На правах рукописи ОВЧИННИКОВА Наталья Владимировна НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ
реклама

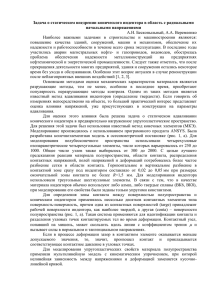
На правах рукописи ОВЧИННИКОВА Наталья Владимировна НАПРЯЖЕННО-ДЕФОРМИРОВАННОЕ СОСТОЯНИЕ КОНТИНУУМА «ЖЕСТКИЙ ИНДЕНТОР – УПРУГОПЛАСТИЧЕСКАЯ СРЕДА» ПРИ ДИНАМИЧЕСКИХ НАГРУЖЕНИЯХ Специальность 01.02.04 – Механика деформируемого твердого тела Автореферат диссертации на соискание ученой степени кандидата технических наук Саратов 2013 Работа выполнена в Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Саратовский государственный технический университет имени Гагарина Ю.А.» Научный руководитель – доктор технических наук, профессор, Лауреат государственной премии СССР в области науки и техники Чеботаревский Юрий Викторович Официальные оппоненты: Белосточный Григорий Николаевич доктор технических наук, профессор, ФГБОУ ВПО «Саратовский государственный университет им. Н. Г. Чернышевского», профессор кафедры «Математическая теория упругости и биомеханика» Тарлаковский Дмитрий Валентинович доктор физико-математических наук, профессор,ФГБОУ ВПО «Московский государственный университет им. М. В. Ломоносова», Научноисследовательский институт механики, заведующий лабораторией динамических испытаний Ведущая организация – Федеральное государственное учреждение науки Институт проблем точной механики и управления Российской академии наук (г. Саратов) Защита состоится «3» декабря 2013 г. в 15:00 часов на заседании диссертационного совета Д 212.242.06 при ФГБОУ ВПО «Саратовский государственный технический университет имени Гагарина Ю.А.» по адресу: 410054, Саратов, ул. Политехническая, 77, ауд. 319/1. С диссертацией можно ознакомиться в научно-технической библиотеке ФГБОУ ВПО «Саратовский государственный технический университет имени Гагарина Ю.А.». Автореферат разослан « 18 » октября 2013 г. Ученый секретарь диссертационного совета Попов В.С. 2 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность работы. В последнее время для улучшения эксплуатационных характеристик различных механизмов получили применение комбинированные методы упрочнения рабочих поверхностей их деталей из металла, объединяющих одновременно несколько способов силового воздействия на обрабатываемый материал. В частности, один из них основан на использовании в процессе поверхностного упрочнения металлов импульсного нагружения рабочего инструмента в сочетании с ультразвуковым воздействием на него. Применение такого режима обработки позволяет существенно повысить качество обрабатываемой поверхности и обеспечить более высокую износоустойчивость готовых деталей. В её процессе проявляются новые динамические эффекты воздействия ультразвука на материал, прогнозирование которых без проведения предварительных аналитических и численных исследований весьма затруднительно. Для осознанного управления технологическим процессом поверхностного упрочнения необходимо определить комплекс геометрических, механических и физических параметров, его характеризующих и исследовать их влияние на результаты обработки. Механические процессы, происходящие при взаимодействии рабочего инструмента и поверхности детали, настолько сложны и разнообразны, что учесть все их специфические особенности в рамках решения единой задачи не представляется возможным. Косвенными характеристиками, позволяющими судить об уровне упрочнения, могут служить возникающие в его процессе остаточные пластические напряжения и деформации в обрабатываемом материале, а также его плотность, являющаяся функцией интенсивности остаточных деформаций. В связи с этим весьма актуальным представляется исследование напряженно-деформированного состояния упрочняемого материала при комбинированном динамическом силовом и ультразвуковом воздействиях. С точки зрения механики сплошных сред задача об исследовании напряженно-деформированного состояния упрочняемого материала при таком воздействии является контактной и должна рассматриваться в динамической постановке с учетом упругопластического характера поведения обрабатываемого материала. Решению контактных задач посвящены пионерские работы Г. Герца, И. Я. Штаермана, Г. Лоренца, А. Н. Динника, Н. М. Беляева. Дальнейшее развитие это направление получило в работах Н. И. Мусхелишвили, Л. А. Галина, В. М. Александрова и многих других российских и зарубежных ученых. Подавляющее большинство опубликованных ими работ посвящено исследованию НДС рассматриваемых объектов при статическом нагружении одного из контактирующих тел. Однако класс задач механики деформируемого твердого тела, рассматриваемых в данной работе, до сих пор является малоизученным. Поэтому разработка новых подходов к решению контактных задач для упругопластических тел, находящихся под воздействием описанных выше сложных динамических нагрузок, представляется весьма актуальной. С учетом этого целью настоящей диссертационной работы является разработка новых подходов к решению задачи о напряженно-деформированном 3 состоянии континуума «жесткий индентор – упругопластическая среда» при различных видах статического и динамического нагружения индентора и неупругом поведении материала среды. Задачи исследования. 1. Постановка динамической задачи о напряженно-деформированном состоянии континуума «жесткий индентор – упругопластическая среда». 2. Получение вариационного уравнения движения континуума «индентор – деформируемая среда», а также применение метода штрафных функций и метода множителей Лагранжа для учета условий контакта непосредственно в вариационных соотношениях, описывающих движение континуума. 3. Исследование напряженно-деформированного состояния «жесткий индентор – упругопластическая среда» с помощью метода конечных элементов. 4. Разработка упрощенной физико-математической модели для решения задачи о напряженно-деформированном состоянии континуума «абсолютно жесткий индентор – упругопластическая среда». 5. Изучение динамики поведения абсолютно твердого индентора, контактирующего с упругопластической средой. 6. Исследование напряженно-деформированного состояния упругопластической среды под действием эквивалентной нагрузки. Методы исследований. При выполнении работы использованы аппарат дифференциального и интегрального исчисления, вариационного исчисления, численные методы математического анализа, включая метод конечных элементов. Для описания упругопластических свойств материала среды в рамках теории течения принята модель изотропно кинематического упрочнения. Достоверность полученных результатов обеспечивается корректностью математической постановки рассматриваемых задач, использованием фундаментальных принципов механики, а также их совпадением с известными аналитическими решениями в некоторых частных случаях. Полученные численные результаты качественно подтверждаются имеющимися в периодической литературе экспериментальными данными и соответствуют физике исследуемых процессов. На защиту выносятся следующие основные положения: 1. Вариационные уравнения движения континуума «жесткий индентор – деформируемая среда», полученные на основе вариационного принципа Даламбера – Лагранжа с применением методов штрафных функций и множителей Лагранжа и позволяющие учесть искривление деформируемых вследствие контакта поверхностей без наложения ограничений на их форму и физические уравнения материалов контактирующих тел (упругое, вязкоупругое, упруго-пластическое); 2. Упрощенная физико-математическая модель процесса контактного взаимодействия тел, образующих континуум «абсолютно твердый индентор – деформируемая среда», позволяющая исследовать напряженнодеформированное состояние среды с меньшими затратами вычислительных ресурсов: – при динамическом нагружении индентора и идеально упругом поведении материала среды; 4 – при статическом нагружении индентора и упруго – пластическом поведении материала среды. 3. Результаты численного исследования напряженно-деформированного состояния тел, образующих континуум, полученные для физической модели изотропно кинематического упрочнения материала среды при различных видах приложения нагрузки к индентору (статическая, динамическая, импульсная, с приложением ультразвуковых воздействий). Научная новизна работы заключается в следующем: – выполнена классическая постановка динамической упругопластической задачи о напряженно-деформированном состоянии континуума «жесткий индентор – деформируемая среда» в виде, позволяющем учесть нарушение первоначальной геометрической формы деформируемых в процессе контакта поверхностей без наложения ограничений на их форму; – на основе принципа Даламбера – Лагранжа с применением методов штрафных функций и множителей Лагранжа выведены вариационные уравнения движения континуума без наложения, каких-либо ограничений на форму деформированных поверхностей контактирующих тел, физические уравнения их материалов и геометрические соотношения; – с целью применения метода конечных элементов для получения численных результатов проведена дискретизация рассматриваемой задачи в вариационной постановке; – получены уравнения для определения координат точек, лежащих на границе контактной области в случае применения метода штрафных функций и при использовании метода множителей Лагранжа; – на базе физической модели изотропно кинематического упрочнения материала среды проведено численное исследование напряженнодеформированного состояния тел, образующих континуум при различных видах приложения нагрузки к индентору (статическая, динамическая, импульсная, с приложением ультразвуковых воздействий); – сформулирована упрощенная инженерная расчетная модель изучаемого процесса контактного взаимодействия тел, образующих континуум «абсолютно твердый индентор – деформируемая среда», позволяющая в некоторых частных случаях нагружения индентора исследовать напряженно-деформированное состояние среды при упругом и упруго-пластическом поведении её материала с меньшими затратами вычислительных ресурсов; – определены границы применимости предложенной упрощенной расчетной модели континуума «абсолютно твердый индентор – деформируемая среда» для исследования напряженно-деформированного состояния среды при различных видах нагружения индентора. Практическая ценность работы состоит в использовании её результатов при проектировании технологического оборудования в ООО «Научнопроизводственное предприятие нестандартных изделий машиностроения» и в учебном процессе при подготовке инженеров по специальности 151701.65 «Проектирование технологических машин и комплексов» в Саратовском государственном техническом университете имени Гагарина Ю.А. Апробация работы. Основные положения и результаты работы докладывались на 5 научно-технических конференциях и 3 научных семинарах, 5 в том числе: XV и XVI Международных симпозиумах «Динамические и технологические проблемы механики конструкций и сплошных сред» им. А. Г. Горшкова (Ярополец, 16-20 февраля 2009 г, 15-19 февраля 2010г.); Всероссийской научно-технической конференции «Совершенствование техники, технологий и управления в машиностроении» (Саратов, 20-24 октября 2009 г.); Всероссийской научно-практической конференции молодых ученых «Инновации и актуальные проблемы техники и технологий», (Саратов, 26-29 октября 2010 г.); XXIV Международной научной конференции «Математические методы в технике и технологиях» ММТТ-24 (Саратов, 2011 г.), научном семинаре «Механика деформируемого твердого тела» СГТУ (Саратов, июнь 2013 г.). Публикации. Основные результаты работы опубликованы в 12 печатных работах, в том числе 7 работ в изданиях, рекомендованных ВАК РФ для публикации материалов кандидатских и докторских диссертаций. Структура и объем работы. Диссертационная работа состоит из введения, 4 глав, заключения, списка использованной литературы и приложения. СОДЕРЖАНИЕ РАБОТЫ Во введении обоснованы актуальность темы диссертационной работы, ее научная новизна и практическая ценность. Сформулирована цель и поставлены задачи исследования. В первой главе приводится обзор литературных источников, тем или иным образом связанных с изучаемой проблемой. На основе их анализа отмечается, что ни один из предлагаемых в изученных литературных источниках подходов без существенных изменений и дополнений не может быть положен в основу решения рассматриваемой в данной работе проблемы. Обосновывается выбор направления исследований. Формулируется математическая модель изучаемого технологического процесса в виде континуума, включающего цилиндрический упругий жесткий индентор со сферической рабочей поверхностью и упругопластическую среду, размеры и форма которой в силу локальности изучаемого процесса особого значения не имеют. Силовое воздействие рабочего инструмента на обрабатываемый материал моделируется путем приложения к нему направленного вдоль общей оси симметрии индентора и среды комбинированного усилия с постоянно действующей и переменной составляющими: F (t ) F0 FD (t ) FV sin t , (1) где F0 , FD (t ) и FV – соответственно постоянная и переменная составляющие усилия, и амплитуда переменной составляющей, колеблющейся с ультразвуковой частотой , t – время. Наличие постоянной составляющей усилия в (1) диктуется необходимостью обеспечения в реальном технологическом процессе гарантированного натяга между рабочим инструментом и обрабатываемой поверхностью и предотвращения тем самым его отрыва от неё в процессе обработки. Закон изменения во времени переменных составляющих обусловлен видом технологического воздействия и может иметь как импульсный, так и характер ультразвуковых колебаний или их комбинацию. 6 При постановке задачи о напряженно-деформированном состоянии континуума для удобства формулирования граничных условий в среде выделяется конечная область в виде правильного кругового цилиндра, к центру одной из торцевых поверхностей которого прикладывается технологический инструмент (рис. 1). Её размеры – радиус R 2 и толщина h2 произвольны, ничем не ограничены и могут принимать любые значения. Нижняя торцевая поверхность выделенного объема среды 1 жестко закреплена. Боковые поверхности индентора и среды 5 и 2 , а также верхняя торцевая поверхность среды 3 и рабочая поверхность индентора 4 , за исключением зоны контакта c (на рисунке не показана), свободны от внешней нагрузки. Зона контакта определяется как пересечение контактирующих поверхностей c 3 4 . С Рис. 1 учетом того, что индентор по условиям своего закрепления может совершать только возвратно-поступательное движение вдоль общей оси симметрии с объемом Oz , исследование напряженного и деформированного состояния континуума проводится в осесимметричной постановке. В предположении, что упругие и пластические деформации материалов среды и индентора являются малыми, и процесс деформирования является изотермическим, определение НДС континуума в рамках теории течения сведено к решению следующей контактной задачи: l zzl 1 d 2u zl rrl rrl rzl d 2url l r zr 2 ( l I , II ) (2) 2 , z r r dt r r z dt rr r rz 0 при r , , z 2 и 5 . (3) nn zz pt , rz 0 при r , , z 6 , u z 0 при r , , z 1 , n 0 при r , , z 3 \ c и r , , z 4 \ c , I II I II nn nn и n n 0 при r , , z c , unI unII 0 , durl du zl l l 0 при t 0 ur u z 0 , dt dt (4) (5) (6) (7) (8) (9) В соотношениях (1) – (9): ijl ( i, j r , , z ) и uil uil r , z, t ( i r , z ) ( l I , II ) – компоненты тензора напряжений и вектора перемещений соответственно; l ( l I , II ) – плотность материала среды или индентора; t – время; p t – равномерно распределенная нагрузка по верхней торцевой поверхности индентора, эквивалентная приложенной к нему сосредоточенной силе: 7 R1 F t 2 pt rdr ; 0 и ( l I , II ) – нормальные и касательные компоненты вектора напряжений на площадках перпендикулярных внешним нормалям деформированных поверхностей индентора и среды в области контакта и её окрестностях, связанные с компонентами тензора напряжений соотношениями: l (10) nn n zl zzl n zl zrl nrl nrl rzl n zl rrl nrl ; l nn l n где nrl и n zl (11) n n n n n n ( l I , II ), ( l I , II ) – направляющие косинусы главных внешних нормалей l n l z l rz l z l rr l r I r l zz l z l zr l r II n I и n деформированных поверхностей индентора и среды, включая и область контакта. Здесь и в дальнейшем верхний индекс l I или l II означает, что данная величина независимо от её физической природы относится соответственно либо к индентору, либо к среде. Компоненты полной деформации ij , состоящие из упругих ijel и пластических ijpl частей (составляющих) ij ijel ijpl ( i, j r , , z ) , (12) 1 3 ср ; ijpl иpl ( i, j r , , z ), (13) ij ij E 1 ij связаны с компонентами вектора перемещений соотношениями Коши: u u u u 1 u (14) rr r , zz z , r , rz z r , 2 r z r z r ij – пластический потенциал. В силу непреодолимых математических трудностей получить аналитическое решение контактной задачи в приведенной выше постановке не представляется возможным. Поэтому во второй главе диссертации для упрощения её решения предложена замена исходной задачи в классической постановке её вариационным аналогом, получаемым на основе дифференциального вариационного принципа Даламбера – Лагранжа для распределенной системы материальных точек, подчиненной неудерживающим связям. С этой целью наряду с радиальной u r и осевой u z составляющими вектора перемещения,в рассмотрение введены соответствующие им компоненты вектора скорости: du du vr r u r , (15) v z z u z . dt dt и их вариации v r и v z . После проведения ряда сложных и громоздких преобразований вариационное уравнение движения континуума «инденторсреда» получено в виде где ijel r , z , t R2 h2 f 0 II r ,t R1 II rdzdr I r ,t f R1 I 0 I R1 ,t h1 8 rdzdr v zI prdr 0 , 0 (16) где l l l l l l l l d vr vr vr rz vr vr f r , z, t r r z dt ( (17) l I , II ) l d v vzl zrl vzl vzl l z ; zzl z r dt l r , t ( l I , II ) – функции, входящие в уравнения деформированных вследствие контакта поверхностей индентора и среды (18) ~l r , z, t z l r , t 0 ( l I , II ). Уравнение (16) описывает движение континуума «индентор – деформируемая среда» с учетом граничных условий на поверхностях тел его образующих и обобщенного контактного условия: vnI vnII nnI vnI vnII nnII 0 , (19) l но без учета требования nn 0 ( l I , II ) в области контакта и условия отсутствия взаимопроникновения («условия непроникновения»): (20) n vnI vnII 0 . В соотношениях (19) и (20) ( l I , II ). (21) vnl vrl nrl v zl nzl , vl vrl nzl v zl nrl составляющие векторов скорости принадлежащих индентору и среде точек возможного контакта в направлении соответствующей нормали. l Для введения условия «непроникновения» (20) и требования nn 0 ( l I , II ) в области контакта непосредственно в вариационное соотношение (16), использованы два метода: штрафных функций и множителей Лагранжа. С применением первого из них вариационное уравнение движения континуума (16) преобразовано к виду: l l rr r , z, t R2 h2 f 0 II r ,t R1 R1 II rdzdr I r ,t f I rdzdr 0 I R1 ,t h1 (22) 1 vnI vnII r , z, t rdr 0, I 0 nz a v prdr I z 0 где (r , z, t ) g z z , z v z H g z z , 0 g z z 0 H g z z g z z z I z II , ; (23) 1 g z 0 z I II z и z – координаты точек возможного контакта, лежащих на поверхности среды и рабочей поверхности индентора соответственно (Рис.2). Задание штрафной функции в виде (22) с учетом (23) позволило сделать её положительно определенной, что обеспечило выполнение требования zzII 0 в области контакта, и отличной от нуля только в точках виртуального проникновения тела индентора в материал среды. 9 Система уравнений для определения начальных координат rнI и rнII граничных точек контактной области получена исходя из условия равенства координат raI , raII и z aI , z aII точек пересечения поверхностей индентора и среды при наличии виртуального проникновения (рис. 2): 2 rнI urI rнI , R02 rнI R0 , t rнII urII rнII ,0, t ; 2 2 R02 rнI R0 u zI rнI , R02 rнI R0 , t u zII rнII ,0, t . С применением метода множителей Лагранжа уравнение (16) преобразовано к нестрогому вариационному равенству: R1 I r ,t f I rdzdr 0 I R1 ,t h1 R2 h2 f 0 II r ,t R1 II rdzdr v prdr 0 1 vnI vnII rdr 0 , (24) I 0 nz a I z где – множитель Лагранжа, удовлетворяющий в каждой точке контактной I поверхности соотношению nn nnII , и равный нулю за её пределами. Система уравнений для определения начальных координат rнI и rнII граничных точек контактной области. Ввиду громоздкости полученных соотношений и ограниченности объема реферата эти уравнения здесь не приводятся. Вариационные соотношения (22) и (24) универсальны в том смысле, что они получены без наложения каких либо ограничений на форму деформированных поверхностей индентора и среды вследствие контакта, геометрические соотношения и на физические Рис. 2 уравнения, определяющие состояние материала тел, образующих континуум. В работе приведено доказательство того, что определение скоростей движения точек континуума на основе вариационных соотношений (22) или (24), обеспечивающих в каждый момент времени безусловный минимум соответствующего функционала, соответствует решению исходной задачи (2) – (9). В третьей главе проведена дискретизация задачи в вариационной постановке путем разбиения континуума на конечные элементы. Связь между компонентами вектора скорости любой точки континуума и их значениями в узловых точках разбиения vkil t задана соотношениями: nl vil r , z, t N kl (r , z )vkil t N kl (r , z )vkil t ( i r , z , l I , II ), k 1 10 (25) где ( l I , II ) – количество узлов в объемах индентора и среды nl соответственно, N kl (r , z ) – функции формы. С учетом (25) на базе вариационного уравнения (22) получена следующая система из 2nI nII обыкновенных дифференциальных уравнений для определения составляющих скоростей в узловых точках разбиения: nI M m1 I km R1 I r ,t a I d vmr 1 I f1 rdzdr I N kI nrI (r , z, t )rdr , ( k 1, nI ) dt 0 I R1 ,t h1 0 nz I km R1 I r ,t R1 a I d vmz 1 I I I f 2 rdzdr I N k nz (r , z, t )rdr N kI prdr , dt 0 I R1 ,t h1 0 nz 0 nI M m1 nII M II km m1 nII M m1 II km R2 h2 a II d vmr 1 II f1 rdzdr I N kII nrII (r , z, t )rdr , dt 0 II r ,t 0 nz (26) R2 h2 a II d vmz 1 II f 2 rdzdr I N kII nzII (r , z, t )rdr , ( k 1, nII ) dt 0 II r ,t 0 nz l l l N k N k lrz N kl , f 2l lzz N kl Izr N kl . f z r r r z l 1 l rr При использовании нестрогого вариационного равенства (24) дополнительно к (25) введена связь между значениями множителя Лагранжа в любой точке контактной поверхности и его значениями в узловых точках контакта следующим образом: nc r , z, t k (r , z )k t , (27) k 1 где k r , z – функции формы множителей Лагранжа; nc – общее число узлов, принадлежащих индентору и среде, находящихся в контакте. Смешанная система из 2nI nII обыкновенных дифференциальных уравнений и nc нестрогих алгебраических неравенств для определения составляющих скоростей в узловых точках разбиения континуума и значений множителей Лагранжа в узловых точках индентора и среды, находящихся в контакте, получена после подстановки (25) и (27) в соотношение (24) и выполнения ряда преобразований в виде nI M m 1 nI M m 1 nII M m 1 R I km r ,t I nc a 1 I d vmr 1 I f1 rdzdr I N kI nrI m m rdr , dt m 1 0 n z 0 I R1 ,t h1 R r ,t ( k 1, nI ) R I km I nc a 1 I 1 d vmz 1 I I f 2 rdzdr N k prdr I N kI nzI m m rdr , dt m 1 0 n z 0 I R1 ,t h1 0 II km R2 h2 II nc a d vmr 1 II f1 rdzdr I N kII nrII m m rdr , ( k 1, nII ) dt m 1 0 n z 0 II r ,t 11 nII M m 1 R II km h II nc a 2 2 d vmz 1 II f 2 rdzdr I N kII nzII m m rdr , dt m 1 0 n z 0 II r ,t (28) nI a nI a 1 I I 1 I n I N m nr k vmr rdr n I N mI nzI k vmzI rdr m 1 0 z m 1 0 z nII a nII a 1 II II 1 II II I N m nr k vmr rdr I N mII n zII k vmz rdr 0 m 1 0 n z m 1 0 n z k 1, nc (29) При решении конкретных задач системы уравнений (26) и (28) и нестрогие неравенства (29) дополнены геометрическими соотношениями (14), устанавливающими зависимости между компонентами вектора перемещений и тензора деформаций, и физическими уравнениями (13), описывающими поведение материалов контактирующих объектов в процессах нагружения и разгрузки. Материал индентора задан идеально упругим в силу его относительно высокой жесткости. Для материала среды приняты условие текучести Губера – Мизеса и модель изотропно-кинематического упрочнения, в соответствии с которой пластический потенциал ij определен соотношением (30) f , 0 0 , где 1 ~ rr ~ 2 ~ ~ zz 2 ~ zz ~ rr 2 6~ rz 2 f , (31) 2 ~ pl ( i, j r , , z ) (32) 0 0 Q 1 e b и В выражениях (31) и (32) ~ij ij ij , ij C 1 0 ij ij иpl ijиpl ( i, j r , , z ), (33) ij – компоненты тензора микронапряжений; 0 и 0 – начальное и текущее значения предела текучести; C и – начальное значение модуля кинематического упрочнения, и параметр, характеризующий его убывание с ~ ростом пластических деформаций; Q и b – соответственно величина максимально возможного изменения предела текучести материала среды и параметр, характеризующий быстроту его изменения в зависимости от скорости интенсивности пластических деформаций. В качестве критериев, позволяющих определять переход материала в каждой точке среды из упругого состояния в пластическое, а также различать процессы нагружения и разгрузки при её упругопластическом поведении, приняты следующие: а) в процессе нагружения; б) в процессе разгрузки. d ij 0 ; 0 ; иpl 0 ij d ij 0 ; 0 ; иpl 0 ij (34) Как частный рассмотрен случай абсолютно жесткого индентора. На основе аналитического решения, полученного А. Динником для задачи о 12 статическом сжатии двух соприкасающихся тел при упругом поведении материала, дана оценка погрешности такого допущения. Представление индентора в виде твердого тела позволило сократить число уравнений в системах (26) и (28) до 21 n II и соответственно понизить требования к объему вычислительных ресурсов и уменьшить время счета при получении численных результатов. Конечноэлементная схема численного решения обоих вариантов вариационной задачи реализована с помощью программного комплекса ABAQUS. В силу локальности рассматриваемого процесса деформирования для оптимизации процесса вычислений при разбиении объектов континуума использована нерегулярная сетка: более густая вблизи области контакта и более редкая в областях, удаленных от контактирующих поверхностей. Расчеты проводились для двух типов конечных элементов – треугольных и четырехугольных, и двух типов функций формы – линейных и квадратичных двумя способами на основе методов Эйлера и Ньютона. В качестве начального принято невозмущенное состояние континуума. Точность расчетов при учете динамики нагружения континуума оказалась в значительной степени, зависящей от размера шага вычислений по времени. При его выборе как критерий использовано условие: отличие расчетных данных для двух соседних и всех последующих значений шага по времени не должно превышать 1% по отношению к предыдущему. С учетом динамики нагружения индентора наибольшее значение шага по времени, позволившее получить удовлетворительные результаты, составило 10-6 с. Для определения скоростей движения и перемещений точек континуума по найденным значениям их ускорений ввиду малости шага по времени использован закон равнопеременного движения. В качестве упрочняемого материала рассмотрена углеродистая сталь, а за материал рабочей поверхности индентора принят синтетический (технический) алмаз. Использование квадратичных функций формы обеспечило большую точность, чем линейных, но время счета при этом увеличилось. Процедура вычислений на базе метода Ньютона оказалась предпочтительней как по точности получаемых результатов, так и по затратам машинного времени. Использование сетки, состоящей из треугольных элементов и исходных уравнений на базе метода множителей Лагранжа, дало результат наиболее близкий к упомянутому выше аналитическому решению. В точках наибольших значений интенсивности напряжений отличие расчетных данных от аналитических находилось в пределах 1%. В качестве примера на рис. 3 и 4 приведены графики поведения интенсивности напряжений с течением времени в центральной точке контактной поверхности и в точке её наибольших значений ( r 0, z 10 4 м ) при практически мгновенном возрастании нагрузки, прилагаемой к абсолютно жесткому индентору, от нуля до заданного значения F0 19,62 Н за промежуток времени t 10 6 c . Из них следует, что процесс деформирования носит колебательный характер и наибольшего значения интенсивность напряжений в центральной точке достигает в момент времени превышающий время возрастания прилагаемой к индентору нагрузки до заданного значения почти в 25 раз (рис. 3б). 13 Рис. 3. Поведение интенсивности напряжений в центральной точке контакта ( r 0, z 0 ) с течением времени Рис. 4. Поведение интенсивности напряжений в точке наибольших значений ( r 0, z 110 4 м ) с течением времени Затем амплитуда интенсивности напряжений убывает, колебательный процесс стремится к квазистационарному (рис. 3в) и с течением времени становится похожим на гармонический (рис. 3г). При заданном уровне нагружения интенсивность напряжений достигает максимального значения не в области контакта, а на некотором расстоянии от неё под центром давления (рис. 4), в то время как осевое напряжение zz имеет наибольшее значение на её поверхности в центре контура давления. Поэтому пластические деформации, впервые возникают не на поверхности контакта, а на некотором расстоянии от неё под центром давления, в точке с координатами r 0, z 7,5 10 5 м . Время, по истечении которого интенсивность напряжений впервые достигает предела текучести 0 2 10 8 Па , составляет 2 10 5 c . Зарождаясь в этой внутренней точке среды, область пластических деформаций в течение промежутка времени 2 10 5 4 10 5 c продолжает неравномерно расширяться по всем направлениям, достигая по его истечении предельного объема. Начиная с момента времени 4 10 5 c дальнейшие изменения полей напряжений и деформаций на уровень интенсивности пластических деформаций и форму занимаемой ими области влияния не оказывают. При этом граница области пластических деформаций до поверхности контакта не доходит, а зона наибольших значений их интенсивности смещается относительно точки их зарождения вглубь среды. Существенное влияние на процесс формирования пластической зоны оказывает скорость нагружения индентора до заданного постоянного значения силы F0 19,62 Н . При увеличении промежутка времени нагружения t качественная картина формирования зоны пластических деформаций и её форма сохраняются, а занимаемый её объем и уровень интенсивности пластических деформаций уменьшаются. При возрастании времени нагружения до t 10 4 c и t 10 2 c уровень наибольших значений интенсивности пластических деформаций падает до 14 2,443 10 4 и 1 10 4 соответственно, что более чем в два и более чем в пять раз меньше, чем при нагружении за промежуток времени t 10 6 c . При этом расстояние от поверхности контакта до упрочненного слоя во всех приведенных выше случаях практически остается тем же, равным 5 10 5 м . С увеличением прикладываемого за тот же промежуток времени t 10 6 c к индентору усилия в два раза толщина поверхностного упругого слоя остается практически той же, область существования пластических деформаций растет в основном вглубь среды, точка наибольших установившихся значений интенсивности пластических деформаций смещается вниз и сами значения возрастают в 1,78 раза. Качественный характер поведения интенсивностей напряжений и деформаций с течением времени остается тем же, но вместе с тем появляется едва заметная тенденция к изменению формы области существования пластических деформаций. При дальнейшем увеличении задаваемых значений усилия происходят изменения как количественных, так и качественных характеристик рассматриваемого механического процесса. При значениях усилия в пределах 19,62Н – 117,72Н во всех точках области существования пластических деформаций наблюдается монотонный рост их уровня с течением времени без выхода её границы на поверхность среды. С превышением этого интервала объем занимаемый пластической зоной существенно изменяет свою форму, а сами пластические деформации выходят на поверхность среды в окрестностях границы пятна контакта. Объем занимаемый областью пластических деформаций достигает своего предельного положения в довольно таки короткие промежутки времени порядка 4 14 10 5 c , в связи с чем целесообразно использование импульсного характера силового воздействия в сочетании с последующим линейным перемещением индентора по обрабатываемой поверхности, с выбором при этом длительности импульса и интенсивности силы исходя из промежутка времени необходимого для формирования предельного положения пластической зоны и требуемой толщины упрочненного слоя. При изучении одиночных импульсных силовых воздействий длительностью 10 4 c ÷10 3 c показано, что после прекращения их действия значения интенсивности пластических деформаций стабилизируются, амплитуда колебаний интенсивности напряжений становится пренебрежимо малой. Ввиду ограниченности объема реферата результаты численного анализа поведения среды при воздействии серии импульсов усилия, а также их влияния в сочетании с ультразвуковым воздействием здесь не приводятся. В четвертой главе предложен упрощенный инженерный способ исследования напряженного деформированного состояния среды, в основе которого лежит физико-математическая модель изучаемого процесса, основанная на замене реального контактного воздействия рабочего инструмента на материал обрабатываемой среды, действием эквивалентной ему, виртуальной распределенной по определенному закону нагрузки (рис. 5). 15 Рис. 5. Схема нагружения индентора и среды в рамках предлагаемой модели Движение абсолютно жесткого индентора приведенной массы m под действием приложенной к нему активной силы F (t ) предложено рассматривать отдельно от движения упруго-пластической среды, заменяя её действие на индентор N 1 (t ) и диссипативных N 2 (t ) сил равнодействующими реактивных контактного взаимодействия. При определении равнодействующей реактивных сил учтено, что рабочий орган может совершать только поступательное перемещение, обрабатываемая поверхность плоская и граница зоны контактного взаимодействия имеет форму окружности некоторого радиуса, а также то, что при вдавливании абсолютно жесткой сферы в упругое полупространство радиус границы области контакта a и распределение напряжений по её поверхности q r связаны с перемещением w центральной точки контакта в направлении оси Oz соотношениями: 2E r2 a R w , qr w 1 2 , a R 1 2 (35) С учетом того, что при динамической постановке контактной задачи и упругопластическом поведении материала среды входящие в (35) характеристики контактного взаимодействия являются функциями времени, выражение для равнодействующей сил реакций связи получено в виде N1 t 2 a 3 2 qr, t rdrd cпр w t . (36) 0 0 где cпр 4 R E 3 1 – приведенный коэффициент жесткости материала среды, E – его модуль упругости при отсутствии пластических деформаций или секущий модуль при их наличии, – коэффициент Пуассона. Для учета влияния рассеяния энергии при циклическом упругопластическом деформировании среды на движение индентора принята условная вязкоупругая модель Кельвина – Фойхта с коэффициентом вязкости, энергетически эквивалентным материалу среды в отношении его поглощающих свойств, согласно которой выражение для равнодействующей диссипативных сил представлено в виде (37) N 2 bпр w . 2 16 Здесь bпр Rw0 E 1 – приведенный коэффициент вязкости материала среды, – его коэффициент поглощения энергии, w0 – некоторое статическое смещение, которое получил бы индентор под действием постоянной составляющей приложенной к нему активной силы F0 , а – круговая частота колебаний её переменной составляющей. С учетом принятых допущений и соотношений (37), (38) изучение движения индентора при нулевых начальных условиях сведено к решению следующей краевой задачи Коши: 2 3 2 bпр w cпр w t F t mw (38) w 0 , w 0 при t 0 . Присутствие в левой части уравнения (38) слагаемого, содержащего перемещение центральной точки контакта индентора в дробной степени с четным знаменателем подтверждает необходимость наличия в обязательном порядке в составе равнодействующей активных сил F (t ) стационарной (постоянной) составляющей F0 , обеспечивающей необходимый рабочий натяг между рабочим инструментом и обрабатываемой средой. Найденные путем решения краевой задачи (38) значения перемещения центральной точки рабочей поверхности индентора wt являются исходными данными для определения в каждый момент времени интенсивности распределенной виртуальной эквивалентной нагрузки q r , t и радиуса её приложения at к среде по формулам (35), причем при идеально упругом поведении материала среды задача о движении индентора рассматривается независимо от задачи о напряженно-деформированном состоянии среды. При появлении в среде пластических деформаций обе задачи решаются совместно в связи с необходимостью перерасчета секущего модуля материала среды в задаче о движении индентора на каждом шаге вычислений. Фактическое существование периодических решений «существенно» нелинейной задачи о движении индентора (38), описывающих состояние колебательного равновесия системы в окрестностях некоторого стационарного (статического) положения подтверждено результатами исследования их устойчивости с применением метода фазовой плоскости и теоремы Ляпунова. При исследовании движения индентора обнаружено явление нелинейного многопикового резонанса в диапазоне частот, кратных частоте собственных колебаний соответствующей (38) линеаризованной системы. Задача о напряженно-деформированном состоянии среды в классической постановке аналогично тому, как это было сделано в главах 2 и 3 диссертации, сведена к решению системы обыкновенных дифференциальных уравнений первого порядка для определения скоростей в узловых точках ее разбиения на элементы: nII M m1 II km R2 h2 II d vmr f1II rdzdr , dt 0 II r ,t 17 nII M m1 II km R2 h2 a II d vmz II f 2 rdzdr N kII qr , z, t rdr dt 0 II r ,t 0 (39) Соответствие предложенной упрощенной инженерной модели исходной задаче подтверждено совпадением полученных с ее помощью результатов с аналитическим решением А. Н. Динника в случае статического нагружения индентора при упругом поведении материала среды. Определены пределы применимости предложенной модели с точки зрения сокращения времени счета. Установлено, что упрощенную модель целесообразно использовать при динамическом нагружении и идеально упругом состоянии материалы среды или при статическом нагружении и упругопластическом его поведении. При динамическом нагружении индентора и учете появления пластических деформаций применение упрощенной модели нецелесообразно в виду необходимости многократного перерасчета секущего модуля в приведенном коэффициенте жесткости и, как следствие эквивалентной нагрузки, на каждом временном шаге вычислений. В заключении приведены основные результаты диссертации. В приложении представлены документы, подтверждающие использование результатов работы ООО «Научно-производственное предприятие нестандартных изделий машиностроения» и в учебном процессе. Основные результаты работы: 1) Сформулирована математическая модель процесса поверхностного упрочнения металлического изделия «алмазным карандашом» в виде континуума, состоящего из цилиндрического упругого жесткого индентора со сферической рабочей поверхностью оказывающего силовое воздействие на упругопластическую среду. На её базе в рамках теории течения поставлена динамическая контактная упругопластическая задача о напряженнодеформированном состоянии континуума в виде, позволяющем учесть нарушение первоначальной геометрии деформируемых вследствие контакта поверхностей без наложения ограничений на их форму. 2) На основе принципа Даламбера – Лагранжа с применением методов штрафных функций и множителей Лагранжа построен вариационный аналог поставленной задачи. Вариационные уравнения движения континуума выведены без наложения, каких-либо ограничений на форму деформированных поверхностей контактирующих тел, физические уравнения их материалов и геометрические соотношения. 3) С использованием метода конечных элементов исследование НДС континуума сведено к определению полей скоростей узловых точек путем решения системы из 2nI nII обыкновенных дифференциальных уравнений при использовании метода штрафных функций и смешанной системы, включающей в себя 2nI nII обыкновенных дифференциальных уравнений и nc нестрогих алгебраических неравенств, обеспечивающих безусловный минимум соответствующих вариационных функционалов. 4) Проведен численный анализ напряженно-деформированного состояния упругопластической среды при различных вариантах приложения нагрузки к индентору (статическая, динамическая, импульсная, с приложением 18 ультразвуковых воздействий). На его основе сформулированы рекомендации по выбору силовых воздействий, обеспечивающих при заданном уровне упрочнения сохранение по возможности однородного поверхностного упругого слоя, играющего роль своего рода амортизатора, снижающего негативное влияние динамических нагрузок на готовое изделие в процессе эксплуатации. 5) Разработана упрощенная инженерная расчетная модель изучаемого процесса, позволяющая проводить численные исследования напряженнодеформированного состояния среды с меньшими затратами вычислительных ресурсов. С учетом физических свойств материала среды и возможных вариантов нагружения индентора даны рекомендации по целесообразности её применения с точки зрения уменьшения временных затрат при проведении вычислений. Основные положения диссертации опубликованы в следующих работах: В изданиях, рекомендованных перечнем ВАК РФ 1. Овчинникова Н. В. Модельная задача для исследования процессов поверхностного упрочнения пластическим деформированием c применением ультразвуковых воздействий / Н. В. Овчинникова, Д. Г. Павлов, Ю. В. Чеботаревский // Вестник Саратовского государственного технического университета. – 2007. –№ 4 (28). – Вып. 1. – С. 14-18. 2. Овчинникова Н. В. О некоторых особенностях применения метода конечных элементов к решению контактной задачи на базе программного комплекса ABAQUS / Н. В. Овчинникова, Ю. В. Чеботаревский // Известия Саратовского университета. Новая серия. Серия: Математика. Механика. Информатика. – 2009. – Т. 9. – Вып. 2. – С. 82-88. 3. Овчинникова Н. В. К расчету напряженно-деформированного состояния упругопластического полупространства, контактирующего с абсолютно жестким индентором / Н. В. Овчинникова, Ю. В. Чеботаревский // Вестник Саратовского государственного технического университета. – 2010. – №4(51). – Вып. 3. – С. 10-17. 4. Овчинникова, Н. В. О движении абсолютно жесткого индентора, взаимодействующего с упругопластической средой / Н. В. Овчинникова, Ю. В. Чеботаревский // Известия высших учебных заведений. Поволжский регион. Технические науки. – 2010. – № 3 (15). – С. 151-164. 5. Овчинникова Н. В. Вариационное уравнение движения континуума «жесткий индентор – деформируемая среда» / Н. В. Овчинникова, Ю. В. Чеботаревский // Вестник Саратовского государственного технического университета. – 2011. – №4(60). – Вып. 2. – С. 48-57. 6. Овчинникова Н. В. Применение метода множителей Лагранжа к решению контактной задачи о взаимодействии деформируемой среды с относительно жестким индентором / Н. В. Овчинникова, Ю. В. Чеботаревский // Вестник Саратовского государственного технического университета. – 2012. – №4(68). – Вып. 2. – С. 36-43. 7. Овчинникова Н. В. Применение метода штрафных функций к выводу вариационного уравнения движения континуума «индентор – деформируемая среда» / Н. В. Овчинникова, Ю. В. Чеботаревский // Вестник Самарского государственного технического университета. – Сер. Технические науки. – 2013. – № 1 (37). – С. 127-134. 19 В других изданиях 8. Овчинникова Н. В. К решению задачи о поверхностном упрочнении металлов с применением ультразвука / Н. В. Овчинникова, Д. Г. Павлов, Ю. В. Чеботаревский // Динамические и технологические проблемы механики конструкций и сплошных сред: материалы XV Междунар. симпозиума им. А. Г. Горшкова, Ярополец, 16-20 февраля 2009 г. – М.: Изд-во «Типография «ПАРАДИЗ», 2009. – Т. 1. – С. 121-122. 9. Овчинникова Н. В. Динамика абсолютно жесткого индентора, взаимодействующего с упругопластической средой / Н. В. Овчинникова, В. Э. Джашитов, Ю. В. Чеботаревский // Динамические и технологические проблемы механики конструкций и сплошных сред: материалы XVI Междунар. симпозиума им. А. Г. Горшкова, Ярополец, 15-19 февраля 2010 г. – Чебоксары: ГУП «ИПК «Чувашия», 2010. – Т. 1. – С. 63-65. 10. Овчинникова Н. В. Об одном аналитическом решении задачи о нелинейных колебаниях материальной точки // Инновации и актуальные проблемы техники и технологий: материалы Всерос. науч.-практ. конф. молодых ученых, Саратов, 26-29 октября 2010 г. Саратов: Сарат. гос. техн. ун-т, 2010. – Т. 1. – С. 201-203. 11. Овчинникова Н. В. Расчет напряженно-деформированного состояния упругопластической среды, контактирующей с абсолютно жестким индентором / Н. В. Овчинникова, Ю. В. Чеботаревский // Инновации и актуальные проблемы техники и технологий: материалы Всерос. науч.-практ. конф. молодых ученых, Саратов, 26-29 октября 2010 г. Саратов: Сарат. гос. техн. ун-т, 2010. – Т. 2. – С. 122-125. 12. Овчинникова Н.В. Инженерный способ расчета НДС упругопластической среды, контактирующей с абсолютно жестким индентором / Н. В. Овчинникова, Ю. В. Чеботаревский // Участники школы молодых ученых и программы У.М.Н.И.К.: сб. тр. XXIV Междунар. науч. конф. ММТТ-24. – Саратов, 2011. – С. 234-235. Подписано в печать 17.10.13 Формат 6084 1/16 Бум. офсет. Усл. печ. л. 1,0 Уч.-изд. л. 1,0 Тираж 100 экз. Заказ 160 Бесплатно Саратовский государственный технический университет 410054, Саратов, Политехническая ул., 77 Отпечатано в Издательстве СГТУ. 410054, Саратов, Политехническая ул., 77 Тел.: 24-95-70; 99-87-39, е-mail: [email protected] 20