Расчет и моделирование электропривода с векторным управлением для вращения бурового станка
реклама

УДК 62-83:621.313.3
В.В.АЛЕКСЕЕВ
Санкт-Петербургский государственный
горный институт (технический университет)
РАСЧЕТ И МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДА
С ВЕКТОРНЫМ УПРАВЛЕНИЕМ
ДЛЯ ВРАЩАТЕЛЯ БУРОВОГО СТАНКА
Одним из основных направлений совершенствования электромеханических и электротехнических технологий для горно-добывающей и нефтегазовой промышленности является
проектирование и применение векторных систем управления частотными приводами с
асинхронными двигателями. Показана методика расчета регуляторов системы векторного
управления асинхронным электроприводом для вращателя бурового станка. Приведены
схемы и модели электропривода, выполненные в системах Диспас и Матлаб. Представлены
переходные процессы в приводе с двигателем 4A280S6.
One of the main directions of perfecting of electromechanical and electrotechnical technologies for mining and petroleum and gas industry is the designing and application of vector control
systems of frequent drives with asynchronous drives. The technique of account of the governors of
a system of vectorial management of the asynchronous electric drive for mechanism of the chisel
machine tool is given. The circuits(scheme) and models of the electric drive executed in systems
Dispas and Matlab are indicated. The transients in the drive with a drive 4A280S6 are presented.
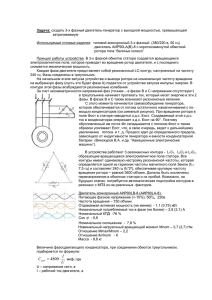
Структурная схема системы векторного
управления с опорным вектором главного
потокосцепления и преобразователем частоты в виде апериодического звена с постоянной времени Тm представлена на рисунке.
Система содержит канал управления модулем главного потокосцепления |o| и канал
управления скоростью с внутренним контуром регулирования активной составляющей тока i2 асинхронного двигателя.
Вектором выходных переменных является {|0|, i2, }. Компенсирующие нелинейные
связи напряжения U 1k p0 Ls (1 k s k r )i2 ,
U 2 k p0 0
содержат составляющую
Cm
ki
k 1 k r Lr
3
p0 ; k S
;
2
1 k S rr
1
; Tm 0,0033 0,005 с.
rS k r rr
Для расчета параметров структурной
схемы и параметров двигателя серии 4А
разработана Программа расчета параметров
модели АД по Г-образной схеме замещения.
В модели двигателя и тексте программ расчета вместо греческих букв применены латинские: вместо – F (или Ф), вместо – n
или w, вместо – d и вместо – q.
Расчет регуляторов системы проводится
по
известной методике.
p0Ls(1 – kskr)i2 = k2ki2, которая может быть
Контур стабилизации потока (|0|) выиспользована для реализации контура регуполняем
при помощи ПИ-регулятора
лирования с поддержанием постоянства
k (k / k ) p 1 Tc p 1
мощности (i2 = const).
,
Wпи1 p 2 1 2
Параметры структурной схемы:
p
Tи p
T
1 k S k r Lr
1 kS kr LS ;
; Ti
1 k S rr
rS k r rr
Рудаков В.В. Электроприводы с программным
управлением и последовательной коррекцией / ЛГИ. Л.,
1990. 103 с.
________________________________________________________________________________________________
Санкт-Петербург. 2004
95
Kd
|0|'
–
K1 – p /K1 + 1
U1s
K2
p
–
U1k
Kum
K
Tmp + 1
T p + 1
|0|
K1k
KФ
TФ p +1
–
|i2|3
Kdi
K2k
'
–
– K5 – p /K6 + 1
p
i2
K6
– K – p /K + 1
3
4
p
U2k
K4
Kum
Ki
Tmp + 1
T ip + 1
i2
Сm
1
Jp
K
Структурная схема векторной системы с асинхронным двигателем
Передаточная функция объекта регулигде Tи 1 kn 1 и T c k n k n 1 – постоянные
рования
скоростного контура
времени интегратора и настройки.
Передаточную функцию разомкнутого
C m k 0
km
канала управления главным потокосцепле,
W01 ( p )
k di j (TТ p 1) p j (TТ p 1) p
нием получаем, выбирая k1 / k2 = TΨ,
k 2 (k1 / k 2 ) p 1k kum k d
,
p Tm p 1T p 1
где km = Cmk|0| / kdi; TТ = 2Ta; J – момент
инерции, кгм2.
При использовании П-регулятора скогде kum – коэффициент передачи преобразо- рости его передаточная функция
вателя частоты, В/В; kdΨ – коэффициент пеjk di k r
редачи датчика потока, В/Вб.
.
k rw
Cm k 4Ta 0
Настройка на технический оптимум определяет коэффициент
С целью получения заданной статиче1
ской точности коэффициент kr рассчитыва.
k2
ется по известной методике.
2Tm k kum k d
При применении ПИ-регулятора и наВ контуре составляющей тока i2 канала стройке на технический оптимум имеем
регулирования скорости ПИ-регулятор тока
j
k
настраивается на технический оптимум. Его
k 6 2 , 5 Tem ,
настройки:
8TТ k m k6
W p
k 4 1 2Tm ki kum k di ; k3 k 4 Ti
при Ti Tm , Tm Ta , Ti Tb ;
k 4 1 2Ti ki kum k di ; k3 k 4 Tm
при Ti Tm , Ti Ta , Tm Tb ,
где Tem = j / Cm|0|2ki – электромеханическая
постоянная времени.
Контур регулирования скорости с ПИрегулятором может настраиваться по условиям симметричного оптимума (при
Tem > 4Ta):
где kdi – коэффициент передачи датчика тока, В/А.
96
k6
k
j
, 5 8Ta .
2
32Ta k m k6
________________________________________________________________________________________________
ISSN 0135-3500. Записки Горного института. Т.157
Для расчета настроек регуляторов с
учетом специфики компьютерных программ
типа Диспас, Матлаб (система моделирования Simulink) разработана программа расчет
регуляторов векторной САУ с АД.
При моделировании системы можно
применить математическую модель АД,
представляющую собой систему дифференциальных уравнений, с использованием составляющих потокосцепления и тока статора (в осях , ):
d
d
s U s I s Rs ;
s U s I s Rs ;
dt
dt
kR
d
R
r r r p0 r s r s ;
dt
Lr
Lr
kR
d
R
r r r p0 r s r s ;
dt
Lr
Lr
-; Rs, Rr – активные сопротивления статора и ротора; s = 1 – ks – коэффициент рассеяния статора; = 1 – ks kr – коэффициент
полного рассеяния; ks=Lm / Ls – коэффициент
потокосцепления статора; kr=Lm / Lr – коэффициент потокосцепления ротора; Ls – индуктивность статора; Lm – взаимная индуктивность между обмотками статора и ротора;
Ls = Ls и Lr = Lr – переходные индуктивности статора и ротора; m и p0 – число фаз
статора и число пар полюсов; – частота
вращения ротора; Mc – статический момент
нагрузки.
Заметим, что другие электромагнитные
переменные получаются по формулам
Ir = (r – kss) / (Lr),
Ir = (r – kss) / (Lr);
0 s s Ls I s ; 0 s s Ls I s ;
s s r r U s /( 4,44 f ) .
Is (s kr r ) /(Ls ) ; Is (s kr r ) /(Ls ) ;
Анализ показывает, что в целом переходные процессы при пуске привода с векторным управлением по схеме (см. рисунок)
в натурном приводе и модели идентичны.
Особенностью моделирования скалярных
систем управления асинхронным двигателем является необходимость учета насыщения магнитной системы машины.
mp0
d
0 I s 0 I s M c J 1 ,
dt
2J
где Is, 0, s, r, Us – проекции обобщенного вектора тока статора, главного потокосцепления, потокосцепления статора и ротора, напряжения статора на неподвижные оси
-; Rs,
Rr – активные сопротивления
________________________________________________________________________________________________
Санкт-Петербург. 2004
97