Metodicheskoe ukazanie k laboratornoi rabote Opredelenie koeffitsienta treniia kacheniia 7421167
Реклама

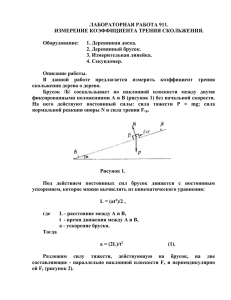
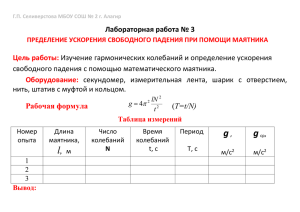
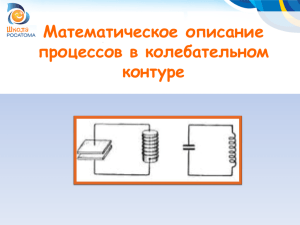
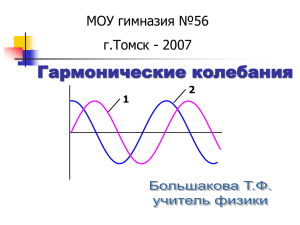
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное агентство по образованию _________________ Государственное образовательное учреждение высшего профессионального образования «Пензенский государственный университет архитектуры и строительства» Кафедра физики ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРЕНИЯ С ПОМОЩЬЮ УСТАНОВКИ ФПМ-02 И ЕЕ КОМПЬЮТЕРНОГО ИМИТАТОРА Методические указания к лабораторной работе № 22 Пенза 2007 УДК 531/534(075.8) ББК 22.3я73 О-62 Рекомендовано Редсоветом университета Рецензент – кандидат физико-математических наук, доцент И.Д. Караман (ПГУАС) Определение коэффициента трения с помощью установки ФПМ-02 и ее компьютерного имитатора: Методические указания /Г.И. Грейсух, Н.Н. Григорьевский, Г.А. Фокин. – Пенза: ПГУАС, 2007. – 20 с. Изложены основы теории затухающих свободных колебаний. Приведена методика эксперимента по определению коэффициента трения качения. Описаны особенности выполнения эксперимента на реальной лабораторной установке и на ее компьютерном имитаторе. Методические указания подготовлены на кафедре физики и предназначены для студентов специальностей, учебные планы которых предусматривают изучение курса физики. © Пензенский государственный университет архитектуры и строительства, 2007 © Грейсух Г.И., Григорьевский Н.Н., Фокин Г.А., 2007 2 Цель работы: изучить свободные затухающие колебания наклонного маятника; освоить методику определения коэффициента трения. Приборы: установка для определения коэффициента трения ФПМ-02, а также IBM-совместимый персональный компьютер и пакет компьютерных программ, имитирующих работу лабораторной установки. ОБЩИЕ СВЕДЕНИЯ 1. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. Колебания называются свободными, если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему. Простейшим типом колебаний являются гармонические колебания – колебания, при которых колеблющаяся величина изменяется во времени по закону синуса или косинуса. Дифференциальное уравнение гармонических колебаний имеет вид d 2x 2 x 0 , 2 dt где x - колеблющаяся величина, - циклическая частота. x A cos( t 0 ) - решение этого уравнения. Здесь A - амплитуда, 0 - начальная фаза. t 0 - фаза колебаний. Амплитуда – максимальное значение колеблющейся величины. Период колебаний – промежуток времени, через который происходит повторение движения тела. Фаза колебания за период получает 2 t приращение 2 . T . T , N - число колебаний. N Частота колебаний – число полных колебаний, совершаемых в единицу 1 N времени. . . Измеряется в герцах (Гц). T T Циклическая частота – число колебаний, совершаемых за 2 секунд. рад 2 . Единица измерения . 2 с T Фаза колебаний – величина, стоящая под знаком косинуса и характеризующая состояние колебательной системы в любой момент времени. 3 Начальная фаза – фаза колебаний в начальный момент времени. Фаза и начальная фаза измеряются в радианах ( рад ). Свободные затухающие колебания – колебания, амплитуда которых из-за потерь энергии реальной колебательной системой с течением времени уменьшается. Простейшим механизмом уменьшения энергии колебаний является ее превращение в теплоту вследствие трения в механических колебательных системах, а также омических потерь и излучения электромагнитной энергии в электрических колебательных системах. Дифференциальное уравнение свободных затухающих колебаний имеет вид d 2x dx 2 20 x 0 , 2 dt dt (1) где x – колеблющаяся величина, описывающая тот или иной физический процесс; – коэффициент затухания; 0 – циклическая частота собственных незатухающих колебаний (собственная частота колебательной системы). Решение уравнения (1) в случае малого затухания (2 << 20 ) имеет вид x A0 e t cos(t 0 ) , где A A0 e t – A0 – 20 2 – 0 – амплитуда затухающих колебаний; начальная амплитуда; циклическая частота затухающих колебаний; начальная фаза колебаний. 1 Промежуток времени , в течение которого амплитуда уменьшается в e раз, называется временем релаксации. Затухание нарушает периодичность колебаний, поэтому затухающие колебания не являются периодическими. Однако, если затухание мало, то можно условно пользоваться понятием периода как промежутка времени между двумя следующими друг за другом максимумами (или минимумами) колеблющейся величины. Тогда период затухающих колебаний вычисляют по формуле 2 2 T . 20 2 Если A(t) и A(t+T) – амплитуды двух последовательных колебаний, соответствующих моментам времени, отличающимся на период, то отношение 4 A( t ) eT A( t T) называется декрементом затухания, а его логарифм A( t ) T 1 ln T – логарифмическим декрементом A( t T ) Ne затухания. Величина Ne – это число колебаний, совершаемых за время уменьшения амплитуды в е раз. Логарифмический декремент затухания – постоянная величина для данной колебательной системы. Для характеристики колебательной системы используют понятие добротности Q, которая при малых значениях логарифмического декремента равна Q Ne 0. T0 2 Добротность пропорциональна числу колебаний, совершаемых системой за время релаксации. 2. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРЕНИЯ С ПОМОЩЬЮ НАКЛОННОГО МАЯТНИКА 2.1. Теоретическое обоснование методики определения коэффициента трения Наклонный маятник представляет собой шар, подвешенный на длинной нити и лежащий на наклонной плоскости. а б Рис. 1 5 Если шар отвести из положения равновесия (ось OO1) на угол , а затем отпустить, то возникнут колебания маятника. При этом шар будет кататься по наклонной плоскости около положения равновесия (рис. 1, а). Между шаром и наклонной плоскостью будет действовать сила трения качения. В результате колебания маятника будут постепенно затухать, то есть будет наблюдаться уменьшение во времени амплитуды колебаний. Можно предположить, что по величине затухания колебаний могут быть определены сила трения и коэффициент трения качения. Выведем формулу, которая связывает уменьшение амплитуды колебаний с коэффициентом трения качения . При качении шара по плоскости сила трения совершает работу. Эта работа уменьшает полную энергию шара. Полная энергия складывается из кинетической и потенциальной энергий. В тех положениях, где маятник максимально отклонен от положения равновесия, его скорость, а следовательно, и кинетическая энергия равны нулю. Эти точки называются точками поворота. В них маятник останавливается, поворачивается и движется обратно. В момент поворота энергия маятника равна потенциальной энергии, поэтому уменьшение потенциальной энергии маятника при его движении от одной точки поворота до другой равна работе силы трения на пути между точками поворота. Пусть А – точка поворота (рис. 1, а). В этом положении нить маятника составляет угол с осью OO1. Если бы трения не было, то через половину периода маятник оказался бы в точке N, а угол отклонения был бы равен . Но из-за трения шар немного не докатится до точки N и остановится в точке В. Это и будет новая точка поворота. В этой точке угол нити с осью OO1 будет равен . За половину периода угол поворота маятника уменьшился на . Точка В расположена несколько ниже, чем точка А, и поэтому потенциальная энергия маятника в точке В меньше, чем в точке А. Следовательно, маятник потерял высоту при перемещении из точки А в точку В. Найдем связь между потерей угла и потерей высоты h . Для этого спроецируем точки A и B на ось OO1 (см. рис. 1, а). Это будут точки A1 и B1 соответственно. Очевидно, что длина отрезка А1В1 A1B1 cos( ) cos , где – длина нити. Так как ось OO1 наклонена под углом к вертикали, проекция отрезка на вертикальную ось и есть потеря высоты h (рис. 1, б): h cos coscos( ) cos . (2) При этом изменение потенциальной энергии маятника при переходе его из положения A в положение В равно: 6 П mgh , (3) где m – масса шара; g – ускорение свободного падения. Вычислим работу силы трения. Сила трения определяется по формуле FТР N , (4) где – коэффициент трения; N mgsin – сила нормальной реакции плоскости. Путь s, пройденный шаром за половину периода колебаний маятника, равен длине дуги AB: s ( 2 ) . Работа силы трения на пути s: A mg sin ( 2 ) . (5) Но A П , поэтому с учетом уравнений (2), (3), (4) получается mg sin ( 2 ) mg coscos( ) cos, откуда tg cos( ) cos . 2 (6) Выражение (6) существенно упрощается с учетом того, что угол очень мал (порядка 10-2 радиан). Итак, cos( ) cos cos sin sin . Но cos 1, sin . Поэтому cos( ) cos sin . Таким образом, формула (6) приобретает вид: sin , tg 2 откуда 2 tg . sin tg (7) Из формулы (7) видно, что потеря угла за половину периода определяется коэффициентом трения и углом . Однако можно найти такие условия, при которых от угла не зависит. Учтем, что коэффициент трения качения мал (порядка 10-3). Если рассматривать достаточно большие амплитуды колебаний маятника , такие, при которых sin tg , то слагаемым tg в знаменателе формулы (7) можно пренебречь и тогда 7 2 tg . sin С другой стороны, пусть угол будет малым настолько, чтобы можно было считать, что sin . Тогда потеря угла за половину периода колебаний будет определяться формулой 2 tg . (8) Формула (8) справедлива, если tg sin 1. (9) Из-за того, что имеет порядок 10-2, неравенству (9) удовлетворяют углы порядка 10-2–10-1 радиан. Итак, за время одного полного колебания потеря угла составит 1 4 tg , а за n колебаний – n 4n tg . Отсюда n . 4ntg (10) Формула (10) дает удобный способ определения коэффициента трения качения. Необходимо измерить уменьшение угла n за 10–15 колебаний, а затем по формуле (10) вычислить . В формуле (10) величина выражена в радианах. Чтобы использовать значения в градусах, формулу (10) необходимо видоизменить: n . 720ntg (11) Выясним физический смысл коэффициента трения качения. Рассмотрим сначала более общую задачу. Шар массой m и моментом инерции Ic относительно оси, проходящей через центр масс, движется по гладкой поверхности (рис. 2). 0 8 Рис. 2 К центру масс C приложена сила F F ( x) , направленная вдоль оси ox и являющаяся функцией координаты x. Со стороны поверхности на тело действует сила трения FТР. Пусть момент силы трения относительно оси, проходящей через центр C шара, равен MТР. Уравнения движения шара в этом случае имеют вид m dvC F ( x ) FТР ; dt (12) d M ТР , dt (13) IC где v C – скорость центpa масс; – угловая скорость. В уравнениях (12) и (13) четыре неизвестных: v C , , FТР, MТР. В общем случае задача не определена. Допустим, что: 1) тело катится без проскальзывания. Тогда vC R , (14) где R – радиус шара; 2) тело и плоскость являются абсолютно жесткими, т.е. тело не деформируется, а касается плоскости в одной точке О (точечный контакт), тогда между моментом силы трения и силой трения имеется связь: M ТР RFТР . (15) С учетом формул (14) и (15) из уравнений (12) и (13) получаем выражение для силы трения: FТР IC . I C mR2 (16) Выражение (16) не содержит коэффициента трения , который определяется физическими свойствами соприкасающихся поверхностей шара и плоскости, такими, как шероховатость, или вид материалов, из которых изготовлены шар и плоскость. Этот результат – прямое следствие принятой идеализации, отражаемой связями (14) и (15). Кроме того, легко показать, что в принятой модели сила трения не совершает работы. Действительно, умножим уравнение (12) на v C , а уравнение (13) — на . Учитывая, что 9 1 d 2 dv 1 d 2 d vC vC C и 2 dt dt 2 dt dt и складывая выражения (12) и (13), получаем d 1 1 mvC2 I C 2 W ( x ) M ТР FТР vC , dt 2 2 (17) где W(x) – потенциальная энергия шара в поле силы F(x). Следует учесть, что d dW dx dW (18) W ( x) vC F ( x) vC . dt dt dt dx Если принять во внимание формулы (14) и (15), то правая часть равенства (17) обращается в нуль. В левой части равенства (17) стоит производная по времени от полной энергии системы, которая состоит из 1 2 кинетической энергии поступательного движения шара mvC , 2 1 кинетической энергии вращательного движения I C 2 и потенциальной 2 энергии W(х). Это значит, что полная энергия системы - постоянная величина, т.е. сила трения не совершает работы. Очевидно, что и этот несколько странный результат также следствие принятой идеализации. Это свидетельствует о том, что принятая идеализация не отвечает физической реальности. В самом деле, в процессе движении шар взаимодействует с плоскостью, поэтому его механическая энергия должна убывать, а это значит, что связи (14) и (15) могут быть верны лишь настолько, насколько можно пренебречь диссипацией энергии. Совершенно ясно, что в данном случае нельзя принять такую идеализацию, поскольку наша цель – определить по изменению энергии маятника коэффициент трения. Поэтому будем считать справедливым предположение об абсолютной жесткости шара и поверхности, а значит, и справедливой связи (15). Однако откажемся от предположения, что шар движется без проскальзывания. Мы допустим, что имеет место слабое проскальзывание. Пусть скорость точек касания (на рис. 2 точка О) шара (скорость проскальзывания) u vC R . (19) u vC . (20) Будем считать, что 10 Тогда, подставляя в уравнение (17) vC u / R и учитывая условия (15) и (20), приходим к уравнению: d dt 1 1 I C vC2 2 mv W ( x ) C FТР u , 2 R2 2 (21) из которого видно, что скорость диссипации энергии равна мощности силы трения. Результат вполне естественный, т.к. тело скользит по поверхности со скоростью и, на него действует сила трения, совершающая работу, вследствие чего полная энергия системы уменьшается. Выполняя в уравнении (21) дифференцирование и учитывая соотношение (18), получаем уравнение движения центра масс шара: I dv u . m C2 C F FТР vC R dt (22) Оно аналогично уравнению движения материальной точки массой m m IC , R2 (23) под действием внешней силы F и силы трения качения FТР. КАЧ FТР u . vC Причем, FТР – обычная сила трения скольжения. Следовательно, при качении шара эффективная сила трения, которую называют силой трения качения, есть просто обычная сила трения скольжения, умноженная на отношение скорости проскальзывания к скорости центра масс тела. На практике часто наблюдается случай, когда сила трения качения не зависит от скорости тела. Видимо, в этом случае скорость проскальзывания и пропорциональна скорости тела: u vC , где – коэффициент пропорциональности. Обычно 1 . Сила трения скольжения описывается формулой (4). Тогда FТР. КАЧ N N , где – коэффициент трения качения. Естественно, независимость силы трения качения от скорости тела может быть проверена только опытным путем. Если это так, то уравнение движения шара (22) имеет вид: 11 d (24) vC F FТР.КАЧ ; dt здесь FТР.КАЧ – постоянная величина. Точно такое же уравнение можно получить, если оставить связь (14), но вместо условия (15) использовать формулу связи между моментом силы трения и силой трения: m M ТР FТР R , (25) где < 1 — некоторый постоянный коэффициент. Связь (25) можно интерпретировать так: тело или плоскость несколько деформируется, поэтому плечо силы трения R немного меньше, чем в случае абсолютно жесткого контакта. Обратимся теперь конкретно к нашей задаче о движении наклонного маятника. В общем случае вопрос о силе трения качения выходит за рамки чисто механических моделей и требует учета вида деформации поверхности, а также изучения характера взаимодействия в зоне контакта тела и поверхности. Рассмотрим силы, действующие на шар (рис. 3). Силу тяжести mg разложим на две составляющие силы, направленные перпендикулярно и параллельно плоскости: F mg sin , F mg cos . Co стороны наклонной плоскости на шар действует сила реакции опоры N так, что сумма всех сил в направлении, перпендикулярном плоскости, равна нулю. Рис. 3 Силу FII (рис. 4) разложим также на две составляющие: направленную вдоль нити и перпендикулярную ей: T F cos и FВ F sin . Таким образом, возвращающая сила в скалярной форме равна FВ mg sin sin , (26) где x / , х — длина дуги, отсчитываемая от положения равновесия (знак минус взят потому, что возвращающая сила 12 направлена в сторону, противоположную смещению). На шар действует сила трения: FТР N mg sin , (27) направление которой зависит от направления скорости проскальзывания u. Рис. 4 Если шар движется справа налево (как на рис. 4), то d vC 0 , u vC 0 и FТР>0 dt при u >0 и F < 0. Подставим выражения (26) и (27) в формулу (22), получим уравнение движения маятника: d 2 (28) m 2 mg cos sin mg sin . dt При этом знак «+» берется тогда, когда шар движется справа налево, знак «—» соответствует движению слева направо. Таким образом, уравнение движения (28) — это фактически два уравнения, описывающих движение шара в противоположных направлениях. Получение решения уравнения (28) сопряжено с определенными трудностями. Именно поэтому был выбран более наглядный энергетический подход для вывода формулы (11). Однако уравнение движения дает еще информацию о периоде колебаний и, кроме того, раскрывает физический смысл неравенств sin tg и (9). Пусть вначале мы отклонили маятник на некоторый угол вправо и d 2 без толчка отпустили его. Шар покатится, если 0 или, как следует из dt 2 уравнения (28), при условии, что sin tg . (29) 13 Обозначим sin 0 tg . Область углов 0 является областью застоя. В этой области сила трения больше возвращающей силы. Таким образом, физический смысл неравенства sin tg очевиден: углы должны быть много больше угла застоя 0, чтобы колебаний было достаточное количество и маятник не остался сразу в зоне застоя. Будем рассматривать малые колебания. Тогда sin , но одновременно tg 0 1 . В этом случае уравнение (28) можно записать так: d 2 m g 20 sin , 2 dt m m g где 0 cos — частота колебаний. Для периода колебаний m 2 получаем следующее выражение: T 0 T 2 где T0 2 T02 m , m cos . g Так как момент инерции шара массой m равен I C m 2 радиус шара, то 1 1,4 , поэтому m 5 T2 1,4T0 . cos 2 mR2 , где R – 5 (30) Эту зависимость нетрудно проверить экспериментально и убедиться в справедливости принятой модели трения качения. 2.2. Экспериментальная установка Для определения коэффициента трения используется установка ФПМ02, общий вид которой приведен на рис. 5. 14 Рис. 5 Она состоит из следующих частей: 1. Регулируемые опоры, позволяющие обеспечить вертикальность первоначальной установки плоскости колебаний маятника. 2. Электронный блок с секундомером и счетчиком числа колебаний. 3. Клавиша включения электронного блока. 4. Индикатор счетчика числа колебаний маятника. 5. Индикатор электронного секундомера. 6. Клавиша обнуления индикаторов. 7. Клавиша остановки счетчика и секундомера (STOP). 8. Осветитель. 9. Шарик маятника. 10. Фотоэлемент, фиксирующий момент прохождения маятником положения равновесия. 11. Стержень, скрепленный с шариком. В момент прохождения маятником положения равновесия стержень перекрывает световой поток, падающий от осветителя на фотоэлемент. 12. Пластина, по которой катится шарик маятника. 13. Нить маятника. 14. Шкала углов отклонения маятника. 15 15. Регулировочный винт для изменения длины нити. 16. Механизм установки угла наклона плоскости колебаний маятника. 2.3. Порядок выполнения работы на установке ФПМ-02 Выполнение работы на установке ФПМ-02 Задание 1. Измерение коэффициента трения . 1. С помощью регулировочных винтов установите наклонную плоскость вертикально. При этом нить маятника занимает вертикальное положение и устанавливается напротив отметки 0 на шкале 14 (см. рис. 5) углов . Шарик почти касается пластины 12 наклонной плоскости. 2. Включить электронный блок и дать ему прогреться в течение трех минут. 3. Вращая рукоятку механизма 16, установить наклонную плоскость под углом =30. 4. Отвести маятник от положения равновесия на угол = 6–10 и подсчитать число колебаний, совершенных маятником до момента, когда амплитуда колебаний уменьшится по сравнению с первоначальным значением на 1=2. 5. Записать результат в табл. 1. Таблица 1 n2 n3 1 n1 1 2 2 3 3 <> 30 45 2 3 4 60 6. Повторить действия, изложенные в пп. 4, 5, начиная с того же угла , для 2=3 и 3=4. 7. Повторить действия, изложенные в пп. 4, 5, 6 для углов наклона плоскости =45 и =60. 8. Используя формулу (11), рассчитать коэффициенты трения для каждого случая и записать их в табл. 1. 9. По данным табл.1 рассчитать по формуле 1 2 3 3 средние для каждого угла значения коэффициента трения <> и записать в табл.1. Задание 2. Определение зависимости условного периода T от угла наклона плоскости колебаний. 16 1. Вращая рукоятку механизма 16, установить наклонную плоскость под углом =30. 2. Выбрать первоначальное значение угла отклонения маятника в интервале 6–10 (это значение будет одинаковым для всех опытов в пределах данного задания). 3. Отвести маятник на выбранный угол и отпустить его, запуская колебания. 4. Наблюдая за счетчиком числа колебаний 2, нажать клавишу 7 «STOP» на электронном блоке в момент, когда показание счетчика станет равным 9. Секундомер остановится тогда, когда счетчик покажет 10 колебаний. 5. Остановить маятник. Разделив время, которое показывает индикатор секундомера, на число 10, записать его в табл.2 в качестве значения периода T для данного угла наклона плоскости. Таблица 2 30 35 40 45 50 55 60 T T2 1/cos 6. Нажать клавишу 6 обнуления индикаторов электронного блока. 7. Повторить пп.3-6 для углов =35; 40; 45; 50; 55; 60. 8. По данным табл.2 построить график зависимости T=f(1/cos). 2.4. Выполнение работы на компьютерном имитаторе Задание 1. Измерение коэффициента трения . 1. Запустить компьютерный имитатор. 2. Ознакомиться с устройством лабораторной установки, просмотрев демонстрационный клип. 3. Начать опыт №1. Для этого с помощью курсора мыши нажать клавишу «Приступить к опыту №1». 4. Включить электронный блок, нажав клавишу «Включить». 5. Для выбора нужного угла наклона плоскости нажать клавишу «». 6. Задать первое значение угла наклона плоскости, нажав клавишу «30». 7. Для выбора первоначального значения угла отклонения маятника нажать клавишу . 8. Выбрать один из возможных значений угла в диапазоне 6–10, нажав соответствующую клавишу. 17 9. Для выбора значения нажать клавишу «». 10. Выбрать =2, нажав соответствующую клавишу. 11. Пустить маятник. Для этого нажать клавишу «Запуск». 12. После появления в таблице на экране монитора значений n1 и 1 нажать клавишу «Сброс». 13. Повторить пп. 9-12 для 2=3 и 3=4. 14. Повторить пп. 5-13 для углов =45 и =60. 15. Закончить выполнение опыта №1. Выключить электронный блок, нажав клавишу «Выключить». 16. Переписать результаты опыта в тетрадь для лабораторных работ в виде табл.1. 17. Нажать клавишу «Вернуться в меню». 18. По данным табл.1 рассчитать по формуле 1 2 3 3 средние для каждого угла значения коэффициента трения <> и записать их в табл.1. Задание 2. Определение зависимости условного периода T от угла наклона плоскости колебаний 1. Начать опыт №2. Для этого нажать клавишу «Приступить к опыту№2». 2. Включить электронный блок, нажав кнопку «Включить». 3. Для выбора нужного угла наклона плоскости нажать клавишу «». 4. Задать первое значение угла наклона плоскости, нажав клавишу «30». 5. Для выбора первоначального значения угла отклонения маятника нажать клавишу . 6. Выбрать один из возможных значений угла в диапазоне 6–10, нажав соответствующую клавишу. 7. Запустить маятник, нажав клавишу «Запуск». 8. Наблюдая за счетчиком колебаний, нажать клавишу «Стоп», когда показание счетчика станет равным 9. Секундомер остановится, когда счетчик покажет 10 колебаний. 9. Для остановки маятника нажать клавишу «Сброс». 10. Повторить пп.3-9 для углов =35; 40; 45; 50; 55; 60. Значение угла должно оставаться равным тому, которое было выбрано в п. 14. 11. Переписать результаты опыта в тетрадь для лабораторных работ в виде табл.2. 12. По данным табл.2 построить график зависимости T=f(1/cosβ). 18 Контрольные вопросы 1. Что такое колебания? 2. Какие колебания называются свободными? 3. Какие колебания называются гармоническими? 4. Запишите дифференциальное уравнение гармонических колебаний и его решение. 5. Какими величинами характеризуются гармонические колебания? Дайте им определения, запишите формулы и укажите единицы измерения. 6. Какие колебания называются свободными затухающими? 7. Запишите дифференциальное уравнение свободных затухающих колебаний и его решение. 8. Запишите формулы для амплитуды, циклической частоты и периода затухающих колебаний, укажите их единицы измерения. 9. Что такое время релаксации? Как его найти? 10.Декремент и логарифмический декремент затухания. 11.Добротность колебательной системы. 12. Опишите устройство лабораторной установки. 13.Какие превращения энергии происходят в процессе колебаний наклонного маятника? 14.Выведите расчетную формулу для определения коэффициента трения с помощью наклонного маятника. Какие допущения приняты при выводе этой формулы? 15.Какие факторы влияют на погрешность определения коэффициента трения? БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Трофимова Т.И. Курс физики. – М.: Высшая школа, 2003. 2. Сивухин Д.В. Общий курс физики. Т. 1. Механика. – М., 1989. 3. Хайкин С.Э. Физические основы механики. – М., 1971. 4. Детлаф А.А., Яворский Б.М. Курс физики. – М., 1989. ОГЛАВЛЕНИЕ ОБЩИЕ СВЕДЕНИЯ........................................................................................... 3 1. СВОБОДНЫЕ ЗАТУХАЮЩИЕ КОЛЕБАНИЯ .......................................... 3 2. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ТРЕНИЯ С ПОМОЩЬЮ НАКЛОННОГО МАЯТНИКА.......................................... 5 19 2.1. Теоретическое обоснование методики определения коэффициента трения ....................................................................................................... 5 2.2. Экспериментальная установка ............................................................ 14 2.3. Порядок выполнения работы на установке ФПМ-02 ....................... 16 2.4. Выполнение работы на компьютерном имитаторе........................... 17 К о н т р о л ь н ы е в о п р о с ы ................................................................ 19 БИБЛИОГРАФИЧЕСКИЙ СПИСОК .............................................................. 19 20 21 22