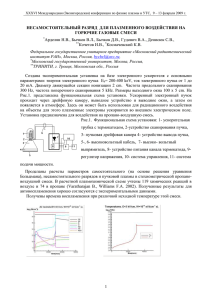
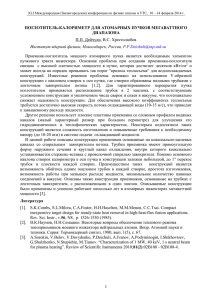
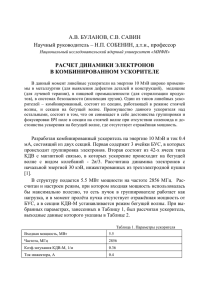
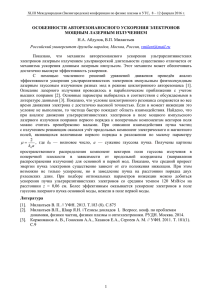
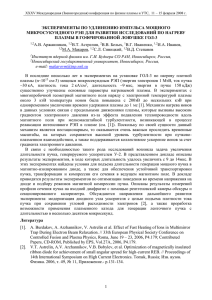
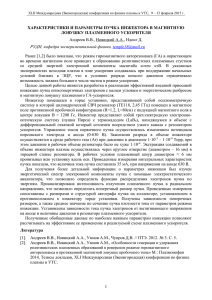
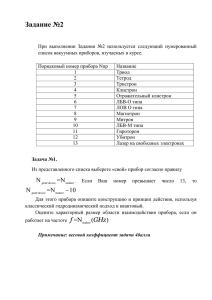
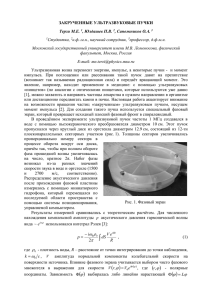
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Приборостроительный факультет Кафедра «Лазерная техника и технология» Группа 11311117 ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Курсовой работы по теме «Расчет преобразования параметров гауссова пучка произвольной оптической системы» По дисциплине: «Лазеры и управление характеристиками лазерного излучения» Студент: Калиновский Е.В. Руководитель: Юмашев К. В. Минск 2020 Оглавление 1.Понятие ABCD-матрицы и границы ее применения. ................................ 4 1.1. Координаты лучей в пространстве предметов и пространстве изображений ................................................................................................... 4 1.2. Преобразование координат оптических лучей ................................ 5 1.3 Геометрический смысл элементов матрицы преобразования ...... 6 1.4 Виды матриц преобразования .............................................................. 8 2. Распространение гауссова пучка и закон ABCD .................................. 13 3. Выводы .......................................................................................................... 17 4.ЛИТЕРАТУРА .................................................................................................. 18 3 1.Понятие ABCD-матрицы и границы ее применения. Основное действие оптической системы заключается в изменении хода лучей, которое описывается преобразованиями двух параметров – линейной и угловой координат луча. Эти преобразования наиболее удобно описывать при помощи аппарата матричной оптики. Матрица преобразования полностью описывает распространение лучей через оптическую систему. 1.1. Координаты лучей в пространстве предметов и пространстве изображений Параметры луча в пространстве предметов и изображений могут быть заданы только в том случае, если выбраны опорные плоскости. Опорная плоскость (ОП) – это некоторая произвольно выбранная плоскость, перпендикулярная оптической оси. Опорные плоскости в пространстве предметов и изображений выбираются из соображений удобства и могут быть либо сопряженными, либо нет. На рис.1.1.1 показаны линейная координата луча y и угловая координата луча α. Рис.1.1.1 Координаты луча. Вместо угла α часто используют направляющий косинус Y оптического лучевого вектора: где – угол между лучом и осью , – приведенный угол. Для лучей в меридиональной плоскости направляющий косинус , таким образом, в параксиальной оптике луч может быть однозначно определен через линейную координату и угловую (1.1.1) 4 координату : Аналогично, луч в пространстве изображений описывается линейной координатой угловой координатой и : (1.1.2) 1.2. Преобразование координат оптических лучей Действие оптической системы заключается в преобразовании координат лучей: Разложим выходные координаты луча в ряд: Если оптическая система является центрированной, то . Все члены ряда, начиная с и , можно отбросить, так как они стремятся к нулю на порядок быстрее, чем предыдущие. Таким образом, для идеальной оптической системы: (1.2.1) Выражение (1.2.1) для преобразования линейной и угловой координат луча можно записать в матричной форме, тогда преобразование координат луча оптической системой можно представить в виде умножения некоторой матрицы на вектор входных координат луча: (1.2.2) Все свойства идеальной оптической системы полностью описываются матрицей преобразования лучей , называемой также гауссовой матрицей или ABCD-матрицей: 5 (6.2.2) Выражение (6.2.1) можно также записать в виде: (6.2.3) где – вектор-столбец входных координат, – вектор-столбец выходных координат, – матрица, описывающая оптическую систему. 1.3 Геометрический смысл элементов матрицы преобразования Рассмотрим луч с координатами (рис.1.3.1). , Рис.1.3.1.Схема для нахождения элементов Подставив в выражение (1.2.1) значения и и (1.3.1) Из рис. 1.3.1 видно, что: , 6 матрицы преобразования. , получим: Отсюда с учетом того, что , можно получить выражения получим два для и : (1.3.2) Таким образом, преобразования: подставив выражения, мы элемента матрицы (1.3.3) Теперь рассмотрим координатой ( луч с входной координатой (𝛼 = −1/𝑛) и ) (рис.1.3.2). Рис.1.3.2. Схема для нахождения элементов Подставив в выражение (1.2.1) значения и и матрицы преобразования. , получим: (1.3.4) Из рис.1.3.2 найдем входную и выходную линейные координаты: (1.3.5) 7 выходной Из этих выражений можно получить еще два элемента матрицы преобразования: (1.3.6) Таким образом матрица преобразования имеет следующий вид: (1.3.7) Элемент матрицы зависит только от параметров оптической системы, а элементы , и зависят еще и от выбора опорных плоскостей. В общем случае все элементы матрицы преобразования не равны нулю, но для случая сопряженных опорных плоскостей элемент . Для сопряженных опорных плоскостей элемент имеет значение линейного увеличения, а элемент - величина обратная элементу . 1.4 Виды матриц преобразования Существуют два основных вида матриц преобразования, описывающих два простых преобразования – перенос луча в свободном пространстве и преломление луча на преломляющей поверхности или в оптической системе. 8 Матрица преломления Рис.1.4.1. Преломление луча. Для вывода матрицы преломления совместим опорные плоскости с главными плоскостями ( , ). Из рисунка (1.4.1) видно, что опорные плоскости сопряжены, то определитель матрицы всегда следовательно . и равен . Тогда единице . Поскольку , а поскольку , В данном случае матрица преобразования имеет смысл матрицы преломления: (1.4.1) Матрица преломления описывает преломление луча оптической системой, при этом у луча изменяется только угловая координата: (1.4.2) 9 Матрица переноса Рис.1.4.2. Перенос луча. При переносе луча изменяется только линейная координата. Из рис. 1.4.2 видно, что: (1.4.3) Угловая координата не В данном случае матрица преобразования имеет смысл матрицы переноса: (1.4.4) где 𝑑/𝑛 – приведенное расстояние между опорными плоскостями. Матрица одной преломляющей поверхности Рис.1.4.3. Преломляющая поверхность. 10 изменяется: Рассмотрим рис.1.4.3. Из треугольников и можно вывести: (1.4.5) Домножим оба выражения на и соответственно: (1.4.6) Из закона преломления следует, что Угол можно найти из , следовательно: : (1.4.7) Тогда, с учетом того, что , , можно получить итоговое выражение для преобразования угловой координаты луча при преломлении на сферической поверхности: (1.4.8) или где – кривизна поверхности. Поскольку в матрице преломления матрицы . Кроме того, сила сферической преломляющей поверхности: (1.4.9) 11 , , элемент следовательно, оптическая В этом случае опорные плоскости совпадают с главными плоскостями, и составляют одну плоскость, касательную к поверхности. Итак, матрица преломления сферической поверхности выглядит следующим образом: (1.4.10) Матрица зеркальной поверхности: Рассмотрим зеркальную поверхность (рис.1.4.4). Рис.1.4.4. Зеркальная поверхность. Если поверхность является отражающей, то сила зеркальной поверхности: Тогда матрица , следовательно, оптическая (1.4.11) преломления зеркальной поверхности: (1.4.12) где – кривизна поверхности, В случае плоского зеркала ( – показатель преломления среды. ) матрица отражения единичная: (1.4.13) Следовательно, плоское зеркало не меняет хода луча (геометрический косинус изменяется, а оптический преломленный (отраженный) косинус остается прежним). 12 2. Распространение гауссова пучка и закон ABCD Рис.2.1. К вычислению напряженности поля в точке Р1 сферической волной , исходящей из точки Р Рассмотрим сначала свободное распространение однородной сферической волны из точечного источника Р, расположенного в точке z=0 (рис. 2.1). Поле U(P1) создаваемое этой волной в точке P1 с цилиндрическими координатами r и 𝑧0 в случае записывается в виде: 𝑈(𝑃1 )~ exp(−𝑖𝑘𝑅) 𝑅 ≈ exp(𝑖𝑘𝑧0 ) 𝑅 𝑖𝑘𝑟 2 exp[−( 2𝑅 ] (2.1) Где R — радиус кривизны сферической волны в точке Отсюда мы видим, что поперечное изменение фазы пучка, а именно (2.2) должно описываться сферической волной радиусом R. Рассмотрим свободное распространение гауссова пучка . Eго распространение описывается выражениями: 2𝑧 𝜔(𝑧) = 𝜔0 [1 + ( 𝐿 )2 (2.3) 𝐿𝜆 𝜔0 = (2𝜋)1/2 (2.4) 𝐿 2 𝑅(𝑧) = 𝑍[1 + (2𝑧) ] (2.5) 2𝑧 𝜙(𝑧) = 𝑎𝑟𝑐𝑡𝑔( 𝐿 ) (2.6) При этом следует заметить, что с помощью (2.4) выражения (2.3) и (2.5) можно преобразовать следующим образом: 𝜆𝑧 2 𝜔(𝑧) = 𝜔0 [1 + (𝜋𝜔 2) ]1/2 (2.7); 0 𝑅(𝑧) = 𝑧[1 + ( 13 𝜋𝜔0 2 1/2 ) ] 𝜆𝑧 (2.8) Для данной длины волны 𝜆 как 𝜔 так и R (а следовательно, и распределение поля) в данной точке z зависят исключительно от 𝜔0 . Это нетрудно понять, если заметить, что в плоскости известно как распределение амплитуды поля (поскольку известна величина и мы договорились, что распределение поля является гауссовым), так и фазы (поскольку R=inf в перетяжке). Тогда поле в любой другой точке пространства можно вычислить, начиная с известного распределения поля в перетяжке пучка с помощью, например, интеграла Френеля — Кирхгофа : 𝑖 𝑈2 (𝑃2 ) = − 2𝜆 ∫1 𝑈1(𝑃1 exp(𝑖𝑘𝑟)(1+𝑐𝑜𝑠𝜃) 𝑟 𝑑𝑆(2.9) Отсюда можно прийти к заключению, что если известно положение перетяжки пучка и ее размер, то распространение гауссова пучка всегда можно описать выражениями (2.7) и (2.6), независимо от того, является ли перетяжка минимальным размером пятна пучка внутри резонатора или же минимальным размером пятна в любой другой точке вдоль пучка (например, благодаря фокусировке пучка положительной линзой). Расстояние от перетяжки пучка, на котором размер пятна увеличивается в √2 раз, называется рэлеевской длиной 𝑧𝑟 . (2.10) Рэлеевская длина равна половине конфокального параметра. Распространение гауссова пучка можно описать в более простой и удобной форме, если определить комплексный параметр следующим образом: (2.11) Нетрудно показать, что использование параметра позволяет записать выражения (2.7) и (2.8) в значительно более простом виде: (2.12); где (2.13) Параметр q называется комплексным радиусом кривизны гауссова пучка или, что более привычно, комплексным параметром пучка. Поперечное изменение фазы пучка можно записать как (2.14) что совпадает с аналогичной записью в случае сферической волны , причем радиус кривизны сферической волны заменяется параметром q. Параметр q обеспечивает весьма удобный способ описания распространения гауссова пучка, как видно, например, из очень простого вида закона распространения пучка, записанного через параметр [см. (2.12)]. Это удобство связано также и со следующим общим результатом: если гауссов пучок на входе некоторой оптической системы, описываемой данной ABCD-матрицей, характеризуется комплексным параметром q1 то на выходе этой системы параметр пучка запишется весьма просто: 14 (2.15) Этот закон, который очень похож на соответствующий закон для распространения сферической волны, обычно называют ABCD-законом распространения гауссова пучка. Доказательство справедливости выражения (2.15) для произвольной оптической системы весьма сложно, поэтому ограничимся здесь лишь рассмотрением его справедливости для нескольких простых случаев. Рассмотрим вначале свободное распространение гауссова пучка от плоскости z=z1 до z=z2 . В соответствии с (2.12) можно написать следующее равенство: (2.16) где мы положили 𝑞2 = 𝑞(𝑧2 ) и 𝑞1 = 𝑞(𝑧1 ) . Выражение (2.16) в точности совпадает с тем, которое было бы получено с помощью закона (4.15), если бы мы использовали матрицу (1.4.4) для свободного распространения. Изучим теперь прохождение гауссова пучка через линзу с фокусным расстоянием f (рис. 4.34,а). Если линза тонкая, то амплитудные распределения пучка непосредственно перед и после линзы совпадают, т. е. размеры пятна могут меняться лишь непрерывным образом. Таким образом, размеры пятна до и после линзы не изменяются, т. е. (2.17) Чтобы определить соответствующее изменение кривизны волнового фронта, рассмотрим вначале прохождение через ту же самую линзу сферической волны (рис.2.2,б). В данном случае сферическая волна, исходящая из точечного источника фокусируется линзой в точечное изображение . В этом случае радиусы кривизны непосредственно до и после линзы будут связаны соотношением: 1 𝑅2 1 1 = 𝑅 −𝑓; (2.18) 1 Иными словами, сферическая линза преобразует радиус кривизны падающей волны R1 в радиус кривизны выходящей волны R2 в соответствии с соотношением (2.18) Точно таким же образом радиус кривизны выходящего гауссова пучка на рис. 2.2, а будет определяться соотношением (2.18). Согласно этому соотношению и (2.17), преобразование комплексного параметра q можно записать в виде (2.19) Это соотношение снова очень похоже на (2.18). Нетрудно теперь показать, что соотношение (2.19) в точности совпадает с тем, которое было бы получено при использовании матричных элементов тонкой линзы 15 Рис. 2.2. Прохождение через линзу гауссова пучка (а) и сферической волны (б). Закон (2.15), справедливый для произвольной оптической системы, находит очень широкое применение для решения многочисленных задач, например для описания распространения гауссова пучка через оптическую систему из сложной последовательности линз, разделенных произвольными промежутками. В качестве элементарного примера проиллюстрируем применение закона для получения фокусировки гауссова пучка линзой. Рассмотрим гауссов пучок с размером пятна 𝜔01 и плоским волновым фронтом, входящий в линзу с фокусным расстоянием f (т. е. перетяжка пучка совпадает с местоположением линзы). Требуется определить положение перетяжки пучка после линзы и размер пятна 𝜔02 в этой перетяжке. В соответствии с формулами (1.4.4) и (1.4.1) матрица системы, состоящей из линзы с фокусным расстоянием вслед за которой расположен свободный от оптических элементов промежуток длиной имеет вид (2.20) Чтобы решить нашу задачу с помощью этой АВСD-матрицы, выражение (2.15) нужно преобразовать к виду (2.21) где 1/q1 в соответствии с (2.13) дается выражением: (2.22) здесь 𝑧𝑅1 — рэлеевская длина, соответствующая размеру пятна в перетяжке 𝜔01 . Согласно (2.11), положение перетяжки пучка после линзы можно найти, если потребовать, чтобы величина 1/q2. как и 1/q1 была чисто мнимой. Из (2.21) и (2.22), используя конкретные значения матричных элементов, нетрудно показать, что (2.23) 16 Таким образом, мы с удивлением обнаруживаем, что минимальный размер пятна достигается на расстоянии 𝑧𝑚 которое всегда меньше фокусного расстояния Впрочем, следует отметить, что в обычных условиях 𝑧𝑅1 ≫ 𝑓, так что 𝑧𝑚 ~𝑓. Следовательно, если положить то размер пятна в фокальной плоскости получается из мнимой части формулы (2.21) в виде: 3. Выводы Радиусы кривизны волнового фронта исходя из формулы (2.8) зависит координаты, длинны волны и размера перетяжки. Размеры пучка на входе и выходе не изменяются, то есть 𝜔1 = 𝜔2 . 𝜆 Угол расходимости равен 𝜃 = 𝜋𝜔 . Образующая пучка представляет собой гиперболу. 0 Размер перетяжки зависит от длинны волны, а так же от длинны оптической среды. 17 4.ЛИТЕРАТУРА 1. Звелто, О. Принципы лазеров: Пер. с англ. – 3-е перераб. и доп. изд. / О. Звелто. – М.: Мир, 1990. – 560 с., ил.2. 2. Ландсберг Г.С. Отика М., 1976 г., 926 стр., с илл. 3. Ананьев Ю.А. Оптические резонаторы и лазерные пучки. — М.: Наука. Гл. ред. физ.-мат. лит., 1990. — 264 с. - ISBN 5-02-014363-4. 18