Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Сибирский государственный университет геосистем и технологий»
(СГУГиТ)
На правах рукописи
Комиссаров Александр Владимирович
Теория и технология лазерного сканирования для пространственного
моделирования территорий
25.00.34 – Аэрокосмические исследования Земли, фотограмметрия
Диссертация на соискание ученой степени доктора
технических наук
Научный консультант –
доктор технических наук,
профессор
Антипов Иван Тимофеевич
Новосибирск – 2015
2
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ……………………………………………………...........................
1
4
МЕТОДОЛОГИЧЕСКИЕ И ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ
ЛАЗЕРНОГО СКАНИРОВАНИЯ.......................................................................
13
1.1 Системное представление лазерного сканирования.......................................
13
1.2 Обобщенная технология лазерной съемки………...........................................
25
1.3 Обобщенный подход к выбору организационных параметров
съемки……………………………………………................................................
2
45
ОБЩИЕ ПРИНЦИПЫ И МАТЕМАТИЧЕСКИЕ ОСНОВЫ ПРОЦЕССА
ИЗМЕРЕНИЙ ЛАЗЕРНЫМИ СКАНЕРАМИ...................................................
60
2.1 Классификация погрешностей в результатах лазерного сканирования….....
60
2.2 Влияние внешних условий на точность лазерного сканирования..................
71
2.3 Влияние метрологических свойств объектов на точность лазерной
съемки....…….......................................................................................................
82
2.4 Инструментальные источники погрешностей………………..........................
94
3
ОЦЕНКА ТОЧНОСТИ ПОСТРОЕНИЯ ТОПОГРАФИЧЕСКОЙ ПРОДУКЦИИ ПУТЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНИ-РОВАНИЯ.......... 112
3.1 Оценка точности методов внешнего ориентирования сканов........................
112
3.2 Теоретические основы скантриангуляции..………………….......................... 140
3.3 Общие принципы оценки точности создания цифровых моделей
объектов и рельефа…………………………………........................................... 144
4
ФОТОГРАММЕТРИЧЕСКИЕ ПРИНЦИПЫ ОБРАБОТКИ ДАННЫХ
НАЗЕМНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ............................................
151
4.1 Теория преобразования сканерных данных в виртуальные
снимки…………………………………………................................................... 151
4.2 Уравнивание скантриангуляции методом связок……………........................
157
3
4.3 Общие принципы формирования и обработки изображений, полученных
по материалам наземного лазерного сканирования и съемки цифровой
камерой…….......................................................................................................... 163
4.4 Обоснование направлений использования данных цифровой съемки при
наземном лазерном сканировании……………….............................................. 169
5
ПР ИМ ЕНЕНИ Е Р ЕЗУ ЛЬ ТАТОВ ИС С ЛЕД ОВ АНИЙ ПР И
Р ЕШ ЕНИИ ПР ИК ЛАД НЫ Х З АДАЧ …………....................................... 176
5.1 Методика поверки наземных лазерных сканеров............................................
176
5.2 Комплексная методика исследования наземных лазерных сканеров............. 182
5.3 Методика калибровки резервуаров шаровых………………............................ 208
5.4 Методика калибровки неметрических цифровых камер с использованием
наземных лазерных сканеров………………...................................................... 221
ЗАКЛЮЧЕНИЕ………………………………………………....................................
229
СПИСОК СОКРАЩЕНИЙ И УСЛОВНЫХ ОБОЗНАЧЕНИЙ..............................
233
СЛОВАРЬ ТЕРМИНОВ..............................................................................................
234
СПИСОК ЛИТЕРАТУРЫ…………………………...................................................
236
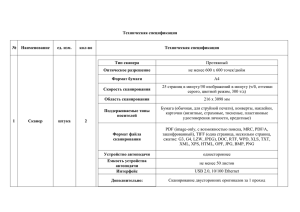
ПРИЛОЖЕНИЕ А (обязательное) ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СКАНЕРОВ……………………...................................................... 273
ПРИЛОЖЕНИЕ Б (обязательное) ГРАФИКИ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ
ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ ДВУМЯ
МЕТОДАМИ УРАВНИВАНИЯ.................................................... 275
4
ВВЕДЕНИЕ
Актуальность темы исследования. Современное дистанционное зондирование благодаря развитию технических средств способно обеспечивать различные
научные и производственные комплексы пространственно-временными данными
об объектах местности, инженерных сооружениях и рельефе. Такие данные необходимы для решения оборонных, экологических, управленческих и разнообразных инженерных задач, а также для автоматизированного анализа при управлении
территориями на основе трехмерного геоинформационного обеспечения.
В настоящее время из всего многообразия новых технических средств особое место занимают лазерные съемочные системы, которые в виду их достоинств
значительно расширяют возможности теории и практики фототопографического
метода сбора пространственных данных. Главными из достоинств таких систем
являются: автоматизация процесса сбора информации, статистическая избыточность, высокая степень детализации и т.д. Однако на настоящий момент недостаточно разработана теория и технология лазерного сканирования.
Ключевое отличие лазерной съемки от традиционных методов фотограмметрии заключается в том, что при фотограмметрической обработке пространственные координаты точек объектов определяют методом прямой засечки по стереопаре снимков, полученных с разных точек, а в основу лазерного сканирования
положен принцип измерения расстояний до точек объектов с помощью лазерного
дальномера в безотражательном режиме. При этом точность фотограмметрических определений значительно варьируется в зависимости от геометрии засечки
(положения объекта относительно точек фотографирования), а при лазерном сканировании все измерения являются практически равноточными во всем диапазоне
работы дальномера. Это свидетельствует о том, что задача получения, обработки
и оценки данных наземного лазерного сканирования является нестандартной для
современной фотограмметрии, а значит требует новых методологических и теоретических решений.
5
Кроме того, традиционные методы геодезии и фотограмметрии ориентированы на получение пространственных координат отдельных точек объектов и местности, в то время как при лазерном сканировании получают координаты массива точек, который полностью описывает геометрию объекта. Поэтому информационная емкость пространственных данных лазерного сканирования на порядок
превосходит традиционные методы геодезии и фотограмметрии. Это обстоятельство указывает на необходимость разработки новых алгоритмов и принципов обработки и интерпретации данных лазерного сканирования.
Лазерное сканирование выполняется с определенным шагом. При этом разрешение сканирования всегда задается минимум в два раза выше требований детальности, предъявляемых к лазерной съемке (для достоверной идентификации
мелких деталей объектов во время обработки). Данное обстоятельство, с учетом
теоремы Котельникова-Шинона о восстановлении сигнала, позволяет сделать вывод, что материалы лазерного сканирования являются непрерывным набором
данных при создании конкретной продукции и являются аналогами снимков.
Разработка средств лазерного сканирования в значительной степени подтолкнуло развитие новых методов представления информации о местности, переводя информационные технологии из плоскости в трехмерное пространство. Значительное развитие получили трехмерные или виртуальные геоинформационные
системы, что потребовало разработки принципиально новых методов хранения,
обработки и пространственного анализа данных.
Таким образом, с одной стороны, появились новые средства измерения, направленные на значительное расширение областей применения информационных
технологий, с другой стороны, недостаточная проработка теоретических основ
технологии лазерного сканирования не позволяет использовать все возможности
данных съемочных систем. Кроме этого, для использования сканирования в различных областях необходимо выполнить разработку методик проведения съемочных работ и обработки данных, позволяющих получать пространственную информацию в on-line режиме. Это позволяет сделать вывод, что перед наукой сего-
6
дня стоит актуальная и значимая проблема приведения в соответствие скорости и
точности выполнения технологических операций лазерного сканирования к требованиям различных отраслей экономики страны. Данную проблему можно решить путем совершенствования теоретических и методологических основ технологии лазерного сканирования.
Степень разработанности темы. Лазерное сканирование является самостоятельным научным направлением, в основе которого положены достижения в
области фотограмметрии, дистанционного зондирования и геодезии отечественных ученых Антипова И. Т., Гука А. П., Дробышева Ф. В., Дубиновского В. Б.,
Журкина И. Г., Карпика А. П., Клюшина Е. Б., Лисицкого Д. В., Лобанова А. Н.,
Лысенко Ф. Ф., Михайлова А. П., Нехина С. С., Погорелова В. В., Пяткина В. П.,
Савиных
В. П.,
Середовича
В. А.,
Трубиной
Л. К.,
Тюфлина
Ю. С.,
Чекалина В. Ф., Чибуничева А. Г., Ямбаева Х. К. и зарубежных – Boehler W.,
Gruending L., Ingensand H., Lichti D., Milev I., Norton J., Rietdorf A., Riegl J., Ullrich
A., Zlatanova S., Zamechikova M. и другие. Существенный вклад в становление и
развитие метода лазерного сканирования в России внесли специалисты Регионального центра лазерного сканирования СГУГиТ.
Имеющиеся публикации в области лазерного сканирования можно характеризовать разрозненностью и отсутствием полноты исследований, что не отвечает
требованиям системного подхода и не имеет общих теоретических и технологических основ. Значительная часть публикаций, связанных с лазерными сканерами,
посвящена практическому опыту их применения. В публикациях представлены
объекты съемки, вид получаемой продукции, используемые модели лазерных
сканеров и программные продукты для обработки результатов сканирования. Таким образом, в диссертационной работе представлено первое системное решение
проблемы приведения в соответствие скорости и точности выполнения технологических операций лазерной съемки к требованиям различных отраслей экономики страны, путем разработки теории и технологии лазерного сканирования для
сбора геопространственных данных.
7
Цель и задачи исследования. Целью диссертационной работы является разработка теории и технологии получения, обработки и оценки точности данных лазерного сканирования, производственное применение которых позволяет обеспечить оперативность, высокую точность и экономичность сбора геопространственных данных об объектах для эффективного планирования городских территорий и
управления ими, проектирования объектов инфраструктуры и контроля их состояния, паспортизации особоопасных объектов и т. д.
Достижение поставленной цели требовало решения следующих основных
задач:
− анализ степени разработанности метода лазерного сканирования для создания трехмерных моделей и топографических планов, на основе чего следует
предложить базовую математическую модель технологии лазерного сканирования;
− теоретическое обоснование и экспериментальное исследование общих
принципов процесса измерения наземными лазерными сканерами и точности создаваемых трехмерных моделей и топографических планов, что должно стать основой повышения точности технологии наземной лазерной съемки;
− разработка оптимальной технологии обработки данных наземного лазерного сканирования на основе теории фотограмметрии;
− постановка теоретических и экспериментальных исследований отдельных
источников погрешностей, оказывающих влияние на точность создаваемой продукции, и разработка методики метрологической аттестации НЛС;
− разработка методики построения скантриангуляции и алгоритма ее уравнивания.
Научная новизна:
− математически и экспериментально обоснованы базовые принципы наземного лазерного сканирования, на основе чего теоретически доказаны и практически исследованы пути повышения точности измерений наземными лазерными сканерами при съемке объектов и рельефа местности. Данные принципы впер-
8
вые позволили учитывать влияние метрологических свойств объектов, что существенно улучшает качество сырых данных НЛС;
− разработана теория фотограмметрической обработки данных лазерного
сканирования, основанная на использовании метода связок для уравнивания сканерных ходов, что позволяет повысить точность определения элементов внешнего
ориентирования (ЭВО) до 35 % по сравнению с другими методами;
− разработано теоретическое и методическое обоснование процессов наземной лазерной съемки, положенное в основу универсальной технологии ее производства, определения параметров съемки и допусков для контроля точности
выполнения процессов наземной лазерной съемки и оценки точности окончательной продукции;
− разработана универсальная методика поверки наземных лазерных сканеров, позволяющая выполнить метрологическую аттестацию всех типов фазовых и
импульсных НЛС;
− разработана методика определения объема объектов сферической формы
на основе построения их трехмерной модели внутреннего пространства по данным наземного лазерного сканирования, использование которой, на примере шаровых резервуаров, обеспечивает относительную погрешность определения вместимости резервуара до 0,03–0,05 %.
Теоретическая и практическая значимость работы. Теоретическая значимость исследований заключается в расширении и дополнении теоретических и
методологических основ проведения лазерной съемки, обработки ее результатов и
расчета точности результатов выполнения технологических операций для создания продукции требуемого качества по данным лазерного сканирования.
Разработанные теоретические основы и принципы расчета точности выполнения технологических операций при наземной лазерной съемке открывают новые возможности использования лазерного сканирования и расширяют область
применения дистанционного зондирования и фотограмметрии. Выполненные разработки используются в СГУГиТ при метрологической аттестации НЛС, что под-
9
тверждено соответствующим актом о внедрении, в учебном процессе при чтении
курсов лекций по дисциплинам «Автоматизированная обработка аэрокосмической
информации», «Трехмерное моделирование и наземное лазерное сканирование» и
при проведении курсов повышения квалификации по программе «Маркшейдерское дело». Проведенные исследования позволили сформулировать рекомендации
по выполнению сканерной съемки для решения практических задач планирования
городских территорий и эффективного управления ими, проектирования объектов
инфраструктуры и контроля их состояния, паспортизации особоопасных объектов
и т. д.
Методология и методы исследования. При выполнении диссертационных
исследований использованы принципы системного и объектно-ориентированного
анализа, вероятностный и экспертный методы. Для оценки точности результатов
лазерного сканирования использованы методы математического моделирования
процессов измерений и статистического анализа.
В качестве исходных данных использованы:
− материалы наземной лазерной съемки сканерами Riegl LMS-Z210, Riegl
VZ-400, Riegl LMS-Z360, Riegl LMS-Z420i, Mensi GS200, Riegl LMS-Z390,
Leica ScanStation C10, Leica ScanStation, Leica ScanStation 2, Trimble GX200,
Minolta V9i;
− аналитические макеты результатов сканерной и цифровой съемок;
− инструкции и нормативные документы по производству и метрологическому обеспечению фотограмметрических и геодезических работ;
− руководства пользователя наземными лазерными сканерами;
− данные из научных книг, статей ведущих научных журналов и изданий
СССР и Российской Федерации (РФ);
− отечественные и зарубежные научные публикации и материалы научных,
научно-технических международных конгрессов и конференций, проводимых
СГУГиТ (СГГА и НИИГАиК), МИИГАиК, Международного общества геодези-
10
стов (FIG) и Международным фотограмметрическим обществом (ISPRS) и другими;
− материалы научных трудов НИИПГ, НИИГАиК, ЦНИИГАиК, ВИНИТИ;
− интернет-источники.
Положения, выносимые на защиту:
− результаты теоретических и экспериментальных исследований точности
процессов измерения и обработки, и, разработанные на их основе, практические
рекомендации по оптимизации выполнения этих процессов в предложенной технологии лазерного сканирования;
− методика выполнения наземной лазерной съемки и обработки ее результатов при решении широкого круга задач;
− принципы исследования процесса измерения наземным лазерным сканером, на основе которых теоретически обоснованы технические и технологические
решения по повышению точности получения данных, которые позволяют учесть
погрешности, вызванные метрологическими свойствами объектов;
− теория фотограмметрической обработки данных лазерного сканирования,
использование которой позволило значительно повысить скорость и точность обработки результатов лазерной съемки;
− методики поверки импульсных и фазовых наземных лазерных сканеров,
определения объемов объектов сферической формы и неметрических цифровых
камер, разработанные с использованием проведенных теоретических исследований.
Степень достоверности и апробация результатов. Материалы, полученные в ходе исследования, докладывались на научно-технической конференции
«ГИС – интегрированное решение муниципальных задач» в 2004 г. в Екатеринбурге; на международной конференции «Лазерное сканирование и цифровая аэросъемка. Сегодня и завтра» в 2004, 2007 гг. в Москве; на научно-технической конференции преподавателей СГГА «Современные проблемы геодезии и оптики» в
2004 г. в Новосибирске; на презентации-семинаре «Приборы и технологии лазер-
11
ной локации, цифровой аэросъемки и геопозиционирования в геоинформатике,
природопользовании, мониторинге природных ресурсов земли и лесоустройстве,
инженерно-геодезических и инженерно-геологических изысканиях» в 2006 г. в
Новосибирске; на международных промышленных форумах GEOFORM+ (на
конференциях «Геопространственные технологии и сферы их применения» в
2005, 2006 гг. в Москве); на международных научных конгрессах «ГЕО-Сибирь»
и «ИнтерЭкспо Гео-Сибирь», направление «Геодезия, картография, маркшейдерия» в 2005 – 2015 гг. в Новосибирске; на 4-й международной конференции «Земля из космоса – наиболее эффективные решения» в 2009 г. в Москве.
Исследования выполнены в рамках госбюджетных НИР по заказам Министерства образования и науки РФ, гранта Президента РФ, Федеральной целевой
программы «Научные и научно-педагогические кадры инновационной России» на
2009 – 2013 гг., утвержденной постановлением Правительства Российской Федерации от 28 июля 2008 г. № 568 «О федеральной целевой программе «Научные и
научно-педагогические
кадры
инновационной
России»
на
2009 – 2013 гг.», гранта мэрии г. Новосибирска.
Реализация основных результатов исследований осуществлялась в рамках
выполнения хоздоговорных работ, заключенных с дочерним предприятием
ОАО «Сибур», ООО «Томскнефтехим», ОАО «Сибнефть-Ноябрьскнефтегаз», Департаментом архитектуры и градостроительства администрации города Томска,
Российское акционерное общество «Единые электрические сети» (РАО «ЕЭС»),
РАО «Российские железные дороги», Государственное автономное учреждение
«Росавтодор», в результате чего на основе данных наземной лазерной съемки:
− выполнена калибровка 64 шаровых резервуаров;
− созданы топографические планы масштаба 1:500 – 1:1 000 на территорию
более 10 000 га;
− созданы трехмерные модели сложных инженерных объектов с целью их
реконструкции общей площадью более 1 000 га;
12
− определен объем сыпучих строительных материалов и твердых полезных
ископаемых (суммарным объемом более 100 000 000 м3);
− определены габариты обкладки железнодорожных тоннелей.
Теоретические исследования, выполненные в рамках диссертационной работы,
реализованы
в
программных
продуктах,
предназначенных
для:
иcследования распределения случайных ошибок величин, измеряемых НЛС, на
соответствие нормальному закону, определения координат центров специальных
марок на радиальном тестовом полигоне, вписывания плоскости в массив точек и
исключения систематических ошибок из результатов угловых измерений НЛС и
другие. Разработанные программы внедрены в учебный процесс кафедры физической
геодезии
и
дистанционного
зондирования
СГУГиТ,
научно-
производственный процесс Регионального центра лазерного сканирования СГУГиТ. Результаты теоретических разработок и экспериментальных исследований
положены в основу ГОСТ Р 8.794-2012. Государственная система обеспечения
единства измерения (ГСИ). Наземные лазерные сканеры. Методика поверки.
По теме диссертационной работы опубликовано 33 работы, из них 18 – в
рецензируемых научных журналах и изданиях, две монографии, три патента на
изобретения, одно авторское свидетельство на программы для ЭВМ.
13
1 МЕТОДОЛОГИЧЕСКИЕ И ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ
ЛАЗЕРНОГО СКАНИРОВАНИЯ
1.1 Системное представление лазерного сканирования
Современный этап развития экономики страны требует значительно большего
объема пространственной информации о территории. Все методы сбора пространственной информации разделяются на контактные и бесконтактные. Причем вторые
имеют ряд неоспоримых преимуществ по отношению к первым, а именно:
− возможность использования в особоопасных и недоступных территория без
ущерба и вреда здоровью человека (исполнителям работ);
− значительно более высокий потенциал автоматизации процесса измерения;
− возможность выполнения измерения с подвижных носителей;
− гораздо больший объем получаемой исходной информации;
− значительно меньшие трудозатраты и трудовые ресурсы при выполнении
измерений.
В свою очередь из всего многообразия бесконтантактных методов съемки наиболее перспективными являются активные системы сбора информации, так как они
обладают рядом преимуществ по отношению к пассивным:
− всепогодность использования;
− нет необходимости в дополнительных источниках освещения, т. е. возможность использования как в дневное так и в ночное время суток;
− измерение дальности до объектов местности, а следовательно получать
трехмерные координаты в процессе съемки;
− узкий спектральный диапазон (практически монохроматичный) создает условия для более полного учета влияния атмосферы в результатах измерений.
Все активные съемочные системы разделяются на два вида:
− лазерные (использующие в основе оптический диапазон излучения);
− радиолокационные (использующие в основе радио диапазон излучения).
14
Использование лазеров при получении пространственной информации об объектах местности вызвано их свойствами, а именно: когерентность излучения, монохроматичность, узкая расходимость пучка и т. д., что позволяет получать более точные и детальные данные по сравнению с другими съемочными системами [221]. Поэтому наибольший интерес для получения пространственной информации об объектах местности представляют данные системы сбора информации.
Кроме того следует учитывать возросшие потребности отраслей экономики,
а именно представление пространственной информации в трехмерном виде. При
этом для них предъявляются следующие требования [142]:
− сопоставимая точность получения данных по высоте и в плане;
− детальность (разрешение) получаемых трехмерных моделей в метрических величинах соответствующая точности получаемых данных;
− решение инженерных и управленческих задач по трехмерной цифровой
модели, состоящей из топологически связанных математических моделей объектов и объеденных с семантической информацией о них, т. е. представление информации в виде трехмерной геоинформационной модели.
Для обеспечения этих потребностей и выполнения всех этих условий современного общества могут быть использованы только приборы лазерного сканирования на современном этапе науки и техники. Однако для их использования в
настоящего время нет единых и комплексных решений, основанных на системных
принципах.
Целевой функцией лазерного сканирования является создание трехмерной
геоинформационной модели (подготовка пространственных решений) (Fg). Этот
процесс базируется на результатах пространственного анализа данных лазерного
сканирования (пространственный анализ данных) (Fa), что составляет сущность
второй важной функции рассматриваемой системы. Для анализа данных необходимы соответствующие модели математического описания объектов и рельефа,
поэтому третьей функцией является моделирование территории (Fm). Однако для
моделирования необходимы исходные данные, поэтому четвертой функцией яв-
15
ляется сбор данных (или съемка территории и предварительная обработка данных), и пятой функцией – получение семантической информации (Fs и Fi). Наконец, для контроля и восприятия человеком результатов пространственного анализа необходима шестая функция – визуализация (Fv). Создание цифровых карт (Fс)
является дополнительной, седьмой функцией.
Рассмотрим детально перечисленные функции в порядке их реализации в
технологическом процессе: от съемки территории до визуализации результатов.
Лазерная съемка территории и сбор исходных данных.
Лазерная съемка и сбор исходных данных являются процессом непосредственного изучения территории.
Процесс непосредственного изучения территории включает в себя измерение и определение характеристик объектов местности. Кроме того к данному
процессу следует относить оценку качества полученных данных, так как только
достоверная, полная и детальная информация пригодна для дальнейшей обработки.
Лазерная съемка выполняется с целью получения геометрических первичных данных, отображающих пространственные свойства объектов местности.
Сущность всех методов лазерного сканирования (воздушного, мобильного и
наземного) заключается в измерении дальности с высокой частотой от сканера до
объектов местности и направления распространения сигнала. При измерении расстояний сканером используется свойства лазерного источника электромагнитного
излучения, а именно когерентность, монохроматичность, малый угол расходимости сигнала.
Результатом лазерного сканирования является массив точек, каждая точка
которого имеет следующие характеристики пространственные координаты (X, Y,
Z), интенсивность отраженного сигнала (I). Кроме того для повышения информационной емкости массива точек, также выполняют цифровую съемку, которая позволяет получить для каждой точки информацию о реальном цвете объекта. Использование данных лазерного сканирования совместно с материалами цифровой
съемки способствует процессу дешифрирования в интерактивном режиме.
16
Результаты измерений далее подвергаются предварительной вычислительной обработке [142]:
− переход от физически измеренных величин к соответствующим геометрическим, т. е. вычисление пространственных координат и введение разного рода
поправок в них (за метеоусловия, инструментальные погрешности, редукцию
и т. п.);
− фильтрация данных, т. е. удаление «ложных» измерений, которые получаются вследствие взаимодействия лазерного сигнала с объектами местности и
окружающей средой при определенных условиях;
− внешнее или взаимное ориентирование данных, т. е. приведение данных
к заданной или единой условной системе координат.
Помимо лазерной съемки, на этапе сбора информации об объектах местности могут выполняться полевое дешифрирование данных, цифровая фото- и/или
видеосъемка, составление абрисов, геодезическая или спутниковая съемки или
получение иной семантической или метрической информации. Данные материалы
в последствии помогают выполнять дешифрирование массива точек и построение
трехмерной модели объектов местности, а также выполнить построение объектов
которые не отобразились на данных лазерного сканирования. Совокупность этих
данных и данных лазерного сканирования в дальнейшем будет называться первичные данные об объекте.
Определение характеристик непространственных свойств пространственных предметов выполняется в пределах заданного перечня свойств конкретных
типов предметов путем наблюдения прямых и косвенных признаков свойств, а
также измерений по массиву точек и прочих данных (материал, толщина, высоты,
глубины, протяженности, ширины). Полученные и зафиксированные в текстовом
или цифровом виде характеристики, в совокупности с идентификаторами предметов, образуют семантические первичные данные.
Совокупность полученных при непосредственном изучении территории
геометрических (Dg), семантических (Ds), топологических (Dt) и идентификаци-
17
онных (Di) данных образует первичные данные об объекте (S), независимо от
формы их представления [142].
Таким образом, функция Fs осуществляет отображение пространственных
( Cp) и непространственных ( Cup) свойств рассматриваемых объектов местности
на множество S
Fs : C→ S,
где C={Cp, Cup} и S={Dt, Di, Dg, Ds}.
Вышеизложенное представлено на рисунке 1.
На рисунке 1 источники данных такие как абрисы и фото/видео съемка и
геодезическое и спутниковые измерения являются вспомогательными и предназначены для опосредованного изучения территории. Они могут использоваться в
качестве дополнения результатов непосредственного изучения. К данным источникам информации прибегают при отсутствии или недостаточности полученных
данных лазерного сканирования.
Рисунок 1 – Функциональная схема получения данных в технологии
лазерного сканирования
18
Если не удается получить полный набор первичных данных о нужных
предметах по массиву точек, то изучение территории дополняется и контролируется абрисами и фото/видео съемкой и геодезическими и спутниковыми измерениями.
Трехмерное информационное отображение территории.
В результате сбора, первичной обработки, контроля и дополнения данных
лазерного сканирования первичные данные представляют как осмысленную и обработанную информацию, которую получают в результате преобразования первичных данных и отображения их в единном пространственно-информационном
поле.
Геометрические данные подвергаются вычислительной обработке, в ходе
которой вычисляются и уравниваются координаты и, при необходимости, высоты
репрезентативных точек. При этом используется исходная информация в виде координат и высот опорных точек в заданной координатной системе и картографической проекции. Таким образом, получается геометрическая информация (Ig).
Топологические данные из схематического изображения территории преобразуются в цифровую табличную форму описания контуров и предметов – топологическую информацию (It). Топологическая информация, совместно с геометрической информацией, образует пространственную информацию, которая полностью отображает пространственные свойства предметов [142].
Обработка семантических данных состоит в систематизации, классификации и кодировании характеристик непространственных свойств предметов. В
результате такой обработки получается атрибутивная информация (Iа).
Идентификационные данные используются при обработке остальных данных без изменения и, как составная часть, входят в пространственную и семантическую информации, обеспечивая их однозначную связь для каждого предмета.
Таким образом, упорядоченная совокупность геометрических, топологических, идентификационных и семантических данных о территории и ее простран-
19
ственных объектах образует трехмерную пространственно-информационную модель данных лазерного сканирования ( I ) , т. е.
Fi : S → I,
где I = {Iр, Iа}; Ip = {Ig, It}.
Трехмерная пространственно-информационная модель представляет собой
законченный результат и может быть использована для решения задач экономики
страны. Но на практике она редко используется как окончательный результат. В
качестве примера использования трехмерной пространственно-информационной
модели можно привести использование ее для цели контроля этапов строительства, где нет необходимости комплексного представления информации об объекте
строительства, а необходимо получить отдельные геометрические параметры и
неметрические характеристики строящегося объекта. При этом использование такой пространственно-информационной модели позволяет выполнять не только
контроль параметров, но и выполнять изменение дальнейших инженерных решений при отступления от допусков контролируемых параметров. Ранее используемые методы контроля не позволяли этого делать. Таким процессы строительства
и проектирования становятся более гибкими, используя технологию лазерного
сканирования.
Моделирование территории.
Наличие трехмерной пространственно-информационной модели позволяет
моделировать территорию и, в частности, создавать ее трехмерную геоинформационную модель. Способов трехмерного моделирования территории существует
множество. В ряде случаев моделирование поверхности Земли выделяют в отдельный процесс создания цифровой модели рельефа, а в результате моделирования остальных предметов пространства получаем цифровую трехмерную модель
объектов. В общем случае при трехмерном моделировании рельеф является таким же пространственным объектом как и другие, а сам процесс моделирования
рельефа имеет очень много общего с моделированием объектов территории.
20
Формально сущность процесса моделирования территории (местности,
промышленной площадки, внутреннего пространства здания и сооружения и т. п.)
соответствует выражению
Fm : I → M,
причем
используются
два
основных
подхода
к
описанию
территории:
структурное, т. е. с выделением пространственных объектов и неструктурированное представление в виде ячеек, в которых заданы усредненные значения характеристик этой части территории. Поэтому множество моделей М, в свою очередь,
представляет собой совокупность подмножеств трехмерных векторных моделей
описания территории: в виде примитивов (Мp), твердотельное (Mt) и TIN или
NURBS-поверхности (Мs)
М = {Mp, Mt, Мs}.
Для создания модели в виде примитивов территории используется геометрическая и топологическая информации. Эти модели строятся на основе геометрических примитивов, т. е. базовых моделей предметов в математической функции (шар, плоскость, цилиндр и т.д).
Трехмерная твердотельная модель представляет собой набор связанных между собой сложных математических моделей элементарным звеном которых является геометрические примитивы. Примером твердотельных моделей является
швеллер, двутавровая балка, параллелепипед и т. д. Твердотельное моделирование в большинстве случаев применяется для технологически сложных промышленных предприятий и городской застройки.
Моделирование территории в виде TIN или NURBS-поверхности представляет собой создание поверхности объекта с использованием в качестве элементарного звена треугольники или сплайн функции соответственно. При этом элементарные звенья объединяются в единый объект.
21
Трехмерная векторная модель территории содержит модели предметов и их
отношений или, по установившейся терминологии, пространственные объекты.
Таким образом, пространственные объекты это модели пространственных
предметов территории и их отношений, под которыми понимаются как физические объекты, так и процессы, явления и события.
Геометрическая информация, получаемая в результате измерений с определенной точностью, не позволяет создавать корректные модели объектов и поверхностей. Поэтому в процессе моделирования производится уравнивание геометрической информации с учетом геометрических условий.
Такое уравнивание позволяет, во-первых, выявить и устранить грубые погрешности при обработке данных лазерного сканирования и, во-вторых, создать
корректную модель. При уравнивании смещение трехмерных объектов или поверхности выполняется в пределах погрешности измерений.
Атрибутивная информация не образует самостоятельную модель, а дополняет трехмерную векторную модель территории. При этом она может входить составной частью в описание каждого пространственного объекта либо содержаться
в атрибутивной базе данных, единой для всей рассматриваемой территории. Однозначная связь разных частей пространственных объектов (предметной и содержательной) обеспечивается с помощью идентификаторов.
Трехмерная модель территории, как правило, состоит из тематических слоев, в которые группируются пространственные объекты, относящиеся к одной теме (классу объектов: трубопроводы, здания и сооружения, дороги и т. п.). В отдельный слой моделируется поверхность земли. При этом для моделирования используется совокупность высот или отметок глубин в узлах регулярной/ псевдорегулярной регулярно-структурной решетки (матрица высот).
Контроль за процессом и результатом моделирования территории осуществляется по вспомогательным материалам, полученным в процессе сбора информации, источники которой показаны на рисунке 1.
22
Пространственный анализ.
Трехмерная векторная модель территории используются для пространственного анализа, выполняемого с помощью программного обеспечения геоинформационной системы (ГИС), которое реализует ряд функций. К ним относятся
программы, обеспечивающие анализ размещения, связей и иных пространственных отношений пространственных объектов, включая анализ сетей, анализ объектов, операции вычислительной геометрии и оверлейные операции, обработку
цифровых моделей рельефа и др.
Анализ сетей – группа пространственно-аналитических операций, имеющих
целью исследование топологических и геометрических свойств линейных пространственных объектов, образующих древовидные или циклические сети (дорожная сеть, сети коммуникаций и т. п.), соответствующие графам, как правило,
планарным. Наличие программного обеспечения для такого анализа позволяет
решать задачи логистики, эксплуатации инженерных сетей и др.
Анализ объектов в пределах буферных зон позволяет решать задачи оценки
зоны влияния существующей или проектируемой сети транспортных коммуникаций и им подобные.
Операции вычислительной геометрии позволяют вычислить площади и координаты центроидов полигонов, длины ломаных и кривых линий и др.
Суть оверлейных операций состоит в наложении двух разноименных слоев
с генерацией производных объектов, возникающих при их геометрическом наслоении, с наследованием их атрибутов.
Обработка цифровых моделей рельефа включает получение морфометрических данных (углы наклона и экспозиции склонов), зон видимости/невидимости;
построение трехмерных изображений (в том числе блок-диаграмм), продольных и
поперечных профилей по заданным линиям (трассам), оценку формы склонов,
вычисление положительных и отрицательных объемов, генерацию структурных
линий и особых точек рельефа, построение изолиний, аналитическую отмывку
рельефа при разном освещении и др.
23
Кроме этих стандартных функций программного обеспечения ГИС для пространственного анализа, используются специальные программы на основе построения детерминистических и стохастических моделей, а также специальные
программы ГИС-приложений по прогнозированию ситуации.
В результате пространственного анализа модель территории ( А) дополняется новыми предметами, а также вырабатывается оценка территории в том или
ином аспекте. Например: комплексная оценка использования территорий, оценка
транспортной доступности, инженерного обеспечения, историко-культурная, инвестиционная, обеспеченности документацией и др.
Формально пространственному анализу соответствует выражение
Fa : М →А.
Данная функциональная зависимость показывает связь процесса моделирования с полученной трехмерной цифровой моделью.
Подготовка пространственных решений на основе лазерного сканирования.
Пространственное решение – это проект действия (G) по пространственному преобразованию либо непосредственно самой территории, либо происходящих
на ней процессов.
Пространственное решение принимается на основе проекта преобразования
рассматриваемой территории. Проект преобразования – это модель рассматриваемой территории с включением/выключением в ней новых элементов, полученных в результате пространственного анализа, проектирования управления или
преобразования территории. Как правило, создается несколько моделей, необходимых для сравнения, обоснования и выбора оптимального решения.
Процесс подготовки пространственных решений формально может быть
выражен как
Fp : M ∪ A → G.
24
Под проектированием управления понимаются изменения организации
функционирования систем жизнеобеспечения. Наиболее востребованы модели
возможного развития катастрофических и экологических природных и техногенных процессов, эксплуатации и развития инженерных сетей и коммуникаций, организации транспортного обслуживания, поиска и эксплуатации месторождений
полезных ископаемых, управления территориями на государственном и муниципальном уровнях. Как правило, при разработке этих моделей используются функции и программное обеспечение пространственного анализа, т. е. традиционно
ГИС-функции.
Структурно-функциональная модель системного трехмерного геоинформационного обеспечения.
Совокупность вышерассмотренных процессов функционирования может
быть отображена на общей схеме структурно-функциональных связей информационных компонентов, показанной на рисунке 2 и объединяющей информационные элементы и функции геодезического информационного обеспечения в единую систему, называемую трехмерной геоинформационной системой (ТГИС), подобно как предложено в работе [94].
В частных случаях применения современных измерительных средств, снабженных вычислительными устройствами, некоторые процессы могут выполняться
не последовательно разнесенными по времени, а в режиме реального времени,
обеспечивая совмещение процессов.
В формальном выражении сущность функционирования трехмерной геоинформационной системы представлена комплексной функцией Р, осуществляющей
преобразования
на
множестве
геопространственных
воспринимаемых данных Y, т. е.
ТГИС ≡ {P, Y},
где P = (Fs, Fi, Fm, Fa, Fg);
Y = {S, I, M, A, G}.
компьютерно-
25
Рисунок 2 – Структурно-функциональная модель системного представления
трехмерного геоинформационного обеспечения
Представленная на рисунке 2 схема показывает взаимосвязь процессов от
получения исходных данных лазерного сканирования до выдачи конечного пространственного проекта (решения) пользователю продукции. Основным и наиболее значимым этапом получения трехмерной геоинформационной модели является получение данных лазерного сканирования, исследования в области которого
характеризуются бессистемностью.
1.2 Обобщенная технология лазерной съемки
Современные тенденции глобализации мировой экономики являются следствием унификации и интеграции в различных сферах жизнедеятельности. Данным процессам стало все более подвержено и топографо-геодезическое производство. Еще в 1980–90-х гг. картография, геодезия и фотограмметрия являлись са-
26
мостоятельными направлениями, но со всеобщей компьютеризацией общества
картография с геодезией и картография с фотограмметрией стали объединяться.
Такая интеграция привела к более быстрому развитию всех трех направлений и к
большей востребованности данных топографо-геодезического производства, а
следовательно, и к росту объемов производства и видов продукции. В настоящее
время уже не достаточно стандартного ряда топографических карт, возникла потребность в новых видах продукции.
Развитие систем автоматизированного проектирования, компьютерной
трехмерной графики и виртуальных технологий привело к возможности создания
и применения на практике цифровых трехмерных моделей местности. Для развития направления по созданию трехмерных цифровых моделей местности стали
интегрироваться геодезия, фотограмметрия и картография. Вследствие этой интеграции появился новый инструментарий – технологии воздушного и наземного
лазерного сканирования. В большей степени результатом интеграции трех направлений топографо-геодезического производства стала технология наземного
лазерного сканирования. Данное направление объединило в себе принципы измерений, используемые в геодезии (горизонтальные и вертикальные углы и расстояния), принципы обработки полученных сканов, применяемые в фотограмметрии
(фильтрация данных, улучшение качества изображений, дешифрирование, распознавание образов), принцип сбора информации (тотальная съемка с получением
качественных характеристик об объекте) и картографические принципы отображения информации (при отображении данных на экране монитора в процессе их
обработки оператор пользуется различными видами проекций: изометрическая,
центральная, ортогональная и т. д.). Поэтому для разработки общей технологии
наземного лазерного сканирования следует использовать такой же подход, как и
при развитии технологических решений в области фотограмметрии и дистанционного зондирования (ДЗ), геодезии и картографии. При развитии новых технологических решений следует использовать комплексный подход – это позволяет
решать проблему не как частный случай, а обобщенно.
27
Из анализа имеющихся технологических решений в области геодезии, картографии, фотограмметрии и ДЗ следует, что реализация комплексного подхода
возможна только при соблюдении следующих принципов:
− системность, предусматривающая разработку технологий как единой системы набора объектов, методов, средств и нормативно-технической документации;
− оптимальность, которая заключается в том, что каждый элемент системы
должен быть направлен на решение поставленной задачи при минимальных затратах и максимальном эффекте от ее функционирования;
− стандартизация, заключающаяся в том, что основные этапы технологии
должны обеспечиваться стандартами их проведения и набором контролируемых
параметров для адекватного, достоверного и точного выполнения каждого технологического процесса;
− динамичность, предполагающая, что технология должна предусматривать
возможность совершенствования с учетом требований реального сектора экономики и прогресса технических средств;
− преемственность, состоящая в том, что технология должна учитывать и
анализировать опыт развития технологических решений, а также быть ориентирована на тенденции развития технических средств;
− адаптивность технологии, которая должна обеспечивать приспособляемость ее к специфике новых задач при развитии реального сектора экономики.
На основе вышеизложенного, разработка любой технологии должна осуществляться с позиций перечисленных принципов. Соблюдение этих условий позволит создать технологию, которая будет наиболее адекватной, значимой и востребованной.
При разработке любых новых технологий необходимо опираться на имеющийся опыт аналогичных исследований, тем самым соблюдая принцип преемственности. В топографо-геодезической отрасли значительное количество работ посвящено разработке технологии производства различного вида продукции, среди
28
них следует выделить в области геодезии [25, 62, 82, 99, 150, 154, 174, 206, 218,
236, 237, 259, 299, 314], фотограмметрии и дистанционного зондирования [8, 22,
24, 34, 39, 75, 87, 89, 90, 151, 161, 164, 178, 199, 213, 217, 246, 256] и картографии
[20, 23, 40, 149, 158, 253, 255].
Технологические решения, применяемые в фотограмметрическом и геодезическом производствах, разделяются на четыре основных этапа (принцип системности):
− организационно-сметный;
− полевой;
− камеральный;
− оформительско-сдаточный.
Организационно-сметный этап обеспечивает принцип системности и является наиболее важным. От качества его исполнения зависят трудовые затраты и
накладные расходы производства. На данном этапе должен быть определен полный перечень состава работ, точность и срок их исполнения, а также сезон их
проведения, на основании чего выполняется расчет сметной или калькуляционной
стоимости производства.
В абстрактном виде стоимость работ является функцией трех переменных:
Ξ = F (Ω, T , K ) ,
(1)
где Ξ – стоимость технологического решения;
Ω – точность технологического решения;
Т – время, за которое должны быть выполнены работы;
К – качество выполнения работ (полнота состава работ).
Стоимость технологического решения прямо пропорциональна точности и
качеству выполнения работ и, как правило, обратно пропорциональна времени,
затрачиваемому на их выполнение.
29
Технологическое решение можно считать наилучшим, если выполняются
условия F (Ω, T , K ) → min при Ω, K → max , T → min .
Итогом организационно-сметного этапа является рабочая программа производства полевого и камерального этапов работ.
Полевые и камеральные работы являются основными производственными
этапами. Качество проведения данных этапов зависит от квалификации и внимательности исполнителей, соответствия исполнения рабочей программе и эффективности использования рабочих средств.
Оформительско-сдаточный этап является заключительным и в основном
опирается на имеющуюся нормативную документацию по форме оформления той
или иной продукции.
Опираясь на основные этапы проведения работ в топографо-геодезическом
производстве и учитывая, что лазерное сканирование является последовательным
этапом развития фотограмметрии и геодезии, обобщенно представим технологию
лазерного сканирования на рисунке 3.
В основу представленной на рисунке 3 технологической схеме положен
комплексный подход, структурно-функциональная модель трехмерного геоинформационного обеспечения (рисунок 2), а также функциональная схема получения данных лазерного сканирования.
На рисунке 3 под внешним ориентированием понимается определение элементов внешнего ориентирования или траектории движения носителя.
Представленная на рисунке 3 технологическая схема получения и обработки
данных лазерного сканирования учитывает особенности всех лазерных съемок:
воздушной, мобильной и наземной.
Технологически воздушное, мобильное и наземное лазерное сканирование
имеют много общих процессов (рисунок 1 и 2), но обладают рядом существенных
отличий, которые нельзя не учитывать при системном обосновании методологических и технологических основ.
Рисунок 3 – Технологическая схема построения трехмерных моделей местности, создания цифровых
топографических планов по данным лазерного сканирования
30
31
Современные задачи, возникающие при обеспечении обороноспособности
страны, производственных процессов высокотехнологичных предприятий и систем экспертных оценок, заставляют повышать требования к пространственной
информации, а именно к точности, детальности и наглядности. Кроме этого следует учитывать, что многие из них требуют получения пространственной информации в on-line режиме или в кратчайшие сроки. К таким задачам можно отнести:
− ликвидацию чрезвычайных ситуаций при разборе завалов;
− работа высокоточных роботизированных систем при обезвреживании
взрывных устройств;
− исполнительная съемка морских нефтедобывающих платформ из-за значительного ограничения пространства;
− контроль и выверка установки технологического оборудования и сложных инженерных сооружений;
− определение геометрических параметров сложных динамических процессов (краш-тесты, взрыв снаряда и т.д) и другие задачи.
Решение этих оборонных, научных и производственных задач в кратчайшие
сроки возможно только с использованием технологии наземного лазерного сканирования. Но при этом встает проблема значительного повышения скорости обработки данных. Кроме этого для некоторых из перечисленных задач необходимо
повышение точности получения пространственной информации наземными лазерными сканерами.
Для повышения быстродействия алгоритмов обработки данных целесообразнее учитывать топологию их получения. На рисунке 4 показаны различия в топологии получения данных наземного, воздушного и мобильного лазерного сканирования.
Из рисунка 4в видно, что топология наземного лазерного сканирования эквивалентна шару. Для последнего топологические свойства идентичны кубу, тетраэдру, параллелепипеду и т. д. Из этого следует, что топология данных лазерного
сканирования эквивалентна всем выше перечисленным объемным телам. Однако
для воздушного и мобильного лазерного сканирования топология получения дан-
32
ных идентична плоскости или набору плоскостей. Вследствие этого различие в
топологии получения данных воздушного, мобильного и наземного лазерного
(рисунок 4) сканирования накладывает существенные особенности на разработку
алгоритмов их обработки. Поскольку для повышения быстродействия алгоритмов
обработки данных необходимо учитывать топологию их получения. Все это также
доказывает о необходимости самостоятельного развития каждого направления
(наземного, мобильного и воздушного).
Кроме этого отличительной особенностью данных мобильного и воздушного лазерного сканирования от наземного является то, что первые два получаются
в движении, а последнее в стационарном положении. Вследствие этого при мобильном и воздушном лазерном сканировании каждый элемент изображения имеет свои индивидуальные элементы внешнего ориентирования, в то время как в наземном сканировании они едины для сканерной станции. Также в результате этого отличия возникают дополнительные погрешности, что приводит к разной
(примерно в 3–15 раз) точности создаваемой продукции. Поэтому при обработке
данных наземного лазерного сканирования используются алгоритмы обработки
принципиально отличающихся от алгоритмов применяемых для данных воздушного и мобильного лазерного сканирования. Это касается от обработки входного
лазерного импульса до получения конечного результата. Единственное, что может
объединять алгоритмы обработки, это идея или подход к обработке. Кроме этого
следует учитывать, что точность создаваемых моделей по данным наземного лазерного сканирования значительно выше, чем при воздушном и мобильном сканировании, посему для этих технологий a priory будут отличаться принципы учета
факторов, влияющих на точность получении и обработки данных.
На основании представленного доказательства можно сделать вывод о невозможности совместных разработок для наземного, воздушного и мобильного
лазерного сканирования. Поэтому в данной диссертационной работе представлены теоретические и методологические разработки, направленные на устранение
проблем в технологии наземного лазерного сканирования, внутри которой лежат
следующие значимые задачи:
− методологическая проработка технологии лазерного сканирования;
33
− повышение информативности и автоматизация обработки данных;
− системная проработка направлений повышений качества и точности получаемых данных;
− теоретическое обоснование принципов оценки точности сбора информации НЛС;
− разработка методических основ использования технологии наземного лазерного сканирования.
б)
а)
в)
Рисунок 4 – Различия в топологии получения данных лазерного сканирования:
а) воздушного; б) мобильного; в) наземного
В настоящее время нет запатентованной и стандартизованной технологии
выполнения работ по наземной лазерной съемке с целью построения трехмерных
34
моделей местности и создания топографических планов и двумерных чертежей
участков сканирования. Существующие публикации [7, 93, 121, 122] отражают
только результат выполнения конкретных работ тем или иным исполнителем и в
них не предприняты попытки к обобщению опыта.
Системный подход решения задач на первом этапе предполагает анализ,
итогом которого при проработке технологических вопросов является обобщение
параметров выходной продукции. В работе [184] приведен наиболее полный перечень областей, в которых применяется технология наземного лазерного сканирования, которые можно разделить по точности получения координат и высот точек местности (категориям):
− топографические (средняя квадратическая погрешность пространственных координат (СКП) до 10 см);
− проектные (СКП до 5 см);
− архитектурно-строительные (СКП до 1 см);
− экспертные, или точные (СКП до 1 мм);
− высокоточные (СКП менее 1 мм).
В основу предложенной классификация положен принцип стандартизации
нормативно-технической базы для выполнения тех или иных видов работ, а именно [70-74, 88, 202-204, 211, 212, 226, 230, 231 и др.].
На основе опыта проведения производственных работ по наземной лазерной
съемке различных объектов и предложенной классификации, а также принципов
системности математическую модель технологии наземного лазерного сканирования предлагается представить следующим образом:
G (Ω, Τ, Κ ) =
+Ω +Τ + Κ
∫ ∫ ∫
0 0
где
0
( f инстр (ω, τ) ⋅ f окр.ср. (ω) ⋅ f метрол (ω))⋅
dωdτdκ ,
f
f
I
(
,
,
)
(
,
,
)
(
)
(
,
,
)
⋅
ω
τ
κ
⋅
ω
τ
κ
+
κ
+
η
ω
τ
κ
обр
ориен
(2)
fинстр(ω,τ,κ) – функция, характеризующая инструментальную точность и ско-
рость сканирования конкретного сканера;
fокр.ср(ω) – функция, описывающая влияние окружающей среды на точность
проводимых измерений НЛС;
35
fметрол(ω) – функция, описывающая влияние метрологических свойств объектов съемки на точность результатов сканирования;
fориент(ω,τ,κ) – функция, характеризующая способ, геометрию и точность
ориентирования сканов;
fобр(ω,τ,κ) – функция, характеризующая способ, режим и допуски при обработке данных наземного лазерного сканирования;
I(κ) – функция отражающая информационную емкость данных наземного
лазерного сканирования;
η(ω,τ,κ) – функция, учитывающая упрощения и округление при расчете параметров наземного лазерного сканирования, которые влияют на качество получаемых данных.
На основе математической модели (2), опыта проведения производственных
работ по наземной лазерной съемке различных объектов [7, 45, 100, 103, 109, 110,
111, 112, 119-122, 124-128, 130-134, 152, 153, 175, 201, 208, 220-222, 243, 252, 257,
258, 284, 303, 304], систематизации разработанных решений [115, 123, 128, 129,
135-145, 178, 182, 184, 273, 274, 279, 281, 283, 285, 289, 292, 293, 297, 316, 317,
318, 324, 329, 330] разработана обобщенная технология наземной лазерной съемки для получения различных видов продукции, представленная на рисунке 5.
Из технологической схемы, представленной на рисунке 5, выделяются четыре основных вида работ, которые можно выстроить в следующую иерархическую цепочку:
− подготовительные работы;
− полевые работы;
− камеральные работы;
− подготовка отчетной документации и контроль качества продукции.
Данная иерархическая цепочка отвечает принципам комплексного подхода.
Рассмотрим сущность и особенности выполнения процессов технологии наземного лазерного сканирования.
Рисунок 5 – Технологическая схема построения трехмерных моделей местности, создания цифровых
топографических планов и чертежей по данным наземного лазерного сканирования
36
37
Подготовительные работы
Составление технического проекта на наземное лазерное сканирование. На
этапе составления технического проекта регламентируются требуемая точность
построения трехмерной модели местности (объекта) или цифрового плана, содержание и детализация их, необходимый формат (структура файла) готовой продукции, используемое оборудование, стоимость проведения работ, выполняется сбор
имеющихся картографических материалов, проектных документов и прочей информации об объекте съемки. При необходимости уточняются вопросы о необходимости сбора дополнительной семантической информации на каждый объект.
Составление рабочей программы планово-высотного обоснования и наземного сканирования. На данном этапе выбирается метод создания основного планово-высотного обоснования (ПВО), способ закрепления точек ПВО, проектируется сеть ПВО, количество и расположение сканерных станций, определяется состав используемого оборудования, рассчитывается оптимальный шаг сканирования, проектируется схема рабочего съемочного обоснования и т. п.
Полевые работы
Создание основного планово-высотного обоснования. В соответствии с инструкцией [88], в качестве точек основного съемочного обоснования выступают
только закрепленные на местности знаки временной и долговременной сохранности. Основное планово-высотное обоснование может быть использовано не только при сканерной, но и при тахеометрической съемке. Определение координат и
высот точек основного ПВО необходимо для создания трехмерных моделей и
крупномасштабных планов местности в заданной системе координат и включает
следующие процессы [138]:
− рекогносцировка местности и уточнение схемы основного ПВО;
− закрепление точек основного планово-высотного обоснования;
− полевые измерения по планово-высотной привязке точек основного обоснования;
38
− камеральная обработка, состоящая из следующих этапов: уравнивание результатов полевых измерений и составление каталога координат и высот точек
основного ПВО;
− оценка точности создания основного съемочного обоснования.
Практический опыт показал, что при наземной лазерной съемке плановые
координаты точек основной опорной сети следует определять с помощью спутниковых геодезических технологий и геодезических построений (проложением теодолитных или полигонометрических ходов, прямой или обратной геодезическими
засечками). В случае геодезических построений отметки точек основной высотной сети определяются тригонометрическим или геометрическим нивелированием.
Вычисление координат точек основного съемочного обоснования и оценка
точности его создания осуществляются в зависимости от выбранного способа координатной привязки и программного обеспечения.
Рекогносцировка местности, составление абрисов и фото-, видеосъемка.
На данном этапе уточняются места расположения сканерных станций. По завершении рекогносцировки составляются абрисы на снимаемую территорию, фрагмент которых показан на рисунке 6. От полноты абрисов зависит достоверность
дальнейшего распознавания объектов съемки при дешифрировании точечной модели в камеральных условиях.
При съемке малозастроенных территорий абрисы лучше составлять по точечной модели объекта (полученной после наземного лазерного сканирования),
распечатанной в ортогональной проекции на бумаге, аналогично тому, как выполняется полевое дешифрирование объектов по фотопланам. При таком подходе
значительно упрощается процесс составления абрисов, так как на скане будут
отображены все объекты в едином масштабе. В процессе составления абрисов
(полевого дешифрирования сканов) на них наносится вся необходимая семантическая информация.
На объекты съемки также выполняют фото- или видеосъемку, которые необходимы для упрощения процесса дешифрирования при обработке данных на-
39
земного лазерного сканирования. При сканировании объектов, имеющих большое
количество ярусов труб, составление абрисов становится очень сложным или
практически невозможным процессом, в этом случае их роль выполняют материалы фото- или видеосъемки.
Рисунок 6 – Фрагмент абриса
Определение координат точек рабочего съемочного обоснования, наземное
лазерное сканирование. Под рабочим съемочным обоснованием понимается совокупность специальных марок, координаты и высоты которых определены относительно основного планово-высотного обоснования. Данный этап заключается в
определении пространственных координат центров специальных марок, для чего
могут быть использованы такие же методы, средства и приемы, как и при создании основного съемочного обоснования. Привязка точек рабочего съемочного
обоснования выполняется с пунктов основного ПВО.
Порядок
этапов [138]:
работы
на
сканерной
станции
состоит
из
следующих
40
а) установка сканера на запроектированной точке на штатив, высота которого задается такой, чтобы обеспечить максимальный охват интересующей территории (объекта) на одном скане;
б) расстановка вокруг сканера специальных марок, которые являются точками рабочего съемочного обоснования;
в) определение координат и высот центров специальных марок с точек основной опорной сети. Оценку точности создания рабочего обоснования можно
выполнить путем многократного измерения центров специальных марок или определением координат одних и тех же марок с различных пунктов основного съемочного обоснования (аналогично, как и при оценке точности тахеометрической
съемки);
г) сканирование местности и объектов вокруг точки стояния сканера. Если
сканер
снабжен
цифровой
камерой,
то
выполняется
также
цифровая
фотосъемка;
д) идентификация и определение приближенных координат центров специальных марок. В зависимости от модели сканера, эти операции выполняются либо
по полученному скану, либо по цифровому снимку, если сканер оснащен цифровой камерой;
е) сканирование специальных марок с максимальным разрешением, что позволяет с предельно возможной точностью для данной модели сканера определять
их координаты в системе координат скана;
ж) перемещение сканера на следующую точку сканирования и повторение
этапов а)–б).
Предварительная обработка данных и внешнее ориентирование сканов.
Управление наземным лазерным сканером и предварительная обработка результатов сканирования обычно осуществляются с использованием программного
продукта фирмы-изготовителя сканера. Предварительная обработка данных начинается с фильтрации данных. На данном этапе удаляются точки, не принадлежащие моделируемому объекту съемки. Для этой цели используются различные
фильтры, например, для удаления шумов, осреднения данных, высокочастотной и
41
низкочастотной фильтрации и т. д. Заключительным процессом на данном этапе
является внешнее ориентирование сканов.
Оценка точности внешнего ориентирования или объединения сканов. В зависимости от программного обеспечения, используемого для внешнего ориентирования и объединения сканов, данный этап может контролироваться по следующим параметрам [138]:
− средней квадратической погрешности единицы веса, вычисляемой при
объединении или внешнем ориентировании сканов;
− расхождениям пространственных координат специальных марок или характерных точек во внешней системе координат;
− средним квадратическим ошибкам (СКО) определения элементов внешнего ориентирования или объединения сканов.
Камеральная обработка и создание отчетной продукции
Создание трехмерных моделей. Экспорт сканов в формат программного
обеспечения (ПО), используемого для обработки данных наземного лазерного сканирования. Поскольку большинство программных продуктов, предназначенных
для обработки сканов, используют внутренний формат, то возникает необходимость экспорта в них данных из программы, управляющей сканером. Результатом
этого процесса является единая база данных сканерной съемки, либо единая точечная модель объекта.
Построение трехмерной векторной модели объектов и рельефа местности
путем вписывания в массив точек геометрических примитивов и поверхностей
(NURBS, Mesh и TIN). Для построения трехмерных векторных моделей объектов
ситуации по данным наземного лазерного сканирования используются следующие режимы:
− автоматический;
− полуавтоматический;
− интерактивный.
42
Выбор режима векторизации точечной модели зависит от используемого
программного обеспечения, от формы и размеров элементов объектов, если они
имеют правильную форму, то используется автоматический режим создания модели. Полуавтоматический и интерактивный режимы применяются для моделирования объектов неправильной, сложной геометрической формы и маленьких размеров.
В процессе векторизации, как с целью создания цифровых топографических
планов, так и построения трехмерной векторной модели целесообразно разделять
объекты по слоям. При этом их следует называть по типам объектов, например,
«забор металлический ниже одного метра», «забор металлический выше одного
метра», «забор бетонный», «сетка рабица», «изгородь» и т. д. Такой подход позволяет при оформлении, например, топографического плана в геоинформационной системе быстро изменить стили линий.
Построение цифровой модели рельефа в виде поверхностей (NURBS, Mesh
и TIN) заключается в выделении точек, принадлежащих поверхности земли, и построении по ним NURBS-, Mesh- и TIN-поверхностей, что определяется рабочей
программой.
Построение осей объектов в виде полилиний. При использовании этой технологии оси элементов конструкций показываются в виде полилиний. Также вычерчивается поперечный профиль конструкции на одном из концов оси. Затем эта
модель в виде полилиний экспортируется в программу САПР, где выполняется
«выдавливание» конструкций по созданным осям. Данные процедуры возможны
и в САПР, где отрисовка выполняется аналогичным образом. Выбор технологического решения в данном случае определяется опытом исполнителя и наличием у
него программного обеспечения.
Применение той или иной технологической ветви построения векторной
модели (см. рисунок 5) зависит от характера элементов ситуации. Для моделирования таких элементов, как уголки, швеллера, двутавровые балки, электрические
кабели и провода, целесообразнее применять вторую схему. Для создания моде-
43
лей зданий, трубопроводов, сферических объектов и т. д. следует использовать
первую схему.
Редактирование и оформление векторной трехмерной модели. Данный
процесс осуществляется с целью обеспечения целостности получаемой трехмерной модели. Обычно редактирование выполняется в системах автоматизированного проектирования, например, AutoCAD.
Создание базы данных. Для решения практических задач трехмерная модель
местности интегрируется или «связывается» с базой данных семантической информации. Для удобства работы база данных и модель разделяются по слоям.
Оценка точности построения векторной трехмерной модели. Оценка точности построения трехмерной модели местности по данным наземного лазерного
сканирования может выполняться двумя способами:
− по разностям координат и высот характерных точек местности (или объектов), полученным по векторной модели и в полевых условиях одним из известных геодезических способов, например, с помощью электронного тахеометра;
− по разностям длин линий, полученным в полевых условиях, и по созданной векторной модели.
В качестве контрольных выбираются точки, которые не должны изменять
свое пространственное положение за время между моментами сканирования и
контрольными геодезическими измерениями.
Создание цифровых чертежей и топографических планов. Векторизация
массива точек и сбор семантической информации по точечной модели для
создания цифровых чертежей и топографических планов. Перед началом
векторизации точечной модели создается поверхность относимости, т. е.
плоскость, на которую будут наноситься элементы чертежа или плана. Для
топографического плана в качестве такой поверхности выбирается плоскость,
параллельная плоскости XY внешней геодезической системы координат. Для
чертежей в качестве такой поверхности может быть выбрана поверхность стены,
элементы которой отрисовываются, или любая другая.
44
Следующим этапом является рисовка объектов, при этом поверхность
относимости должна быть параллельна плоскости экрана. Для векторизации
объектов используются стандартные ГИС или САПР объекты по типу локализации: точка, линия, полилиния, полигон, сплайн-линия, прямоугольник и
равносторонний n-угольник.
По своей сути, векторизация точечной модели с целью создания цифровых
чертежей и топографических планов полностью идентична рисовке по
ортофопланам, по материалам аэро- и космической съемки или фототеодолитной
съемки.
Векторизация точечной модели с целью создания топографических планов
выполняется в следующей последовательности:
а) рисовка сооружений и крупных объектов. На начальном этапе рекомендуется на плане отобразить крупные площадные объекты, такие как здания, сооружения и т. д., которые надежно дешифрируются по точечной модели без применения абрисов;
б) векторизация линейных объектов, например, трубопроводов, кабельных
каналов, линии электропередач (ЛЭП) и т. д. Для надежного дешифрирования таких объектов необходимо использовать абрисы, составленные на этапе проведения полевых работ, а также другие документы, например, ранее созданные топографические планы на данную территорию, технологические схемы объектов и
др.;
в) нанесение точечных объектов, таких как канализационные люки, колодцы связи, пожарные гидранты и др. Пространственное положение объектов, выступающих над землей менее чем на 1 см, рекомендуется определять геодезическими методами, например, с помощью электронного тахеометра.
Отображение рельефа на цифровых топографических планах. Способ построения модели рельефа зависит от загруженности топографического плана. Если топографический план имеет большую плотность контуров, то рельеф отображается в виде точек с отметками, во всех остальных случаях – горизонталями и
другими условными знаками (обрывы, откосы, обваловки, утесы, ледники и т. д.).
45
Экспорт векторной модели в формат ГИС или САПР. Этот процесс аналогичен процессу создания топографических планов на фотограмметрических станциях.
Оформление цифрового топографического плана и создание базы данных.
Данный
этап
заключается
в
формировании
выходных
инженерно-
топографических планов в соответствии с действующей нормативной базой.
Подготовка отчетной документации и контроль качества продукции.
Оценка точности цифрового топографического плана производится по данным
наземного лазерного сканирования таким же образом, как и цифровых моделей
местности.
Подготовка отчетной продукции и сдача продукции являются заключительным этапом. Отчетная продукция, как правило, включает пояснительную записку о проведении работ (технический отчет), а также графические приложения
в виде созданных топографических планов, чертежей и трехмерных моделей. Помимо этого, в отчетную документацию могут входить результаты экспертиз, акты
контроля точности и согласования готовой продукции. Перечень материалов,
входящих в состав отчетной продукции, регламентируется требованиями технического задания и предписанием рабочей программы.
1.3 Обобщенный подход к выбору организационных параметров съемки
Выбор высоты стояния сканера. В зависимости от категории решаемой задачи выбирается тип используемого оборудования и определяются требования к
информационной емкости [1] сканерных данных, которая влияет на дешифрируемость объектов. Исходя из геометрического и физического принципа наземной
лазерной съемки, информационная емкость сканерных данных зависит от следующих параметров:
− высота стояния сканера;
− разрешение сканирования;
− расстояние между сканерными станциями.
46
Выбор высоты стояния сканера, с одной стороны, должен обеспечивать
отображение на одном скане максимальной площади снимаемой территории с необходимой детальностью. При этом если проводить аналогию с тахеометрической
безотражательной и фототеодолитной съемками местности, прибор необходимо
располагать как можно выше. Из рисунка 7 видно, что величина линейного шага
сканирования по вертикали (lнакл.луч.) будет меньше с увеличением высоты стояния
сканера относительно снимаемой поверхности при постоянном отстоянии сканера
до объекта съемки S. Таким образом, установка сканера на большей высоте над
объектом съемки позволяет увеличить обзор области сканирования и плотность
расположения точек на скане, что значительно повышает информативность точечной модели. На рисунке 8 показаны значения lнакл.луч. в зависимости от высоты
стояния сканера h, полученные по формуле
S
lнакл.луч. = h ⋅ tg arctg + ∆θ − S ,
h
где
S – расстояние от сканера до объекта съемки;
h – высота сканера относительно снимаемого объекта;
Δθ – угловой шаг сканирования по вертикали.
Рисунок 7 – Зависимость линейного шага сканирования по вертикали от
высоты сканера относительно снимаемого объекта
(3)
47
Величина линейного шага сканирования по горизонтали (lгор) практически
не зависит от высоты стояния сканера, а зависит только от углового шага сканирования по горизонтали Δϕ и отстояния объекта съемки от НЛС, о чем свидетельствует формула
∆ϕ
lгор = 2 S 2 + h 2 ⋅ sin
.
2
(4)
Все величины представленные в формуле (4) изложены выше.
Рисунок 8 – Изменение lнакл.луч. в зависимости от h при S = 10 м и Δθ = 0,5º
Из рисунка 8 видно, что высота стояния сканера не должна превышать полезной дальности действия сканера.
С другой стороны, при увеличении высоты стояния сканера возрастает
площадь снимаемой территории с одной сканерной станции и пропорционально
возрастает величина мертвой зоны под сканером. При решении конкретной задачи возможны два варианта получения сканерных данных в пределах мертвой зоны, а именно:
а) информацию об объектах, расположенных в области мертвой зоны под
сканером, получают на основе экстраполирования данных наземного лазерного
сканирования;
48
б) данные об объектах внутри мертвой зоны получают с соседних сканерных станций. При этом площадь перекрытия двух смежных сканов должна быть
не менее 50 %.
Вторым фактором, сдерживающим чрезмерное увеличение высоты стояния
сканера, является требуемая детальность исполнения съемки. При подъеме сканера возрастает длина лазерного луча до снимаемого объекта, а с ней – и линейная
величина лазерного пятна на объекте. Для получения данных с требуемой детальностью на основе анализа большого количества производственных данных сформулированы автором условия:
– для НЛС с угловой расходимостью лазерного луча Ψ < 1 мрад
S≤
2d (1 + cos Ψ )
;
sin Ψ
(5)
S≤
8d (1 + cos Ψ )
,
sin Ψ
(6)
– для НЛС Ψ > 1 мрад
где
d – минимальный размер детали объекта, которая должна быть отображена
на трехмерной модели.
Выражения (5) и (6) получены автором путем анализа большого количества
производственных данных.
Таким образом, высота стояния сканера непосредственно связана с разрешением сканирования и удалением сканера от снимаемого объекта и в меньшей
степени зависит от расстояния между сканерными станциями.
Выбор разрешения сканирования. Угловой шаг (разрешение) сканирования,
в первую очередь, коррелирует с детальностью (точностью), требуемой при проведении работ. Обобщая производственный опыт выполнения работ, при выборе
углового шага сканирования следует исходить из того, какой вид продукции будет создаваться по сканерным данным:
49
− двумерные чертежи и трехмерные модели инженерных объектов;
− топографические планы и цифровые модели рельефа.
Для съемки инженерных объектов с целью создания трехмерных моделей и
чертежей угловой шаг сканирования (Δφ, Δθ) по горизонтали и вертикали следует
задавать в соответствии с формулой
180 d
.
∆ϕ(∆θ) =
1,41πS
(7)
Угловой шаг сканирования при наземной лазерной съемке с целью создания
крупномасштабных планов и цифровой модели рельефа задается одинаковым на
каждой станции и определяется следующими факторами:
− техническими характеристиками сканера;
− сложностью объектов;
− детальностью окончательной продукции, которая должна удовлетворять
заданным требованиям;
− производительностью (снимаемой площадью за один день) и оперативностью работ, т. е. временем, затраченным на выполнение работ на одной сканерной
станции.
Для большинства современных моделей лазерных сканеров при съемке объектов с целью создания топографических планов и цифровой модели рельефа угловой шаг сканирования следует задавать в пределах от 0,09° до 0,14° по вертикали и горизонтали.
Приведенные выводы подтверждены результатами выполнения наземной
лазерной съемки с целью создания трехмерных моделей, топографических планов
и двумерных чертежей, изложенными в работах автора [128, 129, 208].
Выбор расстояния между сканерными станциями. В зависимости от назначения наземного лазерного сканирования могут возникать два варианта выбора
расстояния между сканерными станциями Dmax, а именно:
– при экстраполяции сканерных данных внутри мертвых зон
50
Dmax = 1,27 S полез ;
–
(8)
при сканировании пространства внутри мертвых зон с соседних сканер-
ных станций
Dmax = 0,47 S полез ,
(9)
где Sполез – полезная дальность действия.
Геометрическая сущность зависимости Dmax от Sполез показана на рисунке 9.
Рисунок 9 – Пояснение к зависимости отстояния сканерных станций от
дальности действия НЛС: а) при экстраполяции сканерных данных внутри
мертвой зоны; б) при сканировании пространства внутри мертвой зоны с
соседних станций
Расчет полезной дальности действия сканера, используемой в формулах (8)
и (9), можно выполнить на основе минимального угла падения лазерного луча
сканера β и высоты стояния сканера (см. рисунок 7):
S полез = h ⋅ ctg(β) .
(10)
51
Физический смысл выражения (10) заключается в том, что при определенном угле падения для большинства объектов сохраняется диффузность отражения, а свыше данного угла объекты начинают переотражать лазерные импульсы.
Для практического использования выражения (10) встает задача определения предельного значения угла β. Для этих целей выполнены исследования с использованием рекомендаций, предложенных в работе [248], и суть которых заключалась в следующем. По данным наземной лазерной съемки объектов: ОАО
«Сургутнефтегаз» (120 га), территория г. Томска (310 га), ОАО «ГазпромнефтьНоябрьскнефтегаз» (540 га), ОАО «Томскнефть» (6 га) было выбрано более
500 сканерных станций, для которых величина углового шага сканирования отклонялась от оптимальных параметров не более чем на 10 %, причем объекты при
максимальном удалении от сканера однозначно дешифрировались. Помимо этого,
для каждой сканерной станции определялась высота стояния сканера. Затем с использованием выражения (10) вычислялся угол падения лазерного луча. В
таблице 1 приведена часть результатов экспериментальных исследований.
Таб ли ца 1 – Зависимость полезной дальности действия НЛС от высоты стояния
сканера и угла падения лазерного луча на подстилающую поверхность
Высота
стояния
сканера, м
2,08
2,10
2,11
2,25
2,31
2,80
3,50
3,50
3,63
Sполез,
м
40,03
40,04
40,25
40,91
41,61
52,01
60,02
63,93
65,72
β ср
Dmax, м
ctg β
β
hi ⋅ ctg(βср ) ,
S полез − hi ⋅ ctg(βср ) , м
38,33
38,70
38,88
41,45
42,61
51,59
64,49
64,41
66,88
Ср. кв. откл.
-1,704
-1,305
-1,366
0,545
0,997
-0,406
4,492
0,478
1,164
1,666272
м
50,84
51,02
51,11
51,95
52,84
66,01
81,01
81,19
83,47
1,51888
1,51834
1,51842
1,51586
1,51528
1,51700
1,51253
1,51618
1,51562
2,97444°
3,00527°
3,00113°
3,14772°
3,18071°
3,08218°
3,33847°
3,12960°
3,16129°
3,10641°
В таблице 1 значения β ср и среднего квадратического отклонения приведены на основе всех выполненных экспериментальных исследований. Также из результатов экспериментальных исследований установлено, что сканеры можно
52
разделить на две группы в зависимости от расходимости лазерного луча, а именно: НЛС, у которых Ψ до 1 мрад и НЛС, у которых Ψ более 1 мрад. Это объясняется количеством поступающих на приемник сигналов, отразившихся от объектов
ситуации и рельефа при излучении одного импульса.
Если вычисленное значение полезной дальности действия наземного сканера превышает его максимальную дальность действия (Rмаx), то для отражающей
способности объектов 8–20 % в качестве полезной дальности действия следует
принимать величину, рассчитанную по формуле
Rполез = 0,9 Rмаx .
(11)
На основе выполненных экспериментальных исследований сформулированы практические рекомендации для сканерной съемки при высоте стояния сканера от 1,8 до 2,2 м, наиболее часто используемой в производстве работ, а именно:
− для сканирования участков городских территорий среднее расстояние
между сканерными станциями следует задавать равным около 45 м;
− для наземной лазерной съемки сложных инженерных сооружений расстояние между точками стояния сканера рекомендуется примерно 55 м;
− для открытой местности (без сооружений и коммуникаций) сканерные
станции предпочтительнее размещать относительно друг друга на расстоянии
от 150 до 200 м, если дальность действия сканера составляет 200 м и более. В
противном случае дальность следует рассчитывать по формуле (11).
При выборе параметров наземной лазерной съемки на результаты сканирования существенное влияние оказывает наличие различной растительности перед
объектом съемки, что снижает информативность сканерных данных, а впоследствии – производительность их обработки и точность решения задач проектирования и изыскания инженерных сооружений. Влияние растительности на результаты сканирования схематично показано на рисунке 10.
53
От наличия растительности зависит выбор высоты стояния сканера и расстояния между сканерными станциями для съемки инженерных объектов с нескольких позиций.
Рисунок 10 – Влияние растительности на результаты НЛС
Для определения влияния растительности на результаты наземного лазерного сканирования проведены эксперименты, сущность которых заключалась в том,
что по сканам в программном продукте регистрировалась высота стояния сканера
h и угловой шаг сканирования ∆θ, с которыми была получена данная точечная
модель. Для открытых участков местности на максимальной полезной дальности,
на которой возможно по точкам лазерных отражений отобразить плановое положение объектов и рельеф, фиксировался линейный шаг сканирования lверт. По
фиксированным параметрам h, ∆θ и lверт рассчитывалось теоретическое расстояние S от сканера до объекта. На этом же скане выбиралась область, закрытая растительностью. Размер мертвой зоны, создаваемой растительностью, и уменьшение информативности сканерных данных анализировались по сканам визуально.
На основе практического опыта и выполненных измерений определялись харак-
54
теристики растительности: порода, средняя высота деревьев, среднее расстояние
между ними (для массивов деревьев) и густота листвы при ее наличии.
Затем по этим же сканам измерялось расстояние до растительности Sраст, закрывающей объект, оценивалась возможность векторизации объектов, находящихся за растительностью, и измерялась полезная дальность лазерных отражений
от этих объектов для отображения их планового положения Sпл и рельефа Sh. Полученная максимальная полезная дальность (Sпл, Sh) сравнивалась с рассчитанным
значением S (на открытой территории) и оценивалось влияние растительности на
дальность действия лазерного луча в процентном отношении по формуле
∆S =
S пл ( h ) ⋅ 100 %
S
.
(12)
Если наличие растительности позволяло работать с точечной моделью, то
′ для объектов, находящихся за
по ней измерялся линейный шаг сканирования lверт
этой растительностью, и сравнивался со значением требуемой детальности для
′
было меньше требуемой детальности
отображения объектов. Если значение lверт
′
для отображения объектов для той или другой конкретной цели, то значение lверт
номинал
на открытой местности и анализисравнивалось с измеренным значением lверт
ровалось, насколько снижается детальность точечной модели из-за влияния рас′
тительности. Если величина lверт
была больше требуемой детальности отображе-
ния объектов для разных целей, делался вывод, что наличие растительности не
позволяет отображать объекты с заданной детальностью.
В зависимости от влияния растительности на результаты наземной лазерной
съемки делались рекомендации по съемке тех или иных объектов для обеспечения
требуемой детальности сканов.
Если объекты за растительностью абсолютно не отображались на сканах, то
либо делались выводы о непригодности наземного лазерного сканирования при
съемке тех или иных объектов с требуемой точностью из-за особенностей харак-
55
теристик деревьев, либо давались рекомендации по выбору высоты стояния сканера, количества сканерных станций и сезона выполнения съемки этих объектов.
В зависимости от характеристик вся растительность автором была разделена на группы:
− отдельно стоящее хвойное дерево высотой до 6 м;
− отдельно стоящее хвойное дерево высотой от 6 м и выше;
− отдельно стоящее широколиственное дерево высотой до 6 м;
− отдельно стоящее широколиственное дерево высотой от 6 м и выше;
− отдельно стоящий кустарник высотой до 4 м;
− отдельно стоящий кустарник высотой от 4 до 6 м;
− кустарниковая растительность высотой до 6 м;
− массив деревьев в парковой зоне высотой от 4 м и более;
− лесной массив.
Всего было выполнено 639 измерений по 597 сканам.
Пример
результатов
выполнения
экспериментов
представлен
в
таблице 2.
На основе анализа измеренных и представленных в таблице 2 параметров и
выводов о влиянии различных групп растительности на детальность результатов
наземного лазерного сканирования были сформулированы рекомендации, представленные в таблице 3, по выполнению сканерной съемки для решения проектно-изыскательских задач, требующих различной точности.
В целом выполненные эксперименты показали, что наличие растительности
значительно ухудшает детальность сканов, снижает точность обработки данных
наземного лазерного сканирования. Для исключения влияния этого фактора следует соответствующим образом изменять высоту стояния сканера в зависимости
от высоты растительности, производить съемку при отсутствии лиственного покрова либо увеличивать число сканерных станций и при проектировании сканерной съемки учитывать рекомендации, приведенные в таблице 3.
56
Таб ли ца 2 – Данные по определению влияния различной растительности на
результаты лазерной съемки
Наименование
станции
1
Высота
стояния
сканера,
м
Угловой
шаг ска–
нирования
∆θ, ∆ϕ
2
SP10
Sпл,
м
Sh ,
м
Вид
растительности
6
7
8
9,0
3,5
15,0
4,5
100
8,1
40,9
57,5
33,0
0,120°
116
8,7
5,3
35,2
36,4
3,5
0,120°
102
8,6
19,3
25,2
22,2
SP14
2,3
0,100°
97
8,3
4,1
21,9
4,7
SP01
3,6
0,108°
89
8,0
19,0
25,2
25,2
SP03
3,5
0,120°
120
7,8
26,6
64,1
28,8
SP04
2,3
0,100°
126
8,3
12,4
34,6
23,7
SP01
3,5
0,090°
102
8,2
32,5
95,7
53,9
9
Отдельно стоящее
хвойное дерево, высота 3,8 м
Отдельно стоящее
хвойное дерево, высота 12 м
Отдельно стоящее
широколиственное
дерево, высота 5,4 м
Отдельно стоящее
широколиственное
дерево, высота 18 м
Отдельно стоящий
кустарник, высота
3,5 м
Отдельно стоящий
кустарник, высота
4,5 м
Кустарниковая растительность, высота 5 м
Массив деревьев в
парковой зоне, средняя высота
10 м
Лесной массив
S, м
lверт,
м
Sраст,
м
3
4
5
2,3
0,120°
95
SP07
2,1
0,090°
SP18
2,0
SP11
При исследовании влияния растительности на возможность наземного лазерного сканирования следует ввести понятие прозрачности объекта. Прозрачность объекта – это характеристика, показывающая какая часть лазерных отражений проходит сквозь объект. Для численного выражения этого понятия введем
коэффициент прозрачности объекта (kпрозрач). Используя данный коэффициент,
формулу (11) можно записать в следующем виде:
Rполез = k прозрач h ⋅ tg β .
(13)
57
Таблица 3 − Рекомендации по выполнению наземного лазерного сканирования с
учетом высоты и характера растительности
Задачи, для которых выполняется
сканерная съемка
Характер растительности
Высота
деревьев
1
2
3
Фасадная съемка,
′ менее 5 см
lверт
Различная
Фасадная съемка
верхних частей
зданий,
′ менее 5 см
lверт
Низкорослая
растительность
Проектирование и
изыскание инженерных сооружений,
′ менее 5 см
lверт
Отдельно
стоящие деревья или полосы
хвойных деревьев
Проектирование и
изыскание инженерных сооружений,
′ менее 5 см
lверт
Отдельно
стоящие деревья или полосы
лиственных
деревьев
Отдельно
стоящие деревья или полосы
хвойных или
лиственных
деревьев
Проектирование и
изыскание инженерных сооружений,
′ более 5см
lверт
Рекомендации по сканерной
съемке
4
Возможно выполнение съемки
только при значительном увеличении числа сканерных
станций для исключения
Различная
мертвых зон, что является
экономически невыгодным.
Съемку следует выполнять
тахеометром
Задавать высоту стояния сканера свыше 3 м для исключеНиже 3 м
ния такой растительности из
области сканирования
Коэффициент
прозрачности,
kпрозрач
5
0,25
0,90*
Ниже 4 м
Увеличить количество сканерных станций
0,75
Ниже 4 м
Производить наземную лазерную съемку в невегетационный период года
0,85*
Меньше
4м
Рекомендуется устанавливать
высоту стояния сканера ниже
кроны деревьев
0,75*
Выполнять сканерную съемку
не представляется возможным
Различная
0,10
в связи с абсолютной потерей
информативности
При проектировании работ
Построение
следует учесть, что дальность
Лесной массив Различная
0,55
ЦМР**
действия сканера уменьшается
на 50 – 60 %
* Данный коэффициент можно использовать при соблюдении рекомендаций, представленных в колонке 4.
** ЦМР – цифровая модель рельефа.
Проектноизыскательские
работы
Кустарниковая
растительность
58
Коэффициент прозрачности следует выбирать в соответствии с рекомендациями, представленными в таблице 3.
При создании рабочего съемочного обоснования сканерной съемки специальные марки следует располагать парами не менее четырех по схеме, показанной
на рисунке 11. Специальные марки рекомендуется размещать парами по окружности через 90°. Как показал практический опыт, использование такой геометрии
расположения и количества марок позволяет сократить затраты времени на их
расстановку, подготовку рабочего планово-высотного обоснования сканерной
съемки и непосредственно на сканирование [116]. При этом специальных требований к размещению марок по высоте в каждой паре нет.
Рисунок 11 – Схема расположения специальных марок относительно сканера
В случае если наземный лазерный сканер снабжен устройствами центрирования и горизонтирования, необходимость создания рабочего съемочного обоснования сканерной съемки отпадает. При этом точки основного съемочного обосно-
59
вания одновременно являются сканерными станциями и проектируются так, чтобы между ними была прямая видимость, а полезная дальность действия сканера,
расстояние между сканерными стациями, разрешение сканирования и высота установки НЛС также рассчитываются по формулам (3)–(13). Задача ориентирования прибора решается по известному направлению, которое задается специальной
маркой, установленной в отвесное положение над точкой с известными пространственными координатами в прямой видимости со сканером.
Рассмотренные параметры влияют на точность продукции, создаваемой по
результатам наземной лазерной съемки. Выбор данных параметров зависит только от исполнителя работ. Однако исполнитель не может повлиять на следующие
факторы и процессы:
− влияние окружающей среды;
− точность измерений прибором конкретного типа;
− алгоритмы, используемые при обработке данных.
Более подробно рассмотрим влияние данных факторов и процессов в
разделе 2.
60
2 ОБЩИЕ ПРИНЦИПЫ И МАТЕМАТИЧЕСКИЕ ОСНОВЫ
ПРОЦЕССА ИЗМЕРЕНИЙ ЛАЗЕРНЫМИ СКАНЕРАМИ
2.1 Классификация погрешностей в результатах
лазерного сканирования
Для подбора правильной математической модели учета погрешностей измерений любым фотограмметрическим или геодезическим прибором необходимо
знать физическую природу их возникновения. Последнее, в свою очередь, требует
четкого понимания принципа действия измерительного устройства. Поэтому для
правильной классификации и подбора адекватной математической модели рассмотрим принцип действия наземных лазерных сканеров, которые можно поделить на три типа: импульсные, фазовые и триангуляционные [184].
Система для наземного лазерного сканирования состоит из НЛС и полевого
персонального компьютера со специализированным программным обеспечением
[243]. НЛС состоит из лазерного дальномера, адаптированного для работы с высокой частотой измерений, и блока развертки лазерного луча (рисунок 12).
При разработке более поздних моделей НЛС производители стремятся отказаться от использования полевого персонального компьютера, а его функции возложить на специализированные вычислительные устройства, вмонтированные в
корпус сканера. Это не меняет общей сущности системы наземного лазерного
сканирования.
В качестве блока развертки в НЛС выступает сервопривод и зеркало или
призма. Сервопривод отклоняет луч на заданную величину в горизонтальной
плоскости, при этом поворачивается вся верхняя часть сканера, которая называется головкой. Развертка в вертикальной плоскости осуществляется за счет
вращения или качания зеркала.
61
2
4
3
1
6
5
7
1 – лазерный дальномер; 2 – приемо-передающий тракт дальномера; 3 – сканирующее зеркало
(призма); 4 – сканирующая головка сканера; 5 – кабель, соединяющий лазерный сканер с полевым компьютером; 6 – полевой компьютер (промышленный ноутбук) со специализированным
программным обеспечением; 7 – носитель информации
Рисунок 12 – Состав и принципиальная схема наземной
сканирующей системы
В процессе сканирования фиксируются направление распространения лазерного луча и расстояние до точек объекта. Результатом работы НЛС является
растровое изображение – скан (рисунок 13), значения пикселей которого представляют собой элементы вектора со следующими компонентами: измеренным
расстоянием, интенсивностью отраженного сигнала и RGB-составляющей, характеризующей реальный цвет точки. Положение (строка и столбец) каждого элемента (пикселя) полученного растра отражает значения измеренных вертикального и горизонтального углов. Для большинства моделей НЛС характеристика реального цвета для каждой точки получается с помощью неметрической цифровой
камеры.
62
а)
б)
в)
Рисунок 13 – Представление результатов наземного лазерного сканирования
в виде двумерных виртуальных снимков: а) интенсивность отраженного
сигнала; б) расстояние от сканера до снимаемого объекта;
в) реальные цвета объекта)
Другой формой представления результатов наземного лазерного сканирования является массив точек (рисунок 14) лазерных отражений от объектов, находящихся в поле зрения сканера, с пятью характеристиками, а именно пространственными координатами (X, Y, Z), интенсивностью и реальным цветом.
Рисунок 14 – Результат наземной лазерной съемки – массив точек
63
Пространственные координаты точек объекта в системе координат скана
вычисляются по полученным расстояниям и направлениям лазерного луча (рису-
Z
нок 15) по формулам [306-308]:
X
X = R cos ϕ sin θ
Y = R sin ϕ sin θ ,
Z = R cos θ
где
θ
R
(14)
R – измеренная дальность от точки
Y
-Y
-X
ϕ
стояния сканера до объекта;
φ – горизонтальный угол измерен
ного направления лазерного луча R ;
Рисунок 15 – Расположение осей
θ – вертикальный угол направления
R , отсчитываемый от оси Z до вектора R
НЛС
(зенитное расстояние направления лазерного луча).
Формулы (14) являются обобщенными для перехода от полярной системы
координат к пространственной декартовой. Для каждого конкретного сканера они
имеют индивидуальный вид, где учитываются несовпадение источника излучения
и приемника, эксцентриситет вертикальной и горизонтальной осей вращения прибора и другие величины, которые называются параметрами калибровки сканера
[306-308, 322].
В основу работы лазерных дальномеров, используемых в НЛС, положены
импульсный и фазовый безотражательные методы измерения расстояний, а также
метод прямой угловой засечки (триангуляционный).
Принцип действия фазовых и импульсных НЛС. В импульсном способе измерения расстояний в основу положено выражение [61, 210, 259]
R=
c⋅n⋅τ
2
,
(15)
64
где с – скорость распространения электромагнитного излучения в вакууме;
n – показатель преломления электромагнитного излучения, который является
интегральной функцией от метеорологических характеристик окружающей среды
вдоль трассы распространения волн;
τ – время, измеряемое с момента подачи импульса на лазерный диод до момента приема отраженного сигнала.
В основу фазового способа измерения расстояний положено выражение [61,
210, 224, 259]
R=
ϕ2 R ⋅ c ⋅ n
,
(16)
4π ⋅ f
где ϕ 2R − разность фаз между опорным и рабочим сигналом;
f – частота модуляции.
В формуле (16) ϕ 2R можно разложить на целую и дробную часть, тогда эта
формула примет традиционный вид фазового способа измерений расстояний
R=
λ
(N + ∆N ) ,
(17)
2
где λ – длина волны (λ = v/f);
N – целое число уложений длин полуволн λ/2;
∆N – дробная часть уложения длин полуволн в измеряемом расстоянии (∆N
= ϕ /2π).
При измерении расстояний фазовым способом возникает задача определения числа N в выражении (17), которое в НЛС решается методом кратных частот.
В данном методе используется m фиксированных частот, которые дают m независимых уравнений. Фиксированные частоты составляют ряд f1 > f2 > f3 >…> fm.
65
Сущность метода заключается в определении N из результатов измерения разности фаз на следующей более низкой частоте по формуле:
N i −1 =
где
λi
λ i −1
(Ni + ∆Ni ) − ∆Ni −1 ,
(18)
i = (m, …, 4, 3, 2).
Целочисленную величину, равную:
k=
λi
,
(19)
λ i −1
называют коэффициентом неоднозначности, и она тем больше, чем точнее определяется ∆N.
В наземных сканерах используются две несущие частоты.
Триангуляционный метод определения расстояний наземными лазерными
сканерами. В настоящее время существует два варианта реализации триангуляционного метода определения расстояний.
Сущность первого варианта определения расстояний триангуляционными
сканерами заключается в следующем. С помощью проектора лазерный луч низкой
мощности отклоняется от исходного направления [325]. Угол θ 1, образуемый базисом сканера d и лазерным лучом, вычисляется по положению изображения лазерного пятна на приемнике первой ПЗС-камеры (рисунок 16). Угол θ 2 образуется
осью (базисом) сканера и вектором распространения отраженного сигнала от объекта, фиксируемого второй ПЗС-камерой [274, 316, 325]. Термин «триангуляционный лазерный сканер» заимствован из англоязычной литературы и является несколько некорректным, поскольку принцип работы сканера основан на определении расстояний до объекта методом прямой угловой засечки с помощью величин
66
θ 1, θ 2 и d. Но так как в отечественных публикациях нет никаких аналогов этому
названию, то в тексте работы будет использоваться термин «триангуляционный
лазерный сканер» [184].
ПЗС – прибор с зарядовой связью
Рисунок 16 – Принцип действия НЛС Mensi Soisic и S-series (вид сверху)
Сущность другого варианта определения расстояний триангуляционными
лазерными сканерами показана на рисунке 17 [184].
Рисунок 17 – Принцип действия НЛС Minolta (вид сбоку)
Как видно из рисунка 17, в сканерах типа Minolta вместо ПЗС-камеры 1 используется полигональное зеркало, которое при помощи сервопривода отклоняет
лазерный
луч.
В
данном
случае
угол
θ1
измеряется
при
помощи
67
лимба, который регистрирует угол поворота полигонального зеркала относительно начального положения. Основные особенности при определении расстояний
данными триангуляционными сканерами состоят в следующем: развертка луча в
горизонтальной плоскости происходит при помощи системы линз, расположенных вблизи лазерного источника, поэтому сканирование выполняется не лучом, а
плоскостью; отсутствует сервопривод, который выполняет поворот головки сканера.
Таким образом, из принципа действия триангуляционных НЛС видно, что
первый вариант реализации позволяет выполнять сканирование вокруг себя, а
второй – некоей прямоугольной области, аналогично фототеодолиту.
В триангуляционных сканерах координаты точек объекта вычисляются по
формулам:
S cos γ
cos θ1
S cos γ
Y=
,
sin θ1
Z = S sin γ
X=
где
(20)
θ1 – угол между базисом и направлением
лазерного луча на измеряемую точку (см. рисунок 18);
γ – вертикальный угол между плоскостью
XY и направлением лазерного луча на измеряемую точку (см. рисунок 18);
S – расстояние от сканера до точки объекта (см. рисунок 18), которое, опуская выводы,
можно вычислить по формуле [184]
Рисунок 18 – Расположение осей
в триангуляционном сканере
68
S=
d ⋅ f 2 ⋅ sin θ1
,
(21)
f 2 ⋅ cos θ1 + p2 ⋅ sin θ1
где
f2 – фокусное расстояние объектива второй ПЗС-камеры (рисунок 19);
p2 – абсцисса отображения отраженного сигнала от объекта на ПЗС-матрице
второй камеры (рисунок 19).
Рисунок 19 – Геометрическая сущность определения расстояний
триангуляционными сканерами
При измерении угловых величин в НЛС выделяются следующие способы
[184]:
− с применением кодовых дисков с масками числовых шкал. В данном способе лимб, с которого считывается угловая величина, представляет собой кодовый
диск, на котором нанесена система кодовых дорожек, состоящих из отдельных
элементов типа «да-нет». Расположение этих элементов таково, что они в определенном коде зашифровывают измеряемую угловую величину, при этом каждая
дорожка выражает один разряд в значении измеряемого угла. Количество дорожек и последовательность расположения элементов в них зависят от выбранного
кода и точности измерения угловых величин. Считывание кода производится оптическим способом. Данный способ измерения углов относится к абсолютным
[54, 61, 148];
69
− с применением импульсных дисков. Сущность импульсного способа измерения углов состоит в том, что величина угла определяется количеством импульсов (инкрементов, являющихся последовательностью штрихов и интервалов между ними – элементов типа «да-нет»), укладывающихся на дуге окружности, заключенной между двумя сторонами угла. Этот способ основан на использовании
штрихового растра – системы радиальных штрихов, наносимых на внешнем крае
лимба или алидады через одинаковые интервалы. Данный способ измерения углов
принадлежит к числу относительных [54, 61, 148];
− с применением штриховых кодовых шкал. Данный способ отличается от
кодовых способов с числовыми шкалами тем, что информация об измеряемых углах здесь представлена в виде штрихов;
− с применением комбинаторных шкал. Данный способ измерения углов
является модификацией кодового. В нем устранены следующие недостатки:
сложность изготовления дисков с несколькими кодовыми дорожками и громоздкость конструкции считывающего устройства. В комбинаторном способе используется диск с одной кодовой дорожкой, а считывание информации производится с
помощью нескольких датчиков. Положение и количество считывающих датчиков
подобраны так, что каждому дискретному углу поворота шкалы соответствует
определенная комбинация состояний считывающих элементов, то есть кодовая
комбинация [148].
Перечисленные способы обеспечивают высокую скорость считывания, высокую точность измерения (ошибки измерения углов составляют несколько секунд), простую конструктивную реализацию [184].
Всю совокупность ошибок в величинах, измеряемых НЛС, можно разделить
на две группы [84, 184]:
− инструментальные, обусловленные качеством сборки и юстировки механических, оптических и электронных частей прибора;
− методические, источником которых является сам метод определения величин с помощью НЛС.
70
Величины ошибок первой группы фактически отражаются в техническом
паспорте сканера и первоначально определяются на этапе сборки и юстировки
прибора, а затем периодически – во время калибровки и поверки типов НЛС. Результатом таких исследований является заключение о соответствии (несоответствии) точности работы отдельных блоков прибора заявленным характеристикам.
Поверку типов прибора можно выполнять с использованием методик, описанных
в работах автора [117, 118]. Инструментальные ошибки, как правило, можно исключить только заменой частей и/или технологии изготовления прибора.
Методические ошибки обычно можно учесть при обработке результатов
измерений.
Применительно к НЛС методические ошибки можно разделить на следующие:
− ошибки, вызванные окружающей средой (атмосферной рефракцией, затуханием электромагнитных волн, вибрацией прибора и т. п.);
− ошибки, обусловленные характеристиками объекта сканирования (размером, ориентацией, цветом, текстурой и т. д.).
Для определения и учета методических ошибок в результатах наземного лазерного сканирования существует два основных подхода. Сущность первого состоит в раздельном оценивании влияния каждого фактора, как предлагается в работе [336]. Второй подход основан на комплексном учете воздействия всех факторов, аналогично тому, как выполняется исключение систематических ошибок в
координатах точек снимков при их фотограмметрической обработке. С помощью
первого подхода устраняют основную (бóльшую) часть систематических ошибок
из результатов измерения углов и расстояний сканером, причем такое исключение
выполняют на так называемом этапе предварительной обработки сканов. Остальную часть систематических ошибок устраняют с помощью комплексного подхода, для чего обычно используют полиноминальные модели. Исключение искажений в координатах точек сканов с помощью комплексного подхода является наиболее универсальным.
71
Из принципа действия триангуляционных сканеров видно, что они имеют
ограничения по максимальной и минимальной дальности сканирования, что доказывается производимыми на сегодня триангуляционными НЛС (измеряемые расстояния лежат в диапазоне от десятков сантиметров до 25 м [184]). Точность получения пространственных координат точек объекта триангуляционными сканерами составляет от 50 мкм до 0,3 мм. Соответственно, эти сканеры предназначены
для использования в лабораторных условиях, где отсутствуют температурные
градиенты. Этот факт освобождает измерения, выполненные триангуляционными
НЛС, от ошибок, вызванных воздействием окружающей среды.
Отметим, что наземные лазерные сканеры являются объективным средством определения пространственных форм материального мира во времени. Единственным инструментом, имеющим дело с чистыми формами созерцания времени
и пространства, является математика (геометрия – пространство, алгебра – время),
и она же является мерой научности знания. Поэтому для описания процесса измерения НЛС следует использовать математический аппарат с целью определения
точности единичного измерения, производимого в реальных условиях.
2.2 Влияние внешних условий на точность лазерного сканирования
На величины, измеряемые НЛС (расстояние, горизонтальный и вертикальный углы, интенсивность и реальный цвет поверхности объектов, от которых отразился сигнал), оказывает неблагоприятное влияние атмосфера, особенно приземный ее слой. В этом слое происходят значительные изменения плотности воздуха, перемещения и флуктуации воздушных масс, что приводит к уменьшению
скорости распространения света и изменению направления излучения (явление
рефракции), а также к уменьшению интенсивности отраженного сигнала и неправильной цветопередаче (так называемый эффект «дымки») [92, 218].
В результате влияния рефракции световых лучей дальномерный блок измеряет оптическую длину линии, которая превышает по длине геометрическую.
72
Кроме этого, атмосфера изменяет физические параметры излучения [210], вызывая:
− затухание (ослабление интенсивности), обусловленное поглощением и
рассеянием энергии волны в атмосфере;
− случайное изменение параметров волны, обусловленное турбулентностью атмосферного воздуха.
Затухание колебаний электромагнитной волны, вызванное атмосферой, особенно характерно для оптического диапазона, который используется во всех НЛС.
Данный вид влияния атмосферы, в первую очередь, приводит к уменьшению
дальности действия сканеров и неверному определению отражающей способности объекта при наземной лазерной съемке.
К случайным изменениям параметров электромагнитной волны под влиянием турбулентности относятся флуктуации амплитуды (интенсивности), фазы, частоты, поляризации, направления распространения волны и угла расходимости лазерного луча. Влияние флуктуаций выражается в увеличении спектральной плотности мощности шумов на входе приемника, вследствие чего ухудшается отношение «сигнал/шум» [184, 210]. Флуктуации особенно сильно проявляются при
измерениях в оптическом диапазоне. Лучшим способом исключения влияния турбулентности атмосферы является выбор наиболее благоприятных условий для измерений, которые в геодезической практике называются временем «спокойного
изображения».
На ошибку определения скорости света влияет много факторов. Основным
из них является значительная погрешность определения среднеинтегральной величины показателя преломления электромагнитных волн на отрезке между сканером и точкой объекта. Скорость света в вакууме на данный момент получена с относительной ошибкой порядка 10-9, поэтому при проведении измерений на незначительных для световых волн расстояниях (до нескольких километров) погрешностью определения скорости света можно пренебречь. Ошибка показателя преломления зависит от дисперсионной составляющей и от ошибки определения ме-
73
теопараметров вдоль лазерного луча. Использование в качестве источника сигнала лазера (характерное для всех новых разработок в области светодальнометрии и
лазерного сканирования) позволяет пренебречь дисперсионной ошибкой [65-67,
179, 249, 250].
Показатель преломления n для конкретных условий среды обычно представляют функцией плотности воздуха, аргументами которой являются давление,
температура и влажность воздуха, измеряемые при помощи барометра и гигрометра [61, 249]. Поскольку принцип измерения расстояний светодальномерами и
НЛС аналогичен, то для расчета показателя преломления электромагнитных волн
с учетом метеоданных при сканировании объекта можно использовать формулу
[42, 240]
nR = 1 +
nG − 1
p
55e
−
1 + α(T + 273,16 ) 760 1 + α(T + 273,16 )
⋅10 −9 ,
(22)
где α – газовая постоянная, равная 1/273,16;
p – давление атмосферы, в мм ртутного столба;
e – давление водяных паров в воздухе, в мм ртутного столба. Данный параметр связан с абсолютной влажностью уравнением Менделеева-Клайперона;
T – температура воздуха по шкале кельвина;
nG – показатель преломления стандартного воздуха, вычисляемый по формуле [240]
(nG − 1) ⋅107 = 2 876,04 + 16,288 + 0,136 ,
λ
2
(23)
λ
4
где λ – длина волны излучателя.
Скорость распространения электромагнитных колебаний в плотной среде (в
частности, в воздухе), как видно из формул (22) и (23), зависит от физических
свойств среды и длины электромагнитной волны. Показатель преломления элек-
74
тромагнитных волн в нормальных условиях среды для конкретной длины волны
может быть вычислен по формуле [52]
(nR − 1) ⋅10−8 = A +
где
B
C −σ
+
2
D
E −σ
+
2
F (G − σ )
K + (G − σ )
,
(24)
2
A, B, C, D, E, F, G, K – коэффициенты. Ввиду того, что различные авторы
предлагают свои значения коэффициентов, в данной работе они не приводятся;
σ – величина, обратная длине волны в вакууме, в мкм-1.
В зависимости от модели НЛС для исключения влияния атмосферных условий в дальномерных измерениях используется либо выражение (22), либо (24).
В теории интегральный показатель преломления воздуха электромагнитных
излучений в общем виде вычисляется по формуле
nR = ∫∫∫ F ( R, T , p, e)dTdPdE ,
(25)
F (R, T , p, E ) – стохастическая функция интегрального значения показателя
где
преломления, зависящая от метеорологических параметров окружающей среды и
длины трассы распространения электромагнитного излучения, причем R – расстояние от источника излучения до отражающей поверхности, а E – абсолютная
влажность воздуха в г/м3.
На основе выражений (22), (24) и (25) можно получить формулу остаточных
погрешностей в дальномерных измерениях, вызванных влиянием окружающей
среды
δR(T , p, E ) =
c×τ
[(∫∫∫ F (R, T , p, E )dTdpdE ) − u ],
(26)
2
где
u – значение показателя преломления, вычисляемое по формуле (22)
либо (23).
75
Проанализируем величины остаточных погрешностей в дальномерных измерениях, вызванных влиянием атмосферных условий, в зависимости от различных
функций изменения метеорологических параметров и величин T, p, E, которые
представлены в таблице 4 и на рисунке 20.
В таблице 4 приведены результаты моделирования погрешностей измерений,
в основу которых легли практические исследования, опубликованные в литературе, но изменение параметров T, p, E значительно завышено относительно реальных условий.
Таб ли ца 4 – Значения остаточных значений погрешностей в дальномерных
измерениях в зависимости от вида функции изменения метеорологических
параметров и величин T, p, E
Остаточные погрешности при различных
видах функций изменения параметров
линейная, мм
логарифмическая, мм
R = 100 м
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,161
0,311
∆T = 30 °C, ∆p = 0 мм рт. ст., ∆E = 0 г/м3
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,022
0,073
∆T = 7 °C, ∆p = 10 мм рт. ст., ∆E = 0 г/м3
T0 = 10 °C, p0 = 760 мм рт. ст.,E0 = 10 г/м3
0,006
0,013
∆T = 20 °C, ∆p = 20 мм рт. ст., ∆E = 5 г/м3
T0 = 25 °C, p0 = 740 мм рт. ст.,E0 = 10 г/м3
0,014
0,273
∆T = 30 °C, ∆p = 30 мм рт. ст., ∆E = 10 г/м3
R = 500 м
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,806
1,559
∆T = 30 °C, ∆p = 0 мм рт. ст, ∆E = 0 г/м3
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,112
0,365
∆T = 7°C, ∆p = 10 мм рт. ст, ∆E = 0 г/м3
T0 = 10 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,030
0,064
∆T = 20 °C, ∆p = 20 мм рт. ст, ∆E = 5 г/м3
T0 = 25 °C, p0 = 740 мм рт. ст., E0 = 10 г/м3
0,068
1,366
∆T = 30 °C, ∆p = 30 мм рт. ст., ∆E = 10 г/м3
R = 1000 м
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
1,611
3,119
∆T = 30 °C, ∆p = 0 мм рт. ст, ∆E = 0 г/м3
T0 = 20 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,224
0,730
∆T = 7 °C, ∆p = 10 мм рт. ст, ∆E = 0 г/м3
T0 = 10 °C, p0 = 760 мм рт. ст., E0 = 10 г/м3
0,060
0,127
∆T = 20 °C, ∆p = 20 мм рт. ст., ∆E = 5 г/м3
Изменение параметров
76
T0 = 25 °C, p0 = 740 мм рт. ст., E0 = 10 г/м3
0,137
2,731
∆T = 30 °C, ∆p = 30 мм рт. ст., ∆E = 10 г/м3
П р и м е ч а н и е – для исследования влияния изменений метеорологических параметров
вдоль измеряемой трассы использовалось выражение (22)
Из анализа результатов, приведенных в таблице 4 и на рисунке 20, можно
сделать вывод, что используемые формулы вычисления интегрального показателя
преломления в ПО имеют достаточную точность, чтобы пренебрегать погрешностями δR (T, p, E) для решения любых задач с использованием НЛС, если нет антропогенных возмущений температурных полей.
Поскольку формулы (22) и (24) определялись на основе эмпирических данных, то можно заключить, что они учитывают, помимо среднеинтегрального показателя преломления, также и искривление лазерного луча.
77
Рисунок 20 – Графики погрешности измерения расстояний при изменении
метеоусловий вдоль трассы при R = 1 000 м
Ошибки, связанные с рефракцией, приводят к искажению направления световых лучей при изменении показателя преломления. При измерении горизонтальных углов основное влияние оказывает боковая рефракция.
Ошибки, связанные с действием боковой рефракции, носят систематический характер, особенно при спокойном изображении, т. е. стабильном расположении слоев воздуха, проходимых визирным лучом [217, 241]. Для вычисления
78
поправок за влияние боковой рефракции вдоль трассы определяемого расстояния
необходимо измерять горизонтальные градиенты температуры и влажности.
Формулы для расчета поправок за боковую рефракцию в случае однородного поля рефракции имеют вид [86, 241]:
–
для температуры
δ,Г, = −10,9
P
T
–
∂T
,
(27)
1 ∂E
,
S
T ∂y
(28)
S
2
∂y
для влажности
∆δ,Г, = −1,40
где δ,Г, – поправка в измеренное направление, вызванная изменением температуры поперек трассы измеряемого расстояния;
∆δ,Г, – поправка в измеренное направление, связанная с изменением влаж-
ности поперек трассы измеряемого расстояния;
∂T
∂y
,
∂E
– горизонтальные градиенты температуры и влажности;
∂y
S – измеренное расстояние;
T – абсолютная температура;
P – давление, в мм рт. ст.
Горизонтальные градиенты влажности влияют на угол рефракции значительно меньше (примерно на порядок), чем градиенты температуры. Влияние градиента давления на угол боковой рефракции пренебрежимо мало (несколько тысячных секунды) [263].
Из экспериментальных исследований, приведенных в работах [176, 266],
видно, что суточный ход ошибок из-за рефракции имеет синусоидальный характер. Поэтому значения поправок в угловые измерения, связанных с влиянием боковой рефракции, будут изменяться во времени. Так как продолжительность измерений на одной станции может достигать 1,5–2 ч, то значение поправки в угло-
79
вые измерения необходимо задавать как функцию от времени. В работах
[76, 176] предлагается использовать в качестве такой функции параболическую,
что подтверждается и другими публикациями [242, 263-266].
Между градиентами температуры и влажности существует зависимость:
там, где имеет место значительный градиент температуры, возможны значительные градиенты влажности, и наоборот. Это с очевидностью вытекает из самой
природы градиентов. На более увлажненной поверхности величина испарения
больше, следовательно, на него расходуется большее количество тепла, и температура воздуха над этой поверхностью ниже. В результате над границей поверхностей возникают влажностный и температурный градиенты. Если две одинаково
увлажненные поверхности поглощают разное количество тепла, то с более нагретой поверхности испарение будет происходить более интенсивно и над границей
возникает вместе с температурным градиентом также и градиент влажности. Таким
образом,
градиенты
температуры
и
влажности
сопутствуют
друг
другу [43, 263].
Время наблюдения, которое принято наиболее оптимальным в отношении
влияния рефракции, одновременно является выгоднейшим и в отношении влияния турбулентности, поскольку эти два явления вытекают из одних физических
предпосылок; об этом также свидетельствуют и экспериментальные исследования. Следовательно, можно заключить, что при проведении измерений во время
спокойных изображений одновременно сводятся к минимуму ошибки, вызванные
как рефракцией, так и турбулентностью. Возникающие при этом ошибки соответствуют условиям слабой турбулентности [44].
В физическом смысле горизонтальная рефракция является функцией показателя преломления электромагнитных волн в различных слоях атмосферы. Данную функциональную зависимость особенно сложно описать математически для
локальных неоднородностей атмосферы. Поэтому на практике для учета горизонтальной рефракции используют формулу, в которую входят интегральные показатели атмосферы (температура, давление и влажность). Исследования, выполнен-
80
ные различными специалистами [86, 254, 266], показывают, что значительное искажение в измеренное направление могут вносить собственные рефракционные
поля сооружений (в некоторых случаях до 20″ в горизонтальные углы, когда лучи
проходят вблизи сооружений на расстоянии до 1,5 м).
Наиболее изученным из всех явлений является вертикальная рефракция,
учет которой требует измерения температуры и давления.
Резюмируя вышеизложенное, можно заключить, что погрешности в измеряемых углах, вызванные влиянием метеорологических свойств окружающей
среды, можно записать в виде:
–
для горизонтальных углов
δϕT , p, E = G (R XY , TXY , p XY , E XY ) ;
–
для вертикальных углов
δθT , p, E = G (R, TZ , pZ , EZ ) ,
где
(29)
(30)
G (R XY , TXY , p XY , E XY ) и G (R, TZ , pZ , EZ ) – стохастические функции, опи-
сывающие искажения измеренных горизонтальных и вертикальных углов в зависимости от метеорологических свойств окружающей среды;
δϕT , p, E и δθT , p, E – величины погрешностей в горизонтальных и верти-
кальных углах, вызванные влиянием метеорологических свойств окружающей
среды.
Кроме метеоусловий, на результаты лазерного сканирования оказывает
влияние вибрация, которая вызывает смещение прибора вдоль измеряемой линии,
а также поперек нее в вертикальной и горизонтальной плоскостях.
Вибрация оказывает основное влияние на дальномерные измерения и вызывает хаотическое смещение лазерного пучка относительно заданного направления
на точку сканирования, что приводит к случайной амплитудной и фазовой моду-
81
ляциям. Влияние случайного изменения амплитуды модулирующего сигнала из-за
вибрации прибора эквивалентно воздействию мультипликативной помехи. В работе [247] отмечено, что влияние мультипликативной составляющей может приводить к значительным искажениям в измеренных расстояниях. Случайная фазовая модуляция связана с фазовой неоднородностью модулированного излучения и
по результатам исследований, приведенных в работах [210, 247], вызывает ошибки в измеренном расстоянии порядка 1–2 мм. Из-за вибрации НЛС при отстоянии
прибора от объекта от 20 до 30 м погрешность измерения расстояний увеличивается на 40–50 % по сравнению с ошибкой расстояния в случае отсутствия вибрации. При отстоянии от 60 до 70 м эта погрешность возрастает в 3–4 раза. При расстояниях от 80 до 90 м ошибка составляет от 10 до 15 см. Влияние вибрации всегда приводит к увеличению измеренного расстояния по сравнению с истинным
[247]. Вибрация вызывает модуляцию электромагнитного сигнала путем наложения двух колебаний (электромагнитных и вибрационных), что приводит к увеличению оптической длины пути по отношению к геометрической. Также вибрация
в значительной степени приводит к размытию входного сигнала, что приводит к
ложному определению центра сигнала.
Помимо влияния вибрации на измеряемые расстояния, она воздействует на
измеряемые углы следующим образом:
− рассогласовывает время снятия отчета с измерительных угломерных
блоков и время испускания лазерного пучка;
− придает полигональному зеркалу или призме дополнительное угловое
ускорение, что приводит к смещению угла выставки отсчетного устройства относительного полигонального зеркала (призмы);
− вызывает биение в цапфах отсчетных устройств при вращении зеркала
(призмы) вокруг горизонтальной оси и вращении НЛС вокруг вертикальной оси,
что приводит к нарушению главного условия геодезических приборов – перпендикулярности осей.
Исследования, проводившиеся различными авторами для выявления закономерностей описания влияния вибрации на угловые измерения, не привели к ус-
82
пеху. Данные исследования показали увеличение величины погрешности измерения углов.
Таким образом, в общем виде влияние вибрации на результаты наземного
лазерного сканирования можно записать следующим образом:
–
для расстояний
δRвибр = FR ,вибр ( A, ν, λ, R ) ;
–
для горизонтальных углов
δϕ вибр = Fϕ,вибр ( A, ν ) ;
–
(32)
для вертикальных углов
δθвибр = Fθ,вибр ( A, ν ) ,
где
(31)
(33)
FR,вибр(R,А,ν,λ), Fϕ,вибр(А,ν), Fθ,вибр(А,ν) – функции, описывающие влияние
вибрации на результаты измерения расстояний, горизонтальных и вертикальных
углов.
Погрешности, вызванные вибрацией, можно исключить или сделать их пренебрегаемо малыми для конкретного вида решаемых задач на этапе проектирования сканерной съемки в конкретных условиях. Аналогичным образом на этапе организации и проектирования конкретного вида работ можно исключать и погрешности, вызванные метеорологическими условиями.
2.3 Влияние метрологических свойств объектов на
точность наземной лазерной съемки
При рассмотрении данного вида погрешностей следует воспользоваться
правилом разделения каждой проблемы, избранной для изучения, на элементарные составляющие, тем самым повысив качество ее решения.
83
Влияние объекта съемки на точность получения пространственной информации при наземном лазерном сканировании проявляется в погрешностях измеряемых расстояний [184]. Метрологические свойства объекта на точность измерения углов влияния не оказывают. При измерении расстояний импульсным методом форма лазерного сигнала в идеальном случае соответствует кривой Гаусса с
определенной шириной. Длительность импульса лазера, применяемых в современных сканерах, изменяется в пределах от нескольких десятков пикосекунд до
нескольких наносекунд. Это означает, что путь, пройденный лазерным лучом в
открытой атмосфере, составляет от нескольких сантиметров до нескольких метров. На практике для определения расстояний от сканера импульсного типа до
объекта и обратно измеряется время распространения сигнала между максимумами двух функций fизл и fрасс (рисунок 21), соответствующих излученному (опорному) и обратно рассеянному (рабочему) оптическому сигналу. Для определения
расстояний импульсными сканерами необходимо найти максимумы этих функций.
Аналогичным образом происходит обработка сигнала в фазовых и триангуляционных сканерах. Используемые цифровые фазоизмерительные устройства
регистрируют кратковременные импульсы, образуемые из синусоидальных электромагнитных сигналов, каждый из которых соответствует определенной фазе излучаемого и принимаемого светового луча [51, 179]. В триангуляционных сканерах расстояние до объекта вычисляется на основе известного базиса сканера и
двух углов, определяемых на основе регистрации ПЗС-матрицами рассеянного и
излученного сигналов (см. 2.1). Таким образом, точность измерения расстояний
всеми видами сканеров зависит от формы рассеянного сигнала, которая напрямую
влияет на точность определения положения максимума функции fрасс. Поэтому
метрологические свойства сканируемого объекта будут оказывать аналогичное
влияние на результаты съемки импульсными, фазовыми и триангуляционными
НЛС.
84
При наземном лазерном сканировании на точность нахождения максимумов
обеих функций влияют шумовые составляющие в электромагнитном сигнале,
апертура лазерного луча, величина расходимости лазерного излучения и метрологические свойства объектов, такие как ориентация объектов относительно сканера, их форма и отражающая способность, которая, в свою очередь, определяется
текстурой и цветом.
Для анализа общей погрешности наземного лазерного сканирования, вызванной метрологическими свойствами объектов, воспользуемся правилом разделения
ее на элементарные составляющие.
Покажем влияние формы и
орентации сканируемого объекта
Рисунок 21 – Время распространения
на точность определения расстоя-
импульса в пространстве
ний. Предположим, что объект
съемки имеет однородную тексту-
ру и представляет собой сферу с радиусом R, равным расстоянию от лазерного
источника до цели. Тогда время распространения лазерного луча до различных
точек объекта в пределах угла расходимости лазерного излучения и обратно до
приемника (если считать, что он совмещен с источником излучения) будет величиной постоянной (рисунок 22). В этом случае длительность ширина излученного
и обратно рассеянного импульсов будет совпадать, и расстояние будет определяться с высокой точностью. Однако на практике такая ситуация почти никогда
не встречается.
Предположим, что сканируемый объект является плоскостью. Тогда рассеянный сигнал будет несколько больше излученного, причем степень размывания
fрасс зависит от ориентации плоскости по отношению к вектору распространения
лазерного луча (она будет минимальной, если плоскость расположена перпенди-
85
кулярно лучу) (рисунок 23). Таким образом, точность определения расстояния для
случая А будет выше, чем для случая Б.
М1-Мn – диаметр лазерного пятна
Рисунок 22 – Расстояние от лазерного источника до различных точек
сферического объекта радиусом R
Рисунок 23 – Зависимость длительности рассеянного импульса
от ориентации объекта
С учетом симметричности кривой Гаусса поиск максимума функции можно
заменить определением положения ее центра «масс» t0 по оси времени. В этом
случае время распространения сигнала от источника излучения до объекта и обратно до приемника будет вычисляться по формуле
tn
∫ tf (t )dt
t0 =
t1
tn
,
∫ f (t )dt
t1
где
f (t) – функция рассеянного сигнала;
(34)
86
t1, tn – моменты времени регистрации начального (первого) и конечного (nого) рассеянного сигнала (см. рисунок 21), которые выступают пределами интегрирования.
Симметричность функции рассеянного сигнала будет нарушаться в зависимости от формы объекта, его ориентации относительно лазерного луча, а также
градиента функции отражающей способности объекта, на который падает луч.
В том случае, когда лазерный луч попадает на границу двух объектов
(рисунок 24), функция рассеянного сигнала будет иметь два максимума. Если не
учитывать этот факт, то время, вычисляемое по формуле (34), а, следовательно, и
расстояние, полученное по формулам (15) и (16) будут соответствовать некоторой
точке M (рисунок 24), которая не принадлежит объекту.
Измерение расстояний до объектов А и Б возможно при условии, если определено положение двух максимумов функции рассеянного сигнала. Качество решения этой задачи зависит от длительности лазерного импульса и расстояния между объектами А и Б (см. рисунок 24). Минимальное расстояние между двумя
объектами, позволяющее отделить один максимум функции от другого, можно
назвать разрешающей способностью разделения двух объектов, которая определяется критерием Рэлея.
Рисунок 24 – Форма рассеянного сигнала при попадании лазерного луча на
границу двух объектов
87
Текстура и цвет сканируемого объекта непосредственно влияют на интенсивность рассеянного сигнала, что также приводит к изменению формы функции
fрасс. Так, например, из рисунка 25 видно, что при сканировании плоского объекта,
одна часть которого окрашена в белый цвет, а другая – в черный, результат съемки будет иметь большую шумовую составляющую на границе участков различного цвета.
Рисунок 25 – Результат наземного лазерного сканирования объекта с
наличием деталей различного цвета
Влияние метрологических свойств объекта сканирования на функцию распределения интенсивности рассеянного сигнала в общем виде можно описать
формулой
f расс (t ) =
∆ϖ ∆υ
2 D ( ϖ, υ )
(
,
)
(
,
)
−
ϖ
υ
Ψ
ϖ
υ
f
t
K
изл
расс
dϖ ⋅ dυ + η(t ) ,
c
− ∆ϖ − ∆υ
∫ ∫
(35)
где fизл(t) – функция излученного сигнала;
D(ϖ,υ) – функция, которая описывает изменение расстояния от лазерного источника до различных точек объекта в пределах угла расходимости лазерного
пучка, т. е. отражает форму объекта;
88
Kрасс(ϖ,υ) – функция, характеризующая коэффициент рассеяния пучка различными точками объекта сканирования в пределах лазерного излучения;
Ψ(ϖ,υ) – функция, описывающая распределение интенсивности сигнала в
пространстве, т. е. величину расходимости лазерного пучка;
Δϖ, Δυ – углы расходимости лазерного излучения в горизонтальной и вертикальной плоскостях;
η(t) – функция, выражающая шумовые составляющие в электромагнитном
излучении, вызванные стохастическим изменением параметров лазера.
2 D (ϖ, υ)
Функция f изл t −
характеризует процесс распространения сигнала
c
вдоль приемо-передающего тракта. Форма сигнала изменяется в зависимости от
метеоусловий окружающей среды. Формула (35) с учетом влияния метеорологических условий, после исключения малых величин, будет иметь следующий вид
f расс (t ) =
∆ϖ ∆υ
1 2 D ( ϖ , υ)
(
,
)
(
,
)
−
ϖ
υ
Ψ
ϖ
υ
f
t
K
dϖ ⋅ dυ + η(t ) ,
∫ ∫ изл n
расс
c
R
− ∆ϖ − ∆υ
(36)
где nR – показатель преломления световых лучей в реальных условиях, вычисляемый по формуле (22) либо (24).
Поскольку функция nR не изменяется за время действия лазерного импульса
сканера и не зависит от расходимости лазерного излучения, то выражение (36)
примет вид
1
f расс (t ) =
nR
∆ϖ ∆υ
2 D ( ϖ , υ)
(
,
)
(
,
)
−
ϖ
υ
Ψ
ϖ
υ
f
t
K
изл
расс
dϖ ⋅ dυ + η(t ) .
c
− ∆ϖ − ∆υ
∫ ∫
(37)
Величина nR > 1 для реальных условий, поэтому nR является показателем
уменьшения амплитуды, что соответствует выводам, приведенным в работах [58,
92, 179, 210].
89
С использованием формулы (37) можно выполнить математическое моделирование процесса сканерной съемки и изучить влияние таких характеристик объекта, как форма, цвет и текстура на точность получения данных.
Для моделирования измерений расстояний с использованием выражения (6)
следует представить функции D(ϖ,υ), Kрасс(ϖ,υ), Ψ(ϖ,υ), η(t) в виде конкретных
математических зависимостей. Тогда формула (6), описывающая отстояние объектов съемки от НЛС, будет иметь сложный и слишком громоздкий вид, что затрудняет ее анализ. Поэтому для практического исследования поведения функции
fрасс(t) объекты сканирования заданы поверхностями до второго порядка, а для
выполнения интегрирования использован программный продукт MatLab, либо методами приближенного вычисления интегралов [183]. Для проверки работоспособности формулы (37) выполнено моделирование процесса измерений и проведена наземная лазерная съемка реальных тест-объектов.
Результаты моделирования функции fрасс(t) в зависимости от расходимости
лазерного излучения представлены на рисунке 23, из которого видно, что форма
рассеянного сигнала стремится к форме излученного при уменьшении значения
Ψ(ϖ,υ). Следовательно, можно сделать вывод, что расходимость лазерного излучения вызывает эффект низкочастотной фильтрации рассеянного сигнала, в результате чего форма объектов на сканах становится более сглаженной и менее
выраженной.
Для изучения поведения функции рассеянного сигнала в зависимости от изменения коэффициента рассеяния излучения различными точками сканируемой
поверхности в пределах лазерного пятна выполнено моделирование fрасс(t) при
различных значениях Kрасс(ϖ,υ) объекта съемки, на который падает лазерный пучок (рисунок 27).
Для расчета fрасс(t) по формуле (37) функция Kрасс(ϖ,υ) задана, как показано
на рисунке 25. Положение точек сканируемой поверхности с различными коэффициентами рассеяния, полученное в результате моделирования по формулам
(37) и (34), представлено на рисунке 28.
90
Рисунок 26 – Изменение формы входного сигнала в зависимости
от ширины лазерного пятна
Рисунок 27 – Пояснение к исследованию влияния коэффициента Kрасс(ϖ,υ)
на форму рассеянного сигнала
Из анализа рисунка 28 можно сделать вывод о влиянии разности коэффициентов рассеяния сигнала сканируемым объектом на точность измерения расстоя-
91
ний, что подтверждают данные наземной лазерной съемки, представленные на
рисунках 26 и 29.
По результатам моделирования также установлено, что с увеличением
Kрасс(ϖ,υ) соседних объектов съемки возрастает изменение измеряемого расстояния. При уменьшении расходимости лазерного пучка уменьшается величина
ошибки измеряемого расстояния до точек, лежащих на границе объектов с различными коэффициентами рассеяния. Эти выводы подтверждены практическими
исследованиями, выполненными по результатам наземной лазерной съемки сканерами Riegl LMS-Z210, Riegl LMS-Z360, Riegl LMS-Z420i, Leica ScanStation 2,
имеющими различные значения расходимости лазерного пучка. Результаты экспериментов приведены в таблице 5.
(Ψ1(ϖ,υ) > Ψ2(ϖ,υ))
Рисунок 28 – Результаты моделирования измерения расстояний до точек
поверхности при различных коэффициентах рассеяния и значениях
расходимости лазерного пучка
Из таблицы 5 видно, что экспериментальные данные подтверждают выводы,
сделанные по результатам моделирования измерения расстояний НЛС с использованием выражений (37) и (34), подтверждаются экспериментами. Это свиде-
92
тельствует о возможности использования формулы (37) для моделирования процесса работы НЛС с целью решения практических задач.
Как показывают результаты моделирования и опыт автора выполнения сканерной съемки [137], ошибки в расстояниях, вызванные всеми метрологическими
свойствами объектов, могут достигать нескольких метров (если расходимость лазерного пучка более 1 мрад ≈ 3,5′), а для большинства моделей НЛС составляют
от 1 до 3 см.
Рисунок 29 – Результаты сканирования поверхности с различными
коэффициентами рассеяния НЛС Riegl LMS-Z360
Большей части проблем, связанных с влиянием текстуры, формы, ориентации и цвета объекта на результаты сканирования, можно избежать, если уменьшить расходимость лазерного пучка, то есть увеличить степень его коллимации,
тем самым улучшив метрические характеристики сканов. Решить эту задачу можно только путем улучшения характеристик при создании новых моделей сканеров.
Влияние формы и текстуры объекта съемки на точность получения данных
сканирования существующими НЛС можно учитывать, применяя результаты математического моделирования процесса сканерной съемки с использованием
формулы (37) с учетом характеристик конкретных объектов и сканера. Если при
93
обработке выполненных измерений оценить вид функции рассеянного сигнала и
сравнить ее с базовыми вариантами, созданными при моделировании, можно частично исключить влияние формы и текстуры объекта на результаты сканирования.
Таб ли ца 5 – Значения величины погрешности при различных разностях
коэффициентов отражений для различных моделей НЛС
Модель НЛС,
Изменение измеряемого расстояния при различных разностях коэффициентов
значение
рассеяния сигнала (ΔK = K1 – K2) плоскостью, м
расходимости
лазерного
ΔK = 0,01 м-1
ΔK = 0,0375 м-1
ΔK = 0,065 м-1
ΔK = 0,0925 м-1
ΔK = 0,12 м-1
0,027
0,040
0,060
0,071
0,087
0,024
0,036
0,052
0,065
0,079
0,014
0,017
0,022
0,027
0,031
0,009
0,011
0,016
0,019
0,022
пучка
Riegl
LMS-
Z210, 3 мрад
Riegl
LMS-
Z360, 2 мрад
Riegl LMSZ420i,
0,25 мрад
Leica ScanStation 2,
0,12 мрад
Погрешности, вызванные отличием цвета или отражающей способности на
границе соседних объектов, можно уменьшить путем калибровки функции рассеянного сигнала на основе совместной обработки результатов сканерных измерений и информации о цвете объекта, полученных при съемке.
Формула (37) является основой процесса измерения наземным лазерным
сканером, но она к настоящему времени имеет теоретическое значение, так как не
учитывает практический опыт. Это подтверждает анализ истории развития любого открытия, доведенного до практики. Лишь часть утверждений физикоматематического естествознания остаются неизменными. Обнаруживая свою корреляцию с опытом, они подлежат переменам, т. е. на основе практики изменяются
94
формульные записи. Однако фундаментальность математических связей между
природными процессами и физическими величинами остается неизменной, так же
как и явлений, описываемых формулой (37). Поэтому в дальнейшем выражение
(37) следует привести к параметрическому виду для конкретной модели НЛС и
тем самым использовать для практических целей.
Метрологические свойства объекта на точность измерения углов влияния не
оказывают.
Погрешности, вызванные метрологическими свойствами объектов и воздействием окружающей среды, можно свести к минимуму, и в зависимости от решаемых задач применять подходящую для конкретных условий методику. Но,
помимо описанных погрешностей, в результаты единичного измерения вносят
значительный вклад инструментальные погрешности.
Выражение (37) в общем случае описывает процесс измерения наземными и
воздушными лазерными сканерами.
2.4 Инструментальные источники погрешностей
Стабильность работы НЛС
Применение в НЛС в качестве источника излучения лазера, работающего
либо непрерывно, либо с высокой частотой испускания импульсов, вызывает нагрев как самого лазера, так и пространства внутри него. Поэтому производители
лазерных сканеров снабжают их системой охлаждения, отсутствие которой может
приводить к следующим последствиям [184]:
− в результате частого нагрева (выше нормы) и охлаждения сканера будет
происходить деформация измерительных и вращающихся частей НЛС, что отрицательно влияет на точность измеряемых величин от запуска к запуску прибора, а
также уменьшает срок его службы;
− перегрев сканера может вызвать заклинивание подвижных частей в сканере, что грозит выходом прибора из строя.
95
В НЛС реализуется два вида систем охлаждения, а именно:
− воздушная, т. е. основанная на притоке «холодного» воздуха из окружающей среды вовнутрь сканера и оттоке «горячего» воздуха из него. Такие системы включают в себя набор вентиляторов, функцией которых является обеспечение циркуляции воздуха. Недостатком данного вида систем охлаждения является отсутствие герметичности сканера, и следовательно, снижение пыле- и влагозащищенности прибора [184];
− внутренняя, в которой применяется газ, обычно азот. В данных системах
охлаждения используются криогенные насосы (в переводе с греческого kryos –
холод, мороз, лед). В наземных сканерах широко применяются вакуумные насосы
(также имеют место конденсационные), действие которых основано на поглощении
откачиваемого
газа
поверхностью,
охлажденной
до
сверхнизких
температур [184].
От качества работы системы охлаждения зависит стабильность работы
НЛС [14, 19].
Исследования работы измерительных блоков сканеров фирм Riegl и Mensi,
выполненные по методике, описанной в статье автора [104], показали, что наибольшая нестабильность работы дальномерного и угломерных блоков НЛС проявляется в течение первых 5–7 мин. Следовательно, за этот период времени сканер должен быть включен до начала измерений, чтобы внутренние блоки прибора
прогрелись до рабочей температуры. Кроме этого, из экспериментальных исследований установлено, что измеряемые величины нестабильны во времени. Эти
изменения описываются при помощи линейных уравнений вида:
∆Ri пр.изм = а R ⋅ ti + bR
пр.изм
∆ϕ i
= а ϕ ⋅ ti + bϕ ,
∆θi пр.изм = а θ ⋅ ti + bθ
где
ti – время работы НЛС;
(38)
96
∆Riпр.изм , ∆ϕ iпр.изм , ∆θiпр.изм – отклонение измеренного расстояния, горизон-
тального и вертикального угла от истинного значения в момент измерения ti. Эти
измерения должны относиться к интервалу времени стабильной работы, т. е. по
прошествии 5–7 мин с момента запуска, после чего наступает время наиболее
стабильной работы (рисунки 30–32);
аR, aφ, aθ – коэффициенты, характеризующие степень стабильности величин,
измеряемых сканером (расстояния, горизонтального и вертикального углов). Чем
данные коэффициенты меньше по абсолютному значению, тем стабильнее работает блок сканера;
bR, bφ, bθ – коэффициенты, характеризующие систематическую ошибку измеряемой величины, обусловленную недостаточным прогревом прибора. Данные
параметры зависят от температуры внутренних блоков сканера.
На рисунках 30, 31 и 32 показаны графики стабильности работы измерительных блоков НЛС (на примере Riegl LMS-Z360), и представленных в работе
автора [104].
Погрешности, вызванные нестабильностью работы дальномерного и угломерных блоков, можно учитывать на этапе измерений, внося соответствующие
поправки в величины R, φ, θ. Аналогичным образом можно описать и первые
5–7 мин работы сканера, но математическая модель, которая описывает эти изменения, имеет полиномиальный вид. Определить параметры моделей можно при
помощи методики, изложенной в работе автора [104]. Исследования, выполняемые с различными моделями НЛС в течение 6 лет, показали, что параметры подобранных моделей остаются постоянными.
Точность измерения расстояний и вертикальных и горизонтальных углов
Из формулы (15) видно, что точность определения расстояний импульсным
методом зависит от ошибок отсчета времени прохождения сигнала и определения
скорости распространения электромагнитных волн.
Значения измернных расстояний, м
5.040
5.050
5.060
5.070
5.080
5.090
5.100
Рисунок 30 − Измеренные расстояния до специальной марки в зависимости
от времени работы сканера Riegl LMS-Z360
Время, в условных единицах
1 20 39 58 77 96 115 134 153 172 191 210 229 248 267 286 305 324 343 362 381 400 419 438 457 476 495
97
Время, в условных единицах
1 20 39 58 77 96 115 134 153 172 191 210 229 248 267 286 305 324 343 362 381 400 419 438 457 476 495
Рисунок 31 − Значения измеренных горизонтальных углов на специальную марку в зависимости
от времени работы сканера Riegl LMS-Z360
149,765
149,766
149,767
149,768
149,769
149,770
149,771
149,772
149,773
149,774
149,775
98
Значения измеренных горизонтальных углов,
градусы
Значенияизмеренных вертикальных углов,
градусы
1
Время, в условных единицах
21 41 61 81 101 121 141 161 181 201 221 241 261 281 301 321 341 361 381 401 421 441 461 481
Рисунок 32 − Значения измеренных вертикальных углов на специальную марку в зависимости
от времени работы сканера Riegl LMS-Z360
95.450
95.454
95.458
95.462
95.466
99
100
В настоящее время для определения скорости распространения электромагнитных волн в вакууме применяют косвенный физический метод, в
котором используется зависимость [210]:
c = λν fν ,
(39)
где λv – длина электромагнитной волны в вакууме;
fv – частота электромагнитного колебания.
На основе косвенного метода величина скорости распространения
электромагнитных колебаний в вакууме получена с относительной погрешностью 3 × 10-9 [203], что при измерении расстояний до 5 км дает погрешность менее 0,1 мм.
Ошибка измерения расстояния mR фазовым методом с использованием
различных
способов
разрешения
неоднозначности
определяется
по
формуле [46, 210]
v
2
mR = mC +
4πf
2
2
2 m f
+
m
R
ϕ
f
2
2
mv ,
+
v
(40)
где mС – ошибка определения постоянной поправки прибора;
mϕ – ошибка определения разности фаз между опорным и рабочим сигналами;
mf – ошибка, вызванная отличием масштабной частоты от номинального значения;
mν – ошибка определения скорости распространения электромагнитной
волны в атмосфере.
Ошибка определения постоянной поправки в измеряемое расстояние
mС зависит от конструктивных характеристик наземного сканера (фазового
101
угла, отличия напряжения в сети от номинала и других) и способа определения данной поправки при поверке прибора. Современные методики метрологической аттестации электронных дальномеров предполагают принудительное центрирование прибора и отражателя, которое можно выполнить с
ошибкой порядка 0,1 мм. Фактически, эта величина характеризует предельную точность, с которой можно определить приборную поправку [83, 162,
172, 179].
Ошибка измерения разности фаз mϕ, главным образом, зависит от инструментальной точности фазометра и содержит как случайную, так и систематическую составляющие. Основными причинами возникновения погрешностей, связанных с метрологическими характеристиками фазометра, являются [210]:
− соотношение «сигнал – шум»;
− нелинейность фазовой характеристики;
− нелинейность амплитудно-фазовой характеристики;
− влияние гармонических составляющих измеряемых сигналов;
− дискретность преобразования «фаза – код» (в цифровых фазометрах).
Из двух составляющих погрешности mR, не зависящих от величины
расстояния, измеряемого НЛС, наибольшее влияние на общую ошибку оказывает погрешность определения разности фаз.
При работе со сканерами, измеряющими расстояния с фиксированными
частотами, ошибка, вызванная отличием масштабной частоты от номинального значения mf , складывается из погрешностей за нестабильность частоты
и эталонирования, которые примерно одного порядка. В наземных сканерах с
плавным изменением частоты ошибка mf, главным образом, зависит от способа ее измерения. Частотная ошибка включает не только случайную, но и
систематическую составляющую, обусловленную неточной установкой час-
102
тоты в номинал (ошибка эталонирования) и медленным дрейфом частоты генератора.
В формуле (40) первые две составляющие практически не зависят от
величины измеряемого расстояния, а влияние двух других пропорционально
этому расстоянию. Таким образом, среднюю квадратическую ошибку измерения расстояний фазовым НЛС, аналогично, как и импульсным, можно
представить выражением [30-32, 59, 83, 117, 245, 260, 284]
mR = a + bR ,
(41)
где a и b – коэффициенты, определяемые эмпирически на основе измерения
длин эталонных линий, и для каждого дальномера они имеют свои значения.
На точность измерения небольших расстояний фазовыми дальномерами основное влияние оказывают ошибки измерения и отсчитывания разности
фаз, а также ошибка постоянной дальномера, так как погрешности в расстояниях, зависящие от ошибок частоты и скорости распространения электромагнитных колебаний в атмосфере, будут незначительны.
Точность измерения расстояний и углов НЛС зависит от большого количества факторов, в том числе от погрешностей изготовления и юстировки
прибора. В систему для наземного лазерного сканирования входит также и
управляющее программное обеспечение. Это позволяет исключить часть
ошибок в измеренных величинах, имеющих систематический характер. В
программных продуктах, предназначенных для управления НЛС, величины,
которые используются для устранения некоторого вида ошибок в измеряемых углах и расстояниях, называются параметрами калибровки. Для каждой
модели сканера количество параметров калибровки и вид математической
модели для исключения систематических ошибок непосредственно из результатов измерений различаются. Однако анализ способов калибровки НЛС
позволил выявить часть параметров и ошибок, общих для различных сканеров, влияние которых можно уменьшить, а именно [4, 84, 274]:
103
а) масштабный коэффициент b, учитываемый в измеряемых расстояниях [103];
б) приборную поправку [103];
в) некомпланарность вертикальной оси вращения прибора и оси вращения сканирующего зеркала (призмы);
г) некомпланарность вертикальной оси вращения прибора и вектора
распространения лазерного луча;
д) некомпланарность оси вращения сканирующей призмы и вектора
распространения лазерного луча;
е) ошибку осей цапфы;
ж) вертикальную коллимационную ошибку (величина отстояния точки, соответствующей началу измерения расстояний лазерным дальномером,
от горизонтальной оси вращения призмы);
з) горизонтальную коллимационную ошибку (величина отстояния
точки, соответствующей началу измерения расстояний лазерным дальномером, от вертикальной оси вращения прибора).
В программном обеспечении НЛС предусмотрено два варианта учета
первых двух параметров калибровки сканеров. В первом варианте в качестве
параметров калибровки определяются отдельно приборная поправка и масштабный коэффициент, с использованием которых исключаются ошибки в
измеряемых расстояниях. Во втором варианте вводятся поправки в длины
линий за суммарное влияние параметров калибровки, величины которых зависят от конкретного диапазона расстояний. Второй способ исключения систематических ошибок из результатов дальномерных измерений лазерным
сканером является более предпочтительным. Это объясняется следующим
обстоятельством. Расстояния, измеряемые сканерами, колеблются от 1 до
1 200 м. Вследствие этого мощность принимаемого сигнала сильно изменяется на всем диапазоне. Также на мощность сигнала значительное влияние оказывает отражающая способность объекта съемки. Поэтому при поступлении
104
мощного сигнала на приемник излучения, последний может даже выйти из
строя. В связи с этим производители сканеров перед приемником ставят устройства, которые искусственно снижают мощность сигнала. Чем ближе объект сканирования, тем больше ослабляется мощность принимаемого сигнала,
что, в свою очередь, приводит к искажению его формы. В результате становится затруднительным выполнение калибровки сканера при помощи первого варианта.
Следующим фактором, влияющим на точность единичного измерения
углов и расстояний, является несинхронность регистрации R, φ и θ. Поскольку каждая измеряемая величина R, φ и θ в НЛС фиксируется через определенный интервал ТR, Tφ и Tθ соответственно, то ошибки, вызванные несинхронностью регистрации величин, являются функцией, которую в общем виде можно записать следующим образом
∆ = f (R, TR , Tϕ , Tθ , t ),
(42)
где t – время работы сканера с момента запуска.
Ошибки, вызванные несинхронностью регистрации величин R, φ и θ,
невозможно определить на этапе обработки данных наземного лазерного
сканирования, поэтому единственным способом исключения данного вида
погрешностей является обеспечение равенства ТR = Tφ = Tθ на этапе сборки
НЛС.
В сканерах фирм Riegl, Leica, Zoller+Fröhlich и других для сканирования объектов в горизонтальном и вертикальном направлениях используется
непрерывное вращение призмы и оптической головки. Во время этого вращения лазерный источник посылает сигнал на призму, которая отражает его
в направлении объекта. Отразившись от объекта, луч возвращается к приемнику. Поскольку призма и оптическая головка вращаются непрерывно, то за
время прохождения сигнала от сканера до объекта и обратно отсчеты по вер-
105
тикальному и горизонтальному кругу изменяются на углы ∆ϕ и ∆θ. Поэтому
возникает вопрос, в какой момент времени нужно фиксировать значения углов. Наиболее целесообразно определить:
− tout – момент подачи сигнала на источник лазерного излучения;
− tin – момент приема отраженного сигнала;
− вычислять среднее значение угла (tout + tin)/2.
Для обоснования необходимости учета поправок в измеренных направлениях при сканировании вычислим угол, на который повернется призма за
время прохождения импульса от НЛС до объекта съемки и обратно. При этом
будем рассматривать только вертикальный угол сканирования, поскольку
скорость сканирования в горизонтальном направлении на несколько порядков ниже, чем в вертикальном.
Минимальная и максимальная скорость сканирования в вертикальном
направлении составляет от 1 до 20 линий в секунду. Это значит, что минимальная угловая скорость вращения сканирующей призмы будет равна
ν min = 1 лин/с
2 ⋅ 360°
= 240° / c ,
3
а максимальная
ν max = 20 лин/с
2 ⋅ 360°
= 4 800° / c .
3
По формуле (15) можно вычислить время, за которое лазерный луч
пройдет расстояние до объекта и обратно, а затем значения углов поворота
сканирующего зеркала ∆θ за это время (таблица 6).
Как видно из таблицы 6, величины Δθ при νmin и νmax являются значительными, что доказывает необходимость обеспечения синхронизации измерения углов и расстояний.
Для анализа факторов, влияющих на точность определения расстояний
триангуляционным методом, воспользуемся формулой (21).
106
Таб ли ца 6 – Величины углов поворота призмы НЛС с момента выхода
сигнала и до его поступления на приемник
R, м
50
100
200
400
1000
t, с
3,33 × 10-7
6,67 × 10-7
1,33 × 10-6
2,67 × 10-6
6,67 × 10-6
∆θ при νmin
0,00008°
0,00016°
0,00032°
0,00064°
0,00160°
∆θ при νmax
0,00160°
0,00320°
0,00640°
0,01280°
0,03200°
П р и м е ч а н и е – Расчеты, приведенные в таблице 6 и сопутствующие им, выполнены для трехгранной призмы
Тогда максимальное и минимальное расстояния до объекта Rmax и Rmin,
которые являются техническими характеристиками триангуляционных НЛС,
будут определены по формуле (21) подстановкой в нее предельных значений
отклонений сканирующего луча θ1max и θ1min. Величина Rmax – Rmin называется
глубиной области сканирования [326]. Из формулы (21) видно, что точность
определения расстояний до точек объекта триангуляционными НЛС зависит
от параметров d, f2, θ1max, θ1min и точности регистрации величины p2, характеризующей положение отраженного сигнала на ПЗС-матрице второй камеры.
Ошибка величины p2 зависит от размера элементов в ПЗС-матрице. Из выражения (21) следует, что уменьшение базиса сканера d приводит к уменьшению его дальности действия. При увеличении базиса сканера увеличивается
предельная дальность действия сканера, но это влечет за собой увеличение
размеров сканера.
Величины θ1max, θ1min зависят от размеров ПЗС-матриц. Их увеличение
при неизменном размере элементов позволит увеличить глубину сканирования (рисунок 33), однако это приведет к удорожанию НЛС.
Изменение фокусного расстояния объектива ПЗС-камер в триангуляционных НЛС приводит к изменению двух параметров: точности получения
координат точек объекта и глубины резкости изображения на ПЗС-матрице
[184, 273, 317, 326]. Наиболее выгодно использовать короткофокусные объ-
107
ективы, что позволяет обеспечить резкость при большой глубине области
сканирования, однако вызывает большие значения погрешностей, вызванных
аберрациями объектива. Поэтому при разработке триангуляционных НЛС
необходимо учитывать все параметры (d, f2, θ 1, p2) в комплексе и приходить к
компромиссным решениям.
Ошибки
угломерных
блоков НЛС
Рассмотрим
природу
возникновения ошибок угломерных блоков НЛС, присущих штриховым кодовым
Рисунок 33 – Влияние изменения размеров
ПЗС-матрицы на глубину сканирования
шкалам, кодовым дискам с
масками
числовых
шкал,
импульсным дискам, комбинаторным шкалам.
Классификация ошибок осевых систем угломерных приборов, таких
как теодолиты, тахеометры и др., приведена в работах [81, 150, 160, 163, 195198, 232-234, 268-270, 276]. На основе этой классификации погрешности угломерных блоков НЛС можно разделить на следующие группы:
а) эксцентриситеты осей прибора:
− эксцентриситет оси вращения отсчетного устройства, предназначенного для измерения вертикальных углов;
− эксцентриситет оси вращения устройства для отсчитывания горизонтальных углов;
– эксцентриситет оси вращения линзы, фокусирующей лазерный
луч;
б) коллимационные ошибки:
– вертикальная коллимационная ошибка (величина отстояния точки, соответствующей началу измерения расстояний лазерным дальномером, от горизонтальной оси вращения призмы);
108
– горизонтальная коллимационная ошибка (величина отстояния
точки, соответствующей началу измерения расстояний лазерным
дальномером, от вертикальной оси вращения прибора);
в) наклон горизонтальной оси вращения призмы или зеркала:
− колебания наклона горизонтальной оси;
− неперпендикулярность горизонтальной и вертикальной осей (неравенство цапф);
− наклон горизонтальной оси из-за наклона вертикальной оси;
г) наклон вертикальной оси вращения прибора:
− колебания наклона вертикальной оси;
− наклон вертикальной оси за счет упругих деформаций при неуравновешенности вращающейся части;
д) ошибки наклона плоскости отсчетного устройства к соответствующей оси ее вращения.
Помимо перечисленных погрешностей, в угломерной системе НЛС при
использовании компенсаторов углов наклона сканера добавляется ошибка,
вызванная наклоном вертикальной оси прибора из-за ошибки установки ее в
отвесное положение (ошибки юстировки и работы компенсатора углов наклона).
Следующим видом ошибок при измерении углов сканером являются
погрешности изготовления отсчетного устройства, которые подразделяют на
два вида: длиннопериодические и короткопериодические.
Система для наземного лазерного сканирования, включающая персональный компьютер со специализированным программным обеспечением,
позволяет исключить часть ошибок из результатов измерения углов, в частности, коллимационные ошибки и эксцентриситеты отсчетного устройства.
Данные виды ошибок определяются в виде параметров калибровки и автоматически учитываются на этапе предварительной обработки результатов изме-
109
рений с помощью управляющего программного обеспечения. Таким образом,
пользователь НЛС имеет доступ только к исправленным величинам углов.
Из результатов измерения углов при наземном лазерном сканировании
также возможно исключить ошибки изготовления отсчетных устройств. Для
этого в настоящее время используются видоизмененные ряды Фурье следующего вида
k
(
)
∆λ = ∑ A j ⋅ cos ω j ⋅ λ i + λ 0 j ,
j =1
(43)
где Aj – амплитуда колебаний ошибок для гармоники с номером j;
ω j – частота колебаний ошибок для j-й гармоники;
λ 0 j – начальная фаза;
λ i – измеренное направление;
k – число гармоник.
Величины Ai , λ 0 j , λ i для конкретной модели наземного лазерного сканера можно определить на основе методики исследования при помощи радиального тестового полигона, разработанной автором диссертации и опубликованной в работе [118].
Однако в ПО существующих моделей НЛС учет данных видов погрешностей на практике пока не выполняется. Проведенные экспериментальные
исследования показали, что исключение данного вида погрешностей может
повысить точность измерения углов на 40 %.
Существующие модели НЛС позволяют измерять вертикальные и горизонтальные углы с погрешностью от 2″ до 9″.
Перечисленные в данном подразделе погрешности в той или иной мере
учитываются в наземных лазерных сканерах, за исключением стабильности
работы измерительных блоков. Помимо возможных вариантов программного
исправления данных лазерного сканирования, представленных выше, по-
110
грешности измерения также можно уменьшить путем повышения качества
изготовления отдельных элементов сканера.
Основываясь на вышеизложенном, можно заключить, что точность
единичного измерения каждой величины можно в общем случае представить
следующим образом:
m Rед.из. = m F2 [ f вх (t )] + m R2 (T , P , E ) + m R2 вибр
где
mϕед.из.
mθед.из.
(m
+
=
2
mδϕ
(T , p , E )
+ mϕ2 вибр
(m
+
=
2
mδθ
(T , p , E )
+ mθ2вибр
(
m
+
2
Rметрол
n
2
ϕ метрол
2
θметрол
− mσ2Rинстр
2
− mσϕ
n
2
− mσθ
n
)+ m
)+ m
)+ m
2
δϕ
2
δθ
,
,
2
δR
,
(44)
(45)
(46)
m F [ f вх (t )] – средние квадратические погрешности, вызванные изменени-
ем функции входного сигнала при измерении расстояний;
mR (T , P, E ) , mϕ(T , P, E ) , mθ(T , P ,e) – средние квадратические погрешности
измерения расстояний и горизонтальных и вертикальных углов, вызванные
остаточным влиянием систематических погрешностей;
m Rвибр , mϕ вибр , mθвибр – средние квадратические погрешности при изме-
рении расстояний горизонтальных и вертикальных углов, вызванные вибрацией НЛС;
m Rметрол , mϕ метрол , mθметрол – погрешности единичного измерения расстоя-
ния, горизонтального и вертикального углов, полученные по результатам
метрологического освидетельствования прибора;
mσR, mσϕ, mσθ – величины систематических инструментальных ошибок.
Данные погрешности можно исключить по результатам метрологического
111
освидетельствования. Способы исключения систематических погрешностей
выявлены в научных исследованиях, представленных в работах [6, 117, 118];
mδ R , mδϕ , mδθ – средние квадратические погрешности, вызванные слу-
чайным изменением параметров вибрации, изменением скорости и направления ветра, неоднородностью метрологических свойств объекта съемки и т. д.;
n – количество приемов.
Выражения (44), (45) и (46) являются общими, характеризующими точность единичного измерения. При решении прикладных задач методом наземного лазерного сканирования метрические характеристики объектов определяются посредством обработки совокупности, а не единичных измерений. Поэтому на окончательную точность решения задач будут также влиять
методики и алгоритмы, положенные в основу процесса обработки данных
НЛС. Следует рассмотреть точность обработки результатов наземного лазерного сканирования.
112
3 ОЦЕНКА ТОЧНОСТИ СОЗДАНИЯ ТОПОГРАФИЧЕСКОЙ
ПРОДУКЦИИ ПУТЕМ НАЗЕМНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
3.1 Оценка точности методов внешнего ориентирования сканов
Классификация методов определения элементов внешнего ориентирования
сканов. Одним из важных этапов в технологии наземного лазерного сканирования
является внешнее ориентирование сканов. От точности выполнения этого процесса зависят окончательная точность построения цифровой модели ситуации и
рельефа [159], качество дешифрирования точечной модели и возможность автоматизации процесса построения цифровой модели местности (ЦММ). На
рисунке 34 показаны точечные модели дымоходной трубы (вид сверху), полученные по шести сканам, внешнее ориентирование которых выполнено с различной
точностью.
а)
б)
Рисунок 34 – Влияние точности внешнего ориентирования сканов на
дешифровочные свойства массива точек: а) средняя СКО единицы
веса 4 мм; б) средняя СКО единицы веса 7 см
113
В общем случае задача преобразования координат точек из одной системы
координат в другую выполняется при помощи известной в математике формулы
[306-308]
X вн X 0
Y = Y +
вн 0
Z вн Z 0
где
X
A Y ,
Z
(47)
Xвн, Yвн, Zвн – координаты точек скана во внешней системе координат, кото-
рая может быть геодезической или условно заданной в зависимости от решаемой
задачи;
X, Y, Z – координаты точек скана в системе координат сканера;
X0, Y0, Z0 – координаты начала системы координат ОXYZ скана во внешней
системе ОXвнYвнZвн;
A – матрица направляющих косинусов, определяющих ориентацию системы
координат ОXYZ относительно ОXвнYвнZвн, которая в общем случае имеет следующий вид
a1 a2
A = b1 b2
c1 c2
где
a3
b3 ,
c3
(48)
a1, a2, a3,…, c3 – направляющие косинусы, являющиеся функциями углов
Эйлера ε, η, ξ, графически которые показаны на рисунке 35.
Из выражений (47) и (48) видно, что для преобразования координат точек
сканов из системы OскXскYскZск в систему OXYZ необходимо знать параметры X0,
Y0, Z0, ε, η, ξ. В практике выполнения топографо-геодезических работ существуют
два метода определения величин X0, Y0, Z0, ε, η, ξ:
− прямой (инструментальный);
− аналитический.
В системах наземного лазерного сканирования в настоящее время реализуются оба метода внешнего ориентирования сканов.
114
OXYZ – внешняя система координат; OскXскYскZск – система координат сканера;
система координат OскX’Y’Z’ параллельна OXYZ
Рисунок 35 – Элементы внешнего ориентирования скана
Оценка точности определения элементов внешнего ориентирования сканов
инструментальным и аналитическим методами.
Инструментальный метод.
Прямой метод определения элементов внешнего ориентирования (ЭВО)
сканов предусматривает использование дополнительных устройств и приборов и
может быть реализован в двух вариантах.
В первом варианте наземный лазерный сканер (НЛС) центрируется и горизонтируется над опорной точкой с известными координатами, тем самым задаются линейные элементы внешнего ориентирования сканов X0, Y0. Величина Z0 определяется путем суммирования отметки опорной точки и высоты прибора, которая измеряется в полевых условиях. В современных аппаратных средствах для
этих целей обычно применяется лазерный отвес. Средняя погрешность центрирования, а следовательно, и определения элементов X0, Y0 при помощи лазерного отвеса составляет от 1,5 до 3 мм [267], а средняя ошибка определения величины Z0 –
от 2 до 5 мм [218].
Координаты точек стояния сканера могут быть определены в процессе работ по наземному лазерному сканированию на основе геодезических построений
115
или с помощью спутниковой геодезической аппаратуры. Точность определения
пространственных координат точек местности спутниковыми методами приведена в таблице 7.
Угловые элементы внешнего ориентирования скана можно задать в процессе горизонтирования сканера, когда вертикальная ось прибора устанавливается в
отвесное положение (параллельно оси Z внешней системы координат). Вследствие этого продольный ε и поперечный η углы наклона скана будут равны нулю.
Угол разворота ξ скана вокруг оси Z относительно внешней системы координат
определяется при ориентировании лазерного сканера по заданному направлению.
В наземных лазерных сканерах так же, как и в современных геодезических
приборах, например, электронных тахеометрах, для точного горизонтирования
используются двухосевые компенсаторы, точность работы которых в настоящее
время составляет от 1″ до 5″. Ориентирование прибора по начальному направлению выполняется с погрешностью такой же, как измерения горизонтальных углов. Для НЛС эта величина составляет от 3″ до 10″.
Таб ли ца 7 – Погрешности определения пространственных координат точек
местности спутниковыми методами [11, 12, 296]
Погрешности координат
Фазовые измерения
Кодовые измерения
- решение с точными - PPS 2–18 м
Абсолютный
эфемеридами 0,6–4 см
- SPS без режима SA 4–40 м
метод
- SPS с режимом SA 12–100 м
- статика (фиксированное - DGPS по коду, сглаженному
решение) (0,1–1)+D⋅10-7 фазой 0,2–1 м
- DGPS 0,6–5 м
Дифференциаль- см;
ный (относитель- - статика (плавающее реный) метод
шение) 7–50 см;
- кинематика RTK, VRS
0,6–5 см
D – величина измеренного расстояния.
Наименование
метода
В том случае, если сканеры не имеют устройств для горизонтирования, угловые элементы внешнего ориентирования сканов можно определить при помощи
116
инклинометров и инерциальных геодезических систем, описание принципа действия и точностных характеристик которых представлено в работах [69, 75, 159,
184, 270, 277, 281, 287, 290, 291, 294, 295, 311, 323].
Второй вариант прямого метода внешнего ориентирования сканов основан
на определении элементов X0, Y0, Z0, ε, η, ξ непосредственно в процессе сканирования объекта с помощью подвижной наземной сканирующей системы, включающей носитель, на котором размещены и жестко связаны между собой лазерный сканер, спутниковая и инерциальная системы и служба времени, принцип работы которых и точностные параметры определения ЭВО приведены в работах
[11, 12, 59, 296, 299, 303, 312, 314, 331].
В аналитическом методе элементы внешнего ориентирования сканов определяются путем решения обратной задачи на основе формулы (47), т. е. ЭВО находятся с помощью координат точек объекта, известных во внешней системе координат.
В таблице 8 приведены преимущества и недостатки инструментального и
аналитического методов внешнего ориентирования сканов.
Таблица 8 – Достоинства и недостатки методов внешнего ориентирования
сканов
Наименование
Преимущества
1
2
Инструмен– сокращение времени работальный
ты на сканерной станции;
(прямой)
– нет необходимости использования
вспомогательного
оборудования и дополнительных геодезических инструментов (электронного тахеометра и специальных марок);
– легче комплект оборудования для сканерной съемки
(НЛС, аккумулятор, штатив и
при необходимости ноутбук)
Недостатки
3
– трудности размещения НЛС
при съемке сложных технологических и высотных конструкций;
– невозможна оценка точности
определения элементов внешнего ориентирования сканов
117
Продолжение таблицы 8
1
2
Аналитический – возможность наклона вертикальной оси вращения сканера в диапазоне от 0 до 180º,
что позволяет оптимизировать процесс организации лазерного сканирования;
– менее жесткие требования к
размещению соседних сканерных станций, что упрощает исключение «мертвых зон»
при съемке объекта;
–нет необходимости обеспечения оптимального расстояния и видимости между соседними станциями, как для
инструментального метода
3
– необходимо наличие электронного тахеометра или других инструментов для определения координат центров специальных марок;
– более сложное программное
обеспечение для определения
элементов внешнего ориентирования сканов;
– значительно тяжелее вес
комплекта оборудования для
сканерной съемки (НЛС, аккумулятор, комплект специальных марок, электронный
тахеометр, два штатива и при
необходимости ноутбук). В
среднем комплект оборудования тяжелее на 13–18 кг, чем
при прямом методе внешнего
ориентирования сканов
Анализ данных, приведенных в таблице 8, позволяет сделать вывод, что в
сканерных системах должны быть реализованы оба метода определения элементов внешнего ориентирования сканов, что дает возможность оптимальнее проводить сканерную съемку.
При инструментальном методе внешнего ориентирования ЭВО определяются независимо от результатов сканирования. В этом случае суммарную среднюю квадратическую погрешность получения координат точек местности или
объекта можно представить следующим образом
2
2
,
mК2 = mОР
+ mИЗМ
(49)
где mОР − СКО, обусловленная ошибками внешнего ориентирования сканов;
mИЗМ − СКО определения координат точек модели, вызванная влиянием инструментальных ошибок сканера, внешней среды и метрологических свойств объекта сканирования, вычисляемых по формулам (44)–(46).
118
Погрешность mОР в координатах X, Y и Z можно вычислить, продифференцировав выражение (47) по элементам внешнего ориентирования. Тогда СКО определения координаты Xвн точки объекта будет выражаться формулой [138, 184]
m 2X вн
=
m 2X 0
2
2
∂a 2
∂a1 2 ∂a1 2 2
2
1
+
mη +
mξ X +
mε +
∂
ε
∂
η
∂
ξ
2
2
∂a 2
∂a2 2 ∂a2 2 2
2
2
+
mη +
mξ Y +
mε +
∂
ε
∂
η
∂
ξ
2
2
∂a 2
∂a3 2 ∂a3
2
3
+
mη +
⋅ mξ2 Z 2 ,
mε +
∂η
∂ξ
∂ε
где
∂a
1 ,
∂ε
∂a1
,
∂η
(50)
∂a3
∂a1
– частные производные от направляющих ко ,…,
∂ξ
∂ξ
синусов выражения (48) по элементам внешнего ориентирования скана ε, η, ξ.
Аналогичным образом можно получить формулы, выражающие СКО mYвн и
mZ вн . Поскольку угловые элементы внешнего ориентирования сканов ε и η малы,
то для упрощения анализа формул примем, что cos ε ≈ cos η ≈ 1, sin ε ≈ ε и sin η ≈ η.
С учетом сделанных допущений после выполнения некоторых преобразований
формулы зависимости ошибки определения координат точки модели от точности
внешнего ориентирования скана примут вид
m 2X вн = m 2X 0 + mξ2 ⋅ Y 2 + mε2 ⋅ Z 2
2
2
2
2
2
2
mYвн = mY0 + mξ ⋅ X + mη ⋅ Z .
mZ2 вн = mZ2 0 + mε2 ⋅ X 2 + mη2 ⋅ Y 2
(51)
Подставляя значения погрешностей внешнего ориентирования в выражения
(51), получить ошибки в координатах конкретной точки.
Аналитический метод. Принцип действия триангуляционных НЛС отличается от принципа действия фазовых и импульсных сканеров, отсюда следуют раз-
119
личия в сущности внешнего (взаимного) ориентирования сканов, полученных
разными видами НЛС.
В аналитическом методе для внешнего ориентирования сканов, полученных
фазовыми и импульсными НЛС, применяются координаты опорных точек, которыми служат специальные марки. Координаты опорных точек должны быть известны в двух системах координат: в системе координат скана и во внешней системе координат объекта. В данном методе процесс внешнего ориентирования сканов выполняется в два этапа. На первом этапе определяются величины X0, Y0, Z0,
ε, η, ξ, а затем выполняется перевычисление координат точек скана во внешнюю
систему. Оба этапа реализуются с использованием формулы (47). Точность внешнего ориентирования сканов полностью зависит от погрешностей определения X0,
Y0, Z0, ε, η, ξ, т. е. от качества выполнения первого этапа. На точность определения
элементов внешнего ориентирования аналитическим методом влияют следующие
параметры:
а) погрешность измерений НЛС, которую отражает ошибка единицы веса
при решении уравнений по метода наименьших квадратов (МНК);
б) геометрия расположения и количество специальных марок.
Первая составляющая подробно была рассмотрена в в разделе 2.
Рассмотрим влияние расположения и количества специальных марок и
ошибок величин, измеряемых наземными лазерными сканерами, на точность определения элементов внешнего ориентирования скана (X0, Y0, Z0, ε, η, ξ). Для этого будем использовать формулу (47).
Запишем исходные уравнения (47) перехода от системы координат скана к
внешней системе в следующем виде [116]:
F1 = X 0 + a1 X + a2Y + a3Z − X вн = 0
F2 = Y0 + b1 X + b2Y + b3Z − Yвн = 0 .
F3 = Z 0 + c1 X + c2Y + c3Z − Z вн = 0
(52)
В формулах (52) направляющие косинусы a1, a2, a3,…, c3 определяются на
основе выражений [8, 161]:
120
a1 = cos ε cos ξ − sin ε sin η sin ξ
a2 = − cos ε sin ξ − sin ε sin η cos ξ
a3 = − sin ε cos η
b1 = cos η sin ξ
b2 = cos η cos ξ
.
b3 = − sin η
c1 = sin ε cos ξ + cos ε sin η sin ξ
c2 = − sin ε sin ξ + cos ε sin η cos ξ
c3 = cos ε cos η
(53)
Поскольку измеряемыми величинами при наземном лазерном сканировании
являются R, ϕ, θ, представим через них координаты X, Y, Z, воспользовавшись
формулами (14). Тогда уравнения (52) можно записать следующим образом:
F1 = X 0 + a1R cos ϕ sin θ + a2 R sin ϕ sin θ + a3 R cos θ − X вн = 0
F2 = Y0 + b1R cos ϕ sin θ + b2 R sin ϕ sin θ + b3 R cos θ − Yвн = 0 .
F3 = Z 0 + c1R cos ϕ sin θ + c2 R sin ϕ sin θ + c3 R cos θ − Z вн = 0
(54)
Уравнения (54) являются нелинейными по отношению к элементам внешнего ориентирования скана и решаются итерационным методом. При наличии трех
и более специальных марок решение выполняется по методу наименьших квадратов. Для этого необходимо составить уравнения поправок, которые в матричном
виде записываются следующим образом [29, 165, 166, 171]
A3n,6 X 6,1 + L3n,1 = V3n,1 ,
где
(55)
A3n,6 – матрица коэффициентов уравнений поправок, которые являются ча-
стными производными от функций F1, F2, F3 элементам внешнего ориентирования
скана;
X6,1 – вектор неизвестных величин;
L3n,1 – вектор свободных членов уравнений поправок;
V3n,1 – вектор невязок;
n – число марок.
121
Представим уравнения поправок (55) в виде:
1
0
0
1
0
0
...
1
0
0
где
0 0
∂F1
∂ε 1
1 0
0
∂F3
∂ε 1
∂F
0 0 1
∂ε 2
0 1
1 0
0
∂F
0 1 3
∂ε 2
... ...
...
∂F
0 0 1
∂ε n
1 0
0
∂F
0 1 2
∂ε n
∂F1
∂η 1
∂F2
∂η 1
∂F3
∂η 1
∂F1
∂η 2
∂F2
∂η 2
∂F3
∂η 2
...
∂F1
∂η n
∂F2
∂η n
∂F3
∂η n
∂F1
∂ξ 1
∂F2
∂ξ 1
∂F3
l X 1 v X 1
l v
∂ξ 1
Y1 Y1
∂F1 δX l Z vZ
0
1
1
∂
ξ
2 δY0 l X v X
2
2
∂F2 δZ l v
Y2
Y2
0
∂ξ 2 ⋅ δε + l Z = vZ ,
2 2
∂F3
δη ... ...
∂ξ 2 δξ l v
Xn Xn
...
l v
∂F1
Yn Yn
l Z n vZ n
∂ξ n
∂F2
∂ξ n
∂F3
∂ξ n
∂F
1 = −c X − c Y − c Z ,
1 i
2 i
3 i
∂ε i
∂F1
= − sin η(b1 X i + b2Yi − b3 Z i ) ,
∂η i
∂F1
= a2 X i − a1Yi ,
∂ξ i
∂F2
= − sin η sin ξX i − sin η cos ξYi − cos ηZ i ,
∂η i
∂F2
= b2 X i − b1Yi ,
∂ξ i
(56)
122
∂F
3 =a X +a Y +a Z ,
2 i
3 i
1 i
∂ε i
∂F
3
= cos ε(b1 X i + b2Yi − b1Z i ) ,
∂η i
∂F3
= c2 X i − c1Z i .
∂ξ i
Нормальные уравнения, соответствующие уравнениям поправок (56) с учетом весов измерений, выглядят следующим образом
A6T,3n P3n,3n A3n,6 X 6,1 + A6T,3n P3n,3n L3n,1 = 0 ,
(57)
или в развернутом виде, которая из-за громоздкости записи приведена несколькими выражениями:
N1
T
N 2
δ
X
0
δY
0
N 2 δZ 0
⋅
+
N 3 δε
δη n
p
Xi
δξ i∑
=1
n
∑ pX i
i =1
i =1
n
∑ pYi lYi
i =1
n
p
l
∑ Zi Zi
i =1
n
n
∂F3
∂F1
= 0,
lZ i
l X i + ∑ pZ i
∑ pX i
i =1
i =1
∂ε
∂ε
n
n
∂F3
∂F2
∂F1
lZ i
l X i + ∑ pYi
lYi + ∑ pZ i
1
1
=
=
i
i
∂η
∂η
∂η
n
n
∂F
∂F
∂F1
l X i + ∑ pYi 2 lYi + ∑ pZ i 3 lZ i
i =1
i =1
∂ξ
∂ξ
∂ξ
n
∑ pX i lX i
(58)
где P3n,3n – матрица весов измерений, которая является диагональной, состоящей
из элементов p X i , pYi , pZ i i ∈ (1, 2, 3,…, n);
123
n
∑ pX i
i =1
N1 = 0
0
n
∑ pYi
i =1
0
n
∑ p ∂F1
i =1 X i
∂ε i
0
N2 =
n
p ∂F3
Zi
i∑
=1
∂ε i
n11
N 3 = n12
n13
0
0 ,
n
∑ pZ i
i =1
0
n12
n22
n23
∂F1
∑ pX i
∂η
i =1
i
n
∂F2
∑ pYi
∂η
i =1
i
∂F
n
∑ pZ i 3
i =1
∂η i
n
∂F1
∑ pX i
∂ξ
i =1
i
n
∂F2
,
∑ pYi
∂ξ
i =1
i
∂F
n
∑ pZ i 3
i =1
∂ξ i
n
n13
n23 ,
n33
2
2
∂F
∂F
n
1
+ ∑ pZ i 3 ,
n11 = ∑ p X i
i =1
∂ε i i =1 ∂ε i
n
2
2
2
2
2
∂F
n
n
∂F1
∂F2
3 ,
= ∑ pX i
+
+
p
p
∑
∑
Y
Z
∂η i =1 i ∂η i =1 i ∂η
i =1
i
i
i
n
n22
2
n
n
∂F2
∂F3 ,
∂F1
+ ∑ pZ i
n33 = ∑ p X i
+ ∑ pYi
∂ξ
i =1
i =1
i =1
∂
ξ
∂
ξ
i
i
i
∂F ∂F
∂F ∂F
n
n
1
1
+ ∑ pZ i 3 3 ,
n12 = ∑ p X i
i =1
∂ε i ∂η i i =1 ∂ε i ∂η i
∂F ∂F
∂F ∂F
n
n
1
1
+ ∑ pZ i 3 3 ,
n13 = ∑ p X i
i =1
∂ε i ∂ξ i i =1 ∂ε i ∂ξ i
n
∂F ∂F
n
n
∂F1 ∂F1
∂F2 ∂F2
3 3
.
= ∑ pX i
+
+
p
p
∑
∑
Y
Z
∂η ∂ξ i =1 i ∂η ∂ξ i =1 i ∂η ∂ξ
i =1
i
i
i
i
i
i
n
n23
124
При использовании МНК для решения задачи внешнего ориентирования
сканов, полученных наземными лазерными сканнерами, измерения принимаются
равноточными.
Из решения уравнений (58) вычисляются поправки δX0, δY0, δZ0, δε, δη, δξ,
на которые исправляются приближенные значения элементов внешнего ориентирования сканов. После завершения итерационного процесса выполняется оценка
точности определения неизвестных. СКО определения линейного элемента внешнего ориентирования X0 находится по формуле [27, 168, 164, 171]
m X 0 = µ QX 0 X 0 ,
где
(59)
-1
Q X X – диагональный элемент обратной весовой матрицы (ATpA) ;
0 0
µ – СКО единицы веса, вычисляемая по формуле
3n
∑ pVi2
µ=
где
i =1
3n − 6
,
(60)
Vi – элемент вектора невязок.
Аналогичным образом вычисляются СКО определения других элементов
внешнего ориентирования скана.
Для получения формул обратных весовых коэффициентов необходимо выполнить обращение матрицы (ATpA), которая принимает вид
∆ X 0 X 0 ∆ X 0Y0 ∆ X 0 Z 0 ∆ X 0 ε ∆ X 0 η ∆ X 0 ξ
∆
∆
∆
∆
∆
∆
X
Y
Y
Y
Y
Z
Y
ε
Y
η
Y
ξ
0 0
0 0
0
0
0
00
∆
∆
∆
∆
∆
∆
−1
1
X 0Z0
Y0 Z 0
Z0Z0
Z 0ε
Z 0η
Z 0ξ
AT pA = Q =
,
∆( AT pA) ∆ X 0 ε ∆ Y0 ε ∆ Z 0 ε ∆ εε ∆ εη ∆ εξ
∆ X η ∆ Y η ∆ Z η ∆ εη ∆ ηη ∆ ηξ
0
0
0
∆ X 0 ξ ∆ Y0 ξ ∆ Z 0 ξ ∆ εξ ∆ ηξ ∆ ξξ
(
)
(61)
125
где ∆(ATpA) – определитель матрицы (ATpA);
ΔX0X0, ΔX0Y0, …, Δξξ– алгебраические дополнения соответствующего элемента.
В общем виде получить выражения для вычисления элементов обратной весовой матрицы очень сложно, поэтому ограничимся случаем, когда угловые элементы внешнего ориентирования скана малы, тогда можно принять cos ε ≈ cos η≈
cos ξ ≈ 1, sin ε ≈ ε, sin η ≈ η и sin ξ ≈ ξ. Для упрощения вывода формул предположим, что специальные марки располагаются на одинаковом расстоянии от сканера
и лежат в одной плоскости, параллельной XY, как показано на рисунке 36.
С учетом принятых допущений, выполнив необходимые преобразования,
получим выражения для диагональных элементов обратной весовой матрицы (61):
Q X 0 X 0 = QY0Y0 =
Qεε = Qηη
где
1 + cos 2 θ
n sin 2 θ
2
=
,
2
2
nR sin θ
,
n ,
1
Qξξ =
nR 2 sin 2 θ
QZ 0 Z 0 =
1
(62)
n – количество марок.
Рисунок 36 – Схема размещения специальных марок
Аналогично были выведены формулы недиагональных элементов обратной
весовой матрицы:
126
Q X 0 ε = QY0 η = −
2 cos θ
.
(63)
nR sin θ
2
Остальные элементы матрицы Q равны нулю.
Для случая, когда ось вращения лазерного сканера расположена примерно
отвесно, из анализа формул (59) и (62) можно сделать следующие выводы о точности внешнего ориентирования скана [115, 177]:
− точность определения элементов внешнего ориентирования скана возрастает пропорционально
n . На основе практических исследований установле-
но, что оптимальным является количество специальных марок, равное восьми,
расположенных по окружности вокруг сканера;
− чем больше значение измеренного вертикального направления θ на точку сканирования отличается от 90°, тем менее точно определяются элементы X0,
Y0, ε, η и ξ;
− погрешность определения элемента Z0 зависит только от точности измерения расстояний и числа используемых специальных марок;
− при увеличении отстояния специальных марок от сканера возрастает
точность определения угловых элементов внешнего ориентирования скана (как
показано на рисунке 37), но при этом, согласно формуле (44), уменьшается точность измерения расстояний, следовательно, увеличивается СКО единицы веса.
Поэтому для окончательных выводов об оптимальной геометрии расположения
марок относительно каждой конкретной модели сканера необходимо проводить
самостоятельные экспериментальные исследования.
Анализируя недиагональные элементы обратной весовой матрицы (63),
можно сделать вывод, что корреляция между X0 и ε (или Y0 и η) тем меньше, чем
больше измеренное вертикальное измеренное направление θ приближается к 90°,
а измеренное расстояние R стремится к бесконечности [184].
Для априорной оценки точности определения элементов внешнего ориентирования сканов при нестандартной схеме расположения специальных марок необ-
127
ходимо использовать программы моделирования процесса внешнего ориентирования сканов [184].
Рисунок 37 – Зависимость точности определения угловых элементов
внешнего ориентирования скана от удаления специальных марок от сканера,
полученная на основе экспериментальных исследований
Из экспериментальных исследований установлено, что при наземном лазерном сканировании значения вертикальных направлений θ колеблются от 76 º до
85º, расстояния R – от 10 до 30 м, тогда квадратичные обратные весовые коэффициенты, вычисленные по формулам (62), будут иметь значения, представленные в
таблице 9.
Таблица 9 – Значения диагональных элементов обратной весовой матрицы при
стандартном расположении восьми8 специальных марок
Геометрия
расположения
марок
θ = 76º, R = 10 м
θ = 80º, R = 20 м
θ = 85º, R = 30 м
QX
0X0
= QY Y
0,3749
0,3644
0,3562
0 0
QZ
0Z0
0,3536
0,3536
0,3536
Qεε = Qηη
Qξξ
10,6289
5,2361
3,4509
7,5158
3,7025
2,4401
Учитывая, что СКО единицы веса при внешнем ориентировании сканов
обычно изменяется от 1 до 10 мм, из анализа таблицы 9 можно сделать вывод, что
точность определения линейных элементов внешнего ориентирования сканов
аналитическим методом выше, чем инструментальным. Однако точность определения угловых элементов внешнего ориентирования сканов прямым способом в
128
несколько раз выше, чем по координатам специальных марок. Из расчетов по
формулам (62) видно, что для определения продольного и поперечного углов наклона скана с ошибкой порядка одной секунды при μ = 1 мм отстояние специальных марок от сканера должно быть около 103 м. Однако обеспечить видимость
между НЛС и восьмью марками в пределах сотни метров на практике невозможно, особенно если принять во внимание, что наземное лазерное сканирование выполняется на территориях с высокой «загруженностью» объектами, следовательно, невозможно добиться точности определения угловых элементов внешнего
ориентирования сканов аналитическим методом порядка 1″–10″ [184].
Анализ формул (62) требует подготовки специалиста и навыков выполнения
работ, что также сдерживает развитие метода наземного лазерного сканирования.
Традиционно для простоты понимания используют геометрическую интерпретацию процесса. Для процесса определения линейных и угловых элементов внешнего ориентирования сканов воспользуемся выражением (61), из которого следует,
что погрешность пространственного положения сканерной станции (AOSP – Accuracy of Spatial Position) определяется следующим выражением
AOSP = Q X
0X0
+ QY Y + Q Z
0 0
0Z0
,
(64)
а погрешность пространственной ориентации сканерной позиции (AOSO – Accuracy of Spatial Orientation) – по формуле
AOSO = Qεε + Qηη + Qξξ .
(65)
Геометрической интерпретацией выражения (64) является величина, обратно пропорциональная площади, охватывающей проекции единичных векторов
направлений на специальные марки из точки Опр на поверхность, образованную
специальными марками, как показано на рисунке 38, а и б.
Геометрической интерпретацией выражения (65) является величина, обратно пропорциональная среднему расстоянию и площади проекций единичных векторов направлений на специальные марки из точки Опр на поверхность, образованную специальными марками, как показано на рисунке 38, а и б.
Рисунок 38 – Геометрическая интерпретация процесса внешнего ориентирования сканов
а), б), в) варианты решения задачи внешнего ориентирования сканов
129
130
Геометрическая интерпретация выражений (64) и (65) вытекает из выражений (62).
Наиболее неблагоприятным является случай, когда марки расположены на
одной линии. Тогда площадь поверхности фигуры, образуемой специальными
марками равна нулю, следовательно, определитель матрицы системы нормальных
уравнений также равняется нулю (см. рисунок 38 в).
При оценке точности внешнего ориентирования сканов аналитическим методом также необходимо учитывать погрешности метода, которым выполняется
определение координат специальных марок во внешней системе. Однако, если
координаты марок получены с помощью электронного тахеометра, то ошибки
ориентирования и центрирования прибора, влияние которых может достигать
2 мм, не представляется возможным выявить при обработке данных. Поэтому
наиболее точным (в несколько раз) является инструментальный метод определения угловых элементов внешнего ориентирования сканов. Для более качественного определения элементов внешнего ориентирования сканов в НЛС должны быть
реализованы оба метода, как инструментальный, так и аналитический, хотя в настоящее время только пять моделей лазерных сканеров имеют устройства, позволяющие выполнять горизонтирование и центрирование НЛС.
Вывод общей формулы внешнего ориентирования триангуляционных сканов. Среди наземных лазерных сканеров (НЛС), выпускаемых различными фирмами, особое место занимают триангуляционные сканеры, применяемые в машиностроении, медицине, авиастроении и других областях.
Основными отличиями современных триангуляционных сканеров от импульсных и фазовых являются:
- дальность действия от десятков сантиметров до 25 м;
- угол поля зрения не превышает 50° по вертикали и горизонтали;
- управляющее программное обеспечение в качестве результата сканирования предоставляет исполнителю только пространственные прямоугольные координаты точек объектов.
Для внешнего ориентирования сканов используются координаты специальных марок, полученные во внешней системе координат объекта и скана, и формула преобразования координат точек, заданных в различных системах [122].
131
В работах [116, 119, 184] выведены формулы оценки точности внешнего
ориентирования сканов, полученных импульсными и фазовыми НЛС, работоспособность которых подтверждена результатами экспериментальных исследований
и практических работ. Однако приведенные особенности триангуляционных сканеров не позволяют располагать опорные (или связующие) точки для внешнего
(или взаимного) ориентирования сканов таким же образом, как при съемке импульсными и фазовыми НЛС. В связи с этим возникает самостоятельная задача
анализа точности внешнего ориентирования триангуляционных сканов.
При внешнем ориентировании сканов используются уравнения (52). Для
упрощения вывода формул априорной оценки точности внешнего ориентирования
триангуляционных сканов, учитывая особенности сканеров, используемых для их
получения, сделаем следующие допущения:
− углы наклона скана малы (аналогично плановым снимкам), тогда
cos ε ≈ cos η ≈ cos ξ ≈ 1, sin ε ≈ ε, sin η ≈ η, sin ξ ≈ ξ ;
− опорные точки располагаются группами по k вблизи четырех стандартных зон t = 1, 2, 3, 4, как показано на рисунке 39;
− общее число опорных точек n = 4k;
− координаты стандартных зон X 0t = X 0 , Z 0t = Z 0 ;
− координаты опорных точек X i = X 0 , Z i = Z 0 .
n
4
Рисунок 39 – Стандартная схема размещения опорных точек для внешнего
j = 1, 2, 3,…,
ориентирования триангуляционных сканов
132
Используя сделанные допущения, матрица коэффициентов нормальных
уравнений (ATA) при решении задачи внешнего ориентирования триангуляционного скана примет вид
n
0
0
AT A =
0
0
− d
где
n
d = ∑ Yi ; e = n
i =1
(
X 02
+
Z 02
); f
0 0
0
n 0
0 n
0 0
0 d
0
0 0
q
= nZ 02
0
e
p
n
− d
0 0
0
d
,
p q
0
f
0 g
0
+ ∑ Yi ; g
2
i =1
(66)
= nX 02
n
+ ∑ Yi2 ;
i =1
n
n
n
n
4
4
4
4
p = X 0 ∑ Y[2 + 4(i −1)] + ∑ Y[3+ 4(i −1)] − ∑ Y[1+ 4(i −1)] − ∑ Y[4 + 4(i −1)] ;
i =1
i =1
i =1
i =1
n
n
n
4
4
4
q = Z 0 ∑ Y[1+ 4(i −1)] + ∑ Y[2 + 4(i −1)] − ∑ Y[3 + 4(i −1)] −
i =1
i =1
i =1
∑ Y[4 + 4(i −1)] .
j =1
n
4
После математических преобразований получим диагональные элементы
обратной весовой матрицы:
QX
QZ
(
0X0
)
(
0Z0
Qεε
(
)
n efg − q 2 f − p 2 g + d 2 q 2 − eg
;
=
a
1
QY0 Y0 = ;
n
)
)
(
(67)
(68)
n efg − q 2 f − p 2 g + d 2 p 2 − ef
;
=
a
(69)
n nfg − d 2 g + d 2 d 2 − nf
;
=
a
(70)
Qηη
(
)
(
(
)
)
n neg − d 2 e − nq 2
;
=
a
(71)
Qξξ =
где
(
133
(
)
n nef − d 2 e − np 2
,
a
[
)
(72)
(
a = n 2 efg − q 2 f − p 2 g + d 2 d 2 e + n p 2 + q 2 − ef − eg
)] .
Недиагональные весовые коэффициенты имеют следующий вид:
Q X 0 Y 0 = QY 0 Z = QY 0 ε = QY 0 η = QY 0 ξ = 0 ;
0
− d 2 pq
QX Z =
;
0 0
a
nqdf − d 3 q
;
QX ε =
0
a
ndpq
QX η =
;
0
a
QX
0ξ
(73)
(74)
(75)
(76)
(
)
− d d 2 e + np 2 − nef
;
=
a
(77)
pd d 2 − ng
;
=
a
(78)
QZ
0ε
(
)
(
)
d nq 2 + d 2 e − neg
;
QZ η =
0
a
− ndpq
QZ ξ =
;
0
a
Qεη
(80)
(
)
(81)
n d 2 q − nfq
;
a
(
)
(82)
n 2 pq
.
=
a
(83)
− n npg − d 2 p
;
=
a
Qεξ =
(79)
Qηξ
Из выражений (67)–(72) видно, что при увеличении количества опорных точек с n1 до n2 погрешность определения элементов внешнего ориентирования триангуляционного скана уменьшается пропорционально
n1
.
n2
134
Проанализируем выражения (67)–(72), подставляя в них различные значения координат X, Y, Z опорных точек, которые будем задавать таким образом,
чтобы наиболее полно проследить характер изменения квадратичных обратных
весовых коэффициентов (67)–(72)
и выявить общие закономерности влияния
геометрии расположения опорных точек на точность внешнего ориентирования
триангуляционных сканов. Приведем диагональные элементы обратной весовой
матрицы при различных значениях координат опорных точек (таблице 10, 11).
Таб ли ца
10
-
ориентирования
Зависимость точности определения элементов внешнего
триангуляционного
скана
от
различных
комбинаций
расположения опорных точек (варианты 1 и 2)
Диагональные
элементы обратной весовой матрицы
X i = Yi =
Xi = X0;
= Zi = X 0
Zi = Z0 ;
Y1+ 4 ( j −1) = Y2 + 4 ( j −1) = ωY0 ;
Y3+ 4 ( j −1) = Y4 + 4 ( j −1) = κY0 ;
Y0 = const ; ω ≠ κ
QX 0 X 0
2
n
(ω − κ )4 + 2 (ω2 − κ 2 ) + 20(ω − κ )2 + 32(1 + ωκ )
n (ω − κ )4 + 12(ω − κ )2 + 32
QZ 0 Z 0
2
n
(ω − κ )4 + (ω2 − κ 2 ) + 20(ω − κ )2 + 32(1 + ωκ )
n (ω − κ )4 + 12 (ω − κ )2 + 32
Qεε
Qηη
Qξξ
2
[
]
2
[
]
2nX 02
(ω − κ ) 4 + 8(ω − κ ) 2 + 16
n (X 02 + Z 02 ) (ω − κ ) 4 + 12(ω − κ ) 2 + 32
1
4 (ω − κ )2 + 32
1
[
[
nX 02
nZ 02 (ω − κ )4 + 12 (ω − κ )2 + 32
1
8(ω − κ ) 2 + 32
nX 02
[
]
nX 02 (ω − κ ) 4 + 12 (ω − κ ) 2 + 32
]
]
135
Таб ли ца 11 - Зависимость точности определения элементов внешнего ориентирования триангуляционного скана от различных комбинаций расположения опорных точек (варианты 3 и 4)
Xi = X0;
X =αX ;
Диагональные
элементы обратной весовой матрицы
i
0
Yi = β Y0 ;
Zi = Z0 ;
Zi = γ Z0 ;
Y3+ 4 ( j −1) = Y2 + 4 ( j −1) = ρ Y0 ;
α ≠ β ≠ γ;
Y0 = const
Y1+ 4 ( j −1) = Y4 + 4 ( j −1) = νY0 ;
QX 0 X 0
1
β 2
1+
n α 2
(ρ − ν )4 + (ρ 2 − ν 2 ) + 20(ρ − ν )2 + 32(1 + ρν )
n (ρ − ν )4 + 12(ρ − ν )2 + 32
QZ 0 Z 0
1 β 2
1+ 2
n
γ
(ρ − ν ) 4 + 2 (ρ 2 − ν 2 ) + 20(ρ − ν ) 2 + 32(1 + ρν )
n (ρ − ν ) 4 + 12 (ρ − ν ) 2 + 32
1
(ρ − ν )4 + 8(ρ − ν )2 + 16
n (X 02 + Z 02 ) (ρ − ν )4 + 12(ρ − ν )2 + 32
Qεε
(
n α 2 X 02 + γ 2 Z 02
1
Qηη
Qξξ
Y0 = const ; ρ ≠ ν
2
[
]
2
[
)
]
[
[
8(ρ − ν )2 + 32
nγ 2 Z 02
nZ 02 (ρ − ν )4 + 12(ρ − ν )2 + 32
1
4 (ρ − ν ) 2 + 32
nα 2 X 02
[
]
]
nX 02 (ρ − ν ) 4 + 12 (ρ − ν ) 2 + 32
]
Анализ таблицы 10 и 11 позволяет сделать следующие выводы:
− если опорные точки отстоят друг от друга на максимально возможном
расстоянии по осям X и Z, погрешности определения элементов внешнего ориентирования триангуляционного скана будут минимальны;
− максимальная точность определения элементов внешнего ориентирования сканов X0, Z0, ε, η и ξ достигается при максимальном угле обзора на опорные
точки, обеспечиваемом конкретной моделью триангуляционного сканера, и расположении этих точек в плоскости, параллельной XOZ;
136
− погрешность определения элемента Y0 практически не зависит от геометрии расположения опорных точек, а зависит от их количества.
Анализ выражений (73)–(83) показал следующее:
− если не соблюдается равенство Yi = const, то обратные весовые коэффициенты QX 0 ε , QX 0 η , Q X 0ξ , QZ 0 ε , QZ 0 η , QZ 0 ξ , Qεη , Qεξ , Qηξ не равны нулю, и значения их возрастают при увеличении разности Ymax – Ymin;
− при равенстве ординат опорных точек сохраняется корреляция только
между элементами X0 и ξ, Z0 и η. При этом, чем больше величина Xmax – Xmin, тем
меньше элемент обратной весовой матрицы Q X 0ξ , и чем больше разность
Zmax – Zmin, тем меньше значение QZ 0 η .
Таким образом, из выполненных исследований можно сделать вывод, что
для внешнего ориентирования триангуляционных сканов наиболее оптимальной
является схема расположения марок, когда Xmax – Xmin → max, Zmax – Zmin → max, а
Ymax – Ymin → 0.
На основе результатов математического моделирования процесса внешнего
ориентирования триангуляционных сканов установлено следующее:
- погрешность определения пространственного положения сканерной станции AOSP (Accuracy of Spatial Position) обратно пропорциональна площади фигуры Sфиг, образованной концами единичных векторов направлений из точки стояния сканера на специальные марки (рисунок 40)
AOSP =
µ
,
F1 ( S фиг )
где μ – средняя квадратическая ошибка единицы веса;
F1(Sфиг) – функция, характеризующая площадь фигуры;
(84)
137
- погрешность определения пространственной ориентации скана AOSO
(Accuracy of Spatial Orientation) обратно пропорциональна площади фигуры Sфиг и
среднему расстоянию от точки стояния сканера до опорных точек Rср:
AOSO =
µ
,
F1 ( Sфиг ) F2 ( Rср )
(85)
где F2(Rср) – функция, характеризующая среднее расстояние от сканера до опорных точек.
Сделанные теоретические выводы подтверждены результатами практических
работ с использованием триангуляционного сканера Minolta V9i.
Рисунок 40 – Площадь фигуры, образованной концами единичных векторов
направлений из точки стояния сканера на опорные точки
На основе обработки макетных и реальных данных наземной лазерной
съемки установлено, что выражения (84) и (85) справедливы для оценки точности
внешнего ориентирования сканов, полученных как триангуляционными сканерами, так и фазовыми и импульсными.
В фазовых и импульсных наземных лазерных сканерных системах в настоящее время используется как инструментальный, так и аналитический метод
внешнего ориентирования сканов, что позволяет в процессе сканирования выполнять горизонтирование прибора при помощи уровня (т. е. задавать продольный и
поперечный углы наклона равными нулю), а линейные ЭВО и угол разворота оп-
138
ределять аналитическим методом. В этом случае формулы (62) для схемы расположения опорных точек, представленной на рисунке 36, примут вид:
1
QX 0 X 0 = QY0Y0 = QZ 0 Z 0 =
n
.
1
Qξξ =
nR 2 sin 2 θ
При
этом
недиагональные
элементы
(86)
обратной
весовой
матрицы
равны нулю.
В общем виде определение линейных ЭВО и угла разворота является ничем
иным, как задачей Потенота с дополнительным параметром Z0. В настоящее время
насчитывается более 100 вариантов решения данной задачи.
Подставим значения ошибок определения линейных и угловых элементов
внешнего ориентирования сканов инструментальным и аналитическим методами
в выражение (49). При этом на основании опыта выполнения различных работ с
использованием НЛС примем расстояние до измеряемой точки равным 150 м. В
этом случае получим СКО определения плановых координат mX, mY и высот mZ
отсканированных точек местности, которые приведены в таблице 12.
Таблица 12 – СКО определения координат точек объекта в зависимости от ошибок элементов внешнего ориентирования скана
Метод внешнего
ориентирования скана
1
Прямой (инструментальный)
m X = mY = 2,0 мм , mZ = 3,5 мм
0
0
0
mε = mη = 2,5" , mξ = 7"
mX , м
2
mY , м
mплан , м
mZ , м
3
4
5
X = 150 м, Y = 0 м, Z = 0 м
0,0020
0,0055
0,0058
0,0039
X = 0 м, Y = 150 м, Z = 0 м
0,0055
0,0020
0,0058
0,0039
X = 106,066 м, Y = 106,066 м, Z = 0 м
0,0041
0,0041
0,0058
0,0039
X = 75 м, Y = 75 м, Z = 106,066 м
0,0035
0,0035
0,0037
0,0049
X = 0 м, Y = 0 м, Z = 150 м
0,0027
0,0027
0,0038
0,0035
139
Продолжение таблицы 12
1
2
3
4
5
X = 150 м, Y = 0 м, Z = 0 м
0,0020
0,0026
0,0032
0,0029
Аналитический
X
=
0
м,
Y
=
150
м,
Z
=
0
м
при количестве специальных марок
0,0026
0,0020
0,0032
0,0029
8 штук
X
=
106,066
м,
Y
=
106,066
м,
Z
=
0
м
m X 0 = mY 0 = 1,8 мм ,
0,0023
0,0023
0,0032
0,0029
mZ 0 = 1,77 мм
X = 75 м, Y = 75 м, Z = 106,066 м
0,0027
0,0027
0,0038
0,0024
mε = mη = 3,2" , mξ = 2,2"
X = 0 м, Y = 0 м, Z = 150 м
0,0031
0,0031
0,0043
0,0018
X = 150 м, Y = 0 м, Z = 0 м
0,0020
0,0026
0,0032
0,0025
Комбинированный
X = 0 м, Y = 150 м, Z = 0 м
(линейные элементы внешнего ориенти0,0026
0,0020
0,0032
0,0025
рования и угол ξ аналитическим методом, а ε и η – прямым) при количестве
X = 106,066 м, Y = 106,066 м, Z = 0 м
специальных марок 8 штук
0,0023
0,0023
0,0032
0,0025
m X 0 = mY 0 = 1,8 мм , mZ 0 = 1,77 мм ,
X = 75 м, Y = 75 м, Z = 106,066 м
0,0025
0,0025
0,0035
0,0022
mε = mη = 2,5" , mξ = 2,2"
X = 0 м, Y = 0 м, Z = 150 м
0,0027
0,0027
0,0038
0,0018
П р и м е ч а н и е – Величины средних квадратических ошибок определения элементов внешнего ориентирования сканов приведены для случая, когда специальные марки
отстоят от НЛС на 100 м
Практический опыт показывает, что расположить восемь специальных марок на расстоянии 100 м от НЛС практически невозможно. Потому приведенные в
таблице 12 значения ошибок обеспечить при выполнении производственных работ не представляется возможным. Однако общие тенденции, которые выявлены
в результате анализа таблицы 12, применимы для решения практических задач, а
именно:
− комбинированный метод внешнего ориентирования сканов является
предпочтительным, так он как обеспечивает более высокую точность и требует
меньших трудозатрат. Недостатком его является сложность реализации компенсации углов наклона сканера при большой массе существующих приборов;
− в системах наземного лазерного сканирования должны быть реализованы
оба метода внешнего ориентирования сканов. На практике возникают случаи
140
съемки объектов, когда продольный и поперечный углы наклона сканера преднамеренно задают большими, с целью исключения «мертвых» зон вблизи сканера. В
этом случае прямой метод внешнего ориентирования сканов непригоден. Однако
в других ситуациях, когда возможно его применение, он позволяет точнее определить угловые элементы внешнего ориентирования сканов.
3.2 Теоретические основы скантриангуляции
Сущность и общие принципы построения скантриангуляции
Для получения сканов с изображением всех объектов интересующей территории ее сканируют с нескольких станций. Для получения единой точечной модели возникает необходимость внешнего ориентирования каждого скана. Эту задачу
можно решить с помощью программных продуктов, поставляемых вместе со сканером.
Для внешнего ориентирования сканов на практике, как правило, применяется аналитический метод с использованием [272, 306-308, 335]:
− специальных марок;
− характерных точек отсканированных объектов (применяется реже).
Первый способ внешнего ориентирования сканов обеспечивает более высокую точность, чем второй, за счет того, что координаты марок в результате сканирования определяются с более высокой точностью (с погрешностью в несколько
миллиметров в зависимости от модели сканера), чем других точек объекта. Это
обусловлено тем, что специальные марки сканируются с самым высоким разрешением.
В обоих случаях должны быть известны плановое положение и высота центров специальных марок и характерных точек в единой системе координат. Поэтому в том и в другом случаях для внешнего ориентирования сканов необходимо
использовать геодезическое оборудование (тахеометр, GPS-приемники и др.) для
измерения координат всех специальных марок или характерных точек во внешней
системе координат [243, 271]. Это приводит к увеличению времени на производ-
141
ство полевых работ, в связи с чем разработана технология построения скантриангуляции, позволяющая сократить объем работ по подготовке планово-высотного
обоснования сканерной съемки [123].
Сущность построения скантриангуляции заключается в следующем. Вокруг
первой сканерной станции устанавливаются шесть или более специальных марок,
у четырех из которых (четвертая необходима для контроля) геодезическим методом определяются пространственные координаты во внешней системе координат
(рисунок 41). Эти марки будут являться опорными. Со второй станции в поле зрения сканера должно попадать более трех марок, отобразившихся на первом скане,
и не менее трех специальных марок, которые будут видны с третьей станции, и т.
д. На последней сканерной станции необходимо иметь минимум две опорные
марки для уравнивания и оценки точности скантриангуляции [123].
Рисунок 41 – Схема расположения сканерных станций и специальных марок
при построении скантриангуляции
Возможны два варианта объединения сканов, полученных при скантриангуляции, в единую точечную модель. В первом варианте к первому скану подсоединяется второй, затем третий и т. д. до последнего. Затем полученная свободная
точечная модель в системе координат первого скана внешне ориентируется по
опорным маркам. Во втором варианте сканы объединяются в следующем порядке.
Первый скан внешне ориентируется по опорным специальным маркам. Второй
скан ориентируется относительно первого по общим (связующим) специальным
142
маркам и т. д. до последнего скана. Для подсоединения сканов используются
уравнения вида (47), в которых Xi, Yi, Zi – координаты точек в системе координат
j-го скана, Xвн, Yвн, Zвн –координаты точек объекта в системе координат первого
скана или во внешней системе, X0, Y0, Z0 − пространственные координаты j-й точки стояния сканера (начала системы координат j-го скана) первого скана или во
внешней системе [123]. Внешнее ориентирование единой точечной модели выполняется таким же образом, как и одиночного скана, т.е. по формулам (47).
Результатом построения скантриангуляции будут являться параметры, характеризующие положение сканов в пространстве (линейные и угловые элементы
внешнего ориентирования), единая точечная модель и координаты специальных
марок в заданной системе [123].
Сущность и математический аппарат, используемые в методике скантриангуляции, аналогичны этапу подсоединения независимых фотограмметрических
моделей при маршрутной фототриангуляции. Отличием является то, что при подсоединении сканов не определяется масштабный коэффициент, так как расстояния до точек объектов определяются в процессе сканирования.
Анализ результатов выполнения производственных и экспериментальных
работ [208] показал следующие преимущества методики скантриангуляции:
− при проведении работ на одном объекте несколькими бригадами можно
использовать один электронный тахеометр;
− сокращается количество исполнителей в бригаде до двух человек;
− более простая организация работ по наземному лазерному сканированию ряда объектов.
Методология формирования макетных скантриангуляционных построений.
Наиболее эффективным подходом, служащим для исследования сложных процессов, методов уравнивания, выявления закономерностей, является метод математического моделирования процессов. Данный подход заключается в создании идеальной модели, в которую вводятся систематические и случайные погрешности в
соответствии с установленной природой их возникновения и законом распределения. Данный подход позволяет обеспечить принципы оптимальности и адаптивности.
143
Сущность создания макетных скантриангуляционных построений заключается в следующем. В системе автоматизированного проектирования создаются
идеальные скантриангуляционные построения и определяются истинные значения
мест расположения сканерных станций и координаты специальных марок во
внешней системе координат, а также устанавливаются геометрические связи специальных марок и сканерных позиций. Затем по заданным истинным элементам
внешнего ориентирования вычисляются координаты марок в системе координат
сканера с использованием выражений (47). На следующем этапе вычисляются измеренные расстояния и вертикальные и горизонтальные углы для каждой марки с
конкретной сканерной станции при помощи выражения (14). Затем в истинные
значения горизонтальных и вертикальных углов и расстояний вносятся систематические и случайные погрешности по закономерностям, выявленным на реальных данных.
При выполнении измерений НЛС при скантриангуляционных построениях
основными источниками погрешностей являются инструментальные. Для установления математических законов описания систематических и случайных погрешностей были выполнены экспериментальные исследования на основе результатов метрологического исследования НЛС.
Предложенные принципы формирования макетных построений скантриангуляции можно использовать и для формирования макетных сканов с целью исследования алгоритмов фильтрации и вписывания в точечную модель геометрических примитивов и тел в автоматическом режиме. Кроме этого данные принципы позволяют выполнять оценку точности получаемой продукции и других исследований операций. При моделировании сканов, помимо инструментальных
ошибок, необходимо вносить также погрешности, вызванные метрологическими
свойствами объектов, описываемые выражением (37).
На основе предложенных принципов были сформированы несколько сотен
скантриангуляционных сетей различных по конфигурации, с различным количеством связей и различными величинами погрешностей измерения. Эти скантриангуляционные построения послужили для исследования характера накопления
ошибок.
144
3.3 Общие принципы оценки точности создания
цифровых моделей объектов и рельефа
Общие
принципы
оценки
точности
создания
цифровых
топографических планов. Одной из главных составляющих суммарной погрешности построения топографических планов с использованием технологии наземного
лазерного сканирования (НЛС) является ошибка векторизации объектов. В общем
виде ошибку планового положения точек местности на топографическом плане,
созданном по данным НЛС, как установлено в 2.3, можно представить функцией
от расходимости лазерного луча сканера
ml = kf (ψ ) .
(87)
Поскольку все программные продукты для составления топографических
планов по данным НЛС предусматривают интерактивные режимы отрисовки объектов, то наиболее эффективным способом получения коэффициента k в выражения (87) является сравнение топографических моделей, созданных несколькими
исполнителями на основе обработки одних и тех же сканерных данных. Для экспериментальных исследований использованы результаты НЛС (рисунок 42), полученные сканерами Riegl LMS-Z210, LMS-Z360, LMS-Z420i, VZ400, Leica
ScanStation C10, Leica ScanStation 2, Mensi GS200. Технические характеристики
данных сканеров приведены в приложении А.
Объекты, представленные на рисунке 42, отрисованы семью исполнителями
с различным опытом работы. В качестве объектов векторизации выбраны объекты, которые однозначно дешифрировались на точечных моделях, трубопроводы,
здания, центры колодцев, опоры под трубопроводами, кабельные эстакады. В
пределах каждого участка съемки определены координаты около 100 контрольных пикетов. Средние квадратические погрешности отображения объектов на
плане по данным, НЛС различными сканерами, представлены в таблице 13, в которой (mL Ψ )ср.1 – среднее значение, полученное для сканеров с расходимсотью
145
лазерного луча Ψ < 1 мрад (Riegl VZ400, Leica ScanStation C10, Leica
ScanStation 2, Mensi GS200, Riegl LMS Z420; (mL Ψ )ср.2 – среднее значение, полученное для сканеров с Ψ > 1 мрад (Riegl LMS Z210, Riegl LMS Z360).
НЛС Riegl VZ400
НЛС Leica C10
НЛС Riegl LMS-Z420i
НЛС Riegl LMS-Z360
НЛС Riegl LMS-Z210
Рисунок 42 – Данные, полученные различными сканерами, для исследования
точности векторизации точечной модели с целью создания
топографических планов
146
Таблица 13 – Средние квадратические погрешности векторизации точечных моделей, полученных различными сканерами
Модель
m ,м
сканера X
Riegl
VZ400
Leica
C10
Leica
ScanStation
2
Mensi
GS200
LMS
Z420
Riegl
LMS
Z360
Riegl
LMS
Z210
mY, м
mL, м
Ψ,
мрад
mL Ψ ,
м/мрад
(m L Ψ )i − (m L Ψ )i − (m L Ψ )i ,
(m L Ψ )ср.1, (m L Ψ )ср.2 , (m L Ψ )ср.1
м/мрад
%
м/мрад
(m L
(m L
Ψ )i
Ψ )ср.2
%
0,026
0,024
0,0359
0,30
0,11972
–0,0089
–
–6,90
–
0,014
0,011
0,0175
0,14
0,12502
–0,0036
–
–2,77
–
0,011
0,011
0,0159
0,12
0,13237
0,0038
–
2,95
–
0,006
0,006
0,0081
0,06
0,13558
0,0070
–
5,44
–
0,022
0,024
0,0326
0,25
0,13023
0,0016
–
1,28
–
0,024
0,024
0,0340
2,00
0,01691
–
0,0008
–
5,03
0,033
0,032
0,0460
3,00
0,01529
–
–0,0008
–
-5,03
(mL
(mL
Ψ )ср.1
Ψ )ср.2
,
0,12858
0,01610
Из таблицы 13 видно, что точность отрисовки объектов по точечным моделям, полученным сканерами с различной расходимостью лазерного луча значительно отличается. Из приведенных результатов НЛС можно выделить две самостоятельные группы сканеров:
− лазерные сканеры, расходимость лазерного луча у которых меньше
Ψ < 1 мрад;
− лазерные сканеры, у которых Ψ > 1 мрад.
Эти же две группы наземных лазерных сканеров были выделены в результате исследований, приведенных в 1.3.
Для практического использования формулы (87) на основе величин
mL
,
Ψ
приведенных в таблице 13, получены выражения априорной оценки точности
147
планового положения контуров на топографических планах, созданных по данным сканирования.
В случае использования для съемки сканеров Ψ < 1 мрад
mL = 0,12858 × Ψ ,
(88)
а, для сканеров, у которых Ψ > 1 мрад
mL = 0,01610 × Ψ .
(89)
Выражения (88) и (89) для априорной оценки точности векторизации точечной модели при создании топографических планов подтверждают теоретическую
зависимость (87).
Общие принципы оценки точности построения цифровых трехмерных моделей объектов и рельефа. Цифровые трехмерные модели объектов и рельефа могут быть построены по данным НЛС с использованием:
− TIN-, Mesh-, NURBS-поверхностей;
− геометрических примитивов и тел (шар, конус, плоскость, швеллер, двутавровая балка и т. д.).
Точность построения трехмерных моделей объектов на основе TIN-, Mesh-,
NURBS-поверхностей, если соблюдаются условия теоремы Котельникова – Шинона [21], характеризуется ошибкой, рассчитываемой по формуле
2
2
,
mК2 = mОР
+ mИЗМ
(90)
где mОР − СКО, обусловленная ошибками внешнего ориентирования сканов;
mИЗМ − СКО определения координат точек модели, вызванная влиянием инструментальных ошибок сканера, внешней среды и метрологических свойств объекта сканирования.
148
При выполнении производственных работ обеспечить такую плотность точечной модели не представляется возможным. Это объясняется следующим. Для
построения моделей с использованием всего массива точек, содержащего большой объем данных и отображения таких моделей в динамике (вращение, перемещение, масштабирование) затрачиваются значительные объемы машинного времени. В связи с этим решение прикладных задач на основе созданных трехмерных
моделей является очень длительным процессом. Поэтому на практике построение
TIN-, Mesh-, NURBS-поверхностей выполняют по разряженной модели, сохраняя
структурные линии объектов.
Вывод формулы оценки точности построения трехмерных моделей объектов с использованием TIN-, Mesh-, NURBS-поверхностей является очень сложной
задачей, так как на величину погрешности трехмерного моделирования влияет
большое количество факторов, к которым относятся следующие:
− дискретность точечной модели, по которой производится построение
TIN-, Mesh-, NURBS-поверхности;
− величина разброса градиентов функций, описывающих поверхность;
− погрешность измерения координат каждой конкретной точки;
− отклонение точки от положения структурной линии;
− величина случайного влияния при обобщении построенной трехмерной
модели.
Анализ результатов обработки большого количества производственных материалов наземной лазерной съемки и специальных экспериментальных исследований показал, что погрешность построения трехмерных моделей объектов с использованием TIN-, Mesh-, NURBS-поверхностей колеблется в пределах от
mед.изм. до 7mед.изм., (mед.изм. – средняя квадратическая ошибка единичного измерения сканером). Для оценки реальной точности построения трехмерной модели с
использованием TIN-, Mesh-, NURBS-поверхностей целесообразнее использовать
методы математического моделирования.
149
Точность построения трехмерной модели рельефа описывается аналогичным образом, как и точность построения трехмерных моделей объектов, при помощи TIN-, Mesh-, NURBS-поверхностей.
При построении трехмерных моделей объектов с использованием геометрических примитивов и тел применяются три режима:
− автоматический;
− полуавтоматический;
− интерактивный.
Точность построения трехмерных моделей при помощи геометрических
примитивов и тел зависит от следующих факторов:
− случайных уклонений объектов от идеальной математической модели;
− дискретности измерений наземным лазерным сканером;
− точности единичного измерения сканером;
− личных погрешностей оператора при применении полуавтоматического
и интерактивного режима.
Анализ результатов обработки производственных материалов наземной лазерной съемки показал, что для априорной оценки точности построения трехмерных моделей объектов можно использовать выражения, аналогичные формулам
(88) и (89):
–
для сканеров с Ψ > 1 мрад
mL = 0,01610 × k × Ψ ;
–
для сканеров с Ψ < 1 мрад
mL = 0,12499 × k × Ψ ,
где
(91)
(92)
k – коэффициент, величина которого зависит от выбранного режима по-
строения трехмерной модели.
150
На основе апостериорной оценки точности моделирования различных объектов по данным НЛС получены следующие значения коэффициентов:
− для интерактивного режима k = (0,95–1,0);
− для полуавтоматического режима k = (0,70–0,85);
− для автоматического режима k = (0,30–0,70).
С помощью выражений (91) и (92) можно выполнять априорную оценку
точности создания трехмерной модели с использованием геометрических тел и
примитивов. Данные результаты опубликованы в работе автора [13].
151
4 ФОТОГРАММЕТРИЧЕСКИЕ ПРИНЦИПЫ ОБРАБОТКИ
ДАННЫХ НАЗЕМНОГО ЛАЗЕРНОГО СКАНИРОВАНИЯ
4.1 Теория преобразования сканерных данных в
виртуальные снимки
Одной из главных проблем обработки данных наземного лазерного сканирования является малая производительность. Так, например, в существующих
программных продуктах время, затрачиваемое на построение трехмерных моделей или цифровых планов или чертежей фасадов, к продолжительности лазерной
съемки составляет в пропорции
(5 − 9 ) . Это обстоятельство существенно нивели1
рует преимущество значительного сокращения объема полевых работ, что сдерживает развитие технологии наземного лазерного сканирования. Поэтому для обработки данных наземного лазерного сканирования предложено использовать фотограмметрические принципы.
Сущность идеи использования фотограмметрических принципов заключается в преобразовании данных наземного лазерного сканирования в совокупность
виртуальных снимков соответствующих центральной проекции. Аналогичный
подход был предложен П. Д. Амроминым [2] для обработки угловых измерений,
выполненных теодолитом при создании тестового полигона для калибровки камер.
Для реализации этой идеи скан следует представить в виде множества измеренных направлений, т. е. связки лучей, рассекая которую на определенном расстоянии f от точки O плоскостью P, как бы получим снимок. При этом один из
лучей, исходящих из точки О, должен пересекать плоскость P ортогонально (рисунок 43). В этом случае образуемые плоские виртуальные снимки соответствуют
центральной проекции.
Из рисунка 43 видно, что линейные элементы внешнего ориентирования для
всех снимков, образованных с одной сканерной станции, одинаковы. Угловые
152
ЭВО отличаются на углы χi, τi, т. е. аргументами матрицы направляющих косинусов будут являться ε + τi, η, ξ + χ j, где i = (0, 1, 2,…, n), j = (0, 1, 2,…, k). Эту матрицу в общем виде можно представить следующим образом
Aε + τ j , η, ξ + χ i = Aε,µ, ξ ⋅ Aχ i ⋅ Aτ j ,
где
a1 a2
Aε, η, ξ = b1 b2
c1 c2
a3
cos χ i
Aχ i = − sin χ i
0
sin χ i
cos χ i
0
(93)
b3 ,
c3
1
0
Aτ j = 0 cos τ j
0 − sin τ j
0
0,
1
0
sin τ j .
cos τ j
Рисунок 43 – Образование снимков из данных наземного лазерного сканирования
Выполним перемножение матриц Aε,µ, ξ , Aχ i , Aτ j . Тогда выражение (93)
примет вид
153
где
e1
e2
e3
Aε + τ j , η, ξ + χ i = g1
q1
g2
g3 ,
q3
q2
(94)
e1 = a1 cos χ i − a2 sin χ i ,
e2 = (a1 sin χ i + a2 cos χ i )cos τ j − a3 sin τ j ,
e3 = (a1 sin χ i + a2 cos χ i )sin τ j + a3 cos τ j ,
g1 = b1 cos χ i − b2 sin χ i ,
g 2 = (b1 sin χ i + b2 cos χ i )cos τ j − b3 sin τ j ,
g 3 = (b1 sin χ i + b2 cos χ i )sin τ j + b3 cos τ j ,
q1 = c1 cos χ i − c2 sin χ i ,
q2 = (c1 sin χ i + c2 cos χ i )cos τ j − c3 sin τ j ,
q3 = (c1 sin χ i + c2 cos χ i )sin τ j + c3 cos τ j .
Плоские координаты на снимке вычисляются следующим образом:
xi, j = f tg(ϕ − χ i )
.
yi, j = f tg(θ − τ j − 90)
(95)
Для связи координат точек снимков с пространственными координатами
соответственных точек используются уравнения коллинеарности [5, 8, 161]:
e2 ( X M − X 0 ) + g 2 (YM − Y0 ) + q2 ( Z M − Z 0)
e1 ( X M − X 0 ) + g1 (YM − Y0 ) + q1 ( Z M − Z 0)
e3 ( X M − X 0 ) + g 3 (YM − Y0 ) + q3 ( Z M − Z 0) ,
− z0 = f
e1 ( X M − X 0 ) + g1 (YM − Y0 ) + q1 ( Z M − Z 0)
yi , j − y 0 = f
zi , j
где x0, y0 – координаты центра проекции снимка;
XM, YM, ZM – пространственные координаты точек объекта.
(96)
154
Для снимков, образованных по данным наземного лазерного сканирования,
x0, y0 равны нулю.
Помимо вертикальных и горизонтальных углов, НЛС измеряет расстояние
R, которое связано с линейными элементами внешнего ориентирования и пространственными координатами точек объекта следующим образом
R = ( X M − X 0 ) 2 + (YM − Y0 ) 2 + ( Z M − Z 0 ) 2 .
(97)
Выражение (97) определяет длину вектора направления на точку объекта.
Традиционно для нахождения его использовалась пара снимков, имеющих взаимное перекрытие.
На основе данной теории можно создавать два вида снимков: аналитические
и цифровые. Первый вид показан в таблице 14, где элементами изображения выступают измеренные сканером расстояния. Аналитические виртуальные снимки
целесообразнее применять для решения вычислительных задач, т. е. внешнего
ориентирования сканов, уравнивания скантриангуляционных построений, при
реализации автоматических алгоритмов построения трехмерных моделей и т. д.
При этом в настоящее время данный вид виртуальных снимков, возможно, применять только для решения первых двух задач из перечисленных.
Таб ли ца 14 – Пример аналитического виртуального снимка для опорных точек
Номер точки
Tar 4.5
Tar 4.6
Tar 5.1
Tar 5.2
Tar 5.3
Tar 5.4
Tar 5.5
Tar 5.6
Tar 5.7
Tar 5.8
x, мм
42,184
48,343
–82,631
–81,466
–40,328
–37,899
5,081
7,813
24,393
24,140
y, мм
–8,069
–8,176
1,378
1,437
2,775
2,722
1,900
1,812
–2,034
–2,222
R, м
18,367
18,520
39,343
40,550
60,800
60,815
58,258
58,024
34,408
32,550
155
Для цифрового представления виртуальных снимков на практике в качестве
значений пикселей используются три характеристики: интенсивность, расстояние
от сканера до снимаемого объекта и реальный цвет (рисунок 13).
Цифровые виртуальные снимки целесообразнее использовать при автоматизированном дешифрировании, сжатии изображений и построении цифровых моделей.
Для практического применения данной предложенной теории встает два вопроса: выбор количества снимков и выбор фокусного расстояния виртуальных
снимков.
Выбор количества снимков следует решать по пути минимальных затрат на
преобразование данных и оптимального восприятия данных. Исходя из этого наиболее эффективно использовать пять сканерных снимков главные оптические оси,
которых расположены для четырех снимков в плоскости XскYск скана через 90°, а
пятого снимка перпендикулярно плоскости XскYск. Это позволяет покрыть область
сканирования всех выпускаемых сканеров (см. приложение А) всего пятью снимками. Данная схема размещения виртуальных снимков показана на рисунке 44.
Рисунок 44 – Схема преобразования сканерных данных в пять
виртуальных снимков
156
В тоже время такая схема размещения виртуальных снимков не приводит к
видимым искажениям, вызванных пересчетом из сферической поверхности в центральную проекцию. По всему полю снимка эти искажения не превышают 11 %
от размера пикселя (рисунок 45), что визуально является не значимым. На данном
примере (рисунок 45) нет видимых искажений вызванных сферичностью в отличии от снимков показанных на рисунке 13.
Рисунок 45 – Пример виртуального снимка размером 90°×90° с наложенным
цифровым снимком
Кроме этого выбор такой схемы расположения оптических осей значительно сокращает время на внешнее ориентирование. Поскольку элементы матрица
направляющих косинусов для всех снимков, полученных с одной станции, одни и
те же, а при переходе от снимка к снимку внутри скана элементы матрицы направляющих косинусов меняют только свое местоположение и знак (таблица 15),
то это значительно сокращается машинное время на математические операции,
которые можно проводить с виртуальными снимками.
157
Таб ли ца 15 – Вид матрицы направляющих косинусов внутри одного скана для
пяти виртуальных снимков
Номер снимка
Снимок 1
Значения углов
поворота снимков
Вид матрицы направляющих косинусов
χ = 0°;
τ = 0°
Снимок 2
Снимок 3
χ = 90°;
τ = 0°
χ = 180°;
τ = 0°
a1 a2
a3
− a2
a1 a3
− a1 − a2
a3
b1
c1
b3
c3
− b2
− c2
b1
b3
c1
c3
− b1
− c1
b3
c3
b2
c2
− b2
− c2
Снимок 4
Снимок 5
χ = 270°;
τ = 0°
χ = 0°;
τ = 90°
a2
b2
c2
− a1 a3
− b1 b3
− c1 c3
a1 − a3
a2
− b3
− c3
b2
c2
b1
c1
Фокусное расстояние следует выбирать из дальнейших решаемых задач. В
первом случае если необходимо наложить на виртуальные снимки изображения,
полученные цифровой камерой, т. е. получить виртуальные снимки в реальных
цветах, то для них необходимо выбирать фокусное расстояние равное фокусному
расстоянию накладываемых цифровых снимков. Если такой задачи нет, то целесообразнее задавать кратным 100. Это позволяет значительно сократить затраты
машинного времени на преобразование виртуальных снимков. Поскольку задача
вычисления координат плоских виртуальных снимков сводится фактически только к вычислению тангенсов, т. е. тем самым сокращается операция умножения на
величину фокусного расстояния.
4.2 Уравнивание скантриангуляции методом связок
В 3.2 изложена сущность скантраингуляции, которая близка процессу фототриангуляции, имеющему большое значение в фотограмметрической обработке
снимков.
При уравнивании фототриангуляционных сетей достичь наивысшей точности позволяет метод связок, сущность которого заключается в следующем. Для
всех связей, возникающих в фототриангуляционной сети, составляют уравнения
поправок, используя условия коллинеарности, и совместно их решают по МНК.
Данный подход наиболее полноценно отвечает математической трактовке задачи
158
уравнивания по МНК. При этом для уравнивания фототриангуляционных сетей
по методу связок существуют жесткие условия, а именно:
− часть связующих точек должны располагаться в зоне тройного перекрытия;
− для достижения требуемой точности расположение опорных точек
должно выдерживаться в соответствии с инструкцией на фотограмметрические
работы [64];
− на точность фототриангуляционных построений значительное влияние
оказывают продольное перекрытие между снимками и поперечное перекрытие
между маршрутами.
Основываясь на вышеизложенном, и учитывая сходство идеи фототриангуляции и скантриангуляции, задача разработки метода уравнивания последнего
сводится к проверке приведенных умозаключений, касающихся фототриангуляционных сетей.
Таким образом, используя теорию преобразования скана в совокупность
виртуальных снимков, можно уравнять скантриангуляционные построения при
помощи метода связок. Однако в данном случае задача не сводится к тривиальному перекладыванию метода связок при аналитической или цифровой фототриангуляциях на теорию уравнивании скантриангуляции. Сложность задачи вызвана
следующими обстоятельствами:
− при преобразовании скана в виртуальные снимки следует учитывать жесткость расположения главных оптических осей внутри скана;
− при уравнивании скантриангуляционных построений следует использовать абсолютную систему отсчета угловых ЭВО, т. к. получаемые снимки являются перспективными;
− линейные и угловые ЭВО следует отыскивать единые для совокупности
виртуальных снимков, полученных для одной сканерной станции.
При уравнивании скантриангуляции с использованием теории преобразования сканов в виртуальные снимки основными выражениями являются (96а) и
159
(96б). Поскольку отыскание ЭВО выполняется по избыточному количеству измерений, решение уравнений (96) и (97) необходимо выполнять совместно по МНК
итерационным способом. Для этого необходимо составить уравнения поправок,
которые получаются путем дифференцирования выражений (96а) и (96б)
a ix, j δε + bxi, j δη + c ix, j δξ + d xi, j δX 0 + eix, j δY0 + f xi, j δZ 0i, j +
+ g ix, j δX M + hxi, j δYM + i xi, j δZ M + σxi, j + l xi, j = Vxi, j ,
a iy, j δε + b iy, j δη + c iy, j δξ + d iy, j δX 0 + eiy, j δY0 + f yi, j δZ 0i, j +
+ g iy, j δX M + hiy, j δYM + i iy, j δZ M + σyi, j + l iy, j = V yi, j ,
(98)
i, j
i, j
i, j
δε + bRi , j δη + c R
δξ + d Ri, j δX 0 + eR
δY0 + f Ri, j δZ 0i, j +
aR
i, j
+ gR
δX M + hRi, j δYM + iRi, j δZ M + σR + l Ri, j = VRi, j ,
где
δε, δη, δξ, δX0, δY0, δZ0 – приращения к приближенным значениям ЭВО ε, η,
ξ, X0, Y0, Z0;
δXM, δYM, δZM – приращения к приближенным пространственным координатам точек объекта XM, YM, ZM ;
σxi,j, σyi,j, σR – поправки в координаты точек снимка и измеренное расстояние;
lx, ly, lR – свободные члены;
Vx, Vy, VR – вероятнейшие поправки уравнивания.
i, j i, j
Коэффициенты a ix, j , bxi, j , c ix, j ,..., i xi, j , a iy, j , b iy, j ,..., i iy, j , a R
, bR ,..., iRi, j уравне-
ний поправок (97) в общем случае определяются из следующих выражений:
a ix, j = − g ix, j =
(e1 f + e2 xi, j ),
bxi, j = −hxi, j =
(g1 f + g 2 xi, j ),
Y*
Y*
c ix, j = −i xi, j =
d xi, j =
xi, j
Y
*
(q1 f + q2 xi, j ) ,
Y*
f
xi, j
Y
*
eix, j = −
+
160
[q (X − X 0 ) − e1 (Z M − Z 0 )]+
* 1 M
f
Y*
Y
[q2 (X M − X 0 ) − e2 (Z M − Z 0 )],
[g1 (cos ε(Z M − Z 0 ) − sin ε(X M − X 0 )) + b3 (sin (ξ − χi ))(YM − Y0 )] +
[g 2 (sin ε( X M
− X 0 ) − cos ε(Z M − Z 0 )) +
(
)
+ b3 cos(ξ − χi ) cos τ j + cos η sin τ j (YM − Y0 ) ] ,
f
f xi, j = −
Y
*
[(a1 cos χi + a2 sin χi )(X M − X 0 ) + (b1 cos χi − b2 sin χi )(YM − X 0 ) +
xi2, j
+ (c1 cos χi − c2 sin χi )(Z M − Z 0 )] −
cos τ j ,
f
a iy, j = − g iy, j =
(e3 f + e2 yi, j ) ,
b iy, j = −h iy, j =
(g3 f + g 2 yi, j ) ,
c iy, j = −i iy, j =
(q3 f + q2 xi, j ) ,
d iy, j =
Y*
Y*
f
yi , j
Y
*
eiy, j = −
(
Y*
[q (X − X 0 ) − e3 (Z M − Z 0 )] +
* 3 M
f
Y*
Y
[q2 (X M − X 0 ) − e2 (Z M − Z 0 )],
[g3 (cos ε(Z M − Z 0 ) − sin ε(X M − X 0 )) +
)
]
+ b3 cos(ξ − χ i )cos τ j + cos η sin τ j (YM − Y0 ) +
+
yi , j
Y
*
[g 2 (sin ε (X M − X 0 )− cos ε (Z M − Z 0 ))+
161
(
)
(
)
+ b3 cos ξ − χ i cos τ j − cos η sin τ j Y M − Y 0 ,
yi , j
f yi, j = xi, j sin τ j −
cos τ j ,
f
i, j
i, j
aR
= −gR
=−
bRi, j = −hRi, j = −
i, j
= −iRi, j = −
cR
2( X M − X 0 )
R
,
2(YM − Y0 )
,
R
2(Z M − Z 0 )
,
R
i, j
d Ri, j = eR
= f Ri, j = 0 ,
причем
X * = e1 ( X M − X 0 ) + g1 (YM − Y0 ) + q1 ( Z M − Z 0) ,
Y * = e2 ( X M − X 0 ) + g 2 (YM − Y0 ) + q2 ( Z M − Z 0) ,
Z * = e3 ( X M − X 0 ) + g 3 (YM − Y0 ) + q3 ( Z M − Z 0) .
Уравнения поправок вида (97) составляются для всех точек, но при этом для
i, j
, hRi, j , iRi, j равняютопорных точек величины g ix, j , hxi, j , i xi, j , g iy, j , h iy, j , i iy, j , g R
ся нулю.
В выражениях (98) уравниваются величины xi,j и zi,j , которые являются
функциями измеренных величин. Для связи вероятнейших поправок измеренных
величин и их функций необходимо продифференцировать выражения (95)
V
ϕ
cos 2 (ϕ)
.
f
Vy =
Vθ
2
cos (θ)
Vx =
f
(99)
162
Далее встает задача исследования накопления погрешностей в скантриангуляционных построениях, решение которой в общем виде аналитическим способом
является практически невыполнимой. Поэтому для ее решения целесообразнее
воспользоваться методами математического моделирования с использованием
принципов, приведенных в 3.2. Для моделирования использовались результаты
метрологического освидетельствования большого количества НЛС, проведенные
автором работы. В результате выполненных исследований установлено следующее:
− наиболее оптимальным количеством связующих специальных марок является восемь штук. Увеличение числа специальных марок больше восьми к значимому повышению точности не приводит;
− связующие точки должны располагаться таким образом, чтобы они были
видны с j-1, j и j+1 сканерных станций. Это позволяет повысить точность при
уравнивании примерно на 18–35 %. Последующее увеличение связей между сканерными станциями значительно усложняет производство измерений, а точность
повышается незначительно. Графики сравнения точности определения элементов
внешнего ориентирования сканов предложенным и ранее разработанным методами приведены в приложении Б. При подобном повышения точности определения
ЭВО погрешности получения координат точек местности или объекта (mX, mY, mZ)
уменьшаются на 6–11%;
− при построении вытянутой скантриангуляции накопление погрешностей
вдоль его направления в основном зависит от точности измерения расстояний и
количества сканерных станций. Погрешности аккумулируются пропорционально
µ
n , где μ – средняя квадратическая ошибка единицы веса при подсоединении
2
сканов; n – количество сканерных станций;
− накопление погрешностей поперек маршрута происходит пропорцио-
)
(
нально функции li , n 3 , m L , где li – расстояние между сканерными станциями; n
–
число
базисов
в
скантриангуляционных
построениях;
163
mL – средняя квадратическая погрешность измерения планового положения связующих точек НЛС;
− накопление погрешностей по высоте происходит пропорционально
(
)
функции li , n 3 , m H , где mH – средняя квадратическая погрешность измерения
высотного положения связующих точек НЛС;
− более высокая точность (примерно на 100 %) при объединении сканов
достигается при использовании специальных марок, чем при подсоединении по
перекрывающимся зонам, отображенным на сканах. Это объясняется тем, что
точность определения координат центров специальных марок в 3-6 раз выше, чем
точность единичного измерения [112].
Различие законов распределения погрешностей вдоль пропорционально
а поперек и по высоте –
n,
n3 обусловлено следующим. Если представить, что
скантриангуляция состоит из базисов, концами которых являются смежные станции сканирования, то:
− погрешности вдоль скантриангуляционных построений определяются
ошибками длины базисов;
− погрешности поперек скантриангуляционных построений и высоте определяются угловой ориентацией базисов в горизонтальной и вертикальной плоскостях соответственно.
Кроме приведенных примеров использования теории преобразования сканерных данных в совокупность виртуальных снимков, также существуют и другие, как например [136, 257, 258, 289, 315, 317, 318, 326, 332].
4.3 Общие принципы формирования и обработки изображений, полученных
по материалам наземного лазерного сканирования и съемки цифровой камерой
Задачи, решаемые при совместном использовании данных наземного лазерного сканирования и цифровой съемки. Основная идея совместного использования
данных, полученных цифровой камерой и наземным лазерным сканером, – это
повышение дешифровочных свойств точечной модели и создание ортотрансфор-
164
мированных изображений объектов. Из этого и формируются основные задачи
при совместном использовании данных, полученных цифровой камерой и НЛС, а
именно:
− создание чертежей фасадов зданий и памятников, имеющих большое количество элементов декора;
− создание цифровых трехмерных моделей с наложенными цифровыми
изображениями археологических памятников и раскопок;
− определение габаритов разрушений (трещин, сколов, разрывов конструкций), вызванных деформацией зданий и сооружений (цифровые трехмерные
модели с наложенными цифровыми изображениями);
− создание реалистичных цифровых трехмерных моделей объектов (цифровые трехмерные модели с наложенными цифровыми изображениями);
− мониторинг открытых карьеров и подземных выработок (цифровые
трехмерные модели с наложенными цифровыми изображениями).
Из перечисленных задач видно, что изображения, созданные цифровой камерой, используются для повышения информативности данных наземного лазерного сканирования, улучшения конечной продукции и повышения производительности. Этот вывод доказывают и многочисленные публикации, например
[257, 258].
Методология совместного получения и обработки данных наземного лазерного сканирования и цифровой съемки. Наземное лазерное сканирование широко
используется во многих областях производства и науки. Для решения задач, где
требуется распознавание мелких деталей объектов, данные наземного лазерного
сканирования целесообразно использовать совместно с наземными цифровыми
снимками. Однако в настоящее время нет единой проработанной методики совместной обработки данных наземных лазерной и цифровой съемок.
Из теоретических соображений вытекает, что возможно достижение двух
целей при совместном использовании данных наземного лазерного сканирования
и цифровой съемки:
165
− повышение точности данных наземного лазерного сканирования и цифровой съемки при их совместном уравнивании;
− повышение информативности данных наземного лазерного сканирования
(создание ортоизображений и получение цветовой RGB-составляющей для каждого лазерного отражения).
Для повышения точности результатов наземного лазерного сканирования
необходимо, чтобы данные, полученные НЛС и цифровой камерой, были сопоставимы.
Автором предложена методика, за основу которой была принята технология
выполнения работ при наземном лазерном сканировании [184], дополненная с
учетом процессов съемки и обработки цифровых снимков.
Основные этапы методики совместной обработки данных представлены на
рисунке 46.
В методике, представленной на рисунке 46, процессы: составление технического проекта на наземное лазерное сканирование, рекогносцировка местности,
подготовка планово-высотного обоснования, наземное лазерное сканирование и
цифровая съемка, предварительная обработка данных наземного лазерного сканирования – выполняются идентично приведенным в разделе 1.
Отличие при проведении сканерной съемки от технологической схемы,
представленной на рисунке 4, состоит в том, что количество и размещение специальных марок на первой станции должно обеспечивать возможность калибровки
снимков. На последующих станциях расположение специальных марок проектируется только для планово-высотного обоснования сканерной съемки.
Производители применяют два варианта расположения цифровой камеры:
− внутри сканера;
− снаружи сканера, при этом цифровую камеру при помощи приспособлений жестко скрепляют с поворотной головкой сканера (рисунок 47).
166
Рисунок 46 – Методика совместной обработки данных наземного лазерного
сканирования и цифровых снимков
По своей сущности и математическому аппарату обработки данных, полученных цифровой камерой, оба варианта идентичны. Преимуществом второго варианта является возможность использования цифровой камеры с лучшими харак-
167
теристиками, так как пространства для ее размещения значительно меньше ограничено.
Рисунок 47 – Наземный лазерный сканер с цифровой камерой
Кроме этого возможна установка камеры в произвольном месте относительно сканера. Но данный способ как видно из рисунка 46 требует сложного и трудоемкого процесса модификации снимка, требующий поиска соответственных точек
на цифровом снимке и сканерных данных в идеальном случае для каждого элемента цифрового изображения, т. е. процесса, схожего с ортотрансформированием изображений.
При использовании способа, в котором цифровая камера жестко закреплена
с телом сканера, после этапа исправления снимка за дисторсию и углов наклона
получаются цифровое изображение и виртуальный снимок с идентичной связкой
лучей, поскольку фокусное расстояние двух снимков одинаково (см. 4.1). Использование данного варианта ведения цифровой съемки и предложенной теории преобразования сканерных данных в совокупность виртуальных снимков делает более простой задачу ортотрансформирования цифрового изображения. Это объясняется тем, что после совмещения данных получаются две идентичные связки лучей, т. е. для каждого пикселя цифрового изображения известны пространствен-
168
ные координаты объекта XYZ, которые необходимо подставлять в уравнения коллинеарности при переходе из центральной проекции к ортогональной.
Однако использование такого варианта наложения данных требует следующего:
− исключение искажений в размерах пикселя, вызванных сферичностью
исходной проекции, как показано на рисунке 48;
− согласования разрешения сканирования на цифровом виртуальном
снимках.
d1 ≠ d2
Рисунок 48 – Пояснение к искажению виртуальных снимков за сферичность
Для исключения искажений, которые показаны на рисунке 48, получены
формулы
∆ϕ
2
δпанорам.гор = 2 f
∆ϕ
cos2 ϕ − (sin 2 ϕ) ⋅ tg 2
2 ,
∆θ
tg
2
δпанорам.верт = 2 f
∆
θ
cos2 θ − (sin 2 θ) ⋅ tg 2
2
tg
где
(100)
Δφ, Δθ – угловое разрешение сканирования по горизонтали и вертикали;
δпанорам.гор, δпанорам.вер – величина искажений за сферичность для горизонталь-
ных и вертикальных углов;
169
φ, θ – значения горизонтальных и вертикальных углов, отсчитываемые от
оптической оси виртуального снимка.
Калибровка снимков. После предварительной обработки сканов выполняется калибровка снимков.
Для неметрических цифровых камер параметрами калибровки являются
элементы внутреннего ориентирования, радиальная и тангенциальная дисторсия.
Методики, математический аппарат, требования к проведению калибровки кадровых съемочных систем приведены в работах [2, 3, 8, 9, 55-57, 61, 77-79, 91, 97,
111, 286 и др.].
Наложение изображений на точечную модель или TIN–поверхность. Для
выполнения этого процесса необходимо ориентировать снимки относительно системы сканера. При обработке снимков, полученных совместно с НЛС, задача определения ЭВО снимков сводится к нахождению элементов редукции, т. е. линейных смещений главной точки снимка относительно точки О сканера, и ориентации главной оптической оси в системе координат сканера. Данная задача решается так же, как определение элементов внешнего ориентирования снимков с использованием уравнений вида (96).
Создание ортоизображений производится в программе управляющей сканером с использованием уравнений коллинеарности вида (96).
4.4 Обоснование направлений использования данных
цифровой съемки при наземном лазерном сканировании
Основными параметрами, влияющими на качество и количество снимков,
полученных цифровой камерой одновременно с лазерным сканированием объекта,
являются:
− размер элемента ПЗС-матрицы;
− фокусное расстояние объектива;
− размер ПЗС-матрицы;
170
− горизонтальный и вертикальный углы поля зрения камеры;
− расстояние до объекта съемки.
Для того, чтобы точность цифровых снимков соответствовала точности данных наземного лазерного сканирования, необходимо располагать сканерную станцию от объекта съемки на допустимом расстоянии, которое зависит от размера
элемента ПЗС-матрицы и фокусного расстояния объектива выбранной цифровой
камеры.
Для расчета расстояния R от цифровой камеры, установленной на сканер, до
объекта с заданной детальностью следует использовать формулу масштаба съемки
в преобразованном виде, а именно:
R=
δf
,
kd x , y
(101)
где δ – размер элемента изображения на местности;
dx,y – размер элемента ПЗС-матрицы;
f – фокусное расстояние цифровой камеры;
k – коэффициент восприятия наименьшего размера объекта на снимке. Согласно работе [1], при опознавании зрительного изображения коэффициент k для
компактных объектов равняется 3,5, а для линейных – 1,5.
В таблицах 16 и 17 приведены расчеты отстояния цифровой камеры до объекта для часто применяемых типов камер при совместном использовании с данными наземного лазерного сканирования.
Из анализа производственных материалов можно сделать вывод, что проблема повышения точности сканерных данных возникает только при решении
экспертных (точных) и высокоточных задач. Как видно из таблиц 16 и 17, повысить точность можно только при использовании длиннофокусных цифровых камер. Но особенностью данных камер является то, что для покрытия цифровыми
снимками всего поля зрения сканера необходимо большое количество снимков.
точности данных при k = 1,5
Таблица 16 – Зависимость расстояний от сканера до объекта съемки от параметров цифровой камеры и требуемой
171
точности данных при k = 3,5
Таблица 17 – Зависимость расстояний от сканера до объекта съемки от параметров цифровой камеры и требуемой
172
173
Для определения количества снимков, полностью покрывающих область
сканирования, необходимо знать горизонтальный и вертикальный углы поля зрения цифровой камеры, которые можно рассчитать по формулам:
l x ⋅ d x, y
2 f
,
l y ⋅ d x, y
= 2arctg
2 f
ϕ цк = 2arctg
θцк
(102)
где φцк, θцк – горизонтальный и вертикальный углы поля зрения камеры;
lx, ly – размер ПЗС-матрицы.
Вычисленные по формулам (102) значения углов φцк, θцк при заданных размерах ПЗС-матрицы и фокусном расстоянии представлены в таблице 18.
Таблица 18 – Углы поля зрения цифровых камер
Модель цифровой камеры
Nikon D200
Nikon D300
Nikon D3X
Rollei (22)
Canon 1D Mark IV
f, мм
20
35
85
20
35
85
20
35
85
40
80
150
20
35
85
Горизонтальный
угол
°
59 59' 24,2"
36° 42' 44,8"
15° 34' 15,9"
60° 43' 09,7"
37° 13' 44,5"
15° 48' 14,5"
72° 27' 46,0"
46° 02' 51,5"
19° 53' 19,8"
62° 32' 42,8"
34° 01' 38,3"
18° 32' 47,3"
42° 44' 32,2"
25° 14' 25,8"
10° 32' 10,7"
Вертикальный угол
42° 27' 27,6"
25° 03' 39,2"
10° 27' 33,3"
42° 44' 03,8"
25° 14' 07,8"
10° 32' 03,0"
52° 35' 02,6"
31° 37' 39,9"
13° 18' 33,2"
49° 12' 55,9"
25° 51' 34,8"
13° 57' 48,5"
29° 16' 29,9"
16° 58' 52,3"
07° 02' 06,8"
Тогда расчет количества снимков, требуемого для покрытия области сканирования, можно произвести по формулам:
174
ϕ ск
⋅ 100% + 2
ϕ цк (100 − q)
,
θск
ny =
⋅ 100% + 2
θцк (100 − q)
nx =
(103)
где nx, ny – количество снимков по горизонтали и вертикали;
φск, θск – горизонтальный и вертикальный углы поля зрения сканера;
p – продольное перекрытие снимков;
q – поперечное перекрытие снимков.
Для вычисления количества снимков по формулам (103) заданы размеры области сканирования для сканера Riegl LMS Z 420i: 360° по горизонтали и 80° по
вертикали, а продольное и поперечное перекрытия приняты 56 % и 22 % соответственно, как минимальные критерии для обеспечения уравнивания . Результаты
расчетов приведены в таблице 19.
Таблица 19 – Количество снимков для покрытия области сканирования сканера
Riegl LMS Z 420i
Цифровая камера
Nikon D200
Сanon 1D Mark IV
f, мм
20
35
85
20
35
85
Количество снимков
по горизонтали
по вертикали
16
3
26
5
62
11
23
4
38
7
91
16
Общее количество
снимков
48
130
682
92
266
1 456
Из таблицы 19 видно, что при использовании длиннофокусных камер значительно увеличивается количество снимков. Это усложняет процесс совместной
обработки снимков и данных наземного лазерного сканирования и снижает производительность работ, хотя обеспечивает более высокую точность на больших
расстояниях от сканера до объекта съемки.
Эти выводы сделаны для идеальной модели объектива. При работе с реальными объективами даже после калибровки величины остаточных аберраций дос-
175
тигают трех пикселей. Это еще в большей степени свидетельствует о невозможности повышения точности сканерных данных при помощи цифровых снимков.
О нецелесообразности развития методов повышения точности сканерных
данных при помощи цифровых камер говорит и тот факт, что пути к повышению
точности данных лазерного сканирования просматриваются явно (см. раздел 2), а
качество изготовления объективов практически достигло пределов.
Поэтому цифровые снимки целесообразнее использовать при дешифрировании облака точек и создании ортоизображений для повышения производительности векторизации объектов.
176
5 ПР ИМ ЕНЕНИЕ Р ЕЗ УЛЬ ТАТОВ ИСС ЛЕД ОВ АНИЙ ПР И
Р ЕШ ЕНИИ ПР ИК ЛАД НЫ Х З АДАЧ
5.1 Методика поверки наземных лазерных сканеров
Методика определения погрешности измерений расстояний в полевых условиях. Сущность методики заключается в том, что выбираются от пяти до 12 эталонных интервалов линейного базиса длиной от 24 до 7 500 м, количество которых обусловлено дальностью действия сканера. Они должны лежать в пределах
от минимального до максимального значения измеряемой дальности на конкретный тип сканера с соблюдением коэффициента диффузного отражения. Затем
сканер устанавливают в створе линии (величина нестворности не должна превышать 0,25 м), соединяющей центры двух пунктов в ее середине (рисунок 49), причем разница плеч (S1 – S2) не должна превышать 1 м. Марки (пластины) центрируют над пунктами, а их вертикальные оси приводят в отвесное положение.
Рисунок 49 – Схема установки сканера при определении
погрешности и диапазона измерений расстояний в полевых условиях
При измерении НЛС угловое разрешение сканирования по вертикали и горизонтали должно быть максимальным в соответствии с техническими характеристиками сканера.
177
По сканерному изображению размеры пластины можно определить с погрешностью 0,005 м в направлении поперек измеряемого базиса, как пересечение
диагоналей сканерного изображения пластины (рисунок 50). Обработку результатов измерений сканером выполняют с помощью программного продукта и получают координаты центра пластин 1 и 2. По полученным координатам центров
пластин оценивают расстояние S1-2, которое определяют по формуле
S1− 2 = S1 + S 2 ,
(104)
где S1 и S2 – расстояние от сканера до центра пластин 1 и 2 соответственно.
Вычисляют измеренное расстояние между пунктами базиса S1-2 с помощью
координат центров соответственно первой и второй пластин.
Рисунок 50 – Схема определения координат центров пластин
Результаты измерений считают положительными, если разности между измеренным расстоянием и эталонным значением интервала базиса не превышают
допускаемого значения погрешности m Sдоп , вычисленной по формуле
m Sдоп = 4m S ,
где
(
(105)
)
mS = a + b × 10 − 6 S1− 2 – средняя квадратическая погрешность измерений
расстояний, указанная в эксплуатационной документации (ЭД) на конкретный вид
сканера;
178
(a + b ×10 ) мм – «a» постоянная (приборная) и «b» закономерная погреш−6
ности измерений расстояний, указанные в ЭД на конкретный вид сканера.
Погрешность измерений расстояний не должна превышать утроенных значений, указанных в таблице А.1.
Диапазон измерений расстояний определяется на основании минимального и
максимального расстояний, измеренных на линейном базисе. Диапазон измерения
расстояний должен соответствовать значениям, указанным в таблице А.1 (Приложение А).
Определение погрешности измерений расстояний в лабораторных условиях.
Сущность методики заключается в следующем. Устанавливают светоотражающую пластину 1 (рисунок 51) в каретку и, перемещая ее на расстояние 24 м, определяют точное расстояние до нее с помощью СЛИ (SСЛИ.1). Затем устанавливают
светоотражающую пластину 2 (рисунок 51) в каретку и, перемещая ее, подбирают
5 интервалов для исследования НЛС. При каждом положении светоотражающей
пластины 2 (рисунок 51) определяют расстояние до нее с помощью системы линейных измерений (СЛИ) (SСЛИ.2). Затем сканер устанавливают на каретку, которая размещается посередине между двумя светоотражающими пластинами с погрешностью 0,20 м в продольном направлении. Угловое разрешение сканирования
по вертикали и горизонтали должно быть максимальным в соответствии с техническими характеристиками сканера.
Выполняют обработку результатов измерений и вычисляют координаты центров пластин 1 и 2 (см. рисунок 51) путем пересечения диагоналей сканерного
изображения пластин аналогично тому, как показано на рисунке 50. Обработку
данных наземного лазерного сканирования выполняют с помощью программного
продукта.
В результате измерений расстояний оценивают разность расстояний
(S СЛИ.1 − S СЛИ.2 ) , которую определяют по формуле
(S СЛИ.1 − S СЛИ.2 ) = S1 + S 2 ,
(106)
179
где S1 и S2 – расстояния от сканера до центра пластин 1 и 2 (рисунок 51) соответственно.
Рисунок 51 –Схема установки сканера при определении
погрешности измерения расстояний в лабораторных условиях
Результаты измерений считают положительными, если разности между измеренным расстоянием и эталонным значением интервала не превышают допускаемого значения погрешности m Sдоп , вычисленной по формуле (106).
Погрешность измерений расстояний не должна превышать утроенных значений, указанных в таблице А.1 (Приложение А).
Определение погрешности и диапазона измерений углов. Определение погрешности измерений горизонтальных углов в диапазоне от 0° до 360°. Погрешности измерений горизонтальных углов (mϕ) определяют в диапазоне от 0° до
360°. В лабораторных условиях создается тестовый полигон в виде, приближено
напоминающем кольцо, по всему полю зрения поверяемого сканера. Например,
180
для сканера Leica Scanstation C10 направления для расстановки марок приведены
в таблице 20 с абсолютной погрешностью 3°.
Определяют эталонные значения координат центра каждой марки с помощью электронного тахеометра.
Таблица 20 – Значения углов для определения погрешности измерения
горизонтальных и вертикальных углов
Значения эталонных
Значения эталонных
горизонтальных направлений
вертикальных направлений
0°
-45°
30°
-35°
60°
-25°
90°
-15°
120°
-5°
150°
5°
180°
15°
210°
25°
240°
35°
270°
45°
300°
55°
330°
65°
75°
85°
90°
При меч ание – Желательно разместить специальные марки так, чтобы
направления на них соответствовали показанным в таблице с допустимым
отклонением не более 3°.
При обработке результатов измерений сканерной съемки выполняют внешнее ориентирование сканера собственной программой управления, принадлежащей данному оборудованию. Определяют измеренные направления на центры марок и сравнивают с эталонными значениями. Результаты измерений считают положительными, если разности между измеренными и эталонными значениями не
превышают утроенных значений СКП, указанных в ЭД. Допустимая средняя
181
квадратическая погрешность измерения горизонтальных углов mϕдоп вычисляется
по формуле
mϕдоп = 2mϕ ,
(107)
где mϕ – средняя квадратическая погрешность измерений углов, указанная в ЭД
на конкретный вид оборудования.
Погрешность измерений горизонтальных углов не должна превышать утроенных значений, указанных в таблице А.1 (Приложение А).
Условия проведения метрологической аттестации сканеров должны быть
как в работах [219, 232, 233]
Определение погрешности измерений вертикальных углов в диапазоне от
минус 45° до плюс 90°. Погрешности измерений вертикальных углов (mθ) определяют в диапазоне от минус 45° до плюс 90°. В лабораторных условиях создается
тестовый полигон в виде наклонной окружности по всему полю зрения поверяемого сканера.
Процессы обработки и освидетельствования измерения НЛС вертикальных
углов аналогичны как и для горизонтальных.
Средняя квадратическая погрешность mθдоп вертикальных углов вычисляется по формуле
mθдоп = 2mθ ,
где
(108)
mθ – средняя квадратическая погрешность измерений вертикальных углов,
указанная в ЭД на конкретный вид оборудования.
Погрешность измерений вертикальных углов не должна превышать утроенных значений, указанных в таблице А.1 (Приложение А).
182
5.2 Комплексная методика исследования наземных
лазерных сканеров
На основе работ автора, изложенных в работах [105, 106, 113], предложена
методика комплексного исследования наземных лазерных сканеров, которая
представлена на рисунке 52.
Рисунок 52 – Технологическая схема выполнения исследований НЛС
Исследование расходимости лазерного пятна производится в соответствии с
методикой, использующей пространственную миру [4]. Исследование точности
дальномерного и угломерного блоков НЛС выполняется по методике, приведенной в 5.1.
Рассмотрим более подробно методики, приведенные на рисунке 52.
Методика исследования стабильности работы измерительных блоков наземных лазерных сканеров. В качестве количественной оценки стабильности средства измерений служит изменение его метрологических характеристик за установленный интервал времени.
183
В инструкциях, прилагаемых к НЛС, и литературе не приводится сведений
о стабильности работы измерительных блоков прибора и о целесообразности прогрева их до рабочей температуры.
Для исследования стабильности работы НЛС предложена методика, сущность которой заключается в многократном сканировании специальной марки и
определении сферических координат ее центра в системе координат сканера. Исследования стабильности работы НЛС следует выполнять непрерывно в течение
1–2 ч, в отличие от подобных испытаний для (лазерных автоматизированных систем) ЛАС. Это обусловлено тем, что время непрерывной работы на станции, для
НЛС, не превышает 1 ч, а для ЛАС составляет 8–15 ч.
По каждой измеряемой величине (расстоянию, горизонтальному и вертикальному углам) строится график, на котором по оси абсцисс откладывается номер сканирования, характеризующий время работы сканера, по оси ординат указывается отклонение измеренного расстояния или углов при каждом сканировании от среднего значения. Для измеренных расстояний величина отклонения вычисляется по формуле
∆Ri = Riизм − R ср ,
где
(109)
Riизм – расстояние, измеренное при i-м сканировании;
∆Ri – отклонение измеренного i-го расстояния от среднего;
i=1, 2, …, n;
Rср – среднее расстояние, вычисляемое по формуле
n
Rср =
где
∑ Riизм
i =1
n
,
n – число сканирований специальной марки.
(110)
184
На построенном графике выделяется прямолинейный участок, который
можно описать с использованием линейного уравнения вида
∆Ri пр.изм = а ⋅ ti + b ,
где
(111)
ti – время стабильной работы НЛС, которое определяется выражением
ti = iΔt (Δt – время однократного сканирования марки; i – номер сканирования);
∆Riпр.изм – отклонение измеренного расстояния при i-ом сканировании от
среднего, относящееся к прямолинейному участку.
Неизвестными величинами в уравнении (111) являются параметры a и b, а
исходными данными – ∆Riпр.изм и ti. Решение системы уравнений вида (111) осуществляется по МНК. После нахождения неизвестных определяется СКО единицы веса µ по формуле
∑ (∆Riпр.изм − (a ⋅ ti + b ))
n
µ=
где
2
i= j
,
k −2
(112)
j – номер сканирования, начиная с которого сканер работает стабильно (на-
чало прямолинейного участка);
k = n – j – количество измерений, принадлежащих прямолинейному участку графика.
Точность вписывания аппроксимирующей прямой можно оценить по формуле
∑ ((ati + b ) − ∆Riизм )
n
m=
2
i= j
k
,
(113)
185
По аналогичной методике производится вычисление СКО при исследовании
стабильности работы угломерных блоков.
Коэффициент а характеризует степень стабильности величин, измеряемых
сканером (расстояния, горизонтального и вертикального углов) на центр марки.
Чем он меньше по абсолютному значению, тем стабильнее работает блок сканера.
Коэффициент b характеризует систематическую ошибку измеряемой величины,
обусловленную недостаточным прогревом прибора.
C помощью данного исследования можно определить продолжительность
времени непрерывной работы сканера, в течение которого ошибка измерения будет в допуске. Величину допуска можно установить, исходя из требования,
предъявляемого при обработке результатов измерений [25, 26-28]
σ≤
где
δ изм
,
5
(114)
δизм – ошибка единичного измерения НЛС, приведенная в паспорте прибора
или полученная в результате исследования;
σ – систематическая ошибка измерения.
Время непрерывной работы tнепр.раб измерительных блоков сканера с учетом
уравнения (110) и условия (113) можно записать следующим образом
t непр.раб ≤
Для
массив
некоторых
точек
с
моделей
δ изм
.
5⋅ a
НЛС
полученными
результатом
(115)
сканирования
пространственными
является
прямоугольными
координатами. В этом случае для использования предлагаемой методики необходимо перевычислить прямоугольные координаты в сферические по обратным
формулам (14).
Экспериментальные исследования по представленной методике следует
проводить при различных отстояниях специальной марки от сканера.
186
Методика исследования точности определения элементов внешнего ориентирования сканов. Методика создания радиального тестового полигона. У некоторых моделей сканеров существует устройство для горизонтирования и центрирования прибора и реализован алгоритм, позволяющий ориентировать НЛС по
начальному (исходному) направлению (аналогично, как теодолит тахеометр или
фототеодолит). Однако такое решение задачи приведения системы координат
скана заданной выполняется бесконтрольно. Фирмы, выпускающие сканеры, рекомендуют в любом случае использовать специальные марки для нахождения
элементов внешнего ориентирования. В связи с этим возникает задача определения оптимального количества и геометрии расположения марок и расстояния от
них до сканера [305] (такая же задача возникает при калибровке съемочных систем, что указано в разделе 3). Для этих целей предложен тестовый полигон, показанный на рисунке 53.
Из теории и практики определения элементов внешнего ориентирования
одиночных снимков известно, что точность решения задачи зависит от геометрии
расположения опорных точек [161]. Для обеспечения наиболее высокой точности
определения элементов опорные точки следует располагать в углах рабочей площади снимков. Аналогичным образом влияет геометрия расположения специальных марок на точность внешнего ориентирования сканов, из чего следует, что
специальные марки должны располагаться в пределах всего поля зрения лазерного сканера.
Размер радиального тестового полигона должен выбираться в соответствии
с техническими характеристиками сканера и, в первую очередь, зависит от дальности действия, расходимости лазерного луча и максимального разрешения сканера. Так как угол поля зрения у большинства современных моделей сканеров составляет 360° в горизонтальной плоскости, что видно из приложения А, то марки
необходимо размещать по окружности на различных расстояниях от сканера. При
такой геометрии расположения марок точность определения элементов внешнего
ориентирования сканов будет максимальной, так как корреляция между угловыми
187
и линейными элементами внешнего ориентирования скана будет минимальной
[102, 105-107].
Радиусы окружностей, по которым расположены специальные марки, составляют 5, 10, 20, 30, 40, 50, 60, 70, 80, 90 и 100 м; они выбраны, исходя из дальности действия современных лазерных сканеров (приложение А).
Рисунок 53 – Схема радиального полигона
Важным вопросом при создании радиального тестового полигона является
выбор метода геодезических построений для определения координат точек полигона. В данном случае система координат может быть задана произвольным образом.
Методика создания радиального тестового полигона. В настоящее время
наибольшее распространение для создания инженерно-геодезических сетей получили линейно-угловые построения. Точность определения местоположения пунктов в таких сетях выше, чем в сетях триангуляции и трилатерации. Используя оп-
188
тимизированные проекты создания линейно-угловых сетей, можно при минимуме
затрат получить наивысшую точность определения местоположения пунктов
[229]. При построении сетей с помощью угловых измерений количество возникающих геометрических условий больше, чем при линейных измерениях. Но при
определении координат точек методом угловой засечки оказывают неблагоприятное влияние рефракционные поля, методы учета которых остаются малоэффективными. Надежным способом выявления недопустимых рефракционных искажений углов считается непосредственное измерение сторон в сети. Поэтому технически обоснованным будет использование линейно-углового метода геодезических построений для определения координат точек радиального тестового полигона [80, 155]. Для выполнения измерений на радиальном тестовом полигоне наиболее экономически выгодно использовать электронный тахеометр, который позволяет проводить угловые и линейные измерения одновременно.
При реализации проекта радиального тестового полигона необходимо, чтобы его реальные форма и размеры соответствовали проектным, поэтому необходимо
знать
допустимые
значения
отклонений
построенной
сети
от
проектной [177].
Задачу определения допустимых отклонений реальной сети от проектной
решают методами математического моделирования. При этом необходимо достаточно полно выявить возможные изменения в элементах сети при заданных точностных характеристиках измеряемых величин, что позволяют математикостатистические методы оценки проектов построения [177, 187].
При испытаниях, то есть при оценке точности проектов построения геодезических сетей, принимается, что ошибки геодезических измерений подчиняются
закону распределения Гаусса [177, 187].
При помощи методов математического моделирования также можно выбрать математическую модель для обработки геодезических измерений на радиальном тестовом полигоне.
189
Для определения координат специальных марок можно использовать два
способа: прямую или обратную геодезические засечки. Способ обратной геодезической засечки дает более высокую точность по отношению к прямой [37, 218], но
является экономически менее выгодным и требует больше временных затрат на
выполнение измерений. В этом случае необходимо либо долговременное закрепление точек постояннодействующего полигона и поддержание его в надлежащем
состоянии (выполнение метрологической аттестации полигона с определенной
периодичностью), либо проведение трудоемких геодезических измерений по определению координат точек полигона, создаваемого каждый раз при исследовании сканера. В обоих случаях выполнение исследований становится более дорогостоящим по сравнению с применением прямой геодезической засечки для единовременного создания радиального тестового полигона.
Прямая
прямой
угловая
угловой
засечка.
засечки,
Точность
соответствует
сетей,
построенных
точности
способом
триангуляционных
построений [207].
СКО определения планового положения специальных марок с помощью
прямой угловой засечки можно представить формулой [33, 200, 218, 236]:
MQ =
где
mβ
ρ"⋅ sin(∠AQB )
a 2 + b2 ,
(116)
a, b – расстояния от базовых пунктов до центра определяемой специальной
марки (рисунок 54);
∠AQB – угол между линиями, соединяющими базовые пункты с определяемой точкой (угол засечки) (рисунок 54);
mβ – СКО измерения углов в секундах.
При проектировании прямой угловой засечки СКО положения определяемой точки будет возрастать главным образом с увеличением a и b при постоянном
угле засечки или с увеличением отклонений угла засечки от 90°, что следует из
формулы (116) [218]. В источнике [200] приведены результаты исследований
190
прямой угловой засечки при одной и той же точности угловых измерений mβ и
постоянном базисе засечки:
− наиболее точный результат дает прямая засечка под углом в 110° при определяемой точке;
− прямая засечка под углом 30° в 2–4 раза менее точная, чем под углом в
150°;
− из двух засечек с острыми углами предпочтение должно отдаваться той,
у которой a≠b, то есть геометрическая форма геодезического построения отклоняется от равнобедренного треугольника.
Рисунок 54 – Геометрические связи при определении координат
специальной марки прямой линейно-угловой засечкой
Форма прямой линейной засечки аналогично влияет на точность определения планового положения специальной марки Q (рисунок 54).
Для решения прямой угловой засечки часто используются формулы, которые носят название формул котангенсов углов треугольника, или формул Юнга
[200, 218]. Так как в отечественной геодезической практике в качестве внешней
191
применяется левая система координат, а в сканерах – правая система (показана
в 1.2), то формулы котангенсов преобразованы к следующему виду:
где
XQ = X A +
X A ⋅ ctg(∠QBA) исп + X B ⋅ ctg(∠QAB ) исп + Y A − Y B
,
ctg(∠QAB ) исп + ctg(∠QBA) исп
(117)
YQ = Y A +
Y A ⋅ ctg(∠QBA) исп + Y B ⋅ ctg(∠QAB ) исп − X A + X B
,
ctg(∠QAB ) исп + ctg(∠QBA) исп
(118)
XA, XB, YA, YB, YB – плановые координаты базовых пунктов;
(∠QAB)исп, (∠QBA)исп – углы между базовой линией и направлениями на оп-
ределяемую специальную марку (рисунок 51), вычисляемые по формулам:
∠QABисп = ∠QABизм + σ ∠QAB ,
(119)
∠QBAисп = ∠QBAизм + σ ∠QBA ,
(120)
где ∠QABизм, ∠QBAизм – измеренные значения углов;
σ∠QAB, σ∠QBA – поправки в измеренные углы.
Согласно [25], при соответствующем подборе весов уравнивание функций
измеренных величин дает такой же результат, что и уравнивание непосредственно
измеренных величин. В теории уравнивания существует множество подходов к
выбору элементов матрицы весов при уравнивании функции измеренных величин. На практике выбор элементов весовой матрицы в каждом случае выполняется экспериментально, и предпочтение отдается уравниванию измеренных величин. В этом случае исходные уравнения для определения плановых координат
центров специальных марок XQ и YQ при решении прямой угловой засечки примут
вид [35, 36]:
∠QABисп
b2 + q2 − a 2
,
= arccos
2bq
(121)
192
∠QBAисп = arccos
где
2
a 2 + q2 − b2
,
2aq
(122)
2
a = X Q − X B + YQ − YB ,
2
2
b = X − X + Y − Y ,
A
A
Q
Q
q=
(X A − X B )2 + (YA − YB )2 .
В работе [49, 50] отмечен тот факт, что при совместном уравнивании угловых и линейных сетей целесообразнее использовать функции измеренных величин. Поэтому с использованием приемов математического моделирования были
выполнены исследования точности решения прямых угловых, линейных и линейно-угловых засечек при различных вариантах уравнивания. Анализ результатов
исследований автора [114] показал, что точность уравнивания измеренных величин в среднем на 4,7 % выше, чем уравнивание функции результатов измерений.
Преимуществом уравнивания измеренных величин является то, что в случае определения систематических ошибок в измеренных углах и расстояниях с целью
повышения точности уравнивания для нахождения плановых координат центров
специальных марок проще составить уравнения поправок.
Основными источниками систематических ошибок при угловых наблюдениях являются:
− ошибки, связанные с влиянием внешних условий: рефракции и турбулентности атмосферы;
− личные ошибки наблюдателя;
− приборные ошибки.
Ошибки, вызванные рефракцией, приводят к искажению направления световых лучей при изменении показателя преломления. Боковая рефракция приводит к искажениям в основном горизонтальных углов.
193
Ошибки, связанные с действием боковой рефракции, носят систематический характер, особенно при «спокойном изображении», то есть при стабильном
расположении слоев воздуха, через которые проходит визирный луч [47, 85, 218,
241]. Для вычисления поправок за влияние боковой рефракции необходимо измерять горизонтальные градиенты температуры и влажности вдоль направления на
точку визирования. В случае однородного поля рефракции формулы для расчета
поправок в измеренное направление за изменение температуры δ ,Г, и влажности
∆δ ,Г, поперек трассы, соединяющей прибор с точкой визирования, имеют
вид [241]:
δ,,Г = −10,9
P ∂T
S
,
T 2 ∂y
∆δ ,Г, = −1,40
где
1 ∂e
S ,
T ∂y
(123)
(124)
∂T ∂e
,
– горизонтальные градиенты температуры и влажности;
∂y ∂y
S – измеренное расстояние;
T – абсолютная температура воздуха;
P – давление в мм ртутного столба.
Горизонтальные градиенты влажности влияют на ошибку измерения углов
значительно меньше (примерно на порядок), чем градиенты температуры [263].
Между градиентами температуры и влажности существует зависимость: там,
где имеет место значительный градиент температуры, как правило, будет значительный градиент влажности и наоборот. На более увлажненной поверхности величина испарения больше, следовательно, на него расходуется большее количество тепла, и температура воздуха над этой поверхностью ниже. В результате над
границей поверхностей возникают влажностный и температурный градиенты. Ес-
194
ли две одинаково увлажненные поверхности поглощают разное количество тепла,
то с более нагретой поверхности испарение будет происходить более интенсивно
и над границей возникает вместе с температурным градиентом также и градиент
влажности [48, 263]. Это означает, что при определении поправок за рефракцию в
измеренных углах с помощью градиента температуры можно учесть градиент
влажности. Влияние градиента давления на ошибку измерения углов пренебрегаемо мало (несколько тысячных секунды).
Из результатов экспериментальных исследований, приведенных в работах
[263, 266], видно, что суточный ход ошибок направлений из-за рефракции имеет
синусоидальный характер. Отсюда следует, что значения поправок в угловые измерения, связанные с влиянием боковой рефракции, будут изменяться во времени.
Так как расчетное время выполнения геодезических измерений на одном базовом
пункте радиального тестового полигона составляет от 1 до 1,5 ч, то значение поправки в угловые измерения необходимо задавать как функцию от времени. В
случае неучета влияния рефракции измеренные величины не подлежат совместному уравниванию, так как не будут принадлежать одной генеральной совокупности [38]. На основе исследований, представленных в работах [176, 241, 263, 266],
для вычисления поправок в измеренные углы за влияние рефракции предлагается
параболическую функцию, описывающую поправки.
Теоретические и экспериментальные исследования свидетельствуют, что
оптимальное время суток для геодезических наблюдений в отношении влияния
рефракции одновременно является предпочтительным и в отношении влияния
турбулентности, поскольку эти два явления вытекают из одних физических предпосылок. Следовательно, можно заключить, что при проведении измерений во
время «спокойных изображений» одновременно сводятся к минимуму ошибки,
вызванные как рефракцией, так и турбулентностью. Поскольку расчетное время
выполнения геодезических измерений на радиальном тестовом полигоне составляет от 4 до 6 ч, то произвести наблюдения во время «спокойного изображения»
практически невозможно. В этом случае влияние рефракции будет учтено в соот-
195
ветствии с предложенной моделью, однако будет иметь место влияние турбулентности.
При угловых измерениях из личных ошибок наблюдателя наиболее существенными являются систематические ошибки визирования, которые возникают
вследствие наведения биссектора сетки нитей трубы на цель с некоторой постоянной для исполнителя ошибкой. Эти ошибки увеличиваются с уменьшением
контрастности цели и фона, на который она проектируется. Характерно, что знак
данной ошибки одинаков для всех наблюдателей при некотором варьировании ее
величины. При измерении горизонтальных углов между двумя световыми целями
с яркостями m1 и m2 соответственно, поправка в измеренный угол будет равна
[241, 266]:
δβ = k (m2 − m1 ) ,
где
(125)
k – коэффициент пропорциональности.
В настоящее время алгоритмы ПО современных электронных тахеометров
позволяют исключить часть систематических ошибок, связанных с погрешностями изготовления деталей и установки элементов прибора относительно друг друга
(раздел 4). Поэтому в большинстве случаев остаются неучтенными ошибки измерения углов, которые описываются гармоническими функциями (короткопериодические и длиннопериодические) [95, 96, 228]. Для их учета необходимо проводить дополнительные исследования каждого отдельно взятого прибора.
На основе выполненного обзора ошибок, вызванных влиянием различных
факторов на точность измерения горизонтальных углов, и методик их учета предложена модель для определения поправок в горизонтальные углы, измеренные
электронными тахеометрами:
(
)
σ i = ∆A + ∆ 0 + ∆1ti + ∆ 2 ti2 cos ϕ i ,
(126)
196
где
∆А – поправка, учитывающая постоянную ошибку визирования и влияние
рефракции при измерении направления на базовые пункты A, B, C, D
(рисунок 51);
∆0, ∆1, ∆2 – коэффициенты, учитывающие влияние рефракции, связанной с
изменением температурного и влажностного градиентов во времени;
ti – промежуток времени между моментами начала наблюдений и измерения
i-го направления;
ϕ i – углы, образуемые направлением максимальных градиентов температуры и влажности и измеряемым направлением, которые определяются следующим
образом:
ϕ i = ϕ 0 + Aизм.i ,
(127)
где Аизм.i – измеренное i-ое направление;
ϕ 0 – постоянная величина, характеризующая фазовый сдвиг максимальных
градиентов температуры и влажности.
Поправки, определяемые выражением (126), будут едины для всех направлений, измеренных с данной точки стояния прибора. Модель (126) позволяет учесть
влияние различных факторов, описанные формулами (123), (124) и (125), на систематические ошибки измерения.
Прямая линейная засечка. Современные электронные тахеометры позволяют
измерять помимо вертикального и горизонтального углов, также и расстояние в
безотражательном режиме. Поэтому дополнительно к уравнениям (117) и (118) в
систему можно включить следующие уравнения для линейной засечки:
XQ
b
= X A + исп
q
2
2
bисп
+ q 2 − a исп
(X B − X A )⋅
−
b
⋅
q
2
изм
2
2 2
bисп
+ q 2 − a исп
(
)
⋅
−
− 1−
Y
Y
B
A
2bисп ⋅ q
,
(128)
197
b
YQ = Y A + исп
q
2
bисп
+ 1−
2
b 2 + q 2 − a исп
(Y B − Y A ) ⋅ исп
+
⋅
2
b
q
исп
+q
2bисп ⋅ q
2
2
− a исп
2
⋅ ( X B − X A )
.
(129)
Применительно к уравниванию измеренных величин дополнительно к уравнениям (121) и (122) можно составить уравнения вида [35, 36]:
где
a исп =
(X Q − X B )2 + (YQ − YB )2 ,
(130)
bисп =
(X Q − X A )2 + (YQ − Y A )2 ,
(131)
aисп, bисп – горизонтальные проложения от базовых пунктов до центра опре-
деляемой специальной марки (рисунок 54), которые вычисляются по формулам:
a исп = ( a изм + σ r ) ⋅ cos(90 − z BQизм ) ,
bисп = (bизм + σ r ) ⋅ cos(90 − z AQизм ) ,
(132)
(133)
где aизм, bизм – измеренные значения наклонных расстояний;
σ r – поправки в измеренные наклонные расстояния за суммарное влияние
всех факторов;
z BQизм , z AQизм – измеренные значения зенитных расстояний.
В работе [62, 63, 240] показано, что введение метеопоправки в светодальномерные измерения с использованием термодинамической модели атмосферы по
сравнению со стандартным методом приводит к повышению точности примерно
на (0,7–1)×10
-6
м от измеряемого расстояния. Однако такая разница в точности
198
при измерении расстояний, не превышающих 250 м, будет настолько мала, что ею
можно пренебречь и использовать стандартный метод ввода метеопоправки.
В результатах исследований, приведенных в работе [313], показано, что на
точность работы лазерного дальномера электронного тахеометра в безотражательном режиме влияют цвет, текстура и материал объекта, поэтому для учета
этих факторов в уравнения (130) и (131) водятся дополнительные неизвестные. В
этом случае поправку в измеренные расстояния можно представить следующим
образом:
– для электронных тахеометров, работающих в безотражательном режиме
σ r = a0 + a1r ;
(134)
– для электронных тахеометров, работающих с отражателем (для наблюдения на базовые пункты полигона)
σ r = const ,
где
(135)
a0 – коэффициент уравнения поправок, учитывающий постоянную ошибку
дальномера, которая для всех измерений будет неизменной;
a1 – коэффициент, позволяющий учитывать влияние материала специальной
марки на ошибку при измерении расстояний в зависимости от ее удаления от
дальномера.
Уравнения (121), (122), (130) и (131) решаются совместно, и определяются
плановые координаты центров специальных марок и поправки, в измеренные величины, за влияние систематических ошибок.
Определение высот специальных марок. Для определения высот точек применяется два способа нивелирования: геометрическое и тригонометрическое [218,
237, 266]. В инструкциях [88] утверждается, что при развитии высотных сетей
различных классов измерения необходимо выполнять способом геометрического
199
нивелирования. Результаты исследования точности, приведенные в работах
Конопальцева И. М., Дрок М. К., Пискунова М. Е. и других, свидетельствуют о
том, что способ тригонометрического нивелирования сравним по точности с геометрическим. Однако для определения высот центров специальных марок на радиальном тестовом полигоне предпочтение следует отдать способу тригонометрического нивелирования, так как для проведения геометрического нивелирования отсутствует возможность установки рейки на определяемые точки. Кроме
этого, использование способа тригонометрического нивелирования связано со
значительно меньшими временными затратами на выполнение измерений, и следовательно, он экономически более выгоден.
Для определения превышения между двумя точками методом тригонометрического нивелирования используется формула [18]
h1− 2 = S1− 2 cos Z1− 2 +
(S1− 2 sin Z1− 2 )2 (1 − k )
2 RЗемли
+ hинстр − hоб.виз ,
(136)
где S1-2 – наклонное расстояние между двумя точками;
Z1-2 – зенитное расстояние;
RЗемли – радиус земли;
hинстр – высота инструмента;
hоб.виз – высота точки визирования над определяемым пунктом (точкой земной поверхности);
k – коэффициент вертикальной рефракции.
Стандартный коэффициент вертикальной рефракции обычно принимается
при обработке равным 0,13. Однако исследования, выполненные в работе [18],
показали, что использование такого значения коэффициента, приводит к значительным ошибкам при определении превышений между точками. Поэтому необходимо учитывать влияние вертикальной рефракции иным образом, нежели про-
200
стым вводом стандартного коэффициента k. Кроме того, существует ряд других
ошибок, которые влияют на точность тригонометрического нивелирования.
На погрешность определения превышения при помощи электронного тахеометра влияют следующие основные факторы:
− ошибки установки пузырька цилиндрического уровня при алидаде горизонтального круга в нульпункт;
− ошибки работы интерполятора;
− погрешности визирования на цель;
− длина визирного луча;
− воздействие внешних условий.
В настоящее время практически все электронные тахеометры снабжены
двухосевыми компенсаторами для учета ошибок установки пузырька цилиндрического уровня при алидаде горизонтального круга. Погрешности работы таких
компенсаторов очень малы и носят случайный характер, следовательно, ошибками горизонтирования тахеометра можно пренебречь.
Ошибки визирования при нивелировании, по аналогии с угловыми измерениями, будут постоянны для конкретного наблюдателя, следовательно, их можно
исследовать и учесть во время обработки результатов наблюдений.
Средний угол, соответствующий кажущемуся поднятию визирной цели
вследствие вертикальной рефракции света, примерно пропорционален удалению
ее от наблюдателя и составляет в среднем 2″, 3″ на каждый километр длины
луча [263].
Для расчета поправки в результаты одностороннего тригонометрического
нивелирования за систематическое влияние рефракции (нормальной) используется формула [68, 180, 181, 266]:
ρ = 39,5
γ10,2
p 2
× 10 −9 ,
0
,
0342
0
,
71
S
−
2
z
T
(137)
201
где
p – атмосферное давление (в миллибарах):
T – абсолютная температура воздуха;
S – длина проекции визирного луча на горизонтальную плоскость в миллиметрах (горизонтальное проложение);
z – высота визирного луча над земной поверхностью;
γ10,2 – вертикальный градиент изменения температуры (определяется по известной методике [266] по показаниям психрометра).
На результаты измерения вертикальных углов влияют нормальная и аномальная (колебание изображения, вызванное флуктуацией метеопараметров) рефракции. Нормальную рефракцию довольно надежно можно определить и учесть.
Остаточное влияние на результаты нивелирования оказывает аномальная рефракция, которую можно учесть, используя флуктуационный метод определения вертикальной рефракции. Сущность этого метода заключается в измерении величины
колебания изображения с последующим вычислением величины аномальной рефракции, либо наведением оси зрительной трубы при измерении вертикальных углов на верхнюю границу колебания изображения, в этом случае аномальная рефракция равна практически нулю (второй метод менее точен, ошибка 3″ на 2,5 км)
[188].
Анализ литературы [44] показал, что при расстоянии от специальных марок
до базовых пунктов, не превышающих 250 м, на радиальном полигоне целесообразнее учитывать аномальную рефракцию на этапе измерения, то есть наведением
на верхнюю границу «дрожания изображения». Данная методика будет удовлетворять точности создания радиального тестового полигона и является более производительной. Помимо учета влияния рефракции на этапе предварительной обработки результатов измерений также можно исключить остаточное ее влияние во
время уравнивания сети.
При уравнивании сетей тригонометрического нивелирования наибольшее
распространение получили две гипотезы о формировании рефракционного
поля [49, 313]:
202
− коэффициенты рефракции в прямом и обратном направлении по одной и
той же стороне равны между собой, что дает возможность учитывать характер местности, оказывающий влияние на вертикальную рефракцию;
− коэффициент рефракции является величиной постоянной для всех направлений, измеренных с одного пункта, что позволяет учитывать изменение погоды.
Существует также обобщенная гипотеза формирования рефракционного поля, являющаяся комбинацией двух указанных [49, 165-171, 177, 205, 207]. Следует
отметить, что эта модель может быть реализована только при условии, если на
каждом пункте сети измерено не менее шести направлений, что ограничивает ее
применение [171].
Из результатов экспериментальных исследований, приведенных в работе
[10], выявлено, что наиболее точно можно определить высоты точек из уравнивания, основанного на обобщенной гипотезе, а наименее точно из уравнивания, в
основу которого положено предположение равенства коэффициентов рефракции в
прямом и обратном направлениях по одной и той же стороне.
Из анализа теоретических [49, 171, 177] и экспериментальных [10] исследований можно записать уравнение для определения высот центров специальных
марок из тригонометрического нивелирования
H Q = H A + a исп cos(Z изм + σ Z ) +
(
+ (a исп sin (Z изм + σ Z ))2 k + hинстр + σ hинстр
),
(138)
где HQ и HA – высота центра специальной марки и исходного пункта;
σZ – поправка, учитывающая постоянную ошибку визирования в вертикальных углах;
σ hинстр – поправка, исключающая ошибку из-за неточного измерения высоты
прибора;
k – коэффициент, учитывающий влияние рефракции и кривизны Земли.
203
Значение aисп вычисляется по формуле (66).
В уравнении (138) неизвестными будут являться HQ, σ hинстр , k, σZ, основные
из которых (HQ, σZ) определяются для каждого центра марки. Все дополнительные вводимые неизвестные ( σ hинстр , k) будут одинаковы для каждой установки
прибора.
Предположим что, на радиальном тестовом полигоне необходимо определить высоты центров 88 специальных марок с четырех базовых пунктов
(рисунок 50). Тогда количество неизвестных составляет 184, а число уравнений
344. Возникает задача уравнивания, которая будет решаться следующим образом.
Уравнивание
геодезических
построений
для
определения
плановых
координат и высот специальных марок. В геодезической практике наиболее широко распространен комбинированный способ уравнивания, так называемый способ условий (коррелатный) с дополнительными неизвестными [28, 165, 168, 251].
В связи с широким внедрением электронно-вычислительных машин для
большинства видов геодезических построений параметрический способ уравнивания вытесняет коррелатный. Преимуществом параметрического способа уравнивания является простота составляемых исходных уравнений и возможность
оценки точности каждого из неизвестных [28, 29, 41, 98, 146, 147, 165, 166, 171].
Поэтому для уравнивания геодезических построений на радиальном тестовом полигоне с целью определения плановых координат и высот специальных марок будет использоваться параметрический способ уравнивания измеренных величин. При этом основными неизвестными будут являться координаты центров
специальных марок (XQ, YQ, ZQ), а дополнительными – систематические погрешности в результатах измерений (σZ, σ r, σ∠QAB, σ∠QBA, σ hинстр и k). Уравнивание будет осуществляться на основе исходных зависимостей, из решения уравнений вида (121), (122), (130), (131) и (138).
Поскольку исходные уравнения (121), (122), (130) и (131) применяемые для
определения координат центров марок линейно-угловой засечкой являются раз-
204
ной размерности, то для совместного их решения выполняется нормирование коэффициентов и свободных членов уравнений поправок, составленных для линейной засечки. Нормирующие множители вычисляются по формуле
P=
где
1
,
R
(139)
R – измеренные расстояния на определяемую точку.
Оценка точности определения неизвестных (абсцисс X марок) в результате
уравнивания выполняется с помощью СКО, вычисленных по формуле [15-17]:
m X Mi = µ Q XX Mi ,
где
mX
Mi
Q XX
(140)
– СКО определения координаты X для марки Мi;
Mi
– диагональный элемент обратной весовой матрицы – (ATPA) -1;
µ – СКО единицы веса, вычисляемая по формуле [15-17, 185, 186, 189, 190,
216, 239]:
n
µ=
∑Vi Pii Vi
i =1
n−k
,
(141)
где Vi – элемент вектора невязок;
Pii – элемент весовой матрицы;
n – количество решаемых уравнений;
k – количество определяемых неизвестных.
СКО определения ординат Y и высот вычисляются аналогичным образом по
формуле (139).
205
Методика наблюдения специальных марок. Способ угловых измерений на
радиальном тестовом полигоне следует выбирать в соответствии с условиями видимости визирных целей. Если видимость со станции по всем направлениям
удовлетворительная, то при отсутствии других помех следует отдать предпочтение способу круговых приемов, как наиболее экономичному и требующему минимального времени для исполнения установленной программы. Способ круговых приемов с успехом может применяться в триангуляционных и полигонометрических сетях с короткими сторонами [241], что имеет место на тестовом полигоне. Следовательно, для проведения геодезических измерений на радиальном
тестовом полигоне целесообразнее использовать способ круговых приемов. При
этом наблюдение одним полуприемом выполняется с использованием известной в
геодезии методики [241].
Применение электронного тахеометра для геодезических измерений на радиальном тестовом полигоне позволяет одновременно регистрировать наклонные
расстояния, горизонтальные и вертикальные углы.
При проведении геодезических измерений на радиальном тестовом полигоне должны учитываться все рекомендации по выполнению высокоточного геометрического нивелирования.
Методика сканирования радиального тестового полигона. На рисунке 50
показано, что НЛС на тестовом радиальном полигоне должен устанавливаться в
центр псевдоокружностей. С целью обеспечения наиболее высокой точности сканирования необходимо выполнить прогрев лазерного сканера в течении установленного времени, которое определяется в соответствии с методикой, представленной в 5.1, и ввести параметры атмосферы (температуру и давление).
Практически у всех современных моделей НЛС есть встроенная функция
для сканирования специальных марок, которая позволяет выполнять их съемку с
максимально возможным угловым разрешением. При этом задается только примерная область расположения марки по предварительно выполненному скану, либо по видеоизображению, полученному с помощью встроенной видеокамеры или
206
по панорамной фотографии ситуации вокруг сканера. После того, как все марки
отсканированы, необходимо визуально проверить качество выполнения их съемки
(каждая марка должна быть отсканирована полностью и сканы не должны содержать помех). От качества сканерной съемки марок зависит точность определения
координат их центров. Координаты центров марок вычисляются автоматически
управляющим ПО, которое в массив точек, принадлежащих каждой специальной
марке (приложение В), встраивает какой-либо примитив геометрически правильной формы (например, в виде прямоугольной пластины, круга, шара и так далее).
Методика исследования точности построения трехмерных моделей по
данным наземного лазерного сканирования. Для исследования точности построения трехмерной модели разработан тестовый полигон, который представляет собой набор геометрических примитивов (плоскостей, цилиндров, шаров и кубов),
имеющих различные размеры и местоположение. Данный тестовый полигон также включает специальные марки и связующие шары (или цилиндры) в зависимости от используемой модели сканера, как показано на рисунке 55. Для определения пространственных координат специальных марок и параметров, характеризующих форму и пространственное положение специальных связующих шаров
(или цилиндров) и геометрических примитивов, предложено использовать способ
прямой линейно-угловой геодезической засечки с четырех пунктов аналогично,
как и на радиальном тестовом полигоне.
Сущность исследования заключается в сканерной съемке данного тестового
полигона с нескольких точек и определении по результатам сканирования пространственных координат всех специальных марок и параметров, характеризующих форму и пространственное положение геометрических примитивов в единой
системе координат (для шара и куба – координаты центра и радиус или длину
стороны соответственно, для цилиндра – координаты двух точек оси и радиус, для
плоскости – коэффициентов ее уравнения) [114]. При сканировании геометрические примитивы должны располагаться так, чтобы расстояние от прибора до одинаковых типов примитивов было различным. Это необходимо для выявления за-
207
висимости между точностью получаемых данных и расстоянием до объекта. Специальные марки необходимо располагать с учетом рекомендаций, полученных из
экспериментальных исследований по методике, представленной в 5.1.
Рисунок 55 – Принципиальная схема тестового полигона,
состоящего из примитивов
Размеры данного тестового полигона должны быть заданы от характеристик
исследуемого НЛС.
После того как определены параметры, характеризующие форму и пространственное положение геометрических примитивов в единой системе координат, по
результатам сканирования и геодезических работ выполняется их сравнение, на
основе которого делаются выводы о точности построения трехмерных векторных
моделей по данным сканерной съемки конкретным НЛС.
208
5.3 Методика калибровки резервуаров шаровых
Определение вместимости шарового резервуара. Для определения базовой
вместимости резервуара на первом этапе необходимо определить базовую высоту
резервуара, которую измеряют рулеткой с грузом не менее двух раз. Резервуар
при измерении базовой высоты должен быть порожним. При этом расхождение
между результатами двух измерений не должно превышать 2 мм. За результат измерений базовой высоты резервуара Hб, мм, принимают среднее арифметическое
из двух измерений.
Измерение пространственных координат внутреннего пространства резервуара выполняют при помощи наземного лазерного сканера. Для этого выбирают
наиболее оптимальные места расположения НЛС (не менее двух) с учетом внутренних конструкций резервуара. После этого выполняют при помощи термометра
и барометра измерения температуры и давления окружающей среды и измерения
температуры внутреннего пространства резервуара. Результаты измерений заносят в специализированный ПП для управления сканера.
При выполнении сканирования с двух и более сканерных станций в соответствии с рекомендациями, приведенными в разделе 3, и эксплуатационной документацией на тип прибора устанавливают специальные марки во внутреннем
пространстве резервуара (не менее четырех), вид и размер которых зависит от модели применяемого НЛС. Специальные марки следует размещать таким образом,
чтобы они не заграждали внутренние конструкции и поверхность резервуара и
были видны со всех станций НЛС.
Затем выполняют сканирование внутреннего пространства резервуара в соответствии с эксплуатационной документацией на применяемый НЛС. При этом
линейная дискретность шага сканирования должна находиться в пределах от 2 до
5 мм.
После этого выполняют сканирование специальных марок с максимальной
разрешающей способностью НЛС в соответствии с требованиями эксплуатаци-
209
онной документации. Затем устанавливают НЛС в следующее место сканирования и повторяют действия, связанные со сканированием.
Определение вместимости резервуара проводят при помощи программного
обеспечения
НЛС
RapidForm
и
Cyclone
и
программы,
разработанной
ФГБОУ ВПО «СГГА» и включенной в ПП AutoCAD [133].
На первом этапе выполняют взаимное ориентирование сканов, при этом в
зависимости от типа НЛС точность подсоединения второго скана к первому можно контролировать по следующим параметрам:
− средней квадратической погрешности единицы веса, которая не должна
превышать ± 3 мм;
− остаточным расхождениям координат соответственных специальных
марок после взаимного ориентирования, которые не должны превышать ± 5 мм;
− средней квадратической погрешности определения элементов внешнего
ориентирования, которые для линейных величин не должна превышать ± 2 мм, а
для угловых величин – ± 15''.
Затем производят экспорт данных, полученных при сканировании, в
ПО RapidForm, предназначенное для построения трехмерных моделей объектов. В
данном ПП выполняют фильтрацию массива точек от ложных измерений, которые возникают при переотражении сигналов. Эту процедуру производят в интерактивном режиме. Затем в ПО RapidForm создают трехмерную модель в виде
Mesh-поверхности внутренних стенок резервуара (максимальный размер стороны
многоугольников не должен превышать 5 см).
На следующем этапе в ПО Cyclone создают трехмерную модель внутренних
конструкций резервуара в виде твердотельных объектов, при этом используют
только автоматический или полуавтоматический режимы построения.
После этого производят объединение двух полученных моделей в ПО RapidForm. Затем по полученной общей модели внутренних стенок и конструкций
резервуара определяют высоту последнего по формуле
210
H резер = Z max − Z min ,
где
(142)
H резер – высота резервуара (рисунок 56);
Z max и Z min – максимальная и минимальная отметки резервуара (см. рису-
нок 56).
Затем при помощи ПО RapidForm перпендикулярно отвесной линии программно выполняют рассечение трехмерной модели резервуара горизонтальными
плоскостями с расстоянием 1 см между ними (сантиметровый уровень) на g-е количество слоев. При этом первое сечение строится на уровне 1 см от нижней точки резервуара Z min .
Рисунок 56 – Модель резервуара
На следующем этапе в ПО RapidForm вычисляется площадь сечений слоев
трехмерной модели резервуара S j , м2 и площадь сечений внутренних конструк, м2 (рисунок 57).
ций резервуара S конст
j
211
Рисунок 57 – Вычисление площади сечений
Вычисление объема шарового слоя (рисунок 56), соответствующего сантиметровому уровню наполнения резервуара, проводят при помощи программы,
разработанной ФГБОУ ВПО «СГГА» в программном пакете AutoCAD, по формулам:
U 1с.резер
H резер 2 h13
= π ⋅
⋅ h1 − ,
2
3
(143)
где h1 – высота первого шарового слоя, равная 0,01 м;
U с.резер
j
где
(
S j −1 + S j )⋅ h π ⋅ h 3
,
=
+
2
6
(144)
j – количество шаровых слоев, которое изменяется от 2 до n (определяется
путем округления в меньшую сторону до целого числа значения H резер h );
h – высота каждого j-го шарового слоя, равная 0,01 м (1 см);
U nс.резер
+1
H резер 2
hn3+1
,
= π ⋅
⋅ hn +1 −
2
3
(145)
212
где
hn+1 – высота
(n + 1)-го
шарового слоя,
равная
hn +1 = H резер − ( h1 + h ⋅ ( n − 1)) .
Затем определяют вместимость резервуара без учета конструкций U с. резер
по формуле
U с.резер = U 1с.резер +
n
.
+ U nс.резер
∑U с.резер
j
+1
(146)
j =2
Объем g-го шарового слоя (с учетом конструкций), соответствующего
g-му сантиметровому уровню, вычисляют по формуле
U gрезер = U gс.резер − U gконст ,
(147)
где U gс.резер – объем g-го шарового слоя, определяемый по формуле (143)
для g = 1, по формуле (144) для g = j (от 2 до n) и по формуле (145) для g = (n+1);
U gконст – объем внутренних конструкций для каждого g-го шарового
слоя, вычисляемый ПО RapidForm.
Вместимость резервуара U резер подсчитывают по формуле
U резер =
n +1
∑U gрезер .
(148)
g =1
Результатом подсчетов по формуле (148) является один из параметров, который, в соответствии с действующими нормативно-техническими документами
(НТД), следует заносить в градуировочную таблицу.
Определение относительной погрешности подсчета вместимости резервуара. Относительную погрешность подсчета вместимости резервуара определяют при помощи разработанной программы SphereRezer в соответствии с РМГ 62
по формуле
213
δ = k ⋅ δU2 + δ 2мод + δ 2выч ,
(149)
где k – коэффициент, равный 1,1;
δU , δ мод , δ выч – составляющие относительной погрешности подсчета вме-
стимости резервуара, определяемые по формулам:
(
δU = max δU g
)
,
( )
δ выч = max (δ выч g )
δ мод = max δ мод g
где
δU
g
(150)
– относительная погрешность подсчета объема. Здесь и далее по тексту
индекс (g) означает для каждого g-го шарового слоя;
δ мод g – относительная погрешность моделирования;
δ выч g – относительная погрешность.
Определение относительной погрешности подсчета объема δU g выполняют по формуле
δU g =
∆U g
U gс.резер
⋅ 100 % ,
(151)
где ∆U g – абсолютная погрешность подсчета объема, определяемая в соответствии с МИ 2083 по формуле
∂U g
∆U g = k ⋅ ∑
i =1 ∂xi
m
где
2
⋅ ∆xi 2 ,
k – поправочный коэффициент, равный 1,1 при вероятности P = 95 %;
U g – функция объема, зависящая от входных величин xi;
(152)
214
∆xi – абсолютная погрешность измерений величин, полученных в результа-
те прямых измерений.
Для определения абсолютной погрешности подсчета объема первого шарового слоя вычисляют частные производные от функции объема
∂U 1с.резер π ⋅ h12
=
;
∂H резер
2
где
∂U 1с.резер
= π ⋅ H резер ⋅ h1 − π ⋅ h12 ,
∂h1
(153)
H резер – высота резервуара, вычисляемая по формуле (142);
h1 – высота первого шарового слоя, равная 0,01 м.
Абсолютную погрешность измерений объема ∆U1 первого шарового слоя
вычисляют из выражений (151) и (152) по формуле
∆U 1 = k ⋅
где
π 2 ⋅ h14
⋅ ∆H резер 2 + ( π ⋅ H резер ⋅ h1 − π ⋅ h12 ) 2 ⋅ ∆h12 ,
4
(154)
∆H резер , ∆h1 – абсолютные погрешности измерений высоты резервуара и
шарового слоя, равные погрешности измерений расстояния ∆R , определяемой по
формуле
∆R = S R ⋅ t ,
где
(155)
SR = 0,004 м (4 мм) – пределы допускаемого среднего квадратического откло-
нения измерений расстояний;
t – коэффициент Стьюдента, равный 2,776 для доверительной вероятности
P = 95 % и числа результатов наблюдений n = 5 (ГОСТ 8.207).
Из выражений (151) и (154) определяют относительную погрешность измерений объема δU 1 первого шарового слоя
215
δU 1 =
где
100 %
⋅ k ⋅ π ⋅ ∆R ⋅ 1,25 ⋅ h14 + ⋅H резер ⋅ h12 ⋅ ( H резер − 2 ⋅ h1 ) ,
с.резер
U1
U 1с.резер – объем
первого
шарового
слоя,
(156)
вычисляемый
по
формуле (150).
Относительную погрешность подсчета объема δU ( n +1) , (n+1)-го шарового
слоя вычисляют по формуле
δU ( n +1) =
где
100 %
U nс.резер
+1
⋅ k ⋅ π ⋅ ∆R ⋅ 1,25 ⋅ hn4+1 + ⋅H резер ⋅ hn2+1 ⋅ ( H резер − 2 ⋅ hn +1 ) ,
(157)
– объем последнего шарового слоя, вычисляемый по формуле (154);
U nс.резер
+1
hn+1 – высота (n+1)-го шарового слоя.
Для определения относительной погрешности подсчета объема j-го шарово-
го слоя необходимо в формуле (153) значения площади сечений выразить через
расстояния R j −1 , R j и углы θ j −1 , θ j , измеряемые НЛС (рисунок 58)
U с.резер
j
=
( S j −1 + S j ) ⋅ h
2
π ⋅ R j −1 ⋅ sin(θ j −1 ) 2 ⋅ h
2
2
+
π ⋅ h3 π ⋅ b2 ⋅ h + π ⋅ a 2 ⋅ h π ⋅ h3
+
=
+
=
6
2
6
π ⋅ R 2j ⋅ sin(θ j ) 2 ⋅ h
2
π ⋅ h3
+
6
,
(158)
– объем j-го шарового слоя, вычисляемый по формуле (142);
где U с.резер
j
j – порядковый номер шарового слоя (изменяется от 2 до n);
h – высота j-го шарового слоя, равная 0,01 м.
216
Рисунок 58 – Модель шарового слоя
Для определения относительной погрешности подсчета объема j-го шарового
слоя вычисляют частные производные от функции объема:
∂U с.резер
j
j −1
∂R j −1
∂U с.резер
j
= π ⋅ h ⋅ R ⋅ sin(θ j ) 2
j
∂R j
с.резер
∂U j
2
= π ⋅ h ⋅ R j −1 ⋅ sin(θ j −1 ) ⋅ cos(θ j −1 )
.
∂θ j −1
с.резер
∂U j
2
= π ⋅ h ⋅ R j ⋅ sin(θ j ) ⋅ cos(θ j )
∂θ j
2
2
2
2
с.резер
π ⋅ R j ⋅ sin(θ j )
π ⋅ R j −1 ⋅ sin(θ j −1 )
∂U j
+
=
∂h
2
2
= π⋅h⋅R
⋅ sin(θ j −1 ) 2
(159)
Абсолютную погрешность подсчета объема ∆U j , м3 j-го шарового слоя вычисляют из выражений (142) и (156) по формуле
∆U j = k ⋅ Λ1 + Λ 2 + Λ 3 + Λ 4 + Λ 5 ,
где
Λ1 = π 2 ⋅ h 2 ⋅ R 2 ⋅ sin(θ
j −1
j −1
) 4 ⋅ ∆R j −12 ;
(160)
217
Λ 2 = π 2 ⋅ h 2 ⋅ R 2 ⋅ sin(θ ) 4 ⋅ ∆R j 2 ,
j
j
Λ 3 = π2 ⋅ h 2 ⋅ R 4 ⋅ sin(θ
j −1
j −1
) 2 ⋅ cos(θ
j −1
) 2 ⋅ ∆θ
2
j −1
;
Λ 4 = π2 ⋅ h 2 ⋅ R 4 ⋅ sin(θ ) 2 ⋅ cos(θ ) 2 ⋅ ∆θ 2 ;
j
Λ5 =
j
j
j
1
⋅ (π ⋅ R 2 ⋅ sin(θ ) 2 + π ⋅ R 2 ⋅ sin(θ ) 2 + π ⋅ h 2 ) 2 ⋅ ∆h 2 ;
j −1
j −1
j
j
4
∆R j −1 , ∆R j , ∆h – абсолютные погрешности измерений расстояний и высоты
шарового слоя, равные погрешности измерений расстояния ∆R , м, определяемой
по формуле (154);
∆θ j −1, ∆θ j – абсолютные погрешности измерений вертикальных углов, рав-
ные погрешности измерений углов ∆θ , рад, определяемой по формуле
∆θ = Sθ ⋅ t ,
где
(161)
Sθ = 5,82·10-5 рад (12'') – пределы допускаемого среднего квадратического от-
клонения измерений углов;
t – коэффициент Стьюдента, равный 2,571 для доверительной вероятности
P = 95 % и числа результатов наблюдений n = 6 (ГОСТ 8.207).
Преобразовав соответствующим образом выражение (160), определяют относительную погрешность измерений объема δU
δU j =
где
j
j-го шарового слоя:
100 %
⋅ k ⋅ π ⋅ Φ1 + Φ 2 + ∆R 2 ⋅ [Φ 3 + Φ 4 ] ,
с.резер
Uj
Φ1 = ∆θ2 ⋅ h 2 ⋅ ( R 4j −1 ⋅ sin(θ
j −1
) 2 ⋅ cos(θ
Φ 2 = R 4j ⋅ sin(θ ) 2 ⋅ cos(θ ) 2 ) ;
j
j
j −1
)2 ;
(162)
218
h 2 + R 2j ⋅ sin(θ ) 2
1
j
Φ 3 = R 2j −1 ⋅ sin(θ ) 4 ⋅ h 2 + ⋅ R 2j −1 +
;
2
j −1
4
sin(
)
θ
j −1
1 4
h2
2
4 2 1
2
Φ 4 = R j ⋅ sin(θ ) ⋅ h + ⋅ R j +
+ ⋅h .
2 4
j
4
θ
sin(
)
j
Определение относительной погрешности моделирования δ мод g выполняют для каждого g-го шарового слоя следующим образом:
а) ПО RapidForm определяют значение высоты резервуара Hрезер, на основании которого создают идеальную модель шара, в которой Hрезер является диаметром шара;
б) ПО RapidForm выполняют рассечение идеального шара горизонтальными плоскостями на g-е количество слоев с высотой слоя 1 см (кроме последнего
(n+1)-го) и вычисляют площадь сечений S gидеал ;
в) при помощи программы SphereRezer подсчитывают объем каждого g-го
слоя
идеального
шара
U gидеал
ограниченного
смежными
сечениями
( U 1идеал ,U 2идеал ,U 3идеал , ... ,U nидеал
+1 , где n – количество сечений), подставляя в формулы (141)–(143) соответствующие значения высоты слоя h и площади сечения
S gидеал ;
г) ПО RapidForm выполняет моделирование каждого сечения идеального
шара при условии, что площадь сечения S gмод будет иметь форму не окружности,
а многоугольника (рисунок 59), длина стороны которого равна ∆l (размер ячейки
при построении Mesh-поверхности не более 5 см);
д) при помощи программы SphereRezer вычисляют объем каждого g-го
слоя смоделированного шара U gмод , м3, ограниченного смежными сечениями
219
( U 1мод ,U 2мод ,U 3мод ,...,U nмод
+1 ), подставляя в формулы (142)–(144) соответствующие
значения высоты слоя h и площади сечения S gмод ;
е) относительную погрешность моделирования для g-го шарового слоя вычисляют по формуле
δ мод g =
U gидеал − U gмод
U gидеал
⋅ 100 % .
(163)
Рисунок 59 – Модель ячейки при построении Mesh-поверхности
Определение относительной погрешности вычислений δ выч g , % выполняют
для каждого g-го шарового слоя следующим образом:
а) программа SphereRezer на основе идеальной модели шара получает
псевдоизмерения в виде набора пространственных координат (X, Y, Z) для каждой
точки с дискретностью 4 мм;
б) программа SphereRezer на основе полученного набора координат получает псевдоизмереные величины R, φ и θ для каждой точки (переход от пространственной декартовой системы координат к полярной);
220
в) программа SphereRezer полученный набор псевдоизмерений (R, φ, θ) для
каждой точки дополняет значениями погрешности, распределенными по нормальному закону со средними квадратическими отклонениями SR для расстояний
и Sθ – для горизонтальных φ и вертикальных θ углов;
г) ПО RapidForm на основе полученных значений расстояний и углов (с
учетом погрешности измерений НЛС) получает модель резервуара – пространственные координаты точек в системе координат скана, вычисляемые по
формулам (14) через полученные расстояния и направления лазерных лучей;
д) ПО RapidForm выполняет рассечение полученной модели резервуара горизонтальными плоскостями на g-е количество слоев с высотой слоя 1 см (кроме
последнего (n+1)-го) и вычисляет площадь сечений S j ;
е) при помощи ПО RapidForm по формулам (142)–(144) подсчитывают
объем каждого g-го слоя резервуара U gизм , ограниченного смежными сечениями
( U 1изм ,U 2изм ,U 3изм ,...,U nизм
+1 );
ж) относительную погрешность подсчетов для g-го шарового слоя вычисляют по формуле
δ выч g =
U gидеал − U gизм
U gидеал
⋅ 100 % .
(164)
По вычисленным значениям вместимости сантиметровых слоев и относительным погрешностям для соответствующих слоев оформляют сертификат о калибровке, к которому по установленному образцу прилагают:
–
градуировочную таблицу;
–
протокол калибровки.
Приведенная методика является первой в России [194] геометрической методикой калибровки шаровых резервуаров и превосходит по точности объемные
методы калибровки, которые считаются наиболее точными и надежными при гра-
221
дуировке и калибровке всех типов резервуаров. Кроме этого, производительность
по данной методике по отношению к аналогам для других типов резервуаров одинакового объема возросла в 2,5-2,7 раза.
Аналогичный подход может быть применен и для других типов резервуаров, что подтверждается публикациями [184, 220, 221].
5.4 Методика калибровки неметрических цифровых камер
с использованием наземных лазерных сканеров
Наземные лазерные сканеры можно использовать для определения параметров калибровки цифровых неметрических камер. Сущность калибровки камер заключается в следующем.
С помощью цифровой камеры фотографируется тест-объект с нескольких
точек пространства [110]. Параметры калибровки неметрических цифровых камер
(элементы внутреннего ориентирования, радиальная и тангенциальная дисторсия), а также элементы внешнего ориентирования снимков определяются на основе использования формул связи между координатами точек специального тестобъекта и измеренными плоскими координатами точек цифровых снимков. Помимо аберраций объектива по результатам калибровки цифровой камерой определяется отклонения элементов ПЗС-матрицы от регулярной прямоугольной сетки. Выявить последние виды искажений отдельно от всех остальных возможно
только при разборке камеры и индивидуальном исследовании ПЗС-матрицы. Поэтому все дальнейшие рассуждения будут касаться всех вышеперечисленных видов искажений.
Основные этапы методики калибровки цифровых неметрических камер с
использованием наземного лазерного сканера приведены на рисунке 60.
Создание тест-объекта. Для создания тест-объекта используются специальные светоотражающие марки, которые подбираются в соответствии с рекомендациями фирмы-изготовителя сканера.
222
При фотографировании специальных марок необходимо, чтобы они изображались по всему полю снимка. Для обеспечения рельефности тест-объекта с
целью повышения достоверности результатов калибровки следует задавать такое
максимальное Smax и минимальное Smin отстояния от цифровой камеры до точек
тест-объекта, чтобы соблюдалось следующее условие [9]:
S max − S min 1
≥ ,
S
3
(165)
где S – среднее расстояние до точек тест-объекта.
Создание тест-объекта
Установка сканера, наземное лазерное сканирование тест-объекта
Определение координат специальных марок
Установка цифровой камеры, съемка тест-объекта
Обработка результатов сканирования и фотографирования тест-объекта
Определение параметров калибровки цифровой камеры
Рисунок 60 – Основные этапы калибровки цифровых
неметрических камер по данным наземной лазерной съемки
Точность определения параметров калибровки зависит от характера изменения ошибок по полю снимка, возможности аппроксимации их на небольших
участках
и
числа
точек
тест-объекта.
В
большинстве
случаев
испытательный тест-объект с количеством точек от 120 до 150 удовлетворит тре-
223
бованиям
точности
определения
искажений
в
координатах
точек
снимка [8, 9, 149, 207].
Наземное лазерное сканирование тест-объекта. Практически у всех современных моделей НЛС есть встроенная функция для сканирования специальных
марок с максимально возможным угловым разрешением (приложение А). От качества сканерной съемки марок зависит точность определения координат их центров.
Перед сканированием тест-объекта определяется оптимальное расстояние
от специальных марок до сканера.
С теоретической точки зрения точность определения координат центров марок будет выше, если располагать сканер как можно ближе к маркам. Это объясняется тем, что в данном случае при максимальном угловом разрешении НЛС количество точек на скане, принадлежащих каждой марке, будет больше. С другой
стороны, минимально измеряемые расстояния всеми сканерами ограничены. Кроме того, результаты калибровки НЛС показали, что наивысшая точность определения координат центров специальных марок различными сканерами достигается
на разных расстояниях. Поэтому для каждой модели сканера следует устанавливать оптимальное расстояние до марок из экспериментальных исследований [111].
На основе анализа источников [111] следует, что лазерный сканер необходимо располагать симметрично относительно точек тест-объекта и примерно на
одинаковом расстоянии от них, чтобы исключить влияние изменения величины
отстояния марок от сканера на точность определения координат точек тестобъекта.
Оптимальная схема расположения наземного лазерного сканера и цифровой
неметрической
камеры
относительно
тест-объекта
представлена
на
рисунке 61.
Съемка тест-объекта цифровой неметрической камерой. Перед съемкой
необходимо обосновать количество съемочных станций и их расположение, что-
224
бы снять весь тестовый объект при минимальном количестве точек фотографирования и обеспечить заданную точность калибровки камеры.
Из проведенных исследований [8] выявлено, что при увеличении числа
снимков (рисунок 62), участвующих в калибровке, точность определения систематических искажений в плоских координатах точек цифрового изображения возрастает пропорционально корню квадратному из отношения (t + 1) t 2 (t – число
снимков). Следовательно, можно сделать вывод, что практическая стабильность
результатов калибровки наблюдается при числе снимков от 15 до 20. Такое количество снимков можно принять за достаточное и оптимальное [173].
Рисунок 61– Расположение наземного лазерного сканера и цифровой
камеры при съемке испытательного тест-объекта
225
число снимков
Рисунок 62 – Влияние числа снимков на точность калибровки
При выполнении исследований цифровой неметрической камеры предлагается выполнять съемку тест-объекта с четырех точек фотографирования, при этом с
каждой точки должно быть получено по четыре-пять снимков.
Для определения координат точек тест-объекта с заданной точностью необходимо задать отстояние камеры от объекта, рассчитанное по формуле
S=
где
3δ X
mx
f,
(166)
mx — средняя квадратическая ошибка определения координат точек тест-
объекта по цифровым изображениям в масштабе снимка, которая непосредственно связана с размером элемента ПЗС-матрицы;
δX — ошибка определения координат точек тест-объекта с использованием
НЛС;
f — фокусное расстояние камеры.
Перед съемкой тест-объекта цифровой фотоаппарат жестко крепится на
штатив, что позволяет задать фиксированное положение центра фотографирова-
226
ния. Затем производится фотографирование тест-объекта. После этого камера устанавливается на следующую точку и снова выполняется фотографирование.
Определение параметров калибровки камеры и элементов внешнего ориентирования снимков. После окончания наземного лазерного сканирования и фотографирования тест-объекта выполняются следующие работы:
− обработка данных, полученных наземным лазерным сканером, с
целью определения пространственных координат точек тест-объекта (специальных марок);
− измерение координат изображений центров специальных марок на цифровых снимках;
− вычисление параметров калибровки съемочной камеры;
− оценка точности определения параметров калибровки и подготовка отчета.
Для калибровки камер по снимкам специального тест-объекта используются
условия коллинеарности (96).
В качестве функций для описания систематических ошибок σx, σy предлагается использовать полиномы Цернике, достаточно широко применяемые для калибровки цифровых неметрических камер [111, 286]:
2
σx = k1 xr 2 + k2 xr 4 + k3 xr 6 + k4 xr 8 + P1 2 x + r 2 + 2 P2 x y
,
2
2
4
6
8
2
σy = k1 yr + k2 yr + k3 yr + k4 yr + P2 2 y + r + 2 P1 x y
где
(167)
ki и Pi – коэффициенты, описывающие влияние радиальной и тангенциаль-
ной дисторсии;
r – радиус-вектор, характеризующий положение точки на снимке.
В формулах (167):
227
r = x2 + y2
x = x − x0
.
y = y − y0
(168)
Основными неизвестными в уравнениях (96) являются элементы внешнего
ориентирования снимка XS, YS, ZS, α, ω, κ, а дополнительными неизвестными –
элементы внутреннего ориентирования съемочной камеры и коэффициенты ki и Pi
полиномов (167), через которые представлены систематические ошибки в координатах точек снимка.
Уравнения (96) являются нелинейными относительно неизвестных величин,
поэтому их решение выполняется итерационным методом и с использованием метода наименьших квадратов.
Оценка точности определения параметров калибровки. После определения
элементов внешнего и внутреннего ориентирования снимков и коэффициентов
полиномов вычисляются ошибки σx, σy в координатах точек снимка по
формулам (167). Затем на основе выражений (167) вычисляются невязки Δxi, Δyi, с
помощью которых определяются средние квадратические ошибки, характеризующие точность калибровки снимков, по формулам:
n
n
,
n
∑ ∆yi2
= i =1
n
m xкалиб =
m yкалиб
где
снимке.
∑ ∆xi2
i =1
(169)
n – количество специальных марок, координаты которых измерены на
228
Величины ошибок m xкалиб , m yкалиб сравниваются с размером пикселя изображения калибруемой камеры. Калибровка считается удовлетворительной, если выполняется условие:
m xкалиб ≤ d x
,
m yкалиб ≤ d y
где
(170)
dx и dy — размер пикселя по осям x и y.
Практические работы показали следующее:
− с использованием наземного лазерного сканера можно выполнить полную
калибровку цифровой камеры;
− точность определения координат специальных марок сканером удовлетворяет требованиям, предъявляемым к созданию тест-объектов для калибровки
камер;
− по снимкам специальных марок, расположенных, как показано на
рисунке 61, обеспечивается достоверное определение параметров калибровки камеры.
Основными преимуществами калибровки цифровых неметрических камер с
использованием наземных лазерных сканеров являются:
− полная автоматизация процесса калибровки, так как специальные марки
для всех наземных лазерных сканеров изготовлены таким образом, что их легко
можно идентифицировать как на цифровом снимке, так и на точечной модели,
полученной в результате сканирования;
− исключается необходимость закрепления точек тест-объекта и создания
различного рода конструкций;
− калибровку камер можно выполнять как на специальном тестовом полигоне, так и в момент самой съемки объекта, поскольку в технологии наземного лазерного сканирования для объединения сканов, полученных с нескольких сканерных станций, в единую точечную модель применяются специальные марки.
229
ЗАКЛЮЧЕНИЕ
Поставленные в диссертации цели и задачи решены. Представленные
результаты исследований направлены на решение актуальной и значимой научной
проблемы приведения в соответствие скорости и точности выполнения
технологических операций лазерного сканирования с требованиями различных
отраслей
экономики
страны.
Данная
проблема
разрешена
путем
совершенствования методологических, технических и технологических решений
лазерного сканирования, внедрение которых внесет значительный вклад в
развитие лазерного сканирования как средства получения пространственной
информации об объектах, а следовательно, и в развитие экономики страны.
Основными итогами диссертационной работы являются следующие:
а) на основе анализа, обобщения и систематизации практического опыта
применения лазерных сканеров разработана математическая модель технологии
лазерного сканирования, которая позволила выделить основные этапы технологии
и параметры, подлежащие контролю при съемке лазерными сканерами для сбора
геопространственных данных об объектах;
б) разработано теоретическое обоснование и проведены экспериментальные
исследования общих принципов процессов измерения наземными лазерными
сканерами и обработки сканов с целью построения трехмерных моделей и
топографических планов, что позволило выявить и учесть факторы, влияющие на
точность выполнения этих процессов;
в) разработаны теория фотограмметрической обработки данных наземного
лазерного сканирования и алгоритм уравнивания сканерных ходов, результаты
практических исследований которого показали повышение точности определения
линейных элементов внешнего ориентирования сканов на 15–35 %. На основе
предложенной теории фотограмметрической обработки данных лазерного
сканирования адаптированы методы сжатия, фильтрации и классификации сканов
для повышения качества и скорости их обработки. Разработан алгоритм
230
формирования макетных сканов, учитывающий погрешности в реальных данных
лазерного сканирования;
г) проведены теоретические и экспериментальные исследования отдельных
источников погрешностей, оказывающих влияние на точность создаваемой
продукции по данным наземного лазерного сканирования, которые позволили:
1) сформулировать основное уравнение процесса измерения углов и
расстояний наземными лазерными сканерами, на основе которого
методами математического и компьютерного моделирования выполнены
теоретические исследования влияния метрологических свойств объектов
на
точность
наземного
лазерного
сканирования
и
разработаны
рекомендации по повышению точности измерений наземным лазерным
сканером, а именно: уменьшить угол расходимости лазерного луча, что
приведет к значительному уменьшению влияния метрологических
свойств объекта съемки; использовать при наземном сканировании два
излучения с разными длинами волн; вносить поправки в угловые
измерения при помощи ряда Фурье, что позволит повысить точность
измерения угловых величин на 40 %; вносить поправки в измеренные
расстояния, горизонтальные и вертикальные углы за нестабильность
работы измерительных блоков, вызванную нагревом внутренних частей
прибора;
2) разработать
методику
повышения
информационной
емкости
результатов наземной лазерной съемки с помощью цифровых снимков,
применение которой повышает скорость построения ортоизображений на
40-50 %;
3) разработать общие принципы оценки точности построения трехмерных
моделей и топографических планов по данным наземного лазерного
сканирования,
в
том
числе
получить
эмпирические
формулы,
позволяющие априорно оценивать точность создаваемой продукции,
выполнить исследования точности процесса внешнего ориентирования
231
сканов, установить оптимальную геометрию расположения и количество
опорных
марок
при
съемке
импульсными,
фазовыми
и
триангуляционными наземными лазерными сканерами. Это позволяет
использовать
технологию
наземного
лазерного
сканирования
на
производстве;
д)
разработана
методика
построения
сети
скантриангуляции,
использование которой позволяет сократить объем работ по созданию планововысотного обоснования сканерной съемки и расширить возможности применения
технологии наземного лазерного сканирования. Выявлены закономерности
распределения погрешностей при построении скантриангуляционных сетей с
использование макетных сканов и реальных данных;
е)
разработана методика калибровки цифровых неметрических камер с
использованием тестового полигона в виде набора специальных марок,
координаты которых определяются наземным лазерным сканером, которая
сокращает
время
создания
тестового
полигона
и
позволяет
полностью
автоматизировать процесс самой калибровки камер;
ж)
разработаны стандарты, а именно: методика поверки фазовых и
импульсных НЛС, которая стала основой национального стандарта РФ
ГОСТ Р 8.794-2012. ГСИ. «Наземные лазерные сканеры. Методика поверки» и
защищена двумя патентами на изобретения; методика определения объемов
объектов сферической формы, основанная на создании трехмерной модели его
внутреннего пространства по данным наземного лазерного сканирования.
Разработан алгоритм и программное обеспечение для оценки точности
градуировки
резервуаров
с
использованием
методов
математического
моделирования данных лазерного сканирования. Использование предложенной
методики определения объемов объектов сферической формы, на примере
шаровых резервуаров, позволило уменьшить относительную погрешность
определения вместимости до 0,03–0,05 %, что в 2–3 раза точнее ранее
применявшихся методов калибровки. Данная методика утверждена в качестве
232
стандарта МИ и защищена патентом на изобретение и авторским свидетельством
на программу для электронная вычислительная машина.
Перспектива дальнейшей разработки темы связана с развитием методов
сжатия, автоматизированной обработки данных лазерного сканирования на
основе предложенной теории фотограмметрической обработки данных лазерного
сканирования.
Совершенствование
аппаратной
части
НЛС
на
основе
предложенного уравнения процесса измерений с целью повышения точности.
233
СПИСОК СОКРАЩЕНИЙ И УСЛОВНЫХ ОБОЗНАЧЕНИЙ
ГИС – геоинформационная система;
ДЗ – дистанционное зондирование;
ЛЭП – линия электропередач;
МНК – метод наименьших квадратов;
НЛС – наземный лазерный сканер;
НТД – нормативно-технический документ;
ПВО – планово-высотное обоснование;
ПЗС – прибор с зарядовой связью;
ПО – программное обеспечение;
ПП – программный продукт;
САПР – система автоматизированного проектрирования;
СКО (СКП) – среднеквадратическая ошибка (погрешность);
СЛИ – система лазерная измерительная;
СТО – стандарт организации;
ЧС – чрезвычайная ситуация;
ЭВО – элементы внешнего ориентирования;
ЭД – эксплуатационная документация.
234
СЛОВАРЬ ТЕРМИНОВ
В настоящей диссертационной работе применены следующие термины
с соответствующими определениями:
лазерное отражение для точки: Информация о точке объекта,
содержащая пять характеристик, а именно: сферические пространственные
координаты точки (ϕ, θ, R), интенсивность отраженного сигнала (I) и
реальный цвет точки (IRGB);
массив точек (точечная модель): Множество лазерных отражений от
объектов, формируемое из совокупности сканов;
мертвая зона – зона, которая не попадает в поле зрения сканера с
одной станции;
модификация снимка: Процесс исправления снимка за угол наклона и
влияние
рельефа
объекта
или
местности
с
переносом
центра
фотографирования в новую точку;
поверка средств измерений: Совокупность операций выполняемых в
целях подтверждения соответствия средств измерения метрологическим
требованиям.
Для
наземного
лазерного
сканера
метрологическими
характеристиками являются средние квадратические погрешности измерения
расстояний, а также вертикальных и горизонтальных углов;
полезная дальность действия сканера: Максимальное отстояние
сканера от объектов, при котором точность и плотность лазерных отражений
удовлетворяют требованиям решаемой задачи. Данная величина выбирается
в зависимости от модели наземного лазерного сканера и типа решаемой
задачи;
трехмерная векторная модель: Трехмерная модель поверхности или
тела объекта, представляемая с помощью набора математических функций
(геометрических
примитивов,
триангуляционных сетей и т. п.)
сплайн-функций,
нерегулярных
235
сканерная станция: Точка стояния сканера;
Термины введенные автором диссертационной работы:
виртуальный сканерный снимок: Цифровой снимок, полученный путем
преобразования сканерных данных по законам центральной проекции в
плоское изображение, значением пикселя которого может выступать
измеренное расстояние, RGB-составляющая или интенсивность отраженного
сигнала;
прозрачность объекта: Характеристика, показывающая какая часть
лазерных отражений проходит сквозь объект. Для численного выражения
этого понятия введен коэффициент прозрачности объекта (kпрозрач);
радиальный тестовый полигон: Испытательный полигон в виде
специальных марок, расположенных по окружностям через равные углы, и
предназначенный для поверки линейно-угловых средств измерений;
скан: Изображение, получаемое наземным лазерным сканером за один
цикл его работы, элементами (пикселями) которого являются лазерные
отражения точек объекта;
скантриангуляция:
Метод
выполнения
наземного
лазерного
сканирования, позволяющий сократить объем полевых работ по созданию
планово-высотного обоснования;
специальные марки: Приспособления предназначенные для внешнего
или взаимного ориентирования сканов, выполненные согласно требований
эксплуатационной документации к соответствующей модели НЛС.
236
СПИСОК ЛИТЕРАТУРЫ
1
Аковецкий, В. Н. Дешифрирование снимков [Текст] : учебник для ву-
зов / В. Н. Аковецкий. – М.: Недра, 1983. – 374 с.
2
Амромин, П. Д. Зеркальный тест-объект для калибровки фотокамер
[Текст] / П. Д. Амромин // Геодезия и картография. – 1991. − № 6. – С. 29-34.
3
Амромин, П. Д. Калибровка фотокамер с использованием снимков
стробоскопической съемки [Текст] : метод. указания / П.Д. Амромин, Т. А. Широкова. – Новосибирск: НИИГАиК, 1981. − 19 с.
4
Анализ точности лазерных сканирующих систем [Электронный ресурс]
/ W. Boehler и др. // Докл. на XIX симп. CIPA, Анталия, Турция, 30 сент. − 4 окт.
2003. − Режим доступа: http://www.gfk-leica.ru/scan/testir.htm.
5
Аналитические модели местности и снимков (макетные снимки)
[Текст] / А. Н. Лобанов, В. Б. Дубиновский, А. И. Саранцев и др. – 2-е изд., перераб. и доп. – М.: Недра, 1989. – 140 с.: ил.
6
Аникст, Д. А. Аппаратура для эталонирования геодезических приборов
[Текст] / Д. А. Аникст, В. Г. Львов // Геодезия и картография. – 1981. − № 9. –
С. 19−24.
7
Аникушкин, М. Н. Наземные системы лазерного сканирования. Опыт
работ [Текст] / М. Н. Аникушкин // Геопрофи. – 2005. – № 1. – С. 49−50.
8
Антипов, И. Т. Математические основы пространственной аналитиче-
ской фототриангуляции [Текст] / И. Т. Антипов. – М.: Картгеоцентр – Геодезиздат, 2003. – 296 с.
9
Антипов, И. Т. О математической трактовке задачи калибровки АФА
[Текст] / И. Т. Антипов // Сб. науч. тр. НИИПГ. Фотограмметрия в топографогеодезическом производстве и инженерно-геодезической практике. – М.:
ЦНИИГАиК. – 1983. – Вып. 7. – С. 3−24.
237
10
Антонова, Ф. В. Применение многогруппового метода приближений
для уравнивания тригонометрического нивелирования [Текст] / Ф. В. Антонова //
Геодезия и картография. – 1971. − № 3. – С. 28−32.
11
Антонович, К. М. Использование спутниковых радионавигационных
систем в геодезии [Текст] : монография : в 2 т. / К. М. Антонович; ГОУ ВПО
«Сиб. гос. геодез. акад.». – М.: Картгеоцентр, 2005. – 1 т.
12
Антонович, К. М. Использование спутниковых радионавигационных
систем в геодезии [Текст] : монография : в 2 т. / К. М. Антонович; ГОУ ВПО
«Сиб. гос. геодез. акад.». – М.: Картгеоцентр, 2006. – 2 т.
13
Априорная оценка точности создания цифровых моделей местности и
рельефа по данным наземного лазерного сканирования [Текст] / А. В. Комиссаров, Т.А. Широкова, А. В. Комиссаров, Е.А. Егорченкова, Н.С. Коротченко // Инженерные изыскания.− 2012. – № 12. – С. 58–60.
14
Арефьев, А. А. Исследование влияния амплитудных искажений энерге-
тического профиля лазерного пучка на ошибку измерения непрямолинейности и
неплоскостности [Текст] / А. А. Арефьев // Изв. вузов. Геодезия и аэрофотосъемка. – 1983. – № 5. – С. 95−98.
15
Астапович, А. В. О соотношении назначаемой и вычисляемой средних
квадратических ошибок единицы веса в уравнительных вычислениях [Текст] /
А. В. Астапович // Изв. вузов. Геодезия и аэрофотосъемка. – 2002. – № 2. –
С. 32−37.
16
Астапович, А. В. Регуляризованный метод оптимального уравнивания
геодезических сетей [Текст ] / А. В. Астапович // Изв. вузов. Геодезия и аэрофотосъемка. – 2002. – № 1. – С. 30−40.
17
Астапович, А. В. Уравнивание геодезических сетей с учетом ошибок
координат исходных пунктов регуляризованным методом наименьших квадратов
[Текст] / А. В. Астапович // Изв. вузов. Геодезия и аэрофотосъемка. – 2002. – № 3.
– С. 21−25.
238
18
Бабенко, Б. Б. Об учете коэффициента вертикальной рефракции [Текст]
/ Б. Б. Бабенко, В. В. Длужинский // Геодезия и картография. – 1988. − № 10. –
С. 15−16.
19
Байбородин, Ю. В. Основы лазерной техники [Текст] / Ю. В. Байборо-
дин. – 2-е изд., перераб. и доп. – Киев: Вища школа, 1988. – 383 с.
20
Баканова, В. В. Крупномасштабные топографические съемки [Текст] /
В. В. Баканова. − М.: Недра, 1983. – 182 с.
21
Батраков, С. И. Радиотехнические цепи и сигналы [Текст]: учеб. для
вузов по спец. «Радиотехника»/ С. И. Батраков. – 2-е изд., перераб. и доп. – М.:
Высш. шк., 1988. – 448 с.: ил.
22
Белых, Т. П. Комплекс программ для решения задачи калибровки по
снимкам испытательного полигона [Текст] / Т. П. Белых, В. В. Радионов // Сб. науч. тр. НИИПГ. Фотограмметрия в топографо-геодезическом производстве и инженерно-геодезической практике. – М.: ЦНИИГАиК, 1983. – Вып. 7.− С. 25−32.
23
Берлянт, А. М. Картографическая генерализация и теория фракталов
[Текст] / А. М. Берлянт, О. Р. Мусич, Т. В. Собчук. – М.: Недра, 1998. – 136 с.
24
Бобир, Н. Я. Фотограмметрия [Текст] / Н. Я. Бобир, А. Н. Лобанов,
Г. Д. Федорук. − М.: Недра, 1974. – 472 с.
25
Большаков, В. Д. Геодезия. Изыскания и проектирование инженерных
сооружений [Текст] : справ. пособие/ В. Д. Большаков, Е. Б. Клюшин, И. Ю. Васютинский. – М.: Недра, 1991. – 238 с.: ил.
26
Большаков, В. Д. Практикум по теории математической обработки гео-
дезических измерений [Текст] : учеб. пособие для вузов / В. Д. Большаков,
Ю. И. Маркузе. – М.: Недра, 1984. – 352 с.
27
Большаков, В. Д. Теория математической обработки геодезических из-
мерений [Текст] / В. Д. Большаков, П. А. Гайдаев. – 2 изд., перераб. и доп. – М.:
Недра, 1977. – 367 с.
28
Большаков, В. Д. Теория ошибок наблюдений [Текст] : учеб. для вузов /
В. Д. Большаков. – 2-е изд., перераб. и доп. – М.: Недра, 1983. – 233 с.
239
29
Большаков, В. Д. Уравнивание геодезических построений [Текст] :
справ. пособие / В. Д. Большаков, Ю. И. Маркузе, В. В. Голубев. – М.: Недра,
1989. – 413 с.: ил.
30
Бронштейн, Г. С. Комбинационные способы измерения расстояний
[Текст] / Г. С. Бронштейн. – М.: Недра, 1991. – 92 с.: ил.
31
Бронштейн, Г. С. Одновременное определение приборной и периодиче-
ской поправок светодальномера [Текст] / Г. С. Бронштейн // Геодезия и картография. – 1990. − № 10. – С. 19−21.
32
Бронштейн, Г. С. О методике определения постоянной поправки свето-
дальномера [Текст] / Г. С. Бронштейн // Геодезия и картография. – 1983. − № 6. –
С. 27−29.
33
Бугаев, Ю. Г. По поводу современных высокоточных линейных изме-
рений [Текст] / Ю. Г. Бугаев, А. С. Масленников // Геодезия и картография. –
1982. − № 5. – С. 49−52.
34
Буров, М. И. Практикум по фотограмметрии [Текст] : учеб. пособие для
вузов/ М. И. Буров, Б. В. Краснопевцев, А. П. Михаилов. – М.: Недра, 1987. –
302 с.: ил.
35
Бутлер, С. А. Уравнивание тригонометрических сетей, определенных
длинами сторон [Текст] / С. А. Бутлер // Геодезист. – 1939. – № 8. – С. 21−41.
36
Бутлер, С. А. Уравнивание тригонометрических сетей, определенных
длинами сторон [Текст] / С. А. Бутлер // Геодезист. – 1939. – № 9. – С. 22−35.
37
Вагин, В. А. Влияние соотношения точности угловых и линейных из-
мерений на внутреннюю надежность в полигонометрических построениях [Текст]
/ В. А. Вагин, Диб Бирути // Изв. вузов. Геодезия и аэрофотосъемка. – 1992. – № 2.
– С. 9−15.
38
Валеев, С. Г. Регрессионное моделирование при обработке наблюдений
[Текст] / С.Г. Валеев. – М.: Недра, 1991. – 272 с.
240
39
Васильев, Л. Н. Калибровка аэрофотоаппаратов по снимкам испыта-
тельного полигона [Текст] / Л. Н. Васильев и др. // Геодезия и картография. –
1974. − № 10. –С. 40–49.
40
Верещака, Т. В. Полевая картография [Текст]: учеб. для вузов /
Т. В. Верещака, Н. С. Подобедов. – 3-е изд., перераб. и доп. – М.: Недра, 1986. –
351 с.
41
Вершинин, В. И. К анализу уравнивания измерений, содержащих сис-
тематические ошибки [Текст] / В. И. Вершинин // Изв. вузов. Геодезия и аэрофотосъемка. – 1984. – № 4. – С. 26–31.
42
Виноградов, В. В. Методика учета интегрального показателя прелом-
ления воздуха при светодальномерных измерениях [Текст] / В. В. Виноградов,
М. И. Лакотко // Изв. вузов. Геодезия и аэрофотосъемка. – 1989. – № 5. – С. 36–45.
43
Виноградов, В. В. Определение положения лазерного пучка [Текст] /
В. В. Виноградов, Б. К. Бектанов // Геодезия и картография. – 1988. − № 10. –
С. 13–15.
44
Виноградов, В.В. О точности лазерных измерительных систем при ра-
боте в турбулентной атмосфере [Текст] / В.В. Виноградов, А.С. Медовиков // Изв.
вузов. Геодезия и аэрофотосъемка. – 1980. – № 3. – С. 50–58.
45
Виноградов, К. П. Создание ортоизображений объектов архитектуры
по результатам наземного лазерного сканирования [Текст] / К. П. Виноградов //
Методы дистанционного зондирования и ГИС-технологии для оценки состояния
окружающей среды, инвентаризации земель и объектов недвижимости: сб. материалов XII междунар. научно-практ. конф., 29 мая – 5 июня 2008 г. – Новосибирск: СГГА, 2008. – 99 с.
46
Воробьев, В. И. Оптическая локация для радиоинженеров [Текст] /
В. И. Воробьев. – М.: Радио и связь, 1982. – 176 с.
47
Вшивков, О. В. О комплексном подходе к решению рефракционной
проблемы [Текст] / О. В. Вшивков // Изв. вузов. Геодезия и аэрофотосъемка. –
2005. – № 4. – С. 41–46.
241
48
Высоцкий, Л. И. Определение влажности почвы по атмосферной реф-
ракции [Текст] / Л. И. Высоцкий, В. Ф. Вшивков, А. Т. Глухов // Геодезия и картография. – 1984. − № 2. – С. 23–25.
49
Гайдаев, П. А. Математическая обработка геодезических сетей [Текст] /
П. А. Гайдаев. – М.: Недра, 1977. – 288 с.
50
Гайдаев, П. А. Об оценке точности измерений после отбраковки по до-
пускам, установление допусков [Текст] / П. А. Гайдаев, И. В. Колесников // Геодезия и картография. – 1975. − № 8. – С. 30–35.
51
Галахова, О. П. Основы фазометрии [Текст] / О. П. Галахова, Е. Д. Кол-
тик, С. А. Кравченко. – Л.: Энергия, 1976. – 256 с.
52
Галкин, Ю. С. О новой дисперсионной формуле стандартного воздуха
для видимого и ближнего ИК-диапозона спектра [Текст] / Ю. С. Галкин, Р. А. Захаров, Р. А. Татевян // Геодезия и картография. – 1997. − № 11. – С. 14–18.
53
Ганьшин, В. Н. Точность оценивания и форма представления результа-
тов измерений [Текст] / В. Н. Ганьшин, М. С. Нестеренок // Изв. вузов. Геодезия и
аэрофотосъемка. – 1982. – № 3. – С. 3–6.
54
Гауф, М. Электронные теодолиты и тахеометры [Текст] / М. Гауф; пер.
с чеш. – М.: Недра, 1978. – 150 с.
55
Гельман, Р. Н. Калибровка аэрофотоснимков на основе сравнения фо-
тограмметрических моделей [Текст] / Р. Н. Гельман // Геодезия и картография. –
1986. − № 2. – С. 26–29.
56
Гельман, Р. Н. Лабораторная калибровка цифровых камер с большой
дисторсией [Текст] / Р. Н. Гельман, А. Л. Дунц // Геодезия и картография. – 2002.
− № 7. – С. 23–31.
57
Гельман, Р. Н. Опыт использования и калибровки цифровых камер при
совместной аэрофотосъемке с АФА [Текст] / Р. Н. Гельман, М. Ю. Никитин,
А. Л. Дунц // Геодезия и картография. – 2001. − № 6. – С. 25–31.
58
Генике, А. А. Геодезические свето- и радиодальномеры [Текст]: учеб.
для техникумов / А. А. Генике, А. М. Афанасьев. – М.: Недра, 1988. – 302 с.: ил.
242
59
Генике, А. А. Глобальная спутниковая система определения местопо-
ложения GPS и применение в геодезии [Текст] / А. А. Генике, Г. Г. Побединский.
– М.: Картгеоцентр – Геодезиздат, 1999. – 272 с.
60
Геодезическое инструментоведение [Текст] / Ф. Деймлих.− 4-е изд. пе-
рераб. и доп. – М.: Недра, 1970. – 584 с.
61
Геодезия. Геодезические и фотограмметрические приборы [Текст] :
справ. пособие / Н. Н. Воронков, В. С. Плотников, Е. И. Калантаров и др. – М.:
Недра, 1991. – 429 с.: ил.
62
Герасименко, М. Г. Метрологическое обеспечение производства
[Текст] / М. Г. Герасименко, А. И. Спиридонов // Изв. вузов. Геодезия и аэрофотосъемка. – 1981. – № 11. – С. 1–7.
63
Герасименко, М. Г. О некоторых проблемах современных высокоточ-
ных линейных измерений [Текст]/ М. Г. Герасименко, А. А. Генике // Геодезия и
картография. – 1981. − № 6. – С. 16–20.
64
ГКИНП (ГНТА)–02–036–02. Инструкция по фотограмметрическим ра-
ботам при создании цифровых топографических карт и планов [Текст]. – М.:
ЦНИИГАиК, 2002. – 100 с.
65
Голубев, А. Н. Влияние дисперсионного искажения сигнала в атмосфе-
ре на фазовые измерения в лазерном дальномере [Текст] / А. Н. Голубев // Изв.
вузов. Геодезия и аэрофотосъемка. – 1981. – № 4. – С. 3–7.
66
Голубев, А. Н. Использование моделей атмосферы для учета ее влия-
ния на результаты измерений в радиоинтерферометрии со сверхдлинной базой
[Текст] / А. Н. Голубев, Г. А. Шануров, Мохаммед Амин Тажбашар // Изв. вузов.
Геодезия и аэрофотосъемка. – 1992. – № 1. – С. 17–25.
67
Голубев, А. Н. К вопросу о скорости распространения излучения при
измерении расстояний светодальномерами [Текст] / А. Н. Голубев // Изв. вузов.
Геодезия и аэрофотосъемка. – 1985. – № 6. – С. 20–29.
243
68
Гордеевцев, А. В. К учету рефракции в нивелировании [Текст] /
А. В. Гордеевцев, О. А. Мозжухин // Изв. вузов. Геодезия и аэрофотосъемка. –
2005. – № 1. – С. 34–38.
69
Горенштейн, И. А. Инерциальные навигационные системы [Текст] /
И. А. Горенштейн. – М.: Машиностроение, 1970. – 284 с.
70
ГОСТ Р 50779.21–2004. Статистические методы. Правила определения
и методы расчета статистических характеристик по выборочным данным. Ч. 1.
Нормальное распределение [Текст]. – М.: Изд-во стандартов, 2004. – 44 с.
71
ГОСТ Р 51774–2001. Теодолиты и другие геодезические угломерные
приборы. Методика поверки. Изд. официальное. – М.: Изд-во стандартов, 2002. –
12 с.
72
ГОСТ Р ИСО 5479 – 2002. Статистические методы. Проверка отклоне-
ния распределения вероятностей от нормального распределения [Текст]. – М.:
Изд-во стандартов, 2002. – 25 с.
73
ГОСТ 8.570-2000. Резервуары стальные вертикальные цилиндрические.
Методика поверки [Текст].− Введ. 01.01.2002.− Минск, 2000.
74
ГОСТ Р 8.794-2012 Сканеры наземные лазерные. Методика поверки
[Текст]. – М.: Изд-во стандартов, 2012. – 21 с.
75
Данилин, И. М. Лазерная локация земли и леса [Текст] : учеб. пособие /
И. М. Данилин, Е. М. Медведев, С. Р. Мельников. – Красноярск: Ин-т леса им.
В. Н. Сукачева СО РАН, 2005. – 182 с.
76
Джунь, И. В. Метод сравнения точности геодезических приборов, учи-
тывающий эксцесс закона распределения вероятностей ошибок [Текст] /
И. В. Джунь // Изв. вузов. Геодезия и аэрофотосъемка. – 1989. – № 3. – С. 55–61.
77
Дубиновский, В. Б. Калибровка снимков [Текст] / В. Б. Дубиновский. –
М.: Недра, 1982. – 224 с.
78
Дубиновский, В. Б. Калибровка снимков по фотографиям, полученным
из одной точки пространства [Текст] / В. Б. Дубиновский // Геодезия и картография. – 1972. − № 4. – С. 39–48.
244
79
Дубиновский, В. Б. Калибровка снимков с использованием свойств
стереоскопической пары [Текст] / В. Б. Дубиновский // Геодезия и картография. –
1972. − № 9. – С. 55–63.
80
Дурнев, А. И. Метод линейных геодезических засечек [Текст] /
А. И. Дурнев // Изв. вузов. Геодезия и аэрофотосъемка. – 1968. – № 3. – С. 3–15.
81
Елисеев, С. В. Геодезические инструменты и приборы. Основы расчета,
конструкции и особенности изготовления [Текст] / С. В. Елисеев. – 3-е изд., перераб. и доп. – М.: Недра, 1973. – 392 с.
82
Жуков, Б. Н. Геодезический контроль сооружений и оборудования
промышленных предприятий [Текст] : монография / Б. Н. Жуков. – Новосибирск:
СГГА, 2003. – 356 с.
83
Журкин, Ж. Н. О сравнении чувствительности амплитудного и фазово-
го оптико-электронных приборов для высокоточных геодезических измерений
[Текст] / Ж. Н. Журкин, Е. А. Федоров, В. П. Солдатов // Изв. вузов. Геодезия и
аэрофотосъемка. – 1980. – № 5. – С. 86–90.
84
Захаров, А. И. Геодезические приборы [Текст] : справочник / А. И. За-
харов. – М.: Недра, 1989. – 314 с.: ил.
85
Захарова, М. В. К учету рефракции в полигонометрии [Текст] /
М. В. Захарова, Е. А. Белоусова, О. А. Мозжухин // Изв. вузов. Геодезия и аэрофотосъемка. – 2003. – № 5. – С. 3–8.
86
Зюзин, А. С. Боковая рефракция при измерении углов на пунктах го-
родской полигонометрии [Текст] / А. С. Зюзин // Геодезия и картография. – 1956.
− № 6. – С. 18–26.
87
Имитационное моделирование в задачах оптического дистанционного
зондирования [Текст] / Г. М. Креков, И. М. Орлов, В. В. Белов и др. – Новосибирск: Наука, 1988. – 165 с.
88
Инструкция по топографической съемке в масштабе 1 : 5 000, 1 : 2 000,
1 : 1 000 и 1 : 500. Главное управление геодезии и картографии при Совете Министров СССР [Текст]. – М.: Недра, 1973. – 176 с.
245
89
Калантаров, Е. И. Определение инструментальных ошибок универ-
сальных стереофотограмметрических приборов [Текст] / Е. И. Калантаров,
Б. В. Краснопевцев // Изв. вузов. Геодезия и аэрофотосъемка. – 1971. – № 4. –
С. 55–60.
90
Калантаров, Е. И. Фотограмметрическое инструментоведение [Текст] :
учеб. для вузов / Е. И. Калантаров. – М.: Недра, 1986. – 126 с.: ил.
91
Калибровка аэрофотоаппаратов по снимкам испытательного полигона
[Текст] / Л.Н. Васильев и др. // Геодезия и картография. – 1974. − № 10. –
С. 40–49.
92
Камен, Х. Электронные способы измерений в геодезии [Текст] /
Х. Камен. – М.: Недра, 1982. – 132 с.
93
Караванов, М. Ю. Лазерные сканеры Callidus [Текст] / М. Ю. Караванов
// Строительная техника и технология. – 2002. – № 4. – С. 12–16.
94
Карпик, А. П. Структурно-функциональная модель геодезической про-
странственной информационной системы [Текст] / А. П. Карпик // Изв. вузов.
Геодезия и аэрофотосъемка. – 2004 – № 6. – С. 140–148.
95
Карсунская, М. М. Анализ влияния инструментальных ошибок в нако-
пительных растровых датчиках направлений с использованием компьютерной
модели датчика [Текст] / М. М. Карсунская, Х. К. Ямбаев // Изв. вузов. Геодезия и
аэрофотосъемка. – 2000. – № 4. – С. 115–128.
96
Карсунская, М. М. Возможные пути уменьшения влияния инструмен-
тальных ошибок электронных геодезических приборов на точность угловых измерений [Текст] / М. М. Карсунская, Х. К. Ямбаев // Изв. вузов. Геодезия и аэрофотосъемка. – 2000. – № 4. – С. 100–115.
97
Катушков, В. А. Моделирование макетных снимков для задач наземной
фотограмметрии [Текст] / В. А. Катушков, В. М. Сердюков // Геодезия и картография. – 1999. − № 9. – С. 22–25.
98
Кемниц, Ю. В. Теория ошибок измерений [Текст] / Ю. В. Кемниц. –
2-е изд., перераб. и доп. – М.: Недра, 1967. – 176 с.
246
99
Клюшин, Е. Б. Инженерная геодезия [Текст] : учеб. для техникумов /
Е. Б. Клюшин, Д. Ш. Михелев. – М.: Недра, 1990. – 264 с.: ил.
100 Ковров, А. А. ПО RiSCAN PRO и его возможности по обработке данных наземного лазерного сканирования [Текст] / А. А. Ковров // Геопрофи. –
2006. – №5. – С. 59–61.
101 Комиссаров, А. В. Исследование точности наземных лазерных сканеров [Текст] / А. В. Комиссаров // Современные проблемы технических наук: сб.
тез. докл. Новосиб. межвуз. науч. студен. конф. «Интеллектуальный потенциал
Сибири».– Новосибирск, 2004. – Ч. 3.− С. 104.
102 Комиссаров, А. В. Исследование точности трехмерного лазерного сканера (на примере Riegl LMS Z-360) [Текст] / А. В. Комиссаров, Д. В. Комиссаров
// Материалы IV Междунар. конф. и выставки «Лазерное сканирование и цифровая аэросъемка. Сегодня и завтра» – М.: Типография компании XPortMedia, 2004.
– С. 10–11.
103 Комиссаров, А. В. Современные возможности создания трехмерных
метрических моделей объектов с применением наземных лазерных сканеров
[Текст] / А. В. Комиссаров, А. В. Середович // Тез. и аннотации докл. Окружной
научно-техн. конф. «ГИС-интегрированное решение муниципальных задач». –
Екатеринбург: Уралгеоинформ, 2004. – С. 37–38.
104 Комиссаров, А. В. Исследование стабильности работы блока лазерного
дальномера сканера Riegl LMS Z-360 [Текст] / А. В. Комиссаров // Сб. науч. тр.
аспирантов и молодых ученых Сиб. гос. геодез. акад. / под общ. ред.
Т. А. Широковой; СГГА. – Новосибирск, 2005. – Вып. 2.− С. 62–66.
105 Комиссаров, А. В. Разработка конструктивной схемы тест-объектов и
методики для исследования точности наземных лазерных сканеров [Текст] /
А. В. Комиссаров, Т. А. Широкова, Д. В. Комиссаров // ГЕО-Сибирь-2005: сб. материалов науч. конгр. 25-29 апр. 2005 г., Новосибирск. – Новосибирск: СГГА,
2005. – Т. 5.− С. 197–201.
247
106 Комиссаров, А. В. Разработка тест-объектов для исследования точности наземных лазерных сканеров [Текст] / А. В. Комиссаров // Тез. конф. междунар. промышл. форума GEOFORM+ «Геопространственные технологии и сферы
их применения», 14–17 марта 2005, Москва. – М., 2005.− С. 69–70.
107 Комиссаров, А. В. Исследование лазерного сканера RIEGL LMS-Z360
[Текст] / А. В. Комиссаров // ГЕО-Сибирь-2005 : сб. материалов науч. конгр.,
25–29 апр. 2005 г., Новосибирск. – Новосибирск: СГГА, 2005. – Т. 5.− С. 202–204.
108 Комиссаров, А. В. Исследование точности построения цифровой модели рельефа по данным наземного лазерного сканирования [Текст] / А. В. Комиссаров // ГЕО-Сибирь-2006 : сб. материалов междунар. науч. конгр. ,24–28 апр.
2006 г., Новосибирск. – Новосибирск: СГГА, 2006. – Т. 1, ч. 2С. 150–153.
109 Комиссаров, А. В. Определение метрических характеристик об объектах архитектурного наследия по данным наземного лазерного сканирования
[Текст] / А. В. Комиссаров, Д. В. Комиссаров // Материалы конф. Междунар. промышл. форума GEOFORM+ «Геопространственные технологии и сферы их применения», 14–17 марта 2006 г., Москва. – М., 2006. – С. 43–45.
110 Комиссаров, А. В. Мониторинг деформаций сооружений с использованием технологии наземного лазерного сканирования [Текст] / А. В. Комиссаров,
Д. В. Комиссаров // Материалы конф. Междунар. промышл. форума GEOFORM+
«Геопространственные технологии и сферы их применения». – 14–17 марта 2006
г., Москва. – М., 2006. – С. 45–47.
111 Комиссаров, А. В. Методика калибровки цифровых камер для наземных лазерных сканеров [Текст] / А. В. Комиссаров, Д. В. Комиссаров // Геопрофи.
– 2006. – № 6. – С. 50–52.
112 Комиссаров, А. В. Получение метрической информации об объектах
архитектурного наследия по данным наземного лазерного сканирования [Текст] /
А. В. Комиссаров, Д. В. Комиссаров // Изв. вузов. Стр-во. – 2006. – № 5. –
С. 112–115.
248
113 Комиссаров, А. В. Разработка тест-объектов для исследования точности наземных лазерных сканеров [Текст] / А. В. Комиссаров // Тез. конф. Междунар. промышл. форума GEOFORM+ «Геопространственные технологии и сферы
их применения». – 14–17 марта 2005 г., Москва. – М., 2005. – С. 69–70.
114 Комиссаров, А. В. Исследование точности двух методов уравнивания
линейно-угловых засечек [Текст] / А. В. Комиссаров // Сб. науч. тр. аспирантов и
молодых ученых Сиб. гос. геодез. акад. / под общ. ред. Т. А. Широковой; СГГА. –
Новосибирск, 2006. – Вып. 3.− С. 68–73.
115 Комиссаров, А. В. Точность построения цифровой модели рельефа поданным наземного лазерного сканирования [Текст] / А. В. Комиссаров // Материалы конф. Междунар. промышл. форума GEOFORM+ «Геопространственные
технологии и сферы их применения», 14–17 марта 2006 г., Москва. – М., 2006. –
С. 47–48.
116 Комиссаров, А. В. Исследование точности внешнего ориентирования
сканов с использованием результатов моделирования [Текст] / А. В. Комиссаров,
Т. А. Широкова, Д. В. Комиссаров // ГЕО-Сибирь-2007 : сб. материалов III Междунар. науч. конгр., 25–27 апр. 2007 г., Новосибирск. – Новосибирск: СГГА, 2007.
– Т. 3.− С. 71–75.
117 Комиссаров, А. В. Методика исследования дальномерного блока наземного лазерного сканера [Текст] / А. В Комиссаров // ГЕО-Сибирь-2007 : сб. материалов III Междунар. науч. конгр., 25–27 апр. 2007г., Новосибирск. – Новосибирск: СГГА, 2007. – Т. 1, ч. 2.− С. 74–78.
118 Комиссаров, А. В. Экспериментальные исследования точности измерения углов наземными лазерными сканерами Riegl LMS-Z360 и LMS-Z420i [Текст]
/ А. В Комиссаров // ГЕО-Сибирь-2007 : сб. материалов науч. конгр., 25–29 апр.
2007 г., Новосибирск. – Новосибирск: СГГА, 2007. – Т. 1.− С. 78–83.
119 Комиссаров, А. В. Исследование точности определения деформаций
сооружений при помощи электронного тахеометра и наземного лазерного сканера
[Текст] / А. В Комиссаров, Ашраф Абдел Ванис Абдел Мавла Бешр // ГЕО-
249
Сибирь-2008 : сб. материалов науч. конгр., 22–24 апр. 2008 г., Новосибирск. –
Новосибирск: СГГА, 2008. – Т. 1.− С. 107–111.
120 Комиссаров, А. В. Опыт применения высокоточного наземного лазерного сканера Minolta VI-9i для решения прикладных задач [Текст] / А. В. Комиссаров, Т. А. Широкова, О. А. Дементьева, В. А. Середович // ГЕО-Сибирь-2008 :
сб. материалов науч. конгр., 22–24 апр. 2008 г., Новосибирск. – Новосибирск:
СГГА, 2008. – Т. 1.− С. 231–234.
121 Комиссаров, А. В. Применение наземного лазерного сканирования для
паспортизации и инвентаризации автомобильных дорог [Текст] / А. В Комиссаров, Т. А. Широкова, А. В. Иванов, А. В. Середович, В. А. Середович // GeoinfoCAD-Europe - 2008 : XII Междунар. научно-практ. конф. «Методы дистанционного зондирования и ГИС-технологии для оценки состояния окружающей среды,
инвентаризации земель и объектов недвижимости», 25 мая – 5 июня 2008 г., Италия. – Новосибирск, СГГА, 2008. – С. 81–85.
122 Комиссаров, А. В. Построение трехмерных моделей электроподстанций
по данным наземного лазерного сканирования [Текст] / А. В Комиссаров,
Т. А. Широкова, А. В. Иванов, О. А. Дементьева, А. В. Середович,
В. А. Середович. GeoinfoCAD-Europe - 2008 : XII Междунар. научно-практ. конф.
«Методы дистанционного зондирования и ГИС-технологии для оценки состояния
окружающей среды, инвентаризации земель и объектов недвижимости», 25 мая –
5 июня 2008 г., Италия. – Новосибирск, СГГА, 2008. – С. 73–78.
123 Комиссаров, А. В. Разработка и исследование методики прокладки сканерных ходов [Текст] / А. В. Комиссаров, Д. В. Комиссаров // Геодезия и картография. – 2008. – № 4. – С. 12–14.
124 Комиссаров, А. В. Особенности создания цифровых моделей городских
территорий средствами наземного лазерного сканирования [Текст] / А. В. Комиссаров, В. А. Середович, А. В. Середович и др. // ГЕО-Сибирь-2009: сб. материалов науч. конгр., 20–24 апр. 2009г., Новосибирск. – Новосибирск: СГГА, 2009. –
Т. 1, ч. 1.− С. 136–140.
250
125 Комиссаров, А. В. Применение наземного лазерного сканирования для
планирования зон перспективного строительства [Текст] / А. В. Комиссаров,
А. В. Середович, О. А. Дементьева, В. А. Середович // Геодезия и картография.
2009. – № 10. – С. 13–16.
126 Комиссаров, А. В. Особенности наземного лазерного сканирования для
мониторинга железнодорожных тоннелей [Текст] / А. В. Комиссаров, А. В. Середович, Т. А. Широкова, А. В. Антипов, А. В. Иванов // Вестник СГГА.– Вып.
1(12). – 2010. – Вып. 1 (12).− С. 28–34.
127 Комиссаров, А. В. Определение деформационных характеристик тоннелей по данным наземного лазерного сканирования [Текст] / А. В. Комиссаров,
Е. И. Горохова // ГЕО-Сибирь-2010 : сб. материалов науч. конгр., 20–24 апр. 2010
г., Новосибирск. – Новосибирск: СГГА, 2010. – Т. 1, ч. 3.− С. 99–101.
128 Комиссаров, А. В. Разработка методики трехмерного моделирования
объектов ситуации и рельефа городской территории по данным наземного лазерного сканирования г. Томска [Текст] / А. В. Комиссаров, А. К. Аманова,
Т. А. Широкова // ГЕО-Сибирь-2010: сб. материалов науч. конгр., 20–24 апр. 2010
г., Новосибирск. – Новосибирск: СГГА, 2010. – Т. 1, ч. 3.− С. 79–83.
129 Комиссаров, А. В. Обоснование углового шага сканирования при наземной лазерной съемке [Текст] / А. В. Комиссаров, Т. А. Широкова, Е. В. Романович // Изв. вузов. Геодезия и аэрофотосъемка. – 2011. – № 2. – С. 96–99.
130 Комиссаров, А.В. Обоснование параметров съемки тоннелей методом
наземного лазерного сканирования при определении эллиптичности и эксцентриситета его обделки [Текст] / А. В. Комиссаров, Е. И. Горохова // Изв. вузов. Геодезия и аэрофотосъемка. – 2011. – № 3. – С. 81–85.
131 Комиссаров, А. В. Разработка методов контроля геометрических характеристик при строительстве сложных объектов на основе трехмерного моделирования [Текст] : отчет о НИР.− Новосибирск, 2010.− 96 с.– № ГР01201051481;
Инв. №0267.
251
132 Комиссаров, А. В. Разработка методов контроля геометрических характеристик при строительстве сложных объектов на основе трехмерного моделирования [Текст] / отчет о НИР.− Новосибирск, 2011.− 167 с.– № ГР01200964090;
Инв. №0291.
133 Комиссаров А. В. SpereRezer [Текст] : свидетельство об официальной
регистрации программы для ЭВМ №2011614979 / Комиссаров А. В., Комиссаров
Д. В. ; Федеральная служба по интеллектуальной собственности, патентам и товарным знакам, 2011.
134 Комиссаров, А. В. Обоснование выбора расстояния между сканерными
станциями при наземной лазерной съемке [Текст] / А. В. Комиссаров,
Т. А. Широкова, Е. В. Романович // ГЕО-Сибирь-2012 : сб. материалов науч.
конгр., 10-20 апр. 2012 г., Новосибирск. – Новосибирск: СГГА, 2012. – Т. 3.−
С. 91–95.
135 Комиссаров, А. В. Методика исследования метрических характеристик
сканов [Текст] : монография / А. В. Комиссаров. – Saarbrucken, Germany, LAP
Lambert Academic Publishing, 2012. – 199 с.
136 Комиссаров, А. В. Общие принципы формирования виртуальных снимков по данным наземной лазерной съёмки [Текст] / А. В. Комиссаров,
И. Т. Антипов, Л. К. Зятькова // Изв. вузов. Геодезия и аэрофотосъемка.− 2012. –
№2/1. – С. 45-49.
137 Комиссаров, А. В. Общий подход к изучению погрешностей наземной
лазерной съемки, вызванных метрологическими свойствами объектов [Текст] /
А. В. Комиссаров, Т. А. Широкова, Д. В. Комиссаров // Изв. вузов. Геодезия и аэрофотосъемка.− 2013. – №1. – С. 36–42.
138 Комиссаров, А. В. Лазерное сканирование: обобщение существующей
практики [Текст] / А. В. Комиссаров // Инженерные изыскания.− 2013. – № 2. –
С. 22-25.
139 Комиссаров, А. В. Оптимальный метод выбора лазерного сканера для
различных видов инженерно-технических работ [Текст] / В. П. Вербная,
252
В.С. Хорошилов, А. В. Комиссаров // Интерэкспо ГЕО-Сибирь-2015 : Междунар.
науч. конгр.: сб. материалов Междунар. науч. конф. «Геодезия, геоинформатика
картография, маркшейдерия» : сб. материалов в 2т., 13-25 апр. 2015 г., Новосибирск. – Новосибирск: СГУГиТ, 2015. – Т. 1.− С. 204-208.
140 Комиссаров, А. В. Методика совместного получения и обработки данных наземного лазерного сканирования и цифровой съемки [Текст] / А. В. Комиссаров, М.С. Калинина // Изв. вузов. Геодезия и аэрофотосъемка.− 2015. – № 4.−
С. 39-42.
141 Комиссаров, А. В. Системное представление лазерного сканирования
[Текст] / А. В. Комиссаров // Геодезия и картография.− 2015. – №. 7 – С. 18-23.
142 Методика калибровки шаровых резервуаров методом наземного лазерного сканирования [Текст] / А. В. Комиссаров, М. С. Калинина, Е.А. Егорченкова,
Н.С. Коротченко // Проблемы сбора, подготовки и транспорта нефти и нефтепродуктов.− 2015. – №. 4 (102). – С. 163-170.
143 Комиссаров, А. В. Классификация погрешностей в результатах лазерного сканирования [Текст] / А. В. Комиссаров // Геодезия и картография.− 2015. –
№. 10 – С. 13–18.
144 Комиссаров, А. В. Сравнение двух методов уравнивания скантриангуляционных построений [Текст] / А. В. Комиссаров, И.Т. Антипов // Изв. вузов.
Геодезия и аэрофотосъемка.− 2015. – № 5/С. – С. 174-179.
145 Комиссаров, Д. В. Априорная оценка точности результатов наземного
лазерного сканирования для топографической съемки [Текст] / Д. В. Комиссаров,
А. В. Середович // ГЕО-Сибирь-2007 : сб. материалов III Междунар. науч. конгр.,
25–27 апр. 2007 г., Новосибирск. – Новосибирск: СГГА, 2007. – Т. 1, ч. 2.−
С. 134–137.
146 Коугия, В. А. Сравнение методов обнаружения и идентификации грубых ошибок измерений [Текст] / В. А. Коугия // Геодезия и картография. – 1998. −
№ 5. – С. 23–27.
253
147 Коугия, В. А. Строгое уравнивание линейной засечки [Текст] /
В. А. Коугия // Геодезия и картография. – 1979. − № 5. – С. 25–26.
148 Кочетов, Ф. Г. Автоматизированные системы для геодезических измерений [Текст] / Ф. Г. Кочетов. – М.: Недра, 1991. – 207 с.: ил.
149 Кошкарев, А. В. Геоинформатика [Текст] / А. В. Кошкарев, В. С. Тикунов; под общ. ред. Д. В. Лисицкого. – М.: Картоцентр – Геодезиздат, 1993. – 213 с.
ил.
150 Кузнецов, П. Н. Геодезическое инструментоведение [Текст]: учеб. для
вузов / П. Н. Кузнецов, И. Ю. Васютинский, Х. К. Ямбаев. – М.: Недра, 1984. –
364 с.
151 Лаврова, Н. П. Аэрофотосъемка, аэрофотосъемочное оборудование
[Текст] / Н. П. Лаврова, А. Ф. Стеценко. – М.: Недра, 1981. – 295 с.
152 Лазерное сканирование при проведении обследований зданий и сооружений ТЭС [Текст] / А. В. Комиссаров, А. П. Манеев, А. В. Середович,
А. В. Иванов // Электрические станции.− 2013. – № 9. – С. 33–37.
153 Лазерные сканеры Callidus [Электронный ресурс] : офиц. сайт строит.
портала GVOZDIK.RU. – Режим доступа: http://www.mediaglobe.ru
154 Лазерный 3D сканер Trimble GX – современный геодезический инструмент для быстрого измерения координат и получения цифровых изображений
объектов
[Электронный
ресурс]:
сайт
Навгеоком.
–
Режим
доступа:
www.uralgeo.ru/catalogue/022543-148-RU_GX_3Dscanner_DS_1005_lr.pdf
155 Лебедев, Н. Н. О построении специальных сетей, геодезического обоснования [Текст] / Н. Н. Лебедев // Геодезия и картография. – 1975. − № 1. –
С. 23–29.
156 Левчук, Г. П. Прикладная геодезия: Основные методы и принципы инженерно-геодезических работ [Текст] : учебник для вузов / Г. П. Левчук,
В. Е. Новак, В. Г. Конусов. – М.: Недра, 1981. – 438 с.
254
157 Лимаренко, А. А. Способ создания тест-объектов для автоматизированных фотограмметрических комплексов [Текст] / А. А. Лимаренко // Геодезия и
картография. – 1988. − № 7. – С. 33–36.
158 Лисицкий, Д. В. Автоматизированные информационно-измерительные
системы [Текст] : учеб. пособие / Д. В. Лисицкий, В. А. Середович. – Новосибирк:
НИИГАиК, 1989. – 96 с.
159 Лисицкий, Д. В. Основные принципы цифрового картографирования
местности [Текст] / Д. В. Лисицкий. – М.: Недра, 1988. – 261 с.
160 Литвинов,
В.
А.
Геодезическое
инструментоведение
[Текст]
/
В. А. Литвинов, В. М. Лобачев, Н. Н. Воронков. – М.: Недра, 1971. – 328 с.
161 Лобанов,
А.
Н.
Фотограмметрия
[Текст]:
учеб.
для
вузов
/
А. Н. Лобанов.− 2-е изд., перераб. и доп. – М.: Недра, 1984. – 552 с.
162 Лобачев, В. М. Радиоэлектронная геодезия [Текст] / В. М. Лобачев. –
М.: Недра, 1980. – 327 с.
163 Лысов, Г. Ф. Поверки и исследования теодолитов и нивелиров в полевых условиях [Текст] / Г. Ф. Лысов. – М.: Недра, 1978. – 96 с.
164 Малявский, Б. К. Аналитическая обработка фотограмметрической информации в целях инженерных изысканий / Б. К. Малявский, А. А. Жириновский.
– М.: Недра, 1984. – 220 с.
165 Маркузе, Ю. И. Алгоритмы для уравнивания геодезических сетей на
ЭВМ [Текст] / Ю. И. Маркузе. – М.: Недра, 1989. – 248 с.: ил.
166 Маркузе, Ю. И. Геодезия. Вычисление и уравнивание геодезических
сетей [Текст] : справ. пособие / Ю. И. Маркузе, Е. Г. Бойко, В. В. Голубев. – М.:
Картгеоцентр – Геодезиздат, 1994. – 431 с.: ил.
167 Маркузе, Ю. И. К уравниванию комбинированных геодезических сетей
параметрическим способом [Текст] / Ю. И. Маркузе // Изв. вузов. Геодезия и
аэрофотосъемка. – 1973. – № 7. – С. 23–30.
168 Маркузе, Ю. И. Основы уравнительных вычислений [Текст] : учеб. для
вузов / Ю. И. Маркузе. – М.: Недра, 1990. – 240 с.: ил.
255
169 Маркузе, Ю. И. Способ условий с неизвестными и его применение с
контролем грубых ошибок [Текст] / Ю. И. Маркузе, Мансур Жорж // Изв. вузов.
Геодезия и аэрофотосъемка. – 1995. – № 3. – С. 22–30.
170 Маркузе, Ю. И. Уравнивание геодезических измерений с систематическими ошибками [Текст] / Ю. И. Маркузе // Изв. вузов. Геодезия и аэрофотосъемка. – 1974. – № 1. – С. 3–11.
171 Маркузе, Ю. И. Уравнивание и оценка точности плановых геодезических сетей [Текст] / Ю. И. Маркузе. – М.: Недра, 1982. – 191 с.
172 Масленников, А. С. Поверка электронных геодезических дальномеров
[Текст/ А. С. Масленников, А. А. Кирпичев, А. А. Лимаренко // Геодезия и картография. – 1996. − № 2. – С. 17–18.
173 Масловский, Э. Б. Способы исследования и поверок фототеодолитных
камер [Текст] / Э. Б. Масловский // Геодезия и картография. – 1982. − № 2. –
С. 38–42.
174 Машимов, М. М. Уравнивание геодезических сетей [Текст] /
М. М. Машимов. – 2-е изд., перераб. и доп. – М.: Недра, 1989. – 280 с.: ил.
175 Мельников, С. Р. Инновации в создании цифровых моделей – трехмерные лазерные безотражательные сканирующие системы [Текст] / С. Р. Мельников,
О. В. Дроздов // Нефтяное хозяйство. – 2001. – № 6. – С. 26–27.
176 Мерзенин, А. В. Симметричная модель ослабления влияния боковой
рефракции при азимутальных измерениях [Текст] / А. В. Мерзенин // Изв. вузов.
Геодезия и аэрофотосъемка. – 1981. – № 4. – С. 25–29.
177 Методы и приборы высокоточных геодезических измерений в строительстве [Текст] / В. Д. Большаков и др.; под. ред. В. Д. Большакова. – М.: Недра,
1976, – 335 с.
178 Михайлов, А. П. Применение стереоскопического метода для наблюдения и обработки результатов трехмерного лазерного сканирования [Текст] /
А. П. Михайлов, М. Г. Синькова // Геодезия и картография. – 2003. − № 9. –
С. 24–28.
256
179 Михеечев, В. С. Геодезические светодальномеры [Текст] / В. С. Михеечев. – М.: Недра, 1979. – 222 с.
180 Мозжухин, О. А. Метод учета вертикальной рефракции с использованием метеопараметров атмосферы [Текст] / О. А. Мозжухин // Изв. вузов. Геодезия и аэрофотосъемка. – 1981. – № 5. – С. 56–63.
181 Мозжухин, О. А. Определение поправок за влияние рефракции в тригонометрическое нивелирование [Текст] / О. А. Мозжухин // Геодезия и картография. – 1994. − № 6. – С. 16–17.
182 Мониторинг деформаций сооружений в сочетании с технологией трехмерного моделирования [Текст] / А. В. Комиссаров, Т. А. Широкова, В. А. Середович и др.// Геодезия и картография. – 2006. – № 6. – С. 12–14.
183 Мысовских, И. П. Лекции по методам вычислений [Текст] /
И. П. Мысовских. – М.: Физматгиз, 1962. – 344 с.: ил.
184 Наземное лазерное сканирование: монография [Текст] / А. В. Комиссаров, В. А. Середович, Д. В. Комиссаров, Т. А. Широкова. – Новосибирск: СГГА,
2009. – 261 с.
185 Нейман, Ю. М. О назначении весов по эмпирическим дисперсиям
[Текст] / Ю. М. Нейман // Изв. вузов. Геодезия и аэрофотосъемка. – 1968. – № 3. –
С. 26–31.
186 О вариационном методе регуляризации при уравнивании свободных
геодезических сетей [Текст] / А. Н. Тихонов и др.// Изв. вузов. Геодезия и аэрофотосъемка. – 1978. – № 3. – С. 3–10.
187 О математическом моделировании геодезической сети 2 класса [Текст]
/ П. А. Гайдаев и др.// Изв. вузов Геодезия и аэрофотосъемка. – 1975. – № 5. –
С. 23–33.
188 Островский, А. Л. Теория и практика флуктационного метода определения вертикальной рефракции [Текст] / А. Л. Островский, А. И. Мороз // Изв.
вузов. Геодезия и аэрофотосъемка. – 2000. – № 3. – С. 11–29.
257
189 Падве, В. А. Показатель точности геопространственных данных [Текст]
/ В. А. Падве // Геодезия и картография. – 2005. – № 1. – С. 18–19.
190 Падве, В. А. Построение и исследование математических моделей в
фотограмметрии методами регрессионного анализа [Текст] : метод. указания
[Текст] / В. А. Падве, Т. А. Широкова. – Новосибирск: НИИГАИК, 1993. – 21 с.
191 Падве, В. А. Две теоремы об отношении дисперсий уравненных измерений, дисперсий МНК-поправок и дисперсий исходных измерений [Текст] /
В. А. Падве // Вестник СГГА.– Вып. 1(14). – 2011. – Вып. 1 (14).− С. 17–20.
192 Пат. 2429449 Российской Федерации, МПК G01C 1/00. Способ определения погрешности измерения углов наземным лазерным сканером [Текст] /
Комиссаров А. В., Комиссаров Д. В., Середович В. А., Куликов А. В.; заявитель и
патентообладатель
Сибирская
государственная
геодезическая
академия.–
2010120384/28 ; заявл. 20.05.2010 ; опубл. 20.09.2011 № 26. – 5 с.: ил. 1.
193 Пат. 2429450 Российской Федерации, МПК G01C 3/00. Способ определения погрешности измерения расстояний наземным лазерным сканером [Текст] /
Комиссаров А. В., Комиссаров Д. В., Куликов А. В. ; заявитель и патентообладатель Сибирская государственная геодезическая академия. – 2010107063/28 ; заявл.
25.02.2010 ; опубл. 20.09.2011 № 26. – 6 с.: ил. 2.
194 Пат. 2470266 Российской Федерации, МПК G01F 17/00. Способ градуировки резервуара шарового (сферического) для определения вместимости, соответствующей
высоте
его
наполнения
[Текст]
/
Комиссаров
А.
В.,
Комиссаров Д. В., Злыгостева Г. В., Радченко А. В., Уварова В. А. – заявитель и
патентообладатель Сибирская государственная геодезическая академия. −
2011110593/28 ; заявл. 21.03.2011 ; опубл. 20.12.2012 № 35. – 7 с.: ил. 1.
195 Плотников, В. С. Геодезические приборы [Текст] : учеб. для вузов /
В. С. Плотников. – М.: Недра, 1987. – 396 с.: ил.
196 Плотников, В. С. Некоторые вопросы характера проявления ошибок
осевых систем в различных типах угломерных приборов [Текст] / В. С. Плотни-
258
ков, Р. А. Алексанкина // Изв. вузов. Геодезия и аэрофотосъемка. – 1986. – № 2. –
С. 105–110.
197 Плотников, В. С. О некоторых методологических вопросах при определении информационных характеристик геодезических и других измерительных
приборов (в порядке обсуждения) [Текст] / В. С. Плотников, С. Ф. Федоров // Изв.
вузов. Геодезия и аэрофотосъемка. – 1980. – № 6. – С. 93–100.
198 Плотников, В. С. О принципах построения угломерных приборов с автоматическим отсчетом и обработкой результатов измерений [Текст] / В. С. Плотников, В. Н. Баранов, Р. А. Алексанкина // Изв. вузов. Геодезия и аэрофотосъемка.
– 1991. – № 2. – С. 103–108.
199 Полигон для исследования систем, формирующих изображение [Текст]
/ И. Г. Журкин и др.// Геодезия и картография. – 1994. − № 1. – С. 24–26.
200 Пособие по вычислению координат и высот опознаков / С. Г. Морозков
и др.; под общ. ред. В. Ф. Павлова. – М.: Геодезиздат, 1955. – 84 с.
201 Построение трехмерных моделей спортивных сооружений средствами
лазерного сканирования (на примере Новосибирского биатлонного комплекса)
[Текст] / Д. В. Комиссаров и др.// ГЕО-Сибирь-2005 : сб. материалов науч. конгр.,
25–29 апр. 2005 г., Новосибирск. – Новосибирск: СГГА, 2005. – Т. 5.− С. 216–220.
202 ПОТ. РО–14000–00. Положения. Техническая эксплуатация промышленных зданий и сооружений [Текст].− Введ. 12.02.01.– М., 2001.
203 Правила устройства и безопасной эксплуатации лифтов [Текст]. –
СПб.: ДЕАН, 2000. – 224 с.
204 Правила устройства и безопасной эксплуатации эскалаторов [Текст]. –
СПб. : ДЕАН, 2001. – 102 с.
205 Прилепин, М. Т. Инструментальные методы геодезической рефрактометрии [Текст] / М. Т. Прилепин, А. Н. Голубев. – М.: ВИНИТИ.− Т. 15. –
С. 37–82.
206 Применение трехмерного лазерного сканирования в отечественном судостроении [Текст] / В. П. Суетин и др.// Геопрофи. – 2005. – № 1. – С. 13–16.
259
207 Проворов, К. Л. О точности сплошных сетей триангуляции [Текст /
К. Л. Проворов. – М.: Геодезиздат, 1956. – 164 с.
208 Производство топографо-геодезических работ по созданию топографических планов и электронных планов земельных участков, находящихся в пользовании ОАО «Сибнефть – Ноябрьскнефтегаз» [Текст] : отчет о НИР.− Новосибирск, 2006.− 181 с. ГР012005.03279.
209 Пушников, А. Г. Математическое описание основных характеристик
геодезических оптико-электронных приборов [Текст] / А. Г. Пушников, В. С. Титов // Изв. вузов. Геодезия и аэрофотосъемка. – 1981. – № 1. – С. 113–118.
210 Радиогеодезические и электрооптические измерения [Текст] : учеб. для
вузов / В. Д. Большаков и др. – М.: Недра, 1985. – 303 с.: ил.
211 РД 08–95–95. Положение о системе технического диагностирования
сварных вертикальных цилиндрических резервуаров для нефти и нефтепродуктов
[Текст].− Введ. 01.09.1995.− М., 1995.
212 РД 39–117–91. Инструкция по
маркшейдерским и топографо-
геодезическим работам в нефтяной и газовой промышленностях [Текст]. − Введ.
01.04.1992. − М., 1992. − 117 с.
213 Рис, У. Г. Основы дистанционного зондирования [Текст] / У. Г. Рис. –
М.: Техносфера, 2006. – 336 с. : 12 с. цв. вклейки.
214 Рудный, Р. М. О расчете необходимого количества точек испытательного полигона для калибровки аэрофотоаппарата [Текст] / Р. М. Рудный // Изв.
вузов. Геодезия и аэрофотосъемка. – 1980. – № 3. – С. 107–111.
215 Русяева, Е. А. Об использовании преобразующей функции при исследовании рядов ошибок геодезических измерений [Текст] / Е. А. Русяева // Изв.
вузов. Геодезия и аэрофотосъемка. – 1982. – № 5. – С. 20–27.
216 Русяева, Е. А. Регрессионный анализ преобразованных величин [Текст]
/ Е. А. Русяева // Изв. вузов. Геодезия и аэрофотосъемка. – 1982. – № 6. – С. 46–54.
217 Савиных, В. П. Аэрокосмическая фотосъемка [Текст] / В. П. Савиных,
А. С. Кучко, А. Ф. Стеценко. – М.: Картогеоцентр – Геодезиздат, 1997. – 378 с.
260
218 Селиханович, В. Г. Геодезия [Текст] : учебник для вузов / В. Г. Селиханович. – М.: Недра, 1981. – 544 с.− 2 ч.
219 Сергеев, А. Г. Метрология: учеб. пособие для вузов / А. Г. Сергеев,
В. В. Крохин. – М.: Логос, 2000. – 408 с.
220 Середович, А. В. Методика определения геометрических характеристик
стальных цилиндрических резервуаров с использованием лазерного сканирования
[Текст] /А. В. Середович, А. В. Иванов // ГЕО-Сибирь-2005 : сб. материалов науч.
конгр. «ГЕО-Сибирь-2005», 25–29 апр. 2005 г., Новосибирск. – Новосибирск:
СГГА, 2005. – Т. 5.− С. 213–215.
221 Середович, А. В. Применение трёхмерного лазерного сканирования для
определения деформаций вертикальных резервуаров [Текст] / А. В. Середович,
А. В. Иванов // Лазерное сканирование и цифровая аэросъемка. Сегодня и завтра :
тез. докл. V-й Междунар. конф. и выставки. – М.: XportMedia, 2005. – С. 43–46.
222 Синькова, М. Г. Фотограмметрическая съемка архитектурных сооружений с использованием данных наземного лазерного сканирования [Текст] /
М. Г. Синькова // Геодезия и картография. – 2002. − № 2. – С. 29–33.
223 Скейвалас, И. М. Влияние систематических ошибок на критерий эффективности оценки математического ожидания и дисперсии при усеченном распределении [Текст] / И. М. Скейвалас // Изв. вузов. Геодезия и аэрофотосъемка. –
1991. – № 6. – С. 31–36.
224 Скогорев, В. П. Лазеры в геодезии [Текст] / В. П. Скогорев. – М.:
Недра, 1987. – 120 с.
225 Смирнов, И. В. Краткий курс математической статистики для технических приложений / И. В. Смирнов. – М.: Физматгиз, 1959. – 171 с.
226 СНиП 3.01.03–84. Геодезические работы в строительстве [Текст]. –
Утв. 04.02.85. ЦИТП Госстроя СССР. – М.: Стройиздат, 1985.
227 Соколов, А. М. Основные понятия архитектурного проектирования
[Текст] / А. М. Соколов. – Л.: ЛГУ, 1976. – 192 c.
261
228 Солдатов, В. П. Анализ некоторых способов ослабления погрешностей
лимбов высокоточных оптико-электронных угломеров [Текст] / В. П. Солдатов //
Изв. вузов. Геодезия и аэрофотосъемка. – 2002. – № 1. – С. 122–128.
229 Соцков, И. И. Некоторые вопросы реализации оптимальных проектов
геодезических сетей линейно-углового типа [Текст] / И. И. Соцков // Изв. вузов.
Геодезия и аэрофотосъемка. – 1982. – № 5. – С. 44–49.
230 СП 11–104–97. Инженерно-геодезические изыскания для строительства
[Текст]. – Введ. 14.10.1997. – М.,1997. – 86 с.
231 СП 11–104–97. Инженерно-геодезические изыскания для строительства. Часть II. Выполнение съемки подземных коммуникаций при инженерногеодезических изысканиях для строительства [Текст]. – Введ. 01.01.2001. – М.:
ПНИИИС,2001. – 45 с.
232 Спиридонов, А. И. О выборе условий проверки геодезических средств
измерений [Текст] / А. И. Спиридонов // Геодезия и картография. – 1994. − № 1. –
С. 14–17.
233 Спиридонов, А. И. Основы геодезической метрологии [Текст] : производственно-практ. изд. / А. И. Спиридонов. – М.: Картогеоцентр-Геодезиздат,
2003 – 248 с.: ил.
234 Спиридонов, А. И. Поверка геодезических приборов [Текст] /
А. И. Спиридонов, Ю. Н. Калугин, М. В. Кузьмин. – М.: Недра, 1981. – 159 с.
235 Спиридонов, А. И. Справочник-каталог геодезических приборов
[Текст] / А. И. Спиридонов, Ю. Н. Кулагин, Г. С. Крюков. – М.: Недра, 1984. –
238 с.
236 Справочник
геодезиста
[Текст]
:
в
2-х
кн.
/
под
ред.
В. Д. Большакова, Г. П. Левчука. – 3-е изд., перераб. и доп. – М.: Недра, 1985. –
455 с.− кн. 1.
237 Справочник геодезиста [Текст] : в 2-х кн. / под ред. Большакова В.Д. и
Левчука Г. П. – 3-е изд., перераб. и доп. – М.: Недра, 1985. – 440 с.− кн. 2.
262
238 Справочник по специальным функциями. С формулами, графиками и
математическими таблицами [Текст] / под общ. ред. М. Абрамовица, И. Стиган.
– М.: Наука, 1979. – 832 с.
239 Справочник по теории вероятности и математической статистике
[Текст] / В. С. Королюк и др. – М.: Наука, 1985. – 640 с.
240 Сравнительные оценки применения термодинамической модели атмосферы при введении метеопоправки в светодальномерные измерения [Текст] /
В. В. Виноградов и др.// Изв. вузов. Геодезия и аэрофотосъемка. – 1993. – № 5. –
С. 18–20.
241 Судаков, С. Г. Основные геодезические сети [Текст] / С. Г. Судаков. –
М.: Недра, 1975. – 368 с.
242 Суханов, А. С. Выявление и учет боковой рефракции при угловых измерениях в условиях центральной Азии [Текст] / А. С. Суханов // Изв. вузов. Геодезия и аэрофотосъемка. – 1995. – № 4. – С. 32–41.
243 Технология создания трехмерных цифровых моделей различного назначения [Электронный ресурс] : офиц. сайт компании НПП «Геокосмос». –
Режим доступа: http://www.geokosmos.ru
244 Тихонов, А. Н. Методы решения некорректных задач [Текст] /
А. Н. Тихонов, В. Я. Арсенин. – М.: Наука, 1986. – 287 с.
245 Тревого, И. С. О зависимости «постоянной» поправки светодальномера
от фазового угла [Текст]/ И. С. Тревого, В. В. Саломатин // Геодезия и картография. – 1983. − № 8. – С. 22–23.
246 Урмаев, Н. А. Элементы фотограмметрии [Текст] / Н. А. Урмаев. – М.:
Геодезиздат, 1941. – 218 с.
247 Уставич, Г. А. О влиянии вибрации на светодальномерные измерения
[Текст] / Г. А. Уставич, А. В. Кошелев, О. П. Пошивайло // Геодезия и картография. – 1999. − № 8. – С. 8–10.
263
248 Федоров, В. В. Теория оптимального эксперимента (планирование регрессионных экспериментов) [Текст] : монография / В. В. Федоров. – М.: Наука,
1971. – 312 с.
249 Федосов, Б. Т. Об исследовании когерентного светодальномера с активным отражателем [Текст] / Б. Т. Федосов // Изв. вузов. Геодезия и аэрофотосъемка. – 1981. – № 5. – С. 122–128.
250 Федосов, Б. Т. О точности светодальномерных измерений в турбулентной атмосфере [Текст] / Б. Т. Федосов // Изв. вузов. Геодезия и аэрофотосъемка. –
1980. – № 3. – С. 41–49.
251 Ферстнер, Г. Уравнивание полигонометрических сетей [Текст] /
Г. Ферстнер; пер. с нем. – М.: МИИГАиК, 1937.
252 Фрейдин, А. Лазерное 3D-сканирование в геодезии для строительства
[Текст] / А. Фрейдин // Строительная инженерия. – 2005. − № 1. – С. 40–43.
253 Халугин, Е. И. Цифровые карты [Текст] / Е. Н. Халугин, Е. А. Жалковский, Н. Д. Жданов; под ред. Е. И. Халугина. – М.: Недра, 1992. – 419 с.
254 Хргиан, А. Х. К вопросу о теории боковой рефракции [Текст] /
А. Х. Хргиан // Изв. вузов. Геодезия и аэрофотосъемка. – 1961. – № 3. – С. 17–22.
255 Цветков, В. Я. Цифровые карты и цифровые модели [Текст] /
В. Я. Цветков // Изв. вузов. Геодезия и аэрофотосъемка. – 2000. − № 2. – С. 147–
155.
256 Чандра, А. М. Дистанционное зондирование и географические информационные системы [Текст] / А. М. Чандра, С. К. Гош. – М.: Техносфера, 2008. –
312 с. 16 с.: цв. вклейки.
257 Чибуничев, А. Г. Разработка автоматизированной технологии создания
векторной модели объекта по результатам трехмерного лазерного сканирования и
цифровой фотосъемки [Текст] / А. Г. Чибуничев, В.П. Галахов // Изв. вузов Геодезия и аэрофотосъемка. – 2011. – № 2. – С. 89–92.
264
258 Чибуничев, А. Г. Технология совместной обработки результатов наземного лазерного сканирования и цифровой фотосъемки [Текст] / А. Г. Чибуничев, В. П. Галахов // Инженерные изыскания. – 2011. – № 2. –С. 32–36.
259 Шануров, Г. А. Геотроника. Наземные спутниковые радиоэлектронные
средства и методы выполнения геодезических работ [Текст] : учеб. пособие /
Г. А. Шануров, С. Р. Мельников. – М.: Репрография; МИИГАиК, 2001. – 136 с.:
ил.
260 Шевчук, П. М. Определение «постоянной» поправки радио- и светодальномерами по продольным невязкам ходов полигонометрии [Текст] /
П. М. Шевчук // Геодезия и картография. – 1976. − № 2. – С. 34–37.
261 Шеховцов, Г. А. О скалярной оценке точности положения точки в
трехмерном пространстве [Текст] / Г. А. Шеховцов // Изв. вузов. Геодезия и аэрофотосъемка. – 1990. – № 2. – С. 27–31.
262 Электронные тахеометры Topcon GTS-601/602/603/605 [Электронный
ресурс]
:
сайт
компании
ГЕОМОНОПОЛИЯ.
−
Режим
доступа:
http://www.geomonopolya.ru/tahymeter/topcon_gts600.shtml.
263 Юношев, Л. С. Боковая рефракция света при измерениях углов [Текст] /
Л. С. Юношев. – М.: Недра, 1969. – 96 с.
264 Яковлев, Н. В. Высшая геодезия [Текст] : учеб. для вузов /
Н. В. Яковлев. – М.: Недра, 1989. – 445 с.: ил.
265 Яковлев, Н. В. К теории и практике учета суточного хода рефракции
при угловых измерениях и азимутальных определениях в геодезических сетях
[Текст] / Н. В. Яковлев // Геодезия и картография. – 1969. − № 8. – С. 8–17.
266 Яковлев, Н. В. Условия, при которых боковая рефракция оптического
луча стремится к минимуму [Текст] / Н. В. Яковлев // Изв. вузов. Геодезия и аэрофотосъемка. – 1969. – № 5. – С. 8–19.
267 Якушенков, Ю. Г. Теория и расчет оптико-электронных приборов
[Текст] : учебник / Ю. Г. Якушенков. – 5-е изд., перераб. и доп. – М.: Логос, 2004.
– 472 с.: ил.
265
268 Ямбаев, Х. К. Анализ влияния инструментальных ошибок в накопительных растровых датчиках направлений с использованием компьютерной модели датчика [Текст] / Х. К. Ямбаев, М. М. Карсунская // Изв. вузов. Геодезия и аэрофотосъемка. – 2000. – № 4. – С. 115–128.
269 Ямбаев, Х. К. Возможные пути уменьшения влияния инструментальных ошибок электронных геодезических приборов на точность угловых измерений [Текст] / Х. К. Ямбаев, М. М. Карсунская // Изв. вузов. Геодезия и аэрофотосъемка. – 2000. – № 4. – С. 100–115.
270 Ямбаев, Х. К. Геодезическое инструментоведение. Практикум [Текст] :
учеб. пособие для вузов / Х.К. Ямбаев, Н.Х. Голыгин. – М.: ЮНИКС, 2005. –
312 с.: ил.
271 3D Modeling and metric analysis in architectural heritage: photogrammetry
and laser scanning [Text] / M. Caprioli и др. // Procs. 6th Conference on Optical 3-D
Measurement Techniques, PP. 206–213, Zrich, Switzerland, September 22–25, 2003.
272 Akca, D. Full automatic registration of laser scanning point clouds [Text] /
D. Akca // Procs. 6th Conference on Optical 3-D Measurement Techniques,
PP. 330–337, Zurich, Switzerland, September 22–25, 2003.
273 A new calibration system of a non-metric digital camera [Text] / R. Matsuoka и др.// Procs. 6th Conference on Optical 3-D Measurement Techniques, pp 130–137,
Zurich, Switzerland, September 22–25, 2003.
274 Boehler, W. 3D Scanning instruments [Electronic resource] / W. Boehler,
A. Marbs //. Proc. of the CIPA WG6 Int. 2002. Workshop on scanning for cultural heritage recording. – Режим доступа: http://www.isprs.org/commission5/workshop/
275 Calibrating geodetic instruments. Standard for calibration and testing [Text]
/ P. Savveidis и др.// “Magazine for surveying, mapping & GIS professional” Geoinformatics 2004. – № 7. – PP. 18–21.
276 Calibration and testing of a terrestrial laser scanner [Text] / D. Lichti и др.//
Int. Arch. of Photogrammetry and Remote Sensing. – 2000. – Vol. XXXIII, Part B5. –
pp. 485–492.
266
277 Caspary, W. Zur Positionsbestimmung mim inertialen Vermessungssystemen [Text]/ W. Caspary, R. Kőnig// Vermessungs wesen und Raumordnung, 1986. –
№ 48. – PP. 5–6.
278 Cavity monitoring system [Electronic resource]: сайт Optech Inc. − Режим
доступа: http://www.optech.on.ca/PDF/CMSbrochure.pdf
279 Comparison of digital photogrammetry and laser scanning [Text]/ D. Lichti
и др.// Proc. of the CIPA WG6 Int. Workshop on scanning for cultural heritage recording. 2002.
280 Cramer, M. Direct georeferencing using GPS/Inertial exterior orientations
for photogrammetric applications [Text] / M. Cramer, D. Stallmann and N. Haala //
International Archives of Photogrammetry and Remote Sensing. 2000. – v. 33, part B3.
– PP. 198–205.
281 Calibration and testing of a terrestrial laser scanner [Text] / D. Lichti и др.//
Int. Arch. of Photogrammetry and Remote Sensing. – 2000. – Vol. XXXIII, Part B5. –
PP. 485–492.
282 Calibrating geodetic instruments. Standard for calibration and testing [Text]
/ P. Savveidis и др.// “Magazine for surveying, mapping & GIS professional” Geoinformatics 2004. – №7. – PP. 18–21.
283 Callidus CP3200 Specs – Callidus CP 3200 – Technical Specifications
[Electronic resource] : сайт Callidus precision systems. − Режим доступа:
http://www.callidus.de/en/cp3200/techn daten.html.
284 Deformation measurement using terrestrial laser scanning at the hydropower
station of Gabeikovo [Text] / T. Schäfer и др.// INGEO 2004 and Regional Central and
Eastern European Conference on Engineering Surveying, Bratislava, Slovakia,
Novermber 11–13, 2004.
285 Development of rotation scanner, testing of laser scanners [Text] /
B. Koska и др.// INGEO 2004 and Regional Central and Eastern European Conference
on Engineering Surveying, Bratislava, Slovakia, Novermber 11–13, 2004.
267
286 Dörstel, C. DMC – photogrammetric accuracy – calibration aspects and generation of synthetic DMC images [Text] / C. Dörstel, K. Jacobsen, D. Stallmann //
Procs.
6th
Conference
on
Optical
3-D
Measurement
Techniques,
PP. 74–82, Zurich, Switzerland, September 22–25, 2003.
287 Flight test results of an integrated GPS/INS/Pseudolite system for aircraft
precision approach and landing [Electronic resource] / H.K. Lee, J. Wang, B. K. H.
Soon
and
other.
–
2004.
–
5
p.
–
Англ.
–
Режим
доступа
http://www.gmat.unsw.edu.au/snap/publications/lee_etal2004b.pdf
288 Ingensand, H. Performances and experiences in terrestrial laser scanning
[Text] / H. Ingensand, A. Ryf, T. Schulz // Procs. 6th Conference on Optical 3-D Measurement Techniques, PP. 236–243, Zurich, Switzerland, September 22–25, 2003.
289 Georgantas, A. Image to point cloud method of 3D-modeling [Text] /
A. Georgantas, M. Brédif, M. Pierrot-Desseilligny// ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences XXII ISPRS Congress, Commission III/4, 25 August – 01 September 2012, Melbourne, Australia. – 2012. –
Vol. XXXIX-B3. – PP. 23-28.
290 Grejner-Brzezinska, D. A. GPS Error Modeling and OTF Ambiguity Resolution for High-Accuracy GPS/INS Integrated System [Text] / D.A. GrejnerBrzezinska, C.K. Toth // Journal of Geodesy. 1998. – vol. 72. – РР. 626–638.
291 Grejner-Brzezinska, D.A. High-accuracy direct aerial platform orientation
with tightly coupled GPS/INS system [Electronic resource] / D. A. Grejner-Brzezinska,
C.
Toth.
–
2004.
–
79
p.
–
Англ.
–
Режим
доступа
http://www.dot.state.oh.us/research/2004/Aerial/14781-FR.pdf
292 GS200 3D laser scanner [Electronic resource] : сайт Mensi. − Режим доступа: http://www.mensi.com/Website2002/Specs/SpecG200.pdf.
293 GS100 3D laser scanner [Electronic resource] : сайт Mensi. − Режим доступа: http://www.mensi.com/Website2002/Specs/SpecG100.pdf.
294 Hannah, J. Inertial Surveying Systems and their use is Geodetic Positioning
[Text] / J. Hannah// Journal of Surveying Engineering. – 1984. – № 1. – PP. 110–115.
268
295 Hein, G.W. Form GPS and GLONASS via EGNOS to Gallileo-positioning
and navigation in the third millennium [Text] / G.W. Hein // GPS Solutions. – 2000.
Vol. 3, № 4. – P. 39–47. Англ.
296 Hofmann-Wellenhof, B. Global Position System. Theory and Praxis [Text] /
B. Hofmann-Wellenhof, H. Lichtenegger, J. Collins. – New York: Wien. 1993. – 200 p.
англ.
297 Iavaronea, A. Calibration verification facilities for long range laser scanners
[Text]/ A. Iavaronea, E. Martina // Procs. 6th Conference on Optical 3-D Measurement
Techniques, pp 268–278, Zurich, Switzerland, September 22–25, 2003.
298 I-Site Studio 3D laser imaging software [Electronic resource] : сайт I-Site
Pty. − Режим доступа: http://www.isite3d.com/pdf/studio_brochure.pdf
299 Jäger, R. State of the art and present developments of a general concept for
GPS-based height determination [Text] / R. Jäger // Proc. of the First Workshop on GPS
and Mathematical Geodesy in Tanzania (Kilimanjaro Expedition 1999).
300 HDS2500 3D laser scanner [Electronic resource] : сайт Leica Geosystems
HDS Inc. − Режим доступа: http://www.cyra.com/products/hds2500_specs.html.
301 HDS3000 3D laser scanner [Electronic resource] : сайт Leica Geosystems
HDS Inc. − Режим доступа: http://www.cyra.com/products/HDS3000_specs.html.
302 HDS4500 3D laser scanner [Electronic resource] : сайт Leica Geosystems
HDS Inc. − Режим доступа: http://www.cyra.com/products/HDS4500_description.html
303 Kern, F. Automatisierte Modellierung von Bauwerksgeometrien aus 3DLaserscannerdaten [Text] /F. Kern // Geodätische Schriftenreihe der Technischen Universität Braunschweig, 2003. – Nr. 19.
304 Komissarov, A.V. Use of 3D Laser Scanning Technology for Surveying of
the FAKEL Cabel-Stayed Bridge [Text] / A. V. Komissarov, A.V. Seredovich,
A.V. Ivanov, V.A. Seredovich. Proceedings of the FIG WG 6.3 Workshop on Currernt
Challenges of Engineering Surveys. 23-24 April 2008, Novosibirsk, Russian Federation.
– PP. 68–75.
269
305 Kopacik, A. Optimal configuration of standpoints by application of laser terrestrial scanners [Text] / A. Kopacik, M. Korbosova // INGEO 2004 and Regional Central and Eastern European Conference on Engineering Surveying, Bratislava, Slovakia,
Novermber 11–13, 2004.
306 Laser mirror scanner LMS-Z210 technical documentation and users instructions [Text]. – Riegl Austria, 2002.
307 Laser mirror scanner LMS-Z360 technical documentation and users instructions [Text]. –Riegl Austria, 2004.
308 Laser mirror scanner LMS-Z420 technical documentation and users instructions [Text]. – Riegl Austria, 2006.
309 Laser scanner iQsun625 [Electronic resource] : сайт iQvolution. – Режим
доступа: http://www.iqvolution.com/pages_e/3dls_e/iQsun625_e.pdf
310 Laser scanner iQsun880 [Electronic resource] : сайт iQvolution. – Режим
доступа: http://www.iqvolution.com/pages_e/3dls_e/iQsun880_e.pdf
311 Lee, H. K. Carrier phase processing issues for high accuracy integrated
GPS/Pseudolite/INS Systems [Electronic resource] / H. K. Lee, J. Wang, C, Rizos. –
2003.
–
21
p.
–
Англ.
–
Режим
доступа
http://www.gmat.unsw.edu.au/snap/publications/lee_etal2003c.pdf
312 Leick, A. GPS Satellite Surveying [Text] / A. Leick. – New York:
A Willey-Interscience Publication. – 1995. – 560 p. англ.
313 Lichti, D. Modeling of laser scanners NIR intensity for multi-spectral point
cloud classification [Text] / D. Lichti // Procs. 6th Conference on Optical
3-D Measurement Techniques, pp 282-289, Zurich, Switzerland, September
22–25, 2003.
314 Misra, P.N. Global Position System. Signals, Measurements and Performance [Text] / P.N. Misra, P. Enge. – USA: Ganga-Jamuna Press. – 2001. – 390 p.
англ.
315 Monnier, F.Trees detection from laser point clouds acquired in dense urban
areas by a mobile mapping system [Text] / F. Monnier, B. Vallet, and B. Soheilian //
270
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information
Sciences XXII ISPRS Congress, Commission III/4, 25 August – 01 September 2012,
Melbourne, Australia. – 2012. – Vol. I-3. – PP. 245-250.
316 New developments in 3D laser scanners from: static to dynamic multi-model
systems [Text] / F. Blais и др.// Procs. 6th Conference on Optical 3-D Measurement
Techniques, PP. 244–251, Zurich, Switzerland, September 22–25, 2003.
317 Orientation and dense reconstruction of unordered terrestrial and aerial wide
baseline image sets [Text] / J. Bartelsen, H. Mayer, H. Hirschmuller и др. // ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences XXII
ISPRS Congress Commission III/4, 25 August – 01 September 2012, Melbourne, Australia. – 2012. – Vol. I-3. – PP. 25-30.
318 Probabilistic feature matching applied to primitive based registration of TLS
data [Text] / J. Franc¸ ois Hullo, G. Thibault и др.// ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences XXII ISPRS Congress, Commission III/4, 25 August – 01 September 2012, Melbourne, Australia. – 2012. – Vol. I-3. –
PP. 221-226.
319 RapidForm 2004 for reverse engineering [Electronic resource] : сайт Inus
Technology. − Режим доступа: http://www.rapidform.com/RapidForm 3D Scanning
Software - Reverse Engineering & Quality Control.htm
320 RapidForm 2004 for quality inspection [Electronic resource] : сайт Inus
Technology. − Режим доступа: http://www.rapidform.com/RapidForm 3D Scanning
Software – Quality inspection & Quality Control.htm
321 Reconstructor [Electronic resource]: сайт компании Topotek Survey Technologies. − Режим доступа: http://www.topotek.it/rec2engl/index.php
322 Rietdorf, A. A concept for the calibration of terrestrial laser scanners [Text] /
A. Rietdorf, F. Gielsdorf, L. Gruending // INGEO 2004 and Regional Central and Eastern European Conference on Engineering Surveying, Bratislava, Slovakia, Novermber
11–13, 2004.
271
323 Rűeger, J.M. High accuracy in short JSS missions [Text] / J.M. Rűeger //
Bulletin geodesique. – 1986. – Vol. 60, № 2. – PP. 19–27.
324 S10/S25 high accuracy scanner [Electronic resource] : сайт Mensi − Режим
доступа: http://www.mensi.com/Website2002/Specs/SSeries.pdf
325 Schaich, M. 3D-Scaning for archaeology and cultural heritage [Text] /
M. Schaich // “Magazine for surveying, mapping & GIS professional” Geoinformatics
2004. – № 6. – PP. 18–21.
326 Scherer, M. Intelligent tacheometry with integrated image processing instead
of 3D laser scanning? [Text] / M. Scherer // INGEO 2004 and Regional Central and
Eastern European Conference on Engineering Surveying, Bratislava, Slovakia,
Novermber 11–13, 2004.
327 Schlenker, G. Laser Safety [Electronic resource] : сайт the University of
Kentucky. − Режим доступа: http://ehs.uky.edu/radiation/laser_fs.html
328 Software - MODEL, SURVEY [Electronic resource] : сайт компании Faro
Technologies
Company.
−
Режим
доступа:
http://www.iqvolution.com/en/Products/Software.php
329 Stanek, H. Terrestrial laser-scanning – universal method or a specialist’s
tool? [Text] / H. Stanek // INGEO 2004 and Regional Central and Eastern European
Conference on Engineering Surveying, Bratislava, Slovakia, Novermber 11–13, 2004.
330 Tejkal, M. The application of laserscan system in the field of building documentation [Text] / M. Tejkal // GEODIS news. English edition. – 2004. – № 2. –
P. 26–27.
331 Teunissen, P.J.G. GPS for geodesy [Text] / P.J.G. Teunissen, Y. Bock,
G. Beytler et. al. – Berlin: Springer, 1998. – 650 p. англ.
332 Ullrich, A. Using hybrid multi-station adjustment for an integrated camera
laser-scanner system [Text] / A. Ullrich, R. Schwarz, H. Kager // Procs. 6th Conference
on Optical 3-D Measurement Techniques, PP. 298–305, Zurich, Switzerland, September
22–25, 2003.
333 User manual RealWorks Survey 4.1 [Text]. Mensi. 2004. – 232 p.
272
334 User manual 3Dipsos 3.0 [Text]. Mensi. 2004. – 264 p.
335 Weisensee, M. Registration and integration of point clouds using intensity
information [Text] / M. Weisensee, A. Wendt // Procs. 6th Conference on Optical 3-D
Measurement Techniques, pp 290–297, Zurich, Switzerland, September 22–25, 2003.
336 Zamechikova, M. Testing of terrestrial laser systems [Text] / M. Zamechikova, A. Kopacik // INGEO 2004 and Regional Central and Eastern European Conference on Engineering Surveying, Bratislava, Slovakia, Novermber 11–13, 2004.
(обязательное)
Технические характеристики сканеров
Т а б л и ц а А.1 - Характеристики сканеров [93, 153, 206, 283, 292, 293, 300-302, 306-311, 324, 327, 333-335]
ПРИЛОЖЕНИЕ А
273
2
1
– приведено для поверхности, отражающая способность которой 10 %, в скобках для поверхности с отражающей способностью 80 %;
– до поверхности с отражением 84 %;
3
– 800 м до поверхности с коэффициентом отражения 20 %;
4
– предельная дальность действия;
5
– рекомендуемая дальность действия 50 м при 5 % коэффициенте диффузного отражения;
6
– приведено для поверхности, отражающая способность которой 18 %, в скобках для поверхности с отражающей способностью 90 %;
Продолжение таблицы А.1
274
275
ПРИЛОЖЕНИЕ Б
(обязательное)
Графики точности определения элементов внешнего ориентирования двумя
методами уравнивания
Рисунок Б.1 – Погрешности определения элементов внешнего ориентирования в
ходах средней длины и средней длины сторон хода:
каждая марка отображена на пяти сканах (сканерных станциях), кроме опорных марок;
среднее расстояние между сканерными станциями 44 м; данные получены по результатам
полевых измерений сканером Riegl LMS-Z420i
276
Рисунок Б.2 – Погрешности определения элементов внешнего ориентирования в
длинных ходах и больших длинах сторон хода:
каждая марка отображена на пяти сканах (сканерных станциях), кроме опорных марок; среднее
расстояние между сканерными станциями 55 м; исходные данные получены на основе
результатов моделирования
277
Рисунок Б.3 – Погрешности определения элементов внешнего ориентирования в
длинных ходах при сравнительно коротких длинах сторон хода:
каждая марка отображена на семи сканах (сканерных станциях), кроме опорных марок; среднее
расстояние между сканерными станциями 30 м; данные получены на основе результатов
моделирования
278
Рисунок Б.4 – Погрешности определения элементов внешнего ориентирования в
ходах средней длины при сравнительно коротких длинах сторон хода:
каждая марка отображена на трех сканах (сканерных станциях), кроме опорных марок; среднее
расстояние между сканерными станциями 20 м; данные получены по результатам полевых
измерений сканером Leica C10
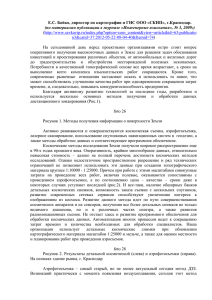
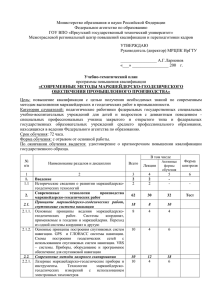
![Наземное лазерное сканирование Focus 3D [ Faro ]](http://s1.studylib.ru/store/data/004674663_1-e2e73e2baa3ff558c74a570f24c4a2c3-300x300.png)