Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
Кафедра «Электрическая тяга»
М. Г. Дурандин
ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ И ПРЕОБРАЗОВАТЕЛИ
Екатеринбург
2007
Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
Кафедра «Электрическая тяга»
М. Г. Дурандин
ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ И ПРЕОБРАЗОВАТЕЛИ
Учебно-методическое пособие по курсовому проектированию
по дисциплине
«Тяговые электрические машины и преобразователи»
для студентов специальности
190303 – Электрический транспорт железных дорог
Екатеринбург
2007
УДК 629.423.31
Д84
Дурандин М. Г. Тяговые электрические машины и преобразователи:
учебно-методическое пособие. – Екатеринбург: УрГУПС, 2007. – 110 с.
Учебно-методическое пособие предназначено для студентов очной и заочной форм обучения специальности 190303 – Электрический транспорт железных дорог и содержит все необходимые сведения для выполнения курсового
проекта по дисциплине «Тяговые электрические машины и преобразователи».
В основу проектных расчетов положены современные принципы конструирования тяговых электродвигателей для электроподвижного состава и действующая методика их проектирования.
В каждом разделе приводится полный перечень расчетных формул, сделаны разъяснения действующих ограничений на конструкцию и параметры
проектируемых узлов, указаны ссылки на учебную литературу по теории вопроса и по методике проектирования, даны рекомендации по стратегии проектирования.
В приложениях собраны все необходимые для выполнения курсового
проекта справочные данные по современным электротехническим материалам
и их характеристикам.
Текстовая часть учебно-методического пособия составлена с соблюдением требований ГОСТ 2.105-95 ЕСКД «Общие требования к текстовым документам».
Одобрено и рекомендовано к изданию на заседании кафедры «Электрическая тяга», протокол №3 от 08 ноября 2007 г.
Автор:
М. Г. Дурандин, доцент кафедры «Электрическая тяга»,
канд. техн. наук, УрГУПС
Рецензент : В. Ф. Григорьев, доцент кафедры «Электрические машины», канд. техн. наук, УрГУПС
© Уральский государственный университет путей сообщения (УрГУПС), 2007
Содержание
Введение …………………………………………………………………. ….. 4
1 Исходные данные и содержание проекта …………………………........
6
2 Основные требования и рекомендации к выполнению проекта …….
8
3 Общие принципы проектирования тяговых электродвигателей …… 10
4 Расчет параметров зубчатой передачи ………………………………….. 14
5 Расчет активного слоя якоря ………………………………………… ….. 22
6 Расчет щеточного аппарата и рабочей длины коллектора ………….. 37
7 Расчет компенсационной обмотки ………………………………………. 40
8 Расчет магнитной цепи ………………………………………………........ 49
9 Расчет стационарной коммутации ………………………………………. 72
10 Расчет добавочных полюсов …………………………………………….. 76
11 Расчет рабочих характеристик и технико-экономических
показателей двигателя ………………………………………………….. 82
Приложение А. Обмоточные провода и ленты ………………………… …. 91
Приложение Б. Типоразмеры щеток для электрических машин …………. 96
Приложение В. Таблицы магнитных характеристик сталей ……………… 99
Приложение Г. Вопросы для подготовки и самоконтроля …………… …. 107
3
Введение
В настоящее время совершенствование электроподвижного состава является одним из главных направлений в развитии железнодорожного транспорта и останется таковым в ближайшей перспективе. Развитие средств электроники и микропроцессорной техники способствует появлению принципиально новых по своим техническим возможностям локомотивов с высоким
уровнем автоматизации процессов управления. Однако каковы бы ни были
масштабы внедрения новых средств автоматизированного контроля и управления техническими системами электрических локомотивов, их реализуемые
эксплуатационные качества всегда будут определяться техническими возможностями их движителей − тяговых электродвигателей (ТЭД).
Тяговые двигатели, выступая основным потребителем электрической
энергии в системе электроподвижного состава, оказывают определяющее
влияние на все эксплуатационные качества современных локомотивов, их
структуру и элементную базу. В то же время они относятся и к наиболее часто повреждаемым узлам. В среднем до 40 % всего потока отказов электровозов в эксплуатации связано с отказами тяговых электрических машин.
В первую очередь, этому способствует сложность самой конструкции
современных двигателей. Достаточно сказать, что один только коллекторный
узел включает в себя более 1000 деталей, при этом точность его сборки и динамической балансировки якоря массой до 1,5…2 т должна быть такой, чтобы обеспечивать радиальное биение в пределах всего лишь 50 мкм.
Нельзя не учитывать и того обстоятельства, что с момента зарождения
отечественного электромашиностроения мощность тяговых двигателей без
существенного изменения их габаритов возросла примерно вдвое и в перспективе достигнет уровня 1000 кВт на ось. Это свидетельствует о том, что
тяговые машины по уровню удельной загруженности относятся к устройствам «предельного» исполнения, т. е. проектируемым по пределу тепловой,
механической, потенциальной и коммутационной устойчивости.
В этих условиях исключительно важная роль отводится процессу проектирования тяговых электродвигателей. В ходе разработки новой конструкции приходится неоднократно уточнять и тщательно увязывать между собой
сотни размеров и параметров машины для выполнения большого количества
конструкторских, технологических, экономических требований и учета разного рода ограничений.
Сложность проектирования связана и с тем, что по своей физической
природе каждый тяговый двигатель представляет собой уникальное устройство, где в едином объеме сводятся воедино и одновременно реализуются четыре вида энергии − механическая, магнитная, электрическая и тепловая. Поэтому в процессе проектирования приходится опираться не только на общую
теорию работы электрических машин и физику каждого из явлений, но и
учитывать особенности их взаимодействия в общей конструк4
ции двигателя. Все это дополняется комплексом требований по рациональности, надежности, технологичности, ремонтопригодности исполнения узлов и
деталей двигателя, а также общим ограничением на экономичность производства машины.
В настоящее время имеются все предпосылки для выполнения расчетов
тяговых электродвигателей автоматизированным способом, однако практика
проектирования показывает, что комплексная увязка узлов машины требует
индивидуального подхода в поиске наиболее оптимального варианта конструкторского решения.
В ходе выполнения курсового проекта перед студентами ставится задача ознакомления с общими положениями, принципами и методиками проектирования коллекторных тяговых двигателей электроподвижного состава.
Общий объем работы и требования, предъявляемые к уровню и качеству
проектирования, существенно снижены в сравнении с реальными проектами.
Достаточно сказать, что из общего перечня исключены такие объемные разделы, как тепловой, вентиляционный и механический расчеты. Главное внимание уделено вопросам разработки конструкции главных частей и их взаимосвязи в единой системе тягового электродвигателя.
Методическое пособие разработано для того, чтобы облегчить студентам самостоятельное проектирование тяговых электродвигателей по заданным параметрам. В своей основе пособие опирается на традиционную методику проектирования тяговых машин, разработанную и используемую в настоящее время коллективами проектировщиков отечественного локомотивостроения.
По уровню сложности методическое пособие адаптировано к среднему
уровню студентов технических вузов и содержит полный перечень расчетных формул, рекомендаций и справочных данных для проектирования тяговых электродвигателей постоянного и пульсирующего тока в объеме учебного проекта. При необходимости ознакомления с особенностями расчетов других разновидностей тягового привода или частей машины студент может обратиться к рекомендуемой технической литературе или уточнить их на индивидуальной консультации у руководителя курсового проектирования.
Выполнение курсового проекта допускает широкое применение современной вычислительной техники на любом из этапов проектирования – при
расчете и сравнительном анализе предварительных вариантов конструкции
узлов и деталей машины, при расчете магнитных и рабочих характеристик
двигателя, при оформлении расчетной пояснительной записки, при разработке чертежной части проекта и т. п.
5
1 Исходные данные и содержание проекта
В качестве исходных данных для проектирования ТЭД задаются:
− номинальная мощность двигателя Pн , кВт;
− номинальное напряжение питания двигателя Uн , В;
− корпусное напряжение Uкорп , В;
− номинальная скорость движения локомотива vн, км/ч;
− конструкционная скорость движения локомотива vmax, км/ч;
− номинальный коэффициент регулирования возбуждения βн ;
− диаметр бандажей ведущих колес Dб , м ;
− ширина колеи bк, м;
− диаметр оси колесной пары dоси, м ;
− вид торможения, предполагаемый в системе локомотива;
− вид системы вентиляции машины;
− род тока;
− назначение тяговой машины.
По усмотрению преподавателя задание может дополняться и некоторыми другими исходными данными, уточняющими специфику и особенности
проектируемой машины.
В соответствии с перечисленными параметрами на проектирование в
курсовом проекте ставится задача по разработке конструкции основных узлов тягового электродвигателя – якоря, коллектора, магнитопровода машины,
главных и добавочных полюсов, а также по расчету его рабочих характеристик. Полное содержание курсового проекта включает в себя расчетную и
графическую части.
Расчетная часть представляется в виде пояснительной записки, состоящей из следующих разделов проектного расчета:
Расчет параметров зубчатой передачи.
Расчет активного слоя якоря.
Расчет щеточного аппарата и рабочей длины коллектора.
Расчет компенсационной обмотки.
Расчет магнитной цепи.
Расчет стационарной коммутации.
Расчет добавочных полюсов.
Расчет рабочих характеристик и технико-экономических показателей
двигателя.
Графическая часть проекта включает в себя два сборочных чертежа тягового двигателя формата А1 с изображениями продольного и поперечного
разрезов.
6
Для выполнения курсового проекта рекомендована следующая основная методическая литература:
1 Проектирование тяговых электрических машин: Учеб. пособие для
вузов ж.-д. трансп. – Изд. 2-е, перераб. и доп. / Под ред. М. Д. Находкина. –
М.: Транспорт, 1976. – 624 с.
2 Проектирование тяговых электрических машин: Учеб. пособие для
вузов ж.-д. трансп. / Под ред. М. Д. Находкина. – М.: Транспорт, 1967. –
536 с.
3 Курбасов А. С., Седов В. И., Сорин Л. Н. Проектирование тяговых
электродвигателей: Учеб. пособие для вузов ж.-д. трансп. / Под ред. А. С.
Курбасова. – М.: Транспорт, 1987. – 536 с.
4 Справочник по электроподвижному составу, тепловозам и дизельпоездам / Под ред. А. М. Тищенко. – М.:Транспорт,1987. – Т.1. – 354 с.
5 Костенко М. П., Пиотровский Л. М. Электрические машины: Учеб.
для студентов высш. техн. учеб. заведений. – Ч.1. Машины постоянного тока. Трансформаторы. – Изд. 3-е, перераб. – Л.: Энергия, 1972.– 544 с.
6 Захарченко Д. Д., Ротанов Н. А. Тяговые электрические машины:
Учеб. для вузов ж.-д. трансп. – М.: Транспорт, 1991. – 343 с.
В первых трех изданиях [1–3] приводится полная методика проектирования различных типов тяговых двигателей с демонстрацией числовых примеров. По справочнику [4] можно ознакомиться с параметрами, характеристиками и рабочими чертежами отечественных тяговых двигателей для действующих типов электровозов и электропоездов. Вопросы теории работы и
конструкции рассматриваются в учебниках [5, 6].
Помимо указанной методической литературы в проведении расчетов и
при разработке чертежей в качестве дополнительных источников могут оказаться полезными следующие пособия:
1 Алексеев А. Е. Тяговые электрические машины и преобразователи. –
Л.: Энергия, 1977. – 445 с.
2 Магистральные электровозы. Тяговые электрические машины/ В. И.
Бочаров, Г. В. Василенко и др.; Под ред. В. И. Бочарова, В. П. Янова. – М.:
Энергоатомиздат, 1992. – 464 с.
3 Иоффе А. Б. Тяговые электрические машины. – Изд. 2-е, перераб. и
доп. – М.; Л.: Энергия, 1965. – 232 с.
4 Аброскин П. И. и др. Магистральные электровозы. – М.: Машиностроение, 1967. – 412 с.
5 Винокуров В. А., Попов Д. А. Электрические машины железнодорожного транспорта: Учеб. для вузов. – М.: Транспорт, 1986. – 511 с.
7
2 Основные требования и рекомендации к выполнению проекта
В ходе выполнения проекта следует помнить, что задание на проектирование тягового двигателя, по существу, является учебным. Это означает, что
главной целью ставится изучение основных принципов и методики проектирования тяговых электрических машин, закрепление и расширение знаний по теории их работы и конструкции, привитие навыков к выполнению сложных инженерных расчетов, развитие технического образа мышления, способностей к
анализу и поиску решений в условиях многовариантного выбора.
Решается эта задача, в первую очередь, через творческую работу самого
студента с технической литературой. Необходимо стремиться не просто к формальному использованию расчетных формул, а к пониманию физического
смысла каждого параметра и формулы в целом, к раскрытию описанных в них
взаимосвязей, действующих между отдельными параметрами и частями машины.
Демонстрируя в ходе расчетов числовые проверки по выполнению тех
или иных ограничений на конструкционные параметры машины, необходимо
обращать внимание не столько на количественные значения, сколько на понимание физической природы этих ограничений и тех последствий, к которым
может привести их нарушение в реальной ситуации.
В ходе проектирования отдельных узлов двигателя и при анализе промежуточных результатов расчета рекомендуется производить их сравнение с соответствующими аналогами реальных тяговых электродвигателей. Использование справочной литературы в значительной степени облегчает изучение взаимосвязей, действующих между параметрами и частями машины, помогает в
принятии обоснованного решения в условиях неоднозначного выбора, а также
гарантирует от явных конструкторских ошибок и промахов. Следует иметь в
виду, что стремление к абсолютному совпадению числовых значений с прототипом проектируемого двигателя лишено практического смысла. Каждая машина по своей конструкции действительно уникальна, поскольку в сильной
степени зависит от любого из исходных параметров на проектирование.
Если в ходе расчетов потребуются данные уточняющего характера, не
указанные явно в основном перечне исходных данных на проектирование, студент, выступающий в данном случае в качестве конструктора-проектировщика,
может их выбрать самостоятельно, руководствуясь справочной литературой и
обосновав свой выбор соответствующими комментариями в пояснительной записке.
В каждом разделе методических указаний сделаны раздельные ссылки на
литературные источники по теории вопроса и по методике проведения расчетов. Поэтому выполнять любой из разделов рекомендуется после комплексного
изучения общих положений теории работы данного узла и методики его расчета. Такая система работы позволяет наиболее эффективно накапливать и запоминать требуемый объем учебных знаний при рациональном использовании
8
фактора времени. Кроме того, всестороннее представление вопроса позволяет
избежать значительного числа конструкторских ошибок.
Начальный этап проектирования тягового двигателя, как правило, наиболее трудный, поскольку связан с перебором нескольких вариантов решений.
Поэтому, во избежание ошибок и путаницы, первые два раздела рекомендуется
заканчивать чистовым расчетом окончательных значений параметров машины.
В пояснительной записке промежуточные расчеты можно не приводить, за исключением тех случаев, когда преподавателем ставится задача по сравнительному анализу нескольких вариантов конструкции.
Пояснительная записка, как и любой проектно-конструкторский документ, оформляется в соответствии с требованиями Единой системы конструкторской документации, в частности ГОСТ 2.105 − 95.
Расчеты, имеющие циклическую структуру, могут выполняться с использованием вычислительной техники и оформляются в виде таблиц, которым
предшествует пример расчета одного из табличных значений.
Основной системой счисления при проведении расчетов в курсовом проекте принята международная система единиц СИ. Исключения сделаны только
при расчете малых толщин изоляционных покрытий и в случаях использования
в формулах эмпирических коэффициентов, числовые значения которых подобраны для устаревших технических систем счисления. В этих случаях к формулам сделаны соответствующие примечания.
Сборочные чертежи тягового двигателя выполняются в соответствии с
ГОСТ 2.109–73 на листах формата А1 с использованием одного из разрешенных
масштабов изображения.
Разработку чертежей рекомендуется начинать с изучения справочной и
учебной литературы по конструкции тяговых машин и примеров их конструктивного исполнения. За основу принимаются рабочие чертежи наиболее близкого по параметрам аналога из числа реальных тяговых двигателей.
Части машины, конструкция которых подлежала расчету, изображаются в
соответствии с полученными размерами. Остальные узлы и элементы двигателя
изображаются по подобию с их изображением на рабочих чертежах выбранного
прототипа.
При выполнении чертежной части проекта необходимо добиваться полного понимания содержания и смысла всех чертежных линий, выяснять функциональное назначение изображенных элементов, интересоваться разновидностями
их конструктивного исполнения, особенностями технологии их изготовления и
сборки, обращать внимание на крепление деталей и их взаимодействие с другими элементами конструкции.
Для успешной защиты курсового проекта студент должен знать теорию
работы, методику расчета, назначение и конструкцию основных узлов ТЭД.
9
3 Общие принципы проектирования тяговых электродвигателей
Проектирование любой электрической машины является сложной и неоднозначной задачей. Сложность проектирования просматривается уже в том,
что при абсолютно одинаковых исходных данных на проектирование конечная
конструкция двигателя допускает возможность разнообразных конструкционных решений, т. е. носит многовариантный характер.
В первую очередь, это обусловлено множеством требований и норм,
предъявляемых к проекту реальной машины:
− нормы стандарта на данную разработку;
− требования по условиям эксплуатации;
− требования в отношении габаритов, массы, механической прочности и
долговечности изделия;
− требования к уровню технологичности производства машины и ее ремонта;
− ограничения на стоимость конструкции, ее ремонта и обслуживания.
При разработке тягового двигателя невозможно в абсолютно равной степени удовлетворить одновременно всем вышеперечисленным требованиям.
Так, стремление к минимальной массе, габаритам и стоимости машины неизбежно вступает в противоречие с требованием к высокой прочности ее узлов и
уровню надежности ее функционирования в эксплуатации. Поэтому в каждом
конкретном случае выделяют главные, наиболее существенные с точки зрения
заказчика требования, стремясь при этом к возможно более полному выполнению и других условий.
С другой стороны, проектирование тяговых электродвигателей уже изначально является математически неопределенной задачей – необходимо определить сотни параметров машины по десятку исходных данных. Данную задачу
можно сравнить с решением системы уравнений, в которой число уравнений
заведомо меньше числа неизвестных. Например, в самом начале расчета для
определения центрального параметра двигателя – номинального тока якоря,
требуется знать величину КПД. Однако точное значение КПД может быть получено только после завершения всего расчета конструкции, когда станут известны все без исключения параметры проектируемого двигателя.
Отсюда вытекает, что целым рядом величин, необходимых для начала
выполнения расчетов, приходится задаваться и выбирать их предварительные
значения исходя из рекомендаций, выработанных практикой проектирования. В
целом эти рекомендации вполне обоснованны, поскольку в усредненной форме
отражают действующие статистические закономерности. Однако следует понимать, что они не могут учесть индивидуальных особенностей проектируемой
конструкции и описать весь комплекс физических взаимосвязей, действующих
между ее различными частями.
Усредненные по целому классу двигателей такие параметры задаются
весьма широким диапазоном рекомендуемых значений, что вносит в расчет
элемент неопределенности в отношении конечного результата, и рассматрива10
ются только в качестве первых приближений для вновь проектируемой конструкции.
Задаваясь приближенным значением того или иного параметра, проектировщик через последующие расчетные зависимости предопределяет уровни
производных от него характеристик машины, которые на определенном этапе
расчета могут вступить в противоречие с установленными для них ограничениями. Например, изначальный выбор чрезмерно малого числа пазов якоря ведет к росту числа проводников в каждом пазу, что может вызвать их перегрев и
нарушение тепловых ограничений. И наоборот, избыточное число пазов может
привести к снижению толщины зубцов якоря до значений, противоречащих их
механической прочности или допустимому уровню магнитного насыщения, что
потребует недопустимо большой длины якоря.
Если принять во внимание количество параметров, на которые наложены
физические, габаритные, конструкционные, технологические и другие виды ограничений в реальном процессе проектировании, то становится понятна главная трудность создания новой машины – нахождение такого оптимального сочетания значений взаимозависимых параметров, которые удовлетворяли бы
всему комплексу действующих на разрабатываемую конструкцию требований и
ограничений.
В силу такой специфики при проектировании тяговых машин неизбежны
ситуации, когда в зависимости от принятого первоначального значения выбранного параметра возникает несколько вариантов конструкции двигателя, и
только сравнительный анализ конечных технико-экономических показателей
позволяет установить среди них наиболее экономичный и рациональный.
Для студентов, впервые выполняющих расчет конструкции тягового двигателя, задача по проектированию в полной постановке описанных выше условий не ставится и ограничивается «черновой» разработкой одного из возможных вариантов исполнения машины без специальных требований к рациональности конструкции, экономичности проекта или технологичности производства и т. п.
Тем не менее необходимо стремиться к выполнению главного проектировочного принципа – максимум технических возможностей при минимуме массо-габаритных показателей машины. Для этого необходимо знать и учитывать с
самого начала расчета основные закономерности, влияющие на конечный уровень технико-экономических показателей проектируемого двигателя.
Известно, что электромагнитная мощность двигателя Pэм пропорциональна его электромагнитному моменту Mэм и угловой частоте вращения ωa
Pýì = M ýì ω a .
(3.1)
В свою очередь, электромагнитный момент пропорционален основному
потоку Ф0 главных полюсов и току якоря Ia
pN
M эм =
Ф0Ia.
(3.2)
2π a
11
Абсолютные значения магнитного потока Ф0 и тока якоря Ia для различных двигателей изменяются по величине в широких пределах в зависимости от
заданной мощности машины. Поэтому в теории проектирования абсолютные
показатели стараются не использовать, а основополагающие расчетные выражения представлять через удельные показатели, которые для различных типоразмеров машин остаются примерно постоянными.
В качестве обобщающего удельного показателя магнитной загруженности двигателя используется понятие средней магнитной индукции в воздушном зазоре под главными полюсами Bδ . Через данный параметр величина магнитного потока выражается
Ф 0 = Bδ α δ
πDa
la ,
(3.3)
2p
где αδ – расчетный коэффициент полюсного перекрытия;
Da – диаметр якоря;
la – длина якоря;
p – число пар полюсов.
В состав формулы (3.3) входит еще один универсальный для всех тяговых
двигателей удельный показатель пространственного использования поверхности якоря – расчетный коэффициент полюсного перекрытия αδ. Он характеризует долю площади поверхности якоря, которая взаимодействует с потоком
главных полюсов в реализации полезной мощности.
В качестве универсальной характеристики токовой загруженности якоря
в теории проектирования вводится еще один удельный показатель − линейная
токовая нагрузка якоря A, характеризующий плотность распределения тока
якорных проводников по длине окружности якоря. Исходя из данного определения, ток якоря Ia для любого двигателя может быть представлен через значение линейной токовой нагрузки якоря
Ia = A
2aπDa
,
N
где
(3.4)
N – число проводников в якоре;
a – число пар параллельных ветвей в обмотке якоря.
При подстановке зависимостей (3.2) – (3.4) в выражение для электромагнитной мощности (3.1) возникает уравнение, показывающее, за счет каких факторов можно реализовать заданную мощность двигателя
a
Pэм = С
(α δ AB δ )( Da2 l a )ω a ,
(3.5)
pN
где С – числовая константа.
В первой скобке выражения (3.5) собраны все удельные показатели − пространственного использования поверхности якоря αδ , магнитной Bδ и токовой
A загруженности машины. Их величина для двигателей различной мощности
остается примерно постоянной, поскольку отражает достигнутый на сегодняш12
ний день технический уровень производства и физических возможностей задействованных в конструкции активных материалов. Значения этих показателей отражают возможность наращивания единичной мощности тяговых двигателей за счет применения более совершенных проводниковых, магнитных и
изоляционных материалов с более высокими свойствами, а также перспективы
развития технологии их изготовления.
Во второй скобке формулы (3.5) выделена величина, пропорциональная
объему якоря, а значит, и объему всей машины. Очевидно, что из всех возможных вариантов конструкторских решений более рациональным считается тот,
который позволяет вписать заданную мощность в возможно меньшие габариты.
При этом снижается расход конструкционных материалов, масса машины, ее
стоимость, улучшаются все технико-экономические показатели.
Следует обратить внимание на то, что данный фактор зависит от диаметра
якоря в квадрате, а от длины – в первой степени. Поэтому при проектировании
машины в первую очередь стремятся полностью реализовать допустимый размер по длине якоря для снижения его диаметра, что ведет к общему снижению
массо-габаритных показателей конструкции.
Важным фактором в уравнении (3.5) выступает и угловая частота вращения якоря ωa. Через передаточное число редуктора μ она пропорциональна частоте вращения колесной пары ωкп , которая, в свою очередь, зависит от заданной
номинальной скорости движения локомотива vн
v
ω a = μω кп = μ н .
(3.6)
Dб / 2
Отсюда становится очевидным, что параметры редуктора непосредственным образом влияют на условия реализации заданной мощности в конструкции
проектируемого двигателя. Из выражений (3.5) и (3.6) следует, что для снижения объема, массы и стоимости проектируемого двигателя необходимо стремиться к возможно большему передаточному числу редуктора μ, поскольку это
обеспечит наибольшую угловую частоту вращения ωa , а значит, и снижение
потребного объема якоря.
Данное обстоятельство важно не только из-за требований по экономичности конструкции, но и в связи с тем, что на поперечные и продольные размеры
двигателя наложены весьма жесткие габаритные ограничения по их вписыванию в конструкцию тележки.
Наконец, из выражения (3.5) видно, что в реализации заданного уровня
электромагнитной мощности машины использование волновых обмоток с одной парой параллельных ветвей (а = 1) позволяет снижать количество проводников якоря N тем больше, чем больше число пар полюсов двигателя р. Таким
образом, применение волнового типа обмоток якоря делает машину более экономичной по затратам на конструкционные материалы, простой по конструкции и в технологии изготовления.
13
4 Расчет параметров зубчатой передачи
Теоретические основы данного вопроса изложены в литературе [6, §6.2],
а методика расчета в [1, глава 6], [2, глава 8] и [3, глава 6].
Целью данного раздела является установление передаточного числа редуктора, параметров большого и малого зубчатых колес, межцентрового расстояния, а также связанных c ними основных размеров сердечника якоря, коллектора, их номинальной и максимальной частот вращения.
При расчете должны быть выполнены следующие ограничения:
− на габаритные размеры подвижного состава;
− на параметры зубчатой передачи, связанные с надежностью ее работы
по механической прочности;
− связанные с вписыванием тягового двигателя в межцентровое расстояние зубчатой передачи;
− по максимальной окружной скорости якоря и коллектора, связанные с
механической прочностью их конструкции;
− на параметры коллектора, связанные с надежностью его работы по
потенциальным условиям.
В разделе 3 было показано, что частота вращения якоря самым непосредственным образом влияет на внешние габариты машины и ее техникоэкономические показатели. Как известно, редуктор представляет собой промежуточное звено, связывающее тяговый двигатель с колесной парой. При заданном диаметре бандажа колесной пары Dб его передаточное число μ увязывает
между собой частоту вращения якоря в номинальном режиме naн и заданную
скорость движения локомотива vн, влияя тем самым на степень использования
активного объема проектируемой машины
μ
naн = 5,3
vн ,
(4.1)
Dб
где μ – передаточное число редуктора;
Dб – диаметр бандажа колесной пары, м;
vн – номинальная скорость движения локомотива, км/ч.
Как уже было сказано, для экономичности конструкции проектируемого
двигателя важно, чтобы частота вращения якоря, а значит, и передаточное число редуктора были бы максимально большими. В то же время из практики проектирования известно, что в действующих габаритах электроподвижного состава выполнение редукторов с μ > 5 ведет к подрезу основания зубьев малого
зубчатого колеса передачи, что снижает их механическую прочность. Кроме того, рост передаточного отношения редуктора сокращает межцентровое расстояние, ухудшая условия вписывания габаритов проектируемого двигателя в
централь.
С другой стороны, передаточное число редуктора не должно оказаться и
слишком малым, иначе чрезмерное снижение частоты вращения якоря приведет
к неоправданному росту объема и массы машины (формула (3.5)).
14
Наконец, нельзя забывать и о том, что передаточное число редуктора определяет не только номинальную, но и максимальную частоту вращения, от которой зависит уровень центробежных усилий, развиваемых на поверхности
якоря и коллектора, и, следовательно, надежность их работы по механической
прочности. Из опыта проектирования установлено, что для исключения чрезмерных центробежных усилий максимальная окружная скорость на поверхности якоря не должна превышать va max ≤ 65…70 м/с, а на поверхности коллектора − vк max ≤ 52…55 м/с.
Таким образом, передаточное число редуктора является одним из тех
центральных параметров, влияние которого в дальнейшем прослеживается на
конструкции практически всех узлов тягового двигателя. В силу такой значимости один из возможных вариантов начала расчета состоит в том, что значением передаточного числа редуктора μ просто задаются, используя опыт проектирования, по справочным данным конструкций, схожих с проектируемым
ТЭД своими исходными параметрами [4]. При таком подходе приемлемость
выбранного значения μ подтверждается в дальнейших расчетах выполнением
всех установленных ограничений и норм на конструкцию ТЭД, а при выходе их
за пределы допустимых значений корректируется в нужную сторону с повторным пересчетом конструкции.
В среднем для локомотивов с конструкционной скоростью в пределах
110…120 км/ч тяговые приводы имеют передаточные числа:
− с односторонней передачей 2,8−3,3;
− с двухсторонней передачей 3,8−4,2;
− для двигателей электропоездов 3,3−3,8.
Следует иметь в виду, что приведенные значения передаточных чисел редукторов носят ориентировочный характер, поскольку с ростом конструкционной скорости локомотивов имеют тенденцию к снижению своих значений относительно указанных величин.
Нахождение оптимального значения μ может оказаться более простым,
если за основу взять другой основополагающий для конструкции ТЭД параметр
− диаметр якоря Da. Предварительным значением диаметра якоря можно задаться, исходя из справочных данных аналога проектируемого двигателя [4]
или по приблизительным зависимостям в расчетных методиках [1, формулы
(2.6), (2.18)] или [2, формулы (3.18), (3.19)].
Знание диаметра якоря (коллектора) позволяет оценить максимально допустимую частоту вращения якоря, исходя из предельной окружной скорости
на его поверхности na max , об/мин
na max = 60
где
va max
πDa
,
Da
– диаметр якоря, м;
va max – допустимая окружная скорость на поверхности якоря, м/с.
15
(4.2)
Поскольку выражение (4.1) справедливо для любого режима, то, разрешив его относительно величины μ для режима конструкционной скорости
движения локомотива, можно сразу найти то наибольшее значение передаточного числа редуктора, которое удовлетворяет ограничению по предельным центробежным усилиям якорной конструкции
Dn
μ = б a max ,
(4.3)
5,3vmax
где vmax − конструкционная скорость локомотива, км/ч.
Однако при любом варианте начала расчета следует быть готовым к тому,
что полученные значения могут оказаться только первым приближением, требующим в дальнейшем своего уточнения для выполнения всей совокупности
ограничений на конструкцию ТЭД. Но и в этом случае проделанная работа не
является напрасной, поскольку полученные результаты позволяют обоснованно
говорить о том, в какую сторону и на сколько следует скорректировать тот или
иной параметр машины для выполнения требуемых ограничений.
Отталкиваясь от передаточного числа редуктора, рассчитывают остальные параметры зубчатой передачи. Для получения наибольшего значения передаточного числа редуктора следует исходить и из наибольших значений диаметра делительной окружности большого зубчатого колеса Dz .
Максимальное значение Dz можно определить по заданному диаметру
круга катания бандажей колесной пары Dб, и исходя из минимальных габаритных и технологических зазоров
Dz = Dб − 2(b + Δ),
(4.4)
где b – просвет между нижней точкой кожуха редуктора и рельсом,
b ≥ 120 мм;
Δ – расстояние между делительной окружностью зубчатого колеса
и нижней точкой кожуха редуктора, Δ ≥ (20…25) мм.
Нормальный модуль зацепления зубчатых колес назначают по величине
передаваемого момента
M í = 9,555
Pí
,
naí
(4.5)
где Мн – вращающий момент в номинальном режиме, кН⋅м;
Pн – мощность в номинальном режиме, кВт;
naн – номинальная частота вращения якоря (формула (4.1)), об/мин.
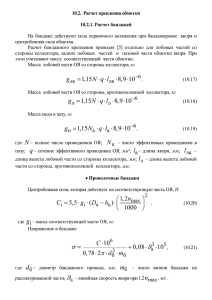
Рекомендуемые значения нормального модуля зацепления в зависимости
от вращающего момента приведены на диаграмме рисунка 4.1.
Достаточно хорошие приближения к значениям диаграммы 4.1 дают также эмпирические формулы вычисления нормального модуля зацепления m, мм:
16
m, мм
13
12
11
k′=1
10
9
k′=2
8
7
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5 Mн/k', кН⋅м
k′ = 1 – при односторонней передаче;
k′ = 2 – при двухсторонней передаче
Рисунок 4.1 – Зависимость нормального модуля зацепления
от вращающего момента
− для косозубых и шевронных передач
M
m = 1,3 í + (5,3...6,5) мм;
(4.6)
k'
− для прямозубой передачи
M
(4.7)
m = 1,3 í + (6,5...8,8) мм.
k'
Назначая величину модуля зацепления следует помнить, что в качестве
конечных значений обычно принимаются целые числа.
При односторонней передаче (область k′ = 1 на рисунке 4.1) зубчатые колеса выполняют прямозубыми, а один из якорных подшипников двигателя делают упорным, чтобы ограничить перемещение вала в осевом направлении. В
случаях значительных величин вращающего момента (превышающих значения
по оси Мн диаграммы 4.1) его распределяют на два конца вала двигателя, применяя двухстороннюю зубчатую передачу (область k′ = 2 на рисунке 4.1). При
двухсторонней передаче зацепление выполняют косозубым с углом наклона Ψ.
Наклон зубьев в редукторах одной колесной пары выполняется встречным для
компенсации продольных отжимающих усилий. Якорные подшипники в этом
случае должны обеспечивать аксиальный разбег якоря порядка 8…10 мм.
После выбора нормального модуля зацепления рассчитывают число зубьев большого зубчатого колеса Z
17
Z=
где
Dz
cosΨ ,
m
(4.8)
Ψ = 0º – угол наклона зубьев при прямозубой передаче;
Ψ = 8…20º – угол наклона зубьев при косозубой передаче.
По диаметру делительной окружности большого зубчатого колеса определяется диаметр делительной окружности малой шестерни dz
D
dz = z .
(4.9)
μ
Необходимо следить, чтобы полученный размер dz не оказался чрезмерно
малым и обеспечивал достаточность толщины тела шестерни bш ≥ 20…25 мм по
условию ее механической прочности. Для проверки толщины тела шестерни
рассчитывают диаметр конца вала двигателя dвк , м
M
d вк = 0 ,1 3 5 ,1 н ,
(4.10)
k 'τ
где k′ − коэффициент деления вращающего момента.
k′ = 1 при односторонней передаче,
k′ = 2 при двухсторонней зубчатой передаче;
τ − допустимые напряжения в теле вала, МПа.
τ = 9…10 МПа при односторонней передаче;
τ = 7,5…8 МПа при двухсторонней передаче.
Толщина тела шестерни вычисляется как
d − dвк − 2m
bш = z
.
(4.11)
2
Если размер bш окажется меньше рекомендуемых пределов, то следует
снижать передаточное число редуктора для увеличения размера dz (формула
(4.9)).
Аналогично (4.8) определяется число зубьев малой шестерни z
d
z = z cos Ψ .
(4.12)
m
Полученные значения числа зубьев зубчатых колес могут потребовать
уточнений. Так, при прямозубой передаче число зубьев малой шестерни не выполняют меньше 15−16, а при косозубой – менее 12 из-за возникновения подреза основания корней зубьев и, следовательно, снижения их механической прочности.
Кроме того, чтобы исключить неравномерный износ в процессе притирания одних и тех же зубьев друг к другу, числа Z и z необходимо выполнять взаимно простыми, т. е. некратными друг другу.
Нельзя забывать и о том, что даже при выполнении названных
ограничений естественное округление числа зубьев в формулах (4.8) и (4.12) до
целых значений требует уточнения передаточного числа редуктора и связанных
с ним значений номинальной и максимальной частот вращения
18
Z
.
(4.13)
z
Окончательные значения найденных параметров зубчатого зацепления
позволяют определить централь Ц − расстояние между центрами оси колесной
пары и вала тягового двигателя, м
1
Ц = 0 ,5 m ( Z + z )
+ ξkm ,
(4.14)
cos Ψ
где ξk – степень коррекции зацепления, ξk = 0,5.
Величина централи характеризует то пространство, которое отводится
для вписывания габаритов проектируемого двигателя. Но поскольку конструкционные размеры двигателя пока неизвестны, можно только ориентировочно
проверить возможность такого вписывания по соотношению централи и диаметра якоря – как основного параметра машины, задающего его внешние габариты.
Рекомендуется выдерживать следующие соотношения:
− для 2p = 4 (четырехполюсные двигатели) с восьмигранным остовом при
опорно-осевом подвешивании
D a ≤ (1 , 01 ... 1 ,16 ) Ц ;
(4.15)
− для 2p = 6 (шестиполюсные двигатели) с круглым остовом при опорноосевом подвешивании
D a ≤ (1, 03 ... 1, 22 ) Ц ;
(4.16)
− при опорно-рамном подвешивании двигателей электропоездов
D a ≤ ( 0 , 9 ... 1 , 05 ) Ц .
(4.17)
Фиксируя окончательный размер диаметра якоря, придерживаются установленного ряда его нормализованных размеров, обеспечивающих минимум
отходов при раскройке листов электротехнической стали:
368; 423; 493; 560; 660; 740; 850; 990 мм.
Полученные значения диаметра и частоты вращения якоря влияют на
конструкцию коллекторного узла и выполнение связанных с ним ограничений.
Поэтому в разделе намечаются также и предварительные параметры коллектора.
Прежде всего устанавливается возможный диапазон варьирования значений диаметра рабочей поверхности коллектора Dк
D к = ( 0 , 75 ... 0 ,9 ) D a .
(4.18)
Ограничение диаметра коллектора сверху диктуется необходимостью
выполнения шлица в петушках коллекторных пластин, достаточного для запайки концов проводников якоря.
С другой стороны, чрезмерно малый диаметр коллектора в соотношении
с диаметром якоря приводит к большой разнице центробежных усилий на их
поверхностях, создавая дополнительные механические напряжения по высоте
петушков коллектора. Следует учитывать и то, что коллекторная пластина в
поперечном сечении имеет клиновидную сужающуюся форму. Поэтому боль-
μ ут =
19
шая высота пластин ведет к снижению механической прочности стенок в основании шлицов петушков коллектора и в месте крепления самой пластины – в
области ласточкиного хвоста.
На окончательный выбор диаметра коллектора в большой степени влияет
и число коллекторных пластин K, для которого можно указать верхнюю и нижнюю допустимые границы.
Максимальное число коллекторных пластин определяется конструкционными ограничениями на их размещение по окружности коллектора. Ограничивающим параметром здесь выступает шаг по коллектору tк – это расстояние по
окружности рабочей поверхности коллектора между одноименными точками
соседних коллекторных пластин.
По условиям механической прочности пластин шаг по коллектору должен удовлетворять условию
t к min ≥ 4, 0 мм.
(4.19)
Отсюда максимальное число коллекторных пластин, возможное при максимальном диаметре коллектора, определяется как
K max =
π D к max
t к min
.
(4.20)
Минимальное число коллекторных пластин ограничивается потенциальными условиями на коллекторе и устанавливается по допустимому среднему
межламельному напряжению Δuк :
− для ТЭД локомотивов постоянного тока без режима электрического
торможения
Δ u к ≤ 20 В ;
(4.21)
− для ТЭД локомотивов постоянного тока с рекуперативным торможением, а также для ТЭД пульсирующего тока с рекуперативным или механическим
торможением
Δ u к ≤ 18 В ;
(4.22)
− для ТЭД с электродинамическим (реостатным) торможением
Δ u к ≤ 14 В .
(4.23)
Отсюда минимальное число коллекторных пластин
2 pU н
K min =
,
(4.24)
Δ u кдоп
где p – число пар полюсов в машине;
Uн – номинальное напряжение питания, В.
Если значения Кmin и Кmax оказываются близкими между собой – это можно рассматривать как признак оптимального проектирования, поскольку ограничения разной физической природы максимально полно реализуются для одной и той же конструкции. Значительное же расхождение значений свидетельствует либо о том, что на данном этапе проектирования выбран избыточный
20
диаметр якоря, либо о том, что конструкция не совсем экономична по числу
полюсов 2р.
Дело в том, что с увеличением полюсности машины уменьшается величина основного магнитного потока каждой пары полюсов, из-за чего снижается
потребное сечение всех элементов магнитопровода и машина улучшает свои
массо-габаритные показатели.
Кроме того, в машинах с петлевой обмоткой в пропорции к числу полюсов снижается ток в параллельных ветвях, что ведет к снижению сечения медных проводников, улучшению их тепловых режимов и условий коммутации.
Таким образом, при прочих равных условиях предпочтительным является
конструкция с большим числом полюсов.
Исходя из того, что при предельно полном использовании конструкции
Кmin стремится к Кmax , можно вывести зависимость по определению максимально возможного числа полюсов 2р при выбранном диаметре якоря
2 ,83 D a Δ u kдоп
2p ≤
.
(4.25)
t к min U н
Очевидно, что результат, полученный по приведенному выражению, округляется до ближайшего меньшего целого и четного значения.
В соответствии с установленным допустимым диапазоном числа коллекторных пластин от Kmin до Kmax назначается их фактическое количество K, для
которого окончательно фиксируются параметры :
πDк
tк =
≥ t к min ,
(4.26)
K
2 pU н
Δ uк =
≤ Δuкдоп .
(4.27)
K
Следует заметить, что в реальном проектировании в наиболее сложных
случаях при неблагоприятных сочетаниях исходных данных для сохранения
экономичности конструкции допускается небольшое нарушение ограничения
по Δuк на 5…6 %, а по tк − на 2...3 %.
Допустимость уточненного значения передаточного числа редуктора μ
также требует окончательной проверки по максимальной окружной скорости
якоря va max и коллектора vк max, м/с :
v a max =
v к max
πDa na max
≤ (65...70) ;
60
πDк na max
=
≤ (52...55) .
60
21
(4.28)
(4.29)
5 Расчет активного слоя якоря
Теоретические вопросы проектирования активного слоя якоря изложены
в [5, глава 3]. Методика выполнения расчета приведена в [1, глава 7], [2, глава
9] и [3, глава 18].
В расчете активного слоя якоря ставится задача окончательного определения числа полюсов, типа обмотки и обмоточных данных якоря, геометрических размеров зубцового слоя якоря, величины основного магнитного потока в
номинальном режиме, длины активной части якоря, массы меди и сопротивления обмотки якоря.
Исходными данными для расчетов являются значения номинальной
мощности, питающего и корпусного напряжения машины, а также полученные
в предыдущем разделе значения диаметра якоря, параметров коллектора и номинальной частоты вращения якоря.
В ходе проектирования активного слоя якоря должно быть обеспечено
выполнение следующих ограничений:
− числа коллекторных пластин, проводников и пазов якоря по условиям
симметрии и рациональности исполнения якорной обмотки;
− структуры заполнения пазов якоря по эффективному использованию
активных материалов и по условиям нагрева;
− геометрии зубцового слоя якоря по условиям механической прочности зубцов, их магнитного насыщения и условиям коммутации;
− геометрических размеров сердечника якоря по условиям вписывания
двигателя в габариты подвижного состава.
Общий подход к расчету активного слоя якоря аналогичен подходу в
предыдущем разделе, когда на основе заданной совокупности функциональных
зависимостей находится такое сочетание конструкционных параметров якоря,
при котором выполнялась бы вся совокупность установленных нормами проектирования ограничений. В отличие от предыдущего раздела, где кроме исходных данных на проектирование двигателя ничего не было известно, сейчас ряд
параметров машины численно определен. Поэтому расчет активного слоя якоря
лучше всего начинать, отталкиваясь от уже найденных параметров, поскольку
их числовые значения уже подобраны под действующие ограничения.
Так, по намеченному числу коллекторных пластин легко определяется
общее количество проводников обмотки якоря, поскольку к каждой коллекторной пластине при одновитковых секциях подходят два проводника
N = 2K ,
(5.1)
где N – общее число проводников якорной обмотки.
Кроме того, из исходных данных на проектирование вытекает значение
тока якоря в номинальном режиме Iан, А
Pн 10 3
I aн =
,
(5.2)
U дн η н
где Pн – мощность двигателя в номинальном режиме, кВт;
22
Uдн – номинальное напряжение питания, В;
ηн – КПД двигателя в номинальном режиме.
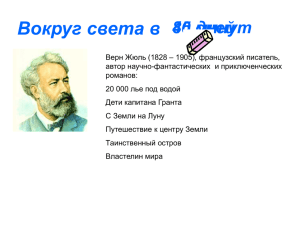
Входящее в выражение (5.2) значение КПД машины окончательно станет
известным лишь после завершения всех расчетов проектируемой конструкции.
Поэтому на данном этапе можно только ориентировочно задаться величиной
КПД по диаграмме рисунка 5.1, отражающей среднестатистические значения
для действующих тяговых электродвигателей.
ηн
0,94
0,93
0,92
0,91
0,90
0
100 200 300
400 500
600
700 800 900
Pн, кВт
Рисунок 5.1 – Зависимость КПД от номинальной мощности ТЭД
Найденные значения числа проводников N и величина тока Iaн входят в
один из основных показателей использования активного слоя якоря проектируемого двигателя – линейную токовую нагрузку A, А/см
I
N
A = aн
,
(5.3)
2a π Da
где a – число пар параллельных ветвей обмотки якоря.
Входящий в выражение (5.3) параметр a – число пар параллельных ветвей обмотки якоря − назначается в зависимости от типа обмотки. В конструкциях современных тяговых электродвигателей используется два основных типа
обмоток – простая волновая и простая петлевая с одновитковыми секциями.
При простой петлевой обмотке число параллельных ветвей всегда равно
числу главных полюсов
2 a = 2 p.
(5.4)
Простая волновая обмотка образует только две параллельные ветви
2a = 2.
(5.5)
В разделе 3 уже указывалось на экономичность волнового типа обмоток
по количеству проводников. Однако несмотря на наличие и других конструкционных преимуществ (отсутствие уравнительных токов и соединений, лучшее
использование активного слоя якоря и др.), волновая обмотка применяется далеко не всегда, а только в машинах с ограниченным током. Практикой установ-
23
лено, что для удовлетворительных условий настройки коммутации необходимо,
чтобы ток параллельной ветви iaн не превышал
I
i a н = a н ≤ 200 А .
(5.6)
2a
Отсюда вытекает, что при токах двигателя более 400 А использование
волновой обмотки становится нецелесообразным по условиям коммутации и
приходится использовать петлевой тип обмоток. Кроме того, выбор типа обмотки влияет на уровень линейной токовой нагрузки якоря соответственно числу пар параллельных ветвей, и поэтому даже в двигателях малой мощности, где
ток якоря небольшой, приходится использовать петлевой тип обмотки для выполнения ограничений на величину линейной токовой нагрузки.
Как физический параметр линейная токовая нагрузка якоря А представляет собой важный удельный показатель машины, так как характеризует удельную загруженность единицы длины окружности якоря током якорных проводников. Увязывая между собой такие ключевые показатели машины, как диаметр якоря, тип обмотки, число и ток активных проводников, данный критерий
явным или опосредованным образом присутствует в расчете практически всех
узлов двигателя, и поэтому его числовое значение в сильной степени влияет на
всю дальнейшую конструкцию проектируемой машины.
С одной стороны, значение линейной токовой нагрузки стремятся выполнить возможно большим, так как ее величина характеризует степень использования якорного объема и заложенных в него дорогостоящих медных и изоляционных материалов. Кроме того, при заданной мощности двигателя с ростом линейной нагрузки якоря снижается степень загруженности магнитной части машины, что благоприятно сказывается на массо-габаритных показателях проектируемого двигателя и его регулировочных свойствах. С другой стороны, чрезмерно высокая линейная токовая нагрузка ведет к токовому перегреву якоря,
ухудшению условий коммутации и потенциальных условий на коллекторе.
В реальном проектировании задача по нахождению оптимальной величины линейной токовой нагрузки якоря решается на основе комплексного сравнительного анализа нескольких вариантов конструкции двигателя. В учебном
проекте этого можно не делать, а отталкиваться от рекомендуемых практикой
проектирования уровней линейной токовой нагрузки якоря, характерных для
существующих образцов ТЭД.
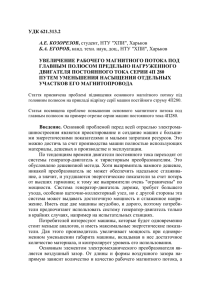
Диапазон рекомендуемых значений для данного показателя во многом
определяется возможностями используемых в тяговом машиностроении активных материалов и технологий. Среднестатистический диапазон варьирования
значений линейной токовой нагрузки для существующих отечественных тяговых электродвигателей в функции от их номинальной мощности представлен
на рисунке 5.2.
24
A, А/см
500
400
300
200
0
100 200
300 400
500 600
700 800
900 Pн, кВт
Рисунок 5.2 – Рекомендуемый диапазон значений линейной токовой
нагрузки якоря (для класса нагревостойкости изоляции «В»)
В случае небольшого отклонения от рекомендуемого диапазона величина
линейной токовой нагрузки A может быть скорректирована, в первую очередь,
за счет подбора числа проводников якоря N. При этом следует помнить, что
число проводников якоря жестко увязано с числом коллекторных пластин K
(формула (5.1)). Поэтому любая корректировка числа проводников в якоре
должна производиться с учетом ранее найденного диапазона {Kmin ; Kmax} с последующим уточнением значений tк и Δuк для окончательного числа K.
Если оказывается, что параметр A существенно выходит за рекомендуемые пределы при любых значениях K из допустимого диапазона, это свидетельствует об изначальной неудачности всей конструкции и требует пересмотра
решения в отношении числа полюсов, диаметра якоря, параметров коллектора
или типа обмотки якоря.
Однако даже в случае выполнения всех вышеперечисленных требований
число проводников N нельзя пока считать окончательным. Это обусловлено
тем, что все проводники якоря должны равномерно распределиться по поверхности в пазах якоря, на число которых Z также наложен ряд ограничений. Например, избыточное число пазов ведет к снижению толщины зубцов якоря, вызывая потерю их механической прочности и рост уровня магнитного насыщения машины. С другой стороны, заниженное число пазов приводит к росту числа проводников в каждом из них, что может повлечь за собой тепловой перегрев якорной изоляции и ухудшение условий коммутации.
При определении рационального числа пазов Z в первую очередь следует
учитывать ограничение по условиям нагрева пучка проводников в пазу якоря в
виде величины объема тока в пазу (iaнNz ), А
( iaн N z ) ≤ 1500 ...1600 А,
где Nz – число проводников в одном пазу.
25
(5.7)
Зная величину тока параллельной ветви iaн (формула (5.6)), из выражения
(5.7) нетрудно определить максимально допустимое число проводников в пазу
якоря Nz для своей машины. В соответствии с выражением (5.1) его необходимо
выбирать целым и четным, так как оно связано с числом коллекторных пластин, приходящихся на один паз, uк аналогичным соотношением
N z = 2uк .
(5.8)
При таком подходе обеспечивается максимально полное использование
зубцового слоя якоря, что способствует снижению активной длины якоря.
Возможен также вариант расчетов, когда числа Nz и uк выбирают в зависимости от уровня питающего напряжения Uдн согласно рекомендациям таблицы 5.1. Дело в том, что с ростом числа проводников в пазу снижается расход
дорогостоящей корпусной изоляции и общая трудоемкость изготовления якорной обмотки. Поэтому в двигателях с высоким уровнем питающего и, особенно,
корпусного напряжения наблюдается рост числа Nz и uк, однако в пределах действующего ограничения (5.7).
Таблица 5.1 – Рекомендуемые значения числа проводников Nz и
коллекторных пластин uк , приходящихся на один паз
Uдн
Uк
Nz
от 500 до 800 В
от 800 до 1200 В
от 1250 В и выше
3
6
3; 4
6; 8
5; 6; 7
10; 12; 14
Наметив значения Nz , uк, необходимо увязать между собой тройки чисел
{N; Nz; Z} и {K; uк; Z} таким образом, чтобы все проводники и коллекторные
пластины распределялись поровну между пазами якоря, т.е. выполнялось бы
условие
N K
Z=
= = целое число.
(5.9)
N z uк
При этом необходимо учесть и то обстоятельство, что для улучшения
коммутации в современных тяговых двигателях применяют обмотки с укороченным шагом. Это означает, что число Z должно быть таким, чтобы первый
шаг обмотки в реальных пазах yz1 имел бы укорочение εz , т. е. удовлетворял
бы условию
Z
yz1 =
− ε z = целое число ,
(5.10)
2p
где εz – укорочение шага обмотки якоря в реальных пазах.
εz = 0,5 паза − при петлевой обмотке,
εz = 0,25 или εz = 0,75 паза − при волновой обмотке.
При волновом типе обмотки равномерное заполнение пазов проводниками якоря обеспечивается в случае, когда наряду с выполнением указанных выше ограничений числа Z, K и uк оказываются нечетными.
26
Увязка между собой числа пазов Z, проводников N и коллекторных пластин K дополняется требованием внутренней симметрии обмотки якоря
⎧Z
⎪ a = целое число
⎪
⎪K
= целое число .
⎨
(5.11)
⎪a
⎪N
⎪ a = целое число
⎩
Возможно, что комплексная взаимоувязка числа пазов, проводников якоря и коллекторных пластин потребует изменения и некоторых ранее рассчитанных параметров машины. Поэтому нужно быть готовым к тому, что на данном
этапе потребуется пересмотреть ранее полученные решения.
После нахождения числа Z окончательно фиксируются значения K и N и
связанные с ними величины A, Δuк, Dк и tк.
Полученные параметры позволяют перейти к задаче расчета конструкции
самого паза якоря. Для этого, отталкиваясь от допустимого верхнего предела
теплового фактора машины WТ = (A ja) и найденного значения линейной токовой нагрузки якоря A (формула (5.3)), находят максимальное допустимое
значение плотности тока в проводниках якоря ja, А/мм2
W Тmax
max
.
ja =
(5.12)
A
Критерий WТ представляет собой обобщенный показатель тепловой напряженности якоря, назначаемый с учетом определяющих факторов токового
нагрева проводников якоря – толщины изоляции, ее класса нагревостойкости,
способа укладки проводников в пазу якоря и вида вентиляции. Рекомендуемые
для расчета допустимые пределы WТ в зависимости от вышеперечисленных
факторов представлены в таблице 5.2.
Таблица 5.2 – Рекомендуемые пределы теплового фактора WТ
Класс нагревостойкости «B»
Класс нагревостойкости «F»
Горизонтальная
Вертикальная Горизонтальная Вертикальная
укладка
укладка
укладка
укладка
2700
3200
3600
4000
до 1000 В
2025
2400
2700
3000
2400
3000
3200
3600
до 1650 В
1800
2250
2400
2700
2000
2750
3000
3250
до 3300 В
1500
2050
2250
2450
Примечание – В числителе – для независимой вентиляции;
в знаменателе – для самовентиляции.
Корпусное
напряжение
27
Под термином «вертикальная укладка» в таблице 5.2 понимается горизонтальное размещение проводников «плашмя» в пазу якоря один под другим
по высоте паза (рисунок 5.3). Из числовых значений теплового фактора видно,
что данный способ позволяет реализовывать существенно большие тепловые
нагрузки за счет снижения суммарной толщины изоляции в направлении отвода
теплового потока через боковые стенки паза. Очевидно, что при таком способе
укладке улучшается использование полезного объема паза, а также снижаются
добавочные потери мощности и улучшаются условия коммутации. Поэтому
данный способ расположения проводников в пазу якоря считается более перспективным, однако на практике его применение сдерживается усложнением
технологии изготовления якорных секций.
Дело в том, что при укладке «плашмя» проводники выходят из паза якоря
в горизонтальном положении, а в шлице коллекторной пластины должны располагаться в вертикальном. Поэтому на передних лобовых участках якорной
катушки проводники приходится перегибать на 90º. Кроме того, если шаг по
коллектору небольшой, то ширина шлица коллекторной пластины, как правило,
оказывается меньше размера узкой части проводников и их приходится дополнительно развальцовывать до нужного размера.
Горизонтальная укладка
uк
1
Вертикальная укладка
2
3
4
7
uк
7
9, 10
8
5
2
6
9
8
10
2
1
3
5
7
9
– клин;
– покровная изоляция;
– витковая изоляция;
– верхняя полусекция;
– элементарный проводник;
2 – изоляционные прокладки;
4 – корпусная изоляция;
6 – медные проводники;
8 – нижняя полусекция;
10 – активный проводник
Рисунок 5.3 – Способы укладки якорных проводников
28
При «горизонтальной укладке» (рисунок 5.3) проводники якоря располагаются вертикально, а заполняют паз по горизонтальной оси. С одной стороны,
это упрощает конструкцию и технологию изготовления якорных секций, но изза худших условий отвода тепла к боковым стенкам паза значения теплового
фактора приходится снижать на 15…20 %. Этому способствует и то, что с ростом высоты активного проводника растут добавочные потери мощности от поперечного поля пазового рассеивания.
Вычисленное по формуле (5.12) значение максимальной плотности тока
позволяет наметить площадь поперечного сечения активного проводника якоря
qa, мм2
i
qa = aн .
(5.13)
ja
Следует иметь в виду, что при больших значениях теплового фактора и
низком уровне линейной нагрузки расчетная плотность тока ja может оказаться
нереально высокой. На практике для продления срока службы медных проводников и снижения их нагрева плотность тока не назначают выше 7…8 А/мм2.
Поэтому, если расчетная величина ja превысит указанные пределы, то ее ограничивают рекомендуемым диапазоном или ориентируются на среднестатистические для тяговых двигателей значения плотности тока в якорных проводниках:
− 6…7 А/мм2 для электровозных двигателей;
− 5…6 А/мм2 для двигателей электропоездов.
Исходя из площади поперечного сечения qa намечают высоту hпр и ширину bпр проводников якоря. Прежде всего в этом выборе ориентируются на установленный сортамент (ГОСТ 434−78) размеров прямоугольной электротехнической меди (приложение А).
Основная сложность при выборе высоты и ширины проводника состоит в
том, что их оптимальное соотношение без сравнительных вариантов расчета
установить невозможно. Для учебного проекта такая задача не ставится, и поэтому можно ориентироваться на самые общие рекомендации по выбору размеров якорных проводников.
В самом простом варианте при первоначальном выборе высоты и ширины проводников якоря можно ориентироваться на их пропорцию в существующем прототипе двигателя [ 4 ].
Другой подход к решению данной задачи основывается на том, что для
конструкций реальных ТЭД характерно примерное равенство ширины паза и
толщины зубца в расчетном сечении. Поэтому в качестве первого приближения
можно использовать следующую расчетную модель паза якоря.
Расчетным для зубцового слоя якоря считается сечение, проходящее на
1/3 высоты паза от его дна (рисунок 5.4). Поэтому в качестве размера ширины
паза bп можно принять половину шага по пазам на поверхности якоря t1 (формула (5.26)), уменьшенную на 1…2 мм (учитывается, что зубец по высоте несколько сужается к расчетному сечению). Если предварительно рассчитать
29
толщину изоляции по ширине паза (см. расчет изоляции паза якоря), то можно
вычислить размер, занимаемый в поперечном направлении чистой медью, исходя из которого и назначают ширину одного проводника bпр с учетом принятого способа укладки и сортамента обмоточных проводов.
Второй размер активного проводника по высоте паза вычисляется исходя
из требуемой площади поперечного сечения активного проводника. При этом
следует учитывать, что при горизонтальном способе укладки для снижения добавочных потерь мощности от поперечной составляющей пазового поля высота
проводников в пределе не должна превышать 10…11 мм. Если площадь поперечного сечения требует больших значений hпр , то каждый активный проводник (10, рисунок 5.3) подразделяют по высоте на два, реже – на три элементарных проводника (9, рисунок 5.3), выдерживая высоту каждого в установленных пределах. При вертикальной укладке («плашмя») данное ограничение
обычно выполняется естественным образом, поскольку проводник по высоте
паза располагается своей узкой частью.
Расчет изоляционной системы по высоте и ширине паза якоря основывается на выбранном способе укладки с учетом количества проводников в каждом
из направлений. Всего в пазу выделяют три вида изоляционных покрытий.
Витковая изоляция (5, рисунок 5.3) накладывается на каждый элементарный проводник. Ее назначение состоит в изолировании проводников относительно друг друга, поэтому ее потенциальная нагрузка небольшая и соответствует рабочему диапазону межламельных напряжений на коллекторе. В современных тяговых двигателях межвитковая изоляция выполняется на основе
слюдинитовых лент толщиной 0,08…0,11 мм. Намотка производится по всей
длине каждого элементарного проводника в один слой так, чтобы каждый последующий виток перекрывал предыдущий на половину размера ширины ленты. Такой способ намотки получил название вполуперекрышу.
В то же время в современной технологии все более широкое применение
находят марки обмоточных проводов (ПСД, ПСДК, ПЭТВСД и др.) с уже готовым изоляционным покрытием и поэтому не требующих специального наложения межвитковой изоляции. Толщина таких покрытий, выполняемых на основе
высокопрочных эмалей и оплетки из стеклонитей, составляет 0,14…0,17 мм на
одну сторону проводника.
При ленточном способе изолировки толщина межвитковой изоляции по
ширине паза Δb мв, мм, рассчитывается:
− при горизонтальном способе укладки
Δb мв = δ мв ×1× 2× 2× uк ;
(5.14)
− при вертикальном способе укладки
Δ b мв = δ мв × 1× 2 × 2,
(5.15)
где δмв – толщина ленты межвитковой изоляции, мм.
Указанные в формулах (5.14) и (5.15) числовые множители в соответствии с порядком их расположения учитывают:
30
− один слой межвитковой изоляции;
− намотку способом вполуперекрышу, что обусловливает двойную толщину ленты с каждой стороны проводника;
− изолировку каждого проводника с двух сторон.
Размер межвитковой изоляции по высоте паза Δh мв, мм:
− при горизонтальном способе укладки
Δh ìâ = δ ìâ × 1 × 2 × 2 × n ýë × 2;
(5.16)
− при вертикальном способе укладки
Δ h ìâ = δ ìâ × 1 × 2 × 2 × u ê × 2 ,
(5.17)
где nэл – количество элементарных проводников в одном активном проводнике
по высоте паза.
Появившийся в формулах (5.16) и (5.17) дополнительный числовой множитель, удваивающий результат, учитывает, что по высоте паза якоря располагаются две полусекции (элементы 7, 8 на рисунке 5.3).
Корпусная изоляция (4, рисунок 5.3) создает основной изоляционный
барьер, воспринимающий рабочее корпусное напряжение двигателя и возможные в условиях эксплуатации перенапряжения. Поэтому данный вид изоляционного покрытия выполняют несколькими слоями слюдинитовых лент толщиной 0,1…0,13 мм, наматываемых вполуперекрышу. Количество слоев корпусной изоляции выбирается в зависимости от уровня корпусного напряжения согласно данным таблицы 5.3.
Таблица 5.3 – Рекомендуемое количество слоев корпусной изоляции
Uкорп
Число слоев nкорп
до 1000 В
3
до 1500 В
4
до 2000 В
5
до 3000 В
6
Толщина корпусной изоляции для любого способа укладки:
− по ширине паза якоря
Δb корп = δ корп × nкорп × 2 × 2;
− по высоте паза якоря
Δh корп = δ корп × nкорп × 2 × 2 × 2,
(5.18)
(5.19)
где δкорп – толщина ленты корпусной изоляции, мм;
nкорп – число слоев корпусной изоляции.
Смысл входящих в выражения (5.18), (5.19) числовых коэффициентов такой же, как и при расчете межвитковой изоляции.
Покровная изоляция накладывается для предохранения мягких слоев
корпусной изоляции от случайных механических повреждений при транспортировке якорных секций и при их укладке в паз. Выполняется на основе стеклолент толщиной 0,1…0,15 мм одним слоем вперекрышу.
Толщина покровной изоляции при намотке вперекрышу:
− по ширине паза якоря
31
Δb покр = δ покр ×1× 2 × 2;
(5.20)
− по высоте паза якоря
Δ h покр = δ покр ×1× 2 × 2 × 2,
(5.21)
где δпокр – толщина ленты покровной изоляции, мм.
Помимо проводников якоря с системой изоляционных слоев в структуру
паза входят:
− пазовые клинья (1, рисунок 5.3), выполняемые из стеклопластовых материалов высотой hкл = 4…8 мм. Клиновое крепление обеспечивает высокую
надежность фиксации пазовой части обмотки якоря при воздействии максимальных центробежных усилий на поверхности якоря и в настоящее время
практически полностью вытеснило проволочное бандажное крепление;
− разделительные изоляционные прокладки (2, рисунок 5.3) из миканита или электрокартона толщиной Δпрокл = 0,2…0,5 мм. Обычно две прокладки
устанавливаются под клин и по одной на дно паза и между верхней и нижней
катушками обмотки.
Намеченные размеры проводников обмотки якоря hпр и bпр с учетом рассчитанных параметров изоляционной системы позволяют определить точные
конструкционные размеры паза якоря:
− ширина паза в штампе bп, мм:
а) при горизонтальной укладке
bп = uк × bпр + Δb мв + Δb корп + Δb покр + (0,2...0,3) + (0,15...0,2); (5.22)
б) при вертикальной укладке
bп = bпр + Δb мв + Δb корп + Δb покр + ( 0 , 2 ... 0 ,3) + ( 0 ,15 ... 0 , 2 );
(5.23)
− высота паза в штампе hп, мм:
а) при горизонтальной укладке
hп = 2nэл × hпр + Δh мв + Δhкорп + Δhпокр + nпрокл× Δпрокл + hкл + (0,2...0,3) + (0,15...0,2); (5.24)
б) при вертикальной укладке
hп = 2uк × hпр + Δh мв + Δhкорп + Δhпокр + nпрокл× Δпрокл + hкл + (0,2...0,3) + (0,15...0,2), (5.25)
где nпрокл – общее количество прокладок в пазу якоря.
Числовые слагаемые в скобках в формулах (5.22) − (5.25) означают:
− 0,2…0,3 мм – зазор на укладку секций в паз;
− 0,15…0,2 мм – разница между размером паза в свету и размером паза в
штампе, назначаемая из-за возможного смещения отдельных листов при сборке
якорного пакета.
Полученные размеры паза якоря должны удовлетворять следующим ограничениям:
− ширина паза должна быть bп ≥ 7 мм, так как при чрезмерно узких пазах
ухудшается процесс коммутации и затрудняется работа штамповочного оборудования;
− высота паза − hп ≤ 50 мм, так как с ростом глубины пазов ухудшаются
условия коммутации и растут добавочные потери мощности.
32
Исходя из полученных размеров паза рассчитывают все остальные конструкционные параметры зубцового слоя якоря (рисунок 5.4).
Шаг по пазам на поверхности якоря (зубцовое деление) t1, мм
πDa
(5.26)
.
t1 =
Z
Ширина зубца на поверхности якоря bz1, мм
b z 1 = t1 − b п .
(5.27)
t1
bz1
bп
hп
t1/3
bz1/3
hп/3
bz2
t2
Рисунок 5.4 – Конструкционные размеры зубцового слоя якоря
Шаг по пазам в расчетном сечении tz1/3 (на высоте 1/3hп ), мм
t z1 / 3 =
π ( Da −
Z
4
hп )
3
.
Ширина зубца в расчетном сечении bz1/3, мм
bz1/ 3 = t z1/ 3 − bп .
Шаг по дну пазов t2, мм
π ( D a − 2 hп )
t2 =
Z
Ширина зубца у основания bz2, мм
b z 2 = t 2 − bп .
33
(5.28)
(5.29)
.
(5.30)
(5.31)
Необходимо проконтролировать, чтобы было выполнено также условие
bz2 ≥ 7 мм для обеспечения достаточной механической прочности зубцов якоря
в основании.
В последующем расчете магнитной цепи машины ключевым параметром
будет выступать величина основного магнитного потока в номинальном режиме Ф0 , Вб
k U 60 a
,
Ф0 = U н
(5.32)
pNn н
где kU − коэффициент, учитывающий потери напряжения на внутренних сопротивлениях обмоток двигателя.
Поскольку сопротивления обмоток пока неизвестны, то внутренние потери напряжения могут быть учтены только приблизительно. В среднем считается, что на внутренних сопротивлениях теряется от 3 до 5 % номинального напряжения питания, т. е. kU ≈ 0,95…0,97. Более определенно kU можно найти из
статистической корреляционной зависимости для действующих образцов тяговых электродвигателей
kU = 0,91+ 0,12⋅10−3 Pн − 6,67⋅10−8 Pн2 ,
(5.33)
где Pн − номинальная мощность двигателя, кВт.
Окончательно приемлемость намечаемого варианта конструкции двигателя при условии выполнения всех предыдущих ограничений проверяется по
длине шихтованного пакета якоря la , м
2 pФ 0
,
la =
(5.34)
B Z 1 / 3 b Z 1 / 3 Z α δ k ст
где BZ1/3 – индукция в расчетном сечении зубцов якоря, Тл. Рекомендуется:
BZ1/3 = 1,8…2,2 Тл − для электровозных двигателей,
BZ1/3 = 1,5…1,9 Тл − для двигателей электропоездов;
αδ – расчетный коэффициент полюсного перекрытия. Принимается:
αδ = 0,62…0,68 − для некомпенсированных машин,
αδ = 0,64…0,72 − для компенсированных двигателей;
bz1/3 – толщина зубца в расчетном сечении, м;
kст – коэффициент заполнения пакета якоря сталью. Устанавливается:
kст = 0,94 − при лаковой изолировке листов,
kст = 0,97 − при изолировке окисной пленкой.
Назначая в выражении (5.34) индукцию в зубцах якоря, следует иметь в
виду, что при больших значениях BZ1/3 растет магнитное насыщение машины,
что увеличивает расход меди в обмотках главных полюсов, ухудшаются регулировочные свойства двигателя, растут магнитные потери в зубцах якоря и их
нагрев. С другой стороны, чрезмерно низкая индукция в зубцах якоря неблагоприятно сказывается на показателях использования полезного объема якоря и
снижает потенциальную устойчивость машины.
Для двигателей электропоездов номинальным считается один из режимов ослабленного возбуждения с βном = 0,4…0,5 . Поэтому во избежание чрез34
мерного магнитного насыщения в режиме полного возбуждения индукцию в
зубцах якоря назначают ниже, чем для электровозных двигателей.
При выборе коэффициента полюсного перекрытия учитывают, что его
максимальное значение ограничено требованием отсутствия воздействия поля
главных полюсов на зону коммутации. Поэтому в двигателях с небольшим
межполюсным пространством следует ориентироваться на меньшие значения
αδ из рекомендуемого диапазона, и наоборот.
Полученное в выражении (5.34) значение длины активной части якоря
должно удовлетворять условию вписывания двигателя в пространство между
ребордами колесной пары:
− la ≤ 480 мм при опорно-осевом подвешивании и односторонней зубчатой передаче;
− la ≤ 440 мм при опорно-осевом подвешивании и двухсторонней зубчатой передаче;
− la ≤ 380 мм при опорно-рамном подвешивании с внутренним карданным валом (электровозные ТЭД);
− la ≤ 315 мм при опорно-рамном подвешивании с наружной карданной
муфтой (ТЭД электропоездов).
В результате проведенных расчетов и корректировок окончательно фиксируются требуемые для дальнейших расчетов величины
Da; Dк; 2p; 2a; N; K; Z; uк; Nz ; A; hпр × bпр ; hп × bп ; t1 ; bZ1 ; αδ ; Ф0 ; la
и их соответствие установленным требованиям и ограничениям.
В заключение раздела рассчитываются шаги и параметры обмотки якоря,
которые являются производными от полученных выше величин.
Результирующий шаг обмотки в коллекторных делениях:
− при простой петлевой обмотке
yк = 1;
(5.35)
− при простой волновой обмотке
yк =
K −a
.
p
Первый шаг в коллекторных делениях
y1 = y Z 1uк .
Второй шаг в коллекторных делениях:
− при простой петлевой обмотке
y2 = y1 −1;
− при простой волновой обмотке
y2 = yк − y1.
(5.36)
(5.37)
(5.38)
(5.39)
Укорочение шага обмотки в коллекторных делениях
εк =
K
− y1 .
2p
Полюсное деление по окружности якоря τ, м
35
(5.40)
τ =
π Da
2p
.
(5.41)
Длина передних и задних лобовых участков якорных проводников может
быть оценена по упрощенной эмпирической формуле lлоб, м
l лоб ≅ 1,3τ .
(5.42)
Точный расчет длин лобовых участков якорных катушек и их вылетов
приведен в [1, § 7.4] , [3, § 9-6 ].
Длина полувитка обмотки якоря lN, м
l N = l a + l лоб .
(5.43)
Общая длина проводников обмотки якоря ΣlN, м
(5.44)
∑ l N = Nl N .
Сопротивление обмотки якоря при 20 °С ra20°, Ом
∑lN ,
ra 200 =
(5.45)
57qa (2a) 2
где qa – площадь поперечного сечения активного якорного проводника, мм2.
Масса меди обмотки якоря mN, кг
m N = 8,9qa ∑ l N ⋅ 10 −3.
(5.46)
При необходимости постановки уравнительных соединений определяется
их шаг по коллектору между точками равного потенциала
y ур =
K
.
p
(5.47)
Как правило, уравнительные соединения впаиваются в шлицы соответствующих коллекторных пластин с рассчитанным выше шагом yур вместе с проводниками якоря. Очевидно, что использование уравнителей связано с дополнительными расходами на дорогостоящие медные и изоляционные материалы,
а также на работы по их изготовлению, изолировке и монтажу. Поэтому, несмотря на то, что наилучшим решением является постановка полного числа
уравнителей, равного uк на один паз якоря, на практике количество уравнительных соединений на паз uу выбирается не больше трех (обычно один-два
уравнителя на паз).
Сечение каждого уравнительного соединения qу, мм2, определяется по
хорошо зарекомендовавшей себя эмпирической формуле
u
q у = ( 0 ,1 ... 0 ,15 ) к q a ,
(5.48)
uу
где uу – число уравнителей на паз;
uк – число коллекторных пластин на паз;
qa – площадь поперечного сечения активного проводника якоря, мм2 .
36
6
Расчет щеточного аппарата и рабочей длины коллектора
Методика расчета щеточного узла изложена в [1, глава 8], [2, §12-4], [3,
глава 19]. Вопросы теории рассмотрены в [5, § 5-14], [6, § 2.2, 2.8].
На данном этапе проекта выполняются расчеты по выбору числа и размеров щеток и определению рабочей длины коллектора.
Исходными данными в расчете выступают: номинальный ток якоря,
число полюсов, диаметр коллектора, шаг по коллектору и параметры обмотки
якоря, рассчитанные в предыдущем разделе.
При расчете должны быть выполнены ограничения:
− по допустимой плотности тока в щеточном контакте;
− по допустимой ширине щетки и щеточного перекрытия;
− по тепловой напряженности коллектора.
Исходя из тока якоря в номинальном режиме Iaн определяют ток одного
щеткодержателя Iщн, А
I
I щн = aн .
(6.1)
p
На напряженность процесса коммутации и нагрев щеточноколлекторного перехода большое влияние оказывает не столько величина тока,
сколько его плотность под щеточным контактом. В современных тяговых двигателях преимущественно используется электрографитированный (ЭГ) тип
щеток. С учетом запаса на токовые перегрузки машины и износ щеток средний
уровень плотности тока назначают на уровне (8…12)104 А/м2.
Более обоснованно плотность тока можно задать по выбранному типу
щеток, ориентируясь на предполагаемые условия эксплуатации проектируемой
машины (ГОСТ 2332−75, таблица Б.2). Необходимо проследить, чтобы выбранный по таблице Б.2 тип щеток соответствовал максимальной окружной скорости коллектора, рассчитанной в разделе 4.
По намеченной плотности тока jщ определяют требуемую площадь щеточного контакта одного щеткодержателя Sщ, м2
I
Sщ = щн ,
(6.2)
jщ
где jщ – плотность тока в щеточном контакте, А/м2.
Неопределенность, связанная с разложением полученной площади на
длину и ширину щетки, легко разрешается, если принять во внимание ограничение на допустимую ширину щеточного контакта. Дело в том, что увеличение
ширины щетки, с одной стороны, благоприятно сказывается на процессе коммутации, поскольку снижается уровень реактивной ЭДС. Но вместе с тем расширение коммутационной зоны ведет к тому, что процесс коммутации начинает усложняться краевыми потоками с наконечника главных полюсов, из-за чего
приходится идти на снижение коэффициента полюсного перекрытия, а значит,
и степень использования активного слоя якоря.
37
Поэтому устанавливается следующее ограничение на ширину щеточного
контакта в зависимости от основных параметров двигателя
D
a
bщ ≤ 0,55 к τ (1 − α δ ) − t к (uк + ε к − ),
(6.3)
Da
p
где bщ – ширина щетки, м.
Полученное значение bщ округляется до меньшего стандартного значения из размеров щеточного сортамента в соответствии с ГОСТ 2332−75 (таблица Б.1).
Тогда длина щеточного контакта Lщ , м
Lщ =
Sщ
bщ
,
(6.4)
где Sщ – площадь щеток одного щеткодержателя, м2.
Полученное значение может оказаться больше допускаемых стандартом
типоразмеров на длину щеток. В этом случае принимается решение о разбиении
щеточного контакта на несколько элементарных щеток (рисунок 6.1). При таком
разбиении снижается масса каждой элементарной щетки, что позволяет существенно уменьшить величину динамических ударов на щеточный аппарат при
работе двигателя и сделать контакт менее чувствительным к вибрациям машины и неровностям поверхности по длине коллектора.
Обычно требуемую длину Lщ разбивают не более чем на 2−3 элементарных щетки, каждая длиной lщ , м
L
lщ = щ ,
(6.5)
nщ
где nщ – число элементарных щеток по длине коллектора.
Намеченное значение lщ также округляется до стандартного типоразмера
согласно ГОСТ 2332−75 (таблица Б.1). Допускается также половинное деление
щеток и по ширине щеточного контакта, но следует понимать, что это существенно усложняет конструкцию щеткодержателя и применяется только в машинах с повышенными токами.
Округленные до стандартных значений размеры элементарных щеток
позволяют установить окончательные величины площади Sщ, м2, и плотности
тока под щеточным контактом jщ, А/м2 :
S щ = nщ bщ l щ ,
(6.6)
I
jщ = щн .
(6.7)
Sщ
Отсюда рабочая длина коллектора (рисунок 6.1) Lк , м
Lк = nщ l щ + Δщд ( nщ − 1) + 2r + b рσ ,
(6.8)
где Δщд – толщина стенок «окна» щеткодержателя, Δщд = (3 …5)10-3 м;
r – размер фасок краев рабочей поверхности коллектора, r ≈ 2⋅10-3 м;
bрσ – осевой разбег якорных подшипников, м, bрσ = (6 … 12)10-3 м.
38
Δщд
18…20 мм
lщ
lщ
r
r
Lк
8…10 мм
Рисунок 6.1 – Осевые размеры коллектора
Достаточность полученного значения рабочей длины Lк проверяется по
нагреву коллектора от протекающего тока и сил трения.
Проверка тепловой напряженности коллектора от токовой нагрузки производится в номинальном режиме по эмпирической формуле
I
Lк ≥ 0,7 aн 10 − 4.
(6.9)
Dк
Примечание – Размеры Lк и Dк выражены в метрах.
Достаточность Lк для отвода тепловыделений от сил трения щеток о
коллектор оценивают в режиме испытательной (разгонной) частоты вращения
якоря по величине удельных потерь на поверхности коллектора pк уд, кВт/м2
f тр p щ v ки ∑ S щ
,
p к уд =
(6.10)
(π D к − K Δ из ) L к
где fтр – коэффициент трения щеток о коллектор. В режиме холостого хода
fтр = 0,2…0,23;
pщ – удельное давление на щетку, кПа (согласно таблице Б.2);
vки – окружная скорость коллектора в режиме испытательной
частоты вращения, м/с,
vки = 1,35vк max – для ТЭД постоянного тока,
vки = 1,25vк max – для ТЭД пульсирующего тока;
ΣSщ – суммарная площадь щеток, м2, ΣSщ= 2pSщ .
Δиз – толщина изоляционных прокладок между коллекторными
пластинами, м, Δиз =(0,8…1,2)10-3 м.
Из опыта проектирования установлено, что для надежной работы тяговых двигателей должно выполняться ограничение
pк уд ≤ (40…50) кВт/м2.
(6.11)
39
7 Расчет компенсационной обмотки
Вопросы теории работы компенсационной обмотки изложены в [5, § 4-1,
6-7] и [6, § 2.5, 2.6]. Методика расчета изложена в [1, глава 9], [2, §11-7] и [3,
глава 20].
В данном разделе устанавливаются геометрические размеры зубцового
слоя полюсного наконечника, параметры компенсационной обмотки и производится расчет заполнения паза компенсационной обмотки. Исходными данными
выступают найденные ранее значения коэффициента полюсного перекрытия и
параметры обмотки якоря.
При расчете должны быть выполнены ограничения:
− по геометрическому вписыванию и рациональности исполнения зубцового слоя компенсационной обмотки в наконечники главных полюсов при
катушечном исполнении компенсационной обмотки;
− по магнитному насыщению зубцов наконечника главных полюсов и
их механической прочности;
− по тепловому нагреву проводников компенсационной обмотки.
Как известно, компенсационная обмотка не является обязательным элементом в конструкции электрических машин и применяется для улучшения их
технических и надежностных характеристик. До появления ЭПС переменного
тока тяговые двигатели выполнялись без компенсационной обмотки, поскольку
считалось, что еще одна обмотка потребует дополнительных расходов на конструкционные материалы, снизит технологичность изготовления и ремонта тяговых двигателей, станет источником повышенных отказов в эксплуатации.
Однако рост мощности локомотивов, высокий уровень питающих напряжений
и повышенные требования к уровню регулируемости тяговых двигателей привели к значительному усложнению условий их работы по потенциальным и
коммутационным условиям, вследствие чего участились случаи перебросов и
круговых огней по коллектору.
Проведенные исследования показали, что для снижения склонности тяговых двигателей к круговым огням наиболее эффективным средством является
введение в структуру двигателей компенсационной обмотки. За счет создания
магнитного потока, встречного поперечному полю якоря, такая обмотка позволяет снизить максимальные межламельные напряжения на 20…30 % в стационарных режимах и на 40…50 % в неустановившихся. Компенсируя большую
часть МДС поперечной реакции якоря, компенсационная обмотка благоприятно
сказывается и на условиях коммутации, упрощает конструкцию добавочных
полюсов, снижая число их витков и потоки рассеивания. За счет компенсации
поперечной реакции якоря использование компенсационной обмотки позволяет
уменьшать величину воздушного зазора под главными полюсами, что сокращает число витков и на главных полюсах. В результате общий расход меди по
машине оказывается даже меньше, чем в некомпенсированных двигателях.
В то же время нельзя отрицать факта, что дополнительная обмотка усложняет конструкцию машины, требует пространства для своего размещения и
40
на 15…20 % повышает трудоемкость изготовления и ремонта тяговых электродвигателей. С учетом такой неоднозначности оценок в настоящее время признается целесообразным использование компенсационной обмотки прежде всего в электровозных двигателях большой мощности, которые более всего напряжены в потенциальном и коммутационном отношениях. Этому способствует и большие габариты таких двигателей, что обеспечивает достаточное пространство для размещения катушек компенсационной обмотки и их межкатушечных соединений.
В тяговых двигателях малой и средней мощности, диаметр якорей которых не превышает 560 мм, использование компенсационной обмотки сдерживается технологическими трудностями ее геометрического вписывания в малые
размеры полюсных наконечников и межполюсного пространства. В таких двигателях для снижения воздействия поперечной реакции якоря вместо компенсационной обмотки применяют расходящиеся воздушные зазоры под главными
полюсами.
Ток в тяговых двигателях, как правило, не превышает 1000 А, поэтому
компенсационную обмотку, имеющую последовательно-встречное соединение
с якорной, обычно выполняют без параллельных ветвей. В этом случае ток в
проводниках компенсационной обмотки по величине такой же, что и ток якоря:
I ко = Iaн .
(7.1)
МДС компенсационной обмотки должна быть по знаку противоположной, а по величине равной МДС поперечной реакции якоря в пределах полюсной дуги:
τ
Fко ≈ αδ Faq = αδ A .
(7.2)
2
Однако из-за целого ряда ограничений на конструкцию зубцового слоя
компенсационной обмотки и ее дискретного распределения по пазам главного
полюса абсолютно точного равенства указанных МДС достичь не удается не
только в пространственном распределении, но и в средних значениях. Поэтому
в расчете потребного числа витков компенсационной обмотки вводится коэффициент степени компенсации νко, количественно оценивающий неравенство
этих двух МДС. Считается, что применение компенсационной обмотки неэффективно при расхождениях в значениях МДС более 15 %. Поэтому для коэффициента степени компенсации νко можно рекомендовать значения из диапазона
ν ко = 0,85 ... 1,15 .
(7.3)
С учетом этого диапазон потребного числа витков катушки компенсационной обмотки можно определить из выражения
α Aτ
W ко = ν ко δ
.
(7.4)
2 I ко
Очевидно, что при проектировании необходимо стремиться к степени
компенсации νко = 1, однако это не всегда достижимо, хотя бы потому, что чис41
ло витков компенсационной обмотки приходится округлять до целого значения.
Кроме того, витки компенсационной обмотки должны равномерно распределиться по пазам главного полюса, на число которых Zко наложен целый ряд ограничений.
Например, при малом числе Zко растет число проводников в каждом пазу, что может вызвать их перегрев. Поэтому необходимо ограничивать объем
тока в пазу компенсационной обмотки пределом 1800…2000 А. Отсюда максимально возможное число проводников в пазу Nz ко
(1800 ... 2000 )
(7.5)
N z ко ≤
= целое число .
I ко
С учетом этого ограничения может быть намечено число пазов компенсационной обмотки в главном полюсе Zко
2W
(7.6)
Z ко = ко = целое число .
N z ко
Как видно из выражения (7.6), чтобы число Zко оказалось целым, приходится подбирать и взаимно увязывать значения Nzко и Wко из диапазонов их допустимых значений.
При выборе числа Zко следует также помнить, что нежелательным является и выбор чрезмерно большого количества пазов, поскольку возрастает трудоемкость изготовления катушек компенсационной обмотки, повышается расход изоляционных материалов и снижается толщина зубцов. Это может стать
причиной их магнитного насыщения, снижения механической прочности и роста добавочных потерь мощности в полюсном наконечнике. Поэтому одним из
критериев, ограничивающих максимальное число Zко выступает допустимая
индукция в расчетном сечении зубцов компенсационной обмотки
Bz ко ≤ 1,8...2,0 Тл.
(7.7)
Точная проверка данного ограничения может быть выполнена только
после завершения всего расчета геометрических размеров зубцового слоя полюса. Поэтому в предварительном выборе числа пазов компенсационной обмотки следует ориентироваться на обычный диапазон Zко, характерный для реальных конструкций тяговых электродвигателей
Z ко = 4... 12 пазов.
(7.8)
Отличительной особенностью конструкции компенсационных обмоток
современных отечественных двигателей является их «катушечное» исполнение.
При таком способе изготовления сборка и изолировка компенсационной обмотки производится на специализированном участке. При этом значительно упрощается технология изготовления и сборки машины, поскольку в пазы главных
полюсов закладываются не отдельные проводники, а полностью готовые катушки.
Однако такой способ изготовления предъявляет ряд требований в отношении конструктивного исполнения главных полюсов. В первую очередь, одновременная закладка проводников компенсационной обмотки в пазы главного
42
полюса возможна только при условии их параллельного расположения относительно друг друга. Поэтому пазы в наконечнике главных полюсов компенсированных машин выштамповываются не радиально, как в якоре, а параллельным
образом (рисунок 7.1).
Кроме того, кольцевой характер протекания тока в катушках компенсационных обмоток исключает возможность их закладки в один полюс. Каждую
катушку монтируют таким образом, чтобы одна ее часть с требуемым направлением тока располагалась в наконечнике полюса одной полярности, а другая, с
противоположным направлением тока, попала бы в пазы полюса другой полярности. Поэтому с каждой стороны от осевой линии полюса располагаются части сразу двух катушек, что, в свою очередь, накладывает требование четного
числа пазов компенсационной обмотки на один полюс
Z ко = четное число .
(7.9)
Наконец, следует учитывать и то, что из-за одновременной зубчатости
поверхности якоря и наконечника главных полюсов при вращении якоря возникает явление продольной пульсации основного магнитного потока, которое вызывает не только дополнительные потери мощности в виде вихревых токов, но
и повышенную вибрацию машины. Для снижения амплитуды этих пульсаций
шаг по пазам на поверхности якоря должен отличаться от шага по пазам компенсационной обмотки не менее чем на 10 %, что приводит к еще одному ограничению на число пазов компенсационной обмотки
Z
Z ко ≠ ( 0 , 9 ... 1,1)α δ
.
(7.10)
2p
Таким образом, окончательный выбор числа витков Wко, удовлетворяющего выражению (7.4), должен производиться в увязке с подбором чисел Nz ко и
Zко и из условия одновременного выполнения ограничений (7.5)–(7.10).
Приведя в требуемое соответствие числа Wко , Zко и Nz ко , можно переходить к расчету геометрии зубцового слоя главных полюсов.
Для этого сначала намечают сечение проводников компенсационной
обмотки, задавшись плотностью тока jко. В предварительном расчете можно
ориентироваться на значение плотности тока, близкое к принятому для проводников якоря, или ориентируясь на среднестатистические для тяговых двигателей значения jко≤ 6…7 А/мм2.
При известной плотности тока площадь поперечного сечения проводников компенсационной обмотки qко, мм2
I
qко = aн .
(7.11)
jко
Полученное значение площади поперечного сечения дает возможность
наметить высоту hпр ко и ширину bпр ко проводников компенсационной обмотки
в соответствии с установленными ГОСТ 434−78 стандартными размерами электротехнической меди (приложение А).
Как и при расчете якорной обмотки, оптимальное соотношение высоты
и ширины проводников заранее установить невозможно, и в реальном проекти43
ровании оно выявляется путем сравнительного анализа нескольких вариантов
расчета. Так, избыточная ширина проводников ведет к сужению зубцов, что
вызывает в них рост магнитной индукции, дополнительный нагрев и снижение
механической прочности. С другой стороны, рост высоты пазов зубцового слоя
полюса усложняет геометрическое вписывание всего двигателя в централь и
его обмоток возбуждения в межполюсное пространство, а также ведет к росту
магнитной индукции в основании рога полюса, что влияет на равномерность
распределения основного магнитного потока вдоль полюсной дуги.
Для придания большей жесткости лобовых вылетов компенсационной
обмотки проводники в пазах обычно располагают вертикально (рисунок 7.1).
1
hп ко
2
3
4
5
1
bz ко
bп ко
6
tко
1 - изоляционные прокладки;
2 – покровная изоляция;
3 – корпусная изоляция;
4 – междувитковая изоляция;
5 – медные проводники;
6 – клин
Рисунок 7.1 − Структура заполнения паза компенсационной обмотки
Зная число проводников в пазу Nz ко и их расположение, можно наметить
один из размеров проводников (приложение А), ориентируясь на «средние» га-
44
бариты паза компенсационной обмотки, характерные для современных двигателей:
− по ширине 10…20 мм;
− по высоте 30…45 мм.
Второй размер проводников подбирается исходя из требуемой площади
поперечного сечения qко с округлением до стандартного типоразмера (приложение А).
Кроме того, в предварительном назначении ширины паза компенсационной обмотки можно исходить из тех же рекомендаций, что и при расчете пазов якоря – ширина пазов и зубцов компенсационной обмотки обычно близки
между собой. Это означает, что ширина паза bп ко может быть принята примерно равной половине шагов по пазам tко (формула (7.21)).
Методика расчета геометрических размеров паза компенсационной обмотки мало, чем отличается от аналогичного расчета для якорной обмотки.
Существенным отличием является только то, что в пазу компенсационной обмотки нет верхней и нижней полусекций и все проводники образуют единый
пакет, изолированный от стенок паза общей системой слоев корпусной и покровной изоляций.
Применительно к стандартной структуре паза компенсационной обмотки (рисунок 7.1):
− толщина межвитковой изоляции Δb мв по ширине паза
Δ b мв = δ мв × 1 × 2 × 2 × N z ко ;
(7.12)
− толщина корпусной изоляции Δb корп по ширине паза
Δ b корп = δ корп × n корп × 2 × 2 ;
(7.13)
− толщина покровной изоляции Δb покр по ширине паза
Δ b покр = δ покр × 1 × 2 × 2 .
(7.14)
Толщину изоляционных лент принимают такой же, как и при расчете
якорной изоляции.
Размер паза компенсационной обмотки по ширине bп ко, мм
bп ко = N z ко × bпр ко + Δb мв + Δb корп + Δb покр + (0,5...0,7) + (0,15...0,2) . (7.15)
Входящие в выражение (7.15) числовые значения соответственно учитывают зазор на укладку и возможное смещение листов полюса относительно
друг друга. Больший, чем в якоре, зазор на укладку 0,5…0,7 мм обусловлен дополнительной трудностью выдерживать точные размеры между сторонами катушки, укладываемыми в пазы различных главных полюсов.
Размеры изоляции по высоте паза:
− толщина межвитковой изоляции Δh мв по высоте паза
Δ h мв = δ мв × 1 × 2 × 2 ;
(7.16)
− толщина корпусной изоляции Δh корп по высоте паза
Δ h корп = δ корп × n корп × 2 × 2 ;
(7.17)
45
− толщина покровной изоляции Δh покр по высоте паза
Δh покр = δ покр × 1 × 2 × 2 .
(7.18)
Полная высота паза компенсационной обмотки hп ко , мм
hп ко = hпр ко + Δh мв + Δh корп + Δh покр + nпрокл × Δпрокл + hкл + (0,2...0,3) + (0,15...0,2) .(7.19)
Параметры прокладок и клина принимаются из тех же рекомендаций,
что и при расчете паза якоря.
Следует помнить, что в результате расчетов ни ширина паза bп ко, ни ширина зубцов bz ко не должны оказаться меньше 7 мм, с учетом ограничения по
механической прочности зубцов.
В заключение приемлемость полученных размеров проверяется по условию допустимой магнитной индукции в зубцах компенсационной обмотки в
соответствии с ограничением (7.7).
Для этого необходимо разработать масштабный эскиз зубцового слоя
полюса. В последующих разделах проектного расчета потребуется эскиз всей
магнитной цепи машины (см. раздел 8) , поэтому его построение можно начать
на данном этапе проектирования с изображения наконечника главного полюса,
а в дальнейшем развивать его, достраивая другие элементы магнитопровода.
Для начала графических построений в нижней части листа намечают
центр двигателя, относительно которого изображается сектор, образованный
осями главного и добавочного полюсов (рисунок 7.2). Центральный угол сектора рассчитывается по общему количеству главных и добавочных полюсов в
машине. В соответствии с диаметром якоря Da проводят дугу окружности якоря
длиной τ/2. Отступив в масштабе от этой линии 4…5 мм (предварительный
размер воздушного зазора под главным полюсом δо), намечают огибающую линию поверхности наконечника главного полюса. При известном коэффициенте
полюсного перекрытия αδ можно определить координату расположения края
наконечника главного полюса, рассчитав длину его действительной полюсной
дуги bр , м:
b р = α δ τ − 2δ o ,
(7.20)
где δо – принятая величина воздушного зазора под главным полюсом, м.
В соответствии с полученным размером на расстоянии bр /2 от
центральной осевой линии намечают границу наконечника главного полюса и
крайний зубец компенсационной обмотки толщиной 5…10 мм (размер С на рисунке 7.2). Считается, что небольшая толщина крайнего зубца способствует его
быстрому магнитному насыщению, что препятствует проникновению силовых
линий основного потока с краев полюса в зону коммутации.
Зная ширину паза bп ко, намечают ось крайнего паза компенсационной
обмотки, располагая ее параллельно оси добавочного полюса. Оси остальных
пазов располагают с равным шагом tко так, чтобы они равномерно распределились вдоль полюсного наконечника параллельно оси первого паза. Шаг по пазам компенсационной обмотки можно оценить и расчетным путем tко, м
46
b р Da + 2δ o
.
(7.21)
Z ко
Da
Относительно каждой из намеченных осей достраиваются сами пазы согласно полученным ранее размерам по ширине bп ко и высоте hп ко .
t ко ≈
ось ГП
bп ко
А
В
1/3hп ко
hпко
ось ДП
δо
С
bр /2
τ /2
Da /2
Рисунок 7.2 – Зубцовый слой компенсационной обмотки
Из проведенных построений (рисунок 7.2) с учетом масштаба изображения определяются конструкционные размеры A, B и C, м, необходимые для
расчета площади сечения зубцового слоя полюса Sz ко, м2
S z ко = 2[(A − bп ко nA ) + B + C ]lm km ст ,
где nА – количество пазов на участке А (рисунок 7.2);
lm – длина сердечника главного полюса, м. Для снижения Bz ко
допускается увеличивать lm= la + (0…15) мм;
km ст – коэффициент заполнения сталью сердечника полюса.
km ст = 0,94 – в ТЭД с компенсационной обмоткой;
km ст = 0,97 – в ТЭД без компенсационной обмотки.
Индукция в зубцах компенсационной обмотки Bz ко, Тл
σ коФ0
Bz ко =
Sz ко
,
где σко – коэффициент рассеивания зубцового слоя полюсов. σко = 1,05.
47
(7.22)
(7.23)
Незначительное превышение ограничения по допустимой индукции Bz ко
в зубцах компенсационной обмотки свидетельствует о необходимости расширения площади Sz ко за счет пересмотра соотношения ширины и высоты проводников таким образом, чтобы увеличить толщину зубцов. Если же расчетная индукция в зубцах Bz ко намного превышает установленные пределы – это свидетельствует о неудачности всей конструкции и требует пересмотра числа пазов и
витков компенсационной обмотки в сторону их снижения.
Для дальнейших расчетов окончательно фиксируются параметры зубцового слоя полюса (рисунок 7.1) − bп ко ; hп ко ; tко ; bz ко.
С некоторым допущением можно считать
(7.24)
Средняя длина лобовой части полувитка катушки компенсационной обмотки ls ко, м
α
Z
Z
ls ко = τ ко (1 − δ ) + 2a + bп ко ко + Δко ( ко − 1) ,
(7.25)
2
2
2
где a – прямолинейный участок катушки на выходе из паза, м.
a = 0,02…0,025 м – для ТЭД пульсирующего тока,
a = 0,035 м
– для ТЭД постоянного тока;
Δко – зазор между торцовыми частями соседних катушек.
Δко = 0,005 м ;
τко – полюсное деление по пазам компенсационной обмотки, м.
Значение τко в выражении (7.25) определяется
bz ко ≈ t ко − bп ко .
τ ко =
π ( D a + 2δ 0 + hп ко )
.
2p
Средняя длина витка катушки компенсационной обмотки lко, м
lко = 2( lm + ls ко ) .
(7.26)
(7.27)
Сопротивление компенсационной обмотки при 20 °С rко, Ом
2 pWкоlко
,
(7.28)
57qко
где qко – площадь поперечного сечения проводников компенсационной обмотки, мм2.
Масса меди компенсационной обмотки mко , кг
rко =
mко = 8,9lко 2 pWкоqко10−3 .
48
(7.29)
8 Расчет магнитной цепи
Теоретические вопросы расчета магнитной цепи двигателя изложены в
[5, § 2-1−2-12]. Методика выполнения расчета показана в [1, глава 12], [2, §11-1
− 11-6] и [3, § 22.1 − 22.4].
Весь расчет магнитной цепи условно можно разбить на два этапа. На
первом этапе намечаются конструкционные размеры всех элементов магнитопровода машины, на основе которых строится эскиз магнитной цепи. Окончательно размеры магнитопровода уточняются с учетом габаритных ограничений
по вписыванию двигателя в межосевое расстояние и до верхнего строения пути.
На втором этапе расчета по известному потоку и уточненным размерам
участков магнитопровода находится намагничивающая сила обмотки возбуждения главных полюсов, необходимая для создания номинального основного
потока, рассчитываются конструкционные размеры и параметры катушки главного полюса, производится ее размещение и компоновка в межполюсном пространстве.
В расчетах должно обеспечиваться выполнение ограничений:
− по степени насыщения стальных участков магнитной цепи;
− по геометрическому вписыванию габаритов двигателя;
− по тепловой напряженности катушек главных полюсов;
− по потенциальной и коммутационной устойчивости ТЭД;
− по уровню регулируемости двигателя.
Первая задача данного раздела – построение эскиза магнитной цепи −
является необходимым и ответственным этапом всего проектировочного расчета, так как от параметров любого из элементов магнитопровода, в конечном
счете, зависят вид рабочих характеристик, эксплуатационные и надежностные
показатели проектируемого двигателя. По эскизу поперечного сечения участков
магнитопровода устанавливаются окончательные формы и размеры основных
узлов машины, их взаимная компоновка и увязка с внешними габаритными ограничениями. На втором этапе расчетов эскиз магнитной цепи выступает как
непосредственный элемент расчета, поскольку из него получают данные о длине силовых линий основного потока.
Построения производят на отдельном листе миллиметровой бумаги в
одном из разрешенных ЕСКД масштабов изображения. Масштаб выбирают исходя из возможности размещения на листе размера централи Ц, полученного
при расчете зубчатой передачи (наиболее удобным является масштаб М 1:2).
Поскольку в поперечном разрезе тяговый двигатель представляет собой
симметричную конструкцию, построение эскиза магнитной цепи производится
только для одного сегмента – от оси главного до оси смежного с ним добавочного полюса. Графические построения ведутся параллельно расчету элементов
магнитопровода. При этом следует иметь в виду, что в ходе компоновки узлов
машины в намеченный эскиз могут вноситься изменения, что потребует и соответствующей корректировки расчетов.
49
Сердечник якоря. Наметив центр двигателя (точка О1 на рисунке 8.1),
радиусом Da /2 с учетом выбранного масштаба проводится огибающая окружности якоря. В соответствии с уже имеющимися конструкционными размерами
bп , hп и t1 на эскизе показываются в качестве примера два-три паза якоря и граница зубцового слоя якоря.
Для определения внутреннего диаметра ярма рассчитывают высоту сечения ярма якоря ha , м
Ф0
2
ha =
+ nк d к ,
(8.1)
2 B a l a k ст
3
где Ba – индукция в сердечнике якоря, Тл.
Ba ≤ 1,6…1,8 Тл – при 2p = 2,
Ba ≤ 1,4…1,6 Тл – при 2p = 4,
Ba ≤ 1,2…1,4 Тл – при 2p = 6;
nк – число рядов вентиляционных каналов в ярме якоря. nк = 1…3;
dк – диаметр вентиляционных каналов, м. dк = 0,02… 0,03 м.
Отсюда внутренний диаметр сердечника якоря Di, м
D i = D a − 2 ( hп + ha ) .
(8.2)
Полученный размер Di показывается на эскизе, после чего решается вопрос о расположении вентиляционных каналов в сердечнике якоря с выбранными значениями их диаметра dк и числа рядов nк. Следует иметь в виду, что
вентиляционные каналы при nк ≥ 2 размещаются в шахматном порядке с межцентровым расстоянием порядка (2…3) dк.
Диаметр вала двигателя в его средней части dв , м :
− при односторонней зубчатой передаче
P
;
(8.3)
d в = ( 0,16 ... 0, 2 ) 3 н
nн
− при двусторонней зубчатой передаче
1, 25 Pн
.
(8.4)
d в = ( 0 ,16 ... 0 , 2 ) 3
2 nн
Поскольку внутренний диаметр Di не совпадает с диаметром вала dв ,
решается вопрос о том, какой элемент будет сопрягающим между шихтованным телом якоря и валом двигателя.
Если их разность находится в пределах
( D i − d â ) ≤ 40 ... 50 мм ,
(8.5)
то шихтованный пакет якоря насаживают на втулку якоря, которая, в свою
очередь, напрессовывается на вал двигателя (рисунок 8.1).
50
Без компенсационной обмотки
С компенсационной обмоткой
ось ГП
O2
2p = 4
2p = 6
dоси
h’j
h”j
f
Δпдш
8
6
7
a 5
c
ось ДП
3
hm
b
Δ
b
bр
8
h′m
bm 5
6
e
ось ДП
7
4
2
2
hj
a
Do
c
Ц
3
Da
B/2
1
hп
1
dк
ha
Di
dв
O1
Рисунок 8.1 – Пример построения эскиза магнитной цепи ТЭД:
при 2p = 4 − без компенсационной обмотки;
при 2p = 6 − с компенсационной обмоткой
51
Если же разность в диаметрах достаточно велика, то для снижения массы двигателя вместо втулки устанавливают пустотелую коробку якоря (рисунок 8.1). Принятые конструкционные решения отражаются на эскизе в соответствии с масштабом изображения и описываются в тексте.
Главные полюса. Для проведения огибающей наконечника главного полюса необходимо предварительно задаться величиной воздушного зазора δо,
которая в сильной степени сказывается на всех выходных характеристиках двигателя. Поэтому точное значение воздушного зазора определяется специальной
методикой, а для предварительных построений можно принять:
− δо = 4 … 5 мм для ТЭД с компенсационной обмоткой;
− δо = 6 … 8 мм для ТЭД без компенсационной обмотки.
Несколько большее значение δо в двигателях без компенсационной обмотки обуславливается необходимостью ограничения воздействия поперечной
реакции якоря на основной поток за счет повышенного магнитного сопротивления воздушного зазора.
Край наконечника главного полюса можно определить по длине реальной полюсной дуги bр , м:
− в двигателях с компенсационной обмоткой
(8.6)
b р ≈ α δ τ − 2δ о ;
− в некомпенсированных двигателях
(8.7)
b р ≈ αδ τ .
Для компенсированных двигателей методика построения пазов компенсационной обмотки подробно рассмотрена в разделе 7.
Расчет геометрических размеров главного полюса ведется исходя из рекомендуемого диапазона значений магнитной индукции в сердечнике полюса
Bm ≤ 1,4…1,7 Тл. Учитывается, что при больших индукциях растет магнитное
насыщение магнитопровода машины, а заведомо низкие значения индукции в
теле полюса неоправданно увеличивают его в размерах.
После наметки края полюсного наконечника (точка «с» на рисунке 8.1)
рассчитывается необходимая для проведения основного потока площадь поперечного сечения сердечника главного полюса Sm, м2
σ Ф
Sm = m 0 ,
(8.8)
Bm
где σm – коэффициент рассеяния обмоток главных полюсов.
σm = 1,25 – при 2p=6 и компенсационной обмотке,
σm = 1,15 – при 2p=6 без компенсационной обмотки,
σm = 1,2 – при 2p=4 и компенсационной обмотке,
σm = 1,1 – при 2p=4 без компенсационной обмотки,
σm = 1,05 – при 2p=2 без компенсационной обмотки;
Bm – индукция в сердечнике полюса, Тл.
Отсюда ширина сердечника главного полюса bm, м
52
bm =
Sm
l m k m ст k ср
,
(8.9)
где km ст – коэффициент заполнения сталью сердечника полюса.
km ст = 0,97 – для некомпенсированных машин,
km ст = 0,94 – для компенсированных машин;
kср
– коэффициент подреза углов сердечника полюса для лучшего вписывания катушки возбуждения.
kср = 0,915 – при намотке меди на узкое ребро (2p = 6),
kср = 1
– при намотке меди на широкое ребро (2p = 4);
lm
– длина сердечника полюса, м. lm = la (см. также (7.22)).
Наметив на эскизе линию боковой грани полюса, устанавливают положение опорной поверхности под катушку главных полюсов (точка «а» на рисунке 8.1). При этом исходят из условия Δ ≥ 4…5 мм во избежание касания катушкой возбуждения поверхности якоря на осевой линии полюса (рисунок 8.1).
Кроме того, сечение ab в основании рога полюса должно быть достаточным для прохождения магнитного потока к крайним участкам полюсного
наконечника. Математически это условие выводится из равенства потока, излучаемого поверхностью bc и проходящего через створ ab
B
(8.10)
ab ≥ δ bc ,
Bр
где Bδ – индукция в воздушном зазоре, Тл;
Bр – допустимая индукция в основании рога полюса, Тл.
Считается, что условия для прохождения магнитного потока в наиболее
узком сечении ab основания рога полюса приемлемы, если
bc
(8.11)
Bð =
B δ ≤ 2 ... 2 , 2 Тл.
ab
Входящую в формулы (8.10) и (8.11) величину индукции в воздушном зазоре Bδ можно определить из выражения
Ф0
Bδ =
.
(8.12)
la + lm
αδτ
2
Таким образом, определение расположения опорной полочки главного
полюса сводится к тому, чтобы подобрать на эскизе и обосновать расчетом положение точки «а», при котором выполнялось бы условие (8.10) или (8.11).
Размеры ab и bc снимаются с эскиза с учетом масштаба изображения. В двигателях с компенсационной обмоткой точки «b» и «с» рассматриваются на огибающей, проведенной по вершинам пазов компенсационной обмотки (см. рисунок 8.1).
Ширина опорной полочки для катушек главных полюсов назначается не
меньше 15…20 мм.
53
Высота полюса hm окончательно устанавливается при компоновке обмотки возбуждения и с учетом вписывания габаритов двигателя в централь. На
предварительном этапе можно ориентироваться на эмпирические выражения:
– hm = (0,1…0,15)τ при 2p = 2;
(8.13)
– hm = (0,2…0,25)τ при 2p = 4;
(8.14)
– hm = (0,3…0,35)τ при 2p = 6.
(8.15)
В четырехполюсных машинах необходимо также учитывать, что главный полюс устанавливается на растачиваемой поверхности специального прилива остова высотой h′m = 10…15 мм, входящей в общую высоту полюса (рисунок 8.1).
Остов. Конфигурация и размеры остова во многом зависят от полюсности машины. Как правило, четырехполюсные тяговые двигатели выполняются с
восьмигранным остовом. При большем числе полюсов технологичнее круглое
исполнение остова.
Для определения размеров остова сначала рассчитывается площадь сечения ярма остова Sj, м2
σ Ф
(8.16)
Sj = m 0 ,
2Bj
где σm – коэффициент рассеяния потока главных полюсов;
Bj – индукция в остове, Тл. Bj ≤ 1,4 Тл .
Расчетная длина ярма остова lj , м, в осевом направлении определяется в
зависимости от формы остова двигателя по эмпирическим зависимостям:
–
при круглом остове
l j = la + 0 , 4 D a ;
(8.17)
при восьмигранном остове
–
⎧ l a + 0 ,8τ
l j = min ⎨
.
(8.18)
⎩ 2 , 3l a
Примечание – Принимается наименьший из размеров.
Отсюда радиальная толщина остова hj, м
Sj
.
(8.19)
hj =
lj
Если геометрические размеры внутренней расточки остова задаются высотой полюса, то величина hj позволяет рассчитать и построить очертания
внешней поверхности остова.
Так, для круглого остова внешний диаметр Do, м
Do = Da + 2(δ o + hm + h j ) .
(8.20)
Для восьмигранных остовов понятие диаметра неприменимо, и поэтому
говорят о размерах остова B по оси главных полюсов. В отличие от круглого
остова толщина восьмигранного остова выполняется неравномерной − в месте
54
расположения главных полюсов толщина h′j делается несколько больше, а под
добавочными полюсами h′′j − меньше расчетной hj, м :
h'j = 1,1 h j ;
(8.21)
h'j' = 0,9h j .
(8.22)
Отсюда внешний размер восьмигранного остова по оси главных полюсов B, м
B = Da + 2(δ o + hm + h'j ) .
(8.23)
Конфигурация и размеры поверхностей восьмигранного остова под установку добавочных полюсов окончательно формируются из условия оптимального размещения обмоток возбуждения главных и добавочных полюсов.
Поэтому на этапе предварительного проектирования, намечая точку поворота
граней остова под 45°, можно ориентироваться на размер посадочной площадки
под добавочный полюс e, м
e ≈ ( 0 ,13 ... 0 ,14 ) B .
(8.24)
Построенный эскиз магнитопровода машины может потребовать уточнений. Это связано с тем, что габаритные размеры двигателя должны удовлетворять ограничениям по геометрическому вписыванию в размер централи Ц и
по высоте до верхнего строения пути.
Для проверки условия вписывания конструкции в межосевое расстояние
необходимо сопоставить рассчитанный внешний размер остова двигателя с тем
пространством, которое позволяет иметь централь Ц для размещения двигателя. Из рисунка 8.1 видно, что при опорно-осевом подвешивании идеальному
варианту вписывания соответствовал бы случай, когда половина габаритного
размера остова Do (B) совместно с половиной диаметра оси колесной пары dоси
и толщиной вкладыша моторно-осевого подшипника Δпдш в точности составляли бы размер централи Ц.
В случае, если габаритный размер остова Do (или B) оказывается больше, чем позволяет вместить централь, то в остове выполняется подрез со стороны расположения моторно-осевых подшипников на величину f (рисунок 8.1).
Реже встречается обратный случай, когда из-за небольших размеров двигателя
колесная пара проходит в стороне от внешнего края остова на некотором расстоянии f, которое заполняется приливом в месте расположения моторноосевых подшипников. Очевидно, что такие варианты вписывания менее предпочтительны и имеют ограничение по величине возможного небаланса f.
Удовлетворительным вариантом вписывания можно считать случаи, когда величина f не выходит за пределы
f ≤ 20...25 мм.
(8.25)
Таким образом, процедура вписывания тягового двигателя в централь
состоит в проверке, а при необходимости и в корректировке предварительно
найденных размеров магнитопровода, с тем чтобы обеспечить выполнение равенств:
55
− при круглом остове
D
d
Ц = a + δ o + hm + h j + Δпдш + оси ± f ;
(8.26)
2
2
− при восьмигранном остове
D
d
Ц = a + δ o + hm + h'j + Δпдш + оси ± f ,
(8.27)
2
2
где Ц − размер централи, полученный в разделе 4.
В выражениях (8.26), (8.27) знак «минус» при величине f соответствует
подрезу остова, а знак «плюс» – приливу. Толщина вкладыша моторно-осевого
подшипника принимается Δпдш = 5 мм.
Для достижения равенств (8.26) или (8.27) рекомендуется, в первую очередь, использовать возможность вариации величины f в ограниченных условием (8.25) пределах. При этом следует иметь в виду, что при любой величине
подреза оставшаяся толщина остова по условиям механической прочности литья не должна оказаться меньше 20…24 мм.
Вписывания в централь можно добиваться также корректировкой предварительно намеченной высоты полюса hm или толщины остова hj. Однако следует помнить, что чрезмерно малая высота полюса в дальнейшем может создать
трудности с размещением обмотки возбуждения, а снижение толщины остова
ведет к росту числа витков в обмотке возбуждения.
В случае опорно-рамного подвешивания тяговый двигатель непосредственно не соприкасается с осью колесной пары, а из-за возможных смещений в
рессорном подвешивании должен иметь относительно нее гарантийный просвет
Δгар , доходящий до 40…45 мм. Для таких машин условие вписывания в централь доказывается равенством
D
d
Ц = a + δ o + hm + h (j ' ) + Δ гар + оси − f .
(8.28)
2
2
Вписывание габаритных размеров двигателя по высоте связано с требованием выполнения гарантированного просвета с ≥ 150 мм между нижней точкой двигателя и головкой рельса (рисунок 8.2). При нарушении этого условия
вал двигателя приподнимают относительно оси колесной пары на ограниченную величину t ≤ 200 мм, перекатывая шестерню двигателя по большому зубчатому колесу.
Отсюда задача вписывания габаритов двигателя по высоте состоит в нахождении требуемой величины t превышения оси двигателя над осью колесной
пары для выбранного значения просвета с для выполнения условия:
− при круглом остове
D
Do ≤ 2( б + t − c ) ;
(8.29)
2
− при восьмигранном остове
D
B ≤ 2( б + t − c ) .
(8.30)
2
56
Ц
B
t
с ≥ 150 мм
Рисунок 8.2 – Вписывание тягового двигателя по высоте
до верхнего строения пути
По завершении операций вписывания конструкции двигателя в габариты
централи и до верхнего строения пути размеры элементов магнитопровода
можно считать окончательно установленными для проведения заключительного этапа расчета магнитной цепи машины – нахождения потребной магнитодвижущей силы обмотки возбуждения главного полюса.
Решение этой задачи основывается на использовании закона полного тока, для чего рассчитываются падения магнитных потенциалов последовательно
на каждом из образующих магнитную цепь участков. Всего выделяют до 8 участков в цепи основного магнитного потока (рисунок 8.1) – ярмо якоря (1), зубцовый слой якоря (2), главный воздушный зазор (3), зубцовый слой полюса (4)
(при наличии компенсационной обмотки), сердечник главного полюса (5), стык
полюса с остовом (6), участок выхода потока из полюса в остов (7) и ярмо остова (8).
В сечении каждого элемента магнитопровода можно указать бесконечное множество магнитных силовых линий, поэтому для определенности расчета на эскизе магнитной цепи по всему контуру замыкания основного потока
проводится так называемая «средняя» расчетная силовая линия (по середине
сечений каждого из участков), которой и характеризуют траекторию магнитного поля в каждом элементе.
Расчет всех стальных участков проводится по единому алгоритму:
57
− на основе окончательных размеров участка уточняется площадь его
поперечного сечения;
− по величине основного потока и площади сечения участка рассчитывается величина магнитной индукции;
− по значению индукции из магнитной характеристики стали данного
участка (приложение В) находится величина магнитной напряженности;
− по длине расчетной силовой линии и значению напряженности рассчитывается величина падения магнитных потенциалов (магнитное напряжение) на данном участке.
Обозначения и размерности величин в приведенных ниже выражениях
те же, что и на этапе предварительного расчета геометрических размеров элементов магнитопровода.
Участок сердечника якоря (1). Площадь поперечного сечения ярма
сердечника якоря Sa, м2
4
k ст l a ( Da − D i − 2 hп − nк d к )
3
.
(8.31)
Sa =
2
Величина магнитной индукции в сердечнике якоря Ba, Тл
Ф0
Ba =
.
(8.32)
2Sa
Падение магнитных потенциалов в сердечника якоря ΔFa, А
Δ Fa = H a La ,
(8.33)
где Ha – магнитная напряженность в сердечнике якоря (по Ba из данных приложения В), А/м;
La – длина силовой линии в сердечнике якоря (из эскиза магнитной цепи),
м.
Участок зубцового слоя якоря (2). Площадь сечения зубцового слоя
якоря Sz1/3, м2
b z 1 / 3 Z α δ l a k ст
S z1/ 3 =
.
(8.34)
2p
Расчетная индукция в зубцах якоря Bz1/3, Тл
Ф0
.
(8.35)
Bz 1 / 3 =
Sz 1 / 3
Магнитное напряжение зубцов якоря ΔFz1/3, А
ΔFz1/ 3 = H z1/ 3hп ,
(8.36)
где Hz1/3 – магнитная напряженность в зубцах якоря (по Bz1/3 из данных
приложения В), А/м;
hп – высота пазов (зубцов) якоря, м.
Участок зубцового слоя главного полюса (3). Значения площади Sz ко и
магнитной индукции Bz ко в зубцах компенсационной обмотки рассчитывались
в разделе 7 (формулы (7.22) и (7.23)).
58
Магнитное напряжение в зубцах компенсационной обмотки ΔFz ко, А
ΔFz ко = H z ко hп ко ,
(8.37)
где Hz ко – магнитная напряженность в зубцах компенсационной обмотки
(по Bz ко из данных приложения В), А/м;
hп ко – высота пазов (зубцов) компенсационной обмотки, м .
Участок сердечника главного полюса (4). Площадь сечения сердечника
главного полюса Sm, м2
S m = bm l m k m ст k ср .
(8.38)
Индукция в сердечнике главного полюса Bm, Тл
σ Ф
Bm = m 0 .
(8.39)
Sm
Падение магнитных потенциалов в сердечнике полюсов ΔFm, А
ΔFm = H m Lm ,
(8.40)
где Hm – магнитная напряженность в сердечнике полюса (по Bm из данных
приложения В), А/м;
Lm – длина силовой линии в сердечнике главного полюса, м.
Участок стыка полюса с остовом (5). В стыке полюса с поверхностью
остова всегда имеются микронеровности, что создает определенное сопротивление для основного магнитного потока. Точно рассчитать падение магнитных
потенциалов в микрозазорах между полюсом и остовом не представляется возможным, поэтому магнитное напряжение этого участка ΔFmj, А, оценивают по
приближенной эмпирической формуле
ΔFm j = 80 Bm .
(8.41)
Участок выхода потока из полюса в остов (6). Площадь сечения участка поворота магнитного потока Sj′, м2, зависит от толщины остова в месте
расположения главных полюсов:
− для круглого остова
S 'j = h j ( lm + bm ) ;
(8.42)
− для восьмигранного остова
S 'j = h'j ( lm + bm ) .
ΔFj′, А
(8.43)
Индукция на участке выхода потока из полюса в остов Bj′, Тл
σ Ф
(8.44)
B 'j = m ' 0 .
2S j
Магнитное напряжение на участке выхода потока из полюса в остов
ΔFj' = H 'j L'j ,
(8.45)
где Hj′ – магнитная напряженность на участке перехода (по Bj′ из данных приложения В), А/м;
Lj′ – длина силовой линии на участке поворота потока в остове (из эскиза
магнитной цепи), м.
59
Участок ярма остова (7). Площадь сечения ярма остова Sj, м2
S j = hjl j .
Индукция в остове Bj, Тл
σ Ф
Bj = m 0 .
2S j
(8.46)
(8.47)
Магнитное напряжение в ярме остова ΔFj, А
ΔF j = H j L j ,
(8.48)
где Hj – магнитная напряженность в остове (по Bj из приложения В), А/м;
Lj – длина силовой линии в ярме остова (из эскиза магнитной цепи), м.
Полученные результаты по каждому из участков сводятся в обобщающую форму таблицы 8.1.
1
2
3
4
5
6
7
Сердечник якоря
0,5Ф0
Sa
Ba
Ha
Зубцовый слой якоря
Sz1/3 Bz1/3 Hz1/3
Ф0
Зубцовый слой полюса
Sко
Bко
Hко
σкоФ0
Сердечник полюса
Bm
Hm
Sm
σmФ0
Стык полюса с остовом
Переход из полюса в остов σm0,5 Ф0 Sj′
Bj′
Hj′
Ярмо остова
B
Hj
S
σm0,5Ф0
j
j
Сумма магнитных напряжений стальных участков
8 Воздушный зазор
Ф0
Sδ
Bδ
Bδ /μ0
МДС намагничивания
МДС на компенсацию действия реакции якоря
МДС возбуждения обмотки главного полюса
Магнитное
напряжение, А
Длина силовой
линии, м
Напряженность,
А/м
Индукция, Тл
участка
Сечение, м2
Наименование
Магнитный
поток, Вб
Номер участка
Таблица 8.1 – Расчет магнитных напряжений и МДС возбуждения
La
ΔFa
hп
ΔFz1/3
hп ко
ΔFко
Lm
ΔFm
ΔFmj
Lj′
ΔFj′
Lj
ΔFj
ΔFст=ΣΔFст i
δэкв
ΔFδ
Fμ= ΔFст+ΔFδ
ΔFρ = kряFaq
Fв = Fμ+ΔFρ
После проведенных расчетов в таблице 8.1 должен остаться незаполненным только один участок воздушного зазора. Падение магнитных потенциалов
в воздушном зазоре под главными полюсами играет главенствующую роль в
суммарной МДС возбуждения, поэтому расчет этого элемента отличается от
расчета стальных участков.
Дело в том, что даже незначительные изменения величины воздушного
зазора сильно сказываются на выходных характеристиках двигателя. Поэтому
расчет магнитного напряжения воздушного зазора ΔFδ ведется, образно говоря,
с «конца» задачи, т.е. из желаемого уровня выходных показателей проектируемого двигателя рассчитывается потребная МДС воздушного зазора.
60
Потребная МДС воздушного зазора ΔFδ , А, определяется как
Δ Fδ = k è k v k ó min α δ Faq ,
(8.49)
где kи – коэффициент использования мощности;
kv – коэффициент регулируемости по скорости;
kу min – коэффициент магнитной устойчивости в режиме βmin;
Faq – МДС поперечной реакции якоря. Faq = Aτ/2.
Входящие в выражение (8.49) коэффициенты представляют собой числовые показатели функциональных требований, предъявляемых к конструкции
ТЭД.
Коэффициент использования мощности kи характеризует соотношение мощностей двигателя при максимальной скорости движения и в номинальном режиме
Pv max
kи =
.
(8.50)
Pн
С увеличением максимальных скоростей движения данный показатель
имеет тенденцию к росту, поэтому в качестве расчетных можно рекомендовать
следующие значения kи:
k è ≈ 0 , 7 ... 0 ,8 при vmax ≤ 120 км/ч;
–
(8.51)
k è ≈ 0 ,8 ... 0 ,9 при 120 ≤vmax ≤ 140 км/ч;
–
(8.52)
k è ≈ 0 ,9 ... 1, 0 при vmax ≥ 140 км/ч.
–
(8.53)
Коэффициент регулирования скорости kv характеризует заданную в
исходных данных ширину диапазона регулирования скорости локомотива
kv =
vmax
.
vн
(8.54)
Коэффициент магнитной устойчивости kу min – используется в качестве параметра, характеризующего напряженность потенциальных условий на
коллекторе.
Данный коэффициент устанавливает соотношение между МДС главных
полюсов и МДС поперечной реакции якоря в наиболее сложном для двигателя
режиме минимального возбуждения
β F
k у min = min вн ,
(8.55)
β нα δ Faq
где β min – минимальный коэффициент ослабления возбуждения;
βн – номинальный коэффициент возбуждения;
Fвн – номинальная МДС возбуждения главных полюсов.
Применение в двигателях компенсационной обмотки в значительной
степени ослабляет воздействие МДС поперечной реакции якоря на основной
поток, что позволяет реализовывать очень глубокие ступени ослабления возбуждения вплоть до β min = 0,2…0,3. Поэтому если были выполнены рекомендации по ограничению уровня средних межламельных напряжений (условия
(4.18) – (4.20)), то в компенсированных машинах с достаточной гарантией на61
дежности работы двигателя по потенциальным условиям можно значение этого
коэффициента принять из диапазона kу min ≈ 0,35…0,45.
В машинах без компенсационной обмотки для снижения воздействия
поперечной реакции якоря наконечникам главных полюсов придают особую
форму так, чтобы получить расходящийся воздушный зазор. Увеличение воздушного зазора от центра к краям полюса обеспечивает нарастание магнитного
сопротивления соответственно росту МДС поперечной реакции якоря относительно центра главного полюса. Очевидно, что степень искажения магнитного
поля главных полюсов, а значит, и величина максимальных межламельных напряжений в этом случае зависят от формы и величины воздушного зазора. Поэтому коэффициент магнитной устойчивости kу min в некомпенсированных двигателях определяется специальным расчетом с учетом индивидуальных особенностей проектируемой машины.
Для этого в первую очередь задаются допустимым уровнем максимальных межламельных напряжений Δuк max. Этот уровень ставится в зависимость
от толщины изоляционных прокладок между коллекторными пластинами, которая назначалась при расчете щеточно-коллекторного аппарата (раздел 6) и
выбирается из рекомендуемого в таблице 8.2 диапазона.
Таблица 8.2 – Допустимые уровни максимальных межламельных напряжений
Толщина межламельной изоляции, мм
Допускаемый уровень Δuк max , В
0,8
32…37
1,0
35…40
1,2
38…43
По уровню максимальных мажламельных напряжений рассчитывается
коэффициент максимального искажения магнитного поля ξmax
Δu
Kα
ξ max = к max δ .
(8.56)
2 pU н
В качестве числовой характеристики изменчивости воздушного зазора
под главными полюсами вводится понятие коэффициента раскрытия неравномерного воздушного зазора
k раск =
δ кр
,
δo
(8.57)
где δкр – воздушный зазор под краем главного полюса.
Величиной коэффициента раскрытия kраск на этапе предварительного
проектирования обычно задаются из ряда простых значений:
1,5; 2;
2,5 ; 3;
3,5; 4.
По известным значениям коэффициентов kраск и ξmax , учитывающих индивидуальные особенности проектируемого ТЭД, и расчетной диаграмме рисунка 8.3 определяется требуемый уровень коэффициента kу min.
62
ξmax
2,0
1,9
1,8
1,7
kраск = 4,0
1,6
kраск = 3,5
1,5
kраск = 3,0
1,4
kраск = 2,5
1,3
0,5
kраск = 2,0
1,5
1,0
kу min
Рисунок 8.3 – Определение kу min в двигателях без
компенсационной обмотки
При значениях ξmax ≥ 2,1 величину kу min можно принимать из того же
диапазона, что и для компенсированных двигателей вне зависимости от назначенного коэффициента раскрытия kраск .
Подстановка коэффициентов kи, kv, и kу min в выражение (8.49) позволяет
рассчитать необходимое магнитное напряжение воздушного зазора ΔFδ , обеспечивающее заданный уровень технических свойств проектируемого двигателя.
Согласно закону полного тока сумма падений магнитных потенциалов в
контуре замыкания основного потока должна компенсироваться МДС намагничивания Fμ , А
Fμ = ΔFa + ΔFz 1 / 3 + ΔFδ + ΔFко + ΔFm + ΔFmj + ΔFj' + ΔFj .
(8.58)
Реальное значение МДС возбуждения главных полюсов Fвн устанавливается несколько больше Fμ с учетом размагничивающего эффекта от поперечной составляющей реакции якоря ΔFρ , А:
Fвн = Fμ + ΔFρ .
(8.59)
Наиболее простым методом нахождения составляющей ΔFρ является ее
расчет через коэффициент реакции якоря kря, связывающий потребную величину компенсирующей составляющей с уровнем МДС поперечной реакции
якоря Faq :
ΔFρ = k ряFaq .
63
(8.60)
В двигателях с компенсационной обмоткой влияние поперечной реакции
якоря на величину основного потока значительно ослаблено и поэтому коэффициент реакции якоря kря принимают в пределах 3…5 %, учитывая только
возможную неточность компенсации при νко ≠ 1
Δ F ρ = ( 0 , 03 .... 0 , 05 ) Faq = ( 0 , 03 ... 0 , 05 ) A
τ
.
(8.61)
2
В некомпенсированных двигателях коэффициент реакции якоря kря определяется по диаграмме рисунка 8.4. Трудность нахождения значения коэффициента kря в этом случае состоит в том, что величина МДС возбуждения Fвн,
входящая в аргумент оси абсцисс диаграммы, согласно выражениям (8.59) и
(8.60) не может быть определена без самого коэффициента реакции якоря kря.
Эту неопределенность с двумя взаимозависимыми неизвестными раскрывают
процедурой последовательных уточнений:
− задаются приближением коэффициента kря (например, из диапазона
значений kря ≈ 0,1…0,12 );
− согласно выражениям (8.59) и (8.60) находят величину Fвн;
− по уровню индукции Bz1/3 (таблица 8.1) и отношению Faq /Fвн, из диаграммы рисунка 8.4 графически определяют значение kря.
Если полученная по диаграмме величина коэффициента kря не соответствует принятому приближению, то делают корректировку первого значения
kря и повторяют пункты описанной выше процедуры до совпадения принятого и
полученного значений.
По полученному значению kря окончательно рассчитывается составляющая ΔFρ и МДС обмотки возбуждения Fвн , которые и указывают в таблице 8.1.
Найденная величина Fвн позволяет найти потребное число витков в обмотке возбуждения главного полюса Wв, которое округляется до целого в
большую сторону
F
Wв = вн .
(8.62)
βн Iaн
Примечание − Если в проектном расчете ставится задача выполнить заданный уровень точности выходных характеристик, то следует обратить внимание на процедуру уточнения значения МДС возбуждения Fвн под целое число витков Wв. Наиболее просто привести в соответствие расчетную сумму Fвн в
таблице 8.1 с МДС возбуждения, пересчитанной на целое число витков, возможно, за счет корректировки величины ΔFδ , поскольку непосредственно воздушный зазор на этом этапе проектирования еще не рассчитывался.
64
kря
Bz 1/3 ≥ 2 Тл
0,20
Bz 1/3 = 1,8 Тл
Bz 1/3 = 1,5 Тл
0,15
Bz 1/3 = 1,2 Тл
0,10
Bz 1/3 = 0,8 Тл
0,05
0
1
Faq
Fв
2
Рисунок 8.4 – Определение kря в двигателях
без компенсационной обмотки
Прежде чем рассчитывать габариты обмотки возбуждения главных полюсов с окончательным числом витков Wв, необходимо окончательно определиться с величиной и конфигурацией воздушного зазора под главным полюсом. На этапе предварительной наметки эскиза магнитной цепи его величина
была назначена из рекомендуемого диапазона значений, тогда как в действительности она должна соответствовать вычисленному значению магнитного
напряжения ΔFδ в таблице 8.1.
Для определения точных геометрических размеров воздушного зазора
сначала рассчитывается эквивалентный воздушный зазор δэкв, м:
δ экв = μ o
Δ Fδ
Bδ
,
(8.63)
где μо – магнитная постоянная, μо = 4π⋅10-7 Гн/м .
Понятие эквивалентного зазора вводится для удобства математического
представления изменяющегося по величине вдоль полюсной дуги реального
воздушного зазора.
Непостоянство воздушного зазора, в первую очередь, связано с зубчатым строением якоря, при котором зазор периодически изменяет свою величину на глубину паза якоря (рисунок 8.5).
65
δо
bz1
t1
δэкв
hп
bп
Рисунок 8.5 – Учет зубчатости строения якоря
при расчете воздушного зазора
Для того чтобы учесть дополнительные воздушные сопротивления от
пазов якоря, его зубчатую поверхность приводят к гладкой с воздушным зазором, эквивалентным по величине магнитного сопротивления реальной поверхности якоря. Связь между конструкционным и эквивалентным воздушными зазорами устанавливается через коэффициент Картера по поверхности якоря
kδa , учитывающий геометрические размеры зубцового слоя якоря
b
t 1 + 5δ o ( 1 + z 1 )
bп
kδ a =
.
(8.64)
b z1
)
b z 1 + 5δ o ( 1 +
bп
В компенсированных двигателях аналогичная картина возникает и со
стороны полюсного наконечника из-за наличия пазов компенсационной обмотки. Поэтому зубчатое строение полюсного наконечника также заменяют гладкой поверхностью с эквивалентным зазором, учитывающим через коэффициент Картера по поверхности полюса kδ ко геометрические размеры зубцового
слоя компенсационной обмотки
bz ко
t ко + 5δ o (1 +
)
bп ко
kδ ко =
.
(8.65)
bz ко
bz ко + 5δ o (1 +
)
bп ко
Поскольку в реальной машине имеет место одновременная зубчатость
поверхности якоря и полюсного наконечника, то связь эквивалентного зазора
δэкв с конструкционным δо определяется выражением, включающим в себя оба
коэффициента приведения
δ экв = δ о k δ a k δ ко .
(8.66)
В двигателях без компенсационной обмотки зубчатое строение якоря
также имеет место и поэтому аналогично учитывается коэффициентом Картера
по поверхности якоря kδa. Однако вместо зубцового слоя компенсационной об66
мотки учету подлежит другая разновидность неравномерности воздушного зазора. Как уже упоминалось, для снижения влияния МДС поперечной реакции
якоря в двигателях небольшой мощности применяют расходящиеся воздушные
зазоры, которые бывают трех видов − эксцентричный, клиновидный и частично расходящийся. В проектных расчетах неравномерный воздушный зазор
заменяют равномерным, эквивалентным по магнитному сопротивлению реальному (рисунок 8.6).
δо
δэкв = const
δкр
Рисунок 8.6 – Приведение неравномерного воздушного
зазора к равномерному
Связь эквивалентного равномерного с центральным размером расходящегося воздушного зазора устанавливается через коэффициент эквивалентности kэкв, учитывающий степень расхождения воздушного зазора в виде коэффициента раcкрытия kраск :
− для эксцентричного зазора (наиболее употребимый)
k раск − 1
;
(8.67)
k экв =
arctg k раск − 1
− для клиновидного зазора
k экв =
k раск − 1
ln k раск
(8.68)
;
− для частично расходящегося
kэкв =
1
1−
0,13 p
( k
− 1 − arctg k
раск
раск
αδ
Примечание – Значения арктангенсов – в радианах.
.
(8.69)
− 1)
Таким образом, в двигателях без компенсационной обмотки эквивалентный зазор δэкв связан с центральным конструкционным размером расходящегося зазора δо также посредством двух коэффициентов приведения
δ экв = δ о k δ a k экв .
(8.70)
67
При известной величине δэкв (формула (8.63)) выражения (8.66) и (8.70)
представляют собой алгебраические уравнения, содержащие в качестве неизвестной величины δо . В случае компенсированных двигателей подстановка в
(8.66) коэффициентов Картера из выражений (8.64) и (8.65) дает относительно
искомой величины δо уравнение третьей степени. Для двигателей без компенсационной обмотки подстановка в (8.70) выражения (8.64) и одного из (8.67) –
(8.69) коэффициентов эквивалентности образует относительно δо уравнение
второй степени. Однако на практике, в силу сложности этих выражений, уравнения допустимо решать методом подбора.
Для этого, задавшись первым приближением δо, его значение подставляют в исходные уравнения (8.66) и (8.70) и по ним рассчитывают величину
δэкв. Полученный ответ сравнивают с ранее полученным значением эквивалентного зазора (формула (8.63)) и, если они не сходятся, делают корректировку
приближения δо. Достаточной для проектного расчета точностью является сходимость результатов в десятых долях миллиметра.
В двигателях без компенсационной обмотки полученное значение δо используется также для определения величины воздушного зазора под краем полюса δкр через назначенный ранее коэффициент раскрытия kраск.
Окончательные конструкционные размеры и конфигурацию воздушного
зазора отображают на эскизе магнитной цепи.
В завершение раздела производят расчет конструкционных размеров
обмотки возбуждения главных полюсов и их вписывание в межполюсное пространство.
В четырехполюсных машинах обмотку возбуждения обычно выполняют
двухслойной с намоткой проводников «плашмя», т. е. на широкое ребро (рисунок 8.7). При этом число витков в верхнем и нижнем слоях делают неравным с
таким расчетом, чтобы боковая грань катушки оказалась параллельной оси добавочного полюса. Образовавшийся при этом уступ заполняется битумной замазкой (5, рисунок 8.7).
В машинах с круглым остовом обмотку возбуждения стараются выполнить с намоткой проводников на узкое ребро, что обеспечивает рациональное
заполнение межполюсного пространства и улучшает теплоотвод. Если нижняя
часть катушки оказывается близко расположенной к обмотке или другим элементам магнитопровода добавочного полюса (менее 10…15 мм), допускается
производить подрез катушки главного полюса параллельно оси добавочного
полюса, но не более чем на половину ее высоты (рисунок 8.7).
Изоляционная система катушек возбуждения по структуре схожа с ранее
рассчитанной якорной изоляцией. Отличительной особенностью является только то, что межвитковую изоляцию допускается выполнять в виде прокладок из
асбестовой бумаги толщиной Δмв = 0,5…0,6 мм. Корпусная и покровная изоляция выполняются из тех же материалов, что и в якорной конструкции, и рассчитываются аналогично.
68
Намотка на узкое ребро
Намотка на широкое ребро
bк1
1
hк
bк
3,6
2
7
5
4
3,6
hк
2
1
3
bк2
1 – проводники обмотки возбуждения;
2 – внешняя изоляция;
3 – выравнивающие прокладки;
4 – стальной фланец;
5 – изоляционная замазка;
6 – пружинный фланец;
7 – изоляционная прокладка
Рисунок 8.7 – Способы исполнения обмоток возбуждения
При намотке на широкое ребро в двухслойной катушке между слоями
устанавливается разделительная изоляционная прокладка (7, рисунок 8.7) толщиной Δразд = 1…2 мм. Для плотного закрепления катушки по высоте полюса
предусматривают также установку стальных фланцев (4, рисунок 8.7) толщиной 1 мм, предохранительных и выравнивающих прокладок из стали или электронита толщиной 1...2 мм. В ряде конструкций встречаются также пружинные
фланцы (6, рисунок 8.7) – это полосы из пружинной стали волнистого профиля
толщиной 3…5 мм, надежно фиксирующие катушку полюса при затяжке болтов в результате их упругой деформации.
В современных двигателях встречается также моноблочное исполнение
обмотки возбуждения (типа «Монолит-2»), при котором катушка возбуждения
пропитывается и запекается совместно со вставленным в нее наборным сердечником полюса. В этом случае фланцы, прокладки и пружинные рамки не требуются.
Конечной задачей компоновки обмотки возбуждения является подбор
таких размеров проводников, которые совместно с элементами крепления и
толщиной изоляции обеспечивали бы полное заполнение пространства от
опорной полочки полюса до остова двигателя для плотного закрепления катушки возбуждения.
Для этого намечают площадь сечения проводников обмотки qв, мм2 :
qв =
β пв I aн
jв
69
,
(8.71)
где β
– коэффициент регулирования возбуждения в режиме полного возбуждения;
jв
– плотность тока в обмотке возбуждения, А/мм2 .
jв = (3,2…3,5) А/мм2 – для машин с самовентиляцией;
jв = (3,0…3,3) А/мм2 – для двигателей пульсирующего тока с
независимой вентиляцией;
2
jв = (2,6…3,0) А/мм – для двигателей постоянного тока с
независимой вентиляцией.
Примечание – Рекомендации справедливы для изоляции с классом нагревостойкости «В».
При необходимости применения изоляции более высоких классов нагревостойкости для габаритного вписывания обмотки возбуждения допустимые
плотности в проводниках обмотки возбуждения увеличиваются на 40 % с каждым последующим классом нагревостойкости.
Таким образом, для изоляции класса «F» допустимые плотности могут
быть увеличены до 4…5 А/мм2 , а при классе «H» − до 6…7 А/мм2. При этом
надо понимать, что одновременно растет и стоимость расходов на конструкционные материалы.
С учетом имеющегося по высоте катушки пространства до остова, способа намотки, размеров элементов крепления и толщины изоляции ориентировочно намечают размер, занимаемый всей медью по высоте катушки и отдельно
каждым проводником. Выбрав ближайший размер проводника из стандартного
ряда (приложение А), второй размер проводника подбирают из требуемой площади поперечного сечения qв .
При окончательном расчете габаритов обмотки возбуждения следует
учитывать то, что из-за пружинящих свойств меди спиральный пакет катушки
стремится к «распушению» по ширине при намотке «плашмя» и по высоте при
намотке на узкое ребро. Поэтому размер медного пакета совместно с межвитковой изоляцией по указанным выше направлениям увеличивают относительно
расчетного на 6…8 %. Кроме того, учитывается, что для исключения случайных замыканий проводников между собой прокладки межвитковой изоляции
должны выступать за края проводников не менее чем на Δвыст = 0,5…1 мм с каждой стороны. Принимают во внимание и то, что из-за неровностей застывшего
лака общие размеры катушки реально оказываются на 0,6…0,8 мм больше расчетного значения.
С учетом указанных факторов размер катушки по высоте hвк, мм :
− при двухслойной катушке и намотке на широкое ребро
в
(8.72)
hкв = 2hпр
+ 4Δвыст + Δ разд + nкорп × 2 × 2 × δ корп + 1× 2 × 2 × δ покр + (0,6...0,8) ;
− при намотке на узкое ребро
пв
в
h кв = (W в h пр
+ (W в − 1) × δ мв )( 1, 06 ... 1, 08 ) +
+ n корп × 2 × 2 × δ корп + 1 × 2 × 2 × δ покр + ( 0 , 6 ... 0 ,8 ).
Общий размер катушек по ширине bвк , мм :
70
(8.73)
− при намотке на широкое ребро (при двухслойной обмотке bвк1 и bвк2)
в
b кв = (W в b пр
+ (W в − 1) × δ мв )(1, 06 ... 1, 08 ) +
+ n корп × 2 × 2 × δ корп + 1 × 2 × 2 × δ покр + ( 0 , 6 ... 0 ,8 ) ;
(8.74)
− при намотке на узкое ребро
в
bкв = bпр
+ 2Δвыст + nкорп × 2 × 2 × δ корп + 1× 2 × 2 × δ покр + (0,6...0,8) .
(8.75)
Примечание – Все величины даны в миллиметрах.
В расчете необходимо показать, что полученный размер катушки по высоте h к в сумме с размерами выбранных элементов крепления и выравнивающих прокладок соответствует высоте проема до остова.
Исходя из полученных размеров катушек рассчитывают среднюю длину
одного витка обмотки возбуждения lвср , м :
− при намотке на широкое ребро (при двухслойной обмотке)
l срв 1 ≈ 2 ( l a + b m ) + π b кв1 ,
(8.76)
в
в
в
l ср
2 ≈ 2 ( la + bm ) + π bк 2 ;
− при намотке на узкое ребро
в
в
l ср
= 2 (( l m + 0 , 02 ) + ( bm + 0 , 01 )) + π bпр
.
Примечание – Все величины даны в метрах.
(8.77)
(8.78)
Общая длина меди обмоток возбуждения Lв, м :
− при намотке на широкое ребро (при двухслойной обмотке)
в
в
L в = 2 p ( l ср
1W в 1 + l ср 2W в 2 ) ;
(8.79)
− при намотке на узкое ребро
L в = 2 pl
(8.80)
в
ср W в
.
Сопротивление обмотки возбуждения при 20 °С rв 20º, Ом
Lв
,
rв 20 =
57 q в k подр
0
(8.81)
где kподр – коэффициент, учитывающий подрез катушки.
kподр = 1 − при намотке «плашмя» или при намотке на узкое ребро,
если подрез не превышает 1/3 высоты катушки;
kподр = 0,95 − при подрезе более 1/3 высоты катушки.
Масса меди катушек главных полюсов mмв , кг
m мв = 8 , 9 L в q в k подр 10 − 3 .
71
(8.82)
9 Расчет стационарной коммутации
Теория коммутации рассмотрена в [5, глава 5] и [6, §2.1−2.3]. Методика
расчета изложена в [1, глава 10], [2, §12-1] и [3,§ 21.1].
Целью данного этапа расчета является нахождение среднего за период
коммутации значения реактивной ЭДС. Расчет выполняется на основе полученных ранее параметров активного слоя якоря, коллектора и щеток. Необходимо
обеспечить выполнение ограничения по допустимой величине средней реактивной ЭДС.
Существует несколько классических методик расчета реактивной ЭДС,
наиболее распространенными из которых являются методы Р. Рихтера, Р. Рихтера−М. Цорна и А. Б. Иоффе. Первый из них считается наиболее точным, поскольку позволяет находить не только средние, но и мгновенные значения реактивной ЭДС. Однако он и наиболее трудоемок, поэтому им пользуются только
при расчете самых ответственных и напряженных в коммутационном отношении машин. В учебном проекте можно ограничиться наиболее простой методикой определения средней за период коммутации величины реактивной ЭДС
А. Б. Иоффе.
Как известно, реактивная ЭДС представляет собой сумму ЭДС само- и
взаимоиндукции проводников, расположенных в коммутируемом пазу якоря.
Поскольку магнитные условия для различных участков паза неоднородны, то
для определения удельных (т. е. приходящихся на единицу длины якоря) коэффициентов индуктивности проводников паза якоря рассматривают четыре характерные области замыкания потоков пазового рассеяния (рисунок 9.1), рассчитывая
λ = λ п1 + λ п 2 + λ к + λ л ,
(9.1)
где λ – суммарный удельный коэффициент индуктивности;
λп1 – магнитная проводимость в пазу якоря над медью;
λп2 – то же для части паза, занятой медью проводников;
λк – то же по коронкам зубцов якоря;
λл – то же для лобовых частей обмотки якоря.
Удельная магнитная проводимость части паза, занятой медью, λп2,
Гн/м, рассчитывается по формуле
λп2 = μ 0ki
h2
,
3b п
(9.2)
где h2 – высота части паза, занятой медью проводников;
ki – коэффициент экранирующего эффекта от вихревых токов.
При расчете λп2 пренебрегают толщиной изоляции и прокладок между
верхней и нижней полусекциями, считая, что весь размер h2 занят медью.
72
bд
δд
Ψк
h1
по коронкам
зубцов
над медью
Ψh1
hп
Ψh2
h2
по меди
bп
Рисунок 9.1 – К расчету удельных магнитных проводимостей
в коммутирующем пазу якоря
Величину h2 можно определить из полной высоты паза hп, если вычесть
толщину изоляции сверху и снизу от проводников и толщину клина (раздел 5):
h2 = hп − hкл − 2Δиз − nпроклΔпрокл ,
(9.3)
где Δиз – односторонняя толщина изоляции якорной катушки;
hкл – высота клина;
nпрокл – общее число прокладок на дне паза и под клином;
Δпрокл – толщина прокладок.
Одностороннюю толщину изоляции вычисляют исходя из размеров лент
и способов намотки, принятых при расчете паза якоря:
Δиз = δ мв ×1× 2 + δ корп × nкорп × 2 + δ покр ×1× 2 .
(9.4)
Коэффициент ki в формуле (9.2) учитывает некоторое демпфирование, т. е. затягивание, процесса становления потоков пазового рассеивания и
связанное с этим снижение магнитной проводимости участка h2 от вихревых
токов в коммутирующих проводниках.
Предварительно необходимо рассчитать приведенную высоту элементарного проводника паза якоря, в зависимости от которой и устанавливается
величина коэффициента демпфирования ki по диаграмме рисунка 9.2.
73
ki
0,9
0,8
0,7
0,6
1 2 3 4 55 66 7 8 99
6 7 8 9
0,5
0
1,0
2,0
ξприв
Рисунок 9.2 – Расчет коэффициента демпфирования ki
Приведенная высота элементарного проводника ξприв, м
ξ прив = hэл пр
Σbмω 'λ м μ 0
,
(9.5)
2bп
где hэл пр – высота элементарного проводника в пазу якоря, м;
Σbм – суммарная ширина меди в пазу, м;
λм
– удельная проводимость меди при ожидаемой рабочей температуре,
См/м. λм = 35⋅106 См/м при t°меди = 150° С ;
ω′
– угловая частота коммутации одного паза, рад/с.
Величину ω′ , рад/с, можно найти из выражения
vкн
ω ' = 2π
,
(9.6)
a
2tк ( uк + γ − )
p
где vкн – окружная скорость на поверхности коллектора в номинальном режиме
(формула (4.25) для nа = naн ), м/с;
γ – коэффициент щеточного перекрытия. γ = bщ /tк .
Удельная магнитная проводимость части паза над медью рассчитывается с некоторым упрощением – пренебрегают расширением паза в месте
распорки клина. В этом случае величина магнитной проводимости в области
над медью λп1, Гн/м, определяется
h
λ п 1 = μ 0 k банд 1 ,
(9.7)
bп
где kбанд – коэффициент, учитывающий материал бандажа крепления якорной
обмотки. При клиновом креплении из стеклопластов kбанд = 1 .
Величину h1 можно найти, используя ранее полученный размер h2 при
расчете проводимости пазового участка по меди
(9.8)
h1 = hп − h2 − Δиз − Δпрокл .
74
Удельная магнитная проводимость по коронкам зубцов λк рассчитывается исходя из величины так называемого первого воздушного зазора между
якорем и добавочным полюсом δд. В этом выборе можно ориентироваться на
среднестатистическое соотношение между воздушными зазорами под главными и добавочными полюсами, характерное для действующих конструкций ТЭД
δ ä ≈ δ î + ( 0 .... 3 ) мм.
(9.9)
Другим необходимым для расчета параметром выступает ширина наконечника добавочного полюса bд (рисунок 9.1). В предварительных расчетах его
величину назначают из величины зубцового деления коммутирующего паза
якоря
b д = (1 ... 1, 5 ) t1 .
(9.10)
С учетом найденных значений магнитная проводимость потока пазового
рассеяния по коронкам зубцов λк, Гн/м
b − bп
λк = μ 0 д
,
(9.11)
4δ д k δ д
где kδд – коэффициент Картера по поверхности якоря под добавочным полюсом
для величины зазора δд.
Удельная магнитная проводимость по лобовым участкам λл учитывает потоки само- и взаимоиндукции не только в пазовой части якоря, но и
вдоль всей длины лобовых вылетов. Удельная магнитная проводимость для лобовых участков λл, Гн/м:
− при немагнитных бандажах крепления лобовых вылетов
l
πτ
λ л = 0,37μ 0 лоб lg (1 +
);
(9.12)
la
4hп
− при проволочных магнитных бандажах
l τ
λ л = 0, 062 μ 0 лоб .
(9.13)
l a hп
Полученные значения коэффициентов магнитной проводимости всей совокупости рассмотренных участков позволяют определить суммарный коэффициент индуктивности λ согласно выражению (9.1). В свою очередь, данный параметр входит в расчетную формулу среднего за период коммутации значения
реактивной ЭДС er , В
8 i a u к λ l a v кн
er =
.
(9.14)
a
tк (uк + γ + ε к −
)
p
Вычисленное значение средней реактивной ЭДС er рассматривается как
один из главных критериев, характеризующих коммутационную напряженность
проектируемого двигателя. Поэтому устанавливается ограничение на значение
средней реактивной ЭДС er в номинальном режиме
e r ≤ 3,5 ... 4 ,0 В.
(9.15)
75
10 Расчет добавочных полюсов
Принцип действия добавочных полюсов рассмотрен в [5, § 6-4, 6-5, 6-6]
и [6, § 2.4]. Методика расчета конструкции добавочных полюсов изложена в [1,
глава 11], [2, § 12-2] и [3, § 21.2, 21.3].
Задачей данного раздела является разработка конструкции добавочных
полюсов, обеспечивающих коммутационную устойчивость тягового двигателя.
При расчете необходимо выполнить ограничения:
− по уровню магнитного насыщения сердечника полюса;
− по механической прочности полюса и его крепления;
− по геометрическому вписыванию самого полюса и его обмотки возбуждения в межполюсное пространство;
− по тепловой напряженности обмотки возбуждения полюса.
Расчет конструкции добавочного полюса ведется из условия равенства
средних значений коммутирующей ЭДС, создаваемой рабочим потоком добавочных полюсов в зоне коммутации, и реактивной ЭДС в коммутируемой секции. Часть параметров системы добавочных полюсов была назначена в предыдущем разделе при расчете реактивной ЭДС – это первый воздушный зазор со
стороны якоря δд и ширина наконечника добавочного полюса bд. Поэтому значения данных параметров можно изменять только при соответствующем пересчете величин λк и еr.
Из условия равенства реактивной и коммутирующей ЭДС рассчитывается требуемая индукция в зоне коммутации Bк, Тл
er
Bк =
,
(10.1)
2 la vaн
где vaн – окружная скорость на поверхности якоря в номинальном режиме, м/с.
Окружная скорость якоря vaн , м/с, в номинальном режиме
π D a n aн
v aн =
.
(10.2)
60
С учетом распушения магнитный поток добавочного полюса должен перекрывать пространство, называемое зоной коммутации. Под шириной зоны
коммутации bзк, м, понимается длина дуги на поверхности якоря, которую описывает ось паза с момента вступления в процесс коммутации первого из его
проводников до размыкания щеткой последнего витка в пазу
πDa
a
).
(10.3)
K
p
Для обеспечения требуемого уровня магнитной индукции в зоне коммутации необходимо создать коммутирующий поток Фк, Вб, величиной
bзк =
( uк + γ + ε к −
Ф к = Bк bзк la .
76
(10.4)
Добавочные полюса в отличие от главных обладают столь значительными собственными полями рассеяния, что в величине полного потока полюсов
Фmд они играют главенствующую роль. Учет потока рассеяния добавочных полюсов ведется через коэффициент рассеяния σд добавочных полюсов.
Полный поток добавочных полюсов Фmд, Вб
Фmд = σ дФк ,
(10.5)
где σд – коэффициент рассеяния добавочного полюса.
σд = 3…4 – в машинах без компенсационной обмотки;
σд ≈ 2
– в компенсированных машинах с распределенной по высоте
добавочных полюсов обмоткой;
σд ≈ 1,5 – в компенсированных машинах с сосредоточенной на конце
добавочных полюсов обмоткой.
Чтобы обеспечить линейность магнитной характеристики добавочных
полюсов во всем рабочем диапазоне тока якоря, включая и режим максимальной мощности, индукция в сердечнике полюса в номинальном режиме не
должна превышать
Bmд ≤ 0,6...0,7 Тл.
(10.6)
Исходя из допустимой индукции можно наметить ширину сердечника
добавочного полюса bmд, м
Ф mд
,
(10.7)
bm д =
B m д l m д k д ст
где Bmд – индукция в сердечнике полюса согласно (10.5), Тл;
lmд – длина сердечника полюса, м. Обычно lmд = lm ;
kд ст – коэффициент заполнения сердечника сталью.
kд ст = 1 – в машинах постоянного тока с литым сердечником добавочных полюсов;
kд ст = km ст – в двигателях пульсирующего тока с шихтованным сердечником добавочных полюсов.
Полученный по формуле (10.7) расчетный размер bmд не всегда оказывается реальным, так как при расчете учитывалось только ограничение по его
магнитному насыщению. Но добавочные полюса в реальных условиях работы
двигателя испытывают и значительные механические нагрузки в виде опрокидывающих моментов со стороны главных полюсов за счет устанавливающихся
между ними магнитных взаимодействий. Наиболее мощные усилия развиваются во время протекания токов короткого замыкания, которые могут сорвать полюс или его обмотку возбуждения. Поэтому для крепления добавочных полюсов предусматривают крепежные болты диаметром не менее 16…20 мм с толщиной стенок сердечника в месте их крепления порядка 5…10 мм.
Отсюда вытекает, что в двигателях постоянного тока ширина добавочного полюса с цельнолитым сердечником (рисунок 10.1) по условиям механической прочности должна составлять не менее 25…30 мм.
77
Сосредоточенная
обмотка
Распределенная
обмотка
δjд
1
2
3
hдк
4
bдк
bmд
5
7
6
8
Фσд
bд
δд
Фк
Фк
bзк
1 – диамагнитная прокладка (второй воздушный зазор);
2 – листы шихтованного сердечника полюса;
3 – литой стержень сердечника полюса с резьбой;
4 – прижимной фланец (прижимные уголки);
5 – обмотка добавочного полюса;
6 – опорные уголки;
7 – пружинные рамки и выравнивающие прокладки;
8 – стягивающие заклепки в шихтованном сердечнике
Рисунок 10.1 – Конструкция шихтованного (слева) и
цельнолитого (справа) добавочного полюса
В двигателях пульсирующего тока имеют место дополнительные пульсации магнитного потока и связанные с этим потери от вихревых токов. Поэтому сердечники добавочных полюсов выполняют шихтованными из листов
электротехнической стали толщиной 0,5 мм. Их набор и крепление к остову
производятся через литые стержни (3, рисунок 10.1), которые вставляются в
выштампованные в листах сердечника отверстия прямоугольного или круглого
профиля. С учетом дополнительного элемента крепления для выполнения условия механической прочности конструкции добавочного полюса в двигателях
пульсирующего тока ширина сердечника должна быть не менее 35…40 мм.
Если при расчете по формуле (10.7) ширина сердечника bmд окажется
меньше рекомендуемых пределов, необходимо увеличить этот размер, изложив
78
причину в текстовой части и пересчитав значение индукции Bmд, соответствующее выбранному размеру bmд.
Полученный размер ширины сердечника оказывает влияние и на способ
крепления обмотки возбуждения. Если ширина сердечника оказывается меньше
ширины наконечника добавочного полюса не менее чем на 10 мм (рисунок
10.1, пример справа), то образовавшиеся заплечики используют в качестве
опорной полочки для обмотки возбуждения.
В случае, когда ширина сердечника больше ширины наконечника (рисунок 10.1, пример слева), на конце добавочного полюса прикрепляют латунные
уголки, выполняющие роль опорной поверхности. Для надежной фиксации катушки по высоте в обоих случаях применяют упорные и пружинные фланцы,
рамки и выравнивающие прокладки.
Особую роль в конструкции добавочного полюса играет диамагнитная
прокладка между сердечником полюса и остовом. Она образует так называемый второй воздушный зазор δjд , изолирующий магнитные цепи основного
потока главных полюсов и потока добавочных полюсов. Это обеспечивает существенное снижение собственных полей рассеяния добавочного полюса, что
повышает линейность его магнитной характеристики, а значит, и степень компенсации реактивной ЭДС в предельных режимах токовых нагрузок и в нестационарных режимах работы ТЭД.
Оптимальное значение второго воздушного зазора δjд (так же, как и первого δд) на практике устанавливается экспериментально при коммутационных
испытаниях опытного двигателя. Поэтому в учебном проектировании значением δjд можно просто задаться, исходя из среднестатистических соотношений,
характерных для действующих конструкций ТЭД. Обычно величины первого и
второго воздушных зазоров близки между собой :
δ jд ≈ δ д ± (0...2) мм.
(10.8)
Полученные конструкционные размеры добавочного полюса позволяют
рассчитать потребную МДС его обмотки возбуждения. В отличие от цепи основного магнитного потока расчет цепи добавочных полюсов может быть значительно упрощен тем, что все стальные участки магнитопровода для потока
Фmд изначально проектировались ненасыщенными (условие (10.6)). Это дает
основание из всего перечня участков в качестве определяющих учитывать
только магнитные сопротивления первого и второго воздушных зазоров.
Магнитное напряжение первого воздушного зазора ΔFδд, А
Δ Fδ д =
1
μо
B кδ д k δд .
Магнитное напряжение второго воздушного зазора ΔFδ jд, А
1
ΔFδ jд =
Bδ jдδ jд ,
μо
где Bδ jд – индукция во втором воздушном зазоре , Тл.
79
(10.9)
(10.10)
Величину индукции в формуле (10.10) можно оценить по значению индукции в сердечнике добавочного полюса, Тл
bmд
.
(10.11)
bmд + 2δ jд
Согласно закону полного тока сумма падений магнитных напряжений в
контуре замыкания потока добавочных полюсов должна компенсироваться
МДС обмотки возбуждения. Однако этого не произойдет, если предварительно
не скомпенсировать МДС поперечной реакции якоря (или ее небалансный остаток в компенсированных машинах), достигающей своего максимума в зоне
коммутации. Отсюда полная МДС обмотки возбуждения добавочных полюсов
Fд, А
b
Fд = (Faq (1 − зк ) − Fко ) + (ΔFδ д + ΔFδ jд ) .
(10.12)
2τ
Скобка при Faq учитывает, что в зоне коммутации ток проводников якоря по величине не остается постоянным, а снижается до нуля на линии геометрической нейтрали. Число витков катушки добавочного полюса Wд
F
Wд = д .
(10.13)
I aн
Полученное значение числа витков Wд требует округления до целого
значения. Учитывая, что в расчете МДС возбуждения добавочного полюса не
учитывались стальные участки магнитной цепи, округление следует производить в большую сторону.
Уточнив из выражения (10.13) значение МДС Fд под целое число витков,
из формулы (10.12) находят новое значение ΔFδ jд , что, в свою очередь, позволяет скорректировать размер второго воздушного зазора δjд, м
Bδ jд = Bmд
δ jд =
Fδ jд bmд
1
μо
Bmд bmд − 2 Fδ
.
(10.14)
jд
Конструкционный расчет катушки возбуждения добавочных полюсов
производится по той же методике, что и расчет обмоток главных полюсов.
Сначала из допустимых условий нагревания оценивают площадь поперечного сечения проводников обмотки qд, А/мм2
I
qд = a ,
(10.15)
jд
где jд – допустимая плотность в проводниках обмотки добавочных полюсов,
А/мм2. Принимается из рекомендаций по (8.71).
Размеры проводников, образующих расчетное сечение, выбирают из
стандартного ряда (приложение А) и по ним уточняют окончательное значение
площади сечения qд и плотности тока jд.
80
В добавочных полюсах, как и в главных, используют два способа намотки обмоточной меди. При большом числе витков, что обычно бывает в некомпенсированных машинах, обмотку наматывают из мягкой шинной меди на узкое ребро, заполняя все свободное пространство по высоте до остова (рисунок
10.1, пример справа). Такая намотка обеспечивает лучшую механическую
прочность конструкции и является более рациональной в тепловом отношении.
При использовании компенсационной обмотки согласно выражению
(10.12) величина потребной МДС добавочных полюсов значительно снижается,
что в сильной степени сокращает число витков. В этих случаях обмотку возбуждения стараются выполнить сосредоточенной на конце полюса с намоткой в
один слой на широкое ребро (рисунок 10.1, пример слева). Как уже отмечалось,
такое расположение имеет большое преимущество в снижении полей рассеяния, степени магнитного насыщения добавочного полюса и небалансных ЭДС в
режимах работы двигателя с большими токами.
При выборе размеров проводников и в расчете обмотки возбуждения
следует также учитывать, что для ограничения полей рассеивания и уровней
силовых взаимодействий между любыми элементами главного и добавочного
полюсов должен обеспечиваться просвет не менее 10…15 мм. Зачастую именно
из-за этого ограничения приходится отказываться от сосредоточенного расположения обмотки возбуждения на конце полюса и использовать распределенную по высоте намотку на узкое ребро даже в компенсированных машинах.
Структура изоляции катушек добавочного полюса, конструкционные
параметры изоляционных лент и прокладок, перечень и размеры крепежных
элементов остаются такими же, как и в конструкции главных полюсов. Расчет
габаритных размеров катушек возбуждения добавочного полюса hдк и bдк производится по формулам, аналогичным выражениям (8.72)–(8.75), а результаты
расчета отображаются на эскизе магнитной цепи.
Средняя длина витка обмотки добавочного полюса lср д, м
lср д = 2 lmд + π ( bmд + bкд ) ,
(10.16)
где bдк – расчетная ширина катушки добавочного полюса, м.
Сопротивление обмоток добавочных полюсов при температуре 20 °С
rд20°, Ом
rд 20 ° = 2 p
W д l ср д
57 q д
.
(10.17)
Масса меди обмоток добавочных полюсов mмд, кг
m мд = 8 , 9 l ср д 2 pW д q д 10 − 3 .
81
(10.18)
11 Расчет рабочих характеристик и технико-экономических
показателей двигателя
11.1 Расчет магнитной характеристики двигателя
Завершающим этапом разработки тягового двигателя в данном проекте
является расчет его рабочих характеристик и технико-экономических показателей, демонстрирующих, в какой степени полученная конструкция отвечает заданию на проектирование и как она соотносится с реальными прототипами по
интегральным технико-экономическим показателям.
Следует понимать, что ни одна из рабочих характеристик машины не
может быть получена без предварительного расчета магнитной характеристики
– зависимости основного магнитного потока от МДС возбуждения Ф0(Fв ). Одна
из точек магнитной характеристики уже была рассчитана в разделе 8, где определялась номинальная МДС обмотки возбуждения главных полюсов для номинального значения основного магнитного потока. Результаты этого расчета были сведены в таблицу 8.1. Очевидно, что, действуя по аналогичной методике
для других значений магнитного потока, можно произвести расчеты МДС возбуждения во всем возможном диапазоне изменения Ф0 для получения искомой
зависимости Ф0 (Fв).
Наиболее рациональным для такого рода циклических расчетов является
использование ЭЦВМ. Однако и для ручного варианта расчета объем вычислительной работы вполне приемлем. При таком подходе расчету подлежит ограниченное количество точек магнитной характеристики для характерных значений основного магнитного потока, например, для
0,25Ф0 ном ;
0,5Ф0 ном ;
0,75Ф0 ном ;
1,25Ф0 ном .
Поскольку в таблице 8.1 площади поперечных сечений и длины силовых
линий участков магнитопровода остаются неизменными, то при изменении значений потока пересчету подлежат только столбцы магнитной индукции, напряженности и магнитных напряжений.
Следует обратить внимание на то, что в некомпенсированных машинах
коэффициент реакции якоря kря , как и сама МДС поперечной реакции якоря
Faq, не остается постоянным и заметно меняется при отличных от номинального значениях магнитного потока. Для простоты расчета ток якоря с некоторой
степенью приближения можно находить из МДС намагничивания Fμ
Iμ
Fμ
,
(11.1)
Ia ≈
=
β н Wвβ н
где Fμ – МДС намагничивания по таблице 8.1 для расчетного значения магнитного потока, А.
Отсюда значение МДС поперечной реакции якоря Faq , А, для очередного расчетного режима можно определить по формуле
N
F aq = I a
.
(11.2)
8 ap
82
Коэффициенты реакции якоря kря для каждого из значений потока определяют по аналогичной методике, что и в номинальном режиме.
Результаты расчетов оформляют либо в виде нескольких таблиц для каждого значения потока по подобию с таблицей 8.1, либо в виде обобщенной
сводной таблицы произвольной формы. После проведения расчета каждую пару
значений основного магнитного потока и МДС возбуждения отображают на координатной плоскости и соединяют плавной огибающей, получая кривую магнитной характеристики проектируемого двигателя (рисунок 11.1).
Ф0
Ф1,25
Фном
Ф0,75
Ф0,5
Ф0,25
F0.25 F0.5 F0.75
Fном
F1.25 Fв ( Iв )
Рисунок 11.1 – Расчет магнитной характеристики
11.2 Расчет электромеханических характеристик
Расчеты зависимостей na ( Ia ); Mв ( Ia ) и ηд ( Ia ) также носят циклический
характер и могут производиться как вручную, так и с помощью ЭЦВМ. Независимой переменной в расчетных характеристиках выступает ток якоря, который
для сериесного возбуждения изменяют в диапазоне от (0,2…0,3)Iaн до
(1,5…2,0) Iaн.
При ручном расчете рекомендуется использовать такой диапазон и шаг
изменения тока якоря, чтобы общее число расчетных точек не превышало 5…6.
Расчет характеристик производится для номинального напряжения питания и
номинального коэффициента регулирования возбуждения.
Перед непосредственным расчетом характеристик определяются те конструкционные параметры, которые будут оставаться постоянными на каждом
шаге расчета.
83
Масса стали зубцов якоря mz, кг
⎧π
⎫
mz = 7800⎨ Da2 − ( Da − 2hп ) 2 − Zbп hп ⎬la kст .
(11.3)
4
⎩
⎭
Масса стали ярма якоря ma, кг
π
(11.4)
m a = 7800
( Da − 2 hп ) 2 − D i2 − m вк d к2 la k ст ,
4
где mвк – общее количество вентиляционных каналов в якоре (по эскизу
магнитной цепи).
Температурный коэффициент сопротивления меди tr вводится в расчет в
связи с тем, что величины сопротивлений обмоток двигателя определялись для
расчетной начальной температуры 20 °С, тогда как характеристики машины согласно ГОСТ 2582−81Е должны рассчитываться на ожидаемую рабочую температуру. Температурный коэффициент меди определяется по выражению
t r = 1 + 0,004(t ðàá − 20 °С),
(11.5)
где tраб – средняя ожидаемая температура нагрева обмоток.
tраб = 115 °С – для класса изоляции «В»;
tраб = 130 °С – для класса изоляции «F» и «H».
Потери на трение в якорных подшипниках в номинальном режиме, Вт
ном
(11.6)
Δ P подш
= 0 , 002 U н I a н .
Потери на трение поверхности щеток о коллектор в номинальном режиме, Вт
ном
Δ Pтщ
= 1000 Σ S щ pщ f тр v кн .
(11.7)
[
]
[
]
Значения параметров ΣSщ , м2, и pщ , кПа, принять из выражения (6.10).
Расчетный коэффициент трения щеток о коллектор в токовом режиме принимается fтр = 0,17. Величина vкн , м/с, использовалась в формулах (9.6) и (9.15).
Дальнейшие расчеты производятся по циклической схеме для каждого
из значений тока якоря в соответствии с приведенной ниже последовательностью шагов.
Шаг 1. Расчет частоты вращения якоря двигателя
Определяется значение ЭДС якоря Ea, В
Ea = U − I a ( ra20 + rко20 + rдп20 + β нrв 20 )tr − ΔUщ ,
0
0
0
0
(11.8)
где ΔUщ – падение напряжения в щеточном контакте, В.
ΔUщ = 2 В – при армированных щетках;
ΔUщ = 3 В – при неармированных щетках.
По значению тока якоря вычисляется МДС возбуждения Fв, А
(11.9)
F в = β н I aW в .
Из магнитной характеристики по величине МДС возбуждения Fв находится текущее значение магнитного потока Ф0, Вб.
84
Полученные данные позволяют рассчитать для заданного значения тока
якоря и коэффициента регулирования возбуждения частоту вращения якоря na,
об/мин
E 60 a
na = a
.
(11.10)
Ф 0 pN
Шаг 2. Расчет потерь мощности и КПД двигателя
Расчету подлежит каждая из составляющих потерь мощности.
Электрические потери в меди обмоток ΔPм, Вт
Δ Pм = I a2 ( ra 20 + rко 20 + rдп 20 + β н rв 20 ) t r + Δ U щ I a . (11.11)
0
0
0
0
Основные потери в стали ΔPc, Вт
Δ Pc ≈ 2 , 25 ( m a p a + m z p z ) ,
где pa – удельные магнитные потери в ярме якоря, Вт/кг;
pz – удельные магнитные потери в зубцах якоря, Вт/кг.
Удельные магнитные потери рассчитываются по формулам :
2
⎡
⎛ f ⎞ ⎤ 2
pa = ⎢0,044 f + 5,6⎜
⎟ ⎥ Ba ;
100
⎝
⎠ ⎥⎦
⎢⎣
2
⎡
⎛ f ⎞ ⎤ 2
pz = ⎢0,044 f + 5,6⎜
⎟ ⎥ Bz1 / 3 ,
100
⎝
⎠ ⎦⎥
⎣⎢
где f – частота перемагничивания стали якоря, Гц.
Частоту перемагничивания стали якоря f , Гц, рассчитывают
f =
pna
.
60
(11.12)
(11.13)
(11.14)
(11.15)
Величины индукций в выражениях (11.13) и (11.14) определяются в зависимости от расчетной величины магнитного потока и значений площади зубцового слоя и ярма якоря (см. таблицу 8.1) :
Ф
Ba = 0 ,
(11.16)
2 Sa
Ф0
Bz1 / 3 =
.
(11.17)
SZ1 / 3
Расчет механических потерь на трение в подшипниках ΔPподш и щеток о
коллектор ΔPтщ ведут относительно их номинальных значений, Вт
na
.
(11.18)
naн
Добавочные потери мощности ΔPдоб включают в себя до восьми составляющих, и поэтому их определение сопряжено с большой трудоемкостью расчетов. С другой стороны, их доля в общей сумме потерь мощности невелика.
ном
ном
( Δ Pподш + Δ Pтщ ) = ( Δ Pподш
)
+ Δ Pтщ
85
Поэтому добавочные потери в большинстве случаев рассчитывают упрощенно через так называемый коэффициент добавочных потерь kдоб в долях
от основных потерь в стали ΔPс
Δ Pдоб = k доб Δ Pс .
(11.19)
Значения коэффициента добавочных потерь принимают из эмпирической зависимости kдоб от относительной к номинальному режиму токовой загрузки двигателя (рисунок 11.2).
Суммарные потери мощности ΣΔP, Вт
ΣΔ P = Δ Pм + Δ Pс + Δ Pмех + Δ Pдоб .
(11.20)
kдоб
0,6
0,5
0,4
0,3
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
Ia /Iaн
Рисунок 11.2 – Определение коэффициента добавочных потерь kдоб
КПД двигателя для расчетного режима ηд
ηд = 1 −
ΣΔ P
.
(11.21)
U Ia
В случае самовентиляции при расчете значений КПД машины необходимо также учитывать потери на вращение якорного вентилятора – потери на
вентиляцию ΔPв. Для этого предварительно рассчитывают потери на вентиляцию в номинальном режиме ΔPвн , Вт
Δ Pвн = g
Qн H н
,
(11.22)
ηн
где Qн – потребный расход охлаждающего воздуха в номинальном режиме,
м3/с;
Hн – напор воздуха в номинальном режиме работы двигателя, мм вод. ст.;
ηн – КПД вентилятора в номинальном режиме. Обычно стараются выполнить ηн ≈ ηmax = 0,175 .
86
Номинальное количество охлаждающего воздуха Qн можно определить,
рассчитав величину потерь мощности в номинальном режиме ΣΔPн по описанной выше методике (формула (11.20))
ΣΔ Pн
Qн =
,
(11.23)
1100 τ в
где τв – величина подогрева вентилирующего воздуха при обдуве двигателя, °С.
При самовентиляции машины τв = 30…35 °С.
Методика точного расчета потребного напора воздуха, создаваемого
якорным вентилятором в номинальном режиме Hн , приведена в [1, §16.4] и [2,
§16.4]. Однако, если исходить из того, что отношение внешнего и внутреннего
диаметров вентиляторов у машин с самовентиляцией примерно постоянно,
можно использовать упрощенную формулу напора Hн , мм вод. ст.
2
H н ≈ ( 0, 75 ... 0,85 ) Da2 naн
10 − 4 ,
(11.24)
Отсюда по формуле (11.22) рассчитываются потери на вентиляцию в
номинальном режиме ΔPвн. Для режимов, отличных от номинального, пересчет
ведется по формуле
3
⎛n ⎞
ΔPв = ΔPвн ⎜⎜ a ⎟⎟ .
⎝ naн ⎠
(11.25)
Шаг 3. Расчет момента на валу двигателя
Полученные значения частоты вращения якоря na и КПД двигателя ηд
позволяют рассчитать значение момента на валу двигателя в заданном токовом
режиме Mв, Н⋅м
U Ia
(11.26)
M в = 9,55
ηд .
na
11.3 Расчет электротяговых характеристик
В семейство электротяговых характеристик (электромеханические характеристики двигателя, отнесенные к ободу колеса) входят следующие зависимости: v ( Ia ); Fкп ( Ia ); ηкп ( Ia ). Их расчет производится на основе ранее полученных электромеханических характеристик. Поэтому электротяговые характеристики можно рассчитывать совместно с электромеханическими, продолжая
вычисления по шагам на каждом из значений тока якоря.
Шаг 4. Расчет скорости движения локомотива
Пересчет скорости движения локомотива v, км/ч, из частоты вращения
якоря na производится по формуле
Dб
v = na
.
(11.27)
5, 3 μ
87
Шаг 5. Расчет КПД на ободе колеса
В значении КПД на ободе колеса ηкп , помимо КПД двигателя ηд , учитывается потеря мощности на силы трения в зубчатой передаче. Эти потери определяются по эмпирической зависимости КПД зубчатой передачиηзп от относительной к номинальному режиму токовой загрузки якоря (рисунок 11.3).
ηзп
0,99
0,97
0,95
0,93
0.91
0,2
0,4
0,6
0,8
1,0
1,4
1,2
1,6
1,8
Ia /Iaн
Рисунок 11.3 – Зависимость КПД зубчатой передачи
Результирующий КПД на ободе колеса ηкп находится
η кп = η д η
зп
.
(11.28)
Шаг 6. Расчет силы тяги на ободе колеса
Расчет силы тяги на ободе колеса Fкп, Н, для заданного токового режима
производится по формуле
F кп = 3 , 6
U Ia
η кп .
v
(11.29)
11.4 Расчет тяговых характеристик
Для получения тяговой характеристики Fкп(v) специального расчета не
требуется. Она получается из табличных данных расчета электротяговых характеристик, если брать попарно значения силы тяги Fкп и скорости локомотива v для одних и тех же значений тока якоря.
11.5 Расчет технико-экономических показателей двигателя
Обобщающие технико-экономические показатели спроектированного
двигателя позволяют произвести интегральную и сравнительную оценку полученной конструкции в целом.
88
Поскольку наблюдается очевидная пропорция между мощностью двигателя и показателями его объема и массы, то в качестве критериев рациональности конструкции используют параметры, приведенные к единице массы машины или ее объема.
Ориентировочно оценить массу спроектированного двигателя можно по
эмпирическим зависимостям :
− при опорно-осевом подвешивании масса двигателя mд, кг
40 ⋅ 10 3 2
mд =
D a l a + 200 ;
p
(11.30)
− при опорно-рамном подвешивании масса двигателя mд, кг
40 ⋅ 10 3 2
mд =
D a la .
p
(11.31)
Исходя из полученной величины массы в качестве удельных критериев
используют:
− удельную мощность на единицу массы двигателя ψp, кВт/кг
P
ψp = н ;
(11.32)
mд
− удельную массу на единицу мощности mуд, кг/кВт
m
m уд = д .
(11.33)
Pн
Рациональность конструкции по использованию объема машины оценивается также машинной постоянной Арнольда СА
6 ⋅ 10 3
D a2 l a na
.
(11.34)
=
CA =
Pэм
α δ Bδ A
Недостатком приведенных выше критериев является то, что объем и
масса машины в большей степени зависят от вращающего момента двигателя,
чем от его мощности. Кроме того, при сравнении конструкций различных двигателей необходимо учитывать, что неблагоприятное соотношение исходных
данных может повлиять на уровень «трудности» проектирования, а значит, и на
рациональность принятых решений. Поэтому для сравнительной оценки часто
пользуются уточненными критериями:
− производная масса машины mM , кг/(кгс⋅м)
m
m M = 3д/ 4 ;
(11.35)
Mн
− коэффициент Балдвина ψ, кВт/кг
P v
ψ = н ⋅ max ;
(11.36)
mд vн
− критерий Г. В. Василенко kтэ
mд
kтэ =
.
(11.37)
M н kv k и
89
Кроме критериев интегрального характера, демонстрирующих уровень
рациональности использования общего объема или массы спроектированной
машины, двигатель оценивают параметрами, характеризующими его технические возможности и уровень загруженности наиболее ответственных узлов:
− коэффициент использования мощности kи
Pv max
Fкпv max v max
,
(11.38)
=
kи =
Pн
Fкпн v н
где Pv max – мощность ТЭД в режиме βmin при vmax;
− коэффициент магнитного насыщения kн
F
k н = вн ;
(11.39)
Fδ н
− коэффициент регулируемости двигателя kр
1
kр =
.
(11.40)
β minkн
90
Приложение А
(справочное)
Обмоточные провода и ленты
Таблица А.1 − Размеры и площади поперечного сечения медной проволоки
Размер
большей
стороны,
мм
0,80
2,00
2,12
2,24
2,36
2,50
2,65
2,80
3,00
3,15
3,35
3,55
3,75
4,00
4,25
4,50
4,75
5,0
5,3
5,6
6,0
6,3
6,7
7,1
7,5
8,0
8,5
9,0
9,5
10,0
10,6
11,2
11,8
12,5
13,2
14,0
15,0
16,0
20,0
22,0
25,0
28,0
30,0
1,463
1,559
1,655
1,751
1,863
1,983
2,103
2,263
2,383
2,543
2,703
2,863
3,063
3,263
3,463
3,663
3,863
4,103
4,343
4,663
4,903
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
Номинальный размер проволоки по меньшей стороне, мм
0,85 0,90 0,95 1,00 1,06 1,12
1,18
1,25 1,32 1,40
Расчетное сечение проволоки, мм2
1,545 1,626 1,706 1,785 1,905 2,025 2,145 2,285 2,425 2,585
1,905
2,160
2,435
2,753
1,734
⎯
⎯
⎯
⎯
⎯
1,749 1,842 1,934 2,025 2,16 2,294 2,429 2,585 2,742 2,921
2,145
2,429
2,735
3,089
1,950
⎯
⎯
⎯
⎯
⎯
1,97 2,076 2,181 2,285 2,435 2,585 2,736 2,910 3,085 3,285
2,435
2,753
3,098
3,495
2,211
⎯
⎯
⎯
⎯
⎯
2,466
2,585
2,753
2,921
3,089
3,285
3,481
3,705
2,225 2,346
2,785
3,145
3,535
3,985
2,526
⎯
⎯
⎯
⎯
⎯
2,522 2,661 2,799 2,935 3,124 3,313 3,502 3,723 3,943 4,195
3,135
3,537
3,973
4,475
2,841
⎯
⎯
⎯
⎯
⎯
2,862 3,021 3,179 3,335 3,548 3,761 3,974 4,223 4,471 4,755
3,535
3,985
4,473
5,035
3,201
⎯
⎯
⎯
⎯
⎯
3,245 3,426 3,606 3,785 4,025 4,265 4,505 4,785 5,065 5,385
4,035
4,545
5,098
5,735
3,651
⎯
⎯
⎯
⎯
⎯
3,67 3,876 4,081 4,285 4,555 4,825 5,095 5,410 5,725 6,085
4,535
5,105
5,723
6,435
4,101
⎯
⎯
⎯
⎯
⎯
4,095 4,326 4,556 4,785 5,085 5,385 5,685 6,035 6,385 6,785
4,596
5,085
5,721
6,410
7,205
⎯
⎯
⎯
⎯
⎯
4,605 4,866 5,126 5,385 5,721 6,057 6,393 6,785 7,177 7,625
5,226
5,785
6,505
7,285
8,185
⎯
⎯
⎯
⎯
⎯
5,2 5,496 5,791 6,085 6,463 6,841 7,219 7,660 8,101 8,605
5,856
6,485
7,289
8,160
9,165
⎯
⎯
⎯
⎯
⎯
6,216 6,551 6,885 7,311 7,737 8,163 8,660 9,157 9,725
⎯
7,285
8,185
9,160
10,29
⎯
⎯
⎯
⎯
⎯
⎯
7,785 8,265 8,745 9,225 9,785 10,35 10,99
⎯
⎯
⎯
9,305
10,41
11,69
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
9,865 10,410 11,04 11,67 12,39
⎯
⎯
⎯
⎯
⎯
11,66
13,09
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
12,29 12,99 13,79
⎯
⎯
⎯
⎯
⎯
⎯
⎯
14,63
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
15,47
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
91
1,50
⎯
⎯
3,145
⎯
3,535
⎯
3,985
⎯
4,510
⎯
5,110
⎯
5,785
⎯
6,535
⎯
7,285
⎯
8,185
⎯
9,235
⎯
10,44
⎯
11,79
⎯
13,29
⎯
14,79
⎯
16,59
⎯
18,50
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
Продолжение таблицы А.1
Размер
большей
стороны,
мм
2,00
2,12
2,24
2,36
2,50
2,65
2,80
3,00
3,15
3,35
3,55
3,75
4,00
4,25
4,50
4,75
5,0
5,3
5,6
6,0
6,3
6,7
7,1
7,5
8,0
8,5
9,0
9,5
10,0
10,6
11,2
11,8
12,5
13,2
14,0
15,0
16,0
20,0
22,0
25,0
28,0
30,0
Номинальный размер проволоки по меньшей стороне, мм
1,6
1,7
1,8
1,9
2,0
2,12 2,24 2,36
2,5
2,65
2,8
Расчетное сечение проволоки, мм2
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
3,369
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
3,561
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
3,785 3,887 4,137
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
4,025
4,407
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
4,265 4,397 4,677 4,957 5,237
⎯
⎯
⎯
⎯
⎯
⎯
4,585
5,038
5,638
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
4,825 4,992 5,307 5,622 5,937 6,315 6,693
⎯
⎯
⎯
⎯
5,145
5,667
6,337
7,141
⎯
⎯
⎯
⎯
⎯
⎯
⎯
5,465 5,672 6,027 6,382 6,737 7,163 7,589 7,829 8,326
⎯
⎯
5,785
6,387
7,137
8,037
8,826
⎯
⎯
⎯
⎯
⎯
⎯
6,185 6,437 6,837 7,237 7,637 8,117 8,597 8,891 9,451 10,05 10,65
6,585
7,287
8,137
9,157
10,08
11,35
⎯
⎯
⎯
⎯
⎯
6,985 7,287 7,737 8,187 8,637 9,177 9,717 10,07 10,70 11,38 12,05
7,385
8,188
9,137
10,28
11,33
12,75
⎯
⎯
⎯
⎯
⎯
7,785 8,137 8,637 9,137 9,637 10,24 10,84 11,25 11,95 12,70 13,45
8,265
9,177
10,24
11,51
12,70
14,29
⎯
⎯
⎯
⎯
⎯
8,745 9,157 9,717 10,28 10,84 11,51 12,18 12,67 13,45 14,29 15,13
9,385
10,44
11,64
13,08
14,45
16,25
⎯
⎯
⎯
⎯
⎯
9,865 10,35 10,98 11,61 12,24 12,99 13,75 14,32 15,20 16,15 17,09
10,510
11,70
13,04
14,65
16,20
18,21
⎯
⎯
⎯
⎯
⎯
11,15 11,71 12,42 13,13 13,84 14,69 15,54 16,21 17,20 18,27 19,33
11,79
13,14
14,64
16,44
18,20
20,45
⎯
⎯
⎯
⎯
⎯
12,59 13,24 14,04 14,84 15,64 16,60 17,56 18,33 19,45 20,65 21,85
13,39
14,94
16,64
18,68
20,70
23,25
⎯
⎯
⎯
⎯
⎯
14,19 14,94 15,84 16,74 17,64 18,72 19,80 20,69 21,95 23,30 24,65
14,99
16,74
18,64
20,92
23,20
26,05
⎯
⎯
⎯
⎯
⎯
15,79 16,64 17,64 18,64 19,64 20,84 22,04 23,05 24,45 25,95 27,45
16,75
18,72
20,84
23,38
25,95
29,13
⎯
⎯
⎯
⎯
⎯
17,71 18,68 19,80 20,92 22,04 23,38 24,73 25,88 27,45 29,13 30,81
18,67
20,88
23,24
26,07
28,95
32,49
⎯
⎯
⎯
⎯
⎯
19,79 20,89 22,14 23,39 24,64 26,14 27,64 28,95 30,70 32,58 34,45
23,40
26,04
29,21
32,45
36,41
⎯
⎯
⎯
⎯
⎯
⎯
24,84 26,24 27,64 29,32 31,00 32,49 34,45 36,55 38,65
⎯
⎯
29,64
33,24
36,95
41,45
⎯
⎯
⎯
⎯
⎯
⎯
⎯
31,64 33,56 35,48 37,21 39,45 41,85 44,25
⎯
⎯
⎯
⎯
49,52
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
92
3,0
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
12,95
⎯
14,45
⎯
16,25
⎯
18,35
⎯
20,75
⎯
23,45
⎯
26,45
⎯
29,45
⎯
33,05
⎯
36,95
⎯
41,45
⎯
47,45
59,52
⎯
74,52
⎯
⎯
Продолжение таблицы А.1
Размер
большей
стороны,
мм
2,00
2,12
2,24
2,36
2,50
2,65
2,80
3,00
3,15
3,35
3,55
3,75
4,00
4,25
4,50
4,75
5,0
5,3
5,6
6,0
6,3
6,7
7,1
7,5
8,0
8,5
9,0
9,5
10,0
10,6
11,2
11,8
12,5
13,2
14,0
15,0
16,0
20,0
22,0
25,0
28,0
30,0
Номинальный размер проволоки по меньшей стороне, мм
3,15
3,35
3,55
3,75
4,00
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
13,63
14,41
15,20
16,15
17,09
18,35
19,30
20,56
21,82
23,08
24,65
26,23
27,8
29,38
30,95
32,84
34,73
36,62
38,83
41,03
43,55
46,70
49,85
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
16,20
⎯
18,21
⎯
20,56
⎯
23,24
⎯
26,25
⎯
29,60
⎯
32,95
⎯
36,97
⎯
41,33
⎯
46,35
⎯
53,05
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
21,82
23,24
24,66
26,08
27,85
29,63
31,40
33,18
34,95
37,08
39,21
41,34
43,83
46,31
49,15
52,70
56,25
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
22,77 24,34
25,94
⎯
25,77 27,54
29,14
⎯
29,14 31,14
33,14
⎯
32,89 35,14
37,14
⎯
36,64 39,14
41,54
⎯
41,14 43,94
46,34
⎯
46,02 49,14
51,94
⎯
51,64 55,14
59,14
⎯
59,14 63,14
79,52
⎯
⎯
⎯
99,52
⎯
111,94
⎯
119,52
⎯
4,25
4,50
4,75
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
25,92
⎯
29,32
⎯
33,14
⎯
37,39
⎯
41,64
⎯
46,74
⎯
52,27
⎯
58,64
⎯
67,14
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
27,49
29,29
31,09
32,89
35,14
37,39
39,64
41,89
44,14
46,84
49,54
52,24
55,39
58,54
62,14
66,64
71,14
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
32,87 34,64
36,64
⎯
37,14 39,14
41,64
⎯
41,89 44,14
46,64
⎯
46,64 49,14
52,14
⎯
52,34 55,14
58,14
⎯
58,52 61,64
65,14
⎯
65,64 69,14
74,14
⎯
75,14 79,14
99,14
⎯
⎯
⎯
124,14
⎯
⎯
⎯
149,14
⎯
93
5,00
5,30
5,60
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
41,54
⎯
46,84
⎯
52,14
⎯
58,50
⎯
65,39
⎯
73,34
⎯
83,94
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
43,94
46,74
49,54
52,34
55,14
58,50
61,86
65,22
69,14
73,06
77,54
83,14
88,74
⎯
⎯
⎯
⎯
⎯
Таблица А.2 − Размеры и площади поперечного сечения медных лент
Номинальный размер
большей
стороны,
мм
22
25
26,3
28
30
32
35
40
45
47
50
55
60
65
70
75
80
1,81
1,95
2,0
Номинальный размер лент по меньшей стороне, мм
2,1
2,26
2,44
2,5
2,63
2,83
3,0
3,28
3,53
Расчетное сечение лент, мм2
39,1
44,6
46,9
50,0
53,6
57,2
62,7
71,7
80,8
42,1
47,9
50,5
53,8
57,7
61,6
67,4
77,2
86,9
⎯
45,3
51,6
54,3
57,9
62,1
66,3
72,6
83,1
93,6
48,6
55,4
58,3
62,2
66,7
71,3
78,0
89,3
100,6
⎯
⎯
⎯
⎯
99,1
⎯
104,1
114,6
125,1
111,9
123,2
134,5
⎯
⎯
⎯
⎯
96,7
106,4
116,2
125,9
135,7
⎯
⎯
⎯
52,4
59,7
62,8
67,0
71,9
76,8
84,1
96,3
108,5
113,4
120,7
132,9
145,1
157,3
169,5
⎯
89,8
98,9
107,9
⎯
⎯
⎯
⎯
⎯
⎯
155,2
⎯
⎯
⎯
⎯
⎯
49,1
⎯
⎯
59,1
⎯
⎯
79,1
⎯
⎯
⎯
⎯
⎯
⎯
⎯
61,2
⎯
⎯
⎯
⎯
72,7
77,5
83,2
88,9
97,4
111,5
125,7
⎯
⎯
⎯
82,1
88,1
94,1
103,1
118,1
133,1
⎯
⎯
91,1
102,7
112,5
128,9
145,3
⎯
⎯
64,3
67,7
72,2
77,4
82,7
90,6
103,7
116,9
120,9
138,5
156,2
⎯
⎯
⎯
⎯
⎯
⎯
123,7
⎯
130,0
142,2
156,3
169,5
139,8
154,0
168,1
182,3
⎯
⎯
⎯
148,1
163,1
178,1
193,1
208,1
161,7
178,1
194,5
210,8
227,3
173,8
191,5
209,1
226,8
244,4
⎯
⎯
⎯
⎯
⎯
⎯
⎯
193,9
⎯
⎯
⎯
238,1
⎯
⎯
⎯
⎯
73,7
⎯
⎯
98,7
⎯
⎯
⎯
Таблица А.3 – Двухсторонняя толщина эмалево-стекловолокнистой изоляции обмоточных изолированных проводов
прямоугольного сечения
Номинальный размер проволоки по
меньшей стороне,
мм
0,80 − 1,12
1,18 − 2,00
2,12 − 3,55
Двухсторонняя толщина изоляции по
меньшей стороне,
мм
0,41
0,41
0,47
Номинальный размер проволоки по большей стороне, мм
2,00 − 3,15 4,00 − 4,50
4,75 − 5,60
6,00 − 7,10
7,50 − 10,00
Двухсторонняя толщина изоляции по большей стороне, мм
0,45
0,45
−
−
0,48
0,48
0,48
0,48
0,50
0,49
0,49
0,53
0,53
0,55
0,56
Приложение Б
(справочное)
Типоразмеры щеток для электрических машин (ГОСТ 2332−75)
Таблица Б.1 − Шкала размеров электрощеток
b щ × lщ × h щ
В миллиметрах
Ширина
bщ
4
5
6,3
8
5
6,3
8
10
12,5
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
12.5
16
—
12,5
16
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
16
20
—
16
20
25
—
—
20
25
—
—
—
—
—
—
—
Осевой размер lщ
10 12,5 16 20
Размер по высоте hщ
— —
— —
— —
— —
16 —
— —
20 20
20 —
— —
— —
16 —
— —
20 20
20 —
25 25
25 25
— 32
32 32
— —
— 40
— —
20 20
25 25
25 25
32 32
32 32
— —
— —
— —
20 —
25 25
25 25
32 32
32 32
— —
— —
— —
— —
96
25
32
40
50
—
—
—
—
—
—
—
—
—
—
—
—
32
40
—
25
32
40
50
—
—
—
—
—
—
—
—
—
—
—
—
32
40
—
—
32
40
50
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
Продолжение таблицы Б.1
Ширина
bщ
10
12,5
16
20
25
32
40
5
6,3
8
—
—
—
—
—
—
—
—
—
—
—
—
—
⎯
⎯
⎯
⎯
⎯
⎯
⎯
—
—
—
—
—
—
—
—
—
—
—
—
—
⎯
⎯
⎯
⎯
⎯
⎯
⎯
—
—
—
—
—
—
—
—
—
—
—
—
—
⎯
⎯
⎯
⎯
⎯
⎯
⎯
Осевой размер lщ
10 12,5 16 20
Размер по высоте hщ
— 25
25 25
— 32
32 32
— —
— 40
— —
— —
— —
25 —
— —
32 32
— —
— 40
— —
— —
— —
— —
— —
— 32
— —
— 40
— 50
— —
— —
— —
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯ ⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
40
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
50
50
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
64
64
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
80
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
80
100
97
25
32
40
50
—
32
40
50
—
32
40
50
—
32
40
50
—
32
40
50
⎯
⎯
⎯
⎯
—
32
40
50
—
32
40
50
—
32
40
50
—
32
40
50
⎯
40
50
64
—
—
40
50
—
—
40
50
64
—
40
50
64
⎯
40
50
64
40
50
64
—
—
—
—
—
—
—
50
64
—
—
50
64
⎯
⎯
50
64
⎯
50
64
2,9
4,3
2,5
15
5
10
40
30
30
50
15–100
40
Генераторы, двигатели
(в т.ч. переменного тока)
с облегченными условиями коммутации
Графитные
1,9
2,0
2,0
11
12
15
25
40
90
20–25
20–25
12–22
Генераторы, двигатели с
облегченными условиями
коммутации и контактные
кольца
Давление на
щетку, кПа
Угольнографитные
Максимальная
скорость, м/с
Плотность
тока, А/см2
ГЗ
611М
6110М
Переходное
ΔUщ (на пару),
В
Г20
Г21
Г22
Тип щеток
Марки щеток
Таблица Б.2 – Характеристики щеток электрических машин
Область применения
20–25
45
10
2,6
ЭГ2А
15–21
90
15
2,2
ЭГ2АФ
15–20
40
12
2,0
ЭГ4
20–40
40
10
2,4
ЭГ8
20–40 Генераторы, двигатели со
40
11
2,5
ЭГ14
Электро20–25 средними и трудными ус60
12
2,2
ЭГ51
графитиловиями коммутации и
35 – 50
60
13
3,0
ЭГ61
рованные
контактные кольца
20–25
40
12
2,2
ЭГ71
17,5–25
50
15
2,7
ЭГ74
15–21
60
15
2,3
ЭГ74АФ
17,5–35
50
15
2,3
ЭГ85
18 – 23
20
20
МГ
0,2
18 – 23
20
20
МГ2
0,5
20 – 25 Низковольтные генерато20
15
МГ4
1,1
Металло15 – 20 ры и контактные кольца
25
25
МГ64 графитные
0,5
18 – 23
20
20
МГС0
0,2
20 – 25
35
15
МГС5
2,0
1,5
15
25
15–20
Ml
Низковольтные
1,8
12
20
15–20
М3
Медные
генераторы и контактные
1,5
15
25
15–20
М6
кольца
1,4
12
20
15–20
М20
Примечание − Верхние значения давлений на щетку соответствуют опорноосевому подвешиванию, нижние – опорно-рамному
98
Приложение В
(справочное)
Таблицы магнитных характеристик сталей
Таблица В.1 − Листовая сталь (Ст3) толщиной 1…2 мм (главные полюса некомпенсированных машин)
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
В, Тл
Напряженность Н, А/м
210
⎯
⎯
⎯
⎯
⎯
⎯
⎯
⎯
0,4
250
—
—
—
275
—
0,5
⎯
⎯
⎯
295
—
—
—
320
—
—
0,6
⎯
⎯
345
—
—
—
375
—
0,7
⎯
⎯
⎯
405
—
—
440
—
0,8
⎯
⎯
⎯
⎯
480
490
495
505
510
520
530
540
550
0,9
570
582
595
607
615
630
642
655
665
1,0
690
703
720
731
748
760
775
790
808
1,1
845
860
880
900
920
940
960
992
1015
1,2
1080
1112
1145
1175
1220
1260
1300
1350
1393
1,3
1490
1530
1595
1645
1700
1750
1835
1920
2010
1,4
2270
2450
2560
2710
2880
3050
3200
3400
3650
1,5
4000
4250
4500
4750
5000
5250
5580
5950
6230
1,6
7050
7530
7950
8400
8850
9320
9800
10300
10800
1,7
11900
12400
13000
13500
14 100
14800
15600
16200
17000
1,8
18800
19700
20700
21500
22600
23500
24500
25600
26500
1,9
29000
30200
31500
32800
34200
36100
38000
40000
42000
2,0
47000
49500
52000
55000
58000
61000
64000
66500
69500
2,1
77500
81000
85000
88500
92000
96000
100000
104500
108500
2,2
0,09
⎯
—
—
—
—
560
680
825
1045
1450
2110
3750
6600
11400
17800
27500
44500
73000
113000
Таблица В.2 − Листовая электротехническая сталь марок 1211, 1212 слаболегированная
(якорные пакеты, главные полюса компенсированных машин постоянного и пульсирующего тока)
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
В, Тл
Напряженность H, А/м
140
143
146
149
152
153
158
161
164
0,4
171
175
179
183
187
191
195
199
203
0,5
211
216
221
226
231
236
241
246
251
0,6
261
266
271
276
281
287
293
299
306
0,7
318
324
330
337
344
352
360
369
378
0,8
397
407
417
427
437
447
458
469
480
0,9
502
514
527
541
555
570
585
600
615
1,0
647
.664
682
701
720
739
859
779
800
1,1
843
86
891
918
946
976
1010
104
1070
1,2
1140
1180
1220
1260
1300
1340
1380
1430
1480
1,3
1580
1640
171
1780
1860
1950
2050
2150
2260
1,4
2500
2640
2790
2950
3110
3280
3460
3660
3880
1,5
4370
4630
4910
5220
5530
5880
6230
6600
6980
1,6
7780
8200
8630
9070
9630
10100
10600
11100
11600
1,7
12800
13400
14200
14600
15200
15900
16600
17300
18000
1,8
19700
20600
21600
22600
23600
24600
25600
26800
28200
1,9
31000
32500
34300
36500
39000
42000
45500
49500
54500
2,0
65500
72500
80000
88000
96000
104000
112000
120000
128000
2,1
144000
152000
160000
168000
176000
184000
192000
200000
208000
2,2
224000
232 000
240000
248000
256000
264000
272000
280000
288000
2,3
304000
312000
320000
328000
336000
344000
352000
360000
368000
2,4
384000
392000
400000
408000
416000
424000
432000
440000
448000
2,5
0,09
167
207
256
312
387
491
631
821
1100
1530
2380
4120
7370
12200
18800
29600
59500
136000
216000
296000
276000
456000
Таблица В.3 − Листовая электротехническая сталь марки 1312 (Э11, Э12, Э13, Э21, Э1300А) среднелегированная
(якорные пакеты, главные полюса компенсированных машин постоянного и пульсирующего тока)
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
В, Тл
Напряженность H, А/м
300
300
300
300
300
310
320
320
330
330
0,6
340
340
350
350
360
370
370
380
380
390
0,7
400
400
410
410
420
420
430
440
450
460
0,8
480
480
490
500
510
520
530
540
550
560
0,9
570
580
590
600
620
630
650
670
690
710
1,0
720
740
750
760
770
800
820
850
870
890
1,1
930
960
990
1010
1050
1100
1130
1160
1190
1230
1,2
1280
1330
1380
1420
1460
1500
1570
1630
1700
1760
1,3
1820
1900
1980
2060
2120
2200
2350
2500
2650
2800
1,4
2900
3000
3100
3250
3350
3500
3700
3900
4100
4300
1,5
4700
5000
5300
5600
6000
6300
6700
7100
7500
7900
1,6
8300
8800
9300
9800
10400
11000
11600
12200
12800
13500
1,7
14200
14900
15600
16300
17100
17900
18700
19600
20500
21400
1,8
22400
23500
24600
25700
26900
28100
29400
30800
32200
33600
1,9
35000
36400
37800
39300
40800
42300
43900
45700
47600
49500
2,0
51500
53500
55600
57700
59800
62000
64300
66600
68900
71200
2,1
73500
75900
78300
80700
83100
85500
88000
90500
93000
95500
2,2
98000
100600
103200
105800
108500
111000
113500
116500
119500
123000
2,3
127000
130500
134000
137500
141500
145500
149500
153500
157000
161000
2,4
165000
169600
173000
177500
182000
187000
192000
197500
203000
209000
2,5
Таблица В.4 − Листовая электротехническая сталь марок 2212, 2213, 2214 среднелегированная с уменьшенными потерями (якорные пакеты, главные полюса компенсированных машин постоянного и пульсирующего тока)
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
В, Тл
Напряженность H, А/м
270
−
−
−
−
−
−
−
−
−
0,4
330
−
−
−
−
−
−
−
−
−
0,5
390
390
400
400
410
420
420
430
440
440
0,6
450
460
460
470
480
480
490
490
500
510
0,7
510
520
530
530
540
550
550
560
560
570
0,8
580
580
590
600
600
610
620
620
630
640
0,9
640
650
650
660
670
670
680
690
690
700
1,0
710
710
720
730
730
740
740
750
760
760
1,1
770
780
780
790
800
800
810
820
820
830
1,2
830
840
850
850
860
870
870
880
890
890
1,3
900
950
1000
1050
1100
1150
1200
1250
1300
1350
1,4
1400
1480
1560
1640
1720
1800
1940
2080
2220
2360
1,5
2500
2720
2940
3160
3380
3600
4100
4600
5100
5550
1,6
5800
6300
6830
7450
8070
8710
9350
10000
10600
11300
1,7
12000
12800
13600
14400
15200
16000
16800
17600
18400
19200
1,8
20000
21000
22000
23000
24000
25000
26000
27000
28000
29000
1,9
30000
31400
32800
34300
35800
37300
38900
40700
42700
44500
2,0
46400
48300
50300
52400
54300
56400
58600
60800
63000
65200
2,1
67400
69700
72000
74300
76600
78900
81300
83700
86100
88500
2,2
90900
93400
95000
98400
101000
103400
105800
108700
111600
115000
2,3
118900
122300
125700
129100
133000
136900
140800
144700
148100
152000
2,4
156000
160900
164000
168500
173000
178000
183000
188500
194000
200000
2,5
Таблица В.5 − Листовая электротехническая сталь марок 1411, 1412, 1413 повышеннолегированная
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
В, Тл
Напряженность Н, А/м
44
45
47
48
49
50
51
52
0,2
56
57
58
59
60
61
63
64
0,3
67
68
69
70
71
72
73
74
0,4
77
78
79
80
81
83
84
86
0,5
90
92
94
96
97
99
101
103
0.6
109
111
113
115
117
119
122
124
0,7
133
135
138
141
144
147
150
154
0,8
166
170
174
179
184
189
194
199
0,9
217
223
230
237
241
252
260
269
1,0
298
309
320
332
345
359
374
390
1,1
444
465
487
510
535
562
590
620
1,2
722
760
800
850
900
960
1030
1110
1,3
1410
1530
1660
1810
1970
2140
2320
2510
1,4
3140
3370
3610
3870
4140
4420
4710
5010
1,5
5980
6330
6700
7090
7500
7930
8380
8850
1,6
10100
11000
11600
12300
13000
13700
14500
15300
1,7
18100
19100
20200
21400
22700
24100
25600
27200
1,8
33500
36300
39700
43700
48300
53700
59700
66200
1,9
88300
96100
104000
112000
120000
128000
136000
144000
2,0
167000
175000
183000
191000
199000
207000
215000
223000
2,1
246000
254000
262000
270000
278000
286000
294000
302000
2,2
326000
334000
342000
350000
358000
365000
373000
381000
2,3
405000
413000
421000
429000
437000
445000
2,4
−
−
0,08
0,09
54
65
75
87
105
127
158
205
278
407
652
1200
2710
5320
9340
16200
29000
73200
151000
231000
310000
389000
−
55
66
76
89
107
130
162
211
288
425
686
1300
2920
5640
9860
17100
31100
80600
159000
239000
318000
397000
−
Таблица В.6 − Листовая электротехническая сталь марок 1511, 1512, 1513 высоколегированная
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
В, Тл
Напряженность Н, А/м
96
97
98
99
100
102
104
106
0,4
114
117
120
123
126
129
132
136
0,5
148
152
156
160
164
168
172
177
0,6
192
197
202
208
214
220
226
233
0,7
254
261
268
275
282
289
296
303
0,8
325
333
341
349
358
367
376
385
0,9
414
424
435
446
458
470
483
496
1,0
538
553
569
586
604
623
643
664
1,1
730
754
780
810
840
870
900
940
1,2
1080
1140
1200
1270
1340
1410
1490
1590
1,3
1940
2060
2200
2340
2500
2700
2920
3140
1,4
3850
4060
4290
4520
4760
5000
5300
5650
1,5
6700
7100
7600
8100
8650
9300
10000
10700
1,6
13000
14000
15000
16000
17000
18000
19000
20000
1,7
23000
24000
25000
26000
27 000
28000
29000
30000
1,8
34000
35500
37000
38500
40500
42500
45000
51000
1,9
70000
77000
84500
92000
100000
108000
116000
124000
2,0
148000
156000
164000
172000
180000
188000
196000
204000
2,1
228000
236000
244000
252 000
260000
268000
276000
284000
2,2
0,08
0,09
108
140
182
240
310
111
144
187
247
317
394
510
685
980
1600
3370
6000
11400
21000
31200
57000
138000
212000
404
524
707
1030
1720
3600
6350
12200
22000
32500
63000
140000
220000
292000
300000
Таблица В.7 − Толстые стальные листы (Ст2, Ст3), поковки (сердечники добавочных полюсов)
В, Тл
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
0
0,01
0,02
0,03
0,04
0,05
Напряженность Н, А/м
0
80
160
240
320
400
488
584
682
798
924
1090
1290
1590
2090
2890
8
88
168
248
328
404
497
593
693
810
938
1108
1315
1630
2160
2990
16
96
176
250
336
417
506
603
703
823
953
1127
1340
1670
2230
3100
24
104
184
264
344
426
516
613
724
835
969
1147
1370
1720
2300
3210
32
112
192
272
352
434
525
623
734
848
986
1167
1400
1760
2370
3320
4100
4250
4400
4550
4700
0,06
0,07
0,03
0,09
40
120
200
280
360
443
535
632
745
850
1004
1187
1430
1810
2440
3430
48
128
208
288
368
452
544
642
755
873
1022
1207
1460
1860
2530
3560
56
136
216
296
376
461
554
652
766
885
1039
1227
1490
1920
2620
3700
64
144
224
304
384
470
564
662
776
898
1056
1248
1520
1970
2710
3830
72
152
232
312
392
479
574
672
787
911
1073
1269
1555
2030
2800
3960
4870
5000
5150
5300
5500
Таблица В.8 – Стальное литье (остова)
В, Тл
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
2,1
0
0,01
0,02
0,03
0,04
0,05
Напряженность Н, А/м
0,06
0,07
0,08
0,09
160
190
220
260
320
170
190
220
270
320
170
190
220
270
330
170
200
230
280
340
170
200
230
280
350
180
200
240
290
360
180
200
240
290
370
180
210
250
300
380
180
210
250
300
390
180
210
260
310
400
410
560
760
1050
1420
2010
420
580
790
1080
1470
2090
440
600
820
1110
1520
2170
450
620
840
1150
1580
2250
460
640
870
1180
1640
2340
480
660
900
1220
1700
2430
500
680
930
1260
1760
2530
510
700
960
1300
1820
2650
530
720
990
1340
1880
2770
550
740
1020
1380
1940
2900
3050
5100
8100
11800
16200
24500
38700
3180
5350
8400
12200
16900
25700
40200
3340
5600
8800
12600
17700
26900
42500
3520
5900
9100
13000
18400
28100
45000
3710
6300
9500
13400
19300
29300
48500
3900
6500
9900
13900
20000
30700
51500
4100
6800
10200
14300
20900
32000
56000
4350
7100
10600
14800
21800
33500
60500
4600
7400
11000
15200
22700
35200
65500
4850
7800
11400
15700
23600
37000
70500
Приложение Г
(обязательное)
Вопросы для подготовки и самоконтроля
1. Как осуществляется опорно-осевое крепление тягового двигателя? Как
влияет данный вид подвешивания на конструкцию тягового двигателя?
2. Как осуществляется опорно-рамное крепление тягового двигателя? Как
влияет данный вид подвешивания на конструкцию тягового двигателя?
3. Какие факторы влияют на выбор передаточного числа редуктора и размеры зубчатых колес?
4. Как влияет изменение диаметра якоря на величину межцентрового расстояния и величину передаточного отношения?
5. В каких случаях рационально применение односторонних и двусторонних
тяговых передач? Как влияет вид передачи на конструкцию ТЭД?
6. Чем обусловлено различие свойств волновых и петлевых обмоток якоря?
Их достоинства и недостатки.
7. Как влияет выбор типа обмотки якоря на конструкцию двигателя?
8. Для чего применяют укорочение (удлинение) шага обмотки? Как реализуется укорочение (удлинение) шага обмотки?
9. Как выбирается расчетная плотность тока в проводниках якоря? На что
может повлиять ее значение в конструкции двигателя?
10. Назначение и принципы расчета витковой, корпусной и покровной изоляции обмотки якоря. На что может повлиять толщина изоляции ТЭД?
11. Разновидности укладки проводников якоря в пазах якоря. Их достоинства
и недостатки.
12. Какие факторы оказывают влияние на выбор числа коллекторных пластин? Влияние их числа на конструкцию двигателя.
13. Какие факторы влияют на выбор оптимального значения коэффициента
полюсного перекрытия?
14. Почему и как влияет соотношение ширины и высоты проводников якоря
на длину его сердечника?
15. Для чего применяют уравнительные соединения в обмотке якоря? Особенности их конструктивного исполнения.
16. Для чего применяется компенсационная обмотка? Принцип ее действия.
17. Ограничения, действующие на конструкцию компенсационной обмотки.
18. Как определяется требуемая намагничивающая сила компенсационной
обмотки и на что может повлиять ее величина в конструкции ТЭД?
19. Как укладываются и подключаются катушки компенсационной обмотки в
общей цепи машины?
20. Как определяются размеры проводников и пазов компенсационной обмотки? На что может повлиять соотношение их ширины и высоты?
21. Как влияет наличие компенсационной обмотки на величину и расчет воздушного зазора?
107
22. Понятие эквивалентного воздушного зазора. Что учитывается коэффициентами воздушного зазора?
23. Эскиз магнитной цепи как элемент проектного расчета.
24. Теоретическая основа расчета магнитной цепи.
25. Как устанавливается величина воздушного зазора в машинах без компенсационной обмотки?
26. Как оценивается степень насыщения магнитной системы машины? На что
влияет ее уровень?
27. Как величина воздушного зазора влияет на степень насыщения машины и
выходные характеристики двигателя?
28. Каким образом укорочение шага обмотки влияет на величину реактивной
ЭДС напряженность процесса коммутации?
29. Каким образом реактивная ЭДС зависит от геометрических размеров паза?
30. Каким образом реактивная ЭДС зависит от щеточного перекрытия и величины коллекторного деления?
31. С какой целью снижается индукция в сердечнике добавочных полюсов?
32. Роль второго воздушного зазора в конструкции добавочных полюсов?
33. От каких факторов зависит положение максимума на электромеханической характеристике КПД двигателя?
34. Какие конструктивные особенности двигателя служат для повышения
КПД двигателя?
35. Какими способами производится регулирование частоты вращения якоря
двигателя? Как изменяются при этом регулировочные характеристики?
36. Как изменяются электромеханические характеристики двигателя при переводе его в генераторный режим работы?
37. В каких частях двигателя и каким образом возникают добавочные потери
мощности?
38. Какие факторы определяют потребное количество расхода вентилирующего воздуха в номинальном режиме?
39. Для какого режима работы выполняется расчет нагревания и в чем его
смысл?
40. Какие факторы определяют интенсивность процесса теплопроводности?
41. Какие факторы определяют интенсивность процесса теплоотдачи в машине?
42. Какую конструкцию должны иметь подшипниковые узлы двигателя при
прямозубой и косозубой передачах?
43. Как предотвращается попадание смазки подшипников внутрь двигателя?
44. На какие нагрузки проектируются болты крепления главных и добавочных полюсов?
45. Порядок разборки (сборки) тягового двигателя.
46. Особенности конструкции коллекторной пластины. Назначение ее элементов.
47. Факторы, определяющие конструкционные размеры щеток.
108
Михаил Гелиевич Дурандин
ТЯГОВЫЕ ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
И ПРЕОБРАЗОВАТЕЛИ
Учебно-методическое пособие по курсовому проектированию
по дисциплине
«Тяговые электрические машины и преобразователи»
для студентов специальности
190303 − Электрический транспорт железных дорог
Редактор В. П. Вовчек
620034, Екатеринбург, ул. Колмогорова, 66, УрГУПС
Редакционно-издательский отдел
Бумага писчая № 1
Подписано в печать
Усл. печ. л. 6.9
Тираж 200 экз.
Формат 60×90 1/16
Заказ