1 - Public Digital Library
реклама

Половинкин А.Н.
Вычисления общего назначения на GPU
Архитектура GPU
Программная модель выполнения на CUDA
Программирование с использованием CUDA
Настольная вычислительная
суперкомпьютерая система Nvidia Tesla
D870
для
◦ параллельных по данным: одна и
та же операция выполняется над
многими данными параллельно
(SIMD)
◦ в
которых
отношение
вычислительных операций к числу
операций по доступу к памяти
велико
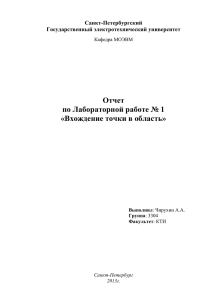
CPU
GPU
GPU
предназначен
вычислений,
Вместо кэша и сложных элементов
управления
на
кристалле
размещено
большее
число
вычислительных элементов
8 SP (Streaming Processor) потоковые скалярные процессоры
2 SFU (Super Functions Unit) –
предназначен для вычисления
сложных математических
функций
RFn (Register File)
Shared Memory – разделяемая
память
ядро (kernel) – функция,
выполняемая решеткой (grid)
блоков потоков (threads block)
блок потоков (threads block) –
набор потоков, выполняющих
одну функцию (kernel) на
одном
мультипроцессоре,
способных общаться между
собой посредством:
◦ разделяемой
памяти
memory)
◦ точек синхронизации
(shared
два потока из двух различных
блоков не взаимодействуют
между собой
каждый поток и блок
потоков имеют
идентификаторы
◦ каждый поток может
определить, с какими
данными он должен
работать
Block ID (1D или 2D)
Thread ID (1D, 2D или 3D)
данный подход
упрощает адресацию
памяти при обработке
многомерных данных
registers
(чтение/запись, одним
SP*)
local (чтение/запись, одним SP)
shared (чтение/запись, всеми SP,
входящими в состав MP**)
constant cache
texture cache
(только чтение,
всеми SP, входящими в состав MP)
(только чтение,
всеми SP, входящими в состав MP)
device (global)
(чтение/запись,
всеми SP, входящими в состав всех
MP)
*SP – scalar processor
**MP – multiprocessor
данные, расположенные в глобальной памяти,
реально располагаются в памяти устройства
(доступ к device memory много медленнее доступа
к shared memory)
общий подход к ускорению вычислений
заключается в следующем:
◦ разбить множество обрабатываемых данных на
подмножества, убирающиеся в shared memory
◦ обрабатывать каждое подмножество данных одним
блоком потоков:
загрузить подмножество данных из global memory в shared
memory
выполнить вычисления над элементами данных из
подмножества
скопировать результаты из shared memory в global memory
host = CPU
device = GPU = набор мультипроцессоров
device memory = собственная память GPU
kernel (ядро) – подпрограмма, выполняемая
на GPU
grid (решетка) – массив блоков потоков,
которые выполняют одно и то же ядро
thread block (блок потоков) – набор
потоков, которые выполняют ядро и могут
взаимодействовать, используя общую
память (shared memory)
Стандартный язык C для разработки
параллельных приложений на GPU
Библиотеки FFT (Fast Fourier Transform) и
BLAS (Basic Linear Algebra Subroutine)
Специализированный драйвер для
вычислений, обеспечивающий быструю
передачу данных между CPU и GPU
Драйвер CUDA, обеспечивающий
взаимодействие с OpenGL и DirectX
Поддержка видеокарт NVidia >= G80, Tesla,
Quadro
Поддержка Windows XP 32/64bit, Windows
Vista 32/64 bit, Linux 32/64bit, Mac OS
Комплект поставки
◦ CUDA driver
◦ CUDA toolkit
◦ CUDA SDK
API представляет собой расширение языка C
Состав CUDA API:
◦ расширения языка C
◦ библиотека времени выполнения (runtime library):
общий компонент, обеспечивающий встроенные
векторные типы и подмножество C runtime library
поддерживающее как host, так и device код
host component, обеспечивающий управление и
доступ к одному или нескольким устройствам с хоста
device
component,
обеспечивающий
функции,
специфичные для устройства
Квалификатор
Выполняется на:
Вызывается с:
__device__
device
device
__host__
host
host
__global__
device
host
__global__ - определяет функцию ядро (kernel)
должна возвращать результат типа void
__device__ и __host__ могут использоваться совместно
невозможно взять адрес __device__ функции
функции, выполняемые на устройстве, не допускают:
рекурсию
объявление статических переменных внутри функции
переменное число аргументов
Пример:
__global__ void KernelFunc(float arg);
__device__ объявляет переменную, размещаемую на GPU
__constant__ объявляет переменную, которая
__shared__ объявляет переменную, которая
◦ размещается в глобальном пространстве памяти;
◦ время жизни переменной совпадает со временем жизни приложения;
◦ доступ к переменной может быть осуществлен из всех потоков,
выполняемых на устройстве, а также с хоста через библиотеки времени
выполнения.
◦ размещается в константном пространстве памяти;
◦ время жизни переменной совпадает со временем жизни приложения;
◦ доступ к переменной может быть осуществлен из всех потоков,
выполняемых на устройстве, а также с хоста через библиотеки времени
выполнения.
◦ размещается в пространстве общей памяти блока потоков;
◦ время жизни переменной совпадает со временем жизни блока потоков;
◦ доступ к переменной может быть осуществлен из потоков,
принадлежащих блоку потоков.
[u]char[1..4]
[u]int[1..4]
[u]long[1..4]
float[1..4]
double2
gridDim – переменная типа dim3, содержит
текущую размерность решетки;
blockIdx – переменная типа uint3, содержит
индекс блока потоков внутри решетки;
blockDim – переменная типа dim3, содержит
размерность блока потоков;
threadIdx – переменная типа uint3, содержит
индекс потока внутри блока потоков;
warpSize – переменная типа int, содержит
размер «свёртки» (warp) в потоках.
Замечание:
◦ данные переменные предназначены только для чтения
и не могут быть изменены из вызывающий программы
перечисление устройств:
выбор устройства:
◦ cudaError_t cudaGetDeviceCount(int* count) – возвращает число
доступных устройств;
◦ cudaError_t cudaGetDevice (int* dev) – возвращает используемое
устройство
◦ cudaError_t
cudaGetDeviceProperties(struct cudaDeviceProp*
prop, int dev) – возвращает структуру, содержащую свойства
устройства
◦ cudaError_t
cudaChooseDevice(int*
dev,
const
struct
cudaDeviceProp* prop) – устанавливает устройство, на котором
выполняется
device
код,
в
наибольшей
степени
соответствующее конфигурации
◦ cudaError_t cudaSetDevice(int dev) – устанавливает устройство,
на котором выполняется device код;
Замечание:
Nvidia Tesla D870 представляется в виде двух устройств
выделение и
устройстве:
освобождение
памяти
на
◦ cudaError_t cudaMalloc(void** devPtr, size_t count)
– выделяет память на устройстве и возвращает
указатель на нее
◦ cudaError_t cudaFree(void* devPtr) – освобождает
память на устройстве
копирование
устройством:
данных
между
хостом
и
◦ cudaError_t cudaMemcpy(void* dst, const void* src,
size_t count, enum cudaMemcpyKind kind) –
копирует данные между хостом и устройством
Функция ядра должна быть вызвана с указанием
конфигурации исполнения
Конфигурация
определяется
использованием
выражения специального вида <<< Dg, Db, Ns>>>
между именем функции и списком ее аргументов,
где:
◦ Dg – определяет размерность и размер сетки, так что
Dg.x * Dg.y равно числу блоков потоков, которые будут
запущены, Dg.z не используется.
◦ Db – определяет размерность и размер каждого блока
потоков, Db.x * Db.y * Db.z равно числу потоков на блок.
◦ Ns – переменная типа size_t, определяет число байт в
разделяемой памяти, которое дополнительно выделяется
на блок добавление к автоматически выделенной
компилятором памяти.
__global__ void KernelFunc()
….
dim3 DimGrid(100, 50);
dim3 DimBlock (8, 8, 8);
size_t SMSize = 64;
KernelFunc<<<DimGrid, DimBlock, SMSize>>>();
void __syncthreads() – синхронизирует все
потоки внутри блока потоков;
как только все потоки достигли данной
точки, они продолжают свое выполнение
используется, чтобы избежать RAW/WAR/
WAW конфликтов при доступе к shared или
global памяти
#include <stdio.h>
#include <stdlib.h>
#include <cutil.h>
const int N = 256;
const int DATA_SZ = N * sizeof(float);
float RandFloat(float low, float high)
{
float t = (float)rand() / (float)RAND_MAX;
return (1.0f - t) * low + t * high;
}
// ядро, каждый поток вычисляет сумму элементов массивов A и B с индексами,
// соответствующими индексу потока
__global__ void vecAdd(float* A, float* B, float* C)
{
int i = threadIdx.x;
C[i] = A[i] + B[i];
}
int main(int argc, char **argv)
{
float *h_A, *h_B, *h_C;
float *d_A, *d_B, *d_C;
int i;
h_A = (float *)malloc(DATA_SZ);
h_B = (float *)malloc(DATA_SZ);
h_C = (float *)malloc(DATA_SZ);
for(i = 0; i < N; i++)
{
h_A[i] = RandFloat(0.0f, 1.0f);
h_B[i] = RandFloat(0.0f, 1.0f);
}
// инициализация GPU
CUT_DEVICE_INIT(argc, argv);
// выделение памяти на GPU
CUDA_SAFE_CALL( cudaMalloc((void **)&d_A, DATA_SZ) );
CUDA_SAFE_CALL( cudaMalloc((void **)&d_B, DATA_SZ) );
CUDA_SAFE_CALL( cudaMalloc((void **)&d_C, DATA_SZ) );
// копирование данных с хоста на GPU
CUDA_SAFE_CALL( cudaMemcpy(d_A, h_A, DATA_SZ, cudaMemcpyHostToDevice) );
CUDA_SAFE_CALL( cudaMemcpy(d_B, h_B, DATA_SZ, cudaMemcpyHostToDevice) );
// вызов ядра
vecAdd<<<1, N>>>(d_A, d_B, d_C);
// копирование вектора, содержащего сумму A и B с GPU на хост
CUDA_SAFE_CALL( cudaMemcpy(h_C, d_C, DATA_SZ, cudaMemcpyDeviceToHost) );
// освобождение памяти на GPU
CUDA_SAFE_CALL( cudaFree(d_C) );
CUDA_SAFE_CALL( cudaFree(d_B) );
CUDA_SAFE_CALL( cudaFree(d_A) );
free(h_C);
free(h_B);
free(h_A);
// освобождение ресурсов устройства
СUT_EXIT(argc, argv);
}
Для каждого потока в свертке:
◦ чтение операндов
◦ выполнение инструкции
◦ запись результата
Для повышения производительности
необходимо:
◦ уменьшить число арифметических инструкций с
низким throughput
◦ максимизировать использование доступной
пропускной способности для каждого типа
памяти
4 clock cycles:
◦ floating point сложение, умножение, умножениесложение (multiply-add)
◦ integer сложение
◦ 24-bit integer умножение (__mul24)
◦ побитовые операции, сравнение, минимум,
максимум, преобразование типов
16 clock cycles:
◦ вычисление обратного числа, 1 / sqrt(x), __logf(x)
◦ умножение 32-bit integers
Целочисленное деление и взятие остатка по
модулю следует заменять битовыми
операциями везде, где это возможно:
◦ если n=2^p, тогда i/n ~ i>>log2(n), i%n ~ i&(n-1)
32 clock cycles:
◦ __sinf(x), __cosf(x), __expf(x) (доступны только из
кода, выполняемого на устройстве)
Рекомендуется использовать везде, где это
возможно, floating point данные и floating
point версии арифметических функций
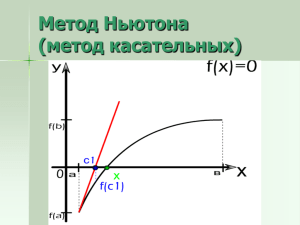
условные операторы и операторы циклов
(if, switch, do, while, for) влияют на
производительность приложений
потоки в свёртке
потоки в свёртке
...
...
condition == false
code 1 idle
idle
code2
idle
code2
condition == true
code 1 idle
idle
code2
code 1 idle
if (condition)
{
code1;
}
else
{
code2;
}
Включают в себя операции чтения/записи
глобальной, локальной и shared памяти.
Выполнение одной инструкции доступа к
памяти требует 4 clock cycles.
Глобальная память обладает латентностью
400-600 clock cycles
__shared__ float shared[32];
__device__ float device[32];
shared[threadIdx.x] = device[threadIdx.x];
Существуют атомарные инструкции для
чтения 32-bit, 64-bit и 128-bit машинных
слов.
__device__ type device[32];
type data = device[tid];
sizeof(type) должен быть равен 4, 8 или 16
данные должны быть выровнены по
sizeof(type)
Выравнивание обеспечивается
компилятором автоматически для
встроенных типов данных (float2, float4, …)
Размер и выравнивание структур
обеспечивается директивой компилятора
__align__
struct __align__(8)
{
float a;
float b;
};
struct __align__(16)
{
float a;
float b;
float c;
};
1 64-bit load
instruction
1 128-bit load
instruction
Структуры размера больше 16 байт следует
определять, используя __align__(16)
struct
{
float
float
float
float
float
};
a;
b;
c;
d;
e;
5 32-bit load
instructions
struct __align__(16)
{
float a;
float b;
float c;
float d;
float e;
};
2 128-bit load
instructions
доступ к глобальной памяти всеми
потоками половины свертки (half warp),
объединяется в 1 или 2 инструкции, при
выполнении условий:
◦ потоки совершают доступ к 32-bit, 64-bit или
128-bit words.
◦ все 16 машинных слов должны лежать в одном
и том же сегменте, размер которого равен
размеру memory transaction size
◦ k-ый поток совершает доступ к k-му слову
shared memory состоит из
блоков памяти равного
размера, доступ к которым
может быть осуществлен
одновременно, - банков
памяти
банки в shared memory
организованы таким
образом, что
последовательно идущие
32-bit words относятся к
последовательно идущим
банкам памяти
Bank 0
Address 0
Address 16
Bank 1
Address 1
Address 17
Bank 2
Address 2
Address 18
Bank 3
Address 3
Address 19
Bank 4
Address 4
Address 20
Bank 5
Address 5
Address 21
Bank 6
Address 6
Address 22
Bank 7
Address 7
Address 23
Bank 8
Address 8
Address 24
Bank 9
Address 9
Address 25
Bank 10 Address 10 Address 26
Bank 11 Address 11 Address 27
Bank 12 Address 12 Address 28
Bank 13 Address 13 Address 29
Bank 14 Address 14 Address 30
Bank 15 Address 15 Address 31
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
__shared__ float shared[32];
float data = shared[BaseIndex + s * tid];
tid – thread ID, s – шаг доступа к элементам
массива
потоки с ID tid и tid+n вызовут bank conflict,
если sn кратно числу банков m
пусть d = НОД(m, s), тогда для того, чтобы
избежать bank conflicts, необходимо, чтобы
d=1
BLAS
(Basic Linear Algebra Subroutines) – набор
базисных подпрограмм линейной алгебры.
Данный набор является основой для функций
из пакета LAPACK.
Состоит
из 3 уровней:
1.Операции над векторами (vector-vector)
2.Вектор-матричные операции (matrix-vector)
3.Операции над матрицами (matrix-matrix)
Имя
любой
процедуры
BLAS
имеет
следующую структуру:
<character code><name><mod>()
<character code> : символ, описывающий
тип данных, с которым работает процедура.
s
вещественный, одинарной точности
с
комплексный, одинарной точности
d вещественный, двойной точности
z
комплексный, двойной точности
Для
некоторых процедур и функций данные
символы могут комбинироваться. Например,
функция scasum принимает на вход массив
комплексных чисел и возвращает вещественное
значение.
<name>
: для BLAS Level 1 определяет тип
операции
(например,
dot
–
скалярное
произведение, swap – перестановка элементов
векторов местами), для BLAS Level 2 и 3
определяет тип матричного аргумента.
Некоторые функции BLAS возвращают
индекс элемента массива. Независимо от
того, какая версия библиотеки (Fortran
или C) используется, элементы массива
нумеруются с 1. Следовательно, при
использовании C-версии из результата,
который вернула функция, следует
вычесть 1.
#include <stdio.h>
#include <mkl.h>
void main()
{
int n = 4;
float x[4] = {1., 2., 3., -4.};
float y[4] = {2., 2., -1., 10};
int incx = 1, incy = 1;
float alpha = 1.0;
int imax = 0;
saxpy(&n, &alpha, x, &incx, y, &incy); // y := alpha*x + y
}
cublasInit() - инициализация CUBLAS
(должна быть вызвана перед
использованием любой другой CUBLAS
функции)
cublasShutdown() - освобождает ресурсы,
используемые библиотекой CUBLAS на
стороне хоста
cublasAlloc(int n, int elemSize, void
**devicePtr) – создает объект в пространстве
памяти GPU, содержащий массив из n
элементов размера elemSize. Указатель на
созданный объект размещается в devicePtr
(данный указатель не должен впоследствии
изменяться в коде, выполняемом на хосте)
cublasFree(const void *devicePtr) –
освобождает память, выделенную на GPU
cublasSetVector (int n, int elemSize, const
void *x, int incx, void *y, int incy) – копирует
n элементов вектора x (пространство
памяти CPU) в вектор y (пространство
памяти GPU)
cublasGetVector (int n, int elemSize, const
void *x, int incx, void *y, int incy) - копирует
n элементов вектора x (пространство
памяти GPU) в вектор y (пространство
памяти CPU)
#include <stdio.h>
#include <cublas.h>
void main()
{
int n = 4;
float x_H[4] = {1., 2., 3., -4.};
float y_H[4] = {2., 2., -1., 10};
float* x_D = 0;
float* y_D = 0;
int incx = 1, incy = 1;
float alpha = 1.0;
cublasInit();
cublasAlloc(n, sizeof(float), &x_D);
cublasAlloc(n, sizeof(float), &y_D);
cublasSetVector(n, sizeof(float), x_H, incx, x_D, incx);
cublasSetVector(n, sizeof(float), y_H, incy, y_D, incy);
// y_D := alpha*x_D + y_D
cublasSaxpy(n, alpha, x_D, &incx, y_D, &incy);
cublasGetVector(n, sizeof(float), y_D, incy, y_H, incy);
cublasFree(x_D);
cublasFree(y_D);
cublasShutdown();
}
=
+
Настольная вычислительная суперкомпьютерная система Tesla D870
2 GPU Tesla C870
32 (2x16) мультипроцессора
256 (2x128) потоковых процессорных ядер
Рабочая частота ядер – 1.35 ГГц
Пропускная способность шины памяти
(пиковая) – 76.8 Гб/с
Пиковая производительность – 1 Tflop/s
Максимальная потребляемая мощность –
520 Вт
Физическое моделирование
Вычислительная биология (задачи
молекулярной динамики)
Вычислительная химия
Томография
Финансовая математика
Компьютерное зрение
…
http://www.nvidia.com/object/cuda_home.html
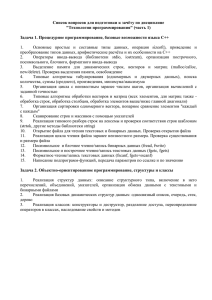
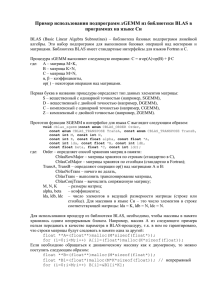
Умножение квадратных матриц
Аппаратное обеспечение
◦ NVidia Tesla C870
◦ Intel Core2 Quad Q6600
Используемое ПО:
◦ Windows XP 32bit;
◦ Microsoft Visual Studio 2005
◦ CUBLAS 2.0 (включен в состав CUDA Toolkit 2.0) (для Tesla
C870)
◦ Intel MKL 10.0.3 (для Core2 Quad 6600)
Замечание: при измерении общего времени работы
алгоритма на видеокарте учитывается время
загрузки данных на карту и получения данных с
карты
Производительность, GFlops
350
300
250
200
Core2 Quad Q6600
150
Tesla C870
Tesla D870
100
50
0
N
Nvidia CUDA Programming Guide
Многочисленные курсы по CUDA:
◦ http://courses.ece.uiuc.edu/ece498/al1/Syllabus.html
◦ http://www.nvidia.ru/object/cuda_state_university_courses_ru.html (на
русском языке)
?