ВЫНУЖДЕННЫЕ УСТАНОВИВШИЕСЯ КОЛЕБАНИЯ ЦИЛИНДРИЧЕСКИХ ТЕЛ С ВНЕШНИМ ТРЕНИЕМ НА ГРАНИЦЕ
реклама

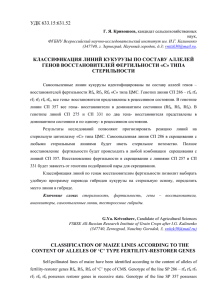
ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ Нелинейные динамические системы Вып. 45 Межвузовский сборник научных трудов 2013 УДК 539.3 И.И. Сафаров, З.И. Болтаев, К.К. Рахмонов, А.О. Умаров Бухарский инженерно-технологический институт Республика Узбекистан, 105017, Бухара, ул. К. Муртазаева, 15 [email protected]; (+99893455-44-24), (+998936247928) ВЫНУЖДЕННЫЕ УСТАНОВИВШИЕСЯ КОЛЕБАНИЯ ЦИЛИНДРИЧЕСКИХ ТЕЛ С ВНЕШНИМ ТРЕНИЕМ НА ГРАНИЦЕ Рассматриваются вынужденные колебания цилиндрических тел с внешним трением. Предполагается, что продольная координата не влияет на процесс колебаний, в этом случае система дифференциальных уравнений Ламе распадается на две независимые задачи. Получены численные значения амплитуды колебаний в зависимости от частот и коэффициентов трения. Введение. Моделирование колебаний тел, находящихся в деформируемой среде, осуществлено различными методами [1, 2, 3, 4]. Исследование динамического напряженно-деформируемого состояния трубопроводов в грунтовой среде относится к сложным задачам механики деформируемого тела. В работах [5, 6] окружающая трубопровод деформируемая среда заменяется пружинками, при этом учитываются линейные и нелинейные восстанавливающие силы. Однако проблемы подбора коэффициента восстанавливающих сил и их влияния на динамический процесс не исследованы. Не рассмотрен также вопрос соответствия © Сафаров И.И., Болтаев З.И., Рахмонов К.К., Умаров А.О., 2013 114 И.И.Сафаров, З.И. Болтаев и др. Вынужденные установившиеся колебания … предлагаемых моделей динамическому поведению трубопроводов. В данной работе моделируются колебания трубопровода как цилиндрического тела с радиусами r0 и R, находящегося в деформируемой среде (рисунок 1), которая заменяется вязким демпфером в радиальном и касательном направлениях. Основной целью работы является исследование вынужденных колебаний цилиндра с внешним трением на границе и сравнение полученных результатов для тел, находящихся в упругой среде, с результатами работы [3]. Постановка задачи. Рассмотрим задачу о колебаниях бесконечного упругого цилиндра с внешним трением на границе (рис. 1). Замкнутая система уравнений свободных малых колебаний упругого цилиндрического тела имеет вид 2u u grad div u f 2 , t i j i j 2 i j , 2 где u u ,u ,u r z (1) – вектор перемещений; , – коэффициенты Ламе; – плотность цилиндра; ij – тензор напряжений; ij – тензор деформаций; f – вектор внешней нагрузки. 1 r R f t 2 r0 х Рис. 1. Расчетная схема цилиндрических тел с вязким внешним трением 115 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2013 На внешней границе r R заданы или перемещения r0 , или внешние нагрузки. Внешняя нагрузка может воздействовать на внутреннюю поверхность цилиндрического тела r r0 и на внешнюю поверхность цилиндра r R ; u 0 . На внешней по- верхности r R задано напряжение n u и перемещение t u 0 при r r0 . Заданы также начальные условия: u u t 0 0; t 0 0 . t Методы решения. Рассмотрим задачу в цилиндрической системе координат (r , , z ). Предполагая, что координата z не влияет на процесс колебаний, получим систему уравнений, распадающуюся на две независимые задачи [2]: u rz 2 z 1 z rz f; r r r t 2 r z rz ; z r z z ; z u u u u u u u 116 u u u u rr 1 r rr 2 r fr ; r r r t 2 r 1 2 2 r f ; r r r t 2 r r 1 rr 2 r ; r r r r 1 r r 2 ; r r r 1 r 1 2 r r r r r r r u u u u u u u (2,а) (2,б) И.И.Сафаров, З.И. Болтаев и др. Вынужденные установившиеся колебания … с краевыми условиями при r R : rz u z , t (2,с) u u r , rr 1 t (2,d) r 2 , t где R – радиус цилиндра; ,1 , 2 – параметры внешнего трения. При r0 0 : rz z u rr r r u u . (3,а) Назовем краевую задачу (2,а) антиплоской, а (2,б) – плоской, или задачей о плоских колебаниях цилиндра. Рассмотрим задачу об антиплоских вынужденных установившихся колебаниях цилиндра (2,а). Если вынуждающая сила f F r eit cos n , то решение уравнения (2,а) записывается в виде uz r eit cos n и задача о колебаниях в перемещениях примет вид u (4) u 2u F 0 r r с краевыми условиями u iu r r 0 u r 0, r R где – частота вынуждающей силы. Линеаризованная по задача выглядит следующим образом: u u i u f 0, r u i r R u r R ; u r0 0. 117 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2013 Для нахождения разложения коэффициентов решения в ряд воспользуемся результатами работы [7], в которой для собственных функций спектральной задачи получены два соотношения обобщенной ортогональности. Для упругого тела с внешним трением они принимают вид xk , xe 1 vk ve 1 vk ... ve d , (5,а) xk , xe 2 vk ve vk ve d vk Bvedr, (5,б) r 1 где xk , xe – любые два решения краевой задачи, соответствую- щие различным собственным значениям; – область решения задачи. В нашем случае кольцо с внутренней окружностью r r0 , с внешней – r=R, 1 – тензор упругих напряжений, u ,V v – собственные функции формы краевой задачи u xk k , Vk u xe e . Ve Для нашей конкретной задачи соотношения ортогональности принимают вид xk , xe 1 2 ikuk ieue r ukuerdr , R (6) a R xk , xe 2 2 ikukue ieukue rdr 2ukue R rRa . (7) a u , а уравне- Далее умножим скалярно уравнение (6) на r k ние (7) на rVk : u r u iu f ru dr 0 , 2 a R R 2 V i a 118 k u rV dr 0 . k И.И.Сафаров, З.И. Болтаев и др. Вынужденные установившиеся колебания … Сложив полученные уравнения и произведя замену переменных в одном из интегралов ru u dr d ru , получим u d ru VV rdr i Vu rdr i uV rdr fu rdr 0. R 2 a R R k R k R k a k a k a a (8) Подставив в (8) выражения и V ciVi и интегри- u cu i i 1 i i 1 руя по частям, получим первый интеграл: 2 u ru r c uudr c V V rdr R a i 1 R a k i i R a i 1 k i i k u rdr i c u V rdr f u rdr 0 . (9) i ciVi a i 1 R R k a R i1 i i k k a 1 0,8 0,6 0,4 0,2 0 0 5 10 15 20 Рис. 2. Зависимость собственных форм от частоты вынуждающей силы Теперь, учитывая краевые условия u r r e u ur 0 , i , 0 выражение (9) можно записать в виде 119 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2013 R i 1 a u u r uurdr 2i c i V u u i u rdr ci 2 ii iik k i k i 1 R R a a i i i k i k k R u u R fu rdr 0. 2 k i k a Используя выражения для скалярных квадратов (7), (8) и учитывая, что xk , xe 1 0 , x k , xe 2 0 при k e , получим ck xk , xk 1 ick xk , xk 2 f , k 0, f , k . ck xk , xk 1 i xk , xk 2 u u Известно [7], что k Тогда ck для x, x 1 x, x 2 f , uk . k i xk , xk 2 . Теперь, зная выражение ck , можем найти решение рассматриваемой задачи x ck xk . Интегралы при вычислении скалярного квадрата и k 1 f , xk находились численным методом Ромбера. Численные результаты. Результаты представлены на рис. 2 (показаны зависимости собственных форм от частоты вынуждающей силы: 1 – представление решения в виде суммы двух слагаемых, 2 – решение в виде суммы четырех слагаемых) для 0,2 соответственно. В таблице даны значения относительной погрешности решения в виде ряда (в процентах) для различных значений параметра внешнего трения и различных частот вынуждающей силы. 120 И.И.Сафаров, З.И. Болтаев и др. Вынужденные установившиеся колебания … 121 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2013 Выводы. Для всех рассмотренных параметров внешнего трения, в том числе и для 1 , уже при шести учтенных членах разложения погрешность составляет порядка 1–2%. При этом нельзя не отметить, что при очень малых 0,2–0,5 и при очень больших 10 даже при четырех членах разложения погрешность составляет десятые доли процента. Амплитуды перемещений точки внутренней поверхности ( / 2 ) цилиндрического тела, находящегося в упругой среде [3, 5], возникающие при воздействии гармонических волн, сравнивали с результатами данной работы. Результаты обеих работ сов- падают в области длинных волн 0 1 с разницей до 20%. R Библиографический список 1. Рашидов Т.Р. Динамическая теория сейсмостойкости сложных систем подземных сооружений. Ташкент: Фан, 1973. 182 с. 2. Рашидов Т.Р., Дорман И.Я., Ишанходжаев А.А. Сейсмостойкость тоннельных конструкций метрополитенов. М.: Транспорт, 1975. 120 с. 3. Гузь А.Н., Головчан В.Т. Дифракция упругих волн в многосвязных телах. Киев: Наука думка, 1972. 254 с. 4. Кубенко В.Д. Нестационарное взаимодействие элементов конструкций со средой. Киев: Наука думка, 1979. 183 c. 5. Сафаров И.И. Колебания и волны в диссипативнонеоднородных средах и конструкциях. Ташкент: Фан, 1992. 250 с. 6. Базаров М.Б., Сафаров И.И., Шокин Ю.М. Численное моделирование колебаний диссипативно-неоднородных и однородных механических систем. Новосибирск: Сиб. отд. РАН, 1996. 189 с. 7. Неймарк М.А. Линейные дифференциальные операторы. М.: Наука, 1968. 528 с. 122