Определение упоров ВРШ
реклама

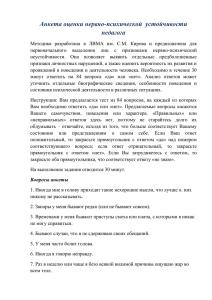
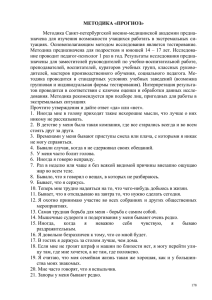
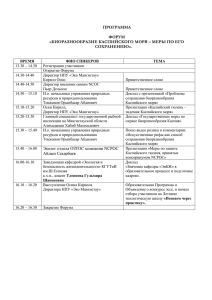
Санкт-Петербургский Государственный электротехнический университет «ЛЭТИ» и ЗАО «ТРАНЗАС» Иоселевский А.А. Степанов А.Д. Определение характеристик упоров ВРШ и НПУ для формирования команд на системы ДАУ ВРШ и НПУ: определение необходимых маневров разработка алгоритма обработки результатов испытаний Главные размерения: Длина - - - - - - - - - - - - - - - - - - - - - - - - Lквл Ширина - - - - - - - - - - - - - - - - - - - - - - - Bквл Осадка - - - - - - - - - - - - - - - - - - - - - - - - Т Водоизмещение нормальное - - - - - - - - D = 58.50 м; = 10.12 м; = 2.80 м; = 600 т. САУ - - - - - - - - - - - - - - - - - - - - - - - - - - 2xВРШ, НПУ Система координированного управления (СКУ) предназначена для ручного и автоматического управления движением судна на малых ходах с помощью средств активного управления движением. удержание на заданном курсе удержание в заданной точке с заданным курсом удержание в заданной точке с разворотом на ветер 𝑿∗ , 𝒀∗ , 𝑿𝑪𝑷𝑷𝒍𝒃 , 𝑿𝑪𝑷𝑷𝒓𝒃 , 𝒀𝑩𝑻 𝝋𝒍𝒃 , 𝝋𝒓𝒃 , 𝒏𝑩𝑻 𝑴∗ 𝑋𝐶𝑃𝑃𝑙𝑏 + 𝑋𝐶𝑃𝑃𝑟𝑏 = 𝑋 ∗ ; 𝑌𝐵𝑇 = 𝑌 ∗ ; 𝑌𝐵𝑇 𝑙𝐵𝑇 + 𝑙𝐶𝑃𝑃 𝑋𝐶𝑃𝑃𝑙𝑏 − 𝑋𝐶𝑃𝑃𝑟𝑏 = 𝑀∗ Нахождение управляющих сил органов управления по заданным 𝑋 ∗ , 𝑌 ∗ , 𝑀∗ . Это решение системы уравнений при наличии ограничений на управление. Ограничения: 𝑌𝐵𝑇 < 𝑌𝐵𝑇𝑚𝑎𝑥 ; 𝑌𝐵𝑇 > 𝑌𝐵𝑇𝑚𝑖𝑛 ; 𝑋𝐶𝑃𝑃𝑏𝑤 < 𝑋𝐶𝑃𝑃 < 𝑋𝐶𝑃𝑃𝑓𝑤 (для каждого борта). Система координат XCPP = KT (λp,𝑝)ρw𝑛𝑃2 𝐷𝑃4 ; 𝑀𝐶𝑃𝑃 = 𝑋𝐶𝑃𝑃𝑙𝑏 − 𝑋𝐶𝑃𝑃𝑟𝑏 𝑙𝐶𝑃𝑃 ; 𝑝= 𝑝 ; 𝐷𝑃 λ𝑃 = 𝑉𝑥 (1−𝑤) 𝑛𝑃 𝐷𝑃 Диаграммы ВРШ Зависимость упора ВРШ от относительного шага ВРШ 𝑚 + λ11 𝑣𝑥 = 𝑋𝐻 + 𝑋𝐴 + 2𝑋𝐶𝑃𝑃 + 𝑋𝑅 𝜌𝑤 𝑣𝑥2 𝑋𝐻 = 𝐶𝑥 𝛽 𝑆 = 𝑅 𝑣𝑥2 2 𝑚 + λ11 𝑣𝑥 = 2𝑋𝐶𝑃𝑃 при малом 𝑋𝐻 𝑚 + λ11 𝑋𝐶𝑃𝑃 ⋍ 𝑎𝑥 2 𝑥, 𝑣𝑥 , 𝜑𝐶𝑃𝑃 ⟹ 𝑣𝑥 ⟹ 𝑎𝑥 𝑌𝐵𝑇 = 𝐾𝐵𝑇 𝛽, 𝐾𝐵𝑇 𝛽, 𝑣𝑥 𝑣𝐵𝑇 𝑌𝐵𝑇 = 𝐾𝐵𝑇 𝑛2 ; MBT = YBT lBT 𝑣𝑥 𝑛2 ; 𝑣𝐵𝑇 = 𝑐𝑜𝑛𝑠𝑡; Зависимость упора НПУ от относительной частоты вращения НПУ Проводится 4 серии испытаний при 𝑝= 25%, 50%, 75%, 100% на ПХ и на ЗХ. Повтор испытаний на обратном курсе. Проводится 4 серии испытаний 25%, 50%, 75%, 100% на ЛБ и на ПБ. 𝐽2 +λ22 при 𝑛= 𝑚 + λ11 𝑉𝑥 = 𝑋𝐻 + 𝑋𝐴 + 2𝑋𝐶𝑃𝑃 + 𝑋𝑅 ; 𝜔 = 𝑀𝐻 + 𝑀𝐴 + 𝑋𝐶𝑃𝑃𝑙𝑏 𝑙𝐶𝑃𝑃 − 𝑋𝐶𝑃𝑃𝑟𝑏 𝑙𝐶𝑃𝑃 + 𝑌𝐵𝑇 𝑙𝐵𝑇 Компенсация момента от НПУ при 𝑛= 25%, 50%, 75%, 100% на ЛБ и ПБ обеспечивается «раздраем» ВРШ при условии 𝑉𝑥 = 0. Фильтрация во временной области: запаздывание необходимость оценивать имеющиеся шумы и возмущения Фильтрация в частотной области: требует постоянного шага измерения необходимо выбирать оконную функцию Окно Ширина главного лепестка по уровню половинной мощности Эквивалентная шумовая полоса Максимальный уровень боковых лепестков, дБ Асимптотическая скорость спадания боковых лепестков, дБ/октава Прямоугольное 0.89 1.00 -13.3 -6 Треугольное 1.28 1.33 -26.5 -12 Ханна 1.44 1.50 -31.5 -18 Хемминга 1.30 1.36 -43 -6 Наттолла (R=3) 1.70 1.80 -98 -6 Преобразование сигнала с целью получения сигнала с постоянным шагом. Дополнение сигнала в область отрицательного времени для исключения «скачков на краях». Применение преобразования Фурье к сигналу: ПФ 𝑣 𝑡 𝑉(𝑓) Определение максимальной частоты сигнала и выбор оконной функции W(f): 𝑊 𝑓 = 0, 𝑓 > 𝐹𝑀𝐴𝑋 Умножение изображения сигнала на оконную функцию: 𝑉 𝑓 = 𝑉 𝑓 ∙ 𝑊(𝑓) Взятие производной: 𝐴 𝑓 = 2𝜋 ∙ 𝑖 ∙ 𝑓 ∙ 𝑉 𝑓 ∙ 𝑊(𝑓) Переход во временную область: 𝑎(𝑡) 𝑣 𝑡 = 𝑑𝑥 𝑑𝑡 Траектория движения корабля Траектория движения корабля в режиме управления в режиме управления «Удержание точки» «Удержание курса» Предложена методика определения упоров ВРШ и НПУ для обеспечения работу СКУ на основе фильтрации сигнала в частотной области. Предложены маневры, необходимые для определения характеристик упоров ВРШ и НПУ. Приведены полученные результаты.