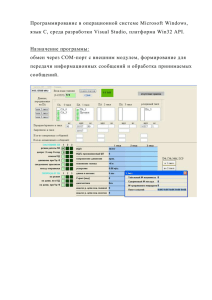
Система симуляции, управление роботом Система сообщений
реклама

Общение пользователя и программы – асинхронный процесс. Нужен способ асинхронно передавать информацию от пользователя к программе и наоборот. Сообщение - это сигнал от системы том, что произошло какое-то событие. Сообщение состоит из имени и параметров. Примеры событий и сообщений: • Нажата клавиша на клавиатуре -> WM_KEYDOWN (код клавиши) • Переместилась мышь –> WM_MOUSEMOVE (x,y) • Нажата кнопка на диалоге -> WM_BTN_CLICKED(код кнопки) • Окно изменило размер -> WM_SIZE(новый размер) • Сработал таймер -> WM_TIMER(код таймера) • Окно закрывается -> WM_CLOSE() • и так далее(окно создано, выбран 2-ой элемент в списке, мышь наведена на элемент и не двигается…) В заголовочный .h файл: В .cpp файл реализации: - в карту сообщений (BEGIN_MESSAGE_MAP( …) В заголовочный .h файл В .cpp файл реализации: - в карту сообщений (BEGIN_MESSAGE_MAP( …) В robot.h В robot.cpp