках ротора и потери при наrрузке.
Добавочные пульсационные потери Pn в поmосных наконеч­
никах ротора обусловлены пульсацией магнитной индукции в за­
зоре из-за зубчатости внуrренней · поверхности статора. Значение
этих потерь (Вт)
P.i = k"pb/1 (10-4 Z1n1 )1'5 [В11 (k1н -l)t1 ]2 • 10-6 , (20.43)
rде ku - коэффициент, учитывающий то� листов поmосов
ротора (при rолщине лисrов 1 мм lcri = 4,6; при толщине листов 2 мм
kn = 8,6; при массивн:ь�х полюснь�х наконечниках kп =23,3); Ьр ширина поmосноrо наконечника, мм; Z1 - число пазов на статоре;
В11 - магнитная индукция в зазоре, Тл; kы - коэффициент воз­
душного зазора статора; t1 - зубцовое деление статора, мм.
Добавочные потери при нагрузке Рдоб в синхроюri,�х машинах
268
определяют в процеmах от подводимой мощности двшателей или
от полезной мощности генераторов. Для синхр01mых машин мощ­
ностью до 1 ООО кВт добавочные потери при наrрузке принимают рав­
ными 0,5%, а для мапmн мощностью более 1000 кВт - 0,25-0,4%.
Суммарные потери в синхроinюй м8ШШ1е (кВт)
(20.44)
:ЕР=(�\ +Р8 +Рм\ +Рмех +P.i +�00 )·10-3•
Коэффициент полезного действия:
для синхронного генератора
(20.45)
Тl r = 1- "f.Р/(Р..0м + "f,P),
где
Р.�ом = mР,ном/lном cos<p 1 • 10-3
(20.46)
- активная мощность, отбираемая от генератора при его номи­
нальной нагрузке, кВт;
для синхронного двшателя
(20.47)
Тlд = 1- :ЕР/f'� ном .
Здесь И,ном и I1ном - фазные значения напряжения и тока статора.
КПД синхронной машины зависит от величины нагрузки (J3 =
= Р2'Рном) и от ее характера ( cos<p 1 ). Графики этой зависимости
аналогичны изображенным на рис. 1.41. КПД синхронных машин
мощностью.до 100 кВт составляет 80--90%, у более мощных ма­
шин КПД достигает 92-99%. Более высокие значения КПД оmо­
сятся к турбо- и гидрогенераторам мощностью в десятки и даже
сотни тысяч киловатт.
Контрольные вопросы
1. Из каких участков состоиr маrниrная цепь .явнопоmосной синхронной ма­
шины?
2. В чем cocroиr .явление реакции .якоря?
3. Каково действие реакции .якоря при �ктивной, индуктивной и емкостной на­
rрузках синхронного генератора?
4. Какие ЭДС наводят в обмотке статора .явнопоmосноrо синхронного генера­
тора магнитные потоки реакции .якоря и каким ющуктивным сопротивлени­
ям эти ЭДС эквивалентны?
5. Почему характеристика к.з. синхронной машины имеет вид пр.ямой линии?
6. Что такое ОКЗ и как влияет этот параметр на свойсrва синхронного генера­
тора?
7. Что такое номинальное изменение напр.яжени.я при сбросе нагрузки и почему
при емкостной нагрузке ero величина отрJЩательна?
8. Опредеmпе изменение напр.яжени.я при сбросе наrрузки дл.я примера 20.2,
если генератор работал с наrрузкой, равной половине номинальной.
9. Какие виды потерь имеют место в синхронной машине?
Параппепьная работа
синх
ронных
гене раторов
Глава 21 •
§ 21.1. Включение rенераторов
на параллельную работу
На электрических стаJЩИЯХ обычно устанавли­
вают несколько синхро1rnых генераторов, включае­
мых параллельно для совмесmой работы (рис.- 21.1).
Наличие нескольких генераторов вместо одного
суммарной мощности дает преимущества,. объяс­
няемые теми же соображениями, которые бьuш из­
ложены применительно к параллельной работе
трансформаторов (см. § 2.2).
При включеmm синхронного генератора в сеть
на параллельную раб<;>1)' необходимо собmодать
следующие условия: ЭДС генератора Ео в моменг
подкточения его к сети должна бьпь равна и противоположна по фазе напряженmо сети ( Е0 = -Uc ),
частота ЭДС генератораf.. должна быть равна часто­
те переменного напряжения в сети/с; порядок следо­
вания фаз на вьmодах генератора должен бьпь таким
же, что и на зажимах сети.
Приведе�е генератора в состояние, удовлетво­
ряющее всем указанным условиям, назьmают син­
хронизацией. Несобmодение mобого из условий син­
хронизации приводит к появленmо в, обмотке
статора больших уравнительных токов, чрезмерное
значение которых может явиться причиной аварии.
Включить генератор в сеть с параллельно рабо­
тающими генераторами можно или способом точной
синхронизации, или способом самосинхронизации
Способ точной синхронизации. Сущность это­
го способа состоиr в том, что, прежде чем включить
генератор в сеть, его приводят в состояние, удовле­
творяющее всем · вышеперечисле1rnым условиям.
Момент собmодения этих условий, т. е. момент син­
хронизации, определяют прибором, назьmаемым
синхроноскопом. По конструкции синхроноскопы
разделяют на стрелочные и ламповые. Рассмотрим
процесс синхронизации генераторов с применением
лампового синхроноскопа, который состоит из трех
ламп 1, 2, 3, расположенных в вершинах равносто­
р01rnего треугольника.
270
При вюпочеmш ламп по схеме «на погасание» (рис. 21.2, а) мо­
меm синхронизации соотвеrствует одновремеююму погасанию всех
ламп.Предположим,что звезда ЭДС генератора ЁА ; Ёв ; Ёс враща­
ется с угловой частотой ro r ,превьппающей угловую чаСТО'I)' враще­
ния ro c звезды напряжений cem UA ; U8 ; Uc .В этом случае напря­
жение на лампах определяется геометрической суммой ЁА + ИА ;
Ё8 +U8 ; Ёс +Uc (рис.
J( нагрузке
21.2, б). В момеm сов­
падения векторов звезды
ЭДС с векторами звезды
напряжений эта сумма
достигает наибольшего
значения, при этом лам­
пь1 горят с наибольшим
накалом (напряжение на
Рис 21.1. Вкmочение синхронных генера- лампах равно удвоенно, му напряжению сети). В
торов на параллельную рабо'I)':
последующие момеmы
r1-Г4 _ синхронные генераторы,пд�-пд4 _ времени
звезда ЭДС обприводныедвигатели
гоняет звезду напряже.
ний и напряжение на лампах уменьшается. В момеm синхрониза­
ции векторы ЭДС и напряжений занимают положение, при котором ЁА +UА= О; Ё8 +U8 =0; Ёс +Ис =О ,т.е. Uл= О,и все три
лампы одновременно гаснуr (рис. 21.2, в). При большой разности угловьIХ частот ro г и ro с а)
о)
лампы вспыхивают часто.. Изменяя чаСТО'I)'
вращения первичного
двигателя, добиваются
равенства ro r = ro с , о
чем будет свидетельст­
вовать погасание ламп
на дпительное время. В
з-;,л момеm и следует
замкнуrь
рубильник,
после чего генератор
окажется подюпочен­
ным к сщ.
Способ самосин­
хронизации. Ротор не­
возбуждешюго генера­
Рис 2 1.2. Ламповый синхроноскоп
тора приводят во вра­
щение первичным двигателем до частоты вращения, отличающейся от синхронной не
более чем на 2-5%,затем генератор подкmочают к сети. Для того
чтобы избежать перенапряжений в обмотке ротора в момент под-
IP
-----+­
271
кточения генератора к сети, ее замыкают на некоторое активное
сопротивление. Так как в момент подкточения генератора к сети
его ЭДС равна нуmо (генератор не возбужден), то под действием
напряжения сети в обмотке статора набmодается резкий бросок
тока, превышающий ноМШiалъное значение тока генератора.
Вслед за вкточением обмотки статора в сеть подкточают обмотку
возбуждения к источнику постояшюго тока и сШIХронный генера­
тор под действием электромагнитного момента, действующего на
его ротор, втягивается в синхронизм, т. е. частота вращения ротора
становится синхронной. При этом ток статора быСiрО уменьшается.
При самосинхронизации в генераторе протекают сложные
электромеханические переходнь1е процессы, вызывающие значи­
тельные механические воздействия на обмотки, пoдlIIИilliИКИ и
муфту, соединяющую генератор с турбиной. Влияние этих воздей­
ствий на надежность генератора учитывается при проектировании
синхрош1ых генераторов. Способ самосШIХронизации (грубой
синхронизации) обычно применяют в генераторах при их частых
вкточениях. Эrот способ прост и легко автоматизируется.
§ 21.2. Наrрузка rенератора, включенноrо
на параллельную работу
Обычно совместно на одну сеть работают несколько сШIХрон­
ных генераторов и мощносТJ> mобого из них намного меньше сум­
марной мощносm всех остальных генераторов. Будем считать, что
сШIХрошп,IЙ генератор подкточают на параллельную рабо1)' с
другими генераторами, суммар­
о)
ная мощность которых настолько
а)
велика по сравненmо с мощно­
стью подкточаемого генератора,
что при mобых изменениях пара­
метров этого_ генератора напря­
жение cem Ис и ее частота /с ос­
таются неизмеш1ыми. •·
После подкточения генерато­
ра в сеть при собmодении всех ус­
ловий синхронизации его ЭДС Е0
равна по значению и цротивопо­
Рис. 21.3. Вепорные диаграммы ложна по фазе напряжению сети
синхрошюrо генератора, вюпо­
чешюrо на параллельную работу (рис. 21.3, а), поэтому ток в цепи
генератора равен нулю, т. е. гене­
_в сеть большой мощности:
ратор работает без нагрузки. Меха­
а - при работе без нагрузки; б Ш1Ческая
мощность приводного
при работе с наrрузкой
двигателя Р1 в этом случае полно­
стью 3а1J)ачивается на покрытие потерь х.х.: Ро = рмех + рм] + рв + pn .
Отсутствие тока в обмотке статора синхронного генератора
(/1 = О) приводит к тому, что обмотка статора не создает вра­
щающегося магнитного поля и в генераторе действует лишь
магнитное поле возбуждения, вращающееся вместе с ротором с
272
угловой частотой ro 1 , но не создающее электромагнитного момента.
Если же увеличигь вращающий момент приводного двшателя
. _М1 , то ротор машины, получив некоторое ускорение, сместиrся
относительно своего первоначального положения на угол 0 в на­
правлении вращения. На такой же угол 0 окажется сдвинугым
вектор ЭДС генератора Ё0 относительно своего положения, соотd
Рис. 21.4. К понятmо об электро­
магнитном моменте синхронного
генератора
ветствующего режиму х.х. генератора (рис. 21.3, б). В результате в
цепи статора появится результирующая ЭДС ЛЁ = Ё0 + Uc , кото­
рая создаст в цепи обмотки статора генератора ток /1 • Если пре­
небречь активным сопротивлением обмотки статора и считать со­
противление этой обмотки чисто индуктивным, то ток i1 отстает
по фазе от ЛЁ на угол 90° (рис. 21.3, б) и отстает по фазе от ЭДС
Ео на угол \jl 1 •
Ток /1 создает·магнитное поле, вращающееся синхроюю с ро­
тором и создающее вместе с полем ротора результирующее маг­
нитное поле синхронной машины. Ось этого результирующего
поля d'--d' не совпадает с продольной осью полюсов ротора d-d:
в синхронном генераторе ось полюсов ротора d-d опережает
ось результирующего поля машины d'-d' на угол 0 (рис. 21.4, а).
Известно, что разноименные магнитные полюсы взаимно при­
тягиваются, поэтому между намагниченными полюсами ротора и
неявно выраже1rnыми полюсами вращающегося поля статора воз­
никают силы магнитного притяжения Fм (рис. 21.4, б). Вектор этой
силъ1 на каждом полюсе ротора, направле1rnый под углом 0 к оси
полюса, имеет две составляющие: F,.. = Fм cos0 - нормальная со­
ставляющая, направленная по оси полюсов, и F, = Fм sin0 - тан­
генциальная составряющая, направлеЮiая перпендикулярно оси
273
nomocoR ротора. Совокупность тангеIЩИалъных составляющих F,
на всех nomocax ротора создает на роторе синхронного генератора
электромагнитнъIЙ момент, направленный встречно вращающему­
ся магнитному поmо:
М = F;2p(D2 /2)= F.._D2 psin0,
(21.1)
где D,, - диаметр ротора.
Из полученного выражения следует, чго электромагнитный
момент синхронной машшп.1 является синусоидальной функцией
угла 0 и может быть представлен выражением
М
=M
max
sin0,
(21.2)
. где Mmax - максимальное значение электромагнитного момеша,
соответствующее значенmо угла 0 = 90 эл. град.
Электромагниmый моменr М, возникающий на роторе генерато­
ра, направлен встречно вращающему момеmу приводного двигателя
М., т. е. он является тормозящим моменrом. На преодоление этого
моменrа за'IJ)ачивается часть мощности приводного двигателя, кото­
рая представляет собой электромаrнитную мощность
(21.3)
rде ro 1 - угловая частота вращения ротора.
Таким образом, с появлением тока /1 в обмотке статора син­
хронного генератора, работающего параллельно с сетью, генера­
тор получает электрическую нагрузку, а приводной двигатель
(турбина, дизельный двигатель и т. п.) получает дополнительную
механическую нагрузку. При. этом механическая мощность при­
водного двигателя Р1 расходуется не только на покрытие потерь
х.х. генератора Р0, но и частично преобразуется в элек'IJ)омагнит­
ную мощность генератора Рэм, т. е.
(21.4)
Следовательно, электромагнитная мощность синхронного
генератора представляет собой электрическую активную мощ­
ность, преобразованную из части механической мощности при­
водного двигателя:
�м
=
Р�-Ро-
Что же касается активной мощносm на выходе синхронного
генератора Р2, отдаваемой генератором в сеть, т. е.
� = тР1 11 cosq>1 • 10-3,
то она меньше электромагнитной мощности Рэм на значение, рав­
2
'ное сумме электр ических пот ерь в обмотке статора � 1 = m.J1 1j и
добавочных потерь Рдоб при нагрузке
(21.5)
Следовательно, мощность на выходе СШIХроmюго генератора Р2
(активная наrрузка) при его параллельной работе с сегью реrуIШрует274
сяизменением вращающего моменга М� приводного двигателя:
� = ,Pi - "[_Р = M1 ro 1 .:... "[_Р,
где ro 1 = 2,ifi / р = const -· угловая синхронная скорость вращения
ротора СШIХрОШЮЙ Ma.шIOIЪI, рад/с.
Если все слагаемые уравнения (21.4) разделить на угловую
частоту Pi /ro 1 = Ро /ro 1 + Р».!ro 1 , то получим уравнение моменгов
(21.6)
М1 =М0 +М.
Из этого уравнения следует, что вращающий момент М1, раз­
виваемый приводным двигателем на валу генератора, равен сумме
противодействующих моментов: момента х.х. М0, обусловленного
потерями х.х. Р0, и электромагнитного момента М, обусловленного
нагрузкой генератора.
Момент х.х. М0 для данного генератора постоянен (М0 =
= const), поэтому нагрузка синхронного генератора возможна
тnпь за счет вращающего момента приводного двшателя, когда
его значение превышает момент х.х., т. е. при М1 > Мо.
§ 21.3. Угловые характеристики синхронного
генератора
Электромагнитная мощность н е яв н о n о л ю с н о г о син­
хронного генератора при его параллельной работе с сетью
�...н = "'i_U1 E0 sin0/xc ,
(21.7)
где 0 - угол, на который продольная ось ротора смещена относи­
тельно продольной оси результирующего поля мапшны (рис. 21.4).
Электромагниmая мощность яв н о п о л ю с н о г о синхронного генератора
m.U1 Eo . 0 -U
р -'-1) sm
1 -- --'-�......a..
. 20 '
sm + m. 12 ((21.8)
'"'·•
Х
2
4
х9
Х4
где xd =хш1 +х1 и х9 =хш1 +х1 - СШIХронные индуктивные со­
противления явнополюсной синхронной мапшны по продольной и
поперечной осям соответствешю, Ом.
Разделив выражения (21.7) и (21.8) на синхронную частоту
вращения ro 1 , получим выражения электромагнитных моментов:
неявнополюсной синхрошюй машины
1ni. U1 Eo
Р
sin0,.
М = ЭI,/. =
(21.9)
п
0) 1
f0 1 Xc
явнополюсной синхронной машины
1 -1) sm
1ni.U12 (1 Eo . 0·+-1ni.U
- �.. -- --'. 20 ,
м.-�-"-sm
2со 1 · х9
ro 1
ro 1 xd
где М----,- электромагнитный момент, Н·м.
xd
(21.10)
275
Анализ выражения (21.10) показывает, что электромагниrный
моменr явнополюсной машины имеет две составляющие: одна из
них представляет собой основную составляющую электромаг­
нитного момента
И1Ео. 0 ,
мосн _-т1
���s1n
ro1xd
(21.11)
другая - реактивную составляющую момента
щU12 -1
( _ _!_)sin20 .
МР =
(21.12)
2ro 1 хч xd
Основная составляющая электромагниrного моменrа Мосн яв­
нополюсной синхронной машшn.1 зависит не только от напряже­
. ния сети ( Мосн U1 ), но и от ЭДС Ео, наведенной магнигным по­
током вращающегося ротора Ф в обмотке статора:
(21.13)
Е0 = 4,44.fiФw,koб\.
· Это свидетельствует о том, что основная составляющая электро­
магнитного моменrа Мосн зависит от магнитного потока ротора:
Мосн Ф. Отсюда следует, что в мшшrnе с невозбужде1шым рото­
ром (Ф = О) основная составляющая момента Мосн = О.
Реактивная составляющая электромагнитнqго момента Мр не
зависит от магнитного потока полюсов ро'!'Ора. Для возникновения
этой составляющей достаточно двух условий: во-первых, чтобы
ротор машины имел явновыражеш1ые полюсы: ( хч * xd) и, во­
вторых, чтобы к обмотке статора бьmо подведено напряжение сети
( МР = U12 ). Подробнее физическая сущность реакт�ного моменrа
будет изложена в§ 23.2.
При увеличении наrрузки синхронного генератора, т. е. с ростом
тока /1, происходит увеличение угла 0 , что ведет к изменешпо элек­
тромапnrrной мощности генератора и его электромагнитного момен­
та. Зависимости �м = /(0) и М = /(0) , представленные графиче­
ски, назьmаются угловыми характеристиками синхронной машины.
Рассмотрим угловые характеристики электромагнитной мощ­
ности �м.• = f(0) и электромагнитного момеша М = /(0) явно­
полюсного синхронного генератора (рис. 21.5). Эти характеристи­
ки построены при условии постоянства напряжения сети ( Ис =
= const) и магнитного потока возбуждения, т. е. Е0 = const. Из вы­
ражений (21.8) и (21.11) видим, что основная составляющая элек­
тромагнитного моменrа Мосн и соответствующая ей составляющая
электромагнитной мощности изменяются пропорционально сину­
су угла 0 (график/), а реактивная составляющая момента (21.12)
и соответствующая ей составляющая электромагнитной мощности
изменяется пропорциоиально синусу угла 20 (график 2). Зависимость результирующего. моменrа м. = Мосн + МР и электромаг­
нитной мощности Рэм от угла 0 определяется графиком 3, полу-
=
=
276
ченнъIМ сложением значений моменгов Мосн и Мр и соответствую­
щих им мощностей по ординатам.
Максимальное значение эле:ктромаrниrного момеmа Mmax со­
ответствует критическому значеншо угла 0 кр .
Как видно из результирующей угловой характеристики (гра­
фик 3), при увеличении нагрузки синхронной машины до значе­
ний, соответствующих
углу 0 � екр , синхрон­
ная машина работает
устойчиво. Объясняется
это тем, что при 0 � 0 кр .
рост нагрузки генерато­
ра (увеличение 0 ) со­
провождается увеличе­
нием электромагнитно­
го момента. В этом слу­
чае тобой установив­
Рис. 21.5. Угловая характеристика син­
хронного генератора
шейся нагрузке соответ­
ствует равенство враща­
ющего моменга первичного двигателя М, сумме противодействую­
щих момеmов, т. е. М1 = м. + М0 • В результате частота вращения
ротора остается неизменной, равной синхронной частоте вращения.
При нагрузке, соответствующей углу 0 > 0 кр , электромагниг­
ный момеm м. уменьшается, что ведет к нарушеншо равенства
вращающего и противодействующих моментов. При этом избы­
точная (неуравновешенная) часть вращающего момента первично­
го двигателя дМ = М1 -(М. + М0 ) вызывает увеличение частоты
вращения ротора, что ведет к нарушению условий синхронизации
(маШШiа выходш из синхронизма).
Электромагнитный момент, соответствующий критическому
значению угла (о кр ), является максималънъIМ Mmax•
Для явнополюсных синхроннъIХ машин 0 кр = 60+80 эл. град.
s
Угол 0 кр можно определить из формулы
Здесь
соs0 кр = .Jp 2 + 0,5 -Р.
.. (21.14)
(21.15)
У н е я в н о п о л ю с н ы х синхроннъIХ машин МР = О, а по­
этому угловая характеристика представляет собой синусоиду и
угол е кр = 90 ° .
Оmошение максимального эле:ктромагниrnого момента М"""' к но­
минальному м_ называется перегрузочной способностью синхронной
машины или коэффициентом статической перегружаемости:
277
л = Mmax / миом= 1,4+3.
(21.16)
Пренебрегая реактивной
составляющей момеша, можно записать
.
.л,:::::l/sin0 HOM ,
(21.17)
т. е. чем меньше угол е ном ' соответствующий номинальной на­
грузке сШ1Хронной машины, тем больше ее перегрузочная способ­
ность. Например, у турбогенератора 0 ном = 25+30°, что соответст­
вует л = 2,35+2,0.
Пример 11.1. Трехфазный сЮ1Хронный генератор с явно выраженными по­
mосами на роторе (2р = 10) вкmочен на пар8JU1ельную рабоtу с сетью напряжени­
ем 6000 В частотой 50 Гц. Обмотка статора соединена звездой и содержиr в каж­
дой фазе w 1 = 310 rюследовательных виrков, обмоточный коэффициеиr k.м;1 = 0,92 ,
индуктивное сопротивление рассеяНИJI обмотки х 1 = 10 Ом. Диаметр расточки
D 1 = 0, 8 м, расчетна,� длина сердечника статора /; = 0,28 м, воздушный зазор рав­
номерный о = 2 мм, коэффищrент поmосноrо перекрытИJ1 а; =0,7, коэффициент
воздушного зазора kti = 1,3, коэффициент магнитного насыщеНИJ1 kµ = 1,1. Маг­
нитный поток ротора Ф = 0,058 Во.
Требуется рассчитать значеНИJ1 электромагнитных моментов и rюстроить
rрафики МО<Ю Мр и М =/(0).
Р е ш е н и е. Полное индуктивное сопротивление реакции якоря по (20.19)
2
D,I; (w1ko61) =2,5·10-6· 3·50
ха = 2 '5-10-бmJ;
l I
okr, kµ
р
0,8 ·0, 28 х
3
·1,3·1,1
2 -10-
. х(310 0,92у =
96 Ом.
�
При а, = 0,7 и равномерном зазоре коэффициенты формы поля по (20.7) и
(20. 8): /с,/= 0,958 и kч = 0,442.
Иццуктивное сопротивление реакции якоря по продольной оси [см. (20. 24)]
XaJ =x0 ka =96·0,958 =91,5 Ом,
по поперечной оси [см. (20.25)]
xaq =x0 kq =96-0,44 2=42,4 Ом.
Синхрою1ые �нь1е сопротивления rю продольной и ооперечной осям:
ха =xad +х1 =104,4+10=114,4 Ом,
xq =xaq +х1 =48, 2+ 10=58, 2 Ом.
ЭДС обмотки статора в режиме х.х. по (21.13)
Е0 =4,44fiФro 1ko6 1 =4,44-50·0,058 ·310-0,92=3659 В.
Н апряжение фазы обмотки статора
= 3468 В.
Ulном =6000/
Угловая частота вращеНИJ1 ротора
ro 1 =2rr.fi/p=2rr.50/5 =62,8 с-1•
.
Максимальное значение основной составляющей электромагнитного момента генератора (21.11)
тДЕ0 3-3468 -3659
=
=
=5954 Н·м.
М
ОСНШIХ
CD1Xa
62,8 ,104,4
Максимальное значение реактивной составляющей электромагнитного мо­
мента (2 1.12)
.Jз
М
pm■x
278
_mpf(
2ro 1
2
l. })_3·3468 ( 1 -� )=
2642 Н·м
2 •62, 8
58, 2 114,4
Xq
Ха
'
Результаты расчета момеиrов Мосн = M.,,,нm■x sin0 , МР = Mpm■, sin20 ,
м. = мосн + мр ДЛJ1 ряда значений угла приведены ниже:
е
\
\
е, rрад
20
0,342
2036
0,643
1698
3734
sin0
Мосн,Н·м
sin20
Мр,Н·м
М,Н·м
30
0,500
2977
0,866
2187
5264
45
0,707
4209
1,0
2642
6851
60
0,866
5156
0,866
2287
7443
70
0,940
5596
0,643
1698
7294
90
1,0
5954
о
о
5954
Угол е"Р , соответствующий максимальному момеюу Мш■х, по (21.14)
Jp
cose "P = 1 +0,5 -Р = .J0,281 +О,5 -0,28 = 0,48 ,
где 13= E0/[4U1 (xd/x9 -1)]= 3659/[4-3468(114,4/58,2-1)]=0,28; arccosOA8=61,3° .
Углу е"Р = 61,3° соответствуют момешы:
М;_ = Мск:нm■х sin0"P = 5954-0,877 = 5222 Н·м;
= Mpm■x sin20"P = 2642·0,842 =2254 Н·м;
Мш■, = М.,,,н + МР =5222+2254= 7476 Нм.
Графики момешов Мосн• Мр и М, = /(0), построенные по результатам рас­
чета, приведены на рис 21.6.
м;
§ 21.4. Колебания синхронных генераторов
Предположим, что синхронный генератор, подкmоченный на
параллельную рабо-�у к сети, работает ненагружеш1ым. Чтобы на­
грузить генератор, увеличивают вращающий момент первичного
двшателя М1 до значе­
Мя
ния м; , соответствую­
Н·м
..---.---..--.---.----.---.---�
щего поворо-�у оси по­ 8·10 1 t---+--4
mосов ротора на угол 01
7 .......+--+-l--+--L-:........11-..p,...+---1�
и электромагнитному
момеюу М = м; (рис.
6 ��-t-м+-1�--.+--➔➔��г---1
21.7, график J). Однако
51---+--+--l.--+--+�f---,I--+--..--�
под действием инерции
4
___,,____�-----1-�>----1
масс
вращающихся
З t----t-,1r+-7"'---11---+--it---+--+--�
синхрошюй машины и
приводного двигателя
ротор повернется на
угол 02 > 01 , при кото­
ром электромагниmый
о
20
моменr генератора дос­
тигает значения М' > Ц . Рис. 21.6. Угловые характеристики моментов (к примеру 21.1)
В результате нарушившегося равновесия момешов ротор начнет поворачиваться в на­
правлении уменьшения угла О , но силь1 инерции и в этом случае
279
помешают ротору остановmъся в положении, соотвеrствующем углу
0 1 , и переведуr его в l}Оложение, соотвеrствующее значенmо угла 0 3 ,
при котором электромаrниrный моменr генератора М" окажется
меньше вращающего моменга м; . Поэтому ротор не остановиrся в
положении 0 3 , а будет пово­
рачиваться в направлении
увеличения угла 0 .
.- Таким образом, ротор
синхронного генератора бу­
дет совершmъ колебательные
движения (качания) около
среднего положеЮ1Я 0 1 (рис.
21.7, график 2), соответст­
вующего равновесmо вра­
щающего и электромагнитв ного моменrов. Если бы
колебания ротора не сопро­
вождались потерями энер­
гии, то они продолжались
бы неопределенно долго,
т. е. были бы н е з а т у ­
ха ющи м и. Однако в ре­
альных условиях колебания
ротора вызьmают потери
энергии, из которых наи­
большее значение имеют
магнитные потери, обуслов­
леннь1е
возникновением
вихревых токов в сердечни­
ке ротора. Объясняется это
тем, что при отсутствии ко­
лебаний частота вращения
ротора постоянна и равна
\
частще вращения результи­
рующего магниrного поля.
Рис. 21.7. Колебания синхронной ма­ Однако
при возникновении
шины:
колебаний
ротора частота
J - угловая характеристиха; 2 - rрафик
вращения
последнего
станоз�пухающих колебаний ротора
вится неравномерной, т. е.
происходит его движение относительно магниrного поля статора,
что ведет к возникновеmпо в сердечнике ротора вихревых токов.
Взаимодействие этих токов с магнитным полем статора оказьmает
на ротор «успокаивающее» действие, уменьшающее его колеба­
ния. Следовательно, колебания ротора имеют з а т у ха ю щ и й
характер, и поэтому спустя некоторое время ротор займет положе­
ние, соответствующее угл у 0 1 , при котором )IСТанавливается рав­
новесие моментов. Причинами, вызывающими колебания ротора,
280
могут быть либо изменения вращающего моменга первичного
двигателя М1, либо изменения нагрузки генератора, т. е. электро­
магнитного момента М. Колебания ротора, вызванные указа1rnыми
причинами, называют собственными.
Возможны также вынужденные колебания, вызванные нерав­
номерным вращением ротора,
например в генераторах с приво­
дом от поршневых двшателей
(дизели, газовые двигатели). Наи­
более опасен случай совпадения
частоты собственных колебаний с
частотой вынужденных (резонанс
колебаний). При этом колебания
резко усиливаются, так что па- Рис. 21.8. Успокоительная (демпраллельная работа генераторов
ферная) обмотка
становится невозможной.
Потери энергии в металлических частях ротора оказывают
тормозящее действие на подвижную часть машины и уменьшают
ее колебания. Однако значительного уменьшения колебаний дос­
тигают применением в синхронной машине успокоителыюй
(демпферной) обмотки. В явнополюсных машинах успокоитель­
ную обмотку выполняют в виде стержней, заложенньIХ в пазы по­
люснъIХ наконечников и соединеННЬIХ на торцовьIХ сторонах пла­
стШiами (рис. 21.8). В неявнополюсных машинах колебания уст­
раняются лишь действием вихревьIХ токов, наводимьIХ в
сердечнике ротора.
В заключение отметим, что изложенное здесь о колебаниях
синхроННЬIХ генераторов в равной мере. относится и к синхроннь1м
двигателям (см. § 22.1).
§ 21.5. Синхронизирующая способность
синхронных маwин
Из рассмотренного в предьщущих параграфах следует, что
при параллельной работе нескольких синхронньIХ генераторов в
каждом из них возникает некоторая сила, удерживающая генера­
тор в состоянии устойчивой работы, т. е. предотвращающая выход
этого генератора из синхронизма.
Другими словами, синхронный генератор, вюпоченнь�й на парал­
лельную раб01)', обладает синхронизирующей способностью. Физиче­
ский смысл синхроШ1Зирующей способносrn синхронных генерато­
ров состоиr в следующем. В процессе раб01ъ1 синхронного
генератора в нем действу�от два вращающихся магниmых поля: поле
статора и поле ротора. Оба поля вращаются синхронно и создают в
мaunm:e результирующее вращающееся магниrное поле. Так как об­
мотки статоров всех генераторов, вюпоченных на параллельную ра­
б01)', электрически связаны между собой, то также «связанными» ока­
зьmаются и результирующие магнитные поля всех генераторов,
которые вращаются с синхронной частотой вращения п1•
281
Результирующее магнитное поле ма:rшmы замыкается через
сердечник ротора. Поэтому электрическая связь между обмотками
статоров параллельно работающих машШI в конечном итоге пере­
ходит в магниmую связь роторов этих машин, аналогичную эла­
стичной механической связи, которая позволяет роторам смещать­
ся относительно друг друга в
пределах угла 0 < 0 кр • При
этом роторы продолжают
вращаться с синхроююй час­
тотой вращения. Лш.uъ при
смещении ротора какой-либо
из параллельно работающих
МаIШШ На угол 0 , ВЫХОДЯЩИЙ
за указанные пределы, связь
ротора этой машины с ротоРис. 21.9. Синхронизирующая спо- рамп других машШI нарушается и маIШШа выходит из
собность синхронной машины
синхронизма.
Для количественной оценки синхронизирующей способности
синхроююй машины вводят понятия удельной синхронизирующей
мощности Ре и удельного синхронизирующего момента те. Удель­
ная синхронизирующая мощность определяется отношением при­
ращения мощносm ЛРэм к соответствующему приращешпо угла
Л0 (рис. 21.9):
(21.18)
Ре = �м fЛ0.
Удельный синхронизирующий момент
(21.19)
те =ЛМ/Л0.
Величины Ре и те тем больше, чем круче подъем угловой ха­
рактеристики на участке, соответствующем изменешпо угла ле. В
неустойчивой области угловой характеристики значения Ре и те
отрицательны, поэтому устойчивая работа синхронной машины
соответствует положительным значениям Ре и те .
При изменениях нагрузки нарушается равенство между мощ­
ностью приводного двигателя и мощностью генератора. Возни­
кающий при этом небаланс мощностей ЛРэм представляет собой
синхронизирующую мощность �м = Рс Л0 .
Синхронизирующей мощносm соответствует СШIХронизирующий момент
ЛМ=�м /rо 1 =щЛ0.
(21.20)
Этот момент обусловлен разностью электромагнитного мо­
мента генератора и вращающего момента приводного двJ,1Гателя и
оказьmает на ротор генератора действие, предотвращающее выход
машШiы из синхронизма.
Из графиков удельных синхронизирующих момента
те= /(0) и мощности Ре = /(0) видно, чrо наибольшей синхро282
низирующей способностью синхршmая мaIПmia обладает при
е = О . С ростом 0 сШIХронизирующая способность машины сни­
жается и при е = О кр совершеmю исчезает (ре= О; те = О). Синхро­
низирующей способностью обладают не только синхронные гене­
раторы, но и синхро1П1Ые двигатели.
· _ § 21.6. U-образные характеристики
синхронного генератора
Ранее мы рассматривали параллельную рабо'I)' синхроmюго
генератора при неизменном токе возбуждения. Что же произойдет
в синхронном генераторе, если после подключения его к сети для
параллельной работъ1 изменить ток в его обмотке возбуждения,
оставив неизме1mым вращающий моменr · приводного двигателя?
Предположим, что генератор после подключения на сеть работает
без нагрузки и его ЭДС Ё0 уравновешивает напряжение сети Ие •
Если при этом увеличить ток в обмотке возбуждения, т. е. п е р е в о з б у д и т ь MaIПmIY, то ЭДС Ёо увеличится до значения Ёо и в
цепи генератQра появиrся избыточная ЭДС ЛЁ = Ё0 - Ие (рис.
21.10, а), вектор которой совпадает по направлению с вектором
ЭДС Ё0 • Ток id , вызвашп,IЙ ЭДС ЛЁ, будет отставать от нее по
фазе на 90° (поскольку 'i � О ). По отношению к ЭДС Ё0 этот ток
также будет отстающим (индуктивным). С увеличением перевоз­
буждения значение реактивного (индуктивного) тока увеличится.
Если же после того, как генератор подключен к сети, умень­
шиrь ток возбуждения, т. е. н е д о о)
в о з б у д и т ь MaIПmIY, то ЭДС Ё0
а)
Uc
уменьшится до значения Ё0 и в цепи
генератора ОIЩТЬ будет действовать
избьпочная ЭДС ЛЁ = Ие - Ё0' . Теперь ld
вектор этой ЭДС будет совпадать по
90° 4Е
направлению с вектором напряжения
сети Ие (рис. 21.10, б), и поэтому ток
id , вызваННЬIЙ этой ЭДС и отстающий
от нее по фазе на 90°, будет опережающим (емкостным) по отношению к · Рис. 21.1 О. Векторные
ЭДС генератора Ёо .
диаrраммы ЭДС синхронПоказанное �а векторных диа- ноrо генератора, вкmо­
граммах можно объяснить следующим. ченноrо на параллельную
При п е р е воз б у ж д е н и и генера- работу
тора увеличивается МДС возбуждения F'o = /8 W8 • Это сопровож­
дается появлением в обмотке статора реактивного тока Id, который
по отношению к ЭДС является отстающим (ШiдУКТИВНЬIМ). Вы­
званная этим током продольно-размагничивающая реакция якоря
281
компенсирует избьпочную МДС возбуждения так, что ЭДС гене­
ратора остается неизменной. Такой же процесс происходит и при
н е д о в о з 6 у ж д е н и и генератора с той лишь разницей, что в
обмотке появляется опережающий (емкостный) ток Id, а вызванная
этим током продольно-намагничивающая реакция якоря компен­
сирует недостающую МДС возбуждения.
Следует иметь в виду, что ток
I
d, отстающий по фазе от ЭДС Ё0 ,
I,
по отношенmо к напряженmо сети
Ис является опережающим током
и, наоборот, ток jd , опережаю­
щий по фазе ЭДС Ё0 , является
отстающим по отношенmо к на­
пряженmо Ис .
1
Если · при всех изменениях
Пвiёв';;5уж8ение
тока возбуждения: вращающий
14
8еиие
r;
момент приводного двигателя
Рис 21.11. U-образные характери­ остается неизменным, то также
стики синхронного генератора
неизменной остается активная
мощность генератора:
� = m1 ИJ1 cosq> 1 = const .
Из этого выражения следует, что при Ис = const активная со­
ставляющая тока статора Iq = 11 cosq> 1 = const.
Таким образом, степень возбуждения синхронного генерато­
ра влияет только на реактивную составляющую тока статора.
Что же касается активной составляющей тока Iq = /1 ·cosq> 1 , то она
остается неизменной.
Зависимость тока статора /1 от тока в обмотке возбуждения /0
при неизмеmюй активной нагрузке генератора выражается 'графи­
чески U-образной кривой. На рис. 21.11 представлены U-образные
характеристики /1 = f(I.) при Р2 = const, построеm1ые для разных
значени й активной нагрузки: Р2 = О; Р2 = 0,5Рном и· Р2 = Рном•
U-образные характеристики синхронного генератора показы­
вают, что любой нагрузке генератора соответствует такое зна­
чение тока возбуждения 1; , при котором ток статора /1 стано­
вится минимальным и равным только активной составляющей:
I,min = /1 cosq> 1 = Iq . В этом случае генератор работает при коэффициенте мощности cosq> 1 = 1. Значения тока возбуждения, соот­
ветствующие cosq> 1 = 1 при различной нагрузке генератора, пока­
заны на рис. 21.11 пунктирной кривой. Некоторое отклонение этой
кривой вправо указывает на то, что при увеличении нагрузки ток
возбуждения, соответствующий cosq> 1 = 1, несколько возрастает.
Объясняется это тем, что при росте нагрузки необходимо некото284
рое увеличение тока возбуждения, компенсирующее активное па­
дение напряжения.
Необходимо иметь в виду, чrо при постепенном уменьшении
тока возбуждения наступ�ет такое минимальное его значение, при
котором магнитный поток обмотки возбуждения оказьmается на­
столько ослаблеННЪIМ, чrо синхроннъIЙ генератор вьmадает из
синхронизма - нарушается· мarmrmaя связь между возбужден­
ными поmосами ротора и вращающимся полем статора. Если со­
единить все точки минимально допустимых значений тока возбу­
ждения на U-образных характеристиках (штриховая линия в левой
части рис. 21.11), то получим линию предела устойчивости рабо­
ты синхронного генератора при недовозбуждении.
С точки зрения уменьшения потерь генератора наиболее вы­
годным является возбуждение, соответствующее минимальному
току статора, т. е. когда cos<p 1 = 1. Но в больШШiстве случаев на­
грузка генератора имеет индуктивный характер и для компенсации
:индуктивных токов (отстающих по фазе от напряжения сети) при­
ходится несколько перевозбуждать генератор, создавая условия,
при которых ток статора i1 опережает по фазе напряжение сети
(;с . Следует отметить, чrо для сохранения cos<p 1 неизменнъIМ при
изменениях активной нагрузки генератора требуется одновремен­
ное изменение тока возбуждения генератора.
§ 21.7. Переходнь1е процессы
в синхронных генераторах
Принципиальное отличие переходных процессов от рассмотрен­
ных ранее установившихся состоит в том, чrо при установившихся
процессах работы синхронного генератора с симметричной нагрузкой
в сердечнике и обмотках ротора не индуцируются никакие токи. В то
же время при переходных процессах и несимметричных нагрузках
между ротором и статором возникают трансформаторные связи.
Наибольший интерес представляет переходнъ1й процесс при
внезапном трехфазном коротком замыкании синхронного генера­
тора. ПереходнъIЙ процесс при резких изменениях нагрузки, след­
ствием которого являются колебания синхронной машинъ1, был
рассмотрен в § 21.4.
При рассмотрении переходного процесса сШIХронноrо генера­
тора пренебрегают активным сопротивлением его обмоток, т. е.
эти обмотки считают сверхпроводниками. Это допущение в значи­
тельной степени облегчает изучение процесса, не внося замеmой
погрешности, особенно для крупных машин, у которых активное
сопротивление обмоток весьма мало. Таким образом, прежде чем
перейти к рассмотренmо внезапного к.з., введем понятие о сверх­
проводящем контуре, для которого по второму закону Кирхгофа
можно записать d\jl /dt = О. ·
В тобой момент времени полное потокосцепление сверхпро­
водящего конrура
285
(21.21)
\jl = \jl внеш + \j/ L = const,
где \j/ внеш и \j/ L - потокосцепления, обусловле1rnые внешней
причиной и самоицдукцией соответствешю.
Рассмотрим внезаIШое трехфазное к.з. синхронного генерато­
ра на его зажимах. Будем считать, 'ПО предварительно этот гене­
ратор работал в режиме
6/
х.х., т. е. в нем действо­
вал единстве1rnый маг­
нитный поток Фв об­
мотки возбуждения, в
которой проходил ток
Ф" d
J.0• При к.з. появляется
вращающийся сШIХрон­
но с ротором магнит­
ный поток статора по
продольной оси (обмот­
ка статора представляет
собой чисто индуктив­
ную нагрузку) Фаd, на­
правле1rnый против по­
Рис 21.12. Картина маппrrноrо поля при
тока Фв (рис. 21.12, а).
внезапном к.з.
При этом в обмотке
возбуждения и в успокоительной обмотке будут индуцироваться
дополнительные токи iд.в·И iд.у, которые в соответствии с правилом
ЛеIЩа препятствуют измененmо результирующего магнитного
потока в машине. Эти токи создают собстве1rnые магнитные пото­
ки Фд.в и Фд.у, которые противодействуют проJЩКНовенmо потока
Фш1 в сердечник ротора, т. е. будут вьпеснять его в воздушный за­
зор межnоmоспого пространства. В результате поток статора зна­
чительно уменьшится до значения . Ф� < Фш1. Соответственно
уменьшится и индуктивное сопротивление обмотки статора по
продольной оси, достигнув значения х; < xd . Поэтому в началь­
ный моменr переходного процесса, назьmаемого сверхпереход­
ным, действующее значение тока внезаmюго к.з. имеет наиболь­
шую величину - ударный ток короткого замыкания
(21.22)
где х; - сверхпереходное индуктивное сопротивление.
Обмотки возбуждения и успокоительная все же обладают не­
_которым активным сопротивлением, а поэтому индуцируемые в
них дополнительные токи iд.в и iд.у будут постепенно заrухать. Од­
нако этот процесс заrухания протекает неодинаково, так как успо­
коительная обмотка и обмотка возбуждения имеют разные посто­
янные времени Т. Обмотка возбуждения, имея значиrелъное число
виrков по сравненmо с успокоительной обмоткой, обладает боль­
шей индуктивностью, а поэтому т. > Ту.
Поэтому к момеmу времени, когда дополнительный ток iд.у в
286
успокоительной обмотке уменьшится до нуля, дополнительный
ток iд.в еще имеет некоторое значение. При этом магнитный поток
реакции якоря частично будет проходить через ротор, отчего его
значение несколько возрастает до значения Ф:Ш > Ф� . Соответст­
венно возрастает индуктивное сопротивление статора по
продольной оси, достигнув значения xd > х:; , назьmаемого пере-
Рис 21.13. Осциллограммы токов при внезапном к.з.
ходным индуктивным сопротивлением. При этом ток внезаmюго
к.з. несколько уменьшится до значения
1; = E0 /xd.
(21.23)
Через некоторое время уменьшится до нуля и добавочнь1й ток
в обмотке возбуждения iд.в• При этом поток статора будет замы­
каться полностью через ротор и его значение станет еще больше
(Фad > Ф:Ш ). Соответственно возрастет и ШJДуКТивное сопротив­
ление статора, достигнув значения x d > xd, а ток к.з.
1к = Eo/x d
(21.24)
В результате в генераторе установится результирующий маг­
НИТНЬIЙ поток (рис. 21.12, б) Ф к = Ф в -Фа;1 .
С уменьшением магнитного потока, сцепленного с обмоткой
статора, уменьшится ЭДС статора до значения Ек < Е0, что приве­
дет к уменьшению тока к.з. до установившегося значения
287
(2125)
/к.уст = Ек/Xd •
Таким образом, при внезаrшом трехфазном к.з. происходит
постепенное затухание тока к.з. Если, например, пик тока (удар­
ный ток) при внезаmюм к.з. досПП"ает 15-кратноrо значения, то
уста1:1овившийся ток к.з. достигает 1,5-кратноrо (для турбогенера­
торов) или 2,5-кратного (для гидрогенераторов) значения при токе
возбуждения, соответствующем -номинальной нагрузке. В некото­
рых случаях ток /к.уст может оказаться даже меньше номинального.
Причина столь малого тока при установившемся к.з. состоит в
-А>м, что генератор размагничивается полем реакции якоря.
На рис. 21.13 представлены осцилл:ограммы токов синхроюю­
го генератора при внезапном к.з., где отмечены три характерных
участка: / ..:_ сверхпереходный процесс; // - переходный процесс;
III - установившееся к.з.
Ударный ток к.з. создает значительные электромагнитные си­
лы, действующие на обмотку статора. Особую опасность эти силы
представляют для лобовых частей обмотки, что требует примене­
ния специальных мер по их укрепленmо, особенно в турбогенера­
торах, где лобовые части имеют значительный вьmет.
При внезапном к.з. синхронного генератора возникают также
значительные электромапnrrnые момещы, действующие на статор и
ротор. В наиболее неблагоприятных условиях мгновенное значение
такого моменrа дОСТШ'8ет· десятикратной величины по сравнению с
номинальным моменrом. Эrо необходимо учитывать при механиче:
ских расчетах некоторых деталей машинъ1 и ее крепления к фунда­
мешу. Режим короткого замыкания нежешпелен еще и потому, что
он нарушает параллельную рабmу синхронных генераторов.
С точки зрения уменьшения ударного тока к.з. полезным явля­
ется увеличение магниrного потока рассеяния обмотки статора
Фа1, так как это ведет к pocry индуктивного сопротивления
xd = х ш1 + х,. Однако не следует забывать и о вредном действии
магнитного потока рассеяния: уменьшении полезного магнитного
потока и росте внутреннего падения напряжения (за счет увеличе­
ния индуктивного сопротивления обмотки).
Контрольные вопросы
1. Что такое синхронизация генератора, вкmочаемоrо на параллельную работу?
2. Как наrрузиrь генератор, вКJПОченный на параллельную работу?
3. Почему с появлеЮ1ем тока нагрузки в цеrш статора генератора приводной
двигатель получает мехаЮ1Ческую нагрузку?
4. Что такое коэфф1ЩИе1П статической переrружаемости?
5. Какова причина собственных колебаний в синхронном генераторе?
6. Почему колебания ротора имеют затухающий характер?
7. Каково назначеШfе и конструкция успокоиrельной обмотки?
8. Что такое синхронизирующая способность синхронной машины и какими
параметрами она оцеЮ1Вается?
9. Почему при внезапном к. э. уменьшается шщуктивное сопротивлеЮ1е обмот­
ки статора по продольной оси?
10. Чем объясняется затухающий характер тока к.э. при внезапном к.з.?
11. Чем опасно внезаmюе к.э. для синхронного генератора?
�ан22•Синхронный
-двигатель
и синхронный
компенсатор
§ 22.1. Принциn действия
синхронноrо двиrателя
В соответствии с прmщипом обратимости элек­
трических машин синхронная машина может рабо­
тать не только в режиме генератора, но и в режиме
двигателя, т. е. потреблять из сети электрическую
энергию и преобразовывать ее в механическую.
Для объяснения прmщипа работы синхронного
двигателя представим себе синхронный генератор,
включенный на параллельную работу в сеть боль­
шой мощносm.
Допустим, приводной двигатель вращает ротор
генератора против часовой стрелки с угловой скоро­
стью ro 1 • При этом нагрузка генератора такова, что
продольная ось полюсов ротора d-d смещена отно­
сительно оси вращающегося поля d'-d' на угол 0' в
направлении вращения ротора (рис. 22.1, справа).
Вращающий момент приводного двигателя М{
уравновешивается суммой электромагнитного мо­
мента генератора М' и момента х.х. М0
( Mj = М' + М0 ). На угловой характеристике этому
. режиму генератора соответствует точка Г.
Если уменьшать вращающий момент М{ , то на­
грузка генератора начнет также уменьшаться, при
этом будет уменьшаться угол 0', а следовательно, и
ток статора /1• В итоге снизится величина электро­
магнитного момента М' и при вращающем моменте
Mj = М0 угол 0 =О, т. е. генератор будет работать в
режиме х.х. (/1 = О) и ЭДС генератора Е0 окажется в
противофазе с напряжением сети Ис. Этому режиму
на угловой характеристике, соответствует точка пе­
ресечения осей координат (точка О на рис. 22.1). Ес­
ли же вал синхронной машинь1 отсоединить от при­
водного двигателя и создать на этом валу т о р м о з н о й м о м е н т, т. е. момент нагрузки М2, на­
правленнь1й встречно вращению ротора машины, то
произойдет смещение вектора ЭДС Е0 на угол - 0
относительно его положения в режиме х.х. в сторону
289
отставания (рис. 22.l, слева). При этом 8 цепи обмотки ста-:­
трра появится результирующая ЭДС ЛЁ = Ё0 + Ис , которая соз­
даст в обмотке статора ток i, , отстающий по фазе от ЭДС дЕ на
угол 90° (предполагается 1i � О) и отстающий по фазе от напряже­
ния сети (;с на угол q> 1 (в генераторном режиме ток i, отстает по
фазе от ЭДС Ео на угол '1', ).
в"
м
м'
-в"
·Син1.ронный генератор
8' '
d
d Статор
1
1 ДВ11гательныи
ЛЁ
:
1
режим
1
1
1
д'
,,
М,'
w, тРотор -.-r-....
d' d
Рис. 22.1. Переход синхронной машины из генераторного режима в
двигательный
Ток /1 создает магнитное поле, вращающееся синхронно с ро­
тором, ось которого d'-d' смещена оmосительно продольной оси
полюсов ротора d-d на угол - 0. Допустим, работа двигателя
происходит в режиме точки Д на угловой характеристике (рис.
22.l, слева}, 'По соответствует углу - 0". Возникшие при этом
ташенциальные составляющие сил магнитного взаимодействия
полюсов F,"= F�'sin 0" создадут на роторе двигателя электромаг­
нитный момент М" , направленный согласно с вращающим маг­
нитным полем и приводящий ротор во вращение с синхронной
частотой ro 1• При этом синхронная машина будет потреблятъ ,из
сети электрическую энергию и преобразовывать ее в меха е­
скую энергию вращения. Вращающий электромагни-mый мом
:Ент
М" преодолевает момент х.х. М0 и создает на валу двшателя по­
лезный момещ М2' , под действием которого приводится во вра­
щение исполнительный механизм:
М"=М0 +М2'.
290
Все значения моменга на угловой характеристике синхроmю­
го двигателя откладываются в отрицательном направлении оси
ординат, так как при переходе синхронной машины из генератор­
ного режима в двигательный электромагнитный момент меняет
свое направление. Также отрицательной становится мощность
синхронного двигателя, которая пос'I)'Пает из сети в машину, а не
из машины в сеть, как это
происходит в генератор­
ном режиме. Оперирова­
ние с отрицательными
знач:ениями мощностей и
моментов крайне неудоб­
но,· поэтому при рассмот. рении синхронных двига­
телей условно будем при- ·
нимать моменты и мощ­
м
носm положительными,
помня при этом изложен­ Рис. 22.2. Угловая характеристика син­
ное ранее о направлении
хронного двигателя
этих параметров.
Электромагнитная мощность синхронного двигателя· опре­
деляется выражениями (21.7) и (21.8), а электромаппrrный моменг (21.9) и (21.10).
.Угловые характеристики электромаппrгного моменга М = /(0)
и его составляющих lу!осн = /(0) и МР = /(0) представлены на
рис. 22.2. Эти характеристики отличаются от угловых характери­
стик генератора (см. рис. 21.5) лишь тем, что располагаются в
третьем квадранте осей координат, т. е. определяются отрицатель­
ными значениями углов 0 и моментов Ми Мосн, а также момента
Мр при 0 = О+(.....,9O° ).
Таким образом, в общем виде угловая характеристика син­
хронной машины представляет собой две полуволны резульm­
рующего момента М: положительную, соответствующую генера­
торному режиму работы (см. рис. 21.5), и отрицательную,
соответствующую двигательному режиму работы (рис. 22.2). Переход
машины из одного режима работы в другой происходит при 0 = О.
Устойчивая работа синхронного двигателя соответствует
участку угловой характеристики (рис. 22.2) при О = О+( 0 1<)) ).
Отношение максимального электромагнитного момента Mma-,,. к
номинальному Мном [см. (21.16)] определяет перегрузочную спо­
собность синхронного двигателя
л, = Mmax f Мном
Обычно перегрузочная способность синхронных двигателей
л = 2+3, что при номинальной нагрузке двигателя соответствует
о ном =30+20 эл. град.
291
Ротор синхроmюго двигателя может вращаться, только с син­
хронной частотой n1 = f. 60/ р. Чтобы убедиться в этом, достаточ­
но предположить, 'ПО ротор двигателя начнет вращаться с часто­
той п2 < п 1• В какой-то моменr времени намагничеm1ые полюсы
ротора расположатся против одноименных поmосов вращающего­
ся магнитного поля статора и тогда нарушится магнитная связь
между намагниченными полюсами ротора и полюсами вращающе­
гося поm статора, так как их одноименные полюсы будут взаимно
отталкиваться и ротор, перестав испытывать устойчивое действие
вращающего электромагнитного моменrа, остановится.
Вращение ротора синхронных двигателей только с синхрон­
ной частотой составляет характерную особенность этих двигате­
лей и часто определяет область их применения (например, для
привода устройств, требующих стабилънрй частоты вращения).
При изменениях нагрузки на валу синхронного двигателя ме­
няется угол е. При этом ротор вследствие инерции вращающихся
масс агрегата не сразу занимает положения, соответствующие но­
вой нагрузке, а некоторое время совершает колебательные дви­
жения. Таким образом, в синхронном двигателе, так же как и в
генераторе, имеют место колебания ( физическая сущность этого
явления изложена в§ 21.4).
По своей конструкции синхршrnые двигатели в прmщипе не
отличаются от синхронных генераторов, но все же имеют некото­
рые особенности. Их изготовляют преимущественно явнополюс­
нь1ми с 2р = 6+24 полюсов; воздушный зазор делают меньшим,
чем в генераторах такой же мощности, 'ПО способствует улучше­
нию ряда параметров двигателя, в частности уменьшению пуско­
в<;>го тока; демпферную (успокоительную) обмотку выполняют
стержнями большего сечения, так как при пуске двигателя она яв­
ляется пусковой обмоткой (см. § 22.2); ширина полюсного нако­
нечника достигает 0,9t вместо 0,7t в генераторах. Поэтому, не­
смотря на свойство обратимости, синхронные машины, вы­
пускаемые промъПШiенностъю, имеют обычно целевое назначение либо это синхронные генераторы, либо синхронные двигатели.
§ 22:2. Пуск синхронных двигателей
Пуск синхронного двигателя непосредственным вюпочением в
сеть невозможен, так как ротор из-за своей значительной инерции
не может быть сразу увлечен вращающимся полем статора, часто­
та вращения которого устанавливается мгновенно. В результате
устойчивая магнитная связь между статором и· ротором не возни­
кает. Для пуска синхронного двигателя приходигся применять
специальные способы, сущность которых состоиг в предваритель­
ном приведении ротора во вращение до синхронной или близкой к
ней частоте, при которой между статором и ротором устанавлива­
ется устойчивая магнитная связь.
В настоящее время практическое применение имеет способ
пуска, получивший название асинхронного. �от способ пуска
292
возможен при наличии в поmосных наконечниках ротора пусковой
обмотки (клетки), аналогичной успокоительной обмотке синхрон­
ного генератора (см. рис. 21.8). Схема вюпочения двигателя при
этом способе пуска приведена на рис. 22.3, а. Невозбужде1ш:ый
синхршrnый двигатель вкmочают в сеть. Возникшее при этом
вращающееся магнитное поле статора наводит в стержнях пуско-
-о----
Рис. 22.3. Ас:инхроНlП,IЙ пуск синхронного двигателя
вой клетки ЭДС, которые создают токи /2 • Взаимодействие этих
токов с полем статора вызывает появление на стержнях пусковой
клетки электромагнитных сил Fэм• Под действием этих сил ротор
приводится во вращение (рис. 22.3, б). После разгона ротора до
частоты вращения, близкой к синхронной ( п2 � О,95п1 ), обмотку
возбуждения подключают к источнику постояшюго тока. Обра­
зующийся при этом синхронный момент [см. (21.10)] втягивает
ротор двигателя в синхронизм. После этого пусковая обмотка дви­
гателя выполняет функцию успокоительной обмотки, ограничивая
качания ротора (см.§ 21.4).
Чем меньше :нагрузка на валу двигателя, тем легче его вхож­
дение в синхронизм. Яв:нопоmосные двигатели малой мощности,
пускаемые без :нагрузки на валу, иногда входят в синхронизм лишь
за счет реактивного момента, т. е. даже без вюпочения обмотки
возбуждения.
С увеличением нагрузочного момента на валу вхождение дви­
гателя в синхронизм затрудняется. Наибольший наrрузочньrй мо­
мент, при котором ротор синхронного двигателя еще втягивается в
сШIХронизм, называют моментом входа двигателя в синхронизм
Мвх• Величина асинхронного момента М0 при частоте вращения
· 293
п2 :::: О,95п1 зависит от активного сопротивления пусковой клетки,
т. е. от сечеIШЯ стержней и удельного электрического сопротивле­
ния металла, из которого они изготовлены (см. рис. 13.6).
Следует обратить внимание, что выбор сопротивления пуско­
вой клетки r2' , соответ(:твующего значительному пусковому мо­
меmу ( м; ), способствует уменьшению момеmа входа в синхро-
s
Рис. 22.4. Асинхронные момен:гы при пуске синхронного
двигателя:
м. - основной моменr; М
4 - дополюпельный моменr, Mu. моменr входа в синхроюtЗм
низм ( м;� ) и, наоборот, при сопротивлении -r2 , соответствующем
небольшому пусковому момеmу ( М� ), момент входа в синхро­
ЮJЗМ увеличивается ( М;х > М��) (рис. 22.4).
В процессе асинхронного пуска обмотку возбуждения нельзя ос­
тавлять разомкнуrой, так как мапnпный поток с'ППора, пересекаю­
щий ее в начальный период пуска с синхронной скоростью, наводит в
ней ЭДС. Вследствие большого числа витков обмотки возбуждения
эта ЭДС достигает значений, опасных как для целости изоляции са­
мой обмотки, так и для обслуживающего персонала. Для предотвра­
щения этого обмотку возбуждения на период разгона ротора замыка­
ют на активное сопротивление r, примерно в десять раз большее
сопротивления обмотки возбуждения. Переключение зажимов Иl и
И2 обмотки возбуждения с сопротивления r на зажимы возбудителя
осуществляют переключателем П (см. рис. 22.3, а).
Замыкание накоротко обмотки возбуждения на время пуска
двигателя нежелательно, так как при этом обмотка ротора образу­
ет однофазный замкнутый коmур, взаимодействие которого с
вращающимся полем статора также создает дополнительный
асинхронный момент Мд. Однако при частоте вращения, равной
половине синхронной, этот момент становится тормозящим (рис.
22.4) и создает «провал» в характеристике пускового (асшrхронно- ·
го) момента (пунктирная кривая). Это заметно ухудшает пусковые
свойства сшrхронного двиrа1:еля.
294
При асинхроmюм пуске синхроmюго двигателя возникает
значиrельный пусковой ток. Поэтому пуск синхршшых двигателей
непосредственным вкmочением в сеть на номинальное напряже­
ние применяют при достаточной мощности сети, способной вы­
держивать без заметного падения напряжения броски пускового
тока пяти- ИJШ семикратного значения (по сравнению с номиналь­
ным током). Если же мощность сети недостаточна, то можно при­
менить пуск двигателя при пониженном напряжении (см. § 15.2):
автотрансформаторный или реакторный.
§ 22.3. U-образнь1е
. и рабочие характеристики
синхронного двигателя
U-образные характеристики. В процессе работы синхронно­
го двигателя в его обмотке статора наводятся ЭДС, сумма которых
z)l, [см. (20.29}] приблизительно равна подведенному к обмотке
статора напряжению сети (;с . Эта сумма ЭДС эквивалентна ре­
зультирующему магнитному поmо, вызванному действием двух
магнитодвижущихся сил: возбуждения F8 = /8 и статора F;. = /1 •
.
.
При неизменном напряжении сети Uc R: -L Е = const результирующее магнитное поле постоянно. Поэтому при изменении
МДС возбуждения Fв (изменении тока возбуждения /8 МДС ста­
тора F1 изменяется таким образ0м, чтобы их совместное действие
оставалось неизмеш1ым, т. е. чтобы оставалось неизмеш1ым ре­
зультирующее магнитное поле синхронного двигателя. Это изме­
нение МДС F1 может происходиrь только за счет изменения величины и фазы тока статора i1, т. е. за счет изменения реактивной
составляющей тока статора ld.
Например, при у в е л и ч е н и и тока возбуждения /8 начиная
от наименьшего его значения ( /8 R: О ) возрастает МДС ротора, при·
этом МДС статора уменьшается. Это уменьшение МДС происхо­
дит при уменьшении индуктивной (по отношению к напряжению
сети (;с ) составляющей тока статора Id, кот�рая оказывает на маг­
!fИТНУЮ систему подмагничивающее _вл�е_.
При этом полный ток-статора /1 = Iq + Id уменьшается, а ко­
эффициент мощности двигателя cosq> 1 увеличивается. При неко­
тором значении тока возбуждения 1; индуктивная составляющая
тока статора падает до нуля. При этом ток статора достигнет ми­
нимального (при данной нагрузке) значения, так как станет чисто
активным ( /1 = Iq ), а коэффициент мощности cosq> 1 = 1.
Увеличение тока возбуждения сверх значения /� , т. е. п е р е в о з б у ж д е н и е двигателя, вызовет увеличение тока i1 , но те­
перь этот ток будет опережающим (емкостньzм) по отношению к
)
295
напряженmо Ис . Таким образом, при недовозбуждении ( /5 < [� )
синхронный двигатель работает с отстающим током, а при пе­
ревозбуждении ( /8 > [� ) - с опережающим. Зависимость тока
статора от тока возбуждения для синхронного двигателя представ­
лена U-образными харктеристиками (рис. 22.5). Ток возбуждения
/� соответствует работе синхроmюго двигателя при коэффициен­
те мощности cosq> 1 =1. При перевозбуждении двигателя в цепи
статора появляется опережающий ток.
Иначе говоря, синхронный двигатель является генератором
реактивного тока: индуктивного по отношению к напряжению
сети при недовозбуждении и емкостного при перевозбуждении.
Указанная способность синхронных двигателей является их цен­
ным качеством, которое используют для повышения коэффициен­
та мощности электрических установок.
АсинхроШIЫе двигатели, являющиеся наиболее распространен­
ными потребиrелями электроэнергии, работают с cosq> 1 < 1, создавая
в сетях значительные индуктивные токи. Если же параллельно группе
асинхронных двигателей вкmочиrъ одm1 или несколько синхронных
двигателей, работающих с перевозбуждением, то возникающая в сети
емкосmая составляющая тока будет частично или полностью ком­
пенсировать индуктивную составляющую тока, обусловленную рабо­
той асинхронных двигателей. При этом электрическая система, раз­
груженная от реакгивных токов, будег работать с cos <Р, ::::: 1 , что
способствует уменьшению потерь электроэнергии. Необходимо, од­
нако, отметиrь, чrо при перевозбуждении синхронный двигатель по­
требля� значительный ток статора. Поэтому синхроШIЫе двигатели,
предназначенные для работы с перевозбуждением, имеют несколько
большие габариты, а их КПД меньше, чем у двигателей, предназна­
ченньrх для работь1 с cosq> 1 = 1, когда ток стаrора и потери двигателя
имеют минимальные значения.
Аналогично синхронному генератору, включенному на парал­
лельную рабоrу с сетью (см.§ 21.6), синхронный двигатель имеет
предел устойчивости при минимальном токе возбуждения (штри­
ховая линия в левой части рис. 22.5).
Рабочие характеристики. Рабочие характеристики синхрон­
ного двигателя представляют собой зависимость частоты враще­
ния ротора п2, потребляемой мощности Р1, полезноrо момента М2,
коэффициента мощности cosq> 1 и тока в обмотке статора /1 от по­
лезной мощности двигателя Р2 (рис. 22.6). Частота вращения рото­
ра п2 всегда равна синхронной частоте п1 = J; 60/ р, поэтому гра­
фик п2 = /(�) имеет вид прямой, параллельной оси абсцисс.
Полезный момент на валу синхронного двигателя М2 = P2 /ro 1 •
Так как-рабочие характеристики снимают при условии .fi = const,
то график М2 = f( Pi) имеет вид прямой, выходящей из начала
координат. Мощность на входе двигателя · Pi = Р2 + L Р. С ростом
296
нагрузки на валу двшателя увеличиваются также и потери L Р,
поэтому потребляемая мощность Р1 растет быстрее полезной мощ­
носm Р2 и график Pi = /(Р2 ) имеет несколько кривоЛШiейный вид.
Вид графика cos<p 1 = /(�) зависит от вида настройки тока
возбуждения: если в режиме х.х. ток возбуждения установлен та­
ким, что cosq> 1 = 1 , то с ростом нагрузки коэффициент мощности
nz
I,
п2 =n,
Р,
ltном
М2
cos <i,
1,
Нг8о8озtiжi1е Пере8озоgжDениt
ние
18
Iв
o �---------,,-,..._-
Рис. 22.5. U-oбpa=Jtt:ыe характери­
стики синхронного двигателя
Рис. 22.6. Рабочие характеристики
синхронного двигателя
О
Pz
снижается, если же установить cosq> 1 = 1 при номинальной на­
грузке, то при недогрузке двшатель будет забирать из сети реак­
тивный опережающий ток, а при перегрузке - отстающий. Обыч­
но устанавливают ток возбуждения таким, чтобы cos<p 1 = 1 при
средней нагрузке (рис. 22.6). В этом случае коэффициент мощно­
сти во всем диапазоне нагрузок остается достаточно высоким. Ес­
ли же установить ток в обмотке возбуждения синхронного двига­
теля таким, чтобы cosq> 1 = 1 бьш при нагрузке несколько
превышающей номинальную, то при номинальной нагрузке
cosq> 1 1::: 0,8 и двигатель будет потреблять из сети опережающий
по отношению к напряжению сети ток, что приведет к повышению
коэффициента мощности этой сети. В этом отношении синхрон­
ные двигатели выгодно отличаются от асинхронных, работающих
с отстающим по фазе током (особенно пр.и недогрузке двигателя)
и снижающих энергетические показатели питающей сети.
Ток в обмотке статора двигателя /1 = Pi /( т1 И1 cosq> 1) • Из этого
выражения видно, что ток /1 с увеличением нагрузки на валу дви­
гателя растет быстрее, чем потребляемая мощность Р1 , вследствие
уменьшения cosq> 1 •
Так как ротор синхронного двигателя вращается _в ту же
сторону, что и поле статора, то направление вращения ротора
определяется порядком следования фаз линейных проводов,
подведенных к обмотке статора, и порядком расположения фаз
обмотки статора. Для изменения направления вращения трех297
фазного синхронного двигателя необходимо переключить два
· линейных привода, подведенных из сети к выводам обмотки
статора (см. § 9. 3).
В заключение необходимо отметить, что синхронные двигате­
ли по сравнению с асинхронными имеют преимущество, закто­
чающееся в· том, что они могут работать с cosq> 1 :::: 1, не создавая в
питающей сети индуктивных токов, вызывающих допоmштельные
потери энергии. Более того, при работе с перевозбуждением син­
хронные двигатели создают в сети емкостный ток, чем способст­
вуют повышению коэффициента мощности энергосистемы в це­
лом. Другое достоинство синхронных двигателей состоит в том,
что, как это следует из (21.11 ), основная составляющая электро­
магнитного момента пропорциональна напряженшо сети U1 , а у
асинхронных двигателей электромагнитный момент пропорционален U12 [см. (13.14)]. По этой причине при понижении напряжения
в сети синхронные двигатели сохраняют большую перегрузочную
способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более
сложная конструкция и повышенная стоимость по сравнению с
асинхронными двигателями с короткозамкнуть�м ротором. Кроме
того, для работы синхронного двигателя требуется устройство для
питания постояю1ым током обмотки возбуждения.
Опьп эксплуатации показал, что применение синхронных дви­
гателей общего назначения наиболее целесообразно при мощности
200 кВт и более в установках, не требующих частьIХ пусков и ре­
гулирования частоть1 вращения (мощные насосы, вентиляторы,
компрессоры и т. п.).
§ 22.4. Синхроннь1й компенсатор
•
· Синхрою1ый компенсатор (СК) представляет собой синхрон­
ную машину, предназначенную для генерирования реактивной
мощности. Синхрою1ый компенсатор включают в электрическую
систему с целью повышения ее коэффициенга мощности.
Принцип происходящих при этом явлений состоит в том, что
необходимую для работы некоторь�х потребителей реактивную
мощность вырабатьmает не синхрою1ый генератор, установленный
на электростанции, а синхронный компенсатор, установлею1ый в
непосредственной близости к потребителю. К числу потребителей
переменного тока, требующих значительной реактивной мощно­
сти, в первую очередь относятся асинхршшые двигатели. На рис.
22.7 показана система, состоящая из синхронного генератора (СГ),
повышающего Tpl и понижающего Tpll трансформаторов, линии
электропередачи (ЛЭП), потребителя Z и синхронного компенса­
тора (СК), включенного непосредственно на входе потребителя.
Синхрою1ый компенсатор, включенный в сеть, работает как син­
хронный двигатель без нагрузки (Р2 = О), т. е . в режиме х.х., и при
этом вырабатьmает реактивную мощность Qск, необходимую для
298
работы потребиrеля Z, например группы асинхронных двигателей.
Благодаря этому реактивная мощность в СГ и ЛЭП доведена до неко­
'торого мmmмалъного значения Qrnin- Эrо способствует повьШiеюпо
технико-экономических показателей всей электрической системы.
Для пояснения явлений, связашn,rх с подключением СК к
электрической системе, рассмотрим рис. 22.8. При подкmочении
· потребителя Z к сети с напряжением Ис (рис. 22.8, а) в сети возни-
Г"\ � - ___-Р1Е.____
�
а)
с
и
P-
Omin-
= 11
lz
-
z
Рис. 22.8. Применение синхронного компенсатора для повышенюt коэффmщента мощности сети
кает ток iz_, отстающий по фазе от напряжения Ис на угол </>z,
обусловленный значительной индуктивной составляющей тока lz.
При подкmочении СК параллельно потребителю Z и создании в
СК режима перевозбуждения (рис. 22.8, б) в сети появиrся ток
iск, опережающий по фазе напряжение Ис на угол 90°. Результи­
рующий ток в сети
(22.1)
Фазовый. сдвиг этого тока относнгельно напряжения сети (;с
(угол q> с) намного меньше угла фазового сдвига до вкmочения СК
(угол q> z ). Кроме того, ток Ic станет меньше Uc < /z). В этом можно
убедиться исходя из следующих соображений. Так как СК работа­
ет без нагрузки на валу, то его активная мощность не велика и оп­
ределяется потерями х.х. в компенсаторе. Пренебрегая этими по­
терями, можно активную мощность в сети до подключения СК
(22.2)
� = Pz = ✓3Iz Uc COS(j)z
приравнять к активной мо�ности сети после подкmочения СК:
Р; = ✓3/c Uc cosq> c .
(22.3)
299
Но так как � = Р;, а cosq> c > cosq>z, то Ic < lz. В результате
сШIХронный генератор и линия электропередачи разгружаются и
потери мощности в них уменьшаются.
В некоторых случаях СК работают с недовозбуждением. Необхо­
димость в этом возникает, если ток в системе содержиr значительную
емкос-rnую составляющую, которая не компенсируется индуктивной
составляющей тока птребителей. Обычно степень возбуждения СК
реrулируют посредством автоматических устройств.
СШIХроннь1е компенсаторы применяют также для стабилиза­
ции напряжения в сети при передаче энергии по линиям большой
протяженности. При больших индуктивных нагрузках напряжение
в коIЩе линии (у потребителей) оказьmается намного меньше, чем
в начале; при малых нагрузках, наоборот, под влиянием емкост­
ных сопротивлений линии напряжение в коIЩе линии может даже
повышаться по сравненmо с напряжением в начале. Если же в
коIЩе линии (у потребителей) вюпочить СК, работающий при
больших нагрузках с перевозбуждением и при мальIХ нагрузках с
недовозбуждением, то это позволит поддерживать напряжение в
коIЩе линии практически неизменным.
Условия нагревания СК при опережающем токе (при перевоз­
. буждении) более тяжелые, чем при отстающем (при недовозбж­
дении), поэтому номинальной мощностью компенсатора считают
мощность при перевозбуждении.
Пример 22.1. Потребиrелъ" вюпоченный в сеть переменного тока напряже­
нием U0 = 6,3 кВ, потребляет мощность 1500 кВ·А при коэфф�щиенте мощности
cos q> О, 7 . Определить мощность синхронного компенсатора, необходимого
для повышения коэфф�щиенrа мощности в сети до cosq>' = 0,95 ( sinq>' =0,31 ).
Определиrь также силу тока нагрузки в сети до и после компенсации.
Р е ш е н и е. До вюпочения СК реактивная мощность ,сети Q = S sin q> =
=1500· О,7 =1050 кВ·Ар, ток нагрузки в сети
=
=S/(✓ЗU0 )=1500/(✓3·6,3)=138 А;
активная составляющая этого тока /с.•.= /с COS(J) =138 · О,7=97 А.
/0
После вкmочения СК реактивная мощность уменьшилась до
Q' = Ssinq>' =1500·0,31 =450 кВ·Ар.
Таким образом, для повышения коэфф�щиента мощности установки от
COS(j) = 0,7 до cosq>' = 0,95 'I])ебуется ВКJПОЧИТЬ ск МОЩНОСТЬЮ
Qc.� =1050-450=600 кВ·Ар.
При этом активная составляющая тока сети не измеюпся _(/0_. = 97 А), а ре­
активная составляющая этого тока станет равной
1;.р =Q'/(✓З ·И0 )= 450/(✓З ·6,3) =42 А.
Следовательно, ток в сети после вкmочения СК
/' = 11 2 +/' 2 =J972 +42 2 =104,А.
с
V с.■ с.р
Обычно коэффициент мощности увеличивают до 0,92--0,95,
так как экономия, получаемая от повышения коэффициента мощ­
ности до едишщы, не оправдьmает увеличивающихся расходов,
300
обусловленных возросшей мощностью синхронного компенсато­
ра. Так, если в рассматриваемом примере потребовалось бы уве­
личить коэффициею мощности в сети до едишщы, то пришлось
зы применить синхронный компенсатор мощностью 1050 кВ·Ар,
т. е. поtпи в два раза больше, чем при cos<p' = 0,95.
Синхр01mые компенсаторы - это электрические машины
большой мощности: от 10 до 160 тыс. кВ·А. ВьmоJПIЯ10т их обыч­
но с горизонrальным расположением вала на напряжение от 6,6 до
· 16 кВ, частотой 50 Гц. Число полюсов в СК .обЬl'Пiо составляет
2р = 6 и 8, что соответствует частоте вращения ротора 1000 и 750
об/мин. В синхронных компенсаторах совремеШП>IХ серий приме­
нен асинхронный пуск, поэтому ротор СК снабжен пусковой Юiеткой.
Вал компенсатора не передает вращающего момеюа, и поэто­
му при его расчете учитывают лшпъ силу тяжести ротора и силу
магнитного приrяжения. В иrоге вал СК по сравнению с валом
синхронного двигателя име_ет уменьшенное сечение. Эrо способ­
ствует уменьшению габариrов и облегчению СК. Так как вал СК
не имеет выступающего к01ща, то СК сравниrельно легко герме­
тизировать с целью применения в нем водородного охлаждения
(см.§ 31.4).
Наиболее важнъrми характеристиками СК являются U-образ­
ные характеристики, определяющие основные_ параметры компен­
сатора: значения токов в обмотке статора и в обмотке возбужде­
ния. В прИIЩИIIе эти характеристики не отличаются от U-образ­
ной характеристики синхронного двигателя в режиме х.х. (Р2 == О).
Указанные характеристики строят для разньIХ напряжений сети.
Синхр01rnый компенсатор не несет активной нагрузки (его
электромагнитная мощность Рэм � О ) и работает при значении уг­
ла е = О, что обеспечивает СК большую перегрузочную способ­
ность.
'
Контрольные воnрQсы
1.
2.
3.
4.
S.
Чем оrраничиваеrся область устойчивой работы СШ1Хроююrо двшателя?
Обьясюпе процесс ·пусu сШIХронноrо двигателя.
Как реrулируеrся коэффициенr мощности сШIХроююrо двигателя?
Каково назначение сШ1Хронноrо компенсатора?
Каковы достоинства и недостатки сШ1Хронных двигателей по сравнению с
асинхрою1ыми?
Синхронные
-машины
специального
назначения
rпава2З•
§ 23.1. Синхронные машины
с постоянными магнитами
Синхршrnые машины с постоя1П1Ь1ми магюrга­
ми (магнитоэлектрические) не имеют обмотки воз­
буждения на роторе, а возбуждающий магнигный
поток у них создается постоянными магюrгами, рас­
положеШIЬIМИ на роторе. Статор этих машин обыч­
ной конструкции с двух- или трехфазной обмоткой.
Применяют эти машины чаще всего в качестве
двигателей небольшой мощности. Синхршrnые ге­
нераторы с постоянными магнитами применяют ре­
же, главным образом в качестве автономно рабо­
тающих генераторов повышенной частоты, малой и
средней мощности.
Синхронные магнитоэлектрические двигате­
ли. Эти двигатели получили распространение в двух
конструктивных исполнеJШЯХ: с радиальным и акси­
альным расположением постоянных магнитов.
При р а д и а л ь н о м ра с п о л о ж е н и и по­
стоянных магнитов пакет ротора с пусковой клет­
кой, вьшолнеmп,IЙ в виде полого цилиндра, закреп­
ляют на наружной поверхности явно выраженных
поmосов постоянного магнита 3. В цилиндре делают
межполюсные прорези, предотвращающие замыка­
ние потока постоянного магнита в этом цилиндре
(рис. 23.1, а).
При а к с и а л ь н о м р а с п о л о ж е н и и маг­
нитов конструкция ротора аналоrична конструкции
ротора асинхронного короткозамкнутого двигателя.
К торцам этого ротора прижаты кольцевые постоян­
ные магниrы (рис. 23.1, б).
Конструкции с аксиальным расположением маг­
нита применяют в двигателях малого диаметра
мощностью до 100 Вт; конструкции с радиальным
расположением магнитов применяют в двигателях
большего диаметра мощностью до 500 Вт и более.
Физические процессы, протекающие при асШI­
хронном пуске этих двигателей, имеют некоторую осо­
бенность, обусловленную тем, 'ПО магнитоэлектриче­
ские двигатели пускают в возбужденном состоянии.
302
Поле постояшюго магшпа в процессе разгона ротора наводит в
обмотке статора ЭДС E,n, частота которой увеличивается пропор­
ционально частоте вращения ротора. Эта ЭДС наводит в обмотке
статора ток, взаимодействующий с полем постоянных магнитов и
создающий т о р м о з н о й момент Мт, направлешn,1й · встречно
вращенmо ротора.
а)
Рис. 23.1. Маrnитоэлеюрические синхронные двигатели с радиальным (а) и
аксиальным (б) расположением постоянных магнитов:
1 - статор, 2 - короткозамкнутый ротор, 3 � rюстоянный маrнит
Таким образом, при разгоне двигателя с поqтояшn,1ми магни­
тами на его ротор действуют два асинхрошn,IХ момента (рис. 23.2):
вращающий Ма (от тока /1 , пос'I)'Пающего в обмотку статора из
сети) и тормозной Мт (от тока /1 n, наведенного в обмотке статора
полем постоящюrо магнита).
Однако зависимость этих моментов от частоты вращения ро­
тора (скольжения) различна: максимум вращающего момента Ма
соответствует значительной частоте (небольшому скольженmо), а
максимум тормозного момента Ыт - малой частоте вращения
(большому скольженmо). Разгон ротора происходит под действи­
ем результирующего момента Мрез = Ма + Mt, который имеет зна­
чительный «провал» в зоне мальIХ частот вращения. Из приведен­
ных на рисунке кривьIХ видно, что влияние момента Мт · на
пусковые свойства двигателя, в частности на момент входа в син­
хронизм Мвх, значительно.
Для обеспечения надежного пуска двигателя необходимо,
чтобы минимальный результирующий момент в асинхронном ре­
жиме Мрез и момент входа в синхронизм Мих были больше момента
нагрузки. Форма кривой асинхронного момента магнитоэлектри­
ческого двигателя в значительной степени зависит от активного
сопротивления пусковой клетки и от степени возбужденности дви­
гателя, характеризуемой величиной l; n = (E0 /U1 ) < 1, где Ео ЭДС фазы статора, наведенная в режиме холостого хода при вра­
щении ротора с синхронной частотой. С увеличением l; n «провал»
в кривой момента Мрез увеличивается.
Электромагнитные процессы в магнитоэлектрических син­
хрош1ых двигателях в прmщипе аналогичны rrроцессам в син­
хрошn,IХ двигателях с электромагнитным возбуждением. Однако
303
необходимо иметь в виду, чrо постОЯimые магнигы в магюrго­
электрических машинах подвержены размагничиванию действием
магнигного потока реакции якоря. Пусковая обмотка несколько
ослабляет это размагничивание, так как оказьmает на постошmые
магнигы экранирующее действие.
Положительные свойства магнигоэлектрических синхронных
двшателей - повьппеШiая устойчивость работы в синхронном
режиме и равномерность частоть1 вращения, а также способность
синфазного вращения нескольких двигателей, включе1mых в одну
сеть. Эти двигатели имеют сравнигельно высокие энергетические
показатели (КПД и cosq> 1 ).
Недостатки магнигоэлектрических синхронных двигателей повьппеШiая стоимость по сравнению с синхронными двшателями
других типов, обусловлеШiая высокой стоимостью и сложностью
обработки постоЯimых мапiитов, вьmолняемых из сплавов, обладающих большой коэрцитивной
м
силой (аmщ, алнико, магнико и
др.). Эти двигатели обычно изго­
товляют на небольшие мощности и
применяют в приборостроении и в
устройствах автоматики для при­
вода механизмов, требующих по1 s стоянства частоты вращения.
Синхронные маrнитоэлектрнческие rенераторы. Ротор та­
Рис. 23.2. Графики асинхрон­
кого генератора вьmолняют при
ных моментов магнитоэлектри­ малой мощности в виде «звездоч­
ческого синхронного двигателя КИ>> (рис. 23.3, а), при средней
мощности - с копеобразными
поmосами и цилиндрическим постояш1ым магнигом (рис. 23.3, б).
Ротор с копеобразными поmосами дает возможность получить
генератор с рассеЯIIИем полюсов, ограничивающим ударный ток
при внезапном коротком замыкании генератора. Этот ток пред­
ставляет большую опасность для постоЯ11Ного магюrга ввиду
сильного размагничивающего действия.
Помимо недостатков, отмечеш1ых при рассмотрении магюrго­
электрических синхронных двшателей, генераторы с постоянны­
ми магнигами имеют еще один недостаток, обусловленный отсуr-
Рис. 23.3. Роторы маmитоэлектрических синхронных генераторов:
1 - вал; 2 - постоянный мarюrr; 3 - поmос; 4 - немаrниrная в'l)'лка
304
ствием обмотки возбуждения, а поэтому регулировка напряжения
в маmитоэлектрических генераторах практически невозможна.
Это затрудняет стабилизацmо напряжения генератора при измене­
ниях нагрузки.
§ 23.2. Синхронные реактивные двигатели
Отличительная особенность синхро1rnых реактивных двигате­
лей (СРД) - отсуrствие у них возбуждения со стороны ротора.
Основной магнитный поток в этом двигателе создается искmочи­
телъно за счет МДС обмотки статора. В двух- и в трехфазных СРД
эта МДС является вращающейся.
Для выяснения пршщипа действия СРД обратимся к выраже­
нmо электромагнитного момента явнополюсной сШ1Хронной ма­
шины [см. (21.10)], из которого следует, что если откmочить об­
мотку возбуждения (Ео = О), то основная составляющая момеmа
становится равной нулю и на ротор машины продолжает действо­
вать ЛШIIЬ реактивная составляющая момеmа [см. (21.12)]
2
М = tniU1
sin 20 .
Р 2m Xq xd
l
(J_ -__!_)
, Пршщип действия СРД закmочается в следующем. При вкmо­
чении обмотки статора в сеть возникает вращающееся магнитное
о}
8=90 °
d'
Рис. 23.4. Принцип действия синхронного реактивного двигателя
поле. Как только ось этого поля d'-d' займет положеIШе в про­
странстве расточки статора, при котором она будет смещена отно­
сительно продольной оси невозбужде1mых поmосов ротора d-d
на угол 0 в сторону вращения (рис. 23.4, а), между полюсами это­
го поля и выс'I)'Пающими полюсами невозбужденного ротора воз­
никнет реактивная сила магнитного притяжения полюса ротора к
полюсу вращающегося поля статора Fp. Вектор этоц силы �
смещен относительно продольной оси ротора также на угол 0 , ,
поэтому сила Fp имеет две составляющие: нормальную Fnp, на305
правленную по продольной оси ротора, и тангеIЩИалъную F1р, на­
правленную перпендикулярно продольной оси поmосов ротора.
Совокупность тангеIЩИальных составляющих реактивных сил F1р
на всех поmосах невозбужденного ротора создаст вращающий ре­
акт.ивный момеm Мр, который будет вращать ротор с синхронной
чgстотой ro 1 • С ростом механической нагрузки на вал СРД угол 0
увеличивается и момеm Мр растет.
Однако при значении угла 0 = 90° реактивный момеm Мр = О.
Такая зависимость момеmа МР от угла 0 является принцшrиаль­
ной для реактивного момеmа, отличающей его от основной со. ставляющей электромагнитного момеmа М0,н синхронного двига­
теля с возбужденным ротором ( см. рис. 22.2, график J), который
при 0 = 90° имеет максимальное значение. Из рис. 23 .4, б видно,
что при 0 = 90° реактивные силъ1 магнитного притяжения Fм р,
действующие на каждый поmос невозбужденного ротора, взаимно
уравновешиваются и реактИВШ,IЙ момеm Мр = О. Максимальное
значение реактивного момента Мр max наступает при значении угла
0 = 45 °. Поэтому _зависимость реактивного момента Мр от угла 0
определяется выражением
МР = Mpmax sin20.
(23.1)
Графически эта зависимость представлена кривой 2 на рис.
22.2. Непременное условие создания реактивного момеmа Мр явнопотосная конструкция ротора, так как только в этом случае
Xq -:#-Xd.
Мощность СРД и развиваемый им момент меньше, чем у син­
хронного двигателя с возбуждеШIЫМи поmосами ротора. Объясня­
ется это тем, что у СРД из-за отсутствия магнитного потока ротора
ЭДС Е0 = О, поэтому основная составляющая электромагнитного
момеmа Мосн = О [см. (21.11)] и электромагнитнь1й момеm СРД
определяется лишь реактивной составляющей (М = Мр)- Поэтому
при ощrnаковых габаритах синхронного двигателя с возбужден­
нь1ми полюсами ротора и СРД мощность на валу и развиваемый
момеm у СРД намного меньше.
К недостаткам СРД следует также отнести невысокие значе­
ния коэффициента мощности и КПД. Объясняется это значитель­
нъ1м намагничивающим током статора, так как возбуждение СРД
происходит за счет магнитного поля статора..
В СРД применяют асинхроннъ1й пуск. Для этого ротор снаб­
жают короткозамкнутой пусковой клеткой. На рис. 23.5, а показа­
на традиционная конструкция ротора СРД отличающаяся от рото­
ра асинхронного двигателя лишь наличием впадин,
обеспечивающих ротору явнопоmосную конструкцию. Чем боль­
ше эти впадинь1, тем больше отношение хd /хч , а следовательно, и
реактивный момеm Мр. Однако с увеличением впадин растет
средняя величина воздушного зазора, что ведет к повышеншо на­
магничивающего тока статора, а следовательно, к сниженшо энер306
rетических показателей двигателя - коэффШ1Ие1Па мощности и
КПД. Кроме того, с увеличением впадин сокращаются размеры
пуско,,юй клетки, что ведет к уменьшению асШIХронного момента,
т. е. к уменьшеюпо пускового моменп, и момента входа в синхро­
низм.
Наилучшие результаты дает следующее сооmошение разме­
ров ротора:
Ьп /'t = 0,5+0,6 и omax/o miп = 10+12.
В этом случае удается добиrься оmошения xd /xq ::::: 2.
Более совершенна секционированная конструкция ротора
СРД, представляющая собой ЦИЛШIДр, в котором стальные полосы
а)
6)
Рис. 23.5. Конструкция роторо_в синхронного
реактивного двигателя
2 залип.1 аmоминием 1 (рис. 23.5, б). Такая конструкция ротора
позволяет получиrь оmошение xd /xq ::::: 4+5. За счет этого суще­
стве1пю возрастает момеш Мр max при сохранении намагничиваю"
щего тока на допустимом уровне.
На торцах секционированного ротора имеются отлигые из
аmоминия кольца, замыкающие аmоминиевые прослойки ротора,
образуя короткозаМКН)'"l)'Ю пусковую клетку.
Простота конструкции и высокая эксплуатационная надеж­
ность обеспечили СРД малой мощности широкое применение в
устройствах автоматики для привода самопишущих приборов, в
устройствах звуко- и видеозаписи и других установках, требующе­
го строгого постоянства частоты вращения.
§ 23.3. Гистерезисные двигатели
•
Работа гистерезисного двигателя основана на действии г и с т е р е з и с н оr о м о м е н т а. На рис. 23.6, а показаны два полюса
постоянного магнига (поле статора); между ними расположен ци­
линдр (ротор) из магнитно-твердого материала. Под действием
внешнего магнитного поля ротор намагничивается. На стороне,
обращенной к северному полюсу постоянного магнига, возбужда­
ется южный полюс, а на стороне ротора, обращенной к южному
полюсу постоянного магнига, - северный полюс. На ротор начи307
нают действовать силы Fм, направле1П1Ые радиально к его поверх­
ности. Если поmосы постояшюго магнита вращать вокруг ротора,
то вследствие явления магнитного запаздывания (гистерезиса)
активная часть ротора не будет перемапmчиваться одновремеmю
с изменением направления вращающегося магнитного поля и ме­
жду осью поля ротора и осью внешнего поля появится угол у. Си"(
8)
а)
N
Рис. 23.6. К понятию о гистерезисном моменте
ль1 Fм, действующие на ротор, также изменят свое направление на
угол у, а тангенциальные составляющие этих сил F, создадут mс­
терезисный момеm Мг (рис. 23.6, б).
Явление магнитного запаздывания заключается в том, что
частицы ферромапmтного материала (помещенного во внешнее
мапmтное поле), представляющие собой элемешарные магннгы,
стремятся ориеIПИроваться в соответствии с направлением внеш­
него поля. Если внешнее поле изменит свое направление, то эле­
меmарные частицы меняют свою ориеmацию. Однако повороrу
элемеmарных частиц препятствуют в магнитно-твердых материа­
лах внутренние силы молекулярного трения. Для изменения на­
правления этих частиц необходима определt:нная МДС, вследст­
вие чего перемагничивание ротора несколько отстает от измене­
ния направления внешнего поля. Это отставание (магнитное за­
паздьmание) характеризуется углом гистерезисного. сдвига у меж­
ду вектором магнитного потока ротора Ф2 и вектором мапmтного
потока обмотки статора Ф 1 (рис. 23.6, в). Этот угол зависиr ис­
ключиrельно от магнитных свойств материала ротора.
На преодоление сил молекулярного трения расходуется часть
подводимой мощности, которая составляет потери на гистерезис.
Величина этих потерь зависит от частотъ1 перемаmичивания рото­
ра h =jjs, а следовательно, от скольжения:
(23.2)
Р,. = sP,.,K ;
308
где Рr.к-потери на mстерезис при неподвижном роторе (при s = 1 ),
т. е. в режиме к. з.
Так как электромагнитная мощность, передаваемая ротору,
равна потерям в роторе, деленным на скольжение [см. (13.5)]:
(23.3)
Рзм = �/s =�-к,
а вращающий момеm - электромагнитной мощности, деленной
на синхршrnую угловую скорость:
(23.4)
Mr = �м /rо 1 = �.к/rо1 ,
то, очевидно, величина гистерезисного момеmа не зависит от час-.
тоты вращения ротора (скольжения). График Мг= f(s) представ­
ляет собой прямую, параллельную оси абсцисс (рис. 23.7).
Угол гистерезисного сдвша зависит от ширины петли гисте­
резиса: чем ш� петля гистерезиса магнитного материала, тем
больше угол гистерезисного сдвига. На рис. 23.8, а представлены
две петли гистерезиса: обычной стали (кривая 2) и сплава викал­
лой (кривая J).
Применение обычной стали для изготовления ротора не обес­
печивает гистерезисного момеmа достаточной величины. Только
магнитно-твердые материалы, например такие, как викаллой, дают
возможность получить большой гистерезисный момент. Роторы
гистерезисных двшател�й обычно делают сборными. Магнитно­
твердая часть выполняется в виде шихтованного или массивного
. кольца 1, размещенного на втулке 2 (рис. 23.8, б). Последняя же­
стко посажена на вал 3.
Рис. 23.7. Механические характеристики гистерезисного
двиrателя
Рис. 23.8. Петли гистерезиса обычной
электротехнической стали и crmaвa викаллой (а) и устройство сборного_ротора
гистерезисного двигателя (б)
В маШШiах с нешихтованным (массивным) ротором· вращаю­
щееся поле статора наводит в роторе вихревые токи. В результате
взаимодействия этих токов с полем статора возникает электромаг­
нитный момеm Мв.т, значение которого пропорционально сколь­
жению:
. •
(23.5)
мв.т =s� тк /rо 1 ,
где Рв.т.к - потери на вихревые токи в роторе при s = 1, т. е. в ре­
жиме к.з., Вт; ro 1 -угловая синхронная скорость, рад/с.
309
Наибольшего значения момеm Мн достигает при неподвиж­
ном роторе (s = 1), т. е. в момеm пуска электродвигателя. Затем по
мере возрастания частоты вращения (уменьшении скольжения)
момеm Мв.т убьmает (см. рис. 23.7), при синхрошюй частоте он
станоnится
равным нуmо.
·
Таким образом, электромагнитнъrй вращающий момеm гисте­
резисного двигателя создается совместным действием момеmов
от вихревы?{ токов Мв.т и гистерезисного Мг :
(23.6)
м = мв.т + мт = s�_тк/rо 1 + Р,_к/rо 1 .
На рис. 23.7 представлена зависимость результирующего мо­
мента гистерезисного двигателя от скольжения: М = f(s). Харак­
тер этой крцвой зависит от соотношения моментов Мв.т и Мг.
Гистерезиснъrй двигатель может работать с синхронной и
асинхронной частотами вращения. Однако работа двигателя в
асинхронном режиме неэкономична, так как связана со значитель­
ными потерями на перемагничивание ротора, величина которых
возрастает с увеличением скольжения.
ДостоШiства гистерезисных двигателей - простота конструк­
ции, бесшумность и надежность в работе, большой пусковой мо­
мент. плавность входа в синхронизм, сравнительно высокий КПД,
малое изменение кратности тока от пуска до номинальной нагруз­
ки (/п //ном =1,3-1,4).
Недостатки mстерезисных двигателей - низкий коэффшхиент
мощности ( cosq> 1 = 0,4--0,5) и сравцительно высокая стоимqсть.
Кроме того, при резких колебаниях нагрузки гистерезисные двига­
тели склоннъ1 к качаниям, что создает неравномерность хода
(вращения). Объясняется это отсуrствием у mстерезисных двига­
телей пусковой клетки, которая при резких изменениях нагрузки
оказывает на ротор успокаивающее (демпфирующее) действие.
Наиболее сильные качания набmодаются у шихтованного ротора,
в котором вихревые токи сильно ограничены. Вызьmаемая кача­
ниями неравномерность вращения ограничивает области примене­
ния гистерезисных двигателей.
§ 23.4. Шаговые двигатели
Шаговые (импульснъ1е) двигатели (ШД) используют обычно в
качестве исполнительных двигателей, преобразующих электриче­
ские сигналь� (импульсы напряжения) в угловые или линейные
дискретные (скачкообразные) перемещения (шаги). Наибольшее
применение ШД получили в электроприводах с программным
управлением.
Различают шаговые двигатели с активным (возбуЖденнъ1м) и
реактивным ротором. Шаговые двигатели с а к т и в н ы м рото­
ром имеют обмотку возбУЖдения или выпоJПiены с постояннъ1ми
магнитами на роторе; шаговые двигатели с р е а к т и в н ы м рото­
ром не имеют обмотки возбУЖдения, а их ротор вьmолняют из ·
310
магНИ11Iо-мягкого материала. Обмотку управления ll1Д обычно
располагают на статоре и делают одно- или многофазной (чаще
трех- или четырехфазной).
Рассмотрим прИIЩИП действия шагового двигателя на примере
реактивного трехфазною llIД, статор которого имеет шесть явно
выраженных полюсов (по два поmоса на фазу), а ротор-- два по­
люса (рис. 23.9).
60'
1
ао·
120·
.-�.....
.
•2
1
:
t
о
t,
t
Рис 23.9. Принцип действия реактивного шагового двигателя
При прохождении импульса тока в фазе 1 обмотки управления
ротор занимает положение, соответствующее действшо электро­
маrnи111ых сил, т. е. по оси полюсов 1-1. В момент времени t 1
появится импульс тока в фазе 2. При этом на ротор будут действо­
вать силы, обусловлеШIЫе одновремеш1ым воздействием двух
. МДС (полюсов 1-1 и 2-2). В результате ротор повернется по
часовой стрелке и займет положение, промежуточное между по­
люсами 1-1 и 2-2, т. е. повернется на шаг aw = 30°. В момент t2
импульс тока в фазе J прекратится и ротор, сделав шаг aw = 30° ,
займет положение по оси полюсов 2-2. В момент t3 появится им­
пульс тока в фазе 3 и ротор, повернувшись еще на 30°, займет по­
ложение между полюсами статора 2-2 и 3-3. В моме1пы време­
ни t4, fs и tб ротор также будет совершать шаги по 30° и в кшще
цикла (момент t6) займет положение по оси полюсов статора 1-1,
совершив за этот ЦИЮI поворот на 180°.
311
В последующие циклы процессы ·в· 11IД будут повторяться.
Таким образом, рассматриваемый реактивный трехфазный 11IД
работает по шеститактной схеме коммутации с р а з д е л ь н о обмоток
включением
ф а з ны х
совместным
у п р а в л е н и я: 1 ➔ 12 ➔ 2 ➔ 23 ➔ 3 ➔ 3 1 ➔ ....
Работают реактивные 11IД от однополярных импульсов напряже­
. ния, так как изменение полярности ЭП1Х импульсов не изменяет на­
правления реактивного момеIПа. Для изменения направления враще­
ния ротора рассматриваемого ШД необходимо изменить схему
коммуrации обмоток, например 1 ➔ 1 3 ➔ 3 ➔ 32 ➔ 2 ➔ 21 ➔ ....
Если в этом двшателе применить раздельное вюпочение об­
моток, т. е. принять схему коммутации 1 ➔ 2 ➔ 3 ➔ ..., то шаr
двигателя aw = 60 °.
Шаг двшателя (град)
(23.7)
a w = 360 °/(2p2 myk) ,
где 2р2 - число полюсных выступов на роторе; ту - число фаз­
ных обмоток управления, пространственно смеще1rnых относи­
. тельно друг друга; k - коэффициеш, определяемый способом
вюпоч�ния фазных обмоток управления (при раздельном включе­
нии k = 1, при раздельно-совместном - k = 2).
Уменьшение шага aw способствует повышению устойчивости
и точности работы ШД. Для уменьшения шага a.w увеличивают
число полюсных выступов на роторе 2Р2 , Так, если в рассматри­
ваемом двигателе применить ротор крестообразного сечения
(2р2 = 4), то при шеститактной коммутации шаг aw = 15 °.
Шаговые.двигатели с активным ротором (с обмоткой возбуж­
дения или постояш1ыми магнитами на роторе) позволяют полу­
чить большие значения вращающего момеша, а также обеспечи­
вают фиксацшо ротора при отсутствии управляющего сигнала.
Один из важных параметров ШД - частота приемистости максимальная частота следования управляющих импульсов, при
которой ротор втяrnвается в синхронизм с места без потери шага.
У шаговых двигателей реактивного тШiа частота приемистости
при номинальной нагрузке достигает 1000--1300 Гц. С увеличе­
нием шага частота приемистости уменьшается. Шаговый двига­
тель работает в комплекте с коммутатором - устройством, преоб­
разующим заданную последовательность управляющих импульсов
в т-фазную систему прямоугольных импульсов напряжения.
При рассматривании прИНЦШiа работы шагового двигателя
влияние нагрузочного момеша на валу двшателя не учитывалось.
Если же на вал шагового двигателя действует наrрузочнь1й момент
Мн, то при переключении управляющего импульса с одной фазы
на друrую МДС статора повернется на угол aw, а ротор двигателя,
поворачиваясь за вектором МДС, будет отставать от него на угол
Л0 с, называемый углом статической ошибки шагового двигателя,
эл. град:
лес= arcsin(Mн/ Mrnax ),
312
где Mmax - максимальный статический момеm, соответствующий
углу смещения ротора относительно вектора МДС статора 0 = 90
эл. град.
Быстродействие шаговых двигателей определяется скоростью
протекания электромагниmых процессов при переключении
. управляющих импульсов напряжения · с одной фазы статора на
друrую. Скорость протекания этих процессов оценивается элек­
тромагнитной постоянной времени, с
Тэ = LФ frФ '
где LФ - ШIД)'КТивность обмотки одной фазы статора, Гн; r Ф активное сопротивление обмотки одной фазы статора, Ом.
Для повышения быстродействия шагового двигателя в обмот­
ки фаз статора последовательно включают резисторы Rдоб, тогда
Тэ = LФ/(rФ + Rдоб).
Энергетическим показателем шагового двигателя является
значение потребляемой мощности Р1 • Частота вращения шагового
двигателя регулируется изменением частоты подачи управляющих
импульсов напряжения на фазы обмотки статора.
§ 23.5. Синхронный rенератор
с коnеобразными полюсами и
электромаrнитнь1м возбуждение.м
Такие синхронные генераторы широко применяются в авто­
тракторном электрооборудовании. На выходе генератора включа­
ют полупроводниковый выпрямитель (рис. 23.10, а), поэтому ге­
нератор выполняет функцию источника постоянного тока. Ротор
генератора имеет конструкцшо, аналогичную рис. 23.3, 6, отлича­
ясь наличием обмотки возбуждения вместо постоянного магнита.
Когтеобразная конструкция ротора позволяет возбудить мно­
гополюсный ротор посредством одной катушки возбуждения,
подключаемой к источнику постоянного тока через конrактные
кольца и щетки. В таком роторе аксиально направленный магнит­
ный поток возбуждения меняет свое направление в воздушном
зазоре и становится радиально направленным (рис. 23.10, 6). Рас-
Рис. 23.10. Принципиальная схема вюпочения (а) и
магнитная система синхронного генератора (б) с коr­
теобразными полюсами
313
сматриваемый генератор отличается простотой конструкции, ком­
nактностью, надежностью и высокой технолог»чНостъю. Послед­
нее достоинство имеет важное значение в условиях массового
производства сшпсршrnых генераторов с копеобразными полюса­
ми. Обычно эm генераторы изготовляются небольшой мощности
(менее 1 кВ·А). В схеме электрооборудования генератор включают
параллельно с аккумуляторной батареей, и он работает с ней в бу­
ферном режиме, т. е. они дополняют друг друга в зависимосm от
величш1ы нагрузки и частоты вращения приводного двигателя.
На рис. 23.11 показано устройство автомобильного сшпсрон­
ного генератора типа Г-250. Статор 8 этого генератора представ­
ляет собой шихтованный пакет, на 18 зубцах которого расположе­
ны катушки 7, образующие трехфазную обмотку, соединенную
звездой. Ротор состоит из вала, на который напрессованы две
стальные шайбы с отогнутъ1ми копеобразными полюсами 2 (по
шесть полюсов на каждой шайбе). На стальную вrулку 1 О надета
цилиндрическая катушка возбуждения 9, концы которой присое­
динены к контактным кольцам 5. На кольца наложены медно-
Рис. 23.11. Устройство синхронного генератора с копеобразными ло­
тосами
314
графиговые щетки 6. На заднем подIШПIНИКовом щиrе 4 располо­
жен выпрямигельный блок из шести креМIШевых диодов 3, соеди­
ненньIХ по мостовой схеме (см. рис 23.10, а). ПодIШШНИКовые щи­
ты 1 и 4 и сердечник статора ст.януrьi трем.я болтами. На валу
генератора укреплены центробежный вентилятор 11 и шкив 12,
· посредством которого ротор генератора приводится во вращение.
§ 23.6. Индукторные синхроннь,е маwины
Некоторые устройства, например установки индукционного
нагрева, гироскопические и радиолокационнь1е устройства, тре­
буют для своей работы переменного тока повьппенной частоты,
выражаемой сотнями и даже тысячами герц. Получение таких пе­
ременньIХ токов посредством синхронньIХ генераторов обычной
конструкции сопряжено с непреодолимыми трудностями, так как
связано с необходимостью либо увеличения частоты вращения
свьппе 3000 об/МШI, либо чрезмерного увеличения числа поmосов,
либо одновременного применения обоих мероприятий. Однако
увеличение частоты вращения ведет к возрастанию центробежньIХ
усилий в роторе до опасньIХ значений, а увеличение числа поmо­
сов ведет к такому уменьшенmо поmосного деления 't, при кото­
ром размещение обмотки на статоре становите.я практически не­
возможным.
Для получения переменного тока повышенной частоты (до 30
кГц) примеНЯ10т и н д у к т о р н ы е г е н ера т о р ы, отличиrель­
ным признаком которых .является то, что за одm1 период магнит­
ный поток в них не меняет своего знака,_как в обычньIХ синхрон­
НЬIХ генераторах, а лишь изменяется от Фmах до Фmin значений, т. е.
пульсирует (рис. 23.12, а). Пульсирующий поток состоит из двух
составляющих: постояmюй Фср и переменной Фnер, представляющей
собой периодически изменяющийся как по значению, так и по направлению магниmый поток с амrunпудой Ф пер = 0,5(Ф max - Ф min ) •
Постоянная составляющая потока не наводит в обмотках ЭДС, а
переменная составляющая, сцепляясь с рабочей обмоткой генера­
тора, наводит в ней ЭДС.
Существует несколько конструктивньIХ схем индукторньIХ ге­
нераторов. Все они основаны на создании пульсаций магнитного
потока за счет изменения проводимости магнитной цещ,�:, т. е. за
счет• зубцовьIХ пульсаций магнитного потока. Для этого статору и
ротору генератора придают зубчатую структуру. Когда зубец ро­
тора находится против зубца статора, то магнитный поток в зубце
статора приобретает !Jаибольшее значение, когда же против зубца
статора расположен паз ротора, то магнитный поток в ·этом зубце
статора становите.я наименьшим. При этом частота изменений пе­
ременного магнитного потока, а следовательно, и частота ЭДС,
наведенной в рабочей обмотке этим потоком, пропорциональны
числу зубцов ротора Z2 :
(23.8)
315
Рассмотрим: одну из конструкщm индукторного генератора,
называемую сдвоеmюй (рис. 23.12, б). Статор 1 и ротор 5 генера­
тора выполнены сдвое1rnыми. Обмотка возбуждения 2, распола­
гаемая на статоре, подключена к источнику постояююго тока и
создает магнипn.IЙ поток, замыкающийся вдоль вала ротора 4, при
этом на каждой части статора (и ротора) возбуждаются поmосы
одной полярности. Число зубцов на статоре и на роторе одинако­
во. Пульсации магmпного потока происходят за счет смещения
aJ
ф
2
б)
t
ф
о
t
�
вi [Ш5
Г--'�
Статор
-.
Ле6ая часть
•
Ротор .
с:
·
- tm
4 W''\�.
1.
Пра6а11 vасть
Рис. 23.12. Индукторный генератор сдвоенного типа:
а� график магнитного потока; б - устройство генератора; в - взаимное рас­
положение зубцов статора и ротора
зубцов вращающегося ротора относительно зубцов статора. На
каждом зубце статора расположена ка'I)'Шка 3, в которой перемен­
ной составляющей магнитного потока наводится ЭДС.
Весьма важным в индукторных генераторах является обес­
печение постоянства общего магнитного потока при вращении
ротора, так как в противном случае в обмотке возбуждения 2
будет индуцироваться ЭДС высокой частоты. В рассматривае­
мом индукторном генераторе постоянс.тво общего магнитного
потока обмотки возбуждения обеспечивается тем, что один па­
кет ротора смещен относительно другого пакета на поло.вину
зубцового деления (рис. 23.12, в). Благодаря этому магнитное
сопротивление суммарному потоку возбуждения остается не­
изменным при любом положении ротора. Это позволило ротор
генератора сделать стальным монолитным (а не шихтованным)
с профрезерованными пазами.
Коэффициент полезного действия генераторов индукторного
типа несколько ниже, чем у генераторов промышленной частоты
(50 Гц), из-за повьппенных электрических потерь в обмотке стато­
ра, обусловленных эффектом вьпеснения тока, вызывающего уве­
личение активного сопротивления обмотки. Отсутствие обмоток
316
11а роторе позволяет искточить в индукторном генераторе кон­
так-mые кольца. Эrо упрощает конструкцию генератора и повы­
шает его надежность.
Генераторы индукторного типа применяются в качестве
возбудителей турбогенераторов серии ТВВ (см.§ 19.1). На рис.
·2з.1З показано устройство такого возбудителя - генератора
индукторного типа мощностью 2700 кВ·А. В отличие от индук­
торного генератора сдвоенного типа (см. рис. 23.12) ротор воз­
будителя имеет шихтованную конструкцию. Вентиляция гене­
ратора выполнена по замкнутому . циклу (см. § 31.4) с приме­
нением газоохладителей.
Индукторная синхронная машина обратима, т. е. она может
работать не только в генераторном, но и в двшательном режиме.
Ин д у к т о р н ы е с и н х р о н н ы е д в и г а т е л и позволяют по­
лучать весьма малые частоты вращения без применения механиче­
ских редукторов. Синхронная частота вращения такого двигателя
при частоте питающего напряженияjj зависиr от числа зубцов Z2 в
сердечнике ротора: п1 = fi · 60/Z2 . Например, при Jj = 50 Гц и
Z2 = 100 получим п1 = 50 · 60/100 = 30 об/МШI.
Для получения вращающегося магниrного поля обмотку ста­
тора индукторного двигателя делают либо трехфазной, либо од­
нофазной. В последнем случае на статоре помимо рабочей распо­
лагают еще и пусковую обмотку, вкточаемую в сеть через
пусковой конденсатор.
Рис. 23.13. Возбудитель индукторного типа мощностью 2700 I<В·А:
1 - статор; 2 - ротор; 3 - гаэоохладигель
317
Контрольные вопросы
1. Почему при �ске синхронного двигателя с посто.1rnными магнитами возни­
кает тормознои моменr?
1. Объ.11сните физическую сущность реактивного момеtпа.
3, Как вЛИ.11ет глубина межпоmосных впадин ротора на рабочий и пусковой моменты реактивного двигателя?
4. Объ.11сните физическую сущность гистерезисного момеtпа.
5. В чем различие шаговых двигателей с активным и реактивным роторами?
6. Как изменитс.11 шаг двигателя, если от раздельного вкmочения обмоток пе­
рейrи к раздельно-совместному?
7. Что такое частота приемистости шагового двигателя?
8. Чем достигается больша.11 частота пульсаций магнитного потока в шщуктор­
ном генераторе?
9. Почему ротор шщукторноrо генератора на рис. 23.12 имеет монолиrную
конструкцию, а на рис 23.13 - шихтованную?
Разд е л
КОЛЛЕКТОРНЫЕ
МАШИНЫ
•
•
•
•
•
•
Принцип действия Электрические машины по­
стоянного тока используются
и устройство
как в качестве генераторов,·
коллекторных
так и в качестве двигателей.
маwин
Наибольшее применение име­
постоянного тока
ют двигатели постоянного то­
ка, области применения и
диапазон мощности которых
достаточно широки: от долей
-Обмотки якоря
ватт
(для привода устройств
маwин
автоматики) до нескольких
постоянного тока
тысяч киловатт (для привода
прокатных станов, шахтных
подъемников и других меха­
низмов). Двигатели постоян­
ного тока широко используют­
Магнитное попе
ся для привода подъемных
маwины
средств в качестве. крановых
постоянного тока
двигателей и привода транс­
портных средств в качестве
тяговых двигателей. Основ­
ные преимущества двигате­
лей постоянного тока по срав­
нению с бесколлекторными
Коммутация
двигателями переменного то­
в маwинах
ка - хорошие пусковые и ре­
. постоянного тока
гулировочные свойства, воз­
можность получения частоты
вращения более 3000 об/мин,
а недостатки - относительно
высокая стоимость, некоторая
Коллекторные
сложность
в изготовлении и
генераторы
пониженная
надежность. Все
постоянного тока
эти недостатки машин посто­
янного тока обусловлены на­
личием в них щеточно-коллек­
торного узла, который к тому
же является источником ра­
Коллекторные
диопомех и пожароопасности.
двигатели
Эти недостатки ограничивают
применение машин постоян-
з 19
•
Машины
постоянного тока
специального
назначения
•
Охлаждение
электрических
машин
ного тока.
В данном разделе рассмотре­
ны машины постоянного тока
общего назначения, получив­
шие наибольшее применение
в современном электроприво­
де. Рассмотрены таюке неко­
торые виды машин постоянно­
го тока специального назна­
чения, главным образом при­
меняемые в устройствах ав­
томатики.
В заключение следует отме­
тить, что наибольшее практи­
ческое применение получили
машины постоянного тока в
качестве электродвигателей.
Объясняется зто возрастаю­
щим применением в качестве
источников постоянного тока
полупроводниковых выпрями­
тельных устройств, имеющих
более высокие технико-эконо­
мические показатели по срав­
нению с коллекторными гене­
раторами постоянного тока.
.
'
Принцип действия
- и устройство
коллекторных
.машин
постоянного тока
rпава24•
§ 24.1. Принцип действия
rенератора и двиrателя
постоянноrо тока
Характерным признаком коллекторных машин
является наличие у них коллектора - механическо­
го преобразователя переменного тока в постоянньIЙ
и наоборот. Необходимость в таком преобразователе
объясняется тем, что в обмотке якоря коллекторной
машины должен протекать перемеmп,IЙ ток, так как
только в этом случае в машине происходит непре­
рывнъIЙ процесс электромеханического преобразо­
вания энергии..
Рассмотрим прИНЦШI действия коллекторного
генератора постоянного тока. На рис. 24.1 изобра­
жена упрощенная модель такого генератора: между
поmосами N и S постоянного магнита находится
вращающаяся часть генератора - якорь, вал кото­
рого посредством шкива и ременной передачи меха­
нически связан с приводнъIМ двигателем (на рисунке
не показан) - источником механической энергии. В
двух продольных пазах на сердечнике якоря распо­
ложена обмотка � виде одного вшка abcd, кшщы
которого присоединены к двум медньIМ изолирован­
НЬIМ друг от друга полукольцам, образующим про­
стейший коллектор. На поверхность коллектора на­
ложены щетки А и В, осуществляющие скользящий
контакт с коллектором и связывающие генератор с
внешней цепью, куда вКЛIQчена нагрузка сопротив­
лением R.
Предположим, что приводной двигатель враща­
ет якорь генератора против часовой стрелки, тогда в
вшке на якоре, вращающемся в магнитном поле по­
стоянного h:{аrнита, наводится ЭДС, мгновенное зна­
чение которой е = 2Blv , а направление для положе­
ния якоря, изображенного на рисунке, · указано '
стрелками.
В процессе работы генератора якорь вращается
и виток abcd занимает разное пространственное по­
ложение, поэтому в обмотке якоря наводится
321
переменная ЭДС. Если бы в машине не было коллектора, то ток во
внешней цепи (в нагрузке R) бьт бы .переменным, но посредством
коллектора и щеток переменный ток обмотки якоря преобразуется
в пул ь с и рую щ и й ток во внешней цепи генератора, т. е. ток,
неизменный по направлению. При положении витка якоря, пока­
занном на рис. 24.1, ток во внешней цепи (в нагрузке) направлен
от щетки А к щетке В; следовательно, щетка А является положи-
+
1
i
1
1
1
1
.J
_.,.
,,,,,,,,
1 •-"'.,,
1 ,,
�---J'
Рис. 24.1. Упрощенная модель кшmекторной машины
'
тельной, а щетка В - отрицательной. После поворота якоря на
180° (рис. 24.2, а) направление тока в витке якоря изменится на
обратное, однако полярность щеток, а следовательно, и направле­
ние тока во внешней цепи (в нагрузке) останутся неизмею1ыми
(рис. 24.2, б). Объясняется это тем, чго в тот момент, когда ток в
витке якоря меняет свое направление, происходит смена коллек­
торных пластин под щетками. Таким образом, под щеткой А все­
гда находится пластина, соединенная с проводником, расположен­
ным под северным магнитным поmосом, а под щеткой В пластина, соединенная с проводником, расположенным под юж­
ным поmосом. Благодаря этому полярность щеток генератора ос­
тается неизменной независимо от положения витка якоря. Что же
касается пульсаций тока во внешней цепи, то они намного ослаб­
ляются при увеличении числа витков в обмотке якоря при их рав­
номерном распределении по поверхности якоря и соответствую­
щем увеличении числа пластин в коллекторе.
В соответствии с пршщипом обратимости электрических ма­
шин упрощеЮiая модель машины постоянного тока может быть
использована в качестве двигателя постоянного тока. Для этого
необходимо откmочить нагрузку генератора R и подвесm к щет­
кам маппmы напряжение от истоЧНИI<а постоянного тока. Напри­
мер, если к щетке А подкточитъ зажим «плюс», а к щетке В <<минус», то в обмотке якоря появится ток/, направление которого
322
· показано на рис. 24.3. В результате взаимодействия этого тока с
магнитным полем постояшюго магюпа (полем возбуждения) поя­
вятся электромагmпные силы Fэм, создающие на якоре электро­
магниrный момент М и вращающие его против часовой стрелки.
После поворота якоря на 180° электромагнитные силы не изменят
своего направления, так как одновременно с переходом каждого
aJ Jfa=OJ
f
Лfa=9D°J шra=tB0°J Nfa=210°J тzra�Jб0 °J
1
[jj +��
2
D::J.
/
f
�
--.... ''
i-.
+ - /
/
/
[jj
''
/
270
"360
o ,.._-�90"="'"""-�!t-----,-----¼--
Рис. 24.2. К прmщип)' действия генератора постоянного тока:
__ ЭДС и ток в обмотке якоря; _____ ЭДС и ток во внешней цепи
генератора
проводника обмотки якоря из зоны одного магнитного поmоса в
зону другого полюса в этих проводниках меняется направление тока.
Таким образом, назначение коллектора и щеток в двигателе
постоянного тока - изменять направ­
ление тока в проводниках обмотки яко­
ря при их переходе из зоны магниrного
поmоса одной полярности в зону поmо­
са другой полярности.
м
Рассмотренная упрощенная модель
машшп,1 постоянного тока не обеспечи­
вает двШ"Зтеmо устойчивой работы, так
как при прохождеmm проводниками J21---__,�-�
обмотки якоря геометрической нейтра­
ли пп' (рис. 24.3) электромагнитныt;
силы Fэм = О (магнитная ющующя в
середине межпоmосного пространства
равна нуmо). Однако с увеличением
Рис. 24.3. К принципу
числа проводников в обмотке якоря
(при равномерном их распределении на действия двигателя посто­
янного тока
323
поверхности якоря) и числа пластин коллектора вращение якоря
двигателя становиrся устойчивым и равномерным.
§ 24.2. Устройство коллекторной маwины
постоянноrо тока
В настоящее время электромашино_строиrельные заводы изго­
товляют электрические маШШIЫ постоянного тока, предназначен­
ные для работы в самых различных отраслях промьПШiенности,
поэтому отдельные узлы этих машин могут иметь разную конст­
рукцюо, но общая конструктивная схема машин одинакова. Не­
подвижная часть машш1ы постоянного тока назьmается статором,
5
6
7
,2
Рис. 24.4. Устройство машины постоянноrо тока
вращающаяся часть-якорем (рис. 24.4).
Статор. Состоиr из станины 6 и главных поmосов 4. С т а - ·
н и н а 6 служит для креплеlШЯ поmосов и подшипниковых щиrов
и является частью магниrопровода, так как через нее замыкается
магнитный поток машины. Станину изготовляют из стали - ма­
териала, обладающего достаточной механической прочностью и
большой магнитной прошщаемостью. В нижней часm станины
имеются лапы 11 для крепления машины к фундаментной плите, а
по окружносm станины расположены отверстия для крепления
сердечников глайJIЫх поmосов 4. Обычно станину делают цельной
из стальной трубы, либо сварной из листовой стали, за искmоче­
нием машин с весьма большим наружным диаметром, у которых
324
станину делают разъемной, что облегчает транспортировку и мон­
таж машины.
Г л а в н ы е п о л ю с ы предназначены для создания в маШШiе
магнитного поля возбуждения. Главный полюс состоит из сердеч­
ника 6 и полюсной ка'I)'ШКИ 5. Со стороны, обращешюй к якорю,
сердечник полюса имеет поmосный наконечник, который обеспе­
чивает необходимое распределение магнитной индукции в зазоре
маrшmы. Сердечники главных полюсов делают шихтованными из
листовой конструкционной ·стали тотциной 1-2 мм или из тон­
колистовой электротехнической анизотропной холоднокатаной
стали, например марки 3411. Штампованные пластины главных
полюсов специально не изолируют, так как тонкая пленка окисла
на их поверхности достаточна для значительного ослабления вих­
ревых токов, наведенных в полюсных наконечниках пульсациями
магнитного потока, вызванного зубчатостью сердечника якоря.
Анизотропная сталь обладает повьппенной магнитной проющае­
мостью вдоль проката, чrо должно учитываться при штамповке
пластин и их сборке в пакет. Пониженная магнитная проющае­
мость поперек проката способствует ослаблению реакции якоря
{см. § 26.2) и уменьшению потока рассеяния главных и добавоч­
ных полюсов (см. § 26.1).
В маШШiах постоянного тока небольшой мощности полюсные
катушки делают бескаркасными - намоткой медного обмоточно­
го провода непосредственно на сердечник полюса, предварительно
наложив на него изоляционную прокладку (рис. 24.5, а). В боль­
ШШiстве машин (мощностью 1 кВт и более) полюсную катушку
делают каркасной: обмоточный провод наматывают на каркас
(обычно пластмассовый), а затем надевают на сердечник полюса
(рис. 24.5, б). В некоторых конструкциях. машин полюсную ка­
тушку для более интенсивного охлаждения разделяют по высоте·
на части, между которыми оставляют вентиляционные каналы.
Якорь. Якорь машины постоянного тока (рис. 24.4) состоит из
вала 1О, сердечника 3 с обмоткой и коллектора 1. С е р д е ч н и к
я к о р я имеет шихтованную конструкцmо и набирается из штам­
пованных пластин тонколистовой электротехнической стали. Лис­
ты покрьmают изоляционным лаком, собирают в пакет и запекают.
Готовый сердечник напрессовьmают на вал якоря. Такая конст­
рукция сердечника якоря позволяет значительно ослабить в нем
вихревые токи, возникающие в результате его перемагничивания в
процессе вращения в магнитном поле. На поверхности сердечника
якоря имеются продольные пазы, в которые укладьmают обмотку
якоря.
Об м о т к у вьmолняют медным проводом круглого или пря­
моугольного сечения. Пазы якоря после заполнения их проводами
обмотки обычно закрьmают клиньями (текстолитовыми или гети­
наксовыми). В некоторых машинах пазы не закрьmают клиньями.
а накладьmают на поверхность якоря бандаж. Бандаж делают из
проволоки или стеююленть1 с предварительным натягом. Лобовые
части 9 обмотки якоря крепят к обмоткодержателям бандажом.
325
К о л-л е к т о р J является ОДIШМ из сложных узлов машины
постоянного тока. Основными элементами коллектора являются
пластины трапецеидального сечения из твердотянуrой меди, соб­
ранные таким образом, что коллектор приобретает цилиндриче­
скую форму. В зависимости от способа закрепления коллекторных
пластин различают два основных типа коллекторов: со стальными
Рис. 24.5. Главные поmосы с бескаркасной (а) и каркасной (б) по­
mосными катушками:
1 - стаюmа, 2 - сердечник поmоса, 3 - пomoCIOUI ка1)'П1К3
конусными шайбами и на пластмассе. На рис. 24.6, а показано
устройство коллектора со стальными конусными шайбами. Ниж­
няя часть коллекторных. пластин 6 имеет форму «ласточкина хво­
ста». После сборки коллектора эти части пластин оказьmаются за­
жатыми между стальными шайбами J и 3, изолировашп,IМИ от
медных пластин миканитовыми манжетами 4. Конусные шайбь1
стянуты винтами 2. Между медными пластинами расположены
миканитовые изоляционные прокладки. В процессе работы маши-
,
2
Рис. 24.6. Устройство коллек­
тора с конусными шайбами
ны рабочая поверхность коллектора постепенно истирается щет­
ками, Чтобы при этом миканитовые прокладки не выступали над
рабочей поверхностью коллектора, что вызвало бы вибрацию ще326
ток и нарушение работы машины, между коллекторными пласти­
нами фрезеруют пазы (дорожки) на глубину до 1,5 мм (рис. 24.6, б).
Верхняя часть 5 коллекторных пластин (см. рис. 24.6, а), называе­
мая петушком, имеет узкий продольный паз, в который заклады­
вают проводники обмотки якоря и тщательно припаивают.
Рис. 24.7. Устройство коллектора
на Шiастмассе
Рис. 24.8. Щеткодержатель (сдво­
еЮIЫй) машины постоянного тока
В машинах постоянного тока малой мощности часто приме­
няют коллекторы на пластмассе, отличающиеся простотой в из­
готовлеmm. Набор медных и миканитовых пластин в таком кол­
лекторе удерживается пластмассой, запрессованной в пространст­
во между набором пластин и стальной втулкой 4 и образующей
корпус коллектора. Иногда с целью увеличения прочности коллек­
.тора эту пластмассу 2 армируют стальными кольцами 3 (рис. 24.7).
В этом случае миканитовые прокладки должны иметь размеры
большие, чем у медных пластин 1, что исключит замыкание пла­
стин стальными (армирующими) кольцами 3.
Электрический контакт с коллектором осуществляется по­
средством щеток, располагаемых. в щеткодержателях 4 (см. рис. 24.4).·
Щеткодержатель (рис. 24.8) состоит из обоймы 4, в которую
помещают щетку 3, курка 1, представляющего собой откидную
деталь, передающую давление пружины 2 на щетку. Щеткодержа­
тель крепят на пальце зажимом 5. Щетка снабжается гибким тро­
сиком 6 для включения ее в электрическую цепь машины. Все
щеткодержатели одной полярности соединены между собой сбор­
ными шинами, подключе1rnыми к выводам машины. Одно из ос, новных условий бесперебойной работы машшп.1 - плотный и на­
дежный контакт между щеткой JI коллектором. Давление на щетку
должно быть отрегулировано, так как чрезмерный нажим может
вызвать преждевремеmn,IЙ износ щетки и перегрев коллектора, а
недостаточныj{ нажим - искрение на коллекrоре.
Помимо указашп.IХ частей маIШJНа постоянного тока имеет
два подшипниковьIХ щита: передний 12 (со стороны коллектора) и
задний 7 (см. рис. 24.4). В центральной части щита имеетс:я рас­
точка под подшипник. На переднем подшипниковом щите име­
ется смотровое окно (люк) с крышкой, через которое можно ос327
мотреть коллектор и щетки не разбирая машины. Ко1щы обмоток
выведены на зажимы коробки выводов. Вентилятор 8 служит для
самоветиляции машит,�: воздух поступает в машину обычно со
· стороны коллектора, омывает нагретые части (коллектор, обмотки
и сердечники) и выбрасывается с противоположной стороны через
решетку.
Из рассмотрения прИIЩIШа действия и устройства коллектор­
ной машины постоЯЮJоrо тока следует, что непременным элемен­
том этой машины, включеюп,�м между обмоткой якоря и внешней
сетью, являеtся щеточно-коллекторный узел - механический
· преобразователь рода тока. Таким образом, коллекторные машины
сложнее бесколлекторных машин переменного тока (асинхронной
и синхронной) и, следовательно, ус'I)'Пают им (особенно асин­
хронной машине) в надежности и имеют более высокую стои­
мость.
Контрольные вопросы
1.
2.
3.
4.
Каково назначение коллектора в генераторе и двигателе?
Почему стаюmу машины делают из стали?
Каково назначение конусных шайб в коллекторе?
Зачем в коллекторе на IVIacтмacce применяют армирующие кольца?
Глава 25• Обмотки якоря·
-машин
постоянного тока
§ 25.1. Петлевые обмотки якоря
Основные понятия. Обмотка якоря машины
постояююrо тока представляет собой замкнутую
систему проводников, определе1rnым образом уло­
же1rnых на сердечнике якоря и присоедине1rnых к
коллектору.
Элементом обмотки якоря является 'секция (ка1)'ШКа), присоединенная к двум коллекторным ш�а­
стинам. Расстояние между пазовыми частям.и секции
должно быть равно или мало отличаться от полюс. ноrо деления t [см. (7.1)] (рис. 25.1):
t=тtDa /(2p).
(25.1)
Здесь Da - диаметр сердечника якоря, мм.
Обмотки якоря обычно вьmолняют двухслой­
ными. Они характеризу�отся следующими парамет­
рами: числом секций S; .числом пазов (реальных) Z;
числом секций, приходящихся на один паз, Sn = S/Z;
числом витков секции wc ; числом пазовых сторон в
обмотке N; числом пазовых сторон в одном пазу
пп = N/Z = 2wcSO • Верхняя пазовая сторона одной
секции и нижняя пазовая сторона другой секции,
лежащие в одном пазу, образуют элементарный паз.
Число элементарных пазов в реальном пазе Zn опре­
деляется числом секций, приходящихся на один паз:
S0 = S/Z (рис. 25.2).
Схемы обмоток якоря делают р а з в е р н у т ы м и, при этом все секции показывают одновитковы­
ми. В этом случае каждой секщrn, содержащей две
пазовые стороны, соответствует один элементарный
паз. Концы секций присоединяют к коллекторным
пластинам, при этом к каждой пластине присоеди­
няют начало одной секции и конец другой, т. е.. на
каждую секцию приходится одна коллекторная пла­
стина. Таким образом, для обмотки якоря справед­
ливо S = Zэ = К, где Zэ - число элементарных пазов;
К - число коллекторных пластин в· коллекторе.
Число секций, приходящихся на один реальный паз,
определяется отношением ZJZ.
329
Простая петлевая обмотка якоря. В простой петлевой об­
мотке якоря каждая секция присоединена к двум рядом лежащим
коллекторным пластинам. При укладке секций на сердечнике яко­
ря начало каждой последующей секции соединяется с коIЩом
предыдущей, постепеmю перемещаясь при этом по поверхности
якоря (и коллектора) так, что за один обход якоря укладъmают все
секции обмотки. В результате конец последней секции оказывает­
ся присоединенным к началу первой секции, т. е. обмотка якоря
замыкается.
На рис. 25.3, а, б изобра­
жены части развернуrой схемы
простой петлевой обмотки, на
которых показаны шаги об­
мотки - расстояния. между
пазовыми сторонами секций по
якорю: первый частичный шаг
по якорю у 1, второй частич­
ный шаг по якорю У2 и резуль­
тирующий шаг по якорю у.
Если укладка секций об­
мотки ведется сл�а направо
Рис. 25.1. Расположение пазовых по якорю, то обмотка назьmа­
сторон секции на сердечнике якоря ется правоходовой (рис. 25.3, а),
а если укладка секций ведется
справа налево, то обмотка на­
зывается левоходовой (рис.
25.4, б). Для правоходовой об­
мотки результирующий шаг
п•ff?""
у= У, = У2.
(25.2)
,;,;
�•l,
1•21,
l•Jl•
Расстояние между двумя
коллекторными
пластШiами, к
Рис. 25.2.Элементарные пазы
которым присоединены начало
и конец одной секции, называют шагом обмотки по коллектору Ук·
Шаги обмотки по якорю выражают в элементарных пазах, а шаг
по коллектору-в коллекторных делениях (пластинах).
Начало и конец каждой секции в простой петлевой обмотке
присоединены к рядом лежащим коллекторным пластинам, следо­
вательно, у= Ук = ±1, где знак плюс соответствует правоходовой
обмотке, а знак минус - левоходовой.
Для определения всех шагов простой петлевой обмотки доста­
точно рассчитать первый частичный шаг по якорю:
У, =[Z,/(2p)]+E,
(25.3)
где Е - некоторая величина, меньшая единицы, вычитая или сум­
мируя которую получают значение шага у1, равное целому числу.
Второй частичньIЙ шаг обмотки по якорю
(25.4)
У2 =У,+ У=У,+ l.
S
1 1'•ir
�1�,
330
Пример 2S.1. Рассчиrать шаги и вьmоmnпь развернуrую схему простой
петлевой обмотки якоря дm1 четырехпоmосной машины (2р = 4) постоJ1Ю10rо
тока. Обмотка правоходовая, содержит 12 секций.
Р еш е н и е. Первый частичныйшаг по якорю по (25.3)
у1 = [Z,/(2p)]=Ft: = (l2/4)=F0 = 3 паза.
Второй частичныйшаг по якорю по (25.4)
У2 = У1 - у = 3 -1 = 2 паза.
I
Рис. 25.. 3. Простая петлевая обмотка:
а� правоходовая; б - левоходовая; в - развернутая схема
-
Прежде чем прис'I)'ШПЬ к въmолненmо схемы обмотки, необходимо отметиrъ и пронумеровать все пазы и секции, нанести на
предполагаемую схему контуры магнитных поmосов и указать их
полярность (25.3, в). При этом нужно иметь в виду, что отмечен­
ный на схеме контур является не полюсом, а зеркальным отобра­
жением поmоса, находящегося над якорем. Затем изображают
комекторные пластины и наносят на схему первую секцшо, пазо­
вые части которой располагают в пазах J и 4. Комекторные пла­
стины, к которым присоединены начало и конец этой секции, обо­
значают J и 2. Затем нумеруют все остальные пластины и наносят
на схему остальные секции (2, 3, 4 и т. д.). Последняя секция 12
должна замкнуть обмотку, что будет свидетельствовать о правильном вьmолнении схемы.
Далее на схеме изображают щетки. Расстояние между щетка­
ми А и В должно бьпь равно К/(2р) = 12/4 = 3 , т. е. должно соот­
ветствовать полюсному деленmо. Что же касается расположения
щеток на комекторе, то при этом следует руководствоваться сле­
дующим. Предположим, что электрический коmакт обмотки яко­
ря с внешней цепью осуществляется не через комектор, а непо­
средственно через пазовые части обмотки, на которые наложены
«условные» щетки (рис. 25.4, а). В этом случае наибольшая ЭДС
машцны: соответствует положенmо «условных» щеток на геомет­
рической нейтрали (см.§ 25.4). Но так как комекторные пластины
смещены относительно пазовых сторон соединенных с ними сек­
ций на 0,5t (рис. 25.4, б), то, переходя к реальным щеткам, их сле­
дует расположить на комекторе по оси главных поmосов, как это
показано на рис. 25.3, в.
При определении полярности щеток предполагают, что маши­
на работает в генераторном режиме и ее якорь вращается в на-
зз 1
правлении стрелки (см. рис. 25.3, в). Воспользовавшись прави­
лом «правой руки», находят направление ЭДС (тока), наведен­
ной в секциях. В итоге получаем, что щетки А 1 и А2, от которых
ток отводится во внешнюю цепь, являются положительными, а
щетки В, и В2 - отрицательными. Щетки· Qдинаковой полярно­
сти присоединяют параллельно к выводам соответствующей
полярности.
Рис. 25.4. Расположение условных (а) и реальных (б) щеток
Параллельные ветви обмотки якоря. Если проследить за
прохождением тока в секциях обмотки якоря (см. рис. 25.3, в), то
можно заметить, что обмотка состоит из четырех участков, соеди­
ненных параллельно друг другу и назьmаемых параллельными
ветвями. Каждая параллельная ветвь содержит несколько после­
довательно соединеш1ых секций с одинаковым направлением тока
в них. Распределение секций в параллельных ветвях показано на
электрической схеме обмотки (рис. 25.5). Эrу схему получают из
развернутой схемы обмотки (см. рис. 25.3, б) следующим образом.
На листе бумаги изображают щетки и имеющие с ними контакт
коллекторные пластины, как это по:ка::.ано на рис. 25.5. Затем со­
вершают обход секций обмотки начиная с секции 1, которая ока­
зьmается замкнутой накоротко щеткой В1 • Далее идут секции 2 и 3,
которые образуют параллеЛЬН)'Ю ветвь. Таким же образом обходЯт
все остальные секции. В результате получаем схему с четырьмя
параллельными ветвями, по две секции в каждой ветви.
Из полученной схемы следует, что ЭДС обмотки якоря опре­
деляется значением ЭДС одной параллельной ветви, тогда как
значение тока обмотки определяется суммой токов всех ветвей
обмотки:
_/а = 2aia ,
(25.5}
где 2а - число параллельных ветвей обмотки якоря; ia - ток од­
ной параллельной ветви.
В простой петлевой обмотке число параллельных ветвей рав­
но числу главных полюсов машины: 2а = 2р.
НетрудНо заметить, что число параллельных ветвей в обмотке
якоря определяет значение основных параметров машины - тока
и напряжения.
332
Пример 25.2. Шестшюmосная машина IЮстояююrо тока имеет на якоре
проС'l)'Ю петлевую обмотку из 36 секций. Опредетm. ЭДС и силу тока в обмотке
якоря машины, если в каждой секции наводиrся ЭДС 1О В, а сечение провода
секции рассчитано на ток не более 15 А.
Р е ш е н и е. Число параллельных ветвей в обмотке 2а = 2р = 6, при этом в
каждой параллельной ветви S0 = S/(2a) = 36/6 = 6 секций. Следовательно, ЭДС
обмотки якрря Е0 = 6· 1 О = 60 В, а допустим'ый ток машины /0 = 6· 15=90 А.
Если бы машина 'при прочих неизменных условиях имела восемь поmосов,
то ее ЭДС уменьшилась бы до 40 В, а ток увеличился бы до 120 А.
Сложная петле­
вая обмотп. При не­
,.обходимосm полу­
чип, петлевую обмот­
ку с большим числом
параллельных ветвей,
как это требуется, на­
пример, в низковольт­
ных маппrnах посто­
янного тока, приме­
;,.няют сложную петле­
tт,.•4i.a
вую обмотку. Такая
обмотка представляет
l­
•
несколько
собой
...
(обычно две) простых
Рис. 25.5. Электрическая схема обмотки
петлевых
обмоток,
рис. 25.3, в
уложенных на одном
якоре и присоединенных к одному коллектору. Число параллельных ветвей в сложной
петлевой обмотке 2а = 2pm, где т - число п1юс:гых петлевых обмо­
ток, из которых составлена сложная обмотка (обычно т = 2). lllиpШia
щеток при сложной петлевой обмотке принимается такой, чгобы ка­
ждая щетка одновременно перекрывала т коллекторных плаСТШI, т. е.
+
Рис. 25.6. Развернутая схема сложной петлевой обмотки
333
столько пластин, сколько простых обмоток в сложной. При этом про­
стые обмотки оказываются присоедине1rnыми параллельно друг дру­
rу. На рис. 25.6 показана развернутая схема сложной петлевой обмот­
ки, состоящей из двух простых (т = 2): 2р = 4; Zэ = 16.
Результирующий шаг обмотки по якорю и шаг по коллектору слож­
ной петлевой обмотки прШIИМают равныму=Ук = т. Первый частичный шаг по якорю определяют по (25.3).
Пример 2S.3. Четырехполюсная машина имеет сложную петлевую обмотку
якоря из 16 секций. Вьmолниrь развернуrую схему этой обмотки, приняв т = 2.
Ре m е н и е. Шаги обмотки: у1 =Z/(2p) = 16/4 = 4 паза; у =Уа =2 паза; у2 =
=у1-у = 4-2= 2паза.
Сначала располагаем все секции одной из простых обмоток
(секции с нечепп,IМИ номерами: 1, 3, 5 и т. д.), а ко1щы этих сек­
ций присоещmением к нечеп1ым пластинам коллектора (рис.
25.6). Затем располагаем на якоре секции другой петлевой обмот­
ки с номерами 2, 4, 6 и т. д. Изображаем на схеме щетки шириной
в два коллекторных деления. Число параллельных ветвей обмотки
2а = 2pm = 4·2 = 8.
§ 25.2. Воnновые обмотки якоря
Простая волновая обмотка. Прос'I)'Ю волновую обмотку по­
лучают при последовательном соедm1ении секций, находящихся
под разными парами поmосов (рис. 25.7). Ко1щы секций простой
волновой обмотки присоедm1ены к коллекторным пластинам, уда­
ленным друг от друга на расстояние шага обмотки по коллектору
Ук = у. За один обход по якорю укладывают столько секций, сколь­
ко пар поmосов имеет машина, при этом конец последней по об­
ходу секции присоеД11НЯЮт к пластине, расположенной рядом с
исходной.
Прос'I)'Ю волновую обмотку назьmают левоходовой, если ко­
нец последней по обходу секций присоединяется к пластине, на­
ходящейся слева от исходной (рис. 25.7, а). Если же эта пластина
находится справа от исходной, то обмотку называют правоходовой
(рис. 25.7, б). Секции волновой обмотки моrут быrь одновитковы­
ми и мноrовитковыми. Шаг простой волновой обмотки по кол­
лектору
(25.6)
Знак минус сОО'ГйеТСТВует левоходовой обмотке, а знак runoc правоходовой. Правоходовая обмотка не получила практического
применения, так как ее вьmолнение связано с дополнительным
расходом меди на перекрещивание лобовых частей.
Первый частичный шаг обмотки определяют по (25.3), а вто­
рой частичный шаг У2 = у- У1.
Уа =у=(К+1)/р.
Пример 2S.4. Четырехполюсная машина постоянного тока имеет пr,остую
волновую обмотку якоря из 13 секций. Построить развернуrую схему и схему
параллельных ветвей этой о_бмотки.
334
Решение. Шаги обмотщ у. = у=(КН)/р=(13-1)/2=6
у1 =[Z, /(2p)]=FE = 13/4-0,25=3 паза; у2 =у1 - у1 =6-3=3 паза.
пазов;
При первом обходе по якорю укладываем секции 1 и 7 (рис.
25.7, в). При втором обходе укладываем секции 13 и 6 и т. д., пока
не будут уложены все 13 секций и обмотка не окажется замкнутой.
Секции 3, 6 и 9 в рассматриваемый момент времени замкнуrы на-
Рис. 25.7. Простая волновая обмотка:
а - правоходовая, б - левоходовая; в - развернуrая схема
12
1J
5
11
,
10
7
t
8,
2
J
-
· ·.
9
+
Рис. 25.8. Электрическая схема обмотки рис. 25.7, в
коротко через щетки одинаковой полярности и провода, соеди­
няющие их. Затем определяем полярность щеток. Далее вьmолня­
ем электрическую схему (схему параллельных ветвей), из которой
видно (рис. 25.8), что обмотка состоит из двух параллельных вет­
вей (2а = 2). Это является характерным для простых волновых об­
моток, у которых число параллельных ветвей не зависит от числа
полюсов и всегда равно двум.
Из рассмотреШIЫХ схем видно, что секции, входящие в одну
параллельную ветвь, равномерно распределены под всеми полю­
сами машины. Следует также отметить, что в простой волновой
обмотке можно было бы обойтись двумя щетками, например щет­
ками В2 и А2• Но в этом случае нарушилась бы симметрия обмотки
и число секций в параллельных ветвях стало бы неодинаковым: в
335
одной ветви семь секций, а в другой - шесть. Поэтому в ма­
шинах с простыми волновыми обмотками устанавливают пол­
ный комплект щеток, столько же, сt<олько главных полюсов,
тем более что это позволяет уменьшить значение тока, прихо­
дящегося на каждую щетку, а следовательно, уменьшить раз­
меры коллектора.
Сложная волновая обмотка (рис. 25.9). Несколько простых
волновых обмоток (обычно две), уложенных на одном якоре, об-
Рис. 25.9. Развернуrая схема сложной волновой обмотки
разуют сложную волновую обмотку. Число параллельных ветвей в
сложной волновой обмотке 2а = 2m (обычно 2а = 4), где m - чис­
ло простых обмоток в сложной (обычно т = 2). Простые обмотки,
входящие в сложную, соединяют параллельно посредством щеток.
Шаг по комектору, а следовательно, и результирующий шаг по
якорю
(25.7)
У.= у =(К+т)/р.
Первый частичный шаг по якорю определяют по (25.3).
Пример 2S.S. Сложная волновая обмотка ст = 2 состоиr из 18 секций. Вы­
поmвпь развернуrую схему этой обмотки, если 2р=4.
Реше н и е. Шаги обмотки: y1 = (Z,/(2p)]=Ft:=18/4-0,5=4 паза,
у. = y=(K=Fm)/p=(18-2)/2 = 8 пазов;у2 = 8-4=4 паза.
·
Порядок вьmолнения схемы обмотки такой же, как и при сложной петлевой
обмотке: сначала укладывают в пазы J1KOPJ1 одну простую обмотку, состоJ1щую из
нечетных секций, а затем другую, состоJ1щую из четных секций (рис. 25.9) Число
параллельных ветвей в обмотке 2а=4.
336
§ 25.3. Уравнительные соединения и
комбинированная обмотка якоря
Условия симметрии обмотки якоря. Обмотку якоря назьi­
. вают симметричной, если ее параллельные ветви обладают одIШа­
ковыми электрическими свойствами: имеют одIШаковые электри­
ческие сопротивления и в них индуцируются одинаковые ЭДС. В
несимметричной обмотке якоря ток якоря распределяется в парал­
лельных ветвях неодинаково, что влечет за собой перегрузку од­
них ветвей в недогрузку других. В результате растут электриче­
ские потери в обмотке якоря, а полезная мощность машины
уменьшается.
Обмотка якоря становится симметричной лишь при соблюде­
IШИ определенньrх условий, называемъrх условиями симметрии.
П е р в о е у с л о в и е. Каждая пара параллельных ветвей об­
мотки должна состоять из одинакового числа секций. Это условие
вьmолняется, если на каждую пару параллельньrх ветвей прихо­
, дится одинаковое число секций, т. е. отношение числа секций S к
числу пар параллельных ветвей а обмотки якоря равно целому
числу (ц.ч.):
(25.8)
S/а = ц.ч.
Нетрудно убедиться, что при несоблюдении зrого условия
электрическое сопротивление параллельных ветвей, а также их
ЭДС становятся неодIШаковыми. Это привело бы к неравномер­
ному распределению токов. в параллельньrх ветвях со всеми нежелательными последствиями.
Вт о р о е у с л о в и е. Секции каждой пары nараллельньrх вет­
вей должны занимать на якоре одинаковое число пазов:
Zla = ц.ч.
(25.9)
Т р е т ь е у с л о в и е. Каждая пара параллельньrх ветвей об­
мотки должна занимать одm1аковое положение относительно сис­
темы главньrх полюсов, что вьmолнимо при
(25.10)
2р/а = ц.ч.
Для сложной петлевой обмотки 2а = 2pm. Подставляя это в
(25.10), получим
2р/а = 2р/(рт) = 2/т = ц.ч.
Оrсюда следует, 1ffO сложная петлевая обмотка будет симметричной только при т = 2.
Уравнительные соединения. Даже при соблюдении всех ус­
ловий симметрии обмоток ЭДС паратrельньrх ветвей обмотки
якоря в мноrополюсных машинах могут оказаться неодинаковы­
ми. Причина зroro - магнитная несимметрия, из-за нее магнит­
ные потоки одноиме1rnых полюсов оказываются неодинаковыми.
Происходит это из-за дефектов, возникающих при изготовлении
машm1ы: наличия раковm1 в отливке стаRШ1Ь1, некачественной
сборки полюсов, неправильной ценrровки якоря, т. е. его перекоса,
отчего воздуlШIЫЙ зазор под полюсами становиrся неодинаковым.
337
Влияние магнитной несимметрии на рабоrу машины зависит
от пmа обмотки якоря. В волновых обмотках секции каждой па­
раллельной ветви равномерно распределены под всеми поmосами
машшrы, поэтому мапrитная несимметрия не влечет за собой не­
равенства ЭДС в параллельных ветвях, так как она одинаково
влияет на все параллельные ветви обмотки.
В петлевых обмотках якоря секции, образующие параллель­
ную ветвь, расположены под смежной парой полюсов. Поэтому
при 2р > 2 магниmая несимметрия становится причиной неравен­
ства ЭДС параллельных ветвей, 1ПО ведет к появлению � обмотке
якоря уравнительных токов.
а)
6)
111 -
+ яz
Рис. 25.10. Уравнительные токи в параллельных ветвях простой петле­
вой обмотки якоря при маrнитной несимметрии
Например, при неправильной центровке якоря (рис. 25.10, а)
ЭДС первой и четвертой параллельных ветвей становятся меньше
ЭДС второй и третьей ветвей (зазор под нижним поmосом меньше,
чем под верхним). При этом потенциалы щеток В1 и В2 оказьmают­
ся неодинаковыми и в параллельных ветвях обмотки появляются
уравнительные токи iyp (рис. 25.10, б). Эти токи замыкаются через
шшrу, соедШ1ЯЮщую указашrые щетки, и во внепппою цепь маши­
ны не выходят. Следует обратить внимание, 1ПО даже при незна­
чительной разности потенциалов и12 между щетками В� и В2 ток iyp
может оказаться весьма значительным, так как электрическое со­
противление параллельной ветви rn.e невелико. Например, при
U12 = 2 В И rп.в = 0,01. 0м уравнитеЛЬНЫЙ ТОК iyp = U12/(2rп.в) =.
= 2/(2·0,01) = 100 А.
Если при этом нагрузочньrй ток в параллельной ветви iп.в =
=200 А, то токи-в параллельШdХ ветвях обмотки становятся неодинаковыми: ial = ialV = in.в - ;УР 200-100= 100 А; iап = iаш = in.в +
+iyp =200+100=300 А.
Неравномерная нагрузка параллельных ветвей ведет к пере­
греву обмотки и увеличеншо электрических потерь в ней. Пере­
численные явления нарушают нормальную рабоrу машшrы, на­
пример перегружаются некоторые щетки (в рассматриваемом
случае- щетка В2}, 1ПО вызьшает шпенсивное искрение на кол-
=
338
лекторе (см.§ 27.3). Для уменьшения неравномерной нагрузки ще­
ток в простых петлевых обмотках поступают следующим образом:
точки обмотки якоря, потеIЩИалы которых теоретически должны
быть одинаковыми, электрически соединяют между собой. В этом
случае возникающие в обмотке уравнительные токи замыкаются
внутри обмотки без выхода на щетки.
• Указаннъ1е соединения вьmолняют медными проводами и на­
зывают уравнительными соединениями первого рода (уравните­
лями). Практически доступными для соединения точками равного
потеIЩИала являются кшщы секций, присоединяемые к коллек­
торным пластинам, шш лобовые части обмотки со стороны, об­
ратной коллектору.
Количество точек в обмотке,· имеющих одинаковый потеIЩИ­
ал, равно числу полюсов в машине. Расстояние между двумя со­
седними точками равного потеIЩИала назьmают потенциальным
шагом Уур• При расположении уравнительных соединений со сто­
роны коллектора потеIЩИальНЪIЙ шаг выражается числом коллекторных делений:
=
(25.11)
Уур К/а=К/р.
· Полное число уравнителей первого рода, которое можно уста­
новить в машине, равно
(25.12)
Однако такое количество уравнитель:нi,IХ соединений приме­
няют только в машинах большой мощносm, например в двигате­
лях прокатнъ�х станов. В целях экономии меди и упрощения кон­
струкции машины обычно применяют неполное число урав­
нителей. Например, в четъ�рехполюсньIХ двигателях делают 3--4
уравнителънъ�х соединения. Уравнительные соединения выполня­
ют проводом, сечение которого составляет 25-50 % сечения про­
вода обмотки якоря.
Пример 25.6. В машине с 2р = 4 и простой петлевой обмоткой .якор.я из 12
секций необходимо установиrь уравюпели первого рода, снабдив ими каждую
·
вторую пластину.
.
Решен и е. Поте1ЩИальный шаг Уур =К/р=12/2=6. Полное число уравюпелей NYP =уур =К/а=12/2=6.
В соответствии с условием задачи показываем на схеме 0,5Nw = 3 уравните­
л.я, расположив их со стороны коллектора (рис. 25.11) и соединив с пластинами
следующим образом: первый уравюпель соедин.яем с пластинами / fl 7, второй с 3 и9, трет�щ-с5 и 11.
В сложнь�х петлевьIХ и волновых обмотках простые обмотки,
образующие сложную, соединены цараллелъно через щеточнь1й
кошакт. Но обеспечить одинаковьIЙ кошакт щеток со всеми про­
стыми обмотками практически невозможно, поэтому ток между
простыми обмотками распределяется неодинаково, что нарушает
равномерное распределение потеIЩИала по коллектору и может
339
.-
вызвать на нем искрение. Для устранения этого нежелательного
явления применяют уравнительные соединения (уравнители) вто­
рого рода, с помощью которых простые обмотки, входящие в
сложную, электрически соедшuпот между собой в точках равного
потеIЩИала. Таким образом, если уравнители первого рода устра­
няют нежелательные последствия магнитной несимметрии, то
уравнители второго рода устраняют неравномерность в рас­
пределении потеIЩИала по коллектору при сложных обмотках якоря.
Рис. 25.11. Уравнительные соединения первого рода:
а - развернуrая схема обмотки, б - вцц со стороны коллектора
На рис. 25.9 представлена схема сложной волновой обмотки с
уравнителями второго рода, соединяющими точки равного потен­
циала на лобовых частях обмотки со стороны, противоположной
комектору. Эти точки отстоят друг от друга на расстоянии потен­
циального шага
Уур =К/а=18/2=9.
Секцию 2 соединяют с секцией 11, секцию 3 - с секцией 12 и
т. д. (на схеме показаны лишь два уравнителя). Полное число
уравнителей определяется по (25.12), но из соображения экономии
меди обычно делают неполное число уравнителей второго рода.
В сложных петлевых обмотках уравнители второго рода вы­
полняют, как показано на рис. 25.12. Ввиду того что в этой обмот­
ке каждую секцию одной из простых обмоток присоединяют к
пластинам комектора, расположенным через одну (например, к
нечепп,1м пластинам), то пластины, находящиеся между ними (на­
пример, чепп,1е), делят напряжение каждой секции на две части.
Для обеспечения равномерного распределения напряжения между
пластинами необходимо, чтобы эти части бьши одинаковыми, т. е.
чтобы напряжение между каждой парой рядом лежащих пластин
(например 7 и 2) было равно половШiе напряжения секции. С этой
целью в обмотке применяют уравнители второго рода, с помощью
которых середину секции со стороны, противоположной коллек340
тору, соединяет с промежуrочной пластиной (например, середину
секции, присоединенной к пластинам J и 3, соединяют с пласти­
ной 2, как это показано на рис. 25.12). Такой уравmпель прихо­
дится «протягивать» между валом и сердечником якоря через спе­
циальное отверстие.
Таким образом, если в сложных волновых
обмотках применяют лшпъ уравнители второго
рода, то в сложных петлевых обмотках необхо­
димь1 как уравнители. первого, так и уравнители
второго рода.
Комбинированная обмотка. Комбшmро­
ванная (лягушачья) обмотка представляет собой
сочетание петлевой и волновой обмоток, распо-­
ложенных в одних пазах и присоединенных к
общему коллектору. Секция этой обмотки пока­
зана на рис. 25.13, а. Так как каждая из состав­
ляющих обмоток двухслойная, то . комбиниро­
ванную обмотку укладьшают в пазах якоря в
четь�ре слоя, а к каждой пластине коллектора Рис. 25.12. Урав­
прШiаивают по четыре проводника.
юпельные соеди­
Достоинство комбинировашюй обмотки - нения второго ро­
большое число параллельных ветвей при отсут­ да в сложной петлевой обмотке
ствии уравнительных соединений. Однако неко­
торая технологическая трудность в вьmолнении
якоря
комбинированных обмоток ограничивает их
применение машинами постоянного тока большой мощности, а
также быстроходными машинами, в которых вьmолнение уравни­
телей затруднено.
Рис. 25.13. Комбинированная обмотка якоря
На рис. 25.13, б показана часть развернутой схемы комбини­
рованной обмотки. Шаги секций комбшmрованной обмотки при­
нимают одинаКОl}ЫМИ (у1 nетл = Yt волн)- Шаг по якорю комбиниро­
ванной обмотки равен сумме шагов составляющих обмоток:
zэ zэ
2р 2р
zэ
р
к
У1 = Уtnетл + Уtволн =-+-=-=-= Уур •
р
341
т. е. шаг комбинированной обмотки по якорю равен потенциаль­
ному шагу [см. (25.11)]. Поэтому IUiастины коллектора, которые
должны быть соединены уравнителями, в комбинированной об­
мотке оказьmаются соединенными секциями.
Следует обратить внимание, что комбинированная обмотка
выполнима лишь при условии равенства чисел параллельных вет­
вей в волновой и петлевой составляющих обмотках. При этом
ЭДС параллельных ветвей обмоток должны бьrrъ одинаковыми. В
петлевой обмотке число параллельных ветвей 2а = 2р, в волновой
обмотке 2а = 2. Для получения одинакового числа параллельных
ветвей в обмотках волновую обмотку вьmолняют сложной с чис­
лом mволн = р. Число параллельных ветвей в комбинированной об­
мотке 2а = 2апетл + 2аволн = 4ane'l:П•
§ 25.4. Электродвижущая сила и
электромаrнитнь1й момент
машины постоянноrо тока
Электродвижущая сила. Она наводится в обмотке якоря ос­
новным магниrным потоком. Для получения выражения этого по­
тока обратимся к графику распределения индукции в зазоре ма­
шины (в поперечном сечении), который при равномерном зазоре в
пределах каждого поmоса имеет вид криволинейной трапеции
(рис. 25.14, а, график 1). Заменим действительное распределение
индукции в зазоре прямоугольным (график 2), при этом высоту
прямоугольника примем равной максимальному значению индук­
ции Bi, а ширину - равной величине Ь;, при которой IUiощадь
прямоугольника равна IUiощади, ограниченной криволинейной
трапецией. Величина Ь; назьшается расчетной полюсной дугой. В
машинах постоянного тока расчетная поmосная дуга мало отлича.· ется от ПОJПОСНОЙ дуги Ьт :
(25.13)
или, воспользовавшись коэффициентом полюсного перекрытия
·. а ;= Ь;/t, получим
Ь; = a ;t.
(25.14)
С учетом (25.14) основной магнитный поток (Вб)
. Ф= Вr,hi; · 10-6= Er,Z;a;t · 10-6 .
Здесь t- поmосное деление, мм; /;-·расчетная длина якоря, мм.
КоэффIЩИенr поmосного перекрытия а, имеет большое влия­
ние на свойства машины постоянного тока. На первый взгляд ка­
жется целесообразным выбрать наибольшее значение а;, так как
это способствует увеличению потока Ф, а следовательно, и увели­
чению мощности машины (при заданных размерах). Однако слиш­
ком большое а; приведет к сближению поmосных наконечников
смежных потосов, что будет способствовать росту магнитного
потока рассеяния и неблагоприятно отразится на других свойствах
342
машины. При этом полезный поток ма1mmы может оказаться даже
меньше предполагаемого значения (см.§ 26.1). Обычно а; = 0,6+0,8,
при этом меньшие значения а1 соответствуют машинам малой
мощности.
На рис. 25.14, б показан продольный разрез главного поmоса и
якоря с радиальными вентиляционнь�ми каналами. График рас­
пределения маmитной индукции в воздушном зазоре по продоль­
ному разрезу машины имеет вид зубчатой кривой (кривая 1). За-
аJ
о)
Рис. 25.14. Распределение магнитной индукции в воздушном зазоре машины постоянного тока
меним эrу кривую прямоугольником высотой Br, и основанием /;,
величина которого такова, что площадь прямоугольника равна
площади, ограниченной зубчатой кривой. Это основание пред­
ставляет собой расчетную длину якоря (мм)
, 11 =0,5(/m +l),
(25.16)
где lm - длина поmоса, мм;
(25.17)
- длина якоря без радиальных вентиляционных каналов, мм; la общая длина якоря, вкmочая венrиляционные каналь1, мм; Ък ширина венrиляционного канала (обычно 10 мм), мм.
При выводе формулы ЭДС будем исходить из прямоугольного
закона распределения шщукции в зазоре, при этом магнитная ин­
дукция на участке расчеrnой поmосной дуги Ь1 = а1т равна В0, а за
ее пределами равна нулю и в проводниках, расположе1шых за пре­
делами Ь1, ЭДС не наводится. Это эквиваленmо уменьшению об­
щего числа пазовых проводников в обмотке якоря до значения N; =
= a;N. Исходя из этого и учитывая, что ЭДС обмотки определяется
суммой ЭДС секций, входящих лишь в одну параллельную ветвь с
числом пазовых проводников N/(2a), запишем
(25.18)
Еа = Enp [N/(2a)P, 1 ,
где
(25.19)
343
- ЭДС одного пазового проводника обмотки, активная длина которого/;.
Окружную скорость вращающегося якоря (м/с) заменим час­
тотой вращения (об/шm): v = ттЦ,п/60 = 2ptn/60, где 1tDa = 2pt.
С учетом (25.18), (25.19) получим
.
2рп N
Еa = B.l.ta.-u 1
1
60 2а
или, учитъmая, что произведеm1е В111; ta; = Ф, получим выражение
ЭДС машины постоянного тока (В):
pN
Еа = -Фп = сеФп '·
(25.20)
60а
где
(25.21)
pN/(60а)
Се
- постоянная для данной машmп.1 величина; Ф - основной маг­
нитный поток, Вб; п - частота вращения якоря, об/шm.
Значение ЭДС обмотки якоря зависит от ширины секции у1•
Наибольшее значение ЭДС соответствует полному (диаметраль­
ному) шагу у1 = t, так как в этом случае с каждой секцией обмотки
сцеIUIЯется весь основной магнитный поток Ф. Если же секция
укорочена (у < t), то каждая секция сцеIUIЯется лишь с частью ос­
новног<1 потока, а поэтому ЭДС обмотки якоря уменьшается. Та­
ков же эффект при удлиненном шаге секций (у > t), так как в этом
случае каждая секция обмотки сцеIUIЯется с основным потоком
одной пары полюсов и частично с потоком соседней пары, имею­
щим противоположное направлеm1е, так что результирующий по­
ток, сцепленный с каждой секцией, становится меньше потока од­
ной пары полюсов. По этой причине в мапnmах постоянного тока
практическое применение получили секции с полным или укоро­
ченнь�м шагом.
На ЭДС машmп.1 влияет положение щеток: при нахождении
щеток на геометрической нейтрали ЭДС наибольшая, так как в
этом случае в каждой параллельной ветви обмотки все секции
имеют одинаковое направлеm1е ЭДС; если же щетки сместить с
нейтрали, то в параллельных ветвях окажутся секции с противопо­
лоЖНЬIМ направлением ЭДС, в результате ЭДС обмотки якоря бу­
дет уменьшена.
При достаточно большом числе коллекторных пластин
уменьшения ЭДС маmmп.1 при сдвиге щеток с нейтрали учитьmа­
ется множителем cos J3:
Еа = сеФпсоsр,
(25.22)
где J3-угол смещения оси щеток <УIНосиrелъно нейrрали (рис. 25.15).
.
Электромагнитный момент. При прохождении по пазовым
проводникам обмотки якоря тока ia на каждом из проводников по­
является электромапnrrная сила
=
344
(25.23)
Совокупность всех электромагнитных сил Fэм на якоре, дейст­
вующих на плечо, равное радиусу сердечника якоря (Dal2), создает
на якоре электромагнитный момент М.
Исходя из прямоугольного закона рас. пределения магниrной индукции в зазоре
(см. рис. 25.14, а, график 2), следует счи­
:тать, что сила F'3М одновременно действует
на число пазовых проводников N; = a;N.
Следовательно, электромагниrный момент
машины постоянного тока (Н·м)
Учитывая, что �м = Bi;l;ia , а также что
rок параJШельной ветви ia = Iа /(2а) ,получим
Используя выражение основного маг­
ниrного потока (25.15), а также имея в ви­
ду, что Da = 2ptlrr., получим выражение
электромагнитного момента (Н·м):
Рис. 25.15. Наведение
ЭДС в обмотке якоря
при сдвиге щеток с
геометрической ней­
трали на угол р
М= pN Фlа =смФiа ,
2rr.a
где Ia ток якоря, А;
с м = pN/(2rr.a)
(25.24)
(25.25)
_:_ величина, постоянная для данной машины.
Электромаrниrный момент машины при ее работе в двша­
тельном режиме является вращающим, а при генераторном режи­
ме - тормозящим по отношеншо к вращающему моменту при­
водного двшателя.
Подставив из (25.20) в (25.24) выражение основного магниг­
ного потока Ф = Eal(c,11), получим еще одно выражение электро­
магнитного момента:
М = [60/(2rr.n)]Ea /a = 9,55�м /n =�м /rо,
(25.26)
где ro = 2rr.n/60 -угловая скорость вращения;
(25.27)
м =мЕа /а
элект м ит ая м щ �
и
ст
т
ь
т
к
гн
н
нн
н
г
н
а
а
аш
р
ы
пос оя о о о ,
о
о о
Вт.
Из (25.26) следует, что в машинах равной мощности электро­
магнитный момент больше у машины с меньшей частотой враще­
ния якоря.
345
§ 25.5. Выбор типа обмопи якоря
Применение в маШШiе постоянного тока того или иного типа
обмотки якоря определяется технико-экономическими требова­
ниями. Выбра1rnый тш� обмотки должен обеспечивать в маШШiе
необходимую ЭДС при заданном токе. При этом следует стре­
миться к минимальному числу уравнительных соединений. Требо­
вания экономического характера при выборе типа обмотки сводят­
ся к возможно лучшему использованmо пазов сердечника якоря,
что определяется значением коэффициента заполнения паза медью
[см. (8.4)].
Выбранный тШI обмотки должен содержать возможно мень­
шее число пазовых проводников N, так как в противном случае
значительная часть ruющади паза будет занята изоляцией этих
проводников. Преобразуя выражения (25.20), получим
N = 60аЕа /(рФп).
(25.28)
Отсюда следует, что при заданньIХ Еа , р, Фи п число провод­
ников в обмотке прямо пропорционально числу пар параллельных
ветвей. Поэтому при выборе типа обмотки следует отдавать
предпочтение обмоткам якоря с мини.1uальным числом параллель­
ных ветвей, например простой волновой обмотке с 2а = 2, которая
к тому же не требует уравнительнь�х соедШiений. В табл. 25.1
приведены рекомеНдации по выбору тШiа обмотки якоря для дви­
гателей постоянного тока общепромышленного назначения в зави­
симости от числа поmосов и силы тока якоря.
Т аб л ица 25.1
Число
поmосов2р
Ток якоря, Ia, А
ТШJ обмотки якор я
Простая петлевая
2
4
4
До700
Свыше700 до 1400
4
Свыше 1400
))
>)
волновая
петлевая или
комбинированная
Сложная петлевая (m =2)
или комбинированная
. К условиям, ограничивающим применение простой волновой
обмотки, следует оmести в перРую очередь предельно допустимое
значение тока в параллельной ветви (300-400 А) и среднее значе­
ние напряжения между смежньIМИ коллекторньIМИ пластинами
Ик.ср = 2pU/K, которое не должно превышать (В):
Машинымощностью до 1 кВт ........25-30
Машины мощностью более 1 кВт
без компенсационной обмотки ........... 16
Машины с компенсащюнной обмоткой ...20
346
Указанные предельные значения Ик.ср распространяются и на
обмотки якоря других типов. При превышении указанных преде­
лов появляется вероятность вознmmовения в машине опасного
явления, называемого круговым огнем ( см. § 27.4).
Контрольные вопросы
1. В чем принципиальное отличие обмоток якоря от обмоток статора бескол­
лекrорных машин переменного тока?
2. Какими параме-Iрами характеризуется обмотка якоря?
3. Сколько параллельных ветвей имееr обмотка якор.я шесnmоmосной машины
в случаях простой петлевой и простой волновой обмоток?
4. Во сколько раз измениrс.я ЭДС обмотки якоря шестипоmосной машины, если
простую волновую обмотку замениrь простой петлевой при том же числе
секций?
5. Что такое маrнитна.я несимме-Iрия и каковы ее последствия?
6. В каких обмотках .якоря примеНJIЮТ уравниrели первого и второго рода?
7. Каковы достоинства комбинированной обмотки?
8. Как влияют ширина секции и положение щеток на ЭДС машины?
9. Какими соображениями руководствуются при выборе типа обмотки якоря?
глава 26• Магнитное поле
-машины
постоянного тока
§ 26.1. Магнитная цепь
маwины постоянноrо тока
Магнитная система машины постояmюго тока
состоит из cтamrnы (ярма), сердечников главных
потосов с потосным:и наконечниками, воздушного
зазора и сердечника якоря.
На рис. 26.1 показана картина магниmого поля
четырехпотосной машины. При этом имеется в виду
машина, работающая в режиме х.х., когда МДС соз­
дается лишь обмоткой возбуждения, а в обмотке
якоря и обмотке добавочных лотосов тока нет или
он настолько мал, что его влиянием на картину маг­
нитного поля можно пренебречь. В целях упрощения
на рисунке не показаны добавочные потосы, так как
в режиме х.х. их влияние на картину магниmого по­
ля машины незначительно. Как это следует из рис.
26.1, магниrный поток главных лотосов состоит из
двух неравных частей: большая часть образует ос­
новной магнитный поток Ф, а меньшая - магнит­
ный поток рассеяния лотосов Фа. Поток рассеяния
учиrьmается коэффициентом рассеяния crm (см. § 20.1).
Магнитодвижущая сила обмотки возбуждения
на пару лотосов в режиме х.х. определяется суммой
магнитных напряжений на участках магнитной цепи
(рис. 26.2):
F.,,
= L F = 2F'r, + 2Е: + 2F
m
+ F,, +
F. ,
(26.1)
где F1,, Fz, Fт, Fa, F. - магнип1ые напряжения воз­
душного зазора, зубцового слоя якоря, главного ло­
тоса, сПШIКИ якоря, станины (ярма) соответствеюю.
Если машина имеет компенсационную обмотку
(см. § 26.4), то в (26.1) следует ввести еще одно сла­
гаемое Fzm, представляющее собой магнит ное на­
пряжение зубцового слоя главного потоса.
Порядок расчета магнитнъ1х: напряжений на уча­
стках магнитной цепи машины постояmюго тока в
принципе такой же, что и в случае асинхронной ма­
шины (см. гл. 11). При этом расчет маrнитнъIХ на­
пряжений станины и сердечника главного лотоса
348
ведут по магнигно:му потоку rлавного полюса Фт, который больше
основного потока Ф на значение потока рассеяния Фа:
Фт =Ф+Фа =Ф(l+u m ),
где u m R: 1 О'Ц т = О, 1 О+О,25 - коэффициент мапm:тного рассеяния.
При заданном значении ЭДС машины Еа определяют требуе­
мое значение основного магнитного потока (Вб) [см. (25.2 0)]:
Рис. 26.1. Магнитное поле машины постоянного тока в
режиме х.х.
60аЕа
.
(26.2)
pNn
Далее рассчитьmают магнитную индукцmо для каждого уча­
•�тка магнитной цепи:
Ф=
1·де Фх - магнитный
поток на данном уча­
стке магнитной цепи,
Вб; Sx - площадь
поперечного сечения
этого участка, м1-.
По таблицам или
ь.
кривым намагничи­
вания для соответст­ Рис. 26.2. Расчетный участок магнитной цепи
вующих
ферромаг­ четырехпотосно,й машины постоянного тока
нитных материалов
находят напряженность магнитного поля на участках магнитной
цепи Нх, а затем определяют магнитное напряжение (А)
F,, = HJx
и МДС обмотки возбуждения на пару поmосов по (26.1 ).
Значения магнитных напряжений для различных участков
магнитной цепи неодинаковы и зависят от магнитных сопротивле­
ний этих участков. Наибольшим маrнитным сопротивлением об349
ладает воздушный зазор, поэтому маrnиnюе напряжение F0 на­
много больше mобого из слагаемых выражения (26.1).
Другие участки магнитной цепи выполняют из ферромагнит­
ных материалов. В машинах постоянного тока для изготовления
различных элементов маrnитной цепи применяют следующие ма­
териалы.
Се р д е ч н и к я к о р я - тонколистовые электротехниче­
ские стали марок 2013, 2312 и 2411 толщиной 0,5 мм (см.
табл. 11.1).
Се р д е ч н и к г л а в н о г о п о л ю с а - листовая анизо­
тропная (холоднокатаная) сталь марки 3411 толщиной 1 мм, пла­
стины не изолируют.
С т а н и н а - в машинах малой мощности станину изготов­
ляют из стальных цельнотянутых труб, а для машин средней и
большой мощности станины делают сварными из листовой конст­
рукционной стали марки Ст3.
Магнитное напряжение воздушного зазора (А)
(26.4)
Fr, = О,8В0бk010 3 ,
где 8 - величина воздушного зазора, мм; k0 - коэффициент воз­
душного зазора, учитывающий увеличение магнитного сопротив­
ления зазора из-за зубчатости якоря (!со> 1).
Маmитная индукция в воздушном зазоре В0 (Тл) пропорцио­
нальна основному магнитному потоку Ф. В машинах постоянного
тока общего назначения В0 = 0,6+1,О Тл (большие значения В0 со­
ответствуют более крупным машинам).
Обычно расчет МДС I,F ведут
ф
для ряда значений маmитного потока
ь
. (0,5Фном, О,75Фном, Фном И 1,2Фном), а
затем строят магнитную характеристику машины Ф. = f(I,F.) , где
относительное
Ф. = Ф/Ф ном
О,
значение
маmитного
потока;
L, F. = L, F /I,Fном - относитель­
ное значение МДС обмотки возбу­
ждения на пару полюсов в режиме
х.х.; Фном и I,FНOM - номинальные
0,5
1,0 ZF*
значения магнитного потока и
МДС в режиме х.х., соответствую­
Рис. 26.3. Магнитная характе- щие номинальному значению ЭДС
Е,, [см. (26.2) ]. В начальной части
ристика
магнитная характеристика прямо­
линейна (рис. 26.3). Объясняется
это тем, что при небольших значениях I,F. маrnитная цепь не
насыщена и МДС возбуждения определяется, в основном, магнит­
ным напряжением воздушного зазора I,F :=:: 2F0 • Затем с ростом
I,F. наступает насыщение маmитной цепи и магнитная характе350
ристика становиrся криволинейной. Коэффшщенr насыщения
магниnюй цепи машины
(26.5)
kµ = "[,Fном•/(2�.) = Ьа/Ьс = 1/(2F1,.) .
Для машин постоянного тока kµ = 1,2+ 1,7.
§ 26.2. Реакция якоря машины постоянного тока
При работе машины в режиме х.х. ток в обмотке якоря прак­
тически отсутствует, а поэтому в машине действует лишь МДС
обмотки возбуждения F80• Магниrное поле машины в этом случае
симметрично относиrельно оси полюсов (рис. 26.4, а). График
распределения магниrной индукции в воздушном зазоре представ­
ляет собой кривую, близкую к трапеции.
Если же машину нагрузиrь, то в обмотке якоря появится ток,
который создаст в маrnитной системе машины МДС якоря Fa, До­
пустим, что МДС возбуждения равна нулю и в машине действует
лишь МДС якоря. Тогда магнитное поле, созданное этой МДС,
будет иметь вид, представленный на рис. 26.4, 6. Из этого рисунка
видно, что МДС обмотки якоря направлена по линии щеток (в
данном случае по геометрической нейтрали). Несмотря на то что
якорь вращается, пространственное положение МДС обмотки яко­
ря остается неизменным, так как направление этой МДС опреде­
ляется положением щеток.
Наибольшее значение МДС якоря - на линии щеток (рис.
26.4, 6, кривая 1), а по оси полюсов эта МДС равна нулю. Однако
распределение магнитной индукции в зазоре от потока якоря сов­
падает с графиком МДС лишь в пределах полюсных наконечни­
ков. В межполюсном пространстве магнитная индукция резко ос­
лабляется (рис. 26.4, 6, кривая 2). Объясняется это увеличением
магнитного сопротивления потоку якоря в межполюсном про­
странстве. МДС обмотки якоря на пару полюсов пропорциональна
числу проводников в обмотке N и току якоря Ia :
(26.6)
Fa = Nia /( 4ар).
Введем понятие линейной нагрузки (А/м), представляющей со­
бой суммарный ток якоря, приходящийся на единицу длины его
окружности по наружному диаметру якоря Da :
{26.7)
А= Nia /(1tDa ) ,
где ia = la /(2а) - ток одного проводника обмотки, А.
Значение линейной нагрузки для машин постоянного тока об­
щего назначения в зависимости от их мощности может быть
(100..,.500)-102 А/м. Воспользовавшись линейной нагрузкой, запи­
шем выражение для МДС якоря: Fa = At. Таким образом, в нагру­
женной машине постоянного тока действуют две МДС: возбужде­
ния Fв0 и якоря Fa.
Влияние МДС обмотки якоря на магниrное поле машины на­
зывают реакцией якоря. Реакция якоря искажает магнитное поле
351
а)
N
1
"1 "•111111 111
1
1
N
1
L-- ---'
n
��
mli:
:J.N
:1
s
1
L___ ...J
n'
s
lf)
п
ii'}
n'
$
'
1
1
L ___ ..J
N
1·
1-
Рис. 26.4. Магнитное поле машины и распределение магнитной индукции
в воздушном зазоре
352
машины, делает его несимметричным относительно оси поmосов.
На рис. 26.4, в показано распределение мапштных силовых
линий результирующего поля машины, работающей в генератор­
ном режиме при вращении якоря по часовой стрелке. Такое же
распределение магнитных линий соответствует работе машины в
режиме двигателя, но при вращении якоря против часовой стрел­
ки. Если принять, что магнитная система машины н е н а с ы щ е н а, то реакция якоря будет лишь искажать результирующий маг­
ниrный поток, не изменяя его значения: край поmоса и
находящийся под ним зубцовый слой якоря, где МДС якоря сов­
падает по направлению с МДС возбуждения, подмагничиваются;
другой край поmоса и зубцовый слой якоря, где МДС направлена
против МДС возбуждения, размагничиваются. При этом резуль­
тирующий магнитный поток как бы поворачивается относительно
оси главных поmосов на некоторый угол, а физическая нейтраль
тт' (линия, проходящая через точки на якоре, в которых индукция
равна нуmо) смещается относительно геометрической нейтрали
пп' на угол а. Чем больше нагрузка машины, тем сильнее искаже­
ние результирующего поля, а следовательно, тем больше угол
смещения физической нейтрали. При работе машины в режиме
генератора физическая нейтраль смещается по направлению
вращения якоря, а при работе двигателем - против вращения
якоря.
Искажение результирующего поля машины неблагоприятно
отражается на ее рабочих свойствах. Во-первых, сдвиг физиче­
ской нейтрали относительно геометрической приводит к более
тяжелым условиям работы щеточного контакта и может послу­
жить причиной усиления искрения на коллекторе (см. § 27 .1 ).
Во-вторых, искажение результирующего поля машины влечет
за собой перераспределение магнитной индукции в воздушном
зазоре машины. На рис. 26.4, в показан график распределения
результирующего поля в зазоре, полученный совмещением
кривых, изображенных на рис. 26.4, а, б. Из этого графика сле­
дует, что магнитная индукция в зазоре машины распределяется
несимметрично относительно оси полюсов, резко увеличиваясь
под подмагниченными краями полюсов. Это приводит к тому,
что мгновенные значения ЭДС секций обмотки якоря в момен­
ты попадания их пазовых сторон в зоны максимальных значе­
ний магнитной индукции (под подмагниченные края полюсных
наконечников) резко повышаются. В результате возрастает на­
пряжение между смежными коллекторными пластинами Ик.
При значительных нагрузках машины напряжение Ик может
превзойти допустимые пределы (см. § 25.5) и миканитовая про­
кладка между смежными пластинами будет перекрыта электри­
ческой дугой. Имеющиеся на коллекторе частицы графита бу­
дут способствовать развитию электрической дуги, что приведет
к возникновению мощной электрической дуги, перекрывающей
весь коллектор или значительную его часть, - явления чрез­
вычайно опасного (см.§ 27.5).
353
Таковы последствия влияния реакции якоря на мшшmу с не­
насыщенной магнитной системой. Если же магнитная система
маrшmы н а с ы щ е н а, что имеет место у большинства электриче­
ских машин, то подмапmчивание одного края потосного нако­
нечника и находящегося под ним зубцового слоя якоря происхо­
дит в меньшей степени, чем размапmчивание другого края и
находящегося под ним
зубцового слоя якоря.
aJ
.--::с::--....
Это благоприятно ска­
зывается на распреде­
лении магнитной индукции
в зазоре, котол
п'
рое становится более
равномерным, так как
максимальное значение
индукции под подмаг­
ничиваемым
краем
полюсного наконеч­
Рис. 26.5. Разложение МДС обмотки якоря на ника уменьшается на
продольную и поперечную составляющие
величину, определяемую высотой участка
/ на рис. 26.4, в. Однако результирующий магнитный поток
машины при этом уменьшается. Таким образом, реакция якоря
в машине с насыщенной магнитной системой размагничивает
машину (так же как и у синхронной машины при активной на­
грузке). В результате ухудшаются рабочие свойства машины: у
генераторов снижается ЭДС, у двигателей уменьшается вра­
щающий момент.
Влияние реакции якоря на работу машинь1 усшmвается при
смещении щеток с геометрической нейтрали. Объясняется это
тем, что вместе со щетками смещается и вектор МДС якоря (рис.
26.5, а). При этом МДС якоря F0 помимо поперечн ой составляю­
щей Faq = F0 cos 13 приобретает и продольную составляющую Fш1 =
= F0 sin 13, направленную по оси потосов. Если машина работает в
г е н е р а т о р н о м р е ж и м е, то при смещении щеток в направ­
лении вращения якоря продольная составляющая МДС якоря дей­
ствует встречно МДС обмотки возбуждения F80, что ослабляет ос­
новной магнитный поток машинь1; при смещении щеток против
вращения якоря продольная составляющая МДС якоря Fш1 дейст­
вует согласованно с МДС Fво, что вызывает некоторое подмагни­
чивание_ машшп,1 и может явиться причиной искрения на коллек­
торе (см. гл. 27). Если машина работает в д в и г а т е л ь н о м
р е ж и м е, то при смещении щеток по направлению вращения яко­
ря продольная составляющая МДС якоря Fш1 подмагничивает ма­
шину, а при смещении щеток против вращения якоря продольная
составляющая Fш1 размагничивает машину. При дальнейшем рас­
смотрении вопросов, связанных с действием продольной состав­
ляющей МДС якоря, будем иметь в виду лишь ее размагничиваю­
щее действие, так как подмагничивающее действие Fш1 в машинах
354
постоянного тока общего назначения недопустимо из-за наруше­
ния работы щеточного контакта.
Следует обратить внимание на то, что смещение щеток с гео­
метрической нейтрали влияет и на поперечную составляющую
МДС якоря - величину, зависящую от угла р, с ростом которого
она уменьшается (FШJ = Fa cos р). Таким образом, в коллекторных
машинах возможны два случая: 1) щетки установлены на геомет­
рической нейтрали и реакция якоря является только поперечной;
2) щетки смещены с геометрической нейтрали и реакция якоря
имеет две составляющие - поперечную и продольную (размапш­
чивающую). Прmщипиально также возможен случай, когда реак­
ция якоря по поперечной оси отсутствует. Это имеет место, когда
щетки расположены по оси, перпендикулярной геометрической
нейтрали, т. е. когда р = 90° (рис. 26.5, б). Однако такой случай не
имеет практического применения, так как машина становится не­
работоспособной: в генераторном режиме ЭДС машины равна ну­
mо, так как в параллельную ветвь обмотки входит равное число
секций со встречнь�м направлением ЭДС, а в двигательном режи­
ме электромагнитные силы активных сторон обмотки якоря, дей­
ствующие слева и справа от оси щеток, равны и противоположно
направлены, а поэтому вращающего момента не создают.
§ 26.3. Учет размагничивающего влияния
реакции якоря
Размагничивающее влияние реакции якоря при нагрузке
машины постоянного тока учитывают при расчете числа вит­
ков полюсных катушек возбуждения. С этой целью при расче­
те числа витков такой катушки wк.в используют значение МДС
обмотки возбуждения Fв .н, соответствующее номинальной на­
грузке машины:
(26.8)
где /8 - ток в обмотке возбуждения, А.
Значение МДС обмотки возбуждения на пару поmосов Fв н
должно быть таким, чтобы ЭДС якоря Еа при работе машинь1 с
номинальной нагрузкой бьша такой же, что и в режиме холостого
хода, когда МДС возбуждения F80 = IFном [см. (26.1) ].
В современных машинах постоянного тока щетки устанавли­
вают на геометрической нейтрали. В этом случае МДС обмотки
возбуждения при нагрузке машинь1:
Fв.н = Fво + Fqd •
(26.9)
Здесь Fqd представляет собой приращение МДС обмотки воз­
буждения, компенсирующее размагничивающее влияние реакции
якоря по поперечной оси на пару полюсов (А).
Количественный учет размагничивающего действия реакции
якоря усложнен тем, что МДС поперечной реакции якоря действу355
ет перпендикулярно оси главных полюсов и вызывает искажение
магнитного потока обмотки возбуждения. Возникающее при этом
размагничивание машины происхощп из-за магнитного насыще­
ния элементов магнитной цепи машины, в первую очередь зубцов
сердечника якоря.
Размагничивающее действие реакции якоря по поперечной
оси учитывают введением коэффициента реакции як оря kii.я• Этот
коэффициент получен в резулътате исследования боль­
--�1'1'1'11'1"'
.
11
кр
шого количества некомпен­
сированных машин постоян­
ного тока при различных
значениях магнитной индук­
ции в зубцах якоря Bz.
Приращение МДС, ком­
пенсирующее реакцmо якоря
по поперечной оси (А),
о--------_...........__.___,,._.
F:td = k _яF,,,
(26.10}
p
о.в
f,6
Z,4 Fa F80
Рис. 26.6. График kp.• =f(F,/F80)
где Fa - МДС обмотки якоря
на пару полюсов (26.6), А.
Для большинства машин
постояmюго тока магнитная индукция в зубцах якоря Bz = 1,7+2,3
Тл. Приращение МДС Fqd определяют по графику kii.я = j(__FJFвo)
(рис. 26.6), где нижняя граница графика соответствует Bz = 1,7 Тл,
а верхняя - Bz = 2,3 Тл.
Значение тока в обмотке возбуждения [см. (26.8)] принимают
в зависимости от вида возбуждения машины постояmюго тока:
при параллельном возбуждении при мощности машин от 10 .до
1000 кВт ток 18 принимают соответственно от 4,0 до 1,0% от номи­
нального тока мапшны, а в машинах мощностью от 1 до 10 кВт соответственно от 8,0 до 4,0%; в мапшнах последовательного возбуж­
деIШЯ ток возбуждеIШЯ прmшмают равным току якоря (см. § 29.6).
В машинах постояmюго тока с компенсационной обмоткой
(см. § 26.4) Fqd = О, т. е. расчет числа витков полюсной ка'I)'ШКИ
(26.8) ведут по величине F80 = L F"0,..
•
Пример 26.1. Двигатель постояЮiоrо тока параллельного возбуждения
мощностью Роом = 75 кВт работает от сети напряжением И= 220-В. КIЩ двигате­
ля при номинальной наrрузке tJ ooм = 0,89. Двигатель четырехполюсный, обмотка
якоря простая воmювая (2а = 2), число эффективных проводников в обмотке N =
= 164, ток возбуждения составляет 1,3% от номиналыюrо потребляемого двига­
телем тока. Определить число виrков в полюсоой каrушке возбуждения w._., если
все они соединены последовательно, воздушный зазор о = 2,0 мм, коэффю.щент
воздуmооrо зазора k6 = 1,3, магнитная ющукция в зазоре Bs = 0,76 Тл, в зубцах
якоря В= = 1,8 Тл; а коэффю.щент насыщения мапnпной цепи машины kµ = 1,35.
Р еш е н и е. Ток, потребляемый двигателем при ооминальной наrрузке,
75 · 103
Р...м 103
=
ном
и11_
220 • о,89
Ток в обмотке возбуждения
I
356
=
383 А
/8
Ток в обмотке .якоря
= 0,013/ном =0,013-383= 5 А.
/0 = /ном-/■=383-5=378 А.
Магнитное напряжение воздушного зазора оо (26.4)
Fi; =0,8��k0103 =0,8-О,76-2,0-1,3-103 =1580 А.
МДС возбуждения в режиме холостого хода на пару поmосов
F._0 = 2Fi;kµ =2 -1580-1,35=4266 А.
МДС обмотки якоря на пару ооmосов по (26.6)
F0 =N/0 /(4ap)=164•378/(4•1 •2)= 7749 А.
Коэффициенr реакции якоря по рис. 26.6 при F0 /F.o = 7749/4266=1,8 и
В, = 1,8 Тл равен 1'i,.• = 0,19.
Приращение МДС, компенсирующее реакцию .якоря по поперечной оси, по
(26.10)
Fq,1 =kp .F,, =0,19-7749=1472 А .
МДС возбуждения при номинальной нагрузке двшателя по (26.9)
F■.н = F.0 + Fq,1 =4266 + 1472 =5738 А.
Число виrков в поmосной юпушке возбуждения оо (26.8)
wк.■ == F•.н/(218 =5738/(2 · 5) = 574.
)
§ 26.4. Устранение вредноrо влияния
реакции якоря
В связи с тем что реакция якоря неблагоприятно влияет на ра­
бочие свойства машины постоянного тока1, при проектировании
машины принимают меры к устранеюпо реакции якоря или хотя
бы к ослаблеюпо ее влияния до допустимых пределов.
Компенсационная обмотка. Наиболее эффективным средст­
вом подавления влияния реакции якоря по поперечной оси являет­
ся применение в машине компенсациоmюй обмотки. Эту обмотку
укладьmают в пазы потосных наконечников (рис. 26. 7) и включа­
ют последовательно с обмоткой якоря таким образом, чтобы МДС
компенсационной обмотки Fк была противоположна по направле­
юпо МДС обмотки якоря Fa. Компенсационную обмотку делают
распределенной по поверхности потосного наконечника всех
главных полюсов машины. При этом линейную нагрузку для ком­
пенсационной обмотки принимают равной линейной нагрузке об­
мотки якоря.
Включение компенсационной обмотки последовательно в
цепь якоря обеспечивает автоматичность компенсации МДС якоря
при любой (в пределах номинальной) нагрузке машины. Таким
образом, в машине постоянного тока с компенсациоmюй обмоткой
при переходе от холостого хода к режиму нагрузки закон распре1 Искmочение составляют r,t:ашины посто.яшюго тока, в которых ооперечное поле
якоря используется оолезно, например электромашинные усилиrели попереч­
_ ного поля (см.§ 30.1).
357
деления магниmой индукции в зазоре главных потосов остается
практически неизме1rnым. Однако в межпотосном пространстве
часть МДС якоря остается нескомпенсированной. Нежелательное
влияние этой МДС на рабслу щеточного контакта устраняют при­
менением в машине добавочных потосов (см.§ 27.4).
Компенсацишrnые обмотки применяют лишь в машинах сред­
ней и большой мощности-более 15�500 кВт при И> 440 В,
Рис. 26.7. Компенсационная обмотка
г';
работающих с резкими колебаниями нагрузки, например в двига­
телях для прокатных станов. Объясняется это тем, что компенса­
ционная обмотка удорожает и усложняет машину и ее применение
в некоторых случаях экономически не оправдьmается.
Увеличение воздушного зазора под главными полюсами. В
машинах малой и средней мощности, не имеющих компенсацион­
ной обмотки, вредное влияние реакции якоря по поперечной оси
ослабляют соответствующим выбором воздушного зазора под
главными потосами. При этом следует иметь в виду, что при дос­
таточно малом воздушном зазоре и значительной линейной на­
грузке реакция якоря по поперечной оси может не только ослабить
магнитное поле под одной из частей главного потоса, но и пере­
магнитить его, т. е. изменить полярность - «опрокинуть поле».
Некоторое увеличение воздушного зазора под главными полюса­
ми, особенно на их краях, значительно ослабляет действие реак­
ции якоря. Однако не следует забывать, что увеличение воздушно­
го зазора ведет к необходимости повьппения МДС обмотки
главных потосов, а следовательно, и к увеличению размеров по­
люсных катушек, полюсов и габарита машины в целом.
На этом же принципе уменьшения МДС поперечной реакции
якоря за счет повьппенного магниmого сопротивления на пути ее
действия основан и другой способ ослабления действия реакции
якоря. Этот способ состоит в том, что сердечники главных полю­
сов делают из листовой анизотрощюй (холоднокатаной) стали
(обычно применяют сталь марки 3411). Эта сталь в направлении
проката обладает повьппенной магнитной проницаемостью, а «по­
перек проката» - небольшой магнитной проницаемостью. Штам­
повать пластинь1 полюсов из такой стали следует так, чтобы ось
полюса совпадала с направлением проката листа стали.
358
• § 26.5. Способы возбуждения маwин
постоянного тока
Для работы электрической машины необ ходимо наличие маг­
mпного поля. В большинстве машин постоянного тока это поле
создается обмоткой возбуждения, питаемой постоя1mым током.
Свойства машин постоянного тока в значиrельной степени опр е­
деляются способом вкmочения обмотки возбуждения, т. е. спосо­
бом возбуждения.
По способам возбуждения машины постоЯJШого тока можно
классифицировать следующим образом:
м а шин ы н е з а вис и м о го в о з б ужд е ния, в которых
обмотка возбуждения (ОВ) питается постоянным током от источ­
ника, электрически не связанного с обмоткой якоря (рис. 26.8, а);
м аши н ы п а р а л л е л ь н о г о в о з б ужд е ния, в которы х
обмотка возбуждения и обмотка якоря соединены параллельно
(рис. 26.8, б);
м а ш и н ы п о с л е д о в а т е ль н о го в о з б ужд е ния (обыч­
но применяемые в качестве двигателей), в которых обмотка воз­
буждения и обмотка якоря соедШiены последовательно (рис. 26.8,
в);
м а шин ы с м еша н н о го в о з б ужд е н и я, в которых
имеются две обмотки возбуждения - параллельная ОВ 1 и после­
довательная ОВ2 (рис. 26.8, г);
м аши н ы с в о з б ужд е н и е м п о с т о я н н ым и м а г­
нитами (рис.26.8,д).
Все указанные машины (кроме последни х) относятся к маши­
нам с э л е к т р о м а гн и т н ым в о з б ужд е н и е м, так как маг­
:нипюе поле в Ш1Х соз­
дается электрическим
током, про ходящим в
обмотке возбуждения.
Начала и КОIЩЪI
обмоток машин по­
стоянного тока со­
гласно ГОСТу обо­
значаются: обмотка
якоря - Яl и Я2, об­
добавочных Рис. 26.8. Способы возбуждения машин по­
мотка
стоянного тока
поmосов - Дl и Д2,
компенсационная
обмотка - К 1 и К2, обмотка возбуждения независимая - М l и
М 2, обмотка возбуждения параллельная (шунтовая)- Ш 1 и Ш 2,
обмотка возбуждения последовательная (сериесная) --С 1 и С2.
359
Контрольные вопросы
1. Какие участки содержиr маrниrная цепь маmины постоинноrо тока?
2. В чем сущность ивления реакции икори машю1ы постоинноrо тока?
3. Почему МДС икори, действующая по поперечоой оси. вызывает размагничи­
вание машины по продолыюй оси?
4. Как учиrываетси размагничивающее действие реакции икори при расчете
числа виrков поmосной юnушки обмотки возбуждения?
5. С какой целью компенсационную обмотку вкmочают последовательно с об­
моткой икори?
6. Почему с увеличением воздушного зазора ослаблиетси размагничивающее
влияние реакции .якори?
7. Какие способь1 возбуждения примеНJIЮТ в машинах посто.янноrо тока?
Глава 27• Коммутация
-в машинах
постоянного тока
§ 27 .1. Причины, вызывающие
искрение на коллекторе
При работе машины постоянного тока щетки и
комектор образуют скользящий контакт. Площадь
конrакта щетки выбирают по значеmпо рабочего
тока машины, приходящегося на одну щетку, в соот­
ветствии с допустимой ruютностью тока для вы­
бранной марки щеток. Если по какой-то причине
щетка прилегает к коллектору не всей поверхно­
стью, то возникают чрезмерные местные плотности
тока, приводящие к искреmпо на комекторе.
Причины, вызьmающие искрение на комекторе,
разделяют на механические, потеIЩИалъные и ком­
мутационные.
Ме х а н и ч е с к и е причины искрения - сла­
бое давление щеток на комектор, биение комекто­
ра, его эШIИПТичность или негладкая поверхность ,
загрязнение поверхности коллектора, выс'I)'Пание
миканитовой изоляции над медными пластинами,
неплотное закрепление траверсы, пальцев или щет­
кодержателей, а также другие причины, вызываю­
щие нарушение электрического контакта между
щеткой и комектором.
П о т е нц и а л ь н ы е причины искрения появ­
ляются при возникновении напряжения между
смежными коллекторными пластинами, превышаю­
щего допустимое значение (см. § 25.5). В этом слу­
чае искрение наиболее опасно, так как оно обычно
сопровождается появлением на комекторе электри­
ческих дуг.
Ко м м у т ац и о н н ы е причины искрения соз­
даются физическими процессами, происходящими в
машине при переходе секций обмотки якоря из од­
ной параллельной ветви в другую.
Иногда искрение вызывается целым комплексом
причин. Выяснение причин искрения следует начи­
нать с механических, так как их обнаруживают ос­
мотром коллектора и щеточного устройства. Труд­
нее обнаружить и устранить коммутационные
причины искрения.
361
При выпуске готовой ма1mmы с завода в ней настраивают
т е м н у ю коммутацию, искточающую какое-либо искрение. Од­
нако в процессе эксплуатации машины:, по мере износа коллектора
и щеток, возможно появление искрения. В некоторых случаях оно
может быть значительным и опасным, тогда машину необходи­
мо остановить для выяснения и устранения причин искрения.
Однако небольшое искрение в машинах общего назначения
обычно допустимо.
Согласно ГОСТу, искрение на коллекторе оценивается степе­
нью искрения (классом коммутации) под сбегающим краем щетки.
Ст е п е н ь 11 - искрения нет (темная коммутация).
Ст е п е н ь 1 /4--слабое искрение под небольшой частью щет­
ки, не вызьmающее почернения коллектора и появления нагара на
щетках.
Ст е п е н ь 1 1 /2 - слабое искрение под большей частью щет­
ки, приводящее к появлению следов почернения на коллекторе,
легко устраняемого протиранием поверхности коллектора бензи­
ном, и следов нагара на щетках.
Ст е п е н ь 2 - искрение под всем краем щетки. Допускается
только при кратковременных толчках нагрузки и при,-�::rерегрузке.
Приводит к появлению следов почернения на коллекторе, не уст­
раняемых протиранием поверхности коллектора бензином, а также
следов нагара на щетках.
Ст е п е н ь 3 - значительное искрение под всем краем щетки
с появлением крупных вьmетающих искр, приводящее к значи­
тельному почернению коллектора, не устраняемое протиранием
поверхности коллектора бензином, а также к подгару и разруше­
нию щеток. Допускается только для моментов прямого (безрео­
статного) вкточения или реверсирования машин, если при этом
коллектор и щетки остаются в состоянии, пригодном для даль­
нейшей работь1.
Если допустимая степень искрения в паспорте электрической
машины не указана, то при номинальной нагрузке она не должна
превышать 1 1/2•
При вращении якоря машины постоянного тока коллекторные
пластинь1 поочередно вступают в соприкосновение со щетками.
При этом переход щетки с одной пластИНЬI (сбегающей) на дру­
гую (набегающую) сопровождается переключением секции об­
мотки из одной параллельной ветви в другую и изменением как
значения, так и направления тока в этой секции. Процесс пере­
кточения секции из одной параллельной ветви в другую и сопро­
вождающие его явления назьmаIQтся коммутацией.
Секция, в которой происходит коммутация, назьmается ком­
мутирующей,. а продолжительность процесса коммутации - пе­
риодом коммутации:
Тк = [60/(Кп)](Ьщ/Ьк) ,
где Ь щ - ширина щетки; К - число коллекторных пластин; п частота вращения якоря, об/мин; Ь к - расстояние между середи362
нами coceдmlX коллекторных пласnm (коллекторное деление).
Сложность процессов коммуrации не позволяет рассмотреть
коммуrацию в общем виде. Поэтому для получения аналитических
и графических зависимостей, поясняющих коммутацию, допуска­
ют, что ширина щетки равна коллекторному делению; щетки рас­
положены на геометрической нейтрали; электрическое сопротив­
ление коммутирующей секции и мест ее присоеДJШения к
коллектору по срав11 НОЛ/J{JИНUt
нению с сопротив- а,
U/
IJ](lЩtHUJI
лением переходноrо
контакта «щетка­
коллектор)) пренеб­
режимо мало (обыч­
но такое сооmоше­
ние указанных со­
противлений соот­
ветствует действи­
тельности).
В
начальный
2ia
момент коммутации
(рис. 27.1, а) кон­
t•O
тактная поверхность Рис. 27.1. Переход коммуrирующей секции из
касается
щетки
одной параллельной ветви в другую
только пластины 1,
а коммутирующая секция оmосится к левой параллельной ветви
обмотки и ток в ней равен ia. Затем пластина 1 постепенно сбегает
со щетки и на смену ей набегает пластина 2. В результате комму­
тирующая секция оказывается замкнутой щеткой и ток в ней по­
степенно уменьшается. В сереДJШе процесса коммутации (t =
= 0,5TJ конrакrная поверхность щетки равномерно перекрьmает обе
коллекторные пласnmы (рис. 27.1, б). В конце коммутации (t = Тк)
щетка полностью переходит на пластину 2 и теряет контакт с пла­
сnmой 1 (рис. 27.1, в), а ток в коммутирующей секции становится
равным - ia, т. е. по значению таким же, что и в начале коммута­
ции, а по направлению - противоположным. При этом коммути­
рующая секция оказалась в правой параллельной ветви обмотки.
§ 27 .2. Прямолинейная коммутация
Этот вид коммутации имеет место в машине, если в процессе
коммутации в коммутирующей секции ЭДС не наводится или, что
более реально, сумма ЭДС в коммуmрующей секции равна нуmо. В
этом случае для коммутирующей секции, замкнугой щеткой (рис.
27 .1, б), в соответствии со вторым законом Кирхгофа можно записать
(27.1)
i1 r1 - i2 r2 =О,
r, и r2 - переходные сопротивления между щеткой и сбегающей 1
и набегающей 2 пластинами; i1 и i2 - токи, переходящие в обмот­
ку якоря через пласnmы 1 и 2:
363
(27.2)
i1 = i0 + i ; i2 = i0 - i ,
здесь i - ток в коммуrирующей секции.
Используя (27.2), получим
Ua + i}lj_ -(i0 i)r2 = О,
откуда ток в коммуrирующей секции
(27.3)
i= i0 (r2 -1j)/(r2 +lj) .
Закон изменения тока коммуrирующей секции в функции
времени определяется уравнением
i= i0 (1-2t/Tк ) •
(27.4)
Это уравнение является линейным, а поэтому график i = fi..t)
представляет собой прямую mmию, пересекающую ось абсцисс в
точке t = 0,5Тк (рис. 27.2). Коммутация, при которой ток в комму­
тирующей секции i изменяется по прямолинейному закону, назы­
вают прямолинейной (идеальной) коммутацией.
Весьма важным фактором, определяющим качество коммуrа­
ции, является ruютность тока в переходном контакте «щетка­
rmастина»: j1 - rmотность тока под сбегающим краем щетки;j2 rmomocть тока под набегающим краем щетки.
Плотность тока под щеткой прямо пропорциональна ташенсу
угла между осью абсцисс и графиком коммуrации, т. е. j1 == tga 1 и
}2 == tga 2 • График прямотmейной (идеальной) коммуrации: имеет
в ид прямой линии. При этом
i
а1 = а2, а следовательно, rmот­
ность тока в переходном кон­
такте «щетка-коллектор» в
течение всего периода комму­
тации остается неизменной (j1 =
=
Ь = const). Физически это
t
объясняется тем, чrо при прямо­
линейной коммутации убьшание
тока, проходящего через сбе­
гающую rmастину коллектора,
пропорционально уменьшению
rmощади конrакта щетки с этой
rmастиной, · а нарастание тока
через набегающую rmастину
Рис. 27.2. График тока прямоли­ пропорционально увеличению
площади контакта щетки с этой
нейной коммутации
пластиной.
Из построений, сделашп,rх на рис. 27.2, следует, что к моменту
времени, когда щетка теряет конrакт со сбегающей пластmюй, ток
через эту rmастину уменьшается до нуля. Таким образом, при пря­
-
молинейной коммутации пластина коллектора выходит из-под
щетки без разрыва тока.
Изложенные свойства прямолинейной (идеальной) коммута-
364
ции - постоянство плопюсти тока под щеткой и выход пласnmы
из-под щетки без разръmа тока :-- являются основными, и благода­
ря им этот вид коммуrации не сопровождается искрением на кол­
лекторе.
§ 27.3. Криволинейная замедленная коммутация
Период коммуrации в совремеlППdХ машинах постоянного то­
ка весьма мал и составляет приблизительно 1 о-з-1 o-s с. При этом
средняя скорость изменения тока в коммуrирующей секции
(di/dt)cp = 2ia /1'.: очень велика, что приводит к появлению в ком­
муrирующей секции ЭДС самоиндукции
eL = -Lc (di/dt),
(27.5)
rде L c - индуктивность секции; i - ток в коммутирующей
секции.
Обычно в каждом пазу якоря на- а)
!l,--'l
!J,-r
ходится несколько пазовых сторон (не
менее двух), принадлежащих разным
секциям. При этом если шаr обмотки
ПОJПIЫЙ (у, = t ), то все ЭТИ секции од­
новременно находятся в состоянии
коммуrации, будучи замкнутыми раз­
ными щетками (рис. 27.3, а). Обычно
ширина щетки больше коллекторного
деления и каждая щетка замыкает одповременно несколько секций. Так о.�
как пазовые части коммуrирующих
секций лежат в одних пазах, то изме­
няющийся магнитный поток каждой из
этих частей наводит в пазовых частях
других секций ЭДС взаимоиндукции
(27.6)
ем =-Mc (di/dt),
где Мс - взаимная индуктивность од­
Рис. 27.3. Магнитная связь
новременно коммугирующих секций.
Обе ЭДС создают в коммути­
одновременно коммути­
рующих секций:
рующей секции реактивную (резуль­
тирующую) ЭДС
а - при полном mare (у1 = 't);
б - при укороченном шаrе
ер =eL +ем =-(Lc +Mc )(di/dt),
обмотки JIKOPJI (у1 < t)
(27.7)
которая препятствует изменению тока в коммуrирующей секции.
Кроме того, под влиянием реакции якоря маrНИПiая индукция в
зоне коммуrации (на геометрической нейтрали) приобретает неко­
торое значение Вк (см. рис. 26.4, в), под действием которой в ком­
мутирующей секции наводится ЭДС вращения
(27.8)
365
где/ - дmm:a пазовых частей секции; Wc - число витков в сек­
ции; v - ЛШiейная скорость движения секции.
Электродвижущая сила вращения в отличие от реактивной
ЭДС может иметь разное направление в зависимосrи от полярно­
сти внешнего магнипюго поля в зоне коммуrации. Если машина
не имеет добавочных поmосов, то ЭДС вращения направлена со­
гласованно с реактивной ЭДС. В этом случае в конrуре коммуги­
рующей секции действует сумма ЭДС
(27.9)
re =ер +евр .
С учетом изложенного уравнение по второму закону Кирхгофа
для коммугирующей секции замкнутой щеткой имеет вид
i,r, - i2r2 = re,
(27.10)
или с учетом (27.3) запишем выражение тока в коммугирующей
секции при кривоЛШiейной замедленной коммугации:
(27.11)
i=[ia (r2 -1j)/(r2 +tj)]+[Le/(r2 +tj)].
Первое слагаемое правой части полученного выражения пред­
ставляет собой ток прям:оЛШiейной коммуrации [см. (27.3)]
(27 .12)
inp = ia (r2 -1j)/(r2 + 1j) .
Второе слагаемое правой части выражения (27 .11) определяет
значение д о п о л н и т е л ь н о г о т о к а к о м м у т ац и и, возни­
кающего в коmуре коммутирующей секции под действием ЭДС L е :
iд = re/(r2 + 'i).
(27.13)
Таким образом, ток в коммутирующей секции при криволиней­
ной замедленной коммуrации равен сумме двух составляющих:
(27.14)
i=inp +iд .
Характер изменения тока iпр определяется графиком, показан­
ным на рис. 27.2. Что же касается дополнительного тока коммуга­
ции iд, то для определения характера его изменения за период
коммутации необходимо предварительно выяснить, как меняются
за период коммуrации величш1ы, определяющие этот ток, а имен­
но ЭДС Le и сумма сопротивлений (r2 + r1).
Если в машине нет добавочных поmосов и магнитная шщук­
ция в зоне коммуrации Вк невелика, то ЭДС Le определяется
главным образом реактивной ЭДС ер = -(Lc + Mc )(di/dt). При
прямоЛШiейном законе изменения тока dildt = const, а следова­
тельно, I е = const.
Закон изменения суммы сопротивлений (r1 + r2) определяется
выражением
(27.15)
366
где R - сопротивление переходного коmакта «щетка-пластина»,
когда пластина коллектора полностью перекрьпа щеткой и пло­
щадь ее переходного коmакта равна Sк.
В начале (t = О) и в кшще (t = Тк) коммугации 'i + r2 = оо; при
t = О,5Тк Гц сумма сопротивлений r2 + r1 = 4R. На рис. 27.4, а
представлен график (r2 + r1) = .l(t). Эrому закону изменения суммы
сопротивлений и постоянству ЭДС
L е соответствует кривая J измене- а)
ния добавочного тока коммугации iд =
\
.l(t), представленная на рис. 27.4, б.
�
График изменения результирую- ::щего тока коммугации i = iпр + iд =
=j(t), полученный сложением орди1
нат графиков тока прямолинейной
о
'-------.i-----.__--t_t_
коммутации iпр = j(t) (см. рис. 27.2) и
добавочного тока коммутации iд = j(t) б)
1
(см. рис. 27.4, б, график J), представ'А
лен на рис. 27.5. Криволинейный вид
этого графика обусло:�щен криволи­
1
нейностью графика iд = j(t). Физиче­
о�-------,,..:✓, t
ски это объясняется реактивным дей­
'
"'/
ствием суммарной ЭДС L е, наводи.......__......... .2 1
мой в коммуrирующей секции, пре­
Т,с
пятствующей изменениям тока в этой
секции от +ia в начале коммутации до Рис. 27.4. Графики измене­
-ia в ее конце. По этой прИЧШiе в се­ ний сопротивлений (r1 + r2)
и тока iд
редине периода коммугации (точка а)
ток в коммуrирующей секции ia = iд,
т. е. он не равен нулю, как это имело место при прямолинейной
коммутации {см. рис. 27.2), а равен добавочному току коммугации
iд, который в этот момент времени {t = О,5Тк) имеет наибольшее
значение (см. рис. 27.4, б, график J). Уменьшение тока ia до нуля и
изменение его направления наС'I)'Пают во второй половине перио­
да коммутации в момеm времени t > О,5Тк {точка Ь), т. е. по срав­
нению с прямолинейной в рассматриваемом виде коммутации
процесс изменения направления тока в коммутирующей секции
. затягивается во времени. В итоге график коммуrации приобретает
\риволинейный вид. По этой прИЧШiе такую коммугацию называ­
�т криволинейной замедленной. Характерный признак этого вида
коммутации - неодинаковая плотность тока под щеткой в начале
и в ко�ще периода коммуrации.
В этом можно убедиться, воспользовавшись построениями,
сделанньJМИ на рис. 27.5, для момента времени t = О,5Тк,
Среднее значение плотности тока под набегающим краем
щеткиj2, имеющим коmакт с пластиной 2 (рис. 27.6, а), меньше
среднего значения плотности токаj1 под сбегающим краем щетки,
имеющим контакт с пластиной 1. С одной стороны, это объясняет­
ся тем, что tg а2 < tg а 1 {см. рис. 27.5), а с другой стороны, тем, что
1
1
/1
'
367
при t = О,5Тк токи, отходящие в обмотку якоря через пластины 1 и
2, не равны: i2 < i1• При криволинейной замедлеmюй коммугации
ruющадь S1 соприкосновения Ш1астинъ1 J с щеткой уменьшается
быстрее, чем ток i1 = ia + iд , а поэтому плоmость тока под сбе­
гающим краем щетки повьппается. К концу периода коммугации
эта плоmость тока достигает наибольшего значения j = tga1, где
а; соответствует t:::::: т;,_ (см. рис. 27.5).
При значительных нагрузках
i
о,5тк
маш1mы плоmость тока под сбе­
гающим краем щетки может дос­
тигнуrъ недопустимо больших
значений и вызвать искрение на
коллекторе. Однако, как показы­
вает опьп, возможно появление
t
искрения и при небольших нагру­
о
зочнъrх
токах в цепи якоря. Это
+
свидетельствует о том, что уве­
....tl
личение плоmости тока под сбе­
.,r
гающим краем щетки не единст­
веШiая причина искрения на
коллекторе. Искрение возЮП<ает
Рис. 27.5. График тока криволи- также при размыкании замкнутой
нейной замедленной коммуrации накоротко щеткой цепи коммутирующей секции при выходе сбе­
гающей пластинъ1 коллектора из-под щетки. В момент размыкания
коммутирующей секции с добавоЧНЪIМ током коммутации накоп­
ленная в ней энергия маmипюго поля (Дж)
(27.16)
11
Oj_Jg__
-
t t, = i., +iA
_........__, ,--.......--, lf,,
Набееоющии
крои
С6еzоюшиt1 ttо6е2оющий
KPOIJ
кроl)
Ctfeeoющ1,.,J
1rpau
Рис. 27.6. Распределение плотности тока под щеткой при криво­
линейной замедленной (а) и ускоренной (б) видах коммуrации
затрачивается на создание электрической дуги между сбегающим
краем щетки и сбегающей коллекторной пластиной.
Изложенные вьппе свойства криволинейной замедленной
коммутации - повышение плоmости тока под сбегающим краем
щетки и вьrход сбегающей IUiастины из-под щетки с разрьmом це368
пи тока коммутации - создают условия к возникновению искре­
ния на коллекторе под сбегающими краями щеток.
§ 27.4. Способы улучwения коммутации
Основная причина неудовлетворительной коммутации в ма­
шинах постояmюrо тока - добавочный ток коммутации
· iд = "f,ej''[,rк .
(27.17)
Здесь "f.rк - сумма электрических сопротивлений добавочному
току коммутации iд: сопротивления мест пайки в петушках, пере­
ходного контакта между коллекторными пластинами и щеткой и
собствеmю щетки.
Однако из перечислеmп,rх сопротивлений, входящих в "f. rк ,
наибольшее значение имеет сопротивление щетки и переходного
контакта, поэтому, обозначив их rш, с некоторым приближением
можно записать
(27.18)
Из полученного выражения следует, что уменьшить ток iд, а
следовательно улучшить коммутацию, можно либо увеличением
сопротивления rш, либо уменьшением суммарной ЭДС "f.e в ком­
муrирующей секции. Отсюда вьпекает ряд способов улучшения
коммутации, основные из которьrх рассмотрены ниже.
Выбор щеток. С точки зрения обеспечения удовлетворитель­
ной коммутации целесообразнее применять щетки с большим пе­
реходным падением напряжения в переходном контакте и собст­
веmю щетке, т. е. щетке с большим сопротивлением rш· Однако
допустимая плотность тока в щеточном контакте этих щеток неве­
лика, а поэтому их применение в машинах со значительным рабо­
чим током ведет к необходимости увеличения площади щеточного
контакта, что требует увеличения площади коллектора за счет ero
длинъ1. Это привело бы к увеличению габаритов машины и допол­
нительному расходу меди. Поэтому щетки с большим rш приме­
няют преимущественно в машинах с относительно высоким на­
пряжением, а следовательно, и с небольшим рабочим током.
-- Щетки для электрических машин разделяют на четъiре rруп­
пъ1�ающиеся составом, способом изготовления и характе­
ристиками (табл. 27.1). Выбирают щетки в соответствии с реко­
мендациями, выработаm1ыми на основании многолетнего опъпа
проектирования и эсплуатации электрических машин. Наибольшее
применение в маппrnах постоЯШiого тока напряжением 110-440 В
имеют электроrрафитирова1ПIЫе щетки.
Увеличенiпо переходного сопротивления щеточного контакта,
а следовательно улучшению коммутации, способствует п о л и т у р а коллектора - тонкая оксидная пленка на поверхности
коллектора, обладающая повышенным электрическим сопро­
тивлением.
369
Уменьшение реактивной ЭДС. Существеююе влияние на
суммарную ЭДС в коммуrирующей секции оказывает реактивная
ЭДС ер = ei + ем, ЭДС взаимоиндукции ем в значительной степени
зависит от ширш1ы щетки: чем шире щетка, тем большее число
коллекторных пластин перекрьmает она одновремеюю, а следова­
тельно, тем больше секций одновремеюю коммуrируется, что вы­
зьmает повьппение ЭДС взаимоиндукции ем. Однако СЛШIIКОМ уз­
кие щетки также нежелательны из-за недостаточной механической
прочности, а также потому, что для создания необходимой площади
Таб л ица 27.1
Гр уппащеток,
обозначеюtе
Графитовые Г, 61lM
ЭлектрографиrированныеЭГ
Угольно-графитовые
УГ;Т
Медно-графитовые
м,мг
Переходное Номинальная плотпадеюtе
напряжения ностьтока,
напару
Nмм2
щеток при
номинальномтоке,В
1,9-2,0
2,0--2,7
2,0
0,2-1,5
Область применения
O,ll---0,12 Для машин с облегченными
условшми коммуrации
0,10---0,15 Для машин со средними и затрудненными условиями коммутации и ДЛJ1 КОНПIК'JНЫХ колец
0,06---0,07 Для машин со средними уеловиями коммуtации
0,15---0,20 Для НИЗКОВОЛЬ'ПIЫХ (до 48 В)
машин и конrактных колец
контактной поверхности в узкой щетке прmплось бы увеЛИЧlfГЪ ее
дmrny, а это привело бы к необходимости увеличения длш1ы кол­
лектора. Наиболее целесообразны щетки шириной в 2-3 коллек­
торных деления.
Заметное влияние на реактивную ЭДС оказьmает тип обмотки
якоря. Так, если обмотку якоря вьmолнить с укорочею1ым шагом
(у 1 < 1:), то активные стороны одновременно коммуrирующих сек­
ций окажутся в разных пазах (см. рис. 27.3, б), что будет способст­
вовать уменьшеншо ЭДС взаимоиндукции. Реактивная ЭДС может
быть ослаблена уменьшением индуктивности секций Lc. Для этого
не следует применять в обмотке якоря секции с большим числом
витков ( Lc w;) и полузакрытые пазы. Однако осуществление
этих мероприятий привело бы к созданшо громоздких и неэконо­
мичных машин. Поэтому при проектировании машин постоянного
тока выбор указаннь�х параметров связьmают со стремлением по­
лучить компактную и экономичную машину. При этом реактивная
ЭДС может быть в значительной степени уменьшена или даже
полностью устранена созданием в зоне коммуrации (по оси щеток)
коммуrирующего поля определенной полярности и велич1шы.
Создается такое поле добавочньIМИ полюсами или сдвигом щеток
с геометрической нейтрали.
=
370
Добавочные полюсы. НазначеJШе добавочных поmосов создать в зоне коммуrации магниrное поле такой величины и на­
правления, чтобы наводимая этим полем в коммутирующей сек­
ции ЭДС вращения евр компенсировала реактивную ЭДС ер. В ма­
шине постояшюго тока без принятия мер по улучшению
коммутации ЭДС ер и евр направлены в одну сторону, т. е. дейст­
вуют согласно:
Ie = ёр +ёвр.
Суммарная ЭДС в коммуrирующей секции L е окажется рав­
ной нуmо, если посредством добавочных поmосов создать в зоне
коммутации магнитное поле с магниrной индукцией Вк такой ве­
личш1ы и направления, чтобы ЭДС вращения евр изменила свое
направление на Qбpamoe [см. (27.8)], а значение ее бъmо бы равно
ЭДС реактивной ер. В этом случае
Iе=ёр +ёвр =О.
и коммуrация становится прямоЛШiейной (идеальной).
Добавочные поmосы располагают между главными. При этом
щетки устанавливают на геометрической нейтрали.
Все мaunmы постоянного тока мощностью свъппе 1 кВт снаб­
жаются добавочными поmосами, число которых прШIИМают рав­
ным числу главных поmосов или же вдвое меньшим. Наличие до­
бавочных поmосов позволяют увеличить ЛШiейную нагрузку
маШШ1Ъ1 и при заданной мощности получить машину меньшего
веса и габаритов.
Число витков обмотки добавочных поmосов выбирают таким,
чтобы МДС добавочных поmосов компенсировала МДС якоря по
поперечной оси в зоне коммутации и имела некоторый избъrгок,
необходимый для создания коммутирующего поля с индукцией Вк,
направлеirn1JГ0 противоположно поmо реакции якоря (рис. 27.7).
Исходя из этого, МДС добавочного поmоса для некомпенсирован­
ных машин постоянного тока прШIИМают равной (А)
(27.19)
� = kдF;,,
коэффициент, учитъmающий требуемое превы­
где kд = F,JF0
шение МДС обмотки добавочного поmоса Fд над МДС якоря Fa
[ см. (26.6)]. Для машин постоянного тока совремеННЪIХ серий этот
коэффициент прШIИМают равНЪIМ kд = 1,20+1,45.
Если машина снабжена компенсационной обмоткой, то МДС
добавочных поmосов следует уменьшить на величину МДС ком­
пенсационной обмотки Fк.о• Обычно в компенсированнъIХ маши­
нах постоянного тока МДС добавочнъIХ поmосов на 15-30 %
больше МДС якоря.
Если МДС добавочнъ�х поmосов сделать больше требуемого
значения [см. (27.19) ], то ЭДС вращения евр станет больше реак­
тивной ЭДС. В этом случае суммарная ЭДС Ie изменит свой
знак, а добавочнъIЙ ток коммутации - свое направление на про-
371
тивоположное по сравнению с тем, какое он имел при криволи­
нейной замедленной коммутации (см. рис. 27.4,6, кривая 2).
График изменения результирующего тока коммутации i2 = ia + iд
в этом случае принимает вид, представленный на рис. 27 .8, т. е.
коммутация становится криволинейной ускоренной, так как ток в
коммутирующей секции достигает нулевого значения за время
Т< 0,5 Тк (точка Ь). Для
кривоЛШiейной уско­
ренной коммутации ха­
повышение
рактерно
плотности тока под на­
бегающим краем щетки
(см. рис. 27.6, б). Объ­
ясняется это тем, что
при этом виде комму­
дтации площадь сопри­
косновения пласпmы 2
с щеткой нарастает
медленнее, чем увели­
чивается ток i2 = ia + iд.
Наибольшее
значение
.!!
плотности тока j; tga2
т
соответствует началу
коммутации
Рис. 27.7. Резульmрующее магнитное поле в периода
(
t
�
О
).
При
значиrелъ­
воздушном зазоре машины с добавочными
поmосами в генераторном ([) и двигатель­ нъrх нагрузках это мо­
жет привесm к искре­
ном (Д) режимах
нию
под набегающим
i
краем щетки. Эго объ­
ясняется тем, что при
ускоренной коммута­
ции въrход сбегающей
пластинъ1 из-под щетки
происходит с разръmом
t
цепи добавочного тока
о
коммутации, который
имеет направление, про­
тивоположное току за­
медленной коммутации.
Для обеспечения
компенсации реактив­
Рис. 27.8. График тока кривошmейной уско­ ной ЭДС при различ­
нъrх нагрузках машинъ1
ренной коммутации
обмотку добавочнъrх
поmосов вюnочают по­
следовательно с обмоткой якоря. В этом случае МДС добавочнъrх
поmосов Fд при различнъrх нагрузках машИНЪI изменяется пропор­
ционально току якоря Ia, т. е. пропорционально МДС якоря Fa.
=
...
1
372
Полярность добавочного лотоса в генераторе должна бьпъ
такой же, как и у следующего по направленmо вращения главного
лотоса, а в двигателе - как у предшествующего лотоса (рис. 27.9).
е
Генератор
Д6иtотель
Рис. 27.9. Полярность добавочных
полюсов при работе машины в
генераторном и двигательном ре­
жимах
ок.-------�I
Рис. 27.10. График изменения ЭДС
в коммутирующей секции в зависи­
мости от тока нагрузки
Добавочные лотосы обеспечивают удовлетворительную ком­
мутацию в машине только в пределах номинальной нагрузки. При
переrрузке машины происходит насыще­
ние магнитной цепи добавочных лотосов.
В этом случае реактивная ЭДС ер изменя­
ется пропорционально току нагрузки, а
рост ЭДС внешнего поля из-за насьпцения
магнитной цепи несколько задерживается
(рис. 27.10). В результате в коммутирую­
щей секции появляется суммарная ЭДС
е = ер - ек , т. е. коммутация становится
замедленной. Насьпценmо сердечников
добавочных лотосов способствует маг­
нитm,пi поток рассеяния Фда, замыкаю­
щийся через сердечники смежных главных
лотосов и станину (рис. 27.11). В целях
уменьшения магнитного потока рассеяния,
а следовательно, обеспечения более линей­
ной зависимосm потока добавочных лото­
сов от тока нагрузки воздушный зазор до- Рис. 27.11. К поняnпо
бавочного лотоса Sд разделяют на два:
о потоке рассеяния
один - между сердечником лотоса и яко- добавочных полюсов
рем Бд1 , а другой - между сердечником
лотоса и станиной Бд2 (см. рис. 27.7). В
этом случае зазор Sд2 ограничит значение потока Фда• Зазор Бд2
создается пакетом немагнитньIХ прокладок, закладьmаемых между
сердечником nomoca и станиной.
Получение коммутирующего поля смещением щеток. В
машинах постоянного тока мощностью до 1 кВт, вьшолняемъIХ без
добавочнъIХ лотосов, коммутирующее поле в зоне коммутации
создается смещением щеток с геометрической нейтрали.
r
373
Если щетки установлены на геометрической нейтрали (рис. 27.12,
а), то поперечное магшпное поле якоря с магнипюй индукцией Baq
создает в зоне коммуrации индукцию Вк (рис. 27.12, б). В результате в
коммутирующих секциях наводится ЭДС вращеШIЯ евр, направлеIШая
согласованно с реакmвной ЭДС ер и способствующая замедлешюй
й)
___________
5) ....,
1
Рис. 27.12. СоздаЮ1е коммуrирующеrо поля сдвигом щеток
коммугации. При сдвш-е щеток на физическую нейтраль тт' комму­
тирующее поле с индукцией В11. исчезает и ЭДС вращения евр = О. При
этом в коммугирующих секциях наводится ЛШIIЪ реактивная ЭДС ер.
Если же щетки сдвинуть на угол J3, т. е. за физическую нейтраль тт'
(mrnия сс1, то коммугирующее поле с индукци«?й в; измеюп свое
направление оrnосиrельно направления при положении щеток на
геометрической нейтрали. Эrо поле будет наводить в коммутирую­
щих секциях ЭДС вращения, равную реактивной ЭДС и противопо­
ложную ей по направлешпо (евр - ер = О), т. е. реактивная ЭДС ока­
жегся скомпенсированной и коммуrация станет прямоmmейной
(идеальной). Для получения необходимого эффекта щетки следует
смещать в направлении вращения якоря у генераторов или против
вращения якоря у двшателей.
ОIШсанный способ улучшения коммутации имеет следующие
недостатки: а) коммутирующее поле изменяется не пропорцио­
нально нагрузке мащш1ы, что исключает полную компенсацию
реактивной ЭДС во всем диапазоне нагрузок, так как для этого
пршплось бы при каждом изменении нагрузки менять положение
щеток (обычно щетки устанавливают в фиксированное положение,
соответствующее полной компенсации реактивной ЭДС при но­
минальной нагрузке); б) при смещении щеток с геометрической
нейтрали усиливается размагничивающее действие реакции якоря
(см. рис. 26.5); в) для реверсируемых машин смещение щеток с
геометрической нейтрали недопустимо, так как требуемое направ­
ление смещения физической нейтрали меняется с изменением на­
правления вращения якоря.
374
§ 27 .5. Круrовой оrонь по коллектору
При значительных переrрузках или внезапном коротком за­
мыкании маШШIЬI постоянного тока коммуrация приобретает рез­
ко замедленный характер. В этом случае между сбегающей кол­
лекторной пластиной и сбегающим краем щетки возникает
электрическая дуга. Так как коллектор вращается, то дуга механи­
чески растягивается
+
(рис. 27.13, а). Наря­ а)
ду с этим переrрузка
машшп,1 сопровожда­
ется усилением реак­
ции якоря, под дейст­
вием которой распре­
деление индукции в
+
воздушном зазоре ма­
шины становится не­ Рис. 27.13. РастяжеJШе электрической дуги на
равномерным (см. рис. вращающемся коллекторе (а) и расположение
барьеров между щетками (б)
26.4, в). В результате
напряжение между
соседними коллекторными пластинами увеличивается� превышая
допустимые пределы (см. § 25.5). Эrо, с одной стороны, может
привести к возникновенmо электрических дуг между смежными
пластинами, а с другой стороны, появление высокого потеIЩИала
на некоторых пластинах вызывает резкое повьппение напряжения
между щеткой и коллекторными пластинами по мере их удаления
от сбегающего края щетки. Все это создает условия для возникнове­
ния электрической дуги между щеткой и коллекторными пластинами.
Таким образом, в условиях значительной переrрузки в машине
постоянного тока появляются коммуrациош1ые и потенциальные
__ причины для возникновения электрической дуги на коллекторе.
При этом электрические дуги, вызванные коммуrациош1ыми при­
чm1ами, сливаются с дугами, вызвашn,1ми потеIЩИальными при­
чm1ами, образуя вокруг коллектора мощную электрическую дугу,
которая может перекинуться также и на корпус машши,1. Описан­
ное явление называется круговым огнем по коллектору. Круговой
огонь очень опасен, так как может привести к тяжелой аварии ма­
шины, вкmочая возникновение в машине пожара.
Добавочные поmосы и компенсационная обмотка хотя и ос­
лабляют опасность возникновения кругового огня, но поmюстью
ее не устраняют. Поэтому для защиты обмотки якоря от повреж­
дения электрической дугой в случае-возникновения кругового огня
в электрических машинах, работающих в условиях частых пере­
rрузок, между коллектором и обмоткой на якоре устанавливают
изолирующий экран. В некоторых машинах применяют воздушное
дутье, сдувающее дугу в сторону подшипника, защищенного теп­
лостойкой изоляционной перегородКой: Дriя создания препятствия
на пути распространения дуги между щетками разной полярности
устанавливают барьеры из изоляционного материала (рис. 27.13, б).
375
§ 27.6. Радиопомехи от коллекторных машин
и способы их подавления
При неудовлетвориrельной коммуrации коллекторная машина
становится источником радиопомех, ухудшающих качество ра­
диоприема, а иногда делающих его невозможным, поэтому уро­
вень индустриальных радиопомех не должен превышать значений,
определяемых действующими нормами.
Радиопомехи распространяются дву­
+
мя путями: по эфиру (электромагнитное
и
излучение) и через электросеть. Для по­
давления помех, распространяемых по
с�
эфиру, электрические машины экрани­
руют. В качестве экрана используют за­
землеmп,IЙ корпус машины. Если со сто­
роны коллектора в машине имеются окна,
ЯI
то их следует закрьпь металлическим
+;:]MI
коJПiаком или сеткой, обеспечив им на­
дежньIЙ
коmакт с корпусом машинь1.
ОВ
Ue
Для подавления помех, проникающих
от машины в сеть, применяют симметри­
М2
с�
у
с
ровште обмоток и включение фильтров.
Симметрирование обмоток состоит в том,
что каждую обмотку, включеШl)'Ю после­
Рис. 27.14. Схема вктов цепь якоря, разделяют на
чения помехозащитного довательно
две
равные
части и присоединяют сими
а
ф льтр
метрично к щеткам разной полярности.
Применение фильтров - основной способ подавления радиопо­
мех. Для большинства машин достаточно установиrь емкостный
фильтр в виде конденсаторов, включаемых между каждым токо­
несущим проводом и корпусом машинь1 (рис. 24.14). Значение ем­
кости конденсаторов подбирают опьпным путем, при этом они
должнь1 бьпь рассчитаны на рабочее напряжение машИНЬI. Для
фильтров предпочтительны п р о х о д н ы е конденсаторы типа
КБП, у которых одним из зажимов является металлическая обо­
лочка, прикрепляемая непосредствешю к корпусу машИНЬI.
Контрольнь1е вопросы
1. Какие причины моrут вызвать искре1mе на коллекторе?
2. Какие степе1m искрени.я предусмотрены ГОСТом? Дайrе каждой из них ха­
рактеристику и укажиrе условия допустимости.
3. Почему прямолинейная коммуrация не сопровождаеrся искре1mем?
4. Какие причины, вызывающие искре1mе, возникают при замедленной коммутации?
5. Объясните назначе1mе и устройство добавочных поmосов.
6. Каковы причшп.1, способные вызвать круговой огонь по коллектору?
7. Как можно снизить уровень радиопомех в коллекторной машине?
rпава2В• Коппекторные
- генераторы
постоянного тока
§ 28.1. Основнь,е понятия
В процессе работы генератора постоянного тока
в обмотке якоря индуцируется ЭДС Еа [см. (25.20)].
При подкmочешm к генератору нагрузки в цепи яко­
ря возникает ток, а на вьшодах генератора устанав­
ливается напряжение, определяемое уравнением на­
пряжений для цепи якоря генератора:
(28.1)
U = Е0 -/0 "[,r.
Здесь
(28.2)
- сумма сопротивлений всех участков цепи якоря:
обмотки якоря rа, обмотки добавочных полюсов rл,
компенсациошюй обмотки rк.о, последовательной
обмотки возбуждения rc и переходного щеточного
контакта rщ•
При отсутствии в маIПИНе каких-либо из указан­
ных обмоток в (28.2) не входят соответствующие
слагаемые.
Якорь генератора приводится во вращение при­
водным двигателем, который создает на валу гене­
ратора вращающий момент М1 • Если генератор ра­
ботает в режиме х.х. (/0 = О), то для вращения его
якоря нужен сравнительно небольшой момеm холо­
стого хода М0• Этот момент обусловлен тормозными
момеmами, возникающими в генераторе при его
работе в режиме х.х.: моментами от сил трения и
вихревых токов в якоре.
При работе нагруженного генератора в проводах
обмотки якоря появляется ток, который, взаимодей­
ствуя с магнитным полем возбуждения, создает на
якоре электромагнитный момент М [см. (25.24)]. В
генераторе этот момеm направлен встречно вра­
щающему момеmу приводного лвигателя ПД (рис.
28.1), т. е. он является нагрузочным (тормозящим).
При неизменной частоте вращения (п = const) вра­
щающий момент приводного лвиrателя М1 уравнове­
шивается суммой противодействующих моментов: мо­
ментом х.х. Мои электромаrниrnым моментом М, т. е.
377
(28.3)
Выражение (28.3) - уравнение моментов для генератора при
п = const. Умножив члены уравнения (28.3) на угловую скорость
вращения якоря ro , получим уравнение мощностей:
Pi = Ро + �м , (28.4)
где Pi = M1 ro - подводимая
от приводного двшателя к
генератору мощность (меха­
ническая); Ро = M0ro - мощ­
м"
ность х.х., т. е. мощность,
подводимая к генератору в
режиме х.х. (при отюпочен­
ной нагрузке); �м = Mro электромалmmая мощность
генератора.
Согласно (25.27), получим
Рис. 28.1. Моменты, действующие в
�м = Еа ]а ,
генераторе постоянного тока
или с учетом (28.1)
(28.5)
�м =U/0 +/;z_r=�+Pэa ,
где Р2 - полезная мощность генератора (элеК'l])ическая), т. е. мощ­
ность, отдаваемая генератором нагрузке; Рэа - мощность потерь на
нагрев обмоток и щеточного конrакта в цеIШ якоря ( см. § 29.8).
Учигьmая потери на возбуждение генератора Рэ.■, получим
уравнение мощностей для генератора постоянного тока:
{28.6)
Pi = � + Ро + Рэа + �-• •
Следовательно, механическая мощность, развиваемая при­
водным двигателем Р1, преобразуется в генераторе в полезную
электрическую мощность Р2, передаваемую нагрузке, и мощ- �
ность, затрачиваемую на покрытие потерь ( Ро + Рэа + �. ).
Так как генераторы обычно работают при неизменной частоте
вращения, то их характеристики рассматривают при условии п =
= const. Рассмотрим основные характеристики генераторов посто­
ЯШiого тока.
Характеристика холостого хода - зависимость напряжения
на выходе генератора в режиме х.х. U0 от тока возбуждения J.:
И0 = f(I. ) при/ = О и п =const.
Нагрузочная характеристика - зависимость напряжения
на выходе генератора И при работе с нагрузкой от тока возбу­
ждения J.:
И= f(J.) при J-:1; О и п = const.
· Внешняя характеристика - зависимость напряжения на вы­
ходе генератора U от тока нагрузки/:
378
U = /(/8 ) при rрг = const и п = const,
где rрг - регулировочное сопротивление в цепи обмотки возбуж­
дения.
Регулировочная характеристика - зависимость тока возбуж­
дения /8 от тока нагрузки/ при неизменном напряжении на выходе
генератора:
18 = f( /) при И= const и п = const.
Вид перечислеюn.IХ характеристик определяет рабочие свой­
ства генераторов постоянного тока.
§ 28.2. Генератор независимоrо возбуждения
Схема вкmочения генератора независимого возбуждения по­
казана на рис. 28.2, а. Реостат rpr, вкmоченный в цепь возбужде­
ния, дает возможность регулировать ток /8 в обмотке возбуждения,
а следовательно, и основной магнитный поток машm1ы. Обмотка
возбуждения питается от источника энергии постоянного тока:
аккумулятора, выпрямителя или же другого генератора постоян­
ного тока, назъmаемоrо в этом случае возбудителем.
6)
а)
+U
a
+Uomax
-Ia
+I
1Ь
1
�
t Ia
1
1
1
1
1
а
в
1
1
1
1
-U -Uomax
o
Рис. 28.2 ПрИJЩИПИальная схема (а) и характеристики х.х. (6) генера­
тора независимого возбуждения
Характеристика холостого хода. При снятии характеристики
И0 = /(18 ) генератор работает в режиме х.х. (/0 = О). Установив
ноМШiалъную. часто'I)' вращения и подцерживая ее неизменной,
постепешю увеличивают ток в обмотке возбуждения /8 от нулево­
го значения до +/8 = Оа, при котором напряжение х.х. Ио =
= 1,15Ином• Получают данные для посrроения кривой 1 (рис. 28.2, б).
Начальная орщmата кривой J не равна нуmо, что объясняется дей­
ствием небольшого магнитного потока остаточного магнетизма,
379
сохраmmшегося от предыдущего намагничивания машины.
Уменьшив ток возбуждения до нуля и измеmm его направление,
постепенно увеличивают ток в цепи возбуждения до -/8 = ОЬ. По­
лученная таким образом кривая 2 называется нисходящей ветвью
характеристики. В первом квадранте кривая 2 располагается вы­
ше кривой 1. Объясняется это тем, что в процессе снятия кривой 1
произошло увеличеm1е маГШ1ТНого потока остаточного намаrни. чивания. Далее опъп проводят в обратном направлении, т. е.
уменьшают ток возбуждения от -/8 = ОЬ до /5 = О, а затем увеличи­
вают его до значения +/5 = Оа. В результате получают кривую 3,
назьшаемую восходящей ветвью характеристики х.х. Нисходящая
и восходящая ветви характеристики х.х. образуют петлю намагни­
чивания. Проведя между кривыми 2 и 3 среднюю линmо 4, полу­
чим расчетную характеристику х.х.
Прямолинейная часть характеристики х.х. соответствует нена­
сыщенной магнитной системе машш1ы. При дальнейшем увеличе­
нии тока сталь машины насыщается и характеристика приобретает
криволинейнъIЙ характер. Зависимость ИO = f( I.) повторяет в
другом масштабе магнитную характеристику машины (см. § 26.1)
и дает возможность судить о магнитных свойствах машш1ы.
Нагрузочная характеристика генератора. Эта характери­
стика выражает зависимость напряжения И на выходе генератора
от тока возбуждения /8 при неизменнъ�х токе нагрузки, например
номинальном, и частоте вращения. При указаннъ�х условиях на­
пряжение на вьшодах генератора меньше ЭДС [см. (28.1)], поэто­
му нагрузочная характеристика J располагается ниже характери­
стики холостого хода 2 (рис. 28.3). Если из точки а,
соответствующей номинальному напряженшо Ином, отложить
вверх отрезок аЬ, равнъ�й 1/[,r, и провести горизонrалъно отре­
зок Ьс до пересечения с характеристикой х.х., а затем соединиrь
точки а и с, то получим аЬс - треугольник реактивный (характе­
ристический).
Так, при работе генератора в режиме х.х. при токе возбужде­
ния Iв1 = Iв.ном напряжение на вьшодах Ио = de; с подключением
нагрузки (при неизменном токе возбуждения) напряжение генера­
тора снизится до значения Ином = ае. Таким образом, отрезок da
выражает значение напряжения ЛИ= Ио - Ином при Iв 1 = lв.ном· На­
пряжение на выводах генератора в этом случае уменьшилось в ре­
зультате действия двух причин: падения напряжения в цепи якоря
[см. (28.1)] и размагничивающего влияния реакции якоря. Измерив
значение сопротивления цепи якоря и подсчитав падение напря­
жения I/[,r, можно определить ЭДС генератора при заданном
токе нагрузки� Еа = И + /а L' . На рис. 28.3 эта ЭДС представлена
отрезком Ье. Электродвижущая сила генератора при нагрузке
меньше, чем в режиме х.х. (Ье < de), что объясняется размагничи­
вающим влиянием реакции якоря. Для количественной оценки
этого влияния из точки с опускаем перпендикуляр на ось абсцисс.
380
Полученный отрезок cf представляет собой ЭДС генератора
при нагрузке; в режиме х.х. для создания этой ЭДС необходим
ток возбуждения /82 < /81 . Следовательно, отрезок fe, равный
разности токов возбуждения /81 - Iв2, представляет собой ток
возбуждения, компенсирующий размагничивающее влияние
реакции якоря.
Катеты реактивного треугольника количественно определяют
причины, вызьmающие умень­
и
шение напряжения генератора
d
при его нагрузке: падение на­
пряжения в цепи якоря определяет
катет
Uном
а
1
(28.7)
1
1
ток возбуждения /81
/ , ком­
1
пенсирующий размагничиваю­
1
щее действие реакции якоря, оп­
1
ределяет катет
1е
......_
о -----�---1�,
I8
I�з
Iвz
2�d + F;,d
82
Ьс = /в1 -/в2 =--=----2wв.к
Рис. 28.3. Нагрузочная характери­
стика генератора независимого
возбуждения
(28.8)
где Fqd и Fad - величинь1, определяющие размагничивающее действие реакции якоря по попе­
речной и продольной осям (см. § 26.2); Wв.к -число витков в по­
люсной катушке обмотки возбуждения.
Реактивный треугольник а'Ь'с' построен для другого значения
тока возбуждения /83• Сторона а'Ь' треугольника осталась неиз­
менной (а'Ь' = аЬ), что объясняется неизменностью тока нагруз­
ки, но сторона Ь'с' уменьшилась (Ь'с' < Ьс), так как при меньшем
токе возбуждения у м е н ь ш и л а с ь степень насыщения магнит­
ной цепи генератора, а следовательно, и размагничивающее дей­
ствие реакции якоря.
Внешняя характеристика генератора. Эта характеристика
представляет собой зависимость напряжения И на вьmодах генера­
тора от тока нагрузки /. При снятии данных для построения внеш­
ней характеристики генератор приводят во вращение с номиналь­
ной скоростью и нагружают его до номинального тока при
номинальном напряжении. Затем, постепенно уменьшая нагрузку
вплоть до х.х. (/ = О), снимают показания приборов. Сопротивле­
ние цепи возбуждения rв и часто'!)' вращения в течение опыта под­
держивают неизменными.
На рис. 28.4, а представлена внешняя характеристика генера­
тора независимого возбуждения, из которой видно, что при увели­
чении тока нагрузки / напряжение на вьmодах генератора понижа­
ется; это объясняется размагничивающим влиянием реакции якоря
и падением напряжения в цепи якоря. Наклон внешней характери­
стики к оси абсцисс (жесткость внешней характеристики) оцени381
вается номинш�ьным изменением напряжения генератора при
сбросе нагрузки:
ом
(28.9)
ЛИном = Ио-Ин ·100%.
ином
Обычно для генератора независимого возбуждения ЛИном =
=5+10%.
Реrулн_ровочная характеристика генератора. Характери­
стика Iв = J(l) показьmает, как следует менять ток в цепи возбуж­
дения, чтобы при изменениях нагруз:кй генератора напряжение на
его вьmодах оставалось неизменным, равным номинальному. При
этом частота вращения сохраняется постоянной (п = const).
При работе генератора без нагрузки в цепи возбуждения уста­
навливают ток Iв0, при котором напряжение на вьmодах генератора
становится равным номинальному. Затем постепенно увеличивают
нагрузку генератора, одновремешю повьппают ток возбуждения
таким образом, чтобы напряжение генератора во всем диапазоне
нагрузок оставалось равным номШiальному. Так получают восхо­
дящую ветвь характеристики (кривая 1 на рис. 28.4, б). Постепен­
но уменьшая нагрузку генератора до х.х. и реrулируя соответст­
вующим образом ток возбуждения, получают нисходящую ветвь
характеристики (кривая 2 на рис. 28.4, б). Нисходящая ветвь реrу­
лировочной характеристики расположена ниже восходящей, что
объясняется влиянием возросшего остаточного намагничивания
магнитной цепи машины в процессе снятия восходящей ветви.
Средюою кривую 3, проведенную между восходящей и нисходяаJ
и
llo �------­
Оном
6)
16
lв.ном
....Iв.о
о
о�-----,-----+--,­
I
lном
3
2
lном
1
Рис. 28.4. Внешняя (а) и регулировочная (б) характеристики генератора независимого возбуждения
щей ветвями, называют практической регулировочной характери­
стикой генератора.
Основной недостаток генераторов независимого возбужде­
ния - это необходимость в постороннем источнике энергии по­
стоянного тока - возбудителе. Однако возможность реrулирова­
ния напряжения в широких пределах, а также сравнительно
жесткая внешняя характеристика этого генератора являются его
достоинствами.
382
§ 28.3. Генератор nараллельноrо возбуждения
Принцип самовозбуждения генератора постояшюго тока ос­
нован на том, <ПО магниrная система ма1mmы, будучи намагни­
ченной, сохраняет длительное время небольшой магнитный поток
остаточного магнетизма сердечников поmосов и стаmmы Ф= (по­
рядка 2-3% от поmюго потока). При вращении я.коря поток Ф0ст
о)
U0,B
120
tOO
11.��""
80
1
60
l
11 :s'
40
о
0,5
11
,)в
Рис. 28.5. Принципиальная схема (а) и характеристика
х.х. (б) генератора параллельного возбуждения
индуцирует в якорной обмотке ЭДС Еост, под действием которой в
обмотке возбуждения возникает небольшой ток lв.=• Если МДС
обмотки возбуждения Jв.остwв имеет такое же направление, как и
поток Фост, то она увеличивает поток главных поmосов. Это, в
свою очередь, вызывает увеличение ЭДС генератора, отчего ток
возбуждения вновь увеличится. Так будет продолжаться до тех
пор, пока напряжение генератора не будет уравновешено падени­
ем напряжения в цепи возбуждения, т. е. J.rв = И0 •
На рис. 28.5, а показана схема включения генератора парал­
лельного возбуждения, на рис. 28.5, б- характеристика х.х. гене­
ратора (кривая J) и зависимость падения напряжения от тока воз­
буждения /5r5 = /(/8
(прямая 2). Точка пересечения А
соответствует окончанию процесса самовозбуждения, так как
именно в ней И0 = I.r•.
Угол наклона прямой ОА к оси абсцисс определяется из треугольника ОАВ:
т
и
(28.10)
_и tga = _Q. = r8,
I.
т;
где т; -масштаб тока (по оси абсцисс), А/мм; т,, - масштаб на­
пряжения (по оси ординат), В/мм.
Из (28.10) следует, <По угол наклона прямой I.r. = f(I.) к оси
)
383
абсцисс прямо пропорционален сопротивленmо цепи возбужде­
ния. Однако при некотором значении сопротивления реостата rpr
сопротивление r. достигает значения, при котором зависимость
/ r = f(l.) становится касательной к прямолинейной части ха­
8 8
рактеристики х.х. (прямая 3). В этих условиях генератор не само­
возбуждается. Сопротивление цепи возбуждения, при которой
прекращается самовозбуждение генератора, называют критиче­
ским сопротивлением (rв.крит).
Следует отметить, что самовозбужUо
дение генератора возможно тппь при
частоте вращения, превышающей крити­
ческую nкр• Это условие вьпекает из ха­
рактеристики самовозбуждения гене­
ратора (рис; 28.6), представляющей
собой зависимость напряжения генера­
тора в режиме х.х. от частоты враще­
о--.......
-----,.,
nном n
n
ния при неизменном сопротивлении
p
Рис. 28.6. Характеристи­ цепи возбуждения, т. е. И0 = f(n) при
r. == const.
ка самовозбуждения
Анализ характеристики самовозбуждения показывает, что при п < nкр увели­
чение частоты вращения якоря генератора сопровождается незна­
чительным увеличением напряжения, так как процесса самовоз­
буждения нет и появление напряжения на выходе генератора обу­
словлено лшпь остаточным намапmчиванием магнитной цепи
генератора. Процесс самовозбуждения начинается при п > nкр. В
этом случае увеличение частоть1 вращения сопровождается резким
ростом напряжения И0• Однако при частоте вращения, близкой к
номинальной, рост напряжения несколько замедляется, что объяс­
няется магнитным насыщением генератора. Критическая частота
вращения зависит от сопротивления цепи возбуждения и с ростом
последнего увеличивается.
Таким образом, самовозбуждение генераторов постоянного
тока возможно при соблюдении следуюIЦИХ условий: а) магнитная
система машины должна обладать остаточным магнетизмом;
б) присоединение обмотки возбуждения должно быть таким, что­
бы МДС обмотки совпадала по направленmо с потоком остаточ­
ного магнетизма Фост; в) сопротивление цепи возбуждения должно
быть меньше критического; г) частота вращения якоря должна
быть больше критической.
Так как генератор параллельного возбуждения самовозбужда­
ется тппь в одном направлении, то и характеристика х.х. этого
генератора может бьпь снята только для одного квадранта осей
координат.
Нагрузочная и регулировочная характеристики генератора па­
раллельного возбуждения практически не отличаются от соответ­
ствующих характеристик генератора независимого возбуждения.
Внешнял характеристика генератора параллельного возбужl(
384
дения 1 (рис. 28. 7) менее жесткая, чем у генератора независимого
возбуждения. Объясняется это тем, что в генераторе параллельно­
го возбуждения помимо прИЧШI, вызьmающих уменьшение на­
пряжения в генераторе независимого возбуждения (реакция якоря
и падение напряжения в цепи якоря), действует еще и третья при­
чина - уменьшение тока возбуждения, вызванное снижением на­
пряжения от действия первых двух причин. Этим же объясняется
и то, что при постепенном
уменьшении сопротивления
ии, ,---�-нагрузки rн ток увеличивается Uнон
---...
лишь до критического значе1 ....�
ния /кр, а затем при дальней'"-..
шем уменьшении сопротив,,,
ления нагрузки ток начинает
уменьшаться. Наконец, ток
\
нагрузки при коротком замы,.____.__,,
__
......._
______
,...
0
Iк I н,н lкр
I
кании fк </кр. Дело в ТОМ, что
с увеличением тока усилива­ Рис. 28.7. Внешняя характеристика
ется размагничивание генера­
возбужде­
тора (усиление реакции якоря генератора параллельного
ния
и уменьшение тока возбуж­
дения), машина переходит в н е н а с ы щ е н н о е состояние, при
котором даже небольшое уменьшение сопротивления нагрузки
вызьmает резкое уменьшение ЭДС машины (см. рис. 28.5, б). Так
как ток определяется напряжением на вьmодах генератора И и
сопротивлением нагрузки rн, т. е./ = Ulrн, то при токах нагруз­
ки I < lкр, когда напряжение генератора уменьшается медлен­
нее, чем убывает сопротивление нагрузки, происходит рост то­
ка нагрузки. После того как/= /кр, дальнейшее уменьшение rн
сопровождается уменьшением тока нагрузки, так как в этом
случае напряжение И убывает быстрее, чем уменьшается со­
противление нагрузки rн•
Таким образом, короткое замыкание, вызванное медленным
уменьшением сопротивления нагрузки, не опасно для генератора
параллельного возбуждения. Но при внезапном к.з. магнитная сис­
тема генератора не успевает размагнититься и ток Iк достигает
опасных для машины значений Iк = (8+12)/ном (кривая 2). При та­
ком резком возрастании тока нагрузки на валу генератора возни­
кает значительный тормозящий момент [см. (25.24)], а на коллек­
торе появляется сильное искрение, переходящее в круговой огонь.
Поэтому необходимо защищать генератор от перегрузки и к.з. по­
средством плавких предохранителей или же применением релей­
ной защиты.
Генераторы параллельного возбуждения широко применяют в
установках постоянного тока, так как отсуrствие возбудителя вы­
годно отличает эти генераторы от генераторов независимого воз­
буждения. Номинальное изменение напряжения генератора парал­
лельного возбуждения [см. (28.9)] составляет 10-30%.
385
§ 28.4. Генератор смеwанноrо возбуждения
Генератор смешанного возбуждения (рис. 28.8, а) имеет па­
раллельную и последовательную обмотки возбуждения. Поток
возбуждения создается в основном параллельной обмоткой. По­
следовате.nъная обмотка обычно вкmочается с о г л а с н о с парал­
лельной (чтобы МДС обмоток складьmались), что обеспечивает
получение жесткой внешней характеристики генератора.
. В режиме х.х. генератор
имеет только параллельное
б)
возбуждение, так как / = О. С
появлением нагрузки возника­
ет МДС последовательной об­
мотки возбуждения, которая,
подмагничивая машину, ком­
пенсирует размагничивающее
действие реакции якоря и па­
дение
напряжения в якоре.
Iнон 1
Внешняя характеристика в
этом случае становится наибо­
лее жесткой (рис. 28.8, б, кри­
вая 2), т. е. напряжение на за­
жимах генератора при увели­
чении тока остается почти неРис. 28.8. Схема вюnочения генера­ изменным. Если же требуется,
тора смешанного возбуждения (а) и чтобы напряжение на зажимах
его внешuие характеристики (б)
потребителя (в ко�ще линии)
оставалось практически неиз­
менным, то число витков последовательной обмотки увеличивают
так, чтобы МДС этой обмотки компенсировала еще и падение на­
пряжеIШЯ в проводах линии (кривая J).
При в с т р е ч н о м вкmочении обмоток возбуждения напряже­
ние генератора с ростом тока нагрузки резко уменьшается (кривая 3),
что объясняется размаmичивающим действием последовательной
обмотки возбуждения, МДС которой направлена против МДС парал­
лельной обмотки. Встречное вюnочение обмоток применяют лишь в
генераторах специального назначения, например в сварочньrх, где
необходимо получить круто падающую внепппою характерис-mку.
Генераторы смешанного возбуждения с согласным вкmочени­
ем обмоток возбуждения применяют для питания силовой нагруз­
ки в случаях, когда требуется постоянство напряжения в линии.
Контрольные вопросы
1. Какие характеристики определяют свойства генераторов постоянного тока?
2. Почему у генератора параллельного возбуждения изменение напряжения при
сбросе нагрузки больше, чем у генератора независимого возбуждения?
3. Каковы условия самовозбуждения генераторов постоянного тока?
4. При каком включении обмоток возбуждения генератора смешанного возбу­
ждения внешняя характеристика получается более «жесткой»?
Коппекторные
-двигатели
rпава29•
§ 29.1. Основные понятия
Коллекторные машины обладают свойством об­
ратимости, т. е. они моrут работать как в режиме
генератора, так и в режиме двшателя. Поэтому если
машину постояmюго тока подкmочнrь к источнику
энергии постоянного тока, то в обмотке возбужде­
ния и в обмотке якоря машины появятся токи. Взаи­
модействие тока якоря с полем возбуждения создает
на якоре электромагниrный момент М, который яв­
ляется не тормозящим, как это имело место в гене­
раторе, а в р а щ а ю щ и м.
Под действием электромагнигного момента яко­
ря машина начнет вращаться, т. е. машина будет ра­
ботать в режиме двшателя, потребляя из сети элек­
трическую энергию и преобразуя ее в механичес­
кую. В процессе работы двигателя его якорь враща­
ется в магнигном поле. В обмотке якоря индуциру­
ется ЭДС Е0, направление которой можно опреде­
лить по правилу «правой руки». По своей природе
она не отличается от ЭДС, наводимой в обмотке
якоря генератора. В двигателе же ЭДС направлена
проmв тока 10, и поэтому ее называют противо­
электродвижущей силой (противо-ЭДС) якоря
{рис. 29.1).
Для двшателя, работающего с постоянной час­
тотой вращения,
(29.1)
Из (29.1) следует, что подведешюе к двигателю
напряжение уравновешивается противо-ЭДС обмот­
ки якоря и падением напряжения в цепи якоря. На
основании (29 .1) ток якоря
(29.2)
Умножив обе часm уравнения (29.1) на ток яко­
ря /0, получим уравнение мощности для цепи якоря:
Ula = I�"'f,r+Ea la ,
(29.3)
387
где И/а-мощность в цепи обмотки якоря; I;I,r - мощность
электрических потерь в цепи якоря.
Для выяснения сущности выражения Eala проделаем следую­
щее преобразование:
= pN 60ro
= pN
/а
Еа Iа
Ф
Фпl"
60а 21t '
60а
или
pN
Ea la = --Фlaro.
21ta
Но, согласно (25.24),
(pN/(2na)y:t,Ia = М,
тогда
Е"1,, = Mro == �... , (29.4)
где ro= 2пп/60 - угловая частота
Рис. 29.1. Направление проти­ вращения якоря; Рзм - электромаг­
во-ЭДС в обмотке якоря двига­ нитная мощность двигателя.
теля
Следовательно, выражение Eala
представляет собой электромаг­
нитную мощность двигателя.
Преобразовав выражение (29.3) с учетом (29.4), получим
Ula = Mro+ I;I,r.
Анализ этого уравнения показьmает, что с увеличением на­
грузки на вал двигателя, т. е. с увеличением электромагнитного
моменrа М, возрастает мощность в цепи обмотки якоря Ula, т. е.
мощность на входе двшателя. Но так как напряжение, подводимое
к двигателю, поддерживается неизменным (U= const), то увеличе­
ние нагрузки двигателя сопровождается ростом тока в обмотке
якоря/,,.
В зависимости от способа возбуждения двшатели постоянного
тока, так же как и генераторы, разделяют на двшатели с возбуждеIШ­
ем от постоянных МагIШТОВ (магIШТОэлектрические) и с электромаг­
ниrnы:м возбуждением. Последние в соответствии со схемой вюnоче­
ния обмотки возбуждения опюсиrельно обмотки якоря подразделяют
на двигатели параллельного (шунтовые), последовm:ельноrо (сериес­
ные) и смешаmюго (компаундные) возбуждения.
В соответствии с формулой ЭДС Еа = сеФп частота вращения
двигателя (об/мин)
n = Еа /(сеФ).
Подставив значение Еа из (29.1 ), получим ( об/мин)
U -la Lr
(29.5)
n==
'
сеФ
388
т. е. частота вращения двигателя прямо пропорционш�ьна на­
пряжению и обратно пропорционш�ьна магнитному потоку воз­
буждения. Физически это объясняется тем, чrо повьппение на­
пряжения U или уменьшение потока Ф вызывает увеличение
разности (И - Е0); это, в свою очередь, ведет к pocry тока la [см.
(29.2)]. Вследствие этого возросший ток повышает вращающий
момент, и если при этом наrрузочнь1й момент остается неизмен­
ным, то частота вращения двигателя увеличивается.
Из (29.5) следует, что регулировать частоrу вращения двига­
теля можно изменением либо напряжения И, подводимого к дви­
гателю, либо основного магнитного потока Ф, либо электрическо­
го сопротивления в цепи якоря L r .
Направление вращения якоря зависит от направлений магнит­
ного потока возбуждения Ф и тока в обмотке якоря. Поэтому, из­
менив направление какой-либо из указанньIХ величин, можно из­
менить направление вращения якоря. Следует иметь в виду, что
перекmочение общих зажимов схемы у рубильника не дает изме­
нения направления вращения якоря, так как при этом одновремен­
но изменяется направление тока и в обмотке якоря, и в обмотке
возбуждения.
§ 29.2. Пуск двиrателя
Ток якоря двигателя определяется формулой (29.2). Если при­
нять и и rr неизменньIМИ, то ток la зависи т от противо-ЭДС Еа.
Наибольшего значения ток 10 достигает при пуске двигателя в ход.
В начальный момент пуска якорь двигателя неподвижен (n = О) и в
его обмотке не индуцируется ЭДС (Еа = О). Поэтому при непо­
средственном подключении двигателя к сети в обмотке его якоря
возникает пусковой ток
(29.6)
Обычно сопротивление L r невелико, поэтому значение пус­
кового тока достигает недопустимо больших значений, в 10-20
раз превышающих номинальный ток двигателя.
Такой большой пусковой ток весьма опасен для двигателя. Во­
первых, он может вызвать в машине круговой огонь, а во-вторьIХ,
при таком токе в двигателе развивается чрезмерно большой пус­
ковой момент, который оказьmает ударное действие на вращаю­
щиеся часm двигателя и может механически их разрушить. И на­
конец, этот ток вызьmает резкое падение напряжения в сети, что
неблагоприятно отражается на работе других потребителей, вклю­
ченньIХ в Э'1)' сеть. Поэтому пуск двигателя непосредственным
подключением в сеть (безреостатнь1й пуск) обычно применяют
для двигателей мощностью не более 0,7-1,0 кВт. В этих двигате­
лях благодаря повышенному сопротивлению обмотки якоря и не­
большим вращающимся массам значение пускового тока лишь в
3-5 раз превышает номинальный, что не представляет опасности
389
для двигателя. Что же касается двигателей большей мощности, то
при их пуске для ограничения пусковоrо тока используют пуско­
вые реостаты (ПР), вкmочаемые последовательно в цепь якоря
(реостаmый пуск).
Перед пуском двиrателя необходимо рычаг Р реостата поста­
вить на холостой конrакт О (рис. 29.2). Затем вкmочают рубиль­
ник, переводят рычаг на первый промежуrочный контакт 1 и цепь
1писк----r.---х;;;.
" 1
,. 'i
1
1
1 r,
""�--'
1
1
5 1
1
ш
J 1
1 1
1
IL______
00 А -И - Я_..JI
1'
-
Рис. 29.2. Схема вюпочения пускового реостата
якоря двигателя оказьmается подкmоченной к сети через наиболь­
шее сопротивление реостата rп.р = r1 + r2 + rз + r4.
Одновремешю через рычаг Р и шину Шк сети подкmочается
обмотка возбуждения, ток в которой в течение всего периода пус­
ка не зависит от положения рычага Р, так как сопротивление ши­
ны по сравненшо с сопротивлением обмотки возбуждения пренеб­
режимо мало.
Пусковой ток якоря при полном сопротивлении пусковоrо
реостата
I = U-Ea
(29.7)
п
rr+rnp.
С появлением тока в цепи якоря /0 max возникает пусковой мо­
мент Мп max, под действием котороrо начинается вращение якоря.
По мере нарастания частоты вращения увеличивается противо­
ЭДС Е0 = сеФп, что ведет к уменьшеншо пусковоrо тока и пуско­
воrо момента.
По мере разгона якоря двигателя рычаг пусковоrо реостата
переключают в положения 2, 3 и т. д. В положении 5 рычаrа рео­
стата пуск двигателя заканчивается (rп.р = О). Сопротивление пус­
ковоrо реостата выбирают обычно таким, чтобы наибольший пус­
ковой ток превышал номинальный не более чем в 2-3 раза.
Так как вращающий момент двигателя М прямо пропорциона­
лен потоку Ф [см. (25.24)], то для облегчения пуска двигателя па­
раллельноrо и смешанного возбуждения сопротивление реостата в
390
цепи возбуждения rрг следует полностью вьmести (rр г = О). Поток
возбуждения Ф в этом случае получает наибольшее значение и
двшатель развивает необходимый вращающий момеш при мень­
шем токе якоря.
Для пуска двшателей большей мощности применять пусковые
реостаты нецелесообразно, так как это вызвало бы значительные
потери энергии. Кроме того, пусковые реостаты бьmи бы громозд­
кими. Поэтому в двшателях большой мощности применяют без­
реостатный пуск двшателя путем понижения напряжения. Приме­
рами этого являются пуск тяговых двигателей электровоза
переюпочением их с последовательного соединения при пуске на
параллельное при нормальной работе (см. § 29.6) или пуск двига­
теля в схеме «генератор-двшатель» (см.§ 29.4).
§ 29.3. Двигатель параллельного возбуждения
Схема вюпочения в сеть двшателя параллельного возбужде­
ния показана на рис. 29.3, а. Характерной особешюстью этого
двшателя является то, что ток в обмотке возбуждения (ОВ) не за­
висит от тока нагрузки (тока якоря). Реостат в цепи возбуждения
rрг служит для регулирования тока в обмотке возбуждения и маг­
mпного потока главных полюсов.
Эксплуатаци01mые свойства двигателя определяются его ра­
бочими характеристиками, под которыми понимают зависимость
частоты вращения n, тока /, полезного моменга М2, вращающего
моменга Мот мощности на валу двигателя Р2 при И= const и 18 =
= const (рис. 29.3, б).
Для анализа зависимости n=f(�) , которую обычно называ­
ют скоросrnой характеристикой, обратимся к формуле (29.5), из
которой видно, что при неизменном напряжении И на частоту
вращения влияют два фактора: падение напряжения в цепи якоря
10 Lr и поток возбуждения Ф. При увеличении нагрузки умень­
шается числитель ( U - 10 L r ), при этом вследствие реакции якоря
уменьшается и знаменатель Ф. Обычно ослабление потока, вы­
званное реакцией якоря, невелико и первый фактор влияет на час­
тоту вращения сильнее, чем второй. В итоге частота вращения
двигателя с ростом нагрузки Р2 уменьшается, а график n = f(�)
приобретает падающий вид с небольшой выпуклостью, обращен­
ной к оси абсцисс. Если же реакция якоря в двшателе сопровож­
дается более значительным ослаблением потока Ф, то частота
вращения с увеличением нагрузки будет возрастать, как это пока­
зано штриховой кривой на рис. 29.3, б. Однако такая зависимость
п = f(�) является нежелательной, так как она, как правило, не
удовлетворяет условию устойчивой работы двшателя: с ростом
нагрузки на двшатель возрастает частота вращения, что ведет к
дополнительному росту нагрузки и т. д., т. е. частота вращения n
двшателя неограниченно увеличивается и двшатель идет «в раз391
нос». Чтобы обеспечить характеристике частоты вращения форму
падающей кривой, в некоторых двигателях параллельного возбу­
ждения применяют легкую (с небольшим числом витков) последо­
вательную обмотку возбуждения, которую называют стаби­
лизирующей обмоткой. При вюпочении этой обмотки согласован-
,,
5)
п
м
1
IaJ
------- ,,,,,,
---------
по
----
М11ин (/но,.,)
H(J)
м"
14
о
Рним Р2
Рис. 29.3. Схема двигателя параллельного возбуждеНИJI
(а) и его рабочие характеристики (б)
но с параллельной обмоткой возбуждения ее МДС компенсирует
размагничивающее действие реакции якоря так, что поток Ф во
всем диапазоне нагрузок остается практически неизмешп,�м.
Изменение частоты вращения двигателя при переходе от но­
минальной нагрузки к х.х., выраженное в процентах, назьшают
номинальным изменением частоты вращения:
Лпном = по - пном • 100 ,
(29.8)
nном
где п0 - частота вращения двигателя в режиме х.х.
Обычно для двигателей параллельного возбуждения Лnном =
= 2+8%, поэтому характеристику частоты вращения двигателя па­
раллельного возбуждения назьmают жесткой.
Зависимость полезного момента М2 от нагрузки установлена
формулой М2 = 9,55Pzf n. При п = const график М2 = f(P2) имел бы
вид прямой. Однако с увеличением нагрузки частота вращения двига­
теля снижается, и позrому зависимость М2 =j(P2) криволинейна.
При п = const вращающий момент двигателя М = М0 + М2• Так
как рабочие характеристики двигателя строят при условии /8 =
= const, что обеспечивает постоянство магнитных потерь в двига­
теле, то момент х.х. М0 = const. Поэтому график зависимости М =
= f(P2) проходит параллельно кривой М2 = j(P2). Если принять по­
ток Ф = const, то график М2 =j(P2) является в то же время выраже­
нием зависимости/ =f(P2), так как М = см Ф/а .
392
Для получения аналиrического выражения механической ха­
рактеристики п =j(М) преобразуем выражение (29.5):
_U-/0 "i,r U I0 "I,,r.
(29.9)
п - ---"-"с;с....._ = -- - -- '
сеФ
сеФ
сеФ
подставив в него из (25 .24) значение тока якоря
/0 = М/( с"Ф ),
получим
(29.10)
U
M"I,,r
(29.11)
n=-----=--2 п0 -Лп,
Ф
с,
с, с "Ф
где п0 - частота вращения в режиме х.х.; Лп - изменение часто­
ты вращения, вызванное изменением нагрузки на валу двигателя.
а)
п
о..______._
Мном М
б)
п
м
о ....________
Мнон М
Рис. 29.4. Механические характеристики двигателя параллельно­
го возбуждения:
• а - при введении в депь .якоря добавочноrо сопр01ПВления; б - при
изменеюm основноrо мапnпноrо потока; в - при изменеюm напряже­
ния в цemt: .якоря
Если пренебречь реакцией якоря, то (так как /8 = const) можно
прШIЯТЬ Ф = const. Тогда механическая характеристика двигателя па­
раллельного возбуждения представляет собой прямую линию, не­
сколько наклонеШl)'Ю к оси абсцисс (рис. 29.4, а). Угол наклона меха­
нической характеристики тем больше, чем больше значение
сопротивления, вкmоченного в цепь якоря. Механическую характери­
стику двигателя при отсутствии допоmmтельного сопротивления в
цепи якоря называют ес тественной (прямая J). Механические харак­
теристики двигателя, полученные при введении дополнительного со­
проrnвления в цепь якоря, назъmают искусственными (прямые 2 и 3).
Вид механической характеристики зависит также и от значе­
ния основного магнитного потока Ф. Так, при уменьшении Ф уве­
личивается частота вращения х.х. п0 и одновременно увеличивает­
ся Лп, т. е. увеличиваются оба слагаемых уравнения (29.11). Это
приводит к резкому увеличению наклона механической характе­
ристики, т. е. к уменьшению ее жесткости {рис. 29.4, б).
393
При изменении напряжения на якоре И меняется частота вра­
щения п0, а Лп остается неизменной. В итоге жесткость механиче­
ской характеристики (если пренебречь влиянием реакции якоря)
не меняется (рис. 29.4, в), т. е. характеристики смещаются по вы­
соте, оставаясь параллельными друг другу.
§ 29.4. Реrулирование частоты вращения
двигателей параллельноrо возбуждения
Способы реrулирования частоты вращения двигателей оцени­
ваются следующими показателями: плавностью реrулирования;
диапазоном реrулирования, определяемым отношением наиболь­
шей частоть1 вращения к наименьшей; экономичностью реrулиро­
вания, определяемой стоимостью реrулирующей аппаратуры и
потерями электроэнергии в ней.
Из (29.5) следует, что реrулировать частоту вращения двига­
теля параллельного возбуждения можно изменением сопротивле­
ния в цепи якоря, изменением основного магнитного потока Ф ,
изменением напряжения в цепи якоря.
Введение дополнительноrо сопротивления в цепь якоря.
Дополнительное сопротивление (реостат rд) включают в цепь яко­
ря аналогично пусковому реостату (ПР). Однако в отличие от по­
следнего оно должно быть рассчитано на продолжительное проте­
кание тока.
При включении сопротивления rд в цепь якоря выражение
частоты (29.5) принимает вид
И -la (r,r+rд) =
п=
п0 -Лп,
(29.12)
сеФ
частота вращения в режиме х.х.;
где п0 = И/(сеФ)
Лп = la ("'[,r+rд )/(с11Ф) - изменение частоты вращения, вызван­
ное падением напряжения в цепи якоря.
С увеличением rд возрастает Лп, что ведет к уменьшению час­
тоты вращения. Зависимость п = f(rд ) илmострируется также и
механическими характеристиками двигателя параллельного воз­
буждения (рис. 29.4, а): с повышением rд увеличивается наклон
механических характеристик, а частота вращения при заданной
нагрузке на валу (М = Мном) уменьшается. Эгот способ обеспечи­
вает плавное реrулирование частоты вращения в широком диапа­
зоне (только в сторону уменьшения частоты от номинальной), од­
нако он неэкономичен из-за значительных потерь электроэнергии
в реrулировочном реостате ( i;rд ), которые шпенсивно растут с
увеличением мощности двигателя.
Изменение основноrо маrнитного потока. Эгот способ ре­
rулирования в двигателе параллельного возбуждения реализуется
посредством реостата rрг в цепи обмотки возбуждения (см. рис.
29.З, а). Так, при уменьшении сопротивления реостата возрастает
394
магнитный поток обмотки возбуждения, что сопровождается по­
нижением частоты вращения [см. (29.5)]. При увеличении rрг час­
тота вращения растет. Зависимость частоты вращения от тока воз­
буждения выражается регулировочной характеристикой двигателя
п = f(l.) при/ = const и И = const.
Из выражения (29.5) следует, что с уменьшением магнитного
потока Ф частота вращения п увеличивается по гиперболическому
а)
л;Iа
Лпиzх
о)
п
J'а
о--------ф-,Рис. 29.5. Регулировочные характеристики двигателя параллельного возбуждения
закону (рис. 29.5, а). Но одновременно уменьшение Ф ведет к рос­
'1)' тока якоря /0 = М/(с"Ф). При потоке Ф = Ф' ток якоря дости­
гает значения 1; = U/(2"f,r), т. е. падение напряжения в цепи яко­
ря достигает значения, равного половШiе напряжения,
подведенного к якорю (I;"f,r = U/2 ). В этих условиях частота
вращения двигателя достигает максимума nmax· При дальнейшем
уменьшении потока (Ф < Ф') частота вращения двшателя начинает
убывать, так как из-за mпенсивноrо роста тока /0 второе слагаемое
выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменrе на валу двшателя мак­
симальная частота вращения птах во мною раз превосходит номи­
нальную частооу вращения двигателя nном и является недопусти­
мой по условиям механической прочности двигателя, т. е. может
привести к его «разносу». Учитывая это, при выборе реостата rрг
необходимо следить за тем, чтобы при полностью введенном его
сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П (см. § 29.9) допускается
превышение частоты вращения над номинальной не более чем в
2-3 раза. Необходимо также следиrь за надежностью электриче­
ских соединений в цепи обмотки возбуждения двшателя, так как
при разрыве этой цепи магнитньIЙ поток уменьшается до значения
потока остаточного магнетизма Фост, при котором частота враще­
ния может достшнуть опасного значения.
395
Вид регулировочных характеристик n = .l{Ф) зависиr от значе­
ния нагрузочного момента М2 на валу двигателя: с ростом М2 мак­
симальная частота вращения nmax уменьшается (рис. 29.5, б).
Недостаток рассмотренного способа регулирования частоты
вращения состоиr в том, что при изменении магнитного потока Ф
меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения
прост и экономичен, так как в двигателях параллельного возбуж­
дения ток /8 = (0,01 +0,07)/а, а поэтому потери в регулировочном
реостате ( /82 rpr ) невелики.
Однако диапазон регулирования обычно составляет nmaxlnmin =
= 2+5. Объясняется это тем, что нижний предел частоты вращения
обусловлен насыщением машины, ограничивающим значение
магнигноrо потока Ф, а верхний предел частоты - опасностью
«разноса» двигателя и усилением влияния реакции якоря, иска­
жающее действие которого при ослаблении основного магнитного
потока Ф усиливается и ведет к искрению на коллекторе или же к
появлению кругового огня (см.§ 27.5).
Изменение напряжения в цепи якоря. Регулирование часто­
ты вращения двигателя изменением питающего напряжения при­
меняется лишь при /8 = const, т. е. при раздельном питании цепей
обмотки якоря и обмотки возбуждения при независимом возбуж­
дении.
Частота вращения в режиме х.х. по пропорциональна напря­
жению, а Лп от напряжения не зависиr [см. (29.11)], поэтому ме­
ханические характеристики двигателя при изменении напряжения
не меняют угла наклона к оси абсцисс, а смещаются по высоте,
оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуще­
ствления этого способа регулирования необходимо цепь якоря
двигателя подкmочить к источнику питания с регулируемым на­
пряжением. Для управления двигателями малой и средней мощно­
сти в качестве такого источника можно примениrь регулируемый
выпрямитель, в котором напряжение постоянного тока меняется
регулировочным автотрансформатором (АТ), вкточенным на вхо­
де выпрямителя (рис. 29.6, а).
Для управления двигателями большой мощности целесооб­
разно применять генератор постоянного тока независимого возбу­
ждения; привод осуществляется посредством приводного двигате­
ля (ПД), в качестве которого обычно используют трехфазный
двигатель переменного тока. Для пиrания постоянным током це­
пей возбуждения генератора Г и двигателя Д используется возбу­
диrель В - генератор постоянного тока, напряжение на выходе
которого поддерживается неизменным. Описанная схема управле­
ния двигателем постоянного тока (рис. 29.6, б) извесrnа под на­
званием системы «rенератор--двигатель» (Г-д).
Изменение напряжения в цепи якоря позволяет регулировать
частоту вращения двигателя вниз от номинальной, так как напря­
жение свыше ноМШiального недопустимо. При необходимости
396
регулировать частm:у вращения вверх от номинальной можно вос­
пользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, рабо­
тающего по системе Г-Д, осуществляется изменением направле­
ния тока в цепи возбуждения генератора Г переключателем П, т. е.
переменой полярности напряжения на его зажимах. Если двига-
Рис. 29.6. Схемы вюпочения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
тель постояшюго тока работает в условиях резко переменной на­
грузки, то для смягчения колебаний мощности, потребляемой ПД
из трехфазной сети, на вал ПД помещают маховик М, который за­
пасает энергию в период уменьшения нагрузки на двигатель Д и
отдает ее в период инrенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в
цепи якоря обеспечивает плавное экономичное регулирование в
широком диапазоне nrrw/nmin ;;i:: 25. Наибольшая частота вращения
здесь ограничивается условиями коммуrации, а наименьшая условиями охлаждения двигателя (см.§ 31.3).
Еще одним достоm1ством рассматриваемого способа регули­
рования является то, что он допускает безреостатньlЙ пуск двига­
теля при пониженном напряжении.
Импульсное регулирование частоты вращения. Сущность
этого способа регулирования илmострируется схемой, изображен­
ной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного
(независимого) возбуждения периодически прерьmается ключом
К. Во время замыкания цепи якоря на время t к обмотке якоря
подводится напряжение U = Иимn и ток в ней дос'IИГает значения
Ia max• Затем ключом К цепь якоря размыкают и ток в ней убывает,
достигая к моменту следующего замыкания цепи значения Ia min
(при размыкании ключа К ток в обмотке якоря замыкается через
диод VD). При следующем замыкании ключа К ток дос'IИГает зна­
чения Iarrшx и т. д. Таким образом, к обмотке якоря подводится не­
которое среднее напряжение
(29.13)
Иер = Ut/T =а.И,
397
где Т - отрезок времени между двумя следующими друг за дру­
гом импульсами напряжения (рис. 29.7, б); а= t/T - коэффици­
ент управления.
При этом в обмотке якоря nроходиг ток, среднее значение которого /аср = 0,5(/amax + /amin) ·
При импульсном реrулироваIШИ частота вращения двигателя
aU-Iacp r,r
n=---�-.
(29.14)
сеФ
Таким образом, импульсное регулирование частоты вращения
аналогично регулированию изменением подводимого к цепи якоря
напряжения. С целью уменьшения пульсаций тока в цепи якоря
вюпочена каl)'ШКа индуктивности (дроссель) L, а частота подачи
импульсов равна 200-400 Гц.
а)
К
L
�
U VD
о) и
Рис. 29.7. Импульсное регулирование частоты вращения двига­
теля постоянного тока
На рис. 29.7, в представлена одна из возможных схем им­
пульсного регулирования, где в качестве юпоча применен управ­
ляемый диод - тиристор VS. Оrкрьmается тиристор подачей крат­
ковременного импульса от генератора импульсов (ГИ) на
управляющий электрод (УЭ) тиристора. Цепь L 1 C, шунгирующая
тиристор, служит для запирания последнего в период между двумя
управляющими импульсами. Происходит это следующим образом:
при открьmании тиристора конденсатор С перезаряжается через
контур L 1 C и создает на силовых электродах тиристора напряже­
ние, обратное напряжению сети, которое прекращает протекание
тока через тиристор. Параметрами цепи L 1 C определяется время
(с) открьпоrо состояния тиристора: t = 1t,Ji;c. Здесь L 1 выража­
ется в генри (Гн); С- в фарадах (Ф).
Значение среднего напряжения Иср регулируется изменением
398
часто1Ы следования управляющих импульсов от генератора им­
пульсов на тиристор VS.
Жесткие механические характеристики и возможность IUiав­
ного реrулирования часто1Ы вращения в широком диапазоне оп­
ределили области применения двигателей параллельного возбуж­
дения в станочных приводах, вентиляторах, а также во многих
других случаях реrулируемого электропривода, где требуется ус­
тойчивая работа при колебаниях нагрузки.
§ 29.5. Режимы работы маwины
постоянноrо тока
В двигателях параллельного возбуждения при неизмеIШом то­
ке в обмотке возбуждения (J. = const) магнитный поток изменяется
при нагрузке весьма незначительно, поэтому с некоторым при­
блmкением можно принять Ф = const. В этом случае электромаг­
ниrnый момент [см. (25.24)] пропорционален току в цеnи якоря и
механическая характеристика п = j(М) может бьrгь представлена
зависимостью п = f(la) (рис. 29.8). Если эту характеристику про­
должигъ в обе стороны за пределы осей коордШiат (прямая 1), то
можно показать, что электрическая машина в зависимости от ве­
личш1ы и знака внешнего момента, действующего на ее вал со
стороны связаIШого с ним механизма, может работать в трех ре­
жимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря /afJ не­
большой. При этом частота вращения п = п0 (точка А). Затем с по­
явлением на валу двигателя нагрузочного момента, противодейст­
вующего вращающему, ток в цепи якоря возрастает, а частота
вращения уменьшается. Если увеличить противодействующий
момент до значения, при котором якорь двигателя остановится
(точка В), то ЭДС Еа = О и ток двигателя достигает значения Iак =
= U/'E,r. Если двигатель применяют ДJIЯ привода механизма, на­
грузочный момент которого может бьrrъ больше вращающегося
(например, привод барабана, на который наматьmается трос с гру­
зом), то при последующем увеличении нагрузочного момента это­
го механизма якорь машш1ы вновь начнет вращаться, но теперь
уже в другую сторону. Теперь момент, действующий на вал элек­
трической маШШIЪ1 со стороны нагрузочного механизма, будет
вращающим, а электромагнитный момент маппrnы - тормозя­
щим, т. е. электрическая машШiа перейдет в т о р м о з н о й р е ж и м. При работе машш1ы в этом режиме ЭДС якоря действует
согласоваIШо с напряжением, т. е. /а = (U + Ea )/'E,r.
При использовании машш1ы в тормозном режиме необходимо
принять меры для ограничения тока якоря. С этой целью в цепь
якоря вюпочают добавочное сопротивление, веЛИЧШiа которого
обеспечивает получение искусствеIШой характеристики двигателя,
пересекающейся с осью абсцисс при токе якоря Iаном < Iак {штрихо­
вая прямая).
399
Если при работе двигателя в режиме х.х. к его валу приложпrь
моменr, направленный в сторону вращения якоря, то частота вра­
щения, а следовательно, и ЭДС Еа начнут возрастать. Когда ЭДС
Еа = U, машина не будет потреблять тока из сети (точка С) и час­
тота вращения якоря достигает значения, назьшаемоrо погранич­
ной частотой вращения nx:x. •
О
Генерато
ный режин
Iao
режим
Рис. 29.8. Режимы работы машины постоянного тока:
1 - с параллельным (независимым) возбуждеЮtем; 2 - со
смешанным возбуждеЮ1ем; 3 - с последовательным возбуж­
деЮ1ем
При дальнейшем увеличении внешнего моменrа на валу ма­
шm1ы ЭДС Еа станет больше напряжения, а в цепи якоря опять
возникает ток, но другого направления. При этом машина перей­
дет в r е н е р а т о р н ы й режим: механическая энергия, затрачи­
ваемая на вращение якоря, будет преобразовываться в электриче­
скую и ПОС'I)'ПЗТЬ в сеть.
Перевод машины из двигательного в генераторный режим ис­
пользуют для торможения двигателя, так как в генераторном ре­
жиме электромагнитный моменr является тормозящим (рекупера­
тивное торможение).
§ 29.6. Двиrатель последовательноrо
возбуждения
В этом двигателе обмотка возбуждения вкточена последова­
тельно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в
нем зависит от тока нагрузки / = Ia = I•. При небольших нагрузках
магнитная система машm1ы не насыщена и зависимость магнитно­
го потока от тока нагрузки прямо пропорциональна, т. е. Ф = kФ/а .
В этом случае найдем по (25.24) электромагнитный момент:
М = См kФ/а /а =с�/;.
400
Формула частоты вращения (29.5) примет вид
= U - 1/f.r = И- 1/f,r
п
сеkФ/а
.
c;Ia
(29_15)
Здесь 4 - коэффициеш пропорциональности.
Таким образом, вращающий момеm двигателя при ненасы­
щеmюм состоЯНШI магнитной системы пропорционален квадрату
тока, а частота вращения oбparno пропорциональна току нагрузки.
а)
8)
п
о)м
п
Миом
п,
я
п,
--- -
n2
О,25Iнон
lнон 1
f
2
О
Рис. 29.9. Двигатель последовательного возбуждения:
а - принципиальная схема; 6 - рабочие характеристики; в - механические
характеристики; J - естественная характеристика; 2 - искусственнах характе­
ристика
На рис. 29.9, б представлены рабочие характеристики М =
= j{l) и n = j{l) двигателя последовательного возбуждения. При
больших нагрузках наступает насыщение магнитной системы
двигателя. В этом случае магнитный поток при возрастании
нагрузки практически не изменяется и характеристики двигате­
ля приобретают почти прямолинейный характер. Характери­
стика частоты вращения двигателя последовательного возбуж­
дения показывает, что частота вращения двигателя значительно
меняется при изменениях нагрузки. Такую характеристику
принято называть мягкой.
При уменьшении нагрузки двигателя последовательного воз­
буждения частота вращения резко увеличивается и при нагрузке
меньше 25% от номинальной может достигнуть опасных для дви­
гателя значений («разнос»). Поэтому работа двигателя последова­
теЛЬ1!9ГО возбуждения или его пуск при нагрузке на валу меньше
25% · от номинальной недопустима.
Для более надежной работы вал двигателя последовательного
возбуждения должен быть жестко соещmен с рабочим механиз­
мом посредством муфты и зубчатой передачи. Применение ремен­
ной передачи недопустимо, так как при обрыве или сбросе ремня
может произойти «разнос» двигателя. Учитывая возможность ра­
боты двигателя на повьппе1шых частотах вращения, двигатели по­
следовательного возбуждения, согласно ГОСТу, подвергают ис­
пьпаншо в течеIШе 2 МШI на превышеIШе частоты вращеIШЯ на
401
20% сверх максимальной, указанной на заводском щиrе, но не
меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного
возбуждения п = f(М) представлены на рис. 29.9, в. Резко падаю­
щие кривые механических характеристик (естествеIШая J и искус­
ствеIШая 2) обеспечивают двигатеmо последовательного возбуж­
дения устойчивую работу при тобой механической нагрузке.
Свойство этих двигателей развивать большой вращающий моменг,
пропорциональный квадра'I)' тока нагрузки, имеет важное значе­
ние, особеIШо в тяжелъrх: условиях пуска и при перегрузках, так
как с постепенным увеличением нагрузки двигателя мощность на
его входе растет медлеIШее, чем вращающий момент. Эrа особен­
ность двигателей последовательного возбуждения является одной
из причин их широкого применения в качестве тяговьrх: двигателей
на транспорте, а также в качестве крановьrх: двигателей в подъем­
ных установках, т. е. во всех случаях электропривода с тяжелыми
условиями пуска и сочетания значиrельньrх: нагрузок на вал двига­
теля с малой частотой вращения.
Номинальное изменение частоты вращения двигателя после­
довательного возбуждения
п
-п
Лnном = [0,2S] ном 1ОООАо,
nном
(29.16)
где n10,2_s1 - частота вращения при нагрузке двигателя, составляю­
щей 25% от номинальной.
Часто'!)' вращения двигателей последовательного возбуждения
можно регулировать изменением либо напряжения И, либо маг­
нитного потока обмотки возбуждения. В первом случае в цепь
якоря последовательно вкmочают регулировочный реостат Rрг
(рис. 29.10, а). С увеличением сопротивления этого реостата
уменьшаются напряжение на входе двигателя и частота его вра­
щения. Этот метод регулирования применяют главным образом в
двигателях небольшой мощности. В случае значиrельной мощно­
сти двигателя этот способ неэкономичен из-за больших потерь
энергии в Rрг• Кроме того, реостат Rрг, рассчиrываемый на рабочий
ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипньrх: двигателей
частоту вращения регулируют изменением схемы их вкmочения
относиrельно друг друга (рис. 29.10, 6). Так, при параллельном
вкточении двигателей каждый из них оказьmается под полньrм
напряжением сети, а при последовательном вкmочении двух дви­
гателей на каждый двигатель приходиrся половина напряжения
сети. При одновремеIШОЙ работе большего числа двигателей воз­
можно большее количество вариаmов вкmочения. Этот способ
регулирования частоты вращения применяют в электровозах, где
установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигатеmо напряжения возможно
также при питании двигателя от источника постояIШого тока с ре402
гулируемым напряжением (например, по схеме, аналогичной рис.
29.6, а). При уменъшеmm подводимого к двигателю напряжения
его механические характеристики смещаются вниз, практически
не меняя своей кривизны (рис. 29 .11).
Регулировать частоrу вращения двигателя изменением маr­
нитноrо потока можно тремя способами: шунrированием обмотки
а)
+
г) +
6)
+
г)
1,,,
�
,...,
Рис. 29.10. РеrулироваIШе частоты вращения двигателей последователь­
ного возбуждения
возбуждения реостатом r!!:• секционироваIШем обмотки возбужде­
ния и шуmированием оt>мотки якоря реостатом rш• Вкmочение
реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а
также уменьшение сопротивления этого реостата ведет к сниже­
нию тока возбуждения Iв = /3 - /pr, а следовательно, к poc'I)' частоты
вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а),
применяется чаще и оценива­
п
ется коэффициентом регулирования kp , =(/р,//а )·100%.
Обычно сопротивление рео­
стата rpr прШIИМается таким, n1 nнон
чтобы /срг ;;э, 50%.
При секционировании об­
мотки возбуждения (рис. 29.10,
г) отюпочение части витков оба --�---'"""""'=---м
мотки сопровождаеrся ростом
Мном
U=О,25Uном
· частоты вращения. При шунrи- Рис. 29.11. Механические характери­
ровании обмотки якоря реоста- стики двигателя последовательного
том rш (см. рис. 29.10, в) увели- возбуждения при изменении подвочивается ток возбуждения Iв = Ia
димоrо напряжения
+ lш, что вызываеr уменьшение
частоты вращения. Этот способ регулирования, хотя и обеспечиваеr
глубокую регулировку, неэкономичен и применяется очень редко.
=
· § 29.7. Двиrатель смеwанноrо возбуждения
Двигатель смешашюrо возбуждения имееr две обмотки воз­
буждения: параллельную и последовательную (рис. 29.12, а). Час­
тота вращения этого двигателя
403
n= U-1/f,r •
(29.17)
се (Ф1 ±Ф 2 )
где Ф 1 и Ф2 - потоки параллельной и последовательной обмоток
возбуждения.
Знак runoc соответствует с о г л а с о в а н н о м у вкmоченшо
обмоток возбуждения (МДС обмоток складываются). В этом слуа)
8)
5)
м
п
n
п,
Мн,
t;c=O
rA:t:O
lp
Iн,н 1
o ---------
"'н,н Н
Рис. 29.12. Схема двиrатеm�: смешанного возбуждения (а), ero рабочие (б) и механические (в) характеристики
чае с увеличением нагрузки общий магнитный поток возрастает
(за счет потока последовательной обмотки Ф2), что ведет к умеш.­
шешпо частоты вращения двигателя. При в с т р е ч н о м вкmоче­
нии обмоток поток Ф2 при увеличении нагрузки размагничивает
машину (знак минус), что, наоборот, повышает частооу вращения.
Работа двигателя при этом становиrся неустойчивой, так как с
увеличением нагрузки частота вращения неограниченно растет.
Однако при небольшом числе виrков последовательной обмотки с
увеличением нагрузки частота вращения не возрастает и во всем
диапазоне нагрузок остается практически неизменной.
На рис. 29.12, б показаны рабочие характеристики двигателя
смешанного возбуждения при согласованном вкmочении обмоток
возбуждения, а на рис. 29.12, в-механические характеристики. В
отличие от механических характеристик двигателя последователь­
ного возбуждения последние имеют более пологий вид.
Следует отметить, что по своей форме характеристики двига­
теля смешанного возбуждения занимают промежуrочное положе­
ние между соответствующими характеристиками двигателей па­
раллельного и последовательного возбуждения в зависимости от ·
того, в какой из обмоток возбуждения (параллельной или последо­
вательной) преобладает МДС.
Двигатель смешанного возбуждения имеет преимущества по
сравненшо с двигателем последовательного возбуждения. Этот
404
двигатель может работать вхолостую, так как поток параллельной
обмотки Ф 1 оrраничивает частоту вращения двшателя в режиме
х.х. и устраняет опасность «разноса». Регулировать частоту вра­
щения этого двшателя можно реостатом в цеIШ параллельной об­
мотки возбуждения. Однако наличие двух обмоток возбуждения
делает двигатель смешаmюго возбуждения более дорогостоящим
по сравнению с двшателями рассмотренных выше типов, что не­
сколько оrраничивает его применение. Двшатели смешанного
возбуждения применяют обычно там, где требуются значигельные
пусковые моменrы, быстрое ускорение при разгоне, устойчивая
работа и допустимо лишь небольшое снижение частоты вращения
при увеличении нагрузки на вал (прокаn1ые станы, rрузовые
подъемники, насосы, компрессоры).
§ 29.8. Потери и коэффициент
полезного действия комекторной машины
постоянноrо тока
В машинах постоянного тока, как и в других электрических
машинах, имеют место маnnпн:ые, электрические и мехаЮIЧеские
потери (составляющие rpyrmy основных потерь) и добавочные
потери.
Магнитные потери Рм происходят только в сердечнике якоря,
так как только этот элемент магнитопровода машш1ы постоянного
тока подвергается перемагничиваншо. Величина магнигных по­
терь, состоящих из потерь от гистерезиса и потерь от вихревых
токов, зависит от частоты перемагничивания/= рп/60, значений
магнитной шщукции в зубцах и сIШНКе якоря, толщины листов
электротехнической стали, ее магнитных свойств и качества изо­
ляции этих листов в пакете якоря.
Электрические потери в коллекторной машине постояmюго
тока обусловлены нагревом обмоток и щеточного контакта. Поте­
ри в цеIШ возбуждения определяются потерями в обмотке возбуж­
дения и в реостате, вюпоченном в цепь возбуждения:
Р..t.в =UJв •
Здесь Ив - напряжение на зажимах цеIШ возбуждения.
Потери в обмотках цепи якоря
(29.18)
/
P..ta = I;'f,r,
(29.19)
где сопротивление обмоток в цеIШ якоря 'f, r , приведешюе к рас­
четной рабочей температуре е раб , определяется по (13.4) с учетом
данных, приведеJПIЬIХ в § 13. 1 и § 8.4.
Электрические потери также имеют место и в контакте щеток:
(29.20)
405
где ЛИщ - переходное падение напряжения, В, на щетках обеих
полярностей, принимаемое в соответствии с маркой щеток по
табл. 27.1.
Электрические потери в цепи якоря и в щеточном конгакте за­
висят от нагрузки машины, поэтому эти потери назьmают пере­
менными.
Механические потери. В машине постоянного тока механиче­
ские потери складываются из потерь от трения щеток о коллектор
Р.с = kтрSщfщ Vк ,
(29.21)
трения в подшипниках Рп и на вентиляцию Рвен
Р ,
=
(29.22)
рмех Р.с + � + вен
где k.rp - коэффшщенr трения щеток о коллектор (k.rp = 0,2+0,3);
Sщ - поверхность соприкосновения
всех щеток с коллектором, м ;
2
, щетки [для машин общего назначе­
Н/м
Jщ - удельное давление,
ния/щ = (2+3)·104 Н/м2];
окружная скорость коллектора (м/с) диаметром Dк (м)
(29.23)
VI( = пDкп/60.
Механические и магнитные потери при стабильной частоте
вращения (п = const) можно считать п о с т о я н н ы м и.
Сумма магниrnых и механических потерь составляют потери х.х.:
(29.24)
Ро = Р,.,. + Рмех•
Если машина работает в качестве двигателя параллельного
возбуждения в режиме х.х., то она потребляет из сети мощность
Pio = Ulao +Ив /в= Р,.,. + Рмех + l�o Lr+ЛUщ lao +UJв . (29.25)
Однако ввиду небольшого значения тока ItlJ электрические по­
тери I;0 I,r и ЛИщ lао весьма маль1 и обычно не превышают 3%
потерь Ро = Р,.,. + Рмех• Поэтому, не допуская заметной ошибки,
можно записать Pio = Ulao +Ив /в = Ро +Ив /в , откуда потери х.х.
(29.26)
J-1 = Pio - Ив /в •
Таким образом, потери х.х. (магнитные и механические) могут
быть определены эксперимекrально.
В машинах постоянного тока имеется ряд трудно учитывае­
МЬIХ потерь - добавочных. Эти потери складьmаются из потерь от
вихревь�х токов в меди обмоток, потерь в уравнительнь�х соедине­
ниях, в стали якоря из-за неравномерного распределения индукции
при нагрузке, в полюсных наконечниках, обусловленных пульса­
цией основного потока из-за наличия зубцов якоря, и др. Добавоч­
ные потери составляют хотя и небольшую, но не поддающуюся
точному учету величину. Поэтому, согласно ГОСТу, в машинах
без компенсационной обмотки значение добавочнь�х потерь Рд
принимают равным 1 % от полезной мощности для генераторов
или 1 % от подводимой мощности для двшателей. В машинах с
406
компенсационной обмоткой значение добавочных потерь прини­
мают равным соответственно 0,5%.
Мощность (Вт) н а в х о д е м а ш и н ы постоянного тока
(подводимая мощность):
для генератора (меха1ШЧеская мощность)
(29.27)
Р�ген = M1 ro = О,105М1 п,
где М1 - вращающий момеш приводного двигателя, Н ·м;
для двигателя (электрическая мощность)
(29.28)
Р1дв = UI.
Мощность (Вт) н а вы х о д е м а ш и н ы (полезная мощ­
ность):
для генератора ( электрическая мощность)
(29.29)
.Рzген = U[;
для двигателя (мехаJШЧеская мощность)
(29.30)
Р2дв = 0,105M2n,
Здесь М1 и М2- момент на валу электрической машины, Н·м; п частота вращения, об/мин.
Коэффициент полезноrо действия. Коэффициент полезного
действия электрической машины представляет собой отношение
мощностей отдаваемой (полезной) Р2 к подводимой (потребляе­
мой) Р1:
ч = �/Р..
Определив суммарную мощность вышеперечисленных потерь
(29.31)
'J:,P= Рм + Рмех +�-в+ Рэа + �щ + �,
можно подсчитать КПД машины по одной из следующих формул:
для генератора
_ UI _ _ 'J:,P
1
(29.32)
11г -�
- -Р. - UI
+ L Р - UI + L Р '
для двигателя
U
11 =�= l-'J:,P=1-'J:,P
(29.33)
-Р.
UI
UI .
Обычно КПД машин постоянного тока составляет 0,75-0,90
для машин мощностью от 1 до 100 кВт и 0,90-0,97 для машин
мощностью свыше- 100 кВт. Намного меньше КПД машин посто­
янного тока малой мощносm. Например, для машин мощностью
от 5 до 50 Вт 11 = 0,15+0,50. Указаннь1е значения КПД соответст­
вуют номинальной нагрузке машины. Зависимость КПД маши­
ны постоянного тока от нагрузки выражается графиком Т} =
= fi.P2), форма которого характерна для электрических машин
(рис. 29.13).
дВ
407
Коэффициент полезного действия электрической машины
можно определять: а) методом непосредствеююй нагрузки по ре­
зультатам измерений подведенной Р1 и отдаваемой Р2 мощностей;
6) косвею1ым методом по результатам измерений потерь.
Метод непосредственной нагрузки применим только для ма­
шин малой мощносm, для остальных случаев применяется кос­
венный метод, как более точный и удобный. Установлено, что при
ТJ > 80 % измерять КПД методом
непосредственной нагрузки неце­
лесообразно, так как он дает
большую ошибку, чем косве1rnый
1
1
метод.
1
Существует несколько кос­
1
веЮIЬIХ
способов определения
1
КПД. Наиболее прост способ хо­
1 Р.
лостого хода двигателя, когда
D ..________.___.___
z
потребляемая машиной постоянРном
ного тока мощность затрачивает­
Рис. 29.13. Зависимость ТJ ==.f(P2)
ся только на потери х.х. [см.
(29.26)]. Что же касается элек­
трических потерь, то их определяют расчетным путем после пред­
варительного измерения электрических сопротивлений обмоток и
приведения их к рабочей температуре.
Пример 29.1. Двиппель посrо.яююго тока параллельного возбуждения (см.
рис. 29.3) вкточен в сеть с напр.яжением 220 В. При номинальной нагрузке и
часrоте вращения п,юм = 1500 об/мин он потребляет ток 1,юм = 43 А. Определить
КПД двигатеJIJ1 при номинальной нагрузке , если ток х.х. 10 = 4 А, а сопротивления
цепей .якоря Lr = 0,25 Ом и возбуждения r. = 150 Ом. При каком добавочном
сопротивлении rдоб, вкточенном последовательно в цепь якор.я , часrота вращения
двигателя будет п = 1000 об/мин (нагрузочный момент М2 = const)?
Р еше н и е. Ток возбуждения 1. = Ulr. = 220/150 =1,47 А. Ток якоря в ре­
жиме х.х. la0 = lo - 10 = 4 -1,47=2,53 А. Ток якор.я номинальный lаком = lном - 10 =
= 43 - 1,47=41,53 А. Сумма маmиrных и механических потерь Ро = Рм + Рмех =
= Ul00 - l�o Lr= 220-2,53-2,532 • 0,25=555 Вт. Электрические потери в цепи
возбуждения по (29.18)
Р..• =Ul. =220-1,47=323,4 Вт.
Электрические потери в цепи .якоря по (29.19)
Р.,, = l;,.oм Lr=41,532 • 0,25 = 431 Вт.
Электрические потери в щеточном контакте по (29.20)
Р,_ =ЛU111I_,,. =2•41,53 = 83 Вт.
Подводимая к двигатеmо мощность по (29.28)
Pi..... =Ul,ю,. =220-43 = 9460 Вт .
Добавочные потери
Рдоб =0,0l,Pi_ =0,01· 9460=94,6 Вт.
Суммарные потери по (29.31)
LP=555+323,4+431+83+94,6=1487 Вт.
Полезная мощность двигателя
111
408
Рном = Р�ном - I Р = 9460-148 7 = 7973 Вт.
КПД двигателя при номинальной нагрузке
1'1ном =Рном /Р�- =7973/9460 =0,843 .
Из выражения (29.5) получим
U-l0 Lr 220- 41,53 ·0,25
cФ=
014_
'
'
пном
1500
ЭДС якоря при частоте вращения 1000 об/мЮI по (25.20)
Е0=с,Фп=О,14 ·1000 = 140В.
Так как ток якоря прямо пропорционален моменту 10 М [см (25.24)), то
при М = const сила тока 10 после вкmочения rдоб останется прежней 10 = lоном =
= 41,53 А. Из выражения тока якоря (29.2) получим
_220-140
_U-E0
- ,6 8 Ом.
0,25_1
rдоб ---L,r4 1,53
0
Электрические потери в добавочном сопротивлеюm
Р..до& = I;rдоб = 41,53 2 • 1, 68 = 28 97 Вт.
Полезная мощность двигателя при частоте вращения 1 ООО об/мЮI
� .., Рном - Р..доб = 7973-28 97 = 5076 Вт.
Расчет полезной мощности Р2 яВЛJ1ется приближенным, так как он не учигы­
вает уменьшение механических потерь двигателя при ero переходе на меньшую
чаСТО'l)' вращения.
=
-�
/
§ 29.9. Маwины постоянного тока серии 2П
Оrечествешюй промьппленностью изготовляются машины
постоянного тока (преимуществешю двигатели) широкого диапа­
зона мощностей различных конструктивных исполнений, предна­
значеш1ые для применения во всех отраслях народного хозяйства.
Изготовление маШШI ведется, как правило, сериями, при этом на­
ряду с сериями машин общего назначения выпускаются серии ма­
ШШI специального назначения (для металлургической, горнодобы­
вающей промьппленности, для транспорта и т. п.). Наиболее
широкое применение в настоящее время получили машины посто­
янного тока общего назначения серии 2П. В основу этой серии по­
ложено разделение машин по высотам оси вращения (см. рис.
18.1), как это сделано в серии трехфазных асинхрош1ых двигате­
лей 4А.
Единая серия 2П имеет 11 габаритов маШШI по высотам оси
вращения 90, 100, 112, 132, 160, 180, 200, 225, 250, 280 и 315 мм
при частоте вращения от 750 до 4000 об/мин. Диапазон мощностей
машины серии 2П составляет: для двигателей--от 0,17 до 200 кВт,
для генераторов - от 0,37 до 180 кВт
На каждом из 11 габаритов по высоте оси вращения делают
машины двух длин сташrnы (Ми L) с унифицировашn.rми разме­
рами (один штамп пластин сердечника якоря). Кроме того, в серии
2П приняты четь1ре исполнения по способу защиrы и охлаждению
машин:
409
а) защшценное исполнение с самовенrиляцией-2ПН;
6) защшцеmюе исполнение с независимой веmиляцией от по­
стороннего вентилятора - 2ПФ;
в) закрьпое исполнение с естествеmn,�м охлаждением-2ПБ;
· г) закрьпое исполнение с обдувом от постороннего вентилятора-2ПО.
Двигатели серии 2П изготовляются с независимьIМ возбужде­
нием при напряжении возбуждения 11О и 220 В независимо от на­
пряжения цепи якоря ( 1 10,220,340 и 440 В).
Генераторы постоянного тока серии 2П изготовляются только
в защшценном исполнении (2ПН). Возбуждение генераторов сме­
шанное, параллельное или независимое. При независимом возбу­
ждении напряжение на обмотку возбуждения подается 11О или
220 В,независимо от напряжения цепи якоря ( 115,230 и 460 В).
Генераторы обеспечивают регулирование напряжения от
номинального до нуля при независимом возбуждении, до
0,5Ином при параллельном возбуждении, до О,8Ином при сме­
шанном возбуждении.
Машины постоянного тока серии 2П с высотой оси вращения
90-200 мм с самовентиляцией или независимой вентиляцией из­
готовляются с изоляцией класса нагревостойкости В, а машины с
высотой оси вращения 22 5-315 В с самовентиляцией или не­
зависимой вентиляцией и двигатели закрытого исполнения с
высотой оси вращения 90-200 мм - с изоляцией класса на­
гревостойкости F.
Сердечники якоря и полюсов вьmолняются из холоднокатаной
тонколистовой электротехнической стали. Перечисленные меро­
приятия позволили увеличить электромагнитные нагрузки и полу­
чить эффективное использование активных материалов. Двигатели
серии 2П могут коМIШектоваться тахогенераторами (см.§ 30.2).
Условное обозначение типа двигателя включает в себя: назва­
ние серии (2П), исполнение по способу защить1 и охлажденmо,
высо1)' оси вращения, номер длины станины, климатическое ис­
полнение. Пример условного обозначения двигателя серии 2П:
2ПН112МГУ4-двигатель защищенного исполнения с самовен­
тиляцией, высота оси вращения 112 мм, первой длины, уком­
плектован тахогенератором, климатическое исполнение У4 по
гост 15150--69.
§ 29.10. Универсальные коллекторные двиrатели
УниверсальньIМИ назьmают коллекторные двигатели, которые
могут работать как от сети постоянного, так и от сети одНофазного
переменного тока.
Коллекторный двигатель постоянного тока в принципе может
работать от сети переменного тока, так как при переходе от поло­
жительного полупериода переменного напряжения к отрицатель­
. ному направление электромагнитного момента сохраняется неизмеmn,�м. Объясняется это тем, что при переходе к отрицательному
410
полупериоду почти одновремеmю с изменением направления тока
в обмотке якоря меняется направление тока в обмотке возбужде­
ния, т. е. меняется полярность полюсов.
Однофазные коллекторные двигатели имеют преимуществен­
но последовательное возбуждение. Применение параллельного
возбуждения (рис. 29.14, а) в данном случае ограничивается зна-
Рис. 29.14. К принципу работы универсального коллекторного двигателя
чительной индуктивностью параллельной обмотки возбуждения,
имеющей большое число виrков. Это создает значительный фазовый сдвиг между током якоря ia и током возбуждения iв на угол
\jJ (рис. 29.14, б). Среднее значение электромагниrного момеmа в
этом случае определяется выражением, аналогичным выраженшо
(25.24), но учитьmающим угол сдвига между током якоря и маг­
нитным потоком:
(29.34)
где Фmах - максимальное значение магниrноrо потока; \JI -угол
сдвига фаз между током якоря и током возбуждения; S - угол
сдвига фаз между током возбуждения и магниrным потоком, обу­
словлеш1ый наличием магнитных потерь в машине [ ( \JI + S) � 90° •
а следовательно, cos(\JI +ь)::::: О].
В двигателе последовательного возбуждения (рис. 29.14, в)
ток якоря ia и ток возбуждения iв совпадают по фазе: \j/ = О (рис.
29.14, г). Поэтому среднее значение электромагниrного вращаю­
щего момента в двигателе последовательного возбуждения Мпосл
больше, чем в двигателе параллельного возбуждения:
Мпосл = см (Ф mах /✓2 )/а cosS.
(29.35)
411
Электромагнитный момеm двигателя последовательного воз­
буждения при работе от сети переменного тока имеет постоянную
составляющую Мпосг (рис. 29.14, д) и переменную составляющую
Мпер , изменяющуюся с частотой, равной удвоенной частоте сетиfi
(рис. 29.14, е). Результирующий момеm этого двигателя является
пульсирующим М_ = Мпосл (рис. 29.14, ж): М_ = Мпосг + (-Мпер)­
Небольшие участки графика М = fit) с отрицательным (тормозя­
щим) моментом обусловлены фазовым сдвигом между векторами
магнитного потока Фmах и током i, (рис. 29.14, г). Пульсации мо­
мента М_ практически не нарушают работу двигателя, вюпоченно­
го в сеть переменного тока, так как сглаживаются за счет момента
Шiерции вращающегося якоря.
По своей конструкции универсальные коллекторные двигате­
ли отличаются от двигателей постоянного тока тем, что их станина
и главные поmосы делаются шихтованными из листовой электро­
теХJmЧеской стали. Это дает возможность сократить магнитные
потери, которые при работе двигателя от сети переменного тока
повышаются, так как переменный ток в обмотке возбуждения вы­
зывает перемагничивание всей магнитной цепи, вкточая станину
и сердечники полюсов.
Основной недостаток однофазных коллекторных двигате­
лей - тяжелые условия коммутации. Дело в том, что в коммути­
рующих секциях помимо реактивной ЭДС и ЭДС внешнего поля
(см. § 27.3) наводится трансформаторная ЭДС етр, действующее
значение которой
(29.36)
Етр = 4,4.fiwcФ max.
Эта ЭДС наводится перемеm1ым магнитным потоком возбуж­
дения, сцеплеm1ым с коммутирующими секциями. Для уменьше­
ния трансформаторной ЭДС необходимо уменьшить поток Фmах, а
чтобы мощность двигателя при этом осталась прежней, следует
увеличить число полюсов в двигателе.
Применение в обмотке якоря двигателя одновитковых секций
(wc = 1) также способствует ограниченшо Етр, но при этом увели­
чивается количество пластШI в коллекторе, а следовательно, воз­
растают его размеры. Применение добавочньrх полюсов с обмот­
кой, вюпоченной последовательно в цепь якоря, позволяет
добиться полной взаимной компенсации трансформаторной ЭДС
только при определеlПIЬIХ значениях тока якоря и частоты враше­
ния. При других режимах работы двигателя условия коммутации
остаются тяжелыми. Реrулировка частоты вращения и реверсиро­
вание однофазного коллекторного двигателя вьmолняются так же, как
и в двигателях постоянного тока последовательного возбуждения.
В универсWlьном коллекторном двигателе стремятся получить
примерно одШiаковые частоты вращения при номШiальной на­
грузке как на постоянном, так и на переменном токе. Достигается
это тем, что обмотку возбуждения двигателя выполняют с ответв­
лениями: при работе двигателя от сети постоянного тока обмотка
412
возбуждения используется поmюстъю, а при работе от сети пере­
меююго тока - частично (рис. 29.15, а).
Расхождения в характеристиках двигателя на постоянном и
переменном токе объясняются тем, что при работе от сети пере­
менного тока на величину и фазу тока оказывают влияние индук­
тивные сопротивления обмоток якоря и возбуждения. Однако
а)
и
cJ
/,А f:o/o n-10fo6/МIJN
� so
f,6 110
10+...--�;q:::,...+°"'-,d---l
в--..--�-�-,;..--.
l,Z ЗО 6 'l""<ii,..,....-t;"'-i_.-i--"-;
0,8 20
1/ t1Г>'t8'!1�-t---t---i
0,1/ 10
Ztй>"-...._�=-=:e?+---=I
о о
О
.9,8
l!J,6 29,1, З.9,Z М,Н1110·1
Рис. 29.15. Схема соединений и рабочие характеристики
универсалъщJrо коллекторного двигателя
уменьшение числа витков обмотки возбуждения обеспечивает
сближение характеристик лишь при нагрузке, близкой к номи­
нальной. На рис. 29.15, б приведены рабочие характеристики уни­
версального коллекторного двигателя пmа УМТ-22 (55 Вт, 200
об/МШI, 110/127 В). Потребляемый двигателем ток при работе от
сети переменного тока больше, чем при работе этого же электро­
двигателя от сети постоянного тока, так как переменнъ1й ток по­
мимо активной имеет еще и реактивную составляющую. Коэффи­
циент полезного действия универсальных двигателей при
переменном токе ниже, чем при ПОС'l'оянном, что вызвано повы­
шеннъIМИ магнитными потерями. Области применения универ­
сальных коллекторных двигателей достаточно широки: их приме­
няют в автоматике, Д11Я привода различного электроинструмента,
бъповых электроприборов и др.
Контрольные вопросы
1. Какие способы оrраничения пускового тока применяются в двигателях по­
стояююго тока?
2. С какой целью при пуске двигателя параллельного возбуждения сопротивле­
Ю1е реостата в цеIШ возбуждения устанавливают минимальным?
3. Сравните двигатели параллельного и последовательного возбуждения по их
регулировочным свойствам.
4. Какова разница в конструхции коллекторных двигателей rюстояююrо и пе­
ременного тока?
rпаваЗО• Машины
- постоянного тока
специального
назначения
§ 30.1. Электромаwиннь1й усилитель
Электромашинный усилитель (ЭМУ) представля­
ег собой электрическую машину, работающую в гене­
раторном режиме и предназначенную для усилеIШЯ
электрических сшналов. Электромашинные усилители
применяются в системах автоматики. Простейший
ЭМУ - это генератор постоянного тока независимого
возбуждеIШЯ (см. рис. 28.2, а). Так как напряжение на
выходе генератора зависит от тока возбуждеIШЯ (см.
рис. 28.2, б), то, изменяя ток возбуждеIШЯ, можно
управлять напряжением на выходе генератора. Следо­
вательно, сравнительно небольшой мощностью в цепи
обмотки возбуждения можно управлять значительной
мощностью в цепи якоря.
Электромашшmые усилители, вьшолненные по
пршщипу генератора независимого возбуждения, не
нашли широкого применения, так как они не могут
обеспечить достаточно большого коэффициента
усиления по мощносm (не более 80---100), представ­
ляющего собой отношение мощности на выходе уси­
лителя к мощности на входе обмотки управлеIШЯ.
Наибольшее распространение в автоматике полу­
чили электромашинные усилители поперечного поля. В
отличие от обычного генератора постоянного тока в
этом ЭМУ основным рабочим потоком является маг­
нитный поток, создаваемый током обмотки якоря, поперечный поток реакции якоря (см. рис. 26.4, б).
На коллекторе ЭМУ установлено два комплекта
щеток: один комплект-q1q2 (рис. 30.1, а) - распо­
ложен по поперечной оси главных полюсов, т. е. на
геометрической нейтрали, а другой - d1 ,d2 - по
продольной оси главных полюсов. Щетки q 1 ,q2
замкнуrы накоротко, а к щеткам d1, d2 подключена
рабочая цепь ЭМУ.
Помимо обмотки якоря усилитель имеет одну
или несколько обмоток управления (у1 ; у2), компен­
сационную обмотку (ОК), поперечную подмагничи­
вающую обмотку (ОП) и обмотку добавочных по­
люсов (ОД). Якорь усилителя приводится во
вращение электродвигателем.
414
Если к одной из обмоток управления подвести напряжение Иу,
то в этой обмотке появится ток управления /У.! который создает
МДС обмотки управления Fy = lywy, Эта МДL, в свою очередь,
создает магнитный поток Фу, который наведет в обмотке якоря в
цепи щеток q1, q2 ЭДС Eq. Электродвижущая сила Eq невелика, но
так как щетки q1, q2 замкнуrы накоротко, то ЭДС Eq вызовет зна­
чительный ток lq , Ток в обмотке
а)
якоря lq создаст МДС Fq и маг­
нип1ый поток Фq, который направлен по поперечной оси
главных поmосов, т. е. по гео­
метрической нейтрали, и непод­
+
вижен в пространстве. В обмот­
ке якоря, вращающейся в не­
подвижном потоке Фq, наводит­
ся ЭДС Ed, снимаемая с про­
дольных щеток d1 , d2.
Если к выходным зажимам
ЭМУ подключить нагрузку r"'
то ЭДС Ed создаст в цепи щеток
d 1 , d2 рабочий ток ld.
Таким образом, небольшая
мощность обмотки управления
проходит две С'l)'Пени усиления:
сначала эта мощность усилива­
ется на С'l)'Пени «цепь управле­
ния-поперечная цепь», а затем
4
на ступени «поперечная цепь­
продольная (рабочая) цепь».
Усиление мощности на каждой ступени характеризуется
о
коэффициентом усш,енuя, который на ступени «цепь управ- Рис. 30.1. ЭМУ поперечного поля:
ления- поперечная цепь» оп­
а - принципиальная схема; б ределяется отношением мощ­
внешние характеристики
ности в поперечной цепи P q =
= Eqlq к мощности управления Ру= И/у:
(30.1)
kyl =�/�.
Коэффициент усиления на ступени «поперечная цепь-про­
дольная (рабочая) цепь» определяется отношением мощностей в
этих цепях:
{
(30.2)
ky 2 = Pd/�'
где P d = U,Jd - мощность в рабочей цепи усилиrеля, т. е. в цепи
щеток d1 , d2.
Общий коэффициент усиления ЭМУ равен произведению ча­
С'ПIЬIХ коэффициешов усиления:
415
(30.3)
Коэффmщенr усиления электромашинных усилителей может
достигать 2000---20 ООО.
Следует помнить, что мощность на выходе ЭМУ Рd представ­
ляет собой преобразованную механическую мощность приводного
электродвигателя. Значение этой мощности, которое может дости­
гать более 20 кВт, управляется небольшой мощностью управлеIШЯ
(обычно 0,1-1,0 Вт).
Обмотка дооавочнъrх поmосов (ОД) служит для улу<ШiеНИЯ
коммутации на продольнъrх щетках d1 , d2• Поперечная подмагни­
чивающая обмотка (ОП) усиливает магниrный поток по попереч­
ной оси, что позволяет уменъшигъ ток в цепи щеток q,, q2, следо­
вательно, улучшиrъ коммутацию на этих щетках (в ЭМУ малой
мощности эта обмотка отсутствует).
Компенсационная обмотка (ОК), наличие которой в ЭМУ обя­
зательно, устраняет размагничивающее влияние реакции якоря по
продольной оси. Дело в том, что ток рабочей цепи ЭМУ (ток на­
rрузки) Id создает МДС по продольной оси Fd, направленную на­
встречу МДС обмотки управления Fy. Эта МДС намного меньше
МДС Fd, поэтому даже при небольшой наrрузке усилителя размаг­
ничивающее влияние реакции якоря по продольной оси настолько
велико, что усилитель размагничивается и напряжение на его вы­
водах падает до нуля. Для устранения этого явления на статоре
ЭМУ располагают к о м п е н с а ц и о н н у ю обмотку, включен­
ную последовательно в рабочую цепь якоря. С появлением тока Id
в рабочей цепи возникает МДС компенсационной обмотки Fк, на­
правленная по продольной оси встречно МДС реакции якоря Fd.
Этим устраняется (компенсируется) размагничивающее влияние
реакции якоря по продольной оси. Для полной компенсации необ­
ходимо, чтобы МДС Fd и Fк бьти равны, так как недокомпенсация
(Fк < Fd) или перекомпенсация (Fк > Fd) оказьmает значительное
влияние на магнипп,IЙ поток Фу, а следовательно, и на свойства
ЭМУ. Однако рассчитать компенсационную обмотку с требуемой
точностью практически невозможно, что ведет к необходимости ·
опытной настройки требуемого значения МДС Fк посредством
реостата rк, шунтирующего компенсационную обмотку.
Электромашинные усилители поперечного поля выпол­
няют двухполюсными, при этом каждый из главных полюсов
расщепляют на две части J, между которыми располагают до­
бавочные полюса 2 (рис. 30.2). Обмотки управления 4 вьшол­
няют сосредоточенными в виде полюсных катушек, надетых
на главные полюса, что же касается компенсационной обмот­
ки 3, то ее делают распределенной, используя для этого пазы
в полюсных наконечниках главных полюсов. Этим достигает­
ся компенсация продольной реакции якоря по всему перимет­
ру статора.
При мощности до нескольких киловатт ЭМУ выполняют в
общем корпусе с приводнъIМ двигателем постоянного или пере416
меmюго тока. При значительной мощности ЭМУ и двигатель вы­
полняют раздельно и монтируют на общей раме.
Рабочие свойства ЭМУ в значительной степени определяются
его внешней характеристикой U d = j{Jd) при п = const и ly = const.
Напряжение на выходе усилителя
ud = Ed-1/f.rd, / (30.4)
J
где I, rd - сумма электрических
сопротивлений в продольной цепи
якоря, Ом, вюпочающая в себя
сопротивления обмотки якоря r a ,
добавочных поmосов r д , компен­
сациоmюй обмотки r к и щеточно­
q
го контакта r щ•
Ввиду того что магниmая
цепь усилителя не насьпцена , на­
4
пряжение U d является mmейной
функцией тока нагрузки ld, т. е.
внешняя характеристика ЭМУ
d
представляет собой практически
Рис.
30.2.
Расположение
обмопрямую линию (рис. 30. 1 , б).
ток ЭМУ на статоре
Угол наклона вне1Ш:1ей характеристики к оси абсцисс (жесткость характеристики ) зависит от степени компенсации реакции
якоря. При п о л н о й к о м п е н с а ц и и МДС компенсационной
обмотки F к равна МДС реакции якоря по продольной оси F d. В
этом случае внешняя характеристика получается достаточно жест­
кой (кривая 3), так как уменьшение напряжения Udпри увеличе­
нии тока нагрузки Id происходит лшпь за счет увеличения падения
напряжения в цепи якоря по продольной оси IdL rd.
, При н е д о к о м п е н с а ц и и F < F внешняя характеристика
к
d
получается менее жесткой (кривая 4). Объясняется это тем, что
при недокомпенсации МДС F d, возрастая с ув еличением тока Id,
значительно ослабляет магнитный поток обмотки управления Фу,
что ведет к заметному уменьшению напряжения на выходе ЭМУ.
Если в усилителе настроить н е б о л ьш у ю п е р е к о мп е н ­
с а ц и ю (F к > Fd) так, чтобы МДС F к полностью скомпенсировала
не только реакцию якоря F d по продольной оси, но и падение на­
пряжения IdI,rd, то внешняя характеристика усилителя становит­
ся aбcomomo жесткой и располагается параллельно оси абсцисс
(кривая 2). В этом случае напряжение на выходе ЭМУ остается
неизмеmп,�м во всем диапазоне изменения нагрузки.
При з н а ч и т е л ьн о й п е р е к о м п е н с а ц и и внешняя ха­
рактеристика ·(кривая J) приобретает восходящий характер, так
как МДС F к не только компенсирует Fd, но и создает дополни­
тельный продольный поток, который, накладьmаясь на магнитный
поток управления Фу , вызьmает увеличение ЭДС E d. Работа усили­
теля с перекомпенсацией становится неустойчивой, так как возни417
кает опасность произвольного самовозбуждения ЭМУ, при кото­
ром увеличение напряжения на выходе уситпеля вызьmает рост
тока нагрузки, что ведет к дальнейшему увеличеншо напряжения,
т. е. происходит неограниченное увеличение тока наrрузки. Обыч­
но в усилителе настраивают небольшую недокомпенсацmо, при
которой увеличение напряжения Ud при уменьшении тока Id от
номинального до нуля составляло бы 12-20%.
§ 30.2. Тахоrенератор постоянного тока
Тахоrенераторы постоянного тока служат для измерения час­
тоты вращения по значеншо выходного напряжения, а также для
получения электрических сшналов, пропорциональных частоте
вращения вала в схемах автоматического регулирования. Тахоге­
нератор постоянного тока представляет собой генератор малой
мощности с электромагнитным независимым возбуждением (рис.
30.3, а) или с возбуждением постоянными магmпами.
Ввиду того что при постоянном токе возбуждения 18 = const
магнитный поток Ф практически не зависит от нагрузки, вы­
ходная ЭДС тахогенератора Еаых прямо пропорциональна час­
тоте вращения:
(30.5)
где с; = се Ф = const.
Формула (30.5) справедлива и для тахогенератора с возбужде­
IШем постоянными магmпами, где Ф = const. Для измерения час­
тоты вращения тахоrенератором вал последнего механически со­
еДШIЯЮТ с валом механизма, частоrу вращения которого требуется
измерить. На выводы тахоrенератора подюпочают измерительный
прибор со шкалой, градуированной в едишщах частоты вращения.
Точность работы тахогенератора определяется его выходной
характеристикой, представляющей собой зависимость выходного
напряжения от частоты вращения п при неизменном значении со­
противления нагрузки. Наиболее точная работа тахогенератора
соответствует прямолинейной выходной характеристике (рис.
30.3, б, прямая 1).
Однако в реальных тахогенераторах выходная характеристика
не прямолинейна (график 2) и к тому же она выходит не из начала
осей координат. Основная причина криволинейности характери­
стики - реакция якоря, поэтому уменьшеюnо криволинейности
. этой характеристики способствует вкточение на выход тахогене­
ратора приборов с большим внутренним сопротивлением, так как
при уменьшении тока якоря ослабляется действие реакции якоря.
В современньiх тахогенераторах отклонение выходной характери­
стики от прямолинейной составляет от 0,5 до 3%.
_ Падение напряжения в щеточном коmакте ЛUщ создает в тахоrенераторе зону нечувствительности. Это диапазон частот
вращения от О до nmin, в котором напряжеIШе на выходе генератора
418
равно нуmо. Граница зоны нечувствительности определяется выражением
;
nmin =ЛИщ /(се Ф).
5)
(30.6)
U86JK
Широкое при­
менение получили
тахогенераторы по­
тока,
стоянного
возбуждаемые по­
стоянными магни­
тами. Эти тахогене­
раторы не имеют
о --L------п
обмотки возбужде­
nmin
ния, и поэтому они Рис. 30.3. Принципиальная схема (а), выходная
проще по конструк­ характеристика (б) тахогенератора постоянного
ции и имеют мень­
тока
шие габариты.
§ 30.3. Бесконтактный двиrатеnь
постоянноrо тока
С целью улу<шiения свойств двигателей постоянного тока бы­
ли созданы двигатели с бесконтактным коммутатором, называе­
мые бесконтактными двигателями постоянного тока (БДПТ). От­
личие БДПТ от коллекторных двигателей традициошюй конструк­
ции состоит в том, что у них щеточно-коллекторный узел заменен
полупроводниковым коммутатором (шmертором), управляемым
сшналами, поступающими с бесконтакmого датчика положения
ротора. Рабочая обмотка двигателя - обмотка якоря - располо­
жена на сердечнике статора, а постоянный магнит - на роторе.
Вал двигателя Д (рис. 30.4, а) механически соединен с датчи­
ком положения ротора (ДПР), сшнал от которого поступает в блок
коммутатора (БК). Подюпочение секций обмотки якоря к источ-
а)
+ -
---'
�-
Рис. 30.4. Бесконтактный двигатель постоянного тока:
а - блок-схема, б - магниrная система
419
пику постоянного тока происходит через элемешы блока комму­
татора (БК). Назначение ДПР-выдавать управляющий сигнал в
блок коммутатора в соответствии с положением поmосов постоян­
ного магнита оmосительно секций обмотки якоря.
В качестве датчиков положения ротора применяют различные
чувствительные бескошактные элеменrы с минимальными разме­
рами и потребляемой мощностью и
большой краmостью минимального и
максимального сигналов, чтобы не вы­
зьmать нарушений в работе блока ком­
муrатора. Чувствительные элементь1
ДПР должны надежно работать при
внешних воздействиях (темпераrура,
влажность, вибрации и т. п. ), на которые
рассчитан двигатель. Такие свойства
присущи ряду чувствительных элемен­
тов (датчиков): индуктивных, трансфор­
маторных, маrнитодиодов и т. п. Наибо­
лее целесообразно использовать датчики
ЭДС Холла (рис. 30.5), представляющие
Рис. 30.5. Датчик ЭДС собой
тонкую полупроводниковую пла­
Холла
стину с нанесенными на ней контактны­
ми площадками, к которым припаяны въmоды 1-2, подкmочен­
ные к источнику напряжения U1 , и выводы 3-4, с которых сни­
мают выходной сигнал U2• Если в цеIШ 1-2 проходит ток/, а дат­
чик находится в магнитном поле, вектор индукции В которого
перпендикулярен плоскости пластины датчика, то в датчике наво­
дится ЭДС и на въmодах 3-4 появляется напряжение U2• Значение
VT2
VTI
VT4
нz
'l,Jl
vтз
кz
и
i3
из-----------..
Рис. 30.6. Прmщипиальная схема БДПТ
420
+
ЭДС завис� от тока / и маnmтной индукции В, а полярность - от
направлеЮ1Я тока / в щепи 1-2 и направления вектора магнипюй
индукции В.
Рассмотрим рабоrу бесконтактного двигателя постоянного то­
ка, для управления которым применяют датчики Холла и комму­
татор, вьmолненньrй на транзисторах VТ1-VТ4 (рис. 30.6). Четьrре
обмотки (фазы) двигэ:геля w1-W4 распон1 ,о
ложены на явно выражеш1ых потосах
шихтов_анного сердечника якоря (см. рис.
30.4, б). Датчики Холла ДХl и ДХ2 уста­
новлены в пазах поmосных наконечников 141
К2
двух смежных поmосов. Силовые транзи,o,.1--v,�+-1,......,.o.:
Н4
сторы VТl- VТ4 работают в релейном
(кточевом) режиме (рис. 30.6). Сигнал на
открытие транзистора ПОС'l)'Шlет от соот­
ветствующего датчика Холла (датчика
/(/ >IJ
положения ротора). Пиrание датчиков
Рис.
30.7.
Расположение
Холла (вьmоды 1-2) осуществляется от
обмоток фаз на nomocax
источника напряжением U1•
статора БДПТ
Каждая обмотка (фаза) вьmолнена из
двух катушек, расположеШIЬIХ на противолежащих поmосах сердечника статора и соединенньrх последова­
тельно (рис. 30.7). Если по какой-либо из обмоток (фаз) статора про­
ходит ток от начала Hl-H4 к ко� Kl-K4, то поmосы сердечника
статора приобретают полярность соответственно S и N.
При положении ротора, показанном на рис. 30.6, в зоне маг­
нитного поmоса N находится датчик ДХl. При этом на вьrходе дат­
чика появляется сигнал, при котором транзистор VТ2 переходит в
открытое состояние. В обмотке (фаза) статора w2 появляется ток i2,
протекающий от Н2 к К2. При этом поmосы статора 2 и 4 приоб­
ретают полярность S и N (рис. 30.8, а). В результате взаимодейст­
вия магнитных полей статора и ротора (постоянного магнита) по-
Рис. 30.8. Магнитное поле статора в четырехпоmосном БДПТ
421
является элеюромагнитный моменr М, вращающий ротор. После
поворота ротора оmосительно оси поmосов статора 1-3 на неко­
торый угол а против часовой стрелки да'ГШК ДХ2 окажется в зоне
магнитного поmоса ротора S, при этом по сшналу с датчика ДХ2
вкточается транзистор VТЗ. В фазной ка'I)'ШКе w3 возникает ток i3
и поmосы 3 и 1 приобретают полярность S и N. При этом магниг­
ный поток статора Ф создается совмесmым действием МДС обмо­
ток фаз w2 и w3• Вектор этого потока повернут оmосительно оси
2-4 на угол 45 ° (рис. 30.8, б). Ротор, продолжая вращение, зани­
мает положение по оси поmосов статора 2-4. При этом датчик
ДХJ попадает в межпоmосное пространство ротора, а датчик ДХ2
останется в зоне поmоса S ротора. В результате транзистор VТ2
закрьmается, транзистор VТЗ останется открытым и магнитный
поток Ф, создаваемый МДС обмотки фазы w3 , поворачивается от­
носительно оси поmосов 2-4 еще на 45° (рис. 30.8, в). После того
как ось вращающегося ротора пересечет ось поmосов статора 2-4,
да'ГШКИДХl иДХ2 окажутся в зоне поmоса ротора S, что приведет
к вкточению транзисторов VТЗ и VТ4. Дальнейшую рабо'I)' эле­
менrов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф
одного оборота проследим по табл. 30.1 и рис. 30.8, а-з.
На рис. 30.9 показано устройство рассмотренного БДПТ. Дат­
чики Холла 3 размещены в специальных пазах поmосных нако­
нечников 1 сердечника статора.
Постоянный магнит 2 не имеет центрального отверстия для
посадки на вал, он закладьmается в тонкостенную гильзу и закры­
вается привариваемыми фланцами двух полуосей. Такая конст­
рукция ротора позволяет избежать вьmолнения центрального от­
верстия в постоянном магните, что часто является причиной брака
(трещины, сколы и т. п.). Блок коммуrатора (БК) расположен на
панелях 5, отделен от двигателя перегородкой 4 и закрьп металли­
ческим колпаком 6, через который вьmедены провода 7 для под­
кmочения двшателя в сети постоянного тока. Подобная конструк­
ция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Рис. 30.9. Устройство БДПТ
422
Т аблица 30.1
ПозИЦЮI на рис. 30.8
Оrкрьпы тр�исторы
Ток i проходиr по фазным
катvшкам
Уrол поворота вектора
потока сrатора, rрад
о
б
VТ2 VТ2,
vтз
в
3
о
VТ4 VТ4, VТJ
VТJ
VТ4
VТJ
VТ2
W1,
W2
г
vтз vтз,
d
е
W2
W2,
W3
W3,
о
45
90
135 180 225
w,
w.
W4
WJ,
w.
ж
W1
VТ2
w,
270 315
360
Изменение направления вращения (реверс) двигателя осуще­
ствляется изменением полярности напряжения U1 в токовой цеIШ
датчиков Холла. Изменение полярности напряжения И на входе
двигателя недопустимо, так как при этом прекращается работа
блока коммуrатора.
Коэффициент полезного действия БДПТ по сравненшо с кол­
лекторными двигателями постояmюго тока вьппе, что объясняется
отсуrствием щеточно-коллекторного узла, а значит, электрических
потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ оmосятся также высокая надежность и
долговечность, что объясняется отсуrствием у IШХ щеточно­
коллекторного узла, т. е. их бесконтактностью. Двигатели мoryr
работать в условиях широкого диапазона температур окружающей
среды, в вакууме, в средах с большой влажностью и т. п., где при­
менение коллекторных двигателей недопустимо из-за неработо­
способности щеточно-коллекторноrо узла.
Недостаток БДПТ - повьппенная стоимость, обусловленная
наличием полупроводникового блока коммуrатора, чувствителъ­
НЪIХ элементов (датчиков ЭДС Холла) и постоянного магнита.
§ 30.4. Исполнительные двиrатели
nостоянноrо тока
Исполнительные двигатели постоянного тока, так же как
асинхронные исполнительные двигатели (см. § 17.4), применяются
в системах автоматики для преобразования электрического сигна­
ла в механическое перемещение. Помимо обычных требований,
предъявляемъ�х к электродвигателям общего назначения, к испол­
нительным двигателям предъявляется ряд специфических требо­
ваний, из которых основными являются отсуrствие самохода и
малоинерционность (см.§ 17.4).
Почти все исполнительные двигатели (исюпочение составля­
ют лmпь двигатели с постоЯШ1ЪIМИ магнитами) имеют две обмот­
ки. Одна из IШХ постоянно подключена к сетикуи называется
б­
а л ния оупр в е
моткой возбуждения, на другую - обмот
электрический сигнал подается лишь тогда, когда необходимо вы­
звать вращение вала. От напряжения управления зависят частота
вращения и вращающий момент исполнительного двигателя, а
следовательно, и развиваемая им механическая мощность.
423
Исполнительные двигатели постояшюrо тока по конструкции
отличаются от двигателей постоянного тока общего назначения
только тем, что имеют шихтовашп,1е (набранные из листов элек­
тротехнической стали) якорь, станину и поmосы, что необходимо
для работы исполниrельных двигателей в переходных режимах.
Магнитная цепь исполнительных двигателей не насыщена, поэто­
му реакция якоря (см.§ 26.2) практически не влияет на их рабочие
характеристики.
В качестве исполнительных двшателей постоянного тока в
настоящее время используют чаще всего двигатели с независимым
возбуждением, реже - двигатели с постоянными магнитами. У
двигателей с независимым возбуждением в качестве обмотки
управления используют либо обмотку якоря - двигатели с якор­
ным управлением, либо обмотку поmосов - двигатели с поmос­
ным управлением.
У исполнительных двигателей с якорным
у п р а в л е н и е м обмоткой возбуждения является обмотка поmо­
сов, а обмоткой управления - обмотка якоря (рис. 30.10, а). Об­
мотку возбуждения подкmочают к сети с постоЯШIЪIМ напряжени­
ем Ив на все время работы автоматического устройства. На
обмотку управления подают сшнал (напряжение управления)
лишь тогда, когда необходимо вызвать вращение якоря двигателя.
От напряжения управления зависят вращающий момент и частота
вращения двигателя. При изменении полярности напряжения
управления меняется направление вращения якоря двигателя.
У исполнительных двигателей с полюсным
у п р а в л е н и е м обмоткой управления является обмотка поmо­
сов, а обмоткой возбуждения - обмотка якоря (рис. 30.10, б).
Якорь двигателя постоянно подкmочен к сети с напряжением Ив =
= const. Для ограничения тока иногда последовательно с якорем
включают добавочное (балласmое) сопротивление Rд. На обмотку
поmосов напряжение управления Uy (сигнал) подают лишь тогда,
когда необходимо вызвать вращение якоря.
Исполнительные двигатели постоянного тока обычной конст­
рукции имеют существенный недостаток - замедленность пере­
ходных процессов, т. е. отсуrствие малоинерционности. Объясня­
ется это в основном двумя причинами: наличием массивного якоря
со стальнь�м сердечником, обладающим значительным моментом
инерции, и значительной индуктивностью L0 обмотки якоря, уло­
женной в пазы сердечника якоря. Последняя причина способству­
ет увеличению электромагнитной постоянной времени Т = La /"[, r .
Указанные недостатки отсуrствуют в д в и г а т е л я х с г л а д к и м ( п о л ы м ) я к о р е м (рис. 30.11). Станина 1 и поmосы З
этого двигателя обычнь1е. Возбуждение двигателя осуществляется
либо с помощью обмотки возбуждения 2, либо постоянными маг­
нитами.
Для уменьшения моменrа инерции якоря его обмотка отделе­
на от массивного ферромагнитного сердечника, последний выпол424
иен неподвижным: (внутренний статор 5) и расположен на цилинд­
рическом выступе подшипникового щиrа 6.
Обмотка якоря в процессе изготовления укладывается на ци­
линдрический каркас, а затем заливается пластмассой. Готовый
якорь 4 представляет собой полый стакан, состоящий из провод­
ников обмотки, связанных воедино пластмассой. Ко1ЩЫ секций
обмотки, как и в обычном двиrателе, соединяются с пластинами кол- а:.::::-...•_- о)
и.
лектора, который является частью
t--''ia.a81A
дна по�оrо стакана якоря 4. Вра18 1
R4
щающиися узел двигателя с глад- 13 �
4
ким якорем состоит из вала, коллек�
тора и обмоТIЩ якоря, залитой
·
пластмассой.
Моменr инерции полого якоря
1н
значительно меньше моменrа инери
иУ t 1,;
�
ции обычного якоря, что обеспечивает хорошее быстродействие дви- Рис. 30.1 О. Схемы вкточения
rателя. Кроме того, индуктивность исполнительных двигателей
постоянного тока
обмотки якоря снижается, что также
способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки
улучшает коммутацию двигателя за счет уменьшения реактивной
ЭДС (см§ 27.4).
Недостаток рассмотренного мало:инерционного двигателя с
полым якорем - наличие большого немагнитного промежутка
между полюсами статора и неподвижным ферромаrниrnым сер-
I1
А-А
Рис. 30.11. Малоинерционный исполнительный двигатель постоянного
тока с полым якорем
425
дечником - внуrреmmм статором. Этот промежуток складьmает­
ся из двух воздушных зазоров и толщины стакана якоря (толщины
слоя обмотки якоря). Наличие большого немагнитного промежут­
ка на пути магнитного потока требует значительного увеличения
МДС возбуждения, что приводиr, во-первых, к увеличешпо габа­
ритов двигателя из-за увеличения объема обмотки возбуждения, а
во-вторых, к росту потерь на нагрев обмотки возбуждения. Однако
КПД двигателя с полым якорем вследствие отсугствия потерь в
стали сердечника якоря практически находится на том же уровне,
что и в обычных двигателях, а в случае применения для возбужде­
ния постоянных моменrов значительно превосходиг КПД последних.
Контрольные вопросы
1. Каково назначение компенсационной обмотки в ЭМУ?
2. Почему выходная характеристика тахоrенератора криволинейна?
3. Будет ли работать БДIП, если измениrь ооляркость напряжеНИJ1 на ero входе
( см. рис. 30.6)?
4. Объясните принцип якорноrо и nomocнoro способов управлеНИJ1 исполни­
тельными двиrателями.
5. Каковы достоинства и недостатки малоинерциоююrо двиrателя постоянноrо
тока?
rпава31• Охлаждение
- электрических
машин
"'
§ 31.1. Нагревание
электрических маwин
и трансформаторов
Работа электрической машины или трансформа­
тора всегда сопровождается ее нагреванием, что яв­
ляется следствием происходящих потерь энергии.
Все виды потерь энергии в иrore преобразуются в
тепло'I)', которая частично отдается в окружающую
среду, а частично идет на нагревание машин. Для
выяснения закона нагревания электрических машин
условно считают, что нагрев происходит равномерно
по всему объему машины, а теплота одинаково рас­
сеивается со всей ее поверхности.
Напшпем уравнение теплового баланса при ука­
заш1ых условиях:
(31.1)
Qdt = Gcd-r+Ю..:r.dt,
где Qdt - количество теплоты, выделяемой в маши­
не за время dt; Q - количество теплоты, выделяе­
мой в машине в единицу времени; t - время; Gcd-r количество теплоты, поглощаемой частями машины
и расходуемой на их нагревание; G - масса нагре­
ваемой машины; с - удельная теплоемкость, т. е.
количество теплоты, необходимой для нагревания
1 кг данного вещества на 1 °С; 't - превышение
темпера'I)'РЫ машшп,1 над темпера'I)'РОЙ окружаю­
щей среды; Sл-rdt - количество теплоты, рассеивае­
мой с поверхности мапrnны в окружающее простран­
ство; S - площадь поверхности, с которой рас­
сеивается теплота; л - коэффициент теплового рас­
сеяния, который представляет собой количество те­
плоты, рассеиваемой с единицы поверхности маши­
ны в 1 с при повышении температуры на 1 °С.
В начальный период работы машина имеет тем­
пера'I)'Ру, практически не отличающуюся от темпе­
ратуры окружающей среды, т.е. 't ::::: О . В этом случае
S'л.-rdt::::: О, а поэтому вся теплота, выделяемая в маши­
не, идет на повышение температуры ее частей. Затем
количество теплоты, рассеиваемой в окружающую
среду, увеличивается. И наконец, через некоторое
427
время машина настолько нагревается, lffO вся теплота, выделяю­
щаяся в машине, будет рассеиваться в окружающую среду. При
этом дальнейшее повышение температуры машшп.1 прекратится и
наступит режим т е п л о в о г о р а в н о в е с и я, при котором вся
теплота, выделяемая в машине, рассеивается с ее поверхности в
окружающую среду:
(31.2)
Qdt = Sл-cycтdt,
где 'Сует - установившаяся температура перегрева машинь1, т. е.
наибольшее возможное превышение температуры маrшmы над
температурой окружающей среды е, в дamn,ix условиях, 0С;
'С ует = еует -01'
где 0 уст -установившаяся температура нагрева машины, 0С.
Из (31.2) следует, что
(31.3)
т. е. установившаяся температура перегрева машины не зависит
от массы машины, а определяется количеством теплоты, выде­
ляемой в машине в единицу времени Q, площадью охлаждаемой
поверхности S и коэффициентом теплового рассеяния л.
Зависимость температуры перегрева машины -с от времени t
выражается равенством
_
(l
-t/T)
(31.4)
'
'С-'Сует -е
где е = 2,71�снование натуралънь�х логарифмов; Т-постоян­
ная нагревания, показьmающая то время, в течение которого дан­
ное тело нагревалось бы до наибольшей установившейся темпера­
туры, если бы не бьmо рассеяния теплоть1.
Кривая нагревания -с= f(t), построенная в соответствии с
(31.4), показьmает, что электрическая машина достигает устано­
вившейся температуры перегрева лишь по истечении длительного
времени (рис. 31.1, а). Проведя касательную к кривой -с= f(t) в ее
начальной части, получим отрезок, численно равный постоянной
нагревания Т. Если прекратится нагревание машшп,1, например
при откmочении машинь1 от сети, то уравнение теплового баланса
примет вид
О = Gcdt + Sл-cdt
или
- Gcdt = Sл-cdt ,
(31.5)
т. е. излучение теплоты с поверхности машинь1 будет происходить
за счет теплоты, накопленной в ней, и поэтому машина начнет ох­
лаждаться. Изменение температуры перегрева в процессе охлаж­
дения машинь1 происходит согласно выражению
(31.6)
428
Кривая охлаждения 't = j{.t) представлена на рис. 31.1, б. Изло­
же1mые законы нагревания и охлаждения электрических машин
применимы и для трансформаторов.
Наиболее чувствигельна к перегреву электрическая изоляция
обмоток. Под действием высоких температур происходиг тепло­
вое старение изоляции, проявляющееся в ухудшении ее электро­
изоляцио1mых и мехаб)
нических
а)
свойств.
Электроизоляционные
't' J:'.===�--=
материалы, применяе- "1:11с,
мые в электрических
машинах и трансфор­
маторах, делят на пять
классов нагревостой­
o------t
кости. Каждому классу
соответствует допус­ Рис. 31.1. Кривые нагревания (а) и охлажде­
тимая предельная тем­
ния (б} электрической машины
пература нагрева, при
которой изоляция может надежно работать в течение длигельного
времени (см. § 8.4). При превышении указа�mой температуры срок
службы изоляции резко сокращается.
Сильный перегрев машины может отрш.�:ательно повлиять и на
другие ее элементы. Так, например, при значигельном перегреве
коллектор может потерять цилиндрическую форму, могут нару­
шиться пайки в «петушках» или же могут выйти из строя подшип­
ники. Стандарты устанавливают предельно допустимые превьппе­
температуры
частей
электрических
машин
и
ния
трансформаторов. В соответствии со стандартом за температуру
окружающей газообразной среды принята температура 40 °С. Ис­
ходя из этого превьппение температуры какой-либо части машины
( С) определяется выражением
(31.7)
0
где еуст - установившаяся температура нагрева да�mой части
машины, С.
Определение установившейся температуры нагрева обмотки
0 уст методом сопротивления состоиг в измерении активного со­
противления этой обмотки до включения машины r1 и после ее
работы в течение времени, за которое температура нагрева обмот­
ки достигнет установившегося значения r2• Продолжительность
этого времени зависиг от режима работы машины и ее массы и
может составлять от 2 до 5 ч. Температура нагрева обмотки ( С)
0
0
еуст
r2 -r1
=--+0
1,
ar
(31.8)
1
где е\ - темперmура обмотки до включения машины, С; а - тем­
пературный коэфф1ЩИенr, для меди и алюмшшя а = 0,004 1/ С.
0
0
429
При расчете электрической машины или трансформатора сле­
дует выбирать удельные нагрузки (плоmостъ тока, магниmая ин­
дукция) такими, чтобы превьпnения температуры частей этой ма­
шины или трансформатора бьmи достаточно близки к
установленным стандартом предельным значениям. Если удель­
ные нагрузки принять заниженными, то превышение темпера'I)'J)ы
окажется намного ниже установленной стандартом, что приведет к
худшему использованию активных материалов в проектируемом
изделии, т. е. к неоправданному увеличеmпо его размеров. Если
же принять завьпnеШIЫе значения удельных нагрузок, то превы­
шение темпера'I)'ры проектируемого изделия окажется недопусти­
мо высоким, что вызовет снижение его КПД и сократит срок его
службы. Поэтому основная задача при проектировании электриче­
ских машин и трансформаторов - выбор оптимальных (наилуч­
ших) сооmошений удельных электромагниmых нагрузок, с тем
чтобы получить надежное изделие с высокими технико-эконо­
мическими показателями.
§ 31.2. Номинальные режимы работы
электрических маwин
В зависимости от характера изменения нагрузки различают
три основных номинальных режима работы электрических машин.
Продолжительный номинальный режим. Это режим рабо­
ты при неизменной номинальной нагрузке, продолжающийся
столько времени, что превьпnение темпера'I)'РЫ всех частей ма­
шины при неизменной температуре окружающей среды достигает
установившихся значений 'tуст (рис. 31.2, а). Условное обозначение
режима Sl.
:Кратковременный номинальный режим. Это режим рабо­
ты, при котором периоды неизменной номинальной нагрузки че­
редуются с периодами отключения машины; при этом периоды
нагрузки fн �астолько кратковременны, что темпера'I)'ра всех час­
тей машины не достшает установившегося значения, а периоды
отключения машины настолько длительны, что все части ее успе­
вают охладиться до температуры окружающей среды (рис. 31.2,
б). Условное Qбозначение режима S2.
Повторно-кратковременный номинальный режим. Это
режим работы, при котором кратковременные периоды неизмен­
ной номинальной нагрузки fн чередуются с периодами отключения
машины (паузами) tn, причем за период нагрузки превышение
температуры всех частей машины не успевает достиrнуrь устано­
вившихся значений, а за время паузы части машины не успевают
охладиться до темпера1УJ)Ы окружающей среды. При этом общее
время работы разбивается на периодически повторяющиеся циклы
tц = tн + tn. Условное обозначение режима S3.
При повторно-кратковременном режиме работы кривая нагре­
вания мaIШffiЫ имеет п и л о о б р а з н ы й вид (рис. 31.2, в). При
430
достижеmш частями машины установившихся значений превьШiе­
ния темпера'I)'Ры, соответствующих повторно-кратковременному
режиму tуст.к, превьШiение температуры этих частей продолжает
колебаться от tmin до tmax меньше установившейся температуры
перегрева при продолжительном режиме работы tуст•
Повторно-кратковреме1rnый режим характеризуется относипродолжительностью
тельной
а) р -,;
вкточения(%)
ПВ=(tн /tu )l 00.
предусматривает
Стандарт
повторно-краткономинальные
t
о
временные режимы с ПВ, состав­
ляющими 15; 25; 40 и 60%. Для 6) ·r
Р
продолжительного режима ПВ =
100%.
Так как при номинальных
кратковременном и повторно­
t
о
кратковременном режимах темпе­
ра'I)'Ра перегрева машины ниже,
�}
Pr
чем при номинальном продолжи­
тельном режиме, то при переводе
машшп.1 из продолжиrельного
режима в кратковреме1шый или
повторно-кратковременный
ре­
t
жим работы ее полезная мощность
может быть увеличена. Например ,
Рис. 31.2. Графики t =./(t) для
при ПВ = 60% полезная мощность
продолжиrельного
(а), кратко­
машины может быть увеличена до
временного (б) и повторно­
1,3Р00 при ПВ = 40% - до l,6P00
кратковременного (в) режимов
работы электрических мапшн
приПВ=25%-до 2Р00 ,rде Р00
номинальная мощность машины
при продолжительном режиме.
Кроме перечисленнъ�х трех основных номинальнь�х режимов
еще возможны: повторно-кратковременный с частыми пускам.и с
ПВ = 15, 25, 40, 60% и числом включений в час 30, 60, 120, 240, ус­
ловное обозначение режима S4; повторно-кратковременный с
частыми пусками (по режиму S4), но еще и с электрическим
торможением, условное обозначение режима S5; перемежаю­
щийся с продолжительностью нагрузки ПН = 15, 25, 40, 60 % и
продолжительностью одного цикла 1О мин , условное обозначение
режима S6; перемежающийся с частыми реверсам.и и электриче­
ским торможением с числом реверсов в час 30, 60, 120, 240, ус­
ловное обозначение режима S7; перемещающийся с двумя (ибо­
лее ) частотами вращения с числом циклов в час 30, 60, 120, 240,
условное обозначение режима S8.
;
;
-
431
§ 31.3. Охлаждение электрических маwин
Из уравнения теплового баланса
Qdt = Gcdт. + Sт.dt = Q1 + Q,,
следует, что теплота, выделяемая в электрической маmине, mппь
частично затрачивается на ее нагревание (Q1 = Gcdт.), а частично
(Q2) рассеивается с поверхности машины, главным образом пуrем
конвекции - переносом потоками воздуха.
По способу охлаждения электрические машшrы разделяют на
два вида: машш1ы с естественным охлаждением и машины с ис­
кусственным охлаждением.
Машины с естественным охлаждением. Эти машины не
имеют вентиляторов или каких-либо других устройств, способст­
вующих охлажденшо машины. Охлаждение происходит в основ­
ном естествеш1ым пуrем за счет теплопроводности и конвекции.
Теплопроводность - это передача теплоты внутри твердого
тела. Например, пазовые части обмотки статора, нагреваясь, пере­
дают теплоту через слои пазовой изоляции в сердечник. Через
места крепления сердечника теплота передается в корпус статора.
Передача теплоты теплопроводностью происходит от более нагре­
тых слоев твердого тела к менее нагретым.
Конвекция состоит в том, что часпщы газа (воздуха), соприка­
сающиеся с поверхностью нагретого тела (лобовые части обмоток,
сердечники, корпус), нагреваются, становятся легче и поднимают­
ся кверху, уступая свое место менее нагретым частицам, и т.д. Та­
кая конвекция назьmается е с т е с т в е н н о й. Во вращающейся
машине имеет место еще и и с к у с с т в е н н а я конвекция, обу­
словленная вращением ротора (якоря), который создает прШIУдИ­
тельную циркуляцию газа (воздуха), что усиливает эффект кон­
векции внутри машины. Естественное охлаждение обычно
применяют либо в открьпых маШШiах большой мощности, либо в
закрытых маШШiах небольшой мощности, работа которых не со­
провождается значительным нагревом. Например, в двшателях
постоянного тока серШI 2П закрьпое исполнение с естествешrым
охлаждением применено при мощносm до 8 кВт.
Машины с искусственным охлаждением. В этих маmинах
применяют специальное устройство, обычно венгилятор, создаю­
щий движение в маmине газа, охлаждающего нагретые части ма­
шш1ы. Значительную группу машин с искусствешrым охлаждени­
ем составляют машшrы с с а м о в е н т и л я ц и е й, у которых
вентилятор закреплен на валу машины; в процессе работы он,
вращаясь, создает аэродинамический напор, необходимый для
«прогона>> охлаждающего газа через машину. Самовенrиляция
может бьпь наружной и внутренней.
При н а р у ж н о й самовентиляции воздухом обдувается
внешняя поверхность корпуса статора (станины). МаШШiа в этом
случае имеет закрьпое исполнение с ребристой поверхностью (для
увеличения поверхности охлаждения). Устройство асинхронного
432
двшателя с наружной самовеJПИ.ЛЯЦИеЙ (наружным обдувом) по­
казано на рис. 10.2.
При в н у т р е н н е й самовеmиляции в корпусе и подшипни­
ковых щитах мarmrnы делают специальные отверстия, через кото­
рые воздух из окружающей машину среды проникает внутрь ма­
шины, охлаждает ее, а затем выбрасьmается наружу.
rепло6ые потоки:
•-- ст нигнитж,1х потер11
<c:=::=::i• orrт электрически�
потерь
Рис. 31.3. Принцип внутренней самовентиляции электрической
машины
Прmщип внуrреIШей самовеmиляции, получивший в электри­
ческих машинах преимуществеIШое применение, иллюстрирует
рис. 31.3. На валу маШШIЫ закреплен центробежный венгилятор.
Вращаясь вместе с валом машины, он затягивает через отверстие в
правом подшипниковом щите воздух, создавая внутри машины
аэродинамический напор, под действием которого воздух прого­
няется через внуrреmпою полость машины. Воздух проходит че­
рез венгиляционные каналы, зазор и межполюсное пространство
(при явнополюсной конструкции маШШIЬr). При этом он «омыва-.
ет» нагретые части машины: сердечники статора и ротора (якоря),
лобовые части обмоток, полюсные каl)'ШКИ. В результате воздух
отбирает теплоту от нагретых частей и в нагретом состоянии вы­
ходит через специальные отверстия (жалюзи) в левом подшипни­
ковом щите со стороны, противоположной вентилятору. Темпера­
тура воздуха на выходе машины 02 больше температуры воздуха
на входе машины 0 1 •
Повышение температуры воздуха (или другого газа) при про­
хождении через машину (0С)
(31.9)
433
можно определить, если извесnп,1 расход газа V (м3) и его удель­
ная теruюемкость с11 [дж/(м3 •0С)]:
(31.10)
где L � - суммарные потери, теплота от которых удаляется ох­
лаждающим газом, Вт. Урельная темплоемкость для воздуха и во­
дорода с" = 1,1·103 Дж/(м ·0С).
с=-=_______
__-=::J
Рис. 31.4. Аксиальная (а) и радиальная (б) системы вентиляции:
1 - статор; 2 - ротор
Для более эффективного охлаждения в магнитопроводе неко­
торых электрических машин делают венrиляци01rnые каналы, че­
рез которые проходит охлаждающий газ. Вентиляци01rnые каналы
называют аксиальными, если они расположены параллельно оси
ротора (рис. 31.3), и радиальными, если они расположены перпен­
дикулярно оси машшп,1. Венrиляцию, при которой охлаждающий
газ перемещается вдоль оси машины, называют аксиальной (рис.
31.4, а), если же газ перемещается перпендикулярно оси машины
по радиальным каналам, то венrиляцию назьmают радиальной
(рис. 31.4, б).
Радиальные вентиляционные каналы получаются делением
общей длины сердечника на пакеты по 40--60 мм. Между пакета­
ми оставляют промежуrки по 10 мм, которые и являются радиаль­
ными каналами. Иногда в машинах применяют радuалыю­
аксuальную вентиляцию.
В двигателях с регулировкой частоты вращения вниз от номи­
нальной при малой частоте вращения самовентиляция становится
малоэффективной. Это ведет к чрезмерному перегреву машины.
· Поэтому в таких двигателях целесообразно применение независи­
мой вентиляции, когда вентилятор имеет собственный привод
(частота вращения последнего не зависит от режима работы ма­
шины). Независимую венrиляцию применяют также для охлажде­
ния электрических машин, работающих во взрывоопасной или хи­
мически активной среде. В этом случае вентилятор 4 (рис. 31.5, а)
через трубопровод 3 нагнетает воздух в машину 1 и по трубе 2 вы­
брасывает его наружу. Такая система независимой вентиляции на­
зывается разомкнутой в отличие от замкнутой системы (рис. 31.5,
б), когда один и тот же объем газа циркулирует в замкнутой сис­
теме, состоящей из двигателя (объект охлаждения) 1, независимо434
го веmилятора 2 трубопровода 3 и 5 и охладителя 4, в котором
охлаждается нагретый в машине газ.
Все способы охлаждения электрических машин принято обо­
значать буквами IC, являющимися начальными буквами англий­
ских слов lnternational Cooling, остальные буквы и цифры обозна­
чают способ охлаждения машины. Сначала указывается буква,
обозначающая вид хладагекrа: А - воздух, Н - водород, W :-вода и т. д. Если хладагеmом является aj
только воздух, то буква опускается.
Затем идет несколько цифр: первая
цифра условно обозначает устройство
цепи охлаждения для циркуляции хла­
дагеmа, например воздуха, вторая способ перемещения хладагента. Если
машина имеет несколько цепей охлаж­
дения (например, внуrренняя веmиля­
ция и наружный обдув), то в обозначе­
нии может бьпъ четыре цифры: две для обозначения наружной цеIШ охла­
ждения и две - для внутренней.
Ниже приведены примеры обозна­
J
чения наиболее распространеюп,rх
способов охлаждения электрических
машин:
ICOI - защищеЮ1ая машина с самовенти­
mщией; венrишrrор расположен на валу машины.
IC37 - закрьrrая машина с подводящей и
отводящей трубами; машина охлаждается вен­
ТИЛJiтором с приводным электродвигателем, не
установле1mым на машине.
IC0041 - закрьпая машина с естествен­
ным охлаждеЮ1ем
IC0141 - закрьпая машина, обдуваемая
наружным вентилятором, расположенным на
валу машш1ы.
Рис. 31.5. Разомкнуrая (а) и
замкнутая (6) независимые
системы вентиляции
§ 31.4. Охлаждение крупных
электрических машин
В крупнъrх электрических машинах применяют замкнутую
систему вентиляции с использова�шем водорода в качестве охлаж­
дающего газа. Особые свойства водорода обеспечивают водород­
ному охлаждению ряд преимуществ:
1. Технический водород более чем в десять раз легче воздуха,
что способствует снижению потерь на вентиляцию, а следователь­
но, повышает КПД машины. Например, в турбогенераторе мощно­
стью 150 тыс. кВт потери на вентиляцию при воздушном охлаж­
дении составляют 1000 кВт, а при водородном охлаждении
турбогенератора такой же мощности эти потери составляют всего
лшпь 140 кВт, т. е. более чем в семь раз меньше.
435
2. Благодаря повышешюй теплопроводности водорода, кото­
рая в 6-7 раз больше, чем у воздуха, он интенсивнее охлаждает
машину. Это дает возможность при заданных габаритах изгото­
вить машину с водородным охлаждением мощностью на 20- 25%
больше, чем при воздушном охлаждении.
3. Водородное охлаждение снижает опасность возникновения
пожара в машине потому, что водород не поддерживает горения.
4. Водородное охлаждение увеличивает срок службы изоля­
ции обмоток, так как при явлении короны благодаря отсутствию
азота в машине не образуются нитраты - соединения, разъедаю­
щие органические составляющие изоляционных материалов.
Эффективность водородного охлаждения повышается с рос­
том давления водорода в машине. Но наряду с перечисле1rnыми
достоинствами водородное _охлаждение имеет и недостатки, сущ­
ность которых сводится к тому, что водородное охлаждение ведет
к усложнению и удорожанию как самой машины, так и ее экс­
плуатации. Объясняется это в первую очередь необходимостью
содержания целого комплекса устройств водородного хозяйства,
обеспечивающего подпитку, очистку и поддержание требуемого
давления водорода в системе охлаждения машины. Однако в ма­
шинах большой единичной мощности (турбогенераторах, гидро­
генераторах, синхроm1ых компенсаторах) водородное охлаждение
оправдано и дает большой экономический эффект.
Рассмотренные способы охлаждения машин являются к о с в е н н ы м и, так как происходят без непосредственного контакта
охлаждающего вещества с наиболее нагретъ1ми элемешами ма­
шины - обмотками. Оrбор теплоты от обмоток при этих способах
охлаждения происходит через электрическую изоляцию (в лобо­
вых частях) и сталь магнкrопровода, что снижает эффективность
процесса охлаждения. Поэтому более эффективным является н е п о с р е д с т в е н н о е охлаждение обмоток и других нагреваемых
элемешов машины. Для осуществления этого способа охлаждения
в проводниках обмотки и сердечниках делают внутренние каналы,
по которым циркулирует охлаждающее вещество - водород, во­
да, масло.
Непосредственный кошакт охлаждающего вещества с про­
водниками обмоток и внутренними слоями магнитопроводов по­
вышает юпенсивность теплоотвода и позволяет существенно уве­
личить удельные электромагнитные нагрузки машины (плотность
тока и максимальное значение магнитной индукции). Обычно не­
посредственное охлаждение применяют в электрических машинах
весьма большой мощности - турбо- и гидрогенераторах, что по­
зволяет значительно увеличить единичную мощность этих машин.
Так, благодаря использованию непосредственного способа охлаж­
дения были созданы турбогенераторы единичной мощности 800 и
1200 тыс. кВт. Дальнейшее совершенствование систем охлажде­
ния позволит создавать электрические машины еще большей еди­
ничной мощности с высокими технико-экономическими показате­
лями.
436
§ 31 .5. Охлаждение трансформаторов
Отсутствие у трансформаторов вращающихся частей умею,­
шает нагрев трансформатора из-за отсутствия механических по­
терь, но это же обстоятельство усложняет процесс охлаждения,
так как исюпочает приме­
нение в трансформаторах
самовентиляции. По этой
причине основной способ
охлаждения трансформа­
торов - естествеmюе ох­
лаждение. Однако в транс­
форматорах значительной
мощносm с целью повы­
шения уделью,IХ электро­
Воздух
магнитю,IХ нагрузок при­
�
меняют более эффектив­
ные методы охлаждения.
Наибольшее применение
получили следующие спо­
собы охлаждения транс­
форматоров.
возЕстественное
душное охлаждение. Все
Возиух
�
нагреваемые части транс­
форматора непосредствен­
но соприкасаются с возду­
хом. Их о:хлаждение про­
исходит за счет излучения
теплоты и естественной
конвекции воздуха. Иногда
трансформаторы
такие
Масло к тра11сформатору
снабжают защиmым кожу­ Рис. 31.6. Мас яное охлаждение транс­
л
хом, имеющим жалюзи или форматора с дутьем
и принудительной
же отверстия, закрытые циркуляцией масла
сеткой. Эrот вид охлажде­
ния применяют в трансформаторах низкого напряжения при их
установке в сухих закрыгых помещениях.
Естественное масляное охлаждение. Магнитопровод с об­
мотками помещают в бак, заполненный трансформаторю,�м мас­
лом, которое омывает нагреваемые части трансформатора, пуrем
конвекции отводит теплоrу и передает ее стенкам бака, последние,
в свою очередь, охлаждаются пуrем излучения теплоты и конвек­
ции воздуха. Для увеличения охлаждаемой поверхности бака его
делают ребристым или же применяют трубчатые баки (см. рис.
1.13). В трансформаторах большой единичной мощности трубы
объединяют в радиаторы (радиаторю,1е баки). Нагретые частицы
масла поднимаются в верхшою часть бака и по трубам опускаются
437
вниз. При этом, соприкасаясь со стенками труб, масло охлаждает­
ся. Трансформаторное масло обладает высокими электроизоляци­
онными свойствами, поэтому, пропитьmая изоляцию обмоток, оно
улучшает ее свойства и повышает надежность трансформаторов
при высоких напряжениях.. Эrо особеmю важно для трансформа­
торов, устанавливаемых на открьпых площадках. Следует заме2·
3
Рис. 31.7. Масляно-водяное охлаждение трансформатора
тить, 'ПО масляное охлаждеIШе усложняет и удорожает эксплуата­
цmо трансформаторов, так как требует систематического контроля
за качеством масла и периодической его замены.
Масляное охлаждение с дутьем. Трансформаторы снабжают
электрическими вентиляторами, которые обдувают радиаторы
тр ансформатора. Конвекция масла внуrри бака остается естест­
вешюй. Эrот вид охлаждения позволяет увеличить единичную
мощность трансформатора на 40+50%. Обычно масляное охлаж­
деIШе с дутьем применяют в трансформаторах мощностью свыше
1О ООО кВт. При снижении нагрузки трансформатора с дутьевым
охлаждеIШем на 50+60% вентиляторы можно отключить, т. е. пе­
рейти на естественное масляное охлаждеIШе.
Масляное охлаждение с дутьем и принудительной цирку­
ляцией масла. С помощью насоса 1 (рис. 31.6) создают принуди­
тельную циркуляцию трансформаторного масла через специаль­
ные охладители 2, собранные из трубок. Одновременно
необходимое число вентиляторов 3 создает направленные потоки
воздуха, обдувающие поверхность трубок охладителя.
Масляно-водяное охлаждение (рис. 31.7). Нагретое в транс­
форматоре 1 масло посредством насоса 2 прогоняется через охла­
дитель 3, в котором циркулирует вода. Эrо наиболее эффективный
способ охлаждения, так как коэффшщент теплопередачи от масла
в воду значительно выше, чем в воздух. Одновременно масло про­
ходит через воздухоохладитель 4 и фильтр 5, где освобождается от
нежелательных вюпочений.
§ 31.6. Новые принципь1
выполнения электрических маwин
В настоящее время резервы по усовершенствованию электри­
ческих машин тращщионной конструкции во многом исчерпаны.
Исследования показали, 'ПО дальнейшее увеличеIШе единичной
438
мощности этих машин возможно лmпь до значений, не превы­
шающих (2+3)-106 кВт, в то время как в ближайшее десятилеще
потребуются машины значительно большей мощности. В этих ус­
ловиях оказьmается целесообразным переход к машинам нового
принципа вьmолнения. За последние годы достигнут определен­
ный прогресс в создании подобных машин. Рассмотрим два вида
машин нового принципа вьmолнения:
криоге1rnые электрические машины и
мапштогидравлические машины.
Криогенные электрические ма­
шины. В криогенных электрических
машинах обмотки вьmолняют из сверх­
проводников юm: химически чистых
металлов (гш�ерпроводников). При
снижении температуры удельное элек­
трическое сопротивление сверхпро­
водников вначале Шiавно снижается, а ,a-��-...Lo----,--!:-::,---::+.,...-�
затем при температуре критического
а fjкp во tБО 2ча о, к
перехода е кр = 20 К (ниже -253 °С) Рис. 31.8. Зависимость
0
резко падает до нуля: р = О (р = О), электрического сопротив­
проводников от тем­
т. е. они переходят в состояние ления
ы:
е
а
тур
п
р
с в е р х п р о в о д и м о с т и (рис. 31.8, 1 - сверхпроводники;
2 кривая 1). У обычных металлов и обычные металлы; 3 - хими­
сплавов нет состояния сверхпроводи­ чески чистые металлы
мости, и при снижении температуры
их удельное электрическое
сопротивление плавно уменьшается,
0
достигая значения р = 10-1 при температуре абсолютного нуля
(кривая 2). У химически чистых металлов (гш�ерпроводников)
также нет состояния сверхпроводимости, но при глубоком охлаж­
дении их удельное электрическое сопротивление уменьшается до
значения, в 5-7 тыс. раз меньшего, чем при комнатной темпера­
туре (кривая 3).
Это свойство сверхпроводников и чистых металлов позволяет
по проводам небольшого сечения 11Ропускать значительные токи,
доводя плотность тока до 100 А/мм и более. Электрические поте­
ри на нагрев обмоток при этом либо отсутствуют, либо незначи­
тельны. Все это дает возможность получать в криоге1rnых маши­
нах сильные магнитные поля с магнитной индукцией В= 5+10 Тл
(в машинах традиционного вьmолнения В= 0,8+1,5 Тл).
Криогенная машина не содержит ферромагнитного сердечни­
ка, который, обладая свойством магнитного насыщения, не позво­
лил бы получить столь высокие значения магнитной индукции, так
как вызвал бы в машине значительные магнитнь1е потери. Сниже­
ние потерь (электрических и магнитных) позволяет повысить КПД
машшI и более эффективно использовать их габариты, создавая
машины весьма большой единичной мощности.
Необходимым элементом криогенной машины является крио­
стат, представляющий собой теплоизолированную от внешней
439
среды емкость, заполнеШl)'Ю хладагенгом (например, жидким ге­
лием). Внутри криостата располагают охлаждаемую обмотку или
же электрическую машину целиком.
Рассмотрим конструктивную схему криогеmюго турбогенера­
тора со сверхпроводящими обмотками статора 4 и ротора 3 (рис.
31.9). Вся машина помещена в криостат, заполненный жидким ге­
лием при температуре 10 К (-263 °С). На валу 2 расположено че­
тыре металлических «поmоса» 5, на каждом из которых укреплена
многовитковая поmосная ка'I)'ШКа 3 из сверхпроводника. Статор
закmочен в магнитный экран 7 из сверхпроводящего сплава. По­
верхность экрана имеет множество отверстий, через которые
внутрь машины проникает жидкий гелий. «Поmосы» ротора 5 и
«сердечник» статора 6, а также другие элементы конструкции ма­
шины не обладают ферромагнитными свойствами, а используются
Л1Ш1Ь для надежного закрепления обмоток.
Вся машина заключена в металлический кожух 8, образующий
стенки криостата. Затем следует толстый слой теплоизоляции 9.
Выделяющаяся за счет потерь теплота, а также теплота, прони­
кающая в криостат из внешней среды, отбирается жидким гелием.
Криогенная маШШiа снабжена рефрижератором 10, подающим в
криостат охлажденный гелий взамен испаряющегося. Контактные
кольца 11 находятся в холодной зоне, а подшшmики 1 и 12 выне­
сены за пределы криостата.
Рассмотренная конструкция криогенного генератора обладает
существенным недостатком - значительные потери энергии в об­
мотке статора, вызванные переменным током в обмотке статора и
переменным магнитным полем, наведенным этой обмоткой. Эти
потери происходят главным образом из-за явления гистерезиса в
сверхпроводящей обмотке. Пока еще не найдены эффективные
Рис. З 1.9. Конструктивная схема криогенного уУрбоrенератора со сверхпроводящими обмотками на статоре и роторе
способы ослабления этих потерь, вызьmающих шпенсивное испа­
рение хладагента (жидкого гелия). Поэтому помимо электриче­
ских машин с криогированием обеих обмоток создаются и иссле­
дуются криогенные машины с криогированием только обмотки
возбуждения. Эта обмотка питается постоянным током и защmце­
на алюминиевым (демпфирующим) экраном от воздействия пере­
менного магнитного поля обмотки статора, поэтому в ней не про440
исходят явления, вызьmающие маrниrные потери. Обмотка стато­
ра в такой машине имеет обычную конструкцmо, т. е. она вьmесе­
на за пределы криостата.
Исследования показали, чrо ЮIД криоrешюrо сШIХронноrо
турбогенератора с учетом всех дополнительных расходов энергии
на собственные нужды (вкточая гелиевое охлаждение обмотки
возбуждения) на 0,8% вьппе, чем у обычного СШIХронноrо rенера-
Рис. 31.10. Сравниrелъные размеры обычного J и крио­
генного 21)'рбоrенераторов мощностью 1200 тыс. кВт
тора с водородным охлаждением мощностью 1200 тыс. кВт. При
этом криоrеш1ый генератор имеет массу в четыре раза меньше.
Уменьшение размеров криогенного турбогенератора 2 по сравне­
нию с обычным 1 иллюстрирует рис. 31.10.
В последнее время получены проводниковые материалы, об­
ладающие сверхпроводимостью при температуре кипения жидко­
го азота (-196 °С) -хладагента более дешевого, чем жидкий ге­
лий (температура кипения -268,9 °С). Ведуrся работы по
созданию проводниковых материалов с еще более высокой темпе­
ратурой сверхпроводимости. Применение этих материалов в крио­
генном электромашиностроении упростит конструкцmо криоста­
тов и снизит стоимость криоrеннь�х электрических машин.
Исследования показали, чrо в ближайшие 10-20 лет крио­
генное электромашиностроение станет одним из ведущих направ­
лений при создании электрических машин особо большой мощно­
сти, вьmолнение которь�х по традиционнь1м прmщипам техничес­
ки невозможно.
Магнитогидродинамические электрические машины. Рас­
смотрим прmщип действия маrнитогидродШiамического (МГД)
генератора, в котором тепловая энергия преобразуется непосред­
ственно в электрическую. ПрИНЦШI действия основан на том, что
при движении рабочего тела, обладающего достаточной электро­
проводностью (электролита, жидкого металла, ионизированного
газа), поперек силовь�х лШIИЙ магнитного поля в этом рабочем те­
ле индуцируется ЭДС и возникает ток, который через соответст­
вующие электроды отводиrся во внешнюю электрическую цепь.
Для пояснения воспользуемся упрощенной схемой МГД-rене­
ратора (рис. 31.11, а), в котором рабочим телом являются продук­
ты сгорания топлива с присадкой, усиливающей их электропро441
водность. Тоruшво 1, воздух 2 и присадка 3 подаются в камеру
сгорания 4. Образующийся при этом ионизированный газ выходит
из сопла 5 и проходит через внутрешпою полость электромагнита
6 поперек магнигных силовых линий поля. В соответствии с явле­
нием электромагнитной индукции в ионизированном газе наво­
дится ЭДС, которая снимается двумя электродами 7 и подается во
внешшою цепь к потребителю rн• Ионизированный газ, пройдя
а)
2
!3
..Г'
t,
�1
4
f
/
"'-5
Рис. 31.11. Принцип действия МГД-генератора (а) и МГД-двиrателя (6)
через магнитное поле, выходиt из генератора. Таким образом, в
МГД-генераторе теплота, образуемая при сгорании тоruшва, непо­
средственно преобразуется в электрическую энергию, а поэтому
необходимость в получении механической энергии оmадает (не
нужны паровой котел и паровая турбина).
Исследования показали, что МГД-генераторы приобретают
существенные преимущества перед тепловыми электростанциями
трад1ЩИонного действия шппъ при условиях значительной еди­
ничной мощности (более 100 МВт) и изготовлении обмотки элек­
тромагнита из сверхпроводника, помещенного в криостат.
МГД-генераторы обратимы и мoryr работать в двигательном
режиме. Обычно МГД-двигатели применяются для перемещения
электропроводных жидкостей, их принято назьmать МГД-насоса­
ми. Для пояснения принципа работы МГД-насоса обратимся к рис.
31.11, 6. Электропроводная жидкость, проходя через канал 1, по­
падает в пространство между полюсами N и S электромагнита.
При этом через жидкость от электрода 2 к электроду 3 проходит
электрический ток, который взаимодействует с мапштным полем
и создает электромагmrrные силы, которые и «проталкивают»
жидкость через межполюсное пространство электромапшта.
Подобные МГД-насосы могут применяться для транспорти­
ровки различных электропроводных жидкостей. Например, их
можно использовать для перемещения расплавленного металла в
литейном производстве.
Рассмотренные МГД-машш1ы назьmают кондукционными, так
как их конструкция предусматривает обязательное наличие элек­
тродов для съема или подачи электрического тока. Созданы также
МГД-машины индукционные (асинхршrnые), в которых отсутст442
вуют электроды, а ЭДС или электромагнитные силы возНИI<ают в
результате взаимодействия перемещаемой электропроводной жид­
кости с бегущим маrmпным полем [1).
Контрольные вопросы
1. Что такое режим теплового равновесия в электрической машине?
2. Можно ли машину, рассчиrанную для работы в повторно-кратковременном
режиме, использовать в продолжиrельном режиме?
3. Перечислите сrюсобы охлажденюr электрических машин и дайrе каждому из
них характеристику.
4. Каковы особенности водородного охлаждения?
5. Какой способ охлаждеННI электрических машин •вляетс• наиболее эффек­
тивным?
6. Перечисmпе способы охлажденш 'Iрансформаторов и дайrе им сравюпель­
ную оценку.
7. Что такое сверхпроводимость и какие материалы ею обладают?
8. Почему в криогенной машине допускаютс,� очень высокие значенюr магюп­
ной ющукции?
9. Объ,rсниrе рабо'I)' МГД-генератора и МГД-двигател,r.
· Задачи для самостоятельного решения
1. ТРАНСФОРМАТОРЫ
Задача 1.1. Однофазный трансформатор вкточен в сеть с час­
тотой тока 50 Гц. Номm1алъное вторичное напряжение И2ном, а ко­
эффициенr трансформации k. Определить число виrков в обмот­
ках w1 и w2, если в стержне магнитопровода трансформатора
сечением Qст максимальное значение маrнитной индукции Brnax
(табл. 1.1).
Таблица 1.1
ВеличIОП,J
И�ном, В
k
Q= м2 ·10-1
Вшах, Тл
1
230
15
0,49
1,3
2
400
10
0,80
1,6
3
680
12
1,2
1,8
4
230
8
1,8
1,3
Варианn.1
5
6
230 400
6
10
0,65 0,80
1,4 1,5
7
400
8
1,2
1,2
8
680
12
0,76
1,3
9
230
14
0,60
1,5
10
230
8
085
1,2
Задача 1.2. Для однофазного трансформатора номинальной
мощностью Sном и первичным напряжением И 1ном, мощностью ко­
роткого замыкания Рк.ном и напряжением к.з. Uк рассчитать данные
и построить график зависимости изменения вторичного напряже­
ния ЛИ от коэффициенrа нагрузки р, если коэффициенr мощности
нагрузки cos q>2 (табл. 1.2).
Таблица 1.2
ВеличIОП,J
Sном, кВ·А
И1,юм, кВ
Рrr.. ном, кВт
Uк, %
cos <pz
1
600
31,5
20
8,5
0,75
2
250
6,3
12
6,5
0,85
3
800
31,5
22
8,5
0,80
4
100
6,3
7
5,5
0,70
(емк.) (Ш!Д.) (емк.) (ицц.)
Варианrы
6
7
5
180 560 320
6,3
10
10
25
13
10
7
6,5
6,5
1,0
0,85 0,9
(Ш!Д.) (емк.)
8
50
3,4
3,5
5,5
1,0
9
120
6,3
8
10
80
10
5,4
6
5,5
0,80 0,70
(Ш!Д.) (инд.)
Задача 1.3. Для однофазного трансформатора, данные которо­
го приведены в задаче 1.2, рассчитать и построить график зависи­
мости КПД от нагрузки Т) = .l{P), если максимальное значение КПД
трансформатора соответствует коэффициеmу нагрузки Р' =0,7.
Задача 1.4. Трехфазный трансформатор номинальной мощно­
стью Sном и номинальными напряжениями (линейными) И� ном и
И2ном имеет напряжение короткого замыкания и", ток холостого
хода io, потери холостого хода Р0н0м и потери короткого замыкания
444
Рк.ном • Обмотки трансформатора соедm-Iены по схеме «звезда­
звезда». Требуется опредетпъ параметры Т-образной схемы
замещения, счиrая ее симметричной: 'i = r; и х1 = х2 ; определигъ
КПД ri и полезную мощность Р2, соответствующие значениям
полной потребляемой мощности S1 = 0,25Sном, S2 = 0,5Sном , Sз =
= О,75Sном и S4 = Sном при коэфф1ЩИенrах мощности наrрузки cos <р2 =
= 0,8 и cos q>2 = l, по полученным даю1ым построmъ графики
ri = /(�) в одних осях координат; определить номинальное
изменение напряжения ЛИном (табл. 1.3).
Таблица 1.3
Величины
Sном,кВ·А
И1ном,кВ
И2ном,кВ
и., %
Роном, кВт
Р.,._ном,кВт
io, %
1
100
0,5
0,23
5,5
0,65
2,0
6,5
2
180
3,0
0,4
5,5
1,2
3,6
5,5
3
320
6,0
0,4
8,5
1,6
5,8
5,5
4
560
10
0,4
6,5
2,5
9,0
5,5
Варианrы
6
5
1000 800
10
35
3,0 0,4
5,5 6,5
5,2 3,6
13,5 10,0
5,0 5,0
7
600
10
0,6
8,5
2,8
9,0
5,5
8
700
6,0
0,6
5,5
3,2
8,2
5,5
9
400
3,0
0,23
6,5
2,0
6,0
5,5
10
200
3,0
0,23
5,5
1,5
4,0
6,5
Задача 1.S. Три трехфазных трансформатора номинальной
мощностью Sном t, Sном\1 и Sнoмlll включены на параллельную рабо'I)'
Требуется определить: 1) нагрузку каждого трансформатора (S1, S11
и S111) в кВ·А, если общая нагрузка равна сумме номинальных
мощностей этих трансформаторов (Soбw = Sномl + Sнoмll + Sномш);
2) степень использования каждого из трансформаторов по мощно­
сти (S/Sном); 3) насколько следует уменьшить общую нагрузку
трансформаторов S00w, чтобы устранить перегрузку трансформато­
ров; как при этом будут использованы трансформаторы по мощно­
сти в проценrах (табл. 1.4).
Таблица 1.4
Величшп.1
1
Первый трансформатор
НомЮJальная мощность Sномl,кВ·А
Напр.яжениек.з. ик1, %
Второй трансформатор
2
Варианты
3
4
5
5000 5600 3200 1800 560
5,3 5,3 4,3 4,4 4,0
Номинальная мощносгь Sном1r,кВ·А
Напр.яжениек.з. и.и, %
3200 3200 4200 3200 420
5,5 5,5 4,3 4,0 4,2
Номинальиая мощность Sном\11,кВ·А
Напряжениек.з. и.111, %
1800 3200 5600 4200 200
5,7 5,5 4,0 3,8 4,5
Третий трансформатор
445
2. ОБЩИЕ ВОПРОСЫ ТЕОРИИ
БЕСКОЛЛЕКТОРНЫХ МАШИН
Задача 2.1. Рассчитать параметры и начертить развернуrую
схему трехфазной двухслойной обмотки статора по данным, при­
веденнь�м в табл. 2.1. Выбрать укорочение шага обмотки, чтобы
уничтожалась v-я высшая гармоника в кривой индуцированной
ЭДС обмотки. Соединение катушечных групп последовательное,
фазы обмотки соеДШIИТЬ звездой, катушки одновигковые.
Таблица 2.1
Величю1ы
Число пазов Z1
l
48
Число
8
2р
ПОJПОСОВ
Гармоника v
5
Варианrы
2
6
36
6
7
24
4
5
36
7
5
7
5
4
48
4
3
36
4
7
5
2
60
2
8
10
9
60
36
6
6
7
5
7
10
54
Задача 2.2. Используя даmп,1е и результаты расчета задачи
2.1, определить эффективные значения фазной и линейной ЭДС
первой, третьей, пятой и седьмой гармоник, приняв величину ос­
новного магнитного потока Ф = 3/Z1 Вб и частоrу тока 50 Гц. Рас­
считать значения этих ЭДС, если бы шаг обмотки бьm полнь�м.
Задача 2.3. По даннь�м задачи 2.1 рассчитать параметры и на­
чертить развернуrую схему трехфазной однослойной обмотки ста­
тора с лобовыми соединениями, расположенньIМИ в двух плоско­
стях. Катушечные группы соединить последовательно, фазные
обмотки соеДШIИТЬ звездой.
3. АСИНХРОННЫЕ МАШИНЫ
Задача 3.1. Определить значения ЭДС, индуцируемые вра­
щающимся магнитнь�м потоком Ф в обмотке статора Е1 , в непод­
вижном и вращающемся роторах Е2 и E2s, частоrу вращения рото­
ра п2 и частоrу тока в роторе h, если известны число
последовательно соединенных витков фазы обмотки статора w 1 ,
обмоточный коэффшшент k061, число поmосов 2р, частота токаfi =
= 50 Гц и номинальное скольжение Sном (табл. 3.1).
446
Таблица 3.1
Величины
3
Ф,Вб·lО-
w,
Ко&,
s_
2р
l
45
96
0,96
0,02
4
2
3
34
28
100 128
0,90 0,94
0,03 0,02
6
8
4
82
48
0,86
0,04
12
Варианrы
6
5
45
55
46
66
0,90 0,96
0,06 0,01
4
2
7
58
60
0,84
0,04
6
8
48
80
0,90
0,03
8
10
9
75
40
40
84
0,96 0,90
0,03 0,02
6
10
Зццача 3.2. Трехфазный асинхронный двшатель с коротко­
замкнутым ротором серии 4А имеет технические данные, приве­
денные в табл. 3.2. Опредеmпь высооу оси вращения: h, число по­
mосов 2р, скольжение при номинальной нагрузке Sном, момент на
валу Миом, начальный пусковой Мп и максимальный Mmax моменты,
номинальный и пусковой токи /1ном и Iп в питающей сети при со­
единении обмоток статора звездой и треугольником.
Таблица 3.2
ТШI двигателя
Варианrы
Рном, кВт
4Al00S2Y3
4Al60S2Y3
4А200М2У3
37,0
4Al32M4Y3
4А180М4У3
4А200М6У3
4А280М6У3
4АЗ15М8У3
_4АЗ55М10У3
11,0
30,0
22,0
90,0
110
110
4All2M4Y3
4,0
15,0
5,5
n2ном, Чном,
об/мни
%
cos
(/)1
_!д_
/lном
2880 86,5 0,89 7,5
2940 88,0 0,91 7,0
2945 90,0 0,89 7,5
1445 85,5 0,85 7,0
1460 87,5 0,87 7,5
1470 91,0 0,89 6,5
975 90,0 0,90 6,5
985 92,5 0,89 5,5
740 93,0 0,85 6,5
590 93,0 0,83 6,0
мп мер
м_
2,0
1,4
1,4
2,0
2,2
1,4
1,3
1,4
1,2
1,0
Ис,В
MIIOM
2,5
2,2
2,5
2,2
3,0
2,3
2,4
2,2
2,3
1,8
220/380
220/380
380/660
220/380
220/380
380/660
220/380
380/660
380/660
380/660
Задача 3.3. Трехфазный асинхрою1ый двшатель с коротко­
замкнутым ротором, работающий от сети частотой 50 Гц и напря­
жением U1 (фазное), имеет параметры, приведе1mые в табл. 3.3:
номинальная мощность Рном, коэффициент мощности cos <j>1 ном .
магниrные потери Рм, механические потери Рмех, активное сопро­
тивление фазы обмотки статора r1 при рабочей температуре, ак­
тивное приведенное сопротивление обмотки ротора r2 . Рассчитать
данные и построить график зависимости КПД от относительного
значения полезной мощности ri = f(P,_/�ом ). При этом принять
добавочные потери равными Рдоб = О,005Р2, а коэффициенr мощ­
ности считать изменяющимся в функции Р,_ / �ом в соответствии с
графиком 2 на рис. 13.9.
447
Величины
Р,юм, кВт
COS (1)\ном
И1,В
r1 ,Ом
r2 ,Ом
Рм,В т
Рм,..,Вт
1
4,0
0,89
220
1,62
1,4
129
80
2
15
0,91
220
0,40
0,2
270
250
3
45
0,90
220
0,083
0,043
4
5,5
0,86
220
1,5
1,2
730
370
145
40
Вариа
5
11
0,87
220
0,53
0,28
230
100
Табл ица 3.3
шы
6
30
0,89
380
0,16
0,06
680
320
7
4,0
0,84
220
1,62
1,40
129
30
8
15
0,88
380
1,1
0,4
9
110
0,9
380
0,11
0,02
264
125
1230 1670
550 900
10
250
0,92
380
0,03
0,01
Задача 3.4. Трехфазный асШIХронный двигатель с коротко­
замкнуrым ротором работает от сети переменного тока частотой
50 Гц. При номинальной нагрузке ротор двигателя вращается с
частотой п200..,; перегрузочн ая способность двигателя л, а крат­
ность пускового момента МпfМ00..,. Рассчиrать дшmые и построить
механическую характеристику двигателя в относительных едини­
цах м. =fi.s) (табл. 3.4).
Величины
n2,юм, об/мин
л
МпfМном
2
3
1
1450 2940 960
2,2 1,9 2,0
1,4 1,4 1,2
Вариа
5
4
1420 720
2,2 2,0
1,0 1,0
шы
6
7
2920 580
1,9 1,8
1,2 1,4
Таблица 3.4
8
9
1430 730
2,2 1,7
1,0 0,9
10
515
1,8
1,0
4. СИНХРОННЫЕ МАШИНЫ
Задача 4.1. Имеется трехфазный сШIХронный генератор мощ­
ностью S00м с напряжением на выходе И100.., (обмотка статора со­
единена звездой) при частоте тока 50 Гц и частоте вращения п 1 •
КПД генератора при номинальной нагрузке Тl ном (табл. 4.1). Гене­
ратор работает на нагрузку с cos (l)ном = 0,9. Требуется определить
активную мощность генератора при номинальной нагрузке Рном ,
ток в обмотке статора 11ном , требуемую первичному двигателю
мощность Р1 и вращающий момент М1 при непосредственном ме­
ханическом соединении валов генератора и перви чного двигателя.
448
Таблица 4.1
Величины
S..,м, кВ·А
И1,юм, кВ
'lиом, %
n1,об/мин
2
330 400
6,3 3,2
92
92
1000 750
l
3
270
0,4
90
600
4
470
6,3
91
1000
Варианты
5
230
0,7
90
600
6
600
3,2
93
500
7
780
6,3
93
1000
8
450
0,4
91
500
9
700
6,3
93
1000
10
500
3,2
92
600
Задача 4.2. Трехфазный синхронный генератор номинальной
мощностью Рном и номинальным (фазным) напряжением И1ф.ном
работает с коэффициентом мощности cos 11> 1 ном = 0,8 (инд.). Об­
мотка фазы статора имеет индуктивное сопротивление рассеяния
х1 (табл. 4.2), отношение короткого замыкания ОКЗ = 0,7. Требу­
ется построигъ практическую диаграмму ЭДС и по ней определить
номинальное изменение напряжения генератора при сбросе на­
грузки. Активным сопротивлением фазы обмотки статора пренеб­
речь. Характеристика х.х. генератора нормальная (см. с. 262).
Таблица 4.2
Величины
Р,юм,кВ·А
И1,юм,В
х1,Ом
Варианты
2
5
7
9
1
10
4
6
8
3
15
25
35 45 60 50 40 30 20 10
230 230 230 400 400 400 400 230 230 230
0,35 0,21 0,15 0,32 0,24 0,30 0,35 0,18 0,25 0,40
Задача 4.3. Трехфазный синхронный двигатель номинальной
мощностью Рном и числом полюсов 2р работает от сети напряже­
нием И1ном (обмотка статора соединена звездой). КПД двигателя
ТJ ном, коэффициент мощности cos 11>1ном при опережающем токе ста­
тора. Перегрузочная способность двигателя л., а его пусковые па­
раметры определены кратностью пускового тока luflнoм и кратно­
стью пускового момента MulМном• Значения этих величин
приведены в табл. 4.3. Требуется определить: потребляемые из
сети двигателем активную мощность Р1 и ток 11ном, развиваемый
двигателем при номинальной нагрузке вращающий момент Миом,
суммарные потери L Р, пусковой момент Мп и пусковой ток In, а
также вращающий момент Mmax, при котором двигатель выпадает
из синхронизма.
449
Табл ица 4.3
Вариа,пы
Р""м'
кВт
1
2
3
4
5
575
600
325
60
160
И1ном.
кВ
6,0
3,0
3,0
0,38
0,38
2р
Величины
COSfPl№м
6
10
8
6
6
0,8
0,9
0,9
0,8
0,8
Тlною %
_!д._
1, -
5
5,5
93
92
90
89
90
4,5
4,5
4,8
мп
М,,,.х
MIIOM
миом
1,4
1,7
1,7
2,2
2,4
1,5
1,5
1,6
1,6
1,5
Задача 4.4. В трехфазную сеть напряжеIШем Ис вкточен по­
требиrелъ мо:щн:остью Sпотр при коэффициеше мощности cos <р.
Определить мощность синхронного компенсатора Qс.к, который
следует подкточить параллельно потребителю, чтобы коэффици­
еш мощности в сети повысился до значения cos<p'. На сколько
необходимо увеличить мощность синхронного компенсатора, что­
бы повысить коэффициеш мощности сети еще на 0,05 (табл. 4.4).
Таблица 4.4
Величины
Ис,кВ
3
SПО1)),кВ·А-10
COS(j)
cosq>'
1
6,0
0,66
0,70
0,90
2
10,0
4,5
0,72
0,92
3
20,0
1,8
0,70
0,88
4
35,0
2,4
0,75
0,90
Варианты
6
5
6,0 10,0
0,8 1,7
0,70 0,72
0,85 0,80
7
20,0
1,5
0,75
0,83
8
35,0
3,5
0,74
0,85
9
6,0
2,0
0,78
0,90
10
10,0
3,5
0,72
0,85
5. КОЛЛЕКТОРНЫЕ МАШИНЫ
Задача 5.1. По данным, приведе1rnым в табл. 5.1, рассчитать
параметры и начертить развернуrую схему простой воmювой (ПВ)
либо простой петлевой (ПП) обмотки якоря. На схеме обозначить
полюсы, расставить щетки и, задавшись направлеIШем вращения
якоря, определить полярность щеток в генераторном режиме. Вы­
полниrь схему параллельных ветвей обмотки якоря и определить
ее сопротивление, считая при этом сопротивление одной секции
равным 0,02 Ом (секции одновиrковые).
450
Таблица 5.1
Величшп.1
1
Число пазов Z 20
4
2р
Тип обмотки
IШ
2
25
6
пв
3
33
8
пв
4
32
4
IШ
Варианrы
6
5
23
4
пв
24
8
IШ
7
29
4
пв
8
30
6
IШ
9
27
4
пв
10
28
6
IШ
Задача 5.2. Генератор постоянного тока независимого возбу­
ждения с номинальным напряжением Ином и номинальной часто­
той вращения nном имеет простую волновую обмотку якоря, со­
стоящую из N проводников. Число поmосов генератора 2р = 4,
сопротивление обмоток в цепи якоря при рабочей темпераrуре
Lr, основной магнитный поток Ф. Требуется для номинального
режима работы генератора определить: ЭДС Е0, ток нагрузки lном
(размагничивающим влиянием реакции якоря пренебречь), полез­
ную МОЩНОСТЬ Рном, электромагmпную МОЩНОСТЬ Рэм и электро­
магнитный момент Миом (табл. 5.2).
Таблица 5.2
Величшп.1
Ином, В
п..,.., об/мин
Lr,
0м
N
Ф,Вб·lО-2
1
2
3
4
230 230 460 460 .
1500 2300 3000 2300
0,175 0,08 0,17 0,3
ню 118 273 234
1,7 2,6
4,8 2,6
Варианrы
5
6
9
8
7
460 115 460 230 230
1500 1000 2300 1000 3000
0,7 0,09 0;}.7 0,35 0,08
252 114 100
200 80
6,1 2,4
4,8 4,5 2,4
10
230
2300
0,14
138
2,2
Задача 5.3. У генератора постоянного тока параллельного
возбуждения МОЩНОСТЬЮ Рном и напряжением Ином сопротивление
обмоток в цепи якоря L r . Необходимо определить электрические
потери якоря и обмотки возбуждения, если в генераторе примене­
ны щетки марки ЭГ (см. табл. 27.1), а также определить КПД в
режиме номинальной нагрузки. Ток возбуждения принять равным
18 = kJном , где kв - коэффициент тока возбуждения, а сумму маг­
нитных и механических потерь принять Рм + Рмех = k,,Pном, где k,, коэффициент постоя1rnых потерь (табл. 5.3).
451
Величины
Рном, кВт
Ином, В
rr,Oм
k.
k,.
l
55
230
0,04
0,02
0,03
2
70
115
0,01
0,02
0,03
3
40
230
0,05
0,02
0,03
4
25
115
0,03
0,03
0,04
Вариашы
5
6
35 50
115 230
0,04 0,04
0,02 0,01
0,04 0,03
Таблица 5.3
7
30
230
0,07
0,03
0,04
9
60
420
0,07
0,02
0,03
8
45
420
0,10
0,03
0,04
10
75
230
0,02
0,02
0,02
Задача 5.4. Двш-атель постояm1ого тока номинальной мощно­
стью Рком вкточен в сеть напряжением Ином и при номинальной
нагрузке потребляет ток lиом, развивая при этом частmу вращения
nиом • Требуется определить: значение мощности Р1иом, потребляе­
мой двш-ателем из сети, суммарные потери L Р, КПД Т! нам и мо­
мент на валу М2нам•
Величины
РIЮм, кВт
U,ю..,В
/1Юм,А
п,юм, об/мин
Варианrы
4
l
5
2
3
6
75
100 125 200 42
55
220 220 220 220 220 110
289 382 503 630 1020 439
1220 1500 1200 1000 1500 2240
Таблица 5.4
7
32
110
347
1060
8
25
110
264
1600
9
75
440
193
3000
10
15
440
42
750
Задача 5.5. Электродвш-ателъ постояm1ого тока параллельно­
го возбуждения мощностью Рком вкточен в сеть напряжением
Инам, и его якорь вращается с частотой nиом (табл. 5.5). Сопротив­
ление обмотки возбуждения при рабочей температуре rв, а сопро­
тивление обмоток в цепи якоря Ir. В двш-ателе применены щет­
ки марки ЭГ (см. табл. 27.1). Требуется определить
электромагнитную мощность и электромагнитный момент при но­
минальной нагрузке двигателя, сумму магниrных и механических
потерь (Рм + Ржх), а также сопротивление пускового реостата rп.р, при
котором начальный пусковой ток двигателя был бы равен 2,5/иом•
Величины
Р ио.,, кВт
UIIOM>
в
nном, об/мин
ТJном, %
rr,Oм
r.,Ом
452
Вариашы
1
2
9
6
110 220
750 1060
81
86
0,14 0,26
34,5 117
Таблица 5.5
3
14
220
1500
88
0,14
117
4
20
220
2360
89
0,05
74
5
7,1
220
750
83
0,45
124
6
11
220
1000
87
0,25
124
7
17
220
1500
89
0,11
124
8
24
220
2360
90
0,08
124
9
15
220
750
83
0,25
53
10
20
220
1000
86
0,17
67
- Список пите
ы
1. Вольдек А. И Электрические машины. Л., 1978. - 832 с.
2. Брускин Д Э., Зорохович А. Е., Хвостов В. С. Электриче­
ские машины. М., 1979. Ч. 1. - 282 с., Ч. II. - 303 с.
3. Иванов-Смоленский А. В. Электрические машины. М.,
1980. - 928 с.
4. Кацман М: М Элеюрические машины. М., 1990. - 463 с.
5. Кацман ММ Расчет и конструирование электрических
машин. М., 1984. - 359 с.
6. Кацман М М Руководство к лабораторным работам по
электрическим машинам и электроприводу. М., 1983. - 215 с.
1. Кацман ММ Электрические машины и электропривод
автоматических усrройств. М., 1987. - 334 с.
8. Копылов И П Элеюрические машины. М., 1986. - 360 с.
9. Костенко Г Н, Пиотровский Л М Электрические ма­
шины. Л., 1972. Ч. 1. - 544 с.; 1973. Ч. П. -648 с.
10. Обмотки электрических машин. В. И. Зимин, М. Я. Ка­
план, А. М. Палей и др. М., 1975 - 288 с.
11. Петров Г Н Электрические машины. Ч. 1. Трансфор­
маторы. М., 1974. - 240 с.
12. Петров Г. Н Электрические машины. Ч. П. Асинхрон­
ные и синхронные мапumы. 1963. - 416 с.
13. Петров Г Н Электрические машины. Ч. Ш. Коллек­
торные машины rюсто.янноrо и переменного тока. М., 1968. 224 с.
14. Пиотровский Л М, Васютинский С. Б., Несговорова Е.
Д Испыrание электрических машин. Ч. 2. М., 1960. - 290 с.
15. Проектирование электрических машин./Под ред.
И. П. Коmшова. М., 1980. -495 с.
16. Специальные элеюрические маmины./Под ред. А. И Бер- .
тинова. М., 1982. - 552 с.
17. Юферов Ф. М Электрические машины автоматических
усrройств. М., 1976. -416 с.
к;;;;;;:::;w Предметный указатель
Автотрансформатор72
- реrулировочный75
- трехфазный 74
Венrил.чтор ценrробежный433
Ветви параллельные обмотки фазы117
- - - якоря322
Возбужде1Ше постояш1ыми маrниrами
242,359
- электромаrюпное239,359
Высота оси вращения231
Гармоники ЭДС зубцовые112
Генератор индукторный315
- независимого возбуждения 379
- параллельного возбуждеlШЯ 383
- с копеобразными поmосами313
- синхронный, принцип работы97
- - маrюпоэлектрический304
- смешанного возбуждеlШЯ386
Гидрогенератор242
Группа трансформаторная36
- ка-rушечная обмотки статора115
Группы соединения трансформаторов61
- - - упрощенная 51
- круговая асинхронного двигателя184
- ЭДС практическая266
Дизель-генератор244
Дроссель94
Запаздыва1Ше маr1ШТНое308
Зона несовпадения 20
Зона нечувствительности тахоrене­
ратора419
Измене1Ше вторичного напряже1ШЯ
трансформатора52
- напряжения генератора постоянного
тока382
- - синхронного генератора264
Изоляция обмотки статора 122
Имmщоры82
Искре1Ше на коллекторе361
Каналы венrиляционные аксиальные
434
- - радиальные434
Катушка поmосная бескаркасная325
- - каркасная 325
Датчик ЭДС Холла420
Классы ншревостойкости изоляции 123
Двигатель асинхронный исполнитель- Колебания синхроШfЬIХ машин279
Кольца емкостные82
ный224
Коллектор на пластмассе327
- - конденсаторный212
- с конусными шайбами 326
_ J.. линейный 220
Компенсатор синхроШfЬIЙ298
- - однофазный208
Коммутация замедленная 365
- - принцип работы 98
- прямолинейная363
- - , устройство140
- ускореШ1ая368
- - с глубокими пазами на роторе199
- - - двигателя295
- - - двумя клетками на роторе200
- - трехфазный с короткозамкнутым Коэффициенr воздушного зазора 148
- заполнеlШЯ паза123
ротором140
- - с фазным ротором143
- маrюпноrо насыщения 149, 250
- - рассеяния250 ,349
- бесконrактный постоянного тока419
- исполнительный асинхрош1ый223
- мощности асинхронного двигателя
175
- - постоянного тока423
- коллекторный параллельного возбуж- - - синхроШ1оrо двигателя 296
деlШЯ 391
- обмоточш.IЙ 111
- - последовательноп> возбуждения400
Коэффшщенr полезноrо действия асин- - смешанного возбуждеlШЯ403
хроШ1оrо двигателя 164
- - У1ШВерсальный 410
- - - машины rюстоянноrо тока 407
- синхронный гистерезисный 307
- - - СИНХроШIОЙ машиш.1267
- - трехфазный289
- - - трансформатора 56
- - маrюпоэлектрический302
- nomocнoro перекрьпия 252, 342
- - реактивный305
- распределения обмотки109
- шаговый 310
- реакции якоря машины постояШ1оrо
Диаграмма векторная асинхрошюrо
тока356
двигателя 159
- статической переrружаемости277
- - синхрошюrо генератора261
- типовой мощности88
- - трансформатора35
- трансформации26
--напряжений158
--токов158
-укорочения шага обмотки107
- усиления МОЩНОСТИ415
- формы поля возбуждения 253
---статора 252
Маmитопровод трансформатора17
--броневой19
--стыковой19
--шихтованный20
МалоЮ1ерционность225
Машины электрические синхронной
связи220
МГД-rенератор 442
МГД-двиrатель 442
МДС обмотки статора распределенной
127
---сосредоточенной 126
---трехфазной129,131
---фазы 129
Метод аналиrический расчета характеристик 190
Метод вольтметра 65
-фазометра65
Момент асинхронноrо двиrателя166
-асинхронный дополнительный294
--максимальный167
--пусковой 168
-входа в синхронизм293
-гистерезисный309
-синхронизирующий221
-- удельный 282
-электромаrюпный машины постоянноrо тока 345
--основной синхронной машины 276
--реактивный сшюqюнной машины276
--синхронной машины 274
Моменты паразитные асинхронного
двигателя 176
Мощность полезная 56, 164, 407
-проходная 73
-расчетная 73
-типовая 88
-:- удельная синхронизирующая 282
-электромаrнитная асинхронного двигателя 163
--машины постоянного тока346
--синхронной машины274
- простая волновая 334
--петлевая 330
- пусковая 201,292
- ротора короткозамкнутая 142
-сложная волновая 336
--петлевая 333
-рабочая201
-статора двухслойная114
---с дробным числом пазов на nomoc
и фазу118
- - однослойная концентрическая 120
-- -шаблонная 121
--однофазная121
- трансформаторная вЮIТОвая 22
- - концентрическая 21
- - цилиндрическая 22
Огонь круговой 375
Опьп к. з. асинхронноrо двигателя 181
-- трансформатора46
-х. х. асинхронного двигателя1 79
-- трансформатора 43
Охлаждение трансформаторов 437
-электрических машин 432
-- -водородное435
---естественное 432
-- -искусственное 432
--- непосредственное 436
Нагревание электрических машин427
Наrрузка линейная 351
Нейтраль геометрическая331
-физическая 353
Несимметрия маrюпная 337
Передача сшюqюнная шщикаторная221
Перекmочаrель отвеnлений обмоток58
Перенапряжения в трансформаторах 79
Петля rистерезиса 309
Пик-трансформатор91
Поле маrюпное беrущее227
-- вращающееся круговое132
-- эллиптическое 132
--пульсирующее 133
Поmосы добавочные 370
Потери добавочные163, 406
--при наrрузке268
- - пульсационные268
-маrюпные 54, 162,268,405
-механические 163,268,406
-на возбуждение267
--rистерезис308
-электрические54,162,268,405
Поток вынужденноrо намаrничивания87
-маmиrный рассеяния26,150,250,349
Преобразователь частоты 92, 219
Процессы переходные 78, 285
Причины искрения 361
Противо-ЭДС 387
Пуск асинхронноrо двиrателя 194, 196
-двиrателя постоянноrо тока389
-синхронного двигателя 292
Обратимость электрических машин 9
Обмотка возбуждения 99, 239,325
- комбинированная341
-компенсационная 357,416
Работа параллельная синхронных гене­
раторов 270
--трансформаторов 66
Радиопомехи коллекторных машин 376
455
Разделение потерь асинхронного дви­
гателя180
Реакция якоря машины постоянного
тока351
- - синхронного генератора 254
Реrулирование
частоты
вращения
асинхронных двигателей202
- - - двигателей параллельного возбу­
ждения 394
- - - - последовательного возбуждения
402
Реrулятор ющукционный218
Режим постоянного момента 206
- постоянной мощности207
- теплового равновесия 428
Режим работы кратковременный431
- - повторно-кратковременный431
- - продолжиrельный430
Режимы работы асинхронной машины
137
- - машины постоянного тока430
Реостаты пусковые195,390
Ротор короткозамкнуrый142
- неявнопоmосный244
- сборный309
- с копеобразными поmосами313
- ЯВНОПОJПОСНЫЙ243
Самовентиляция электрических машин
432
Самовозбуждение генераторов241,384
Самосинхронизация синхронного ге­
нератора241
Самоход224
Свойства пусковые асинхронных двигателей193
Секция обмотки якоря329
Сельсин бесконтактный223
- контактный222
Сердечник ротора141
- статора140
Серия электрических машин230
-4А230
-АИ233
-2П409
Синхронизация точная 270
Силы пондеромоторные152
Система бесконтактного возбуждения
240
- генератор-двигатель397
Скольжение137
- критическое166
Скос пазов113
Соединение обмоток в зигзаг38
Соединения уравнительные второго
рода 340
- - первого рода339
Сопротивление ющуктивное главное258
- - рассеяния 26,150
- - сверхпереходное 286
456
Сопротивления индуктивные реакции
якоря258
- - синхронные275
Способность перегрузочная асинхрон­
ного двигателя169
- - синхронной машины277,291
Способы возбуждения машин постоян­
ного тока359
Степени искрения 362
Схема замещения трансформатора 33,
51
- - асинхронного двигателя160
Тахогенератор418
Ток коммутации366
-к.з. асинхронного двигателя181
- - трансформатора46
- х.х. асинхронного двигателя 181
- - - трансформатора28
- ударный к. з. 286
Торможение противовкmочением139
Транспозиция 22
Трансформатор15
- вольтдобавочный59
- для выпрямителя86
- - дуговой сварки23
- импульсный89
- приведенный32
- реrулируемый намагничиванием шунтов85
- с подвижным сердечником84
- трехобмоточный71
- трехфазный 36
Треугольник к.з. трансформатора48
Турбогенератор244
Угол гистерезисного сдвига308
- рассогласования222
Укорочение шага обмотки относительное 107
Управление амплmудно-фазовое224
Уравнение МДС трансформатора 29
- моментов генератора постоянного
тока 378
- мощностей генератора постоянного
тока378
- - двигателя постоянного тока387
- напряжений асинхронного двигателя
154
- - генератора постоянного тока377
- - синхронного генератора258
- - трансформатора27
- токов асинхронного двигателя 157
- - трансформатора21
Условия симметрии обмотки якоря337
Устройства возбудительные тиристорные241
Фазореrулятор 212
Характерисrика внеШЮiя трансформа­
тора53
-- синхроююrо rенератора264
- - rенератора постояююrо тока 379,
385,386
--ЭМУ417
- выходная тахоrенератора 418
- к. з. синхроююrо rенератора 262
- механическая асинхроююrо двиrателя167
- наrрузочная rенератора постоянноrо
тока 382
- реrулировочная rенератора rюстоянноrо тока 382
-- синхронноrо rенератора265
- самовозбуждения 384
- х.х. rенератора постоянноrо тока 379,
383
-- синхронноrо rенератора 262
Характерисrики механические двиrа­
теля постоянноrо тока 393, 402, 403,
404
- рабочие асинхронноrо двиrателя 173
- - двиrателя постоянноrо тока 392,
401,404
--- синхронноrо296
-- универсальноrо коллекторноrо дви"i!t rателя413
- уrловые синхронноrо rенератора 276
--- двиrателя 291
Характерисrики U-образные синхрон­
ноrо rенератора284
-- двиrателя 295
Частота вращения асинхроЮ1ая 100
--критическая 384
-- СИНХрйЮ18Я 98
-приемистости 312
-скольжения 155
Число пазов на nomoc и фазу108
Шаr обмотки второй частичный330
--первый330
-- относительный 107
--по пазам103
-по коллектору330
-потешщальный339
ЭДС катушки104
ЭДС обмотки ротора155
-- статора 110, 154
--.нкоря342
коммутирующей
- взаимоиндукции
секции365
-вращения --365
- реактивная --365
-самоиндукции --365
- трансформаторная --412
Электрические машины криоrенные438
-- маrниrоrидродинамические441
Электромашинный усилитель414
Элемент фазосмещающий210
Эффект краевой227
- Оrпавпение
Предисловие ................................................................................................................. 3
Введение ....................................................................................................................... 4
§ В.1. Назначение электрических машин и трансформаторов ................................ 4
§ В.2. Элеюрические машины - элеюромеханичесmе преобразователи энерmи ........7
§ В.З. Классификация электрических машин .......................................................... 10
Раздел 1. ТРАНСФОРМАТОРЫ ........................................................................... 13
Глава 1. Рабочий процесс трансформатора ......................................................... 15
§ 1.1. Назначение и области применения трансформаторов .................................. 15
§ 1.2. Принцип действия трансформаторов ............................................................. 16
§ 1.3. Устройство трансформаторов ......................................................................... 17
§ 1.4. Уравнения напряжений трансформатора ....................................................... 25
§ 1.5. Уравнения маrнитодвижущих сил и токов .................................................... 28
§ 1.6. Приведение параметров вторичной обмотки и схема замещения
приведенного трансформатора ....................................................................... 32
§ 1.7. Векторная диаграмма трансформатора .......................................................... 34
§ 1.8. Трансформирование трехфазного тока и схемы соединения обмоток
трехфазных трансформаторов ........................................................................ 36
§ 1.9. Явления при намагничивании магнитопроводов трансформаторов ............ 39
§ 1.1О. Влияние схемы соединения обмоток на работу трехфазных
трансформаторов в режиме холостого хода ................................................ 40
§ 1.11. Опьпное определеюtе параметров схемы замещения трансформаторов "43
§ 1.12. Упрощенная векторная диаграмма трансформатора .................................. 50
§ 1.13. Внешняя характеристика трансформатора .................................................. 52
§ 1.14. Потери и КПД трансформатора .................................................................... 54
§ 1.15. Регулирование напр.вжения трансформаторов ............................................ 57
Контрольные вопросы ............................................................................................... 60
Глава 2. Группы соединения обмоток н паралле льная работа
трансформаторов ...................................................................................... 61
§ 2.1. Группы соединения обмоток ........................................................................... 61
§ 2.2. Параллельная работа трансформаторов ......................................................... 66
Контрольные вопросы ............................................................................................... 70
Глава 3. Трехобмоточные трансформаторы и автотрансформаторы ............. 71
§ 3.1. Трехобмоточные трансформаторы ................................................................. 71
§ 3.2. Автотрансформаторы ..................................................................................-.... 72
Контрольные вопросы ............................................................................................... 15
Глава 4. Переходные процессы в трансформаторах .......................................... 76
§ 4.1. Переходные процессы при вкточении и при внезапном коротком
замыкании трансформаторов .......................................................................... 76
§ 4.2. Перенапряжения в трансформаторах и защита от перенапряжений ........... 79
Контрольные вопросы ............................................................................................... 83
458
Глава S. Трансформаторные устройства специального назначения ............... 84
§ 5. 1. Трансформаторы с rmавным реrулированием напряжения ......................... 84
§ 5.2. Трансформаторы для выпр.ямиrельных установок ....................................... 86
§ 5.3. Трансформаторы для автоматических устройств .......................................... 89
§ 5.4. Трансформаторы для д)ТОвой электросварки ............................................... 93
Контрольные вопросы ............................................................................................... 94
Раздел 2. ОБЩИЕ ВОПРОСЫ ТЕОРШI БЕСКОJLJIЕКТОРНЫХ МАШШI .....95
Глава 6. Принцип действия бесколлекrорных машин переменного тока ..... 97
§ 6.1. Пршщип действи.я синхроююrо генератора .................................................. 97
§ 6.2. Пршщип действи.я асинхроююrо двшател.я ................................................ 100
Контрольные вопросы ............................................................................................. 101
Глава 7. Принцип выполнения обмоток статора ............................................. 102
§ 7 .1. Устройство статора бесколлекторной машины и основные поняти.я
об обмотках статора ....................................................................................... 102
§ 7.2. Электродвижуща.я сила катушки .................................................................. 104
§ 7.3. Электродвижуща.я сила катушечной группы ....................................,.......... 108
§ 7.4. Электродвижуща.я сила обмотки статора ..................................................... 110
§ 7.5. Зубцовые гармоники ЭДС ............................................................................. 112
Контрольные вопросы ............................................................................................. 113
Глава 8. Основные типы обмоток статора ........................................................ 114
§ 8.1. Трехфазные двухслойные обмотки с целым числом пазов на пошос и фазу .... 114
§ 8.2. Трехфазна.я двухслойна.я обмотка с дробным числом пазов
на полюс и фазу .............................................................................................. 118
§ 8.3. Однослойнь1е обмотки статора ..................................................................... 120
§ 8.4. Изоm�ция обмотки статора ............................................................................ 122
Контрольные вопросы ............................................................................................. 123
Глава 9. Магннтодвнжущая сила обмоток статора ......................................... 125
§ 9.1. Магииrодвижуща.я сила сосредоточеююй обмотки ................................... 125
§ 9.2. Магииrодвижуща.я сила распределеююй обмотки ..................................... 127
§ 9.3. Мапnподвижуща.я сила трехфазной обмотки статора ............................... 129
§ 9.4. Круговое, эллюпическое и пульсирующее маrниrные пол.я .................... 132
§ 9.5. Высшие простран(,-твенные гармоники магниrодвижущей силы
трехфазной обмотки ...................................................................................... 133
Контрольные вопросы ............................................................................................. 134
Раздел 3. АСIПIХРОННЫЕ МАШИНЫ ............................................................ 135
Глава 10. Режимы работы и устройство асинхронной машины .................... 137
§ 10.1. Режимы работы асинхронной машины ...................................................... 137
§ 10.2. Устройство асинхронных двигателей ........................................................ 140
Контрольные вопросы ............................................................................................. 145
Глава 11. Магнитная цепь асинхронной машины ........................................... 146
§ 11.1. Основные поияти.я ....................................................................................... 146
§ 11.2. Расчет маrюпной цепи асинхронного двиrател.я ...................................... 148
§ 11.3. Маrниrные потокирассе.яния асинхронной машины ............................... 150
459
§ 11.4. Роль зубцов сердечника в наведеюm ЭДС и создаюm
элекромаrюпноrо момента ......................................................................... 151
Контрольные вопросы ............................................................................................. 153
Глава lZ. Рабочий процесс трехфазноrо асннхронноrо двнrателя ................ 154
§ 12.1. Уравнения напряжений асинхроююrо двигателя ..................................... 154
§ 12.2. Уравнения МДС и токов асинхроююrо двигателя ................................... 156
§ 12.3. Приведение параметров обмотки ротора и векторная диаграмма
асинхронного двигателя .............................................................................. 158
Контрольные вопросы ............................................................................................. 161
Глава 13. Электромаrнитный момент и рабочие характеристики
асинхронноrо двнrателя ..................................................................... 162
§ 13.1. Потери и КПД асинхронного двиrателJI .................................................... 162
§ 13.2. ЭлеК'IJ)Омаrюпный момент и механические характеристики
асинхроююrо двигателя .............................................................................. 165
§ 13.3. Механические характеристики асинхроююrо двиrаrеля
при изменениях напряжения сети и активного сопротивления
обмотки ротора ............................................................................................ 172
§ 13.4. Рабочие характеристики асинхроююrо двигателя .................................... 173
§ 13.5. Электромаrниrные моменты от высших пространствею1ых гармоник
маnnпноrо поля асинхронного двигателя ................................................. 175
Контрольные вопросы ............................................................................................. 178
Глава 14. Опьrrное определение параметров н расчет рабочих
характеристик асинхронных двиrателей ......................................... 179
§ 14.1.Основные поюrrия ....................................................................................... 179
§ 14.2.Опьп холостого хода .................................................................................... 180
§ 14.3.Опьп короткого замыкания ......................................................................... 181
§ 14.4. Круговая диаграмма асинхроююrо двигателя ........................................... 184
§ 14.5. Построение рабочих характеристик асинхроююrо двигателя
по круговой диаграмме ................................................................................ 187
§ 14.6. Аналитический метод расчета рабочих характеристик асинхронных
двигателей ..................................................................................................... 189
Контрольные вопросы ............................................................................................. 192
Глава lS. Пуск и реrулнрование частоты вращения трехфазных
асинхронных двнrателей .................................................................... 193
§ 15.1. Пуск двигателей с фазным ротором ........................................................... 193
§ 15.2. Пуск двигателей с короткозамкнутым ротором ........................................ 196
§ 15.3. Короткозамкнутые асинхроные двигатели с улучшеюшми
пусковыми характеристиками ..................................................................... 199
§ 15.4. Реrулирование частоты вращения асинхрою1ых двигателей ................... 202
Контрольные вопросы ............................................................................................. 207
Глава 16. Однофазные н конденсаторные асинхронные двиrатели ............. 208
§ 16.1. Принцип действия и пуск однофазного асинхронного двигателя ........... 208
§ 16.2. Асинхрою1ые комденсаторные двигатели�................................................. 212
§ 16.3. Работа трехфазного асинхронного двигателя от однофазной сети ......... 214
460
§ 16.4. Однофазный двигатель с экранированными поmосами ............................ 216
Контрольные вопросы ............................................................................................. 217
Глава 17. Асинхронные машины специального назначения ......................... 218
§ 17.1. Индукциою1ый реrулятор напряжения и фазореrулятор ......................... 218
§ 17,.2. Асинхроюn.lЙ преобразователь частоты ...................................................• 219
§ 17.3. Электрические машины синхроююй св.язи ............................................... 220
§ 17.4. Асинхроюn.1е исполюrrельные двигатели ................................................. 223
§ 17.5. Линейные асинхрою1ые двигатели ............................................................. 226
Контрольные вопросы ............................................................................................. 229
Глава 18. Основные типы серийно выпускаемых асинхронных двигателей ..... 230
§ 18.1. Низковольтные асинхроЮ1Ые двигатели .................................................... 230
§ 18.2. Высоковольтные асинхр01mые двигатели ................................................. 233
§ 18.3. Крановые и металлургические асинхрою1ые двигатели ........................... 234
Контрольные вопросы ............................................................................................. 236
Раздел 4. СИНХРОННЫЕ МАШИНЫ .............................................................. 237
Глава 19. Способы возбуждения и устройство синхронных машин ............. 239
§ 19.1. Возбуждение синхроюn.�х машин ........................•..................................... 239
§ 19.2. Типы синхроннь�х машин и их устройство ................................................ 242
Контрольные вопросы ............................................................................................. 248
Глава 20. Магнитное поле н характеристики синхронных генераторов ..... 249
§ 20.1. Маrюrrна.я цепь синхронной машины ........................................................ 249
§ 20.2. Маrюпное поле синхронной машины ....................................................... 251
§ 20.3. Реакция .якоря синхроююй машины ........................................................... 254
§ 20.4. Уравнения напряжеЮIЙ синхронного rенератора ..................................... 258
§ 20.5. Векторные диаrраммы синхронного генератора ....................................... 260
§ 20.6. Характеристики синхронноrо генератора .................................................. 262
§ 20.7. Практическая диаграмма ЭДС синхронноrо rенератора .......................... 265
§ 20.8. Потери и КПД синхроннь�х машин ............................................................ 267
Контрольные вопросы ............................................................................................. 269
Глава 21. Параллельная работа синхронных генераторов ............................. 270
§ 21.1. Вкmочение rенераторов на параллельную работу .................................... 270
§ 21.2. Нагрузка rенератора, вкmоченноrо на rтараллельную работу .................. 272
§ 21.3. Уrловые характеристики синхронноrо rенератора ................................... 275
§ 21.4. Колебания синхроннь�х rенераторов .......................................................... 279
§ 21.5. СинхроЮ1Зирующа.я способность синхронных машин ............................. 281
§ 21.6. U-образные характеристики синхронноrо генератора .............................. 283
§ 21.7. Переходные процессы в синхроннь�х rенераторах ................................... 285
Контрольные вопросы ............................................................................................. 288
Глава 22. Синхронный двигатель и синхронный компенсатор ..................... 289
§ 22.1. Принцип действия синхронноrо двигателя ............................................... 289
§ 22.2. Пуск синхроннь�х двигателей ...................................................................... 292
§ 22.3. U-образные характеристики и рабочие характеристики
синхронноrо двигателя ................................................................................ 295
461
§ 22.4. Синхроннъrй компенсатор ........................................................................... 298
Контрольные вопросы ............................................................................................. 301
Глава 23. Синхронные машины специального назначении ........................... 302
§ 23.1. Синхроннъ1е машины с постоянными маrниrами ···························••,•······· 302
§ 23.2. Синхронные реактивные двигатели ........................................................... 305
§ 23.3. Гистерезисные двигатели ............................................................................ 307
§ 23.4. Шаговые двшатели ...................................................................................... 31О
§ 23.5. Синхроннъrй генератор с копеобразными поmосами
и электром�гниrным возбуждением ··························································· 313
§ 23.6. Ицдукторные синхронные машины ............................................................ 315
Контрольные вопросы ............•....•...........•.................................•............................. 318
Раздел 5. КОJLЛЕКТОРНЫЕ МАШИНЫ ......................................................... 319
Глава 24. Принцип действии и устройство коллекторных машин
постоянного тока .................................................................................. 321
§ 24.1. Принцип действия генератора и двигателя постояююrо тока ................. 321
§ 24.2. Устройство коллекторной машины постоянного тока ............................. 324
Контрольные вопросы ............................................................................................. 328
Глава 25. Обмотки якори машин постоиииоrо тока ........................................ 329
§ 25.1. Петлевые обмотки якоря ............................................................................. 329
§ 25.2. Волновые обмотки якоря ............................................................................ 334
§ 25.3. Уравнительные соединения и комбюmрованная обмотка якоря ............. 337
§ 25.4. Электродвижущая сила и электромаrниrный момеm машины
постоянного тока .......................................................................................... 342
§ 25.5. Выбор типа обмотки якоря ......................................................................... 346
Контрольные вопросы ............................................................................................. 347
Глава 26. Магнитное поле машины постоянного тока .................................... 348
§ 26.1. Магнитная цепь машш1ы постоянного тока .............................................. 348
§ 26.2. Реакция якоря маmш1ы постоянного тока ................................................. 351
§ 26.З. Учет размагничивающего влияния реакции якоря ................................... 355
§ 26.4. Устранение вредного влияния реакции якоря ........................................... 357
§ 26.5. Способы возбуждения машин постоянного тока ...................................... 359
Контрольные вопросы ...........................•.................•............................................... 360
Глава 27. Коммутации в машинах постоянного тока ...................................... 361
§ 27.1. Причш1ы, вьпывающие искрение на коллекторе ...................................... 361
§ 27.2. ПрямолШiейная коммуrация ....................................................................... 363
§ 27.3. КриволШiейная замедленная коммуrация .................................................. 365
§ 27.4. Способы улучшения коммуrации ............................................................... 369
§ 27.5. Круговой огонь по коллектору ................................................................... 375
§ 27.6. Радиопомехи от коллекторных машин и способы их подавления ........... 376
Контрольные вопросы ............................................................................................. 376
Глава 28. Коллекторные генераторы постоянного тока ................................. 377
§ 28.1. Основные понятия ....................................................................................... 377
§ 28.2. Генератор независимого возбуждения ....................................................... 379
462
§ 28.3. Генератор параллельного возбуждения ..................................................... 383
§ 28.4. Генератор смешаmюго возбуждения ......................................................... 386
Контрольные вопросы ............................................................................................. 386
Глава 29. Коллекторные двигатели .................................................................... 387
§ 29.1. Основные понятия ............. .......................................................................... 387
§ 29.2. Пуск двигателя ............................................................................................. 389
§ 29.3. Двш-атель параллельного возбуждения ..................................................... 391
§ 29.4. Реrулирование частоты вращения двигателей параллельноrо возбуждеl-lИJI .. 394
§ 29.5. Режимы работы машm1ы постояЮIОrо тока .............................................. 399
§ 29.6. Двигатель последовательноrq возбуждения .............................................. 400
§ 29.7. Двигатель смешанного возбуждения .......................................................... 403
§ 29.8 Потери и коэффициент полезного действия коллекторной машm1ы
постоянного тока .......................................................................................... 405
§ 29.9. Машины постоянного тока серии 2П ......................................................... 409
§ 29.1О. Универсальные коллекторные двиrаrели ................................................ 41О
Контрольные вопросы ............................................................................................. 413
Глава 30. Машины постоянного тока специального назначения ................. 414
§ 30.1. ЭлеКiрОмашинный усилитель ..................................................................... 414
§ 30.2. Тахоrенератор постоянного тока ................................................................ 418
§ 30.3. Бесконтактный двигатель постоянного тока ............................................. 419
§ 30.4. Исполнительные двигатели постоянного тока .......................................... 423
Контрольные вопросы ............................................................................................. 426
Глава 31. Охлаждение электрических машин .................................................. 427
§ 31.1. Нагревание электрических машин и трансформаторов ............................ 427
§ 31.2. Номmшльные режимы работы электрических машин .............................. 430
§ 31.3. Охлаждение электрических машин ............................................................ 432
§ 31.4. Охлаждение крупных электрических машин ............................................. 435
31.5. Охлаждение трансформаторов .................................................................... 437
[ 31.6. Новые принципы вьпюлнения электрических машин .............................. 438
·онтрольные вопросы ............................................................................................. 443
ачи для самостоятельного решения .................................................................. 444
�нсок литературы ................................................................................................ 453
редметный указатель .......................................................................................... 454
Учебное издание
Кацман Марк Михайлович
Электрические машины
Редактор Н.Е. Овчеренко
Художественный редактор Ю.Э. Иванова
Художник К.Э. Семенков
Корректор Г.Н. Петрова
Компьютерная верстка С. Ч. Соколовский
Изд. No ВТИ-60. Сдано в набор 25.10.99. Подп. в печать 5.10. 2000.
Формат 60х90 1 /16. Бум rазетн. Гарнитура <•Тайме,,. Печать офсетная.
_Объем 29,0 усл. печ. л. 29,5 усл. кр.-отr. 28,01 уч.-изд. л.
Тираж 13 ООО экз. Заказ 3265.
ЛР No 010146 от 25.12.96. ГУП «Издательство «Высшая школа,,,
101430, Москва, ГСП-4, Неrлинная ул. д. 29/14.
Факс: 200-03-01, 200-06-87
E-mail: [email protected]
�ttp: // www.v-shkola.ru
ЛР .№ 071190 от 11.07.95. Издательский центр «Академия•>,
105043, Москва, ул. 8-я Парковая, д. 25.
Отпечатано на MBS
в ОАО «Ярославский полиrрафкомбинат».
150049, Ярославль, ул. Свободы, 97.