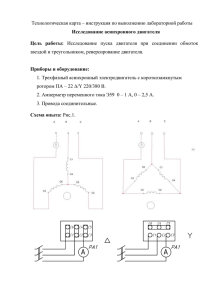
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ УНИВЕРСИТЕТ ИТМО А.В. Новотельнова Электрические машины и электропривод Лабораторный практикум Учебное пособие Санкт-Петербург 2016 УДК 621.3 Новотельнова А.В. Электрические машины и электропривод: Учеб. пособие. СПб.: Университет ИТМО; 2016. 108 с. Приведены описания лабораторных работ по разделу «Электрические машины и электропривод» курса «Общая электротехника». В конце работы дан список литературы. Предназначены для самостоятельной работы студентов направления бакалавриата 16.03.03 «Холодильная, криогенная техника и системы жизнеобеспечения» очной и заочной форм обучения по дисциплине «Общая электротехника»... Университет ИТМО – ведущий вуз России в области информационных и фотонных технологий, один из немногих российских вузов, получивших в 2009 году статус национального исследовательского университета. С 2013 года Университет ИТМО – участник программы повышения конкурентоспособности российских университетов среди ведущих мировых научно-образовательных центров, известной как проект «5 – 100». Цель Университета ИТМО – становление исследовательского университета мирового уровня, предпринимательского по типу, ориентированного на интернационализацию всех направлений деятельности. Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики, 2016 Новотельнова А.В., 2016 ВВЕДЕНИЕ Основой настоящего пособия является курсы лекций «Общая электротехника», «Электротехника и промышленная электроника» и «Электротехника и электроника», читаемые в Санкт-Петербургском национальном университете информационных технологий механики и оптики. Настоящее пособие охватывает круг основных вопросов, изучаемых студентами в рамках разделов «Трансформаторы», «Электрические машины и электропривод» курсов «Общая электротехника», «Электротехника и промышленная электроника» и «Электротехника и электроника». При изучении данных разделов сделан акцент на экспериментальном изучении электротехнических устройств. В пособии рассмотрены следующие вопросы: - электрические трансформаторы; - электрические двигатели постоянного тока; - асинхронные электрические двигатели; - основы электропривода. Проводимые в процессе выполнения работ исследования позволяют понять принцип действия и физические процессы, протекающие в исследуемых устройствах, и дают навык работы с современными электротехническими устройствами. В связи с большой потребностью в устройствах автоматизированного электропривода много экспериментов проводится по изучению способов регулирования частоты двигателей. В случае привода асинхронных двигателей рассмотрены возможности использования современного микропроцессорного преобразователя частоты типа G100. Изучение данного раздела курса вносит свой вклад в формирование мировоззрения обучающихся и их информационной и исследовательской компетенции. 3 ОСНОВНЫЕ ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ВЫПОЛНЕНИИ ЛАБОРАТОРНЫХ РАБОТ Во избежание несчастных случаев и преждевременного выхода приборов и электрооборудования из строя каждый студент должен строго выполнять следующие правила техники безопасности. 1. К работе на стенде допускаются лица, прошедшие инструктаж и получившие зачет по технике безопасности для электроустановок до 1000 В. 2. Инструктаж по технике безопасности перед каждой лабораторной работой проводит преподаватель, ведущий эти занятия в группе. 3. В лабораторию электрических машин и электропривода запрещается приносить верхнюю одежду (куртки, пальто, шубы и пр.), большие сумки, свертки и т.п., так как они загромождают рабочие места и способствуют созданию условий, которые могут привести к нарушению правил техники безопасности. 4. Напряжение, подводимое к стенду, не должно превышать 220 В. О включении стенда сигнализирует загорание лампы на распределительном щите и на самом стенде. 5. Сборка электрической схемы проводится только при выключенном напряжении питания и отключенном автоматическом выключателе. 6. Проверку электрической цепи на лабораторной установке перед включением стенда под напряжение проводит инженер. Разрешение на включение стенда под напряжение и проведение опытов дает преподаватель, ведущий занятия. 7. При проведении опытов не допускаются превышение номинальных режимов оборудования и отклонение от рекомендованных условий нагрузки электродвигателей. 8. Все переключения в схемах осуществляются при полной остановке двигателей и выключенном питании стенда. 9. После запуска двигателей необходимо соблюдать особую осторожность: не касаться руками или какими-либо предметами вращающихся частей или снимать защитный кожух при вращающемся двигателе. 10. При измерении частоты вращения тахометром ИТ5-Ч не касаться вращающихся частей корпусом тахометра. 4 11. Лабораторную работу можно проводить только на исправном стенде при участии не менее двух человек одновременно. 12. При обнаружении неисправности в электрической схеме, появлении дыма или искрения следует немедленно обесточить стенд и сообщить об этом преподавателю. 13. После выполнения работы необходимо снять напряжение со схемы, предъявить результаты измерений преподавателю и получив разрешение разобрать схему. Рабочее место привести в исходное состояние. 14. При случайном попадании человека под напряжение необходимо немедленно освободить его от воздействия электрического тока, отключив соответствующий выключатель. При потере сознания и остановке дыхания необходимо освободить пострадавшего от стесняющей одежды и делать искусственное дыхание до прибытия врача. 5 ЛАБОРАТОРНАЯ РАБОТА № 1М ИССЛЕДОВАНИЕ ОДНОФАЗНОГО ТРАНСФОРМАТОРА Теоретические сведения Трансформатором называют статическое электромагнитное устройство, предназначенное для преобразования посредством магнитного поля электрической энергии переменного тока одного напряжения в электрическую энергию переменного тока другого напряжения той же частоты. Трансформаторы используют там, где необходимо согласовывать участки цепи, имеющие разные рабочие напряжения. Применяют трансформаторы в линиях электропередачи, в технике связи, автоматике, измерительной технике, и других областях. В соответствии с назначением различают: силовые трансформаторы для питания электрических двигателей и электрических сетей; специальные трансформаторы для питания сварочных аппаратов, электропечей и других потребителей, измерительные трансформаторы для подключения измерительных приборов. По числу фаз трансформаторы делят на одно- и трехфазные. По числу обмоток различают двухобмоточные и многообмоточные трансформаторы, а также автотрансформаторы. Трансформатор представляет собой замкнутый магнитопровод, на котором расположены обмотки (рис. 1-1). Для уменьшения потерь на перемагничивание магнитопровода, его изготавливают из магнитомягкого материала – трансформаторной стали, имеющей узкую петлю гистерезиса. В состав материала магнитопровода для снижения потерь на вихревые токи (токи Фуко) вводят примесь кремния, повышающую его электрическое сопротивление, а сам магнитопровод собирают из отдельных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга теплостойким лаком или специальной бумагой. В высокочастотных трансформаторах в качестве материала сердечника используют ферриты – химические соединения на основе окиси железа. У многих ферритов сочетаются высокая намагниченность и высокое удельное сопротивление, что и нужно для сердечника трансформатора. 6 Обмотки трансформатора изготавливают из медного провода и располагают на одном и том же или на разных стержнях, рядом или одна под другой. Обмотку трансформатора, к которой подводится напряжение питающей сети, называют первичной. Обмотку, к которой подсоединяется нагрузка, – вторичной. Рис. 1 -1. Схема работы однофазного трансформатора Исключение составляет автотрансформатор. Он имеет одну обмотку, часть которой является первичной или вторичной обмоткой, в зависимости от того, служит ли автотрансформатор для повышения или понижения напряжения. Работа трансформатора основана на явлении взаимной индукции, которое является следствием закона электромагнитной индукции. При подключении первичной обмотки трансформатора к сети переменного тока напряжением U1 по обмотке начинает проходить ток I1, который создает в магнитопроводе переменный магнитный поток. Магнитный поток, пронизывая витки вторичной обмотки, индуцирует в ней ЭДС. Е2, которую можно использовать для питания нагрузки. Одним из основных параметров трансформатора является 7 коэффициент трансформации К12 U1 w1 , U 2 w2 где U1, U2 - напряжения на первичной и вторичной обмотках, w1 и w2 – число витков обмоток трансформатора (соответственно). При работе трансформатора, т.е. часть подводимой к трансформатору электрической мощности расходуется на потери. Выделяемая при этом теплота производит нагрев трансформатора. Обычно, при работе трансформатора в условиях близких к номинальному режиму потери мощности составляют 1-5% от номинальной мощности трансформатора. Потери в трансформаторах разделяют на два вида: потери в стали сердечника (складываются из потерь, создаваемых перемагничиванием сердечника и вихревыми токами) – Рст; потери в меди обмоток (обусловлены тепловым действием электрического тока, протекающего в проводах обмоток) – Рм. Потери в меди складываются из потерь в первичной обмотке I12 R1 и потерь во вторичной обмотке I 22 R2 : K12 Pм I12 R1 I 22 R2 где R1 и R2 – сопротивление первичной и вторичной обмоток трансформатора, I1 и I2 --- первичный и вторичный токи. Потери в стали зависят от конструкции сердечника трансформатора и свойств использованных материалов, а также величины магнитного потока в сердечнике, который в свою очередь определяется напряжением на первичной обмотке трансформатора U1. От нагрузки трансформатора потери в стали не зависят. Потери в меди напротив зависят от нагрузки. Коэффициент полезного действия трансформатора определяется как отношение полезной мощности Р2 (активной мощности, отдаваемой вторичной обмоткой электроприемнику) к затраченной мощности P1 (активной мощности, потребляемой первичной обмоткой трансформатора) Р Р2 . 2 Р1 Р2 Рст Рм Наглядное представление о распределении мощностей в трансформаторе дает энергетическая диаграмма трансформатора, 8 приведенная на рис. 1-2. Рис. 1-2. Энергетическая диаграмма трансформатора. Различают следующие режимы работы трансформаторов: режим холостого хода: характеризуется разомкнутой вторичной цепью трансформатора, вследствие чего ток в ней отсутствует. нагрузочный режим: является основным рабочим для трансформатора и характеризуется замкнутой на нагрузке вторичной цепи трансформатора. режим короткого замыкания: получается в результате замыкания вторичной цепи трансформатора накоротко. При номинальном значении напряжения на первичной обмотке ток короткозамкнутой вторичной обмотки достигает запредельных величин, так как сопротивление вторичной обмотки равно нулю. Короткое замыкание в условиях эксплуатации создает аварийный режим и может приводить к катастрофическим последствиям для трансформатора. Поэтому в цепях с трансформаторами предусматривают защиту, которая автоматически отключает трансформатор при коротком замыкании. Для определения параметров трансформатора используют опыт холостого хода и опыт короткого замыкания. Опыт холостого хода трансформатора. Холостым ходом трансформатора называется работа трансформатора без нагрузки, т. е. при разомкнутой вторичной обмотке. При проведении опыта холостого хода к зажимам вторичной обмотки трансформатора 9 подключают вольтметр для измерения напряжения U20. Так как сопротивление измерительной обмотки вольтметра велико, его включение имитирует размыкание вторичной обмотки. К первичной обмотке подводится напряжение близкое к номинальному. В этом случае по первичной обмотке протекает ток холостого хода I10, ток во вторичной обмотке I2 равен нулю. Значении тока в первичной обмотке, измеряемое в опыте холостого хода, обычно составляет I10=(0,05…0,1) I1н. При этом мощность, потребляемая трансформатором, расходуется на потери в стали и пренебрежимо малые потери в меди первичной обмотки, так что можно считать эту мощность приблизительно равной потерям в стали. Ошибка расчёта при этом не превышает 1%. В опыте холостого хода можно определить коэффициент трансформации, мощность потерь в стали, коэффициент мощности ненагруженного трансформатора, ток холостого хода трансформатора. Измеряемыми параметрами являются ток в первичной обмотке I10, потребляемая активная мощность P10 и напряжение на вторичной обмотке U20. Опыт короткого замыкания. Опыт короткого замыкания производят при пониженном напряжении U1кз, при котором токи в обмотках не превышают номинальных значений. При проведении опыта короткого замыкания вторичная обмотка трансформатора замыкается на амперметр. Сопротивление измерительной обмотки амперметра мало, что практически идентично короткому замыканию. Напряжение на вторичной обмотке U2кз равно нулю. В опыте короткого замыкания первичное напряжение обычно составляет U1кз=(0,05…0,12)U1н. Магнитный поток в сердечнике уменьшается пропорционально напряжению, а потери в нём (потери в стали) уменьшаются пропорционально квадрату магнитного потока (квадрату напряжения). Поэтому принимают, что вся потребляемая мощность расходуется только в активном сопротивлении обмоток (потери в меди при номинальной нагрузке). Ошибка расчёта при этом не превышает 1,5%. Измеряемыми параметрами при проведении опыта короткого замыкания являются ток в первичной обмотке I1кз, потребляемая активная мощность P1кз и напряжение на первичной обмотке U1кз. По данным измерений в опыте короткого замыкания определяются следующие параметры: потери в меди, величины 10 сопротивлений обмоток, процентное значение первичного напряжения при коротком замыкании. Определённые в опытах холостого хода и короткого замыкания потери в элементах трансформатора затем используются при расчёте его коэффициента полезного действия (метод разделенных потерь). Определению параметров трансформатора и изучению его характеристик при переменной нагрузке посвящена лабораторная работа. Лабораторный эксперимент Цель работы 1. Приобрести практические навыки по использованию и испытанию трансформаторов. 2. Научиться определять основные параметры и характеристики трансформаторов. 3. Экспериментально подтвердить теоретические знания, полученные на лекциях и самостоятельных занятиях. Схема лабораторной установки Лабораторная установка, предназначенная для испытания однофазного силового трансформатора, состоит из регулируемого источника однофазного переменного тока, однофазного трансформатора, контрольно-измерительных приборов, коммутационно-защитных аппаратов и потребителей энергии. Номинальные данные исследуемого в лабораторной работе трансформатора: полная мощность Sн = 60 ВА; напряжение первичной обмотки U1н =220 В; напряжение вторичной обмотки U2н = 12 В; ток первичной обмотки I1н = 0,425 A; ток вторичной обмотки I2н = 5 А1. На рис. 1-3 приведены электрические схемы лабораторной 1 В учебных трансформаторах, используемых в лабораторной работе, параметры тока холостого хода и напряжения короткого замыкания значительно отклоняются от стандартных значений промышленных трансформаторов. Значение этих параметров составляет 30% от соответствующих номинальных значений. Если пренебречь при этом потерями в стали в опыте короткого замыкания, то погрешность расчета коэффициента полезного действия может превышать 10%, что существенно искажает картину физических процессов в трансформаторе. Указанное обстоятельство должно быть учтено при выполнении расчётов и анализе экспериментальных данных в отчёте по лабораторной работе. 11 установки для проведения опыта холостого хода (рис. 1-3, а), опыта короткого замыкания (рис. 1-3, б) и исследования работы трансформатора при нагрузке (рис. 1-3, в). Питание установки осуществляется от сети переменного тока. Входное напряжение U1 регулируется автотрансформатором. Программа работы 1. Провести опыт холостого хода и опыт короткого замыкания и определить основные параметры трансформатора. 2. Провести исследования работы трансформатора при переменной активной нагрузке (cos 2=1). 3. Построить рабочие характеристики трансформатора U2, cos1, , P1, I1 как функции от отдаваемой в нагрузку мощности P2 . 4. Проанализировать полученные результаты и сделать выводы по работе. Сопоставить полученные результаты с известными данными из теоретического курса по трансформаторам. Порядок выполнения работы 1. Ознакомиться с электрической схемой, приборами, аппаратами и другим оборудованием экспериментальной установки, которое используется для испытания трансформаторов. Записать технические характеристики трансформатора в бланк отчета. 2. Собрать электрическую схему экспериментальной установки (рис. 1-3, а) для проведения опыта холостого хода и предъявить для проверки инженеру. При проведении опыта холостого хода используемые приборы установить на следующие пределы измерений: мультиметр PA1 (диапазон измерения переменного тока 20 А), вольтметр PV1 на 250 В, ваттметр PW на 300 В; 0,5 А, вольтметр РV2 на 30 В. При выполнении опыта первичная обмотка трансформатора включается на клеммы 220 В (нижняя пара клемм), а вторичная – на 12 В (крайние клеммы). Во избежание повреждения трансформатора ручка регулирующего автотрансформатора до включения схемы должна быть установлена в нулевое положение, (т.е. в крайнее положение против часовой стрелки). 12 Рис. 1-3. Электрические схемы испытаний трансформатора: а – опыт холостого хода; б – опыт короткого замыкания; в – при переменной нагрузке. PW – ваттметр; PA1 - мультиметр в первичной цепи, РА2– амперметр во вторичной цепи , РV1 и PV2 - вольтметры в первичной и вторичной цепях; S – выключатель нагрузки; (0-250 В) – выход ЛАТРа; R- активная нагрузка 13 3. После проверки правильности соединений и получения разрешения на проведение опыта включить стенд, установить с помощью ЛАТР номинальное напряжение на первичной обмотке трансформатора. Данные наблюдений занести в табл. 1. Таблица 1 Измеряемые величины U10, B I10, А P10, Вт U20, B Вычисляемые величины K12 сos10 I*10, % Pст, Вт 4. На основании опытных данных вычислить: - коэффициент трансформации U K12 10 ; U 20 - процентное значение тока холостого хода, в % * I10 100; I10 I1н - коэффициент мощности P cos10 10 . U10 I10 5. Рассчитать потери в стали Pст, с учетом потерь мощности в активном сопротивлении первичной обмотки трансформатора R1=14 Ом: 2 Pст P10 I10 R1. 6. Собрать электрическую схему экспериментальной установки (рис. 1-3, б) для проведения опыта короткого замыкания и предъявить для проверки инженеру. Во избежание повреждения трансформатора ручка регулирующего автотрансформатора до включения схемы должна быть установлена в нулевое положение, (т.е. в крайнее положение против часовой стрелки). При проведении опыта короткого замыкания используются приборы: мультиметр PA1 (диапазон измерения переменного тока 20 14 А), вольтметр PV1 на 150 В, ваттметр PW на 75 В; 0,5 А, амперметр PA2 на 5 А. После проверки правильности соединений и получения разрешения на проведение опыта включить стенд и, плавно регулируя ЛАТР, установить номинальный ток во вторичной обмотке трансформатора I2н=5 А, при этом напряжение на первичной обмотке U1 будет меньше номинального значения (U1кз U1н). Данные наблюдений опыта короткого замыкания записать в табл. 2. Таблица 2 Вычисляемые величины Измеряемые величины U1кз, В I1кз, А P1кз, Вт I2кз, А U*1кз % Rk , Ом Zk, Ом Xk , Ом Pм , Вт 7. На основании опытных данных вычислить процентное значение первичного напряжения, в % U * U1кз 1кз 100, U1н где U1кз– напряжение, подводимое к первичной обмотке при коротком замыкании трансформатора; U1н - номинальное первичное напряжение трансформатора (U1н = 220 В). 8. Рассчитать потери в меди Рм, с учетом дополнительных потерь в магнитопроводе (сердечнике): 2 U Pм P1кз Pст 1кз . U1н 9. Определить: - активное суммарное сопротивление обмоток, приведенных к первичной P Rk 2м R1 R ' 2 ; I1кз - приведенное к первичной активное сопротивление вторичной обмотки: R '2 Rk R1 ; - активное сопротивление вторичной обмотки: 15 R '2 ; K122 - полное сопротивление трансформатора в режиме короткого замыкания U Z к 1кз ; I1кз - реактивное сопротивление трансформатора в режиме короткого замыкания R2 X k Z k2 Rk2 ; - индуктивное сопротивление индуктивности рассеяния первичной обмотки первичной обмотки X X1 k ; 2 - индуктивное сопротивление индуктивности рассеяния вторичной обмотки X' X 2 22 . K12 10. Собрать электрическую схему экспериментальной установки (рис.1-3, в) для исследования работы трансформатора при нагрузке и предъявить инженеру. При исследовании трансформатора использовать следующие приборы: мультиметр PA1 на 20 А. амперметр РА2 на 5 А, вольтметр PV1 на 250 В, вольтметр PV2 на 30 В, ваттметр РW2 на 300 В; 0,5 А, реостат R1 на 15 Ом; 5 А. После проверки правильности соединений и получения разрешения на проведение опытов установить с помощью ЛАТРа на зажимах обмотки трансформатора номинальное напряжение U1н и поддерживать его постоянным при изменении нагрузки. Нагрузку изменять с помощью реостата от 0 до I2н (снять 5-6 точек). Данные наблюдений записать в табл.3 Таблица 3 № Измеряемые величины опыта U1, I1 , P1 , U2 , В А Вт В 1 2 I2 , А 0 1,5 Вычисляемые величины P2 , cos1 U2, Вт % 16 оп расч № Измеряемые величины опыта U1, I1 , P1 , U2 , В А Вт В 3 4 5 6 I2 , А 2 3 4 5 Вычисляемые величины P2 , cos1 U2, Вт % оп расч 11. Предъявить данные опытов для проверки преподавателю и с его разрешения схему разобрать. Рабочее место привести в исходное состояние и предъявить инженеру. 12. На основании данных вычислить для каждого опыта: - коэффициент мощности P cos 1 1 ; U1 I1 - коэффициент загрузки трансформатора I 2 ; I 2н - полезную мощность P2 = U2I2cos2; где cos2 = 1, так как нагрузка трансформатора – активная; - процентное изменение напряжения U U2 U 2 20 100%; U 20 - опытное значение КПД (прямой метод определения КПД) P оп 2 ; P1 - расчетное значение КПД (метод разделения потерь) βSн cos 2 ηрасч , βSн cos 2 Pст β2 Pм где Sн –номинальная мощность трансформатора, Рст и Рм – потери в стали и меди, раздельно определенные в опытах холостого хода и короткого замыкания. 13. Построить в масштабе энергетические диаграммы для опытов холостого хода, короткого замыкания и работы под нагрузкой 17 Содержание отчета В отчете должны быть приведены: 1. Программа работы. 2. Номинальные данные трансформатора и его параметры, определенные в ходе исследований. 3. Электрические схемы лабораторной установки для всех опытов. 4. Таблицы с измеренными и вычисленными величинами. 5. Графики рабочих характеристики трансформатора: зависимости U2; оп; cos1; I1; P1 в функции полезной мощности P2. 6. Энергетические диаграммы трансформатора для опытов короткого замыкания, холостого хода и работы под нагрузкой. 7. Использованные формулы. 8. Краткие выводы. Сопоставление опытных и расчетных данных с известными положениями из теории. Контрольные вопросы Цель и порядок выполнения работы 1. С какой целью проводится опыт холостого хода? 2. Порядок проведения опыта холостого хода. 3. Где затрачивается мощность, потребляемая трансформатором в режиме холостого хода? 4. С какой целью проводится опыт короткого замыкания? 5. Порядок проведения опыта короткого замыкания. Какова величина напряжения, подводимого к первичной обмотке при опыте короткого замыкания? 6. Где затрачивается мощность, потребляемая трансформатором в режиме короткого замыкания? 7. Что называется коэффициентом трансформации и как он выражается? 8. Что называется коэффициентом полезного действия трансформатора, и какими способами он может быть определен? 9. Устройство и принцип действия трансформатора? Из каких составляющих состоит ток холостого хода трансформатора? 10. Что называют внешней характеристикой? Какие факторы влияют на изменение напряжения трансформатора при нагрузке? 18 ЛАБОРАТОРНАЯ РАБОТА № 2М ИСПЫТАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ Теоретические сведения В автоматизированных электроприводах и в системах автоматического управления широкое распространение получили электродвигатели постоянного тока. Как и все двигатели, двигатель постоянного тока состоит из неподвижной части - статора и вращающейся части -ротора (якоря) (рис. 2-1). . Рис. 2-1. Электрическая машина постоянного тока в разобранном виде: 1,2 – подшипниковые щиты, 3 – станина с полюсами, 4 - якорь с коллектором, 5траверса со щеткодержателями. Статор – неподвижная часть электрической машины, выполненная в виде полого цилиндра из литой электротехнической стали (рис.2-2). Статор служит для крепления к нему отдельных 19 деталей машины (главных и добавочных полюсов, подшипниковых щитов, щеточного устройства). Статор защищает узлы машины от механических повреждений. Рис. 2 -2. Устройство статора двигателя постоянного тока 1 – станина статора; 2 - сердечники главных полюсов; 3 - сердечники дополнительных полюсов; 4 – обмотка возбуждения. На внутренней поверхности статора закреплены главные полюсы машины. Главные полюсы состоят из набранных из листов электротехнической стали сердечников с полюсными наконечниками и катушек возбуждения. Катушки возбуждения соединяют между собой таким образом, чтобы полярность полюсов чередовалась. Совокупность всех соединенных катушек образует обмотку возбуждения. Обмотку возбуждения подключают к источнику постоянного тока. По обмотке возбуждения протекает ток, создающий основное 20 магнитное поле машины. Статор является частью магнитопровода, по которому замыкается основной магнитный поток машины. В машинах средней и большой мощности между основными полюсами располагают добавочные полюсы. Обмотку, находящуюся на них, соединяют последовательно с якорной обмоткой. Каждому из дополнительных полюсов сообщают ту же полярность, которую имеет главный полюс соседний с ним в сторону вращения. В момент коммутации магнитное поле вспомогательных полюсов будет наводить в коротко замкнутой секции электродвижущую силу, компенсирующую электродвижущую силу самоиндукции. Назначение дополнительных полюсов заключается в достижении без искровой коммутации. Якорь – вращающаяся часть машины постоянного тока. Состоит из вала, на который насаживается сердечник, обмотки якоря и коллектора. Сердечник якоря набирают из листов электротехнической стали. На наружной поверхности сердечника якоря находятся пазы, предназначенные для укладки в них обмотки якоря. В двигателях постоянного тока обмотка якоря с помощью коллекторно-щеточного узла присоединяется к источнику постоянного тока. Щеточно-коллекторный узел является характерной частью большинства машин постоянного тока. Он обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины, и состоит из коллектора (набора контактов, расположенных на роторе) и щёток (скользящих контактов, расположенных вне ротора и прижатых к коллектору). Коллектор представляет собой полый цилиндр, набранный из отдельных медных пластин, изолированных друг от друга и от вала миканитом (прессованной слюдой). Коллекторно-щеточный узел служит для получения постоянного по направлению электромагнитного момента, когда машина работает двигателем. При работе машины в режиме генератора с его помощью происходит выпрямление переменной ЭДС, индуцированной во вращающейся обмотке якоря. 21 Рис. 2-3 Принцип действия двигателя постоянного тока. Работа двигателя постоянного тока, как и любой другой электрической машины, основана на принципе электромагнитной индукции. Ток в обмотке возбуждения, расположенной на статоре, возбуждает магнитное поле машины, которое, в свою очередь, приводит в движение подвижную часть - якорь (рис. 2-3). Взаимодействие магнитного поля статора и электрического поля ротора создает вращающий момент, именно он и является причиной вращения ротора двигателя. Для обеспечения непрерывности вращения якоря в его обмотке необходимо производить переключение направления тока с помощью щеточно-коллекторного механизма в зависимости от углового положения ротора. Таким способом происходит преобразование электрической энергии, подаваемой на обмотку возбуждения, в механическую (кинетическую) энергию вращения. Полученную механическую энергию можно использовать, приводя в движение механизмы. Поскольку в двигателе постоянного тока магнитное поле постоянно, то оно может создаваться или постоянными магнитами, или обмоткой статора. Постоянными магнитами поле создается только 22 в маломощных двигателях, а в более мощных используется поле, создаваемое обмоткой статора. Способы подключения к источнику питания обмоток машин постоянного тока показан на рис. 2-4. а б в г Рис. 2-4. Подключение обмоток двигателя постоянного тока: а - независимое, б - параллельное, в - последовательное, г - смешанное. Для питания обмоток статора и ротора можно использовать отдельные источники (рис 2-4, а), тогда мы будем иметь дело с двигателями с независимыми обмотками. Если же мы имеем только один источник питания, то можно включить обмотки статора и ротора в цепь питания тремя различными способами: параллельно (рис. 2-4, б), последовательно (рис. 2-4, в) и смешанным образом (рис. 2-4, г). В последнем случае, часть обмотки статора включается параллельно с обмоткой ротора, а вторая часть - последовательно. Наиболее часто используются двигатели с последовательным или параллельным соединением обмоток. 23 Буквенные и цифровые обозначения выводов обмоток электрических машин постоянного тока Наименование обмотки Обмотка якоря Обозначение выводов Начало Конец Я1 Я2 Обмотка добавочных полюсов Последовательная Д1 Д2 С1 С2 Независимая HI Н2 Параллельная Ш1 Ш2 Механические характеристики двигателей с последовательной и параллельной схемами включения обмоток приведены на рис. 2-5. б a Рис. 2-5. Механические характеристики двигателей постоянного тока при различных схемах включения обмотки возбуждения а – последовательное включение 1- U=Uном; 2 - U=0,6Uном ; 3- U=0,25Uном б – параллельное включение: 1- U=U1=Uном ; 2- U=U2; 3- U=U3 U1U2U3 Механическая характеристика двигателя с последовательным возбуждением мягкая (рис. 2-5, а). При нагрузке менее 0,25 Мном 24 скорость вращения резко возрастает и двигатель идет «в разнос». При малой скорости вращения двигатель развивает значительный момент. Это свойство двигателей последовательного возбуждения используется в электроприводах трамваев, троллейбусов, метро. Механическая характеристика двигателя параллельного возбуждения жесткая (рис. 2-5, б) . При параллельном включении обмоток статора и якоря частота вращения электродвигателя определяется выражением: U I я Rя n n0 K E I я Rя , CE Ф где U - напряжение, подаваемое на якорь двигателя, Rя сопротивления обмотки якоря, Iя - ток, протекающий в цепи якоря; Ф – магнитный поток; СЕ - постоянный коэффициент, зависящий от конструктивных параметров данной машины, n0 -частота вращения идеального холостого хода равная U , n0 CE Ф 1 , KE CE Ф В точке режима идеального холостого хода двигатель развивает частоту вращения n0 и не создает момента. В режиме идеального холостого хода противо-ЭДС E0, равная E0 CE Фn0 , полностью компенсирует приложенное к якорю напряжение U. Ток якоря, определяемый выражением U E0 , Iя Rя будет равен нулю и, как следствие, будет равен нулю электромагнитный момент, приложенный к якорю М K М ФI я . Здесь КМ – постоянная, зависящая от конструктивных параметров данной машины. Величина n0 может быть определена только графическим путем по скоростной характеристике двигателя постоянного тока (зависимости скорости вращения якоря от тока, протекающего в якорной цепи). 25 При приложении к якорной цепи номинального напряжения скоростная характеристика представляет прямую, проходящую через точки n0 (Iя=0) и nн (Iян). На рис. 2-6 представлено семейство скоростных характеристик при различных значениях напряжения якорной цепи. Рис. 2-6. Скоростные характеристика двигателя постоянного тока 1 – U1=Uн; 2– U2<Uн; 3– U3<U2. Величину сопротивления обмотки якоря Rя можно рассчитать: U (n0 nн ) . Rя n0 I ян При понижении напряжения U скоростные характеристики будут сдвигаться вниз от основной характеристики. Частоту вращения двигателей постоянного тока можно регулировать различными способами. Действительно, число оборотов якоря определяется выражением U I я ( Rя R) n , CE Ф где R – величина сопротивления, соединенного последовательно с сопротивлением обмотки якоря Rя. Это выражение показывает, что изменение скорости вращения двигателя можно осуществить изменением напряжения сети, сопротивления цепи якоря и магнитного потока. При работе двигателя постоянного тока часть подводимой к двигателю электрической мощности расходуется на потери, которые преобразуются в тепло. Потери разделяют на два вида: 26 - постоянные потери; - переменные потери. Постоянные потери Рпост в двигателях постоянного тока параллельного возбуждения складываются из потерь в стали якоря Рст, создаваемых перемагничиванием сердечника и вихревыми токами, потерь в обмотке возбуждения Pв и механических потерь Pмех. Постоянные потери зависят от напряжения, приложенного к цепи якоря. От нагрузки постоянные потери не зависят. Переменные потери, напротив, зависят от нагрузки. К переменным потерям относят потери в цепи обмотки якоря Pя I я2 Rя . Постоянные потери определяют из опыта холостого хода двигателя. Мощность, потребляемая двигателем на холостом ходу P0, P0 U ( I я I в ) расходуется на потери P0 Pст Pв Pмех Pя =Pпост + Pя . Тогда 2 Pпост P0 Pя U ( I я I в ) I я0 Rя Коэффициент полезного действия двигателя постоянного тока определяется как отношение полезной мощности Р2 к затраченной P1 Р Р2 2 . Р1 Р2 Рпост Ря Цель работы 1. Изучить устройство двигателя постоянного тока. 2. Приобрести практические навыки по испытанию электродвигателя постоянного тока. 3. Исследовать способы управления частотой вращения двигателя постоянного тока. 4. Экспериментально подтвердить теоретические знания, полученные на лекциях и самостоятельных занятиях. 27 Лабораторная установка Лабораторная установка (на рис. 2-7 приведена ее электрическая схема) включает в себя испытуемый двигатель постоянного тока типа КП-560А, выпрямитель, контрольноизмерительные приборы, коммутационные аппараты и нагрузочное устройство. Паспортные данные исследуемого электродвигателя: Номинальное напряжение питания цепи якоря Uя.н Номинальное напряжение питания цепи обмотки возбуждения Uв.н…………………………………... Номинальный ток якоря Iя.н Номинальный ток обмотки возбуждения Iв.н Номинальная мощность Рн ……………………….. Номинальная частота вращения ротора nн ………. Коэффициент полезного действия ηн……………... 24 В, 24 В, 5,6 А 0,56 А 60 Вт 5000 об/мин 39 % Напряжение к испытуемому двигателю подводится от автотрансформатора ЛАТР через выпрямитель Выпр.2. Величина подводимого напряжения измеряется с помощью вольтметра постоянного тока pV c пределом измерения 30 В. Ток в обмотке возбуждения измеряется амперметром постоянного тока pA1 на 1А. Ток в обмотке якоря измеряется мультиметром pA2 (диапазон измерения постоянного тока 20А). Нагрузкой испытуемого электродвигателя служит электромагнитный тормоз ЭТ. Питание обмоток тормоза производится через 28 Рис. 2-7. Электрическая схема испытаний электродвигателя постоянного тока параллельного возбуждения 29 выпрямитель Выпр.1 и магазин емкостей С от сети напряжением 220 В. Пределы изменения ёмкости от 0 до 3,5 мкФ. Частота вращения измеряется тахометром ИТ5-Ч. Программа работы 1. Изучить устройство машин постоянного тока и особенности конструкции испытуемого электродвигателя. 2. Произвести пуск электродвигателя и его реверсирование. 3. Снять скоростные характеристики двигателя при различных напряжениях на якоре. Построить скоростные характеристики и определить значение сопротивления якоря. 4. На основании полученных данных произвести расчёт: - потребляемой двигателем мощности из сети Р1, - постоянных и переменных потерь, - момента сопротивления (полезного момента) на валу якоря Мс, - полезной мощности на валу двигателя Р2 , - коэффициента полезного действия . 5. Построить рабочие характеристики двигателя постоянного тока параллельного возбуждения в одной координатной системе: М, Iя, n и η в функции полезной мощности Р2 при Uн=24 В. 6. Построить семейство механических характеристик двигателя постоянного тока параллельного возбуждения n=f(М) при Uя=12; 18; 24 В. 7. Сделать выводы о проделанной работе. Порядок выполнения работы 1. Используя стенд «Машины постоянного тока» изучить устройство двигателей постоянного тока. 2. Записать в бланк отчёта технические данные испытуемого электродвигателя и приборов. 3. Собрать электрическую схему (рис. 2-7) и предъявить её для проверки инженеру. 4. После получения разрешения преподавателя на проведение опытов включить пакетным выключателем питание стенда. 5. Плавно поворачивая рукоятку автотрансформатора 30 произвести пуск электродвигателя и установить соответствующее значение напряжения якорной цепи (12, 18 или 24 В). 6. При заданном напряжении измерить и записать в табл.1 данные опыта холостого хода электродвигателя при Мс =0. 7. Снять данные необходимые для построения рабочих и механических характеристик. Для этого с помощью магазина емкостей С необходимо изменять величину тока в обмотке электромагнитного тормоза, создавая тем самым момент нагрузки на валу электродвигателя Мс. Нагрузку двигателя изменять ступенями, контролируя величину тока якоря. Ток якоря при проведении опытов не должен превышать значение 3 А. Напряжение на якоре U при увеличении нагрузки следует поддерживать постоянным. Данные измерений заносятся в табл.1 Таблица 1 1 , % Мс.расч,Нм Р2 , Вт Ря, Вт P1, Вт Вычисляемые величины Pпост, Вт n, об/мин Iв , А В Iя , А , Измеряемые величины Мс.опыт, мНм U 0 2 0 1 8 0 2 4 Частота вращения электродвигателя измеряется тахометром ИТ5-Ч. Измерение частоты вращения осуществляется настройкой тахометра по метке, закрепленной на валу ротора. Расстояние от 31 излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Плавно ориентируя излучатель тахометра по отношению к вращающейся метке добиться одновременного свечения светодиодов: красного – непрерывно, а зеленого – с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин). 8. Рассчитать сопротивление обмотки якоря по экспериментальным данным. 8.1. По результатам испытаний построить в одной системе координат семейство скоростных характеристик n=f(Iя) при U= const для трех значений напряжений (12 В, 18 В, 24 В). 8.2. Продолжить полученные характеристики до пересечения с осью ординат и определить частоту вращения идеального холостого хода n0. 8.3. В соответствии с рис. 2-8 определить для значения тока якоря Iя=3 А величину n=n0-n, где n принять равным значению скорости вращения при Iя=3 А. Рис. 2-8. Определение частоты вращения идеального холостого хода и величины n по скоростной характеристике двигателя постоянного тока. 8.4. Рассчитать характеристики, Ом: сопротивление Rяi = якоря Ui (n0 - n) Ui n = . I я n0 I яn0 32 для каждой Для получения сопротивление якоря усреднить полученные значения R Rя2 Rя3 Rя = я1 . 3 9. По данным, полученным при снятии рабочих характеристик, рассчитывают следующие величины: 9.1. Мощность постоянных потерь, определяемая на холостом ходу, для значений напряжений якоря 24В, 18В, 12В Pпост U ( I я I в ) I я2 Rя 9.2. Мощность, потребляемую двигателем из сети, Вт Р1=U(Iя + Iв); 9.3. Потери мощности в якорной цепи, Вт Ря = Iя2Rя, 9.4. Полезная мощность на валу якоря, Вт Р2 = Р1 –Ря – Рпост; 9.5. Полезный момент нагрузки на валу якоря, Нм P2 ; Мс 0,105 n 9.6.Коэффициент полезного действия двигателя η, % Р Р2 2 . Р1 Р2 Рпост Ря 10. Произвести реверс (изменение направления вращения) двигателя. Для этого, уменьшить до нуля питающее напряжение, поворачивая рукоятку ЛАТРа в крайнее положения против часовой стрелки, отключить цепь якоря с помощью пакетного выключателя. Изменить полярность подключения якоря к выпрямителю Выпр.1. Включить пакетный выключатель. Плавно поворачивая рукоятку автотрансформатора подать питающее напряжение на якорную цепь. Убедиться, что двигатель вращается в противоположную сторону. 11. Предъявить данные опыта и предварительных расчётов преподавателю и с его разрешения разобрать схему. 33 Содержание отчёта В отчёте должны быть представлены: 1. Номинальные данные испытуемого двигателя. 2. Электрическая схема установки. 3. Программа работы. 4. Результаты измерений и расчётов, необходимых для построения соответствующих характеристик двигателя, а также формулы, по которым производились расчёты. 5. Скоростные характеристики n=f(Iя), построенные по опытным данным при U=12, 18 и 24 В. 6. Механические характеристики n=f(M) при U=12, 18 и 24 В. 7. Построенные по опытным данным рабочие характеристики зависимости n=f(P2); =f(P2); Iя =f(P2); M =f(P2). Все рабочие характеристики могут быть нанесены на один график, поскольку они имеют одну и ту же независимую переменную Р2. 8. Краткие выводы по работе. Контрольные вопросы 1. Цель и программа работы. 2. На чем основан принцип действия электродвигателя постоянного тока? 3. Почему при пуске двигатели постоянного тока потребляют большой ток? 4. Что понимают под рабочими характеристиками электродвигателя и что они показывают? 5. Какова роль коллектора в машинах постоянного тока? 6. Почему уменьшается частота вращения двигателя постоянного тока при увеличении нагрузки на валу якоря? 7. Что понимают под процессом коммутации в машинах постоянного тока? 8. Как классифицируются двигатели постоянного тока по способу возбуждения? 9. Каким образом создается магнитный поток возбуждения в двигателях постоянного тока? 10. От чего зависит число оборотов двигателя постоянного тока? 34 11. Какие потери мощности существуют в двигателях постоянного тока? 12. Что такое постоянные потери в двигателях постоянного тока? Как их определяют? 13. Чем определяется вращающий момент двигателей постоянного тока? 14. Какими способами можно изменить направление вращения двигателя постоянного тока? 35 ЛАБОРАТОРНАЯ РАБОТА № 3М ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ Теоретические сведения Асинхронные двигатели – самые распространенные из всех видов электрических машин из-за их простоты, надежности, меньших в сравнении с другими машинами весогабаритных показателей, стоимости и иных достоинств. С их помощью приводят в движение краны, лебедки, эскалаторы, насосы, вентиляторы, конвейеры и др. механизмы. Асинхронные двигатели производят мощностью от нескольких десятков ватт до 15000кВт при напряжениях обмотки статора до 6кВ. Асинхронные двигатели состоят из двух частей: неподвижной части – статора и подвижной части – ротора, разделенных воздушным зазором (рис. 3-1). Сердечник статора асинхронного двигателя представляет собой полый цилиндр, собранный из штампованных пластин электротехнической стали толщиной 0,35-0,5мм. В пазы на внутренней поверхности статора укладываются проводники обмотки статора. Обмотку статора выполняют в виде одно- или многовитковых катушек, имеющих одинаковые размеры. Каждая фаза статорной обмотки состоит из нескольких последовательно включенных катушек, находящихся в соседних пазах. Обмотки статора питаются от сети трехфазного переменного тока. Сердечник статора закреплен на станине двигателя. К станине болтами прикрепляют боковые щиты с помещенными на них подшипниками, на которые опирается вал ротора. Ротор асинхронного двигателя набирается из штампованных пластин электротехнической стали, которые запрессовываются на вал, входящий при сборке машины в боковые подшипниковые щиты. В пазах на внешней поверхности цилиндрического ротора располагается обмотка ротора. Различают два вида обмоток ротора: короткозамкнутую обмотку и фазную обмотку. В настоящее время асинхронные двигатели выполняют преимущественно с короткозамкнутым ротором и лишь при больших мощностях и специальных случаях используют 36 фазную обмотку ротора. Двигатели с короткозамкнутым ротором проще и надежнее в эксплуатации, значительно дешевле, чем двигатели с фазным ротором. Однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами. Короткозамкнутая обмотка имеет вид беличьей клетки и состоит из толстых проводящих стержней, соединенных по торцам кольцами. Короткозамкнутую обмотку изготавливают путем заливки расплавленного металла (меди или алюминия) в пазы ротора. Одновременно с обмоткой ротора отливаются лопасти вентилятора, обеспечивающие охлаждение машины. Рис. 3-1 Устройство асинхронного двигателя с короткозамкнутым ротором: 1- статор, 2 - сердечник статора, 3- ротор, 4 – подшипниковые щиты, 5 – лопасти вентилятора. Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля и законов электротехники. При включении в сеть трехфазного тока в статоре образуется вращающееся магнитное поле. Скорость вращения поля n1 37 (синхронная скорость) определяется соотношением n1=60f/p, где f – частота питающей сети, p – число пар магнитных полюсов. Силовые линии вращающегося магнитного поля пересекают проводники обмотки ротора. При этом, согласно закону электромагнитной индукции, в обмотке ротора индуцируется ЭДС, пропорциональная частоте пересечения силовых линий. Под воздействием индуцированной ЭДС в короткозамкнутой обмотке возникают значительные токи. В соответствии с законом Ампера, на проводники с током, находящиеся в магнитном поле, действуют механические силы, которые по принципу Ленца стремятся устранить причину, вызывающую индуцированный ток, т.е. пересечение стержней обмотки ротора силовыми линиями. Таким образом, возникшие механические силы будут раскручивать ротор в направлении вращения поля, уменьшая скорость пересечения стержней обмотки силовыми линиями (рис. 3-2). Рис. 3-2. Принцип действия асинхронного двигателя Скорость вращения ротора n2, в обычных условиях всегда меньше скорости вращения поля статора n1. То есть, в асинхронных двигателях ротор вращается асинхронно с полем. Если ротор будет вращаться с частотой вращения поля, то сила, вызывающая его 38 вращение, станет равной нулю, и силы трения и полезная нагрузка на вал двигателя затормозят ротор. Разность скоростей вращения поля и ротора определяются нагрузкой на вал, а при отсутствии нагрузки силами трения. Следовательно, наибольшая скорость вращения достигается при отсутствии нагрузки на валу двигателя. Частоту вращения магнитного поля относительно ротора, выраженную в долях частоты вращения поля называют скольжением s n n s 1 2. n1 Скольжение зависит от нагрузки двигателя. При увеличении механической нагрузки асинхронного двигателя тормозящий момент становится больше вращающего и скольжение возрастает. Увеличение скольжения вызывает возрастание ЭДС и токов в обмотке ротора, благодаря чему увеличивается вращающий момент и восстанавливается динамическое равновесие. Таким образом, увеличение нагрузки вызывает увеличение скольжения. При номинальной нагрузке его значение составляет около 0,05 у машин небольшой мощности и около 0,02 у мощных машин. Вращающий момент, развиваемый двигателем, зависит от скольжения (рис. 3-3, а). Рис. 3-3. Зависимость вращающего момента на валу асинхронного двигателя от скольжения (а) и механическая характеристика (б). На этой зависимости различаются два участка: устойчивый режим работы от s=0 до критического скольжения sкр и неустойчивый режим работы двигателя от s=sкр до s=1. Устойчивая работа двигателя возможна только на первом участке. Мmax – максимальный вращающий момент, развиваемый 39 двигателем. Если тормозной момент превысит это значение, динамическое равновесие вращающего и тормозящего момента нарушается и двигатель останавливается вследствие превышения тормозного момента над вращающим. Механической характеристикой асинхронного двигателя называется зависимость частоты вращения ротора n2 от момента на валу при неизменных значениях напряжения и частоты питающей сети (рис. 3-3, б). С увеличением момента нагрузки частота вращения двигателя уменьшается незначительно. Такую зависимость называют жесткой. При перегрузке свыше максимального момента двигатель останавливается. Изменение направления вращения ротора называется реверсированием. Для обеспечения реверсирования необходимо изменить направление вращения магнитного поля, т.е. изменить порядок чередования фаз. Для реверсирования асинхронного двигателя достаточно поменять местами две любые фазы на клеммной колодке двигателя. Подводимая к обмотке статора мощность P1 расходуется на полезную мощность на валу P2 и потери. Потери в обмотке статора (потери в меди) Рм1 зависят от тока, протекающего в обмотке статора, и рассчитываются по выражению Рм1 = 3 I 12 Rф, где I1 – ток фазы статора, а Rф – сопротивление фазной обмотки. Потери в магнитопроводе (потери в стали) Рст определяются из опыта холостого хода и принимаются равными половине постоянных потерь, т. е. Рст = 0,5 (Р0 – 3 I102 Rф), где Р0 и I10 – активная мощность и ток, потребляемые АД в режиме холостого хода, Р0 = 3Рф0. Для определения вращающего момента асинхронного двигателя M необходимо определить электромагнитную мощность Рэм, передаваемую ротору Рэм = Р1 – Рм1 – Рст . 40 Тогда М Рэм , 0,105 n1 где n1 = 1500 об/мин – синхронная частота вращения. Потери в обмотке ротора Рм2 определяются по формуле Рм2 = sРэм. Полезная мощность на валу Р2 рассчитывается по формуле Р2 = 0,105Мсn2, где Мс – момент сопротивления на валу (момент нагрузки). Оценка энергетических характеристик асинхронного двигателя базируется на энергетической диаграмме. На рис. 3-4 показана энергетическая диаграмма асинхронного двигателя. Рис. 3-4. Вид энергетической диаграммы асинхронного двигателя Лабораторный эксперимент Цель работы 1. Ознакомиться с конструктивными элементами асинхронного электродвигателя (АД). 2. Приобрести практические навыки по использованию и испытанию асинхронных двигателей. 3. Экспериментально подтвердить теоретические знания, 41 полученные на лекциях и самостоятельных занятиях. Лабораторная установка Лабораторная установка (на рис. 3-5 приведена ее электрическая схема) включает в себя испытуемый трехфазный асинхронный двигатель с короткозамкнутым ротором типа АОЛ 011/4, который питается от сети через трехполюсный пакетный выключатель S, контрольноизмерительные приборы, коммутационные аппараты и нагрузочное устройство. Паспортные данные исследуемого электродвигателя: Номинальные напряжения при частоте 50 Гц Номинальная мощность Рн Номинальная частота вращения ротора n2н Коэффициент полезного действия ηн 220 В(∆)/380 В (Υ) 50 Вт 1390 об/мин 43 % Номинальные напряжения исследуемого трехфазного асинхронного электродвигателя составляют 220 В(∆)/380 В (Υ). В лабораторных установках по условиям техники безопасности максимальное напряжение не должно превышать 220 В. Поэтому в схеме лабораторной установки обмотки двигателя соединяются в «звезду». В результате фазное напряжение будет отличаться от паспортного значения в 3 раз в меньшую сторону, что приводит к искажению остальных параметров и характеристик. В качестве нагрузочного устройства в работе использован электромагнитный тормоз (ЭТ). Электромагнитный тормоз предназначен для создания тормозного момента на валу электродвигателя. Он состоит из электромагнитной системы, связанной с противовесом и системой отсчета по шкале, а также металлического диска, жестко связанного с валом электродвигателя. Питание электромагнитной системы осуществляется постоянным током от выпрямителя. При протекании постоянного тока в катушках электромагнитной системы возникает постоянное магнитное поле. Во вращающемся диске при пересечении магнитным полем наводятся вихревые токи. Взаимодействие постоянного магнитного поля и вихревых токов в диске вызывает тормозной момент, и 42 электромагнитная система отклоняется на определенный угол, фиксируя величину момента по шкале. Частота вращения ротора электродвигателя n2 определяется с помощью электронного тахометра ИТ5-Ч. Измерение частоты вращения осуществляется настройкой тахометра по метке, закрепленной на валу ротора. Расстояние от излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Плавно ориентируя излучатель тахометра по отношению к вращающейся метке, добиться одновременного свечения светодиодов: красного – непрерывно, а зеленого – с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин). Правильность выполненных измерений подтверждает соответствие (близкое значение) измеренной и синхронной частоты вращения ротора (n1 = 1500 об/мин). Программа работы 1. Изучить особенности конструкции и способы подключения трехфазных асинхронных двигателей с короткозамкнутым ротором. 2. Осуществить пуск, реверс и остановку трехфазного асинхронного двигателя с короткозамкнутым ротором. 3. Экспериментально определить данные, необходимые для построения механической и рабочих характеристик трехфазного асинхронного двигателя с короткозамкнутым ротором. 4. Построить по опытным данным: – механическую характеристику n2= f(M); – рабочие характеристики n2, s, M, Iф, cos в функции от Р2; – график зависимости вращающего момента от скольжения M = f(s). 5. Сделать выводы по работе. Сопоставить полученные результаты с известными из теоретического курса данными по асинхронным двигателям. 43 Рис. 3-5. Электрическая схема испытания трехфазного асинхронного двигателя с короткозамкнутым ротором: S – пакетный выключатель; АД – асинхронный двигатель; PW – ваттметр; PA – мультиметр в цепи статора АД; PV – вольтметр в цепи статора АД; Выпр. – выпрямитель; ЭТ – электромагнитный тормоз с обмоткой; ФТ – фототахометр 44 Порядок выполнения работы 1. Ознакомиться с электрической схемой, приборами, аппаратами и другим оборудованием экспериментальной установки. Записать паспортные данные асинхронного двигателя в бланк отчета. 2. Собрать электрическую схему экспериментальной установки для испытания асинхронного двигателя (рис. 3-5) и предъявить для проверки инженеру. При проведении испытаний асинхронного двигателя в схеме используются приборы: мультиметр РA (диапазон измерения переменного тока 20 А) , вольтметр PV на 150 В, ваттметр РW на 150 В и 0,5 А. 3. После проверки правильности соединений и получения разрешения преподавателя на проведение опытов осуществить прямой пуск АД. Для осуществления прямого пуска АД необходимо подать питание на электродвигатель, замкнув цепь выключателем S. Для остановки двигателя необходимо его отключить от сети с помощью выключателя S. 4. Изменить направление вращения электродвигателя (реверс). С этой целью при обесточенной электрической схеме поменять местами линейные провода любых двух фаз (например, А и В или A и C или В и С) двигателя и потом подать питание выключателем S. Убедиться, что электродвигатель изменил направление вращения ротора на противоположное. 5. Провести испытание электродвигателя под нагрузкой при соединении обмоток фаз статора звездой. Нагрузка на валу электродвигателя создается с помощью электромагнитного тормоза. При испытании асинхронного двигателя под нагрузкой проводится серия опытов. Первый опыт проводится при отсутствии нагрузки на валу двигателя, т. е. в режиме холостого хода (ток в обмотке электромагнитного тормоза отсутствует). Затем включается электромагнитный тормоз и при регулировании величины тока в обмотке проводится еще несколько опытов. Максимальное значение тока I1, потребляемого двигателем, должно соответствовать номинальному паспортному значению или полному отклонению электромагнитного тормоза. Показания приборов при каждом опыте записать в табл. 1. 52 , % сos Р2, Вт s, % расч, Вт Hм Нм Мс M, Hм Рэм, P1, Вт Вычисляемые величины S, ВА оп, Mс n2,об/мин РФ, Bт Измеряемые величины I1, А Номер опыта Таблица 1 0 1 2 3 4 5 6 6. На основании данных измерений для каждого опыта вычислить: – полную мощность, потребляемую двигателем, ВА S = 3U1I1; – активную мощность, потребляемую двигателем, Вт P1 = 3 Pф, где Рф – фазная мощность, измеренная с помощью ваттметра; – потери мощности в обмотке статора, Вт Рм1 = 3 I12 Rф , где Rф = 200 Oм – сопротивление фазы обмотки статора; – потери в стали магнитопровода, Вт 2 Рст = 0,5(3Рф0 – 3 I10 Rф ), где Рф0 – активная мощность, потребляемая фазой АД в режиме холостого хода (опыт 1); – скольжение, % 53 s n1 n2 100 ; n1 – электромагнитную мощность, передаваемую на ротор, Вт Рэм = Р1 – Рм1 – Рст; – потери в обмотке ротора Рм2 Рм2 sРэм ; – вращающий момент асинхронного двигателя, Нм М Рэм ; 0,105 n1 – полезную мощность на валу двигателя P2 = 0,1M с расч n2; – момент сопротивления нагрузки на валу M с расч = М – М0, где M0 – момент холостого хода двигателя, определяемый из опыта холостого хода (1-я строка табл. 1), Hм: M0 P0мех 0,105n20 , где P0мех = Рст; n20 – частота вращения асинхронного двигателя на холостом ходу (опыт № 1, табл. 1); – механическая мощность, передаваемая ротору, Рмех = Рэм – Рм2; – потери трения, принимаемые равными половине постоянных потерь (потерям в стали) Ртр = Рст; – коэффициент полезного действия двигателя, % 54 P2 100; P1 – коэффициент мощности cos Рф U1 I 1 . Построение энергетической диаграммы производится для максимальной нагрузки (опыт № 6, табл. 1). 7. Данные, необходимые для построения энергетической диаграммы, занести в табл. 2. Таблица 2 P1, Вт Pст, Вт Pэм, Вт Pм1, Вт Pм2, Вт Pмех, Вт Pтр, Вт P2, Вт 8. Предъявить данные опытов для проверки преподавателю и после получения разрешения разобрать схему. Привести рабочее место в исходное состояние и предъявить инженеру. 9. Построить по опытным данным: а) механическую характеристику n2 = f(M); б) рабочие характеристики n2, s, M, I1, cos и η в функции от P2; в) график зависимости вращающего момента от скольжения М = f(s). 10. Сделать выводы о проделанной работе. Сопоставить полученные результаты с паспортными данными исследованного двигателя. Содержание отчета В отчете должны быть представлены: 1. Цель работы. 2. Номинальные данные исследованного асинхронного электродвигателя АОЛ 011/4. 3. Электрическая схема лабораторной установки по испытанию асинхронного двигателя. 4. Таблицы с измеряемыми и вычисляемыми величинами. 55 5. Рабочие характеристики асинхронного двигателя в одной координатной системе: n2; s, M, Iф; cos и η в функции полезной мощности Р2. 6. Зависимость величины момента на валу двигателя от скольжения M = f (s). 7. Механическая характеристика асинхронного двигателя n2 = f (M). 8. Использованные формулы. 9. Краткие выводы. Сопоставление опытных и расчетных данных. Контрольные вопросы 1. Цель и порядок выполнения работы. 2. Как устроен трехфазный асинхронный двигатель с короткозамкнутым ротором? 3. Как обозначаются начала и концы фаз обмотки статора? 4. Принцип действия асинхронного двигателя. Как создается вращающееся магнитное поле в статоре асинхронного двигателя? 5. Как изменить направление вращения трехфазного асинхронного двигателя? 6. Какую зависимость называют механической характеристикой? 7. Как изменяется коэффициент мощности асинхронного двигателя при переходе от режима холостого хода к работе с номинальной нагрузкой на валу? 8. Почему при перемене двух фаз изменяется направление вращения трехфазного асинхронного двигателя? 9. Синхронная частота вращения. По какой формуле она рассчитывается? 10. Понятие скольжения асинхронного двигателя. 11. Как зависит вращающий момент от скольжения? 12. Виды потерь в статоре и роторе асинхронного двигателя и от каких факторов они зависят? 13. Как зависит КПД от полезной мощности? 14. Как влияет величина питающего напряжения на величину вращающего момента? 56 ЛАБОРАТОРНАЯ РАБОТА № 4М ИЗУЧЕНИЕ КОНСТРУКЦИИ И АЛГОРИТМОВ НАСТРОЙКИ УНИВЕРСАЛЬНОГО СТЕНДА ДЛЯ ИССЛЕДОВАНИЯ СПОСОБОВ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ Теоретические сведения Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления в цепи ротора, изменение напряжения, подводимого к обмотке статора двигателя, переключение числа пар полюсов, а также изменение частоты питающего напряжения. Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора возможно только для двигателя с фазным ротором. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Но такой способ регулирования сопряжен с существенным снижением пускового и критического момента Регулирование частоты вращения асинхронного двигателя переключением числа пар полюсов можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что путем изменения частоты питающего напряжения при неизменном числе пар полюсов р можно изменять скорость вращения магнитного поля статора. При реализации этого способа управления используется зависимость синхронной скорости n1 от частоты источника питания fп: 60 f п , n1 р где р – число пар фиктивных полюсов. 57 Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Частота вращения ротора двигателя не совпадает с частотой вращения магнитного поля. Она всегда несколько меньше и определяется выражением n2 = n1 (1 – s), где s – скольжение. Скольжение зависит от нагрузки на двигатель. При увеличении нагрузки скольжение также увеличивается, однако величина его в диапазоне рабочих нагрузок остается малой. При номинальном моменте скольжение составляет s = 0,03–0,12. Чтобы изменить частоту вращения асинхронного двигателя, изменяют частоту напряжения, питающего его статорные обмотки. Для регулирования частоты в современном электроприводе широко применяют преобразователи частоты (ПЧ), которые преобразуют переменный ток с постоянными значениями Uc, fc в переменный ток с регулируемыми значениями Uп, fп. Преобразователи частоты позволяют решать широкий спектр практических задач: осуществление плавного пуска и электрическое торможение двигателя, регулирование частоты вращения, реверсирования и т.п. На рис.4-1 представлена структурная схема преобразователя частоты. Питание на ПЧ подается от трехфазной или однофазной сети промышленной частоты (1). Неуправляемый диодный выпрямитель (блок 2) обеспечивает питание инвертора (блок 4) и цепей управления. Выпрямленное напряжение сглаживается фильтром в блоке3. Инверторный блок (блок 4), выполненный на IGBT-модуле, формирует из постоянного напряжения блока 2 трехфазное выходное напряжение посредством широтно-импульсного модулирования (ШИМ). В обмотках двигателя (блок 5) формируется синусоидальный ток соответствующей частоты и напряжения. Контроллер 6, представленный в виде пульта управления БОП (базовая операционная панель), позволяет программировать все режимы работы ПЧ с выводом соответствующей информации на жидкокристаллический дисплей. 58 Рис.4-1. Структурная схема преобразователя частоты. Изменение частоты питающего напряжения необходимо совмещать с регулированием напряжения. Если напряжение сети U1 постоянно, то при изменении частоты напряжения будет изменяться магнитный поток в соответствии выражением U Фm 1 . CE f То есть при уменьшении частоты будет возрастать магнитный поток. При увеличении магнитного потока магнитная система перейдет в режим магнитного насыщения, что приведет к увеличению тока холостого хода и потерь в стали магнитопровода. При уменьшении потока возрастет ток ротора, что приведет к его повышенному нагреву и увеличению потерь мощности. Существуют различные способы регулирования напряжения и частоты в зависимости от требований, предъявляемых к двигателю. Если тормозной момент на валу двигателя не изменяется, то частоту и напряжение изменяют так, чтобы магнитный поток в машине оставался неизменным, т.е. подводимое к двигателю напряжение необходимо изменять пропорционально его частоте, чтобы отношение напряжения к частоте оставалось постоянным (U/f=const). Такой способ регулирования двигателя, когда напряжение меняется прямо пропорционально частоте называется линейное 59 управление. Механические характеристики для этого случая выглядят так, как это показано на рис. 4-2, а. При этом критический (максимальный) момент двигателя Мmax остается неизменным. Если к асинхронному электроприводу предъявляются требования по энергосбережению, то используется способ регулирования, при котором напряжение изменяется незначительно в функции U2/f=const (квадратичное управление). В этом случае критический момент изменяется, но остается примерно постоянной мощность. Механические характеристики в этом случае имеют вид, представленный на рис. 4-2, б. Рис. 4-2 Механические характеристики асинхронного двигателя при различных способах управления: а - линейное управление; б – квадратичное управление. В некоторых случаях применяют специальное (многоточечное) программирование. Лабораторный эксперимент Цель работы Ознакомиться с современными методами регулирования частоты в асинхронном электроприводе. Приобрести практические навыки по программированию преобразователей частоты. Изучить методики определения постоянных потерь в 60 асинхронном электродвигателе при частотном управлении. Экспериментально подтвердить теоретические полученные на лекциях и практических занятиях. знания, Лабораторная установка В основу универсального лабораторного стенда положена комплектная установка Сименс G110. Стенд содержит: панель, на которой смонтированы трехфазный асинхронный электродвигатель, преобразователь частоты, разъем для подключения установки к однофазной сети, переключатели аналого-цифрового управления и разъемы для подключения установки в локальную компьютерную сеть. На рис. 4-3 показан общий вид универсального стенда, с расположенным на нем оборудованием. Рис. 4-3 Внешний вид универсального стенда для исследования способов управления асинхронным двигателем 1 – преобразователь частоты типа G110 со встроенным пультом управления БОП; 2 – трехфазный асинхронный электродвигатель; 3 – разъем для подключения компьютера RS485; 4 – разъем для подключения к локальной 61 сети; 5 – элементы ручного управления электродвигателем; 6 – нагрузочное устройство электродвигателя. Нагрузка на валу исследуемого электродвигателя, имитирующая статический момент сопротивления приводного механизма, создается фрикционным устройством, позволяющим изменять ее в широких пределах. Программирование параметров работы преобразователя и управление асинхронным двигателем осуществляется с помощью пульта управления БОП (базовая операционная панель). На рис. 4-4 показан внешний вид пульта управления (БОП) преобразователем частоты, позволяющего программировать все режимы работы электродвигателя. Рис. 4-4. Внешний вид панели пульта управления преобразователем частоты. Назначение кнопок пульта управления: I – пуск; 0 - стоп; FN(длительное нажатие – вызов программируемого параметра); Р – вызов номера программируемого параметра; ▲ увеличение программируемого параметра; ▼ - уменьшение программируемого параметра; JOG – переход в шаговый режим; - изменение направления вращения (реверс). Паспортные данные исследуемого электродвигателя: Номинальные напряжения при частоте 50 Гц 220 В(∆)/ 380 В (Υ) Номинальная мощность Рн ……………………. 120 Вт Номинальный ток……………………………… 0,75/0,43 А 62 Номинальная частота вращения ротора n2н …. 1365 об/мин Коэффициент полезного действия ηн ……………… 65 % Коэффициент мощности……………………....... 0,65 Электрическая схема исследования асинхронного двигателя представлена на рис. 4-5. Поскольку в лаборатории по условиям техники безопасности допустимое на стендах напряжение должно быть не выше 220 В, то обмотки статора электродвигателя должны быть включены по схеме «треугольник». Измерение токов, потребляемых обмотками двигателя и напряжений, подаваемых с помощью преобразователя, производится с помощью преобразователя частоты. Мощность, потребляемую трехфазным асинхронным двигателем, измеряется методом двух ваттметров. Схема содержит два ваттметра PW1 и PW2.Токовые обмотки ваттметров включаются на 1 А, обмотки напряжения на 300 В. Частота вращения электродвигателя измеряется фототахометром ИТ5-Ч. Программа работы Ознакомиться с основными элементами универсального стенда и их назначением. Изучить основные команды и алгоритмы настройки преобразователя частоты. Произвести программирование выводимых на дисплей параметров работы двигателя, режимов работы и режимов управления преобразователем частоты. Произвести испытания двигателя на холостом ходу при различных частотах питающего напряжения для линейного и квадратичного способов регулирования частоты. Произвести расчет постоянных потерь в двигателе для различных способов регулирования. 63 Рис. 4-5. Электрическая схема исследования асинхронного частотно-регулируемого электропривода 64 Порядок работы на универсальном стенде 1. Подача питания на стенд осуществляется от однофазной сети переменного тока напряжением 220 В и частотой 50 Гц с помощью шнура, соединяющего соответствующую розетку и стенд. 2. Включение стенда производится выключателем S со встроенной индикацией (зеленая лампа), который находится на левой стенке стенда. 3. Дальнейшее управление стендом производится кнопками пульта управления БОП, смонтированного на преобразователе частоты. 4. Для проведения испытаний собирается электрическая схема, показанная на рис. 4-5 6. После проверки схемы преподавателем (или инженером лаборатории) можно приступать к испытаниям в соответствии с программой работ. Последовательность программирования ПЧ Работа универсального стенда начинается с программирования преобразователя частоты на определенный режим работы. В преобразователе частоты можно запрограммировать: вывод на дисплей электрических параметров схемы, которые измеряются самим преобразователем в процессе работы двигателя, режимы работы преобразователя; режимы управления преобразователем; режимы разгона и торможения двигателя и пр. Программирование производится с помощью пульта управления БОП: Выключателем S подается питание на универсальный стенд. При этом загорается встроенный в S зеленый индикатор, а на ЖК дисплее пульта появляется первая информация, соответствующая ждущему режиму. Программирование преобразователя частоты производится в ждущем режиме. Программирование осуществляется подачей соответствующей команды и выбором необходимого для работы параметра. Процесс 65 программирования (настройки) производится при помощи кнопок FN, ▲, ▼ и P. Последовательность действий для программирования одного параметра показана на диаграмме (рис. 4-6). Доступ к программируемым параметрам осуществляется с помощью кнопки – Р. На диаграмме использованы следующие обозначения: r0000 – чтение адреса параметра; Рхххх – адрес (номер) параметра; Р – значение параметра. Нажатие кнопок ▲,▼ приводит к увеличение/уменьшение показываемой величины. После первого нажатия кнопки Р на дисплее появляется r0000. Затем нажатием кнопки ▲ вызывается соответствующая команда - Рхххх (например, Р1300 – что соответствует способу регулирования частоты). Повторным нажатием кнопки Р выводится существующее значение параметра (например, 2, что соответствует квадратичной зависимости изменения напряжения U2/f=const). Кнопками ▲ или ▼ устанавливается требуемое значение параметра (в соответствии с нижеприведенными значениями). Программирование вывода измеряемых параметров на дисплей. На дисплей пульта управления БОП выводятся параметры работы преобразователя (текущее значение частоты, выходное напряжение, напряжение на выходе выпрямителя, ток, потребляемый электродвигателем), которые подлежат измерению и записи в таблицу измерений. Команды для Параметры, измеряемые преобразователем и программирования вывода выводимые на дисплей на дисплей параметров схемы Р0005=21 Выходная частота переменного тока, Гц Р0005=25 Выходное линейное напряжение переменного тока, В (a …..V) Р0005=26 Р0005=27 Напряжение промежуточной цепи постоянного тока на выходе выпрямителя, В (d…V). Величина линейного тока, потребляемого двигателем, А 66 Для перехода в режим программирования следует набрать команду Р0005→ выбор параметров для показа на дисплее. Затем с помощью кнопок ▲, ▼ ввести команду, соответствующую требуемому параметру. Рис. 4-6. Порядок программирования преобразователя частоты 67 Перечень основных команд для программирования режимов работы преобразователя частоты: 1. Формирование закона управления (Р1300). Различные виды управления управляют соотношением между частотой двигателя и напряжением, подаваемым статическим преобразователем на обмотки статора. Линейное управление - U/f =const Р1300=0. Линейный закон регулирования частоты позволяет сохранить неизменное значение максимального вращающего момента Мmax=const); Квадратичный закон регулирования - U2/f=const Р1300=2. Квадратичный закон управления применяется для изменяемых нагрузок момента для решение задач энергосбережения. 2. Задание способа управления преобразователем частоты (Р0700): Р0700=1 – управление с помощью пульта БОП, (пуск, остановка, реверс, шаговый режим); Р0700= 5 – управление с помощью компьютера. 3. Установка минимальной частота питания электродвигателя(Р1080). Выставленное на заводе- изготовителе значение по умолчанию fmin=5 Гц. 4. Установка максимальной частота питания (Р1082). По условиям механической прочности электродвигателя максимальная частота питания не должна превышать 80 Гц. 5. Задание времени пуска (разбега) до заданной частоты вращения (Р1120): Допустимые значения от 0 с до 650с. 6. Установка времени торможения до полной остановки (Р1121): Допустимые значения от 0 с до 650с. 7. Окончание программирования (Р3900= 1). Закончив программирование ПЧ, переходят к настройке работы ПЧ в системе управления электродвигателем. Порядок выполнения работы 1.Полностью освободить нагрузочное устройство: убедиться, 68 что фрикционный механизм – максимально ослаблен и не создает трения на шкиве. 2.Собрать схему рис. 4-5 и предъявить ее для проверки преподавателю или инженеру лаборатории. После проверки правильности соединений и инструктажа о порядке работы с преобразователем частоты ПЧ студенты получают разрешение на работу с установкой. 3.Выключателем S со встроенной индикацией подать питание на стенд. 4.Нажать кнопку I и произвести испытание преобразователя частоты ПЧ (при условии ранее выполненного программирования) при управление от БОП, с индикацией напряжения постоянного и переменного тока, частоты и величины потребляемого тока. Способ изменения частоты – линейный (U/f = const → Р1300 =0). 5. Темп запуска и торможения электродвигателя установить 5с. 6. Завершив программирование преобразователя, запустить электродвигатель с минимальной частотой питания – 5Гц. 7. Произвести испытания электродвигателя на холостом ходу (ослабленном шкиву) при различных частотах, изменяя частоту с помощью кнопки ▲+. Примечание. Измерение частоты вращения АД n2 осуществляется настройкой тахометра на метку, закрепленную на валу нагрузочного устройства. Расстояние от излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Ориентируя излучатель тахометра по отношению к вращающейся метке, следует добиться одновременного свечения светодиодов: красного – непрерывно и зеленого – непрерывно или с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин). Синхронная скорость вращения, исследуемого АД (р = 2) определяется выражением 60 f п n1 30 f п , об/мин, p где fп – частота источника питания. 69 Правильность выполненных измерений проверяется соответствием (близкое значение) измеренной и синхронной частоты вращения n1 (например, 1500 об/мин для fп = 50 Гц, 900 об/мин для fп = 30 Гц, 600 об/мин для fп = 20 Гц и т.д.). Результаты записать в таблицу №1. Значения измеряемых параметров схемы I10; U10; n20; P10, соответствуют измерениям при отсутствии нагрузки на валу электродвигателя (холостой ход двигателя). Таблица 1 1 2 3 4 5 Рпост, Вт U/f Рм1, Вт Вычислено P10, Вт сos φ Измерено fп, Гц n1, об/мин n20, об/мин I10, A U10, B Pw1, Вт Pw2, Вт S, BA Номе р опыт а 10 20 30 40 50 Мощность, измеряемую ваттметрами, следует заносить с учетом знака. При низких значениях коэффициента мощности показания ваттметра pW2 могут иметь отрицательные значения. После выполнения всех измерений предъявить результаты преподавателю. 8. Произвести аналогичные измерения при квадратичном законе управления (U2/f=const), запрограммировав значение Р1300 =22. Результаты записать в таблицу №2. После выполнения всех измерений предъявить результаты преподавателю. 2 Измерения по п.8 выполняют по указанию преподавателя 70 Таблица 2 1 2 3 4 5 Рпост, Вт U2/f Рм1, Вт Вычислено S, BA P10, Вт сos φ Измерено fп, Гц n1 , об/мин n20, об/мин I10, A U10, B Pw1, Вт Pw2, Вт Номе р опыт а 10 20 30 40 50 9. На основании выполненных измерений вычислить: – полную мощность, потребляемую асинхронным двигателем, ВА S 3I10U10 ; – активную мощность асинхронного двигателя, Вт P10 PW1 PW 2 ; – коэффициент мощности P cosφ 10 ; S – потери в обмотках статора двигателя (переменные потери), Вт 2 Pм1 = 1,5 I10 R, где R – сопротивление обмотки статора, измеренное между двумя фазами (значение R указано на стенде); – постоянные потери в двигателе для каждой частоты питания fп (потери в стали магнитопровода и механические потери), Вт Рпост = Р10 – Рм1; 11. Построить графики I10 = f(fп), cosφ = f(fп), U10 = f(fп), n20 = f(fп) и Рст (fп). Содержание отчета В отчете должны быть представлены: 1. Номинальные данные асинхронного 71 двигателя преобразователя частоты и электроизмерительных приборов. 2. Электрическая схема лабораторной установки. 3. Результаты программирования преобразователя частоты. 4. Таблица с результатами измерений и вычислений. 5. Графики зависимостей I10 = f(fп), cosφ= f(fп), U10= f(fп), n20 = f(fп ) и Рпост (fп) для линейного и квадратичного способа регулирования и их анализ. 6. Использованные для расчетов формулы. 7. Краткие выводы о проделанной работе. Контрольные вопросы 1.Для каких целей применяют преобразователи частоты ПЧ? 2. Из каких основных блоков состоит преобразователь частоты? 3. Какие функции выполняет пульт управления БОП? 4. Какие параметры схемы выводятся на дисплей пульта управления БОП? 5. Какие три основных закона регулирования напряжения и частоты применяют в современных преобразователях частоты? 6. Что такое широтно-импульсное модулирование и для чего оно применяется в ПЧ? 7. В чем заключается смысл измерения мощности в трехфазной установке методом двух ваттметров? 8. В каких случаях при измерениях мощности двумя ваттметрами один из них показывает отрицательное значение? 9. Что такое постоянные потери мощности в асинхронном двигателе и как их измерить? 10. Что такое переменные потери мощности в электродвигателе и как их рассчитать? 11. Почему при работе асинхронного двигателя на холостом ходу и изменении частоты изменяется коэффициент мощности cosφ? 72 Лабораторная работа № 5м ИССЛЕДОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ВРАЩЕНИЯ Общие сведения Эффективное использование регулируемого электропривода в технологических установках пищевой и холодильной промышленности требует знания его энергетических и регулировочных характеристик. Для решения этой задачи необходимо уметь экспериментально определять и анализировать механические характеристики двигателей при регулировании частоты вращения. В настоящей работе студентам предлагается изучить семейство механических характеристик асинхронного двигателя при различных значениях частоты fп и напряжения, задаваемых с помощью преобразователя частоты SINAMICS G110. Лабораторный эксперимент Цель работы 1. Изучить принцип работы частотно-регулируемого асинхронного электропривода. 2. Приобрести практические навыки по определению энергетических характеристик регулируемого электропривода с преобразователем частоты. 3. Снять и построить механические характеристики регулируемого электропривода. 4. Экспериментально подтвердить теоретические знания, полученные на лекциях и практических занятиях. 73 Лабораторная установка Лабораторная установка (рис. 4-5) включает преобразователь частоты типа G110 с вмонтированным пультом управления БОП; трехфазный асинхронный электродвигатель мощностью 120 Вт, напряжением 220/380 В, номинальным током 0,75/0,43 А, числом оборотов nн=1365 об/мин, сosφ = 0,65, КПД= 0,65. Общий вид установки, принципиальная электрическая схема, порядок включения и программирования преобразователя частоты приведены в лабораторной работе № 4м. В качестве нагрузочного устройства в работе использован фрикционный механизм, сила трения которого регулируется винтом. Нагрузочное устройство на валу электродвигателя с регулировочным винтом позволяет изменять величину статического момента нагрузки на валу электродвигателя. Измерение частоты вращения производится фототахометром ИТ5-Ч. Измерение основных электрических параметров производится с помощью преобразователя частоты – (величины тока, напряжения и частоты). Результаты измерений выводятся на дисплей пульта управления БОП. Мощность, потребляемая электродвигателем, измеряется методом двух ваттметров. Пределы измерений ваттметров должны быть установлены на 300 В и 1А. Программа работы 1. Собрать электрическую схему, представленную на рис. 4-5. 2. Экспериментально определить механические характеристики асинхронного двигателя при различных частотах питающего напряжения 30, 50, 60 Гц. 3. Построить зависимость коэффициента мощности от нагрузки cos φ = f(M) при fп = 30, 50 и 60 Гц. 4. Построить зависимость коэффициента полезного действия от нагрузки η = f(M) при fп = 30, 50 и 60 Гц. 5. Проанализировать полученные результаты и сделать выводы о проделанной работе. 74 Порядок выполнения работы 1. Ознакомиться с электрической схемой, приборами, аппаратами и другим оборудованием экспериментальной установки и записать их технические данные в отчет. 2. Собрать электрическую схему установки (рис. 4-5) и предъявить для проверки преподавателю или инженеру лаборатории. 3. После проверки правильности соединений и инструктажа о порядке работы с преобразователем частоты ПЧ студенты получают разрешение на работу с установкой. 4.Установить квадратичный закон регулирования (U2/f =const)), программируя Р1300=2. Порядок, значение и способ ввода параметров преобразователя частоты описаны в лабораторной работе № 4м. Ими следует руководствоваться и в настоящей работе. Примечание: преподаватель может внести уточнения по величинам частот и количеству снимаемых механических характеристик. 5. Для нескольких значений частоты fп провести испытание регулируемого электропривода и результаты занести в табл. 1. Нагрузка на валу создается с помощью регулировочного винта, при завинчивании которого увеличивается момент трения на шкиве. Первый опыт производится при отсутствии нагрузки на валу (фрикционный механизм максимально ослаблен и не создает трения на шкиве), т. е. в режиме холостого хода (I10, U10, P10). Затем без остановки электродвигателя, изменяется величина тормозного момента на валу, и производятся следующие измерения значений линейного тока I1, напряжения U1 и мощности РW1 и PW2. Мощность, измеряемую ваттметрами, следует заносить с учетом знака. При низких значениях коэффициента мощности показания ваттметра pW2 могут иметь отрицательные значения. 6. Результаты измерений для каждого опыта занести в табл.1. 7. Используя экспериментально полученные данные, следует вычислить следующие величины: – полную мощность, потребляемую двигателем, BA S 3U1 I1 ; – активную мощность, Вт 75 50 2 3 4 1 2 6 60 76 η, % 30 Р2, Вт Мc, Нм. М, Нм. Рм2, Вт Рэм, Вт Рм1, Вт Измеряемые величины Рст, Вт s, отн. ед сos φ P1, Вт S, ВА n2, об/ мин PW2, Bт PW1, Bт U1 , B I1 , А № fп, Гц Таблица 1 Вычисляемые величины 0 0 0 0 0 0 P1 PW 1 PW 2 ; - коэффициент мощности cos P1 ; S –скольжение, в относительных единицах n n s 1 2 n1 где n1 = 30fп - синхронная частота вращения; n2 – частота вращения ротора, измеренная тахометром; – потери в стали магнитопровода принимаются равными половине постоянных потерь; они определяются по результатам первого опыта (на холостом ходу) и остаются постоянными для каждой частоты: Рст = Рмех = 0,5(Р10 – 1,5 I 02 R), где R – сопротивление обмотки статора, измеренное между двумя обмотками статора (значение R указано на стенде), P10 PW1 PW 2 - М0 – момент сопротивления холостого хода, определяемый механическими потерями (на трение) в двигателе, Рмех ; M0 0,105 n20 где n 20– частота вращения ротора на холостом ходу; – потери мощности в обмотке статора (переменные потери) Рм1 = 1,5 I12 R; – электромагнитную мощность, передаваемую ротору, Рэм = Р1 – Рм1 – Рст; – потери в обмотке ротора 77 Рм2 = sРэм; – вращающий момент асинхронного двигателя M Рэм ; 0,105 n1 – полезную мощность на валу двигателя P2 = 0,105Mс n2, где Мс = М – М0 – момент сопротивления нагрузки на валу; – коэффициент полезного действия, % P2 100 . P1 Результаты вычислений следует записать в табл. 1. 8. На основании выполненных расчетов следует построить следующие зависимости: – семейство механических характеристик n2 = f(M) при fп = 30, 50 и 60 Гц; – зависимость коэффициента полезного действия от нагрузки η = f(M) при fп = 30, 50 и 60 Гц; – зависимость коэффициента мощности от нагрузки cosφ = f(M) при fп = 30, 50 и 60 Гц. Содержание отчета 1. Паспортные данные испытуемого двигателя, преобразователя частоты и электроизмерительных приборов. 2. Электрическая схема установки. 3. Программа работы. 4. Результаты измерений и расчетов, необходимых для построения соответствующих характеристик привода, а также формулы, по которым производились расчеты. 5. Графики характеристик, построенные по экспериментальным и расчетным данным: – семейство механических характеристик n2 = f(M) при fп = 30, 50 и 60 Гц; – зависимость коэффициента полезного действия от нагрузки 78 η = f(M) при fп = 30, 50 и 60 Гц; – зависимость коэффициента мощности от нагрузки сos φ = f(M) при fп = 30, 50 и 60 Гц. 7. Краткие выводы о проделанной работе. Контрольные вопросы 1. Что называется электроприводом? 2. Что такое механическая характеристика электродвигателя? 3. Какими основными точками характеризуется механическая характеристика асинхронного электродвигателя? 4. От каких параметров источника питания асинхронного двигателя зависит вид его механической характеристики? 5. Как зависит механическая характеристика асинхронного двигателя от частоты питающей сети? 6. Почему с увеличением частоты напряжения питания увеличивается скольжение? 7. Какие способы регулирования частоты вращения применяются в асинхронном электроприводе? 8. Каким образом реализуется частотное регулирование электропривода? 9. Как можно определить переменные (зависящие от нагрузки на валу) потери в асинхронном двигателе? 10. Что называется постоянными потерями в электродвигателе и как их можно определить? 11. Как определяются потери мощности в роторе асинхронного электродвигателя? 79 ЛАБОРАТОРНАЯ РАБОТА № 6М ДИАГНОСТИКА СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ Теоретические сведения Основным элементом, определяющим характеристики и нормальную работу асинхронного двигателя, является обмотка статора. Статорная обмотка односкоростного асинхронного двигателя обычно имеет шесть выводов, соответствующих началам и концам фазных обмоток (рис. 6-1). Рис. 6-1. Обозначение обмотки односкоростного двигателя В табл. 1 приводятся обозначения этих выводов в соответствии с ГОСТ 2.709–89. Таблица 1 Наименование фазы Первая Вторая Третья Обозначение выводов Начало U1 V1 W1 Конец U2 V2 W2 Обычно выводы всех фаз статорной обмотки присоединяются к выводам клеммной коробки, как указано на рис. 6-2 а, б. Приведенная конструкция дает возможность получить соединение в звезду при горизонтальном расположении перемычек (высокое напряжение) и соединение в треугольник при их вертикальном расположении (низкое 80 напряжение). Рис. 6-2. Схема для соединения обмоток статора на панели асинхронного двигателя: а – в звезду; б – в треугольник. Правильность соединения соответствующих выводов статорных обмоток определяет нормальный режим работы электродвигателя. При неправильном соединении отдельных фазных обмоток величина тока в линейных проводах различна, иногда она превышает номинальное значение даже без нагрузки электродвигателя. Неправильное включение обмоток статора вызывает появление пульсирующего вращающего момента электродвигателя. Этот недостаток сопровождается значительным шумом и вибрацией электродвигателя. На рис. 6-3 показано правильное (а) и неправильное (в) соединение фазных обмоток статора звездой. На рис. 6-3, в показано соединение обмоток звездой, когда фазная обмотка U1-U2 "перевернута", а на рис. 6-3, г - направление магнитных осей фазных обмоток для этого случая. 81 Рис. 6-3. Соединение фазных обмоток звездой: а - правильное включение обмоток, б - правильное расположение магнитных осей фазных обмоток, в - неправильное включение обмоток, г - неправильное расположение магнитных осей обмоток Неправильное соединение фазных обмоток чаще всего встречается в электродвигателях, имеющих шесть выводов при соединении их звездой или треугольником (в зависимости от напряжения сети). В процессе ремонта возможно неправильное внутреннее соединение фазных обмоток статора и при наличии только трех выводов (для одного линейного напряжения). Поэтому после всех профилактических работ с электродвигателем (или при отсутствии маркировки) требуется маркировать обмотки и проверять их взаимную согласованность. Согласованность обмоток у машин средней и большой мощности рекомендуется проверять даже при наличии заводской маркировки. Предварительно находятся парные выводы каждой фазы. Для этого необходимо разъединить все фазные обмотки и мегомметром, омметром или контрольной лампой определить принадлежность выводов отдельным фазным обмоткам. Затем определяют начала и концы фазных обмоток. Одновременно следует произвольно выбрать начала фазных обмоток и начало первой фазной обмотки обозначить HI, конец ее - К1 и соответственно второй и третьей фазных обмоток Н2-К2 и НЗ-КЗ. Затем к одной фазной обмотке присоединяют источник постоянного тока. Так как активное сопротивление обмоток небольшое, то 82 источником постоянного тока может служить аккумулятор напряжением 2-4 В. В момент включения или отключения выключателя в двух других фазных обмотках наводится ЭДС. Ее направление определяется полярностью концов фазной обмотки, присоединенной к источнику постоянного тока, и производимой операцией - включением или отключением выключателя. Если к принятому началу HI первой фазной обмотки присоединяется плюс аккумулятора, то при отключении выключателя на соответствующих началах двух других обмоток получается также плюс. Таким образом, пользуясь милливольтметром, можно установить начала и концы двух других фазных обмоток в соответствии с принятым началом и концом первой фазной обмотки. При очень большом отклонении стрелки милливольтметра необходимо последовательно с фазной обмоткой включить реостат для уменьшения тока. После того, как установлены начала и концы фазных обмоток, целесообразно произвести четкую маркировку их в соответствии с ГОСТ 2.709–89. После этого, не включая двигатель, предварительно оценивают с точностью до 5 % (с учетом скольжения) номинальную частоту вращения. Для этого определяют число фиктивных пар полюсов р и частоту вращения магнитного поля статора n1, об/мин: n1 60 f . p Тогда частота вращения ротора n2 = n1 (1 – s), где s – скольжение, величина которого может быть предварительно равна s = 0,05. Лабораторный эксперимент Цель работы 1. Ознакомиться с общими принципами диагностики асинхронного двигателя. 2. Приобрести практические навыки по проверке маркировки и схем соединения обмоток статора. 3. Научиться определять основные параметры и характеристики 83 асинхронного двигателя. 4. Экспериментально подтвердить теоретические полученные на лекциях и практических занятиях. знания, Программа работы 1. Для заданного асинхронного электродвигателя найти парные выводы каждой фазы. 2. Определить полярность выводов одним из двух способов – на постоянном и переменном токе. 3. Определить число фиктивных полюсов обмотки статора. 4. На основании пп.1 и 2 собрать схему включения двигателя, соответствующую напряжению на лабораторном стенде, и произвести пробный запуск. Оценить величину тока холостого хода. 5. Составить отчет о проделанной работе с соответствующими выводами о параметрах диагностируемого двигателя. Порядок выполнения работы 1. С помощью тестера определить парные выводы каждой обмотки и объединить их с помощью изоляционной ленты. Для этого следует установить центральный переключатель тестера в положение OHM 1K и подключить поочередно концы обмоток до получения на шкале нулевых показаний. 2. Произвести проверку маркировки выводов фазных обмоток. 2.1. Проверка маркировки выводов с использованием дополнительного источника постоянного тока. Одна из обмоток статора принимается за основную, маркируются ее выводы U1–U2 и собирается схема (рис. 6-4). Батарея Е включается импульсно выключателем S в цепи этой фазы, а к другим фазам поочередно подсоединяется тестер с положением центрального переключателя DC–V–10. Путем изменения присоединения выводов второй и третьей обмоток подбирается такое включение тестера, при котором в момент подачи напряжения от батареи стрелка прибора дает отклонение вправо. В этом положении схемы против плюса батареи и минуса тестера находятся начала фазных обмоток (U1, V1, W1). 84 Рис. 6-4. Проверка маркировки выводов обмотки статора с помощью источника постоянного тока. C помощью специальных бирок следует зафиксировать эти выводы. Тогда оставшиеся три вывода будут являться концами фаз (U2, V2, W2). 2.2. Проверка маркировки выводов с использованием источника переменного тока пониженного напряжения (рис. 6-5). Рис. 6-5. Проверка маркировки выводов обмотки статора с помощью источника переменного тока Для этого две произвольные фазы статорной обмотки соединяются последовательно и включаются на пониженное напряжение переменного тока. Пониженное напряжение используется для ограничения тока обмоток при неподвижном роторе. В лабораторных условиях это напряжение (30 – 50 В) получают с помощью автотрансформатора. Затем на третью свободную фазу подключают тестер с установленным центральным переключателем в положении AC–V–50. Если первые две фазы соединены одноименными выводами (например, концами, как показано на рис. 6-5) сплошной линией, то тестер покажет отсутствие напряжения, поскольку результирующий магнитный поток встречно включенных обмоток равен 0. При соединении двух фаз разноименными (конец–начало) зажимами (пунктирная линия на рис. 6-5) тестер покажет наличие 85 напряжения. Аналогично определению взаимного соответствия первых двух фаз производится маркировка выводов третьей фазы. 3. Определение числа полюсов обмотки статора. Измерение числа полюсов обмотки статора необходимо для установления частоты вращения магнитного поля или синхронной скорости ротора n1. Этот опыт производится с использованием тестера при положении центрального переключателя DC–mA–0,5. Тестер подключается к выводам одной или двух фаз. При проворачивании рукой ротора двигателя под действием остаточного магнетизма в обмотке статора возникнет ЭДС, вызывающая периодическое отклонение стрелки тестера. Число отклонений стрелки в одну сторону будет равно числу полюсов одной полярности, прошедших мимо данной фазы статора. Во избежание ошибки рекомендуется выполнить 10 оборотов вала (N = 10) и посчитать соответствующее число m отклонений стрелки тестера в одну сторону. Например, пусть число отклонений m = 30. Тогда число пар полюсов двигателя p m 30 3, N 10 а синхронная скорость n1 = 60 f/p = 3000/3 = 1000 об/мин. 4. Пробный запуск диагностируемого электродвигателя. Пробный запуск преследует решение следующих задач: – проверка правильности монтажа обмоток электродвигателя (звезда или треугольник) в соответствии с величиной напряжения, принятой в лабораторной установке; – проверка разбега двигателя до частоты вращения, близкой к синхронной n1, и оценка тока холостого хода (до 30 % от номинального Iн). Для запуска электродвигателя собирается схема в соответствии с рис. 6-6. 86 Рис. 6-6. Схема проведения опыта пробного включения двигателя на холостом ходу После включения выключателя S убедиться в нормальной работе двигателя, для чего: – с помощью тахометра ИТ5-Ч измерить частоту вращения ротора; – измерить ток холостого хода. Измерение частоты вращения осуществляется настройкой тахометра на метку, закрепленную на валу ротора. Расстояние от излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Плавно ориентируя излучатель тахометра по отношению к вращающейся метке, добиться одновременного свечения светодиодов: красного – непрерывно, а зеленого – с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин). Показания тахометра и амперметра занести в табл. 2. Таблица 2 Расчетные величины I, А Опытные величины n1, об/мин I, А n2, об/мин 5. Предъявить результаты опытов преподавателю и с его разрешения разобрать схему и привести рабочее место в исходное состояние. 87 Содержание отчета 1. Методика определения парных концов фазных обмоток асинхронного двигателя (АД). 2. Схемы и описание опытов по определению начал и концов фаз обмоток статора АД. 3. Схема и результаты пробного включения АД на холостом ходу. Контрольные вопросы 1. Цель и программа работы. 2. С какой целью производят диагностику асинхронных двигателей? 3. Как обозначаются начала и концы обмоток статора в соответствии с ГОСТ 2.709–89? 4. Как маркируются начала и концы обмоток статора? 5. Как определить число фиктивных магнитных полюсов статора? 6. Как осуществляется проверка маркировок выводов обмотки статора с помощью источника переменного тока? 7. Как производится проверка маркировок выводов обмотки статора с помощью источника постоянного тока? 8. С какой целью производится опыт пробного включения двигателя на холостом ходу? 88 ЛАБОРАТОРНАЯ РАБОТА № 7М ИССЛЕДОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С РЕВЕРСИВНЫМ МАГНИТНЫМ ПУСКАТЕЛЕМ Теоретические сведения Управление электроприводами сводится к осуществлению пуска, регулирования скорости вращения, торможения, реверсирования и непрерывному поддержанию режима, который обусловлен технологическим процессом производства. Электрические схемы управления отдельными электрифицированными агрегатами представляют собой графические изображения электрических машин, аппаратов и линий электрической связи между ними. Они составляются на основе изучения технологического процесса, выбора типа электродвигателя и использования основных принципов построения схем автоматизированного электропривода. Электрические схемы показывают осуществляемые электрическим током взаимосвязи отдельных элементов установки друг с другом или внутри того или иного аппарата. Во всех схемах управления электроприводами различают: цепи главного тока, к которым относят силовые цепи электродвигателей, генераторов, силовых трансформаторов; цепи вспомогательного тока, к которым относят цепи управления, блокировки, защиты и сигнализации. В схемах электрического управления электроприводами могут использоваться как релейно-контакторные аппараты, так и бесконтактные аппараты управления. Электрические аппараты управления предназначены для управления режимом работы электрооборудования. К ним относят контакторы, пускатели, контроллеры, электрические реле управления, командоаппараты, рубильники, электромагниты управления и электроуправляемые муфты. Контакторы служат для многократных включений и отключений электрической цепи при токах нагрузки, не превышающих номинальный, а также для редких отключений при токах перегрузки (в 7-10 раз превышающих номинальный). 89 Пускатели предназначены для включения и отключения двигателей. От контакторов они отличаются наличием встроенной системы, осуществляющей защиту двигателей от токов перегрузки. Для защиты электрооборудования от недопустимых по величине и продолжительности токов перегрузки или короткого замыкания в цепях питания установок предусматриваются аппараты защиты. При отклонении режимов работы от нормальных они автоматически отключают установку от питающей сети. К ним относят автоматические выключатели (автоматы) и низковольтные предохранители. Для защиты и предотвращения нежелательных явлений, связанных с чрезмерным повышением температуры нагрева обмоток электродвигателей бытовых приборов при неисправной их эксплуатации или аварийных режимах работы, часто применяют специальные защитные устройства – тепловые реле. Тепловые реле защищают двигатель от длительных перегрузок на10-20%. Принцип действия их основан на изменении физических свойств материалов при изменении температуры нагрева. Чувствительным элементов таких реле служит биметаллическая пластина, состоящая из двух сваренных по всей длине слоев разнородных металлов с разными коэффициентами линейного температурного расширения. Один конец биметаллической пластины закреплен неподвижно, а второй, на котором расположен подвижный контакт, свободно перемещается. Ток обмотки статора защищаемого электродвигателя протекает через специальный нагреватель, выполненный из пластины или проволоки с большим удельным сопротивлением. Нагреватель располагается вблизи биметаллической пластины или непосредственно намотан на нее. Биметаллическую пластину при этом не включают в главную цепь питания защищаемого электродвигателя. Теплота, выделяемая нагревательным элементом, нагревает расположенную рядом биметаллическую пластину. При перегрузках двигателя протекает ток, превышающий номинальные значения. Нагрев, производимый этим током, достаточен для деформации биметаллической пластины. Она изгибается в сторону слоя металла с меньшим коэффициентом линейного температурного расширения и размыкает контакты в цепи управления электродвигателя. В 90 результате двигатель останавливается Пуск асинхронных двигателей небольшой мощности с короткозамкнутым ротором осуществляется обычно с помощью магнитных пускателей. В тех случаях, когда необходимо изменять направление вращения, управление двигателями может быть осуществлено с помощью реверсивного магнитного пускателя. Реверсивный магнитный пускатель состоит из двух контакторов переменного тока и двух тепловых реле. Лабораторная установка На рис. 8-1 приведена схема управления асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем. Рис.7-1. Схема управления трехфазным асинхронным двигателем с короткозамкнутым ротором с реверсивным магнитным пускателем 91 Схема позволяет осуществлять прямой пуск асинхронного короткозамкнутого двигателя, а также изменять направление вращения двигателя, т.е. производить реверс. Назначение основных элементов схемы приведено в табл.1. Таблица 1 Обозначение элементов QF SB1 SB2 SB3 КМ1 и КМ2 KK1, KK2 FU3, FU4 H Назначение элементов схемы Автоматический выключатель для подключения асинхронного электропривода к сети трехфазного переменного тока Кнопка управления (кнопка "Вперед") Кнопка управления (кнопка "Назад"), Кнопка управления (кнопка "Стоп") Контакторы Нагревательные элементы и контакты тепловых реле Предохранители в цепи управления Сигнальная лампа Пуск двигателя осуществляется включением автоматического выключателя QF и нажатием кнопки SB1, вследствие чего контактор КМ1 получает питание, замыкает свои силовые контакты и статор двигателя подключается к сети. Ротор двигателя приходит во вращение. Одновременно кнопка SB1 шунтируется блокировочными замыкающими контактами КM1. Для реверса двигателя необходимо нажать кнопку SB3. Это приведет к отключению контактора КМ1, после чего нажимается кнопка SB2 и включается контактор КМ2. Таким образом, двигатель подключается к сети с изменением порядка чередования фаз, что приводит к изменению направления его вращения. Во избежание короткого замыкания в цепи статора вследствие ошибочного одновременного нажатия на обе кнопки в схеме применена блокировка от возможного ошибочного одновременного включения контакторов КМ2 и КМ1 с помощью размыкающих контактов КМ2, КМ1. Для большей надежности реверсивные магнитные пускатели снабжены механической блокировкой, осуществляемой рычажной системой, препятствующей втягиванию одного контактора, если включен другой. В схеме предусмотрены следующие виды защит: • от коротких замыканий — с помощью автоматического 92 выключателя QF и предохранителей FU1 и FU2 ; • от перегрузок электродвигателя — с помощью тепловых реле КК1 и КК2 (размыкающие контакты этих реле при перегрузках размыкают цепь питания контактора КМ, тем самым отключая двигатель от сети); • нулевая защита — с помощью контакторов КМ1 и КМ2 (при снижении или исчезновении напряжения контактор в цепи управления теряет питание, размыкая свои контакты, и двигатель отключается от сети). Преимущества автоматического выключателя: невозможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это имеет место при установке предохранителей; не требуется замена элементов, как в предохранителях при сгорании плавкой вставки. Отключение двигателя от сети осуществляется кнопкой SB3 и автоматическим выключателем QF. Цель работы 1. Ознакомиться с типовыми узлами релейно-контакторных систем управления асинхронных электродвигателей и закрепить навыки чтения принципиальных электрических схем. 2. Изучить устройство реверсивного магнитного пускателя 3. Ознакомиться с агрегатом асинхронного электропривода. 4. Исследовать работу асинхронного электропривода. 5. Экспериментально подтвердить теоретические знания, полученные на лекциях и при самостоятельных занятиях по управлению асинхронным электроприводом. Программа работы 1. Ознакомиться с установкой асинхронного электропривода. 2. Изучить устройство реверсивного магнитного пускателя. 3. Произвести пуск асинхронного электропривода. 4. Произвести остановку асинхронного электропривода. 5. Произвести реверс асинхронного электропривода. 7. Сделать выводы по работе. Сопоставить полученные результаты с данными из теоретического курса. 93 Порядок выполнения работы 1. Ознакомиться с приборами, аппаратами и другим оборудованием установки и записать их технические данные в отчет. 2. Произвести пуск асинхронного электропривода. Включить автомат QF, в результате чего загорается лампа, сигнализирующая о подаче напряжения на схему установки. При нажатии на кнопку SB1 ("Вперед") получает питание катушка реверсивного контактора КM1; контактор срабатывает и своими контактами КM1 подключает статорную цепь двигателя к сети трехфазного переменного тока, при этом двигатель начинает работать (пуск двигателя). Блок-контакт КM1 блокирует кнопку SB1. Одновременно размыкающий контакт КM1 размыкает цепь катушки контактора КM2. 3. Произвести остановку асинхронного электропривода. При нажатии на кнопку SB3 ("Стоп") катушка реверсивного контактора КM1 лишается питания. Контакт КM1 размыкается и отключает статорную цепь двигателя от сети трехфазного переменного тока. Двигатель при этом останавливается. 4. Произвести реверс асинхронного электропривода. При нажатии на кнопку SB1("Вперед") двигатель начинает вращаться в одном направлении. При нажатии на кнопку SB3 ("Стоп") двигатель будет останавливаться. При нажатии на кнопку SB2 ("Назад") получает питание катушка реверсивного контактора КM2, контактор срабатывает и своими контактами КM2 подключает статорную цепь асинхронного двигателя к трехфазной сети переменного тока. Блокконтакт КM2 блокирует кнопку SB2. Так как при этом оказываются переключенными две фазы (В и С) двигатель начинает вращаться в противоположном направлении (реверс двигателя). Содержание отчета 1. Номинальные данные асинхронного электропривода с реверсивным магнитным пускателем. 2. Электрическая схема установки. 3. Программа работы. 6. Краткие выводы. 94 Контрольные вопросы 1. Цель и программа работы. 2. Способы пуска асинхронного двигателя с короткозамкнутым ротором. Их преимущества и недостатки. 3. Как изменить направление вращения трехфазного асинхронного двигателя? 4. Назначение реверсивного магнитного пускателя. 5. Работа магнитного пускателя в схеме асинхронного электропривода. 6. Виды защиты в схеме асинхронного электропривода. 7. Порядок проведения опыта по снятию механической характеристики. 8. Каково назначение тепловых реле FU1; FU2? 9. Какую защиту осуществляют плавкие предохранители? 10. Каково назначение блок-контактов, включенных параллельно кнопкам SB1 и .SB2 95 ЛАБОРАТОРНАЯ РАБОТА № 8М ИССЛЕДОВАНИЕ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПУСКОМ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ С ПЕРЕКЛЮЧЕНИЕМ ОБМОТОК СТАТОРА СО ЗВЕЗДЫ НА ТРЕУГОЛЬНИК Теоретические сведения Трехфазный асинхронный электродвигатель с короткозамкнутым ротором отличается простотой конструкции, высокой надежностью в работе, долговечностью, низкой стоимостью и универсальностью. Его обмотки могут быть соединены звездой или треугольником. Если фазные обмотки двигателя рассчитаны на номинальное напряжение, равное линейному напряжению сети, то его обмотки должны быть соединены треугольником. При соединении обмоток треугольником двигатель работает на полную паспортную мощность (примерно в 1,5 раз больше, чем при соединении звездой), но имеет очень большие значения пусковых токов (в 5-7 раз превышающих номинальные значения). Большие значения пусковых токов являются существенным недостатком асинхронных двигателей. Электрическая сеть обычно не рассчитана на столь большой пусковой ток, что вызывает самопроизвольного отключения релейно-контакторной аппаратуры и снижение напряжения в сети. Снижение напряжения отрицательно влияет на устойчивую работу соседних электроприемников. Провал напряжения в сети при пуске асинхронного электродвигателя с короткозамкнутым ротором от сети соизмеримой мощности во избежание нарушения режимов работы других потребителей не должен превышать 20-25% от Uн. Поэтому при пуске асинхронных двигателей приходится применять специальные меры, позволяющие уменьшать пусковой ток. Чтобы уменьшить пусковые токи трехфазных асинхронных короткозамкнутых двигателей больших мощностей, их включают с помощью переключателя схем со звезды на треугольник. При этом сначала обмотки двигателя соединяются по схеме звезда, потом, после того как ротор двигателя наберет номинальную частоту вращения, его обмотки переключаются в схему треугольник. 96 Снижение пускового тока двигателя при переключении его обмоток со звезды на треугольник происходит потому, что вместо предназначенной для данного напряжения сети схемы треугольник каждая обмотка двигателя включается на напряжение в √3 раз меньшее, а потребляемый ток снижается в три раза. Снижается также в три раза и мощность, развиваемая электродвигателем при пуске. Поэтому изложенный способ снижения пускового тока можно использовать лишь при нагрузке не более 1/3 номинальной. Цель работы 1. Изучение принципа действия и элементов схемы автоматического управления пуска асинхронного двигателя. 2. Исследование работы схемы пуска асинхронного электропривода при автоматическом переключении обмоток статора со звезды на треугольник. 3. Экспериментальное подтверждение теоретических знаний, полученных на лекциях и при самостоятельных занятиях по электроприводу, работающему в автоматическом режиме. Лабораторная установка На рис. 8-1 представлена принципиальная схема лабораторной установки пуска с автоматическим переключением обмоток статора со звезды на треугольник. Назначение элементов схемы приведено в табл.1. Таблица 1. Назначение элементов схемы QF Автоматический выключатель для подключения схемы автоматического управления асинхронного короткозамкнутого электродвигателя к сети переменного тока. SB1 Кнопка "Пуск". SB2 Кнопка "Стоп". КМ1 Контактор для включения обмотки статора электродвигателя по схеме соединения звездой КТ Реле времени для осуществления выдержки времени при переключении со схемы звезда на схему треугольник (контакты реле К2 маломощные). КМ2 Магнитный пускатель для подключения электродвигателя к сети трехфазного переменного тока. 97 К Промежуточное реле для обеспечения надежной работы цепи контактора КМ. КМ3 Контактор для включения обмотки статора электродвигателя по схеме треугольник. КТ Тумблер для отключения реле времени при работе по схеме звезда. FU1 Предохранители в цепи управления. FU2 KK1 Тепловые реле в цепи статора с размыкающими КК2 контактами с ручным возвратом Рис. 8-1. Схема пуска асинхронного двигателя с переключением обмоток статора со звезды на треугольник Программа работы 1. Ознакомиться с условными обозначениями схемы, научиться читать схему. 98 2. Изучить принцип действия элементов схемы. 3. Проанализировать схему при работе в автоматическом режиме переключения обмоток статора со звезды на треугольник. 5. Сопоставить полученные результаты опытов с известными зависимостями из теоретического курса и сделать выводы по работе. Порядок выполнения работы 1. Ознакомиться с электрической схемой и ее элементами, записать их технические данные в отчет. 2. Подготовить схему к пуску: - включить тумблер KТ в цепи реле времени; - включить автомат QF в цепи трехфазного тока (загорается лампочка, сигнализирующая о подаче напряжения на схему установки). 3. Произвести пуск асинхронного электродвигателя. При нажатии кнопки SB1 ("Пуск") получает питание контактор KM1. Контактор срабатывает и своими контактами включает статорную обмотку электродвигателя по схеме соединения звезда, при этом блок - контакты контактора KМ1 шунтируют кнопку пуска SB1 и подключают магнитный пускатель KM2, контакты которого замыкаются в цепи контактора KM3, подготавливая схему для питания катушки контактора KM3. С включением контактора KM1 получает питание реле времени KT. Контакты этого реле замыкаются с выдержкой времени задаваемой реле KT. Получает питание катушка промежуточного реле K. Контакты реле K разрывают цепь питания катушки контактора КM1 и замыкают цепь катушки контактора KМ3. Контакты контактора КМ3 замыкаются и включают обмотки статора по схеме треугольник. 4. Произвести остановку асинхронного электродвигателя. Нажать на кнопку SB2 ("Стоп"), катушка контактора KM3 и катушка магнитного пускателя KM2 лишаются питания. Двигатель останавливается. Схема приходит в исходное состояние. Содержание отчета 1. Номинальные данные асинхронного электродвигателя и аппаратуры схемы управления. 99 2. Электрическая схема установки. 3. Программа работы. 5. Краткие выводы. Контрольные вопросы 1. Цель и программа работы. 2. Какое соотношение между действующими значениями токов при включении электродвигателя по схеме звезда и по схеме треугольник и как при этом изменяется момент двигателя? 3. Какова последовательность срабатывания элементов схемы управления при пуске и остановке электродвигателя по схеме звезда и треугольник? 4. Пояснить назначение реле времени в схеме управления. 5. Как выполнена защита цепи управления в рассмотренной установке? 6. Каково назначение автоматического выключателя SB1? 7. Каково назначение тепловых реле KK1 и KK2? 100 ЛАБОРАТОРНАЯ РАБОТА № 9М ИССЛЕДОВАНИЕМ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПУСКОМ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ Теоретические сведения В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств используются Внешний вид двигателя с фазным ротором и фазного ротора приведен на рис 9-1. Рис. 9-1. Двигатель с фазным ротором: а - внешний вид двигателя с фазным ротором; б – фазный ротор 1 – вал ротора, 2 – контактные кольца; 3 – обмотки ротора. На роторе (рис. 9-1, б) укладывается трехфазная обмотка с геометрическими осями фазных катушек, сдвинутыми в пространстве друг относительно друга на 120°. Фазы обмотки ротора соединяются звездой и концы их присоединяются к трем контактным кольцам, насаженным на вал и электрически изолированным как от вала, так и друг от друга. С помощью металлографитовых щеток, скользящих по кольцам, имеется возможность включать в цепи фазных обмоток регулировочные реостаты. 101 Реостат играет роль добавочного активного сопротивления, одинакового для каждой фазы обмотки ротора. В двигателях с фазным ротором имеется возможность увеличивать пусковой момент до максимального значения (в первый момент времени) с помощью пускового реостата (рис. 9-2), тем самым, уменьшая пусковой ток. Рис. 9-2 . Механические характеристики двигателя с фазным ротором: 1 – естественная характеристика (Rдоб1=0), 2, 3, 4 – искусственные характеристики (Rдоб4> Rдоб3> Rдоб2) Пуск двигателя с фазным ротором осуществляется с введенными резисторами в цепи ротора. Резисторы в цепи ротора служат для ограничения токов не только в процессе пуска, но и при реверсе, торможении, а также при снижении скорости. По мере разгона двигателя для поддержания ускорения привода резисторы выводятся. Когда пуск закончится, резисторы полностью шунтируются, и двигатель перейдет работать на естественную механическую характеристику. Двигатели с фазным ротором применяются для привода механизмов, которые пускают в ход при большой нагрузке. Асинхронные двигатели с фазным ротором имеют лучшие пусковые и регулировочные свойства, однако им присущи большие 102 масса, размеры и стоимость, чем двигателям с короткозамкнутым ротором. Цель работы 1. Изучить схему автоматического пуска асинхронного двигателя с фазным ротором. 2. Экспериментально подтвердить теоретические знания, полученные на лекциях по управлению асинхронным двигателем с фазным ротором. Лабораторная установка На рис.9-3 приведена принципиальная схема автоматического пуска асинхронного двигателя с фазным ротором в функции тока. Схема предусматривает пуск двигателя и его защиту без реверсирования и торможения. Для контроля пуска по току применяют токовые реле, которые срабатывают при пусковом токе и отпадают при минимальном токе переключения. Назначение элементов схемы приведено в табл.1. R2 Таблица 1.Назначение элементов схемы QF Автоматический выключатель для подключения асинхронного электропривода к сети трехфазного переменного тока SB1 Кнопка "Пуск" SB2 Кнопка "Стоп"; KM Контактор переменного тока с тремя контактами и одним замыкающим блок-контактом KK1 Тепловые реле в цепи статора с размыкающими КК2 контактами с ручным возвратом KM1 Двухполюсные контакторы, главные контакты которых KM2 шунтируют пусковые сопротивления R1 и R2 KA1 Реле тока, имеющие по одному размыкающему контакту KA2 KT Реле времени, имеющие один контакт с выдержкой времени при замыкании; KT Выключатель для включения реле времени R1, Пусковые сопротивления в цепи обмотки ротора двигателя FU1, Плавкие предохранители для защиты цепи управления FU2 103 Рис. 9-3. Схема пуска асинхронного двигателя с фазным ротором Пуск двигателя осуществляется при включении в цепь автоматического выключателя QF и контактора КМ, причем в цепь ротора полностью введены пусковые резисторы. В схеме предусмотрены следующие виды защит: - от коротких замыканий — с помощью автоматического выключателя QF и предохранителей FU1 FU2; - от перегрузок электродвигателя — с помощью тепловых реле КК1 и КК2 (размыкающие контакты этих реле при перегрузках размыкают цепь питания контактора KМ, тем самым отключая двигатель от сети); - нулевая защита — с помощью контактора KМ (при снижении или исчезновении напряжения контактор в цепи управления теряет питание, размыкая свои контакты, и двигатель отключается от сети). 104 Программа работы 1. Ознакомиться с установкой. 2. Изучить схему автоматического пуска асинхронного двигателя с фазным ротором и уяснить назначение всех элементов. 3. Произвести пуск асинхронного двигателя с фазным ротором. 4. Сделать выводы по работе. Порядок выполнения работы 1. Ознакомиться с приборами, аппаратами и другим оборудованием установки и записать их технические данные в отчет. 2. Произвести пуск двигателя. 2.1. Включить автомат QF (загорается лампа, сигнализирующая о подаче напряжения на схему установки). 2.2. Выключатель KT поставить в положение «Включено». 2.3. Нажать пусковую кнопку SB1. Катушка контактора КM получает питание, контактор срабатывает, его контакты в силовой цепи замыкаются и на статор двигателя подается напряжение. В обмотках ротора, соединенных по внешней цепи через пусковые сопротивления R1, R2 звездой, потечет пусковой ток, создается пусковой момент и ротор начинает вращаться. Блокировочный контакт КM, замыкаясь, шунтирует пусковую кнопку SB1. Пусковой ток ограничен двумя секциями пусковых сопротивлений R1 и R2, включенных в цепь ротора. При этом токе реле тока KK1 и KK2 сработают, их контакты в цепи управления разомкнутся, тем самым, предотвратив преждевременное срабатывание двухполюсных контакторов KМ1 и KМ2. Одновременно катушка реле времени КТ получает питание и через определенный промежуток времени (3,5 с) реле сработает. Его контакты замкнутся и цепь контакторов KМ1 и KМ2 будет подготовлена к работе. По мере разгона двигателя ток в цепи ротора уменьшится. Когда ток достигнет величины тока отпускания реле KK1, контакты KK1 замкнутся, и катушка контактора KМ1 получит питание. Контактор KМ1 сработает, его контакты в цепи ротора двигателя замкнутся, и пусковые сопротивления первой секции R1 будут зашунтированы. 105 Одновременно блокировочный контакт KМ1 также замкнется, контактор KМ2 подготавливается к работе. Ток отпускания реле КК2 меньше тока отпускания реле KK1, поэтому не будет преждевременного срабатывания реле тока KK2. По мере дальнейшего разгона двигателя ток в роторе снова уменьшится; когда он достигнет значения тока отпускания реле тока KK2 его контакты в цепи управления замкнутся и на катушку ускорительного контактора KМ2 будет подано питание. Контактор KМ2 сработает, его главные контакты в цепи ротора двигателя замкнутся и зашунтируют вторую секцию пусковых сопротивлений R2. Блокировочные контакты KМ2 также замкнутся, тем самым поставив контактор KМ2 на самоблокировку. Двигатель переходит на работу по естественной механической характеристике. Пуск двигателя завершен. 3. Остановить двигатель нажатием кнопки SB2. При этом цепь питания контактора KM обесточивается, его контакты KM размыкаются, двигатель отключается от сети. 4. Выключить автомат QF в цепи питания статора асинхронного двигателя. Содержание отчета 1. Номинальные данные асинхронного двигателя с фазным ротором. 2. Электрическая схема установки. 3. Программа работы. 4. Краткие выводы. Контрольные вопросы 1. Устройство и принцип действия асинхронного двигателя с фазным ротором. 2. Особенности пуска асинхронного двигателя с фазным ротором. 3. Назначение элементов схемы автоматического пуска асинхронного двигателя с фазным ротором. 4. Виды защит в схеме. 106 5. Что такое естественная и искусственная механические характеристики? В чем их отличие? 6. Преимущества и недостатки асинхронных двигателей с фазным ротором в сравнении с двигателем с короткозамкнутым ротором? 7. Каким образом можно менять частоту вращения фазного ротора асинхронного двигателя при постоянной нагрузке? 8. Каково назначение пусковых реостатов в цепи ротора асинхронного двигателя с фазным ротором? 9. Как работает схема автоматического пуска асинхронного двигателя с фазным ротором? 10. Каково назначение тепловых реле FU1 и FU2? 11. Как осуществляется пуск асинхронного двигателя с фазным ротором? 12. Почему по мере разгона асинхронного двигателя с фазным ротором резисторы ротора выводятся из цепи? 107 СПИСОК ЛИТЕРАТУРЫ 1. Касаткин А.С., Немцов М.В. Электротехника. М.: Высш.шк., 2002. 542 с. 2. Электротехника и электроника: Учебное пособие для вузов/В. В.Кононенко, В.И. Мишкевич, В.Ф. Планидин, П.М.Чеголин; под ред Кононенко В.В. Изд. 3-е, исправл. и дополненное. – Ростов н/Д: Феникс, 2008. 778с. 3. Иванов И.И., Соловьев Электротехника Учебное пособие – 6изд, стер. СПб: Лань, 2014. 496c. 4. Белов Н. В., Волков Ю. С. Электротехника и основы электроники. Учебник для вузов.-Спб.: Лань.-2012, 432 с. 5. Афанасьева Н.А., Булат Л.П. Электротехника и электроника: Учеб. пособие для вузов. – СПб.: СПбГУНиПТ, 2006. 178 с. 6. Электротехнический справочник в 4-т. Т.2 Электротехнические изделия и устройства/ Под общ. ред. профессоров МЭИ В.Г. Герасимова и др. (гл. ред И.Н.Орлов). 8-е изд. испр и доп. М.: Издательство МЭИ, 1998. 518. 7. Алиев И.И. Справочник по электротехнике и электрооборудованию. 3-е изд.. М.: Высш.шк., 2002. 255с. 8. Алиев И.И. М., Абрамов М.Б. Электрические аппараты. Справочник. М.: Издательское предприятие Радиософт, 256с. 9. Вольдек А.И. Электрические машины. Учебник для студентов высших технических учебн. заведений.- 3-е изд.. Л. Энергия, 1978. 832с. 10. Кацман М.М. Электрические машины. Учебн. для электротехнических средн. спец. учебн. заведений. М.: Высш. шк., 2002, 469с. 11. Справочник по электрическим машинам. В 2-х томах Т. 1. Под общ ред. И.П.Копылова, Б.К. Клокова. М., 1988. 455с. 12. Епифанов А.П. Электрические машины: Учебник. СПб: Издательство «Лань», 2006. 272 с. 13. Епифанов А.П., Малайчук Л.М., Гущинский А.Г. Электропривод: Учебник/ Под ред Епифанова А.П.. СПб.: Издательство «Лань», 2012. 400 с. 108 СОДЕРЖАНИЕ ВВЕДЕНИЕ .................................................................................... 3 ОСНОВНЫЕ ПРАВИЛА ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ВЫПОЛНЕНИИ ЛАБОРАТОРНЫХ РАБОТ ................................. 4 ЛАБОРАТОРНАЯ РАБОТА № 1М ИССЛЕДОВАНИЕ ОДНОФАЗНОГО ТРАНСФОРМАТОРА ....................................... 6 ЛАБОРАТОРНАЯ РАБОТА № 2М ИСПЫТАНИЕ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ ......................................... 19 ЛАБОРАТОРНАЯ РАБОТА № 3М ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ ................................................................................... 36 ЛАБОРАТОРНАЯ РАБОТА № 4М ИЗУЧЕНИЕ КОНСТРУКЦИИ И АЛГОРИТМОВ НАСТРОЙКИ УНИВЕРСАЛЬНОГО СТЕНДА ДЛЯ ИССЛЕДОВАНИЯ СПОСОБОВ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ............................................................. 57 ЛАБОРАТОРНАЯ РАБОТА № 5М ИССЛЕДОВАНИЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С РЕГУЛИРУЕМОЙ ЧАСТОТОЙ ВРАЩЕНИЯ....................................................................66 ЛАБОРАТОРНАЯ РАБОТА № 6М ДИАГНОСТИКА СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ................................ 80 ЛАБОРАТОРНАЯ АСИНХРОННОГО РАБОТА № 7М ИССЛЕДОВАНИЕ ЭЛЕКТРОПРИВОДА С РЕВЕРСИВНЫМ МАГНИТНЫМ ПУСКАТЕЛЕМ ..................................................... 89 ЛАБОРАТОРНАЯ РАБОТА № 8М ИССЛЕДОВАНИЕ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПУСКОМ АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ С ПЕРЕКЛЮЧЕНИЕМ ОБМОТОК СТАТОРА СО ЗВЕЗДЫ НА ТРЕУГОЛЬНИК ...................................................... 96 ЛАБОРАТОРНАЯ РАБОТА № 9М ИССЛЕДОВАНИЕМ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПУСКОМ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ ....... 101 СПИСОК ЛИТЕРАТУРЫ ........................................................... 108 109 Новотельнова Анна Владимировна ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ЛАБОРАТОРНЫЙ ПРАКТИКУМ Учебное пособие Редакторы Корректор Компьютерная верстка Подписано в печать . .2016. Формат 60×84 1/16 Усл. печ. л. Печ. л. Уч.-изд. л. Тираж экз. Заказ № С3 НИУ ИТМО. 197101, Санкт-Петербург, Кронверкский пр., 49 110