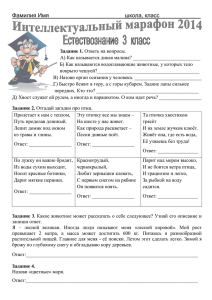
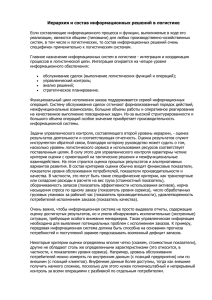
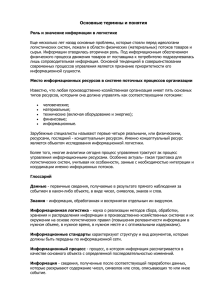
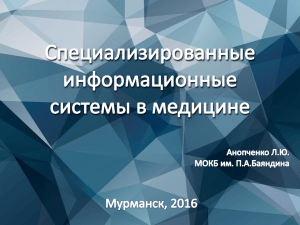
Оглавление 1 Анализ требований задания ..................................... 3 2 Анализ кинематической электропривода и схемы механизма подачи металлорежущих станков ..................................................... 5 3 Анализ возможных вариантов и выбор системы электропривода подачи металлорежущего станка ............................................................................................... 8 4 Расчет мощности и выбор двигателя ............... 9 5 Расчет и выбор элементов силовой части тиристорного преобразователя ......................................11 5.1 Расчет параметров и выбор силового трансформатора .......................................................................................... 12 5.2 Расчет и выбор тиристоров .................................................. 13 5.3 Расчет индуктивности уравнительных реакторов. . 14 5.4 Расчет индуктивности сглаживающего дросселя ...... 15 5.5 Расчет регулируемой характеристики коэффициента передачи и постоянного времени тиристорного преобразователя............................................................................................ КПЭП 130302.17.20 ПЗ 16 Изм Лис № докум. Разраб. . т Харисова Провер. Львова Т.Н. Л.А. Реценз. Н. Контр. Утверд. Подпис Дат ь а Проектирование электропривода металлорежущего станка Лит. Лист Листов КНИТУ гр.8131-51 5.6 Расчет постоянных времени электропривода .............. 17 6 Анализ возможности разомкнутой системы по обеспечению требований задания .............................19 7 Синтез замкнутой системы электропривода 21 8 Анализ технических данных спроектированного электро- .............................................23 привода .....................................................................................23 1 Анализ требований задания Спроектировать электропривод подачи металлорежущего станка, осуществляющего преобразование вращательного движения ходового винта в поступательное перемещение суппорта с помощью ходовой пары «винт-гайка», требующего регулирования частоты вращения при постоянном наибольшем допустимом моменте в диапазоне D со статической ошибкой, не превышающей ∆доп. Требуемая частота вращения двигателя на верхнем пределе диапазона регулирования равна - верх . Механизм работает в длительном режиме с переменной нагрузкой. Работу механизма характеризует нагрузочная диаграмма Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 3 на рисунке 1.1. Рисунок 1.1 – Нагрузочная диаграмма Параметры нагрузочной диаграммы (рисунок 1.1), кинематической цепи сведены в табл.1.1, а параметры суппорта и требования к ЭП приведены в табл. 1.2. Таблица 1.1 № п/п Требования к электроприводу D Δдоп, % ωверх, рад/c 450 5 157 20 Нагрузочная диаграмма Mхв0, Н·м 14 Mхв1, Н·м 70 Mхв2, Н·м 90 t1, с t2, с Tц, с 60 220 300 Таблица 1.2 № Кинематическая цепь Суппорт п/п ip ŋp р, м/рад dхв, м lхв, м a, м b, м c, м 20 8 0,95 0,01 0,07 1,5 0,14 0,5 1,5 В табл. 1.1, 1.2 приняты следующие условные обозначения: 1. Параметры нагрузочной диаграммы: Mхв0 – момент на ходовом винте в режиме холостого хода, H×м; Mхв1 – момент на ходовом винте при выполнении первой технологической операции, H×м; Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 4 Mхв2 – момент на ходовом винте при выполнении второй технологической операции, H×м; t1 – время движения суппорта в режиме холостого хода, с; t2 – время выполнении первой технологической операции, с; Tц – время выполнении технологического цикла, с. Параметры кинематической цепи редуктор – ходовой винт: iр – передаточное число редуктора; ηр – КПД редуктора; ρ – радиус приведения кинематической ходовой пары «винтгайка», м/рад; dхв – диаметр ходового винта, м; lхв – длина ходового винта, м. Параметры суппорта: a – длина суппорта, м; b – ширина суппорта, м; c – высота суппорта, м. Суппорт выполнен из стали и при расчете его массы может рассматриваться как параллелепипед. 2 Анализ кинематической электропривода и механизма схемы подачи металлорежущих станков В настоящее время в тяжелых и средних металлорежущих станках электроприводы подачи выполняются по типовой кинематической схеме, которая показана на рисунке 2.1. Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 5 Рисунок 2.1 – Типовая кинематическая схема электропривода и механизма подачи. Электродвигатель Ml через понижающий редуктор, показанный в виде шестерни Т1 и зубчатого колеса Т2, приводит в движение ходовой винт ТЗ. Преобразование вращательного движения ходового винта в поступательное движение суппорта А1 по направляющим Е7, Е8 осуществляется с помощью ходовой пары «винт-гайка» Т4. Соединение редуктора с двигателем и ходовым винтом осуществляется с помощью муфт XI, Х2. Валы ВII и ВIII вращаются в подшипниках Е1 - Е4, а ходовой винт ТЗ - в подшипниках Е5, Е6. Приведение моментов на ходовом винте к валу двигателя осуществляется с помощью следующих соотношений: M M M M пр пр пр хв 0 ; M хв1 ; M хв 2 , хв 0 i хв1 i хв 2 i р мп р мп р мп где мп - КПД механической передачи вал двигателя – ходовой винт. Определим КПД механической передачи вал двигателя - ходовой винт. В соответствии с рис.2.1 можем записать 2 0,98 0,95 0,99 0,92 мп м р пп где м - КПД упругой муфты; р - КПД редуктора; пп - КПД пары подшипников, установленных на ходовом винте. M Изм. Лис т M 14 пр хв0 1,9 Н м хв0 i 8 0,92 р мп № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 6 M M 70 пр хв1 9,51 Н м хв1 i 8 0,92 р мп M M 90 пр хв 2 12,23 Н м хв 2 i 8 0,92 р мп В таблице 2.1 приводятся значения коэффициентов полезного действия различных элементов кинематической цепи электропривода подачи. Таблица 2.1 Элементы кинематической цепи Значения КПД Упругая муфта 0,98 Винтовая пара «винт-гайка качения» 0,9 - 0,95 Пара подшипников качения 0,99 - 0,995 Пара подшипников скольжения 0,98 - 0,99 Определяем момент инерции ходового винта, кг м 2 J хв 2 mхв d хв 4 где mхв - масса ходового винта, кг . Масса ходового винта: mхв Vхв 2 l2 d хв хв 4 0,072 1,52 4 7,8 103 67,5 кг , 2 mхв d хв 67,5 0,07 2 J хв 0,082 кг м 2 4 4 где Vхв - объем ходового винта; - плотность стали ( 7,8 103 кг м3 ) Момент инерции суппорта, кг м 2 : J c mc p 2 Масса суппорта, кг : Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 7 mc m Vc a b c 0,14 0,5 1,5 7,8 103 819 кг , 3 J c mc p 2 819 0,012 0,0819 кг м2 где Vc - объем суппорта, м3 . Приведем параметры ходового винта и суппорта к скорости ходового винта. При этом суммарный момент инерции суппорта и ходового винта равен, кг м 2 : J J хв J с 0,082 0,0819 0,1639 кг м2 Приведем параметры движения на ходовом винте к валу двигателя. Суммарный момент инерции, приведенный к валу двигателя, определяем на основании закона сохранения импульса движения, кг м 2 : J 0.1639 J пр 0,003 кг м2 2 64 ip Пренебрегая влиянием упругих связей, считаем коэффициенты J ω жесткости с12 и с23 бесконечно большими. Это позволяет M заменить трехмассовую механическую часть ЭП одной Mc эквивалентной массой с моментом инерции J , и перейти к одномассовой расчетной схеме. В качестве момента нагрузки М с рассматривается приведенный к валу пр двигателя момент ходового винта М хв . Полный момент инерции электропривода, кг м 2 : J J пр J , 1 где J - момент инерции ротора двигателя. 1 3 Анализ системы возможных вариантов и электропривода выбор подачи металлорежущего станка Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 8 Для осуществления автоматического регулирования предусматриваются управляемые преобразователи и регуляторы, позволяющие автоматически под воздействием обратных связей осуществлять регулирование координат электропривода. Наиболее широко используются вентильные преобразователи напряжения постоянного тока и преобразователи частоты и соответствующие системы электропривода: система тиристорный преобразователь – двигатель постоянного тока (ТП – ДПТ), преобразователь частоты –асинхронный двигатель (ПЧ-АД). Данные системы имеют ряд преимуществ и недостатков, анализ которых, учитывая предъявляемые технические требования, позволяют осуществить правильный выбор системы регулирования. Система ТП-ДПТ обладает достаточно высоким быстродействием и КПД и технически проще реализуема. Система ПЧ-АД представляется технически более сложнее по сравнению с системой регулирования выпрямленным напряжением, так как требует дополнительные ступени преобразования электроэнергии. Из рассмотренных вариантов, учитывая требования задания, наиболее целесообразнее выбрать систему ТП-ДПТ. 4 Расчет мощности и выбор двигателя Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 9 Определяем эквивалентный момент: M Э (M пр 2 пр пр 2 2 2 2 ) t ( M )2 t ( M ) t хв0 1 хв1 2 хв 2 3 14 60 70 220 90 20 t t t 60 220 20 1 2 3 64,6 Н м Определяем расчетную мощность электродвигателя: Р р k з М э верх 1,2 64,6 157 12,17кВт где k з 1,1 1,3. Преобразуем угловую скорость в частоту вращения: nверх 30 верх 30 157 1500 об мин Определяем частоту вращения двигателя на нижней границе диапазона регулирования: nниж 30 верх D nверх 1500 = 3,3 об мин D 450 На основании расчетных данных выбираем двигатель постоянного тока П61М. Параметры двигателя приведены в таблице 4.1. Таблица 4.1 Тип Мощность, Напряжение, двигателя кВт Ток, А В Частота КПД, % вращения, об/мин П-61М 12 220 65 1500 84 Номинальный электромагнитный момент ДПТ НВ: P 12000 М н ном 8 Н м , ном 1500 Номинальный ток якоря: Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 10 I ном Рн 12000 65 А U я.н 220 0,84 Постоянная двигателя: с М ном 8 0,12 , I ном 65 где Iном – номинальный ток двигателя. 5 Расчет и выбор элементов силовой части Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 11 тиристорного преобразователя 5.1 Расчет параметров и выбор силового трансформатора Определяем мощность на стороне выпрямителя тока: Pd U d I d U я.н I я.н 220 65 14300 Вт. Определяем типовую мощность трансформатора для трехфазной мостовой схемы выпрямителя: ST 1,045 Pd 1,045 14300 14943,5 ВА. С учетом коэффициента запаса расчетная мощность трансформатора составляет: ST . расч 1,25 14943,5 18679,375 ВА. Выбираем трансформатор ТСЗ -25/0,7. Параметры трансформатора приведены в таблице 5.1. Таблица 5.1 – Параметры трансформатора Номиналь ная мощность, кВА Ток холосто го хода, % Напр. короткого замыкания ,% 25 2,6 3,8 Габаритные и установочные размеры ТСЗ, мм Потери Холостого хода, кВт Короткого замыкания , кВт Длина Ширин а Высот а 0,155 0,6 700 350 650 Масс а ТСЗ, кг 300 Определяем номинальный фазный ток вторичной обмотки трансформатора: I Изм. Лис т № докум. 2ф Подпис Дат ь а Sн 25000 65,6А 3U я.н 3 220 КПЭП 130302.17.20 ПЗ Лис т 12 Находим полное, активное и индуктивное сопротивления обмоток трехфазного трансформатора при соединении первичной обмотки в звезду: Z U kU НН 3,8 220 0,07 Ом 100 I 2ф 3 100 65,6 3 Pk 3U нн2 280 3 2202 RTR 0,022 Ом 3Pн2 3 250002 2 Х Т Z 2 RTR 0,072 0,0222 0,066 Ом Индуктивность фаз вторичной обмотки трансформатора: LTR XT 0,066 0,0002 Гн 2 f1 2 3,14 50 5.2 Расчет и выбор тиристоров Максимальное значение выпрямленного ЭДС для трехфазной мостовой схемы: Ed .max 1,35 U нн 1,35 220 297 В Максимальное обратное напряжение на тиристорах: U обр.max 1,05 Ed .max 1,05 297 311,85В Класс тиристора: класс U обр.max 100 311,85 3,12 100 Исходя из полученных расчетов, тиристоры должны быть не ниже 4-го класса. Среднее значение тока тиристора: Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 13 I ср.т I d I я.н 65 21,67 А 3 3 3 Максимальное значение тока тиристора в момент пуска двигателя определяем при условии, что замкнутая система управления электропривода обеспечивает кратность пускового тока к двум. I d.max ki I я.н 2 65 43,34 А 3 3 3 I max.Т Выбираем тиристор серии Т122-25-4, параметры которого приведены в таблице 5.2. Таблица 5.2 – Параметры тиристора Т122-25-4 Наименование Максимально Обратное Пороговое параметров, допустимый напряжение, напряжение, единица измерения средний ток, В В А Обозначение U U Iср.т обр 0 Величина 25 100-1200 1,75 Время включения тиристора, мкс tвкл 10 Для построения реверсивного тиристорного преобразователя тиристоров серии Т122-25-4 необходимо в количестве штук. 5.3 Расчет индуктивности уравнительных реакторов. Уравнительные токи могут протекать по одному из: 1) IIф AT1 – VS1 – L1 – L2 – VS8 – IIф BT1; 2) IIф AT1 – VS10 – L4 – L3 – VS5 – IIф BT1. Действующее значение уравнительного тока: I ур 0,1 I я.н 0,1 65 6,5 А Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 14 Требуемая суммарная индуктивность двух уравнительных реакторов при совместном согласовании управлении группы тиристоров в реверсивном преобразовании определяется по формуле: Lур kД 2 U НН 2 f1 I ур 0,12 2 220 0,018 Гн 2 3,141 50 6,5 5.4 Расчет индуктивности сглаживающего дросселя Индуктивность СД рассчитываем без учета индуктивности уравнительного реактора, полагая, что они насыщаются рабочими токами. LСД где en Edmax (2 LTP La ) Гн, ie 2 f1 m I ур - относительная величина эффективного значения пульсации первой гармоники выпрямленного напряжения; - относительная величина эффективного значения пульсации первой гармоники выпрямленного тока; m – число пульсаций выпрямителя. max 90 en 0,24 н 2 nн nн 3,14 1500 157 рад с 60 30 30 Индуктивность якорной цепи двигателя La Изм. Лис т № докум. U ан 0,6 220 0,006 Гн pn н I ан 2 157 65 Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 15 0,24 297 L (2 0,0002 0,006) 0,023 Гн СД 0,02 2 3,141 50 6 65 5.5 Расчет регулируемой характеристики коэффициента передачи и постоянного времени тиристорного преобразователя Регулировочная характеристика тиристорного преобразователя с учетом выбранных элементов силовой части строится в соответствии с выражением: Ed Ed max cos Коммутационное сопротивление тиристорного преобразователя определяется по формуле: RК X T m 0,066 6 0,063 Ом 2 2 3,141 Принимаем Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 16 Определяем суммарное сопротивление тиристорного преобразователя: Rп 2 0,22 0,063 2 0,4 103 2 0,005 0,005 0,5188 Ом Внутреннее падение напряжения тиристорного преобразователя: U п Rп I я.н 0,5188 65 33,7 В Чтобы определить коэффициент передачи строим касательную к графику функции: U d Ed max cosφ Rп I я.н Коэффициент передачи тиристорного преобразователя на линейном участке его регулировочной характеристики можно определить по формуле: kП Edmax 297 37,125 U су ном 8 где U су ном – напряжение регулирования, необходимое для изменения угла α на 90°. Для тиристорных преобразователей – 0…10 В. Достаточно часто на вход системы СИФУ тиристорного преобразователя устанавливают фильтры. Постоянную времени такого фильтра принимают равным Tф 0,008 с, при этом постоянную времени преобразователя определяем по формуле: TП TФ 5.6 Изм. Лис т 1 2 f1 0, 008 1 0, 01с 2 3,141 50 Расчет постоянных времени электропривода № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 17 Определяем сопротивление якорной цепи двигателя: Ом Определяем сопротивление якорной цепи электропривода: R я 2 Rтр Rк 2 Rдин 2 R ур Rсд Rа Rп Rа 0,5188 0,0744 0,5932 Ом Определяем индуктивность якорной цепи электропривода: Электромагнитную постоянную времени электропривода определяем по формуле: Lя 47 103 TЭ 0,24c Rя 195,6 103 Электромеханическую постоянную времени определяем по формуле: TЭМ Rя J 0,1956 0,49 0,28с c2 0,122 Наиболее благоприятным для электропривода является такое соотношение постоянных времени, когда TЭМ 4TЭ . Видно, что в данном случае желаемое такое соотношение между постоянного времени не выдерживается. Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 18 6 Анализ возможности разомкнутой системы по обеспечению требований задания Структурная схема разомкнутой системы электропривода, выполненной по принципу тиристорный преобразователь – двигатель постоянного тока с независимым возбуждением с регулированием частоты вращения путем изменения напряжения на якоре, представлена на рисунке 6.1. Рисунок 6.1 – Структурная схема разомкнутой системы Структурная схема состоит из двух основных частей – тиристорного преобразователя и ДТП НВ с нагрузкой. Тиристорный преобразователь в общем случае состоит из двух звеньев: 1) Система импульсно-фазового управления (СИФУ) с входным устройством; 2) Силовая схема тиристорного преобразователя. В инженерных расчетах передаточную функцию тиристорного преобразователя в режиме непрерывного тока с достаточной для практических расчетов точностью, можно представить в виде: Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 19 W ( p) kтп Tтп p 1 где р - оператор дифференцирования; ТТП - постоянная времени тиристорного преобразователя зависит от используемой схемы выпрямления, быстродействия СИФУ преобразователя и индуктивности силовой цепи. В зависимости от этих параметров ТТП принимается в диапазоне от 0,01 до 0,004 с. Коэффициент усиления тиристорного преобразователя определяется по формуле: k тп E d0 , U у.ном где Ed 0 - ЭДС на выходе преобразователя; Модуль жесткости механической характеристики электропривода (рисунок 6.1) определяется как: с2 Rя Анализ электромеханических свойств разомкнутой системы целесообразно начать с рассмотрения статических механических характеристик для верхнего и нижнего пределов диапазона регулирования, по которым можно судить об обеспечении заданных требований. Уравнение статической механической характеристики имеет вид: Механическую характеристику ДПТ НВ можно построить по двум точкам. Для этого определяем значения частоты вращения на верхнем и нижнем пределах регулирования для двух режимов работы электропривода: при Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 20 7 Синтез замкнутой системы электропривода Синтез проводим с учетом инерционности фильтра на выходе тахогенератора, полагая, что силовой полупроводниковый преобразователь(СПП) можно рассматривать, как инерционное звено. Передаточная функция разомкнутого контура регулятора скорости: Wраз.с ( p ) WPC ( p ) WП ( p ) WPC ( p ) Изм. Лис т № докум. Подпис Дат ь а kДС kП 1/ c TП p TэмTэ p 2 Tэм p 1 Tэ p 1 КПЭП 130302.17.20 ПЗ Лис т 21 7.1 Расчет значения частоты вращения двигателя в режиме холостого хода Рассчитываем значение частоты вращения двигателя в режиме холостого хода на верхней границе диапазона регулирования 0max 7.2 U aн 220 379,3 рад с с 0,58 Определение коэффициента передачи канала обратной связи по скорости Принимаем максимальное значение задания скорости: U зс max 8B Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 22 kДС U зс max 0 max 8 Вс 0,021 379,3 рад kДС kТГ 7.3 Расчет постоянной времени двигателя Т Д Т эм Т э 0,26с 7.4 Расчет параметров регулятора скорости Принимаем постоянную времени фильтра на входе тахогенератора Т Ф 0,002с . TИ РС TД РС Т Д 0,26 с T TП Т Ф 0,1 TД РС 0,01 0,002 0,1 0,26 0,038 с kРС c TД ac T kП kДС 8 Анализ 0,58 0,26 1,87 2 0,038 50,45 0,021 технических данных спроектированного электропривода Изм. Лис т № докум. Подпис Дат ь а КПЭП 130302.17.20 ПЗ Лис т 23