С. А. Бронов
А. В. Марарескул
Автоматизированное проектирование электромеханических систем
Учебное пособие по
теоретической подготовке
2
Содержание
1 Электромеханические устройства и системы ...........................................................6
1.1 Общие понятия об электромеханических системах. ..................................................6
1.1.1 Общие понятия ...........................................................................................................6
1.1.2 Задачи анализа ЭМС ...................................................................................................8
1.1.3 Задачи синтеза ЭМС ..................................................................................................9
1.1.4 Классификация ЭМС...................................................................................................9
1.2 Электромеханические устройства ..............................................................................12
1.2.1 Классификация электромеханических устройств ................................................12
1.2.2 Принципы работы электромеханических устройств ..........................................13
1.3 Общие сведения из механики .....................................................................................15
1.3.1 Законы Ньютона для поступательного и вращательного движения ................15
1.3.2 Механические передаточные устройства (редукторы) ......................................19
1.3.3 Учёт люфтов и упругих свойств механических передач ......................................22
1.3.4 Приведение механической нагрузки к одному валу ................................................25
1.4 Сведения из электротехники .......................................................................................30
1.5 Сведения из теории электромагнитных и магнитных цепей ...................................32
1.6 Законы электромеханики.............................................................................................41
1.7 Двухполюсные и многополюсные электромеханические устройства ....................42
1.8 Явнополюсные и неявнополюсные электрические машины ...................................43
1.9 Электрические машины постоянного тока ................................................................44
1.9.1 Физический принцип работы ...................................................................................44
1.9.2 Устройство машины постоянного тока ...............................................................46
1.9.3 Искрение щеток на коллекторе ..............................................................................48
1.9.4 Генераторы постоянного тока ..............................................................................48
1.9.5 Двигатели постоянного тока..................................................................................50
1.9.6 Механические характеристики двигателей постоянного тока..........................51
1.9.7 Способы управления скоростью двигателей постоянного тока ........................51
1.10 Электрические машины переменного тока .............................................................52
1.10.1 Физический принцип работы. ................................................................................52
1.10.2 Создание вращающегося магнитного поля. .........................................................55
1.11 Синхронные машины .................................................................................................58
1.11.1 Принцип работы. Устройство. ............................................................................58
1.11.2 Синхронные генераторы. .......................................................................................60
1.11.3 Синхронные двигатели. ..........................................................................................60
1.11.4 Способы управления скоростью. Вентильные двигатели. .................................61
1.12 Синхронные двигатели с постоянными магнитами, гистерезисные
двигатели, синхронные реактивные двигатели, шаговые двигатели .....................................62
1.13 Асинхронные машины ...............................................................................................65
1.13.1 Принцип работы. Устройство. ............................................................................65
1.13.2 Механические характеристики и способы управления асинхронным
двигателем. ..................................................................................................................................66
1.14 Параметры и структурные схемы электромеханических систем ..........................69
1.14.1 Структурные схемы и передаточные функции электроприводов
постоянного и переменного ток. ...............................................................................................69
1.14.2 Динамика замкнутых и разомкнутых ЭМС .........................................................71
1.14.3 Энергетика ЭМС и выбор мощности двигателя ................................................72
2 Математические модели электромеханических устройств и систем .................73
2.1 Исходное математическое описание ЭМУ ................................................................73
3
2.1.1 Общие принципы получения математического описания ЭМУ на основе
теории цепей ................................................................................................................................73
2.1.2 Уравнения равновесия напряжений обмоток ЭМУ ..............................................74
2.1.3 Электромагнитный момент ЭМУ ..........................................................................76
2.1.4 Математическое описание простейшей механической нагрузки .......................79
2.1.5 Изображающие векторы в теории ЭМУ ...............................................................83
2.2 Cовмещенное матричное описание ЭМУ ..................................................................86
2.3 Автоматизация получения математических моделей ЭМУ ..................................102
Приложение А .................................................................................................................109
Литературные источники.............................................................................................122
4
ВВЕДЕНИЕ
Электромеханическая система является неотъемлемой частью многих
технических комплексов и автоматизированных систем. Так как целью
большинства промышленных установок является то или иное воздействие на
окружающие объекты. Например, на сырьё, чтобы получить готовую продукцию. Или на дорогу, чтобы переместить груз транспортным средством.
Для повышения эффективности такого воздействия применяют автоматические системы. В целом любая промышленная автоматическая система состоит из трёх частей: информационной, управляющей и силовой. Информационная часть получает информацию об объекте и окружающем мире (через датчики), управляющая часть формирует сигналы, соответствующие желаемому
воздействию (с помощью регуляторов), силовая часть реализует это воздействие на окружающий мир.
При проектировании и исследовании электромеханических систем используются математические модели входящих в них элементов, среди которых главную роль играют модели электромеханических устройств (ЭМУ),
которые в ЭМС могут присутствовать в качестве электродвигателей и датчиков (например, тахогенераторов, сельсинов, вращающихся трансформаторов). Математическая модель ЭМУ в значительной степени определяет вид
модели всей ЭМС, а также возможный выбор методов её анализа и синтеза.
В зависимости от задачи исследования или проектирования ЭМС, для
используемого в ней ЭМУ необходима модель определённого типа — в скалярной или матричной форме, с использованием фазных переменных обмоток или изображающих векторов, нелинейная или линеаризованная, в виде
системы дифференциальных уравнений или передаточной функции, для статических или динамических режимов и т. д. В конечном счёте, каждое ЭМУ,
используемое в ЭМС, должно иметь полный комплект таких моделей. Получение его до недавнего времени было сложным делом, так как предполагало
большой объём аналитических выкладок. Как правило, каждый исследователь выполнял только небольшую часть общей работы — в соответствии со
своей частной задачей исследования. В результате, различные модели одного
типа ЭМУ оказывались полученными различными авторами при различных
допущениях, в различных обозначениях, с использованием различного сочетания переменных и параметров. При необходимости выполнения дальнейших преобразований каждому исследователю приходилось выполнять все
предыдущие выкладки, чтобы получить модель ЭМУ в требуемой форме.
В то же время, сформировавшаяся общая методика получения моделей
ЭМУ представляет собой последовательность детально отработанных алгоритмов, которые могут быть реализованы программно с использованием современных символьных процессоров, позволяющих выполнять аналитические выкладки автоматически, избавляя исследователей от рутинной работы
и предотвращая возможные ошибки. Наиболее совершенными являются сим-
5
вольные процессоры Maple и Mathematika, символьные ядра которых используются в других математических программах. Например, символьное ядро
Maple используется в MathCAD и MatLab, обеспечивая разумное сочетание
символьных и численных возможностей этих программ.
Программирование символьных операций напоминает таковое для численных вычислений, но всё же имеет много особенностей. Они связаны как
со спецификой символьных операций, так и с особенностями их реализации в
том или ином символьном процессоре. Поэтому создание комплекса программ для символьных выкладок, в частности, в области электромеханики,
является нетривиальной задачей и требует специальной проработки. Главной
задачей при этом является универсализация выкладок с тем, чтобы для каждого конкретного типа ЭМУ при задании его характерных отличий можно
было получить все возможные варианты математических моделей.
6
1 Электромеханические устройства и системы
1.1 Общие понятия об электромеханических системах.
1.1.1 Общие понятия
Целью большинства промышленных установок является то или иное воздействие на
окружающие объекты. Например, на сырьё, чтобы получить готовую продукцию. Или на
дорогу, чтобы переместить груз в транспортном средстве. Для повышения эффективности
такого воздействия применяют автоматические системы. В целом любая промышленная
автоматическая система состоит из трёх частей: информационной, управляющей и силовой. Информационная часть получает информацию об объекте и окружающем мире (через
датчики), управляющая часть формирует сигналы, соответствующие желаемому воздействию (с помощью регуляторов), силовая часть реализует это воздействие на окружающий
мир.
Суть любого силового воздействия — в преобразовании по заданному закону какойлибо первичной энергии (запасённой ранее) в механическую. В качестве первичной используется энергия: механическая, электрическая, пара, воды, взрыва (двигатели внутреннего сгорания), сжатого воздуха и др. Соответственно различным видам первичной энергии соответствуют различные типы преобразователей энергии, составляющих основу силовой части.
Электромеханические системы (ЭМС) являются разновидностью силовой части автоматических систем, в которых первичной энергией является электрическая.
Существует несколько типов преобразователей электрической энергии в механическую: электродвигатели, электромагниты, электрические муфты и некоторые другие, но
наибольшее распространение получили электродвигатели. В данном курсе будут изучаться ЭМС с вращающимися электродвигателями.
Согласно определению, приводимому в стандарте ГОСТ 16593-79, электромеханическая система — это совокупность механических и электротехнических устройств, объединенных общими силовыми электрическими цепями и (или) цепями управления, предназначенная для осуществления механического движения объекта.
Имеется также разновидность ЭМС — электропривод (ЭП). Согласно тому же стандарту, электропривод — это ЭМС, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение вспомогательных органов рабочей машины и управления этим движением. Примечание: Преобразовательное и (или) передаточное устройство могут отсутствовать.
Таким образом, в нашем случае термины ЭМС и электропривод равнозначны и будут использоваться совместно.
Расшифруем с помощью того же стандарта термин "электропривод" через определение его составляющих:
электродвигательное устройство — электротехническое устройство, предназначенное для преобразования электрической энергии в механическую. Примечание: Электродвигательное устройство содержит один или несколько электродвигателей;
преобразовательное устройство — электротехническое устройство, преобразующее
род тока и (или) напряжение, частоту и (или) изменяющее показатели качества электрической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство; примерами преобразовательных устройств являются усилители мощности, инверторы, выпрямители и т. п.;
7
передаточное устройство — устройство, предназначенное для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины и согласования вида и скоростей их движения;
управляющее устройство — электротехническое устройство, предназначенное для
управления преобразовательным и (или) электродвигательным и (или) передаточным устройствами; в автоматизированном электроприводе это — корректирующие устройства
(регуляторы), а также пусковая аппаратура (выключатели, реле и др.);
рабочая машина — машина, осуществляющая изменение формы, свойства, состояния и положения предмета труда; это может быть робот, станок, антенная установка на
спутнике и т. п.;
исполнительный орган рабочей машины — движущийся элемент рабочей машины,
выполняющий рабочую операцию; например, рука робота–манипулятора, ось антенной
установки с антенной, колесо электромобиля и др.
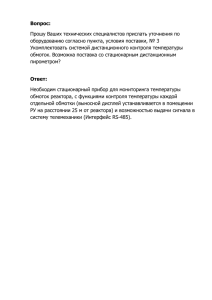
В соответствии с определением ЭМС (и ЭП) можно изобразить в общем виде следующим образом (Рис. 1.1).
В качестве управляющего устройства УУ1 используются электронные аналоговые и
цифровые устройства — регуляторы (корректирующие устройства).
В качестве управляющего устройства УУ2 служат датчики угла, скорости, момента,
тока и др.
В качестве преобразовательного устройства ПУ обычно применяются тиристорные
или транзисторные усилители мощности.
В качестве электродвигательного устройства ЭУ используются двигатели различных
типов: постоянного тока, синхронные, асинхронные, шаговые, пьезоэлектрические.
8
ИП
u
y
УУ1
ПУ
ЭУ
УП
ИОРМ
УУ2
Рис. 1.1 — Обобщённая структурная схема ЭМС
ИП — источник питания (сеть, аккумулятор и т.п.);
УУ1 и УУ2 — части устройства управления (УУ1 — формирует сигналы управления, УУ2 — собирает информацию об объекте);
ПУ — преобразовательное устройство;
ЭУ — электродвигательное устройство;
УП — передаточное устройство;
ИОРМ — исполнительный орган рабочей машины;
u — сигнал задания (входной сигнал);
y — выходные координаты перемещения ИОРМ.
В качестве передаточного устройства УП используются различного вида механические передачи (редукторы): зубчатые, волновые и др.
Исполнительным органом рабочей машины ИОРМ может быть, например, перемещаемый инструмент станка, колесо электромобиля, рука робота и т.п.
1.1.2 Задачи анализа ЭМС
Анализом называют исследование существующей (функционирующей или спроектированной) ЭМС. Важно, чтобы были известны все её параметры. При этом рассчитываются координаты ЭМС в процессе её функционирования.
Конкретные задачи анализа могут быть различными, но в целом они сводятся к следующему. С одной стороны, ЭМС должна выполнять заданные механические перемещения, а с другой стороны, этому препятствуют внешние возмущающие воздействия, в частности, статический момент и момент инерции вращающихся частей. Поэтому задачей
анализа ЭМС в общем случае является определение значений управляемых координат при
заданных управляющих координатах с учетом статического момента и момента инерции.
При анализе ЭМС требуется рассчитывать следующие характеристики:
значения управляемых координат в переходных и установившихся режимах, например, изменение скорости в процессе пуска двигателя;
характеристики, показывающие взаимосвязь между различными координатами —
как управляющими, так и управляемыми, например, зависимость между напряжением питания и скоростью или между током и коэффициентом полезного действия.
В частности, в ЭМС при различных нагрузках и управляющих воздействиях требуется рассчитывать кривые изменения механических величин: скорости ω , угла поворота
θ , момента M , а также электрических величин: тока двигателя i , к. п. д. η , потребляемой мощности, cos φ и др. Эти характеристики могут быть представлены в общем виде
следующим образом:
9
ω = f (t ); θ = f (t ); ε = f (t ); i = f (t );
η = f ( M ); cos φ = f ( M ); i = f ( M ); ω = f ( M );
⎫
⎬
ω = f (i ); K⎭
Анализ ЭМС можно производить на двух уровнях — макроуровне и микроуровне.
На макроуровне обычно изучают выходные управляемые координаты — скорость, угол
поворота, а также токи в обмотках двигателя. На микроуровне изучают процессы в отдельных компонентах ЭМС, например, сигналы на выходах датчиков и регуляторов, сигналы управления транзисторами усилителя мощности, обратные напряжения на диодах
транзисторных ключей и т. п. В первом случае речь идет о структурном анализе, а во втором — о функциональном или поэлементном анализе.
Применяют два основных способа анализа — аналитический и моделирование. Аналитические исследования связаны с выводом законченных математических выражений
(формул) для расчёта соответствующих характеристик (1.1). Ввиду сложности ЭМС, аналитические исследования возможны только на макроуровне и при условии значительной
идеализации элементов ЭМС. При моделировании на ЭВМ используют более детальный
учёт свойств реальных ЭМС. При этом модель ЭМС представляет собой систему уравнений (а не формулу, как при аналитических исследованиях), которые автоматически решаются на ЭВМ различными методами, например, численными. Моделирование позволяет
упростить анализ на макроуровне (нет необходимости выводить законченные формулы) и
обеспечивает более детальный анализ на микроуровне, недоступный аналитическим исследованиям.
1.1.3 Задачи синтеза ЭМС
Под синтезом понимают определение вида управляющих воздействий, а также выбор структуры и расчёт параметров управляющих устройств (регуляторов). Синтез является одной из составляющих процесса проектирования.
Любую ЭМС можно представить в виде двух частей, называемых неизменяемой и
изменяемой.
К неизменяемой части относятся устройства, выбор которых осуществляется исходя
из требований к силовым параметрам: моменту, скорости, ускорению нагрузки; величине
напряжения и тока двигателя и т.п. Одной из особенностей неизменяемой части является
то, что ее компоненты выбираются исходя из имеющейся номенклатуры соответствующих
изделий и поэтому ограничен. К неизменяемой части относятся, в частности, двигатель,
редуктор, усилитель мощности, датчики.
Изменяемая часть включает управляющее устройство (регулятор), иногда к ней относят также датчики, если их параметры нужно выбирать в процессе синтеза.
1.1.4 Классификация ЭМС
ЭМС принято подразделять на общепромышленные и ЭМС автоматики. Различие
между ними — в выполняемых функциях и задачах проектирования.
Общепромышленные ЭМС предназначены для силового сравнительно грубого воздействия на объект. Их показатели качества регулирования не очень высокие, они часто
бывают разомкнутыми (без обратной связи) и имеют сравнительно простую структуру. В
общепромышленных ЭМС часто используются двигатели большой мощности — более 10
кВт. Главной задачей при проектировании общепромышленных ЭМС является обеспечение силовых характеристик — момента, тока, к. п. д., cos ϕ и т.п. Одной из из важнейших
проблем при разработке общепромышленных ЭМС является выбор преобразовательного
устройства, способного обеспечить требуемые напряжения (амплитуды, частоты) и токи
питания, без чего невозможно управление двигателем.
10
ЭМС автоматики являются составной частью систем автоматического управления
более высокого уровня. Они отличаются обычно меньшими значениями мощности, повышенными требованиями к качеству регулирования, являются преимущественно замкнутыми. Обычно используются сравнительно маломощные электродвигатели — до 10 кВт.
При проектировании ЭМС автоматики наибольшую проблему представляет обеспечение
показателей качества регулирования. Поэтому они имеют более сложные структуры,
большее разнообразие управляющих устройств и датчиков. Ввиду малой мощности двигателей, выбор преобразовательного устройства не представляет сложности и главной задачей становится разработка устройства управления.
Поскольку большинство типов электродвигателей выпускается на самые разные
мощности, принципы работы как общепромышленных ЭМС, так и ЭМС автоматики в целом одинаковы.
Следует различать способы управления электродвигателями и принципы построения
электромеханических систем.
Под способом управления понимают алгоритм изменение параметров внешних воздействий, в том числе питающих напряжений (амплитуды, частоты, фазы). Например, существуют реостатный способ управления двигателями постоянного тока (изменением сопротивления в цепи якоря), частотный — для асинхронного и синхронного двигателей
(изменением частоты питающих напряжений), частотно–токовый — для асинхронных и
синхронных двигателей (когда в обмотках формируют токи заданной частоты) и др. Способ управления характеризуется в основном особенностями двигателя и преобразовательного устройства (усилителя мощности).
Под принципом построения ЭМС понимают её структуру, т. е. наличие и взаимосвязанность двигателя, датчиков, регуляторов. Существуют, в частности, разомкнутые ЭМС
(без обратных связей), ЭМС с единственной главной обратной связью по регулируемой
координате (например, следящие системы с обратной связью по углу поворота), ЭМС с
подчинённым регулированием параметров и др.
Один и тот же принцип построения ЭМС может применяться при различных способах управления и, с другой стороны, один и тот же способ управления может быть использован в сочетании с различными принципами построения замкнутых ЭМС.
ЭМС можно классифицировать по различным признакам. Основные из них:
• по наличию обратной связи (разомкнутые, замкнутые);
• по основной управляемой координате (позиционные, скоростные и моментные);
• по типу используемого двигателя (постоянного тока, асинхронные, синхронные и
др.);
• по типу преобразовательного устройства (например, тиристорный электропривод,
транзисторный электропривод, система "управляемый выпрямитель – двигатель",
система "преобразователь частоты – двигатель", система "генератор – двигатель,
система "магнитный усилитель – двигатель" и др.);
• по возможности регулирования — регулируемые и нерегулируемые (в данном курсе будут рассматриваться только регулируемые);
• по способу управления двигателем;
• по принципу построения замкнутой ЭМС.
Могут быть и другие классифицирующие признаки.
ЭМС также принято разделять на разомкнутыми и замкнутыми. Различие между разомкнутыми и замкнутыми ЭМС весьма существенны. В разомкнутых ЭМС отсутствуют
датчики и поэтому точность регулирования невысока. При этом используются системные
свойства самого электродвигателя, который сам по себе уже является электромеханической системой с внутренними электромагнитными связями. Поэтому даже без датчиков и
11
регуляторов двигатель способен поддерживать заданную скорость в переходных и установившихся режимах, хотя и не всегда с требуемой точностью.
Системные свойства двигателей проявляются в следующем.
Вращающий момент двигателя в установившемся режиме всегда равен статическому
моменту нагрузки. Если статический момент нагрузки изменяется, двигатель автоматически изменяет ток в обмотках таким образом, чтобы момент двигателя вновь уравновесил
момент нагрузки. Поэтому потребляемый от источника ток двигателя определяется моментом нагрузки — чем больше нагрузка, тем больше ток.
В случае изменения механической нагрузки на валу, скорость двигателя меняется
сравнительно незначительно. При восстановлении прежней механической нагрузки автоматически восстанавливается и прежняя скорость двигателя.
Все эти свойства свидетельствуют о наличии внутренних отрицательных и положительных обратных связей, что и говорит о системных свойствах двигателей.
ЭМС автоматики обычно замкнутые, но изучение разомкнутых ЭМС имеет большое
практическое и методологическое значение.
Во-первых, разомкнутая ЭМС является как бы внутренним контуром замкнутой.
Во-вторых, в разомкнутых системах отрабатываются способы управления двигателями, которые затем используются и в замкнутых ЭМС.
Для вращающегося двигателя естественной управляемой координатой обычно является скорость (только у шаговых двигателей — угол поворота). Поэтому все разомкнутые
ЭМС — скоростные.
В ряде случаев требуется обеспечить перемещение в заданную точку пространства — для этого служат позиционные ЭМС. В них управляемой координатой является угол
поворота. Типичным представителем позиционных ЭМС является следящий ЭП. Позиционные ЭМС всегда должны быть замкнутыми (кроме ЭМС с шаговыми двигателями), так
как без датчика угла поворота невозможно определить тот момент времени, когда следует
приложить напряжение питания, а когда его снять.
Кроме устройств, реализующих перемещение в заданное положение или с заданной
скоростью, бывают механизмы, в которых требуется создавать некоторое усилие: например, прессы, вибраторы, устройства для прижимания деталей, удержания предметов на
весу и т. п. В качестве силового элемента в них часто используются вращающиеся двигатели, но в режиме работы на упор, т. е. без вращения ротора. ЭМС такого рода называются моментными и они строятся несколько иначе, чем обычные ЭМС перемещений. Моментные ЭМС всегда замкнутые, с обратными связями по току и специальными преобразовательными устройствами (усилителями мощности). В них, кроме обычных двигателей,
используются двигатели специального исполнения, также называемые моментные двигатели. Они спроектированы с учётом повышенного нагрева обмоток.
Существует много типов электродвигателей, но все их можно разделить на три
большие группы: постоянного тока и переменного — синхронные и асинхронные. Они
отличаются системами электропитания, характеристиками и способами регулирования
скорости. Соответственно этому разными оказываются преобразовательные устройства и
управляющие устройства.
В ЭМС постоянного тока единственной изменяемой величиной является напряжение
питания. Им определяется скорость двигателя.
В асинхронных ЭМС на скорость двигателя влияют амплитуда, частота и фаза питающих напряжений, а на направление вращения — также порядок чередования фаз.
В синхронных ЭМС единственным способом регулирования скорости является изменение частоты питающих напряжений. В то же время, ввиду особенностей конструкции
синхронного двигателя и режимов его работы, может оказаться необходимым регулиро-
12
вать также его возбуждение путем изменения напряжения, питающего соответствующую
обмотку.
В настоящее время вследствие появления разнообразных электронных преобразовательных устройств оказывается возможным применять способы управления одним типом
двигателя к другому типу. Например, из синхронного двигателя делают так называемый
бесконтактный двигатель постоянного тока. Из асинхронной машины с фазным ротором — синхронную, запитывая обе обмотки (статорную и роторную) напряжениями переменного тока. И т. д.
В соответствии со спецификой электродвигателей различного типа появляются специфические задачи изучения соответствующих ЭМС.
Во-первых, оказываются разными характеристики самих двигателей, которые в значительной степени определяют поведение управляемых координат всей ЭМС.
Во-вторых, способ управления, связанный с типом двигателя, предопределяет возможные варианты построения замкнутой ЭМС.
Например, в ЭМС с двигателем постоянного тока имеется только одна управляющая
координата — напряжение питания.
В ЭМС с асинхронным двигателем могут быть три управляющих координаты (амплитуда, частота, фаза питающих напряжений). Причём может быть как любая одна, так и
любые две и, наконец, все три управляющих координаты. Получается вектор управляющих координат. Формировать управление и анализировать процессы в таком случае значительно сложнее. Аналогично — в случае ЭМС с синхронным двигателем.
1.2 Электромеханические устройства
1.2.1 Классификация электромеханических устройств
Преобразователи электрической энергии в механическую и наоборот называются
электромеханическими устройствами (ЭМУ). В частности, к ЭМУ относятся электродвигательные устройства электромеханических систем.
Различают ЭМУ общепромышленные и для систем автоматики. Различия связаны
главным образом с функциональным назначением и мощностью. Общепромышленные
ЭМУ — это генераторы, двигатели, синхронные компенсаторы. Мощность общепромышленных ЭМУ составляет от единиц до миллионов кВт. ЭМУ для систем автоматики — это
датчики различных параметров и двигатели мощностью от долей ватта до десятков кВт.
Некоторые типы маломощных двигателей выпускаются только для систем автоматики, а
датчики вообще не применяются вне автоматических систем (поскольку вне автоматических систем датчики не нужны).
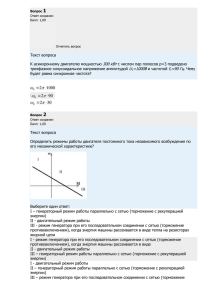
ЭМУ для систем автоматики можно разделить на три большие группы в зависимости
от их роли в процессе преобразования энергии: электрической Wэ (характеризующейся
напряжением u и током i ) и механической W м (характеризующейся скоростью ω , углом
поворота θ и электромагнитным моментом M ):
двигатели — осуществляющие преобразование электрической энергии в механическую и являющиеся обычно оконечными устройствами, непосредственно воздействующими на рабочие органы механизма;
генераторы — преобразующие механическую энергию в электрическую и служащие
либо в качестве источников электрической энергии (силовые генераторы), либо в качестве
датчиков скорости (тахогенераторы);
13
преобразователи сигналов — изменяющие параметры электрической энергии под
воздействием некоторых параметров механической (например, угла поворота), и служащие для измерения этих механических параметров.
Генераторы
Преобразователи сигналов
Двигатели
u,i
Wэ
θ,ω,M
Wм
θ,ω,M Wм
u,i
u,i
Wэ
Wэ
Wэ
u,i
Wм
θ,ω,M
Рис. 1.2 — Классификация ЭМУ по их роли
в электромеханическом преобразовании энергии
В зависимости от выполняемых в ЭМС функций ЭМУ можно отнести к исполнительным элементам (двигатели, генераторы) или измерительным (датчики). Генераторы
могут быть как источниками питания, так и датчиками. Преобразователи сигналов всегда
являются датчиками.
Приведенная классификация отражает только тот факт, что для двигателей внешним
воздействием являются питающие напряжения, а результатом — вращающий момент,
скорость и угол поворота. Для датчиков, напротив, внешним воздействием являются параметры вращения (скорость и угол поворота), а результатом — напряжение на обмотках.
На методику получения моделей ЭМУ не влияет отнесение их к классу двигателей или
датчиков. Как будет показано далее, математическое описание ЭМУ практически не зависит от его назначения и определяется лишь некоторыми конструктивными особенностями:
наличием и числом обмоток, наличием постоянных магнитов и др.
1.2.2 Принципы работы электромеханических устройств
В основе конструкции электромеханических преобразователей энергии лежат фундаментальные законы физики, открытые Фарадеем и Ампером в области электромагнетизма и Ньютоном в области механики. Физическая сущность этих законов связана с установлением условий взаимного преобразования электрической, магнитной и механической форм энергии, что и даёт возможность создавать электромеханические преобразователи различного назначения. Смысл этого преобразования энергии заключается в том, что
наиболее удобно получать и передавать её в электрической форме, расходовать необходимо в механической, а промежуточной при преобразовании из электрической формы в
механическую выступает энергия в форме магнетизма.
Проектирование новых и исследование существующих электромеханических преобразователей энергии связано с разработкой их математических моделей, по которым выполняются все необходимы расчёты. Особенно необходимы математические модели при
автоматизации проектирования электродвигателей и электромеханических систем, в которых они используются.
Математические модели разрабатываются на основе существующих теоретических
положений соответствующих наук. Электромеханика является комплексной областью научной и инженерной деятельности и основывается на теоретических положениях механики, электротехники, теории магнетизма, электроники, теории управления.
Теоретические положения механики позволяют записать уравнения движения механической нагрузки, в которых присутствуют скорость, ускорение, вращающий (от двигателя) и противодействующий (сторонний) моменты, массы и моменты инерции, другие
14
параметры. Главными здесь являются уравнения динамики Ньютона, входной величиной — вращающий момент электродвигателя, выходной — угловая скорость или угол поворота. Цель решения уравнений механики — определение скоростей и углов поворота
различных частей механической нагрузки (в том числе, ротора двигателя) при заданных
изменениях вращающего момента двигателя и момента сопротивления со стороны нагрузки.
Методы теоретической электротехники позволяют записать уравнения равновесия
напряжений для обмоток электродвигателя с учётом числа фаз и схем их подключения к
источнику питания — раздельное подключение, звезда, треугольник и др. В уравнениях
присутствуют напряжения, электрические потенциалы, токи, а также параметры цепей —
активные сопротивления, индуктивности, ёмкости конденсаторов, источники ЭДС и тока.
Целью решения системы уравнений является определение токов в обмотках при заданных
питающих напряжениях (амплитудах, частотах, фазах) и параметрах обмоток (активные
сопротивления и индуктивности) с учётом угловой скорости и угла поворота ротора.
Теория магнетизма позволяет увязать между собой уравнения электротехники и механики через законы Фарадея и Ампера и получить выражение электромагнитного момента через токи и магнитные потоки электродвигателя.
Теоретические положения электроники позволяют реализовать электропитающие
устройства (стабилизаторы, выпрямители, конверторы, инверторы, преобразователи частоты) и записать их модели.
Главным результатом математического описания электродвигателя на основе всех
перечисленных выше теоретических положений является определение условий формирования и характера электромагнитного момента двигателя, а также взаимодействие цепей
электродвигателя и источника питания.
По своей сути любой электромеханический преобразователь энергии сам является
электромеханической системой, так как в его конструкции присутствуют элементы (индуктор, якорь, обмотки, постоянные магниты, магнитопровод), образующие систему ввиду специально подобранных связей между ними. Но электродвигатели сами по себе рассчитаны на работу при постоянной скорости с постоянной механической нагрузкой на валу. В современных системах автоматики требуется регулирование угла поворота, скорости, развиваемого ими усилия (вращающего момента) и тогда они должны применяться в
составе электромеханических систем, содержащих устройства для изменения питающих
напряжений, датчики обратных связей и др. Частным случаем электромеханических систем являются электроприводы, которые предназначены для приведение в движение исполнительных органов рабочих машин.
Работа электродвигателей при прямом подключении к сети или в составе электропривода существенно различна, так как используемые совместно с ними другие устройства изменяют свойства двигателей, например, характер вращающего момента. Поэтому
электродвигатель необходимо рассматривать совместно с электропитающими устройствами и связанными с ними другими элементами электромеханической системы.
Управление двигателем включает способы управления и принципы построения
замкнутых систем электропривода.
Способы управления базируются на функциональных зависимостях угловой скорости (или угла поворота) ротора от параметров питающих напряжений (амплитуды, частоты, фазы). Любой электродвигатель всегда рассматривается совместно с используемым
способом управления, так как только их сочетание порождает конкретные характеристики
электродвигателя.
Принципы построения замкнутых систем электропривода базируются на общих результатах теории автоматического управления с обратными связями. В соответствии с
этой теорией фактическое значение регулируемой величины (например, угла поворота)
15
сравнивается с её заданным значением, а по результату сравнения формируется управляющая величина (или нескольких управляющих величин) в соответствии с используемым способом управления. Определяющим элементом для выбора принципа построения
замкнутой системы является электродвигатель, который необходимо рассматривать совместно со способом управления. Для них подбирается типовая структура замкнутой системы, которая адаптируется затем с учётом имеющихся особенностей. Для построения
замкнутых систем электропривода требуется математическая модель электродвигателя и
других элементов, причём в такой форме, какая необходима для применения того или
иного универсального метода синтеза из теории автоматического управления. Таким образом, методы синтеза порождают требования к форме представления математических
моделей электродвигателя, а форма модели накладывает ограничения на возможные методы синтеза и достигаемый результат.
1.3 Общие сведения из механики
1.3.1 Законы Ньютона для поступательного и вращательного
движения
Весьма распространённой задачей в окружающем человека мире является выполнение механической работы, т. е. перемещение предметов с желаемой скоростью на желаемые расстояния с преодолением при этом мешающих перемещению сил. Механические
процессы описываются законами Ньютона, которые для поступательного движения формулируются следующим образом.
Первый закон Ньютона (закон инерции): изолированное материальное тело сохраняет состояние покоя или равномерного прямолинейного движения.
Второй закон Ньютона (основной закон динамики): сила, действующая на материальное тело, сообщает ему ускорение, имеющее направление силы, пропорциональное её
величине и обратно пропорциональное массе тела, т. е.
d 2x
d 2x
F
, или иначе m ⋅
=F,
2
2
m
dt
dt
где x — координата, по которой движется тело; m — масса тела; F — сила, действую=
щая на тело.
Частным следствием второго закона является первый закон: если сила равна нулю,
то ускорение также равно нулю, что означает движение с постоянной скоростью или состояние покоя.
Третий закон Ньютона (равенство действия и противодействия): всякому действию
отвечает противодействие, направленное по той же прямой в противоположную сторону.
Это означает, что сумма всех сил действия и противодействия равна нулю:
∑ Fдейств + ∑ Fпротиводейств = 0 .
Четвёртый закон Ньютона (сложение сил): если к материальному телу приложено
несколько сил, то сообщаемое ему ускорение таково, как если бы к нему была приложена
одна сила, являющаяся геометрической суммой всех приложенных сил. Геометрическое
сложение сил осуществляется методом параллелограмма с учётом их величины и направления действия (Рис. 1.3).
На Рис. 1.3 показано
суммирование
трёх сил, приложенных к маr последовательное
r
r r
r
r
териальному телу m : F12 = F1 + F2 , F123 = F12 + F3 . В результате материальное тело
16
будет двигаться с ускорением a в направлении оси x , совпадающей с результирующей
r
силой F123 .
r
F2
r
F2
m
m
r
F1
m
r
F1
r
F3
r
F3
r
F3
r
F12
r
F12
r
F123
a=
d 2x
x
dt 2
Рис. 1.3 — Геометрическое суммирование одновременно приложенных сил
Источниками сил, которые приводят в движение материальные тела, являются двигатели различной природы (электрические, паровые, внутреннего сгорания, реактивные и
т. д.), но наиболее часто используются электрические двигатели — в станках (сверлильных, токарных, фрезерных), в бытовой технике (стиральных машинах, миксерах, вентиляторах), в специальной аппаратуре (дисководах, принтерах) и т. д.
В силу особенностей своей конструкции, большинство электродвигателей создают
вращательное движение (хотя есть двигатели линейные и с более сложной траекторией
движения).
Для вращательно движения законы Ньютона имеют аналогичную форму, но иной
состав физических величин: перемещением является угол поворота θ (измеряется в радианах, рад), скоростью — угловая скорость ω (измеряется в радианах в секунду, рад/с)
или частота вращения (измеряется в Герцах, Гц, т. е. в оборотах в секунду, или в оборотах в минуту, об/мин), усилием — момент (измеряется в ньютонах на метр, Н·м), ускорение — ускорение вращения (измеряется в радианах в секунду в квадрате, рад/с2).
Первый закон Ньютона для вращательного движения: свободно вращающееся
материальное тело сохраняет состояние покоя или равномерного вращения.
Второй закон Ньютона для вращательного движения: момент сил, действующий
на вращающееся материальное тело, сообщает ему ускорение вращения, имеющее направление момента сил, пропорциональное его величине и обратно пропорциональное
моменту инерции тела, т. е.
d 2θ
d 2θ
M
, или иначе J ⋅
=
=M ,
J
dt 2
dt 2
где θ — угол поворота тела; J — момент инерции тела; M — момент сил, действующих на тело.
Частным следствием второго закона является первый закон: если момент сил равен
нулю, то ускорение вращения также равно нулю, что означает вращение с постоянной угловой скоростью или состояние покоя.
Момент сил образуется как действие обычной силы на материальное тело, закреплённое в одной точке (Рис. 1.4,а):
M =r⋅F,
где M — момент сил; F — модуль вектора силы; r — расстояние между точкой приложения силы A и центром вращения 0 .
17
Сила должна быть приложена под углом 90° к рычагу. Если сила приложена
под
r
другим углом, то она раскладывается на две составляющие — радиальную Fr и танген-
r
циальную Ftg (Рис. 1.4,б и Рис. 1.4,в) и для определения момента сил берётся тангенци-
r
альная составляющая Ftg :
M = r ⋅ Ftg = r ⋅ F ⋅ sin(α ) ,
где α — угол между направлением рычага и направлением приложенной силы.
m A
A
r
Fr
r
F
α
A
90° ω, M
r
0
0
а)
90°
A
r
Fr
r
Ftg
90° ω, M
r
r
F
б)
α
r
Ftg
r
0
r
F
ω, M
в)
Рис. 1.4 — К понятию момента сил при вращательном движении:
а) сила направлена перпендикулярно оси рычага;
б) сила направлена произвольным образом от центра вращения;
в) сила направлена произвольным образом к центру вращения
Вторая составляющая — радиальная — направлена по радиусу, соединяющему
центр вращения 0 и точку A приложения силы, причём может быть как от центра
(Рис. 1.4,б), так и к центру (Рис. 1.4,в) вращения "0". Но в обоих случаях вращение будет
обеспечиваться только тангенциальной составляющей силы, приложенной по касательной
к окружности, а радиальная составляющая не производит никакой полезной работы.
Сила является вектором, т. е. имеет не только величину, но и направление. Момент
не является вектором, так как всегда направлен по касательной к окружности вращения
тела (рычага) и пропорционален произведению величины силы на радиус этой окружности.
Момент может быть приложен к кругу и тогда плечом является прямая, соединяющая центр вращения и точку приложения силы на окружности, как это имеет место с ротором электродвигателя. Т. е. момент приложен не к конкретной точке круга (как сила), а
в целом к кругу — ко всем его точкам на радиусе, поэтому он и является величиной не
векторной, а скалярной (имеет только знак, но не произвольное направление).
Момент инерции характеризует инерционность вращающихся тел и отражает зависимость её не только от массы (как при поступательном движении), но и от расстояния до
центра (оси) вращения. Под инерционностью понимают стремление материального тела
сохранить направление и скорость движения (в частности, состояние покоя). Момент
инерции, как и масса, проявляет себя, главным образом, при изменении скорости (величи-
18
ны или направления), т. е. при наличии ускорения, а потому и входит в уравнение динамики по второму закону Ньютона.
A
r 90°
F
0
ω
Рис. 1.5 — К понятию момента сил
при вращательном движении круга или цилиндра
Момент инерции цилиндра, например, ротора электродвигателя (Рис. 1.5):
r2
J =m⋅ .
2
Третий закон Ньютона для вращательного движения: всякому действию отвечает
противодействие, направленное по той же прямой в противоположную сторону. Это означает, что сумма всех моментов сил действия и противодействия равна нулю:
∑ M действ + ∑ M противодейств = 0 .
Четвёртый закон Ньютона для вращательного движения: если к вращающемуся
материальному телу приложено несколько моментов сил, то сообщаемое ему ускорение
вращения таково, как если бы к нему был приложен один момент сил, являющийся алгебраической суммой всех приложенных моментов сил. В отличие от поступательного движения, моменты силы приложены к телу одинаково, так как связаны с одним и тем же
центром вращения, и поэтому не требуется их геометрического сложения. Но они могут
быть направлены в разные стороны, поэтому их сумма должна быть алгебраической (с
учётом знака).
Рассмотренные законы Ньютона для вращательного движения применяются в том
числе к ротору самого двигателя. В самом общем случае математическая модель механической части электродвигателя (т. е. его вращающихся частей) описывается системой
дифференциальных уравнений:
dωr 1
⎫
= ( M + M c );⎪
⎪
dt
J
⎬,
dθ r
⎪
= ωr ,
⎪⎭
dt
(1.1)
где ωr — угловая скорость ротора двигателя; θ r — угол поворота ротора; M — электромагнитный момент двигателя; M c — момент сопротивления нагрузки; J — момент
инерции ротора двигателя.
Первое уравнение в (1.1) является вторым законом Ньютона для вращательного
движения, а второе — отражением факта, что угловая скорость есть производная угла поворота по времени.
19
1.3.2 Механические передаточные устройства (редукторы)
Часто угловая скорость двигателя не соответствует требуемой угловой скорости рабочей машины. Тогда ротор двигателя соединяют с ней через передаточное устройство
(редуктор) — механическое устройство, предназначенное для механического изменения
угловой скорости и момента. Простейший редуктор содержит сцепленные между собой
колёса различного диаметра (Рис. 1.6). Каждые два соседних колеса составляют кинематическую пару. Традиционно колесо меньшего диаметра называют шестернёй, а большего — зубчатым колесом. Далее все колёса для краткости будут называться шестернями.
Кроме шестерней могут использоваться также другие типы механических соединений
(например, "винт — гайка" и др.), поэтому термин кинематическая пара — общеприменимый для всех редукторов.
M 1 , ω1
1
r1
M 2 , ω2
2
r2
M 3 , ω3
3
r3
Mc
Рис. 1.6 — Трёхзвенная двухступенчатая механическая передача
(понижающий редуктор)
Пусть шестерня 1 с радиусом r1 располагается на валу двигателя, создающего момент M 1 , и вращается с угловой скоростью ω1 . Шестерня 2 с радиусом r2 сцеплена с
шестернёй 1 и вращается с угловой скоростью ω2 , развивая момент M 2 . Шестерня 3 с
радиусом r3 сцеплена с шестернёй 2 и вращается с угловой скоростью ω3 , развивая момент M 3 . На валу шестерни 3 располагается механическая нагрузка, создающая статический момент сопротивления M st . Таким образом, шестерня 1 является первичной (входной), шестерня 2 — промежуточной (вращается шестернёй 1 и сама вращает шестерню 3),
шестерня 3 — выходной.
К выходной шестерне 3 приложен тормозящий момент M st со стороны механической нагрузки. В установившемся режиме (согласно второму законом Ньютона) выполняется M 3 = − M st и моменты уравновешиваются.
Рассмотренный редуктор имеет две кинематические пары образующие две ступени:
шестерни 1 и 2, а также 2 и 3. Шестерня 1 для шестерни 2 является ведущей, а шестерня 2
для шестерни 1 — ведомой. Та же шестерня 2 для шестерни 3 является ведущей, а шестерня 3 для неё — ведомой. Таким образом, первичная (входная) шестерня 1 является
только ведущей, выходная шестерня 3 — только ведомой, а промежуточная шестерня 2 —
и ведомой, и ведущей.
Характерным является то, что ведущая и ведомая шестерни вращаются навстречу
друг другу, т. е. при передаче вращения его направление меняется.
Рассмотрим, как соотносятся скорости и моменты на валах взаимно сцепленных
шестерней.
20
Когда шестерня 1 делает полный оборот, точка её зацепления с шестернёй 2 проходит путь
s1 = 2πr1 ,
где r1 — радиус шестерни 1.
Когда шестерня 2 делает полный оборот, точка её зацепления с шестернёй 1 проходит путь
s2 = 2πr2 ,
где r2 — радиус шестерни 2.
Отношение этих путей даёт передаточное отношение кинематической пары
i2,1 =
s2 2πs2 r2
=
= .
s1 2πs1 r1
(1.2)
Если у шестерней имеются зубцы (Рис. 1.7), то их ширина должны быть одинакова у
обеих шестерней, иначе они не смогут зацепляться.
z2
z1
Рис. 1.7 — Кинематическая пара (одна ступень) из двух зубчатых колёс
Поэтому количество зубцов пропорционально длине окружности каждой шестерни и
тогда передаточное отношение кинематической пары
i2,1 =
z2
,
z1
(1.3)
где z — число зубцов соответствующей шестерни.
Линейная скорость точек окружности вращающегося круга связана с его радиусом и
угловой скоростью:
v = ω1 ⋅ r1 , v = ω2 ⋅ r2 ,
откуда линейная скорость (одинаковая для обеих шестерней)
v = ω1 ⋅ r1 = ω2 ⋅ r2 ,
r2 ω1
=
r1 ω2
и после подстановки в (1.2)
i2,1 =
r2 ω1
,
=
r1 ω2
т. е. разные радиусы шестерней приводят к разным угловым скоростям.
(1.4)
21
Передаточное отношение справедливо и в случае рассмотрения углов поворота соответствующих шестерней:
ω1 ω1 ⋅ Δ t θ1
=
= ,
ω2 ω2 ⋅ Δ t θ 2
i2,1 =
где числитель и знаменатель выражения (1.4) умножен на одну и ту же величину Δ t —
время работы кинематической пары; θ — угол поворота соответствующей шестерни.
Передаточное отношение i2,1 показывает, что при i2,1 > 1 ведомая шестерня 2 делает всегда в i2,1 раз меньше оборотов, чем ведущая шестерня 1, причём передаточное отношение i2,1 равно отношению радиусов шестерней.
Мощность на валу каждой из шестерней кинематической пары:
P1 = M 1 ⋅ ω1 , P2 = M 2 ⋅ ω2 ,
где M — моменты сил на валах соответствующих шестерней.
Из закона сохранения энергии вытекает закон сохранения механической мощности:
P1 = P2 ,
M 1 ⋅ ω1 = M 2 ⋅ ω2 ,
откуда
ω1 M 2
,
=
ω2 M 1
и поэтому передаточное отношение кинематической пары
i2,1 =
r2 ω1 θ1 M 2
,
=
=
=
r1 ω2 θ 2 M 1
(1.5)
т. е. может быть выражено через отношение радиусов, угловых скоростей, углов поворота
и моментов сил.
Таким образом, параметры вращения вала второй шестерни имеют вид:
i2,1 =
r2 z 2
ω
θ
= , ω2 = 1 , θ 2 = 1 , M 2 = i2,1 ⋅ M 1 ,
r1 z1
i2,1
i2,1
(1.6)
т. е. передаточное отношение уменьшает угловую скорость и угол поворота, увеличивает
момент сил.
Для кинематической пары из шестерней 2 и 3 справедливо:
i3, 2 =
r3 z3
θ
ω
= , ω3 = 2 , θ3 = 2 , M 3 = i3, 2 ⋅ M 2 .
r2 z 2
i3, 2
i3, 2
(1.7)
Для всей механической передачи от шестерни 1 к шестерне 3 справедливы следующие выкладки для угловых скоростей:
ω2 =
ω1
ω
ω1
ω
, ω3 = 2 , поэтому ω3 =
= 1,
i2,1
i3, 2
i2,1 ⋅ i3, 2 i3,1
т. е. передаточное отношение всего редуктора:
(1.8)
22
i3,1 = i2,1 ⋅ i3, 2 ,
(1.9)
аналогично для углов поворота:
θ3 =
θ1
θ
= 1 ,
i2,1 ⋅ i3, 2 i3,1
(1.10)
и для моментов сил:
M 3 = i3, 2 ⋅ M 2 = i3, 2 ⋅ i2,1 ⋅ M 1 = i3,1 ⋅ M 1 .
(1.11)
Редуктор, у которого последующие шестерни больше предыдущих, называется понижающим редуктором (так как угловая скорость понижается), редуктор с противоположным соотношением шестерней — повышающим редуктором (так как угловая скорость
повышается). При этом передаваемое усилие (момент сил), наоборот, у понижающего редуктора повышается, а у повышающего — понижается.
В некоторых случаях шестерни имеют одинаковые радиусы (числа зубцов) и служат
для изменения направления вращения вала — скорости, угла поворота и момента, которые
по величине при этом не изменяются.
1.3.3 Учёт люфтов и упругих свойств механических передач
Рассмотренные выше кинематические пары обладали идеализированными свойствами:
•
передаточное отношение считалось неизменным на обороте каждой шестерни,
т. е. предполагалось, что шестерни имеют идеальную форму, например, форму
круга;
• отсутствовали зазоры (люфты) между зубьями шестерней;
• отсутствовали механические потери на преодоление трения внутри кинематических пар (это может быть трение скольжения или трение качения);
• валы, на которых крепились шестерни и нагрузка, считались абсолютно жёсткими (не изгибались и не скручивались).
Учёт реальных характеристик элементов редуктора приведёт к следующим усложнениям рассматриваемых процессов.
Неидеальная форма шестерней означает, что передаточное отношение должно зависеть от углов поворота обеих шестерней кинематической пары:
i1, 2 = f [r1 (θ1 ), r2 (θ 2 )] ,
(1.12)
где показано, что радиусы шестерней r1 и r2 могут зависеть от угла поворота соответствующей шестерни θ1 и θ 2 .
Причиной такой зависимости могут быть как дефекты изготовления самих шестерней (отклонение от круговой формы), так и смещение вала (оси вращения) относительно
геометрического центра шестерни.
Учёт люфтов (зазоров между зубьями) означает, что в некоторые моменты времени
зубья шестерней не касаются друг друга (Рис. 1.8) и передача между шестернями отсутствует, т. е. движение ведомой шестерни не зависит от движения ведущей. Это происходит,
например, в начале движения двигателя, когда люфты не выбраны. В процессе вращения
шестерней их зубья вступают в контакт и люфты выбираются. Далее вращение происхо-
23
дит так, как будто люфты отсутствуют. Но при частых реверсах (изменениях направления
вращения) люфты сказываются каждый раз.
L
L
Рис. 1.8 — Люфт в кинематической паре
Наличие люфтов приводит не только к погрешностям передачи вращения (скорости,
угла, момента), но и к ударам зубьев ведущих шестерней по зубьям ведомых. В моменты,
когда шестерни не сцеплены между собой (люфты с двух сторон зуба), возможны колебания их скоростей, углов и моментов. Это снижает точность передачи вращения, приводит
к снижению надёжности редуктора, поэтому стараются уменьшать люфты. Для этого используют специально рассчитанную форму зубьев и вспомогательные устройства. Но
полностью избавиться от люфтов можно не во всех типах передач. Иногда полная ликвидация люфтов увеличивает механические потери и нагрев редуктора.
Всякая механическая передача создаёт механические потери мощности из-за трения
в кинематических парах. Потери влияют на передаваемый момент, но на угол и скорость
они влиять не могут. Реальный момент на валу ведомой шестерни будет меньше, чем показывают выше рассмотренные формулы. Закон сохранения механической мощности с
учётом к. п. д.:
P2 = η ⋅ P1 , M 2 ⋅ ω2 = η ⋅ M 1 ⋅ ω1 ,
где η — к. п. д., откуда
ω1
M2
=
,
ω2 η ⋅ M 1
и поэтому передаточное отношение
i2,1 =
r2 ω1 θ1
M2
=
=
=
,
r1 ω2 θ 2 η ⋅ M 1
(1.13)
т. е. отличие содержится только в выражении для моментов.
Изгиб вала ведомой шестерни под действием усилия со стороны ведущей (или, наоборот, изгиб вала ведущей шестерни под действием сопротивления со стороны нагрузки
через ведомую шестерню может вызывать колебания радиуса шестерни с изогнутым валом, изменение траектории зацеплении зубцов, и, как следствие — колебания мгновенного значения передаточного отношения, снижение к. п. д. (из-за дополнительных потерь в
неправильно сцепленных кинематических парах), а также поломку.
24
1
4
ω2
ω1
2
ω3
M1
M2
3
Δθ
1
1
2
Рис. 1.10 — Эффект скручивания
нагруженного вала
Рис. 1.9 — Эффект изгиба
нагруженного вала
Такие ситуации чрезвычайно редки в правильно спроектированных редукторах, так
как валы в них имеют небольшую длину. Поэтому допущение об отсутствии изгиба валов
в редукторах обычно является достаточно правомочным.
Скручивание валов шестерней (Рис. 1.10) является более частым явлением ввиду
общего свойства материалов не быть абсолютно жёсткими. В основном это относится к
сильно нагруженным кинематическим парам.
Наиболее подвержен изгибу и скручиванию выходной вал редуктора, соединяющий
его с рабочей машиной, который может иметь сравнительно большую длину.
Физический смысл скручивания вала следующий. Если на один конец вала 1 действует момент сил M 1 , а на второй вал 2 действует момент сил M 2 , то вал может повернуться на малый угол Δ θ , который пропорционален разнице приложенных моментов:
Δ θ = C 2,1 ⋅ ( M 2 − M 1 ) = C2,1 ⋅ M 2,1 ,
(1.14)
где C 2,1 — крутильная жёсткость (или просто жёсткость), характеризующая упругие
свойства материала вала.
Можно представить себе процесс иначе: если каким-либо образом повернуть концы
вала (т. е. связанные с ними колёса) в противоположные стороны с образованием между
ними угла Δ θ , то возникнет упругий момент сил
M θ 2,1 =
1
Δθ ,
C2,1
упругость которого проявляется в том, что он стремится вернуть концы вала и связанные
с ними колёса в прежнее положение.
Это происходит при плавном повороте колёс. Если колёса поворачивать быстро, то
возникнет дополнительная составляющая упругого момента, пропорциональная скорости
скручивания:
M ω 2,1 =
1
Δω,
β2,1
которая по своему характеру аналогична моменту вязкого трения; β2,1 — коэффициент
упругого вязкого трения при скручивании.
25
Суммарный упругий момент, появляющийся вследствие скручивания вала, содержит
обе указанные составляющие:
M 2,1 = M θ 2,1 + M ω 2,1 =
1
1
1
1 d (Δ θ )
.
Δθ +
Δω =
Δθ +
C 2,1
β2,1
C 2,1
β2,1 dt
(1.15)
Необходимость учёта второй составляющей зависит от используемого материала,
его температуры и других свойств.
Выражение (1.15) получено в предположении, что отсутствуют люфты, и справедливо, в частности, когда люфты выбраны при вращении вала двигателя только в одну сторону. Учитывается также допущение, что отсутствует пластическая деформация, приводящая к тому, что после уменьшения скручивающих моментов вал не возвращается в прежнее состояние. В реальных кинематических парах упругая деформация сохраняется до некоторых значений угла Δ θ , а затем наступает фаза пластической деформации, которая
может приводить к разрушению вала. Сочетание упругих свойств с люфтом приводит к
тому, что при переменном вращающем моменте (или при переменном моменте нагрузки),
в частности, при реверсе, могут возникать колебания угловой скорости (или угла поворота) шестерни, оказывающейся между двумя люфтами.
1.3.4 Приведение механической нагрузки к одному валу
При рассмотрении механической нагрузки совместно с редуктором могут решаться
различные задачи.
Во-первых, может представлять интерес распределение скоростей, углов поворота и
моментов сил в редукторе, т. е. какие их значения соответствуют движению вала каждой
шестерни механической передачи. Знание момента сил позволяет, например, определить
нагрузку на зубцы шестерней и оценить возможность их разрушения. Знание угловой скорости позволяет, например, определить взаимодействие шестерни со смазкой и соответствующий момент вязкого трения. Знание угла поворота конкретной шестерни позволяет
учитывать мгновенное значение передаточного отношения, несоосность и т. п. (наиболее
существенно это на выходе редуктора).
Во-вторых, можно определять, каковы параметры вращения на выходном валу механической передачи, т. е. в рабочей машине. Это необходимо, чтобы анализировать (например, моделировать на ЭВМ) процессы в электромеханической системе.
В-третьих, может ставиться задача определить, как чувствует двигатель механическую нагрузку с учётом редуктора. Это необходимо, в частности, при выборе двигателя,
т. е. на этапе синтеза электромеханической системы.
При решении первой задачи последовательно используются рассмотренные выше
выражения для кинематических пар.
При решении второй задачи рассматривают выражения для скорости, угла и момента сил на выходном валу редуктора с учётом вращающего момента двигателя и параметров редуктора, в частности, (1.8) — (1.11):
ω3 =
ω1
θ
, θ3 = 1 , M 3 = M 1 ⋅ i3,1 ,
i3,1
i3,1
(1.16)
причём здесь ω1 , θ1 , M 1 — параметры вращения вала двигателя, а ω3 , θ3 , M 3 — те же
параметры вращения двигателя, пересчитанные к выходному валу редуктора. Т. е. в этой
задаче оперируют параметрами вращения двигателя на входе и выходе редуктора. Этот
процесс называют приведением к выходному валу.
26
При решении третьей задачи рассматривают выражения для скорости, угла и момента сил на валу двигателя с учётом момента нагрузки и параметров редуктора.
Выражения (1.16) можно переписать относительно вала шестерни 1 (вала двигателя):
ω1 = ω3 ⋅ i3,1 , θ1 = θ3 ⋅ i3,1 , M 1 =
M3
,
i3,1
(1.17)
причём здесь ω3 , θ3 , M 3 — параметры вращения механической нагрузки, а ω1 , θ1 ,
M 1 — те же параметры вращения нагрузки, пересчитанные к входному валу редуктора.
Т. е. в этой задаче оперируют параметрами вращения нагрузки на выходе и входе редуктора. Этот процесс называют приведением к входному валу.
Кроме угловой частоты, угла поворота и момента сил, к тому или иному валу можно
приводить и другие параметры нагрузки, в частности, моменты инерции.
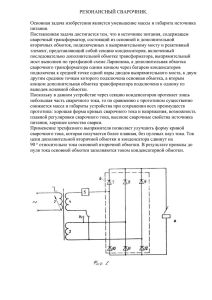
Рассмотрим для примера редуктор с двумя кинематическими парами (Рис. 1.11). В
нём имеется 4 шестерни. Шестерня 1 находится на валу двигателя, шестерня 4 — на валу
механической нагрузки, шестерни 2 и 3 находятся на одном валу и сцеплены, соответственно, с шестернями 1 и 4.
J3
J1
1
Двигатель
ω1
Нагрузка
3
ω3
ω2
2
2
J2
Рис. 1.11 — Редуктор с двумя кинематическими парами
Каждая шестерня имеет свой момент инерции. Пусть при этом момент инерции J1
включает момент инерции как самой шестерни 1, так и ротора вращающего её двигателя;
момент инерции J 2 включает момент инерции обеих шестерней на валу 2; момент инерции J 3 включает момент инерции как самой шестерни 3, так и подсоединённой к ней механической нагрузки. В моменты инерции входят также моменты инерции соответствующих валов.
В основе приведения момента инерции лежит уравнение равновесия кинетической
энергии на входе и выходе редуктора, что следует из закона сохранения энергии для вращательного движения. Полная кинетическая энергия редуктора может быть определена
как сумма кинетических энергий всех вращающихся частей:
Wк = Wк1 + Wк 2 + Wк 3 ,
27
где кинетическая энергия каждой из трёх вращающихся частей (в соответствии с законами
физики для вращательного движения):
Wк1 = J1
ω2
ω12
ω2
, Wк 2 = J 2 2 , Wк 3 = J 3 3 .
2
2
2
(1.18)
Кинетическая энергия всей системы на Рис. 1.11 может быть представлена также через некую обобщённую величину момента инерции всех вращающихся частей (двигателя,
редуктора, нагрузки) и угловую скорость входного вала (вала двигателя):
ω12
Wк = J ′Σ
,
2
где J Σ′ — приведённый момент инерции всех шестерней и валов редуктора, нагрузки и
двигателя к входному валу, вращающемуся с угловой скоростью ω1 .
Дальнейшая задача — определить, как J ′Σ связан с моментами инерции отдельных
вращающихся частей системы на Рис. 1.12.
Wк′2,3
J1 + J 2′ ,3
1
Двигатель
ω1
J3
Нагрузка
3
ω2 Wк′3
2
2
J 2,3
ω3
Wк 3
Wк 2,3
= J 2 + J 3′
Рис. 1.12 — Приведение момента инерции к входному валу редуктора
Пусть кинетическая энергия шестерни 3 (вместе с валом и нагрузкой):
Wк 3
ω32
= J3
.
2
Та же кинетическая энергия со стороны вала шестерни 2:
Wк′3 = J 3′
ω22
,
2
где используется угловая скорость шестерни 2 и пока не известный момент инерции J 3′ ,
который является приведённым моментом инерции шестерни 3 к валу шестерни 2.
С учётом равенства кинетических энергий на входе (шестерня 2) и выходе (шестерня
3) рассматриваемой кинематической пары:
28
ω32
ω22
Wк′3 = Wк 3 , J 3′
,
= J3
2
2
откуда приведённый момент инерции:
J 3′ = J 3
ω32
ω22
=
J3
i22,3
,
(1.19)
т. е. приведённый момент инерции уменьшается в квадрат передаточного отношения раз.
Это означает, что если вращать вал шестерни 2, то инерционность шестерни 3 (вме2
сте с нагрузкой) будет чувствоваться с ослаблением в i2,3 раз, а при больших значениях
передаточного отношения будет практически не заметна.
Суммарный момент инерции шестерни 2 с учётом её собственного момента инерции:
J 2,3 = J 2 + J 3′ = J 2 +
J3
i22,3
.
(1.20)
Аналогично этому происходит дальнейшее приведение момента инерции к валу
шестерни 1:
Wк′2,3
ω12
ω22
ω12
ω22
= J 2′ ,3
= J 2,3
, Wк 2,3 = J 2,3
, Wк′2,3 = Wк 2,3 , J 2′ ,3
,
2
2
2
2
откуда приведённый момент инерции двух последних шестерней:
J 2′ ,3 = J 2,3
ω22
ω12
=
J 2,3
i12, 2
.
(1.21)
Суммарный момент инерции шестерни 1 с учётом её собственного момента инерции
(и момента инерции двигателя):
J Σ = J1 + J 2′ ,3 = J1 +
J 2 ,3
i12, 2
.
(1.22)
Выражение (1.20) подставляется в (1.21), а результат затем в (1.22):
J Σ = J1 + J 2′ ,3 = J1 +
= J1 +
J 2,3
i12, 2
1
i12, 2
= J1 +
J2 +
1
i12, 2
1 J3
i12, 2 i22,3
(J 2 + J 3′ ) = J1 +
= J1 +
J2
i12, 2
+
J3
i12,3
J 3 ⎞⎟
1 ⎛⎜
+
J
2
i12, 2 ⎜⎝
i22,3 ⎟⎠
,
(1.23)
откуда следует, что момент инерции каждой вращающейся части с точки зрения входного
вала (двигателя) ослабляется в квадрат передаточного отношения раз. Чем далее от входного вала находится рассматриваемая вращающаяся часть, тем меньше её приведённый
момент инерции, т. е. тем слабее она ощущается двигателем. Фактически, лишь момент
инерции ближайшей к двигателю вращающейся части имеет значение.
29
Если в нагрузке учитываются неидеальности механической передачи (люфты, упругое скручивание вала), то соответствующие параметры также могут быть приведены к
входному или выходному валу.
Приведение люфта можно выполнить, используя формулы приведения угла поворота. Люфт обычно задаётся с помощью линейного размера L (Рис. 1.13), который можно
перевести в угловой размер θ L , т. е. определить, на какой угол должно повернуться то
или иное зубчатое колесо, чтобы "выбрать" люфт и создать зацепление.
L
θL
r
Рис. 1.13 — Пересчёт линейного размера люфта к угловому
Очевидно, что величина угла поворота при этом будет различной для соприкасающихся колёс, так как линейный размер люфта одинаков для обеих колёс, а радиусы их могут быть различными. В соответствии с Рис. 1.13:
⎛θ ⎞ L
⎛ L⎞
sin ⎜ L ⎟ = , θ L = 2 arcsin⎜ ⎟ , рад.
⎝ 2r ⎠
⎝ 2 ⎠ 2r
При малых значениях угла выполняется sin( x) ≅ x (если угол измеряется в радианах), поэтому при малых значениях люфтов (а они всегда малы):
θL L
L
, θ L ≅ , рад.
≅
2 2r
r
При движении зубчатого колеса 1 в зоне люфта оно должно повернуться на угол
L
, чтобы началось вращение зубчатого колеса 2. При этом зубчатое колесо 2 не
r1
L
и угловой люфт будет передан с учётом следующих соотповернётся на угол θ L 2 ≅
r2
θ L1 ≅
ношений:
L = r2θ L 2 = r1θ L1 , θ L 2 = θ L1
r1
1
= θ L1
,
r2
i2,1
т. е. в понижающем редукторе с i2,1 > 1 угловой люфт ослаблен в передаточное отношение раз, как и другие углы.
Это означает, что при больших передаточных отношениях люфт передаётся со входа
на выход редуктора с ослаблением и наибольшее значение для точности передачи вращения имеет люфт последней кинематической пары.
30
В то же время, наличие люфта приводит к соударениям между сцепляющимися зубчатыми колёсами. В понижающем редукторе выходные кинематические пары имеют небольшие относительные скорости и соударения оказываются сравнительно слабыми. Первая от двигателя кинематическая пара имеет самую высокую относительную скорость
(скорость двигателя) и удары могут быть весьма значительными. Поэтому, несмотря на то,
что люфт первой кинематической пары почти не влияет на точность передачи, его следует
всё же делать как можно меньшим, так как он может снижать надёжность всего редуктора.
Приведение параметров вращения нагрузки к валу двигателя позволяет понять, в каком режиме должен работать двигатель, чтобы удовлетворить требования по нагрузке. В
частности, какие статические и динамические составляющие момента нагрузки он должен
преодолевать в процессе работы, так как исходными при выборе двигателя являются параметры вращения нагрузки.
Из выражений (1.17) следует, что в случае понижающего редуктора, когда его передаточное отношение больше 1, угловая скорость и угол поворота двигателя должны быть
больше, чем у нагрузки. Момент сил сопротивления нагрузки ослабляется в передаточное
отношение редуктора раз и слабо ощущается двигателем. В соответствии с (1.23) моменты
инерции нагрузки уменьшаются в квадрат передаточного отношения раз для каждой вращающейся части, т. е. могут вообще не ощущаться двигателем.
В целом можно сделать важный вывод: понижающий редуктор ослабляет воздействие нагрузки на двигатель. При этом статическая составляющая момента (в данном случае
M 3 ) ослабляется в передаточное отношение раз, а динамическая составляющая (в данном
случае пропорциональная J 3 ) — в квадрат передаточного отношения раз. Если, к примеру, принять величину передаточного отношения i3,1 = 10 (обычно бывает больше), то
статическая составляющая момента нагрузки будет чувствоваться двигателем ослабленной в 10 раз, а динамическая — в 100 раз. Необходимо только выбрать такой двигатель, у
которого номинальная скорость соответствует требуемой: ω1 = ω3 ⋅ i3,1 . Такое влияние
редуктора можно считать положительным и в этом одна из причин широкого применения
редукторов совместно с высокоскоростными двигателями. Отрицательным свойством редукторов является то, что с увеличением передаточного отношения увеличивается количество кинематических пар и одновременно снижаются точность редуктора и его надёжность, так как с увеличением числа вращающихся и трущихся частей увеличивается число
люфтов, повышается износ и вероятность выхода редуктора из строя.
1.4 Сведения из электротехники
Суть любого силового воздействия — преобразование какой-либо первичной энергии, запасённой ранее, в механическую. Электрические двигатели являются разновидностью силовых преобразователей, в которых первичной энергией является электрическая.
Их распространённость обусловлена удобством производства и передачи электрической
энергии в отличие, например, от энергии пара, воды, Солнца и др. Достоинством электрической энергии является то, что её можно получать из источников всех других видов энергии и накапливать в аккумуляторах.
Поскольку электродвигатели используются совместно с источниками питания и другими электротехническими устройствами, в теории электромеханического преобразования
энергии присутствуют некоторые теоретические положения теории электрических цепей:
• понятие о типовых элементах (резистор, катушка индуктивности, источник ЭДС,
источник напряжения, источник тока);
• законы Ома и Кирхгофа;
31
•
•
схемы соединения контуров ("звезда", "треугольник" и др.);
методы анализа многоконтурных цепей (методы контурных токов, узловых потенциалов и др.).
Обмотки двигателя целесообразно представлять в виде некоторой эквивалентной
электротехнической схемы замещения (Рис. 1.14,а).
L
R
u
eLL
i
а)
u
R
eL
R
eLL
i
u
e
i
б)
в)
Рис. 1.14 — Схема замещения обмоток:
а) с выделением собственной индуктивности;
б) с заменой индуктивности эквивалентной ЭДС;
в) с включением эквивалентной ЭДС в общую ЭДС
Очевидно, такая схема должна содержать резистор R (так как металлический провод обмотки имеет активное сопротивление), катушку индуктивности L (так как обмотка
по своей сути является ею) и источник ЭДС eLL (который имитирует наведение в обмотке ЭДС токами других обмоток). Каждая обмотка имеет начало и конец, к клеммам которых подключается соответствующий источник напряжения u .
Количество обмоток порождает соответствующее количество контуров схемы замещения. Для контура на Рис. 1.14,а можно записать уравнение Кирхгофа равновесия напряжений:
u + eLL = R ⋅ i + L
di
,
dt
di
— падение напряжения на индуктивном сопротивлении, которое можно замеdt
di
нить ЭДС eL = − L
в соответствии с законом Фарадея электромагнитной индукции
dt
где L
(Рис. 1.14,б), и тогда можно представить обе ЭДС контура в виде одной общей
e = eLL + eL (Рис. 1.14,в).
Соединение обмоток (и соответствующих им контуров схемы замещения) с подключением их к источнику питания может быть различным (Рис. 1.15). Типовыми схемами
являются: "раздельное подключение" (Рис. 1.15,в), "звезда без общего провода"
(Рис. 1.15,а), "звезда с общим проводом" (Рис. 1.15,б), "треугольник" (Рис. 1.15,г).
Возможность использования той или иной схемы определяется количеством обмоток. При наличии двух обмоток возможно только раздельное подключение. При наличии
трёх обмоток и более возможны все указанные схемы. Вид схемы определяется сочетанием схемы соединения источников питания и схемы соединения обмоток.
Уравнения равновесия напряжений для раздельного подключения источников питания и обмоток имеет самый простой вид:
u k + ek = Rk ⋅ ik
32
на основании второго закона Кирхгофа, где k — номер (индекс) обмотки (в качестве индексов могут использоваться обозначения фаз).
u1
u2
u3
i1
R1 e1
u1
i2
R2 e2
u2
i3
R3 e3
u3
а) "звезда" без общего провода
u1
i1
e1
i2
e2
в) раздельное
подключение
R2 e2
i3
R3 e3
i1
u2
i2
R2
u2
i2
R1
e1
u3
R1 e1
б) "звезда" с общим проводом
u1
R1
i1
R2
i3
e3
R3
e2
г) "звезда" — "треугольник"
Рис. 1.15 — Возможные схемы соединения обмоток
При раздельном подключении обмоток число уравнений равновесия напряжений
всегда равно числу обмоток.
Уравнения равновесия напряжений для других схем подключения обмоток записываются в соответствии с методами анализа многоконтурных цепей, например, метода контурных токов, узловых потенциалов и др. При этом может оказаться, что число независимых контуров (и число уравнений равновесия напряжений) окажется меньше числа обмоток. Примером такого подключения являются "звезда без общего провода" (Рис. 1.15,а) и
"звезда —треугольник" (Рис. 1.15,г). Кроме приведённых на Рис. 1.15 схем, возможны
также другие — с иным сочетанием схемы соединения источников питания и обмоток.
1.5 Сведения из теории электромагнитных и магнитных
цепей
Существует много типов электродвигателей, но все они работают на основе одних и
тех же фундаментальных законов физики электромагнетизма —Био — Савара — Лапласа,
Фарадея, Ампера. Закон Био — Савара — Лапласа отражает способность электрического
тока создавать в окружающем пространстве магнитное поле, закон электромагнитной индукции Фарадея отражает процесс преобразования механической энергии в электрическую, а закон Ампера — электрической в механическую. В обоих последних случаях ис-
33
пользуется промежуточный вид энергии — электромагнитная (энергия электромагнитного
поля).
При объяснении принципа работы электродвигателей и разработке их математического описания используются базовые понятия физики магнетизма — магнитное поле,
магнитодвижущая (намагничивающая) сила, напряжённость магнитного поля, намагниченность, магнитная проницаемость, магнитная проводимость, магнитная индукция,
магнитный поток, потокосцепление, индуктивность.
Понятие магнитного поля появилось как попытка объяснить механическое взаимодействие тел без их непосредственного контакта. Из физики известно, что некоторые
предметы (например, сделанные из железа) при некоторых условиях могут взаимодействовать с другими предметами на расстоянии, вызывая их перемещение. Такое взаимодействие на расстоянии без непосредственного контакта называют полевым, но оно остаётся
материальным, так как поле является одной из форм существования материи.
Различают электрическое, магнитное и электромагнитное поля. Электрическое поле
создаётся неподвижными или движущимися электрическими зарядами (электронами, ионами). Магнитное поле создаётся постоянными магнитами, т. е. телами с магнитными
свойствами. Электромагнитное поле представляет собой физическое единство электрического и магнитного полей в их взаимодействии с учётом преобразования электрических
величин в магнитные и наоборот.
Постоянный магнит представляет собой пространственное геометрическое тело из
металла, полупроводника или другого материала. В исходном состоянии оно не обладают
магнетизмом. Для придания ему магнитных свойств его помещают во внешнее магнитное
поле, намагничивают и извлекают, после чего оно сохраняет полученные магнитные свойства.
Электромагнит представляет собой катушку с обмоткой из металлического провода,
по которому протекает электрический ток. Такая катушка с током в соответствии с законом Био — Савара — Лапласа создаёт магнитное поле и может быть намотана на сердечнике из железа или другого материала.
В соответствии с современными физическими представлениями магнитные свойства материалов определяются свойствами элементарных частиц, главным образом электронов, которые обладают двумя видами магнетизма — орбитальным, связанным с их вращением относительно атомных ядер и других электронов, и спиновым, обусловленным
собственным движением (которое упрощённо понимают как вращение вокруг собственной оси электрона, что не совсем точно). В результате создаются магнитные моменты —
силы, способные производить механическое воздействие на другие физические объекты
(например, на соседние электроны или на электроны в рядом расположенных других физических телах). В обычных условиях магнитные моменты направлены хаотично и в среднем компенсируют друг друга, никак себя не проявляя. Экспериментально показано и
теоретически обосновано, что элементарными источниками магнетизма являются электроны с некомпенсированными магнитными моментами, возникающими под действием
внешнего магнитного поля. В результате возникает намагниченность материала и по его
характеру принято различать ферромагнетики, парамагнетики и диамагнетики. Ферромагнетики (например, железо, никель, кобальт) усиливают действие внешнего магнитного
поля, парамагнетики (например, воздух, алюминий) нейтральны в этом отношении, а диамагнетики (например, медь) его ослабляют. Каждое тело, находящееся во внешнем магнитном поле, благодаря намагниченности, содержит внутреннее магнитное поле, которое
усиливает (у ферромагнетиков) или ослабляет (у диамагнетиков) действие внешнего поля.
При наличии рядом расположенных физических тел из различных материалов магнитное
поле стремится проходить через ферромагнетики. Специально предназначенные для локализации магнитного поля конструкции из ферромагнетиков называют магнитопроводами.
34
В общем случае источником магнитного поля являются намагниченность J материала и (или) магнитодвижущая сила (МДС) — магнитный аналог электродвижущей силы (ЭДС), которая создаёт напряжённость внешнего магнитного поля H .
Среда, через которую распространяется магнитное поле, характеризуется магнитной
проницаемостью. Выделяют магнитную проницаемость вакуума и магнитную проницаемость конкретного материала относительно вакуума.
Основной физической и числовой характеристикой магнитного поля является магнитная индукция (плотность магнитного потока)
B = μ0 ⋅ μ ⋅ ( J + H ) ,
где H — напряжённость магнитного поля; J — намагниченность материала; μ0 —
магнитная проницаемость вакуума; μ — магнитная проницаемость материала.
Магнитная индукция характеризует свойства материла, в котором распространяется
магнитное поле, представленное магнитной напряжённостью.
Намагниченность материала характеризует свойство этого материала воспринимать
магнитное поле, и, в свою очередь, зависит от напряжённости внешнего магнитного поля:
J = kμH
где коэффициент k μ — магнитная восприимчивость.
В соответствии с законом Био — Савара — Лапласа
При протекании электрического тока по обмотке напряжённость электромагнитного
поля:
Η = w⋅i,
где w — число витков обмотки; i — сила тока (единица измерения магнитной напряжённости ампер-виток).
Магнитный поток Φ (прописная греческая буква "фи", единица измерения вебер,
Вб) определяется как интеграл от магнитной индукции по поверхности S , пронизываемой
данным вектором магнитной индукции:
Φ = ∫ B( S ) ⋅ dS ,
(1.24)
S
где выражение B (S ) показывает, что в общем случае индукция может быть разной в разных точках рассматриваемой поверхности.
При одинаковых значениях магнитной индукции во всех точках исследуемой поверхности (при этом она может изменяться во времени, но должна в любой его момент
быть одинаковой во всех точках) такой интеграл сводится к произведению индукции на
площадь пронизываемой поверхности: Φ = B ⋅ S .
Если МДС создаётся током в проводнике, то можно записать: Φ = f (i ) , т. е. магнитный поток является некоторой функцией тока. Это выражение отражает возможность
воздействия электрических процессов на магнитные и используется при создании электромагнитов.
Согласно закону Фарадея (или закону электромагнитной индукции), в проводнике,
находящемся в изменяющемся магнитном поле, наводится электродвижущая сила (ЭДС)
e=−
dΦ[x(t ), t ]
dΦ ( x )
dΦ (t )
⎧ dΦ ( x) dx dΦ (t ) ⎫
⋅v −
= e1 + e2 ,(1.25)
= −⎨
⋅ +
⎬=−
dt
dt
dt ⎭
dx
dt
⎩ dx
35
где e — полная ЭДС индукции; Φ — магнитный поток; t — время; x — пространственная координата, вдоль которой изменяется магнитный поток (эта координата, в свою
dΦ ( x) dx
dΦ ( x )
⋅ =−
⋅ v — ЭДС вращеdx
dt
dx
dx
ния от перемещения магнитного потока в пространстве с некоторой скоростью v =
;
dt
dΦ (t )
— трансформаторная ЭДС (от изменения магнитного потока во времени).
e2 = −
dt
очередь, может изменяться во времени); e1 = −
Закон Фарадея является основным законом, отражающим воздействие магнитных
процессов на электрические. Он показывает, что это воздействие существует только при
изменении каким либо образом магнитного потока.
В (1.25) учитывается изменение магнитного потока как во времени (наличие производной по времени t ), так и в пространстве (наличие производной по пространственной
координате x ).
При использовании в качестве источника магнитного поля постоянного магнита
поток может изменяться только в пространстве (перемещение проводника в поле или магнита относительно проводника) и тогда трансформаторная ЭДС e2 = −
dΦ (t )
= 0.
dt
При использовании электромагнита постоянного тока в его обмотке протекает постоянный ток от источника питания и картина аналогична использованию постоянных
магнитов, т. е. изменение потока возможно только в пространстве и трансформаторная
ЭДС отсутствует.
В обмотке электромагнита переменного тока протекает переменный ток и образуемый им магнитный поток изменяется во времени. Поэтому возможна ситуация, когда
поток изменяется только во времени и тогда ЭДС вращения e1 = −
dΦ ( x) dx
⋅ = 0 — это
dx
dt
имеет место в трансформаторах. Но в электромагните переменного тока возможно одновременное изменение магнитного потока как во времени, так и в пространстве, и тогда появляются обе составляющих ЭДС.
Закон электромагнитной индукции применяется прежде всего при создании генераторов электрической энергии.
При создании электродвигателей исходят из закона Ампера, гласящего, что на проводник с током, находящийся в магнитном поле, действует сила, выталкивающая его из
этого поля, и определяемая векторным произведением вектора тока и вектора магнитной
индукции:
F = [I × B ] = i ⋅ [ l × B ] ,
(1.26)
где F — вектор силы; I — вектор тока; i — величина тока через проводник; l — вектор направления протекания тока i (длина проводника с током в обмотке с учётом его
ориентации в пространстве); B — вектор магнитной индукции.
Направление действия силы определяется с помощью так называемого правила левой руки, известного из курса элементарной физики, а величина силы в простейшем случае:
F = B ⋅ i ⋅ l ⋅ sin θ ,
где θ — угол между проводником с током l и вектором магнитной индукции B .
(1.27)
36
Правило левой руки гласит, что если пальцы левой руки направить вдоль протекания
тока ( i ), а ладонь повернуть так, чтобы магнитные силовые линии (индукции B ) входили
в нее, то отогнутый большой палец покажет направление действия возникающей при этом
силы.
B ( магнитное поле)
θ
F
i (ток )
l (проводник )
r
Рис. 1.16 — К закону Ампера образования силы F
r
r
при взаимодействии тока i в проводнике l с магнитной индукцией B
Законы Фарадея и Ампера лежат в основе процессов электромеханического преобразования энергии. Закон Фарадея описывает преобразование механической энергии в электрическую, а закон Ампера — электрической в механическую. Согласно закону Фарадея,
электрические машины генераторного типа являются источниками ЭДС, а согласно закону Ампера, электрические машины двигательного типа являются источниками электромагнитной силы.
При анализе магнитных процессов рассматривают магнитные цепи, которые включают источники МДС и магнитопроводящую среду, состоящую из примыкающих друг к
другу участков пространства с той или иной магнитной проводимостью. Магнитная проводимость железа и некоторых других металлов весьма высокая, а магнитная проводимость воздуха, дерева и большинства металлов (например, меди, алюминия) весьма низкая. Магнитные потоки всегда стремятся распространяться в среде с наибольшей магнитной проводимостью. Поэтому часто электрический провод наматывают на сердечнике из
материала с хорошей магнитной проводимостью, который называют магнитопроводом. В
этом случае магнитный поток сосредоточивается внутри магнитопровода и передаётся по
магнитной цепи в нужном направлении с минимальным рассеянием в окружающем пространстве, т. е. с минимальными потерями.
Одним из основных физических параметров магнитных цепей является потокосцепление, которое тесно связано с понятием магнитного потока и законом Фарадея для ЭДС
индукции. Понятие потокосцепления можно пояснить следующим образом (Ошибка! Источник ссылки не найден.).
Пусть магнитный поток Φ пронизывает катушку с несколькими витками. Согласно
закону Фарадея, в каждом его k -том витке будет наводиться ЭДС индукции
ek = −
где w — число витков обмотки.
dΦ (t )
, k = 1K w ,
dt
(1.28)
37
Φ (t )
e1
e2
eΣ
e3
Рис. 1.17 — К понятию потокосцепления:
Φ — магнитный поток, e — ЭДС индукции
Величина ЭДС e Σ на клеммах всей обмотки будет равна сумме ЭДС, наведённых в
каждом витке (в данном случае — в трёх витках):
eΣ =
k =w
∑ ek =
k =1
dΦ (t )
d [w ⋅ Φ (t )]
dψ (t )
⎡ dΦ (t ) ⎤
w
=
−
=
−
=
−
,
⎥⎦
dt
dt
dt
dt
⎣
k =1
k =w
∑ ⎢−
(1.29)
где ψ = w ⋅ Φ — потокосцепление, определяемое как произведение потока (в данном случае общего для всех витков обмотки) на число витков.
Если поток различен от витка к витку, то в качестве потокосцепления необходимо
использовать сумму его значений для каждого витка:
ψ=
k =w
∑ Φk .
(1.30)
k =1
Таким образом, понятие потокосцепления по физическому смыслу аналогично понятию магнитного потока, но отражает ещё и эффект от его воздействия при создании ЭДС.
В электромагнитных цепях основными параметрами являются индуктивность l , которая отражает связь между током i , протекающим по данной обмотке, и возникающим
при этом потокосцеплением ψ :
ψ = l ⋅i ,
(1.31)
где индуктивность l называется также коэффициентом индукции.
Индуктивность связана с другими параметрами обмотки на основе следующих соотношений:
l ⋅ i = ψ , ψ = w ⋅ Φ , Φ = S ⋅ B , B = μ ⋅ H , H = w ⋅ i;
⎫
⎪
l ⋅ i = ψ = w ⋅ Φ = w ⋅ S ⋅ B = w ⋅ S ⋅ μ ⋅ H = w ⋅ S ⋅ μ ⋅ w ⋅ i = w 2 ⋅ S ⋅ μ ⋅ i;⎬ (1.32)
⎪
l = μ ⋅ w2 ⋅ S .
⎭
Таким образом, индуктивность зависит от магнитной проницаемости среды магнитопровода, квадрата числа витков и площади поперечного сечения магнитопровода. Очевидно, что число витков зависит, в свою очередь, от длины катушки (при том же диаметре
провода). Увеличение индуктивности способствует увеличению потокосцепления, а для
этого следует увеличивать все указанные конструктивные параметры. Для увеличения
магнитной проницаемости μ необходимо выбирать специальный материал магнитопро-
38
вода, например, железо или его сплавы. Поскольку индуктивность проявляет себя по отношению к току, который протекает в обладающей ею катушке, она называется собственной индуктивностью или коэффициентом самоиндукции.
Источником магнитного потока для обмотки может быть другая обмотка с протекающим в ней током, тогда возникает эффект взаимной индукции (взаимоиндукции):
ψ 2,1 = l2,1 ⋅ i1 ,
ψ1, 2 = l1, 2 ⋅ i2 ,
l1, 2 ≡ l2,1 ,
(1.33)
где ψ , i — потокосцепление и ток соответствующего контура; l — коэффициент, физический смысл которой тот же, что и у рассмотренной выше индуктивности, но в данном
случае его называют взаимной индуктивностью (взаимоиндуктивностью) или коэффициентом взаимоиндукции; характерной особенностью является то, что взаимная индуктивность в обоих направлениях взаимодействия контуров одинакова.
Взаимная индуктивность характеризует электромагнитную связь между двумя расположенными рядом обмотками, а именно, связь тока i1 , протекающего в обмотке 1, с потокосцеплением ψ 2,1 , возникающим в обмотке 2 (и наоборот).
Φ2
θ1, 2
2
Φ1
l 2 ,1
ψ 2 ,1
θ1, 2
2
l1, 2
1
i2
u1
1
u2
ψ1, 2
i1
Φ1
Φ2
а)
б)
Рис. 1.18 — К понятию взаимной индуктивности
между двумя контурами (обмотками):
а) индуктивность l 2,1 , б) индуктивность l1, 2
На Рис 1.8 а обмотка 1 запитана напряжением u1 , в результате чего в ней протекает
ток i1 , который создаёт магнитный поток Φ1 , пронизывающий также обмотку 2 и осуществляющий с ней потокосцепление. При анализе процессов в магнитосвязанных обмотках
учитывается взаимная ориентация этих обмоток: если оси обмоток совпадают, то взаимная индуктивность между этими обмотками максимальна; если оси обмоток направлены
под углом 90º, то взаимная индуктивность равна нулю. Приблизительно эта зависимость
может быть выражена косинусоидальной функцией:
l2,1 = L2,1 ⋅ cos( θ1, 2 ) ,
(1.34)
39
где θ1, 2 — угол между осями обмоток; L2,1 — максимум взаимной индуктивности, определяемый конструкцией обмоток (числом витков, наличием сердечника и т. п.).
На Рис. 1.18,б представлена зеркальная ситуация: обмотка 2 запитана напряжением
u 2 , в результате чего в ней протекает ток i2 , который создаёт магнитный поток Φ2 , пронизывающий также обмотку 1 и осуществляющий с ней потокосцепление. Этому процессу соответствует взаимная индуктивность
l1, 2 = L1, 2 ⋅ cos( θ1, 2 ) .
(1.35)
Физическая природа взаимной индуктивности такова, что всегда L1, 2 = L2,1 , так как
они рассчитываются через одни и те же параметры обеих обмоток, поэтому l1, 2 = l2,1 , поскольку угол θ1, 2 также один и тот же.
Т. е. величина собственной индуктивности обмотки зависит только от её конструкции (числа витков, их расположения, материала сердечника), а величина взаимной индуктивности зависит от таких же параметров обеих обмоток и ещё от их взаимного положения.
В результате потокосцепление одной обмотки с другой имеют также примерно косинусоидальную зависимость от угла между ними:
ψ 2,1 = l2,1i1 = L2,1 ⋅ cos( θ1, 2 ) ⋅ i1 , ψ1, 2 = l1, 2i1 = L1, 2 ⋅ cos( θ1, 2 ) ⋅ i2 .
(1.36)
В общем случае взаимные потокосцепления ψ1, 2 и ψ 2,1 не являются одинаковыми
по величине, так как определяются не только взаимными индуктивностями (которые одинаковы), но также токами противоположных обмоток.
Магнитный поток от постоянного магнита также образует с обмотками потокосцепление, имеющее аналогичную зависимость от угла θ1, 2 между осью постоянного магнита
S μ и обмотки S w .
Sμ
θ1, 2
Φμ
Sw
ψ 2 ,1
Φμ
Рис. 1.19 — К понятию потокосцепления обмотки
с магнитным потоком постоянного магнита
Потокосцепление обмотки с магнитным потоком постоянного магнита выражается
аналогичным образом:
40
ψ 2,1 = k μ ⋅ Φ μ ⋅ cos( θ1, 2 ) ,
(1.37)
где k μ — коэффициент, характеризующий обмотку (число витков, геометрию магнитопровода и т. п.); Φμ — поток постоянных магнитов.
Угол между осями обмоток или между осью обмотки и осью постоянного магнита
может меняться во времени (как это имеет место в электродвигателях вращательного
движения).
При изменении потокосцепления обмотки из-за изменения угла или тока в ней наводится ЭДС взаимоиндукции, которую можно определить в соответствии с выше рассмотренными выражениями для потокосцепления и взаимной индуктивности. При наличии
потокосцепления от другой обмотки соответствующая ей ЭДС
e2,1 = −
=−
=−
dt
d { l2,1 [ θ1, 2 (t ) ]}
dt
d [ l2,1 (θ1, 2 ) ]
=−
=−
d { ψ 2,1 [ θ1, 2 (t ), t ]}
dθ1, 2
⋅
d [ l2,1 (θ1, 2 ) ]
dθ1, 2
d [ L2,1 ⋅ cos( θ1, 2 ) ]
dθ1, 2
= − L2,1 ⋅
d [ cos( θ1, 2 ) ]
dθ1, 2
d { l2,1 [ θ1, 2 (t ) ] ⋅ i1 (t )}
dt
⋅ i1 (t ) − l2,1 [ θ1, 2 (t ) ] ⋅
dθ1, 2
dt
=−
di1 (t )
=
dt
⋅ i1 (t ) − l2,1 [ θ1, 2 (t ) ] ⋅
⋅ ω1, 2 ⋅ i1 (t ) − l2,1 [ θ1, 2 (t ) ] ⋅
di1 (t )
=
dt
di1 (t )
=
dt
⋅ ω1, 2 ⋅ i1 (t ) − L2,1 ⋅ cos( θ1, 2 ) ⋅
di1 (t )
=
dt
⋅ ω1, 2 ⋅ i1 (t ) − L2,1 ⋅ cos( θ1, 2 ) ⋅
di1 (t )
=
dt
= L2,1 ⋅ sin( θ1, 2 ) ⋅ ω1, 2 ⋅ i1 (t ) − L2,1 ⋅ cos( θ1, 2 ) ⋅
где ω1, 2 =
dθ1, 2
dt
=
di1 (t )
,
dt
(1.38)
— скорость изменения угла между обмотками (угловая скорость враще-
ния одной из обмоток относительно другой).
В соответствии с полученным выражением (1.38) можно увидеть, что ЭДС, наводимая во второй обмотке от воздействия на неё тока первой обмотки, включает две составляющие: зависящую от угловой скорости ω1, 2 и тока i1 (ЭДС вращения) и зависящую от
производной тока
di1
(противо-ЭДС).
dt
ЭДС вращения обусловлена механическим перемещением одной обмотки относительно другой, поэтому в случае взаимно неподвижных обмоток эта составляющая отсутствует. Эта ситуация имеется, например, в трансформаторах. Противо-ЭДС появляется
вследствие известного эффекта возникновения ЭДС, препятствующей изменению тока, и
41
пропорциональной его производной. Эта составляющая отсутствует, если в первой обмотке протекает постоянный ток.
1.6 Законы электромеханики.
Кроме законов физики при создании и анализе ЭМУ используются законы электромеханики, являющиеся обобщением или, напротив, конкретизацией законов физики применительно к электромеханическим процессам. Выделяют три закона электромеханики.
Первый закон электромеханики: электромеханическое преобразование энергии не
может осуществляться с КПД, равным 100%.
Невозможность взаимного преобразования энергии с КПД больше 100% обусловлена законом сохранения энергии, но в данном случае речь идёт о том, что даже КПД 100%
достичь невозможно (что, вообще говоря, законом сохранения энергии не запрещается и
в некоторых редких случаях имеет место в других технических устройствах). Для доказательства этого положения следует рассмотреть математические модели ЭМУ. Тогда можно заметить, что в них входят активные сопротивления обмоток. Рассеяние энергии на
этих сопротивлениях является причиной потерь в ЭМУ и поэтому их стремятся уменьшить. Но если эти сопротивления приравнять нулю (что соответствует КПД 100%), уравнения математически не будут иметь решения, т. е. нормальные процессы в таких ЭМУ не
могут протекать. Существуют ЭМУ со сверхпроводящими обмотками (погружёнными в
специальный охладитель), что вроде бы противоречит данному закону электромеханики.
Но на самом деле сверхпроводимостью обладают только сами обмотки, а внешние провода, соединяющие их с источником питания или электрической нагрузкой, имеют конечное
сопротивление и за счёт этого такие ЭМУ могут работать. При этом сверхпроводимость
обеспечивает высокий КПД, близкий (но не равный!) 100%, и, главное, — малый нагрев
самих ЭМУ.
Второй закон электромеханики: все электрические машины обратимы, т. е. они
могут работать как в двигательном, так и в генераторном режимах.
Этот закон непосредственно вытекает из законов Фарадея и Ампера, так как они оба
справедливы для любого ЭМУ. Но может оказаться, что схемы включения ЭМУ в двигательном и генераторном режимах будут различными.
Третий закон электромеханики: однонаправленное электромеханическое преобразование энергии осуществляется полями, неподвижными относительно друг друга.
Т. е. если одно из полей (например, статора) вращается, то и другое (например, ротора) должно вращаться с такой же скоростью. Это хорошо видно из анализа работы простейшего ЭМУ двигательного типа. Здесь ротор со своими магнитами строго следует за
магнитами статора и поля вращаются с одинаковой средней за оборот скоростью (мгновенная скорость может колебаться в соответствии с колебаниями нагрузки). Из анализа
математических моделей ЭМУ следует, что в случае, если поля статора и ротора перемещаются друг относительно друга, то создаётся переменный момент, периодически меняющий свой знак. Такой ЭМУ может использоваться в качестве вибратора, но в качестве
вращающего механизма он работать не может.
Отличие законов электромеханики от законов физики в отношении ЭМУ заключаются, в частности, в том, что законы физики позволяют анализировать процессы в ЭМУ, а
законы электромеханики позволяют обобщить сведения об этих процессах. Т. е. законы
физики сводятся к математическим выражениям, а законы электромеханики являются логическими выводами из них с учётом их применения в ЭМУ.
42
1.7 Двухполюсные и многополюсные электромеханические
устройства
Выше было рассмотрено так называемое двухполюсное ЭМУ, у которого для каждой фазы было по одному северному и одному южному полюсу. Кроме двухполюсных
выпускаются также многополюсные ЭМУ, у которых каждая фаза содержит более одной
обмотки и таким образом создаётся несколько полюсов. При этом пропорционально числу
полюсов увеличивается вращающий момент, но также пропорционально уменьшается
скорость, а мощность (произведение скорости на момент) остаётся неизменной.
Рассмотрим структуру размещения обмоток в двухполюсной и многополюсной машинах и сравним их.
На Рис. 1.20,а представлена однофазная обмотка с одной парой полюсов. Она состоит из двух полуобмоток, размещаемых, например, на статоре по его диаметральной оси.
На Рис. 1.20,б представлена двухфазная обмотка с одной парой полюсов. Здесь две
одинаковые обмотки сдвинуты на 90˚ и запитаны каждая своим напряжением.
На Рис. 1.20,в показана однофазная обмотка с двумя парами полюсов. Она напоминает двухфазную, так как состоит тоже из четырёх полуобмоток, расположенных под углом 90˚, но отличается их соединением (все они соединены последовательно) и питанием
от одного источника. Полуобмотки должны быть соединены так, чтобы их полюса (северный N и южный S) перемежались.
На Рис.1.20,г показана двухфазная обмотка с двумя парами полюсов. Видно, что
вторая обмотка сдвинута на 45˚, а не на 90˚, как при одной паре полюсов.
u1b
u1a
а) одна фаза, одна
пара полюсов
u1a
б) две фазы, одна
пара полюсов
i1b
u1b
i1a
i1a
u1a
u1a
в) одна фаза, две
пары полюсов
г) две фазы, две
пары полюсов
Рис. 1.20 — К понятиям многофазной и многополюсной обмотки
Увеличение числа пар полюсов проявляется в том, что при той же частоте питающих
напряжений уменьшается угловая скорость поля и увеличивается величина вращающего
момента.
.
43
1.8 Явнополюсные и неявнополюсные электрические
машины
Важной конструктивной характеристикой ЭМУ является также явнополюсность.
ЭМУ бывают явнополюсные и неявнополюсные, что всецело определяется их конструкцией. Отнесение ЭМУ к той или иной категории существенно влияет на исходные выражения индуктивностей и, следовательно, на математическую модель.
Смысл понятия явнополюсности в следующем. Магнитный путь в ЭМУ проходит
через железо статора и ротора и воздушный зазор между ними. Магнитное сопротивление
железа магнитопровода весьма мало и им можно пренебречь по сравнению с магнитным
сопротивлением воздушного зазора. Магнитное сопротивление воздушного зазора пропорционально воздушному промежутку, преодолеваемому магнитным потоком.
Φ
а) неявнополюсная
Φ
б) явнополюсная
Рис. 1.21 — К понятиям явнополюсная и неявнополюсная обмотка
(в данном случае — ротора)
У неявнополюсной обмотки (Рис. 1.21,а) форма сердечника ротора (снаружи) соответствует форме сердечника статора (внутри) по всей окружности, поэтому воздушный
зазор на всём протяжении имеет одинаковую величину. Это означает, что при вращении
ротора магнитное сопротивление зазора всегда и везде остаётся неизменным и не влияет,
например, на значения собственных и взаимных индуктивностей обмоток. Разумеется, в
реальности пазы, в которые укладывается обмотка ротора, искажают воздушный зазор и
на самом деле при вращении ротора возникает амплитудная модуляция потока (возникают
так называемые пространственные гармоники поля). Но эти модуляции незначительны и
поэтому ими обычно пренебрегают.
У явнополюсной обмотки (Рис. 1.21,б) форма сердечника ротора соответствует форме сердечника статора только в небольшой части в близи полюсов, а в стальной части —
нет. Поэтому при вращении ротора магнитная проводимость воздушного зазора периодически меняется, что вызывает уже значительные модуляции магнитного потока, которые
необходимо учитывать.
Таким образом, понятия явнополюсность и неявнополюсность связаны прежде всего
с ротором двигателя.
В некоторых специальных типах ЭМУ явнополюсным или неявнополюсным может
быть и статор. При явнополюсных статоре и роторе картина поля в зазоре существенно
усложняется ввиду появления многочисленных пространственных гармоник.
44
В некоторых ЭМУ (например, в двигателях с электромагнитной редукцией) пространственные гармоники создаются специально и используются в качестве рабочих гармоник для получения специальных эффектов. В частности, путём формирования определённого вида явнополюсности статора и ротора обеспечивают работу двигателя на пониженных скоростях с повышенными электромагнитными моментами, что позволяет обходиться без механических редукторов.
В классических машинах обычно статор делают неявнополюсным, а ротор — неявнополюсным у асинхронных машин и явнополюсным — у синхронных.
Равномерность воздушного зазора определяется главным образом тем, какими выполнены обмотки — явнополюсными или неявнополюсными. В случае явнополюсных
обмоток зазор в принципе неравномерный. В случае неявнополюсных обмоток зазор в целом равномерный, но наличие пазов для обмоток всё же приводит к некоторой его неравномерности, которую в ряде случаев следует учитывать, хотя в большинстве случаев ею
пренебрегают.
1.9 Электрические машины постоянного тока
1.9.1 Физический принцип работы
Несмотря на преимущественное распространение электроэнергии переменного тока,
электрические машины постоянного тока в настоящее время широко применяются в качестве двигателей и, в меньшей степени, в качестве генераторов. Это объясняется важным
преимуществом двигателей постоянного тока перед другими электродвигателями. Электродвигатели постоянного тока имеют хорошие регулировочные свойства, значительную
перегрузочную способность и позволяют получать жесткие и мягкие механические характеристики. А именно:
Они допускают плавное регулирование частоты вращения ротора простыми способами;
Двигатели постоянного тока обладают большими пусковыми моментами при относительно малых пусковых токах.
Назначение. Такие машины широко используют для привода различных механизмов
в черной металлургии (прокатные станы, кантователи, роликовые транспортеры), на
транспорте (электровозы, тепловозы, электропоезда, электромобили), в грузоподъемных и
землеройных устройствах (краны, шахтные подъемники, экскаваторы), на морских и речных судах, в металлообрабатывающей, бумажной, текстильной, полиграфической промышленности и др.
Двигатели небольшой мощности применяют во многих системах автоматики в качестве исполнительных звеньев, а специальные генераторы используются как усилители
электрических сигналов и как датчики частоты вращения.
Конструкция двигателей постоянного тока сложнее и их стоимость выше, чем асинхронных двигателей. Однако в связи с широким применением автоматизированного электропривода и тиристорных преобразователей, позволяющих питать электродвигатели постоянного тока регулируемым напряжением от сети переменного тока, эти электродвигатели широко используют в различных отраслях народного хозяйства.
Генераторы постоянного тока ранее широко использовались для питания электродвигателей постоянного тока в стационарных и передвижных установках, а также как источники электрической энергии для заряда аккумуляторных батарей, питания электролизных и гальванических ванн, для электроснабжения различных электрических потребителей на автомобилях, самолетах, пассажирских вагонах, электровозах, тепловозах и др.
45
Недостаток машин постоянного тока — наличие щеточноколлекторного аппарата,
который требует тщательного ухода в эксплуатации и снижает надежность работы машины.
Электропромышленность выпускает ряд двигателей постоянного тока специального
исполнения — для электротяги, экскаваторов, металлургического оборудования, шахтных
подъемников, буровых установок, морских и речных судов и других приводов мощностью
от нескольких сотен до нескольких тысяч кВт.
Устройство простейшей машины. На Рис. 1.22 представлена простейшая машина постоянного тока, а на рис. дано схематическое изображение этой машины в осевом направлении. Неподвижная часть машины, называемая индуктором, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в машине основного магнитного потока. Индуктор изображенной простейшей
машины имеет два полюса (1).
Вращающаяся часть машины состоит из укрепленных на валу цилиндрического якоря (2) и коллектора (3). Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанной
на рисунке простейшей машины имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае
равно двум. На коллектор налегают две неподвижные щетки (4), с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных машинах постоянного тока создаются обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
В данном случае основной магнитный поток создается постоянными магнитами, но в
большинстве случаев используются электромагниты.
Рис. 1.22 — Устройство простейшей машины постоянного тока
Режим генератора. Рассмотрим сначала работу машины в режиме генератора. Предположим, что якорь машины приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуцируется ЭДС, направление которой может быть определено
по правилу правой руки. Поскольку поток полюсов предполагается неизменным, то эта
ЭДС индуктируется только вследствие вращения якоря и называется ЭДС вращения. Эта
ЭДС является переменной, так как проводники обмотки якоря проходят попеременно под
северным и южным полюсами, в результате чего направление ЭДС в проводниках меня-
46
ется. По форме кривая ЭДС проводника в зависимости от времени t повторяет кривую
распределения индукции В вдоль воздушного зазора
Если обмотка якоря с помощью щеток замкнута через внешнюю цепь, то в этой цепи, а так же в обмотке якоря возникает ток Ia. В обмотке якоря этот ток будет переменным, и кривая его по форме аналогична кривой ЭДС. Однако во внешней цепи направление тока будет постоянным, что объясняется действием коллектора. Действительно, при
повороте якоря и коллектора на 900 и изменении направления ЭДС в проводниках одновременно происходит также смена коллекторных пластин под щетками. Вследствие этого
под верхней щеткой всегда будет находиться пластина, соединенная с проводником, расположенным под северным полюсом, а под нижней щеткой – пластина, соединенная с
проводником, расположенным под южным полюсом. В результате этого полярность щеток и направление тока во внешней цепи остаются неизменными.
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Режим двигателя. Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При
этом на проводники обмотки якоря будут действовать электромагнитные силы Fпр и возникнет электромагнитный момент Мэм. Величины Fпр и Мэм, как и для генератора, определяются равенствами . При достаточной величине Мэм якорь машины придет во вращение и
будет развивать механическую мощность. Момент Мэм при этом является движущим и
действует в направлении вращения.
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора
тока.
Проводники обмотки якоря двигателя также вращаются в магнитном поле, и поэтому в обмотке якоря двигателя тоже индуктируется ЭДС Еа,. Направление ЭДС в двигателе
такое же, как и в генераторе. Таким образом, в двигателе ЭДС якоря Еа направлена против
тока Ia и приложенного к зажимам якоря напряжения Uа. Поэтому ЭДС якоря двигателя
называется также противоэлектродвижущей силой.
Принцип обратимости. Из изложенного выше следует, что каждая машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью. Для перехода машины постоянного тока из режима генератора в режим двигателя и
обратно при неизменной полярности полюсов и щеток и при неизменном направлении
вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в машинах переменного тока.
1.9.2 Устройство машины постоянного тока
Сердечники полюсов набираются из листов, выштампованных из электротехнической стали, а иногда из листов конструкционной стали. Так как магнитный поток полюсов
в стационарных режимах не изменяется, то листы друг от друга обычно не изолируются.
Расположенная на полюсе обмотка часто разбивается на 2-4 катушки для лучшего ее охлаждения. Число главных полюсов всегда четное, причем северные и южные полюсы чередуются, что достигается соответствующим соединением катушек возбуждения отдельных полюсов. Катушки всех полюсов соединяются обычно последовательно. Для улучшения токосъема с коллектора в машинах мощностью более 0,5 кВт между главными полю-
47
сами устанавливаются также дополнительные полюсы, которые меньше главных по своим
размерам. Сердечники дополнительных полюсов обычно изготовляются из конструкционной стали. Как главные, так и дополнительные полюсы крепятся к ярму с помощью
болтов. Ярмо в современных машинах обычно выполняется из стали (из стальных труб в
машинах малой мощности, из стального листового проката, а так же из стального литья).
В машинах постоянного тока массивное ярмо является одновременно также станиной, т.е.
той частью, к которой крепятся другие неподвижные части машины и с помощью которой
машина обычно крепится к фундаменту или другому основанию. Сердечник якоря набирается из штампованных дисков электротехнической стали. Диски насаживаются либо непосредственно на вал, либо набираются на якорную втулку, которая надевается на вал.
Сердечники якоря диаметром 100 см и выше составляются из штампованных сегментов
электротехнической стали. сегменты набираются на корпус якоря, который изготовляется
обычно из листового стального проката и с помощью втулки соединяется с валом. В пазы
на внешней поверхности якоря укладываются катушки обмотки якоря. Выступающие с
каждой стороны из сердечника якоря лобовые части обмотки имеют вид цилиндрического кольца и своими внутренними поверхностями опираются на обмоткодержатели, а по
внешней поверхности крепятся проволочными бандажами . Обмотка соединяется с коллектором
Обмотка якоря является важнейшим элементом машины и должна соответствовать
следующим требованиям:
обмотка должна быть рассчитана на заданные величины напряжения и тока нагрузки, соответствующие номинальной мощности;
обмотка должна иметь необходимую электрическую, механическую и термическую
прочность;
конструкция обмотки должна обеспечить удовлетворительные условия токосъема с
коллектора, без вредного искрения;
расход материала при заданных эксплуатационных показателях должен быть минимальным;
технология изготовления обмотки должна быть по возможности простой.
В современных машинах постоянного тока якорная обмотка укладывается в пазах на
внешней поверхности якоря. Такие обмотки называются барабанными. Обмотки якорей
подразделяют на петлевые и волновые. Существуют также обмотки, которые представляют собой сочетание этих двух обмоток.
Коллектор состоит из медных пластин изолированных друг от друга миканитовыми
прокладками. Пластины имеют трапецеидальное сечение и вместе с прокладками составляют кольцо. Коллектор крепится на валу с помощью шпонки. К каждой пластине коллектора присоединяются соединительные проводники от обмотки якоря.
Для отвода тока от вращающегося коллектора и подвода к нему тока применяется
щеточный аппарат, который состоит из щеток, щеткодержателей, щеточных пальцев, щеточной траверсы и токособирающих шин.
Коллектор и щеточный аппарат являются весьма ответственными узлами машины,
от конструкции и качества изготовления которых в большей степени зависит бесперебойная работа машины и надежность электрического контакта между коллектором и щетками.
На корпусе машины имеется коробка с зажимами, куда выведены концы обмотки
якоря и обмотки возбуждения. Обычно на корпусе присутствует паспортный щиток, на
котором указаны номинальные параметры машины (отдаваемая электрическая мощность
генератора или механическая мощность двигателя, напряжение, ток, частота вращения,
способ возбуждения, коэффициент полезного действия, масса, номер машины, данные
производителя).
48
1.9.3 Искрение щеток на коллекторе
Работа машины постоянного тока может сопровождаться искрением между краями
щеток и коллекторными пластинами. При интенсивном искрении поверхности щеток и
коллектора разрушаются. Искрение может вызываться большим количеством причин, которые обычно разбивают на две группы — механические и электромагнитные.
Механические причины следующие: биение коллектора, его эллиптичность, шероховатость рабочей поверхности коллектора, наличие выступающих коллекторных пластин
и изоляционных прокладок, вибрация щеткодержателей и т. п. Эти причины приводят к
вибрации щеток, в связи с чем возможен кратковременный разрыв контакта между щеткой и коллекторными пластинами и возникновение кратковременной электрической дуги.
Особенно трудно обеспечить устойчивую работу щеток при больших окружных скоростях
коллектора — примерно 50 м/с и выше, что связано с особыми свойствами щеточного
контакта.
Электромагнитные причины приводят к тому, что даже в случае идеального состояния щеточного контакта при выходе коллекторной пластины из-под щетки происходит
разрыв электрической цепи, по которой проходит ток, и возникает короткая электрическая
дуга, повреждающая сбегающие части щетки и коллекторных пластин. Искрение, вызванное электромагнитными причинами, повреждает поверхность коллектора и приводит к
вибрации щеток, т. е. способствует возникновению искрения по механическим причинам.
Неустойчивость щеточного контакта, обусловленная механическими причинами, существенно влияет на электромагнитные процессы, происходящие в коммутируемых секциях.
Поэтому, как правило, искрение щеток на коллекторе — это результат совместного действия многих причин.
Затраты на ремонт и эксплуатацию коллекторных машин (замену щеток, проточку
коллекторов, устранение последствий кругового огня и т. п.) очень велики. Поэтому мероприятия, проводимые по уменьшению интенсивности искрения щеток, могут дать существенный технико-экономический эффект.
Повышенное искрение щеток могут вызывать и другие особенности эксплуатации;
вибрация и удары машины, работа на высоте более 1000 м над уровнем моря, работа в запыленных помещениях или в агрессивной среде и т. п. Поэтому технические требования,
предъявляемые к разработке машин постоянного тока, должны учитывать условия их будущей эксплуатации.
1.9.4 Генераторы постоянного тока
Свойства генератора постоянного тока обусловлены в основном способом питания
обмотки возбуждения. В зависимости от этого различают следующие типы генераторов:
1) с независимым возбуждением — обмотка возбуждения получает питание от постороннего источника постоянного тока;
2) с параллельным возбуждением — обмотка возбуждения подключена к обмотке
якоря параллельно нагрузке;
3) с последовательным возбуждением — обмотка возбуждения включена последовательно с обмоток якоря и нагрузкой;
4) со смешанным возбуждением — имеются две обмотки возбуждения: одна подключена параллельно нагрузке, а другая— последовательно с ней.
Генераторы рассматриваемых типов имеют одинаковое устройство и отличаются
лишь выполнением обмотки возбуждения. Обмотки независимого и параллельного возбуждения, имеющие большое число витков, изготовляют из провода малого сечения,
имеющего большое сопротивление в сотни Ом; обмотку последовательного возбуждения,
имеющую небольшое число витков,— из провода большого сечения. В данных способах,
чтобы создать необходимое МДС и уменьшить потребление энергии в обмотках возбуж-
49
дения увеличивают число витков, при этом уменьшается ток возбуждения. Ток возбуждения составляет 3÷5% от номинального тока, что является экономичным. Генераторы малой мощности иногда выполняют с постоянными магнитами. Свойства таких генераторов
близки к свойствам генераторов с независимым возбуждением.
Свойства генераторов анализируются с помощью характеристик, которые устанавливают зависимости между основными величинами, определяющими работу генераторов.
Такими основными величинами являются: 1) напряжение на зажимах U, 2) ток возбуждения Iв, 3) ток якоря Ia или ток нагрузки I, 4) скорость вращения n.
Обычно генераторы работают при n=const. Поэтому основные характеристики генераторов определяются при n= const.
Существует пять основных характеристик генераторов: 1) холостого хода, 2) короткого замыкания, 3) внешняя, 4) регулировочная, 5) нагрузочная.
Все характеристики могут быть определены как экспериментальным, так и расчетным путем.
Магнитная характеристика генератора постоянного тока. Магнитодвижущая сила
обмотки возбуждения создает магнитные потоки полюсов. Зависимость магнитного потока от тока возбуждения Iв называется магнитной характеристикой. Ее получает экспериментальным путем. Магнитная характеристика представляет собой узкую петлю гистерезиса, т.к. магнитопровод машины выполнен из магнитомягкого материала. Начальная,
прямолинейная, часть магнитной характеристики соответствует ненасыщенному состоянию магнитной цепи. Строить машину с ненасыщенной магнитной цепью невыгодно, т.к
машина получится тяжелой. Нецелесообразно также строить машину с чрезвычайно насыщенной магнитной цепью, т.к. необходимо выполнить мощную обмотку возбуждения и
с большими потерями мощности на возбуждение. По этим причинам электрические машины изготовляются с умеренным насыщением при номинальном режиме.
Характеристика холостого хода. Характеристика холостого хода Е=f(Iв) при I=0 и
n=const определяет зависимость ЭДС или напряжения якоря от тока возбуждения. Характеристика снимается экспериментально. Снятие характеристики целесообразно начинать с
максимального значения тока возбуждения и ЭДС (напряжения).
Самовозбуждение генератора постоянного тока. При отсутствии тока в обмотке возбуждения, в якоре наводится небольшая ЭДС (около 3÷5% от номинального значения
ЭДС) за счет остаточной намагниченности машины. Остаточный поток такой величины
практически всегда имеется в уже работавшей машине. Вновь изготовленную машину или
машину, которая по каким-либо причинам размагнитилась, необходимо намагнитить,
пропуская через обмотку возбуждения ток от постороннего источника.
При соблюдении необходимых условий процесс самовозбуждения протекает следующим образом. Небольшая ЭДС, индуктируемая в якоре остаточным магнитным потоком, вызывает в обмотке возбуждения малый ток Iв. Этот ток вызывает увеличение потока
полюсов, а следовательно увеличение ЭДС, которая в свою очередь обуславливает дальнейшее увеличение Iв, и т.д. Такой лавинообразный процесс самовозбуждения продолжается до тех пор, пока напряжение генератора не достигнет установившегося значения. С
насыщением цепи рост ЭДС замедляется. Процесс возбуждения длится 1-2 минуты, после
чего к генератору можно подключить нагрузку.
Очевидно, самовозбуждение генератора постоянного тока происходит при соблюдении следующих условий: 1) наличие остаточного магнитного потока полюсов; 2) подключение обмотки к якорю должно быть таким, чтобы направления остаточного и возбуждаемого потоков, складывались; 3) скорость вращения якоря должна иметь номинальное
значение.
Эксплуатационные характеристики генератора. Практический интерес представляют
два качества генератора как источника питания: 1) степень постоянства напряжения при
50
росте тока через нагрузку; 2) возможность плавного регулирования этого напряжения.
Представления об этих качествах дают характеристики холостого хода Е=f(Iв) и внешней
нагрузки U=f(I).
1.9.5 Двигатели постоянного тока
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости
вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на
транспорте и т.д.)
По способу возбуждения (Рис. 1.23) двигатели постоянного тока подразделяются
аналогично генераторам на двигатели независимого, параллельного, последовательного и
смешанного возбуждения.
Рис. 1.23 — Способы возбуждения двигателей постоянного тока
При пуске двигателя в ход необходимо:1) обеспечить надлежащую величину пускового момента и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Для двигателей постоянного тока могут быть применены три способа пуска:
1) прямой, при котором обмотка якоря подключается непосредственно к сети;
2) реостатный, при котором в цепь якоря включается пусковой реостат для ограничения тока;
3) путем плавного повышения питающего напряжения, которое подается на обмотку
якоря.
Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента, действующего на якорь. Это можно осуществить двумя
способами: путем изменения направления тока в обмотке якоря или изменения направления магнитного потока , т. е. тока возбуждения. Для этого переключают провода, подводящие ток к обмотке якоря или обмотке возбуждения.
51
1.9.6 Механические характеристики двигателей постоянного тока
Механическая характеристика двигателя - функциональная зависимость скорости
ротора от момента:
ω=
Uя
R
− 2 я 2 ⋅M .
K эм ⋅ Φ в K эм ⋅ Φ в
Механические характеристики двигателя полностью определяют качество работы
электромеханической системы в установившемся режиме и ее производительность. Они
также влияют на динамические режимы электропривода, характеризуя избыточный динамический момент, определяющий ускорение или замедление двигателя (Рис. 1.24).
Рис. 1.24 — Механическая характеристика двигателя постоянного тока с независимым и
параллельным возбуждением
Для двигателей последовательного возбуждения механическая характеристика нелинейная и не имеет точки холостого хода. При малых моментах у двигателей последовательного возбуждения наступает режим «разноса».
1.9.7 Способы управления скоростью двигателей постоянного тока
Возможны три способа регулирования скорости вращения.
Полюсное регулирование. Наиболее распространенным и экономичным является
способ регулирования скорости путем изменения потока Фв, т.е. тока возбуждения Iв.
С уменьшение Фδ, согласно выражению механической характеристики, скорость
возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фв, т.е. с наименьшей величиной ω. Поэтому практически можно только
уменьшить Фв.
Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от
номинальной. При таком регулировании КПД двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока
возбуждения. К тому же при уменьшении Iв мощность возбуждения уменьшается.
52
Верхний предел регулирования скорости вращения ограничивается механической
прочностью машины и условиями ее коммутации.
Для увеличения диапазона регулирования n посредством ослабления поля в машинах
малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют Iв=const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов Iв и поток уменьшают. Искажающее влияние поперечной
реакции якоря под первой группой полюсов в этом случае будет проявляться значительно
слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из ЭДС секций, расположенных под всеми полюсами, то в результате такого регулирования потока полюсов распределение напряжения между пластинами
будет более равномерным.
Данный вид регулирования применяется при параллельном возбуждении обычно с
помощью реостата в цепи возбуждения.
Реостатное регулирование. Другой способ регулирования скорости заключается во
включении последовательно в цепь якоря реостата или регулируемого сопротивления
.Этот способ дает возможность регулировать скорость вниз от номинальной и связан со
значительными потерями в добавочном сопротивлении и понижением КПД.
По этой причине данный способ применяется в основном для двигателей небольшой
мощности, а для более мощных двигателей используется редко и только кратковременно
(пуско-наладочные режимы и т.д.).
Основной недостаток данного метода регулирования - возникновение больших потерь энергии в реостате (особенно при низких частотах вращения).
Данный способ позволяет только уменьшать частоту вращения (по сравнению с частотой при естественной характеристике). Иногда существенным является то обстоятельство, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими (мягкими), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения.
Якорное регулирование. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при Uя>Uн (номинальное напряжение) недопустима, то данный способ, согласно выражениям механической характеристики, дает возможность регулировать скорость также вниз от номинальной. КПД двигателя при этом остается высоким, так как никаких добавочных источников потерь в схему двигателя не вносится. Однако в этом случае необходим отдельный источник тока с
регулируемым напряжением, что удорожает установку.
1.10 Электрические машины переменного тока
1.10.1 Физический принцип работы.
Рассмотренные выше физические основы электромеханического преобразования
энергии можно свести к следующим положениям:
1. в электромагнитных цепях существует возможность преобразования электрической энергии в магнитную через собственные и взаимные индуктивности обмоток;
2. преобразование магнитной энергии в электрическую возможно через изменение
во времени или пространстве магнитного потокосцепления, пересекающего витки обмотки, в соответствии с законом электромагнитной индукции Фарадея;
3. закон электромагнитной индукции Фарадея обеспечивает также возможность
преобразования механической энергии в электрическую в виде ЭДС вращения;
53
4. электромагнитное поле также, как и поле постоянных магнитов, имеет северный
и южный полюса;
5. закон Ампера обеспечивает возможность преобразования электромагнитной
энергии (совместно действующих электрической и магнитной) в механическую.
Совокупность рассмотренных физических принципов лежит в основе конструкции
любой электрической машины, в том числе синхронного двигателя с постоянными магнитами.
Любой электродвигатель имеет две взаимодействующие части — неподвижный
статор и подвижный ротор. Кроме того, чтобы в соответствии с законом Ампера обеспечить создание электромагнитной силы, необходимо иметь источник магнитного поля,
называемый индуктором, и обмотки с током, называемые якорем. Пары терминов статор — ротор и индуктор — якорь могут соотноситься различным образом. Индуктор
может располагаться как на статоре, так и на роторе. Якорь, как правило, располагается на
противоположной части двигателя∗. Ротор и статор располагаются соосно, при этом ротор
крепится на валу, который является одновременно выходным валом электродвигателя, на
котором и формируется механическая энергия, преобразованная из электрической.
Простейшее ЭМУ генераторного типа приведено на Рис. 1.25. Для получения тока
в нагрузке необходимо иметь источник магнитного поля (магнит) и помещенную в это
поле выходную обмотку с подключенной к ней нагрузкой. Источником магнитного поля
может быть как постоянный магнит, так и электромагнит. При взаимном перемещении
поля и выходной обмотки в последней наводится ЭДС. Если источником поля является
постоянный магнит, то величина ЭДС определяется только скоростью взаимного перемещения поля и выходной обмотки. Если же источником поля является электромагнит, то
появляется возможность влиять на величину поля изменением тока через обмотку электромагнита, и наводимая в выходной обмотке ЭДС будет зависеть не только от скорости
взаимного перемещения, но и от величины и характера тока электромагнита. Возможно
питание электромагнита постоянным и переменным током. При питании электромагнита
постоянным током ЭДС в выходной обмотке наводится только при наличии взаимного
перемещения поля и обмотки. При питании электромагнита переменным током ЭДС будет наводиться также и при отсутствии взаимного перемещения, но в этом случае величина ЭДС будет зависеть от угла между осью ротора (направлением максимума поля) и осью
выходной обмотки: при угле 0º ЭДС будет максимальна, а при угле 90º — равна нулю. В
этом случае появляется возможность использовать ЭМУ как преобразователь электрической энергии в электрическую же, но с изменением её параметров в зависимости от механических величин (в частности, угла поворота ротора). В частности, такие ЭМУ используются как трансформаторы напряжения с переменным коэффициентом трансформации,
зависящим от угла поворота ротора.
54
R
R
u
S
S
θr
θr
K
K
N
Rн
N
Rн
б)
а)
Рис. 1.25 — Простейшее ЭМУ генераторного типа
(преобразование механической энергии в электрическую):
а) с постоянным магнитом; б) с электромагнитом.
Принцип работы простейшего электромеханического устройства двигательного типа
можно пояснить следующим образом (Рис. 1.26).
S
R
θM
θr
θΦ
K
Рис. 1.26 — Простейшее электромеханическое устройство
двигательного типа
Имеется два постоянных магнита, расположенных концентрически один внутри другого, причём оба могут вращаться на общем валу. Каждый магнит имеет свою пару полюсов (северный N и южный S ), через которые можно провести соответствующие оси:
S — для внешнего магнита, R — для внутреннего. Внутренний магнит притягивается
своими полюсами к противоположным полюсам внешнего. Если внешний магнит поворачивается в направлении θΦ , то внутренний магнит поворачивается вслед за ним, так как
на его полюсы действуют силы притяжения от полюсов внешнего магнита. Если внутренний магнит тормозить, то появится угол θ M между его осью и осью внутреннего магнита.
Этот угол называется углом нагрузки, так как характеризует величину приложенного тормозящего усилия нагрузки. Если угол лежит в диапазоне ±90°, то вращение осуществляется нормальным образом, т. е. внутренний магнит вращается синхронно с внешним. Если
угол θ M выходит за указанные пределы, то внутренний магнит начинает колебаться вместо нормального вращения.
Указанную конструкцию имеют электромагнитные муфты, предназначенные для передачи вращения от одного вала к другому без непосредственного контакта. Они приме-
55
няются, например, когда необходимо передать вращение из одного пространства в другое,
отделённое от первого какой-либо перегородкой.
Но это устройство не может выполнять функции двигателя, так как, хотя вращение
внутреннего магнита происходит под действием внешнего, но вращение внешнего магнита также должно быть чем-то обеспечено. Решение этой задачи нашёл Никола Тесла, который предложил вместо постоянного внешнего магнита использовать электромагнит, содержащий несколько обмоток, сдвинутых между собой на некоторые углы. Эти обмотки
называют также фазными обмотками или просто фазами. С их помощью и определённого алгоритма изменения питающих их напряжений создаётся вращающееся электромагнитное поле, которое и увлекает за собой внутренний магнит.
Каждая статорная обмотка содержит по две полуобмотки, которые наматываются на
статоре с двух сторон относительно оси двигателя и соединяются последовательно, т. е.
направление намотки провода сохраняется .
i
S1
N1
S
N
S2
N2 Φ
u
Рис. 1.27 — Иллюстрация к принципу размещения ротора
в разрыве обмотки статора между её полуобмотками:
u — напряжение питания, i — ток, Φ — магнитный поток,
N , S — северный и южный полюса электромагнитного поля
Можно считать, что это — одна обмотка, разорванная в середине. В разрыв вставлен
ротор и поэтому весь основной магнитный поток Φ обмотки его пронизывает. Характерным является то, что, если обмотка делится на две части, которые располагаются на статоре по обе стороны ротора, то направление витков этих обмоток одно и то же: это приводит к тому, что полюса электромагнитных полей обеих полуобмоток располагаются последовательно: Юг S1 — Север N1 — Юг S 2 — Север N 2 . Таким образом, поля складываются и формируется общее электромагнитное поле: Юг S1 — Север N 2 .
Каждая полуобмотка с частью магнитопровода, на которой она намотана, становится
электромагнитом с северным N и южным S полюсами. Расположенный на роторе постоянный магнит своими полюсами притягивается к противоположным полюсам электромагнитов полуобмоток и его ось совпадает с осью обмотки. Вращение ротора возможно,
если будет вращаться электромагнитное поле.
1.10.2 Создание вращающегося магнитного поля.
Рассмотренный выше принцип работы электродвигателя реализуется на практике
следующим образом. Основным в работе электродвигателя является наличие вращающегося поля. В рассмотренном идеализированном примере вращающееся магнитное поле
создавалось за счет вращения постоянного магнита — источника этого поля. На практике
вращающийся постоянный магнит заменяют электромагнитом, обеспечивая тем или иным
способом вращение электромагнитного поля вместо вращения магнита.
На Рис. 1.28 поясняется принцип образования вращающегося электромагнитного поля за счёт использования двух обмоток, расположенных под некоторым углом друг к другу, при питании каждой из них переменным током.
56
Φ
u1b
u1a
Рис. 1.28 — Схема создания вращающегося электромагнитного поля
Наиболее часто используются обмотки, сдвинутые на 90º (рис.3.4). При питании какой-либо обмотки током в ней создается магнитный поток Φ , направленный вдоль оси
соответствующей обмотки. При изменении направления тока соответственно становится
противоположным также направление потока. Это отражено на временной диаграмме
(Рис. 1.29). Подадим на обмотку 1a напряжение питания. Тогда, благодаря возникшему в
обмотке току, появится магнитный поток, направленный горизонтально слева направо.
Отключим источник питания от обмотки 1a и подключим его к обмотке 1b. В обмотке
возникнет магнитный поток, направленный вертикально снизу вверх. Отключим источник
от обмотки 1b и вновь подключим его к обмотке 1a, изменив полярность по сравнению с
предыдущим случаем. Тогда появится поток, направленный горизонтально справа налево.
Отключим источник питания от обмотки 1a и вновь подключим его к обмотке 1b, поменяв
полярность по сравнению с предыдущим случаем. Возникший магнитный поток будет направлен вертикально сверху вниз. Таким образом, подключая поочерёдно источник питания к обмоткам, получают перемещение магнитного потока в пространстве — т. е. "прыгающее" электромагнитное поле. Данный алгоритм можно назвать 4–интервальным и он
является простейшим.
u1a
t
u1b
t
Φ
t
Рис. 1.29 — Формирование "прыгающего" электромагнитного поля
Если на роторе находится постоянный магнит, то прыгающее магнитное поле заставит ротор вращаться, увлекая роторный магнит за собой. Получается, в этом частном случае, синхронный двигатель, так как ротор вращается синхронно с полем статора. Но скачкообразное изменение положения ротора не всегда приемлемо. Для того, чтобы сгладить
вращение, можно изменить алгоритм подключения источников питания к обмоткам по
57
сравнению с описанным выше. Можно на какое-то время сохранять одновременное включение обоих источников питания (Рис. 1.30). Тогда каждая обмотка будет создавать свой
магнитный поток ( Φ1a , Φ1b ), а результирующий магнитный поток Φ будет определяться
как их векторная сумма: Φ = Φ1a + Φ1b .
Φ1b
Φ
Φ1a
u1a
t
u1b
t
Φ
t
Рис. 1.30 — Формирование "прыгающего" поля
с уменьшенной дискретностью перемещения
Получается тоже "прыгающее" магнитное поле, но с перемещением при каждом
скачке не на 90º, как в первом случае, а на 45º. Такой алгоритм можно назвать 8–
интервальным. Он лучше 4-интервального, но всё же не достаточно хорош. Желательно,
чтобы поле перемещалось не скачками, а плавно, т. е. было вращающимся. Кроме того,
желательно, чтобы модуль (амплитуда) потока оставался постоянным при его перемещении, если он специально не регулируется в каких-то целях. В случае, показанном на
Рис. 1.30, модуль потока меняется при изменении угла поворота поля, так как в четырёх
случаях (при 0º, 90º, 180º и 360º) поле создаётся только одной обмоткой, а в четырёх других случаях (45º, 135º, 225º и 315º) — двумя обмотками. Соответственно, в последнем
случае модуль магнитного потока оказывается в 2 раз больше. Обеспечить выполнение
всех перечисленных требований можно, если питать обмотки синусоидальными токами,
сдвинутыми по фазе на 90º, как это показано на Рис. 1.31.
На Рис. 1.31 в обмотке по оси 1a напряжение (и, соответственно, ток) изменяется по
синусоидальному закону, а в обмотке по оси 1b — по косинусоидальному. Каждая обмотка создаёт свой поток. Они векторно суммируются в соответствии с Рис. 1.31. Чтобы определить результирующий магнитный поток в заданный момент времени, необходимо для
этого момента времени (одного и того же по осям 1a и 1b) спроецировать по осям 1a и 1b
соответствующие точки синусоидальной и косинусоидальной кривой в круговую область.
Их пересечение и даст вершину искомого вектора потока.
Вращающееся магнитное поле можно получить, используя не только две обмотки,
но три и более. В этих случаях обмотки должны быть запитаны синусоидальными токами
с фазовыми сдвигами, соответствующими пространственным углам между обмотками
(например, для трёхфазной сети пространственные углы и соответствующие фазовые
сдвиги составляют 120º).
58
Φ
i1a
θ
i1b
θ
Рис. 1.31 — Образование вращающегося вектора магнитного потока Φ
с помощью двух токов — синусоидального и косинусоидального
Две обмотки — это минимально возможное количество обмоток, позволяющее получить вращающееся магнитное поле. Поэтому многие общие свойства ЭМУ рассматривают на примере машин с двумя первичными обмотками на статоре или роторе — в зависимости от того, где именно необходимо создавать вращающееся поле. Количество вторичных обмоток при этом может быть любым и вместо них может быть, например, постоянный магнит.
1.11 Синхронные машины
1.11.1 Принцип работы. Устройство.
Синхронные машины используют главным образом в качестве источников электрической энергии переменного тока; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на передвижных электростанциях и транспортных установках (тепловозах, автомобилях, самолетах). Синхронные машины широко используют и в качестве электродвигателей при мощности 100 кВт и выше для привода насосов, компрессоров, вентиляторов и других механизмов, работающих при постоянной
частоте вращения.
В электробытовых приборах (магнитофонах, проигрывателях, киноаппаратуре) и
системах управления широко применяются различные синхронные микромашины—с постоянными магнитами, индукторные, реактивные, гистерезисные, шаговые.
59
Рис. 1.32 — Электромагнитная схема синхронной машины (а) и схема ее включения (б)
Статор 1 синхронной машины (Рис. 1.32,а) выполнен так же, как и асинхронной: на
нем расположена трехфазная (в общем случае многофазная) обмотка 3. Обмотку ротора 4,
питаемую от источника постоянного тока, называют обмоткой возбуждения, так как она
создает в машине магнитный поток возбуждения. Вращающуюся обмотку ротора соединяют с внешним источником постоянного тока посредством контактных колец 5 и щеток 6 (Рис. 1.32,б). При вращении ротора 2 с некоторой частотой n2 поток возбуждения
пересекает проводники обмотки статора и индуцирует в ее фазах переменную ЭДС, изменяющуюся с частотой:
f1 =
p ⋅ n2
.
60
Если обмотку статора подключить к какой-либо нагрузке, то проходящий по этой
обмотке многофазный ток создает вращающееся магнитное поле, частота вращения которого:
n1 =
60⋅ f1
p
Из выше сказанного следует, что n1=n2, т.е. что ротор вращается с той же частотой,
что и магнитное поле статора. Поэтому рассматриваемую машину называют синхронной.
Результирующий магнитный поток Фрез синхронной машины создается совместным действием МДС обмотки возбуждения и обмотки статора, и результирующее магнитное поле
вращается в пространстве с той же частотой, что и ротор.
В синхронной машине обмотку, в которой индуцируется ЭДС и проходит ток нагрузки, называют обмоткой якоря, а часть машины, на которой расположена обмотка возбуждения,— индуктором. Следовательно, в приведенной машине статор является якорем,
а ротор — индуктором. Для принципа действия и теории работы машины не имеет значения — вращается якорь или индуктор, поэтому в некоторых случаях применяют синхронные машины с обращенной конструктивной схемой. Такую машину называют обращенной. Обращенные машины имеют сравнительно небольшую мощность.
При подключении обмотки статора к сети с напряжением U и частотой f1 проходящий по обмотке ток создает вращающееся магнитное поле. В результате взаимодействия
этого поля с током Iв, проходящим по обмотке ротора, создается электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при
работе в генераторном режиме — тормозным. В рассматриваемой машине в отличие от
асинхронной поток возбуждения (холостого хода) создается обмоткой постоянного тока,
расположенной обычно на роторе. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой вращения n1=n2 независимо от механической нагрузки на валу ротора или электрической нагрузки.
60
Таким образом, для установившихся режимов работы синхронной машины характерны следующие особенности:
а) ротор машины, работающей как в двигательном, так и в генераторном режимах,
вращается с постоянной частотой, равной частоте вращающегося магнитного поля, т. е.
n1=n2;
б) частота изменения ЭДС E, индуцируемой в обмотке якоря, пропорциональна частоте вращения poтopa;
в) в установившемся режиме ЭДС в обмотке возбуждения не индyциpyeтcя; МДС
этой обмотки определяется только током возбуждения и не зависит от режима работы
машины.
Синхронные машины выполняют с неподвижным или вращающимся якорем. Машины большой мощности для удобства отвода электрической энергии со статора или подвода ее выполняют с неподвижным якорем. Поскольку мощность возбуждения невелика по
сравнению с мощностью, снимаемой с якоря (0,3..2%), подвод постоянного тока к обмотке
возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем. В обращенной синхронной машине с вращающимся якорем и неподвижным индуктором нагрузка подключается к обмотке посредством трех колец.
1.11.2 Синхронные генераторы.
Основными характеристиками, определяющими свойства синхронного генератора,
являются внешние и регулировочные характеристики.
Внешние характеристики. Зависимости выходного напряжения U от тока нагрузки
при неизменных токе возбуждения Iв, угле φ и частоте f1 (постоянной частоте вращения
ротора n2) называют внешними характеристиками генератора.
Регулировочные характеристики. Зависимости тока возбуждения Iв от тока нагрузки
при неизменных напряжении U, угле φ и частоте f1 называют регулировочными характеристиками. Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки. Очевидно, что с
возрастанием нагрузки при φ>0 необходимо увеличивать ток возбуждения, а при φ<0—
уменьшать его. Чем больше угол φ по абсолютной величине, тем в большей степени требуется изменять ток возбуждения.
1.11.3 Синхронные двигатели.
Синхронная машина, работающая параллельно с сетью, автоматически переходит в
двигательный режим, если к валу ротора приложен тормозной момент. При этом машина
начинает потреблять из сети активную мощность и возникает электромагнитный вращающий момент. Частота вращения ротора остается неизменной, жестко связанной с частотой сети по соотношению:
n1 = n2 =
60⋅ f1
,
p
что является важнейшим эксплуатационным свойством синхронных двигателей.
Синхронные двигатели имеют следующие достоинства:
а) к сокращению размеров двигателя, так как его ток меньше тока асинхронного
двигателя той же мощности;
б) меньшую чувствительность к колебаниям напряжения, так как их максимальный
момент пропорционален напряжению в первой степени (а не квадрату напряжения);
в) строгое постоянство частоты вращения независимо от механической нагрузки на
валу.
61
Недостатки синхронных двигателей:
а) сложность конструкции;
б) сравнительная сложность пуска в ход;
в) трудности с регулированием частоты вращения, которое возможно только путем
изменения частоты питающего напряжения.
Указанные недостатки синхронных двигателей делают их менее выгодными, чем
асинхронные двигатели, при ограниченных мощностях до 100 кВт. Однако при более высоких мощностях, когда важно иметь уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных.
Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет
дважды изменять свое направление, т. е. средний момент за период равняется нулю. При
этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий
определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо
разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время чаще всего применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой, выполненной по типу «беличья клетка». При
включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле,
которое, взаимодействуя с током Iп в пусковой обмотке, создает электромагнитные силы F
и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
1.11.4 Способы управления скоростью. Вентильные двигатели.
Частота вращения синхронного двигателя n2 равна частоте вращающегося магнитного поля . Следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2р. Регулировать частоту вращения путем изменения числа
полюсов в синхронном двигателе нецелесообразно, так как в отличие от асинхронного
здесь требуется изменять число полюсов, как на статоре, так и на роторе, что приводит к
значительному усложнению конструкции ротора. Поэтому практически используют лишь
изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного
регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень
малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала. При больших мощностях такие условия имеются только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом
инерции приводного механизма, необходимо очень плавно изменять частоту питающего
напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск
в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригоден метод частотного регулирования с самосинхронизацией, при котором двигатель в
принципе не может выпасть из синхронизма.
62
Принцип частотного регулирования с самосинхронизацией заключается в том, что
управление преобразователем частоты осуществляется от системы датчиков положения
ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки θ<90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как эти
двигатели могут получить питание от сети как постоянного, так и переменного тока.
При питании вентильного двигателя от сети постоянного тока в преобразователе
частоты должны применяться транзисторы или тиристоры с узлами принудительной коммутации. При питании вентильного двигателя от транзисторного преобразователя частоты, основанного на использовании автономного инвертора напряжения, преобразователь
подключен к источнику постоянного тока и формирует трехфазное напряжение изменяющейся частоты, которое подается на фазы обмотки якоря двигателя. К каждой фазе можно
подвести положительное и отрицательное напряжения.
1.12 Синхронные двигатели с постоянными магнитами,
гистерезисные двигатели, синхронные реактивные
двигатели, шаговые двигатели
Синхронные двигатели с постоянными магнитами относятся к микромашинам и
применяются в системах автоматики
Применение постоянных магнитов в магнитных системах синхронных машин так
же, как и в других типах электрических машин, обусловлено стремлением уменьшить габариты и вес машины, упростить конструкцию, увеличить к.п.д., повысить надежность в
эксплуатации.
Постоянные магниты в синхронных машинах предназначены для создания магнитного поля возбуждения, причем для этого могут применяться постоянные магниты, комбинированные с электромагнитами, по катушкам которых протекает постоянный ток. Использование комбинированного возбуждения позволяет получить требуемые регулировочные характеристики по напряжению и частоте вращения при значительно уменьшенной мощности возбуждения и объеме магнитной системы по сравнению с классическими
электромагнитными системами возбуждения синхронных машин.
В настоящее время постоянные магниты применяются при мощности синхронных
машин до одного или нескольких киловольт-ампер. По мере создания с постоянных магнитов с улучшенными характеристиками, мощности машин возрастают.
Подавляющее большинство синхронных двигателей пускается как асинхронные, для
чего они снабжаются пусковой обмоткой. Однако в отличие от двигателей с электромагнитным возбуждением постоянные магниты на время пуска невозможно "отключить". Поэтому в процессе разгона поток постоянных магнитов индуцирует в обмотке статора ЭДС,
под действием которой по обмотке через источник протекает ток. Этот ток, взаимодействуя с полем постоянного магнита, создает момент по своей природе аналогичный асинхронному моменту, развиваемому пусковой обмоткой. Однако этот момент является не
движущим, а тормозящим. Тормозной момент образует провал в пусковой характеристике
двигателя, тем самым создает опасность застревания его на малой скорости вращения.
В последнее время в схемах автоматики получили широкое распространение гистерезисные двигатели, ротор которых имеет стальной цилиндр, выполненный из магнитотвердого материала (например, из викаллоя). С целью экономии дорогостоящего магнитотвердого материала роторы обычно делают сборными. Они состоят из втулки и наружного
63
массивного или шихтованного цилиндра из магнитотвердого материала. Зазор между статором и ротором равномерный по всей окружности. Статор у гистерезисных двигателей
такой же, как у других синхронных и асинхронных двигателей. Внешний вид гистерезисных двигателей не отличается от внешнего вида асинхронных двигателей с массивным
стальным ротором.
Магнитодвижущая сила обмотки якоря намагничивает стальной цилиндр ротора, в
результате чего при синхронном вращении он становится постоянным магнитом. Во время пуска и при асинхронном ходе поток якоря, вращающийся относительно ротора, перемагничивает стальной цилиндр. При этом полярность цилиндра как бы поворачивается
вслед за полем якоря. Если бы ротор был выполнен из магнитомягкого материала, то вектор, определяющий направление потока в цилиндре ротора, точно совпадал бы с вектором
вращающегося потока якоря. Вследствие сильно выраженного гистерезиса имеет место
сдвиг векторов на угол θг, вызванный молекулярным трением. Угол θг отставания потока в
роторе не зависит от частоты перемагничивания, он определяется лишь магнитными свойствами материала цилиндра. Поэтому создающийся в двигателе гистерезисный электромагнитный момент М не зависит от скорости вращения двигателя.
При пуске и асинхронном вращении ротора в массиве цилиндра возникают вихревые
токи. В результате их взаимодействия с потоком машины создается асинхронный момент.
Активное сопротивление ротора гистерезисного двигателя велико, поэтому критическое
скольжение больше единицы и максимальное значение асинхронный момент имеет при
пуске. При синхронном вращении он равен нулю. Таким образом, во время пуска помимо
гистерезисного момента возникает также асинхронный момент.
У двигателей с шихтованным цилиндром из магнитотвердого материала асинхронный момент практически отсутствует. Двигатели с массивным цилиндром могут работать
в синхронном и в асинхронном режимах. В последнем случае их момент увеличивается.
Однако при асинхронном режиме перемагничивание кольца, выполненного из магнитотвердого материала, связано с большими потерями, поэтому гистерезисные двигатели
обычно работают в синхронном режиме или в асинхронном при небольшом скольжении
ротора. Для уменьшения потерь от зубцовых гармоник в двигателях с массивным цилиндром желательно иметь на статоре закрытые пазы.
Существенными преимуществами гистерезисных двигателей по сравнению с синхронными двигателями других типов являются большие моменты, пусковой и входа в
синхронизм, плавность входа в синхронизм, малый пусковой ток (1,1÷1,5), простота конструкции, надежность в эксплуатации, бесшумность при работе и высокий к. п. д. (достигающий 65%), малые вес и габариты. Преимуществом гистерезисных двигателей по сравнению со всеми другими синхронными двигателями является возможность их выполнения
многоскоростными с переключением обмотки статора на различное число полюсов.
К недостаткам гистерезисных двигателей следует отнести склонность ротора к качаниям. Особенно это имеет место, когда цилиндр из магнитотвердого материала выполнен
шихтованным, так как токи в стали ротора оказываются малыми, и их демпфирующее
действие незначительным. Недостатком гистерезисных двигателей является также малый
cosφ, который обычно не превышает 0,5. В асинхронном режиме коэффициент мощности
низок вследствие малой магнитной проницаемости ротора, а в синхронном — из-за сравнительно малой м. д. с. цилиндра ротора.
Коэффициент мощности, момент и к. п. д. двигателя могут быть существенно увеличены кратковременным подмагничиванием ротора, что может быть осуществлено повышением на 1÷2 периода напряжения, подводимого к статору. Подмагниченный таким образом ротор разгружает обмотку статора от намагничивающего тока. В некоторых случаях
после подмагничивания максимальный момент двигателя в синхронном режиме может
увеличиться в 4÷6 раз, а ток статора уменьшится вдвое и стать опережающим.
64
Реактивные двигатели распространены в аппаратах звукозаписи, звуковоспроизведения, лентопротяжные и других механических системах, в которых требуется строго постоянная скорость вращения при небольших моментах сопротивления на валу.
Реактивный двигатель представляет собой явнополюсную синхронную машину без
обмотки возбуждения. Поток двигателя и его вращающий момент создается м. д. с. реакции якоря, отсюда и название — реактивный двигатель.
Роторы, в основном, выполняются двух типов: со впадинами и секционированные. В
последнем случае промежутки между магнитопроводящими секциями пластин ротора заполняются слоями алюминия или меди, которые образуют короткозамкнутую пусковую
клетку. Секционированный ротор имеет большую магнитную проводимость по продольной оси в результате чего увеличивается максимальный реактивный момент двигателя.
Ротор со впадинами шихтуется из штампованных стальных листов, имеющих специальный профиль, или в некоторых случаях выфрезеровывается из обычного ротора короткозамкнутого асинхронного двигателя. Намагничивающий ток реактивного двигателя, так
же как и асинхронного, поступает из сети переменного тока со стороны обмотки статора.
Однофазные реактивные двигатели часто выполняются конденсаторными. Эллиптичность поля приводит к неравномерному вращению двигателей, к появлению шума и
вибраций. Поэтому обычно реактивные двигатели проектируют таким образом, чтобы
круговое поле имело место при номинальном, синхронном режиме. Для увеличения пускового момента двигатели иногда выполняют с пусковой и рабочей емкостями.
В настоящее время в случаях, когда не требуется строгого постоянства скорости
вращения, реактивные двигатели заменяются гистерезисными, которые имеют лучшие
пусковые и рабочие свойства. На практике иногда синхронный реактивный двигатель получают из асинхронного. При этом статор оставляют без изменения, а в роторе выфрезеровывают часть стержней короткозамкнутой обмотки. Мощность такого синхронного
двигателя составляет 35—40% от асинхронного, его к. п. д. и коэффициент мощности
также ухудшаются.
Недостаток реактивных двигателей — низкий максимальный момент, коэффициент
мощности (cosφ = 0,5) и к. п. д. У двигателей мощностью в несколько десятков ватт
η=35÷40%, а у двигателей мощностью в несколько ватт η<25%.
К достоинству реактивных синхронных двигателей следует отнести отсутствие колебаний ротора и высокую надежность работы.
Для преобразования управляющих импульсов в заданный угол поворота применяются синхронные двигатели, в которых поле вращается не равномерно, а при подаче сигнала
поворачивается скачкообразно. Такие двигатели называются шаговыми или импульсными.
На статоре шаговые двигатели имеют две (иногда три) сдвинутые в пространстве
обмотки, которые могут быть сосредоточенными или распределенными. Ротор двигателей
всегда имеет явно выраженное исполнение. Шаговые двигатели разделяются на двигатели
с активным ротором (имеющие обмотку возбуждения или постоянные магниты) и двигатели с реактивным ротором (не имеющие возбуждения).
Шаговый двигатель работает следующим образом. В обмотку статора (или комбинацию статоров) подается постоянный ток. При этом полюса ротора устанавливаются против возбужденных полюсов статора, по обмоткам которых проходит ток. Когда постоянный ток подают в другие обмотки статора, ротор поворачивается на один шаг в положение, при котором его полюсы устанавливаются против следующих возбужденных полюсов статора. При каждом переключении постоянного тока в обмотках управления ротор
двигателя поворачивается на один шаг.
К шаговым двигателям предъявляются следующие требования: надежность в работе,
быстродействие, малый шаг, недопустимость накопления ошибки с увеличением числа
65
шагов, отсутствие свободных колебаний при отработке шага, минимальное число обмоток
управления.
Число пазов статора двигателя выбирается кратным четырем. Один зубцовый шаг
статора соответствует половине полюсного деления. На статоре укладываются две независимые обмотки, состоящие из катушек, которые охватывают, один зубец. Катушки каждой обмотки надевают на зубцы, расположенные через один. Таким образом, зубцы, охватываемые катушками одной и другой обмоток, чередуются. Полярность зубцов, создаваемая одной обмоткой, изменяется от одного зубца к другому. Катушки уложены таким образом, что если бы по обеим обмоткам одновременно проходил ток, то рядом расположились бы два зубца одинаковой полярности, охватываемые катушками разных обмоток.
Ширина полюсного наконечника ротора соответствует ширине одного зубца, но
число полюсов ротора в два раза меньше числа зубцов на статоре. Поэтому полюса ротора
находятся под пазами статора, расположенными через один. Эти пазы охватываются катушками одной обмотки.
Обмотка возбуждения полюсов ротора питается постоянным током через контактные кольца. В статорные обмотки двигателя поочередно подаются импульсы постоянного
тока. Полярность тока в обмотке при переключении изменяется. При каждом переключении тока в обмотках статора ротор поворачивается на один шаг. Чтобы двигатель изменил
направление вращения, необходимо изменить полярность включения одной из обмоток
статора.
Для уменьшения шага двигатели, иногда выполняют по типу редукторных. В этом
случае поверхность роторных и статорных зубцов имеет мелкие зубчики.
Современные двигатели позволяют делать до 200 шагов в секунду без потери шага
при внезапных остановках и пусках. Шаговые двигатели находят широкое применение в
ракетной технике, счетно-решающих машинах, самозаписывающих и лентопротяжных
механизмах
1.13 Асинхронные машины
1.13.1 Принцип работы. Устройство.
Асинхронной машиной называется машина переменного тока, у которой только первичная обмотка получает питание от электрической сети с постоянной частотой, а вторая
обмотка замыкается накоротко или на электрическое сопротивление. Токи во вторичной
обмотке появляются в результате электромагнитной индукции. Их частота ω2 зависит от
угловой скорости вращения ротора ω1.
Асинхронные машины используются в основном как двигатели, в качестве генераторов они применяются крайне редко. Наибольшее распространение получили трехфазные асинхронные двигатели с короткозамкнутым ротором, имеющие трехфазную обмотку
на статоре и питающиеся от трехфазной сети. Трехфазный асинхронный двигатель является наиболее распространенным двигателем постоянного тока.
В системах автоматического управления используются двухфазные асинхронные
двигатели с короткозамкнутым, чаще всего с немагнитным полым ротором.
В асинхронных машинах обмотки статора, питающиеся переменным током частоты:
f1 =
ω1
2 ⋅π
,
создают магнитное поле, вращающееся с частотой ω1/p, где p- количество пар полюсов на статоре. Под действием элекгромагнитной индукции в обмотках или элементах короткозамкнутого ротора ("беличьей клетке")
66
индуктируются вторичные ЭДС и токи частоты ω2, которые взаимодействуют с вращающимся магнитным полем, создается электромагнитный момент Mэм, что приводит к
вращению ротора с частотой ωr.
Скорость вращения ротора не может быть равной скорости вращения поля, так как
при этом не будет индуцироваться вторичная ЭДС, что приведет к отсутствию вращающегося момента. Поэтому ротор в своем движении должен отставать от магнитного поля проскальзывать - отсюда наименование двигателя - асинхронный, а один из основных параметров - скольжение:
s=
ω1 − ωr
ω1
.
Скольжение является относительной величиной и в двигательном режиме изменяется в пределах 0<s≤1, причем s=0 соответствует синхронной работе, а s=1- пуску двигателя.
В настоящее время асинхронные электродвигатели потребляют около половины всей
вырабатываемой в мире электроэнергии и широко применяются в качестве электропривода подавляющего большинства механизмов. Это объясняется простотой конструкции, надежностью и высоким значением КПД этих электрических машин.
Неподвижная часть асинхронного двигателя называется статором, а подвижная – ротором. Сердечники статора и ротора асинхронных машин собираются из листов электротехнической стали, которые до сборки обычно покрываются масляно-канифольным изоляционным лаком. Сердечники машин малой мощности иногда собираются из листов без
лакового покрытия, так как в этом случае достаточной изоляцией является естественный
или искусственно созданный слой окислов на поверхности листов стали.
Сердечник статора закрепляется в корпусе, а сердечник ротора на валу (машины малой и средней мощности) или на ободе с крестовиной и втулкой, надетой на вал (машины
большой мощности).
На внутренней цилиндрической поверхности статора и на внешней цилиндрической
же поверхности ротора имеются пазы, в которых размещаются проводники обмоток статора и ротора. Обмотка обычно выполняется трехфазной (m=3), но может иметь и другое
число фаз машинах для специальных целей (m=2,6).
Концы фаз трехфазной обмотки ротора соединяются обычно в звезду, а начала с помощью контактных колец и металлографитных щеток выводятся наружу. Такая асинхронная машина называется машиной с фазным ротором. К контактным кольцам обычно
присоединяется трехфазный пусковой или регулировочный реостат. Фазная обмотка ротора выполняется с тем же числом полюсов магнитного поля, как и статор.
Другая разновидность обмотки ротора – обмотка в виде беличьей клетки. При этом в
каждом пазу находится медный или алюминиевый стержень и концы всех стержней с
обоих торцов ротора соединены с медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Стержни от сердечника обычно не изолируются. Такая асинхронная машина называется машиной с короткозамкнутым ротором.
Воздушный зазор между статором и ротором в асинхронных машинах выполняется
минимально возможным по условиям производства и надежности работы и тем больше,
чем крупнее машины.
Асинхронные машины, как правило, охлаждаются воздухом.
1.13.2 Механические характеристики и способы управления
асинхронным двигателем.
Наибольшее значение для оценки свойств асинхронного двигателя имеет механическая характеристика, представляющая собой графическую зависимость частоты вращения
67
ротора от вращающего момента М Механическая характеристика у асинхронного двигателя нелинейная (Рис. 1.33).
Рис. 1.33 — Механическая характеристика у асинхронного двигателя
Ее можно разбить на два участка - рабочий (0-а) при 0<s<sкр и участок пуска (a-b)
при sкр<s<1.При sкр момент принимает максимальное значение.
При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой
момент должен быть достаточно большим, а пусковые токи - по возможности малыми.
Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Принципиально возможных метода регулирования асинхронных двигателей: изменение частоты f1 (частотное регулирование), числа полюсов 2р (полюсное регулирование)
и скольжения s. Скольжение s обычно изменяют путем изменения потерь в цепи ротора с
помощью реостата (роторное регулирование), но в некоторых случаях для этого изменяют
величину питающего напряжения.
Частотное регулирование. Этот способ регулирования частоты вращения позволяет
применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым
ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты — электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (транзисторах или тиристорах).
Существенное изменение величины потока Ф при регулировании нежелательно, так
как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи
и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользо-
68
вание машины, уменьшение перегрузочной способности и увеличение тока ротора при
том же значении М и т.д. Поэтому в большинстве случаев целесообразно поддерживать
Ф=const. При этом одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т.е. поддерживать
U1
= const ,
f1
что является выражением закона Костенко.
Закон Костенко — характеристики асинхронного двигателя при частотах питающего
напряжения, отличных от номинальной, зависят от соотношения между напряжением сети
U1 и частотой f1, т. е. питающее напряжение следует изменять прямо пропорционально
его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Полюсное регулирование. Такое регулирование позволяет получить ступенчатое изменение частоты вращения.. Для этого каждую фазу обмотки статора разделяют на две
части, которые переключают с последовательного соединения на параллельное. При
включении катушек в две параллельные ветви число полюсов уменьшается в 2 раза, а следовательно, частота вращения магнитного поля увеличивается в 2 раза.
При переключении число последовательно включенных витков в каждой фазе
уменьшается вдвое, но так как частота вращения возрастает в 2 раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения
может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь
три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
Многоскоростные двигатели имеют следующие недостатки: большие габариты и
массу по сравнению с двигателями нормального исполнения, а, следовательно, и большую
стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте
f1 = 50 Гц частота вращения поля при переключениях изменяется в соотношении
3000:1500:1000:750.
Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопротивлений Rдоб1, Rдоб2, Rдоб3 и других изменяется форма
зависимости M=f(s) и механической характеристики ωr=f(M) двигателя. При этом некоторому нагрузочному моменту Мн соответствуют скольжения sl, s2, s3,..., большие, чем
скольжение при работе двигателя на естественной характеристике (при Rдоб=0). Следовательно, установившаяся частота вращения двигателя уменьшается.
Этот метод регулирования может быть использован только для двигателей с фазным
ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются:
а) большие потери энергии в регулировочном реостате;
б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора.
В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
69
1.14 Параметры и структурные схемы
электромеханических систем
1.14.1 Структурные схемы и передаточные функции
электроприводов постоянного и переменного тока
Передаточные функции электроприводов постоянного и переменного тока необходимы для синтеза системы управления в первом приближении. При этом можно использовать как передаточные функции, получаемые из полных линеаризованных уравнений
электрических машин, так и упрощённые передаточные функции.
Для машин переменного тока необходимо провести линеаризацию исходных дифференциальных уравнений. Затем линеаризованная модель преобразуется по Лапласу заменой всех переменных их изображениями. При этом можно явно выразить решение для переменных состояния и выходных переменных:
x( p) = ( pE − A ) B u ( p) + ( pE − A ) Gr ( p);
⎫⎪
⎬
−1
−1
y ( p) = C( pE − A ) B + D u ( p) + C( pE − A ) Gr ( p),⎪⎭
−1
−1
[
]
где E – единичная матрица; p – оператор Лапласа; векторы переменных состояния x ,
управлений u , возмущений r и выходных координат y .
По полученным выражениям можно выполнять расчёты передаточных функций на
ЭВМ численными методами без предварительных преобразований к форме собственно
передаточных функций. При этом используется понятие матричной передаточной функции. В данном случае можно выделить четыре матричных передаточных функции, в зависимости от выходных и входных переменных:
Wxu ( p) =
x( p)
−1
= ( pE − A ) B;
u ( p)
Wx r ( p ) =
x( p)
−1
= ( pE − A ) G;
r ( p)
Wyu ( p) =
y ( p)
−1
= C( pE − A ) B + D;
u ( p)
Wy r ( p) =
y ( p)
−1
= C( pE − A ) G.
r ( p)
Так как в матричном исчислении отсутствует операция деления векторов, то матричная передаточная функция является лишь математической абстракцией, удобной для
компактного представления линеаризованных систем со многими входами и выходами в
изображениях по Лапласу. Реально от матричных передаточных функций переходят к
обычным частным передаточным функциям в виде отношения двух полиномов.
Полные передаточные функции можно получить в аналитическом виде, а затем рассчитывать их параметры в зависимости от точки линеаризации. Эти выкладки для большого порядка и получаемые в результате выражения весьма громоздки, поэтому более целесообразно эту операцию выполнять на ЭВМ, пользуясь стандартными процедурами математических библиотек. В результате получаются передаточные функции для конкретных образцов двигателей с числовыми параметрами, которые затем можно использовать
при автоматическом синтезе регуляторов также с помощью ЭВМ различными методами.
70
Значительно более важное значение имеют упрощённые передаточные функции для
конкретных практически важных режимов работы, которые можно получить аналитически с учётом реального соотношения параметров ДДП. Это приводит к общим теоретическим результатам и, кроме того, позволяет лучше понять процессы в двигателе, в том числе степень влияния параметров самого привода, управляющих (напряжения) и возмущающих (механическая нагрузка) воздействий.
Для получения передаточных функций ДДП предложена следующая методика. Составляется структурная схема, в которой разделяются каналы формирования электромагнитных и механических процессов. Для передаточных функций, описывающих электромагнитные процессы, входными величинами являются параметры питающих напряжений
(частоты, амплитуды, фазовые сдвиги), а также угол поворота и угловая скорость ротора.
Выходные величины — приращения вращающего момента, которые суммируются (с учётом принципа суперпозиции) и поступают на вход механической части. На выходе механической части формируются угловая скорость и угол поворота ротора, поступающие затем по каналу внутренней обратной связи на вход передаточных функций для электромагнитных процессов.
Упрощение передаточных функций производится в два этапа.
На первом этапе рассматриваются только электромагнитные переходные процессы в
обмотках. При этом удаётся оперировать исходными полными передаточными функциями
первого–второго порядков, что позволяет аналитически корректно произвести требуемые
упрощения.
На втором этапе полученные упрощённые передаточные функции для электромагнитных процессов объединяются в соответствии со структурной схемой и в процессе их
объединения производятся дальнейшие упрощения.
Наиболее простой вариант для рассмотрения в качестве примера структурной схемы
и передаточной функции -это электропривод с постоянным током независимого возбуждения. Так как исходные дифференциальные уравнения изначально линейные и натребуют упрощения.
Анализируя динамику электропривода с постоянным током независимого возбуждения можно ограничиться двумя уравнениями- уравнением равновесия ЭДС в цепи якоря и
уравнением движения:
’
где
,
Перейдя к операторной и решив систему уравнений, получим передаточную функ-
цию:
,
где Тя=Lя/Rя – электромагнитная постоянная времени якоря, Тм=J*Rя/(kM*ke) – электромеханическая постоянная времени двигателя.
На основании этих уравнений может быть построена структурная схема двигателя
как динамической системы.
71
Рис. 1.34 — Структурная схема двигателя постоянного тока независимого возбуждения в
системе стабилизации скорости
Представленная структурная схема может использовать при исследовании электромеханических систем, предназначенных для управления скоростью.
1.14.2 Динамика замкнутых и разомкнутых ЭМС
Для квалифицированного проектирования и использования электромеханических
систем необходимо знание не только стационарных режимов, но и динамических свойств.
Переходные процессы в таких системах представляют сложную взаимосвязь электромеханических и электромагнитных переходных процессов, протекающих в ЭМС. Переходные процессы в электроприводе связанны с появлением внешних возмущающих воздействий, таких как изменение нагрузки или параметров напряжения питающей сети, а также с
изменением управляющих воздействий. Поведение привода в неустановившихся режимах
описывается системой дифференциальных уравнений. Это математическое описание дает
хотя и приближенную, но достаточно близкую картину сложных процессов, происходящих в динамических режимах.
При анализе динамики привода даже в простейшем случаем случае всегда приходиться учитывать механическую инерцию. Если при этом оказывается возможным отказаться от учета электромагнитных явлений, то переходные процессы называют механическими.
В настоящее время в связи с интенсификацией всех производственных процессов, а
соответственно и процессов в системах приводов, в большинстве случаев отказ от учета
электромагнитных явлений при анализе динамики оказывается невозможным и приходиться учитывать электромагнитную инерцию ряда звеньев. Переходные процессы, рассматриваемые при совместном действии механических и электромагнитных явлений, называются электромеханическими.
Исследование систем линейными свойствами ведется, как правило, на базе хорошо
отработанной теории линейных дифференциальных уравнений. При этом все решения получаются в удобной для анализа аналитической форме, что позволяет проследить влияние
отдельных параметров и постоянных времени.
Решение задач, касающихся систем с нелинейными характеристиками, намного
сложней. В этом случае исследования динамических режимов приходиться проводить с
помощью численных методов решения дифференциальных уравнений на ЭВМ. Данный
метод наиболее эффективен при проектирование реальной, конкретной электромеханической системы.
72
1.14.3 Энергетика ЭМС и выбор мощности двигателя
Работа электромеханической системы основана на преобразовании электрической
энергии в механическую через посредство электромагнитной (Рис. 1.35).
Электрическая
энергия
Электромагнитная
энергия
Механическая
энергия
Источник
питания, обмотки
Магнитопровод,
воздушный зазор
Вал двигателя,
вал нагрузки
Напряжения,
токи
Магнитный поток
в пространстве
Момент, угол
поворота, скорость
Рис. 1.35 — Процесс преобразования электрической энергии
в механическую через посредство электромагнитной
Первая линия блоков показывает основной путь при преобразовании энергии из
электрической в механическую через электромагнитную. При этом все стрелки, отображающие направление преобразования энергии, двунаправленные, что говорит о взаимном
преобразовании всех видов энергии, являющимся принципиальным свойством электрических машин.
Вторая линия блоков отражает те элементы электрической машины и соединённые с
ней элементы других устройств, в которых происходит преобразование соответствующего
вида энергии.
Третья линия блоков содержит указание на физические величины, характеризующие
соответствующий вид энергии.
Электрическая энергия представляется напряжениями и токами, которые связаны
с обмотками и источником питания. Обычно для питания электрических машин используются источники напряжения, а токи формируются в соответствии с режимами работы
электрической машины. Но питание может осуществляться также от источника тока, при
этом напряжение на клеммах формируется в зависимости от режима.
Электромагнитная энергия характеризуется многими параметрами, из которых в
теории электрических машин применительно к их использованию в электромеханических
системах используется магнитный поток и связанное с ним потокосцепление.
Механическая энергия характеризуется моментом сил, углом поворота и его производными по времени (скоростью, ускорением и др.), которые связаны с валом двигателя
и механической нагрузки.
Электромагнитное поле в общем виде описывается уравнениями Максвелла, в которых рассматриваются векторы электрических и магнитных величин в трёхмерном пространстве и во времени. Но в реальных электрических машинах картина магнитного поля
проще ввиду локализации его в обмотках и магнитопроводе. Обмотки локализуют (сосредоточивают в себе) электрическое поле (именно к клеммам обмоток приложены напряжения и именно через обмотки протекают токи), а магнитопровод локализует магнитное поля (и оно не рассеивается в пространстве вокруг двигателя, а находится внутри него, выполняя предназначенное ему превращение электрической энергии в механическую). Имеются и другие конструктивные ограничения: в частности, все движущиеся части ЭМУ
имеют только одну степень свободы, вращаясь вокруг одной оси. Поэтому уравнения
Максвелла существенно упрощаются.
73
Электрическая энергия в виде многофазного напряжения переменного тока подводится от своего источника к обмоткам электродвигателя. В обмотках возникают переменные токи, создающие свои магнитные потоки, которые перемешиваются в пространстве (в
общих для них магнитопроводе и воздушном зазоре), в результате чего образуется единый
магнитный поток. Он характеризует собой электромагнитное поле с северным и южным
полюсами, вращающееся с угловой скоростью, пропорциональной частоте питающих напряжений. Последний термин подчёркивает тот факт, что это магнитное поле создаётся
электрическими токами. В остальном оно обладает теми же свойствами, что и поле постоянных магнитов: имеет северный и южный полюса, магнитные силовые линии, замкнутые
между полюсами, и т. д.
Статор играет роль многофазного переменного электромагнита. Переменный характер магнитного поля выражается в том, что магнитный поток изменяется вслед за током,
т. е., если ток в обмотке изменяется по синусоидальному закону, то и магнитный поток
меняется синусоидально.
Электромеханическое преобразование энергии является чрезвычайно удобным способом выполнения механической работы.
Одним из основных этапов проектирования электромеханических систем является
выбор мощности двигателя является. Надежная и экономична работа системы возможна
только при соответствии двигателя тем режимам, в которых он должен работать, и ожидаемой нагрузке. Определяющим при выборе мощности двигателя являются нагрев обмоток и возможные мгновенны нагрузки. Таким образом, для выбора мощности двигателя
необходимы тепловые расчеты, которые убедили бы, что при его работе температура не
превысит максимально допустимую. Однако эти расчеты могут быть выполнены только
для конкретного двигателя. Для которого известна номинальная мощность, КПД, момент
инерции и т.п. При этом предварительно должны быть построены так называемы перегрузочные диаграммы, т.е. графики изменения тока, момента, скорости двигателя в процессе
работы электромеханической системы. Следовательно, мощность двигателя не может определенна однозначно, а приходиться как-то ориентировочно выбирать двигатель, а затем
его соответствие заданным условиям. При этом часто приходиться идти по пути последовательного приближения т каждый раз проводить расчеты динамики и строить перегрузочные диаграммы. Выбранный по условиям нагрева двигатель должен быть проверен на
перегрузочную способность применительно к пикам нагрузки, которые могут иметь место
в нагрузочных диаграммах.
2 Математические модели электромеханических устройств и
систем
2.1 Исходное математическое описание ЭМУ
2.1.1 Общие принципы получения математического описания ЭМУ
на основе теории цепей
Математическое описание электромеханического устройства (ЭМУ) является результатом его структурной и параметрической идентификации. Структурная идентификация подразумевает определение вида используемых математических выражений (в частности, уравнений), а параметрическая — значений их параметров (коэффициентов и других составляющих).
Существует два основных подхода к получению математического описания ЭМУ —
с использованием теории поля и теории цепей.
74
Первый из них основывается на уравнениях Максвелла и приводит к рассмотрению
поведения магнитного поля (магнитодвижущих сил, магнитной индукции, магнитного потока) с учётом конструкции конкретного ЭМУ (конфигурации и магнитного сопротивления магнитопровода и т. п.). В результате удаётся установить связь между параметрами
(коэффициентами) уравнений и конструктивными параметрами ЭМУ: числом витков обмоток, геометрическими размерами пазов и зубцов, магнитной проницаемостью отдельных участков магнитопровода и др. Очевидно, что такой подход целесообразен при проектировании самих ЭМУ, но представляется излишне сложным при использовании ЭМУ в
электромеханических системах, так как требует знания параметров, не всегда приводимых
в технической документации.
Подход с позиций теории цепей получил название "математической теории электрических машин". Он характеризуется представлением ЭМУ в виде схемы замещения, содержащей типовые электротехнические элементы — резисторы, катушки индуктивности и
источники ЭДС, параметры которых зависят от конструкции и принципа действия конкретного ЭМУ.
Для всех типов ЭМУ вид исходных уравнений одинаков, а конкретные особенности
конструкции выражаются через функциональные зависимости индуктивностей и взаимных индуктивностей от угла поворота.
Некоторые различия в получении математической модели ЭМУ зависят от следующих обстоятельств:
6. имеются или отсутствуют постоянные магниты;
7. учитываются или нет те или иные упрощающие допущения.
Математическая модель ЭМУ содержит две части — электрическую, отражающую
процессы в обмотках, и механическую, отражающую движение ротора. Поскольку в общем случае исследуются динамические процессы
Учитываются также реальные значения углов между обмотками, когда некоторые
выражения существенно упрощаются. Далее следует идентификация параметров на основе принципа "серого ящика", т. е. с учётом имеющейся информации о структуре объекта.
2.1.2 Уравнения равновесия напряжений обмоток ЭМУ
Основной частью математической модели любого ЭМУ является система уравнений
равновесия напряжений, отражающая процесс взаимодействия источника питания с обмотками ЭМУ. Уравнения равновесия напряжений отражают также влияние внутренних
обратных связей от механических величин — угла поворота и угловой скорости ротора —
на токи и потокосцепления обмоток.
Последовательность получения уравнений равновесия напряжений обмоток следующая.
С учётом наличия, числа, размещения и соединения обмоток составляется схема замещения в виде электрической цепи, содержащей столько контуров, сколько обмоток
имеет ЭМУ.
75
R1a
u1a
i1a
R2 a
e2 a
e1a
R1b
u1b
i1b
i2a
u2 a
R2b
e1b
e2 b
i2b
u2b
Рис. 2.1 — Схема замещения на примере ЭМУ
с двумя обмотками на статоре и двумя обмотками на роторе
В каждый контур включается источник напряжения на входных клеммах, резистор
(имитирующий активное сопротивление обмотки) и источник ЭДС, суммарно отражающий эффект от противо-ЭДС из-за наличия собственной индуктивности (и индуктивности
рассеяния обмотки) и взаимной ЭДС, отражающей взаимные индуктивные связи между
обмотками.
Из физических соображений, путём экспериментальных исследований и на основании схемы размещения обмоток определяются функциональные зависимости индуктивностей и взаимных индуктивностей между каждой парой обмоток от угла поворота и тока
(для учёта насыщения):
lk = f (θ r , i ) ,
где lk — собственные или взаимные индуктивности k -той обмотки; θ r — угол поворота
ротора; i — ток через обмотку (отражает эффект насыщения). Это может быть постоянная величина, косинусоидальная функция, более сложная периодическая (по углу) функция, которую обычно разлагают в ряд Фурье, беря несколько первых членов:
l (θ r , i ) = l0 (i ) +
ν=n
∑ lν (i ) ⋅ cos(ν θr + αν ) ,
ν =1
где l0 , lν — соответственно постоянная составляющая и амплитудное значение ν -той
гармоники индуктивности (взаимной индуктивности), αν — фаза гармоники, n — число
используемых гармоник.
С учётом полученных выражений для индуктивностей и взаимных индуктивностей
записывают выражения для соответствующих потокосцеплений между обмотками. Для
каждой обмотки полное потокосцепление взаимной индукции
ψ mk =
j=n
j =n
j =1
j =1
∑ ψ kj =
∑ lmkj (θr , i) ⋅ i j ,
где k — номер обмотки, для которой определяется взаимная индуктивность; j — номер
обмотки, с которой связана данная обмотка; n — число обмоток, связанных с данной об-
76
моткой; i — ток в обмотке, связанной с данной обмоткой через взаимную индуктивность
lmkj (θr , i ) .
R1a
u1a
e1a
i1a
R1b
u1b
i1b
ψ μ1a
l1a ,1b
e1b
2a
ψ μ1b
Рис. 2.2 — Схема замещения на примере ЭМУ
с двумя обмотками на статоре и постоянными магнитами на роторе
С использованием какого-либо метода теории электрических цепей записываются
уравнения для контуров эквивалентной схемы (первый и второй законы Кирхгофа, метод
контурных токов, метод узловых потенциалов, комбинированные методы).
С использованием закона Фарадея ("ЭДС электромагнитной индукции равна производной магнитного потока по времени") определяются выражения для противо-ЭДС и
ЭДС взаимной индукции:
emk = −
dψ mk
.
dt
Подставляют в уравнения для электрических цепей выражения для ЭДС и группируют слагаемые следующим образом: все слагаемые с производными токов переносятся в
левую часть уравнений, а слагаемые без производных тока — в правую.
2.1.3 Электромагнитный момент ЭМУ
В двигательном режиме ЭМУ является источником момента, который создаётся согласно закону Ампера, благодаря действию силы, возникающей от взаимодействия магнитного поля с токопроводящими витками обмоток. Действие этой силы направлено тангенциально (по касательной) к поверхности ротора, и произведение силы на радиус ротора
даёт вращающий момент двигателя. Выражение для электромагнитного момента можно
получить, анализируя конструкцию конкретного ЭМУ и размещение полей и обмоток, но
можно применить также методику, связанную с использованием понятия электромагнитной энергии обмоток.
В двигательном режиме преобразование энергии в ЭМУ осуществляется следующим
образом:
Wэ
Wэм
Wмех
Aмех
Wэ.п
где Wэ — электрическая энергия, поступающая от источника питания; Wэм — электромагнитная энергия поля, образующаяся в результате протекания токов по обмоткам;
77
Wмех — механическая энергия ротора двигателя; Aмех — механическая работа, включая
механические потери в подшипниках и др., произведённая двигателем за счёт механической энергии; Wэ.п — энергия электрических потерь в активных сопротивлениях обмоток
и т. п.
Согласно закону сохранения энергии, вся электромагнитная энергия обмоток преобразуется в механическую энергию, а затем и в механическую работу по перемещению ротора вместе с присоединённым к нему рабочим механизмом. Из этого можно получить
общее выражение для вращающего момента. Но предварительно рассмотрим линейное
движение.
Механическая работа для линейного движения Aлин определяется через силу F и
перемещение x (Рис. 2.3):
F
x
P
Рис. 2.3 — Определение механической работы через силу F и путь x
( P — вес тела, создающий за счёт трения
противодействие перемещению)
Aлин = F ⋅ x = Aмех ,
а механическая работа для вращательного движения Aвращ определяется аналогично через момент M и угол поворота θ r :
Aвращ = M ⋅ θr = Wмех = Wэм .
При этом учитывается, что энергия является по своей сути пока невыполненной работой, а работа — потраченной энергией. Именно это обстоятельство применяется при
использовании закона сохранения энергии.
При вращении ротора на малом участке пути Δ θ r элементарная работа
Δ Aмех = M ⋅ Δθ r = ΔW мех = ΔWэм ,
откуда получаем выражение электромагнитного момента с дальнейшим перехода от конечных приращений к производной:
M=
Δ Aмех dW мех dWэм
=
=
, при Δ θ r → 0 ,
Δ θr
dθ r
dθ r
откуда следует, что для получения выражения электромагнитного момента конкретного
ЭМУ необходимо определить электромагнитную энергию его обмоток Wэм , а затем продифференцировать её по углу поворота.
В общем виде электромагнитная энергия обмоток, согласно законам физики, определяется как полусумма произведений токов на потокосцепления всех электромагнитных
контуров (обмоток):
78
k =n
Wэм = 0,5 ∑ ψ k ik ,
k =1
где n — число электромагнитных контуров, т. е. обмоток.
Полученное выражение является общим для всех типов ЭМУ, а все различия возникают именно при определении электромагнитной энергии для конкретного ЭМУ. Поэтому
электромагнитный момент ЭМУ:
k = n d (ψ i )
k =n d
dWэм
k k
= 0,5 ∑
= 0,5 ∑
M=
dθ r
k =1 dθ r
k =1 dθ r
⎡⎛ j = ν
⎞ ⎤
⎢⎜⎜ ∑ lkj i j ⎟⎟ik ⎥ ,
⎠ ⎦⎥
⎣⎢⎝ j =1
(2.1)
где первоначально развёрнуто выражение для электромагнитной энергии через потокосцепления и токи), а затем — выражение для потокосцеплений через индуктивности и также токи. Учтено, что входящий в них угол α может содержать угол поворота. При использовании в некоторых контурах постоянных магнитов последние остаются представленными потокосцеплениями, т. е. через индуктивности и токи не выражаются (поскольку
в постоянных магнитах нет ни индуктивностей, ни токов). Индекс ν означает число элементарных электромагнитных контуров, составляющих соответствующую k -тую обмотку: это — собственный электрический контур обмотки, а также контуры связи с другими
обмотками и постоянными магнитами.
При рассмотрении (2.1) следует выяснить, какие величины зависят от угла поворота,
так как именно по нему осуществляется дифференцирование. Токи от угла поворота не
зависят — они зависят лишь от времени. От угла поворота зависят только индуктивности.
Таким образом, хотя под знаком дифференцирования находится сложная функция в виде
произведения трёх переменных (индуктивности и двух перемножающихся токов), дифференцировать следует только индуктивности, полагая токи коэффициентами. Но индуктивности также не все зависят от угла поворота. Независящие от угла поворота слагаемые после дифференцирования обращаются в ноль, а останутся только зависящие, которые и
станут составляющими вращающего момента. Это позволяет сделать важный вывод, что
условием создания вращающего момента является наличие хотя бы одной индуктивности, зависящей от угла поворота (иначе все составляющие после дифференцирования
обратятся в ноль).
Выполняют преобразования уравнений (например, разрешают их относительно производных) для получения наиболее удобной формы представления модели (например, в
форме Коши). В частности, уравнение движения можно вынести в отдельную модель механической нагрузки.
По паспортным данным или экспериментально определяют параметры уравнений:
активные сопротивления обмоток, функциональные зависимости индуктивностей и взаимных индуктивностей от угла поворота, величину эквивалентного магнитного потокосцепления постоянных магнитов (если они имеются), момент инерции ротора и присоединённой нагрузки.
Для всех ЭМУ набор параметров одинаков, и их можно определять по типовым методикам.
Значение теории обобщённого электромеханического преобразователя энергии в
том, что:
• она приводит к эквивалентным электрическим схемам, содержащим обычные в
теории электрических цепей элементы, что позволяет использовать хорошо разработанные методы получения математического описания в статике и динамике;
79
•
для определения параметров уравнений нет необходимости знать параметры
конструкции ЭМУ, известные обычно только изготовителям;
• можно производить идентификацию параметров модели, используя сравнительно
простые и доступные методы экспериментальных исследований;
• получаемые модели хорошо согласуются с моделями электронных блоков (в том
числе по используемым методам расчёта), что упрощает методологию моделирования в целом и позволяет в перспективе перейти к автоматизированной разработке моделей;
• полученные таким образом модели отвечают требованиям, предъявляемым к декомпозиции общей модели ЭМС.
Входными переменными модели ЭМУ являются: напряжения или потенциалы, поступающие от источника питания; угол поворота и угловая скорость ротора, поступающие
из модели механической нагрузки.
Переменными состояния модели ЭМУ являются токи обмоток.
Выходными переменными модели ЭМУ являются токи обмоток и вращающий момент, передаваемый в модель механической нагрузки.
При любом изменении входных напряжений токи остаются непрерывными (поскольку протекают по цепям с индуктивностями) и поэтому требование о развязке по входам и выходам модели соблюдается. Наличие в модели взаимных индуктивностей обеспечивает учёт внутренних обратных связей, воздействующих через ЭДС взаимной индукции
(т. е. отсутствуют неучтённые внутренние обратные связи).
2.1.4 Математическое описание простейшей механической нагрузки
При создании математической модели ЭМУ часто целесообразно отделить от неё
математическую модель механической нагрузки, которая в этом случае представляется
двумя универсальными дифференциальными уравнениями:
dωr (t ) 1
⎫
= [M (t ) + M st (t )];⎪
⎪
dt
J
⎬
dθ r (t )
⎪
= ωr (t ),
⎪⎭
dt
(2.2)
где M — электромагнитный момент ЭМУ; M st — статический момент механической
нагрузки; J — момент инерции всех вращающихся масс, приведённый к валу двигателя;
ωr — угловая скорость ротора; θ r — угол поворота ротора; t — время.
Электромагнитный момент формируется токами и потокосцеплениями обмоток
ЭМУ и является управляющим воздействием. Статический момент механической нагрузки задаётся извне (он присущ рабочей машине, которая приводится в движение с помощью ЭМУ) и является возмущающим воздействием. Его характер (постоянный, переменный) определяется типом механической нагрузки.
Таким образом, математическая модель ЭМУ должна на своём выходе сформировать
электромагнитный момент, который затем подаётся на вход модели механической нагрузки. Этим достигается универсальность механической модели, так как происхождение
электромагнитного момента уже не имеет значения и к такой нагрузке можно подсоединять ЭМУ любого типа.
Математическое описание сложной механической нагрузки
Первое уравнение в (2.2) можно переписать для любой вращающейся части механической системы:
80
M =J
dω
− M st ,
dt
(2.3)
где ω — угловая скорость.
Из (2.3) следует, что вращающий момент M уравновешивается двумя составляющими момента сопротивления нагрузки: статическим моментом M st и динамическим
моментом J
dω
.
dt
Статический (установившийся) режим двигателя связан с постоянством скорости
(в частном случае скорость может быть равна нулю). Термин "статический момент нагрузки" показывает, что он проявляет себя только при постоянной скорости, т. е. постоянен или может зависеть от скорости, но никогда не зависит от ускорения.
Статический момент обычно рассматривают в зависимости от угловой скорости и
он может состоять из трёх составляющих:
• момент внешних сил M вн ;
•
•
момент сухого трения M c.т = k с.т ⋅ sgn(ω) , k с.т где — коэффициент сухого
трения (при численном задании имеет отрицательное значение, например: k с.т = –
5 Н·м);
момент вязкого трения M в.т = k в.т ⋅ ω , где k в.т — коэффициент вязкого трения
(при численном задании имеет отрицательное значение, например: k в.т = –
0,4 Н·м·с/рад);
•
2
момент вентиляторный M вент = k вент ⋅ ω ⋅ sgn(ω) , где kвент — коэффициент
вентиляторного момента.
M
M в .т
M вн
ω
M с .т
M вент
Рис. 2.4 — Составляющие статического момента M st :
M вн — момент внешних сил, M в.т — момент вязкого трения,
M с.т — момент сухого трения, M вент — вентиляторный момент
Момент внешних сил не зависит от режима работы двигателя. Это, например, момент, возникающий под действием силы тяжести. В процессе работы двигателя этот момент может изменяться произвольным образом, в том числе оставаться постоянным. Момент внешних сил встречается, в основном, в земных условиях. В космосе момент внешних сил обычно отсутствует.
81
Момент сухого трения постоянен по величине, но зависит от знака скорости и всегда направлен навстречу движению, т. е. является тормозным. Он состоит из коэффициента сухого трения k с.т и знаковой функции или сигнатуры:
⎧1, x > 0;
⎪
sgn( x) = ⎨0, x = 0;
⎪− 1, x < 0.
⎩
Он обусловлен обычным трением материала в кинематических парах и в подшипниках. Это может быть трение скольжения, трение качения или их комбинация — в зависимости от формы зубцов и типа подшипников. Реальная зависимость сухого трения от скорости может отличаться от идеализированной .
Конкретные зависимости момента сухого трения от скорости сложно вывести теоретически, их необходимо получать экспериментально. В целом стремятся уменьшить коэффициент сухого трения, так как он способствует нагреву кинематических пар, приводит
к дополнительным потерям мощности, снижает надёжность системы из-за возможных деформаций контактирующих поверхностей. Для этого при изготовлении шестерней используют "взаимно скользкие" материалы, стремятся придать зубцам кинематических пар
специальную форму, применяют смазку.
Возможная зависимость момента сухого трения от угловой скорости может состоять
из следующих зон. В зоне 1 происходит трогание с места и в первый момент времени при
нулевой скорости момент сил равен нулю, а затем очень быстро нарастает. После трогания и начала разгона в зоне 2 величина момента сухого трения несколько снижается, например, из-за разогрева соприкасающихся поверхностей или смазки между ними. В зоне 3
наступает стабилизация момента сухого трения, когда условия трения поверхностей стабилизированы (в частности, температура и консистенция смазки постоянны). В зоне 4 при
высоких скоростях условия работы трущихся поверхностей могут начать изменяться, например, может увеличиваться температура и из-за этого смазка может стать более жидкой,
а слой её между трущимися поверхностями может уменьшиться, также может начаться
разрушение поверхностей и др.
M
ω
M с .т
1
2
3
4
Рис. 2.5 — Характер реального момента сухого трения:
1 — зона трогания, 2 — зона разгона,
3 — зона стабилизации сухого трения,
4 — зона разрушения соприкасающихся поверхностей
Сухое трение может меняться также в зависимости от угла поворота в связи с неидеальностью шестерней — их формы, условий зубчатого зацепления, несоосностью валов и
82
подшипников и т. д. При длительной работе возможна зависимость от времени. Уменьшение момента сухого трения может происходить вследствие притирания поверхностей (их
взаимного шлифования), улучшения свойств смазки из-за периодических нагревов и охлаждений и др. Увеличение момента сухого трения может происходить из-за разрушения
соприкасающихся поверхностей или изменений в смазке (например, увеличения её вязкости вследствие накапливания продуктов истирания поверхностей). Сочетание обоих факторов приводит к некоторому результирующему изменению сухого трения.
Момент вязкого трения пропорционален скорости, причём обычно коэффициент
kв.т < 0 . Момент вязкого трения возникает, например, из-за наличия жидкой смазки или
в других вязких средах. Коэффициент k в.т может меняться по величине и знаку в процессе работы, например, при нагреве смазки.
Реальная зависимость момента вязкого трения от скорости может существенно отличаться от идеализированной (Рис. 2.6) и содержать несколько зон. В зоне 1 происходит
трогание с места при наличии густой смазки, которая существенно мешает движению. В
зоне 2 смазка разогревается, разжижается и начинает оказывать меньшее сопротивление
движению. В зоне 3 смазка переходит в некое стабильное для неё состояние с постоянной
температурой и консистенцией и создаёт постоянное сопротивление движению, т. е. существует постоянный коэффициент вязкого трения. В зоне 4 возможен перегрев смазки,
её существенное разжижение, вытекание из зоны трения и, следовательно, уменьшение
сопротивления движению. Коэффициент вязкого трения при этом может уменьшаться.
Тогда с увеличением скорости момент вязкого трения начинает уменьшаться, а не увеличиваться.
M
12
3
4
ω
M в .т
Рис. 2.6 Характер реального момента вязкого трения при наличии смазки:
1 — зона трогания с густой смазкой,
2 — зона разгона с разогревом и постепенным разжижением смазки,
3 — зона работы при стабильной консистенции и сопротивлении смазки,
4 — зона перегрева смазки и уменьшение её сопротивления
С точки зрения теории автоматического управления возникает контур положительной обратной связи. В целом это явление обычно считается вредным, так как может приводить к неустойчивой работе двигателя и всей электромеханической системы.
Момент вентиляторный зависит от квадрата скорости. Такой момент сопротивления имеют вентиляторы, грибные винты кораблей, пропеллеры самолётов и т. п. В космических аппаратах вентиляторный момент присутствует в механизмах принудительного
охлаждения — газового и жидкостного. У всех них при увеличении скорости увеличивается сопротивляемость газовой или жидкостной среды. В реальности эта зависимость не
обязательно квадратичная, показатель степени у скорости может быть любой, в том числе
дробный — в зависимости от свойств среды. Если можно считать, что работа вращающегося механизма не влияет на свойства среды, то показатель степени остаётся неизменным.
Но часто такое влияние имеет место и тогда показатель степени сам зависит от скорости.
83
Термин "динамический момент" означает, что эта составляющая момента проявляет себя только в динамических (переходных) режимах при наличии ускорения. Она обусловлена инерционностью ротора двигателя, редуктора и нагрузки, а её величина пропорциональна ускорению.
Анализ всех составляющих момента сопротивления нагрузки показывает, что для
космических аппаратов наибольшее значение имеют моменты сухого трения и динамические моменты.
Если нагрузка должна работать плавно, т. е. предполагаемые ускорения малы, то
наибольшее влияние оказывают различные составляющие статического момента (моменты трения). Если же предполагается, что механизм будет работать с большими ускорениями, например, останавливаться, а затем резко трогаться с места, или выполнять быстрый реверс (изменение направления вращения), то будут большие динамические моменты.
В этом случае двигатель должен быть способен преодолевать их и иметь соответствующий запас по моменту.
Математическое описание источника питания
2.1.5 Изображающие векторы в теории ЭМУ
Математическое описание ЭМУ возможно в скалярной форме фазовых координат
(напряжения, токи, потокосцепления каждой из фаз многофазных обмоток), а также в
векторно-матричной форме.
Под векторно-матричной формой понимают специфическую для ЭМУ форму представления переменных величин, при которой вводится понятие так называемых изображающих векторов для каждой группы однотипных переменных — напряжений, токов,
потокосцеплений, причём раздельно для каждой системы многофазных обмоток. Объединение изображающих векторов происходит представлением их в матричном виде, когда
матрицы заполнены не скалярными величинами, а изображающими векторами. При этом
параметры ЭМУ (активные сопротивления и индуктивности обмоток) также записываются в виде матриц. В результате и получается векторно-матричная форма записи.
Вначале вводится понятие изображающего вектора потокосцеплений. Это — реальный вектор, физически существующий в пространстве. Смысл его в следующем:
по каждой фазной обмотке протекает ток от собственного источника питания и от
ЭДС электромагнитной индукции, наведённых в ней токами других обмоток;
в результате каждая фазная обмотка создаёт магнитный поток Φ , направленный
вдоль её оси и реально существующий в пространстве; величина вектора определяется мгновенным значением протекающего тока, меняющегося, например, синусоидально, а угол поворота — углом расположения обмотки (0);
в пространстве (в материале
магнитопровода и в воздушном зазоре) эти отдельные
r
магнитные потоки Φ обмоток перемешиваются, складываются геометрически
по методу параллелограмма и образуется результирующий магнитный поток (0).
При изображении обмоток (0) магнитный поток показан как некая физическая велимагнитного почина, образующая силовые линии, а не как вектор: Φ . При изображении
r
тока в пространстве (0) используется векторное изображение: Φ .
84
1b
Φ1a
Φ1b
1a
Φ1c
1c
Рис. 2.7 — Образование векторов магнитных потоков обмоток
r
Φ1b
r
Φ1ab
r
Φ1ab
r
Φ1a
r
Φ1
r
Φ1c
r
Φ1c
а)
б)
Рис. 2.8 — Суммирование векторов магнитных потоков обмоток
в пространстве в трёхфазной системе обмоток
Вообще говоря, в пространстве складываются все элементарные магнитные потоки и
в результате образуется единый магнитный поток ЭМУ, но для раздельного анализа процессов в обмотках его условно разделяют на соответствующие составляющие — изображающий вектор потокосцепления статора, изображающий вектор потокосцепления ротора
и др.
Как известно из физики, связь между потокосцеплением ψ и током i выражается
через коэффициент индукции (индуктивность) L :
ψ ~ Li .
Поэтому можно представить, что каждому изображающему вектору потокосцепления соответствует некий изображающий вектор тока соответствующей многофазной обмотки, содержащий в качестве составляющих (проекций на оси) фазные токи. В отличие
от реального вектора потокосцепления, этот вектор тока является уже условной величиной, так как в действительности токи протекают по проводникам фазных обмоток и имеют направление в соответствии с их витками. Но для удобства представляется, что изображающий вектор токов располагается в пространстве так же, как и изображающий вектор соответствующего ему потокосцепления.
По закону Ома между током i и напряжением питания u существует связь, выражаемая через полное сопротивление цепи z (включающее активную и реактивную составляющие):
85
u ~ zi
Поэтому можно представить себе, что имеется также условный изображающий вектор напряжений, расположенный в пространстве и отклоняющийся от вектора тока на некоторый угол, определяемый комплексным сопротивлением обмоток (соотношением его
активной и индуктивной составляющих).
Таким образом, для каждой многофазной обмотки вводятся три изображающих вектора — напряжения, тока и потокосцепления. Эти векторы вращаются в пространстве и
характеризуются своими амплитудами и углами поворота относительно оси отсчёта
(обычно оси одной из фаз своей обмотки). Из них реально существует только вектор потокосцепления, а векторы тока и напряжения являются условными (фиктивными). Изображающие векторы в теории ЭМУ представляют собой математические абстракции,
удобные для анализа процессов в них.
Смысл изображающего вектора в том, что через одну переменную (одно обозначение) представляют систему многофазных переменных. Изображающий вектор состоит из
всех фазных переменных рассматриваемой обмотки. Можно также представить себе, что
эти фазные переменные являются проекциями некоторого геометрического вектора (представленного в виде стрелки, выходящей из центра системы координат) на оси координат,
совпадающие с осями фазных обмоток. Обычно в математике применяются две оси координат — ординат и абсцисс. Но в теории электрических машин применяют только оси ординат, а ось абсцисс (время) не показывается. Таким образом, речь идёт о параметрически
заданных функциях напряжений, токов и потокосцеплений (т. е. функциях, зависящих от
некоей общей для всех величины, в данном случае — времени).
Скалярное и матричное описание ЭМУ
Математическое описание ЭМУ возможно в скалярной форме фазовых переменных
(напряжения, токи, потокосцепления каждой из фаз многофазных обмоток), а также в
матричной форме.
Обычно исходным является представление математического описания в скалярной
форме фазовых переменных, которая получается естественным образом из схемы замещения ЭМУ с помощью методов электротехники (законы Кирхгофа, метод контурных токов
и т. п.). При этом можно получить математическое описание как в форме дифференциальных уравнений для переходных процессов, так и в форме алгебраических уравнений для
установившихся процессов (но в этом случае — только для постоянных или синусоидальных питающих напряжений). Достоинством скалярной формы является то, что все электромагнитные переменные (напряжения, токи, потокосцепления) имеют естественный физический смысл. Недостатком скалярной формы является большое число уравнений и переменных в многофазных и многообмоточных ЭМУ.
Под матричной формой математического описания в теории ЭМУ понимают обычные математические абстракции, когда наборы однотипных величин (переменных и параметров) представляются в виде таблиц (матриц) соответствующих величин. В частном
случае такие таблицы вырождаются в матрицы с одним столбцом или с одной строкой —
тогда говорят соответственно о векторах-столбцах и векторах-строках. В этом случае скалярные параметры и переменные, с помощью которых описываются процессы в ЭМУ,
представляют в виде матриц и такое описание будет называться описанием в матричной
форме или матричным математическим описанием ЭМУ.
Можно выделить три разновидности матричного описания ЭМУ: матричное совмещённое, матричное раздельное, векторно-матричное.
Наиболее простой является матричная совмещённая форма математического описания, получаемая формально-математическим представлением системы уравнений ЭМУ в
матричной форме через выделение входных и выходных величин и параметров. Матричная раздельная форма является естественным уточнением совмещённой с разделением
86
общего матричного уравнения на систему матричных уравнений для каждой обмотки (в
этом случае матрицы появляются в случае многофазности обмоток). Векторно-матричная
форма является дальнейшим развитием раздельной формы, когда вводится понятие изображающих векторов всех величин (напряжений, ЭДС, токов, потокосцеплений). При
этом сохраняется матричное представление уравнений, но сами матрицы меняются, так
как вновь переходят е одному матричному уравнению, в котором в качестве переменных
присутствуют изображающие векторы.
2.2 Cовмещенное матричное описание ЭМУ
Матричное уравнение равновесия напряжений для обмоток ЭМУ:
d ψ (t )
= −R ⋅ i (t ) + u(t ) ,
dt
где ψ — вектор-столбец потокосцеплений (далее называемый векторным потокосцеплением или просто потокосцеплением); R — диагональная матрица активных сопротивлений обмоток (далее называемая матричным сопротивлением или просто сопротивлением); i — вектор-столбец токов (далее называемый векторным током или просто током);
u — вектор-столбец питающих напряжений (далее называемый векторным напряжением
или просто напряжением); t — время.
В развёрнутом виде указанные выше векторы и матрица имеют вид:
u1 (t )
u(t ) =
i1 (t )
ψ1 (t )
R1
0
K
0
0 R2 K 0
u 2 (t )
i2 (t )
ψ 2 (t )
, i (t ) =
, ψ (t ) =
, R=
,
K K K K
K
K
K
u n (t )
in (t )
ψ n (t )
0
0
K Rn
где n — общее число независимых контуров (число фаз статора плюс число фаз ротора
плюс число других обмоток).
Для конкретных типов ЭМУ некоторые элементы матриц и векторов могут быть нулевыми, например: у короткозамкнутого асинхронного двигателя отсутствуют напряжения питания ротора, у синхронного двигателя с постоянными магнитами отсутствуют токи i 2 (t ) и активные сопротивления ротора, у ЭМУ с электромагнитным возбуждением
отсутствуют потокосцепления от постоянных магнитов и т. д.
Связь между током и потокосцеплением:
ψ[θ r (t )] = L[θ r (t )] ⋅ i (t ) + ψ μ [θ r (t )],
где L — матрица индуктивностей (собственных и взаимных); потокосцепление ψ показано как функция угла поворота, зависящего от времени; ψ μ — вектор потокосцеплений
постоянных магнитов (называемый далее векторным потокосцеплением постоянных магнитов или просто потокосцеплением постоянных магнитов) с соответствующими обмотками (показан зависящим от угла поворота, зависящего, в свою очередь, от времени):
87
ψ μ1 [θ r (t )]
ψ μ [θ r (t )] =
ψ μ 2 [θr (t )]
K
.
ψ μ n [θ r (t )]
Индуктивности:
L=
L1,1 cos (θ1,1 )
L2,1 cos (θ 2,1 )
L1, 2 cos (θ1, 2 ) K L1,n cos (θ1,n )
L2, 2 cos (θ 2, 2 ) K L2,n cos (θ 2,n )
K
K
K
K
Ln,1 cos (θ n,1 ) Ln, 2 cos (θ n, 2 ) K Ln,n cos (θ n,n )
,
где L j , k — амплитудные значения индуктивностей; θ j , k — соответствующие углы между обмотками (некоторые из них являются постоянными значениями, а некоторые могут
содержать угол поворота ротора θ r и являются переменными). Одинаковые индексы соответствуют собственным индуктивностям, а разные — взаимным индуктивностям.
Основное допущение — отсутствие насыщения магнитной цепи.
Потокосцепление постоянных магнитов имеется не во всех типах ЭМУ.
Для дальнейшего использования данного выражения в уравнении равновесия напряжений потокосцепление можно записать следующим образом:
ψ (t ) = L[θr (t )] ⋅ i (t ) + ψ μ [θ r (t )] ,
где для упрощения записи зависимость потокосцепления от угла поворота не отражается.
Для получения далее выражения электромагнитного момента потокосцепление можно записать следующим образом:
ψ (θ r ) = L(θ r ) ⋅ i (t ) + ψ μ (θ r ) ,
где отражена зависимость потокосцеплений и индуктивности только от угла поворота, так
как именно этот факт существенен для дальнейших выкладок, а зависимость их от времени не используется.
Тогда электромагнитная энергия контуров:
1
W (θ r ) = ψ T (θr ) ⋅ i (t ) ,
2
где транспонированный вектор потокосцеплений:
[
]
ψ T (θ r ) = L(θ r ) ⋅ i (t ) + ψ μ (θr ) T .
Электромагнитный момент определяется как частная производная электромагнитной
энергии по углу поворота ротора:
[
]
dW (θ r ) 1 d
1 dψ T (θ r )
T
M=
= ⋅
ψ (θ r ) ⋅ i (t ) = ⋅
⋅ i (t ) ,
D θr
dθ r
2 dθ r
2
88
где учитывается, что постоянный коэффициент (в данном случае ток, не зависящий от угла поворота, по которому производится дифференцирование) может быть вынесен за знак
дифференцирования.
Из полученного выражения следует, что в общем виде электромагнитный момент
определяется производной по углу поворота транспонированного вектора потокосцеплений, умноженной на ток. Поскольку потокосцепления также зависят от протекающих по
обмоткам токов, то в результате в выражении электромагнитного момента появятся произведения токов и их квадраты.
Если потокосцепления не будут зависеть от угла поворота ротора, то рассматриваемая производная обратится в ноль и электромагнитного момента не будет. Это происходит, например, в трансформаторах.
На основании данного математического описания можно построить различные математические модели ЭМУ с электромагнитным возбуждением и с возбуждением от постоянных магнитов, выделив для каждого случая переменные состояния, параметры,
входные и выходные переменные.
Раздельное матричное описание ЭМУ
Исходное раздельное матричное описание ЭМУ
Уравнения равновесия напряжений
Матричные уравнения равновесия напряжений для обмоток ЭМУ:
d
⎫
ψ1 (t ) = − R1 ⋅ i1 (t ) + u1 (t ); ⎪
⎪
dt
⎬,
d
ψ 2 (t ) = − R 2 ⋅ i 2 (t ) + u 2 (t ),⎪⎪
dt
⎭
где индексы 1 и 2 обозначают соответственно статорные (для первой обмотки) и роторные
(для второй обмотки) величины; ψ — векторы-столбцы потокосцеплений (далее называемые векторными потокосцеплениями или просто потокосцеплениями); R — диагональные матрицы активных сопротивлений обмоток (далее называемые матричными сопротивлениями или просто сопротивлениями); i — векторы-столбцы токов (далее называемые векторными токами или просто токами); u — векторы-столбцы питающих напряжений (далее называемые векторными напряжениями или просто напряжениями);
t — время.
В развёрнутом виде векторы и матрицы имеют вид:
u1 (t ) =
u1a (t )
u1b (t )
K
u m1 (t )
, i1 (t ) =
i1a (t )
i1b (t )
K
im1 (t )
, ψ1 (t ) =
ψ1a (t )
ψ1b (t )
K
ψ m1 (t )
;
u 2 a (t )
i2 a (t )
ψ 2 a (t )
u 2b (t )
i2b (t )
ψ 2b (t )
u 2 (t ) =
, i 2 (t ) =
, ψ 2 (t ) =
,
K
K
K
u m 2 (t )
im 2 (t )
ψ m 2 (t )
89
R1 =
R1a
0
0 K
R1b K
K
0
K
0
0
0
K K
K Rm1
, R2 =
R2 a
0
0 K
R2b K
K
0
K
0
0
0
K K
K Rm 2
,
где m — общее число независимых контуров (число фаз) первой или статорной ( m1 ) и
второй или роторной ( m2 ) обмоток.
Уравнения связи между токами и потокосцеплениями
Связь между токами и потокосцеплениями не может быть выражена по отдельности
для каждой обмотки, так как обмотки взаимосвязаны, поэтому уравнение связи между токами и потокосцеплениями обмоток записывается общим матричным выражением:
ψ[θ r (t )] = L[θ r (t )] ⋅ i (t ) + ψ μ [θ r (t )] = L[θ r (t )] ⋅ i (t ) + K μ [θ r (t )] ⋅ Φ μ ,
которое может быть записано через блочные матрицы и векторы соответствующих обмоток:
ψ1 [θ r (t )]
ψ 2 [θr (t )]
+
=
L1,1 [θ r (t )]
L 2,1 [θ r (t )]
K μ1,1 [θ r (t )]
K μ 2,1 [θ r (t )]
L1, 2 [θ r (t )]
L 2, 2 [θ r (t )]
K μ1, 2 [θ r (t )]
K μ 2, 2 [θr (t )]
⋅
⋅
Φ μ1
Φμ2
i1 (t )
+
i 2 (t )
,
где L1,1 и L 2, 2 — матрицы индуктивностей (собственных и взаимных между фазами)
каждой из обмоток; L1, 2 и L 2,1 — матрицы взаимных индуктивностей между обмотками;
потокосцепления ψ показаны как функции угла поворота, зависящего от времени;
K μ — матрицы коэффициентов потокосцеплений, т. е. коэффициентов взаимодействия
между магнитными потоками и обмотками при создании потокосцеплений, являющихся
по физической сущности числами витков соответствующих обмоток с учётом их углов
размещения (введение K μ позволяет использовать матричную форму в этой части уравнения); Φ μ — величины потоков постоянных магнитов. Основное допущение — отсутствие насыщения магнитной цепи, что позволяет считать индуктивности постоянными коэффициентами (учитывая лишь зависимость некоторых из них от угла поворота ротора, но
не от величины магнитного потока).
Справедливо также:
L1, 2 = LT2,1 .
В общем виде индуктивности:
90
L1,1 =
L 2,1 =
l1a ,1a
l1b,1a
l1a ,1b
l1b,1b
K
K
l1m1 ,1a
l1m1 ,1b
l2 a ,1a
l2b,1a
l 2 a ,1b
l2b,1b
K
K
l2 m2 ,1a
l2 m2 ,1b
l1a ,1m1
l1b,1m1
K
K
K
K
K l1m1 ,1m1
K
K
L1, 2 =
;
l 2 a ,1m1
l2b,1m1
K
K
K l 2 m2 ,1m1
L 2, 2 =
;
l1a , 2 a
l1b,2 a
l1a , 2b
l1b, 2b
K
K
l1m1 , 2 a
l1m1 , 2b
l2a,2a
l 2b , 2 a
l 2 a , 2b
l 2b , 2 b
K
K
l2 m2 ,2 a
l2 m2 , 2b
K
K
l1a , 2 m1
l1b, 2 m1
K
K
K l1m1, 2 m1
K
K
l 2 a , 2 m1
l2b, 2 m1
K
K
K l2 m2 , 2 m1
;
.
В более частном случае, когда индуктивности могут быть представлены как имеющие зависимость от угла между обмотками:
L1,1 =
L1, 2 =
L 2,1 =
L 2, 2 =
l1a ,1a (θ1a ,1a )
l1b,1a (θ1b,1a )
l1a ,1b (θ1a ,1b )
l1b,1b (θ1b,1b )
l1a ,1m1 (θ1a ,1m1 )
l1b,1m1 (θ1b,1m1 )
K
K
K
K
K
K
l1m1 ,1a (θ1m1 ,1a ) l1m1 ,1b (θ1m1 ,1b ) K l1m1 ,1m1 (θ1m1 ,1m1 )
l1a , 2 a (θ1a , 2 a )
l1b, 2 a (θ1b, 2 a )
l1a , 2b (θ1a , 2b )
l1b, 2b (θ1b, 2b )
;
l1a , 2 m1 (θ1a , 2 m2 )
l1b, 2 m1 (θ1b, 2 m2 )
K
K
K
K
K
K
l1m1 , 2 a (θ1m1 , 2 a ) l1m1 , 2b (θ1m1 , 2b ) K l1m1 , 2 m1 (θ1m1 , 2 m2 )
l2 a ,1a (θ 2 a ,1a )
l 2b,1a (θ 2b,1a )
l 2 a ,1b (θ 2 a ,1b )
l 2b,1b (θ 2b,1b )
K
K
;
l 2 a ,1m1 (θ 2 a ,1m1 )
l 2b,1m1 (θ 2b,1m1 )
K
K
K
K
l 2 m2 ,1a (θ 2 m2 ,1a ) l2 m2 ,1b (θ 2 m2 ,1b ) K l2 m2 ,1m1 (θ 2 m2 ,1m1 )
l 2 a , 2 a (θ 2 a , 2 a )
l 2b, 2 a (θ 2b, 2 a )
l 2 a , 2b (θ 2 a , 2b )
l 2b, 2b (θ 2b, 2b )
K
K
;
l 2 a , 2 m1 (θ 2 a , 2 m2 )
l 2b, 2 m1 (θ 2b, 2 m2 )
K
K
K
K
l2 m2 , 2 a (θ 2 m2 , 2 a ) l 2 m2 , 2b (θ 2 m2 , 2b ) K l2 m2 , 2 m1 (θ 2 m2 , 2 m2 )
,
В идеализированном случае, когда зависимости индуктивностей от угла между обмотками могут быть аппроксимированы косинусоидами:
91
L1,1 =
L1, 2 =
L 2,1 =
L 2, 2 =
L1a ,1a cos (θ1a ,1a )
L1b,1a cos (θ1b,1a )
L1a ,1b cos (θ1a ,1b )
L1b,1b cos (θ1b,1b )
L1a ,1m1 cos (θ1a ,1m1 )
L1b,1m1 cos (θ1b,1m1 )
K
K
;
K
K
K
K
L1m1 ,1a cos (θ1m1 ,1a ) L1m1 ,1b cos (θ1m1 ,1b ) K L1m1 ,1m1 cos (θ1m1 ,1m1 )
L1a , 2 a cos (θ1a , 2 a )
L1b, 2 a cos (θ1b, 2 a )
L1a , 2b cos (θ1a , 2b )
L1b, 2b cos (θ1b, 2b )
L1a , 2 m1 cos (θ1a , 2 m 2 )
L1b, 2 m1 cos (θ1b, 2 m 2 )
K
K
K
K
K
K
L1m1 , 2 a cos (θ1m1 , 2 a ) L1m1 , 2b cos (θ1m1 , 2b ) K L1m1 , 2 m1 cos (θ1m1 , 2 m 2 )
L2 a ,1a cos (θ 2 a ,1a )
L2b,1a cos (θ 2b,1a )
L2 a ,1b cos (θ 2 a ,1b )
L2b,1b cos (θ 2b,1b )
K
K
;
L2 a ,1m1 cos (θ 2 a ,1m1 )
L2b,1m1 cos (θ 2b,1m1 )
K
K
K
K
L2 m 2 ,1a cos (θ 2 m 2 ,1a ) L2 m 2 ,1b cos (θ 2 m 2 ,1b ) K L2 m 2 ,1m1 cos (θ 2 m 2 ,1m1 )
L2 a , 2 a cos (θ 2 a , 2 a )
L2b, 2 a cos (θ 2b, 2 a )
L2 a , 2b cos (θ 2 a , 2b )
L2b, 2b cos (θ 2b, 2b )
K
K
;
L2 a , 2 m1 cos (θ 2 a , 2 m 2 )
L2b, 2 m1 cos (θ2b, 2 m 2 )
K
K
K
K
L2 m 2 , 2 a cos (θ 2 m 2 , 2 a ) L2 m 2 , 2b cos (θ 2 m 2 , 2b ) K L2 m 2 , 2 m1 cos (θ2 m 2 , 2 m 2 )
,
где L j , k — амплитудные значения индуктивностей; θ j , k — соответствующие углы между обмотками (некоторые из них являются постоянными значениями, а некоторые могут
содержать угол поворота ротора θ r и являются переменными); m1 , m2 — числа фаз соответственно первой и второй обмоток. Одинаковые индексы соответствуют собственным
индуктивностям, а разные — взаимным индуктивностям.
Коэффициенты потокосцепления содержат число витков соответствующей обмотки
и учитывают конструкционные особенности соответствующей части магнитопровода
ЭМУ. Коэффициенты определяются экспериментально. В общем виде матричные коэффициенты потокосцеплений постоянных магнитов:
k μ1a ,1 [θ r (t )]
K μ1,1 [θr (t )] =
k μ1b,1 [θ r (t )]
K
k μ m1 ,1 [θ r (t )]
k μ1a , 2 [θ r (t )]
, K μ1, 2 [θ r (t )] =
k μ1b, 2 [θ r (t )]
K
k μ m1 , 2 [θ r (t )]
;
92
k μ 2 a , 2 [θ r (t )]
k μ 2 a ,1 [θ r (t )]
k μ 2b,1 [θ r (t )]
K μ 2,1 [θ r (t )] =
K
k μ 2b, 2 [θr (t )]
, K μ 2, 2 [θ r (t )] =
K
,
k μ m 2 , 2 [θr (t )]
k μ m 2 ,1 [θ r (t )]
где учитывается возможная зависимость некоторых из коэффициентов от угла поворота.
Можно рассматривать и сами потокосцепления от постоянных магнитов:
ψ1 [θ r (t )]
ψ 2 [θr (t )]
+
=
L1,1 [θ r (t )]
L1, 2 [θ r (t )]
L 2,1 [θ r (t )]
ψ μ1,1 [θ r (t )]
ψ μ 2,1 [θr (t )]
⋅
L 2, 2 [θ r (t )]
ψ μ1, 2 [θ r (t )]
ψ μ 2, 2 [θ r (t )]
i1 (t )
i 2 (t )
+
,
где общие потокосцепления обмоток ψ1 и ψ 2 выражаются через магнитные потоки от
постоянных магнитов ψ μ .
ψ μ1,1 и ψ μ 2, 2 представляют собой потокосцепления обмоток соответственно первой (статорной) и второй (роторной) обмоток с постоянными магнитами этих же частей
ЭМУ; ψ μ1, 2 и ψ μ 2,1 представляют собой потокосцепления обмоток соответственно первой (статорной) и второй (роторной) обмоток с постоянными магнитами противоположной части ЭМУ. В современных конструкциях ЭМУ обычно отсутствуют потокосцепления ψ μ1,1 и ψ μ 2, 2 , но, вообще говоря, они могут быть, например, как паразитные явления.
Вектор потокосцепления первой (статорной) обмотки от постоянных магнитов этой
же системы (статора):
ψ μ1,1 [θ r (t )] = K μ1,1 [θ r (t )] ⋅ Φ μ1 =
k μ1a ,1 [θ r (t )]
=
k μ1b,1 [θr (t )]
K
k μm1 ,1 [θ r (t )]
Φ μ1k μ1a ,1 [θ r (t )]
⋅ Φ μ1 =
Φ μ1k μ1b,1 [θ r (t )]
K
Φ μ1k μm1 ,1 [θ r (t )]
ψ μ1a ,1 [θ r (t )]
=
ψ μ1b,1 [θ r (t )]
K
,
ψ μm1 ,1 [θ r (t )]
где Φ1 — поток постоянного магнита первой системы обмоток (статора). В двухполюсном ЭМУ этот поток формируется одним магнитом, а в многополюсном — совокупностью магнитов для всех полюсов.
Вектор потокосцепления первой (статорной) обмотки от постоянных магнитов второй системы (ротора):
ψ μ1, 2 [θ r (t )] = K μ1, 2 [θ r (t )] ⋅ Φ μ 2 =
93
k μ1a , 2 [θ r (t )]
=
Φ μ 2 k μ1a , 2 [θ r (t )]
k μ1b, 2 [θ r (t )]
⋅ Φμ 2 =
K
k μm1 , 2 [θ r (t )]
Φ μ 2 k μ1b, 2 [θ r (t )]
K
ψ μ1a , 2 [θ r (t )]
ψ μ1b, 2 [θ r (t )]
=
Φ μ 2 k μm1 , 2 [θ r (t )]
K
.
ψ μm1 , 2 [θ r (t )]
где Φ2 — поток постоянного магнита второй системы обмоток (статора). В двухполюсном ЭМУ этот поток формируется одним магнитом, а в многополюсном — совокупностью магнитов для всех полюсов.
Вектор потокосцепления второй (роторной) обмотки от постоянных магнитов первой системы (статора):
ψ μ 2,1 [θ r (t )] = K μ 2,1 [θ r (t )] ⋅ Φ μ1 =
k μ 2 a ,1 [θr (t )]
=
k μ 2b,1 [θ r (t )]
K
Φ μ1k μ 2 a ,1 [θ r (t )]
⋅ Φ μ1 =
k μm 2 ,1 [θ r (t )]
Φ μ1k μ 2b,1 [θ r (t )]
K
ψ μ 2 a ,1 [θ r (t )]
=
Φ μ1k μm 2 ,1 [θ r (t )]
ψ μ 2b,1 [θ r (t )]
K
.
ψ μm 2 ,1 [θ r (t )]
Вектор потокосцепления второй (роторной) обмотки от постоянных магнитов этой
же системы (ротора):
ψ μ 2, 2 [θr (t )] = K μ 2, 2 [θ r (t )] ⋅ Φ μ 2 =
k μ 2 a , 2 [θ r (t )]
=
k μ 2b, 2 [θ r (t )]
K
k μm 2 , 2 [θ r (t )]
Φ μ 2 k μ 2 a , 2 [θ r (t )]
⋅ Φμ2 =
Φ μ 2 k μ 2b, 2 [θ r (t )]
K
Φ μ 2 k μm 2 , 2 [θ r (t )]
ψ μ 2 a , 2 [θ r (t )]
=
ψ μ 2b, 2 [θ r (t )]
K
.
ψ μm 2 , 2 [θ r (t )]
Введение коэффициентов потокосцеплений постоянных магнитов K μ [θ r (t )] позволяет учесть неравенство и некосинусоидальность потокосцеплений по осям обмоток. Их
значения и вид функциональной зависимости можно получить экспериментально, а затем
интерполировать.
Такую конструкцию не имеет ни один реальный ЭМУ, так как постоянные магниты
располагаются или только на роторе (обычное исполнение), или только на статоре (обращённое исполнение), но данная обобщённая модель позволяет получить затем модель
конкретного исполнения ЭМУ, приравняв нулю потокосцепления соответствующих постоянных магнитов. Поэтому такая обобщённая модель может быть использована при автоматизации получения математических моделей.
В развёрнутой матричной форме в общем виде на примере 3-фазного ЭМУ с обмотками и постоянными магнитами на статоре и роторе:
94
ψ1a
ψ1b
ψ1c
ψ 2a
ψ 2b
ψ 2c
l1a ,1a
l1b,1a
l1c,1a
=
l2 a ,1a
l2b,1a
l2c,1a
l1a ,1b
l1b,1b
l1c,1b
l2 a ,1b
l2b,1b
l2c,1b
l1a ,1c
l1b,1c
l1c,1c
l2 a ,1c
l2b,1c
l2c,1c
l1a , 2 a
l1b, 2 a
l1c, 2 a
l2a, 2a
l 2b , 2 a
l2c , 2 a
ψ μ1a
l1a , 2c
i1a
ψ μ1b
l1b, 2c
i1b
ψ μ1c
l1c 2c
i
,
⋅ 1c +
ψ μ 2a
l2 a , 2c
i2 a
ψ μ 2b
l 2b , 2 c
i2 b
ψ μ 2c
l2c,2c
i2 c
l1a , 2b
l1b, 2b
l1c, 2b
l 2 a , 2b
l 2b , 2b
l 2 c , 2b
где индуктивности и потокосцепления от постоянных магнитов являются функциями угла
поворота (не показано для большей компактности записи); потокосцепления от постоянных магнитов:
ψ μ1a
0
ψ μ1b
0
ψ μ1c
0
=
ψ μ 2a
k μ 2 a1
ψ μ 2b
k μ 2b1
ψ μ 2c
k μ 2c1
k μ1a 2
k μ1b 2
k μ1c 2
Φ μ1
.
⋅
0
Φμ2
0
0
В развёрнутой форме на примере 3-фазного синхронного двигателя с постоянными
магнитами:
ψ1a
l1a ,1a
ψ1b = l1b,1a
ψ1c
l1c,1a
l1a ,1b
l1b,1b
l1c,1b
l1a ,1c
i1a
ψ μ1a
l1b,1c ⋅ i1b + ψ μ1b ,
l1c,1c
i1c
ψ μ1c
где на роторе отсутствуют обмотки, но имеется постоянный магнит, создающий соответствующие потокосцепления с фазными обмотками статора:
ψ μ1a
k μ1a 2
ψ μ1b = k μ1b 2 Φ μ 2 .
ψ μ1c
k μ1c 2
В развёрнутой форме на примере 3-фазного синхронного двигателя с электромагнитным возбуждением (или сельсина):
ψ1a
ψ1b
ψ1c
ψ 2a
=
l1a ,1a
l1a ,1b
l1a ,1c
l1a , 2 a
l1b,1a
l1b,1b
l1b,1c
l1b, 2 a
l1c,1a
l2 a ,1a
l1c ,1b
l2 a ,1b
l1c,1c
l2 a ,1c
l1c , 2 a
l2a, 2a
i1a
⋅
i1b
i1c
i2 a
,
где на роторе отсутствуют постоянные магниты, но имеется одна обмотка.
В развёрнутой форме в общем виде на примере 2-фазного ЭМУ:
95
ψ1a
ψ1b
ψ 2a
=
ψ 2b
l1a ,1a
l1a ,1b
l1a , 2 a
l1a , 2b
l1b,1a
l1b,1b
l1b, 2 a
l1b, 2b
l2 a ,1a
l2 a ,1b
l2a, 2a
l 2 a , 2b
l2b,1a
l2b,1b
l 2b , 2 a
l 2b , 2b
ψ μ1a
i1a
⋅
i1b
+
i2 a
ψ μ1b
ψ μ 2a
,
ψ μ 2b
i2 b
где имеются по две обмотки на статоре и роторе и есть постоянные магниты:
0
0
k μ1a 2
k μ 2 a1
0
0
ψ μ1a
ψ μ1b
ψ μ 2a
=
ψ μ 2b
k μ1b 2
k μ 2b1
Φ μ1
⋅
Φμ2
.
В развёрнутой форме на примере 2-фазного асинхронного двигателя (3-обмоточного
вращающегося трансформатора или фазовращателя):
l1a ,1a
l1a ,1b
l1a , 2 a
l1a , 2b
l1b,1a
ψ1b
=
l2 a ,1a
ψ 2a
l2b,1a
ψ 2b
l1b,1b
l1b, 2 a
l1b, 2b
l2 a ,1b
l2a,2 a
l 2 a , 2b
l2b,1b
l 2b , 2 a
l 2b , 2b
ψ1a
i1a
⋅
i1b
,
i2 a
i2 b
где на роторе отсутствуют постоянные магниты, но имеется две обмотки.
В развёрнутой форме на примере 2-фазного двигателя с электромагнитным возбуждением или 3-обмоточного вращающегося трансформатора или 3-обмоточного фазовращателя:
ψ1a
l1a ,1a
l1a ,1b
l1a , 2 a
ψ1b = l1b,1a
l1b,1b
l1b, 2 a ⋅ i1b ,
ψ 2a
l2 a ,1b
l2 a , 2 a
l2 a ,1a
i1a
i2 a
где на роторе отсутствуют постоянные магниты, но имеется одна обмотка.
В развёрнутой форме на примере 2-фазного синхронного двигателя с постоянными
магнитами:
ψ1a
ψ1b
=
l1a ,1a
l1b,1a
ψ μ1a
l1a ,1b
i
⋅ 1a +
,
ψ μ1b
l1b,1b
i1b
где на роторе отсутствуют обмотки, но имеется постоянный магнит, создающий соответствующие потокосцепления с фазными обмотками статора:
ψ μ1a
k μ1a 2
=
⋅ Φμ 2 .
ψ μ1b
k μ1b 2
Выражение электромагнитного момента находится как производная электромагнитной энергии по углу поворота.
96
Полные потокосцепления обмоток:
{
}
ψ (θr ) = L(θr ) ⋅ i (t ) + ψ μ (θr )
или в развёрнутом виде:
ψ μ1 (θ r )
L1,1 (θr ) L1, 2 (θ r )
ψ1 (θ r )
i (t )
=
⋅ 1
+
.
ψ μ 2 (θ r )
L 2,1 (θ r ) L 2, 2 (θ r )
ψ 2 (θ r )
i 2 (t )
Полные потокосцепления постоянных магнитов с каждой из обмоток:
ψ μ1 (θ r ) = ψ μ1,1 (θ r ) + ψ μ1, 2 (θ r ) ; ⎫⎪
⎬
ψ μ 2 (θ r ) = ψ μ 2,1 (θ r ) + ψ μ 2, 2 (θ r ) .⎪⎭
Выражение потокосцеплений домножается слева на единичную матрицу:
{
}
E ⋅ ψ (θ r ) = E ⋅ L(θr ) ⋅ i (t ) + ψ μ (θ r ) .
Все матрицы и векторы раскрываются:
ψ μ1 (θ r )
ψ (θ )
i (t )
1 0
1 0 ⎛⎜ L1,1 (θ r ) L1, 2 (θ r )
⋅ 1 r =
⋅
⋅ 1
+
ψ μ 2 (θ r )
ψ 2 (θ r )
0 1
0 1 ⎜ L 2,1 (θr ) L 2, 2 (θr ) i 2 (t )
⎝
после чего выполняются операции перемножения и разделяются потокосцепления:
ψ1 (θ r ) = L1,1 (θ r ) ⋅ i1 (t ) + L1, 2 (θ r ) ⋅ i 2 (t ) + ψ μ1 (θ r ) ; ⎫⎪
⎬
ψ 2 (θ r ) = L 2,1 (θ r ) ⋅ i1 (t ) + L 2, 2 (θr ) ⋅ i 2 (t ) + ψ μ 2 (θ r ) .⎪⎭
Электромагнитная энергия всех контуров ЭМУ определяется выражением:
1
1 ψ (θ )
W (θ r ) = ψ T (θ r ) ⋅ i (t ) = ⋅ 1 r
2
2 ψ 2 (θ r )
T
⋅
i1 (t )
=
i 2 (t )
ψ μ1 (θr )
i (t )
1 ⎛ L1,1 (θ r ) L1, 2 (θ r )
= ⎜
⋅ 1
+
ψ μ 2 (θ r )
i 2 (t )
2 ⎜ L 2,1 (θ r ) L 2, 2 (θ r )
⎝
T
⎞
⎟ ⋅ i1 (t ) ,
⎟
i 2 (t )
⎠
которое раскрывается следующим образом:
ψ μ1 (θ r )
i (t )
1 ⎛ L1,1 (θ r ) L1, 2 (θ r )
W (θ r ) = ⎜
⋅ 1
+
ψ μ 2 (θ r )
i 2 (t )
2 ⎜ L 2,1 (θ r ) L 2, 2 (θ r )
⎝
1 L1,1 (θr ) ⋅ i1 (t ) + L1, 2 (θ r ) ⋅ i 2 (t ) + ψ μ1 (θ r )
=
2 L 2,1 (θ r ) ⋅ i1 (t ) + L 2, 2 (θ r ) ⋅ i 2 (t ) + ψ μ 2 (θ r )
=
{
T
⎞
⎟ ⋅ i1 (t ) =
⎟
i 2 (t )
⎠
T
⋅
i1 (t )
i 2 (t )
}
=
1
[
L1,1 (θ r ) ⋅ i1 (t )]T + [L1, 2 (θ r ) ⋅ i 2 (t )]T + ψ Tμ1 (θ r ) ⋅ i1 (t ) +
2
⎞
⎟
⎟
⎠
97
+
{
}
1
[
L 2,1 (θr ) ⋅ i1 (t )]T + [L 2, 2 (θ r ) ⋅ i 2 (t )]T + ψ Tμ 2 (θ r ) ⋅ i 2 (t ) ,
2
где учитывается, что при транспонировании блочных матриц выполняется (например, для
двухмерного случая):
A=
A1,1
A1, 2
A 2,1
A 2, 2
T
→A =
A1,1T
A 2,1T
A1, 2T
A 2, 2 T
,
т. е. транспонируются как главная матрица (относительно своих блоков), так и блоки
внутри себя.
Электромагнитный момент определяется как производная по углу поворота от электромагнитной энергии:
⎧⎪ T
i1 (t ) ⎫⎪
T
ψ
(
)
ψ
(
)
θ
θ
⋅
⎨ 1 r
⎬
2 r
i 2 (t ) ⎪⎭
⎪⎩
1 d
1 dψ1T (θ r )
1 dψ T2 (θ r )
=
ψ1T (θ r ) ⋅ i1 (t ) + ψ T2 (θ r ) ⋅ i 2 (t ) =
⋅ i1 (t ) +
⋅ i 2 (t ) .
2 dθ r
2 dθ r
2 dθ r
M=
[
]
dW (θ r ) 1 d
1 d
ψ T (θ r ) ⋅ i (t ) =
=
dθ r
2 dθ r
2 dθ r
[
]
Вместо потокосцепления подставляются их выражения через индуктивности, токи и
потокосцепления от постоянных магнитов:
[
]
1 d
⋅
L1,1 (θ r ) ⋅ i1 (t ) + L1, 2 (θ r ) ⋅ i 2 (t ) + ψ μ1 (θ r ) T ⋅ i1 (t ) +
2 dθ r
1 d
+ ⋅
L 2,1 (θ r ) ⋅ i1 (t ) + L 2, 2 (θr ) ⋅ i 2 (t ) + ψ μ 2 (θ r ) T ⋅ i 2 (t ) .
2 dθ r
M=
[
]
Операция транспонирования переносится на блочные матрицы:
{
}
}
1 d
[
⋅
L1,1 (θ r ) ⋅ i1 (t )]T + [L1, 2 (θr ) ⋅ i 2 (t )]T + ψ Tμ1 (θ r ) ⋅ i1 (t ) +
2 dθ r
1 d
[
+ ⋅
L 2,1 (θ r ) ⋅ i1 (t )]T + [L 2, 2 (θr ) ⋅ i 2 (t )]T + ψ Tμ 2 (θ r ) ⋅ i 2 (t ) .
2 dθ r
M=
{
Производная матрицы равна матрице производных, причём операция транспонирования роли не играет:
T
d [L1, 2 (θ r ) ⋅ i 2 (t )]T dψ Tμ1 (θr ) ⎫⎪
1 ⎧⎪ d [L1,1 (θ r ) ⋅ i1 (t )]
+
+
M = ⋅⎨
⎬ ⋅ i1 (t ) +
dθ r
dθ r
dθ r ⎪
2 ⎪
⎩
⎭
T
d [L 2, 2 (θ r ) ⋅ i 2 (t )]T dψ Tμ 2 (θ r ) ⎫⎪
1 ⎧⎪ d [L 2,1 (θ r ) ⋅ i1 (t )]
+ ⋅⎨
+
+
⎬ ⋅ i 2 (t ) .
dθ r
dθ r
dθ r ⎪
2 ⎪
⎩
⎭
За скобки операций дифференцирования выносятся токи как не зависящие от угла
поворота, а также учитывается, что транспонирование произведения матриц равняется
произведению транспонированных с переменной следования сомножителей:
98
T
T
dψ Tμ1 (θ r ) ⎫⎪
⎡ dL1, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⎬ ⋅ i1 (t ) +
⎥ + dθ
⎥ + i 2 (t ) ⋅ ⎢ dθ
d
θ
2 ⎪
⎦
⎣
⎦
⎣
r
r
r
⎪⎭
⎩
T
T
dψ Tμ 2 (θ r ) ⎫⎪
⎡ dL 2,1 (θ r ) ⎤
⎡ dL 2, 2 (θ r ) ⎤
1 ⎧⎪ T
T
+ ⋅ ⎨i1 (t ) ⋅ ⎢
+ i 2 (t ) ⋅ ⎢
+
⎬ ⋅ i 2 (t ) .
dθ r ⎥⎦
dθr ⎥⎦
dθ r ⎪
2 ⎪
⎣
⎣
⎩
⎭
Раскрываются скобки:
T
T
dψ Tμ1 (θ r )
⎡ dL1, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⋅ i1 (t ) +
⎥ ⋅ i1 (t ) + dθ
⎥ ⋅ i1 (t ) + i 2 (t ) ⋅ ⎢ dθ
d
θ
2 ⎪
⎦
⎣
⎦
⎣
r
r
r
⎩
T
T
⎫⎪
dψ Tμ 2 (θ r )
⎡ dL 2,1 (θ r ) ⎤
⎡ dL 2, 2 (θr ) ⎤
T
T
+ i1 (t ) ⋅ ⎢
⋅
+
⋅
⋅
+
⋅
i
(
t
)
i
(
t
)
i
(
t
)
i
(
t
)
⎬.
2
2
2
2
⎥
⎢ dθ
⎥
d
θ
d
θ
⎣
⎦
⎣
⎦
r
r
r
⎪⎭
Приводятся подобные члены (с одинаковыми комбинациями токов):
T
T
⎡ dL1,1 (θ r ) ⎤
⎡ dL 2, 2 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⎥ ⋅ i1 (t ) + i 2 (t ) ⋅ ⎢ dθ
⎥ ⋅ i 2 (t ) +
d
θ
2 ⎪
⎣
⎦
⎣
⎦
r
r
⎩
+
T
⎡ dL1, 2 (θ r ) ⎤
T
i 2 (t ) ⋅ ⎢
⎥
⎣ dθ r ⎦
dψ Tμ1 (θr )
+
dθ r
T
⎡ dL 2,1 (θ r ) ⎤
⋅ i1 (t ) + (t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) +
d
θ
⎣
⎦
r
T
⎫⎪
dψ μ 2 (θ r )
⋅ i1 (t ) +
⋅ i 2 (t )⎬ .
dθ r
⎪⎭
i1T
T
Далее учитывается, что матричные индуктивности L 2,1 (θ r ) ≡ L1, 2 (θ r ) :
T
T
⎡ dL 2, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) +
⎥ ⋅ i1 (t ) + i 2 (t ) ⋅ ⎢ dθ
d
θ
2 ⎪
⎦
⎣
⎦
⎣
r
r
⎩
T
T
⎡ dLT1, 2 (θ r ) ⎤
⎡ dL1, 2 (θ r ) ⎤
T
T
+ i 2 (t ) ⋅ ⎢
⎥ ⋅ i1 (t ) + i1 (t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) +
d
θ
d
θ
⎣
⎦
r
r
⎢⎣
⎥⎦
⎫⎪
dψ Tμ1 (θr )
dψ Tμ 2 (θr )
+
⋅ i1 (t ) +
⋅ i 2 (t )⎬ .
dθ r
dθ r
⎪⎭
Тогда можно преобразовать выражение:
T
T
⎡ dL1,1 (θ r ) ⎤
⎡ dL 2, 2 (θ r ) ⎤
1 ⎧⎪ T
T
⋅ i1 (t ) + i 2 (t ) ⋅ ⎢
⋅ i 2 (t ) +
M = ⋅ ⎨i1 (t ) ⋅ ⎢
dθ r ⎥⎦
dθ r ⎥⎦
2 ⎪
⎣
⎣
⎩
99
+
T
⎡ dL1, 2 (θ r ) ⎤
⎡ dL1, 2 (θ r ) ⎤
T
T
i 2 (t ) ⋅ ⎢
⎥
⎥ ⋅ i1 (t ) + i1 (t ) ⋅ ⎢ dθ
d
θ
⎣
⎦
⎣
⎦
r
r
T
T
⎫⎪
dψ μ1 (θr )
dψ μ 2 (θr )
+
⋅ i1 (t ) +
⋅ i 2 (t )⎬ .
dθ r
dθ r
⎪⎭
⋅ i 2 (t ) +
Чтобы показать, что вторая составляющая содержит два одинаковых члена, выполним следующие операции. Введём двойное транспонирование матрицы (равной произведению трёх матриц левого члена второй составляющей электромагнитного момента), ис-
( )
T T
пользуя свойство транспонирования A = A
, выделив левый сомножитель и объединив в один сомножитель произведение двух правых сомножителей:
T
T
⎡ dL 2, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) +
⎥ ⋅ i1 (t ) + i 2 (t ) ⋅ ⎢ dθ
d
θ
2 ⎪
⎦
⎣
⎦
⎣
r
r
⎩
T
T
T
⎡⎡
dL1, 2 (θ r ) ⎤
⎛ ⎡ dL1, 2 (θ r ) ⎤
⎞⎤ ⎤
⎡
T
T
+ ⎢ ⎢i 2 (t ) ⋅ ⎜⎜ ⎢
⋅ i1 (t ) ⎟⎟⎥ ⎥ + i1 (t ) ⋅ ⎢
⎥
⎥ ⋅ i 2 (t ) +
⎢ ⎢⎣
⎥
d
θ
d
θ
⎥
⎣
⎦
⎣
⎦
r
r
⎝
⎠⎦ ⎦
⎣
+
dψ Tμ1 (θr )
dθ r
⋅ i1 (t ) +
dψ Tμ 2 (θ r )
dθ r
⎫⎪
⋅ i 2 (t )⎬ .
⎪⎭
Воспользуемся тем, что транспонирование произведения двух матриц равно произведению транспонированных матриц, но с изменением порядка их следования (для левого
тока и группы из двух матриц справа):
T
T
⎡ dL 2, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) +
⎥ ⋅ i1 (t ) + i 2 (t ) ⋅ ⎢ dθ
d
θ
2 ⎪
⎦
⎣
⎦
⎣
r
r
⎩
T
T
⎛ ⎡ dL1, 2 (θ r ) ⎤
⎞
⎡ dL1, 2 (θ r ) ⎤
+ ⎜⎜ ⎢
⋅ i1 (t ) ⎟⎟ ⋅ i 2 (t ) + i1T (t ) ⋅ ⎢
⎥
⎥ ⋅ i 2 (t ) +
d
θ
d
θ
⎦
⎣
⎦
r
r
⎝⎣
⎠
⎫⎪
dψ Tμ1 (θr )
dψ Tμ 2 (θr )
+
⋅ i1 (t ) +
⋅ i 2 (t )⎬ .
dθ r
dθ r
⎪⎭
Ещё раз учтём то свойство, что транспонирование произведения двух матриц равно
произведению транспонированных матриц, но с изменением порядка их следования (для
произведения матриц во внутренних скобках первого члена второй составляющей электромагнитного момента):
T
T
⎡ dL1,1 (θ r ) ⎤
⎡ dL 2, 2 (θ r ) ⎤
1 ⎧⎪ T
T
⋅ i1 (t ) + i 2 (t ) ⋅ ⎢
⋅ i 2 (t ) +
M = ⋅ ⎨i1 (t ) ⋅ ⎢
dθ r ⎥⎦
dθ r ⎥⎦
2 ⎪
⎣
⎣
⎩
100
+
T
T
⎡ dL1, 2 (θ r ) ⎤
⎡ dL1, 2 (θ r ) ⎤
T
T
i1 (t ) ⋅ ⎢
⎥
⎥ ⋅ i 2 (t ) + i1 (t ) ⋅ ⎢ dθ
d
θ
⎣
⎦
⎣
⎦
r
r
T
T
⎫⎪
dψ μ1 (θr )
dψ μ 2 (θ r )
+
⋅ i1 (t ) +
⋅ i 2 (t )⎬ .
dθ r
dθ r
⎪⎭
⋅ i 2 (t ) +
Таким образом, вторая составляющая электромагнитного момента имеет два одинаковых слагаемых, которые суммируются (одновременно раскрываются скобки и коэффициент
1
умножается на соответствующие составляющие):
2
T
T
⎫⎪
⎡ dL1,1 (θ r ) ⎤
⎡ dL 2, 2 (θ r ) ⎤
1 ⎧⎪ T
T
⋅ i1 (t ) + i 2 (t ) ⋅ ⎢
⋅ i 2 (t )⎬ +
M = ⋅ ⎨i1 (t ) ⋅ ⎢
dθ r ⎥⎦
dθ r ⎥⎦
2 ⎪
⎣
⎣
⎪⎭
⎩
+
1
2
T
⎡ dL1, 2 (θr ) ⎤
T
+ i1 (t ) ⋅ ⎢
⎥ ⋅ i 2 (t )
⎣ dθ r ⎦
⎧⎪ dψ Tμ1 (θ r )
dψ Tμ 2 (θ r )
⋅⎨
⋅ i1 (t ) +
d
θ
dθ r
⎪⎩
r
+
⎫⎪
⋅ i 2 (t )⎬ .
⎪⎭
В первой составляющей электромагнитного момента присутствуют квадраты токов
каждой из многофазных обмоток (которые появятся после перемножения матриц).
Во второй составляющей электромагнитного момента содержатся комбинации из
произведений токов разных обмоток.
В третьей составляющей момента содержатся произведения токов на потокосцепления постоянных магнитов.
Из полученного выражения следует, что если все индуктивности или потокосцепления от постоянных магнитов не будут зависеть от угла поворота ротора, то все производные по углу поворота ротора обратятся в ноль и электромагнитного момента не будет. Это
происходит, например, в трансформаторах.
На основании данного математического описания можно построить различные математические модели ЭМУ с электромагнитным возбуждением и с возбуждением от постоянных магнитов, выделив переменные состояния, параметры, входные и выходные переменные. При этом постоянные магниты и обмотки могут располагаться как на статоре,
так и на роторе.
Для конкретных типов ЭМУ некоторые элементы матриц и векторов могут быть нулевыми, например: у всех ЭМУ с электромагнитным возбуждением отсутствуют потокосцепления от постоянных магнитов ( Φ μ1 = 0 или Φ μ 2 = 0 ), у короткозамкнутого асинхронного двигателя дополнительно к этому отсутствуют напряжения питания ротора
( u 2 (t ) = 0 ), у синхронного двигателя с постоянными магнитами на роторе отсутствуют
постоянные магниты на статоре ( Φ μ1 = 0 ), токи ротора ( i 2 (t ) = 0 ) и активные сопротив-
ления ротора ( R 2 = 0 ) и т. д. Если в ЭМУ имеются постоянные магниты, то они присутствуют только статоре или только на роторе, поэтому для таких ЭМУ выполняется одно
из двух условий: Φ μ1 = 0 , Φ μ 2 ≠ 0 или Φ μ1 ≠ 0 , Φ μ 2 = 0 .
101
Ниже приводятся примеры конкретизации математической модели для различных
типов ЭМУ.
У синхронного двигателя с постоянными магнитами на роторе при явнополюсной
конструкции электромагнитный момент
T
⎫⎪
dψ Tμ1 (θr )
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
⋅ i1 (t ) +
⋅ i1 (t )⎬ ,
M = M р + M а = ⋅ ⎨i1 (t ) ⋅ ⎢
dθ r ⎥⎦
dθ r
2 ⎪
⎣
⎪⎭
⎩
где отсутствует ток ротора: i 2 (t ) ≡ 0 и соответствующие составляющие момента.
При этом имеются две составляющие электромагнитного момента — активная (от
взаимодействия постоянных магнитов ротора с токами статорных обмоток)
T
1 dψ μ1 (θ r )
Mа = ⋅
⋅ i1 (t )
dθ r
2
и реактивная (возникающая из-за разной магнитной проводимости магнитопровода двигателя в различных направлениях):
T
⎡ dL1,1 (θ r ) ⎤
1
M р = ⋅ i1T (t ) ⋅ ⎢
⎥ ⋅ i1 (t ) ,
d
θ
2
⎣
⎦
r
где характерно то, что взаимодействуют токи одной и той же (первой) обмотки, нот это
взаимодействие осуществляется через индуктивности, зависящие от угла поворота (если
они не зависят от угла поворота, то взаимодействия не будет и эта составляющая будет
отсутствовать).
У синхронного двигателя с постоянными магнитами на роторе при неявнополюсной
конструкции остаётся только активная составляющая электромагнитного момента
T
1 dψ μ1 (θ r )
M = Mа = ⋅
⋅ i1 (t ) ,
dθ r
2
определяемая взаимодействием токами и потокосцеплениями от постоянных магнитов.
У синхронного реактивного двигателя (у которого конструкция всегда явнополюсная) имеется только реактивная составляющая электромагнитного момента
T
⎡ dL1,1 (θ r ) ⎤
1
M = M р = ⋅ i1T (t ) ⋅ ⎢
⎥ ⋅ i1 (t ) .
2
⎣ dθ r ⎦
У синхронного двигателя с электромагнитным возбуждением при неявнополюсной
конструкции электромагнитный момент
M
⎡ dL1, 2 (θ r ) ⎤
= i1T (t ) ⋅ ⎢
⎥
⎣ dθ r ⎦
T
⋅ i 2 (t ) ,
где присутствуют составляющие только от взаимодействия токов первой многофазной и
второй (обычно однофазной, но иногда двухфазной) обмоток.
У синхронного двигателя с электромагнитным возбуждением при явнополюсной
конструкции электромагнитный момент
102
T
T
⎫⎪
⎡ dL 2, 2 (θ r ) ⎤
⎡ dL1,1 (θ r ) ⎤
1 ⎧⎪ T
T
M = ⋅ ⎨i1 (t ) ⋅ ⎢
i
(
t
)
i
(
t
)
i
(
t
)
⋅
⋅
+
⋅
⎬+
1
2
2
⎥
⎢ dθ
⎥
2 ⎪
d
θ
⎦
⎣
⎦
⎣
r
r
⎪⎭
⎩
T
+
i1T
⎡ dL1, 2 (θ r ) ⎤
(t ) ⋅ ⎢
⎥ ⋅ i 2 (t ) ,
d
θ
⎣
⎦
r
где присутствуют составляющие от взаимодействия токов первой (обычно многофазной)
и второй (обычно однофазной) обмоток, а также от собственных токов обмоток.
Для асинхронного двигателя (имеющего обычно неявнополюсную конструкция)
электромагнитный момент
M
⎡ dL1, 2 (θ r ) ⎤
= i1T (t ) ⋅ ⎢
⎥
⎣ dθ r ⎦
T
⋅ i 2 (t ) ,
где присутствуют составляющие только от взаимодействия токов двух многофазных обмоток.
Таким образом, видно, что в некоторых случаях разные типы двигателей могут
иметь одинаковую математическую модель в матричной форме. Реально различия заключаются в числе обмоток и форме питающих напряжений. Например, в асинхронном двигателе имеется две многофазные обмотки (на статоре и роторе), в то время как у синхронного двигателя с электромагнитным возбуждением статорная обмотка многофазная, а роторная — как правило однофазная (иногда — двухфазная) и питается напряжением постоянного тока.
2.3 Автоматизация получения математических моделей
ЭМУ
В зависимости от задачи исследования или проектирования ЭМС, для используемого в ней ЭМУ необходима модель определённого типа — в скалярной или матричной
форме, с использованием фазных переменных обмоток или изображающих векторов, нелинейная или линеаризованная, в виде системы дифференциальных уравнений или передаточной функции, для статических или динамических режимов и т. д. В конечном счёте,
каждое ЭМУ, используемое в ЭМС, должно иметь полный комплект таких моделей. Получение его до недавнего времени было сложным делом, так как предполагало большой
объём аналитических выкладок. Как правило, каждый исследователь выполнял только небольшую часть общей работы — в соответствии со своей частной задачей исследования. В
результате, различные модели одного типа ЭМУ оказывались полученными различными
авторами при различных допущениях, в различных обозначениях, с использованием различного сочетания переменных и параметров. При необходимости выполнения дальнейших преобразований каждому исследователю приходилось выполнять все предыдущие
выкладки, чтобы получить модель ЭМУ в требуемой форме.
В то же время, сформировавшаяся общая методика получения моделей ЭМУ представляет собой последовательность детально отработанных алгоритмов, которые могут
быть реализованы программно с использованием современных символьных процессоров,
позволяющих выполнять аналитические выкладки автоматически, избавляя исследователей от рутинной работы и предотвращая возможные ошибки. Наиболее совершенными
являются символьные процессоры Maple и Mathematika, символьные ядра которых используются в других математических программах. Например, символьное ядро Maple ис-
103
пользуется в MathCAD и MatLab, обеспечивая разумное сочетание символьных и численных возможностей этих программ.
Программа MatLab предоставляет практически полный доступ ко всем возможностям символьного процессора, которые имеются в оригинальной программе Maple. Программа MathCAD предоставляет только часть таких возможностей. Это связано с тем, в
MathCAD символьное ядро взаимодействует с системой интерфейса в MathCAD, более
сложной, чем таковая в MatLab. Но в MathCAD ввод и вывод формул осуществляется в
очень удобной форме, наиболее приближенной к естественной математической нотации.
Поэтому в качестве платформы для создания комплекса программ использована программа MathCAD. Опыт реализации алгоритмов символьных выкладок показал, что в целом
возможностей символьного процессора, предоставляемых MathCAD вполне достаточно
для решения задач получения разнообразных математических моделей в области электромеханики.
Использование символьного процессора в MathCAD возможно несколькими способами (Риc. 2.9 — Рис. 2.11).
Электромагнитный момент синхронного двигателя с постоянными
магнитами
⎡⎢⎛⎜ −27 ⋅ p ⋅L ⋅I 2 − 27 ⋅ p ⋅L ⋅I 2⎞⎟ ⋅cos θ ⋅ p − 9 ⋅Ψ ⋅ p ⋅I ⎥⎤ ⋅sin θ ⋅ p
( M μ ) 8 m μ m⎦ ( M μ )
4 μ m11 m ⎠
⎣⎝ 8 μ m1 m
⎛⎜ −27 ⋅ p ⋅L − 27 ⋅ p ⋅L ⎞⎟ ⋅cos θ ⋅ p ⋅sin θ ⋅ p ⋅I 2 − 9 ⋅Ψ ⋅ p ⋅I ⋅sin θ ⋅ p
( M μ) ( M μ) m 8 m μ m ( M μ)
⎝ 8 μ m1 4 μ m11⎠
27
−
27
⎡⎢⎛⎜
⎞⎟ ⋅cos θ ⋅ p ⋅sin θ ⋅ p ⋅I 2 − 9 ⋅Ψ ⋅I ⋅sin θ ⋅ p ⎥⎤ ⋅ p
⋅L
−
⋅L
( M μ ) ( M μ ) m 8 m m ( M μ )⎦ μ
⎣⎝ 8 m1 4 m11⎠
а) меню
б) пример выполнения символьных выкладок с помощью меню
Риc. 2.9 Выполнение символьных выкладок в MathCAD с помощью меню
Составляющая электромагнитного момента
синхронного двигателя с постоянными магнитами
( )
MΨ I , θ r
expand
−3
→
⋅ p ⋅Ψ ⋅I ⋅sin θ M ⋅ pμ
4 μ m m
simplify
(
)
а) последовательность б) пример выполнения символьных выкладок с помощью
команд
последовательности команд
Рис. 2.10 — Выполнение символьных выкладок в MathCAD
с помощью последовательности команд
Формирование матриц в символьном
виде:
MForm ( Nr , Nc , A) :=
for k ∈ ORIGIN.. ORIGIN − 1 + Nc
Автоматические формирование матрицы
нужного размера с нужными символами
⎛⎜ a1 , 1 a1 , 2 a1 , 3 a1 , 4 ⎞⎟
z
←A
⎜
⎟
j, k
j, k
A := MForm ( 3 , 4 , a) → a2 , 1 a2 , 2 a2 , 3 a2 , 4
⎜
⎟
z
⎜a
⎟
a
a
a
⎝ 3, 1 3, 2 3, 3 3, 4 ⎠
а) использование процедур
б) пример выполнения символьных выкладок с
пользователя
помощью процедуры пользователя
Рис. 2.11 — Выполнение символьных выкладок в MathCAD
for j ∈ ORIGIN.. ORIGIN − 1 + Nr
104
с помощью процедур пользователя
Они имеют свои достоинства и недостатки, а потому — свою область применения:
1) в командном режиме, когда команды задаются через меню, а результат выводится
в виде отдельной строки (Риc. 2.9);
2) с помощью последовательности команд, записываемых на рабочем листе (Рис.
2.10);
3) с помощью подпрограмм, аналогичных (хотя и не полностью) подпрограммам для
численных расчётов (Рис. 2.11).
Первый способ является диалоговым и представляет интерес при проверке различных вариантов математических выкладок, но для целей автоматизации получения моделей
не вполне пригоден, так как требует постоянного участия пользователя.
Второй вариант наиболее приемлем для рассматриваемых целей, так как позволяет
не только разработать алгоритмы символьных выкладок, но также зафиксировать их в виде последовательности команд. Символьные выкладки существенно отличаются от численных, так как в них большое значение имеет последовательность операций (при численных вычислениях последовательность операций может вообще не играть роли). Изменение последовательности операций даёт один и тот же результат с точки зрения содержания, но, возможно, различный по форме. Поэтому отладка алгоритмов символьных выкладок должна заканчиваться их фиксацией.
Третий вариант хорошо дополняет второй, являющийся основным. MathCAD предоставляет возможность создавать подпрограммы для символьных выкладок, которые
внешне не отличаются от таковых для численных расчётов. В некоторых случаях одна и
та же программа может выполнять как численные, так и символьные расчёты, что определяется характером передаваемых в неё исходных данных. В результате имеется возможность создавать библиотеки подпрограмм и хранить их обычным образом.
Общие принципы формирования структуры комплекса программ для получения математических моделей в целом соответствует схеме , что обеспечивает последовательное
преобразование моделей.
Укрупнённо можно выделить следующие структурные части:
1) задание исходных выражений;
2) подстановка допущений (равенство между некоторыми параметрами, пренебрежение другими и т. д.);
3) выполнение символьных выкладок;
4) преобразование символьных результатов в необходимую форму.
Для ряда преобразования требуются одни и те же операции (например, задание исходных переменных), которые также могут быть автоматизированы с помощью соответствующих подпрограмм. Поэтому создана и постоянно пополняется библиотека подпрограмм для символьных вычислений.
MForm ( N , M , A) :=
Входные данные:
for j ∈ 1 .. N
for k ∈ 1 .. M
z
j, k
←A
z
Число строк: N := 3
Число столбцов: M := 4
j, k
- число строк формируемой матрицы;
M - число столбцов формируемой матрицы;
A - символ для обозначения элементов формируемой
матрицы
N
⎛⎜ a1 , 1
⎜
I := MForm ( N , M , a) → a2 , 1
⎜
⎜a
⎝ 3, 1
a
a
a
1 , 2 1 , 3 1 , 4 ⎞⎟
⎟
a
a
a
2, 2 2, 3 2, 4 ⎟
⎟
a
a
a
3, 2 3, 3 3, 4 ⎠
105
VForm( N , A) :=
а) формирование символьной матрицы
Входные данные:
N - размерность формируемого вектора;
A - символ для обозначения элементов формируемого
вектора
for j ∈ 1 .. N
z ←A
j
j
z
Размер вектора:
⎛⎜ x1 ⎞⎟
⎜ ⎟
X := VForm( N , x) → x2
⎜ ⎟
⎜x ⎟
⎝ 3⎠
N := 3
б) формирование символьного вектора
MSim ( A) :=
N ← cols( A)
Входные данные:
for j ∈ 1 .. N
A
- исходная квадратная матрица
for k ∈ j .. N
A
k, j
←A
j, k
A
Исходная матри⎛⎜ d1 , 1
⎜d
⎜ 2, 1
D :=
⎜d
⎜ 3, 1
⎜d
ца: ⎝ 4 , 1
⎛⎜ d1 , 1
⎜d
⎜ 1, 2
Dsim := MSim ( D) →
⎜d
⎜ 1, 3
⎜ d1 , 4
⎝
d
d
d
1 , 2 1 , 3 1 , 4 ⎞⎟
⎟
d
d
d
2, 2 2, 3 2, 4 ⎟
⎟
d
d
d
3, 2 3, 3 3, 4 ⎟
d
d
d
⎟
4, 2 4, 3 4, 4 ⎠
⎛⎜ d1 , 1
⎜d
⎜ 1, 2
Dsim := MSim ( D) →
⎜d
⎜ 1, 3
⎜ d1 , 4
⎝
Размер матрицы:
d
d
d
1 , 2 1 , 3 1 , 4 ⎞⎟
⎟
d
d
d
2, 2 2, 3 2, 4 ⎟
⎟
d
d
d
2, 3 3, 3 3, 4 ⎟
d
d
d
⎟
2, 4 3, 4 4, 4 ⎠
в) симметрирование матрицы
Входные данные:
⎟
N - число строк и столбцов формируемой квадратной
d
2, 4 ⎟
матрицы;
⎟
d
3, 4 ⎟
V - символ или число, размещаемое по диагонали форd
⎟
мируемой матрицы
4, 4 ⎠
d
d
d
1 , 2 1 , 3 1 , 4 ⎞⎟
d
d
2, 2 2, 3
d
d
2, 3 3, 3
d
d
2, 4 3, 4
⎛W
⎜
Ds := MDiagSim ( N , W ) → 0
⎜
⎝0
N := 3
0
⎞
⎟
⎟
W⎠
0
W 0
0
г) формирование диагональной матрицы
Рис.2.12 — Библиотека символьных процедур: матричные символьные операции
Операции (Рис. 2.13) просто реализуются и избавляют от необходимости прописывать большие матрицы и векторы в общем виде. Процедура позволяет сформировать матрицу с элементами, представляющими собой одну и ту же функцию с разными аргументами. В данном случае в качестве аргумента использовался угол θ , а задаваемая функция — косинус. Это позволяет заполнять большие матрицы соответствующими функциями в автоматическом режиме. Эта процедура используется, в частности, для задания матриц косинусоидальных индуктивностей в моделях электрических двигателей. Для трёхфазного асинхронного двигателя необходимо задать 6×6=36 элементов с собственными
амплитудами и аргументами (фазами).
MFun ( N , M , A , F , θ ) :=
for j ∈ 1 .. N
for k ∈ 1 .. M
z
z
k, j
←A
k, j
(
⋅F θ
k, j
)
Входные данные:
N - число строк формируемой матрицы;
M - число столбцов формируемой матрицы;
A - символ или число, размещаемое перед функцией;
F - функция;
x - аргумент функции.
106
⎛⎜ U1 , 1 ⋅cos( θ 1 , 1)
⎜
Fun := MFun ( 4 , 3 , U , cos , θ ) → U2 , 1 ⋅cos( θ 2 , 1)
⎜
⎜ U ⋅cos( θ )
3, 1
⎝ 3, 1
( )
U
⋅cos( θ
2, 2
2 , 2)
U
⋅cos( θ
3, 2
3 , 2)
U
⋅cos θ
1, 2
1, 2
( )
U
⋅cos( θ
2, 3
2 , 3)
U
⋅cos( θ
3, 3
3 , 3)
U
⋅cos θ
1, 3
1, 3
( ) ⎞⎟
⎟
U
⋅cos( θ
2, 4
2 , 4) ⎟
⎟
U
⋅cos( θ
3, 4
3 , 4) ⎠
U
⋅cos θ
1, 4
1, 4
Рис. 2.13 — Библиотека символьных процедур:
формирование символьной функциональной матрицы
Процедура (Рис.2.14) позволяет выполнять символьное дифференцирование матриц.
В MathCAD символьное дифференцирование выполняется очень хорошо, позволяя продифференцировать даже сравнительно сложные выражения, но работает только со скалярными функциями. Чтобы дифференцировать матрицы и векторы, приходится воспользоваться циклом, а для этого создаётся специальная процедура, в которую вводится исходная подлежащая дифференцированию матрица и её аргумент. Важно, чтобы ранее эта
матрица была записана как функция с аргументом, по которому затем будет производиться дифференцирование.
MDif( A , x) :=
Входные данные:
A - матрица с подлежащими дифференцированию
элементами;
x - аргумент функции.
M ← cols( A( x) )
N ← rows( A( x) )
for j ∈ 1 .. N
for k ∈ 1 .. M
z
←
j, k
d
dx
A( x)
j, k
z
Исходная матрица с функциями:
⎛ sin( x)
⎜
2
GT ( x) := ⎜ sin ( x )
⎜
⎝ 0
17
⎞
⎟
x ⎟
⎟
tan( 2 ⋅x) ⎠
cos( x)
exp( 2 ⋅x)
3
x
⎛⎜ cos( t)
⎜ 2 ⋅cos( t2) ⋅ t
⎜
dGT := MDif( GT , t) →
⎜
⎜
⎜
0
⎝
2 ⋅t
2 ⋅e
3 ⋅t
⎞⎟
⎟
⎟
1
⎟
2
2 ⋅t
⎟
2⎟
2 + 2 ⋅ tan( 2 ⋅ t) ⎠
−sin ( t)
0
2
1
Рис.2.14 — Библиотека символьных процедур: дифференцирование матрицы
Процедура (Рис. 2.15) позволяет выделить из системы линейных алгебраических
уравнений матрицу.
MElimi n( A , Nv) :=
Входные данные:
A - матрица-столбец с линейными уравнениями;
Nv - размерность вектора.
NA ← rows( A( v) )
for j ∈ 1 .. Nv
for k ∈ 1 .. Nv
v ←0
k
v ←1
j
for k ∈ 1 .. NA
Z
k, j
← A( v)
k
Z
Исходная система уравнений:
⎛⎜ a1.1 ⋅x1 + a1.2 ⋅x2 ⎞⎟
⎜
⎟
R ( x) := a2.2 ⋅x2 + a2.3 ⋅x3
⎜
⎟
⎜ a3.1 ⋅x + a3.3 ⋅x ⎟
1
3⎠
⎝
Вектор:
⎛⎜ x1 ⎞⎟
⎜ ⎟
x := x2
⎜ ⎟
⎜x ⎟
⎝ 3⎠
⎛ a1.1
⎜
AX := MElimin ( R , 3) → ⎜ 0
⎜a
⎝ 3.1
a1.2
0
⎞
⎟
a2.2 a2.3 ⎟
0
⎟
a3.3 ⎠
Рис. 2.15 — Библиотека символьных процедур:
выделение матрицы из системы линейных уравнений
Это бывает необходимо, когда вследствие символьных преобразований получена
система линейных алгебраических уравнений:
107
a1,1 x1 + a1,2 x2 + K + a1, n xn
u1
a2,1 x1 + a2,2 x2 + K + a2, n xn
u
= 2
K
K
am,1 x1 + am,2 x2 + K + am, n xn
um
которую целесообразно далее перевести в матричную форму вида A ⋅ x = u :
a1,1 a1,2 K a1, n
x1
u1
a2,1 a2,2 K a2, n
x
u
⋅ 2 = 2 .
K
K K K
K
K
am,1 am,2 K am, n
xn
um
Т. е. в исходном виде уравнения записаны в строку и вся система представляет из
себя матрицу-столбец, которая поступает в процедуру. Эта исходная матрица-столбец
должна быть записана как функция от вектора, который должен быть пронумерован. Размерность вектора и исходной матрицы-столбца могут быть разными, если число уравнений не равно числу переменных. Размерность исходной матрицы-столбца (число строк)
определяется автоматически, а размерность вектора задаётся. Идея вычленения матрицы
заключается в том, что в цикле все элементы вектора задаются равными нулю, кроме одного, который задаётся равным единице. Тогда все элементы с нулевыми сомножителями
также обнуляются и исчезают, а при единичном коэффициент сомножителе выделяется и
записывается в выходную матрицу.
Процедура (Рис. 2.16) позволяет сформировать матрицу, отражающую структуру исходной матрицы — с нулевыми элементами на месте нулевых элементов исходной матрицы и ненулевыми элементами (заданной цифрой — например, единицей, или символом).
Такие матриц часто оказываются необходимы при анализе структур, для перехода от матриц к графам и т. п. Сложность реализации этой процедуры связана с тем, что символьный
процессор не умеет определять наличие или отсутствие символа, т. е. операция сравнения
x = 0 ? имеет смысл только для чисел.
WS ( W , h , b) :=
Входные
N ← rows( W )
M ← cols( W )
for k ∈ 1 .. N
for j ∈ 1 .. M
W
Z
k, j
←
данные:
матрица;
h - вспомогательный параметр, задаваемый при вводе
в
виде
любого
символа;
b - число или символ, помещаемый вместо ненулевых
элементов.
W
W
k, j
⋅b
+ h
k, j
Z
Исходная матрица с нулевыми и
ненулевыми элементами:
⎛⎜ R1 , 1
⎜
W := R2 , 1
⎜
⎜ 0
⎝
0
R
2, 2
R
3, 2
R
SW := WS ( W , h , L) substitute , h = 0
1 , 3 ⎞⎟
⎟
⎟
⎟
R
3, 3 ⎠
0
SW := WS ( W , h , 1) substitute , h = 0
⎛L
⎜
→ L
⎜
⎝0
⎛1
⎜
→ 1
⎜
⎝0
0 L⎞
⎟
⎟
L L⎠
0 1⎞
⎟
1 0
⎟
1 1⎠
L 0
Рис. 2.16 — Библиотека символьных процедур: формирование структуры матрицы
Поэтому данная процедура реализована в сочетании с вторым способом выполнение
символьных операций. Математическая основа использованного приёма для определения
наличия или отсутствия символьного выражения в соответствующей ячейке матрицы следующая. Символьно может выполниться операция:
108
Z
⋅b ,
Z +h
где Z — любое содержание ячейки (символ); h и b — вспомогательные символьные переменные, из которых b может быть также числом.
Если ячейка была пуста, то рассматриваемое выражение будет иметь вид:
0
⋅b = 0,
0+h
так как умножение на нуль символьный процессор "понимает" правильно и выдаёт
нуль. Если бы в знаменателе не было символьной переменной h , то получилось бы деление нуля ну нуль, что символьный процессор понять не может.
Если ячейка не пуста, то в этом месте формируется выражение:
Z
⋅b ,
Z +h
которое затем обрабатывается в командном режиме с подстановкой значения h = 0 ,
что означает:
Z
Z
⋅ b = ⋅ b = 1⋅ b = b
Z +0
Z
и оно превращается в число или символ, заданный через параметр b .
Из изложенного видно, что программирование для символьного процессора, с одной
стороны, весьма схоже с программированием обычных вычислений, но с другой стороны,
имеет массу нюансов и тонкостей, как правило, не документированных. Возможно, именно поэтому оно пока не получило значительного распространения и не вошло в учебные
пособия по программированию, математическим и специальным дисциплинам. В то же
время, оно может играть важную роль в инженерной деятельности и должно найти своё
место в учебном процессе.
109
Приложение А
Основная терминология в области электромеханических систем
U–образная характеристика синхронной машины
автоматизированный электропривод
автономный электропривод
адаптивный электропривод
аккумуляторный электропривод
алгоритм
algorithm
алгоритм управления
control algorithm
амплитудное управление
аналоговый объект управления
analogue controlled object
аналого-дискретный объект управления
analogue–discrete controlled
object
асинхронный электродвигатель
асинхронный электропривод двойного питания
безредукторный электропривод
безынерционный объект
управления
вентильный каскад
вентильный
вод
электропри-
взаимная индуктивность
(взаимоиндуктивность)
inertialess controlled object
зависимость тока в обмотке якоря синхронной машины
от тока возбуждения при неизменных активной мощности, напряжении на выводах обмотки якоря и скорости
вращения [2]
регулируемый электропривод с автоматическим регулированием параметров [1]
электропривод, потребляющий энергию от автономного
источника [1]
автоматизированный электропривод, автоматически
избирающий структуру или параметры системы регулирования при изменении условий работы [1]
автономный электропривод, источником энергии которого является химический источник [1]
точное предписание, которое задает вычислительный
процесс (называемый в этом случае алгоритмическим),
начинающийся с произвольного исходного данного (из
некоторой совокупности возможных для данного алгоритма исходных данных) и направленный на получение
полностью определяемого этим исходным данным результата [5]
алгоритм, определяющий управление в реальном времени [4]
объект управления, в математической модели функционирования которого все координаты могут принимать
любые значения в некоторых диапазонах непрерывной
шкалы [4]
объект функционирования, математическая модель
функционирования которого содержит как координаты,
принимающие любые значения в некоторых диапазонах
непрерывной шкалы, так и координаты, принимающие
конечное число значений [4]
электропривод переменного тока, в котором электродвигательным устройством является асинхронный двигатель [1]
система "преобразователь частоты–двигатель", в которой обмотки статора и ротора асинхронного двигателя
подключены к источнику энергии и одна из них получает питание от преобразователя частоты [1]
вращательный электропривод, в передаточном устройстве которого отсутствует редуктор [1]
объект управления, изменения управляемых координат
которого практически не отстают от вызвавших их изменений управляющих координат [4]
каскадный электропривод, в котором для преобразования мощности скольжения используется вентильный
преобразователь [1]
электропривод, преобразовательным устройством которого является вентильный преобразователь электроэнергии [1]
110
взаимосвязанный электропривод
внешнее воздействие
external action
внешняя характеристика
электрического генератора
внутреннее воздействие
internal action
воздействие обратной связи
воздействие уставки
feedback action
set–point action
возмущение
disturbance
вращательный
электропривод
вращающий момент электродвигателя [3]
вспомогательный
электропривод
входное воздействие
input action
входной момент в синхронизм
вхождение в синхронизм
синхронной машины
выпадание из синхронизма
синхронной машины
выходное воздействие
генератор
постоянного
тока
главный параметр воздействия
output action
main parameter of the action
два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок, и (или) положения исполнительных органов рабочих машин [1]
воздействие внешней среды на систему управления или
ее элемент (подсистему) [4]
зависимость напряжения на выводах цепи обмотки при
нерегулируемом токе возбуждения и неизменной скорости вращения. (Прим.: Для генератора переменного тока
должен быть неизменным также коэффициент мощности) [2]
воздействие одного элемента (подсистемы) системы
управления на другой или тот же ее элемент (подсистему) [4]
воздействие, реализующее обратную связь [4]
задающее воздействие, значения которого представляют
заданные значения управляемой координаты [4]
воздействие извне на любой элемент (подсистему) системы управления, включая объект управления, затрудняющее, как правило, достижение цели управления [4]
электропривод, электродвигательным устройством которого являются вращающиеся электродвигатели [1]
электропривод, обеспечивающий вспомогательное движение исполнительных органов рабочей машины и
(или) вспомогательные операции процесса [1]
воздействие, приложенное к входу системы управления
или отдельно рассматриваемого ее элемента (подсистемы) [4]
наибольший момент на валу синхронной машины, при
котором возможно достижение синхронной скорости
вращения после подключения возбуждения [2]
достижение включенной в сеть синхронной машиной
устойчивой синхронной скорости вращения [2]
нарушение устойчивой параллельной работы синхронной машины с сетью при синхронной скорости вращения, в результате которого она начинает вращаться с
асинхронной скоростью [2]
воздействие, направленное с выхода системы управления или отдельно рассматриваемого элемента (подсистемы) [4]
параметр воздействия, количественно характеризующий
рассматриваемое влияние других объектов на данный
объект. (Прим.: 1. Другие признаки (параметры) воздействия не являются существенными для управления.
2. Различают: однопараметрическое воздействие — воздействие с одним главным признаком или параметром и
многопараметрическое воздействие — воздействие с
несколькими главными признаками или параметрами.
3. Значение главного признака или параметра воздействия следует называть значением воздействия, а совокупность значений главных признаков или параметров
многопараметрического воздействия в определенный
момент времени — состоянием воздействия [4]
111
главный признак воздействия
main feature of the action
признак воздействия, качественно характеризующий
рассматриваемое влияние других объектов на данный
объект [4]
электропривод, обеспечивающий главное движение
исполнительного органа рабочей машины и (или) основную операцию процесса [1]
электропривод, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины [1]
determinated
object
объект управления, в математической модели функционирования которого управляемые координаты однозначно зависят от других координат [4]
зависимость скорости движения исполнительного органа от времени для машин, работающих в циклическом
режиме [1]
возможные пределы изменения установившегося значения регулируемого параметра электропривода при заданной точности регулирования и установленных пределах изменения возмущений [1]
теплоэлектрический привод, источником энергии которого является дизель–генератор [1]
нагрузка электропривода, вызываемая моментом инерции движущихся элементов электропривода и машины
при изменении скорости [1]
способность синхронной машины сохранять устойчивую параллельную работу с сетью с синхронной скоростью вращения после колебания этой скорости, вызванных внезапным нарушением установившегося состояния машины [2]
момент, определяющий ускорение электродвигателя,
равный разности между вращающим моментом и моментом сопротивления на валу [2]
разность между установившимся значением скорости
электропривода до и наименьшим мгновенным значением скорости после приложения заданной статической
нагрузки [1]
объект управления, в математической модели функционирования которого все координаты могут принимать
только конечное число значений [2]
электропривод, подвижные части электродвигательного
устройства которого в установившемся режиме находятся в состоянии дискретного движения [1]
потери, возникающие в результате наличия высших
гармонических в кривых намагничивающей силы обмоток, потока рассеяния обмоток, пульсации магнитного
потока в воздушном зазоре, вытеснения тока в проводниках и других неосновных электромагнитных процессов в электрической вращающейся машине [2]
отношение разности электромагнитных моментов, развиваемых электродвигательным устройством, к соответствующей разности скоростей электропривода [1]
воздействие на управляющий объект, предназначенное
для изменения цели управления [4]
главный электропривод
групповой электропривод
двигатель
постоянного
тока
детерминированный объект управления
controlled
диаграмма скорости электропривода
диапазон регулирования
электропривода
дизель-электрический
привод
динамическая
нагрузка
электропривода
динамическая
устойчивость синхронной машины
динамический
момент
электродвигателя
динамическое
падение
скорости электропривода
дискретный объект управления
diskrete controlled object
дискретный электропривод (вместо "шаговый
электропривод")
добавочные потери в электрической вращающейся
машине
жёсткость механической
характеристики
задающее воздействие
setting action
закон Ампера
закон управления
control action, control law
математическая форма преобразований задающих воздействий, возмущений, воздействий обратных связей,
определяющих управляющие воздействия [4]
112
закон частотного управления
закон электромагнитной
индукции (закон Фарадея)
импульсный электропривод
индивидуальный электропривод
индуктивная нагрузочная
характеристика электрического генератора
индуктивность
инерционный
объект
управления
регулируемый электропривод, скорость которого изменяется путём периодического включения и отключения
источника питания [1]
электропривод, обеспечивающий движение одного исполнительного органа рабочей машины [1]
нагрузочная характеристика синхронного генератора
при токе в обмотке якоря, отстающем на 90 градусов от
напряжения на ее выводах [2]
inertial controlled object
ионный электропривод
исполнительный
орган
рабочей машины
к. п. д. электродвигателя η
каскадный электропривод
качество управления
control performance
комбинационный
дискретный объект управления
discrete controlled object
without memory
координата
coordinate
коэффициент синхронизирующей мощности
крутизна
сельсина–
приёмника (вращающегося трансформатора) Sс
линейный объект управления
linesr controlled object
объект управления, изменения управляемых координат
которого отстают по времени от вызвавших их изменений управляющих координат [4]
вентильный электропривод, преобразовательным устройством которого является ионный преобразователь
электроэнергии [1]
движущийся элемент рабочей машины, выполняющий
рабочую операцию [1]
отношение полезной механической мощности электродвигателя на выходном валу к потребляемой активной
мощности [3]
регулируемый электропривод переменного тока с асинхронным двигателем, в котором мощность скольжения с
помощью преобразователей возвращается в сеть переменного тока или на вал двигателя [1]
совокупность характеристик управления, принятая для
оценки полезности управления. (Прим.: Качество
управления может оцениваться одной характеристикой
или совокупностью характеристик, например, временных, точностных, частотных, энергетических, экономических [4]
дискретный объект управления, в математической модели которого значения выходных координат в каждый
момент времени зависят только от значений входных
координат в тот же момент времени [4]
в электромеханических системах совокупность физических величин, входящих в уравнения математической
модели объекта управления, в частности: угол поворота,
скорость, ускорение, момент, токи, потокосцепления и
др. [0]
производная активной мощности синхронной машины
по углу сдвига между напряжением на выводах обмотки
якоря и ее электродвижущей силой по продольной оси
[2]
изменение выходного напряжения на единицу угла рассогласования сельсина–приёмника (вращающегося
трансформатора) в положении согласования трансформаторной дистанционной передачи. (Прим.: Определяется как отношение выходного напряжения сельсина–
приёмника
(вращающегося
трансформатора–
приёмника) к углу рассогласования дистанционной передачи в пределах 5°) [3]
объект управления, в математической модели функционирования которого все зависимости между координатами могут быть представлены линейными функциями
[4]
113
линейный электропривод
электропривод, электродвигательным устройством которого является линейный электродвигатель [1]
магнитная проводимость
магнитная характеристика
электрической
вращающейся машины
магнитодвижущая
сила
(м. д. с.)
маховиковый электропривод
машинно-вентильный каскад
зависимость магнитного потока в воздушном зазоре
электрической вращающейся машины от тока возбуждения [2]
механическая характеристика электродвигателя
механическая характеристика электропривода
минимальный вращающий
момент асинхронной машины
многодвигательный электропривод
многомерный
управления
объект
multi–dimensional
controlled object
многосвязный
управления
объект
multi–loop controlled object
многоскоростной электропривод
многоцелевой
объект
управления
модуляция
модуляция амплитудноимпульсная
модуляция
частотноимпульсная
модуляция
широтноимпульсная
мощность скольжения
нагрузочная
диаграмма
электродвигателя
нагрузочная
диаграмма
электропривода
multi–purpose
object
controlled
вращательный электропривод, в состав которого входит
маховик [1]
каскадный электропривод, в котором мощность скольжения через вентильный преобразователь поступает на
якорь двигателя постоянного тока [1]
зависимость между вращающим моментом электродвигателя и его скоростью вращения при неизменных напряжении, частоте тока питающей сети и внешних сопротивлениях в цепях обмоток двигателя [2]
зависимость скорости электропривода от электромагнитного момента, развиваемого электродвигательным
устройством [1]
наименьшее значение вращающего момента, развиваемого асинхронным короткозамкнутым двигателем при
данном напряжении в диапазоне изменения скорости
вращения от нуля до значения, соответствующего максимальному моменту [2]
взаимосвязанный электропривод, электродвигательные
устройства которого совместно работают на общий вал
[1]
объект управления, математическая модель функционирования которого содержит несколько управляющих и
(или) управляемых координат [4]
объект управления, в математической модели функционирования которого хотя бы одна управляемая координата зависит от нескольких управляющих координат
или несколько управляемых координат зависят от одной
и той же управляющей координаты [4]
регулируемый электропривод с многоскоростным электродвигательным устройством [1]
объект управления, предназначенный для достижения
нескольких заданных результатов функционирования
[4]
часть мощности электромагнитного поля асинхронного
двигателя, прямо пропорциональная его скольжению [1]
зависимость вращающего момента или тока в цепи якоря электродвигателя от времени в течение рабочего
цикла [2]
зависимость нагрузки электропривода от времени для
рабочих машин, работающих в циклическом режиме [1]
114
нагрузочная
характеристика электрического генератора
зависимость напряжения на выводах цепи обмотки якоря генератора от тока возбуждения при неизменных
токах нагрузки, скорости вращения. (Прим.: Для генератора переменного тока должен быть неизменным
также и коэффициент мощности) [2]
намагничивающая
сила
(н. с.), то же, что и магнитодвижущая сила (м. д. с.)
напряжение питания возбуждения электрической
машины малой мощности
напряжение
трогания
электродвигателя
напряжение
управления
электрической
вращающейся машиной малой
мощности
нелинейный
объект
управления
нереверсивный электропривод
нерегулируемый электропривод
нестационарный стохастический объект управления
nonlinear controlled object
non–stationary
controlled object
номинальные
данные
электрической
вращающейся машины
номинальный
входной
момент в синхронизм
нормальная характеристика холостого хода электрической вращающейся
машины
обратная связь
stohastic
электрическое напряжение, подаваемое на выводы цепей питания (возбуждения) электрической вращающейся машины малой мощности, установленное как номинальное значение с предельными отклонениями или как
номинальный диапазон значений. (Прим.: Для машин с
дополнительным устройством — напряжение, подаваемое на выводы цепи питания, включающей это устройство) [3]
наименьшее значение электрического напряжения на
выводах цепи питания или управления, при котором
ротор электродвигателя начинает устойчиво вращаться
без нагрузки. (Прим.: Определяется как наибольшее
значение в пределах оборота ротора) [3]
электрическое напряжение, подаваемое на выводы цепи
управления электрической вращающейся машины малой мощности, установленное как номинальный диапазон значений [3]
объект управления, в математической модели функционирования которого хотя бы одна зависимость между
координатами не может быть представлена линейной
функцией [4]
электропривод с одним направлением движения электродвигательного устройства [1]
электропривод, параметры которого изменяются в результате возмущающих воздействий [1]
стохастический объект управления, в математической
модели функционирования которого некоторые вероятностные характеристики зависят от времени [4]
данные, характеризующие номинальный режим работы
электрической вращающейся машины [2]
вращающий момент синхронного двигателя, развиваемый при скорости вращения, равной 95% от синхронной скорости, и номинальных напряжении возбуждения
и частоте [2]
усреднённая характеристика холостого хода электрической вращающейся машины, выраженная в относительных единицах [2]
feedback
зависимость текущих воздействий на объект от его состояния, обусловленного предшествующими воздействиями на этот же объект. (Прим.: 1. Обратная связь может быть естественной (присущей) объекту или искусственно организованной. 2. Различают отрицательную
обратную связь и положительную обратную связь как
обратную связь, действующую в первом случае в сторону уменьшения, а во втором — в сторону увеличения
отклонений текущих значений координат объекта от их
предшествующих значений) [4]
115
объект управления
controlled
controllable object
объект управления с распределенными параметрами
объект управления с сосредоточенными параметрами
объект управления с чистым запаздыванием
distributed–parameters
controlled object
одномерный
управления
объект
one–dimensional controlled
object
односвязный
управления
объект
single–loop
object
contorlled
single–purpose
object
controled
одноцелевой
объект
управления
основные магнитные потери в электрической вращающейся машине
object,
lumped–parameter
controlled object
controlled object with pure
time–lag
основные потери в электрической вращающейся
машине
основные электрические
потери в электрической
вращающейся машине
передаточное устройство
электропривода
переменные потери в
электрической
вращающейся машине
позиционный электропривод
показатель
управления
качества
control performance index
объект, для достижения желаемых результатов функционирования которого необходимы и допустимы специально организованные воздействия. (Прим.: 1. Объект
управления, подвергаемый управляющим воздействиям,
можно называть управляемым объектом. 2. Объектами
управления могут быть как отдельные объекты, выделенные по определенным признакам (например, конструктивным, функциональным), так и совокупности объектов — комплексы. 3. В зависимости от свойств или
назначения объектов управления могут быть выделены
технические, технологические, экономические, организационные, социальные и другие объекты управления и
комплексы) [4]
объект управления, математическая модель функционирования которого содержит хотя бы одно дифференциальное уравнение в частных производных [4]
объект управления, математическая модель функционирования которого не содержит дифференциальных
уравнений в частных производных [4]
инерционный объект управления, изменения управляемых координат которого повторяют вызвавшие их изменения управляющих координат со сдвигом по времени [4]
объект управления, математическая модель функционирования которого содержит одну управляющую координату и одну управляемую координату [4]
объект управления, в математической модели функционирования которого каждая управляемая координата
зависит только от одной соответствующей ей управляющей координаты [4]
объект управления, предназначенный для достижения
одного заданного результата функционирования [4]
потери от гистерезиса и вихревых потоков, возникающие в ферромагнитных участках магнитной цепи электрической вращающейся машины при их намагничивании основным магнитным потоком [2]
потери, связанные с основными электромагнитными и
механическими процессами в электрической вращающейся машине, представляющие собой сумму потерь в
обмотках, определяемых сопротивлением обмоток постоянному току, электрических потерь в скользящих
контактах, потерь от основного магнитного потока в
магнитопроводе и механических потерь [2]
потери в обмотках электрической вращающейся машине, определяемые как произведение сопротивления постоянному току на квадрат тока в обмотке, и электрические потери в скользящих контактах [2]
устройство, предназначенное для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины
и согласования вида и скоростей их движения [1]
потери в электрической вращающейся машине, изменяющиеся с изменением нагрузки, если напряжение при
этом остаётся неизменным [2]
автоматизированный электропривод, предназначенный
для регулирования положения исполнительного органа
рабочей машины [1]
количественная оценка качества управления [4]
116
полупроводниковый электропривод
последовательностный
дискретный объект управления
discrete controlled object
with mempry
постоянные потери в электрической вращающейся
машине
поток магнитный
потокосцепление
правое направление вращения
электрической
вращающейся машины
преобразовательное
ройство
уст-
программно–управляемый
электропривод
рабочая машина
рабочие характеристики
электрической
вращающейся машины
рассредоточенный объект
управления
реактивный момент электрической
вращающей
машины
реверсивный электропривод
регулировочная характеристика
электрического
генератора
регулируемый
электропривод
редукторный электропривод
режим работы электрической вращающейся машины
distributed controlled object
вентильный электропривод, преобразовательным устройством
которого
является
вентильно–
полупроводниковый преобразователь электроэнергии
[1]
дискретный объект управления, в математической модели которого значения выходных координат хотя бы в
один момент времени зависят от значений входных координат как в тот же момент времени, так и в предшествующие моменты времени [4]
потери в электрической вращающейся машине, практически не зависящие от нагрузки, если напряжение и
скорость вращения при этом остаются неизменными [2]
направление вращения по часовой стрелке электрической машины с односторонним приводом, определяемое
со стороны присоединения её к первичному двигателю
или рабочему механизму [2]
электротехническое устройство, преобразующее род
тока и (или) напряжение, частоту и (или) изменяющее
показатели качества электрической энергии, предназначенное для создания управляющего воздействия на
электродвигательное устройство [1]
регулируемый электропривод, управляемый в соответствии с заданной программой [1]
машина, осуществляющая изменение формы, свойства,
состояния и положения предмета труда [1]
зависимость подводимой мощности, тока в обмотке
якоря, вращающего момента, коэффициента полезного
действия, коэффициента мощности и скорости вращения электрической вращающей машины от ее полезной
мощности при неизменных напряжении на выводах обмотки якоря, частоте и внешних сопротивлениях в цепях обмоток машины [2]
объект управления, расстояния между элементами (подсистемами) или другими частями которого существенны для организации системы управления [4]
вращающий момент, возникающий в электрической
вращающей машине с неравномерным воздушным зазором из–за стремления ротора занять положение, соответствующее наименьшему сопротивлению магнитному
потоку [2]
электропривод, обеспечивающий движение электродвигательного устройства в противоположных направлениях [1]
зависимость тока возбуждения от тока нагрузки генератора при неизменном напряжении на выводах цепи обмотки якоря и скорости вращения. (Прим.: Для машины
переменного тока должен быть неизменным также коэффициент мощности) [2]
электропривод, параметры которого изменяются под
воздействием управляющего устройства [1]
вращательный электропривод, передаточное устройство
которого содержит редуктор [1]
установленный порядок чередования и продолжительности нагрузки, холостого хода, торможения, пуска и
реверса электрической вращающейся машины во время
ее работы [2]
117
резисторный электропривод
сельсин
синхронизм
машины
регулируемый электропривод, скорость которого изменяется путём изменения сопротивления резистора,
включённого в силовую цепь электродвигателя [1]
синхронной
устойчивая параллельная работа синхронной машины с
сетью или с другой синхронной машиной при синхронной скорости вращения [2]
скорость вращения ротора машины переменного тока,
равная скорости вращения магнитного поля, участвующего в основном процессе преобразования энергии [2]
синхронная скорость вращения машины переменного тока
синхронный двигатель
синхронный электропривод
электропривод переменного тока, в котором электродвигательным устройством является синхронный двигатель [1]
регулируемый электропривод, преобразовательным
устройством которого является электромашинный преобразовательный агрегат [1]
регулируемый электропривод, преобразовательным
устройством которого является магнитный усилитель
[1]
вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты [1]
система
"генератор–
двигатель" (система Г–Д)
система "магнитный усилитель–двигатель" (система МУ–Д)
система "преобразователь
частоты–двигатель" (система ПЧ–Д) (вместо "частотно-регулируемый электропривод")
система
"управляемый
выпрямитель–двигатель"
(система УВ–Д)
система управления
control system
скорость вращения [2, в
тексте]
скорость
дотягивания
электропривода
скорость идеального холостого хода электропривода
скорость электропривода
следящий электропривод
собственная
постоянная
времени обмотки синхронной машины
сосредоточенный
управления
объект
способ управления двигателем
статическая нагрузка электропривода
lumped controlled object
вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель [1]
система, состоящая из управляющего объекта и объекта
управления [4]
скорость регулируемого электропривода, которая обеспечивает остановку исполнительного органа рабочей
машины с заданной погрешностью [1]
скорость электропривода при электромагнитном моменте электродвигательного устройства, равном нулю
[1]
скорость электродвигательного устройства и всех движущихся масс, механически с ним связанных [1]
автоматизированный электропривод, отрабатывающий
перемещение исполнительного органа рабочей машины
в соответствии с произвольно меняющимся задающим
сигналом [1]
электромагнитная постоянная времени, определяемая
параметрами обмотки якоря синхронной машины при
отсутствии трансформаторной связи ее с другими обмотками [2]
объект управления, расстояния между элементами (подсистемами) или другими частями которого на существенны для организации системы управления [4]
управление классифицируются по изменяемой управляющей величине (частотное, амплитудное, фазовое,
изменением формы напряжения, реостатное, дроссельное); уточняется по характеру изменения этой величины
(частотно-независимое, частотно-зависимое); уточняется по установившемуся частотно-токовое)
нагрузка электропривода при установившейся скорости
[1]
118
статическая перегружаемость синхронной машины
статическая устойчивость
синхронной машины
статическое падение скорости электропривода
стационарный стохастический объект управления
стохастический
управления
объект
структура системы управления
тахогенератор
теплоэлектрический привод
тиристорный электропривод
stationary
controlled object
stohastic
stohastic controlled object
control system structure
турбоэлектрический привод
угол геометрический
угол электрический
угловая
характеристика
синхронной машины
управление
control
управляемая координата
controlled ccoordinate
управляющая координата
управляющее воздействие
controlling coordinate
controlling action
управляющее устройство
электропривода
управляющий объект
controlling object
отношение максимальной мощности синхронной машины, развиваемой при плавном изменении нагрузки, неизменных возбуждении и напряжении на выводах обмотки якоря и синхронной скорости вращения, к ее номинальной мощности [2]
способность синхронной машины сохранять устойчивую параллельную работу с сетью с синхронной скоростью вращения при плавном нарушении ее установившегося состояния [2]
разность установившихся скоростей электропривода до
и после приложения заданной статической нагрузки [1]
стохастический объект управления, в математической
модели функционирования которого некоторые вероятностные характеристики зависят от времени [4]
объект управления, в математической модели функционирования которого зависимость хотя бы одной управляемой координаты от других координат является вероятностной [4]
совокупность и характер связей и отношений между
элементами (подсистемами) системы управления [4]
автономный электропривод, источником энергии которого является тепловой двигатель [1]
полупроводниковый электропривод, преобразовательным устройством которого является тиристорный преобразователь электроэнергии [1]
теплоэлектрический привод, источником энергии которого является турбогенератор [1]
реальный угол
реальный геометрический угол, умноженный на коэффициент электрической редукции (например, число пар
полюсов)
зависимость активной мощности синхронной машины
от угла сдвига между напряжением на выходах обмотки
якоря и ее электродвижущей силой по продольной оси
при неизменных напряжении на выводах обмотки якоря, частоте тока в ней и тока возбуждения [2]
процесс выработки и осуществления управляющих воздействий. (Прим.: 1. Выработка управляющих воздействий включает сбор, передачу и обработку необходимой
информации, принятие решений, обязательно включающее определение управляющих воздействий. 2.
Осуществление управляющих воздействий включает
передачу управляющих воздействий и при необходимости преобразование их в форму, непосредственно воспринимаемую объектом управления) [4]
координата объекта управления, значения которой зависят от управляющих воздействий и показывают степень
достижения цели управления [4]
координата управляющего воздействия [4]
воздействие на объект управления, предназначенное для
достижения цели управления [4]
электротехническое устройство, предназначенное для
управления преобразовательным и (или) электродвигательным и (или) передаточным устройствами [1]
объект, предназначенный для осуществления управления [4]
119
уравнение равновесия напряжений
уравнение вида u (t ) = R ⋅ i (t ) +
dψ (t )
, где t — вреdt
мя, u — напряжение, R — активное сопротивление
обмотки, i — ток в обмотке, ψ — потокосцепление
обмотки
см. уравнение равновесия напряжений
уравнение электрического
равновесия
уравнение движения
dωr (t ) 1
= [M (t ) + M с (t )] , где
dt
J
t — время, ωr — угловая скорость ротора, J — мо-
уравнение вида
мент инерции ротора и присоединённой к нему механической нагрузки, M — вращающий момент двигателя,
M с — статический момент нагрузки
уравнение механического
равновесия
установившееся состояние
электрической
вращающейся машины
фазовое управление
функция
управляющего
объекта
см. уравнение движения
работа электрической вращающейся машины при неизменных электромагнитных, тепловых и механических
параметрах [2]
controlling object function
характеристика короткого
замыкания асинхронного
двигателя
характеристика короткого
замыкания электрической
вращающейся машины
характеристика холостого
хода асинхронного двигателя
характеристика холостого
хода электрической вращающейся машины
цель управления
частотно–векторное
управление
частотное управление
частотно–токовое управление
шаговый двигатель
control aim
совокупность действий управляющего объекта, относительно однородная по некоторому признаку, направленная на достижение частной цели, подчиненной общей цели управления. (Прим.: К числу функций управляющих объектов, например, относят: функцию сбора,
передачи и преобразования исходной информации;
функцию принятия решений; функцию диагностирования; функцию осуществления управляющих воздействий; функцию документирования и др. [4]
зависимость тока в обмотке статора асинхронного двигателя от подведённого к ней напряжения при неподвижном роторе, обмотка которого замкнута накоротко
[2]
зависимость установившегося тока в замкнутой накоротко обмотке якоря электрической вращающейся машины от тока возбуждения при неизменной скорости
вращения [2]
зависимость тока холостого хода от напряжения на выводах обмотки статора асинхронного двигателя при неизменной частоте тока питающей сети [2]
зависимость электродвижущей силы, индуктируемой в
обмотке якоря электрической вращающейся машины
при разомкнутой цепи от тока возбуждения [2]
значения, соотношения значений координат процессов в
объекте управления или их изменения во времени, при
которых обеспечивается достижение желаемых результатов функционирования объекта [4]
120
экскаваторная механическая характеристика электропривода
электрическая асинхронная машина
электрическая машина
электрическая
машина
переменного тока
электрическая
машина
постоянного тока
электрическая синхронная
машина
электрический вал
электрический каскад
электрический угол машины переменного тока
электрогидравлический
привод
электродвигатель
электродвигательное устройство электропривода
электродвижущая
сила
(э. д. с.)
электромагнитная постоянная времени обмотки
синхронной машины
электромагнитные
процессы
электромагнитный момент
[1, в тексте]
электромашинный каскад
электромашинный преобразовательный агрегат
электромеханическая постоянная времени электропривода
электромеханическая система
механическая характеристика, имеющая два резко отличающихся участка: первый участок, при меньших значениях электромагнитного момента, с большей жёсткостью и второй участок, при больших значениях электромагнитного момента, с резко пониженной жёсткостью [1]
взаимосвязанный электропривод, обеспечивающий синхронное вращение двух и более электродвигателей, валы которых не имеют механической связи [1]
каскадный электропривод, в котором мощность скольжения возвращается в сеть [1]
произведение значения геометрического угла, образованного двумя полуплоскостями, проходящими через
ось вращения машины переменного тока, на число пар
полюсов [2]
электропривод, имеющий гидравлическое передаточное
устройство [1]
электротехническое устройство, предназначенное для
преобразования электрической энергии в механическую
или механической в электрическую. (Прим.: Электродвигательное устройство содержит один или несколько
электродвигателей) [1]
время, в течение которого электромагнитная величина,
связанная с данной обмоткой якоря синхронной машины, изменяясь по экспоненциальному закону, увеличивается до значения, равного 0,632 установившегося, или
уменьшается до значения, равного 0,368 первоначального [2]
каскадный электропривод, в котором для преобразования мощности скольжения используется электромашинный преобразовательный агрегат [1]
устройство, предназначенное для преобразования энергии, состоящее из двух или более электрических машин,
валы которых соединены между собой [1]
время, в течение которого электропривод разгоняется из
неподвижного состояния до скорости идеального холостого хода под действием неизменного момента, равного моменту короткого замыкания электродвигателя [1]
совокупность механических и электротехнических устройств, объединённых общими силовыми электрическими цепями и (или) цепями управления, предназначенная для осуществления механического движения
объекта [1]
121
электромеханическая характеристика электропривода (вместо "скоростная
характеристика")
электромеханические процессы
электромеханический каскад
электропривод
электропривод непрерывного действия
электропривод переменного тока
электропривод постоянного тока
зависимость электропривода от тока электродвигательного устройства [1]
каскадный электропривод, в котором мощность скольжения преобразуется в механическую и возвращается на
вал двигателя [1]
электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и
управляющего устройств, предназначенная для приведения в движение вспомогательных органов рабочей
машины и управления этим движением. (Прим.: Преобразовательное и (или) передаточное устройства могут
отсутствовать) [1]
электропривод, подвижные части электродвигательного
устройства которого в установившемся режиме находятся в состоянии непрерывного движения [1]
электропривод с электродвигательным устройством
переменного тока [1]
электропривод с электродвигательным устройством
постоянного тока [1]
122
Литературные источники
1 ГОСТ 16593–79
2 ГОСТ 17154–71
3 ГОСТ 23375–78
4 Теория управления. Терминология: Сборники рекомендуемых терминов. Вып.
107.– М.: Наука, 1988.– 56 с.
5 Математический энциклопедический словарь / Гл. ред. Ю. В. Прохоров.– М.: Советская энциклопедия, 1988.= 847 с.
6 Бензарь В.К. Словарь–справочник по электротехнике, промышленной электронике
и автоматике.– Минск: Вышэйшая школа, 1980.– 192 с.
7 Вольдек, А. И. Электрические машины: Учебник для вузов. — 3-е изд., перераб. /
А. И. Вольдек. — Л.: Энергия, 1978. — 832 с.
8 Важнов, А. И. Переходные процессы в машинах переменного тока / А. И. Важнов. — Л.: Энергия. Ленингр. отд-ние, 1980. — 256 с.
9 Ковач, К. П. Переходные процессы в машинах переменного тока: пер. с нем. / К. П.
Ковач, И. Рац. — М.; Л.: Госэнергоиздат, 1963. — 744 с.
10 Копылов, И. П. Математическое моделирование электрических машин: учебник
для вузов / И. П. Копылов. — М.: Высшая школа, 1987. — 248 с.
11 Копылов, И. П. Математическое моделирование электрических машин: учебник
для вузов / И. П. Копылов. — 3-е изд., перераб. и доп. — М.: Высшая школа,
2001. — 327 с. — ISBN 5-06-003861-0.
12 Сипайлов, Г. А. Электрические машины (специальный курс): учебник для вузов /
Г. А. Сипайлов, Е. В. Кононенко, К. А. Хорьков. — 2-е изд., перераб. и доп. — М.:
Высшая школа, 1987. — 287 с.
13 Чиликин, М. Г. Теория автоматизированного электропривода: Учеб. пособие для
вузов / М. Г. Чиликин, В. И. Ключев, А. С. Сандлер. — М.: Энергия, 1979. — 616 с.