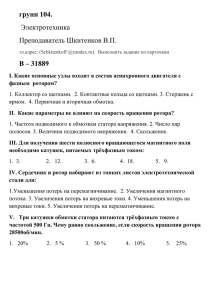
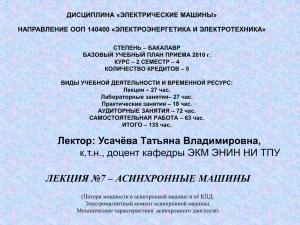
ЛАБОРАТОРНАЯ РАБОТА №5 «Снятие механической характеристики трехфазного асинхронного двигателя с короткозамкнутым ротором» 1 Теоретическая часть Асинхронные двигатели в силу ряда достоинств (относительная дешевизна, высокие энергетические показатели, простота обслуживания) являются наиболее распространенными среди всех электрических машин. В количественном отношении они составляют около 90 % всего парка машин в народном хозяйстве. В настоящее время самым распространённым двигателем промышленных электроприводов является трёхфазный асинхронный двигатель с короткозамкнутым ротором. Про него можно сказать, что он является самым простым, самым надёжным и самым дешёвым электродвигателем в широком диапазоне частоты вращения и мощности. Статор асинхронной машины обычно выполнен в виде нескольких, расположенных в пазах, катушек, а ротор – в виде «беличьей клетки» (короткозамкнутый ротор) или в виде нескольких катушек (фазный ротор). Короткозамкнутая обмотка ротора в большинстве двигателей выполняется заливкой собранного сердечника ротора расплавленным алюминиевым сплавом. При этом одновременно со стержнями обмотки отливаются короткозамыкающие кольца и вентиляционные лопатки (рис 6.1). Рисунок 6.1 – Конструкция короткозамкнутого ротора: а- обмотка «беличья клетка», б-короткозамкнутый ротор с вентиляционными лопатками. Двигатели с фазным ротором конструктивно отличаются от короткозамкнутого устройством ротора: на валу машины закреплен шихтованный сердечник с трехфазной обмоткой, выполненной аналогично обмотки статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам, расположенным на валу, и, с помощью скользящих по ним щеток, обмотка ротора может быть замкнута на внешние резисторы (рис. 6.2.). Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. 2 Рисунок 6.2 Асинхронный двигатель с фазным ротором. 1-сердечник ротора; 2-обмотка ротора; 3- вал; 4-крышка; 5- корпус статора; 6-обмотка статора; 7 –пазы сердечника статора; 8- клемная коробка; 9,10,11 – вентилятор; 12,13 – контактные кольца. Принцип действия асинхронного двигателя. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле статора, частота вращения которого n1 определяется по формуле: n1 = (60·f1)/p где f1 – частота тока питающей сети; р – число пар полюсов машины. т.е. при питании от сети f1 = 50 Гц синхронная частота вращения может быть 3000, 1500, 1000, 750, 600... об/мин в зависимости от конструкции машины (числа пар полюсов р). Вращающееся поле статора (полюсы N1 и S1) сцепляется как с обмоткой статора так и с обмоткой ротора и наводит в них ЭДС. ЭДС обмотки статора, являясь ЭДС самоиндукции, действует встречно приложенной к обмотке напряжению и ограничивает значение тока в обмотке. Обмотка ротора замкнута, поэтому ЭДС ротора создает в стержнях обмотки ротора токи. Взаимодействие этих токов с полем статора создает на роторе электромагнитные силы Fэм, направления которых определяют по правилу «левой руки». Из рисунка 6.3 видно, что силы Fэм стремятся повернуть ротор в направлении вращения магнитного поля статора. Совокупность сил Fэм создает на роторе электромагнитный момент М, приводящий его во вращения с частотой n2. Таким образом, электрическая энергия, поступающая из сети в обмотку статора, преобразуется в механическую энергию вращения ротора двигателя. Направления вращения магнитного поля статора, а следовательно и направление вращения ротора зависят от порядка чередования фаз напряжения подводимого к обмотке статора. Частота вращения n2, называемая асинхронной, всегда меньше частоты вращения поля n1, так как только в этом случае происходит наведение ЭДС в обмотке ротора асинхронного двигателя. 3 Рисунок 6.3 – Принцип действия асинхронного двигателя. Весьма важным параметром асинхронной машины является скольжение – величина, характеризующая разность частот вращения ротора и вращающегося поля статора: s = (n1-n2)/n1 Характеристики асинхронных двигателей. Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие. Механическая характеристика. Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма. Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы n= f(М) или s = f(M) (рисунок 6.4). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. 4 Рисунок 6.4 Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата Как показывает кривая на рисунке 6.4 а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства. Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Участок механической характеристики от нулевого до максимального (критического) значения носит название устойчивой части характеристики, а участок ВС — неустойчивой части. Объясняется такое деление тем, что на возрастающей части характеристики ОВ с увеличением скольжения, т.е. с уменьшением скорости, растет развиваемый двигателем момент. Это означает, что при увеличении нагрузки, т. е. при возрастании тормозного момента, уменьшается скорость вращения двигателя, а развиваемый им момент увеличивается. При снижении нагрузки, наоборот, скорость возрастает, а момент уменьшается. При изменении нагрузки на всем диапазоне устойчивой части характеристики происходит изменение скорости вращения и момента двигателя. Двигатель не в состоянии развить момент больше критического, и если тормозной момент окажется больше, двигатель неминуемо должен остановиться. Происходит, как принято говорить, опрокидывание двигателя. Механическая характеристика при постоянных U и I и отсутствии добавочного сопротивления в цепи ротора называется естественной характеристикой. Искусственными, или реостатными, характеристиками называются такие, которые соответствуют добавочному сопротивлению в цепи ротора. 5 Поэтому, при включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис.6.4 б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax. Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosϕ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 6.5). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М 2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения. Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки. Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosϕ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей. 6 Рисунок 6.5 Рабочие характеристики асинхронного двигателя Режимы работы асинхронной машины. Асинхронный двигатель, может работать в двигательном, генераторном и тормозном режимах. Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 < n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какоголибо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ (рис. 6.6, б). Вполне очевидно, что с увеличением нагрузочного момента на валу асинхронного двигателя частота вращения ротора n2 уменьшается. Следовательно, скольжение асинхронного двигателя зависит от механической нагрузки на валу двигателя и может изменяться в диапазоне 0 < s ≤ 1. При включении асинхронного двигателя в сеть в начальный момент времени ротор под влиянием сил инерции неподвижен (n 2 = 0). При этом скольжение s равно единице. 7 Рисунок 6.6 Режимы работы асинхронной машины В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля (s ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением SHOM. Для асинхронных двигателей общего назначения SHOM = 1 8%, при этом для двигателей большой мощности sном = 1%, а для двигателей малой мощности sном = 8%. Преобразовав выражение для определения скольжения, получим формулу для определения асинхронной частоты вращения (об/мин): n2 = n1(1-s) Генераторный режим. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 > n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 6.6, а). В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q 8 трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле. Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне - ∞ < s < 0, т. е. оно может принимать любые отрицательные значения. Режим торможения противовключением. Этот режим применяется в ряде случаев, когда после отключения двигателя от сети требуется его быстрая остановка без реверса. Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие (рис. 6.6, в). Этот режим работы асинхронной машины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение. В режиме электромагнитного торможения частота вращения ротора является отрицательной, а поэтому скольжение приобретает положительные значения больше единицы: s = [n1 - (- n2)] / n1 = (n1 + n2) /n1 > 1 Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 < s < + ∞ , т. е. оно может принимать любые положительные значения больше единицы. Обобщая изложенное о режимах работы асинхронной машины, можно сделать вывод: характерной особенностью работы асинхронной машины является неравенство частот вращения магнитного поля статора n1 и ротора n2, т. е. наличие скольжения, так как только в этом случае вращающееся магнитное поле наводит в обмотке ротора ЭДС и на роторе возникает электромагнитный момент. При этом каждому режиму работы асинхронной машины соответствует определенный диапазон изменений скольжения, а следовательно, и частоты вращения ротора. На рисунке 6.7 представлена механическая характеристика асинхронной машины при данных режимах работы. 9 Рисунок 6.7 Механическая характеристика асинхронной машины при различных режимах работы Как следует из рисунка 6.7 , по мере увеличения момента сопротивления увеличивается скольжение машины и развиваемый момент. При некотором критическом значении скольжения sКР, момент двигателя достигает максимального (или критического) значения – МКР. Приближенное уравнение механической характеристики асинхронного двигателя (формула Клосса) удовлетворительно воспроизводит механическую характеристику в области малых скольжений (от s = 0 до s = sКР). 6.2 Экспериментальная часть Определение механической характеристики n=f(M) трехфазного асинхронного двигателя с короткозамкнутым ротором Обозначение G1 G2 G4 G5 М1 А2 А6 А10 Перечень аппаратуры Наименование Трехфазный источник питания Источник питания двигателя постоянного тока Машина постоянного тока Преобразователь угловых перемещений Асинхронный двигатель с короткозамкнутым ротором Трехфазная трансформаторная группа Трехполюсный выключатель Активная нагрузка Тип 201.2 206.1 101.2 104 106 347.1 301.1 306.1 10 Р1 Р2 Р3 Блок мультиметров Измеритель мощностей Указатель частоты вращения 508.2 507.2 506.2 Электрическая схема соединений для определения механической характеристики асинхронного двигателя n=f(M) Указания по проведению эксперимента Убедиться, что устройства, используемые в эксперименте, отключены от сети электропитание. Соединение гнезда защитного заземления « » устройств, используемых в эксперименте с гнездом «РЕ» трехфазного источника питания G1 Соедините аппаратуру в соответствии с электрической схемой соединения. Переключатели режима работы источника G2 и выключателя А6 установите в положение «РУЧН». Регулировочную рукоятку источника G2 поверните против часовой стрелки до упора, а регулировочные рукоятки активной нагрузки А10 – по часовой стрелке. 11 Установите переключателем в трехфазной трансформаторной группе А2 номинальные напряжения вторичных обмоток трансформаторов, например, 127В. Включите выключатель «СЕТЬ» блоков, задействованных в эксперименте. Активизируйте мультиметры блока Р1, задействованные в эксперименте. Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся дампочки. Пустите двигатель М1 нажатием кнопки «ВКЛ» выключателя А6. Нажмите кнопку «ВКЛ» источника G2. Вращая регулировочную рукоятку источника G2 , изменяйте ток I статорной обмотки двигателя М1 и заносите показания амперметра Р1.1 (ток I) и ваттметра измерителя мощности Р2 (активная мощность Р фазы двигателя М1) и указателя Р3 (частота вращения n двигателя М1) в таблицу 1. Таблица 1. I, А 0.15 0.18 0.20 0.22 0.24 Р, Вт 105 140 160 170 185 -1 n, мин 1380 1300 1250 1200 1150 По завершению эксперимента отключите А6 и источник G1 Выключите выключатели «СЕТЬ» блоков, задействованных в эксперименте. Вычислите электромагнитный момент М двигателя для каждого значения тока I из табл.1 по формуле. 3 (Р − 80𝐼 2 ), Нм М= 50π 1) 𝑀 = 2) М = 3) М = 4) М = 5) М = 3 50∗3.14 3 50∗3.14 3 50∗3.14 3 50∗3.14 3 50∗3.14 ∗ (105 − 80 ∗ 0.152 ) = 1.97, Нм ∗ (140 − 80 ∗ 0.182 ) = 2.62, Нм ∗ (160 − 80 ∗ 0.202 ) = 2.99, Нм ∗ (170 − 80 ∗ 0.222 ) = 3.17, Нм ∗ (185 − 80 ∗ 0.242 ) = 3.44, Нм 12 и занесите его в таблицу 2 Таблица 2 М, Нм 1.97 2.62 -1 n, мин 1380 1300 2.99 1250 3.17 1200 3.44 1150 n=f(M) 1400 1350 1300 1250 1200 n=f(M) 1150 1100 1050 1000 1,97 2,62 2,99 3,17 3,44 Используя данные таблицы 2 постройте искомую механическую характеристику n=f(M) трехфазного асинхронного двигателя с короткозамкнутым ротором. Таблица 1. I, А 0.15 Р, Вт 105*30 -1 n, мин 1380 0.18 140*30 1300 0.20 160*30 1250 0.22 170*30 1200 0.24 185*30 1150 По завершению эксперимента отключите А6 и источник G1 Выключите выключатели «СЕТЬ» блоков, задействованных в эксперименте. Вычислите электромагнитный момент М двигателя для каждого значения тока I из табл.1 по формуле. 3 (Р − 80𝐼 2 ), Нм М= 50π 1) 𝑀 = 2) М = 3 50∗3.14 3 50∗3.14 ∗ (105 ∗ 30 − 80 ∗ 0.152 ) = 60.1, Нм ∗ (140 ∗ 30 − 80 ∗ 0.182 ) = 80.2, Нм 13 3) М = 4) М = 5) М = 3 50∗3.14 3 50∗3.14 3 50∗3.14 и занесите его в таблицу 2 Таблица 2 М, Нм 60.1 80.2 -1 n, мин 1380 1300 ∗ (160 ∗ 30 − 80 ∗ 0.202 ) = 91.6, Нм ∗ (170 ∗ 30 − 80 ∗ 0.222 ) = 97.4, Нм ∗ (185 ∗ 30 − 80 ∗ 0.242 ) = 106, Нм 91.6 1250 97.4 1200 106 1150 n=f(M) 1400 1350 1300 1250 1200 n=f(M) 1150 1100 1050 1000 60,1 80,2 91,6 97,4 106 Используя данные таблицы 2 постройте искомую механическую характеристику n=f(M) трехфазного асинхронного двигателя с короткозамкнутым ротором. Контрольные вопросы: 1. Назовите достоинства и недостатки асинхронного двигателя. 2. Чем конструктивно отличается короткозамкнутый ротор от фазного? 3. Принцип действия асинхронного двигателя? 4. Что называется скольжением и что эта величина характеризует? 5. Напишите формулы синхронной частоты вращения и асинхронной? 6. Что называется механической характеристикой асинхронной машины и для чего она нужна? 7. Чем отличается естественная характеристика от искусственной? 14 8. Какая из указанных характеристик мягче и почему? 9. Напишите соотношения моментов, которые определяют перегрузочную способность двигателя и пусковые свойства? 10.Укажите на механической характеристики участки устойчивой и неустойчивой работы двигателя и объясните почему? 11.Что называется рабочими характеристиками асинхронной машины 12.Дайте характеристику каждой рабочей зависимости? 13.Перечислите режимы работы асинхронной машины? 14.Расскажите о двигательном режиме 15.Расскажите о генераторном режиме 16.Расскажите о тормозном режиме 17.Охарактеризуйте механическую характеристику при данных режимах работ асинхронной машины 18.Напишите приближенное уравнение механической характеристики в области малых скольжений? 15