")
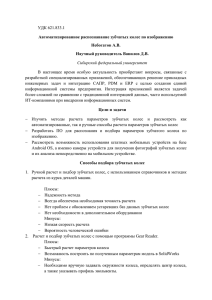
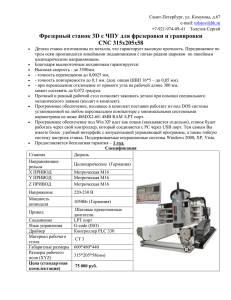
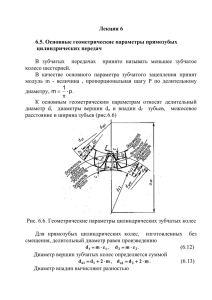
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Факультет подготовки и переподготовки инженерных кадров Контрольная работа по дисциплине «Оборудование машиностроительных производств» Вариант № 9 Зачетная книжка № 20160227 Выполнил: студент группы ЭТЗ-331 Гарафеев Р.Т. Проверил: Сидякин Ю.И. Волгоград 2021 Вариант 9 7. Кинематическая цепь подач станка мод. 16К20 для нарезания метрической резьбы. Составить уравнение кинематического баланса и подсчитать максимальное и минимальное значения шагов нарезаемых резьб. Цепь подач для нарезания резьбы : 28 35 30 для правых резьб 28 18 15 45 60 30 25 а с 28 28 45 18 1об .шп. 60 для левых резьб 12 PН , мм. в d 28 30 28 35 i зуш 25 45 25 35 28 42 30 Уравнение кинематического баланса для нарезания метрической резьбы с минимальным шагом: Максимальным шагом : 16. Кинематическая цепь главного движения станка мод. 16К20РФ3С19. Составить уравнение кинематического баланса и подсчитать максимальное и минимальное значения частот вращения шпинделя. Кинематическая схема токарного станка 16К20РФ3С19 Цепь подач Мин. и макс. = 22.4 = 2240 23. Горизонтально-расточной станок мод. 2611Ф2 с ЧПУ. Компоновка, основные узлы, движения в станке. Основные характеристики горизонтального расточного станка 2611Ф2 Диаметр выдвижного расточного шпинделя - 80 мм; Наибольший диаметр растачивания - 250 мм; Частота вращения шпинделя - 12,5…1250 об/мин Пределы подач стола, стойки, шпинделя, бабки и поворота стола - 2…1600 мм/мин; Устройство ЧПУ станка типа - Размер 2М или П323 обеспечивает позиционирование и прямоугольное формообразование; Система устройства - замкнутая, в качестве датчиков обратной связи применяют сельсины; Число управляемых осей координат (всего/ одновременно) - 5/2; Дискретность отсчета по осям координат X', Y', Z' - 0,01 мм; Электродвигатель привода шпинделя - 8 кВт; 1500 об/мин Вес станка - 12,8 т. Станок выполнен с выдвижным шпинделем, продольно-подвижной стойкой и продольно-подвижным поворотным столом. Инструмент устанавливают в шпинделе ; ему сообщается главное движение. По горизонтальным направляющим станины перемещаются салазки стойки от редуктора подачи . Стол имеет поперечную подачу по оси X от редуктора подач. Кроме того, стол имеет запрограммированный поворот на угол β. По вертикальным направляющим стойки перемещается шпиндельная бабка (подача по оси Y). Шпиндель IV имеет возможность осевого перемещения по оси Z. Главное движение — вращение шпинделя осуществляется от двигателя постоянного тока через два двойных блока зубчатых колес и через передачу . Направление вращения изменяется реверсированием электродвигателя. Рабочие и установочные перемещения (подачи) узлов станка осуществляются двумя двигателями постоянного тока .От электродвигателя М3 происходит осевая подача шпинделя, салазок, стойки и шпиндельной бабки, от электродвигателя М2 — поперечное перемещение и поворот стола. Осевая подача шпинделя осуществляется от вала XI через передачи (27/81), (81/80) (включена муфта М3), валы IX и XV, передачу (30/20), вал XVI, цилиндрическую пару (43/43) (муфта М6 шариковая предохранительная), вал XIII, конические пары с круговыми зубьями (19/28), (42/32) и (24/79), вал VI, электромагнитную муфту М7, передачу 48/40 и ходовой винт качения V с шагом р = 10 мм. На конце винта V расположена тормозная муфта М8. Гидросистема станка осуществляет переключение механических ступеней главного привода, отжим подвижных органов станка, отжим инструмента в шпинделе, смазку отдельных узлов станка. Механизм переключения скоростей главного привода электрогидравлический с дистанционным управлением. По программе, заложенной в электросхеме, соответствующие гидрораспределители управления перебрасывают потоки масла, и гидроцилиндры посредством поводков переводят блоки зубчатых колес. На каждом гидроцилиндре закреплены поводки, в крайних положениях воздействующие на конечные выключатели, установленные в корпусе. При срабатывании конечных выключателей перевод блоков зубчатых колес завершается и подается команда на фиксирование данного расположения поводков. 30. Кинематическая схема универсальной делительной головки (УДГ). Составить уравнение кинематического баланса цепи для дифференциального метода деления, вывести формулу настройки гитары дифференциала. Метод дифференциального деления При таком делении шпиндель УДГ кинематически связан сменными зубчатыми колесами a/b и·с/d c делительным лимбом Д2, который освобождается от защелки У и тоже вращатся. В этом случае поворот рукоятки Р будет вызывать не только вращение шпинделя, но и от него (через сменные зубчатые колеса a/b и·с/d, коническую и зубчатую пары) также и вращение лимба Д . Поэтому полный поворот рукоятки на N z 2 часть окружности будет складываться из двух величин. Первое слагаемое получается N zф только за счет поворота рукоятки на -ую часть оборота, а второе – поворота уже лимба на 1 a c z nд 3 z b d z4 дополнительную z U 5 см , z6 z откуда при z3 z 4 z5 z 6 1 величину nд , определяемую выражением a c N U см zф z – передаточное отношение b d zф сменных колес (здесь z ф – некоторое фиктивное число, принимаемое близким к заданному числу z , чтобы z ф стало кратным характеристике делительной головки, т.е. числу N). Пример найстройки Настроить делительную головку для обработки зубчатого колеса с числом зубьев Z=127. Принимаем Zф = 120. Поворот рукоятки для деления определяем по формуле Сменные зубчатые колеса определяются по формуле 41. Зубообрабатывающие станки, их классификация. Основные методы нарезания зубчатых колес на станках. Станки различают: 1) по виду обработки и инструменту: зубодолбежные, зубофрезерные, зубострогальные, протяжные, зубошевинговальные, зубошлифовальные; 2) по назначению: для нарезания цилиндрических колес с прямым и винтовым зубом; для шевронных колес, для нарезания конических колес с прямыми и круговыми зубьями; червячных колес, зубчатых реек и т.д.; 3) по точности и степени шероховатости нарезаемых зубьев: для предварительного нарезания зубьев; для чистовой обработки зубьев; для доводки рабочих поверхностей зубьев. В зависимости от метода образования профиля зуба нарезание цилиндрических зубчатых колес осуществляют либо методом копирования, либо методом обкатки. Метод копирования. При нарезании методом копирования каждая впадина между зубьями на заготовке обрабатывается инструментом, имеющим форму, полностью соответствующую профилю впадины колеса. Инструментом в этом случае обычно являются фасонные дисковые и пальцевые фрезы. Обработку производят на фрезерных станках с применением делительных головок. Метод обкатки обеспечивает высокую производительность, большую точность нарезаемых колес, а также возможность нарезания колес с различным числом зубьев одного модуля одним и тем же инструментом. При образовании профилей зубьев методом обкатки режущие кромки инструмента, перемещаясь, занимают относительно профилей зубьев колес ряд последовательных положений, взаимно обкатываясь; при этом инструмент и заготовка воспроизводят движение, соответствующее их зацеплению. Из инструментов, используемых для нарезания цилиндрических зубчатых колес методом обкатки, наибольшее распространение получили долбяки и червячные фрезы. Литература 1. Металлорежущие станки. / В.Д. Ефремов, В.А. Горохов, А.Г. Схиртладзе, И.А. Ко-ротков. Старый Оскол: ТНТ, 2016. – 696 с. 2. Сибикин М.Ю. Технологическое оборудование. Металлорежущие станки. Изд. 2-е, перераб. и доп. Старый Оскол: ТНТ, 2012. – 448 с. 3. Подлеснов В.Н., Ананьев А.С., Схиртладзе А.Г. Оборудование машиностроительного производства. Учеб. пособие. Ч. I. ВолгГТУ. – Волгоград, 2014. - 128 с. 4 .Подлеснов В.Н. Лабораторный практикум по зубообрабатывающим станкам: учеб. пособие. /В.Н. Подлеснов, С.П. Стольников. ВолгГТУ. – Волгоград, 2008. - 97 с. 5. Балла О.М. Обработка деталей на станках с ЧПУ. Оборудование. Оснастка. Техноло-гия. /О.М. Балла. – С-Пб.: изд. «Лань», 2015. 368 с.