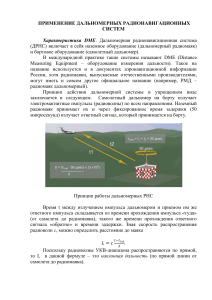
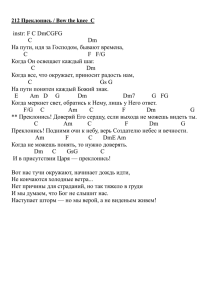
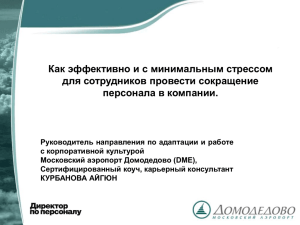
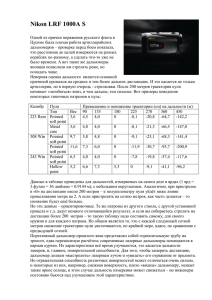
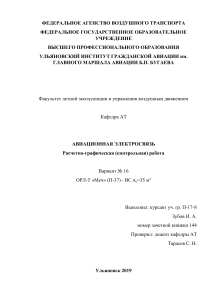
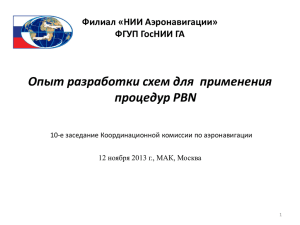
ПРИМЕНЕНИЕ ДАЛЬНОМЕРНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ Характеристика DME. Дальномерная радионавигационная система (ДРНС) включает в себя наземное оборудование (дальномерный радиомаяк) и бортовое оборудование (самолетный дальномер). В международной практике такие системы называют DME (Distance Measuring Equipment – оборудование измерения дальности). Такое на название используется и в документах аэронавигационной информации России, хотя радиомаяки, выпускаемые отечественными производителями, могут иметь и совсем другое официальное название (например, РМД – радиомаяк дальномерный). Принцип действия дальномерной системы в упрощенном виде заключается в следующем. Самолетный дальномер на борту излучает электромагнитные импульсы (радиоволны) по всем направлениям. Наземный радиомаяк принимает их и через фиксированное время задержки (50 микросекунд) излучает ответный сигнал, который принимается на борту. Принцип работы дальномерных РНС Время t между излучением импульса дальномером и приемом им же ответного импульса складывается из времени прохождения импульса «туда» (от самолета до радиомаяка), такого же времени прохождения ответного сигнала «обратно» и времени задержки. Зная скорость распространения радиоволн с, можно определить расстояние до маяка 𝑡−𝑡 𝐿 = 𝑐 зад. 2 Поскольку радиоволны УКВ-диапазона распространяются по прямой, то L в данной формуле – это наклонная дальность (по прямой линии от самолета до радиомаяка). В данном случае получается, что бортовое оборудование как бы запрашивает информацию у радиомаяка, то есть является запросчиком (interrogator), а радиомаяк отвечает ему, является ответчиком (transponder). Это общий принцип измерения дальности, но на самом деле, конечно, все сложнее и интереснее. Дальномер излучает не одиночные, а парные импульсы (интервал между импульсами в паре, например, 12 мкс) и радиомаяк «отвечает» только в том случае, если получил именно такой импульс. В противном случае ему пришлось бы отвечать на все случайные импульсы, которые какое-то другое оборудование передало на этой частоте (например, сотовая связь работает в близком диапазоне частот). Все самолеты, работающие с данным радиомаяком, излучают импульсы на одной частоте, но интервал между парами импульсов у всех ВС разный, у каждого своя частота повторения импульсов PRF (Pulse Repetition Frequency). Ответчик радиомаяка посылает импульсы с такой же PRF, с какой принял сигналы от данного самолета. Это сделано для того, чтобы каждый самолет получил ответ именно на свой сигнал, а не для другого ВС. Кроме того, радиомаяк отвечает не на той частоте, на которой он сигнал принял, а на отличающейся от нее на 63 МГц. Это сделано для того, чтобы бортовой дальномер не принял по ошибке за ответный сигнал радиомаяка собственные импульсы, отраженные от каких-то объектов (гор, облаков, фюзеляжа). В противном случае могло бы получиться так, что дальномер излучил запросные импульсы, они отразились от горы, дальномер их принял и посчитал, что это ответные импульсы от радиомаяка. При включении бортового оборудования DME оно вначале работает в режиме поиска и передает запросные импульсы с частотой 150 пар в секунду. Когда ответный сигал получен (обычно через 4-5 секунд) частота следования импульсов уменьшается до 25 в секунду. Пропускная способность наземного ответчика ограничена, он может не успевать ответить всему множеству самолетов, которые его запрашивают. Обычно радиомаяк способен обслужить одновременно 100 самолетов. Если их в зоне действия маяка находится больше, то перестают обслуживаться наиболее слабые сигналы, от наиболее удаленных самолетов. Для работы DME выделен диапазон частот от 960 до 1215 МГц. Это дециметровые волны (UHF) ультракоротковолнового диапазона, откуда следует, что они распространяются в пределах дальности прямой видимости. Поэтому к ним относится все, что говорилось ранее о максимальной дальности действия средств УКВ-диапазона. Но оказывается, что в большинстве случаев пилоту вовсе не обязательно знать, на какой частоте работает радиомаяк DME. Дело в том, что по отдельности, сами по себе, такие радиомаяки устанавливают крайне редко. В большинстве случаев они совмещены (co-located) с маяками VOR или маяками посадочной системы ILS. Конструктивно эти средства с DME могут быть никак не связаны и работают на других частотах, просто установлены в одном и том же месте. В этом случае частоты таких радиомаяков DME и радиомаяков VOR (или ILS) являются спаренными, то есть объединены в пары. Каждой частоте VOR соответствует своя вполне определенная частота DME. Опубликованы специальные таблицы соответствия частот. Например, если частота VOR 108,40 МГц, то частота DME обязательно будет 1045 МГц для запросных импульсов и 982 МГц (на 63 МГц меньше) для ответных импульсов. То же самое и для ILS. Частоты VOR и ILS, о которых шла речь в предыдущих главах, пронумерованы и эти номера названы каналами (Channel). Таблица 6.1 Выдержка из таблицы номеров каналов Канал Частота VHF средства, МГц 20Х 108,30 20Y 108,35 21X 108,40 21Y 108,45 22X 108,50 22Y 108,55 23X 108,60 24Y 108,65 Вид VHF средства Соответствующие частоты DME и TACAN, МГц Запрос Ответ ILS ILS VOR VOR ILS ILS VOR VOR 1044 1044 1045 1045 1046 1046 1047 1047 981 1107 982 1108 983 1109 984 1110 Из таблицы можно видеть, что для каналов, обозначенных Х, частота ответа на 63 МГц меньше, чем запроса, а для каналов У – наоборот на 63 МГц больше. Если пилот на своем бортовом оборудовании устанавливает частоту VOR (или ILS), то автоматически устанавливается и соответствующая ей частота DME. Могут использоваться радиомаяки трех видов, обозначаемые как DME/N, DME/P и DME/W. В подавляющем большинстве случаев приходится иметь дело с маяками DME/N как на трассах, так и на аэродромах, поэтому под DME далее и будем понимать именно их. Они имеют узкий спектр излучения (N – narrow, узкий). Маяки DME/P являются более точными (P – precision, точность), но устанавливаются, как правило, только в составе микроволновой системы посадки MLS (Microwave Landing System). Но таких систем на аэродромах мира установлено очень мало. Еще реже используются DME/W с широким спектром излучения (W – wide, широкий). Бортовое оборудование, работающее с маяками DME, часто называют самолетными дальномерами (например, СД-67, СД-75). Пилоту приходится иметь дело с его индикатором, на котором дальность отображается в виде цифр – электромеханическим способом (барабанный счетчик) или с помощью светодиодов. Значение дальности может быть выведено и на другие индикаторы, например, на HIS. DME является очень точным средством. В соответствии со стандартами ИКАО суммарная погрешность измерения дальности, выраженная в метрах, должна быть не больше ±(460+0,0125D), где D – значение измеряемой дальности. Чем дальше самолет от маяка, тем больше погрешность измерения дальности. Указанная погрешность соответствует вероятности 0,95, следовательно, СКП измерения дальности вдвое меньше. Это означает, что вблизи радиомаяка СКП имеет порядок около σD=0,3 км, а на удалении, например, D=300 км, уже около σD=2 км. Это очень хорошая точность, которая в большинстве случаев удовлетворяет современным жестким требованиям к точности аэронавигации. У DME/P погрешность еще меньше (порядка 30 м). Пересчет наклонной дальности в горизонтальную. Дальномерные системы непосредственно измеряют наклонную дальность, но для навигации чаще необходима дальность горизонтальная. Для определения МС, то есть местоположения ВС на земной поверхности, пилот откладывает дальность на карте, то есть в горизонтальной плоскости. Очевидно, что по величине наклонная и горизонтальная дальности различаются, и если вместо горизонтальной дальности использовать наклонную (например, отложив ее на карте), то будет иметь место погрешность. Она будет иметь систематический характер, поскольку при данных условиях будет иметь одну и ту же величину. Разумеется, эта погрешность возникает не по вине самой дальномерной системы (она-то измеряет дальность правильно), а по вине пилота, который вместо одной величины использует другую. С учетом сферичности Земли рассчитать горизонтальную дальность по известной наклонной можно по формуле 𝐿2 − 𝐻2 𝐷=√ , 𝐻 1+ 𝑅 где H – высота полета; R – радиус Земли. Можно обратить внимание, что в данной формуле величина H/R очень мала (порядка одной тысячной), следовательно, знаменатель под корнем очень близок к единице. Поэтому данную формулу вполне можно упростить: 𝐷 = √𝐿2 − 𝐻2 . Очевидно, что эта формула соответствует теореме Пифагора и предполагает, что Земля плоская. Однако ею вполне можно пользоваться, учитывая, что в гражданской авиации выполняются полеты не на столь уж больших высотах, особенно по сравнению с радиусом Земли. Например, если полет выполняется на высоте H=10 км и измерена L=300 км, то по точной формуле (с учетом сферичности Земли) получим D=299,598 км, а по приближенной (на плоскости) D= 299,833 км. То есть погрешность составит всего 235 метров. Это сопоставимо со случайной погрешностью измерения дальности с помощью DME. Таким образом, учитывать сферичность Земли при расчете горизонтальной дальности не имеет особого смысла, особенно на небольших удалениях. Наклонная и горизонтальная дальности Но, может быть, можно вообще не пересчитывать наклонную дальность в горизонтальную? А вот это допустимо делать далеко не всегда. Прежде всего, можно обратить внимание, что соотношение между L и D зависит еще и от высоты полета H. Когда ВС находится точно над радиомаяком, наклонная дальность равна высоте полета, а горизонтальная дальность равна нулю. В такой ситуации имеет место самое большое различие между L и D. Но по мере удаления от радиомаяка различие между этими величинами становится все меньше. Уменьшается разность между гипотенузой (L) и катетом (D) в прямоугольном треугольнике, вершинами которого являются радиомаяк, ВС и МС. Эта разность может стать сравнимой по величине с самой точностью измерения наклонной дальности. На практике принято считать, что вполне допустимо не пересчитывать наклонную дальность в горизонтальную (то есть, принять D=L) в случае, если наклонная дальность превышает высоту полета в 5-7 раз и более, то есть 𝐿 > 5 … 7. 𝐻 Например, если H=10 км, а L=70 км (в семь раз больше), то получим D=69,3 км. Наклонная дальность отличается от горизонтальной на 700 м. В большинстве случаев этой погрешностью можно пренебречь, ведь современный самолет пролетает это расстояние за 3 сек. Но если при полете на той же высоте наклонная дальность составляет всего L=30 км, то ей соответствует D=28,3 км. Погрешность в 1,7 км является уже довольно существенной, особенно при полете в районе аэродрома, где требуется более высокая точность навигации. Пересчет наклонной дальности в горизонтальную можно выполнить непосредственно по формуле, например, с помощью калькулятора. Но при наличии НЛ-10 это удобнее сделать с использованием вспомогательного угла θ . Очевидно, что 𝐻 𝑠𝑖𝑛𝜃 = , 𝐿 D=L sin θ. Эти несложные формулы могут быть легко реализованы на НЛ-10 с помощью ключа. Пересчет наклонной дальности в горизонтальную на НЛ-10 Применение DME для решения навигационных задач. При полете на радиомаяк или от него легко определить путевую скорость с использованием секундомера. Ведь пройденное расстояние равно изменению дальности, поэтому: 𝑊= 𝐷2 −𝐷1 , 𝑡 Разумеется, пройденное расстояние (разность дальностей) не должно быть слишком мало. В противном случае погрешности измерения дальностей могут привести к снижению точности определения W (см. п. ). Некоторые виды бортового дальномерного оборудования позволяют не только измерять дальность, но и рассчитывать путевую скорость по скорости изменения дальности. А если уже известна W и расстояние до радиомаяка, нетрудно определить и время полета до него. Разумеется, скорость и время будут определены правильно только в случае, когда ВС летит на радиомаяк или от него. Измерив две дальности до двух радиомаяков DME можно определить место самолета на карте. Навигационному параметру дальность соответствует ЛРР, имеющая форму окружности. Построив на карте две ЛРР можно найти МС в точке их пересечения. Две окружности, вообще говоря, пересекаются в двух точках, в каждой из которых дальности имеют измеренные значения. Возникает вопрос: в какой из этих двух точек на самом деле находится ВС? Этот вопрос приходится решать отдельно, но обычно большой проблемы здесь нет. Эти две точки чаще всего находятся достаточно далеко друг от друга. Обычно ВС летит близи заданного маршрута и примерный район местоположения ВС известен. Если одна из точек оказалась вблизи ЛЗП, а другая в сотне километров от нее, то пилот легко определит, где ВС находится на самом деле. Определение МС по двум дальностям Точность определения МС таким способом на карте зависит не столько от погрешностей измерения дальностей (это всего лишь несколько сотен метров), сколько от погрешностей графической работы на карте при прокладке ЛРР. Действительно, с помощью линейки вряд ли возможно отложить расстояние точнее, чем 0,5- 1 мм. Но на полетных картах в зависимости от их масштаба одному миллиметру обычно соответствует 2-4 км. Зависит точность и от угла пересечения двух ЛРР, имеющих вид окружностей. Нетрудно сообразить, что две окружности пересекаются по таким же углом, что и радиусы этих окружностей, исходящие из точки пересечения (это углы с взаимно перпендикулярными сторонами). Поэтому при выборе радиомаяков лучше выбирать такие два из них, чтобы угол между направлениями на них был ближе к 90°. Таким образом, определить МС на карте дальномерным способом (по двум дальностям) достаточно легко, но на практике этим способом пользуются довольно редко. В частности, потому, что для прокладки ЛРР нужен циркуль, которого в наборе штурманских инструментов пилота обычно нет. Однако дальномерный способ определения МС на многих современных ВС автоматизирован. Ведь обобщенный способ определения МС не обязательно предполагает, что линии положения нужно графически наносить на карте. Координаты МС можно определить аналитически, путем расчета. В п. упоминалось, что если известна зависимость двух навигационных параметров (а здесь параметрами являются D1 и D2) от координат точки (например, широты и долготы), то путем решения системы из двух уравнений D1= f1(φ,λ), D2= f2(φ,λ), можно найти координаты МС φ и λ. Вид функций f1 и f2 на поверхности земной сферы (не говоря уже об эллипсоиде), является довольно сложным. Если обозначить через φp и λp координаты радиомаяков, то формулы будут иметь вид D1=R arccos(sin φp1 sin φ+cos φp1 cos φ cos(λp1-λ)); D2=R arccos(sin φp2 sin φ+cos φp2 cos φ cos(λp1-λ)). Понятно, что вручную непросто решить такую систему уравнений и найти координаты самолета φ и λ, но бортовой вычислитель легко справляется с подобной задачей. Координаты радиомаяков уже хранятся в бортовой базе аэронавигационных данных, дальности до этих маяков непрерывно измеряются бортовым оборудованием DME и бортовой вычислитель постоянно рассчитывает текущие координаты самолета. Точность такого автоматизированного способа определения координат довольно высока. Ведь дальности измеряются достаточно точно, а погрешности графической работы на карте вовсе отсутствуют. Поэтому в современной аэронавигации этот способ является вторым по точности после спутниковых навигационных систем.