Ло Ван Хао_Кx - Томский политехнический университет
реклама

ИЗМЕРЕНИЕ РАССТОЯНИЯ ПРИ ПОМОЩИ ИНФРАКРАСНОГО
ИЗЛУЧЕНИЯ
Ло Ван Хао
Томский политехнический университет, г. Томск
Научный руководитель: Нестеренко Т.Г.,к.т.н., доцент
Научные исследования были первой областью, где нашли применение методы
инфракрасной техники. Сначала появилась инфракрасная (ИК) спектроскопия. Уже с
середины XIX века ИК спектроскопия начала использоваться при лабораторных
исследованиях молекулярной структуры веществ и определении органических соединений
по их ИК спектрам. Затем ИК приборы начали применяться в астрономии для измерения
температуры небесных тел по их ИК излучению. Большую роль они сыграли в
исследованиях Солнца. И только в начале XX века некоторые из методов ИК техники
начали использоваться для решения проблем, связанных с промышленностью, медициной
и военным делом.
Сегодня возможности применения методов и приборов ИК техники для научных
исследований настолько многообразны, что даже простое перечисление их заняло бы не
одну страницу. В этой статьи обратимся к применению ИК излучения в измерении
расстояния.
Для измерения расстояния до объекта существуют распространенные оптические
датчики, работающие на методе триангуляции. Это работающие на длине волны от λ =
0,74 мкм до 2 мм, инфракрасные (на английском языке infra-red, сокращенно IR) датчики
расстояния с выходным аналоговым напряжением, производимые фирмой Sharp. Для
использования в лабораторном исследовании, например, датчик GP2D120, имеет источник
инфракрасного света с линзой, который
излучает узкий световой луч. Обладая
свойством отражения, при излучении в
направлении объекта инфракрасный свет
отражается от объекта, и часть отраженного
света возвращается назад через другую линзу на
позиционно-чувствительный фотоэлемент. От
местоположения падающего на позиционночувствительный фотоэлемент луча зависит его
проводимость,
которая
преобразуется
в
напряжение
и
через
аналого-цифровой
преобразователь
микроконтроллера
вычисляется расстояние.
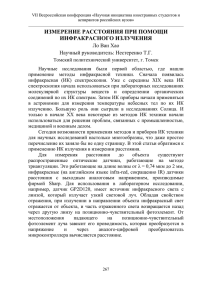
Рисунок1 Отраженные лучи на различных расстояниях
На рисунке 1 изображены отраженные лучи инфракрасного света при различном
расстоянии до объекта. В зависимости от расстояния источника света до объекта, угол
отражения изменяется. Если объект находится в положении P1, то угол отражения луча к
приемнику будет β. В положении P2 угол отражения будет α. При возрастании расстояния
до объекта угол отражения уменьшается (α < β). Углам отражения α и β соответствуют на
приемнике выходные сигналы U2 и U1. Выходной сигнал датчика уменьшается с
увеличением расстояния и увеличивается при увеличении угла отражения (U2<U1).
Выходное напряжение модуля датчика GP2D120, в зависимости от измеряемого
расстояния, достигает до 3 В. Датчик подключается к модулю «Датчики», его выходное
напряжение через усилитель поступает на канал аналого-цифрового преобразователя AVR
атмега16, который преобразует его в цифровой. Здесь микропроцессор выполняет
следующую важную операцию. Работая под программой, микропроцессор обрабатывает
сигнал на выходе АЦП, результат которого временно сохраняется и подается на
устройство индикации Lcd 16x02.
Угол отражения
волны
Напряжение
Датчик
ИК
Датчик GP2D120
Напряжение
Усилитель
Цифровой сигнал
АЦП
Цифр на индикаторе
МП
Микроконтроллер
AVR
УИ
Индикатор LCD
16x02
Рис.2 Схема преобразования значения дистанции
Входное напряжение модуля датчика GP2D120 изменяется в зависимости от
измеренного расстояния. Например, по (datasheet) стандарту производителя, если
полученное напряжение равно 0.5 В, то это соответствует дистанции 26 См, а 1.0 В соответствует 13 См. Зависимость между выходным напряжением и измеренным
расстоянием не является линейной (рис. 3). Поэтому преобразование выходного
напряжения датчика в цифровой код АЦП Атмега 16 с 10-битным значением аналого дигитального преобразователя и опорным напряжением +5 V является сложным.
Однако зависимость между обратной величиной выходного напряжения на выходе АЦП в
виде числа и значением расстояния почти линейная (рис. 4). Благодаря этому можно найти
функцию, отображающую значение расстояния L через числовые данные на выходе АЦП
(функция1).
L=3000/(ADC+20)+1 (См), (1)
где L- расстояние (дистанция);
ADC- значение на выходе АЦП,
определяемое по формуле :
ADC=Vin.
,
где Vin - величина выходного напряжения датчика.
(2)
Рисунок.3 Зависимость расстояния от выходного напряжения датчика.
Рисунок.4 Зависимость расстояния от выходного сигнала АЦП датчика.
Программа с кодом, которая
микроконтроллера AVR Атмега 16.
написана
в
codevision
AVR
для
while (1)
{
ADC = read_adc(0);// читать значение АЦП delay_ms(10);// режим задержки
lcd_gotoxy(0,0);// определение положение на дисплее
lcd_puts("dlina=");// выводить слово "dlina=" на дисплей
lcd_putnum(3000/(ADC+20)+1,7,0); // высчитать и выводить значение дистанции на
дисплей
lcd_puts("cm");// выводить слово "cm" на дисплей
}.
В результате получим таблицу 1 с определенными значениями расстояния в
сантиметрах. И по сравнению с исходными данными модуля датчика погрешность
полученного расстояния находится в пределах не более 1 См.
Таблицу 1: Измеренные расстояния
GP2D120
Данные
Дистанция
GP2D120
Данные
Дистанция
Vout
АЦП
Vout
АЦП
0.4
82
30.41
1.5
307
10.17
0.5
102
25.59
1.6
328
9.62
0.6
123
21.97
1.7
348
9.15
0.7
143
19.40
1.8
369
8.71
0.8
164
17.30
1.9
389
8.33
0.9
184
15.70
2.0
410
7.97
1.0
205
14.33
2.1
430
7.66
1.1
225
13.24
2.2
451
7.36
1.2
246
12.27
2.3
471
7.10
1.3
266
11.48
2.4
492
6.85
1.4
287
10.47
2.5
512
6.63
Литература :
1. Борисов Ю. Инфракрасные излучения .М.: Энергия,1976.
2. Бориков В.Н Микроконтроллеры в измерительных устройствах.