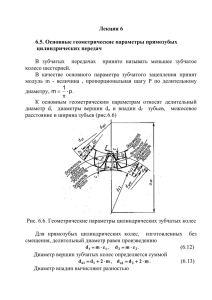
ВВЕДЕНИЕ - ЭТИ СГТУ
advertisement

Министерство образования и науки Российской Федерации Саратовский государственный технический университет Технологический институт Г.А. Саврасов, С.В. Лысенко, А.М. Долгих ДЕТАЛИ МАШИН ЗУБЧАТЫЕ ПЕРЕДАЧИ учебное пособие к курсовому проекту для студентов машиностроительных специальностей 120100, 170500, 170600 Саратов 2008 УДК 621.81.001.66(075-8) ББК 34.42.73 С25 Рецензенты: Кафедра «Технология сельскохозяйственного машиностроения» Саратовского государственного аграрного университета им. Н.И. Вавилова Кандидат технических наук А.Ж. Бабанов. Государственное научно-производственное предприятие «Алмаз». Одобрено Редакционно-издательским советом Саратовского государственного технического университета Саврасов Г.А., Лысенко С.В., Долгих А.М. Детали машин. Зубчатые передачи Сарат. гос. техн. ун-т, 2008. 92 с. JSBN 5-217-00335-9 В учебном пособии рассмотрены наиболее распространенные виды зубчатых передач. На конкретных примерах попазана методика учета нагрузочных факторов при выборе оптимальной схемы механических передач. Предназначено для студентов специальности 120100, 170500, 170600, изучающих курс Детали машин и выполняющих курсовой проект по этой дисциплине, а также инженеров - конструкторов, занятых проектированием электропривода с механическими передачами. УДК 621.81.001.66(075-8) ББК 34.42.73 © Саратовский государственный технический университет, 2008 © Саврасов Г.А., Лысенко С.В., Долгих А.М., 2008 ISBN 5-217-00335-9 ВВЕДЕНИЕ .......................................................................................................................................................... 4 1. КИНЕМАТИЧЕСКИЙ И ДИНАМИЧЕСКИЙ АНАЛИЗ СХЕМЫ МЕХАНИЗМА ............. 6 1.1. ОПРЕДЕЛЕНИЕ ПОЛЕЗНОЙ МОЩНОСТИ ....................................................................................................... 6 1.2 ВЫБОР ДВИГАТЕЛЯ ....................................................................................................................................... 6 1.3 ОПРЕДЕЛЕНИЕ ОБЩЕГО ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ ПРИВОДА .............................................................. 7 1.4 ОПРЕДЕЛЕНИЕ МОМЕНТОВ НАГРУЗКИ НА ВАЛЫ ЗУБЧАТОЙ ПЕРЕДАЧИ ....................................................... 8 2.ВЫБОР ПРОЕКТНЫХ ПАРАМЕТРОВ ЗУБЧАТЫХ ПЕРЕДАЧ ........................................................ 13 2.1. ВЫБОР МОДУЛЯ И ЧИСЛА ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС................................................................................. 13 2.2. ТОЧНОСТЬ ЗУБЧАТЫХ ПЕРЕДАЧ................................................................................................................. 13 2.3. РЕКОМЕНДАЦИИ ПО ВЫБОРУ КПД ЗУБЧАТЫХ ПЕРЕДАЧ ........................................................................... 15 2.4. ВЫБОР МАТЕРИАЛОВ ДЛЯ ЗУБЧАТЫХ КОЛЕС ............................................................................................ 15 2.5. ОПРЕДЕЛЕНИЕ ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ .......................................................................................... 17 3. ЦИЛИНДРИЧЕСКИЕ ПЕРЕДАЧИ .......................................................................................................... 20 3.1. 3.2. 3.3. 3.4. 3.5. ГЕОМЕТРИЧЕСКИЕ РАЗМЕРЫ КОЛЕС .................................................................................................. 20 СИЛЫ В ЗАЦЕПЛЕНИИ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС. ........................................................... 22 РАСЧЕТ НА ИЗГИБ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС .................................................................. 23 РАСЧЕТ НА КОНТАКТНУЮ ВЫНОСЛИВОСТЬ ЦИЛИНДРИЧЕСКИХ ПРЯМОЗУБЫХ ПЕРЕДАЧ. ............ 25 КОСОЗУБЫЕ ЦИЛИНДРИЧЕСКИЕ ПЕРЕДАЧИ ....................................................................................... 26 4. ПЕРЕДАЧИ КОНИЧЕСКИМИ ЗУБЧАТЫМИ КОЛЕСАМИ ............................................................. 30 4.1. ВИДЫ КОНИЧЕСКИХ ПЕРЕДАЧ И ИХ КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ................................................... 30 4.2. РАСЧЕТ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОНИЧЕСКИХ ЗУБЧАТЫХ ПЕРЕДАЧ .................................. 33 4.3. ОПРЕДЕЛЕНИЕ СИЛ В ЗАЦЕПЛЕНИИ КОНИЧЕСКИХ КОЛЕС ................................................................. 37 4.4. РАСЧЕТ КОНИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС НА ПРОЧНОСТЬ .................................................................. 39 5. ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ ......................................................................................................................... 47 5.1. ВИДЫ ЧЕРВЯЧНЫХ ПЕРЕДАЧ И ИХ КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ...................................................... 47 5.2. ВЫБОР МАТЕРИАЛОВ ДЛЯ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ. ................................................................................... 50 5.3. ГЕОМЕТРИЧЕСКИЕ И КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ЧЕРВЯЧНЫХ ПЕРЕДАЧ. ...................................... 54 5.4 РАСЧЕТ НА ПРОЧНОСТЬ ЗУБЬЕВ ЧЕРВЯЧНОГО КОЛЕСА............................................................................... 62 5.5 РЕКОМЕНДАЦИИ ПО ВЫБОРУ КПД И СМАЗКА ЧЕРВЯЧНОЙ ПЕРЕДАЧИ. ..................................................... 68 5.6 ТЕПЛОВОЙ РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ. ............................................................................................... 70 6. ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ ................................................................................................................... 72 6.1. ОБЩИЕ СВЕДЕНИЯ: ХАРАКТЕРИСТИКА, ВИДЫ ПЕРЕДАЧ, ОБЛАСТИ НАЗНАЧЕНИЯ И ПРИМЕНЕНИЯ. ........ 72 6.2. КИНЕМАТИКА ПЛАНЕТАРНЫХ ПЕРЕДАЧ.................................................................................................... 74 6.3. КПД ПЛАНЕТАРНЫХ ПЕРЕДАЧ. ................................................................................................................. 76 6.4. СМАЗКА ПЛАНЕТАРНЫХ ПЕРЕДАЧ. ............................................................................................................ 79 6.5. РАСЧЕТ ЗУБЧАТЫХ ЗАЦЕПЛЕНИЙ. ............................................................................................................. 80 6.6. ПРИМЕР РАСЧЕТА ПЛАНЕТАРНОГО РЕДУКТОРА ........................................................................................ 84 ЛИТЕРАТУРА ................................................................................................................................................... 91 3 ВВЕДЕНИЕ Зубчатые передачи (редукторы) являются составной частью большинства приводных устройств, широко применяемых в промышленных устройствах: транспортерах, конвейерах, смесителях, питателях как штучными заготовками, так и сыпучими веществами, а также зубчатые передачи применяются в приводах станков, грузоподъемных машинах и т.д. Выполнение курсового проекта по расчету зубчатых передач – первая самостоятельная творческая работа, в ходе которой у студентов, не имеющих опыта проектирования, возникают трудности, связанные с установлением последовательности выполнения расчетов, выбора материалов, характера термической обработки заготовок деталей, установления значений расчетных коэффициентов в расчетных формулах и пр. Решение этих вопросов отнимает много времени у студентов. Цель настоящих методических указаний – изложить учебный материал в форме, наиболее удобной для использования при проектировании, помочь студентам в выполнении проекта с использованием минимального справочного материала. В излагаемой ниже методике расчета применяются следующие условные обозначения: Т – крутящий момент, Н∙м; Ft – окружная сила, Н; Fr – радиальная сила, Н; Fa – осевая сила, Н; u – передаточное число механических передач; Р – мощность, Вт; N – число циклов перемены напряжений; [σНР ]– допускаемое контактное напряжение, Па; [σFP ]– допускаемое напряжение при расчете на выносливость зубьев по изгибу, Па; σH – расчетное контактное напряжение, Па; σF – расчетное напряжение изгиба, Па; n – частота вращения, об/мин; aw – межосевое расстояние, мм; d – диаметр делительной окружности, мм; da – диаметр окружности вершин зубьев, мм; df – диаметр окружности впадин зубьев, мм; dw – диаметр начальной окружности, мм ; db – диаметр основной окружности, мм; wHt, wFt – удельная расчетная окружная сила, Н/мм; wHv, wFv – удельная окружная динамическая сила, Н/мм; Re – внешнее конусное расстояние, мм; 4 m – окружной модуль зубьев, мм; mn – окружной модуль в нормальном сечении косозубого колеса, мм; mt – окружной модуль в торцевом сечении косозубого колеса, мм; mnm – нормальный модуль в среднем сечении конического колеса, мм; mtm – модуль в среднем нормальном сечении зуба конического колеса, мм; mte – модуль в нормальном сечении по большому торцу зуба конического колеса, мм; de – внешний делительный диаметр, мм; dm – средний делительный диаметр, мм. 5 1. Кинематический и динамический анализ схемы механизма Целью кинематического и динамического анализа схемы механизма является обеспечение заданного закона движения исполнительного звена путем подбора определенных типов передач с соответствующими передаточными отношениями, а также определение коэффициента полезного действия механизма, расчет мощности двигателя, выбор двигателя, определение скорости движения характерных промежуточных звеньев, усилий в звеньях и моментов нагрузки на валах передачи. 1.1. Определение полезной мощности Исполнительное звено привода может совершать вращательное или поступательное движение.Оно приводит в движение рабочий орган машины. Основанием для проектирования привода являются параметры нагрузки рабочего органа машины, например, для ленточных и цепных конвейеров параметрами нагрузки являются тяговое усилие F (H) и линейная скорость V (м/сек) движения ленты или цепи конвейера. Для винтового подъемника параметрами нагрузки являются осевое усилие F (H) на винте и линейная скорость V (м/сек) перемещения гайки. Для мельниц, смесителей, транспортных устройств с рабочим органом в виде шнека параметрами нагрузки являются крутящий момент Т (Нм) и угловая скорость w (1/сек) или число оборотов n (об/мин) на валу рабочего органа. В некоторых заданиях на проектирование полезная мощность Рп на выходном звене привода может быть непосредственно задана . По заданному тяговому усилию F и линейной скорости V полезная мощность Рп на ведомом валу определяется Рп (Вт) = F V (Нм/сек) ( 1.1 ) По заданному крутящему моменту Т (Нм) на валу и угловой скорости w (1/сек) полезная мощность Рп (Вт) определится Рп (Вт) = Т w (Нм/сек) ( 1.2 ) Если вместо угловой скорости движения выходного ведомого вала задана его частота движения n (об/мин), то полезная мощность Рп определяется по формуле Рп (Вт) = Т n / 30 (Нмоб/мин) ( 1.3 ) 1.2 Выбор двигателя Необходимая мощность двигателя определяется по выражению Рдв (Вт) = Рп / , 6 (1.4 ) где : Р дв (Вт) – мощность двигателя, Рп (Вт) – полезная мощность, - общий коэффициент полезного действия механизма. Обычно в электроприводах передачи и узлы механизма располагаются последовательно. В этом случае общий к.п.д. механизма равен произведению к.п.д. отдельных элементов, составляющих привод ( ременные, цепные передачи, муфты, соединяющие валы механизма, зубчатые передачи). = 123 I , ( 1.5 ) где : 1, 2, …I - к.п.д. отдельных ступеней передачи. Номинальная мощность двигателя принимается Рн Рдв в соответствии с ближайшим большим значением. Если предусматривается работа механизма на открытом воздухе в зимних условиях, то необходимо предусмотреть запас мощности двигателя, так как при загустевании смазки и замерзании ремней, при наличии ременных передач, пускового момента двигателя может оказаться недостаточно для трогания механизма в момент пуска. Коэффициент запаса мощности для подобных случаев равен Кз = 1.5. В электроприводах общего назначения обычно используются асинхронные трехфазные электродвигатели закрытые, обдуваемые серии 4А по ГОСТ 19523-81. Пусковой момент Тп этих двигателей равен Тп = 1.7 Тн. Здесь Тн – движущий момент, соответствующий номинальной паспортной мощности электродвигателя. Таким образом, с учетом коэффициент Кз запаса, запас мощности для привода холодного механизма составит 1.5∙1.7 = 2.55, что вполне, как показывает практика эксплуатации механизмов в холодных климатических условиях, достаточно для пуска. Число оборотов вала двигателя следует определить с учетом коэффициента скольжения в зависимости от синхронной скорости движения вала двигателя . 1.3 Определение общего передаточного отношения привода Общее передаточное число привода определится как отношение u = nДВ / n ( 1.6 ) где : nДВ и n - частота вращения двигателя и последнего ведомого вала вала передачи, (об/мин). Для многоступенчатых передач u = u1∙u2∙u3 …, ( 1.7 ) где : u1, u2, u3 - передаточные числа отдельных ступеней. Практикой выработаны следующие рекомендации для механического привода для средних и тяжелых нагрузок: 7 u 5 – одноступенчатые передачи, u 20 – двухступенчатые передачи, u 80 – трехступенчатые передачи. В случаях ручного привода, а также там, где предусматривается консистентная смазка при не высоких нагрузках механизма, можно выбрать повышенные передаточные числа в соответствии со значениями передаточных чисел стандартного ряда. При разбивке передаточного числа редуктора по зубчатым передачам необходимо учитывать предполагаемое устройство механизма. В редукторах с валами, расположенными в одной плоскости, следует стремиться к более равномерному заполнению колесами корпуса и улучшению условий смазки передач. Это условие достигается различной величиной модуля зубчатых пар, а также тем, что в двухступенчатых цилиндрических редукторах рекомендуется принимать передаточное число u1 = (1.2 1.25) u . В трехступенчатых редукторах u1u2u3 примерно на 30%. Для соосных двухсупенчатых редукторов, как вариант, может быть выбрано u1 = u2 = u . В общем случае компактность механизма редуктора и равномерная загрузка материала колес достигается выбором разных модулей и передаточных чисел в ступенях передачи, что требует соответствующих оптимизационных расчетов. Оптимальная конструкция механизма передач параллельно с проведением расчетов отрабатывается с помощью эскизного проектирования отдельных узлов устройства и их взаимного расположения. 1.4 Определение моментов нагрузки на валы зубчатой передачи Соотношение между моментами нагрузки в на валах передачи Т1 = Т2 , u (1.8) где : Т1 и Т2 – соответственно моменты нагрузки на валах шестерни и колеса, - коэффициент полезного действия зубчатой передачи с учетом потерь в подшипниках опор вала ведомого колеса. Редукторы являются передаточными механизмами с функцией понижения частоты вращения валов от входного вала, который чаще всего бывает связан с двигателем, к выходному, соединенному с исполнительным устройством. Определение моментов нагрузки на валах передачи рассмотрим на примерах электроприводов конвейеров. П р и м е р 1. Электропривод ленточного конвейера, построенного по схеме рис. 1.1. Передачи электропривода ленточного конвейера включают 8 в себя быстроходную ступень в виде передачи цилиндрическими колесами z1 – z2, червячную передачу z3 – z4, цепную передачу со звездочками z5 – z6. Таким образом передача движения от электродвигателя к приводному барабану диаметром D является трехступенчатой. Обозначим передаточные числа ступеней u1 = z2/z1, u2 = z4/z3, u3 = z6/z5. Моменты нагрузки на валах передачи: Т1 – момент нагрузки на быстроходном валу редуктора ( на этом валу стоит шестерня z1); Т2 – момент нагрузки на втором (промежуточном) валу (в подобных редукторах это червячный вал) на него ставится колесо z2; Т3 – момент нагрузки на выходном (тихоходном) валу редуктора (на этом валу установлены червячное колесо z4 и ведущая звездочка z5 цепной передачи). Z1 Z4 Z5 Z6 Ç D F V Ì Z2 Z3 Рис.1.1 Обозначим ТБ – момент нагрузки на валу приводного барабана конвейера. В данном случае заданы нагрузка F (Н) на ленту конвейера и скорость V (м/сек) движения конвейера. Момент нагрузки ТБ на валу приводного барабана конвейера определяется ТБ (Н∙м)= F∙D/2. Обозначим : η1 – к.п.д. цилиндрической передачи; η2 – к.п.д. червячной передачи; η3 – к.п.д. цепной передачи. Обозначенные к.п.д. выбираются в проектных расчетах в соответствии с рекомендациями [1,2.3] и включают в себя потери на трение в подшипниковых опорах соответствующих валов. В соответствии с формулой (1.1) моменты нагрузки в механизме привода ленточного конвейера (рис.1.1) определятся: ТБ(Н∙м) = F(Н)∙D(м)/2 – момент на валу приводного барабана (ведомой звездочки z6); Т3 = ТБ/u3∙η3 – момент на тихоходном валу редуктора ( этот момент является нагрузкой для червячного колеса z4 и для звездочки z5); Т2 = Т3/u2∙η2 – момент нагрузки на промежуточном валу редуктора (он является также нагрузкой для червяка z3 и для зубчатого колеса z2); Т1 = Т2/u1∙η1 – момент нагрузки быстроходного вала редуктора ( момент нагрузки шестерни z1 ); ТДВ = Т1 / ηМ – момент нагрузки на валу электродвигателя. Здесь ηМ – к.п.д. соединительной муфты (выбирается также в соответствии с рекомендациями [1, 2, 3]). 9 В данном примере общее передаточное число передач привода определяется u = nДВ/nБ, где : nДВ – частота вращения вала двигателя, nБ (об/мин) = 60∙V(м/сек)/π∙D(м) – частота вращения вала приводного барабана конвейера. Общее передаточное отношение «u» механизма передач в соответствии со схемой привода ленточного конвейера равно u = u1∙u2∙u3. П р и м е р 2. Цепные конвейеры приводятся в движение ведущей звездочкой, основными расчетными параметрами которой являются шаг цепи t (мм) и число зубьев zЗВ. Рассмотрим определение кинематических и динамических параметров электропривода цепного конвейера в соответствии со схемой, показанной на рис. 1.2. Z1 Ì Z4 Z2 Z3 Ï ëî ñêî ñò ü õî äà öåï è êî í âåéåðà Рис.1.2. Механизм привода цепного конвейера состоит из электродвигателя и коническо-цилиндрического редуктора, соединенных между собой муфтой упругого типа. На выходной вал редуктора насаживается ведущая звездочка цепного конвейера. Техническое задание на проектирование привода конвейера включает в себя : F = 3.8∙103 Н – нагрузка на цепь конвейера; V = 0.8 м/сек – скорость движения конвейера; t = 100 мм – шаг цепи конвейера; zЗВ = 8 – число зубьев приводной звездочки конвейера. Согласно данных задания определим полезную Р П мощность. м Р П F V 3.8 10 3 H 0.8 3.04 10 3 Вт . с 10 Мощность Рдв двигателя определяется с помощью полезной Р П мощности и к.п.д. электропривода. 1 2 3 4 53 , где: 1 4 0,965 -рекомендуемое значение к.п.д. соединительных муфт; 2 0,98 - к.п.д. цилиндрической зубчатой передачи; 3 0,97 - к.п.д. конической передачи; 5 0,985 - к.п.д. подшипниковых опор валов. 0,965 0,98 0,97 0,9853 0,846. Р 3.04 10 3 Рдв п 3.59 10 3 Вт . 0,846 Выбираем двигатель асинхронный трехфазный в закрытом обдуваемом исполнении типа 4А112МВ6У3 мощностью N дв 4кВт , числом оборотов n дв 950 об мин с учетом скольжения ротора двигателя по отношению к синхронной частоте вращения магнитного потока статора. Согласно принятой к проектированию кинематической схеме привода передаточное отношение «u» определяется передаточным отношением 2-х ступенчатого коническо-цилиндрического редуктора. u u1 u 2 z 2 n1 -передаточное отношение цилиндрической передачи, z1 n 2 где: n1 -число оборотов 1-го вала редуктора (входного); n 2 -число оборотов промежуточного вала редуктора; z1; z 2 -числа зубьев соответственно u1 конического колеса и шестерни. z n u2 4 2 , z3 n3 где: n 3 -число оборотов выходного вала редуктора; z 4 ; z 3 -числа зубьев соответственно цилиндрического колеса и шестерни. В данном механизме n1 nдв Общее передаточное отношение u редуктора равно u u1 u 2 , n дв 950 об мин ,определим расчетное число nЗВР оборотов ведущей звездочки конвейера nЗВР = 60*V/*dЗВ = 60*0.8/3.14*0.261 = 58.6 об/мин, здесь диаметр dЗВ звездочки равен d ЗВ t 100 261мм 0.261м 0 180 180 0 sin sin z ЗВ 8 Следовательно u=u1∙u2= nДВ/nЗВР = 950/58.6=16.2 11 В соответствии с ГОСТ 2185-83 выбираем передаточные числа ступеней редуктора из предпочтительного 1-го ряда: u1 4 ; u2 4 Тогда: u u1 u2 4 4 16 . Определим моменты нагрузки на валах механизма. Момент Т3 нагрузки на выходном валу Т3=dЗВ*F/2 = 3.8*103*0.261/2=496 Нм. Момент нагрузки на промежуточном (втором) валу передачи Т2 Т3 496 128.46Н м . u 2 3 5 4 0,98 0,985 Этот момент будет также являться нагрузкой для конического колеса z2 и шестерни z3 цилиндрической передачи. Момент нагрузки на первом валу (момент нагрузки для конической шестерни z1) Т1 Т2 u1 2 5 128.46 33.6Н м . 4 0.97 0,985 Определим частоту вращения валов передачи. n1 = nДВ = 950 об/мин – частота вращения первого (быстроходного) вала. n2 = n1/u1 = 950/4 = 237.5 об/мин – частота вращения промежуточного (второго) вала. n3 = nЗВД = 237.5/4 = 59.375 об/мин – частота вращения третьего (тихоходного) вала, на котором стоит приводная звездочка цепного конвейера. Это значение числа оборотов третьего вала незначительно отличается от требуемого числа оборотов приводной звездочки. В таких случаях вычисляется погрешность δ% выходного параметра, т.е. частоты вращения приводной звездочки. δ% = n ЗВД n ЗВР n ЗВД 100% 59.375 58.6 100% 1.3% 59.375 Здесь: nЗВД – действительная частота вращения приводной звездочки конвейера в соответствии с принятыми значениями передаточных чисел u1 и u2, соответственно nЗВР – расчетная частота вращения приводной звездочки. Вычисленное значение погрешности движения механизма сравнивается с допускаемой погрешностью в соответствии с техническим заданием. Для механизмов общего применения допускаемая погрешность составляет 4%. Если техническое задание на проектирование механизма предусматривает более точный режим скорости движения исполнительного органа, то эта задача решается соответствующим подбором передаточных чисел ступеней передачи. 12 2.Выбор проектных параметров зубчатых передач 2.1. Выбор модуля и числа зубьев зубчатых колес Модуль m зубчатого колеса является основным стандартизующим параметром при расчете геометрических параметров передачи. Модуль m вычисляется m = рt/π, где рt – расстояние между одноименными сторонами двух соседних зубьев по дуге делительной окружности. Модули эвольвентных зубчатых колес стандартизованы. Нормальные модули m эвольвентных цилиндрических зубчатых колес и внешние модули mte конических прямозубых колес в соответствии с ГОСТ 9563-80 приведены в таблице 2.1. 1-й ряд 2-й ряд 1 1.125 1.25 1.5 1.375 1.75 2 2.25 2.5 3 2.75 3.5 4 4.5 5 5.5 6 7 Таблица 2.1. 8 9 При выборе модуля передачи первый ряд следует предпочитать второму. Минимальное число зубьев, при котором не происходит подрезание ножки зуба zmin = 17. Рекомендуется принимать число зубьев шестерни z1 = zmin +(3…5). С увеличением окружной скорости следует увеличивать число зубьев. При проектировании редукторов силовых передач z1 = 20….30. 2.2. Точность зубчатых передач Погрешность в изготовлении зубьев приводит к повышенному износу и шуму во время работы и преждевременному разрушению передачи; поэтому точность изготовления передачи регламентируется стандартом ГОСТ 1643-81. Стандарт регламентирует нормы кинематической точности, плавности работы, контакта зубьев, а также боковой зазор. Кинематическая точность характеризуется полной погрешностью углов поворота сцепляющихся колес за один оборот. Кинематическая точность существенно важна для делительных цепей, передач, соединенных с большими массами, и быстроходных силовых передач из-за опасности резонансных и других колебаний и шума. Эта погрешность связана с накопленной погрешностью шага и эксцентриситета зубчатого венца относительно действительной оси вращения зубчатого колеса. Плавность работы передач характеризуется многократно повторяющимися за оборот колеса колебаниями скорости, вызывающие динамические нагрузки, колебания (в том числе резонансные) и шум. Существенно влияет на работоспособность силовых быстроходных передач. Эта погрешность определяется ошибками шага и профиля. 13 Пятно контакта зубьев характеризует концентрацию нагрузки на зубьях. Существенно влияет на работоспособность силовых передач. Боковой зазор между неработающими поверхностями зубьев сопряженных зубчатых колес предотвращает заклинивание от различных причин (температурная деформация, погрешности изготовления и сборки и пр.). Эта погрешность влияет на работоспособность передачи при крутильных колебаниях валов, а также в реверсируемых передачах. Шероховатость рабочих поверхностей зубьев влияет на износостойкость передачи. В стандарте ГОСТ 1643-81 предусмотрены 12 степеней точности, обозначаемых в порядке убывания точности передач от 1 до 12. В то же время настоящим стандартом допуски и отклонения стандартизованы для степеней точности от 3 до 12. В широкой практике используются: для передач повышенной точности – 6-я степень; передачи нормальной точности – 7-я степень; передачи механизмов общепромышленного использования, например, редукторы транспортных машин, конвейеров и пр. – 8-я степень; грубые передачи, в том числе, изготовляемые штамповкой из пластмасс – 9-я степень точности. Поскольку износ и усталостное разрушение зубьев передачи зависит от скоростного режима, то степень точности изготовления зубчатых колес назначают в зависимости от окружной скорости (м/сек), таблица 2.2. Степень точности по ГОСТ 1643-81 6-я (передачи повышенной точности) 7-я (передачи нормальной точности) 8-я (передачи пониженной точности) 9-я (передачи грубые) Таблица 2.2. Окружная скорость колес, Область применения м/сек, не более прямозубые Косозубые 20 30 Скоростные передачи, делительные механизмы 12 20 Передачи, работающие с повышенными нагрузками и умеренными скоростями или наоборот 6 10 Передачи общего машиностроения 3 5 Тихоходные передачи машин низкой точности Независимо от степени точности стандартизованы следующие виды сопряжения колес в порядке увеличения бокового зазора : Н,Е,Д,С,В,А. В сопряжении Н минимальный зазор равен нулю. Обычно рекомендуют сопряжение В для передач редукторов общего промышленного назначения. Для реверсируемых передач, с целью уменьшения энергии соударения в зацеплении и шума передачи рекомендуются сопряжения с меньшим зазором (Д, С). 14 Примеры обозначения точности передачи : 8 – В - обозначение точности передачи, выполняемой по 8-й степени точности с нормальным боковым зазором; 7-8-8-Д - обозначение точности передачи, выполняемой по 7-й степени кинематической точности, 8-й степени норм плавности, пятна контакта и уменьшенным боковым зазором. 2.3. Рекомендации по выбору КПД зубчатых передач Коэффициент полезного действия передачи (КПД) необходим для расчета значений моментов нагрузки на валы механизма, а также для выбора двигателя с учетом потерь мощности в передачах. Средние значения КПД одной пары колес при передаче полной мощности без учета потерь в подшипниках и уплотнительных устройствах выходных концов валов приведены в таблице 2.3. Передачи Цилиндрические конические КПД закрытой передачи при степени точности 6; 7 0.99 – 0.98 0.98 – 0.97 Таблица 2.3. КПД открытой передачи при степени точности 8 9 0.97 0.96 0.96 0.95 В зубчатых механизмах каждый вал имеет опоры, как правило, в виде двух подшипников с телами качения. КПД одной пары подшипников η П принимают в проектных расчетах при передаче полной мощности равным ηП = 0.985. 2.4. Выбор материалов для зубчатых колес При выборе материалов для изготовления зубчатых колес необходимо обеспечить прочность зубьев на изгиб, стойкость поверхностных слоев по контактным напряжениям и сопротивление заеданиям. Основными материалами являются термически обрабатываемые стали. Допускаемые контактные напряжения в зубьях пропорциональны твердости материалов, а несущая способность передач по контактной прочности пропорциональна квадрату твердости. С целью достижения высокой долговечности нагруженных силовых передач целесообразно применение для зубчатых колес сталей, закаливаемых до значительной твердости. В массовом и крупносерийном производстве применяют исключительно зубчатые колеса с высокой твердостью зубьев, которые подвергаются отделочным операциям после термической обработки. Основным видом термической обработки остается объемная закалка. Колеса изготовляют из распространенной стали 40Х (в ответственных случаях применяют 40ХН, 40ХВН). Однако объемная закалка не сохраняет вязкую сердцевину при высокой твердости поверхности. Обычно твер15 дость поверхности 45…55 HRC. Передачи, изготовленные таким образом, склонны к выкрашиванию зубьев колес при прогибе валов, динамических нагрузках, погрешностях сборки. Более работоспособными оказываются зубчатые колеса, изготовленные с применением поверхностной закалки и химико-термических методов упрочнения (цементация, азотирование). В зависимости от твердости рабочей поверхности стальные зубчатые колеса делятся на две группы: колеса с твердостью по шкале Бринелля НВ<350 и НВ>350. Первые нормализованные, улучшенные или закаленные применяются в мало- и средненагруженных передачах. Термообработку (нормализация или улучшение) проводится до нарезания зубьев. В этом случае при применении зуборезного инструмента, выполненного из быстрорежущей стали или твердого сплава, получается высокая чистота рабочей поверхности зубьев. Колеса с твердостью НВ>350 применяют в тяжело нагруженных передачах. Высокой твердости достигают с помощью поверхностной или объемной закалки. Механические характеристики сталей широко применяемых для зубчатых колес приведены в таблице 2.4. Диаметр заготовки, мм 3 150-400 100-200 100-160 150-300 60 200 Любой 90-120 180-250 250-350 До 120 120-150 180-250 220-315 120 200 3 200 σВ σТ σ -1 4 610 690 890 930 940 740 520 730 690 660 930 850 780 800 930 920 4 980 5 320 390 690 740 740 490 295 390 340 300 690 590 490 630 690 750 5 786 6 - 225 315 295 285 420 395 370 375 420 415 6 440 Таблица 2.4. НВ для поверхности 7 190-229 241-285 215-229 235-291 190-241 220-260 147 194-222 180-207 180-195 260-282 240-270 215-243 235-262 269-302 48…50* 7 26…30* 200 1050 900 460 850-900 20Х 120 780 640 370 12ХН3А 200 1000 800 445 * Указано значение твердости в единицах шкалы Роквелла (НRC). 16 50…63* 56…63* Сталь Термообработка 1 50Г 40Л 45 2 Нормализация Улучшение Нормализация Улучшение Нормализация Улучшение Нормализация Улучшение 40Х Улучшение 30ХГСА 35Х 1 40ХНМА 38ХМЮА Поверхностная закалка 2 Мягкое азотирование Жесткое азотирование Цементация - σВ - временное сопротивление разрыву; σТ - предел текучести; σ -1 - предел выносливости. 2.5. Определение допускаемых напряжений Геометрические параметры быстроходных силовых передач определяются в первую очередь по действию контактных напряжений. Проверочный расчет проводится по допускаемым напряжениям изгиба. Допускаемое контактное напряжение [σH] при проектном расчете на контактную выносливость определяют по формуле [σH] = σH lim b KHLZRZv/SH; ( 2.1 ) здесь σH lim b – предел контактной выносливости при базовом числе циклов (таблица 2.5); KHL – коэффициент долговечности; ZR – коэффициент, учитывающий шероховатость сопряженных поверхностей зубьев; Zv – коэффициент, учитывающий окружную скорость; SH – коэффициент безопасности ( для колес из сталей, подвергнутых нормализации и улучшению или объемной закалке, SH = 1,1…1,2; для колес с поверхностным упрочнением зубьев SH = 1,2…1,3). NHO ì ëí . öèêëî â 100 60 40 30 20 15 10 200 300 400 500 Í Рис. 2.1. Коэффициент долговечности KHL = 6 N HO / N HE , ( 2.2 ) где : NHO – базовое число циклов перемены напряжений, зависящее от твердости материала [на рис.2.1 показана зависимость NHO от твердости материала по шкале Бринелля (НВ)]; NHE – эквивалентное число циклов перемены напряжений за время работы передачи NHE = 60∙c∙n∙t = 572,4∙w∙t, ( 2.3 ) 17 здесь с – число одинаковых зубчатых колес, сцепляющихся с рассчитываемым зубчатым колесом; n – частота вращения, (об/мин); t – число часов работы под нагрузкой; w – угловая скорость (рад/сек). Зная NHO и NHE , можно определить КHL по рис. 2.2. KHL 2.2 2.0 1.8 1.6 1.4 1.2 1.0 10 -2 10 -1 2 3 6 10 NHE / NHO Рис. 2.2. В расчетах на выносливость допускаемое напряжение при изгибе определяют по формуле [σF] = σ оF lim b KFLKFgKFdKFc/SF ( 2.4 ) Таблица 2.5. Термообработка Средняя твердость Сталь σH lim b (МПа) зубьев Нормализация или улучшение Объемная закалка Поверхностная закалка Цементация и нитроцементация Азотирование поверхности зубьев НВ≤ 350 HRC 38…50 HRC 40…50 HRC 56 HV 550…750 2(HB) + 70 Углеродистая и легированная Легированная с низким содержанием углерода 18 (HRC) + 150 17 (HRC) + 200 23 (HRC) 1050 В формуле ( 2.4 ) : σ оF lim b - предел выносливости зубьев при изгибе при базовом числе циклов перемены напряжений (таблица 2.6); KFL – коэффициент долговечности; KFg – коэффициент, учитывающий влияние шлифования переходной поверхности зуба ( для зубьев с нешлифованной поверхностью зуба KFg = 1 ); KFd – коэффициент, учитывающий влияние упрочнения деформационного или электрохимического типа ( при отсутствии деформационного или электрохимического упрочнения KFd = 1); KFc – коэффициент, учитывающий влияние двустороннего приложения нагрузки (при одностороннем приложении нагрузки KFc = 1, при двусто18 роннем – KFc = 0,7…0,8); SF – коэффициент безопасности ( принимают в пределах 1,7…2,2, причем большие значения для литых заготовок). Произведение коэффициентов KFg, KFd, KFc можно принимать равным 1. Для колес из материалов с НВ ≤ 350 коэффициент долговечности равен KFL = 6 N FO / N FE , ( 2.5 ) Причем: 1 ≤ KFL ≤ 2, а NFO = 4∙106 для всех сталей. При НВ > 350 коэффициент KFL = 9 N FO / N FL и 1 ≤ KFL ≤ 1,6. При KFL < 1 принимают KFL = 1. Таблица 2.6. Сталь Термообработка 40, 45, 50, Нормализация, 40Х, 40ХН, улучшение 40ХФА 40Х, 40ХН, Объемная за40ХФА калка 40ХН Закалка при 40ХН2МА нагреве ТВЧ 20ХН Цементация 20ХН2М 12ХН2 12ХН3А Стали, соАзотирование держащие алюминий * - твердость сердцевины. Твердость зубьев На поверхВ сердцености вине основания Σ оF lim b МПа SF 180 – 350 НВ 1,8(НВ) 1,76 45…55 HRC 500 – 550 1,8 48…58 HRC 25…35 HRC 57…63 HRC 700 1,75 950 1,55 300+1.2(HRC*) 1,75 HV 700…950 HRC 24…40 19 3. Цилиндрические передачи Передаточное отношение i = w1/w2 = n1/n2 = dw1/dw2 = z2/z1. Отношение чисел зубьев z2/z1 называют передаточным числом (u). Для стандартных редукторов (ГОСТ 9563-60) значения u приняты в соответствии со стандартным рядом чисел, причем 1-й ряд предпочтительней 2-го: 1-й ряд………….1 1,25 1,6 2,0 2,5 3,15 4,0 5,0 6,3 8,0 2-й ряд………….1,12 1,4 1,8 2,24 2,8 3,55 4,5 5,6 7,1 9,0 При установлении значений z1 и z2 уточняют передаточное число. Оно не должно отличаться от номинального более чем на 2,5%. при u ≤ 4,5, если u > 4,5 допускается отклонение передаточного числа 4%. Цилиндрические и конические передачи применяются широко в разнообразных силовых и не силовых механизмах, поэтому в практике проектирования встречаются передачи с передаточными числами от 1 до 11, при передаточном числе u < 1 ведомое колесо вращается быстрее ведущего. Такие передачи называют мультипликаторами. В редукторных передачах скорость вращения валов уменьшается от ведущего звена к ведомому. При больших передаточных числах в одной ступени резко возрастают габариты механизма в целом, поэтому в силовых передачах выбирают передаточное число одной ступени u ≤ 5. 3.1. Геометрические размеры колес Диаметр делительной и начальной окружности, если они совпадают, d = dw = m∙z ( 3.1 ) Диаметр окружности вершин d = d + 2h a = d + 2m ( 3.2 ) Диаметр окружности впадин df = d – 2hf = d – 2,5m ( 3.3 ) Межосевое расстояние передачи aw = (d1 + d2)/2 = d1(u +1)/2 = m(z1 + z2)/2 ( 3.4 ) Ширина венца колеса b2 = bd∙d2 ( 3.5 ) Ширина венца шестерни b1 = b2 + (4…5) mm ( 3.6 ) Конструктивное оформление зубчатых колес показано на рис. 5, 6. На рис. 3.1 показано расположение зубчатого колеса 1 и шестерни 2 на валу 4, а также подшипниковые опоры вала. В данном случае подшипники смазываются пластической смазкой поэтому они защищены от вытекания смазки и от попадания масляного тумана мазеудерживающими шайбами 5. 20 1 3 2 5 4 6 Рис. 3.1. На валу также располагается звездочка 3 цепного привода масляного насоса. Передача момента от зубчатого колеса к валу и от вала к шестерне осуществляется с помощью шпоночного соединения (на рис. 3.1 – шпонка 6). 5 6.3 1.25 1• 45Å 75 5 31 Ç 40 Ç 55- 0,15 Ç 30- 0,02 Ç 39,8 Ç 40- 0,05 44 1.25 0,5 1.25 1.25 Ç 28- 0,021 4 20 19 2,5• 45Å 145 50 25 220 Рис. 3.2. 21 50 2,5• 45Å 2.5 20 0,05 Rz20 10 +0 ,35 2,5 +0 ,0 2 5 Ç 35 Í7 +0 ,35 4• 45Å 2 ô àñêè Ç 50 4î ò â ÷åðåç 90 +0 ,0 4 39,5 Ç 84- 0,15 2• 45Å 39,5 Рис. 3.3. 2.5 10 Js9 Ç 35 H7 Ç 50 Ç 58 Ç 120 Ç 205- 0,25 Ç 180 6.3 20 2.5 40 î Рис. 3.4. На рис. 3.2 показан быстроходный вал цилиндрического редуктора, на котором сформирована шестерня. На рис. 3.3 и рис. 3.4 показаны: зубчатое колесо и шестерня, которые напрессовываются на вал. Наиболее широко распространена в таком случае легкопрессовая посадка (пример обозначения Ф35 Н7/р7). 3.2. Силы в зацеплении цилиндрических зубчатых колес. Силы взаимодействия между зубьями (рис.3.5) принято определять в полюсе зацепления. На рис.3.5 : w1, w2 – угловые скорости вращения зубчатых колес; Т1, Т2 – соответственно момент движущих сил и момент сил сопротивления на ведомом колесе; - угол зацепления ( в стандартном эвольвентном зацеплении = 20о); Ft1, Ft2 – окружные усилия; Fr1, Fr2 – радиальные (распорные) силы; Fn – нормальное усилие. Окружная и радиальная силы Ft = Fn∙cos w = T1(u + 1)/aw = 2T1/d1 ; Fr = Ft∙tg w ( 3.7 ) На ведомом колесе окружная сила Ft1 и крутящий момент Т1 действуют в направлении угловой скорости, а на ведущем колесе – в противоположном направлении. 22 w2 î2 a Fr 2 Fn Fr 1 Fn Ft 2 aw Ft 1 Ò2 a w1 Ò1 î1 Рис. 3.5. 3.3. Расчет на изгиб цилиндрических зубчатых колес При работе передачи нормальная сила Fn , возникающая в зацеплении, циклично создает напряжение изгиба и сжатия в основании зуба. Продолжительная работа зубьев возможна при достаточно высоком пределе выносливости при изгибе зубьев шестерни и колеса. Расчет на выносливость при изгибе ведут в предположении, что в зацеплении находится только одна пара зубьев, силы трения малы и ими пренебрегают, зуб рассматривают как консольно защемленную балку с моментом сопротивления в основании Wx = ba2/6, где a – толщина зуба; b – длина зуба (ширина венца). Наибольшее напряжение в опасном сечении ножки зуба (на растянутых волокнах) σF = YF∙Ft∙KF∙KFv/(bm), ( 3.8 ) здесь: Yf – коэффициент формы зуба; КF - коэффициент неравномерности распределения нагрузки по длине зуба; КFv – коэффициент динамической нагрузки; m – модуль зацепления; b – длина зуба. 23 При проектном расчете рекомендуют 3 2 К Fv = 1,4; тогда формула для вычисления модуля с учетом [σF] – допускаемым напряжением изгиба будет выглядеть m = 1,4 3 YF T1 K F /( bd z12 [ F ]) , ( 3.9 ) здесь принято : b =bd∙d1 = =bd∙z1∙m – вычисление длины зуба ( ширина зубчатого венца у прямозубых колес); Ft = 2T1/d1 = 2T1/(mz1). Значения bd указаны в таблице 3.1. Таблица 3.1. Значения bd при твердости рабочих поверхностей зубьРасположение шестерни ев колеса относительно опор НВ ≤ 350 НВ > 350 Консольное 0,3 – 0,4 0,2 – 0,25 Симметричное 0,8 – 1,4 0,4 – 0,9 Несимметричное 0,6 – 1,2 0,3 – 0,6 Примечание. Большие значения bd принимают при постоянных нагрузках и твердости поверхности зубьев НВ < 350. Значения коэффициента формы зуба YF для некорригированного (коррекция – исправление профиля зуба для передач, в которых число зубьев шестерни z1 < 17, достигается смещением по линии центров зуборезного инструмента) внешнего зацепления приведены в таблице 3.2. z или zv 17 20 22 24 YF 4,26 4,07 3,98 3,92 z или zv 40 45 50 65 YF 3,70 3,66 3,65 3,62 Примечание. Zv – для косозубых колес. 26 3,88 80 3,60 28 3,81 100 3,60 Таблица 3.2. 30 35 3,79 3,75 150 300 3,60 3,60 Условие равной прочности на изгиб шестерни и колеса имеет вид [σF1]/YF1 [σF2]/YF2 ( 3.10 ) Рассчитывают колесо, для которого отношение [σF]/YF наименьшее. Коэффициентами bd и ba устанавливается соотношение между соответственно шириной колеса b и диаметром делительной окружности d, шириной колеса b и межосевым расстоянием aw передачи. Коэффициенты bd и ba связаны зависимостью bd = 0,5ba (u + 1) ( 3.11 ) Ширину венца колеса принимают из условия b2 = ba ∙ a = bd∙ d. Ширина шестерни b1 = b2 + (4….5) мм. Неравномерность нагружения зубьев объясняется деформацией и изнашиванием деталей передачи. Влияние перекоса возрастает с увеличением ширины венца b2. Неравномерность нагрузки на зубья учитывают поправочным коэффициентом KF (таблица 3.3). В процессе приработки зубьев неравномерность нагрузки сглаживается. Необходимо заметить, что 24 зубчатые колеса с высокой твердостью поверхности зубьев, например, прошедшие процесс цементации или азотирования и получившие после закалки твердость по шкале Роквелла HRC 56…62 практически не прирабатываются, склонны к кромочному зацеплению, в результате чего возникает скол зубьев у краев по ширине колеса. Таблица 3.3. Расположение шеТвердость стерни относитель- поверхности но опор зубьев НВ Консольное; опоры ≤ 350 шарикоподшипники > 350 Консольное; опоры ≤ 350 роликоподшипники > 350 Симметричное ≤ 350 > 350 Несимметричное ≤ 350 > 350 Значения KF при bd 0,2 1,16 1,33 1,10 1,20 1,01 1,02 1,05 1,09 0,4 1,37 1,70 1,22 1,44 1,01 1,02 1,10 1,18 0,6 1,64 1,38 1,71 1,05 1,08 1,17 1,30 0,8 1,57 1,07 1,14 1,25 1,43 1,2 1,14 1,20 1,42 1,73 Такие передачи нуждаются в точном изготовлении и сборке для того чтобы зубья были равномерно нагружены по своей длине. 3.4. Расчет на контактную выносливость цилиндрических прямозубых передач. Расчет основан на использовании формулы Герца для наибольших контактных напряжений в зоне зацепления σН = Е пр q 2 1 2 пр , ( 3.12 ) здесь: Епр – приведенный модуль упругости материалов шестерни (Е1) и колеса (Е2). Приведенный модуль упругости вычисляется: Епр = Е1∙Е2/2(Е1 + Е2). В случае когда шестерня изготовляются из одного материала, т.е Е1 = Е2, то Епр = Е1 = Е2 = Е – модуль упругости примененного материала. μ – коэффициент поперечной деформации. Для сталей μ = 0,3. q – удельная нагрузка от окружной силы Ft по длине зуба b. пр – приведенный радиус кривизны сопряженных поверхностей зубьев колес. После преобразования входящих в формулу ( 3.12 ) величин получим u 1 t σН = 436∙103 d b u K H K Hv H 1 2 F ( 3.13 ) 25 или можно получить выражение для определения межосевого расстояния в передаче aw = Ka(u + 1) 3 T1 K H /( bd u[ H ] 2 ) . ( 3.14 ) Таблица 3.4. Расположение шеТвердость стерни относитель- поверхности но опор зубьев НВ Консольное; опоры ≤ 350 шарикоподшипники > 350 Консольное; опоры ≤ 350 роликоподшипники > 350 Симметричное ≤ 350 > 350 Несимметричное ≤ 350 > 350 Значения КН при bd 0,2 1,08 1,22 1,06 1,1 1,01 1,01 1,03 1,06 0,4 1,7 1,44 1,12 1,25 1,02 1,02 1,05 1,12 0,6 1,28 1,19 1,45 1,03 1,04 1,07 1,20 0,6 1,27 1,04 1,07 1,12 1,29 1,2 1,07 1,16 1,19 1,48 1,6 1,11 1,26 1,28 - Для пары сталь – сталь коэффициент Ка = 4950, для пары сталь – чугун Ка = 4450, для пары сталь – бронза Ка = 4300 [8]. Значения коэффициента КН указаны в таблице 3.4. Для редукторов установлены следующие стандартные значения ba согласно ГОСТ 2185-80 (таблица 3.5). ba 0,1 0,125 0,16 0,2 0,25 0,315 0,4 0,5 0,63 Таблица 3.5. 0,8 1,0 Значения межосевого расстояния (aw) определены ГОСТ 2185-80 (таблица 3.6). Эти значения межосевых расстояний желательно использовать для унификации редукторов и коробок передач. Таблица 3.6. 1-й ряд 2-й ряд 40, 50, 63, 80, 100, 125, 160, 200, 250, 315, 400, 580, 630, 800 71, 90, 112, 140, 180, 224, 280, 355, 450, 560, 710 Модуль зацепления ориентировочно принимают m = (0,01…0,02)aw ( 3.15 ) 3.5. Косозубые цилиндрические передачи Косозубые передачи применяют в ответственных механизмах при средних и высоких скоростях (см. таблицу 2.2). Шаг (р) между зубьями косозубых колес можно измерить в торцевом и нормальном направлениях; соответственно различают торцовый рt и 26 Ft Fn Fa Fa ð t b нормальный рn шаги, и, следовательно, торцовый mt и нормальный mn модули. Согласно рис.10 pt = pn/cos и mt = mn/cos . Здесь - угол наклона по отношению к оси колеса. Нормальный модуль mn выбирается в соответствии с таблицей 2.1. Диаметр делительной и начальной окружности d = dw = mtz/cos ( 3.16 ) Высота головки зубьев ha = mn; высота ножки hf = 1,25mn. Диаметры окружности вершин и впадин da = d + 2mn ; df = d – 2.5mn ( 3.17 ) Межосевое расстояние aw = (d1 + d2)/2 = mn(z1 + z2)/(2cos) ( 3.18 ) Значение угла наклона зубьев на делительном цилиндре колеса рекомендуется брать в пределах 8о … 18о. В период зацепления в косозубой передаче нормальная сила Fn действует по линии зацепления нормально боковой поверхности зубьев шестерни и колеса. Эта сила раскладывается по трем взаимно перпендикулярным направлениям на составляющие: окружную Ft = 2T1/d1, радиальную Fr = Ft∙tg /cos и осевую Fa = Ft tg . На рис. 3.6 показана схема сил, действующих в цилиндрической косозубой передаче. 1 Fr p n 1 Fn a w Ft Fn Fn 1 Рис. 3.6. На рис. 3.6 показаны: pn и pt – соответственно нормальный и осевой шаги зубьев; Fn и Fn' – соответственно нормальная и нормальная составляющая окружной силы Ft; Fr – радиальное усилие; Fa – осевая сила; угол наклона зубьев косозубого колеса; w – угол зацепления. 27 При проектном расчете аналогично расчету прямозубых передач определяют модуль mn = 1,12 3 YF T1 K F /( bd z 2 [ F ]) , ( 3.19 ) гдеYF – коэффициент формы зуба, определяемый по эквивалентному числу зубьев ( можно воспользоваться таблицей 3.2). Эквивалентное число зубьев вычисляется с учетом угла наклона зубьев zv1 = z1/cos3; zv2 = z2/cos3. ( 3.20 ) Значения коэффициента КF приведены в таблице 3.3; bd в таблице 3.5. В формулу ( 3.19 ) подставляют значения YF и [σF] для шестерни или колеса, выбирая меньшее из двух отношений [σF]/YF. При проверочном расчете аналогично расчету прямозубых передач определяют напряжение σF = 0,9YFKFKFvFt/(b2mn)≤ [σF] . ( 3.21 ) При проектном расчете на контактную прочность цилиндрических косозубых передач, как и для прямозубых, находят межосевое расстояние aw = Ka(u + 1) 3 T1 K H /( ba u[ H ] 2 ) , ( 3.22 ) здесь Ка = 4300 – для пары сталь – сталь; Ка = 3900 – для пары сталь – чугун; Ка = 3750 – для пары сталь – бронза. При проверочном расчете используют формулу 1 σH = 376∙103 Ft K H K H K Hv (u 1) /(ud 1b2 ) ≤ [σH]. ( 3.23 ) При v = 15 м/сек и 6 ÷ 8 степени точности изготовления передачи коэффициент распределения нагрузки между зубьями КН принимают 1,02….1,12 (ГОСТ 21354-75). Значения коэффициента неравномерности нагрузки по длине зуба КН приведены в таблице 3.4, коэффициента динамической нагрузки КHv в таблице 3.7 Таблица 3.7. Степень Твердость точности поверхностей по ГОСТ зубьев 1643-81 1 2 Н1 и Н2 6 > 350НВ Н1 илиН2 ≤350 НВ Н1 и Н2 7 >350НВ Н1 или Н2 ≤350НВ 28 КHv KFv 1 5 10 15 3 1,02 1,01 1,03 1,01 1,-2 1.01 1,04 1,02 4 1,1 1,06 1,16 1,06 1,12 1,05 1,2 1,08 5 1,2 1,08 1,32 1,13 1,25 1,1 1,4 1,16 6 1,3 1,12 1,48 1,19 1,37 1,15 1,6 1,24 v м/сек 20 1 7 1,4 1,16 1,64 1,26 1,5 1,2 1,8 1,32 8 1,02 1,01 1,06 1,03 1,02 1,01 1,08 1,03 5 10 9 1,1 1,06 1,32 1,13 1,12 1,05 1,4 1,16 10 1,2 1,08 1,64 1,26 1,25 1,1 1,8 1,32 15 20 11 12 1,3 1,4 1,12 1.16 1,96 1,38 1,51 1,37 1,5 1,15 1,2 1,48 1,64 1 8 9 2 Н1 и Н2 >350НВ Н1 или Н2 ≤350НВ Н1 и Н2 >350НВ Н1 или Н2 ≤350НВ 3 1,03 1,01 1,05 1,02 1,03 1,01 1,06 1,02 4 1,15 1,06 1,24 1,1 1,17 1,07 1,28 1,11 5 1,3 1,12 1,48 1,19 1,35 1,14 1,56 1,22 6 1,45 1,18 1,72 1,29 1,52 1,21 1,84 1,34 7 1,6 1,24 1,96 1,38 1,7 1,28 1,45 8 1,03 1,01 1,1 1,04 1,03 1,01 1,11 1,04 9 1,15 1,06 1,48 1,19 1,17 1,07 1,56 1,22 10 1,3 1,12 1,96 1,38 1,35 1,14 1,45 11 12 1,45 1,6 1,18 1,24 1,58 1,77 1,52 1,7 1,21 1,28 1,67 - . Выбор коэффициента КHv зависит от степени точности передачи, твердости поверхности зубьев шестерни и колеса (в таблице Н1 – твердость зубьев шестерни, Н2 – соответственно твердость поверхности зубьев колеса; конструктивно они могут быть одинаковыми, но чаще твердость зубьев шестерни делают несколько выше для того, чтобы уравнять нагрузочную способность шестерни и колеса). Кроме того, выбор коэффициента К Hv зависит от окружной скорости передачи. Косозубую передачу рассчитывают по допускаемому напряжению [σH] = 0,45[σH1] + [σH2] ≤ 1,23[σH2], ( 3.24 ) Здесь [σH1] и [σH2] – допускаемые напряжения соответственно для шестерни и колеса. 29 4. Передачи коническими зубчатыми колесами 4.1. Виды конических передач и их конструктивные особенности В случае необходимости передать движение между валами, оси которых пересекаются, применяют зубчатые передачи коническими колесами. В большинстве случаев угол между осями валов равен 900. Это ортогональные передачи. Для изготовления механизмов с коническими передачами первостепенное значение имеет сложность изготовления корпусных деталей, если угол между осями колес отличается от 90о. Для изготовления самих колес этот угол большого значения не имеет. Кинематическая характеристика редукционных конических передач устанавливается передаточным отношением (u) конусной передачи c числом зубьев шестерни (z1 )и колеса (z2 ) u = w1/w2 = z2/z1 = de2/de1 = tg2 = 1/tg1, ( 4.1 ) где : w1 и w2 – соответственно угловые скорости шестерни и колеса, z2 и z1 - числа зубьев колеса и шестерни, 1 и 2 – половины углов делительных конусов соответственно шестерни и колеса, рис.4.4, de2 и de1 – соответственно внешние делительные диаметры колеса и шестерни, рис.4.4. Особенносью применения конической передачи является необходимость точной установки зубчатых колес. В противном случае зацепляться будут сечения зуба с разным шагом (соответственно и с разным модулем), что приводит к быстрому износу передачи, а работа ее сопровождается большим шумом. Для правильной установки конических колес используются резьбовые дополнительные детали для перемещения и установки валов с колесами, либо применяются наборы дистанционных колец, которые подкладываются в местах установки подшипников. На рис.4.1 показан вид сверху со снятой крышкой одноступенчатого редуктора с конической передачей. В данной конструкции настройка зацепления производится только с помощью дистанционных колец, за счет которых можно при необходимости перемещать в осевом направлении валы с коническими колесами. На рис.4.2 приведен фрагмент конструкции механизма с конической передачей, настройка зацепления которой предусматривается смешанным способом. В процессе сборки узла и настройки зацепления конических колес правильная установка конического колеса 4, напрессованного на валшестерню 3, достигается за счет набора тонких дистанционных колец, подкладываемых между торцами подшипников 2 и упорными стаканами 1. Необходимое перемещение вала конической шестерни, (в данном случае 30 вал и коническая шестерня выполненны заодно), достигается перемещением втулки 7 относительно корпуса подшипников 6, так как корпус подшипников 6 и втулка 7 соединяются между собой с помощью резьбы. Подшипник, расположенный непосредственно у шестерни, при перемещении вала смещается относительно посадочного отверстия в корпусе подшипников 6. Подшипники второй опоры вала располагаются во втулке 7, крепятся с помощью гайки 8 и резьбового стакана 9. Таким образом, они так же двигаются вместе с валом. Рис. 4.1. 1 2 5 6 7 8 9 3 4 Рис. 4.2. 1- втулка, 2- подшипник, 3- вал-шестерня, 4- коническое колесо, 5- коническая шестерня, 6- корпус подшипников, 7- втулка, 8- гайка, 9- стакан. В некоторых случаях коническую шестерню изготовляют отдельно от вала, соединяют ее с валом по посадке скольжения. Для передачи момента 31 нагрузки используется шпоночное соединение. Шестерня крепится к валу с помощью гайки, наворачиваемой на резьбовой конец вала в этом случае настройку зацепления можно осуществлять с помощью дистанционных колец, подкладываемых под торцы шестерни. Конические колеса (рис.4.3) выполняют с прямыми рис.4.3,а, тангенциальными рис.4.3,б, круговыми рис.4.3,в зубьями, последние два вида колес относят к косозубым коническим передачам. Прямозубые конические передачи применяют при невысоких окружных скоростях порядка 2….3 м/сек. В монтаже такие передачи наиболее простые. При более высоких скоростях применяются колеса с круговыми зубьями. Они обеспечивают более плавное зацепление, меньший шум передачи, большую несущую способность. В передаче с круговыми зубьями при движении в одну сторону с помощью конструктивных деталей (подкладных шайб, резьбовых втулок) можно обеспечить практически бесшумность работы, не уступающую передачам с косозубыми цилиндрическими колесами. Но при реверсе передачи неизбежно шум усиливается (характер звуков при проворачивании механизма вручную – глухой треск). Это происходит за счет смещения колес передачи из-за зазоров в подшипниках. Для основного рабочего направления движения передача настраивается при небольшом моменте нагрузки на валу ведомого колеса, зазоры в подшипниках при этом выбираются. При настройке взаимного расположения шестерни и колеса добиваются бесшумности передачи. b 90Å b а) б) в) Рис. 4.3. Зубья конических колес обрабатывают на специальных станках для нарезания конических колес. В массовом и крупносерийном производстве в связи с возможностью компенсации при нарезании зубьев последующих закалочных деформаций конические колеса не шлифуют, а ограничиваются притиркой. 32 4.2. Расчет геометрических параметров конических зубчатых передач Геометрические расчеты конических колес аналогичны расчетам цилиндрических. Зубья конических колес образуют обкатыванием по плоскому колесу с прямолинейным профилем зуба аналогично тому, как зубья цилиндрических колес образуются обкатыванием по рейке. Число зубьев плоского колеса z = z12 z 22 . Вместо начальных и делительных цилиндров вводятся понятия: начальный и делительный конусы, которые, как правило, совпадают, так как для конических колес угловую коррекцию практически не применяют. В качестве торцовых сечений рассматриваются сечения поверхностями дополнительных конусов, т.е. конусов оси которых совпадают с осью колеса, а образующие перпендикулярны к образующим делительного конуса рис.4.4. d ae2 d m2 d e2 d 2 o2 a dv 2 d a2 d f2 b d 1 d f1 d a1 d v1 dm 1 o1 da e1 de 1 h Rm Re Рис. 4.4. 33 Используются понятия внешнего и внутреннего дополнительных конусов, между которыми заключен зубчатый венец. В конических зубчатых передачах различают: делительные диаметры – внешний de, средний dm и др.; начальные диаметры – внешний dwe, средний dwm и др.; диаметры вершин зубьев – dae, средний dam и др. Длина отрезка образующей делительного конуса конического зубчатого колеса от его вершины до пересечения с образующей делительного дополнительного конуса называется делительным конусным расстоянием, или просто конусным расстоянием, R. Различают внешнее Re, внутреннее Ri и среднее Rm делительные конусные расстояния. Зубья конических колес по признаку изменения размеров сечений по длине выполняют трех форм рис.4.5, а, б, в. Осевая форма (рис.4.5, а) – нормально понижающиеся зубья, вершины делительного и внутреннего конусов совпадают. Эту форму применяют для конических передач с прямыми и тангенциальными зубьями, а также ограниченно для передач с круговым зубом при модулях mn 2 и z = 20÷100. à) á) â) Рис. 4.5. В соответствии с осевыми формами (рис.4.5, б) ширина впадины колеса выполняется постоянной, а толщина зуба по делительному конусу растет с увеличением расстояния от вершины. Эти формы позволяют обрабатывать одним инструментом сразу обе поверхности зубьев колеса. Поэтому подобные формы являются основными для колес с круговыми зубьями. Осевая форма (рис.4.5, в) характерна равновысокими сечениями зубьев по их длине. Такое нарезание конических колес характерно для круговых зубьев при z = 40 и более, при средних конусных расстояниях 75…750 мм. 34 У конических колес удобно измерять, а потому и задавать размеры зубьев на внешнем дополнительном конусе. В зубчатых колесах с зубьями формы (рис.4.5,а) обычно оперируют окружным модулем mte на внешнем торце. В зубчатых колесах с зубьями по осевой форме (рис.4.5, б, в) преимущественно оперируют нормальным модулем mnm на середине ширины зубчатого венца. Круговые зубья нарезают немодульным инструментом, позволяющим обрабатывать зубья в некотором диапазоне модулей. Поэтому встречаются передачи с нестандартными модулями. Угол наклона линии зуба выбирают, учитывая, что увеличение m улучшает плавность зацепления, но при этом возрастают усилия. При круговых зубьях преимущественно применяют m = 35о, а при тангенциальных 20о….30о. Минимально допустимые числа зубьев приведены в таблице 4.1. Таблица 4.1. Передаточное число u 1 1,6 2 3,15 0…15 17 15 13 12 Z1 при m 20…25 17 15 12 10 30…40 17 14 11 8 Для уменьшения шума передачи рекомендуется применять притирку, а из конструктивных факторов применять некратные числа зубьев колеса и шестерни. Для конической прямозубой передачи рекомендуют передаточные Числа u = 2…3; для непрямозубых передач возможны более высокие значения u. Согласно ГОСТ 12289-81 для распространенных быстроходных кинических передач с круговыми зубьями наибольшее значение u = 6,30. В таблице 4.2 приведены расчетные формулы для определения основных геометрических параметров конических зубчатых колес с прямыми, тангенциальными и круговыми понижающимися зубьями (форма зубьев согласно рис.4.5, а) при межосевом угле 90о, т. е. взаимоперпендикулярных осях валов колес. Параметр зацепления 1 Внешнее конусное расстояние Ширина венца Среднее конусное расстояние Таблица 4.2. Расчетная формула 2 Re = 0,5mtez b ≤0,3Re(kbe = b/Re≤0,3 Rm = Re – 0,5b 35 1 Наибольшая высота: зубьев (у торца) головки зубьев (у торца) ножки зубьев (у торца) Окружная толщина зуба по внешней делительной окружности Угол : ножки зубьев делительного (начального) конуса конуса вершин конуса впадин Диаметр : внешней делительной окружности внешний вершин шестерни колеса Расчетное базовое расстояние (от вершины делительного конуса до основания наружного конуса) Эксцентриситет для тангенциальных зубьев Угол наклона : тангенциальных зубьев у торца круговых зубьев 2 he = 2h*temte + c, где h*te в долях модуля h*te=cosm, c=0,2mte hae1=(h*te+x1cosm)mte; hae2=2h*temte-hae1 hfe1=he-hae1; hfe2=he-hae2 se1 = (0,5+2x1tgn+x)mte se2=mte-se1 tgt1 = hfe1/Re; tgf2 = hfe2/Re tg1 = z1/z2 ; 2 = 90 - 1 a1 = 1 + f2 ; ф2 = 2 + а1 f1 = 1 - f1 ; f2 = 2 - f2 de1 = mtez1; de2 = mtez2 dae1 = de1 + 2hae1cos1 dae2 = de2 + 2hae2cos2 A1 = Recos1 – hae1sin1 A2 = Recos2 – hae2sin2 e = Rmsinm sine = e/Re e = m + , где = b(CA – CB/Rm) CA = 57,3/(dинcosm) CB = 28,65tgm dин = (1,7….2,1)Rm * - обозначает величину в долях модуля В таблице 4.3 приведены расчетные формулы для определения основных геометрических параметров конических зубчатых колес с постоянной шириной дна впадины (рис.4.5, б) Параметр зацепления 1 Среднее конусное расстояние Ширина зубчатого венца Внешняя конусная дистанция Высота головки зуба посредине ширины венца Окружная толщина зуба в среднем нормальном сечении Промежуточная расчетная величина (определяется при m 0 и округляется до целого числа, кратного 10) Сумма углов ножек зубьев шестерни и колеса в минутах 36 Таблица 4.3. Расчетная формула 2 Rm = mnmz/2cosm b≤0,35Rm (kbm=b/Rm≤0,35) Re = Rm + 0,5b ha1 = (h*a + x1)mnm; ha2 = 2h*amnm – ha1; где h*a = 1 snm1 = (0,5+x1tgn+x1)mnm snm2 = mnm – snm1 a = (C1 – C2Rm)/z; где C1 = 10800tgm/tgn; С2 = 2С1sinm/dин; dин = (1,5…2,3)Rm При m 0 f = acosecm; При m = 0 f = 10800ctgn/z 1 2 Угол ножки зуба (округлить до 1) f1 = fSnm2/mnm; f2 = f - f1 Поправка высоты головки при переходе ha1 = 0,5b tgf2; ha2 = 0,5b tgf2 на внешний конус Наибольшая высота: головки зубьев (по торцу) hae1 = ha1 + ha1; hae2 = ha2 + ha2 зуба по торцу he = 2ha + c + ha1 + ha2 Примечание . Величины , a, f, de, dae, A определяются в соответствии с формулами, приведенными в таблице 4.2. В таблице 4.4 приведены расчетные формулы для определения геометрических параметров конических колес с равновысокими зубьями (рис.4.5, в). Параметр зацепления Высота зуба Высота головки зуба Таблица 4.4. Расчетные формулы h = 2h*a mnm + c, где h*a = 1; c = 0,25mnm ha1 = mnm( h a* + x1); ha2 = 2h*a mnm – ha1 Угол начального, наружного и внутреннеtg1 = z1/z2; 2 = 90о - 1 го конусов Окружная толщина зуба в среднем норsn1 = (0,5 + 2x1 tg0n + x)mnm мальном сечении sn2 = mnm – sn1 Примечание. Величины de, dae, A определяют по формулам таблицы 4.2. Для повышения износостойкости и сопротивления зубьев заеданию применяется высотная коррекция зубьев в сочетании с тангенциальной. С помощью высотной коррекции выравнивают удельные скольжения зубьев шестерни и колеса, а с помощью тангенциальной коррекции выравнивают прочность зубьев шестерни и колеса. Рекомендуемый коэффициент радиального смещения у шестерни cos 3 x1 = 2(1 – 1/u ) z1 2 ( 4.2 ) Коэффициент тангенциального смещения у шестерни при u 2.5 x = a + b(u – 2,5) , ( 4.3 ) 0 где : при m = 0…..15 величины (a) и (b) соответственно равны a = 0,03; b = 0,008, при m = 150….290 a = 0,07, b = 0,010, при m = 200….400 a = 0,11, b = 0,010. 4.3. Определение сил в зацеплении конических колес Рассмотрим действие сил в зацеплении конических зубчатых колес (рис.4.6, а, б). 37 Окружная составляющая сил, отнесенная к средней по ширине венца делительной окружности dm1 (мм) шестерни с учетом момента Т1 (Нм) на валу, Ft = 2103T1/dm1 ( 4.4 ) Прямозубые конические колеса (рис.4.6, а). В связи с не применением коррекции зубьев в коническом зацеплении угол зацепления равен углу профиля инструмента. Сила, раздвигающая зубья Fv, действует в плоскости y-z. По аналогии с цилиндрическими колесами Fv = Ft tg . ( 4.5 ) Составляющие сил вдоль осей y и z ( - угол начального конуса) соответственно равны: Fy = Fv cos = Ft tg cos ( 4.6 ) Fz = Fv sin = Ft tg sin. ( 4.7 ) Суммарная, нормальная к оси вала сила (в плоскости x-y) Fr = Ft 2 Fy2 Ft 1 tg 2 cos 2 . ( 4.8 ) a F t F t F n d z Fv F z d F u F z F v F y F y a n F v z F v F u y F n b y F t x F n F t x а) б) Рис. 4.6. Конические колеса с тангенциальными и криволинейными зубьями. В этом случае удобно рассматривать два расчетных случая, различающихся направлением отдельных составляющих сил на зубьях. 38 С л у ч а й 1 (рис.4.6, б). Сила FN, нормальная к линии зуба ( лежащая в плоскости, касательной к делительному конусу), имеет проекцию на образующую делительного конуса, направленную от его вершины. FN=Ft/cos ( 4.9 ) Сила, раздвигающая зубья, нормальная к образующей делительного конуса (по аналогии с цилиндрическими колесами), Fv = FN tgn = Ft tgn/cos. ( 4.10 ) Составляющая Fu силы FN, направленная вдоль образующей делительного конуса определится Fu = FN sin = Ft tg. ( 4.11 ) Составляющие силы по осям координат y и z определяются как алгебраическая сумма проекций сил Fv и Fu на эти оси: Ft (tgn cos - sin sin), cos Ft Fz = (tgn sin + sin cos). cos Fy = ( 4.12 ) ( 4.13 ) С л у ч а й 2. Сила FN, нормальная к линии зуба, имеет проекцию на образующую начального конуса, направленную к его вершине. В связи с эти в предыдущих формулах вторые члены меняют знаки на обратные. Направление осевой силы к вершине конуса нежелательно в связи с возможностью заклинивания передачи при значительных осевых зазорах в подшипниках. При = 1 + 2 = 900 радиальная сила на шестерне по абсолютной величине равна осевой силе на колесе, а осевая сила на шестерне равна радиальной силе на колесе. 4.4. Расчет конических зубчатых колес на прочность 1. Выбор передаточного числа и чисел зубьев. В конических передачах рекомендуют принимать (в проектных расчетах) для прямозубых колес umax = 3 и umax = 4 c круговым зубом. Фактические значения передаточных чисел обычно не должны отличаться от номинальных по ГОСТ 12289-81 более чем на 3%. При более детальных расчетах следует пользоваться рядом стандартных значений передаточных чисел. Сумму чисел зубьев шестерни и колеса практически принимают не более 70…80. В предварительных проектных расчетах следует принимать минимальное число зубьев шестерни прямозубой передачи zmin25 и zmin15 – для пары с круговыми зубьями. Для конических колес с круговыми зубьями рекомендуется выбирать средний угол наклона линии зуба m = 25o….40o, с тангенциальными 39 зубьями m = 20o….30o. Нормальный профиль зубьев эвольвентный, n = 20o. 2. Выбор материала. При выборе материалов колес конической передачи и их термообработкой следует руководствоваться данными таблицы 2.6. 3. Допускаемые напряжения. Допускаемое контактное напряжение (МПа) определяется по зависимости [НР ] = НРKHL . ( 4.14 ) При этом за расчетное принимают среднее и HP1 и НР2 причем [НР ] = НР1 НР2 2 1,15 НР min ( 4.15 ) Допускаемое напряжение (МПа) при расчете на выносливость по изгибу определяется [FP ] = FPKFL. ( 4.16 ) 4. Определение параметров конической передачи прочностным расчетом. Предварительные вычисления геометрических параметров конической передачи производятся, исходя из расчета на контактную выносливость зубьев колес. Определяется средний делительный диаметр dm1 = kd u2 1 2 u [ HP ] T1 k 0.85 bd , ( 4.17 ) где : kd – вспомогательный коэффициент; kd = 680 МПа1/3 – колеса с тангенциальными и круговыми зубьями; kd = 780 Мпа1/3 – прямозубые конические колеса; Т1 (Нм) – крутящий момент на валу шестерни; [НР] Мпа – допускаемое контактное напряжение; dm1 (mm) – средний делительный диаметр; bd = bw/dm – коэффициент ширины шестерни среднего диаметра. Рекомендуют bd = 0,3…0,6 при соблюдении условий (bw/Re) 0,3 и b10mte. Меньшие значения bd принимают при твердости зубьев HB350 и при резко переменных нагрузках. Определяется ширина шестерни b = dm1bd . ( 4.18 ) Определяются углы делительных конусов tg2 = ctg1 = u ( 4.19 ) 0 0 1 = 90 - 2; 2 = 90 - 1. Определяется внешний делительный диаметр шестерни de1 = dm1 + bwsin1 . ( 4.20) Определяется внешнее конусное расстояние 40 Re = de1/2sin1 . ( 4.21 ) Проверяется условие bw/Re0,3. Определяется модуль и число зубьев mte(bw/10). ( 4.22 ) Округляется mte до ближайшего стандартного значения (таблица 2.1) z1 = (de1/mte) ( 4.23 ) Принимается число зубьев z1zmin. Уточняются de1, Re, dm1 : de1 = z1mte, Re = de1/2sin1, dm1 = de1 – bsin1. Определяются аналогичные параметры для колеса: z2 = z1u, de2 = z2mte, dm2 = de2 – bsin2. Определяется модуль в среднем нормальном сечении mtm = dm1/z1 . ( 4.24 ) В соответствии с рекомендациями принимается угол наклона линии зуба, при этом mnm = mtmcos, ( 4.25 ) определяется число зубьев эквивалентных колес (прямозубая коническая передача) и число зубьев биэквивалентных колес – для конических передач с тангенциальным и круговым зубом. Для прямозубых колес zv1 = z1/cos1 ( 4.26 ) zv2 = z1/cos2. ( 4.27 ) Для тангенциальных и круговых zv1 = z1/cos1cos3 , ( 4.28 ) 3 zv2 = z2/cos2cos . ( 4.29 ) 5. Проверочный расчет на контактную выносливость рабочих поверхностей зубьев. Определяется окружная сила Ft (H) Ft = 2103T1/dm1 . ( 4.30 ) Определяется окружная скорость vm (М/сек) на среднем делительном диаметре Vm = dmn/601000. ( 4.31 ) По таблице 2.2 назначаем степень точности. Определяем действующие в передаче контактные напряжения H = zHzMz Ft k H u2 1 , 0,85 b d m1 u ( 4.32 ) 41 где: zH – коэффициент, учитывающий форму сопряженных поверхностей зубьев, выбирается по таблице 4.5; Таблица 4.5. 0,05 0,03 0,02 0,01 0,005 0,0 -0,005 -0,01 -0,015 -0,02 0 10 15 20 25 30 35 40 + x2)/(z1 + 0,08 Угол Значения zH при относительном коэффициенте смещения контура (x1 наклона z2 ) линии зуба , град. 1,48 1,47 1,46 1,43 1,42 1,38 1,35 1,30 1,52 1,51 1,50 1,47 1,45 1,42 1,37 1,32 1,58 1,56 1,55 1,52 1,49 1,46 1,40 1,34 1,62 1,60 1,58 1,55 1,52 1,48 1,42 1,37 1,68 1,66 1,63 1,60 1,57 1,52 1,46 1,39 1,71 1,69 1,67 1,63 1,59 1,54 1,48 1,41 1,76 1,74 1,71 1,67 1,62 1,56 1,50 1,42 1,83 1,80 1,77 1,72 1,67 1,60 1,53 1,45 1,93 1,90 1,86 1,80 1,79 1,65 1,56 1,47 2,14 2,07 2,00 1,91 1,81 1,70 1,60 1,50 2,35 2,13 1,97 1,81 1,66 1,53 zM – Коэффициент, учитывающий механические свойства материалов сопряженных колес, для стальных зубчатых колес zM 1/3 = 275 Мпа ; z = коэффициент, учитывающий суммарную длину контактных линий. Для прямозубых конических передач z = (4 ) / 3 . Для передач с тангенциальными и круговыми зубьями z = 1 / , где : [1,88 – 3,2( 1 1 )] cosm. z1 z 2 ( 4.33 ) KH = KHKHKHv - коэффициент нагрузки; KH - коэффициент, учитывающий распределение нагрузки между зубьями. Для прямозубых конических пар KH = 1, для передач с тангенциальными и круговыми зубьями КН определяют по таблице 4.6. КН - Коэффициент, учитывающий распределение нагрузки по ширине венца конического колеса, выбирается по таблице 10. КHv – коэффициент, учитывающий динамическую нагрузку, возникающую в зацеплении. Для передач с круговыми зубьями принимается по таблице 4.7, а для конических прямозубых передач и передач с тангенциальными зубьями определяется по формуле KHv = 1 + (wHv/wHt), ( 4.34 ) где : wHv – удельная окружная динамическая сила, (Н/мм). WHv = Hg0vm (Re 0,5b) / u wHv max, ( 4.35 ) 42 где : Н – коэффициент, учитывающий влияние вида зубчатой передачи, определяется по таблице 4.9; g0 – коэффициент, учитывающий влияние разности шагов зацепления шестерни и колеса – принимается по таблице 4.8. Для передач, выполненных на одну степень менее точными. Если значение wHv , полученное по формуле 4.35, превышает значения, выбираемые по таблице 4.10, то их следует принимать равными wHv max. WHt = FtkHkH/b – удельная расчетная окружная сила, (Н/мм). Окружная скорость, v м/сек 2,5 5,0 10 15 20 25 Степень точности 7 8 Таблица 4.6. Значения kH при степени точности по нормам плавности работы 6 7 8 9 1,01 1,02 1,03 1,04 1,05 1,06 1,03 1,05 1,07 1,09 1,12 - 1,05 1,09 1,13 - 1,13 1,16 - Таблица 4.7. Значения коэффициента kHv = kFv для конических передач с круговыми зубьями при окружной скорости vm (м/сек) 3 4 5 6 7 8 9 10 11 13 15 1,04 1,045 1,05 1,06 1,065 1,07 1,075 1,08 1,085 1,09 1,095 1,08 1,1 1,11 1,12 1,13 1,14 1,15 1,16 1,17 - Модуль, m, мм До 3,5 Св. 3,5 до 10 Таблица 4.8 Значения g0 при степени точности по нормам плавности работы 6 7 8 9 38 47 56 73 42 53 61 82 6. Проверочный расчет конической передачи на изгибную выносливость зубьев. Из пары сопряженных колес расчет производят по колесу с меньшим значением соотношения (FP/ YF). Здесь YF – коэффициент, учитывающий форму зуба – определяется по формуле YF = YF [(2,2 + x)/2,2]2 , ( 4.36 ) где : x - коэффициент изменения толщины зуба, принимают по таблице 4.11; YF – выбирается по таблице 3.2 в зависимости от числа зубьев эквивалентного zv (формула 4.26, 4.27) или биэквивалентного (формула 4.28, 4.29) колес. 43 Таблица 4.9. Твердость поверхности зубьев При твердости колеса или шестерни НВ350 При твердости колес зубчатой пары НВ350 Модуль, m, мм До 3,5 Св. 3,5 Передаточное число передачи От 2,5 до 4 Св. 4 до 6,3 Вид зубьев Н Прямые без модификации головки Прямые с модификацией головки Косые Прямые без модификации головки Прямые с модификацией головки Косые 0,006 0,004 0,002 0,014 0,010 0,004 Таблица 4.10. Предельные значения wHv и wFv, (H/mm) точности по нормам плавности работы передачи 6 7 8 9 160 240 380 700 194 310 410 880 Таблица 4.11. Значения x при среднем угле наклона линии зуба m 0 От 0 до 150 Св. 150 до 290 Св. 190 до 400 Св. 400 до 450 0,04 0,08 0,12 0,16 0,06 0,10 0,14 0,18 Определяются действующие в конической передаче напряжения изгиба F = YF Y Ft F 0,85b mnm FP , ( 4.37 ) где : Y - коэффициент, учитывающий наклон зуба Для прямозубой конической пары Y = 1, для передач с тангенциальными и круговыми зубьями Y = 1 - m/140, kF = kF kF kFv – коэффициент нагрузки, kF = 1 – коэффициент, учитывающий распределение нагрузки между зубьями, kF коэффициент, учитывающий распределение нагрузки по ширине венца конического колеса (как для консольного расположения), kFv – коэффициент, учитывающий динамическую нагрузку при расчете на изгиб зуба. Для передач с круговыми зубьями значение kFv принимают по таблице 4.7, а для конических прямозубых и передач с тангенциальными зубьями определяют по формуле kFv = 1 + (wFv/wFt), wFt = (Ft kF kF)/b – удельная расчетная окружная сила, (Н/мм); wFv – удельная окружная динамическая сила, (Н/мм), определяется по выражению 44 wFv = Fg0vm Rl 0,5b Fv max , u ( 4.38 ) где F – коэффициент, учитывающий влияние вида зубчатой передачи; для прямозубых конических пар F = 0,016; для других передач F = 0.006. Коэффициент g0 определяют по таблице 4.8, но на одну степень точности грубее. Если значения wFv , вычисленные по формуле 4.38 превышают wFv max (таблица 4.10), то их следует принимать равными wFv max. После проверки зубьев на контактную и изгибную выносливость (см. формулы 4.32 и 4.37) окончательно устанавливают материал колес конической пары и вид термообработки. 7. Определение сил, действующих в зацеплении конической передачи. Таблица 4.12. Коэффициент смещения 0,7 0,5 0,3 0,10 -0,0 -0,1 -0,3 -0,5 Коэффициент YF 14 3,12 3,42 3,78 16 3,15 3,40 3,72 17 3,16 3,40 3,67 4,03 4,26 18 3,17 3,39 3,64 3,97 4,2 19 3,18 3,39 3,62 3,92 4,11 4,32 20 3,19 3,39 3,61 3,89 4,08 4,28 21 3,2 3,39 3,60 3,85 4,01 4,22 22 3,21 3,39 3,59 3,82 4,00 4,20 24 3,23 3,39 3,58 3,79 3,92 4,1 25 3,24 3,39 3,57 3,77 3,90 4,05 4,28 28 3,27 3,40 3,56 3,72 3,95 3,95 4,22 30 3,28 3,40 3,54 3,70 3,80 3,90 4,14 32 3,29 3,41 3,54 3,69 3,78 3,87 4,08 4,45 37 3,32 3,42 3,53 3,64 3,71 3,80 3,96 4,20 40 3,33 3,42 3,53 3,63 3,70 3,77 3,92 4,13 45 3,36 3,43 3,52 3,62 3,68 3,72 3,86 4,02 50 3,38 3,44 3,52 3,60 3,65 3,70 3,81 3,96 60 3,41 3,47 3,53 3,59 3,62 3,67 3,74 3,84 80 3,45 3,50 3,54 3,58 3,61 3,62 3,68 3,73 100 3,49 3,52 3,55 3,58 3,60 3,61 3,65 3,68 150 3,60 3,63 3,63 3,63 Рейка 3,63 П р и м е ч а н и е. Эквивалентное число зубьев определяется: для цилиндрического прямозубого колеса по формуле z1 = d1/m, z2 = z1u (z1 17), для косозубых колес zmin = 17cos3, z2 = z1u; для конического прямозубого zv = zvt, (формула4.26-27), для конического с круговым зубом zv = zvn, (формула4.28-29). Эквивалентное число зубьев 45 Окружная сила (Н) на среднем диаметре шестерни (колеса) 2 10 3 T1 Ft1 = d m1 ( 4.39 ) Для конической передачи с прямыми зубьями: радиальная сила на шестерне (Н) Fr = Fttgcos1, ( 4.40 ) Осевая сила на шестерне (Н) Fa1 = Fttgsin1. ( 4.41 ) Для конической передачи с тангенциальными и круговыми зубьями радиальная сила (Н) Fr = Ft (tgcos1 sinm sin1), cos ( 4.42 ) Fa = Ft (tgsin1 sinm cos1). cos ( 4.43 ) осевая сила В последних двух формулах знак зависит от направления внешнего момента, приложенного к валу шестерни, и линии наклона зуба как винтовой линии (таблица 4.13). Таблица 4.13 Т1 Линия наклона зуба Знак Формула 4.42 Формула 4.43 По часовой стрелке Правая + Левая + Против часовой Правая + стрелки Левая + П р и м е ч а н и е. Направление Т1 определяется при наблюдении со стороны большого торца шестерни. 8. Определение недостающих геометрических параметров и размеров конических колес передачи. Геометрические параметры конической передачи определяются по формулам, приведенным в таблицах 4.2, 4.3, 4.4 в зависимости от типа рассчитываемой передачи, т.е. с прямыми зубьями, тангенциальными или круговыми. 46 5. Червячные передачи 5.1. Виды червячных передач и их конструктивные особенности Червячная передача относится к передачам зацеплением. Она применяется обычно в случаях, когда геометрические оси ведущего и ведомого валов перекрещиваются (обычно под углом 90 С). При вращении червяка его витки плавно входят в зацепление с зубьями колеса и приводят его во вращение. Передачи используют в станках, автомобилях, подъемнотранспортных и других машинах. Червячную передачу целесообразно использовать там, где требуется плавность, бесшумность, компактность передачи при значительном редуцировании частоты вращения и сравнительно небольшой передаваемой мощности (обычно до 60 кВт). Червячная передача позволяет получать большие передаточные числа (около 500…1000). Однако для силовых передач оно выбирается в интервале 8…80, редко 110. 2 1 Рис. 5.1 Червячные передачи относятся к числу зубчато-винтовых, имеющих характерные черты зубчатых и винтовых передач. В отличие от винтовых зубчатых передач с пе-рекрещивающимися осями, у которых начальный контакт происходит в точке, в червячных передачах имеет место линейный контакт. В осевом сечении зубья колеса имеют дуговую форму. Это обеспечивает облегание тела червяка и увеличение длины контактных линий. Червячная передача состоит из червяка 1, т.е. винта с трапецеидальной или близкой к ней по форме резьбой, и червячного колеса 2, т.е. зубчатого колеса с зубьями особой формы, получаемой в результате взаимного огибания с витками червяка (рис. 5.1). Ведущим звеном обычно является червяк, а в ускоряющих передачах – колесо. 47 Передаточное отношение u червячной передачи определяют из условия, что за каждый оборот червяка колесо поворачивается на число зубьев, равное числу витков червяка: u = w1/w2 = n1/n2 = z2/z1, (5.1) где: z1– число витков червяка и z2 – число зубьев червяка; n1 и n2 - частоты вращения червяка и колеса, мин-1 Таким образом, передаточное число не зависит от отношения диаметров червяка и червячного колеса. ГОСТ 2144-76 устанавливает следующие значения передаточных отношений червячных редукторов: Ряд 1-й Ряд 2-й 8 9 10 11,2 12,5 14 16 18 20 22,4 25 28 31,5 35,5 40 45 50 56 Таблица 5.1 63 80 71 Фактические значения передаточных отношений не должны отличаться более чем на 4% от значений по ГОСТу. Значения модулей m,мм выбирают из ряда 1; 1,25; 1,6; 2; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; допускаются m, равные 1,5; 3; 3,5; 6; 7; 12; и 14. Межосевые расстояния w ,мм Ряд 1-й 40 Ряд 2-й 140 50 180 63 225 80 280 100 125 355 450 160 200 250 315 Таблица 5.2 400 500 По форме тела червяки разделяют на цилиндрические, глобоидные и тороидные. Самыми распространенными являются цилиндрические червяки как более простые в изготовлении и обеспечивающие достаточно высокую нагрузочную способность. Установлены следующие разновидности цилиндрических червяков: архимедов (ZA), конвалютный(ZN), эвольвентный(ZI), образованный конусом(ZK), образованный тором(ZT). Архимедовы червяки (рис. 5.2,а) представляют собой винты с резьбой, имеющей прямолинейные очертания профиля (трапецию) в осевом сечении (в торцовом сечении витки очерчены архимедовой спиралью). Эти червяки просты в изготовлении, если не требуется их шлифование, поэтому они сохранили применение в тихоходных, не сильно напряженных передачах. Для их шлифования требуется круг, очерченный сложной кривой в осевом сечении, что ограничивает их применение. Под конволютными червяками (рис. 5.2,б) понимают червяки, имеющие прямолинейный профиль в сечении, нормальном к оси симметрии. Витки в торцовом сечении очерчены удлиненной или укороченной эвольвентой. Эти червяки обладают некоторыми технологическими преимуществами перед архимедовыми. При точении резьбы двусторонним резцом 48 (по профилю канавки) по обеим боковым граням резца имеют место одинаковые углы резания. Шлифование конволютных червяков конусными кругами с прямолинейными образующими на обычных резьбошлифовальных станках привоÁ  À À À- À Á ã)  À- À Á- Á À Â-  á) à) Àðõè ì åä î â à ñï è ðàë ü À À  À À- À Â-  â) Á- Á Óä ë è í åí í àÿ ýâ î ë üâ åí òà ä) Á- Á Ýâ î ë üâ åí òà å) Рис. 5.2 дит к получению нелинейчатых боковых поверхностей, весьма близких к поверхностям конволютных червяков. Червячные фрезы для нарезания червячных колес шлифуют тем же способом, поэтому получают правильное зацепление. Нарезание резьбы нелинейчатых червяков перед их шлифованием конусным шлифовальным кругом может быть осуществлено также дисковой фрезой. Эвольвентные червяки (рис. 5.2,в) представляют собой косозубые колеса с малым числом зубьев и очень большим углом их наклона. Профиль зуба в торцовом сечении очерчен эвольвентой. Эвольвентная поверхность имеет прямолинейный профиль в сечении плоскостью, касательной к основному цилиндру червяка, поэтому эвольвентные червяки можно шлифовать плоской стороной шлифовального круга. Шлифуемые червяки следует делать эвольвентными. Достоинства червячных передач: 1) возможность получения большого передаточного отношения; 2) плавность и бесшумность работы, 3) повышенная кинематическая точность. 49 Недостатки: 1) низкий КПД; 2) необходимость применения для колеса дорогостоящих антифрикционных материалов. 3) повышенные требования к точности сборки, необходимость регулировки; 4) необходимость специальных мер по интенсификации теплоотвода. 5.2. Выбор материалов для червячной передачи. Червячные колеса обычно изготавливают из бронзы или чугуна. Червяки в силовых передачах, как правило, выполняют из сталей, термически обработанных до значительной твердости. Материал червяка выбирается в зависимости от вида назначаемой термической обработки, его размеров, технологических возможностей изготовителя. Материалы червяка делят на группы: 1)нетермообрабатываемые, 2)улучшаемые, 3)поверхностно-закаливаемые, 4)цементуемые под закалку, 5)подвергаемые азотированию и хромированию. Наилучшую стойкость передач обеспечивают червяки из цементуемых сталей. Наиболее применяемый материал - сталь 18ХГТ, твердость поверхности после цементации и закалки 56…63 HRCэ. Широко применяют также червяки из сталей 40Х, 40ХН, 35ХГСА с поверхностной или объемной закалкой до твердости 45...55 HRC3. При этом необходимы шлифование и полирование червяка. Применяют также червяки из азотируемых сталей (38Х2МЮА, 38Х2Ю и др.), требующих только полирования (без шлифования). Улучшенные червяки применяют вместо закаленных из-за ограниченных технологических возможностей (отсутствия оборудования для шлифования червяков) или ввиду необходимости взаимной приработки колеса и червяка. Кроме того, улучшенные и нормализованные червяки применяют во вспомогательных тихоходных и малонагруженных передачах. Для передач с колесами очень больших диаметров возможно применять бронзовые червяки, которые позволяют выполнять колеса чугунными. Венцы червячных колес при скоростях скольжения Vск4 м/с выполняют из оловянно-фосфористых бронз БрО10Н1Ф1, 5рО10Ф1, оловянноцинковой бронзы БрО5Ц5С5 (I группа). Необходимость в применении бронзы с высоким содержанием олова тем выше, чем больше иск и относительная продолжительность работы передачи. Для тихоходных передач применяют алюминиево-железистые бронзы БрА10Ж4Н4Л, БрАЭЖЗЛ и латуни (II группа), они значительно 50 дешевле, но имеют низкие антифрикционные свойства. При этом червяк должен обязательно иметь высокую твердость, не ниже 45 HRC,. Для тихоходных малонагруженных передач при малых скоростях скольжения (менее 2 м/с) и при больших диаметрах колес допустимо применять чугуны марок СЧ15, СЧ20 (III группа). Нарезают червячные колеса червячными фрезами, форма которых совпадает с формой червяка. Лишь в исключительных случаях колеса нарезаются специальными фасонными резцами на оправке (летучкой). В целях экономии дорогостоящей бронзы колеса часто делают составными: бронзовый венец и чугунный или стальной центр. Материалы, применяемые для червячных колес и червяков Таблица 5.3 Червяк Червячное колесо Материал I группа: БР ОФ 10-1 БР ОНФ БР ОЦС 6-6-3 БР ОЦС 5-5-5 σB , МПа σТ , МПа 200250 140200 290 170 150180 80100 150180 90100 Твердость HB Модуль упругости Е, МПа 80100 12 70 70 Марки стали Твердость 0,75·105 1·105 0,75·105 0,75·105 45;50;20Х; 40Х; 40ХН; 30ХГС 20ХНЗА; 12ХНЗА; 18ХГТ;15ХФ 38Х2М10А; 38Х20 HRC 4562 40ХН;30ХГ; 20ХГР; 20ХНЗА; 38ХГН; 30ХГС; 35ХГСА II группа: БР АЖ 9-4 БР АЖН 10-4-4 БР АМц 10-2 ЛАЖМц 66-6-3-2 ЛАМцС 58-2-2 400500 600 500 600700 300 200 200 200 240 140 100110 170 110 160 100 0,9·105 0,9·105 0,9·105 0,9·105 0,9·105 III группа: СЧ 15 СЧ18 СЧ 28 32 36 48 - 165230 170230 170240 0,75 1,00·105 Сталь 20, 40 Сталь 45, 50 Ст6, Ст5 HRC 4550 HB <350 Меньшие значения – при отливке в земляные формы, большие - при отливке в кокиль. σB - временное сопротивление разрыву. σТ - предел текучести. В червячном зацеплении имеется зона с неблагоприятными условиями скольжения. Кроме того, контакт искажается в связи с деформациями тела червяка. Выполнение обоих тел червячной пары из твердых материалов не дает положительных результатов и одно тело (обычно колесо) необ51 ходимо выполнять из антифрикционного, относительно мягкого материала. Материалы червячной пары в соответствии с видами разрушения и повреждения зубьев должны обладать износостойкостью, пониженной склонностью к заеданию, хорошей прирабатываемостью и повышенной теплопроводностью. Причины выхода из строя червячных передач и критерии их работоспособности. Основными причинами выхода из строя червячных передач являются износ зубьев колеса, заедание, поверхностные разрушения зубьев колеса. Износ ограничивает срок службы большинства червячных передач. Он очень сильно зависит от смазки, увеличивается при неточном монтаже зацепления, при загрязненном смазочном материале, при повышенной шероховатости червяка, а также при частых пусках и остановах передачи, при которых условия смазки ухудшены. Заедание особо опасно, если колеса изготовлены из твердых материалов: безоловянных бронз и чугуна. При твердых материалах колес заедание происходит в ярко выраженной форме со значительными повреждениями поверхностей и последующим быстрым изнашиванием зубьев частицами материала колеса, приварившимися к червяку. При мягких материалах колес (оловянных бронз) заедание наблюдается в менее опасной форме: материал колеса (бронза) «намазывается» на червяк. Усталостное выкрашивание наблюдается главным образом в передачах с колесами из стойких против заедания бронз. Выкрашивание, как правило, наблюдается только у колеса. Пластическое разрушение рабочих поверхностей зубьев червячного колеса наблюдается при действии больших перегрузок. Изломы зубьев колеса можно наблюдать главным образом после износа или вследствие ошибок изготовления. На работоспособность червячной передачи существенно влияет точность изготовления элементов передачи и точность ее монтажа. Стандарт СЭВ 311-76 устанавливает для червячных передач двенадцать степеней точности, обозначаемых в порядке убывания точности от 1 до 12. Кроме того, стандартом устанавливается шесть видов сопряжений червяка с червячным колесом А, В, С, D, Е, Н ( в порядке убывания величины бокового зазора). Степень точности устанавливается в зависимости от нормы кинематической точности, нормы плавности, нормы контакта зубьев и витков, скорости, передаваемой мощности и других факторов. В каждом конкретном случае она определяется соответствующим расчетом. В первом приближении ее можно принимать по табл. 5.4. 52 Таблица 5.4 Степень точности 6 (высокоточ-ные) Скорость скольжения Свыше 5 Метод нарезания и обработки Условия работы Цементация и закалка или только закалка червяков. Боковые поверхности витков червяка обязательно шлифуются и полируются. Червячные колеса нарезаются шлифовальными червячными фрезами. Рекомендуется обкатка под нагрузкой. До 10 Рекомендуется цементация и закалка или только закалка червяков. Закаленные червяки должны обязательно шлифоваться и полироваться по профилю. Червячные колеса должны нарезаться шлифовальными червячными фрезами. При отсутствии чистовой заделки обкатка под нагрузкой обязательна. 8 (средней точности) До 5 Червяк с HB≤350, не шлифуется. Колесо нарезается шлифовальной червячной фрезой или «летучкой». Рекомендуется обкатка под нагрузкой. 9 (пониженной точности) До 2 Червяк с HB<350, не шлифуется. Колесо нарезается любым способом. 7 (точные) Конечные делительные пары станков средней точности, скоростные передачи регуляторов двигателей. Транспортные и промышленные силовые червячные передачи с повышенными скоростями и повышенными требованиями в отношении бесшумности Транспортные и промышленные силовые червячные передачи средних скоростей, передачи подъемных и поворотных механизмов Неответственные передачи с низкими скоростями, с кратко-временной работой и ручные Рекомендуемое соответствие между видами сопряжения червяков с червячным колесом в передаче и степенью кинематической точности дано в табл. 5.5. Вид сопряжения Степень кинематической точности A 5…12 D 5…12 C 3…9 D 3…8 Таблица 5.5 E H 1…6 1…6 Для силовых червячных передач обычно используются сопряжения B, C, при повышенном нагреве – А. 53 5.3. Геометрические и кинематические параметры червячных передач. w,мм, m,мм q z2/z1=u 1-й ряд 40 50 63 80 100 125 140* 160 200 250 2 2,5 3,15 4 5 5 5 8 10 12,5 8 280* 10 400 20 500 20 *Второй ряд 54 da1 ha1 d1 df 1 hf 1 õ= 20 Å Основные геометрические размеры червяка на рис.5.3. В червячных передачах стандартный угол профиля принимают обычно равным равным 20°: у архимедовых червяков - в осевом сечении х, у конволютных -в нормальном сечении, у эвольвентных червяков, как у косозубых колес,- в нормальном сечении косозубой рейки (n=20°), сцепляющейся с червяком, у нелинейчатых - угол профиля находят как угол конуса производящей поверхности. Для передач с вогнутым червяком угол профиля в осевом сечении витка червяка, измеренный на делительном диаметре, равен 22°. Расстояние между одноименными точками соответствующих боковых сторон двух смежных витков черð вяка, измеренное парал лельно оси, называют расчетным шагом червяка и обозначают через р. Отношение р/π называют модулем m. Модуль — стандартный параметр, b1 для червяка он является осевым, для червячного Рис. 5.3 колеса — торцовым. Основные параметры цилиндрических червячных передач, выполненных без смещения. w,мм, 1-й ряд 8 8 8 8 8 10 16 8 8 8 12,5 16 8 10 32:4 32:2 32:1 32:4 32:2 32:1 32:4 32:2 32:1 32:4 32:2 32:1 32:4 32:2 32:1 40:4 40:2 40:1 40:4 40:2 40:1 32:4 32:2 32:1 32:4 32:2 32:1 32:4 32:2 32:1 50:4 50:2 50:1 40:4 40:2 40:1 32:4 32:2 32:1 40:4 40:2 40:1 40 50 63 80 100 125 140* 160 200 250 280* 400 500 m, мм 1,6 2 q z2/z1=u 10 10 40:4 40:2 40:1 40:4 40:2 40:1 4 4 5 10 12,5 10 40:4 40:2 40:1 50:4 50:2 50:1 46:4 46:2 46:1 8 10 10 10 40:4 40:2 40:1 40:4 40:2 40:1 10 16 16 10 10 12,5 46:4 46:2 46:1 40:4 40:2 40:1 50:4 50:2 50:1 Если при выбранных m, z2 и q межосевое расстояние не соответствует стандартному (или передача должна вписываться в заданные размеры), червячная передача выполняется со смещением (см.табл. 5.6), (на практике со смещением выполняется большинство червячных передач). В таблице 5.6 приведены расчетные формулы для определения основных геометрических и кинематических параметров червячной передачи с цилиндрическим червяком: Таблица 5.6 Параметры и обозначения 1 Модуль m,мм Коэффициент диаметра червяка q Формулы 2 Исходные данные - Указания 3 - Число витков червяка z1 - Вид червяка Z1 Передаточное число u Межосевое расстояние w ,мм Частота вращения червяка n, мин-1 - Число витков червяка выбирают в зависимости от передаточного отношения u. ГОСТ устанавливает z1 равным 1, 2 и 4(из опыта проектирования) см.табл.5.7 Z1- эвольвентный - Расчет геометрических и кинематических параметров Минимальное число зубьев червячных колес z2min принимают для кинематических передач Число зубьев червячного z2=u·z1 (5.2) равным 17, в силовых передачах колеса z2 z2min = 28. Наиболее желательно для силовых передач z2 = 30…90. Коэффициент смещения червяка x = w /m - 0.5(q+z2) Коэффициент смещения (и инструмента при нарезании (5.3) червяка x колеса) выбирают в пределах ±1. tg = pz1/πd1 = где pz1= pz1- ход витка червяка; Делительный угол pz1/πd1= mz1/d1 = р - шаг. подъема z1/q, (5.4) Основной угол подъема Определяется только для червяcos b= cos a n cos ков Z1. (Здесь a n =20º) (5.5) b 55 1 Делительный диаметр червяка d1, мм колеса d2 Диаметр вершин витков червяка da1, мм: зубьев червячного колеса df1 Наибольший диаметр червячного колеса daM2 ,мм Основной диаметр червяка, мм Начальный диаметр червяка dω1, мм Начальный угол подъема ω Ширина венца червячного колеса b2, мм Длина нарезанной части червяка b1, мм Межосевое расстояние , w мм Высота головки витка червяка ha1, мм Высота витка червяка h1 Радиус кривизны переходной кривой червяка (колеса) ρf1 , мм Радиус кривизны линии притупления витка ρk1 , мм Расчетный шаг червяка p1, мм Ход витка pz1 , мм 56 2 d1=qm (5.6) d2 = mz2 (5.7) da1 = d1+2 ha1* m (5.8) da2= d2+2(ha1*+x)m (5.9) daM2 da2+6m/z1+k (5.10) 3 q выбирают в сочетании с модулем m. Рекомендуется выбирать q = 0,25z2 (при этом d10,4w, где w — межосевое расстояние), так как увеличение q приводит к снижению КПД передачи, а уменьшение - к падению изгибной жесткости червяка. Допустимым считают значения qmin=0,212z2. Здесь ha1* = 1 коэффициент высоты головки где k=4 для передач ZT, для остальных k=2. Определяется только для червяков Z1 dω1 =( q+2·x)·m (5.11) tg ω= m ·z1 / dω1 (5.12) b20,75 da1 b20,67 da1 (5.13) (5.14) b1(12+0,1·z2)m+25 (5.15) w = 0,5m(q+ z2+2x) (5.16) ha1 = ha1* m (5.17) h1 = h* m (5.18) ρf1= 0,3·m (5.19) ρk1=0,1·m p1=π·m pz1= p1·z1 (5.20) (5.21) (5.22) (при z1≤2), (при z1=4). (см. табл. 5.8) Для редукторов, выполняемых в виде самост. агрегатов, значении округляются до рекомендуемых (см. табл. 5.2) где коэффициент высоты головки ha1* = 1 Здесь h* = 2+0,2·cos для червяков Z1 , h* =2+0,2 – для остальных 1 2 Условный угол обхвата, град червяка v1 колеса v2 Скорость скольжения витков червяка по зубьям колеса, м/с 3 Условный угол обхвата 2 для расчета на прочность находят по точкам пересечения окружности sin =b2/ da1-0,5m (5.23) da1-0,5m с торцовыми (контурными) линиями червячного колеса Окружная скорость, м/с v1 = π dw1 n1/60000 (5.24) v2 = π d2 n2/60000 (5.25) vск = v1/cos w (5.26) Диаметр вершин и впадин зубьев колеса в среднем сечении: df2= m(z2-2,4+2x) для всех передач, кроме передач с эвольвентным червяком, для которых df2 = m(z2-2-0,4cos +2x) À À 2 0,25m df 2 d2 da2 daì 2 Ñì åù åí èå À b2 Рис. 5.4 Число заходов червяка z1 можно определять в зависимости от передаточного отношения u: 57 Таблица 5.7 u z1 10-18 4 18-40 2 св.40 1 Формулы для расчета нарезанной части червяка приведены в табл. 5.8 Таблица 5.8 x -1,0 -0,5 0 +0,5 +1,0 Расчетные формулы при z1 1и2 4 b1≥(10,5+ z1)∙m b1≥(10,5+ z1)∙m b1≥(8+0,06∙ z2)∙m b1≥(9,5+0,09∙ z2)∙m b1≥(11+0,06 ∙z2)∙m b1≥(1,25+0,09∙ z2)∙m b1≥(11+0,1∙ z2)∙m b1≥(12,5+0,1∙ z2)∙m b1≥(12+0,1∙ z2)∙m b1≥(13+0,1∙ z2)∙m Примечания: 1.При промежуточном значении коэффициента x длину b1 в (мм) вычисляют по ближайшему пределу x, который дает большее значение. 2.Для шлифуемых и фрезеруемых червяков полученную по таблице длину b1 необходимо увеличить: на 25 мм при m<10 мм; на 35…40 мм при =10…16 мм; на 50 мм при m >16 мм. Путем варьирования значений m, q и x можно вписать в заданное w червяки с разным числом заходов z1 и колеса с разным числом зубьев z2 , получая различные передаточные отношения при неизменных габаритах корпуса. (см. табл. 5.9). Значение модулей m в зависимости от коэффициентов диаметра червяка q при z=1,2,4 m,мм q m,мм 2 8;10;(12);12,5;16;20 (7) 2,5 8;10;(12);12,5;16;20 8 (3) (10); (12) 10 3,15 8;10;12,5;16;20 (12) (3,5) (10); (12*); (14*) 12,5 4 8;(9);10;(12*);12,5;16;20 (14) 5 8;10;12,5;16;20 16 (6) (9);(10) 20 6,3 8;10;12,5;14;16;20 * только при z1=1; ** только при z1=1 и 2 ; *** только при z1=2. Значения без скобок являются предпочтительными. Таблица 5.9 q (12) 8;10;12,5;16;20 8;10;12,5;16;20 (10**) 8;10;12,5;16;20 (8***) 8;10;12,5;16 8;10 Пример 1. Определить размеры червяка и колеса червячной передачи, которая должна быть «вписана» в межосевое расстояние aw=165 мм. Передаточное число передачи u=33. По условиям прочности модуль должен быть не менее 8 58 мм, а коэффициент диаметра червяка q =8. Червяк шлифованный, закаленный, однозаходный. Решение. 1. Найдем коэффициент смещения инструмента x= aw/m-0,5(q+z2)=165/8+0,5∙(8+33)=0,125; 2. Определим размеры червяка по формулам: Делительный диаметр d1 = q m = 8∙8=64 мм. Диаметр вершин витков червяка da1 = d1 + 2 ham=64+28=80 мм. Диаметр впадин червяка df1 = d1 - 2 (ha+с) m=64-2(1+0,2)∙8=44,8 мм. Начальный диаметр червяка dw1 = m (q + 2x)=(8+2∙0,125)∙8=66 мм. Длина нарезанной части червяка 59 b1≥(11+0,06∙ z2)∙m+25=(11+0,06∙33)∙8+25=128,84=130 мм. Делительный угол подъема витков червяка w = arctg z1/q = arctg1/8=7º9´ Шаг червяка P= π∙ m = 3,14∙8=25,12 мм. 3. Размеры червячного колеса. Делительный диаметр d2 = m z2 =833=264 мм. Средний диаметр вершин зубьев червячного колеса da2 = d2+ 2m ( ha + x)= 264+2∙8(1+0,125)=282 мм. Средний диаметр впадин червячного колеса df2= d2-2∙m(ha1*+c-x)=264-2∙8(1+0,2-0,125)=246,8 мм. Наибольший диаметр червячного колеса dam2 da2 + 6 m/( z1 + 2)=282+6∙8/1+2=298 мм. Ширина венца колеса b2 0,75 da1= 0,75∙80=60 мм. Скольжение в червячной передаче. Витки червяка скользят при движении по зубьям колеса. Для червячных передач характерны большие скорости скольжения Vск и неблагоприятное направление её относительно линии контакта. Когда точка контакта совпадет с полюсом зацепления, относительная скорость vск направлена по касательной к винтовой линии витка червяка (рис. 5.5). vск v1 v2 где v1 = π dw1 n1/60000 – окружная скорость, м/с, на начальном диаметре червяка; v2 = π Âèò î ê ÷åðâÿêà Çóá êî ëåñà d2 n2/60000 - окружная скорость, м/с, на делительном диаметре колеса. vск = v1/cos V2 n1 Условием отсутствия заедания и интенсивного износа является существование жидкостного трения между витками червяка и зубьями колеса. Условие выполняется V1 Vñê при существовании в зоне контакта клиноРис. 5.5 видного зазора в направлении вектора скорости скольжения. Если скольжение поверхностей 60 происходит вдоль линии контакта, масляный слой образоваться не может. В червячных передачах, в отличие n1 от зубчатых, часть поверхности зуба колеса имеет зону, в которой скольжение происходит вдоль контактных линий. На рис. 5.6 1 V ñ ê цифрами 1,2 и 3 отмечены после2 довательные положения контактных линий в процессе зацепления 3 и направления скорости скольжения Vск в некоторых точках. Зона, Vñê где направление Vск практически совпадает с направлением конVñê тактных линий, заштрихована. Рис. 5.6 Причиной низкого КПД червячного зацепления является неблагоприятное направление вектора скорости скольжения. Силы, действующие в зацеплении. Составляющие от силы в зацеплении принимают приложенными в полюсе зацепления и направляют по трем взаимно перn2 пендикулярным осям (рис. 5.7). 1. Окружная сила на колесе, равная по модулю осевой силе на F r2 червяке: Ft2 = Fa1 = 2000 T2/d2 (5.27) F a2 F t2 2. Окружная сила на червяке n1 равна осевой силе на колесе: F t1 Ft1 = Fa2 = 2000 T1/dw1 (5.28) F a1 3. Радиальная сила, раздвигающая червяк и колесо: Fr1 = Fr2 = Ft2 tg (5.29) В этих зависимостях Т2 и Т1 – F r1 вращающие моменты на валах колеса червяка, Нм, угол профиля витка червяка, линейные размеры d2, dw1,мм. Рис. 5.7 61 5.4 Расчет на прочность зубьев червячного колеса. Червячные передачи рассчитывают на сопротивление усталости и статическую прочность по контактным напряжениям и напряжениям изгиба. В большинстве случаев напряжения изгиба не определяют размеры передачи и расчет по ним определяют в качестве проверочного. Он значим только при больших числах зубьев колес (более 90…100) и для ручных передач. Зубья червячного колеса являются расчетным элементом зацепления, так как они имеют меньшую поверхностную и общую прочность, чем витки червяка. Зубья червячных колес рассчитывают так, как и зубья зубчатых колес – на контактную прочность и на прочность при изгибе; расчет на контактную прочность должен обеспечить не только отсутствие выкрашивания рабочих поверхностей зубьев, но и 2 отсутствие заедания, приводящего к задирам рабочих поверхностей зубьев. Расчет на контактную прочность активных поверхностей зубьев является основным для закрытых (работающих в масле) передач. Экспериментально уста2 новлено, что наименьшую кон/ d2 тактную прочность имеет околополюсная зона активных (рабочих поверхностей зубьев). Поэтому расчет контактных Рис. 5.8 напряжений производят для фазы контакта зубьев в полюсе зацепления (рис.5.8 ) Формулы для расчета червячных передач на контактную прочность Для проектировочного расчета: 1) межосевое расстояние при любом сочетании материалов червяка и колеса 2 0,463 KT2 E пр aw = (z2/q + 1) 3 z2 H q (5.30) 2) межосевое расстояние при стальном червяке и бронзовом (чугунном) колесе 62 2 5400 К К T aw = (z2/q + 1) 3 2 z2 H q (5.31) при проектировании редукторов серийного изготовления aw округляется до значений, рекомендуемых (см табл.5.2) по ГОСТ 2144-76. Для проверочного расчета: 1) контактные напряжения при произвольном сочетании материалов червяка и венца червячного колеса 3 z2 1 0,463 q K K T E σH= H a 2 пр z2 q (5.32) 2) контактные напряжения при стальном червяке и бронзовом (чугунном) колесе 3 z2 1 170 q K K T σH= H z 2 a 2 q (5.33) где [σH]- допускаемые контактные напряжения, Н/мм2 Т2 – момент на валу червячного колеса, Н∙мм К – коэффициент нагрузки: К = Кβ Кυ; Кβ - коэффициент неравномерности нагрузки: Кβ = 1+( z2/θ)3∙(1-x) (5.34) θ –коэффициент деформации червяка (выбирается по табл. 5.10) Таблица 5.10 Число заходов червяка 1 2 4 8 9 72 57 47 89 71 58 Коэффициент деформации θ при q 10 12 12,5 14 108 86 70 147 117 94 157 125 101 176 140 112 16 20 215 171 137 300 238 190 x = Tm/ Tmax = Σ Ti/ Tmax∙ni об/NL; (5.35) NL = Σ Lhi∙ni; ni об = Lhi∙ni; (5.36) где Tm – средний крутящий момент; Ti ,Lhi, ni – соответственно момент, время работы в часах или относительных единицах и частота вращения в минуту при режиме i; Tmax – максимальный длительно действующий момент. При постоянной нагрузке x=1 и Кβ =1; 63 Кυ – коэффициент, учитывающий динамическую нагрузку; определяется качеством изготовления и скоростью скольжения (табл. 5.11) Таблица 5.11 Степени точности по СТ СЭВ 311-76 6 7 8 9 до 1,5 1 1,1…1,2 1,2…1,3 Скорость скольжения υск, м/с свыше 1,5 свыше 3 свыше 7,5 свыше 12 до 3 до 7,5 до 12 до 16 1 1,1 1,3 1 1,1 1,2 1,2…1,3 1,4 - свыше 16 до 25 1,5 - При скорости скольжения υск≤ 3 м/с Кυ≈1. Для проектировочных расчетов принимают Кυ = 1,3…1,4. Епр = 2Е1∙Е2/Е1+Е2, где Е1 и Е2 – модули упругости материалов червяка и колеса, Н/мм2. Формулы для расчета червячных передач на изгибную прочность Расчет на изгиб для червячных передач является проверочным и ведется по колесу: σF= YF KFt 2 cos 1,3m 2 q F (5.37) Лишь в редких случаях для открытых передач с ручным приводом, а также при большом числе зубьев колеса (более 80) при машинном приводе он бывает проектным: m= 1,54YF KT2 cos qz 2 F (5.38) где YF – коэффициент формы зуба; выбирается по эквивалентному числу зубьев zv=z2/cos3γ по табл. 5.12 zv 20 24 26 28 YF 1,98 1,88 1,85 1,80 zv 30 32 35 37 YF 1,76 1,71 1,64 1,61 zv 40 45 50 60 YF 1,55 1,48 1,45 1,40 zv 80 100 150 300 Таблица 5.12 YF 1,34 1,30 1,27 1,24 Допускаемые напряжения изгиба для зубьев колеса определяют также, как и для зубчатых колес. Приближенные значения [σF] даны в табл.5.13. Допускаемые напряжения для материалов червячных колес Таблица 5.13 [σH], МПа Материал [σF], Скорость скольжения vск, м\с колеса МПа 0,5 1 2 3 4 6 8 БрАЖ 9-4 250 230 210 180 160 120 900 80 СЧ 15 130 115 86,5 38 СЧ 10 115 100 72,5 34 Примечание: Значения даны для колес, заготовки которых получены литьем в землю. 64 Формулы для расчета тела червяка на прочность и жесткость 1. Прочность тела червяка (рис. 5.7) рассчитывается по формуле: σF1= ME 0,1d f 1 3 F1 (5.39) где МЕ – эквивалентный момент, Н∙мм МЕ= M F 2 T12 МF- суммарный изгибающий момент, Н∙мм: МF= Ft l / 42 Fr l / 4 Ft d1 / 4 2 (5.40) l- расстояние между опорами, мм, для предварительных расчетов можно принимать l = (0,9…1,0)d2; Т1 – крутящий момент на червяке, Н∙мм: Т1 =1000∙N1/ω1 ,N1(Вт); (5.41) [σF1] – выбирают по табл. 5.14 Допускаемые напряжения [σF1],для червяка 1 2 Твердость Марка стали Термическая обработка (или состояние) HB HRC Ст 5 Ст 6 20 40 45 45 20Х 40Х 40Х 40ХН 18ХГТ 30ХГС 12ХНЗА 38Х2Ю 38Х2МЮА Горячекатаная Горячекатаная Нормализация Нормализация Нормализация Закал.,отпущ. Цемен., закал., отпущ. Улучшенная Закал.,отпущ. Закал.,отпущ. Цемен., закал., отпущ. Закал.,отпущ. Цемен., закал., отпущ. Закал.,отпущ.,азотир. Закал.,отпущ.,азотир. 170 200 200 280 250 - 45 45 35 - Предел прочности σb, МПа 500 600 410 570 600 850 850 750 1000 1300 1000 1100 1000 950 1050 Таблица 5.14 Допускаемое напряжение [σF1], МПа 50 60 45 60 60 70 70 75 85 90 85 85 85 80 90 В быстроходных передачах рекомендуется червяк проверять на выносливость. 2. При недостаточной жесткости прогиб червяка велик. Это нарушает правильность зацепления, ухудшает условия работы передачи. Чтобы избежать этого, желательно рассчитать величину прогиба червяка и сравнить ее с допустимой по формуле l 3 Fr Ft1 2 f= 48EI пр 2 f (0,010...0,005)m (5.42) где Iпр – приведенный момент инерции сечения червяка, мм4,определяемый по выражению 65 Iпр = d f 1 64 4 (0,375 0,625d a1 / d f1 ) (5.43) Если расчетная величина прогиба окажется больше допустимой, следует увеличить коэффициент диаметра червяка q или уменьшить расстояние между опорами. Допускаемые контактные напряжения 1. Для червячных колес из оловянистых бронз допускаемые контактные напряжения можно определить по формуле H (0,75...0,9) b 8 10 7 N HE (5.44) NHE –эквивалентное число циклов нагружений: NHE = 60∙Σ(T2i/T2)4ni∙Lni; (5.45) T2i , ni, ∙Lni – соответственно момент, частота вращения колеса в минуту и время работы в часах при режиме i; T2 – максимальный длительно действующий момент по которому ведется расчет. Если NHE >2,5∙107, то его принимают равным NHE = 25∙107 2. Для твердых бронз, латуней и чугунов допускаемые контактные напряжения выбирают из условия сопротивления заеданию в зависимости от скорости скольжения, материала червяка и его термической и механической обработок. [σH]=300-25∙vск, Н/мм2 – для бронзы БрАЖ 9-4 при работе со стальным закаленным и шлифованным червяком; [σH]=180-40∙vск – для колес из чугунов СЧ 15-32, СЧ 18-36 и стальных червяков; [σH]=210-35∙vск – для чугунных колес и чугунных червяков, где vск – скорость скольжения. Допускаемые напряжения при расчете зубьев колеса на изгиб 1. Допускаемые номинальные напряжения изгиба для бронзовых червячных колес при работе зубьев одной стороной можно определять по формуле [σF]= (0,25 Т 0,08 b )9 10 6 N FE (5.46) где σТ и σb - пределы текучести и прочности бронзы при растяжении; NFE – эквивалентное число циклов нагружений: NFE = 60∙Σ(T2i/T2)9ni∙Lni; (5.47) 6 6 Если NFE<10 ,его принимают равным 10 ; Если NFE>25∙107 ,его принимают равным 25∙107. 2. Допускаемые напряжения при работе обеими сторонами (при реверсивной передаче) [σ-1F]= 0,16 b F )9 66 10 6 N FE (5.48) 3. Допускаемые напряжения для чугунных червячных колес при работе одной стороной зуба [σF]= 0,12 bF (5.49) где σbF – предел прочности на изгиб. 4. При реверсивной передаче [σ-1F]= 0,075 b F (5.50) При использовании цементированных и закаленных до твердости HRC≥45 шлифованных и полированных червяков допускаемые напряжения изгиба для бронзовых и чугунных колес в связи с меньшим износом в зацеплении можно повысить на 25 %. 5.Предельные допускаемые напряжения при проверке на максимальную статическую или единичную пиковую нагрузку: [σFП]= 0,8 Т - для бронзы; (5.51) [σFП]= 0,6 b - для чугуна, (5.52) где σb – предел прочности при растяжении Пример 2. Определить основные размеры червячной цилиндрической передачи при следующих данных: момент на валу колеса T2=500 Н∙м, частота вращения колеса n2=30 об/мин, частота вращения приводного двигателя n1=960 об/мин. Решение: 1. Передаточное отношение u=960/30=22. 2. Принимаем двухзаходный червяк z1=2, коэффициент диаметра червяка ориентировочно q=10. Находим число зубьев колеса z2=u∙z1=22∙2=44. 3. В качестве материала червяка принимаем сталь 45, термообработка – закалка; материал колеса – бронза БрОФ10-1, отливка заготовки в кокиль. Допускаемое контактное напряжение [σН]=190 МПа. 4. Принимаем ориентировочно КНβКНυ=1,2 и находим межосевое расстояние по формуле: 2 5400 К К T = aw = (z2/q + 1) 3 2 z2 H q 2 =(44/10+1)∙ 3 5400 500 1,2 ≈158 мм. 44 190 10 5. Определяем модуль передачи, принимая x=0: 67 m 2a 2 158 5,58 мм q z 2 10 44 Округляем до стандартного значения m=6 мм и проверяем из ряда правильность принятого значения q. 6. Уточняем фактическое значение межосевого расстояния а mq z 2 610 44 162 мм 2 2 Определяем размеры червяка: d1 = qm = 106 = 60; d2 = z2m = 446 = 264; dа1 = m (q+2) = 6(10+12) = 72; dа2 = m (z2+2) = 6(44+2) = 276; df1 = m (q-2,4) = 6(10-2,4) = 45,6; df2 = m (z2-2,4) = 6(44-2,4) = 249,6; b1 ≥ (11+0,06z2) m = (11+0,0644)6 = 82; b2 ≤ 0,075dа1 = 0,07572 = 54, принимаем b1=100 мм, b2=54 мм. daM2 da2+1,5m = 276+1,56=285 мм 8. Оценим прочность зубьев колеса при изгибе по формуле: σF = 0,7YF Ft 2 1900 = 0,71,5 = 6,28 МПа 54 5,88 b2 m n вычислим требуемые для расчета величины: T2 z 2 500 = 1900 Н; arctg 1 arctg 11°20´; 10 d 2 0,264 q z2 44 47; mn= mcos γ =60,98 = 5,88 мм; zυ2 = 3 cos (0,98) 3 Ft2 = ΥF =1,5 (см. табл. 5.13) Так как допускаемые напряжения изгиба [σF] = 50 МПа выше расчетного значения напряжения в колесе, то условие прочности выполняется. 5.5 Рекомендации по выбору КПД и смазка червячной передачи. 3 КПД червячного зацепления определяют аналогично КПД резьбовой пары, которая по кинематическим свойствам аналогична червячной передаче. = tg /tg(+ 1) (5.53) где 1- приведенный угол трения, уменьшающийся с увеличением скорости скольжения, так как при этом улучшаются условия образования масляного слоя. 68 КПД передачи возрастает с увеличением числа заходов передачи z1, но передаточное число уменьшается. В предварительном расчете можно принимать: z1 1 0,7-0,75 2 0,75-0,82 Таблица 5.15 3,4 0,87-0,92 Невысокий КПД свидетельствует о том, что в червячной передаче значительная часть энергии превращается в теплоту. Вызванное этим повышение температуры ухудшает защитные свойства масляного слоя, увеличивает опасность заедания и выхода передачи из строя. Для предотвращения чрезмерного повышения температуры масла оценивают тепловой баланс между тепловыделением и теплоотдачей и при необходимости принимают меры по уменьшению тепловыделения или увеличению теплоотдачи. В первом случае за счет ограничения глубины погружения червяка в масло, применения маслоразбрызгивающих колец, верхнего размещения червяка и др. уменьшают потери на разбрызгивание и размешивание масла. Повышают также КПД передачи путем уменьшения шероховатости витков червяка, снижения коэффициента трения в контакте за счет подбора масла. Теплоотдачу улучшают увеличением поверхности охлаждения деталей корпуса (оребрением), искусственным охлаждением корпуса (обдувом вентилятором), применением циркуляционной системы смазывания (с подачей охлажденного масла в зоны контакта через струйные сопла (при v >10 м/с )). При окружных скоростях червяка до 5 м/с рекомендуется помещать его под колесом с целью улучшения подачи масла в зону зацепления. Оптимальный уровень масла – по центру нижнего тела качения подшипников; желательно, чтобы червяк был погружен в масло на глубину витка. Если условие не выдерживается, ставят маслоразбрызгивающие кольца. Для смазки ч.п. применяются нефтяные машинные масла повышенной вязкости. Вязкость масла рекомендуется выбирать в зависимости от скорости скольжения по табл. 5.16. Скорость скольжения vs,м/с Способы подачи масла 0…1* 0…2,5* 0…5** 5…10 10…15 15…25 Свыше 25 Окунанием -//-//Струйная или окунанием Под давлением ,МПа 0,07 0,2 0,3 Таблица 5.16 Кинематическая вязкость масла vt·10-6. м2/с при 50ºС (100 ºС) 450(55) 300(35) 180(20) 120(12) 80 60 45 69 5.6 Тепловой расчет червячной передачи. Червячные передачи работают с большим тепловыделением. Трение в зацеплении, подшипниках и размешивание и разбрызгивание масла приводят к нагреву редуктора. С повышением температуры ухудшаются смазочные свойства масла, что может быть причиной выхода редуктора из строя, поэтому червячные передачи необходимо проверять на нагрев. Точный расчет на нагрев сложен, требует большого количества исходных данных, которые часто неизвестны. Обычно ведут приближенные расчеты. Приближенные расчеты червячных передач, работающих в непрерывном или повторно-кратковременном режиме, производят по формуле: t=t0+(1-η)· N1 /[ Kt ·S(1+ψ)·β]≤(t) (5.54) где: t0- температура окружающего воздуха,ºС (обычно принимается равной 20ºС); η- КПД передачи; N1- мощность на червяке, Вт; Kt-16 Вт/(м· ºС) – коэффициент теплопередачи корпуса; S= S1+ S2 - свободная поверхность охлаждения корпуса редуктора; S1≈20· w2 ( w – межосевое расстояние, м) – поверхность редуктора без ребер; S2=(0,1…0,2) S1 – расчетная (50% фактической) поверхность ребер (меньшее значение при w >160 мм); Ψ ≈0,25 – коэффициент, учитывающий теплоотвод в фундаментную плиту; β - коэффициент, учитывающий уменьшение тепловыделения в единицу времени цикла работы ч.п. за счет перерывов и снижения нагрузки, tч.цикл/(∑ Ni· tчi/ Nрасч); tч.цикл – продолжительность цикла; Ni и tчi – мощность и продолжительность i-й ступени нагружения; Nрасч- расчетная мощность. Для передач, работающих в непрерывном режиме, наибольшее значение рабочей температуры масла t не должно превышать [t]=70…90ºС (70 ºС для редукторов с верхним, 90 ºС- с нижним расположением червяка). При наличии вентилятора расчет ведут по формуле t=t0+(1-η)· N1 /[ Kt ·(S-Sв)·(1+ψ)+Kт.в.· Sв]·β ≤(t) (5.55) где: Sв ≈0,3· S1- площадь поверхности, обдуваемой вентилятором, м2 Kт.в – коэффициент теплопередачи поверхности, обдуваемой вентилятором, Вт/(м· ºС), выбирается по табл. 5.17 в зависимости от средней скорости движения воздуха у поверхности редуктора vв (м/с), vв≈0,1√ vкр3; vкр = π·Dв·n1/60000 – окружная скорость крайних точек лопастей центробежного вентилятора м/с; 70 Dв≈0,7·d2 – наружный диаметр крыльчатки вентилятора, м; d2 – делительный диаметр червячного колеса, м. Средняя скорость движения воздуха vв , м/с 0 2 4 6 8 Коэффициент теплопередачи Kт.в ,Вт/(м· ºС) 10,5 15,0 19,5 24,0 28,5 Средняя скорость движения воздуха vв , м/с 10 12 14 16 18 Таблица 5.17 Коэффициент теплопередачи Kт.в ,Вт/(м· ºС) 33,0 37,5 42,0 46,5 51,0 Для тяжелонагруженных червячных передач, работающих с длительными остановками, во время которых редуктор успевает остыть, определяется допустимое время непрерывной работы до достижения предельной температуры, с: Lh=(G1·c1+ G2·c2)·([tmax]-t0) / (1-η)·N1-S·tm(1+ψ) , (5.56) где: G1 и G2 - соответственно масса редуктора и масла, кг; c1 – удельная теплоемкость металла, c1=0,5·103 Дж/(кг· ºС) c2 – удельная теплоемкость масла, c2=1,63·103 Дж/(кг· ºС); [tmax]- предельно допустимая температура нагрева, [tmax]=90…120 ºС; tm – средняя избыточная температура масла, ºС, tm=0,5([tmax]- t0). 71 6. Планетарные передачи 6.1. Общие сведения: характеристика, виды передач, области назначения и применения. Планетарными называют передачи, колеса которых движутся подобо планетам солнечной системы (рис.6.1): центральные колеса вращаются только вокруг своей оси (называемой центральной), а сателлиты 2, входящие в зацепление (внутреннее или внешнее) с центральными колесами, вращаются вокруг осей центральной и своей. Оси сателлитов закреплены на водиле, вращающемся относительно центральной оси. Другими словами планетарные передачи имеют зубчатые колеса с перемещающимися геометрическими осями. Различают простые планетарные передачи, дифференциальные и замкнутые дифференциальные. Широко используются также комбинации планетарных передач с коробками, вариаторами, гидротрансформаторами, муфтами и другими устройствами. Если в планетарном механизме подвижны все звенья, такая передача называется дифференциальной. Здесь один вид движения можно разделить на два, или, наоборот, два вида движения соединить в одно. Такие передачи находят широкое применение в станках, приборах, транспортных машинах и т.д. Если два основных звена планетарного механизма связаны какой-либо передачей, такая планетарная передача называется замкнутой. У нее в отличие от дифференциальной одна степень свободы. Планетарный механизм показан на рис. 6.1. 3 3 Í 2 Í 2 O 1 1 Рис. 6.1. 72 O Зубчатые колеса 3 и 1 называют центральными. У них общая с водилом Н геометрическая ось OO (основная). Колеса 1, 3 и водило Н называют основными звеньями. Колесо 2 называется сателлитом. Сателлит в работе совершает сложное движение: вращается с водилом Н и вокруг своей собственной оси, закрепленной в водиле. Вообще сателлиты планетарных передач выполняют одно- или двухвенцовми в большинстве случаев с внутреннм отверстием для подшипников или оси. В планетарном ряду обычно несколько сателлитов. Самым оптимальным считается вариант с тремя сателлитами, так как в этом случае последние нагружаются более равномерно. На рис 6.2. показана кинематическая схема планетарных замкнутых дифференциалов с одной степенью свободы. Основная планетарная передача показана жирными линиями, замыкающая – тонкими. Замыкающая передача соединяет: а – колеса 1 и 3, б - колесо 3 и водило Н, в – колесо 1 и водило Н. 3 3 H H 1 1 Рис. 6.2 Планетарные передачи имеют широкие области назначения и применения: 1. Редуцирование скорости – силовые передачи с малыми удельными габаритами и массой, кинематические передачи с большими передаточными отношениями. 2. Сложение и разложение движения, в том числе с автоматическим управлением скорости в станках, автомобилях и других машинах, многоступенчатые планетарные коробки скоростей, управляемые поочередным торможением звеньев, замкнутые планетарные передачи с встроенной бесступенчатой передачей и т.д. 73 Преимущества планетарных передач (малые габариты и меньшая масса) объясняются следующими причинами: а) распределением нагрузки между сателлитами, благодаря чему нагрузки на зубьях меньше в несколько раз (нагрузка на опоры меньше - силы в передаче взаимно уравновешиваются); б) большим передаточным отношением в одной ступени, что часто позволяет не прибегать к сложным многоступенчатым передачам; в) широким применением передач с внутренним (более прочным) зацеплением, обладающих повышенной несущей способностью. Кроме того, в связи с меньшими размерами планетарные передачи допускают термическую обработку колес до более высокой твердости. Планетарные передачи работают с меньшим шумом, чем простые, что связано с повышенной плавностью внутреннего зацепления, меньшими размерами колес, замыканием сил в механизме и передачей меньших сил на корпус. Зато планетарные передачи требуют повышенной точности изготовления, имеют, как правило, большее число деталей и сложнее в сборке, чем передачи с неподвижными осями. Планетарные передачи хорошо вписываются в электродвигатели, ходовые колеса, барабаны, шкивы. 6.2. Кинематика планетарных передач. Кинематические схемы наиболее распространенных планетарных передач и их основные параметры. Наиболее распространенная передача, показанная на схеме 1. По сравнению с другими она имеет малые габариты, большую нагрузочную способность и высокий КПД. Передачу по схеме 2 обычно применяют в комбинации с простой зубчатой и передачей по схеме 1 в приводах повышенной надежности. Эти передачи простые с небольшими передаточными отношениями и высоким КПД. Передачи применяют для силовых приводов. 2 3 3 2 H H 1 1 74 Передачи по схеме 3 характеризуются большими передаточными отношениями, но имеют низкий КПД и малую нагрузочную способность (они однопоточные). Их применяют в приводах с малыми нагрузками или кратковременного включения. 3 2' 1 2 H Передачи по схеме 4 применяют как дифференциальные (с ведущим водилом и ведомыми центральными колесами 1 и 3, а водилом – ведомым). и как редукторную – с одной степенью свободы. 2 3 1 H Передачи по схеме 5 имеют диапазон передаточных отношений, как и передачи по схеме 3, но более высокий КПД и большую нагрузочную способность (благодаря многопоточности). Вследствие наличия блока сателлитов 2-2' технологически сложны. Применяют в кинематических и силовых приводах. 3 2 2' 4 1 H 75 Примечания: В приведенных формулах верхний индекс, стоящий в скобках при i, n, η и ψ, обозначает неподвижное звено. Первый нижний индекс обозначает ведущее звено, второй – ведомое. Ориентировочное значение коэффициента потерь в одной паре зубчатых колес ψ(H) = 0,025. При проектировании планетарных передач очень важно выбрать оптимальную кинематическую схему, так как планетарные передачи разных схем для одной и той же цели могут иметь существенно различные габариты и в несколько раз отличающиеся потери. Таблица передаточных отношений и чисел зубьев колес для схем 1-5. z3 z1 z2 i(3)1H i(1)3H 50 16-20 17-15 4,125-3,500 1,320-1,400 55 15-23 20-16 4,670-3,391 1,273-1,418 60 16-24 22-18 4,750-3,500 1,267-1,400 63 15-27 24-18 5,200-3,333 1,238-1,429 65 15-27 25-19 5,333-3,407 1,231-1,415 68 16-28 26-20 5,250-3,429 1,235-1,412 70 16-30 27-20 5,375-3,333 1,229-1,429 75 15-31 30-22 6,000-3,419 1,200-1,413 80 16-34 32-23 6,000-3,353 1,200-1,425 85 15-35 35-25 6,667-3,429 1,176-1,412 90 16-38 37-26 6,625-3,368 1,178-1,422 95 15-39 40-28 7,333-3,346 1,158-1,411 100 16-42 42-29 7,250-3,381 1,160-1,420 105 17-45 44-30 7,176-3,333 1,162-1,428 110 18-46 46-32 7,111-3,391 1,163-1,418 115 19-49 48-33 7,053-3,347 1,165-1,426 120 18-50 51-35 7,666-3,400 1,150-1,418 z1- число зубьев солнечного колеса (изменяется через два зуба); z2 – число зубьев сателлита (изменяется через один зуб); z3 - число зубьев корончатого колеса; Н- водило. 6.3. КПД планетарных передач. В силовых планетарных передачах относительно небольшие потери мощности на трение и их можно не учитывать при проектировочных прочностных расчетах. Потеря мощности в планетарной передаче образуется из потерь на трение в зацеплениях, опорах и потерь на разбрызгивание и размешивание масла. Относительно точно потери в зацеплениях и опорах определяются расчетным путем. Аналитически определить гидравлические потери сложно и 76 расчеты получаются приближенными, поэтому их определяют опытным путем. КПД планетарной передачи определяется при остановленном водиле как η н = 1-ψн, где ψн = ψнз + ψнn ; ψнз – коэффициент потерь в зацеплении. Для одной пары зацепления ψнз = 2,3f3(1/z1±1/z2) f3 = 0,08 – коэффициент трении я в зацеплении; z1 и z2 – число зубьев сопряженных колес ; плюс – для внешнего, минус – для внутреннего зацепления; ψнn – ко 13H эффициент, учитывающий по 31H тери в подшипниках. Для 0 ,9 8 планетарных передач, имеющих несколько сателлитов, H13 потери в подшипниках неве0 ,9 6 H лики и ими можно прене-4 -8 - 12 i 13 бречь. Рис. 6.3. На рис 6.3 представлены ориентировочные значения КПД планетарных редукторов. 6.4. Подбор числа зубьев колес. При подборе числа зубьев колес планетарной передачи необходимо выдержать не только заданное передаточное отношение, но и обеспечить условие соседства, соосности и 3 сборки. 1 2 da2 O2 p aw12 Рис. 6.4. nc da2' O2' 2' Условием соседства предполагается, что сателлиты не должны касаться друг друга (рис. 6.4). Чтобы соседние сателлиты или паразитные колеса не касались друг друга необходимо выполнить условие: 77 О2О2´ > da2, где О2О2´ - межосевое расстояние между соседними сателлитами; da2 - диаметр окружности выступов сателлитов. Выражая О2О2´ через межосевое расстояние aω12 , получим 2∙ aω12 ∙sin π/nc > da2, где nc – число сателлитов. Если зубья нарезаны без смещения, то aω12 = a12 = 0,5∙m∙(z1+z2); da2 = m∙ z2 + 2∙m; (z1+z2) ∙sin π/nc > z2+2. Минимальное значение зазора между окружностями вершин зубьев соседних сателлитов принимают равным модулю передачи, но не менее 2 мм. Условие соосности состоит в том, что в планетарных передачах с цилиндрическими колесами межосевые расстояния должны совпадать: aω12 = aω23 Для зубчатых колес, нарезанных без смещения: a12 = a23 Если выразить a12 и a23 через модуль и числа зубьев, то получим: 0,5m(z1+z2) = 0,5m(z3 - z2); z1+z2 = z3 – z2. Числа зубьев корончатого колеса 3 и сателлита 2 z3 = z1+ 2z2 z2 = 0,5(z3 – z1) = 0,5z1(i(3)1H– 2) Для передачи по схеме 3. где колеса расположены в двух параллельных плоскостях, условие соосности aω12 = aω2' 3 При равенстве модулей обеих пар колес и условии что они нарезаны без смещения инструмента, то условие соосности: z1 - z2 = z3 – z2 Для передачи по схеме 5, где колеса также расположены в двух параллельных плоскостях, условие соосности aω12 = aω23 = aω2' 4 или (при равных модулях и зубьях, нарезанных без смещения инструмента) z1+z2 = z3 – z2 = z4 – z2' Условие вхождения зубьев в зацепления при равных углах расположения сателлитов. Для передач, где колеса расположены в одной плоскости z1+z3/nc=целое число или по формуле 6. . 78 2(z1+z2)/ nc= целое число В передачах, где колеса расположены в двух параллельных плоскостях, для выполнения этого условия зубья всех ценральных колес выбирать кратными числу сателлитов. Относительное расположение зубьев во всех сателлитах с двумя венцами должно быть одинаковым. В многопоточных соосных планетарных передачах, представленных выше в схемах (кроме схемы 3), для их собираемости и при выборе чисел зубьев колес необходимо выполнить все три условия. 6.4. Смазка планетарных передач. В планетарных передачах, выполненных в виде самостоятельных агрегатов, применяют два способа смазывания: окунание колес в масляную ванну и циркуляционный. Первый способ применяется при условии, что окружная скорость сателлита в месте зацепления с корончатым колесом υ = 5 м/с. Объем масляной ванны в пределах 0,3-0,5 л на 1 кВт передаваемой мощности; в редукторах транспортных машин значительно меньше ( до 0,03 л на 1 кВт ). При υ > 3 м/с смазывание центральных колес и подшипников качения сателлитов обеспечивается разбрызгиванием масла. Если значение скорости меньшее, то для смазывания подшипников применяют пластичные смазочные материалы, которые закладываются при сборке в полость подшипников, а затем в подшипник устанавливают мазеудерживающие кольца. Чтобы продукты износа могли осесть на дно масляной ванны, расстояние от него до наиболее погруженной вращающейся поверхности должно быть не менее 20 мм, а при значении модуля более 4 мм- порядка 5-8 модулей. Для исключения гидравлического удара следует избегать образования застойных зон масла в полостях венцов внутреннего зацепления и встроенных зубчатых муфт, предусматривая необходимые дренажные отверстия. Уровень масла проверяют контрольными резьбовыми пробками, устанавливаемыми в корпусах на высотах, соответствующих максимальному и минимальному уровням масла; крановыми маслоуказателями, щупами или масломерными стеклами. Сливают отработанное масло через отверстие, закрываемое резьбовой пробкой, Форма дна и расположение отверстия должны обеспечить полный слив масла. Если отсутствует периодический контроль масла, его замену необходимо производить через 2500…5000 ч работы. Циркуляционную систему смазывания применяют в редукторах большой мощности, где смазывание окунанием не обеспечивает подвод масла к трущимся поверхностям. В системе смазывания устанавливают в редукто79 ре масляный насос, фильтры, редукционный клапан, холодильник и измерительные и приборы. Производительность насоса определяется тепловым расчетом редуктора. Ориентировочно принимают ее при υ ≤ 10 м/с – 1 л/мин на 10 мм ширины венца, при υ> 10 м/с – 2 л/мин. Общий объем масла в системе должен быть не менее трехминутного расхода. Масло в зацепление подается форсунками на торцы колес или через осевое и радиальные отверстия в солнечном колесе, выходящие во впадины зубьев. Для смазки планетарных передач используются нефтяные нелегированные масла, главным образом индустриальные общего назначения, реже, в основном для высокоскоростных редукторов, - турбинные и авиационные масла. Синтетические масла обладают лучшими смазочными свойствами, но из-за сравнительно высокой стоимости применяются лишь тогда, когда не могут быть заменены нефтяными. При циркуляционной системе смазки во избежание больших гидравлических сопротивлений используют масла сравнительно невысокой вязкости, повышая их несущую способность введением антизадирных присадок. 6.5. Расчет зубчатых зацеплений. Расчет зубчатых зацеплений состоит из расчета зубчатых колес на прочность; расчета геометрических параметров и проверки качества зацепления по геометрическим характеристикам. Размеры зубчатых колес планетарных передач определяют в большинстве случаев из расчета на контактную выносливость активных поверхностей зубьев и значительно реже из расчета зубьев на изгиб или заданную долговечность подшипников качения сателлитов. Расчеты на изгиб обычно ведут в форме проверочных, так как необходимые данные оказываются известными после проектировочного расчета на контактную выносливость активных поверхностей зубьев. Проверка прочности колес при действии максимальной нагрузки проводится следующим образом. Контактная прочность. Расчетное напряжение σHmax=σH T1 max , T1H где T1max – максимальная нагрузка. Допускаемое напряжение для колес, подвергнутых нормализации, улучшению, объемной закалке с низким отпуском, ТВЧ σНРМ = 2,8 σТ, где σТ – предел текучести материала, МПа; для цементованных колес σНРМ = 40 HRC. Прочность при изгибе. Расчетное напряжение σFМ = σF T1FM/ T1F, 80 где T1FM – максимальный момент. Стали Термическая обработка Легированные и углеродистые То же Легированные То же -//-//То же, не содержащие алюминий То же, содержащие алюминий Твердость на поверхнос- в сердцевине ти Нормализация или улучшение Закалка ТВЧ Закалка объемная Закалка ТВЧ с охватом дна впадины Цементация и закалка Нитроцементация Азотирование HB 180…350 - Допускаемые напряжения σFРМ,МПа 2,74 HHB HRC 45…50 HRC 48…60 HB 200…300 HRC 25…29 3,43 HHB 1400 1257 HRC 56…62 HRC 30…45 1200 HRC 56…62 HV 500…700 HRC 30…45 HRC 24…40 1500 1000 Азотирование HV 700…950 HRC 24…40 1150 Табл. 6.1. Допускаемые напряжения при расчетах на прочность при изгибе максимальной нагрузкой при вероятности неразрушения P = 0,99 В планетарных передачах, где сателлит входит в зацепления с двумя центральными колесами (солнечным и корончатым) и механические характеристики материала колес примерно одинаковы, рассчитывают на прочность только внешнее зацепление (солнечное колесо - сателлит). При определении числа циклов нагружения зубьев надо учитывать только относительную частоту вращения колес, т. е. при остановленном водиле. Для передач с вращающимся центральным колесом 1 и неподвижным n относительные частоты вращения колес определяют по формулам: n1(H)= n1(n) – nH(n) nn(H)= – nH(n) nc(H)= nH(n)zn/zc Порядок расчета зубьев планетарных передач на прочность зависит от задания на проектирование. При проектировании планетарной передачи как отдельной сборочной единицы расчет следует начинать с определения межосевого расстояния из условия контактной прочности. При проектировании мотор - редуктора диаметр передачи определяется диаметром 81 корпуса присоединяемого электродвигателя, поэтому расчет удобно начинать с определения ширины колес из условий контактной и изгибной прочности. Окончательная ширина колес определяется после подбора подшипников сателлитов. Величины сил и вращающих моментов, действующих на звенья планетарных передач, не зависят от числа степеней свободы. В передачах с одной степенью свободы вращающий момент, действующий на неподвижное центральное колесо, уравновешивается реакциями мест закрепления. В многопоточных передачах (рис. 6.) в установившемся режиме работы силы в зацеплениях, действующие на центральные колеса и водило, уравновешивают друг друга, и поэтому валы нагружены только вращающим моментом. Силы зацеплений, действующие на сателлиты, приложены на диаметрально противоположных сторонах, поэтому их радиальные составляющие уравновешивают друг друга, а окружные складываются, так как они параллельны и направлены в одну сторону; суммарная нагрузка действует на подшипники и оси сателлитов. n F21 n F21 F2H n F23 n 1 F23 3 n F21 H n F23 F2H F2H n F23 n F32 H 3 F2H F n n F21 12 n F21 n F23 n F12 n F32 1 n n F12 n F21 n F32 F23 F2H 82 F2H Рис. 6. Для проведения силового расчета удобно пользоваться методом, представленным на рис 6. , где последовательно рассматривается равновесие каждого звена передачи. Начинать нужно со звена, на котором задан вращающий момент, по его значению и размерам колес находят уравновешивающую силу; затем на основании равенства действующей и противодействующей сил находят силу, действующую на звено, входящее в кинематическую пару. Далее рассматривают равновесие второго звена, находят уравновешивающую силу или момент и т. д., пока не будет рассмотрено равновесие всех звеньев передачи. Все силы обозначены буквой с двумя нижними цифровыми индексами: первый указывает на номер звена, со стороны которого действует сила, второй – звено, на которое действует сила. Проверкой правильности силового расчет служит уравнение равновесия внешних вращающих моментов, приложенных к передаче (в том числе и опорный момент). F32 3 F2H H 2 TH F23 FH2 F12 T3 F21 T1 1 Рис. 6. TH=F2Ha12n' c; F2H=TH/a12n' c; FH2=F32+F12; F32=F12=FH2/2; T3=F23∙d3/2∙ n' c; T1=F21 ∙d1/2∙ n' c; TH=T1+T3; 83 6.6. Пример расчета планетарного редуктора Входные данные для расчета: Р = 2.2 кВт – мощность на ведущем валу редуктора, W1 = 73.3 1/сек – угловая скорость ведущего вала, W2 = 10.5 1/сек – угловая скорость выходного вала редуктора. Z2 Âî äèëî Z1 Z3 Êèí åì àò è÷åñêàÿ ñõåì à ðåäóêò î ðà Fñàò .- í åï .ê. Fâ- ñ Ðî Ñõåì à äåéñò âèÿ ñèë â ï ëàí åò àðí î ì ì åõàí èçì å Кинематический расчет Определим передаточное число редуктора i = w1/w2 = 73.3/10.5 = 7 84 Выберем кинематическую схему редуктора . Для передаточных чисел в диапазоне 3 – 9, как уже говорилось выше, подходит схема одноступенчатой планетарной передачи с неподвижным колесом с внутренними зубьями. Передаточное отношение для подобных передач определится i 1-3 = 1+Z3/Z1 Подбираем числа зубьев исходя из обеспечения условий соосности, сборки и соседства. Выберем числа зубьев Z1=20, Z2=50, Z3=1120. Передаточное число при выборе зубьев трудно сохранить в точности с заданием. Примем допустимую погрешность скорости движения 2%. i1-3 = 1 + 120/20 = 7 Погрешность передаточного отношения отсутствует. Принимаем выбранные числа зубьев колес. Проверяем условия работоспособности и сборки планетарного механизма. 1.Проверка передачи по условию соосности: Z1+Z2=Z3-Z2 20+50=120-50 = 70 70=70 Условие соосности соблюдается 2. Проверяем передачу по условию сборки: Z1+Z3=C, Где =Z1*i1-3/C – конструктивный коэффициент. Для данной передачи =20*7/3=46.6, здесь С – число сателлитов, выбираем С=3. Тогда Z1+Z3 = C = 20+120=46.6*3 , или 140=140. Условие сборки выполняется. 3.Проверяем условие соседства: Z3[Z1(1+sin60)-4]/(1-sin60)=[20(1+0.866)-4]/(1-0.866) = 237 Z3=120237, Условие соседства выполняется. Определим коэффициент полезного действия планетарной передачи При неподвижном колесе с внутренними зубьями расчетная формула 1-Н = 1- (1-1/i1-2)(1-13). Здесь 13 – к.п.д. зубчатой передачи от первого колеса к третьему при неподвижном водиле для двух цилиндрических передач с последовательным включением равно 0.94. I1-2=Z2/Z1=50/20=2.5 85 Таким образом к.п.д. планетарной передачи вычислится 1-Н = 1-(1-1/2.5)(1-0.94) = 0.96 Определение момента нагрузки на шестерне Момент нагрузки на валу шестерни определим исходя из прилагаемой мощности и угловой скорости движения вала Мном = Р1/W1=2000/73.3 = 27.3 Нм Определим расчетное значение момента на шестерне с учетом распределения потока мощности между сателлитами и коэффициента нагрузки Кн = 1.2 М1=Мном*Кн/С = 27.3*1.2/3=11 Нм Выбор материала для зубчатой передачи Для передач редуктора предусматривается эвольвентное зацепление без смещения исходного контура. Основные параметры зацепления согласно ГОСТ 2185-75. По условиям работы редуктор является механизмом длительного действия с коэффициентом включения ПВ близким к 90% при 2-3 сменной работе. Исходя из высоких требований к прочности и надежности передачи выбираем сталь ст 40Х с объемной закалкой и отпуском до твердости HRc48. Для зубчатых колес примем 7-ю степень точности по нормам плавности по ГОСТ 1643-81 (ст СЭВ 641-77). Для прямозубых колес разность средней твердости шестерни и колеса должна составлять 20 единиц по шкале Бринеля. Твердость материала шестерни желательно иметь больше с точки зрения обеспечения равномерности износа передачи и компенсации уменьшения прочности зуба у шестерен с небольшим количеством зубьев. При длительной работе передачи при постоянно высокой нагрузке близкой к номинальной в соответствии с мощностью двигателя основным прочностным расчетом является расчет по контактным напряжениям. Проверочным является расчет на изгиб зуба. Из расчета зубьев на контактную прочность вычисляется межосевое расстояние передачи a . Поскольку в нашем случае схема расположения зубчатых колес определена и принята заранее, а для наиболее тяжело нагруженных передач приняты межосевые расстояния, то часть расчетов проводятся как проверочные. Выбор допускаемых напряжений 86 Выберем коэффициент ширины зубчатого венца колеса ба =0.3 Основной расчет передачи проводим по контактным напряжениям. Твердость колеса и шестерни выбираем одинаковой, соответствующей объемной закалке HRc48 = HB460 Коэффициент неравномерности нагрузки по длине зуба KH=1 для прямозубой тихоходной передачи. Допускаемое контактное напряжение Н вычислим по формуле Н = zRzVzHLHlimв/SH , где : imв = 18HRc+150=18*48+150=1014 Мпа – предел контактной выносливости поверхности зубьев соответствующий принятому методу закалки ст40Х. SH=1.1 – коэффициент безопасности, ZR=0.95 – коэффициент, учитывающий шероховатость поверхностей зубьев, ZV=1 - коэффициент, учитывающий скоростные характеристики передачи. Базовое число циклов напряжений для твердости HB460 равно NНО = 70 6 10 , эквивалентное число циклов вычислится NHE=60n5t= 60*33*104 =19.8 106 Для соотношения NHE/NHO=19.8*106/70*106=0.28 Коэффициент долговечности KHL=1.3 Определим допускаемое контактное напряжение = 0.95 * 1 * 1.3 * 1014/1.1 =1138 Мпа Допускаемое контактное напряжение расчитано для срока службы редуктора t=104 часов, т.е. для 5 лет при односменной работе . Для трехсменной работы КHL=0.9 и 0.95 * 1 * 0.9 * 1014 /1.1 = 790 Мпа Примем меньшее значение для дальнейших расчетов. Вычислим межосевое расстояние, которое должно иметь передача при данных условиях работы [aw] = Ka( u+1) 3 2 u 2 в а [ H ] , где Ка = 495 – коэффициент нагрузки для прямозубой передачи, u = 2.5 – передаточное отношение передачи Z1 – Z2, М1 = 11 Нм. 87 Определим допускаемое межосевое расстояние в соответствии с принятыми допускаемыми напряжениями [aw] = 495*3.5 3 11 *1.05 37 мм 6.25 * 0.3 * 7902 Вычислим потребное значение модуля исходя из прочности передачи по контактным напряжениям м=2аw/(Z1+Z2) = 2*37/(20+50) = 1.06 mm Принимаем стандартное значение модуля м=1.5 мм. В связи с этим модулем пересчитаем межосевое расстояние в между колесами Z1 и Z2 aw = m(Z1+Z2)/2 = 1.5(20+50)/2=52.5 mm Вычислим ширину колеса и шестерни bk = ba*aw = 0.3*52.5=15.75 mm bш = bk + 10 = 25.75 mm Произведем проверку прочности зубьев по напряжениям изгиба и контактным напряжениям Проверим рабочие поверхности зубьев на контактную прочность по максимальному контактному напряжению при действии на зубцы кратковременной нагрузки ZH ZM Z u 1 3 103 M 1K HL K H K H (u 1) /( 2a ва ) , u где : ZH = 1.76 – для прямозубых передач; Z M E / (1 2 ) - коэффициент, учитывающий механические свойства материала. Для стали ст 40Х ZM = 275 * 103 Па1/2 Z= (4 ) / 3 - коэффициент, учитывающий перекрытие в зацеплении зубьев. = 1.88 – 3.2(1/Z1 – 1/Z2) – коэффициент торцевого перекрытия. 1.88 – 3.2(1/20+1/50) = 1.655 Z= (4 1.655) / 3 = 0.87 Вычислим H = 1.76*275*0.77*1.14 10311 *1.05 *1 *1 * 8 /( 2 * 37 2 * 0.3) 383Мпа Для стали ст 40Х с объемной закалкой и отпуском по ГОСТ 4543-71 предел текучести =700Мпа. 88 Допускаемое контактное напряжение для зубьев мах=2.8=2.8 * 700 = 1960 Мпа 2=2 * 397 = 794 МПамах=1960 Мпа Следовательно при кратковременной перегрузке передача сохраняет прочностные свойства. Проверочный расчет передачи произведем по напряжениям изгиба у зубьев шестерни, используя формулу F YF Y Y K F K F K F 2 10 3 2 F , Z12 вд м 3 где : YF= 3.8 – коэффициент формы зуба ( для шестерни Z1 =20). Y=1 ; Y=1 – для прямозубых колес. Делительный диаметр d1 = m* z2 =1.5*20 = 30 mm. Окружная скорость передачи V = w1d1/2 = 73.3*0.03/2= 1 м/сек Для скорости V = 1 м/сек коэффициенты КHV=1.02, KH=1.03, FF=1 При тердости HB460 и бd=0.6 принимаем коэффициенты KF=1, KFV=1.02 Предел изгибной выносливости зубьев для принятой стали и метода термической обработки F lim b=580 Мпа Примем коэффициент безопасности SF=1.7. Эквивалентное число циклов напряжений NFE=60n1t=60 * 700 * 30 103= =108 106 Так как NFENFo, то коэффициент долговечности КEL=1 ; KFc=1. Допускаемое напряжение на изгиб FFlim bKELKFc/SF=580*1*1/1.7=341МПа Произведем проверочный расчет зубьев шестерни на изгиб F = 3.8*1*1*1.02*1.03*1*2000*48/202*0.6*23=81.2 Мпа Таким образом : F=81.2 Мпа [F]=341 Мпа При действии штатной нагрузки зубья передачи будут прочными по напряжениям изгиба. Проверим зубья на пластическую деформацию или хрупкий излом при изгибе при действии на зубья кратковременной перегрузки в два раза. Расчетное напряжение на изгиб зубьев, вызываемое расчетным моментом М1=11 Нм. Допускаемое максимальное напряжение на изгиб зубьев Fмах=0.6в=0.6х950=570 Мпа, 89 где :в=950 Мпа предел прочности для стали 40Х с объемной закалкой по гост 4543-71. Так как кратковременная перегрузка больше номинальной в два раза, то Fмах=2F=2х78=156 МПаF570 Мпа Следовательно при 2-х кратной перегрузке зубья на изгиб вполне прочные. Определение геометрических пераметров зубчатых колес Вычислим характерные диаметры зубчатых колес: d1 = m*Z1 = 1.5*20=30mm – диаметр делительной окружности шестерни da1 = d1+2m = 33 mm – диаметр окружности выступов df1 = d1-2.5m=26.25 mm – диаметр впадин d2 = m*Z2 = 1.5*50 =75 mm da2 = d2 + 2m = 78 mm df2 = d2 – 2.5m = 71.25 mm d3 = m*Z3 = 1.5*120 =180 mm da3 = d3 + 2m = 180+3=183 mm df3 = d3 – 2.5m = 180-3.75=176.25 mm Определение усилий в зацеплении зубчатых колес и реакций в опорах валов передачи Усилия в зацеплениях и опорах принято определять из условия поочередного рассмотрения равновесия каждого звена под действием сил, являющихся внешними для данного звена. Силы трения при этом не учитываются. На рис . показано действие сил в зацеплении. Из условия равновесия солнечного колеса при заданном моменте на валу М1 получим расчетное окружное усилие в зацеплении Ро = 2М1*Кн/d1, где Кн = 1.2 – коэффициент неравномерности нагрузки. Ро = 2*11*1.2/0.03 = 880 Н Радиальное усилие равно Рр=Ро*tg = 880*0.364 = 320 Н Усилие в опоре (подшипниковый узел) сателлита Рс = 2Ро =1760 Н. Реакция в опоре сателлита (при центральном расположении колеса) определится R = Рс 2 Рр 2 1760 2 320 2 1784 Н При симметричном расположении сателлитов входные и выходные валы планетарных передач нагружены только вращающим моментом и опоры этих валов разгружены от радиальных нагрузок. 90 Передача мощности от ведущего колеса к ведомому водилу осуществляется по нескольким потокам, число которых равно числу сателлитов. Нагрузка на зубья колес планетарных передач уменьшается соответственно в несколько раз. Литература 1. Анурьев В.И. Справочник конструктора машиностроителя: В 3 т. М., 1979-1982. Т. 1 - 728 с. Т. 2 – 559 с. Т 3 – 557 с. 2. Решетов Д.Н. Детали машин. М.: Машиностроение, 1989. 496 с. 3. Планетарные передачи: Справочник/ Под ред.В.Н. Кудрявцева и Ю.Н. Кирдяшева. М. – Л., 1977. 536 с. 4. Курсовое проектирование деталей машин./ Под ред. С.А. Чернавский, Г.М. Ицкович, К.Н. Боков. М.: Машиностроение, 1979. – 391 с. 5. Иванов М.Н. Детали машин. М.: Машиностроение, 1984. – 399 с. 6. Сборник задач по деталям машин./ Под ред. М.Я. Романов, В.А. Константинов, Н.А. Покровский. М.: Машиностроение, 1984. – 240 с. 7. Курсовое проектирование грузоподъемных машин./ Под ред. Н.Ф. Руденко, М.П. Александров, А.Г. Лысяков. М.: Машиностроение, 1970. – 464 с. 8. Детали машин в примерах и задачах./ Под ред. С.Н. Ничипорчика, М.И. Корженцевский, В.Ф. Калачев. Мн.: Высшая школа, 1981. – 432 с. 9. Курсовое проектирование деталей машин: Справочное пособие. Часть 1/ А.В. Кузьмин, Н.Н. Макейчик, В.Ф. Калачер и др. Мн.: Высшая школа, 1982. – 208 с. 10. Курсовое проектирование деталей машин: Справочное пособие. Часть 2/ А.В. Кузьмин, Н.Н. Макейчик, В.Ф. Калачер и др. Мн.: Высшая школа, 1982. – 334 с. 91 Учебное издание САВРАСОВ Генрих Андреевич ЛЫСЕНКО Сергей Викторович ДОЛГИХ Анатолий Михайлович ЗУБЧАТЫЕ ПЕРЕДАЧИ Учебное пособие к курсовому проекту для студентов машиностроительных специальностей Редактор Р.А. Козина Лицензия ИД №06268 от 14.11.01 Подписано в печать 92 Формат Бум. Тип. Усл. печ. л. 6.4(6.9) Уч.-изд. л . 6,2 Тираж 100 экз. Заказ ………. ………… Саратовский государственный технический университет 410054 г. Саратов, ул. Политехническая, 77 Копирпринтер СГТУ, 410054 г. Саратов, ул. Политехническая, 77 93