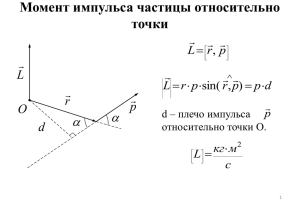
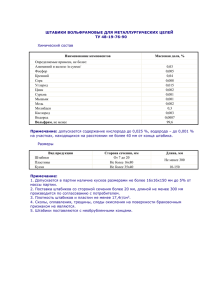
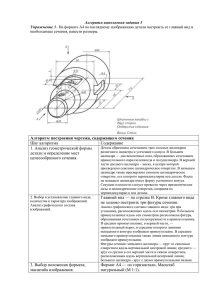
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Брянский государственный технический университет» Утверждаю Ректор университета __________А.В. Лагерев «___»___________2012 г. ПРИКЛАДНАЯ МЕХАНИКА Методические указания к выполнению расчётно-графических работ для студентов очной формы обучения по направлению подготовки бакалавров 140400 – «Электроэнергетика и электротехника» Издание второе, переработанное и дополненное Брянск 2012 УДК 621.01:531.8(075.8) Прикладная механика. [Текст] + [Электронный ресурс]: методические указания к выполнению расчётно-графических работ для студентов очной формы обучения по направлению подготовки бакалавров 140400 – «Электроэнергетика и электротехника». – 2-е изд., перераб. и доп. – Брянск: БГТУ, 2012. – 56 с. Разработал: В.А. Татаринцев, канд. техн. наук, доц. Рекомендовано кафедрой «Детали машин» БГТУ (протокол №6 от 05.06.2012) Печатается по изданию: Прикладная механика. Расчётно – графические работы: методические указания по выполнению расчётнографических работ для студентов дневной формы обучения специальности 180400 – «Электропривод и автоматика промышленных установок и технологических комплексов». – Брянск: БГТУ, 2001. Научный редактор В.Д. Цветков Редактор издательства Л.И.Афонина Компьютерный набор А.В. Какорина Иллюстрации Т.А. Прохоренкова Темплан 2012 г., п.267 Подписано в печать 01.11.12. Формат 60х84 1/16. Бумага офсетная. Офсетная печать. Усл. печ.л. 3,25. Уч.-изд.л. 3,25. Тираж 40 экз. Заказ . Бесплатно. Издательство Брянского государственного технического университета 241035, Брянск, бульвар 50-летия Октября, 7, БГТУ. 58-82-49. Лаборатория оперативной полиграфии БГТУ, ул. Институтская, 16. 2 ПРЕДИСЛОВИЕ Программой курса «Прикладная механика» предусмотрено изучение важнейших разделов дисциплин «Теория механизмов и машин», «Сопротивление материалов» и «Детали машин и основы конструирования», являющихся фундаментом общепрофессиональной подготовки студентов. Порядок выполнения заданий по курсу построен на принципе органического единства трёх традиционных дисциплин подготовки бакалавров к проектно-конструкторской профессиональной деятельности. Их выполнение способствует обобщению, углублению и закреплению знаний, полученных при изучении курса, для последующего применения их при комплексном решении задачи проектирования механизмов электропривода. Методические указания содержат задания по восьми основным разделам курса. В каждом разделе приведён пример решения типовой задачи. Указан список литературных источников по разделам курса и сборников задач с примерами их решения. Номер схемы для выполнения задания соответствует последней цифре номера зачетной книжки, а номер варианта числовых значений параметров – предпоследней цифре. Например, если номер зачётной книжки 901638, то нужно выполнять задание, соответствующее расчетной схеме 8 и числовым значениям параметров по варианту 3. Цифра ноль соответствует десятому варианту или десятой схеме задания. Расчётно-графические работы оформляются в виде пояснительной записки, содержащей формулы, расчётные схемы, эпюры, числовые значения параметров, результаты вычислений и краткие пояснения выполняемых действий. 3 1. СТРУКТУРНОЕ И КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ПЛОСКИХ МЕХАНИЗМОВ Задание 1. Для плоского рычажного механизма (рис. 1) определить класс механизма, его степень подвижности, скорости и ускорения точек шарниров, а также угловые скорости и ускорения звеньев в положении, задаваемом углом φ, при известном значении угловой скорости входного звена 1 const и его длине li (табл. 1). Таблица 1 Исходные данные к заданию 1 Числовые значения параметров по вариантам Параметр 1 2 3 4 5 6 7 8 9 10 φ, град. 120 150 180 90 60 30 210 240 300 270 ω1, рад/с 10 20 30 40 50 60 70 90 25 l 1, м 0,5 0,4 0,3 0,2 0,15 0,1 0,2 0,15 0,2 0,4 80 Указания по выполнению задания 1. Выделить структурные группы Ассура в механизме. Определить их класс, порядок и вид. 2. Записать формулу строения механизма, найти его класс и степень подвижности. 3. Принять размеры других звеньев механизма из условия свободного вращения кривошипа («проворачиваемости звеньев») по размеру входного звена. Полученные числовые значения длин звеньев привести в табличной форме. 4. Определить скорости точек шарниров и угловые скорости звеньев с помощью построения плана скоростей. 5. Найти ускорение точек шарниров и угловые ускорения звеньев построением плана ускорений. 6. Свести в таблицу полученные результаты. 4 Рис. 1. Структурные схемы механизмов к заданию 1. В кружках – номера вариантов 5 ПРИМЕР РАСЧЁТА В плоском механизме выталкивателя (рис. 2, а) определить степень подвижности, выделить структурные группы Ассура, составить структурную формулу механизма. Определить скорости и ускорения точек шарниров, угловые скорости и ускорения звеньев в заданном положении кривошипа при его угле поворота 45 , если частота вращения кривошипа п1 сопst 60 мин-1, его длина lOA l1 0, 25 м. Решение 1. Начиная от выходного звена 5, выделяем кинематические цепи с нулевой степенью свободы (W 0) , структурные группы Ассура (рис. 2, б). Звенья 5 и 3 кинематические пары В, С, S образуют структурную группу Ассура второго класса, второго порядка, пятого вида – II2,4. Звенья 2 и 4 пары А, D, Е составляют группу Ассура второго класса, второго порядка, второго вида – II2,2. Звенья 0 – стойка и 1 – кривошип образуют начальный механизм первого класса (рис. 2, в). Формула структуры механизма имеет вид М НМI 0;1 II 2,2 2; 4 II 2,4 3;5 . В целом механизм второго класса. 2. Степень подвижности (число степеней свободы) плоского механизма определяем по формуле Чебышева W Зп 2 рн рв , где п - число подвижных звеньев, n 5 ; pн - число низших кинематических пар, pн 7 (пары О; А; С; D - вращательные, пары В; E; L поступательные); рв - число высших кинематических пар, рв 0 , то есть исследуемый механизм относится к рычажным, W 3 5 – 2 7 – 0 1. 3. Вычертим кривошип в масштабе и, вращая его вокруг точки О, выберем размеры других звеньев, обеспечивающие условия проворачиваемости кривошипа и работы механизма в целом. Рассмотрим механизм в положении, соответствующем углу поворота кривошипа 45 . Масштабный коэффициент кинематической схемы механизма l l1 / ОА 0, 25 / 25 0, 01 м/мм. Из условия проворачиваемости кривошипа ОL ОА ; АВ 2OА ; АD AB . 6 Рис. 2. К кинематическому расчету механизма: а - кинематическая схема механизма; б - структурные группы Ассура; в – начальный механизм; г - план скоростей; д - план ускорений; е - к определению направления ускорения Кориолиса Принимаем l AD l2 0, 7 м ; OL 0, 35 м . Ход звена 5 определяется перемещением точки B, когда кривошип проходит горизонтальное положение, то есть при 0 и 180 . При этом: АDО arcsin lOA / l AD аrcsin 0, 25 / 0, 7 20,93 , OD l AD cos ADO 0, 7 cos 20,93 0, 65 м, Н 2 x 2 OD OL tg ADO 2 0, 65 0,35 tg 20,93 0, 23 м, где H – ход звена 5. 4. Определим угловую скорость кривошипа 7 1 n1 / 30 3,14 60 / 30 6, 28 рад/с. Скорость точки А (VA 1 l1 6, 28 0, 25 1,57 м/с), направлена в сторону вращения кривошипа, при этом VA ОА . Выберем величину отрезка на плане скоростей, ра 30 мм. Тогда масштабный коэффициент плана скоростей V VA / pa 1,57 / 30 0,052 (м/с)/мм . Скорость точки О известна, VO 0 . Определяем скорость точкиD из уравнения: векторного VD VA VDA . y AD Скорость точки D VD ( pd ) V 15 0,052 0,78 м/с. Скорость точки C, принадлежащей звену 2, находим из векторного уравнения VС2 VD VC2 D . y CD Скорость VCD определим из пропорции (c2 d ) / (ad ) BD / AD lBD / l AD ; c2 d ad lBD / l AD 22 0,15 / 0,7 4,7 мм; VCD (c2 d ) v 4,7 0,052 0,24 м/с, VCD действует перпендикулярно AD по направлению угловой скорости 2 . Скорость точки С2 VС2 ( pc2 ) v 18 0,052 0,94 м/с. Скорость точки С, принадлежащей звену 3 - VС3 , находим из векторного уравнения V С3 V e V r V С2 V С3С2 , x AD где Ve и Vr – соответственно переносная и относительная скорости. VС3 ( pc3 ) v 10 0,052 0,52 м/с. Угловая скорость звена 2 определяется по направлению вращения точки D относительно точки A, которое характеризуется вектором VDA . В данном случае вращение против часовой стрелки. 2 VDA / l AD da v / l AD 22 0,052 / 0,7 1,63 рад/с. Получены следующие результаты: 8 Точка........................................….. A C2 C3 D Скорость V, м/с........................…. 1,57 0,94 0,52 0,78 Звено........................................….. 1 2 3 4, 5 Угловая скорость ω, рад/с......…. 6,28 1,63 1,63 0 Направления скоростей показаны стрелками на плане скоростей (рис. 2, г). 5. Определим ускорение в точке А a A a A n 12l1 9, 282 0, 25 9,86 м/с2. Масштабный коэффициент плана ускорений: a a A / ( pa) 9,86 / 19 0,52 (м/с2)/мм. Ускорение точки D определим из векторного уравнения: n aD a A aDA aDA . y AD AD Нормальное ускорение точки D относительно A aDA n 2 2l AD 1,632 0,7 1,86 м/с2 , (an2 ) aDA n / a 1,86 / 0,52 3,6 мм, направлено от точки D к A (рис. 2, г). Ускорение в точке D aD ( p ' d ) a 13 0,52 6,76 м/с2. Тангенциальное ускорение точки D относительно А a AD (nd ) a 14 0,52 7, 28 м/с2. Угловое ускорение звена 2 2 a AD / l2 7, 28 / 0,7 10, 4 рад/с2, определяется по направлению ускорения точки D относительно точки A, которое характеризуется вектором aDA , направлено против часовой стрелки. Положение точки С2 на отрезке аd определяем из пропорции aC 2 / ad AC / AD l AC / l AD ; aС2 ad ad AC / AD 14 0,55 / 0,7 11 мм. Ускорение точки С2: aС2 ( p 'c2 ) a 15 0,52 7,8 м/с2. 9 Ускорение точки Сз определяем из векторного уравнения ac3 ac2 ar ak ac2 ac3c2 ack3c2 . x AD Ускорение Кориолиса: a 22Vr 22VC3C2 22 (c2 c3 V ) 2 1,63 18 0,052 3,05 м/c2; направление определяем, повернув вектор скорости VС3С2 на 90о в k C3C2 направлении угловой скорости ω2 (рис. 2, г). с2 k aСk 3С2 / a 3,05 / 0,52 5,9 мм. Ускорение точки Сз aC 3 ( p 'c3 ) a 7 0,52 3,64 м/с2. Получены следующие результаты: Точка…………………………... А С2 С3 D Ускорение a, м/c …..…………. 9,86 7,8 3,64 6,76 Звено…………………………... 1 2 3 4 5 Угловое ускорение , рад/с …. 0 10,4 10,4 0 0 Направления ускорений показаны на плане ускорения стрелками (рис. 2, д). 2. СИЛОВОЕ ИССЛЕДОВАНИЕ ПЛОСКИХ МЕХАНИЗМОВ Задание 2. Определить реакции в кинематических парах плоских механизмов (рис. 1) и движущий момент при действии на выходное звено постоянной силы производственного сопротивления Fnc , направленной в противоположную сторону вектора скорости выходного звена, и значениях масс mi и моментов инерции ISi звеньев (табл. 2). Для решения использовать исходные данные к заданию 1 (рис. 1, табл. 1) и результаты кинематического расчёта. Указания по выполнению задания 1. Вычертить механизм в заданном положении в масштабе и приложить к нему следующие силы: силы производственного сопротивления, приложенные к выходному звену в направлении, противоположном направлению его вектора скорости, силы тяжести, приложен10 ные в центре масс звеньев Si и направленные вертикально вниз, силы инерции, приложенные в центре масс звеньев и направленные противоположно направлению ускорений в этих точках, реакции в кинематических парах и моменты сил инерции, направленные противоположно направлению угловых ускорений звеньев. Таблица 2 Исходные данные к заданию 2 Числовые значения параметров по вариантам Параметр 1 2 3 4 5 6 Fnc. кН m1=m2, кг m3, кг 0,5 10 6 0,4 8 4 0,3 7 5 0,4 9 5 0,5 7 4 0,6 12 7 m4, кг 8 6 7 6 6 m5, кг 5 4 6 5 4 7 8 9 10 0,7 0,8 13 14 8 9 10 11 6 0,9 10 5 9 10 11 8 7 6 5 4 6 4 IS2 , кг∙м2 0,18 0,12 0,9 0,14 0,1 0,17 0,19 0,2 0,18 0,13 2. Определить реакции в кинематических парах и движущий момент, применяя метод кинетостатического исследования, основанный на принципе Даламбера, из условия равновесия структурных групп Ассура и отдельных звеньев. 3. С помощью теоремы Жуковского выполнить проверку значения движущего момента, найденного методом кинетостатического исследования. ПРИМЕР РАСЧЁТА Определить реакции в кинематических парах и движущий момент плоского механизма выталкивателя (рис. 2, а), если известно, что при рабочем ходе на выходное звено 5 действует постоянная сила производственного сопротивления Fnc 0,3 кН, а инерционные характеристики звеньев – момент инерции I S 0, 49 кг·м2, массы звеньев 2 т1 10 кг, т1 12 кг, т1 4 кг, т1 5 кг, т1 6 кг. Остальные исходные данные принять по заданию 1. 11 Решение 1. Вычертим в масштабе механизм в заданном положении (см. задание 1). Приложим к его звеньям действующие силы – силу производственного сопротивления Fпс силы тяжести Gi , силы инерции FИi и моменты сил инерции МИi (рис.3, a), а после мысленного расчленения механизма (рис. 3, в) реакции в кинематических парах Rij (первый индекс указывает, к какому звену приложена реакция, второй – от какого звена). Силы тяжести и силы инерции приложим в центрах масс звеньев – Si. 2. Выделим в механизме структурные группы Ассура (п. 1, с. 6, рис. 2, б, в) и, начиная со структурной группы, содержащей выходное звено 5, рассматриваем их равновесие (рис. 3, в, г). Составим векторное уравнение для сил, действующих на структурную группу, состоящую из звеньев 5 и 3: Fпс G5 FИ5 G3 FИ3 R50 F32 . x AD В этом векторном уравнении известны по значению и направлению следующие параметры. Сила производственного сопротивления Fnc 0,3 кН 300 Н действует вдоль оси х противоположно направлению вектора скорости звена 5 – V5 (рис. 2, г). Силы тяжести G5 и G3 действуют вертикально вниз G5 т5 g 6 9,8 59 Н , G3 mg 3 49,839 Н. Силы инерции FИ3 и FИ5 действуют противоположно направлению векторов ускорений в точках С, принадлежащих звеньям 5 – С5 и 3 – С3 (рис. 3, б): aС3 aС5 ( p 'c3 ) a 8 0,52 4,16 м/с . Соответствующие силы инерции FИ5 т5 aС5 6 4,16 25 Н; FИ3 4 4,16 17 Н. Реакция на звене 5 от стойки R50 направлена перпендикулярно оси х, значение ее неизвестно, а реакция R32 на кулису 3 со стороны ползуна 4 направлена перпендикулярно кулисе АD и значение её также неизвестно по величине. Строим план сил для звеньев 5 и 3, приняв масштабный коэффициент F 10 Н/мм (рис. 3, з). Получаем числовые значения реакции, умножая отрезки плана сил на масштабный коэффициент: R50 4 10 40 Н, R32 27 10 270 Н. Для определения значений плеча реакции R50 запишем сумму 12 моментов относительно точки С для звена 5 при lS5 0, 2 м: M F R l i i 50 S5 h50 G5 lS 5 0 ; h50 lS 5 G5 R50 / R50 0, 2 59 40 / 40 0,095 м. Аналогично определим плечо h32 , записав сумму моментов относительно точки С для звена 3 M i Fi R32 h32 0 ; h32 0 м. 3. Определим реакцию R53 в кинематической паре С. Для этого рассмотрим статическое равновесие звена 5 (рис. 3, д). Сумма проекций на ось x X i Fnc FИ5 R53n 0 ; R53n Fnc FИ5 300 25 275 Н. Сумма проекций на ось y Yi R53 G5 R50 0 ; R53 G5 R50 59 40 19 H. Числовые значения реакции: R53 n 2 53 R R 53 2 2752 192 176 Н; R53 R35 . 4. Рассмотрим равновесие структурной группы, образованной звеньями 2 и 4. Составим векторное уравнение для сил, действующих на структурную группу, состоящую из звеньев 2 и 4: n G4 R23 FИ4 G2 FИ 2 R21 R21 R40 0 . AD AD x В этом векторном уравнении известны значения и направления следующих параметров. Сила тяжести звена G4 m4 g 5 9,8 49 H направлена вертикально вниз. Реакция R23 , действующая на звено 2 со стороны звена 3, направлена перпендикулярно AD. Сила инерции звена 4 FИ 4 m4 a4 m4 aD 5 6,8 3, 4 Н направлена вверх. Сила инерции звена 2 FИ 2 m2 aS 2 m2 ( p ' s2 ) a 12 16 0,52 100 Н приложена в центре масс звена 2 – S2 и направлена противоположно направлению вектора ускорения этого звена аS2 (на плане ускорений (рис. 3, б) – отрезок p’s2, а точка s2 расположена посередине отрезка аd, так как центр масс S2 расположен посередине звена 2, A1S 2 S 2 D ). Сила тяжести G2 m2 g 12 9,8 118 Н направлена вертикально вниз. Реакцию в кинематической паре A – R21 раскладывают на две составляющие: нормальную R21n (направлена вдоль AD) и тангенциальную R21 (направлена перпендикулярно AD). Реакция R40, действую13 щая на звено 4 от стойки О, направлена вдоль оси х. Плечо этой реакции находим из условия статического равновесия звена 4 (рис. 3, e). Сумма моментов относительно точки D звена 4 M D ( Fi ) R40 h40 0 ; h40 0 . Определим значение тангенциальной составляющей реакции R21 из условия равновесия структурной группы из звеньев 2 и 4 относительно точки D: M D Fi F23 lCD G2 0,5l2 sin ODA FИ2 h2 R21 l2 M И2 0 ; R21 ( F23 lCD G2 0,5l2 sin(ODA) Fu 2 h2 M И 2 ) / l2 . Найдем геометрические параметры, входящие в это выражение: lCD CD l 15 0,01 0,15 м. Угол между линией АD и вектором G2 равен углу ОDА как накрестлежащий. Угол ОDА определим по теореме синусов из ОАD: AD / sin(AOD) OA / sin(ODA) ; sin(ODA) OA sin(AOD) / AD; ODA arcsin(25 sin(135o ) / 70) 14,63 o . Плечо силы FИ2 определяем графически (рис. 3, в). Момент сил инерции звена 2 направлен противоположно направлению углового ускорения 2 M И 2 I S2 2 , где IS2 - момент инерции звена 2 относительно центра масс S2 для стержня: I S2 m2l2 2 / 12 12 0,7 2 / 12 0, 49 кг∙м2, 2 (da) a / l2 14 0,52 / 0,5 10, 4 рад/с2; М И 2 0, 49 10, 4 5,1 H·м. Подставляя полученные числовые значения, имеем: R21 (270 0,55 118 0,5 0,7 sin14,63o 100 : 0,06 5,1) 0,7 243 Н. (направление соответствует указанному на рис. 3, в). После определения силы R21 в векторном уравнении остались неизвестными только числовые значения реакций R21n и R40 , которые определяем графически с помощью плана сил при масштабном коэффициенте F 10 Н/мм (рис. 3, и). Получим следующие значения реакций: R40 8 10 80 Н, направлена в противоположную сторону 4 10 40 Н, направлена в сторону, той, что показана на рис. 3, в, R21 показанную на рис. 3, в. Значение реакции в кинематической паре А 14 Рис. 3. К расчету механизма: а – структурная схема механизма; б – план ускорений; в, г, д, е, ж – расчетные схемы; з, к, и – планы сил 15 R21 R12 n 2 21 R R 2 21 402 2342 246 Н. 5. Находим из условия равновесия звена 4 (рис. 3, е) реакцию в кинематической паре D : X i R40 R42n sin(ODA) R42 cos(ODA) 0 ; 80 R42n sin(14,63o ) R42 соs (14,63o ) 0 . Сумма проекций сил на ось у: Y F i И4 G4 R42n cos (ODA) R42 sin(ODA) 0 ; 34 49 R42n cos (14,63) R42 sin(14,63) 0 . Решаем систему двух уравнений с двумя неизвестными: 0,2525R42n 0,9676R42 80 0; n 0,9676R42 0,2525R42 15 0. R42 81 Н; R42n 6 H. Сила R42n направлена противоположно показанному на рис.3, е. 6. Определяем из векторного уравнения сил, приложенных к звену 1 (рис. 3, к), величину реакции вопоре О R12 G1 R10 0 . Реакция в кинематической паре определена сложением векторов R21n и R21 , направлена в противоположную сторону вектора R21 , R21 246 Н. Сила тяжести звена 1 направлена вертикально вниз и приложена в центре вращения О, благодаря применению на кривошипе противовесов G1 m1 g 10 9,8 98 H. Построением плана сил определяем реакцию в опоре О (рис. 3, к): h2 EDl 6 0,01 0,06 м; R10 30 10 300 Н. Значение движущего момента М Д R12 h1 246 24 0,01 59 Н·м. Движущий момент направлен против часовой стрелки (рис. 3, ж). 7. Рассчитаем движущий момент с помощью теоремы Жуковского. Для этого повернем план скоростей механизма (рис. 2, г) на 90 и приложим к нему как к твердому телу все действующие на механизм внешние активные силы и силы инерции. При этом действующие моменты сил необходимо привести к силам или парам сил. Движущий момент приводим к движущей силе, приложенной в 16 точке A звена 1, так что FД OA (рис. 4, а). Замена эквивалентна, если сумма моментов сил относительно точки O не изменится M i Fi M Д FД lOA . Тогда FД M Д / l1 59/0,25=236 Н. Момент сил инерции M И2 приводим к паре сил, приложенной на / концах звена 2, так что FИ 2 AD , FИ//2 AD , FИ/ 2 FИ//2 (рис. 4, б). При этом пара сил вращает звено 2 так же, как вращает его M И2 . Сумма моментов сил относительно центра масс S2 M F M i i И2 FИ/ 2 lDS2 FИ//2 l AS2 FИ/ 2 l AD . Тогда FИ/ 2 M И 2 / l AD 5,1/0,7=7,3 Н. Рис. 4. К расчёту по теореме Жуковского: а, б – приведение моментов сил; в – рычаг Жуковского По теореме Жуковского повёрнутый план скоростей, рассматриваемый как рычаг с опорой в полюсе скоростей (рис. 4, в), должен находиться под действием всех рассматриваемых сил в равновесии, то есть сумма моментов сил относительно полюса M p ( Fi ) 0 : (FИ3 FИ5 Fпс )h1 (FИ4 G4 )h2 G2 (h2 h3 ) FД h4 FИ2 h5 FИ/ 2 h6 FИ//2 (h6 h7 ) 0; FД/ (( FИ3 FИ5 Fпс )h1 ( FИ 4 G4 )h2 G2 (h2 h3 ) FИ 2 h5 FИ//2 h7 ) / h4 . 17 Так как V сокращается, можно подставлять значения плеч в мм. FД/ ((17 25 300)23,1 (3,4 49)33,6 118(33,6 5,6) 100 25,1 7,3 46,3) / 63,6; откуда движущая сила FД/ 228 Н. Расхождение расчётных значений 1 FД/ / FД 1 (228 / 236) 0,034 3, 4% не превышает 5...7%, что допустимо для графо-аналитических методов расчёта. 3. РАСТЯЖЕНИЕ (СЖАТИЕ) СТЕРЖНЕЙ Задание 3. К стальному (Ест, т) или чугунному (Еч, вр, вс) стержню (брусу) переменного сечения площадью Аi приложены сосредоточенные силы F1 и F2 и распределенная нагрузка интенсивностью q согласно схеме (рис. 5). Определить коэффициент запаса прочности стержня (по его величине сделать вывод о разрушении) и перемещение его не опёртого конца. Исходные данные для расчета приведены в табл. 3. Таблица 3 Исходные данные к заданию 3 Числовые значения параметров по вариантам Параметр F1, кН 1 60 2 80 3 50 4 80 5 40 6 20 7 40 8 80 9 60 10 70 F2, кН 40 20 60 50 60 80 80 20 20 50 q, кН/м 200 400 100 200 100 100 200 400 100 200 L, м 0,2 0,1 0,4 0,3 0,2 0,4 0,3 0,1 0,4 0,25 А104 м2 4 6 2 8 4 5 4 8 6 2 Материал Сталь Чугун Чугун Сталь Чугун Чугун Сталь Сталь Чугун Чугун 340 380 650 T, МПа 300 120 280 150 180 150 200 вр, МПа - 500 1000 600 700 600 780 вс, МПа 18 Рис. 5. Расчётные схемы к заданию 3. В кружках – номера вариантов 19 Указания по выполнению задания 1. Построить эпюру продольных сил N , применяя метод сечений. 2. Построить эпюру нормальных напряжений по эпюре N, используя зависимость N / А . 3. Найти максимальное значение напряжений mах на эпюре . Определить коэффициент запаса прочности по формуле S lim / max , где lim – предельные напряжения для пластических материалов lim тр тс , для хрупких - и lim=вр или lim=вс , max – максимальные напряжения в стержне. Предел текучести т и пределы прочности при растяжении σвр и сжатии σвс определяют по таблицам [6 – 8] в зависимости от марки материала. Если m ax lim ( S 1 ), то наступает разрушение конструкции. 4. Построить эпюру перемещений сечений стержня по зависимости li N i li / ( Ei Ai ) . Определить перемещение неопёртого (свободного) конца стержня. Принять модули упругости для стали Ест 2 105 МПа, для чугуна – Еч 105 МПа. ПРИМЕР РАСЧЕТА К чугунному брусу (стержню) переменного сечения площадью Аi приложены сосредоточенные силы F1 40 кН, F2 60 кН и распределённая нагрузка q 200 кH/м согласно схеме (рис. 6). Определить коэффициент запаса прочности бруса и перемещение его свободного конца, если площадь сечения A 4 104 м2, а длина l 0, 2 м. Решение 1. Разбиваем стержень на силовые участки, в пределах которых силовой фактор описывается одним математическим выражением. Границами участков являются границы стержня и сечения (точки), в которых приложены нагрузки. Стержень содержит четыре силовых участка. Определение опорной реакции в защемлении (заделке) не является обязательным, так как внутренние продольные усилия в сечениях стержня можно найти методом сечений, перемещаясь вдоль продольной оси (оси z) от свободного конца стержня к защемлению (на рис. 6, а – сверху вниз). 20 Рис. 6. К расчету стержня на растяжение (сжатие): а – расчетная схема стержня; б – расчетная схема для второго участка; в – расчетная схема для третьего участка; г – эпюра продольной силы; д – эпюра напряжений; е – эпюра удлинений стержня Мысленно проведём на первом силовом участке сечение 1-1 и, отбросив нижнюю часть стержня, рассмотрим равновесие верхней части. На первом участке внешние силовые факторы отсутствуют, поэтому внутреннее продольное усилие N1 0 . Выполним аналогичные операции на втором силовом участке. К верхней части стержня сечения 2-2 приложим внутреннее растягивающее продольное усилие, которое условно считаем положительным (направлено от сечения 2-2 вдоль оси z), и внешнюю силу F1 (рис. 6, б). Под действием этих сил верхняя часть стержня находится в равновесии. Для второго участка уравнение статического равновесия Zi 0 ; N 2 F1 0 ; N 2 F1 40 кН. Знак минус показывает, что внутренняя продольная сила – сжимающая и постоянная на всем участке. Эпюра продольной силы N2 на втором участке ограничивается прямой, параллельной базисной линии (рис. 6, г). Аналогично мысленно выполним сечение 3-3 на третьем участке (рис. 5, в). Переменная координата изменяется от 0 до 5l, ( 5l z3 0 ). Условия равновесия верхней части стержня на третьем участке имеют вид Zi 0 ; N3 F1 qz3 0 ; N3 F1 qz3 ; 5l z3 0 21 в начале третьего участка при z3 0 N 3 0 F1 q 0 F1 40 кН (сжатие); в конце третьего участка при z3 5l N 3 (5l ) F1 q 5l 40 200 5 0, 2 160 кН (растяжение). Эпюра продольной силы N3 на третьем участке представляется наклонной прямой (рис. 5, г), так как q const , а переменная z3 в первой степени. При определении внутреннего продольного усилия методом сечений нет необходимости всякий раз изображать отсеченную часть бруса. Достаточно мысленно выполнить изображенные на рис. 6, а и 6, б действия, направить внутреннее продольное усилие от сечения (как растягивающее усилие) и написать уравнение статического равновесия отсеченной части стержня. Для четвёртого участка (сечение 4-4) оно имеет вид N 4 F1 q 5l F2 0; N 4 F1 q 5l F2 40 200 5 0, 2 60 100 кН (растяжение). Продольная сила N4 - растягивающая и постоянная на всем четвертом участке, изображенная на эпюре прямой, параллельной базисной линии (рис. 6, г). При определенном навыке можно пропускать уравнение статического равновесия, а записывать выражение для N сразу, учитывая внешние силовые факторы со знаком плюс, если они направлены от рассматриваемого сечения, и минус, если они направлены в сторону рассматриваемого сечения. 2. Построим эпюру нормальных напряжений σ для определения максимальных напряжений. Напряжение на первом участке постоянное и равное 1 N1 / A 0 . На втором участке нормальное напряжение постоянно и равно: 2 N 2 / A 40 104 / 4 104 100 106 Н/м2 100 МПа. На третьем участке напряжения переменные, так как продольная сила изменяется линейно N 3 ( z3 ) и изменяется площадь сечения. В начале третьего участка 3 (0) N 3 (0) / (2 A) ( 40 103 ) / (2 4 10 4 ) 50 10 6 Н/м2 50 МПа. На расстоянии z3 2l при площади сечения 2А: N 3 (3l ) F1 q 3l 40 200 3 0, 2 80 кН (растяжение). 22 3 (3l ) N3 (3l ) / (2 A) (80 103 ) / (2 4 104 ) 100 106 Н/м2 100 МПа. Там же при площади 3А 3 (3l ) N 3 (3l ) / (3 A) (80 103 ) / (34 104 ) 67 106 Н/м2 67 МПа. В конце третьего участка: 3 (5l ) N3 (5l ) / (3 A) (160 103 ) / (34 104 ) 133 106 Н/м2 133 МПа. На четвертом участке: 4 N 4 / (3 A) (100 103 ) / (34 104 ) 83106 Н/м2 83 МПа. По полученным значениям напряжений строим эпюру σ (рис. 6, д). Видно, что максимальное нормальное напряжение в стержне max 133 МПа. Коэффициент запаса прочности S lim / max вр / max 150 / 133 1,13 . 3. Определим перемещения на каждом силовом участке стержня. На первом силовом участке перемещения l1 N1 l1 / ( Er A2 ) 0 , так как N1=0. На втором участке перемещения l2 N2 l2 / (Er A2 ) N2 2l / ( Er A) ( 40 103 20,2) / (105 106 4104 ) 4104 0, 4 мм (сокращение длины). Перемещение на третьем участке l3 l3 l3 , где ∆l3' – перемещение подучастка третьего участка с меньшим сечением площадью 2А, а ∆l3'' – перемещение подучастка с большим сечением 3A; l3' N3 (0) l3' / Er A3' q(l3 )2 / 2Er A3' N3 (0) 3l / Er 2A q(3l)2 / 2 Er 2A ; l3' 40103 30,2 / 105 106 24104 200 103 (30,2)2 / 2105 106 2 4104 ; l3' 3 104 4,5 104 0,15 мм (удлинение); l3'' N3 (3l)l3'' / Er A3'' q(l3'' )2 / 2Er A3'' N3 (3l)2l / Eч 3A q(2l)2 / 2Eч 2A ; 2 l3'' 80103 20,2 / 105 106 34104 200103 20,2 / 2105 106 34 104 ; l3'' 2,7 104 1,3 104 4 104 м 0, 4 мм (удлинение); l3 0,15 0, 4 0,55 мм Перемещение на четвертом участке l4 N4 l4 / (Er A4 ) N4 l / (Er 3A) (100 103 0,2) / (105 106 3 4104 ) 1,7 104 м = 23 0,17 мм (удлинение). Построение эпюры перемещений сечений стержня ∆l начинают от защемления, где перемещение защемлённого сечения l 0 . Тогда на границе четвертого и третьего участков оно составит l 0,17 мм. На третьем участке перемещения сечений изменяются по параболе. В месте изменения размеров перемещение сечения составит l l4 l3'' 0,17 0, 4 0,57 мм. Перемещение на границе третьего и второго участков: l l4 l3'' l3' 0,17 0, 4 0,15 0,72 мм. Первый силовой участок не нагружен внешними силами, поэтому не даёт приращения перемещения (l1 0) . Перемещение свободного конца стержня (рис. 6, е) l l4 l3'' l3' l2 l1 0,17 0, 4 0,15 0, 4 0 0,32 мм. Эпюра на первом участке изображена прямой, параллельной базисной линии. Перемещение (удлинение) свободного конца l 0,32 мм. 4. КРУЧЕНИЕ СТЕРЖНЕЙ Задание 4. Круглый стальной брус диаметром d1, одним концом жёстко закрепленный в заделке, воспринимает действие сосредоточенных, вращающих (скручивающих) моментов Ti (рис. 7). Построить эпюры крутящих моментов, касательных напряжений и углов закручивания. Определить коэффициент запаса прочности бруса, если модуль сдвига стали G 8 104 МПа, предельные касательные напряжения lim 170 МПа. Исходные данные для расчета даны в табл. 4. Указания по выполнению задания 1. Построить эпюру крутящих моментов T, применяя метод сечений. 2. Построить эпюру касательных напряжений τ, используя эпюру Т и зависимость Т / W p . 3. Найти максимальное значение напряжений τmах на эпюре τ и определить коэффициент запаса прочности по формуле S lim / max , где τlim – предельные напряжения, для пластических материалов lim T , для хрупких -lim в. Пределы текучести τт и прочности τв определяют по таб24 лицам в зависимости от марки материала. Если max lim ( S 1), то наступает разрушение конструкции. Рис. 7. Расчетные схемы к заданию 4. В кружках – номера вариантов 25 Таблица 4 Исходные данные к заданию 4 Числовые значения параметров по вариантам Параметр T1, Нм 1 2 100 120 3 80 4 5 6 7 8 9 10 200 400 350 480 120 160 120 T2, Нм 250 220 250 280 490 450 500 Т3, Нм 60 80 100 220 110 d, мм 20 30 25 35 l, м 0,2 0,3 0,4 0,1 80 40 260 80 220 350 260 40 22 32 24 34 28 38 0,2 0,3 0,4 0,2 0,1 0,4 4. Построить эпюру углов поворота (закручивания) сечений стержня по зависимости i (Т i li ) / (Gi I pi ) . Модуль сдвига чугуна – Gч 4 104 МПа, стали – Gст 8 104 МПа. ПРИМЕР РАСЧЁТА К круглому чугунному брусу, закреплённому с одной стороны в заделке, приложены вращающие моменты (рис. 8, а) T1 400 Н·м, T2 250 Н·м, T3 100 Н·м, длина l 0, 2 м, наружный диаметр d 30 мм, отношение внутреннего диаметра к наружному d 0 / d 0,8 . Построить эпюры крутящих моментов, касательных напряжений и углов закручивания. Определить коэффициент запаса прочности бруса при модуле сдвига чугуна Gч 4 104 МПа и продольных касательных напряжениях lim 90 МПа. Решение 1. Разбиваем брус вдоль продольной оси на четыре силовых участка. Границами участков являются границы бруса и сечения, в которых приложены вращающие моменты. Определение реакций в защемлении не обязательно, так как внутренние силовые факторы – крутящие 26 моменты – можно найти методом сечений, перемещаясь вдоль продольной оси от свободного конца стержня (бруса) к защемлению (на рис. 8, а – снизу вверх). Мысленно проведём на первом силовом участке сечение 1-1 и, отбросив верхнюю часть бруса, рассмотрим равновесие нижней части. На первом участке внешние силовые факторы отсутствуют, поэтому внутренний крутящий момент T1 0 . Рис. 8. К расчёту стержня на кручение: а – расчётная схема стержня; б – эпюра крутящих моментов Т; в – эпюра касательных напряжений ; г – эпюра узлов закручивания сечений Выполним аналогичные операции на втором участке. К нижней части бруса сечения 2-2 приложим внешний вращающий момент Т3 и внутренний крутящий момент Т2, который условно считаем положительным, если при взгляде на сечение со стороны внешней нормали крутящий момент Т2' направлен против часовой стрелки. Следует всегда задавать Т' положительным (против часовой стрелки), тогда результат всегда будет получаться правильным по знаку (против часовой стрелки – плюс, а по часовой – минус).. Для второго участка уравнение статического равновесия имеет вид M zi Ti 0 ; T3 T2' 0 ; T2' T3 100 Н·м. Значение и знак «плюс» показывают, что крутящий момент на первом участке постоянный и направлен против часовой стрелки. На эпюре это прямая, параллельная базисной линии (рис. 8, б). Условие 27 равновесия нижней части бруса на третьем участке имеет вид Ti 0 ; T3 T2' T3' 0 ; T3' T3 T2 100 250 150 Н·м. Крутящий момент Т 3 на всем участке постоянный и направлен по часовой стрелке. Его эпюра представлена прямой, параллельной базисной линии. Применим метод сечений для четвертого участка. Уравнение статического равновесия имеет вид Ti 0; T3 T2 T4' T1 0 ; T4' T3 T2 T1 100 250 400 250 Н·м. Крутящий момент Т4' на всем четвертом участке постоянный и направлен против часовой стрелки. Его эпюра представлена прямой, параллельной базисной линии (рис. 8, б). 2. Построим эпюру касательных напряжений τ для определения наиболее напряженных сечений бруса. Предварительно необходимо рассчитать геометрические характеристики сечений круглого стержня (бруса). Полярный момент сопротивления круглого сечения диаметром d определяют по формуле W p I p / max (2 d 4 ) / (64d ) d 3 / 32 0, 2d 3 . Для круглого полого сечения (рис. 9) с наружным диаметром d, внутренним d0 имеем W p ( I p I p0 ) / max ( d 4 d0 4 ) / (32 0,5d ) ( d 3 (1 (d 0 / d ) 4 ) / 16 , W p 0, 2d 3 (1 (d 0 / d ) 4 ) . В нашем случае для полого бруса переменного сечения имеем: при d1 d 30 мм Wp1 0,2d13 (1 (d0 / d1 )4 ) 0,2 303 1 0,84 3,2 103 мм3; Рис. 9. Сече при d 2 3d 3 30 90 мм ние полого W 0,2d 3 (1 (d / d )4 ) 0,2 903 1 0,84 86,1103 ммз; 2 0 2 стержня (ва- p2 при d3 2d 2 30 60 мм ла) Wp3 0,2d33 (1 (d0 / d3 )4 ) 0,2 603 1 0,84 25,5103 ммз. Касательные напряжения на первом участке постоянны и равны 1 T1 / W p1 0 . 28 На втором участке касательные напряжения зависят от диаметров d1 и d2. На первом подучастке второго участка при диаметре d1 касательные напряжения 1 T1' / Wp1 100 103 / 3, 2 103 31 Н/мм2 31 МПа. На втором подучастке второго участка при диаметре d2 1' T1' / W p2 100 103 / 86,1103 1 Н/мм2 1 МПа. На первом подучастке третьего участка 3 T3' / W p2 150 103 / 86,1 103 2 Н/мм2 2 МПа. На втором подучастке третьего участка 3' T3' / W p3 150 103 / 25,5 103 6 Н/мм2 6 МПа. На четвертом участке 4 T4 ' / W p3 250 103 / 25,5 103 10 Н/мм2 10 МПа. По полученным значениям напряжений строим эпюру (рис. 8, в). Видно, что максимальное касательное напряжение в брусе max 31 МПа. Коэффициент запаса прочности S lim / max 90 / 31 3 . Полярный момент инерции для полого круглого сечения брусакольца (рис. 9) определяют по формуле I p I p' I p0 (( pd 4 ) / 32 ( pd04 ) / 32) ( pd 4 / 32) (1 d0 / d)4 ) 0,1d 4 (1 (d0 / d)4 ). Имеем: при d1 d 30 мм I p1 0,1d14 (1 (d 0 / d1 ) 4 ) 0,1304 (1 0,84 ) 4,8 104 мм4; при d 2 3 d 330 90 мм I p2 0,1d 2 4 (1 (d 0 / d 2 ) 4 ) 0,1 904 (1 0,84 ) 387, 4 104 мм4; при d3 2 d 2 30 60 мм I p3 0,1d34 (1 (d 0 / d3 ) 4 ) 0,1604 (1 0,84 ) 76,5 104 мм4. 3. Определим перемещения сечений – углы поворота i на каждом силовом участке стержня: на первом 1 (T1 l1 ) / (G I p1 ) 0 , т.к. Т1 0 ; на втором 2 2 2 , 29 где 2' – угол поворота подучастка с диаметром d второго участка, а 2''– угол поворота на подучастке с диаметром 3d второго участка. 2 (T2 l2 ) / (G I p1 ) (100 103 2 0, 2 103 ) / (4 104 4,8 104 ) 2 102 рад, 2 (T2l2 ) / (G I p 2 ) (100 103 2 0,2 103 ) / (4 104 387,4 104 ) 0,03102 рад, 2 2 102 0,02 102 2,03 102 рад; на третьем 3 3 3 , где 3 '– угол поворота на подучастке с диаметром 3d третьего участка, а 3' '– угол поворота на подучастке с диаметром 2d, 3 (T3 l3 ) / (G I p2 ) (150 103 20,2 103 ) / (4104 387,4 104 ) 0,04102 рад, 3'' (T3l3 ) / (G I p3 ) (150 103 10,2 103 ) / (4 104 76,5104 ) 0,1102 рад, 3 3 3 0,04 102 0,1102 0,14 102 рад; на четвёртом 4 (T4 l4 ) / (G I p 3 ) (250 103 0, 2 103 ) / (4 104 76,5 104 ) 0, 2 102 рад. Построение эпюры углов сечений бруса начинают от защемления, где поворот защемлённого сечения 0 . Тогда на границе третьего и четвертого участков угол поворота составит 4 0, 2 102 рад. График представлен наклонной линией на четвёртом участке. На третьем участке в месте перехода диаметра 2d в диаметр 3d угол поворота сечения 4 3 0, 2 102 0,1 102 0,1 102 рад. На границе второго и третьего участков 4 3 3 0,2 102 0,1 102 0,04 102 0,06 102 рад. На втором участке в месте перехода диаметра 3d в диаметр d 4 3'' 3' 2 '' 0, 2 0,1 0,04 0,03 102 0,09 102 рад. На границе первого и второго участков 4 3 3 2 2 0,2 0,1 0,04 0,03 2 102 2,09 102 рад. На первом участке угол поворота (закручивания) сечений постоянный: 4 3 3 2 2 1 0,2 0,1 0,04 0,03 2 0102 2,09 102 рад. График представлен прямой, параллельной базисной линии эпюры 30 (рис. 8, г). Угол закручивания свободного конца бруса 2,09 102 рад или 1,2 °. 5. ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПЛОСКИХ СЕЧЕНИЙ Задание 5. 0пределить геометрические характеристики сечения сложной формы (рис. 10): а) площадь; б) моменты инерции относительно центральных осей; в) полярный момент; г) центробежный момент инерции; д) положение главных центральных осей; е) главные центральные моменты инерции; ж) главные центральные радиусы инерции. Исходные данные для расчета приведены в табл. 5, где – угол поворота сечения против часовой стрелки от горизонтальной оси. Таблица 5 Исходные данные к заданию 5 Числовые значения параметров по вариантам Параметр 1 2 3 4 5 6 7 8 9 10 a, мм 10 15 20 25 25 20 15 10 12 18 , град 0 90 180 270 0 90 180 270 0 90 Указания по выполнению задания 1. Выбрать исходную систему координат х, у, вычислить относительно этих осей статические моменты сечения, найти центр тяжести сечения. 2. Провести через центр тяжести сечения оси xñ , óñ , параллельные исходным. 3. Вычислить осевые, полярный и центробежный моменты относительно этих осей. 4. Определить положение главных центральных осей инерции u, v. 5. Вычислить значения главных центральных моментов инерции относительно осей u, v. 31 Рис. 10. Расчетные схемы плоских сечений. В кружках – номера вариантов 32 6. Рассчитать значения главных центральных радиусов инерции ru и rv. ПРИМЕР РАСЧЁТА Определить положение главных центральных осей инерции, значения главных центральных моментов инерции и радиусов инерции сечения, изображенного на рис. 11, при а 20 мм. Решение 1. Разобьём сложное сечение на три простых фигуры – два прямоугольника I и II, круг – III. Геометрические характеристики присоединяемых сечений фигур (прямоугольников I и II) складываются, а вырезаемых (круг – III) – вычитаются. Определяем площадь сечения A Ai A1 A2 A3 20 60 40 60 3,14 202 / 4 3286 мм2. Выбираем исходную систему координат х, у. В этой системе координат находим положение центров тяжести простых фигур. Для прямоугольника I – С1 ( х1 10 мм, y1 30 мм), для прямоугольника II – С2 ( х2 60 мм, у2 20 мм), для круга III – С3 ( х3 60 мм, у3 20 мм). Через центры тяжести простых фигур проводим оси координат – их центральные оси инерции. 2. Вычислим статические моменты сечения: относительно оси х Sx Ai yi A1 y1 A2 y2 A3 y3 1200 30 2400 20 314 20 90280 мм2; относительно оси у Рис. 11. Расчётное сечение S y Ai xi A1x1 A2 x2 A3 x3 1200 810 2400 60 314 60 174840 мм2 3. Определим координаты центра тяжести фигуры: 33 xc S y / A Ai xi / A 174840 / 3286 44,7 мм; yc S x / A Ai yi / A 90280 / 3286 23,1 мм. Проводим параллельно исходным осям x и у через центр тяжести сечения С с координатами (44,7; 23,1) центральные оси координат xс и ус. 4. Вычислим моменты инерции относительно центральных осей xс и yс. Момент инерции сечения относительно оси xс I xc I xIc I xIIc I xIIIc , где I xIc , I xIIc , I xIIIc - моменты инерции простых сечений I, II, III относительно оси xс. Расчёт момента инерции I xIc выполняем по формуле I xIc I xc a12 A1 . 1 Момент инерции прямоугольника I относительно собственной центральной оси xс1 I xc b· h3 / 12 a· (3a )3 / 12 27 а 4 / 12 36 104 мм4. 1 Расстояния между осями xс1 и хc a1 y1 yc 30 23,1 6,9 мм. Площадь прямоугольника I A1 3а а За 2 3 202 1200 мм2. Значение момента инерции относительно оси xс1 I xIc 36 104 6,92 1200 417132 мм4 . 1 Аналогично для прямоугольного сечения II I xIIc I xc a2 2 A2 ; 2 момент инерции прямоугольника II относительно собственной центральной оси xс2 I xc b· h3 / 12 3a· (2a )3 / 12 24а 4 / 12 32 104 мм4; 2 расстояния между осями xс21 и хc a2 y2 yc 20 23,1 3,1 мм; площадь прямоугольника II A2 3а 2а 6а 2 6 202 2400 мм2; 34 2 I xIIc 32 104 3,1 2400 731864 мм4. Момент инерции сечения круга III относительно оси xс: I xIIIc I xc a32 A3 ; 3 I xc3 d / 64 3,14 204 / 64 7850 мм4; a3 y3 yc 20 23,1 3,1 мм; A3 p d 2 / 4 3,14 202 / 4 314 мм2; I xcIII 7850 3,12 314 61735 мм4. Величина момента инерции сечения относительно оси xс I xc 417132 343064 10867 749329 мм4. 5. Момент инерции сечения относительно оси ус I yc I yIc I yIIc I yIIIc , 4 где I yIc , I yIIc , I yIIIc - моменты инерции простых сечений I, II, III относительно оси ус. Момент инерции I ycI рассчитываем по формуле I yIc I yc b12 A1 . 1 Момент инерции прямоугольника I относительно собственной центральной оси yс1 I yc1 h· b3 / 12 3a a 3 / 12 а 4 / 4 4 104 мм4. Расстояния между осями yс1 и yс b1 x1 xc 10 44,7 34,7 мм. Площадь прямоугольника I A1 1200 мм2. Величина момента инерции относительно оси ус 2 I ycI 4 104 34,7 1200 1484908 мм4 . Аналогично для прямоугольника II: I yIIc I yc b2 2 A2 ; 2 I yc hb / 12 2a (3a) / 12 4,5а 4 4,5 204 72 104 мм4; 3 3 2 b2 x2 xc 60 44,7 15,3 мм. 2 I yIIc 72104 15,3 2400 1281816 мм4. Момент инерции круга относительно оси yс: 35 I yIIIc I yc b32 A3 ; 3 I y d / 64 3,14 204 / 64 7850 мм4; 4 c3 b3 x3 xc 60 44,7 15,3 мм; A3 d 2 / 4 3,14 202 / 4 314 мм2; I ycIII 7850 15,32 314 8135 мм4. Величина момента инерции сечения относительно оси yс I yc 1484908 1281816 81354 2685370 мм4. Полярный момент инерции сечения I p I xc I yc 749329 2685370 3434699 мм4. 6. Центробежный момент инерции сечения I x y I xI y I xII y I xIII y , С С I где I x II C C C С C C III , I xC yC , I xC yC – центробежные моменты инерции простых се- y C C чений I, II, III относительно осей xс , ус . Центробежный момент инерции прямоугольника I относительно осей xс , ус I xI y C C Ix y C1 С1 a1 b1 A1 . Оси xc1 и yc1 являются осями симметрии прямоугольника I, поэтому I x С 1 0 . Ранее найдены a1 6,9 мм; b1 34,7 мм; А1 1200 yС 1 м2. После подстановки получим I xII y 0 6,9 34,7 1200 287316 мм4. С С Аналогично центробежный момент инерции прямоугольника II относительно осей xс , ус . Оси xc2 и yc2 являются осями симметрии прямоугольника II, поэтому I x С 2 yС 0 . Ранее определили a2 13,1 мм; b2 15,3 мм; 2 A2 2400 мм2. После подстановки получим I xII y 0 3,1 15,3 2400 113832 мм4. С С Центробежный момент инерции круга относительно осей xс , ус I xIII y I x С С y С3 С3 a3 b3 A3 . Оси xc3 и yc3 являются осями симметрии круга III, поэтому Ix С3 yС 3 0 . Ранее определили a3 3,1 мм; b3 15,3 мм ; A3 314 мм2. 36 После подстановки получим I xIII y 0 3,1 15,3 314 14893 мм4. С С Центробежный момент инерции сечения I x y 287316 113832 14893 386255 мм4. C C 7. Угол поворота центральных осей, определяющих положение центральных главных осей: arctg( I xC yC / ( I yC I xC )) arctg(386255 / (2685370 749329)) 8,42 . Знак минус показывает, что систему координат x c , С, yc нужно повернуть по часовой стрелке на угол и получить оси u и v – главные центральные оси инерции сечения. 8. Определим главные центральные осевые моменты инерции 2 Iu Imax I1 0,5(Iyc Ixc ) 0,5(I yc Ixc ) Ix2cyc 0,5( 2685370 749389 ) ( 0,5( 2685370 749389 ))2 ( 386255)2 1717349,31042236,6 2759586 мм4 . 2 Iv Ilim I2 0,5(Iyc Ixc ) 0,5(Iyc Ixc ) Ix2c yc 1717349,31042236,6 675113 мм4. 9. Главные центральные радиусы инерции: ru Iu / A 2759586 / 3914 26,6 мм; rv I v / A 675113 / 3914 13,1 мм. 6. ИЗГИБ СТЕРЖНЕЙ (БАЛОК) Задание 6. Для балки на двух опорах, нагруженной сосредоточенной силой F, распределённой нагрузкой интенсивностью q и изгибающим моментом M (рис. 12), рассчитать размеры следующих поперечных сечений: а) прямоугольника; б) квадрата; в) круга; г) швеллера; д) двутавра. Сравнить массы балок с поперечными сечениями этой формы. Значения силовых факторов и размеров приведены в табл. 6. Допускаемые напряжения изгиба 150 МПа. 37 Указания по выполнению задания 1. Определить из условия статического равновесия реакции в опорах балки. 2. Применяя метод сечений для каждого участка балки, построить эпюры внутренних силовых факторов - изгибающего момента М и поперечной силы Q. 3. Определить максимальный изгибающий момент на эпюре М. Из условия прочности на изгиб: M max / Wx , найти геометрический параметр поперечного сечения – момент сопротивления сечения Wx M max / . Таблица 6 Исходные данные к заданию 6 Числовые значения параметров по вариантам Параметр 1 2 3 4 5 6 7 8 9 10 20 25 30 35 40 45 50 55 60 65 q, кН/м 100 200 50 150 120 80 140 160 180 60 M, кH м 10 5 8 7 6 9 12 14 15 16 l, м 0,2 0,4 0,1 0,3 0,5 0,1 0,2 0,3 0,4 0,5 F, кН 4. В зависимости от формы сечения балки по величине Wx определить размеры сечения. Для прямоугольного сечения принять h 2b . 5. Из условия mi / mk Ai / Ak найти соотношения масс балок для разных геометрических форм поперечных сечений. 6. Рассчитать максимальные касательные напряжения для различных форм поперечных сечений. Сравнить их с допускаемыми напряжениями. 38 Рис. 12. Расчетные схемы к заданию 6. В кружках – номера вариантов 39 ПРИМЕР РАСЧЁТА Балка опирается на две опоры и нагружена сосредоточенной силой F 40 кН, распределённой нагрузкой интенсивностью q 100 кН/м, согласно схеме на (рис. 13, а). Рассчитать размеры поперечных сечений следующей формы: а) прямоугольника; б) круга; в) швеллера; г) двутавра, если допускаемые напряжения 120 МПа, а длина l 0, 2 м. Сравнить массы балок с поперечными сечениями разной формы. Решение 1. Отбросим опоры, а их действие на балку заменяем опорными реакциями YА и YВ . Определяем реакции опор из условия статического равновесия балки: MA F l q 2l 0,5 2l YВ 2l M ; YВ (F l 2q l 2 M ) / (2l ) (40 0,2 2 100 0,22 6) / (2 0,2) 15 кH. Знак минус показывает, что реакция опоры B направлена в противоположную сторону от первоначально выбранного направления. Изменим на противоположное направление YВ на расчётной схеме (рис. 13, б). Знак плюс показывает, что направление этой реакции соответствует выбранному первоначально. Проверка: У i F У А q 2l YВ 40 95 100 0, 4 15 0. Реакции опор определены правильно. 2. Построим эпюру внутреннего силового фактора – изгибающего момента. Разбиваем балку вдоль продольной оси на силовые участки. Границами участков являются границы балки и сечения, в которых приложены внешние силовые факторы. В нашем случае таких участков три. Мысленно выполним сечение на первом силовом участке. Из условия статического равновесия отсечённой части определим значение внутреннего силового фактора – изгибающего момента на первом участке (рис. 13, в). Правило знаков при составлении уравнения и построении эпюр приведено на (рис. 14). Введём переменную координату z1 на первом участке, 0 z1 l Fz1 M 1 0; M 1 Fz1 , при z1 0 M 1 0; 40 при z1 l M 1 F l 40 0, 2 8 кНм. График изменения изгибающего момента представлен прямой (рис. 13, е). В дальнейшем будем пропускать уравнение равновесия для мысленно отсечённого участка балки и сразу записывать выражение для изгибающего момента в соответствии с принятым правилом знаков: М В F 3l q 2l 0,5 2l YА 2l M 0; YА (F 3l 2q l 2 M ) / (2l ) (40 3 0,2 2 100 0,22 6) / (2 0,2) 95 кН. На втором участке переменная координата z 2 , 0 z2 2l (рис. 13, г). Для отсечённого участка балки М 2 F (l z2 ) У А z2 q z22 / 2; при z2 0 M F l 40 0, 2 8 кН∙м; при z2 2l M 2 F 3 l YА 2 l q(2 l )2 / 2 40 3 0,2 95 2 0,2 100 0, 42 / 2 6 кН∙м. График изменения изгибающего момента на втором участке представлен параболой, так как переменная z 2 в квадрате. На третьем участке переменная координата z3 , 0 z3 l (рис. 13, д). Для отсечённого участка балки M 3 F (3l z3 ) YА (2l z3 ) YВ z3 q 2l (0,5 2l z3 ); при z3 0 M3 F 3l YА 2l q 2l 2 40 0,6 95 0,4 100 2 0,22 6 кН∙м; при z3 l M3 F 4l YА 3l YВ l q 4l2 40 4 0,2953 0,2 15 0,2100 4 0,22 6 кН∙м. Эпюра на третьем участке представлена прямой линией, параллельной базисной (рис. 13, е). 3. Построим эпюру поперечной силы. Для этого воспользуемся методом сечений. Для отсечённой на первом участке части балки (рис. 13, в) условие равновесия имеет вид Yi 0; F Q1 0; Q1 F 40 кН. Направление Q1 не соответствует первоначально заданному и согласно правилу знаков (рис. 14) является отрицательным. Эпюра на этом участке представлена прямой, параллельной базисной линии эпюры. Мысленно отсечём часть балки на участке II (рис. 13, г). Запишем сразу выражение для поперечной силы на втором участке, 0 z2 2l Q2 F YА q z2 ; 41 при z2 0 Q2 F YА 40 95 55 кН; при z2 2l Q2 F У А q 2l 40 95 100 2 0,2 15 кН; Рис. 13. К расчёту балки на изгиб: а – расчётная схема балки; б – схема реакций опор; в, г, д – схемы определения М и Q на силовых участках; е – эпюра изгибающих моментов М; ж – эпюра поперечных сил Q Рис. 14. Правило знаков при построении эпюр М и Q 42 График изменения Q на втором участке представлен наклонной прямой. Отсечение части балки на третьем участке (рис. 13, д) приводит к следующему выражению: Q3 F YА q 2l YВ 40 95 100 2 0, 2 15 0 . На участке III поперечная сила отсутствует (рис. 13, ж). 4. Запишем условие прочности балки при изгибе M max / Wx , где M max – максимальный изгибающий момент, M max 8 кН∙м; Wx – момент сопротивления поперечного сечения, зависящий от его формы и размеров; – допускаемое напряжение, 120 МПа = 120 Н/мм2. Момент сопротивления сечения Wx M max / 8 106 / 120 66,7 103 мм 3 66,7 см 3 . Для прямоугольного поперечного сечения при h 2b получим Wx b h2 / 6 b(2b)2 / 6 2b3 / 3 66,7 см 3 , b 3 (3 66,7) / 2 4,65 см. h 2b 2 4,65 9,3 см. Площадь сечения: A h b 9,3 4,65 43,2 см 2 . Для квадратного поперечного сечения b h Wx b3 / 6 66,7 см 3 , b 3 (6 66,7) 7,37 см. Площадь сечения: А b 2 7,37 2 54,3 см2. Для круглого поперечного сечения Wx d 3 / 32 66,7 см 3 , d 3 (32 66,7 / 3,14) 8,79 см. Площадь сечения A d 2 / 4 3,14 8,792 / 4 60,7 см2. Для швеллера №14 Wx 70, 2 см 3 66,7 см 3 , площадь его сечения А 15,6 см2. 3 Для двутавра №14 Wx 81,7 см 66,7 см 3 , площадь его сечения А 17, 4 см2. 5. Примем площадь швеллера за единицу для сравнительного анализа масс балок с различными поперечными сечениями. Тогда получим следующее отношение масс для балок из одного материала и одинаковой длины mi / mш Ai / Aш : для прямоугольника An / Aш 43, 2 / 15,6 2,77 ; для квадрата Aкв / Aш 54,3 / 15,6 3, 48 ; 43 для круга Aкр / Aш 60,7 / 15,6 3,89 ; для двутавра Aд / Aш 17,4 / 15,6 1,12 . Наименьшую материалоёмкость при изгибе обеспечивают тонкостенные сечения – швеллер и двутавр, наибольшую – круг. 6. Рассчитаем значения касательных напряжений, возникающих в этих сечениях, и сравним их с допускаемыми. Допускаемые касательные напряжения: 0,6 0,6 120 72 МПа 72 Н/мм 2 . Максимальные касательные напряжения определяем по формуле Журавского (Q S xотс ) / (b I x ), где Q – максимальная поперечная сила, Q 55 кН, S хотс - статический момент отсечённой площади, b – ширина поперечного сечения, I x – момент инерции поперечного сечения. Для прямоугольника [Q 0,5b ( h 2 / 4)] / (b h 3 / 12) (3 / 2)[Q / (b h )] (3 / 2)(Q / A) (3 / 2)[(55 103 ) / (43,2 102 )] 19 Н/мм2 72 Н/мм2. Для квадрата (3 / 2)(Q / A) (3 / 2)[(55 103 ) / (54,3 102 )] 15H / мм2 72 Н/мм2.. Для круга (4Q) / (3 R2 ) (4Q) / (3 A) (4 55 103 ) / (3 60,7 102 ) 12 H/мм2 . Для швеллера ( Q S xотс ) / ( b I x ) (55 10 3 40,8) / (0, 49 491) 9327 Н/см2 = = 93,3 Н/мм2 72 Н/мм2. Действующие касательные напряжения превышают допускаемые. Для двутавра (Q S xотс ) / (b I x ) (55 103 46,8) / (0, 49 572) 9183 H/ñì 2 92 H/мм 72 H/мм . 2 2 Действующие касательные напряжения превышают допускаемые. Поскольку касательные напряжения в швеллере и двутавре превышают допускаемые значения, применение этих тонкостенных сечений не возможно. Нужно выбрать сечения с большими значениями b и I x , то есть швеллер №16 и двутавр №16, проверить их на прочность и соответственно изменить соотношение масс 44 mi / mш Ai / Aш . 7. СЛОЖНОЕ НАГРУЖЕНИЕ Задание 7. Стальной пространственный ломаный брус круглого поперечного сечения нагружен внешними силами F1 и F2 (рис. 15). Рассчитать диаметр поперечного сечения бруса, если известно, что длина участков l (табл. 7), предел текучести стали т 420 МПа, коэффициент запаса прочности S 2,5 . Таблица 7 Исходные данные для задания 7 Параметр Варианты и числовые значения параметров 1 2 3 4 5 6 7 8 9 10 F1 , кН. 10 -20 30 -40 15 -5 25 -30 20 -25 F2 , кН. 20 -10 -5 15 -20 15 -30 20 40 35 0,2 0,1 0,3 0,4 0,45 0,5 0,2 l,м. 0,15 0.25 0,35 Примечание. Знак минус в таблице указывает на то, что сила направлена в противоположную сторону той, что показана на рис. 15. Указания по выполнению задания 1. Применяя метод сечения для каждого участка ломаного бруса, строим эпюру изгибающих и крутящих моментов от каждой силы отдельно. 2. На базе метода суперпозиции сложением эпюр, полученных от каждой силы отдельно, строим результирующие эпюры изгибающих моментов M x , M y и крутящего момента Т. 3. Используя одну из гипотез прочности, определим эквивалентный момент в наиболее нагруженном сечении M экв М 2 Т 2 , M 2 M x2 M y2 . 4. Из условия прочности определим значение диаметра в этом сечении, приняв допускаемые напряжения т / S . 45 Рис. 15. Расчётные схемы к заданию 7. В кружках – номера вариантов 46 ПРИМЕР РАСЧЕТА Пространственный ломаный брус круглого сечения нагружен внешними силами F1 30 кН и F2 40 кН (рис. 16, а). Определить диаметр поперечного сечения бруса при известной длине l 0,5 м, пределе текучести стали т 340 МПа, коэффициенте запаса прочности S 3. Решение 1. При построении эпюр для пространственных брусьев выбирают текущую систему координат на прямолинейном участке со стороны свободного конца. При этом ось z всегда направляют в сторону свободного конца, а оси х и у правой системы координат размещают в плоскости сечения. При переходе к последующему участку поворачивают систему координат, принятую на предыдущем участке, относительно оси, перпендикулярной плоскости, образуемой смежными участками рамы. Построение эпюр начинаем от свободного конца, двигаясь по прямолинейным участкам в сторону защемления. Эпюры строим, поочерёдно: сначала только от силы F1 , а затем только от силы F2 . Результирующие эпюры внутренних силовых факторов получим сложением эпюр, построенных от каждой силы в отдельности. 2. Строим эпюры только от силы F1 . На первом участке ось z направлена к свободному концу (рис. 16, а). Изгибающий момент действует относительно оси х, при переменной координате z1 получим M x1 F1 z1 , 0 z1 l ; при z1 0 M x1 F1 0 0; при z1 l M x1 F1 l 30 0, 2 6 кН∙м (сжатый слой бруса снизу). На втором участке ось z направлена вдоль продольной оси к свободному концу. Перенесём силу F1 в начало второго участка, приложив к нему вращающий момент T F1 l1 , постоянный на всем участке II и направленный против часовой стрелки (знак положительный). Изгибающий момент действует относительно оси х. Введя переменную z 2 , получим M x 2 F1 z2 , 0 z2 l ; при z2 0 M x 2 F1 0 0; 47 при z2 l M x 2 F1 l 30 0, 2 6 кН∙м (сжатый слой бруса снизу). На третьем участке ось z направлена вдоль продольной оси к свободному концу (рис. 16, а). В начале третьего участка действуют изгибающие моменты, постоянные на всей длине участка III: M x 3 F1 l 30 0, 2 6 кН∙м (сжатый слой бруса слева); M y 3 F1 l 30 0, 2 6 кН∙м (сжатый слой бруса сзади). На четвёртом участке ось z направлена вдоль продольной оси к свободному концу (рис. 16, а). В начале четвертого участка действует сила F1 и возникшие при её переносе вращающий момент T F1 l , направленный против часовой стрелки (знак плюс), и изгибающий момент M x F1 l . Введем переменную z 4 , получим Mx4 Mx F1 z4 , 0 z2 2 l ; при z4 0 M x 4 M x F1 l 30 0, 2 6 кН∙м; при z4 2l M x 4 M x F1 2l F1 l F1 2l 30 0,2 30 2 0,2 6 кН∙м (сжатый слой с начала участка до середины – сверху, а затем – снизу). Эпюра крутящих моментов постоянная на всей длине участка четыре, T F1 l 30 0, 2 6 кН∙м (положительное направление). 3. Строим эпюры только от силы F2 . На первом и втором участках сила F2 не вызывает изгибающих и крутящих моментов. В этом можно убедиться, применяя метод сечений для каждого из участков. На третьем участке вводим переменную координату z3 (0 z3 l ) . Изгибающий момент на этом участке: M x 3 F2 z3 , при z3 0 M x 3 F2 0 0 кН∙м; при z3 l M x 3 F2 l 40 0, 2 8 кН∙м (сжатый слой справа). На четвертом участке действуют перенесенная в его начало сила F2 и вращающий момент T F2 l1 . Введем переменную координату z4 (0 z4 l ) . Изгибающий момент M y 4 F2 z 4 , при z4 0 M y 4 0 ; при z4 2l M y 4 F2 2l 40 2 0,2 16 кН∙м (сжатый слой справа). Крутящий момент постоянный на всём четвертом участке T4 F2 l 40 0,2 8 кН∙м (рис. 16, в). 4.Строим результирующую суммарную эпюру путем сложения эпюр моментов, действующих в одной плоскости. Например, на тре48 тьем участке эпюра M x 3 : при z 3 0 M x 3 F1 l 30 0, 2 6 кН∙м; при z 3 l M x 4 F1 l F2 l l ( F1 F2 ) 0, 2(30 40) 2 кН∙м. Эпюра представлена наклонной прямой, пересекающей базисную линию. Крутящий момент на четвёртом участке T F1 l F2 l l ( F1 F2 ) 0, 2 (30 40) 2 кН∙м. На остальных участках результирующие эпюры дублируют графики соответствующих участков эпюр от отдельных сил (рис. 16, г). 5. Определим диаметр поперечного сечения пространственного бруса из условия его прочности при сложном нагружении. Диаметр определяем по формуле d 3 10 M экв III / , где M экв III – эквивалентный момент, полученный по третьей гипотезе прочности, M экв III M x2 M y2 T 2 , M x , M y - изгибающие моменты в опасном сечении относительно осей x и y соответственно; – допускаемые напряжения, / S 340 / 3 113 МПа = 113 Н/мм2. Рис. 16. К расчету балки при сложном нагружении: а – расчётная схема; б, в – эпюры изгибающих и крутящих моментов сил F1 и F2 ; г – результирующая эпюра 49 В наиболее нагруженном сечении защемления максимальный эквивалентный момент M экв III M x2 M y2 T 2 62 162 22 17, 2 кН∙м, тогда диаметр в наиболее нагруженном сечении: d 3 (17, 2 10 6 ) / 113 53, 4 мм. Принимаем диаметр бруса d 54 мм. 8. СЛОЖНОЕ СОПРОТИВЛЕНИЕ Задание 8. Определить диаметр для раздаточного вала постоянного сечения (рис. 17), передающего вращательное движение мощностью Р со шкива 1 на шкив 2 и 3 при частоте вращения n (табл. 8). Допускаемые напряжения 60 МПа, диаметры шкивов D1 , D2 и D3 , силы натяжения ветвей ремня Fi 2 Fi ' , расстояние между шкивами l i . Указания по выполнению задания 1. Определить вращающие моменты, действующие на вал, по заданным значениям мощности P и частоты вращения n: T1 P / 30 P / ( n ), T2 T3 0, 5T1 . 2. Вычислить окружную силу Fti 2Ti / Di и силы напряжения ветвей ремня Fi Fti Fi ' , при Fi 2 Fi ' . 3. Перенести действующие на вал нагрузки на его ось. Отбросить опоры вала, заменив их действие опорными реакциями в вертикальной и горизонтальной плоскостях. 4. Составить уравнения равновесия всех сил, действующих на вал, отдельно в вертикальной и горизонтальной плоскостях. Определить реакции опор в обеих плоскостях. 5. Построить эпюры изгибающих моментов в вертикальной M x и горизонтальной M y плоскостях и эпюру крутящих моментов. 6. Определить наибольшее значение эквивалентного момента: M эквШ M x2 M y2 T 2 . 7. Рассчитать диаметр вала в этом сечении d 3 10 M эквШ / . 50 Рис. 17. Расчётные схемы к заданию 8. В кружках – номера вариантов 51 ПРИМЕР РАСЧЁТА Определить диаметр раздаточного вала постоянного сечения (рис. 18, а), передающего мощность Р 3 кВт со шкива 1 на шкивы 2 и 3 при частоте вращения п 60 мин 1 , диаметрах шкива D1 320 мм, D2 200 мм, D3 180 мм, расстояниях l1 l2 l3 l4 200 мм и допускаемых напряжениях [ ] 50 МПа. Натяжение ветвей ремня Fi 2 Fi ' . Таблица 8 Исходные данные к заданию 8 Параметр Числовые значения параметров по вариантам. 1 2 3 4 5 6 7 8 9 10 Р,кВт 5 6 7 8 9 10 11 12 13 14 n, мин 1 750 750 750 1000 1000 1000 1000 1500 1500 1500 D1 , мм 300 300 300 250 250 250 250 350 350 350 D2 , мм 200 200 150 200 150 300 150 300 200 250 , D3 мм l ,м 150 250 250 300 200 150 200 200 300 150 0,1 0,1 0,15 0,15 0,1 0,15 0,2 0,25 0,25 0,2 l2 , м 0,2 0,15 0,3 0,25 0,3 0,35 0,35 0,25 0,25 0,2 l3 , м 0,3 0,3 0,2 0,3 0,25 0,25 0,25 0,25 0,3 0,25 l4 , м 0,15 0,2 0,1 0,1 0,15 0,2 0,25 1 0,2 0,2 0,15 Решение 1. Определим вращающие моменты, действующие на вал от шкива 1: T1 P / 30 P / ( n) 30 3103 / (3,14 600) 47,8 Н∙м. Вращающие моменты, снимаемые со шкивов 2 и 3 T2 T3 0,5 47,8 23,9 Н∙м. 2. Вычислим окружные силы на шкивах: на первом шкиве Ft1 2T1 / D1 2 47,8 103 / 320 299 Н; 52 на втором шкиве Ft 2 2T2 / D2 2 23,9 103 / 200 239 Н; на третьем шкиве Ft 3 2T3 / D3 2 23,9 103 / 180 266 Н. Силы напряжения ветвей ремней на шкивах: на первом шкиве F1 Ft1 F1' Ft1 0,5 F1 ; 0,5F1 Ft1 ; F1 2 Ft1 2 299 598 Н; F1' 0,5F1 0,5 598 299 Н, R1 F1 F1' 598 299 897 Н. на втором шкиве F2 2 Ft 2 2 239 478 Н; F2' 0,5 F2 0,5 478 239 Н, R2 F2 F2' 478 239 717 Н; на третьем шкиве F3 2 Ft 3 2 266 532 Н; F3' 0,5 F3 0,5 532 266 Н, R3 F3 F3' 532 266 798 Н. Рис. 18. К расчёту вала при сложном сопротивлении: а - расчетная схема вала; б - эпюра изгибающего момента Мх; в - эпюра изгибающего момента Му; г - эпюра крутящего момента Т 53 3. Из условия статического равновесия вала в вертикальной плоскости определим реакции YА и YВ : M A R2 l1 R3 (l2 l3 ) YВ (l2 l3 l4 ) 0; YВ R2 l2 R3 (l2 l3 ) / (l2 l3 l4 ) 717 200 798 (200 200) / (200 200 200) 771 Н. Знак минус указывает на то, что реакция YВ направлена в противоположную сторону. M В R2 (l1 l2 l3 l4 ) YA (l2 l3 l4 ) R3 l4 0; YA ( R (l1 l2 l3 l4 ) R3 l4 ) / (l2 l3 l4 ) (717 (200 200 200 200) 798 200) / (200 200 200) 690 Н. Проверка: Yi R2 YА R3 YВ 717 690 798 771 0. Реакции опор определены верно. Из условия статического равновесия вала в горизонтальной плоскости определим реакции Х А и Х В : M А R1 l2 X В (l2 l3 l4 ) 0; Х В R l2 (l2 l3 l4 ) 897 200 / (200 200 200) 299 Н; M В Х А (l2 l3 l4 ) R1 (l3 l4 ) 0; X A R1 (l3 l4 ) / (l2 l3 l4 ) 897 (200 200) / (200 200 200) 598 Н. Проверка: X i X А R1 X В 598 897 299 0 . Реакции опор определены верно. 4. Разобьём вал на четыре силовых участка (рис. 18, б). Построим эпюру изгибающего момента в вертикальной плоскости (эпюра Мх). На участке I переменная координата z1 0 z1 l1 , M 1 R2 z1 ; при z1 0 M 1 0; при z1 l1 M 1 R2 l1 717 200 143400 Н∙мм 143, 4 Н∙м. На участке II переменная координата z2 0 z2 l2 M 2 R2 (l1 z2 ) YА z2 ; при z2 0 M 2 R2 l1 143,4 Н∙м; при z2 l2 M 2 R2 (l1 l2 ) YА l2 717(200 200) 690 200 148800 Н∙мм = 148,8 Н∙м. На участке III переменная координата z3 0 z3 l3 54 M 3 R 2 ( l1 l 2 z 3 ) Y А ( l 2 z 3 ); при z2 0 M 3 R2 (l1 l2 ) 148,8 Н∙м; при z3 l3 M 3 R2 (l1 l2 l3 ) YА (l2 l3 ) 717(200 200 200) 690(200 200) 154200 Н∙мм 154, 2 Н∙м. На четвёртом участке переменная z4 от опоры В 0 z4 l4 M 4 YВ z4 ; при z4 0 M 4 0 ; при z4 l4 M 4 YВ l4 771 200 154200 Н∙мм 154, 2 Н∙м. Произошла стыковка числовых значений эпюр, построенных с разных сторон (рис. 18, в). Строим эпюру изгибающих моментов в горизонтальной плоскости (эпюра Му) (рис. 18, г). На первом силовом участке переменная координата z1 0 z1 l2 , M 1 Х А z1 ; при z1 0 M 1 0 ; при z1 l2 M 1 Х А l2 598 200 119600 Н∙мм 119,6 Н∙м. На четвёртом силовом участке переменная координата z4 0 z 4 l4 M 4 Х В z4 ; при z4 0 M 4 0 ; при z4 l4 M 4 Х В l4 299 200 59800 Н∙мм 59,8 Н∙м. Строим эпюру крутящих моментов (рис. 18, д). На участках I и II действует постоянный крутящий момент, направленный против часовой стрелки (знак плюс), T12' T2 23,9 Н∙м. Крутящий момент на участках три и четыре T34' T2 T1 23,9 47,8 23,9 Н∙м. 4.Наибольший эквивалентный момент действует в сечении на границе участков I и II. Его значение: M эквIII M 32 M 22 T 2 148,82 119,6 2 23,9 2 192, 4 Н∙м. 5. Определим диаметр вала d 3 (10 M эквIII ) / 3 (10 192, 4 103 ) / 50 33,7 мм. Принимаем диаметр вала d 34 мм. 55 СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ 1. Джамай, В.В. Прикладная механика: учебник для вузов/ В.В. Джамай, Ю.Н. Дроздов, Е.А. Самойлов [и др.]. – М.: Дрофа, 2004. – 415 с. 2. Бегун, П.И. Прикладная механика: учебник для вузов/ П.И. Бегун, О.П. Кормилицын. – СПб: Политехника, 2006. – 463 с. 3. Иосилевич, Г.Б. Прикладная механика: учеб для вузов/ Г. Б. Иосилевич, Г.Б. Строганов, Г.С. Маслов.– М: Высш школа, 1989. – 351 с. 4. Абрамов, Б. М.Типовые задачи по теории механизмов и машин/ Б. М. Абрамов. – Харьков: Вища шк., 1976. – 280 с. 5. Юдин, В. А. Сборник задач по ТММ/ В. А. Юдин, Г. А. Барсов, Ю. И. Чупин. – М.: Высш. шк., 1982. – 215с. 6. Буланов, Э. А. Решение задач по сопротивлению материалов/ Э.А. Буланов.- М. Высш. шк., 1994. – 206 с. 7. Миролюбов, И.Н. Сопротивление материалов: пособие по решению задач/ И.Н. Миролюбов, Ф.З. Алмаметов, Н.А. Курицын. СПб.: Лань, 2007. 512 с.: ил. 8. Копнов, В.А. Сопротивление материалов: Руководство для решения задач и выполнения лабораторных и расчетно-графических работ/ В.А.Копнов, С.Н.Кривошапко. – М.: Высш. шк., 2003. 351с. 56