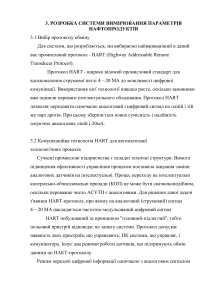
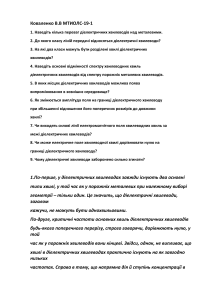
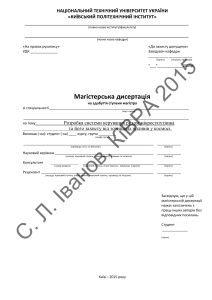
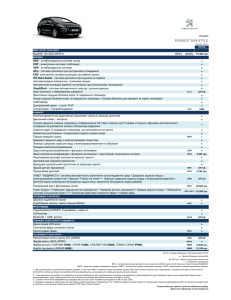
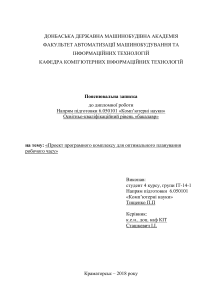
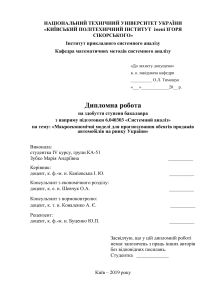
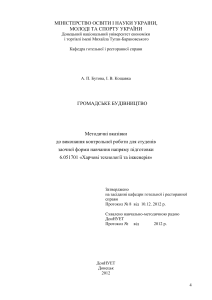
1 Загальна частина. Опис призначення вимірювачів відстані (дальномірів) 1.1 Сучасний стан методів вимірювання відстані Дальноміри поділяються на активні та пасивні. Активні дальноміри можуть бути таких видів: - ультразвукові; - оптичні; - індуктивні; - інфрачервоні; - лазерні. З пасивних можна виділити: - дальноміри, з використанням оптичного паралаксу; - дальноміри, використовуючі зіставлення об’єкта з яким-небудь зразком, наприклад нитковий дальномір. Принцип дії активних дальномірів полягає у вимірюванні часу, за який сигнал надходить від передавача до приймача сигналу. Серед дальномірів активного типу найбільш використовуваними є звукові або ультразвукові та інфрачервоні дальноміри. 1.1.1 Інфрачервоні вимірювачі відстані Для виміру відстані до об’єкту існують оптичні датчики, які використовують принцип триангуляції. Найбільш поширені з них це інфрачервоні (Infra-Red, IR, ІЧ) вимірювачі відстані з вихідною аналоговою напругою, наприклад фірми Sharp (рис.1.1). Рисунок 1.1 – Інфрачервоний вимірювач відстані фірми Sharp В таких вимірювачах встановлено інфрачервоний світлодіод с лінзою, який випромінює вузький світловий промінь. Відбиваючись від об’єкта промінь прямує до іншої лінзи на позиційно-чутливий фотоелемент (PositionSensitive Detector, PSD) (рис.1.2). Від розташування падаючого на фотоелемент променя залежить його провідність. Провідність перетворюється в напругу яку потім можна подавати на вхід аналогово-цифрового перетворювача (АЦП) мікроконтроллера (МК). оцифрований сигнал в МК можна розрахувати відстань. Використовуючи Рисунок 1.2 – Шлях світлового променя інфрачервоного вимірювача відстані Вихід датчика відстані Sharp обернено пропорційний - із збільшенням відстані його значення повільно зменшується. Вид графіка залежності між відстанню і напругою наведено на рис. 1.3. Датчики, в залежності від їх типу, мають кордону виміру, в межах яких їх вихід може бути визнаний надійним. Вимірювання максимального реального відстані обмежують два фактори: зменшення інтенсивності відбитого світла і неможливість PSD реєструвати незначні зміни місця розташування відображеного променя. Рисунок 1.3 - Графік залежності між відстанню і напругою, ІЧ вимірювача відстані (d-відстань, U-напруга на виході) При вимірі відстані до сильно віддалених об'єктів вихід датчика залишається приблизно таким же, як і при вимірюванні мінімально віддалених відстаней. Мінімально вимірювана відстань обмежена особливостями датчика, а саме - вихідна напруга при зменшенні відстані (в залежності від датчика - від 4-х до 20 см) починає різко падати. Це означає, що одному значенню вихідної напруги відповідають дві відстані: дуже близьке і дуже далеке. Для запобігання проблеми слід уникати занадто близького наближення об'єктів до датчика. Графік залежності між відстанню і напругою не є лінійним, однак в межах допустимих відстаней графік зворотної величини вихідної напруги і відстані до лінійності наближається досить близько, і з його допомогою досить просто отримати формулу для перетворення напруги в відстань. Для знаходження такої формули необхідно точки цього графіка ввести в будь-яку програму обробки табличних даних і з них створити новий графік. У програмі обробки табличних даних на основі точок графіка можливо автоматично обчислити лінію тренда. Наведено графік зв'язку виправленої зворотної величини між вихідною напругою інфрачервоного датчика GP2Y0A21YK і відстанню разом з лінією тренда (рис. 1.4). Вихідна напруга перетворена в 10бітове значення АЦП з опорною напругою +5 В. [3] Рисунок 1.4 – Графік залежності між вихідною напругою датчика GP2Y0A21YK і відстанню Працювати з ІЧ вимірювачами відстані Sharp дуже просто - достатньо підключити до нього живлення і під’єднати його вихід до аналогового входу МК (наприклад налагоджувальної плати Arduino). Значення одержуваної функції є цілим числом від 0 до 1023. Таким чином, щоб дізнатися напругу на виході сенсора, необхідно значення на аналоговому вході Arduino помножити на +0,0048828125 (5 В /1024).[3] 1.1.2 Ультразвукові вимірювачі відстані Ультразвуковий вимірювач відстані – пристрій для визначення відстані в якому в основі вимірювання лежить принцип ехолокації. В більшості випадків такі датчики складаються з передавача, що генерує ультразвукові коливання (хвилі), та приймача, який приймає відбитий від об’єкта ультразвуковий сигнал, і додаткових елементів для нормальної роботи модуля вимірювача. Процес вимірювання продемонстровано на рис.1.5. Рисунок 1.5 – Напрямок ультразвукового сигналу при вимірюванні відстані Ультразвуковий датчик відстані HC-SR04 (рис.1.6) - призначений для вимірювання відстаней від 2 до 400 см, причому межа точності може досягати до 3 мм. Модуль включає ультразвуковий передавач, приймач і вузол контролю. На покази датчика практично не впливають сонячне випромінювання і електромагнітні шуми. На передній частині HC-SR04 розташовано два ультрозвукових датчика, перший з написом T (Transmiter) це передавач ультрозвукових хвиль (TCT40-16T), а другий з написом R (Receive) - це приймач відбитих ультрозвукових хвиль (TCT40-16R), по центру розташований вивідний кварцовий генератор на 27 МГц.[4] Рис.1.6 – Загальний вигляд модуля HC-SR04 Цифровий ультразвуковий датчик EV3 (45504) (рис. 1.7) генерує звукові хвилі і фіксує їх відбиття від об'єктів, тим самим вимірюючи відстань до об'єктів. Він також може використовуватися в режимі сонара, випускаючи поодинокі хвилі. Крім того, датчик може вловлювати звукові хвилі, які будуть тригерами для запуску програм. Наприклад, можна використовувати датчик для побудови системи моніторингу трафіку, вимірювання відстані між автомобілями. Завдяки цьому датчику принципи роботи ультразвукової технології і способи її застосування в автоматичних дверях, машинах і заводських системах, стають простішими для вивчення на платформі Lego EV3. Рисунок 1.7 – Зовнішній вигляд ультразвукового датчика EV3(45504) Основні характеристики EV3 датчика: - Вимірює відстані в межах від 1 до 250 см - Точність вимірювань складає +/- 1 см - У режимі прослуховування зовнішній світлодіод постійно блимає, в режимі випромінювання світлодіод постійно горить - Якщо ультразвукової сигнал розпізнано, датчик повертає логічне значення "Істина" - Автоматична ідентифікація програмним забезпеченням EV3 Але використання даного датчика є недоцільним так як він має досить велику ціну, та виконується тільки для платформи Lego EV3. [6] Ультразвуковий датчик US-015 (рис.1.8) зовні та за розташуванням виходів не відрізняється від вказаного вище HC-SR04. Їх різниця тільки у тому що він більш стабільний та вимірює далі.[5] Рисунок 1.8 – Зовнішній вигляд датчика US-015 1.2 Принцип роботи ультразвукового вимірювача дальності 5 Як було вказано вище в більшості випадків ультразвукові датчики складаються з передавача, що генерує ультразвукові коливання, та приймача, який приймає відбитий сигнал, і елементів обв’язки. Процес вимірювання продемонстровано на рис.1.5. Спрощено, принцип роботи даного датчика можна представити в такий спосіб. Дальномір генерує звукові хвилі на частоті 40 кГц. Після того як ці хвилі відбиваються від об'єкта і повертаються на приймач, датчик видає інформацію про час, витрачений на проходження звуку від датчика до об'єкта і назад. Ультразвуковий сигнал поширюється широконаправленою хвилею в 30°. Найбільш ефективний кут вимірювання 15°. Тому для того, щоб вимірювання були точні, необхідно не допускати попадання в діаграму спрямованості зайвих об'єктів. На рис. 1.9 показана діаграма спрямованості датчика HC-SR04. Рисунок 1.9 – Діаграма спрямованості датчика HC-SR04. На показання ультразвукових дальномірів не впливають засвічення від сонця або колір об'єктів, як це відбувається з інфрачервоними датчиками. Ультразвукова хвиля буде відображатися практично від будь-яких поверхонь, навіть прозорих, але можуть виникнути труднощі з визначенням відстані до пухнастих або дрібних предметів. [7] Також, на свідчення впливає кут падіння хвилі. Якщо датчик спрямований перпендикулярно об'єкту, то вимірювання будуть найбільш точними. А якщо, кут падіння буде занадто великим, то хвиля, відбившись від об'єкта, що не потрапить в приймач, що призведе до невірного вимірювання (рис. 1.10). Рисунок 1.10 – Невірні вимірювання через неправильний кут об’єкта Сам датчик нічого не розраховує самостійно, а лише видає імпульс певної тривалості. Усі розрахунки проводяться в МК. Розрахунок відстані відбувається на підставі отриманого часу і обчислюється за наступною формулою(1.1): S vt ; t T / 2 S vT / 2, (1.1) де, υ - швидкість звуку (≈ 340 м / с); t - час руху хвилі від датчика до об'єкта, T - час руху хвилі від датчика до об'єкта і назад. Відстань до об’єкта розраховується виходячи з часу отримання відбитого сигналу і швидкості розповсюдження звуку в повітрі. На рис. 1.11 представлені сигнали ультразвукового датчика. Рисунок 1.11 – Сигнали ультразвукового датчика. Ділення на 2 у (1.1) потрібно через те що, сигнал проходить відстань до об’єкта і зворотній шлях, тоді коли нам потрібна відстань тільки до об’єкту. Для більш точного вимірювання тривалості сигналу можна використовувати таймер. Таймер налаштовується так, що 1 розряд дорівнює 0,000001 с. Звідси виходить що формула буде мати вигляд: