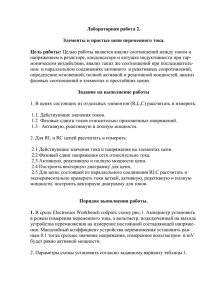
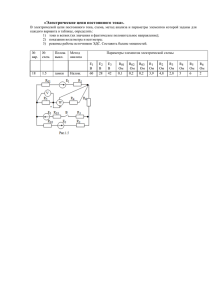
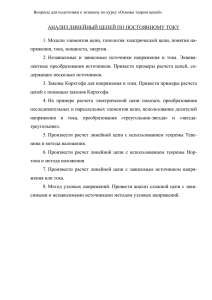
, ПРОЕКТИРОВАНИЕ И. В. Черных g электротехнических устройств : SimPowerSystems и Simulink з: f в MATLAB, ф ф � 'О о � ф >< % s J:. � � \� �а.,�';� -� (/) i ·�:- _,; � ,:-·�:: ::е ... о ф - (/) '< С/) (О 3 и s � 3 с: ::::1 71:' r 1 д;,� Windows 2000/XPjVista И. В.Черных Модепирование аnек1ротехнмческмхустроiств вМАТLАВ, SlmPowerSyatems и Slmullnk Москва • Санкт-Петербург • Нижний Новгород • Воронеж Новосибирск • Ростов-на-Дону • Екатеринбург • Самара Киев • Харьков • Минск 2008 ББК 32.973.26-018.2 УДК 004.438 Ч 45 Ч45 Черных И. В. Моделирование электротехнических устройств в МАTLAB, SimPowerSystems и Simulink. - М.: ДМК Пресс; СПб.: Питер, 2008. - 288 с.: ил. ISBN 5-94074-395-1 («ДМК Пресс») ISBN 978-5-388-00020-О («Питер») В 1<ииrе содержится описание приt<Ладной программы Simulink и библиоте1<и блоков SimPowerSystems, предназначенной длJ1 моделирования электротехничесt<Их уе1ройств и систем. РассмаЧJивается методика создания моделей с помощью графического интерфейса программы, описаны методЫ расчета моделей, подробно освещена методИt<а создания элеКЧJОтехничесt<Их блоков пользователя. Даны основные команды для управления моделью из ядра па1<ета МАТLАВ, рассмОЧJеН механизм выполнения расчета модели, приводятся советы автора по применению программы. Книга Вt<Лючает в себя большое количество примеров, поясняющих работу бло1<ов и методику создания модели. Издание предназначено длJ1 инженеров, научных работников, аспира,нтов и студентов, занимающихся моделированием в области электротехники. Черных Илья Викторович Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink Главный редактор Корректор Верстка Дизайн обложки [email protected] МовчанД. А. Си1111еваГ И Ча11нова А. А. Мовча11А. Г Налоговая льгота - общсроссийсt<Ий 1<Лассифи1<атор продукции ОК 005-93, том 2; 95 3005 - литература учебная. Подписано в печать 24.10.07. Формат 70х100/16. Усл. п. л. 23,22. Тираж 2000. Заказ 5281 Отпечатано по технологии CtP в ОАО ((ПечаlliыЙ двор» им. А. М. Горького. 197110, Санкт-Петербург, Чкаловскнй пр., д. 15. ООО «Питер Пресс», 198206, Санкт-Петербург, Петерrофское шоссе, д. 73, лит. А29. Издательство ДМК Пресс WеЬ-сайт издательства: [email protected] Intemet-мaraзин: www.abook.ru ISBN 5-94074-395-1 ISBN 978-5-388-00020-О © Черных И. В., 2008 © Оформление ДМК Пресс, 2008 Краткое содержание Введение ............................................................................ 1 О Глава 1 ОПЕРАЦИОННАSI СРЕДА SIMULINK ................................ 11 Глава 2 ОБЗОР ОСНОВНОЙ БИБЛИОТЕКИ SIMULINK ............... 27 ГлаваЗ БИБЛИОТЕКА БЛОКОВ SIMPOWERSYSTEMS ............... 35 Глава4 ГРАФИЧЕСКИЙ ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛSI POWERGUI ........................................................................ 215 Глава 5 СОЗДАНИЕ ЭЛЕКТРОТЕХНИЧЕСКИХ БЛОКОВ ПОЛЬЗОВАТЕЛЯ ............................................................. 238 Глава 6 БИБЛИОТЕКА НЕЛИНЕЙНЫХ МОДЕЛЕЙ ..................... 248 Глава 7 ОСНОВНЫЕ КОМАНДЫ MATLAB ДЛSI УПРАВЛЕНИЯ SРS-МОДЕЛЬЮ ............................. 252 Глава 8 КАК SIMPOWERSYSTEMS РАБОТАЕТ ........................... 260 Глава 9 СОВЕТЫ ПОЛЬЗОВАТЕЛSIМ SIMPOWERSYSTEMS .... 266 Приложение 1 СИСТЕМА МЕНЮ ОБОЗРЕВАТЕЛЯ БИБЛИОТЕК ПРОГРАММЫ SIMULINK .......................... 280 Приложение 2 СИСТЕМА МЕНЮ ОКНА МОДЕЛИ ................................. 281 Литература .................................................................... 286 Предметный указатель .............................................. 287 Содержание Введение .......................................................................... 10 Глава 1. Операционная среда Simulink ................... 11 1. 1. Запуск системы .............................................................. 12 1.2. Обозреватель библиотеки блоков Simulink ..................... 12 1.3. Создание модели ........................................................... 15 1.4. Основные элементы окна модели ................................... 17 1.5. Основные приемы подготовки и редактирования модели ........................................................................... 20 Добавление текстовых надписей ........................................ 20 Выделение объектов ......................................................... 20 Копирование и перемещение объектов в буфер хранения ..... 21 Вставка объектов из буфера хранения ................................ 21 Удаление объектов ........................................................... 21 Соединение блоков .......................................................... 21 Изменение размеров блоков ............................................. 22 Перемещение блоков и вставка блоков в соединение ........... 23 Использование команд Undo и Redo ................................... 23 Форматирование объектов ................................................ 23 1.6. Установка параметров моделирования и его выполнение ........................................................... 24 Установка параметров расчета модели ............................... 25 Выполнение расчета .......................................................... 26 Завершение работы ......................................................... 26 Глава 2. Обзор основной библиотеки Simulink ..... 27 2.1. Источники сигналов Sources ........................................... 28 2.2. Приемники сигналов Sinks .............................................. 28 2.3. Блоки непрерывных моделей Continuous ........................ 28 2.4. Блоки дискретных моделей Discrete ................................ 29 2.5. Нелинейные блоки Discontinuities ................................... 29 2.6. Блоки математических операций Math Operations ........... 30 2.7. Блоки маршрутизации сигналов Signal&Routing .............. 31 2.8. Блоки определения свойств сигналов Signal Attributes .... 31 2.9. Блоки задания таблиц 1:-ook-Up ТаЫеs ............................. 32 Содержание 5 2.10. Функции, определяемые пользователем User-defined Function .......................................................................... 32 2.11. Порты и подсистемы Ports & Subsystems ....................... 32 2.12. Блоки верификации сигналов Model Verification ............ 33 2.13. Библиотека дополнительных утилит Model-Wide Utilities ... 33 2.14. Блоки логических операций Logic and Bit Operations ...................................................................... 33 2.15. Часто используемые блоки Commonly Used Blocks ........ 34 2.16. Дополнительные математические и дискретные блоки Additional Math & Discrete ................................................ 34 Глава 3. Библиотека блоков SimPowerSystems ... 35 3.1. Состав библиотеки и основные особенности .................. 36 3.1.1. Состав библиотеки .................................................. 36 3.1.2. Основные особенности ........................................... 37 3.1.3. Единицы измерения электрических и неэлектрических величин ...................................... 39 3. 1.4. Повышение скорости и точности расчетов ................. 44 3.2. Источники электрической энергии Electricat Sources ...... 47 3.2.1. Идеальный источник постоянного напряжения DC Voltage Source .................................................... 47 3.2.2. Идеальный источник переменного напряжения АС Voltage Source .................................................... 48 3.2.3. Идеальный источник переменного тока АС Current Source ................................................................... 50 3.2.4. Управляемый источник напряжения Controlled Voltage Source ........................................................ 52 3.2.5. Управляемый источник тока Controlled Current Source ... 54 3.2.6. Трехфазный источник напряжения 3-Phase Source ..... 56 3.2.7. Трехфазный программируемый источник напряжения 3-Phase ProgrammaЫe Voltage Source ...... 58 3.3. Измерительные и контрольные устройства ..................... 61 3.3.1. Измеритель тока Current Measurement ....................... 61 3.3.2. Измеритель напряжения Voltage Measurement ............ 63 3.3.3. Мультиметр Multimeter ............................................ 65 3.3.4. Трехфазный измеритель Тhree-Phase V-I Measurement ..... 68 3.3.5. Измеритель полного сопротивления lmpedance Measurement .......................................................... 71 6 Моделирование электротехнических устройств в MATLAB 3.4. Электротехнические элементы Elements ......................... 73 3.4.1. Последовательная RLС-цепь Series RLC Branch .......... 73 3.4.2. Параллельная RLС-цепь Parallel RLC Branch ............... 75 3.4.3. Последовательная RLС-нагрузка Series RLC Load ....... 77 3.4.4. Параллельная RLС-нагрузка Parallel RLC Load ............ 80 3.4.5. Трехфазная последовательная RLС-цепь 3-Phase Series RLC Branch .................................................... 82 3.4.6. Трехфазная параллельная RLС-цепь 3-Phase Parallel RLC Branch ............................................................. 84 3.4.7. Трехфазная последовательная RLС-нагрузка 3-Phase Series RLC Load ....................................................... 86 3.4.8. Трехфазная параллельная RLС-нагрузка 3-Phase Parallel RLC Load ..................................................... 88 3.4.9. Трехфазная динамическая нагрузка 3-Phase Dynamic load .......................................................... 90 3.4.1О. Грозозащитный разрядник Surge Arrester ................. 93 3.4.11. Взаимная индуктивность Mutual lnductance .............. 95 3.4.12. Трехфазная взаимная индуктивность 3-Phase Mutual lnductance Z1-Z0 ................................................... 98 3.4.13. Выключатель переменного тока Breaker ................... 99 3.4.14. Трехфазный выключатель переменного тока 3-Phase Breaker ................................................... 102 3.4.15. Трехфазный короткозамыкатель 3-Phase Fault ........ 104 3.4.16. Линия электропередачи с сосредоточенными параметрами PI Section line .................................. 107 3.4.17. Трехфазная линия электропередачи с сосредоточенными параметрами 3-Phase PI Section line ...................................................... 11 О 3.4.18. Линия электропередачи с распределенными параметрами Distributed Parameters line ................ 111 3.4.19. Силовой трансформатор без учета насыщения стали сердечника linear Transformer ...................... 113 3.4.20. Силовой трансформатор с учетом насыщения стали сердечника SaturaЫe Transformer ................. 116 3.4.21. Трехфазный двухобмоточный трансформатор Three-phase Transformer (Two Windings) .................. 120 3.4.22. Трехфазный трехобмоточный трансформатор Three-phase Transformer (Three Windings) ............... 123 Содержание 7 3.4.23. Трехфазный трансформатор без учета насыщения сердечника ( 12 выводов} Three-phase Linear Transformer ( 12-terminals} ..................................... 126 3.4.24. Трехфазный трансформатор с первичной обмоткой, соединенной в зигзаг Zigzag Phase-Shifting Transf ormer .............................. ,.......................... 127 3.4.25. Многообмоточный трансформатор Multi-Winding Transformer ......................................................... 130 3.4.26. Трехфазный фильтр Three-Phase Harmonic Filter ..... 134 3.4.27. Заземление Ground ............................................. 135 3.4.28. Нейтраль Neutral .................................................. 137 3.4.29. Клемма Connection Port........................................ 138 3.5. Элементы силовой электроники Power Electronics ........ 139 3.5.1. Силовой диод Diode .............................................. 139 3.5.2. Тиристор Thyristor, Detailed Thyristor ........................ 142 3.5.3. Полностью управляемый тиристор GTO Thyristor ...... 145 3.5.4. Биполярный транзистор IGBT ..............: .................. 148 3.5.5. Транзистор Mosfet ................................................ 151 3.5.6. Идеальный ключ ldeal Switch ................................... 153 3.5.7. Универсальный мост Universal Bridge ...................... 156 3.5.8. Трехуровневый мост Three-Level Bridge ................... 158 3.6. Электрические машины Machines ................................. 162 3.6.1. Машина постоянного тока DC Machine .................... 162 3.6.2. Асинхронная машина Asynchronous Machine ............ 167 3.6.3. Упрощенная модель синхронной машины Simplified Synchronous Machine ............................................. 172 3.6.4. Синхронная машина Synchronous Machine ............... 175 3.6.5. Синхронная машина с постоянными магнитами Permanent Magnet Synchronous Machine .................. 179 3.6.6. Блок измерения переменных электрической машины Machines Measurement Demux .................... 182 3.6.7. Система возбуждения синхронной машины Excitation System ................................................... 185 3.6.8. Гидравлическая турбина с регулятором Hydraulic Turblne and Governor .............................................. 188 3.6.9. Паровая турбина с регулятором Steam Turblne and Governor ......................................................... 190 3.6.1 О. Универсальный стабилизатор энергосистемы Generic Power System Stabllizer .............................. 196 8 Моделирование электротехнических устройств в MATLAB 3.6.11. Многополосный стабилизатор энергосистемы Multiband Power System Stabilizer ........................... 198 3.6.12. Однофазная асинхронная машина Single Phase Asynchronous Machine .......................................... 202 3.6.13. Вентильный реактивный двигатель Switched Reluctance Motor ................................................. 206 3. 7. Модели для расчета векторным методом Phasor Elements . 209 3.7.1. Статический компенсатор реактивной мощности Static Var Compensator ........................................... 209 Глава 4. Графический интерфейс пользователя Powergui . . . . . . . . .. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 215 4. 1. Расчет схемы векторным методом ................................ 218 4.2. Дискретизация модели ................................................. 220 4.3. Расчет установившегося режима .................................. 221 4.4. Инициализация трехфазных схем, содержащих электрические машины ................................................ 223 4.5. Использование Simulink LTI-Viewer для анализа электрических схем ...................................................... 226 4.6. Определение импеданса цепи ...................................... 226 4.7. Гармонический анализ ................................................. 228 4.8. Создание отчета ........................................................... 230 4.9. Инструмент расчета характеристики намагничивания .. 232 4.1О. Расчет параметров линии электропередачи ............... 234 Глава 5. Создание электротехнических блоков пользователя . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238 5.1. Принцип создания электротехнических блоков пользователя ............................................................... 239 5.2. Модель нелинейного резистора ................................... 240 5.3. Модель насыщающегося реактора ............................... 241 5.4. Модель двигателя постоянного тока с независимым возбуждением .............................................................. 243 5.4.1. Математическое описание ДПТ НВ и его Simulink-мoдeль .................................................... 243 5.4.2. Модель двигателя на базе источника тока ................ 244 5.4.3. Модель двигателя на базе источника напряжения .... 245 Содержание 9 Глава 6. Библиотека нелинейных моделей ......... 248 Глава 7. Основные команды MATLAB для управления SРS-моделью . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252 7.1. Функция инициализации SРS-модели power_init ........... 254 7.2. Функция для определения математической модели линейной части электрической схемы power_statespace .......................................................... 255 7.3. Функция для анализа модели электрической схемы power _analyze ............................................................... 258 7.4. Функция для расчета параметров линии электропередачи power_lineparam ................................ 259 Глава 8. Как SimPowerSystems работает .............. 260 8.1. Алгоритм расчета SimPowerSystems-мoдeли ................ 261 8.2. Выбор метода интегрирования ..................................... 263 8.�. Особенности моделирования схем силовой электроники ................................................................. 264 Глава 9. Советы пользователям SimPowerSystems ...................... ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266 9.1. RLC «по-русски» ........................................................... 267 9.2. Задание начальных условий расчета ............................. 268 9.3. Модернизация блока Fourier ......................................... 279 9.4. Особенности блока Breaker .......................................... 271 9.5. Моделирование выбега электродвигателя .................... 271 9.6. Модель операционного усилителя ................................ 272 9.7. Открытие и сохранение моделей ранних версий ........... 276 9.8. Проведение серии вычислительных экспериментов ..... 278 Приложение 1 . Система меню обозревателя библиотек программы Simulink ........... . . . . . . . . . . . . . . . . . . . . 280 Приложение 2. Система r.1еню окна модели ....... 281 . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286 Предметный указатель . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287 Литература Введение Библиотека блоков SimPowerSystems ( в версии МАTLAB 6.1 и более ранних - Power System Blockset) является одной из множествадополнительных библиотек Simulink, ориентированных на моделирование конкретных устройств. SimPowerSystems со­ держит набор блоков для имитационного моделирования электротехнических устройств. В состав библиотеки входят модели пассивных и активных электро­ технических элементов, источников энергии, электродвигателей, трансформато­ ров, линий электропередачи и тому подобного оборудования. Имеется также раздел, содержащий блоки для моделирования устройств силовой электроники, включая си­ стемы управления для них. Комбинируя возможности Simulink и SimPowerSystems, пользователь может не только имитировать работу устройств во временной обла­ сти, но и выполнять различные виды анализа таких устройств. В частности, пользователь имеет возможность рассчитать установившийся режим работы сис­ темы на переменном токе, выполнить расчет импеданса ( полного сопротивления) участка цепи, получить частотные характеристики, проанализировать устойчи­ вость, а также выполнить гармонический анализ токов и напряжений. Несомненным достоинством SimPowerSystems является то, что сложные элект­ ротехнические системы можно моделировать, сочетая методы имитационного и структурного моделирования. Например, силовую часть полупроводникового преобразователя электрической энергии можно выполнить с использованием имитационных блоков SimPowerSystems, а систему управления - с помощью обычных блоков Simulink, отражающих лишь алгоритм ее работы, а не ее электри­ ческую схему. Такой подход, в отличие от пакетов схемотехнического моделиро­ вания, позволяет значительно упростить всю модель, а значит, повысить ее устой­ чивость и скорость работы. Кроме того, в модели с использованием блоков SimPowerSystems (в дальнейшем SРS-модели) можно использовать блоки и ос­ тальных библиотек Simulink, а также функции самого МАTLAB, что дает практи­ чески не ограниченные возможности для моделирования электротехнических си­ стем. Библиотека SimPowerSystems достаточно обширна. В том случае, если все же нужного блока в библиотеке нет, пользователь имеет возможность создать свой собственный блок как с помощью уже имеющихся в библиотеке блоков, реализуя возможности Simulink по созданию подсистем, так и на основе блоков основной библиотеки Simulink и управляемых источников тока или напряжения. Таким образом, SimPowerSystems в составе Simulink на настоящее время мо­ жет считаться одним из лучших пакетов для моделирования электротехнических устройств и систем. Глава 1 Операционная среда Simulink 1. 1. Запуск системы ...... ...................... . . ..... 12 1.2. Обозреватель библиотеки блоков Simulink ................................................ 12 1.3. Создание модели ................................. 15 1.4. Основные элементы окнэ модели ........ 17 1.5. Основные приемы подготоеки и редактирования модели .................... 20 1.6. Установка параметров моделирования и его выполнение ................................. 24 12 Операционная среда Simulink 1 . 1 . Запуск системы Для запуска программы Simulink необходимо предварительно запустить пакет МАTLAB. Рабочий стол системы МАTLAB с командным окном показан на рис. 1.1. Там же показана подсказка, появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов. Рис. 1. 1. Рабочий стол системы MATLAB После открытия основного окна программы MATLAB нужно запустить про­ грамму Simulink. Это можно сделать одним из трех способов: ► нажать кнопку (Simulink) на панели инструментов командного окна MATLAB; ► в строке командного окна МАТLАВ напечатать Simulink и нажать клавишу Enter на клавиатуре; ► выполнить команду Open... меню File и открыть файл модели (mdl-файл). Последний способ предпочтителен при запуске уже готовой и отлаженной мо­ дели, когда требуется лишь провести моделирование и не нужно добавлять новые блоки в модель. При применении двух первых способов открывается окно обозре­ вателя библиотеки блоков (рис. 1.2). 1 .2. Обозреватель библиотеки блоков Simulink Окно обозревателя библиотеки блоков Simulink Library Browser содержит сле­ дующие элементы (рис. 1.2): 1. Заголовок с названием окна - Simulink Library Browser. 2. Меню с командами File, Edit, View, Help. 3. Панель инструментов с кнопками наиболее часто используемых команд меню. Обозреватель библиотеки блоков Simulink [I]- 13 ...._=�==.;;.;,;;.,, ;-;;;;;;===:.;:-�:"'1.>I ;;;;;;;.;..;;._....,._ 0/.r�� 4 ""' Г,] /Elle fcl!_ � �/р 1, C-.,UoodBЬd<, � 1� - 0/IТ•� usedBlo<Ь ' 1 OiscDnthJiie � :ilconttuu :!t/Disae11r ;!t!-­ �­ iL)-4 LDIJIC .-dB•q,<,O!ln � LOD<Ц> TilJloc �м.t>Оро,•"'"' ;/lJ"'1odolv.r- DО�е 1 :1:1 Ра-1> а Swoys11rm1 ;!ils.,.., ..11rь.,,,,s blSl.1>alRoutn;i tljSOLtooc ;!tj,--F<n:ttn< j ' .� � Aeltl111CNI М.lh & OilcrelS � • ..,_,.elod<tot � J!�Rsl'ororceBlockoвt � 11, BiocЬot 18; Ca,rnl S',sll!m Т09Ьо,t Со.......,_,. •1 R№f 1 .> .:J !! . Рис. 1. 2. Обозреватель библиотеки блоков 4. Окно комментария для вывода поясняющего сообщения о выбранном раз­ деле библиотеки или блоке. 5. Список разделов библиотеки. 6. Окно для вывода содержимого раздела библиотеки (список вложенных разделов библиотеки или блоков). 7. Строка состояния, содержащая подсказку по выполняемому действию. На рис. 1.2 выделена основная библиотека Simulink (в левой части окна) и показаны ее разделы (в правой части окна). Основная библиотека системы Simulink содержит следующие разделы: ► Commonly Used Blocks - часто используемые блоки; ► Continuous - блоки аналоговых элементов; ► Discontinuities - нелинейные блоки; ► Discrete - дискретные блоки; ► Logic and Bit Operations - блоки логических и битовых операций; ► Look-Up ТаЫеs - блоки таблиц; ► Math Operations - блоки математических операций; ► Model Verification - блоки верификации сигналов; ► Model-Wide Utilities - раздел вспомогательных утилит; ► Ports & Subsystems - порты и подсистемы; ► Signal Attributes - блоки получения свойств сигналов; ► Signal&Routing- блоки преобразования сигналов и вспомогательные блоки; ► Sinks - приемники сигналов; ► Sources - источники сигналов; ► User-defined Function - функции пользователя; ► Additional Math & Discrete. 14 Операционная среда Simulink Список разделов библиотеки Simulink представлен в виде дерева, и правила рабо­ ты с ним являются общими для списков такого вида: пиктограмма свернутого узла дерева содержит символ«+», а пиктограмма развернутого содержит символ«-». Для того чтобы развернуть или свернуть узел дерева, достаточно щелкнуть на его пиктограмме левой клавишей мыши. При выборе соответствующего раздела библиотеки в правой части окна ото­ бражается его содержимое (рис. 1.3). ffle r lidtt Jl,lew l:ie'P о���-�--�-----�� Dee'f.•� �� ф.а/сl. 6 Рис. 1.3. Отображение содержимого библиотеки обозревателем блоков Для работы с окном используются команды, собранные в меню. Меню обозревателя библиотек содержит следующие пункты: ► File (Файл) - работа с файлами библиотек; ► Edit (Редактирование) - добавление блоков и их поиск (по назваtrию); ► View (Вид) - управление показом элементов интерфейса; ► Help (Справка) - вывод окна справки по обозревателю библиотек. Полный список команд меню обозревателя библиотек приведен в приложении 1. Для работы с обозревателем можно также использовать кнопки на панели ин­ струментов (рис. 1.4). ?-Т i-f-1--=---ь-•--=-,,;...,...;,;;, __ , ,.,_J 1 1 З ◄ Рис. 1.4. Кнопки панели инструментов обозревателя Создание модели 15 Кнопки панели инструментов имеют следующее назначение: 1. Создать новую Simulink-мoдeль (открыть новое окно модели). 2. Открыть одну из существующих S-моделей. 3. Изменить свойство окна обозревателя «всегда сверху». После нажатия на кнопку окно обозревателя будет отображаться поверх других открытых окон. 4. Найти блок, название которого ( или первые несколько символов названия) указано в расположенном справа от кнопки текстовом поле. Если требуе­ мый блок найден, в окне обозревателя открывается соответствующий раз­ дел библиотеки, а блоI< отображается как выбранный, в противном случае в подокне комментария выводится сообщение Not found <имя блока> (Блок <имя> не найден). 1 .3. Создание модели Для создания модели в среде SIMULINK необходимо последовательно выпол­ нить ряд действий: 1. Создать новый файл модели с помощью команды File ⇒ New ⇒ Model (здесь и далее с помощью символа«⇒» указывается последовательность вызова пунктов меню) или используя кнопку Q на панели инструментов. Вновь созданное окно модели показано на рис. 1.5. file l;.dlt i(iew D �lil� w,,-,lation 1'!»,м� IooJs �11) • • •JioF""/н.....i Э gj�[D� ;· "'0!1& Рис. 1.5 Пус10е окно модели 2. Расположить блоки в окне модели. Для этого необходимо открыть соответ­ ствующий раздел библиотеки. Далее, указав курсором на требуемый блок и нажав на левую клавишу мыши,«перетащить» блок в созданное окно. Кла­ вишу мыши нужно держать нажатой. На рис. 1.6 показано окно модели, со­ держащее блоки. Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу мыши), а затем нажать клавишу Delete на клавиатуре. 3. Да.лее, если это требуется, нужно изменить параметры блока, установлен­ ные по умолчанию. Для этого необходимо дважды щелкнуть левой клави­ шей мыши, указав курсором на изображение блока. Откроется окно редак­ тирования параметров данного блока. При вводе численных параметров 16 Операционная среда Simulink .... Рис. 1.6. Окно модели с блоками следует иметь в виду, что в качестве десятичного разделителя должна ис­ пользоваться точка, а не запятая. После внесения изменений нужно за­ крыть окно кнопкой ОК. Можно также, не закрывая окна, воспользоваться кнопкой Apply для сохранения изменений. На рис. 1.7 в качестве примера показаны блок, моделирующий передаточную функцию, и окно редактиро­ вания параметров данного блока. 'fцt\llflf)ffcn 14_ _,_,.,.._...,, __ ,.,_ -- � ............ in.. � с..-......... ь��.d J Рис. 1.7. Блок передаточной функции и его окно параметров 4. После установки на схеме всех блоков требуется выполнить соединение элементов схемы. Для этого необходимо указать курсором на «выход» бло­ ка, а затем нажать и, не отпуская левую клавишу мыши, провести линию ко входу другого блока. После чего отпустить клавишу. Если соединение не создано, то линия связи будет пунктирной и иметь красный цвет. В случае правильного соединения линия связи будет сплошной. Для создания линии связи можно также выделить блок-источник сигнала, затем нажать кла­ вишу Ctrl на клавиатуре и выделить блок-приемник. Для создания точки разветвления в соединительной линии нужно подвести курсор к предпола­ гаемому узлу и, нажав правую клавишу мыши, протянуть линию. Для уда­ ления линии требуется выбрать линию, а затем нажать клавишу Delete на Основные элементы окна модели 17 клавиатуре. Схема модели, в которой выполнены соединения между блока­ ми, показана на рис. 1.8. BI� Q Edlt !t1ew Sln1Ulatton �liHI f"\ �Q: liJ'nl,llt Ioo/5 1:1е1Р ► •Fn� -� i1 SH5cr!Ф Рис. 1.8. Готовая модель 5. После составления расчетной схемы необходимо сохранить ее в виде файла на диске, выбрав пункт меню File ⇒ Save As... в окне схемы и указав папку и имя файла. Следует иметь в виду, что имя файла не должно превышать 64 символов, должно начинаться с буквы и содержать только алфавитно­ цифровые символы латиницы и знак подчеркивания. Это же требование (за исключением длины названия) относится и к пути файла. При последую­ щем редакт11ровании схемы можно пользоваться пунктом меню File ⇒ Save. При повторных запусках программы SIMULINK загрузка схемы осу­ ществляется с помощью меню File ⇒ Open ... в окне обозревателя библиоте­ ки или из командного окна системы МАTLAB. 1 .4. Основные элементы окна модели Окно модели содержит следующие элементы (рис. 1.9): 1. Заголовок с названием окна. Вновь созданному окну присваивается имя Untitled с соответствующим номером. 2. Панель меню - File, Edit, View, Simulation, Fonnat, Tools и Help. 3. Панель инструментов. 4. Окно для создания схемы модели. 5. Строка состояния, содержащая информацию о текущем состоянии модели. Меню окна содержит команды для редактирования модели, ее настройки и управления процессом расчета, работы с файлами и т. п.: ► File (Файл) - работа с файлами моделей; ► Edit (Редактирование)- изменение модели и поиск блоков; ► View (Вид) - управление показом элементов модели и интерфейса; ► Simulation (Моделирование) - задание настроек для моделирования и управление процессом расчета; ► Fonnat (Форматирование) - изменение внешнего вида блоков и модели в целом; 18 Операционная среда Simulink :ilmulatюo, FQrmat :{ools J:ie(p 11'\ ;., >.: ► roo-· jNomмl - j( _:j g/ !(1 @) � Рис. 1.9 Основные элементы окна модели ► Tools (Инструментальные средства) - применение специальных средств для работы с моделью (отладчик, инструмент линейного анализа и т. п.); ► Help (Справка) - открытие окна справочной системы. Полный список команд меню окна модели приведен в приложении 2. Для работы с моделью можно также использовать кнопки на панели инстру­ ментов (рис. ·1. 10). D 1 1 !то IN':mat Э ш Мэ @1 � tffi -. in rs !)- � 1 1 1 10! 111 121 1 1 1 1 1 191 201 .21! 221 231 g 9 13 14 15 16 17 1 & �с ► • Рис. 1. 10. Панель инструментов окна модели Кнопки панели инструментов имеют следующее назначение: 1. New Model- открыть новое (пустое) окно модели; 2. Open Model - открыть существующий файл модели (mdl-файл); 3. Save Model - сохранить файл на диске; 4. Print Model - вывод на печать схемы модели; 5. Cut - вырезать выделенную часть модели в буфер промежуточного хра­ нения; 6. Сору - скопировать выделенную часть модели в буфер промежуточного хранения; 7. Paste - вставить в окно модели содержимое буфера промежуточного хра­ нения; 8. Undo - отменить предыдущую операцию редактирования; 9. Redo - восстановить результат отмененной операции редактирования; 1О. Start/Pause/Continue Simulation - запуск модели на исполнение (команда Start); после запуска модели на изображении кнопки выводится символ 11 , и ей соответствует уже команда Pause (приостановить моделирова­ ние). Для возобновления моделирования после паузы следует шелю1уть но Основные элементы окна модели 19 той же кнопке, поскольку в режиме паузы ей соответствует команда Con­ tinue (Продолжить); 11. Stop - закончить моделирование. Кнопка становится доступной после на­ чала моделирования, а также после выполнения команды Pause; 12. Simulation Stop T ime - время окончания моделирования. Позволяет задать время окончания расчета; 13. Normal/Accelerator - обычный/ускоренный режим расчета. Инструмент доступен, если установлено приложение Simulink Performance Tool; 14. Show when hovering- показывать значения сигналов на выходах блока при наведении на блок указателя мыши; 15. IncrementaJ BuiJd - генерировать код для инструмента Real Time Workshop (мастерская реального времени); 16. Refresh Model Blocks - обновить входные и выходные порты и параметры всех блоков модели; 17. Update diagram - обновить окно модели; 18. Build Subsystem - создать исполняемый код подсистемы; 19. Library Browser - открыть окно обозревателя. Если обозреватель уже от­ крыт, то его окно будет выведено поверх всех остальных окон; 20. Launch model Explorer - открыть окно исследователя модели (инструмен­ та, систематизирующего информацию о модели); 21. Toggle Model Browser - открыть окно обозревателя модели. При использо­ вании данного инструмента в левой части окна модели будет открыто до­ полнительное окно, содержащее изображение иерархической структуры модели в виде дерева; 22. Go to parent system - переход из подсистемы в систему высшего уровня иерархии ( �родительскую систему�). Команда доступна, только если от­ крыта подсистема; 23. Debug - запуск отладчика модели. В нижней части окна модели находится строка состояния, в которой отобража­ ются кратки� комментарии к кнопкам панели инструментов, а также к пунктам меню, когда указатель мыши находится над соответствующим элементом интер· фейса. Это же текстовое поле используется и для индикации состояния Simulink: Ready (Готов) или Running (Выполнение). В строке состояния отображаются также: ► масштаб отображения блок-диаграммы (в процентах, исходное значение равно 100%); ► индикатор степени завершенности сеанса моделирования (появляется пос­ ле запуска модели); ► текущее значение модельного времени (выводится также только после за­ пуска модели); ► используемый метод расчета состояний модели. 20 Операционная среда Simulink 1.5. Основные приемы подготовки и редактирования модели Добавление текстовых надписей Для повышения наглядности модели удобно использовать текстовые надписи. Для создания надписи достаточно указать мышью место надписи и дважды щелк­ нуть левой кнопкой мыши. После этого появится блок надписи с курсором ввода. Так же можно изменить и подписи к блокам моделей. Для этого нужно установить мышь в область надписи и щелкнуть левой кнопкой мыши - в подписи появится курсор ввода, и ее можно будет редактировать. На рис. 1.11 показаны текстовая надпись и изменение надписи в блоке Transfer Function. Следует иметь в виду, что только начиная с версии программы Simulink 6.5 (MATLAB 2006Ь) допустимо использование кириллических шрифтов. Более ранние версии Simulink не адап­ тированы к их использованию, и применение таких шрифтов может иметь самые разные последстьия: отображение надписей в нечитаемом виде, обрезание надпи­ сей, сообщения об ошибках, а также невозможность открыть модель после ее со­ хранения. Поэтому применение надписей на русском языке для ранних версий Simulink крайне не желательно. 1:ilm<�вtlon 1';i f·{l'n181 Lool<I Г,0:0- ]N_, Thls ls rho text strinQ !jelp ш- :] /R /М @J � ,. (:щ 15 i � ,100% Рис. 1. 11. Создание текстовых надписей Выделение объектов Для выполнения какого-либо действия с элементом модели (блоком, соедини­ тельной линией, надписью) этот элемент необходимо сначала выделить. Выделе­ ние объектов удобнее всего осуществляется с помощью мыши. Для этого необхо­ димо установить курсор мыши на нужном объекте и щелкнуть левой кнопкой мыши. Объект будет выделен. Об этом будут свидетельствовать маркеры по уг­ лам объекта (см. рис. 1.11). Можно также выделить несколько объектов. Для этого требуется установить курсор мыши вблизи них, нажать левую кнопку мыши и, удерживая ее, начать перемещать мышь. Появится пунктирная рамка, размеры которой будут изменяться при перемещении мыши. Все охваченные рамкой объекты становятся выделенными. Для выделения всех объектов в модели удобно использовать команду Edit ⇒ Select АН. После выделения объекта его можно ко- Основные приемы подготовки и редактирования модели 21 пировать или перемещать в буфер промежуточного хранения, извлекать из буфера, а также удалять, используя стандартные приемы работы в Windows-пporpaммax. Копирование и перемещение объектов в буфер хранения Для копирования объекта в буфер ero необходимо предварительно вьщелить, а затем выполнить команду Edit ⇒ Сору или воспользоваться инструментом � на панели инструментов. Для вырезания объекта в буфер ero необходимо предварительно выделить, а затем выполнить команду Edit ⇒ Cut или воспользоваться инструментом Х:, на панели инструментов. При выполнении данных операций следует иметь в виду, что объекты помещаются в собственный буфер МАTLAB и недоступны из других приложений. Использование команды Edit => Сору model to Clipboard позволяет поместить графическое изображение модели в буфер Windows и, соответственно, делает его доступным для остальных программ. Копирование можно выполнить и таким образом: нажать правую клавишу мыши и, не отпуская ее, переместить объект. При этом будет создана копия объек­ та, которую можно переместить в необходимое место. Вставка объектов из буфера хранения Для вставки объекта из буфера необходимо предварительно указать место встав­ . ки, щелкнув левой клавишей мыши в предполагаемом месте вставки, а затем выполнить команду Edit => Paste или воспользоваться инструментом ,е на панели инструментов. Удаление объектов Для удаления объекта его необходимо предварительно выделить, а затем выпол­ нить команду Edit => Clear или воспользоваться клавишей Delete на клавиатуре. Нужно помнить, что команда Clear удаляет блок без помещения ero в буфер обме­ на. Однако эту операцию можно отменить командой меню File => Undo. Соединение блоков Для соединения выхода одного блока со входом другого курсор мыши устанавли­ вается на выходе блока, от которого должно исходить соединение. При этом кур­ сор превращается в большой крест из тонких линий (рис. 1.12). Держа нажатой левую кнопку мыши, необходимо переместить курсор ко входу следующего бло­ ка, где курсор мыши приобретет вид креста из тонких сдвоенных линий (рис. 1.13). Добившись протяжки линии ко входу следующего блока, следует от­ пустить левую кнопку мыши. Соединение будет завершено, и в конце ero появит­ ся жирная стрелка. 22 Операционная среда Simulink �lmuldtloo Fi)fJl>u1 I<><>ls 1:J.elp � ► jio'o� Э'1 � tn 11,1 О----1-- COl'WШII Re'!dy в Soop• 100% Рис. 1. 12. Начало проведения линии Elle li.(!it \/.lew �inц1.11lon Fll!"\'nilt l<X>I� /з<,lр Q .,j: g iO fl !) ► * pnD � .q:/ Ь @\ С, J iit !14 flli > -! 0---+В *",. Coflltaflf Рис. 1. 13. Завершение проведения линии Созданную линию можно выделить, признаком чего будут квадрап,ые марке­ ры, расположенные в узловых точках соединительной линии (см. рис. 1.14). Для выделенной линии доступны те же операции, что и для блоков модели: удаление, перемещение, копирование в буфер промежуточного хранения и т. д. Иногда требуется сделать петлю соединительной линии в ту или иную сторо­ ну. Для этого нужно захватить фрагмент линии и отвести его в нужную сторону, перемещая мышь с нажатой левой кнопкой. Рисунок 1.14 поясняет этот процесс. Изменение размеров блоков Для изменения размера блока он выделяется, после чего курсор мыши необходи­ мо установить на один из маркеров по углам блока. Как только курсор мыши пре­ вратится в двунаправленную диагональную стрелку, можно будет при нажатой [1/е Edlt Jllew Wmufatlon F(!rl'l'lat Ioof• 1:!elp D r.;Qfi .а · ► •foo"°� !1/е@Ф Рис. 1. 14. Создание петли линии 19�!11 * Основные приемы подготовки и редактирования модели 23 левой кнопке растягивать блок по диагонали, увеличивая или уменьшая его раз­ меры (см. рис. 1.15). При этом изменяется только графическое изображение бло­ ка, а размеры его названия в виде текстовой надписи остаются прежними. flle Edit !llrw /ilitdlltlott F:s,mllt !OC>ls � о wi g. . 0 .!:l 1 • • /ito"j;;;;;;-3, gJ. � ф .l • ш,. '! "' Рис. 1. 15. Изменение размеров блока перемещение блоков и вставка блоков в соединение Блок, участвующий в соединении, можно перемещать в окне модели, выделив его и перетаскивая, как обычно, мышью. При этом соединение не разрывается, а просто сокращается или увеличивается в длине. В длинное соединение можно вставить новый блок, поместив его в нужном месте линии. Такая вставка возможна лишь для блоков, имеющих один вход и один выход, которые включаются в соединение. Использование команд Undo и Redo В процессе освоения программы пользователь может совершать действия, кажу­ щиеся на первый взгляд необратимыми (например, случайное удаление части мо­ дели, наложение блоков друг на друга при копировании и т. д.). В этом случае следует воспользоваться командой Undo - отмена последней операции. Команду можно вызвать с помощью кнопки в панели инструментов окна модели или из меню Edit. Для восстановления отмененной операции служит команда Redo (ин­ струмент Q ). Форматирование объектов В меню Fonnat (так же как и в контекстном меню, вызываемом нажатием правой клавиши мыши на объекте) находится ряд команд форматирования блоков. Их можно разделить на несколько характерных групп. 1. Управление отображением надписей и видом блоков: ► ЕnаЫе ТеХ comrnands - включить выполнение специальных текстовых команд для отображения математических символов, греческих букв и т. п.; ► Text alignrnent - выравнивание текста в текстовом блоке; 24 Операционная среда Simulink 2. 3. 4. 5. ► Flip name - помещение подписи блока сверху или снизу блока; ► Show/Hide name - отображение или скрытие подписи выделенного блока; ► Show drop shadow - показ тени от блока; ► Show port labels - показ меток портов. Установка цветов: ► Foreground color - установка цвета линий выделенных блоков; ► Background color - установка цвета фона для выделенных блоков; ► Screen color - установка цвета фона для всего окна модели. Изменение положения блока: ► Flip Ыосk - зеркальное отображение относительно вертикальной оси симметрии; ► Rotate Ыосk - поворот блока на 90° по часовой стрелке. Форматирование надписей. Команда Format ⇒ Font выводит окно с уста­ новками шрифта для текстовых надписей, позволяющее изменять вид шрифта надписи, размер шрифта, начертание и тому подобные параметры надписи. Прочие установки: ► Library link display - отображение связей с библиотеками; ► Sample time colors - установка цвета блока индикации времени; ► Wide nonscalar lines - увеличение/уменьшение ширины нескалярных линий; ► Signal dimensions - отображение размерности сигналов; ► Port data types - вывод данных о типе портов; ► Storage class - класс памяти. Параметр, устанавливаемый при работе Real-Time Workshop; ► Execution order - вывод порядкового номера блока в последовательно­ сти исполнения. 1.6. Установка параметров моделирования и его выполнение Перед выполнением расчетов необходимо предварительно задать параметры расчета. Задание параметров расчета выполняется в панели управления меню Simulation ⇒ Coofiguration Parameters. Вид панели управления приведен на рис. 1.16. В левой части панели управления находится список групп настраиваемых параметров. При выборе какой-либо группы параметров в левой части окна по­ является панель, позволяющая изменять параметры данной группы. Установка параметров моделирования выполняется с помощью элементов управления, раз­ мещенных в панели Solver (Решатель). Эти элементы разделены на две группы (рис. 1.16): Simulation time (Интервал моделирования) и Solver options (Пара­ метры расчета). Установка параметров моделирования и его выполнение 25 TJo!)I' м.,.,...,. /v.. -., .:J s,;.., 1ode45 ID-'1c,) ---•�1;,--_,-. -----; ...., ,,.. -----=·а.......,_f1е-э ........ -. ,_ �......,_ 1Ь:,1 .--"-;,.._,,.....,,-U.. ---3--..· Рис. 1. 16. Окно настройки параметров расчета Установка параметров расчета модели Simulation time: [интервал моделирования]. Величина интервала моделирования задается с по­ мощью указания начального (Start time) и конечного (Stop time) значений време­ ни расчета. Начальное время, как правило, задается равным нулю. Величина ко­ нечного времени задается пользователем исходя из условий решаемой задачи. Solver options: [параметры решателя]. При выборе параметров решателя необходимо указать метод интегрирования (Туре) либо с фиксированным (Fixed-step), либо с пере­ менным (VariaЬle-step) шагом. Как правило, VariaЬle-step используется для моде­ лирования непрерывных систем, а Fixed-step - для дискретных. Можно выбрать один из следующих �етодов: ► ode45 - одношаговые явные методы Рунге-Кутта 4-ro и 5-го порядка; ► ode23 - одношаrовые явные методы Рунrе-Кутта 2-ro и 3-го порядка; ► ode113 - многошаговый метод Адамса-Башворта-Мултона переменного порядка; ► ode15s - мноrошаговый метод переменного порядка (от 1 до 5), использую­ щий формулы численного дифференцирования; ► ode23s - одношаговый метод, использующий модифицированную формулу Розенброка 2-го порядка; ► ode23t - метод трапеций с интерполяцией; ► ode23tb - неявный метод Рунге-Купа в начале решения и метод, исполь­ зующий формулы обратного дифференцирования 2-ro порядка в после­ дующем. 26 Операционная среда Simulink Содержимое панели Configuration Parameters может меняться в зависимости от выбранного метода интегрирования и решателя. Основные параметры решате­ лей для разных методов интегрирования приведены ниже: ► Мах step size - максимальный шаг интегрирования. По умолчанию он устанавливается автоматически (auto), и его значение в этом случае равно (StopTime - StartTime)/50. Довольно часто это значение оказывается слишком большим, и наблюдаемые графики представляют собой ломаные, а не плавные линии. В этом случае величину максимального шага расчета необходимо задават-ь явным образом; ► Min step size - минимальный шаг интегрирования; ► Initial step size - начальное значение шага интегрирования; ► Zero crossing control - контроль пересечения нулевого уровня. Значение параметра выбирается из списка: Use !оса! setting (Использовать настройки блоков), ЕnаЫе оп ( Включить для всех блоков), DisaЫe оп ( Выключить для всех блоков). Параметр позволяет управлять точностью расчета при пере­ сечении сигналами нулевого уровня. При отключении Zero crossing control может быть существенно повышена скорость расчета, но будет снижена точность; ► Relative tolerance - относительная погрешность; ► Absolute tolerance - абсолютная погрешность; ► Fixed step size - фиксированный шаг расчета. Параметр доступен при вы­ боре метода интегрирования с фиксированным шагом. Выполнение расчета Запуск расчета выполняется с помощью выбора пункта меню Simulation ⇒ Start. или инструмента ► на панели инструментов. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или инструмент ■ . Расчет также можно остановить (Simulatioo ⇒ Pause) и затем продолжить (Simulatioo ⇒ Cootinue). Завершение работы Для завершения работы необходимо сохранить модель в файле, закрыть окно мо­ дели, окно обозревателя библиотек, а также командное окно пакета MATLAB. Глава 2 Обзор основной библиотеки Simulink 2.1. Источники сигналов Sources ................ 28 2.2. Приемники сигналов Sinks ................... 28 2.3. Блоки непрерывных моделей continuous ............................................ 28 2.4. Блоки дискретных моделей Discrete .... 29 2.5. Нелинейные блоки Discontinuities ........ 29 2.6. Блоки математических операций Math Operations .................................... 30 2.7. Блоки маршрутизации сигналов Signal&Routing ...................................... 31 2.8. Блоки определения свойств сигналов Signal Attr1butes .................................... 31 2.9. БлОl(И задания таблиц Look-Up ТаЫеs .. 32 2.10. Функции, определяемые пользователем User-defined Function " 32 2. 11. Порты и подсистемы Ports & Subsystems ......................................... 32 2.12. Блоки верификации сигналов Model Ver ification .......................................... 33 2.13. Библиотеl(а дополнительных утилит Model-Wide Utilities ............................. 33 2.14. Блоl(и логических операций logic and Bit Operations ............................... 33 2.15. Часто используемые блоки Commonly Used Blocks ........................ 34 2.16. Additional Math & Discrete .................... 34 28 Обзор основной библиотеки Simulink 2.1. Источники сигналов Sources 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. Constant - источник постоянного сигнала. Sine Wave - источник синусоидального сигнала. Ramp - источник линейно-изменяющегося воздействия. Step - генератор ступенчатого сигнала. Signal Generator - генератор сигналов. Uniform Rundom Number - источник случайного сигнала с равномерным распределением. Random Number - источник случайного сигнала с нормальным распреде­ лением. Pulse Generator - источник импульсного сигнала. Chirp Signal - генератор линейно-изменяющейся частоты. Band-Limited W hite Noise - генератор белого шума. Clock - источник времени. Digital Clock- дискретный источник времени. From File - блок считывания данных из файла. From Workspace - блок считывания данных из рабочей области MATLAB. Ground - формирователь сигнала нулевого уровня. Repeating Sequence - источник периодического сигнала. Inport - входной порт. Signal Builder - конструктор сигналов. Repeating Sequeoce Stair - источник ступенчатого периодического сигнала. Repeating Sequence Interpolated - источник периодического сигнала с ин­ терполяцией. Couoter Free-Runoing - источник сигнала типа �счетчик•. Counter Limited - источник типа �счетчик с ограничением•. 2.2. Приемники сигналов Sinks 1. 2. 3. 4. 5. · 6. 7. 8. 9. Scope - осциллограф. Floating Scope - �плавающий• осциллограф. ХУ Graph - графопостроитель. Display - цифровой дисплей. Stop Simulation - блок остановки моделирования. То File - блок записи в файл. То Workspace - блок записи в рабочую область MATLAB. Terminator - концевой приемник. Outport - выходной порт. 2.3. Блоки непрерывных моделей Continuous 1. Derivative - блок вычисления производной. 2. Integrator - интегратор. Нелинейные блоки Discontinuities 3. 4. 5. 6. 7. 29 Transport Delay - блок фиксированной задержки сигнала. VariaЫe Transport Delay -блок управляемой задержки сигнала. Transfer Fcn - передаточная функция. Zero-Pole - передаточная функция <<нули-полюса». State-Space - объект пространства состояний. 2.4. Блоки дискретных моделей Discrete 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. Unit Delay - единичная дискретная задержка. Zero-Order Hold - экстраполятор нулевого порядка. First-Order Hold - экстраполятор первого порядка. Discrete-Time lntegrator - дискретный интегратор. Discrete Transfer Fcn - дискретная передаточная функция. Discrete Zero-Pole- дискретная передаточная функция «нули-полюса». Discrete Filter - дискретный фильтр. Discrete State-Space - дискретный объект пространства состояний. Memory - блок задержки на один расчетный шаг. Integer Delay -блок задержки дискретного сигнала на n расчетных шагов. Tapped Delay - блок задержки дискретного сигнала на n расчетных шагов с выводом всех задержанных сигналов. Difference -блок вычисления приращения сигнала за один расчетный шаг. Discrete Derivative - блок вычисления производной дискретного сигнала. Transfer Fcn First Order - дискретная передаточная функция первого по­ рядка. Transfer Fcn Lead or Lag - передаточная функция, компенсирующая за­ держку или опережение сигнала. Transfer Fcn Real Zero -передаточная функция с действительными нулями. Weighted Moving Average -блок вычисления скользящего среднего значе­ ния входного сигнала с учетом весовых коэффициентов. 2.5. Нелинейные блоки Discontinuities 1. 2. 3. 4. 5. 6. 7. 8. Saturation - ограничитель. Dead Zone -зона нечувствительности. Relay - реле. Rate Limiter -блок ограничения скорости изменения сигнала. Quantizer - квантователь. Coulomb and Viscous Friction -блок сухого и вязкого трения. Backlash - люфт. Hit Crossing - блок определения момента пересечения порогового зна­ чения. 9. Saturation Dynamic - управляемый ограничитель. 10. Dead Zone Dynamic -управляемая зона нечувствительности. 30 Обзор основной библиотеки Simulink 11. Rate Limiter Dynamic - управляемый блок ограничения скорости измене­ ния сигнала. 12. Wrap То Zero - блок, выполняющий сброс сигнала до нулевого уровня. 2.6. Блоки математических операций Math Operations 1. 2. 3. 4. 5. 6. 7. 8. 9. 1 О. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. Abs - блок вычисления модуля. Sum - сумматор (пиктограмма в виде окружности). Product - умножитель. Sign - определитель знака. Gaio, Matrix Gain - усилитель. Slider Gain - ползунковый регулятор. Dot Product - блок скалярного умножения векторов. Math Function - математическая функция. Trigonometric Function - тригонометрическая функция. Complex to Real-Image - блок вычисления действительной и (или) мнимой части комплексного числа. Complex to Magnitude-Angle - блок вычисления модуля и (или) аргумента комп.liексноrо числа. Real-Image to Complex - блок расчета комплексного числа по его действи­ тельной и мнимой части. Magnitude-Angle to Complex - блок расчета комплексного числа по его модулю и аргументу. MinMax - блок вычисления максимального или минимального значения. Rounding Function - блок округления числа. Algebraic Constraint - блок алгебраического контура. Assignment - блок присвоения элементам массива новых значений. Matrix Concatenation - блок объединения сигналов в матрицу. Reshape - преобразователь размерности сигнала. Polynomial - степенной многочлен. Add- сумматор (пиктограмма в виде прямоугольника). Subtract - блок вычисления разности. Swn of Elements - блок вычисления суммы элементов вектора. Bias - смещение. Product of Elements - блок вычисления произведения элементов вектора. Weighted Sample Time Math - блок поддержки вычислений, использующих шаг дискретизации. Divide - блок деления. Unary Minus - унарный минус. MinMax Runniog ResettaЫe - блок вычисления максимального или мини­ мальногь значения с возможностью сброса. Блоки определения свойств сигналов Signal Attributes 31 30. Sine Wave Function - синусоидальная функция. 2.7. Блоки маршрутизации сигналов Signal&Routing 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. Mux - мультиплексор. Demux - демультиплексор. Bus Creator - шинный формирователь. Bus Selector - шинный селектор. Selector - селектор. Merge - объединитель сигналов. Goto - блок передачи сигнала. From - блок приема сигнала. Goto Tag V isibllity - блок признака видимости сигнала. Data Store Memory- блок создания общей области памяти. Data Store Write - блок записи в именованную область памяти. Data Store Read- блок считывания из именованной области памяти. Switch - переключатель. Multiport Switch - многовходовой переключатель. Manual Switch - ручной переключатель. Bus Assignment - блок, выполняющий замену сигнала в шине. Environment Controller - контроллер среды. Index Vector - переключатель элементов вектора. 2.8. Блоки определения свойств сигналов Signal Attributes 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. Data Туре Conversion - преобразователь типа сигнала. Width - блок определения размерности сигнала. IC - блок установки начального значения. Signal Specification - блок проверки спецификаций сигнала. Probe - датчик свойств сигнала. Rate Transition - блок согласования дискретных сигналов. Data Туре Duplicate - проверка совпадения типа данных. Data Туре Propagation - преобразование типа сигнала в соответствии с ти­ пом образцового сигнала. Data Туре Scaling Strip - масштабирование сигнала с фиксированной точкой. Data Туре Conversion Inherited - преобразование типа входного сип,ала. Signal Conversion - преобразование векторного сигнала. Weighted Sample Time - блок определеиия величииы шага дискретизации (вариант блока Weighted Sample Time Math). 32 Обзор основной библиотеки Simulink 2.9. Блоки задания таблиц Look-Up ТаЫеs 1. 2. 3. 4. 5. 6. 7. 8. 9. Look-Up ТаЫе - одномерная таблица. Look-Up ТаЫе (2D) - двумерная таблица. Look-Up ТаЫе (n-D) - многомерная таблица. Direct Look-Up ТаЫе (n-D) - многомерная таблица с прямым доступом к элементам. PreLook-Up Index Search - блок обработки индексов. Interpolation (n-D) using PreLook-Up - блок интерполяции табличной функции. Lookup ТаЫе Dynamic - одномерная таблица. Табличные данные задаются внешними сигналами. Sine - табличная функция sin. Cosine - табличная функция cos. 2. 1О. Функции, определяемые пользователем User-defined Function 1. 2. 3. 4. 5. 6. Fcn - блок задания функции. MATLAB Fcn - блок задания МАТLАВ-функции. S-function - $-функция. S-Function Builder - конструктор $-функции на языке С. Embedded MATLAB Function - вложенная МАТLАВ-функция. Level-2 M-file S-Function - блок задания $-функции второго уровня. 2. 11. Порты и подсистемы Ports & Subsystems 1. Subsystem, Atomic Subsystem - виртуальная и неделимая подсистемы. 2. EnaЬled Subsystem, EnaЫed - управляемая наличием сигнала подсистема и ее блок управления. 3. Triggered Subsystem, Trigger - управляемая фронтом сигнала подсистема и ее блок управления. 4. EnaЬled and Triggered Subsystem - управляемая уровнем и фронтом сигна­ ла подсистема. 5. Function-Call Subsystem - управляемая функцией подсистема и ее блок управления. 6. Function-Call Generator - внешний блок управления FС-nодсистемой. 7. If - блок условного оператора. 8. Switch Case - блок переключателя. 9. If Action Subsystem - управляемая условием подсистема. 10. Switch Case Action Subsystem - переключаемая подсистема. Logic and Bit Operations 33 11. 12. 13. 14. For Iterator Subsystem - управляемая циклом For подсистема. While lterator Subsystem - управляемая циклом While подсистема. ConfiguraЫe Subsystem - переконфиrурируемая подсистема. CodeReuse Subsystem - подсистема, имеющая общий код для всех ее экземпляров в модели. 15. Model - блок, обеспечивающий подключение файла к текущей модели. 16. ln - входной порт. 17. Out- выходной порт. 2.12. Блоки верификации сигналов Model Verification 1. 2. 3. 4. 5. Check Static Lower Bound - блок контроля минимального уровня сигнала. Check Static Upper Bound - блок контроля максимального уровня сигнала. Check Static Range - блок контроля сигнала внутри зоны. Check Static Gap - блок контроля сигнала вне зоны. Check Dynamic Lower Bound - блок контроля динамического минималь­ ного уровня сигнала. 6. Check Dynamic Upper Bound - блок контроля динамического максималь­ ного уровня сигнала. 7. Check Dynamic Range - блок контроля сигнала внутри динамической 8. 9. 1 О. 11. зоны. Check Dynamic Gap - блок контроля сигнала вне динамической зоны. Assertion - блок проверки сигнала на нулевое значение. Check Discrete Gradient - блок контроля градиента дискретного сигнала. Check Input Resolution - блок проверки разрешения входного сигнала. 2.13. Библиотека дополнительных утилит Model-Wide Utilities 1. Model Info - информационный блок. 2. DocBlock - блок документации. 3. Timed-Based Linearization - блок линеаризации для заданного момента времени. 4. Trigger-Based Linearization - блок линеаризации для момента времени, за­ данного управляющим сигналом. 2.14. Блоки логических операций Logic and Bit Operations 1. Bitwise Operator - блок побитовых лоrических операций. 2. Combinatorial Logic - блок комбинаторной логики. 3. Logical Operator - блок логической операции. 34 Обзор основной библиотеки Simulink 4. Relational Operator - блок вычисления операции отношения. 5. lnterval Test - блок, определяющий, что значение входного сигнала нахо­ дится в заданном интервале. 6. lnterval Test Dynamic - блок, определяющий, что значение входного сигна­ ла находится в заданном интервале. Значение интервала задается внешни­ ми сигналами. 7. Compare То Zero - сравнение с нулем. 8. Compare То Constant - сравнение с константой. 9. Bit Set - блок устанавливает указанный бит целого числа равным 1. 10. Bit Clear - блок устанавливает указанный бит целого числа равным О. 11. Shift Arithmetic - сдвиг числа в двоичном представлении. 12. Extract Bits - извлечение битов двоичного числа. 13. Detect Increase - обнаружение увеличения сигнала. 14. Detect Decrease - обнаружение уменьшения сигнала. 15. Detect Change - обнаружение изменения сигнала. 16. Detect Rise Positive - обнаружение увеличения положительного сигнала. 17. Detect Rise Nonnegative - обнаружение увеличения неотрицательного сигнала. 18. Detect Fall Negative - обнаружение уменьшения отрицательного сигнала. 19. Detect Fall Nonpositive - обнаружение уменьшения неположительного сигнала. 2. 15. Часто используемые блоки Commonly Used Blocks Библиотека включает наиболее часто используемые пользователями блоки из других библиотек (Constant, Step, Sum, Scope, Gain и т. д.). 2. 16. Дополнительные математические и дискретные блоки Additional Math & Discrete Библиотека содержит два раздела: Additional Discrete (Дополнительные диск­ ретные блоки) и Increment/Decrement (Блоки <<Приращение/Уменьшение�). В первом разделе находятся дополнительные блоки дискретных передаточных функций и разного вида блоки задержки сигналов. Во втором разделе находятся блоки, увеличивающие и уменьшающие значение сигналов на фиксированную величину. Глава 3 Библиотека блоков SimPowerSystems 3.1. Состав библиотеки и основные особенности ........................................ 36 3.2. Исn,чники электрической энергии Electricat Sources .................................. 47 3.3. ИJ,,tермтельные и контРольные ус:тройстеа ........................................... 61 З.4. Электротехнические элементы Bements ............................................... 73 3.5. Эnемантw силовой э.nектрониlСИ Power Electronlcs ... ...... .. ........ .......... . .. 139 3.6. Электрические машины Machines ...... 162 3.7. Модели дnя расчета векторнwм методом Phasor Elements ................... 209 36 Библиотека блоков SimPowerSystems 3. 1. Состав библиотеки и основные особенности З. 1. 1. Состав библиотеки Библиотека SimPowerSystems имеет восемь основных разделов: ► Electrical Sources - источники электрической энергии. В состав библиоте­ ки входят источники постоянного и переменного напряжения и тока, управляемые источники напряжения и тока, а также трехфазные источ11и­ ки переменного напряжения. ► Measurements - измерительные и контрольные устройства. Библиотека содержит датчики тока и напряжения, блок измерения для трехфазных систем, мультиметр и измеритель полного сопротивления цепи (импе­ данса). ► Elements - электротехнические элементы. В библиотеке находится боль­ шой набор моделей пассивных электротехнических элементов: одно- и трех­ фазные RLС-цепи, трансформаторы, взаимоиндуктивность, rрозозащит­ ный разрядник и т. д. ► Power Electronics - устройства силовой электроники. В библиотеку включены модели силовых полупроводниковых элементов, диода, тирис­ тора, IGВТ-транзистора и тому подобных элементов. Кроме того, в биб­ лиотеке находятся модель универсального моста и модель трехуровнево­ го моста. ► Machines - электрические машины. В библиотеку входят различные моде­ ли машин постоянного и переменного тока, а также модели паровой и водя­ ной турбин с регуляторами. ► Phasor Elements - модели устройств для расчета векторным методом. ► Extra Library - дополнительные электротехнические устройства. В данной библиотеке находятся модели дискретных и аналоговых элементов управ­ ления, в частности блоки управления полупроводниковыми выпрямителя­ ми и инверторами, различные фильтры, генераторы, таймеры и тому подоб­ ные устройства. Кроме того, в библиотеке находятся различные устройства для измерения, в частности блоки вычисления действующего и среднего значения сигнала, блок вычисления гармонического состава, блок вычисле­ ния активной и реактивной мощности и т. д. В библиотеке также есть раз­ дел, где сведены все модели трехфазных элементов. ► Libraries Application - прикладные библиотеки. Библиотека включает мо­ дели элементов для конкретных отраслей электротехники, в частности мо­ дели электроприводов постоянного и переменного тока. Используя блоки из этих разделов, пользователь в состоянии за короткое время создать полноценную модель достаточно сложной электротехнической системы. Состав библиотеки и основные особенности 37 3. 1.2. Основные особенности Методика создания SРS-модели ничем не отличается от методики создания моде­ ли на основе базовой библиотеки Sirnulink. Так же как и для обычной Sirnulink­ �oдeли ($-модели), необходимо выполнить расстановку блоков на схеме, задать их параметры, соединить блоки и установить параметры расчета модели в целом. Для SРS-моделей доступен ускоренный режим расчета и все возможности Sirnulink, включая набор инструментов Sirnulink Perforrnance Tools, линейный анализ, отладчик и т. д. Однако SРS-модели имеют и некоторые особенности: 1. Входы и выходы SРS-блоков, в отличие от блоков Sirnulink, не показывают направление передачи сигнала, поскольку фактически являются эквива­ лентами электрических контактов. Таким образом, электрический ток мо­ жет через вход или выход блока протекать в двух направлениях: как во­ внутрь блока, так и наружу. 2. Соединительные линии между блоками являются, по сути, моделями элект­ рических проводов, по которым ток может протекать также в двух направ­ лениях. В Sirnulink-мoдeляx же информационный сигнал распространяется только в одном направлении - от выхода одного блока ко входу другого. 3. Sirnulink-блoки и SimPowerSysterns-блoки не могут быть непосредственно соединены друг с другом. Сигнал от $-блока можно передать к SРS-блоку через управляемые источники тока или напряжения, а наоборот - с по­ мощью измерителей тока или напряжения. 4. При расчете схемы, содержащей нелинейные блоки, следует использовать методы: • ode15s - мноrошаговый метод переменного порядка (от 1 до 5), исполь­ зующий формулы численного дифференцирования; • ode23t - метод трапеций с интерполяцией. Эти методы дают наилучшие результаты по быстродействию. 5. На схеме должен присутствовать хотя бы один измерительный блок (Cur­ rent Measurement, Voltage Measurement, Three-Phase VI Measurernent или Multimeter). Это связано с особенностями преобразования SimPowerSys­ tems-мoдeли в эквивалентную расчетную Simulink-мoдeль. Пример: На рис. 3.1 приведена модель трехфазного мостового тиристорного преобразо­ вателя, работающего на активно-индуктивную нагрузку. В модели преобразователя использованы как блоки библиотеки SimPowerSys­ tems (источники переменного напряжения, тиристорный мост, система управле­ ния, RLС-цепи, измерители тока и напряжения), так и блоки основной библиоте­ ки Simulink (осциллограф, блок ступенчатого сигнала и т. д.). На схеме модели показаны изображения резистора и катушки индуктивности в соответствии со стандартом, принятым в России. Если не предпринимать спе­ циальных мер, то изображения этих элементов будут выглядеть в соответствии со стандартом США. Каким образом можно изменить пиктограммы элементов, опи­ сано в главе 9. 38 Библиотека блоков SimPowerSystems V1 v" Synchroniz.ition VolUg" Synohronized e-Puls• G•n•r.1tor Рис. 3. 1. Модель трехфазного мостового тиристорного преобразователя На рис. 3.2 показаны осциллограммы токов, напряжений и мощности в различ­ ных участках схемы. На рисунке хорошо видно, что при переходе преобразовате­ ля в инверторный режим напряжение на нагрузке меняет знак, хотя направление тока остается прежним. -о )С JiAAl±i i 1 Jtf: : : ! :Е! : 1 :�::1 ,mo om 002 о.оз о.о, 005 o.os 0.01 сов 0111 01 Рис. 3. 2. Диаграммы работы тиристорного преобразователя Состав библиотеки и основные особенности 39 3. 1.3. Единицы измерения электрических и неэлектрических величин При указании параметров элементов могут использоваться абсолютные и относи­ тельные единицы. Система абсолютных единиц приведена в табл. 1.1. Таблица 1. 1. Система абсолютных единиц Параметр Обозначение Единицы измерения Time(время) Length (расстояние) Mass(масса) Energy(энергия) Current(ток) Vоltаgе(наnряжение) Active power(активная мощность) Apparent роwег(полная мощность) Reactive роwег(реактивная мощность) lmpedance(полное сопротивление) Resistance(активное сопротивление) lnductance(индуктивность) Capacitance(емкость) Flux linkage( nотокосцеnление) Rotation speed(угловая частота) revolutions per minute Torque (момент) lnertia(момент инерции) Friction factor (коэффициент трения) second meter kilogram joule аmреге volt watt volt-ampere var ohm ohm henry farad volt-second radians per second rpm(Об/мин) newton-meter kilogram-meter2 newton-meter-second s(с) m(м) kg (КГ) J(дж) А(А) V(B) W(Вт) VA(BA) var(BAp) Ohm(Oм) Ohm(Oм) Н(Гн) F(Ф) V-c (В-с) rad/s(рад/с) N-m (Н-м) kg-m2 (кг-м 2) N-m-s (Н·М·С) В некоторых моделях для задания параметров используются также и относи­ тельные единицы (p.u., о.е.). Общая формула для перехода к относительным еди­ ницам имеет вид: у у уб' где У- значение физической величины (параметра, переменной и т. п.) в исход­ ной системе единиц, например в системе единиц СИ; У6 -базисное (базовое) зна­ чение физической величины, выраженное в той же системе единиц и принятое в качестве единицы измерения величины У в системе относительных единиц. Основными базисными единицами электрических величин выбраны две неза­ висимые величины: ► S6 - базисная мощность, равная номинальной полной мощности устрой­ ства (S,,); ► U6 -базисное напряжение, равное номинальному действующему значению напряжения питания устройства ( Ин )Все остальные электрические базисные единицы определяются через эти две единицы. Например, базисный электрический ток: = Iб = Sб и/ 40 Библиотека блоков SimPowerSystems базисное сопротивление: u2 zб =_§__. Sб Для цепей переменного тока должна задаваться базисная частота /6, равная, как правило, номинальной частоте питающего напряжения /11• Для трансформатора, имеющего несколько обмоток, одна и та же мощность (номинальная мощность трансформатора) будет использоваться для всех обмо­ ток. Однако в соответствии приведенными выше выражениями каждая обмотка может иметь разные базисные напряжение, ток и сопротивление. Для асинхронной электрической машины дополнительно задаются: Q6 - базисная угловая скорость, 6 М6 = р - базисный момент. 0.6 Вместо момента инерции при задании параметров машины в относительных единицах используется инерционная постоянная: 1 -х/•О.12 Н=-2 __ 5 1/ где] - момент инерции; О. 1 - угловая скорость вращения магнитного поля. Инерционная постоянная выражается в секундах. Величина инерционной по­ стоянной показывает, какое время вал электрической машины будет вращаться под действием запасенной кинетической энергии во вращающихся частях маши­ ны при номинальной нагрузке. Для машин большой мощности значение этой по­ стоянной лежит в пределах 3-5 с. Для машин малой мощности эта величина мень­ ше: 0,5-0,7 с. При.мер 1: Параметры трехфазного двухобмоточного трансформатора имеют следующие значения (табл. 1.2). Таблица 1.2. Параметры трехфазного двухобмоточного трансформатора Параметр Обозначение m Число фаз s. Nominal power (номинальная мощность) Nominal frequency (номинальная частота сети) /. Первичная обмотка: Схема соединения Nominal voltage (номинальное напряжение) U1. Une-to-line resistance (межфазное сопротивление) R!. Leakage reactance (реактивное сопротивление Х1. рассеяния) Вторичная обмотка: Схема соединения Nominal voltage (номинальное напряжение) lf2. Значение э 300 60 звезда 25 0.01 0.02 треугольник 600 Единицы измерения кВА Гц кВ о.в. о.е. в Состав библиотеки и основные особенности 41 Таблица 1.2. Параметры трехфазного двухобмоточного трансформатора (продолжение) Параметр Обозначение Значение Единицы измерения Une-to-line resistance (межфазное сопротивление) Leakage reactance (реактивное сопротивление рассеяния) Magnetizing losses at nominal voltage in% of nominal current (nотери на намагничивание nри номинальном напряжении в% от номинального тока): Resistive (активные) lnductive (реактивные) R2, 0.01 о.е. х2. 0.02 о.е. % % Выражения для определения базисных единиц и их значения приведены в табл. 1.3. Таблица 1. 3. Базисные единицы Параметр Расчетное выражение Значение Единицы измерения Frequency (частота) Первичная обмотка: fб-fн 60 Гц 100 - 103 Вд 14434 в 6.928 А 2083 Ом 2063 Ом 5.525 Гн Power (мощность) Voltage (напряжение) Current (ток) lmpedance (nолное сопротивление) Resistance (активное сопротивление) lnductance (индуктивность) Вторичная обмотка: Power (мощность) Voltage (напряжение) Current (ток) lmpedance (nолное сопротивление) Resistance (активное сопротивление) lnductance (индуктивность) оо-10' 516 = s. = з 3 т 3 VI. _25-10 Ul 6 _ -7з----л:3 100-10 /1 6 =�= Ul6 14434 U16 = 14434 = 216 116 6.928 U16 = 14434 _ Rl 6 116 6.928 = 2083 = � L16 2-11· /6 2-11-60 300-10 526 = s. = m З V2- и2.-600 3 100-10 S2 12 6 = 6 = U2 6 600 U2 =-600 = � Z2 6 12 6 166.7 U2 6 600 = = R2 6 12 6 166.7 100 . 103 Вд 600 в 166.7 А 3.60 Ом 3.60 Ом 0.009549 Гн 3 L2 6 =�=� 2-11-/6 2-11-60 Значения параметров обмоток в абсолютных единицах могут быть определены следующим образом. 42 Библиотека блоков SimPowerSystems Первичная обмотка: R1 = R1. х R16 = 0,01 х 2083 = 20,83 Ом, L1 = L1. х L16 = 0,02 х 5,525 = 0,1105 Гн. Вторичная обмотка: R2 = R2. х R26 = 0,01 х 3,60 = 0,0360 Ом, L2 = L2. х L26 = 0,02 х 0,009549 = 0,191 mГ. Для цепи намагничивания значение активной мощности, равное 1 %, и значе­ ние реактивной мощности, равное 1 %, означает, что активное сопротивление цепи намагничивания равно 100 о.е. и реактивное сопротивление цепи намагничива­ ния равно 100 о.е. Следовательно, абсолютные значения параметров цепи намаг­ ничивания равны: Rm = 100 х R1 6 = 100 х 2083 = 208,3 кОм, Lm = 100 х L 1 6 = 100 х 5,525 = 552,5 Гн. Пример 2: Параметры трехфазного четырехполюсного асинхронного двигателя с фазным ротором имеют следующие значения (табл. 1.4). Таблица 1. 4. Параметры асинхронного двигателя Обозначение Параметр Значение з т Чисnофаз Чисnо пар полюсов р Схема соединения обмотки статора Nominal роwег (номинальная мощность) Nominal frequency (номинальная частота сети) /. Une-to-line voltage (номинальное линейное напряжение) Mutual inductance (взаимоиндуктивность обмоток) Lm Rotor inertia (момент инерции ротора) J Параметры статора: R, Активное сопротивление L, Индуктивность Параметры ротора, приведенные к статору: Активное сопротивление R'r L', Индуктивность s. и. Единицы измерения 2 звезда 2238 60 220 Вд 69.31 0.089 mГн кr-м2 0.435 0.002 Ом Гн 0.816 0.002 Ом Гн Гц в Выражения для определения базисных единиц и их значения приведены в табл. 1.5. Таблица 1.5. Базисные единицы Параметр Расчетное выражение Роwег (мощность) S6 =5• =� Frequency (частота) Voltage (напряжение) т 3 16 - !. 220 U6-�_ -Гз-Гз Значение Единицы измерения 746 Вд 60 127.0 Гц в Состав библиотеки и основные особенности 43 Таблица 1.5. Базисные единицы (продолжение) Параметр Расчетное выражение Значение Единицы измерения Current (ток) 746 16 = S6 = 0 5.874 А 21.62 Ом 21.62 Ом 0.05735 Гн 188.5 рад/с 11.87 Н· М lmpedance (полное сопротивление) Resistance (активное соnротивление) lnductance (индуктивность) Speed (частота вращения) TorQue (момент) 127. 121.0 26 = иб = /6 5 874 127.0 R 6 = U6 = / 6 5.874 �- 21.62 L6 2·1t·/6 2,,с,60 Uб 2·n·/ 2·n·6 0 !16=!1 1 =--"=-2 р 746·3 ·m = = S6 Мб !16 188.5 Значения параметров обмоток двигателя и цепи намагничивания могут быть определены следующим образом. Сопротивление статора: R .435 = 0.0201 о.е. Rs • = s = О Zб 21.62 Индуктивность статора: 0·002 = Ls• =ь_ =--.0349 о.е. Lб 0.05735 О Сопротивление ротора: R',•=�= 0·816 =0.0377 о.е. Z б 21.62 Индуктивность ротора: 2 L'r•= & = О.ОО =0.0349 о.е. Lб 0.05735 Величина инерционной постоянной равна: 1 2 2 1 -х J ·0 1 -хО.089-188.5 2 2 = =0.7065с. Н= 2238 s" Рассчитанные параметры асинхронной машины заданы «по умолчанию" для модели машины в относительных единицах ( блок Asynchronous Machine pu U nits ). При наблюдении переменных блоком Scope следует иметь в виду, что блок по­ казывает мгновенные значения переменных. Иными словами, максимальное зна­ чение синусоидальной переменной, показываемое осциллографом, будет в J2 больше, чем заданное в параметрах блока действующее значение. 44 Библиотека блоков SimPowerSystems Использование относительных единиц имеет следующие преимущества: ► облегчается сравнение значений переменных в разных режимах работы. Например, если величина напряжения какого-либо участка электрической цепи равна 1,5 о.е., то это означает, что величина напряжения этого участка ·В 1,5 раза больше, чем номинальное питающее напряжение; ► величины полных сопротивлеttий слабо меняются при изменении мощно­ сти и питающего напряжения устройства. Например, для всех трансформа­ торов в диапазоне мощностей от 3 до 300 кВА реактивное сопротивление рассеяния изменяется в пределах между 0,01 и 0,03 о.е., а активные сопро­ тивления обмоток изменяются от 0,01 до 0,005 о.е., независимо от номи­ нального напряжения. В свою очередь, для трансформаторов в диапазоне мощностей от 300 кВА до 300 МВА реактивное сопротивление рассеяния изменяется в пределах между 0,03 и 0,12 о.е., а активные сопротивления обмоток - от 0,005 до 0,002 о.е. Таким образом, если параметры трансфор­ матора мощностью 1О кВА неизвестны, не будет большой ошибкой принять среднее значение 0,02 о.е. для реактивности рассеяния и 0,0075 о.е. для ак­ тивных сопротивлений; ► вычисления в относительных единицах упрощены. Когда все полные со­ противления энергетической системы вычислены на общей энергетической базе и номинальных напряжениях подсетей, то общее полное сопротивле­ ние может быть вычислено простым суммированием полных сопротивле­ ний подсетей без учета коэффициентов трансформации. 3. 1.4. nо�ышение скорости и точности расчетов На точность и скорость расчета модели в Simulink и SimPowerSystems можно воз­ действовать многими способами, включая структуру модели и ее параметры. Ре­ шающие модули Simulink и SPS работают точно и эффективно с параметрами, заданными для них �по умолчанию�. Однако для некоторых моделей можно до­ биться лучших результатов по скорости и точности, если задать более точно пара­ метры решателя дифференциальных уравнений. Также, если предполагаемое пове­ дение модели известно, то можно, используя эту информацию, повысить скорость и точность расчетов. Как правило, модель электротехнической установки включает не только SimPowerSystems-блoки, но и блоки основной библиотеки Simulink, по­ этому повышение скорости и точности расчета может достигаться как общими для Simulink-мoдeлeй методами, так и методами, специфическими для SРS-моделей. Ниже приведены рекомендации по повышению скорости и точности расчетов, как для Simulink-мoдeлeй, так и для моделей, включающих SimPowerSystems-блoки. Малая скорость моделирования может иметь много причин. Среди них можно выделить основные: ► Модель содержит блок МАTLAB Fcn. При использовании блока МАTLAB Fcn в модели Simulink на каждом расчетном шаге обращается к интерпретатору Состав библиотеки и основные особенности 45 ► ► ► ► ► языка МА TLAB для выполнения расчетов в данном блоке. Вместо блока MATLAB Fcn, если это возможно, следует использовать блоки Fcn или Math Function. Модель включает $-функцию, написанную на языке МАTLAB. В этом слу­ чае также происходит обращение к интерпретатору языка MATLAB на каждом расчетном шаге. Вместо MATLAB $-функции более предпочти­ тельным было бы использование $-функций, написанных на языках С или Fortran и откомпилированных в исполняемый машинный код в виде дина­ мической библиотеки. Модель включает блок памяти Memory. Использование блока памяти за­ ставляет решающие модули с переменным порядком (ode15s и ode113) вы­ полнять снижение порядка до первого на каждом расчетном шаге. Максимальный размер шага (Мах step size) слишком мал. Если этот пара­ метр был изменен, то следует попробовать выполнить моделирование сно­ ва, установив этот параметр равным auto. Задана слишком высокая точность расчетов. Обычно значение абсолютной погрешности (Relative tolerance), заданное равным 0,1%, достаточно для большинства расчетов. При слишком малых значениях этого параметра шаг расчета может оказаться также достаточно малым, что приведет к за­ медлению расчетов. Задан слишком большой интервал расчета по времени. Как правило, при моделировании динамических систем переходные процессы представляют ► ► ► ► ► больший интерес, нежели установившийся режим. По достижении устано­ вившегося режима расчет можно прекратить, поскольку далее никаких из­ менений в состоянии модели не будет. Желательно заранее оценить пред­ полагаемое время расчета, исходя из знаний о моделируемом объекте. Модель может оказаться жесткой, а используемый решатель не предназна­ чен для моделирования жестких систем. Сл�дует попробовать использо­ вать методы ode15s или ode23t и сравнить время расчета при решении эти­ ми методами. В модели используются блоки, шаг дискретизации которых (Sample time) не является кратным. В этом случае Simulink уменьшает шаг расчета до та­ кого значения, чтобы он был кратен шагу дискретизации каждого блока. Например, если шаг дискретизации одного блок равен 0,5, а другого - 0,7, то Simulink установит максимальное значение шага расчета, равное 0,1. Модель содержит алгебраический контур. Алгебраические контуры рас­ считываются в Simulink с помощью итерационной процедуры на каждом шаге расчета, что замедляет общее время расчета. Модель имеет блок Random Number, который передает свой выходной сиг­ нал на вход интегратора (блок Integrator). Предпочтительнее использовать блок Band-Limited White Noise Ыосk из библиотеки Sources. Модель включает большое число блоков Scope. Блоки требуют значитель­ ного объема памяти для хранения отображаемых данных, что может при­ вести к использованию компьютером виртуальной (дисковой) памяти и существенному замедлению расчетов. 46 Библиотека блоков SimPowerSystems ► В блоках Scope параметр Limit data points to last задан значительно мень­ шим, чем фактическое число расчетных шагов (либо флажок этого парамет­ ра снят). В этом случае, при превышении числом шагов значения параметра Limit data points to last, для отображения каждой новой расчетной точки будет выполняться процедура выделения памяти, что существенно замед­ ляет скорость расчета. Рекомендуется заранее установить параметр Limit data points to last большим, чем фактическое число расчетных шагов. Имеет смысл также задать параметр Decimation (прореживание) большим 1, что­ бы сократить число хранi.rмых блоком Scope данных. Скорость расчета можно также повысить в несколько раз, используя ускорен­ ный (Accelerator) режим расчета. Это можно сделать с помощью меню Tools или панели инструментов. В ускоренном режиме расчета предварительно проводится трансляция модели в исполнительный код (dll-файл), а затем уже проводится сам расчет. Некоторые дополнительные затраты времени на трансляцию с лихвой окупаются ускорением расчета модели. Однако при изменении структуры модели процедура трансляции будет повторена. К сожалению, ускоренный режим расче­ та не может быть использован в моделях, имеющих алгебраические контуры. Существенный выигрыш по времени может дать использование дискретных моделей вместо непрерывных. В SРS-моделях дискретизацию удобнее всего вы­ полнить с помощью графического интерфейса пользователя - Powergui. При моделировании ключевых устройств следует избегать неоправданно боль­ шого различия в параметрах для включетюго и выключенного состояний. Так, на­ чинающий пользователь для Ideal Switch может задать сопротивление во включен­ ном состоянии Ron = 1о-6 Ом, а активное сопротивление искроrасящей цепи Rs = 106 Ом, полагая, что такие параметры обеспечат наилучшее приближение к идеальной модели. При этом разница в сопротивлении ключа для включенного и выключенного состояний составит 12 порядков и модель окажется жесткой, что вынудит Simulink существенно снизить шаг расчета и, соответственно, общее время расчета модели значительно возрастет. В то время как для достижения вполне хоро­ ших результатов различие между Ron и Rs может составлять всего 2-3 порядка. Моделирование полупроводниковых преобразователей энергии может зани­ мать достаточно большое время. Если при расчетах требуются повторные вычис­ ления, начиная с некоторого момента времени, то можно сэкономить время, со­ хранив вектор состояний модели для этого момента в рабочей области MATLAB. Все повторные расчеты можно будет проводить, начиная с этого состояния. Для реализации такого механизма необходимо выполнить соответствующие настрой­ ки на вкладке Workspace окна Configuration parameters. Наиболее существенным с точки зрения скорости вычислений может оказаться правильный выбор уровня детализации модели. К примеру, если выполняется моде­ лирование системы электроснабжения города, вряд ли стоит моделировать каждый потребитель электрической энергии: электрический двигатель, чайник, сварочный апларат и т. п. Вполне достаточным будет создание обобщенных моделей электриче­ ских потребителей на уровне заводского цеха, жилого дома, трамвайного парка и т. п. Чтобы проверить, достаточно ли точно выполняется моделирование, следует провести сравнительные расчеты с разными значениями параметра Relative Источники электрической энергии Electrical Sources 47 tolerance (относительная погрешность). К примеру, можно провести расчет с за­ данным �по умолчанию� значением этого параметра - 1е-3 и с меньшим (te-4) значением. Если результаты расчетов отличаются незначительно, то можно пола­ rать, что найденное решение является верным. Если решения значительно отли­ чаются в начальной стадии, то следует задать в явном виде достаточно малый на­ чальный шаг расчета (Initial step size). Если решение оказывается неустойчивым, то это может быть вызвано следую­ щими причинами: ► моделируемая система сама является неустойчивой; ► используется метод ode 15s. Следует ограничить порядок величиной 2 или использовать метод ode23t. Если решение кажется неточным, то следует задать в явном виде параметр Absolute tolerance (абсолютная погрешность) и выполнить ряд расчетов, умень­ шая величину этого параметра. Если при уменьшении абсолютной погрешности точность расчетов не улучша­ ется, следует уменьшить относительную погрешность (это приведет к уменьше­ нию шага расчета) либо в явном виде задавать достаточно малую величину макси­ мальноrо шага расчета. 3.2. Источники электрической энергии Electrical Sources 3.2. 1. Идеальный источник постоянного напряжения DC Voltage Source Пиктограмма: а .:L Т DC Voltage Source а Назначение: Вырабатывает постоянное по уровню напряжение. Вход и выход блока DC Vol­ tage Source соответствуют положительному и отрицательному выводам источника. Окно задания параметров: OCV<>ЦJo so"ce('!>шf\lr,I<) !о,.,IОС�ши" Р•-• �("i 48 Библиотека блоков SimPowerSystems Параметры блока: Amplitude (V): [Амплитуда (В)]. Задает величину выходного напряжения источника. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Voltage - выходное напряжение источника. Блок является идеальным источником напряжения, то есть его собственное сопротивление равно нулю. Пример: На рис. 3.3 показан пример включения активно-индуктивной нагрузки на постоянное напряжение. Подключение источника к нагрузке обеспечивается бло­ ком Ideal Switch, который замыкает электрическую цель по сигналу, вырабатыва­ емому генератором ступенчатого сигнала Step. Измерение тока в цепи выполня­ ется с помощью блока Current Measurement. Полученный измерителем сигнал отображается с. помощью блока Scope. ш--г-�,·��·1- В.fore = О Alter = 1 Steptime • 0.01 Cs = inf Rs • 1е6 Ron = 0_01 ldeal Switch Step �I + � • I Scop ; Current Me asurement .:l_ DC Voltage Т Source V= 100 fllll@t! · s, 1"" ,оо 100 50 ••. .; 004 Series RLC Branch L = 10е-ОЗ R = 0.5 1�-----------�' 006 о.се Рис. 3.3. Подключение источника постоянного напряжения к нагрузке 3.2.2. Идеальный источник переменного напряжения АС Voltage Source Пиктограмма: а � АС Voltage Source а 01 Тmooltмt О Источники электрической энергии Electrical Sources 49 Назначение: Вырабатывает синусоидальное напряжение с постоянной амплитудой. Напря­ жение источника АС Voltage Source описывается следующим выражением: И = Ах sin(2p/t + Ф), где А - амплитуда напряжения источника;/- частота; ф- начальная фаза напря­ жения. Знак •+• на пиктограмме блока показывает положительное направление ·на­ пряжения источника. Окно задания параметров: �-•11,,.� 1 •1111,11,,1..., /,1 l:�.....,...дc�- J, 111,1,·"�•,111 ,, (З �V..... Siulaa-!IН\J rfi;::._ flt oo j 1 ldlat Jo"'- ===-=-..,=-=-=""�-""--......=" �м. 60 s....­ JO Параметры блока: Peak Arnplitude (V): [Амплитуда (В)]. Амплит.уда выходного напряжения источника. Phase (deg): [Фаза (град)]. Начальная фаза. Frequency (Hz): [Частота (Гц)]. Частота источника. Sample time:' [Шаг дискретизации]. Параметр задает шаг дискретизации по времени выход­ ного напряжения источника при создании дискретных моделей. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Voltage - выходное напряжение источника. Блок является идеальным источником напряжения, то есть его собственное сопротивление равно нулю. 50 Библиотека блоков SimPowerSystems При.мер: На рис. 3.4 показана схема, моделирующая подключение активно-индуктив­ ной нагрузки к источнику переменного напряжения. Там же приведен график тока в нагрузке. г Step Before = О Alter = 1 S!ep time = О .001 Cs = inf :o�:��i, Bre;вker � Scope i 0 -♦ �2 1 Curre�tJ Me.1surement � АС Voltage Source \,tn = 100 f = 50 '-? ] ·- о Series RLC Br.1nch L"' 10е-03 R = 0.5 .__________________,1 Рис. 34. Подключение источника переменного напряжения к нагрузке 3.2.З. Идеальный источник переменного тока АС Current Source Пиктограмма: " ф " AC,Current Source Назначение: Вырабатывает синусоидаль­ ный ток с постоянной амплиту­ дой. Ток источника АС Current Source описывается следующим выражением: 1 =Ах sin(2pft + Ф), где А - амплитуда тока источника; f - частота; ф - начальная фаза тока. Знак �+� на пиктограмме бло­ ка показывает положительное на­ правление тока источника. Окно задания параметров: fAC Cuanl s.....,.(.,..kl\lnl<J ldelf...,,_A(;"""«t-1t.l)OOМщ,er,!4r.....,it�Ь!'lt• Источники электрической энергии Electrical Sources 51 Параметры блока: Реак Amplitude (А): [Амплитуда (А)]. Амплитуда выходного тока источника. Phase (deg): [Фаза (град)]. Начальная фаза. Frequency (Hz): [Частота (Гц)]. Частота источника. Sample time: [ Шаг дискретизации]. Параметр задает шаг дискретизации по времени выход­ ного тока источника при создании дискретных моделей. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Current - выходной ток источника. Блок является идеальным источником тока, то есть его собственное сопротив­ ление равно бесконечности. Для амплитуды и фазы допустимы отрицательные значения. Нулевая частота определяет источник постоянного тока. Задание отри­ цательной частоты недопустимо. Пример: На рис. 3.5 показана схема, моделирующая работу двух источников тока на ак­ тивную нагрузку. Источники имеют одинаковую амплитуду тока (3 А), но разную частоту (50 и 60 Гц). Ток в нагрузке является суммой токов этих двух источников. 1ф I . АС Current Source lm • 3 ] , ... 1 •-� j ф + i ... • " .. -6о"--··-=-0."'�� 1 о.2��оэ,..._...,__,, о. , Current=l Measurem АС Current Source1 lm • 3 Q Series RLC Branch R = 5D Рис. 3.5. Работа источников тока на общую нагрузку 52 Библиотека блоков SimPowerSystems 3.2.4. Управляемый источник напряжения Controlled Voltage Source 1 Пиктограмма: а �ICo,\roll,d v,11,,, s,,.,, Назначение: Вырабатывает напряжение в соответствии с сигналом управления. Сигнал управления является безразмерным Simulink-cиrнaлoм. Источник Controlled Vol­ tage Source может быть инициализирован как источник постоянного или пере­ менного напряжения. При моделировании установившегося режима начальное значение управляющего сигнала должно соответствовать начальным значениям параметров источника. Окно задания параметров: C�Vdl,,g,,Sc.,;ce.t,м,k) (lrj,J C:-..lho s..... .,,... agaof,..,.., equ;,..,.,. ....... - н.. ,.,.....--.! .... it ....... Ь,it,,�'9'alollheblod\. y.., ___ cilWit..,,•.....,iir;N:.c,DCvologo.lll'DU"°"'IO-.ltio � .. .ieoфtl•• O..l,icQ.rc,i,1-Ьe�.,.tqм,1� .... � .. oc��t*1hl,_.,,...., Параметры блока: Initialize: [Инициализация]. При установке флажка выполняется инициализация источ­ ника с заданными начальными параметрами - амплитудой, фазой и частотой. Source type: [Тип источника]. Тип источника указывается, если требуется инициализация источника. Если инициализация источника не задана, то параметр недоступен. Значение параметра выбирается из списка: ► АС - источник переменного напряжения; ► DC - источник постоянного напряжения. Источники электрической энергии Electrical Sources 53 lnitial amplitude (V): [Начальная амплитуда (В)]. Начальное значение выходного напряжения ис­ точника. Параметр доступен, если задана инициализация источника. Initial phase (deg): [Начальная фаза (град)]. Начальная фаза. Параметр доступен, если источник инициализируется как источник переменного напряжения. Initial frequency (Hz): [Initial частота (Гц)]. Начальная частота источника. Параметр доступен, если источник инициализируется как источник переменного напряжения. Measurements: [ Измеряемые переменные). Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Voltage - выходное напряжение источника. Блок является идеальным источником напряжения, то есть его собственное сопротивление равно нулю. Пример: На рис. 3.6 показана схема с использованием управляемого источника напря­ жения, формирующего по сигналу управления прямоугольное напряжение на на­ грузке. Voluge Me.1surement лл Controlled Volt.age Source Pulse Gener.1tor .Amplitude • 100 Т• 0.02 •+ ��}·----- i l Curre�t Me.asu11ment Series RLC Br.1nch L= 10е-03 R • 0.6 □ Scope ·=== ··шшrншлл о • .. . . ... ••• .. .. ·:� 0о 0.05 l'mitOftNL О Рис. 3. 6. Формирование пульсирующего напряжения с помощью управляемого источника напряжения 0.1 0.15 54 Библиотека блоков SimPowerSystems 3.2.5. Управляемый источник тока Controlled Current Source Пиктограмма: а lc,, 1� ..1 ., с"�" s,,.� Назнаttение: Вырабатывает ток в соответствии с сигналом управления. Сигнал управления является безразмерным Simulink-cиrнaлoм. Источник Controlled Current Source может быть инициализирован как источник постоянного или переменного тока. При моделировании установившегося режима начальное значение управляюще­ го сигнала должно соответствовать начальным значениям параметров источника. Окно задания параметров: Carьo&.d wro:,t Sourca ("""") �) ' eo,,..,,,rtrtt.S-r,pii;q,af.,.,.,,,..,.41ent.,.,,ooi""""" T�-ooo,1,Jdod ...,,.,.. ;.�!,vth&""',igr,,iol!ho� У«•-�· Уо,, O<W! ...... ,o;,m, А(: О( осе.....�. Н ,0,, ..,,,110 ""'' h ..,,_,..,�,!",eblocl<ц,u<,i;щ!Ь..,,,,.,«..'edtoec,gno,'Мlm!I«� �Jюdedr:10Cw�1(1(f",cm�1o��v.wi-4. Параметры блока: Initialize: [Инициализация]. При установке флажка выполняется инициализация источ­ ника с заданными начальными параметрами - амплитудой, фазой и частотой. Source type: [Тип источника]. Тип источника указывается, если требуется инициализация источника. Если инициализация источника не задана, то параметр недоступен. Значение параметра выбирается из списка: ► АС - источник переменного тока; ► DC - источник постоянного тока. Источники электрической энергии Electrical Sources 55 Initial ampUtude (А): [Начальная амплитуда (А)]. Начальное значение выходного тока источника. Параметр доступен, если задана инициализация источника. Initial phase (deg): [Начальная фаза (град)]. Начальная фаза. Параметр доступен, источник ини­ циализируется как источник переменного тока. Initial frequency (Hz): [Initial частота (Гц)]. Начальная частота источника. Параметр доступен, ис­ точник инициализируется как источник переменного тока. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Current - выходной ток источника. Блок является идеальным источником тока, то есть его собственное сопротив­ ление равно бесконечности. Пример: На рис. 3.7 показана схема с использованием управляемого источника тока, формирующего в нагрузке серии синусоидальных импульсов тока. Amplitude = 100 f:: 2•pj•50 Sin e Wave лл Puls e Generator Amplitud e " 1 Т= 0.1 х Prod uct Controlle d Current c urre nt e ure nt : т :&•----M- j ·j Se ri es RLC Bran ch ·II П '1 Scop e у -ох 100 .. ,,, ...... , , .. ·�· 1 ·100 �- ·• , .. �- --Q�I--Q,-5-Q-2-�Q25 0. 05 �- ...___ . ________.. Рис. 3. 7. Применение управляемого источника тока _,.,,._N. _ 56 Библиотека блоков SimPowerSystems 3.2. 6. Трехфазнь,й источник напряжения 3-Phase Source Пиктограмма: Three-Pho11se Source Назнаttение: Моделирует трехфазный источник напряжения. Блок 3-Phase Source включа­ ет в себя три источника переменного напряжения, соединенных в звезду с нуле­ вым проводом или без него. Каждая фаза источника обладает внутренним актив­ но-индуктивным сопротивлением. Внутренние сопротивления всех фаз источника одинаковы. Внутреннее сопротивление источника может быть задано непосредственно с помощью значений сопротивления и индуктивности фазы или косвенно, с помощью параметров короткого замыкания. Окно задания параметров: r=-��.,;.� [r.....,._,s-1,,,,,o1c1tln<$ Tt.� ...... apilCe81-мhRLЬr-.:h 1 !25еЭ ··=1 -----..-....--------·=��- ,,._..,.d,,._Af� !о ! F-(Н.zt 11 р-_ jroSpecq�w,;,t,a,1..-. ..... ....,_......,...Jvg 1 3't,I,-choll-QIC\ll lмl а1 Ь... vdloooiVA} 1 J100e6 ! � WJIOIJtf\l.... � �-.........��--·=,=·=���� Параметры блока: Phase-to-phase nns voltage (V): [Действующее значение линейного напряжения]. Источники электрической энергии Electrical Sources 57 Phase angle of phase А (deg): (Начальная фаза напряжения в фазе А (град)]. Frequency (Hz): (Частота (Гц)]. Частота источника. Intemal connection: [Соединение фаз источника]. Значение параметра выбирается из списка: ► У - звезда; ► Yn - звезда с нулевым проводом; ► Yg - звезда с заземленной нейтралью. Specify impedance using short-circuit level: [Задать собственное полное сопротивление источника, используя параметры короткого замыкания). При установке флажка в окне диалога появляются допол­ нительные графы для ввода параметров короткого замыкания источника. Source resistance (Ohms): [Собственное сопротивление источника (Ом)]. Source inductance (Н): [Собственная индуктивность источника (Гн)]. 3-Phase short-circuit level at base voltage (VA): [Мощность короткого замыкания при базовом значении напряжения]. Base voltage (Vrms ph-ph): (Действующее значение линейного базового напряжения]. Величина ба;ювого линейного напряжения источника, при котором определена мощность короткого замыкания. X/Rratio: [Отношение индуктивного и активного сопротивлений). При задании импеданса источника через мощность короткого замыкания реак­ тивное сопротивление источника определяется по выражению: 2 Х=Vк.з QICЭ ' где� - мощность короткого замыкания; Ию - напряжение источника, при кото­ ром определена мощность короткого замыкания. Активное сопротивление источника находится в соответствии с выражением: х R=k' где k - отношение Х к R (параметр Х/ R ratio). Пример: На рис. 3.8 показана схема с использованием трехфазного источника напряже­ ния, подключаемого к несимметричной трехфазной нагрузке. Токи в нагрузке из­ мерены с помощью блока Multimetr. 58 Библиотека блоков SimPowerSystems Before = О After = 1 Step time = 0.01 Step г 1-�:1: Э-Ph.11se Source t = 60 \An"' 2бе3 __J_ - Ground (output) - - .J� :�Q:l·· �:.:��L:.:: Э-Ph,1se Bre,1ker L = 1De-03 '·R = 10 Cs "' inf . .-----, _____. � Rs = 1е6 Ron = 0.001 Series RLC Br.11nch2 R • 0.1 Ground (input) _L -=- Multimeter --· Рис. 3.8. Работа трехфазного источника напряжения на несимметричную нагрузку 3.2. 7. Трехфазный программируемый источник напряжения 3-Phase ProgrammaЬ/e Voltage Source Пиктограмма: Three-Ph.11se Progr,1mmaЫe Voltage Source Назначение: Блок 3-Phase ProgrammaЫe Voltage Source вырабатывает трехфазную систему напряжений с программируемыми во времени изменениями амплитуды, фазы и частоты, а также гармонического состава. Источники электрической энергии Electrical Sources 59 Окно задания параметров: l�Bl<Jt k P(iГ.illl�"" tt'Г<,: JI 1rt-'r' �)! !(i'-1,t' f't 1,1 jflifllll/(JIJI(• V<)lt, , Thf..�P!ogr......Ы.Vaioge s- {'-.1 (li№J TlwЬ!ocl<�o«ll;eo1"1tse"""� .... ...,c:a.The.,_ +,odo(nы,<11Jol1h<llme l<IU'<:eolt...,......... "'4qx,(1 !N)<ll!e.llЬ:k. т ... _..to,,ь�.�ondЬ-olU1e�o1-11o IЩ>f<>gr...мd: 1n eddlion, i..,�clnЬ. � onlle � D Note fo, """- ЩlaliOn". /requll,c;y � tnd t\l,Jncw1ic �.,. nQi � S�• Grdot•1mdS,q,1.2ot0b��� �•Аю:18" anyteqJef'(.'e. f1100 060] т,,.,.v..,-,<1:/дщ,il,Jdo Twe olv_,,,,_·,,..,S,..top ___,.::::;;:;==::::!::;,�;;;::::=.;.:;;:.==; S\ep<11��(p;.HtQ<dj,gt 05 V..,ix,, IJiМQ !•J · 1 s,.,.. fnd 1 112) f:; F�ol<r>;llo,H-go,,e,_, д. ( 0,do:{nJ �) Ph..щ�J $0(!(0. 1 о, 211 j1э0.2 -25 01 &: ( Ordelfnl Aч,ie.do(pul Pho:.o(deg..,.J �eqll. 1 о, 2) J /(20.153521 Tlr.t10f•J l�t E'>d\ lio.� ЗJ Параметры блока: Positive-sequence: [Amplitude (Vrms Ph-Ph) Phase (degrees) Freq. (Hz)] [Прямая последовательность: [Действующее значение (В) Фаза (градусы) Частота (Гц)]]. Параметр задается в виде вектора из трех элементов. Time variation of: [Изменение во времени]. Раскрывающийся список позволяет выбрать пара­ метр источника, который будет изменяться с течением времени. Значение пара­ метра выбирается из списка: ► None - нет изменяющихся во времени параметров источника: ► Amplitude - амплитуда; ► Phase - фаза: ► Frequency - частота. lype of variation: [Способ изменения]. Параметр задает вид изменения выбранного параметра источника. Вид изменения выбирается из списка: ► Step - ступенчатое изменение; ► Ramp - линейное изменение; ► Modttlation - модуляция; ► ТаЫе of time-amplitude pairs - таблица 'время-значение'. 60 Библиотека блоков SimPowerSystems Step magnitude [pu, Hz or deg]: [Уровень ступенчатого сигнала [о.е., Гц или rрад.])._Задает величину, на кото­ рую ступенчато изменяется выбранный параметр. Изменение величины напряже­ ния задается в относительных единицах (о.е.), фазы - в эл. градусах, и частоты в Гц. Например, если выбрано ступенчатое изменение амплитуды сигнала, равное 0,5, то это означает, что величина выходного напряжения источника будет увели­ чена на 0,5 относительно указанного в первой графе значения. Время, в течение которого величина выходного напряжения будет изменена, задается в графе Variation timing. Rate of change (value/s): [Скорость изменения (величина/с)]. Задает скорость изменения параметра источника. Изменение величины напряжения задается в о. е/с, фазы - в эл. гра­ дусах/с, и частоты - в Гц/с. Amplitude of the modulation: [Амплитуда модуляции). В данной графе задается амплитуда модуляции пара­ метра источника. Амплитуда модуляции напряжения задается в относительных единицах (о.е.), фазы - в эл. градусах, и частоты - в Гц. Frequency of the modulation (Hz): [Частота модуляции (Гц)). Variation timing (s): [Start End] (Время действия изменения [Начало Конец]]. Параметр определяет время нача­ ла и время окончания действия изменения выбранного параметра источника. Пара­ метр задается в виде вектора из двух значений (начальное и конечное время). Fundamental and/or Harmonic generation: [Наложение прямой, обратной, или нулевой последовательности и/или выс­ ших гармоник]. А: [Order(n) Amplitude Phase (degrees) Seq (О, t or 2)) (А: [Гармоника (n) Амплитуда Фаза (град) Последовательность (О, 1 или 2))). В графе задается вектор параметров генерируемой гармоники напряжения: номер гармоники, амплитуда (в относительных единицах), начальная фаза, последова­ тельность (О - нулевая, 1 - прямая, 2 - обратная). Результирующее выходное на­ пряжение будет являться суммой напряжений, заданных в графе Positive-sequen­ ce и в данной графе. В: [Order (n) Amplitude Phase(degrees) Seq (О, 1 or 2)). [В: [Гармоника (n) Амплитуда Фаза (град) Последовательность (О, 1 или 2))). Параметр задается аналогично предыдущему. Hannonic timing (s): [Start End] [Время действия гармоники (с) [Начало Конец]]. В графе задается вектор на­ чального и конечного значений времени для генерации гармоник. Источник является идеальным источником напряжения (его внутреннее со­ противление равно нулю). Пример: На рис. 3.9 показана схема с использованием трехфазного программируемого источника напряжения, подключенного к симметричной активной нагрузке. Измерительные и контрольные устройства 61 В интервале времени от 0,02 до 0,06 с источник дополнительно генерирует третью гармонику напряжения прямой последовательности с амплитудой 0,5 о.е. Scope Г+:l________JEJ г�-___. �l:....:..Г-i=J Volt.ige __i_ _ Me.isurement -c=J----ch S• :;;:__----, L----c=:J- _____. Series RLC Branch1 3-Ph.ise С � rogrammaЫe _ oltage Source __l__ \Ams. Ph.ise, frequency = [ЗO"(sqrt(З))lsqrt(2) О 50] Series RLC Branch2 R • 10 А• р 0.5 О 1] 8=[0000) 1iming = [О .02 О .OCIJ __l_ Рис. 3.9. Применение трехфазного программируемого источника напряжения 3.3. Измерительные и контрольные устройства 3.3.1. Измеритель тока Current Measurement Пиктограмма: ar:-тl> [__Ja Current Measurement Назначение: Выполняет измерение мгновенного значения тока, протекающего через соеди­ нительную линию ( провод). Выходным сигналом блока Current Measurement яв­ ляется обычный сигнал Simulink, который может использоваться любым Simu­ link-блoкoм. 62 Библиотека блоков SimPowerSystems Окно задания параметров: Параметры блока: Output type: [Вид выходного сигнала]. Выбор значения параметра возможен, только если с помощью блока Powergui установлен режим расчета схемы комплексным мето­ дом (Phasor simulation). В этом случае значение параметра выбирается из списка: ► Magnitude- амплитуда (скалярный сигнал); ► Complex- комлексный сигнал; ► Real-Imag- вектор, состоящий из двух элементов- действительная и мни­ мая составляющие сигнала; ► Magnitude-Angle - вектор, состоящий из двух элементов - амплитуда и ар­ гумент сигнала. Положительное направление тока задается знаками«+» и •-� на пиктограмме блока. При протекании тока от клеммы«+» к клемме«-» знак тока считается по­ ложительным. г Step Вl!fоП! • О Alter = 1 Step time = 0.0001 : u2 Breaker Cs" inf Rs • 1е3 Ron • 0.001 .:l_ DC Voltage Source T v"' 100 Continuous _ l Current Measurement l Series RLC Brainch l • 0.001 Rc1 С" 0.0001 0.015 TW8oftнt О т Рис. 3. 10. Измерение тока цепи Измерительные и контрольные устройства 63 Пример: На рис. 3.1 О показана схема, в которой блок Current Measurement использует­ ся для измерения тока в последовательном колебательном контуре. Simulink-cиr­ нaл, формируемый данным блоком, используется затем для отображения тока на осциллографе. Нулевые начальные условия для расчета схемы задаются в окне параметров блока Series RLC Branch. 3.3.2. Измеритель напряжения Voltage Measurement Пиктограмма: au аг.-::1 Voltage Measurement Назначение: Выполняет измерение мгновенного значения напряжения между двумя узла­ ми схемы. Выходным сигналом блока Voltage Measurement является обычный сигнал Simulink, который может использоваться любым Simulink-блoкoм. Окно задания параметров: Параметры блока: Output signal: [Выходной сигнал]. Вид выходноrо сигнала блока. Выбор значения параметра возможен, только если с помощью блока Powergui установлен режим расчета схе­ мы комплексным методом (Phasor simulation). В этом случае значение параметра выбирается из списка: ► Magnitude- амплитуда (скалярный сигнал); ► Complex - комлексный сигнал; ► Real-Imag- вектор, состоящий из двух элементов - действительная и мни­ мая составляющие сигнала; ► Magnitude-Angle - вектор, состоящий из двух элементов - амплитуда и ар­ гумент сигнала. Положительное направление напряжения задается знаками <!+• и <<-• на пик­ тограмме блока. Знак напряжения считается положительным, если напряжение направлено от клеммы<!+• к клемме<<-•. 64 Библиотека блоков SimPowerSystems Пример: На рис. 3.11 показана схема, в которой блок Voltage Measurement используется для измерения напряжения на конденсаторе последовательного колебательного контура. Simulink-cиrнaл, формируемый данным блоком, используется затем для отображения напряжения на осциллографе. Нулевые начальные условия для рас­ чета схемы задаются в окне параметров блока Series RI.C Branch. с,-.,. Step В.fore • О 1 Nter• 1 Step time • 0.0001 ./"2 ....----,: 1о1 . Bre.lk1r Cs • inf Rs • 1е3 Ron • О.001 S1rles RLC Br.1nch L • 0.001 R•1 DC Voluge Sour� V• 100 l d_T Series RLC Br,1noh1 С• 0.0001 _l Т Scope .________G-€] Voluge Me.1sur1ment --· 0.015 Рис. 3. 11. Измерение напряжения участка цепи Измерительные и контрольные устройства 65 3.3.3. Мультиметр Multimeter Пиктограмма: Mul1imeter Назначение: Блок Multimeter выполняет измерение токов и напряжений блоков библиоте­ ки SimPowerSystems, для которых в их окне диалога установлен. параметр Measurements (измеряемые переменные). Окно 3адания параметров: l!IGID, ) 1111ri1l,,,t "t11ltm1Pl<•r Sele,;ted Measurements UЬ: Series »J.C t'anch src-: DC Vьlcao• Sourc-• 1Ь � s•.r: i•• atc Зrа.n'Ш : s■ri•• R.L,C Br8nd\ IЬ: S•ri■11 R.LC SrW'.c:h Параметры блока: Availahle Measurements [ Переменные, доступные для измерения]. В данной графе отображаются пере­ менные (токи и напряжения) блоков схемы, для которых в их окне диалога уста­ новлен параметр Measurements (измеряемые переменные}. Обновление списка переменных можно выполнить с помощью клавиши U pdate. Selected Measurements [Измеряемые переменные]. В данной графе указываются переменные, кото­ рые будут передаваться на выход блока Multimeter. Для управления списком из­ меряемых переменных можно использовать следующие клавиши: ► >> - добавить выделенную переменную в список измеряемых; ► Up - передвинуть вверх выделенную переменную в списке измеряемых; ► Down - передвинуть вниз выделенную переменную в списке измеряемых; ► Remove -удалить выделенную переменную из списка измеряемых; ► + / - - изменить знак выделенной переменной. 66 Библиотека блоков SimPowerSystems О utput type: [Выходной сигнал]. Вид выходного сигнала блока. Выбор значения параметра возможен, только если с помощью блока Powergui установлен режим расчета схе­ мы комплексным методом (Phasor simulation). В этом случае значение параметра выбирается из списка: ► Magnitude- амплитуда (скалярный сигнал); ► Complex - комлексный сигнал; ► Real-Imag- вектор, состоящий из двух элементов - действительная и мни­ мая составляющие сигнала; ► Magnitude-Angle - вектор, состоящий из двух элементов - амплитуда и ар­ гумент сигнала. Блок может использоваться для измерения напряжений и токов вместо обыч­ ных измерителей - Current Measurement и Voltage Measurement. Список блоков, в окне параметров которых имеется параметр Measurements, приведен в табл. 3.1. Таблица З. 1. Блоки, имеющие параметр Measurements Название блока АС CurrentSource АС VoltageSource Breaker Controlled CurrentSource Controlled VoltageSource DC Voltage Source DistributedParameter Une LinearTransformer Multi-Windlng Transformer Mutual lnductance Parallel RLC Branch Parallel RLC Load Название блока PI Section Une SaturaЫeTransformer Series RLC Branch Series RLC Load Surge Arrester Three-Level Bridge Three-Phase Harmonic Filter Three-Phase Load (Series andParallel) T hree-Phase Branch (Series andParallel) Тhree-Phase Transformer (Two and Тhree Windings) Universal Bridge ZigzagPhase-Shifting Transformer Выходным сигналом блока является вектор сигналов измеряемых переменных. Знаки измеряемых переменных (токов и напряжений) не являются столь оче­ видными, как при измерениях с помощью Current Measurement или Voltage Measurement, поскольку блоки, для которых выполняются измерения, могут быть повернуты. При этом никаких символов для указания положительных направле­ ний токов или напряжений на самих блоках нет. В отличие от Simulink-блoкoв порты SРS-блоков являются ненаправленными, и по ним нельзя судить о поло­ жительных направлениях токов и напряжений. В SРS-блоках положительные на­ правления определяются их ориентацией. Для нахождения ориентации блока не­ обходимо выделить требуемый блок и выполнить команду вида: get_param(gcb,'Orientation'). В табл. 3.2 приведены полярности токов и напряжений для различной ориен­ тации блоков. Естественная ориентация блоков, т.е. их ориентация в библиотеке, - right для горизонтально ориентированных блоков и down - для блоков, ориентированных вертикально. Измерительные и контрольные устройства 67 Таблица 3.2. Полярность токов и напряжений блоков в зависимости от их ориентации Ориентация блока Положительное наnравпение тока Положительное наnравпение напряжения 'right left down up слева направо справа налево сверху вниз снизу вверх от левой клемме к правой от правой клеммы к левой от верхней клемме к нижней от нижней клеммы к верхней Для однофазных трансформаторов, клеммы обмоток которых расположены как с левой, так и с правой стороны, напряжение обмотки есть напряжение верх­ ней клеммы относительно нижней вне зависимости от ориентации блока (right или left). Токи обмоток - это токи, втекающие в верхнюю клемму. Для трехфаз­ ных трансформаторов положительные направления токов и напряжений будут показаны с помощью меток сигналов в самом блоке мультиметра. Например, мет­ ка сигнала Ubn_w2 означает, что измеряется напряжение второй обмотки транс­ форматора между нейтральной точкой и клеммой В, а метка сигнала Iab_w1 озна­ чает, что измеряется ток, протекающий от клеммы А к клемме В первой обмотки трансформатора. Пример: На рис. 3.12 показана схема однофазного мостового выпрямителя, работающего на активно-индуктивt1ую нагрузку. С помощью блока Multimeter измеряются на­ пряжение и ток одного из вентилей, выходное напряжение моста и ток нагрузки. �---•A J ACVoluge� Source "(' \,tn = 100 t = 50 " '�- ---■ В Series RLC Branch L = 10е-ОЗ R=1 Universal Brid ge Anns = 2; Ron = 1е-З; Lon • О; Rs = 1е5; Cs: inf \/1 = о ,б1) Usw1: Universal Bri е lsw 1 : Universal Вndge Udc: Universill Bridge 1Ь: Series R LC Branch Multimeter Demux , .. ,. 1• ;. " • " о[J}:][\[\Л 100== Scope �==== :� О Рис. З. 12. Использование блока Multimetr (102 О 04 0.08 (108 68 Библиотека блоков SimPowerSystems 3.3.4. Трехфазный измеритель Three-Phase V-1 Measurement Пиктограмма: аА а В а С \/\Jbc > labc > а а Ь а с а Three-Phase V-1 Measurement Назначение: Блок Three-Phase V-1 Measurement выполняет измерение токов и напряжений в трехфазных цепях. Окно задания параметров: Т�\1! м..,.••.,,.,,,t{rnиk)IW'-) ТЬ.Ыоd, 1tutedщ,_•� ,,.._"'1d.,.,.,.,11•"'""-lt. when �......._t,eмniheltireo� votoQct n� cvrotta: w:мcted.,_.,..,.. Thotiicd.can""'!Utho,..._ond_l\""'""'V-Olin-ond -Q-IOti.ll>t�Ьoilt}f!IOU-� ....... 1111>..a-ond-. inpu 1 ' F u.... W>d Sig,,otW.. (uwofian,t,loct.lOcafad l!R,o,111 1 Р' Vdl.og,, npu а c...rert--1ye, f1 U••lol>ol Sv,,i\8Ьol (""'•f--1• ooloct 1ta t.igмj ' j1.ьс i;;c..,...,..,"' 8_,р0..., (Vд �i,he,e) j100e6 Параметры блока: Voltage Measuremeot: 1 """""-"�......,"-""'...,__,..,..._.,-,;.;�] ' [Измерение напряжений]. В данной графе производится выбор измеряемого напряжения: Измерительные и контрольные устройства 69 ► no - напряжения не измеряются; ► phase-to-ground - измерение фазного напряжения; ► phase-to-phase - измерение линейного (межфазного) напряжения. Use а label: [Использовать метку]. При установке флажка сигнал будет передаваться к блоку From. Параметр Goto tag блока From должен соответствовать имени мет­ ки, заданной в графе Signal label. Signal label: [Метка сигнала]. Voltages in p.u.: [Измерение напряжений в относительных единицах]. При установке флажка измеренные напряжения будут преобразованы в соответствии со следующим вы­ ражением: U и . = Uб . .fj_;Jз' где U6 - базисное напряжение, задаваемое в графе Base voltage. Base voltage (Vrms phase-phase): [Базисное напряжение (действующее значение линейного напряжения)]. Current measurement: (Измерение токов]. В данной графе производится выбор измерения токов: ► no - токи не измеряются; ► yes - токи измеряются. Use alabel: [Использовать метку]. При установке флажка сигнал будет передаваться к блоку From. Параметр Goto tag блока From должен соответствовать имени мет­ ки, заданной в графе Signal label. Signal label: [Метка сигнала]. Currents in p.u.: [Измерение токов в относительных единицах). При установке флажка изме­ ренные токи будут преобразованы в соответствии со следующим выражением: /. = / S6•.fi./(Uб·Jз)' где S6 - базисная мощность, задаваемая в графе Base power. Base power (VA 3 phase): [Базисная мощность]. Полная мощность трех фаз. Output signal: [Выходной сигнал]. Вид выходного сигнала блока. Выбор значения параметра возможен, только если с помощью блока Powergui установлен режим расчета схе­ мы комплексным методом (Phasor simulation). В этом случае значение параметра выбирается из списка: 70 библиотека блоков SimPowerSystems ► Magnitude- амплитуда (скалярный сигнал); ► Complex- комлексный сигнал; ► Real-lmag- вектор, состоящий из двух элементов- действительная и мни­ мая составляющие сигнала; ► Magnitude-Angle - вектор, состоящий из двух элементов- амплитуда и ар­ гумент сигнала. Выходными сигналами блока являются векторы сигналов измеряемых пере­ менных. Пример: На рис. 3.13 показана схема включения трехфазного источника напряжения на активно-индуктивную нагрузку. С помощью блока Three-Phase V-I Measurement измеряются фазные токи и напряжения нагрузки. Step Before = О Atter• 1 Step time • 0.01 3-Philse Source t • 50 \m = 100 Sccpe com а--А Three-Philse V-1 Measurement З-Pho1se Breo1ker Cs = inf Rs = 114 Ron • 0.001 ъ•-�:. . о •50 .. � ·· • . . ,, ,. , •..\ 1: --CJ---fYY'З-Pho1se Series RLC Bro1nch L• 1е-3 R = 0.1 с= inf . ' ; . .. : .. . .t j ·100 200 · : · - •· ... о� .; .. . • .. •20] , о , .. . ,. • 001 ·' �02 ' ·•• ; . ' nоэ о.о, . .. . ' 0115 _ • oos П-Oftмt. о Рис. 3. 13. Измерение токов и напряжений в трехфазной цепи �l:3 Измерительные и контрольные устройства 71 3.3.5. Измеритель полного сопротивления lmpedance Measurement Пиктограмма: lmped.1nce Me.1surement Назначение: Блок Impedance Measurement выполняет измерение зависимости полного со­ противления (импеданса) участка электрической цепи от частоты. Окно задания параметров: Параметры блока: Multiplication factor: [Масштабный коэффициент]. Значение параметра, отличающееся от 1, может использоваться для соответствующего увеличения или уменьшения измеряемого значения. Например, при измерении полного сопротивления между двумя фаза­ ми симметричной трехфазной цепи значение параметра можно установить рав­ ным 0,5. В результате будет получено значение полного сопротивления только для одной фазы. Для отображения зависимости импеданса от частоты необходимо установить на схему блок Powergui. Открыв окно диалога блока, следует нажать кнопку Im­ pedance vs Frequency Measurements и в новом открывшемся окне нажать кнопку Display. В итоге в окне будут отображены зависимости модуля и аргумента полно­ го сопротивления от частоты. При расчете полного сопротивления схемы учитываются только три нелиней­ ных блока: Breaker (выключатель), Ideal Switch (идеальный ключ) и Distributed Parameter Line (линия с распределенными параметрами). Все остальные нели­ нейные блоки (электрические машины, силовые полупроводниковые приборы и т. п.) будут отключены. 72 Библиотека блоков SimPowerSystems При использовании измерителя полного сопротивления следует иметь в виду, что этот блок выполнен на основе источника тока и не может быть включен после­ довательно с индуктивными элементами. Для устранения этого ограничения сле­ дует шунтировать блок резистором с достаточно большим сопротивлением. Вели­ чину сопротивления следует выбирать такой, чтобы свойства схемы значительно не изменялись. Пример: На рис. 3.14 показана схема подключения блока lmpedance vs Frequency Mea­ surements к последовательному колебательному контуру для измерения его пол­ ного сопротt1вления. Там же показано окно блока Powergui с графиками. Continuous 1 Series RLC Branch L = 0.001 R= 1 С= 0.0001 Series RLC Branch1 т � R = 1е6 f Iow,·r,JI.I! lrнp, 111.111, 1· "!,• r,..,11r,•111,•111..., 1но•t. 1 lr1tpt•,t,111r, ',1, ,1 lmped•nce: t'v1e,в_surement МJ/tiplication F'actor • 1 l!!lr;J.IЗ Рис. 3. 14. Измерение полного сопротивления цепи Электротехнические элементы Elements 73 3.4. Электротехнические элементы Elements 3.4. 1. последовательная RLС-цепь Series RLCBranch Пиктограмма: Series RLC Branch Назначение: Блок Series RLC Branch моделирует последовательное включение резистора, индуктивности и конденсатора. Окно задания параметров: OHlork 1'.1r,Шlf•lr-r0• :,.,r,,н, HI (; Hr,mch s...t RU: 8<"1Ch \....+;)tlr,kl Е1 �•--Ьran::holALC.......,.._ , 1).., 11-е 'В,.щ, 1)1ре' Oll""1f!W to odd or remo-,a � from tho lw.,,,_h 1 ,ю.oot.nce(Нt ,,.э Р Sot tl,o inilмl ir1<kt1» мt,,1 l�с,,,._щ,.,..11\) J1o-6 ., l}euhO;;,.,,� ;,,.., Сас>е<i.о,...,..,._м. Параметры блока: Branch type: [Тип цепи]. Параметр задает конфигурацию цепи: RLC, R, L, С, RL, RC, LC, Open circuit (разрыв). Resistance R (Ohms): [ Сопротивление (Ом)]. Величина активного сопротивления. Для исключения резистора из цепи значение сопротивления можно задать равным нулю. В этом случае на пиктограмме бло.ка резистор отображаться не будет. 74 Библиотека блоков SimPowerSystems Inductance L (Н): [Индуктивность (Гн)]. Величина индуктивности. Для исключения индуктив­ ности из цепи ее величину можно задать равной нулю. В этом случае на пикто­ грамме блока индуктивность отображаться не будет. Set initial inducor current: [Задать начальный ток индуктивности]. При установке флажка в окне параметров появляется дополнительная графа для ввода начального значения тока. Inductor initial current (А): [Начальный ток индуктивности (А)]. Capacitance С (F): [Емкость ( Ф)]. Величина емкости. Для исключения конденсатора из цепи зна­ чение емкости можно задать равным inf (бесконечность). В этом случае конденса­ тор на пиктограмме блока показан не будет. Set initial capacitor voltage: [Задать начальное напряжение конденсатора]. При установке флажка в окне параметров появляется дополнительная графа для ввода начального значения напряжения. Capacitor initial voltage (V): [Начальное напряжение конденсатора (В)]. Measurernents: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; - 1:1" iD ,-------.------, '° -20 .4() .;оо'----,0."' �1 --,o."'1s=----:'02 :------' о. 11; 'ТlrNoffмt D Series RLC Branch L= 0.001 R = 0.1 С= 0.001 т Рис. 3. 15. Переходные процессы в последовательном колебательном контуре Электротехнические элементы Elements 75 ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. Отображаемым сигналам в блоке Multimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. Прим.ер: На рис. 3.15 показана схема с использованием последовательного колебательного контура. На схеме источник переменного напряжения амплитудой 100 В и частотой 50 Гц подключается к цепи с параметрами: R = 0,1 Ом, L = 0,001 Гн и С= 0,001 Ф. 3.4.2. параллельная RLС-цепь Parallel RLC Branch Пиктограмма: Parall@I RLC Branch Назначение: Блок Parallel RLC Branch моделирует параллельное включение резистора, ин­ дуктивности и конденсатора. Окно задания параметров: С)1,1.,, > 1·,11,нr,.,t.,,,, l',н,111, 11:1 С Нr,нн t, !Е:��--"'.. 1 1е-З j gs"n,u"°"""..-,.,., · -�� ��;,-•--==-•-4•=� ��..,..м о lм-{н- -'-- j� � l3; 76 Библиотека блоков SimPowerSystems Параметры блока: Branch type: [Тип цепи]. Параметр задает конфигурацию цепи: RLC, R, L, С, RL, RC, LC, Open circuit (разрыв). Resistance R (O hms): [Сопротивление (Ом)]. Величина активного сопротивления. Для исключения резистора из цепи значение сопротивления можно задать равным inf (бесконеч­ ность). В этом случае на пиктограмме блока резистор отображаться не будет. Inductance L (Н): [Индуктивность (Гн)]. Величина индуктивности. Для исключения индуктив­ ности из цепи ее величину можно задать равной inf (бесконечность). В этом слу­ чае на пиктограмме блока индуктивность отображаться не будет. Set initial inducor current: [Задать начальный ток индуктивности]. При установке флажка в окне параметров появляется дополнительная графа для ввода начального значения тока. Inductor initial current (А): [Начальный ток индуктивности (А)). Capacitance С (F): [Емкость (Ф) ]. Величина емкости. Для исключения конденсатора из цепи зна­ чение емкости можно задать равным нулю. В этом случае конденсатор на пикто­ грамме блока показан не будет. Set initial capacitor voltage: [Задать начальное напряжение конденсатора). При установке флажка в окне параметров появляется дополнительная графа для ввода начального значения напряжения. Capacitor initial voltage (V): [Начальное напряжение конденсатора (В)]. Measurements: [ Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. Отображаемым сигналам в блоке Multimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. Пример: На рис. 3.16 показана схема с использованием параллельного колебательного контура. На схеме источник переменного напряжения амплитудой 100 В и часто­ той 50 Гц подключается к цепи с параметрами: R = 0,1 Ом, L = 0,1-10·3 Гн и С= 0,01-10·3 Ф. Электротехнические элементы Elements 77 IЦI)----�---� 005 n, Рис. 3. 16. Переходные процессы в параллельном колебательном контуре З.4.З. последовательная RLС-нагрузка Series RLC Load Пиктограмма: а��а Series RLC Load Назначение: Блок Series RI.C Load моделирует последовательное включение резистора, ин­ дуктивности и конденсатора. Параметры цепи задаются через мощность цепи при номинальном напряжении и частоте. 78 Библиотека блоков SimPowerSystems Окно задания параметров: Sene• RU: tood 1,м,а) (W.J ,,__•-RU:io.ri 10.З j100 tS�hr.wl� ...... /Copdorni<IVW90M ! ; Se\lhe .......,Фж,=GUlt!W=-��-=�-��='""""",._,,,,._'"'"'"' lt,dodo, ,ti,,I.....,.. fllt Параметры блока: Nominal voltage Vn (V rms): [Номинальное напряжение (В)]. Значение действующего напряжения цепи, для которого определены мощности элементов. Nominal frequency fn (Hz): [Номинальная частота (Гц)]. Значение частоты, для которого определены мощности элементов. Active power Р (W): [Активная мощность (Вт)]. Inductive reactive power QL (positive var): [Реактивная мощность индуктивности (ВАр)]. Потребляемая индуктивно­ стью реактивная мощность. Capacitive reactive power QC (negative var): [Реактивная мощность емкости (ВАр)]. Отдаваемая конденсатором реактивная мощность. В графе вводится абсолютное значение мощности (без учета знака). Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. Электротехнические элементы Elements 79 Отображаемым сигналам в блоке Multimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. Величины мощностей моrут быть определены по следующим выражениям: P=R· Ql, u2 я2 =WL· +(с}с -wL) 2, u2 R2 +( 1 ro L оо С - ) 2 2' J, Qc = _1_ ____и____ wC 2 1 -ro R L оо С rде Р- активная мощность; QL - реактивная мощность индуктивности; Qc- реак­ тивная мощность емкости; w - круговая частота напряжения; U - действующее значение напряжения. +( Пример: На рис. 3.17 показана схема с использованием последовательной нагрузочной цепи. На схеме источник переменного напряжения амплитудой 100 В и частотой г Step Before=O Atter= 1 Step time = 0.0001 ё\ с 1 U- В с:•:ki�; D i + _ � Scope Current� M1 asurem1nt Rs = 1е3 Ron = 0.001 АС Volt.1ge Source '(" \.tn • 100 f • 50 20 .21) .,а .eoo----,o,.,,os,.---=n�, ---=o.. , s, ., ---= · 02 1iintof1'18t: Series RLC Load V'I = 100 fn • 50 Р = 121.347 OL= 381.224 ас= 3.863е3 т о Рис. 3. 17. Переходные процессы в последовательном колебательном контуре 80 Библиотека блоков SimPowerSystems 50 Гц подключается к цепи с параметрами: Ин = 100 В.fн = 50 Гц, Р = 121,347 Вт, QL = 381,224 ВАр и Qc = 3863 ВАр. При выбранных нагрузочных параметрах зна­ чения сопротивления, индуктивности и емкости будут равны параметрам после­ довательной RLС-цепи, показанной на рис. 3.15. 3.4.4. параллельная RLС-нагруэка Parallel RLC Load · 8· Пиктограмма: Parallel RLC Load Назначение: Блок Parallel RLC Load моделирует параллельное включение резистора, ин­ дуктивности и конденсатора. Параметры цепи задаются через мощности цепи при номинальном напряжении и частоте. Окно задания параметров: (:}Blo, k P,,r,1111,•t,•r-,: P,ir,,11,•1 Н1 С I Octfl E'J Электротехнические элементы Elements 81 Параметры блока: Nominal voltage Vn (Vrms): [Номинальное напряжение (В)]. Значение действующего напряжения цепи, для которого определены мощности элементов. Nominal frequency fn (Hz): [Номинальная частота (Гц)]. Значение частоты, для которого определены мощности элементов. Active power Р (W): [Активная мощность (Вт)]. Inductive reactive power QL (positive var): [Реактивная мощность индуктивности (ВАр)]. Потребляемая индуктивно­ стью реактивная мощность. Capacitive reactive power QC (negative var): [Реактивная мощность емкости (ВАр)]. Отдаваемая конденсатором реактивная мощность. В графе вводится абсолютное значение мощности (без учета знака). Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. Отображаемым сигналам в блоке Мultimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. Величины мощностей могут быть определены по следующим выражениям: u2 P=R' u2 Qi_ = wL' Qc= lf2wC, где Р- активная мощность; QL - реактивная мощность индуктивности; Qc - реак­ тивн,щ мощность емкости; w - круговая частота напряжения; И - действующее значение напряжения. Пример: На рис. 3.18 показана схема с использованием последовательной нагрузочной цепи. На схеме источник переменного напряжения амплитудой 100 В и частотой 50 Гц подключается к цепи с параметрами: Ин = 100 В, fн = 50 Гц, Р = 100 кВт, QL = 318,3 кВАр и Qc = 31,42 ВАр. При выбранных нагрузочных параметрах зна­ чения сопротивления, индуктивности и емкости будут равны параметрам парал­ лельной RLС-цетти, показанной на рис. 3.16. 82 Библиотека блоков SimPowerSystems г Step ВeforeaO Mer•1 S'teptime = 0.0001 с 1 U2 - Breaker сs" 1n, .• l D i + • � Scope Current Measure ment Rs"' 1е3 Ron=0.001 АС Voltage Source � \,tna100 1 =ti0 Parallel RLC Load \.tt " 100 fn: !iO Р: 100е3 QL: 318.3е3 ас" 31.416 m Рис. 3. 18. Переходные процессы в параллельном колебательном контуре З.4.5. Трехфазная последовательная RLС-цепь 3-Phase Series RLC Branch Пиктограмма: Three-Phase Series RLC Branch Назначение: Блок 3- Phase Series RLC Branch моделирует трехфазную цепь, состоящую из трех RLС-цепей. Электротехнические элементы Elements 83 Окно задания параметров: l.]Blo, k ,•,1r,1m"f1)f', ,hr,·.: ,·t,,1•,,· ',,•111", ,it С llr ·1'--PhseS-AI.C i!un:,h (,._,)�) 1�••�-RlCЬ,an<:h U"'lho '9� !ИJе' �Jo addOI _......,.. lюmlf-eЬr.,,.I,. f.З 1..6 м--fнmе Параметры блока: Branch type: [Тип цепи]. Параметр задает конфигурацию цепи: RLC, R, L, С, RL, RC, LC, Open circuit (разрыв). Resistance R (Ohms): [Сопротивление (Ом)]. Величина активного сопротивления в одноj;j фазе. Для исключения резистора из цепи значение сопротивления можно задать равным нулю. В этом случае на пиктограмме блока резистор отображаться не будет. Inductance L (Н): [Индуктивность (Гн)]. Величина индуктивности в одной фазе. Для исключе­ ния индуктивности из цепи ее величину можно задать равной нулю. В этом случае на пиктограмме блока индуктивность отображаться не будет. Capacitance С (F): [Емкость ( Ф) ). Величина емкости в одной фазе. Для исключения конденсато­ ра из цепи значение емкости можно задать равным inf (бесконечность). В этом случае конденсатор на пиктограмме блока показан не будет. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► BrancЬ voltage and current - напряжение и ток цепи. Отображаемым сигналам в блоке Мultimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. 84 Библиотека блоков SimPowerSystems Пример: На рис. 3.19 показана схема, в которой трехфазная последовательная RLС­ цепь подключается к трехфазному источнику напряжения с действующим значе­ нием линейно.го напряжения 25 кВ и частотой 50 Гц. Подключение осуществля­ ется с помощью блока 3-Phase Breaker. Параметры цепи выбраны следующими: R = 0,1 Ом, L = О,1·10-3 Гн и С= 0,05-10-3 Ф. Для измерения тока в трехфазной си­ стеме использован блок Three-Phase V-I Measurement. 1·,� :1=:; �: =: : =:1: � r :IЭi Stop Вeforo • О Иtor• 1 Step timo • О .ООО 1 а ---- А 3-Phase Bro.t<er Cs = inf Rs • 1е� Ron = 0.001 f. � \,tn • 2583 1, com 1_,_ """ Three-Phase V-1 M1,sur1m1nt s 00 р 1 �---------. 3-Ph,se Series RLC Branм L• 1е-3 R•I С= 5е.3 11110 � /,А 05 -ll5 ., .. --· -1 50 0.05 0.1 0.15 Рис. З. 19. Переходные процессы при подключении трехфазной последовательной цепи к источнику 3.4.6. Трехфазная параллельная RLС-цепь 3-Phase Parallel RLC Branch Пиктограмма: ::и:: а:��С а Three-Ph.1se Par.illel RLC Br.inch Электротехнические элементы Elements 85 Назначение: Моделирует трехфазную цепь, состоящую из трех параллельных RLС-цепей. Окно задания параметров: tt,м.fhaRPll4olRLCllr.-ch(.-itw.1 �•llr�i,«,lolRI.Cl>t<lnch. U�ll'8t!"'"'111)1,e' pa..,...to..ti0<1.....,._•lronit1JoЬ,,rm Параметры блока: Branch type: [Тип цепи]. Параметр задает конфигурацию цепи: RLC, R, L, С, RL, RC, LC, Open circuit (разрыв). Resistance R (Ohms): [ Сопротивление (Ом)]. Величина активноrо сопротивления в одной фазе. Для ис­ ключения резистора из цепи значение сопротивления можно задать равным inf (бес­ конечность). В этом случае на пиктограмме блока резистор отображаться не будет.• Inductance L (Н): [Индуктивность (Гн)]. Величина индуктивности в одной фазе. Для исключе­ ния индуктивности из цепи ее величину можно задать равной inf (бесконечность). В этом случае на пиктограмме блока индуктивность отображаться не будет. Capacitance С (F): [Емкость (Ф)]. Величина емкости в одной фазе. Для исключения конденсато­ ра из цепи значение емкости можно задать равным нулю. В этом случае конденса­ тор на пиктограмме блока показан не будет. Measurements: (Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блuка Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. 86 библиотека блоков SimPowerSystems Отображаемым сигналам в блоке Multimeter присваиваются метки: ► Ib - ток цепи; ► Ub - напряжение цепи. Пример: На рис. 3.20 показана схема, в которой трехфазная параллельная RLС-цепь подключается,к трехфазному источнику напряжения с действующим значением линейного напряжения 25 кВ и частотой 50 Гц. Параметры цепи выбраны сле­ дующими: R = 0,1 Ом, L = 0,1-10·3 Гн и С= 0,01-10·3 Ф. Вefore = О Nter= 1 Step time •О.ООО 1 Step l•I� ;1=� �: = Е h com 31 __ А в 3-Ph••• Source f • бО \tn "2бе3 ,, ''" •Ь'Э P��.tar:JA�,_9 • ,10 ,5 .... ..... г--·. 0.1 11!18 -« З-Рhи• Bre.icer Cs • inf Rs" 188 Ron" 0.001 с la � =--г Scope ь --i_ с с т hree-Ph••• V-1 Me,surement с Three-Ph••• P•r•llel RLC Br•ncll L•О.1•-З R "0.1 С •0.01•3 Рис. 3.20. Переходные процессы при подключении трехфазной параллельной цепи к источнику 3.4. 7. Трехфазная последовательная RLС-наrрузка 3-Phase Series RLC Load Пиктограмма: а fт а а Three-Phase Series RLC Load Электротехнические элементы Elements 87 Назначение: Блок 3- Phase Series RLC Load моделирует трехфазную цепь, состоящую из трех последовательных RLС-нагрузок. Схема соединения цепей может быть раз­ личной. Параметры цепи задаются через мощности фаз цепи при номинальном напряжении и частоте. Окно задания параметров: 1 Ccmiµ-.f у �""1ded) 1 Nor....i �ФРI'->dlago Vn (1/m,zJ /1000 �---��--�--"" llanNl�-fn{/1,J: = r,["ЗС] г� Параметры блока: Configuration: [Соединение]. Параметр задает схему соединения трехфазной цепи. Значение выбирается из списка: ► У (grounded) - звезда с заземленной нейтралью, ► У (floating) - звезда без нулевого провода, ► У (neutral) - звезда с нулевым проводом, ► Delta - треугольник. Nominal phase-phase voltage Vn (Vrms): [Номинальное линейное напряжение (В)]. Значение действующего линейного напряжения цепи, для которого определены мощности элементов. Nominal frequency fn (Hz): [Номинальная частота (Гц)]. Значение частоты, для которого определены мощности элементов. Active power Р (W): [Активная мощность на три фазы (Вт)]. Inductive reactive power QL (positive var): [Реактивная мощность индуктивности на три фазы (ВАр) ]. Потребляемая ин­ дуктивностью реактивная мощность. 88 Библиотека блоков SimPowerSystems Capacitive reactive power QC (negative var): [Рещ<Тивная мощность емкости на три фазы (ВАр)). Отдаваемая конденсато­ ром реактивная мощность. В графе вводится абсолютное значение мощности (без учета знака). Пример: На рис. 3.21 показана схема с использованием трехфазной последовательной нагрузочной цепи. На схеме источник переменного напряжения с действующим значением линейного напряжения 25 кВ и частотой 50 Гц подключается к цепи с параметрами: • rg р �/л А 1:м С!! 9 • Ин = 25 кВ.fн = 50 Гц,Р = 188,7 МВт, (4-_ = 59,29 МВАр 1, 1110 и Qc = 120,1 МВАр. При выбранных нагрузочных параметрах значения сопротивления, индуктив­ 05 ности и емкости будут равны параметрам трехфаз­ ной последовательной RLС-цепи, показанной на рис. 3.19. ·150'-------nos ___o�, -�n1s ---0 Step ВеfОП! = О Nter= 1 Step time = О.ООО 1 l• ��1=�� З-Ph.1se Source1 f = �iO \tn = 2541!3 com Scope ,._д _ A ь-в с-с �-� с-с 3-Рhие Bre.1ker Cs = inf Rs = 1е6 Ron = 0.001 lab: Three-Ph.1se V-1 Me.1surement Рис. 3 21. Переходные процессы при подключении трехфазной последовательной нагрузки к источнику 1 З-Ph.1se Series RLC Lo.1d V1 = 25e3/sqrt(3) fn = 50 Р = 1.887е8 OL= 5.929е7 ас= 1.201е8 3.4.8. Трехфазная параллельная RLС-наrруэка 3-Phase Parallel RLC Load Пиктограмма: а а а Three-Ph.1se P.1r.1llel RLC Lo.1d Назна11ение: Блок 3-Phase Parallel RLC Load моделирует трехфазную цепь, состоящую из трех параллельных RLС-нагрузок. Схема соединения цепей может быть различ- Электротехнические элементы Elements 89 ной. Параметры цепи задаются через мощности фаз цепи при номинальном на­ пряжении и частоте. Окно задания параметров: ��Blo,k 1',1rc1111c•l,•r-,: ll1r1•,• pf,.,.,., 1',1r,1ll,•I 1Н С I o,,,i Е] so NJнe-PM 10.З Параметры блока: Configuration: [Соединение]. Параметр задает схему соединения трехфазной цепи. Значение выбирается из списка: ► У (grounded) - звезда с заземленной нейтралью, ► У (floating) - звезда без нулевого провода, ► У (neutral) - звезда с нулевым проводом, ► Delta - треугольник. Nominal phase-phase voltage Vn (Vrms): [Номинальное линейное напряжение (В)]. Значение действующего линейного напряжения цепи, для которого определены мощности элементов. Nominal frequency fn (Hz): [Номинальная частота (Гц)]. Значение частоты, для которого определены мощности элементов. Active power Р (W): [Активная мощность на три фазы (Вт)]. Inductive reactive power QL (positive var): [Реактивная мощность индуктивности на три фазы (ВАр)]. Потребляемая ин­ дуктивностью реактивная мощность. Capacitive reactive power QC (negative var): [Реактивная мощность емкости на три фазы (ВАр)]. Отдаваемая конденсато­ ром реактивная мощность. В графе вводится абсолютное значение мощности (без учета знака). 90 Библиотека блоков SimPowerSystems Пример: На рис. 3.22 показана схема с использованием трехфазной параллельной нагрузочной цепи. На схеме источник переменного напряжения с дей­ ствующим значением линейного напряжения 25 кВ и частотой 50 Гц подключается к цепи с параметрами: Ин = 25 кВ.fн = 50 Гц, Р= 2083 МВт, Qz, = 6631 МВАр и Qc = = 654,5 кВАр. При выбранных нагрузочных параметрах значения сопротивления, индуктивно­ сти и емкости будут равны параметрам трехфазной параллельной RLС-цепи, показанной на рис. 3.20. ' . , 1.5 ,. 0.5 о .. -0.5 '1 \ ) 1 11 . . . . i , 11 . : .• �\/!�- '•··' V �: _,·: \: .... :..: . 0.1 0.15 Before = О .Atter = 1 Step time = 0.0001 Step 1 . -' . . . =1=: com _•1� с_- с _ _ur-c e-� _ _e S �-3---P-h.;is _ o f = 50 \,tn = 25е3 � а - А с -с 3-Ph.;ise Breaker Cs = inf Rs = 1е6 Ron = 0.001 l11b: :..Г с 1 Scope А __.I___ГV"V"SL__LJ ' Three-Ph.;ise [__ С V-1 Me.;isure me nt Рис. 3.22. Переходные процессы при подключении трехфазной параллельной нагрузки к источнику 3-Ph.;ise P.;ir,1llel RLC Lo.;id \,to = 2бе3 fn = 50 Р = 2.08Зе9 OL = 6.631е9 ОС= 6.54бе5 3.4.9. Трехфазная динамическая нагрузка 3-Phase Dynamic Load Пиктограмма: Three-Ph.ase Dyn.;i mic Lo,1d Назначение: Блок 3-Phase Dynamic Load - трехфазный блок динамической нагрузки моде­ лирует трехфазную, трехпроводную динамическую нагрузку, чья активная мощ- Электротехнические элементы Elements 91 ность Р и реактивная мощность Q изменяются как функция напряжения прямой последовательности. Токи обратной и нулевой последовательностей не модели­ руются, поэтому фазные токи нагрузки являются сбалансированными даже при несбалансированных напряжениях. Полное сопротивление нагрузки сохраняется постоянным, если напряжение на зажимах нагрузки более низкое, чем заданная величина Vmin• Когда напряже­ ние на зажимах большее, чем величина Vmin• активная мощность Р и реактивная мощность Q нагрузки изменяются в соответствии с выражениями: V )пµ (1+1 p1s) P(s)=Po (- --'---, V0 (1+T p2s) где V0 - начальное напряжение прямой последовательности; Р0 и Qo - начальные значения активной и реактивной мощности при напряж�нии V0; V - напряжение прямой последовательности; пр и nq - показатели степени (обычно между 1 и 3), управляющие свойствами нагрузки; ТР1 и ТР2 - постоянные времени, управляю­ щие динамикой активной мощности J>-, Tq 1 и Tq2 - постоянные времени, управляю­ щие динамикой реактивной мощности Q. Для моделирования, например, токовой нагрузки постоянной величины тре­ буется задать пр и nq равными 1, а для задания постоянного по величине полного сопротивления нагрузки необходимо задать пр и nq равными 2. Окно задания параметров: Тt•••-РмооО� I.08d 1"'°'"'1 �i ,....,,...�._....4"....cloed.-PAO'"'Paю..­ _,Q«>IO!hedЬ,,lhelood_.,�Ol�..._.v """"�lo,..,.,.,.,� 1/ll>Vmir\,P.-:IQ,..,,, .. � P-l'o,VNo(tc>.'(l•Tp1 »'{1,tpZ.,J tvi:;.-;,,,�Nvrntfl1•Tq1,,И,•T�t1 s-�"'1hФ-nclч�""8d.,..loodl tl,od( 'E>tomal-ol PQ• to -- r..,,, • ,,,,..,..,.i Sildnl< ..,,..(PQJ rP"'-... №mNIU..,......,-- (111-(V,n,o)lr,IН:)I: J1500о3б0) д.:м,,,...,,..._.1,i,,1/..,..\l'<l(WJQo(..,)I ' j(50o6 25е6) 1..i,._., _,,,.voi,p,Vol№IP)�(�lt J(0,99,1-11.8) Г�c#Ololf'O Р«......8(1'4>"'11 (1.32} liмotONl..,.ftp! To2Tq1 То2) l•t i(O О О О) 1,1......,,..ri.,g,,v,,;,,&,ut /0.1 92 Библиотека блоков SimPowerSystems Параметры блока: Nominal L-L voltage and frequency [Vn (Vrms) fn (Hz)]: [Номинальное линейное напряжение и частота]. Active & reactive power at initial voltage [ Ро (W) Qo (var)]: [Значения активной и реактивной мощности при начальном напряжении]. Initial positive-sequence voltage Vo [Mag (pu) Phase (deg.)]: [Начальное значение напряжения прямой последовательности]. Параметр за­ дается вектором, содержащим значение модуля напряжения Mag и его начальной фазы Phase. Величина напряжения задается в относительных единицах (по отно­ шению к номинальному напряжению), а фаза - в эл. градусах. Extemal control of PQ: [Внешнее управление активной и реактивной мощностью]. При установке флажка на пиктограмме блока появляется дополнительный входной порт, на кото­ рый следует подавать векторный сигнал из двух элементов для управления Р и Q. Parameters [np nq]: [Параметры пр и nq ]. Показатели степени, управляющие свойствами нагрузки. Tirne constants [Тр1 Тр2 Tq1 Tq2] (s): [Постоянные времени нагрузки]. Minimum voltage Vrn in (pu): [Минимальное напряжение Vn ,inJ· Параметр задается в относительных единицах. l- ·.� = 1 = 1 = -D-""-:1 � : ;Ф· .... ,....,. ,... Current г __L с -с с 500kV 2000MVA З•phase r. .. ul Г\ � Voltage Sourco Scope с 3-Phase Vl(pu) р (W) Q(var) Scope1 1MW :� :� 2� 0 о 1Wott" О �2 о• nв ов , 1 z ,, Рис. 3. 23. Схема с использованием трехфазной динамической нагрузки Электротехнические элементы Elements 93 Пример: На рис. 3.23 показана схема с использованием трехфазной динамической на­ грузки. Поскольку блок 3-Phase Dynamic Load создан на базе источников тока, то он не может быть последовательно включен с индуктивными элементами, поэто­ му параллельно динамической нагрузке добавлена малая активная нагрузка (1 MW). 3.4. 1 О. Грозозащитный разрядник Surge Arrester Пиктограмма: a�lllllf- 0 S u rg е Arreste r Назначение: Грозозащитный разрядник (варистор) Surge Arrester представляет собой ре­ зистор с нелинейной вольт-амперной характеристикой и предназначен для защи­ ты энергетического оборудования от перенапряжений. Конструктивно разрядник выполняется в виде одного или нескольких параллельно включенных столбов металлоксидных дисков, заключенных в диэлектрический (фарфоровый) корпус. Нелинейная характеристика варистора аппроксимируется комбинацией трех экс­ поненциальных функций вида: ( J )1/а; K V,ef = i 1,ef V где V и I - напряжение и ток разрядника; V,ef и lref- защитное напряжение разряд­ ника и его ток при этом напряжении; Ki и a.i - параметры i-го участка нелинейной зависимости. На рис. 3.24 показаны графики вольт-амперной характеристики разрядника в обычном и логарифмическом масштабах. V J log(VN,�) а3 log (Щ�) ctl nI,� I Рис 3.24. Вольт-амперные характеристики разрядника 94 Библиотека блоков SimPowerSystems Окно задания параметров: ! 'mplerne,n. �-...SLlgo д,,еа1е, (roatl<J\IМJ Р•- !'!otetlion� � 1 (!SOOe«<! N....Ь.,d<:etm,, Параметры блока: Protection voltage Vref: [Напряжение защиты]. Number of columns: [Количество столбов металлоксидных дисков]. Reference current per colurnn lref: [Ток одного столба при напряжении, равном Vref]. Segment 1 characteristic: [Параметры К и а первого сегмента вольт-амперной характеристики). Segment 2 characteristic: [Параметры Ки а второго сегмента вольт-амперной характеристики). Segment 3 characteristic: [Параметры К и а третьего сегмента вольт-амперной характеристики). Measurements: [Из:�·еряемые переменные]. Значения параметра выбираются из списка: ► Ncr1 � - нет переменных для отображения; ► Вп ch voltage Voltage - напряжение на зажимах элемента; ► Branch current - ток элемента; ► Branch voltage and current - напряжение и ток элемента. Пример: На рис. 3.25 показана схема, в которой при замыкании ключа Breaker происхо­ дит скачкообразное повышение напряжения на конденсаторе. Блок Surge Arrester Электротехнические элементы Elements 95 V'et = 75 Columns = 2 lntf=� k1, alpha1 • [D.Q55 50) k2, 11ph12 • (t .О 25] k3, alpha3 • [D.9915 16.5] Cs • inf Rs • inf Ron = 0.01 Bre;iker Surge Arrester c-HII� �------c:J--•-------·1� : ✓□ 2 Alter • 1 Step time • О .04 ] Sarias RLC Branch1 R = 10 7 �ACVolt.ige Source \АТ\= 100 t = 50 Series RLC Branch С• 500.-06 8DГ'"------===..., �у Plot Eil! о1О 1 :ю Q «J ------ ,:irm .1а;ю о Xhre нm :nx1 ��rmм ,·· :� . "' "t" l!IGID :::_.:.. :.:г:.: ).� --· О ЦШ ЦО4 na& М8 ЦI Рис. 3.25. Ограничение перенапряжений с помощью разрядника предотвращает чрезмерное повышение напряжения. На рисунке показана также вольт-амперная характеристика разрядника. 3.4. 11. Взаимная индуктивность Mutual lnductance Пиктограмма: а�а aJffii-a а�а Mutual lnduot.ince 96 Библиотека блоков SimPowerSystems Назначение: Блок взаимной индуктивности Mutual Inductance предназначен для модели­ рования катушек или проводников, имеющих магнитную связь. Блок позволяет моделировать три или два магнитно-связанных элемента. Схема модели взаимо­ индуктивности показана на рис. 3.26. = == L2-Lm IU-Rm Rl-Rm Ll-Lm � � Рис. 3.26. Схема модели взаимоиндуктивности Окно задания параметров: р.,-.,.. '#indino l ..t �• JR1/0hm)L!(HJt jr,111�1 WWing 2 tell �\f\2{0tri,JL�11: J! 1.11.10-03) � lt,.. � М...ь..1 \nd<,­ \/.'nfr,; Э t,f �(l\�mJ ЩИ)I, [11111е-03) "'"'"""�lfl�IL�JI: j[1.01.0..QЭ] Параметры блока: -=-----====-:==--3-.. Winding 1 selfimpedance [R1 (Ohm) L1 (Н)]: [Собственное сопротивление и индуктивность первой обмотки]. Тhree windings Mutual Inductance: [Трехобмоточная взаимная индуктивность]. Снятие флажка позволяет уби­ рать из модели третью обмотку. Winding 2 selfimpedance [R2 (Ohm) L2 (Н)]: [ Собственное сопротивление и индуктивность второй обмотки]. Электротехнические элементы Elements 97 Winding 3 self impedance [RЗ (Ohm) L3 (Н)]: [ Собственное сопротивление и индуктивность третьей обмотки]. Mutual impedance [Rm (Ohm) Lm (Н)]: [Взаимное сопротивление и индуктивность обмоток]. Measurements: [Измеряемые переменные].Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Winding voltages - напряжения обмоток; ► Winding currents - токи обмоток; ► Winding voltages and currents - напряжения и токи обмоток. Задаваемые параметры обмоток должны удовлетворять следующим ограниче­ ниям (см.рис. 3.26): R1, R2, RЗ * Rm, L1, L2, LЗ :#:-Lm. При моделировании схем с использованием взаимной индуктивности (так же как и трансформаторов) следует иметь в виду, что, несмотря на отсутствие види­ мой потенциальной связи между обмотками, такая связь (через резистор) все же имеется. Она необходима для расчета потенциалов в узлах всей схемы. Наличие подобной связи не оказывает влияния на измеряемые величины токов и напряже­ ний обмоток взаимной индуктивности. Пример: На рис.3.27 показана схема, в которой третья гармоника напряжения на на­ грузке вводится с помощью блока взаимной индуктивности. j I п j ,.,:� ,: :� ��1* 1 ] IJ • ] � Mutual lnduotanc• RI. LI • (11 . 1.1е-03] R2. L2 = [ 1.1 1.1•·03] R3, L.Э • [ 1.11.1•·03] Rm. un = 11.0 1 .O•·D3J о 1.2 mH Э Ohms .х Рис. 3.27. Формирование полигармонического напряжения с помощью Mutual lnductance 98 Библиотека блоков SimPowerSystems 3.4. 12. Трехфазная взаимная индуктивность 3-Phase Mutual lnductance Zt -ZO Пиктограмма: аА�Аа j aB�B a 1 а c--1QQol-c а Three-Phase Mutual lnductance Z:1-ZD Назначение: Блок трехфазной взаимной индуктивности 3-Phase Mut11al Ind11ctance Z1-Z0 предназначен для моделирования трехфазной цепи с индуктивной связью между фазами. В качестве основы модели трехфазной взаимной индуктивности исполь­ зуется блок M11t11al Inductance с тремя обмотками. Параметры блока взаимной индуктивности пересчитываются исходя из задаваемых для трехфазной взаим­ ной индуктивности параметров прямой и обратной последовательностей по сле­ дующим выражениям: R5 - (2 х R 1 + R0) / 3, Ls = (2 х L 1 + L0 ) / 3, R,,, = (� - R 1 ) / 3, Lm = (Lo - L 1 ) /3 , rде R0 и R 1 - сопротивления нулевой и прямой последовательности блока трех­ фазной взаимной индуктивности; L 0 и L 1 - индуктивности нулевой и прямой по ­ следовательности блока трехфазной взаимной индуктивности; R5 и Rm - соб­ ственное сопротивление каждой из трех обмоток блока взаимной индуктивности и их взаимное сопротивление; Ls и Lm - собственная индуктивность каждой из трех обмоток блока взаимной индуктивности и их взаимная индуктивность. Окно задания параметров: T�t.1.....ili'ICЬ:l.....,.Zl�t,_l�J П•Ь1ос1<�•-р1,оsе�-­ �-.,,_ Seil�.-.!ouuol щ,edan<,ec«eutЬJ>�-•"'1<1reo� ро,-� Электротехнические элементы Elements 99 Параметры блока: Positive-sequence parameters [R 1 (Ohms) L1 (Н) ): [Параметры прямой последовательности). Сопротивление и индуктивность прямой последовательности. Zero-sequence parameters [RO (Ohms) LO (Н)]: [Параметры нулевой последовательности]. Со­ противление и индуктивность нулевой последова­ тельности. Пример: На рис. 3.28 показана схема с использованием блока трехфазной взаимной индуктивности. Three-Phase V-1 Measurement 1�:1==:�:-в � A S ----------c-_-c----Гffi'-c1. 3-Phase Source f" 50 \An =2бе3 � Three-Phase Mulual lnductanc• Z1-ZD [ RO L.O ] • ,i .1 100е-З) [ R1 L1 ] =[ 0.02 бОе-3) С labc Scope a--cJj ь--cJc--cJR=1 Рис. 3.28. Моделирование трехфазной цепи, имеющей взаимоиндуктивную связь 3.4. 1 З. Выключатель переменного тока Breaker :0: Пиктограмма: а�а Three-Phase Bre.;iker Назначение: Моделирует устройство включения и выключения переменного тока. Выключа­ тель Breaker может управляться внешним входным сигналом или от встроенного таймера. Включение устройства выполняется единичным управляющим сигналом. Команда на выключение дается нулевым уровнем сигнала, при этом выключение устройства осуществляется при уменьшении тока до нуля. Устройство имеет встроенную искрогасящую RС-цепь, включенную параллельно контактам вык­ лючателя. 100 Библиотека блоков SimPowerSystems Окно заданил параметров: В-'<• l'"""')IИ<I , l•""'8f•entнdR>.ii Ьiнkerwt.1,щmof,.._....,,,A..._ Ror,lc,oquire,:!Ь;,lho ,nocW an<1onvЬo•1o...,. J[1/G0'511,0) ! f"'E....,.<:tJr'lrdof�..,. 1 м-Jн..,. !1 � ;:..-:�==�::::-Щ) Параметры блока: Breaker resistance Ron (Ohm): [Сопротивление выключателя в замкнутом состоянии (Ом)]. Initial state (О for 'open', 1for 'closed') [Начальное состояние выключателя (О - разомкнут, 1 - замкнут)). Snubber resistance Rs (Оhm): [ Сопротивление искрогасящей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость искроrасящей цепи (Ф)]. Switching times (s): [Время срабатывания выключателя]. Параметр задается в виде вектора, опре­ деляющего моменты времени срабатывания выключателя. Например, при разом­ кнутом начальном состоянии ключа значение параметра, заданное вектором [0.005 0.010.020.03], означает, что замыкание ключа будет выполняться в моменты времени 0,005 с и 0,02с, а размыкание - в моменты времени 0,01 с и 0,03 с. Extemal control of switching times: [Внешнее управление временем срабатывания]. При установке флажка на пиктограмме блока появляется входной управляющий порт. Единичный уровень управляющего сигнала вызывает замыкание ключа, а нулевой уровень является командой на размыкание ключа, при этом разрыв цепи выполняется при достиже­ нии током нулевого уровня. Электротехнические элементы Elements 1 О1 Measurements: [ Измеряемые переменные]. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Volta'ge - напряжение на зажимах элемента; ► Branch current - ток элемента; ► Branch voltage and current - напряжение и ток элемента. Show additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. ЕnаЫе zero crossing detection ( create an algebraic loop ): [Включить определение прохождения сигнала через нулевой уровень (создать алгебраический контур):]. С помощью данной опции устанавливается режим про­ верки смены знака переменной. Момент смены знака переменной может попасть между расчетными точками и результат моделирования существенно исказится. Повышение точности в этом случае может быть достигнуто за счет существенного уменьшения шага расчета, однако это приведет к увеличению времени моделиро­ вания. Для исключения этого Simulink на каждом расчетном шаге проверяет сме­ ну знака переменными и, если такое изменение обнаружено, то Simulink выполня­ ет интерполяцию значений переменной на текущем шаге. Благодаря данному алгоритму время расчета существенно не увеличивается. При.мер: На рис. 3.29 показана схема, в которой элемент Breaker осуществляет подклю­ чение и отключение активно-индуктивной нагрузки к источнику переменного тока. На диаграмме хорошо видно, что отключение источника от нагрузки проис­ ходит только тогда, когда ток в цепи упадет до нуля. Ampli!ude = [ D 1 D J Т..м = [D D.D25 D.D67) Timer г IЛI г .-:В Scope -d.-----. �: �1 ACVoltag•� oS urce 'у 1 в re.iker Cs = inf Rs = 1е6 Ron = D D1 Current Measurement Sees ri RLC Branch L=D.I R=1 J ' - о" {] i !1 ! 1 :·;;;; � О П.otfaet. 0.02 0.114 О.ОБ о Рис 3.29. Коммутация электрической цепи с помощью блока Breaker О.00 0.1 102 Библиотека блоков SimPowerSystems 3.4. 14. Трехфазный выключатель переменного тока 3-Phase Breaker Пиктограмма: Three-Phase Breaker Назначение: Блок 3- Phase Breaker моделирует трехфааное устройство включения и выклю­ чения переменного тока. Состоит и:з трех блоков Breaker, управляемых одним сиг­ налом. Окно задания параметров: U.�..,.,_ ,,.,,..� !tve,,-l'ho"' ЗtН'« !ma,l;J U,,.11'!.otoowe<I� Cort..., 11,о � n 11/<IOJ •""11 и,, you "'3rtlto � 'oUo«1do/,,e d,o!l,-�d,oщ, lr"'1tr>o4"1>!tЬ,,o, OI-W<!<1"''1'М,o;1,c,l,фl,i lf;,c,u .,;,,.,1< tl,o�,o�C()lild'lю-<,\tlO...,.,,..,icor,o,1o'f)lt .,. __ lr,ь,,i>1w"dЬ<oa1.,i� cpon f; S..!<:ЩIOI ph=A 3 w' S�ol�B Р S�oo,1,... i; т,.,.,...,щ ..,(,1 Jf4/SO 10/SOJ ГE�tol'iмjot�liмt 8r-reor,IIIOO> R<n(olmo) fiiixn-:"······-�·---·�--· �..--. ,omt...,.Rp {Ohtrw] /1.s r�Cp(Ferod'I м-,-4None Параметры блока: Initial status of breakers: [Начальное состояние ключей]. Значение параметра выбирается из списка: ► open - все ключи открыты; ► closed - все ключи закрыты. Switching of phase А: [Управление ключом фазы А]. При снятом флажке управление ключом не про­ изводится. Состоm1ие ключа определяется параметром Initial status of breakers. Электротехнические элементы Elements 103 Switching of phase В: [Управление ключом фазы В). При снятом флажке управление ключом не про­ изводится. Состояние ключа определяется параметром Initial status of breakers. Switching of phase С: [Управление ключом фазы С]. При снятом флажке управление ключом не про­ изводится. Состояние ключа определяется параметром Initial status of breakers. Transition times (s): [Время срабатывания выключателя]. Параметр задается в виде вектора, опре­ деляющего моменты времени срабатывания выключателя. Extemal control of switching times: [Внешнее управление временем срабатывания]. При установке флажка на пиктограмме блока появляется входной управляющий порт. Единичный уровень управляющего сигнала вызывает замыкание ключей, а нулевой уровень является командой на размыкание ключей, при этом разрыв цепи в каждой фазе выполня­ ется при достижении током этой фазы нулевого уровня. Breaker resistance Ron (Ohm): [ Сопротивление выключателя в замкнутом состоянии (Ом)]. -:�· ·: 1 ·Ш i J 1 -5000 Timer .l'mplitude = fO 1 О ] Тime = [ О О .ООб О .0346] 3-Phase Source f = 60 'l.tn = 2бе3 R = 0.312 L = е.езе-3 о ·, ; , .. n01 002 аоэ no, n!Ji о� ТNotf8et О 3-Phase Breaker Cs:: inf Rs = 118 Ron" 0.001 . 3-Phase Series RLC Branch L= 11-З R=1 Рис. 3,30. Коммутация трехфазной электрической цепи с помощью блока 3-Phase Breaker 104 Библиотека блоков SimPowerSystems Soubber resistaoce Rs (Ohm): [Сопротивление искрогасящей цепи (Ом)]. Soubber capacitaoce Cs (F): [Емкость искрогасящей цепи (Ф)]. Measuremeots: [Измеряемые переменные]. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах элемента; ► Branch current - ток элемента; ► Branch voltage and current - напряжение и ток элемента. Пример: На рис. 3.30 показана схема с использованием трехфазного выключателя. Управление выключателем осуществляется с помощью блока Timer. Измерение фазных токов выполняется блоком Multimetr. 3.4. 15. Трехфазный короткозамыкатеr,,ь 3-Phase Fault Пиктограмма: :r:v а� Three-Ph,se F ,ult Назначение: Моделирует трехфазное устройство, замыкающее фазы между собой, а также на землю. Схема блока 3- Phase Fault показана на рис. 3.31. Величина сопротивле­ ния заземления Rg устанавливается равной 106 Ом, если замыкание на землю не задано в окне параметров блока. Рис 3.31. Схема блока 3-Phase Fault Электротехнические элементы Elements 105 Окно задания пара.метров: T�F... r-kl�i U.OhЬЬok!l>_..,../Alt!al,oot,_,iJЬ.-, -,,�ondlhl i,oini y..,..,delt,olhofdlllWiJI <lrqb\l,eЩt,a,or.щ,.,......,.logicol,q,a ff l""' ch!d<"'" 'Е...... cor,lt,Jlio,. ""' .............. � ...,.,.., ! �;�fd ! Gionl�Aglolw): f' fnooi 1 f....nli .... ,,11� � т.-....,.11л.1 "i j( 1)60 5/60] s,..ы,e,,-........,f\11t......l. irl ........,_,JNone Параметры блока: Phase А Fault: [Управление ключом фазы А). При снятом флажке управление ключом не про­ изводится. Состояние ключа определяется параметром Transition status, если блок работает под управлением встроенного таймера, или параметром Initial status of fault, если блок управляется внешним сигналом. Phase В Fault: [Управление ключом фазы В). При снятом флажке управление ключом не про­ изводится. Состояние ключа определяется параметром Transition status, если блок работает под управлением встроенного таймера, или параметром Initial status of fault, если блок управляется внешним сигналом. Phase С Fault: [Управление ключом фазы С). При снятом флажке управление ключом не производится. Состояние ключа определяется параметром Transition status, если блок работает под управлением встроенного таймера, или параметрqм Initial status of fault, если блок управляется внешним сигналом. 106 Библиотека блоков SimPowerSystems Fault resistance Ron (Ohm): [Сопротивление выключателей в замкнутом состоянии (Ом)). Ground Fault: [Замыкание на землю). При установленном флажке производится замыкание на землю. Ground resistance Rg (Ohm): [Сопротивление заземления (Ом)]. Величина сопротивления заземления не может задаваться равной нулю. Extemal control of fault timing: [Внешнее управление временем срабатывания). При установке флажка на пиктограмме блока появляется входной управляющий порт. Единичный уровень управляющего сигнала вызывает замыкание ключей, а нулевой уровень является командой на размыкание ключей. Transition status (1 О 1 ... ): [Состояние ключей]. Состояние ключей, которое соответствует моменту вре­ мени, заданному вектором Transition times (О - разомкнутый ключ, 1 - замкнутый ключ). Параметр доступен при управлении блоком от встроенного таймера. Transition times (s): [Время срабатывания ключа]. Параметр задается в виде вектора значений вре­ мени, определяющих моменты срабатывания ключей. Параметр доступен при управлении блоком от встроенного таймера. Initial status of fault (Phase А Phase В Phase С): [Начальное состояние ключей]. Параметр задается в виде вектора из трех элементов, определяющих состояние ключей в начальный момент времени. Значение элемента, равное О, соответствует разомкнутому начальному состоя­ нию, 1 - замкнутому. Параметр доступен при внешнем управлении устрой­ ством. SnubЬers resistance Rs (Ohm): [Сопротивление искрогасящей цепи (Ом)]. Snubbers capacitance Cs (F): [Емкость искрогасящей цепи (Ф)]. Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Fault voltages - напряжения на входных зажимах короткозамыкателя; ► Fault currents - токи короткозамыкателя; ► Fault voltages and currents - напряжения и токи короткозамыкателя. Пример: На рис. 3.32 показана схема с использованием трехфазного короткозамыкате­ ля. В момент времени 0,02 с производится межфазное короткое замыкание. Управление устройством осуществляется с помощью блока Step. Измерение фаз­ ных токов выполняется блоком Multimetr. Электротехнические элементы Elemeпts R = 10 3-Phase Series RLC Branch l• ��I-B:-l _L 3-Phase S ource f = 60 \.m = 25е3 ·:□ , . . ;. .J ,10 1 : : ; • o.s .. .. ·' •. " ,. • . .. . .. . . . . . . о� -0.5 ·1 о < 1D u 107 • .•. o.az ' , .. ;. о.а< ' . . :· ; о.� • о.оо n.otfaet о 3-Phase F ault Ron = 0.001 .______,Cs = inf Rs = 1е6 Рис. 3.32. Моделирование трехфазного короткого замыкания Multimeter З.4.16. Линия электропередачи с сосредоточенными параметрами PI Section Line Пиктограмма: а1 ,т- Pi Section Line la Назначение: Блок PI Section Line моделирует однофазную линию электропередачи с сосре­ доточенными параметрами. В реальной линии электропередачи сопротивления, индуктивность и емкость равномерно распределены вдоль линии. Приближенная модель высоковольтной линии (рис. 3.33) может содержать от одной до несколь­ ких идентичных секций с сосредоточенными параметрами. Число секций зависит от частотного диапазона, который необходимо охватить при моделировании. Приближенно число секций можно определить из выражения: fшах Nv = 81 , 1 - скорость распространения в км/с, при -vLC измерении индуктивности в Гн/км и емкости в Ф /км; / - длина линии в км; N число секций. где/max - максимальная частота; v = г;-;:; 108 Библиотека блоков SimPowerSystems R L R L R L С/2 02 Рис. 3.33. Схема модели блока PI Section Line Окно задания параметров: Pi Sec11on t,,o 1"'"81<) IW-1 P!-�h р........ 1 F�uooo1<11ALC�ilxll}/z} Jro А-.-Ро1 -lor,glh (Ol,m,ik,,t Параметры блока: Frequency used for R L С specification (Hz): [Частота работы линии (Гц)]. Resistance per unit length (Ohm/km): [Сопротивление линии на 1 км длины (Ом/км)]. Inductance per unit length (H/km): [Индуктивность линии на 1 км длины (Гн/км)]. Capacitance per unit length (F/km): [Емкость линии на 1 км длины (Ф/км)]. Length (km): [Длина линии (км)]. I Электротехнические элементы Elements 109 Number of pi sections: [Число секций линии]. Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► None - нет переменных для измерения; ► lnput and output voltages - входные и выходные напряжения; ► Input and output currents- входные и выходные токи; ► АН voltages and currents - все напряжения и токи. Пример: На рис. 3.34 показана схема, моделирующая процессы отключения от источни­ ка и подключение к нему линии электропередачи длиной 200 км. Модель линии имеет две секции. ,----.. o--a-----,,----- ...___ ___ -n_, ... -----, PI Section Line f = 60 R = o_og55 p.u.ll<m L = 2.137е-ОЗ p.u.ll<m С= 12.37е-09 p.u.11<m length = 200 km Breaker: open at 1/60 sec. close at 3/60 seo. n=2 rл\ АС Volt.1ge Source 'у' f\,tn= 60= lеЗ I \A)UI (v) \An (v) ·=== , .,. '1"' 1!181:1, -� 500 .,х,, •l!XIO . . . . . )• .. , . :· ' ' .... ... ' .... ... . : . ...... . . , Vы(-.,1 :� о ,l!XIO ·:/0000 " ', ....;,... , .. " .. 002 noc оа; . ' .. n� n1 Рис. 3.34. Коммутация ЛЭП 11О Библиотека блоков SimPowerSystems 3.4. 17. Трехфазная линия электропередачи с сосредоточенными параметрами 3-Phase PI Section Line :1� ,. �:1: Пиктограмма: а С С а Three-Phase PI Section Line Назначение: Блок 3-Phase PI Section Line моделирует трехфазную линию электропередачи с сосредоточенными параметрами с учетом взаимной индуктивности фаз линии. Модель состоит из одной секции. Для создания модели из нескольких секций не­ обходимо последовательно включить нужное количество блоков. Окно задания параметров: _Pl_ ll'>'_,..,....,.,,"""'8d Тl,...�PISocii;,,1.ц(p,o,/<)fi,,kl ' fhi, blott �·� Р1 ,ecl,on 1re1o •.-. � Ь-щ,,� fliь�-- ..... ,_pt_ TQ ........... ,.....,.� -o/Jhitblock11......_ fl 0.01273 llэв64! Powvo-o,,,:1,.,;,._,,�(Нliunl(ll LOJ· j10,93370-Э 4 12643] ""°''""'""""' Cf\PO<- {Fi№J ( С1 0J J, f',,...,._ ,nj J112.7.._Э 7.151е-ЭJ L.-.-le<,glil(IФIJ J100 Параметры блока: Frequency used for R L С specification (Hz): [Частота работы линии (Гц)). Частота, для которой определяются параметры линии R, L и С. Positive- and zero-sequence resistances [R1 (Ohms/km) RO (Ohms/km)]: [Сопротивление прямой и нулевой последовательности линии на 1 км длины (Ом/км)]. Параметр задается в виде вектора. Positive- and zero-sequence inductances [L1 (H/km) LO (H/km) ]: [Индуктивност� прямой и нулевой последовательности линии на 1 км длины ( Гн/км) ]. Параметр задается в виде вектора. Электротехнические элементы Elements 111 Positive- and zero-sequence capacitances (С1 (F/km) СО (F/km)]: [Емкость прямой и нулевой последовательности линии на 1 км длины (Ф/км)]. Параметр задается в виде вектора. Line section length (km): (Длина линейной секции (км)]. Пример: На рис. 3.35 показана схема, моделирующая процессы подключения к источ­ нику линии электропередачи длиной 100 км. [·,к&о- ;[::[; ,:[---8--1� -о- �lэ ✓ 3-PhJse Source f • 80 \An = 2 .572об с1 3-PhJse Breilktr Cs = inf Rs = inf Ron = 0.001 :1•"· . •. � rэ Р :> flJ А� r.;1...э___...:., ·\ - . . 2 ·0 5 ,.,..,_ о 001 3-Ph•st SeritS . RLC в,.nch R = 100 � т; Q\A ,2 3-PhJst PI Stclion f = 80 R = [ 0.01273 0.38&4] Ohmsll<m L•(0.Q337t•3 4.1264е-3] Hll<m С• [12.74e-Q 7.751t·9] F ll<m ltngth = 100 km 002 о.� о.о, 0.05 Рис 3.35 Под.:лючение ЛЭП к источнику 3.4. 18. Линия электропередачи с распределенными параметрами Distributed Parameters Line Пиктограмма: a---c=:=:=:J-a D-c::::=::=:::)-D D�D Distributed Parameters Line Назначение: Блок Distributed Parameters Line моделирует многофазную линию электропе­ редачи с распределенными параметрами. Математическое описание модели изло­ жено в [9]. 112 Библиотека блоков SimPowerSystems Окно задания параметров: D�P•-1.iм(,-j,.),.._1 1 t-•N��,,..-lnoll!Odet !"°I\J....t.Clnt ) �-�t,y!!1"4J- To-•Jwo..hoe-.01•"""-.,....,,.,lno)'Olj-oilhllq,d,� 1Nit11- .. �-��-...-ь.,.........-.1-, -O,,-fo!•�oo 41'-�� !,,o,�Clt&oцuo/ �•._...i ine 11,,.�з;,- ....� _.......,.,.for • бО А� 1'> l,lri 1111:Qi!t� (10.01273 0.311641 100 ,�!Nme fli?i """"1 оо [flt ROA()ol 3 Параметры блока: Number of phases N: [Число фаз]. Frequency used for R L С specification (Hz): [Частота работы линии (Гц)]. Частота, для которой определяются параметры линии R, L и С. IResistance per unit leogth (Ohms/km) [N*N matrix] or [R1 R R0m]: [Сопротивление линии на 1 км длины (Ом/км)]. Inductance per unit length (H/km) [N*N matrix] or [L1 L0 L0m]. [Индуктивность линии на 1 км длины (Гн/км)]. Capacitance per unit length (F/km) [N*N matrix] or [С1 СО C0m]: [Емкость линии на 1 км длины (Ф/км)]: Line length (km): [Длина линии (км)]. Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► None - нет переменных для измерения; ► Phase-to-ground voltages - напряжения относительно земли на входе и на выходе линии. Для моделирования двух-, трех- или шестифазной симметричной линии можно задать параметры линии в виде матриц размерностью Nx N (N - число фаз) или задать параметры прямой последовательности. Для двух- или трех- Электротехнические элементы Elements 113 фазной транспонированной линии можно ввести параметры прямой и нулевой последовательностей. Для шестифазной транспонированной линии нужно дополнительно задать параметры нулевой последовательности взаимного сопротивления, индук­ • тивности и емкости. Для моделирования не­ . V"(v!. . симметричной линии требуется задать матрицы 1 параметров размерностью N х N. Пример: На рис. 3.36 показана схема, моделирующая процессы отключения от источника и подключение к нему линии электропередачи длиной 200 км. В схеме использованы те же параметры линии и источника, что и в примере для однофазной линии с сосредоточенными параметрами (рис. 3.34). !�� 1 v .... i,,1 1(ЦI •••. . о • . -1!0) .• ,... ..• ···• i--· ... ,.. ... : . . .. i· .. ;_ �. •) .m,f\/j_-- -- -,--�� ; na2 o.:i. n0& noe •21.Wо Г=�---...---�----� Bre�tr1: n .1t 1160 sec. е •I Зl!Ю sec. АС Volt.1ge � Sou1ce � Distrlbuted P•rameteis Line t • 80 R • О.�5 p.u.A<m L • 2.1Э7е-Э p.u.A<m С• 12.37e•g p.u.A<m length = 200 km \A>ut ..�·.:: ] (v) Рис. 3.36. Коммутация ЛЭП 3.4. 19. Силовой трансформатор без учета насыщения стали сердечника Linear Transformer Пиктограмма: а��: а з �: Linear Transformer . о., 114 Библиотека блоков SimPowerSystems Назначение: Блок Linear Transfoпner моделирует трех- или двухобмотоtfный однофазный транс­ форматор. Нелинейность характеристики намагничивания материала сердечника не учитывается. Электромаrnитная схема трансформатора показана на рис. 3.37. = = L2 RI LI � Lm Rm � R2 Рис. 3.37. Схема модели трансформатора Окно задания параметров: j(250o660) 'wA1r191 �..-.o1,;,1vцv....JR1u,uJЩpuJt , l1•2•ЗSеЗ 0002 оов1 Wmng 2 ""'- !'1'2r,/1,,,\ EЩi,ur 11181 f)7e3 0.002 0.00) uь,un т...,........,.1011..,.,.,.,.. Р w'rdr'9Э1>«-.,,.1\1�1"")Rj\pu)L�)t /( 6ОеЗ o.oos 0.02 J Mag111.<,t_,��a>d-jR1Щ>.1)L,r(;,цU, j(500500) Параметры блока: Nominal power and frequency [Pn (VA) fn (Hz)]: [Номинальная полная мощность (ВА) и номинальная частота (Гц)]. Winding 1 parameters [V1 (Vrms) R1 (pu) 11 (pu)]: [Параметры первой обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки J. Электротехнические элементы Elements 115 Winding 2 parameters: [Параметры второй обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Three windings transformer: [Трехобмоточный трансформатор). При установленном флажке трансформа­ тор имеет две вторичные обмотки, если флажок снят - то одну. Winding 3 parameters: [Параметры третьей обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Magnetization resistance and reactance [ Rm (pu) Lm (pu)]: [Активное сопротивление цепи намагничивания (о.е.) и индуктивность цепи намагничивания (о.е.)). Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► Winding voltages - напряжения обмоток; ► Winding currents - токи обмоток; ► Magnetization current - ток намагничивания; ► AII voltages and currents - все напряжения и токи. Активные сопротивления и индуктивности обмоток, а также цепи намагничи­ вания задаются в относительных единицах. Для каждой обмотки относительные значения сопротивления и индуктивности вычисляются по выражениям: R =- R. R/ L L.=- L/ rде R. и L. - относительные значения сопротивления и индуктивности; R и L и2 абсолютные значения сопротивления и индуктивности; R6 = -11- базисное со­ Р" R6 базисная индуктивность; И,, - номинальное напряжепротивление; L6 = 2 · 1t • /,, ние обмотки;/,, - номинальная частота. Параметры цепи намагничивания можно найти, используя величину тока на­ магничивания, задаваемую в процентах относительно номинального тока. Так, например, при величине тока намагничивания, равной 0,2%, сопротивление и ин­ дуктивность цепи намагничивания будут равны 1/(0,2/100) = 500 о.е. Пример: На рис. 3.38 показана схема, в которой двухобмоточный линейный трансфор­ матор используется для питания активной нагрузки. - 116 Библиотека блоков SimPowerSystems · □-----, ..---□ � Voltage Measurement1 Voltage Measurement � АС Voltage Source f = 50 Um = 22o•sqrt('2) Line.ir Tr.insformer ....._________, Pn, fn = [250е6 60) V1, R1, L1 = (735e3/sqrt(З) 0.002 0.08) \1.2, R2, L2 = [315e3/sqrt(З) О.002 0.08] Rm, Lm = (500 500) '-? Q Scope SeriesRLC Branch R = 10 1 Continuous щ��---�--� А А f\ f\· h :I..___ 200 ·1 v·. .__: v.......:__\/.....__,� v_·.._·_ L :� i•---:•i·� +,,.. 1 200 Щ) ,..........---�-----. Рис. 3.38. Работа трансформатора на активную нагрузку �г�1 "°°D 0.02 0.04 O.D6 0.08 0.1 3.4.20. Силовой трансформатор с учетом насыщения стали сердечника SaturaЫe Transformer Пиктограмма: S.itur.iЫe Tr.insformer Назначение: Моделирует трех- или двухобмоточный однофазный трансформатор. В моде­ ли SaturaЬle Transformer учитывается нелинейность характеристики намагничи­ вания материала сердечника. Электромагнитная схема трансформатора показана на рис. 3.39. Электротехнические элементы Elements 117 L2 RI R2 LI Рис. 3.39. Схема модели трансформатора В модели сопротивление цепи намагничивания R,,, учитывает активные потери в сердечнике. Нелинейная индуктивность Lsat учитывает насыщение сердечника трансформатора. Нелинейная характеристика в модели задается как кусочно-линейная зави­ симость между магнитным потоком сердечника и током намагничивания (рис. 3.40 а). В модели имеется возможность задать остаточный магнитн:ый поток в сердечнике. В этом случае вторая точка нелинейной характеристики должна со­ ответствовать нулевому току (рис. 3.40 6). ф ф О ст ат очиъ1й пaror; Ф1 -+ 2 З 4 1 i i -2 а) Рис. 340. Зависимость F(i) трансформатора 6) 118 БиблиотекаблоковSimРоwеrSуstеms Окно задания параметров: j(250oь60J ',,fm,,g 1 �-r111v,m1 R1{puj L11Pu1: !( (24 З5еЗ 0.002 о.ов 1 1 1 Wl!dir,g2p,r-•r"f""'IR2!p,�1.1!Jiult Ji 181.87.З 0.002 0.081 р Тl-...-.ino>molamet 'IO'>dln93po1-l',IW..,JR�J�!t ! j( 181.87еЭ 0.002 0.001 эо1..,11оr1 � �111>u1 i:n11PJI. i2 pl,i2; • i 1 f(O,O: 0.0024.1.2:1.0.1.521 Со• ь.,�,;,1__, tnd rкi<,/fut(Rll(s:,u)�U "\Ro\(pu)J onl,. 1 11500! гs...,.� м--,�N--------�-----з�� t;;° --Showacl:iliona�•·•-·-··•- 1 Г 810lf<A'g<,Ьacщn�inodel Параметры блока: Nominal power and frequency [Pn (VA) fn (Hz)]: [Номинальная нолная мощность (БА) и номинальная частота (Гц)]. Winding 1 parameters [V1 (Vrms) R1 (pu) L1 (pu)]: [Параметры первой обмотки. Действующее значение напряжения обмотки ( В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Winding 2 parameters [V2 (Vrms) R2 (pu) L2 (pu)]: [Параметры второй обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Three windings transfonner: [Трехобмоточный трансформатор]. При установленном флажке трансформа­ тор имеет две вторичные обмотки, если флажок снят - то одну. Winding 3 parameters [VЗ (Vrms) RЗ (pu) LЗ (pu)]: [Параметры третьей обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Saturation characteristic [i1 (pu) phi1 (pu); i2 phi2; ...]: [Характеристика насыщения сердечника]. Core loss resistance and initial flux [Rm (pu) phi (pu)] or [Rm (pu)] only: [Сопротивление цепи намагничивания (о.е.) и остаточный поток (о.е.) или только сопротивление цепи намагничивания (о.е.)]. Электротехнические элементы Elements 119 . Simulate hysteresis: [Моделировать гистерезис]. При установленном флажке в характеристике на­ магничивания учитывается гистерезис. Hysteresis Data Mat file: [Имя файла данных, содержащего гистерезисную характеристику]. Файл данных может быть создан с помощью блока Powergui. Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► Winding voltages - напряжения обмоток; ► Winding currents - токи обмоток; ► Flux and excitation current (Imag_lRm) - поток и ток холостого хода; ► Flux and magnetization current (Imag) - поток и ток намагничивания; ► All Measurements (V, 1, Flux)- все напряжения, токи и поток. Show additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. Break Algebraic loop in discrete model: [Разрывать алгебраический контур в дискретной модели). Активные сопротивления и индуктивности обмоток, а также сопротивления цепи намагничивания задаются в относительных единицах аналогично модели трансформатора без учета насыщения сердечника. Характеристика намагничивания задается значениями намагничивающего тока и потока в относительных единицах, начиная с точки (О, О). Относительные значения тока и потока определяются по выражениям: 1 ].=-, 16 ф Ф.=­ Ф6 ' где [. и Ф. - относительные значения тока и магнитного потока; / и Ф - абсо- лютные значения тока и магнитного потока; 16 = S" Ji - базисный ток; U1 Ui Ji - базисный поток; И1 - номинальное напряжение первичной обФ 6 = 2·7t ./ " мотки;/,. - номинальная частота. Пример: На рис. 3.41 показана схема, в которой двухобмоточный трансформатор ис­ пользуется для питания активной нагрузки. На осциллограмме хорошо виден не­ синусоидальный характер тока первичной обмотки, обусловленный нелинейной характеристикой трансформатора. 120 Библиотека блоков SimPowerSystems Continuous Curren: :••�u:ement l Гл\ АС Volt•ge Source 'у' \,tn = 10e3"sqrt(2) 1 1 а 0D 1 L � _п • � � 3 е: fl У 1L_Ji _ er S•turaЫe Transfo!m Pn. fn = [ЗбеЗ 60) VI. RI. LI = (10000 0.002 0.08) \l.l, R2, L2 = [240 0.002 0.08) Rm, phi0 = (500 0.8] Satuг.ition char.юteristic = 1D О ; 0.1 1.2 ; 1.3 2.6 ; 2б ; 4 12) 1 Series RLC Br,nch L= О R = 100 С= inf Рис. 3. 4 1. Работа силового трансформатора на активную нагрузку З.4.21. Трехфазный двухобмоточный трансформатор Three-phase Transformer (Two Windings) Пиктограмма: а А а С у ;ii а у с а Three-Phase Transformer (Two Windings) Назнаt1ение: Моделирует двухобмоточный трехфазный трансформатор. Модель Three­ phase Transformer (Two Windings) построена на основе трех однофазных транс­ форматоров. В модели может учитываться нелинейность характеристики намаг­ ничивания материала сердечника. Электротехнические элементы Elements 121 Окно задания параметров: Tltм-l'llaoo f,� (Two�Ji-t,,)IJl-.1 т.. �...,_,..•t1��.....,,..1,s1uщiu-� ___._ 5'!i"8....dr,oC()IV'Odionto'M -!'QOl-1<>«-llierlOl.hl i,orldlf"IW!!A r"l'- 1 Ncmol-ondJ,_ !�J,lf\Н,)I jl 250<6. so 1 ' Wr,df,g 1 w,c1- ·1v \olМl>Jl>l'-•f\11 �f11J'i,R1/p.,J,L1/puJJ Н7З5еЗ. 0.002. 0.(IЭ 1 1 ...,r,di\lJ'll.ЬOJ�-: fY lиnd",,v!>4'-IV'2 P!,ffl\'.,..), R,ь,u), Щрu) J /1 З15е3 . 0.002 .0.001 S-.Ы.CORt llmw-d i г�! M�,мa-•\.n,IPuJ 500 �JNone {: �.,, ---- -- Sho\O � Р41__,, ........,..._ L·- . [Е::_:Ь � 1 8'eel\дlo,,a""?"""'"<ioc,,,t,,modi,I Параметры блока: � l .....�.J Nominal power and frequency [ Pn (VA) fn ( Hz)]: [Номинальная полная мощность (ВА) и частота (Гц) трансформатора]. Winding 1 (АБС) connection [У, Yn, Yg, Delta (D1), Delta (D11)]: [Схема соединения первичной обмотки]. Значение параметра выбирается из списка: ► У -звезда; ► Yn - звезда с нейтралью; ► Yg - звезда с заземленной нейтралью; ► Delta (D1) - треугольник первой группы (сдвиг напряжений на 30° эл. в сторону отставания по сравнению с соединением в звезду); ► Delta (D11) - треугольник одиннадцатой группы (сдвиг напряжений на 30° эл. в сторону опережения по сравнению с соединением в звезду). Windingparameters [V1 Ph-Ph (V), R1 (pu), L1 (pu)]: [Параметры первичной обмотки [V1 Ph-Ph (В), R1 (о.е.), L1 (о.е.)]]. Линейное на­ пряжение (В), активное сопротивление обмотки (о.е.), индуктивность обмотки (о.е.). Winding 2 (аЬс) connection [У, Yn, Yg, Delta (D1), Delta (D11)]: [Схема соединения вторичной обмотки]. Значение параметра выбирается из списка: 122 Библиотека блоков SimPowerSystems ► У -звезда; ► Yn -звезда с нейтралью; ► Yg -звезда с заземленной нейтралью; ► Delta (D1) - треугольник первой группы; ► Delta (D11) - треугольник одиннадцатой группы. Winding parameters [V2 Ph-Ph (V), R2 (pu), L2 (pu)]: [Параметры вторичной обмотки [V2 Ph-Ph (В), R2 (о.е. ), L2 (о.е.)]]. Линейное на­ пряжение (В), активное сопротивление обмотки (о.е.), индуктивность обмотки (о.е.). SaturaЫe core: [Насыщающийся сердечник]. При установленном флажке используется модель трансформатора с учетом насыщения сердечника. Magnetization resistance Rm (pu): [Сопротивление цепи намагничивания (о.е.) ]. Magnetization inductance Lrn (pu): [Индуктивность цепи намагничивания (о.е.)]. Параметр доступен при модели­ ровании трансформатора без учета насыщения сердечника (флажок SaturaЫe core не установлен). Saturation characteristic (pu) [i1, phi1; i2, phi2 ; ...] [Характеристика насыщения сердечника]. Значения намагничивающего тока и магнитного потока задаются в относительных единицах. Параметр доступен при моделировании трансформатора с учетом насыщения сердечника (флажок Satu­ raЫe core установлен). Simulate hysteresis: [Моделировать гистерезис]. При установленном флажке в характеристике на­ магничивания учитывается гистерезис. Hysteresis Data Mat file: [Имя файла данных, содержащего гистерезисную характеристику]. Файл дан­ ных может быть создан с помощью блока Powergui. Specify initial fluxes [phiOA, phiOB, phiOC]: [Начальные потоки для фаз АБС]. Параметр доступен при моделировании трансформатора с учетом насыщения сердечника (флажок SaturaЫe core установлен). Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► None -нет переменных для измерения; ► Winding voltages -напряжения обмоток; ► Winding currents -токи обмоток; ► Flux and excitation current (Imag_IRm) - поток и ток холостого хода; ► Flux and magnetization current (Imag) - поток и ток намагничивания; ► All Measurements (V. 1, Flux) - все напряжения, токи и поток. Show additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. Break Algebraic loop in discrete model: [Разрывать алгебраический контур в дискретной модели]. Электротехнические элементы Elements 123 Активные сопротивления и индуктивности обмоток, а также параметры цепи намагничивания задаются в относительных единицах аналогично модели транс­ форматора без учета насыщения сердечника. Характеристика намагничивания задается аналогично модели трансформато­ ра с учетом насыщения сердечника. Пример: На рис. 3.42 показана схема, в которой двухобмоточный трехфазный транс­ форматор используется для питания трехфазной активной нагрузки. В примере использован вариант модели трансформатора без учета насыщения сердечника. -р !< Рис. 3.42. Работа трехфазного трансформатора на активную нагрузку 1 Continuous г-D-+8 Voltage Measurement Scope гl�:1:: __L - - Т..oltмt О _L З-Phase Source f • 60 1.tn • 10,з А в ➔ с .., а в �ь у с Thr•••Ph••• Transformer (Two Windings) Pn. fn • [ 250ее . ео ] VI. RI, LI: (424.�оЗ, 0.002, 0.08] V2, R2, L2 • [ З15еЗ , 0.002, 0.08] Rm • 500: lJn = 500 с 3-Phaso � Serles RLC Branch R= 100 3.4.22. Трехфазный трехобмоточный трансформатор Three-phase Transformer (Three Windings) Пиктограмма: у а2 а аА1с_Ы а 0 В 0 С У С с2 а С_аЗ а Сьз а у сЗ а Three-Phase Transformer (Three Windings) _j__ 7 124 Библиотека блоков SimPowerSystems Назначение: Моделирует трехобмоточный трехфазный трансформатор. Модель Three­ phase Transformer (Three Windings) построена на основе трех однофазных транс­ форматоров. В модели может учитываться нелинейность характеристики намаг­ ничивания материала сердечника. Окно задания параметров: n.Ыосt.....,.,....____,,,_ь,_.... ...._ j ........._�h�cohclir,,,wY�'"")'Cill_lri_hi_tl pcn allliiiW,ef\1, ...... 1 and3..Ц ,,..,_ j N....., _ __,._.,,.,, ll'lltlдJ.lrf/zll 1 j(250e6,SIJJ WIIФc 1 (1Щ) � fv � .......... {Vl�.R11Pu).t1(11,j1) , lt 7Э5еЭ. 0.002. о.оо 1 ,....... � j Wlncfro2�21 --...- J""v --=:::::::=:::==::::::::..-... 1 � ........ IV2f'l,.fl(Vwr,al,юt,u),�J j lr Э15о3, 0.002. о.оо 1 �-� ! W..VЭW>c-31- � ...._-�=-•"-"-·-r......,_, ! Wnll!O� f V3Pbl'lf,/,...I. R�. LЭIPul 1 1 Jt 315оЭ , 0.002 , 0.00 1 rs.u.ыe­ lsoo ! И.--,ьj None j1 г.,, в-�1оарi>"""""--·----.....--------- 1c.:и.::JJ � Параметры блока: Nominal power and frequency [Pn (VA) fn (Hz)]: [Номинальная полная мощность (ВА) и частота (Гц) трансформатора]. Winding 1 (АБС) connection: [Схема соединения первой обмотки]. Значение параметра выбирается из списка: ► У-звезда; ► Yn - звезда с нейтралью; ► Yg -звезда с заземленной нейтралью; ► Delta (D1) - треугольник первой группы (сдвиг напряжений на 30° эл. в сторону отставания, по сравнению с соединением в звезду); ► Delta (D11) - треугольник одиннадцатой группы (сдвиг напряжений на ЗQО ЭЛ. В Сторону опережения, ПО СравНеНИЮ С соединением В Звезду). Электротехнические элементы Elements 125 Winding parameters [V1 Ph-Ph (V), R1 (pu), 11 (pu)]: [Параметры первой обмотки]. Линейное напряжение (В), активное сопротивление обмотки (о.е.), индуктивность обмотки ( о.е. ). Winding 2 (аЬс) connection: [Схема соединения второй обмотки]. Значение параметра выбирается из списка: ► У-звезда; ► Yn -звезда с нейтралью; ► Yg - звезда с заземленной нейтралью; ► Delta (D1) - треугольник первой группы; ► Delta (D11) - треугольник одиннадцатой группы. Winding parameters [V2 Ph-Ph (V), R2 (pu), L2 (pu)]: [Параметры второй обмотки]. Линейное напряжение (В), активное сопротив­ ление обмотки (о.е.), индуктивность обмотки (о.е. ). Winding З (аЬс) connection: [Схема соединения третьей обмотки]. Значение параметра выбирается из списка: ► У -звезда; ► Yn - звезда с нейтралью; ► Yg -звезда с заземленной нейтралью; ► Delta (D1)-треугольник первой группы; ► Delta (D11)-треугольник одиннадцатой группы. Winding parameters [УЗ Ph-Ph (V), RЗ (pu), LЗ (pu)]: [Параметры третьей обмотки]. Линейное напряжение (В), активное сопротив­ ление обмотки (о.е. ), индуктивность обмотки (о.е.). SaturaЫe core: [Насыщающийся сердечник]. При установленном флажке используется модель трансформатора с учетом насыщения сердечника. Magnetization resistance Rm (pu): [Сопротивление цепи намагничивания (о.е.)]. Magnetization inductance Lm (pu): [ Индуктивность цепи намагничивания (о.е.)]. Параметр доступен при модели­ ровании трансформатора без учета насыщения сердечника ( флажок SaturaЫe core не установлен). Saturation characteristic (pu) [i 1, phi1; i2, phi2; ...] [Характеристика насыщения сердечника]. Значения намагничивающего тока и магнитного потока задаются в относительных единицах. Параметр доступен при моделировании трансформатора с учетом насыщения сердечника (флажок Satu­ raЬ\e core установлен). Simulate hysteresis: [Моделировать гистерезис]. При установленном флажке в характеристике на­ магничивания учитывается гистерезис. Hysteresis Data Mat fi.le: [Имя файла данных, содержащего гистерезисную характеристику]. Файл дан­ ных может быть создан с помощью блока Powergui. Параметр доступен при уста­ новленном флажке Simulate hysteresis. 126 Библиотека блоков SimPowerSystems Specify initial fluxes [phiOA, phiOB, phiOC]: [Начальные потоки для фаз АБС]. Параметр доступен при моделировании трансформатора с учетом насыщения сердечника (флажок SaturaЬ\e core установлен). Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► Winding voltages- напряжения обмоток; ► Winding currents- токи обмоток; ► Flux and excitation current (Imag_IRm) - поток и ток холостого хода; ► Flux and magnetization current (lmag) - поток и ток намагничивания; ► All Measurements (V, 1, Flux)- все напряжения, токи и поток. Show additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. Break Algebraic loop in discrete model: [Разрывать алгебраический контур в дискретной модели]. Активные сопротивления и индуктивности обмоток, а также параметры цепи намагничивания задаются в относительных единицах аналогично модели транс­ форматора без учета насыщения сердечника. Характеристика намагничивания задается аналогично модели трансформато­ ра с учетом насыщения сердечника. 3.4.23. Трехфазный трансформатор без учета насыщения сердечника (12 выводов) Three-phase Linear Transformer (12-terminals) Пиктограмма: а С1+� n �С2+ а а С1 ..:, С2 а 1� Thr•••Phas• Transform•r 12 Terminals Назначение: Моделирует трехфазный трансформатор без учета насыщения сердечника. Модель Three-phase Linear Transformer (12-terminals) построена на основе трех однофазных трансформаторов без учета насыщения сердечника. Блок имеет от­ дельные зажимы для всех выводов обмоток трансформатора. Электротехнические элементы Elements 127 Окно заданил параметров: п,..�t..м.. r,� 12-т".....i.t"""1<)io<1<1 fl•t:iod<�� te,...,,.. ... oc:t...ьi. .. ;,ф�two-wr><tr,g�e,,rfc;rr.o,,.дl� Параметры блока: Three-phase rated power and frequency (Pn (VA) fn (Hz)]: [Трехфазная номинальная полная мощность (БА) и номинальная частота (Гц)]. Winding 1 parameters [V1 (Vrms) R1 (pu) L1 (pu)]: [Параметры первичной обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Winding 2 parameters: [Параметры вторичной обмотки. Действующее значение напряжения обмотки (В), активное сопротивление (о.е.) и индуктивность рассеяния (о.е.) обмотки]. Magnetization branch [Rm (pu) Lm (pu)): [Сопротивление цепи намагничивания (о.е.) и индуктивность цепи намагни­ чивания (о.е.)]. 3.4.24. Трехфазный трансформатор с первичной обмоткой, соединенной в зигзаг Zigzag Phase-Shifting Transformer Пиктограмма: aAf. аз а В+ а С+ 1 ЬЗ а А· V '- � а В· / а С· сЗ 1" а а а Zigz.ag Ph.ase-Shifting Transformer Назначение: Моделирует трехфазный трансформатор, первичные обмотки которого соеди­ нены в зигзаг. Модель Zigzag Phase-Shifting Transformer построена на основе трех 128 Библиотека блоков SimPowerSystems однофазных трехобмоточных трансформаторов. Все зажимы первичных обмоток доступны. В модели может учитываться нелинейность характеристики намагни­ чивания материала сердечника. Окно задания параметров: \.�1 1\,•1� J\11,11111•1�•,--. /111,,1,Jl�l,,t...,e Sl11flн1(1 l1,111..,for .. l.:J1 ZilP'��<;..,;,,gT,&'\11-�ll!i<} П,,ЬЬ;k ...... ��-.,,,,.._ь,...,._ ��-....,,.._ Pwoo,f-cl�1..t2 oomodlldt1J111-""11Al ___ ........,_�(widr,g3Jc111 ь.........,iw .. .,.., ..... 11100oG60J P,u,[ag-"'!l)......,.vot9Vpt,lio,sPl,t'hl \10.э s--,.,,,_ WlhQ8Jil,мeN�/f11111'М'tiJ� Jiэ:JoЗ +15] � ...... [IЬcl­ \f{fld,,g1 �: llflfl>,,I L1fs>uD. /10.0020.081 1 W.-q2�. (R2(p'lf !r0002 о.081 1.28,uR 1 11/ni,gЭ[..,,.,..,,I: [R:w,.;j U(pujJ ; j(00020081 гs........ M�llr--� I.Jцrlullc jisoosoo1 я Параметры блока: Nominal power and frequency [Pn (VA) fn (Hz)]: [Номинальная полная мощность (БА) и частота (Гц) трансформатора]. Primary ( zig-zag) nominal voltage Vp [Vrms Ph-Ph ]: [Действующее значение номинального линейного напряжения первичной об­ мотки трансформатора]. Secondary nominal voltage and phase shift [VЗ (Vrms Ph-Ph) Phi (Deg)]: [Действующее значение номинального линейного напряжения вторичной обмот­ ки трансформатора и фазовый сдвиг напряжения вторичной обмотки ( эл. град)]. Secondary winding (аЬс) connection: [Схема соединения вторичной обмотки]. Значение параметра выбирается из списка: ► У - звезда; ► Yn - звезда с нейтралью; ► Yg - звезда с заземленной нейтралью; Электротехнические элементы Elements 129 ► Delta (D1) - треугольник первой группы; ► Delta (D11) - треугольник одиннадцатой группы. Winding 1 (zig-zag): [Rt (pu) L1 (pu)]: [Параметры первой обмотки]. Активное сопротивление (о.е.) и индуктивность (о.е.) первой обмотки однофазного трехобмоточноrо трансформатора. Winding2 (zig-zag): [R2 (pu) L2 (pu)]: [Параметры второй обмотки]. Активное сопротивление (о.е.) и индуктивность (о.е.) второй обмотки однофазного трехобмоточноrо трансформатора. Winding 3 (secondary): [RЗ (pu) L3 (pu)]: [Параметры третьей обмотки]. Активное сопротивление (о.е.) и индуктив­ ность (о.е.) третьей (вторичной) обмотки однофазного трехобмоточноrо транс­ форматора. SaturaЫe core: [Насыщающийся сердечник]. При установленном флажке используется мо­ дель трансформатора с учетом насыщения сердечника. Magnetizing branch: [Rm (pu) Lm (pu)]: [Параметры цепи намагничивания]. Активное сопротивление (о.е.) и индуктив­ ность (о.е.) цепи намагничивания. Параметр доступен, если флажок SaturaЫe core не установлен (моделируется трансформатор без учета насыщения сердечника). Magnetization resistance Rm (pu): [Сопротивление цепи намагничивания (о.е.)]. Параметр доступен, если уста­ новлен флажок SaturaЫe core. Saturation characteristic (pu) [i1, phi1; i2, phi2; ... ]: [Характеристика насыщения сердечника]. Значения намагничивающего тока и магнитного потока задаются в относительных единицах. Параметр доступен при моделировании нелинейного трансформатора (флажок SaturaЫe core уста­ новлен). Measurements: ► None - нет переменных для измерения; ► Phase voltages - фазные напряжения обмоток; ► Phase currents - фазные токи обмоток; ► Fluxes and excitation currents (Imag + IRm) - потоки и токи холостого хода; ► Fluxes and magnetization currents (Imag) - поток и ток намагничивания; ► All measurements (V I Fluxes) - все напряжения, токи и поток. Show additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. Break Algebraic loop in discrete model: [ Разрывать алгебраический контур в дискретной модели]. Активные сопротивления и индуктивности обмоток, а также параметры цепи намагничивания задаются в относительных единицах аналогично модели транс­ форматора без учета насыщения сердечника. 130 Библиотека блоков SimPowerSystems 3.4.25. Многообмоточный трансформатор Multi-Winding Transformer Пиктограмма: а 1+ а1 � +2 а 2 а з S::+ § ·�: 4a <=: 4а Multi-Winding Transformer Назначение: Блок Mнlti-Winding Transformer моделирует однофазный многообмоточный трансформатор с произвольным числом обмоток как на первичной, так и на вторич­ ной стороне. Эквивалентная схема трансформатора аналогична схеме однофазного трансформатора с учетом насыщения сердечника. Предусматривается также воз­ можность моделирования обмоток с отпайками. Отпайки могут быть заданы либо для первой обмотки на первичной стороне (верхняя левая), либо для первой об­ мотки на вторичной стороне (верхняя правая). Число витков между отпайками одной и той же обмотки одинаково. Активное сопротивление и индуктивность каждой секции обмотки находятся делением всего сопротивления обмотки и ее индуктивности на число секций обмотки (число отпаек+ 1 ). На рис. 3.43 показана схема модели многообмоточного трансформатора. RI L3 LI RЗ 3+ !+ 31 Lm 3.2 Rm 3.3 3.4 �= R2 35 L2 = L4 � � R4 Рис. 3.43. Схема модели многообмоточного трансформатора 3 4+ 4 Электротехнические элементы Elements 1 З1 Окно задания параметров: jз т�..dnojno1ops N...ы-on<l"-1[Prt.lA}lr4Н,)f ! /17SeЗQ1J Wrdi,g,,.,....,i�(U1 U2 ... Unj� /114400 121) 121)121)) \rlni,g•--1/11112 .. RnJlput fl o.w; 0.00; о.� О.005! '\IГll'ldr,gW,ogo rwkl.-. (\.1 L.2 Ln)tpu� f1002 0.02 0.02 0021 Г 5.Ь...Ы.ще м.,....,...,,_..,., Rм!Puf Jro J 1,1�-,-....,.Lmь,..1 J 50 �None r,, ---·�<lddiioowpo,-•----· Параметры блока: Number of windings оп left side: [Количество обмоток на первичной стороне]. Number of windings оп right side: [Количество обмоток на вторичной стороне]. Tapped winding: [Обмотки с отпайками]. Параметр позволяет выбрать обмотку, для которой будет задано число отпаек. Значениу параметра выбирается из списка: ► no taps - нет обмоток с отпайками; ► taps on upper left winding - отпайки на первой обмотке первичной стороны (верхняя левая); ► taps on upper right winding - отпайки на первой обмотке вторичной стороны (верхняя правая). Number of taps (equally spaced): [Число отпаек]. Параметр доступен, если выбрана обмотка, для которой необ­ ходимо задать отпайки. 132 Библиотека блоков SimPowerSystems Nominal power and frequency [Pn (VA) fn (Hz)]: [Номинальная полная мощность (ВА) и номинальная частота (Гц)]. Номи­ нальные параметры трансформатора. Winding nominal voltages [U1 U2 ... Un] (Vrms): [Номинальные напряжения обмоток [U1 U2 ... Un] (В)]]. Параметр задается в виде вектора. Каждый элемент вектора определяет действующее значение на­ пряжения обмотки, номер которой соответствует порядковому номеру элемента в векторе. Winding resistances [R1 R2 ... Rn] (pu): [Активные сопротивления обмоток [R1 R2 ... Rn] (о.е.)]]. Параметр задается в виде вектора. Каждый элемент вектора определяет активное сопротивление об­ мотки, номер которой соответствует порядковому номеру элемента в векторе. Winding leakage inductances [L1 L2 ... Ln] (pu): [Индуктивности рассеяния обмоток [L1 L2 ... Ln] (о.е.)]]. Параметр задается в виде вектора. Каждый элемент вектора определяет индуктивность обмотки, но­ мер которой соответствует порядковому номеру элемента в векторе. SaturaЫe core: [Насыщающийся сердечник]. При установленном флажке используется модель трансформатора с учетом насыщения сердечника. Magnetization resistance Rm (pu): [ Активное сопротивление цепи намагничивания ( о.е.)]. Magnetization reactance Lm (pu): [Индуктивность цепи намагничивания (о.е.)]. Параметр доступен при модели­ ровании трансформаторов без учета насыщения сердечника (флажок SatuгaЫe core не установлен). Saturation characteristic (pu) (i1, phi1; i2, phi2 ;... ) [Характеристика насыщения сердечника]. Значения намагничивающего тока и магнитного потока задаются в относительных единицах. Параметр доступен при моделировании трансформатора с учетом насыщения сердечника (флажок SaturaЫe core установлен). Simulate hysteresis: [Моделировать гистерезис]. При установленном флажке в характеристике на­ магничивания учитывается гистерезис. Hysteresis Data Mat file: [Имя файла данных, содержащего гистерезисную характеристику]. Файл данных может быть создан с помощью блока Powergui. Measurements: [Измеряемые переменные]. Значения параметра выбираются из списка: ► Winding voltages - напряжения обмоток; ► Winding currents - токи обмоток; ► Flux and excitation current (lmag_IRm) - поток и ток холостого хода; ► Flux and magnetization cuгrent (lmag) - намагничивания; ► All Measurements (V, 1, Flux) - все напряжения, токи и поток. Электротехнические элементы Elements 133 Sbow additional parameters: [Показать дополнительные параметры]. При установке флажка в окне диалога будут отображены дополнительные параметры модели. Активные сопротивления и индуктивности обмоток, а также сопротивления цепи намагничивания задаются в относительных единицах аналогично модели линейного трансформатора. Характеристика намагничивания задается аналогично модели нелинейного трансформатора. Пример: На рис. 3.44 показана схема, в которой мноrообмоточный трансформатор ра­ ботает на активную нагрузку. Первая обмотка на вторичной стороне имеет одну отпайку. 1+ � � :,.;,,.mo,I ., 2.1 ■ Series RLC Br,1nch � АС Volt.1ge Source \,tn = 1 Oe3"sqrt('2) f z б() 2 а t +3 • � 3. Q 1 1 Q Series RLC Branch2 1 Multi-Win ding Tr,1nsformer Lett \Мndings = 1 Right \Мndings • 2 Tapped\Мnding • t.ips on uPPer right winding NumЬerOfTaps • 1 Рис. 3. 44. Работа трехфазного многообмоточного трансформатора на активную нагрузку Series RLC Br,1nch1 134 Библиотека блоков SimPowerSystems З.4.26. Трехфазный фильтр Three-Phase Harmonic Filter Пиктограмма: ш w �[Q] а D Three-Ph.ise H.irmonic Filter FikerType = Single-tuned D Three-Phase H.irmonic Filter FilterType = DouЬle-tuned а а а а а D D Three-Ph.ise Harmonic Filter F�terType • High-pass Three-Phase Harmonic Filter F�terType = C-type Hi9h-pass Назначение: Блок Three-Phase Harmonic Filter моделирует 4 типа трехфазных гармониче­ ских фильтров, используя RLС-элементы. Фильтры подобного рода используют­ ся в энергетических системах для снижения искажений напряжения и тока, а так­ же повышения коэффициента мощности. Окно задания параметров: dвtыl< P,,r,1!11''\N�: fl,r,.,· Pl1,I<,(' 11,11"1НО!11( 1 il!rг н,е&-Рt..., н..,.,....:.fito< f<",..kl IJ».I EJj ,�.,..,....,...&,,,,,�-ta. 1 ther-,1,1,. ... ..,1.,,,._f\U:c� Tt,eiv-...,�11>,,pe,iio(l ...,,,....,,eoo\l'te""""". ..,,.,g�o,:,.,e,-,w[.,.l«dq,_.,l«lol jjelp Параметры блока: Туре of filter: [Тип фильтра). Значение параметра выбирается из списка: ► Single-tuned - однорезонансный фильтр; ► DouЫe-tuned -- двухрезонансный фильтр; Электротехнические элементы Elements 135 ► High-pass - фильтр верхних частот; ► C-type High-pass - фильтр верхних частот С-типа. Filter connection: [Соединение]. Параметр задает схему соединения фильтра. Значение выбирается из списка: ► У (grounded) - звезда с заземленной нейтралью; ► У (floating) - звезда без нулевого провода; ► У (neutral) - звезда с нулевым проводом; ► Delta - треугольник. Nominal L-L voltage and frequency [Vn (Vrms) fn (Hz)]: [Номинальное линейное напряжение и частота [ Ин (В) fн (Гц)]]. В качестве номинального напряжения задается действующее значение линейного напряжения. Nominal reactive power (var): [Номинальная реактивная мощность (ВАр)). Thning frequency (Hz): [Резонансная частота (Гц)). Параметр задается для однорезонансных фильтров. Thning frequencies [Fr1 (Hz) Fr2 (Hz)]: [Резонансные частоты [Fr1 (Гц) Fr2 (Гц)]]. Параметр задается для двухрезонансных фильтров. Quality factor ( Q): [Добротность (Q) ]. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Branch voltage Voltage - напряжение на зажимах цепи; ► Branch current - ток цепи; ► Branch voltage and current - напряжение и ток цепи. Пример: На рис. 3.45 приведена схема, в которой трехфазный гармонический фильтр обес­ печивает существенное снижение пятой гармоники тока в нагрузке. В качестве трех­ фазного источника напряжения использованы управляемые источники напряжения, соединенные в звезду с нулевым проводом. Управление источниками осуществляет­ ся от блоков Sine Wave, генерирующих первую и пятую гармоники сигнала. З.4.27. Заземление Ground Пиктограмма: а _L Ground Назначение: Блок Ground обеспечивает соединение с землей. 138 Библиотека блоков SimPowerSystems Пример: На рис. 3.4 7 показана схема, использующая .блоки Neutral. Два блока с номе­ ром узла 10 электрически связаны между собой. Блок Neutral с нулевым номером обеспечивает связь с землей. г -t> node 10 ACVolt,1ge � Source <J---+ node 10 . . Current Measurement l Scope Series RLC Br,1nch % -- _l_ "?nodeO Рис. 3.4 7. Использование блоков Neutral 3.4.29. Клемма Connection Port Пиктограмма: 0о Connection Port Назначение: Блок Connection Port создает порт в подсистеме для соединения с блоками SimPowerSystem. При установке блока внутри подсистемы на пиктограмме появ­ ляется порт, аналоrичный портам стандартных блоков SimPowerSystem. Окно задания параметров: 136 Библиотека блоков SimPowerSystems rn ·�-·r0+1-+ Sine W•ve Add . . Current Controlled Volt•ge М e.asuremen t Source Controlled Volt•ge Source1 Controlled Voltage Source2 -= -� о . ' " ' 1· ' .· ' ,200 ;_ . О.09 : 0.1 • . ·. " .t . ,., . . : ' •. \· �- . .... ш .L SeriesRLC Branch1 Series RLC ...J._ Branch2 7 Three-Phase Harmonic Filter ' ., WWl 200 Current Measurement1 Series RLC Br.anch ... . •. . '"' 0.11 0..12 Q13 0.14 0.15 0.1& Рис. 3.45. Применение трехфазного гармонического фильтра для снижения высших гармоник тока в нагрузке Окно задания параметров: Параметры блока: Нет. Пример: На рис. 3.46 показан пример использования блоков Ground. В примере источ­ ник и оба элемента нагрузки одним из портов подключены к блоку Ground, что обеспечивает электрическую связь между ними. Электротехнические элементы Elements г- + - 11 Current �surement Гл\ АС Volt�ge � Source _l_Ground 137 I Series RLC Branch _l_Ground1 тI Series RLC Branch1 _l_Ground2 Рис. 3.46. Пример использования блоков Ground 3.4.28. Нейтраль Neutral Пиктограмма: \l'Назначение: а node 1D Блок Neutral обеспечивает электрическое соединение между блоками с одина­ ковыми номерами узлов. Окно задания параметров: Параметры блока: Node number: [Номер узла]. Блок позволяет соединить между собой далеко отстоящие на схеме электри­ ческие узлы без видимых линий связи (проводов). Блок с номером узла, равным нулю, обеспечивает соединение с землей. Элементы силовой электроники Power Electronics 139 Параметры блока: Node number: [Номер узла]. Port location оп parent subsystem: [Расположение порта на пиктограмме подсистемы]. Значение параметра выбирается из списка: ► Left - порт расположен слева; ► Right - порт расположен справа. Пример: На рис. 3.48 показана схема, в которой используется подсистема, состоящая nз блоков SimPowerSystem. Для соединения содержимого подсистемы с внешними элементами использованы блоки Connection Port. 0 r -----0..... -ч:::::1-- Сн11•1111Н11 �•f't t,«..-flt..C е,м.,м Ct11:111tclieA 1 ,... -c:J---0 thЧ'> tCJon ♦ г АС Voltage � Source \(' Scop• i - - Connection Port1 C+urrent Measurement Connection Port •-----. Connection Port2 ,----◄ ._____S_ub _ syst _ _e_m______, Рис. 3.48. Использование блока Connection Port в подсистеме 3.5. Элементы силовой электроники Power Electronics З. 5. 1. Силовой диод Diode Пиктограмма: Diode Назначение: Блок Diode моделирует полупроводниковый силовой диод. 140 Библиотека блоков SimPowerSystems Модель диода состоит из последовательно включенных резистора R00, индук­ тивности L00, источника постоянного напряжения Uf и ключа SW (рис. 3.49). Блок логики управляет работой ключа. При положительном напряжении на дио­ де (Uak - Uf) происходит замыкание ключа и через прибор начинает протекать ток. Размыкание ключа (выключение диода) происходит при снижении тока Iak, протекающего через диод, до нуля. + ло---{:>f-----ок Анод Като д Блок лоrикм Uak lak Рис. 3.49. Модель диода lak Статическая вольт-амперная характе­ ристика модели диода показана на рис. 3.50. В модели параллельно самому диоду включена последовательная RС-цепь, вы­ полняющая демпфирующие функции. Окно задания параметров: 1 ------+--.--------. Uak Uf Рис. 3.50. Статическая вольт-амперная характеристика модели диода ----•�ir> ... мho-RCtrdil,e,Ctcui.lnм-.... lheOiodt ...W .... _...,........,.\flonlordnЬ:lw:e(l.oniFor-�h j = n�-=O.-�•nne �ьа--.,_ T� ,..._ P- R--fkntom,,} 10 FOIWOld .... VIM 08 1'11111...,entlc!дl. Элементы силовой электроники Power Electronics 141 Параметры блока: Resistance Ron (Ohm): [Сопротивление во включенном состоянии (Ом)]. Inductance Lon (Н): [Индуктивность во включенном состоянии (Гн)]. Forward voltage Vf (V): [Падение напряжения в прямом направлении (В)]. Initial cuпent Ic (А): [Начальное значение тока (А)]. При значении параметра, равном нулю, моде­ лирование начинается при закрытом состоянии диода. Если параметр задан поло­ жительным значением, то моделирование будет начато при открытом состоянии диода. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs ( F): [Емкость демпфирующей цепи (Ф)j. Show measurement port: [Показать измерительный порт]. При установленном флажке на пиктограмме блока появляется выходной порт m, на котором формируется векторный Simu­ link-cиrнaл из двух элементов. Первый элемент - анодный ток диода, второй напряжение анод-катод диода. Пример: На рис. 3.51 показана схема модели однополупериодноrо выпрямителя, рабо­ тающего на активно-индуктивную нагрузку. Приведены графики тока в нагрузке и напряжения на нагрузке. Ron = 0.001; L.on = le-6 Rs = 20'; Cs = 4е-6 \1У = 0.8 Г�Diode I + Current Measurement ·- S ource \tn = 100 f = 50 □ ·-� ' 50 " .. ' '" • '" ,, ' о '.!О •· " • " Scope . .. " ' ...... '; . rл'\ АС Voltage 'r" Voltage о ' .• " ... ·:[A])iill_ О D.02 O.Dt Series RLC Branch L = 2е•О3 R= 1 Рис. 3.51. Модель однополупериодного выпрямителя ; ; 0(5 008 . 0.1 142 Библиотека блоков SimPowerSystems 3. 5.2. Тиристор Thyristor, Detailed Thyristor Пиктограмма: � D�D Thyristor Назначение: Моделирует тиристор. В библиотеке SimPowerSystems имеются две модели ти­ ристора: Thyristor (упрощенная модель) и Detailed Thyristor (уточненная модель). Упрощенная модель тиристора состоит из последовательно включенных ре­ зистора Ron • индуктивности L0n, источника постоянного напряжения Uf и ключа SW (рис. 3.52). Блок логики управляет работой ключа. При положительном на­ пряжении на тиристоре (Uak - Uf) и наличии положительного сигнала на управ­ ляющем электроде (g) происходит замыкание ключа и через прибор начинает протекать ток. Размыкание ключа (выключение тиристора) выполняется при снижении тока Iak, протекающего через тиристор, до нуля и нулевом управляю­ щем сигнале. Uak + ,\ o--t>k-----o к Анод g Катод Уnраеnя�ощий ,nеКТрод Блок логики Uak lak g Рис. 3.52. Упрощенная модель тиристора В уточненной модели тиристора длительность управляющего импульса должна быть такой, чтобы при включении анодный ток тиристора превысил ток удержания (Il). В противном случае включение не произойдет. При выключении тиристора длительность приложения отрицатель­ lak ного напряжения анод-катод должна Включено превышать время выключения тиристо­ ра (Tq). В противном случае произойдет автоматическое включение тиристора, Вкn�оч,ни, даже если управляющий сигнал равен \ ( 11 > О) нулю. \ 11 • '' Выключено Uak Статические вольт-амперные харак­ Выключено Uf теристики модели тиристора для вклю­ ченного и выключенного состояний по­ Рис. 3.53. Статические волы-амперные казаны на рис. 3.53. характеристики модели тиристора f Элементы силовой электроники Power Electronics 143 В модели параллельно самому тиристору включена последовательная RС-цепь, выполняющая демпфирующие функции. Окно задания параметров: l E:,Blo< к l',,r,1111<•\••r<,: ll1y1·1<,tor l�fmoaklllri<I � 1:1 rhJ<>,tor"P11...,...,��.-яc....щr<:i,;,,it1.,-...iмrtv�modoll\tt .,...,n.,1,-.,,..�lll'lf!ltld,-.t1':t«w.1'(loo� fo,-�!1,o ......l'Jt>' -alnAc!Ь.Uito""11nolf..i•tl...H!11<Юa...,""'1te�• р.,.,.,�... Параметры блока: Resistance Ron (Ohm): [Сопротивление во включенном состоянии (Ом)], Inductance Lon (Н): [Индуктивность во включенном состоянии (Гн)]. Forward voltage Vf (V): [Падение напряжения в прямом направлении (В)]. Initial current 1с (А): [Начальное значение тока (А)]. При значении параметра, равном нулю, моде­ лирование начинается при закрытом состоянии тиристора. Если параметр задан положительным значением, то моделирование будет начато при открытом состоя­ нии тиристора. Snubber resistance Rs (Ohm): t Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи ( Ф) J. Latching current Ii (А): [Величина тока удержания (А)]. Параметр задается в уточненной модели ти­ ристора. Turn of time Tq (s): [Время выключения (с)]. Параметр задается в уточненной модели тиристора. 144 Библиотека блоков SimPowerSystems Show measurement port: [Показать измерительный порт]. При установленном флажке на пиктограмме блока появляется выходной порт m, на котором формируется векторный Simulink-cиrнaл из двух элементов. Первый элемент - анодный ток тиристора, второй - напряжение анод-катод тиристора. Пример: На рис. 3.54 показана схема модели управляемого однополупериодноrо вы­ прямителя, работающего на активно-индуктивную нагрузку. В схеме использова­ на упрощенная модель тиристора. Импульсы управления тиристором формиру­ ются блоком Pulse Generator, при этом величина угла управления тиристором определяется длительностью фазовой задержки (Phase Delay) генератора. На ри­ сунке приведены также графики тока в нагрузке и напряжения на нагрузке. '"iм'Г' ·1: ' г =+ �itude= 1 Period = 1150 Pulse\Мdth = 1 о Ph11se Delay = 50'(0 .02/360) Ron = 1 е,03; Lon = 1 е-6 Rs " 20'; Cs " 4е-6 Vf" 0.8 1 с,.,.,, е , ,м �m" ' ·-.__+1--+-----□ 9 �ACVoltage Source \tn = 100 t = 50 Scope Series RLC Branch L = 2е-03 R� 1 ·-� 50 о 60 . .. ' . ·!·· .. ' ' . : ·• .. ·" . ' . .• :ШмJ О 002 O.OI 00& ООО 0.1 Т\моfь«: О Рис. 3.54. Модель управJ1яемого однополупериодного выпрямителя Элементы силовой электроники Power Electronics 145 3.5.З. Полностью управляемый тиристор GTO Thyristor Пиктограмма: � а�а Gto Назначение: Блок GTO Thyristor моделирует полностью управляемый тиристор. Модель полностью управляемого тиристора состоит из последовательно включенных резистора Ron, индуктивности Lon, источника постоянного напря­ жения Uf и ключа SW (рис. 3.55). Блок логики управляет работой ключа. При положительном напряжении на тиристоре (Uak - Uf) и наличии положительного сигнала на управляющем электроде (g) происходит замыкание ключа и через при­ бор начинает протекать ток. Для выключения прибора достаточно управляющий сигнал снизить до величины, равной нулю. •+ л o--{>k--o к Анод - Катод g Уnр88ЛАIОЩИЙ ,лектрод Блок логики Uak lak g Рис. 3.55. Модель полностью управляемого тиристора Статические вольт-амперные ха­ рактеристики модели полностью управляемого тиристора для вклю­ ченного и выключенного состояний показаны на рис. 3.56. В модели параллельно самому ти­ ристору включена последовательная RС-цепь, выполняющая демпфи­ рующие функции. В модели учитывается также ко­ нечное время выключения тиристо­ ра. Процесс выключения разбит на lak ВКПIОЧIНО - , ✓ ВЫКПIОЧIНМI ' ' (g•O) , е ючени Вклg►O) , '\ ВЫКПIОЧIНО Uf ВКПIОЧIНО Рис. 3.56. Статические волы-амперные характеристики модели полностью управляемого тиристора 146 Библиотека блоков SimPowerSystems lak lmax ltail = 0.1 lmax .. �,.. 1 g 1 1 Тf 1 1 1 1 1 � Рис. 3.57. Процесс выключения полностью управляемого тиристора два участка (рис. 3.57) и характеризуется, соответственно, временем спада (Tf), при котором анодный ток уменьшается до О, 1 от тока в момент выключения (Imax), и временем затягивания (Tt), при котором анодный ток уменьшается до нуля. Окно задания параметров: �610,.k />.,rd111ett•r-,: Uto - Gto '-'<ltlrisl 1�-6GTO�oittp,,•-•-At.,.w,,,ora.tt tn .,,......,ц,,t,, G10 ri\l>del no, � iemi61>CO li'!мJ ono rdкt"°"" {lo,,, lnQ<'f..tntnoGJD..,:J<iol/\ot,.,и;,,i,,t,d.,,..• The r,�•,nф;W_,. °""""'Ье ,otto ,e,o.Ditaetiuoonol tt.,GTO • .....,,,, иl, t/VOuф 11\О Utm<tol Br!dge � р.,-.,. Re,,,tancoAon�I (0.001 1......,1.,.ц tcr, /НI .! f10&<> 1З Элементы силовой электроники Power Electronics 147 Параметры блока: Resistance Ron (Ohm): [Сопротивление во включенном состоянии (Ом)]. Inductance Lon (Н): [Индуктивность во включенном состоянии (Гн)]. Forward voltage Vf (V): [Падение напряжения в прямом направлении (В)]. Current 10% fall time Tf (s): [Время спада тока до уровня 0,1 от тока в момент выключения (с)]. Current tail time Tt (s): [Время затягивания (с)]. Время, за которое ток уменьшится до нуля от уровня О, 1 тока в момент выключения. Initial current 1с (А): [Начальное значение тока (А)]. При значении параметра, равном нулю, моде­ лирование начинается при закрытом состоянии прибора. Если параметр задан положительным значением, то моделирование будет начато при открытом состоя­ нии прибора. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкостьдемпфируюшей цепи (Ф)]. Show measurement port: [Показать измерительный порт]. При установ­ ленном флажке на пиктограмме блока появляется выходной порт m, на котором формируется векторRon • 0.01; Lon • 1t•6 Rs = 20'; Cs • .._.е Tf • 10е-6; 1\ = 20t·6 Vf = 1 G1o --· Scope Dlodt Ron = 0.001; Lon = 1t•6 Rs • 20'; Cs • 48-6 Vf = 0.8 Рис. 3.58. Схема модели импульсного регулятора напряжения 148 Библиотека блоков Sim PowerSystems ный Simulink-cиrнaл из двух элементов. Первый элемент - анодный ток тиристо­ ра, второй - напряжение анод-катод тиристора. Пример: На рис. 3.58 показана схема модели импульсного регулятора напряжения. Ве­ личина среднего значения напряжения на нагрузке такого регулятора зависит от скважности управляющих импульсов. На рисунке представлены также графики напряжения и тока в нагрузке. 3. 5.4. Биполярный транзистор IGBT Пиктограмма: а@ IGBT Назначение: Моделирует биполярный транзистор с изолированным затвором. Модель I GBT транзистора состоит из последовательно включенных резистора Ron, индуктивности Lon, источника постоянного напряжения Uf и ключа SW (рис. 3.59). Блок логики управляет работой ключа. Включение прибора происхо­ дит в случае, если напряжение коллектор-эмиттер положительно и больше, чем Uf, и на затвор транзистора подан положительный сигнал (g > О). Выключение прибора происходит при уменьшении сигнала на затворе до нуля (g = О). При от­ рицательном напряжении коллектор-эмиттер транзистор находится в выключен­ ном состоянии. Uce + lc 1 Кол�е�_j__г;:и�ер g З•твор SW Ror, Lон Uf С �-u..... � � Е Бл ок логики Uce lc g Рис. 3. 59. Модель IGBT транзистора Статические вольт-амперные характеристики модели IGBT транзистора для включенного и выключенного состояний показаны на рис. 3.60. В модели параллельно самому прибору включена последовательная RС-цепь, выполняющая демпфирующие функции. В модели учитывается также конечное время выключения транзистора. Про­ цесс выключения разбит на два участка (рис. 3.61) и характеризуется, соответ- Элементы силовой электроники Power Electronics lc 81СЛIОЧ8НО ' , Включенме ...._ ' (g>O) \ ' 8ЫIСЛIОЧ8-\ \ Н118 (g = 0) \ ВЫIСЛIОЧtнО ._ J-- ,t ---- lc \ ______...,..,.___.._....,_� Uce Uf 149 ВЫIСЛIОЧIНО Рис. 3.60. Статические вольт-амперные характеристики модели IGBT транзистора Рис. 3.61. Процесс выключения IGBT транзистора ственно, временем спада (Tf), при котором ток коллектор-эмиттер уменьшается до 0,1 от тока в момент выключения (Imax), и временем затягивания (Тt), при ко­ тором ток уменьшается до нуля. Окно задания параметров: .._:�нJ,н� l',,r,.нt••t, 1, l<HI J.З' 1681 &,,мl<t� ........ 811G8T ""'""- .,�wlh•-RC ..... dlcul. ln-118 IG8T .... hl0inllmel-(Rll'l)enil .......... ll.""41n.,_U.IG8f ...Whмrlinlt.....,., Тhо .......... М-.._Ье_.lО_ D�dh!G8Tio_,_,..n,.......,h� .. blodL ·- . . 1 150 Библиотека блоков SimPowerSystems Параметры блока: Resistance Ron (Ohm): [ Сопротивление во включенном состоянии (Ом)]. Inductance Lon (Н): [Индуктивность во включенном состоянии (Гн)]. Forward voltage Vf (V): [Падение напряжения в прямом направлении (В)]. Current 10% fall time Tf (s): [Время спада тока до уровня 0.1 от тока в момент выключения (с)]. Current tail time Тt (s): [Время затягивания (с)]. Время, за которое ток уменьшится до нуля от уровня О,1 тока в момент выключения. Initial current lc (А): [Начальное значение тока (А)]. При значении параметра, равном нулю, моде­ лирование начинается при закрытом состоянии прибора. Если параметр задан положительным значением, то моделирование будет начато при открытом состоя­ нии прибора. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи (Ф)]. Show measurement port: [Показать измерительный порт]. При установ­ ленном флажке на пиктограмме блока появляется ,s�--�-----� выходной порт m, на котором формируется вектор­ : ный Simulink-cигнaл из двух элементов. Первый . i. . • 5 , ·. : . , : элемент - ток коллектор-эмиттер транзистора, вто­ о� . . • . ' ' . рой - напряжение коллектор-эмиттер транзистора. . .. Пример: На рис. 3.62 показана схема модели нереверсив­ ноrо широтно-импульсноrо преобразователя поL • 4Юе-б Series: RLC �r•nch Т-ott.nt О !� Ron•006,t.on•01e-3 "'. ,.... с,. <lf Dlode11.i • О е Ron • О 05: Lon • О le•O Rr • 1е5·, Cs •inf l.i •08 Рис. 3. 62. Модель нереверсивного широтно-импульсного преобразователя постоянного напряжения Элементы силовой электроники Power Electronics 151 стоянноrо напряжения с параллельным включением транзистора по отношению к нагрузке. На рисунке представлены также графики напряжения и тока в актив­ но-емкостной нагрузке. 3.5.5. Транзистор Mosfet .1:�:� Пиктограмма: Mosfet Назначение: Моделирует силовой полевой транзистор с параллельно включенным обрат­ ным диодом. Модель Mosfet транзистора состоит из последо-1Jательно включенных резисто­ ра Ron • индуктивности L0n и ключа SW (рис. 3.63). Блок логики управляет рабо­ той ключа. Включение прибора происходит в случае, если напряжение сток-исток положительно и на затвор транзистора подан положительный сигнал (g > О). Выключение прибора происходит при уменьшении сигнала на затворе до нуля (g = О). При отрицательном напряжении сток-исток транзистор находится в вык­ люченном состоянии и ток проводит обратный диод. + ld Uds g 38Т8Ор g Рис. 3.63. Модель Mosfet транзистора Статические вольт-амперные харак­ теристики модели Mosfet транзистора для включенного и выключенного со­ стояний показаны на рис. 3.64. В модели параллельно самому прибо­ ру включена последовательная RС-цепь, выполняющая демпфирующие функции. ld ' ' ВыкntоЧенме Rt = Ron \ (g = О) \ Bl:>IICЛIOЧtНO Рис. 3.64. Статические вольт-амперные характеристики модели Mosfet транзистора Включено Bкnioчttto Выключено Uds 152 Библиотека блоков SimPowerSystems Окно задания параметров: J.!Ollot fmФ:l<l!lri<� ""°" Щ!SFП"1>М...,мh•••..•tliC�C)l':U: IIJP<Нlo!eineMOSF'Et modoi hc ;,t$М! '"""4МСе fR,Jt,J .,.i� (l.onl ln о/1,о\О!е lho MOSFП lw�� T/len...,./��ЬenttoDioei«II_,,, otlho MOSFE T • .....ЫО ..,!у tlwaud,11.Urmrяl S,ijge Ыоd,.. � 1 Параметры блока: Resistance Ron (Ohm): [ Сопротивление во включенном состоянии (Ом)]. Inductance Lon (Н): (Индуктивность во включенном состоянии (Гн)]. Initial current Ic (А): [Начальное значение тока (А)]. При значении параметра, равном нулю, моде­ лирование начинается при закрытом состоянии прибора. Если параметр задан положительным значением, то моделирование будет начато при открытом состоя­ нии прибора. Internal diode resistance Rd (Ohms): (Внутреннее сопротивление диода во включенном состоянии (Ом)]. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи (Ф) ]. Show measurement port: [Показать измерительный порт]. При установленном флажке на пиктограмме блока появляется выходной порт т, на котором формируется векторный Simulink-cиrнaл из двух элементов. Первый элемент - ток сток-исток транзисто­ ра, второй - напряжение сток-исток транзистора. Пример: На рис. 3.65 показана схема модели полумостового однофазного инвертора, работающего на RLС-нагрузку. На рисунке представлены также графики напря­ жения и тока в нагрузке. Элементы силовой электроники Power Electronics □ Sign.il(s) Pulses Constant 153 PWM Generator 1-arm Brige (2 p ulses) C.irrier frequency = 2400 M ultimeter Scope ..:l_ DC Voltag@ � ..:l_Dc �ltage Т Source1 V• 100 ] OL.. ...... �g�� �-=-1-1 J Рис. 3.65. Модель полумостового однофазного инвертора Mosfet Ron = 0.001; Lon" 1е-6 R Cs " 1е-6 = .. �� Mosfet1 L = 1е-04 R = 0.2 С = 4.2Q2e-05 -:== -� '=�� ·100 . .2!11) 3.5.6. Идеальный ключ ldeal Switch Пиктограмма: Bli!tJ, • "' ,,р,• •. • о' т... ,..... о . •.• . .. . ... . ... . .. -500 : . .,ооо &. • ' 65 7 • . 15 : • '; . •.; : 8 ,10·3 � а�а ldeal Switch Haзнlllteнue: Моделирует идеальный ключ. Модель ключа Ideal Switch состоит из последовательно соединенных резисто­ ра R0n и ключа SW (рис. 3.66). Блок логики управляет работой ключа. Включение прибора происходит в случае, если на управляющий вход подан единичный поло­ жительный сигнал (g � 1). Выключение прибора происходит при уменьшении уп­ равляющего сигнала до нуля (g = О). Статические вольт-амперные характеристики модели ключа для включенного и выключенного состояний показаны на рис. 3.67. В модели параллельно контактам ключа подсоединена последовательная RС­ цепь, выполняющая демпфирующие функции. 154 Библиотека блоков SimPowerSystems U12 + '�to----o2 112 Вывод 2 Вывод 1 g Упра■ЛАIОЩИI! :,nектрод Блок логики g Рис. 3.66. Модель идеального ключа 112 Включено ...._ ' Выключение ' (g = 0) Включение (g � 1) Выключено \ ' '\ '' ' ' Накnон =1/ R.,.\ \ � Выключено Включение (g � 1) U12 Выключение' , (g = О) Включено Рис. 3.67. Статические вольт-амперные характеристики модели ключа Окно задания параметров: ldtal s...lt{lмd<l \rr,k) S.....,tmdodЬ,,a•,igм/..nPir...il'il:h•-Rt....Ы......_in ...---s�moc111i. .. i,..,.-1R ..� \r,df.-111ii...,• __ ..., u,,,....,.,,,.....__Ьt�lhart-. --ll<>n(Olwot/· Jo.001 1 1м11111o1eto1or·_,·, ,"".М· о ! / 5,.._,........R,�J 1 1,.;; i S..ЬЬ.,otpd..... �(F}: 1 Jn / ;;si---r,a1 Элементы силовой электроники Power Electronics 155 Параметры блока: Intemal Resistance Ron (Ohms): [Сопротивление во включенном состоянии (Ом)]. Initial state (О for 'open', 1 for 'closedэ): [Начальное состояние]. Параметр задается равным О для открытого состояния ключа и 1 для закрытого состояния. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи (Ф)]. Show measurement port: [Показать измерительный порт]. При установленном флажке на пиктограмме блока появляется выходной порт m, на котором формируется векторный Simulink­ cиrнaл из двух элементов. Первый элемент - ток ключа, второй - напряжение ключа. Пример: На рис. 3.68 показана схема □х модели, в которой подключение "'i питания асинхронного электро­ двигателя производится при замыкании трех ключей Ideal Switch. Управляющий сиПiал для каждого ключа формируется блоком Step. На рисунке приве­ 400 .... дены также графики частоты 200 вращения вала двигателя и электромагнитного момента. ---�--- ·:Шo...-___,.n2,---o,..,, ...,o..,_s--!-авс---_...__.....,1,_,.2_...,,1"", __..,, в,---",.е f.,..Df't8et: 0 -@\.tn f = 50 ldeal Switch Ph;;ise = О :-& = 22o•sqrt(2) -@- Ph;;ise = • 120 -@- Ph;;ise = 120 •-------в ldeal Switch1 :-& Co nstant '-----А ldeal Switch2 Cs = О.01е-6 Rs = 0.1 Ron = 0.01 m □ M achines Scope Measurement Demux Asynchronous M achine SI Units Scope1 Step Рис. 3. 68. Пуск асинхронного электродвигателя 156 Библиотека блоков SimPowerSystems 3.5. 7. Универсальный мост Universa/ Bridge Пиктограмма: �:� ш: Univets.11 Bridge Назначение: Моделирует универсальный мост. Модель Universal Bridge позволяет выбирать количество плеч моста (от 1 до 3), вид л ___ полупроводниковых приборов (диоды, тиристо- в ---+--➔ ры, идеальные ключи, а также полностью управ­ ляемые тиристоры, IGBT и MOSFET транзис­ -1 торы, шунтированные обратными диодами). На рис. 3.69, в качестве примера, представлена схе­ ма тиристорного трехфазного моста. Рис. 3.69. Схема силовой части блока Universal Bridge Окно задания параметр�в: u_,.в,,_.(,м,1(1� П•blod<�•Ьailaoal.мc-.1,--- S...RC �_,..,___,,, .....,.wlilмch-".,._ p,.н.-ii« l..__,i.,....., ..... ""'" .........�,.. -�11,е rМINl�IAnd�e,,d�,IQМЬeoot18_, р­ � а1 tr... -1з S,,,.Ы,,, _ R, (Oh,\CJ Параметры блока: Number of bridge arms: [Число плеч моста]. Выбирается из списка: 1, 2 или 3. Элементы силовой электроники Power Electronics 157 Snubber resistance Rs (Ohm): (Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи (Ф)]. Power Electronic device: (Вид полупроводниковых приборов моста]. Значение параметра выбирается из списка: ► Diodes - диоды; ► Thyristors - тиристоры; ► GTO / Diodes - полностью управляемые тиристоры, шунтированные об­ ратными диодами; ► MOSFET / Diodes - МОSFЕТ-транзисторы, шунтированные обратными диодами; ► IGBT / Diodes - IGВТ-транзисторы, шунтированные обратными диодами; ► Ideal Switches - идеальные ключи. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter переменные, которые затем можно увидеть с помощью блока Scope. Значения параметра выбираются из списка: ► None - нет переменных для отображения; ► Device voltages - напряжения на полупроводниковых устройствах; ► Device currents - токи полупроводниковых устройств; ► UAB UBC UCA UDC voltages - напряжения на зажимах моста; ► AII voltages and currents - все напряжения и токи моста. Отображаемым сигналам в блоке Multimeter присваиваются метки: ► Usw1, Usw2, Usw3, Usw4, Usw5, Usw6- напряжения ключей; ► Isw1, Isw2, Isw3, Isw4, Isw5, Isw6- токи ключей; ► Uab, Ubc, Uca , Udc - напряжения на зажимах моста. Кроме приведенных выше параметров, в окне диалога задаются и параметры для выбранных полупроводниковых приборов. Пример 1: На рис. 3.70 показана схема трехфазного тиристорного выпрямителя, рабо­ тающего на активно-индуктивную нагрузку. В момент времени, равный 0,06 с, выполняется перевод выпрямителя в инверторный режим. На графиках хорошо видно, что выходное напряжение выпрямителя при этом меняет знак. После того как вся энергия, запасенная в индуктивности, отдана, происходит выключение выпрямителя. Пример 2: На рис. 3.71 показана схема однофазного инвертора на IGВТ-транзисторах, шун­ тированных обратными диодами. Нагрузка инвертора носит резонансный характер, что объясняет синусоидальный характер выходного напряжения инвертора. На ри­ сунке показаны дополнительно графики тока в нагрузке и напряжения на нагрузке. 158 Библиотека блоков SimPowerSystems -@-----c::J---N"'--0------c::J---N"'-------1 -0----c::J---N"'-------1 iA + Vo v.ь вс VЬо ---�СА Untvers•I Bridge .lnns•3; Ron • 1е-3; Lon • О; Rs•бOO; Cs•0.1e-8 vr • О.8 Jtls•• Vo, Synchroniz,1tion VolUgu Synchronized 11-Pulse Gener.nor J1llAEi: 1 }iti 1 ·: !?:! : 1 :EtEt±№i i 1 IXXJO 0.01 0.112 0.111 О.О< 0.1!1 О.О& 0.01 0.08 0.09 0.1 �ottмt о Рис. 3. 70. Трехфазный тиристорный выпрямитель З.5.8. Трехуровневый мост Three-Level Bridge Пиктограмма: {Б] ��а Three.Level Brldge Элементы силовой электроники Power Electronics 159 Current Measurement □ г�-. 1 L а Зе-3 +Vdc = 1200 V Scope R2 = 0.05 L2 = 250е-6 • в ________.,_____._____, Universal Bridge �hllftJulПJlflЛП)lJЩ ·==•· ·•· . . : . .. ; ' · · . =Н\J\··· ··•1•� "! • ·1000 .· · о - •1000 l ·:ЮОО ; о 1h80f1iМI : .. • ·: • • � о • · � . · i ' .. .. : · . :· .. .. = � � � � � � � · � • , . • . · . ,. . ...� . .,·. Рис. 3. 71. Однофазный инвертор Назначение: Моделирует трехуровневый мост. Модель Three-Level Bridge позволяет выбирать количество плеч моста (от 1 до 3) и вид полупроводниковых приборов (полностью управляемые тиристоры, IGBT и MOSFET транзисторы, шунтированные обратными диодами, а также идеаль­ ные ключи). На рис. 3.72 представлена схема устройства для случая, когда каждое из коммутирующих устройств состоит из полупроводникового прибора и обрат­ ного диода. На рис. 3.73 показана схема трехуровнеrо моста, когда в качестве коммутирую­ щих устройств выбраны идеальные ключи. 160 Библиотека блоков SimPowerSystems Рис. 3. 72. Схема трехуровнего моста с полупроводниковыми приборами +<>-o---- � - -1 ---- � _ _ ) s a ) s _lb- ---�J w Swl w s':-f-oA w.> a ) S w 2a �в w , л:, ) Sw 2b c �с ow c .> ) Sw2 c No-......._________._______, Рис. 3. 73. Схема трехуровнего моста с идеальными ключами Окно з(lдания параметров: Элементы силовой электроники Power Electronics 161 Параметры блока: Number of bridge arms: [Число плеч моста]. Выбирается из списка: 1, 2 или 3. Snubber resistance Rs (Ohm): [Сопротивление демпфирующей цепи (Ом)]. Snubber capacitance Cs (F): [Емкость демпфирующей цепи (Ф) ]. Power Electronic device: [Вид полупроводниковых устройств моста]. Значение параметра выбирается из списка: ► GTO / Diodes - полностью управляемые тиристоры, шунтированные об­ ратными диодами; ► MOSFET / Diodes - МОSFЕТ-транзисто­ ры, шунтированные обратными диодами; ► IGBT / Diodes - IGВТ-транзисторы, шунти­ рованные обратными диодами; 200 � 100 . . .. ' ··• .. • .... .••.. ► Ideal Switches - идеальные ключи. Measurements: [Измеряемые переменные]. Параметр позволяет выбрать передаваемые в блок Multimeter перемен­ 100�� 50 •· ; 1 ••• , • ные, которые затем можно увидеть с помощью блока о • ..' • . .. : ... . .......•.. Scope. Значения параметра выбираются из списка: :rt151s/sJ ',: --· О Discrete 3-р h11se PWM Gener11tor Р1 ----------, Volto1ge Me.1Surement Р2 g Q02 QOI QD6 □ ��-•+ DC Voltage Source 0 V•10 _ _ _ ____ __ 1N _ _ 1�- DC Voltage Souroe1 V= 100 c1-----------D----"'Y'- Three-Level Bridge Arms • З; Ron•1е-З; Rs = 1е!>; Cs•inf Vf,Vfd•(0 0) Рис. 3. 74. Трехуровневый инвертор Series RLC Branoh2 L = 1е-ОЗ R•1 0.06 162 Библиотека блоков SimPowerSystems ► None - нет переменных для отображения; ► All device currents - токи полупроводниковых устройств; ► Phase-to-neutral and DC voltages - фазные напряжения и напряжение меж­ ду клеммами 4+� и�-� моста; ► All voltages and currents - все напряжения и токи моста. Кроме приведенных выше параметров, в окне диалога задаются и параметры для выбранных полупроводниковых приборов. Пример: На рис. 3. 74 показана схема трехуровневого инвертора, работающего на актив­ но-индуктивную нагрузку. На графиках показаны напряжение и ток одной фазы нагрузки. 3.6. Электрические машины Machines 3. 6. 1. Машина постоянного тока DC Machine Пиктограмма: )TL m> -x- a.At-�Aa aF+�F-a DC M.11chine Назначение: Моделирует электрическую машину постоянного тока. Порты модели А+ и А- являются выводами обмотки якоря машины, а порты F+ и F- представляют собой выводы обмотки возбуждения. Порт TL предназна­ чен для подачи момента сопротивления движению. На выходном порту m форми­ руется векторный сигнал, состоящий из четырех элементов: частота вращения, ток якоря, ток возбуждения и электромаrнитный момент машины. Схема блока DC Machine представлена на рис. 3.75. Цепь якоря машины представлена последовательно включенными элемента­ ми: Ra - активное сопротивление якорной цепи, La - индуктивность якорной цепи и E_FCEM - ЭДС обмотки якоря (управляемый источник напряжения). Величина ЭДС обмотки якоря вычисляется по выражению: Е = КЕ х ro, где Е - ЭДС обмотки якоря; ro - частота вращения вала электродвигателя; КЕ коэффициент пропорциональности между угловой частотой вращения и ЭДС. Коэффициент пропорциональности между частотой вращения и ЭДС зависит от величины тока обмотки возбуждения машины: Электрические машины Machines 163 TL Coulomb (Тf)& Viscous ( Bm•w) friotion Torquк Mu• д. L1f 20.-е"1 F- Рис. 3. 75. Схема модели машины постоянного тока КЕ= La/X[f, где L01 - взаимоиндуктивность между обмоткой якоря и обмоткой возбуждения; 11 - ток возбуждения машины. Цепь возбуждения машины представлена на схеме элементами Rf и Lf - актив­ ное сопротивление и индуктивность обмотки возбуждения. Механическая часть модели вычисляет угловую частоту вращения вала маши­ ны в соответствии с уравнением J :: =Те -TLsi,gn(ro)-Bтro-Tf, где Те - электромагнитный момент машины; Вт - коэффициент вязкого трения; т1 - момент сухого трения; TL - момент сопротивления. Механическая часть модели представлена интегратором и усилителем с ко­ эффициентом передачи 1 /], а также соответствующими сумматорами и умно­ жителем. Величина электромагнитного момента машины вычисляется в соответствии с выражением Те =Кт х/0 , где /0 ток якоря; Кт- коэффициент пропорциональности между электромагнит­ ным моментом и током якоря. По величине коэффициент Кт равен КЕ. - 164 Библиотека блоков SimPowerSystems Окно задания параметров: [P•­ Pie,e(.-/No ! -р -- S-dol-.!p0r-•-�­ jros 0.011 I ....._-....w�!R•!ah!ioJi.tн11 fiai..-w..W,n:e (Rf fcllrllJU 11111 1 Jr 2со 1201 1 r.,.._,......�L4!1i}. г,т---· �=-=��-='"......'"""-�=•'-"""J T<МJ--..J�i,,"2) Q_(lj 0 1 / .02 cwiomЬ�..-itaquoT/[N.m) . y.,._,,_coolli:ior'IIВ.,\tl.m,•I fo Параметры блока: Preset model: [Выбор модели]. Параметр позволят выбрать модель машины из каталога. Show detailed parameters: [Показать параметры модели]. При установленном флажке параметры модели доступны для просмотра и изменения. Annature resistaoce aod ioductaoce [Ra (Ohms) La (Н)]: [Активное сопротивление Ra (Ом) и индуктивность La (Гн) цепи якоря]. Field resistaoce aod ioductaoce [Rf (Ohms) Lf (Н)]: [Активное сопротивление Rf (Ом) и индуктивность Lf (Гн) цепи возбуждения]. Field-armature mutual ioductance Laf (Н): [Взаимная индуктивность между цепью якоря и цепью возбуждения двигателя (Гн)]. Total ioertiaJ (kg.mл 2): [Момент инерции двигателя] (кr•мл 2)]. Viscous frictioo coefficient Bm (N.m.s): [Коэффициент вязкого трения Bm (Н*м*с)]. Coulomb frictioo torque Tf (N.m): [Величина момента сухого трения Tf (Н*м)]. Initial speed (rad/s): [Начальная угловая частота вращения вала двиrателя (рад/с)]. Электрические машины Machines 165 Параметры машины постоянного тока с независимым возбуждением можно определить на основе ее каталожных данных по следующим выражениям [2]: U1 11=­ Rв ' = 30Рн М н = рн ' 00н 1t пн ] ан = р н - ] f' UанТ\н М L " а/ = тт ан f · LaRf L1 �(2-5)--, Ra (5-10)LaP112 J� 2 2 2 ' Ra ·О)н ·lан Рмех= (0,005 - 0,02) Р11 , Т Рмех f =2-· оон вт =_ рмех2- ' 200" где 11 - ток обмотки возбуждения; и1 - напряжение обмотки возбуждения; R1 активное сопротивление обмотки возбуждения; L1- индуктивность обмотки воз­ буждения; ]ан - номинальный ток обмотки якоря; Иан - номинальное напряжение обмотки якоря; Ra - активное сопротивление обмотки якоря; М,. - номинальный момент; Р11 - номинальная мощность; п11 - номинальная частота вращения якоря (об/мин); с.о11 - номинальная угловая частота вращения якоря (рад/с); Рмех- об­ щие механические потери машины. Индуктивность якорной цепи может быть найдена по формуле: La =С Иан ' la11 n11 p где С= (1-2,5) для машин с компенсационной обмоткой (большая величина от­ носится к тихоходным двигателям); С= 6 для машин без компенсационной об­ мотки; р - число пар полюсов. Пример: На рис. 3. 76 показана схема, обеспечивающая пуск двигателя с помощью трех­ ступенчатого пускового устройства (блок Motor Starter). На рисунке показаны также графики изменения угловой частоты вращения и электромагнитного мо­ мента двигателя в функции времени и динамическая механическая характеристи­ ка машины, построенная с помощью блока XY-Graph. В примере момент сопро- 166 Библиотека блоков SimPowerSystems DC Volbge Sourc•1 �-�� Gain Scopo G+8 jv �ltago Scope1 M@J1sur1:m1:nt __l_ . о" XfPlot 1�, ЦО �>- ю 6Q • .. " •... То щ ;ю 0 0 '1�t>::C: -�-. =1 1!Ю-----. 1(1) ,! XYGr�ph ro .\О Хм, filJ 0 о 1 ; 6 В j 10 Тhoffsfl!C. О Рис. 3. 76 Схема пуска двигателя постоянного тока � тивления движению, зависящий от угловой частоты вращею:?., задается с по­ мощью усилителя Gain. В библиотеке Machines представлена также дискретная модель машины посто­ янного тока - Discrete DC Machine. Модель отличается от рассмотренной выше использованием блоков дискретных передаточных функций. В окне диалога бло­ ка также присутствует параметр Sample time ( s) - шаг дискретизации. Электрические машины Machines 167 3.6.2. Асинхронная машина Asynchronous Machine Пиктограмма: >Tm D А D 8 D С >Tm > m 3 D D aD С D Asynchronous Maohine SI Units А D 8 D С > 3 D o. D С D Asynchronous Machine pu Units Назначение: Блок Asynchronous Machine моделирует асинхронную электрическую машину в двигательном или генераторном режимах. Режим работы определяется знаком электромагнитного момента машины. Порты модели А, В и С являются выводами статорной обмотки машины, а пор­ ты а, Ь и с - обмотки ротора машины. Порт Tm предназначен для подачи момента сопротивления движению. На выходном порту m формируется векторный сиг­ нал, состоящий из 21 элемента: токов. потоков и напряжений ротора и статора в неподвижной и вращающейся система� координат, электромагнитного момен­ та, угловой частоты вращения вала, а также его углового положения. Для удоб­ ства извлечения переменных машины из вектора в библиотеке SimPowerSystems предусмотрен блок Machines Measurement Demux. Модель асинхронной машины включает в себя модель электрической части, представленной моделью простран­ ства состояний четвертого порядка, и модель механической части в виде системы второго порядка. Все электрические переменные и параметры машины приведе­ ны к статору. Исходные уравнения электрической части машины записаны для двухфазной (dq-ocи) системы координат. На рис. 3.77 приведена схема замеще­ ния машины и ее уравнения. Уравнения электрической части машины имеют вид: . + Uqs = Rslqs d -;[j Ч'qs +<OЧJds, ! 1 lr 1 (1)-.(J)r) f// [1r R. (1) V{i, -1:' :э·-<....:�-.Jfll'-"1-"l'III�-{- )''-[::J-.. 1.111 q axis ' IJ, <Jr d axis Рис. З. 77. Схема замещения асинхронной машины 168 Библиотека блоков SimPowerSystems d U,1s= Rs l.,1s+ Ч1,1s-OOЧf qs • dt d U ;qr=R ; rl·! qr+-\jl ; qr +(00-00,)\jl ; dr, dt d U ; dr = R ; rl·! dr+-\jl ; dr-(00-00,)\jl ; qr, dt те = 1.5( 'V,1siqs - 'V qsids ), . / где \Jl qs - L5 1.q5 + L m l·/ qr, Чl ds - L5 l.q5 +L ml·! dr, \jl qr = L1 r l·/ qr+L ml.qs • Ч1 1 dr=L1 ,td,+ + L m itfs , L5 = L1s + L m , L1 , = U1r + Lm . Индексы в системе уравнений машины имеют следующие значения: d - проекция_ переменной на ось ;d q - проекция переменной на ось q; r - индекс, обозначающий параметр или переменную ротора; s - индекс, обозначающий параметр или переменную статора; l - индуктивность рассеяния; т - индуктивность цепи намагничивания. Механическая часть машины описывается двумя уравнениями: 1 - d со т =(Т -Fco m -Тт ), 2Н е dt d dtem = (О m · Переменные в уравнениях машины имеют следующие значения: R_,, L1s - активное сопротивление и индуктивность рассеяния статора; R 1 ,, L1, - активное сопротивление и индуктивность рассеяния ротора; L m - индуктивность цепи намагничивания; L5 , U,- полные индуктивности статора и ротора; Иqs• iq.< - проекции напряжения и тока статора на ось q; и 1 qr, / qr- проекции напряжения и тока ротора на ось q; Utfs, ids - проекции напряжения и тока статора на ось d; и 1 dr, /dr - проекции напряжения и тока ротора на ось d; Уds • Уqs - проекции потокосцепления статора на оси d и q; \jl Idr, 'V Iq,- проекции потокосцепления ротора на оси d и q; (l)m - угловая частота вращения ротора; ет - угловое положение ротора; р - число пар полюсов; (l)Y - электрическая угловая частота вращения ротора ( (l)m х р); 0у - электрическое угловое положение ротора (0m хр); Те -электромагнитный момент; Тт - механический момент на валу; J - суммарный момент ю1ерции машины и нагрузки; Электрические машины Machines 169 Н - суммарная инерционная постоянная машины и нагрузки; F - суммарный коэффициент вязкого трения (машины и нагрузки). С Simulink-мoдeлью асинхронной машины можно ознакомиться, открыв биб­ лиотеку powerlib_models.mdl в папке ...toolbox\physmod\powersys\ powersys. Окно задания параметров: г�� (....t<ltw-1 ' ' 1...,,...���illech,,e(-.,d1olalQ114ilrtl\jogt) ll'ICidllocf.,.,_dq_..,._h... Si.iarond-""""4/r«-� y,.,ca'ltiiod\,r,ii,lv...,.tct_ord_ "'"""'"'"'�,,..llpon. щ,enta""" ... __ cny ,,,__fNo � --- St.мd1Wмf P11-•--­ RЬl<r \jipO: \Wcu,d Re1«..-1,-/'"'А,..ош-......а.=�::::::.:::==:=::;.;:::=:::::::::::.__:::; "°""""_,.._./lr,e,lr,etand�IP,-jYAJ.Vr(llnnoill'>(Н,}t jrэт.ю 460 roJ St.ior.....,.,. end ;,duc:lмo,,( Rl(ohnl Ul(НJ t ln 11s 1100591•1 R°""-c,dRЬ:\lnce(М-J U'\l!Jt \IHl!Э 1100597•1 MUIUOl-�(Н} J112037 t �"->lecЬ8'1dl1"""•°'p<ilo,(Jjцi"'"2) fн IM) ll(H )i0.02 0.0057!>2 2) /,;tlol ....... 111 ,о 0,0,0 0,0,0 1 Параметры блока: Pre setmodel: [Выбор модели]. Параметр позволят выбрать модель машины из каталога. Show detailedparameters: [Показать параметры модели]. При установленном флажке параметры модели доступны для просмотра и изменения. Rotortype: [Тип ротора]. Значение параметра выбирается из списка: ► Squirrel-Cage - короткозамкнутый ротор, или �беличья клеткаi); ► Wound - фазный ротор. Reference frame: [Система координат]. Значение параметра выбирается из списка: ► Rotor - неподвижная относительно ротора; ► Stationary - неподвижная относительно статора; ► Synchronous - вращающаяся вместе с полем. 170 Библиотека блоков SimPowerSystems Nom. power, L·L volt. and frequency [Pn (VA), Vn (V ), fn (Hz)}: [Номинальная мощность Pn (ВА), действующее линейное напряжение Un (В) и номинальная частота fn (Гц)]. Stator [Rs (Ohm) Lls (Н)]: [Активное сопротивление Rs (Ом) и индуктивность Ls (Гн) статора]. Rotor [Rr (Ohm) Llr' (Н)]: [Активное сопротивление Rr (Ом) и индуктивность Lr (Гн) ротора]. Mutual inductance Lm (Н): [Взаимная индуктивность (Гн)]. Inertia, friction factor and pairs of poles U (kg*mл2) F (N*m*s) р): [Момент инерции J (кг*мл2), коэффициент трения F (Н*м*с) и число пар полюсов р}. Initial conditions [s th (deg) isa, isb, isc (А) phA, phB, phC (deg)]: [Начальные условия}. Параметр задается в виде вектора, каждый элемент которого имеет следующие значения: ► s - скольжение; ► th - фаза (град.); ► isa, isb, isc - начальные значения токов статора (А); ► phA, phB, phC - начальные фазы токов статора (град.). Начальные условия машины могут быть вычислены с помощью блока Powergui. Исходными данными для расчета параметров машины являются следующие: Рн - номинальная мощность [Вт]; Ин - номинальное линейное напряжение [В]; /1 - частота сети [Гц]; п н - номинальная угловая частота вращения вала [об/мин]; р - число пар полюсов; ri - коэффициент полезного действия [о.е.]; cos <Р - коэффициент мощности [о.е.}; Iн - номинальный ток статора (А]; k1 - кратность пускового тока [о.е.]; тп - кратность пускового момента [о.е.]; ттах - кратность максимального момента [о.е.]; J - момент инерции [кг х м2]. Параметры асинхронной машины рассчитываются по следующим выражени­ ям (2): U= Jзи - номинальное фазное напряжение (В} при схеме соединения обмот- ки - звезда; п1 = бО /i - частота вращения магнитного поля (синхронная частота враще­ р ния) [об/мин}; Электрические машины Machines 171 п -п 1 11 s11 =-- номинальное скольжение [о.е.]; - n1 sкр = s11 (mmax + Jm�ax -1)- критическое скольжение [о.е.]; 2 11 ro 1 = 7t - угловая частота вращения магнитного поля (синхронная частота) р [рад /с]; пп ro 11 = n - номинальная угловая частота вращения вала [рад/с]; 30 М11 = рн - номинальный момент [Нм]; (1) 1/ Mmax = ттах Мн - максимальный момент [Нм]; Мп = т п М11 - пусковой момент [Нм]; Рмех = (0,01 + 0,0S)P11 - механические потери [Вт); С= (1,01 + 1,05) - расчетный коэффициент (меньшее значение для машин большей мощности); 1 Р +Р Rr = 11 мех - приведенное активное сопротивление ротора [Ом]; 3 ,2 1 -s" н s" И cosq,(1-ri) С 2 R Рм� R5 =---'---"'- активное сопротивление статора [Ом]; r !,, 31 1/ и Lsp =L rp = 41t/1 (1+C 2 )k1 l" и ротора [Гн]; - приведенная индуктивность рассеяния статора и L =---- -_-_-_-_-_-_-_:::------ - индуктивность статора [Гн]; � 21t f tM max S11 2 2 21t / 1 / J 1-cos (q>) 3 pU s кр Lm =L -Lsp - индуктивность цепи намагничивания [Гн]. По окончании расчета необходимо определить расчетный коэффициент .� 1/ L С1 =1+ ___!Е_ Lm и сравнить его с ранее принятым коэффициентом С. При необходимости расчет следует повторить, добиваясь минимальной разницы между С и С1. Пример: На рис. 3.78 показана схема, обеспечивающая прямой пуск двигателя и после­ дующий наброс нагрузки. На рисунке приведена динамическая механическая ха­ рактеристика двигателя, а также графики угловой частоты вращения вала и элект­ ромагнитного момента. 172 Библиотека блоков SimPowerSystems Е3-+В Е Sco pe2 тm [D+ -e---- S_te�p-•A m -@--в -----.. с ______ \An -@= 22o•sqn(2) Asynchronous M•chine f = 50 l!lf;J •�1,1 11,t, SI Units M•chines Me•surement Demux ,::�, :V··:;··:· ··1:·;·1 ··;1: · · 1� 1 1!11 200 ... ,. о . ..... ,... . -2000 0:S ; ·!· ...... .... Sco pe XYGr• p h .,. ·••··. .. . ,:, � �5 Э 1-8ffSC О Рис. 3. 78. Прямой пуск асинхронного двигателя 3.6.З. Упрощенная модель синхронной машины Simplified Synchronous Machine Пиктограмма: >Pm m > Аа 0 >Е_ 8 D С D Simpli1ied Synchronous Machine SI Units >Pm >Е m> : D Simplified Synchronous Machine pu Units Назначение: Является упрощенной моделью синхронной машины с неявнополюсным рото­ ром. Модель выполнена в двух вариантах: Simplified Synchronous SI Units (пара- Электрические машины Machines 173 метры машины задаются в системе единиц СИ) и Simplified Synchronous Machine pu Units (параметры машины задаются в системе относительных единиц). В зави­ симости от варианта входные и выходные переменные машины также измеряют­ ся в системе единиц СИ или в относительных единицах. Порты модели А, В и С являются выводами статорной обмотки машины. На выходном порту m формируется векторный сиrнал, состоящий из 12 элементов: токов (isa, isb, isc), напряжений (va, vb, vc) и ЭДС (еа, еЬ, ее) обмотки статора, угло­ вого положения (thetam) и угловой частоты вращения ротора (vm), а также элект­ ромагнитной мощности (Ре). Для удобства извлечения переменных машины из выходного вектора измеряемых переменных в библиотеке SimPowerSystems пре­ дусмотрен блок Machines Measurement Demux. Сигнал, равный механической мощности на валу машины, подается на вход­ ной порт Рт, а на входной порт Е подается сигнал, задающий действующее значе­ ние линейных ЭДС обмотки статора. Модель каждой фазы машины состоит из источника напряжения и последова­ тельно с ним включенных активного сопротивления и индуктивности фазной об­ мотки. При этом активное сопротивление фазы может быть задано равным нулю, а индуктивность должна всегда быть больше нуля. Механическая часть модели описывается уравнениями: 1 Лоо(t) = --j'(Tm -Те )dt-Kd Лоо(t), 2Н о oo(t) = Лоо(t) + 000, где Лоо(t) - отклонение угловой частоты вращения ротора от синхронной; Н - мо­ мент инерции ротора; 7m - механический момент; Те - электромагнитный момент; · Kd - коэффициент демпфирования; oo(t) - угловая частота вращения ротора; 000 - синхронная угловая частота вращения (1 о.е.). На рис. 3.79 представлена структурная схема механической части модели. /"m(r.u 1·1:1r u. (/) IJJ.11 ) Рис. 3. 79. Структурная схема механической части модели На структурной схеме хорошо видно, что в модели вычисляется отклонение угловой частоты вращения ротора от синхронной, а не само значение частоты. 174 Библиотека блоков SimPowerSystems Окно задания параметров: Sщ,l",ed �MIIChino ( .... jl(nkJ •-11 �••3-INn,-i>llied.,..,..""""' !Ndw>e. Madwwioщodelod.,., ,.,,.;""41,g,,Ьomda/l,L� s-� •toan �-"' ....... ;;.. Med,anicol-lЩ>todlolhemac:t/no,nW-Pm>Ofo,-"""ПW>do. l'!n<Olo,-""1iio- j(187о6131Ц) 60] lnodia, de<'c,,,g 1.,л" ..i """' о1 po1oofJ(�m"2J i118!бео о 201 к�_т1pu_wiPШ ��(R{<hnl L/Нlt J100№ 08104&-Э! J�. ccnd l dwl1:J 11,{deg) iio.t,.ic4дJ !'hl.l>hЬ�� 1 11 о.о о.о.о о.о.о 1 Параметры блока: Connection type: [Тип соединения обмотки статора]. Значение параметра выбирается из списка; ► 3-wire У - звезда без нулевого провода; ► 4-wire У - звезда с иулевым проводом. Nom. power, L-L volt. and freq. [Pn (VA) Vn (Vrms) fn (Hz)]: [Номинальная мощность Pn (ВА),действующее линейное напряжение Un (В) и номинальная частота fn (Гц)]. Inertia, damping friction factor and pairs of poles U (kg* mл2) Kd (pu_Т/pu_w) р]: [Момент инерции J (кг*мл2),коэффициент демпфирования Kd (о.е._Т/о.е._w) и число пар полюсов р]. Intemal impedance [R (Ohm) L (Н)]: [Активное сопротивление и индуктивность обмотки статора R (Ом) L (Гн)]. l11it. cond. [dw (%) th (deg) ia,ib,ic (А) pha,phb, phc (deg)]: [Начальные условия]. Параметр задается в виде вектора, каждый элемент которого имеет следующие значения: ► dw (%) - отклонение угловой частоты вращения (в %); ► th (deg) - угловое положение ротора (град.); ► ia,ib,ic - начальные значения токов статора (А); ► phA, phB, phC - начальные фазы токов статора (град.)]. Пример: На рис. 3.80 показана схема, в которой синхронный генератор включается на трехфазную сеть. На рисунке приведены угловая частота вращения ротора (n, об/мин) и электромагиитной мощности (Ре, МВт), а также график изменения угла между ЭДС и напряжением одной из фаз обмотки статора. Электрические машины Machines 175 phi_V• mogn«ud• ���-..i-----+lsignaqle phl_e• IA•chlnes Mttиurement � Pm Qm Рт '- А SSM В �еVLL rms С Demux SоореЭ � -----0----t_j L__j ��и_ --, ....,.-{§� vc Slmplifitd Synchronous M•chlne SI Uni1s j_ Scope1 7 е :�к;;�_.: ,---....fj 5 tJf,oР ;r, А &"а\ ti ·�Е-? .,..--ft 1 О � 1 U 2 TINlolttet О Рис. 3.80. Подключение синхронного генератора к сети 3.6.4. Синхронная машина Synchronous Machine Пиктограмма: >Pm m> � ,w_\LJl :: Synchronous Machine SI Fundementel Synchronous Mechine pu Fundamental Synchronous Machine pu standard Назначение: Является моделью классической синхронной машины с демпферной обмот­ кой. Модель выполнена в трех вариантах: Synchronous Machine SI Fundamental 176 Библиотека блоков SimPowerSystems (параметры машины задаются в системе единиц СИ), Synchronous Machine pu Fundamental (параметры машины задаются в системе относительных единиц) и Synchronous Machine pu Standard (используются параметры схемы замещения машины в относительных единицах). В зависимости от варианта входные и ВЫ• ходные переменные машины также измеряются в системе единиц СИ или в отно­ сительных единицах. Порты модели А, В и С являются выводами статорной обмотки машины. На выходном порту m формируется векторный сигнал, состоящий из 16 элементов: 1-3: токи обмотки статора - i5a, isЬ, isc; 4-5: проекции токов статора на оси d и q - id и iq; 6-8: ток возбуждения ifd и проекции токов демпферной обмотки ikd и ikq; 9-1 О: проекции намагничивающего потока на оси q и d - q,md и (f)mq; 11-12: проекции напряжений статора на оси d и q - ud и uq ; 13: отклонение угла ротора ле (угол нагрузки о); 14: угловая частота вращения ротора wy; 15: электромагнитная мощность Ре; 16: отклонение угловой частоты вращения ротора dw. Для удобства извлечения переменных машины из выходного вектора измеряе­ мых переменных в библиотеке SimPowerSystems предусмотрен блок Machines Measurement Demux. Сигнал, равный механической мощности на валу машины, подается на вход­ ной порт Pm, а на входной порт Vf - сигнал, задающий напряжение обмотки воз­ буждения. Схема замещения синхронной машины в системе координат, связанной с рото­ ром (d-q оси), использованнilЯ при создании модели, показана на рис. 3.81. Все параметры ротора и его переменные приведены к статору. Индексы пере­ менных и параметров обозначают следующее: d, q - проекции переменных на оси d и q; R, s - параметры ротора и статора; ось q Рис. 3.81. Схема замещения синхронной машины в системе координат, связанной с ротором Электрические машины Machines 177 /, т - индуктивности рассеяния и цепи намагничивания; /, k - переменные цепи возбуждения и демпферной обмотки. Приведенная на рис. 3.77 схема замещения описывается системой дифферен­ циальных уравнений 5-го порядка: d s ld+ t (p d -(l)R(j)q, ud = R. d Uq = d I ·! d I = R fdlfd+ dt <pfd' I ufd ; Rs l.q+ dt(f)q+OOR<pd, = ukd ; -1 d ; Rkdikd+ dt <pkd' d I I I ·! 1 ukqt =Rkqt 1 kqt + dt <pkq' ·/ ) I ! / / = 1 1 ·/ . =L . ' dld+Lmd c1·/d+lkd), </)q = Lqt q+Lmq1·kq• <p fd= Lfd1.fd+Lmd (td+ <pkd <pd tkd' I ./ . . ·/ 1 ./ / = Lkd1 kd+Lmd (ld+lfd)' <pkq1 = Lkq11kq1+Lmq 1q· где Модель механической части машины выполнена точно так же, как и в блоке Simplified Synchronous Machine. Окно задания параметров: -L ;в,,1( 1 ,.IГ,1111,·I, 'Г'-, '-.;у111 1 ,r 1/ 1• ,11�. 111111111• �I 11111, ! f "-...wJNo P--5"""doi.-!,,_____ 11o1c,r .,., 1soient-pdo --.YOt.nq,.-.IWdщ,f�)�lr(lilllaW\ /1187f:S !ЗIIXJ 60 10871 5-/ A!f,/1,o) �,, jJ 2.SО6ЗЕ-03 Э.ООИ-04 Э.21&4Е-03 З.715ЭЕ-041 1 F'll!ld I flf'\olnl LNRIH j( 5.!Ю\ЭЕ-04 Э,07 12Е-04 ( 1 D-fRl\lt.L.W l\l\q1'.l.l<q1' )�t Jll,l!IXE-02 4 .ЮШ: -04 2.ООЭlЕ-02 1.ОЭ65Е-ОЭJ "-,,,...,,,_ """.,._ 1 JfФJl"lJ '!!;••1 1111 � /1э.-о 201 t.-L CONI 1 � ":!11'!!!it.ilд,\J � V1М t f(OO О О 00 О 010.3192) w(��� s-,,-.1,ii,.№- i-1:..u•..z....МJ....ii p2ЗЭ.S,14Эll2.1583.7;9SS0,10S23.12243,1ЭOSЭ,137!i7,14437,15180.15890,16567J r µ.....,w....,.,.--� l:J 178 Библиотека блоков SimPowerSystems Параметры блока: Preset model: [Выбор модели]. Параметр позволят выбрать модель машины из каталога. Show d�tailed parameters: [Показать параметры модели]. При установленном флажке параметры модели доступны для просмотра и изменения. Rotor type: [Тип ротора]. Выбирается из списка: ► Salient-pole- явнополюсный ротор; ► Round - неявнополюсный ротор. Nom. power, volt., freq. and field cur. [Pn(VA) Vn(Vrms) fn(Hz) ifn(А)]: [Номинальные полная мощность Pn (БА), действующее линейное напряжение Vn(В), частота fn(Гц), ток возбуждения ifn(А)]. Stator [Rs(Оhш) Ll, Lmd, Lmq(Н)]: [Параметры статора: активное сопротивление Rs(Ом), индуктивность рассея­ ния LI (Гн), индуктивность по продольной оси Lmd(Гн), индуктивность по попе­ речной оси Lmq (Гн)]. Field [Rf'(Ohm) Llfd'(Н)]: [Приведенные параметры обмотки возбуждения ротора: сопротивление Rf' (Ом) и индуктивность Llfd'(Гн)]. Dampers [Rkd', Llkd' Rkq1', Llkq1'](R=Ohm,L=H): [Приведенные параметры демпферной обмотки: сопротивление (Ом) и индук­ тивность(Гн) по продольной и поперечной осям]. Inertia, friction factor and pole pairs U (kg.mл2) F(N.m.s) р()]: [Момент инерции J (кr•мл2), коэффициент трения F(Н*м*с) и число пар по­ люсов р]. Init. cond. [dw(%) th(deg) ia, ib, ic(А) pha, phb, phc(deg) Vf(V)): [Начальные условия]. Параметр задается в виде вектора, каждый элемент которого имеет следующие значения: ► dw(%)- отклонение угловой частоты вращения(%); ► th( deg) - угловое положение ротора(град.); ► ia, ib, ic - начальные значения токов статора(А); ► ph A, phB, phC - начальные фазы токов статора(град.); ► Vf - напряжение обмотки возбуждения(В). Simulate saturation: [Моделировать насыщение]. При установленном флажке появляется допол­ нительное поле Saturation parameters. Saturation parameters [ifdt, ifd2, ... (А); vt1, vt2, ... (VLL rms)]: [Характеристика насыщения]. Параметр задается в виде матрицы, задающей характеристику холостого хода. Первая строка матрицы содержит значения тока возбуждения(А), а вторая - значения выходного напряжения(В). Display Vfd which produces nominal Vt: [Отобразить значение напряжения обмотки возбуждения Vfd (В), при кото­ ром выходное напряжение Vt(В) будет номинальным]. Электрические машины Machines 179 Для варианта модели синхронной машины Synchronous Machine pu Standard вместо параметров статорной, роторной и обмотки возбуждения задаются реак­ тивные сопротивления машины и постоянные времени по продольной и попереч­ ной осям. Приме р: На рис. 3.82 показана схема, в которой син­ хронная машина работает в двигательном ре­ жиме. В момент времени, равный 2 с, происходит наброс нагрузки. На рисунке приведены графи­ ки тока действующего значения статора isi часто­ ты вращения вала пи активной мощности маши­ ны Ре. :1-с ·-�,,__- 3t=�� -j · M•chines M1,1surement Domux 0 :�•1 , ;.• ·•"!'·••1 • О�,:: .......;·•· .. ·····: ,2 О 1 2 3 • .МOffмt о is_qd ·1 sqr(u(1)A2+u[2JA2) fcn1 5 is2 :-�-е Pm 8 l 18.71i4Q [. \/1'_ vtd Synchronous M•chine i m•ch v, � c-----eU _i_ vc Рис. 3.82 Двигательный режим синхронной машины 3. 6. 5. Синхронная машина с постоянными магнитами Permanent Magnet Synchronous Machine Пиктограмма: )Tm@ :: а � m) С Permanent Мagnet Synchl'onous Machine 180 Библиотека блоков SimPowerSystems Назначение: Блок Permanent Magnet Synchronous Machine является моделью синхрон­ ной машины с постоянными магнитами. В модели не учитывается насыщение магнитной цепи, пс,скольку такие машины имеют, как правило, повышенный воздушный зазор. Порты модели А, В и С являются выводами статорной об­ мотки машины. Входной порт Tm служит для задания момента сопротив­ ления. На выходном порту m формируется векторный сигнал, состоящий из 1 О элементов: 1-3: токи обмотки статора - isa, i5ь, i5c; 4-5: проекции токов статора на оси d и q - id и iq; 6-7: проекции напряжений статора на оси q и d - ud и uq; 8: угловая частота вращения ротора ооу; 9: угол поворота ротора 0; 10: электромагнитный момент Те . Для удобства извлечения переменных машины из выходного вектора измеряе­ мых переменных в библиотеке SimPowerSystems предусмотрен блок Machines Measurement Deшux. Электрическая часть модели машины описывается системой уравнений, свя­ занных с ротором: Lq . +-pOO,l q, Ld d . 1 R . L . л. роо, l = u - l + d poo, zd dt q Lq q Lq q Lq Те =1.Sp[л.iq +(Ld -Lq )id iq ]Bce параметры ротора и его переменные приведены к статору. В системе уравнений приняты следующие обозначения: Ld, Lq - индуктивности статора по осям d и q; R - активное сопротивление обмотки статора; id, iq - проекции тока статора на оси d и q; ud, uq- проекции напряжения статора на оси d и q; оо, - угловая частота вращения ротора; л - магнитный поток постоянных магнитов, сцепленный с обмоткой статора; р - число пар полюсов; Те - электромагнитный момент. Механическая часть модели описывается следующими уравнениями: d . 1 R . -Zd =-Ud --ld dt Ld · Ld ---т;-· 1 d -оо, =-(Te -Foo, -Тт ), dt J .!!._0=оо '' dt где] - суммарный момент инерции ротора и нагрузки; F - коэффициент трения; 0 - угол положения ротора; Тт - момент сопротивления. Электрические машины Machines 181 Окно задания параметров: �.ui,.e.....,....,.��·.......... 1 =·"====----�.J То,: N8d)ncol__,inN,,,. Tм>OJar-llllldt,111<0111 ......... Tte�...W,•WмtЬt,"-"'l-.,-i8�-.ifl"NJ4flll -•...-.t/dcL..,..._мll..,..tм,,,t 1'\eoe\llOdotj No �,.,,.,.,.,��=-''. - P.- . �.....,,.._..�,,__,......_8 �-.._.......... 1�-Slwiw��-­ �� f:a750 1 ...,_l\..dtlltq\1111 fii's;з.в.s.з1 · ! 1 fuiinliadta, ..... fNI,� 0.175 I\ ,_,.....,.,_..,,.....,,,..,Jkм"21 ftjat/ •н J(O.l!e-3.0, 4 J L...- -��:;;;.; Параметры блока: Preset model: [Выбор модели]. Параметр позволяет выбрать модель машины из каталога. Show detailed parameters: [Показать параметры модели]. При установленном флажке параметры модели доступны для просмотра и изменения. Resistance R (Ohrn): [ Активное сопротивление статора R (Ом)]. Inductances [Ld (Н) Lq (Н)]: [Индуктивности статора по продольной и поперечной осям Ld (Ом) Lq (Ом)]. Flux induced Ьу niagnets (Wb): [Поток возбуждения (Вб)]. Inertia, friction factor and pairs of poles U (kg.mл 2) F (N.m.s) р ()]: [Момент инерции] (кr•мл2), коэффициент трения F (Н*м*с) и число пар по­ люсов р). Пример: На рис. 3.83 показана схема, в которой используется модель синхронной ма­ шины с постоянными магнитами в двигательном режиме. Там же приведены диа­ граммы токов обмотки статора, угловой частоты вращения и электромагнитного момента при пуске и последующем набросе нагрузки. 182 Библиотека блоков SimPowerSystems Step Е ffi--+тm is_abc ---А -@ m m wm wm Те -@ --в Те Machines Measurement Demux -@---с Perm.вnent Magnet Synchronous Machine □ Scope1 Scope2 т. 29�·� Рис 3 83 Двигательный режим синхронной машины с постоянными магнитами -о��� 21)0 Q,QS Q.1 015 02 nмortaiet о 3.6.6. Блок �змерения переменных электрической машины Machines Measurement Demux Пиктограмма: is_qd > m vs_qd > wm t> Maohines Measurement Demux Назначение: Блок Machines Measurement Demux предназначен для извлечения переменных состояния из вектора измеряемых переменных электрической машины. Блок ра­ ботает совместно с моделями синхронных и асинхронных машин. Электрические машины Machines 183 Окно задания параметров: j ! Г S!<IIФ<:W...Ь (iц nti ,ocJ Р' St.otolcцre,,\• 1 q .:t 1 Г DМ"8f�C\Jm!l'U fi«11 i«12 i.dJ ():fu_Q ptц_dJ i FIOl:lмon! Г M<Мiilwco, Р S1•or"'111- Г R"'°'onglodoмal,;Jn (ldJ fv,_q v>_dJ (d_l"«•J rad Р' Rot.-, wee<! (WIII) ГElocЬtolpawe, !Р8! Г Roь,,,i,o<>d� fdwJ [�) doo ITel ID•<rl doo IP.oJ lfleoJ Параметры блока: Machine type: [Тип машины]. Выбирается из списка: ► Simplified synchronous - упрощенная синхронная машина; ► Synchronous - синхронная машина; ► Asynchronous - асинхронная машина; ► Permanent magnet synchronous - синхронная машина с постоянными маг­ нитами. В зависимости от выбранного типа машины в окне параметров будет отобра­ жаться разный набор выходных переменных машины. Ниже приведены доступ­ ные для измерения переменные различных типов машин. Синхронная машина: ► Stator currents [isa isb isc] - токи обмотки статора; ► Stator currents [iq id] - проекции токов статора на оси q и d; ► Field current [ifd] - ток возбуждения синхронной машины; ► Damper winding currents [ikq1 ikq2 ikd] - проекции токов демпферной об­ мотки синхронной машины; ► Mutual fluxes [phim_q phim_d] - проекции намагничивающего потока на оси q и d; ► Stator voltages [vs_q vs_d] - проекции напряжений статора на оси q и d; 184 Библиотека блоков SimPowerSystems ► Rotor angle deviation [d_theta] rad- отклонение уrла ротора Л0 синхронной машины (угол нагрузки 8); ► Rotor speed [wm] -угловая частота вращения ротора; ► Electrical power [Ре] -электромагнитная мощность; ► Rotor speed deviation [dw] - отклонение угловой частоты вращения ротора; ► Rotor mechanical angle [theta] deg-yroл поворота ротора (град); ► Electromagnetic torque [Те] - электромагнитный момент; ► Load angle [Delta] deg- угол нагрузки синхронной машины; ► Output active power [Рео] - выходная активная мощность; ► Output reactive power [Qeo] - выходная реактивная мощность. Упрощенная модель синхронной машины: ► Line currents [isa isb isc] - фазные токи статора; ► Terminal voltages [va vb vc]- напряжения на зажимах обмотки статора (фазные напряжения); ► Internal voltages [еа еЬ ее] - фазные ЭДС статора; ► Rotor angle [thetam] rad- уrол поворота ротора; ► Rotor speed [wm] -угловая частота вращения ротора; ► Electrical power [Ре] -электромагнитная мощность. Синхронная машина с постоянными магнитами: ► Stator currents [ia ib ic] - токи статора; ► Stator currents [is_q is_d] -проекции токов статора на оси q и d; ► Stator voltages [vs_q vs_d] - проекции напряжений статора на оси q и d; ► Rotor speed [wm] -угловая частота вращения ротора; ► Rotor angle [thetam] rad- угол поворота ротора; ► Electromagnetic torque [Те] N.m- электромагнитный момент. Асинхронная машина: ► Rotor currents [ira irb irc] - токи обмотки ротора; ► Rotor currents [ir_q ir_d ] - проекции токов ротора на оси q и d; ► Rotor fluxes [phir_q phir_d]- проекции потоков ротора на оси q и d; ► Rotor voltages [vr_q vr_d]- проекции напряжений статора на оси q и d; ► Stator currents [ia, ib, ic] А-токи статора; ► Stator currents [is_q is_d] А- проекции токов статора на оси q и d; ► Stator fluxes [phis_q phis_d] -проекции потоков статора на оси q и d; ► Stator voltages [vs_q vs_d] V-проекции напряжений статора на оси q и d; ► Rotor speed [wm] rad/s -угловая частота вращения ротора; ► Electromagnetic torque [Те) N.m -электромагнитный момент; ► Rotor angle [thetam] rad-угол поворота ротора. Для извлечения требуемой переменной необходимо отметить ее флажком. Электрические машины Machines 185 З. 6. 7. Система возбуждения синхронной машинь, Excitation System Пиктограмма: VI vq vstab Excit1tion System Назначение: Блок Excitation System является моделью системы возбуждения для синхрон­ ной машины. Позволяет регулировать напряжение на зажимах машины, работаю­ щей в генераторном режиме. За основу модели блока взят возбудитель, описан­ ный в [10), без учета насыщения магнитной цепи. Основными элементами системы возбуждения (рис. 3.84) являются регулятор напряжения и возбудитель. vr1f V10 lk• sq.-:u(1)"2 + u(2)"2) vq 4 Positive Seq1nc1 Volt•g• ---� M•ln Regul.t1or k• 1(1• ... 1) О 02"1 О 001"1 300 Low Р.11:1 Fltt1r 1 \(lr...1) 1-----------' '" _;111_1с) '- -' __, ..�.ь '------� 0001• О 1"1 14t----------' D•mplng kf.s\ (tf.s +1) Рис. 3.84. Модель системы возбуждения На первый вход блока (vref) подается требуемое значение напряжения на за­ жимах статора. На второй (vd) и третий (vq) входы подаются текущие значения проекций напряжений статора на оси q и d. Четвертый вход может быть использо­ ван для создания контура стабилизации мощности машины. Все входные пере­ менные и выходная переменная имеют размерность относительных единиц (р. u. ). 186 Библиотека блоков SimPowerSystems Модель возбудителя представлена в виде передаточной функции между на­ пряжением возбуждения(Vf) и выходным напряжением регулятора(Ef): v d(s) E1(s) 1 K8 +sTe 1 ---=--- Окно задания параметров: (:J, 111к!iо11 lilvck P,1r,,111••te1· .. , ( Х( il,;tio;; sv"1,•111 �,Sv,teo.{....t)tl,,k) 1-,o1!€EE4""1•�.1t-""'"OIIJQ81�c""°""' t,,.,,,...,;i.,, fl,o � о1 lhotlcd. 1>Uw,li,;6..,..,,!d," р", tоЬё ,wiedto s.,._.,..Ф<t d <1SJoll:h011Q1nMaol.-Ьlocl<. EJ' "'°\11 Cc:,,-nec<11>eVd""6\'qmoooц�•IIP'l'l>olhSynd,01'10UtM....,.bloct­ {,ign,l;9enil10] \О tho\l�"""\lq._.ttoll"°E�S,-Ьlod<. f20е-Э Rog,Jelot gм, om 1n ooмorJ 1� r111>1 t 11:m.0.0011 ,,_ 1 К.О Te(•J t 1.01 T,..,_,,<»t'l�(ТЬ(,J 1,:(,)t /10.01 1)-� oa,>.,ldfimo<-Orlmnl (i;,u T�•J i lro.001.0.11 R�"'-"!М 11-'11• aod g..., ( Efmn.Et<n<w 11'-"t Yl>ltt 11 -11 5. 11.5. о1 th!Мlv...... d \omN v;,t.>ge ondf<old voloo,,, (VIO (l,ц}VIO!J>,J)J 1 j11.o 1.28} lf Параметры блока: Low-pass filter time constant Tr(s): [Постоянная времени фильтра нижних частот Tr (с)]. Постоянная времени фильтра датчика напряжения(см.рис. 3.79). Regulator gaio aod time coostant [Ка() Та (s)]: [Коэффициент усиления Ка и постоянная времени Та реrулятора]. Exciter [Ке() Те (s)]: [Коэффициент усиления Ке и постоянная времени Те модели возбудителя]. Transieot gaio reductioo [ТЬ(s) Те(s)]: [Постоянные времени ТЬ и Те стабилизатора]. Dampiog filter gain aod time constant [Kf() Tf(s) ]: [Коэффициент усиления Kf и постоянная времени Tf реальноrо дифференци­ рующего звена]. Параметры блока, вычисляющего производную напряжения воз­ буждения, используемую для осуществления обратной связи. Электрические машины Machines 187 Regulator output limits and gain [Efmin, Efmax(p.u.), Кр()]: [Минимальное Efmin и максимальное Efmax значения выходного напряжения регулятора в о.е. и его коэффициент усиления Кр]. Верхний предел может быть постоянным и равным Efmax или переменным и равным значению выпрямленно­ го напряжения на зажимах генератора Vtf, умноженному на коэффициент усиле­ ния Кр. Если коэффициент усиления задан равным нулю, то используется пер­ вый вариант, если Кр задан положительным значением, то используется второй вариант. Initial values of tenninal voltage and field voltage [VtO(pu) VfO(pu) ]: [Начальное значение напряжения на зажимах генератора Vt и начальное зна­ чение напряжения возбуждения Vf]. При правильно выбранных начальных усло­ виях процесс моделирования может быть начат с установившегося режима. На­ чальное значение напряжения на зажимах генератора для этого обычно задается равным 1 о.е. Начальное значение напряжения возбуждения можно вычислить с помощью утилиты Load Flow блока Power Gui. Пример: На рис. 3.85 показана схема, в ко­ ..о" торой синхронная машина работает совместно с системой возбуждения. В момент времени t = 0,2 с происхо­ дит скачкообразное изменение зада­ ния на выходное напряжение гене­ ратора. Осциллограммы на рисунке показывают, как синхронная маши­ на и система возбуждения отрабатывают изменение задания. Step □ 0.7516 Constant Vf Excitation System Synchronous Machine 200 MVA 13.8 kV L.---------tvs_qd m.j8;;;;;;;;;;;;;;;==i==iiiiiii!!I Machines Measurement Demux <( ai (.) _2_ l о -1._Con tinuous __. - Рис. 3.85. Работа синхронной машины при регулировании возбуждения 188 Библиотека блоков SimPowerSystems З.6.8. Гидравлическая турбина с регулятором Hydraulic TurЬine and Governor Пиктограммл: Prtf Pm РеО clW Hydr.1ullo TurЬin• ,1nd Governor Назначение: Блок Hydraulic Turblne and Governor является моделью гидравлической тур­ бины с системой регулирования [ 11 ]. Система регулирования включает пропор­ ционально-дифференциальный (ПИД) регулятор и управляющий сервомотор. Общая схема модели показана на рис. 3.86. :is-----------------, dw hydr,1ulio turЫne Ре Рис. 3.86. Модель системы регулирования На первые два входа блока подаются требуемые значения угловой частоты вращения (wref) и мощности (Pref). На третий и четвертый входы блока поступа­ ют фактические значения угловой частоты вращения (we) и активной мощности (Ре). На пятый вход подается отклонение уrлQвой частоты вращения ротора син­ хронного генератора (dw). Выходными сигналами являются механическая мощ­ ность, которая должна подаваться на соответствующий вход блока синхронной машины (Pm), и величина открытия затвора гидротурбины (gate). Входы 2 и 4 могут оставаться неподключенными, если в качестве обратной связи будет ис­ пользоваться сигнал о положении затвора, а не отклонении частоты вращения. Все входные и выходные величины измеряются в относительных единицах. Электрические машины Machines 189 Сама гидравлическая турбина моделируется нелинейной системой, показан­ ной на рис. 3.87. dllll beta (u(2)1u(1))"2 opening gain Pm Рис. 3.87. Модель гидравлической турбины Серводвигатель, управляющий затвором турбины, моделируется системой второго порядка (рис. 3.88). servo­ motor 0 regulato(s output speed limit ·� position •Ш �-J� opening Рис. 3.88. Модель серводвигателя Окно задания пара.метров: JI 001 0.91518 -01 0.1 J ��ancj,eguietor (Rl()J:,p(ll({)l(,()Tc(r}t jl О.Сб 1.163 0.1Сб О 0.Cl 1 �.... -.1ь.wс т...:-н 11 о 2.S7 1 O,oop......,..�OIO,l"Ofl'O� J0.7516 190 Библиотека блоков SimPowerSystems Параметры блока: Servo-motor [Ка() Та (sec)]: [Параметры серводвигателя] Параметры модели серводвигателя: коэффици­ ент усиления Ка и постоянная времени Та. Gate opening limits [grnin, grnax(pu) vgrnin, vgrnax(pu/s)]: [Пределы регулирования затвора grnin, grnax(о.е.) vgrnin, vgrnax(o.e.jc)]. Мак­ симальное и минимальное значения координаты затвора gmin, grnax(о.е. ), а также максимальное и минимальное значения скорости перемещения затвора vgrnin, vgrnax(о.е./с). Permanent droop and regulator [Rp() Кр О Кi О Kd() Td(s)]: [Параметры регулятора]. Коэффициент передачи в цепи обратной связи регу­ лятора Rp, коэффициенты усиления пропорциональной (Кр) и интегральной (Ki) части ПИД-регулятора, коэффициент усиления (Kd) реального дифферен­ цирующего звена ПИД-регулятора и его постоянная времени(Td). Hydraulic turbine [beta() Tw(sec)]: [Параметры гидравлической турбины beta () Tw (с)]. Коэффициент демпфи­ рования отклонения угловой частоты вращения beta и постоянная времени моде­ ли гидравлической части турбины Tw(с). Droop reference (O=power error, 1 =gate opening): [Вид обратной связи]. Задает вид сигнала обратной связи: 1 - положение затвора, О - девиация электрической мощности. Initial mechanical power (pu ): [Начальное значение механической мощности(о.е.) ]. Пример: На рис. 3.89 показана схема модели с гидрогенератором, работающим с номи­ нальной мощностью. Там же приведены графики угловой частоты вращения вала турбины и выходного напряжения фазы С генератора. 3.6.9. паровая турбина с регулятором Steam Turblne and Governor Пиктограмма: WП!f wm d_theta dw_б-2 g•e Pm Steam Turblne and Governor Назначение: Блок Stearn TurЬine and Governor является моделью паровой турбины с систе­ мой регулирования. Вал турбины может моделироваться как мноrомассовая (до четырех масс) система. Схема модели показана на рис. 3.90. Электрические машины Machines 191 .._____,:-=о�---:�1 1 ;г 0.7516 Synchronous Machine 200 MVA 13.8 kV HTG Soope1 г� � Vc '-------t� ml8--------------' Scope _j_ L.....--�Peo Machines Measurement Demux .,. wm 1.8...----.-----�--� 4 •10 Vc 1.5.-----.--------� ······•:···,···•···: ...... .. . .............. . . ·!·'" 10 ТmeoHsot: О 15 20 ,Time oHset: О Рис. 3.89. Модель с гидрогенератором, работающим на активную нагрузку На первые два входа блока подаются требуемые значения угловой частоты вращения (\vref) и мощности (Pref). На третий и четвертый входы блока поступа­ ют фактическое значение угловой частоты вращения (wm) и уrол нагрузки син­ хронного генератора (d_theta). Выходными сигналами являются вектор отклоне­ ний частоты вращения для каждой части многомассовой модели вала (dw_S-2), вектор значений момента также для каждой части многомассовой модели вала (Tr_S-2), механическая мощность, которая должна подаваться на соответствую­ щий вход блока синхронной машины (Pm), и величина открытия затвора турби­ ны (gate). Все входные и выходные величины, за исключением уrла нагрузки, из­ меряются в относительных единицах. 192 Библиотека блоков SimPowerSystems flowHP Pnf ste,m turblne 4 ma:sshlft Р• openi',g speed regul.itor 4 d_theu Pboil dw_б-2 з wm Рис. 3.90. Модель паровой турбины Система pery лирования включает пропорционально-дифференциальный (ПИД) регулятор, реле скорости и управляющий сервомотор [12]. Общая схема модели показана на рис. 3.91. opening 1 11...НР Рис. 3.91. Модель системы регулирования Сама паровая турбина моделируется четырехкомпонентной нелинейной си­ стемой, показанной на рис. 3.92. Паровая турб ина имеет четыре каскада, каждый из которых смоделирован пе­ редаточной функцией первого порядка. Первый каскад представляет паросбор­ ник, в то время как три других каскада представляют или трубопровод, или вто­ ричный подогреватель. Котел не смоделирован. Давление котла задается постоянным и равным 1,0 о.е. Элементы F2-F5 используются для распределения мощности тур бины по различным каскадам вала. Модель вала турбины представляет собой четырехмассовую систему (рис. 3.93). Масса, ближайшая к турбине, имеет номер 2, а масса, наиболее близкая к синхрон­ ному генератору, имеет номер 5. Электрические машины Machines х Э.3$+1 193 10$+1 Pboil flowHp Рис. 3.92. Модель паровой турбины ctrl1=1 Еn,Ые м+-i�":th � ,------1 ctrl1 dw_5-2--+--- ---, en _]!_!!m��.o:e �nr-r-i 1 m.ass .::::: :::... dw_5-2 H-➔.Ph �•n Tm 2 m•ss es en -----+-, Multiport Swilch1 ctot1=Э Ts_5-2 Multlpoot SwltchЗ dw_5-2 ---+-+-1-+-' _ тm �a..en....:----1-o-+� .___ _...aa ,._+ +---t-----1.i-...... Э m,ss es ctrl1==4 ,.____.w rт_1-4 n s_5•2 dw_б-2------� _.!,Tm��•�nl-� � L--+fr:;: :, 4 mass es h en :::... Рис. 3 93. Модель вала турбины Multiport Switch2 194 Библиотека блоков SimPowerSystems Окно задания параметров: "111111сt1ов f\lo< k P,1rc1111<'t,,,-.,, Stt'c1111 111rtн11,· c111,I (iov .. , Sta""' Т..Ь,,• a,,d цо,�оо, {mmJ{W-1 EJI l�••�t"4el!>�-,,,.,.,,,,м:1t)'tltln..-dJdr,g ,o,e,,�atot.�l<atine!\ndoat<!l\"""11,pto4"""set 'ff,ell"'""'"""'• mat• 11 lolэolo,lм,• #1 a,,,;J 11 no/ ..,..Wf"'• Tht oh,lt 1r,,;, oos,o,i to 11,е_ .2.ll>Of.ollhe,t,.#5. lf •мatt lsNJ.toЬ.00,dod,1<1.i'•ri«!JaH 10 ""' т..,� roctor nt <yjjJ, =щ,ontir,,tn ""'r<>t tonlioblod ,,,.,J саnЪо lell a. ot. \i/1,,,, ,,,,,.,.. ,,...t,ct 'l'<teno i> ''�' \<Жafd; lhe ,;io,,o,..r"J<le. t � l-«• und- � ""11 Ьо-112еnd�З Tht rcu dol• 1<, 11',о m..,.,. _it o!-110\d -=r� _.ir,c,. G.,,..,tor ooelf,....., or• �mв= tl>o•­ \>'Ре/ Т� (,,,.,mм,J R�.g,,,. 11<'"' lt"'11>.doodw,,,IYФ Ар{рц) O>!P.u)t )11 Q.00 OJ CoeW о1 .-.et1io ! HZ НЗ Н4 Н5 l(t\ j(004G 1.430 1465 0.192) SIJlt!МaC<>elt JK\211:23 КЗ4 K45J{puload): /1зо.ц 53.86 64 !i9 62.94 J D,q;ng,-.(!12,l)З D♦ 05\&,ц T!p.u d,,� О.01Э7 J J! 0.0115 О.Э575 й.ЗбSЗ fnif,,i- otld ?'fWМUI rolo, ..v,;. 1 Ph,Q 11>-u 1 -.o!diщ) t Параметры блока: Generator type: [Тип генератора]. Выбирается из списка: ► Tandem-compound (single mass) - одномассовый; ► Tandem-compound (multi-mass) - мноrомассовый. Regulator gain, perm. droop, dead zone [Кр Rp (p.u.) Dz (p.u.)]: [Параметры регулятора]. Коэффициент усиления регулятора Кр, коэффициент ослабления обратной связи Rp (о.е.) и ширина мертвой зоны Dz (о.е.). Speed relay and servo-motor time constants [Tsr Tsm] (s): [Постоянные времени реле скорости и серводвигателя [Tsr Tsm] (с)]. Gate opening limits [vgmin,vgmax (p.u/s) gmin,gmax (p.u.)]: [Пределы регулирования затвора [gmin, gmax (о.е.) vgmin, vgmax (о.е./с)]]. Максимальное и минимальное значения координаты затвора gmin, gmax (о.е.), а также максимальное и минимальное значения скорости перемещения затвора vgmin, vgmax (о.е/с). Электрические машины Ma�hines 195 Steam turblne time constants [Т2 ТЗ Т4 TS] (s): [Постоянные времени турбины [Т2 ТЗ Т4 TS] (с)]. Turblne torque fractions [F2 FЗ F4 FS]: [Коэффициенты распределения момента по валу (F2 FЗ F4 FS]]. Coeff. of inertia (Н2 НЗ Н4 HS] (s): [Постоянные инерции составляющих вала [Н2 НЗ Н4 HS) (s)]. Stiffness coeff. [К12 К2З КЗ4 К45] (pu/rad): [Коэффициенты жесткости составляющих вала [К12 К2З КЗ4 К45) (о.е.jрад):] Damping factors [D2 DЗ D4 DS] (p.u. T/p.u. dw): [Коэффициенты демпфирования составляющих вала [D2 DЗ D4 DS] (о.е. Т/о.е. dw):] Initial power and generator rotor angle [PmO (p.u.) thO (deg)]: [Начальное значение механической мощности и угол поворота вала генерато­ ра [PmO (о.е.) thO (град)]]. Параметры могут быть вычислены с помощью блока PowerGui. При одномассовой системе требуется задать только начальное значе­ ние механической мощности. Если все четыре массы в мноrомассовой системе моделировать не требуется, то необходимо для соответствующих частей вала задать постоянную инерции, рав­ ную нулю. Коэффициенты жесткости и декременты затухания, соответствующие опущенным массам, при этом не используются. Когда часть масс вала не модели- 13·12 �Ш-) .; - 9.96 ·;·_ З.98 ·[_ З.9 З.92 З,9' Тmeott88t о J 10 ,J)DIOftNI О 0.00017 d_thou Prof "'"' 1--+-11----"-'-"--d11 M•chinos Me•surement Domux Vf eoo ...vд-22kV еонz-эеоо,рm С ---С Рис. З 94. Синхронный генератор, вращаемый паровой турбиной 196 Библиотека блоков SimPowerSystems руется, оставшиеся массы сдвигаются в направлении генератора. Для исключен­ ных масс коэффициенты распределения момента по валу должны быть заданы равными нулю. Допускается задавать коэффициенты распределения момента по валу ненулевыми при нулевых коэффициентах инерции тех же частей вала. Пример: На рис. 3.94 показана схема модели паровой турбины и синхронного генерато­ ра, работающего на активную нагрузку. Там же приведены графики переменных модели генератора для установившегося режима. З. 6. 1 О. Универсальный стабилизатор энергосистемы Generic Power System Stabllizer Пиктограмма: G Generic Power System Stabllizer Назначение: Блок универсального стабилизатора энергосистемы Generic Power System Stabilizer может использоваться для улучшения демпфирующих свойств ротора синхронного генератора путем управления его возбуждением. Нарушения в ра­ боте энергосистемы могут приводить к возникновению колебаний частоты вра­ щения ротора генератора. Эти колебания должны подавляться для сохранения устойчивости энергосистемы. Выходной сигнал блока (Vstab) является вход­ ным для системы возбуждения генератора. Входным сигналом блока может быть ошибка по частоте вращения ротора (dw) или сигнал, пропорциональный разности между механической мощностью и электрической мощностью гене­ ратора: Ра-Рт-Рео- Для того чтобы гарантировать жесткое демпфирование, блок PSS должен обеспечивать умеренное фазовое опережение на частотах, представляющих инте­ рес, и тем самым производить компенсацию естественного отставания между воз­ буждением магнитного поля и электрическим вращающим моментом, вызванным действием PSS. Модель стабилизатора включает в себя фильтр нижних частот, основной усилитель, а также фильтр высших частот, подавляющий низкочастот­ ные составляющие, которые присутствуют во входном сигнале. Фазокомпенси­ рующая система состоит из двух последовательно включенных звеньев первого порядка, используемых для компенсации фазового запаздывания между напря­ жением возбуждения и электромагнитным вращающим моментом синхронной машины. Схема модели стабилизатора показана на рис. 3.95. Электрические машины Machines ln Sensor Т1n.Sl-1 T2n.Sl-1 T1d.Sl-1 T2d.s>1 Lead-lag #1 Lead-lag #2 _/ W•sh-out Ovor•II G•in 197 Limiter Рис. 3.95. Модель стабилизатора Окно задания параметров: 681>10ioP-SJo,teoi1Stdzt.\-)1'+-\ ��-•-•gO,n,• � hф1)8Ц li...........__ 1'-blod< �•-"' "- s,-s..,_., (PSS! 11�о1 е .,..,.., ot>d1nWl""lmile, Thoir°4U10f/\e�oootl.-� ........... will�10noninal tdwnp.,)!>1-lho �...,,.�(P�oinl"I • f:n.з G"" 2 Lмd-iogl1Ncomtm.lT....,.foen] /15Оо-З20о-ЗJ 1.N!t\41vlr.:i""'___,.lT"""'tden! нзs.4] Ot.lJltJ 1mЬ: f vsrr.-,s.,.,.1 j[-0.150.15) looaiq,Ц jo jlog,p,,c,,(-2.2.500) �-J Параметры блока: Sensor time constant: [Постоянная времени датчика]. Постоянная времени фильтра нижних частот (с), используемого для фильтрации входного сигнала. Gain: [ Коэффициент усиления]. Общий коэффициент усиления стабилизатора. Wash-out time constant: [Постоянная времени фильтра высших частот]. 198 Библиотека блоков SimPowerSystems Lead-lag # 1 time constants: [Tnum Tden] [ Постоянные времени первого звена системы фазовой компенсации [Tnum Tden]l. Tnum - постояfшая времени числителя, Tden - постоянная времени зна­ менателя. Leag-lag #2 time constants: [Tnum Tden] [Постоянные времени второго звена системы фазовой компенсации [Tnum Tden]]. Tnum - постоянная времени числителя, Tden - постоянная времени зна­ менателя. Outputlimits: [VSmin VSmax] [Минимальное и максимальное значения выходного сигнала [VSmin VSшax]]. Initial input: [Начальное значение входного сиrиала]. Plot frequency response: [Построение частотного отклика стабилизатора]. При установке флажка про­ изводится построение частотного отклика. Magnitude in dB: [Измерение аплитуды сигнала в дБ). При установке флажка амплитуда сигна­ ла на частотной хара�<Теристике измеряется в дБ, в противном случае - в относи­ тельных единицах. Frequency range (Hz): [Частотный диапазон (Гц)]. В качестве параметра задается вектор частот, для которого должна быть построена частотная характеристика. 3. 6. 11. Многополосный стабилизатор энергосистемы Multiband Power System StaЬilizer Пиктограмма: 1� -f Multi-Band Power System Stabllizer Назначение: Блок Mнltiband Power System Stabllizer является моделью многополосного стабилизатора энергосистемы. Неполадки, случающиеся в энергетической системе, приводят к электроме­ ханическим колебаниям электрических генераторов. Эти колебания должны быть эффективно подавлены, чтобы сохранить стабильность системы. Элект­ ромеханические колебания могут быть классифицированы по четырем главным категориям: ► локальные колебания: между генератором и остальной частью электро­ станции, а также между электростанцией и остальной частью энерrети- Электрические машины Machines 199 ческой системы. Частоты таких колебаний обычно находятся в диапазоне от 0,8 ДО 4,0 Гц; ► межстанционные колебания: между двумя электрически близкими элект­ рическими станциями. Частоты колебаний могут изменяться от 1 до 2 Гц; ► групповые колебания: между двумя большими группами электростанций. Частоты - обычно в пределах от 0,2 до 0,8 Гц; ► глобальные колебания: характеризуются общими, совпадающими по фазе колебаниями всех генераторов в изолированной системе. Частота таких глобальных колебаний - обычно около 0,2 Гц. Таким образом, необходимо обеспечить подавление колебаний в широком (почти две декады) диапазоне частот. Упрощенная структурная схема стабилизатора показана на рис. 3.96. L\(!) 8-I � Fв л(J) Датчик скорости л� \1 l.м1 [А 1·1 Кн 1 ''"" ---- \.'sтмдх V;,tnb Iм"d+ \' 0 �:н + 1 Vs1М1N VH \.'11 Рис. 3.96. Упрощенная структурная схема стабилизатора Сигнал от датчика частоты вращения вала генератора разделяется на три ка­ нала, для каждого из которых используется полосовой фильтр, работающий в соответствующем диапазоне частот. После фильтрации все три сигнала склады­ ваются. Дополнительно осуществляется ограничение выходного сигнала по амп­ литуде как в каждом из трех каналов, так и суммарного выходного сигнала. Выходной сигнал блока (Vstab) является входным дЛЯ системы возбуждения ге­ нератора. Подробная структурная схема показана на рис. 3.97. 200 Библиотека блоков SimPowerSystems r-----------------------1 + Ло, Лrо 11 Рис. 3 97. Подробная структурная схема стабилизатора Окно заданил параметров: Мo.jt,,88'1<1Powei 5-$t,iblzet !,,_HW.I Thi�.,,..,._••МIAl-ь-lCl"-S�St..Ы..,!Мbl'SS) T"'l_tl.., ...,.,,� o�-.siond��PШ Std421 5'J. When"OeiaiodМll,r,sJ'"ia.-1,lho�}, �� ll>dl'io;t(Н}lr-jl •a11--Ьe-nl!,.l�Ol<ler М 1о T•121<,looleQ!vl<•11 ondl:.�17(""-e"'"-, 1 crHJ, р,._, lol°""of°""'>iion:/S�selli,go Gkbl!IOI' J1n2 20J l��tw,t(fl(Н,�К! 1 \1nэ2S1 l1'Jlllb-t,,w,d; 1 f1-Чl/zJ. 1:/-i J J!12.014Б) • s��...._...,.....1/Н-.VS.....J /1,075 15 ,15 .15] р l?lot,._,_ Г lolv,!Udo n dl f-•-tli>i QIC Электрические машины Machines 201 Параметры блока: Mode of operation: [Режим задания параметров]. Значение параметра выбирается из списка: ► Simplified settings - упрощенное задание параметров; ► Detailed settings - подробное задание параметров. Global gain: [Общий коэффициент усиления]. Общий коэффициент усиления стабили­ затора. Low frequency band: [FL (Hz), KL] [Параметры низкочастотного фильтра [FL (Гц), KL]]. Параметр задается в виде вектора. Первый элемент - центральная частота (Гц), второй - максималь­ ное значение коэффициента передачи фильтра. Параметр доступен для режима Simplified settings. Intennediate frequency band: [FI (Hz), КI] [Параметры среднечастотного фильтра [FL (Гц), KL]]. Параметр задается в виде вектора. Первый элемент - центральная частота (Гц), второй - максималь­ ное значение коэффициента передачи фильтра. Параметр доступен для режима Simplified settings. Нigh frequency band: [FH (Hz), КН] [Параметры высокочастотного фильтра [FL (Гц), KL)]. Параметр задается в виде вектора. Первый элемент - центральная частота (Гц), второй - максималь­ ное значение коэффициента передачи фильтра. Параметр доступен для режима Simplified settings. Low frequency gains: [KL1, KL2, KL] [Коэффициенты усиления низкочастотного канала [KL1, KL2, KL]]. Параметр доступен для режима Detailed settings. Low frequency time constants (s): [Постоянные времени низкочастотного канала]. Параметры задаются в виде вектора [Т в� Тв2 Твз Т в4 Твs Т ВБ Т87 Т88 Твэ Тв�о Т 811 Т 812 К811 К 817 ). Параметр доступен для режима Detailed settings. Intennediate frequency gains: [KI1, КI2, КI] [Коэффициенты усиления среднечастотного канала [KI1, KI2, КI]]. Параметр доступен для режима Detailed settings. Intennediate frequency time constants (s): [Постоянные времени среднечастотноrо канала]. Параметры задаются в виде вектора [Т11 ТI2 ТI3 Т 14 ТI 5 ТI6 Т 17 ТI8 ТI9 Т110 Т111 Т112 К11 1 К117 ]. Параметр доступен для режима Detailed settings. Нigh frequency gains: [КН1, КН2, КН] [Коэффициенты усиления высокочастотного канала [КН1, КН2, КН]]. Пара­ метр доступен для режима Detailed settings. 202 Библиотека блоков SimPowerSystems High frequency time constants ( s): [Постоянные времени высокочастотного канала]. Параметры задаются в виде вектора [ТН1 ТН2 Тнз Тн4 Тнs Тн6 Тн7 Тнв Тн9 Тн�о Тн11 Тн12 Кн11 Кн17]. Параметр доступен для режима Detailed settings. Signals Limits (VLmax, Vlmax, VHmax, VSmax) [Уровни ограничения]. Уровни ограничения выходного сигнала: VLmax в низкочастотном канале, Vlmax - в среднечастотном канале, VHmax - в высоко­ частотном канале, VSmax - уровень ограничения суммарного сигнала. Plot frequency response: [Построение частотной характеристики стабилизатора]. При установке флаж­ ка производится построение частотной характеристики. Magnitude in dB: [Измерение аплитуды сигнала в дБ]. При установке флажка амплитуда сигна­ ла на частотной характеристике измеряется в дБ, в противном случае - в относи­ тельных единицах. Frequency range (Hz): [Частотный диапазон (Гц)]. В качестве параметра задается вектор частот, для которого должна быть построена частотная характеристика. 3.6.12. Однофазная асинхронная машина Single Phase Asynchronous Nlachine Пиктограмма: Single Phase Asynchronous Machine Назначение: Блок Single Phase Asynchronous Machine моделирует однофазную асинхрон­ иую электрическую машину с короткозамкнутым ротором. Машина имеет две об­ мотки - основную и вспомогательную. Блок позволяет моделировать машину с расщепленной обмоткой, пусковым конденсатором, пусковым и рабочим кон­ денсатором, а также с раздельными основной и вспомогательной обмотками. Мо­ дель не учитывает насыщения и потерь в стали. Электрические машины Machines 203 Окно задания параметров: �Вlщ k Pc1rc111н•ler<,: S111<JI<• Р/1,1.,,• 1\<,у11(f,го1ю11<, \l,1 . 1З S&,glof'hмeA,irmonowM«no"(m<Osl<)fl,i\J 1.. �•••Фl'М'•'"'J'l'>C'-""""' m,i:tц{�t"P4d,.·шit с11Ра<".1Х•м1..., ,.....,<ll>d".ool.W��Jo'IOdelodn1м,;1<1<11J11r ,�r,_ Moi,<lf'ld_....,�-n�iю..re Уощ,.,.оресilум.1 ц,оеd 11..twll.....,,lhelil<ICМO.., �rhe � � Ш rhe�or�O� l:кl.tor,/Jl!er 4chЩ1!tto iheU11щ,.1щ>too:cmrnU., ""'""""""dP"'-.. u...js1 Type ot-ьinoj c.,p.,щ,-Sto,t-A..., N_J>C".,.,,, �. iWld m,quot,(:\• { Pr,_VAt Vr(V,ms! /\Щ)) 1 1 25"746 110 60) ММ\-,:q S\!llct ( Rt{ohJ>). U.IНJ ! J[2.02 748-ЗJ Mi"' � rolor I R<1otcni Li'tНI 1 lr• 12 s.Ge-эJ Mainwi,6ngm<дlii/�t.11111НJ Jn1m � wning шtor (l\t/chn} US(tiJ 1 J!714 li5e-ЗJ l"'1Ь.1.lric<mlattor,p1111fd�d"-""IJ!l,oni'2l f'IN"'•J p,N J • 110.0146 о 21.18) ·�--=��---�·---�..·-·~,...-·�·�"··'-'· C.,W,o,,StOII [lld{-L c.(l•odl) 112 254.7e-Sj Параметры блока: Units: [Система единиц]. Параметры машины можно задавать в абсолютных единицах в системе СИ (SI) или в относительных (pu). Туре of single phase asynchronous machine: [Тип машины]. Параметр задает тип машины: ► split-phase - с расщепленной обмоткой; ► capacitor-start - с пусковым конденсатором; ► capacitor-start-capacitor-run - с пусковым и рабочим конденсатором; ► main & auxiliary windings - с раздельными основной и вспомогательной об­ мотками. 204 Библиотека блоков SimPowerSystems Nomioal power, voltage, aod frequeocy [Pn (VA), Vn (Vrms), f (HZ)]: [Номинальная мощность, напряжение и частота [Pn (ВА), Vn (В), f (Гц)]]. Па­ раметр задается в виде вектора из трех элементов - номинальная полная мощ­ ность (ВА), действующее значение напряжения (В) и частота (Гц). Maio wiodiog stator [Rs (Ohm), Lls (Н)]: [Активное сопротивление и индуктивность основной обмотки статора [Rs (Ом), Lls (Гн)]]. Maio wiodiog rotor [Rr' (Ohm), Llr' (Н)]: [Приведенные активное сопротивление и индуктивность обмотки ротора [Rr' (Ом), Llr' (Гн)]]. Maio wiodiog mutual ioductaoce Lms (Н): [Индуктивность намагничивания основной обмотки статора (Гн)]. Auxiliarywiodiog stator [RS (Ohm), LlS (Н)]: [Активное сопротивление и индуктивность вспомогательной обмотки статора [Rs (Ом), Lls (Гн)]]. Ioertia, frictioo factor, pairs ofpoles, ratio oftums U (kg.mл 2), F (N.m.s), р, N]: [Момент инерции J (кr*мл2), коэффициент трения F (Н*м*с), число пар полюсов р и отношение чисел эффективных витков вспомогательной и основной обмоток]. Capacitor-Start [Rst (Ohm), Cs (farad)]: [Емкость пускового конденсатора и величина резистора, включенного после­ доватльно с конденсатором, [Rst (Ом), Cs (Ф)]]. Capacitor-Ruo [Rru (Ohm), Cru (farad)]: [Емкость рабочего конденсатора и величина резистора, включенного последо­ ватльно с конденсатором, [Rru (Ом), Cru (Ф)]]. Discoooectioo speed wc (% synchronous speed): [Частота вращения ротора wc, при которой происходит отключение вспомогательной обмотки (в % от синхронной частоты]. Initial speed wO (% synchronous speed): [Начальная частота вращения ротора (в % от синхронной частоты]. На выходном порту m блока формируется вектор из 14 переменных машины: 1. Rotor current ir_a - ток обмотки ротора а; 2. Rotor current ir_b- ток обмотки ротора Ь; 3. Rotor current iq - проекция тока обмотки ротора на ось q; 4. Rotor current id - проекция тока обмотки ротора на ось d; 5. Rotor flux phir_q - проекция потока ротора на ось q; 6. Rotor flux phir _d - проекция потока ротора на ось d; 7. Rotor voltage Vr_q - проекция напряжения ротора на ось q; 8. Rotor voltage Vr_d - проекция напряжения ротора на ось d; 9. Main winding stator current ia - ток основной обмотки статора; 1О. Auxiliary winding stator current ib - ток вспомогательной обмотки статора; 11. Voltage capacitor Vc - напряжение на конденсаторе; 12. Stator flux phis_q - проекция потока статора на ось q; 13. Stator flux phis_d - проекция потока статора на ось d; 14. Rotor speed - частота вращения ротора; Электрические машины Machines 205 15. Electromagnetic torque Те - электромагнитный момент; 16. Rotor angle thetam - угловое положение ротора. Пример: На рис. 3.98 показана схема, обеспечивающая конденсаторный пуск однофаз­ ного асинхронного двигателя и последующий наброс нагрузки. По достижении частоты вращения ротора, равной 75% синхронной, пусковой конденсатор отклю­ чается. На рисунке приведены также графики токов основной и вспомогательной обмоток, напряжение пускового конденсатора, частота вращения ротора и элект­ ромагнитный момент. jcontinuous 1 110V Source1 $и Single Phase Asynchronous Macnine <flAlin winding curn,nt la (А or pu)> <AlxHiary winding curn,nt lb (Aor pu)> <\.tikage capac�or \А: (:,/ or pu )> <Rotor speed (r.id/s or pu)> □ < Bectromagnetic torque Те (N"m or pu)> <Au,aiO!JI � ccrrent lb 1д or рµ)> 10 nтттr..-;-т:-,с:-,-:-,-,.,.,-:-=-:-,-:-:-:о-т---------.---------, 1 · · · · · · · · · · 1 · · � · · , · · · :�••�н{ -10���----��-------�------� Time offset О Рис. 3.98. Пуск однофазного асинхронного двигателя Scope 206 Библиотека блоков SimPowerSystems 3.6.13. Вентильный реактивныйдвиrатель Switched Reluctance Motor Пиктограмма: > TL а А1 --,,,,-u ·, --.�,"\ (ri,G� ,:..1') m 1> D А2, // а 81 �--� , \�-' ) I ) D 82 ',( '-. ·,1 L- .,'/ а С1 а С2 �... , Switched Reluctance Motor Назначение: Блок Switched Reluctance Motor моделирует вентильный реактивный двига­ тель. Модель может быть представлена в двух вариантах: Specific model (уточненная модель) и Generic model (обобщенная модель). Параметры блока: Туре: [Тип двигателя]. Параметр задает тип двигателя в зависимости от числа полюсов статора и ротора: ► 6/4 - 6 полюсов на статоре и 4 полюса на роторе; ► 8/6 - 8 полюсов на статоре и 6 полюсов на роторе; ► 10/8 - 10 полюсов на статоре и 8 полюсов на роторе. Plot magnetization curves: [Построить кривые намагничивания). При установке флажка и закрытии окна параметров блока будут построены зависимости потокосцепления машины от тока статора при различном угловом положении ротора. Stator resistance (Ohm): [Активное сопротивление статора (Ом)]. Inertia (kg.m.m): [Момент инерции) (кг•мл 2)). Friction (N.m.s): [Коэффициент трения F (Н*м*с)). Initial speed and position [wo (rad/s) Theta0 (rad)]: [Начальная частота и угловое положение ротора [wo (рад/с) Theta0 (рад)]). Unaligned inductance (Н): [Индуктивность при несовпадении осей полюсов статора и ротора). Индук­ тивность при совпадении оси статора с осью межполюсного пространства ротора. Электрические машины Machines 207 Окно задания параметров: OBl,,ck l\1r,1rн,•tcrc,: S,v,t< li<>,1 l(Pltr, t,1ricc Чotor , �ontn&mow<����,o 111P!'P'!....W,,, tn,stllOt� , А u-,� S...,,.;od � M"'1>! 11М1О 6 st/Jkil. i,o\o< о,ю 4 ro1a PQl!,s. . д/w�owrcltedR�t.4-hМ,gS�poletJIICIS/OI... � дr,,. .�,.,s...,cl\edRш\lneeMcш�Jas1п_,...,,ie,щi� 1З ;:! т,.. _........ """"'�i>llll»�,nd��-tho ....-�.-....,\hil_...,,cц,.,;,.,.iii-"""""""�� Tмq,ed,c; nvxl!I it thal.octe,,ndt,i, 11\е m�chol..:!n!iQ o-, �• toble ol fl>., lt'i<OII"., f� с/ tho rol0< pw.,an lll>d 1М ,t,,t" WIW -Р-•· � Tw,,/614 1 Moi:l>i'IO nqjojJGenenc modol f' Plot мgneli:_, eumt 5,...,,...,1,irc:e(O�! ! J0.1)1 Aligned inductance (Н): [Индуктивность при совпадении осей полюсов статора и ротора). Saturated aligned inductance (Н): [Индуктивность при совпадении осей полюсов статора и ротора в режиме насыщения (Гн)). Maximum current (А): [Максимальный ток (А)]. Maximum flux linkage (V.s): [Максимальное потокосцепление (Вс)). Потокосцепление, соответствующее максимальному току. Magnetisation characteristic tаЫе (МАТ file): [Таблица характеристики намагничивания (МАТ-файл)). 208 Библиотека блоков SimPowerSystems На выходном порту m блока формируется вектор из 6 переменных машины: 1. V - вектор напряжений статора; 2. flux - потокосцепление; 3. 1 - вектор токов статора; 4. Те - электромагнитный момент; 5. w - частота вращения ротора; 6. teta -- yrловое положение ротора. Пример: На рис. 3.99 показана схема электропривода на базе вентильного реактивного двигателя. CONVERTER □ TL Scope А1- А1 /(}.- <IW г--V+ т 240V_:L в, ----в1 112CI ----с1 L--v- <Те (N'm)> А2 с2- m � С2 Switched Reluct,nc• Motor ----------� <w radls)> <IW Discrete 1 Ts•1e-OC6s powergul � Tum-off angle (deg) Position_Sensor <To(N''m)> 150 100 50 О'------'-----'------'-----'-----_._____,______, (W 1od/s}> Thloottsd. о Рис. 3.99. Электропривод на базе синхронного реактивного двигателя Модели для расчета векторным методом Phasor Elements 209 3. 7. Модели для расчета векторным методом Phasor Elements 3. 7. 1. Статический компенсатор реактивной мощности Static Var Compensator Пиктоiрамма: а А B(pu) t> а В а С \,tn(pu) � Static Var Compensator НазнW1ение: Блок Static Var Compensator моделирует трехфазный статический компенсатор реактивной мощности. Схема модели компенсатора представлена на рис. 3.100. �---------------------------в Перанчныс наnря1<сния 1 Втсричиые иапря:о:еиия Да1'1111< иаnр11:аеиюr: Vm Pery11J1Тop напряжения ___,..._____ v,.,,1 1 Импульсы Синхронизирующий генератор I .. -------- тsс 14--о,---1 Рас пределитель I -с:с;е:а;;�:н :.- - - - - - - - - - Рис. 3. 100. Схема модели статического компенсатора реактивной мощности В состав системы управления входят: ► датчик напряжения, измеряющий напряжение прямой последовательно­ сти, которым необходимо управлять; ► стабилизатор напряжения, который использует ошибку по напряжению (разность между измеренным напряжением Vm и опорным напряжением Vref), чтобы определить реактивную проводимость В системы TSC, необхо­ димую для поддержания постоянства линейного напряжения; ► распределитель, определяющий, на какую труппу тиристоров должны по­ даваться импульсы управления, а также угол управления тиристорами; ► синхронизирующий генератор, который вырабатывает импульсы управле­ ния тиристорами. Блок предназначен для работы только при расчете схемы векторным методом. Выбор векторного метода расчета необходимо выполнить с помощью блока 21 О Библиотека блоков SimPowerSystems Powergui. Модель статического компенсатора может использоваться при расче­ тах трехфазных энергетических систем, включающих синхронные генераторы, двигатели и динамические нагрузки, для определения динамической устойчиво­ сти и влияния статического компенсатора на электромеханические колебания в системе, а также на емкость линии передачи. Данный блок содержит упрощен­ ные модели входящих в него систем, которые представлены довольно простыми передаточными функциями и элементами задержки, дающими правильные ре­ зультаты на основной частоте системы. Статический компенсатор реактивной мощности может работать в двух режимах: ► Voltage regulation - регулирование напряжения; ► Var control (Fixed susceptance Bref) - режим управления реактивной мощ­ ностью (поддержание постоянства реактивной проводимости). Вольт-амперная характеристика компенсатора в режиме регулирования напряжеt1ия показана на рис. 3.1 О1. Емкостной ток Индуктивный ток А Реактивный ток Рис. 3.101. Вольт-амперная характеристика статического компенсатора реактивной мощности Пока реактивная проводимость компенсатора В не выходит за пределы огра­ ничений Ветах и B/max• определяемых величИtlами реактивных мощt1остей конден­ саторов и реакторов, значение напряжения определяется величиной опорного на­ пряжения Vref. При этом обычно имеет место некоторый спад напряжения (при значеt1иях выходной реактивной мощности в пределах 1-4% от максимального значения), что и показано на рис. 3.101. Вся вольт-амперная характеристика ком­ пенсатора в данном режиме описывается тремя уравнениями: V = Vref + Xs х I - режим регулирования (Ветах < В< Вlmax ), 1 V = -- - режим выработки максимальной емкостной мощности (В = Ветах), Bc max 1 V = - - режим выработки максимальной индуктивной мощности (В = Blmax), В1111ах Модели для расчета векторным методом Phasor Elements 211 rде V - напряжение прямой последовательности (о.е.); I - реактивный ток (o.e.jPbase). Значение/> О указывает на индуктивный характер тока; Xs - наклон или реактивное сопротивление на участке спада (o.e./Pbase); Ветах - максималь­ ная емкостная проводимость (o.e.jPbase); Вlтах - максимальная индуктивная проводимость (o.e.jPbase); Pbase - базисная мощность (суммарная для трех фаз). Коrда компенсатор работает в режиме стабилизации напряжения, скорость ре­ акции на изменение напряжения в системе зависит от параметров регулятора на­ пряжения (коэффициента усиления пропорциональной части Кр и интегральной части Ki), реактивного сопротивления Xs и устойчивости энергосистемы. Для ин­ тегрирующего регулятора напряжения (Кр = О), если постоянной времени Tm .си­ стемы измерения и величиной задержки включения тиристоров Td можно прене­ бречь, то замкнутая система регулирования, состоящая из компенсатора реактивной мощности и энергетической системы, может быть аппроксимирована системой пер­ вого порядка с величиной постоянной времени замкнутого контура, равной: 1 , Те =----Кi-(Xs+Xn) где Те - постоянная времени замкнутого контура; Кр - коэффащиент усиления пропорциональной части регулятора напряжения (о.е._В/о.е._V); Кi - коэффи­ циент усиления интегрирующей части регулятора напряжения (о.е._В/о.е._V/с); Xs - наклон, или реактивное сопротивление на участке спада (o.e.jPbase); Хп эквивалентное реактивное сопротивление энергосистемы (o.e.jPbase). Окно задания параметров: �(Jl()ck f\ir,,пн•t,•r•. :,l,1t1c. V,1r Corop1•r1•..1for Sto!icY•�.... �T,и,e}("'""'J� EJ r;..,,.....-ISVCi H"blocl<.�• pt,....nlod,/o/tll>r..-,,i-,lt>-SlkV• 1 !, Ti,,Bou;u,ognal{S'IIC__,.11�) �ll>a«ApAotll,o�og,, ,о0-1&о< "' 11,, ""'.,,.,., su,cei;...,. э,е1., .,, -.о1 ""'°" [t,o\/rn�•tht-odoo,_,_,.,_vot,,gofщ j&ЮоЭ f,,tot,ve-tmutaщ•<11>0I Q�va,<C!)I ,­ !t200e6 -100о6] -�.=с;;.==·=•-•"--. .......-��� , п,.._ь... ;х,,,о1РЬоtер,д1; Rol....u ,ф,gо \/1,I\PJ\, j(D :юJ) T,no.,,,.,i.,. ol\/Clt"II"......,-� Т11>/1) jео-з 212 Библиотека блоков SimPowerSystems Параметры блока: Mode of operation: [Режим работы]. Модель может работать в двух режимах: ► Voltage regulation - регулирование напряжения; ► Var c ontrol (Fixed susceptance Bref) - режим управления реактивной мощ­ ностью (поддержание постоянства реактивной проводимости). Reactive power limits [Qc (var>0) QI (var<0)): [Пределы изменения реактивной мощности]. Параметр задается в виде векто­ ра, первое значение которого Qc - значение реактивной мощности батареи кон­ денсаторов, QI - значение реактивной мощности реактора. Three-phase base power Pbase (VA): [Базисная мощность Pbase (ВА) (суммарная для трех фаз)]. Reference voltage Vref (pu): [Опорное напряжение Vref (о.е.)]. Droop Xs (pu/Pbase): [Наклон Xs o.e./Pbase]. Наклон, или реактивное сопротивление на участке спада. Voltage regulator fKp (puB/puV) Ю (puB/puV /s) ]: [Параметры регулятора напряжения [Кр(о.е._В/о.е._ V) Ki(o.e._B/ o.e._ V/с)]]. Коэффициент усиления пропорциональной части Кр и интегральной части Ki) регулятора. Bref for var control mode (pu/Pbase): [ Опорное значение реактивной проводимости Bref в режиме управления реактивной мощностью (o.e./Pbase).] Time constant of voltage measurement system Tm (s): [Постоянная времени датчика напряжения Tm (с)]. Average time delay due to thyristor valves firing Td (s): [Среднее время задержки включения тиристоров Td (с):] Пример: На рис. 3.102 показана схема, иллюстрирующая работу статического компен­ сатора реактивной мощности в энергосистеме напряжением 500 кВ, частотой 60Гц и мощностью 3000 МВА. Блок статического компенсатора имеет батарею конденсаторов мощностью 200 МВА и реактор мощностью 100 МВА. Для компенсатора задан режим регули­ рования напряжения (опорное напряжение Vref = 1 о.е.). Реактивная проводимость Xs равна 0.03 о.е./200 МВА, благодаря чему напряжение энергосистемы может из­ меняться в пределах от 0.97 о.е. до 1.015 о.е. в случае, если реактивная мощность компенсатора не превышает мощности батареи конденсаторов или реактора. Блок трехфазного программируемого источника напряжения Three-Phase ProgrammaЫe Voltage Source используется в качестве генератора энергосистемы. В начальный момент времени напряжение генератора равно номинальному значению ( 1 о.е., 500 кВ). Затем, в момент времени t = 0.1 с, напряжение скачкообразно уменьшается до 0.97 о.е., в момент времени t = 0.4 с напряжение увеличивается до 1.03 о.е. и, на­ конец, снова становится равным номинальному в момент времени t = 0.7 с. Диа­ граммы работы модели энергосистемы показаны на рис. 3.103. r _L -= -в -с А --о-лvп- в □•-□ �-атJр бОО kV 3000 MVA XJR • 10 с в ь-в svc с с-с Three-Phиe V-1 Meиyrement □ m SVC (Phnor typ•) s.1.cto, Phasors Scope ·� о rn10MW Sign•I Proc.-ing �� :s:: � :n DoYЬle click to plot V-1 м•r•cteristic poWefgui Рис. 3. 102. Модель энергосистемы со статическим компенсатором реактивной мощности "О 11) .z:. ф -1 11) О1 ф � о "О :I: !l: 31: 31: ф -1 о о ]:] 31: "О "3 11) (/) о .., m ф 3 ф :, (/) ..... 1\) (.,) 214 Библиотека блоков SimPowerSystems � ,( "1"' l!ll!JE] •.; (::,,--; VJ ,... 1.06 . . ,.. ·· . ....... ·yvm· 1 04 1.112 ............ ' ., ... . ·�••· "'"' ':"''"'' ., --· ····!·· ..............�..... ··❖·•·· О.Э 0,4 05 0.6 Ql (18 D.9 Рис. 3 103. Диаграммы работы модели На верхней диаграмме рис. 3.104 показаны фактическое значение рtактивной проводимости прямой последовательности В 1 и сигнал управления реактивной проводимостью регулятора напряжения. На нижней диаграмме показаны факти­ ческое значение напряжения прямой последовательности V1 и выходной сигнал Vm датчика напряжения. Быстродействие системы (с учетом перечисленных выше допущений) опре­ деляется постоянной времени замкнутого контура Те, которая равна 0,0345 при заданных параметрах модели (Кр = О; Ki = 300; Хп - 0.0667 о.е./200 МВА; Xs = = 0.03 о.е./200 МВА). Если в данной модели увеличивать коэффициент усиления пропорциональ­ ной части регулятора или уменьшать устойчивость системы, пренебрегая Тт и Td, то можно получить колебатель­ ную реакцию системы и в ко­ нечном счете неустойчивость. На рис. 3.104, иллюстрирующем дан­ ную ситуацию, показан сигнал с выхода В регулятора напряже­ ния для двух эиерrосистем с раз­ ными параметрами. -02 . Рис. 3. 104. Сравнение двух энергосистем с различными параметрами .. -;· � ... Q.eo r-otfмt о 01 112 оэ о.• о., С.6 0.7 0.8 О.! Глава 4 Графический интерфейс пользователя Powergui 4.1. Расчет схемы векторным методом ..... 218 4.2. дискретизация t.ЩD.8JIИ ...................... 2ао 4.3. Расчет устамоеивwегос,� реJКИм& ....... 221 4.4. Иницмаnизация трехфазных схем, содерJКаЩЮ( эnекtрические машины .............................................. 223 4.5. Исполь:ювание Slmulink LTI-Viewer дпя анализа электрических схем .............. 226 4.6. Определение импеданса цепи ........... 226 4, 7. Гармонический анализ ....................... 228 4.8. Создание ОNета ................................ 230 4.9. ИнструtАент расчета характеристиkи намагничивания ................................. 232 4.10. Расчет параметров линии электропередачи ...............,.............. 234 216 Графический интерфейс пользователя Powergui Пиктограмма: Continuous Discrete, Ts = 0.01 s. Назначение: Блок Powergui является инструментом rрафического интерфейса пользователя и обеспечивает решение следующих задач: ► расчет схемы векторным методом; ► расчет установившегося режима; ► дискретизация модели; ► задание начальных условий; ► инициализация трехфазных схем, содержащих электрические машины, таким образом, чтобы расчет начался с установившегося режима; ► анализ схемы с помощью инструмента Simulink LTI-Viewer; ► определение полного сопротивление (импеданса) цепи; ► выполнение гармонического анализа; ► создание отчета; ► создание файла характеристик намагничивания для модели трансформато­ ра с учетом насыщения сердечника; ► вычисление параметров линии электропередачи. Окно задания параметров: С;-- -mie-----� .' lllll1!l•�I l!!liiJD, т--,,,----, ,;- o,sac_.....,.__....., _ _____ ... s.,p,, - (•} р.оо, ('.� Г: Sho' .. __ onotvм --� •-�._.....,,,.""""-----.:-_-·,� ,...J.,.... -- Utol11"'°"''"' _,,,,f_y_,,_,_ mл-wy... ,i1 ----�--�� --� TOOI 1 ! j __...щ.,: Но11? u,.,�_J Графический интерфейс пользователя Powergui 217 Параметры блока: Simulation type: [Вид расчета]. Вид расчета выбирается с помощью одноrо из трех переключа­ телей: ► Phasor simulation: [Расчет схемы векторным методом). При выбранном переключателе вы­ полняется расчет схемы векторным методом. При этом необходимо задать частоту источников в графе Frequency; ► Discretize electrical model: [Дискретизация электрической модели]. При выбранном переключателе выполняется дискретизация модели. При этом необходимо задать шаг дис­ кретизации в rрафе Sample time; ► Continuous: [Режим расчета при непрерывном времени]. Show messages during analysis: [Показывать сообщения при проведении анализа). Если флажок не установ­ лен, то подавляется вывод сообщений в командном окне MATLAB при выполне­ нии расчетов. Steady State Voltages and Currents: [Установившиеся значения напряже11ий и токов J. Расчет установившихся зна­ чений переменных. При нажатии на кнопку открывается окно, в котором будут показаны соответствующие значения. lnitial states Setting: [Установка начальных значений]. При нажатии на кнопку открывается окно, в котором отображаются начальные значения переменных. Эти значения можtю изменять. Новые значения используются при расчете переходных про­ цессов. Load Flow and Machine Initializations: [Инициализация схем, содержащих электрические машины). Use LТI Viewer: [Использование LTI Viewer). Применение инструмента Simulink LTI Viewer для анализа схемы. Impedance vs Frequency Measurements: [Определение импеданса цепи). FFТ Analysis: [Гармонический анализ]. Generate Report: [Создание отчета]. Hysteresis Design Tool: [Инструмент расчета характеристики намагничивания]. Compute RLC Line Parameters: [Вычисление параметров линии электропередачи]. 218 Графический интерфейс пользователя Powergui 4. 1. Расчет схемы векторным методом Расчет схемы векторным методом (Phasor simulation) производится для электри­ ческой схемы, имеющей ключевые элементы в тех случаях, когда пользователя интересуют только установившиеся значения переменных схемы. Вид расчета установившегося режима Steady-State в этом случае не очень удобен, поскольку он выполняется лишь для начального состояния ключей схемы. Если в линейной цепи нужно определить только значения амплитуды и фазы всех напряжений и токов, то нет необходимости решать полную систему уравнений модели (система уравнений в пространстве состояний), получаемых при описании совокупности элементов модели. Вместо этого достаточно решить намного более простой набор алгебраических уравнений, связывающих векторы напряжения и тока элементов модели. Именно это делает векторный метод решения. Метод вычисляет напря­ жения и токи как векторы (комплексные числа, отображающие синусоидальные напряжения и токи определенной частоты). Векторы могут быть представлены декартовой (действительная и мнимая часть числа) или в полярной системе коор­ динат (амплитуда и фаза). Поскольку переходные процессы при таком способе расчета не учитываются, то моделирование происходит намного быстрее. Однако необходимо всегда помнить, что эта более быстрая методика решения дает резуль­ тат только для одной определенной частоты. Для проведения расчета векторн:ым методом необходимо в окне Powergui вы­ брать режим расчета Phasor simulation и задать частоту источников в rрафе Fre­ quency. В режиме Phasor simulation пользователь может проследить, как меняют­ ся установившиеся значения переменных при различных коммутациях в схеме. Пример: На рис. 4.1 показаны пример схемы и результаты расчета схемы векторным методом: Представленная схема является упрощенной моделью трехфазной схе­ мы с частотой сети 60 Гц и напряжением сети 230 кВ, в которой изображена толь­ ко одна фаза. Эквивалентный источник моделируется источником напряжения (230 кВ RMS / sqrt(3) или 132.8 кВ, 60 Гц), соединенным последовательно с пол­ ным внутренним сопротивлением (Rs и Ls). Источник подключен к RL-наrрузке линией с распределенными параметрами длиной 150 км, которая моделируется блоком PI section 1-ro порядка (цепь RL1 и 2 шунтирующих конденсатора, С1 и С2). В цепи установлен выключатель, используемый для подключения нагрузки (75 МВт, 20 МВАр) к приемному концу линии передачи. В качестве отображае­ мых переменных выбраны амплитудные значения тока и напряжения, которые рассчитываются на основе комплексных значений с помощью блоков Complex to Magnitude-Angle (в данном случае эти блоки вычисляют модуль комплексного числа). На графики, для сравнения, наложены графики расчета переходных про­ цессов схемы. Из графиков видно, что расчет векторным методом дает, по сути, огибающие графиков переходных процессов. Следует отметить, что в режиме Continuous закрывание выключателя Breaker происходит при переходе тока через нулевое значение, следующее после поступления сигнала на отпирание, в случае же использования метода векторного моделирования выключение наступает не- г�т-� • Rs Ls RL1 ro 1 km tr�nsmission lint � 132.В kVrms 'у)60Нz 1 _L Ph•sois С1 т _l ] 1 1 о ■ o---o-r_J.!=ю � Lo•d current Bro•kor I С2 Scope RL Lo•d 7f5 MW20 Mv•r _L Comploxto M•gnitud"Angle1 _L 1 Complexto M•gnitude-Angle 5.857е+оо1 / l>ispl•y 1 .562 е+ОО7 J . ..,, "'" ·- 1!113 IЗ Ci-·e i" filt! �t � Jr-1' looki Desi<tQp Wlndow Ые11> , "" r j"t,J ·;Sj!'""fA.fi -\r ......,,__ ,..,,=- -, ,,;;;,ь, ;;::, , Lloed t '\ r· -� fl:" (l-;f, �1�1l;1l·jl ,t 1110' 2 V_ino • . . О.02 О.О< . 1 . 1 .. ,. .. .1.f •с ····f" lllflf:offat. о О.О& o.t8 0.1 0.12 0.14 0.1S о: о: 3:: . ,. C.t8 ф 3:: � 't) :I: \J 3:: ф -t o,1�' 111''J {\;--',,·u•\i{\j\f. -v' k . .\ .)J. 1 т .v. .. ·t v -2 х (") а, ф J .. JJ �/ t =1 IJ+'J+ .,,m�--�-��-�-��-�-�� 1 l>ispl•y1 -а Q) (") L ф -t D.2 j Рис. 4. 1. Расчет схемы векторным методом 3:: ..... 1\) со 220 Графический интерфейс пользователя Powergui замедлительно. Это происходит потому, что при векторном моделировании нет понятия перехода через ноль. Расчет схемы векторным методом позволяет использовать математику комп­ лексных чисел для проведения дополнительных вычислений в модели. Напри­ мер, для вычисления мощности может быть использовано выражение: • 1 · 1 · 1 · · . S =Р+ 7Q= U · I = -U-I, .n, .n, 2 где U - вектор напряжения; I - комплексно-сопряженный вектор тока. В нижней части схемы рис. 4.1 показана реализация данного выражения с по­ мощью блоков Simulink. Значения активной и реактивной мощностей в нагрузке выводятся на блоки Display. Данный вид расчета может быть использован и для очень сложных схем, когда расчет переходных процессов не дает устойчивого решения. 4.2. Дискретизация модели Дискретизация электрической модели (Discretize electrical model) позволяет, как правило, существенно увеличить скорость ее расчета. Величина шага дискретиза­ ции задается в окне параметров блока Powergui. Дискретизация выполняется с использованием метода Тастина (интегрирование методом трапеций с фиксиро­ ванным шагом). Для того чтобы устранить замкнутые алгебраические контуры при дискретизации моделей электрических машин, применяется прямой метод Эйлера. Точность расчета определяется величиной шага дискретизации. При большом шаге дискретизации точность может быть не высока. Для выбора нужно­ го значения шага требуется выполнить несколько расчетов с разными значениями величины шага дискретизации и сравнить результаты с ·расчетом по непрерывной модели. После сравнения следует выбрать наибольшее значение шага, при кото­ ром разницу с расчетом по непрерывной модели можно считать несущественной. Обычно, для расчета систем, работающих на частотах 50-60 Гц, шаг дискретиза­ ции может быть выбран равным 20-50 мкс. Для систем, содержащих полностью управляемые ключи (IGВТ-транзисторы, GТО-тиристоры, схемы с искусствен­ ной коммутацией и т. п.), шаг дискретизации должен быть существенно снижен. Так, например, для расчета инвертора с широтно-импульсной модуляцией, рабо­ тающего на частоте 8 кГц, шаг дискретизации должен быть задан не менее чем 1 мкс. В дискретных моделях системы управления могут быть как непрерывными, так и дискретными, но наибольшая скорость расчета может быть достигнута толь­ ко в последнем случае. При выполнении дискретизации существуют некоторые ограничения. Дискретизация полностью упраеляемых полупроводниковых устройств (IGBT, GTO или MOSFET) может выполняться только в том случае, если они входят в состав блока Universal Bridge. Если же такие устройства используются по отдельности, то дискретизация выполнена не будет, а появится окно с сообще­ нием об ошибке при попытке запуска модели на расчет. Расчет установившегося режима 221 При моделировании электрических машин в дискретном режиме возможно возникновение колебаний решения. Для устранения этого источники питания к зажимам машины необходимо подключать через резистор с малым сопротивле­ нием. Величина сопротивления определяется мощностью машины и величиной шага дискретизации. При шаге дискретизации 25 мкс для системы, работающей на частоте 60 Гц, выделяемая активная мощность на резисторе должна составлять примерно 2,5% от номинальной мощности машины. При увеличении шага дис­ кретизации мощность резистора должна быть увеличена . .Например, для синх­ ронной машины мощностью 200 МВА и шагом дискретизации модели 50 мкс тре­ буется, чтобы на дополнительном резисторе выделялось 5% от номинальной мощности машины, или 10 МВт. При уменьшении шага дискретизации до 20 мкс мощность резистора может быть уменьшена до 4 МВт. Индуктивность диодов и тиристоров во включенном состоянии (Lon) должна быть задана равной нулю. Если параметр Lon задан не равным нулю, то этот пара­ метр будет обнулен принудительно и SimPowerSystems выдаст предупреждаю­ щее сообщение об этом. Пример: На рис. 4.2 показана модель однофазного мостового выпрямителя, работающе­ го на активно-емкостную нагрузку. На рисунке приведены также осциллограммы напряжения на нагрузке и токи вентилей моста. 4.3. Расчет установившегося режима Режим Steady-State позволяет выполнить расчет установившихся значений пере­ менных. Расчет производится для состояния схемы в момент времени t = О. В этом режиме расчета в окне блока Powergui отображаются значения переменных состо­ яния модели, а также измеряемых переменных источников и нелинейных элемен­ тов. Расчет проводится для одной фиксированной частоты, равной частоте источ­ ников схемы, либо для нулевой частоты, если в схеме присутствуют только источники постоянного напряжения. Результаты могут быть представлены как в виде действующих, так и в виде амплитудных значений. При расчете на пере­ менном напряжении будут показаны также фазовые сдвиги соответствующих пе­ ременных. При наличии в схеме ключевых элементов следует иметь в виду, что расчет будет выполнен для начального состояния ключей. Для отображения результатов возможно использование следующих настроек: Units: [Система измерения]. Выбор системы измерения: ► Peak values - амплитудные значения; ► RMS values - действующие значения. Frequency: [Частота]. Частота источников (Гц). Display: [Отображаемые переменные]. При установке флажков отображаются следую­ щие расчетные переменные: 222 Графический интерфейс пользователя Powergui 3 12оvф 5 0 Hz г:: 1 � -�J-=61 L V 1._____г:з �-w 100 mH Т2 100VA 120 V/24V l Univeis.11 Bridge Ts" 0.000 s. 5 0 2 0.С I lvl Discrete, · S, орР • {i'З 1 Р J1> fti J,A аж�. е lv2 Scope Multimeter 'i' .. f!l/3 Е] :tНft11IТТl Vdc 4 ,---т----т--....----.---.----.----,--=r---т-"""""" lv1 :L±:111iUUJ , lv2 Timo offset О Рис. 4.2: Дискретная модель вь�прямителя ► States - переменные состояния (токи в индуктивностях и н9пряжения на конденсаторах); ► Measurements - измеряемые переменные, то есть переменные, для измерения которых в модели установлены датчики тока или напряжения; ► Sources - напряжения и токи источников; ► Nonlinear - токи и напряжения нелинейных элементов. Пример: На рис. 4.3 показаны пример схемы и результаты ее расчета для установивше­ гося режима. Инициализация трехфазных схем, содержащих электрические машины 223 .---------� Curre�t� Measurement Scope j 1 с, �� � 1 � АС Voltage Source1 Series RLC Load powergui SOU.CIS: F---С-•-Э �-cir ....•--J -� ���-�~�-=•�=-� Рис 4.3. Расчет установившегося режима 4.4. Инициализация трехфазных схем, содержащих электрические машины Для того чтобы начать расчет схемы, содержащей электрические машины, с уста­ новившегося режима (при синусоидальных токах и постоянных скоростях), предварительно необходимо инициализировать схему должным образом. Такая инициализация осуществляется инструментом Load Flow and Machine Initiali­ zation. Инициализация выполняется для схем, содержащих синхронные и асин­ хронные машины, а также блоки 3-Phase Dynamic Load. Для выполнения ини­ циализации необходимо ввести исходные данные в правой части окна инструмента (рис. 4.4). В зависимости от вида электрической машины состав исходных данных может меняться. 224 Графический интерфейс пользователя Powergui i М,1сtшн· 1 о,нJ r low I ool modнl Powerqш l о;н1 l low lJpd,11ed Synchronous Kachine SI Funda11:ental 2 kVA 762.102355330306 V ras Kachine: Noмinal: Вus Туре: Uan phase: ,.,. Sving generator о.оо· 762.1 Vr11s [1 pu] 30.00· 762.1 Vras [1 pu] -90.00· 762.1 Vr11s [1 pu) 150.00· 1.5152 Aras [1 pu] о.оо· 1.5152 Aras [1 pu] -120.00' 1.5152 lrJOS [1 pu] 120.00· 2000 V [1 pu] 1.2711е-013 Vars [6.356е-017 pu) 2001.8 V [1.001 pu] 12.744 N.11 [1.201 puJ 353.61 V (18.814 pu] UаЬ; UЬс: Uca: Ia: Ib: Ic: Р: О: Раес: Torque: Vf: Bus Туре: Uan phase: UаЬ: UЬс: Uca: Ia: Ib: Ic: Р: О: PJtec: Torque: slip: Asynchronous Kachine S. � But T.wie: lswing Ьu: Тermiмl dage UАВ (Vf!nfi !762.102 Active � goяm (Watts) · !о Asynchronous Kachine SI Units 2.238 kVA 220 V ras Asynchronous aachine -60.00· 381.05 Vras [1.732 pu] -30.00· 381.05 Vrмs [1.732 pu] 90.00· 381.05 Vras [1.732 pu] -150.00· 9.8184 Arмs [1.672 puJ 91.11 • 9.8184 Aras [1.672 pu] -28.89 ° 9.8184 Arмs (1.672 pu] -148.89 ° -5673.8 V [-2.535 pu) -3130.5 Vars [-1.399 pu] о \J [О puJ О N.a [О puJ -З.67Зе-040 Kachine: Noainal: 1!!11.'i!E'J м� Rei!ICtlve power tv�sl: о PhмedUANvolloge{deg): 10 Lo«1 flow h8Ql,leЩ' (Hz). 8 j50 Load Flow � condiion 3 IAulo Ucxlllte сiщ &. mмNW/1lllnls [!tf Updete LOIJd Flcw 1 сь.е 1 Рис. 4.4. Окно инструмента Load Flow and Machine lnitialization Machines: [Машины]. Список электрических машин, имеющихся в модели. Bustype: [Входные данные). Параметр определяет перечень задаваемых параметров ма­ шины. Значение выбирается из списка: ► P&V Generator - задаются активная мощность и номинальное линейное напряжение (действующее значение); ► P&Q Generator - задаются активная и реактивная мощности; ► Swing Bus - задаются линейное напряжение (действующее значение), предполагаемая активная мощность и начальная фаза напряжения UAN ( эл. град). Данный тип шины предполагает двунаправленную передачу мощно­ сти, поэтому этот тип шины должен быть установлен хотя бы для одной синхронной машины в схеме. Terminal voltage UАВ (Vrms): [Напряжение U лв (действующее значение)). Инициализация трехфазных схем, содержащих электрическ�е машины 225 Active power (Watts): [Активная мощность (Вт)]. Reactive power (Vars)]: [Реактивная мощность (ВАр)). Phase of UAN voltage (deg): [Начальная фаза напряжения UAN ( эл. град)). Mechanical power (Watts): [Механическая мощность (Вт)]. Параметр задается для асинхронной машины. Load flow frequency: [Частота]. Load Flow initial condition: [Начальные условия]. Значения параметра выбираются из списка: ► Auto - расчет выполняется для найденных начальных условий; ► Start from previous solution - результаты предыдущего расчета являются начальными условиями для следующего. При внесении изменений в схему пересчет начальных условий необходимо выполнить кнопкой Update circuit & measurements. После нажатия кнопки Update Load Flow произойдет автоматическая запись рассчитанных начальных условий в параметры блоков электрических машин. Кроме того, если потребуются изменения и во входных сигналах блоков (момент нагрузки, входная мощность и т. п.), то будут выведены сообщения с нужными значениями. Эти значения необходимо задать с помощью блоков IC. Пример: На рис. 4.5 показана схема, в которой синхрон­ ный генератор, работающий на активную нагрузку, приводится во вращение асинхронным двигателем. На осциллограмме показано напряжение фазы С 1 ЫХJ . генератора. Как видно на осциллограмме, началь­ ное значение напряжения не равно нулю, как это имело бы место при нулевых начальных условиях. EJ Рис. 4.5. Расчет схемы с ненулевыми начальными значениями 226 Графический интерфейс пользователя Powergui 4.5. Использование Simulink LTI-Viewer для анализа электрических схем Инструмент Simulink LТJ-Viewer, входящий в состав инструмента Control System Toolbox, является очень удобным инструментом для анализа линейных систем в Simulink. С помощью него можно определить реакцию системы на единичное импульсное и ступенчатое воздействия, построить частотные характеристики, найти нули и полюса общей передаточной функции системы, построить годограф Найквиста и т. д. Все эти возможности доступны и при анализе электрических схем. Вызов Simulink L TI-Viewer для анализа электрической схемы выполняется из среды Powergui с помощью кнопки Use LTI Viewer. При запуске LTI-Viewer пользователю предоставляется возможность указать входные (System inputs) и выходные переменные (System outputs) для выполнения анализа (рис. 4.6). ) J',1wprqш l1пi< lo L 11 VIPW rnudul \J�p l 11 V1PWt'I ll!!lliJEJ ______ Qpen_,c,.,,ertLTI.,,_,., f ] Рис. 4 6 Окно выбора входных и выходных переменных Для просмотра результатов линейного анализа необходимо нажать кнопку Open new LТI Viewer и выбрать вид графика в окне LТI Viewer. Пример: На рис. 4.7 показаны пример электрической схемы и результаты ее анализа. На графиках представлены графики изменения амплитуды и фазы тока источника питания при изменении его частоты. 4.6. Определение импеданса цепи Для проведения расчета полного сопротивления электрической цепи на схеме модели должен быть установлен блок Impedance Measurements. Электрическая цепь обязательно должна быть замкнута. Если же требуется измерить импеданс отдельного (разомкнутого) участка цепи, то его следует шунтировать резистором с достаточно большим сопротивлением, не изменяющим существенно общее со­ противление цепи. Для просмотра результатов необходимо нажать кнопку lmpe­ dance vs Frequency Measurements. После чего будет открыто окно Powergui Impe­ dance Measurement. Определение импеданса цепи 227 г= � АС Volt.illge Source \An = 100 j f•� • 1 I :,�:,mo,I Series RLC Br•nch L'" 1е-ОЭ R=I С= le-06 1 11 V1<•v1cr 1 т I ] Series RLC Br.illnch1 L • le-03 Rz 1 1 с-"'"' 1 powergui 1!!113EJ (!]---------.о :1Е -40 4S = о,-..---� а. 4� F,�(�} Рис. 4. 7. Анализ электрической схемы с помощью Simulink LTI-Viewer Для отображения результатов возможно использование следующих настроек: Axis: ► [Оси]. Настройка свойств осей графиков: ► Logarithmic lmpedance - логарифмическая шкала импеданса; ► Linear Impedance - линейная шкала импеданса; 228 Графический интерфейс пользователя Powergui ► Logarithmic Frequency - логарифмическая шкала частоты; ► Linear Frequency - линейная шкала частоты. Range (Hz): [Частота (Гц)]. Диапазон по частоте для расчета импеданса. Параметр задается в виде вектора. При использовании логарифмической шкалы частоты удобно за­ дать диапазон с помощью функции logspace. Grid: [Сетка]. Нанесение масштабной сетки на графики. Save data to workspace: [Запись данных в рабочую область MATLAB]. При установленном флажке выполняется запись результатов в область MATLAB. VariaЬle name: [Имя переменной]. Имя переменной для записи результатов в рабочей области MATLAB. Данные будут сохранены в виде матрицы, первый столбец которой частота, а второй - значение импеданса (комплексное число). Пример: На рис. 4.8 показана схема для измерения полного сопротивления цепи. Изме­ ряемая цепь зашунтирована резистором сопротивлением 1 МОм. Результаты рас­ чета полного сопротивления участка исследуемой цепи в функции частоты пока­ заны там же. 4. 7. Гармонический анализ Для проведения гармонического анализа необходимо предусмотреть вывод ис­ следуемых сигналов в рабочую область MATLAB. Это можно выполнить путем соответствующей настройки осциллографа Scope или с помощью блока То Workspace. Формат выводимых данных должен быть задан как Structure With Time (структура с полем �время�). После того как процесс расчета модели завер­ шен, необходимо открыть окно блока Powergui и нажать кнопку FFТ Analysis быстрое преобразование Фурье (БПФ). После этого откроется окно Powergui FFТ Tools, в котором необходимо нажать кнопку Display для отображения ре­ зультатов. Настройка процедуры гармонического анализа выполняется с по­ F мощью параметров,задаваемых в окне Powergui FТ Tools: Structure: [Структура]. Имя переменной, содержащей исследуемые данные. Input: [Вход]. Метка входного сигнала (параметр Signal name линии связи). Signal number: [Номер сигнала]. Start time (s): [Начальное время (с)]. Время начала временного интервала,для которого про­ водится гармонический анализ. Number of cycles: [Число периодов]. Число периодов исследуемого сигнала, для которого вы­ полняется анализ. Гармонический анализ 229 1 Series RLC Branch L= 1е-03 R= 1 С= 1е-06 т � Series RLC Branch1 L = 1е-03 R=1 с= inf ] Series RLC Br.1nch2 R = 1е6 D0 � lmpedance Me,1surement Continuous с:: ,400.-----------�--lmpedana е :m � �а :.m .. IMiJ мs------ } 100 R8'9'�i �1,5,1000) o'-------=::.-:i..::: :-.:._ ��....110 rt:' �� 1fГ 10 18 10 L,- _,._,.. 1 3 4 5 frequency (Нz) ,. �f� f'Lt.eerF� Ph- -Щ) .._�............���.__..............................-....... � � Рис. 4.8. � Frequency (Нt) � 1� Расчет импеданса электрической цепи Display FFГ window: [Показывать окно БПФ]. Показывать сигнал на временном интервале, для которого выполняется гармонический анализ. Если выбран данный параметр, то на верхнем графике окна будет отображаться входной сигнал только для заданно­ го временного интервала. Display entire signal: [Показывать весь сигнал]. При выборе данного параметра на верхнем графике окна будет показан входной сигнал для всего рассчитанного интервала. 230 Графический интерфейс пользователя Powergui Fundamental frequency (Hz): [Базовая частота]. Частота первой гармоники исследуемого сигнала. Мах frequency (Hz): [Максимальная частота]. Частота наивысшей гармоники, до которой необходимо выполнить расчет. Frequency axis: [ Ось частот]. Градуировка оси частот: ► Hertz - по горизонтальной оси откладывается частота гармоник в Гц; ► Harmonic order - по горизонтальной оси откладываются номера гармоник. Display style: [Стиль отображения]. Параметр задает способ отображения результатов: ► Bar (relative to Fund. or DC) - гистограмма (в% относительно первой или нулевой гармоник); ► List (relative to Fund. or DC) - список (в% относительно первой или нуле­ вой гармоник); ► Ваг (relative to specified base) - гистограмма (в о.е. по отношению к заданно­ му базовому значению); ► List (relative to specified base) - список (в о.е. по отношению к заданному базовому значению). Basevalue: rБазовое значение]. Пример: На рис. 4.9 приведены схема трехфазного мостового выпрямителя и окно ин­ струмента гармонического анализа. На верхнем графике рисунка показано вы­ ходное напряжение выпрямителя, а на нижнем - гистограмма амплитуд гар­ моник. 4.8. Создание отчета Блок Powergui может создавать отчет, включающий в себя значения измеряе­ мых переменных в установившемся режиме, токов и напряжений источников, нелинейных моделей и переменных состояния схемы. Отчет сохраняется в тек­ стовом файле с расширением rep. Для создания отчета необходимо нажать кноп­ ку Create report в окне блока Powergui. После чего появится окно Generate report (рис. 4.10), в котором можно задать разделы, включаемые в отчет. При настройке содержания отчета можно изменять следующие параметры: Items to include in the report: [Разделы, включаемые в отчет]. В отчет можно включить следующие разделы: ► Steady-State - значения измеряемых переменных в установившемся ре­ жиме; ► Initial states - начальные значения переменных; ► Machine load flow - параметры нагрузки электрических машин. Создание отчета 231 Vc Discrete, Ts = 1е-006 s. То Worlcspace .:.1 --· ·� г--:: =· · .,.....,,,.._ :.1 � .:] 1 1 ,� fi,:,�.-.. ,......... 3 .. �.::J .!,�� , Рис. 4.9. Определение гармонического состава напряжения выпрямителя Frequency used in the report: [Частота, используемая в отчете). С помощью пара­ метра можно выбрать значения частот, для которых бу­ дут сохраняться данные. Units: [Система измерения]. Выбор системы измерения: ► Peak values - амплитудные значения; ► RMS values - действующие значения. Format: [ Формат чисел]. Рис. 4. 10. Окно настройки отчета J r,,,rн•r,1fe "'Р tо..,,,,. ь... tllhe tep<rt Ps-ii·­ i:;-,.;ь,1- l!ISIЗ i;,-.. 1oeoм- fr«11JO!OCYIO.-.,W,,lnll\o�<,\; JsijНz �--·�--�--;] 232 Графический интерфейс пользователя Powergui Пример: Ниже приведен отчет для схемы рис. 4.3. В отчет включены все разделы. Зна­ чения переменных выводятся как действующие значения. SimPowerSystems Report. generated Ьу powergui, 11-Jan-2007 14:37:45 Model : C:\Users\Mlab_7\Work\steady_state_simulation.mdl. (1] Steady-State voltages and currents: States at 50 Hz : Il Series RLC Load = 2.8289е+ООО Arms -72.34 ° Measurements at 50 Hz Current Measurement 2.8289е+ООО А rms -72.34 ° Sources at 50 Hz : АС Voltage Sourcel 7.0711е+001 V rms 0.00 ° Nonlinear elements at 50 Hz (21 Initial values of States VariaЫes: 1: (Il) Series RLC Load = -3.8122е+ООО А (3) Machine Load Flow solution: There is no machine Ыосk in the model 4.9. Инструмент расчета характеристики намагничивания Инструмент позволяет создать mаt-файл с данными кривой намагничивания. Файл может быть использован при моделировании электрических машин и трансформаторов. Для запуска инструмента необходимо нажать кнопку Hysteresis Design Tool в окне Powergui В открывшемся окне (рис. 4.11) необходимо задать следующие параметры: Segments: [Участки]. Число линейных участков, аппроксимирующих кривую намагни­ чивания. Инструмент расчета характеристики намагничивания 233 А Specl8I - С] х Неlр . Ну8111'41М �&lе' Sltpi,ь: C:��811_6_�_aya\Ex... �ui\hyllertwj"'s"" 1 2_......,___ =J_ ' ·1···---·t·--····�····•·+······: • 1 ' • f . 0.85 ' !�111.�:: G) . , . ' ' =-....:......... Sl!lnliiin"':Fi� Л 11.2 �-lt/1114 0.015 ��lс,Ч '' ·1 1..· · · ·1.· · ·- : · · · (· · (· ). · · · 1.· • �.s · . 1 1 ' ·j·······:·· ' ' • • ' 1 1 .' • < ·······�······t······�·······:· ' ' 1 • - ' ' • • 1 • ' � 005 О Cllll'tlt 0:005 О'.01 O.t115 т.......,..,т�,t:llfoi TOL..�I']1!)-i"i1( f-7'1-liмd ...... Рис. 4. 11. Окно инструмента расчета характеристики намагничиваниR Remanent flux Fr (pu): [Остаточный магнитный поток Fr (о.е.)]. Значение потока в точке 1 на графике (рис. 4.11). Saturation Flux Fs (pu): [Поток насыщения Fs (о.е.)]. Значение потока в точке 2 на графике. Saturation current ls (pu): [Ток насыщения (о.е.)]. Значение тока в точке 2 на графике. Coercive current lc (pu): [Размагничивающий ток (о.е.)]. Значение тока в точке 3 на графике. dF/dl at coercive current: [Коэффициент dF/dl для значения размагничивающего тока]. Коэффициент наклона кривой для значения размагничивающего тока. Saturation region currents (pu): [Значения токов (о.е.)]. Вектор значений токов для участка насыщения. Число элементов в векторе должно быть равно размерности вектора параметра Saturation region fluxes. Требуется задать только положительную ветвь характе­ ристики. 234 Графический интерфейс пользователя Powergui Saturation region fluxes (pu): [Значения nотоков (о.е.)]. Вектор значений потоков для участка насыщения. Чис­ ло элементов в векторе должно быть равно размерности вектора параметра Saturation region currents. Требуется задать только положительную ветвь характеристики. T ransfo Nominal Parameters [Р (VA), V (Vrms), f (Hz)]: [Номинальные параметры преобразования [Р (ВА), V (В), f (Гц)]]. Данные значения используются для перехода к системе абсолютных единиц, если кривая гистерезиса задана в относительных единицах. Parameter units: [Система единиц измерения]. Значение выбирается из списка: ► pu - система относительных единиц; ► SI - международная система СИ. Zoom around hysteresis: [Увеличить область гистерезиса). При установленном флажке на графике ото­ бражается только область rnстерезиса, в противном случае - вся характеристика. Tolerances [TOL_F (% Fs) TOL_I (% Ic)]: [Погрешности расчета потока (в % от Fs) и тока (в % от Ic)]. Параметр доступен, если предварительно была выполнена команда Tools => Tolerances из меню Special. Для записи кривой намагничивания необходимо воспользоваться командой Save this model меню File. Значения кривой можно сохранить также и в текстовом файле с помощью команды Special => ЕМТР => Save in ЕМТР fonnat. 4. 1 О. Расчет параметров линии электропередачи Инструмент Compute RLC Line Parameters обеспечивает вычисление параметров моделей линий электропередачи на основании характеристик проводов и геомет­ рических размеров линии (рис. 4.12). Окно инструмента показано на рис. 4.13. Для расчета параметров ЛЭП необходимо ввести следующие данные: Units: [Система единиц]. Возможен выбор одной из двух систем счисления: ► metric - геометрические размеры задаются в метрах; ► english - геометрические размеры провода (фазы) задаются в дюймах, а размеры, определяющие расположение провода (фазы), - в футах. Frequency (Hz): [Частота]. Частота (Гц), для которой будут рассчитываться параметры. Ground resistivity (Ohm-m): [Сопротивление земли (Ом-м)]. Удельное сопротивление земли ( Ом·м). Пара­ метр может иметь значение, равное О. Number of phase conductors (bundles ): [Количество фазных проводов (расщепленных фаз)]. Расчет параметров линии электропередачи 235 Resisь vity , Рис. 4 12 Расчетная модель ЛЭП l!lliJEJ ) l'ow,•r l11юр,н,1m l 11ю [),1\,1 of [)cf,1111111rн•l'.11,,ri,.,t,.r•, rn,11 ,...,. Jrnetric F,�.....,V (Нt', f 3 UneGeomeuy -ofpn...-•� 50 -•f grщ',d wirH(-� G,-ou,dre,!&tl\ty(<tmmt (,-...,.,100,,,__ � pt,a.,, )( - pt р� Гз Г3'"'"i YIQ\'IW Ymr> С� (м) 1111) (Шl<to) type (m) ГТ-l -12.ао1s J 20.1255 1 20.7265 1 �J ! 1 з (; о ri-- гт- .... , -- -D--;j-B-99-1. 63-;.\-32 -.9-185-j;..32-9-185-\ Con!luelofi,ц,"81---e<l 111/111 fIOtwllo �-"�,3 Con.id:w ОС �15 1 1 '°""""") 3556 127 � _s- 1 0.375 0.5 1 1 J21д lo 04ЗJ.400 1 1 о 4945д / З.10036 1 1 1 20.7265 1 20.7265 1 . 1 20.7265 1 20 7266 1120016 1 .е 99163 32.9165 32.9185 � � pen,,elll>illy -,,.,_ -.. 2 p-�-•ffoct �or 4 1 а""'° "'1!11eof c<Jm;dQr 1 (с,,,} (degrff•J 64 6582 45 о ,:..-,:,itolit.C� '""--• Рис. 4. 13. Окно инструмена Compute RLC Line Parameters о 236 Графический интерфейс пользователя Powergui Number of ground wires: [Количество заземленных проводов). Параметр задает число грозозащитных тросов ЛЭП. Conductor (bundle): [Обозначение провода (расщепленная фаза)]. Фазные проводники обознача­ ются как р1, р2, рЗ и т. д. Грозозащитные тросы - как g1, g2 и т. д. Phase number: [Номер фазы). Фазы нумеруются 1, 2, 3 и т. д. Грозозащитные тросы имеют номер О. X(m): [Расстояние Х(м) ). Горизонтальное положение проводника (см.рис. 4.12). Ytower(m): [Расстояние Ytower (м)]. Расстояние от точки крепления проводника до земли (см. рис. 4.12). Ymin (m): [Расстояние У min (м)]. Минимальное расстояние от проводника до земли (см. рис. 4.12). Conductor (bundle) type: [Тип проводника (фазы)]. Номер типа проводника для данной фазы. Коли­ чество типов проводников и их параметры задаются в панели Cooductor and Bundle Characterisc, которая расположена в нижней части окна. Number of conductor types or bundle types: [Количество типов проводов или расщепленных фаз]. Параметр задает коли­ чество типов фазных проводов (включая расщепленные фазы). Include conductor skin effect: [Учитывать скин-эффект). При установке флажка учитывается эффект вытес­ нения тока на поверхность проводника. Conductor intemal inductance evaluated from: [Вычислять собственную индуктивность исходя из]. Параметр определяет на­ бор исходных данных, по которым рассчитывается собственная индуктивность провода. Параметр может иметь следующие значения: ► Т/D ratio - отношение Т/D для полого проводника, где Т - толщина про­ водника и D- наружный диаметр. Этот параметр может измениться между О и 0,5. Значение 0,5 задает сплошную жилу; ► Geometric Mean Radius (GMR)- средний геометрический радиус. Величи­ на параметра обычно предоставляется производителем провода; ► Reactance Ха at 1-foot spacing ( or 1-meter spacing if the U nits parameter is set to metric) - реактивное сопротивление проводника на единицу длины (1 м или 1 фут, в зависимости от выбранной системы единиц). Conductor outside diameter (ст): [Внешний диаметр проводника (см)). Conductor DC resistance (Ohm/km): [У дельное активное сопротивление проводника (Ом/км)]. У дельное активное сопротивление проводника на единицу длины. Расчет параметров линии электропередачи 237 Conductor relative penneabllity: [Относительная магнитная проницаемость проводника]. Number of conductors per bundle: [Количество проводников в расщепленной фазе]. Bundle diameter (ст): [Диаметр расщепленного проводника (см)). В случае если в фазе только один проводник, значение параметра равно О. Angle of conductor 1 (degrees): [Угол проводника № 1 (град)]. Угол а расположения первого проводника в рас· щепленной фазе относительно линии, параллельной земле (см. рис. 4.12). Пара­ метр определяет ориентацию проводников в расщепленной фазе. В случае если в фазе только один проводник, значение параметра равно О. Для вычисления параметров линии необходимо нажать кнопку Compute RLC Line Parameters в нижней части окна. Результаты расчета будут выведены в от­ дельное окно (рис. 4.14.). Полученные результаты можно передать в блок модели линии кнопкой Selected Ыосk (предварительно блок должен быть выделен), сохранить в Work­ space (кнопка Send RLC parameters to workspace) или поместить в отчет (кнопка Create а report). ; IJ1½pl,1y HI С V,1lш•·· l!llilEI Resistance matrix R_matrix (ohm/km). lnduclance matrix l_matrix (Нlkm): Capac�ance matrix C_matrix (F/km) 1 1661е-ООЭ -212б8е-ЩЭ-5ВЗ62мJ10 2.12688'009 1.2t 17е-003 -2. 12б8е-ОСS 5 В362мJ10 -21266е-ООЭ 11661..ООЭ ,,.,.::;-� ""'Р1 -U1e Doownqo6 flLC-ICeS f or ____. Рис. 4. 14. Окно результатов расчета параметров ЛЭП Глава 5 Создание электротехнических блоков пользователя 5.1. Принцип создания электротехнических блоков пользователя ..................................... 239 5.2. Модель нелинеRноrо резистора ........ 240 5.3. Модель насыщающегося реакто� .... 241 5.4. Модель двигателя постоянного тока с независимым возбуждением .......... 243 Принцип создания электротехнических блоков 239 5. 1 � Принцип создания электротехнических блоков пользователя Библиотека блоков SimPowerSystems достаточно обширна, однако иногда требуе­ мая пользователю модель устройства может в ней отсутствовать. Это касается, например, нелинейных резисторов, насыщающихся реакторов, новых типов элект­ родвигателей и т. п. В этом случае пользователь может сам создать нужную мо­ дель на основе блоков Simulink и блоков SPS. Общая структура модели показана на рис. 5.1. -------------------0- Series RLC Branch Voltage Measurement Simulink-model Subsystem Controlled Current Source Рис. 5 1. Общая структура модели На схеме к управляемому источнику тока параллельно подключен измеритель напряжения. Между выходом измерителя напряжения и входом источника тока включена Simulink-мoдeль, реализующая нужную вольт-амперную характерис­ тику устройства. Параллельно источнику также подключен развязывающий ре­ зистор. Его наличие обусловлено тем, что большое число блоков SPS выполнено на базе источников тока. При последовательном соединении таких блоков источ­ ники тока оказываются включенными последовательно, что недопустимо. Нали­ чие же развязывающего резистора позволяет включать такие блоки последова­ тельно. Величина сопротивления резистора должна выбираться достаточно большой, чтобы его влияние на характеристики создаваемоrо блока было ми­ нимально (обычно его величина для силовых электротехнических блоков выби­ рается в пределах 500-1000 Ом). Зажимами блока являются входной и выходной порты. Таким образом, для создания электротехнического блока пользователь прежде всего должен создать обычную Simulink-мoдeль, входом которой является сигнал, пропорциональный напряжению на зажимах устройства, а выходом - сиг­ нал, пропорциональный току устройства, а затем использовать эту модель в схе­ ме, представленной на рис. 5.1. При создании многофазных устройств, как прави­ ло, требуется создать модели отдельных фаз, а затем уже включить их по нужной схеме. 240 Создание электротехнических блоков пользователя 5.2. Модель нелинейного резистора Пусть вольт-амперная характеристика нелинейного резистора задана выражением: a i=lo(;J , rде i и и - мгновенные значения тока и напряжения; И0 - пороговое значение на­ пряжения; /0 - величина тока устройства при значении напряжения, равном по­ роговому; а - показатель степени, определяющий нелинейность вольт-амперной характеристики резистора (обычно лежит в пределах от О до 50). Схема блока нелинейного резистора показана на рис. 5.2. Модель Simulink ре­ зистора реализована с помощью блока Fcn. Численные значения параметров при­ няты следующими: И0 = 110 Кв; 10 = 500 А; а = 25. �----------------с=}- Series RLC Br.inch Volt.ige Ma�sur•m•nt 500"(u/110e3)"25 Fcn �Q V +I--..-.< Out1 Controlled Current Source Рис. 5.2 Схема блока нелинейного резистора Схема всей модели и диаграммы ее работы показаны на рис. 5.3. На схеме показаны датчики тока и напряжения, снимающие сигналы, пропор­ циональные этим переменным. Графопостроитель XY-Graph по этим сигналам строит вольт-амперную характеристику резистора. Временные диаграммы тока и напряжения также иллюстрируют нелинейность характеристики резистора. Некоторым недостатком такой модели резистора является наличие безынер­ ционного замкнутого контура, образованного датчиком напряжения, блоком Fcn и управляемым источником тока (рис. 5.2). Simulink выполняет расчет таких мо­ делей, используя итерационную процедуру, что несколько снижает скорость рас­ чета. Также при наличии замкнутых алгебраических контуров становится невоз­ можным расчет модели в ускоренном режиме (Acceleration mode). Для того чтобы разорвать безынерционный контур, достаточно включить в линию между датчи­ ком напряжения и источником тока фильтр с малой постоянной времени. Вели­ чина постоянной времени должна выбираться таким образом, чтобы изменение динамических свойств модели было минимальным (обычно величина постоянной Модель насыщающегося реактора 241 ХУ Gr.1ph Scope Volt.1g• Me.1surement .. ' 1□11( 1: 1 1• trl '1. r IS 05 .ОБ ·1 ,1 5 7 ' -з .; ·1 О Х:Ах,о Э 2 .. 10' Рис. 5.3. Схема модели с нелинейным резистором времени фильтра выбирается в пределах от 10-8 до 10-6 с). Схема модели нели­ нейного резистора с использованием фильтра показана на рис. 5.4. Временные диаграммы работы такой ·модели практически ничем не отличают­ ся от представленных на Р,ИС. 5.3. 5.3. Модель насыщающегося реактора Методика создания модели нелинейной индуктивности ничем не отличается от аналогичной методики для нелинейного резистора. ----------------..---� Seri■s RLC Br.1noh Votuge M■uur■m■nt бОО"(u/11083)"25 Tr.1nsf■r Fon Fon Controlled Current Souro■ Рис. 5.4. Схема модели нелинейного резистора с использованием фильтра 242 Создание электротехнических блоков пользователя Уравнения, описывающие насыщающийся реактор, выглядят следующим об­ разом: u=Ri+ d \\f dt' i = a\Jf + b\Jf3, где i, и, \Jf - мгновенные значения тока, напряжения и потокосцепления; а, Ь - ко­ эффициенты нелинейной зависимости между потокосцеплением и током. Первое из уравнений есть дифференциальное уравнение для напряжения на реакторе, а второе - алгебраическая зависимость между потокосцеплением и то­ ком реактора. Последнее уравнение может быть и другим, в зависимости от требо­ ваний к точности аппроксимации нелинейности реактора. Для создания Simulink-мoдeли реактора требуется сначала перейти к опера­ торной форме записи дифференциального уравнения для напряжения реактора (при нулевых начальных условиях): и(р) = Ri(p) + p'Jl(p), а затем получить передаточную функцию (ПФ), связывающую потокосцепление и напряжение: \\l(p) = [и( р)-Ri(p)J_!._ р Полученная передаточная функция и нелинейная зависимость между током и потокосцеплением дают возможность создать Simulink-мoдeль реактора. Схема Simulink-мoдeли показана на рис. 5.5. 60" u+40000" uлз i Fcn 2 ...-----------' Gain Рис. 5 5. Simulink-мoдeль насыщающегося реактора На схеме величю�а активного сопротивления реактора принята равной 2 Ом, а коэффициенты а = 60 и Ь = 40 ООО. Далее, используя шаблон SРS-модели {рис. 5.1), нетрудно создать модель насыщающегося реактора полностью. Схема всей модели, SРS-модель реактора и временные диаграммы работы модели пока­ заны на рис. 5.6. Несинусоидальный характер тока реактора иллюстрирует нелинейные свой­ ства реактора. Модель двигателя постоянного тока с независимым возбуждением 243 ,---------------------С}Voltag• Me.asurement eo•u+40000"u "3 fc n lntegr.ator ,....____<. 2i.------' �'f с-:] M• + � �Q+,-t-�2 V Out1 Controllod Current Sourc• - r nt • ►1 г т Г-с_______:]- ....., l Cu rrent Series RLC Br.a nch )С □ 1 Scope Рис. 5.6. SРS-модель насыщающегося реактора 5.4. Модель двигателя постоянного тока с независимым возбуждением 5.4. 1. Математическое описание дпт НВ и его Simulink-мoдeль Двигатель постоянного тока независимого возбуждения (рис. 5.7) описывается следующей системой дифференциальных и алгебраических уравнений в абсо­ лютных единицах: di . L ·-, и=е+ R ·t+ (1) dt dro M-Mc=f , (2) dt М= СмхФхi, (3) е = Сю хФхоо, (4) где и - напряжение на якорной обмотке двигателя; е - электродвижущая сила (ЭДС) якоря; i - ток якоря; Ф - поток, создаваемый обмоткой возбуждения; М электромагнитный момент двигателя; Мс - момент сопротивления движению; ro - угловая часто�;а вращения вала двигателя; R - активное сопротивление якор- 244 Создание электротехнических блоков пользователя J Рис. 5. 7. Двигатель постоянного тока независимого в озбуждения в озбужден.t я ной цепи; L - индуктивность якорной цепи;] - суммарный момент инерции якоря и нагрузки; С00 - коэффициент свя­ зи между угловой частотой вращения и ЭДС; См - коэф­ � фициент связи между током якоря и электромагнитным Яl<орь моментом. С точки зрения будущей модели входными воздействиями являются напряже­ ния якоря u и момент сопротивления движению Мс, выходными переменными электромагнитный момент двигателя Ми угловая частота вращения вала двигате­ ля (1), а переменными состояния - переменные, стоящие под знаком производной (ток якоря i и угловая частота вращения вала двигателя ffi). Остальные переменные, входящие в состав уравнений (1)-(4), являются параметрами, численные значения которых необходимо будет задавап, при проведении расчетов. Для создания модели, так же как и в случае насыщающегося реактора, сначала необходимо получить передаточные функции, применив к дифференциальным уравнениям преобразование Лапласа для нулевых начальных условий. Диффе­ ренциальное уравнение (1) даст ПФ, связывающую ток якоря и падение напряжения на якоре: 1 i(p) = [ и(р)- е(р)] (5) R+Lp Уравнение (2) дает передаточную функцию, связывающую динамический мо­ мент и угловую частоту вращения вала двигателя: 1 ro(p) = [М(р)-Мс(Р)] . (6) Обмотке /р Уравнения (3) и (4) остаются без изменений. В итоге, используя уравнения (3)-(6), нетрудно составить Simulink-мoдeль двигателя. Схема модели, а также графики электромагнитного момента и частоты вращения при прямом пуске двигателя показаны на рис. 5.8. В примере приняты следующие значения параметров двигателя (в единицах СИ): L = 0,001, R = 0,1, J = 10, Ст = 10, Cw = 10, И= 220, Fi = 1. Наброс нагрузки производится в момент времени 0,2 с, величина момента нагрузки равна 2500 Нм. 5.4.2. Модельдвигателя на базе источника тока Для создания SРS-модели двигателя на базе управляемого источника тока также можно воспользоваться общей схемой, приведенной на рис. 5.1. Выход датчика напряжения должен быть подключен к первому входу сумматора, а на управляю­ щий вход источника тока должен быть подан сигнал, пропорциональный току Модель двигателя постоянного тока с независимым возбуждением 245 Step Мс Tr.1nsfer F cn1 i L.s+-R Const,nt 1аюr\; Tr.1nsfer F cn □ J.s G.1in Scop• 1····· ·'·· ·· ···;· · ··� о.... -+. ··········::::·····,········..·· -=· '··········· �tc· ·т . 1 эо О : : ··1 . ··. 0.1 0.2 ! ........ о.э о., ' Рис. 5.8. Simulink-мoдeль ДПТ НВ якоря двиrателя (выходной сиrnал блока Transfer Fcn на рис. 5.8). Схема блока SРS-модели двиrателя, полная схема модели, а также графики тока якоря и угло­ вой частоты вращения вала показаны на рис. 5.9. При работе с моделью двиrателя следует иметь в виду, что она не является электротехнической в чистом виде, поскольку выходные сигналы электромаrнит­ ноrо момента и частоты вращения являются обычными однонаправленными без­ размерными сиrналами Simulink. Графики переменных, представленные на рис. 5.9, полностью повторяют соответствующие графики обычной Simulink-мo­ дeли двигателя, показанные на рис. 5.8. 5.4.3. Модель двигателя на базе источника напряжения Модель двигателя постоянного тока можно создать также и на базе управляемого источника напряжения и датчика тока. Схема замещения цепи якоря двиrателя содержит источник ЭДС, индуктивность и резистор. Последние два элемента можно исключить из Simulink-мoдeли, исключив соответственно и уравнение ( 1 ), а также передаточную функцию (5). Сами резистор и индуктивность можно доба­ вить к модели с помощью стандартноrо блока Series RLC Branch. В результате бу­ дет получена комбинированная модель двигателя (рис. 5.1 О). На рис. 5.1 О показа­ на также полная схема модели с подключенным источником питания двиrателя ( DC Voltage Source). �--------------------cJVoltage Measurement Мс Т ransfer F cn2 f\) � О) Series RLC Branch () о i:s: 1 :r J.s L.s+R ф (,) :::i ф :,о: Т ransfer F cn � о "О С ontrolled Current Source □ М: Step Мс1 w A [:-J Scope DPT �� DC Voltage Source Рис. 5. 9. SРS-модель ДПТ НВ на базе источника тока -J ,о;,,-1 ве � :r :s: е� l!lliJDj ·��==· �q•· • г � · · :·· · -Р,0/Ь AG� �r \· - : . . :. 1 О 'Тrlleof1мt 0.1 о 02 1lЗ 0..4 L ф С') :,о: :s: х О\ :::i о � tll :::J g g; о tll Q) � � :а Модель двигателя постоянного тока с независимым возбуждением 247 Графики переменных двигателя на рис. 5.10 не приведены, поскольку они пол­ ностью совпадают с представленными на рис. 5.8 и 5.9. Таким образом, используя изложенную выше методику, пользователь может создавать модели электротехнических устройств различной степени сложности. Мс Currtnl Me.1sur1m1nt Tr1nsfor Fcn1 .. 0••--------� А+ Strio• RLC Br,noh А· Sourct Sltp Мс1 Scopt А+ DPT DC Volt1go Scurco �fРис. 5. 10. SРS-модель ДПТ НВ на базе источника напряжения Глава 6 Библиотека нелинеиных моделеи Библиотека нелинейных моделей 249 Нелинейные модели электротехнических блоков являются обычными Simulink­ мoдeлями, имеющими однонаправленные входы и выходы, и используются в про­ цессе составления эквивалентной расчетной модели непосредственно перед нача­ лом моделирования (см. главу 8). Электротехнические блоки, представленные в библиотеке SimPowerSystems, как правило, недоступны для просмотра и редакти­ рования их содержимого. Однако доступ к устройству блоков SimPowerSystems все-таки может быть получен. Для этого необходимо открыть библиотеку нелиней­ ных моделей powerlib_models.mdl из папки ...toolbox\physmod\powersys\ powersys. Открыть библиотеку также можно и из основного окна MATLAB, набрав в команд­ ной строке powerlib_models. Библиотека нелинейных моделей (рис. 6.1) содержит 5 разделов: ► Continuous - непрерывные модели; ► Discrete - дискретные модели; ► Switch Current Source - модели ключей; ► Phasors - модели устройств для расчета векторным методом; ► Sources - модели источников. :, i ,t,r.нy pow,·rl1b modl'I', • l!!lli!IЗ Рис. 6. 1. Библиотека нелинейных моделей Знакомство с библиотекой powerlib_models может быть полезно для того, чтобы лучше понять устройство блоков SimPowerSystems и научиться делать их самому. Блоки из библиотеки нелинейных моделей можно использовать и для непосред­ ственного создания пользовательских моделей. Для создания своей модели раз­ работчику необходимо лишь дополнить нелинейную модель источниками тока и датчиками напряжения, как изложено в главе 4, посвященной пользовательским моделям. Для этого каждый блок ИМ€ет вход v, на который нужно подать сигнал, пропорциональный напряжению, и выход i, подключаемый к источнику тока. Библиотека непрерывных моделей Continuous (рис. 6.2) содержит два типа блоков: ► схемы для использования в SРS-моделях, созданных на базе источников тока (модели электрических машин, насыщающегося трансформатора, rро­ зозащитного разрядника и линии электропередачи с распределенными па­ раметрами); ► блоки логики переключения полупроводниковых устройств с естественной коммутацией (Breaker, Diode, Thyristor и Universal Bridge). 250 Библиотека нелинейных моделей □ в □ о Machln• modets: ..... wq MBPSS PMSW_mtd'l.11\lc:t: Тranstormer models: HTG PSS Ott,er moelels: O r.:;1 ппп в G U swttches: ��� i.,• ._, o,._..,o\L tнeaktl'МX Thrt•Lev.l Bricf_ge daUlltd_tnyl'id:Of (loglo,I) 6) " m dlodt Qo;lo.1) G] . OTO.IGBT Bti4g• Г-1 l.3 tnyrlst:41 (tooJo,,11) Рис. 6.2. Библиотека непрерывных моделей Блоки первого типа используют входное напряжение (выход модели про­ странства-состояния) и выходной ток, который подается на вход модели про­ странства-состояния. Для сложных моделей типа электрических машин, с не­ сколькими входами и выходами, используются векторные сигналы. Все нужные внутренние сигналы передаются большинством моделей в выходной вектор изме­ рений т. Например, модель асинхронной машины сохранена в блоке с названием Asynchronous_Machine. На вход модели подается вектор, состоящий из четырех напряжений: два напряжения ротора (VabR и VbcR) и два напряжения статора (VabS и VbcS). На выходе модели - вектор из четырех токов: два тока ротора (IaR и IbR) и два тока статора (IaS и IbS). Модель также выдает более 20 измеренных сигналов в выходной вектор т. Когда в SРS-модели используется блок асинхрон­ ной машины, этот вектор выходных измерений доступен через выход m, отобра­ жаемый на пиктограмме машины. Блоки второго типа содержат только логическую схему переключения устрой­ ства. Они определяют статус ключа ( «открыто1> или «закрыто�>). Статус ключа передается в S-функцию, которая производит вычисление переменных состояния Библиотека нелинейных моделей 251 модели ключа каждый раз, когда статус ключа изменяется. В выходной вектор т SРS-модели передаются значения тока и напряжения ключа. На выходе i блоков вырабатывается значение тока для ключей с принудительной коммутацией (IGBT; GTO и т. п.). Все логические схемы ключей векторизованы, то есть одна и та же схема используется для моделирования всех устройств одного вида. Дискретная библиотека содержит дискретные варианты блоков библиотеки Continuous. Библиотека Phasors (рис. 6.3) включает модели электрических машин, ключей и линии электропередачи, предназначенные для расчета схемы векторным методом. l!!IШEI ru11tн,ну µowcrllb ffiO(!ol•,/Pl1,1•,or:,. E•le о fdit Y:iew r;i; liJ 6 Ma.chln• models: FQrmat _ • 1: ,,.: □. .tlelp .. lfi Ui -:)- g ,. m 81mpfif/ecf_,yn,o_m.1«1 � +... м,�,u,,m,r,t..J'mp1ttud, щ� 1� ....� Mt•si.,rem,nt_t,111,�ndudtA�gl• lltllt8S\lrtmtnt_Rtallm10 Рис. 6.3. Библиотека моделей для расчета векторным методом Библиотека Switch Current Source (рис. 6.4) содержит молели силовых элект­ ронных устройств, которые смоделированы с использованием источников тока. Эти устройства - диод и тиристор, для которых индуктивность во включенном со­ стоянии Lan > О, и три устройства с принудительной коммутацией: запираемый ти­ ристор (GTO), канальный полевой униполярный МОП-транзистор (MOSFET) и биполярный транзистор с изолированным затвором (IGBT). Все эти модели не­ прерывные и содержат внутреннюю индуктивность, которая позволяет осуществ­ лять быстрые переключения преобразователей с принудителшой коммутацией. Что касается электрических машин, эти блоки используют входное напряжение (выход модели пространства-состояния) и выходной ток, который подастся на вход модели пространства-состояния. Все эти модели векторизованы. При использовании моделей на базе источников тока следует иметь в виду, что такие модели нельзя включать последовательно с индуктивностью. Для устране- 252 Библиотека нелинейных моделей □□. О' О' □·□· e dio4• m thytiltor 1 m detall•ct_t,.,._.., 1 m gto t m g m 1081 mosfet Рис. 6.4. Библиотека моделей ключей ния этого ограничения следует шунтировать либо индуктивность, либо саму мо­ дель резистором с достаточно большим сопротивлением. Блок выключателя Breaker и блоки силовых электронных ключей имеют встроенную демпфирующую RС-цепь. Демпфирующая цепь может бьrrь и чисто активной при Cs = Inf или реактивной при Rs = О. Для устранения демпфирующей цепи необходимо задать Rs - Inf и Cs - О. Библиотека Sources (рис. 6.5) содержит модели источников. В состав библиотеки входят Simulink-мoдeли источников постоянноrо и перемен­ ноrо напряжений для расчета переходных процессов и расчета векторным методом. G в O.CVott.1oeSo�•_C1nptк G [@ ACS01,1f'C4 в ACS01.1toti_Cmpьc ThfttPhиe8ou,oe ThrtePh111t1Sou'"_Cmptк Рис. 6.5. Библиотека источников Текущая версия SimPowerSystems не позволяет пользователю добавлять бло­ ки в библиотеку powerlib.mdl и, соответственно, в библиотеку нелинейных моделей powerlib_models.mdl. Однако пользователь может изменять блоки в нелинейной библиотеке. Для этого необходимо файл библиотеки powerlib_models.mdl скопиро­ вать в текущую (рабочую для данного сеанса работы с MATLAB) или иную ди­ ректорию. Во втором случае необходимо задать путь к данной папке с помощью меню Set Path основного окна МАТLАВ. При этом путь к данной папке должен быть определен раньше, чем путь к стандартной папке SimPowerSystems. После выполнения описанной выше процедуры пользователь может менять содержимое блоков, их названия, номера входов и выходов, а также параметры в окне диалога. Все изменения в библиотеке вступят в действие при следующем се­ ансе моделирования. Глава 7 Основные команды MATLAB для управления SРS-моделью 7 .1. � �зецмм SРS•мадели p)Wtr_lnit ........,................................., 254 7.2. Фунесциядм�оnределения М8Тем&ТМ'f8Сlt.ОЙ мо деяи линейной частм зnе1СТричеокой схем ы power_atatespace ............................... 255 7.3. Фун1СЦМR щ�я анализа мо дели аnеnрмческ.ой схемы power_analyze " 258 7.4. Функция для расчета параметров линии э.nектроnередачи power _ltneperam .................................. 259 254 Основные команды MATLAB для управления SРS-моделью При разработке графического интерфейса пользователя, создании S-функций и тому подобных задач, требующих управления конфигурацией, параметрами и ра­ ботой Simulink- и SimPowerSystems-мoдeлeй, допускается использовать спе­ циальные команды (функции) языка MATLAB. Для работы с SРS-моделью до­ пускается применять те же самые команды, что и для Simulink-мoдeлeй (add_line, add_Ыock, get_param, set_param и т. д.). При этом следует иметь в виду, что не­ которые Simulink-кoмaнды будут иметь ограничения. Так, например, команда set_param не позволяет изменять параметры SРS-блоков в процессе расчета как для Simulink-блoкoв. Для SРS-моделей есть и свои особенные команды. Их всего три: ► powerinit - задание начальных условий SРS-модели; ► power_statespace - нахождение математического описания линейной моде­ ли электрической цепи в уравнениях пространства состояний; ► power2sys - анализ электрической схемы, построенной с помощью SimPo­ werSystems. В большинстве случаев пользователю нет необходимости принудительно вы­ зывать эти функции, поскольку они вызываются SimPowerSystems автоматиче­ ски при начале расчета либо из графической среды пользователя Powergui. 7. 1 . Функция инициализации SРS-модели power_init Назначение: Задание начальных условий. Синтаксис: power_init('system','look') - команда выводит начальные значения перемен­ ных модели system. power_init('system','reset') - команда устанавливает нулевые начальные значе­ ния переменных модели system. power_init('system','steady') - команда устанавливает начальные значения пе­ ременных модели system таким образом, чтобы расчет начался из точки устано­ вившегося режима. power_init('system','set',p) - команда устанавливает начальные значения пере­ менных модели system, заданные в векторе р. Порядок следования переменных можно определить командой powerinit('system','look'). power_init('system','setb', 'StateVariaЫeName', value) - команда устанавливает начальное значение value переменной StateVariaЬleName модели system. Пример 1: На рис. 7.1 показана модель последовательного колебательного контура, под­ ключенного к источнику постоянного тока. Имя файла модели - sys.mdl. Выполнение команды powerinit(sys,'look') в окне МАТLАВ позволяет увидеть начальные значения переменных модели: Функция для определения математической модели линейной части Г 255 it---� C+urrent------i asurement l � АС Voltage Source ооо; оа, 0015 002 01115 Qаэ Series RLC Branch Т Рис. 7. 1. Расчет колебательного контура с нулевыми начальными условиями Current values of the 2 electrical initial states of your model. Note that your model have а total of 2 Simulink states 1: Il Series RLC Branch = О 2: Uc Series RLC Branch = О. На осциллограмме видно, что начальное значение тока контура равно значе­ нию, найденному с помощью функции powerinit. Пример 2: Команда power_init('sys','setb','Il_Series RLC Branch',-50) задает значение тока в RLС-цепи, равное -50 А. На рис. 7.2 показана осциллограмма тока для расчета схемы с указанным начальным значением тока. 7.2. Функция для определения математической модели линейной части электрической схемы power_statespace Назначение: Функция рассчитывает матрицы А, В, С, В уравнений пространства-состоя­ ния, описывающих линейную часть электрической схемы: х=Ах+Ви, y=Cx+Du, 256 Основные команды MATLAB для управления SРS-моделью )1 it--- �c:,,.�t--i j Menurement j � АС Volt.1ge Source Series RLC 81.1nch т Рис. 7.2. Расчет колебательного контура с ненулевыми начальными условиями rде х - вектор состояния (токи индуктивностей и напряжения конденсаторов); и - вектор входных воздействий; у - вектор выходных сигналов; А, В, С, D - мат­ рицы: системы, входа, выхода и обхода соответственно. Функция power_statespace вызывается автоматически функцией power_analyze при начале расчета модели. Можно также запускать функцию на выполнение не­ посредственно из командного окна МАТLАВ или из m-файла. Функция позволя­ ет использовать возможности SimPowerSystems, которые недоступны из графи­ ческого интерфейса, например с ее помощью можно определить трансформатор и взаимную индуктивность с более чем тремя обмотками. Линейная часть схемы может содержать любую комбинацию источников на­ пряжения и тока, RLС-цепей, мноrообмоточных трансформаторов, взаимоиндук­ тивностей и ключей. Переменными состояния будут являться токи индуктивно­ стей и напряжения конденсаторов. Модель пространства-состояния линейной части электрической схемы (матрицы А, В, С, D и вектор начальных значений хО), вычисленная функцией power_statespace, может использоваться в системе Simu­ link с помощью блока State-Space. Нелинейные элементы электрической схемы (механические или электронные выключатели, трансформаторы с насыщающимися сердечниками, электрические машины, линии с распределенными параметрами и т. д.) могут быть соединены с линейной частью схемы. Нелинейные Simulink-мoдeли соединяются с линейной частью схемы с помощью входных (напряжения) и выходных (токи) переменных. Синтаксис: Вызов функции должен выполняться минимум для 7 аргументов: [A,B,C,D,states,x0,x0sw,rlsw, u,x,y,freq,Asw,Bsw,Csw,Dsw,Hlin] = power_statespace(rlc,switches,source,line_dist,yout,y_type,unit), Функция для определения математической модели линейной части 257 где А, В, С, D -матрицы: системы, входа, выхода и обхода соответственно для случая, когда все ключи схемы разомкнуты; states - строковая матрица, содержа­ щая имена переменных состояния. Каждое имя должно находиться в отдельной строке и иметь следующий формат: ► Il_bxx_nzz1_zz2-ток индуктивности; ► Uc_bxx_nzz1_zz2 - напряжение на конденсаторе, где хх - номер ветви; zz1-номер первого узла ветви; zz2-номер второго узла ветви; ► хО-вектор начальных значений переменных состояния; ► xOsw-вектор начальных значений токов ключей; ► rlsw-матрица размерностью (nswitch, 2) содержащая значения R (Ом) и L (Гн) ключей, где nswitch-число ключей в схеме; ► u, х, у-матрицы, содержащие комплексные значения установившихся ве­ личин: u(ninput,nfreq) - входные величины, y(noutput,nfreq) - выходные величины, x(nstates,nfreq) - переменные состояния, где nfreq-размерность вектора freq, содержащего значения частот источников схемы; ► Asw,Bsw,Csw,Dsw -матрицы уравнений пространства-состояния схемы для закрытых состояний ключей. Каждый закрытый ключ, имеющий внутреннюю индуктивность, добавляет одну переменную состояния схемы; ► Hlin - трехмерный массив (nfreq, noutput, ninput) комплексных взаимных сопротивлений вход-выход для каждого значения частоты; ► rlc-матрица цепей, задающая топологию схемы; ► switches - матрица ключей, содержащая параметры ключей. Является пус­ той, если ключи в схеме не используются; ► source - матрица источников, содержащая параметры источников. Являет­ ся пустой, если источники в схеме не используются; ► line_dist - матрица линий с распределенными параметрами. Является пустой, если линии с распределенными параметрами в схеме не исполь­ зуются; ► yout - строковая матрица, задающая выражения для расчета выходных пе­ ременных. Каждое выражение может содержать линейную комбинацию значений переменных состояния и их производных; ► у_type - вектор целых чисел, определяющий вид выходной переменной (О -напряжение, 1-ток); ► unit - строковый параметр, задающий единицы измерения. Если значение параметра равно "ОНМ", то значения R, L и С задаются в Ом для базовой частоты, определяемой параметром freq__sys (по умолчанию - 60 Гц). Если значение параметра равно "О HU", то значение R задается в Ом, L-в mГн и С-в мкФ. Функция power_statespace может вызываться также с 12, 13, 14 или 16 аргу­ ментами. Подробности о форматах каждого аргумента и использовании функции можно найти в руководстве пользователя для SimPowerSystems [13]. 258 Основные команды MATLAB для управления SРS-моделью 7.З. Функция для анализа модели электрической схемы power_analyze Назначение: Функция power_analyze рассчитывает матрицы А, В, С, D уравнений про­ странства-состояния, описывающих модель: х===Ах+Ви, y===Cx+Du, где х - вектор состояния (токи индуктивностей и напряжения конденсаторов); и - вектор входных воздействий; у - вектор выходных сигналов; А, В, С, D - мат­ рицы: системы, входа, выхода и обхода соответственно. Функция power_analyze вызывается автоматически из Simulink при начале расчета модели. Можно также запускать функцию на выполнеtше непосредствен­ но из командного окна МАТLАВ или из m-файла. Синтаксис: power2sys('sys','structure') Команда создает структуру для модели sys. Поля структуры имеют тот же смысл, что и данные, возвращаемые функцией power_statespace. Подробности о способах использования функции power_analyze можно иайти в руководстве пользователя для SimPowerSystems [13]. Пример: Для модели, показанной на рис. 7.1, вызов функции psb = power_analyze ('sys','structure') дает следующий результат: psb = circuit: states: inputs: outputs: А: В: С: D: хО: Aswitch: Bswitch: Cswitch: Dswitch: x0switch: uss: xss: yss: \'sys" [2х21 char] "U_AC Voltage Source" "I Current Measurement" [2х2 douЫe] [2xl douЫe] [ 1 О] о [2xl douЬle] [2х2 douЫe] [2xl douЬle] [1 О] о [0xl douЫe] 100 (2xl douЫe) l.2135+34.8138i Функция дпя расчета параметров линии электропередачи power_lineparam 259 Hlin: frequencies: LoadFlow: OscillatoryModes: 0.0121+ О.З481i 50 [) [2хЗ9 char) Значения полей структуры psb могут быть найдены следующим образом: >> A=psb.A А ; -100 1000 -1000 о >> B;psb.B в = 1000 о >> C=psb.C с = 1 о >> D=psb.C D = 1 О Остальные поля структуры находятся аналогично. 7.4. Функция для расчета параметров линии электропередачи power_lineparam Для расчета параметров линии электропередачи используется функция power_lineparam. Функция открывает графический интерфейс для ввода исход­ ных данных и нахождения параметров ЛЭП. Она может быть вызвана также ко­ мандой Compute RLC Line Parameters из блока Powergui. Основные особенности функции рассмотрены в п. 4.10, посвященном графи­ ческому интерфейсу пользователя Powergui. Глава 8 Как SimPowerSystems работает 8.1. Алгоритм расчета SimPowerSystems-мoдenи .................. 261 8.2. Выбор метода мнтеrрироеанмя .......... 263 8.З. Особенности моделмроеания схем смnовой эnе!СТ1)0НМl(И ••.......•.........•..•.• 264 Алгоритм расчета SimPowerSystems-мoдeли 261 8. 1. Алгоритм расчета SimPowerSystems-мoдeли После того как SimPowerSystems-мoдeль построена, она может быть запущена на расчет так же, как любая модель Simulink. Перед началом каждого расчета проис­ ходит инициализация модели. При инициализации вычисляется модель про­ странства состояний электрической схемы и строится эквивалентная модель, ко- Библиотека Simulink Создание схемы БибJШотеJСа SimPow erSystem Начало расчета power_analyze • анализ топологии схемы • получение парамеiров блоков power _statespace • вычисление модели просiранства состояний линейной части системы • расчет установившегося режима и определение начальных значений переменных Непрерывный метод Дискретный метод Дискреmзация (метод Т аст1D1а) БибJD10ТВ1Са рowerlib _models Powel"gui power_analyze • посiроение Simulink-мoдeли • инициализация нелинейных моделей • расчет установившегося режима • установка начальных значений • инициализация элекiрическнх машин (LoadFlow) • ра счет импеданса цепи SimuJink начало расчета Рис. 8. 1. Алгоритм расчета: 262 Как SimPowerSystems работает торая может рассчитываться в Simulink. Вызов функции power_analyze на_чинает этот процесс (рис. 8.1 ). Функция power_analyze выполняет при инициализации несколько этапов. 1. Сортировка SimPowerSystems-блoкoв, получение параметров блоков, опреде­ ление топологии схемы и автоматическое присвоение номеров узлам схемы. При сортировке блоки разделяются на блоки SimuHnk и SimPowerSystems­ блoки. Кроме того, SРS-блоки делятся на линейные и нелинейные. 2. Вычисление модели пространства состояний линейной части системы функ­ цией power_statespace. На этом же этапе происходят расчет установивше­ гося режима и определение начальных значений переменных. Если задана дискретизация модели, то определяется дискретная модель схемы в про­ странстве состояний. При этом используется метод Тастина. 3. Строится Simulink-мoдeль схемы и запоминается внутри одного из измери­ тельных блоков. Это означает, что на схеме должен присутствовать хотя бы один измерительный блок (Current Measurement, Voltage Measurement, Three-Phase VI Measurement или Multimeter). Связь между эквивалентной Simulink-мoдeлью и измерительными блоками осуществляется с помощью блоков Goto и From. В эквивалентной Simulink-мoдeли используется блок State-Space или блок S-function для моделирования :Линейной части системы. Для моделирования не­ линейных SimPowerSystems-блoкoв испот,зуются Simulink-мoдeли из библиоте­ ки powerlib_models. Для моделирования источников энергии используются бло­ ки источников Soures библиотеки Simulink. Блок Powergui, помещенный в модель, позвnляет задать начальные значения переменных модели, выполнить расчет установившегося режима, осуществить инициализацию схемы, содержащей электрические машины, и найти полное со­ противление (импеданс) цепи. Связь нелинейных моделей с Simulink-мoдcлью показана на рис. 8.2. Нелиней­ ные модели включаются в цепи обратных связей линейной части Siпшlink-модели. После завершения и1шциализации фуt1кuией power_analyze программа Siinu­ link начинает расчет модели. Линейная модель Источники (входы) � i u Матр�щы уравнений пространства-состояЮIЯ Непинейные модели s - у Выходы измерительных блоков - Рис. 8.2. Связь нелинейных моделей с Siniulink-мoдeл�,ю Выбор метода интегрирования 263 8.2. Выбор метода интегрирования При расчете модели пользователь имеет возможность выбора метода интегрирова­ ния - непрерывного или дискретного, с переменным или фиксированным шагом. Для сие.тем небольшого размера расчет непрерывным методом с переменным шагом, как правило, более точен. Алгоритм с переменным шагом также быстрее, поскольку число шагов оказывается меньшим, чем при расчете с фиксированным шагом и сопо­ ставимой точностью. При расчетах устройств силовой электроники методы с пере­ менным шагом дают большую точность, поскольку определяют прохождение через нуль токов полупроводниковых приборов с высокой точностью так, что не наблюда­ ется разрывов сигналов. Однако для больших систем (систем, имеющих большое чис­ ло переменных состояния или нелинейных блоков) высокая точность непрерывных методов приводит к замедлению расчета. При этом под большой системой понимает­ ся (условно) система, имеющая более 30 переменных состояния и более 6 'К.llючей. В таких случаях выгодно провести дискретизацию модели. Большинство из имеющихся в Simulink методов расчета с переменным шагом дает хорошие результаты при расчете линейных систем. Однако схемы, содержа­ щие нелинейные элементы, требуют методов решения для жестких систем. Самая высокая скорость расчета нелинейных систем дО'стиrается методами ode23t или ode15s с параметрами, заданными по умолчанию: ► Solver (метод): ode23t или ode15s; ► Relative tolerance (относительная погрешность) = 1е-3; ► Absolute tolerance (абсолютная погрешность)= auto; ► Maximum step size (максимальный шаг)= auto, ► InitiaI step size (минимальный шаr) = auto; ► Initial step size (начальный шаr) = auto; ► Maximum order (максимальный порядок для ode15s) = 5. Обычно для абсолютной погрешности и максимального размера шага можно выбирать значение auto. В некоторых случаях приходится ограничивать макси­ мальный размер ша�·а и абсолютную погрешность. Обычными рекомендациями при выборе максимального размера шага являются: ► шаг не должен превышать величины О, 1 минимальной постоянной времени системы; ► при наличии в схеме источников переменного напряжения или тока шаг расчета не должен превышать 0,01-0,02 периода источника с максималь­ ной частотой. Выбор абсолютной погрешности зависит от ожидаемых максимальных значе­ ний сигналов в схеме. Рекомендуемое соотношение здесь: 0,01-0,001 максималь1-юго значения сигнала. Например, если значения токов и напряжений схемы со­ ставляют тысячи ампер или вольт, то абсолютная погрешность может быть выбрана О, 1 или даже 1,0. Если же в схеме максимальные значения токов и напря­ жений лежат в пределах 10-100 А или В, то абсолютная погрешность должна быть выбрана на уровне 0,001-0,01. 264 Как SimPowerSystems работает При расчетах схемы векторным методом (Phasor Simulation) рекомендуется выбирать метод расчета ode15s или ode23t и шаг расчета, равный периоду напря­ жения источников. 8.3. Особенности моделирования схем силовой электроники Для моделирования устройств силовой электроники используются два метода. ► Если внутреннее сопротивление ключа имеет только активный характер (R0n > О), а внут ренняя индук тивность отсутствует (L00 = О), то модель ключа рассматривается как часть линейной схемы. В процессе расчета при изменении состояния ключей производятся пересмотр топологии схемы и переопределение ее модели пространства-состояния. Этот метод всегда ис­ пользуется при наличии в схеме блоков Breaker и Ideal Switch, поскольку они не имеют внутренней индуктивности. Данный метод применяется та к­ же для блоков Diode и Thyristor, если для них задано R0n > О и L0n = О, а так­ же для блока U niversal Bridge в том случае, если в качестве приборов моста выбраны GTO, MOSFET, IGBT или Ideal Switches (для этих устройств в составе моста - Lon = О). ► Если ключ содержит индуктивность (Diode и Thyristor с 4'n > О, IGBT, MOSFET или GTO), то он моделируется как нелинейный элемент на базе ис­ точника тока в цепи обратной связи линейной схемы, как показано на рис. 8.2. �--l:i :-�ll � 01Н С 7,84 Ohms J � v ,_,C•-•M•uг " Synohronized e-Pulи GenerDor 208 V 1ms L·L З.рhае Source V&I ·"NVV\Aj == ' о . ' �vt:J·i;;::1 --· О O.tn 002: О.Ф О.О' Рис. 8.3. Модель тиристорного преобразователя Q.OI Q.05 O.CV O.at 0.18 Q.1 Особенности моделирования схем силовой электроники 265 Пример: Для многих задач внутреннюю индуктивность ключей можно задать равной нулю. Однако для ряда задач необходимо задавать ненулевое значение индуктив­ ности. На рис. 8.3 показана схема трехфазного тиристорного преобразователя, ра­ ботающего на активно-индуктивную нагрузку. Если индуктивность L0n = О, то в процессе коммутации, который происходит квазимгновенно, два тиристора мос­ та шунтируют источник питания. Ток в таком контуре ограничивается только ак­ тивными сопротивлениями самих тиристоров и сопротивлением источника. По­ скольку эти сопротивления весьма малы (R0n = 0,01 Ом), ток в короткозамкнутом контуре достигает очень больших значений (более 7 кА). Для исключения этого явления следует задавать конечное значение Lon · На рис. 8.4 показаны осциллограммы для той же самой схемы, но при L0n = 1 мкГн. Как видно из осциллограмм, броски тока отсутствуют. Коммутация вентилей в этом случае производится за время, определяемое величиной L0n и уровнем тока в вентилях. .. ;� ':�: :�."': --· 1!!0 ОО . Q.O, . , 0.02 003 • •. О.О. • 0..05 11.05 ! :· :'· 1 ... • .... -�·-·· OJJ1 D(8 О.ОЭ 01 Рис. 8.4. Ток и напряжение преобразователя при L0n = 1 мкГн Глава 9 Советы пользователям SimPowerSystems 9.1. RLC •ПО-русски• ................................. 267 9.2. Задание начальных условий расчета .............................................. 268 9.3. Модернизация блока Fourlar .............. 270 9.4. Особенности блока Breaker ............... 271 9.5. Моделирование выбега электродвигателя .............................. 271 9.6. Модель операционного усилит еля ..... 272 9.7. Открытие и сохранение моделей ранних версий .................................... 276 9.8. Проведение серии вычислительных экспериментов ................................... 278 RLC «по-русски» 267 9. 1. RLC «по-русски» Условные графические обозначения элементов на пиктограммах блоков в биб­ лиотеке SimPowerSystems не полностью соответствуют принятым в России. Это существенно затрудняет восприятие и анализ моделей. Особенно сильно отлича­ ется от принятого в России изображение резистора. Также имеются отличи,� в изображениях индуктивности, конденсатора и других элементов. В предыду­ щих версиях MATLAB пользователь мог сам отредактировать нужный файл (Ьlocicon.m) и получить требуемые изображения элементов. Однако в текущую версию исходный файл Ьlocicon.m не включен, и отредактировать его невозмож­ но. Но выход из создавшейся ситуации все же есть - необходимо использовать файлы более раю1ей версии MATLAB (MATLAB 6.5). Процедура получения новых графических изображений элементов сводится к следующим шагам. 1 . Изменить файл Ыocicon.m из MATLAB 6.5 для отображения <1русских1> символов элементов.Ниже приводится фрагмент файла Ыocicon.mс новы­ ми значениями векторов, обеспечивающих построение условного изобра­ жения последовательной RLС-цепи (строки 31-38 и 144-1 51 для версии MATLAB 6.5): rx=(O 30 30 120 120 150 120 120 30 30]; ry=(O О -14 -14 О О О 14 14 О]; lx = [О 25 25 25.15 25.45 26.1 26.8 28 29 30.5 32 33.5 35.5 37.5 39.5 41.5 43 44:5 46 47.1 48.2 49 49.45 49.85 50 50 50.15 50.45 51.1 51.8 53 54 55.5 57 58.5 60.5 62.5 64.5 66.5 68 69.5 71 72.1 73.2 74 74.45 74.85 75 75 75'.15 75.45 76.1 76.8 78 79 80.5 82 83.5 85.5 87.5 89.5 91.5 93 94.5 96 97.1 98.2 99 99.45 99.85 100 100 100.2 100.5 101.1 101.8 103 104 105.5 107 108.5 110.5·112.5 114.5 116.5 118 119.5 121 122.1 123.2 124 124.5 124.8 125 125 150]; ly = (О О О 1.93 3.32 5.13 6.46 8.12 9.17 10.4 11.2 11.8 12.3 12.5 12.3 11.8 11.2 10.4 9.17 8.01 6.46 4.9 3.67 1.93 О О 1.93 3.32 5.13 6.46 8.12 9.17 10.4 11.2 11.8 12.3 12.5 12.3 11.8 11.2 10.4 9.17 8.01 6.46 4.9 3.67 1.93 О О 1.93 3.32 5.13 6.46 8.12 9.17 10.4 11.2 11.8 12.3 12.5 12.3 11.8 11.2 10.4 9.17 8.01 6.46 4.9 3.67 1.93 О О 1.93 3.32 5.13 6.46 8.12 9.17 10.4 11.2 11.8 12.3 12.5 12.3 11.8 11.2 10.4 9.17 8.01 6.46 4.9 3.67 1.93 О О о) ; cxl [О 60 60 60]; [О О -25 25]; cyl сх2 (90 90 90 150); су2 [25 -25 О О]; 2. -Изменить имя этого файла на Ыocicon_.m. 3. Создать копию файла powericon.mпод именем powericon_.m. 4. В файлах powericon_.m и Ыocicon_.m изменить имя функции Ыocicon на Ыocicon_. 5. Транслировать файлы powericon_.mи Ыocicon_.mв р-файлы: 268 Советы пользователям SimPowerSystems pcode ('Ьlocicon_') pcode ( 'powericon ') 6. Поместить файлы blocicon_.• в папку ...powersys\powersys\private. 7. Поместить файлы powericon_."' в папку ...powersys\powersys. 8. Открыть библиотеку Elements, щелкнув на ней правой клавишей мыши и выполнив команду Open the Elements Library. 9. Разблокировать библиотеку командой Edit ⇒ Unlock library. 1О. Для блока Series RLC Branch добавить на вкладку Initializationмаски блока вызов функции powericon_: [sl_,s2_,s3_,s4_,rl_,r2_,ll_,l2_,cl_,c2_,c3_,c4_]�powericon_ ('Series RLC Branch',Resistance,Inductance,Capacitance); 11. Для блока Series RLC Branch изменить на вкладке Iconмаски блока коман­ ду рlоt: plot (sl ,s2 ,s3 ,s4 ,rl ,r2 , 11 , 12 ,cl , с2 , сЗ ,с4 ) ; 12. Сохранить библиотеку� - - - - - 13. В главном окне МАТLАВ выполнить обновление кэша - File ⇒ Preferences ⇒ General. Нажать кнопку Update Toolbox Path Cache. 14. Перезапустить МАTLAB. Результатом проделанных операций будет новое изображение пиктограммы блока (рис. 9.1 ). Series RLC Branch Series RLC Branch Рис. 9. 1. Старое и новое изображения блока Series RLC Branch Для изменения пиктограмм остальных блоков нужно внести изменения на вкладках Icon и Initializationмаски блока, аналогичные указанным выше. 9.2. Задание начальных условий расчета При выполнении расчета электрической схемы начинающий пользователь может получить довольно неожиданный результат, обусловленный не заданными спе­ циально начальными условиями. Дело в том, что перед началом расчета Simulink выполняет расчет у.становившегося режима и результаты этоrо расчета принима- Задание начальных условий расчета 269 ет в качестве начальных условий для расчета на заданном интервале времени. На рис. 9.2 показана схема, в которой источник постоянного напряжения подключен к активно-индуктивной нагрузке. Как видно из графика, величина тока равна 100 А и не меняется на всем протяжении расчета, что не соответствует представ­ лениям о переходных процессах в цепях, содержащих реактивные элементы. .---------+ ,f,�1 j=.L Т Curre�tJ Measurement DC Volt.1ge Source - С1 х ,оо------�----< -- 80 . 60 • ) '° -­ --· :;о Series RLC Branch ОО j ··< ОсО! 002 .. QОЭ 004 005 006 Рис. 9. 2. Установившийся режим в RL-цепи Для того чтобы принудительно задать нулевые начальные условия, требуется в окне параметров блока установить флажок для параметра Set the initial inductor cшrent (задать начальный ток индуктивности) и ввести нулевое начальное значе­ ние тока в графе Inductor initial current. На рис. 9.3 показана модель RL-цепи и график изменения тока в ней при нуле­ вых начальных условиях. Начальное значение можно также задать с помощью блока Powergui или функ­ ции power_init . .---------+ ,t,�I jА_Т Curre�tJ Me.1surement DC Voltage Source Series RLC в�n� l!llbl · s,,1,,• 100 60 80 '° ..._ .. ............... :;о О О ..., QO, 0.02 о.оэ О.ОС Q(JS 0.06 ].__________________,J Рис. 9.3. Переходный процесс в RL-цепи 270 Советы пользователям SimPowerSystems 9.3. Модернизация блока Fourier Б состав дополнительной библиотеки измерительных блоков входит блок Fourier, позволяющий измерить амплитуду и фазу гармонических составляющих сигнала. Для определения амплитуды и фазы гармоники в параметрах блока необходимо задать Fundamental frequency (базовую частоту) и Harmonic n (номер гармоники). На выходах блока формируется magnitude (амплитуда гармоники) и angle (фаза гармоf!ики). На практике исследователя довольно часто интересует не одна или небольшое число гармоник, а их достаточно широкий диапазон. Однако блок по­ зволяет получить характеристики лишь одной гармоники. Это весьма неудобно при исследовании большого числа гармоник, поскольку число блоков Fourier, ко­ торые следует установить на схеме, будет равно числу исследуемых гармоник. Для устранения этого недостатка можно модернизировать блок Fourier таким образом, чтобы в, окне параметров задавать диапазон или вектор номеров гармо­ ник, а на выходах иметь векторы амплитуд и фаз сигналов. Для модернизации блока необходимо сначала разорвать связь блока с библиотекой. Для этого требу­ ется выделить блок и выполнить последовательность команд меню Edit ⇒ Link options ⇒ DisaЫe Link. После этого можно открыть блок командой Edit ⇒ Look under mask и приступить к редактированию. Новая схема блока показана на рис. 9.4. ��l'•'<IГ I f Оt/Гl('Г /lr,,1fy.·eг I [lle fdlt .\ll6W Slmulatlon Fgrtnat Iools tjelp l!IGJEJ Рис. 9.4. Модернизированная схема блока Fourier Суть модернизации заключается в том, что блоки в исходной версии, рабо­ тающие со скалярами, заменяются блоками, выполняющими поэлементные мат­ ричные операции. Благодаря этому в окне параметров блока становится воз­ можным параметр Harmonic n (номер гармоники) задавать в виде вектора. На рис. 9.5 показан пример расчета гармонического состава сигнала, синтезирован­ ного из нескольких синусоидальных сигналов с разными амплитудой, частотой и фазой. Моделирование выбега электродвигателя 271 0.31 7.113е-006 0.7 7.654е-006 magnilude 1------t11>1 t--+----t.i signal Sine Wave angle Fourier Analyzer 8.036е-006 8.47Qe-006 8.Q74e-006 9.514е-006 1.00Qe-005 0.5 Display Scope Рис. 9. 5. Пример расчета гармонического состава сигна11а 9.4. Особенности блока Breaker Часто начинающий пользователь для коммутации в моделях с источниками посто­ янного напряжения использует блок Breaker. Однако при этом не учитывается тот факт, что Breaker предназначен для коммутации переменного тока. Его особенно­ стью является то, что при снятии управляющего сигнала разрыв цели происходит лишь при достижении током нулевого уровня. В цепях постоянного тока такого не наблюдается, и ключ остается замкнутым при снятии управляющего сигнала. Рису­ нок 9.6 иллюстрирует эту ситуацию. На рисунке показаны электрические цепи, коммутируемые с помощью блока Breaker. При этом в одной из цепей используется источник переменного напряжения, а в другой - постоянного. На рисунке хорошо видно, что в первой цепи отключение нагрузки от источника происходит в момент спадания тока цепи до нуля, в то время как во второй цепи нагрузка остается под­ ключенной к источнику, несмотря на отсутствие управляющего сигнала на ключе. Для коммутации в цепях постоянного тока необходимо использовать блок Ideal Switch. 9.5. Моделирование выбега электродвигателя В практических задачах моделирования электропривода часто встречается задача моделирования не только пуско-тормозных режимов, но и режима выбега элект­ родвигателя при отключении питания. Для решения этой задачи необходимо пос- 272 Советы пользователям SimPowerSystems --: �2 • �-+---Breaker ACVoltage � Source '(' Current Measurement 10 Ohm 0.1 Н Timer ,----•• :�21--,-а+ 1 � Breaker1 DCVoltage Source Т ..:l_ �-- 1 l!lt..l 1:! . .. .., ' :66r' 1 -:1-:----· . ; . : ::::z: 1 Q:D··: О т•оn-. О O.Q2 0.04 .. QOG 008 1 J Q1 Current Measurement1 10 Ohm 0.1 н 1 � ---- Рис. 9. б Работа блока Breaker в цепях постоянного и переменного тока ле источников фазных напряжений поставить ключи (Breaker или Ideal Switch) и сформиро­ вать напряжения управления ключами (для размыкания ключей нужен нулевой сигнал). В параметрах ключей требуется задать очень большое сопротивление искрогасящей цепи (в 100-500 раз большее, чем сопротивление фазы Ад), а емкость этой цепи необходимо задать inf (что соответствует отсутствию конденсатора). Схема модели и графики ее работы показа­ ны на рис. 9.7. 9.6. Модель операционного усилителя В некоторых случаях при работе с Simulink и SimPowerSystems пользователю требу­ ется не только отработать алгоритмы управления каким-либо устройством, но и про­ верить схемную реализацию системы управления. Аналоговые системы управления обычно реализуются с помощью операционных усилителей (ОУ). Однако в библио­ теках SPS отсутствует модель такого устройства. Вместе с тем такую модель доста­ точно просто создать, используя стандартные блоки Simulink и SimPowerSystems. Модель операционного усилителя 273 Scope2 gт:d 1 2 ldeal Switch gт:d 1 2 □ [fl+тm Ground wm А m в m Те ..------" с Asynchronous Machine SI Units Machines Measurement Demux Scope ldeal Switch2 .,�, ,, . . . . ' , 1!131:J Step1 Рис. 9. 7 Запуск и выбег асинхронного двигатет� Передаточная функция идеализированно­ го операционного усилителя определяется выражением [8]: K(s)= КО ' 1+St где КО - коэффициент передачи ОУ на посто- ко 0 ._.... _.,._., _ _______________, янном токе; t = - - постоянная времени пе2тт 1 редаточной функции ОУ;/1 - частота единичного усиления. В основу модели операционного усилителя (рис. 9.8) положен управляемый источник напряжения Controlled Voltage Source. Коэффициент передачи ОУ 1-1а постоянном токе (КО) задает усилитель Gaiн, на вход которого постунает раз­ ность входных напряжений усилителя. Блок передаточной функции Traнsfcr Fcn задает частотные свойства операционного усилителя, а подсистема Subsys­ tem обеспечивает ограничение выходного напряжения на уровне напряжений положительной и отрицательной полярностей, имитируя нелинейносн харак­ теристики реального усилителя, ВЬiзванную конечной величиной напряжен �1 й питания. Схема подсистемы Subsystem приведена на рис. 9.9. Если сигнал на входе In подсистемы не выходит за предельные значения, подаваемые на входы V+ (уро­ вень напряжения ограничения положительной полярности) и V- (уровень на­ пряжения ограничения отрицательной полярности), то входной сигнал прохо- 274 Советы пользователям SimPowerSystems '0•-Ф (U G.1in G)... •--�--­ j -Su-bsyst-, m Coмt,1nt1 <I>• f _L on�oll•d Volt,"c Sou1ct r· _L Рис. 9. 8. Модель операционного усилителя douЫe Relalion•I Oper•tor1 D•t• Туре Conveision1 SwitchЭ Switch1 Rtl•tion•I Operator D•I• Туре Conveision2 Switch2 Ground Рис. 9.9. Модель подсистемы ограничения выходного напряжения ОУ дит на выход подсистемы без изменений. В противном случае на выход прохо­ дит сигнал, задающий напряжение ограничения усилителя (пuложительный, если входной сигнал положительный, и отрицательный, если входной сигнал отрицательный). Модель операционного усилителя 275 Окно задания параметров: 0oe,_,..�(ю.r.l:I ldoolOpe,.,,.,,�Wl/lln•-IJndioiled...,._Voh\le р..,_. O�o,,ir, !10е5 !Мцv<:t"!!OЫ.fv,.,,'/"""'J ![·1515) Параметры блока: Open-loop gain: [Коэффициент усиления на постоянном токе] . Unity-gain bandwidth, Hz: [Частота единичного усиления, Гц]. Значение частоты входного сигнала, при котором коэффициент усиления ОУ уменьшается до единицы. Этот параметр определяет максимально возможную полосу пропускания ОУ. Output voltage limits [Vmin Vmax]: [Напряжения ограничения выходного напря­ жения]. Параметр задается в виде вектора, первый элемент которого задает положительный уровень ограничения, а второй - отрицательный. 06 «r• D.2 0.015 0,02 r . 0•�-c=J- ,------c=J------, С2 • О 1ЗuF R1 • 2k s Controlltd Volt1ge � Souree1 J_ Q % � Rn• 1k Рис, 9, 10. Модель колебательного звена 276 Советы пользователям SimPowerSystems Пример 1: На рис. 9.10 показан пример использования ОУ для реализации колебательно­ го звена. Операционный усилитель в данном примере включен по инвертирую­ щей схеме и работает на линейном участке характеристики. Пример 2: На рис. 9.11 показан пример реализации инвертирующего интегратора на опе­ рационном усилителе. В данном примере показан выход операционного усилите­ ля на ограничения. 20 оо so ео г� 100 С• О 5mF --j �· 0· -� _[ Г _j_ -::- �ontrolled Voltage Source I _J,_ + f ы> Op-Amp -,- 1· n у _L Rn = Scope 1k Рис. 9. 11. Модель инвертирующего интегратора Пример 3: На рис. 9.12 показан пример включения ОУ по неинвертирующей схеме. Ко­ эффициент передачи усилителя в этом случае определяется выражением R К=1+_Д:_. R1 При заданных значениях Rt = 2k и Roc = Sk коэффициент усиления равен 3,5. Открытие и сохранение моделей ранних версий г Roc= 5k Constant �s _L 277 � 0 .,-----�--r'· . Controlled Voltage Source1 Op-Amp Г] R1 = 2k у I _L к= 1 + Ro.:/R1 QI _L 3.5031 Display Rn = 1k _L Рис. 9. 12. Модель неинвертирующеrо усилителя 9.7. Открытие и сохранение моделей ранних версий При открытии и сохранении в Simulink моделей более ранних версий возможно возникновение ошибок, связанных с особенностями версии МАTLAB. Как прави­ ло, эти ошибки связаны с использованием кириллических шрифтов при создании модели. Для устранения ошибок такого рода необходимо сразу после запуска вы­ полнить в окне МАТLАВ команду: set_param(O, 'CharacterEncoding', 'windows-1251'). Также необходимо, чтобы имя пользователя или администратора компьютера не имело символов кириллицы, поскольку это имя записывается в файле модели н может вызвать ошибку. Начиная с версии MATLAB 2006Ь (версия 7.3), кириллические шрифты явля­ ются допустимыми, но для использования их перед сеансом работы с Simulink необходимо выполнить в окне МАТLАВ команды: slCharacterEncoding('windows-1251'); feature('MultibyteCharSetChecking',О). Эти команды можно написать в файле startup.m и поместить в папку ...toolbox\ local. В этом случае команды будут выполнены автоматически после запуска MATLAB. 278 Советы пользователям SimPowerSystems Cur,ent Me.1surement � .J АС Volt•g• Source -=- G1ound (output) Sorios RLC Br.1nch Т conn@ctor S01les RLC Br,nch1 L connector --.-------,1 � г. ���:::ent � Acvott•o• '{..11 Source Series RLC Br.1nch Series RLC Branch1 т -----�---� � G1ound (output) Т connecto, L connector Рис. 9. 13. ИсходнаR и конвертированнаR модели Ранние версии SРS-моделей необходимо конвертировап, с помощью команды psbupdate: рsЬuрdаtе('Имя_ модели'). После конвертирования файл будет открыт и сохранен в текущей папке под именем Имя_модели_ updated. На рис. 9.13 показаны исходная и конвертированная модели. Как видно из рисунка, блоки библиотеки Connectors, которая отсутствует в текущей версии, в конвертированной модели заменены специальными соедини­ телями. Их необходимо удалить вручную и восстановить схему. Проведение серии вычислительных экспериментов 279 9.8. Проведение серии вычислительных экспериментов Довольно часто при моделировании в Simulink требуется проведение серии расче­ тов, например для того, чтобы проследить влияние какого-либо параметра на ра­ боту схемы. Выполнение изменения требуемого параметра вручную и последую­ щий запуск модели также вручную весьма утомительны при проведении серии расчетов. Для решения данной задачи можно создать m-файл (сценарий), в кото­ ром организовать запуск и изменение параметра в цикле. Ниже приводится при­ мер такого сценария, в котором реализован предложенный алгоритм (изменение параметров блока выполняется с помощью функции set_param): clear all; % Очистка Рабочей области open('Series_RLC_Branch_2.mdl') % Открытие модели % Series RLC Branch 2 figure; % Создание окна для графиков for R ; 1:2:11, % Цикл расчета % Присвоение значения сопротивления: set_param('Series_RLC_Branch_2/Series RLC Branch', 'Resistance' ,num2str(R)); sim('Series_RLC_Branch_2'); % Запуск модели line(time,Current); % Построение графиков end % Окончание цикла Сценарий обеспечивает построение графиков тока во времени при изменении величины сопротивления параллельного колебательного контура. На рис. 9.14 представлены схема модели и результаты расчета. г веiо: = о Р Nter" 1 Steptime = 0.0001 : Jl�З i /п 2 -+ � 1 L.o-J Current Breaker Measurement Cs "inf Rs = 1е3 Ron = 0.001 � DC Voltage Source • 1 ; 11,11н, 1 1!1�1:J flle Edlt � Jnatr I40& Unldo1 Wlndov l:ieti: • Q�Qjfj t. ЩЕ,Нj!J � 09 Ci) М2 004 ООО Parallel RLC Branch L = О.001е-03 R = 0.01 С= 0.0le-03 Рис. 9. 14. Влияние сопротивления колебательного контура на переходные процессы О� 01 Приложение 1 Система меню обозревателя библиотек программы Simulink File (Файл) - работа с файлами библиотек. Edit (Редактирование) - добавление компонентов и их поиск. View (Вид) - управление показом элементов интерфейса. Help (Справка) - вывод окна справки по обозревателю библиотек. Таблица П. 1. Меню обозревателя библиотек Команда Fllе(Файл) New Model (Ctrl+N) Library Ореп ... (Ctrl+O) Close (Ctrl+W) Preferences... Назначение Открыть окно новой блок-диаграммы Открыть окно для создания Simulink-мoдeли Открыть окно для создания новой библиотеки Simulink Открыть существующий mdl-файл. При выборе двнного пункта открывается стандарт­ ная диалоговая панель файловой системы Windows, с помощью которой можно найти и открыть требуемый файл модели Закрыть окно схемы (и соответствующий mdl-файл). В том случае, если в блок­ диаграмму вносились изменения, которые не были сохранены в файле на диске, то перед закрытием окна MATLAB запрашивает подтверждение на закрытие файла Настройка Simulink. Задает параметры •по умолчанию» создаваемых моделей Edlt(Редактирование) дdd to the current Добавить выделенный блок в текущую модель model Найти блок с заданным именем. Команда выводит окно с запросом имени блока FindЫock... Найти следующий блок с заданным именем. Эту же операцию выполняет и команда Find nextЫосk... Find next в окне задания слова для поиска Vlew(Bид) Toolbar Status bar Description Stay оп top Collapse entire Browser Expand entire Browser Large icons Sm all icons Show Parameters for selected Ыосk Вывод/скрытие панели инструментов Вывод/скрытие строки состояния Вывод/скрытие окна сообщений Установка статуса окна обозревателя библиотек •поверх всех окон• Закрытие текущего раздела библиотеки Раскрытие текущего раздела библиотеки Отображение пиктограмм блоков в увеличенном размере Отображение пиктограмм блоков в уменьшенном размере Вывод окна установки параметров отмеченного блока Help (Справка) Help оп the selected Справка по выделенному блоку Ыосk Simulink help Вывод окна справочной системы Simulink Tip of the day Полезные советы на каждый день Приложение 2 Система меню окна модели File (Файл) - работа с файлами моделей. Edit (Редактирование) - изменение модели и поиск блоков. View (Вид) - управление показом элементов интерфейса. Simulation (Моделирование) - задание настроек для моделирования и управ­ ление процессом расчета. Fonnat (Форматирование) - изменение внешнего вида блоков и модели в целом. Tools (Инструментальные средства) - применение специальных средств для работы с моделью (отладчик, линейный анализ и т. п.). Help (Справка) - вывод окон справочной системы. Таблица П.2. Меню окна модели Команда Flle(Фaйn) New Model (Ctrl+N) Library Open ... (Ctrl+O) Close (Ctrl+W) Назначение Открыть окно новой блок-диаграммы Открыть окно для создания Simulink-мoдeли Открыть окно для создания новой библиотеки Simulink Открыть существующий mdl-фа.йл Закрыть окно схемы (и соответствующий mdl-файл). В том случае, если в схему вносились изменения, которые не были сохранены в файле на диске, то перед закрытием окна MATLAB запрашивает подтверждение на закрытие файла Сохранить (записать на диск) mdl-файл. Если данный файл сохраняется первый раз, Save (Ctrl+S) то nри выборе этой команды открывается стандартная диалоговая панель, с по­ мощью которой пользователь может указать новое имя файла (вместо untitled) и каталог, в котором будет производиться запись. Если файл уже записывался на диск, то при выполнении команды Save он будет сохранен под прежним именем и в том же каталоге (без открытия окна диалога) Save as ... Сохранение файла под новым именем или в другой папке Управление источниками сигналов Source Control... Проверка входа. Позволяет ввести расширенное текстовое описание источника Checkin... Проверка выхода. Позволяет ввести расширенное текстовое описание источника Checkout Отмена проверки выхода Undo Check out Свойства модели Model Properties Настройки •ПО умолчанию• Preferences Печать схемы модели Print (Ctrl+P) Преобразование модели к форме, удобной для публикации в сети lnternet Export to WEB... Выбор уровня детализации для печати модели: печать текущего блока, печать Print details... текущего блока и модели верхнего уровня иерархии, печать текущего блока и моделей нижнего уровня иерархии либо печать всей модели Настройка параметров печати Print setup... ЕпаЫе Tiled Printing Разрешить печать с перекрытием Завершение работы с системой MATLAB ExitMATLAB Edlt (Редактмроаанме) Отменить предыдущую команду редактирования. В некоторых случаях команда Undo Undo может уточняться, например после добавления в схему линии связи она будет называться Undo Add Line (Отменить добавление линии). Если нельзя отменить предыдущее действие, то команда Undo заменяется сообщением Can't Undo Отменить выполнение команды Undo. Эта команда также может видоизменяться Redo (например, Redo Add Line) либо сообщать о невозможности отмены (Сап'! Redo) Вырезать (переместить) в буфер обмена фрагмент схемы. Соответствующий Cut фрагмент должен быть выделен 282 Моделирование электротехнических устройств в MATLAB Таблица П.2. Меню окна модели (продолжение) Команда Сору Paste PasteDuplicate lnport Delete Select AII (Ctrl+ A) CopyModel to Clipboard Find ... (Ctrl+F) Explore Block Parameters Block Properties... Signal Properties Create Subsystem (Ctrt+G) Mask Subsystem., . (Ctrl+M) Look UnderMask (Ctrl+U) Назначение Копировать фрагмент схемы. Соответствующий фрагмент должен быть выделен. Данная команда используется совместно с командой Paste Вставить копируемый или удаленный в буфер обмена участок модепи. Для того чтобы указать позицию вставки, необходимо предварительно щелкнуть в соответствующей точке окна схемы (этой точке будет соответствовать верхний левый угол вставляемой области) Вставить дублирующий входной порт. Перед выполнением команды исходный порт необходимо скопировать в буфер Удалить выделенную область Выделить все элементы схемы Копировать модель в буфер обмена. Запись графического изображения схемы в буфер обмена Windows (Clipboard) для передачи в другие Windоws-приложения в виде графического объекта. По умолчанию блок-диаграмма сохраняется в формате WМF (WindowsMetafile), формат может быть изменен из командного окна МАТLАВ (меню File, команда Preferences) Поиск объекта в модели ЗапускModel Explorer (обозреватель модели) Открытие окна параметров выделенного блока Вызов окна диалога для установки дополнительных атрибутов выбранного блока Команда обеспечивает вызов окна диалога для установки атрибутов сигнала, передаваемого по выделенной линии связи Создать подсистему Маскировать подсистему. Если выделенная подсистема уже является маскирован­ ной, то командаMask Subsystem принимает вид EditMask Заглянуть под маску. Команда открывает окно блок-диаграммы маскированной подсистемы. Команда доступна только в том случае, если выбранный блок является маскированной подсистемой Настройка связей блока Link options Go То Ubrary Link Перейти к связанной библиотеке. Команда открывает раздел библиотеки, к которому относится выделенный блок. Команда доступна только в том случае, если блок взят из библиотеки пользователя или из раздела Simulink Extras Break Link Разорвать связь с библиотекой. Команда позволяет сделать библиотечный блок •самостоятельным•, не связанным с библиотекой, что обеспечивает возможность его редактирования Restore Unk Восстановить связь с библиотекой Просмотр изменений View Changes Открыть библиотеку. Команда доступна только в окне библиотеки (Ubrary). После ее Unlock Ubrary выполнения становится возможным редактирование соответствующего раздела, при этом на месте команды выводится признак Ubrary Unlocked (Библиотека открыта), который сохраняется до закрытия окна редактируемого раздела RefreshModel Ыocks Обновить блоки модели. Команда используется, если модель содержит ссылки на другие файлы моделей Обновить блок-диаграмму. Команду необходимо использовать в следующих случаях: UpdateDiagram • после изменения (редактирования) библиотечных блоков, копии которых исполь­ (Ctrl+D) зуются в модели; • после добавления в конфигурациюMATLAB нового раздела библиотеки, блоки из которого используются в открытой модели; • после изменения параметров одного или нескольких блоков модели из командно­ го окнаMATLAB; • после изменения S-функции, используемой в модели (при добавлении или удалении входных и/или выходных портов соответствующего блока) View(Bмд) Go to Parent Toolbar Statusbar Model Browser Options Model Browser Переход из подсистемы в систему высшего уровня иерархии (•родительскую систему•). Команда доступна, только если открыта подсистема Показать/скрыть панель инструментов Показать/скрыть строку состояния Работа с обозревателем модели Вызов обозревателя модели Система меню окна модели 283 Таблица П.2. Меню окна модели (продолжение) Команда Show Library Links ShowMasked Subsystems Block Data Tips Options Block name Parameter names and values User description string Ubrary Browser System Requirements дdd link to Word selection Add link to active Excelcell Edit/дdd Unks... Unk setting... Zoom ln Назначение Показывать в окне обозревателя библиотечные подсистемы, то есть подсистемы, созданные пользователем и включенные им в состав собственной библиотеки. При выборе этой команды окно блок-диаграммы модели дополняется подокном, отображающим ее иерархическую структуру в виде дерева Показывать в окне обозревателя маскированные подсистемы Подсказка no параметрам блока. Содержит команды управления вс11лывающей подсказкой (tips) для блоков модели. О том, что соответствующий режим установлен, свидетельствует маркер в виде флажка. Подсказка появляется на экране, если задержать на некоторое время указатель мыши над пиктограммой блока Показывать название блока Показывать имена и значения параметров настройки блока Показывать описание блока, заданное пользователем с помощью команды Edit/Block Properties... Показывать окно обозревате11я библиотек блоков Технические требования к системе. Команда позволяет добавить к контекстному меню блока ссылку не технические требования Добавить ссылку на выделенный фрагмент текста в программе MicrosoftWord Добавить ссылку на выделенную ячейку в программе Microso« Excel Редактировать/Добавить ссылку Параметры ссылки Увеличить масштаб. Увеличить масштаб изображения схемы. Каждое обращение к команде дает увеличение масштаба в полтора раза (на 50%) ZoomOut Уменьшить масштаб. Ум еньшить масштаб изоб ражен ия схемы Каждо е обращение к команде дает уменьшение масштаба в полтора раза Подготовить систему для просмотра. Увеличить масштаб изображения выбранного Fit system to view элемента схемы. Команда обеспечивает N-кратное увеличение (кратность увеличе• ния зависит от исходного размера элемента) и позиционирует элемент no центру окна схемы Значения сигналов на выходных портах блоков Port Values , Show None Не показывать ShowWhen Hovering Показывать nри наведении указателя мыши Toggle When Clicked Включить nокаэ после одиночного щелчка левой клавишей мыши на пиктограмме блока Параметры отображения значений сигналов (шрифт, размер, интервал обновления Options... no времени и т. д.) Показывать границы листа ShowPage Boundaries Восстановить стандартный масштаб изображения Normal ( 100%) Remove highlighting Отменить цветовое выделение Slmulвtlon (Моделирование) Запуск моде11и на исполнение. При запуске модели команда Start заменяется Start командойPause, которая позволяет приостановить сеанс моделирования. Кроме того, становится доступной команда Stop, расположенная ниже. При прерывании моделирования с помощью командыPause она заменяется альтернативной командой - Continue Завершить моделирование. Команда становится доступной после запуска модели Stop на расчет Настройка параметров моделирования Configuration parameters ... Обычный (неускоренный) режим расчета. Команда доступна, если установлено Normal приложение SimulinkPerformance Tool Ускоренный режим расчета. Команда доступна, если установлено приложение Accelerator Simulink Perlormance Tool. В этом режиме, после запуска модели на исполнение, создается исполняемый файл модели в виде динамической библиотеки (файл с расширением dll). В результате скорость расчета возрастает в несколько раз. Ускоренный режим расчета не поддерживается для моделей, имеющих замкнутые алгебраические контуры 284 Моделирование электротехнических устройств в MATLAB Таблица П.2. Меню окна модели (продолжение) Команда External Назначение Внешний режим. Режим обеспечивает обмен данными между Simulink-мoдeлью и внешней программой Format (Форматирование) Выбор шрифта для текстовой информации, выводимой на пиктограмме блока, Font... и для метки (имени) блока ЕnаЫеТеХ Включить выполнение специальных текстовых команд для отображения математиче­ ских символов, греческих букв и т. n. commands Выравнивание текста. Задает способ расположения текстовой области Text Alignment Изменить положение имени блока (над или nод изображением блока) FlipName HideName/ Скрыть/показать имя блока ShowName Развернуть изображение блока относительно вертикальной оси симметрии на 180" Flip Block Повернуть изображение блока относительно вертикальной оси симметрии на эо· Rotate Block (no часовой стрелке) Show/Hide Drop Показать/скрыть -тень• Shadow Hide/Show Port Скрыть/показать метки портов блока. Данная команда применима только к блокам­ Labels nодсистемам (Subsystem), содержащим внутренние входные или выходные nорты, то есть блоки ln и Out. Если такие блоки имеются в подсистеме, то их метки no умолчанию выводятся на пиктограмме блока-подсистемы Foreground Color Основной цвет. Выбор цвета контура и символов на пиктограмме выбранного блока (rpynnы блоков) Background Color Цвет фона. Выбор цвета фона пиктограммы выбранного блока (rpynnы блоков) Выбор цвета фона схемы Screen Color Port Signal/Displays Отображение свойств сигналов/портов Sample Time Colors Подсветка блоков, управляемых параметром Sample time. Блоки, работа которых зависит от величины шага модельного времени, а также соединяющие их линии связи при выполнении данной команды выделяются на блок-диаграмме красным цветом Показывать индикаторы точек линеаризации Linearization lndicators Тип nорта. Рядом с линиями связи отображаются наименования типов данных, Рог\ Data Types установленных для портов, с которыми они соединены Размерность векторных и матричных линий связи. Для векторных или матричных Signal dimensions линий связи выводится в цифровой форме размерность передаваемого сигнала, то есть число элементов вектора класс памяти Storage class Testpoint lndicators Показывать индикаторы тестовых точек Показывать индикаторы средств просмотра сигналов Viewer lndicators Wide nonscalar lines Широкие линии связи для нескалярных величин. Линии связи, no которым передают­ ся векторные и матричные величины, выводятся более •жирными• Вывод порядкового номера блока в nоследоватl!льности выполнения расчета Block Displays Sorted Order Model BlockVersion Отображение номера версии блока Отображение несоответствия типа входных/выходных сигналов блока Model Block 1/0 Mismatch Индикатор контекста выполнения подсистемы Execution Context lndicator Library Link Display Отображение связей с библиотеками Tools (Инструментальные средства) Simulink debugger... Отладчик моделей. Позволяет в пошаговом режиме протестировать модель Fixed-Point settings... Настройка режима расчета с фиксированной точкой Model Advisor. . Запуск инструмента Model Advisor (Консультант). Инструмент анализирует модель с точки зрения наилучшей эффекивности и точности Model Dependency Запуск инструмента Model DependencyViewer (Обозреватель структуры модели). Viewer... Инструмент представляет в графической форме структуру модели с точки зрения состава используемых в модели библиотек. Позволяет быстро перейти к нужной библиотеке Система меню окна модели 285 Таблица П.2. Меню окна модели (продолжение) Команда Назначение Lookup ТаЫе Editor... Редактор таблиц. Инструмент позволяет редактировать параметры блоков таблиц Data Class Designer... Инструмент создания классов данных Bus Editor... Позволяет редактировать свойства объектов типа Bus Создание отчета о процессе моделирования. Команда должна быть выполнена Profiler до начала процесса моделирования. По окончании моделирования создается и выводится на экран отчет, в котором можно просмотреть временные затраты при выполнении расчета Coverage Setting... Открытие окна настроек отчета по моделированию Requirements Технические требования к системе Unk Setting... Настройка ссылок для выделенного объекта Consistency checking Проверка на непротиворечивость. По данной команде выполняется проверка соответствия допущений, принятых решателями Simulink, и аналогичных допущений, используемых в S-функциях моделей Generate Report... Создание отчета по всем системным требованиям, связанным с моделью и ее блоками Выделить объекты модели, для которых установлены системные требования Higlight model Инструмент для работы с генераторами сигналов и устройствами просмотра Signal and Scope сигналов Manager Real-Time Workshop Мастерская реального времени. Инструмент для создания приложений, работающих в реальном времени Параметры Options... Создать исполняемый файл для модели Bulld Model... Build Subsystem... Создать исполняемый файл для выделенной подсистемы Generate S-function... Создать S-функцию для выделенной подсистемы External Mode Панель управления внешней по отношению к Simulink программы Control Рапе!... Model differences... Сравнение моделей Merge/Compare Объединить/Сравнить две модели two models... Сравнить текущее состояние модели с вариантом, который был сохранен на диске Compare to last в последний раз saved model... Инструмент проектирования систем управления. Команда доступна, если установлен Control De�ign инструмент Control System Toolbox (Приложение к MATLAB для исследования и разработки систем управления) Исследование линейных стационарных систем Unear Analysis... Определение коэффициента передачи обратной связи для замкнутой системы Compensator Design... Model Descretizer... Дискретизация модели Инструмент подбора параметров. Инструмент позволяет подбирать параметры Parameter модели, основываясь на экспериментальных данных Estimation... Report Generator... Инструмент создания отчетов Создание описания модели на языке HDL HDLCoder Параметры Options ... Создать описание модели на языке HDL Generate HDL Unk for TASKING Data Object Wizard Мастер создания объектов данных Инструмент тестирования модели System Test... Help (Справке) Using Simulink Blocks Blocksets Blocks Support ТаЫе Shortcuts S•functions Demos Terms of Use... Patents... About Simulink Справка по работе с программой Simulink Справка по выделенному блоку или библиотеке блоков Справка по установленным библиотекам блоков Таблица блоков, поддерживающих различные типы данных Справка по управлению программой Simulink с помощью нажатия комбинаций клавиш Справка по созданию S-функций Запуск системы демонстрационных примеров Сроки использования Патенты Вывод окна с номером версии Simulink Литература 1. Черных И. В. SIMULINК: Среда создания инженерных приложений / Под общ. ред. В. Г. Потемкина. - М.: ДИАЛОГ-МИ ФИ, 2003. - 496 с. 2. Герман-Галкина С. Г., Карданов Г. А. Электрические машины. Лабораторные работы на ПК. -СПб.: КОРОНА принт, 2003. - 256 с. 3. Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых сис­ тем в MATLAB 6.0: Учебное пособие. - СПб.: КОРОНА принт, 2001. -320 с. 4. Герман-Галкин С. Г. Линейные электрические цепи. Лабораторные рабо­ ты. - СПб.: Учитель и ученик, КОРОНА принт, 2002. -320 с. 5. Герман-Галкин С. Г. Силовая электроника. Лабораторные работы. - СПб.: Учитель и ученик, КОРОНА принт, 2002. -304 с. 6. Дьяконов В. П. MATLAB 6/6.1/6.5 + Simulink 4/5. Основы применения. Полное руководство пользователя. - М.: Солон-Пресс. - 2002. - 768 с. 7. Дьяконов В. П. Simulink 4. Специальный справочник. - СПб.: Питер, 2002.528 с. 8. Разевиr В. Д. Система проектирования OrCAD 9.2 / В. Д. Разевиr. М.: Солон-Р, 2001. - 520 с. 9. Dommel Н. Digital Computer Solution of Electromagnetic T ransients in Single and Multiple Networks, IEEE Transactions оп Power Apparatus and Systems, Vol. PAS-88, No. 4, April, 1969. 10. Recommended Practice for Excitation System Models for Power System StaЬility Studies, IEEE Standard 421.5-1992, August, 1992. 11. IEEE Working Group on Prime Mover and Energy Supply Models for System Dynamic Performance Studies, Hydraulic TurЬine and TurЬine Control Models for Dynamic Studies, IEEE Transactions оп Power Systems, Vol. 7, No. 1, February, 1992, рр. 167-179. 12. IEEE committee report, Dynamic models for steam and hydro turblnes in power system studies, IEEE Transactions оп Power Apparatus and Systems, Vol. PAS-92, No. 6, 1973, рр. 1904-1915. 13. SimPowerSystems 4. Reference. T he MathWorks, lnc. 2006. - 931 р. Предметный указатель Символы 3-Phase Breaker, 102 3-Phase Dynamic Load, 90 3-Phase Fault, 104 3-Phase Mнtual Inductance Z1-Z0, 98 3-Phase Parallel RLC Load, 88 3-Phase PI Section Line, 11О 3-Phase ProgrammaЫe Voltage Source, 58 3-Phase Series RLC Branch, 82 3-Phase Series RLC Load, 87 3-Phase Source, 56 А-В Absolute tolerance, 26 АС Current Source, 50 АС Voltage Source, 49 Asynchronous Macblne, 167 Breaker, 99 с Compute Rl.C Line Parameters, 234 Configuration Parameters, 24 Connection Port, 138 Controlled Current Source, 54 Controlled Voltage Source, 52 Create report, 230 Current Measurement, 6t D DC Machine, 162 DC Voltage Source, 47 Detailed Thyristor, 142 Diode, 139 Discretize electrical model, 220 Distributed Parameters Line, 111 Е Electrical Sources, 36 Elernents, 36 Excitation System, 185 Extra Library, 36 F FFT Analysis, 228 Fixed step size, 26 G Generic Power System Stabllizer, 196 Ground, 135 GTO Thyristor, 145 н Hydraulic Turblne and Governor, 188 Hysteresis Design Tool, 232 1 Ideal Switch, 153 IGBT, 148 Impedance Measurement, 71 Impedance vs Frequency Measurements, 226 Initial step size, 26 L Libraries Application, 36 Linear Transformer, 114 Load Flow and Machine Initialization, 223 м Machines, 36 Machines Measurement Demux, 182 288 Моделирование электротехнических устройств в MATLAB Мах step size, 26 Measurements,36 Min step size, 26 Mosfet, 151 Mнlti-Winding Transformer, 130 Multiband Power System StaЬilizer, 198 Multimeter, 65 Mutual Inductance, 96 N Neutral,137 о ode15s, 37 ode23t,37 P-R Parallel RLC Branch, 75 Parallel RLC Load,80 l1cr111,шcnt Magnet Synchronous Macl1ine, 180 Phasor Elements,36 Phasor simulation, 218 PI Sectio11 Line,107 Jluwer Electronics, 36 power_analyze,258 JIO\ver_liвeparam, 259 power_statespace, 256 Powcrgui,216 powerinit,254 po,verlib_modcls,249 H.elative tolerance, 26 s Saturablc Traпsformer, 116 Seгics RLC Branch, 73 Seгies RLC Load, 77 Simplified Synchronous Machine pu Units, 173 Simplified Synchronous SI Units, 172 Simulation time,25 Simulink Library Browser, 12 Simulink LTI-V iewer, 226 Single Phase Asynchronous Machine,202 Solver options, 25 Static Var Compensator, 209 Steady-State, 221 Steam TurЬine and Governor, 190 Surge Arrester, 93 Switched Reluctance Motor, 206 Synchronous Machine pu Fundamental,176 Synchronous Machine SI Fundamental, 175 т Three-Level Bridge,159 Three-Phase Harmonic Filter,134 Three-phase Linear Transformer (12-terminals), 126 Three-phase Transformer (Three Windings), 124 Three-phase Transformer (Two Wiпdings), 120 Three-Phase V-I Measurement,68 Thyristor, 142 U-V-Z Universal Bridge, 156 Voltage Measurement,63 Zero crossing control,26 Zigzag Phase-Shifting Transformer,127 И.В.Черных Моделирование электротехнИ'ческих устройств в Matlab, SimPowerSystems и Simulink В книге содержигся описание прикладной программы SimL1link и библиотеки блоков SimPowerSysten1s, предназначенной д11я модепирова1-н1я электротехнических ус, ройств III систем. Рассматривается методика созцания моделей с помощью графического иI◄терфейса программы, описаны методы расчета моде1Iей, подробно освещена методика создания электротехнических блоков польэоtЮтеля. Да1s1ы ос�ювные команды для уnравлеI�ия моделью из ядра пакета MATLAB, рас­ смотрен механизм выполнения расчета модели, приводятся советь� автора по примене'"Iию программы. Книга включает в себя большое количество примеров, поясняющих работу блоков и методику создания модели. Издание предназliачено дпя инженеров, нау,-1ных рабон1иков, асп�,рантов и студентов. за,�имающихся модели­ рованием в области электротехники. Заказ книг. .197198, Санкт-Петербург. аlя 619 теn.: (8'12) 703-73-74, [email protected] 61093, Харьков-93, а/я 9130 теп.: (057) 758-41-45, 751-10-02, piter@khar1<ov.piter.com J[f[П[[l! o www.piter.com - вся информация о книгах и веб-магазин