Егоров
реклама

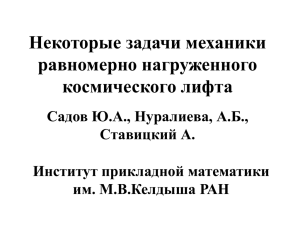
ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РЕКУПЕРАЦИИ СИСТЕМ ЭЛЕКТРОПРИВОДА ТЕЛЕСКОПОВ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ CALCULATING OF RECUPERATION TIME IN ELECTRICAL DRIVE OF SATELLITE ORBIT DETERMINATION TELESCOPE Томасов В.С., Егоров А.В., Rafal Jastrzebski, Соколов М.А. Department of Electrical Engineering and Precision Electromechanical Systems of ITMO University Lappeenranta University of Technology, Faculty of Technology Докладчик Алексей Егоров Наиболее тяжелые режимы работы для замкнутого по скорости, углу или моменту электропривода: • Режим торможения противовключением. При торможении противовключением токи, протекающие в обмотках двигателя, могут превышать пусковые токи до двух раз. На величину этих токов должны быть рассчитаны обмотки двигателя и транзисторы инвертора. • Режим рекуперативного торможения. Режим рекуперативного торможения характеризуется превращением кинетической энергии вращающихся частей электропривода в электрическую энергию, и ее возвратом в звено постоянного тока энергетической подсистемы привода. Докладчик Алексей Егоров 2 Структурная схема энергетической подсистемы электропривода телескопа траекторных измерений Предельные динамические возможности электропривода исключительно параметрами энергетической подсистемы. определяются 1 - источник питания ИП (AC-DC преобразователь или трансформатор с неуправляемым выпрямителем); 2 - сглаживающий фильтр (СФ), состоящий из конденсатора в поперечной ветви звена постоянного тока; 3 - дискретно функционирующая тормозная цепь (ТЦ); 4 - обратимый инвертор напряжения ИН (на базе IGBT или MOSFET полупроводниковых приборов со встречно-параллельными диодами); 5 - электромеханический преобразователь, в качестве которого выступает трехфазная синхронная машина с постоянными магнитами, работающая в режиме вентильного двигателя; Reporter: Alexey Egorov 3 Особенности энергетических подсистем электроприводов ТТИ • Энергетические подсистемы ТТИ, как правило, обладают односторонней проводимостью между питающей сетью и электромеханическим преобразователем. Относительно невысокие кинетические энергии вращающихся частей таких приводов делают экономически нецелесообразным применение преобразователей частоты с активным выпрямителем. • Возвращаемая в процессе рекуперации энергия может запасаться либо в конденсаторе сглаживающего фильтра, либо в аккумуляторной батарее (при ее наличии). • Оправдано применение тормозной цепи с балластным резистором, принимающей энергию рекуперации сверх той, которую способен запасти конденсатор. Reporter: Alexey Egorov 4 Определение мощности рекуперации При выводе уравнений были сделаны следующие допущения: 1) тепловые потери в инверторе напряжения отсутствуют; 2) напряжения, подаваемые на обмотки двигателя, синусоидальной формы; 3) токи, протекающие в обмотке двигателя, имеют синусоидальную форму и синфазные с напряжениями; 4) потери в стали равны нулю. В режиме «перенаведения» трубы телескопа с одного объекта на другой, а так же при обходе так называемых «мертвых зон» ставится задача перемещения визирной оси за минимально короткое время. При этом относительно хрупкие оптические узлы накладывают жесткие ограничения на величину максимального ускорения. Ограничения на скорость и ускорение есть и со стороны энергетической подсистемы. Pмех t Pк t Pм t 0 (1) Сумма мощностей системы электропривода всегда равна нулю. Pмех t , Pм t , Pк t – соответственно механическая мощность «на валу», мощность потерь в обмотках электродвигателя (в меди), и мощность, возвращаемая в звено постоянного тока. Reporter: Alexey Egorov 5 5 Определение мощности рекуперации Pмех t J t Mсопр t (2) – механическая мощность «на валу» J t Mсопр 3 Pм t Rф 1.5 С 2 e 2 (3) – мощность потерь в меди Исходя из (1-3) получаем общем случае: J t Mсопр 3 P t к J t Mсопр t Rф (4) 1.5 С 2 e Подставляя в (4) выражения для мгновенной скорости и ускорения можно рассчитать электромагнитные нагрузки для любой циклограммы работы электропривода с трехфазным ВД. 2 Reporter: Alexey Egorov 6 Режим реверса с токоограничением В процессе реверса с токоограничением двигатель развивает постоянный по величине момент. Мгновенная скорость Mдвmax Mсопр t y J Время рекуперации токоограничением: t рек где 1.2 1 0.9 0 t рек Tм у y / хх 2 4 6 8 10 1 – график относительной скорости, 2 – относительное напряжение задание, 3 – относительный момент ВД; 4 – относительное напряжения на конденсаторе СФ. (5) торможении с (6) Mсопр Mдвmax у I сопр I I сопр Mсопр / MП 1.1 при J y M двmaxTм рек t M двmax MП (7) Iфmax IП Mсопр M sign() Энергия, возвращенная за время рекуперации в звено постоянного тока: Eк Mдвmax J y MдвmaxTм 2J Mдвmax Mсопр Reporter: Alexey Egorov 2 (8) I у I 2Eк eк 2 I сопр J хх 2 (9) 7 Режим реверса с заданным постоянным ускорением Мгновенная скорость t y t Время рекуперации токоограничением: t рек рек t рек Tм y где дин 1 – график относительной скорости, 2 – относительное напряжение задание, 3 – относительный момент ВД; 4 – относительное напряжения на конденсаторе СФ. J Mсопр 1 дин 1.5Ce2 дин при торможении с Rф (10) сопр у (11) J MП Энергия, возвращенная за время рекуперации в звено постоянного тока: 2 Mсопр Mсопр 1 Eк J y TМ TМ 2 J сопр 2 2Eк eк 1 дин сопр у 2 дин J хх Reporter: Alexey Egorov (12) (13) 8 Условие существования рекуперации Условия существования рекуперации: Сe (t ) Iф m (t ) Rф или (t ) TM (t ) (8) , где Iфm (t ) амплитуда фазного напряжения (9) Скорость вращения вала электропривода в режиме реверса с токоограничением, при которой оканчивается рекуперация (в безразмерной форме): у I Условие существования рекуперации в режиме реверса с токоограничением вместо (9): у I (10) Дополнительное условие существования рекуперации в режиме реверса с заданным постоянным ускорением (в противном случае, в течение всего интервала торможения привод работает в двигательном режиме): J Mсопр или дин сопр Reporter: Alexey Egorov 9 Выводы • Анализируя полученные выражения можно заключить, что в режиме торможения с заданным постоянным ускорением время рекуперации при наличии сил трения больше, по сравнению со случаем, когда они не учитываются. • С увеличением величины сил трения, время рекуперации растет, в пределе достигая значения времени торможения (при равенстве требуемого динамического момента моменту сил трения). При этом энергия возвращаемая (рекуперируемая) в звено «постоянного тока» и мощность рекуперации уменьшаются. • В режиме торможения с токоограничением мгновенная мощность, возвращаемая в звено постоянного тока, время рекуперации и энергия рекуперации уменьшаются с ростом сил трения. Reporter: Alexey Egorov 10 Результаты • Получены соотношения позволяющие определить время рекуперации для электропривода телескопа траекторных измерений с ВД для режима реверса с токоограничением и реверса с заданным постоянным ускорением. • Получены соотношения для энергии рекуперации, позволяющие определить требуемую емкость и/или максимальное напряжение конденсатора. • Полученные выражения в относительных единицах полностью справедливы для процессов рекуперативного торможения в приводах как с ДПТ, так и с ВД. Reporter: Alexey Egorov 11 Спасибо за внимание! Thank you for your attention! Reporter: Alexey Egorov