ГЛАВА 9
Движение в неинерциальных системах отсчета
§ 9.1. Положение системы отсчета
Прежде чем приступить к изучению движения частицы из произвольных систем
отсчета, определимся с тем как задать положение одной системы отсчета относительно
другой. До сих пор мы интересовались инерциальными системами отсчета, когда начало
отсчета одной могла двигаться относительно другой с постоянной скоростью и взаимная
ориентация осей координат этих систем отсчета не менялась
с течением времени. Сейчас приступаем к случаю, когда эти
e z′
ez
e y′
ограничения не существуют. Для краткости будем отождествлять систему отсчета с выбранной в ней декартовой си
O′
e
стемой координат.
y
ez
R
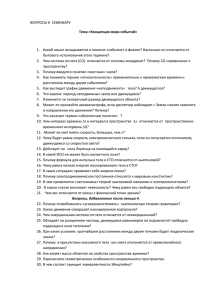
Итак, имеем систему отсчета K с началом в точке O
ex
ex′
и ортами ex , e y , e z . Другая система отсчета, обозначим ее K ′ ,
O
имеет начало отсчета в точке O′ и орты ex′ , e y′ , e z′ . Наша заey
ex
дача: задать положение K ′ относительно K (рис.1).
Положение начала O′ относительно K укажем радиРис. 1
ус- вектором R . Ориентацию системы K ′ относительно системы K зададим с помощью косинусов углов между ортами обеих систем отсчета, т.е.
преобразованием поворота (А.4.12)
(9.1.1)
ek′ = aki ei
k = 1,2,3 и i = 1,2,3 .
с матрицей коэффициентов преобразования (А.4.11)
a11 a12 a13
cos(e1′, e1 ) cos(e1′, e2 ) cos(e1′, e3 )
a( ki ) = a21 a22 a23 = cos(e2′ , e1 ) cos(e2′ , e2 ) cos(e2′ , e3 ) .
a31 a32 a33
cos(e3′ , e1 ) cos(e3′ , e2 ) cos(e3′ , e3 )
(9.1.2)
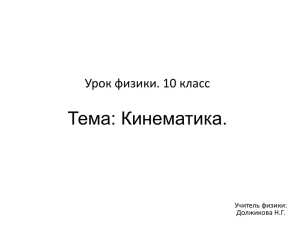
Из этих девяти углов только три независимые. Их можно выбрать равными углам
Эйлера ϕ , θ ,ψ (рис.2) (подробнее в Приложении А §5). Углы Эйлера определяют все коэффициенты преобразования aki (А.5.11):
a( ki )
cosψ cos ϕ − cos θ sin ϕ sin ψ
= − sin ψ cos ϕ − cos θ sin ϕ cosψ
sin θ sin ϕ
cosψ sin ϕ + cos θ cos ϕ sin ψ
cos θ cos ϕ cosψ − sin ϕ sin ψ
− sin θ cos ϕ
sin ψ sin θ
cosψ sin θ . (9.1.3)
cos θ
Итак, положение одной системы отсчета K ′ относительно другой системы отсчета
K определяется в общем случае шестью независимыми величинами: тремя проекциями
радиус-вектора начала системы отсчета K ′ и тремя углами Эйлера, определяющими ориентацию системы K ′ относительно системы K .
Система отсчета K ′ может произвольно двигаться относительно K , т.е. не только
движется начало отсчета, но и оси координат (орты) могут поворачивать, изменять ориен-
144
Истеков К.К. Курс теоретической физики. Т.1.
тацию в пространстве. В таком случае, и R , и коэффициенты преобразования aki , и углы
Эйлера ϕ , θ ,ψ будут функциями времени.
Зная функцию R (t ) можно найти:
dR
скорость V (t ) =
(9.1.4)
dt
dV
и ускорение a0 =
,
(9.1.5)
dt
с которыми движется начало отсчета K ′ -системы относительно K -системы.
Если же наоборот, известно ускорение a0 начала отсчета K ′ -системы, тогда в произвольный момент времени его скорость будет равна
(9.1.6)
V (t ) = ∫ a0 dt ,
а радиус-вектор в любой момент времени будет равен
R(t ) = ∫ V (t )dt .
(9.1.7)
Если известна зависимость углов Эйлера от времени ϕ (t ) , θ (t ) , ψ (t ) то ориентация осей координат K ′ -системы относительно K -системы задана в любой момент времени и можем полностью охарактеризовать вращательное движение K ′ -системы.
Пусть в произвольный момент времени t система K ′ занимала некоторое положение, задаваемое углами Эйлера ϕ , θ ,ψ . За малый промежуток времени dt оси K ′ -системы
заняли новое положение относительно K -системы,
z
e z′
характеризуемое углами Эйлера
e y′
eϕ
ϕ + dϕ , θ + dθ ,ψ + dψ .
eψ θ
Такое движение можно представить как три после
довательных бесконечно малых поворота осей коорy
ez
R
динат K ′ -системы на углы dϕ , dθ , dψ (А.5.16).
ψ
Сумма трех векторов поворота dϕ , dθ , dψ дает по
′x
e
ϕ
ex
ey
ворот системы координат K ′ на малый угол dχ во
eθ
круг некоторой мгновенной оси вращения, прохоx
дящей через начало координат O′ :
dχ = dϕ + dθ + dψ .
Рис. 2
Если за время dt система K ′ совершила поворот на угол dχ , то величина
dχ dϕ dθ dψ
(9.1.8)
=
+
+
ω=
= ϕ + θ + ψ
dt
dt
dt
dt
называется угловой скоростью вращения вокруг оси. Она выражена через проекции на оси
углов Эйлера.
Зная функции ϕ (t ), θ (t ),ψ (t ) можно найти компоненты угловой скорости вращения
ω и по осям K ′ -системы. Проекции вектора dχ на оси K ′ -системы определяются формулами (А.5.30)
dχ x′ = dϕ sin θ sin ψ + dθ cos θ ,
dχ y ′ = dϕ sin θ cosψ − dθ sin ψ ,
dχ z ′ = dϕ cos θ + dψ .
Разложение угловой скорости ω по осям K ′ -системы получим, поделив каждое из
этих выражений на dt :
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
145
dχ x′
= ϕ sin θ sin ψ + θ cos θ ,
dt
dχ ′
(9.1.9)
ω y ′ = y = ϕ sin θ cosψ − θ sin ψ ,
dt
dχ
ω z ′ = z ′ = ϕ cos θ + ψ .
dt
Система уравнений (9) называются кинематическими уравнениями Эйлера.
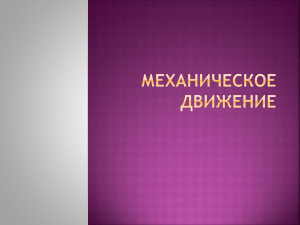
В результате поворота dχ каждый из ортов ex′ , e y′ , e z′ системы координат K ′ изменил свое направление относительно K -системы (рис.3), т.е. получил приращения
dex′ , dey′ , dez′ определяемые соотношением (А.3.2.)
z
dχ
dex′ = [dχ ⋅ ex′ ] , dey′ = dχ ⋅ ey′ , dez′ = [dχ ⋅ ez′ ] . (9.1.10)
dey′
e z′
dχ
dχ
dex′ dey′ dez′
Величины
,
,
дают скорости, с которыe y′
dt
dt
dt
dez′
ми движутся концы ортов относительно системы K .
Разделим каждое из выражений (10) на dt и везде
dex′
dχ
O′
dχ
величину
заменим на ω согласно определению (8).
y
dt
x
Получим, что если система K ′ вращается с угловой скороex′
стью ω , то концы ортов ex′ , e y′ и e z′ движутся относительРис. 3
но системы K со скоростями, соответственно равными
dey′
dex′
dez′
(9.1.11)
= ω ⋅ ey′ ,
= [ω ⋅ ex′ ] ,
ey′ ≡
ex′ ≡
ez′ ≡
= [ω ⋅ ez′ ].
dt
dt
dt
Эти соотношения называются формулами Пуассона.
Если вращательное движение K ′ -системы относительно K -системы задано угло
вой скоростью ω , то кинематические уравнения Эйлера (9) будут представлять собой систему трех обыкновенных дифференциальных уравнений первого порядка относительно
трех неизвестных функций ϕ (t ), θ (t ),ψ (t ) . Определив зависимости от времени углов Эйлера ϕ (t ), θ (t ),ψ (t ) мы полностью опишем ориентацию осей координат K ′ относительно
K в любой момент времени, а из (3) найдем и зависимость от времени направляющих косинусов aki .
ωx′ =
[
[
]
]
§ 9.2. Положение и скорость материальной точки
относительно произвольных систем отсчета.
Итак, имеем две системы отсчета K и K ′ . Систему отсчета K считаем покоящейся
и инерциальной. Начало O′ системы отсчета K ′ произвольно движется с некоторым
ускорением a0 относительно системы K и оси координат K ′ вращаются с угловой скоро
стью ω вокруг начала O′ . Это означает, что радиус-вектор R начала O′ является функ
цией времени и орты ex′ , e y′ , e z′ системы K ′ меняют свои направления относительно посто
янных ортов ex , e y , e z системы K , т.е. коэффициенты aki (или углы Эйлера) также зависят
от времени.
И функция R (t ) , и функция aki (t ) могут быть заданы непосредственно. Но если,
как в нашем случае, известны ускорение a0 и угловая скорость ω , то R(t ) и aki (t ) могут
быть получены как описано в предыдущем параграфе.
146
Истеков К.К. Курс теоретической физики. Т.1.
Допустим, что нам известны как функции времени, направляющие косинусы aki (t )
и известна векторная функция R (t ) в компонентах на оси системы K
(9.2.1)
R = Xex + Yey + Zez .
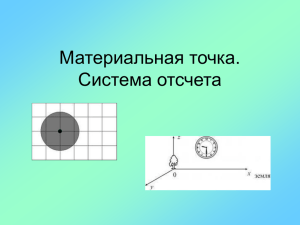
Опишем из этих систем отсчета K и K ′ движение материальной точки A . Положение этой частицы в некоторый момент времени t в K -системе обозначим радиус
вектором r (t ) , а в K ′ -системе - радиус-вектором r ′(t ) (рис.1).
Пусть радиус-вектор r известен и задан компонентами в K -системе
(9.2.2)
r = xex + yey + zez .
e z′
Необходимо найти радиус-вектор r ′ , т.е. закон преобразования
А r′
′
e
y
радиус-вектора при переходе из системы отсчета K в систему отO′
ez
счета
K′ .
r
В классической механике расстояние между двумя точками
R
ex′
O
′
и
абсолютно.
Это
расстояние
в
-системе
равно
r
−R ,ав
A
K
O
ez
ex′
системе K ′ это же расстояние равно r ′ , тогда
Рис. 1
(9.2.3)
r′ = r − R .
Зная компоненты x, y, z и X , Y , Z векторов r и R можем записать найденный век
тор r ′ в проекциях на оси координат покоящейся K -системы
(9.2.4)
r ′ = (x − X )ex + ( y − Y )ey + (z − Z )ez .
Нам же нужны компоненты радиус-вектора r ′ в K ′ -системе, оси которой повернуты относительно осей K -системы. Так как известны коэффициенты преобразования поворота aki , то, используя (А.4.11), получим
x′ = ax′x (x − X ) + a y ′y ( y − Y ) + az ′z ( z − Z ) ,
y′ = a y ′x (x − X ) + a y ′y ( y − Y ) + a y ′z ( z − Z ) ,
(9.2.5)
xi′ = aki ( xk − X k )
(9.2.6)
z′ = az ′x ( x − X ) + az ′y ( y − Y ) + az ′z (z − Z ) .
В тензорных (сокращенных) обозначениях (А.6.6) можем записать
i = 1,2,3 и k = 1,2,3 .
Выражения (3) и (5) и есть правила преобразования радиус-вектора и координат частицы при переходе из покоящейся системы отсчета в произвольно движущуюся систему
отсчета. Так как известная нам функция r (t ) является законом движения частицы в покоящейся инерциальной системе отсчета K , то (3) и (5) позволяют получить закон движения
этой же частицы r ′(t ) в произвольно движущейся системе отсчета K ′ .
Пусть теперь нам известен радиус-вектор r ′(t ) частицы, т.е. закон движения, в
произвольно движущейся системе отсчета K ′ . Значит, известны и компоненты r ′(t ) в системе K ′
(9.2.7)
r ′ = x′ex′ + y′ey′ + z′ez′ .
Теперь необходимо получить закон движения r (t ) этой же частицы в покоящейся
системе отсчета K . Векторную функцию r (t ) найдем из (3):
(9.2.8)
r = r′ + R .
Чтобы найти компоненты этого вектора в K -системе, достаточно совершить преобразование обратное преобразованию (5). Тогда, используя (А.6.7), можем записать
x = X + axx′ x′ + a yy ′ y′ + azz ′ z′ ,
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
y = Y + a yx′ x′ + a yy ′ y′ + a yz ′ z′ ,
147
(9.2.9)
z = Z + azx′ x′ + azy ′ y′ + azz ′ z′ .
В тензорных обозначениях эти соотношения имеют следующий вид:
xi = X i + aik xk′
i = 1,2,3 и k = 1,2,3 .
(9.2.10)
Итак, формулы преобразования компонент радиус-вектора материальной точки из
одной системы отсчета к произвольной другой системе отсчета получены. Они позволяют
находить закон движения частицы в одной системе отсчета по известному закону движения в другой системе отсчета.
Получим соотношение между скоростью частицы υ , с которой она движется отно
сительно системы K , и скоростью той же частицы υ ′ относительно системы K ′ . Пусть
известна υ ′ . Надо найти υ .
Продифференцируем выражение (8) по времени
dr dr ′ dR
.
(9.2.11)
=
+
dt dt dt
В него входят очевидные величины
dr dx dy dz
(9.2.12)
= ex + ey + ez
υ=
dt dt
dt
dt
- это скорость частицы в системе K и
dR dX dY dZ
(9.2.13)
=
V=
ex +
ey +
ez
dt
dt
dt
dt
- скорость начала отсчета K ′ в системе K .
dr ′
Но есть и другая величина:
. Радиус-вектор r ′(t ) определен в K ′ - системе и его
dt
зависимость от времени, с точки зрения K -системы, обусловлена как движением самой
частицы, так и вращением системы отсчета K ′ относительно K . Производная по времени
dr ′
вычисляется в K -системе, поэтому ее следует брать, учитывая зависимость ex′ , e y′ , e z′
dt
от времени, т.е. учитывая вращение системы отсчета K ′ относительно K
dey′
dez′
dr ′ dx′ dy′ dz′ dex′
(9.2.14)
x′ +
y′ +
z′ .
=
ex′ +
ey′ +
ez′ +
dt
dt
dt
dt dt
dt dt
В этом выражении первая скобка показывает быстроту изменения координат частицы в системе K ′ , т.е. величина
dx′ dy′ dz′
(9.2.15)
υ ′ = ex′ +
ey′ +
ez′
dt
dt
dt
- это скорость частицы относительно системы отсчета K ′ .
dr ′
Производную
, определяемую выражением (14), называют абсолютной произdt
водной (она вычислена в K -системе). Производную (15), вычисленную при постоянных
ортах, называют относительной или локальной производной и иногда обозначают симвоd∗
лом
, т.е.
dt
d ∗ r ′ dx′ dy′ dz ′
υ′ =
ex′ +
e y′ +
ez′ .
=
dt
dt
dt
dt
Соотношение (14) учитывает, что изменение компонент вектора r ′ с течением
148
Истеков К.К. Курс теоретической физики. Т.1.
времени может происходить как за счет движения частицы относительно K ′ -системы, так
и из-за вращения самой системы координат K ′ .
Используя формулу Пуассона (9.1.11), последнюю скобку в (14) представим в виде
dey′
dex′
de ′
x′ +
y′ + z z′ = ([ωex′ ]x′ + ωey′ y′ + [ωez′ ]z′) =
dt
dt
dt
= ([ω (ex′ x′)] + ω (ey′ y′) + [ω (ez′ z′)]) = ω (x′ex′ + y′ey′ + z′ez′ ) = [ωr ′] . (9.2.16)
[ ]
[
]
[
]
Теперь проясняется смысл этого выражения. Если система отсчета K ′ вращается с
угловой скоростью ω , то величина [ωr ′] есть ни что иное, как скорость вращательного
движения (линейная скорость) в системе K той точки системы отсчета K ′ , радиус-вектор
которой равен в данный момент r ′ .
Иными словами, [ωr ′] - это скорость (по отношению к K ) той точки системы K ′ ,
которую в данный момент времени проходит частица и эта скорость обусловлена только
вращением системы отсчета. Скорость [ωr ′] характеризует не движение частицы в систе
ме K ′ , а вращение самой системы отсчета K ′ относительно вектора r ′ .
Подставляя (15) и (16) в (14), получим
dr ′
(9.2.17)
= υ ′ + [ωr ′] .
dt
Затем, используя (12), (13) и (17), из (11) получим интересующее нас соотношение
между υ - скоростью частицы относительно системы K и υ ′ - скоростью той же частицы
относительно системы K ′ :
(9.2.18)
υ = υ ′ + [ωr ′] + V .
Напомним, здесь V и ω - скорость и угловая скорость системы K ′ относительно
системы K соответственно, а r ′ - радиус-вектор частицы относительно системы K ′ .
Сумму
(9.2.19)
υn = V + [ωr ′]
называют переносной скоростью. Смысл ее, подчеркнем, в том, что это есть скорость (по
отношению к системе K ) той точки системы K ′ , которую в данный момент времени проходит интересующая нас частица.
Таким образом, формулы преобразования координаты и скорости частицы при переходе из одной системы отсчета в произвольно движущуюся систему отсчета нами получены. Дифференцируя выражение (18) по времени можно получить и преобразование
ускорения. Это преобразование мы найдем позже.
§ 9.3. Функция Лагранжа частицы в неинерциальной системе отсчета
Определение неинерциальной системы отсчета можно дать так: это такие системы
отсчета, относительно которых изолированная (свободная) материальная точка движется
ускоренно.
Если выбрана инерциальная система отсчета K , то любая другая, движущаяся относительно нее с ускорением будет неинерциальной. Произвольная система отсчета K ′ ,
рассмотренная в предыдущем параграфе, перемещается относительно системы K с поступательным ускорением
dV
(9.3.1)
a0 =
dt
и вращается с мгновенной угловой скоростью ω . В таком случае, система отсчета K ′ является неинерциальной системой отсчета.
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
149
Функция Лагранжа L частицы массой m , движущейся со скоростью υ = dr dt во
внешнем поле U (r ) в инерциальной системе отсчета K , нам известна. Это соотношение
(2.4.4), записанное для одной частицы,
mυ 2
(9.3.2)
L=
− U (r ) .
2
Необходимо найти функцию Лагранжа частицы в неинерциальной системе отсчета
K ′ , где скорость частицы уже υ ′ , а радиус-вектор равен r ′ . Для этого произведем соот
ветствующее преобразование функции (2), т.е. перепишем ее в новых переменных r ′ и υ ′ ,
используя (9.2.8) и (9.2.18). При этом преобразование потенциальной энергии U (r ) све
дется к замене r на r ′ . Тогда подставив в выражение (2) значение скорости υ из формулы
преобразования (9.2.18), получим
2
m
L = (υ ′ + [ωr ′]) + 2(υ ′ + [ωr ′])V + V 2 − U (r ) =
2
2
m
(9.3.3)
= υ ′2 + 2υ ′[ωr ′] + [ωr ′] + 2(υ ′ + [ωr ′])V + V 2 − U (r ) .
2
Воспользуемся тождеством
d dV dr ′
′
′
rV =r
+
V,
dt
dt
dt
но с учетом (1) и (9.2.17) это выражение примет вид
d
r ′V = r ′a0 + (υ ′ + [ωr ′])V .
dt
Из него найдем, выражение, стоящее в четвертом слагаемом формулы (3)
(9.3.4)
(υ′ + [ωr′])V = d r′V − r′a0 .
dt
Кроме того, V 2 является заданной функцией времени (т.к. движение K ′ относительно K известно, задано). Тогда V 2 может быть представлено как полная производная
по времени от некоторой функции f (t ) :
d
V2 =
f (t ) .
dt
С учетом этого выражения и формулы (4), соотношение (3) перепишется
2
d
m
d
L = υ ′2 + 2υ ′[ωr ′] + [ωr ′] + 2
r ′V − 2r ′a0 +
f (t ) − U (r ) =
dt
dt
2
m 2 d m
m
= υ ′2 + mυ ′[ωr ′] + [ωr ′] + mr ′V + f (t ) − mr ′a0 − U (r ) =
2
dt
2
2
m 2
m
d m
= υ ′2 + mυ ′[ωr ′] + [ωr ′] − mr ′a0 − U (r ) + mr ′V + f (t ) .
2
2
2
dt
Но известно, что функция Лагранжа любой механической системы определена с
точностью до полной производной по времени от произвольной функции координат и
времени. Поэтому, отбрасывая в полученном выражении последний член, получим функцию Лагранжа частицы в произвольной неинерциальной системе отсчета
m
m 2
(9.3.5)
L = υ ′2 + [ωr′] + mυ ′[ωr′] − mr ′a0 − U (r ) .
2
2
(
)
(
)
( )
( )
( )
( )
150
Истеков К.К. Курс теоретической физики. Т.1.
§ 9.4. Уравнение движения частицы в неинерциальной системе отсчета
Для нахождения уравнения движения частицы в неинерциальной системе отсчета
будем исходить из принципа наименьшего действия. Этот принцип не ограничен выбором
системы отсчета, вместе с ним в произвольной системе отсчета остается в силе и уравнение Лагранжа
d ∂L
∂L
(9.4.1)
− = 0.
dt ∂υ ′ ∂υ ′
Необходимо только знать функцию Лагранжа L в неинерциальной системе отсчета, а ее мы уже получили - это формула (9.3.5).
∂L
∂L
Чтобы найти производные и , входящие в уравнение Лагранжа, предвари∂r ′
∂υ ′
тельно напишем вариацию функции L (9.3.5):
∂U (r ′)
(9.4.2)
δL = mυ ′δυ ′ + m[ωr ′][ωδr ′] + mδυ ′[ωr ′] + mυ ′[ωδr ′] − mδr ′a0 − δr ′ .
∂r ′
Во втором слагаемом произведем циклическую перестановку векторов
[ωr′][ωδr′] = ω [δr′[ωr′]] = δr′[[ωr′]ω ] = −δr′[ω [ωr′]] .
Циклическая перестановка в четвертом слагаемом дает
υ ′[ωδr ′] = ω [δr′υ ′] = δr′[υ ′ω ] = −δr′[ωυ ′] .
Теперь выражение (2) примет вид
∂U (r ′)
δL = mυ ′δυ ′ − mδr ′[ω [ωr ′]] + mδυ ′[ωr ′] − mδr ′[ωυ ′] − mδr ′a0 − δr ′ =
∂r ′
′
∂U (r )
= (mυ ′ + m[ωr ′])δυ ′ − m[ω [ωr ′]] + m[ωυ ′] + ma0 +
δr ′ .
∂r ′
Отсюда следует, что
∂U (r′)
∂L
(9.4.3)
= − m[ω [ωr′]] + m[ωυ ′] + ma0 +
,
∂r ′
∂r ′
∂L
(9.4.4)
= mυ ′ + m[ωr ′] .
∂υ ′
d ∂L
Теперь вычислим производную
. Обратим внимание, что как только мы заdt ∂υ ′
писали функцию Лагранжа в переменных υ ′ и r ′ , то все действия производим, находясь в
системе отсчета K ′ , и производная по времени вычисляется в системе отсчета K ′ , т.е. ор
ты ex′ , e y′ , e z′ считаются постоянными и тогда абсолютная (9.2.14) и локальная (9.2.15)
производные совпадут и dr ′ = υ ′ .
dt
В таком случае из (4) найдем
d ∂L
dυ ′
dω
(9.4.5)
+ m
r ′ + m[ωυ ′],
=m
dt ∂υ ′
dt
dt
где ω = dω
- это угловое ускорение, характеризующее неравномерность вращения сиdt
стемы отсчета K ′ .
Подставим найденные производные (3) и (5) в уравнение Лагранжа (1):
∂U (r ′)
dυ ′
(9.4.6)
m
=−
− ma0 − m[ω [ωr ′]] − m ω r ′ − 2m[ωυ ′] .
∂r ′
dt
Это уравнение движения частицы в произвольной неинерциальной системе отсче-
[ ]
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
151
та, которая вращается с угловой скоростью ω вокруг оси, перемещающейся поступатель
но с ускорением a0 .
Напомним:
dυ ′
….....- ускорение частицы в неинерциальной системе отсчета;
a′ =
dt
∂U (r ′)
- сила, действующая на частицу со стороны внешнего поля, со стороны
F =−
∂r ′
окружающих тел.
Если бы сила F действовала на нашу частицу в инерциальной системе отсчета, то
она приобрела бы ускорение
F
1 ∂U (r ′)
a= =−
.
m ∂r ′
m
Отличие в ускорениях a′ ≠ a трактуется как результат действия дополнительной
силы (кроме силы F ), равной
(9.4.7)
Fин = − ma0 + m[ω [ωr ′]] + m ω r ′ + 2m[ωυ ′] .
[ ]
(
В обозначениях (7) уравнение (6) примет вид
ma′ = F + Fин .
)
(9.4.8)
Таким образом, ускорение частицы относительно неинерциальной системы отсчета
a′ возникает под действием силы со стороны других реально существующих тел F , а
также, в результате ускоренного движения системы K ′ по отношению к системе K .
Ускоренное движение системы отсчета проявляется на частице как результат дей
ствия некоторой силы, называемой силой инерции Fин .
Входящие в обозначение (7) величины имеют общепринятые названия:
F0 = −ma0 ………- поступательная сила инерции, обусловленная поступательным ускоренным движением системы отсчета;
Fцб = −m[ω [ωr ′]] - центробежная сила инерции, лежащая в плоскости векторов r ′ и ω и
направленная перпендикулярно оси вращения;
Fвр = −m ωr ′ .......- сила, связанная с неравномерностью вращения и специального названия
не имеет (иногда называют вращательной);
(9.4.9)
Fкор = −2m[ωυ ′] - кориолисова (поворотная) сила инерции.
Сумму силы Fвр с поступательной силой инерции F0 и с центробежной силой
инерции Fцб называют силой инерции переносного движения:
(9.4.10)
Fn = ma0 + m ω r ′ + m[ω [ωr ′]] .
Таким образом,
Fин = Fn + Fкор
[ ]
[ ]
и уравнение движения (6) можем записать в следующем виде
dυ ′
∂U (r ′)
(9.4.11)
m
=−
+ Fn + Fкор .
dt
∂r ′
На практике применение уравнения движения упрощается частными случаями.
Рассмотрим движение частицы относительно системы отсчета, вращающейся вокруг неподвижной или равномерно движущейся точки отсчета.
152
Истеков К.К. Курс теоретической физики. Т.1.
В этом случае a0 = 0 и из (6) исчезнет поступательная сила инерции. Останется
dυ ′
∂U (r ′)
(9.4.12)
m
=−
− m[ω [ωr ′]] − m ω r ′ − 2m[ωυ ′] .
dt
∂r ′
При равномерном вращении системы отсчета ω = 0 и уравнение (6) примет вид
∂U (r ′)
dυ ′
(9.4.13)
m
=−
− ma0 − m[ω [ωr ′]] − 2m[ωυ ′] .
∂r ′
dt
Если же, частица в системе отсчета K ′ покоится, т.е. υ ′ = 0 , то отсутствует кориолисова сила:
∂U (r ′)
dυ ′
(9.4.14)
m
=−
− ma0 − m[ω [ωr ′]] − m ω r ′ .
∂r ′
dt
Возможен вариант, когда система отсчета не вращается ω = ω = 0 , а только движется с
поступательным ускорением a0 (ускорение начала отсчета):
dυ ′
∂U (r ′)
(9.4.15)
m
=−
− ma0 .
dt
∂r ′
Таким образом, если или a0 ≠ 0 , или ω ≠ 0 , тогда есть хотя бы одна сила инерции.
Могут встретиться и комбинации приведенных выше частных случаев, соответствующие
уравнения движения записать не сложно.
Мы обратим внимание на случай, когда система отсчета K ′ относительно инерциальной системы отсчета K движется равномерно, прямолинейно и без вращения, т.е.
a0 = 0 , ω = ω = 0 . Тогда система отсчета K ′ тоже является инерциальной, силы инерции
отсутствуют и из (6) получим уравнение движения частицы в инерциальной системе отсчета K ′
dυ ′
∂U (r ′)
(9.4.16)
m
=−
.
dt
∂r ′
Из сравнения уравнения (16) с уравнением (6) или с любым из (12)-(15) видно, что
инерциальные системы отсчета являются преимущественными перед неинерциальными
системами отсчета. Об этом говорилось и раньше.
Уравнение (16) свидетельствует об инвариантности уравнения движения частицы
во всех ИСО. Но уравнение (6) для частицы движущейся под действием той же силы
∂U (r′)
− , вообще говоря, различны в разных неинерциальных системах отсчета, так как
∂r ′
для этих систем отсчета различны ускорения начала отсчета a0 и угловая скорость вра
щения ω .
Из уравнения (6) можем получить и формулу преобразования ускорения. Введем
обозначения:
Fцб
= [ω [ωr ′]] …….-центробежное ускорение;
aцб =
m
F
aкор = кор = 2[ωυ ′] ……-кориолисово (поворотное) ускорение.
m
Уравнение (6) можно переписать, сократив на массу m , в следующем виде
(9.4.17)
a = a′ + a0 + [ω [ωr ′]] + ω r ′ + 2[ωυ ′].
[ ]
[ ]
[ ]
Подставим обозначений ускорений. Это дает
a = a′ + a0 + aцб + ω r ′ + aкор .
[ ]
(9.4.18)
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
153
Формулы (17) или (18) - это и есть формула преобразования ускорения из одной
системы отсчета в произвольную неинерциальную систему отсчета.
Теперь обратим внимание на следующую особенность сил инерции. Силы инерции
обусловлены изменением состояния движения самой системы отсчета и целиком определяются характером движения неинерциальной системы отсчета K ′ по отношению к инер
циальной системе отсчета K (величинами a0 и ω ), а так же положением и скоростью ча
стицы в этой системе отсчета ( r ′ и υ ′ ).
∂U (r ′)
порождена действием внешнего поля, имеющего
Напомним, что сила F = −
∂r ′
своего источника, и она не зависит от характера движения системы отсчета K ′ .
В отличие от этого, силы инерции обусловлены не взаимодействием тел, нельзя
указать другое тело, действующее на данную частицу. Поэтому сила инерции (7) не имеет
соответствующей ей противодействующей силы, иначе говоря, они не подчинены третьему закону Ньютона. Но силы инерции вполне реальны в том смысле, что их можно измерить.
Но самое существенное замечание состоит в следующем. Все задачи механики в
неинерциальной системе отсчета можно решить и не вводя силы инерции, а используя соотношения (9.2.5) между координатами исследуемой частицы в инерциальной и неинерциальной системах отсчета.
Для ясности повторим такую схему решения задачи. Надо найти закон движения
некоторой частицы из неинерциальной системы отсчета x′(t ) , y ′(t ) и z′(t ) .
Сама неинерциальная система отсчета задана относительно инерциальной системы
отсчета тремя координатами начала отсчета
X (t ) , Y (t ) , Z (t )
и тремя углами Эйлера
ϕ (t ) , θ (t ) , ψ (t ) .
Зная углы Эйлера, находим все девять направляющих косинуса aki .
Теперь составляем уравнение движения частицы в инерциальной системе отсчета.
Проинтегрировав это уравнение, находим закон движения частицы в инерциальной системе отсчета
x(t ) , y (t ) , z (t ) .
В таком случае все величины в правой части формул (9.2.5) являются известными
функциями времени, и мы находим искомый закон движения частицы в неинерциальной
системе отсчета
x′(t ) , y ′(t ) и z′(t ) .
Но тогда возникает вопрос: если все задачи механики мы можем решить без введения сил инерции, то зачем вообще их вводить? Дело в том, что некоторые задачи можно
решить проще и быстрее при помощи сил инерции.
Из определения (7) можно заметить еще одну особенность силы инерции. Она (все
ее слагаемые), подобно силам тяготения, пропорциональна массе, на которую она действует и для которого пишется уравнение движения (6).
Конечно, и силы инерции, и силы тяготения зависят от положения тела. Но если
рассматривать малые области пространства, в пределах которых силу инерции и силу тяготения можно считать не меняющимися, то все тела под действием одной и той же силы
инерции движутся с одним и тем же ускорением, также как и двигались бы под действием
одной и той же силы тяготения.
Это положение называется локальным (местным) принципом эквивалентности сил
инерции и сил тяжести или принципом эквивалентности Эйнштейна.
Значит, в неинерциальных системах отсчета все механические явления в малых об-
154
Истеков К.К. Курс теоретической физики. Т.1.
ластях пространства протекают так же, как и в инерциальных системах отсчета, но с доба
вочной силой “тяжести” равной Fин .
Если рассматривать однородные поле силы тяготения и поле силы инерции, т.е. не
зависящие от положения в них частицы, то сказанное выполняется во всей области пространства, где существуют такие поля. Тогда ускоренное движение какой-нибудь системы
отсчета (см. например (15)) невозможно отличить от наличия однородного гравитационного поля.
Эйнштейн высказал предположение, что вообще никакими физическими опытами
невозможно отличить однородное поле тяготения от однородного поля сил инерции. Тогда получаем следующую формулировку принципа эквивалентности Эйнштейна:
Все физические явления в однородном поле тяготения происходят совершенно так
же, как и в соответствующем однородном поле сил инерции.
Это послужило отправным пунктом при построении Эйнштейном общей теории
относительности или релятивистской теории гравитации.
§ 9.5. Механическая система частиц в неинерциальной системе отсчета
Рассмотрим механическую систему из n взаимодействующих между собой и находящихся во внешнем поле частиц относительно произвольной системы отсчета K ′ . Начало системы отсчета K ′ движется относительно инерциальной системы отсчета K с уско
рением a0 , а ее оси координат вращаются относительно осей координат K -системы с уг
ловой скоростью ω .
Напишем для каждой из частиц уравнение движения в неинерциальной системе отсчета (9.4.11)
dυi′
∂U (ri′,..., rn′) i i
( i = 1,..., n )
(9.5.1)
mi
=−
+ Fn + Fкор ,
dt
∂ri ′
где Fni - переносная сила инерции и Fкорi - кориолисова сила инерции:
(9.5.2)
Fni = − mi a0 − mi [ω [ωri′]] − mi ω ri′ ,
i
(9.5.3)
Fкор = −2mi [ωυi′] .
[ ]
Имеем систему из n векторных уравнений движения механической системы (1) в
K ′ -системе. Необходимо уточнить потенциальную энергию системы U (r1′,..., rn′, t ) . Она
включает как энергию взаимодействия частиц между собой U ij , так и энергию каждой частицы во внешнем поле U ie .
Тогда, как и в случае (1.6.16), можем записать
n
1 n n
U (r1′,..., rn′, t ) = ∑U ie (ri ′, t ) + ∑∑U ij ( ri ′− rj′ ) .
2 i =1 j =1
i =1
Значит,
∂U ie n ∂U ij e n
∂U (r1′,..., rn′, t )
−
=
−
− ∑ = Fi + ∑ Fij = Fi ,
∂ri ′
∂ri ′ j =1 ∂ri ′
j =1
e
где Fi обозначает геометрическую сумму внешних Fi и внутренних
(9.5.4)
∑F
ij
сил взаимо-
j
действия, приложенных к i -ой частице механической системы.
Подставим (4) в уравнения (1) и получим следующую форму записи уравнений
движения механической системы в неинерциальной системе отсчета
dυi′ e n
(9.5.5)
mi
= Fi + ∑ Fij + Fni + Fкорi .
dt
j =1
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
В развернутом виде уравнения (1) или (5) имеют следующий вид
dυi′ e n
mi
= Fi + ∑ Fij − mi a0 − mi [ω [ωri′]] − mi ω ri′ − 2mi [ωυi′].
dt
j =1
[ ]
155
(9.5.6)
В каждом отдельном случае, в зависимости от удобства, будет использована одна
из форм записи уравнений движения или (1), или (5), или (6).
Наша ближайшая задача: получить в неинерциальной системе отсчета законы изменения со временем таких динамических величин механической системы как импульс,
момент импульса и кинетическая энергия.
Начнем с импульса механической системы. Сложим все n уравнений (5)
e
i
i
d
′
(9.5.7)
F
+
F
+
m
υ
=
+
F
F
∑i i dt i ∑i i ∑∑
∑i n ∑i кор ,
ij
i
j
Внутренние силы удовлетворяют 3-ему закону Ньютона (6.3) и (6.4), значит
F
∑∑ ij = 0 .
i
j
Кроме того, в (7) поменяем местами знаки производной и суммы
d
(9.5.8)
(miυi′) = ∑ Fie + ∑ Fni + ∑ Fкорi .
∑
dt i
i
i
i
Введем обозначения:
(9.5.9)
miυi′ = pi′ ……………….- импульс i -ой частицы в K ′ - системе;
(9.5.10)
∑ (miυi′) = P′ …………..- импульс всех частиц в K ′ - системе.
Величина
∑ Fi e = F e
является главным вектором внешних сил.
Это позволяет переписать уравнения (8)
d
(9.5.11)
P′ = ∑ Fie + ∑ Fni + ∑ Fкорi .
dt
i
i
i
Таким образом, изменение вектора импульса механической системы в неинерциальной
системе отсчета обусловлено действием внешних сил и сил инерции.
Чтобы получить уравнение изменения со временем момента импульса механической системы в неинерциальной системе отсчета, поступим следующим образом. Произведем в уравнениях (5) замену (9)
d
(9.5.15)
pi′ = Fie + ∑ Fij + Fni + Fкорi .
dt
j
Теперь умножим векторно каждое из этих уравнений на радиус-вектор ri ′ :
dυi′ ′ e ′ i i
(9.5.16)
mi ri ′ = ri Fi + ri ∑ Fij + ri ′Fn + ri ′Fкор .
dt
j
Для преобразования левой части равенства, используем очевидное тождество
d dri ′ dυi′ dυi′ dυi′
[riυ′ i′] = υi′ + ri ′ = [υi′υi′] + ri ′ = ri ′ .
dt
dt dt
dt dt
После этой замены в левой части (16), получим
i
d
.
mi [riυ′ i′] = ri ′Fie + ri ′∑ Fij + ri ′Fni + ri ′Fкор
dt
j
[ ]
[ ] [
]
[ ]
[ ] [
]
Истеков К.К. Курс теоретической физики. Т.1.
156
Просуммируем все эти уравнения
∑ mi
i
[ ]
[ ]
[ ]
d
[riυ′ i′] = ∑ ri ′Fie + ∑ ri ′∑ Fij + ∑ ri ′Fni + ∑ ri ′Fкорi .
dt
i
i
j
i
i
(9.5.17)
В правой части имеется слагаемое
[ ]
′
′
=
r
F
r
∑i i ∑j ij ∑∑
i Fij .
i j
В этой сумме будут встречаться пары типа
ri ′Fij + rj′Fji .
Но Fij это внутренние силы удовлетворяющие 3-у закону Ньютона (1.6.3) и (1.6.4):
Fij = − Fji и Fij ↑↑ (ri ′− rj′) .
В таком случае, каждая пара будет давать нуль
ri ′Fij + rj′Fji = ri ′Fij − rj′Fij = (ri ′− rj′)Fij = 0 .
[ ] [ ]
[ ] [ ] [ ] [ ] [
Значит,
]
∑ r ′∑ F = 0 (это доказывали и в §3.1) и уравнение (17) примет вид
i
i
ij
j
[ ]
[ ]
[
]
d
(9.5.18)
[ri ′(miυi′)] = ∑ ri ′Fie + ∑ ri ′Fni + ∑ ri ′Fкорi .
∑
dt i
i
i
i
Введем обозначения (все величины даются в K ′ - системе):
(9.5.19)
[ri ′(miυi′)] = [ri ′pi′] = M i′ ….….- момент импульса i -ой частицы;
(9.5.20)
∑ M i′ = M ′ = ∑ [ri ′(miυi′)] - момент импульса всех частиц;
ri ′Fi e = N ie …………..…….- момент внешней силы, действующей на i -ю частицу;
∑ ri ′Fi e = N e …….….........- сумма моментов внешних сил, действующих на всю механическую систему - главный момент внешних сил;
i
i
i
ri ′Fn + ri ′Fкор = N ин …...…- моменты сил инерций, действующих на i -ю частицу;
∑ ri ′Fni + ∑ ri ′Fкорi = N ин - сумма моментов сил инерций, действующих на всю механическую систему.
Перепишем уравнение (18), используя эти обозначения,
dM ′ e
(9.5.21)
= N + N ин .
dt
Получили закон изменения момента импульса механической системы относительно
неинерциальной системы отсчета.
Из уравнений (11) и (21) следует, что даже если на механическую систему не дей
ствуют внешние силы, т.е. ∑ Fie = 0 и N e = 0 , импульс и момент импульса такой системы
в неинерциальной системе отсчета не сохраняются. Значит, в неинерциальной системе отсчета нет замкнутых механических систем, так как силы инерции выступают в роли
внешних сил.
Теперь выясним, как меняется кинетическая энергия механической системы в неинерциальной системе отсчета. Каждое из уравнений (5) умножим скалярно на скорость
соответствующей частицы υi′ в K ′ -системе отсчета:
dυi′ e n
i
.
(9.5.22)
miυi′
= υi′Fi + υi′∑ Fij + υi′Fni + υi′Fкор
dt
j =1
[ ]
[ ]
[ ] [
[ ]
]
[
]
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
Преобразуем левую часть этого равенства
dυ ′ d m υ ′2 dT ′
miυi′ i = i i = i .
dt 2 dt
dt
157
(9.5.23)
Мы ввели обозначение для кинетической энергии i -й частицы в K ′ -системе:
m υ ′2
(9.5.24)
Ti′ = i i .
2
dT ′
Производная i дает изменение кинетической энергии в единицу времени.
dt
В правую часть уравнения (22) входят выражения вида υi′F i . Это мощности сил
i dri ′ i F i dri ′ dA′
,
(9.5.25)
F =
υi′F =
=
dt
dt
dt
т.е. работа
(9.5.26)
dA′ = F i dri ′
i
некоторой силы F за единицу времени.
Значит, в правую часть уравнения (22) входят:
e
υi′Fi …...- мощность внешних сил, действующих на i -ю частицу со стороны других частиц не входящую в данную механическую систему;
n
υi′∑ Fij - мощность сил, действующих на i -ю частицу со стороны остальных частиц сиj =1
стемы (мощность внутренних сил);
i
υi′Fn ……- мощность переносных сил инерции, действующих на i -ю частицу;
υ i′Fкорi ….- мощность кориолисовой силы инерции, действующей на i -ю частицу.
Но мощность кориолисовой силы инерции равна нулю. Действительно, используя
выражение (3) для кориолисовой силы и произведя циклическую перестановку в смешанном произведении векторов, получим
(9.5.27)
υ i′Fкорi = −2miυi′[ωυi′] = −2miω [υi′υi′] = 0 .
Значит, кориолисова сила работу не выполняет.
Выразим сумму мощностей внутренних и внешних сил через работу Ai′ , совершаемую этими силами над i -ой частицей, в соответствии с (25):
n dA′
(9.5.28)
υi′Fie + υi′∑ Fij = i .
dt
j =1
Тогда, с учетом выражений (24), (27) и (28), уравнения (22) примут вид
dTi′ dAi′ i
(9.5.29)
=
+ υi′Fn .
dt
dt
Суммируем все уравнения (29), меняя местами знаки суммы и производной,
i
d
d
′
′
(9.5.30)
T
=
A
+
υ
∑ i dt ∑i i ∑i i′Fn .
dt i
Введем обозначения:
miυi′2
- полная кинетическая энергия механической системы в неинерциальT ′ = ∑ Ti′ = ∑
2
ной системе отсчета K ′ ;
Истеков К.К. Курс теоретической физики. Т.1.
158
A′ = ∑ Ai′ …..............- работа внутренних и внешних сил, совершаемая над всеми частицами системы в неинерциальной системе отсчета K ′ .
В таком случае, закон изменения полной кинетической энергии механической системы в неинерциальной системе отсчета (30) перепишется так
dT ′ dA′
(I9.5.31)
=
+ ∑υi′Fni .
dt
dt
i
Итак, в неинерциальной системе отсчета изменение кинетической энергии системы
в единицу времени равно работе, производимой в то же время внешними и внутренними
силами взаимодействия и переносными силами инерции.
§ 9.6. Связи между динамическими величинами в произвольных системах отсчета
Если известно ускорение a0 , с которой движется K ′ -система относительно инерциальной системы отсчета K , то, значит, в произвольный момент времени нам известны
скорость V (9.1.6) и радиус-вектор R (9.1.7) начала отсчета K ′ -системы относительно
K -системы.
В системе отсчета K состояние i -ой частицы механической системы характеризу
ется радиус-вектором ri и скоростью υ i . В системе отсчета K ′ положение этой частицы
задано радиус-вектором ri ′ , а ее скорость равна υ i′ .
Соотношения между положениями и скоростями каждой из частиц в разных системах отсчета нам известны. Это формулы (9.2.8) и (9.2.18):
(9.6.1)
ri = ri ′+ R ,
(9.6.2)
υ i = υ i′ + [ωri ′] + V ,
где ω - угловая скорость вращения системы координат K ′ относительно K .
В неинерциальной системе отсчета K ′ для механической системы мы ввели следующие динамические величины:
(9.6.3)
P′ = ∑ miυi′ ………..…….- импульс,
(9.6.4)
M ′ = ∑ [ri ′(miυi′)] …………- момент импульса,
2
m υ′
(9.6.5)
T ′ = ∑ i i ……………..- полная кинетическая энергия.
2
i
Эти же динамические величины можно посчитать и в инерциальной системе отсчета K :
(9.6.6)
P = ∑ miυi ……………...- импульс,
(9.6.7)
M = ∑ [ri (miυi )] ……..….- момент импульса,
miυi2
……………..- полная кинетическая энергия.
(9.6.8)
T=∑
2
Найдем соотношения между динамическими величинами, характеризующими механическую систему и отнесенными к произвольным системам отсчета K и K ′ . Начнем с
импульса. Подставим связь скоростей каждой материальной точки (2) в определение импульса (6)
(9.6.9)
P = ∑ miυi = ∑ mi υi′ + [ωri ′] + V = ∑ miυi′ + ∑ mi [ωri ′] + ∑ miV .
(
i
i
)
i
i
i
Первое слагаемое, в соответствии с определением (3) дает импульс системы P ′ от
носительно K ′ -системы. Кроме того, ω и V не зависят от частиц и потому выносятся изпод знака суммы:
Часть I. КЛАССИЧЕСКАЯ МЕХАНИКА
159
P = P′ + ω ∑ mi ri ′ + V ∑ mi .
i
i
Обозначим:
(9.6.10)
∑ m = m …….- масса всей механической системы,
∑ m r ′ = R′ …..- радиус-вектор центра масс частиц в K ′ -системе,
(9.6.11)
i
i i
m
(9.6.12)
c
∑ m υ ′ = V′ ….- скорость центра масс частиц в K ′ -системе.
i i
(9.6.13)
c
m
Теперь выражение (10), связывающее импульсы P и P ′ , примет вид
(9.6.14)
P = P′ + m ωRc′ + mV .
Чтобы получить связь между моментами импульса M и M ′ , подставим в (7) соотношения (1) и (2):
M = ∑ [ri (miυi )] = ∑ mi R + ri ′ υi′ + [ωri ′] + V =
[ ]
)]
[( )(
′ ]}=
= ∑ m {[Rυ ′]+ [R[ωr ′]]+ [RV ]+ [rυ′ ′] + [r ′[ωr ′]] + [rV
i
i
i
i
i
i i
i
i
i
i
= R ∑ miυi′ + ∑ mi [ωri ′] + ∑ miV + ∑ [ri ′(miυi′)] + ∑ mi [ri ′[ωri ′]] + ∑ mi ri ′V .
i
i
i
i
i
i
В фигурной скобке первого слагаемого узнаем выражение (9) для импульса P .
Второе слагаемое, в соответствии с определением (4) дает момент импульса M ′ . В четвертом слагаемом произведем замену (12). Получим:
(9.6.15)
M = RP + M ′ + ∑ mi [ri ′[ωri ′]] + m Rc′V .
[ ]
[ ]
i
Получить связь между кинетическими энергиями в разных системах отсчета T и
T ′ так же просто. Встречающиеся при этом преобразования выражений, нами уже были
использованы при составлении функции Лагранжа в K ′ - системе. Подставим (2) в (8):
2
2
m
m
T = ∑ i υi′ + [ωri ′] + V = ∑ i υi′2 + 2υi′[ωri ′] + [ωri ′] + 2υi′V + 2[ωri ′]V + V 2 =
2
2
i
i
m
m 2
m
= ∑ i υi′2 + ∑ miυi′[ωri ′] + ∑ i [ωri ′] + ∑ miυi′V + ∑ mi [ωri ′]V + ∑ i V 2 .
2
2
2
i
i
i
i
i
i
Первое слагаемое - это кинетическая энергия механической системы T ′ в K ′ системе отсчета. В смешанном произведении векторов из второго слагаемого произведем
циклическую перестановку υi′[ωri ′] = ω [riυ′ i′] , тогда
′
′
′
′
(
)
ω
M′.
[
]
[
]
m
υ
ω
r
=
ω
r
m
υ
=
∑ ii i ∑ i ii
(
)
i
(
)
i
Кроме того, в четвертом, пятом и шестом слагаемых произведем очевидные замены (3),
(12) и (11) соответственно. После всего этого, получим
[ ]
mV 2
m 2
.
(9.6.16)
T = T ′ + ωM ′ + ∑ i [ωri ′] + P′V + m ωRc′ V +
2
2
i
Полученные соотношения (14), (15) и (16) между динамическими характеристика
ми механической системы P , M и T в системе отсчета K и динамическими характери-
160
Истеков К.К. Курс теоретической физики. Т.1.
стиками той же механической системы P′ , M ′ и T ′ в системе отсчета K ′ существенно
упрощаются, если начало координат неинерциальной системы отсчета K ′ совпадает с
центром масс механической системы.
В такой K ′ -системе Rc′ = 0 и P′ = 0 и Vc′ = 0 . Кроме того, радиус-вектор R и ско
рость движения V начала отсчета K ′ -системы относительно K -системы совпадет с ради
ус- вектором Rc и скоростью Vc центра масс механической системы в той же K ′ -системе:
R = Rc и V = Vc . Тогда из (14), (15) и (16) находим
(9.6.17)
P = mVc .
(9.6.18)
M = Rc P + M ′ + ∑ mi [ri ′[ωri ′]] .
[ ]
i
m 2 mVc2
.
(9.6.19)
T = T ′ + ωM ′ + ∑ i [ωri ′] +
2
2
i
И наконец в частном случае, когда K ′ -система движется не вращаясь относительно
K -системы, т.е. ω = 0 , соотношения (18) и (19) совпадут с уже известными формулами
преобразования динамических величин (5.2.19) и (5.2.11).