Московский Авиационный Институт
(Государственный Технический Университет)
Кафедра 604
“Системный анализ и управление”
Курсовая работа по дисциплине
«Надежность аэрокосмических систем»
Выполнил:
студент группы 60-407Б
ТарасенкоД.А
.
Принял:
Доцент кафедры 604
Гришин Вячеслав Михайлович
Москва 2019г.
Оглавление
Введение........................................................................................................... 3
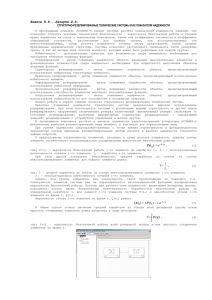
Методика расчета .......................................................................................... 13
Сопоставление величин m и Qc , вычисленных точным и приближенным
методами. ............................................................................................................... 15
Аналитический метод определения критических значений вероятностей
отказа нерезервированного элемента
Q0 кр
. ......................................................... 16
Численный метод определения критических значений вероятностей
отказа нерезервированного элемента Q0 кр . ......................................................... 19
Вывод.............................................................................................................. 20
Приложение 1. Программа для заданий 1-3 ............................................... 20
Приложение 2. Программа для задания 6.1................................................ 21
Приложение 3. Программа для задания 6.2................................................ 21
Приложение 4. Программа для задания 7 ................................................... 21
Приложение 5. Программа для задания 7 ................................................... 22
Приложение 6. Программа для задания 8 ................................................... 22
2
Введение
Все системы, сколь сложны и многообразны они не были имеют
иерархический принцип построения. Он заключается в следующем. Исходная
система состоит из нескольких главных подсистем первого уровня,
определяемых схемой членения. Каждая из них, в свою очередь, состоит из
подсистем более низкого уровня. Процесс декомпозиции продолжается до тех
пор, пока не будет достигнут требуемый уровень детализации. На каждом
уровне декомпозиции, для каждой из подсистем могут быть построены
структурные схемы исследования их надежности (структурные схемы
надежности), которые в случае отсутствия резервирования имеют вид
последовательного соединения элементов (основное соединение), а при
наличии резервирования – вид параллельно – последовательного соединения
элементов.
Таким образом, выстраивается дерево структурных схем надежности
(ССН), которое существенно облегчает исследование надежности как
отдельных подсистем, так и системы в целом. Это обусловлено тем, что
показатели надежности подсистем одного уровня входят в качестве элементов
в ССН вышележащего уровня, позволяя последовательно переходить от
расчета показателей надежности на нижних уровнях к вышележащим
уровням.
В соответствии с иерархическим принципом построения сложных
систем на определенном этапе членения ЛА в качестве одной из подсистем
выступает система управления (СУ ЛА). При отсутствии резервирования
структурная схема надежности СУ ЛА, как отмечалось, представляет
последовательное соединение всех ее контуров (каналов). Для повышения
надежности в некоторых ЛА резервируется вся система управления. В этом
случае
ССН
системы
управления
представляет
собой
параллельное
соединение.
3
Каждый контур, в свою очередь, так же состоит из отдельных подсистем
(вычислителей, преобразователей, корректирующих устройств, усилителей
и т.д.), рассматриваемых на данном этапе членения как неделимые элементы.
По аналогии с предыдущим, при отсутствии резервирования контура, сколь
сложным он не был и какой бы вид не имел, его ССН представляет собой
последовательное соединение всех входящих в него элементов.
Рассмотрим
некоторые
элементы,
обладающие
специфическими
особенностями построения, входящие в контур практически любых систем
управления (СУ ЛА) (дискретных, непрерывных, линейных, нелинейных,
детерминированных, стохастических
и т.д.). Например, в состав системы
управления ЛА часто входит привод с электродвигателем (электрический
привод). Он представляет собой замкнутую систему, изображенную на рис. 1.
ИД
U пр
УН
1
КУ
2
U пр
УМ
3
4
q
6
5
7
E
Рис. 1. Блок-схема привода с электродвигателем (подсистема i-того
уровня членения ЛА)
Привод содержит следующие элементы: сравнивающее устройство (1);
усилитель напряжения (2); корректирующее устройство (3); усилитель
мощности (4); исполнительный двигатель (5); редуктор (6); потенциометрприемник (7), являющийся потенциометром обратной связи. Так как при
4
E
отказе каждого из семи рассмотренных элементов привод выходит из строя,
то структурная схема
надежности его представляет последовательное
соединение всех семи элементов. Однако, четыре наиболее ответственных
элемента: усилитель напряжения (2), корректирующее устройство (3),
усилитель мощности (4), и исполнительный двигатель (5) для повышения
надежности привода раздельно (поэлементно) резервируются. Поэтому,
структурная
схема
надежности
параллельно-последовательного
электрического
соединения
привода
элементов.
имеет
На
вид
рис.
2
представлена структурная схема надежности электрического привода при
раздельном (поэлементном) резервировании. При отказе любого из четырех
резервированных элементов неисправный автоматически отключается и
включается
резервный
элемент
с
помощью
переключателей
(П).
Использование переключателей позволяет избежать изменения параметров
электротехнических элементов при возникновении отказов.
1
2
п
3
п
4
п
5
п
2
п
3
п
4
п
5
п
6
7
Рис. 2. ССН электрического привода с резервированными элементами.
Здесь элементы 2, 3, 4 и 5 имеют двукратное резервирование. В
некоторых
случаях
применяют
трехкратное
и
четырехкратное
резервирования.
Усилители (напряжения и мощности) являются одними из самых
распространенных устройств, так как входят не только в качестве
самостоятельных элементов контуров управления летательными аппаратами,
5
но и в состав отдельных подсистем на последующих уровнях членения, что
иллюстрируется рисунком 1. Особенностью этих элементов является то, что
оба
они
передают
сигнал
в
электрической
форме
и
состоят
из
последовательного соединения одинаковых компонентов, количество которых
может превышать 10.
Корректирующее устройство (КУ) может быть активным и пассивным.
Пассивное
КУ
однотипных
и
представляет
примерно
собой
последовательное соединение
одинаковых
по
показателям
m
надежности
четырехполюсников. На рис.3 представлена блок-схема пассивного КУ.
R2
R1
Rm 1
C2
C1
1
R1
2
Cm
R2
Rm1
m
Рис . 3 Блок-схема пассивного КУ.
Активные корректирующие устройства строятся на усилительных
элементах.
Наиболее
просто
активные
корректирующие
устройства
реализуются на операционных усилителях путем подбора соответствующих
импедансов на входе и в обратной связи усилителя постоянного тока. Блоксхема активного корректирующего устройства имеет вид, изображенный на
рис. 4. Из рисунка видно, что оно представляет собой последовательное
соединение m однотипных элементов (операционных усилителей). Каждый
операционный усилитель сформирован на усилителях постоянного тока с
общим коэффициентом усиления 1010 1012 и выше, охваченных “глубокой”
отрицательной обратной связью.
6
Z m
Z 2
Z1
Z1
Z m
Z 2
>k
>k
>k
2
1
m
Рис. 4. Блок-схема активного КУ.
Структурная схема надежности активных и пассивных корректирующих
устройств имеет вид основного соединения. Однако для повышения
надежности элементы и активного и пассивного корректирующих устройств
резервируются. Поэтому их структурная схема надежности приобретает вид
параллельно-последовательного соединения.
На рис. 5 представлена структурная схема надежности активных и
пассивных корректирующих устройств при раздельном двукратном активном
резервировании.
1
2
m
КУ
п
КУ
п
КУ
п
КУ
п
КУ
п
КУ
п
Рис. 5. ССН активных и пассивных КУ.
Усилительное устройство как элемент системы управления ЛА состоит
из
последовательного
соединения
m1
одинаковых
усилителей,
характеристики усиления которых (напряжение, мощность) могут изменяться
в определенном диапазоне. На рис.6 представлена блок-схема усилительного
устройства.
7
m1
2
1
E
E
E
У
У
У
Рис . 6. Блок-схема усилительного устройства.
Структурная
схема
надежности
усилительного
устройства,
изображенного на рис. 6 имеет вид основного соединения, однако при
резервировании ССН приобретает вид параллельно-последовательного
соединения элементов как и в предыдущих случаях.
Таким образом, усилители напряжения, мощности, пассивные и
активные
корректирующие
устройства,
усилители
постоянного
тока,
входящие в состав активных корректирующих устройств, компенсирующие
усилители пассивных корректирующих устройств - все построены по одному
принципу в виде последовательного соединения одинаковых или однотипных,
но примерно равных по показателям надежности компонентов. Причем,
количество последовательно соединенных компонентов этих устройств может
варьироваться в довольно широких пределах при условии обеспечения
требуемых выходных характеристик.
Рассмотрим
оптимизацию
параметров
типичного
класса
резервированных элементов систем управления. Особенностями этого класса
являются:
8
1) каждый элемент представляет собой последовательное соединение
отдельных компонентов;
2) все компоненты элемента одинаковы по составу, характеру работы и
показателям надежности;
3) компоненты элементов раздельно резервируются.
Примерами
таких
элементов
систем
управления
летательными
аппаратами (помимо рассмотренных выше) являются , источники снабжения
систем управления (и борта в целом) постоянным током, состоящие из
последовательно соединенных нескольких элементов электропитания . Таким
образом,
имеется
довольно
большой
класс
элементов
СУ
ЛА
электротехнического характера, обладающих указанными выше свойствами.
В качестве способа резервирования будем использовать активное
горячее раздельное резервирование.
Рассмотрим структурную схему надежности [2] нерезервированного
и резервированного элемента СУ ЛА. В качестве оптимизируемых критериев
надежности будем рассматривать показатели безотказности при внезапных
отказах.
Введём следующие обозначения:
Pc (t з ) Pc -
вероятность
безотказной
работы
резервированного
элемента системы за
время выполнения задания t з ;
Qc t з Qc - вероятность отказа резервированного элемента системы за
время
выполнения задания t з ;
9
P0 (t з ) P0 - вероятность безотказной работы нерезервированного
элемента системы за
время выполнения задания t з ;
Q0 t з Q0 - вероятность отказа нерезервированного элемента системы
за время t з ;
0 -обозначения основных и резервных элементов;
qt з q -вероятность отказа основных и резервных компонентов
элемента за время t з ;
p(t з ) p - вероятность безотказной работы основных и резервных
компонентов
элемента системы за время выполнения задания t з ;
q p t з q p -
вероятность отказа переключателей за время t з ;
m -количество последовательно соединенных компонентов;
k -кратность резервирования;
На рисунке 7 представлена структурная схема надежности
нерезервированного элемента, состоящая из последовательного соединения m
одинаковых компонентов с одинаковыми показателями q .
1
2
0
0
m
0
Рис.7. Структурная схема надежности нерезервированного элемента.
Очевидно,
Q0 1 (1 q ) m .
(1)
10
На рисунке 8 представлена структурная схема надежности (ССН)
резервированного элемента.
1
1
0
2
k
m
qp
2
0
qp
0
qp
0
qp
0
qp
0
qp
0
qp
0
qp
0
qp
Рис 8. Структурная схема надежности резервированного
элемента СУ ЛА.
Назовем последовательное соединение компонента и переключателя
участком, а параллельное соединение k участков узлом. Тогда структурная
схема надежности резервированного элемента представляет собой
последовательно
соединенных
узлов.
элемента.
Из
резервированного
Определим
вероятность
отказа
видно,
что:
рис.8
вероятность безотказной работы участка равна (1 q)(1 q p ) ,
вероятность отказа узла равна [1 (1 q)(1 q p )]k ,
m
(2)
(3)
вероятность безотказной работы узла равна 1 [1 (1 q)(1 q p )]k ,
(4)
вероятность отказа резервированного элемента Qc 1 {1 [1 (1 q)(1 q p )]k }m
(5)
Сравним
нерезервированного
резервированного
вероятности
элементов.
элемента
отказа
резервированного
и
Для
этого,
вероятность
отказа
выразим
через
вероятность
отказа
11
нерезервированного. Из выражения (1) получим значение 1-q и подставим в
(5), получим:
1
m
Qc 1 {1 [1 (1 Q0 ) (1 q p )]k }m .
(6)
Полученный
результат
можно
интерпретировать
следующим
образом. Если нерезервированный элемент с вероятностью безотказной
работы P0 резервируется целиком с кратностью k (т.е. имеет место общее
резервирование), то вероятность безотказной работы резервированного
элемента равна:
Pc 1 1 P0 .
k
Разобьем элемент на m одинаковых частей (компонентов). Тогда
1
m
0
вероятность безотказной работы каждой компоненты равна P . Если
производить раздельное резервирование каждой компоненты, то вероятность
безотказной работы такой резервированной системы будет равна:
1 k
m
Pc 1 1 P0
Полученное выражение справедливо
m
.
при идеальной надежности
переключателей ( p p 1 ). При реальной надежности переключателей ( p p 1 )
данное выражение имеет вид:
m
k
1
m
Pc 1 1 P0 p p .
В [2] указано, что существует максимум
12
m
k
1
m
Pc max 1 1 P0 p p ,
m
где m - оптимальный масштаб резервирования (разбиения элемента на
компоненты).
Нетрудно видеть, что выражение для
Pc
эквивалентно
выражению (6) для Qc . Поэтому функция Qc выражения (6) имеет минимум по
m . В связи с этим, задача исследования в КР ставится следующим образом:
по заданной кратности k раздельного резервирования и вероятности отказа
переключателя q p найти оптимальный размер m* и оптимальную вероятность
отказа одного компонента
q*
элемента СУ ЛА, обеспечивающих
минимальную вероятность отказа резервированного элемента в целом.
Экстремум функции Qc f (m)
в выражении (6) обусловлен
влиянием двух противоположных тенденций:
-с одной стороны с ростом размера m элемента вероятность отказа
растет;
-с другой стороны при постоянной величине Q0 вероятность отказа
1
m
компонента q с ростом m падает так как
q 1 (1 Q0 ) , а это приводит к
падению Qc . Оптимальные значения m* можно определить аналитически и
численно (а также графически).
Методика расчета
1.
Составить программу расчета вероятности отказа подсистемы, заданным в
задании способом резервирования, точным численным методом
Qc f q p , Q0 , k , m
.
(1)
13
2.
Провести расчеты и построить график функции (1) в зависимости от m для
заданных в соответствии с вариантом значений параметров
3.
Определить
Q0 , q p , k
.
m , обеспечивающее минимум
точное значение аргумента
функции (1) и точное оптимальное значение минимума функции Qc .
4.
Вычислить значение аргумента m по приближенным формулам
m
Q0
k 1
qp
m
или
Q0
k 11 q p
qp
и сопоставить с
точным значением m .
5.
Сопоставить точное оптимальное (минимальное) значение вероятности отказа
резервированной подсистемы Qc со значением, вычисленным приближенной
формуле
~
Qc
Q0
q k 1k k
k 1k 1 p .
Результаты сопоставления величин m и Qc , вычисленных точным
и приближенным методами оформить в виде таблицы, приведенной в
пояснительной записке к КР для заданного значения Q0 .
6.
Провести расчеты и построить в одних осях координат функции Qc f Q0 по
выражению (1) и функции Q0 Q0 для двух вариантов:
6.1 q p 0.2; m ; k 2,3,4; (проварьировать k)
6.2
7.
q p 0.1;0.2;0.3; m ; k 2.
(проварьировать qp)
Определить критические значения
Q0 kp
и выяснить причины наличия
критических областей.
8.
Повторить пункт 6 (без подпунктов 6.1 и 6.2) и пункт 7 для величины m и
значений
k, q p
,заданных в
соответствии с вариантом исходных данных.
14
Оценить
Q0 kp
для
реальных диапазонов исходных данных, указанных в
задании.
9.
Вычислить значения
Q0 kp
по приближенной формуле
~
Q0 kp
mq kp
1 kqkp1
и сравнить со значениями
Q0 kp
,
полученными в пункте 8 при сопоставимых исходных данных. Результаты
сравнения оформить в виде таблицы.
10. Сделать выводы по работе.
Сопоставление величин
m
и
Qc
, вычисленных точным и
приближенным методами.
Рис. 9 График зависимости вероятности отказа подсистемы от m
Таблица 1.
15
Сравнение результатов оптимизации безотказности резервированного
элемента СУ ЛА точным и приближенным методами
Оптим.
парам .
Q0
0.1
Qc точ
0.00814809917679704
Qcприб
0.008
m точ
5
m приб
5
Из представленных данных видно, что в рассмотренных случаях
приближенные значения mприб , вычисленные без округления, совпадают с
точными значениями m точ . Показатели безотказности, вычисленные точным
и приближенным методами отличаются в 4 знаках после запятой.
Аналитический метод определения критических значений
вероятностей отказа нерезервированного элемента Q0 кр .
16
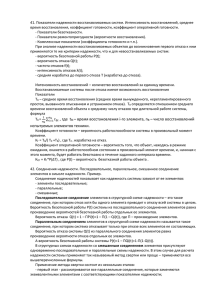
Рис. 10 Графики зависимостей Qc f (m) q p =0,2, m=5 и различных
значений k.
Рис. 11 Графики зависимостей Qc f (m) , k=2 m=5 и различных значений
qp .
Рис 12 .Сопоставление графиков функции Qc f (Q0 ) и Q0 Q0 .
17
Рисунок 12 показывает, что для различных значений кратности
резервирования k имеются диапазоны (участки) Q0 , где графики функции Qc
резервированного элемента расположены выше графика нерезервированного
элемента. Отмеченные на графике точки задают правые границы участков оси
Q0 (от начала координат), где данный способ резервирования дает показатели
надежности хуже, чем показатели надежности нерезервированной системы.
Эти точки определяют критические значения Q0 кр аргумента Q0 для различных
значений кратности резервирования k. Чем ниже величина k, тем шире
диапазон, в котором нерезервированный элемент СУ ЛА лучше по
безотказности, чем резервированный.
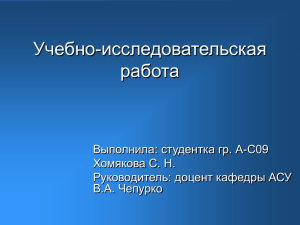
Рис 13 .Сопоставление графиков функции Qc f (Q0 ) и Q0 Q0 .
Рисунок 13 показывает, что для различных значений вероятностей
отказа переключателя q p имеются диапазоны (участки) Q0 , где графики
функции
Qc
резервированного элемента расположены выше графика
18
нерезервированного элемента. Отмеченные на графике точки задают правые
границы участков оси Q0 (от начала координат), где данный способ
резервирования
дает
показатели
надежности
хуже,
чем
показатели
надежности нерезервированной системы. Эти точки определяют критические
значения Q0 кр аргумента Q0 для различных значений вероятностей отказа q p .
Графики
также
показывают,
диапазонов (0 Q0 кр )
что
причиной
наличия
нежелательных
является ненадежность переключателя. Чем выше
величина q p , тем шире диапазон, в котором нерезервированный элемент СУ
ЛА лучше по безотказности, чем резервированный.
Численный метод определения критических значений
вероятностей отказа нерезервированного элемента
Q0 кр .
19
Рис 14. График функций Qc f (Q0 ) и Q0 Q0 для k 2 и q p 0,002 .
Представленные графике точные результаты показывают, что
нежелательные участки (0 Q0 кр ) практически отсутствуют ( Q0 кр меньше 0.05).
Вывод
По результатам проведенных вычислений можно сказать, что наиболее
надежной системой будет являться система с параллельным соединением из
пяти компонентов для k=2, Q0=0.1 и qp=0.02. Критическое значение
вероятности отказа нерезервированного элемента для полученной системы
равно 0.00814.
Приложение 1. Программа для заданий 1-3
clear; clc;
k=2;
qp=0.02;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
m1(i)=0;
pc(i)=0;
grid on;
hold on;
for m = 1:0.0001:25
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
m1(i)=m;
i=i+1;
end
plot(m1,t);
[Amin,ind]=min(t)
m1(ind)
20
Приложение 2. Программа для задания 6.1
clear; clc;
k=2;
qp=0.2;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
m1(i)=0;
m=6;
pc(i)=0;
grid on;
hold on;
for k = 2:4
i=1;
for q0 = 0:0.000001:1
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
m1(i)=q0;
i=i+1;
end
plot(m1,t);
end
Приложение 3. Программа для задания 6.2
clear; clc;
k=2;
qp=0.002;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
m1(i)=0;
m=6;
pc(i)=0;
grid on;
hold on;
for qp=0.1:0.1:0.3
for q0 = 0:0.00001:1
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
m1(i)=q0;
i=i+1;
end
plot(m1,t);
i=1
end
Приложение 4. Программа для задания 7
clear; clc;
k=2;
qp=0.2;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
21
m1(i)=0;
m=6;
pc(i)=0;
grid on;
hold on;
for k = 2:4
i=1;
for q0 = 0:0.000001:1
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
m1(i)=q0;
i=i+1;
end
plot(m1,t);
end
plot(m1,m1);
Приложение 5. Программа для задания 7
clear; clc;
k=2;
qp=0.02;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
m1(i)=0;
m=6;
pc(i)=0;
grid on;
hold on;
for qp=0.1:0.1:0.3
for q0 = 0:0.00001:1
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
m1(i)=q0;
i=i+1;
end
plot(m1,t);
end
plot(m1,m1);
Приложение 6. Программа для задания 8
clear; clc;
k=2;
qp=0.002;
q0=0.1;
qdop=0.008;
i=1;
t(i)=0;
m1(i)=0;
m=6;
pc(i)=0;
grid on;
hold on;
for q0 = 0:0.00001:1
t(i)= 1-(1-(1-((1-q0)^(1/m))*(1-qp))^k)^m;
22
m1(i)=q0;
i=i+1;
end
plot(m1,t);
plot(m1,m1);
23