Построение и исследование нечеткой модели системы управления дистанцией между автомобилями
advertisement

Курсовая работа
Построение и исследование нечеткой модели системы управления
дистанцией между автомобилями.
Содержание
ВВЕДЕНИЕ .....................................................................................................................................................3
1. Нечеткая логика и возможности ее применения в системах управления современного
автомобиля ..................................................................................................................................................4
2. Нечеткая система управления дистанцией между движущимися автомобилями .........................11
3. Термы входных и выходных переменных...........................................................................................18
4. Реализация системы управления дистанцией ....................................................................................26
ЗАКЛЮЧЕНИЕ .............................................................................................................................................29
СПИСОК ЛИТЕРАТУРЫ ...............................................................................................................................29
2
ВВЕДЕНИЕ
Основным
требованием,
средствам, является
предъявляемым
к
обеспечение безопасности
автотранспортным
дорожного движения.
Выполнение этого требования, в условиях непрерывного роста скоростей и
интенсивности транспортных потоков, представляет собой государственную
социально-экономическую проблему. Трудности ее решения обусловлены
сложной взаимосвязью трех составляющих человеко-машинной системы
водитель – автомобиль - дорога в едином динамическом процессе
управляемого
движения
автомобиля.
Преодолению
этих
трудностей
уделялось и уделяется большое внимание, однако предпринятые в этом
направлении
меры
не
позволяют
говорить
о
решении
проблемы
безопасности. Об этом свидетельствует удручающая статистика дорожнотранспортных происшествий и их социально-экономических последствий.
Так, в 2017 году в дорожно-транспортных происшествиях (ДТП) погибло
более 30 тыс. человек, наряду с этими невосполнимыми потерями, экономика
России понесла значительный ущерб, который составил около 500
миллиардов рублей.
Многочисленные исследования показывают, что основной причиной
ДТП является человеческий фактор. Таким образом, зависимость процесса
управления движением автомобиля от психофизиологического состояния
водителя создает трудности в решении данной проблемы. Устранение этой
зависимости следует искать на пути автоматизации управления движением
автомобиля с сохранением за водителем приоритетного права принятия
решений.
По данным Национального Управления Безопасности Дорожного
Движения США, внедрение средств автоматизации позволяет значительно
сократить количество ДТП. В частности оборудование автомобиля системой
3
управления курсовой устойчивостью (Electronic stability control) позволяет
уменьшить общее количество ДТП, с участием этого автомобиля, на 8%.
Оборудование же всех автомобилей США системой адаптивного круизконтроля позволит уменьшить число жертв ДТП на 59,6%.
Приведенные факты дают основание полагать, что создание замкнутой
автоматизированной человеко-машинной системы управления движением
автомобиля позволит значительно повысить безопасность дорожного
движения. Рассмотрение этой задачи и составляет предмет данной работы.
При этом автор сосредотачивает внимание не только на синтезе нечеткого
управления движением автомобиля, но и реализации его аппаратными
средствами.
Целью работы является повышение безопасности дорожного движения,
что достигается путем синтеза автоматизированной системы управления
движением автомобиля. При таком подходе к решению этой проблемы
основные
функции
по
управлению
движением
возлагаются
на
автоматическую систему, оставляя за водителем приоритетное право
принятия решений в случае возникновения непредвиденных ситуаций. В
соответствии с указанной целью в работе решаются следующие задачи:
- синхронизация скорости движения с впередиидущим автомобилем;
- коррекция скорости движения для управления дистанцией.
1. Нечеткая логика и возможности ее применения в системах
управления современного автомобиля
В современном мире к автомобилю предъявляется все больше
требований, обеспечение или необеспечение которых позволяет судить об
успешности той или иной модели еще на ранних этапах создания. Многие
элементы конструкции автомобиля, отвечающие за безопасное, комфортное
и простое управления автомобилем, плотно вошли в сознание рядового
4
водителя
как
данность.
Противопробуксовочная
система,
система
кондиционирования воздуха, автоматическая трансмиссия, система помощи
при парковке, многочисленные системы безопасности входят в базовую
комплектацию практически любого современного автомобиля.
Постоянное
совершенствование
устройств,
агрегатов
и
систем
направлено на облегчение управления автомобилем, за счет повышения
уровня автоматизации.
Усложнение конструкции и автоматики, в свою очередь, вызывает
усложнение систем контроля и управления. Вместе с тем, усложненные
системы управления требуют использования более прогрессивного и
продуктивного математического аппарата и математических моделей.
Полную математическую модель движения автомобиля создать
невероятно трудно.
Многие взаимосвязи невозможно описать в терминах классической
четкой логики: большое число реальных технических решений базируется на
экспертном опыте, формализовать который проблематично.
Как
показывает опыт ведущих
автомобилестроительных
фирм:
системы управления автотранспортными средствами развиваются, в общемто, в одном направлении — в сторону повышения их адаптивности, т. е.
способности изменять свои параметры в зависимости от управляющих
воздействий водителя и дорожных условий. Можно выделить три этапа
развития.
На первом из них специалисты для синтеза алгоритмов управления
использовали классические методы теории автоматического управления и
создавали устройства с двузначной (четкой) логикой, базирующиеся на
элементах гидро- и пневмоавтоматики.
Однако
такие
устройства,
работающие
по
принципу
«запрет-
разрешение», лишены возможности оперативного перепрограммирования,
т.е. даже их принудительной адаптации к изменившимся условиям.
На
втором этапе
появилось микропроцессорное
5
управление с
электронными программируемыми компонентами. Средства вычислительной
техники, бортовые ЭВМ и микрокомпьютеры позволили вводить в их
запоминающие устройства различные программы управления, в какой-то
мере способные приспосабливаться (адаптироваться) к изменению дорожных
и иных условий.
На третьем, нынешнем, этапе для одновременного учета огромного
многообразия
информации,
различных
обстоятельств
и
ситуаций,
характеристик управляющих воздействий водителя, внешней среды и
механизмов транспортного средства стали создаваться интеллектуальные
системы управления. В основе их алгоритмов лежит нечеткая логика,
подобная процессам мышления человека. Это уже адаптивные системы в
классическом смысле.
Последовательность перечисления этапов не является хронологически
строгой. Элементы каждого последующего зарождались в предыдущем.
Более того, этапы даже существуют параллельно. Например, если взять класс
адаптивных систем автоматического управления, то они охватывают
различные механизмы и подсистемы автомобиля — двигатель, трансмиссию,
тормоза, подвеску, рулевое управление.
Типичный пример — система предназначенная для управления
двигателем
фирмы
«General
Motors».
Ее
центральный
процессор
обрабатывает информационные сигналы от следующих датчиков: количества
(массового расхода) воздуха, положения дроссельной заслонки, температуры
в цилиндре, содержания кислорода в отработавших газах и положения
коленчатого вала. В устройствах памяти и процессора записаны базовые
алгоритмы управления. Блок принятия решений с заложенными в нем
алгоритмами нечеткой логики вырабатывает управляющий сигнал, который
корректирует
базовую
программу,
управляющую
исполнительным
электронным блоком управления форсункой.
Второй пример — адаптивная система фирмы «Toyota». Сигналы
датчиков процесса смесеобразования ДВС и датчика положения педали
6
акселератора через информационно-измерительный блок поступают на вход
контроллера, в котором запрограммированы продукционные правила.
Контроллер выдает управляющий сигнал, отрабатываемый приводом
воздушной заслонки. Продукционные правила контроллера описывают
качественное и количественное состояние процесса смесеобразования и
используют такие лингвистические переменные, как «очень бедная»,
«бедная», «богатая», «переобогащенная» смесь и т.д. При изменении
характеристик
механизмов
смесеобразования
правила
адаптируют
управляющие сигналы к новым условиям.
Технологии высшего уровня адаптивности предполагают создание
комплексных систем, наделенных функциями оценки, диагностирования,
контроля и защиты всех систем транспортного средства. Это подтверждает
автомобильная
система
«General
Motors
Precept»
с
элементами
искусственного интеллекта, управляющая двигателем и трансмиссией на
стадиях получения энергии, ее преобразования и передачи к колесам.
Система имеет центральный 32-битный компьютер с быстродействием
266 МГц, который работает в режиме постоянного диалога и обмена
информацией с основными механизмами, подсистемами и органами
управления, осуществляя управление двигателем, в том числе системой его
охлаждения, а также трансмиссией и тормозами. При совершении водителем
какого-либо действия или изменении внешней обстановки компьютер
идентифицирует данную ситуацию, анализирует ее, делает прогноз и
выбирает тот вариант совместного взаимодействия всех систем, который
оптимизирует затраты энергии и сокращает выбросы вредных веществ.
Кроме
центрального
процессора,
система
оснащена
еще
47
компьютерными модулями меньшего размера, отвечающими за работу
отдельных механизмов автомобиля. Например, один из таких модулей
решает задачу рекуперации энергии торможения: при нажатии на педаль
тормоза или отпускании педали акселератора он подключает специальный
электромотор, который начинает работать как генератор. В результате идет
7
подзаряд бортового накопителя (аккумулятора) электрической энергии и
повышается эффект торможения.
Адаптивные
системы
управления
тормозами,
обеспечивающие
безопасность движения автомобиля в опасных и экстремальных ситуациях,
впервые начали применять за рубежом и в настоящее время получили самое
широкое
распространение.
Автоматизированная
адаптивная
система
аварийного торможения автомобиля включает в себя датчики, которые
обнаруживают потенциально опасный объект, измеряют расстояние до него и
относительную скорость сближения с ним. ЭВМ с заложенными в нее
алгоритмами
нечеткой
логики
на
основе
обработки
поступившей
информации подает соответствующий сигнал водителю о необходимости
экстренного торможения. Водитель может данное решение системы
отменить или даже упредить, нажав на педаль тормоза. Но если он этого не
сделает, тормозная система от управляющего сигнала ЭВМ срабатывает
автоматически. Причем во многих случаях точнее, чем это сделал бы
водитель.
Потому
что
система
использует
такие
информационные
переменные, как конкретные значения коэффициента сцепления шин с
опорной
поверхностью
дороги,
собственной
скорости
автомобиля,
суммарного времени срабатывания тормозов, т.е. то, что водитель может
учитывать лишь приблизительно.
Для обеспечения безопасности движения автомобилей в колонне
предназначена система, распознающая сигналы, передаваемые лидирующим
транспортным средством и самостоятельно принимает необходимое решение
по обеспечению торможения ведомого транспортного средства в случае
экстренного торможения впередиидущего.
Существуют
также
адаптивные системы
активного
управления
демпфирующими свойствами автомобиля. Электронный блок центрального
процессора регулирует степень демпфирования амортизатора на основе
информации, получаемой от стандартных, используемых в АБС датчиков
частоты вращения колес в соответствии с реальной дорожной ситуацией:
8
система практически мгновенно реагирует на изменение сцепных свойств
опорной поверхности и подбирает оптимальный уровень демпфирования,
определяемый текущими скоростными параметрами движения колеса. Более
сложные системы, применяемые в настоящее время в так называемых
активных подвесках, работают на основе нечеткой логики.
Нечеткая логика это система, которая обобщает классическую
двузначную логику рассуждений в условиях неопределенности. Она
позволяет описывать качественные, неточные понятия и наши знания об
окружающем мире, а также оперировать этими знаниями с целью получения
новой информации. Основная идея, используемая в системах управления с
использованием нечеткой логики, заключается во введении «опыта эксперта»
(человека-оператора; лица, принимающего решение) в разработку схемы,
управляющей некоторым динамическим процессом. По утверждению
создателя нечеткой логики Л. Заде, с ростом сложности системы постепенно
падает способность человека делать точные и в то же время значащие
утверждения относительно ее поведения, пока не будет достигнут порог, за
которым точность и релевантность становятся
взаимоисключающими
характеристиками. В системах управления с использованием нечеткой
логики сложные отношения между входом и выходом динамических
процессов описываются набором правил нечеткой логики, подразумевающих
использование
лингвистических
переменных
вместо
усложненной
динамической модели. Применение лингвистических переменных, правил и
законов нечеткой логики, а также приближенных рассуждений позволяет
вносить опыт эксперта в разрабатываемую схему управления.
Нечеткая логика имеет ряд преимуществ. Во-первых, нечеткая логика
поддерживает разработку быстрого прототипа технического устройства с
последующим усложнением его функциональности. Во-вторых, нечеткая
логическая
модель
более проста для
понимания, чем
аналогичная
математическая модель на основе дифференциальных или разностных
уравнений. В-третьих, нечеткие модели оказываются более простыми для
9
своей аппаратной реализации по сравнению с классическими алгоритмами
управления
техническими
системами.
Нечеткая
логика
использует
логические законы, такие как «если X, то Z». Например, если обороты
двигателя слишком низкие и они снижаются, то необходимо впрыскивать
больше топлива.
Системы управления с использованием нечеткой логики имеют
широчайшую
область
применения.
Фотоаппараты
и
видеокамеры
используют нечеткую лоrику, чтобы реализовать опыт фотографа в
управлении этими устройствами. Например, компании Fisher и Sanyo
производят нечеткие логические видеокамеры, в которых применяется
нечеткая фокусировка и стабилизация изображения. Компания Matsushita
выпускает стиральную машину, в которой используются датчики и
микропроцессоры
с
нечеткими
алгоритмами
управления.
Датчики
определяют цвет и вид одежды, количество твердых частиц, степень
загрязнения, а нечеткий микропроцессор выбирает наиболее подходящую
программу стирки из 600 доступных комбинаций температуры воды,
количества стирального порошка и времени производственного цикла
быстрого или медленного вращения и промывки. Кроме того, компании
Mitsubishi, Nissan, Toyota, Audi, Renault и многие другие успешно применяют
на
своих
автомобилях
«нечеткую»
автоматическую
трансмиссию.
Использование процессорных блоков с основанными на принципах нечеткой
логики
адаптивными
алгоритмами
переключения
передач
позволяет
подстраиваться под манеру управления водителя. Процессор, работающий по
таким алгоритмам, анализирует сигналы от датчиков и, опираясь не на
простые двоичные правила, а на схожие с человеческими относительные
понятия, допускающие множество промежуточных градаций, анализирует
ситуацию. Соответственно, принятое решение получается более адекватным.
Применяются элементы нечеткой логики и в адаптивных системах
рулевого
управления.
При
повороте
рулевого
колеса
датчик,
вмонтированный в рулевую колонку, передает информацию об угле этого
10
поворота
на
нечеткий
контроллер.
Последний
вырабатывает
соответствующий управляющий сигнал для электродвигателя, приводящего в
действие зубчатую пару, которая через систему тяг и шарниров осуществляет
угловое перемещение управляемого колеса. Чтобы один угол поворота
соответствовал
другому,
а
усилия
на
рулевом
колесе
были
пропорциональными сопротивлению дороги и темпу его изменения,
нечеткий контроллер собирает информацию о реальных параметрах поворота
управляемого колеса, которую учитывают функции принадлежности и
продукционные правила нечеткой логики. В результате контроллер,
обработав
информацию,
вырабатывает
управляющие
сигналы
для
электродвигателя, приводящего в действие рулевой механизм. Таким
образом обеспечивается обратная связь между поворотом управляемых колес
и действиями водителя.
В связи с выше перечисленным можно смело утверждать - одной из
мировых тенденций автомобилестроения становится внедрение в систему
управления элементов нечеткой логики. Несмотря на то что нечеткая логика
появилась сравнительно недавно, она уже успела зарекомендовать себя как
относительно простой, надежный и быстрый теоретический механизм,
позволяющий повысить степень автоматизации управления автомобилем за
счет реализации принципов, не поддающихся обработке классической
двузначной логикой.
2. Нечеткая система управления дистанцией между движущимися
автомобилями
Наиболее
безопасной
дистанцией
D*
при
движении
является
расстояние, превышающее тормозной путь автомобиля, равный [2, 3]:
(1)
11
где V - скорость движения автомобиля перед началом торможения,
км/ч; jb - расчетное значение ускорения при торможении, м/с2; g = 9,81 ускорение свободного падения, м/с2; φ= 0,1-0,9 - коэффициент сцепления
шин с дорогой; ke= 1,1-1,6 - коэффициент снижения эффективности
торможения, зависящий от конструкции, степени изношенности тормозной
системы и других факторов.
Однако данное расстояние не является оптимальным в смысле
повышения пропускной способности автомагистралей.
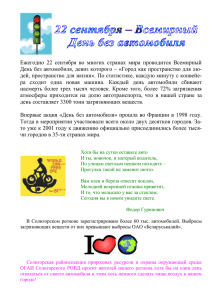
Согласно требованиям пункта 9.10 правил дорожного движения
водитель должен соблюдать такую дистанцию до движущегося впереди
транспортного средства, которая позволяла бы избежать столкновения.
Поскольку впередиидущий автомобиль не может остановиться мгновенно,
даже в случае экстренного торможения, эта дистанция может быть
значительно меньше тормозного пути (рис. 1).
Рис. 1. Безопасная дистанция
Для определения дистанции большое значение имеет время, которое
необходимо водителю для приведения в действие тормозной системы, и
время, необходимое автомобилю для безаварийного торможения. Поэтому
дистанцию до впередиидущего автомобиля можно выразить в единицах
времени [3]:
(2)
где t1 = 0,6—1,0 - время реакции водителя, с; t2 = 0,1-0,2 - время
срабатывания тормозного привода, с; t3 = 0,1-0,4 - время нарастания
замедления в зависимости от дорожных условий, с; jb1, jb2 - расчетные
12
значения ускорения при торможении впередиидущего и управляемого
автомобилей, соответственно, м/с2; V - скорость движения автомобиля перед
началом торможения, км/ч.
В
целях
обеспечения
безопасности
можно
считать,
что
у
впередиидущего автомобиля наибольшая эффективность торможения ke=1,1,
тогда как у следующего за ним – наименьшая ke = 1,6.
Полуэмпирическая формула (2) позволяет вычислить безопасную
дистанцию,
однако
для
этого
необходимо
знание
конструктивных
особенностей автомобиля и состояния дороги.
Поэтому ее использование в рассматриваемом случае предполагает
идентификацию коэффициентов сцепления шин с дорогой φ и снижения
эффективности тормозной системы ke, соответственно, как для управляемого
автомобиля, так и впередиидущего. Если идентифицировать коэффициент φ
возможно [4-6], то определить ke - затруднительно. Поэтому при определении
безопасной дистанции имеет смысл перейти от зависимости в виде формулы
(2) к ее нечеткому представлению. Эта задача может быть решена с
использованием адаптивной нейро-нечеткой системы заключений ANFIS
(Adaptive Neuro- Fuzzy Inference System) [7].
Для этого по формуле (2) была сгенерирована обучающая выборка,
соответствующая изменению скорости движения от 0 до 100 км/ч с
дискретностью 1 км/ч и изменению коэффициента сцепления шин с дорогой
в пределах от 0,1 до 1 с дискретностью 0,1. В качестве метода настройки
использовался гибридный алгоритм, сочетающий в себе методы наименьших
квадратов и обратного распространения ошибки. При этом для описания
скорости
движения
автомобиля
использовались
три
терма,
а
для
коэффициента сцепления шин с дорогой - четыре, представленный:
функциями
Гаусса. Описание выкодного
сигнала осуществлялось с
использованием двенадцати термов, каждый из который представляет собой
единственное вещественное значение. В результате быта получена система
нечетких заключений, работающая по алгоритму Сугено [8].
13
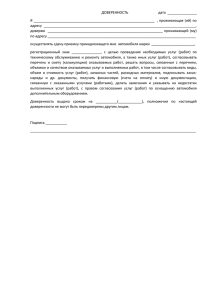
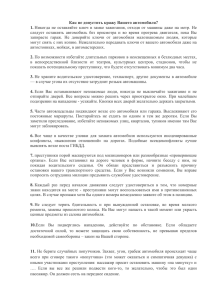
Рис. 2. Дистанция при различных значениях коэффициента сцепления
шин с дорогой: --- при вычислении по формуле (2); ― при использовании
системы нечетких заключений
Из графиков на рис. 2 следует, что это система, настроенная по методу
ANFIS, в целом хорошо описывает вид зависимости дистанции автомобиля
от скорости и коэффициента сцепления тин с дорогой. Погрешность при этом
не превышает 0,5%.
Примем, что основное влияние на движение автомобиля оказывает
сила сопротивления качению Fr передних и задних колес. В общем случае эта
сила определяется по формуле [9]
(3)
где L - расстояние от переднего до заднего моста автомобиля; f1 коэффициент сопротивления качению переднего моста автомобиля; f 2 коэффициент сопротивления качению заднего моста; l1 - расстояние от
центра масс автомобиля до переднего моста; l2 - расстояние от центра масс
автомобиля до заднего моста l2 = L-l1.
Поскольку основную протяженность дорожных сетей занимают
участки прямолинейного движения, то при решении задачи управления
дистанцией автомобиль можно рассматривать в качестве материальной
точки, подверженной воздействию движущей силы F и силы сопротивления
14
Fr:
(4)
где m - масса автомобиля; S - перемещение автомобиля; Fr - сила
сопротивления качению передних и задних колес автомобиля.В этом случае,
принимая f1= f2=f в (3), получим:
(5)
Отметим, что при движении автомобиля с большой скоростью
коэффициент сопротивления качению изменяется по квадратичному закону:
(6)
Здесь f0 - коэффициент сопротивления качению колес при движении
автомобиля с малой скоростью.
Поскольку
сила
сопротивления
качению
имеет
нелинейную
зависимость от скорости V , уравнение движения автомобиля относится к
классу нелинейных. Коэффициенты, входящие в это уравнение {m, f0}, в
процессе эксплуатации автомобиля могут изменяться в широких пределах.
Это обстоятельство с учетом непредсказуемости скорости впередиидущего
автомобиля дает основания для применения нечеткой логики при решении
задачи управления дистанцией.
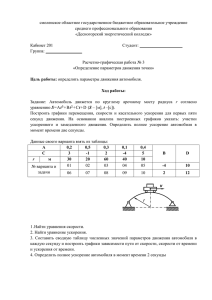
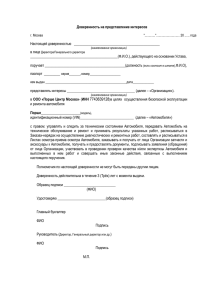
Управляющая часть системы управления (рис. 3) содержит три
регулятора и состоит из трех последовательно вложенных автономных
замкнутых контуров управления. Отметим, что система управления является
дискретной (аналого- и цифроаналоговые преобразователи на рис. 3 не
показаны в целях упрощения).
15
Рис. 3. Блок-схема системы управления дистанцией до впередиидущего
автомобиля: БПП - блок подготовки параметров; НРУД - нечеткий
регулятор
управления
дистанцией;
НРСС
-
нечеткий
регулятор
стабилизации скорости; БФ - блок фаззификации; БФЛВ - блок
формирования логического вывода; БДФ - блок дефазификации; БП база правил
Первый
контур
осуществляет
управление
скоростью
движения
автомобиля V. Он состоит из объекта управления (автомобиль) и регулятора
скорости, на вход которого подается сигнал ошибки eV, представляющий
собой разность желаемой V* и действительной V скоростей движения:
(7)
где tk - текущий момент времени.
Под желаемой V* понимается скорость, формируемая нечеткой
системой управления на основе измеряемых параметров, таких как
дистанция,
скорость
управляемого
и
относительная
скорость
впередиидущего автомобилей.
Второй контур осуществляет синхронизацию скорости движения с
впередиидущим автомобилем. Он включает в себя систему управления
скоростью движения автомобиля, блок подготовки параметров (БПП) и
нечеткий регулятор синхронизации скорости (НРСС). На вход БПП
16
поступает сигнал ошибки eΔV, вышисляемыш как разность между желаемой
скоростью
получаемой
движения
с
относительно
помощью
впередиидущего
микроволнового
радара,
автомобиля
и
V*,
действительной
относительной скоростью Vr:
(8)
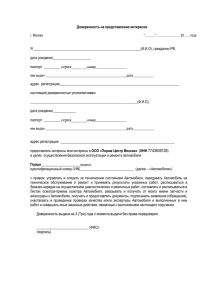
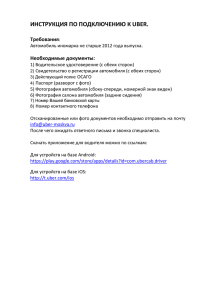
Радар позволяет одновременно производить измерение двух величин расстояния D между автомобилями путем измерения времени между
излучением сигнала и приходом его отраженного эха, и относительной
скорости Vr путем определения смещения частоты отраженного сигнала,
вызванное эффектом Доплера (рис. 4).
Рис. 4. Схема действия микроволнового радара
БПП вычисляет скорость e‘ΔV изменения ошибки eΔV :
(9)
Вместе с сигналом ошибки данные [eΔV, e‘ΔV] передаются НРСС,
рассчитывающему
желаемое
ускорение
движения
автомобиля
V*,
поступающее на вход дискретного интегратора (приведенного на рис. 3 в
форме z-преобразования). Интегратор, в свою очередь, вычисляет желаемую
скорость движения V* в каждый текущий момент времени tk.
17
Третий
контур
осуществляет
управление
дистанцией
D
до
впередиидущего автомобиля. Он включает в себя систему синхронизации
скорости движения автомобиля с впередиидущим автомобилем, БПП и
нечеткий регулятор управления дистанцией (НРУД). На вход БПП поступает
сигнал ошибки eD, являющийся разностью между желаемой D* и
действительной D дистанциями до впередиидущего автомобиля:
(10)
БПП вычисляет скорость eD изменения ошибки eD:
(11)
Затем данные [eD, e’D] передаются НРУД, который рассчитывает
желаемую относительную скорость движения V*.
Каждый нечеткий регулятор состоит из четырех блоков:
-
блока
фаззификации
действительный:
входных
(БФ),
осуществляющего
переменных
нечеткого
переход
регулятора
к
от
их
лингвистическому представлению;
- базы правил (БП);
- блока формирования логического вывода (БФЛВ), производящего с
помощью БП вычисление нечеткого управляющего воздействия;
- блока дефаззификации (БДФ), выполняющего переход от нечеткого
представления управляющего воздействия к действительному.
3. Термы входных и выходных переменных
Лингвистические
определяются
термы
треугольными
входных
функциями
и
выходных
принадлежности
переменных
(степенью
принадлежности численного значения переменной лингвистическому терму
или степенью истинности принадлежности этого значения терму)
18
где а, с – абсциссы концов основания треугольника, b – абсцисса его
вершины.
Получение
необходимых
заключений
осуществляется
с
использованием прикладного пакета Fuzzy Logic Toolbox в среде MATHLAB
[8] по схеме Мамдани.
Функцией fuzzy из режима командной строки запускается основная
интерфейсная программа пакета Fuzzy Logic — редактор нечеткой системы
вывода (Fuzzy Inference System Editor). В меню Edit командой Add Variable
Input (Output) формируем необходимое количество входных (выходных)
переменных, задаем их имена (рис. 5).
19
Рис. 5. Вид окна FISEditor
В редакторе функций принадлежности (Membership Function Editor)
необходимо определить диапазон изменения переменных (поле Range),
выбрать тип (поле Type) функции принадлежности, задать имя (поле Name), а
также параметры (поле Params) каждого терма.
Для описания входных и выходных переменных каждого нечеткого
регулятора были использованы пять треугольных термов: отрицательный
большой - ОБ, отрицательный средний - ОС, нулевой - Н, положительный
средний - ПС, положительный большой - ПБ (рис. 6).
20
Рис. 6. Термы входных величин нечеткого регулятора
Для описания выходных переменных каждого нечеткого регулятора
были
использованы
семь
термов:
21
отрицательный
большой
-
ОБ,
отрицательный средний - ОС, отрицательный малый - ОМ, нулевой - Н,
положительный малый - ПМ, положительны средний - ПС, положительный
большой - ПБ (рис. 7).
Рис. 7. Термы выходных величин нечеткого регулятора
Термы, непосредственно прилегающие к нулевому терму, в процессе
настройки всегда имели свое окончание (для отрицательных) или начало (для
положительных) в середине нулевого терма. Такое ограничение диктуется
необходимостью исключения зоны нечувствительности, обусловленной
алгоритмом управления. Это, однако, не исключает ее наличие на практике в
силу неидеальности аппаратных средств.
На вход нечеткого регулятора синхронизации скорости поступает
сигнал о текущей скорости и ускорении относительно впередиидущего
автомобиля. На выходе регулятора формируется значение ускорения, которое
поступает
на
вход
интегратора,
вычисляющего
22
желаемую
скорость
движения.
При этом относительная скорость движения является положительной,
если впередиидущий автомобиль движется быстрее, и отрицательной - если
медленнее.
На вход нечеткого регулятора управления дистанцией поступает
информация о разности между желаемой и действительной дистанциями до
впередиидущего автомобиля, а также о скорости изменения этой разности.
На выходе регулятора формируется поправка - желаемая скорость движения
относительно впередиидущего автомобиля. При этом разность между
желаемой и действительной дистанциями положительная, если автомобиль
находится слишком
Правила, описывающие работу данных регуляторов, приведены в табл.
1 и 2.
В дальнейшем ограничимся рассмотрением только блока управления
дистанцией до впереди идущего автомобиля.
23
Для ввода экспертных баз знаний используем редактор Rule Editor
(команда Rule в меню Edit) (рис. 8).
Рис. 8. Нечеткая база знаний Мамдани в RuleEditor
На рисунке 9, приведено окно визуализации нечеткого вывода
(команда Rule в меню View). В поле Input указываются значения входных
переменных, для которых осуществляется нечеткий логический вывод.
24
Рисунок 9 - Визуализация нечеткого вывода для входных значений
В результате получаем возможность визуализации зависимости
выходной переменной от двух выбранных переменных и базы правил,
позволяющей наглядно представить процесс нечеткого вывода, влияния
каждого правила на конечный результат и оценить зависимость выходной
переменной от каждой из входных переменных.
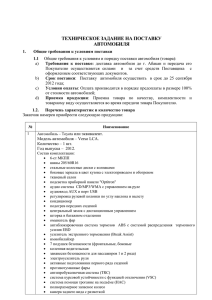
Правилам нечеткого вывода, приведенным в таблице, соответствуют
поверхность нечеткого вывода для входных переменных eD - deD,
приведенная на рис. 10 (команда Surface в меню View).
25
Рис. 10. Визуализация нечеткого вывода синтезированной нечеткой
системы в SurfaceViewer
В результате выполнения аналогичных действий получена нечеткая
система типа Мамдани.
4. Реализация системы управления дистанцией между движущимися
автомобилями
Структура системы (рис.11) представляет собой схему с двухвходовым
нечетким контроллером с зависимыми входами, что делает возможным при
анализе
динамики
системы
представление
нечеткого
контроллера
эквивалентным нелинейным элементом с одним входом и выходом.
26
Scope1
-90
1
D
s
1
deD
Fuzzy Logic
Controller
with Ruleviewer
Transfer Fcn
du/dt
Derivative
Рисунок 11 - Визуализация нечеткого вывода для входных значений
Начальные установки программы:
27
File-Export-To Workspace
Зададимся следующими значениями переменных: начальная дистанция
100м, допустимая дистанция 10м, начальное ускорение 1 м/с2.
Результат сближения автомобилей показан на рис. 12.
Рис. 12. Моделирование сближения автомобилей
28
Можно видеть, что в результате регулирования между автомобилями
устанавливается дистанция 50м.
ЗАКЛЮЧЕНИЕ
Автоматизация процесса управления автомобилем в непрерывном
транспортном потоке представляет собой одно из возможных решений
проблемы безопасности дорожного движения. Она включает в себя
управление дистанцией между автомобилями. Основной трудностью в
данном случае является - непредсказуемость впередиидущего автомобиля,
преодолеть которую, путем построения системы управления на основе
синтеза
регулятора
методами
классической
теории
автоматического
управления, не представляется возможным по причине нелинейности модели
объекта и частичной неопределенности ее параметров. В данной работе
приведено решение рассматриваемой проблемы с использованием аппарата
нечеткой логики. Как свидетельствуют результаты, нечеткая система
управления способствует уменьшению риска столкновения с впередиидущим
автомобилем
путем
обеспечения
соблюдения
безопасной
дистанции,
зависящей от дорожных условий и скорости движения.
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев К.Б., Малявин А.А., Палагута К.А. Сравнительный анализ
предикторного
и
нечеткого
управления
движением
автомобиля
//
Мехатроника, автоматизация, управление. 2009. № 5. С. 36-45.
2. Андрейчук В.М. Советы начинающему автолюбителю. - Киев:
Техника, 1984. - 40 с.
3. Суворов Ю.Б. Судебная дорожно-транспортная экспертиза. учеб.
29
пособ. для вузов. - М.: Экзамен, 2004. - 208 с.
4. Chia-Shang Liu, Huei Peng. Road friction estimation for vehicle path
prediction // Vehicle System Dynamics. 1996. Vol. 25 Suppl. P. 413-425.
5. Takahashi Akira. Road friction coefficient estimating apparatus for
vehicle. U.S. Patent № 6526804, May 30, 2001.
6. Matsuno Koji. Road friction coefficient estimating apparatus and vehicle
equipped with road friction coefficient estimating apparatus. U.S. Patent №
6556911, June 18, 2001.
7. Jang, J.-S. R., ANFIS: Adaptive-Network-based Fuzzy Inference Systems
// IEEE Transactions on Systems, Man, and Cybernetics. 1993. Vol. 23, No. 3. P.
665-685.
8. Леоненков А.В. Нечеткое моделирование в среде MATLAB и
fuzzyTECH. - СПб.: БХВ-Петерберг, 2005. - 736 с.
9. Тарасик В.П. Теория движения автомобиля: учеб. для вузов. - СПб.:
БХВ-Петербург, 2006. - 478 с.
10. Крутько П.Д. Обратные задачи динамики в теории автоматического
управления. - М.: Машиностроение, 2004. - 573 с.
30