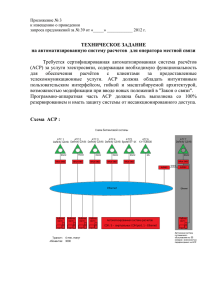
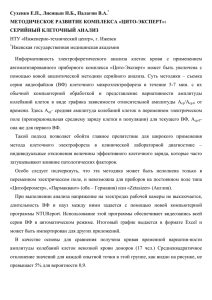
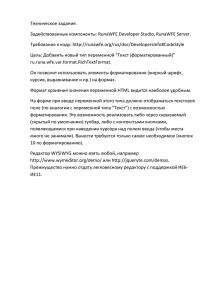
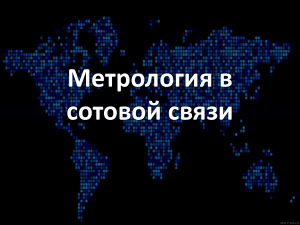
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ В.Ф. КУЗИЩИН, Е.И. МЕРЗЛИКИНА АСР ТЕМПЕРАТУРЫ ЭЛЕКТРОНАГРЕВАТЕЛЯ С ПОЗИЦИОННЫМ АЛГОРИТМОМ РЕГУЛИРОВАНИЯ НА БАЗЕ КОНТРОЛЛЕРА ПЛК 150 Лабораторная работа №3 Методическое пособие по курсам «Технические средства автоматизации» и «Автоматизация систем теплоснабжения и кондиционирования» для студентов, обучающихся по направлению «Теплоэнергетика и теплотехника» Москва Издательский дом МЭИ 2012 УДК 621.36 К 89 Утверждено учебным управлением МЭИ Подготовлено на кафедре автоматизированных систем управления тепловыми процессами Рецензент: ????? Кузищин В. Ф., Мерзликина Е.И. К 89. АСР температуры электронагревателя с позиционным алгоритмом регулирования на базе контроллера ПЛК 150. Лабораторная работа № 3: Методическое пособие/ В.Ф. Кузищин, Е.И. Мерзликина. – М.: Издательский дом МЭИ, 2011. – 12 с. Посвящена изучению АСР температуры электронагревателя с двухпозиционным алгоритмом регулирования, на базе микропроцессорного контроллера ПЛК 150, программированию контроллера в среде CoDeSys, настройке регулятора и проведению испытаний системы регулирования. Продолжительность лабораторных занятий – 4 часа. Предназначено для студентов ИТАЭ, ИПЭЭФ. ______________ Учебное издание Кузищин Виктор Федорович Мерзликина Елена Игоревна АСР ТЕМПЕРАТУРЫ ЭЛЕКТРОНАГРЕВАТЕЛЯ С ПОЗИЦИОННЫМ АЛГОРИТМОМ РЕГУЛИРОВАНИЯ НА БАЗЕ КОНТРОЛЛЕРА ПЛК 150 Лабораторная работа № 3 Методическое пособие по курсам «Технические средства автоматизации» и «Автоматизация систем теплоснабжения и кондиционирования» для студентов, обучающихся по направлению «Теплоэнергетика и теплотехника» Редактор издательства В.В. Сомова Темплан издания МЭИ 2009, учебн. Подписано в печать Печать офсетная Формат 60х84/16 Физ. печ. л. 0,75 Тираж 100 экз. Изд. № Заказ № ОАО «Издательский дом МЭИ», 111250, Москва, Красноказарменная, д. 14 Отпечатано в типографии ФКП «НИИ «Геодезия», 141292, Московская обл., г. Красноармейск, просп. Испытателей, д. 14 © Московский энергетический институт (технический университет) 2012 1. ЦЕЛЬ РАБОТЫ Изучение технической структуры и функционального состава АСР с двухпозиционным алгоритмом регулирования на базе контроллера ПЛК 150; получение навыков самостоятельного построения АСР с позиционным регулятором, исследование качества работы этой АСР. 2. ВОПРОСЫ ДЛЯ КОЛЛОКВИУМА 1. Что является объектом регулирования на изучаемом стенде? 2. Каким образом формируется и вводится в контроллер сигнал по температуре электронагревателя? 3. Какие существуют типовые алгоритмы регулирования? 4. Какова область применения позиционных регуляторов? 5. Каковы особенности работы АСР с двухпозиционным регулятором? 6. Какие показатели характеризуют процесс регулирования в системе с двухпозиционным регулятором? 7. Какое влияние оказывает гистерезис релейного элемента на процесс двухпозиционного регулирования? 8. Каким путем можно влиять на периодичность включений двухпозиционного регулятора? 9. При каком условии периодические колебания при двухпозиционном регулировании будут симметричными? 10. Какие входы и выходы ПЛК 150 используются в данной работе? 11. Какой вид имеет процесс регулирования в системе с двухпозиционным регулятором при изменении задания? 12. Чем отличается микропроцессорный программируемый контроллер от контроллера с жесткой алгоритмической структурой? 3. ОБЩИЕ СВЕДЕНИЯ О ДВУХПОЗИЦИОННЫХ РЕГУЛЯТОРАХ Двухпозиционные регуляторы широко используются в промышленности и коммунальном хозяйстве. Их несомненным достоинством является простота реализации и возможность управлять установками большой мощности. Они могут применяться для регулирования технологических параметров в тех случаях, когда не требуется высокой точности и объект обладает свойством фильтрации (сглаживания) высокочастотных колебаний благодаря аккумулирующим способностям технологического оборудования. С помощью двухпозиционных регуляторов поддерживают заданную температуру в промышленных установках с электрическим нагревом, температуру в холодильных установках, уровень воды (конденсата) в различных емкостях и т.д. В бытовой технике с их помощью регулируется температурный режим электрических водонагревателей, конвекторов и масляных радиаторов, в духовках электроплит, в камерах холодильников и морозильников, рабочей поверхности электрических утюгов и т.д. Кроме того, двухпозиционные устройства применяются в системах сигнализации и автоматической защиты для формирования дискретных сигналов о выходе переменных за заданные значения. На рис. 1 показана структурная схема АСР с двухпозиционным регулятором. Рис. 1. Структурная схема АСР с двухпозиционным регулятором: РЭ – релейный элемент; u (SP) – задание; y (PV) – регулируемая переменная; μ (MV) – регулирующее воздействие; ε = u - y = SP - PV - рассогласование Двухпозиционный регулятор строится на базе релейного элемента РЭ, который может быть выполнен в виде электромеханического реле, электронной схемы или реализован программным путем. Этот элемент имеет нелинейную статическую характеристику. Статическая характеристика двухпозиционного реле приведена на рис. 2: а) без гистерезиса, б) с гистерезисом (зоной возврата). а) б) Рис. 2. Статическая характеристика двухпозиционного реле: а) без гистерезиса; б) с гистерезисом (зоной возврата) Двухпозиционное реле без гистерезиса (рис. 2а) имеет однозначную статическую характеристику, которая описывается выражением: k 0 , если k 0 , иначе k 0 , (1) где: ε – входная переменная регулятора (сигнал рассогласования), μ – выходная переменная регулятора (регулирующее воздействие). Двухпозиционное реле с гистерезисом (рис. 2б) относится к классу устройств с «памятью», то есть учитывает предыдущее состояние, и имеет неоднозначную статическую характеристику, которая может быть представлена следующим образом: k 0 , если k ; иначе k 0 , если k ; иначе k k 1 . 2 2 (2) где: Δ – гистерезис (зона возврата) релейной характеристики. Двухпозиционный регулятор имеет всего два возможных значения выходного сигнала: минимальное (в данном случае – нуль, нагреватель выключен) и максимальное (в данном случае – μ0 , нагреватель включен). Отметим, что для реле с гистерезисом переключения в сторону «больше» и в сторону «меньше» происходят при разных значениях ε. Особенностью АСР с двухпозиционными регуляторами является процесс регулирования в форме устойчивых автоколебаний – периодических незатухающих колебаний (см., например, рис. 4). При этом регулируемая переменная PV колеблется вокруг задания SP, а воздействие регулятора MV периодически переключается с максимального μ0 на минимальное значение и обратно. Амплитуда колебаний регулируемой переменной и их период зависят от свойств объекта регулирования, гистерезиса Δ и воздействия μ0. Кроме того, при несимметричном воздействии регулятора на объект в направлениях «Больше» и «Меньше» происходит смещение средней линии колебаний, что видно, например, на рис. 4. При использовании реле без гистерезиса (рис. 2а) период переключений регулирующего воздействия может оказаться недопустимо малым, например, при управлении холодильной установкой. Кроме того, при медленном изменении регулируемой переменной PV вблизи задания SP может возникнуть явление «дребезга» - частых беспорядочных переключений реле из-за действия случайных помех. Поэтому на практике применяются двухпозиционные регуляторы, имеющие зону гистерезиса (с разнесенными порогами переключения). Описанная выше особенность АСР с двухпозиционными регуляторами (автоколебания) может рассматриваться как недостаток, так как электромеханические релейные элементы имеют ограниченный ресурс переключений. Кроме того, точность регулирования в АСР с двухпозиционным регулятором может оказаться недостаточной. 4. МЕТОДИКА РАСЧЕТА ПАРАМЕТРОВ АВТОКОЛЕБАНИЙ ПО ХАРАКТЕРИСТИКЕ ОБЪЕКТА Если свойства объекта регулирования можно аппроксимировать моделью в виде апериодического звена с запаздыванием , (3) а размах колебаний регулируемой переменной Δy(t) в режиме автоколебаний составляет незначительную долю предельного изменения H = |Δy(t)|max << Kob ∙µ0. (4) то участки изменения переменной Δy(t) в первом приближении можно представить отрезками прямых линий (рис. 3), то есть для расчетов можно использовать кусочно-линейную аппроксимацию процессов. Рис. 3. Аппроксимация процесса автоколебаний В этом случае параметры установившихся автоколебаний для режима двухпозиционного регулирования можно теоретически оценить по описанной ниже методике. Введем следующие обозначения: h = Kob∙µ0 – предельное изменение регулируемой переменной PV = y; PV_0 – начальное значение переменной PV в статике (при нулевой мощности нагревателя); в данном случае можно принять PV_0 = 22 °C; SP – заданное значение переменной PV; s = SP-PV_0 – заданное изменение переменной PV относительно начального значения; Δ – гистерезис (зона возврата) релейного элемента; Ton и Toff – длительность включения и отключения релейного элемента; T0 = Ton + Toff – период автоколебаний; ymax и ymin - максимальное и минимальное значения переменной y(PV); H – размах автоколебаний: H= ymax – ymin . A – амплитуда автоколебаний: A= H/2. X0 = 0.5∙(ymax + ymin) - SP – смещение среднего уровня переменной y(PV) в режиме автоколебаний относительно задания u(SP); – коэффициент заполнения импульсного сигнала (коэффициент использования мощности нагревателя). Путем изменения параметра Q можно управлять средней мощностью нагревателя и тем самым получать различный температурный режим. Из анализа геометрических построений (см. рис.3) с учетом приведенных допущений и обозначений можно записать: – скорость нагрева; – скорость охлаждения; – размах колебаний переменной y. Тогда параметры автоколебаний можно рассчитать теоретически (в первом приближении) по следующим формулам: ; (5) ; (6) ; , (7) , (8) ), (9) (10) где Kob, Tob и τ – параметры модели объекта (по данным работы №1). Из приведенных соотношений следует, что смещение X0 будет отсутствовать (колебания будут симметричными), если , то есть если заданное изменение переменной PV относительно начального значения PV_0 составляет половину предельного изменения этой переменной. В противном случае колебания будут несимметричными. 5. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО РАБОТЕ Работа №3 выполняется на том же стенде, что и работы №1 и №2. Описание стенда приводится в работе №1. Положение всех переключателей – такое же, как для работы №2. Номинальное напряжение нагревателя 200 В. В рамках настоящей работы выполняется исследование АСР с двухпозиционным регулятором и объектом типа «нагреватель». При выполнении работы используются функциональные блоки HYSTERESIS и ON_OFF_HIST_REG (по заданию преподавателя), находящиеся в подключаемых библиотеках, и стандартные блоки SUB, MUL, ADD и BOOL_TO_WORD. Блок HYSTERESIS находится в библиотеке Util.lib. Подключение библиотеки происходит через Менеджер Библиотек так же, как и в работе №2. описание входов и выходов блока HYSTERESIS. В табл. 1 приводится описание входов и выходов этого функционального блока. Таблица 1 Функциональный блок HYSTERESIS № Наименование Тип Описание Входы 1 IN INT Входная величина регулятора 2 HIGH INT Верхнее пороговое значение 3 LOW INT Нижнее пороговое значение Выходы 1 OUT BOOL Выход блока. На выходе устанавливается значение TRUE, если IN < LOW, и значение FALSE, если вход IN > HIGH. Блок ON_OFF_HIST_REG находится в библиотеке PID_Regulators.lib, разработанной фирмой Овен. Входы и выходы этого блока описаны в табл. 2. В данной работе используется выход HEATER. Таблица 2 Входы и выходы функционального блока ON_OFF_HIST_REG № Наименование Тип Описание Входы 1 PV REAL Входная величина регулятора 2 SP REAL Уставка (задание) регулятора 3 HYST REAL Гистерезис (зона возврата) 4 DB REAL Зона нечувствительности (смещение) 1 2 COOLER HEATER BOOL BOOL Выходы Реле включения «холодильника» Реле включения «нагревателя» 5. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ Задание 1. Подготовка стенда к работе. 1.1. Установить номинальное напряжение нагревательного элемента 200 В. Запустить CoDeSys. В «Настройках целевой платформы» задать PLC150.U-L (стенды 1-5) или PLC150.I-L (стенд 6). 1.2. В окне «Новый программный компонент (POU)» в графе «Имя нового POU» оставить “PLC_PRG”, язык реализации - CFC, тип POU – программа. Задание 2. Реализация АСР с двухпозиционным регулятором на базе функционального блока HYSTERESIS из библиотеки Util.lib. 2.1. В окне кода редактора CFC объявить переменные и ввести элементы для реализации схемы, показанной на рис.3, а именно: стандартные блоки MUL, REAL_TO_INT, BOOL_TO_WORD; пять элементов «Вход» и три элемента «Выход»; функциональный блок HYSTERESIS из библиотеке Util.lib. 2.2. Соединить элементы и функциональные блоки таким образом, чтобы получилась схема, показанная на рис.3. Рис.3. Программа на языке CFC. 3. Аналоговые входы конфигурируются аналогично предыдущей работе (вкладка «Ресурсы»). При этом используются входные сигналы по температуре электронагревателя (тип датчика: ТСМ, 50М, w=1.428) и положению регулирующего органа (U=0…1 В). Переменные Temp и Reg, объявляемые при конфигурировании входов – выходов контроллера, являются глобальными. Для конфигурирования дискретного выхода нужно во вкладке «Ресурсы» войти в «Конфигурацию ПЛК», далее войти в «Discrete output», щелкнуть левой кнопкой мыши по надписи АТ для третьего выхода (на втором стенде – для четвертого) и в появившемся поле ввода ввести имя переменной Reg. Остальные переменные являются локальными. Переменная Vih_reg требуется для отображения на графике выхода алгоритма регулирования в удобном виде. Задание 3. Создание окна визуализации для АСР на базе блока HYSTERESIS. 1. Для создания окна визуализации войти во вкладку «Визуализации», щелкнуть по левой вертикальной панели левой кнопкой мыши и в появившемся меню выбрать пункт «Добавить объект». В открывшееся поле ввода ввести имя новой визуализации. В поле визуализации поместить объект «Тренд» и десять объектов «Прямоугольник». Пример визуализации показан на рис. 4. Рис. 4. Пример визуализации для АСР с двухпозиционным регулятором на базе блока HYSTERESIS. Верхний порог: 52 ºС, нижний порог: 48 ºС. Для верхнего и нижнего порогов переключения предусмотреть возможность задания их значений через визуализацию (аналогично работе №2). При конфигурировании графика вывести значения следующих переменных: температуры нагревателя, выхода алгоритма регулирования (выход OUT блока HYSTERESIS), верхнего и нижнего порогов переключения, также предусмотреть запись процессов в файл истории. Задание 4. Получение процессов регулирования в системе с двухпозиционным регулятором на базе блока HYSTERESIS. 1. Откомпилировать программу, загрузить её в контроллер. Установить пороги переключения: HIGH=52, LOW=48 (что соответствует заданному значению SP=50°С), дождаться установившегося режима колебаний, записать не менее трех периодов. 2. Изменить пороги переключения: HIGH=98, LOW=92 (что соответствует заданному значению SP=95°С), дождаться установившегося режима колебаний, записать не менее трех периодов. 3. Выполнив пункт 2, с помощью ключа «Меньше-0-Больше» изменить напряжение питания нагревателя с 200 В до 220 В. Наблюдать за процессом. Дождаться установившегося режима колебаний, снять три периода колебаний, затем снова установить 200 В. 6. ОБРАБОТКА ПОЛУЧЕННЫХ ДАННЫХ 6.1. По данным регистрации построить графики процессов регулирования в системе с двухпозиционным регулятором. 6.2. Для полученных графиков оценить экспериментальные значения показателей работы АСР при двухпозиционном регулировании: Ton и Toff – длительность включения и отключения релейного элемента; T0 = Ton + Toff – период автоколебаний; ymax и ymin - максимальное и минимальное значения переменной y(PV); H – размах автоколебаний: H= ymax – ymin . A – амплитуду автоколебаний: A= H/2. X0 – смещение среднего уровня переменной y(PV) в режиме автоколебаний относительно задания u(SP); – коэффициент заполнения импульсного сигнала. 6.3. Используя параметры модели объекта (по данным работы №1) рассчитать теоретические значения параметров автоколебаний по формулам (1)…(6) и сравнить их с экспериментальными значениями. 7. СОДЕРЖАНИЕ ОТЧЕТА ПО РАБОТЕ 1. Цель работы. 2. Схема установки с расшифровкой обозначений элементов. 3. Краткое описание программы контроллера, использованной в работе. 4. 5. 6. 7. Описание математической модели объекта (по данным работы №1). Описание используемого алгоритма регулирования. Графики полученных процессов, оценки параметров автоколебаний. Теоретические значения параметров автоколебаний по формулам (1)…(5) и сравнение их с экспериментальными данными. 8. Выводы. 9. КОНТРОЛЬНЫЕ ВОПРОСЫ 1. 2. 3. 4. 5. В чем состоит принцип работы двухпозиционного регулятора? Каковы достоинства и недостатки позиционных регуляторов? Какова область применения позиционных регуляторов? Для чего вводится гистерезис (зона возврата) в характеристику реле? Какие факторы влияют на период и амплитуду автоколебаний в системе с двухпозиционным регулятором? 6. Что является причиной смещения среднего значения колебаний регулируемой переменной относительно задания при двухпозиционном регулировании? 7. Чем определяется алгоритм работы регулятора при его реализации на базе контроллера ПЛК 150? 8. В каких случаях и для чего используется тип данных BOOL? 9. Какие входы и выходы у функционального блока HYSTERESIS? 10. Отобразите цепь преобразования сигнала от точки измерения регулируемой переменной до узла воздействия на объект. 11. Какие типы измерительных преобразователей (датчиков) используются в настоящей работе? Каким путем настраивается контроллер ПЛК150 для работы с этими датчиками? 12. Каким путем можно управлять средней мощностью нагревателя и получать различный температурный режим при двухпозиционном регулировании? 9. СПИСОК ЛИТЕРАТУРЫ 1. Петров И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного программирования. – М.: Солон-Пресс, 2007. 2. В.Р. Сабанин, Н.И. Смирнов. Расчет автоматических систем регулирования в теплоэнергетике. М.: Издательство МЭИ, 2004. 3. Сайт фирмы ОВЕН www.owen.ru .