На правах рукописи
Бубнов Алексей Владимирович
ПРЕЦИЗИОННЫЕ СИСТЕМ Ы СИНХРОННО- СИНФАЗНОГО
ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА:
ТЕОРИЯ И ПРОЕКТИРОВАНИЕ
Специальность 05.09.03. - Электротехнические комплексы и системы
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
доктора технических наук
Омск 2006
На правах рукописи
Бубнов Алексей Владимирович
ПРЕЦИ ЗИ ОННЫЕ СИ СТЕМЫ СИНХРОННО- СИНФАЗНОГО
ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА:
ТЕОРИ Я И ПРОЕКТИРОВАНИЕ
Специальность 05.09.03 — Электротехнические комплексы и системы
Автореферат диссертации на соискание ученой степени
доктора технических наук
Омск 2006
Работа выполнена в Омском государственном техническом университете
на кафедре «Электроснабжение промышленных предприятий».
Научный консультант:
доктор технических наук, профессор Зажирко Виктор Никитич
Официальные оппоненты:
доктор технических наук, профессор Беспалов Виктор Яковлевич
доктор технических наук, профессор Щ ерба Виктор Евгеньевич
доктор технических наук, профессор Щ ербаков Виталий Сергеевич
'• '• • Ведущая организация — Новосибирский государственный технический
университет,т. Новосибирск
ч:
-. ' • •
Защита диссертации состоится «26» октября 2006 г. в 15 час. на заседании
диссертационного совета Д 212.178.03 при Омском государственном техническом университете по адресу: 644050, г. Омск, пр. Мира, 11, ауд. 6- 340.
С диссертацией можно ознакомиться в библиотеке Омского государственного технического университета.
Автореферат разослан « Я » сентября 2006 г.
Отзывы на автореферат в двух экземплярах, заверенные гербовой печатью, просим направлять в адрес диссертационного совета Д 2J2.178.03.
Ученый секретарь
диссертационного совета
А.Н . Кириченко
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIH
Синхронно- синфазный электропривод (ССЭ)
представляет собой совокупность управляемого задающего генератора и одного
или нескольких электроприводов с фазовой синхронизацией, построенных на
основе принципа фазовой автоподстройки частоты вращения (ФАПЧВ). В таких
системах связь электроприводов с задающим генератором осуществляется с помощью односторонних каналов управления, в результате обеспечивается синхронность вращения каждого исполнительного электродвигателя и стабилизация заданного взаимного углового положения их валов.
Область использования прецизионных систем синхронно- синфазных
электроприводов охватывает авиационную и космическую технику, робототехнику, технику приема, передачи, регистрации и воспроизведения информации,
информационно- измерительную технику; они находят широкое применение при
построении обзорно- поисковых и сканирующих систем и устройств, в системах
технического зрения современных робототехнических комплексов, установках
видеозаписывающей аппаратуры и копировальных установках. В частности, актуальной является задача разработки прецизионных электроприводов для обзорно- поисковых систем, осуществляющих автоматический обзор пространства
в инфракрасном диапазоне спектра с целью получения информации о расположенных в нем объектах.
Ш ирокое использование электроприводов, построенных на основе принципа ФАПЧВ, обусловлено их высокими точностными показателями в широком
диапазоне регулирования угловой скорости.
Основы теории построения прецизионных систем синхронно- синфазного
электропривода постоянного тока заложены в работах P.M. Трахтенберга. Им
были предложены упрощенные математические модели импульсного частотнофазового дискриминатора (И ЧФД), разработаны различные алгоритмы работы
логического устройства сравнения (ЛУС), предложен ряд способов регулирования ССЭ, для анализа динамических процессов в электроприводе с фазовой
синхронизацией использованы метод фазовой плоскости и методы теории линейных импульсных систем.
Экспериментальные и теоретические исследования в этой области проводились различными научными коллективами. Значительный вклад в решение
вопросов проектирования ССЭ внесли Вас.В. Андрущук, Вл.В. Андрущук, И.В.
Булин- Соколов, В.П. Галас, В.Н. Зажирко, В.Г. Кавко, В.Н. Катькалов, А.А. Киселев, С М . Миронов, Л.М. Осипов, Б.А. Староверов, В.И. Стребков, А.М. Сутормин, М.В. Фалеев, А.В. Ханаев, А.Н . Ш иряев, Б.М. Ямановский и др.
На этой основе спроектированы электропривода для различных областей
применения, разработаны новые способы регулирования и новые технические
решения построения систем ССЭ. Однако вопросы анализа и синтеза систем
управления электроприводом с фазовой синхронизацией освещены в литературе
недостаточно полно, при анализе процессов в электроприводе используются упрощенные модели ЛУС, отсутствуют достаточно простые, пригодные для инже-
мерной практики методики проектирования, что сдерживает более широкое использование ССЭ в различных областях техники.
Таким образом, развитие теории прецизионных систем синхронносинфазного электропривода постоянного тока является актуальной проблемой,
решение которой позволит улучшить точностные и динамические характеристики проектируемых электроприводов, расширить область их применения и
автоматизировать процесс проектирования, уменьшая затраты на их предварительные экспериментальные исследования.
Настоящая работа является частью комплексных научных исследований
по теме «Исследование и разработка прецизионных систем электропривода специального назначения», которые проводились в Омском государственном техническом университете (ОмГТУ) на основе хоздоговорных работ с научнопроизводственным объединением «Полюс» г. Томск.
Цель диссертационной работы. Целью работы является выполнение
комплекса теоретических обобщений, конструкторских и экспериментальных
исследований, направленных на совершенствование способов и средств управления прецизионными системами синхронно- синфазного электропривода постоянного тока.
Для достижения указанной цели в диссертационной работе поставлены
следующие задачи:
1) разработать обобщенную функциональную схему синхронносинфазного электропривода постоянного тока;
2) разработать полную математическую модель импульсного частотнофазового дискриминатора (входящего в состав ЛУС), адекватно отражающую
его нелинейности;
3) определить условия линеаризации полной математической модели
электропривода с фазовой синхронизацией, адекватно отражающей нелинейности импульсной системы ФАПЧВ, в пропорциональном режиме работы и исследовать влияние уровня реального токоограничения электродвигателя на динамику электропривода;
4) исследовать влияние алгоритмов работы регулятора в контуре ФАПЧВ
на динамику электропривода;
5) разработать способы и средства регулирования электропривода с фазовой синхронизацией с улучшенными динамическими характеристиками в режимах втягивания контура ФАПЧВ в синхронизм со входным частотным сигналом;
6) провести сравнительный анализ способов фазирования систем ССЭ по
быстродействию и разработать фазирующие регуляторы с улучшенными динамическими характеристиками;
7) провести сравнительный анализ алгоритмов работы и средств построения основных элементов электромеханического узла ССЭ и разработать новые
более совершенные алгоритмы работы и технические решения по их построению;
8) на основе сравнительного анализа алгоритмов работы и средств построения основных функциональных узлов системы управления синхронносинфазного электропривода сформировать рекомендации по их выбору (в зависимости от характеристик проектируемых ССЭ) и разработать новые алгоритмы
работы и технические решения по построению узлов с улучшенными точностными, динамическими и надежностными показателями. Разработать методику
инженерного проектирования ССЭ;
9) экспериментально подтвердить выдвинутые теоретические положения
путем компьютерного моделирования и проведения исследований на опытных
образцах электропривода.
Основные методы научных исследований. В работе использован комплексный подход к решению рассматриваемой проблемы, включающий обобщение и анализ литературных источников и дальнейшее развитие теории построения прецизионных синхронно- синфазных электроприводов постоянного
тока. При теоретическом исследовании режимов втягивания контура ФАПЧВ в
синхронизм со входным частотным сигналом и режимов фазирования использовался метод фазовой плоскости. Применялись частотные методы анализа систем
управления, модальный метод синтеза систем. Разработка алгоритмов работы и
средств построения функциональных узлов ССЭ проводилась с применением
основ теории автоматического управления, теории цепей, теории электрических
машин, теории графов, методов математического моделирования. Основные
расчетные соотношения получены с применением преобразований Лапласа,
дифференциального и интегрального исчисления. Теоретические положения и
разработанные технические решения проверялись путем моделирования в среде
MATLAB и экспериментально на макетных образцах синхронно- синфазного
электропривода.
Научная новизна работы. Решение поставленных задач определило научную новизну диссертационной работы, которая заключается в следующем.
1. Впервые на основе комплекса выполненных теоретических и экспериментальных исследований разработаны основные принципы формирования математической модели синхронно- синфазного электропривода, использования
математического аппарата при проведении теоретических исследований и проектирования подсистем ССЭ.
2. Разработана полная математическая модель импульсного частотнофазового дискриминатора (входящего в состав ЛУС), адекватно отражающая
его нелинейности.
3. На основе разработанной модели ИЧФД построены полные структурные схемы контура ФАПЧВ при различных способах демодуляции выходного
сигнала фазового дискриминатора и определены условия их линеаризации в
пропорциональном режиме работы электропривода с фазовой синхронизацией.
4. На основе метода фазовой плоскости проведен анализ динамических
процессов в электроприводе с фазовой синхронизацией с учетом реального токоограничения электродвигателя. Получены уравнения линий переключения и
определены области начальных условий для пропорционального режима работы
электропривода. Исследовано влияние значения коэффициента усиления регулятора на качество переходных процессов в системе управления и сформулированы рекомендации по его практическому выбору.
5. Предложена классификация способов регулирования электропривода с
фазовой синхронизацией в зависимости от места введения дополнительных
корректирующих сигналов в основной контур регулирования, и на основе метода фазовой плоскости проведен их сравнительный анализ. Для различных алгоритмов регулирования получены уравнения линий переключения из режима насыщения в режим фазового сравнения ЛУС и определены области начальных
условий по угловой ошибке и ее производной.
6. Разработаны: а) эффективный способ коррекции электропривода с фазовой синхронизацией, основанный на введении дополнительного корректирующего сигнала в основной канал регулирования в режимах насыщения ИЧФД
при малых частотных рассогласованиях контура ФАПЧВ; б) способ регулирования угловой скорости электропривода с фазовой синхронизацией с опережающей разблокировкой И ЧФД (при повторном совпадении во времени его
входных импульсов). В результате обеспечивается сокращение времени переходных процессов и снижение перерегулирования по угловой скорости в контуре ФАПЧВ.
7. Усовершенствованы широко используемые при построении ССЭ способы фазирования: а) с пошаговым доворотом вала электродвигателя; б) квазиоптимального по быстродействию фазирования электропривода.
8. Предложены новые алгоритмы работы узлов ССЭ и разработаны на
уровне изобретений новые технические решения по их построению.
Практическая ценность работы.
1. Предложена методика проектирования прецизионного синхронносинфазного электропривода постоянного тока.
2. Использование результатов сравнительного анализа способов построения ССЭ и его отдельных узлов позволяет в зависимости от предъявляемых к
электроприводу технических требований выбрать наиболее подходящие схемные решения.
3. Разработаны и подтверждены авторскими свидетельствами на изобретения варианты основных узлов прецизионного синхронно- синфазного электропривода постоянного тока с улучшенными точностными, динамическими и
надежностными показателями.
4. Результаты анализа динамических процессов в электроприводе с фазовой синхронизацией и разработанные на уровне изобретений структурные схемы основных узлов системы регулирования могут быть также использованы
при проектировании систем фазовой автоподстройки частоты различных управляемых генераторов импульсов.
Реализация результатов работы.
Результаты теоретических исследований, обобщенные в монографии «Вопросы анализа и синтеза прецизионных систем синхронно- синфазного электро-
привода постоянного тока» используются в ОмГТУ при проведении занятий по
дисциплине «Системы прецизионного электропривода».
Результаты теоретических и экспериментальных исследований диссертационной работы использованы при разработке прецизионного синхронносинфазного электропривода постоянного тока ПС- 10, что позволило существенно снизить амплитуду угловых качаний ротора электродвигателя, а также сократить время переходных процессов синхронизации и фазирования в экспериментальных образцах электропривода. Работа проводилась на основе хоздоговоров ОмГТУ с научно- производственным объединением «Полюс», г. Томск.
Методика проектирования прецизионного синхронно- синфазного электропривода и рекомендации по построению узлов электропривода с фазовой
синхронизацией использовались при проектировании прецизионных электроприводов в ФГУП «Центральное конструкторское бюро автоматики» и Омском
НИИ приборостроения, г. Омск.
Апробация работы. Основные положения диссертационной работы докладывалась и обсуждались на:
- Всесоюзной научно- технической конференции «Состояние и перспективы развития электротехнологии»: Вторые Бенардосовские чтения, г. Иваново,
1985;
- Всесоюзной научно- технической конференции «Проблемы повышения
эффективности и качества систем синхронизации», г. Львов, 1985;
- Всесоюзных семинарах «Системы управления, следящие приводы и их
элементы», г. Москва, 1986, 1987;
- XIII научно- технической конференции «Системы электроснабжения автономных объектов», г. Томск, 1987;
- Всесоюзной научно- технической конференции «Состояние и перспективы развития электротехнологии»: Третьи Бенардосовские чтения, г. И ваново,
1987;
- Всесоюзной научно- технической конференции «Микропроцессорные
системы автоматизации технологических процессов», г. Новосибирск, 1987;
- I Всесоюзной научно- технической конференции по электромеханотронике, г. Ленинград, 1987;
- Всесоюзной научно- технической конференции «Современное состояние, проблемы и перспективы энергетики и технологии в энергостроении»: Четвертые Бенардосовские чтения, г. Иваново, 1989;
- I, IV, V Международных научно- технических конференциях «Динамика
систем, механизмов и машин», г. Омск, 1995, 2002, 2004;
*• - • научно- практической конференции «Энергетика на рубеже веков»
г. Омск, 2003;
- II, III Всероссийских научно- практических конференциях «Автоматизированный электропривод и промышленная электроника в металлургической и
горно- топливной отраслях», г. Новокузнецк, 2004, 2006.
П убликации. Основное содержание работы опубликовано в 60 печатных
работах, в том числе 15 авторских свидетельствах и 1 патенте на изобретения.
Результаты теоретических исследований обобщены в монографиях «Вопросы
анализа и синтеза прецизионных систем синхронно- синфазного электропривода
постоянного тока» и «Вопросы теории и проектирования прецизионных синхронно- синфазных электроприводов постоянного тока». Основные научные результаты опубликованы в журналах «Электричество», «Электротехника», «Известия вузов. Электромеханика», «Известия Томского политехнического университета», «Омский научный вестник».
Структура и объем работы. Диссертационная работа состоит из введения, девяти основных глав и заключения, выполнена на 268 страницах основного текста, содержит 130 рисунков и 3 таблицы, список используемой литературы из 152 наименований и приложения на 15 страницах. Общий объем диссертации — 283 страницы.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы, сформулированы цель и основные задачи работы, характеризуется научная новизна и практическая ценность результатов исследований.
В первой главе на основе анализа показателей назначения узла оптикомеханической развертки и с учетом комплекса ограничений определены требования к электроприводу сканирующей системы. Обосновано использование бесконтактного двигателя постоянного тока в качестве основы для построения
электромеханического узла ССЭ и принципа ФАПЧВ в качестве основы для построения прецизионного синхронно- синфазного электропривода постоянного
тока.
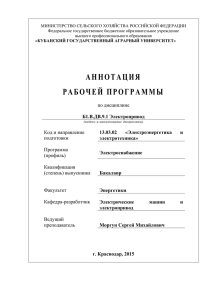
Предложена обобщенная функциональная схема ССЭ (рис. 1), реализованная на основе электропривода с фазовой синхронизацией. Контур ФАПЧВ
содержит частотно- задающий блок ЧЗБ, формирующий импульсы опорной частоты zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
fon и импульсы задания начального положения вала электродвигателя
Fon; блок импульсных датчиков БИ Д частоты вращения / ж и положения вала
электродвигателя F^.; логическое устройство сравнения ЛУС частот и фаз двух
импульсных последовательностей: задания / о'„ и обратной связи / ^ ; корректирующее устройство КУ и бесконтактный двигатель постоянного тока БДП Т.
Фазирующий регулятор ФР содержит блок определения углового рассогласования Аа^, БОУР; блок регулирования угловой ошибки БР, формирующий им- ,
пульсы добавочной частоты fd, и смеситель СМ основных fon, / ж и добавочной f6 частот.
ФР
Ч З Б FM
1r'
A
CM
Л УС
i
n
КУ
— Б ДП
T
A
БР
БИД
Да
—w.
Б ОУР
Ф
foe
—
Рис. 1. Обобщенная функциональная схема
синхронно- синфазного электропривода
Во второй главе предложена функциональная схема И ЧФД (рис. 2, где
ФД - фазовый дискриминатор, ЧД — частотный дискриминатор, ЛБ — схема логической блокировки). Индекс / в обозначениях сигналов указывает на логический характер представления этих сигналов.
ФД"
1
ЛБ
чд
А/ ,.
Рис. 2. Функциональная схема ИЧФД
На основе анализа алгоритма работы ЛУС разработана полная математическая модель ИЧФД (рис. 3, где НЭ - нелинейный элемент, РЭ - релейный
элемент, Ш ИМ — широтно- импульсный модулятор), в которой отражены все его
нелинейности. В предлагаемой модели обосновано представление фазового
дискриминатора, входящего в состав ИЧФД, в виде широтно- импульсного модулятора нормированного сигнала фазового рассогласования Дф сравниваемых
частот: частоты задания fon и частоты / ис следования импульсов в цепи обратной связи электропривода с фазовой синхронизацией.
л/ ,
1Ш1М 1
РЭ
'
нэ
Рис. 3. Полная модель ИЧФД
В третьей главе построены полные структурные схемы контура фазовой
синхронизации при различных способах демодуляции выходного сигнала фазового дискриминатора (рис. 4, где ФНЧ — фильтр нижних частот; СВХ — схема
выборки- хранения).
Рис. 4. Полные структурные схемы контура ФАПЧВ
при различных способах демодуляции выходного сигнала ИЧФД
Определены условия линеаризации структурных схем контура ФАПЧВ в
пропорциональном режиме работы:
- при использовании демодулятора на основе ФНЧ
/ „»»Т ф1/ 2п»пс/ 2п,
где Тф - постоянная времени Ф Н Ч , ю с - частота среза лин еаризован н ой в п ропорциональном режиме работы системы регулирования;
- при использовании демодулятора на осн ове С ВХ
for, * Aco r / Aa d .
где Дсог = - J2tpozm - максимальн ое зн ачен ие ош ибк и п о угловой скорости в
пропорцион альн ом режиме работы электропривода, <р0 = 2к/ : — угловое рас10
стояние между метками ИДЧ, zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFE
z — количество меток И ДЧ, гт — максимальное
ускорение электродвигателя, Лосй —допустимая погрешность преобразования
угловой ошибки Да.
.
Проанализировано влияние основных возмущающих воздействий на точностные показатели электропривода и даны рекомендации по выбору структуры
и параметров регулятора. Показана целесообразность использования модального регулятора в контуре ФАПЧВ, обеспечивающего апериодический (критический) переходный процесс в пропорциональном режиме работы электропривода.
.
•
. . •
•
•
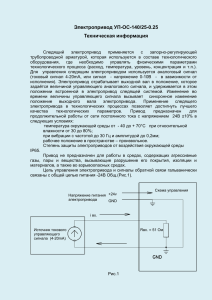
На основе метода фазовой плоскости (рис. 5) проведен анализ динамических процессов в контуре ФАПЧВ, получены уравнения линий переключения
и определены области начальных условий для режима вхождения электропривода в синхронизм со входным задающим частотным сигналом
= сро/ 2± <р0я
| ^ Дсо..
к= \
Рис. 5. Фазовый портрет работы электропривода
с учетом токоограничения БДПТ
Проанализированы динамические процессы в электроприводе с фазовой
синхронизацией с учетом реального токоограничения электродвигателя. Для
линейной зоны работы электропривода получено уравнение линий переключения (аЪ и cd), обусловленных токоограничением электродвигателя
.
Дш.лД
Дш,
Дю =
Да + —- р=,
2ф 0
4 лД
где к— коэффициент усиления корректирующего устройства.
Исследовано влияние коэффициента усиления регулятора к на качество
переходных процессов в электроприводе с фазовой синхронизацией и сформу11
лированы рекомендации по его практическому выборуzyxwvutsrqponmlkjihgfedcb
(к = 1 . . . 16). В области
низких частот вращения электропривода показана целесообразность использования демодулятора выходного сигнала И ЧФ Д на основе схемы выборкихранения и применения цифрового регулятора в контуре Ф АП ЧВ.
В четвертой главе предложена классификация способов регулирования
электропривода с фазовой синхронизацией (рис.6). Н а основе метода фазовой
плоскости исследовано влияние алгоритма работы регулятора на динамику кон. тура фазовой синхронизации.
Для различных алгоритмов работы получены уравнения линий переключения и определены области начальных условий ошибок регулирования по углу
и частоте вращения в пропорциональном режиме работы электропривода:
- изменение алгоритма работы ЛУС
1. П ринудительная разблокировка И ЧФ Д
Дш = Да> 0, - уравнение линии переключения,
фо / 2< Д а^Ф о / 2
Дсо = Дсоо
—область начальных условии.
2. Релейные режимы работы ЛУС
Да = + ф о и — уравнение линии переключения,
Да = 0
. .
|Дсо| < Дсо,
— область начальных условий.
- введение корректирующих сигналов в каналы импульсных последовательностей
1. Способ фазовой коррекции (дискретной фазовой коррекции)
Да = - 7^Дю + ф о / 2 - уравнение линии переключения, где Т к — постоянная времени корректирующего устройства),
Г- Т?гт + ф 0 / 2 < Да < Г/ е_ + ф о / 2 + 71 Дш.
o l
k
r
< к m vo/
* m
- область начальных условий.
[ T tem* An» Т к ет- Аюг
2. И спользование дополнительного генератора импульсов
Да = Фо/ 2 + Дф м . — уравнение линии переключения,
- фо / 2< Д а Ј фо / 2
- область начальных условии.
Д ш 0 > Д о S Дсо о —Дсо г
3. Способ автоматического фазирования
Да = Фо/ 2 — уравнение линии переключения,
Да = ф о / 2
, _,, - область начальных условии.
о > Д а . > - Д Ф , / 2" / 2
12
Способы улучшения динамики ЭП с ФС
изменение алгоритма
работы ЛУС
введение корректирующих
сигналов в каналы импульсных последовательностей
введение корректирующих
сигналов в режимах насыщения
И ЧФД
1
I
га
3
§§
•ек
Рис. 6. Классификация способов улучшения динамики
электропривода с фазовой синхронизацией
- введение корректирующих сигналов в режимах насыщения ИЧФД
1. Использование сигналов ошибки по частоте вращения
Да = ф о / 2 — уравнение линии переключения,
Да = ф о / 2
— область начальных условий.
О > Дга > - ,
= - До).
2. Дифференцирование выходного сигнала дополнительного фазового
дискриминатора
Да = Ф 0 / 2 — уравнение линии переключения,
13
* = Фо/2
- область начальных условий.
О > Дш > zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCB
- ^J2(p0sm = - Дсог
Результаты проведенного анализа позволяют сделать вывод о влиянии
рассмотренных алгоритмов регулирования в основном на динамические характеристики электропривода с фазовой синхронизацией. При этом наибольший
эффект в плане сокращения времени переходного процесса и снижения перерегулирования по угловой скорости дают опережающая разблокировка И ЧФД и
введение корректирующих сигналов в основной контур регулирования в режимах насыщения ЛУС при малых частотных рассогласованиях электропривода,
что определяет целесообразность дальнейшего совершенствования соответствующих способов регулирования.
В пятой главе разработан эффективный способ коррекции контура
ФАПЧВ, основанный на введении дополнительного корректирующего сигнала в
основной канал регулирования в режимах насыщения И ЧФД при малых частотных рассогласованиях электропривода (рис. 7, а, где ДУ — дифференцирующее
устройство, УК - управляемый ключ, ЧД - частотный дискриминатор).
Л.
Дф"
И ЧФ Д
я
Рис. 7. Функциональные схемы регулятора в контуре ФАПЧВ
и двухканального ЛУС
В этом .способе предлагается использовать для управления УК дополнительный частотный дискриминатор ЧД, в результате область действия коррекции расширяется в режимы насыщения ЛУС. Корректирующий сигнал Дш ,
пропорциональный отклонению угловой скорости, формируется путем дифференцирования сигнала Дф измерителя фазового рассогласования и затем суммируется с выходным сигналом ИЧФД у в диапазоне значений ошибки по угловой скорости |Асо|<Да>о, определяемой с помощью частотного дискриминатора. При частотных рассогласованиях, превышающих Дю 0, сигнал коррекции
отключается.
Для реализации этого способа разработаны алгоритмы работы фазового
дискриминатора с расширенной линейной зоной характеристики (рис. 7, б, где
Р, Т, П — сигналы индикации режимов работы электропривода: разгона, торможения и пропорционального) и ИЧФД с синхронизацией работы по импульсам
задающей частоты и индикацией режимов работы электропривода (рис. 8, а, где
14
ЛУ — логическое устройство, ЛБ - логическая блокировка). Работа ИЧФД поясняется с помощью графа переходов (рис. 8, б).
р,
л zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
ЛБ
/<.„
[ ФД я
1
—> D Т1
я
1
р
—
•
[г т
II
ЛУ
О
С
D Т2
С,
г
Рис. 8. Структурная схема и граф переходов ИЧФД
с синхронизацией работы блокирующих триггеров
Фазовый дискриминатор выполняется в виде суммирующего счетчика
импульсов частоты zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
foc с коэффициентом пересчета равным трем с насыщением
при достижении выходным кодом счетчика значения 10 и сбросом в 00 по импульсам частоты / о „ . В результате такой реализации счетчик подсчитывает количество поступивших импульсов частоты / ос между двумя соседними импуль- .
сами частоты / о„.
Логическое устройство ЛУ в зависимости от состояния счетчика импульсов и значений выходных сигналов блокирующих триггеров T l, T2 формирует
сигналы, поступающие на информационные входы блокирующих триггеров.
Эти сигналы отражают требуемое изменение текущего режима работы ИЧФД и
в момент прихода импульса частоты fon запоминаются в блокирующих триггерах.
Высокий уровень.напряжения Н на выходе второго разряда счетчика импульсов в ФД соответствует состояниям РЪ, ПЪ или 73 графа переходов и используется в схеме ЛБ для опережающей разблокировки ИЧФД в случае прихо15
да подряд двух или более импульсов частоты zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQ
foc между двумя соседними импульсами частоты fon в соответствии с логической функцией yt = \ Р + ТАЩ JH.
Разработан способ регулирования угловой скорости электропривода с фазовой синхронизацией с опережающей разблокировкой ИЧФД, в результате
обеспечивается сокращение времени переходного процесса в контуре ФАПЧВ.
Для организации опережающей разблокировки И ЧФД предлагается функциональная схема ЧД, алгоритм работы которой основан на определении ситуации
повторного наложения во времени входных импульсов ЧД (рис. 9, где ФКИ —
формирователь коротких импульсов стабильной длительности т) .
Рис. 9. Функциональная схема частотного дискриминатора
Совпадение во времени входных импульсов ЧД определяется с помощью
логического элемента И, а количество таких повторных совпадений подсчитывается первым двухразрядным счетчиком импульсов СТ1. Второй счетчик импульсов СТ2 подсчитывает количество повторно совпадающих пауз, определяемых с помощью логического элемента ИЛИ- НЕ между повторными наложениями входных импульсов. Если такое количество совпадений пауз превышает
единицу, то счетчик импульсов СТ1 устанавливается в ноль по сигналу с выхода Q2 счетчика импульсов СТ2, и разблокировки ИЧФД не происходит. Если же
повторное совпадение импульсов произошло на следующем такте fon, то появляется единица на выходе Q2 счетчикаzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQP
СТ1 (выходной сигнал ЧД Л / ) , по которой срабатывает одновибратор, осуществляющий разблокировку ИЧФД в пропорциональный режим работы или подключение второго канала регулирования
(рис. 7, а).
При таком алгоритме работы частотного дискриминатора величина ошибки по угловой скорости Дса при повторном совпадении во времени входных
импульсов ЧД находится в области
|Дш| < Д ю 0 = 2т о>э / ф 0 .
В шестой главе рассматриваются вопросы построения фазирующего ре-
гулятора. Для обеспечения фазирования (начальной установки фазы) электропривод снабжается датчиком положения, формирующим равномерно распределенное количество импульсов F^. за оборот вала электродвигателя, равное чис16
лу граней используемого в узле развертки полигонального зеркала, и фазирующим регулятором, содержащим блоки БР и БОУР (рис. 1).
Обычно используется алгоритм последовательной стыковки во времени
процессов синхронизации и фазирования, который может быть реализован с
помощью следующих способов фазирования:
1) с пошаговым доворотом вала электродвигателя;
2) с постоянной скоростью доворота вала электродвигателя;
3) с пропорциональной угловой ошибке скоростью доворота вала электродвигателя;
4) с квазиоптимальным (оптимальным) по быстродействию регулированием.
На основе метода фазовой плоскости проведен сравнительный анализ
способов фазирования электроприводов с фазовой синхронизацией по быстродействию с учетом результатов научных исследований, полученных в третьей
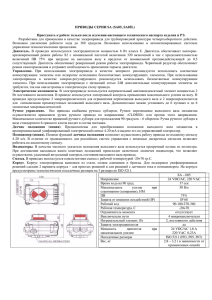
главе. Получены зависимости нормированного времени регулирования /, от количества меток ИДЧ (то есть, в конечном счете, от требуемой точности фазирования) для выше упомянутых способов фазирования при значениях максимальной угловой ошибки ± гф о / 2 (рис. 10)
f,«l,6Vz
(приЈ = 1), /,«0,75Vz
(при А = 10);
t2 « 0,25- N/ Z;
f3 к 0,4 In z;
t4 = Vo 7'1 » 1,1 (при 5' = 0,8),
где t/ =( 1/ 1фопт , t, —время переходного процесса при / - м способе фазирования,
1
фопт ~ время фазирования при оптимальном регулировании 5' — коэффициент,
учитывающий снижение ускорения в режиме фазирования по сравнению с е т .
На основе проведенного сравнительного анализа способов реализации фазирующего регулятора можно сделать вывод о перспективности использования
в ССЭ двух алгоритмов фазирования:
1) пошагового доворота вала электродвигателя;
2) квазиоптимального по быстродействию фазирования.
Первый способ наиболее прост в реализации и может использоваться в
системах ССЭ с редкой перестройкой заданной угловой скорости со,, например
в системах покадрового сканирования. В этом случае режим фазирования осуществляется один раз при пуске электропривода и длительность времени фазирования не играет большой роли.
17
.»• «
100
80
/
/
60
l(t=l)
/
•
/
40
20
\
0
^
0)
2 .
^——-
А-
1000 2000 3000 4000zyxwvutsrqponmlkjihgfedcbaZY
z
Рис. 10. Зависимости максимального времени фазирования от количества меток
ИДЧ при различных способах начальной установки фазы
Способ квазиоптимального по быстродействию фазирования целесообразно использовать в системах ССЭ с периодической перестройкой &3. В этом
случае за счет большого времени фазирования происходит значительная потеря
информации, следовательно длительность переходных процессов в режиме фазирования необходимо сводить к минимуму.
Для уменьшения времени фазирования в пошаговом режиме предлагается
определять знак угловой ошибки и соответственно ему вводить возмущающие
импульсы в каналы задания или обратной связи (рис. 11, где ИВИ - источник
возмущающих импульсов, БИС - блок индикации синхронизации). Разделение
режимов синхронизации и фазирования осуществляется с помощью БИ С,
управляющего работой ИВИ.
Усовершенствован способ квазиоптимального по быстродействию фазирования электропривода, в результате алгоритм работы квазиоптимального регулятора сводится к изменению знака ускорения вала в момент отработки половины начальной угловой ошибки фазирования Аа 0 , сформировавшейся в конце
процесса синхронизации. Для сохранения пропорционального режима работы
при отработке линейно нарастающего частотного сигнала накладывается ограничение на скорость нарастания сигнала задания угловой скорости
\ du>,ldt\ <(zm- zH){\ - r),
.
где г - коэффициент, учитывающий перерегулирование угловой ошибки в контуре ФАПЧВ в переходных режимах. При выполнении этого условия и задании
одинаковой величины ]<Ла3/<Л| при разгоне и торможении электродвигателя в
режиме фазирования обеспечивается независимость ускорения электропривода
от величины момента нагрузки, то есть |<Ло/сЛ|= |<Ло3 jdt\ .
18
ФР,
ЧЗЕ
CM
ЛУС
КУ
• Б ДП Т
ВИ Д
— Б О УР
иви
БИС
Рис. 11. Функциональная схема синхронно- синфазного электропривода
с пошаговым доворотом вала электродвигателя
Функциональная схема электропривода с квазиоптимальиым фазирующим регулятором приведена на рис. 12. В зависимости от знака начальной угловой ошибки Д а 0 , определяемой БОУР в режиме фазирования, БР выдает сигналы zyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
Р или Т, управляющие соответственно разгоном или торможением электропривода с ускорением е^ = е т 5 ' , при этом на вход ЛУС поступает сигнал
Jon ~ Jd •
ФР
f
f
ЧЗБ
Fm[
ЛУГ У
CM
КУ
*
л.
Ф
i
БР
•
!
иви
1
t
1
БДПТ
Б ОУР
БИД
Р
Т
\
i
Рис. 12. Функциональная схема синхронно- синфазного электропривода
с квазиоптимальным по быстродействию фазированием
В седьмой главе рассмотрены вопросы проектирования основных элементов электромеханического узла прецизионного электропривода: бесконтактного двигателя постоянного тока, датчика положения ротора БДПТ, фотоэлек19
трического импульсного датчика частоты вращения и датчика угловой скорости.
Основу БДПТ составляет синхронный двигатель (СД), являющийся сложным нелинейным объектом, для управления которым необходимы специальные
методы. Задача линеаризации звена «силовой преобразователь (СП) — СД» решается путем использования известного принципа частотно- токового управления. Введение позиционной обратной связи превращает синхронную машину с
инвертором в бесконтактный аналог машины постоянного тока, имеющей линейную механическую характеристику, высокие показатели использования и
высокий к.п.д. Функциональная схема электромеханического преобразователя
электропривода приведена на рис. 13, где УПМ - устройство позиционной модуляции, П - перемножитель, РЭ - релейный элемент, ДТ — датчик тока, ДП Р датчик положения ротора.
Рис. 13. Функциональная схема БДПТ
При построении БДПТ показана целесообразность построения ДП Р на основе цифрового преобразователя угла (ЦПУ), использования цифровой позиционной модуляции и релейного регулятора фазных токов БДПТ, функционирующего в скользящем режиме. Датчик положения ротора (ДПР) на основе
цифрового преобразователя угла (ЦПУ) реализуется в соответствии со схемой,
приведенной на рис. 14. Выходные цифровые сигналы ДПР sin zyxwvutsrqponmlkjihg
pa и cos pa
формируются с помощью постоянных запоминающих устройств (ПЗУ), в которые предварительно записываются требуемые значения модулирующих функций. На входы ПЗУ подается цифровое значение угла поворота ротора а , которое формируется с помощью цифрового преобразователя углового положения
ротора БДПТ.
Задача разработки ЦПУ требует решения двух основных вопросов, связанных с реализацией первичного преобразователя угла (ППУ) и системы преобразования полученного сигнала в цифровое значение угла, обеспечивающей
требуемые характеристики ЦПУ. Разработана конструкция первичного преобра20
зователя угла для БДПТ, отличающаяся простотой и технологичностью изготовления (рис. 15).
sm/xx
Рис. 14. Функциональная схема ДПР
'ууу- л/ / / ууууу / / ууууууууууу xss> <
Рис. 15. Конструкция ППУ
Предложены алгоритм работы и схема цифрового преобразователя угла на
основе фазовращателя, функционирующая в режиме непрерывного слежения за
выходным сигналом первичного преобразователя угла. (рис. 16, где Г — генератор импульсов; СИ - счетчик импульсов; ФП - функциональный преобразователь; ФВ - фазовращатель на основе предложенного датчика положения ротора;
БОУ — блок отслеживания выходного значения угла ФВ; ВУ - вычитающее устройство).
Разработаны способы коррекции оборотных погрешностей измерительн ы х преобразователей частоты вращения, которые позволяют скомпенсировать
основную погрешность датчиков, обусловленную эксплуатационным эксцентриситетом.
Предложен способ коррекции выходного сигнала импульсного датчика
частоты вращения и разработана конструкция фотоэлектрического преобразователя с датчиком эксцентриситета, выполненного в виде кольцевых растров и
дополнительной фотопары (рис. 17, где ИС - источники света; Ф - фотоприемники; К — компаратор; ФИ — формирователь импульсов). В этой конструкции на
21
подвижном 1 и неподвижном 2 модуляторах датчика дополнительно к радиальной наносится кольцевая растровая решетка и устанавливается дополнительная
фотопара (ИС2, Ф2), формирующая компенсирующий сигналzyxwvutsrqponmlkjihgfedcb
и2, который используется для автоматической коррекции выходного сигнала датчика.
Рис. 16. Функциональная схема ЦПУ на основе фазовращателя
ИС2
Г~1
И С1
Рис. 17. Конструкция И ДЧ
Показано, что для устранения погрешности преобразования датчиков угловой скорости (ДУС), обусловленной неидеальностью их конструкции и эксцентриситетом, целесообразно использовать сигнал ИДЧ для коррекции сигнала, пропорционального со. Коррекция выходного сигнала ДУС осуществляется
с помощью функционального преобразователя ФП (рис. 18, а), формирующего
корректирующий сигнал и2 путем сравнения сигнала с выхода И ДЧ foc и выходного сигнала преобразователя иъ. Учитывая зависимость чувствительности
ДУС от положения ротора, можно записать
U, = *'(«)*»«>
:
22 •'
гдеzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
к'(а) —коэффициент, учитывающий изменение чувствительности ДУС от
положения ротора; к а — коэффициент преобразования скорость- напряжение
ДУС.
ДУС
Из
Ml
2
I"
И ДЧ
f
U,
ин
свх
\п
ФП
Рис. 18. Функциональные схемы преобразователя угловой скорости с'
коррекцией оборотной погрешности ДУС и функционального преобразователя
Для получения широкого диапазона измерения угловой скорости, включая
область низких частот вращения, разработан способ коррекции выходного сигнала датчика угловой скорости, основанный на определении коэффициента
А'(а) в моменты прихода импульсов с ИДЧ путем сравнения проинтегрированного в ФП сигнала с выхода ДУС с выходным сигналом ИДЧ и в соответствии с
этим формировании корректирующего сигнала м2 • Структурная схема ФП, реализующего предложенный способ коррекции выходного сигнала ДУС, приведена на рис. 18, б, где И Н — интегратор напряжения, П — перемножитель.
В восьмой главе рассмотрены вопросы проектирования основных узлов
системы управления синхронно- синфазного электропривода: логического устройства сравнения, корректирующего устройства, фазирующего регулятора.
Обоснована необходимость использования на входе ЛУС схемы разделения совпадающих во времени импульсов и разработана схема с высоким быстродействием (рис. 19, а). На рис. 19, б приведен граф переходов устройства (узлы графа соответствуют различным выходным состояниям устройства, а линии
связи — логическим значениям входных сигналов foc и fon соответственно).
Предложена функциональная схема ИЧФД с синхронизацией работы блокирующих триггеров по импульсам задающей частоты и индикацией режимов
работы электропривода (рис. 8, а), что позволило расширить функциональные
возможности ЛУС, повысить надежность и эффективность его работы. Разработаны схемы фазового дискриминатора с расширенной линейной зоной характеристики (рис. 7, б) и частотного дискриминатора с опережающим формированием выходного сигнала частотного рассогласования (рис. 9).
23
Рис. 19. Функциональная схема и граф работы устройства
для разделения совпадающих во времени импульсов на основе ПЗУ
Высокое быстродействие при преобразовании сигналаzyxwvutsrqponmlkjihgfedcb
у в аналоговый
сигнал достигается при использовании дискретного преобразователя (рис. 20, а)
на основе схемы выборки хранения (СВХ). Функциональный преобразователь
ФП осуществляет формирование напряжения ип> значение которого в момент
прихода импульса частоты foc пропорционально сигналу у. Это значение напряжения запоминается в СВХ и поступает на выход демодулятора.
\
Л УС
ФП
СВХ иt
i
Д
1
А
1
Рис. 20. Структурная схема демодулятора ШИМ- сигнала на основе СВХ
и функционального преобразователя
Предложена схема ФП, выполненная в виде разделительной ЯС- цепи (рис.
20, б) и позволяющая обеспечить высокую точность преобразования в широком
диапазоне рабочих частот / о „ .
Проведен сравнительный анализ способов получения сигнала ошибки по
угловой скорости в электроприводе с фазовой синхронизацией. Показано, что
для получения высокой точности измерения ошибки по угловой скорости Дсо
во всем диапазоне рабочих частот вращения электропривода с фазовой синхронизацией сигнал Дсо целесообразно формировать путем преобразования сигна24
ла у, формируемого на выходе ЛУС с достаточно высокой точностью в рабочем
диапазоне угловых скоростей электропривода.
Дифференцирующее устройство с постоянной времени zyxwvutsrqponmlkjihgfedcbaZY
Т к на операционном усилителе при простоте практической реализации позволяет в контуре
ФАГТЧВ сформировать сигнал Дсо требуемой точности в широком диапазоне
рабочих угловых скоростей в области высоких частот вращения электропривода.
Дискретный характер сигнала у определяет возможность вычисления
сигнала Am в цифровой форме в виде первой разности двух измерений фазовой
ошибки с последующим формированием корректирующего сигнала с помощью
цифрового корректирующего устройства, построенного на основе методов проектирования цифровых регуляторов. В контуре ФАПЧВ измерение значений
фазовой ошибки осуществляется в моменты прихода импульсов обратной связи,
то есть с периодом Т ос. Показано, что в области пропорциональной работы
электропривода (|Дш |< Дш г ) 7^, « Т о„ и, следовательно, временной интервал
дискретизации можно считать постоянным.
В области низких частот вращения такой способ измерения Дсо является
перспективным для реализации в цифровых системах управления электроприводом с фазовой синхронизацией (рис. 21, где БОФ - блок определения фазового рассогласования; БОПРФ - блок определения первой разности фазорассогласований импульсов сравниваемых частот / о „ и / „ . ; СУМ - сумматор). Дополнительные перестраиваемые частоты / , и f2 необходимы для поддержания постоянными параметров цифрового корректирующего устройства при изменении
заданной частоты вращения.
Б ОФ
ЧЗБ
СУМ
>/Г ИЧФД
ЦАП
БОПРФ
идч
Рис. 21. Цифровое корректирующее устройство
для электропривода с фазовой синхронизацией
Разработаны схемы фазирующего регулятора, реализующие алгоритмы пошагового доворота вала электродвигателя и квазиоптималыюго по быстродействию фазирования и позволяющие сократить время фазирования (рис. 11, 12).
25
Предложена методика проектирования ССЭ (задается момент инерции рабочего механизма узла оптико- механической развертки zyxwvutsrqponmlkjihgfedcbaZ
J, погрешность регулирования угловой ошибки Аа„ и диапазон рабочих угловых скоростей ы3):
1) исходя из допустимой погрешности регулирования угловой ошибки
Ла„ , рассчитывается количество меток z ИДЧ из условия
Ф 0 < 100Да„ ,
или с учетом того, что ф 0 = 2я / г,
100Ла п '
' 2) исходя из нижней границы рабочего диапазона регулирования угловой
скорости с учетом условий линеаризации фазового дискриминатора при аналоговой и дискретной фильтрации сигнала у, определяется требуемая частота среза сос замкнутой системы регулирования:
- для аналогового демодулятора
—;
Фо
- для дискретного демодулятора
&с < 2л10
<
10
ф0
фо
3) задавая значение коэффициента усиления к регулятора в пределах
1...10, с учетом величины момента инерции У рабочего механизма электропривода, M 3M =iy\ \ fm и s = M 3M/ J определяются максимальные значения тока и
момента БДПТ в переходных режимах:
е
=
qW.
"*• aw max ~~ **^m »
' у max
' " ai* max / т т *
4) рассчитывается постоянная времени КУ
где D c = 2е т Л/ ф 0 - добротность электропривода по ускорению;
5) для снижения времени переходного процесса и величины перерегулирования по Дсо в электроприводе целесообразно использовать'двухканальное
ЛУС и систему управления с введением корректирующих сигналов в режимах
насыщения ИЧФД и опережающей разблокировкой логического устройства
сравнения по сигналу дополнительного частотного дискриминатора;
6) в зависимости от области применения ССЭ выбирается алгоритм работы фазирующего регулятора (пошаговый доворот вала электродвигателя или
квазиоптимальное по быстродействию регулирование).
В девятой главе приведены результаты моделирования электропривода с
фазовой синхронизацией в области высоких частот вращения (режим стабили26
зации угловой скорости и следящий режим работы) и цифрового электропривода с фазовой синхронизацией в пропорциональном режиме работы в приложении SIMULINK программного пакета MATLAB.
Цифровая система управления обеспечивает качественное регулирование
электропривода с фазовой синхронизацией в области низких частот вращения
(где не выполняются условия линеаризации контура ФАПЧВ в пропорциональном режиме работы). Использование методов параметрической оптимизации
цифрового корректирующего устройства позволяет реализовать требуемый вид
переходных процессов в пропорциональном режиме работы электропривода.
Передаточная функция цифрового регулятораzyxwvutsrqponmlkjihgfedcbaZYXWVUT
W^z) определяется путем
аппроксимации передаточной функции аналогового ПД- регулятора №*(р), полученной для критического переходного процесса, в виде
,
k ( )
Яг
где q0=k(T k +T 0),
qx=- kT k , q2~^o ~ коэффициенты передаточной функции
цифрового регулятора; Го - период дискретизации.
С целью улучшения качества переходного процесса в цифровом электроприводе с фазовой синхронизацией была проведена параметрическая оптимизация цифрового корректирующего устройства. В качестве критерия оптимизации
был принят средний квадрат ошибки управления
где: М- число тактов квантования на выбранном интервале оптимизации.
При моделировании работы цифрового электропривода были заданы сле2
2
дующие значения параметров: г = 4800, е т = 10 с" , с/ 0 = 1,268 • 10~ ,
2
3
<7, = - 1,168 - 10~ , q2 = 1- 10~*. Период дискретизации Т о = 1(Г с выбран равным
периоду следования задающих импульсов. Моделирование проводилось при
1
следующих начальных условиях:
Дш = - Дсог = - ^/ 2(p 0sm = - 1,618- 10"' с" ,
Да = ф о / 2 = 6,55- 1О~4 рад.
Результаты моделирования при вариациях параметров цифрового корректирующего устройства позволяют сделать вывод о том, что изменение коэффициентов qa и qx приводит к ухудшению показателен переходного процесса в
электроприводе, а путем изменения коэффициента <7г можно улучшить качество
переходного процесса. График изменения среднего значения квадрата ошибки
при вариации коэффициента qi приведен на рис. 22. Из полученного графика
видно, что оптимальный режим работы электропривода обеспечивается при
уменьшении q2 на 10%.
Приведены результаты экспериментальных исследований опытного образца синхронно- синфазного электропривода. В электроприводе использован
ИДЧ с z = 4800 и бесконтактный синхронный электродвигатель с возбуждением
от постоянных магнитов, обеспечивающий в электроприводе в заданном диапа27
зоне регулирования e m = 10с"1 и е „ / е т 2 0,07, на основе которого реализован
БДПТ путем использования системы релейного частотно- токового управления
СД. Токи в обмотках электродвигателя формируются с помощью релейного регулятора, функционирующего в скользящем режиме.
si
510"9
410"'
М О" 9
9 . . О1 0
50
60
70
80
90
100 П О 120zyxwvutsrqponmlkjihgfedcbaZYXW
q2. %
Рис. 22. График зависимости среднего квадрата ошибки S^
от нормированного значения коэффициента q2
Для уменьшения времени переходного процесса использован разработанный в пятой главе способ коррекции контура ФАПЧВ, заключающийся во введении дополнительного корректирующего сигнала, пропорционального Дсо, в
канал регулирования в режимах насыщения ИЧФД при малых частотных рассогласованиях электропривода. Основные элементы контура ФАПЧВ выполнены
на основе предложенных технических решений. Устройство фазирования реализовано на основе разработанных в восьмой главе функциональных схем квазиоптимального по быстродействию регулятора угловой ошибки. Осциллограммы переходных процессов по ошибке регулирования угловой скорости
ССЭ и фазовому рассогласованию контура ФАПЧВ приведены на рис. 23, а. Фазовый портрет работы синхронно- синфазного электропривода Дсо = / ( Д а )
приведен на рис. 23, б.
Комплексное использование разработанных методик, алгоритмов и структурных схем позволило реализовать синхронно- синфазный электропривод,
удовлетворяющий высоким требованиям по точности и быстродействию. Результаты экспериментальных исследований подтвердили правильность теоретических выводов. Синхронизация электропривода во всем диапазоне рабочих
частот вращения осуществляется в линейной зоне работы без повторных выходов ИЧФД в режимы насыщения. Вид переходного процесса близок к критическому. Фазирование осуществляется без размыкания контура ФАПЧВ, количество циклов регулирования не превышает 4. Время фазирования не превышает 2 с.
28
Угловая ошибка синфазного режима не превышает 2 угл.с. в диапазоне частот
вращения 60...6000 об/ мин.
Рис. 23. Осциллограммы: а) переходных процессов по ошибке регулирования
угловой скорости ССЭ и фазовому рассогласованию контура ФАПЧВ;
б) фазовый портрет работы синхронно- синфазного электропривода
В приложении приведены материалы о внедрении результатов диссертационной работы.
ЗАКЛЮЧЕНИЕ
В результате выполненного комплекса теоретических и экспериментальных исследований разработаны основные принципы формирования математической модели синхронно- синфазного электропривода и проектирования подсистем ССЭ, на этой основе предложены новые способы и средства регулирования электропривода и построения его основных узлов.
Основные научные и практические результаты диссертационной работы заключаются в следующем:
1) разработана полная модель ИЧФД, в которой отражены все его нелинейности; на ее основе построены полные структурные схемы контура ФАГТЧВ
при различных способах демодуляции выходного ШИМ- сигнала фазового дискриминатора и определены условия их линеаризации в пропорциональном режиме работы;
2) на основе метода фазовой плоскости проведен анализ динамических
процессов в электроприводе с фазовой синхронизацией с учетом реального токоограничения электродвигателя. Получены уравнения линий переключения и
определены области начальных условий для режима вхождения контура
ФАПЧВ в синхронизм со входным задающим частотным сигналом, в том числе
обусловленные токоограничением БДПТ. Исследовано влияние коэффициента
29
усиления регулятора на качество переходных процессов в системе и сформулированы рекомендации по его практическому выбору;
3) предложена классификация способов регулирования электропривода с
фазовой синхронизацией в зависимости от места введения корректирующих
сигналов в основной контур регулирования;
4) исследовано влияние алгоритма работы регулятора на динамику контура фазовой синхронизации, для различных алгоритмов управления получены
уравнения линий переключения и определены области начальных условий по
угловой ошибке и ее производной для пропорционального режима работы электропривода;
5) разработан эффективный способ коррекции контура ФАПЧВ, основанный на введении дополнительного корректирующего сигнала в основной канал
регулирования в режиме насыщения ИЧФД при малых частотных рассогласованиях электропривода;
6) разработан способ регулирования угловой скорости электропривода с
опережающей разблокировкой ИЧФД (при повторном совпадении во времени
его входных импульсов), в результате обеспечивается сокращение времени переходного процесса и снижение перерегулирования по угловой скорости в контуре ФАПЧВ;
7) на основе метода фазовой плоскости с учетом результатов анализа динамики контура ФАПЧВ проведен сравнительный анализ существующих способов фазирования ССЭ по быстродействию;
8) усовершенствован способ фазирования ССЭ с пошаговым доворотом
вала электродвигателя, в котором учитывается знак начальной угловой ошибки;
9) усовершенствован способ квазиоптимального по быстродействию фазирования электропривода;
10) предложена конструкция датчика положения ротора для БДПТ, отличающаяся простотой и технологичностью изготовления;
11) предложен алгоритм работы и разработана схема цифрового преобразователя угла на основе фазовращателя, функционирующая в режиме непрерывного слежения за выходным сигналом первичного преобразователя угла;
12) разработаны способы и средства коррекции оборотных погрешностей
измерительных преобразователей частоты вращения (ИДЧ и ДУС), которые позволяют скомпенсировать основную погрешность датчиков, обусловленную
эксплуатационным эксцентриситетом;
13) разработаны быстродействующие схемы разделения совпадающих во
времени импульсов на входе ИЧФД;
14) разработаны алгоритм работы и схема ИЧФД с синхронизацией работы блокирующих триггеров по импульсам задающей частоты, что позволило
расширить его функциональные возможности, повысить надежность и эффективность работы;
15) разработаны алгоритмы работы и схемы фазового дискриминатора с
расширенной линейной зоной характеристики и частотного дискриминатора с
опережающим формированием выходного сигнала частотного рассогласования;
30
16) предложена схема демодулятора выходного ШИМ- сигнала ЛУС на
основе разделительной / ?С- цепи;
17) проведен сравнительный анализ способов получения сигнала ошибки
по угловой скорости в электроприводеzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONM
с фазовой синхронизацией и предложены
схемы построения цифрового корректирующего устройства;
18) разработаны схемы фазирующего регулятора, реализующие алгоритмы пошагового доворота вала электродвигателя и квазиоптимального по быстродействию фазирования и позволяющие сократить время фазирования;
19) предложена методика проектирования ССЭ.
Основное содержание диссертации опубликовано в следующих работах:
1. Бубнов А.В. Вопросы анализа и синтеза прецизионных систем синхронно- синфазного электропривода постоянного тока // Омск: Редакция журнала «Омский научный вестник», 2004. - 131 с.
2. Бубнов А.В. Вопросы теории и проектирования прецизионных синхронно- синфазных электроприводов постоянного тока: Монография. — Омск:
Редакция журнала «Омский научный вестник», 2005. — 190 с.
3. Бубнов А.В. Анализ влияния алгоритма работы импульсного частотнофазового дискриминатора на динамику электропривода с фазовой синхронизацией // Известия Томского политехнического университета. - 2004. - № 6. - Т.
307.- С . 139- 143.
4. Бубнов А.В. Многофункциональное логическое устройство сравнения
для электропривода с фазовой синхронизацией // Известия Томского политехнического университета. - 2005. - № 4. - Т. 308. - С. 153- 157.
5. Бубнов А.В. Математическая модель логического устройства сравнения
для электропривода с фазовой синхронизацией // Электричество. - 2005. — № 5.
- С . 27- 31.
6. Бубнов А.В. Улучшение динамики электропривода с фазовой синхронизацией // Электротехника. - 2005. - № 11. - С. 48- 52.
7. Бубнов А.В. Способ коррекции электропривода с фазовой синхронизацией // Известия вузов. Электромеханика. - 2005. - № 4.- С. 49- 52.
8. Бубнов А.В. Анализ влияния нелинейностей системы управления на
динамику электропривода с фазовой синхронизацией // Омский научный вестн и к . - 2 0 0 5 . - № 2 . - С . 125- 127.
9. Бубнов А.В. Вопросы выбора регулятора для следящего электропривода
с фазовой синхронизацией / А.В. Бубнов, П.А. Катрич // Омский научный вестн и к . - 2 0 0 5 . - № 2 . - С . 128- 131.
10. Бубнов А.В. Методика проектирования синхронно- синфазного электропривода/ / Омский научный вестник.- 2005. —№ З . - С . 120- 122.
11. Бубнов А.В. Цифровой регулятор для электропривода с фазовой синхронизацией / А.В. Бубнов, А.И. Лыченков // Омский научный вестник. - 2005.
- № З . - С . 122- 125.
31
12. Бубнов А.В. Эффективный способ фазирования систем синхронносинфазных электроприводов // Омский научный вестник. —2005. - № 4. - С.
142- 147.
13. Бубнов А.В. Определение условий линеаризации модели импульсного
частотно- фазового дискриминатора в электроприводе с фазовой синхронизацией // Электричество. - 2006. - № 1. - С. 38- 43.
14. Бубнов А.В. Сравнительный анализ способов улучшения динамики
электропривода с фазовой синхронизацией // Известия вузов. Электромеханика.
- 2 0 0 6 . - № 2 . - С . 37- 41.
15. Бубнов А.В. Анализ влияния токоограничения двигателя на динамику
электропривода с фазовой синхронизацией // Электричество. - 2006. - № 5. — С.
35- 39.
16. Бубнов А.В. Импульсный частотно- фазовый дискриминатор для прецизионного синфазного электропривода / А.В. Бубнов, В.Л. Федоров. - Омск,
1999. - Деп. в ВИНИТИ 23.12.99, № 3806 - В99. - 13 с.
17. Бубнов А.В. Исследование режима синхронизации в контуре фазовой
автоподстройки частоты вращения. - Омск, 1999. - Деп. в ВИНИТИ 23.12.99, №
3805- В99. - 21с .
18. А.с. 737840 СССР, МК И 2 G01 R 11/ 00. Счетчик электрической энергии
/ В.Г. Ш ахов, Р.А. Ахмеджанов, А.В. Бубнов (СССР) - 3 с : ил.
19. А.с. 1029080 СССР, МКИ 3 G 01 Р 3/ 46. Преобразователь угловой скорости / А.В. Бубнов, В.Н. Горюнов (СССР). - 3 с : ил.
4
20. А.с. 1273810 СССР, МКИ G01 Р 3/46. Преобразователь угловой скорости / А.В. Бубнов, В.Н. Зажирко, Б.М. Ямановский (СССР). — 4 с : ил.
21. А.с. 1312734 СССР, МК И 4 Н03 М 1/24. Фотоэлектрический преобразователь угла поворота вала в код / А.В. Бубнов, В.Н. Зажирко, A.M. Сутормин и
др. (СССР). - 4 с : ил.
22. А.с. 1328887 СССР, МК И 4 Н02 К 24/ 00. Бесконтактный преобразователь угла поворота с сосредоточенными обмотками / В.Н. Зажирко, Б.М. Ямановский, А.В. Бубнов и др. (СССР). - 4 с : ил.
23. А.с. 1492459 СССР, МКИ 4 НОЗ К 5/ 153. Устройство для разделения
двух последовательностей импульсов / А.В. Бубнов, В.Н. Зажирко, А.Г. Ш ахнович, A.M. Сутормин (СССР). - 6 с : ил.
24. А.с. 1508332 СССР, МКИ 4 Н02 Р 5/06. Устройство для стабилизации
частоты вращения электродвигателя / А.В. Бубнов, В.Н. Зажирко, В.Г. Кавко и
др. (СССР). - 4 с : ил.
4
25. А.с. 1508334 СССР, МК И Н02 Р 5/06. Стабилизированный электропривод / А.В. Бубнов, В.Г. Кавко, A.M. Сутормин (СССР). — 4 с : ил.
5
26. А.с. 1589373 СССР, МКИ НОЗ D 13/ 00. Частотно- фазовый дискриминатор / А.В. Бубнов, В.Г. Кавко, A.M. Сутормин (СССР). - 5 с : ил.
5
27. А.с. 1591172 СССР, МКИ Н02 Р 5/50, 5/06. Синхронно- синфазный
электропривод / А.В. Бубнов, В.Г. Кавко A.M. Сутормин и др. (СССР). - 6 с : ил.
32
28. Ах. 1594689 СССР, МК И 5 НОЗ М 1/48, 1/64. Преобразователь угла поворота вала в код / А.В. Бубнов, В.Г. Кавко, A.M. Мудрик, A.M. Сутормин
(С С С Р ).- 5 с : ил.
29. А.с. 1612368 СССР, МК И 5 Н02 Р 5/50, 5/06. Устройство для согласования углового положения синхронно вращающихся валов электродвигателей постоянного тока / А.М. Сутормин, В.Г. Кавко, А.В. Бубнов и др. (СССР). - 4 с :
ил.
30. А.с. 1624649 СССР, МК И 5 Н02 Р 5/ 06. Стабилизированный электропривод / А.В. Бубнов, Б.М. Ямановский (СССР). — 4 с : ил.
31. А.с. 1688381 СССР, МК И 5 НОЗ D 13/ 00. Импульсно- фазовый дискриминатор / В.Л. Федоров, А.В. Бубнов, В.Г. Кавко, A.M. Сутормин (СССР). - 4 с :
ил.
32. А.с. 1707723 СССР, МК И 5 Н02 Р 5/ 06. Устройство для стабилизации
частоты вращения электродвигателя / A.M. Мудрик, А.В. Бубнов, В.Г. Кавко и
др. (СССР) - 1 7 с : ил.
33. Пат. 2145060 РФ, МК И 7 G01 F 1/78, 1/28. Устройство для определения
массового расхода текучих сред / А.В. Бубнов, В.И. Кузнецов, В.К. Федоров,
И.О. Щука (РФ) - 4 с : ил.
34. Бубнов А.В. Измерение малых угловых скоростей тахогенераторами
постоянного и переменного тока с коррекцией от импульсного датчика положения / А.В. Бубнов, В.Н. Горюнов // Исследование электрооборудования железнодорожного транспорта: Межвуз. сб. науч. тр. - Омск: ОмИИТ, 1981. — С. 4247.
35. Горюнов В.Н. Особенности применения редкоземельных магнитов в
измерительных преобразователях скорости / В.Н. Горюнов, А.В. Бубнов // Исследование электрооборудования железнодорожного транспорта: Межвуз. сб.
науч. тр. - Омск: ОмИИТ, 1981. - С. 70- 75.
36. Бубнов А.В. Особенности построения цифровой системы управления
бесконтактным двигателем постоянного тока / А.В. Бубнов, Ю.И. Юрьев // Расчет и оптимизация параметров электромагнитных устройств и систем управления электроприводом. - Омск: ОмПИ, 1984. — С. 14- 17.
37. Бубнов А.В. Цифровая фазовая коррекция для дискретного электропривода // Расчет и оптимизация параметров электромагнитных устройств и
систем управления электроприводом. — Омск: ОмПИ, 1985. — С. 62- 65.
38. Бубнов А.В. Исследование режима захвата в астатическом дискретном
электроприводе // Электромагнитные процессы в электрических машинах и аппаратах / Под ред. В.Н. Зажирко. - Омск: ОмПИ, 1986. - С. 37- 39.
39. Мудрик AM . Цифровое моделирование астатического электропривода
с фазовращателем в контуре фазовой синхронизации / A.M. Мудрик, А.В. Бубнов // Расчет и оптимизация параметров электромагнитных устройств и систем
управления электроприводом / Под ред. В.Н. Зажирко. - Омск: ОмПИ, 1987. С. 4- 9.
40. Зажирко В.Н. Многофункциональный измерительный преобразователь
для синхронного электропривода / В.Н. Зажирко, А.В. Бубнов // Разработка ав33
томатизированных средств измерения, контроля и управления для предприятий
железнодорожного транспорта. - Омск: ОмИИТ, 1988. - С. 6- 10.
41. Бубнов А.В. Разработка модели импульсного частотно- фазового дискриминатора // Электромагнитные процессы в электрических устройствах и
машинах. - Омск: ОмПИ, 1990. - С . 18- 21.
42. Зажирко В.Н. Сравнительный анализ способов построения электроприводов с фазовой синхронизацией / В.Н. Зажирко, А.В. Бубнов // Разработка и
исследование автоматизированных средств контроля и управления для предприятий железнодорожного транспорта. — Омск: ОмИИТ, 1990. — С. 6- 10.
43. Бубнов А.В. Датчик положения ротора для бесконтактного двигателя
постоянного тока / А.В. Бубнов, А.И . Лыченков // Электромагнитные процессы
в электромеханических преобразователях энергии: Межвуз. темат. сб. науч. тр. /
Омский гос. ун- т путей сообщения. - Омск, 2006. - С . 51- 57.
44. Зажирко В.Н. Параметрическая оптимизация цифрового корректирующего устройства в системе импульсно- фазовой автоподстройки частоты
вращения / В.Н. Зажирко, А.В. Бубнов, A.M. Сутормин // Тез. докл. Всесоюз.
науч.- техн. конф. «Проблемы повышения эффективности и качества систем
синхронизации». - М.: Радио и связь, 1985. - С. 99.
45. Зажирко В.Н. Цифровая система стабилизации частоты вращения бесконтактного двигателя постоянного тока / В.Н. Зажирко, А.В. Бубнов, A.M. Сутормин / / Тез. докл. Всесоюз. науч.- техн. конф. «Состояние и перспективы развития электротехнологии»: Вторые Бенардосовские чтения. - Иваново, 1985. Т .1.- С . 127- 128.
46. Зажирко В.Н. Многофункциональный измерительный преобразователь
для астатического дискретного электропривода / В.Н. Зажирко, А.В. Бубнов //
Системы управления, следящие приводы и их элементы / Всесоюз. семинар:
Тез. докл. - М., 1986. - С. 166.
47. Зажирко В.Н. Оптоэлектронный преобразователь информации для
дискретного астатического электропривода / В.Н. Зажирко, А.В. Бубнов, A.M.
Сутормин // Системы управления, следящие приводы и их элементы / Всесоюз.
семинар: Тез. док л.- М ., 1987.- С . 229- 230. .
48. Зажирко В.Н. Улучшение динамики синхронно- синфазного электропривода с помощью цифрового корректирующего устройства / В.Н. Зажирко,
А.В. Бубнов, A.M. Сутормин // Системы электроснабжения автономных объектов / ХШ науч.- техн. конф.: Тез. докл. - Томск, 1987. - С . 166- 167.
49. Зажирко В.Н. Анализ динамических свойств астатического дискретно- ,
го электропривода / В.Н. Зажирко, А.В. Бубнов, A.M. Сутормин // Тез. докл.
Всесоюз. науч.- техн. конф. «Состояние и перспективы развития электротехно- ,
- .....
логии»: Третьи Бенардосовские чтения.- И ваново, 1987.- С . 82.
50. Зажирко В.Н. Анализ динамических свойств синхронного электропри- .
вода с цифровой фазовой коррекцией / В.Н. Зажирко, А.В. Бубнов // Тез. докл.
Всесоюз. науч.- техн. конф. «Микропроцессорные системы автоматизации технологических процессов». - Н овосибирск, 1987. - С . 22.
.zyxwvutsrqponmlk
- • .;.
34
51. Бубнов А.В. Моментный двигатель для автономных систем синхронизированного электропривода / А.В. Бубнов, В.Г. Кавко, Д.М. Сутормин // Тез.
докл. 1 Всесоюз. науч.- техн. конф. по электромеханотронике. —Л., 1987. - С.
240- 241.
52. Бубнов А.В. Исследование режима синхронизации в синфазном электроприводе / А.В. Бубнов, A.M. Сутормин // Тез. докл. Всесоюз. науч.- техн.
конф. «Современное состояние, проблемы и перспективы энергетики и технологии в энергостроении»: Четвертые Бенардосовские чтения. - Иваново, 1989. - Т.
2 . - С . 161- 162.
53. Кавко В.Г. Оценка эффективности модальных регуляторов в электроприводе с импульсно- фазовой автоподстройкой частоты вращения / В.Г. Кавко,
А.В. Бубнов // Тез. докл. Междунар. науч.- техн. конф. «Динамика систем, механизмов и машин». - Омск: ОмГТУ, 1995. - К н.1. - С. 33.
54. Бубнов А.В. Эффективный способ коррекции синфазного электропривода / А.В. Бубнов, В.Г. Кавко // Тез. докл. Междунар. науч.- техн. конф. «Динамика систем, механизмов и машин».— Омск: ОмГТУ, 1995.- К н .1.- С . 35.
55. Бубнов А.В. Обоснование модели импульсного частотно- фазового
дискриминатора в системе синхронно- синфазного вращения // Мат. IV Междунар. науч.- техн. конф. «Динамика систем, механизмов и машин». —Омск: ОмГТУ, 2002.- К н .1.- С . 141- 144.
56. Бубнов А.В. Анализ влияния токоограничения электродвигателя на
динамику электропривода тепловизорной системы / А.В. Бубнов, А.И . Лыченков, П.А. Катрич, Т.А. Бубнова // Энергетика на рубеже веков:zyxwvutsrqponmlkjihgfedcbaZY
Сб. матер, науч,практ. конф. / Под ред. В.Н. Горюнова. - Омск: изд. ОмГТУ, 2003. - С. 165- 170.
57. Бубнов А.В. Способ синхронизации синфазного электропривода. //
Динамика систем, механизмов и машин: Мат. V Междунар. науч.- техн. конф. Омск: ОмГТУ, 2004. - С. 169- 172.
58. Бубнов А.В. Способ коррекции синхронно- синфазного электропривода. // Динамика систем, механизмов и машин: Мат. V Междунар. науч.- техн.
конф. - Омск: ОмГТУ, 2004. - С. 173- 176.
59. Бубнов А.В. Разработка способа коррекции электропривода с фазовой
синхронизацией с улучшенными динамическими характеристиками / А.В. Бубнов, Т.А. Бубнова, А.И. Лыченков // Труды Н Всероссийской науч.- практ. конф.
«Автоматизированный электропривод и промышленная электроника в металлургической и горно- топливной отраслях». — Новокузнецк: Изд- во СибГИУ,
2004.- С . 104- 108.
60. Бубнов А.В. Анализ влияния параметров регулятора на динамику
электропривода с фазовой синхронизацией с учетом токоограничения электродвигателя / А.В. Бубнов, П.А. Катрич, А.И . Лыченков // Труды III Всероссийской науч.- практ. конф. «Автоматизированный электропривод и промышленная
электроника в металлургической и горно- топливной отраслях». - Новокузнецк:
Изд- во СибГИУ, 2006. - С. 63- 68.
35
Отпечатано с оригинал- макета, предоставленного автором
И Д № 06039 от 12.10.2001
Подписано к печати 13.07.06. Бумага офсетная. Формат 60*84 1/16.
Отпечатано на дупликаторе. Усл.печл. 2,0. Уч.- изд.л. 2,0.
Тираж 100 экз. Заказ 604.
Издательство ОмГТУ. 644050, г. Омск, пр. Мира, 11.
Типография ОмГТУ.