Министерство образования и науки Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«Омский государственный технический университет»
А. И. Мирошник, О. А. Лысенко
ЭЛЕКТРИЧЕСКИЙ ПРИВОД
Конспект лекций
Омск
Издательство ОмГТУ
2010
1
УДК 621.31
ББК 31.291
М63
Рецензенты:
В. К. Федоров, д-р техн. наук, профессор кафедры электроники
Омского государственного аграрного университета (ОмГАУ);
Б. Н. Коврижин, канд. техн. наук, доцент, начальник учебнопроизводственного центра МЭПЭП «Омскэлектро» г. Омска
Мирошник, А. И.
М63
Электрический привод : конспект лекций / А.И. Мирошник,
О.А. Лысенко. – Омск: Изд-во ОмГТУ, 2010. – 100 с.
ISBN 978-5-8149-0987-9
Изложен материал по изучению электрических приводов, которые являются основным средством автоматизации и комплексной механизации технологических и производственных процессов. Значительное внимание уделено
устройствам электроприводов постоянного и переменного тока, принципам их
работы и основным характеристикам. Выделены также наиболее существенные
и общие черты современных разомкнутых электроприводов.
Предназначен для студентов специальности 140610 «Электрооборудование
и электрохозяйство предприятий, организаций и учреждений» и по направлению подготовки бакалавриата 140600 «Электротехника, электромеханика и
электротехнологии» дневной и дистационной форм обучения, а также студентов специальности 080801Э «Прикладная информатика в электрооборудовании
и электрохозяйстве предприятий, организаций и учреждений» дневной формы
обучения.
Печатается по решению редакционно-издательского совета
Омского государственного технического университета
УДК 621.31
ББК 31.291
ISBN 978-5-8149-0987-9
© ГОУ ВПО «Омский государственный
технический университет», 2010
2
ВВЕДЕНИЕ
Электрический привод (ЭП) является энергетической основой технологических и производственных процессов, которые реализуются за счет механической энергии. Приводя в движение исполнительные органы (ИО) рабочих машин и механизмов и управляя этим движением с заданным качеством, ЭП
обеспечивает добычу полезных ископаемых, изготовление и обработку различных изделий и материалов, перемещение людей и грузов, и выполнение многих
других технологических операций с наилучшими техническими и экономическими показателями.
Более 60 % вырабатываемой в стране электроэнергии потребляется электрическим приводом. Чем же определяется главенствующее место электрического привода среди других возможных видов привода – теплового, гидравлического и пневматического. Объясняется это целым рядом его преимуществ:
1) наиболее экономичным преобразованием электрической энергии в механическую;
2) возможностью изготовления электродвигателей на самые разнообразные
мощности и скорости движения. Диапазон мощности современного электропривода колеблется от сотых долей ватта до десятков тысяч киловатт, а пределы скорости вращения – от долей оборота вала в минуту до нескольких сотен
тысяч оборотов в минуту;
3) высоким КПД электропривода, надежностью в эксплуатации, благоприятными условиями для обслуживающего персонала, отсутствием загрязнения
окружающей среды;
4) возможностью создания электроприводов для работы в самых разнообразных условиях – в воде, в среде агрессивных жидкостей и газов, при низких и
высоких температурах и т.д.;
5) разнообразием конструктивного исполнения электродвигателей, что
позволяет рационально соединять приводы с исполнительным органом рабочей
машины;
6) возможностью с помощью простых средств реализовать разнообразные
и сложные виды движения исполнительных органов рабочих машин, а также
изменять направление движения и его параметры – скорость, ускорение;
7) легкостью автоматизации производственных и технологических процессов.
Возможности использования современных ЭП продолжают постоянно
расширяться.
3
1. ПОНЯТИЕ «ЭЛЕКТРОПРИВОД»
1.1. Структурная схема электропривода
Электропривод предназначен для приведения в движение исполнительных органов (ИО) рабочих машин. Он позволяет осуществлять автоматизацию
и комплексную механизацию производственных и технологических процессов,
резко повысить производительность труда, качество выпускаемой продукции,
улучшить условия труда [3,4].
Простейшая структурная схема разомкнутого электропривода приведена
на рисунке 1.1. Обратные связи в схеме отсутствуют.
ИЭЭ
ЭЭ
ПУ
ЭЭ
ЭД
МЭ
МПУ
МЭ
ИО
Рис. 1.1. Структурная схема электропривода
В схеме:
ЭЭ – электрическая энергия. Ее параметры – напряжение (U), частота (f)
и ток (I);
МЭ – механическая энергия. Ее параметры – угловая (ω) или линейная
(V) скорость, полезный момент (М) или сила (F);
ИЭЭ – источник электрической энергии;
ПУ – преобразовательное устройство – преобразователь напряжения или
частоты, предназначенное для преобразования параметров электроэнергии;
ЭД – электродвигательное устройство (электродвигатель). Электродвигатель предназначен для преобразования электрической энергии в механическую
и обратно. В электроприводах применяют электродвигатели постоянного и переменного тока традиционного исполнения и специального исполнения. Ротор
(или якорь) обладают моментом инерции J (кг·м2), вращаются со скоростью
(рад/с). На валу двигателя возникает полезный момент М (Н м) и полезная
мощность Р2 (кВт);
МПУ – механическое передаточное устройство, предназначенное для изменения скорости вращения или вида движения. В качестве МПУ в электроприводах применяют редуктор, ременную передачу, винтовую и зубчатореечную передачи, кривошипно-шатунный механизм, барабан с тросом, электромагнитную фрикционную муфту и некоторые другие.
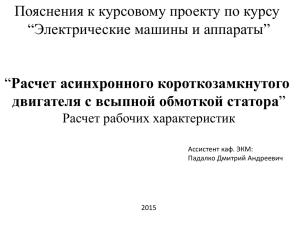
В качестве примера приведем редукторную и винтовую передачи
(рис.1.2 а, б).
В элементах МПУ за счет трения возникают потери мощности ∆Р (кВт).
МПУ обладают либо моментом инерции Jи.о. (кг м2 ) или инерционной массой m
(кг);
ИО – исполнительный орган, предназначенный для совершения полезной
работы.
4
ωио
а)
Ζ2
ИО
б)
ИО
VИ.О (м/с)
Д
ωд
Ζ1
Д
Ходовой винт
Гайка
ωд
Рис. 1.2. Виды передач:
а) редукторная передача; б) винтовая передача
На ИО – возникает момент сопротивления Мс или сила сопротивления Fс
в ньютонах, в зависимости от вида движения. Они создают на ИО мощность
сопротивления Рс = М с и .о – при вращательном движении; Рс = Fс Vи.о – при
линейном движении.
Электродвигатель (с учетом потерь мощности в МПУ) должен преодолевать мощности сопротивлений.
Согласно приведенной структурной схеме режимы работы электродвигателя, а следовательно, и исполнительного органа задаются вручную путем воздействия на параметры преобразовательного устройства (ПУ).
1.2. Функции электропривода и требования к нему
Для функционирования рабочих машин и механизмов к их исполнительным органам от привода должна быть подведена механическая энергия, за счет
которой и совершается движение этих механизмов. Характер движения может
быть разнообразным – вращательным однонаправленным (крыльчатка насоса и
вентилятора, фреза фрезерного станка) и реверсивным (валки прокатного стана,
шпиндель токарного станка), поступательным однонаправленным (лента
транспортера, цепь конвейера) и реверсивным (стол строгального станка, подъемные механизмы), а также возвратно-поступательным (прессы). Иногда эти
движения должны совершаться сразу в нескольких плоскостях – антенна радиотелескопа, рука «робота», ковш экскаватора.
Многие машины и механизмы при своей работе требуют изменения не
только направления, но и скорости движения исполнительных органов. Так, угловая скорость валков прокатного стана должна быть различной в зависимости
от профиля прокатываемого металла. Также необходимо изменять скорость подачи режущего инструмента или стола металлообрабатывающего станка в зависимости от твердости материала обрабатываемой детали, ее конфигурации и
стойкости режущего инструмента. Для большинства подъемно-транспортных
машин – кранов, лифтов – для обеспечения точного останова исполнительных
органов их скорость должна быть предварительно снижена [3].
5
Еще одно важное требование к электроприводу связано с поддержанием с
заданной точностью скорости движения исполнительного органа (металлорежущие станки, прокатные станы и т.д.).
Наряду с обеспечением движения исполнительных органов электропривод одновременно выполняет и разнообразные функции по автоматизации технологических процессов и операций. Круг этих функций разнообразен. Большинство их может быть решено только с применением современного автоматизированного электропривода.
Немаловажной функцией, возлагаемой на электропривод, является обеспечение защит, блокировок и сигнализаций при работе технологического оборудования.
1.3. Классификация электроприводов
Классификация электроприводов обычно производится по виду движения и управляемости, роду электрического и механического передаточных
устройств, способу передачи механической энергии исполнительным органам
[4].
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения.
По принципу регулирования скорости и положения исполнительного
органа электропривод может быть:
нерегулируемый и регулируемый по скорости;
следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим
сигналом);
программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой);
адаптивный (электропривод автоматически обеспечивает оптимальный
режим движения исполнительного органа при изменении условий его работы);
позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают:
вентильный электропривод, преобразовательным устройством в котором
является тиристорный или транзисторный преобразователь электроэнергии;
система управляемый выпрямитель-двигатель (УВ-Д) – вентильный
электропривод постоянного тока, преобразовательным устройством которого
является регулируемый выпрямитель напряжения;
система преобразователь частоты – двигатель (ПЧ-Д) – вентильный
электропривод переменного тока, преобразовательным устройством которого
является регулируемый преобразователь частоты;
6
система генератор-двигатель (Г-Д) и магнитный усилитель-двигатель
(МУ-Д) – регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат
или магнитный усилитель.
По способу передачи механической энергии исполнительному органу
электроприводы делятся на групповые, индивидуальные и взаимосвязанные.
Групповой электропривод характеризуется тем, что от одного двигателя
приводится в движение через трансмиссию несколько исполнительных органов
одной или нескольких рабочих машин. Кинематическая цепь в таком приводе
сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие
этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным
двигателем. Этот вид привода в настоящее время является основным, так как
при индивидуальном электроприводе упрощается кинематическая передача
(в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса,
улучшаются условия обслуживания рабочей машины.
Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных ЭП, при работе
которых поддерживается заданное соотношение или равенство скоростей, или
нагрузок, или положение исполнительных органов рабочих машин. Необходимость в таком приводе возникает по конструктивным или технологическим соображениям.
Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного
конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса.
В том случае, когда во взаимосвязанном электроприводе возникает необходимость постоянства соотношения скоростей рабочих органов, не имеющих
механических связей, или когда осуществление механических связей затруднено, используется специальная схема электрической связи двух или нескольких
электродвигателей, называемая схемой электрического вала. Примером такого
привода может служить привод сложного металлообрабатывающего станка,
электропривод шлюзов и разводных мостов и т.д.
Взаимосвязанный электропривод широко применяется в бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического
производства и т.д.
7
Следует отметить, что по уровню автоматизации электроприводы можно разделить на неавтоматизированные, автоматизированные и автоматические. Два последних типа электроприводов находят применение в подавляющем большинстве случаев.
1.4. Основные направления развития электропривода
1. Совершенствование существующих и создание новых типов электроприводов в направлении повышения их надежности, производительности, экономичности и точности в работе. В электроприводах необходимо применять
современные или перспективные электродвигатели, преобразователи и аппаратуру управления. Подробно это направление можно изучить в рекомендуемой
учебной литературе.
2. Расширение областей применения электроприводов.
3. Расширение диапазона номинальных мощностей электродвигателей.
4. Расширение шкалы номинальных скоростей электродвигателей.
5. Расширение диапазона регулирования скоростей электродвигателей
(до 10000 – 15000 и более).
6. Дальнейшее сближение электродвигателя с исполнительным органом.
7. На базе разомкнутых электроприводов шире внедрять цифровые замкнутые автоматизированные электроприводы (следящие и с числовым программным управлением), что позволит автоматизировать работу исполнительных органов и осуществить широкую автоматизацию цехов.
2. МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Активные и реактивные моменты сопротивления
Активные моменты сопротивления – моменты, вызванные весом поднимаемого и спускаемого груза. В уравнении механического движения электропривода перед этим моментом всегда ставится знак (–) независимо от подъема
или спуска груза.
Реактивный момент сопротивления – момент, всегда препятствующий
движению электропривода и изменяющий свой знак при изменении направления движения (например при резании металла). При положительной скорости
электродвигателя перед этим моментом в уравнении механического движения
электропривода необходимо ставить знак (–), а при обратном движении знак
(+).
За положительное направление вала двигателя принимается вращение по
часовой стрелке. Если временной момент на валу двигателя направлен в эту
сторону, то ему приписывают знак (+). При обратном направлении движения –
знак (–). В тормозных режимах двигателя знаки перед вращающимся моментом
двигателя и угловой скоростью противоположны.
8
2.2. Приведение к валу электродвигателя моментов
и сил сопротивления, моментов инерции и инерционных масс
Механическая часть электропривода может быть сложной и представлять кинематическую цепь с большим числом движущихся элементов (шестерни, соединительные муфты, тормозные шкивы, барабаны, поворотные платформы, линейный стол, поднимаемые грузы и т.д.). Движение одного элемента
дает полную информацию о движении всех остальных элементов. Обычно в качестве такого элемента принимают вал двигателя, приводя к нему моменты и
усилия сопротивления, а также моменты инерции и массы.
В результате такого приведения реальная кинематическая схема заменяется расчетной энергетически эквивалентной схемой. Это позволяет наиболее
точно исследовать характер движения привода и режим его работы, точнее
формировать законы движения. Покажем такое приведение на примере схемы
механической части электропривода подъемной лебедки (рис. 2.1).
Ζ2
ω,М,Jд
ЭД
б
М2
х
М1
К
р
х
ωи.о,Jио,Мио
Б
ωд Мд
Jпр,Мс.пр
Vио
Fс.ио
Кр
Ζ1
m
Рис. 2.1. Схема механической части электропривода
На основании вышеизложенного запишем в окончательном виде формулы
приведенных к валу электродвигателя параметров исполнительных органов [1,2].
Примем следующие допущения: система жесткая, без зазоров.
При прямом потоке энергии в механической части ( подъем груза)
М с.ио
.
i р н
М с.пр
(2.1)
При обратном потоке энергии в механической части (опускание груза)
М с.пр
М с.ио н
,
iр
(2.2)
В формулах (2.1) и (2.2):
д 2
– передаточное число редуктора;
ио 1
п р б – КПД передачи.
iр
При линейном движении ИО и прямом потоке энергии (подъем груза)
М с.пр
9
Fс.ио
н
.
(2.3)
При обратном потоке энергии (опускание груза)
М с.пр Fс.ио н .
В формулах (2.3) и (2.4):
Fс.ио – сила тяжести, Н;
Fс.ио m g , m – масса груза вместе с крюком, кг;
g = 9,81 м/с2 – ускорение силы тяжести;
r
Vио
д
(2.4)
– радиус приведения кинематической цепи между двигателем и ис-
полнительным органом, м.
Приведенный к валу двигателя суммарный момент инерции
J пр J д
J ио
mr 2 ,
2
i
(2.5)
В формуле (2.5) в момент инерции двигателя J д входит момент инерции
муфты М1 и шестерни Z1, а в момент инерции исполнительного органа (барабана) J ио – момент инерции муфты М2 и шестерни Z2 .
2.3. Механические характеристики исполнительных органов
и электродвигателей
При рассмотрении работы электродвигателя, приводящего в действие
исполнительный орган, необходимо выявить соответствие механических характеристик двигателя характеристикам исполнительных органов. Поэтому для
правильного проектирования и экономической эксплуатации электропривода
необходимо изучить эти характеристики.
Зависимость между скоростью и приведенным к валу двигателя моментом сопротивления исполнительного органа f ( M с.пр ) называют механической характеристикой исполнительного органа.
Эмпирическая формула для механической характеристики имеет вид [1]:
М с М с.тр (М с.ном М с.тр )( / ном ) х ,
(2.6)
где М с – момент сопротивления ИО при скорости ;
М с.тр – момент сопротивления трения в движущихся частях ИО;
М с.ном – момент сопротивления при номинальной скорости ном ;
х – показатель степени, характеризующий изменение момента сопротивления при изменении скорости.
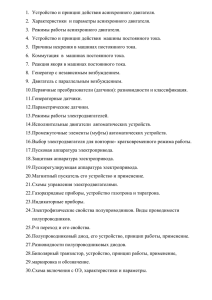
Приведенная формула (2.6) позволяет классифицировать механические
характеристики исполнительных органов на следующие основные категории.
1. Не зависящая от скорости механическая характеристика (прямая 1 на
рис. 2.2.). При этом х = 0 и момент сопротивления не зависит от скорости. Такой характеристикой обладают все подъемные установки, механизмы подач металлорежущих станков, поршневые насосы при неизменной высоте подачи,
конвейеры с постоянной массой передвигаемого материала и т.д., а также все
10
ИО, у которых основным моментом сопротивления является момент сопротивления трения.
2. Линейно-возрастающая механическая характеристика (прямая 2 на
рис. 2.2.). В этом случае х =1 и момент сопротивления линейно зависит от скорости . Такая характеристика получается, например, в приводе генератора постоянного тока с независимым возбуждением, если последний будет работать
на постоянный внешний резистор.
ω
4
3
2
1
Мс
Рис. 2.2. Механические характеристики исполнительных органов
3. Нелинейно-возрастающая (параболическая) механическая характеристика (кривая 3 на рис.2.2.). Этой характеристике соответствует х =2; момент
сопротивления здесь зависит от квадрата скорости. По характеристике 3 работают все исполнительные органы центробежного типа (насосы, вентиляторы,
компрессоры, дымососы, гребные винты и т.д.).
4. Нелинейно-спадающая (гиперболическая) механическая характеристика
(кривая 4 на рис. 2.2). При этом х = –1 и момент сопротивления М с изменяется
обратно пропорционально скорости.
Механическую характеристику вида 4 имеют механизмы главного движения токарных, фрезерных и других станков, различные наматывающие устройства.
Механической характеристикой электродвигателя вращательного движения называется зависимость его угловой скорости от развиваемого им момента,
т.е. f ( М ) .
Естественной называется механическая характеристика двигателя, которая соответствует основной схеме включения двигателя, номинальным параметрам питающего напряжения и отсутствию в электрических цепях дополнительных элементов (например, резисторов). В противном случае электродвигатель будет иметь искусственную (регулировочную) характеристику. Искусственных характеристик у электродвигателя может быть много.
На рисунке 2.3 показаны естественные характеристики наиболее распространенных электродвигателей вращательного движения:
1 – двигателя постоянного тока независимого возбуждения;
2 – двигателя постоянного тока последовательного возбуждения;
11
3 – асинхронного двигателя;
4 – синхронного двигателя.
Для оценки жесткости механической характеристики двигателя вводится
понятие жесткости, которое определяется как [1,4]
д
М М 2 М 1
,
2 1
(2.7)
Используя этот показатель, характеристику синхронного двигателя (прямая 4 на рис. 2.3) можно назвать абсолютно жесткой ( д ), двигателя постоянного тока с независимым возбуждением (прямая 1) – жесткой ( д 0 ), а с
последовательным возбуждением (кривая 2) – мягкой ( д 0 ).
ω
4
1
3
5
2
М
Рис. 2.3. Естественные механические характеристики электродвигателя
Характеристика асинхронного двигателя (кривая 3) имеет переменную
жесткость – на рабочем участке жесткость отрицательна и незначительна по
модулю, в области критического момента она равна нулю, а при меньших скоростях – положительна и невелика.
Характеристика 5 – абсолютно мягкая механическая характеристика
( д 0 ). Момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока
независимого возбуждения при питании их от источника тока или при работе в
замкнутых системах электропривода в режиме стабилизации тока якоря.
Понятие жесткости может быть применено к механическим характеристикам исполнительных органов. Эти характеристики можно оценивать жесткостью
с
М с
.
Тогда для характеристики 1 (рис.2.2)
с 0 , а для характеристики 4 с 0 .
12
(2.8)
с 0 , для характеристик 2 и 3
2.4. Уравнение движения электропривода
Когда момент, развиваемый двигателем, равен моменту сопротивления
исполнительного органа, скорость привода постоянна.
Однако во многих случаях привод ускоряется или замедляется, т.е. работает в переходном режиме.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т.е. пуск, торможение, изменение направления вращения и т.п., а также нарушение работы системы электроснабжения.
Уравнение движения электропривода должно учитывать все моменты,
действующие в переходных режимах.
В общем виде уравнение движения электропривода может быть записано
следующим образом [1]:
М М спр J пр
d
.
dt
(2.9)
При положительной скорости уравнение движения электропривода имеет
вид
М М спр J пр
d
.
dt
(2.10)
Уравнение (2.10) показывает, что развиваемый двигателем вращающий
момент М уравновешивается моментом сопротивления М с и динамическим
пр
моментом J пр
d
. В уравнениях (2.9) и (2.10) принято, что момент инерции
dt
привода J пр является постоянным, что справедливо для значительного числа
исполнительных органов.
Из анализа уравнения (2.10) видно:
d
0 , т.е. имеет место ускорение привода;
dt
d
0 , т.е. имеет место замедление привода (очевидно,
2) при М < М спр ,
dt
1) при М > М с ,
пр
замедление привода может быть и при отрицательном значении момента двигателя);
3) при М = М с ,
пр
d
0 ; в данном случае привод работает в установившемdt
ся режиме.
Динамический момент (правая часть уравнения моментов) проявляется
только во время переходных режимов, когда изменяется скорость привода. При
ускорении привода этот момент направлен против движения, а при торможении
он поддерживает движение.
13
2.5. Установившееся движение и устойчивость
установившегося движения электропривода
Имея механическую характеристику двигателя и исполнительного органа,
нетрудно определить выполнимость условия установившегося движения
М М с . Для этого совместим в одном и том же квадранте эти характеристики.
Факт пересечения этих характеристик говорит о возможности совместной работы двигателя и исполнительного органа, а точка их пересечения является точкой установившегося движения, так как в этой точке М М с и d / dt 0 .
На рисунке 2.4 показаны механические характеристики вентилятора
(кривая 1) и двигателя независимого возбуждения (прямая 2). Точка А является
точкой установившегося движения, а ее координаты уст , М уст – координатами
установившегося движения вентилятора.
ω
ω0
ωуст
А
1
2
Муст
м
Рис. 2.4. Определение параметров установившегося движения
Для полного анализа установившегося движения необходимо определить,
является ли это движение устойчивым. Устойчивым будет такое установившееся движение, которое, будучи выведенным из установившегося режима какимто внешним возмущением, возвращается в этот режим после исчезновения возмущения [2].
Для определения устойчивости движения удобно пользоваться механическими характеристиками.
Необходимым и достаточным условием устойчивости установившегося
движения является противоположность знаков приращения скорости и возникающего при этом динамического момента, т.е.
М дин / 0 ,
(2.11)
Оценим в качестве примера (рис. 2.5) устойчивость движения электропривода. Установившееся движение возможно с двумя скоростями: уст1 в точке 1 и уст 2 в точке 2, в которых М М с . Определим, устойчиво ли движение в
обеих точках.
14
0
ω
ИО
1
1/
уст1
1/ /
АД
2
уст 2
М
0
М 1/
Мс
М2//
Рис. 2.5. Определение устойчивости механического движения
Точка 1. Предположим, что под действием кратковременного возмущения
скорость увеличилась до значения 1/ , после чего воздействие исчезло. По механической характеристике АД скорости 1/ будет соответствовать момент
М 1/ М с .
В результате этого динамический момент М дин = J пр d / dt М1/ М с станет
отрицательным, и привод начнет тормозиться до скорости уст1 , при которой
М Мс .
Если возмущение вызовет снижение скорости до значения 1/ / , то момент АД возрастет до значения М1/ / М с , динамический момент
М дин = J пр d / dt М1// М с станет положительным, и скорость увеличится до
прежнего значения уст1 . Таким образом, движение в точке 1 со скоростью уст1
является устойчивым.
При проведении аналогичного анализа можно сделать вывод о неустойчивости движения электропривода в точке 2 со скоростью уст 2 .
Устойчивость или неустойчивость движения может быть определена и
аналитически с помощью понятия жесткости механических характеристик АД
и исполнительного органа: д и с . Условие устойчивости:
д с 0 или д с .
(2.12)
Для рассматриваемого примера с 0 , поэтому устойчивость определяется знаком жесткости характеристики АД: для точки 1 д 0 движение устойчиво, а для точки 2 д 0 и движение неустойчиво.
Отметим, что в соответствии с уравнением (2.10) при определенной жесткости c устойчивая работа электропривода возможна и при положительной
жесткости механической характеристики АД, в частности, на так называемом
нерабочем участке характеристики АД.
15
2.6. Неустановившееся движение электропривода
при постоянном динамическом моменте
Неустановившееся механическое движение электропривода возникает во
всех случаях, когда момент двигателя отличается от момента нагрузки, т.е. когда М дин 0 .
Рассмотрение неустановившегося движения электропривода имеет своей
основной целью получение зависимостей во времени выходных механических
координат электропривода – момента М (t ) , скорости (t ) и положение вала
двигателя (t ) . Кроме того, часто требуется определить время неустановившегося движения (переходного процесса) электродвигателя. Отметим, что законы
изменения моментов двигателя и нагрузки должны быть предварительно заданы.
Рассмотрим неустановившееся движение при постоянном динамическом
моменте М дин const во время пуска электродвигателя. Предполагается, что во
время пуска электродвигателя М дв const и М с const , но М дв М с .
Решая уравнение механического движения электропривода, получаем
следующую зависимость [2,4]:
пр
(t )
(t )
М дв М с.пр
J пр
пр
tп нач ;
(2.13)
М дв М с.пр tп 2
нач tп нач .
J пр
2
(2.14)
Уравнение (2.14) получено с учетом равенств d / dt и d dt .
Полагая в уравнении (2.13) н и t tп tпп , находим время изменения
скорости от 0 до н
tпп
J пр н
М дв М спр
.
(2.15)
Характеристики М f (t ) , f (t ) , f (t ) представлены на рисунке 2.6.
М,ω,φ
φкон
ωн
ω(t)
φ(t)
М(t)
tп
t
Рис. 2.6. Характеристики М f (t ) , f (t ) , f (t )
при пуске ЭД
16
В уравнениях (2.13), (2.14) и (2.15) момент М дв принят равным среднему
моменту М ср при пуске двигателя, поэтому полученные выше аналитические
соотношения используют только при выполнении различных приближенных
расчетов в электроприводе. В частности, неустановившееся движение может
быть рассмотрено при торможении и реверсе электропривода, или при переходе с одной характеристики на другую.
2.7. Неустановившееся движение электропривода
при линейной зависимости моментов двигателя
и исполнительного органа от скорости
Рассматриваемый вид движения является весьма распространенным.
На рисунке 2.7 представлены механические характеристики ЭД и ИО при
пуске электродвигателя.
ω
ω0
ИО
ωу
ЭД
Мсо
Мкз
Мс
М
Рис. 2.7. Механические характеристики ЭД и ИО при пуске электродвигателя
Механические характеристики ЭД и ИО можно выразить аналитически
следующими уравнениями:
М М кз д;
(2.16)
М с М со с ,
(2.17)
В уравнениях (2.16) и (2.17) д
М с
М
и с
– коэффициенты жестко
сти механических характеристик ЭД и ИО.
Подставляя выше приведенные уравнения в уравнение механического
движения электропривода, получаем следующие уравнения для зависимостей
М f (t ) , f (t ) , f (t ) [2,4].
(2.18)
М (М нач М у )еt / Т М у ;
п
м
(нач у )еt / Т у ;
(2.19)
нач Т м (нач у )(1 еt /Т ) уtп ,
(2.20)
м
п
где Т м
J пр
д с
м
– электромеханическая постоянная времени в секундах, учитыва-
ющая механическую инерционность привода и влияющая на время пуска электропривода.
17
Полученные выражения (2.18)–(2.20) могут использоваться для анализа
переходных процессов различного вида, но в каждом конкретном случае должна быть определена электромеханическая постоянная времени Т м , а также
начальные и конечные значения координат нач , М нач , М уст , нач . В частном случае, когда М с const и c 0 , эти величины могут быть определены по формулам:
Т м J пр / д J пр / М J пр 0 / М к . з ;
(2.21)
уст 0 М с / д ; М уст М с ,
(2.22)
где Т м – это время, в течение которого электропривод запускается до скорости
0 при М к. з const . Тогда tп Т м . Так как обычно момент М двигателя при пуске
изменяется, то на практике время пуска в секундах определяют по выражению
tп 4Т м , или по следующему выражению: tп Т М еп
М иа 2 М у
1.2М у М у
.
Зависимости М f (t ) , (t ) приведены на рисунке 2.8.
М
Мкз
ω=f(t)
ω
М=f(t)
Му=Мс
tп
t
Рис. 2.8. Зависимости М f (t ) ,
(t ) при пуске электродвигателя
2.8. Неустановившееся движение электропривода
при произвольной зависимости динамического момента
от скорости
При определении М f (t ) ; (t ) ; f (t ) при сложных зависимостях
момента двигателя и момента сопротивления от скорости, пользуются численным
методом Эйлера. Суть его в том, что в уравнении движения электропривода
дифференциалы переменных d и dt заменяются малыми приращениями
и t .
Покажем использование метода Эйлера на примере пуска асинхронным
электродвигателем центробежного насоса. Механические характеристики ЭД
и центробежного насоса приведены на рис. 2.9 [2].
18
ω
ω5
ω4
ω3
ω2
ω1
ИО
∆ω5
ЭД
∆ω4
∆ω3
∆ω2
∆ω1
Мд1
Мд2
М
Рис. 2.9. Механические характеристики ЭД и ИО
1. Ось скорости разбивают на малые и равные участки ∆ω.
2. На каждом участке определяют средние моменты М д1 , М д2 и т.д.,
М с1 , М c 2 и т.д.
3. Затем составляется таблица 2.1 и по ней определяют зависимости
М д (t ), (t ) .
Таблица 2.1
ω1=∆ω1
ω2=ω 1+∆ω2
ω3=ω 2+∆ω3
…
ωn
t1
М д1
М с1
М д2
М с2
М д3
М с3
…
Мдn
…
t1=∆t1
t2= t1+∆t2
t3=t2+∆t3
…
tn
М сn
Jпр 1
;
М д1 М с1
t2
Jпр 2
и т.д.
М д2 М с 2
Зависимость ∆φ можно определить по выражению ∆φ = ω∆t.
Зависимости М (t ), (t ) приведены на рисунке 2.10.
ω,М
М(t)
ω(t)
М(кз)
tп
t
Рис. 2.10. Характеристики М (t ), (t ) при пуске ЭД
Примечание. По аналогичной методике можно построить вышеуказанные
зависимости и при торможении электропривода.
19
3. ПОНЯТИЕ О РЕГУЛИРОВАНИИ КООРДИНАТ,
РЕЖИМАХ РАБОТЫ И СИСТЕМАХ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
На рисунке 3.1 приведена структура механической части электропривода
[2,4].
ЭД
, , ,
i,
МПУ
и .о , Vи .о
и .о , аи .о
и . о , S и .о
ИО
Рис. 3.1. Структура механической части электропривода
В структуре:
ЭД – электродвигатель:
МПУ – механическое передаточное устройство;
ИО – исполнительный орган;
и ио – угловые скорости ЭД и ИО;
и ио – угловые ускорения ЭД и ИО;
и ио – угол поворота вала ЭД и ИО;
ио – линейное ускорение ИО;
Sио – величина линейного перемещения ИО.
Параметры ИО можно регулировать механическим путем при неизменной скорости ЭД, изменяя величины i и коробки скоростей или вариатора:
ио ; ио / i ; Sио ; ио / i ; ио / i ; Vио .
Коробки скоростей или механические вариаторы могут быть громоздкими (сложными). Их применение уменьшает надежность и КПД электропривода.
Поэтому на практике в основном применяют электрический способ регулирования, воздействуя на параметры электродвигателя или источника питания.
Этот способ имеет лучшие технико-экономические показатели. Однако на некоторых металлообрабатывающих станках применяют смешанный способ регулирования.
В теории электропривода механические, электрические и магнитные переменные, характеризующие работу двигателя, – скорость, ускорение, положение вала, момент, ток, магнитный поток и т.д. – часто называют координатами.
Поэтому управление движением исполнительного органа электрическим способом осуществляется за счет регулирования координат (переменных) электродвигателя.
Существенно отметить, что регулирование координат электропривода
должно осуществляться для управления как установившимся, так и неустановившимся движением исполнительного органа.
Типичным примером регулирования переменных может служить ЭП
пассажирского лифта. При пуске и останове кабины для обеспечения ком20
фортности пассажиров ускорение и замедление ее движения не должно быть
выше допустимого уровня. Перед остановкой скорость кабины должна снижаться, т.е. она должна регулироваться. И, наконец, кабина с заданной точностью должна останавливаться на требуемом этаже, т.е. необходимо обеспечивать заданное положение (позиционирование) кабины лифта.
Пользуясь рассмотренным примером, отметим то важное обстоятельство,
что часто электропривод должен обеспечить регулирование одновременно нескольких координат: скорости, ускорения и положения исполнительного органа.
При изготовлении бумаги, тканей, кабельных изделий, различных пленок,
прокатке металлов требуется обеспечение определенного натяжения этих материалов, что также осуществляется с помощью ЭП. Регулирования координат
требуют и многие другие рабочие машины и механизмы: подъемные краны, металлообрабатывающие станки, транспортеры, насосные агрегаты, роботы и манипуляторы и т.д.
3.1. Регулирование скорости электроприводов
Регулированием скорости является принудительное изменение скорости
двигателя в целях регулирования скорости движения исполнительных органов
машин и механизмов. В общем случае регулирование скорости двигателей – а
под этим понимается также и поддержание скорости на заданном уровне – может осуществляться двумя способами – параметрическим и в замкнутых
системах.
При параметрическом способе регулирование достигается изменением
каких-либо параметров электрических цепей двигателей или питающего
напряжения за счет включения, например, различных дополнительных элементов: резисторов, конденсаторов, индуктивностей. Качество такого регулирования скорости обычно оказывается не очень высоким.
При необходимости получения процесса регулирования скорости с высокими качественными показателями переходят к замкнутым системам электропривода, в которых воздействие на двигатель обычно осуществляется изменением подводимого к двигателю напряжения, или частоты этого напряжения,
или того и другого. Для этой цели служат различные силовые преобразователи
постоянного и переменного тока.
Регулирование скорости в количественном отношении характеризуется
шестью основными показателями [1,3,4].
1. Диапазон регулирования Д определяется отношением максимальной
max и минимальной min скоростей: Д ma x / mi n при заданных пределах изменения нагрузки на валу двигателя.
Различные рабочие машины требуют разных диапазонов регулирования.
Так, прокатные станы характеризуются диапазоном Д 20 50 , станки от
Д 3 4 до Д 50 1000 и более, бумагоделательные машины Д 20 и т.д.
2. Направление регулирования скорости определяется расположением получаемых искусственных характеристик относительно естественной. Если они
располагаются выше естественной, то говорят о регулировании скорости вверх
21
от основной, если ниже – вниз от основной. Расположение искусственных характеристик как выше, так и ниже естественной обеспечивает так называемое
двухзонное регулирование.
3. Плавность регулирования скорости определяется числом получаемых
в данном диапазоне искусственных характеристик: чем их больше, тем регулирование скорости будет осуществляться плавнее. Плавность оценивается коэффициентом, который находится как отношение скоростей на двух ближайших
характеристиках
(3.1)
кпл i / i 1 ,
где i и i 1 – скорости на i -й и (i 1)-й искусственных характеристиках.
Наибольшая плавность достигается в замкнутых системах с использованием преобразователей напряжения и частоты, небольшая плавность
обычно соответствует параметрическим способам регулирования. При плавном
регулировании скорости качественно протекает технологический процесс,
улучшается качество выпускаемой продукции, повышается производительность
работы электропривода и т.д.
4. Стабильность в поддержании заданной регулировочной скорости технологом зависит от жесткости механической характеристики ЭД. Более жесткую механическую характеристику возможно получить только в замкнутых
электроприводах. В разомкнутом электроприводе и при слишком пониженной
скорости и колебаниях момента сопротивления будут происходить большие колебания скорости, что недопустимо.
5. Допустимая нагрузка на двигатель при регулировании скорости зависит от протекающего тока в силовой части. Этот ток не должен превышать номинального значения. В противном случае двигатель будет перегреваться. Допустимый ток зависит от вида механической характеристики исполнительного
органа и примененного способа регулирования скорости.
6. Экономичность регулирования определяется капитальными и эксплуатационными затратами на регулируемый электропривод. Капитальные затраты
должны быть по возможности минимальными, или в противном случае такими,
чтобы срок окупаемости электропривода не превысил нормативного.
Эксплуатационные затраты обычно оцениваются средневзвешенным коэффициентом полезного действия ср.вз. и коэффициентом мощности cos ср.вз. ЭД:
n
ср.вз.
Р
2i
ti
;
1
n
(Р
2i
(3.2)
Рi ) ti
1
n
cos ср.вз.
P
2i
ti
.
1
n
(
1
22
Pi i ) ti
2
2
(3.3)
В формулах (3.2) и (3.3):
n – количество регулируемых скоростей в диапазоне регулирования:
P2i – активные мощности на валу двигателя при различных скоростях;
Pi – потери мощности при различных скоростях;
ti – время работы электродвигателя на каждой регулируемой скорости;
pi и i – активные и реактивные мощности, потребляемые электродвигателем.
Чтобы приведенные коэффициенты были не слишком малы, необходимо
выбрать верный способ регулирования скорости.
3.2. Регулирование тока и момента двигателей
Регулирование тока и момента двигателей производится в тех случаях, когда ЭП должен обеспечить требуемое ускорение или замедление движения исполнительных органов или создать необходимое натяжение в обрабатываемом
материале или изделии.
Сюда же относятся и случаи, когда требуется ограничивать момент ЭП
для предотвращения поломки рабочей машины или механизма при внезапном
стопорении ИО (например, при копании грунта, бурении скважин, заклинивании механической передачи и т.д.).
Регулирование (ограничение) тока и момента двигателей требуется также
для обеспечения нормальных условий работы самих двигателей. Так, при пуске
двигателей постоянного тока обычного исполнения по соображениям нормальной работы их коллекторно-щеточного узла ток должен быть ограничен на
уровне 2…3 Iном. Необходимость ограничения тока возникает и при пуске мощных двигателей постоянного и переменного тока, когда большие пусковые токи
двигателей могут привести к недопустимому снижению напряжения питающей
сети.
3.3. Регулирование положения электроприводов
Регулирование положения характеризуется процессом перемещения исполнительных органов рабочих машин и механизмов (механизмы подач станков, роботы, клапаны, задвижки и т.д.) в заданную точку пространства или
плоскости и их установку там (фиксирование) с заданной точностью. Такое их
перемещение называется позиционированием и обеспечивается соответствующим регулированием положения вала двигателя.
В разомкнутых электроприводах в начальной и конечной точках движения исполнительного органа устанавливают конечные выключатели. Конечный
выключатель производит отключение электропривода от источника питания.
Исполнительный орган тормозится и с невысокой точностью останавливается
(например, останов кабины лифта).
При необходимости получения высокой точности регулирования положения и обеспечения качественного характера движения исполнительного органа
используется замкнутый электропривод с обратной связью по положению. В
23
этом случае система автоматически вырабатывает сигнал на начало торможения и обеспечивает заданную точность останова исполнительного органа
(например, останов механической руки робота).
На рисунке 3.2 показан идеализированный рациональный график движения электропривода при отработке единичного перемещения (шага) исполнительного органа.
М,ω,φ
φкон
φ
ω
М
разгон
установшееся
движение
торможение
t
Рис. 3.2. Рациональный график движения электропривода
Этот график имеет в общем случае три участка – разгон, установившееся
движение, торможение. В конечной точке, когда кон , скорость движения
и его момент М равны нулю, что соответствует состоянию покоя исполнительного органа [2,4].
Регулирование положения чаще всего требуется при реализации следящего и программно-управляемого движения исполнительного органа.
3.4. Режимы работы электроприводов
Электрический привод может работать в одном из двух режимов – установившемся или переходном. Установившийся режим характеризуется тем, что
все механические координаты (переменные) электропривода не изменяются во
времени. Математическим условием установившегося режима является равенство нулю всех производных механических координат. К установившемуся режиму электропривода относится его движение с постоянной скоростью.
Переходный или динамический режим имеет место, когда хотя бы одна из
производных механических координат электропривода отлична от нуля. Эти
режимы описываются дифференциальными уравнениями. Типовыми переходными процессами для электропривода являются пуск, реверс, торможение,
сброс и наброс нагрузки, регулирование скорости.
Основной целью рассмотрения переходных процессов является определение зависимости изменения во времени тока, момента, скорости, угла поворота вала двигателя. Нахождение этих зависимостей имеет большое практиче24
ское значение, так как они позволяют определить соответствие динамических
характеристик электропривода требованиям технологического процесса, оценить допустимость возникающих в динамике тока и момента двигателя, определить правильность выбора двигателя и аппаратуры управления, рассчитать
потери энергии и т.д.
Физическая причина наличия переходных процессов заключается в способности элементов электропривода накапливать и отдавать энергию – механическую, электромагнитную и тепловую. Поскольку процессы накопления и отдачи протекают не мгновенно, а постепенно в течение определенного времени,
то изменения ЭДС, тока, момента, скорости, угла поворота отличаются инерционностью [1,3,4].
В зависимости от вида накапливаемой и отдаваемой энергии в электроприводе различают механические, электромагнитные и тепловые переходные
процессы, которые взаимосвязаны между собой. Тепловые процессы протекают
очень медленно, и рассматриваются отдельно.
В свою очередь механическая и электромагнитная инерционности элементов реального электропривода могут существенно различаться. В тех случаях, когда механическая инерционность значительно превышает электромагнитную, последнюю обычно не учитывают, и в этом случае переходные процессы
называют механическими (они рассмотрены в теме 2). При сопоставимых механической и электромагнитной инерционностях имеют место электромеханические переходные процессы.
На рисунке 3.3 все электрические элементы электропривода объединены
в электрическую часть электропривода (ЭЧЭП), а механические – в механическую часть (МЧЭП).
ЭЧЭП
Тэ
МЧЭП
Тм
Рис. 3.3. Электрическая и механическая части
электропривода
К электрической части отнесены все элементы системы управления и
электрическая часть двигателя (его обмотки), а к механической – все элементы,
участвующие в механическом движении, в том числе и ротор двигателя.
Электромагнитная постоянная времени Т э (в секундах) характеризует
инерционность обмоток двигателя и элементов силового преобразователя и
схемы управления.
Электромеханическая постоянная времени Т м (в секундах) является мерой инерционности механической части электропривода.
25
Для построения графиков изменения во времени координат электропривода должны быть предварительно известны следующие исходные данные:
1) вид рассматриваемого переходного процесса;
2) начальные и конечные значения тока, момента, скорости и других координат. Эти данные определяются с помощью статистических характеристик,
на которых находятся начальная и конечная точки переходного процесса;
3) параметры электропривода, к числу которых относятся коэффициенты
усиления (передачи) элементов и их постоянные времени.
3.5. Общие принципы построения систем управления
электроприводами
Всю совокупность систем управления электроприводами можно разделить на неавтоматизированные и автоматизированные. Автоматизированные
в свою очередь делятся на разомкнутые и замкнутые.
Неавтоматизированными называются системы, в которых все операции
по управлению электроприводом осуществляются человеком (оператором) с
помощью ручных средств управления. Обычно такие системы управления используются при выполнении простых технологических операций.
Автоматизированными называются такие системы, в которых человек
(оператор) дает только команду на начало и конец работы, а все остальные операции по обеспечению заданного технологического процесса выполняются системой управления без участия человека.
В разомкнутой системе изменение внешних возмущений (Мс) отражается
на выходной величине. Другими словами, разомкнутая система не обеспечивает
отстройку выходной величины (например, скорости). Однако разомкнутые системы из-за своей простоты нашли широкое применение в электроприводе,
например для автоматизации его пуска, реверса и торможения.
В замкнутых системах влияние возмущающего воздействия на выходную
координату частично или полностью устраняется. Достигается это в системе с
обратной связью. Все обратные связи можно разделить на положительные и отрицательные, жесткие и гибкие и др. Подробно материал по замкнутым электроприводам излагается в дисциплине «Автоматизированный электропривод». В заключение следует отметить, что в замкнутых электроприводах можно
получить качественный переходный процесс при появлении каких-либо внешних возмущений и добиться устойчивости в их работе.
26
4. РЕЖИМ РАБОТЫ И ХАРАКТЕРИСТИКИ ЭЛЕКТРОПРИВОДА
С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ (ДПТ НВ)
4.1. Схема включения, режимы работы
и статические характеристики двигателя постоянного тока
независимого возбуждения (ДПТ НВ)
На рисунке 4.1 приведена схема включения ЭД в сеть.
Uя = Uc
+
-
Е
КО
М
ДП
RД
Iя
ОВМ
Iв Uв
Rдв
-
+
Рис. 4.1. Схема включения ЭД в сеть
ДПТ НВ может работать в двигательных и тормозных режимах.
Электромеханической характеристикой называется зависимость угловой
скорости ЭД от тока якоря f ( I я ) . Она характеризует загрузку якоря по току.
Механической характеристикой называется зависимость момента ЭД от
скорости: М f ( ) . Она характеризует работу электродвигателя. Обе зависимости связаны между собой следующим выражением:
М кфн I я ,
(4.1)
PN
– конструктивный коэффициент ЭД ( Р – число пар полюсов стато2 а
ра; N – число активных проводников обмотки якоря; а – число параллельных
где к
ветвей обмотки якоря);
фн – номинальный магнитный поток статора, Вб;
I я – ток якоря, А.
Двигательный режим ДПТ НВ
Для якорной цепи может быть записано следующее выражение:
Uя = Е+(Rя+Rд) Iя.
(4.2)
Для цепи возбуждения:
Uв = (Rовм+Rдв) Iв,
(4.3)
где Iя и Iв – токи в цепи якоря и обмотки возбуждения, А; Uя = Uс – напряжение
якоря и сети, В; Е – противоЭДС, наводимая в обмотке якоря при его вращении в
магнитном поле, создаваемом обмоткой возбуждения, В; Rд и Rдв – добавочные
27
сопротивления в цепях якоря и возбуждения, Ом (они могут отсутствовать);
Rя = Rо.я +Rко + Rдп + Rщ.к – внутреннее сопротивление якорной цепи, Ом;
(Rо.я – сопротивление обмотки якоря; Rдп – сопротивление обмотки дополнительных полюсов; Rко – сопротивление компенсационной обмотки; Rщ.к – сопротивление щеточного контакта).
Сопротивление Rя определяется по выражению:
Rя 0,5(1 нД )
U ян
.
I ян
(4.4)
Ток возбуждения создает магнитный поток Ф (в веберах). Для получения
номинального магнитного потока при пуске ЭД сопротивление Rдв принимается равным нулю. После чего подается номинальное напряжение на якорную
цепь и на обмотку возбуждения. Взаимодействие пускового тока якоря с номинальным магнитным потоком статора Фн создает вращающий момент Мв и
двигатель запускается.
При скорости 0 и R Д 0 , пусковой ток в якоре определяется по выражению
I япуск
U ян
(10 50) I ян ,
Rя
т.к. Rя – очень мало.
Для уменьшения пускового тока якоря до безопасного значения (2,5 Iян) на
время пуска ЭД в цепь якоря необходимо включать добавочное сопротивление
U ян
Rя .
2,5 I ян
RД
(4.5)
Обычно добавочное сопротивление (пусковой реостат) разбит на секции.
По мере увеличения скорости растет противоЭДС и ток в якоре уменьшается
согласно выражению:
Iя
U ян Е
,
Rя RД
(4.6)
где Е кфн – противоЭДС ЭД.
Поэтому при пуске ЭД необходимо постепенно шунтировать секции пускового реостата.
Если решить уравнение (4.2) относительно угловой скорости, то получим
уравнение для естественной электромеханической характеристики [1,4]:
U ян I я Rя
0 ,
кфн
кфн
(4.7)
где 0 – скорость идеального холостого хода ЭД; – перепад скорости по отношению к скорости 0 .
В уравнении (4.7) кфн определяется как:
кфн
где н
nн
зо
U ян I ян Rя
н
,
– номинальная угловая скорость ЭД, рад/с.
28
(4.8)
Ток якоря определяется по выражению I ян М н / кфн .
Если этот ток подставить в уравнение (4.7), то получим уравнение для
механической характеристики [1,4]:
где М н 9550
U ян М н Rя
0 ,
кфн (кфн ) 2
(4.9)
Р2 н Р2 н
103 , Н м; Р2 н – номинальная мощность ЭД, кВт;
nн
н
М н – номинальный момент ЭД, Н·м.
Если Uя Uян, или ф фн, или Rд 0, то получим искусственные элек-
тромеханические и механические характеристики. Естественная и искусственные характеристики приведены на рисунке 4.2.
ω
Ф≠Фн,Uян,
ω0И2
ωое
Rд=0
Фн,Uян, Rд=0
Rд ≠ 0
Фн,Uя1<Uян, Rд=0
ωОИ1
ω2
иск.2
ωе
ест
ω3
реост.
ω1
иск1
I
Мс
0
М
Iя
Рис. 4.2. Естественная и искусственные
характеристики ЭД
Тормозные режимы ДПТ НВ
ЭД может работать в трех тормозных режимах – генераторном (рекуперативном), динамического торможения и в режиме противовключения [1,4].
а) Генераторный (рекуперативный) режим
Его можно получить, если уменьшить напряжение на якоре (Uя < Uян).
При этом скорость якоря будет больше скорости 0/ . Схема ЭД будет такая
же, как и в двигательном режиме. Сначала ЭД тормозится, отдавая энергию в
сеть, затем он переходит работать в двигательный режим, но с меньшей скоростью (рис. 4.3).
29
ω
ω0
-Е>Uя
ωе
+Uян>-Е
ω0/
рек
Е U я
Rя
М Т кфн ( I яТ )
ωи
I яТ
дв
I
II
-М
М
Мс
0
Рис. 4.3. Характеристики двигательного и рекуперативного
режима торможения ЭД
б) Динамический режим
Необходимо у работающего ЭД якорь замкнуть на тормозное сопротивление Rт, а обмотку возбуждения оставить подключенной к источнику питания
(рис. 4.4).
RТ
Iя
М
+
ОВМ
Енач
; М Т кф( I ЯТ )
Rя RТ
I ЯТ
-
Рис. 4.4. Схема ЭД в динамическом режиме торможения
Сопротивление Rт включено для ограничения начального тормозного тока до величины Iт.нач = 2,5Iян: RТ
Енач
Rя .
2,5 I ян
Тормозная характеристика приведена на рисунке 4.5 (второй квадрант).
ω
ωос
ωс
ест
Uя=0
Е=-Е
+Uян>-Е
дин
II
-М
0
дв
I
Мс
Рис. 4.5. Тормозная характеристика ЭД
в динамическом режиме торможения
30
М
в) Торможение противовключения путем перемены полярности напряжения на якоре. Схема ЭД приведена на рисунке 4.6.
КМ 1
КМ 2
+(-)
Rд
Rпр
-
М
+
КМ 2
КМ1
-(+)
ОВМ
+
-
Рис. 4.6. Схема ЭД при реализации торможения противовключения
путем перемены полярности напряжения на якоре
Для включения ЭД в двигательный режим необходимо включить контакты
контактора КМ1. Для получения торможения противовключением необходимо
отключить контакты КМ1 и включить контакты контактора КМ2. В результате
таких переключений поменяется полярность напряжения на якоре, изменится
направление тока в якоре, и ЭД будет тормозиться.
Для ограничения тормозного тока на время торможения ЭД включают в
цепь якоря сопротивление Rд и так называемое сопротивление противовключения Rпр:
Rпр
U ян Еиле
( Rя Rд ) ,
2,5 I ян
(4.10)
Тормозной ток определяется по выражению:
I яТ
U ян Енач
2U ян
, М Т I яТ .
Rя Rд Rпр
Rя Rд Rпр
(4.11)
Тормозные характеристики приведены на рисунке 4.7 (второй квадрант).
ω
ω0
ωс
-Uян-Е
прот.
-М
III
0
IV
-Uян+Е
ω0
ДВ
дв
I
II
ест
Uян-Е
-ωт
Мс
М
+Uян+Е
-ω
Рис. 4.7. Тормозные характеристики ЭД при торможении противовключением
31
При скорости 0 ЭД отключают от сети. Если требуется осуществить
реверс ЭД, то при скорости 0 необходимо отключить сопротивление Rпр.
Тогда двигатель начнется вращаться в противоположную сторону (третий квадрант).
г) Торможение противовключением за счет действия активного момента
сопротивления Мса.
Если при подъеме груза ввести в цепь якоря сопротивление Rд и Rпр, то
сформируется механическая характеристика, на которой все моменты двигателя
(в том числе и при нулевой скорости) будут меньше Мс. Под действием момента сопротивления якорь выворачивается в обратную сторону. В результате в
режиме противовключения осуществляется спуск груза на малой (ползучей)
скорости ( T ). Механическая характеристика приведена на рисунке 4.7 пунктиром.
4.2. Энергетические режимы работы ДПТ НВ
Энергетический режим работы ЭД зависит от механических М , и электрических Е , I координат ЭД, определяющих его механическую Р2 М и
электромагнитную Рэм ЕI мощности.
Для двигательного режима характерно одинаковое направление скорости
и момента и противоположное направление ЭДС и тока, а для генераторного,
наоборот, направление ЭДС и тока совпадают, а скорости и момента – нет. Для
режима холостого хода характерно равенство нулю тока и момента, а для режима короткого замыкания – равенство нулю ЭДС и скорости двигателя [2].
Следует отметить, что в электродвигателе при любых значениях и знаках
М с ЭДС выполняет функции регулятора тока (момента) как в двигательном,
так и в тормозных режимах работы машины.
Схемы и энергетические режимы ДПТ НВ приведены на рисунке 4.8.
+U -
ЭЭ
+U -
+U -
ЭЭ
с
U=E
+
-
+
I
-
Е
I=0
Е
МЭ
ω0
ω
а)
ЭЭ
Iк.з.
+U -
+
ЭЭ
-
МЭ
Мк.з
г)
Е
ω
б)
М
в)
+U -
+U -
Rд
-
I
Е
ω
+
МЭ
М
I +
Е
ω=0
I
МЭ
М
д)
-
+
Е
ω
М
Рис. 4.8. Схемы и энергетические режимы ДПТ НВ
32
е)
На основании рисунка 4.8 можно утверждать:
а) в режиме холостого хода ЭД не получает энергии ни из электрической
сети (за исключением электроэнергии на возбуждение), ни с вала;
б) в двигательном режиме ЭД получает электроэнергию и за вычетом потерь в двигателе преобразует ее в механическую, которая отдается с вала ДПТ;
в) в режиме рекуперативного торможения (генераторный режим работы
ЭД параллельно с сетью) ЭД получает механическую энергию от рабочей машины и отдает ее (рекуперирует) в виде электроэнергии в сеть, но за вычетом
потерь в двигателе;
г) режим короткого замыкания наступает при 0, Е 0 . В этом режиме
электроэнергия поступает из сети в ЭД и рассеивается в виде тепла в резисторах (сопротивлениях) якорной цепи. Механическая энергия с вала ЭД не отдается, так как 0 ;
д) в режиме торможения противовключением (режим генератора последовательно с сетью) электроэнергия поступает из сети и вырабатывается самим
ЭД за счет поступающей на его вал механической энергии и рассеивается в виде тепла в резисторах якорной цепи;
е) в режиме динамического торможения (режим генератора независимо
от сети) электроэнергия вырабатывается за счет механической энергии, поступающей с вала ЭД и рассеивается в резисторах якорной цепи.
5. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ДПТ НВ
ПРИ ПУСКЕ И ТОРМОЖЕНИИ ПРИ ПИТАНИИ ЕГО ОТ СЕТИ
5.1. Автоматический пуск ЭД в функции ЭДС
Схема пуска ЭД приведена на рисунке 5.1.
ОВМ
-
+
+
КМ1
КМ
М
Rд1
КМ1 Rу
1
КМ2
SB2
-
КМ2
Rд2
Rу2
SB1
КМ
КМ
Рис. 5.1. Схема автоматического пуска ЭД в функции ЭДС
33
В схеме: КМ – главный контактор; КМ1 и КМ2 – контакторы шунтирования секций пускового реостата (Rд1 и Rд2); Rу1 и Rу2 – настроечные резисторы
управления.
Для включения ЭД необходимо нажать на кнопку SB1. Пуск осуществляется в три этапа. При скорости 1 срабатывает контактор КМ1. Он своим контактом КМ1 шунтирует первую секцию пускового реостата Rд1. При скорости
2 срабатывает контактор КМ2, который шунтирует вторую секцию пускового
реостата Rд2, и ЭД выходит для работы на естественную механическую характеристику.
Напряжение на катушках контакторов [1]
(5.1)
U км1 кфн 1 I 2 Rя ;
(5.2)
U км 2 кфн 2 I 2 Rя ,
I 2 1, 2I ян – ток, при котором срабатывают контакторы КМ1 и КМ2 .
Достоинства схемы: простота.
Недостатки:
1) при Iс =Мс/кфн > I2 происходит «застревание» скорости на промежуточной механической характеристике;
2) при значительном уменьшении напряжения в сети также происходит
«застревание» скорости;
3) нагрев катушек влияет на момент срабатывания контакторов КМ1 и
КМ2.
Поэтому такую схему применяют для пуска ЭД небольшой мощности.
5.2. Автоматический пуск ЭД в функции тока
Схема пуска приведена на рисунке 5.2.
ОВМ
-
+
+
-
Rд2
КА1
КМ
Rд1
М
КА2
КМ2
КМ1
SB1
SB2
КМ
КМ
КМ
КМ1
КА1
КМ1
КА2
КМ2
Рис. 5.2. Схема автоматического пуска ЭД в функции тока
34
В схеме: КА1 и КА2 – реле тока. Эти реле в прямом направлении срабатывают при токе I1 =2.5 Iян, а в обратном направлении при токе I2 = 1,2 Iян.
Время срабатывания КА1 и КА2 значительно меньше времени срабатывания контакторов КМ1 и КМ2 , т. к. Т КА1, КА2
L
L
Т КМ 1, КМ 2 .
R
R
Для пуска ЭД необходимо нажать на кнопку SB1. Команду на шунтирование секций Rд1 и Rд2 подают реле тока КА1 и КА2. Секции пускового реостата
шунтируются контакторами КМ1 и КМ2.
5.3. Автоматический пуск ЭД в функции времени
Схема пуска приведена на рисунке 5.3.
В схеме: КТ1 и КТ2 – реле времени.
ОВМ
+
-
+
КМ1
КМ2
Rд2
Rд1
КМ
М
КТ2
SB2
SB1
КМ
КМ
КТ1
КМ
КМ1
КТ1
КМ2
КТ2
Рис. 5.3. Схема автоматического пуска ЭД в функции времени
Работа схемы при пуске ЭД происходит следующим образом. При подаче напряжения на схему происходит возбуждение ЭД, и срабатывает реле КТ1,
размыкая свой контакт в цепи катушки контактора КМ1. Схема подготовлена к
пуску.
Пуск ЭД происходит нажатием кнопки SВ1, в результате чего получает
питание контактор КМ. Включившись, он своим главным контактом КМ подключает ЭД к напряжению сети.
Двигатель начинает разбег с резисторами (сопротивлениями секций) Rд1
и Rд2 в цепи якоря. Одновременно замыкающий вспомогательный контакт
35
контактора КМ шунтирует кнопку SВ1 и она может быть отпущена оператором,
а размыкающий вспомогательный контакт КМ разрывает цепь питания реле
времени КТ1. Реле КТ1, потеряв питание, начинает отсчет времени, соответствующий времени работы ЭД на первой искусственной механической характеристике. При скорости 1 , что соответствует времени пуска t1 , реле КТ1 срабатывает в обратном направлении, замыкая свой контакт в цепи катушки контактора КМ1. Последний включается и своим главным контактом закоротит резистор Rд1 в цепи якоря и обесточит катушку реле КТ2. До этого реле КТ2 было
включено в прямом направлении при протекании тока в якорной цепи. Двигатель продолжает свой разбег по второй искусственной механической характеристике. При скорости 2 , что соответствует времени пуска t 2 , реле КТ2 срабатывает в обратном направлении, замыкая свой контакт в цепи катушки контактора КМ2. Последний включится и своим главным контактом закоротит резистор Rд2 в цепи якоря. Двигатель выйдет на свою естественную характеристику, по которой и продолжит свой разбег до точки установившегося режима за
время t3 . Таким образом осуществился пуск ЭД в три этапа. Для остановки ЭД
необходимо нажать на кнопку SВ2.
Схема надежна, имеет более высокую точность в работе. Поэтому на
практике она получила наибольшее применение.
Пусковая диаграмма и кривые переходного механического процесса при
пуске ДПТ приведены на рисунке 5.4.
а)
б)
ω, рад/с
ωо
ω, M, Iя
d
ωн
M1,I1
Естественн.
характерист.
III
ω`2
ω2
c
ω`1
M(t)
Iя(t)
II
б
ω1
M2,I2
Mc,Ic
ω(t)
I
а
Мc
(Ic)
М2
(I2)
М1
(I1)
а)
М, Н·м
Iя, А
t1
б)
Рис. 5.4. Пусковая диаграмма (а)
и кривые переходного процесса (б)
36
t2
t3
t, c
Методика расчета механического переходного процесса приведена ниже
[2,3].
1 этап
(нач уст ) еt / Тм уст ;
1
1
М (М нач М уст ) еt / Тм1 М уст ;
нач 0; уст ; Мнач М1 (приI1 ); М уст М с ,
J пр 0 J пр ( Rя RС1 RС 2 )
Т м1
М1
;
( КФН )2
t1 Т м1ln
М1 М с
.
М2 Мс
2 этап
(
нач
уст)еt2 / Т м 2 уст ;
М (М нач М уст ) еt2 / Т м 2 М уст ;
нач 1;уст 2 ; М нач М1; М уст М с ;
Т м2
J пр (0 1 )
М1
t2 Tм 2 ln
J пр ( Rя RС 2 )
( КФН )2
;
M1 M 2
.
M2 Mc
3 этап
(нач уст)еt
3 / Тv 3
уст ;
М (М нач М уст ) еt3 / Т м 3 М уст ;
нач 2 ; уст н ; М нач М1; М уст М с ;
t3 4Tм 3 ; Т м3
J пр Rя
( КФн )2
;
Т м1 Т м 2 Т м 3 – проверка на верность расчетов;
tпуска (t1 t2 t3 ).
Полученных четырех точек на каждой ступени (этапе пуска) достаточно
для построения кривых скорости, момента ( тока ) при пуске двигателя.
Сопротивления секций пускового реостата определяются по следующим
выражениям:
RЯ
RЯ
; Rc1 RЯ аб ; Rc 2 RЯ бс ; Rп Rд1 Rд 2 Rс1 Rс 2 .
dс
37
5.4. Автоматический пуск
и динамическое торможение ЭД
Схема пуска и динамического торможения ЭД приведена на рисунке 5.5.
ОВМ
-
+
+
-
КМ1
КМ
М
Rд1
КМ2
Rд2
КМ1
SB2
SB1
КМ
КМ
КТ
КМ
КМ
КТ
КМ2
Рис. 5.5. Схема пуска и динамического торможения ДПТ НВ
Пуск ЭД осуществляется в функции ЭДС. Для этого необходимо нажать
на кнопку SB1. После срабатывания контактора КМ мгновенно в прямом
направлении срабатывает реле времени КТ.
Для останова ЭД необходимо нажать на кнопку SB2. В результате чего
отключается контактор КМ и включается контактор КМ2. Якорь ЭД замыкается
на тормозное сопротивление Rд2, и происходит динамический режим торможения. Реле времени, отсчитав выдержку времени при нулевой скорости, размыкает свой контакт. Катушка контактора КМ2 теряет питание, и схема приходит
в исходное положение для повторного включения ЭД.
Анализируя приведенные схемы автоматического пуска и торможения
ДПТ НВ при питании его от сети, можно сделать следующие выводы. Пуск,
торможение (как и реверс) ДПТ осуществляются с помощью релейноконтакторных схем управления. При их автоматизации используются принципы времени, скорости и тока.
Реализация указанных принципов осуществляется с помощью соответствующих датчиков, от которых в схему управления поступает информация о
текущих значениях скорости, тока или времени.
Некоторые схемы управления строятся по принципу пути, когда с помощью конечных или путевых выключателей осуществляется контроль за углом
поворота вала ДПТ.
38
Статические механические характеристики при пуске и кривые переходного процесса при динамическом торможении ЭД приведены на рисунке 5.6 [1].
ω
ω0
ω М
ωу1
ωу1
ω(t)
-М
М
Мc
tT
t
-М(t)
-М1
Рис. 5.6. Статические механические характеристики при пуске
и кривые переходного процесса при динамическом торможении ЭД
Со схемой автоматического пуска и реверса ЭД и механическими переходными процессами при активном и реактивном моментах сопротивления
можно ознакомиться в рекомендуемой учебной литературе.
5.5. Электромеханические переходные процессы
при учете индуктивности цепи якоря Lя
Индуктивность цепи якоря Lя (в генри) ДПТ оказывает существенное
влияние на характер переходных процессов (на зависимости (t ), I я (t ) и М (t ) в
электроприводе. В первую очередь ее влияние проявляется в незначительном
ограничении пиков тока в якоре и значительном увеличении времени переходных процессов.
При определенных соотношениях механической и электромагнитной постоянных времени, а именно при Т м 4Т я переходные процессы в электроприводе имеют колебательный характер. Для примера на рисунке 5.7 показаны
кривые изменения момента и скорости ДПТ НВ при пуске под нагрузкой, отражающие это положение [1].
Из-за колебательного характера процесса увеличивается время пуска и
перерегулирование скорости. Отметим также, что наличие индуктивности привело к некоторому запаздыванию t з при пуске, которое определяется временем
нарастания момента ДПТ до момента нагрузки Мс.
39
а)
М
Мс
б)
0
ω
t
ωс
0
t
tз
Рис. 5.7. Изменение момента (а) и скорости (б)
при пуске ДПТ НВ при существенной индуктивности цепи якоря
Индуктивность якоря нарушает в переходных процессах однозначную
связь между скоростью и моментом ДПТ, определяемую его статической механической характеристикой. Это обстоятельство может привести в переходных
процессах (например, сброса или наброса нагрузки) к существенно большим
динамическим перепадам скорости по сравнению со статическими, которые соответствуют статической механической характеристике.
При питании ДПТ от сети индуктивность в цепи якоря в переходных
процессах проявляется, как правило, не очень сильно. Определяется это тем обстоятельством, что для ограничения переходных токов в цепь якоря вводятся
дополнительные резисторы, которые значительно уменьшают постоянную времени Тя и увеличивают электромеханическую постоянную времени Тм. В этом
случае в электроприводе будет протекать механический переходный процесс
(он был рассмотрен ранее). В то же время при питании ДПТ от вентильного
преобразователя, когда в цепь якоря включаются сглаживающие и уравнительные реакторы, индуктивность якорной цепи может оказывать существенное
влияние на переходные процессы.
6. РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ ДПТ НВ
6.1. Регулирование угловой скорости путем введения
добавочных резисторов (сопротивлений) в цепь якоря
Электромеханические и механические характеристики получаются такие
же, как показаны на пусковой диаграмме (рис. 5.4 а).
Скорость регулируется только вниз. Способ регулирования скорости ступенчатый, так как регулировочный реостат разбит на секции. Диапазон регулирования Д при длительном регулировании небольшой: Д ≈ 1,5. При большом
диапазоне регулирования уменьшается жесткость механических характеристик,
из-за этого трудно поддерживать пониженную скорость при колебаниях Мс на
40
валу ЭД. Кроме этого увеличивается расход электроэнергии по причине потерь
его мощности Р в якорной цепи.
Допустимой нагрузкой на валу ЭД является Мс = Мсн. При этом ток в
якоре не превышает номинального значения для тех ДПТ, условия охлаждения
которых не изменяются по мере снижения их скорости.
Стоимость регулировочного реостата невелика, но могут быть большие
потери мощности Р в якорной цепи при большом диапазоне регулирования
[1]
Ря.и. Р1 б Р1
0
.
0
(6.1)
В формуле (6.1): б / 0 – относительный перепад скорости.
Так, при б = 0,5, что соответствует диапазону регулирования Д = 2, половина потребляемой мощности ЭД теряется в якорной цепи (Ряц. 0,5Р1 ) . При
кратковременном и повторно-кратковременном регулировании диапазон регулирования скорости можно увеличить до Д 5.
Сопротивление регулировочного реостата R р в цепи якоря определяется
по формуле
R р Rя (
и
1) .
е
(6.2)
Значения е и и находятся по заданным естественной и искусственной характеристикам ДПТ, как показано на рисунке 6.1.
ω
ω0
е
}
{
и
естеств.
искусств.
(Rр≠0)
I(М)
Iн(Мн)
Рис. 6.1. К расчету сопротивления
регулировочного резистора
Несмотря на низкие технико-экономические показатели, реостатное регулирование скорости из-за простоты своей реализации используется достаточно
широко, например в электроприводах подъемных кранов, некоторых металлорежущих станков.
41
6.2. Регулирование угловой скорости
уменьшением магнитного потока
С уменьшением тока возбуждения уменьшается и магнитный поток, а
скорость якоря увеличивается.
Возможные схемы включения обмотки возбуждения ДПТ НВ приведены
на рисунке 6.2.
а)
б)
ОВМ
+
Rдв
Iв
+
-
Iв
ОВМ
Uу
-
УВ
~
а)
б)
Рис. 6.2. Схемы включения обмотки возбуждения ДПТ НВ
Схема рис. 6.2 а предусматривает включение в цепь возбуждения добавочного резистора Rдв, за счет чего ток возбуждения Iв и тем самым магнитный поток Ф могут быть уменьшены. В схеме рис. 6.2 б для изменения тока
возбуждения используется управляющий выпрямитель УВ, выходное напряжение которого регулируется по сигналу управления Uу. Эта схема более экономична и применяется для регулирования тока возбуждения мощных ДПТ.
В соответствии с выражением (4.7) уменьшение магнитного потока приводит к увеличению скорости идеального холостого хода ω0:
U ян I я Rя
0 .
кф кф
(6.3)
При пуске ЭД пусковой ток якоря Iпя (ток короткого замыкания):
Iпя Iкз Uян / Rя при скорости ω = 0 от магнитного потока не зависит и будет
оставаться неизменным. Пусковой момент (момент короткого замыкания)
М П Мк.з кфI П Я при уменьшении магнитного потока изменяется. Так как
Iпя = const, то при уменьшении магнитного потока пропорционально ему
уменьшается и пусковой момент Мп (момент короткого замыкания).
Пусковые электромеханические характеристики при уменьшении магнитного потока приведены на рисунке 6.3 а, а пусковые механические характеристики – на рисунке 6.3 б.
Для ДПТ НВ традиционного исполнения диапазон регулирования скорости при данном способе равен 3–4. Для специальных ЭД с повышенной механической прочностью якоря и улучшенным коллекторно-щеточным устройством диапазон регулирования скорости равен 8–9.
42
а)
б)
ω
ωои1
ωое
ω
ωои1
Мс
ω1
Ф<фн
ω1
Ф<фн
ωое
ωн
ωн
фн
фн
Iсн
Iяп=const
Iя
Мсн
а)
Мп2
Мп1
М
б)
Рис. 6.3. Пусковые характеристики ЭД
при уменьшении магнитного потока
Направление регулирования скорости – вверх от естественной характеристики. Плавность регулирования скорости определяется плавностью регулирования тока возбуждения. Стабильность скорости достаточно высока, хотя она и
снижается при уменьшении магнитного потока. Способ регулирования скорости экономичный, так как малы потери мощности Р в цепи возбуждения.
Допустимая нагрузка ДПТ при его работе на искусственных характеристиках определяется по выражению:
М доп М с кфи I ном ,
(6.4)
где фи - магнитный поток на искусственной характеристике.
Так как при данном способе регулирования фи <фн, то и Мдоп < Мном,
т.е. ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Этим способом осуществляется регулирование при постоянной мощности на валу электродвигателя [2]:
М доп и Рдоп М ном ном Рном const .
(6.5)
Таким образом, при работе ДПТ на искусственных характеристиках он
может быть нагружен на свою номинальную мощность. Объяснение этого заключается в том, что хотя момент нагрузки (Мс) при уменьшении магнитного
потока должен быть снижен, одновременно повышается скорость ДПТ, а их
произведение, определяющее механическую мощность, остается неизменным и
численно равным номинальной мощности ДПТ.
Данный способ нашел широкое применение в электроприводе металлорежущих станков, прокатных станов, наматывающих устройств. Он также часто
используется в комбинации с другими способами регулирования скорости.
43
6.3. Регулирование угловой скорости ДПТ НВ
путем изменения напряжения на якоре в системе Г-Д
Электрическая схема системы Г-Д приведена на рисунке 6.4.
Уравнение равновесия ЭДС системы
ЕГ Е Д I Я ( RЯГ RЯД ) .
(6.6)
Если решить уравнение (6.6) относительно скорости , то получим уравнения:
для электромеханической
I ( R RЯД )
ЕГ
Я ЯГ
0
кфД
кф
(6.7)
и механической характеристик [1,2]:
~
М ( RГ RЯД )
ЕГ
0 .
кфД
(кф)2
М
Rяд
Rяг
U1=const
f1=const
Iя
М
G
ω1
ω1=const
Uв
И0
ω2
ОВМ
ОВG
+
(6.8)
-
+
Uв
-
Рис. 6.4. Электрическая схема системы Г-Д
Схема замещения системы (рис.6.5) и ее параметры:
Е Г кфГ 1
Rяд
RЯG
При1 const
Е Г фГ
Iя
Ег
Ед
Е Д кфД 2
U Д Е Г I Я ( RЯГ RЯД )
Рис. 6.5. Схема замещения системы
44
RЯГ 0.5(1 НГ )
U ЯНГ
I ЯНГ
RЯД 0.5(1 НД )
U ЯНД
I ЯНД
Уменьшая напряжение на якоре ДПТ в разомкнутом электроприводе
можно получить диапазон регулирования скорости Дmaxвниз = 8. Диапазон регулирования скорости можно расширить до Дmaxвверх = 2, если уменьшить магнитный поток ДПТ. Тогда суммарный диапазон будет равен Д 16 . В замкнутом электроприводе этот диапазон может быть несколько сотен.
Предельные значения диапазона регулирования скорости в разомкнутом
приводе [1]
Д max
ое
Мн
Г Д 1,
(6.9)
где Г Д – модуль жесткости механической характеристики в системе Г-Д.
Этот диапазон невелик и зависит от жесткости Г Д механической характеристики ЭД. В тех случаях, когда требуется обеспечить заданное значение
скорости с определенной точностью, пользуются понятием статизма (погрешностью) механической характеристики [1]
н
opmin
.
(6.10)
На практике задают в относительных единицах или в процентах.
Тогда
Д max
ое з Г Д
Мн
.
(6.11)
ДПТ может работать в тех же режимах, как и при подключении его к сети. Механические характеристики ДПТ, подключенного к генератору постоянного тока, приведены на рисунке 6.6.
ω
ωое
Рек.
Ег1=Uн
ωои1
с
Ег2
ωои2
Мс
-М
Ег3
Ег=0
с
Дв-й
Дв-й
дин
-ωои2
-ωои1
-Ег3
-Ег2
-ωое
М
Рек.
-Ег1
-ω
Рис. 6.6. Механические характеристики ДПТ,
подключенного к генератору постоянного тока
45
С уменьшением з надо уменьшать Дmax. Для расширения диапазона регулирования надо формировать более жесткие механические характеристики.
При этом увеличивается модуль жесткости Г Д , что возможно только в замкнутых электроприводах. Минимальная скорость при этом определяется как
ор min
Мн
з ГД
.
(6.12)
6.4. Регулирование угловой скорости ЭД в системе
«Управляемый тиристорный выпрямитель – ДПТ НВ»
Для регулирования скорости применяют однофазные и трехфазные нереверсивные и реверсивные выпрямители. Устройство, принцип работы и их характеристики подробно рассмотрены в дисциплине «Электрические и электронные аппараты». Значительный интерес представляет тиристорный реверсивный электропривод, состоящий из двух управляемых выпрямителей, выполненных по мостовой схеме и включенных параллельно-встречно (рис. 6.7).
~
А
С
Б
ТV
VS1
VS4
VS1
VS4
VS3
VS6
VS3
VS6
VS5
VS2
VS5
VS2
В1
М
Id
+(-)
Ud
-(+)
Ld
L2
L1
Рис. 6.7. Тиристорный реверсивный электропривод
46
В2
Выпрямленные напряжения при работе на холостом ходу и с нагрузкой
на валу ЭД определяются по выражениям [2]:
U dм 1,35 Е2 л ;
U d1 U dм cos ;
U d2 U dм cos I d Rn ;
0
0
0
0, М с 0
В схеме на рисунке 6.7 L1 и L2 – уравнительные реакторы, предназначены для уменьшения уравнительного тока, чтобы протекающий ток через тиристоры выпрямителей В1 и В2 не превышал номинального тока; Ld – реактор
(фильтр), предназначенный для сглаживания выпрямленного тока.
В приведенных выражениях [2] – угол открывания тиристоров; Е2 л – линейная ЭДС вторичной обмотки понижающего (согласующего) трансформатора ТV.
Выпрямленный постоянный ток определяется по выражению [2] как
Id
U dм cos Е
,
Rя Rп
(6.13)
В формуле (6.13) Rп – эквивалентное сопротивление преобразователя (выпрямителя), которое определяется по выражению:
Rп Тр m / 2 RТ RL ,
(6.14)
где Тр , RТ – приведенные ко вторичной обмотке индуктивное сопротивление
рассеивания и активное сопротивление первичных обмоток трансформатора;
RL – активное сопротивление сглаживающего реактора.
Обратные напряжения, которые прикладываются к закрытым тиристорам,
определяются по следующему выражению:
(6.15)
U 2обр.max 2 3Е2ф 2, 44 Е2ф ,
где Е2ф – фазное (действующее) значение ЭДС вторичной обмотки трансформатора.
Выпрямители могут работать раздельно и совместно. При раздельной
работе выпрямитель В1 включен, а выпрямитель В2 отключен, или наоборот.
Электромеханические и механические характеристики можно построить
по следующим выражениям [2,3,4]:
U dм cos I d ( Rя Rп )
0 ,
кфн
кфн
(6.16)
U dм cos М ( Rя Rп )
0 .
кфн
(кфн ) 2
(6.17)
Пусть работает только выпрямитель В1.Электромеханические и механические характеристики ДПТ НВ приведены на рисунке 6.8.
При совместной работе выпрямителей В1 и В2 импульсы управления на
один выпрямитель подают при углах от 0 до 90°, а на другой – при углах
от 90 до 180°. Тогда один из выпрямителей (например, В1) будет работать в
47
выпрямительном режиме, а второй будет подготовлен для работы в инверторном режиме. Для перевода последнего в инверторный режим необходимо, чтобы ЭДС электродвигателя оказалась больше выпрямленного напряжения U d .
Условия работы тиристоров при совместной работе выпрямителей В1
и В2:
αВ1 + αВ2 = 180°.
ω
ω0с
α=00
ω1
ω0и1
ω2 α=380
ω0и2
ω0и3
двигательный
режим
ω3 α=750
Iя
ω4 Мс α=850
М торможение
-ω3
α=900 проитивовключением
динамический
-ω2
режим торможения
0
α=120
-ω0и1
режим рекуперативного
торможения
-ω0с
-ω1
α=1800
-ω
Рис. 6.8. Электромеханические и механические характеристики ДПТ НВ
при работе выпрямителя В1
Характеристики ЭД, работающего в различных режимах, показаны на рисунке 6.9.
ω
αВ2max
αВ1min
Дв-й
Рек.
I
II
-Iя,
-М
Iя,
М
0
IV
III
Дв-й
Рек.
αВ2min
αВ1max
-ω
Рис. 6.9. Характеристики ЭД, работающего в различных режимах
48
Достоинства тиристорных электроприводов постоянного тока:
1) плавность и значительный диапазон регулирования скорости (до 10 и
более);
2) большая жесткость получаемых механических характеристик;
3) высокий КПД электропривода (около 0,95);
4) уменьшение количества электрических машин;
5) бесшумность в работе, простота в обслуживании и эксплуатации.
Тиристорным электроприводам постоянного тока присущи следующие недостатки:
1) из-за односторонней проводимости тиристоров для получения характеристик ДПТ во всех четырех квадрантах требуется использовать реверсивный двухкомплектный преобразователь;
2) для сглаживания пульсаций тока, которые ухудшают условия работы
ДПТ, в большинстве случаев необходимо применять сглаживающий реактор;
3) с ростом диапазона регулирования скорости снижается коэффициент
мощности cos электропривода ( cos cos );
4) тиристорный электропривод вносит искажения в форму тока и
напряжения источника питания;
5) тиристорные преобразователи обладают невысокой помехозащищенностью и малой перегрузочной способностью по току и напряжению.
Несмотря на отмеченные недостатки, система тиристорный преобразователь – двигатель (ТП-Д) является в настоящее время основным видом регулируемого электропривода постоянного тока и широко применяется для привода
таких ответственных рабочих машин, как прокатные станы, металлорежущие
станки, экскаваторы и т.д.
В заключение следует отметить, что в некоторых случаях на практике,
кроме рассмотренных способов регулирования скорости, применяют способы
импульсного регулирования и в схеме шунтирования якоря ДПТ НВ.
Способы импульсного регулирования угловой скорости повторяют основные способы регулирования скорости ДПТ НВ и связаны с импульсным изменением сопротивления добавочного резистора в цепи якоря, магнитного потока
и подводимого к якорю напряжения. Для схем импульсного регулирования в
современных электроприводах чаще всего применяются бесконтактные полупроводниковые ключи, обычно тиристорные.
Характерной особенностью импульсных регулируемых электроприводов
является простота и надежность их схем, определяемая малым числом элементов. Показатели импульсного регулирования скорости в основном соответствуют непрерывным способам регулирования. Вместе с тем энергетические
показатели импульсных электроприводов постоянного тока несколько хуже.
Схема с шунтированием якоря, которая с помощью двух добавочных резисторов Rш, включаемых параллельно якорю, и Rп, включаемого последовательно с якорем, позволяет получать сравнительно жесткие характеристики в
области малых скоростей.
Данный способ регулирования скорости по своим характеристикам и показателям занимает промежуточное положение между способами, связанными с
49
изменением напряжения на якоре и сопротивлением в цепи якоря. Диапазон регулирования скорости лежит в пределах 5–6, плавность регулирования определяется плавностью изменения сопротивлений Rш и Rп. Регулирование скорости осуществляется вниз от основной при постоянном моменте нагрузки.
Экономичность этого способа регулирования невысока из-за значительных потерь мощности в якорной цепи. По этой причине данный способ используется для регулирования скорости ДПТ небольшой мощности при кратковременной работе на пониженной скорости (например, для электроприводов некоторых подъемных кранов).
6.5. Переходные процессы
при изменении магнитного потока ДПТ НВ
Индуктивность обмотки возбуждения ДПТ, как правило, существенно
превышает индуктивность якорной цепи. Поэтому ток возбуждения и поток будут изменяться не мгновенно, а постоянно. Процесс изменения скорости и момента ДПТ при уменьшении магнитного потока иллюстрирует рисунок 6.10.
а) ω
б) ω,М
ω(t)
ω2
ω02
2
ω2
ω1
3
ω01
М(t)
1
ω1
Мс
0
Мс
М1
0
М
а)
t
б)
Рис. 6.10. Переходные процессы в ДПТ
при ослаблении магнитного потока
На рисунке 6.10 а показаны статические механические характеристики
ДПТ при номинальном и ослабленном потоке (соответственно прямые 1 и 2) и
динамическая механическая характеристика в виде пунктирной кривой 3.
На рисунке 6.10 б (в качестве примера) показаны зависимости от времени
скорости и момента ДПТ в переходном процессе при ослаблении магнитного
потока. Эти кривые соответствуют показанному на рисунке 6.10 а переходному
процессу [2].
50
6.6. Регулирование координат электропривода
в системе источник тока – электродвигатель
В рассмотренных ранее системах электропривода ДПТ питался от источника ЭДС, не зависящей от тока нагрузки. При питании ДПТ от источника тока
(ИТ), который обеспечивает протекание по якорю тока, неизменного и независящего от ЭДС и сопротивления нагрузки (допустим I = Iном), электропривод
получил название «система источника тока – двигатель» (ИТ–Д). Такая система
приведена на рисунке 6.11.
Механические характеристики такого привода представляют собой вертикальные прямые линии (рис. 6.11в), т.е. являются абсолютно мягкими (момент не зависит от угловой скорости), а их положение (значение момента)
определяется магнитным потоком, так как М=кфI=кфIном. Такие характеристики
обеспечивают постоянство момента на валу ДПТ при любой его скорости, а сам
электропривод приобретает свойства источника момента, управляемого по цепи
возбуждения.
а)
Uс
б)
~
в)
ω
ф1 ф2 ф3
ИТ
ω
ф3 ф2ф1
I=const
0
I=const
0
М
М
+-
ОВМ
Iв
а)
+
б)
в)
Рис. 6.11. Система источника тока – двигатель:
а) схема; б) электромеханическая характеристика;
в) механическая характеристика
Такие электроприводы при введении обратной связи по скорости позволяют получать характеристики, пригодные и для целей регулирования скорости.
Рассматриваемый электропривод применяется для создания требуемого
натяжения в обрабатываемом материале (изготовление проводов, бумаги и т. д.).
51
7. ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
С ДВИГАТЕЛЯМИ ПОСЛЕДОВАТЕЛЬНОГО
И СМЕШАННОГО ВОЗБУЖДЕНИЯ
7.1. Механические и электромеханические
характеристики двигателей постоянного тока
последовательного возбуждения
В электроприводах постоянного тока иногда используются двигатели постоянного тока последовательного возбуждения ДПТ ПВ.
На рисунке 7.1 приведена схема включения двигателя последовательного
возбуждения.
Uc
+
-
ДП
Е
ОВ
Rп.я.
Iя=Iв
Рис. 7.1. Схема включения двигателя
последовательного возбуждения
Обмотка возбуждения двигателя включена последовательно с его якорем,
в связи с чем ток возбуждения, а следовательно, и поток возбуждения определяются нагрузкой на валу двигателя. Ток якоря одновременно является и током
возбуждения.
Уравнение электромеханической характеристики:
Rя
Uс
Iя.
кф( I я ) кф( I я )
(7.1)
Уравнение механической характеристики:
Rя
Uс
М.
кф( I я ) кф( I я )2
(7.2)
Внешне уравнения электромеханической (7.1) и механической (7.2) характеристик рассматриваемого двигателя не отличаются для соответствующих
уравнений ДПТ НВ [1,4].
Если предположить, что магнитный поток ф от тока якоря имеет линейную зависимость, то получим характеристики, представленные на рисунке 7.2.
52
а) ω
б) ω
Iк.з.
0
Мк.з.
0
I
М
-ω0
-ω0
а)
б)
Рис. 7.2. Электромеханическая (а) и механическая (б) характеристики
ДПТ ПВ
Уравнения (7.1) и (7.2) не могут быть использованы для инженерных расчетов, так как в действительности магнитная система машины насыщена, и
кривая намагничивания весьма далека от прямой. Поэтому в практических целях обычно пользуются универсальными характеристиками для серии машин,
построенными в относительных единицах (величинах): / н ; I I / I н и
М М / М н ( н , I н и М н ) – номинальные величины двигателя, Rп.я = 0.
На практике построение искусственных механических характеристик
производится на основании данных каталогов, где приводятся естественные
характеристики f ( I я ) и М ( I я ) (рис. 7.3).
М*
2.4
ω*
2.0
ω*
1.6
М*
1.2
10квт и выше
до 1
0 квт
0.8
0.4
Iя*
0
0.4
0.8
1.2
1.6
2.0
2.4
2.8
Рис. 7.3. Кривые f ( I я ) и М ( I я )
Когда известна естественная электромеханическая характеристика, значение скорости на искусственной характеристике при заданном токе якоря
определяется по следующей формуле пересчета [1]:
е
иск
U cн Rя I я
U н ( Rя Rв ) I я
53
.
(7.3)
Порядок построения искусственных характеристик
1. По каталожным данным строится естественная электромеханическая
характеристика.
2. Задаваясь токами нагрузок I я , I я …, на естественной характеристике
определяют скорости ест , ест … соответственно этим токам.
3. По формуле пересчета определяют скорости иск , иск … на искусственной электромеханической характеристике.
4. Строят искусственную электромеханическую характеристику.
5. Пользуясь кривой М ( I я ) и электромеханической характеристикой,
строят кривую f (М ) , т.е. механическую характеристику двигателя.
Естественные и реостатные характеристики двигателя представлены на
рисунке 7.4.
1
1
2
2
1
ω*
2
ω*
ω
ωе1*
ωе2
и1
*
*
ω
и2
*
Iя1*
ωис
Iя2*
ωе3
*
ест.
ест.
Rпя≠0
Rпя≠0
к3*
Iя3*
М*
Iя*
Рис. 7.4. Естественные и реостатные
характеристики двигателя
При малых нагрузках магнитный поток незначителен, поэтому механическая характеристика мягкая. При больших нагрузках машина насыщается, поэтому механическая характеристика дальше жесткая, но в целом – она мягкая.
При идеальном холостом ходе, когда I я 0 и М 0 , конечная скорость
определяется величиной остаточного потока: 0 U c / кфост .
Так как остаточный магнитный поток незначителен, то конечная скорость
при идеальном холостом ходе может в десятки раз превышать номинальную
скорость двигателя. Такое превышение значения скорости двигателя недопустимо по условиям прочности коллектора и бандажей, крепящих обмотку якоря. Для выпускаемых промышленностью двигателей последовательного возбуждения кратность допустимой максимальной скорости к номинальной составляет не более 4. Эти двигатели пускать без нагрузки и применять для привода с малым моментом сопротивления нельзя. Для устранения возникновения
разноса в приводах с двигателями последовательного возбуждения недопустимо применение ременных и клиноременных и цепных передач, нужно применять жесткие передачи.
54
7.2. Тормозные режимы ДПТ ПВ
Электропривод с ДПТ ПВ может работать в тех же энергетических режимах, что и привод с ДПТ НВ, за исключением режима идеального холостого
хода и режима рекуперативного торможения, поскольку при нагрузке, стремящейся к нулю, к нулю стремится и магнитный поток.
Некоторые особенности при последовательном возбуждении имеет режим динамического торможения с самовозбуждением.
Якорь и обмотка возбуждения отключаются от сети и замыкаются на дополнительное сопротивление Rд.т (рис. 7.5).
км2
+
Я1
-
Я2 км1 в1 ов
Е
в2 км1
Iв
км2 Rд.т
Iя
Рис. 7.5. Схема динамического торможения
с самовозбуждением
После отключения двигателя от сети якорь продолжает вращаться под
действием сил инерции, и в его обмотке наводится ЭДС, обусловленная остаточным потоком возбуждения. Под действием этой ЭДС в замкнутом контуре
цепи якоря возникает ток, который одновременно является и током возбуждения.
Если направление этого тока таково, что обусловленный им магнитный
поток совпадает по направлению с остаточным потоком, то в результате увеличивается поток и возрастает ЭДС якоря, что в свою очередь вызывает увеличение тока, а значит, и потока и т. д. Иными словами, в рассматриваемой схеме
будет иметь место самовозбуждение. Для его возникновения необходимо, чтобы направление тока в обмотке возбуждения совпало с направлением тока в
этой обмотке в режиме, предшествовавшем торможению, если при этом
направление вращения также остается прежним.
Благодаря указанному переключению (см. рис.7.5) направление тока обмотки возбуждения остается неизменным, тогда как направление тока якоря
меняется на обратное. При несоблюдении указанных переключений машина
может размагнититься.
Механические характеристики двигателя для этого случая приведены на
рисунке 7.6 (второй квадрант) [1,4].
При этом способе торможения может вначале происходить интенсивное
самовозбуждение, приводящее к значительному скачку тормозного момента,
55
который при сравнительно больших маховых массах механизма, может вызвать
нежелательные удары в механизме.
На практике чаще применяется схема с независимым возбуждением при
динамическом торможении.
ω
- М(Iя)
II
+ М(Iя)
I
0
Рис. 7.6. Механические характеристики ДПТ ПВ
в двигательном и тормозном режимах
В заключение следует отметить, что ДПТ ПВ широко применяются в
подъемно-транспортных устройствах. Способы регулирования скорости такие
же, как для ДПТ НВ.
7.3. Электропривод с двигателем постоянного тока
смешанного возбуждения ДПТ СВ
Основная схема включения ДПТ СВ приведена на рисунке 7.7 а.
а)
б) ф
ф
-
+
ОВН
Е
фовп
Rд1
ОВП
фовн
Rд1
I
I
-I1 0
а)
б)
Рис. 7.7. Схема включения (а)
и характеристика намагничивания (б) ДПТ СВ
Двигатель имеет две обмотки возбуждения – последовательную ОВП и
независимую ОВН. Вследствие этого магнитный поток Ф ДПТ определяется
суммой двух потоков Фн и Фп (рис. 7.7 б). Важно отметить, что при токе якоря
– I1, ДПТ размагничивается.
Электромеханические и механические характеристики ДПТ СВ выражаются соответственно формулами (7.1) и (7.2), в которых магнитный поток Ф
также есть функция тока. Эти характеристики приведены на рисунке 7.8 [1,4].
56
ДПТ СВ сочетает в себе свойства как ДПТ НВ, так и ДПТ ПВ.
ДПТ СВ может работать во всех возможных режимах, а именно двигателем, генератором (параллельно, последовательно и независимо от сети), а
также в режимах холостого хода и короткого замыкания.
а)
б)
ω
ω
ω0
-I1
0
а)
ω0
I
-Мmax
0
б)
М
Рис. 7.8. Естественная электромеханическая (а)
и механическая (б) характеристики ДПТ СВ
Регулирование координат ДПТ СВ может осуществляться всеми характерными способами, связанными с изменениями магнитного потока, напряжения и сопротивления в цепи якоря.
Управление ДПТ СВ осуществляется с помощью схем, применяемых для
ДПТ НВ и ДПТ ПВ.
Отметим, что из-за относительно невысоких технико-экономических показателей ДПТ смешанного возбуждения (высокая стоимость, повышенные
масса, габариты и расход материалов), электропривод с ним применяется сравнительно редко (требуется технико-экономическое обоснование).
8. ЭЛЕКТРОПРИВОДЫ С АСИНХРОННЫМ ДВИГАТЕЛЕМ
ЭП с трехфазным асинхронным двигателем (АД) является самым массовым видом привода в промышленности, в коммунальном и сельском хозяйстве.
Такое положение определяется простотой изготовления и эксплуатации АД,
меньшими по сравнению с ДПТ массой, габаритными размерами и стоимостью,
а также высокой надежностью в работе. В народном хозяйстве наибольшее распространение получили АД с короткозамкнутым ротором.
Основной областью применения АД вплоть до недавнего времени являлся нерегулируемый электропривод. В последние годы в связи с разработкой и выпуском электротехнической промышленностью тиристорных преобразователей частоты и напряжения стали создаваться регулируемые асинхронные ЭП с характеристиками, не уступающими по своим показателям ЭП
постоянного тока.
57
8.1. Механические характеристики
асинхронных двигателей
Основная схема включения трехфазного АД в сеть и соответствующая ей
однофазная схема замещения с вынесенным контуром намагниченности показаны на рисунке 8.1 [1,2].
~ U1,f1
а)
1
б)
R1д
I1
I1
I
ω,М
I2
I 2/
~ Uф
АД
R1
2/
R2/
S
Rμ
R2д
Рис.8.1. Схема включения (а) и однофазная схема замещения (б) АД
На схеме приняты следующие обозначения:
Uф – действующее значение фазного напряжения сети, В;
I м , I1 , I 2/ – фазные токи соответственного намагничивания, обмотки статора и приведенный ток ротора, А;
– индуктивное сопротивление контура намагничивания, Ом;
R1 , R2/ – активные фазные сопротивления обмоток, соответственно статора
и ротора; последнее приведено к обмотке статора, Ом;
R1д и R2д – добавочные сопротивления в фазах статора и ротора;
1 , 2/ – индуктивные фазные сопротивления, обусловленные полями рассеяния обмоток статора и ротора; последнее приведено к обмотке статора, Ом.
S – скольжение двигателя, определяется по выражению [1,4]:
0
,
(8.1)
0
где – угловая скорость ротора, рад/с; 0 – угловая скорость магнитного поля
S
статора, называемая синхронной, рад/с.
0
2 f1
,
p
(8.2)
В выражении (8.2):
f1 – частота напряжения питающей сети, Гц; р – число пар полюсов двигателя.
Рассматриваемая схема замещения АД получена при определенных допущениях. В частности, ее параметры считаются не зависящими от режима работы, не учитываются насыщение магнитопровода, добавочные потери, а также
58
влияние пространственных и временных высших гармонических составляющих
(н.с.) обмоток статора и ротора.
При подведении к обмотке статора переменного трехфазного напряжения
в статоре образуется вращающееся магнитное поле со скоростью 0 . Это поле
пересекает обмотку ротора и наводит в ней ЭДС [1]:
Е2s 4, 44к2 f 2 W2 фт ,
(8.3)
где к2 < 1 – обмоточный коэффициент, учитывающий уменьшение ЭДС ротора
вследствие геометрического сложения ЭДС, и укорочение шага обмотки ротора;
f 2 – частота тока в обмотке ротора, Гц;
W2 – число витков обмотки фазы ротора;
фт – максимальное значение магнитного потока статора, Вб.
Эта ЭДС создает ток в обмотке ротора
I2
Е2s
Z 2s
Е2s
R2 2 2 2
(8.4)
,
где R2 – активное сопротивление фазной обмотки ротора;
2 – индуктивное сопротивление рассечения фазы роторной обмотки.
Взаимодействуя с полем статора, активный ток создает пусковой вращающий момент, и двигатель запускается, вращаясь в дальнейшем со скоростью
0 (1 S ) .
(8.5)
При номинальном скольжении S н номинальная скорость н 0 (1 Sн ) .
Для обычных двигателей S н = 0,02÷0,06, для двигателей с повышенным
скольжением S н = 0,08÷0,18.
Запуск электродвигателя происходит по следующей механической характеристике (рис. 8.2).
ω,s
S=0
ω0
ωн
а
Sк
ω=0
S=1 Мн
Мп
Мк
М
Рис. 8.2. Механическая характеристика АД
На рисунке 8.2 обозначено: Мп – пусковой момент; Мк – критический
момент; Мн – номинальный момент; Sк – критическое скольжение.
59
Так как ЭДС, индуктированная в обмотке ротора в момент пуска имеет
максимальное значение (при S=1, f2=50 Гц), то ток в обмотке ротора
I2 = (4–8)Iн.д. (Iн.д – номинальный ток двигателя).
Однако на пусковой момент влияет не эта величина пускового тока
(I2 = Iп), а сдвиг фаз между током I2 и ЭДС Е2s ротора.
Если индуктивность обмотки ротора велика, то будет большим и сдвиг
фаз между током ротора I2 и ЭДС ротора Е2s.
В момент пуска, когда ротор еще неподвижен, частота тока в обмотке
ротора наибольшая ( f 2 = f1 =50 Гц), и поэтому индуктивное сопротивление 2
имеет наибольшее максимальное значение 2 м :
s
2 2 f 2 L2 2 м ;
S
f 2 f1 S ,
S
(8.6)
где L2s – индуктивность рассеяния фазы обмотки ротора.
Вращающий момент АД определяется по формуле [1]
Мвр к2 фт I 2 cos 2 ,
(8.7)
а коэффициент мощности cos 2 - по выражению [1]
cos 2
Rя
Z 2S
R2
R2 2 2S 2
.
(8.8)
В формуле (8.7): к2 – обмоточный коэффициент; 2 – угол сдвига фаз
между ЭДС и током фазы обмотки ротора.
Таким образом, момент двигателя определяется активной слагающей
пускового полного тока ротора I 2 cos П I 2 а .
Пусковой момент двигателя можно увеличить, если в момент пуска
уменьшить сдвиг фаз меду током I2 и ЭДС E2S ротора. Это приведет к тому,
что увеличится cos 2 . При R2доб = 0 и ω = 0 cos 2 = 0,1÷0,2. При R2доб ≠ 0
cos 2 = 0,3–0,6. При ω = ωн cos 2 = 0,8÷0,9. На практике этим способом часто
пользуются. Для этого в цепь ротора вводят активное сопротивление, которое
затем выводят как только двигатель увеличит скорость, либо применяют двигатель, у которого на роторе глубокие пазы для стержней, либо две клетки (две
короткозамкнутые обмотки).
Таким образом, пусковой момент двигателя зависит от конструкции ротора.
При пуске АД с уменьшением скольжения от S = 1 до S = Sк уменьшаются частота f 2 и ЭДС Е2, полный ток I2 уменьшается очень медленно (всего на
29 % от I2п), а cos 2 и активный ток I2а значительно увеличиваются. При дальнейшем пуске АД от S = Sк до S = 0 токи I2 и I2а резко уменьшаются при незначительном росте cos 2 . Такие изменения параметров в цепи ротора и определяют вид характеристики (рис. 8.2).
Для вывода уравнения механической характеристики и ее построения
обычно пользуются схемой замещения двигателя (рис. 8.1б), рассматривая баланс мощности в двигателе.
П
60
Электромагнитная мощность Р12, передаваемая ротору от статора, определяется электромагнитным моментом М, развиваемым двигателем: Р12 = М ω0.
Здесь, как и ранее, считается, что электромагнитный момент двигателя приблизительно равен моменту на его валу, т.е. не учитываются механические потери.
Мощность, передаваемую ротору, можно разделить на две составляющие:
мощность, преобразуемую в механическую Рм, и мощность потерь ∆Рэл.2 в роторе. Первая составляющая может быть определена следующим образом:
Рм = М ω. Вторая составляющая представляет собой электрические потери в
обмотках ротора и потери на перемагничивание.
Как правило, потери в стали ротора существенно меньше электрических
потерь, в связи с чем последними можно пренебречь. Тогда
Р12 =Рм + ∆Рэл.2,
(8.9)
или М ω0 = М ω +∆Рэл.2.
Отсюда
∆Рэл.2 = М(ω0 – ω) = М ω0 S.
(8.10)
Учитывая, что
∆Рэл.2 = 3I 2/ R2/ ,
где R2/ = R2/ R2/ Д , можно записать выражение для момента в виде
2
3I 2/ R2/
.
М
0 S
(8.11)
2
(8.12)
Из схемы замещения [1,2]
I 2(/ S )
Uф
R/
( R1 2 ) 2 к2
S
,
(8.13)
где к 1 2/ – индуктивное фазное сопротивление короткого замыкания.
Выражение (8.13) представляет собой уравнение электромеханической
характеристики двигателя I 2/ ( S ) , так как скольжение S однозначно определяет
величину скорости двигателя 0 (1 S ) .
Отметим, что для АД обычно под электромеханическими и механическими характеристиками понимаются зависимости момента и тока от скольжения. В этом случае соответствующие уравнения получают более компактную
форму записи и оказываются удобными для вычисления.
Подстановка (8.13) в (8.12) дает уравнение механической характеристики
[1,2,3,4]:
М
3Uф 2 R2/
R2/ 2
0 S ( R1
) к2
S
.
(8.14)
Максимальное значение момента Мк принято называть критическим (допустимым перегрузочным моментом). Соответствующее ему скольжение Sк
также называется критическим. Для определения Sк необходимо решить уравнение вида
dМ
0 , подставив в него М(S).
dS
61
Решение этого уравнения дает:
Sк
R2/
R12 к2
.
(8.15)
Подставляя значение S к в уравнение (8.14), находим:
Мк
3Uф2
20 ( R1 R12 к2 )
.
(8.16)
Знак (+) соответствует S > 0, а (–) – S < 0. Знаки « » в уравнении (8.16)
означают, что максимум момента может иметь место при S > 0 в двигательном
режиме или в режиме противовключения, а при S < 0 – в генераторном режиме.
Из уравнения (8.16) видно, что при работе в генераторном режиме с рекуперацией энергии критический момент больше, чем при работе в двигательном режиме или режиме противовключения.
Из уравнений (8.14) и (8.16) с учетом (8.15) может быть получена другая
формула для механической характеристики:
Мк
где а
R1
2М к (1 аSк )
.,
S / Sкр. Sкр. / S 2аSк
(8.17)
R1
.
R2/
Для крупных машин сопротивление R1 невелико, поэтому практически
к . В этом случае получится формула, более удобная для расчетов [1,2]:
М
2М к
,
S / Sк Sк / S
(8.18)
Критическое скольжение можно определять по следующему выражению:
S к S н ( 2 1 ) ,
(8.19)
где М к / М н – коэффициент перегрузочной способности.
Для уравнения (8.18) достаточно знать лишь параметры, которые обычно
указываются в каталогах, или могут быть найдены по данным каталогов, тогда
как такие параметры, как к и R1 обычно неизвестны.
Анализ формулы (8.18) показывает, что при S > Sк (нерабочая часть характеристики) получается гипербола. Эта часть характеристики соответствует
лишь пусковым и тормозным режимам.
При малых значениях скольжения (S < Sк) для М = f(S) получится уравнение прямой линии. Эта линейная часть характеристики является ее рабочей
частью, на которой двигатель обычно работает в установившемся режиме. На
этой же части характеристики находятся точки, соответствующие номинальным данным Мн, Iн, ωн, Sн … .
Величина номинального скольжения зависит от сопротивления ротора и
мощности двигателя. Двигатель с малым сопротивлением (большой мощности)
ротора имеет малые Sк и Sн и более жесткую механическую характеристику.
62
Анализ уравнений (8.15) и (8.16) показывает, что Мк и Sк уменьшаются с
увеличением индуктивных сопротивлений обмоток к и активного сопротивления R1 обмотки статора.
Критическое скольжение не зависит от питающего напряжения и прямо
пропорционально R2/ . Это свойство используется для увеличения пускового
момента АД с фазным ротором при включении в цепь ротора добавочного сопротивления R2д (рис. 8.1а).
Механические характеристики АД с фазным ротором приведены на рисунке 8.3.
ω
R2д=0
ω0
R2д2 >R2д1
R2д1
R2д2
0
-М
+М
Рис. 8.3. Механические характеристики АД с фазным ротором
С увеличением сопротивления R2д снижается жесткость механических
характеристик аналогично как и для ДПТ независимого возбуждения.
Момент Мк не зависит от активного сопротивления цепи ротора и пропорционален квадрату напряжения питающей сети. Снижение напряжения питающей сети на ~15 % приводит к уменьшению Мк и соответственно λ на 28 %.
8.2. Электромеханические характеристики АД
Для АД существуют два типа характеристик: I1 (S) и I 2/ (S).
Уравнение для второй электромеханической характеристики уже получено ранее в виде (8.13).
Ток ротора I 2/ является основной величиной для оценки работы двигателя.
Ввиду отсутствия подробных данных о сопротивлениях двигателя, для
построения электромеханической характеристики удобно воспользоваться параметрами, используемыми для построения механических характеристик двигателя по формуле Клосса (8.18).
Для анализа формы электромеханической характеристики ее уравнение
(без вывода) можно представить в виде [1,2]
/
I 2/ I 2max
S
S S к2
2
63
.
(8.20)
Из формулы (8.20) видим, что ток ротора интенсивно растет при увеличении скольжения от нуля до Sк. При S=Sк I 2/ 0, 71I 2/ max . При дальнейшем росте
скольжения S > Sк ток I 2/ увеличивается медленно (рис. 8.4).
I
I1
I 2/
Iμ
{
0
Sк
S=1
S
Рис. 8.4. Электромеханические характеристики АД
Для схемы замещения с вынесенным на зажимы сети контуром намагничивания ток намагничивания Iμ сохраняется неизменным во всех режимах.
С достаточной степенью точности его можно считать чисто реактивным, пренебрегая потерями мощности на перемагничивание стали статора.
Ток I1 определяется как [1,2,4]
I1 I м2 I 2/2 (1 2 ) ,
где
I м
/
I 2max
(8.21)
– коэффициент.
Для выпускающих промышленностью машин значение I м лежит в пре/
делах 0,4–0,8 и соответствующие им токи I 2max
= 3–8. Поэтому в среднем
0,13–0,115. Зависимости I1 (S ) и I 2/ ( S ) показаны на рис. 8.4.
Необходимо обратить внимание, что при одинаковых значениях скольжения ток ротора в двигательном режиме меньше тока в генераторном режиме.
8.3. Определение КПД АД и cos 1 АД
Коэффициент полезного действия (КПД) цепи ротора определяется из отношения части электромагнитной мощности, преобразуемой в механическую, к
электромагнитной мощности:
2
Рм
М
1 S .
Р12 М 0 0
(8.22)
В частности, в номинальном режиме:
2 н 1 S н .
(8.23)
Отсюда следует, что с увеличением скольжения и увеличением сопротивления R2 КПД ротора снижается.
Следует подчеркнуть, что значение КПД в выражении (8.22) не учитывает потери на перемагничивание стали статора и ротора, механические потери и
потери, обусловленные высшими гармоническими составляющими. Указанные
64
потери относительно невелики. Поэтому, как и для машины постоянного тока,
приведенные выражения позволяют оценить значение КПД двигателя в целом.
Коэффициент мощности для главной цепи двигателя, без учета контура
намагничивания, может быть определен следующим образом [1,2]:
cos
/
1
R1 R2/ / S
( R1 R2/ / S ) 2 к2
,
(8.24)
С учетом контура намагничивания и используя параметры Sк и α двигателя , коэффициент мощности можно записать следующим образом [1,2]:
cos 1
Sк S
(1 )2 S 4 Sк2 2 (1 )2 S 2 2 Sк4
.
(8.25)
Из анализа выражения (8.25) следует, что cos 1 0 при S=0, т.е. в режиме
идеального холостого хода двигатели потребляют из сети чисто реактивный ток
намагничивания. При увеличении скольжения коэффициент мощности цепи
статора сначала возрастает, а затем снижается (рис. 8.5).
cosφ1
S
1
Sн
Рис. 8.5. Зависимость cos 1 асинхронного двигателя от скольжения
8.4. Тормозные режимы АД
Асинхронный двигатель может работать в тех же тормозных режимах,
что и двигатель постоянного тока, а именно: в режиме рекуперативного торможения, противовключения и динамическом [1,2,3,4].
Режим рекуперативного торможения осуществляется в том случае, когда скорость ротора АД превышает синхронную ( р 0 ).
Режим рекуперативного торможения практически применяется для двигателей с переключением полюсов и в приводах грузоподъемных машин
(подъемники, экскаваторы и т.п.) и имеет место при р 0 . При переходе в генераторный режим вследствие изменения знака момента меняет знак активная
составляющая тока ротора. В этом случае АД отдает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), необходимую для возбуждения. Такой режим возникает, например, при торможении (переходе) двухскоростного АД с высокой на низкую скорость, как показано на
рис. 8.6а.
65
а)
б
б)
ω
ωуст1
ω01
ω
ω0
а
а
с
ω02
1
Мс
ВС )
3
2
0
1(U
А
б
М
0
Мп Мс
М
-ωуст1
2 (U
АС В )
а)
-ωуст2
с
б)
Рис. 8.6. Торможение АД в основной схеме включения:
а) с рекуперацией энергии в сеть; б) противовключением
Предположим, что в исходном положении АД работал на характеристике 1 и в точке а, вращаясь со скоростью уст1 . При увеличении числа пар полюсов АД переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове АД или при переходе с характеристики
на характеристику. Для этого осуществляется уменьшение частоты выходного
напряжения, а тем самым синхронной скорости 0 2 f / р . В силу механической инерции текущая скорость АД будет изменяться медленнее чем синхронная скорость 0 , и будет постоянно превышать скорость магнитного поля.
За счет этого и возникает режим торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого АД включается в
направлении спуска груза (характеристика 2 рис. 8.6 б).
После окончания торможения он будет работать в точке со скоростью
– уст 2 . При этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения.
Перевод АД в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз
питающего АД напряжения. Допустим, что АД работает на характеристике 1
(рис. 8.6 б) при чередовании фаз напряжения АВС. Тогда при переключении
двух фаз (например, В и С) АД переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении
скольжение АД изменяется от S = 2 до S = 1.
66
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его
будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в
7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается
коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия,
потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые двигатели кратковременно перегружаются по току.
Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению I 2/ и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным
ротором в цепи их роторов вводят добавочные сопротивления, что позволяет
ограничить токи в обмотках и увеличить момент.
Другой путь торможения противовключением может быть использован
при активном характере момента нагрузки, который создается, например, на
валу АД грузоподъемного механизма. Допустим, что требуется осуществить
спуск груза, обеспечивая его торможение с помощью АД. Для этого АД путем
включения в цепь ротора добавочного резистора (сопротивления) переводится
на искусственную характеристику (прямая 3 на рис. 8.6б). Вследствие превышения моментом нагрузки Мс пускового момента Мп АД и его активного характера груз может опускаться с установившейся скоростью – уст1 . В этом режиме торможение скольжения АД может изменяться от S = 1 до S = 2.
Для динамического торможения обмотки статора АД отключают от сети
переменного тока и подключают к источнику постоянного тока, как это показано на рис. 8.7. Обмотка ротора АД 1 при этом может быть закорочена, или в ее
цепь включаются добавочные резисторы с сопротивлением R2д.
а)
Iп
-
+
б)
Rп
w1
Iп
2
с
М
+
Iп
1
I2
3
Fп 3I пW1
а)
б)
Рис. 8.7. Схема динамического торможения АД (а)
и схема включения обмоток статора (б)
67
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота
которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный
поток, также неподвижный относительно статора. Взаимодействие тока ротора
с результирующим магнитным полем АД создает тормозной момент, за счет
которого достигается эффект торможения. Двигатель в этом случае работает в
режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей ЭП и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
На рисунке 8.7 б показана наиболее распространенная схема включения
обмоток статора при динамическом торможении. Система возбуждения АД в
этом режиме является несимметричной. Для проведения анализа работы АД в
режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу) АД, что и
постоянный ток.
Опуская выводы, эквивалентный ток для схемы (рис. 8.7 б) определится
как Iэкв = 0,816 Iп, а уравнение для электромеханической характеристики I 2/ ( S )
запишется в виде
I 2/
где 0,95
Uф
I~
I экв
( R / S )2 ( 2/ )2
/
2
,
(8.26)
– индуктивное сопротивление контура намагничивания.
При 0 и S 0 , ток I 2/ оказывает размагничивающее действие на АД.
Тогда как при неподвижном роторе намагничивающий ток I и определяемый
им магнитный поток ф , минимальны. Ели пренебречь последним фактором и
считать, что const , то текущие значения моментов, максимальный момент и
скольжение можно определять по следующим формулам [1,2]:
М
2М м
;
S / Sм Sм / S
Мм
2
3I экв
2
20 ( 2/ )
Sм
R2/
.
2/
;
(8.27)
(8.28)
(8.29)
Электромеханическая I 2/ ( S ) и механические М ( S ) характеристики представлены на рис. 8.8.
68
4
5 6
ω
S
Sм2
Sм1
I
II
-М
Мм2
Мм1
7
0
I экв
I 2/
Рис. 8.8. Электромеханическая I 2/ ( S )
и механические М ( S ) характеристики АД
Характеристика I 2/ ( S ) расположена на рисунке в первом квадранте I, где
S / 0 – скольжение АД в режиме динамического торможения. Механические
характеристики АД расположены во втором квадранте II.
Различные искусственные характеристики АД в режиме динамического
торможения можно получить, изменяя сопротивление R2 Д добавочных резисторов 3 (рис. 8.7) в цепи ротора или постоянный ток I п , подаваемый в обмотки
статора. На рисунке 8.8 показаны механические характеристики АД для различных сочетаний I п и R2 Д . Характеристика 6 соответствует току I п1 и сопротивлению резистора R2 Д 1 , максимальный момент на ней равен М м1 , а скольжение, ему соответствующее, S м1 . Увеличение сопротивления резисторов 3
( R2 Д 2 R2 Д 1 ) при I п const не приводит к изменению максимального момента, в
то время как максимальное скольжение S м при этом пропорционально возрастает, что видно из характеристики 4.
Увеличение тока I п ( I п 2 I п1 ) при R2 Д 1 const вызывает увеличение максимального момента пропорционально квадрату тока. Характеристика двигателя в
этом случае имеет вид кривой 5. Варьируя значения I п и R2 Д , можно получить
желаемый вид механических характеристик АД в режиме динамического торможения и, тем самым, соответствующую интенсивность торможения асинхронного ЭП.
8.5. Типовые схемы управления электроприводов
с асинхронными двигателями
Типовые схемы релейно-контакторного управления асинхронными двигателями строятся по тем же принципам, что и схемы управления двигателями
постоянного тока. АД с короткозамкнутым ротором малой и средней мощности
пускаются прямым подключением к сети без ограничения пусковых токов.
Схемы управления АД с фазным ротором средней и большой мощности долж69
ны предусматривать ограничение токов при их пуске, реверсе и торможении с
помощью добавочных резисторов в цепи ротора.
Реверсивная схема управления АД с короткозамкнутым ротором приведена на рисунке 8.9.
~
QF
с
I>
FА
КМ1
КМ2
SB3
SB1
FА
КМ2
КМ1
КМ1
КК
КК
SB2
КМ2
М
КК
КМ2
КМ1
Рис. 8.9. Реверсивная схема управления АД
с короткозамкнутым ротором
Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и два
тепловых реле защиты КК. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном (неавтоматическом)
управлении.
В схеме предусмотрена защита от перегрузок двигателя (реле КК) и коротких замыканий в цепи статора (автоматический выключатель QF) и управления (предохранители FA). Кроме того, схема управления обеспечивает и нулевую защиту от исчезновения (снижения) напряжения сети (контакторы КМ1и
КМ2).
Пуск двигателя при включенном автоматическом выключателе QF в
условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора
КМ1 или КМ2, подключению двигателя к сети и его разбегу.
Для реверса или торможения двигателя вначале нажимается кнопка SB3,
что приводит к отключению включенного до сих пор контактора (например,
КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком
чередования фаз. Магнитное поле двигателя изменяет направление вращения на
противоположное, и начинается процесс реверса, состоящий из двух этапов:
торможения противовключением и разбега в противоположную сторону.
В случае необходимости только торможения двигателя при достижении
им нулевой скорости должна быть вновь нажата кнопка SB3, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Ес70
ли кнопка SB3 нажата не будет, то это приведет к разбегу двигателя в другую
сторону, т.е. к его реверсу.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2,
в реверсивных магнитных пускателях иногда предусматривается специальная
механическая блокировка. Она представляет собой рычажную систему, которая
предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировке в схеме используется типовая электрическая
блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепь
катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF.
Его наличие исключает возможность работы привода при обрыве одной фазы,
при однофазном коротком замыкании, как это может иметь место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления АД, обеспечивающая прямой пуск и динамическое
торможение в функции времени, приведена на рис. 8.10.
~
FA
SB1
FA
КМ1
КМ
КК
КМ
КМ
КТ
КМ1
КМ
КК
V
КМ1
Rт
КМ КТ
М
Рис. 8.10. Схема пуска и динамического торможения АД
Пуск двигателя осуществляется нажатием кнопки SB1, после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания. Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в
этой цепи размыкающий контакт КМ.
Для остановки двигателя нажимается кнопка SB3, контактор КМ отключается, размыкая свои контакты в цепи статора двигателя и отключая тем самым его от сети переменного тока. Одновременно с этим замыкается контакт
КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора по71
стоянного тока от выпрямителя V через резистор Rт и переводу двигателя в режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки времени.
Через интервал времени, соответствующий времени останова двигателя, реле
КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное
положение.
Интенсивность динамического торможения регулируется резистором Rт,
с помощью которого устанавливается необходимый постоянный ток в статоре
двигателя.
Для исключения возможности одновременного подключения статора к
источникам переменного и постоянного тока в схеме использована типовая
блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схема управления пуском и торможением противовключением АД с фазным ротором в функции ЭДС приведена на рисунке 8.11.
А
~
Б
С
I>
QF
FA
SB1
SB2
КМ2
КМ1
КМ1
КМ2 КК
КМ1
КМ2
SB2
КV
КМ2
КМ3
КТ
М
YB
КМ1
RР
КМ3
V2
Rд1
КМ4
V1
КМ4
КМ1
КТ
Rд2
KV
Рис. 8.11. Схема управления пуском и торможением противовключением АД
с фазным ротором
После подачи напряжения включается реле времени КТ, которое своим
размыкающим контактом разрывает цепь питания контактора КМ3, предотвращая тем самым его включение и преждевременное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1, после чего
включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя.
Включение КМ1 одновременно приводит к срабатыванию контактора КМ4, ко72
торый своим контактом шунтирует ненужный при пуске резистор противовключения Rд2, а также разрывает цепь катушки реле времени КТ. Последнее,
потеряв питание, начинает отсчет выдержки времени, после чего замыкает свой
контакт в цепи катушки контактора КМ3, который срабатывает и шунтирует
пусковой резистор Rд1 в цепи ротора, и двигатель выходит на свою естественную характеристику.
Управление торможением обеспечивает реле торможения KV, контролирующее уровень ЭДС (скорости) ротора. С помощью резистора Rр оно отрегулировано таким образом, что при пуске, когда скольжение двигателя 0 < S < 1,
наводимая в роторе ЭДС будет недостаточна для включения, а в режиме противовключения, когда 1 < S < 2, уровень ЭДС достаточен для его включения.
Для осуществления торможения двигателя нажимается сдвоенная кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1. После этого двигатель отключается от сети и разрывается цепь
питания контактора КМ4, и замыкается цепь питания реле КТ. В результате
этого контакторы КМ3 и КМ4 отключаются, и в цепь ротора двигателя вводится сопротивление Rд1 + Rд2.
Нажатие кнопки SB2 приводит одновременно к замыканию цепи питания
катушки контактора КМ2, который, включившись, вновь подключает двигатель
к сети, но уже с другим чередованием фаз сетевого напряжения на статоре.
Двигатель переходит в режим торможения противовключением. Реле RY срабатывает и после отпускания кнопки SB2 будет обеспечивать питание контактора КМ2 через свой контакт и замыкающий контакт этого аппарата.
В конце торможения, когда скорость будет близка к нулю и ЭДС ротора
уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2. Последний, потеряв питание, отключит
двигатель от сети, и схема придет в исходное положение. После отключения
КМ2 тормоз УВ, потеряв питание, обеспечит фиксацию (торможение) вала
двигателя.
На рисунке 8.12. приведена схема панели типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей
управления двигателей с фазным и короткозамкнутым ротором и обеспечивает
пуск двигателей в две ступени и динамическое торможение по принципу времени.
При подаче на схему напряжений 220 В и переменного тока 380 В (замыкание рубильников QS1 и QS2 и автомата QF) включается реле времени КТ1,
чем подготавливается двигатель к пуску с полным пусковым резистором в цепи
ротора. Одновременно с этим, если рукоятка командоконтроллера находится в
нулевой (средней) позиции и максимально-токовые реле FА1-FА3 не включены, включится реле защиты КV от понижения питающего напряжения и подготовит схему к работе.
73
~ 380
- 220
QS2
QS1
FA1
FA2
FA3
QF
I > КМ5
QF
YA
КМ5
КК
КМ2
КК
КМ1
КТ3
КТ1
КМ4
КМ3
Rдт
М
I>
КV
КТ2
КV
FA1 FA2 FA3
SA
3 21 01 2 3
КМ4
КМ2
Rд1
КМ1
КМ3
КМ3
КТ1
Rд2
КМ4
КМ2
КМ5
КТ2
КТ3
Рис. 8.12. Схема панели типа ПДУ 6220
Пуск двигателя осуществляется по любой из двух искусственных характеристик или естественной характеристике, для чего рукоятка SА должна устанавливаться соответственно в положение 1, 2 или 3. При переводе рукоятки в
любое из указанных положений SА включается линейный контактор КМ2, подключающий двигатель к сети, контактор управления тормозом КМ5, подключающий к сети катушку YА электромагнитного тормоза, который при этом растормаживает двигатель и реле времени КТ3, управляющее процессом динамического торможения. При переводе SА в положение 2 или 3 включаются контакторы ускорения КМ3 и КМ4, и двигатель начинает разгоняться.
Торможение двигателя происходит при переводе рукоятки SА в нулевое
(среднее) положение. При этом отключатся контакторы КМ2 и КМ5 и включится контактор динамического торможения КМ1, который подключит двигатель к источнику постоянного тока. В результате этого будет идти интенсивный
процесс комбинированного (механического и динамического) торможения двигателя, который закончится после отсчета реле КТ3 своей выдержки времени,
соответствующей времени торможения.
Схема асинхронного электропривода с тиристорным пусковым устройством приведена на рисунке 8.13.
74
~U1
VS2
VS4
ТПУ
VS6
СИФУ
VS3
Uу
VS5
М
Рис. 8.13. Схема асинхронного ЭП
с тиристорным пусковым устройством
Эффективным методом формирования желаемых графиков изменения тока и момента двигателя в переходных режимах является регулирование напряжения на его статоре с помощью тиристорных пусковых устройств (ТПУ).
Чаще всего это делается для ограничения тока и момента двигателя при пуске
(«мягкий» способ пуска), хотя с помощью этих устройств можно обеспечить и
повышение момента двигателя при пуске («жесткий» способ пуска).
Тиристорное пусковое устройство включается между источником питания (сетью переменного тока) с напряжением U1 и статором двигателя. В нереверсивном ТПУ его силовую часть образуют три пары встречно-параллельно
включенных тиристоров VS1-VS6, управление которыми осуществляется импульсами напряжения, поступающими на них от системы импульсно-фазового
управления (СИФУ). Ограничение тока и момента осуществляется за счет снижения подводимого к двигателю напряжения, что достигается соответствующим изменением во времени угла управления тиристорами. Напряжение при
пуске может изменяться по различным законам – линейно нарастать от нуля
до сетевого, быть пониженным в течение всего времени пуска или изменяться
по так называемому бустерному варианту, при котором для облегчения пуска
двигателя на него вначале подается скачком некоторое напряжение, которое затем продолжает нарастать уже по линейному закону. В замкнутой системе может быть обеспечено и поддержание тока статора на заданном уровне.
8.6. Регулирование координат асинхронного двигателя
с помощью резисторов
Данный способ регулирования координат, называемый часто реостатным,
может быть осуществлен введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 8.14). Он привлекает в первую очередь
простотой своей реализации, отличаясь в то же время невысокими показателями качества регулирования и экономичностью.
75
а)
б)
~U1;f1
~U1;f1
R1д
I1
Rc
I1
R1д
М
Rp
ωМ
R2д
I2
М
ωМ
Рис. 8.14. Схемы включения АД с фазным ротором (а)
и с короткозамкнутым ротором (б)
Включение добавочных резисторов R1д в цепь статора применяется
главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором.
Все искусственные электромеханические характеристики располагаются
в первом квадранте ниже и левее естественной. С учетом того, что скорость
идеального холостого хода ω0 при включении R1д не изменяется, получаемые
искусственные электромеханические характеристики можно представить семейством кривых (рис.8.15 а).
а) S ω
0
б)
ω0
1
ω
ω0
1
2
3
4
2
3
4
0
1 0
Iкз3
Iкз2
Iкз1
Iкз,е
Мк3 Мк2 Мк1 Мк,е
М
I/2
а)
б)
Рис.8.15. Электромеханические (а) и механические (б) характеристики АД
при регулировании координат с помощью резисторов в цепи статора
Характеристики 2–4 расположены ниже естественной характеристики 1,
построенной при R1д = 0, причем большему значению R1д соответствует больший наклон искусственных характеристик 2-4.
Механические характеристики АД представлены на рисунке 8.15 б.
76
Координаты точки экстремума Мк и Sк изменяются при варьировании R1д,
а именно: в соответствии с (8.15) и (8.16) при увеличении R1д критический момент Мк и критическое скольжение Sк уменьшаются. Уменьшается и пусковой
момент.
В то же время искусственные механические характеристики (рис. 8.15б)
мало пригодны при регулировании скорости АД: они обеспечивают небольшой
диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения
R1д снижается; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его
статора применяется редко [2].
Включение добавочных резисторов R2д в цепь ротора применяется как
с целью регулирования тока и момента АД, так и его скорости (рис. 8.14а).
Искусственные электромеханические характеристики при R2д = var имеют вид, показанный на рисунке 8.15а, и могут использоваться для регулирования (ограничения ) пускового тока Iкз = Iп .
Скорость идеального холостого хода АД ω0 и максимальный (критический) момент двигателя Мк в соответствии с [2] остаются неизменными при регулировании R2д , а критическое скольжение Sк , как это следует из [2], изменяется.
Выполненный анализ позволяет построить естественную 1 (R2д = 0) и искусственные 2–3 (R2д3 > R2д2) характеристики (рис. 8.16) и сделать заключение,
что за счет изменения R2д имеется возможность повышать пусковой момент АД
вплоть до критического момента Мк без снижения перегрузочной способности
двигателя, что весьма важно при регулировании его скорости.
ω
с
ω0
а
б
Sе
g
1
с
Sк,е
2
d
Sк,и
Sи ω
и
1 0
3
f
е
Мном Ми
Ми1
Мк=Ми2
М
Рис. 8.16. Механические характеристики при различных сопротивлениях
R2д добавочного резистора в цепи ротора
В остальном рассматриваемый способ характеризуется такими же показателями, что и для ДПТ НВ. Диапазон регулирования скорости небольшой –
77
около 2–3 – из-за снижения жесткости характеристик и роста потерь по мере
его увеличения. Плавность регулирования скорости, которая изменяется только
вниз от основной, определяется плавностью изменения добавочного резистора
R2д.
Затраты, связанные с созданием данной системы ЭП, невелики, так как
для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время эксплуатационные затраты оказываются значительными, поскольку велики потери в ПД.
С увеличением скольжения S возрастают потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД ЭП.
Регулирование скорости этим способом осуществляется при небольшом
диапазоне регулирования скорости или кратковременной работе на пониженных скоростях. Этот способ нашел широкое применение например, в ЭП подъемно-транспортных машин и механизмов.
Расчет сопротивления добавочного резистора R2д может быть выполнен
несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика определена полностью, то сопротивление добавочного резистора (например, R2д1) можно определить по выражению [2,4]:
R 2Д1 R2 ф ( sки / sке 1) R2 ф ( Sи / Sе 1) ,
(8.30)
где R2ф – сопротивление фазы ротора АД.
Если искусственная характеристика задана своей рабочей частью, то
можно использовать метод отрезков, для чего на рисунке 8.16 проведена вертикальная линия, соответствующая номинальному моменту Мном, и отмечены характерные точки: а, b, c, d, e. Сопротивление искомого резистора R2д1 определяется как [2,4]
R2д1 = R2номаb/ас,
(8.31)
где R2ном E2k / ( 3I 2ном ) – номинальное сопротивление АД; Е2к – ЭДС ротора при
S = 1; I 2ном – номинальный ток ротора.
8.7. Регулирование скорости асинхронного двигателя
изменением числа пар полюсов
Этот способ регулирования скорости может быть реализован только
при использовании специальных АД, получивших название многоскоростных.
Особенность этих АД в том, что их статорная обмотка состоит из двух одинаковых секций (полуобмоток). За счет разных схем их соединения может быть
изменено число пар полюсов р АД. В соответствии с формулой 0 2 f1 / р это
позволяет изменять скорость вращения магнитного поля 0 и тем самым регулировать скорость АД. Ротор многоскоростных АД обычно выполняется короткозамкнутым.
78
Так как число пар полюсов АД может принимать только дискретные значения ( р = 1, 2, 3, 4…), то и скорость АД этим способом может регулироваться
лишь ступенчато [1].
Рассмотрим принцип получения различного числа пар полюсов при переключении секций обмотки статора на следующем примере.
Пусть фаза статорной обмотки состоит из двух одинаковых секций
1н – 1к, 2н – 2к, имеющая каждая по два проводника (рис. 8.17а) и соединенных
последовательно и согласно. По обмотке статора протекает ток, имеющий в
данный момент времени показанное стрелками направление. Используя правило буравчика, определим направление магнитных силовых линий, создаваемых
протекающим по проводникам током I. Не трудно заметить, что магнитное поле имеет в этом случае четыре полюса или р = 2.
а)
б)
S
N
S
1к
1к=2н
2к
1н
в)
N
S
N
1н
2к
2н
N
1к 2н
2к
1н
I
I
I
S
а)
б)
в)
Рис. 8.17. Схемы соединений секций обмотки статора
для изменения числа пар полюсов АД
Изменим теперь схему соединения секций, включив их последовательно
и встречно (рис. 8.17б), оставив то же направление подводимого к обмотке тока. В этом случае статорная обмотка образует уже магнитное поле с вдвое
меньшим числом пар полюсов. Уменьшение вдвое числа пар полюсов достигается и в схеме (рис. 8.17в), где секции соединены параллельно.
В этом и другом случае уменьшение числа пар полюсов достигается изменением направления тока на противоположное в одной из секций (в данном
случае во второй). При этом диапазон изменения скорости вращения магнитного поля равен двум.
Наиболее часто на практике применяются две схемы переключений статорной обмотки многоскоростных АД: с треугольника (Д) на двойную звезду
(УУ) и со звезды (У) на двойную звезду (УУ).
Рассмотрим схемы соединения статора и механические характеристики
АД для этих случаев.
Треугольник – двойная звезда. Для получения большего числа пар полюсов р1 секции каждой фазы статора включены последовательно и согласно и
соединены в треугольник (рис. 8.18а). А1н и А2н – начала соответственно первой
и второй секций фазы А ; А1к и А2к – их концы (обозначения для выводов фаз В
79
и С аналогичны). Соединение секций по схеме (рис. 8.18б) аналогично схеме
(рис. 8.17в) и вызовет уменьшение в 2 раза числа пар полюсов р2 АД. Схема на
рисунке 8.18б, в которой фазы статора образованы двумя параллельно включенными секциями, получила название двойной звезды.
Механические характеристики АД для схем соединения обмоток в треугольник 2 и двойную звезду 1 показаны на рисунке 8.18в [2,4].
а)
б)
~U1
А1к
Р1
Р2
А1н
А1к А2н
в)
~U1
ω
ω02
А2н
А1н
А2к
1
2
ω01
А2к
0
а)
б)
М
в)
Рис. 8.18. Схемы соединения обмоток статора в треугольник (а),
двойную звезду (б) и механические характеристики при этих схемах (в)
Звезда – двойная звезда. В этом варианте низкая скорость (большее число
пар полюсов р1 ) получается в схеме одинарной звезды (рис. 8.19а).
а)
б)
~U1
А1н
Р1
ω
1
ω02
А1к
А2н
А2к
2
ω01
0
а)
М
б)
Рис. 8.19. Схема соединения обмоток статора в звезду (а)
и механические характеристики двигателя
при схемах соединения обмоток звезда и двойная звезда (б)
Переключение на двойную звезду осуществляется по схеме (рис. 8.18б),
при этом число пар полюсов р2 уменьшится вдвое. Получаемые механические
характеристики при соединении обмоток в звезду 2 и двойную звезду 1 двухскоростного АД изображены на рисунке 8.19б [2,4].
Помимо рассмотренных двухскоростных АД применяются также трехи четырехскоростные. Первые из них помимо переключаемой обмотки статора, выполняемой аналогично рассмотренной выше, имеют также одну непе80
реключаемую обмотку. Четырехскоростные АД имеют две переключаемые
обмотки статора с числом пар полюсов р1 , р2 , р3 , р4 и позволяют получить четыре регулировочные механические характеристики.
Рассматриваемый способ регулирования скорости АД характеризуется
рядом положительных показателей, что определяет широкое его применение в
регулируемом ЭП переменного тока. К ним в первую очередь следует отнести
экономичность, так как регулирование скорости не сопровождается выделением в роторной цепи дополнительных потерь энергии, вызывающих излишний
нагрев АД и ухудшающих его КПД.
Механические характеристики многоскоростных АД отличаются хорошей и достаточной перегрузочной способностью.
Схему переключения «звезда – двойная звезда» целесообразно применять
при постоянном моменте нагрузки М с , схему «треугольник – двойная звезда» –
при нагрузке ЭП, имеющей характер постоянной мощности.
Недостатком рассмотренного способа является ступенчатость изменения скорости двигателя, относительно небольшой диапазон ее регулирования,
не превышающий обычно 6–8, и увеличенный габарит двигателя.
8.8. Регулирование координат электропривода
с асинхронным двигателем изменением напряжения
Изменение величины напряжения, подводимого к статору АД, позволяет
осуществлять в статических и динамических режимах регулирование его координат с хорошими показателями и с помощью относительно простых схем
управления (рис.8.13). Этот же способ может быть использован и для обеспечения наиболее экономичных режимов работы АД.
Для регулирования координат короткозамкнутого АД между сетью переменного тока со стандартным напряжением U1ном и статором (рис. 8.20а) двигателя 2 включен тиристорный регулятор 1 напряжения (ТРН), выходное напряжение которого U1рег изменяется с помощью маломощного внешнего сигнала
управления Uу.
Изменяя величину этого сигнала, можно регулировать напряжение на
статоре двигателя U1рег в пределах от величины сетевого напряжения U1ном и
практически до нуля.
Регулирование напряжения на статоре не приводит к изменению скорости
холостого хода 0 2 f1 / р и не влияет на критическое скольжение Sк, но существенно изменяет величину критического (максимального) момента Мк..
В результате при U1рег = var искусственные характеристики (рис. 8.20б)
оказываются малопригодными для целей регулирования скорости, так как по
мере уменьшения напряжения резко снижается критический момент АД и тем
самым его перегрузочная способность, а диапазон регулирования скорости
очень мал.
81
а)
б)
~U1ном
ω
ω0
Uу
ТРН
в)
2
3
U1рег при α=0
4
4 3
ωt
U1рег
U1
1
М
U1
2
5
U1рег
6
ωt
α
0
Мс
а)
М
б)
в)
Рис. 8.20. Схема регулирования координат АД изменением напряжения
на статоре (а), механические характеристики (б) и кривые напряжения (в)
Характеристики 3–6 построены при напряжениях 1; 0,8; 0,6 и 0,4 U1ном.
По указанным причинам разомкнутая схема (см. рис. 8.13) используется лишь
для воздействия в переходных процессах на момент АД, что может требоваться, напомним, для обеспечения заданных ускорения движения ЭП или регулирования натяжения на исполнительном органе рабочей машины.
Диапазон напряжения скорости можно увеличить лишь в замкнутых
электроприводах.
Регулятор напряжения позволяет также осуществлять регулирование
(ограничение) в переходных режимах тока АД. Электромеханические характеристики при этом имеют вид, показанных на рис. 8.15 [2].
При подаче на тиристоры ТРН импульсов управления с углом управления
0 они будут полностью открыты, и к АД будет приложено все напряжение
сети U1 = Uрег (рис. 8.20 в). Если осуществлять подачу импульсов на тиристоры
с некоторой задержкой относительно предельного режима (угол управления
0 ), то к АД будет прикладываться часть напряжения сети, как показано для
фазы А (рис. 8.20 в). Изменяя угол управления от нуля до , можно регулировать напряжение на АД от полного напряжения сети до нуля.
Существенно отметить, что форма напряжения на статоре АД является
не- синусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений – гармоник, каждая из которых изменяется с определенной частотой. Частота изменения первой из них
(основной гармоники) равна частоте питающего напряжения, а частота других
гармоник больше чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду и по ней ведутся все основные расчеты.
С помощью ТРН можно обеспечивать принудительное электрическое
торможение АД, формирование требуемых динамических характеристик ЭП в
переходных режимах, обеспечение наиболее экономичных режимов АД при его
работе с переменной нагрузкой и изменение направления скорости АД.
82
8.9. Регулирование координат электропривода
в системе преобразователь частоты – двигатель
Частотный способ является одним из наиболее перспективных и широко
используемых в настоящее время способов регулирования скорости АД. Принцип его заключается в том, что, изменяя частоту f1 питающего АД напряжения,
можно в соответствии с выражением 0 2 f1 / р изменять его синхронную скорость 0 , получая тем самым различные искусственные характеристики. Этот
способ обеспечивает плавное регулирование в широком диапазоне, получаемые
характеристики обладают высокой жесткостью. Частотный способ к тому же
отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место,
например, при реостатном регулировании. Поэтому при этом способе регулирования потери скольжения оказываются небольшими, в связи с чем частотный
способ наиболее экономичен [1].
Для лучшего использования АД и получения высоких энергетических показателей его работы – коэффициентов мощности, полезного действия, перегрузочной способности – одновременно с изменением частоты питающего
напряжения необходимо изменять и значение этого напряжения. Закон изменения напряжения при этом зависит от характера момента нагрузки [1].
При выборе соотношения между частотой и напряжением, подводимым к
статору АД, часто исходят из условия сохранения его перегрузочной способности , которая определяется отношением критического момента двигателя М к
к моменту нагрузки М с ( М к / М с const ).
При постоянном моменте нагрузки М с const должно соблюдаться соотношение [2]
U ф / f1 const ,
(8.32)
т.е. напряжение на статоре должно изменяться пропорционально его частоте.
Для вентиляторного характера момента нагрузки соотношение имеет следующий вид [2]:
(8.33)
Uф / f12 const ,
а при моменте нагрузки, обратно пропорциональном скорости, соотношение
запишется в виде [2]
U ф / f1 const .
(8.34)
На рисунке 8.21а приведены механические характеристики АД при выполнении соотношения (8.32).
Для частот ниже номинальной ( f1i f1ном ) критический момент АД постоянен, что обеспечивает неизменную перегрузочную способность двигателя. При
частоте выше номинальной ( f1i f1ном ), когда по техническим условиям напряжение на статоре не может быть повышено сверх номинального, критический
момент АД снижается.
83
f15 f14 f1ном f11 f12 f13
ω
ω04
ω
ω05
U ф U ф,ном ; f1 var
f15 f14 f1ном
ω0е
ω01
f11
ω02
ω0е
f1ном
ω01
f11
ω02
f12
f12 Uф / f1 const ω03
f13
М
0
Мк
ω03
0
f13
М
б)
а)
Рис. 8.21. Механические характеристики при частотном регулировании
координат АД: а – расчетные; б – практические
Приведенные характеристики получены при пренебрежении активным
сопротивлением статора. Это допущение мало сказывается при большой (близкой или выше номинальной) частоте, в то время как при малых частотах оно
заметно отражается на характеристиках электропривода. Для примера, на
рис. 8.21б приведено семейство экспериментальных характеристик АД, снятых
при выполнении соотношения (8.32).
Из графиков видно, что при небольших частотах произошло снижение
критического момента АД. Причина этого заключается в уменьшении магнитного потока АД при низких частотах вследствие влияния активного сопротивления статора, вызывающего из-за падения напряжении на R1 уменьшение ЭДС
АД. Для компенсации этого влияния следует с уменьшением частоты снижать
напряжение в меньшей степени, чем это предусмотрено соотношением (8.32).
Преобразователем частоты называется преобразователь напряжения
переменного тока стандартных частоты и напряжения в напряжение переменного тока регулируемой частоты. Применительно к схемам ЭП одновременно с
частотой в определенном соотношении регулируется и выходное напряжение
преобразователя, как и было отмечено ранее.
В преобразователях частоты применяют инверторы.
Инвертором называется преобразователь напряжения постоянного тока в
напряжение переменного тока. Эти преобразователи используются в составе
преобразователей частоты в случае питания ЭП от сети переменного тока или в
виде самостоятельного преобразователя при питании ЭП от источника постоянного напряжения. В составе ЭП они обеспечивают, как правило, получение
переменного напряжения регулируемой частоты, что требуется для регулирования скорости двигателей переменного тока.
84
Существует большое количество инверторов, различающихся своими
схемами, характеристиками и областями применения. В схемах ЭП наибольшее
применение нашли автономные инверторы напряжения и тока.
Автономные инверторы напряжения (АИН) имеют жесткую внешнюю
характеристику, представляющую собой зависимость выходного напряжения от
тока нагрузки, вследствие чего при изменении тока нагрузки их выходное
напряжение практически не изменяется. Управляющим воздействием на двигатель переменного тока является напряжение регулируемой частоты.
Автономные регуляторы тока имеют «мягкую» внешнюю характеристику
и обладают, тем самым, свойствами источника тока, в связи с чем при их использовании управляющим воздействием на двигатель является ток регулируемой частоты.
В схемах инверторов применяются управляемые полупроводниковые
приборы – тиристоры и транзисторы. Схемы автономных инверторов приведены далее при рассмотрении преобразователей частоты.
Полупроводниковые преобразователи частоты (ПЧ) делятся на две группы: преобразователи с непосредственной связью и преобразователи с промежуточным звеном постоянного тока.
Силовая часть схемы трехфазного преобразователя частоты с непосредственной связью показана на рисунке 8.22.
1
2
VS5
VS6
Uс
VS4
f1
VS3
Ub
VS1
U1
VS2
Uа
С1
Zа
С2
Zb
3
4
С3
Zc
Uрег
fрег
Рис. 8.22. Силовая часть схемы преобразователя частоты
Он образован тремя группами 2, 3 и 4-х тиристоров VS1 – VS6, включенных между вторичными обмотками трансформатора 1 и нагрузкой Zа, Zb и Zс.
Напряжения U рег , регулируемое по частоте f рег и величине, на нагрузке, формируется из напряжения источника питания (трансформатора) Uа, Ub и Uс, что и
определило название этого типа преобразователя частоты. Частота напряжения
на нагрузке может регулироваться только вниз от сетевой f1 , и ее максимальное
значение обычно не превосходит 20 Гц, что определяет ограничение возможности применения этого типа преобразователя частоты [2].
85
Преобразователи частоты с промежуточным звеном постоянного тока в
составе ЭП могут выполняться по двум основным схемам. На рисунке 8.23 показана силовая часть схемы трехфазного преобразователя частоты с инвертором
напряжения.
VD1...VD6
VT1...VT6
U1
Uрег
fрег
f1
С
М
В
АИН
VD7...VD12
Рис. 8.23. Силовая часть схемы преобразователя частоты
с инвертором напряжения
Она состоит из нерегулируемого выпрямителя В, собранного на шести
диодах VD1 – VD6, и автономного инвертора напряжения АИН на шести
управляемых ключах, в качестве которых на схеме показаны модули, содержащие биполярные транзисторы с изолированным затвором VT1 – VT6 и шунтирующие диоды VD7 – VD12. Выпрямитель преобразует напряжение сети U1
стандартной частоты f1 в выпрямленное напряжение U рег регулируемой частоты f рег . Регулирование напряжения U рег на нагрузке осуществляется широтноимпульсной модуляцией выпрямленного напряжения. Конденсаторы С выполняют роль фильтра и элемента, осуществляющего обмен реактивной мощности
с нагрузкой [4].
На рисунке 8.24 показана силовая часть схемы преобразователя частоты с
инвертором тока.
VS1...VS6
L
VS7...VS12
С
U1
f1
М
U2 f2
В
И
Рис. 8.24. Силовая часть схемы преобразователя частоты
с инвертором тока
86
Она включает управляемый выпрямитель В на транзисторах VS1 – VS6 и
инвертор тока И на запираемых тиристорах VS7 – VS12. Конденсаторы С являются источником реактивной мощности для нагрузки, реактор L обеспечивает работу инвертора тока. Приведенная схема позволяет осуществлять рекуперацию (отдачу) энергии в сеть [4].
9. СИНХРОННЫЕ ДВИГАТЕЛИ
9.1. Механические и угловые характеристики
синхронного двигателя (СД)
Синхронные двигатели занимают в промышленных автоматизированных
электроприводах значительное место и применяются главным образом для привода механизмов, скорость которых не требуется регулировать (компрессоры,
вентиляторы, насосы, холодильные машины, преобразовательные агрегаты и
т.д.) [1].
К достоинствам СД следует отнести простоту их конструкции по сравнению, например, с машинами постоянного тока, высокие энергетические показатели, определяющиеся в первую очередь компенсационными свойствами СД, относительно невысокую стоимость (СД большой мощности – выше 2000–3000 кВт
дешевле асинхронных), возможность в будущем регулирования скорости и др.
Схема включения СД приведена на рисунке 9.1а.
По конструктивному исполнению статор СД такой же, как и у АД. Ротор
выполняется с двумя обмотками: пусковой обмоткой ОП типа беличьей клетки
(как у асинхронного короткозамкнутого двигателя) и обмоткой возбуждения
ОВ постоянного тока. Первая из обмоток служит для асинхронного пуска СД,
вторая – для его возбуждения в нормальном режиме работы.
ω
б)
а)
ω0
ω≈0.95ω0
ωр=ω0
Мвх1
Мвх2
1
ОВ
1-Rра1
2-Rра2
Rра2>Rра1
2
0
М
Мн Мп1
а)
Мп2
б)
Рис. 9.1. Схема включения синхронного двигателя (а)
и механические характеристики (б)
87
Двигатель
0,950
(0
пускается
2 f
р
в
или n0
ход
как
асинхронный.
При
скорости
60 f1
) подается возбуждение, и двигатель втягир
вается в синхронизм: р 0 .
СД выполняются с пусковыми клетками двух типов (с различными активными сопротивлениями Rра пусковой обмотки ротора), что позволяет получить различные пусковые механические характеристики (характеристики 1 и 2,
рис. 9.1б).
Выбор одной из двух указанных характеристик зависит от момента сопротивления производственного механизма. При пуске и вхождении двигателя
в синхронизм необходимо выполнение условия [1,3]:
М П . Дв М П . мех.
,
М вх. Дв М вх. мех.
(9.1)
где М П . Дв и М П . мех. – пусковые моменты двигателя и механизма ИО; М вх. Дв
и М вх. мех. – входные моменты двигателя и механизма.
Двигатели, у которых пусковая клетка выполняется с повышенным активным сопротивлением, применяются обычно с большим значением статического момента при пуске (характеристика 2). При вентиляторном характере
статического момента более приемлемы двигатели с механической характеристикой 1.
Обратим внимание на то обстоятельство, что пусковые клетки СД рассчитываются на кратковременный режим их работы продолжительностью
20–30 с. Увеличение времени пуска выше допустимого может привести к перегреву клетки и ее повреждению.
Связь между скольжением и моментом СД при работе на пусковой клетке
приблизительно выражается формулой как у обычного АД.
Рабочая механическая характеристика СД от холостого хода до выпадения из синхронизма является горизонтальной прямой, т.е. при изменении
нагрузки на валу двигателя его скорость остается постоянной (рис. 9.1б).
Однако мгновенные значения скорости ротора СД в процессе работы могут несколько отличаться от синхронной скорости 0 , например, вследствие отставания ротора от поля статора при увеличении нагрузки на валу.
Для решения вопроса об устойчивой работе двигателя в таких случаях
необходимо знать зависимость развиваемого им момента от угла внутреннего
сдвига фаз между векторами ЭДС статора и напряжения сети ( М f ( ) ). Эта
зависимость называется угловой характеристикой СД. Приведем эту зависимость в виде формулы (9.2) для неявнополюсной машины [1]:
М
3Е1U с
sin М max sin ,
0 с
(9.2)
В формуле (9.2): Е1 – фазная ЭДС статора; U c – фазное напряжение сети;
– угол внутреннего сдвига фаз; c – индуктивное сопротивление статора.
Зависимость момента синхронного двигателя от угла внутреннего сдвига
фаз (угловая характеристика 1) приведена на рисунке 9.2.
0
88
М
2
Мм
1
Мн
0
н
Мр / 2
0
Рис. 9.2. Угловые характеристики СД
Наибольшего значения момент двигателя достигает при угле / 2 . Эта
величина характеризует собой перегрузочную способность СД.
Увеличение угла более значения / 2 может привести к неустойчивой
работе двигателя и выпадению его из синхронизма. При меньших значениях
его работа устойчива.
Номинальный угол сдвига фаз н 25 30 характеризует возможный длительный режим работы двигателя по условиям нагревания, следовательно, и его
номинального момента Мн. Перегрузочная характеристика СД определяется
как М max / М ном 2 3 .
Для механизмов с переменной нагрузкой, особенно при вероятности возникновения ее пиков, применяются двигатели с высокой перегрузочной способностью. В некоторых случаях осуществляется автоматическое увеличение
ЭДС двигателя за счет кратковременного его перевозбуждения, что приводит к
повышению М max и соответственно до 4.
Следует также отметить, что СД менее чувствителен к снижению напряжения питающей сети, чем АД, так как момент СД пропорционален первой
степени напряжения.
В явнополюсных СД реактивные сопротивления по продольной и поперечным осям не равны. Поэтому зависимость момента от угла внутреннего
сдвига фаз имеет вид (для характеристики 2 рис. 9.2) [1]:
М
U c2 1
3 U c E
1
sin
( ) sin ,
0 d
2 q d
(9.3)
где d и q – реактивные сопротивления по продольной и поперечной осям.
Второй член в приведенном выражении представляет собой значение реактивного момента. Из анализа формулы (9.3) следует, что явнополюсный СД
может развивать некоторый момент и без возбуждения.
Следует отметить, что с погрешностью 10–20 % для крупных явнополюсных двигателей можно пренебречь составляющей реактивного момента и пользоваться выражением (9.2).
89
9.2. Схемы и способы пуска и торможения СД
Конструкция современных двигателей приспособлена к условиям асинхронного пуска, и в настоящее время этот способ пуска является общепринятым.
В двигателе для обеспечения достаточного пускового момента Мп пусковая клетка имеет большое активное сопротивление. В ходе пуска пусковая
клетка сильно нагревается, так как значительная часть мощности скольжения
превращается в тепло. В связи с этим пусковые клетки выполняются из стержней сравнительно большого сечения с большой теплоемкостью. Для увеличения
активного сопротивления при сохранении достаточно большой теплоемкости
часто применяются стержни из бронзы, удельное сопротивление которой в ~ 5
раз больше удельного сопротивления меди.
Схемы пуска различаются главным образом способами включения статора и ротора. В зависимости от способа включения статора можно выделить следующие схемы (рис. 9.3), где а) схема непосредственного пуска; б) пуск через
реактор; в) пуск через автотрансформатор; г) схема блока трансформатордвигатель [1].
а)
а)
г)
в)
б)
б)
в)
г)
Рис. 9.3. Схемы включения статора СД
В зависимости от способа подключения обмотки возбуждения выделяются следующие схемы цепи возбуждения (рис. 9.4), где а) с постоянно включенным возбудителем; б) с переключением на время пуска обмотки возбуждения
на гасящее сопротивление; в) с последовательным включением гасящего сопротивления в цепь якоря возбудителя; г) с питанием обмотки возбуждения от выпрямителя [1].
овр
c
б)
овр
в)
овр
г)
овр
R2
R2
В
R2
а)
б)
в)
Рис. 9.4. Схемы цепи возбуждения
90
г)
Выбор той или иной схемы пуска определяется следующими факторами:
1) допустимым падением напряжения питающей сети во время пуска;
2) значением момента нагрузки двигателя во время пуска;
3) моментом инерции системы привода в целом;
4) максимально допустимым ускорением ведомой машины;
5) длительностью пуска;
6) свойствами самого двигателя, в особенности его механической и тепловой прочности;
7) стоимостью установки схемы пуска и экономичностью ее эксплуатации.
Для обеспечения правильного хода пуска применяются системы автоматического управления и соответствующие противоаварийные системы.
Система автоматического пуска производит подключение статора двигателя к питающей сети непосредственно или через реактор, или автотрансформатор, а также выполняет возможные переключения в цепи возбуждения. Эта
система должна обеспечивать удобный в условиях эксплуатации пуск двигателя, например при помощи кнопки из нескольких различных мест, или по заданной программе, или по сигналу системы управления технологическим процессом.
Простейшей схемой пуска является непосредственный пуск с постоянно
включенным возбудителем, и всегда, когда это только возможно, рекомендуется именно этот способ. По мере роста мощности питающих электрических сетей возможности применения непосредственного пуска все более расширяются.
Нарастание тока возбуждения должно быть только на заключительной
стадии разгона двигателя; слишком раннее появление тока в обмотке возбуждения оказывает неблагоприятное влияние на ход асинхронного пуска, так как
оно приводит к появлению тормозного момента, который увеличивает скольжение и затрудняет вхождение двигателя в синхронизм. Кроме того, постоянный ток, проходящий по обмотке возбуждения, во время асинхронного вращения вызывает пульсацию тока статора и связанные с этим колебания напряжения в менее мощных сетях – явление особенно неприятное в сетях с осветительной нагрузкой. В наиболее распространенном случае, когда возбудитель
соединен с валом двигателя, процесс самовозбуждения возбудителя начинается
только при некоторой определенной скорости, зависящей от величины сопротивления в цепи возбуждения возбудителя. Это может произойти, например,
при скорости, равной примерно 60 % синхронной. Вследствие электромагнитной инерции нарастание возбуждения возбудителя происходит довольно медленно, своей полной величины возбуждение достигает только на последней
стадии пуска, т.е. именно тогда, когда это нужно.
В случае возбудителей с отдельным приводом, когда двигатель, возбудитель и синхронный двигатель включаются одновременно, также можно создать
условия, при которых самовозбуждение возбудителя соответствовало бы последней фазе пуска двигателя.
Задержка нарастания возбуждения достигается путем увеличения величины сопротивления в цепи возбуждения возбудителя. В системе автоматиче91
ского пуска имеется возможность включения дополнительного сопротивления,
закорачиваемого на заключительной стадии пуска. В тех случаях, когда для
вхождения двигателя в синхронизм необходимо увеличение тока возбуждения
(при пуске под нагрузкой для систем привода с большим моментом инерции J),
автоматика должна обеспечивать форсирование возбуждения за счет временного закорачивания всех дополнительных сопротивлений в цепи возбуждения
возбудителя.
В процессе пуска обмотку возбуждения СД не следует оставлять разомкнутой, так как при большом скольжении в ней индуцируется значительная
ЭДС. Однако нельзя замыкать обмотку ОВ ротора накоротко или на малое сопротивление якоря возбудителя, т.к. вследствие явления однофазного включения в пусковой характеристике СД наблюдается снижение момента на половинной скорости, и пусковая характеристика будет иметь провал.
По обмотке возбуждения будет протекать однофазный переменный ток,
создающий соответствующее магнитное поле ротора. Это поле можно разложить на две составляющие Ф1 и Ф2, вращающиеся относительно ротора в разные стороны с одинаковыми скоростями, равными (0 ) .
Поток Ф1 при этом будет вращаться относительно статора со скоростью [1]
(0 ) 0 ,
(9.4)
(0 ) 2 0 .
(9.5)
а поток Ф2 со скоростью [1]
Таким образом, магнитный поток Ф1 вращается со скоростью поля статора. Поток Ф2 при скорости ротора, меньшей 1/2ω0, будет вращаться в сторону,
противоположную вращению ротора, что следует считать двигательным режимом; при скорости, большей 1/2ω0, вращение потока Ф2 будет происходить в ту
же сторону, что и ротора, – режим будет генераторный.
Поэтому кривую момента, обусловленного взаимодействием потока Ф2 с
полем статора, можно изобразить в виде кривой 3. Кривая 2 изображает момент, создаваемый взаимодействием потока Ф1 с полем статора, а кривая
1 – момент от пусковой обмотки (рис. 9.5).
Сложив эти три кривые, получим результирующую кривую 4, имеющую
провал, подобный провалу на характеристике АД от высших гармоник МДС
(проявился эффект Гёргеса).
Поэтому, если статический момент на валу СД значителен, может возникнуть устойчивый асинхронный режим (застревание ротора при малой скорости), и двигатель в синхронизм не войдет.
Уменьшить провалы в характеристике синхронного двигателя (явно нежелательные) можно увеличением сопротивления, на которое замыкается обмотка возбуждения при пуске.
92
ω
ω0
3
2
4
1
Мс
М
Мп
Рис. 9.5. Механические характеристики при асинхронном пуске СД
Величина ограничивающего активного сопротивления должна составлять
Rогр ≈ (8–10)Rов.сд. = Rгас. При этом ток в ней во время пуска будет меньше,
соответственно меньше будет и максимум момента в генераторном режиме для
кривой 3 (рис. 9.5).
Схема прямого пуска СД приведена на рисунке 9.6.
К1
К3
СД
К2
В
овв
Rгас
Rдовв
К4
Rгас
Рис. 9.6. Схема прямого пука СД
В современных системах пуска СД применяется, как правило, вариант с
последовательным включением сопротивления в цепь возбудителя и изредка
вариант с переключением на сопротивление.
Ток статора СД при асинхронном запуске превосходит номинальный ток
примерно в 5 раз. Средством для уменьшения пускового тока является понижение напряжения на статоре с помощью реактора. Этот способ применяют тогда,
когда требуется уменьшить динамические нагрузки на двигатель или же если
сеть маломощная.
Если возникает необходимость ограничить потребляемый от сети ток при
одновременном сохранении максимально возможного пускового момента, следует использовать автотрансформаторный пуск.
93
В случае реакторного пуска для уменьшения вдвое потребляемого от сети
тока индуктивное сопротивление реактора должно быть равно пусковому сопротивлению двигателя. В результате напряжение на двигателе будет равно половине питающего напряжения, а момент – ¼ момента, развиваемого двигателем, подключенным непосредственно к сети. При применении автотрансформатора для снижения потребляемого от сети тока вдвое его коэффициент трансформации должен быть равен 2 . При этом напряжение на зажимах двигателя
составит 1/ 2 напряжения сети, а момент будет равен половине значения момента при полном напряжении питания.
Различают легкий и тяжелый пуск СД. При легком пуске обмотка статора
включена через реактор до тех пор, пока скорость СД не станет равной синхронной. При подсинхронной скорости подается возбуждение, двигатель втягивается в синхронизм при пониженном напряжении, после чего реактор закорачивают. Такой пуск применяют при малых нагрузках на валу ( М с 40 %М сн ).
При тяжелом пуске обмотка статора включена через реактор только до
того времени, пока скорость двигателя не достигнет подсинхронной, затем реактор закорачивается и подают возбуждение – двигатель втягивается в синхронизм при полном напряжении. Такой пуск применяют при значительно большей нагрузке в сравнении с легким пуском.
При асинхронном пуске крупных синхронных двигателей иногда приходится считаться со значительным падением напряжения в питающей сети (на
сопротивлениях трансформаторов и реакторах короткого замыкания). Поэтому
в ряде случаев накладывают ограничения на проведение групповых пусков в
системах автоматического включения резервного питания (системах АВР).
Напряжение при пуске двигателей должно оставаться таким, чтобы, вопервых, обеспечить достаточный для пуска вращающий момент, а во-вторых,
не вызывать нарушений в работе других потребителей.
Ориентировочно можно считать, что если двигатель питается от осветительной сети и предполагаются частые пуски, то допустимы падения напряжения до 0,9 номинального значения. В случае питания двигателя непосредственно от линии высокого напряжения распределительной подстанции напряжение
может падать даже до 0,7 номинального значения. Надо иметь ввиду, что применение пускового реактора повлечет за собой уменьшение напряжения на
двигателе, что не выгодно для системы электропривода в целом. Чем больше
будет напряжение на зажимах двигателя во время пуска под нагрузкой, тем
меньше нагреются его обмотки. Как правило, максимально допустимой температурой пусковой клетки считается температура 300 °С. Для каждого типа двигателя заводы-изготовители указывают максимально допустимое число пусков
повторных.
В последнее время для пуска СД постепенно начали внедрять тиристорные регуляторы напряжения.
Для торможения СД применяется режим динамического торможения, при
котором обмотка статора замыкается на дополнительное сопротивление RД, а
обмотка возбуждения подключается на постоянное напряжение (рис. 9.7а).
94
Механические характеристики синхронной машины в режиме динамического торможения аналогичны характеристикам асинхронной машины
(рис. 9.7б).
а)
б)
ω
ген.
Rд
дв-й
дин.
СД
+
-
I
II
-М
+М
0
а)
Мс
б)
Рис. 9.7. Схема динамического торможения СД (а)
и его тормозные характеристики (б)
Торможение противовключением применяется редко, так как оно сопровождается большими толчками тока и ведет к усложнению аппаратов управления. Генераторный режим возможен, если ротор синхронного двигателя вращать от постороннего источника механической энергии. Механическая характеристика является продолжением во втором квадранте характеристики двигательного режима (рис. 9.7б).
Примечание. Ввиду того, что коллекторная машина постоянного тока
ухудшает эксплуатационные качества привода, в последнее время, наряду с
обычным СД, промышленность начала выпускать двигатели с дополнительными обмотками на статоре. Питание ОВ СД производится от полупроводникового выпрямителя (рис. 9.8).
~
+
В
ОВ СД
-
Рис. 9.8. Схема СД с дополнительными обмотками на статоре
Разработаны также типы СД без ОВ на роторе. Обмотка возбуждения
укладывается на станине двигателя, что исключает возможность в контактной
системе цепи возбуждения.
СД может работать и на пульсирующую нагрузку, например, поршневой
компрессор. Однако при резко пульсирующих нагрузках использовать СД с
опережающим cosφ нецелесообразно и даже опасно, т.к. колебания ротора могут совпасть с частотой тока сети, двигатель входит в механический резонанс, и
наступает авария.
95
Чтобы избежать явления резонанса, частоту колебаний ротора следует
уменьшить. Для этого повышают маховые массы электропривода с помощью
подсоединения маховика или применяют двигатели с повышенным моментом
инерции ротора. При подсоединении маховика нагрузочный график выравнивается, и уменьшается ток двигателя.
9.3. Компенсация коэффициента мощности (cosφ)
Синхронный двигатель отличается от других машин тем свойством, что с
его помощью можно регулировать потребление реактивной мощности из сети.
Пояснить это положение можно следующим образом [1].
Если пренебречь падением напряжения в обмотке статора двигателя, обусловленным активным и индуктивным сопротивлениями, то ЭДС, возникающая
в обмотке статора при работе двигателя без нагрузки, равна напряжению сети.
Она определяется результирующим магнитным потоком в воздушном зазоре.
Последний определяется намагничивающей силой (н.с.) обмотки статора и обмотки возбуждения. В том случае, когда ток возбуждения отсутствует, весь поток создается только током статора. СД при этом, так же как и АД, работающий
без нагрузки, потребляет из сети реактивный ток, отстающий от напряжения на
90°. Если машину возбудить, то часть результирующей н.с. будет создана током
возбуждения ротора, и намагничивающий ток статора уменьшится.
Дальнейшее увеличение тока ротора приведет к тому, что ток обмотки
статора может стать размагничивающим. В противном случае поток машины
оказался бы больше результирующего, соответствующего заданной ЭДС. Таким образом, при перевозбуждении СД будет потреблять размагничивающий
ток, опережающий по фазе напряжение на угол 90°, т.е. машина будет работать
генератором реактивной энергии.
На рисунке 9.9 приведены векторные диаграммы СД при постоянной
нагрузке на валу, неизменном напряжении сети и разных по величине токах
возбуждения. Векторы I d и I q на этом рисунке представляют собой составляющие тока статора по продольной и поперечной осям. В том случае, когда СД
перевозбужден (рис. 9.9а), недостаток реакторной энергии покрывается из сети,
т.е. двигатель, кроме активного тока, участвовавшего в создании момента на
валу, потребляет реактивный намагничивающий ток. Ток возбуждения может
быть выбран таким образом (рис. 9.9б), что из сети потребляется только активный ток. Если двигатель перевозбужден (рис. 9.9 в), то избыток реактивной
энергии отдается в сеть. Полный ток двигателя характеризуется при этом двумя
составляющими: активной и реактивной. Последняя для двигателя является
размагничивающей.
При Р 3U с I cos const , U с const и I cos I а const конец вектора тока
(полного) I на рисунке 9.9 при изменении возбуждения двигателя скользит по
линии LM. Модуль полного тока будет минимальным при cosφ = 1. При этом
Imin = Iа.
96
IR
IR
Uc
JI
q q
J Id d
IR
E
J Iq q
Uc
JI d d
φ
Θ
I
I
Id
б)
а)
М
Iq
Iq
0
Id
d
I φ
0
а)
-Е
J Iq q
Θ
-Е
Θ
Iq
q
Uс
L
J Id d
d
Id
q
q
d
в)
б)
в)
Рис. 9.9. Векторные диаграммы СД
Зависимость полного тока I1 статора и cosφ СД от тока возбуждения при
разных нагрузках на валу иллюстрируется U-образными характеристиками,
приведенными на рисунке 9.10 [2,4].
I1,cosφ
I
II
III
φ=0
Р1
Р1>Р2>Р3
I1н,cosφн
cosφ
φ>0
φ<0
Р2
потребление
реактивной мощности
из сети
Р3
I1
отдача реакт.
мощности в сеть
Iв
Iвн
Рис. 9.10. U-образные характеристики СД
Кривая I характеризует границу статической устойчивости двигателя; при
переходе ее двигатель может выпасть из синхронизма. Кривая II представляет
регулировочную характеристику при cosφ =1. Кривая III соответствует верхней
границе возбуждения по условиям допустимого нагрева двигателя (обмотки
возбуждения) и самораскачивания двигателя.
97
Отдаваемая (или потребляемая при недовозбуждении) реактивная мощность СД определяется общей формулой
3U ф I1 sin .
(9.6)
Более удобные для практических расчетов выражения можно подготовить
с помощью векторных диаграмм СД. Для явнополюсного СД получено следующее выражение [2]:
Е1 cos
3U ф
d
Uф (
cos 2
d
sin 2
) .
q
(9.7)
Формулу для неявнополюсного СД можно получить из выражения (9.7),
если положить в нем d q 1 [2]:
3U ф
1
Е1 cos Uф .
(9.8)
Анализируя формулы (9.7) и (9.8) можно сделать вывод о том, что с увеличением тока возбуждения, и тем самым ЭДС Е1 , растет генерируемая СД реактивная мощность, значение которой при этом зависит от нагрузки СД, определяющей угол .
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Чиликин М.Г. Общий курс электропривода / М.Г. Чиликин, А.С. Сандлер. М. : Энергоиздат, 1981. 576 с.
2. Москаленко В.В. Атоматизированный электропривод : учебник для вузов / В.В. Москаленко. М.: Энергоиздат, 1986. 416 с.
3. Онищенко Т.Б. Электрический привод: учебник для вузов / Т.Б. Онищенко. М. : РАСХН, 2003. 320 с.
4. Москаленко В.В.Электрический привод : учебник для студ. высш. учеб.
заведений / В.В. Москаленко. М. : Изд. центр «Академия», 2007. 368 с.
98
ОГЛАВЛЕНИЕ
Введение ................................................................................................................................ 3
1. Понятие «Электропривод» ............................................................................................. 4
1.1. Структурная схема электропривода ......................................................................... 4
1.2. Функции электропривода и требования к нему ..................................................... 5
1.3. Классификация электроприводов ............................................................................ 6
1.4. Основные направления развития электропривода ................................................. 8
2. Механика электропривода ............................................................................................ 8
2.1. Активные и реактивные моменты сопротивления.................................................. 8
2.2. Приведение к валу электродвигателя моментов
и сил сопротивления, моментов инерции и инерционных масс ...................................... 9
2.3. Механические характеристики исполнительных органов
и электродвигателей ........................................................................................................... 10
2.4. Уравнение движения электропривода .................................................................. 13
2.5. Установившееся движение и устойчивость установившегося движения
электропривода..................................................................................................................... 14
2.6. Неустановившееся движение электропривода при постоянном
динамическом моменте .................................................................................................. 16
2.7. Неустановившееся движение электропривода при линейной
зависимости моментов двигателя и исполнительного
органа от скорости .......................................................................................................... 17
2.8. Неустановившееся движение электропривода при произвольной
зависимости динамического момента от скорости ......................................................... 18
3. Понятие о регулировании координат, режимах работы
и системах управления электропривода ...................................................................... 20
3.1. Регулирование скорости электроприводов ........................................................... 21
3.2. Регулирование тока и момента двигателей .......................................................... 23
3.3. Регулирование положения электроприводов ........................................................ 23
3.4. Режимы работы электроприводов .......................................................................... 24
3.5. Общие принципы построения систем управления
электроприводами ................................................................................................................ 26
4. Режим работы и характеристики электропривода с двигателем
постоянного тока независимого возбуждения (ДПТ НВ) ........................................... 27
4.1. Схема включения, режимы работы и статические характеристики
двигателя постоянного тока независимого возбуждения (ДПТ НВ) ......................... 27
4.2. Энергетические режимы работы ДПТ НВ ............................................................ 32
5. Автоматическое управление ДПТ НВ при пуске и торможении
при питании его от сети ................................................................................................... 33
5.1. Автоматический пуск ЭД в функции ЭДС ........................................................... 33
5.2. Автоматический пуск ЭД в функции тока ............................................................. 34
5.3. Автоматический пуск ЭД в функции времени ...................................................... 35
5.4. Автоматический пуск и динамическое торможение ЭД ...................................... 38
5.5. Электромеханические переходные процессы при учете
индуктивности цепи якоря Lя ............................................................................................. 39
6. Регулирование угловой скорости ДПТ НВ .............................................................. 40
6.1. Регулирование угловой скорости путем введения добавочных
резисторов (сопротивлений) в цепь якоря ................................................................... 40
6.2. Регулирование угловой скорости уменьшением магнитного потока ................. 42
99
6.3. Регулирование угловой скорости ДПТ НВ
путем изменения напряжения на якоре в системе Г-Д ...................................................44
6.4. Регулирование угловой скорости ЭД в системе «Управляемый
тиристорный выпрямитель – ДПТ НВ» ........................................................................46
6.5. Переходные процессы при изменении магнитного потока ДПТ НВ ..................50
6.6. Регулирование координат электропривода в системе
источник тока – электродвигатель ......................................................................................51
7. Электроприводы постоянного тока с двигателями последовательного
и смешанного возбуждения ..............................................................................................52
7.1. Механические и электромеханические характеристики двигателей
постоянного тока последовательного возбуждения .........................................................52
7.2. Тормозные режимы ДПТ ПВ ...................................................................................55
7.3. Электропривод с двигателем постоянного тока смешанного возбуждения
ДПТ СВ .................................................................................................................................56
8. Электроприводы с асинхронным двигателем .........................................................57
8.1. Механические характеристики асинхронных двигателей ...................................58
8.2. Электромеханические характеристики АД ............................................................63
8.3. Определение КПД АД и cos 1 АД .........................................................................64
8.4. Тормозные режимы АД ............................................................................................65
8.5. Типовые схемы управления электроприводов с асинхронными
двигателями ..........................................................................................................................69
8.6. Регулирование координат асинхронного двигателя с помощью
резисторов ............................................................................................................................75
8.7. Регулирование скорости асинхронного двигателя изменением
числа пар полюсов ...............................................................................................................78
8.8. Регулирование координат электропривода с асинхронным двигателем
изменением напряжения .....................................................................................................81
8.9. Регулирование координат электропривода в системе преобразователь
частоты – двигатель..............................................................................................................83
9. Синхронные двигатели ................................................................................................87
9.1. Механические и угловые характеристики синхронного
двигателя (СД) .....................................................................................................................87
9.2. Схемы и способы пуска и торможения СД ............................................................90
9.3. Компенсация коэффициента мощности (cosφ) .....................................................96
Библиографический список ............................................................................................98
Редактор В. А. Маркалева
Компьютерная верстка – А. В. Отраднова
ИД № 06039 от 12.10.2001
Свод. темплан 2010 г.
Подписано в печать 21.10.10. Формат 60х84 1/16. Отпечатано на дупликаторе.
Бумага офсетная. Усл. печ. л. 6,25. Уч.-изд. л. 6,25.
Тираж 100 экз. Заказ 663.
Издательство ОмГТУ. Омск, пр. Мира, 11. Т. 23-02-12
Типография ОмГТУ
100